Embed Size (px)
Citation preview

1
Introducción VCO
Introducción al proceso digital deimagen y visión por computador
Ilustraciones extraidas de diversasfuentes

2
Introducción VCO
Libros de referencia
• Gonzalez & Woods “Digital Image Processing” Addison-Wesley
• Klette& Schluns&Koshan “Computer vision. Three-dimensional datafrom images” Springer-Verlag
• Jain&Kasturi&Schunck “Machine Vision” McGraw Hill
• Horn “Robot Vision” MIT Press
• Pratt “Digital Image Processing”
• Haralick&Shapiro “ Computer and Robot Vision” Addison Wesley
• Castleman “Digital Image Processing” Prentice Hall

3
Introducción VCO
Contenido
• Conceptos iniciales
• Geometría de la captura de la imagen– Calibración
– Visión estereo y el problema de la correspondencia
• Modelo radiométrico-fotométrico de la generación de laimagen.

4
Introducción VCO
História

5
Introducción VCO

6
Introducción VCO
Convención de ejes

7
Introducción VCO
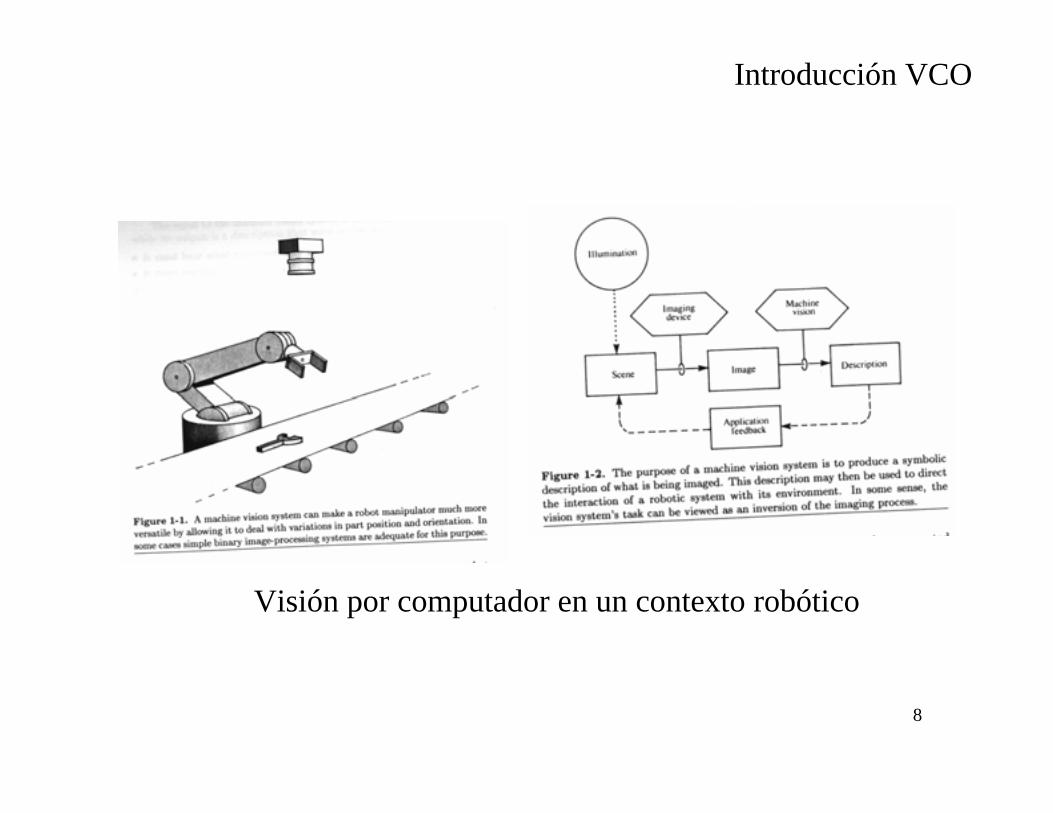
Estructura del sistema de procesode imagen
8
Introducción VCO
Visión por computador en un contexto robótico

