-
CAPITOLO 3
I Processi Stocastici
3.1. Definizione di Processi Stocastici
Una distinzione importante tra i segnali è quella che si fa tra
segnali predicibili,di cui si può conoscere a priori l’evoluzione
nel tempo (come ad esempio un’ondaquadra) e segnali non
predicibili, di cui si possono al più supporre alcune
caratter-istiche principali (ad esempio le escursioni massime, la
velocità di variazione e cosìvia).
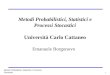
Si supponga di registrare l’evoluzione della pressione
atmosferica in un certo lu-ogo della Terra durante l’anno. Questa
grandezza fisica non è predicibile a priori, el’unico modo per
conoscerla è quello di osservarla a posteriori. Dopo
l’acquisizionesi potranno fare alcune osservazioni, come ad esempio
il fatto che essa difficilmentesupera i 1030 mB e altrettanto
difficilmente va al di sotto di 950 mB. Una cosa impor-tante a
proposito di questo segnale è che non solo non si può prevedere, ma
che essocambia a seconda del periodo in cui è stato registrato
(cioè la sua osservazione nelmese di marzo è sicuramente diversa da
quella nel mese di agosto) ed inoltre cambiaa seconda del luogo
della Terra in cui viene registrato, anche se la registrazione è
fattanello stesso periodo (vedi in figura 3.1.1 tre differenti
misurazioni).
100
0
50
100
150
200
250
0 10 20 30 40 50 60 70 80 90−50
FIGURA 3.1.1. Rappresentazione delle pressioni atmosferiche in
variluoghi della Terra.
La variabilità del processo è quindi di due tipi: una
variabilità tra i vari segnali eduna variabilità dell’evoluzione
temporale del singolo segnale. Il modellamento di unsegnale
aleatorio viene fatto attraverso la teoria dei processi
stocastici.
67
-
3.1. DEFINIZIONE DI PROCESSI STOCASTICI 68
Come nella teoria delle probabilità, dovremmo, per un segnale
aleatorio, individ-uare lo spazio delle probabilità, cioè l’insieme
di tutti i possibili segnali che costitu-iscono il processo
(ammesso che questo si possa fare): ⌦ = {!
i
}. Quindi riferendosial processo si può pensare una
corrispondenza che associ ad ogni campione !
i
di ⌦un dato segnale. Questa corrispondenza costituisce il
processo aleatorio. Una datamisurazione della pressione atmosferica
in un punto della Terra costituisce un risultatodello spazio
campione e viene chiamato realizzazione del processo x
i
(t) = X(t, !i
).Il processo stocastico è comunemente indicato con X(t),
omettendo la relazione
di dipendenza dallo spazio campione con cui è associato ⌦.Una
volta fissato quale tra i vari segnali del processo va estratto, si
ha una funzione
del tempo che rappresenta la realizzazione. Una realizzazione
del processo stocasticonon è più aleatoria, a posteriori, nel senso
che dopo l’osservazione essa è una funzionedeterministica del
tempo. Viceversa, si può fissare un arbitrario istante di tempo
edosservare il valore che tutte le realizzazioni del processo
assumono a quell’istante:X(t
o
) (vedi in figura 3.1.2)
ot
−50
100
150
200
250
300
350
400
0 10 20 30 40 50 60 70 80 90 100
0
50
FIGURA 3.1.2. Estrazione di una variabile aleatoria dal processo
stocastico.
I valori che sono assunti sulle varie realizzazioni del processo
non sono predicibilia priori e quindi rappresentano i risultati di
una variabile aleatoria.
3.1.1. Processi parametrici. Un primo esempio di processi
stocastici è dato daiprocessi parametrici, cioè processi in cui per
le funzioni del tempo esiste una formachiusa che permetta di
rappresentarle, sebbene uno o più parametri di queste funzionisiano
variabili aleatorie.
Si supponga di considerare il seguente processo:
(3.1.1) X(t; !) = e�A(!)tu(t)
-
3.1. DEFINIZIONE DI PROCESSI STOCASTICI 69
dove A(!) rappresenta una variabile aleatoria con distribuzione
uniforme nell’inter-vallo [0, 1/T ]. Se omettiamo la dipendenza dal
risultato !, si può scrivere: X(t) =e�Atu(t). In questo processo
parametrico è quindi definita una classe di funzioni il
cuiandamento dipende dal valore estratto di una v.a.
Un altro esempio notevole (che avremo modo di riprendere più
avanti) è quellodell’oscillazione sinusoidale prodotta da un
oscillatore reale. In un oscillatore reale,mentre si possono
controllare abbastanza bene l’ampiezza e la frequenza
dell’oscil-lazione, è molte volte difficile determinare la fase
iniziale. Ne consegue che accen-dendo in tempi differenti
l’oscillatore la funzione sinusoidale che viene generata puòessere
modellata come un processo stocastico parametrico:
(3.1.2) X(t) = A · sin(2⇡fo
t + ⇥)
dove ⇥ è una variabile aleatoria uniforme nell’intervallo [0,
2⇡[.
3.1.2. Caratterizzazione di un processo stocastico. Al contrario
di quanto si puòfare per un segnale deterministico, per un processo
stocastico non è possibile una suacaratterizzazione in termini di
andamento temporale. Si devono quindi introdurre glistrumenti della
teoria delle probabilità per poter caratterizzare il processo in
modostatistico.
Si cominci ad osservare che, se si considera un istante di tempo
ben determinatoto
, il valore che tutte le realizzazioni assumono in quell’istante
rappresenta una v.a.Quindi è possibile, per quella v.a. definire
una funzione di distribuzione di probabilità(dipendente da t
o
):
(3.1.3) F (x; to
) = P (X(to
) x)
La funzione di distribuzione cambierà al variare di to
, dato che al variare dell’istantedi osservazione la v.a. è
differente. Questo modellamento non è tuttavia sufficiente
acaratterizzare il processo. Se così fosse dovremmo essere in grado
di prevedere l’an-damento della singola realizzazione a partire da
tutte le funzioni di distribuzione diprobabilità estratte ad ogni
istante, e così non è. Si pensi ad esempio alla possibil-ità che
abbiamo di prevedere l’andamento di un titolo in borsa nel tempo.
Si vuolecioè cercare di determinare quando il valore del titolo
supera il valore attuale. Perfare questo la caratterizzazione del
primo ordine che abbiamo dato non è sufficiente.E’ necessaria una
caratterizzazione che permetta di correlare, congiuntamente, le
duevariabili aleatorie nei due istanti differenti t
o
e t1 nei quali conduciamo l’osservazione.
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 70
E’ necessaria quindi una caratterizzazione del secondo ordine.
Questa relazione è de-scritta dalla funzione di distribuzione di
probabilità congiunta per una coppia di v.a.:
(3.1.4) F (x1, x2; t1, t2) = P (X(t1) x1; X(t2) t2)
La conoscenza completa della statistica del secondo ordine
richiede che queste fun-zioni di distribuzione siano note per ogni
coppia possibile di istanti di tempo.
Iterando questo ragionamento, si capisce che la
caratterizzazione di un processostocastico si può considerare
completa solo quando, fissati n istanti di tempo (con
narbitrariamente grande), si è in grado di determinare la funzione
di distribuzione con-giunta di ordine n per le n variabili
aleatorie che si hanno estraendo i valori dallerealizzazioni agli
istanti t1, t2, ..., tn:
(3.1.5)F (x1, x2, ..., xn; t1, t2, ..., tn) = P (X(t1) x1, X(t2)
x2, ..., X(tn) xn)
Da questa si può ricavare la funzione densità di probabilità di
ordine n:
(3.1.6) f(x1, x2, ..., xn; t1, t2, ..., tn) =@nF (x1, x2, ...,
xn; t1, t2, ..., tn)
@x1@x2...@xn
La conoscenza della classe di funzioni f(x1, x2, ..., xn; t1,
t2, ..., tn) per qualunque val-ore n e qualunque n � pla di istanti
di tempo caratterizza completamente il processoaleatorio.
Si capisce bene che la conoscenza completa di un processo
aleatorio è impresaquali sempre impossibile. Nella maggior parte
dei casi si cerca di determinare la dis-tribuzione (e densità) del
primo o al più secondo ordine. Altre volte ci si accontenta
dideterminare alcuni parametri statistici.
3.2. Parametri Statistici del 1o e 2o Ordine
3.2.1. Valor medio, potenza e varianza. Alcuni parametri
statistici permettonodi determinare le caratteristiche principali
di un processo statistico, pur senza la conoscen-za completa di
esso.
Tra questi parametri particolarmente significativa è la funzione
valor medio: µX
(t).Per definizione questa funzione è il valor medio della v.a.
che si ottiene estraendo i
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 71
valori delle realizzazioni all’istante assegnato:
(3.2.1) µ(t) = E[X(t)] =Z +1
�1xf
X
(x, t)dx
al variare di t si generano una serie di valori medi che
costituiscono la funzione. Lafunzione valor medio rappresenta una
statistica del primo ordine, dato che per il suocalcolo è
sufficiente la conoscenza della statistica di primo ordine del
processo. Lafunzione valor medio rappresenta una specie di
compendio di tutte le realizzazioni delprocesso stocastico, ma non
rappresenta necessariamente essa stessa una realizzazionedel
processo.
EXAMPLE 3.2.1. Si supponga di considerare il processo aleatorio
parametricoX(t) = a cos(2⇡f
o
t + ⇥), dove ⇥ è una v.a. con densità di probabilità
uniformenell’intervallo [0, ⇡[. La funzione valor medio si può
determinare osservando che, perogni istante t fissato, il processo
X(t) si può pensare come la trasformazione della v.a.⇥ in un’altra
v.a. X = X(⇥). Il suo valor medio quindi si può determinare con
ilteorema del valor medio: µ(t) = E[X(t)] = E[a cos(2⇡f
o
t + ⇥)]:
(3.2.2)
µ(t) =
Z +1
�1a cos(2⇡f
o
t + ✓)f✓
(✓)d✓ =a
⇡
Z
⇡
0
cos(2⇡fo
t + ✓)d✓ = �2a⇡
sin(2⇡fo
t)
Analogamente si potrebbe ricavare la funzione valor medio nel
caso visto nella eq.3.1.2, in cui cioè: X(t) = a sin(2⇡f
o
t + ⇥), con ⇥ = U(0, 2⇡).
Un’altra grandezza statistica del primo ordine utile per
caratterizzare il processo, èla potenza media statistica istantanea
(brevemente detta potenza media):
(3.2.3) Px
(t) = E[X2(t)] =
Z +1
�1x2 · f
X
(x, t)dx
analoga alla potenza istantanea per i segnali deterministici.Si
può inoltre definire la funzione varianza del processo:
(3.2.4) �2x
(t) = E[(X(t)� µ(t))2] =Z +1
�1(x� µ(t))2 · f
X
(x, t)dx
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 72
Si ricava, abbastanza facilmente:
(3.2.5) �2x
(t) = Px
(t)� µ2(t)
la relazione che esprime la dipendenza tra varianza, funzione
valor medio e potenzaistantanea.
3.2.2. Autocorrelazione e autocovarianza. Due parametri
statistici del secondoordine, fondamentali per lo studio dei
processi stocastici, sono la funzione di autocor-relazione e la
funzione di autocovarianza. Il loro significato è rimandato più
avanti,quando si introdurranno i processi stazionari.
Si supponga di considerare due istanti di tempo arbitrari, t1 e
t2. Dato il processostocastico, è possibile estrarre le due v.a. Y
= X(t1) e Z = X(t2). Ha senso allora ef-fettuare il calcolo della
correlazione tra Y e Z. Generalmente questa correlazione
saràfunzione dei due istanti di tempo, e quindi si può ritenere una
funzione di due variabili:
(3.2.6)
Rx
(t1, t2) = E[X(t1)X(t2)] =
Z +1
x1=�1
Z +1
x2=�1x1x2fx(x1, x2; t1, t2)dx1dx2
La funzione che così si ottiene è detta funzione di
autocorrelazione, poichè le duevariabili aleatorie sono state
ottenute estraendole dallo stesso processo.
