Embed Size (px)
Citation preview

一般解説
宇宙機のGPS航 法技術
石 島 義 之**宇 宙 開 発 事 業 団 技 術 研 究 本 部 シ ス テ ム誘 導 グ ル ー プ
茨 城 県 つ くば 市 千 現2-1-1
*Guidance, Control, and Dynamics Group, National Space Develop-
ment Agency of Japan2-1-1 Sengen, Tsukuba, Ibaraki, Japan
E-mail:[email protected]
キ ー ワー ド:宇 宙 用(space application),航 法(navigation), GPS差
分 航 法(differential GPS navigation),ラ ンデ ブ(rendezvous),姿 勢
決 定(attitude determination)
JL0009/01/4009-0670(C)2001 SICE
1. は じ め に
GPS (Global Positioning System)は,米 国の国防総省
(DoD)が 開発 した人工衛星による電波測位 システムであ
る.そ の利用は,航 空機 ・船舶 ・自動車などの移動体航法
を中心 として広範囲にわたっている.SA (Selective Avail-
ability:民 間用測位信号の意図的な精度劣化)の 解除(2000
年5月),L2帯C/Aコ ー ド追加(2003年),民 間用新規周
波数L5帯 追加(2005年)も 手伝って,利 用範囲はます ま
す拡大 していくことであろう.
宇宙開発事業団(NASDA)で は,GPS航 法技術の宇宙
機搭載化 を目指 し,1986年 に宇宙用GPS航 法技術の研究
を開始 した.1994年 には,H-IIロ ケッ ト打ち上げによる軌
道再突入実験(OREX)に おいて最初の宇宙用GPS受 信機
の軌道上実験 を行った.GPS観 測データ(シ ュー ドレン
ジ・デルタレンジ)を 地上 にダウンリンクし,GPS受 信機
が軌道上で正常に機能 していることが確認 された.そ れ以
降,さ まざまな宇宙用GPS受 信機 さらにGPS航 法システ
ムの実証 を行ってきた.GPSは 宇宙機の自動 ・自律化には
必須の機器であ り,今 後の宇宙における利用範囲は地上用
と同様 に広がっていくと予想される.た だし,宇 宙用GPS
の開発 にあたっては,地 上用 との違いを理解 してお く必要
がある.軌 道上では,地 上 と比較 して速度が非常 に速 く,
衛星切 り替えロジックの工夫や周波数サーチ範囲を広 くす
る等の対処が必要である.ま た,宇 宙機搭載機器 として,
ロケット打ち上 げ時の振動環境,軌 道上での熱真空環境や
放射線環境に耐 える等の耐環境性が求められる.
地上用では差分航法や2周 波対応など高機能化が進めら
れているが,宇 宙用でも高機能化が進められている.技 術
試験衛星VII型(ETS-VII, 1997年 打ち上 げ)の ランデブ用
GPS相 対航法 システムやALFLEX(小 型 自動着陸実験,
1996年 実施)に おけるシュー ドライ ト方式GPS差 分航法
システムは,2宇 宙機間あるいは地上基準点 との高精度な
相対航法(<10m)を 実現するものであり,将来のランデブ
宇宙機や宇宙往還機着陸用の航法システム として利用が期
待 される.ま た,地 球観測衛星の分野では,非 常に高精度
な軌道決定(<1m)が 要求されL1/L2帯2周 波受信機 を
開発中である(陸域観測技術衛星ALOS).ま た,ロ ケット
等 の宇宙輸送機に もGPS受 信機が搭載 され,H-II Aロ
ケットでは飛行経路監視用 として利用される.ロ ケットの
オフノミナルな飛行状態でも受信可能 となるよう,信 号捕
捉追尾性能が強化 されている.
本稿では,GPSシ ステムの概要および動向,宇 宙用GPS
航法技術について,そ の特徴,現 在 までの開発実績や将来
の計画について概説する.
