Embed Size (px)
Citation preview

Math 240, Spring 2019 Peter McGrath
Homework 1
Due: Tuesday, January 22
�is week. Review �rst order linear di�erential equations. Read 2.1-2.5 in the book.
Review of �rst order di�erential equations
1. If z = x + iy is a complex number, one way to de�ne ez is by the power series
ez = 1 + z +z2
2!+z3
3!+ · · · +
zk
k!+ · · · =
∞∑n=0
zn
n!. (1)
a) Using the usual (real) power series for cosy and siny, show Euler’s Identity:
eiy = cosy + i siny.
b) Using equation (1), one can show that ez+w = ezew for any complex numbers z and w(accept this for now). Consequently
ei (x+y ) = eixeiy .
Use this and the result of part (a) to derive the usual formulas for cos(x+y) and sin(x+y).
2. An object with mass m falling near the earth’s surface encounters an air resistance forceFair = −kv proportional to its velocity v = v (t ).
a) Using Newton’s second law, show that v satis�es (where д is the gravitational constant)
dv
dt+
k
mv = д.
b) Solve this equation when v (0) = 0 and describe the long term behavior of v (t ).[Suggestion: �is is a �rst order linear equation—use an integrating factor.]
3. A di�erent model for the air resistance force is Fair = −kv2, i.e. the drag force is proportionalto the square of the velocity. With this assumption, v satis�es
dv
dt+
k
mv2 = д.
We solved this separable equation in class. In Mathematics: from the birth of numbers (W. W.Norton & Co. Inc., New York, 1997), author Dr. Jan Gullberg “solves” this equation using anintegrating factor. Read his approach (a�ached on Canvas) and explain why it is �awed.
1

4. A mass ofm kg is suspended from an ideal spring with spring constant k N· m. Let L0 be thestretched length of the spring when the system is in static equilibrium—when the spring andgravitational forces balance—and y (t ) be the displacement from the equilibrium position.a) Draw a picture and make a force diagram with the forces acting on the mass. Use New-
ton’s second law to derive the following di�erential equation for themotion of the system:
y ′′(t ) +k
my (t ) = 0. (2)
b) Verify that c1 cos(ω0t )+c2 sin(ω0t ),whereω0 :=√
km , solves (2) for any numbers c0, c1 ∈ R.
c) Find a solution of (2) with initial position y (0) = p0 and initial velocity y ′(0) = v0. [Youwill have to solve a simple system of equations to determine c1 and c2.]
Vectors5. Two of the four vectors in the accompany-
ing �gure sum to one of the other two vec-tors. Write an equation expressing this rela-tionship.
xw
v
u
6. Consider vectors v1 =
120
, v2 =
020
, and b =
123
.
a) Draw a picture to explain why there are no numbers c1, c2 ∈ R such that c1v1 + c2v2 = b.b) Reinterpret the equation c1v1 + c2v2 = b as a system Ax = b of three equations in two
variables (c1 and c2) and reinterpret your answer in this notation. What are A and x?
7. You are looking for the liney = c1x+c2 of best �t for the data points (0, 0), (1, 2), and (2, 2).a) Sketch the points in the plane and a best �t line (don’t worry yet about �nding c1 and
c2). Label the vertical distances di , (i = 1, 2, 3) between the data points and the pointsabove/below them on the line.
b) Write out a vector equation c1v1 + c2v2 = b that would be satis�ed if there was a liney = c1x + c2 that passed through all three points. What are the vectors v1, v2, and b?
c) Find the equation of the plane inR3 containing v1 and v2. Sketch the plane, v1, v2, and b.d) Find the vector in the plane which is as close as possible (in terms of R3 distance) to b.e) Find the numbers c1, c2 so that the vector you found above is equal to c1v1 + c2v2.f) Explain why the c1, c2 you just found give the line y = c1x + c2 which minimizes the sum
of the squares of the errors d21 + d22 + d
23 .
8.
2

Given an n-sided polygon in the plane withvertices p1 = (x1,y1), . . . ,pn = (xn ,yn ) andassociated edge vectors ~e1 = (x2 − x1,y2 −y1), . . . ,~en = (x1 − xn ,y1 − yn ), associate toeach edge ~ei (i = 1, . . . ,n) a vector ni by re-questing that ni is orthogonal to ~ei , ni pointsoutward along ~ei and that ni and ~ei have thesame length. Show that
∑ni=1 ni = 0.
[Note: the �gure is not to scale]n1
n2
n3
n4
9. Consider the vectors v =
100
and w =
−2−11
in R3.
a) Using the cross product, �nd a normal vector to the plane containing v and w.b) By solving a system of equations, �nd a normal vector to the plane containing v and w.
[Hint: recall that two vectors are orthogonal precisely when their dot product is zero.]
10. [Deriving the cross product]. �e cross product of v = (x1,y1, z1) and w = (x2,y2, z2) is
v ×w = (y1z2 − y2z1,x2z1 − x1z2,x1y2 − x2y1) =
��������
ı̂ ̂ k̂x1 y1 z1x2 y2 z2
��������.
Recall that v ×w has the important property that it is orthogonal to both v and w.a) Write out the system of two homogeneous linear equations that are satis�ed when a
vector (a,b, c ) is orthogonal to both v and w.b) Solve the system—show the solutions (a,b, c ) are precisely the scalar multiples of v ×w.
11. Consider the vectors u =
1000
, v =
2−100
, andw =
0111
inR4. Solve a system of equations
to �nd a normal vector to the hyperplane inR4 containing u, v andw. Note: there is no goodgeneralization of the cross product to higher dimensions.
Matrix Algebra
12. Let
A =
[1 23 1
], B =
[1 0 23 1 −2
], C =
[1 −2 3−2 1 −1
], D =
−221
.
3

a) Mark all the products that are de�ned, and give the dimensions of the result:AB,BA,ABC,ABD,BC,BCT ,BTC,DC,DTCT .
b) Compute AB,A(3B +C ),BTA,A(BD), (AB)D.
13. [Matrix multiplication is noncommutative.] We say matricesA and B commute ifAB = BA.
a) Let A =[1 00 0
]. Find a 2 × 2 matrix B such that AB , BA.
b) Find all matrices which commute with[1 23 4
].
14. Find all 2 × 2 matrices whose squares are equal to the zero matrix.
15. �e trace of a square matrix is the sum of the diagonal entries. Using the de�nition of matrixmultiplication and summation notation, show that the trace of AB is equal to the trace of BA.
16. Compute[1 10 1
]nand
λ1 0 0 0 00 λ2 0 0 00 0 λ3 0 00 0 0 λ4 00 0 0 0 λ5
5
.
17. Determine all values of parameter t for which the following system
x + 2y − 3z = 43x − y + 5z = 2
4x + y + (t2 − 14)z = t + 2
has (a) no solutions, (b) a unique solution, (c) in�nitely many solutions.
18. �e following system of equations is already in reduced echelon form (so you don’t have todo any row reduction). Use this to �nd the general solution to the system.
x1 + x3 − 2x5 = 3x2 + 2x3 + x5 = −2
x4 − x5 = 1.
4