In modo del tutto analogo è possibile determinare la funzione di
autocovarianza:
Cx
(t1, t2) = E[(X(t1)� µ(t1)) · (X(t2)� µ(t2))] =
(3.2.7) =Z +1
x1=�1
Z +1
x2=�1(x1 � µ(t1)) · (x2 � µ(t2)) · fx(x1, x2; t1, t2)dx1dx2
Dalla definizione è facile ricavare che: Cx
(t1, t2) = Rx(t1, t2)� µ(t1)µ(t2).
EXAMPLE 3.2.2. Si calcoli la funzione di autocorrelazione del
processo X(t) =a · cos(2⇡f
o
t + ⇥), con ⇥ = U [0, ⇡[. Estraendo il processo negli istanti t1
e t2 siottengono le v.a.: X(t1) = a · cos(2⇡fot1 + ⇥) e X(t2) = a ·
cos(2⇡fot2 + ⇥), che si
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 73
possono ritenere entrambe trasformazioni della stessa v.a..
Quindi, mediante il teore-ma del valor medio si ottiene:
Rx
(t1, t2) = E[X(t1)X(t2)] = E[a · cos(2⇡fot1 + ✓) · a ·
cos(2⇡fot2 + ✓)] =
(3.2.8) = a2 ·Z
⇡
0
1
⇡cos(2⇡f
o
t1 + ✓) cos(2⇡fot2 + ✓)d✓ =a2
2
cos(2⇡fo
(t1 � t2))
In questo esempio la funzione di autocorrelazione è sinusoidale,
come i segnali checostituiscono le singole realizzazioni del
processo, inoltre dipende dalle due vari-abili attraverso la loro
differenza. La funzione di autocorrelazione è quindi, in
realtà,funzione di una sola variabile.
Si supponga ora di avere lo stesso processo precedente: X(t) = a
·cos(2⇡fo
t+⇥),ma con ⇥ = U [0, 2⇡[. Si voglia calcolare la funzione valor
medio, la funzione diautocorrelazione e la funzione di
autocovarianza.
Si osservi che, se per la funzione valor medio si ha:
(3.2.9) µ(t) = E[X(t)] =Z 2⇡
0
1
2⇡· a · cos(2⇡f
o
t + ✓)d✓ = 0
allora: Cx
(t1, t2) = Rx(t1, t2). Entrambe valgono:
Rx
(t1, t2) = E[X(t1)X(t2)] =
(3.2.10) =Z 2⇡
0
1
2⇡·a·cos(2⇡f
o
t1+✓)·a·cos(2⇡fot2+✓)d✓ =a2
2
cos(2⇡fo
(t1�t2))
pari al risultato ottenuto precedentemente (vedi 3.2.8).Vediamo
infine il caso in cui nel processo X(t) = A · cos(2⇡f
o
t) a variare sial’ampiezza dell’oscillazione sinusoidale. Tale
ampiezza vari come una v.a. uniformenell’intervallo [0, 1]. La
funzione valor medio si ottiene fissando un dato istante ditempo
t:
(3.2.11) µ(t) = E[X(t)] = E[A · cos(2⇡fo
t)] = E[A] · cos(2⇡fo
t) =1
2
· cos(2⇡fo
t)
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 74
La funzione di autocorrelazione vale:
Rx
(t1, t2) = E[A ·cos(2⇡fot1) ·A ·cos(2⇡fot2)] = cos(2⇡fot1)
·cos(2⇡fot2) ·E[A2] =
(3.2.12) =1
3
cos(2⇡fo
t1) · cos(2⇡fot2)
e in questo caso non si può esprimere come funzione di una sola
variabile. La funzionedi autocovarianza vale infine:
Cx
(t1, t2) =1
3
cos(2⇡fo
t1) · cos(2⇡fot2)�1
2
· cos(2⇡fo
t1) ·1
2
· cos(2⇡fo
t2) =
(3.2.13) =1
12
cos(2⇡fo
t1) · cos(2⇡fot2)
Un altro esempio notevole è il seguente:
EXAMPLE 3.2.3. Processo di Bernoulli e processi derivati.Si
consideri il seguente processo tempo discreto: I
n
= {0, 1} che può assumerevalori solo in istanti discreti
indicati con indici interi n 2 N. I valori assunti dallesingole
realizzazioni possono essere soltanto 0 o 1. In particolare il
valore 0 è assuntocon probabilità p, il valore 1 con probabilità 1�
p:
(3.2.14) In
=
⇢
0 p1 1� p
Le singole realizzazioni, come pure le estrazioni in una singola
realizzazione sonoindipendenti tra loro (vedi figura 3.2.1).La
funzione valor medio vale:
(3.2.15) mI
(n) = p · 0 + (1� p) · 1 = 1� p
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 75
0 1 1 1 0 0 1 .....
i i+1 i+2 i+3 ............
1 1 0 1 0 1 1 .....
i i+1 i+2 i+3 ...............
FIGURA 3.2.1. Rappresentazione grafica del processo di
Bernoulli.
ed è indipendente dal tempo (cioè l’indice n). La varianza
vale:
(3.2.16) �2I
= E[I2n
]� E2[In
] = p · 02 + (1� p) · 12 � (1� p)2 = p(1� p)
Infine la funzione di autocorrelazione vale:
(3.2.17) RI
(n, m) = E[In
Im
] = E[In
]E[Im
]
essendo le estrazioni indipendenti. Quindi si ha: RI
(n, m) = (1� p)2.Un processo derivato da quello di Bernoulli è
il seguente:
(3.2.18) Dn
= 2In
� 1 =⇢
�1 p1 1� p
Il suo valor medio vale:
(3.2.19) mD
(n) = E[2In
� 1] = 2(1� p)� 1 = 1� 2p
la sua varianza vale
(3.2.20) �2D
= E[D2n
]� E2[Dn
] = E⇥
4I2n
� 4In
+ 1
⇤
� (1� 2p)2 = 4p(1� p)
Infine la funzione di autocorrelazione vale:
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 76
RD
(n, m) = E[Dn
Dm
] = E[4In
Im
� 2In
� 2Im
+ 1] =
(3.2.21) = 4(1� p)2 � 4(1� p) + 1 = (1� 2p)2
che è lo stesso risultato che avremmo ottenuto semplicemente
osservando che: E[Dn
Dm
] =
E[Dn
]E[Dm
].L’ultima applicazione del processo di Bernoulli è la
passeggiata a caso unidimen-
sionale, cioè il processo:
(3.2.22) Sn
= D1 + D2 + ... + Dn
Il suo valor medio vale:
(3.2.23) E[Sn
] = E[D1+D2+ ...+Dn] = E[D1]+E[D2]+ ...+E[Dn] = n(1�2p)
e questa volta è una quantità dipendente da n. Inoltre, essendo
i processi indipendentitra loro la varianza è somma delle
varianze
(3.2.24) �2S
n
=
n
X
k=1
�2D
= 4np(1� p)
La sua funzione di autocorrelazione vale:
(3.2.25)
RS
(n.m) = E[Sn
Sm
] = E
"
n
X
k=1
Dk
·m
X
l=1
Dl
#
=
n
X
k=1
m
X
l=1
E [Dk
· Dl
] = n·m·(1�2p)2
Il range di valori che può assumere questo processo è variabile
con n. Per un certon fissato, S
n
può assumere tutti i valori compresi tra [�n, n]. La probabilità
che tra iD1, D2, ..., Dn vi siano k valori pari ad 1 ed n�k valori
pari a�1 (quindi la probabilitàche S
n
valga: k � (n� k) = 2k � n) è:
(3.2.26) P (Sn
= 2k � n) = ( nk
)(1� p)kpn�k
Una variazione sul tema dei processi stocastici di Bernoulli è
il segnale telegraficocasuale. Il processo consiste di
realizzazioni che possono assumere solo valori discreti
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 77
pari a �1 od a 1. Le funzioni sono continue nel tempo:
(3.2.27) X(t) =⇢
�11
Per ipotesi si suppone inoltre che
(3.2.28) P (X(0) = 1) = P (X(0) = �1) = 1/2
Le realizzazioni del processo assumono valori differenti
cambiando di “stato” nellostesso modo con cui arrivano gli eventi
negli esperimenti aleatori alla Poisson. Unapossibile realizzazione
è riportata in figura (3.2.2).
FIGURA 3.2.2. Realizzazione di un processo telegrafico
casuale
Sia ↵ l’intensità della legge di Poisson che governa il
processo. Ogni singola real-izzazione, x(t), permane ad un dato
valore sino a che non c’è un arrivo che gli facambiare stato. Il
numero di arrivi nell’unità di tempo è regolato da una v.a.
discretadi Poisson con intensità ↵. Calcoliamo la probabilità che
ad un dato istante t la singolarealizzazione abbia uno dei due
valori:
P (X(t) = 1) = P (X(t) = 1/X(0) = 1) · P (X(0) = 1)
(3.2.29) +P (X(t) = 1/X(0) = �1) · P (X(0) = �1)
la prima delle due somme a secondo membro ha il termine P (X(t)
= 1/X(0) = 1)che si può verficare solo se il numero di cambiamenti
(eventi di Poisson) verificatosi èpari, per il secondo termine il
numero di cambiamenti da verificarsi è dispari:
-
3.2. PARAMETRI STATISTICI DEL 1o E 2o ORDINE 78
(3.2.30) P(Ncamb
= pari) =1
X
j=0
(↵t)2j
(2j)!e�↵t = e�↵t · 1
2
(e↵t + e�↵t) =1
2
(1 + e�2↵t)
(3.2.31)
P (Ncamb
= dispari) =1
X
j=0
(↵t)2j+1
(2j + 1)!e�↵t = e�↵t · 1
2
(e↵t � e�↵t) = 12
(1� e�2↵t)
Da cui si ha in conclusione:
(3.2.32) P (X(t) = 1) =1
2
[
1
2
(1 + e�2↵t) +1
2
(1� e�2↵t)] = 12
ed analogamente: P (X(t) = �1) = 12 .Calcoliamo la funzione
valor medio e la funzione varianza del processo:
(3.2.33) mX
(t) = E[X(t)] =1
2
· (�1) + 12
· (+1) = 0
(3.2.34) �2X
(t) = Px
(t) = E[X(t)2] =1
2
· (�1)2 + 12
· (+1)2 = 1
Calcoliamo infine la funzione di autocorrelazione e la funzione
di autocovarianza:R
x
(t1, t2) = Cx(t1, t2).
(3.2.35) Rx
(t1, t2) = E[X(t1)X(t2)]
tuttavia il prodotto di X(t1)X(t2) può essere solo o �1 oppure
+1. In particolare èpari a �1 quando il numero di cambiamenti
(eventi di Poisson) avvenuti tra t1 e t2 èdispari, altrimenti il
prodotto X(t1)X(t2) è pari a +1. Quindi:
P (X(t1)X(t2) = 1) = P (Ncamb = pari) = P (N(t2 � t1) = pari)
=
-
3.3. PROCESSI STAZIONARI 79
(3.2.36) =1
2
(1 + e�2↵(t2�t1))
Analogamente per un numero dispari di arrivi:
P (X(t1)X(t2) = �1) = P (Ncamb = dispari) = P (N(t2 � t1) =
dispari) =
(3.2.37) =1
2
(1� e�2↵(t2�t1))
Si ha in conclusione:
E[X(t1)X(t2)] = (+1) ·1
2
(1 + e�2↵(t2�t1)) + (�1) · 12
(1� e�2↵(t2�t1)) =
(3.2.38) = e�2↵|t2�t1|
ed, ancora una volta, abbiamo trovato un processo la cui
funzione di autocorrelazione(e di autocovarianza) dipende solo
dalla differenza dei due istanti generici, e nonseparatamente dai
due.
