Embed Size (px)
Citation preview
www.furuno.com
FURUNO GNSS受信機
eRideOPUS 6/ eRideOPUS 7
型式 GV-8620/ GV-8720
Dead Reckoning
ユーザーガイド
(Document No. SE16-900-001-01)
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
FURUNO ELECTRIC CO., LTD. All rights reserved.
重要事項
お客様は、以下の内容をご理解いただいた上でお客様ご自身の責任において対象 GNSS製品名 (以下、「本製品」
とします) を使用するということを明確に認識し、同意するものとします。
お客様は、本書に記載されている製品仕様や設計情報などの各種情報を使用して商品化されたお客様の製品の、
一切の設計責任をご自身で負うことを明確に認識しているものと見なします。
本書は、記載されている他社の製品の機能、性能および品質を保証するものではございません。
本書に記載されている内容は、必ずしもお客様の要求を満たすものであることを保証するものではございません。
本書に記載されている内容は、本製品の製品仕様や弊社の開発環境で検証した設計情報であり、お客様の特定用
途への適合性を保証するものではございません。そのため、本製品を用いてお客様の製品開発をされた場合の、お
客様の製品の一切の、そして如何なる明示または黙示の保証をするものではございません。
本書に記載されている内容に関してのお客様からの問い合わせに対し、古野電気による口頭または書面での情報、
助言、案内などの一切は、新たな保証を約束するものではございません。
本書の記載内容に関連した情報が原因で、お客様が損害を受けた場合は、お客様ご自身が、その損害に必要なす
べての費用をご負担いただくものとします。
本書に記載されている内容は、予告なく変更することがあります。
本書に記載されている社名、製品名は、各メーカーの登録商標または商標であり、法令上保護の対象となります。
本書に記載されている内容の著作権は発行元である古野電気株式会社に帰属し、同社の書面による許諾なく複写、
複製、転載および第三者へ開示することを禁止します。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
FURUNO ELECTRIC CO., LTD. All rights reserved.
改訂歴
Revision 改訂内容 改訂年月日
0 初版発行 2017.10.24
1
表 3.1 サポートしている慣性センサを変更
4.2節~4.7節を削除
表 5.1、表 5.2 その他のセンサの組み合わせを削除
2017.11.16
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
FURUNO ELECTRIC CO., LTD. All rights reserved.
目次
1 概要 ··································································································································· 1
2 FURUNO DR GNSS受信機が提供するソリューション ····································································· 1
3 システム構成 ························································································································ 2
3.1 サポートしているセンサ ····································································································· 2
3.2 センサ情報入力端子について ····························································································· 3
4 参考回路図 ·························································································································· 4
4.1 SMI130 ························································································································ 4
5 慣性センサの設置角度について ································································································ 6
5.1 オートオリエンテーション機能による設置角度自動補正 ····························································· 7
5.2 PERDAPI,AUTOORIENTコマンドによるオートオリエンテーションの範囲拡大 ································· 7
5.3 ミスアライメント設定コマンドによる設置角度の設定 ·································································· 8
5.4 センサ設置例 ················································································································· 9
5.4.1 進行方向に対して傾きがない場合 ·················································································· 9
5.4.2 オートオリエンテーションが機能する範囲での設置例 ························································· 10
5.4.3 オートオリエンテーションの機能する範囲を拡大した場合 ···················································· 11
5.4.4 ミスアライメントの設定が必要な場合 ············································································· 12
6 キャリブレーション ················································································································ 13
6.1 電源ONからGNSS測位まで ······························································································ 13
6.2 GNSS測位からキャリブレーションを開始し、DR有効となるまで ·················································· 14
6.3 車速パルス、加速度センサのキャリブレーション ····································································· 14
6.4 ジャイロセンサのキャリブレーション ····················································································· 15
6.5 経年変化や温度変動に対する対応 ····················································································· 15
7 DRデータのバックアップ方法とその取扱いについて ······································································ 16
8 評価時の推奨NMEA出力センテンス ························································································· 16
9 特記事項 ··························································································································· 17
9.1 慣性センサの取扱いに関する注意事項 ················································································ 17
9.2 慣性センサの特性に対する特記事項 ··················································································· 17
9.3 外的要因による慣性センサへの影響 ··················································································· 17
9.4 キャリブレーション ··········································································································· 17
9.5 受信機起動時の動作 ······································································································· 18
10 FAQ ······························································································································ 19
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
1 FURUNO ELECTRIC CO., LTD. All rights reserved.
1 概要
本書は下記の FURUNO Dead Reckoning(以下 DR)対応 GNSS受信機(以下 GNSS+DR受信機)の性能を、
最大限に引き出していただくためのユーザーガイドです。
- eRideOPUS 6 (型式: ePV6010B) Dead Reckoning Chip solution
- eRideOPUS 7 (型式: ePV7010B) Dead Reckoning Chip solution
- GV-8720 - GV-8620
対象となるソフトウェアは ENP6.53A以降とします。
GNSS+DR受信機は、以下の外部入力により DR機能を実現することができます。
<センサまたは車載機器からの信号入力>
以下の車載機器からの情報を、直接受信機に信号として入力する方法です。
- 弊社のサポートしているジャイロセンサ、および加速度センサ
- 車速パルス
- バック信号
2 FURUNO DR GNSS受信機が提供するソリューション
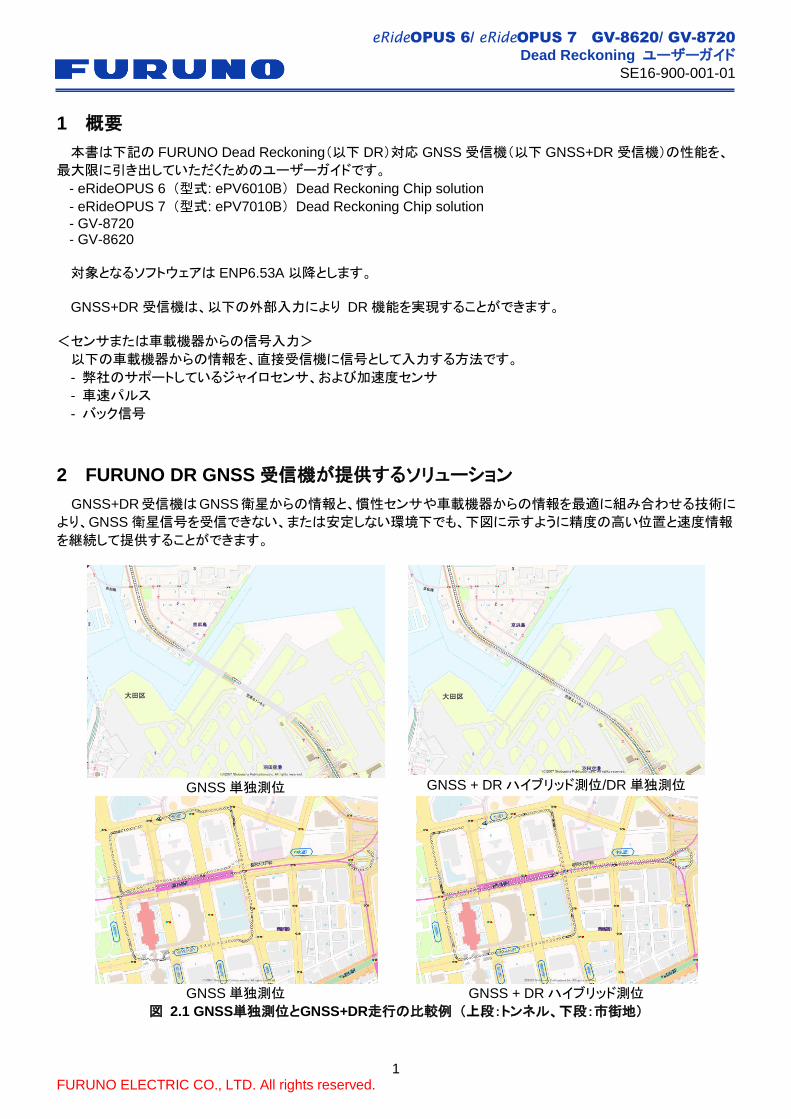
GNSS+DR受信機はGNSS衛星からの情報と、慣性センサや車載機器からの情報を最適に組み合わせる技術に
より、GNSS衛星信号を受信できない、または安定しない環境下でも、下図に示すように精度の高い位置と速度情報
を継続して提供することができます。
GNSS単独測位
GNSS + DRハイブリッド測位/DR単独測位
GNSS単独測位
GNSS + DRハイブリッド測位
図 2.1 GNSS単独測位とGNSS+DR走行の比較例 (上段:トンネル、下段:市街地)
