Embed Size (px)
Citation preview

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüBir Deprem Simülatörünün Tasarımı
Abdullah SÜTDanışman: Doç.Dr.Oğut Yakut
SonuçSarsma Tablasına Sinüs Sinyali Uygulaması: http://1drv.ms/1o3Eyp5Sarsma Tablasına Gerçek Deprem Verilerinin Uygulanması:http://1drv.ms/1mVJO11 http://1drv.ms/1jb1DFF
Referanslar1- TEKO ELEKTRONİK ( www.tekoelektronik.com.tr, TEL : 0216 34627 84) 2- Panasonic Instruction Manual AC Servo Motor and DriverMINAS A4 Series (http://industrial.panasonic.com/ww/i_e/25000/minas_a4_e/minas_a4_e.pdf) 3- Panasonic AC Servo Driver MINAS Series Set up SoftwarePANATERM Ver.5.0 ( http://minas-a5.panasonic.biz/manual/en/PANATERMforA5_en.pdf )
GirişBu proje (Sarsma Tablası)’nin amacı,daha önce gerçekleşmiş ve kayıt altına alınmış deprem verilerinin,hazır bir eğitim seti üzerinde AC servomotorlar ve DAQ kartı yardımıyla gerçekleşmesini sağlamaktır.
Deprem Simülatörünün AmacıDünyanın oluşumundan beri,sismik yönden aktif bulunan bölgelerde depremlerin ardışıklı olarak oluştuğu ve sonucundan da milyonlarcainsanın ve barınakların yok olduğu bilinmektedir.Bilindiği gibi yurdumuz dünyanın en etkin deprem kuşaklarından birinin üzerindebulunmaktadır.Geçmişte yurdumuzda birçok yıkıcı depremler olduğu gibi,gelecekte de sık sık oluşacak depremlerle büyük can ve mal kaybınauğrayacağımız bir gerçektir. Bu bilinçle depreme karşı elimizden geldiğince mücadele etmek ve kendimizi eğitmemiz şarttır.Bu eğitimlerdenbazısı daha önce bir çok kez gerçekleştirilmiş olan ve bizimde bu projemizde gerçekleştirdiğimiz deprem simülatörüdür. DepremSimülatörü,elektrikli ya da bir akışkan yardımı ile tahrik edilebilen kontrol çözünürlüğü yüksek mekanik sistemler tarafından,rastgele sinyallerinveya gerçek deprem sinyallerinin bu mekanik sistemde gerçekleştirilmesidir. Deprem simülatörünün amacı Deprem Mühendisliği ve İnşaatMühendisliği bölümlerinde tasarlanan yapıların modellerinin deprem karşısındaki durumunu incelemek,yapıların eksik yönlerinin ortayaçıkarılmasını ve deprem karşısında alınabilecek önlemleri ortaya çıkararak bu alanlardaki çalışmalara destek sağlamaktır. Aynı zamandadeprem simülatörleri bazı vakıf veya özel kuruluşların desteği ile gezer tırlara uygun hale getirirlerek,okullarımızda,halk eğitim merkezlerindetoplumsal olarak deprem bilincini aşılamak amacıyla kullanılmaktadır.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüBir Bölgenin Rüzgar Potansiyelini Hesaplayan Cihaz Tasarımı (Anemometre)
Ziya YILMAZ & Cuma Ali MİLLİDanışman: Doç.Dr. Oğuz YAKUT
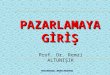
SonuçBu projede; bir bölgenin rüzgar enerjisi potansiyelinin ölçümü içingerekli olan cihaz tasarımı yapılmış ve şuan çalışır durumdadır.Cihazımız 7-160 km/h arasındaki hızları ölçebilmektedir. Ancak,rüzgarhızının ani azalması veya artması, hemen kapakçıkların dönüş hızınaetki etmeyebilir. Bu nedenle rüzgarın ani hız değişiminden kaynaklıolarak %10-15'lik hata oluşabilmektedir.
ReferanslarVHDL FPGA CPLD Verilog Digital Electronics eBook. Solidworks ileModelleme 2007/Prof.Ahmet ÖZDEMİR
GirişYenilenemez enerji kaynaklarının(petrol,doğal gaz...vb.) yakın gelecekte tükeneceğinin bilinmesi,yenilenebilir enerji kaynaklarına olan eğilimiartırmıştır.Yenilenebilir enerji kaynaklarının önemli bir kısmını oluşturan rüzgar enerjisinin ülkemizdeki potansiyelinin bilinmesi, yapılacak olansistemlerin ilk adımını oluşturmaktadır.Rüzgar enerjisinden yararlanmanın ilk adımı olan rüzgar potansiyelinin bilinmesi için cihaz tasarımınıyapmış bulunmaktayız.
