Embed Size (px)
Citation preview

HARDWARE ARCHITECTURE FOR NANOROBOT APPLICATION IN CEREBRAL ANEURYSM
Adriano Cavalcanti, Bijan Shirinzadeh, Toshio Fukuda, Seiichi Ikeda
CAN Center for Automation in NanobiotechRobotics & Mechatronics Research Lab., Monash University
Dept of Micro-Nano Systems Eng., Nagoya University
IEEE NANO 2007 Int’l Conf. on NanotechnologyHong Kong, ChinaAugust 2-5, 2007
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

The new era of Nanotechnology is coming
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Medical Nanorobot Research Nanorobot Research Challenge
Research ObjectivesResearch Methodology
Computational AnalysisNanorobot Design
Sensing MethodologyControl Model
Verification MethodologiesNanorobot IC Layout
Conclusion
P r e s e n
t a t i o n o u
t l i n e :
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

1. MEDICAL NANOROBOT RESEARCH
- Quantum Dot new materials
- Genome analysis
- Biomedical Problems
- Microelectronics miniaturization nanoelectronics
New research subject:- Interdisciplinary focus
Natural result from:
Motivation:- Establish Methodologies
on System and Device Prototyping- Control and Architecture of Nanorobots for Medicine
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

2. NANOROBOT RESEARCH CHALLENGE
a. Architecture, sensing and actuation at nanoscale:- development of molecular nanomachine & systems
Possible applications: - Nanoassembly automation- Health care
b. An acceptable approach
i. Agents as assemblers sensory feedback intelligent control is indispensable for micro/nano manipulation
ii. Advanced analytical approach as a tool for exploration and design
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

3. RESEARCH OBJECTIVES
a. Methodology:
- Establish the necessary tools for the study of nanorobots
b. Control: - Identify methodology to control nanorobots
c. Architecture: - Investigate issues associated
with hardware requirements
d. Flow Signal: - Define the chemical / thermal blood flow signals
that interferes with sensing and actuation
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

4. RESEARCH METHODOLOGY
c. System Identification and Requirements:- System Modular approach
to validate nanorobot architecture analysis- Verification Hardware Description Language
(VHDL) to verify IC-Layout Architecture simulation
a. Characterization of sensor-based events: - Define protein anti-body based signals- Control modelling - nanorobot behaviours
b. Biomedical Flow Signal:
-Finite Element Method (FEM) to study flow patterns
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

5. COMPUTATIONAL ANALYSIS
b. Mobile nanorobot interaction and tasks - Perform molecular assembly manipulation - Biomedical engineering applications
c. Storage simulation data - Later analyses for nanodevices manufacturing - Serves on sensing/actuation device design- Layout for DNA based new ICs: nanobioelectronics
a. A 3D tool to simulate the nanorobot within the human body
- Enable fast nanorobots control investigation
- Provide physical parameters for
manufacturing evaluation- Nanorobot Control Design (NCD) system
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

6. NANOROBOT DESIGN
b. Nanorobot navigation: - Uses plane surfaces (three fins total) - Propulsion by bi-directional propellers: two simultaneously counter-rotating screw drives - navigational acoustic sensors
a. For Molecular Manipulationnanorobot uses actuators
nanorobot design
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

7. SENSING METHODOLOGY
a. Decision planning
Medical target delivery
Motion: random, chemical, thermochemical
Behaviour activation www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

b. Physical parameters in the simulator
Interactive simulation
Blood Flow Signal Analysis (FEM)
- velocity
- temperature
- shear stress
- molecular concentrations
7. SENSING METHODOLOGY
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

8. CONTROL MODELa. Nanorobots Collective Control Planning
tn
t
m
i
ti ywrfMax
1 1
)(
dQyts tt ..
LxQ ti
t
determines the kind of behaviour for r. ψ:
y: surplus/deficit to the desired protein/drug amount.w: chemical level of the medical target i at time t.
Q: total of protein captured by r in t.
d: desired protein compound rate.
x: substance amount injected in the medical target i.
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

8. CONTROL MODEL
xCvCD /2
b. Signal Sensor - Based Control Reaction
)2/()(
2),,( Dxrve
Dr
QzyxC
222 zyxr
Q : molecules per second
v: flow velocity
D: diffusion coeficient
C: molecules concentration per 3m
r: distance from the center of the vessel
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

9. VERIFICATION METHODOLOGIES - CASES STUDIES
Nanorobots searching for malignant tissues
a. Nanorobots for Cancer - Surgery / Drug Delivery / Early Diagnosis
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Constant signal diffusion from injury target
Genome Mapping - Chromosome 21
E-cadherin / bcl-2 gradient
changed by tumour
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

This high constant diffusion could be used as signals for robots.
target area
signal spreads further throughout vessel
E-cadherin / bcl-2: protein signals to detect cancer
Chemical & temperature signals activate nanorobots near target. www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

20microns diameter vessel
Comparative behaviors
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Such control activation parameters could be used for biomedical applications – e.g. Coronary Atherosclerosis
Blood temperature in the occluded region
b. Nanorobots for Cardiology Blood Pressure Monitoring / Drug Delivery
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Nanorobots and Red Blood Cells Near the vessel occlusion
sVCAM-1 chemical signal
concentration in the stenosis
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

c. Nanorobots for Diabetes - Glucose Monitoring
patients must take small blood samples many times a day to control glucose levels.
Such procedures are uncomfortable and
extremely inconvenient
Nanorobots with nanobiochemosensors (hSGLT3) can be used for pervasive diabetes monitoring.
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

