Embed Size (px)
Citation preview

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 1/15
A RTIFICIAL I NTELLIGENCE
VII. PEMBAHASAN BEBERAPA BIDANG KECERDASANBUATAN
7.1.Robotic
MOVING BLOCK
Penggeraknya disebut penggerak (mover ). Yang dimaksud denganmoving block adalah prosedur yang akan menjawab serta menyelesaikanpersoalan atau pertanyaan gerakan yang dilakukan oleh penggerak.Penggerak dalam hal ini diumpamakan bekerja dengan sekumpulan atauhimpunan balok (block ; benda-benda seperti: kubus, piramida dan lain-lain) yang terletak pada suatu tempat untuk kemudian dipindah / disusunsesuai dengan perintah yang diberikan oleh kita.
Untuk kesepakatan dalam memberikan perintah digunakan format sebagaiberikut:
put <block_name_1> on <block_name_2> <another_block_name>
untuk melaksanakan instruksi atau perintah, penggerak harusmerencanakan sederetan gerakan sehingga dapat mengambil /meletakkan hanya satu balok pada suatu waktu.
put_on : Untuk menyusun balok di atas balok yang lain. Semua aksi
dimulai dengan put_on. Dengan perintah put_on, dia akanbekerja untuk mendapatkan atau menemukan tempat padabalok target dan menggerakkan balok tersebut.
put_at : Menempatkan suatu balok pada tempat tertentu. Tempatyang akan ditempati harus dinyatakan dengan sistemkoordinat. put_at akan bekerja dengan mencengkerambalok, menggerakkannya ke tempat tujuan koordinat Cxy
dan melepaskannya.grasp : Jika robot menggenggam balok, sesudah diberikan perintah
grasp, maka grasp harus mengatur robot mengangkat
balok juga grasp harus membersihkan semua benda obyekyang akan dijepit.clear_top : akan membersihkan semua benda yang berada di atas
obyek tertentu.get_rid_of : Membersihkan obyek. Dia bekerja meletakkan obyek pada
lokasi tertentu.ungrasp : Melepaskan apapun yang dicengkeram.get_space : Untuk mendapatkan ruang pada top balok target untuk
memindahkan balok. Untuk melaksanakan kerja inipenggerak menggunakan find _space atau make_space.
find_space : Untuk mendapatkan ruang pada lokasi tertentu. Jika tidak
ada ruang pada balok target, find_spacemenyerah.make_space : Membantu jika find_space menyerah. make_space dapat
melakukan lebih baik, karena ia dapat menyingkirkan balokyang menghalanginya.
move_obyek : Memindahkan obyek.move_hand : Memindahkan/menggerakkan tangan.
BY TONI KHALIMI, S.SI Hal. #1

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 2/15
A RTIFICIAL I NTELLIGENCE
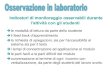
Semua perintah-perintah untuk menggerakkan balok dapat digambarkanpada diagram berikut:
Keterangan:Garis putus-putus menunjukkan tidak selalu dilakukan.
BY TONI KHALIMI, S.SI Hal. #2
put_on get_spacece
make_space
find_space
get_rid_of
graspput_at
move_object
ungrasp
move_hand
clear_top
A
C
B
D
E

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 3/15
A RTIFICIAL I NTELLIGENCE
Misalkan kita ingin memindahkan balok C ke atas balok E. Dalammerencanakan gerakan tangan robot seolah-olah dengan memberikansuatu instruksi robot akan mengetahui urutan-urutan instruksi yangmestinya diterima sehingga robot dapat melaksanakan. Untuk menjawabpersoalan ini perintah pertama yang diberikan adalah put_on. put_on akan
meminta get_space koordinat balok C yang harus diletakkan di atas balokE. Dengan dimintanya get_space oleh put_on, get_space mencoba untukmendapatkan find_space. Karena di atas E tidak ada yang menghalangi,maka kita dapat meminta grasp untuk menjepit C dan memintamove_object untuk menggerakan / memindahkan obyek dari suatu tempatke tempat yang dituju. Tentu saja untuk maksud ini kita juga memintamove_hand. Akhirnya, setelah tepat di atas E, maka diminta untuk ungrasp.
Langkah yang dilakukan:- grasp C- move C to some location on E
- ungrasp C
Goal and Subgoal Form A TreeDi dalam diagram pohon harus dinyatakan subgoal-subgoal yang harusdilakukan atau dicapai kedua-duanya atau salah satunya. Untuk kedua-duanya digunakan istilah and, yang dalam penggambarannya dinyatakansebagai .
Sedangkan untuk salah satu digunakan istilah or, yang dalampenggambarannya digunakan .
Untuk contoh memindahkan balok C ke atas balok E di atas, bentukdiagram pohonnya adalah
Contoh yang lain: memindahkan balok A ke atas balok E.Langkah yang dilakukan adalah:
- grasp C- move C to some location on the table- ungrasp C- grasp A- move A to some location on E
BY TONI KHALIMI, S.SI Hal. #3
Goal
Subgoal_1 Subgoal_2
Goal
Subgoal_1 Subgoal_2
A
C
E
put_on C,E
get_space Exyz
put_at C,Exyz
grasp C move_objectC,E
xyz
ungrasp Cfind_spaceExyz
move_hand