PROJE ÖZETİDönen yarım küre şeklindeki kapakçıklardan meydana gelen anemometre, rüzgar kuvvetinin çukur yüzde, tümsek yüze nazaran daha fazlaolması prensibi ile çalışır. Bu kuvvetlerin farklılığı sonucu kapakçıklar düşey eksen etrafında dönerler ve kurulan bir mekanizma ile dönmeenerjisi Encoder'e aktarılır ve darbe üretilir. Encoder tarafından oluşturulan darbeler, FPGA mikroişlemcisine aktarılır ve burada sayılır. Her 100darbeden sonra encoderin bir devir attığı bilindiği için rüzgarın açısal hızı bulunur. Daha sonra kalibrasyon sonucu elde edilen bir denklemsayesinde çizgisel hıza dönüştürülür. Böylece rüzgar hızı tespit edilmiş olur.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüSes Kontrollü Güneş Enerjisiyle Çalışan Mobil Araç Tasarımı
Çiğdem ATALAYDanışman: Yrd. Doç. Dr. Hakan ÇELİK
Sonuçİstenilen amaç doğrultusunda gerekli düzenlemeler yapılarak ses ilekontrol edilen ve yenilenebilir güneş enerjisi kullanan araç yapılmıştır.
ReferanslarYrd. Doç. Dr. Hakan ÇELİK & Arş. Gör. Çağrı KAYMAK
GirişProje ses kontrollü ve güneş enerjisiyle çalışan mobil bir araçtır. Araç yönlendirecek kişinin ses komutuyla istenilen yöne gidecek şekildeprogramlanmıştır. Aynı zamanda araç enerji olarak güneş enerjisini kullanmakla birlikte güneş enerjisinin yetmediği kısımlarda pil devreyegirerek aracın hareketin devamı sağlanmaktadır.
Proje HakkındaTasarlanılan araç 15x17 cm boyutlarında pleksiglass malzemeden yapılmıştır.İki tekerlekli ve bir sarhoş tekerlek aracın hareketisağlanmaktadır.Araç iki motorludur. Üzerindeki ses devresinde kaydedilen komutlarla uzaktan kontrol edilebilmektedir. Bu komutlar 'sağ' 'sol''ileri' 'geri' ve 'dur' komutlarıdır. istenildiği zaman başka komutlarda eklenerek robotun işlevselliği artırılabilmektedir. Kişi sesi ayırt etmeksizinaraç bu komutlara uyar. Ayrıca üzerindeki güneş panelleri güneş enerjisi aracın kullanacağı enerjiye dönüştürülerek yenilenebilir enerji kullanımısağlanmıştır.Güneşten gelen enerji mikroişlemcide kontrol edilerek ve voltaj ayarlamaları yapılarak motor sürücüsüne aktarılmaktadır vemotorlar kontrol edilebilmektedir. Bu gerilimin yeterli olmadığı durumlarda robot üzerinde bulunan pil otomatik olarak devreye girmektedir.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüYOL TAKİBİ YAPAN MOBİL ROBOT
Ebubekir BOZKURTDanışman: Yrd. Doç. Dr. Ayşegül UÇAR
SonuçProje çalışması devam etmektedir.
Referanslar
GirişTeknolojinin gelişmesiyle araçlar günlük hayatımızda önemli yer edinmişlerdir. Bir yerden başka bir yere seyahat etmek, evden işe gitmek gibibir çok alanda araçları kullanmaktayız. Bu denli kullanım araçlarda konforun ve güvenliğin önemini her geçen gün ortaya koymaktadır. Sürücühatalarından kaynaklanan kazalar, uzun yollarda sürücülerin yorulması gibi etkenler sonucunda sürücüye kolaylık sağlayan hatta sürücüyütamamen devreden çıkaracak otonom yol takip sistemi yapılması amaçlanmaktadır.
otonom sürüş sistemiYukarıdaki resimde çalışmalardan bir kesit görülmektedir.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüPID ve PWM ile DC Motor Hız Kontrolü
Gizem ERDOĞDUDanışman: Yrd. Doç. Dr. Ayşegül UÇAR
SonuçProje planlandığı gibi istenen değer ve sensör geribildirim ile çalıştı.PID değerleri uygulanan farklı hız düzeyleri arasında düzgün çalıştı.
