Embed Size (px)
Citation preview

2016. 12. 22
GPS 기본 개념
Unmanned Solution Co., Ltd.
[ 교육용 ]

Contents

3
1. GPS 기본 원리
Unmanned Solution

GPS(Global Positioning System) 기본 원리
4
1-1
GPS 란?
- GPS 위성에서 보내는 신호를 수신해 사용자의 현재 위치를 계산하는 위성항법시스템
- GPS는 1973년 미국 국방부에서 폭격의 정확성을 높이기 위해 군사용으로 개발 시작
- 1995년 21개의 주 위성과 3개의 보조 위성으로 구성 된 총 24개의 위성으로 민간 서비스 시작
• GPS 위성의 궤도 배치
- 모든 위성의 고도는 20,200km, 12시간을 주기로 지구를 돌며
- 궤도면은 지구의 적도면과 55의 각도를 이룬다.
- 총 궤도는 6개이며, 각도는 60도씩, 1개의 궤도면 당 4개의 위성이 위치한다.
- 이 배치로 인해 지구상 어느 지점에서나 동시에 5개에서 8개까지 위성을 볼 수 있다.

5
1-2
GPS 원리
- 삼각측량 원리 이용. 구하고자 하는 P점을 사이에 두고 있는 두 변의 길이를 측정하여 P점의 위치 결정
- 인공위성에서 부터 수신기까지의 거리는 :
거리 = 빛의속도 * 경과시간(경과시간 : 부호 신호 발생 시점과 수신 시점의 시간 차이 측정 )
GPS(Global Positioning System) 기본 원리

6
1-3
GPS 신호
- GPS 위성은 위성에 탑재된 시계의 시각 및 오차와 위성의 상태 정보, 모든 위성과 관련된 궤도 정보와 상
태(almanac), 각각의 궤도정보와 이력(ephemeris), 오차 보정을 위한 계수 등이 포함된 항법메시지(navigation
message)를 50 bps의 속도로 지속적으로 방송한다.
- 각 위성은 두 가지의 다른 주파수의 신호를 동시에 생성, L1 반송파(1.57542 GHz), L2 반송파 (1.2276 GHz)
신호로 구성된다.
- 항법메시지는 C/A 코드(Coarse/Acquisition code 또는 Standard code)와 P 코드(Precision code)와 함께 반송
파(搬送波, carrier wave)에 실려 송신된다. C/A 코드와 P 코드는 각각 비트율 1.023 Mbps, 10.23 Mbps로 위성마다
고유한 의사잡음부호(PRN, Pseudo-Random Noise)가 담긴다. C/A 코드는 민간에 개방되어 있으나 P 코드는 군
사 목적으로 전용하기 위해 공개되지 않은 W 코드를 이용해 암호화되는데, 암호화된 P 코드를 Y 코드 또는 P(Y)
코드라고 한다. P(Y) 코드를 해독하기 위해서는 특별한 장비가 필요하다.(뿐만 아니라, 암호화 되는 키가 1주일
단위로 갱신되므로 키를 모른다면 해독할 수 없음.)
GPS(Global Positioning System) 기본 원리

7
1-4
GPS 신호 종류
- L1 (10.23 MHz × 154 = 1575.42 MHz) : 항법메시지, C/A 코드, P(Y) 코드.
- L2 (10.23 MHz × 120 = 1227.60 MHz) : P(Y) 코드, Block-IIR-M 이후부터는 L2C 코드도 포함.
- L3 (10.23 MHz × 135 = 1381.05 MHz) : 방위지원프로그램에서 사용.
- L4 (1379.913 MHz) : 추가적인 전리층 보정을 위해 연구 중.
- L5 (10.23 MHz × 115 = 1176.45 MHz) : ARNS (Aeronautical Radio Navigation System)에 할당된 주파수대역.
항공기의 안전한 운항을 위하여 사용된다.
GPS(Global Positioning System) 기본 원리

