Embed Size (px)
Citation preview
Grado en Ingenierıa Aeroespacial
4o curso
MECANICA DEL VUELO
Damian Rivas RivasCatedratico de Ingenierıa AeroespacialDepartamento de Ingenierıa Aeroespacial y Mecanica de FluidosUniversidad de Sevilla
Sevilla, septiembre de 2013
1
TEMARIO
Tema 1. Ecuaciones del movimiento.
Hipotesis generales. Sistema de referencia y sistemas de ejes. Modelo de 3 grados de libertad.Ecuaciones generales. Vuelo simetrico.
Tema 2. Modelos de atmosfera y de avion.
Modelo de atmosfera. Modelo aerodinamico. Polar. Eficiencia aerodinamica. Velocidad de entradaen perdida. Velocidad equivalente. Modelo propulsivo. Velocidad calibrada (CAS).
Tema 3. Actuaciones de punto.
Techo teorico. Velocidad maxima. Envolvente de vuelo. Angulo de subida. Velocidad de subida(rate of climb). Factor de aceleracion. Angulo de descenso. Velocidad de descenso (rate of des-cent). Actuaciones en planeo.
Tema 4. Actuaciones integrales.
Alcance. Cruise climb. Diagrama alcance-carga de pago. Autonomıa. Costes de operacion. Costindex. Efecto del viento. Aceleracion en vuelo horizontal. Distancia horizontal y tiempo desubida/descenso. Actuaciones en planeo.
Tema 5. Actuaciones en viraje.
Viraje en un plano vertical. Pull up / Push down. Viraje horizontal uniforme. Virajes optimos.Diagrama de maniobra (V -n). Viraje uniforme en planeo. Viraje horizontal no estacionario.
Tema 6. Despegue y aterrizaje.
Despegue. Carrera de despegue. Velocidad V1. Aterrizaje. Frenado con reversa. Recorrido en elaire.
Tema 7. Estabilidad y control estaticos. Movimiento longitudinal.
Sustentacion y momento de cabeceo del avion. Estabilidad estatica longitudinal. Punto neutrocon mandos fijos. Control estatico longitudinal. Equilibrado del avion.
Tema 8. Estabilidad y control estaticos. Movimiento lateral-direccional.
Fuerza lateral y momentos de balance y guinada del avion. Estabilidad estatica lateral-direccional.Control estatico lateral-direccional.
Tema 9. Respuesta dinamica del avion.
Ecuaciones del movimiento. Modelo de 6 grados de libertad. Respuesta dinamica longitudinal.Respuesta dinamica lateral-direccional. Sistema de control de vuelo (FCS).
2
PRACTICAS
1. Velocidad de entrada en perdida del avion MD-81, y estimacion del CLmaxdel avion.
2. Velocidad de vuelo del avion MD-81 en planeo, fijada una velocidad de descenso, y estimacionde los coeficientes CD0 y k de la polar del avion.
BIBLIOGRAFIA
Mecanica del Vuelo, 2a edicion, M.A. Gomez Tierno, M. Perez Cortes y C. Puentes Marquez,Garceta, 2012.
Fundamentals of Airplane Flight Mechanics, David G. Hull, Springer-Verlag, 2007.
Flight Mechanics of High-Performance Aircraft, Nguyen X. Vinh, Cambridge Univ. Press, 1993.
An Introduction to Aircraft Performance, Mario Asselin, AIAA Education Series, 1997.
Performance, Stability, Dynamics, and Control of Airplanes, 2nd Ed., Bandu N. Pamadi, AIAAEducation Series, 2004.
Introduction to Aircraft Flight Dynamics, Louis V. Schmidt, AIAA Education Series, 1998.
Dynamics of Flight, Stability and Control, 3rd Ed., B. Etkin y L.D. Reid, John Wiley & Sons,1996.
3

Pagina en blanco
4

TEMA 1 ECUACIONES DEL MOVIMIENTO
1.1 Hipotesis generales
En el estudio de las actuaciones del avion se considera el movimiento del centro de masas del avion,considerado como un cuerpo puntual de masa variable con 3 grados de libertad.
En la formulacion del problema se consideran las hipotesis generales siguientes:
1. avion cuerpo rıgido,
2. avion simetrico (tiene un plano de simetrıa),
3. motor fijo respecto al avion,
4. Tierra plana,
5. gravedad constante,
6. atmosfera en calma (no hay viento).
