Embed Size (px)
DESCRIPTION
gear
Citation preview
HELICAL GEARS
• 3.1 Helical gears – an introduction
• 3.2 Helical gears – geometry and nomenclature
• 3.3 Helical gears – force analysis
• 3.4 Helical gears – tooth proportions
• 3.5 Helical gears – bending stress
• 3.6 Helical Gears- Bending Strength (Buckingham)
• 3.7 Helical Gears-Wear Strength (Bhandari’s Book)
3.1 HELICAL GEARS – an introduction
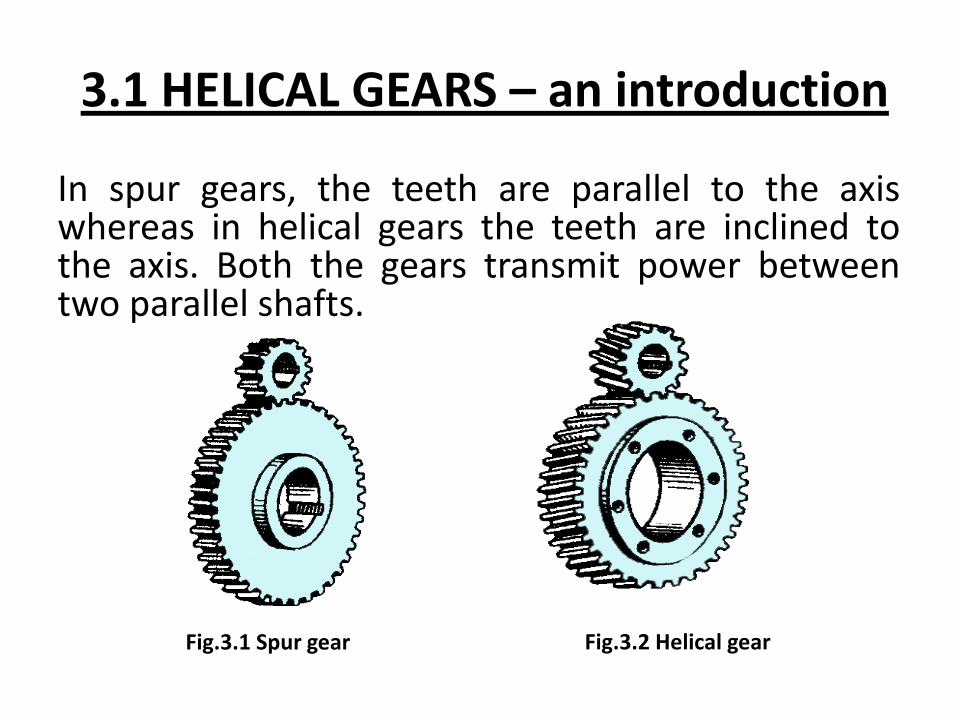
In spur gears, the teeth are parallel to the axis whereas in helical gears the teeth are inclined to the axis. Both the gears transmit power between two parallel shafts.
Fig.3.1 Spur gear Fig.3.2 Helical gear
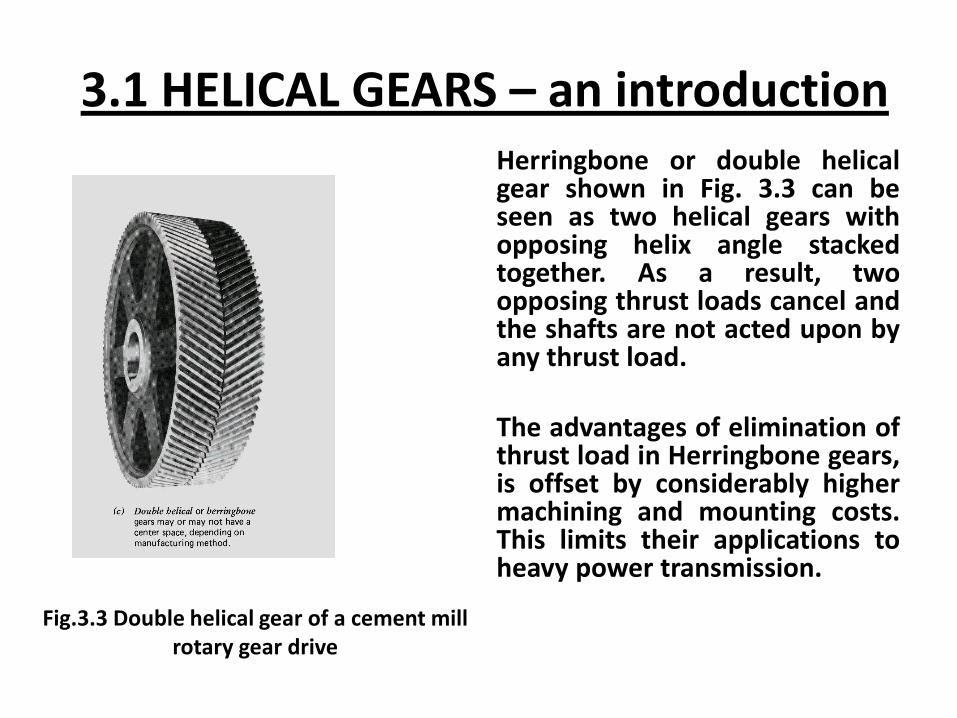
3.1 HELICAL GEARS – an introduction Herringbone or double helical gear shown in Fig. 3.3 can be seen as two helical gears with opposing helix angle stacked together. As a result, two opposing thrust