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
2 FURUNO ELECTRIC CO., LTD. All rights reserved.
3 システム構成
3.1 サポートしているセンサ
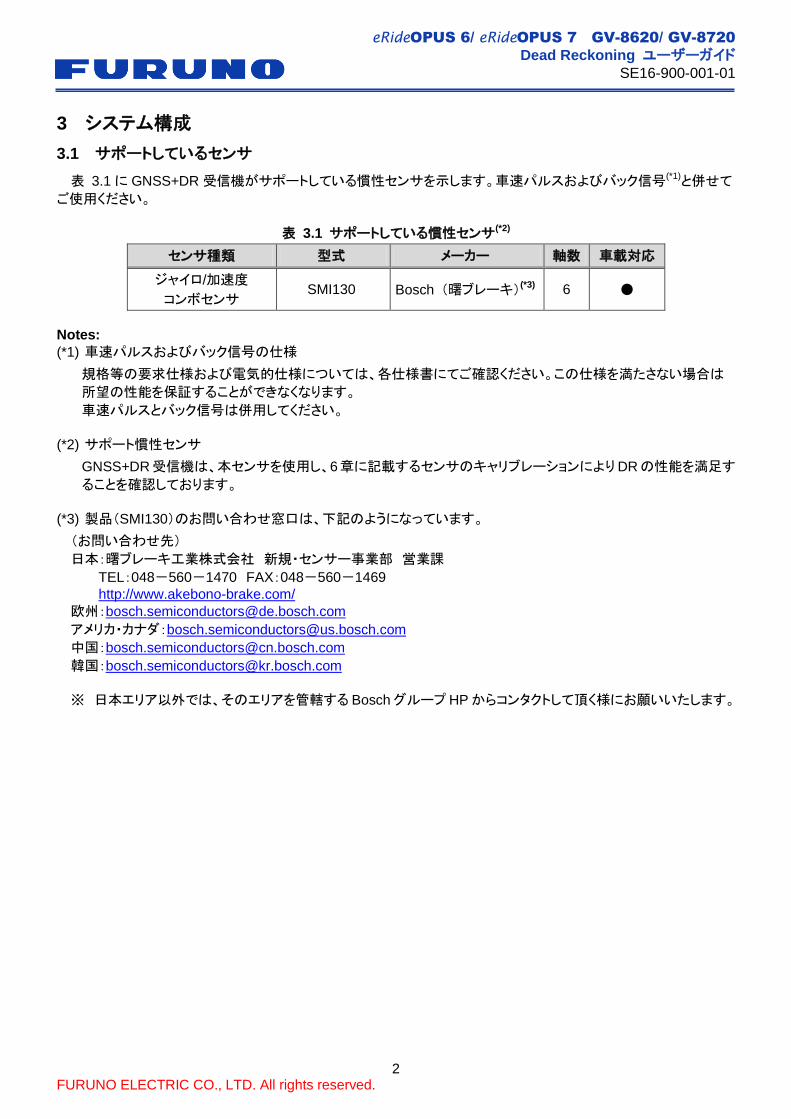
表 3.1に GNSS+DR受信機がサポートしている慣性センサを示します。車速パルスおよびバック信号(*1)と併せて
ご使用ください。
表 3.1 サポートしている慣性センサ(*2)
センサ種類 型式 メーカー 軸数 車載対応
ジャイロ/加速度
コンボセンサ SMI130 Bosch (曙ブレーキ)(*3) 6 ●
Notes:
(*1) 車速パルスおよびバック信号の仕様
規格等の要求仕様および電気的仕様については、各仕様書にてご確認ください。この仕様を満たさない場合は
所望の性能を保証することができなくなります。
車速パルスとバック信号は併用してください。
(*2) サポート慣性センサ
GNSS+DR受信機は、本センサを使用し、6章に記載するセンサのキャリブレーションによりDRの性能を満足す
ることを確認しております。
(*3) 製品(SMI130)のお問い合わせ窓口は、下記のようになっています。
(お問い合わせ先)
日本:曙ブレーキ工業株式会社 新規・センサー事業部 営業課
TEL:048-560-1470 FAX:048-560-1469
http://www.akebono-brake.com/
アメリカ・カナダ:[email protected]
※ 日本エリア以外では、そのエリアを管轄するBoschグループHPからコンタクトして頂く様にお願いいたします。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
3 FURUNO ELECTRIC CO., LTD. All rights reserved.
3.2 センサ情報入力端子について
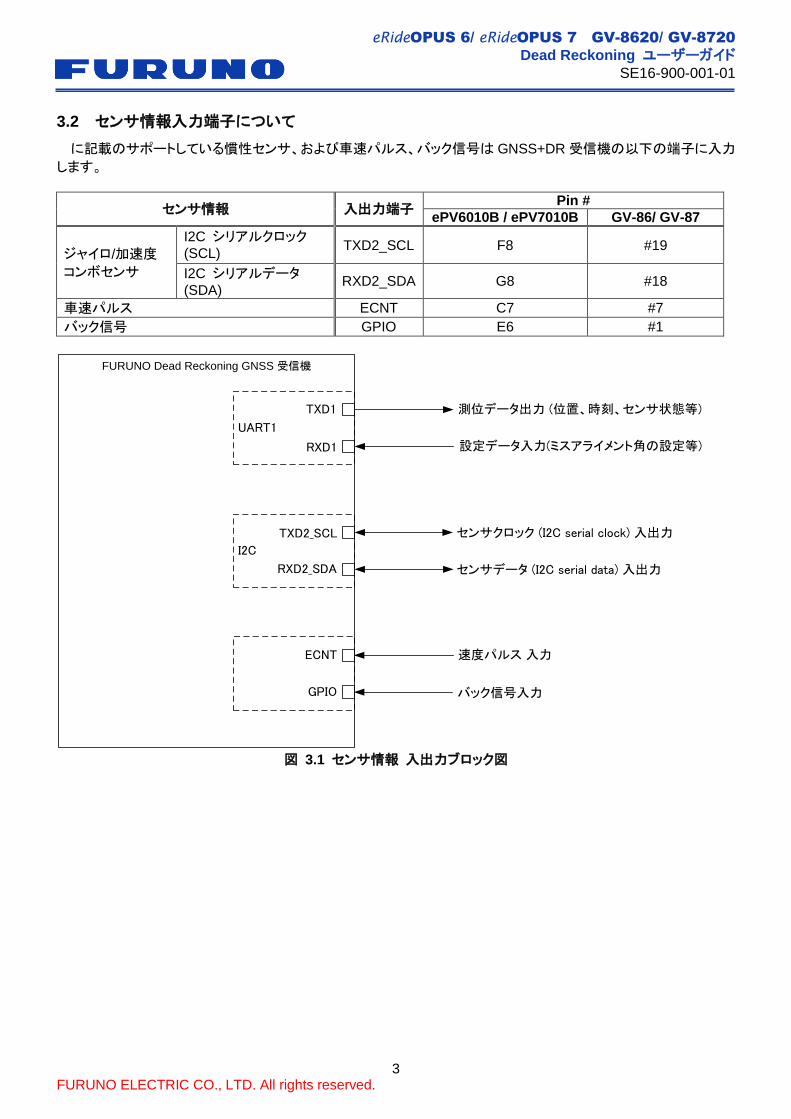
に記載のサポートしている慣性センサ、および車速パルス、バック信号は GNSS+DR受信機の以下の端子に入力
します。
センサ情報 入出力端子 Pin #
ePV6010B / ePV7010B GV-86/ GV-87
ジャイロ/加速度
コンボセンサ
I2C シリアルクロック
(SCL) TXD2_SCL F8 #19
I2C シリアルデータ
(SDA) RXD2_SDA G8 #18
車速パルス ECNT C7 #7
バック信号 GPIO E6 #1
FURUNO Dead Reckoning GNSS 受信機
ECNT
GPIO
RXD2_SDA
TXD2_SCL
RXD1
TXD1 測位データ出力 (位置、時刻、センサ状態等)
設定データ入力(ミスアライメント角の設定等)