Math 240, Spring 2019 Peter McGrath
Homework 2
Due: Tuesday, January 29
�is week. Download Mathematica/Matlab/Sage if you haven’t already and read 2.6 in the book.Become comfortable parametrizing the solution space to a linear system once the reduced rowechelon form is known.
Di�erential Equations
1. For j ∈ {1, 2, . . . , 7} de�ne vector vj = (cos 2π j7 , sin
2π j7 ). Show that v1 + v2 + · · · + v7 = 0 by
completing the following steps.
a) Associate to each vj the complex numberzj = ei
2π j7 = cos 2π j
7 + i sin 2π j7 . Show
using Euler’s identity that z7j = 1 forj = 1, 2, . . . , 7.
b) By the preceding and the fundamentaltheorem of algebra, the zj are the rootsof the equation z7 − 1 = 0, so that
z7−1 = (z−z1) (z−z2) · · · (z−z6) (z−z7).
Finish the problem by computing the co-e�cient in front of z6 on both sides of theabove equation.
2π/7
2. Rosencrantz and Guildenstern are talking about Euler’s identity
eiθ = cosθ + i sinθ , θ ∈ R.
Rosencrantz: I wonder what ii is.Guildenstern: WolframAlpha says it is e−π /2 ≈ .208. How is that possible?Rosencrantz: Many things are possible, Guildenstern. Remember what happened when youasked WolframAlpha for “random my li�le pony curve”?Help Rosencrantz and Guildenstern: use Euler’s identity and logarithms to show ii = e−π /2.Is e−π /2 the only value that could reasonably be assigned to ii?
3. Recall the equation derived previously for the motion y (t ) of an ideal mass-spring system:
y ′′ +k
my = 0. (3)
a) Let E (t ) = 12ky
2 + 12my
′2 be the total energy (potential plus kinetic). Without solving thedi�erential equation, show that the total energy is conserved. [Hint: show E ′(t ) = 0].
5

b) Use this to show that if y (0) = 0 and y ′(0) = 0, then y (t ) = 0 for all t ≥ 0.c) Suppose that u (t ) and v (t ) both satisfy equation (3), and also u (0) = v (0) and u ′(0) =
v ′(0). Show that u (t ) = v (t ) for all t ≥ 0.
Systems of Equations/Row Reduction
4. Which of the following matrices are in reduced row echelon form?[0 11 0
],
[1 10 0
],
1 0 2 50 0 0 20 1 1 0
,
1 0 −1 00 0 1 20 1 1 0
,
[1 0 0 0 2190 0 0 1 1
].
5. Let the rows of A be r1, r2, r3. Fnd a matrix B such that BA is the matrix
r1 + r2r2 − 2r3
r1 + 3r3 − 5r2
.
6. One day of mining at mine A produces 20 metric tons of copper and 550 kilograms of silver,while one day of mining at mine B produces 30 metric tons of copper and 500 kilograms of
silver. Let u =[
20550
]and v =
[30500
]represent the output per day of the two mines.
a) Given an interpretation for the vector 3u.b) Write a vector equation whose solution gives the number of days each mine should op-
erate to produce 150 tons of copper and 2825 kilograms of silver.c) Using so�ware or otherwise, solve the equation from (b).
7. Compute (showing all your steps) the reduced row echelon form of the following matrix:
2 4 1 11 141 2 1 8 104 8 2 22 28
.
8. Compute the reduced row echelon form of the matrix A and �nd the general solution of theequation Ax = 0, where
A =
2019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 2019
.
6

9. Solve the system of linear equations
x1 + x2 + x3 = 0x2 + x3 + x4 = 0
· · ·
x99 + x100 + x1 = 0x100 + x1 + x2 = 0.
10. �e wicked witch of the west says she has found 4 × 4 matricesM1 andM2 such that
M1M2 −M2M1 =
1 0 0 00 2 0 00 0 3 00 0 0 4
.
Show that the wicked witch of the west is lying. [Hint: use the trace.]
Matrix Inverses
11. Let A =[a bc d
]. Check by direct computation that if ac −bd , 0, A−1 = 1
ad−bc
[d −b−c a
].
12. Find the following matrix inverses using the formula for the inverse of a 2 × 2 matrix:[2 35 7
],
[cosθ − sinθsinθ cosθ
],
[1 23 4
].
13. Compute via row-reduction the inverses of the following matrices.
a)
2 1 31 −1 23 3 4
.
b)
1/2 1/2 1/2 1/21/2 1/2 −1/2 −1/21/2 −1/2 1/2 −1/21/2 −1/2 −1/2 1/2
.
14. In your head, �nd the inverse of the matrix
a1 0 . . . 00 a2 . . . 0....... . .
...
0 0 . . . an
, where ai , 0 for all i .
7

15. a) IfA,D, and S are square matrices, S is invertible, andA = SDS−1, show thatAn = SDnS−1.
b) Compute[17 −635 −12
]5by hand using the equation
[17 −635 −12
]=
[2 35 7
] [2 00 3
] [−7 35 −2
].
16. You have inherited nine gold rings of unknown masses. You are allowed to place some of therings on one side of a balance and an equal number of rings on the other side. A�er thusdistributing the rings, the balance gives a comparison of the total mass on each side, eitherby indicating that the two masses are equal or by indicating that a particular side is the moremassive of the two. Show that at least eight such comparisons are required to determinewhether all of the rings are of equal mass.
Applied Problems
17. Consider the following toy example of a network consisting of three airports PHL, ORD, andEWR. Each day, there are three �ights (in each direction) between PHL and ORD, 2 �ights (ineach direction) between PHL and EWR, and 4 �ights (again in each direction) between ORDand EWR.
a) Draw a graph (collection of vertices and edges) representing the three airports and the�ights between them.
b) Write down a 3×3 matrixA = (ai j ) such that ai j is the number of �ights per day betweenairport i and airport j.
c) Write down a 3 × 3 matrix B = (bi j ) such that bi j is the number of di�erent ways to getfrom airport i to airport j in exactly two �ights? How is this related to the matrix A?
d) How would you compute the total number of ways to get from PHL to ORD in exactly�ve �ights?
e) Compute via so�ware the number of ways to get from PHL to PHL in exactly 8 �ights.
18. A path is an ordered sequence of edges whereany two consecutive edges share a commonvertex. Howmany length 9 paths are there ona cube which begin on a �xed vertex and endon the diametrically opposite vertex? It maybe helpful to think of the vertices and edgesof the cube as in the accompanying �gure.
8

Math 240, Spring 2019 Peter McGrath
Homework 3
Due: Tuesday, February 5
�is week. Peruse chapter 3, ignoring the material concerned with permutations.
1. Suppose a 2×1000 matrixD contains 1000 points ofR2. �e goal of this problem is to computethe number of multiplications required to transform these points using two arbitrary 2 × 2matrices A and B, i.e. the number of multiplications to compute ABD.
a) How many multiplications are required to compute A(BD)?b) How many multiplications are required to compute (AB)D?
2. Let A be the n × n matrix with i, j entry i + j. What is the rank of A?
Determinant Bonanza
3. Compute the following determinants:
�����5 27 3
�����
�����1 23 4
�����
�����cosα − sinαsinα cosα
�����
�����1 logb a
loga b 1�����.
4. Compute the following fourth order determinants:
����������
1 1 1 11 −1 1 11 1 −1 11 1 1 −1
����������
,
����������
1 0 2 a2 0 b 03 c 4 5d 0 0 0
����������
.
5. Without doing any calculations, explain why
����������
1 e 1 12 π 2 13√5 3 0
4 219 4 1
����������
= 0.
6. a) By generalizing the method in class used to �nd the equation of a line through two points,explain why the general equation for the equation for a circle through any three points(x1,y1), (x2,y2), (x3,y3) in the plane is
����������
x2 + y2 x y 1x21 + y
21 x1 y1 1
x22 + y22 x2 y2 1
x23 + y23 x3 y3 1
����������
= 0.
9

