Embed Size (px)
Citation preview
Identification par la méthode des moindres carrés et par laméthode du modèle : principe et exemples.
FRANÇOIS BAILLY – [email protected] FLAMANT – [email protected]
1 Introduction
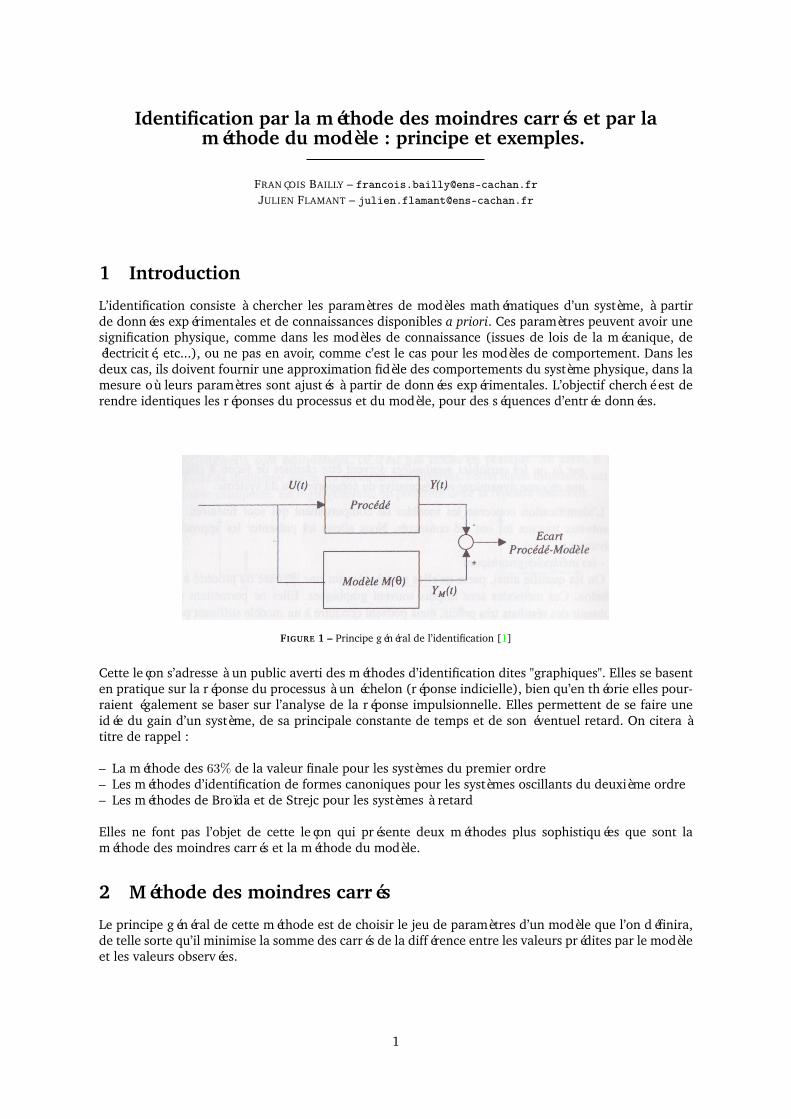
L’identification consiste à chercher les paramètres de modèles mathématiques d’un système, à partirde données expérimentales et de connaissances disponibles a priori. Ces paramètres peuvent avoir unesignification physique, comme dans les modèles de connaissance (issues de lois de la mécanique, deélectricité, etc...), ou ne pas en avoir, comme c’est le cas pour les modèles de comportement. Dans lesdeux cas, ils doivent fournir une approximation fidèle des comportements du système physique, dans lamesure où leurs paramètres sont ajustés à partir de données expérimentales. L’objectif cherché est derendre identiques les réponses du processus et du modèle, pour des séquences d’entrée données.