1.2 Sistema de referencia y sistemas de ejes
La Mecanica del Vuelo utiliza distintos sistemas inerciales de referencia, segun la mision de que setrate. Para vuelos interplanetarios debe considerarse un sistema inercial heliocentrico. Para vuelos enlas proximidades de la Tierra debe considerarse un sistema inercial geocentrico (fijo con respecto a laeclıptica), pudiendo hacerse la hipotesis de que la Tierra es esferica. Para vuelos a baja altitud y bajavelocidad (vuelos de aviones), puede considerarse un sistema inercial fijo con respecto a la Tierra, quegira con respecto al sistema inercial geocentrico con la velocidad angular de la Tierra (~w), que puedesuponerse constante; tambien puede suponerse que las fuerzas de inercia de Coriolis y centrıfuga sondespreciables. Para vuelos cortos, y en particular para el estudio de actuaciones, se puede hacer lahipotesis de Tierra plana, en la cual la superficie terrestre se supone plana y cualquier sistema dereferencia fijado a ella (topocentrico) se supone inercial.
Para obtener las ecuaciones escalares del movimiento se consideran las ecuaciones vectoriales enforma matricial. Para ello los vectores deben proyectarse en un sistema de ejes determinado. Eneste curso se utilizan distintos sistemas de ejes, que se describen a continuacion. Para obtener lascomponentes de un vector ~a en ejes Y conocidas sus componentes en ejes X, se considera la matrizasociada a la transformacion X → Y que permite escribir
[a]Y = [T]Y X [a]X (1.1)
1.2.1 Sistema inercial topocentrico
El sistema inercial topocentrico I(O, x, y, z) se define como sigue:O – cualquier punto de la superficie terrestre;x – en direccion norte;y – en direccion este;z – completa un triedro a derechas (dirigido hacia abajo).
5
El plano xy es el plano horizontal.
1.2.2 Sistema de ejes horizonte local
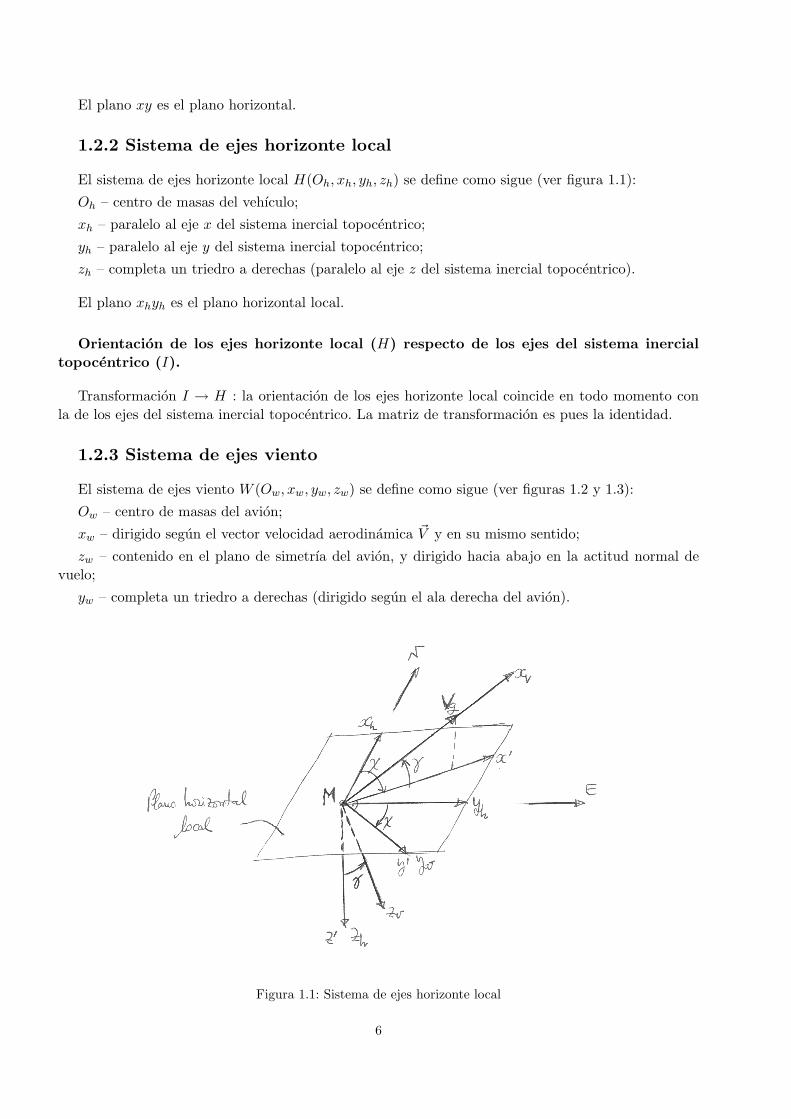
El sistema de ejes horizonte local H(Oh, xh, yh, zh) se define como sigue (ver figura 1.1):
Oh – centro de masas del vehıculo;
xh – paralelo al eje x del sistema inercial topocentrico;
yh – paralelo al eje y del sistema inercial topocentrico;
zh – completa un triedro a derechas (paralelo al eje z del sistema inercial topocentrico).
El plano xhyh es el plano horizontal local.
Orientacion de los ejes horizonte local (H) respecto de los ejes del sistema inercialtopocentrico (I).