loads cancel and the shafts are not acted upon by any thrust load. The advantages of elimination of thrust load in Herringbone gears, is offset by considerably higher machining and mounting costs. This limits their applications to heavy power transmission.
Fig.3.3 Double helical gear of a cement mill rotary gear drive
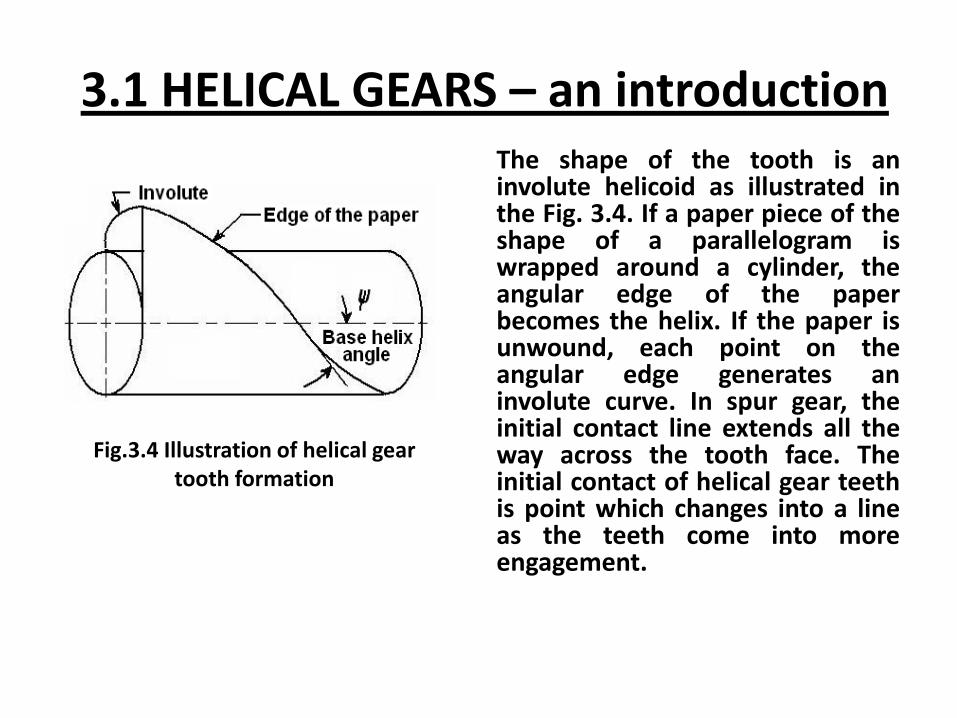
3.1 HELICAL GEARS – an introduction The shape of the tooth is an involute helicoid as illustrated in the Fig. 3.4. If a paper piece of the shape of a parallelogram is wrapped around a cylinder, the angular edge of the paper becomes the helix. If the paper is unwound, each point on the angular edge generates an involute curve. In spur gear, the initial contact line extends all the way across the tooth face. The initial contact of helical gear teeth is point which changes into a line as the teeth come into more engagement.