Referanslar[1] G. Bezanov, Embedded programming for the 80x51, Published byMIG Consulting Ltd, London, 2008. ISBN: 9780955815317 [2] PowerElectronics, Converters, Applications and design [3] Mohan, Undelandand Robbins, Power Electronics, Converters, Applications and design,published by Wiley ISBN 0-471-50537-4. [4] Atmel, datasheet.(2010)www.atmel.com/dyn/resources/prod_documents/doc8271.pdf (2010-05-09). [5] IDE new software (2010) www.arduino.cc (2010-05-09). [6]Microcontroller circuit packet (2010) www.freeduino.org (2010-05-09).
GirişBu proje en az bütçe ve enerji tasarruf yöntemleriyle başarılı bir soğutucu elde etmek amacıyla tasarlanmıştır.
Proje ÖzetiSistem DC motor hız kontrolünü sağlamak için PID kontrol ve dijital sinyaller kullanarak gömülü bir çözüm üzerinde durularaktasarlanmıştır.Mikroişlemci analog sinyallerden geri bildirim sıcaklık sensörünü ve istenen sıcaklık değeri kontrolü olarak potansiyometredeğerlerini değerlendirir ve okur. Motorun kontrol edilmesinde PWM kullanılır. Mikrodenetleyiciye değer girişi atanır.Girişin geri beslemesi birsıcaklık sensöründen alınır PID kontrol girdilerin sonucunu karşılaştırır. Bu program Arduino donanımıyla çalıştırılmıştır.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüKızılötesi Sensör Yardımı ile Bulunduğu Çevredeki Nesnelerin Geometrilerinin Belirlenmesi
Mustafa Can BİNGÖLDanışman: Doç. Dr. Oğuz YAKUT
SonuçSilindir cismin çapı aynı olsa dahi farklı uzaklıklarda farklı derinlikbilgisi göndereceğinden çapı önemsizdir. Bu yüzden oluşturulangörüntü üzerinde her bir pikselde yarıçapı 5 ile 12 piksel arasındaçember arandı. Görüntülerde çembere en fazla uyum gösteren piksellerseçildi. Bu şekilde %90’a (yapılan 10 deneyin 9'u başarı ilegerçekleştirildi.) varan başarı elde edilirken geriye kalan %10luk kısımise sensörün kalite yetersizliği ve motorun yüksek çözünürlük ilesürülemiyor olması neden kabul edildi.
ReferanslarFundamentals of Digital Image Processing / Chris SOLOMON & TobyBRECKON Verilog HDL / Samir PALNITKAR MATLAB for EngineersExplained / Fredrik Gustafsson & Niclas Bergman
GirişGünümüzde teknoloji hız ile gelişmektedir. Bu gelişen teknolojiler ile imkânsız görünen birçok şey gerçekleşti. Örnek verecek olursak insansızhava uçakları, kişisel araçlarda otomatik sürücü seçeneği, uzaydan canlı yayın gibi birçok şey sayabiliriz. Bu tür imkânsız görünen işlerinbirçoğunda sistemin kendi kendini idare edebilir olduğu görünmektedir. Yani otonom sistemler her geçen gün daha gelişmekte ve bu da hayalbile edilemeyecek gerçekliklere bizi şahit emektedir.
Proje ÖzetiŞekil tanımlama robotik sistemler için çok önemlidir. Çünkü otonom bir sistem kendi çevresini analiz edebilmelidir. Günümüzde şekil tanımlamabirçok yöntem ile yapılıyor. Bu yöntemlerden biri derinlik sensörü kullanarak yapılır. Bu projede kızılötesi sensör kullanılmıştır. Bilgi kızılötesisensörden alınır ve FPGA ortamında değerlendir. Bu bilgi bilgisayar ortamına aktarılır. Sonra bu bilgilerden MATLAB ortamında görüntüoluşturulur. Oluşturulan bu görüntü MATLAB ortamında işlenir. Son olarak silindir cisim bulunur. Anahtar Kelimeler: Şekil tanımlama, KızılötesiSensör, MATLAB, FPGA, Görüntü İşleme

Mühendislik Fakültesi - Mekatronik Mühendisliği Bölümü Microsoft Kinect Sensör ile Robot Kontrolü
Yavuz Uğrak Oğuzhan CipliDanışman: Yrd. Doç. Dr. Ayşegül UÇAR
SonuçSonuç olarak robot kolu üretiminde ağırlığının minimum olması robotkolunun daha iyi çalışmasını sağlamaktadır.Bu nedenle üretimdeağırlık azaltımına gidilip malzeme olarak alüminyum yerine pleksi glassdaha uygun görülmüştür. Görüntü işlemede bulunan cisimlerin herortamda aynı sonucu vermesi için gerekli algoritmalara ihtiyaçduyulduğu saptanmıştır.Bu sonuç, robot kolunun hassasiyetinietkilediği görülmüştür.cisimlerin koordinatları ne kadar nethesaplanırsa robot kolu o kadar net sonuç vermektedir.Bunun içindegerekli algoritmalar Matlab ortamında yazılmıştır.