FIGURE 1 – Principe général de l’identification [1]
Cette leçon s’adresse à un public averti des méthodes d’identification dites "graphiques". Elles se basenten pratique sur la réponse du processus à un échelon (réponse indicielle), bien qu’en théorie elles pour-raient également se baser sur l’analyse de la réponse impulsionnelle. Elles permettent de se faire uneidée du gain d’un système, de sa principale constante de temps et de son éventuel retard. On citera àtitre de rappel :
– La méthode des 63% de la valeur finale pour les systèmes du premier ordre– Les méthodes d’identification de formes canoniques pour les systèmes oscillants du deuxième ordre– Les méthodes de Broïda et de Strejc pour les systèmes à retard
Elles ne font pas l’objet de cette leçon qui présente deux méthodes plus sophistiquées que sont laméthode des moindres carrés et la méthode du modèle.
2 Méthode des moindres carrés
Le principe général de cette méthode est de choisir le jeu de paramètres d’un modèle que l’on définira,de telle sorte qu’il minimise la somme des carrés de la différence entre les valeurs prédites par le modèleet les valeurs observées.
1

Moindres carrés, méthode du modèle
Pour l’identification des paramètres, on dispose d’un vecteur de mesures :
y = [y1 y2 · · · yN ]T
Et on veut construire un vecteur estimé, via le modèle et ses paramètres :
y = [y1 y2 · · · yN ]T
Il convient donc d’établir le modèle permettant de calculer la variable y. On cherche ce modèle sousforme discrète :
y(k+1) = − (a1y(k) + a2y(k − 1) + · · ·+ any(k − n− 1))+b1u(k)+b2u(k−1)+· · ·+bmu(k−m+1) (1)
On suppose qu’une séquence (u(1), u(2), · · · , u(N)) a été appliquée en entrée, et que la séquence dessorties correspondantes a été observée (y(1), y(2), · · · , y(N)). Notons d’ores et déjà que la prédictionpar le modèle de y(k+1) est réalisée à partir des mesures antérieures, et non des prédictions antérieures.
Afin de limiter les développements lourds en notations, présentons sans plus attendre deux exemplessimples.
Premier exemple Le premier exemple est le plus classique, celui de la régression linéaire. En effet,bien souvent, on dispose d’une série de mesures y en fonction d’une entrée u qui semble linéaire, et l’onsouhaite trouver la régression linéaire, c’est à dire l’équation de la droite y = f(u) minimisant l’erreur ausens des moindres carrés. Pour simplifier, nous chercherons l’équation de la droite sous la forme y = au,a étant le paramètre inconnu. Ce modèle permet alors de calculer le vecteur y :
Observation Commande Prévisiony0 u0 y0 = au0y1 u1 y1 = au1· · · · · · · · ·yN uN yN = auN
Le critère à minimiser est alors, au sens des moindres carrés :
J(a) =1
2
[(y0 − y0)
2 + (y1 − y1)2 + · · ·+ (yN − yN )2
](2)
On peut réécrire ce critère sous forme matricielle :
J(a) =1
2(y −Ha)T(y −Ha) (3)
Où, y =
y0y1...yN
et H =
u0u1...uN
.