Fig.3.4 Illustration of helical gear tooth formation
3.1 HELICAL GEARS – an introduction In spur gears the line of contact is parallel to the axis of rotation; in helical gears the line is diagonal across the face of the tooth. Hence gradual engagement of the teeth and the smooth transfer of load from one tooth to another occur. This gradual engagement makes the gear operation smoother and quieter than with spur gears and results in a lower dynamic factor, Kv. Thus, it can transmit heavy loads at high speeds. Typical usage is automotive transmission for compact and quiet drive.
3.2 HELICAL GEARS – GEOMETRY AND NOMENCLATURE
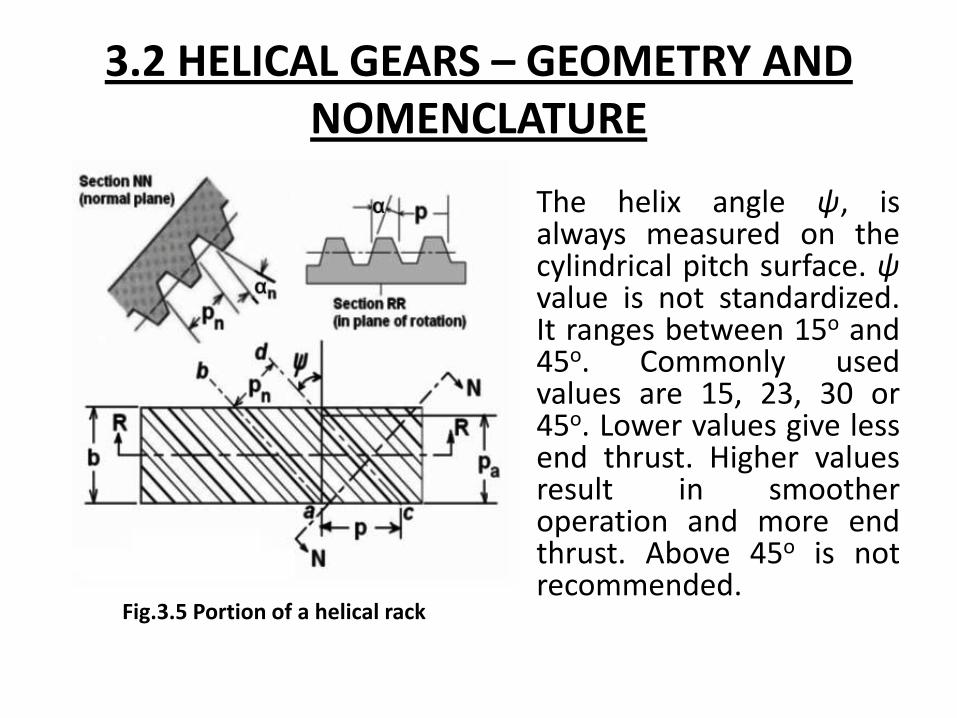
The helix angle ψ, is always measured on the cylindrical pitch surface. ψ value is not standardized. It ranges between 15o and 45o. Commonly used values are 15, 23, 30 or 45o. Lower values give less end thrust. Higher values result in smoother operation and more end thrust. Above 45o is not recommended. Fig.3.5 Portion of a helical rack
3.2 HELICAL GEARS – GEOMETRY AND NOMENCLATURE
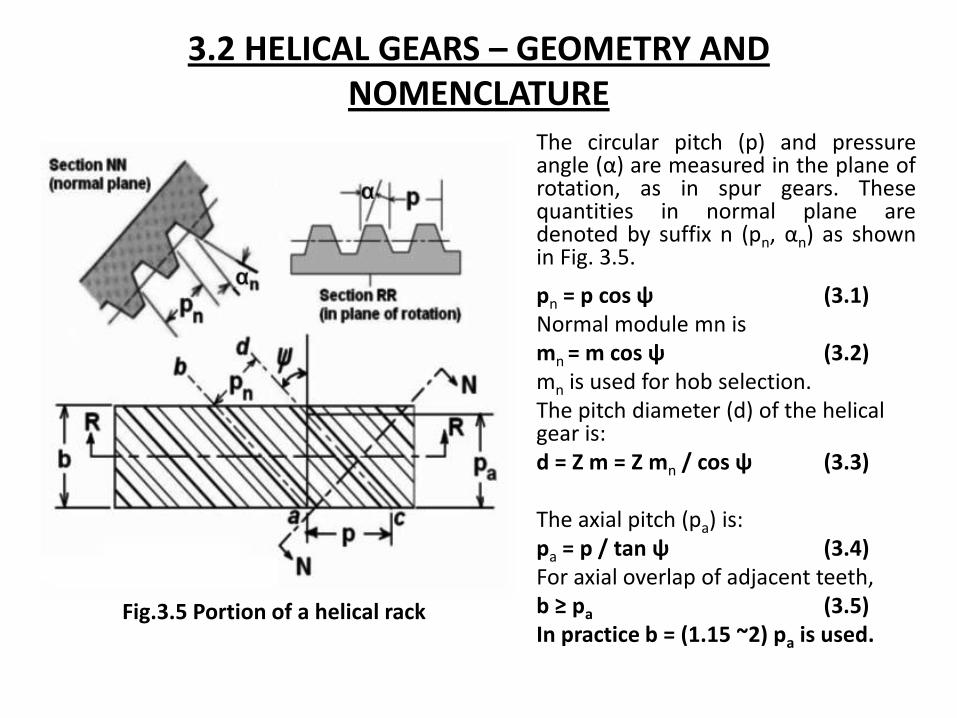
The circular pitch (p) and pressure angle (α) are measured in the plane of rotation, as in spur gears. These quantities in normal plane are denoted by suffix n (pn, αn) as shown in Fig. 3.5.