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 4/15
A RTIFICIAL I NTELLIGENCE
- ungrasp E
Diagram pohonnya adalah
Sekarang, misalkan kita ingin memindahkan balok A ke atas balok B.Langkah yang dilakukan adalah
- grasp D- move D to some location on the table- ungrasp D- grasp C- move C to some location on the table- ungrasp C- grasp A- move A to some location on B- ungrasp A
Sedangkan diagram pohonnya adalah sebagai berikut:
BY TONI KHALIMI, S.SI Hal. #4
B
D
A
C
put_on A,E
get_space Exyz
put_at A,Exyz
grasp A move_objectA,E
xyz
ungrasp Afind_spaceExyz
get_rid_ofC,A
clear_top A
find_spaceC,Table
xyz
put_atC,Table
xyz
grasp C move_objectC,Table
xyz
ungrasp C
move_hand
put_on A,B
get_space B put_at A,B
grasp A move_objectA,B
ungrasp A
find_space B
get_rid_ofC,A
clear_top A
find_spaceC,Table
xyz
put_atC,Table
xyz
grasp C move_objectC,Table
xyz
ungrasp C
move_hand
make_space B
get_rid_ofD,B
find_space B
find_spaceD,Table
xyz
put_atD,Table
xyz
grasp D move_objectD,Table
xyz
ungrasp D
move_hand

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 5/15
A RTIFICIAL I NTELLIGENCE
Latihan:1. What part of the analogy procedure would need replacement in orderto handle the tree dimensional problem in figures below? What is thebest answer?
BY TONI KHALIMI, S.SI Hal. #5C
D
A B
A
12 3
4 5

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 6/15
A RTIFICIAL I NTELLIGENCE
2. Consider the three block tower. Create goal and subgoal tree thatreflecting what mover does when asked to put A on B.
3. Use goal and subgoal tree to answer the following question:a. Why did you move D? b. Why did you move C?c. Why did you move A?d. How did you the top of A?e. How did you get rid of C?
4. Consider the situation in figure. Create goal andsubgoal tree that reflecting what mover does whenasked to put A block on C block.
5. The exercises explore the calssic problem of transporting threemissionaries and three cannibals accross a river in a boat that can helponly two at a time. The constraint, of course is that the cannibals cannotout number the missionaries anywhere. What are they to do?
7.2.Sistem Pakar (Expert System)
Sistem pakar mengharapkan komputer dapat melakukan kegiatansebagaimana yang telah dilakukan oleh seorang ahli. Sehingga, suatusistem pakar dapat dianalogikan sebagai cara berfikir seorang pakarmelalui penalaran-penalaran dalam daerah domain tertentu. Untukmenuju kearah tersebut, diperlukan suatu program yang melakukansimulasi penalaran-penalaran seorang ahli yang berbekal padapengetahuan-pengetahuan yang telah tersimpan di dalam basis data.Sebelum kita merencanakan suatu sistem pakar, kita harus membuatsuatu aturan-aturan dasar (rule base) yang berlaku / akan digunakanpada program. Untuk sistem pakar yang sederhana, kita dapatmenggunakan aturan-aturan logika yang ada pada bahasa
pemrograman.
Contoh aplikasi sistem pakar :- medial diagnostik- electronics circuit diagnostik- mineral exploration- CAI (komputer aided Instruction)
Principles Of Rule Based Expert System1. Production rule: if_then_ rule.
if A then B
A: condition part, Left Hand Side (LHS)B: action part, Right Hand Side (RHS)
Sistem yang menggunakan aturan-aturan tersebut untukmerepresentasikan pengetahuan (knowledge) dinamakan
BY TONI KHALIMI, S.SI Hal. #6
A
C