Chercher le paramètre a qui minimise ce critère revient à dériver le critère par rapport à a, et à chercherquand il s’annule. La valeur du paramètre qui annulent la dérivée du critère est donnée par :
a = (HTH)−1(yTH) (4)
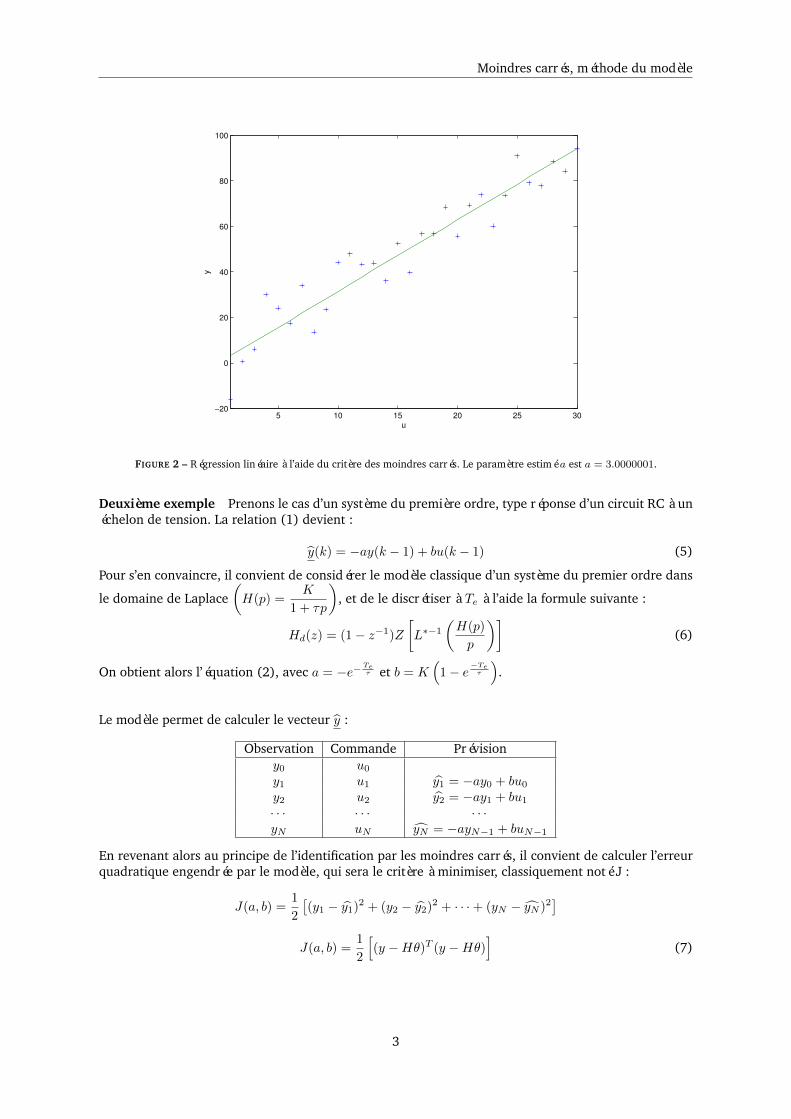
On se propose de vérifier ceci par une simulation. On a un jeu de mesures donné, et on désire trouverla régression linéaire correspondante.
2
Moindres carrés, méthode du modèle
5 10 15 20 25 30−20
0
20
40
60
80
100
y
u
FIGURE 2 – Régression linéaire à l’aide du critère des moindres carrés. Le paramètre estimé a est a = 3.0000001.
Deuxième exemple Prenons le cas d’un système du première ordre, type réponse d’un circuit RC à unéchelon de tension. La relation (1) devient :
y(k) = −ay(k − 1) + bu(k − 1) (5)
Pour s’en convaincre, il convient de considérer le modèle classique d’un système du premier ordre dans
le domaine de Laplace(H(p) =
K
1 + τp
), et de le discrétiser à Te à l’aide la formule suivante :
Hd(z) = (1− z−1)Z
[L∗−1
(H(p)
p
)](6)
On obtient alors l’équation (2), avec a = −e−Teτ et b = K
(1− e
−Teτ
).
Le modèle permet de calculer le vecteur y :
Observation Commande Prévisiony0 u0y1 u1 y1 = −ay0 + bu0y2 u2 y2 = −ay1 + bu1· · · · · · · · ·yN uN yN = −ayN−1 + buN−1
En revenant alors au principe de l’identification par les moindres carrés, il convient de calculer l’erreurquadratique engendrée par le modèle, qui sera le critère à minimiser, classiquement noté J :
J(a, b) =1
2
[(y1 − y1)
2 + (y2 − y2)2 + · · ·+ (yN − yN )2
]J(a, b) =
1
2
[(y −Hθ)T (y −Hθ)
](7)
3
Moindres carrés, méthode du modèle
Où 1, y =
y1y2...yN
, H =
−y0 u0−y1 u1
......