pn = p cos ψ (3.1) Normal module mn is mn = m cos ψ (3.2) mn is used for hob selection. The pitch diameter (d) of the helical gear is: d = Z m = Z mn / cos ψ (3.3) The axial pitch (pa) is: pa = p / tan ψ (3.4) For axial overlap of adjacent teeth, b ≥ pa (3.5) In practice b = (1.15 ~2) pa is used.
Fig.3.5 Portion of a helical rack
3.2 HELICAL GEARS – GEOMETRY AND NOMENCLATURE
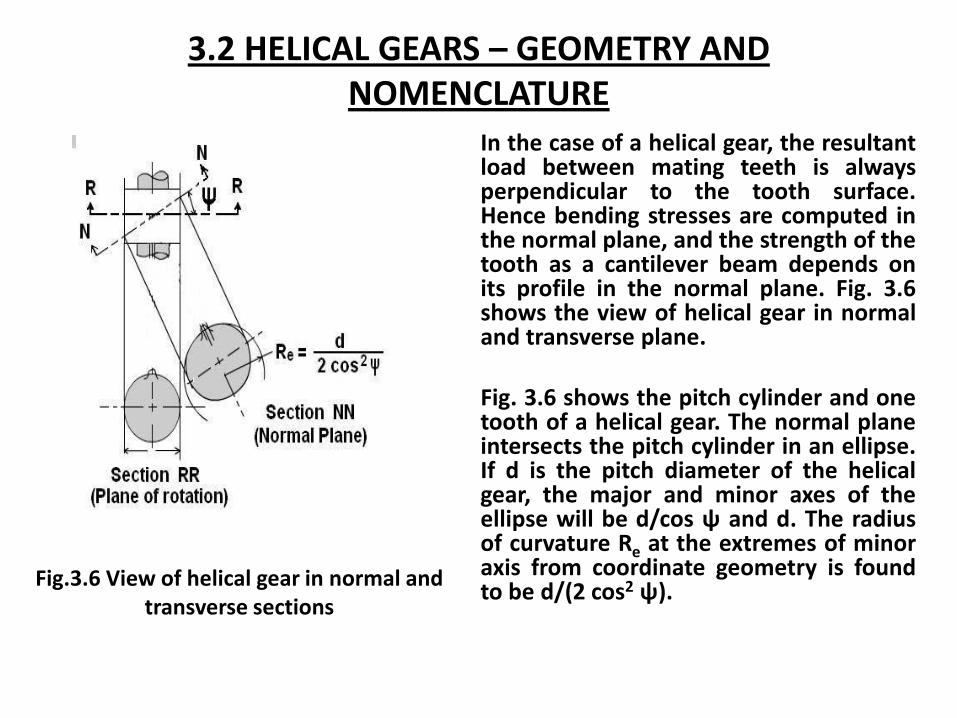
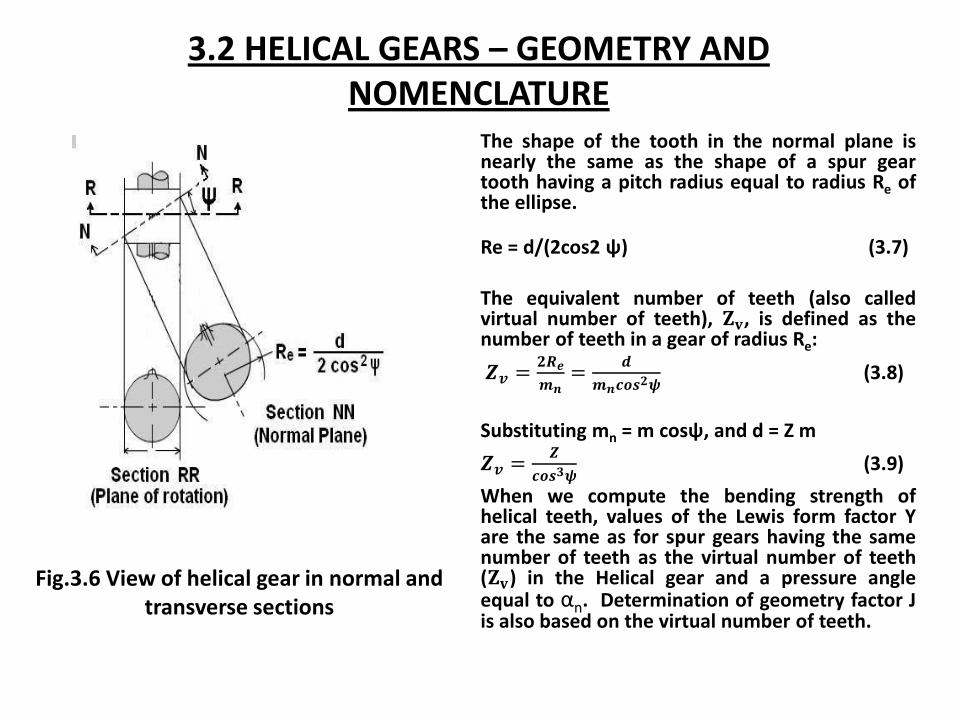
In the case of a helical gear, the resultant load between mating teeth is always perpendicular to the tooth surface. Hence bending stresses are computed in the normal plane, and the strength of the tooth as a cantilever beam depends on its profile in the normal plane. Fig. 3.6 shows the view of helical gear in normal and transverse plane. Fig. 3.6 shows the pitch cylinder and one tooth of a helical gear. The normal plane intersects the pitch cylinder in an ellipse. If d is the pitch diameter of the helical gear, the major and minor axes of the ellipse will be d/cos ψ and d. The radius of curvature Re at the extremes of minor axis from coordinate geometry is found to be d/(2 cos2 ψ).
Fig.3.6 View of helical gear in normal and transverse sections
3.2 HELICAL GEARS – GEOMETRY AND NOMENCLATURE
The shape of the tooth in the normal plane is nearly the same as the shape of a spur gear tooth having a pitch radius equal to radius Re of the ellipse.
Re = d/(2cos2 ψ) (3.7) The equivalent number of teeth (also called virtual number of teeth), 𝐙𝐯, is defined as the number of teeth in a gear of radius Re:
𝒁𝒗 =𝟐𝑹𝒆
𝒎𝒏=
𝒅
𝒎𝒏𝒄𝒐𝒔𝟐𝝍 (3.8)
Substituting mn = m cosψ, and d = Z m
𝒁𝒗 =𝒁
𝒄𝒐𝒔𝟑𝝍 (3.9)
When we compute the bending strength of helical teeth, values of the Lewis form factor Y are the same as for spur gears having the same number of teeth as the virtual number of teeth (𝐙𝐯) in the Helical gear and a pressure angle equal to αn. Determination of geometry factor J is also based on the virtual number of teeth.