2. GPSの 概 要
2.1 GPSお よび測位原理について
表1にGPS衛 星の主要諸元,図1にGPS衛 星軌道の概
略図を示す.6つ の軌道面に4機 ずつ計24機 が基本の衛星
配置である.周 回の軌道周期は11時 間58分2秒=1/2恒
星 日である.GPS受 信機 はGPS衛 星からの測位信号 を受
表1 GPS衛 星の主要諸元1)
図1 GPS衛 星軌道の概略図
670 計測と制御 第40巻 第9号 2001年9月 号

信 す る こ とに よ り,衛 星-受 信 機 間 の レ ン ジ ン グ(距 離)
デ ー タ を得 る.た だ,受 信 機 時 計 はGPS時 刻 と同 期 して い
な い た め,こ の 距 離 デ ー タ は時 刻 誤 差 を 含 ん で い る こ とか
ら,疑 似 距 離(シ ュ ー ドレ ン ジ)と い う.以 下 に 基 本 とな
る観 測 方 程 式 を示 す.
(1)
た だ し1≦i≦n, n≧4, nは 受 信 衛 星 数,cは 光 速 で あ る.
GPS衛 星 の 位 置(xi-gps, yi-gps, zi-gps)は 航 法 メ ッセ ー ジ か
ら計 算 で き る.先 に も述 べ た よ う に受 信 機 時 計 に 誤 差 が あ
るの で,4衛 星 あ る い は そ れ 以 上 の シ ュー ド レ ン ジ観 測 量
riか ら,3次 元 位 置x, y, zに 受 信 機 時 計 補 正 量 Δtc-errを
加 えた4変 数 を未 知 数 とす る連 立 方 程 式 を解 くこ とで位 置
を求 め る.時 計 補 正 量 が 併 せ て 推 定 で き る こ とか ら,高 精
度 時 刻 基 準 と し て利 用 され る場 合 も多 い.
GPS衛 星 か ら の 信 号 はL1帯(1.57542GHz)とL2帯
(1.2276GHz)の2波 の電 波 か らな る.と も に,疑 似 雑 音 符
号(シ ュ ー ドラ ン ダム コー ド)で 位 相 変 調 され て お り,衛
星 ご とに 異 な る コ ー ドパ タ ー ン を割 り当 て る こ と に よ り,
分 離 受 信 で き る.コ ー ドはC/Aコ ー ドお よびP(Y)コ ー ド
か ら な り,C/Aコ ー ドはL1帯 に,P(Y)コ ー ドはL1帯,
L2帯 で 変 調 され て い る.C/Aコ ー ドは民 間 に公 開 され て
い るが,P(Y)コ ー ドは原 則 軍 事 用 で あ る.GPS衛 星 に は,
非 常 に高 精 度 な 原 子 周 波 数 標 準 が 搭 載 され て お り,衛 星 の
時 計 や コ ー ド符 号 お よび 搬 送 波 周 波 数 は これ を基 準 と して
い る.航 法 計 算 に必 要 とな るGPS衛 星 位 置 等 の 情 報(航 法
メ ッセ ー ジ)は,50bps (bit per sec)で 重 畳 され る.ユ ー
ザ ー 受 信 機 は,GPS衛 星 信 号 と受 信 機 内 で 発 生 さ れ るC/
Aコ ー ド(あ る い はP(Y)コ ー ド)の 相 関 を取 る こ とで伝
搬 時 間 測 定 を行 う.ま た,衛 星 位 置 は航 法 メ ッセ ー ジ か ら
解 読 され たGPS衛 星 軌 道 デ ー タか ら求 め る.さ ら に,GPS
衛 星 搭 載 時 計 や 電 離 層 遅 延 の補 正 量 も航 法 メ ッセ ー ジ に乗
せ られ て お り,そ れ ら も航 法 計 算 の補 正 に利 用 す る.図2に
GPS受 信 機 の 構 成 例 を 示 す.ア ン テ ナ か ら入 るGPS信 号
は,ダ ウ ン コ ンバ ー トお よびA/D変 換 さ れ た 後,コ ー ド相
関 回 路 に よ り同 期 が 確 立 す る.そ れ か ら求 め られ た 遅 延 時
間 に光 速 を乗 じて シ ュ ー ドレ ン ジ を算 出 す る.処 理 の 大 半
図2 GPS受 信機の構成例
はASICお よびMPUで 行われる.観 測景や航法 メッセー
ジに基づ く航法計算はMPU搭 載 ソフ トウェアにより行わ
れる.観 測量 としては,シ ュー ドレンジの他に搬送波位相
も用いる場合が多い.搬 送波波長はL1帯 の場合約19cm
であるので,シ ュー ドレンジよりも観測ノイズが小さく(数
mm程 度),航 法高精度化 には有効な観測量である.し か
し,波 数整数倍の不確定性(ア ンビギュイティ)が あるの
で,速 度推定には増分値であるデルタレンジを利用し,姿
勢決定(3.2.6)で はアルゴリズムによりアンビギュイティ
を推定 してか ら姿勢決定処理を行 う.