−yN−1 uN−1
et θ =(ab
).
Chercher les paramètres a et b qui minimisent ce critère revient à dériver le critère par rapport à θ,et à chercher quand il s’annule. La valeur des paramètres qui annulent la dérivée du critère est donnéepar :
θ = (HTH)−1(yTH) (8)
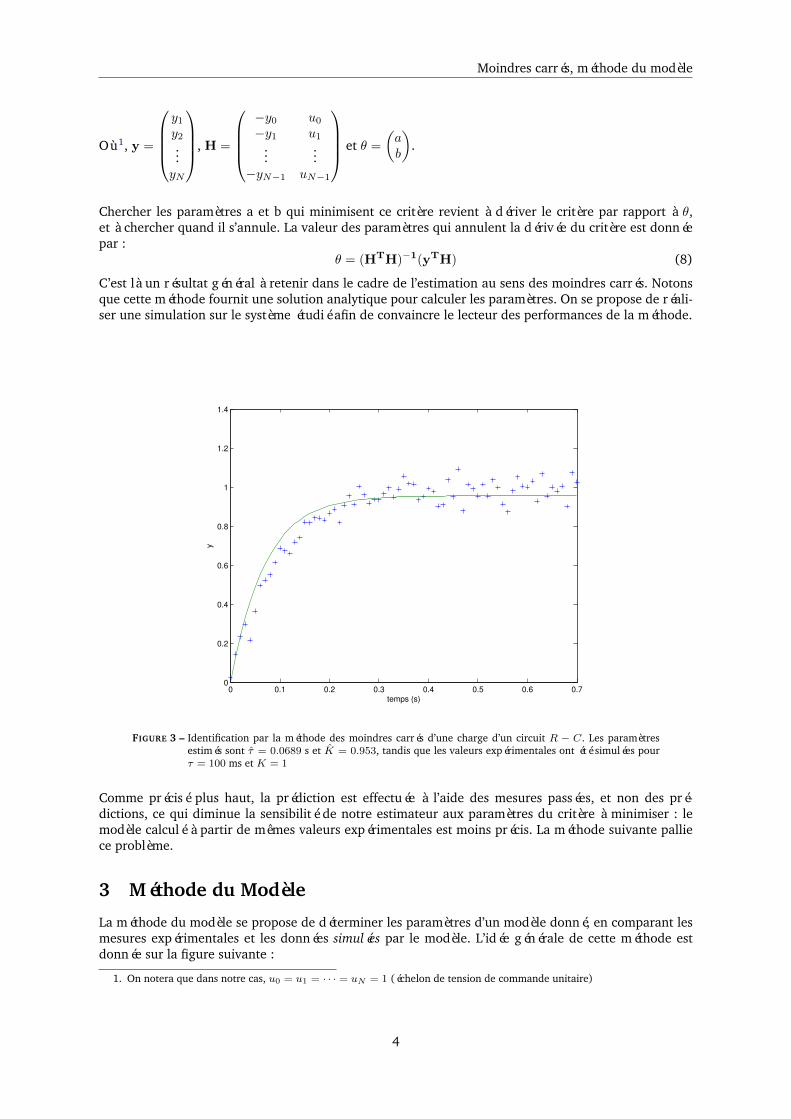
C’est là un résultat général à retenir dans le cadre de l’estimation au sens des moindres carrés. Notonsque cette méthode fournit une solution analytique pour calculer les paramètres. On se propose de réali-ser une simulation sur le système étudié afin de convaincre le lecteur des performances de la méthode.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.2
0.4
0.6
0.8
1
1.2
1.4
y
temps (s)
FIGURE 3 – Identification par la méthode des moindres carrés d’une charge d’un circuit R − C. Les paramètresestimés sont τ = 0.0689 s et K = 0.953, tandis que les valeurs expérimentales ont été simulées pourτ = 100 ms et K = 1
Comme précisé plus haut, la prédiction est effectuée à l’aide des mesures passées, et non des pré-dictions, ce qui diminue la sensibilité de notre estimateur aux paramètres du critère à minimiser : lemodèle calculé à partir de mêmes valeurs expérimentales est moins précis. La méthode suivante palliece problème.