センサデータ (I2C serial data) 入出力
センサクロック (I2C serial clock) 入出力
速度パルス 入力
バック信号入力
UART1
I2C
図 3.1 センサ情報 入出力ブロック図
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
4 FURUNO ELECTRIC CO., LTD. All rights reserved.
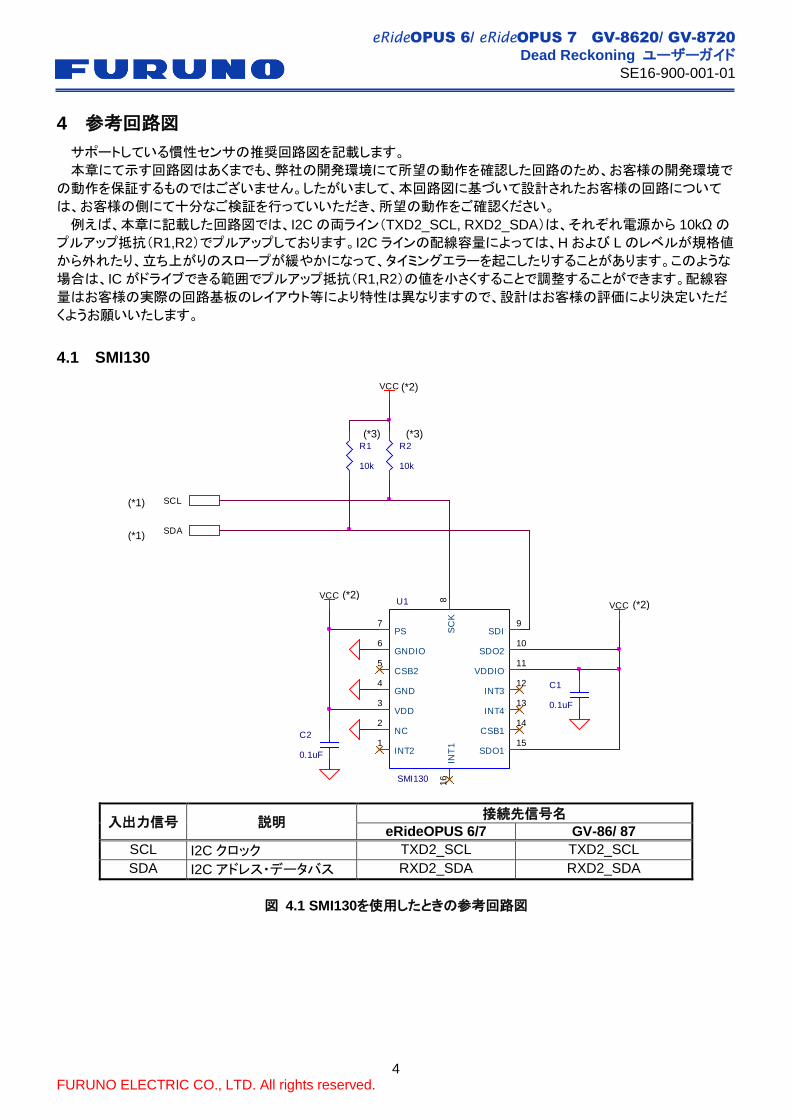
4 参考回路図
サポートしている慣性センサの推奨回路図を記載します。
本章にて示す回路図はあくまでも、弊社の開発環境にて所望の動作を確認した回路のため、お客様の開発環境で
の動作を保証するものではございません。したがいまして、本回路図に基づいて設計されたお客様の回路について
は、お客様の側にて十分なご検証を行っていいただき、所望の動作をご確認ください。
例えば、本章に記載した回路図では、I2Cの両ライン(TXD2_SCL, RXD2_SDA)は、それぞれ電源から 10kΩの
プルアップ抵抗(R1,R2)でプルアップしております。I2C ラインの配線容量によっては、Hおよび Lのレベルが規格値
から外れたり、立ち上がりのスロープが緩やかになって、タイミングエラーを起こしたりすることがあります。このような
場合は、ICがドライブできる範囲でプルアップ抵抗(R1,R2)の値を小さくすることで調整することができます。配線容
量はお客様の実際の回路基板のレイアウト等により特性は異なりますので、設計はお客様の評価により決定いただ
くようお願いいたします。
4.1 SMI130
入出力信号 説明 接続先信号名
eRideOPUS 6/7 GV-86/ 87
SCL I2C クロック TXD2_SCL TXD2_SCL
SDA I2Cアドレス・データバス RXD2_SDA RXD2_SDA
図 4.1 SMI130を使用したときの参考回路図
SCL
SDA
R2
10k
C1
0.1uF
R1
10k
C2
0.1uF
U1
SMI130
INT21
NC2
VDD3
GND4
CSB25
GNDIO6
PS7
SC
K8
SDI9
SDO210
VDDIO11
INT312
INT413
CSB114
SDO115
INT
11
6
VCC
VCCVCC
(*1)
(*1)
(*2)
(*2) (*2)
(*3) (*3)
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
5 FURUNO ELECTRIC CO., LTD. All rights reserved.
Notes:
(*1) I2Cマスターデバイスが eRideOPUS 6/ eRideOPUS 7で、I/O電源を 1.8Vでご使用の場合は、レベルシフタ等
により 3.3V仕様にしてください。
(*2) 電源(VCC)は受信機と共通にしてください。I2Cマスターデバイスが eRideOPUS 6/ eRideOPUS 7で、I/O電
源を 1.8Vでご使用の場合は、レベルシフタ等により 3.3V仕様にしてください。
(*3) 本抵抗値は線路の浮遊容量により電気的特性を満足しない場合がありますので、線路の浮遊容量を考慮して
抵抗値を決めてください。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
6 FURUNO ELECTRIC CO., LTD. All rights reserved.
5 慣性センサの設置角度について
GNSS+DR受信機では、慣性センサの設置について、車両の座標系と慣性センサの座標系の傾き・ずれに仕様値
を設けています。GNSS+DR受信機は、仕様値内の傾き・ずれを補正する機能を有しています。
① オートオリエンテーション機能により設置角度の傾き・ずれを自動補正する方法
② 既知の設置角度の傾きをミスアライメント設定コマンドによって、あらかじめ設定する方法
この機能により、傾き・ずれから生じる慣性センサの出力誤差を補正・除去することが可能です。
オートオリエンテーション機能は、「$PERDAPI,AUTOORIENT,1*6E (*1)」コマンドにより、自動補正できる角度範囲
を拡大することもできます。
オートオリエンテーションについては、5.1節、5.2節に、ミスアライメントの設定方法については5.3節に詳細を記載
します。
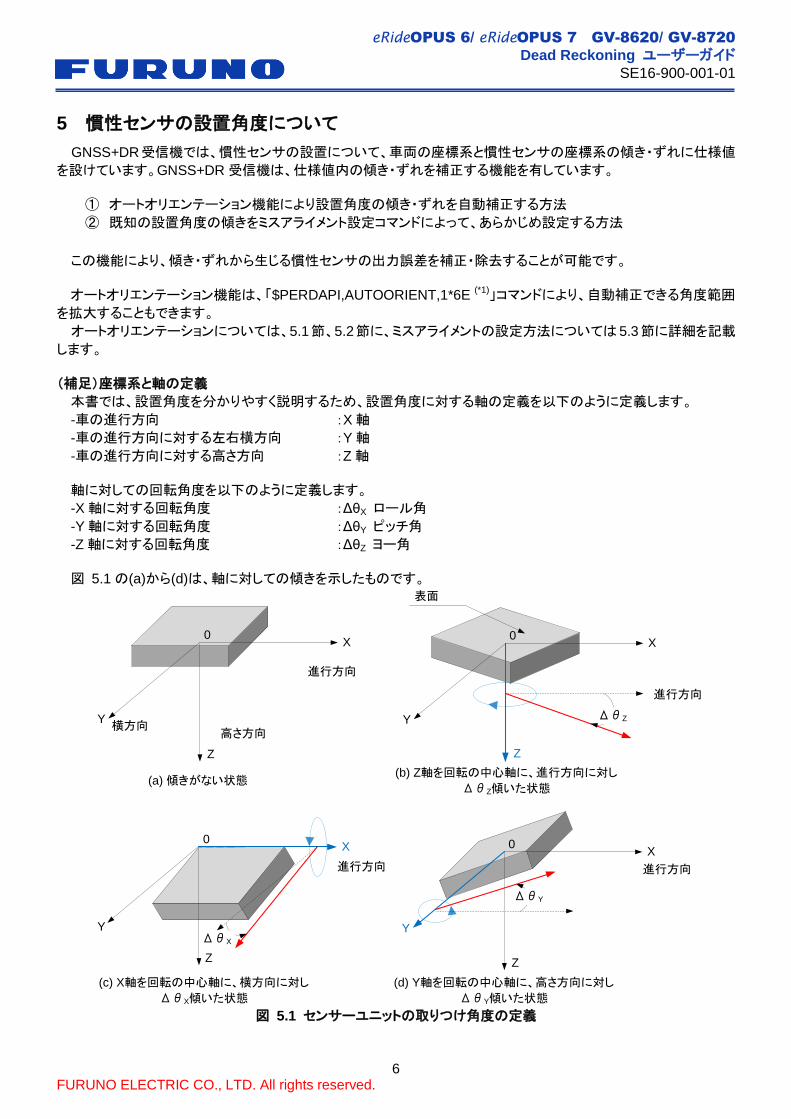
(補足)座標系と軸の定義
本書では、設置角度を分かりやすく説明するため、設置角度に対する軸の定義を以下のように定義します。
-車の進行方向 :X軸
-車の進行方向に対する左右横方向 :Y軸
-車の進行方向に対する高さ方向 :Z軸
軸に対しての回転角度を以下のように定義します。
-X軸に対する回転角度 :ΔθX ロール角
-Y軸に対する回転角度 :ΔθY ピッチ角
-Z軸に対する回転角度 :ΔθZ ヨー角
図 5.1の(a)から(d)は、軸に対しての傾きを示したものです。
Z
X
Y
(a) 傾きがない状態
Z
X
Y
(b) Z軸を回転の中心軸に、進行方向に対し
ΔθZ傾いた状態
Z
X
Y
(c) X軸を回転の中心軸に、横方向に対し
ΔθX傾いた状態
Z
X
Y
(d) Y軸を回転の中心軸に、高さ方向に対し
ΔθY傾いた状態
ΔθY
0 0
0
表面
0
進行方向
ΔθZ
ΔθX
進行方向
高さ方向横方向
進行方向 進行方向
図 5.1 センサーユニットの取りつけ角度の定義
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
7 FURUNO ELECTRIC CO., LTD. All rights reserved.
なお、それぞれの慣性センサのデータシートに記載されている軸の定義と GNSS+DR受信機における軸の定義は、
Z 軸、Y 軸がそれぞれ逆に定義されている場合があります。この場合は、GNSS+DR受信機で、Z 軸・Y 軸にそれ
ぞれ-1 倍して、本章で定義した軸の定義に合わせています。
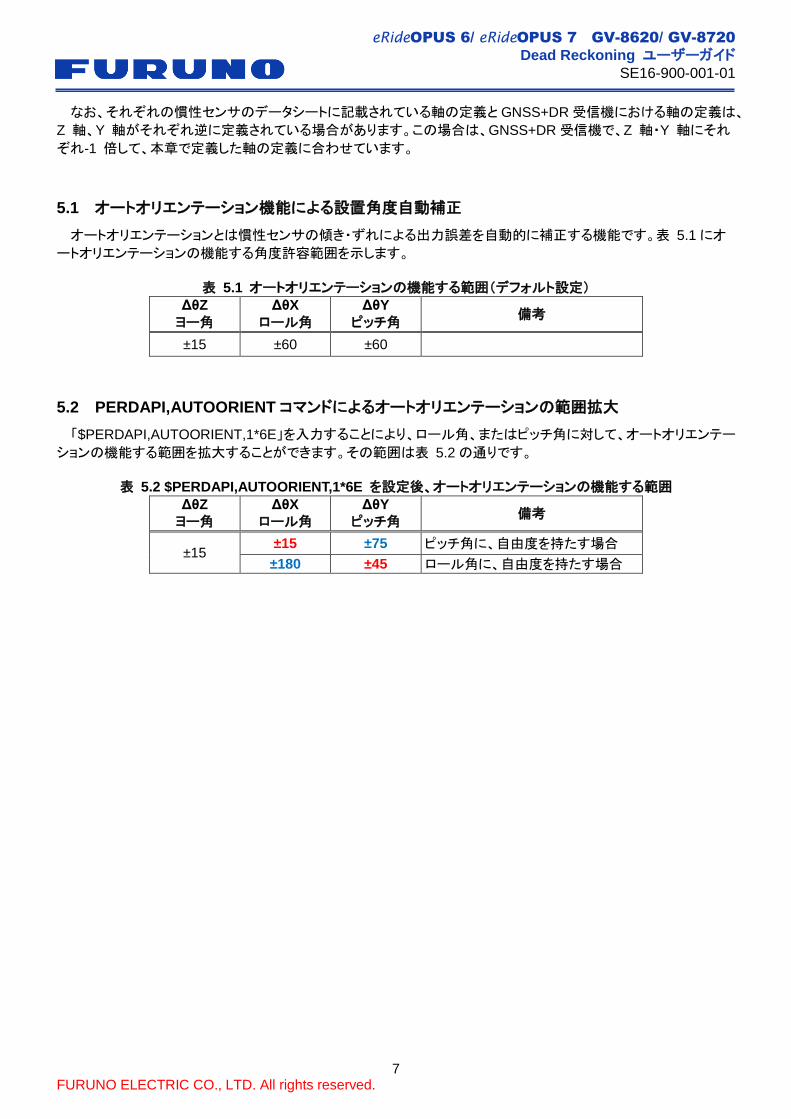
5.1 オートオリエンテーション機能による設置角度自動補正
オートオリエンテーションとは慣性センサの傾き・ずれによる出力誤差を自動的に補正する機能です。表 5.1にオ
ートオリエンテーションの機能する角度許容範囲を示します。
表 5.1 オートオリエンテーションの機能する範囲(デフォルト設定) ΔθZ
ヨー角
ΔθX
ロール角
ΔθY
ピッチ角 備考
±15 ±60 ±60
5.2 PERDAPI,AUTOORIENT コマンドによるオートオリエンテーションの範囲拡大
「$PERDAPI,AUTOORIENT,1*6E」を入力することにより、ロール角、またはピッチ角に対して、オートオリエンテー
ションの機能する範囲を拡大することができます。その範囲は表 5.2の通りです。
表 5.2 $PERDAPI,AUTOORIENT,1*6E を設定後、オートオリエンテーションの機能する範囲
ΔθZ
ヨー角
ΔθX
ロール角
ΔθY
ピッチ角 備考
±15 ±15 ±75 ピッチ角に、自由度を持たす場合
±180 ±45 ロール角に、自由度を持たす場合
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
8 FURUNO ELECTRIC CO., LTD. All rights reserved.
5.3 ミスアライメント設定コマンドによる設置角度の設定
5.1節、5.2節に記したオートオリエンテーションの機能する範囲を超えた設置角に、慣性センサを設置する場合、ミ
スアライメント設定コマンド(*1)(ジャイロセンサ:PERDAPI,GYROALIGN、加速度センサ:PERDAPI,ACCELALIGN)
により慣性センサの進行方向に対する設置角度を設定できます。
ミスアライメントの設定は、初めて慣性センサの内蔵した端末を設置したとき、またはその端末の設置角度を変更し
たときに行います。手順は以下の通りです。
(手順)
① 慣性センサを内蔵した端末を設置します。
② 慣性センサの設置位置が、仕様の設置方向に対して、どれくらいの角度の傾きがあるかを実測します。
③ 車両を停止した状態で、GNSS+DR受信機を稼働します。
④ $PERDAPI,STOP,DRPARK*5D コマンドを発行し、GNSS+DR 受信機の測位動作を停止します。
⑤ ②で実測した傾きをミスアライメントの設定コマンドを入力します。
(ジャイロセンサのミスアライメントの設定コマンド)
$PERDAPI,GYROALIGN, Δθx, Δθy, Δθz*hh<CR><LF>
(加速度センサのミスアライメントの設定コマンド)
$PERDAPI,ACCELALIGN, Δθx, Δθy, Δθz*hh<CR><LF>
※ミスアライメント角の設定は絶対座標に対して ΔθX→ΔθY→ΔθZの順で回転させます。
※<CR><LF> CR: Carriage Return, LF: Line Feed
⑥ $PERDAPI,START,SIMCOLD*48 コマンドを発行し、GNSS+DR 受信機の測位動作を開始します。(*2)
Notes:
(*1) ミスアライメント設定コマンドは、PERDAPI,STOP,DRPARK コマンドの発行、電源 OFF、ハードウェアリセットに
よりデフォルト値に戻るため、ESIPLISTにコマンドを登録することを推奨します。
(*2) 測位動作中に慣性センサの設置角度を変更しないでください。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