3.3. Processi Stazionari
Una notevole proprietà dei processi stocastici è la
stazionarietà. Si è visto chei parametri statistici del primo e
secondo ordine dipendono dalla scelta degli istantidi tempo. Anche
la funzione densità di probabilità congiunta di ordine n
dipendegeneralmente dalla scelta degli istanti di tempo in
corrispondenza dei quali si valuta ilprocesso.
Si supponga ora di considerare n istanti di tempo t1, t2, ...,
tn, in corrispondenzadei quali si ottiene la funzione di densità di
probabilità congiunta:f
x
(x1, x2, ..., xn; t1, t2, ..., tn).Se si spostano rigidamente
tutti gli istanti di tempo di una stessa quantità �t, gen-
eralmente otterremo una differente funzione di densità di
probabilità congiunta:
(3.3.1) fx
(x1, x2, ..., xn; t1 + �t, t2 + �t, ..., tn + �t)
-
3.3. PROCESSI STAZIONARI 80
.
PROPOSITION 3.3.1. Un processo si dice stazionario in senso
stretto, se risultache, per ogni scelta di n, t1, t2, ..., tn e di
�t:
(3.3.2) fx
(x1, x2, ..., xn; t1, t2, ..., tn) = fx(x1, x2, ..., xn; t1+�t,
t2+�t, ..., tn+�t)
La stazionarietà forte (in senso stretto) richiede l’uguaglianza
della funzione didensità di probabilità congiunta per qualunque
ordine, scelta degli istanti di tempo edi traslazione. Cioè
richiede che rispetto a tutte queste variabili la funzione f
x
siainvariante. I processi X(t) e X(t + �t) devono quindi avere
le stesse statistiche.Questo non significa che le due variabili
aleatorie che estrarremo nei due istanti ditempo sono identiche
(poichè questo non può mai accadere per il significato stesso
digrandezza statistica) ma significa che le due quantità non
possono essere distinte traloro con misure statistiche.
Conseguenza di questa definizione è che: fx
(x; t) = fx
(x; t+�t) cioè la funzionedensità di probabilità del primo
ordine non è funzione del tempo e anche i parametristatistici del
primo ordine (funzione valor medio, funzione potenza e funzione
varian-za) non dipendono dalla variabile tempo (stazionarietà del
primo ordine).
Inoltre per quel che riguarda la stazionarietà del secondo
ordine, si ha:
(3.3.3) fx
(x1, x2; t1, t2) = fx(x1, x2; t1 + �t, t2 + �t)
e questo può accadere solo se la funzione di densità di
probabilità dipende dalladifferenza tra gli istanti di tempo, e non
separatamente dai due: f
x
(x1, x2; t1, t2) =f
x
(x1, x2; t1 � t2). Allora tutte le statistiche del secondo
ordine (funzione di autocor-relazione e funzione di autocovarianza)
dipenderanno dalla differenza degli istanti ditempo e non
separatamente dai due. Questo è il caso del processo visto in
(3.1.2) o delsegnale telegrafico casuale.
Salendo di ordine (sebbene statistiche di ordine superiore non
siano state introdotte)si ottiene che la funzione densità di
probabilità congiunta di ordine n e tutte le statis-tiche di ordine
correlato non dipenderanno dagli istanti di tempo separatamente,
madalle n � 1 differenze t1 � t2, t2 � t3, ..., tn�1 � tn, dato che
solo queste differenzerestano invariate rispetto ad una traslazione
rigida dei tempi.
COROLLARY 3.3.2. Una stazionarietà di ordine n implica la
stazionarietà di tuttigli ordini più bassi (il contrario
generalmente non è vero).
-
3.3. PROCESSI STAZIONARI 81
3.3.1. Stazionarietà in senso lato. La verifica della
stazionarietà in senso stret-to, anche per ordini bassi, è in
genere un compito arduo (salvo casi particolari). Disolito allora
ci si accontenta di una definizione di stazionarietà meno
restrittiva: lastazionarietà in senso lato (o debole).
PROPOSITION 3.3.3. Un processo aleatorio è stazionario in senso
lato se la suafunzione valor medio è costante µ
x
(t) = µx
e la sua funzione di autocorrelazionedipende solo dalla
differenza degli istanti di tempo R
x
(t1, t2) = Rx(t1 � t2).
La definizione di stazionarietà in senso lato coinvolge solo due
statistiche e quindinon richiede alcuna paricolare proprietà alla
funzione densità di probabilità congiunta.
COROLLARY 3.3.4. Un processo stazionario in senso stretto è
stazionario anchein senso lato. Non è vero il viceversa
Se il processo è stazionario in senso lato la funzione di
autocovarianza vale:
(3.3.4) Cx
(t1, t2) = Rx(t1 � t2)� µ2x
= Cx
(t1 � t2)
cioè anche la funzione di autocovarianza dipende dalla
differenza degli istanti ditempo. Anche nel caso di stazionarietà
in senso lato rimane comunque difficile ver-ificare la proprietà.
Infatti la verifica di una proprietà statistica come la
stazionarietàrichiede che si riescano a manipolare (per effettuare
misure statistiche) tutte le possi-bili realizzazioni del primo e
secondo ordine del processo, o che si conosca in qualchemodo una
forma chiusa della funzione di densità di probabilità del processo
stesso alvariare di t (cosa normalmente non vera).
La funzione di autocorrelazione, nell’ipotesi di stazionarietà
in senso lato può es-sere riscritta mettendo in evidenza proprio la
dipendenza dalla differenza degli istantidi tempo:
(3.3.5) Rx(t1, t2) = Rx(t, t� ⌧) = E[X(t)X(t� ⌧)]
EXAMPLE 3.3.5. Riprediamo l’esempio visto più volte: X(t) =
a·cos(2⇡fo
t+⇥),con ⇥ = U [0, ⇡[. Si è ottenuto che µ(t) = �2a
⇡
sin(2⇡fo
t), quindi il processo non sipuò considerare stazionario in
senso lato, dato che la funzione valor medio dipende daltempo.
Il processo X(t) = a · cos(2⇡fo
t + ⇥), con ⇥ = U [0, 2⇡[, ha invece: µ(t) = 0e R
x
(t1, t2) =a
2
2 cos(2⇡fo(t1 � t2)), e quindi si può ritenere un processo
stazionario
-
3.3. PROCESSI STAZIONARI 82
in senso lato, dato che la funzione valor medio è costante e la
funzione di autocorre-lazione dipende solo dalla differenza dei
tempi.
Un caso particolare del processo telegrafico casuale è il
seguente
EXAMPLE 3.3.6. Segnale dati.Si supponga di avere un processo
stocastico le cui realizzazioni sono funzioni del
tempo V (t) che possono assumere solo due valori discreti: +1 e
�1 con probabilità1/2. Si supponga inoltre che la funzione cambi di
stato solo ad istanti prefissati, cheverranno indicati con degli
indici interi: V (nT ) = V
n
. I valori inoltre sono assunti inmodo indipendente l’uno
dall’altro. Quindi la funzione assume valore costante per tuttigli
istanti di tempo t compresi tra due transizioni: V (t) = V
n
per nT t < (n + 1)T .La forma generica della funzione è
quindi la seguente:
(3.3.6) V (t) =+1X
n=�1V
n
rect(t� nT � T/2
T)
Il precedente processo modella molto bene un segnale dati
binario con velocità di clockpari a 1/T . Esso è utile a
schematizzare tutte le situazioni in cui si ha il trasferimento
dibit tra due sistemi (ad esempio un computer ed una sua
periferica). Poichè infatti nonè nota a priori l’informazione che
si sta trasmettendo, il processo si può considerare atutti gli
effetti aleatorio.
Determiniamo ora i parametri statistici rilevanti e verifichiamo
l’eventuale staziona-rietà. Ad un certo istante fissato t,
l’osservazione di tutte le realizzazioni porta a direche i valori
che queste possono assumere sono soltanto +1 o �1. Inoltre, poichè
si èsupposto che tali valori sono assunti con probabilità pari ad
1/2, la funzione di densitàdi probabilità del primo ordine non può
che valere:
(3.3.7) fv
(v; t) =1
2
�(v + 1) +1
2
�(v � 1)
Questa funzione non dipende dalla variabile tempo. Quindi il
processo è stazionarioin senso stretto per il primo ordine. Ci
aspettiamo allora che la funzione valor mediosia costante:
(3.3.8) µv
(t) =
Z +1
�1vf
v
(v; t)dv =
Z +1
�1v · [1
2
�(v + 1) +1
2
�(v � 1)]dv = 0
-
3.3. PROCESSI STAZIONARI 83
Il calcolo della funzione di autocorrelazione è un po’ più
complesso. Tuttaviasi può facilmente dimostrare che il processo non
è stazionario nè in senso stretto,nè in senso lato per quel che
riguarda il secondo ordine, dato che la funzione diautocorrelazione
non può dipendere dalla sola differenza dei tempi.
Si consideri infatti, nella figura 3.3.1, i due istanti di tempo
t1 e t2. Nel graficoin alto i due istanti di tempo capitano
all’interno dell’intervallo [nT, (n + 1)T ], quin-di la
realizzazione assume valore uguale: V (t1) = V (t2) = Vn. Si ha
allora cheR
v
(t1, t2) = E[V (t1)V (t2)] = E[V 2n
] = 1. Se ora spostiamo rigidamente i due istantidi tempo sino a
farli capitare a cavallo di due intervalli, come indicato nella
figura inbasso, si avrà che V (t1) 6= V (t2) e quindi
(3.3.9) Rv
(t1, t2) = E[V (t1)V (t2)] = E[V (t1)]E[V (t2)] = E[Vn]E[Vn+1] =
0
Se il processo fosse stazionario in senso lato la funzione di
autocorrelazione dovrebbedipendere solo dalla differenza dei due
istanti di tempo e quindi la R
v
(t1, t2) nei duecasi avrebbe dovuto mantenere lo stesso
valore.
2
t t
t
1 2
1 t
FIGURA 3.3.1. Realizzazione di un processo dati binario
Si può concludere quindi che il processo in esame non è
stazionario in senso lato,pur essendo stazionario in senso stretto
per il primo ordine.
Un caso molto frequente è quello in cui si conosce la forma di
un segnale (cioè ilsuo andamento) ma non si riesce a piazzare il
segnale rispetto ad un preciso riferimento
-
3.3. PROCESSI STAZIONARI 84
temporale. In tal caso il segnale può essere modellato come un
processo stocastico diquesto tipo:
EXAMPLE 3.3.7. X(t) = p(t � ⇥), con ⇥ variabile aleatoria che
modella l’in-certezza sulla posizione temporale del segnale. Un
esempio classico è l’eco del segnaleradar.
Se supponiamo per semplicità che il segnale sia periodico di
periodo T : p(t) =p(t + T ), ⇥ si può ipotizzare distribuita in
modo uniforme tra 0 e T : ⇥ 2 U(0, T ).Troviamo le proprietà del
processo descritto.
La funzione valor medio:
(3.3.10) µ(t) = E[p(t�⇥)] =Z
T
0
p(t� ✓) 1T
d✓ =1
T
Z
t
t�Tp(↵)d↵
Poichè la funzione p(↵) è periodica di periodo T , il suo
integrale in un periodo non puòdipendere dagli estremi di
integrazione, quindi dal valore t. Quindi la funzione valormedio è
indipendente dalla variabile tempo. In particolare il valore che la
funzionevalor medio assume è pari al valor medio della funzione
p(↵).