2.2 GPS近 代化(Modernization)に ついて
ユーザーのより高度な要求に対応すべ く,GPSの 近代化
が計画 されている.前 述のように,す でに2000年5月 には
L1帯C/Aコ ー ドに乗せ られていたSAが 解除 され,単 独
航法精度 がSAあ りの100m~150mか ら10m~20m程
度にまで向上 した.ま た,2003年 から,L2帯C/Aコ ー ド
送信機能 をもつGPS衛 星の打ち上げが開始され,計12機
打ち上 げられ る予定である.こ れによ り制限 されていた
L2帯 利用が完全に開放 され,電 離層遅延補正や搬送波利
用による高精度航法が民間で も利用可能 となる.さ らに,
2005年 からは新 しい民間用周波数 であるL5帯(1.17645
GHz)送 信機能をもつGPS衛 星(Block II F)の 打ち上げ
も開始 される.
これ らか ら2周 波,3周 波対応受信機 も開発 され,今 後の
高精度要求にも対応可能 となる.多周波利用のメ リットは,
電離層遅延補正 と搬送波位相利用性の向上である.電 離層
遅延は,GPS信 号が電離層を通過する際に生じる遅延量で
あ り,数mか ら数十m程 度になる.本 遅延量は,搬 送波周
波数に依存する性質を有 してお り,2周 波以上利用できる
受信機では,そ の性質を利用 して遅延量を補正することが
可能 となる.ま た,搬 送波利用においては,ワ イ ドレーン
(複数の波の重ね合わせでで きる周波数の低い合成波)に よ
り,ア ンビギュイティ推定が容易になる.搬 送波利用は将
来のGPS航 法の高精度化 には必須であ り,GPS近 代化 に
より搬送波位相航法が広 く適用されることとなろう.
3. 宇 宙 用GPS航 法 技 術 の 研 究 開 発
3.1 宇宙用GPSの 特徴
宇宙用GPSで も2.1の 方式・原理は共通である.地 上用
との違いは,宇 宙環境の特異性によるところが大きい.宇
宙用GPS受 信機および搭載 ソフ トウェアについて,以 下
に基本的な特徴を述べる.
1) GPS受 信機
宇宙機 に搭載 されるGPS受 信機 は,ロ ケットによる打
ち上げ環境(振 動,音 響等)や 軌道上環境(熱 真空,放 射
線等)に 対する耐環境性が必要になる.GPS受 信機は電子
部品により構成 されるため,耐 放射線性が問題 となる.耐
放射線性 を有する電子部品を適用する.
計測と制御 第40巻 第9号 2001年9月 号 671

図3 OREXに おけるGPS航 法実験
2) 搭載 ソフ トウェア
地球低軌道 を周回する宇宙機の場合,周 回軌道速度(>7
km/s)で 飛行す ることによる影響が大きい.GPS衛 星 との
相対速度差,す なわち搬送波 ドップラーシフ トが大きくな
る.初 期捕捉の際には,搬 送波周波数バンド切 り替えを行
いつつコー ド相関を取 る必要があるが,ド ップラー周波数
は,地 上用 ±5kHzに 対 して,宇 宙用では ±50kHz以 上
(低軌道)の 周波数サーチ幅を取 る必要がある.ま た,衛 星
切 り替えも頻繁に起 こる.要 求精度を満足するよう,衛 星
切 り替 えロジックや航法 フィル タ収束性 に関 して ソフ ト
ウェアによる対策が必要になる.
