Embed Size (px)
Citation preview
Universidade da Beira Interior
Mestrado Integrado em Engenharia AeronáuticaHelicópteros
Helicopter Challenge 2018
Autores:Ana Rita Paiva Lourenço, nº33885
Emanuel António Rodrigues Camacho, nº33878Miguel Ângelo Lopes Duarte, nº33520
Simão Tiago Livramento Henriques, nº33612Venira Sofia Pina Cardoso de Pina, nº34955
Maio, 2018


Helicópteros UBI - Departamento de Ciências Aeroespaciais
Índice1. OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1. Teoria do Disco Atuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Formulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1.2 Limitações da Teoria do Disco Atuador . . . . . . . . . . . . . . . . . . . . . 11
2.2. Teoria do Elemento de Pá . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2.1 Formulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2.2 Limitações da Teoria do Elemento de Pá . . . . . . . . . . . . . . . . . . . . 13
3. PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1. Escolha do Perfil Alar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2. Dimensionamento do Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3. Dimensionamento do Cubo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3.1 Peça central . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3.2 Mecanismo de passo variável . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3.3 Longarinas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4. PLANO DE PRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5. ESTUDO EXPERIMENTAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6. CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7. APÊNDICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.1. Apêndice A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247.2. Apêndice A2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267.3. Apêndice B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
UBI - Departamento de Ciências Aeroespaciais Helicópteros
Índice de FigurasFigura 1 Volumes de controlo em subida (a) e descida (b). . . . . . . . . . . . . . . . 7Figura 2 Variação de vi em função de Vz na condição de subida ou voo pairado. . . . 9Figura 3 Evolução da eficiência propulsiva com Vz normalizado por vh. . . . . . . . . 9Figura 4 Variação de vi em função de Vz na condição de descida. . . . . . . . . . . . . 11Figura 5 Formulação BET (Blade Element Theory). . . . . . . . . . . . . . . . . . . . 12Figura 6 Ângulos de projeto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Figura 7 Rotor (Qblade). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Figura 8 Peça central. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Figura 9 Mecanismo de passo variável. . . . . . . . . . . . . . . . . . . . . . . . . . . 19Figura 10 Blueprint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Figura 11 Rotor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Figura 12 Cubo do rotor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Figura 13 Mecanismo de passo coletivo. . . . . . . . . . . . . . . . . . . . . . . . . . . 22Figura 14 Eficiência aerodinâmica dos perfis considerados. . . . . . . . . . . . . . . . . 24Figura 15 Coeficiente de sustentação dos perfis considerados. . . . . . . . . . . . . . . 25Figura 16 Variação da eficiência aerodinâmica com o número de Reynolds. . . . . . . . 26Figura 17 Variação do coeficiente de sustentação com o número de Reynolds. . . . . . . 27

Helicópteros UBI - Departamento de Ciências Aeroespaciais
Lista de TabelasTabela 1 Parâmetros do ponto de projeto. . . . . . . . . . . . . . . . . . . . . . . . . 15Tabela 2 Constantes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Tabela 3 Folha de Cálculo (Parte 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Tabela 4 Folha de Cálculo (Parte 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
UBI - Departamento de Ciências Aeroespaciais Helicópteros
Nomenclatura
A Área do rotorAi Área da secção de entradaAo Área da secção de saídaρ Massa específicaµ Viscosidade dinâmicag Aceleração gravíticac Corda aerodinâmicaR Raio do rotorr Raio do elemento de páδr Largura do elemento de páRe Número de Reynoldsm Caudal mássicoVz Velocidade do escoamento de aproximaçãovi Velocidade induzida pelo rotorvh Velocidade induzida em voo pairadovw Velocidade do escoamento na esteiraup Componente vertical do escoamento de aproximaçãoF Tração do rotorP Potência do rotorPi Potência induzida do rotorPh Potência induzida em voo pairadoCl Coeficiente de sustentaçãoL Força de sustentaçãoCd Coeficiente de resistência ao avançoD Força de resistência ao avanço
L/D Eficiência aerodinâmicaα Ângulo de ataqueθ Ângulo de incidênciaϕ Ângulo de trajetóriaΩ Velocidade angularN Número de pás
Helicópteros UBI - Departamento de Ciências Aeroespaciais
1. OBJETIVOSEste trabalho tem uma componente teórica e uma prática, tendo como objetivos a aplicação e
validação das teorias que suportam o dimensionamento das pás e, por sua vez, o desenvolvimentoe construção de um rotor que ao ser largado, entre em autorrotação e maximize o seu tempo devoo.
As restrições para o desenvolvimento deste rotor são cinco, sendo que o peso mínimo é iguala 150g, o diâmetro máximo igual a 0.7m e o lançamento não poderá ser realizado no sentidoascendente, sendo permitido a utilização de um dispositivo auxiliar, desde que a velocidade nolançamento, quer angular, quer de translação, seja igual ou superior no momento em que chega aosolo.
Página 6

UBI - Departamento de Ciências Aeroespaciais Helicópteros
2. INTRODUÇÃOO projeto detalhado de um rotor com aplicação aeronáutica representa um dos pontos fulcrais
para o sucesso operacional de um veículo aéreo, na medida em que a geometria e o regime defuncionamento determinam a sua eficiência propulsiva.
Ao longo do tempo, várias teorias foram propostas para o auxílio do desenho concetual de umrotor, das quais se destacam a teoria do disco atuador[1,2,3,6], a teoria do elemento da pá[1,2,3,6] e ateoria do momento linear do elemento da pá. Embora muito utilizadas, estas formulações apresen-tam diversas limitações no que diz respeito ao tratamento da esteira, transiência do escoamento eperdas que ocorrem paralelamente ao funcionamento do rotor.
2.1. Teoria do Disco AtuadorNeste subcapítulo explica-se a formulação da Teoria do Disco Atuador, como também as limi-
tações associadas a esta.
2.1.1 Formulação
A teoria do disco atuador considera o rotor como um disco fino que induz uma velocidadeconstante ao longo do eixo de rotação. Na Figura 1 são apresentados os volumes de controloconsiderados nos dois regimes de funcionamento de um rotor.
Vz
Vz + vw(a) (b)
Vz + vi
Vz
Vz
Vz vw
vi
Figura 1: Volumes de controlo em subida (a) e descida (b).
Aplicando a conservação da massa ao volume de controlo (a) tem-se que
m = ρAiVz = ρA(Vz + vi) = ρAo(Vz + vw)
No que diz respeito à conservação do momento linear,
F = (mV )o − (mV )i
Página 7

Helicópteros UBI - Departamento de Ciências Aeroespaciais
F = m(Vz + vw)− mVz = mvw (1)
vw =F
m
Sabendo que a energia é conservada no volume de controlo considerado, constata-se que
P =
(mV 2
2
)o
−(mV 2
2
)i
F (Vz + vi) =m (Vz + vw)
2
2− mV 2
z
2⇔
⇔ F
m(Vz + vi) =
(2Vzvw + v2w)
2
Tendo em conta a conservação do momento linear, substitui-se Fm
por vw na equação anteriore obtém-se
vw (Vz + vi) =vw (2Vz + vw)
2
vi =vw2
(2)
Deste modo, é possível concluir que a velocidade na esteira aumenta para o dobro da velocidadeinduzida pelo disco.
Assim, com base nas Equações (1) e (2), vem que a força no disco é:
F = 2ρA(Vz + vi)vi (3)Na situação de voo pairado, ou seja, Vz = 0, a força no disco fica reduzida a
F = mvw = 2ρAv2i
onde
vi = vh =
√F
2ρA(4)
Consequentemente, a potência ideal em voo pairado é dada por
Ph = Fvh = F
√F
2ρA
A partir da relação presente nas Equações (3) e (4) e, resolvendo a equação quadrática obtida,tem-se
vi = −Vz
2+
√(Vz
2
)2
+ v2h ∨ vi = −Vz
2−
√(Vz
2
)2
+ v2h
Página 8

UBI - Departamento de Ciências Aeroespaciais Helicópteros
sendo a primeira solução a fisicamente válida na condição de subida. Esta encontra-se repre-sentada graficamente na Figura 2.
0 1 2 3 4 5 60
0.5
1
1.5
Vz/vh
v i/v
h
Subida e Voo Pairado
Figura 2: Variação de vi em função de Vz na condição de subida ou voo pairado.
Portanto, a potência induzida do rotor é dada por
P = F
−Vz
2+
√(Vz
2
)2
+F
2ρA
e a sua eficiência propulsiva é traduzida pela seguinte expressão:
ηp =FVz
F
(−Vz
2+√(
Vz
2
)2+ F
2ρA
)A eficiência propulsiva evolui com a velocidade de subida do seguinte modo
0 1 2 3 4 5 60
0.5
1
1.5
Vz/vh
η p
Eficiência propulsiva
Figura 3: Evolução da eficiência propulsiva com Vz normalizado por vh.
Página 9

Helicópteros UBI - Departamento de Ciências Aeroespaciais
Analogamente à situação de subida, aplica-se a conservação da massa ao volume de controlo(b), pelo que
m = ρAiVz = ρA(Vz + vi) = ρAo(Vz + vw)
No que diz respeito à conservação do momento linear,
−F = (mV )o − (mV )i
− F = m(Vz + vw)− mVz = mvw (5)
vw = −F
m
Sabendo que a energia se conserva no atual volume de controlo, constata-se que
P =
(mV 2
2
)o
−(mV 2
2
)i
−F (Vz + vi) =m (Vz + vw)
2
2− mV 2
z
2⇔
⇔ −F
m(Vz + vi) =
(2Vzvw + v2w)
2
Tendo em conta a conservação do momento linear, substitui-se − Fm
por vw na equação anteriore obtém-se
vw (Vz + vi) =vw (2Vz + vw)
2
vi =vw2
(6)
É possível concluir que a velocidade na esteira aumenta para o dobro da velocidade induzidapelo disco.