Per la funzione di autocorrelazione si ha invece:
Rx
(t1, t2) = E[X(t1)X(t2)] = E[p(t1 �⇥)p(t2 �⇥)] =
(3.3.11) =Z
T
0
p(t1 � ✓) · p(t2 � ✓)1
Td✓ =
1
T
Z
t1
t1�Tp(↵) · p(t2 � t1 + ↵)d↵
Anche in questo caso la funzione integranda, essendo il prodotto
di due segnali peri-odici di periodo T, è ancora periodica di
periodo T , quindi il suo integrale non dipendedal particolare
posizionamento degli estremi di integrazione. La funzione di
autocorre-lazione quindi non dipende separatamente da t1 o da t2,
ma solo dalla loro differenza:R
x
(t1, t2) = Rx(t1�t2). Se si pone allora: t1�t2 = ⌧ nella
equazione precedente si ha:
(3.3.12) Rx
(⌧) =1
T
Z
T/2
�T/2p(↵) · p(↵� ⌧)d↵
avendo posto t1 = T/2. La funzione di autocorrelazione
statistica del processo X(t) èpari alla funzione di
autocorrelazione del segnale deterministico e periodico p(t).
-
3.3. PROCESSI STAZIONARI 85
3.3.2. Proprietà della funzione di autocorrelazione di un
processo stazionarioin senso lato. Vediamo ora alcune proprietà
della funzione di autocorrelazione di unprocesso stazionario in
senso lato.
(1) La funzione di autocorrelazione Rx
(⌧) è pari: Rx
(⌧) = Rx
(�⌧).Per dimostrare questa proprietà si osservi che, per la
stazionarietà del proces-so, la funzione di autocorrelazione rimane
invariata se la si calcola relativa-mente a due istanti di tempo t
e t� ⌧ oppure ai due istanti t e t + ⌧ , dato chequesti ultimi sono
ottenuti semplicemente mediante traslazione rigida. Si haallora
(3.3.13) Rx
(⌧) = E[X(t)X(t� ⌧)] = E[X(t + ⌧)X(t)] = Rx
(�⌧)(2) Il valore assunto da R
x
(⌧) nell’origine è pari alla potenza statisica del
pro-cesso:
(3.3.14) Rx
(⌧)|⌧=0 = Rx(0) = E[X(t)X(t)] = E[X
2(t)]
.
(3) La funzione di autocorrelazione è massima in modulo
nell’origine: Rx
(0) �|R
x
(⌧)|.Se si considera infatti la disuguaglianza: E[(X(t) ± X(t �
⌧))2] � 0, siosserva che essa è sempre vera, dato che rappresenta
la aspettazione di unaquantità sempre positiva. Sviluppando la
relazione precedente si ha però:
E[(X(t) ± X(t� ⌧))2] =
(3.3.15) = E[X2(t) + X2(t� ⌧) ± 2X(t)X(t� ⌧)] = 2Rx
(0) ± 2Rx
(⌧)
che prova la disuguaglianza.(4) Se R
x
(⌧) non è periodica il suo valore limite per ⌧ ! 1 è il quadrato
delvalor medio:
(3.3.16) lim⌧!1
Rx
(⌧) = µ2x
Per giustificare qualitativamente questa proprietà si ricordi
innanzitutto che:R
x
(⌧) = Cx
(⌧) + µ2x
. Al crescere della distanza ⌧ tra gli istanti di tempo, te t� ⌧
, i valori delle variabili aleatorie tendono sempre più ad
“allontanarsi”tra loro, ad assumere cioè comportamenti statistici
sempre più indipendenti,finchè, al limite per ⌧ !1, il loro
comportamento è completamente indipen-dente e quindi la loro
autocovarianza è nulla. La funzione di autocorrelazionequindi
diventa pari al quadrato del valor medio.
-
3.3. PROCESSI STAZIONARI 86
EXAMPLE 3.3.8. Si riconsideri il processo dati binario già visto
precedentemente.Se il riferimento temporale non è noto, il modello
più appropriato per questo processoè:
(3.3.17) V (t) =+1X
n=�1V
n
rect(t�⇥� T/2� nT
T)
t
0
0
t
FIGURA 3.3.2. Realizzazioni di un processo dati binario
conriferimento temporale non noto
dove la variabile aleatoria ⇥ contiene l’incertezza relativa al
riferimento temporale,ed è distribuita nell’intervallo [0, T ] in
modo uniforme. Tale v.a. è indipendente dallagenerazione dei dati
binari, ed è modellata da una v.a. uniforme nell’intervallo [0, T
[.Indipendentemente dall’istante di inizio del processo, il
ragionamento fatto per deter-minare la funzione di densità di
probabilità del primo ordine vale ancora. Quindi ilprocesso si può
ancora definire stazionario in senso stretto per il primo ordine, e
ilcalcolo della funzione valor medio è uguale a quanto già fatto in
(3.3.8). Si ha allorache: µ
v
(t) = µv
= 0. Per il calcolo della funzione di autocorrelazione si ha
invece:
Rv
(t1, t2) = E[+1X
n=�1V
n
rect(t1 �⇥� T/2� nT
T)·
·+1X
m=�1V
m
rect(t2 �⇥� T/2�mT
T)] =
-
3.3. PROCESSI STAZIONARI 87
(3.3.18)
=
+1X
n=�1
+1X
m=�1E[V
n
Vm
rect(t1 �⇥� T/2� nT
T) · rect(t2 �⇥� T/2�mT
T)]
ottenibile sfruttando la linearità dell’operatore aspettazione.
Ora si osservi che rispettoalla statistica dei dati binari, E[V
n
Vm
] è diversa da zero solo quando gli indici n edm sono uguali
(vedi il ragionamento e l’eq. (3.3.9)). Quindi della doppia
sommatoriasopravvive solo un indice:
Rx
(t1, t2) =+1X
n=�1E⇥[rect(
t1 �⇥� T/2� nTT
) · rect(t2 �⇥� T/2� nTT
)] =
=
+1X
n=�1E⇥[rect(
t�⇥� T/2� nTT
) · rect(t� ⌧ �⇥� T/2� nTT
)] =
=
1
T
+1X
n=�1
Z
T
0
rect(t� ✓ � T/2� nT
T) · rect(t� ⌧ � ✓ � T/2� nT
T)d✓ =
se ora si pone: ↵ = t� ✓ � nT , si ha:
(3.3.19) =1
T
+1X
n=�1
Z
t�nT
t�nT�Trect(
↵� T/2T
)rect(↵� ⌧ � T/2
T)d↵
Si osservi ora che la funzione integranda non contiene la
dipendenza da n, quindi ivalori dell’integrale saranno tutti uguali
al variare di n e saranno funzioni dipendentisolo da ⌧ . Inoltre,
poichè tali integrali sono calcolati in intervalli disgiunti del
tipo:[nT � T, nT ], la funzione di autocorrelazione si può anche
scrivere come:
(3.3.20) Rx
(⌧) =1
T
Z +1
�1rect(
↵� T/2T
)rect(↵� ⌧ � T/2
T)d↵
-
3.4. FILTRAGGIO DI UN PROCESSO ALEATORIO 88
che rappresenta la nota correlazione deterministica tra due
funzioni rettangolo. Il risul-tato è pari alla funzione triangolo
di base 2T :
(3.3.21) Rx
(⌧) = (1� |⌧ |T
)rect(⌧
2T)
Quindi, in questo secondo caso, il segnali dati binario è
stazionario in senso lato, datoche la funzione valor medio è
costante e la funzione di autocorrelazione dipende solodalla
variabile ⌧ .
3.3.2.1. Significato della funzione di autocorrelazione. Si
supponga di avere dueprocessi stocastici e stazionari in senso lato
X(t) e Y (t), dotati degli stessi parametristatistici del primo
ordine (funzione valor medio, funzione potenza e funzione
varian-za). In tal caso, rinunciando all’idea di riuscire a
determinare la funzione di densitàdi probabilità congiunta di
qualunque ordine per i due processi, ci si deve affidare,
perpoterli distinguere, ai parametri statistici. I parametri
statistici del primo ordine peròsono tra loro uguali e quindi non
permettono una distinzione statistica dei due processiin esame.
In tal caso vengono in aiuto i parametri statistici del secondo
ordine ed in par-ticolare la funzione di autocorrelazione, il cui
significato ed utilità sono molto beneevidenziati proprio per i
processi stazionari. Infatti se si suppone che i due proces-si X(t)
ed Y (t) hanno funzioni di autocorrelazione differenti tra loro,
qusto significache, in uno stesso istante di tempo ⌧ , R
x
(⌧) ed Ry
(⌧) saranno differenti. Cioè se siosservano i processi in due
istanti di tempo distaccati di un intervallo ⌧ , la loro ve-locità
di variazione è differente, dato che uno dei due processi
assomiglia molto dipiù a se stesso rispetto all’altro processo
(quello con autocorrelazione maggiore haun’autosomiglianza
maggiore).
In conclusione la funzione di autocorrelazione decresce tanto
più velocemente azero quanto più rapida è la variazione delle
realizzazioni del processo. Essa misuracioè la rapidità di
variazione del segnale aleatorio.
3.4. Filtraggio di un Processo Aleatorio
Si è già detto che il motivo principale nell’introduzione della
teoria dei processistocastici sta nel modellamento di fenomeni
reali che sono descrivibili da grandezzefisiche che variano nel
tempo e il cui comportamento non è predicibile a priori. Poichèle
grandezze fisiche con cui ha a che fare l’ingegnere sono anche
grandezze fisichemanipolabili, ha senso porsi il problema di cosa
succede al processo (e quindi anchealle sue statistiche) se lo si
fa passare per un sistema. Uno dei sistemi più semplici dastudiare
è il filtro, cioè un sistema lineare e tempo-invariante, che può
essere descrittocompletamente dalla sua risposta all’impulso, o
dalla sua funzione di trasferimento.
-
3.4. FILTRAGGIO DI UN PROCESSO ALEATORIO 89
Un tipico esempio è quello in cui il processo in ingresso è
costituito da un segnaledeterministico noto a cui è sovrapposto un
processo aleatorio a valor medio nullo (det-to disturbo o rumore):
X(t) = s(t)+n(t), come riportato nell’esempio in figura 3.4.1.
30
−1
−0.5
0
0.5
1
1.5
0 5 10 15 20 25−1.5
FIGURA 3.4.1. Esempio di un segnale deterministico rumoroso
Quello che si fa è normalmente di cercare, almeno in parte, di
elaborare s(t) elim-inando la componente rumorosa. Questa
operazione può essere effettuata da un filtro.L’operazione imposta
da un filtro è un’operazione di convoluzione con un segnale noto(la
risposta all’impulso del filtro), quindi il comportamento sui
segnali deterministici ènoto. Resta da vedere come si comporta sui
processi stocastici.
X(t) Y(t)h(t)
FIGURA 3.4.2. Filtraggio del processo X(t)
Ogni realizzazione del processo di partenza X(t) è ottenuta
mediante estrazione diun risultato dallo spazio campione ⌦: x(t;
!). Questa realizzazione è un segnale cheammette un’uscita dal
sistema filtro: y(t) = x(t; !) ? h(t), dove l’operazione ? denotala
convoluzione. Per ogni risultato dello spazio campione ⌦ si ha una
realizzazionedifferente e quindi un segnale di uscita differente.
L’insieme dei segnali di uscita cos-tituiscono un nuovo processo, Y
(t), che può complessivamente denotarsi con:
(3.4.1) Y (t) = X(t) ? h(t)
-
3.4. FILTRAGGIO DI UN PROCESSO ALEATORIO 90
Generalmente il problema di determinare la funzione densità di
probabilità congiuntadi qualunque ordine del processo di uscita,
ammesso che sia nota quella del processodi partenza, è
insolubile.
Quello che si fa allora è di determinare la relazione che esiste
tra i parametri stastiti-ci del primo e secondo ordine (si suppone
di essere riusciti a determinare per lo menola funzione valor medio
e la funzione di autocorrelazione di X(t)). La funzione valormedio
vale:
µy
(t) = E[Y (t)] = E[X(t) ? h(t)] =
Z +1
�1h(⌧)E[X(t� ⌧)]d⌧ =
(3.4.2)Z +1
�1h(⌧)µ
x
(t� ⌧)d⌧ = µx
(t) ? h(t)
La funzione valor medio in uscita si ottiene effettuando la
convoluzione tra la funzionevalor medio in ingresso con la risposta
all’impulso del sistema. Il processo in ingressosi può sempre
pensare, ai fini del filtraggio, come la somma di una funzione
determin-istica, µ
x
(t) e di un processo a valor medio nullo: X(t) = Xo
(t) + µx
(t). Il filtraggiodel processo X(t), per la linearità del
sistema, dà in uscita un processo somma di duecomponenti: quella
deterministica è ottenuta filtrando il segnale deterministico µ
x
(t),la componente statistica ha valor medio nullo.