Transformacion I → H : la orientacion de los ejes horizonte local coincide en todo momento conla de los ejes del sistema inercial topocentrico. La matriz de transformacion es pues la identidad.
1.2.3 Sistema de ejes viento
El sistema de ejes viento W (Ow, xw, yw, zw) se define como sigue (ver figuras 1.2 y 1.3):
Ow – centro de masas del avion;
xw – dirigido segun el vector velocidad aerodinamica ~V y en su mismo sentido;
zw – contenido en el plano de simetrıa del avion, y dirigido hacia abajo en la actitud normal devuelo;
yw – completa un triedro a derechas (dirigido segun el ala derecha del avion).
Figura 1.1: Sistema de ejes horizonte local
6
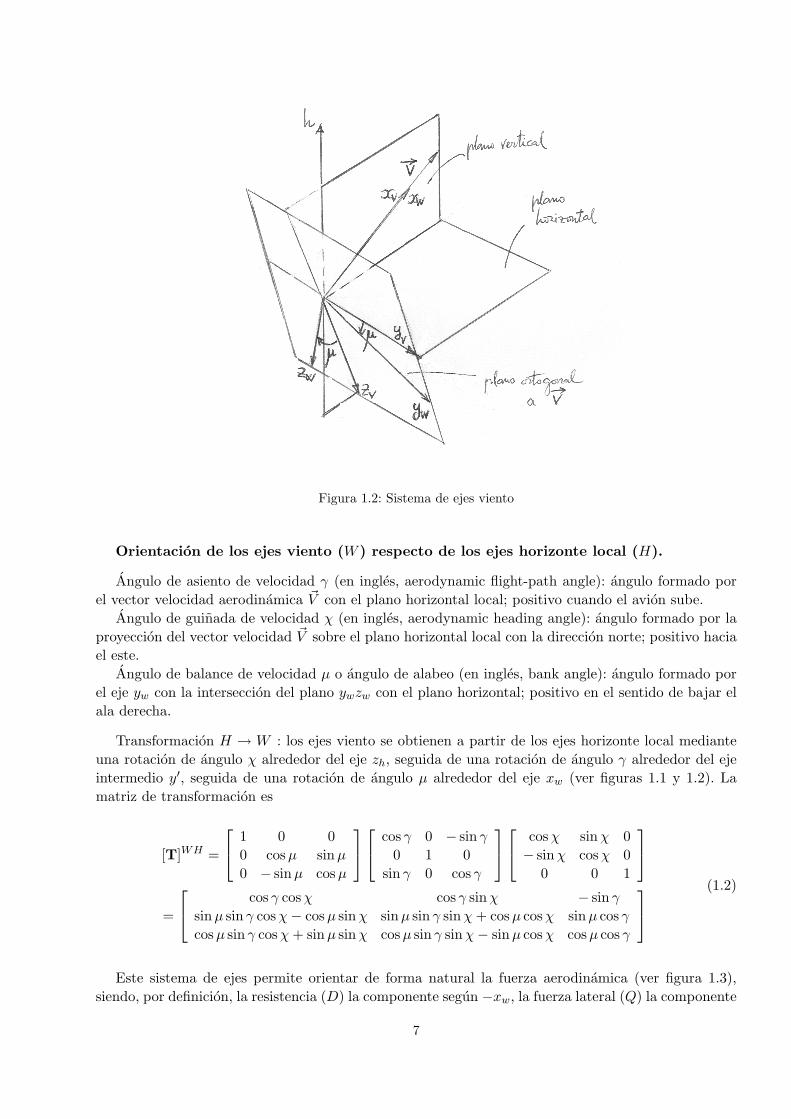
Figura 1.2: Sistema de ejes viento
Orientacion de los ejes viento (W ) respecto de los ejes horizonte local (H).
Angulo de asiento de velocidad γ (en ingles, aerodynamic flight-path angle): angulo formado porel vector velocidad aerodinamica ~V con el plano horizontal local; positivo cuando el avion sube.
Angulo de guinada de velocidad χ (en ingles, aerodynamic heading angle): angulo formado por laproyeccion del vector velocidad ~V sobre el plano horizontal local con la direccion norte; positivo haciael este.
Angulo de balance de velocidad µ o angulo de alabeo (en ingles, bank angle): angulo formado porel eje yw con la interseccion del plano ywzw con el plano horizontal; positivo en el sentido de bajar elala derecha.
