Embed Size (px)
Citation preview
Information Architecture and Control Design for
Rigid Formations
Brian DO Anderson, Changbin (Brad) Yu, Baris Fidan
Australian National University and National ICT Australia
2007 Chinese Control Conference

Chinese Control Conference 中国控制会议 2
Thanks
Coauthors:
J HendrickxJ LinA MorseI ShamesD v d WalleW WhiteleyR Yang
• To the conference organisers for inviting me• To my colleagues for helping me:
Contributions of all these individuals appear somewhere in this talk
P Belhumeur
V Blondel
M Cao
S Dasgupta
T Eren
J Fang
D Goldenberg
Baris FidanChangbin (Brad) Yu
Collaborators
Chinese Control Conference 中国控制会议 3
Aim of Presentation
• To expose current problems involving swarms• To indicate a typical messy application problem• To indicate some of the tools (building blocks)
being developed to tackle general application problems We shall describe a number of ‘standardised’ swarm
problems and partial solutions Solutions to real swarm problems depend on many of
these standardised problems
Chinese Control Conference 中国控制会议 4
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 5
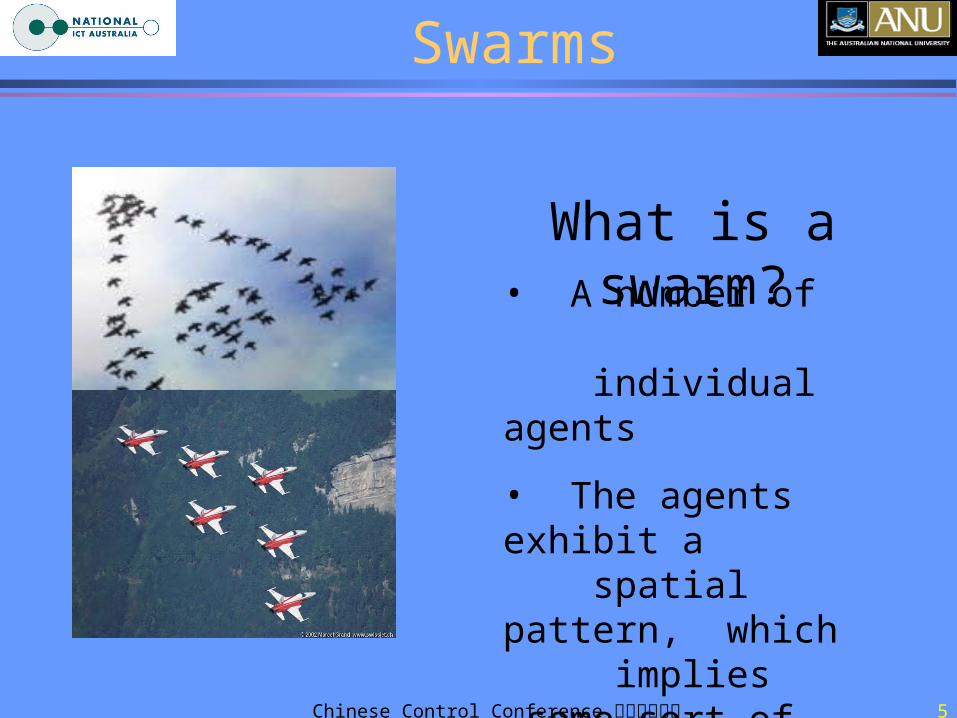
Swarms
• A number of individual agents
• The agents exhibit a spatial pattern, which implies some sort of interaction between the agents
What is a swarm?