b) Use the method of the previous part to �nd the equation for the circle passing through(1, 7), (6, 2), and (4, 6). Simplify your answer until it is in standard form.[Suggestion: compute the determinant by a cofactor expansion.]
7. True or False (Explain your answer brie�y in either case)
a) det(4A) = 4 det(A) for all 4 × 4 matrices A.b) det(A + B) = det(A) + det(B) for all 5 × 5 matrices A and B.c) det(A10) = (detA)10 for all 10 × 10 matrices A.d) If all the entries of a 7 × 7 matrix A are 7, then detAmust be 77.e) �e equation det(−A) = detA holds for all 6 × 6 matrices.f) If all the entries of a square matrix are 1 or 0, then detAmust be 1, 0 or −1.
8. Show that the determinant of the matrix
1 7 3 40 0 5 18 5 1 73 4 1 7
is a multiple of 17.
[Hint: use column operations cleverly.]
9. Show that the matrix
0 1 2 3 4−1 0 −7 −6 8−2 7 0 −1 −2−3 6 1 0 −219−4 −8 2 219 0
is not invertible.
[Hint: �e fast way to do this just uses that A = −AT and properties of determinants. ]
10. Compute |A|, where A =
1/2 1/2 1/2 1/21/2 1/2 −1/2 −1/21/2 −1/2 1/2 −1/21/2 −1/2 −1/2 1/2
.
[Hint: Last week you showed A = A−1. Use properties of determinants and that AA−1 = I .]
11. Let A be a 4 × 4 matrix with determinant 5. Give a proof or counterexample for each of thefollowing.
a) For some vector b the equation Ax = b has exactly one solution.b) For some vector b the equation Ax = b has in�nitely many solutions.c) For some vector b the equation Ax = b has no solution.d) For some vector b the equation Ax = b has at least one solution.
10

12. Suppose that A and B are 4 × 4 invertible matrices. If |A| = −2 and |B | = 3, compute
det(((A−1B)T (2B−1))).
13. Is the determinant of the matrix
A =
1 1000 2 3 45 6 7 1000 8
1000 9 8 7 65 4 3 2 10001 2 1000 3 4
positive or negative? How can you tell? Do not use technology.
Applied Problems: Least Squares Regression
14. [Approximating a spring constant.] Hooke’s law in Physics states that the length x of a uni-form spring is a linear function of the applied forcey. If wewritey = a+kx , then the coe�cientk is called the spring constant. Suppose a particular unstretched string has a measured lengthof .155 meters (i.e. x = .155 when y = 0). Forces of 2, 4, and 6 Newtons are then applied tothe spring, and the corresponding lengths are found to be .193, .221, and .264 meters. Use themethod of least squares to estimate the spring constant.
15. [Approximating the gravitational constantд.] According to Newton’s second law, a body nearthe earth’s surface falls vertically downward according to the equation
x = x0 +v0t +12дt2,
where x (t ) is the vertical displacement downward relative to some �xed point,v0 is the initialvelocity, x0 is the initial position, and д is the acceleration of gravity at earth’s surface. Anexperiment is performed to evaluate д using this equation. A mass is released with unknowninitial displacement and velocity and at certain times the distance to some �xed referencepoint are measured. In particular, at times .1, .2, .3, .4, and .5 seconds, it is found that theweight has fallen −.079, .091, .357, .713, and 1.167 meters from the reference point. Find anapproximate value of д using this data by using least squares.
11

Math 240, Spring 2019 Peter McGrath
Homework 4
Due: Tuesday, February 12
�is week. Read through 4.6, with an eye towards building intuition.
Di�erential Equations
1. �e spring-mass system from before is now subject to an additional force: a damping forceproportional to the mass’ velocity, that is Fd = −cy ′(t ) for some constant c > 0.
a) Draw a picture of the system and make a force diagram. Use Newton’s second law toderive the following di�erential equation for the motion of the system:
y ′′ +c
my ′ +
k
my = 0. (4)
b) Show that the set of functionsV ={f : R→ R : f ′′ + c
m f ′ + km f = 0
}is a vector space.
c) In the case where c/m = k/m = 2, check that f1 (t ) and f2 (t ) solve (4), where
f1 (t ) = e−t sin t and f2 (t ) = e−t cos t .
d) Using the preceding parts, �nd a solution y (t ) of (4) (when c/m = k/m = 2) with initialposition and velocity given by (y (0),y ′(0)) = (2, 1).
2. Consider the equationru ′′(r ) + u ′(r ) = 0. (5)
a) Show that the set of functions V ={f : R→ R : r f ′′(r ) + f (r ) = 0
}is a vector space.
b) Verify by direct substitution that f1 (r ) = 1 and f2 (r ) = ln r solve (5).c) Using the preceding parts, �nd a solution u (r ) of (5) satisfying u (1) = 1 and u (2) = 2.
Educational remark: Equation (5) models the equilibrium temperature distribution in acircular pool (where r is the distance from the center) where the pool’s outer edge is kept ata �xed temperature. You can learn more about this in Math 241.
Vector Spaces and Subspaces
3. Draw pictures of subsets A and B of R2 which have the following properties.
a) A is closed under vector addition, but not under scalar multiplication.b) B is closed under scalar multiplication, but not under vector addition.
4. Let S = {v ∈ R3 : v = (r − 2s, 3r + s, s ), r , s ∈ R}.
12

a) Show that S is a subspace of R3.b) Show that the vectors in S lie on the plane with equation 3x − y + 7z = 0.
5. Which of the following sets are vector spaces? For the ones which are not, explain why.
a) �e set of solutions to the ODE f ′′ + f ′ + 1 = 0.b) �e set of solutions to a matrix equation Ax = b, where b , 0.c) �e set of solutions to the ODE f ′′ + f ′ = 0.d) �e set of solutions to a matrix equation Ax = 0.e) �e set of functions u (x ,y) de�ned on the unit square [0, 1] × [0, 1] satisfying ∆u =:
∂u∂x +
∂u∂y = 0.
f) �e set of all polynomials p (x ) satisfying p (3) = p (4).g) �e set of polynomials of degree exactly 2019.
Linear Independence and Bases
6. Show that {e−t sin t , e−t cos t } is linearly independent in the vector space V from problem 1.
7. Is the set {sin 2x , cos 2x , cosx sinx } linearly independent in the space of all functions?
8. Find span(v1, v2), where v1 = (1, 2, 3, 4)T and v2 = (5, 6, 7, 8)T . Your answer should consist ofa set of equations, which determines whether a vectors (x ,y, z, t ) is in span(v1, v2).
9. Find all solutions of the vector equation
c1v1 + c2v2 + c3v3 = 0,
where v1 = (1, 1, 0)T , v2 = (0, 1, 1)T , and v3 = (1, 0, 1)T . What conclusion can you make aboutlinear independence (dependence) of the system of vectors {v1, v2, v3}?
10. Determine a basis for the nullspace (kernel) of A, where A =
2 4 1 11 141 2 1 8 104 8 2 22 28
.
Suggestion: Use the row reduced echelon form of A you computed on HW2!
11. Write down a basis for the vector space of 4 × 4 skew-symmetric matrices. You do not needto prove your set is a basis.
13