9
Introducción VCO
Sensores

10
Introducción VCO
Sensores
• Cámaras basadas en CCD (Charge coupled device)
• Color: 1 ó 3 chips
• Problemas de calibración fotométrica– Nivel de negro: corrección de la imagen producida por el ruido
térmico en el sensor cuando no hay iluminación.
– Balance de blanco: Equilibrado de los canales para que un objetoblanco se vea como tal.
– Re-Corrección de gamma: eliminar el ajuste de la emisión delmonitor (no-lineal) a la la irradiación recibida por la cámara(lineal).
– Efectos no lineales: pre-kneeing, clipping, blooming

11
Introducción VCO

12
Introducción VCO

13
Introducción VCO
Técnicas de imagenMédica, basadas en proyecciones
14
Introducción VCO
Muestreo y cuantización
• Muestreo (Sampling): discretización deldominio espacial de la imagen
• Cuantización (Quantization): discretizacióndel rango de valores de la imagen
• Resolución: efecto combinado del muestreoy la cuantización

15
Introducción VCO

16
Introducción VCO

17
Introducción VCO

18
Introducción VCO
Geometría de la cámara
• Modelo básico de la cámara
• Transformación de cámara
• Calibración
• Cámara con lente
• Calibración y corrección (Tsai)

19
Introducción VCO
Modelo de cámara puntual

20
Introducción VCO
Proyección sin inversión de la imagen
Transformación proyectiva

21
Introducción VCO
Relación entre las coordenadas en el plano imagen y los índices de los pixels

22
Introducción VCO
Transformación entrelos sistemas de coordenadas del mundo y la cámara
Proyección ortogonal

23
Introducción VCO
Pan: giro horizontalTilt: giro verticalOffset: desplazamientodel plano imagen
Transformación expresadaen coordenadas homogéneas

24
Introducción VCO
Descomposición de la transformación entre sistemas de coordenadas

25
Introducción VCO
Calibración lineal
Dados (X,Y,Z) (x,y) el sistema de ecuaciones para estimar [aij] es indeterminado

26
Introducción VCO
Objetos de calibración

27
Introducción VCO
Modelo de cámara con lente

28
Introducción VCO
Diametro del circulo correspondiente al punto desenfocado
Pto. desenfocado

29
Introducción VCO
Transformaciones de unalente con distorsión

30
Introducción VCO

31
Introducción VCO
Método de calibración de Tsai
Obtenidos a partir de la imagen de calibración
donde
Más de 7 ptos de calibración, sistema sobredeterminado
El signo depende de que las posiciones recalculadas tengan el mismo signo que (xb,yb)

32
Introducción VCO
Método de calibración de Tsai (cont)
Sistema sobredeterminado

33
Introducción VCO
Se trata de minimizar una función de error de ajuste de las proyecciones a partir de las coordenadas del mundo y de la imagen,Para obetener un mejor ajuste de los parámetros
Coordenadas obtenidas a partir de las coordenadas del mundo
Coordenadas obtenidas a partir de las coordenadas de la imagen
Función de error a minimizar
Minmización por descenso del gradiente

34
Introducción VCO
Imagenes estéreo coplanares

35
Introducción VCO

36
Introducción VCO
Cámaras en posición arbitraria

37
Introducción VCO
Superficie de disparidad nula

38
Introducción VCO
Correspondencia basada en bordes
Asume que las lineas epipolares coinciden con las filas de la imagen
39
Introducción VCO
Correspondencia basada en regiones
• Detección de puntos de interés– Calculo de las varianzas direccionales
– Selección en base a la máxima varianza
– Selección de máximos locales de interés
• Emparejamiento de características en base ala correlación de regiones– Asume que las lineas epipolares coinciden con
las filas de la imagen