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 7/15
A RTIFICIAL I NTELLIGENCE
productions system. Untuk mendapatkan production system, ada 3bagian :
▪ Rule base / knowledge base, berisi pola sisi kiri yangmenentukan pemakaian aturan tertentu, dan sisi kanan yangmenggambarkan tindakan yang harus dilakukan jika aturan
tertentu tersebut digunakan.▪ Data base / global database / working memory , berisiinformasi tentang tugas-tugas khusus.▪ Rule interpreter / inference system / inference engine.
Interaksi dari 3 bagian di atas digambarkan sebagai berikut:
Istilah fire digunakan jika condition part dipenuhi yang berartiaction part dilaksanakan / terjadi. Di dalam logika, kalimat bernilaibenar (true) dalam sistem produksi diistilahkan fire.
Contoh:Identifying drinks. Ada 5 jenis minuman : beer, wine, grape juice,mineral water, dan lemonade.
Rule base :R1 : if for children then non alcoholicR2 : if for drivers then non alcoholicR3 : if non alcoholic then thirst quenchingR4 : if ideal when hot then thirst quenchingR5 : if thirst quenching and for adults only then beer
R6 : if made from grapes and for adults only then wineR7: if made from grapes and taste of fruit and non alcoholic thengrape juiceR8 : if thirst quenching and not taste of fruit and bubbling then mineralwaterR9 : if thirst quenching and taste of fruit and bubbling then lemonade
Untuk menyingkat penyajian dapat digunakan notasi, misalnya:For children : ANon alcoholic : BFor drivers : C
Thirst quenching : DIdeal when hot : EFor adults only : GBeer : H
Made from grapes : IWine : J Taste of fruit : K
Grape juice : LBubbling : MMineral water : NLemonade : O
Sehingga rule base nya menjadi:R1 : A ⇒B
BY TONI KHALIMI, S.SI Hal. #7
Rule base
Rule 1: if … then…Rule 2: if … then…. . . . . . . . . . . . . .. . . .Rule n: if … then…
Data baseSymbols
Interpreter

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 8/15
A RTIFICIAL I NTELLIGENCE
R2 : C ⇒BR3 : B ⇒DR4 : E ⇒DR5 : D & G ⇒HR6 : I & G ⇒ J
R7 : I & K & B ⇒LR8 : D & not K & M ⇒NR9 : D & K & M ⇒O
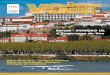
2. Active Memory / Database.Untuk mengetahui cara kerja sistem produksi, kita gunakan tahap-tahap sebagai berikut:
i.Cari semua aturan yang bagian kondisinya (LHS) nya benar.
ii. Aktifkan aturan-aturan tadi yang akan mengakibatkanbagian aksi (RHS) menghasilkan simbol yang sudah disimpan didatabase.iii. Pilih aturan yang membuat fire, jika lebih dari satu, makapilih yang mempunyai rule rendah. Jika tidak ada keluar darisitu.iv. Buat semua aturan non aktif dan kembali ke syarat satuuntuk melakukan sikel ke-2.
BY TONI KHALIMI, S.SI Hal. #8
H J L N O
G
I
M
a n d
R5
a n d
R6
a n d
R7
a n d
R8
a n d
R9
E
D
B
A C
R4
n o t
d K
R3
R1R2