Vediamo adesso la funzione di autocorrelazione del segnale di
uscita:
Ry
(t1, t2) = E[Y (t1)Y (t2)] = E[(X(t1) ? h(t1))(X(t2) ? h(t2))]
=
= E[
Z +1
�1X(↵)h(t1 � ↵)d↵
Z +1
�1X(�)h(t2 � �)d�] =
=
Z +1
�1
Z +1
�1E[X(↵)h(t1 � ↵)X(�)h(t2 � �)]d↵d� =
=
Z +1
�1
Z +1
�1h(t1 � ↵)h(t2 � �)E[X(↵)X(�)]d↵d� =
(3.4.3) =Z +1
�1
Z +1
�1h(t1�↵)h(t2� �)Rx(↵, �)d↵d� = Rx(t1, t2) ? h(t1) ? h(t2)
-
3.4. FILTRAGGIO DI UN PROCESSO ALEATORIO 91
La doppia convoluzione va intesa nel senso che, nella prima la
variabile t2 è consider-ata costante, nella seconda convoluzione è
t1 ad essere considerata costante.
3.4.1. Filtraggio di un processo stazionario in senso lato.
Particolare interesseassume il caso in cui il processo in ingresso
al filtro sia stazionario in senso lato. Perla funzione valor medio
sia ha infatti la seguente relazione ingresso-uscita:
(3.4.4) µy
(t) = µy
=
Z +1
�1h(⌧)µ
x
(t� ⌧)d⌧ = µx
Z +1
�1h(⌧)d⌧ = H(0) · µ
x
dove H(0) è il valore che la trasformata di Fourier della
risposta all’impulso delsistema (la sua funzione di trasferimento
H(f)) assume in f = 0.
La funzione di autocorrelazione vale:
Ry
(t, t� ⌧) = E[Y (t)Y (t� ⌧)] = E[(X(t) ? h(t))(X(t� ⌧) ? h(t�
⌧))] =
= E[
Z +1
�1h(↵)X(t� ↵)d↵
Z +1
�1h(�)X(t� ⌧ � �)d�] =
= E[
Z +1
�1
Z +1
�1h(↵)h(�)X(t� ↵)X(t� ⌧ � �)d↵d�] =
=
Z +1
�1
Z +1
�1h(↵)h(�)E[X(t� ↵)X(t� ⌧ � �)]d↵d� =
=
Z +1
�1
Z +1
�1h(↵)h(�)R
x
(⌧ + � � ↵)d↵d� =
(3.4.5) =Z +1
�1h(�) · [
Z +1
�1h(↵)R
x
(⌧ + � � ↵)d↵]d�
Si osservi subito che la funzione di autocorrelazione non
dipende da t, ma solo da ⌧ .Inoltre:
(3.4.6)Z +1
�1h(↵)R
x
(⌧ + � � ↵)d↵ = Rx
(⌧ + �) ? h(⌧ + �)
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 92
Quindi la funzione di autocorrelazione in uscita diventa:
(3.4.7) Ry
(⌧) =
Z +1
�1h(�) · [R
x
(⌧ + �) ? h(⌧ + �)]d� = Rx
(⌧) ? h(⌧) ? h(�⌧)
Se poi si osserva che la convoluzione di un segnale con se
stesso ribaltato rispettoall’asse dei tempi è la autocorrelazione
deterministica, si ha che: h(⌧)?h(�⌧) = r
h
(⌧).Quindi: R
y
(⌧) = Rx
(⌧) ? rh
(⌧).In conclusione:
THEOREM 3.4.1. Se un processo in ingresso ad un sistema lineare
tempo invari-ante è stazionario in senso lato, lo è anche in uscita
dal sistema. Il valore medio e lafunzione di autocorrelazione del
processo in uscita sono legate a quelle del processoin ingresso
tramite, rispettivamente, le (3.4.4) e (3.4.7).
3.5. Analisi Spettrale di un Processo Aleatorio
Poichè si è introdotto il problema del filtraggio di un processo
aleatorio, può averesenso la descrizione dello stesso problema in
termini spettrali, dato che per il sistema lafunzione di
trasferimento è facilmente calcolabile. Si deve tuttavia introdurre
l’analisifrequenziale per i processi aleatori. Si supporrà di
studiare le proprietà in frequenza peri soli processi aleatori
stazionari in senso lato, anche se, concettualmente, è
possibileanalizzare nel dominio delle frequenze un qualunque
processo aleatorio.
La caratterizzazione di un processo aleatorio in frequenza, in
termini di spettro diampiezza e fase è normalmente inusuale. E’
infatti sempre concepibile l’estrazionedi una realizzazione x(t)
dal processo X(t) e la sua trasformazione secondo Fourier.Tuttavia
l’analisi dell’intero processo richiederebbe lo studio in frequenza
di ogni real-izzazione del processo. Conseguentemente le ampiezze e
le fasi dello spettro sarebberocaratterizzate in maniera aleatoria,
con relazione tra aleatorietà nel tempo e aleatorietàin frequenza
non banale.
E’ allora più comune limitarsi alla descrizione degli spettri di
potenza del segnalealeatorio. Le realizzazioni di un processo
stazionario in senso lato non possono esseresegnali ad energia
finita. Infatti tutti i segnali ad energia finita prima o poi, al
tenderedi t ! 1 tendono a zero. Se così fosse anche la funzione
valor medio, calcolata pervalori di t ! 1 tenderebbe a zero, e
quindi, a meno che non è sempre pari a zero,essa non sarebbe più un
valore costante. Quindi generalmente le realizzazioni di unprocesso
stazionario in senso lato sono segnali a potenza finita e perciò il
processoaleatorio ammette spettro di potenza.
La funzione densità spettrale di potenza di un processo
aleatorio è la media dellefunzioni densità spettrale di potenza
ottenute per le singole realizzazioni:
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 93
(3.5.1) Sx
(f) = E[Sx
(f ; !)] = E[ limT!1
|= {xT
(t; !)}|2
T]
dove l’operazione di media va fatta tra tutti i segnali aleatori
Sx
(f ; !) che si otten-gono prendendo i pezzi delle realizzazioni
del processo X(t) che sono compresi tra[�T/2, T/2], e cioè:
xT
(t; !) = x(t; !) · rect( tT
)
e facendone il modulo quadro della loro trasformata di Fourier.
La definizione di spet-tro di potenza ricalca quindi quella che si
potrebbe fare per un segnale deterministicodi potenza. L’unica
differenza è dovuta alla presenza di una collezione (anche
infinita)di realizzazioni sulla quali non possiamo fare altro che
effettuare una media. Questadefinizione è del tutto generale, cioè
è valida anche per processi non stazionari.
Normalmente essa è molto difficile da utilizzare, anche per
processi stazionari insenso lato. Si utilizza allora nella pratica
la definizione dovuta a Wiener-Kintchine. Inbase a questa
definizione
PROPOSITION 3.5.1. la densità spettrale di potenza dei processi
stazionari è cal-colabile come trasformata di Fourier della
funzione di autocorrelazione:
(3.5.2) Sx
(f) =
Z +1
�1R
x
(⌧)e�j2⇡f⌧d⌧
Vediamo alcune proprietà.(1) La densità spettrale di potenza di
un processo aleatorio e stazionario in senso
lato è una funzione reale e pari, dato che è la trasformata di
Fourier di unsegnale reale e pari
(2) La potenza statistica media del processo (che si ricordi è
una costante, datala stazionarietà del processo) è pari
all’integrale della densità spettrale di fre-quenza su tutto l’asse
delle frequenze:
(3.5.3) Px
= E[X2(t)] =
Z +1
�1S
x
(f)df
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 94
(3) la densità spettrale di potenza è una funzione non negativa:
Sx
(f) � 0.Quest’ultima proprietà discende direttamente dalla
definizione diretta, e nondalla definizione di
Wiener-Kintchine.
3.5.1. Filtraggio di un processo stazionario. Riprendiamo allora
il problema delfiltraggio visto in fig. 3.4.2 di un processo
stazionario e vediamo come ora si puòcaratterizzare la densità
spettrale del processo in uscita, nota la densità spettrale
delprocesso in ingresso. Sappiamo infatti che, se il processo in
ingresso è stazionario insenso lato, lo è anche quello in
uscita.
La densità spettrale del processo in uscita vale:
(3.5.4) Sy
(f) = F {Rx
(⌧) ? h(⌧) ? h(�⌧)} = Sx
(f)H(f)H(�f)
Inoltre, poichè il sistema si suppone reale, H(�f) = H⇤(f), si
ha:
(3.5.5) Sy
(f) = Sx
(f) · |H(f)|2
che è la stessa relazione che vale per gli spettri di potenza
dei segnali deterministici.La risposta in fase del sistema non
influenza la densità spettrale del processo in uscita.
Nella densità spettrale di potenza sono quindi contenute tutte
le informazioni spet-trali del processo e cioè come si distribuisce
la potenza sulle varie componenti ar-moniche, dato che S
x
(f) si comporta come la densità spettrale di potenza di un
segnaledeterministico.
Conseguentemente il significato di densità spettrale di potenza
è lo stesso per i seg-nali deterministici e per i processi
aleatori: una fettina spettrale alla frequenza f rapp-resenta il
contenuto in potenza del processo sulla sinusoide a frequenza f
moltiplicatoper la banda passante infinitesima intorno a f , df :
dP
x
(f) = Sx
(f)df .
EXAMPLE 3.5.2. Calcoliamo la densità spettrale di potenza del
processo vistoin (3.1.2): X(t) = A · sin(2⇡f
o
t + ⇥), con ⇥ = U [0, 2⇡[. Poichè il processoè stazionario in
senso lato, la sua densità spettrale di potenza può essere
calcolatasecondo la definizione di Wiener-Kintchine. Poichè si è
già trovato che: R
x
(⌧) =a
2
2 cos(2⇡fo⌧), la densità spettrale di potenza vale:
(3.5.6) Sx
(f) = F⇢
a2
2
cos(2⇡fo
⌧)
�
=
a2
4
[�(f � fo
) + �(f + fo
)]
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 95
La potenza dell’intero processo è quindi concentrata sulla
frequenza fo
.La funzione di autocorrelazione misura, come già detto, la
velocità di variazione e
l’autosomiglianza di un processo con sè stesso. Poichè la
densità spettrale di potenza èla trasformata di Fourier della
funzione di autocorrelazione (per i processi stazionari),allora
anche la densità spettrale di potenza può caratterizzare un
processo. In parti-colare, quanto più rapidamente variano le
singole realizzazioni di un processo, tantopiù larga è la banda
passante della densità spettrale di potenza, dato che ad una
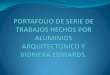
bandalarga corrisponde una funzione di autocorrelazione piccola.
Quindi a variazioni rapidecorrispondono termini spettrali a potenza
non nulla sempre più in alta frequenza. Nellafigura 3.5.1 è
riportata una singola realizzazione di tre processi, ciascuno dei
quali pre-senta una densità spettrale di potenza a banda crescente.