9 FURUNO ELECTRIC CO., LTD. All rights reserved.
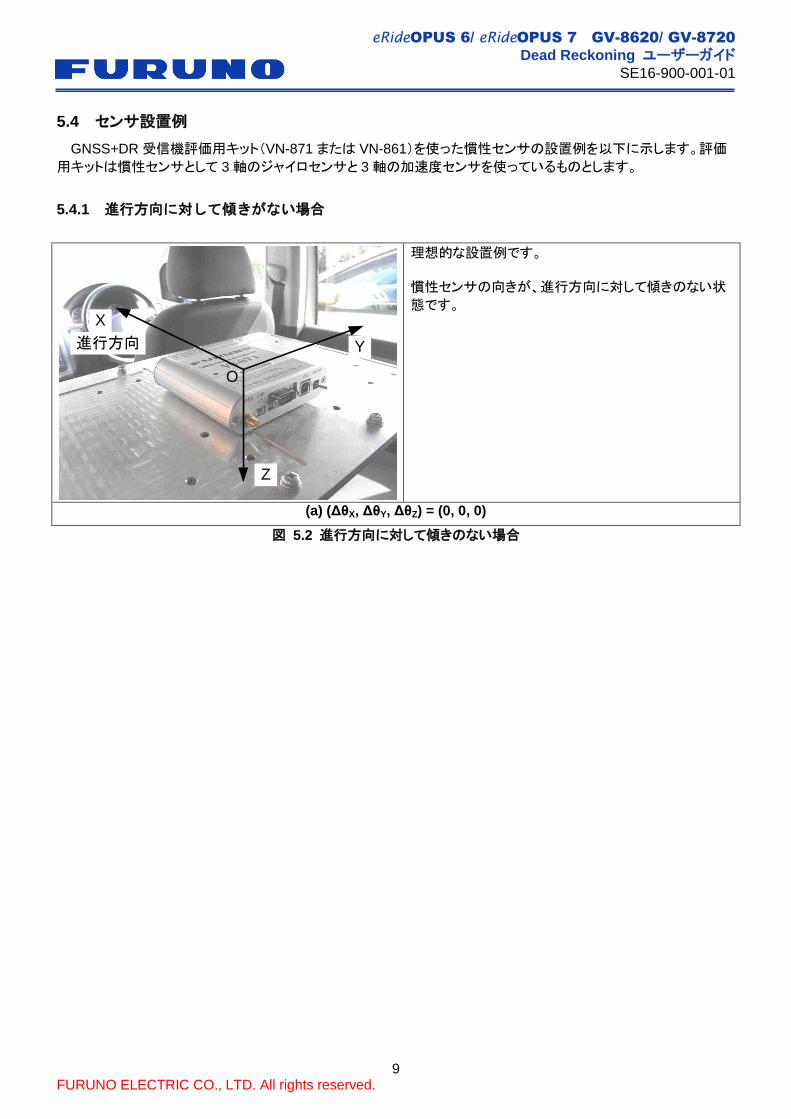
5.4 センサ設置例
GNSS+DR受信機評価用キット(VN-871または VN-861)を使った慣性センサの設置例を以下に示します。評価
用キットは慣性センサとして 3軸のジャイロセンサと 3軸の加速度センサを使っているものとします。
5.4.1 進行方向に対して傾きがない場合
X
Y
Z
進行方向
O
理想的な設置例です。
慣性センサの向きが、進行方向に対して傾きのない状
態です。
(a) (ΔθX, ΔθY, ΔθZ) = (0, 0, 0)
図 5.2 進行方向に対して傾きのない場合
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
10 FURUNO ELECTRIC CO., LTD. All rights reserved.
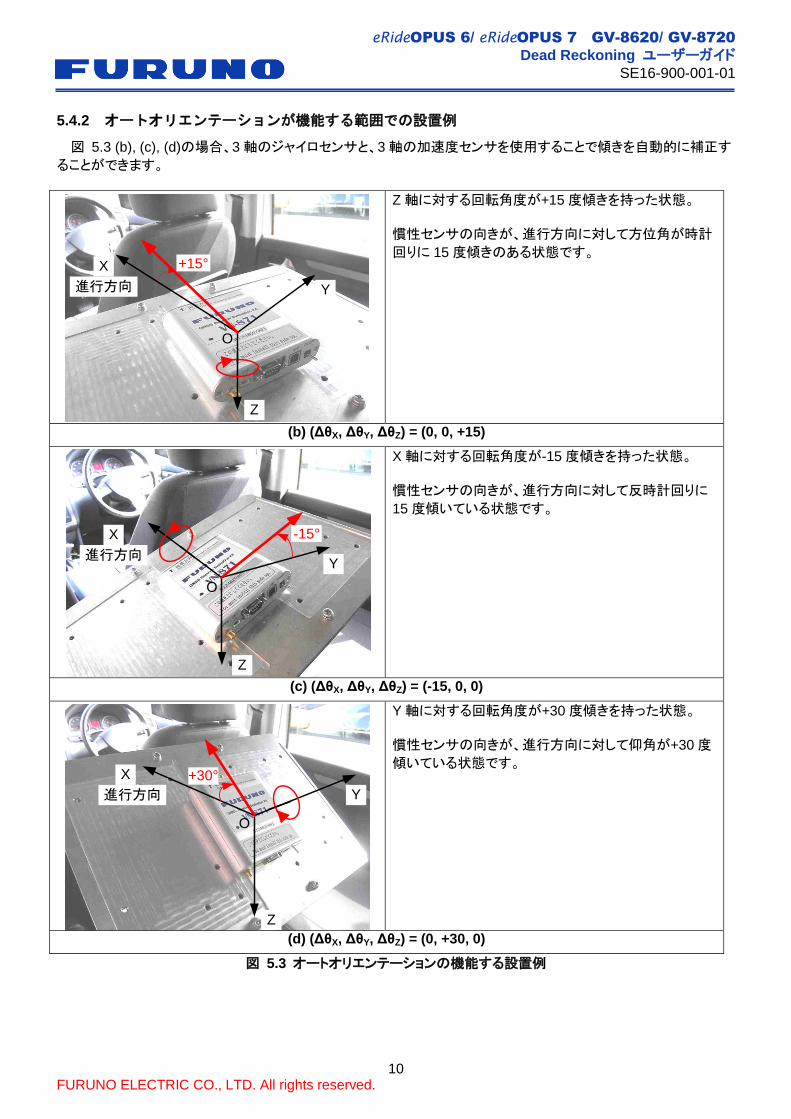
5.4.2 オートオリエンテーションが機能する範囲での設置例
図 5.3 (b), (c), (d)の場合、3軸のジャイロセンサと、3軸の加速度センサを使用することで傾きを自動的に補正す
ることができます。
X
Z
Y進行方向
+15°
O
Z軸に対する回転角度が+15度傾きを持った状態。
慣性センサの向きが、進行方向に対して方位角が時計
回りに 15度傾きのある状態です。
(b) (ΔθX, ΔθY, ΔθZ) = (0, 0, +15)
Z
X
進行方向Y
-15°
O
X軸に対する回転角度が-15度傾きを持った状態。
慣性センサの向きが、進行方向に対して反時計回りに
15度傾いている状態です。
(c) (ΔθX, ΔθY, ΔθZ) = (-15, 0, 0)
Z
Y
X
進行方向
O
+30°
Y軸に対する回転角度が+30度傾きを持った状態。
慣性センサの向きが、進行方向に対して仰角が+30度
傾いている状態です。
(d) (ΔθX, ΔθY, ΔθZ) = (0, +30, 0)