40
Introducción VCO
Varianzas direccionales
Interés
Correlación para decidir la correspondencia
41
Introducción VCO
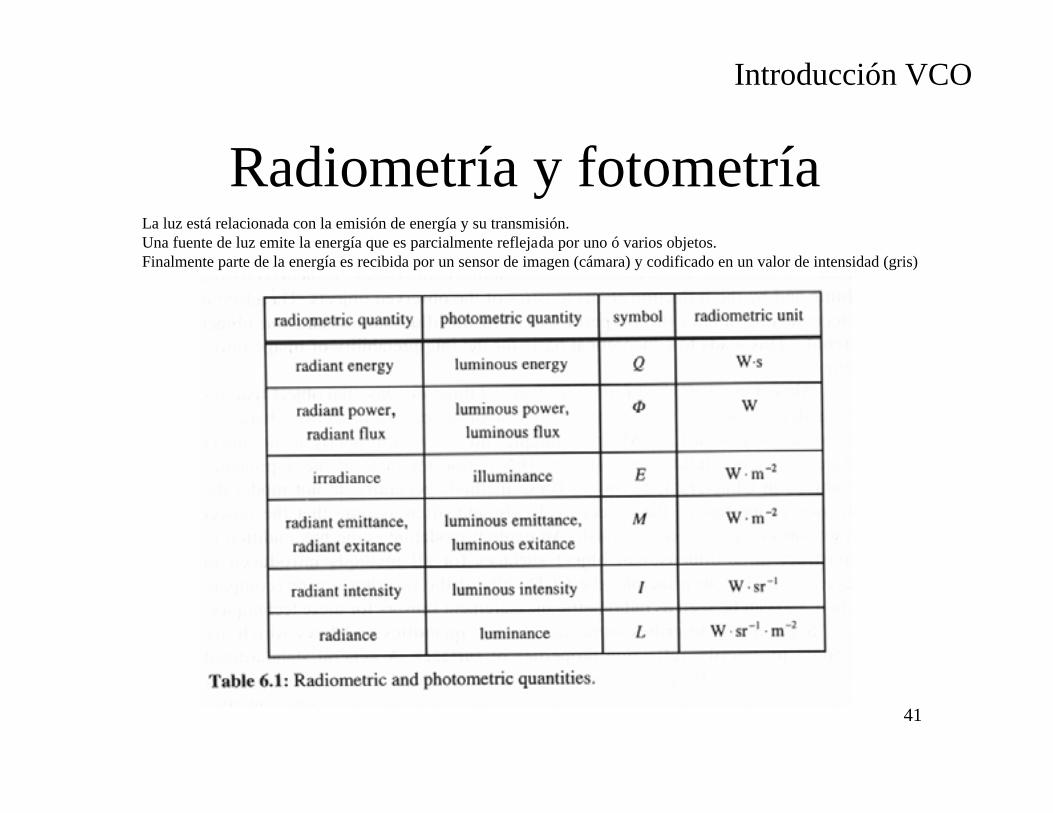
Radiometría y fotometríaLa luz está relacionada con la emisión de energía y su transmisión.Una fuente de luz emite la energía que es parcialmente reflejada por uno ó varios objetos.Finalmente parte de la energía es recibida por un sensor de imagen (cámara) y codificado en un valor de intensidad (gris)

42
Introducción VCO
El flujo radiante o potencia radiante es la energía radiante por unidad de tiempo
La emitancia radiante o excitación es el flujo en un área radiante A
La irradiación es lapotencia radiante recibida por unidad de tiempo y area
La intensidad de radiación es el flujo radiante por ángulo sólido, Corresponde a la densidad angular del flujo radiante
La radiancia es el flujo radiante por ángulo sólido y área Radiancia de la escenaO reflejada

43
Introducción VCO
Relación de intercambio de flujo radiante entre dos superficies

44
Introducción VCO
Intensidad radiante en el área emisora
Diferencial de la intensidad radiante
Diferencial de la irradiancia en el mismo area
Integrando se obtiene la irradiancia sobre el área receptora

45
Introducción VCO
Función de distribución de la reflectanciaLa función de distribución bidireccional de reflectancia es la herramienta básica de descripción de la reflectancia

46
Introducción VCO
La función de distribución bidireccional de la reflectancia describe como se observa una superficie desde una dirección general cuando se ilumina desde una dirección precisa
Si se considera que la irradiación es direccional
Integrando sobre el ángulo sólido de llegada de la radiación se obtiene una expressiónPara la radiancia reflejada