Transformacion H → W : los ejes viento se obtienen a partir de los ejes horizonte local medianteuna rotacion de angulo χ alrededor del eje zh, seguida de una rotacion de angulo γ alrededor del ejeintermedio y′, seguida de una rotacion de angulo µ alrededor del eje xw (ver figuras 1.1 y 1.2). Lamatriz de transformacion es
[T]WH =
1 0 00 cos µ sinµ
0 − sinµ cos µ
cos γ 0 − sin γ
0 1 0sin γ 0 cos γ
cos χ sinχ 0− sinχ cos χ 0
0 0 1
=
cos γ cos χ cos γ sin χ − sin γ
sinµ sin γ cos χ − cos µ sinχ sinµ sin γ sinχ + cos µ cos χ sinµ cos γ
cos µ sin γ cos χ + sinµ sinχ cos µ sin γ sinχ − sin µ cos χ cos µ cos γ
(1.2)
Este sistema de ejes permite orientar de forma natural la fuerza aerodinamica (ver figura 1.3),siendo, por definicion, la resistencia (D) la componente segun −xw, la fuerza lateral (Q) la componente
7

segun −yw y la sustentacion (L) la componente segun −zw. Notese que en general la velocidad ~V noesta contenida en el plano de simetrıa del avion (en el caso de vuelo simetrico sı lo esta); se llamaangulo de resbalamiento (en ingles, sideslip angle) β al angulo formado por el vector ~V con el planode simetrıa.
Figura 1.3: Orientacion de la fuerza aerodinamica
Para orientar el empuje respecto de los ejes viento, se definen el angulo de ataque del empuje (ε)y el angulo de resbalamiento del empuje (ν), tal y como se indica en la figura 1.4.
Figura 1.4: Orientacion del empuje
8
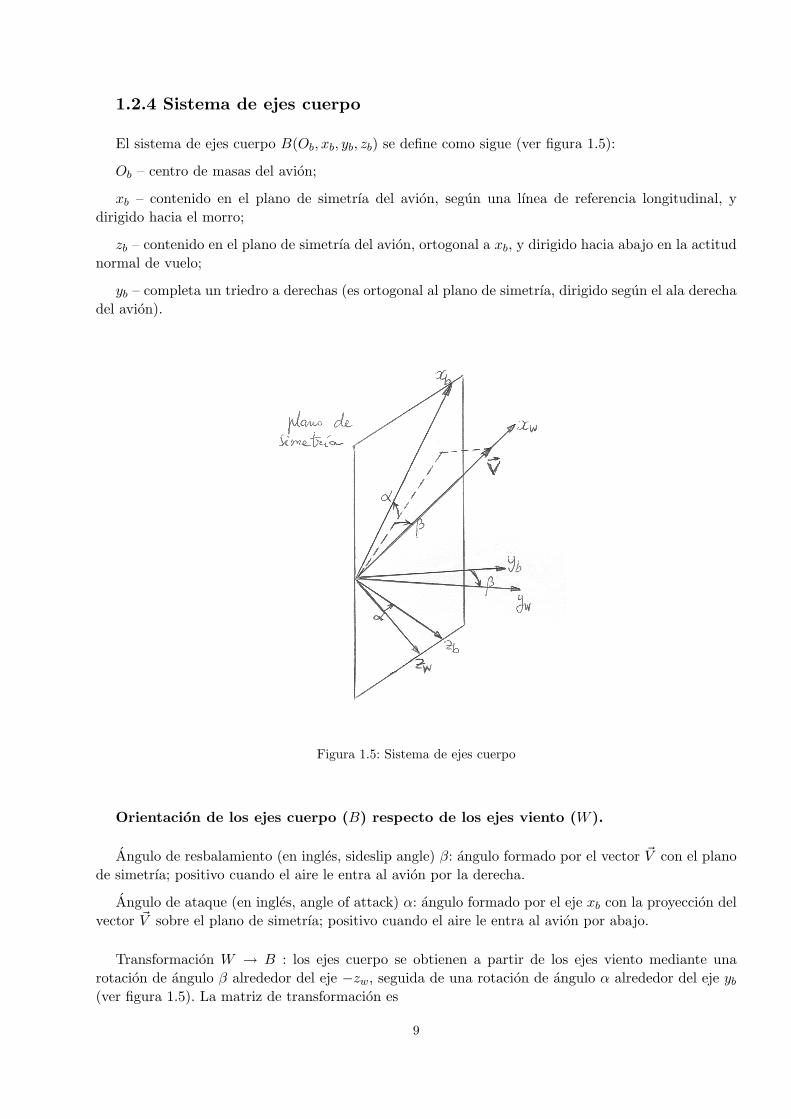
1.2.4 Sistema de ejes cuerpo
El sistema de ejes cuerpo B(Ob, xb, yb, zb) se define como sigue (ver figura 1.5):
Ob – centro de masas del avion;
xb – contenido en el plano de simetrıa del avion, segun una lınea de referencia longitudinal, ydirigido hacia el morro;
zb – contenido en el plano de simetrıa del avion, ortogonal a xb, y dirigido hacia abajo en la actitudnormal de vuelo;
yb – completa un triedro a derechas (es ortogonal al plano de simetrıa, dirigido segun el ala derechadel avion).