Assim, com base nas Equações (5) e (6), vem que a força no disco é:
− F = 2ρA(Vz + vi)vi (7)Aplicando as relações presentes na Equação (4) e Equação (7) e, resolvendo a equação quadrá-
tica obtida, tem-se
vi = −Vz
2+
√(Vz
2
)2
− v2h ∨ vi = −Vz
2−
√(Vz
2
)2
− v2h
sendo a segunda solução a fisicamente válida na condição de descida. Esta é apresentada nográfico da Figura 4.
Página 10

UBI - Departamento de Ciências Aeroespaciais Helicópteros
−6 −5 −4 −3 −2 −1 00
0.5
1
1.5
Vz/vh
v i/v
h
Voo de descida
Figura 4: Variação de vi em função de Vz na condição de descida.
Logo, a potência induzida do rotor é dada por
P = −F
−Vz
2−
√(Vz
2
)2
− F
2ρA
É de salientar que existe, de acordo com a teoria do disco atuador, uma região indefinida para
a condição de autorrotação, visível no intervalo ]− 2, 0] do gráfico da Figura 4. Esta zona indeterminada deve-se à ocorrência de dois fenómenos: Ring Vortex State e Turbu-
lent Wake State. O primeiro consiste na reentrada do escoamento no disco que foi previamenteacelerado, diminuindo drasticamente a quantidade de momento linear na esteira. No segundo caso,o disco atua como uma placa circular devido à igualdade das velocidades de descida e induzidapelo rotor, resultando numa zona de alta turbulência a jusante do disco[1,2,3,6] .
2.1.2 Limitações da Teoria do Disco Atuador
A teoria do disco atuador apresenta grandes limitações[1,2,3,6] na sua formulação devido ao factode desprezar:
• A não uniformidade do escoamento de aproximação.
• Um número finito de pás.
• A existência de rotação da esteira.
• A transiência do escoamento.
• As perdas devido aos vórtices da ponta da pá.
Página 11

Helicópteros UBI - Departamento de Ciências Aeroespaciais
2.2. Teoria do Elemento de PáNeste subcapítulo explica-se a formulação da Teoria do Elemento de Pá, assim como as limita-
ções associadas a esta.
2.2.1 Formulação
A Teoria do Elemento de Pá formula o rotor como sendo um conjunto de pás, em que cada umaé segmentada num número finito de elementos, sendo possível calcular os parâmetros aerodinâmicosnas diversas secções de cada pá. Assim, no sentido de projetar a geometria e as característicascinéticas do rotor, excluiu-se totalmente a idealização do rotor como um disco.
Na Figura 5 apresenta-se um elemento infinitesimal segundo a formulação da Teoria do Ele-mento de Pá.
ϕ
α θ
L
D
up = Vz + vi
v = Ωr
U∞
Eixo da corda
Figura 5: Formulação BET (Blade Element Theory).
Nesta teoria cada um dos elementos comporta-se como um perfil alar bidimensional sujeito aum vento relativo, U∞, resultante da rotação do elemento, Ωr, e do vento que atravessa o rotor,up. A componente vi desta última velocidade é calculada recorrendo à Teoria do Disco Atuador,assunção em que se despreza a não uniformidade do escoamento induzido pelo rotor.
Uma vez obtidos os coeficientes de força e a eficiência do perfil, com recurso a simulaçõesnuméricas, determina-se as forças de sustentação e de resistência ao avanço em cada elemento dapá pelas seguintes equações
L =1
2ρU2
∞cCl
D =1
2ρU2
∞cCd
Página 12

UBI - Departamento de Ciências Aeroespaciais Helicópteros
No sentido de calcular as forças no eixo e no plano do rotor, utilizou-se o ângulo de trajetóriaϕ para decompor as forças aerodinâmicas. Assim,
Fz = L cosϕ−D sinϕ
Fx = L sinϕ+D cosϕ
Dado que se pretende obter as forças em cada elemento de pá, é necessário multiplicar Fz eFx pelo comprimento dr do elemento em questão, pelo que as expressões finais para a tração,momento e potência ficam, respetivamente,
dF = NFzdr
dQ = NFxrdr
dP = ΩdQ = NFxΩrdr
onde, N corresponde ao número de pás.
2.2.2 Limitações da Teoria do Elemento de Pá
A teoria do elemento de pá apresenta grandes limitações[1,2,3,6] na sua formulação devido aofacto de desprezar:
• A não uniformidade do escoamento induzido pelo rotor.
• A existência de rotação da esteira.
• As perdas devido aos vórtices da ponta da pá.
Página 13
Helicópteros UBI - Departamento de Ciências Aeroespaciais
3. PROJETOEste capítulo corresponde ao estudo de viabilidade e desenvolvimento concetual de todos os
componentes do rotor.
3.1. Escolha do Perfil AlarO rotor a ser projetado irá funcionar num intervalo de número de Reynolds baixo, pelo que
é necessário escolher um perfil que proporcione valores elevados de eficiência aerodinâmica e decoeficiente de sustentação no regime de operação. De modo a obter o perfil com a melhor razãoCl/Cd para um baixo número de Reynolds, este deverá possuir uma grande curvatura e umareduzida espessura, de forma a produzir sustentação a baixa velocidade[4].
No sentido de selecionar o perfil que mais se adequa às condições anteriormente referidas,recorreu-se à base de dados do Department of Aerospace Engineering from University of Illinoisat Urbana-Champaign[5]. De entre os perfis disponibilizados, selecionaram-se dez para uma análisepormenorizada, tendo por base a alta eficiência aerodinâmica presente em resultados preliminaresjá publicados.
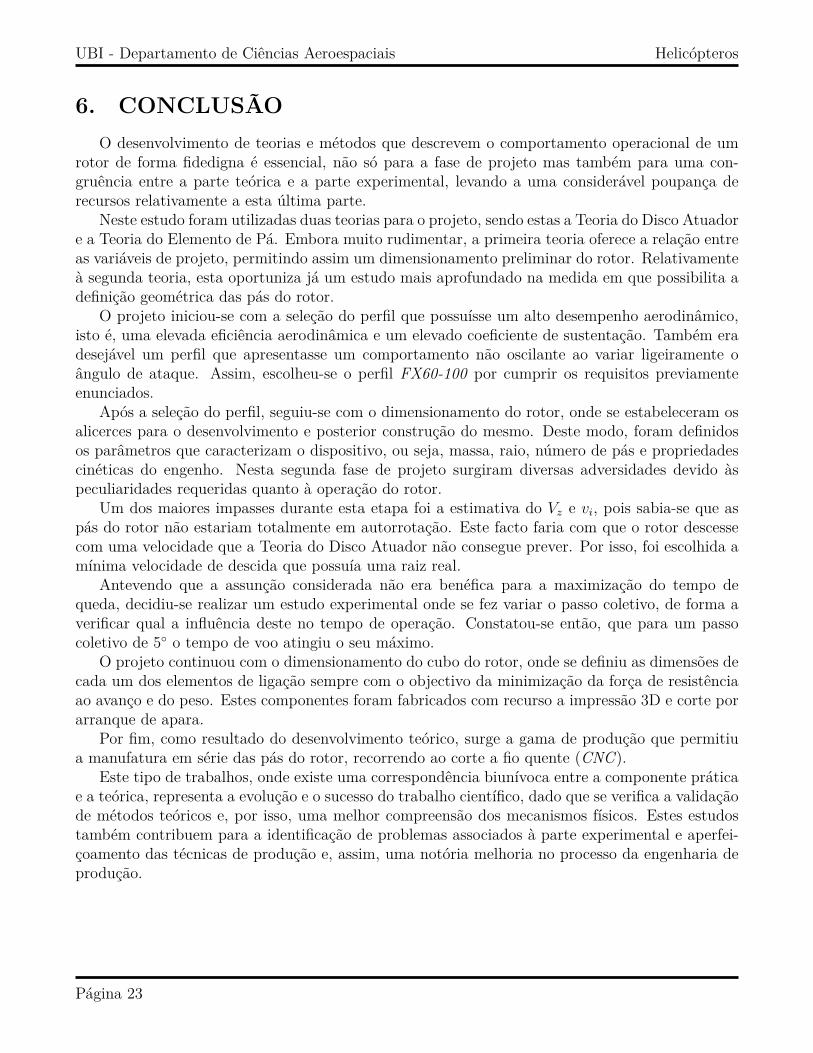
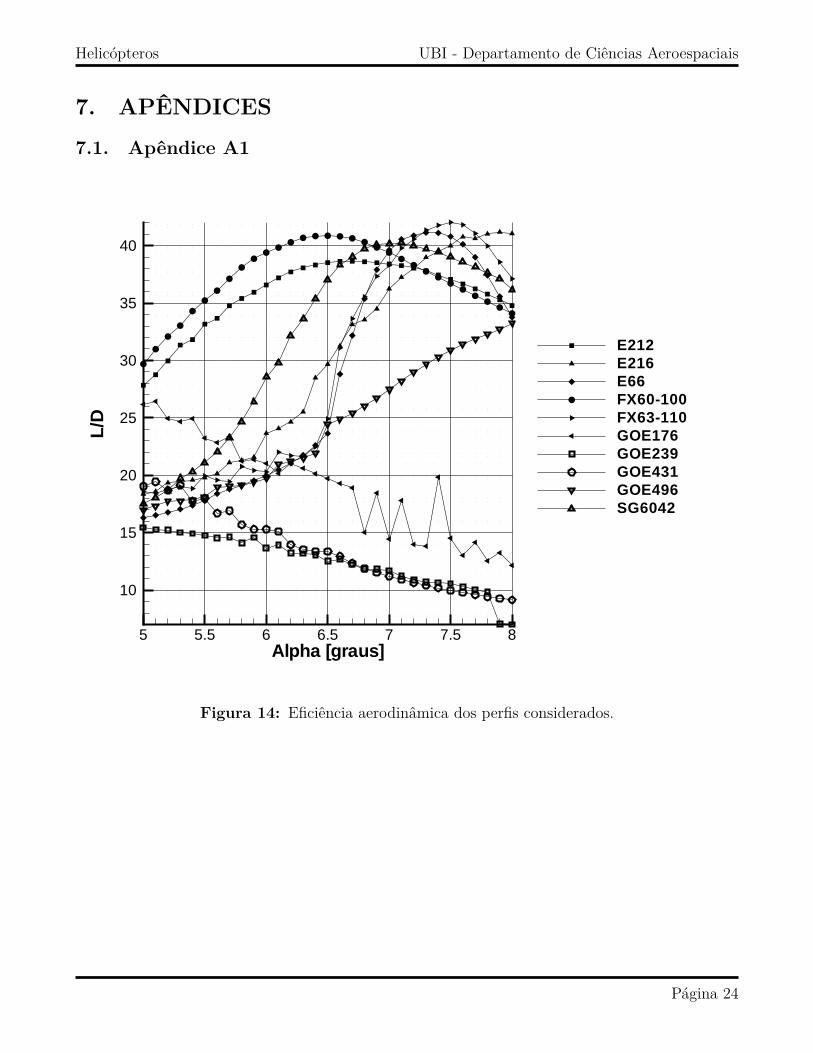
A análise detalhada a estes dez perfis realizou-se com recurso ao software xflr5 (v6.40), pararegime laminar e para um número de Reynolds de 50000, valor médio estimado para a operação dorotor. Os gráficos da eficiência aerodinâmica e do coeficiente de sustentação em função do ângulode ataque são apresentados no Apêndice A1, os quais correspondem aos resultados obtidos nestaanálise para cada um dos dez perfis pré-selecionados.