3 Méthode du Modèle
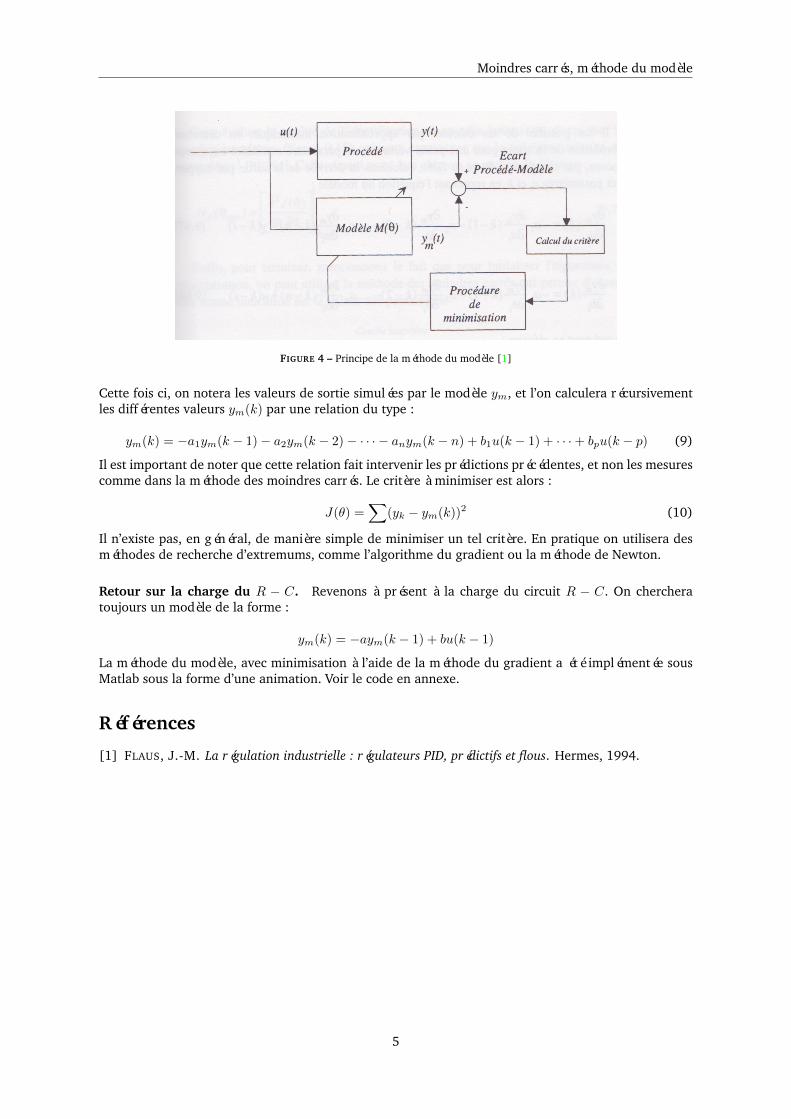
La méthode du modèle se propose de déterminer les paramètres d’un modèle donné, en comparant lesmesures expérimentales et les données simulées par le modèle. L’idée générale de cette méthode estdonnée sur la figure suivante :
1. On notera que dans notre cas, u0 = u1 = · · · = uN = 1 (échelon de tension de commande unitaire)
4
Moindres carrés, méthode du modèle
FIGURE 4 – Principe de la méthode du modèle [1]
Cette fois ci, on notera les valeurs de sortie simulées par le modèle ym, et l’on calculera récursivementles différentes valeurs ym(k) par une relation du type :
ym(k) = −a1ym(k − 1)− a2ym(k − 2)− · · · − anym(k − n) + b1u(k − 1) + · · ·+ bpu(k − p) (9)
Il est important de noter que cette relation fait intervenir les prédictions précédentes, et non les mesurescomme dans la méthode des moindres carrés. Le critère à minimiser est alors :
J(θ) =∑
(yk − ym(k))2 (10)
Il n’existe pas, en général, de manière simple de minimiser un tel critère. En pratique on utilisera desméthodes de recherche d’extremums, comme l’algorithme du gradient ou la méthode de Newton.