Figura 1.5: Sistema de ejes cuerpo
Orientacion de los ejes cuerpo (B) respecto de los ejes viento (W ).
Angulo de resbalamiento (en ingles, sideslip angle) β: angulo formado por el vector ~V con el planode simetrıa; positivo cuando el aire le entra al avion por la derecha.
Angulo de ataque (en ingles, angle of attack) α: angulo formado por el eje xb con la proyeccion delvector ~V sobre el plano de simetrıa; positivo cuando el aire le entra al avion por abajo.
Transformacion W → B : los ejes cuerpo se obtienen a partir de los ejes viento mediante unarotacion de angulo β alrededor del eje −zw, seguida de una rotacion de angulo α alrededor del eje yb
(ver figura 1.5). La matriz de transformacion es
9

[T]BW =
cos α 0 − sinα
0 1 0sinα 0 cos α
cos β − sinβ 0sinβ cos β 0
0 0 1
=
cos α cos β − cos α sinβ − sinα
sin β cos β 0sin α cos β − sinα sinβ cos α
(1.3)
Orientacion de los ejes cuerpo (B) respecto de los ejes horizonte local (H).
Angulo de asiento (en ingles, pitch angle) θ: angulo formado por el eje xb con el plano horizontallocal; positivo hacia arriba.
Angulo de guinada (en ingles, yaw angle) ψ: angulo formado por la proyeccion del eje xb sobre elplano horizontal local con la direccion norte; positivo hacia el este.
Angulo de balance (en ingles, roll angle) φ: angulo formado por el eje yb con la interseccion delplano ybzb con el plano horizontal; positivo en el sentido de bajar el ala derecha.
Cuando φ = 0 se dice que el avion vuela con las alas a nivel.
Transformacion H → B : los ejes cuerpo se obtienen a partir de los ejes horizonte local medianteuna rotacion de angulo ψ alrededor del eje zh, seguida de una rotacion de angulo θ alrededor del ejeintermedio y1, seguida de una rotacion de angulo φ alrededor del eje xb. La matriz de transformaciones
[T]BH =
1 0 00 cos φ sinφ
0 − sinφ cos φ
cos θ 0 − sin θ
0 1 0sin θ 0 cos θ
cos ψ sinψ 0− sinψ cos ψ 0
0 0 1
=
cos θ cos ψ cos θ sinψ − sin θ
sinφ sin θ cos ψ − cos φ sin ψ sinφ sin θ sinψ + cos φ cos ψ sinφ cos θ
cos φ sin θ cos ψ + sin φ sin ψ cos φ sin θ sin ψ − sinφ cos ψ cos φ cos θ
(1.4)
Esta matriz verifica la siguiente relacion
[T]BH = [T]BW [T]WH (1.5)
la cual permiten relacionar los angulos (θ, ψ, φ) con los angulos (α, β) y (γ, χ, µ).
1.3 Modelo de 3 grados de libertad
Se analiza aquı el movimiento del centro de masas del avion bajo la accion de diversas fuerzas. Estemovimiento esta definido en cada instante por la posicion, la velocidad y la masa del avion (consideradocomo una masa puntual). En cada instante el avion esta sujeto a una fuerza total compuesta por lafuerza gravitatoria m~g, la fuerza aerodinamica ~FA y la fuerza propulsiva ~FT .
Las ecuaciones del movimiento respecto de un sistema inercial de referencia (en este curso se
10

considera el sistema inercial topocentrico) son(d~r
dt
)I
= ~VI
m
(d~VI
dt
)I
= ~FA + ~FT + m~g
dm
dt= −c
(1.6)
donde ~r =−−→OOh es el vector de posicion, t el tiempo, ~VI la velocidad absoluta del vehıculo (velocidad
respecto del sistema inercial), m la masa del vehıculo y c el gasto masico de combustible (en generalla masa es una funcion del tiempo, como consecuencia del consumo de combustible); las derivadas delos vectores ~r y ~VI se efectuan en el sistema inercial de referencia.
Se tiene un sistema de 7 ecuaciones diferenciales ordinarias no lineales, para las 3 componentes delvector de posicion, las 3 de la velocidad y la masa. El estudio aerodinamico y propulsivo del avionpermitira definir ~FA, ~FT y c.
Notese que la velocidad absoluta ~VI coincide con la velocidad respecto de tierra (en ingles, groundspeed) ~Vg, que puede expresarse como ~Vg = ~V + ~Vw, siendo ~V la velocidad aerodinamica y ~Vw lavelocidad del viento. Dado que no se considera viento, se tiene ~VI = ~Vg = ~V .
1.4 Ecuaciones escalares
Para obtener las ecuaciones escalares del movimiento se van a considerar las ecuaciones vectorialesen forma matricial. Para ello los vectores deben proyectarse en un sistema de ejes determinado.