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 9/15
A RTIFICIAL I NTELLIGENCE
Pada tahap pertama, semua kondisi (LHS) dievaluasi untuk nilaibenar/salah (true/false). Tahap ke-2 dijaga jangan sampai terdapatduplikasi simbol di dalam database. Jika terjadi lebih dari satuaturan untuk sementara dipilih aturan terendah : ruas kiri (LHS)
sesedikit mungkin.Misalnya : database (A,M,K)
▼ Mulai, sikel I. Pada tahap I► Aturan 1 (R1) digunakan, R1 fire, B terjadi.► Database menjadi (B,A,M,K)► R1 non aktif.
▼ Sikel II:► Aturan 3 (R3) digunakan, R3 fire, D terjadi.► Database menjadi (B,A,M,K)► R3 non aktif.
▼ Sikel III:► Aturan 9 (R9) digunakan, R9 fire, O terjadi.► Database menjadi (O,D,B,A,M,K)► R9 non aktif.
Jadi menghasilkan O = lemonade.
3. Controlling Strategy / Conflict Resolution Strategy Jika terdapat lebih dari satu aturan (rule) yang cocok dengan fakta,maka diperlukan pemilihan aturan mana yang didahulukan /diterapkan. Untuk maksud ini digunakan beberapa patokan:
a. Pada waktu membuat aturan (rule base), supayadisusun menurut aturan prioritas.Untuk menentukan prioritas tidak ada patokan yang baku,tergantung dari pakar pembuat aturan. Ini disebut dengan ruleorder .b. Simbol/lambang/elemen yang disimpan di basisdatanya terurut.Urutan simbol/lambang/elemen disesuaikan denganurutan/prioritas dari rule basenya. Sehingga pada saat dilakukanpemindaian (scanning), simbol/lambang/elemen yangmenyebabkan aturan dengan prioritas tertinggi yang dipilih(fire). Ini disebut data order .c. Jika lebih dari satu yang memenuhi, maka aturanyang lebih spesifik yang diambil. Ini dinamakan generatingorder (specify).d. Dipilih aturan yang mengakibatkan penambahanpada basis datanya.
Misalkan pakar membuat rule order sebagai berikut:R1 : A ⇒BR2 : B ⇒C
R3 : E ⇒DR4 : E & C ⇒ K Maka urutan prioritasnya dari yang tertinggi sampai terendahadalah R1, R2, R3, dan R4.Dengan demikian, untuk database (B,E,C) langkah yang dilakukanR1 tidak dipilih, karena LHS salah (tidak ada dalam database)
BY TONI KHALIMI, S.SI Hal. #9

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 10/15
A RTIFICIAL I NTELLIGENCE
R2 tidak dipilih, karena tidak mengakibatkan penambahandatabase.R3 dipilih (fire), karena terjadi penambahan database.R4 tidak dipilih, karena prioritasnya lebih rendah dari R3.Sehingga menghasilkan (D,B,E,C).
7.3.Logika Samar (Fuzzy Logic)Logika samar dikembangkan pertama kali oleh Lotfi A. Zadeh,seorang ilmuwan Amerika berkebanggaan Iran dari UniversitasCalifornia di Berkeley, melalui tulisanya tahun 1965.
Logika samar umumnya diterapkan pada masalah-masalah yangmengandung unsur ketiakpastian (uncertainty ).
Contoh :
► Seseorang dikatakan “tinggi” jika tinggi badannya di atas 170cm. Apakah orang yang tingginya 169,99 cm atau 165 cmtermasuk kategori “tinggi”? menurut persepsi manusia, orang yangmempunyai tinggi sekitar 170 cm dikatakan “kurang lebih tinggi”atau “agak tinggi”.► Kecepatan pelan didefinisikan di bawah 20 km/jam. Bagaimanadengan kecepatan 20,01 km/jam, apakah masih dapat dikatakanpelan? Kita mungkin mengatakan bahwa kecepatan 20,01 km/jamitu “agak pelan”.
Kedua contoh di atas memperlihatkan bahwa ketidakpastian dalam
kasus ini disebabkan oleh kaburnya pengertian “agak”, “kuranglebih”, “sedikit”, dan sebagainya.
Fungsi Karakteristik
Fungsi karakteristik merupakan cara untuk menyajikan himpunan.
Fungsi karakteristik dilambangkan dengan χ , mendefinisikan apakahsuatu unsur dari semesta pembicaraan merupakan anggota suatuhimpunan atau bukan, yaitu:
χ A( x ) =Ax,Ax,
∉
∈
01
Jadi, χ A memetakan X ke himpunan {0, 1}, yang dalam hal ini X adalah semesta pembicaraan.
Contoh 1:
Misalkan X = {1, 2, 3, 4, 5, 6} dan A ⊆ X , yang dalam hal ini A = {1, 2,5}. Dengan fungsi karakteristik, kita menyatakan A sebagai
A = {(1,1), (2,1), (3,0), (4,0), (5,1) , (6,0)}
Keterangan: (2,1) berarti χ A(2) = 1; (4,0) berarti χ A(4) = 0.Contoh 2:
Misalkan X = { x |0 ≤ x ≤ 10, x ∈ R}. Misalkan A ⊆ X , yang dalam halini A = { x |5 ≤ x ≤ 8, x ∈ R}. Maka kita dapat menyatakan bahwa
BY TONI KHALIMI, S.SI Hal. #10