3.2 宇宙用GPS受 信機の研究開発実績
3.1で 示 した宇宙用GPSの 特性 をふ まえてNASDAで
は宇宙用GPS航 法技術の開発 を進めてきた.以 下にはそ
の概略を示す.
3.2.1 OREX2)
OREX(軌 道再突入実験)は1994年 にH-II初 号機で打
ち 上げられ,大 気圏への再突入実験が目的であった.こ の
OREXに は日本初の宇宙用GPS受 信機が搭載 され,軌 道
上および再突入フェーズにおける実証が行われた(図3).
計算機の不具合があったため,当 初予定 されていたオン
ボー ド航法は実施できなかったが,シ ュー ドレンジ/デ ルタ
レンジの観測は正常 に行われ,GPS受 信機の機能が確認 さ
れた.ま た,観 測データを用い,オ フライン航法精度評価
が行われた.Cバ ン ドレーダーとの比較で数100m程 度の
精度が達成できることを確認 した.
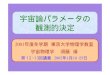
3.2.2 ALFLEX3)
1996年 に実施 された小型 自動着陸実験(ALFLEX)は 次
世代の宇宙往還機で必要 となる自動着陸技術の実証を目的
としていた.ALFLEXで は,シ ュー ドライ ト方式ディファ
レンシャルGPS (DGPS)航 法が実証 された.シ ュー ドラ
イ トとは疑似衛星 という意味であり,地 上からも擬似的な
GPS信 号 を送信す ることを意味する.デ ィファレンシャル
GPS航 法 とは,比 較的近距離の2点 で観測 されるGPS観
図4 小 型 自動 着 陸 実 験(ALFLEX)と シ ュ ー ドラ イ トデ ィ
フ ァ レ ン シ ャルGPS航 法
測 量 に共 通 に含 まれ る誤 差(SAや 電 離 層 遅 延 等)を 差 し引
き,2点 間 の 位 置 ベ ク トル を高 精 度 に 求 め る技 術 で あ る.
シ ュ ー ドラ イ ト方 式DGPS航 法 シ ス テ ム の 概 略 を 図4に
示 す.地 上GPS受 信 機 で は,GPS信 号 を受 信 し,観 測 デー
タ(シ ュー ドレ ン ジ,デ ル タ レ ン ジ)を 地 上 計 算 機 に 送 信
す る.地 上GPS受 信 機 の 設 置 位 置 は あ ら か じ め正 確 に 求
め て お く.地 上 計 算 機 で は,観 測 デ ー タ と地 上GPS受 信 機
の 既 知 の 位 置 か ら,シ ュ ー ドレ ン ジ補 正 量 を求 め て,シ ュー
ドラ イ ト送 信 機 に 送 信 す る.シ ュ ー ドラ イ ト送 信 機 は,
シ ュ ー ドラ イ ト補 正 量 を シ ュ ー ドラ イ ト信 号 に乗 せ て 送 信
す る.宇 宙 機 に搭 載 され るGPS受 信 機 は,通 常 のGPS信
号 と シ ュー ドラ イ ト信 号 を受 信 で き る機 能 を もつ(DGPS
受 信 機).こ の シ ュー ドラ イ ト信 号 はGPS信 号 と類 似 の ス
ペ ク トラム 拡 散 変 調 方 式 が 適 用 さ れ る の で,DGPS受 信 機
の 空 きチ ャ ン ネ ル を シ ュー ドラ イ ト信 号 受 信 用 に割 り当 て
る こ とが 可 能 で あ る.ま た,本 方 式 で はGPS衛 星 の み な ら
ず,シ ュ ー ドラ イ ト局 と も測 距 を行 う こ とに な り,GPS衛
星 配 置 悪 化 に よ る航 法 精 度 劣 化 を 回 避 す る 有 効 な シス テム
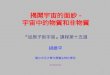
とな っ て い る.図5に は,デ ィフ ァ レ ン シ ャルGPS航 法 結
果 の 一 部 を示 す.デ ィ フ ァ レ ン シ ャ ルGPSと 併 せ て搬 送
波 位 相 を利 用 した キ ャ リア ス ム ー ジ ン グ法 を適 用 した もの
で あ り,高 精 度 な 結 果 が 得 ら れ て い る.