GPS(Global Positioning System) 측량
8
2-1
GPS 측량
- 단독 측위 (Standard Positioning System(SPS)) 수신기 1대를 사용해서 위치를 측정
- 상대 측위 (Differential GPS) : DGPS는 서로 가까운 거리에 위치한 두 수신기가 가지는 공통 오차 상쇄하여 정밀한 데
이터얻는 기술. 일반적으로 기준국(Base Station)에서 오차의 범위 등을 포함한 보정신호를 이동국(Rover)에 전송한다.
- 실시간 이동 측위((Real-Time Kinematic) : RTK의 기본개념은 오차보정을 위해 기준국에서 전송되는 데이터가 반송파
수신자료라는 것을 제외하고는 DGPS의 개념과 같다.
기법 내용 정밀도
단독 측위 GPS 수신기 1대로 위치측정 100 m
DGPS 측량용과 항법용 수신기를 결합하여 이동체의 후처리 및 실시각 정밀위치 측정
1 m - 5 m
후처리 상대 측위
2대 이상의 측량용 GPS 수신기를 이용하여 고정밀 상대위치 측정하나 실시각간 계산이 불가능
수 mm
실시간 이동 측위
2대 이상의 측량용 수신기를 이용하여 실시간 고정밀 위치 측정
1 cm - 2 cm

GPS(Global Positioning System) 오차의 원인
9
3-1
GPS 오차의 종류
구 분 종 류 내 용 오차 크기 비 고
구조적 오차
위치, 시간 오차 인공위성의 시간 및 위치에 따른 오차
시간 오차 0-1.5m 미국에서 시간 및 위치 오차를 계속 감시 및 오차 보정 중 위치 오차 1-5m
전리층, 대류층 굴절
인공위성에서 보내는 라디오파를 전리층에서 *하전입자들이 들어오는 신호를 끌어당겨서 굴절시키고 대류층에서는 다른 비율로 물방울들이 신호를 굴절시킴
전리층 굴절 0-30m 대기 굴정 모델 적용에 따른 50~70 오차 상쇄 및 현재에는 dual-frequency 수신기를 사용해 보정가능(단 전리층만해당)
대류층 굴절 0-30m
잡음 GPS 수신기 자체에서 발생. 신호기마다 다르지만 대부분 수신기는 잡음에 대한 내부 필터링 장치를 가짐
0-10m
PRN 코드 잡음과 수신기 잡음이 합쳐져서 전체 잡음이 된다.
다중 경로 인공위성에서 반사되어 들어오는 신호를 받아들이는 경우 틀린 위치를 제공함
0-1m 신호세기에 따른 다중경로 오차 상
쇄 가능
*하전입자 : 수중에서 입자의 표면에 전기화학적 힘의 균형으로 어떤 전하를 띄는 입자
*GPS 위성으로부터 발신되는 위치결정용 전파 신호로서, 유사거리를 관측하기 위한 Time Mark(시간 신호)
역할과 24개 GPS 위성의 식별부호 역할을 병행한다.

GPS(Global Positioning System) 오차의 원인
10
3-2
GPS 오차의 종류
구 분 종 류 내 용 오차 크기 비 고
기하학적 오차
PDOP
측위 시 이용되는 위성들의 배치상황에 따라 오차가 증가. 위성의 배치의 고른 정도를 DOP(Dilution of Precision) 라고 함. DOP는 종류가 많으며 , 그 중 PDOP(Positional DOP)를 사용하며, PDOP에 거리 오차를 곱하면 측위 오차가 된다. (거리오차;Range Error) x (PDOP) = (측위오차)
DOP < 2 매우 우수
PDOP가 3인 경우 대략 15m
의 오차를 갖음
DOP = 2-3 우수
DOP = 4-5 보통
DOP>=6 불가능

