Embed Size (px)
Citation preview

I n te r p ret at i o n and C I ass if i cat i o n of F r i n g e Patter t i s
Huang Zhi and lioll‘ U Joh;iiisson
Abstract A procedure for interpretation and classification of digital fringes, including design of quantitative features and methods of feature extraction, is presented. Totally, fourteen parameters, related to the geometrical shape and the physical meaning of fringes, are proposed. These parameters can be used, either for a macroscopic description of the fringe pattern, or for feature interpretation of parts of the pattern. The parameter extraction method can be successfully applied to noisy fringes. The methods are well suited for automatic fringe pattern analysis and results of applying the procedures are presented.
1 Introduction Image processing is widely used in automatic analysis of fringe patterns. A basic step in the analysis is to automatically generate a quantative representation of the fringe pattern. In this step, the pattern is classified into fringe areas of different characters and their (relative) locations in the pattern are measured. In the next step, a condensed, high-level description is created and relevant quantitative data is attached to each area or to specific points in each area[l].
General interpretation procedures are needed, at least in some steps of the interpretation process. However, there is a lack of general procedure for interpreting fringe patterns quantatively in fringe analysis. One reason for this is the complexity of fringe patterns. The complexity is due to the optical set-up and the particular application. The traditional parameters used to describe digital images can not be used directly to describe fringe patterns generally. Another reason is that researchers in this field have spent their main effort in the application, leaving the details of the question. A more
suitable and general procedure for automatic fringe interpretation is thus needed, since an increasing number of measurement applications, require automatic analysis of interferograms[2].
This paper presents a general procedure for interpretation and classification of fringe patterns, using in total 14 feature parameters, based on both the geometrical shape of fringes and their possible physical meaning. The parameters are designed for describing features of one pixel, of a subpicture, or of whole fringe area. Methods of extracting and calculating these parameters from noisy fringe pictures are proposed. Examples of using this procedure to analyze a particular fringe pattem are given. 2 Idea of parameter design Fringe pattern can be considered as a serious curves with ridge-valle y structure. Curve shapes of the ridge-valley structure are to some extent irregular and spatial frequencies may vary many orders of magnitude over one specific interferogram.
Because of complexity and irregularity of the patterns, it is difficult to use a general model to describe features of a whole fringe area and to classify different patterns. However, the description becomes possible by interpreting the pattern using several parameters, each of which represents special features, and by analysing subpictures of the pattern. Since size of the subpictures can be changed freely (from one pixel to whole picture), and for many applications, only some special features are needed, this simplification does not cause any loss of generality, but can really reach the purpose of interpretation procedure.
Feature parameters in this paper are designed based on this idea. A series of quantitative parameters are proposed for describing one pixel, two pixels, subpattern, and whole pattern
105 0-8186-2920-7192 $3.00 @ 1992 IEEE

respectively. Using only one or two parameters may be not enough to interpret the whole pattern, bu t it is sufficient for those applications, in which we are only interested in special features of the fringes. Furthermore, a suitable combination of the parameters can really satisfy the requirements of the whole pattern interpretation.
Interpreting the fringes using skeleton pictures is an efficient and common method in fringe analysis. Therefore, processing proposed in this paper is based on skeleton patterns. It is assumed that the centerlines of the fringes have been extracted before parameter extraction[2]. 3 Feature parameters 3.1 Feature parameters of one pixel A pixel in fringe area can be described by characterizing the fringe, on which the processed pixel is, and the local area around this pixel. 3.1.1 Features related to fringes Geometrical features, shape and length of the fringe are used for description. In physical meaning, shape of a fringe describes the geometrical distribution of a group of special points of equal phase difference between the two light beams used in generating the interferogram. The length of a fringe gives the total number of these special points on the object surface to be measured.
Digital fringes may appear as closed, open, or touching curves. We denote these curves as 0-, S-, and X-type curves, respectively. Three parameters are designed and defined as:
(1)
(2)
F, = L(fringe) F, = C(pixe1)
for 0 type;
for S t y p ;
i=l (3) i:lnc h) for X type;
where L(fringe) is the length of the processed fringe and C(pixe1) is curvature of the fringe at the processed pixel.