図 5.3 オートオリエンテーションの機能する設置例
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
11 FURUNO ELECTRIC CO., LTD. All rights reserved.
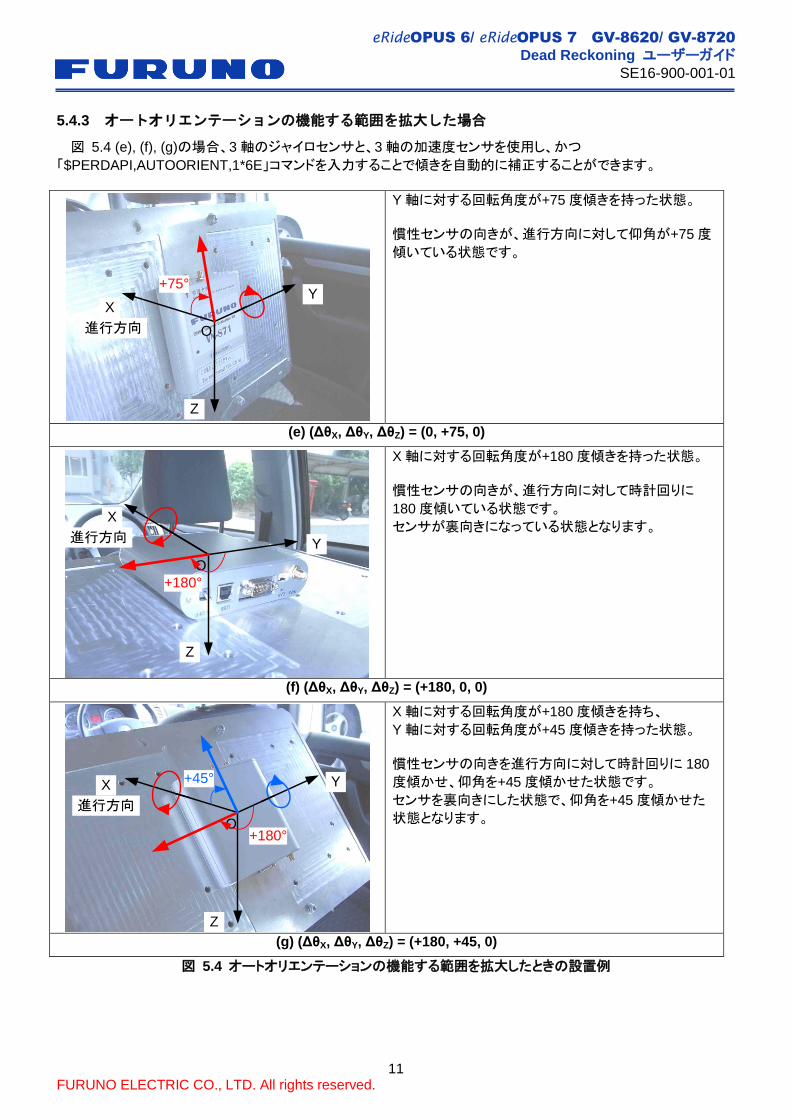
5.4.3 オートオリエンテーションの機能する範囲を拡大した場合
図 5.4 (e), (f), (g)の場合、3軸のジャイロセンサと、3軸の加速度センサを使用し、かつ
「$PERDAPI,AUTOORIENT,1*6E」コマンドを入力することで傾きを自動的に補正することができます。
+75°
XY
Z
進行方向 O
Y軸に対する回転角度が+75度傾きを持った状態。
慣性センサの向きが、進行方向に対して仰角が+75度
傾いている状態です。
(e) (ΔθX, ΔθY, ΔθZ) = (0, +75, 0)
X
Y
Z
進行方向
O
+180°
X軸に対する回転角度が+180度傾きを持った状態。
慣性センサの向きが、進行方向に対して時計回りに
180度傾いている状態です。
センサが裏向きになっている状態となります。
(f) (ΔθX, ΔθY, ΔθZ) = (+180, 0, 0)
O
X Y
Z
進行方向
+180°
+45°
X軸に対する回転角度が+180度傾きを持ち、
Y軸に対する回転角度が+45度傾きを持った状態。
慣性センサの向きを進行方向に対して時計回りに 180
度傾かせ、仰角を+45度傾かせた状態です。
センサを裏向きにした状態で、仰角を+45度傾かせた
状態となります。
(g) (ΔθX, ΔθY, ΔθZ) = (+180, +45, 0)
図 5.4 オートオリエンテーションの機能する範囲を拡大したときの設置例
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
12 FURUNO ELECTRIC CO., LTD. All rights reserved.
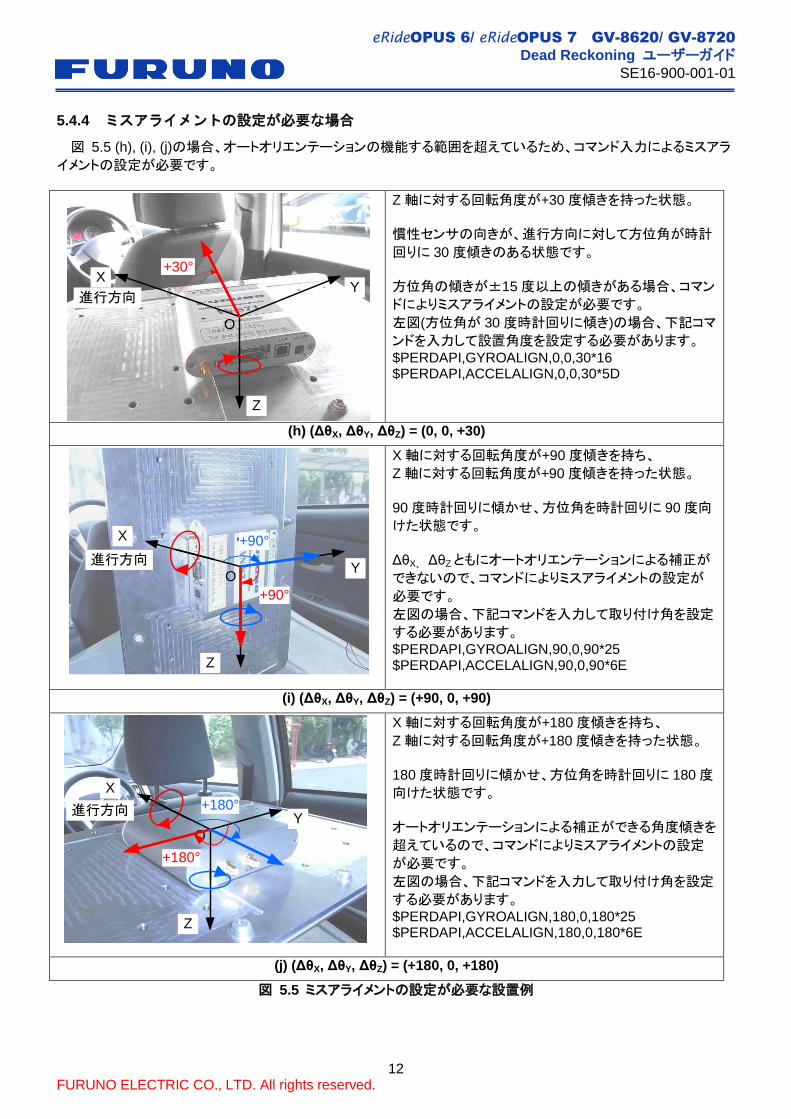
5.4.4 ミスアライメントの設定が必要な場合
図 5.5 (h), (i), (j)の場合、オートオリエンテーションの機能する範囲を超えているため、コマンド入力によるミスアラ
イメントの設定が必要です。
Z
YX
進行方向
O
+30°
Z軸に対する回転角度が+30度傾きを持った状態。
慣性センサの向きが、進行方向に対して方位角が時計
回りに 30度傾きのある状態です。
方位角の傾きが±15度以上の傾きがある場合、コマン
ドによりミスアライメントの設定が必要です。
左図(方位角が 30度時計回りに傾き)の場合、下記コマ
ンドを入力して設置角度を設定する必要があります。
$PERDAPI,GYROALIGN,0,0,30*16 $PERDAPI,ACCELALIGN,0,0,30*5D
(h) (ΔθX, ΔθY, ΔθZ) = (0, 0, +30)
+90°
+90°
O
X
Y
Z
進行方向
X軸に対する回転角度が+90度傾きを持ち、
Z軸に対する回転角度が+90度傾きを持った状態。
90度時計回りに傾かせ、方位角を時計回りに 90度向
けた状態です。
ΔθX、 ΔθZともにオートオリエンテーションによる補正が
できないので、コマンドによりミスアライメントの設定が
必要です。
左図の場合、下記コマンドを入力して取り付け角を設定
する必要があります。
$PERDAPI,GYROALIGN,90,0,90*25 $PERDAPI,ACCELALIGN,90,0,90*6E
(i) (ΔθX, ΔθY, ΔθZ) = (+90, 0, +90)
O
X
Y
Z
進行方向 +180°
+180°
X軸に対する回転角度が+180度傾きを持ち、
Z軸に対する回転角度が+180度傾きを持った状態。
180度時計回りに傾かせ、方位角を時計回りに 180度
向けた状態です。
オートオリエンテーションによる補正ができる角度傾きを
超えているので、コマンドによりミスアライメントの設定
が必要です。
左図の場合、下記コマンドを入力して取り付け角を設定
する必要があります。
$PERDAPI,GYROALIGN,180,0,180*25 $PERDAPI,ACCELALIGN,180,0,180*6E
(j) (ΔθX, ΔθY, ΔθZ) = (+180, 0, +180)