47
Introducción VCO
BRDF de una superficie perfectamente difusa
Superficie reflectante perfectamente difusa: •Igualmente brillante desde cualquier dirección de observación•Independiente del tipo de iluminación
Superficie reflectante Lambertiana: emite por reflexión toda la energía que le llega. •La radiancia es igual a la irradiación de entrada•La radiancia reflejada no depende de la dirección y es constante•La BRDF es constante•La emitancia radiante es igual a la irradiación
La emitancia radiante se puede calcular como la integral de la radiancia reflejada
Para una fuente de luz
48
Introducción VCO
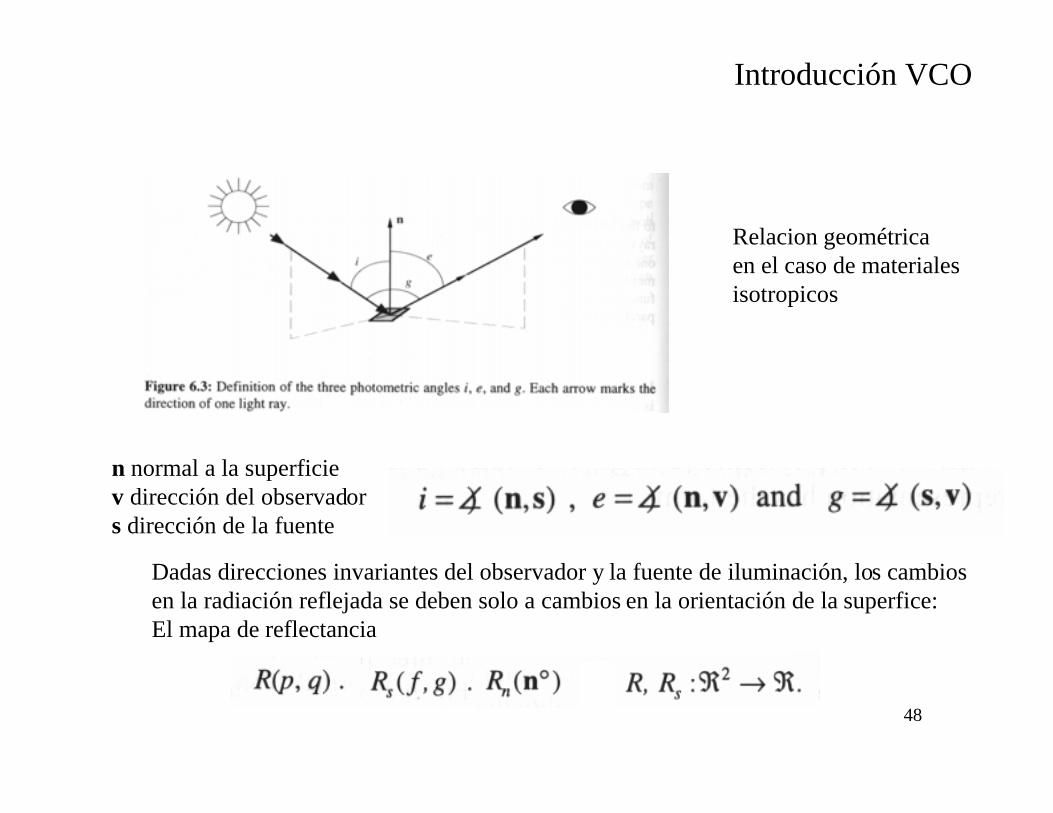
n normal a la superficiev dirección del observadors dirección de la fuente
Relacion geométricaen el caso de materialesisotropicos
Dadas direcciones invariantes del observador y la fuente de iluminación, los cambiosen la radiación reflejada se deben solo a cambios en la orientación de la superfice:El mapa de reflectancia

49
Introducción VCO
Mapas de reflectancia lineales
Gradiente de la iluminación
Irradiación de la fuente de luz
Albedo (coeficiente de absorción de la luz)