F3 is shape parameter. For the 0-type, it is the compactness, A/L2, where A is the area inside the closed fringe and L is the length of the fringe. For the S-type pattern, F3 is a measure of the deviation of the fringe line from a straight line. This line is obtained from the
F3 = l x D i s ( x i , y i )
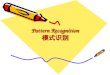
fringe skeleton pixels using suitable estimation methods. Dis(xi, yi) is the distance from the pixel (xi, yi) on the fringe to the straight line. In the X-type pattern, two fringes touch each other. In principle, many lines may touch, e.g. at a discontinuity like an edge. We think of this as a number of branches, which are counted if they are longer than a preasigned threshold. In this case, F3 represents the total number of branches. 3.1.2 Features related to a local area Fig.1 shows the possible patterns in a local area. The pictures may be characterized as follows: a. area of straight or almost straight fringes; b. area of open fringes; c. the processed pixel is central point in a group of closed fringes; d. the processed pixel is a central point in a group of saddle-like fringes; e. and f.. area similar to the cases of c and d, respectively, but the processed pixel is not in the structural centre.
a . b . C .
d. e . f . Fig.1 Fringe pattems in a local area
Five parameters are designed for describing the patterns in Fig.1. F4 is defined as
NGkeleton) SIZE(loca1)
F, = (4)
where N(ske1eton) is total number of skeleton pixels in this local area, and SIzE(loca1) is size of the local area. The physical meaning of F4 is a measure of the intensity of change or variation in the area.
For cases a and b, the similarity of the fringes has to be investigated as to the curvature of the fringe lines. For straight-like fringes, there exists a uniform direction over the area, if a parameter, F5, defined as,
106

N M
i=1 j=l \JI is small. N is the total number of fringes in the local area and M is the total number ofvpixels on the ith fringe skeleton. Slopei(j) is the direction of the jth pixel on the ith skeleton.
The direction of the fringes in the local area is given by Fg.
N
dY, = YJi) - Y,(i) dY, = YJi) - Y,(i)
where Ye (i), ys(i), xe(i> and xs(i) are vertical and horizontal coordinates of end and start pixels of the ith fringe skeleton.
For patterns in pictures c - f, it is necessary to investigate the character of the fringe lines: if they are closed lines, or represent a saddle pattern, if the processed pixel is a centre point, etc. The parameter F7 is designed for the classification into saddle pattern or closed fringes.
(7) where N(cfrin) is total number of closed fringes. If F7 > 0, the pattern consists of closed fringes and if F7 = 0, we have a saddle pattern.
Parameter F8 is used to classify into centre or non-center situation. The area related to the point is, in this case, a circle, the radius of which is determined by the spatial frequencies in the area. The parameter is defined as:
F, = N(cfrin)
N(ske1eton) F, = A(circ1e) (8)
where N(ske1eton) is total number of skeleton pixels inside this circle and A(circ1e) is its area. If F8 is larger than a pre-set threshold, the pixel is called "a centre point". 3.2 Features involving two pixels Two parameters are used to describe the relation of two pixels. One is the distance between them, in number of fringe lines between them. The other is a measure of their similarity.
For the distance, we have: (9) F, = N(pixfrin)
where N(pixfrin) is total number of fringes between two pixels
For similarity, parameter F10 is designed as (10) Fie= D1+ 4 + D3+ D4+ Dg+ D,
D1= I Fi(1)- F1(2) I / [F1(1) + F1(2)1
D2= I Fz(l)-F2(2) I/[F~(l)+F2(2)1 I F3 (1) - F3@) I / [F,(U + F3@N type;
D3 = i o diuatnl lypc;
D,= i o diffaav type;
D4 = IF4(l)-F4(2) I/[F4(1)+ F,(2)1 I F#) - F&) I/ + F&)l WE 1412;
SanE tye; D6= i: Matnltype;
where F1. F2, F3, F4, and Fg are the parameters defined in section 3.1. The indices (1) and (2) refer to pixels 1 and 2, respectively. 3.3 Local fringe area parameters 3.3.1 Spatial frequency, F4 The definition and description of F4 has been given in section 3.1.2, Eq.(4), 3.3.2 Main direction, F11 Parameter F11 is designed to describe the main direction of the local area, as
tan' (gNk(skeleton) Fl / ~Ni,,(slceleton)) F l pc5 p=- 7E
2 (1 1) Fl,= n /2 ;
:leton) ,TNiy(skeleton) : P>z i \ F l F 1 1 2
where, as shown in Fig.2, XI, YI, ~ 2 , Y2, and ~ 3 , ~3 are boundaries of the three squares, which are centred in the processed local area. Nix and Niy are total number of skeleton pixels on the horizontal and vertical boundary of the ith square.