12. Determine whether the set of vectors
121
,
3−12
,
11−1
is a basis for R3.
13. Determine whether the given set of vectors is linearly independent inM2×2 (R):
A1 =
[1 10 1
], A2 =
[2 −10 1
], A3 =
[3 60 1
].
14. Fix some vectorw ∈ Rn . For a ∈ R and u ∈ Rn , de�ne
a ⊗ u = a(u −w ) +w .
u ⊕ v = u +v −w .
Show that if we equip V = Rn with the operations ⊗ and ⊕ (as our scalar multiplication andvector addition, respectively), thenwe get a vector space. What is the zero vector of this vectorspace? (Note: we use the symbols ⊗ and ⊕ to distinguish these notions of multiplication andaddition from the usual ones on Rn).
14

Math 240, Spring 2019 Peter McGrath
Homework 5
Due: Tuesday, February 19
�is week. Read through 4.9. Intuitively understand the di�erence between a vector and itscoordinate vector with respect to some basis.
Bases and Coordinate Vectors
1. In the accompanying �gure, sketch the vector
u with [u]B =[−12
], where B is the basis
for R2 consisting of the vectors v,w. w
v
2. Consider the vectors u, v, and w sketched inthe accompanying �gure. Find the coordinatevector of w with respect to the basis u, v.
w (translated)v (translated)
u0
3. Consider the plane x1 + 2x2 + x3 = 0 with basis B =
−101
,
−210
. If [x]B =
[2−3
],
�nd x. Make a sketch (which need not be to scale) of x and the basis vectors in the plane.
4. Let B = {e1, e2, e3, e4} be the standard ordered basis forR4 and let C = {e3, e1, e2, e4}. Computethe change of bases matrices PC←B and PB←C .
5. Consider the set V ={f : R→ R : f (x ) = c1x+c2
(x−1) (x−2) for some c1, c2 ∈ R}.
a) Show that V is a subspace of the space of all functions.b) One basis for V is B =
{1
(x−1) (x−2) ,x
(x−1) (x−2)
}. Another is C =
{1
x−1 ,1
x−2
}. Compute the
change of basis matrix PC←B .c) Using part b), the fact that∫
A
x − 1+
B
x − 2dx = A log |x − 1| + B log |x − 2| +C,
and the equation [v]C = PC←B[v]B , e�ortlessly compute the following integrals:∫2x + 1
(x − 1) (x − 2)dx ,
∫3x − 8
(x − 1) (x − 2)dx .
15

6. For the problems below, determine the component vector of the given vector in the vectorspace V relative to the given ordered basis B.
a) V = R3; B = {(1, 0, 1), (1, 1,−1), (2, 0, 1)}; v = (−9, 1,−8).b) V = P2 (R); B = {5 − 3x , 1, 1 + 2x2}; p (x ) = 15 − 18x − 30x2.
c) V = M2×2 (R); B ={ [
1 11 1
],
[1 11 0
],
[1 10 0
],
[1 00 0
]}; A =
[−3 −2−1 2
].
�e Rank Nullity �eorem
7. Use the reduced row echelon form computed in HW2 to �nd a basis for colspace(A), where
A =
2 4 1 11 141 2 1 8 104 8 2 22 28
.
8. For the problems below, determine the nullity of A “by inspection” by appealing to the Rank-Nullity �eorem. Avoid computations.
a) A =
2 −30 0−4 622 −33
.
b) A =
0 1 00 1 00 0 10 0 1
.
c) A =[0 0 0 −2
].
9. Rosencrantz and Guildenstern are discussing interpolation polynomials.Rosencrantz: Given any numbers y1,y2,y3,y4, is there a unique polynomial p (x ) = a3x
3 +
a2x2 + a1x + a0 whose graph contains the points (1,y1), (2,y2), (3,y3) and (4,y4)?
Guildenstern: �at is plausible—there are as many degrees of freedom as variables. �emapT : R4 → R4 given byT ((a3,a2,a1,a0)) = (p (1),p (2),p (3),p (4)), where p (x ) = a3x
3 + a2x2 +
a1x + a0 is likely then the key to solving this problem.Help Rosencrantz and Guildenstern:
a) Show T is a linear map.b) Show that kerT = {0}. Hint: use the fundamental theorem of algebra.c) Use b) and the Rank-nullity theorem to show that there is an (at most cubic) polynomial
passing through all four points.
16

10. Hamlet, having only listened to the �rst sentence of the entire preceding discussion, realizes
p (x ) =(x − y2) (x − y3) (x − y4)
(1 − y2) (1 − y3) (1 − y4)y1 +
(x − y1) (x − y3) (x − y4)
(2 − y1) (2 − y3) (2 − y4)y2+
+(x − y1) (x − y2) (x − y4)
(3 − y1) (3 − y2) (3 − y4)y3 +
(x − y1) (x − y2) (x − y3)
(4 − y1) (4 − y2) (4 − y3)y4
is an explicit (at most) cubic polynomial whose graph passes through (j,yj ) for j = 1, 2, 3, 4.Hamlet wonders if (for �xed (y1,y2,y3,y4) ∈ R
4) there may be any other (at most) cubicpolynomials passing through the same points.a) Let T be the map de�ned in problem 9. Use the existence of p (x ) and the Rank-nullity
theorem to explain why kerT = {0}. Do not use the fundamental theorem of algebra.b) Explain why there is only one (at most) cubic polynomial whose graph passes through
(j,p (j )), j = 1, 2, 3, 4.
Di�erential Equations
11. Consider the set V = { f : R→ R : f ′′ − f = 0} of solutions to the ODE f ′′ = f .a) Show that ex , e−x , sinhx , and coshx are all elements of V .b) Show that the lists of vectors {ex , e−x } and {sinhx , coshx } are each linearly independent.c) It can be shown that V is a two-dimensional vector space (accept this for now), so thatB = {coshx , sinhx } and C = {ex , e−x } are bases for V .
d) Let u (x ) be the solution to the initial value problem
u ′′(x ) − u (x ) = 0, u (0) = 5, u ′(0) = −2.
Pick one of the bases above and write u as a linear combination of the basis elements.Comment: �e calculations in d) are noticeably simpler in one of the bases—that’s the point!
12. Recall the equation (HW4) for the positiony (t ) of a spring-mass systemwith a damping force:
y ′′ +c
my ′ +
k
my = 0, (6)
where c > 0 is the damping constant and k > 0 is the spring constant. Let E (t ) = 12my
′2+ 12ky
2
be the total (potential plus kinetic) energy.a) Without solving the di�erential equation, show that E ′(t ) ≤ 0.b) Use this to show that if y (0) = 0 and y ′(0) = 0, then y (t ) = 0 for all t ≥ 0.c) Suppose that u (t ) and v (t ) both satisfy equation (6), and also u (0) = v (0) and u ′(0) =
v ′(0). Show that u (t ) = v (t ) for all t ≥ 0.d) Show that the set of functionsV =
{f : R→ R : f ′′ + c
m f ′ + km f = 0
}is a vector space.
17