Se vera mas adelante que resulta necesario proyectar vectores definidos por un producto vectorial,por ejemplo ~A = ~ω × ~a. Para ello se utiliza el resultado siguiente: si en el sistema de ejes dado es
~ω =
p
q
r
(1.7)
el tensor dado por
Ω =
0 −r q
r 0 −p
−q p 0
(1.8)
permite escribir~ω × ~a = Ω·~a (1.9)
por tanto, se tiene[A]E = [Ω]E [a]E (1.10)
siendo
[Ω]E =
0 −r q
r 0 −p
−q p 0
(1.11)
la matriz asociada a ~ω.
11

1.4.1 Ecuaciones cinematicas
En primer lugar se van a obtener las ecuaciones cinematicas escalares. Para ello se proyecta laecuacion vectorial en los ejes del propio sistema de referencia topocentrico. Se tiene[(
dr
dt
)I
]I
= [V ]I (1.12)
Las ecuaciones escalares se obtienen a partir de las siguientes expresiones
[r]I =
x
y
z
(1.13)
[(dr
dt
)I
]I
=
x
y
z
(1.14)
[V ]W =
V
00
(1.15)
[V ]I = [T]HW [V ]W =
V cos γ cos χ
V cos γ sinχ
−V sin γ
(1.16)
siendo [T]HW la matriz traspuesta de [T]WH , que viene dada por la ecuacion (1.2). Se tienen lassiguientes ecuaciones cinematicas, tomando h = −z,
dx
dt= V cos γ cos χ
dy
dt= V cos γ sinχ
dh
dt= V sin γ
(1.17)
1.4.2 Ecuaciones dinamicas
A continuacion se van a obtener las ecuaciones dinamicas escalares. Para ello se escribe en primerlugar la derivada de ~V en ejes viento, que son unos ejes moviles que giran con respecto al sistema inercialcon velocidad angular ~ωWI , para lo cual sera necesario utilizar el siguiente resultado de Mecanicacorrespondiente al movimiento angular relativo:
Sea un sistema de referencia fijo F y otro movil M que gira respecto del fijo con velocidad angular~ωMF constante. La relacion entre las derivadas temporales de un vector ~A en ambos sistemas vienedada por la siguiente relacion: (
d ~A
dt
)F
=
(d ~A
dt
)M
+ ~ωMF × ~A (1.18)
12

Por tanto, dado que (d~V
dt
)I
=
(d~V
dt
)W
+ ~ωWI × ~V (1.19)
se tiene (d~V
dt
)W
+ ~ωWI × ~V =1m
~FA,T + ~g (1.20)
A continuacion se proyecta la ecuacion dinamica vectorial en ejes viento, se tiene[(dV
dt
)W
]W
+ [ΩWH ]W [V ]W =1m
[FA,T ]W + [g]W (1.21)
donde [ΩWH ]W es la matriz asociada a ~ωWH = ~ωWI , que viene dada por
~ωWH = χ~kh + γ~jx + µ~iw (1.22)
siendo ~jx la direccion y′ de los ejes intermedios X ′ que se obtienen al girar los ejes H el angulo χ
alrededor del eje zh.Las ecuaciones escalares se obtienen a partir de la ecuacion (1.21) y de las siguientes expresiones
[(dV
dt
)W
]W
=
V
00
(1.23)
[g]H =
00g
(1.24)
[g]W = [T]WH [g]H =
−g sin γ
g cos γ sinµ
g cos γ cos µ
(1.25)
[ΩWH ]W [V ]W =
0V (χ cos γ cos µ − γ sinµ)−V (χ cos γ sinµ + γ cos µ)
(1.26)
Finalmente, se tiene el siguiente resultado
dV
dt=
1m
(FA,T )xw− g sin γ
V (dχ
dtcos γ cos µ − dγ
dtsinµ) =
1m
(FA,T )yw+ g cos γ sinµ
−V (dχ
dtcos γ sin µ +
dγ
dtcos µ) =
1m
(FA,T )zw+ g cos γ cos µ
(1.27)
donde (FA,T )xw, (FA,T )yw
, (FA,T )zwson las componentes de las fuerzas aerodinamica y propulsiva en
los ejes viento.