DGPS(Differential GPS), RTK(Real-Time Kinematic)
11
4-1
DGPS와 RTK 비교

DGPS(Differential GPS), RTK(Real-Time Kinematic)
12
4-2
DGPS와 RTK 비교

DGPS(Differential GPS), RTK(Real-Time Kinematic)
13
4-3
DGPS와 RTK 비교
구 분 DGPS RTK
원리
일정 지역에서 하나의 수신기는 정지 상태로, 다른 하나는 이동을 하면서 위치 측정을 시행한다. 정지상태
의 수신기는 위성으로 부터 수신 받은 데이터들의 위치 오차를 계산 및 보정 데이터를 생선한다. 생성된
데이터는 이동 측위를 하는 수신기 측에 전송한다. 전송된 데이터를 가지고 이동 측위를 하는 수신기는
보정값을 이용하여 위치결정 오차를 줄인다.
차이점
• 4개 이상의 위성 사용
• C/A코드 해석
• 반송파를 사용하지 않는다
• 장거리 사용 100 to 200km
• 오차 1m~5m
• 5개 이상의 위성 사용
• 반송파를 사용한다 : 반송파의 오차 보정치를 이
용한다.
• 10~20km 거리 내외로 사용된다
• 오차 1cm~1m

DGPS(Differential GPS), RTK(Real-Time Kinematic)
14
4-4
DGPS, RTK 에 필요한 보정신호
- 기준국(Base Station)에서 생성되는 보정신호는 RTCM 규격을 따른다
- RTCM SC-104((Maritime Service Special Committee 104)
- Radio Technical Commission for Maritime Service의 특별 위원회
- 종류 : RTCM(선박), RTCA(항공) 등
구 분 명칭 버전 요약
RTCM 10402.3 Recommended Standards for Differential GNSS (Global Navigation Satellite Systems) Service
2.3
This standard is used around the world for differential satellite navigation systems, both maritime and terrestrial.
RTCM 10403.1 Differential GNSS (Global Navigation Satellite Systems) Services
3.1 A more efficient alternative to RTCM 10402.3

DGPS(Differential GPS), RTK(Real-Time Kinematic)
15
4-5
RTCM 데이타 구조
- 각 각의 데이터들은 구분되어 번호가 표시
- 번호가 표시된 데이터들은 헤더와 데이터를 포함한다
RTCM Message Type RTCM2.3
Description
1 Differential GPS Corrections
2 Delta Differential GPS Corrections
3 GPS Reference Station Parameters
4 Reference Station Datum
5 GPS Constellation Health
6 GPS Null Name
7 DGPS Beacon Almanac
8 Pseudolite Almanac
9 GPS Partial Correction Set
10 P-Code Differential Correction
11 C/A Code, L1, L2 Delta Corrections
12 Pseudolite Station Parameter
13 Ground Transmitter Parameter
14 GPS Time of Week
15 Ionospheric Delay Message

DGPS(Differential GPS), RTK(Real-Time Kinematic)
16
4-6
RTCM 데이타 구조
- 각 각의 데이터들은 구분되어 번호가 표시
- 번호가 표시된 데이터들은 헤더와 데이터를 포함한다
RTCM Message Type RTCM3.0 Message Type Message Description
Observations 1001 L1-only GPS RTK Observables
1002 Extended L1-Only GPS RTK Observables
1003 L1 & L2 GPS RTK Observables
1004 Extended L1 & L2 GPS RTK Observables
1005 L1 Only GLONASS RTK Observables
1006 ExtendedL1-Only GLONASS RTK Observables
1007 L1 & L2 GLONASS RTK Observables
1008 Extended L1 & L2 GPS RTK Observables
Station Coordinates 1009 Stationary RTK Reference Station ARP
1010 Stationary RTK Reference ARP with Antenna Height
Antenna Description
1011 Antenna Descriptor
1012 Antenna Descriptor & Serial Number
Auxiliary Operation Information 1013 System Parameters

DGPS(Differential GPS), RTK(Real-Time Kinematic)
17
4-7
RTCM3.0
- RTCM 3.0 : New data structure developed for network RTK applications.
- new signals L2C and L5
- GNSS system data
- Compact Data Structure
- RTCM 2.0 – 0.5 kbit / sec. (DGPS)
- RTCM 2.1-2.3 requires 5 kbit / sec (DGPS+RTK)
- RTCM 3.0.requires 2 kbit / sec