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 11/15
A RTIFICIAL I NTELLIGENCE
χ A(3) = 0
χ A(4,8) = 0 χ A(7) = 1
χ A(5,654) = 1
Pada gambar grafik di atas menunjukkan grafik fungsi karakteristik A.Garis tebal antara 5 dan 8 menyatakan bahwa nilai-nilai x di dalamselang tersebut memiliki keanggotaan 1, sedangkan di luarnyamempunyai nilai keanggotaan 0.
Derajat Keanggotaan
Logika samar dikembangkan dari teori himpunan samar (fuzzy set ).
Berbeda dengan himpunan klasik yang merupakan himpunan tegas(crisp set ) dimana syarat keanggotaannya dinyatakan secara tegas,yakni apakah sebuah unsur x adalah anggota atau bukan.
Misalkan V = himpunan kecepatan pelan (yaitu v ≤ 20 km/jam).Apakah kecepatan v = 20,001 km/jam termasuk ke dalam himpunankecepatan pelan? Menurut himpunan tegas 20,001 ∉ V , tetapimenurut himpunan fuzzy tidak ditolak ke dalam himpunan V, tetapiditurunkan derajat keanggotaannya.
Dalam teori himpunanfuzzy
, keanggotaan suatu elemen di dalamhimpunan dinyatakan dengan derajat keanggotaan (membershipvalues) yang nilainya terletak di dalam selang [0, 1].
Derajat keanggotaan ditentukan dengan fungsi keanggotaan:
µ A : X → [0, 1]
Bandingkan dengan fungsi keanggotaan pada teori himpunan tegas:
χ A : X →{0, 1}
Arti derajat keanggotaan adalah sebagai berikut:▪ Jika µ A( x ) = 1, maka x adalah anggota penuh dari himpunan A▪ Jika µ A( x ) = 0, maka x bukan anggota dari himpunan A▪ Jika µ A( x ) = µ , dengan 0 < µ < 1, maka x adalah anggota dari
himpunan A dengan derajat keanggotaan sebesar µ .
Mendefinisikan Himpunan Fuzzy
Misalkan himpunan fuzzy A didefinisikan pada semesta pembicaraan X
= { x 1, x 2, . . ., x n}. Maka cara mendefinisikan himpunan fuzzy adalahsebagai berikut:
Cara 1 : Untuk anggota himpunan fuzzy bernilai diskrit.Sebagai himpunan pasangan berurutan A = { ( x 1, µ A( x 1)), ( x 2, µ A( x 2)), . . . , ( x n, µ A( x n)) }
BY TONI KHALIMI, S.SI Hal. #11
0 5 8 x
χ
A
1

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 12/15
A RTIFICIAL I NTELLIGENCE
Contoh 3:Misalkan X = {becak, sepeda motor, mobil kodok (VW), mobil kijang, mobilcarry } dan
A = himpunan kendaraan yang nyaman dipakai untuk bepergian jarak jauh oleh keluarga besar (terdiri dari ayah, ibu, dan empat oranganak).
Didefinisikan bahwa, x 1 = becak, µ A( x 1) = 0 x 2 = sepeda motor, µ A( x 2) = 0.1 x 3 = mobil kodok, µ A( x 3) = 0.5 x 4 = mobil kijang, µ A( x 4) = 1.0 x 5 = mobil carry , µ A( x 5) = 0.8
maka, dalam himpunan fuzzy ,
A = { (becak, 0), (sepeda motor, 0.1), (mobil kodok, 0.5), (mobilkijang, 1.0), (mobil carry , 0.8) }
Cara 2 : Untuk anggota himpunan fuzzy bernilai kontinu (real).Dinyatakan dengan menyebut fungsi keanggotaan.
Contoh 4:Misalkan
A = himpunan bilangan riil yang mendekati 2.
Maka, dalam himpunan fuzzy ,
A = { ( x , µ ( x )) | µ ( x ) =))2(1(
2
2− x
}.
Cara 3 : Dengan menuliskan sebagai
A = {1
1)( x
x Aµ +
2
2)( x
x Aµ + . . . +
n
n A
x
x )(µ }
= ∑=
n
ii
i A
x
x
1
)(µ
untuk x diskrit, atau
A = { ∫ x
A
x
x )(µ
}
untuk x kontinu. Lambang ∫ bukan berarti integral.
Contoh 5:i. Diskrit
X = himpunan bilangan bulat positif. A = himpunan bilangan bulat yang mendekati 10
= { 0.1/7 + 0.5/8 + 1.0/10 + 0.8/11 + 0.5/12 + 0.1/13}i. Kontinu
X = himpunan bilangan riil positif.
BY TONI KHALIMI, S.SI Hal. #12