3.2.3 ETS-VII4)
1997年 に打 ち上 げ られ たETS-VIIは,タ ー ゲ ッ ト衛 星 お
よ び チ ェ イサ ー衛 星 の2衛 星 か ら構 成 され,ラ ンデ ブ ド ッ
キ ン グ 技 術 が 軌 道 上 実 証 され た.GPS相 対 航 法(RGPS)
が ラ ンデ ブ用 セ ン サ と して 適 用 され,GPS相 対 航 法 は遠 方
域 か ら500mま で の 範 囲 で メ イ ン航 法 セ ン サ と して 使 用
され た.図6にGPS相 対 航 法 シ ス テ ム の 構 成 を示 す.タ ー
672 計測 と制御 第40巻 第9号 2001年9月 号

図5 ALFLEXに お け るDGPS航 法 結 果
ゲ ッ ト衛 星 で 受 信 され たGPS観 測 量(シ ュー ド レ ン ジ,デ
ル タ レ ンジ)を チ ェイ サ ー 衛 星 に送 信 し,チ ェ イ サ ー衛 星
の 受 信 機 で デ ィ フ ァ レ ン シ ャ ル 航 法 を 行 う こ とで,タ ー
ゲ ッ トー チ ェイ サ ー 間 の 相 対 位 置 ・速 度 お よ び時 刻 を 出 力
す る.要 求 精 度 は面 内21m/面 外16mで あ っ た が,そ れ を
上 回 る 精 度 が 得 ら れ て い る.図7に は ラ ン デ ブ レー ダ ー
(RVR)と の航 法 結 果 の比 較 を示 して い る が,5m以 下 の精
度 が 実 現 で きて い る こ とが わ か る.さ ら に,搬 送 波 位 相 を
利 用 した よ り高 精 度 な相 対 航 法 の検 討 を行 っ て い る.
ETS-VIIで 開発 され たGPS相 対 航 法 技 術 は,宇 宙 ス テ ー
シ ョン補 給 機 で あ るHTV (H-II Transfer Vehicle)の
ラ ン デ ブ 系 開 発 に活 か され て い る.さ ら に,将 来 の フ ォ ー
メ ー シ ョ ン フ ラ イ ト(複 数 衛 星 の編 隊 飛 行)や 軌 道 上 サ ー
ビ ス機 等 の 高 度 な ラ ンデ ブ ミ ッ シ ョンへ の 適 用 が 期 待 さ れ
て い る.
3.2.4 H-II A5)
H-II Aロ ケ ッ トに は,飛 行 経 路 監 視 用 にGPS受 信 機 が
図6 ETS-VII GPS相 対 航 法 シ ス テ ム
図7 ETS-VII GPS相 対航法結果
搭載され,1号 機で実証 される予定である.図8にH-II A
ロケットに搭載 されるGPS受 信機 を示す.従 来 は地上局
レーダーのみを利用 していた,打 ち上げ運用効率化のため
GPS受 信機 も搭載 され ることとなった.衛 星搭載用 と比較
すると,打 ち上げ時の振動環境で信号捕捉できるように特
にクロック部に耐振動性 をもたせた点,搭 載アルゴリズム
により信号捕捉性能向上がなされている点が特徴である.
受信機 はL1帯24チ ャンネル(3ア ンテナ ×8チ ャンネ
ル)で,受 信電力の高い8衛 星 を選択 して航法を行 う.受
信機は2段 目ロケッ トに,ア ンテナはロケット機体側面に
3式 取 り付 けられている.ア ンテナは視野確保の観点か ら,
それぞれ120°離されている.