좌표계(Grid system)
18
5-1
정의
- 지구 표면에 가상의 격자 선을 그어 특정한 점의 위치를 표시
- 여러줄의 위도선 및 자오선을 통칭한다
- 위선(line of latitude) : 지구 표면에 있는 좌표 선, 적도로부터 매 도 간격으로 거리 표시
- 경선(line of longitude) : 본초자오선으로부터 매 도 일정 간격으로 거리를 표시

좌표계(Grid system)
19
5-2
지오이드와 타원체
- 지오이드 : 평균해수면을 이용하여 지구의 모양을 나타낸 것

좌표계(Grid system)
20
5-3
지이드와 타원체
- 지구는 완전한 구(球)가 아니라 적도반지름이 극반지름보다 약간 긴 일그러진 타원체이며, 지표면은 그 형상이
매우 불규칙하여 어떤 일정한 규칙에 따른 임의 점의 위치표시가 불가능.
- 지오이드 또한 매우 복잡한 형태를 띄고 있어 위치를 표시하기 위해서는 복잡한 계산과정을 거쳐야 한다. 이를
해결하고자 측지학에서는 지오이드와 가장 유사한 지구의 기하학적 형상을 편평한 회전타원체로 재정의하여 사용
하고 있으며, 이를 지구타원체(Earth Ellipsoid)라고 한다.
- 지구타원체는 장반경과 편평률로 정의되는데, 부정형한 전 지구를 하나의 타원체로 오차없이 표현하는것은 불
가능하기 때문에 각 나라에서는 해당 지역의 지오이드면에 적합한 지구타원체를 정의하여 그 지역의 준거타원체
(Reference Ellipsoid)로 이용하고 있다.
- 각 나라마다 다른 준거타원체를 사용해도 자국의 측지측량 및 지도제작에는 아무런 문제가 되지 않지만, 인공위
성과 같이 전 세계를 대상으로 하는 부문에서는 변환 없이 사용이 불가능하다는 문제가 생기게 되어 전체지구에 가
장 적합한 지구타원체를 결정하는 것이 필요하다. 이러한 필요에 의해 결정된 것을 국제표준타원체라 부르고 있으며
GRS80타원체, WGS84타원체가 있다.

좌표계(Grid system)
21
5-4
데이텀(Datum)
- 타원체를 선택 후 해당 지역에 가장 적합하도록 타원체의 위치 기준을 정하게 되는데, 이를 데이텀(Datum, 측지
계)이라 하며, 타원체의 종류, 좌표체계의 기준점과 방향 등을 정의하게 된다.
- 좌표체계 차이는 어떤 타원체를 사용하며, 어디에 기준점을 두는지에 따라 크게 다르다.
- 대한민국은 측지계2002(KGD2002)에 따라 세계기준계인 ITRF2000 지구중심좌표계를 따르고 타원체로는 GRS80
타원체를 적용하여 경위도를 계산한다.
* 세계측지계란 국제표준타원체를 사용하여 타원체의 중심을 지구의 질량중심과 동일하게 정의하여 사용하는 것을 말한다.
* 대한민국은 측량법을 개정하여 2003년 1월부터 2009년 12월 31일까지 세계측지계(KGD2002)와 한국측지계(동경데이텀)를
병행 사용하였으며, 2010년 1월 1일부터는 공공측량 성과물에 세계측지계 사용을 의무화하였다.

좌표계(Grid system)
22
5-5
데이텀(Datum)
- 타원체, 원점과 같은 좌표계의 정의 제공
- 위치를 3차원으로 나타내기 위해서는 3차원의 표면 필요
- 지구를 나타내는 방법 ‘지오이드’, 해양의 평균해수면과 일치하는 지구 중력장 등 포테셜면
- 중력의 변화에 따른 지오이드 변화가 문제
- 데이텀과 관련된 계산을 위해 정형의 수학적 모델 필요
- 수학적 모델인 ‘타원체’ 사용
- GPS는 WGS84 측지 데이텀을 사용한다.