A partir da análise destes gráficos, verificou-se que o perfil FX63-110 apresenta a maior efici-ência aerodinâmica para um ângulo de ataque de 7.5 graus. No entanto, uma pequena oscilaçãode α, devido a efeitos transientes, resultará num decréscimo acentuado da razão L/D, o que fezeliminar de imediato esta opção.
Outro perfil considerado foi o E216, pois apresenta não só uma elevada eficiência aerodinâmicacomo também um elevado valor de coeficiente de sustentação. Contudo, considerando a gamade α estudada, isto é, de 5 a 8 graus, a razão L/D é máxima para um ângulo de ataque deaproximadamente 8 graus, pelo que uma operação do rotor acima do ponto de projeto poderálevar à ocorrência da perda aerodinâmica e, consequentemente, à falha catastrófica na operação.
Assim sendo, de forma a contornar estes inconvenientes, optou-se pelo airfoil FX60-100 pois,embora não possua a melhor eficiência ou coeficiente de sustentação, estes não são tão afetadospela variação do ângulo de ataque. Com este perfil é também reduzido o risco de entrada emperda aerodinâmica, uma vez que o ângulo de ataque é menor para o ponto de maior eficiênciaaerodinâmica, garantindo uma operação mais segura.
Os restantes perfis alares foram descartados porque não alcançaram os requesitos mínimos deprojeto em termos de eficiência aerodinâmica e coeficiente de sustentação.
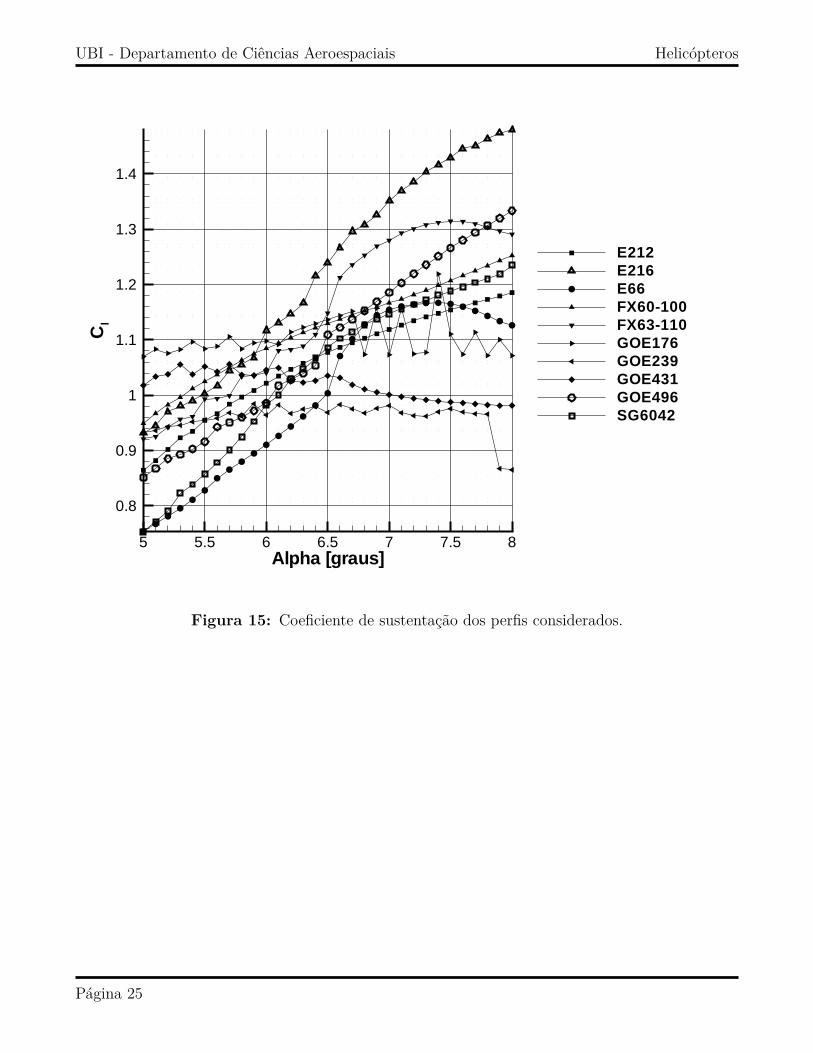
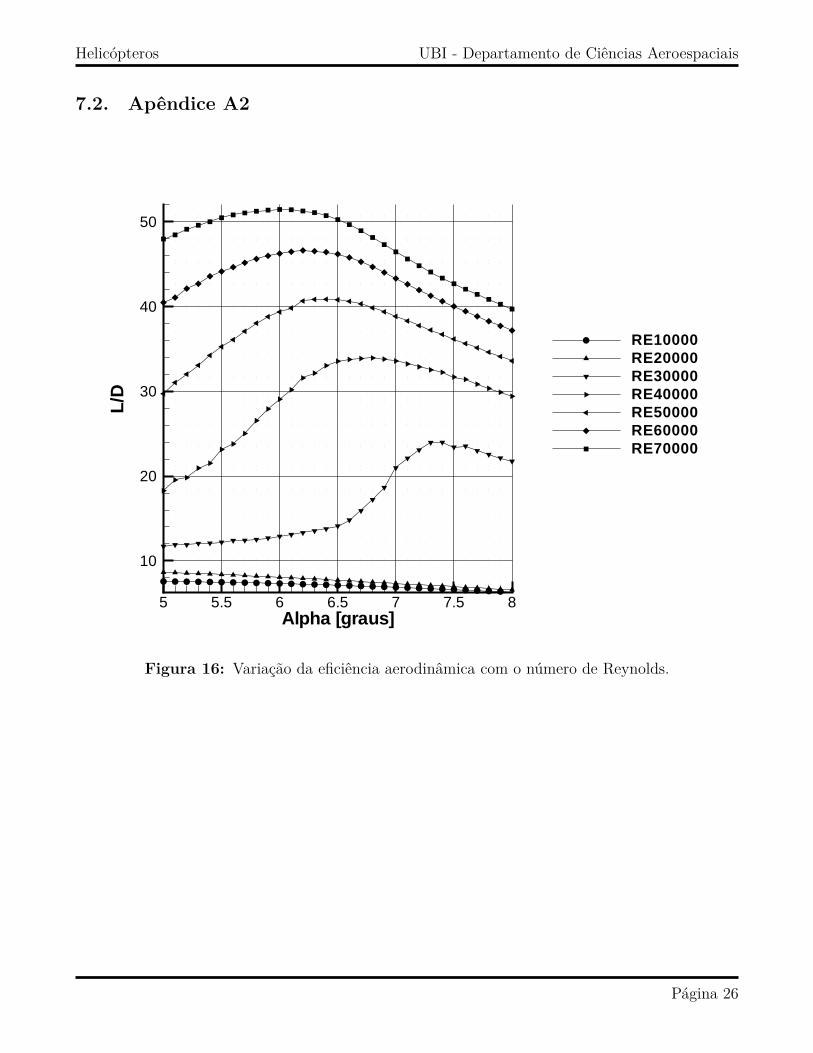
Portanto, com o objetivo de analisar o desempenho do perfil FX60-100 na gama de Re em queirá operar, realizou-se uma simulação da qual resultaram os gráficos presentes no Apêndice A2.Verificou-se que com o aumento do número de Reynolds, a eficiência aerodinâmica aumenta e oângulo de ataque diminui, para a razão máxima L/D. Já em relação ao Cl, este toma valores cadavez maiores à medida que o número de Reynolds aumenta.
É de salientar que para um baixo número de Reynolds, o perfil não apresenta boas carac-terísticas aerodinâmicas, pelo que não deverá ser adotado nesta gama de valores. Todavia, na
Página 14
UBI - Departamento de Ciências Aeroespaciais Helicópteros
secção localizada a 75% das pás do rotor, secção essencial na produção de tração, o perfil escolhidoapresenta um elevado desempenho para valores de Re de aproximadamente 50000.