50
Introducción VCO
Mapas de reflectancia Lambertianos
Radiancia de una superficie Lambertiana, asumiendo albedo ρ, una fuente de luz con irradiancia E0 bajo el ángulo de incidencia i
Omitiendo factoresconstantes, el mapade reflectancia

51
Introducción VCO
Mapas de reflectancia Lambertianos
En espacio gradiente
En coordenadas estereográficas
Mapa rotacionalmente simétrico

52
Introducción VCO

53
Introducción VCO
Ecuación de irradiancia de la imagen
Relaciona la radiancia de la escena con la irradiación del sensor deimagen. La formación de la imagen:
Focallength
Diámetrodela lente
Radianciareflejada
Irradiaciondela image
Ángulo entreel eje óptico yel rayo
Asunciones:•Sistema enfocado.•La única fuente de radiación es L.•No hay vignetting•No hay pérdida por transmisión•La refracción es despreciable

54
Introducción VCO
Relación de la imagen con el mapa de reflectancia
Asumiendo la proyección ortográfica
Obviando el factor de escala
La relación lineal entre la irradiación medida y el mapa de reflectanciaobliga a que se realice la re-corrección de gamma en las cámaras concorrección de gamma si se trata de recuperar el mapa de reflectancia orealizar el análisis en base a él.