좌표계(Grid system)
23
5-6
세계 주요 지구타원체

투영법(Grid system)
24
6-1
투영도법
- 타원체는 삼차원 좌표나 경위도 좌표 등으로 위치를 나타내게 된다. 하지만 이는 타원체상에서의 3차원 좌표(곡
면)이므로 우리가 보는 2차원(평면) 지도상의 좌표와는 다르다. 이 타원체상의 3차원 좌표를 평면으로 나타내기 위해
또 다시 투영이라는 과정을 거치게 된다. 이 투영 과정에서 또 다시 여러 지도체계로 세분된다.
Bessel 좌표계를 사용하는 경우 주로 TM도법으로 투영하며, WGS84좌표계를 사용하는 경우 주로 UTM도법을 사용하
여 투영한다. 여기서 주의해야 할 점은 Bessel 타원체를 기준으로 UTM 투영이 가능하며, 반대로 WGS84 타원체도 TM
투영이 가능하다는 점이다. UTM도 TM과 같은 방법으로 투영계산을 거치지만 그 상수만 다를 뿐이기 때문이다.
*TM(Transverse Mercator)좌표 : 임의 지역에 대한 기준지점을 좌표원점으로 정하고 원점을 중심으로 TM 투영한 평면상에
서 원점을 지나는 자오선을 X축, 동서방향의 위도 선을 Y축으로 각 지점의 위치를 m단위의 평면 직각 좌표계로 표시.
*TM 좌표 또는 평면 직각 좌표계에서의 좌표 기준점으로 서부 원점(125° E, 38° N), 중부 원점(127° E, 38° N), 동부 원점
(129° E, 38° N)의 3개 원점을 사용
*X축은 북쪽 방향이 양의 값을 나타내고 Y축은 동쪽 방향이 양의 값을 나타난다
*X 좌표는 600,000mN이고 Y좌표는 200,000mE
*중부원점인 127도를 기준으로 동쪽으로는 1,000m단위로 201,202,203,……으로 표기하고 서쪽으로는 199,198,197,…의 순으
로 표기한다. 또한 38도를 기준으로 북쪽일 때는 501,502,503,….이고 남쪽일 때는 499,498,497으로 표기

투영법(Grid system)
25
6-2
TM(Transverse Meractor) – 횡단원통등각투영법)
- 우리나라의 경우 평면직각 좌표계인 TM(Transverse Meractor) 좌표계를 국가기본도의 기본체계로 하고 있으며,
군사지도 및 단일원점을 사용하는 일부 부처에서 부분적으로 UTM(Universal Transverse Mercator) 좌표계를 사용하고
있다. 국가기본도의 경우 GRS80타원체를 기본타원체로 적용하고 있고, 좌표의 수평 기준원점은 경도 방향의 위치에
따라 125도, 127도, 129도, 131도 경도선을 기준으로 서부, 중부, 동부, 동해원점의 4가지를 혼용하고 있다.
고도 기준원점의 경우 검조장에서 다년간 조석 관측한 결과를 평균조정한 평균해수면(MSL, Mean sea level)을 사용하
고 있는데, 이 평균해수면은 일종의 가상면으로 수준 측량에 직접 사용할 수 없으므로 그 위치를 지상에 연결하여 영
구 표석을 설치한 후 수준원점(OBM, Original bench mark)으로 삼고 이것으로부터 전국의 주요 국도를 따라 수준망을
형성하였다. 현재 사용하고 있는 우리나라의 수준원점은 인하공업전문대학 교정 내에 설치되어 있으며, 인천만의 평
균 해면상으로부터 26.6871m 위에 존재한다.