Math 240, Spring 2019 Peter McGrath
Homework 6
Due: Tuesday, February 26
�is week. Read Chapter 6, with an eye towards answering the following question: Why are wereserving special a�ention to Linear Transformations, instead of studying more general functionsas you did in 114?
Di�erential Equations
1. Let V ={f : R→ R : f ′′ + c
m f ′ + km f = 0
}be the vector space of functions satisfying the
di�erential equation for the damped spring-mass system (cf. HW5).
a) Show that the function T : V → R2 by T ( f ) =[
f (0)f ′(0)
]is a linear transformation.
b) Show that kerT = {v ∈ V : Tv = 0} consists only of the zero function (you will need touse the result of part c) from the problem in HW5).
c) Show that V is at most two dimensional by showing that any three vectors u1,u2,u3 ∈ Vare linearly dependent as follows: sinceTu1,Tu2,Tu3 are three vectors in the two dimen-sional space R2, there are c1, c2, c3 ∈ R not all zero such that c1Tu1 + c2Tu2 + c3Tu3 = 0.What do you do next?
Comment: c) means the set of solutions is not too big. In particular, once two linearly indepen-dent solutions are known, by taking linear combinations, we have found all of the solutions!
Linear Transformations
2. For the problems below, verify directly from the de�nition that the giving function is a lineartransformation.
a) T : C2 ([a,b]) → C0 ([a,b]) de�ned by T ( f ) = f ′′ − 16f .b) T : Mn×n → Mn×n de�ned by T (A) = AB − BA, where B is a �xed n × n matrix.c) T : R2 → R2 by T (x1,x2) = (x1 cosθ − x2 sinθ ,x1 sinθ + x2 cosθ ), where θ ∈ R is �xed.
3. For the problems below, determine the matrix of the given transformation T : Rn → Rm .
a) T (x1,x2,x3) = (x3 − x1,−x1, 3x1 + 2x3, 0).b) T (x1,x2) = (x1 cosθ − x2 sinθ ,x1 sinθ + x2 cosθ ), where θ ∈ R is �xed.
4. In this problem, letV be the vector space of 2×2 matrices with real entries, and letT : V → R
be de�ned by T[a bc d
]= a + d , in other words TM is the trace ofM .
a) Show that T is a linear transformation.
18

b) Compute the matrix [T ]CBassociated to the linear transformation T , where
B =
{ [1 00 0
],
[0 10 0
],
[0 01 0
],
[0 00 1
]}, C = {1}.
c) Compute the rank and nullity of the matrix [T ]CB.
5. For i ∈ {1, 2, . . . , 7} de�ne vector vi = (cos 2π i7 , sin
2π i7 ). Let T : R2 → R2 be the counter-
clockwise rotation by 2π/7. From class, T is linear, so
T (v1 + · · · + v7) = Tv1 + · · · +Tv7.
Redo HW 2.1 (i.e., show that v1 + · · · + v7 = 0) by analyzing both sides of the equation above.
6. Find the matrix with respect to the standardbasis for the (right hand oriented) rotation by120 degrees in R3 about the vector (1, 1, 1).�e accompanying picture may be helpful.Note: the answer is simple—involved compu-tations are unnecessary. ~e1
~e2
~e3
7. Find a 2 × 2 matrix A (other than A = I2) such that A2019 = I2.
8. a) Find a 2 × 2 matrix that rotates the plane by +45 degrees.b) Find a 2 × 2 matrix that re�ects across the horizontal axis.c) Find a 2 × 2 matrix that rotates the plane by +45 degrees followed by a re�ection across
the horizontal axis.d) Find a 2 × 2 matrix that re�ects across the horizontal axis followed by a rotation in the
plane by +45 degrees.e) Find a matrix that rotates the plane through +60 degrees, keeping the origin �xed.f) Find the inverse of each of these maps.
9. Find 3 × 3 matrices A and B which act on R3 as follows.a) A keeps the x1 axis �xed but rotates the x2x3 plane by 60 degrees.b) B rotates the x1x3 plane by 60 degrees and leaves the x2 axis �xed.
10. Consider the linear transformationT fromU 2×2, the space of upper triangular 2 × 2 matrices,
to U 2×2, given by T (M ) =
[1 20 3
]−1M
[1 20 3
]. Let A be the C-matrix of T , B be the B-
matrix of T , and P = PC←B the change of basis matrix from B to C, where C and B are the
19

bases ofU 2×2 given by
C :={ [
1 00 0
],
[0 10 0
],
[0 00 1
]}, and B :=
{ [1 −10 0
],
[0 10 1
],
[0 00 1
]}.
a) Find A and B.b) State a known relation between A, B, and P .c) Find P and verify that the relation you stated in b) above holds.
11. True or false: If u, v, and w are vectors in a vector space V and T : V → W is a lineartransformation. If {u, v,w} is linearly independent, then {Tu,Tv,Tw} is linearly independent.
12. For the transformation ofT : R2 → R2 with the given matrix, sketch the image of the squarewith vertices (1, 1), (2, 1), (2, 2), and (1, 2).
a) A =
[2 00 3
]
b) A =
[cosα − sinαsinα cosα
]
c) A =
[1 00 0
]
d) A =
[−1 00 1
].
13. Which of the following maps F are linear?
a) F : R3 → R2 de�ned by F (x ,y, z) = (x , z).b) F : R4 → R4 de�ned by F (x) = −x.c) F : R3 → R3 de�ned by F (x) = x + (0,−1, 0).d) F : R2 → R2 de�ned by F (x ,y) = (3x + y,y).e) F : R2 → R de�ned by F (x ,y) = xy.
Applied Problems
14. [Application to genetics.] In autosomal inheritance, each individual inherits one gene fromeach of its parents’ pairs of genes to form its own particular pair. It is believed that each of aparent’s two genes are equally likely to be passed on to the o�spring. �e following table liststhe probabilities of the possible genotypes of the o�spring for all the possible combinationsof the parents’ genotypes.
20

Parent’s GenotypeAA-AA AA-Aa AA-aa Aa-Aa Aa-aa aa-aa
O�springGenotype
AA 1 1/2 0 1/4 0 0Aa 0 1/2 1 1/2 1/2 0aa 0 0 0 1/4 1/2 1
A breeder has a large population of dogs consisting of some distribution of all three genotypesAA,Aa, and aa. By design, each dog in the population mates with a dog of the same genotype.Your goal is to determine the distribution of each genotype in any given generation. Forn = 0, 1, 2, . . . , let
an = fraction of dogs of genotype AA in the n-th generation,bn = fraction of dogs of genotype Aa in the n-th generation,cn = fraction of dogs of genotype aa in the n-th generation.
De�ne the vector x(n) =
anbncn
.
a) Find a matrixM such that x(n) = Mx(n−1) (for n = 1, 2, . . . ).b) Since x(n) = Mx(n−1) = M2x(n−2) = · · · = Mnx(0) , it is desirable to compute large powers
of M . Using Mathematica, compute M3,M6, and M9. Does it appear that Mn approachesa limit? If so, what do you conjecture limn→∞ x(n) to be?
21