Fig.3.6 View of helical gear in normal and transverse sections
3.3 HELICAL GEARS - FORCE ANALYSIS
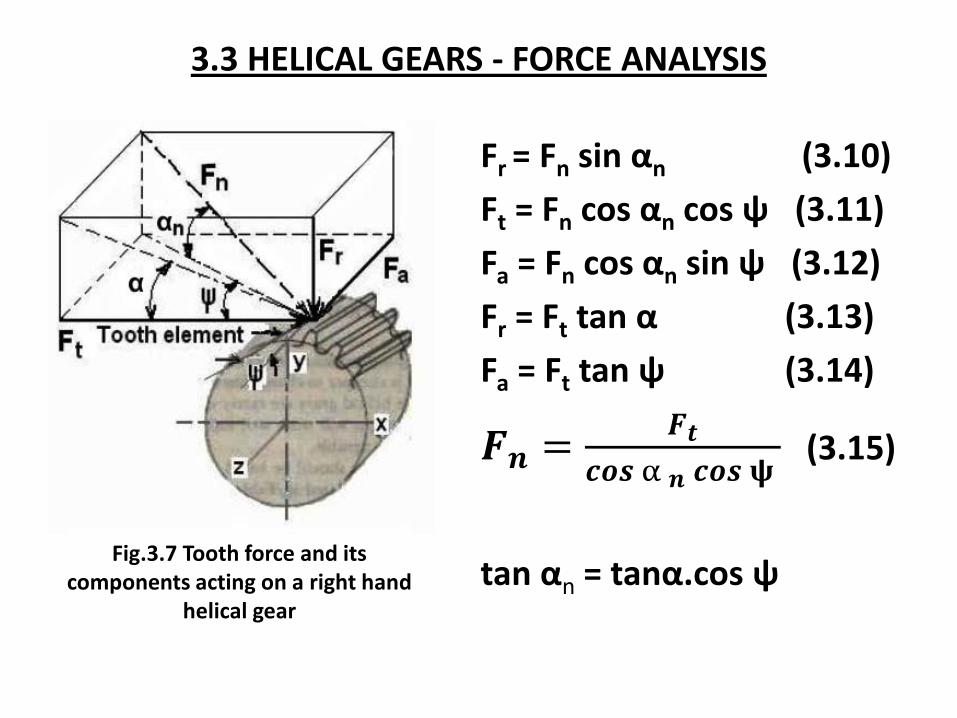
Fr = Fn sin αn (3.10)
Ft = Fn cos αn cos ψ (3.11)
Fa = Fn cos αn sin ψ (3.12)
Fr = Ft tan α (3.13)
Fa = Ft tan ψ (3.14)
𝑭𝒏 =𝑭𝒕
𝒄𝒐𝒔 α 𝒏 𝒄𝒐𝒔 𝛙 (3.15)
tan αn = tanα.cos ψ
Fig.3.7 Tooth force and its components acting on a right hand
helical gear
3.4 Helical Gears- Tooth Proportions
In helical gears, the normal module mn should be selected from standard values, the first preference values are mn (in mm) = 1, 1.25, 1.5, 2, 2.5, 3, 4, 5, 6, 8 and 10 The standard proportions of addendum and dedendum are ha = mn, hf = 1.25 mn, c = 0.25 mn The addendum and dedendum circle diameters are given by, respectively;
𝒅𝒂 = 𝒅𝒐 + 𝟐𝒉𝒂 = 𝒎𝒏(𝒁
𝒄𝒐𝒔 𝝍 + 𝟐) (3.16)
𝒅𝒇 = 𝒅𝒐 − 𝟐𝒉𝒇 = 𝒎𝒏(𝒁
𝒄𝒐𝒔 𝝍 − 𝟐. 𝟓) (3.17)
The normal pressure angle, αn is generally 20o and the face width b is kept as 𝒃 ≥ 𝝅 𝒎𝒏/𝒔𝒊𝒏 𝛙 (3.18)
3.5 Helical Gears- Bending Strength
Beam Strength of a helical gear normal plane is considered equivalent to that of a spur gear in tangential plane. Spur gear: beam strength, Sb = m b σb Υ (3.19)
Helical gear: beam strength, (Sb)n = mn bn σb Υn
or (Sb)n = mn But Sb is the component of (Sb)n in the plane of rotation (Fig. 3.7), i.e., Sb = (Sb)n cos ψ (3.21) From equations (3.20) and (3.21): Sb = mn b σb Υn (3.22) where Υn will be calculated for Z/cos3 ψ number of teeth.