Si osservi come, al cresceredella banda aumenta non solo la
rapidità di variazione della realizzazione, ma anchel’ampiezza
delle escursioni, e cioè la potenza complessiva del segnale
8000
−1
−0.5
0
0.5
1
1.5
0 1000 2000 3000 4000 5000 6000 7000−1.5
8000
−1
−0.5
0
0.5
1
1.5
0 1000 2000 3000 4000 5000 6000 7000−1.5
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 96
8000
−1
−0.5
0
0.5
1
1.5
0 1000 2000 3000 4000 5000 6000 7000−1.5
FIGURA 3.5.1. Esempio di tre processi a banda crescente nello
spettrodi potenza
3.5.2. Processo aleatorio bianco. Si supponga ora di considerare
un processo lacui densità spettrale di potenza ha una banda che
cresce illimitatamente, pur mantenen-do lo stesso valore per f = 0.
La funzione di autocorrelazione di tale processo tenderàad un
valore piccolissimo (la funzione non assomiglia quasi per niente a
sè stessa evaria sempre più rapidamente). Al limite per f ! 1 la
funzione di autocorrelazionediventa impulsiva e quindi la densità
spettrale di potenza diventa costante su tutto lospettro di
frequenze:
(3.5.7) Rx
(⌧) = n · �(⌧) , Sx
(f) = n
A tale tipo di processo, astrazione matematica di molti fenomeni
reali, si dà il nomedi processo di rumore bianco. Il nome rumore
bianco deriva dal fatto che tutte le com-ponenti spettrali sono
ugualmente rappresentate, così come tutti i colori sono ugual-mente
rappresentati nel processo di composizione della luce bianca. Il
valor medio diquesto processo è nullo, dato che il valor medio è
pari al lim
⌧!1Rx(⌧) = 0. Inoltresi capisce bene che tale processo è solo
una idealizzazione, dato che esso dovrebbepossedere potenza
infinita, condizione impossibile per un qualunque processo
chemodelli un segnale fisico.
Una delle applicazioni più comuni di questa idealizzazione
consiste nel modella-mento del rumore termico. Un comune resistore,
oltre a presentare una certa resistenzaR, presenta anche una debole
tensione di rumore, dovuta alla casuale agitazione ter-mica degli
elettroni nel materiale che compone il resistore. Questa agitazione
termicaè tanto più elevata quanto più alta è la temperatura
assoluta alla quale si trova il resis-tore. Il modello che
normalmente si utilizza è allora quello di considerare il
resististore
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 97
ideale e di porre in serie ad esso un generatore di tensione con
tensione pari a n(t) V ,dove n(t) è un processo casuale,
responsabile della produzione di rumore termico.L’espressione che
assume la densità spettrale di potenza del rumore termico deriva
daconsiderazioni di carattere quantistico (e quindi non verrà
effettuata in questa sede) edassume la forma:
(3.5.8) Sn
(f) = kTR
|f | /fo
e|f |/fo � 1
dove il valore di fo
è: fo
= kTR
/h, con k = 1.38 · 10�23J/K costante di Boltzmann,h = 6.62 ·
10�34J · s costante di Plank e T
R
temperatura assoluta del resistore. Allatemperatura ambiente il
valore di f
o
è estremamente alto (⇠ 6THz). Poichè i valoridi frequenza che
normalmente si utilizzano nelle applicazioni pratiche sono molto
piùbassi, l’espressione precedente si può approssimare come
segue:
(3.5.9) Sn
(f) = kTR
|f | /fo
e|f |/fo � 1 ⇡ kTR
cioè come una costante. Il processo di rumore bianco è quindi,
in questo caso, un utileidealizzazione di una situazione reale. Un
circuito elettrico infatti che sia compostoda un filtro con banda
passante B ⌧ f
o
, “vedrà” la densità spettrale del processopraticamente come
piatta.
EXAMPLE 3.5.3. Si voglia determinare la densità spettrale di
potenza del processoin uscita dal sistema riportato in figura
3.5.2, con N(t) un processo stazionario in sensolato e densità
spettrale di potenza costante e pari ad n.
Il primo blocco effettua una media pesata del segnale in
ingresso su un intervallo[t� T, T ]:
(3.5.10)1
T
Z
t
t�T(•)d⌧
La sua risposta all’impulso vale allora: g(t) = 1T
rect( t�T/2T
). Il secondo blocco è unfiltro passa banda ideale, con banda
pari a 2/T intorno ad f0, con f0T � 1. Infine ilmoltiplicatore
moltiplica per un oscillatore locale la cui espressione è del tipo:
p(t) =2 cos(2⇡f0t + ⇥), quindi è in realtà un processo, con ⇥
variabile aleatoria con densitàdi probabilità uniforme in [0,
2⇡[.
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 98
0
N(t) X(t) Y(t) Z(t)
H(f)g(t)
p(t)
−f f0
2/T
0f
| H(f) |
FIGURA 3.5.2. Sistema dell’esempio e filtro passa banda H(f)
Poichè il processo in ingresso è stazionario in senso lato e il
blocco g(t) è linearee tempo invariante, anche il processo in
uscita X(t) è stazionario in senso lato. Il suovalor medio è: µ
x
= µn
G(0) = 0 · G(0) = 0, essendo il processo in ingresso a
medianulla. La funzione di autocorrelazione di X(t) é:
(3.5.11)
Rx
(⌧) = Rn
(⌧) ? g(⌧) ? g(�⌧) = n�(⌧) ? rg
(⌧) = nrg
(⌧) =n
T(1� |⌧ |
T)rect(
⌧
2T)
e dipende solo da ⌧ . La corrispondente densità spettrale di
potenza vale: Sx
(f) =F {R
x
(⌧)} = n · sinc2(Tf).Il processo p(t) sappiamo che è
stazionario, avendo valor medio nullo e funzione di
autocorrelazione pari a: Rp
(⌧) = 2 cos(2⇡fo
⌧). La funzione valor medio del prodottotra le due è:
(3.5.12) µy
(t) = E[X(t)p(t)] = 2E[X(t) cos(2⇡f0t + ⇥)]
Poichè la v.a. ⇥ è indipendente dalla sinusoide in cui è
contenuta (all’interno del pro-cesso p(t)) lo è a maggior ragione
anche dal processo X(t). Quindi l’aspettazionedel prodotto è pari
all’aspettazione presa separatamente dei singoli processi: µ
y
(t) =E[X(t)p(t)] = E[X(t)]E[p(t)] = 0. La funzione di
autocorrelazione vale:
-
3.5. ANALISI SPETTRALE DI UN PROCESSO ALEATORIO 99
Ry
(t, t� ⌧) = E[Y (t)Y (t� ⌧)] =
= 4E[X(t)X(t� ⌧) cos(2⇡f0t + ✓) cos(2⇡f0(t� ⌧) + ✓)] =
= 4E[X(t)X(t� ⌧)] · E[cos(2⇡f0t + ✓) cos(2⇡f0(t� ⌧) + ✓)] =
(3.5.13) = 2Rx
(⌧) · cos(2⇡f0⌧)
Anche il processo Y (t) è quindi stazionario in senso lato,
essendo il suo valor medionullo e la sua funzione di
autocorrelazione dipendente solo da ⌧ . La densità spettraledi
potenza è la trasformata di Fourier di R
y
(⌧):
Sy
(f) = F {Ry
(⌧)} =
(3.5.14)= n · sinc2(fT ) ? [�(f � f
o
)+ �(f + fo
)] = n · [sinc2(T (f � fo
))+ sinc2(T (f + fo
))]
La maggior parte della potenza si è spostata attorno ad fo
, anche se le code delle fun-zioni sinc2 si sovrappongono sino
ad infinito. L’effetto del filtraggio passa banda finaleè quello di
tagliare appunto queste code, in modo da lasciar passare solo la
parte dellospettro che contiene più potenza (vedi in figure 3.5.3
ed 3.5.4 ). Approssimatamentequindi lo spettro di potenza in uscita
si può scrivere come:
(3.5.15)
Sz
(f) ⇡ n · [sinc2(T (f � fo
)) · rect(f � fo2/T
) + sinc2(T (f + fo
)) · rect(f + fo2/T
)]
-
3.6. PROCESSI ALEATORI GAUSSIANI 100
frequenze normalizzate fT
0.2
0.4
0.6
0.8
1
1.2
−15 −10 −5 0 5 10 150
FIGURA 3.5.3. Filtraggio del processo Y (t). I valori
nell’esempioriportato sono: f0T = 5.
frequenze normalizzate fT
0.2
0.4
0.6
0.8
1
−15 −10 −5 0 5 10 15
Sz(f
)
0
FIGURA 3.5.4. Densità spettrale di potenza in uscita dal
sistema, Sz
(f)
3.6. Processi Aleatori Gaussiani
Nell’esempio del rumore termico la generazione della tensione di
rumore è dovutaalla somma della tensione provocata dal movimento
casuale degli elettroni. Poichèil processo in esame è generato dal
contributo di molti fenomeni elementari ed in-dipendenti, si può
ritenere che la statistica del processo stesso sia di tipo
gaussiano(per il teorema del limite centrale). Poichè una grande
quantità di fenomeni fisici sicomportano in modo simile, è utile
studiare le proprietà dei processi gaussiani.
DEFINITION 3.6.1. Un processo aleatorio X(t) è gaussiano se
scelto n arbitraria-mente grande ed n istanti di tempo t1, t2, ...,
tn, le variabili aleatorie
[X(t1), X(t2), ..., X(tn)] sono congiuntamente gaussiane.
In questa definizione è quindi necessario verificare non solo la
gaussianità dellasingola variabile aleatoria che si può ottenere ad
ogni istante t, ma anche del vettorealeatorio [X(t1), X(t2), ...,
X(tn)], comunque si scelgano gli istanti di tempo.
Molti fenomeni fisici sono modellati come processi gaussiani
(onde sismiche, voceumana, rumore termico, etc) e questo spiega la
centralità di questo tipo di processi nellostudio dei processi
stocastici.
-
3.6. PROCESSI ALEATORI GAUSSIANI 101
La descrizione statistica completa di un processo è possibile
solo se è nota la suafunzione di densità di probabilità di ogni
ordine e per ogni n� pla di istanti di tempo:f
x
(x1, x2, ..., xn; t1, t2, ..., tn). Tuttavia se X(t) è gaussiano
la densità di probabilitàcongiunta ha una forma nota:
(3.6.1)f
X
(x1, x2, ..., xn; t1, t2, ..., tn) =1
p
(2⇡)n det |CX
|· exp(�1
2
(x�µX
)
T C�1X
(x�µX
))
dove il vettore aleatorio x è quello che si ottiene estraendo le
variabili aleatorie[X(t1), X(t2), ..., X(tn)]. Per la conoscenza
completa della funzione di densità diprobabilità congiunta (e
quindi dell’intero processo) è sufficiente conoscere quindi
lafunzione valor medio e la funzione di autocovarianza; µ
x
(t) e Cx
(t1, t2). Infatti perogni n� pla di istanti di tempo (t1, t2,
..., tn) si ha:
(3.6.2) µX
= [µx
(t1), µx(t2), ..., µx(tn)]
Invece per la funzione di autocovarianza si ha: Cx
= [cij
], dove
(3.6.3)cij
= E[(X(ti
)� µx
(ti
)) · (X(tj
)� µx
(tj
))] = Cx
(ti
, tj
) = Rx
(ti
, tj
)� µx
(ti
)µx
(tj
)
Una delle proprietà notevoli dei processi gaussiani consiste nel
fatto che la staziona-rietà in senso lato implica la stazionarietà
in senso stretto (cosa generalmente non ve-ra). Infatti la
stazionarietà in senso lato equivale ad imporre una funzione valor
mediocostante ed una funzione di autocorrelazione dipendente solo
dalla differenza degli is-tanti di tempo: µ
X
(t) = µX
e Rx
(t1, t2) = Rx(⌧). Se allora si considera l’n � pla
diistanti:
[t1 + �t, t2 + �t, ..., tn + �t]
in tali istanti la funzione valor medio non sarà cambiata poichè
è una costante. Lafunzione di autocovarianza rimane anch’essa
costante dato che dipende solo dalledifferenze tra una qualunque
coppia di istanti di tempo.