투영법(Grid system)
26
6-3
TM(Transverse Meractor) – 횡단원통등각투영법)
- 국가 기본 좌표체계 정리 표
좌표계 TM (Transverse Mercator)
지구타원체 GRS 1980
Datum ITRF 2000
수평기준원점
서부원점 경도 경도: 동경 125˚ 00', 위도: 북위 38˚ 00'
중부원점 경도 경도: 동경 127˚ 00', 위도: 북위 38˚ 00'
동부원점 경도 경도: 동경 129˚ 00', 위도: 북위 38˚ 00'
수준기준원점 인하공업전문대학 내 설치 (해발 26.6871m)
X 방향 가상 좌표 200,000 m
Y 방향 가상 좌표 500,000 m

투영법(Grid system)
27
6-4
UTM 좌표계 (Universal Transverse Mercator)
- 기본적으로 TM과 같은 방법으로 투영계산을 거치지만 그 상수가 다를 뿐이다. UTM 좌표계는 횡단 Mercator 투
영법을 사용하는 좌표계 중의 하나로서 전 세계를 경도 6° 간격의 영역으로 나누고, 이들 각각의 영역에 대해 별도의
원점과 축을 지정하여 좌표를 Meter 단위로 나타내는 것이다. 이들 UTM Zone 번호는 서경 180°를 기준으로 경도 6°
간격씩 동쪽으로 이동하며 순차적으로 증가한다. UTM 좌표계에서 기준 원점의 위치는 각 UTM Zone의 중심경도선
과 적도가 만나는 위치이며, 이 점을 기준으로 경도 방향을 X축, 위도 방향을 Y축으로 설정한다. 우리나라의 경우 52
번째 Zone에 위치하며, 이 지역의 기준 원점인 경도 129°, 위도 0°를 UTM 좌표계의 원점으로 사용한다. UTM 좌표계
와 같이 Meter 단위의 좌표를 사용하는 경우 기준원점의 위치에 따라 음의 부호를 갖는 좌표가 나타나게 되는데 일
반적으로 이러한 현상을 없애기 위해 각 축의 방향으로 가상의 좌표를 더해 주게 된다. UTM 좌표계의 경우 X축으로
500,000m의 값을 더하여 실제 좌표를 나타내며, Y축 방향으로는 남반구의 경우에 한해 10,000,000m의 값을 더해 주
게 된다.

투영법(Grid system)
28
6-5
UTM 좌표계 (Universal Transverse Mercator)
- UTM Zone

투영법(Grid system)
29
6-6
참고자료
- 대한민국에서 사용하는 좌표계의 종류 및 기본 정보

투영법(Grid system)
30
6-7
투영법
- 3차원 좌표는 경위도좌표계(Geodetic Coordinate System), 지심좌표계(Geocentric Coordinate
System,ECEF)가 있다.
- 측지계 > 데이텀 > 타원체 > 투영
- ex) 동경측지계 > 도쿄데이텀 > bessel1840타원체 > TM투영
세계측지계 > ITRF2000데이텀 > GRS80타원체 > UTM투영
세계측지계 > WGS데이텀 > WGS84타원체 > TM 투영
- TM투영법을 사용하여 나온 좌표는 x,y 의 2차원 직각 좌표계이다.
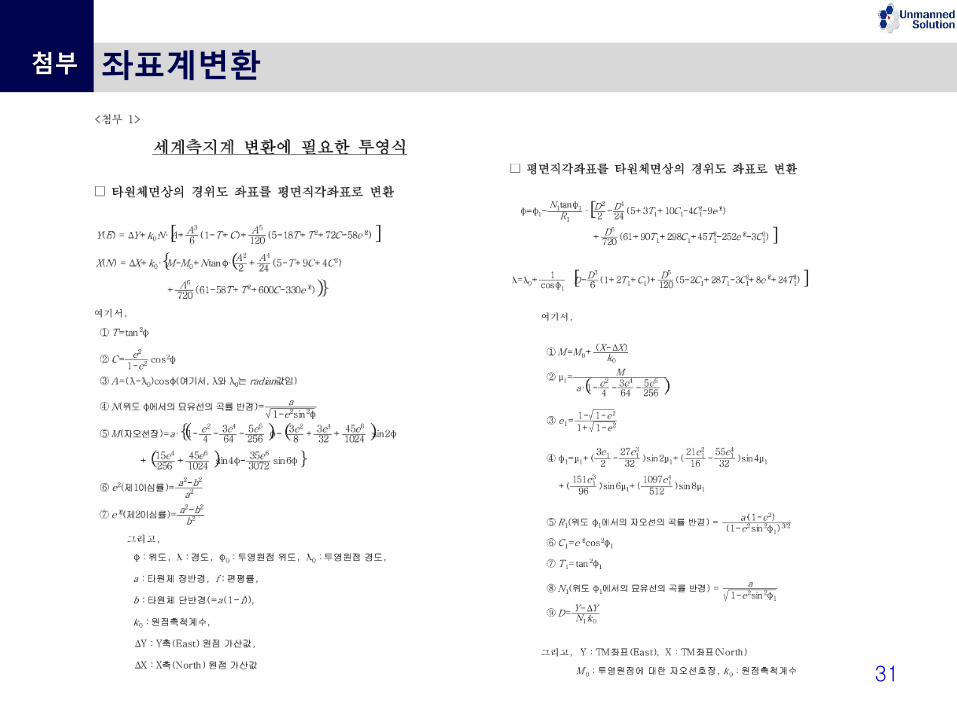
좌표계변환
31
첨부