Retour sur la charge du R − C. Revenons à présent à la charge du circuit R − C. On chercheratoujours un modèle de la forme :
ym(k) = −aym(k − 1) + bu(k − 1)
La méthode du modèle, avec minimisation à l’aide de la méthode du gradient a été implémentée sousMatlab sous la forme d’une animation. Voir le code en annexe.
Références
[1] FLAUS, J.-M. La régulation industrielle : régulateurs PID, prédictifs et flous. Hermes, 1994.
5
Moindres carrés, méthode du modèle
Annexe : codes utilisés pour la simulation
%% programme e f f e c t u a n t l a s imula t ion des moindres c a r r e sc l e a r a l l ;c l o s e a l l ;c l c ;
%% Exemple 1 y = a∗x
c l e a r a l l ;c l o s e a l l ;c l c ;
% generer l e s donnees y = a0∗x + b , b b r u i t e t a0 =3;N = 30; %Nb d ’ e c h a n t i l l o n sa0 =3;x = 1:N ;b = 10∗randn (N , 1 ) ;y = a0∗x ’ + b ;
% es t imat ion des parametres
a = inv ((x∗x ’ ) )∗x∗y ;
p l o t (x , y , ’+ ’ ,x , a∗x )
%% Exemple 2 tau = 100ms , charge RCc l e a r a l l ;c l o s e a l l ;c l c ;
%generat ion des mesuresTe = 1e−2;t = 0:Te : 0 . 7 ;tau = . 1 ;N = length (t ) ;br = randn (1 ,N ) ;y = 1−exp(−t/tau ) + 0.05∗br ;
%% es t imat ion des parametresH = [−y (1 :N−1) ’ ones (1 ,N−1) ’ ] ;theta = inv (H ’∗ H ) ∗(y (2 : N )∗H ) ’ ;
a = theta (1) ;b = theta (2) ;tauexp = −Te/ log(−a ) ;Kexp = b/(1+a ) ;p l o t (t , y , ’+ ’ ,t , Kexp∗(1−exp(−t/tauexp ) ) ) ;
6
Moindres carrés, méthode du modèle
%% methode du modele
%% Exemple 2 tau = 100ms , charge RCc l e a r a l l ;c l o s e a l l ;c l c ;
%generat ion des mesuresTe = 1e−2;t = 0:Te : 0 . 7 ;tau = . 1 ;N = length (t ) ;br = randn (1 ,N ) ;yexp = 1−exp(−t/tau ) + 0.03∗br ;
%methode du modele
%i n i t i a l i s a t i o n
a=−0.8;b=0.3;ym = zeros (N , 1 ) ;f o r i =1:N−1
ym (i+1) = −a∗ym (i ) + b ;end
Nit = 300; % nombres d ’ i t e r a t i o n
f o r i = 1: Nitp lo t (t , yexp , t , ym ) ;pause ( .01) ;% c a l c u l du grad ien t de JH = [−ym (1 :N−1) ones (1 ,N−1) ’ ] ;theta = [a ; b ] ;gradJ = −H ’ ∗ ( yexp (2 : N ) ’−H∗theta ) ;%on c a l c u l e l e nouveau parametre the tatheta = theta −0.002∗gradJ ;% on r e c a l c u l e l a s o r t i ea=theta (1) ; b=theta (2) ;ym = zeros (N , 1 ) ;f o r i =1:N−1
ym (i+1) = −a∗ym (i ) + b ;end
end
7




