-
3.6. PROCESSI ALEATORI GAUSSIANI 102
Poiche infine la funzione di densità di probabilità congiunta
del processo dipendesolo da questi due parametri statistici, si può
concludere che il processo stazionario insenso lato lo è anche in
senso stretto.
Quando si fa passare un processo attraverso un sistema lineare
tempo-invariante,di cui si conosce la funzione di trasferimento, è
generalmete difficile determinare lafunzione di densità di
probabilità congiunta di uscita, anche se nota quella di ingresso.I
processi gaussiani fanno eccezione a questa regola: un processo
gaussiano che vengafatto passare attraverso un sistema lineare
conserva la sua proprietà principale di gaus-sianità; inoltre
conserva anche la stazionarietà se il sistema è anche
tempo-invariante eil processo in ingresso è stazionario.
Intuitivamente il motivo per cui la statistica del processo non
cambia si può com-prendere osservando l’operazione che si effettua
quando il processo passa attraverso ilsistema:
(3.6.4) Y (t) = X(t) ? h(t) =Z +1
�1X(↵)h(t� ↵)d↵
Questa operazione si può pensare come una somma di infiniti
termini, ciascuno delquali vale approssimatamente:
(3.6.5) X(k�↵)h(t� k�↵)�↵
dove si deve pensare k intero e �↵ molto piccolo. Poichè allora
il processo in uscitaaltro non è che una combinazione lineare di
tanti processi in ingresso, tutti gaussiani(X(t), calcolato per t =
k�↵ è gaussiano), è anch’esso gaussiano, comunque si scelgal’n� pla
degli istanti di tempo [t1, t2, ..., tn].
EXAMPLE 3.6.2. Si consideri un processo gaussiano stazionario
con densità spet-trale di potenza:
(3.6.6) Sn
(f) = No
(1� |f |B
)rect(f
2B)
e si supponga di far passare questo processo attraverso un
campionatore. Il cam-pionatore è un sistema che, dato un segnale
continuo, ne estrae il valore per particolariistanti di tempo,
normalmente equispaziati. A partire da una funzione tempo
continua
-
3.6. PROCESSI ALEATORI GAUSSIANI 103
costruisce quindi una funzione tempo discreta o, se si
preferisce, una successione dinumeri reali.
Il campionatore campioni il processo agli istanti di tempo k/B.
Se k lo facciamovariare da 1, ..., n otterremo n numeri reali
X(t1 = 1/B), X(t2 = 2/B), ..., X(tn = n/B)
corrispondenti ad n variabili aleatorie. Si vuole calcolare la
densità di probabilitàcongiunta di queste n variabili aleatorie
f
x
(x1, x2, ..., xn).
k/B
N0
f
S (f)
0 B−B
n
X(t) X k
FIGURA 3.6.1. Densità spettrale e schema a blocchi dell’esempio
3.6.2
Si osservi subito che se X(t) è un processo a valor medio nullo,
anche il processocampionato, essendo l’insieme di n v.a. a valor
medio nullo, è a valor medio nullo.Inoltre la sua funzione di
autocovarianza vale:
cx
i
x
j
= E[(Xi
� µx
i
)(Xi
� µx
j
)] = E[Xi
Xj
] = E[X(ti
)X(tj
)] =
(3.6.7) = Rx
(ti
� tj
) = Rx
(
i� jB
)
Poichè conosciamo Sn
(f) è possibile esprimere in forma chiusa anche la funzione
diautocorrelazione:
(3.6.8) Rn
(⌧) = No
B · sinc2(B⌧)
-
3.7. PROCESSI ERGODICI 104
Quindi l’autocovarianza vale: cx
i
x
j
= No
B · sinc2(i� j) = No
B · �ik
(con �ik
simbolodi Kronecker) ed è una matrice diagonale. Questo ci dice
che le variabili aleatorieestratte con l’operazione di
campionamento sono a due a due incorrelate. Essendo in-oltre
congiuntamente gaussiane (l’operazione di campionamento è infatti
chiaramentelineare) esse sono a due a due indipendenti. La loro
potenza statistica, è pari anche allaloro varianza: R
n
(0) = No
B. La densità di probabilità congiunta è allora il prodottodelle
singole densità di probabilità delle v.a. [X1, X2, ..., Xn]:
f(x1, x2, ..., xn) =n
Y
k=1
f(xk
)
(3.6.9) f(x1, x2, ..., xn) =1
p
(2⇡)n · (No
B)nexp(�x
21 + x
22 + ... + x
2n
2No
B)
3.7. Processi Ergodici
I parametri statistici di un processo aleatorio si possono
considerare operazionid’insieme, poichè sono effettuate
sull’insieme delle funzioni campione (o realizzazioni).Ad esempio
la funzione valor medio si determina, per ogni istante fissato t,
effettuan-do la media di tutte le realizzazioni in t, nota che sia
la funzione densità di probabilitàdi primo ordine per
quell’istante. Questa operazione, dal punto di vista teorico
noncomporta alcuna difficoltà, ammesso che del processo si conosca
una forma chiusa,ammesso cioè che si sia in grado di scrivere ogni
possibile realizzazione del processo,insieme con la funzione di
densità di probabilità del primo ordine (o di ordine superioreper
le altre statistiche).
In pratica la funzione di densità di probabilità non è nota e a
volte non si riescenemmeno a fare delle ipotesi ragionevoli sulla
sua forma con misure statistiche sulprocesso in esame. A volte
infatti, di un dato processo, è possibile misurare soltan-to una
singola realizzazione. La domanda che sorge spontanea è allora: è
possibileeffettuare alcune misure sulla singola realizzazione per
ottenere un comportamentostatistico generale ? La risposta a questa
domanda è sì, a volte si può fare, ma ciòdipende da una particolare
proprietà che possono possedere i processi aleatori.
Questaproprietà è l’ergodicità.
DEFINITION 3.7.1. Un processo aleatorio stazionario in media si
dice ergodico inmedia se, con probabilità che tende ad 1 si ha che
la media d’insieme coincide con lamedia temporale effettuata sulla
singola realizzazione:
-
3.7. PROCESSI ERGODICI 105
(3.7.1) P ( E[X(t)] = limT!1
Z
T/2
�T/2x(t)dt ) = 1
Tale definizione nasce infatti dall’osservazione che, se si
possiede una sola realiz-zazione del processo, può avere senso
effettuare delle misure deterministiche sul quelprocesso (media
temporale, misura della autocorrelazione e così via). In
particolare perla misura della media temporale può accadere che
questa sia differente realizzazioneper realizzazione oppure che,
anche se sempre uguale per tutte le realizzazioni, siadifferente
dalla media d’insieme del processo in esame. Per alcuni processi
invececapita che non solo la media temporale è uguale per tutte le
realizzazioni, ma ancheche questo valore è pari a quello che si
determina dalla media d’insieme. Tali processisono appunto detti
ergodici in media.
Un processo ergodico in media è un processo la cui singola
realizzazione si com-porta come tutto il processo in esame dal
punto di vista statistico, permette cioè misuredi media che
dovrebbero essere fatte altrimenti su tutta la statistica del
processo stesso.E’ evidente che, affinchè un processo sia ergodico,
è necessario che sia stazionario, da-to che la media temporale è
necessariamente un valore singolo e quindi non potrebbemai essere
pari ad una funzione del tempo (se il processo non fosse
stazionario).
Si osservi che nella definizione non abbiamo dato una condizione
di uguaglian-za con certezza, ma con probabilità tendente ad 1, che
è una cosa differente. Infattiquando si osserva la singola
realizzazione, questa è una sola tra le tante che potreb-bero
capitare, e quindi il valore che estraiamo della media temporale è
essa stessa unavariabile aleatoria. L’uguaglianza di tale variabile
aleatoria con una costante (il valormedio ottenuto come media
d’insieme) può essere fatta solo in termini
probabilistici,affermando cioè che tale variabile aleatoria ha
valor medio che coincide con la mediad’insieme e varianza nulla. Si
tenga inoltre presente che nei casi pratici non si puòosservare
nemmeno tutta la realizzazione (cioè da �1 a +1) e quindi quella
che siottiene è solo una stima del valor medio (che a sua volta è
una variabile aleatoria).Quello che nella pratica si riesce ad
ottenere è quindi:
(3.7.2) XT
=
1
T
Z
T/2
�T/2x(t)dt
la media temporale sarà quindi:
Xm
= lim
T!1X
T
-
3.7. PROCESSI ERGODICI 106
ed inoltre:
(3.7.3) µX
m
= lim
T!1µ
X
T
, �2X
m
= lim
T!1�2
X
T
! 0
anche se questi ultimi risultati non sono accessibili in una
situazione reale.Si ricordi infine che, essendo la varianza della
variabile aleatoria X
T
pari alla funzionedi autocovarianza valutata per ⌧ = 0, il
verificarsi della condizione di ergodicità inmedia è subordinato al
verificarsi di una determinata condizione (C
X
T
(0) ! 0) checoinvolge la statistica del secondo ordine del
processo.
Per il calcolo della media temporale si definisce un operatore
valor medio tempo-rale, che si può applicare a qualunque segnale
x(t) determinato o no:
(3.7.4) hx(t)i = limT!1
1
T
Z
T/2
�T/2x(t)dt
La proprietà di ergodicità in media può essere allora riscritta
nel modo seguente:
(3.7.5) E[X(t)] = hx(t; !)i
dove si è messo in evidenza che la media temporale è stata
effettuata sulla particolarerealizzazione estratta dal processo
X(t). Se però il processo è ergodico tale valore èuguale per tutte
le realizzazioni e quindi, con notazione non proprio rigorosa si
puòscrivere:
(3.7.6) E[X(t)] = hX(t)i
La dimostrazione che l’uguaglianza della definizione vale con
probabilità pari ad 1è legata alla dimostrazione che la media della
variabile aleatoria hx(t)i sia pari al valormedio d’insieme e la
sua varianza tenda a zero. L’aspettazione della media temporale
-
3.7. PROCESSI ERGODICI 107
è:
E[hx(t)i] = E[ limT!1
1
T
Z
T/2
�T/2x(t)dt] =
(3.7.7) = limT!1
1
T
Z
T/2
�T/2E[x(t)]dt = lim
T!1
1
T
Z
T/2
�T/2µxdt = µx
La varianza della variabile aleatoria hx(t)i invece vale:
V ar(hx(t)i) = E[(hx(t)i � µx)2] =
= E[( limT!1
1
T
Z
T/2
�T/2x(t)dt� µx)2] = lim
T!1E[(
1
T
Z
T/2
�T/2x(t)dt� µx)2] =
= lim
T!1E[
1
T 2
Z
T/2
�T/2(x(t)� µx)dt ·
Z
T/2
�T/2(x(t)� µx)dt] =
= lim
T!1E[
1
T 2
Z
T/2
�T/2
Z
T/2
�T/2(x(t)� µx)(x(t1)� µx)dtdt1] =
= lim
T!1
1
T 2
Z
T/2
�T/2
Z
T/2
�T/2E[(x(t)� µx)(x(t1)� µx)]dtdt1 =
= lim
T!1
1
T 2
Z
T/2
�T/2
Z
T/2
�T/2C
x
(t, t1)dtdt1 = limT!1
1
T 2
Z
T/2
�T/2
Z
T/2
�T/2C
x
(t� t1)dtdt1 =
dove l’ultima uguaglianza vale solo nell’ipotesi che il processo
sia stazionario in sensolato e non solo in media. In questa ipotesi
infatti la dimostrazione che la varianzadi hx(t)i va a zero per T !
1 risulta più semplice (la dimostrazione nel caso piùgenerale è più
complessa).Se ora si pone t�t1 = u, si osserva che al variare di
(t, t1) nel quadrato [�T/2, T/2]⇥[�T/2, T/2], u varia da [�T, T ].
Inoltre dtdt1 =
p2(T � |u|)du: si provi infatti a
calcolare l’area del rettangolino che si ottiene spostando di un
infinitesimo du la rettat� t1 = u (vedi figura 3.7.1).