3.2. Dimensionamento do RotorNeste subcapítulo é apresentada a fase do projeto relativa ao dimensionamento do rotor, como
também todas as considerações necessárias inerentes ao seu desenvolvimento.Um dos primeiros passos é a escolha do raio do rotor, pelo que foi decidido que este tomaria o
valor máximo admissível de acordo com o regulamento do Helicopter Challenge 2018. Esta decisãopermite atingir uma maior tração para uma reduzida velocidade de rotação.
Relativamente à sua massa, de forma a diminuir a tração necessária por parte do rotor, optou-sepela mínima massa permitida.
No que diz respeito ao número de pás, com o objetivo de garantir alguma estabilidade na faseinicial do voo, foi estipulado que o rotor deveria ter três pás, pois um número inferior resultarianuma maior instabilidade no momento de lançamento. Um maior número de pás não seria benéfico,uma vez que resultaria num aumento da força de resistência, o que no global penalizaria a eficiênciaaerodinâmica do rotor.
Ao ser utilizada uma formulação BET, a velocidade induzida é calculada utilizando a Teoriado Disco Atuador. Com o intuito de maximizar o tempo de voo, foi escolhida a mínima velocidadeque devolve uma raiz real, ou seja, Vz = −2vh e, por consequência, o vi toma o mesmo valor de vh.
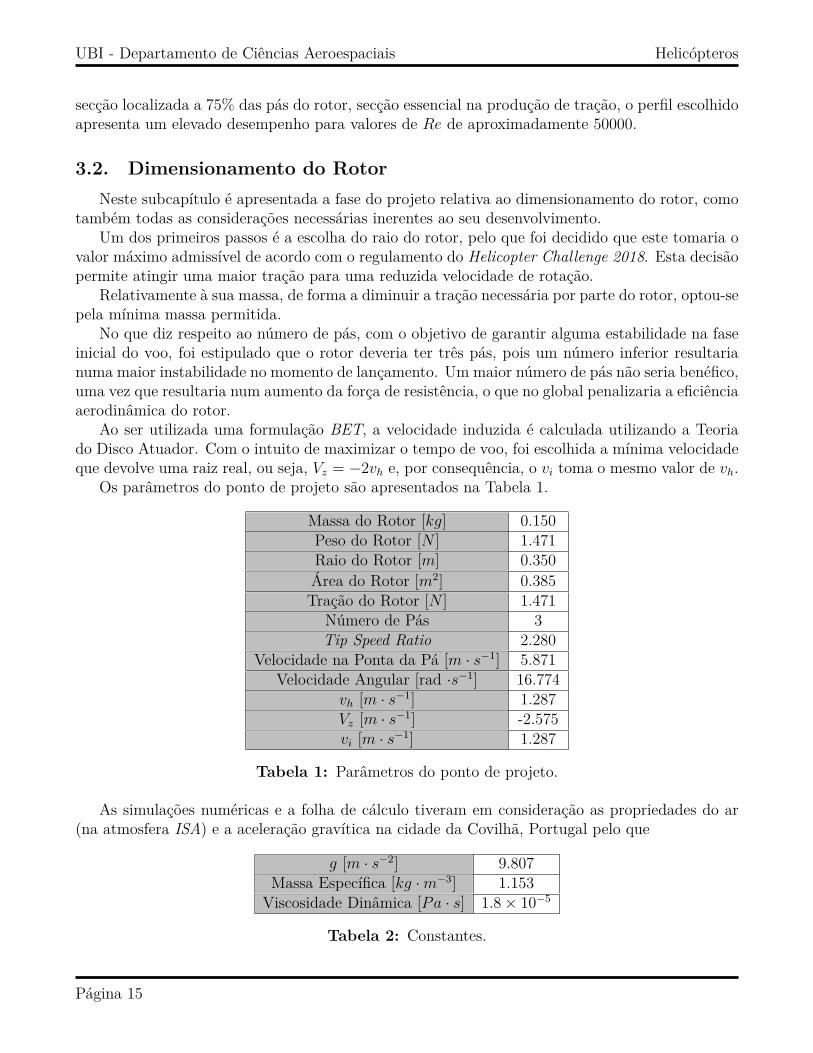
Os parâmetros do ponto de projeto são apresentados na Tabela 1.
Massa do Rotor [kg] 0.150Peso do Rotor [N ] 1.471Raio do Rotor [m] 0.350Área do Rotor [m2] 0.385Tração do Rotor [N ] 1.471
Número de Pás 3Tip Speed Ratio 2.280
Velocidade na Ponta da Pá [m · s−1] 5.871Velocidade Angular [rad ·s−1] 16.774
vh [m · s−1] 1.287Vz [m · s−1] -2.575vi [m · s−1] 1.287
Tabela 1: Parâmetros do ponto de projeto.
As simulações numéricas e a folha de cálculo tiveram em consideração as propriedades do ar(na atmosfera ISA) e a aceleração gravítica na cidade da Covilhã, Portugal pelo que
g [m · s−2] 9.807Massa Específica [kg ·m−3] 1.153
Viscosidade Dinâmica [Pa · s] 1.8× 10−5
Tabela 2: Constantes.
Página 15
Helicópteros UBI - Departamento de Ciências Aeroespaciais
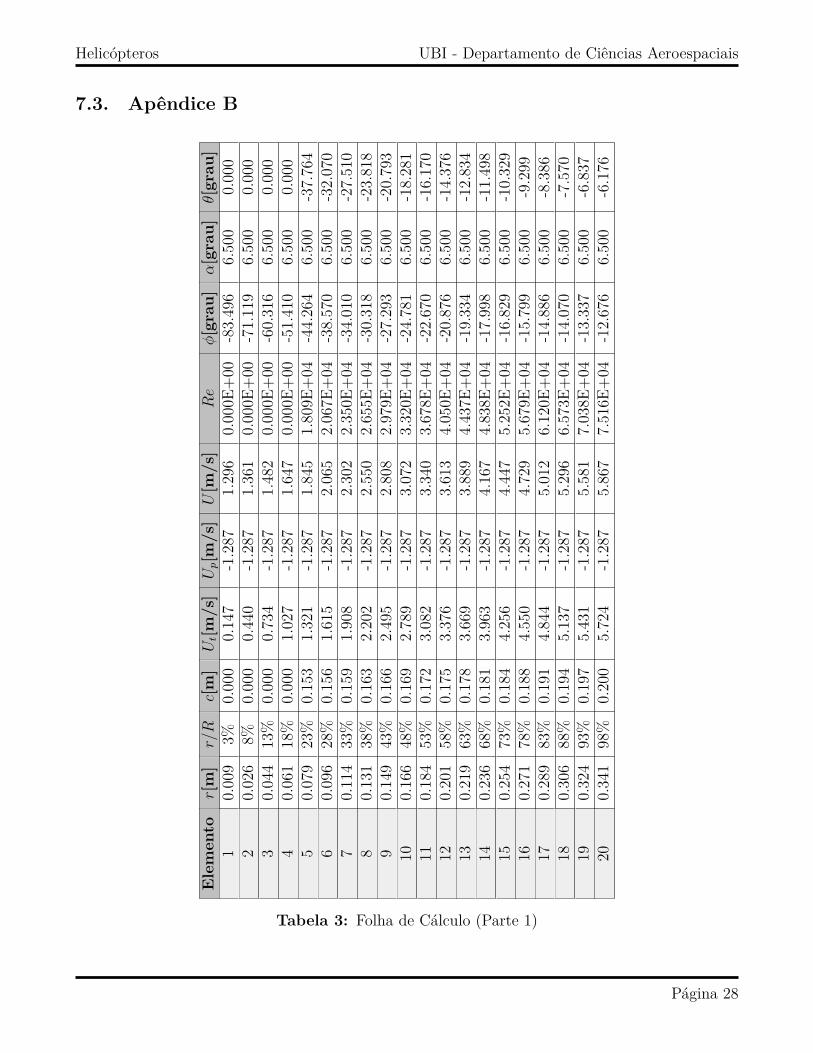
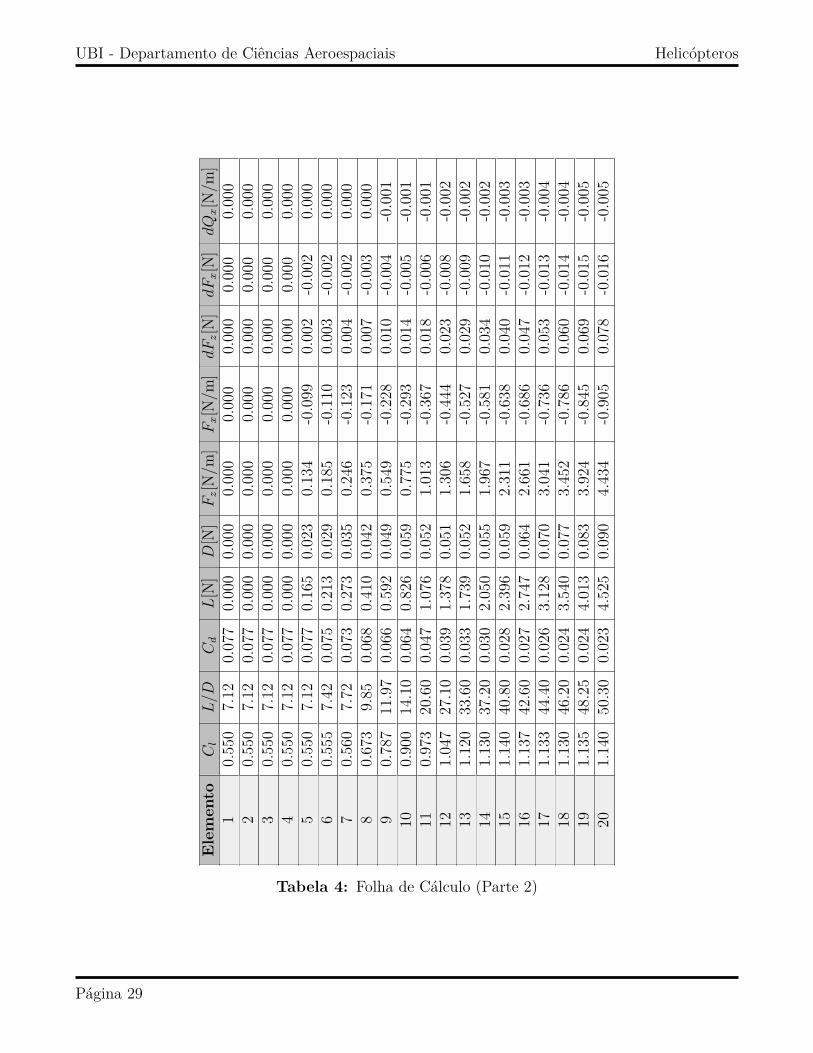
Como já referido, foi utilizada a Teoria do Elemento de Pá para o dimensionamento e estudodas características geométricas do rotor. Esta teoria foi implementada com recurso ao MicrosoftExcel 2016, sendo apresentados os resultados no Apêndice B.