図 5.5 ミスアライメントの設定が必要な設置例
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
13 FURUNO ELECTRIC CO., LTD. All rights reserved.
6 キャリブレーション
キャリブレーションとは、慣性センサや車速パルスの出力誤差を推定する機能です。推定する出力誤差は、バイア
スとゲインです。バイアスとは、入力値が 0のときの出力値、ゲインとは、入力値と出力値の比のことです。推定した
バイアスとゲインを使って、慣性センサ・車速パルスの出力値を補正し、高精度な位置を出力します。
キャリブレーションの状態を、弊社所定の出力プロトコルで確認することができます。
キャリブレーションは、6.1節~6.5節で定める方法で実施してください。詳細は以降で記載します。
6.1 電源 ONから GNSS測位まで
(手順)
GNSS衛星受信環境が良い環境(オープンスカイ)(*1)で GNSS+DR 受信機を稼働し、GNSS測位させます。
(確認方法)
①GNSS測位しているかどうかは、GNS、RMCセンテンス等の測位状態で確認します。
例:黄色のハイライトの箇所が測位状態を示しています。(GNSセンテンスは、左から GPS、GLONASS、Galileo
の測位状態を表す) A(単独測位)または D(ディファレンシャル測位)になっていることを確認します。
$GNRMC,071201.776,A,3442.7276,N,13520.1229,E,0.00,30.96,130614,,,A,V*3C $GNGNS,071201.776,3442.7276,N,13520.1229,E,AAN,18,0.5,3.6,36.7,,,V*5C
②GPS/GNSS衛星受信状態は GSVセンテンスの各衛星の SNR (C/N0)で確認します。40dB/Hz以上の衛星で
受信している衛星が、多ければ多いほど受信環境が良い状態です。
例:黄色のハイライトの箇所が各 GNSS衛星の C/N0値を示しています。
$GPGSV,4,1,14,19,73,309,50,03,70,345,52,27,55,031,52,16,46,084,50,1*6A $GPGSV,4,2,14,07,40,307,52,11,39,211,49,08,19,320,46,01,15,199,40,1*61 $GPGSV,4,3,14,13,15,247,43,30,13,319,,22,11,090,46,23,05,219,42,1*6F $GPGSV,4,4,14,42,00,000,46,93,32,161,43,,,,,,,,,1*6F $GLGSV,2,1,07,82,71,317,56,80,67,326,53,79,50,152,52,81,30,031,55,1*7C $GLGSV,2,2,07,83,25,238,53,73,14,329,29,78,01,151,34,,,,,1*42
Notes:
(*1) C/N0が 40dB-Hz以上の衛星が測位使用衛星の 50%以上であれば、GNSS衛星受信環境が良いと判断でき
ます。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
14 FURUNO ELECTRIC CO., LTD. All rights reserved.
6.2 GNSS測位からキャリブレーションを開始し、DR有効となるまで
(手順)
GNSS測位の状態で一定の速度(20 km/h 以上)で走行してください。キャリブレーションを開始します。
20Km/h overRun
!注意
20km/h以下で走行し続けると、キャリブレーションが行われず、DR機能が有効にならない場合があります。
20km/h以上の速度で、しばらく走行すると DR有効となり、GNSS+DR測位の状態となります。
!注意
DR有効になっていますが、この時、必ずしもセンサのキャリブレーションが完了しているわけではありません。
(確認方法)
DR有効になっているかは、PERDCRD,R センテンスの Field3:慣性センサ DRモードが 1(有効)になっていること
で確認します。GNSS+DR測位になっているかは PERDCRD,R センテンスの Field4:DR使用モードが
2(DR/GNSS mixed)になっていることで確認します。
例: $PERDCRD,R,1,2,-0.68,-8.85,-0.01,-0.4,0.1,265.6,1,10*23
6.3 車速パルス、加速度センサのキャリブレーション
(手順)
車速パルス、加速度センサのキャリブレーションは、6.2節の手順と同様、一定の速度で走行することで行われま
す。
(確認方法)
速度精度を十分に得られているか確認するために車速パルス、または、加速度センサの信頼性を確認してくださ
い。
【車速パルスを使用する場合】
信頼性の確認は、PERDCRI,OセンテンスのField 3 (odomtrConf)の値が7 or 15(*1)になっていることで行います。
例: $PERDCRI,O,7,29,2,4.00,1.569858*10 $PERDCRI,O,15,0,0,4.02,1.569858*18
(*1) 7の状態からバック信号を認識したときに 15になります。車速パルスを使用する際はバックさせたときにバック
信号が認識できることを確認ください。
【加速度センサを使用する場合】
PERDCRI,A センテンスの Field 17 (learnmode) が 3以上であることを確認します
例: $PERDCRI,A,3,7,724,-701,-25,2572,2572,2572,689,-717,-22,88,44,0,3*19

eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
15 FURUNO ELECTRIC CO., LTD. All rights reserved.
6.4 ジャイロセンサのキャリブレーション
(手順)
GNSS測位、または GNSS+DR 測位の状態で、右折および左折を 8~12回程度繰り返してください。本節の手順
は 6.2節、6.3節の手順と混在しても構いません。
Turn Left Turn Right
(確認方法)
方位精度が十分に得られているか確認するために、ジャイロセンサの信頼性を確認してください。
【ジャイロセンサの信頼性の確認方法】
PERDCRI,GセンテンスのField 17 (learnmode) が5、7、13、15のいずれかであることを確認します。いずれで
もない場合、再度右折・左折を繰り返してください。
例: $PERDCRI,G,3,7,79,-8,-27,2601,2601,2601,79,-8,-27,88,44,0,7*1A
6.5 経年変化や温度変動に対する対応
キャリブレーション完了後も、実運用の中でバイアスとゲインを推定し続けます。これは経年変化や温度変動による
特性の変化に追従するためです。
(手順)
特に手順は必要ありませんが、実運用の中でバイアスとゲインを推定します。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