3.2.5 ALOS6)
図8 H-II Aロ ケ ッ トと搭 載GPS受 信 機
計測 と制御 第40巻 第9号 2001年9月 号 673

図9 GPS姿 勢決定地上実験
ALOS(陸 域観測技術衛星)に は宇宙用2周 波GPS受 信
機が搭載される.GPSはC/Aコ ー ドによるオンボー ド航
法によりリアルタイムで軌道情報 を出力する.こ れは地球
指向姿勢制御に不可欠な情報である.ま た,ALOSの オフ
ライン軌道決定要求精度 は1m以 下 と非常 に高い要求で
ある.高 精度軌道決定 システムによりこの精度が実現 され
るが,こ のシステムで はALOS搭 載GPS受 信機 の観測
データ,地 上GPS受 信データ,精 密軌道歴 をオフライン処
理する.GPS受 信機は2周 波受信が必要であるが,L2帯
は非公 開のYコ ー ドで変調 され てい るた め,不 明なY
コー ドを推定 して搬送波位相が観測可能 となるような方式
を適用 している(コー ド相関方式).本 方式 は,S/N比 の関
係 で可視衛 星数 や精 度 に制 約 を与 えて い る.L1帯 は
シュー ドレンジおよび搬送波位相 を出力 し,L2帯 は搬送
波位相を出力する.さ らに,高 精度時刻基準 としての役割
もある.1PPS (Pulse Per Sec)基 準時刻データがGPS受
信機か ら配信 され,シ ステムの時刻基準 となっている.
3.2.6 次世代宇宙用GPS受 信機および航法技術
1) GPS姿 勢決定7)
GPS姿 勢技術 によりGPSの みで宇宙機の軌道だけでな
く姿勢決定が実現で きるため,従 来の姿勢センサが不要 と
な り,シ ステムの簡素化 につながる.本 技術では,搬 送波
位相を利用する.複 数(3ア ンテナ以上)の 各アンテナにお
ける搬送波位相の差 を取 り,各 アンテナ間基線ベク トルを
求め,最 終的に姿勢 を決定す るものである.搬 送波位相差
にはアンビギュイティがあるため,ア ルゴリズムにより求
める.本 技術が適用 され始めたのは,受 信機の多チャンネ
ル化やMPU高 性能化が進んできた点が大 きい.図9に 地
上実験の様子を示す.4ア ンテナのシステムであり,32チ ャ
ンネルGPS受 信機(8チ ャンネル ×4系 統)に 入力 され
る.実 験結果の1例 を図10に 示す.本 結果はヨー軸周 りに
回転を行 った場合の ヨー姿勢角の推定誤差である.動 的な
環境でも0.5deg程 度の精度が実現可能であることを確認
した.ま た,本 システムを航空機に搭載 し,姿 勢マヌーバー
下での精度評価 を行 う実験 も計画 されており,将 来の軌道
図10 地上実験結果の一例
上実証に発展 させる.
2) GPS受 信機高性能化
電子部品の高性能化に伴い,受信機の小型軽量化/低 電力
化が進んでいる.ま た,デ ィジタル部の宇宙用ゲー トアレ
イの大容量化やMPU高 速化 に伴い,地 上用GPS受 信機
では普及 しつつある新 しい信号捕捉技術8)を適用すること
が可能 となってきた.高速信号捕捉 は,専用回路 によりハー
ドウェアで実現するマッチ ドフィル タの他に,FFTに より
ソフ トウェアで実現する方式 もある.従 来 は,GPS信 号捕
捉時間短縮のため,ア ルマナック(粗 いGPS軌 道データ)
をア ップロー ドしていたが,高 速信号捕捉により,こ の運
用が不要になると見込んでいる.ま た,信 号 ロックロス後
の再捕捉時間短縮 により,大 マヌーバーを行 う宇宙機への
適用が可能 とな り,GPS航 法の信頼性向上につなが る.