A partir da folha de cálculo, constatou-se que uma configuração favorável à otimização datração seria um crescimento linear da corda desde 0.15m até 0.20m ao longo do raio da pá. Aspás situam-se a 0.07m do centro de rotação, visto que, para um raio menor, encontra-se o sistemaprojetado para a união das mesmas.
Relativamente à ponta da pá, foi decidido aplicar endplates, no sentido de assegurar a bidi-mensionalidade do problema e, assim, eliminar as perdas inerentes à formação de vórtices.
Por sua vez, estabeleceu-se o valor de 6.5 graus para o ângulo de ataque, dado que foi onde severificou a condição de maior eficiência aerodinâmica para o número de Reynolds de 50000. Noentanto, deveria ter sido efetuado um ajuste do ângulo de ataque que maximiza a razão L/D paracada valor de Reynolds, o que não se realizou devido a limitações de construção.
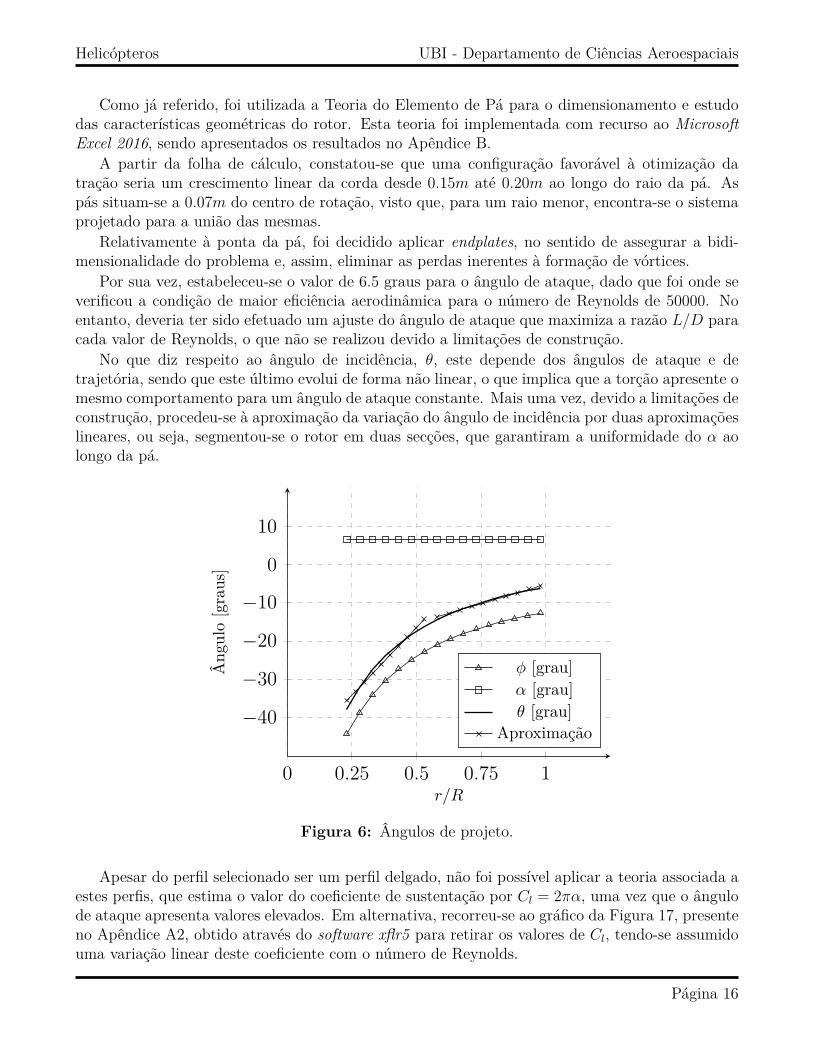
No que diz respeito ao ângulo de incidência, θ, este depende dos ângulos de ataque e detrajetória, sendo que este último evolui de forma não linear, o que implica que a torção apresente omesmo comportamento para um ângulo de ataque constante. Mais uma vez, devido a limitações deconstrução, procedeu-se à aproximação da variação do ângulo de incidência por duas aproximaçõeslineares, ou seja, segmentou-se o rotor em duas secções, que garantiram a uniformidade do α aolongo da pá.
0 0.25 0.5 0.75 1
−40
−30
−20
−10
0
10
r/R
Âng
ulo
[gra
us]
ϕ [grau]α [grau]θ [grau]
Aproximação
Figura 6: Ângulos de projeto.
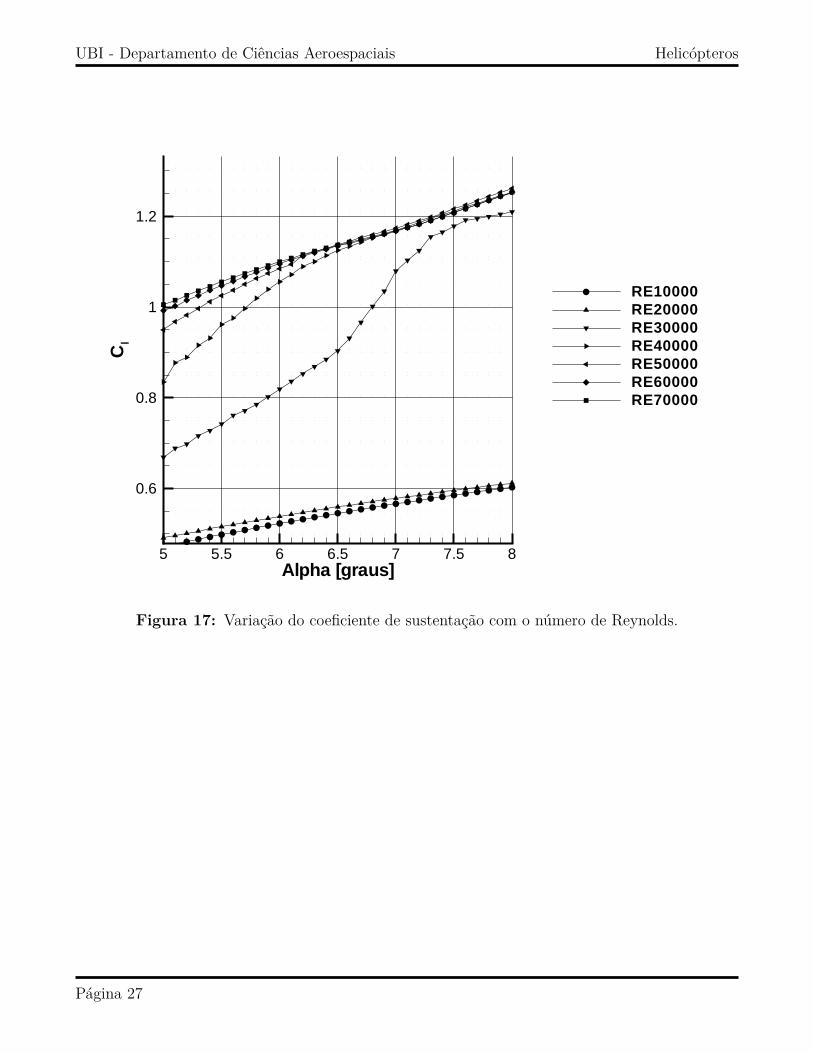
Apesar do perfil selecionado ser um perfil delgado, não foi possível aplicar a teoria associada aestes perfis, que estima o valor do coeficiente de sustentação por Cl = 2πα, uma vez que o ângulode ataque apresenta valores elevados. Em alternativa, recorreu-se ao gráfico da Figura 17, presenteno Apêndice A2, obtido através do software xflr5 para retirar os valores de Cl, tendo-se assumidouma variação linear deste coeficiente com o número de Reynolds.
Página 16
UBI - Departamento de Ciências Aeroespaciais Helicópteros
O mesmo processo foi utilizado para a obtenção da eficiência aerodinâmica, tendo em conside-ração o gráfico da Figura 16, que consta no mesmo apêndice.
A determinação destes dois parâmetros permitiu o cálculo do coeficiente de resistência ao avançoe das forças aerodinâmicas, bem como a tração, o momento e a potência, através das expressõesrelativas à Teoria do Elemento de Pá, referidas no capítulo introdutório.
É de salientar que a força F tem de igualar o peso do rotor, de forma a que a descida seja ummovimento vertical uniforme, objetivo alcançado na folha de cálculo por alteração da velocidadede rotação.