Chinese Control Conference 中国控制会议 6
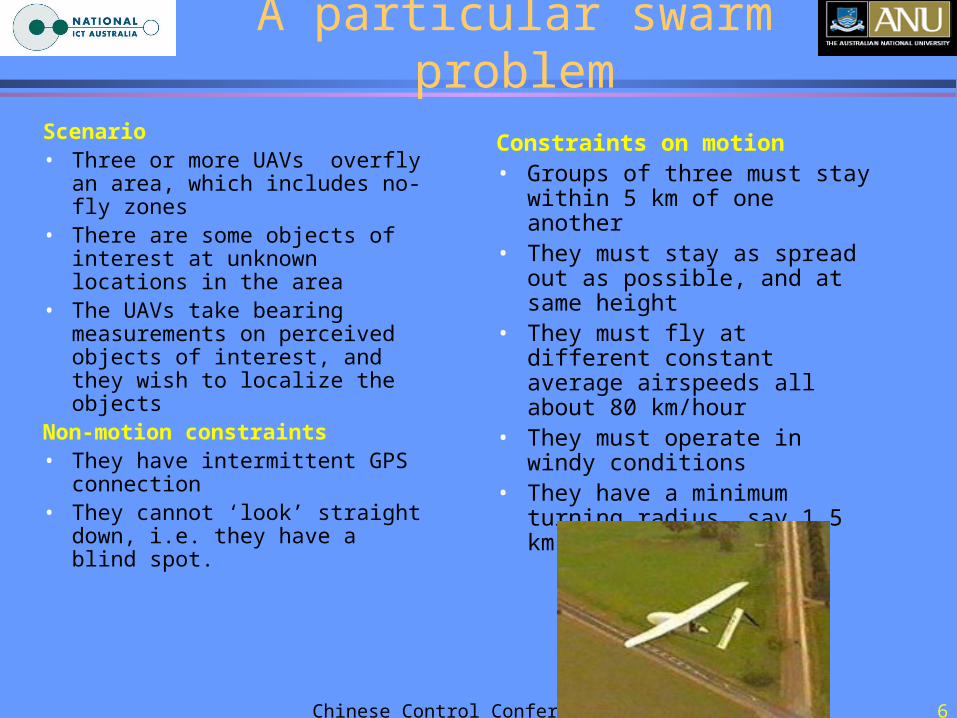
A particular swarm problem
Scenario• Three or more UAVs overfly an
area, which includes no-fly zones• There are some objects of interest
at unknown locations in the area• The UAVs take bearing
measurements on perceived objects of interest, and they wish to localize the objects
Non-motion constraints• They have intermittent GPS
connection• They cannot ‘look’ straight down,
i.e. they have a blind spot.
Constraints on motion• Groups of three must stay
within 5 km of one another• They must stay as spread out as
possible, and at same height• They must fly at different
constant average airspeeds all about 80 km/hour
• They must operate in windy conditions
• They have a minimum turning radius, say 1.5 km
Chinese Control Conference 中国控制会议 7
A particular swarm problem
How do they: Search the area? Modify their search strategy if lots of objects turn up in one area? Avoid collisions? Avoid obstacles and no-fly zones? Deal with moving objects? Complete the task in minimum time? Modify their strategy if they lose GPS? Cope with a loss of a communications link?
How do we: Decide whether having more agents would or would not be
worthwhile?
Chinese Control Conference 中国控制会议 8
Generic Operational Problems
Certain problems apply to most artificial swarms as well as the particular scenario described:
• Dealing with failures of agents and/or communication links
• Achieving a self-repair capability to a swarm• Reconfigurable computing• Capacity constrained communication• Environmental hazards: smoke, heat, …Practical problem solutions need theoretical building Blocks...
Chinese Control Conference 中国控制会议 9
Classes of considered problems
• Rendezvous (not part of written paper)• Consensus and flocking (not part of written paper)• Station keeping (maintaining formation shape)• Moving formation from A to B while maintaining
shape• Splitting, merging and repairing formations
A number of ‘simpler’ idealized swarm problems have been tackled. This talk describes some.