Math 240, Spring 2019 Peter McGrath
Homework 7
Due: Tuesday, March 12
�is week. Read chapter 7.
Eigenvalues and Eigenvectors
1. True or False (Explain your answer brie�y in either case)
a) If two matrices A and B have the same characteristic polynomial, then A and B haveexactly the same set of eigenvalues.
b) If two matrices A and B have the same characteristic polynomial, then A and B haveexactly the same set of eigenvectors.
c) Each eigenspace of an n × n matrix is a subspace of Rn .d) It is possible for a square matrix A to have in�nitely many di�erent eigenvectors.e) A linear combination of a set of eigenvectors of a matrix A is again an eigenvector of A.f) If a matrix A has a repeated eigenvalue, then it is defective.g) An n × n matrix A is nondefective if it has n di�erent eigenvectors.h) If v is an eigenvector of A, then v is also an eigenvector of A5.i) If A2 has eigenvalue 9, must 3 or −3 be an eigenvalue of A?j) �e eigenvalues of A and AT are the same.k) 0 can be an eigenvalue of a matrix.
2. Find all eigenvalues as well as the dimension of each eigenspace for the following matrix.
1 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 4 1 0 0 0 00 0 0 4 1 0 0 00 0 0 0 4 0 0 00 0 0 0 0 4 0 00 0 0 0 0 0 2 10 0 0 0 0 0 0 2
3. Write down a simple 3 × 3 matrix with eigenvalues 3, 4, and 7.
4. �e linear transformation T : R2 → R2 with matrix A =[0 11 0
]re�ects each vector across
the line y = x . By arguing geometrically, determine all eigenvalues and eigenvectors of A.
22

5. Determine all eigenvalues and corresonding eigenvectors of the given matrix.
a)[1 62 −3
].
b)
7 −8 68 −9 60 0 −1
c)
1 1/4 00 1/2 00 1/4 1
.
Diagonalization
6. Determine whether the given matrixA is diagonalizable. Where possible, �nd a matrix S suchthat S−1AS is diagonal, with the eigenvalues along the diagonal.
a)[
1 −2−2 2
].
b)
1 0 00 3 71 1 −3
.
7. Is the matrix A =
2019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 20192019 2019 2019 2019 2019
diagonalizable? If so, exhibit matrices
S and D, where D is diagonal, such that A = SDS−1. Otherwise, explain why A is defective.
8. Use the ideas introduced in this section to solve the system of di�erential equations
x ′ = x + 4yy ′ = 2x + 3y.
9. Compute the matrix exponential eAt for the following matrices A.
a) A =
[1 33 1
]
b) A =
6 −2 −18 −2 −24 −2 1
(You may use that p (λ) = −(λ − 2)2 (λ − 1).)
23

Applied Problems
10. �is is a continuation of the genetics problem from HW6. LetM be the matrix given there.
a) DiagonalizeM .b) For any n ∈ N, compute all the entries inMn .c) Evaluate limn→∞Mn and comment on the limiting distribution limn→∞ x(n) .
11. �e goal of this problem is to compute the number of length 2019 paths on a cube (cf. HW2)which begin on a �xed vertex and end on the diametrically opposite vertex. LetA be the 8× 8adjacency matrix for the cube you wrote down in HW2.
a) Find all eigenvalues and eigenvectors of A (in Mathematica: Eigensystem).b) Diagonalize A by writing A = SDS−1.c) By computing an appropriate entry of A2019, solve the problem—write your answer as
simply as possible, in terms of some numbers raised to the 2019 power.
Bonus
[Please give this directly to Professor McGrath]
12. �is problem derives the equation (2) given in HW4 (recall the Educational Remark) forthe equilibrium temperature distribution in a pool, where the outer edge is kept at a constanttemperature. We start from the fact from thermodynamics (derived e.g. in Math 241) that thetemperature u (x ,y) of a uniform body in thermal equilibrium satis�es the Laplace Equation:
0 = ∆u =: div(∇u) =∂2u
∂x2+∂2u
∂y2. (7)
Because of the circular symmetry, u depends on the radius r , and not on θ , i.e. u = u (r ).
a) Integrate the equation 0 = div(∇u) on the region of the plane {(r ,θ ) ∈ R2 : r ∈ (r1, r2)}between two concentric circles and use the divergence theorem to show that
2πr1u ′(r1) = 2πr2u ′(r2). (8)
b) Explain how this implies that ru ′′(r ) + u ′(r ) = 0.c) For full bonus points, derive the equation for the temperature u = u (r ) of a spherically
symmetric region in thermal equilibrium in three dimensions (�e equation div(∇u) = 0still holds; use the three dimensional divergence theorem).
24

Math 240, Spring 2019 Peter McGrath
Homework 8
Due: Tuesday, March 19
�is week. Read 8.1-8.3.
1. True/Falsea) Ify1,y2, . . . ,yn are solutions to a regular nth order linear homogeneous di�erential equa-
tion such thatW [y1,y2, . . . ,yn](x ) is zero at exactly n points of I , then {y1, . . . ,yn } is alinearly independent set of functions.
b) If L1 and L2 are linear di�erential operators, then L1L2 = L2L1.c) If yp is a particular solution to the di�erential equation Ly = F , then yp + u is also a
solution to Ly = F for every solution u of the corresponding homogeneous di�erentialequation Ly = 0.
2. Verify by direct substitution that xex is in the kernel of D2 − 2D + 1 = (D − 1)2.
3. �is problem justi�es a fact we have used in class: that {eλt , teλt , t2eλt , . . . , tm−1eλt } is a basisfor the kernel of the operator (D − λ)m .a) If p (t ) is a polynomial and λ is a scalar, show that
(D − λ)(p (t )eλt
)= p ′(t )eλt .
b) If p (t ) is a polynomial of degree less thanm, what is
(D − λ)m(p (t )eλt
)?
c) Find a basis of the kernel of the linear di�erential operator (D − λ)m .
4. Compute the kernel of L, where L = x2D + x .
5. Write a formula for the solution y (t ) of y ′′ + y ′ + 14λy = 0 in each of the cases λ < 1, λ = 1
and λ > 1. Show that if λ ≥ 1, then limt→+∞y (t ) = 0.
6. What is the dimension n of the space of solutions to the linear ODE u ′′′ + 9u ′ = 0? Find nfunctions that give a basis of this vector space, and use them to write a formula for the generalsolution u (t ).
7. Determine which of the following sets of vectors is a basis for the solution space to the di�er-ential equation y ′′ − 16y = 0:
S1 = {e4x }, S2 = {e
2x , e4x , e−4x }, S3 = {e4x , e2x },
S4 = {e4x , e−4x }, S5 = {e
4x , 7e4x }, S6 = {cosh 4x , sinh 4x }.
25

8. Determine the general solutions of the following equations:
a) y ′′ − y ′ − 2y = 0.b) y ′′ − 6y ′ + 9y = 0.c) (D + 2)2y = 0.d) y ′′′ − y ′′ + y ′ − y = 0.e) y ′′′ − 2y ′′ − 4y ′ + 8y = 0.
9. Determine the annihilator of the given functions:
a) F (x ) = x3e7x + 5 sin 4x .b) F (x ) = (1 − 3x )e4x + 2x2.
10. Find the general solution to the following di�erential equation. Derive your trial solutionusing the annihilator technique.
a) (D2 + 16)y = 4 cosxb) (D + 1) (D − 3)y = 4(e−x − 2 cosx ).
Jordan Canonical Form
11. How many Jordan canonical forms are there for a 4× 4 matrix with eigenvalues λ = 1, 1, 3, 3?Do not count rearrangements of the Jordan blocks, and list each of the Jordan canonical forms.
12. SupposeA is a 6×6matrix with eigenvalue λ (of multiplicity 6). If it is known that (A−λI )3 = 0but (A − λI )2 , 0, write down all possible Jordan canonical forms of A.
13. Find the Jordan canonical form for the matrixA =
−1 −1 00 −1 −20 0 −1
, and determine an invert-
ible matrix S such that S−1AS = J .
14. a) Compute eAt , where A =[2 −11 4
].
b) Solve the initial value problem Ax = x′, x(0) =[
0−1
], where A is the matrix in part a) .
Bonus Problem
[Please give this directly to Professor McGrath]
26