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 13/15
A RTIFICIAL I NTELLIGENCE
A = himpunan bilangan riil yang mendekati 10
= ∫ 1/(1 + ( x -10)2 ) / x
Operasi Himpunan Fuzzy
Misalkan himpunan fuzzy A dan himpunan fuzzy B masing-masingmemiliki fungsi keanggotaan yang grafiknya adalah seperti padagambar di bawah
Operasi-operasi pada himpunan fuzzy didefinisikan sebagai berikut :1. Gabungan
A ∪ B → µ A ∪ B = µ A( x ) ∨µ B( x ) = max (µ A( x ), µ B( x ))
A ∪ B diartikan sebagai “ x dekat A” atau ” x dekat B”
Grafik fungsi keanggotaan A ∪ B digambarkan pada Gambar dibawah berikut, garis yang lebih tebal menunjukkan derajatkeanggotaan hasil gabungan.
2. Irisan
A ∩ B → µ A ∩ B = µ A( x ) ∧µ B( x ) = min(µ A( x ), µ B( x ))
A ∩ B diartikan sebagai “ x dekat A” dan ” x dekat B”
Grafik fungsi keanggotaan A ∩ B digambarkan pada gambar diatas, garis yang lebih tebal menunjukkan derajat keanggotaan hasilirisan.
BY TONI KHALIMI, S.SI Hal. #13
0 5 8
x
µ
A
1
0 4
x
µ
B
1
(a) (b)
0 5 8 x
µ A∪ B
1
4
0 5 8 x
µ A∪ B
1
4

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 14/15
A RTIFICIAL I NTELLIGENCE
3. Komplemen
Ā → µ Ā = 1 - µ A( x )
Ā diartikan sebagai “x tidak dekat A”.
Grafik fungsi keanggotaan Ā digambarkan pada gambar di bawah,garis yang lebih tebal menunjukkan derajat keanggotaan hasilkomplemennya.
Logika Fuzzy (Fuzzy Logic)
Pada logika klasik, nilai kebenaran proposisi adalah 1 (true) atau 0(false). Tetapi pada logika fuzzy , nilai kebenaran proposisi adalah nilairiil di dalam selang [1, 0].
Misalkan p adalah proposisi yang didefinisikan pada himpunan fuzzy A,maka nilai kebenaran proposisi p adalah T ( p).
T ( p) = µ A( x ), 0 ≤ µ A ≤ 1
Jadi, nilai kebenaran p : x ∈ A sama dengan derajat keanggotaan x didalam A.
Dua bentuk proposisi di dalam logika fuzzy :1. Proposisi atomik, berbentuk “ x is A” yang dalam hal ini, x adalah
peubah linguistik dan A adalah terma/nilai linguistik.
Contoh: proposisi dalam bahasa Inggris “man is old”. Jika x = 50 dan fungsi keanggotaan old adalah
µ old =
≥
<
≤
601
60451545
450
x
x x
x
,
,/)(
,
maka nilai kebenaran “42 is old” adalah (50 – 45) / 15 = 1/3 =0.3333
2. Proposisi majemuk, berbentuk
“ x is A or y is B”“ x is A and y is B”
Contoh: “temperature is cold or it is rainy ”7.4.Bahasa Alamiah7.5.Pengenalan Suara7.6.Neural Networks
BY TONI KHALIMI, S.SI Hal. #14
µ
Ā
0 5 8 x
1

5/10/2018 HO AI PembahasanBeberapaBidangKB_#10 11 & 12 - slidepdf.com
http://slidepdf.com/reader/full/ho-ai-pembahasanbeberapabidangkb10-11-12 15/15
A RTIFICIAL I NTELLIGENCE
7.7.
BY TONI KHALIMI, S.SI Hal. #15