References • RTCM Recommended Standards for Differential NAVSTAR GPS service
www.navcen.uscg.gov/pubs/dgps/rctm104/Default.htm
• RTCM Official Website
http://www.rtcm.org/
• DGPS Data Formats 2.0
www.geopp.de/download/DGPS-data-formats2.pdf
• Reference Station Network Information Distribution
http://www.network-rtk.info/euler/euler.html
• 국토지리정보원 자료실
http://www.ngii.go.kr/kor/board/view.do?rbsIdx=31&idx=251

3-1 Autonomous Car
ADAS 에서 자율주행으로…
[Global Navigation Satellite System]
위성항법시스템
CAMERA
LiDAR Ultrasonic
RADAR
33

3-2 Autonomous Car
GNSS [Global Navigation Satellite System]
34

35
GNSS Solution
장애물, 건물, 나무 등 위성신호 수신이 불량한 지역에서는 데
이터를 출력하지 못하거나 데이터의 신뢰도가 떨어지게 된다.
INS Solution
누적되는 오차를 Refresh 해 줄 방법이 없기 때문에 시간의 경
과에 따라 오차가 계속 누적되는 드리프트 현상의 발생하게
된다. GNSS + INS Solution
IMU의 연속성으로 GNSS의 약점인 수신 불가지역에서의 데이
터 점핑 현상을 보완하고 GNSS의 정확성이 IMU의 오차 누적
을 방지하게 하면서 연속적이고 정확한 데이터를 취득할 수
있다.
실제 경로
자율주행자동차
3-6
• 사용 데이터 : 시간, 위도, 경도, 방위각, 속도 등
• 특 성 : 연속 측정의 경우 오차의 누적은 없으나 기상상태, 환경의
영향을 받음
- GNSS + INS 결합 형태로 많이 사용함
GNSS

36
자율주행자동차
3-7
* RTCM : The Radio Technical Commission for Maritime Services * VRS : Virtual Reference Station
DGPS : Differential GPS
GNSS의 위치 오차를 줄이기 위한 방법
VRS Server
NMEA
RTCM
자율주행자동차
- RTK : 기준국을 세워 오차 정보를
만들어 이동국의 오차를 제거
- VRS : 가상의 기준국을 이용하여
이동국의 오차를 제거
GNSS

37
자율주행자동차
3-8 GNSS
![잠김압박금속판의 기본 원리 (Basic Principle of the Locking Compression Plate]€¦ · · 2015-07-27잠김압박금속판의 기본 원리 265 10) Sim JC, Chung NS, Hong](https://img.pdfslide.tips/doc/110x75/5b05024a7f8b9aba168e1b54/-basic-principle-of-the-locking-compression.jpg)












![[NDC12] 게임 물리 엔진의 내부 동작 원리 이해](https://img.pdfslide.tips/doc/110x75/5588f818d8b42a04688b456a/ndc12--55893ba6be007.jpg)


![[대표님특강]아동의 두뇌과학적 이해와 학습 및 생활지도 원리](https://img.pdfslide.tips/doc/110x75/58f9b78f1a28abb0328b4567/-58f9b78f1a28abb0328b4567.jpg)