B-1 Say a function u (t ) satis�es the di�erential equation
u ′′ + b (t )u ′ + c (t )u = 0 (9)
on the interval [0, A] and that the coe�cients b (t ) and c (t ) are both bounded, say |b (t ) | ≤ Mand |c (t ) | ≤ M (if the coe�cients are continuous, this is always true for someM).
a) De�ne E (t ) := 12 (u′2 + u2). Show that for some constant γ (depending on M) we have
E ′(t ) ≤ γE (t ). [Suggestion: use the simple inequality 2xy ≤ x2 + y2.]b) Show that E (t ) ≤ eγ tE (0) for all t ∈ [0, A]. [Hint: First use the previous part to show
that (e−γ tE (t ))′ ≤ 0].c) In particular, if u (0) = 0 and u ′(0) = 0, show that E (t ) = 0 and hence u (t ) = 0 for all
t ∈ [0, A]. In other words, if u ′′ + b (t )u ′ + c (t )u = 0 on the interval [0, A] and that thefunctions b (t ) and c (t ) are both bounded, and if u (0) = 0 and u ′(0) = 0, then the onlypossibility is that u (t ) ≡ 0 for all t ≥ 0.
d) Use this to prove the uniqueness theorem : if v (t ) andw (t ) both satisfy equation
u ′′ + b (t )u ′ + c (t )u = f (t ) (10)
and have the same initial conditions, v (0) = w (0) and v ′(0) = w ′(0), then v (t ) ≡ w (t ) inthe interval [0, A].
27
Math 240, Spring 2019 Peter McGrath
Homework 9
Due: Tuesday, March 26
�is week. Very carefully read 8.5.
1. True/Falsea) An underdamped spring-mass system tends to rest as t → ∞.b) Underdamped, critically damped, and overdamped spring-mass systems exhibit periodic
motion.c) �e larger the mass, the shorter the period of a spring mass system that is undergoing
simple harmonic motion.d) �e initial conditions (initial position and velocity) can change whether a spring-mass
system is underdamped, critically damped, or overdamped.
2. Determine the motion of the spring-mass system governed by the initial value problem. Ineach case, state whether the motion is underdamped, critically damped, or overdamped. Makea sketch in Mathematica depicting the motion.a) y ′′ + 4y ′ + 7y = 0, y (0) = 2, y ′(0) = 6.b) y ′′ + 3y ′ + 2y = 0, y (0) = 1, y ′(0) = 0.
3. Consider the damped forced motion described by
d2y
dt2+
c
m
dy
dt+
k
my =
F0m
cosωt .
Derive the steady state solution (8.5.24) given in the text.
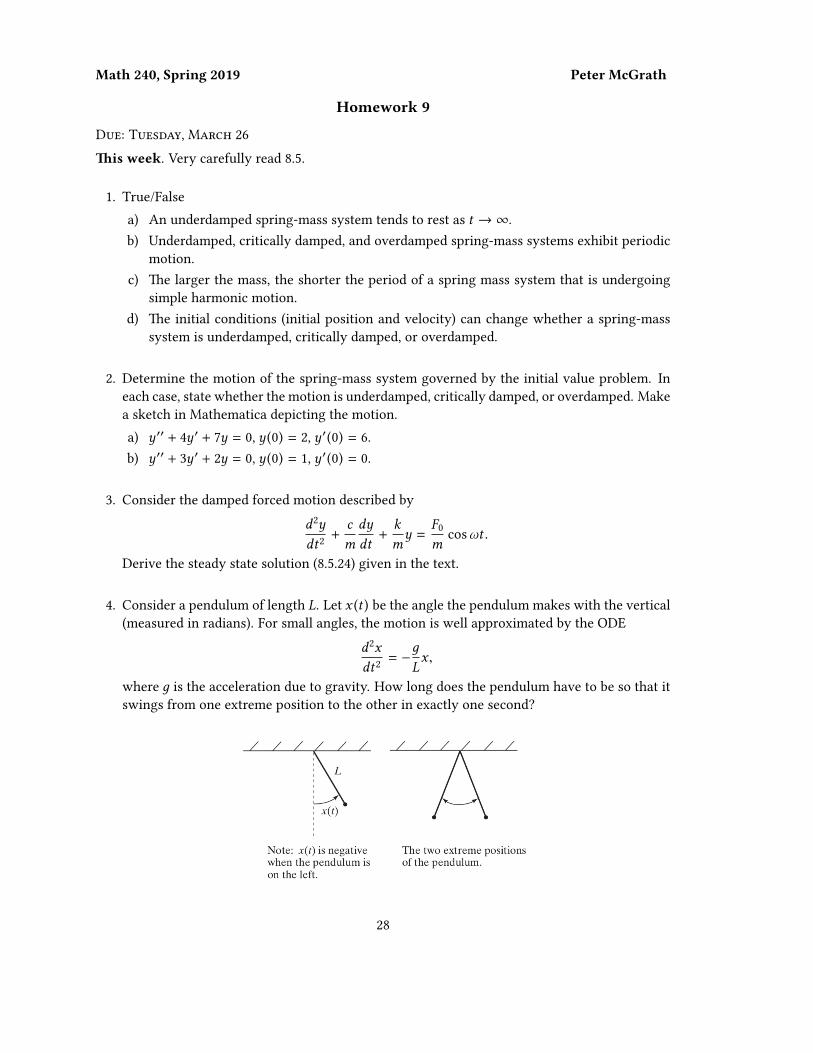
4. Consider a pendulum of length L. Let x (t ) be the angle the pendulum makes with the vertical(measured in radians). For small angles, the motion is well approximated by the ODE
d2x
dt2= −
д
Lx ,
where д is the acceleration due to gravity. How long does the pendulum have to be so that itswings from one extreme position to the other in exactly one second?
28

5. Consider the spring-mass system whose motion is governed by the initial-value problem
y ′′ +15y ′ +
1100
y = 0, y (0) = 1, y ′(0) = 5.
a) Determine the position of the mass at time t .b) Determine the maximum displacement of the mass.c) Make a sketch (mathematica, matlab, etc.) depicting the general motion of the system.
6. Consider the spring-mass system whose motion is governed by the initial-value problem
y ′′ + 2y ′ + 5y = 17 sin 2t , y (0) = −2, y ′(0) = 0.
a) Determine whether the motion is underdamped, overdamped, or critically damped.b) Find the solution to the given initial-value problem and identify the steady-state and
transient parts.
7. Given that y = ekt solves the equation (D − k )2y = 0, show via the method of reduction oforder that tekt solves the same equation.
29