3) 静止軌道 におけるGPSの 利用
GPS軌 道高度(約20,000km)以 上におけるGPSの 利用
も検討 されている9).こ れは,地 球の縁 を通過するGPS信
号を裏側で受信するものである.信 号電力が低 く可視衛星
数に制限があるものの,本 技術が確立すれば,従 来地上局
による軌道決定 に頼 らざるをえなかった静止衛星において
航法自動化が実現できる.メ インローブでは,可 視衛星数
が少ないため,サ イ ドローブも利用するというアイデ ィア
もあるが,サ イ ドローブでは電力がさらに低 くなる.受 信
機の高感度化が必須である.
4) シュー ドライ ト技術の応用
着陸航法用 として開発 されたシュー ドライ ト技術 は,
フォーメーションフライ トにおける高精度相対航法 として
も有望である.シ ュー ドライ ト技術 を応用 したGPSラ イ
クな相対航法 システムが提案 されてお り10),多 数の衛星間
の相対航法を実現するには効率的であると考えている.
4. ま と め
本稿では,宇 宙用GPS航 法技術について,GPSの 動向に
も触れながら概説 した.自 動 ・自律化が求め られ る宇宙分
野においては,GPS航 法は非常に有効な技術であり,そ の
応用範囲は低軌道衛星のみな らず ロケット等の輸送系等,
宇宙機全般 に広がっている.将 来の宇宙機に対する,よ り
674 計測 と制御 第40巻 第9号 2001年9月 号

高 度 な 自 動 ・自 律 化 要 求,航 法 高 精 度 化,信 頼 性 向 上 要 求
等 に 応 え る べ く,宇 宙 用GPS航 法 の 高 性 能 化 を 目 指 し た
研 究 開 発 を 進 め て い く予 定 で あ る.
(2001年4月26日 受付)
参 考 文 献
1) ICD-GPS-200C
2) 冨 田,張 替,ほ か:宇 宙 用GPS受 信機 搭 載 実 験 の軌 道 決 定,航 空
宇宙 技 術 研 究所 報 告, TR-1280 (1995)
3) 鈴 木,泉,ほ か:シ ュー ドラ イ ト方 式DGPS着 陸 航 法 のAL-
FLEXに お け る評 価結 果,日 本 航 空 宇宙 学 会 論 文 集, 47-543, 143/
148 (1999)
4) I. Kawano, et al.: First Autonomous Rendezvous Using
Relative GPS navigation by ETS-VII, Proc. ION GPS-99, 393/
400 (1999)
5) 神武,中 安,ほ か:H-II A用GPS受 信機 の開 発 状 況 報 告,信 学
技 法, SANE 98-117 (1990)
6) 戸 田,岩 田:陸 域 観 測 技術 衛 星(ALOS)搭 載 用 高精 度GPS受 信
機 の 開 発,信 学 技 法, SANE 98-118 (1999)
7) 石島,宮 野,ほ か:GPS姿 勢 決 定技 術 の 研 究,第43回 宇 宙 科学 技
術 連 合 講 演 会 講演 集,神 戸 (1999)
8) D.M. Lin, et al.: Acquisition Schemes for Software GPS
Receiver, Proc. ION GPS-98, 317/325 (1998)
9) M.C. Moreau, et al.: GPS Receiver Architecture Expected
Performance for Autonomous Navigation in High Earth
Orbits, Journal of Institute of Navigation, 47-3, Fall (2000)
10) F.H. Bauer, et al: Enabling Spacecraft Formation Flying
through Spaceborne GPS and Enhanced Autonomy Technol-
ogies, Proc. ION GPS-99, 369/384 (1999)
[著 者 紹 介]
石 島 義 之 君
1970年12月24日 生.93年 東京大学工学部航空学科卒業.95年 東
京大学大学院修士課程修了.同 年宇宙開発事業団入社.技 術研究本部
にてGPS航 法技術 を中心 とした宇宙機 の誘 導制御技術 の研究 に従
事.日 本航空宇宙学会 員.
計測と制御 第40巻 第9号 2001年9月 号 675