Chinese Control Conference 中国控制会议 10
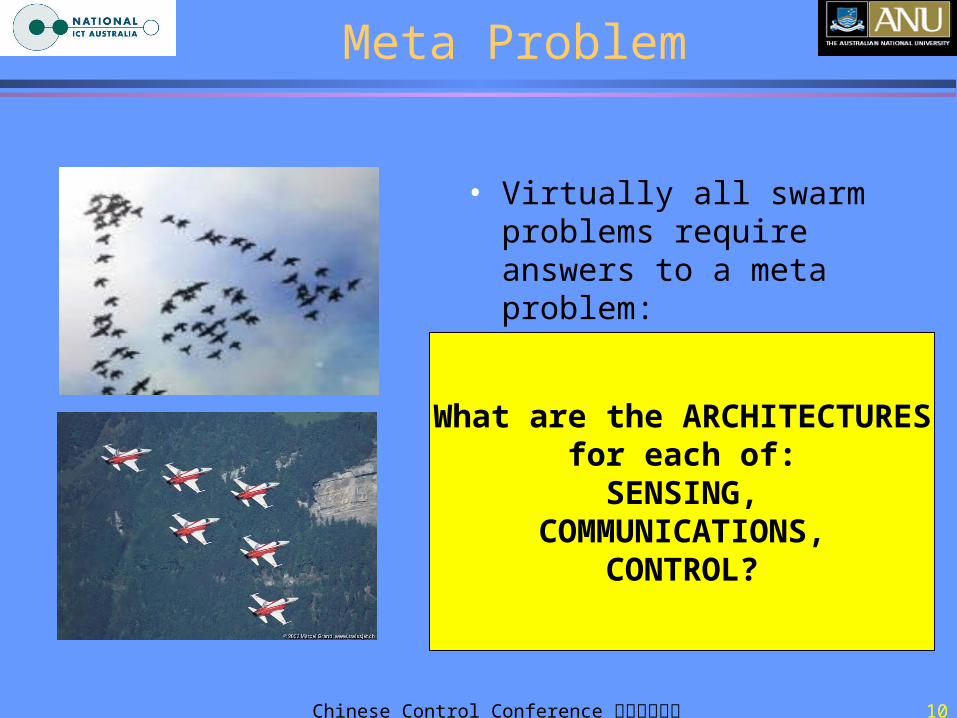
Meta Problem
• Virtually all swarm problems require answers to a meta problem:
What are the ARCHITECTURESfor each of:SENSING,
COMMUNICATIONS,CONTROL?
Chinese Control Conference 中国控制会议 11
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 12
Rendezvous
• Consider N agents In the plane Agents are point agents Agents have same sensing radius of r Agents all have their own local coordinate basis, and no compass Each agent knows difference between its x coordinate and that of
each sensed agent, and its y coordinate and that of each sensed agent
Each agent has its own clock
• Rendezvous control task: Using local calculations at each agent, and only the information
available at that agent, determine a motion strategy for each agent that will promote the
assembly of all agents to the one point.
Chinese Control Conference 中国控制会议 13
Rendezvous
• Consider N agents In the plane Agents are point agents Agents have same sensing radius of r Agents all have their own local coordinate basis, and no compass Each agent knows difference between its x coordinate and that of
each sensed agent, and its y coordinate and each sensed agent Each agent has its own clock