Math 240, Spring 2019 Peter McGrath
Homework 10
Due: Tuesday, April 2
�is week. Skim 8.8. Understand all of the �rst page of 8.9 (through equation 8.9.5); skim the rest.
1. Determine the general solution to the given di�erential equations on (0,∞).
a) x2y ′′ + 5xy ′ + 13y = 0.b) x2y ′′ − 3xy ′ + 4y = 0.c) x2y ′′ − xy ′ − 35y = 0.
2. In the problems below, y1 is a solution to the given di�erential equation. Use the method ofreduction of order to determine a second linearly independent solution.
a) x2y ′′ − 2xy ′ + (x2 + 2)y = 0, x > 0, y1 (x ) = x sinx .b) (1 − x2)y ′′ − 2xy ′ + 2y = 0, −1 < x < 1, y1 (x ) = x .
3. Determine the general solution to the given di�erential equation.
a) x2y ′′ − 3xy ′ + 4y = 8x4, x > 0.b) y ′′ − 4y ′ + 4y = 4e2x lnx , x > 0.
4. Solve the given system of di�erential equations.
a) x ′1 = 2x1 + 4x2, x ′2 = 4x1 − 6x2.b) x ′1 = 2x2, x ′2 = x1 + x2, x1 (0) = 3, x2 (0) = 0.
5. Convert the following system of di�erential equations to a �rst-order linear system:
x ′ − ty = cos t , y ′′ − x ′ + x = et .
30

Math 240, Spring 2019 Peter McGrath
Homework 11
Due: Tuesday, April 9
�is week.
1. Solve the following systems of di�erential equations. When given an initial condition, �ndthe particular solution satisfying that condition.
a) x ′1 = x1 − 3x2, x ′2 = 3x1 + x2.b) x ′1 = 2x1 + 5x2, x ′2 = −x1 − 2x2, x1 (0) = 0, x2 (0) = 1.c) x ′1 = x1 + x2 + e
2t , x ′2 = 3x1 − x2 + 5e2t .
2. Convert the di�erential equation y ′′ + 2ty ′ + y = cos(t ) to a �rst-order linear system.
3. Decide whether each of the following statements is true or false. Brie�y justify your answer.
a) If A is a 2 × 2 matrix of constants whose determinant is zero, then the vector di�erentialequation x ′(t ) = Ax (t ) cannot have two linearly independent solutions.
b) A single fourth-order linear di�erential equation can be rewri�en as a 4×4 linear systemof di�erential equations.
c) If x0 (t ) is a solution to the homogeneous vector di�erential equation x′(t ) = A(t )x(t ),then x0 (t )+b(t ) is a solution to the nonhomogeneous vector di�erential equation x′(t ) =A(t )x(t ) + b(t ).
4. For each item below, show that the set of functions in that item is linearly dependent on(−∞,∞).
a) x1 =[
et
2e2t
], x2 =
[4et8e2t
].
b) x1 =
tt2
−t3
, x2 =
2t3t20
, x3 =
−t03t3
.
5. Show that the given functions are solutions of the system x′(t ) = A(t )x(t ) for the givenmatrixA and �nd the general solution to the system (remember to check linear independence).
a) x1 (t ) =[
e2t
−e2t
], x2 (t ) =
[e2t (t + 1)−te2t
], A =
[3 1−1 1
].
b) x1 (t ) =[2tet
], x2 (t ) =
[03et
], A =
[1/t 00 1
].
6. Decide whether each of the following statements is true or false. Brie�y justify your answer.
31

a) Each pair of complex conjugate eigenvalues λ = a ± ib (b , 0) of a matrix A gives rise toa pair of real-valued solutions to the vector di�erential equation x′ = Ax.
b) IfA and B are n×n matrices with the same characteristic equation, then the solution setsto the vector di�erential equations x′ = Ax and x′ = Bx are the same.
7. For each item, determine the general solution to the system x′ = Ax for the given matrix A.
a) A =
[1 −25 −5
].
b) A =
0 1 0−1 0 00 0 5
.
c) A =
1 1 −11 1 1−1 1 1
.
8. Solve the initial value problem x′ = Ax, x(0) = x0, where
A =
2 −1 33 1 02 −1 3
, x0 =
−444
.
9. Let λ = a + ib, b , 0, be an eigenvalue of the n × n (real) matrix A with correspondingeigenvector v = r + is. In this situation, we have shown that the two real-valued solutions tox′ = Ax are
x1 (t ) = eat(cos(bt )r − sin(bt )s
), x2 (t ) = eat
(sin(bt )r + cos(bt )s
).
Prove that x1 and x2 are linearly independent on any interval (you may assume r and s arelinearly independent vectors in Rn).
32

Math 240, Spring 2019 Peter McGrath
Homework 12
Due: Tuesday, April 16
�is week. Finish reading Chapter 9.
1. Decide whether each of the following statements is true or false and brie�y justify your an-swer.
a) IfA is an n×n defective matrix, then the vector di�erential equation x′ = Ax cannot haven linearly independent solutions.
b) A cycle of generalized eigenvectors ofA corresponding to an eigenvalue λ consisting of kvectors yieldsk linearly independent solutions to the vector di�erential equation x′ = Ax.
c) �e number of linearly independent solutions to x′ = Ax corresponding to λ is equal tothe dimension of the eigenspace Eλ .
d) If v0 is an eigenvector ofA corresponding to λ and v1 is a vector satisfying (A−λI )v1 = v0,then x(t ) = eλtv1 is a solution to the vector di�erential equation x′ = Ax.
2. Determine the general solution to the system x′ = Ax for the given matrix A.
a) A =
[−3 −22 1
].
b) A =
0 1 00 0 11 1 −1
.
c) A =
4 0 01 4 00 1 4
.
3. Solve the initial value problem x′ = Ax, x(0) = x0, where
A =
[−2 −11 −4
], x0 =
[0−1
].
4. Decide whether each of the following statements is true or false and brie�y justify your an-swer.
a) If the matrix exponential function etA is known, then one can explicitly solve the initial-value problem x′ = Ax, x(0) = x0.
b) �e matrix exponential function etA can be wri�en as etA = X (t )X−1 (0) for any funda-mental matrix X (t ) for the vector di�erential equation x′ = Ax.
33

5. Use the techniques we learned, determine a fundamental matrix for x′ = Ax and �nd etA,where
A =
3 0 00 3 −10 1 1
.
6. Solve x′ = Ax by determining 3 linearly independent solutions of the form x(t ) = etAv, where
A =
0 1 32 3 −21 1 2
.
You may assume that p (λ) = −(λ + 1) (λ − 3)2.
7. Decide whether each of the following statements is true or false and brie�y justify your an-swer.
a) A linear system x′ = Ax for whichA has complex eigenvalues a±ib gives rise to ellipticaltrajectories in the phase plane.
b) If all solutions to the linear system x′ = Ax approach (0, 0), then (0, 0) is stable.c) �e type of equilibrium point for the linear system x′ = Ax is the same as the type of
equilibrium point for the linear system x′ = (2A)x.
8. For each matrix below, characterize the equilibrium point for the system x′ = Ax and sketchthe phase portrait.
a) A =
[0 2−2 0
].
b) A =
[1 03 1
].
c) A =
[5 44 5
].
d) A =
[3 00 3
].
34
















![waliye.men.gov.ma organisation... · I soxcŽ ,2007 90 - ,2007 .190 - ,2007 90 - ,2007 90 - - - - ,2007 90 - - - - ,2007 90 - 05 37 77 20 43 - 05 37 77 18 70 Çk..3 as..] êk...3](https://img.pdfslide.tips/doc/110x75/5e0cafe2bd591a71645b3c12/organisation-i-soxc-2007-90-2007-190-2007-90-2007-90-2007.jpg)