Relativamente à velocidade angular do rotor, esta será menor do que a velocidade calculadanumericamente, visto que esta formulação não considera as perdas aerodinâmicas existentes devidoao sistema de ligação das pás e a zonas de vorticidade na esteira do rotor.
Uma vez que a diminuição da velocidade de rotação aumenta o ângulo de ataque, existirá umdesvio em relação ao α de projeto, pelo que será necessário compensar este desequilíbrio com oaumento do ângulo de incidência global da pá.
Uma outra adversidade a salientar é o facto de toda a pá não se encontrar em autorrotação,o que faz diminuir o módulo de Vz e, consequentemente, alterar a velocidade induzida pelo disco.Uma estimativa viável para Vz seria o valor de vh, visto que a condição aerodinâmica de descida éidêntica à condição de voo pairado para esta situação operacional.
No entanto, este valor de Vz corresponde a uma zona altamente instável de voo, devido a efeitostransientes associados a estruturas vorticiais e perturbações na esteira e, por isso, uma estimativaúnica de vi não é adequada, mas sim uma gama de valores de operação.
De forma a contornar os dois problemas acima referidos foi realizado um estudo experimentalonde se alterou o passo coletivo das pás em busca da otimização do tempo de voo.
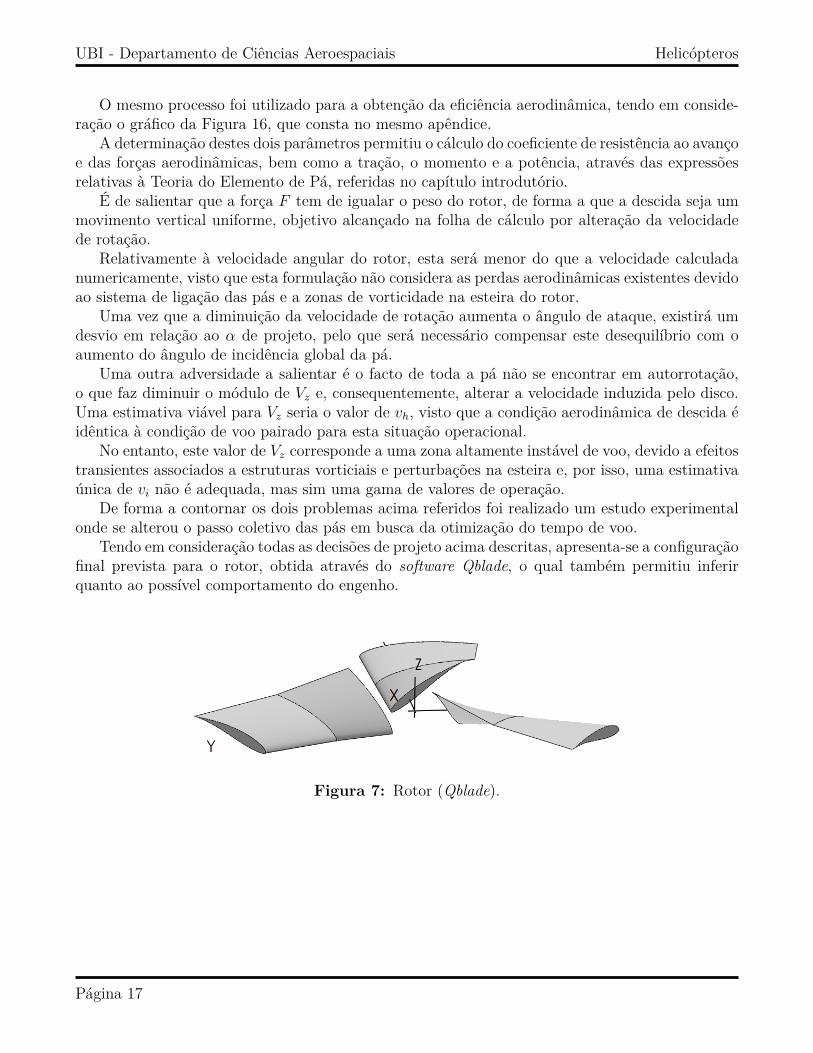
Tendo em consideração todas as decisões de projeto acima descritas, apresenta-se a configuraçãofinal prevista para o rotor, obtida através do software Qblade, o qual também permitiu inferirquanto ao possível comportamento do engenho.
Figura 7: Rotor (Qblade).
Página 17
Helicópteros UBI - Departamento de Ciências Aeroespaciais
3.3. Dimensionamento do CuboEste subcapítulo destina-se ao projeto dos elementos constituintes do cubo, cuja função é unir
as pás e alterar o seu passo coletivo. O cubo é então constituído por uma peça central, ummecanismo de variação de passo coletivo das pás e longarinas.
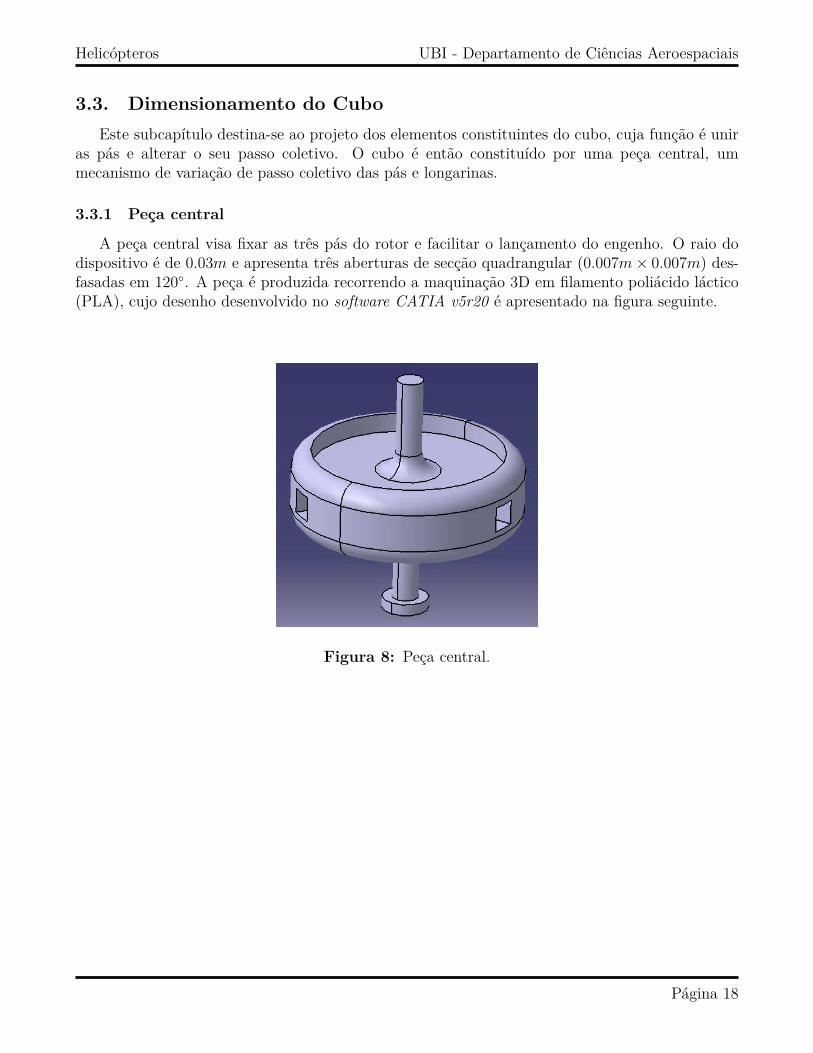
3.3.1 Peça central
A peça central visa fixar as três pás do rotor e facilitar o lançamento do engenho. O raio dodispositivo é de 0.03m e apresenta três aberturas de secção quadrangular (0.007m× 0.007m) des-fasadas em 120. A peça é produzida recorrendo a maquinação 3D em filamento poliácido láctico(PLA), cujo desenho desenvolvido no software CATIA v5r20 é apresentado na figura seguinte.
Figura 8: Peça central.
Página 18
UBI - Departamento de Ciências Aeroespaciais Helicópteros
3.3.2 Mecanismo de passo variável
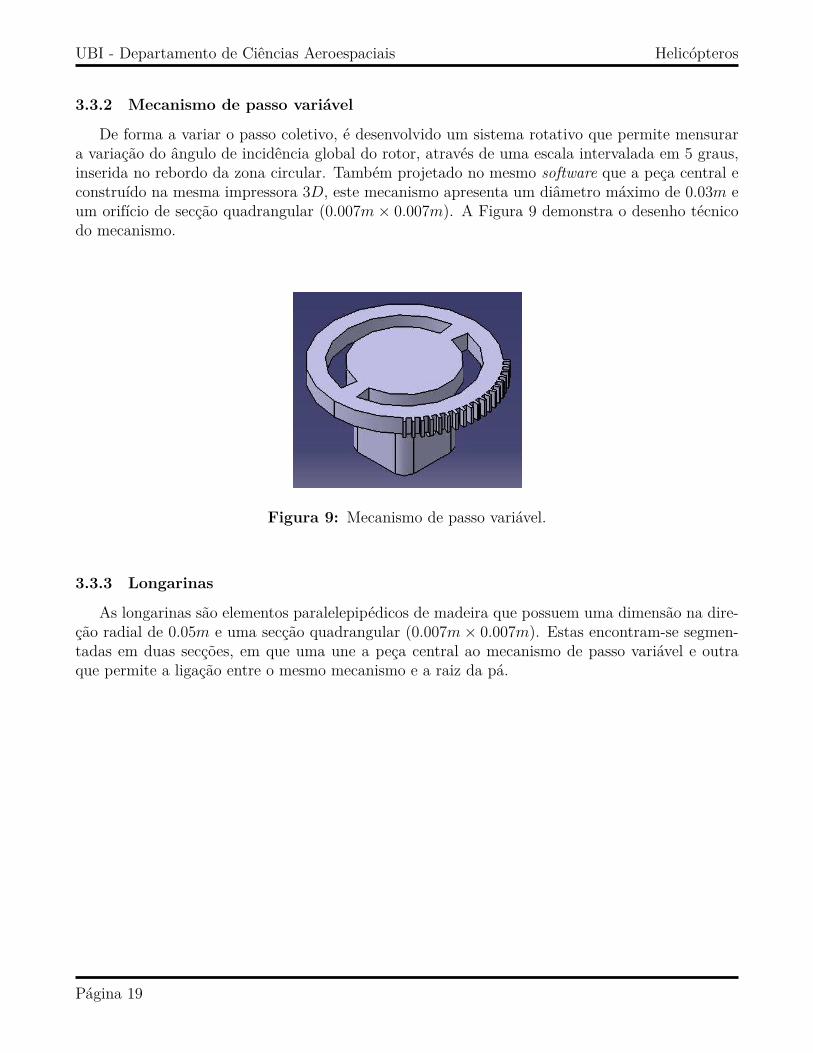
De forma a variar o passo coletivo, é desenvolvido um sistema rotativo que permite mensurara variação do ângulo de incidência global do rotor, através de uma escala intervalada em 5 graus,inserida no rebordo da zona circular. Também projetado no mesmo software que a peça central econstruído na mesma impressora 3D, este mecanismo apresenta um diâmetro máximo de 0.03m eum orifício de secção quadrangular (0.007m × 0.007m). A Figura 9 demonstra o desenho técnicodo mecanismo.