(3.20) 𝒃
𝐜𝐨𝐬 𝝍𝝈𝒃𝒀𝒏
3.5 Helical Gears- Bending Strength
Beam strength Sb indicates the maximum value of tangential force that the tooth can transmit without bending failure. However; the bending stress would include the dynamic load factors etc; i.e.,
𝑭𝒅 =𝑲𝒐𝑲𝒎
𝑲𝒗 𝑭𝒕 and
𝝈𝒅𝒆𝒔𝒊𝒈𝒏 =𝑭𝒅
𝒎𝒏 𝒃 𝜸𝒏 (3.23)
Endurance limit stress in helical gears is the same as for spur gear design. Hence
𝑺𝒆
(𝒇𝒔)≥ 𝝈𝒅𝒆𝒔𝒊𝒈𝒏 =
𝑭𝒕
𝒃 𝒎𝒏 𝜸𝒏(
𝑲𝒐𝑲𝒎
𝑲𝒗) (3.24)
where Ko = Overload or application factor is the same as given for spur gear drives. Kv = Velocity factor is the same as given for spur gear drives; however, expressions for hobbed / shaped or shaved / ground gears, as the case may be, are to be used. Km = Load distribution factor is about 90% of the values given for spur gears because helical gears are slightly better in this respect.
3.6 Helical Gears- Bending Strength (Buckingham)
According to Buckingham, the incremental dynamic load is given by the following equation;
𝑭𝒊 =𝟐𝟏.𝟎 𝑽 𝑪𝒆𝒃 𝒄𝒐𝒔𝟐𝝍+𝑭𝒕 𝒄𝒐𝒔𝝍
𝟐𝟏.𝟎 𝑽+(𝑪𝒆𝒃 𝒄𝒐𝒔𝟐𝝍+𝑭𝒕)𝟎.𝟓 (N) (3.25)
Where V = pitch line velocity, m/s C = deformation factor, N/mm2 e = sum of errors between meshing teeth, mm b = face width of teeth, mm ψ = helix angle, deg.
Values of C and e are the same as for spur gears (Tables 2.4 and 2.5)
Design Load, as before, is
FDB = Ft + Fi (3.26)
3.7 Helical Gears-Wear Strength (Bhandari’s Book)
The wear strength of spur gear is Sw = b Q d1k For a helical gear, the component of (Sw)n in the plane of rotation is denoted by Sw. Therefore Sw = (Sw)n cos ψ
Further, for a helical gear, face width along the tooth width is 𝒃
𝒄𝒐𝒔 𝝍 and
the pitch circle diameter for a formative pinion is d1 /cos2 ψ Substituting these values, the equation for wear strength of a helical gear is
(𝑺𝒘)𝒏 =𝒃
𝒄𝒐𝒔 𝝍𝑸
𝒅𝟏
𝒄𝒐𝒔𝟐𝝍 K
or 𝑺𝒘
𝒄𝒐𝒔 𝝍= 𝒃𝑸𝒅𝟏𝑲/𝒄𝒐𝒔𝟑𝛙
or 𝑺𝒘 = 𝒃𝑸𝒅𝟏𝑲/𝒄𝒐𝒔𝟐𝛙
3.7 Helical Gears-Wear Strength (Bhandari’s Book)
This is the Buckingham’s equation for wear strength in the plane of rotation. Therefore, Sw is the maximum tangential force that the tooth can transmit without pitting failure. It may be recalled that the virtual number of teeth Zv is given by Zv = Z/ cos3 ψ (3.9) Therefore, Z1v = Z1/cos3 ψ Z2v = Z2/cos3 ψ, and Q = 2 Z2v/(Z2v + Z1v) or Q = 2 Z2/(Z2 + Z1) (Similarly for a pair of internal gears Q = 2 Z2/(Z2 - Z1) Where, Z1 and Z2 are the actual number of teeth in the helical pinion and gear, respectively)
3.7 Helical Gears-Wear Strength (Bhandari’s Book) Contd.
The pressure angle αn = 20o is in a plane normal to the tooth element. Thus the K factor is given by
𝐾 =1
1.4[𝜎𝐶2 sin 𝛼𝑛 cos 𝛼𝑛
1
𝐸1+
1
𝐸2]
σc = Surface endurance strength (N/mm2) E1, E2 = modulii of elasticity of materials for pinion and gear, respectively, (N/mm2) αn = pressure angle in a plane normal to the tooth element (20o) For gears made of steel E1, E2 = 206000 N/mm2, and αn = 20o σc = 2.65 (BHN) N/mm2 Substituting these value K = 0.16 (BHN)2
3.7 Helical Gears-Wear Strength (Bhandari’s Book)
K = 0.16 (BHN)2
For other material, corresponding values of E1, E2 and σc should be used. Thus for design purposes 𝑆𝑤
(𝑓𝑠)≥ 𝐹𝑑 = (
0.16
𝑐𝑜𝑠2ψ)𝑏 𝑄 𝑑1(𝐵𝐻𝑁)2