16 FURUNO ELECTRIC CO., LTD. All rights reserved.
7 DRデータのバックアップ方法とその取扱いについて
GNSS+DR受信機は、DRデータをバックアップするメモリーとして、Flash ROMとバックアップ用 SRAMの 2種類
を用意しています。DRデータとは、最終測位解(位置と方位)、キャリブレーションにより推定したバイアス、ゲインの
ことです。
バックアップ用SRAMへは自動的に毎秒データを保存します。Flash ROMへデータをバックアップするためには電
源を切る前に、STOP コマンド($PERDAPI,STOP,DRPARK*5D)を発行する必要があります。
電源遮断後の次回以降の走行においては、DRデータがバックアップから読み込まれ、GNSSの衛星からの信号
を受信するまで、この DRデータを基に DR単独測位による位置を出力します。GNSSの衛星からの信号を受信し、
その測位結果が正しいと判断すると GNSS+DRハイブリッド測位に移ります。
搭載する車両を変更した場合、電源遮断時と電源再投入時で位置や方位が異なる場合、慣性センサの設置角度
を変更した場合は、$PERDAPI,START,SIMCOLD*48 コマンドにより、バックアップ情報を消去し、上述のキャリブ
レーションを再度行ってください。
8 評価時の推奨 NMEA出力センテンス
GNSS+DR受信機を評価時は、下記の手順でコマンドを発行し、慣性センサデータ(PERDCRDおよびPERDCRI
センテンス)と診断データ(Diagデータ)を出力した状態で、ログを収集することを推奨します。
PERDCRDおよび PERDCRIセンテンスはお客様が慣性センサの状態を把握するために、Diagデータは弊社で
データを解析する際に使用します。
(1) Stop コマンド「$PERDAPI,STOP,DRPARK*5D」で受信機の測位動作を停止。
(2) センサデータ(PERDCRD および PERDCRIセンテンス)出力コマンド「$PERDAPI,CROUT,DI*09」を送信。
(3) Diagデータ出力コマンド「$PERDSYS,RECPLAY,ON*0B」を送信。
(4) START コマンド「$PERDAPI,START*37」で測位動作を開始。
Notes:
- 上記データを出力する場合は、下記コマンドでプロトコルのボーレートを 460800 bpsに変更してください。
$PERDCFG,UART1,460800*68
ただし、ボーレートを 460800 bpsに変更すると、シリアル通信のエラー率が高くなるため、Diagデータを収集する
目的以外では、ご使用にならないでください。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
17 FURUNO ELECTRIC CO., LTD. All rights reserved.
9 特記事項
9.1 慣性センサの取扱いに関する注意事項
慣性センサの取扱いに対しては、各慣性センサの仕様書等に記載されている使用上の注意事項や実装条件等に
記載されている内容に沿って取扱い願います。また、設計された製品について十分な検証を行い、所望の動作が行
えているかどうかをご確認願います。
9.2 慣性センサの特性に対する特記事項
GNSS+DR受信機は慣性センサの仕様書に記載されているバイアスおよびゲイン特性に対してのみ、その誤差を
推定し、DRの性能を確保するよう設計されております。そのため、慣性センサの仕様書に記載されていない特性の
影響を受けることで、DR性能が劣化することがございます。
9.3 外的要因による慣性センサへの影響
慣性センサは高感度なデバイスのため、下記のような外的要因により、センサの出力値に変動を与える可能性が
あります。これらの影響を低減するよう、センサ周辺のレイアウト設計をしていただくようお願いします。
(1) 温度要因
温度によるセンサ出力値への影響を回避する対策の例を記載します。
a. 慣性センサを熱源のそばに配置しない。
b. 熱の対流の影響を受ける位置に慣性センサを配置しない。
(2) 機械的要因
機械的要因によるセンサ出力値への影響を回避する対策の例を記載します。
a. 基板固定部近傍に慣性センサを配置する。
b. ゴムなどの緩衝材を用いて基板を挟む。
c. 慣性センサが実装された基板・ユニットを車体にねじで固定する。
(3) その他要因
ジャイロセンサと加速度センサはMEMSデバイスのため、そのセンサ内部において機械的にMEMSを振動させる駆
動周波数および電気的周波数特性を持ちます。外部からこれらの周波数に近い周波数特性を持つ機械的または電
気的な影響を受けると、センサの出力特性が著しく変わる場合があります。この出力特性の異常な変化により、DR
の性能が著しく低下する恐れがあります。ご使用のセンサに対して、外部からの機械的な振動やクロック等の電気的
な信号の影響を受けない設計をしていただくようお願いします。
9.4 キャリブレーション
適切なキャリブレーションを実施するために、良好なGNSS受信環境(6.1節Notes参照)が必要です。可能な限り、
GNSS信号を受信しやすい位置にアンテナを設置してください。また、実際の運用において、十分な利得が得られて
いるか、ノイズによる受信感度の劣化がないか、十分にご確認願います。
車速パルスのキャリブレーションを実施するためには、良好な GNSS受信環境で 20km/h以上で走行する必要が
あります。実際の運用が低速走行である場合(例:市街地のバス運行など)、キャリブレーションに時間がかかる、ま
たは完了しない可能性があります。そのような場合は、まずキャリブレーションを完了させてから実運用をするように
ご検討ください。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
18 FURUNO ELECTRIC CO., LTD. All rights reserved.
9.5 受信機起動時の動作
GNSS+DR 受信機は、最終更新位置や方位、DRパラメータなどをバックアップします。次回起動時には、
GNSS+DR 受信機は、このバックアップデータを使用して、DR単独測位で起動します。その後、DRにより求めた方
位と GNSS測位により求めた方位が一致した時に、GNSS+DR 測位に移行します。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
19 FURUNO ELECTRIC CO., LTD. All rights reserved.
10 FAQ
Q1. キャリブレーションが完了しているかどうかの確認はどのようにすればよいでしょうか?
A1. まずは PERDCRD,Rセンテンスを確認ください。
このセンテンスの Field 3 (imuVerified) の値が 1になっていることで DRが有効になっていることを確認できま
す。下記に一例を記載します。詳細は各機種のプロトコル仕様書を参照ください。
例:$PERDCRD,R,1,2,-2.28,-12.12,0.16,-1.3,-0.5,260.5,3,17*17
1になっていることを確認ください。
ただし、この値のみの確認では DRが有効になっているかどうかしか確認できないので、以下の方法で速度精度
と方位精度が十分に得られているかどうかを確認ください。
速度精度を十分に得られているか確認するために車速パルス、または、加速度センサの信頼性を確認してくださ
い。
※車速パルスまたは加速度センサのキャリブレーション方法は 6節 <ステップ 2>の内容を参照ください。
【車速パルスを使用する場合】
PERDCRI,Oセンテンスの Field 3 (odomtrConf)の値が 7 or 15になっていることを確認します。
【加速度センサを使用する場合】
PERDCRI,A センテンスの Field 17 (learnmode) が 3以上であることを確認します。
方位精度が十分に得られているか確認するために、ジャイロセンサの信頼性を確認してください。
※ジャイロセンサのキャリブレーション方法は 6節 <ステップ 3>の内容を参照ください。
【ジャイロセンサの信頼性の確認方法】
PERDCRI,Gセンテンスの Field 17 (learnmode) が 5、7、13、15のいずれかであることを確認します。
Q2. センサが有効になりません。
A2. ジャイロセンサ、加速度センサの設置向きが 5章に記載されている内容に合致しているかを確認ください。
車速パルスを使用している場合は、車速パルスが電気的仕様を満たしていることと、車速パルスのカウントを確
認ください。
Q3. ジャイロセンサのみで DRを使用することは可能でしょうか。
A3. できません。ジャイロセンサを使う場合は車速パルスを併せてご使用ください。
Q4. 車速パルスを使用する場合は、バック信号は必要でしょうか。
A4. 必要です。
Q5. センサから推測される傾斜角はどこに出力されますか?
A5. PERDCRD,Rセンテンスの Field 9 (pitch)を確認ください。
Q6. 高度データにセンサから推測される傾斜角は反映されていますか?
A6. GNSセンテンス等で確認される高度データは、センサによる推定ピッチ角を反映していません。
eRideOPUS 6/ eRideOPUS 7 GV-8620/ GV-8720
Dead Reckoning ユーザーガイド
SE16-900-001-01
20 FURUNO ELECTRIC CO., LTD. All rights reserved.
Q7. ジャイロセンサ + 加速度センサ + 車速パルスを使っているときに、車速パルスが認識できなかった場合の挙
動はどうなるでしょうか。
A7. 最初から車速パルスがない場合、加速度センサから速度を作成して DRを行うモードに推移します。途中から車
速パルスがなくなる場合、しばらくの間航跡が乱れますが、その後、キャリブレーションをリセットし、加速度セン
サから速度を作成して DRを行うモードに推移します。加速度センサを使って速度を作成しているかどうかは、
PERDCRD,Rセンテンスの Field 11 (countsStatus) が 0であることを確認してください。
Q8. 参考回路図はありませんか。
A8. 4章を参照ください。
Q9. 自動車以外で使うことはできますか。
A9. できません。GNSS+DR受信機は、自動車のカーナビゲーションやテレマティクス端末向けに設計されていま
す。
Q10. ジャイロセンサのキャリブレーションが完了しません。
A10. 良好な GNSS受信環境であるかを確認してください。C/N0が 40dB-Hz以上の衛星が測位使用衛星の 50%
以上であれば、GNSS衛星受信環境が良いと判断できます。