13

Combinando las ecuaciones 2a y 3a anteriores se obtienen las siguientes ecuaciones dinamicas
dV
dt=
1m
(FA,T )xw− g sin γ
V cos γdχ
dt=
1m
[(FA,T )yw
cos µ − (FA,T )zwsin µ
]−V
dγ
dt=
1m
[(FA,T )yw
sinµ + (FA,T )zwcos µ
]+ g cos γ
(1.28)
1.5 Ecuaciones generales
Las componentes de las fuerzas aerodinamica y propulsiva en ejes viento vienen dadas por
[FA,T ]W =
T cos ε cos ν − D
T cos ε sin ν − Q
−(L + T sin ε)
(1.29)
Las ecuaciones generales, con todas las hipotesis indicadas, son pues las siguientes
dx
dt= V cos γ cos χ
dy
dt= V cos γ sinχ
dh
dt= V sin γ
mdV
dt= T cos ε cos ν − D − mg sin γ
mV cos γdχ
dt= (T cos ε sin ν − Q) cos µ + (L + T sin ε) sin µ
mVdγ
dt= − [(T cos ε sin ν − Q) sin µ − (L + T sin ε) cos µ] − mg cos γ
dm
dt= −c
(1.30)
En estas ecuaciones se tiene la siguiente dependencia funcional
L = L(h, V, α, β)
D = D(h, V, α, β)
Q = Q(h, V, α, β)
T = T (h, V, π)
c = c(h, V, π)
ε = ε(α, β)
ν = ν(α, β)
(1.31)
siendo π el parametro de control del motor. Se tiene pues un sistema de 7 ecuaciones diferencialesordinarias con 11 variables dependientes: 7 variables de estado (variables derivadas), x, y, h, V, χ, γ,m;y 4 variables de control (variables no derivadas), α, β, π, µ. Se tienen por tanto 4 grados de libertadmatematicos, es decir, se deben especificar 4 condiciones adicionales para poder integrar el sistemajunto con sus condiciones iniciales.
14

Obtencion de los angulos ε y ν.
La orientacion del empuje respecto de ejes cuerpo es conocida. Sea ~T = T~t, y sea
[t]B =
k1
k2
k3
(1.32)
donde k1, k2, k3 son los cosenos directores del vector unitario ~t, que cumplen k21 + k2
2 + k23 = 1. Las
componentes de ~t en ejes viento son, por definicion (ver Fig. 1.4),
[t]W =
cos ε cos ν
cos ε sin ν
− sin ε
(1.33)
A partir de la igualdad[t]B = [T]BW [t]W (1.34)
se obtienen las siguientes relaciones que definen ε(α) y ν(α, β)
sin ε = k1 sinα − k3 cos α
cos ε sin(β + ν) = k2
(1.35)
1.6 Vuelo simetrico
Se dice que el vuelo es simetrico cuando los vectores ~V y ~T estan contenidos en el plano de simetrıay Q = 0. Como consecuencia, tambien se tiene β = ν = k2 = 0. Las ecuaciones del vuelo simetrico sonpues
dx
dt= V cos γ cos χ
dy
dt= V cos γ sinχ
dh
dt= V sin γ
mdV
dt= T cos ε − D − mg sin γ
mV cos γdχ
dt= (L + T sin ε) sin µ
mVdγ
dt= (L + T sin ε) cos µ − mg cos γ
dm
dt= −c
(1.36)
En estas ecuaciones se tiene la siguiente dependencia funcional
L = L(h, V, α)
D = D(h, V, α)
T = T (h, V, π)
c = c(h, V, π)
ε = ε(α)
(1.37)
15

Se tiene ahora un sistema de 7 ecuaciones diferenciales ordinarias con 10 variables dependientes:7 variables de estado (variables derivadas), x, y, h, V, χ, γ,m; y 3 variables de control (variables noderivadas), α, π, µ. En vuelo simetrico se tienen por tanto 3 grados de libertad matematicos.
En vuelo simetrico se tienen ademas los siguientes resultados:— 1) el plano xwzw (plano LD) coincide con el plano de simetrıa del avion;— 2) los ejes yw e yb coinciden;— 3) α es el angulo formado por el eje xb con el vector ~V ;— 4) ε es el angulo formado el vector ~T con el vector ~V .
En este caso de vuelo simetrico la ecuacion (1.34) se reduce a k1
0k3
=
cos α 0 − sinα
0 1 0sinα 0 cos α
cos ε
0− sin ε
(1.38)
de donde se obtieneε = α − artan
k3
k1(1.39)
Es decir, se puede ponerε = α + ε0 (1.40)
siendo ε0 un parametro de diseno conocido (ver figura 1.6).
Figura 1.6: Vuelo simetrico
16

1.6.1 Vuelo simetrico en un plano vertical
El vuelo en un plano vertival esta definido por la condicion χ = const. Por comodidad se puedetomar χ = 0 y por tanto y = const (ver figura 1.7). De las ecuaciones dinamicas se deduce µ = 0. Lasecuaciones del vuelo simetrico en un plano vertical son pues
dx
dt= V cos γ
dh
dt= V sin γ
mdV
dt= T cos ε − D − mg sin γ
mVdγ
dt= L + T sin ε − mg cos γ
dm
dt= −c
(1.41)
junto con las relaciones funcionales definidas en la ecuacion (1.37).
Se tiene ahora un sistema de 5 ecuaciones diferenciales ordinarias con 7 variables dependientes: 5variables de estado (variables derivadas), x, h, V, γ,m; y 2 variables de control (variables no derivadas),α, π. En vuelo simetrico en un plano vertical se tienen por tanto 2 grados de libertad matematicos.