• Rendezvous control task: Using local calculations at each agent, and only the information
available at that agent, determine a motion strategy for each agent that will promote the
assembly of all agents to the one point.
No centralized controller! No global information!
Chinese Control Conference 中国控制会议 14
Rendezvous
• Consider N agents In the plane Agents are point agents Agents have same sensing radius of r Each agent knows difference between its x coordinate and that
of each sensed agent, and its y coordinate and each sensed agent (ie each agent knows the distance vector to each neighbour)
• Rendezvous control task: Using local calculations at each agent, and using the
information available at that agent, determine a motion strategy for each agent that will promote
the assembly of all agents to the one point.
Could be R3
Restrictive
Could have angles, distances, location on hyperbola (time difference of arrival), etc
Over-simplified
No centralized controller! No global information!
Chinese Control Conference 中国控制会议 15
Using a Graph
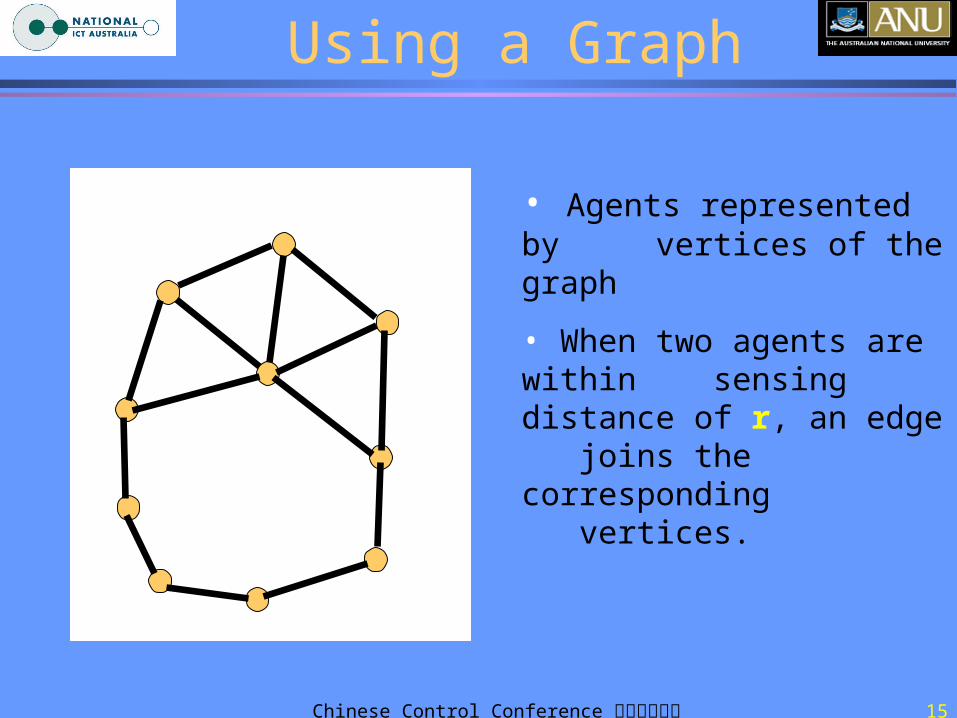
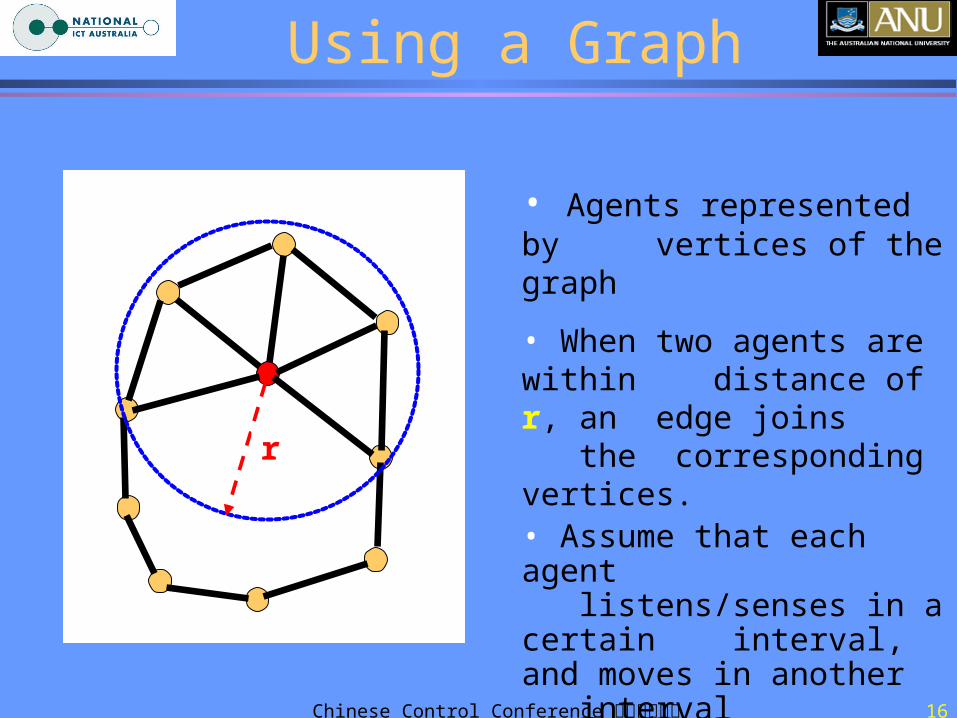
• Agents represented by vertices of the graph
• When two agents are within sensing distance of r, an edge joins the corresponding vertices.