Figura 9: Mecanismo de passo variável.
3.3.3 Longarinas
As longarinas são elementos paralelepipédicos de madeira que possuem uma dimensão na dire-ção radial de 0.05m e uma secção quadrangular (0.007m× 0.007m). Estas encontram-se segmen-tadas em duas secções, em que uma une a peça central ao mecanismo de passo variável e outraque permite a ligação entre o mesmo mecanismo e a raiz da pá.
Página 19
Helicópteros UBI - Departamento de Ciências Aeroespaciais
4. PLANO DE PRODUÇÃONeste capítulo procede-se à exposição dos materiais, técnicas e métodos que permitiram a
construção dos diferentes componentes do rotor, isto é, três pás e uma peça central com a funçãode união.
O processo de construção iniciou-se com o corte de um bloco de poliestereno expandido, comrecurso a uma máquina CNC. Cada pá é então composta por duas secções e por uma endplateque será adicionada à extremidade, também obtida pela mesma técnica. Por fim, procedeu-se aorevestimento destes elementos com papel autocolante.
Relativamente à estrutura de união, projetada com o software CATIA v5r20, esta foi construídanuma impressora 3D, em poliácido láctico (PLA).
Após a conceção destes elementos, seguiu-se a ligação de cada pá à zona central do rotor pormeio de um elemento paralelepipédico de madeira.
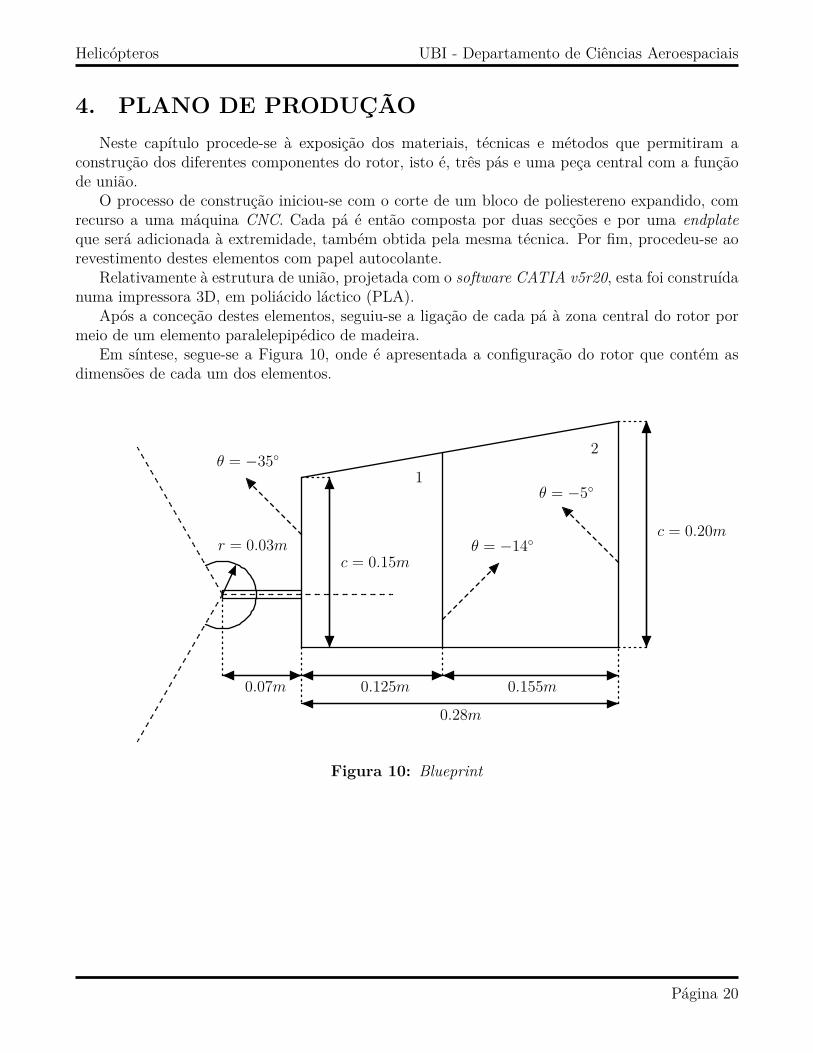
Em síntese, segue-se a Figura 10, onde é apresentada a configuração do rotor que contém asdimensões de cada um dos elementos.
r = 0.03m
0.07m
c = 0.15m
0.28m
0.125m 0.155m
c = 0.20m
θ = −35
θ = −14
θ = −51
2
Figura 10: Blueprint
Página 20
UBI - Departamento de Ciências Aeroespaciais Helicópteros
5. ESTUDO EXPERIMENTALO estudo experimental teve como principal objetivo corroborar as formulações teóricas utiliza-
das e maximizar o tempo de operação do rotor por alteração do passo coletivo.Como referido anteriormente, a Teoria do Disco Atuador oferecia uma grande dificuldade re-
lativamente à obtenção de uma estimativa da velocidade induzida pelo rotor, tendo consciênciade que o regime operacional seria discrepante ao calculado. Assim sendo, a alteração do passocoletivo foi a única solução identificada pela equipa como fonte de maximização do tempo de voo.
Com o intuito de alterar o passo coletivo, recorreu-se ao mecanismo de passo variável, expostona subsecção 3.3.2. Esta peça possuía uma escala inscrita intervalada de 5 em 5 graus, pelo que oerro máximo associado à medição é de 2.5 graus.
O estudo iniciou-se com um passo coletivo de 0 graus, que corresponde a uma incidência naraiz de aproximadamente -35 graus. O resultado associado a esta condição validou as formulaçõesteóricas utilizadas, uma vez que existiu uma concordância do tempo de voo previsto pela teoria eo obtido experimentalmente, mesmo com as limitações que estas apresentam.
O aumento em 5 graus do passo coletivo fez aumentar o tempo de voo, verificando-se assimque o ângulo de ataque teria aumentado. Foi também verificado que um novo aumento do passonão favorecia o tempo de voo. Os 15 graus de incidência global das pás provocavam o fenómeno deperda aerodinâmica, pois verificava-se uma redução da velocidade angular do rotor e consequenteinstabilidade durante o voo.
Deste modo é escolhido um passo coletivo de 5 graus, que favorece o tempo de operação dorotor e garante a estabilidade em voo.
Embora o estudo experimental apresente um cariz maioritariamente qualitativo, devido aosproblemas associados a este tipo de estudos, verificou-se claramente uma relação entre o passocoletivo das pás e o tempo de voo do rotor.
Algumas fotografias do rotor e dos mecanismos utilizados que permitiram concluir o estudoexperimental com sucesso são apresentadas de seguida.
Figura 11: Rotor.
Página 21
Helicópteros UBI - Departamento de Ciências Aeroespaciais
Figura 12: Cubo do rotor.
Figura 13: Mecanismo de passo coletivo.
Página 22
UBI - Departamento de Ciências Aeroespaciais Helicópteros
6. CONCLUSÃOO desenvolvimento de teorias e métodos que descrevem o comportamento operacional de um
rotor de forma fidedigna é essencial, não só para a fase de projeto mas também para uma con-gruência entre a parte teórica e a parte experimental, levando a uma considerável poupança derecursos relativamente a esta última parte.
Neste estudo foram utilizadas duas teorias para o projeto, sendo estas a Teoria do Disco Atuadore a Teoria do Elemento de Pá. Embora muito rudimentar, a primeira teoria oferece a relação entreas variáveis de projeto, permitindo assim um dimensionamento preliminar do rotor. Relativamenteà segunda teoria, esta oportuniza já um estudo mais aprofundado na medida em que possibilita adefinição geométrica das pás do rotor.
O projeto iniciou-se com a seleção do perfil que possuísse um alto desempenho aerodinâmico,isto é, uma elevada eficiência aerodinâmica e um elevado coeficiente de sustentação. Também eradesejável um perfil que apresentasse um comportamento não oscilante ao variar ligeiramente oângulo de ataque. Assim, escolheu-se o perfil FX60-100 por cumprir os requisitos previamenteenunciados.