ReferanslarYrd. Doç. Dr. Ayşegül UÇAR, Doç. Dr. Oğuz YAKUT, Kritik Reklam-Serkan GÜRSOY
GirişMicrosoft Kinect Sensor ile cisimlerin renkleri ayırt edilir. Cisimlerin koordinatları hesaplanıp robot koluna iletilir. Robot Kolu bu koordinatlarıtakip ederek istenilen cismi alıp istenilen noktaya bırakması hedeflenmektedir.
Uyarlama Aşaması5 eksenli robot kolu çizimi Solidworks programı aracılığıyla çizilmiştir. Üretimi gerçekleştirilirken momentum hesabı sonucu malzeme pleksiglass veya alüminyum üzerinde çalışılmıştır.3 ana eksen 2 yardımcı eksenden oluşan robot kolunun amacı, Microsoft Kinect Sensör ilecisimlerin renk ve konumlarını bulmaktadır. Bu yazılım Matlab ile sağlanmaktadır. Matlab'da bulunan cismin koordinatları seriport vasıtası ilerobot koluna iletilir. Robot kolu ise Ardunio ile aldığı koordinatı yola çevirip istenilen koordinata gitmektedir. Bu şekilde Sensörün bulduğucisimlerden herhangi birini robot koluna aldırmak mümkündür.Alınan cisim belirlenen noktaya götürülüp bırakılmıştır ve robot kolu tekrar ilkkonumuna geri dönmüştür.

Mühendislik Fakültesi - Mekatronik Mühendisliği Bölümü Kablosuz Veri Aktarımlı Barkod Okuyucu
Orhan BAŞAK / M. Zeki UNCİDanışman: Yard. Doç. Hakan Çelik
SonuçKamera yardımıyla bilgisayara aktarılan barkod resimleri MatlabGörüntü İşleme ile ürünün tanınması ve fiyat ürün gibi bilgilerinuzaktaki bi noktaya aktarılıp bilgi ekranında yazılması sağlanmıştır.
ReferanslarYrd. Doç. Dr. İlhan AYDIN (Ders Notları: MATLAB İLE GÖRÜNTÜİŞLEME) Coşkun TAŞDEMİR (ARDUINO)
GirişBu proje amacı marketlerde müşterilerin ve market sahiplerinin ürün bilgilerinin kontrolünü ve stok takibini yapmalarını sağlamaktır. Ürünbilgileri müşteriye alışveriş sepetlerine yada belli noktalara yerleştirilen LCD bilgi ekranlarına ulaştırılır. Müşteri bilgisini istediği ürününbarkodunu kameraya göstermelidir. Kamera aldığı görüntüyü bilgisayara aktararak ürün bilgilerine ulaşacak ve ürüne ait bilgiler RF bağlantısıylamüşterinin bulunduğu yerdeki LCD ekrana gönderilecektir.
Barkod OkuyucuMATLAB Image Processing Toolbox kullanılarak kameradan elde edilen resimler hazırlamış olduğumuz algoritmalar yardımıyla ürüne ait barkodnumaraları elde edilmektedir. Barkod okuma algoritmalarıyla barkod numaralarından okunamayan bir sayı olduğunda yine yazılan algoritmalarsayesinde doğru olan numarayı hesaplayarak bulabilmektedir. Barkod numaraları yardımıyla ürüne ait fiyat ve stok bilgileri bulunarak RFhaberleşme yöntemiyle uzaktaki bi noktaya ürüne ait bilgiler gönderilmektedir.

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüCASUS ROBOT
-Ramazan Civelek-Mesut Yürekdeler-Danışman: Yrd. Doç.Dr.Ayşegül Uçar
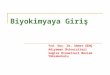
SonuçAskeri polisi olaylarda personel göndermeden olay yerini tanıma videove ses aktarımı sayesinde bilgi edinmek için kullanılabilir. Sadece birpencere veya kapıdan atılarak uzaktan kumandasıyla kontroledebileceğiniz casus robot video aktarımı yapabilme olanağı sağlar.
Referanslarhttp://www.reconrobotics.com/products/scout_IR.cfm
GirişCasusluk insanların zekâsının gelişim tarihinde pek erken başlamış ince bir tekniktir. Bilhassa 1800’den sonra çok gelişmiştir. Cihan Harbi’ndenönceleri casuslar teknik bir sınıf haline girmiş bulunuyorlardı.