Chinese Control Conference 中国控制会议 16
Using a Graph
• Agents represented by vertices of the graph
• When two agents are within distance of r, an edge joins the corresponding vertices.• Assume that each agent listens/senses in a certain interval, and moves in another interval• Synchronous case much easier but less practical than asynchronous case
r
Chinese Control Conference 中国控制会议 17
Using a Graph
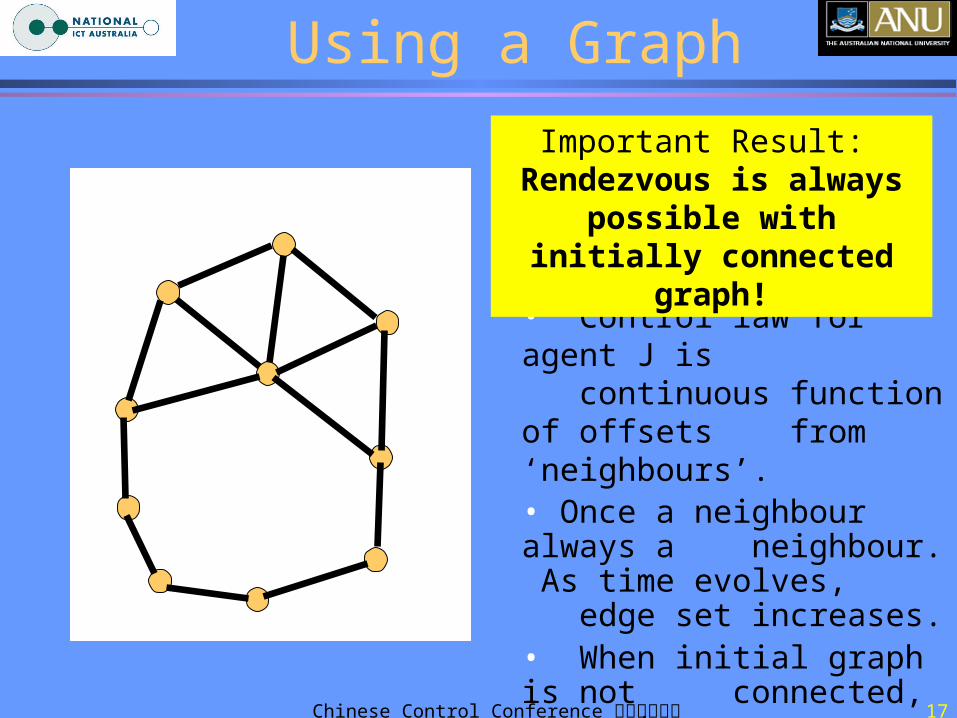
• Control law for agent J is continuous function of offsets from ‘neighbours’.• Once a neighbour always a neighbour. As time evolves, edge set increases.• When initial graph is not connected, may get one rendezvous point or several.
Important Result: Rendezvous is always possible with initially
connected graph!
Chinese Control Conference 中国控制会议 18
Connected graph RV
QuickTime™ and aCinepak decompressor
are needed to see this picture.
Graph initially connected
Neighbors are never lost
Each node progressively acquires more neigbors
Chinese Control Conference 中国控制会议 19
Rendezvous with leader
QuickTime™ and aCinepak decompressor
are needed to see this picture.
Leader here
Can always assign a leader--which does not move
Everybody goes to him/her
Chinese Control Conference 中国控制会议 20
Disconnected Graph RV
QuickTime™ and aCinepak decompressor
are needed to see this picture.
Graph is not initially connected
Unconnected interior agents are ‘captured’
Chinese Control Conference 中国控制会议 21
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 22
Consensus and Flocking
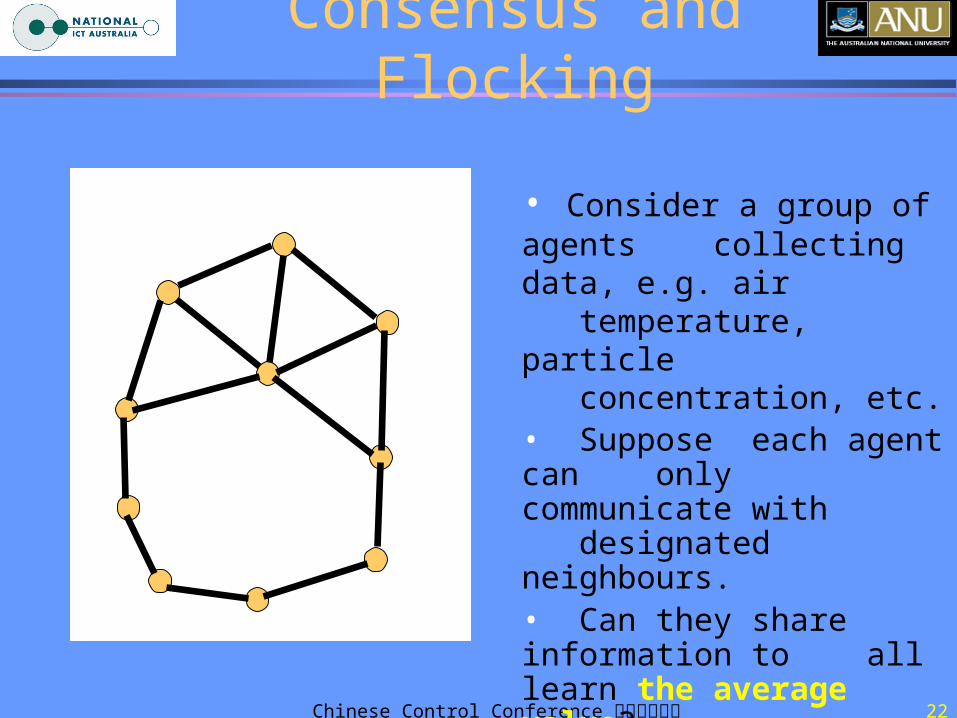
• Consider a group of agents collecting data, e.g. air temperature, particle concentration, etc.• Suppose each agent can only communicate with designated neighbours.• Can they share information to all learn the average value?