xl=Lx. x2=2/3Lx. X3=1/3Lx: Y k L V . Y2=2/3Lv. Y3=1/3Lv
a. B < x/2 b. B = n/2 c. B > x/2 Fig3 Calculation of main direction
For case a, 13 < d 2 ; for case b, f3 = x/2; for case e, 13 > d 2 . By checking the position of start and end pixels of the first fringe in the local area(fringe f l in Fig2 ), we can decide which case of Eq.( 1 1). Using three squares, instead of one square, a better average of the direction information can be obtained. 3.3.3 F12
(12) This parameter can tell the information about stable areas with closed fringes, both the area
F12= N(ShCl0)
107

number and the area position. A stable area is defined as that area, which is a centre of a closed fringe or a centre point in a saddle-like pattern. 3.3.4 F13
(13) This parameter gives information about stable areas with saddle fringes, both the area number and the area position. 3.3.5 F14
Combinations of the feature parameters may also be useful in many cases. The total number of stable areas is such a measure. 3.4 Features of the whole pattern When the size of the processed subpicture in section 3.3 is equal to the picture size, the subpicture is the whole fringe picture. In this case, the parameters introduced in section 3.3 can be used to describe the whole picture. 4 Feature parameter extraction The variables needed for parameter calculation are first extracted from skeleton pictures, and then the equations supposed in section 3 are used to calculate the feature parameters.
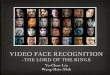
Procedure of extracting the variables are given in our full paper presentation. 5 Experiment results As an example, we use the proposed procedure to analyze the fringe pattern in Fig.3. The pattern was obtained using double exposure holography. The fringes represent the moving situation of the leg surface measured during the two exposures. The interesting features of the fringes include closed-like stable areas, fringe directions, and spatial frequency of fringes in each leg area. These features are used to classify the leg is normal(1eg 2) or abnormal(1eg 1)[3].
F13=N(StaSha)
F14= F12+ F13 (14)
a. Original picture b. Skeleton picture Fig.3 Holographic interferogram of human legs
Table 1 gives the calculation results of the interesting features. Parameters P3, P4, and P5
are the main directions of local areas 1,2, and 3 respectively( see Fig.4 ). SF is a combined feature used to classify legs and is defined as
where C1, ..., C5 are coefficients, which can be decided based on the parameter values using linear classification theory. For simplicity, in our experiment, we let Cl=C2=C3=C4=C5 =l. Table 1 Experiment Results
Spatial frequency pl 21.0 16.0 Close-like stable area p2 7.0 3 .O Direction of area 1 P3 4.8 0.3 Direction of area 2 P4 3.4 3.8 Direction of area 3 P5 3.6 3.7
SF = Cl*Pl+ C2*P2 + C3*P3 + C4aP4 + C5*P5
Features Leg 1 k g 2
SF 45.8 26.8
Fig.4 Local areas of Fig3
6 Discussion The proposed interpretation procedure is general for fringe pattern description and is also conveniently usable for practical applications. To satisfy the requirements of describing the whole fringe pattern, a few suitable parameters can be combined to give a synchronize features. To satisfy the requirements of extracting special features of the patterns, one or two corresponding features can be used.
The feature parameters are designed according to both possiblelly physical meaning and geometrical characters of fringes so user can conveniently choose suitable parameters for their requirements. 7 References 1. Reid, G. T., Automatic fringe pattern - - analysis: a review, Opt. and Las. in Engng, 7, 37-68, 1986 Z.Yatagai,T., Automatic fringe analysis using digital image processing techniques, Opt. Engng, 21, 432-5, 1982 3.Zhi.H, Recognition system for automatic diagnosis of knee ligaments, Proc. of 10th Int. Conf. of Pattern Recognition, 1990, Atlantic City, USA, 597-602
108