CASUS 1Casusluğun amacı şudur: Barış zamanında askeri ve siyasi gizli kuruluşlardan ve plânlardan haber almak, savaş zamanı ise hareketlerden vesiyasî haberleşmelerden ve savaşı sürdürme kudretinden sürekli istihbarat alabilmektir. İstihbaratın içeriğini açtığımızda, bir milletin karşıkarşıya olduğu fırsat ve tehlikeleri önceden görebilmesi için stratejik, operasyonel düzeyde taktik olaylarla, gelişmelerle, kişiliklerle, kurumlarlailgili olarak bilgi toplama karşılaştırma, değerlendirme, analiz, birleştirme ve yorumlama faaliyeti şeklinde ifade edebiliriz. CASUS 1 ile açık vekapalı alanlarda fark edilmeden görüntü ve ses aktarımı sayesinde haberdar olabiliriz. CASUS 1 sayesinde "Nerede ne var?", "Şüphelilernerede?", "Rehine var mı?", "Rehineler yaralı mı?", "Bina planı nasıl?" gibi pek çok sorunun cevabını kolayca alabileceksiniz..

Mühendislik Fakültesi - Mekatronik Mühendisliği BölümüOTOMATİK PLAKA TANIMA ÖZELLİĞİNE SAHİP AKILLI BARİYER
SİSTEMİ TEVFİK YİĞİT
Danışman: Yard. Doç. Dr. HAKAN ÇELİK
SonuçProje fiziksel olarak tamamlanmış ve sağlıklı olarak çalıştığıgörülmüştür.Kameradan fotoğraf alınmadığı, uygun font ile yazılmışplaka örneklerinin direkt olarak işlendiği durumlarda %98 başarısağlanmış ve her karakter okunabilmiştir. Kamera üzerinden fotoğrafçekilen durumlarda ise ışık ve tam odaklanabilme gibi etkenlere bağlıolarak daha düşük bir doğruluk başarısı elde edilmiştir. Yine dekullanılan ekipman ve projenin kapsamı düşünüldüğünde bu durumdada başarı yüksek görülebilir.
Referanslar1)Kurtulan, S., (2008), PLC ile Endüstriyel Otomasyon, BirsenYayınevi. 2)Çevik, K. K., Çakır, A., (2010), Görüntü İşlemeYöntemleriyle Araç Plakalarının Tanınarak Kapı KontrolününGerçekleştirilmesi, Afyon Kocatepe Üniversitesi Fen Bilimleri EnstitüsüDergisi, Cilt 10, Sayı. 1, s. 31-38. 3) Hauslen, R. A., (1977), ThePromise Of Automatic Vehicle identification, IEEE Transactions onVehicular Technology, February, Vol. 26, Iss.1, pp. 30-38.
GirişSon otuz yılda araç sayısının artması ve trafik sorunları, otomatik araç tanıma ve trafik akışı kontrolü sistemlerine duyulan ihtiyacı arttırmıştır. Buyöndeki çalışmalar; araçları özel bir noktadan geçerken tanımlamak, aracın konumunu belirlemek, davranışlarını gözlemlemek ve bu verilerikullanarak trafik denetimi sağlamaya yöneliktir.
TANITIMBu çalışmada, bir giriş kapısına gelen aracın plakasının görüntü işleme algoritmaları ile tanınarak kapının otomatik olarak açılıp kapanmasınısağlayan bir sistem geliştirilmiştir. Çalışmada, insan gücünden tasarruf sağlamak ve güvenliği artırmak amaçlanmıştır. Matlab üzerindengörüntü işleme yönteminin kullanıldığı projede, çekilen fotoğraf üzerinden plaka tespiti yapılır ve bu aracın tanınıp tanınmadığına karar verilir.Fotoğraf belli bir alana odaklanmış sabit kamera ile çekilmektedir. Böylece çekilen fotoğrafın netliği arttırılmakta ve tanıma işlemi daha doğru birşekilde gerçekleştirilmektedir. Matlab kodları fotoğraftan plaka tespitini yaptıktan sonra plakayı veri tabanında aramaktadır. Eşleşmebulmadığında uyarı verilip herhangi bir işlem yapılmamakta, eşleme bulunduğu takdirde ise tasarladığımız iletişim kartı yardımı ile PLC'yearacın tanındığı bilgisi gönderilmektedir. Bu bilgi doğrultusunda PLC bariyeri açmakta ve yeterli süre bekleyip bariyeri kapatmaktadır. Bununyanında PLC, art arda tanınan araçlar geçiyorsa kapıyı sürekli açık tutmaktadır.