Chinese Control Conference 中国控制会议 23
Another motivation
Chinese Control Conference 中国控制会议 24
Vicsek et al problem
• A collection of agents moves with the same speed but different headings
• Each agent can sense the heading in which its neighbours are moving
• Agents update their headings at the same time:
new heading of an agent = average of headings of itself and all neighbours
• No centralized controller/coordinator but may have a leader. Neighbour sets may be time-varying.
• Observation: Agents align, within one or more flocks
• Vicsek simulation explained by Jadbabaie, Lin, Morse

Chinese Control Conference 中国控制会议 25
Vicsek et al problem 2
• Intuitive picture: averaging headings (or temperatures or air pollution measurements) is like a discrete time and space version of heat flow equation
• Idea works with communication delays• Extensions have been done to cope with dynamics in
agents• Vicsek simulated effect of noise• Algorithm was known in another form in computer science
and ‘flocking’ goes back at least to 1989• Tools for analysis include graph theory and properties of
matrices with nonnegative entries, mainly from inhomogeneous Markov chain literature (decades old)

Chinese Control Conference 中国控制会议 26
Normal flocking
QuickTime™ and aVideo decompressor
are needed to see this picture.
Agents start with random orientations --but get aligned.
Alignment direction not easily predictable
Chinese Control Conference 中国控制会议 27
Flocking with a fast leader
Red is leader
Yellow is neighbor of leader
Blue is nonneighbor of leader
QuickTime™ and aVideo decompressor
are needed to see this picture.
Agents can follow a leader
Agents may lose connection through not turning fast enough
Chinese Control Conference 中国控制会议 28
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 29
Station Keeping
• Suppose a collection of agents in R2 or R3 is supposed to maintain a cohesive formation shape.
• They may or may not be moving. • Suppose they can sense their neighbours.• The key questions:
What needs to be sensed and what needs to be controlled to maintain the formation shape?
Chinese Control Conference 中国控制会议 30
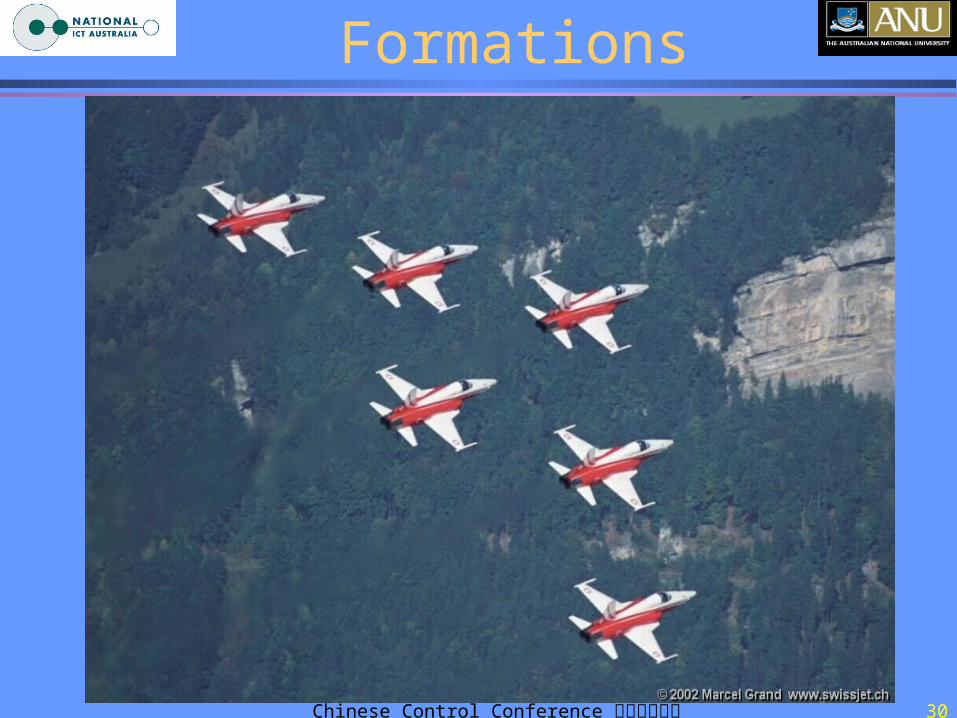
Formations
Chinese Control Conference 中国控制会议 31
Formations
Chinese Control Conference 中国控制会议 32
Formations
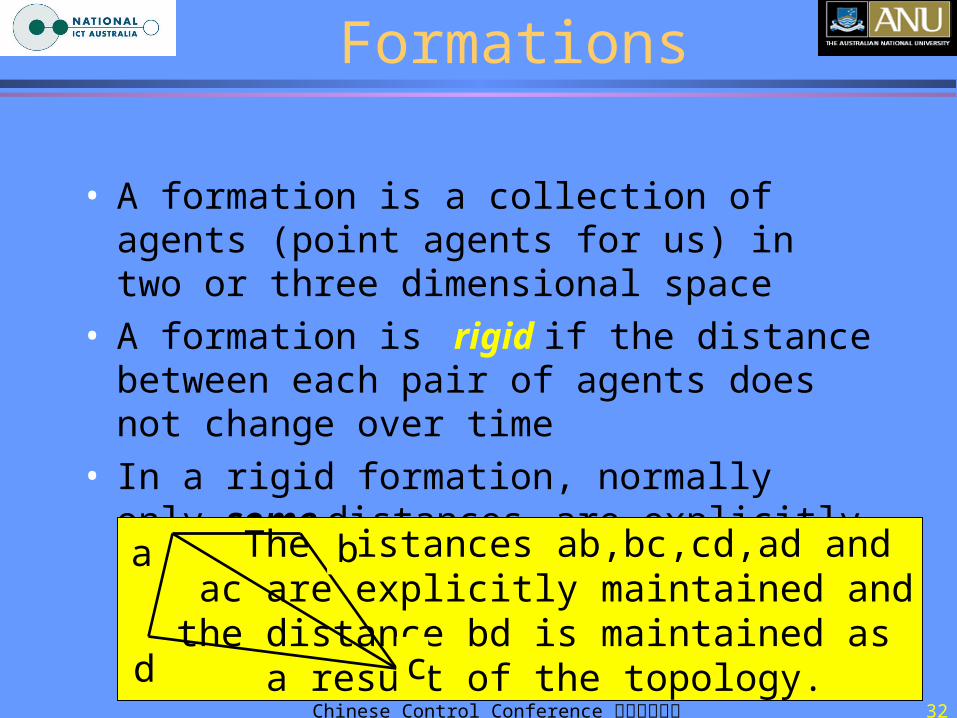
• A formation is a collection of agents (point agents for us) in two or three dimensional space
• A formation is rigid if the distance between each pair of agents does not change over time
• In a rigid formation, normally only some distances are explicitly maintained, with the rest being consequentially maintained.
The distances ab,bc,cd,ad and ac are explicitly maintained andthe distance bd is maintained as
a result of the topology.