-
3.7. PROCESSI ERGODICI 108
−T/2
t−t = ut−t = u+du1
1
t1
t0−T/2 T/2
T/2
FIGURA 3.7.1. Calcolo del differenziale nel cambio di variabile
t �t1 = u
Quindi:
(3.7.8) = limT!1
1
T 2
Z
T
�T
p2(T � |u|)C
x
(u)du = 0
dato che la funzione di autocovarianza non può divergere per
nessun valore della vari-abile indipendente. E’ quindi dimostrata
la definizione di ergodicità in media secondola relazione
probabilistica.
L’operatore di media temporale può essere utilizzato per
definire l’autocorrelazionedi un segnale deterministico a potenza
finita:
(3.7.9) hx(t)x(t� ⌧)i = limT!1
1
T
Z
T/2
�T/2x(t)x(t� ⌧)dt
Risulta allora abbastanza chiaro che il concetto di ergodicità
in media può essere estesaanche alla autocorrelazione, purchè il
processo sia stazionario non solo in media maanche per quel che
riguarda l’autocorrelazione, sia cioè stazionario in senso
lato.
DEFINITION 3.7.2. Un processo aleatorio stazionario in senso
lato è ergodico inautocorrelazione se con probabilità pari ad 1
risulta vera l’uguaglianza;
-
3.7. PROCESSI ERGODICI 109
(3.7.10)
Rx
(⌧) = E[X(t)X(t� ⌧)] = hx(t)x(t� ⌧)i = limT!1
1
T
Z
T/2
�T/2x(t)x(t� ⌧)dt
Si osservi che l’ipotesi di stazionarietà è necessaria per
l’ergodicità in autocor-relazione, dato che altrimenti il processo
avrebbe una funzione di autocorrelazioned’insieme dipendente da due
variabili, mentre l’autocorrelazione temporale dipendechiaramente
da una sola variabile. Inoltre, per gli stessi motivi addotti
precedente-mente, è necessario dare anche in questo caso una
definizione in termini probabilistici.
L’ergodicità in autocorrelazione è importante poichè mediante
questa è possibiledeterminare la funzione di autocorrelazione
d’insieme mediante l’osservazione di unasingola realizzazione.
Dalla funzione di autocorrelazione si può poi calcolare la
densitàspettrale di potenza del processo.
Le condizioni sull’ergodicità in autocorrelazione del processo
coinvolgono grandezzestatistiche del quarto ordine, poichè si deve
provare che la varianza della variabilealeatoria
(3.7.11) hx(t)x(t� ⌧)iT
=
1
T
Z
T/2
�T/2x(t)x(t� ⌧)dt
tende a zero al tendere di T !1.Un processo ergodico in valor
medio e in autocorrelazione si dice ergodico in
senso lato.
DEFINITION 3.7.3. Un processo si dice ergodico in senso stretto
se la proprietàdi ergodicità vale per una qualunque grandezza
statistica estratta dal processo (e diqualunque ordine):
(3.7.12)E[g(X(t), X(t�⌧1), ..., X(t�⌧n�1))] = hg(X(t; !), X(t�
⌧1; !), ..., X(t� ⌧n�1; !))i
EXAMPLE 3.7.4. Dimostriamo che il processo X(t) = a ·
cos(2⇡fo
t + ⇥), con⇥ = U [0, 2⇡[, con a ed f
o
noti, è ergodico in senso lato.Abbiamo già dimostrato che tale
processo è stazionario in senso lato (quindi il
problema è ben posto). Inoltre si è già trovato che:
-
3.8. CENNI SULLE CATENE DI MARKOV 110
(3.7.13) µx
= 0, Rx
(⌧) =a2
2
cos(2⇡fo
⌧)
Calcoliamo ora le corrispondenti medie temporali:
(3.7.14)
hx(t; ✓)i = limT!1
1
T
Z
T/2
�T/2a · cos(2⇡f
o
t + ⇥)dt =1
T
Z
T/2
�T/2a · cos(2⇡f
o
t + ⇥)dt = 0
dato che la media di un qualunque segnale periodico può essere
valutata sul singoloperiodo. Il risultato ottenuto è indipendente
dal particolare valore di ⇥. Il processo èquindi ergodico in
media.
Per l’autocorrelazione temporale si ha poi:
hx(t; ✓)x(t� ⌧ ; ✓)i = limT!1
1
T
Z
T/2
�T/2a · cos(2⇡f
o
t + ⇥)a · cos(2⇡fo
(t� ⌧) + ⇥)dt =
=
1
T
Z
T/2
�T/2a ·cos(2⇡f
o
t+⇥)a ·cos(2⇡fo
(t�⌧)+⇥)dt = a2
2T
Z
T/2
�T/2cos(2⇡f
o
⌧)dt =
(3.7.15)a2
2
cos(2⇡fo
⌧) = Rx
(⌧)
Il processo è ergodico anche in autocorrelazione e quindi lo è
in senso lato.
3.8. Cenni sulle Catene di Markov
3.8.1. Qualche definizione sulle catene di Markov. Le catene di
Markov sonouna delle applicazioni della teoria dei processi
aleatori più diffusa. Esse sono utilizzatein un’enorme varietà di
contesti poichè modellano molto bene una classe di fenomenireali
(gli arrivi e le attese in coda).
Si supponga di considerare un processio aleatorio X(t) e si
supponga di volerconoscere qualche proprietà della variabile
aleatoria X(t
k
) a partire dalla conoscenzadelle variabili aleatorie X(t1),
X(t2), ..., X(tk�1), con t1, t2, ..., tk arbitrariamente es-tratti.
Si vuole quindi, se possibile, determinare:
-
3.8. CENNI SULLE CATENE DI MARKOV 111
(3.8.1) P (X(tk
) = xk
/X(tk�1) = xk�1, X(tk�2) = xk�2, ..., X(t1) = x1)
DEFINITION 3.8.1. Un processo aleatorio è detto di Markov se
risulta:
P (X(tk
) = xk
/X(tk�1) = xk�1, X(tk�2) = xk�2, ..., X(t1) = x1) =
(3.8.2) = P (X(tk
) = xk
/X(tk�1) = xk�1)
cioè se l’evoluzione del processo dipende soltanto
dall’osservazione della variabilealeatoria all’istante
immediatamente precedente, comunque si scelgano t1, t2, ..., tk.La
definizione precedente può anche essere posta in questi termini:
l’evoluzione futuradel processo dipende solo dallo stato attuale
del processo e non dagli stati passati.
Una prima proprietà è la seguente:
P (X(tk
) = xk
, X(tk�1) = xk�1, ..., X(t1) = x1) =
P (X(tk
) = xk
/X(tk�1) = xk�1, X(tk�2) = xk�2, ..., X(t1) = x1)·
·P (X(tk�1) = xk�1, X(tk�2) = xk�2, ..., X(t1) = x1) =
= P (X(tk
) = xk
/X(tk�1) = xk�1)·
·P (X(tk�1) = xk�1, X(tk�2) = xk�2, ..., X(t1) = x1) =
· · ·
= P (X(tk
) = xk
/X(tk�1) = xk�1) · P (X(tk�1) = xk�1/X(tk�2) = xk�2) · ...
(3.8.3) ... · P (X(t1) = x1)
-
3.8. CENNI SULLE CATENE DI MARKOV 112
Naturalmente l’ultima quantità, cioè P (X(t1) = x1) è una
probabilità non condizion-ata e deve essere nota a priori.
DEFINITION 3.8.2. Una catena di Markov è detta omogenea quando
le probabilitàcondizionate non dipendono dall’origine dell’asse dei
tempi ma solo dalla differenzatra i tempi considerati:
(3.8.4)P (X(t
k
) = xk
/X(tk�1) = xk�1) = P (X(tk + �t) = xk/X(tk�1 + �t) = xk�1)
I processi di Markov che assumono solo valori discreti sono
detti catene di Markov.Le catene di Markov possono essere tempo
discrete o tempo continue a seconda cheevolvano o no in modo
discreto.
3.8.2. Catene di Markov tempo discrete. Per le catene di Markov
discrete è al-lora possibile scrivere le probabilità di transizione
ad un passo, cioè: p
ij
= P (Xn+1 =
i/Xn
= j), dove l’evoluzione temporale nel caso di catene discrete è
indicato con unindice sul processo aleatorio: X(t
n
) = X(n · �t) = Xn
. E’ allora possibile raggrup-pare in forma matriciale le
probabilità ad un passo, a seconda dei valori che il
processoaleatorio può assumere. Naturalmente questa matrice può
anche essere di dimensioneinfinita se il numero dei valori
possibili assunti dal processo è infinito:
(3.8.5) P =
2
6
6
6
6
4
p00 p01 ... p0n ...p10 p11 ... p1n ......
... . . ....
...p
n0 pn1 ... pnn ...... ... ... ... ...
3
7
7
7
7
5
La somma degli elementi su una riga deve necessariamente essere
pari ad 1 (da uno sta-to il processo deve capitare con probabilità
1 in uno qualunque degli altri stati possibili:
(3.8.6)X
j
pij
= 1
Generalizzando la definizione precedente si può anche definire
la probabilità ditransizione ad k passi:
-
3.8. CENNI SULLE CATENE DI MARKOV 113
(3.8.7) pij
(k) = P (Xn+k = i/Xn = j)
Si fa vedere facilmente che: pij
(2) =
P
k
pik
pkj
, cioè la probabilità di transizionea due passi si determina
effettuando il prodotto della riga i � sima per la colonnaj � sima
della matrice di transizione ad un passo. Allora è possibile
costruire facil-mente la matrice di transizione a due passi, dato
che:
(3.8.8) P (2) = P · P = P 2
e, generalizzando:
(3.8.9) P (k) = P · P · ... · P| {z }
k�volte
= P k
Se si vuole determinare la probabilità che all’istante tn
una singola realizzazionedel processo abbia valore pari a x
i
, si trova che:
P (Xn
= i) =
(3.8.10)=
X
j
P (Xn
= i/Xn�1 = j) · P (Xn�1 = j) =
X
j
pij
Pi
(n� 1) =X
j
pij
(n)Pi
(0)
Dato un processo aleatorio che risulta essere anche una catena
di Markov tempo disc-reta, normalmente le quantità note sono la
matrice di transizione ad un passo e leprobabilità iniziali del
processo, cioè le: P
i
(0) = P (Xo
= i).
DEFINITION 3.8.3. Una catena di Markov tempo discreta ammette
equilibrio seesiste il limite:
(3.8.11) limn!1
Pi
(n) = ⇧i
-
3.8. CENNI SULLE CATENE DI MARKOV 114
Si vuole vedere cioè se le probabilità, per tempi di
osservazione lunghi si stabiliz-zano o variano continuamente.
DEFINITION 3.8.4. Una catena di Markov si dice stazionaria se,
ammettendoequilibrio risulta: ⇧
i
= Pi
(0).
In una catena di Markov stazionaria si dimostra facilmente che
8n : Pi
(n) = ⇧i
.
3.8.3. Catene di Markov tempo continue. Le catene di Markov
tempo continuesono caratterizzate dal fatto che, seppure le singole
realizzazioni del processo aleatorioassumono valori discreti, il
cambiamento di stato avviene ad istanti qualunque e nonper istanti
discreti prefissati. Naturalmente vale il concetto generale che
definisce lecatene di Markov: l’evoluzione per stati futuri dipende
solo dallo stato attuale delprocesso. Vale anche la definizione di
catena omogenea, dato che questa è stata datain forma genericamente
continua.
Le proabilità di transizione da uno stato ad un altro possono
ancora essere definite,ma ora sono genericamente funzioni del
tempo:
(3.8.12) P (X(s + t) = i/X(s) = j) = Pij
(t)
Nel caso di catene di Markov tempo continue è utile definire il
cosiddetto tempo dipermanenza in un possibile stato. Questo tempo
di permanenza è normalmente unavariabile aleatoria, dato che la
transizione da uno stato al