Após a seleção do perfil, seguiu-se com o dimensionamento do rotor, onde se estabeleceram osalicerces para o desenvolvimento e posterior construção do mesmo. Deste modo, foram definidosos parâmetros que caracterizam o dispositivo, ou seja, massa, raio, número de pás e propriedadescinéticas do engenho. Nesta segunda fase de projeto surgiram diversas adversidades devido àspeculiaridades requeridas quanto à operação do rotor.
Um dos maiores impasses durante esta etapa foi a estimativa do Vz e vi, pois sabia-se que aspás do rotor não estariam totalmente em autorrotação. Este facto faria com que o rotor descessecom uma velocidade que a Teoria do Disco Atuador não consegue prever. Por isso, foi escolhida amínima velocidade de descida que possuía uma raiz real.
Antevendo que a assunção considerada não era benéfica para a maximização do tempo dequeda, decidiu-se realizar um estudo experimental onde se fez variar o passo coletivo, de forma averificar qual a influência deste no tempo de operação. Constatou-se então, que para um passocoletivo de 5 o tempo de voo atingiu o seu máximo.
O projeto continuou com o dimensionamento do cubo do rotor, onde se definiu as dimensões decada um dos elementos de ligação sempre com o objectivo da minimização da força de resistênciaao avanço e do peso. Estes componentes foram fabricados com recurso a impressão 3D e corte porarranque de apara.
Por fim, como resultado do desenvolvimento teórico, surge a gama de produção que permitiua manufatura em série das pás do rotor, recorrendo ao corte a fio quente (CNC).
Este tipo de trabalhos, onde existe uma correspondência biunívoca entre a componente práticae a teórica, representa a evolução e o sucesso do trabalho científico, dado que se verifica a validaçãode métodos teóricos e, por isso, uma melhor compreensão dos mecanismos físicos. Estes estudostambém contribuem para a identificação de problemas associados à parte experimental e aperfei-çoamento das técnicas de produção e, assim, uma notória melhoria no processo da engenharia deprodução.
Página 23
Helicópteros UBI - Departamento de Ciências Aeroespaciais
7. APÊNDICES7.1. Apêndice A1
Alpha [graus]
L/D
5 5.5 6 6.5 7 7.5 8
10
15
20
25
30
35
40
E212E216E66FX60-100FX63-110GOE176GOE239GOE431GOE496SG6042
Figura 14: Eficiência aerodinâmica dos perfis considerados.
Página 24
UBI - Departamento de Ciências Aeroespaciais Helicópteros
Alpha [graus]
Cl
5 5.5 6 6.5 7 7.5 8
0.8
0.9
1
1.1
1.2
1.3
1.4
E212E216E66FX60-100FX63-110GOE176GOE239GOE431GOE496SG6042
Figura 15: Coeficiente de sustentação dos perfis considerados.
Página 25
Helicópteros UBI - Departamento de Ciências Aeroespaciais
7.2. Apêndice A2
Alpha [graus]
L/D
5 5.5 6 6.5 7 7.5 8
10
20
30
40
50
RE10000RE20000RE30000RE40000RE50000RE60000RE70000
Figura 16: Variação da eficiência aerodinâmica com o número de Reynolds.
Página 26
UBI - Departamento de Ciências Aeroespaciais Helicópteros
Alpha [graus]
Cl
5 5.5 6 6.5 7 7.5 8
0.6
0.8
1
1.2
RE10000RE20000RE30000RE40000RE50000RE60000RE70000
Figura 17: Variação do coeficiente de sustentação com o número de Reynolds.
Página 27
Helicópteros UBI - Departamento de Ciências Aeroespaciais
7.3. Apêndice B
Ele
men
tor[
m]
r/R
c[m
]Ut[m
/s]
Up[m
/s]
U[m
/s]
Re
ϕ[g
rau]
α[g
rau]
θ[gr
au]
10.
009
3%0.
000
0.14
7-1
.287
1.29
60.
000E
+00
-83.
496
6.50
00.
000
20.
026
8%0.
000
0.44
0-1
.287
1.36
10.
000E
+00
-71.
119
6.50
00.
000
30.
044
13%
0.00
00.
734
-1.2
871.
482
0.00
0E+
00-6
0.31
66.
500
0.00
04
0.06
118
%0.
000
1.02
7-1
.287
1.64
70.
000E
+00
-51.
410
6.50
00.
000
50.
079
23%
0.15
31.
321
-1.2
871.
845
1.80
9E+
04-4
4.26
46.
500
-37.
764
60.
096
28%
0.15
61.
615
-1.2
872.
065
2.06
7E+
04-3
8.57
06.
500
-32.
070
70.
114
33%
0.15
91.
908
-1.2
872.
302
2.35
0E+
04-3
4.01
06.
500
-27.
510
80.
131
38%
0.16
32.
202
-1.2
872.
550
2.65
5E+
04-3
0.31
86.
500
-23.
818
90.
149
43%
0.16
62.
495
-1.2
872.
808
2.97
9E+
04-2
7.29
36.
500
-20.
793
100.
166
48%
0.16
92.
789
-1.2
873.
072
3.32
0E+
04-2
4.78
16.
500
-18.
281
110.
184
53%
0.17
23.
082
-1.2
873.
340
3.67
8E+
04-2
2.67
06.
500
-16.
170
120.
201
58%
0.17
53.
376
-1.2
873.
613
4.05
0E+
04-2
0.87
66.
500
-14.
376
130.
219
63%
0.17
83.
669
-1.2
873.
889
4.43
7E+
04-1
9.33
46.
500
-12.
834
140.
236
68%
0.18
13.
963
-1.2
874.
167
4.83
8E+
04-1
7.99
86.
500
-11.
498
150.
254
73%
0.18
44.
256
-1.2
874.
447
5.25
2E+
04-1
6.82
96.
500
-10.
329
160.
271
78%
0.18
84.
550
-1.2
874.
729
5.67
9E+
04-1
5.79
96.
500
-9.2
9917
0.28
983
%0.
191
4.84
4-1
.287
5.01
26.
120E
+04
-14.
886
6.50
0-8
.386
180.
306
88%
0.19
45.
137
-1.2
875.
296
6.57
3E+
04-1
4.07
06.
500
-7.5
7019
0.32
493
%0.
197
5.43
1-1
.287
5.58
17.
038E
+04
-13.
337
6.50
0-6
.837
200.
341
98%
0.20
05.
724
-1.2
875.
867
7.51
6E+
04-1
2.67
66.
500
-6.1
76
Tabela 3: Folha de Cálculo (Parte 1)
Página 28
UBI - Departamento de Ciências Aeroespaciais Helicópteros
Ele
men
toC
lL/D
Cd
L[N
]D
[N]
Fz[N
/m]
Fx[N
/m]
dFz[N
]dFx[N
]dQ
x[N
/m]
10.
550
7.12
0.07
70.
000
0.00
00.
000
0.00
00.
000
0.00
00.
000
20.
550
7.12
0.07
70.
000
0.00
00.
000
0.00
00.
000
0.00
00.
000
30.
550
7.12
0.07
70.
000
0.00
00.
000
0.00
00.
000
0.00
00.
000
40.
550
7.12
0.07
70.
000
0.00
00.
000
0.00
00.
000
0.00
00.
000
50.
550
7.12
0.07
70.
165
0.02
30.
134
-0.0
990.
002
-0.0
020.
000
60.
555
7.42
0.07
50.
213
0.02
90.
185
-0.1
100.
003
-0.0
020.
000
70.
560
7.72
0.07
30.
273
0.03
50.
246
-0.1
230.
004
-0.0
020.
000
80.
673
9.85
0.06
80.
410
0.04
20.
375
-0.1
710.
007
-0.0
030.
000
90.
787
11.9
70.
066
0.59
20.
049
0.54
9-0
.228
0.01
0-0
.004
-0.0
0110
0.90
014
.10
0.06
40.
826
0.05
90.
775
-0.2
930.
014
-0.0
05-0
.001
110.
973
20.6
00.
047
1.07
60.
052
1.01
3-0
.367
0.01
8-0
.006
-0.0
0112
1.04
727
.10
0.03
91.
378
0.05
11.
306
-0.4
440.
023
-0.0
08-0
.002
131.
120
33.6
00.
033
1.73
90.
052
1.65
8-0
.527
0.02
9-0
.009
-0.0
0214
1.13
037
.20
0.03
02.
050
0.05
51.
967
-0.5
810.
034
-0.0
10-0
.002
151.
140
40.8
00.
028
2.39
60.
059
2.31
1-0
.638
0.04
0-0
.011
-0.0
0316
1.13
742
.60
0.02
72.
747
0.06
42.
661
-0.6
860.
047
-0.0
12-0
.003
171.
133
44.4
00.
026
3.12
80.
070
3.04
1-0
.736
0.05
3-0
.013
-0.0
0418
1.13
046
.20
0.02
43.
540
0.07
73.
452
-0.7
860.
060
-0.0
14-0
.004
191.
135
48.2
50.
024
4.01
30.
083
3.92
4-0
.845
0.06
9-0
.015
-0.0
0520
1.14
050
.30
0.02
34.
525
0.09
04.
434
-0.9
050.
078
-0.0
16-0
.005
Tabela 4: Folha de Cálculo (Parte 2)
Página 29

Helicópteros UBI - Departamento de Ciências Aeroespaciais
Referências[1] Johnson, W. (1994) Helicopter Theory. New York, NY: Dover Publications, INC.
[2] Newman, S. (1994) Foundations of Helicopter Flight. United Kingdom: Elsevier Science.
[3] Padfield, D. G. (2007) Helicopter Flight Dynamics. Washington DC: Blackwell Publishing.
[4] Selig, M. S. (2003) Low Reynolds Number Airfoil Design. Urbana, Illinois 61801 USA.
[5] Airfoil Database, http://m-selig.ae.illinois.edu/
[6] Silvestre, M. A, R. (2018) Apontamentos das Aulas.
Página 30