RF are proposed in our nanorobot architecture for:
Upload controlData communication
Tele-operation
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Human Genome Mapping
Chromosome 12 DNA Analysis provides antibody agent for CMOS Electro-Chemical biosensors.
is progressively advancing through integration of new materials for nanobiosensors and actuator for biomedical application.
New NanoCMOS IC Design
Can be applied for cerebral aneurysm with detection of iNOS (inducible Nitric Oxide Synthase)
Medical Nanorobots
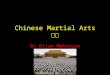
d. Nanorobots for Brain Aneurysm Early Diagnosis / Nanowire Delivery
Brain Aneurysm Bulb
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Diagnosis and detection of vessels dilatation & deformation
in early stages is crucial
Nanorobots can enable precise delivery of nanowires to fill the aneurysm
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Nanorobots can be used with biosensors to detect iNOS
Signals for diagnosis before a stroke happens
iNOS (inducible Nitric Oxide Synthase)
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

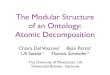
10. Nanorobot IC Layout
* CMOS
Can be used as embedded nanodevice to build integrated sensors and actuator for nanorobots
CMOS achieved 10nm sizes functionality
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

* CMOS
RF-CMOS with wireless communication is a feasible way to interface with nanorobots – tracking, operation, diagnosis
Photonics + Q.D. + nanotubes:enable high performance to production of nanodevices
10. Nanorobot IC Layout
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

* CMOS
Nanorobot hardware integrated nanocircuit architecture
10. Nanorobot IC Layout
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com
Electromagnetic backpropagation waves are used to define the nanorobot positions

Selected Peer Reviewed Publications
Adriano Cavalcanti, Tad Hogg, Bijan Shirinzadeh, “Nanorobotics System Simulation in 3D Workspaces with Low Reynolds Number”, IEEE-RAS MHS Int’l Symposium on Micro-Nanomechatronics and Human Science, Nagoya, Japan, pp. 226-231, Nov. 2006.
Adriano Cavalcanti, Warren W. Wood, Luiz C. Kretly, Bijan Shirinzadeh, “Computational Nanomechatronics: A Pathway for Control and Manufacturing Nanorobots”, IEEE CIMCA Int’l Conf. on Computational Intelligence for Modelling, Control and Automation, IEEE Computer Society, Sydney, Australia, pp. 185-190, Nov. 2006.
JournalAdriano Cavalcanti, Bijan Shirinzadeh, Robert A. Freitas Jr., Luiz C. Kretly, “Medical Nanorobot
Architecture Based on Nanobioelectronics”, Recent Patents on Nanotechnology, Bentham Science, Vol. 1, no. 1, pp. 1-10, Feb. 2007. Adriano Cavalcanti, Robert A. Freitas Jr., “Nanorobotics Control Design: A Collective Behavior
Approach for Medicine”, IEEE Transactions on NanoBioscience, Vol 4., no. 2, pp. 133-140, Jun. 2005.
Conference
Adriano Cavalcanti, Lior Rosen, Bijan Shirinzadeh, Moshe Rosenfeld, “Nanorobot for Treatment of Patients with Artery Occlusion”, Springer Proceedings of Virtual Concept,
Cancun, Mexico, Nov. 2006.
Adriano Cavalcanti, “Assembly Automation with Evolutionary Nanorobots and Sensor-BasedControl applied to Nanomedicine”, IEEE Transactions on Nanotechnology, Vol. 2,
no. 2, pp. 82-87, Jun. 2003.
Arancha Casal, Tad Hogg, Adriano Cavalcanti, “Nanorobots as Cellular Assistants in Inflammatory Responses”, IEEE BCATS Biomedical Computation at Stanford 2003 Symposium, IEEE Computer Society, Stanford CA, USA, Oct. 2003.
Adriano Cavalcanti, Bijan Shirinzadeh, Declan Murphy, Julian A. Smith, “Nanorobot forLaparoscopic Cancer Surgery”, IEEE-ICIS Int’l Conf. on Computer and Information Science, Melbourne, Australia, pp. 738-743, Jul. 2007.
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Acknowledgments / Technical Collaboration
T. Hogg (HP US)
W. W. Wood (Michigan State University US)
R. A. Freitas Jr. (Inst. for Molecular Manufacturing US)
L. Rosen (Tel Aviv University IL)
A. Casal (Stanford University US)
L. C. Kretly (Campinas University BR)
D. Murphy (Guy’s Hospital UK)
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

11. CONCLUSION
b. Rapid Evaluation of Various Control Algorithms
First methodology for medical nanorobot investigation
CONTRIBUTIONS
First nanorobot architecture based on nanobielectronics
a. Real-time digital simulation as a valuable tool
for the better investigation of biomedical flow signals
c. Show a practical approach to investigatenanodevices manufacturing for nanorobots
e.g.: transducers/nanobiosensors prototyping
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com

Just a few quotes…
“There is nothing permanent except change.”Heraclitus of Ephesus (ca. 525-475 B.C.)
“A scientific truth does not triumph by convincing its opponents and making them see the light, but rather because its opponents
eventually die and a new generation grows up that is familiar with it.”
Max Plank (1858-1947)
“A pessimist sees the difficulty in every opportunity; An optimist sees the opportunity in every difficulty.”
Winston Churchill (1874-1965)
www.c a n b i o t e c h n e m s.com www.n a n o r o b o t d e s i g n.com