Figura 1.7: Vuelo simetrico en un plano vertical
Caso particular: vuelo horizontal (rectilıneo). El vuelo horizontal esta definido por h = const.De las ecuaciones cinematicas se deduce γ = 0. Las ecuaciones del vuelo simetrico horizontal en unplano vertical son pues
dx
dt= V
mdV
dt= T cos ε − D
0 = L + T sin ε − mg
dm
dt= −c
(1.42)
17
junto con las relaciones funcionales definidas en la ecuacion (1.37).
Se tiene ahora un sistema de 3 ecuaciones diferenciales ordinarias y 1 ecuacion algebraica con 5variables dependientes: 3 variables de estado (variables derivadas), x, V,m; y 2 variables de control(variables no derivadas), α, π. En vuelo simetrico horizontal en un plano vertical se tiene por tanto 1grado de libertad matematico.
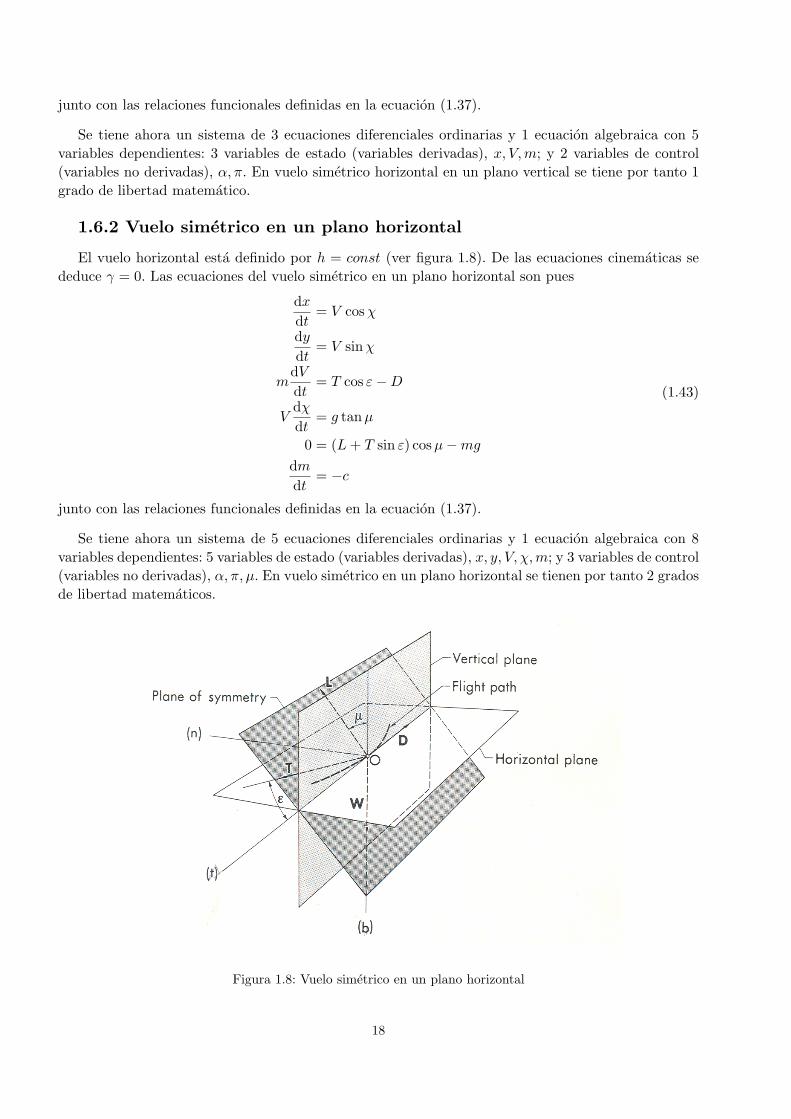
1.6.2 Vuelo simetrico en un plano horizontal
El vuelo horizontal esta definido por h = const (ver figura 1.8). De las ecuaciones cinematicas sededuce γ = 0. Las ecuaciones del vuelo simetrico en un plano horizontal son pues
dx
dt= V cos χ
dy
dt= V sinχ
mdV
dt= T cos ε − D
Vdχ
dt= g tanµ
0 = (L + T sin ε) cos µ − mg
dm
dt= −c
(1.43)
junto con las relaciones funcionales definidas en la ecuacion (1.37).
Se tiene ahora un sistema de 5 ecuaciones diferenciales ordinarias y 1 ecuacion algebraica con 8variables dependientes: 5 variables de estado (variables derivadas), x, y, V, χ,m; y 3 variables de control(variables no derivadas), α, π, µ. En vuelo simetrico en un plano horizontal se tienen por tanto 2 gradosde libertad matematicos.
Figura 1.8: Vuelo simetrico en un plano horizontal
18





