55
Introducción VCO
Color
• Las imágenes monócromas pueden considerarse como funciones conrango en un intervalo 0≤f(x,y)≤Gmax
• Las imágenes en niveles de gris tienen como rango una discretización de eseintervalo
• Las imágenes en color se representan en los monitores de forma aditiva. Loscolores básicos son Rojo (700nm), verde G (546nm) y azul B (435nm). Lostriestimulos son
• Los componentes de color normalizados respecto a la intensidad son
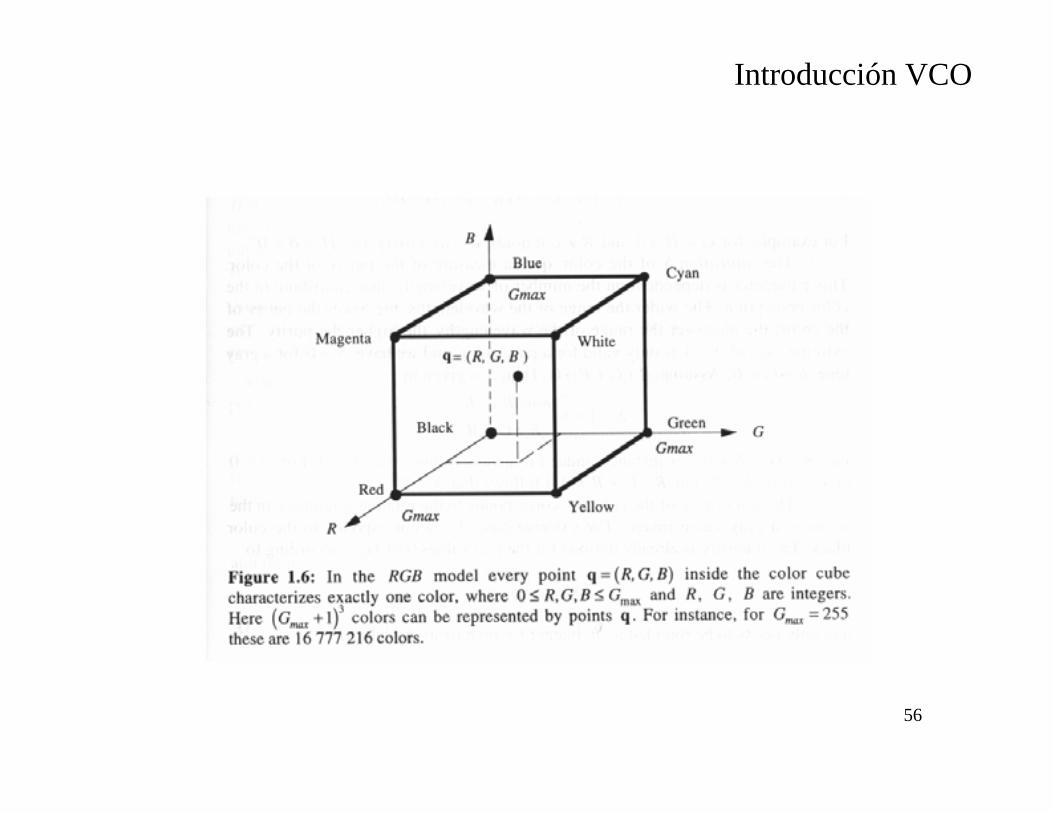
• Los niveles de gris corresponden a la diagonal del cubo RGB: (u,u,u)
• RGB es la representación interna más común computacionalmente
56
Introducción VCO
57
Introducción VCO
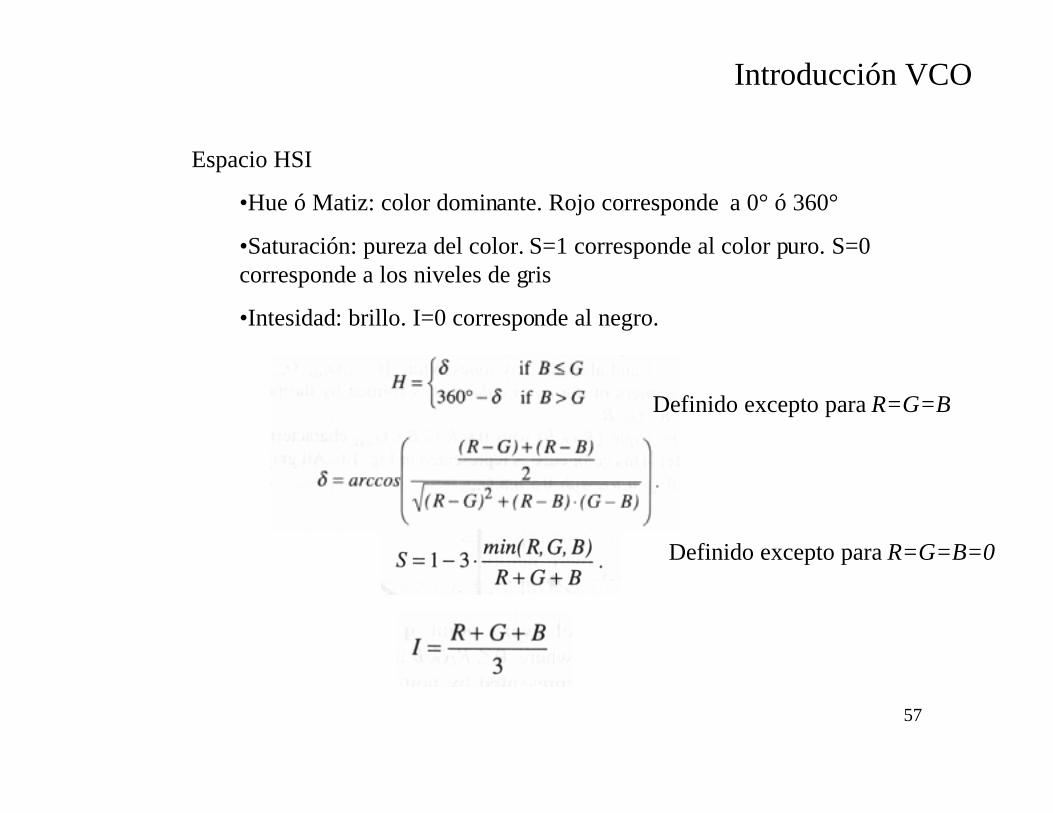
Espacio HSI
•Hue ó Matiz: color dominante. Rojo corresponde a 0° ó 360°
•Saturación: pureza del color. S=1 corresponde al color puro. S=0corresponde a los niveles de gris
•Intesidad: brillo. I=0 corresponde al negro.
Definido excepto para R=G=B
Definido excepto para R=G=B=0

58
Introducción VCOConversión RGB a HSI

59
Introducción VCO





