a b
cd
Chinese Control Conference 中国控制会议 33
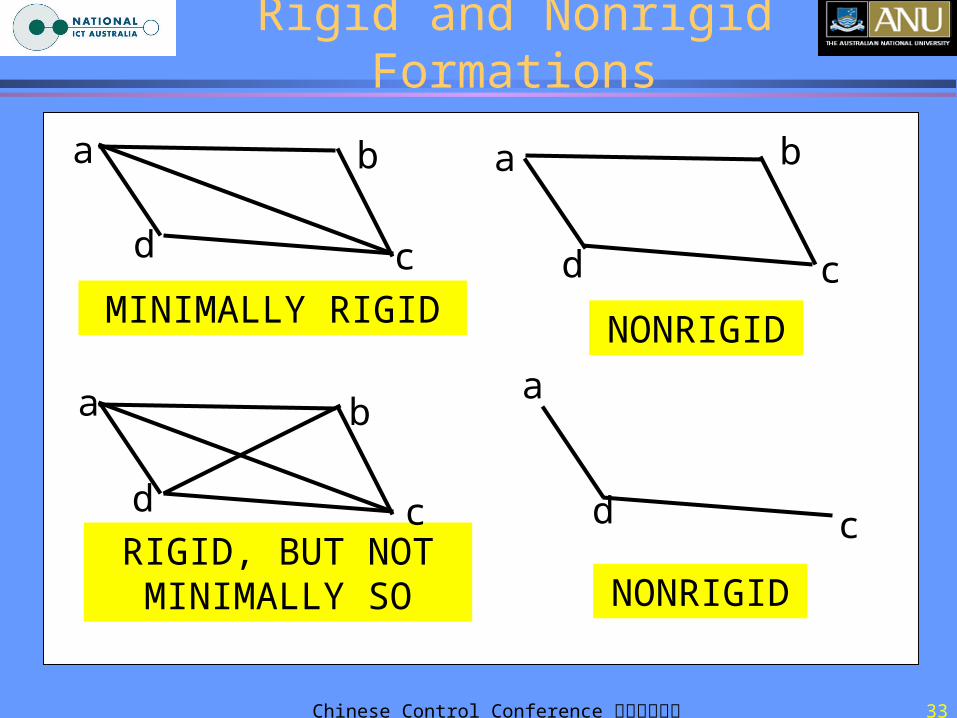
Rigid and Nonrigid Formations
MINIMALLY RIGID NONRIGID
NONRIGIDRIGID, BUT NOT MINIMALLY SO
a b a b
cd
a
d cc
ba
d
cd
Chinese Control Conference 中国控制会议 34
Undirected/Directed Graphs
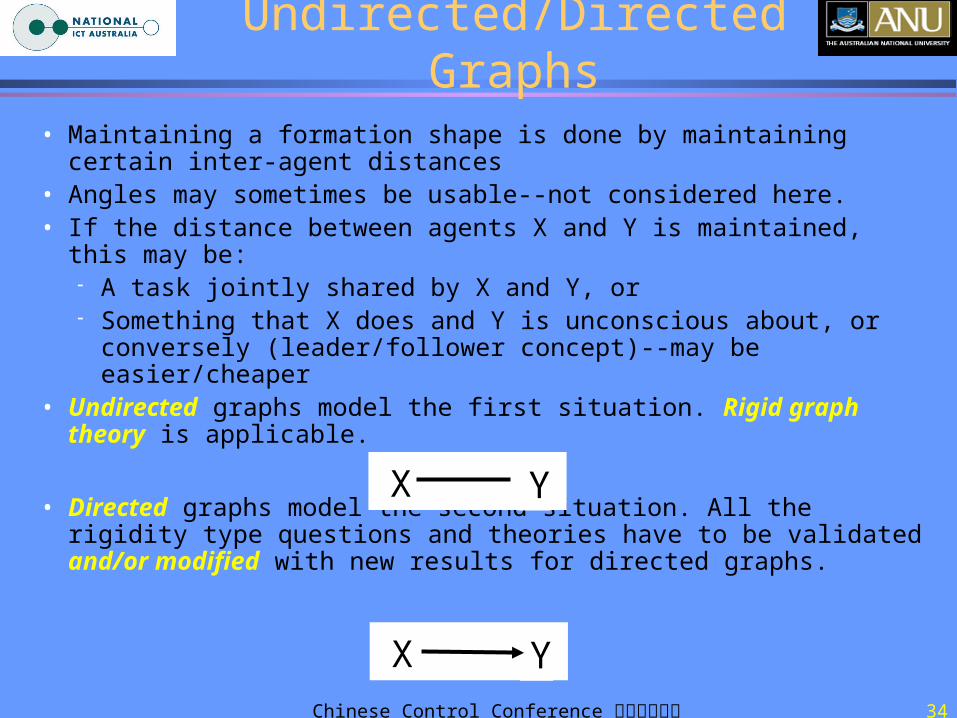
• Maintaining a formation shape is done by maintaining certain inter-agent distances
• Angles may sometimes be usable--not considered here.• If the distance between agents X and Y is maintained, this may be:
A task jointly shared by X and Y, or Something that X does and Y is unconscious about, or conversely
(leader/follower concept)--may be easier/cheaper• Undirected graphs model the first situation. Rigid graph theory is
applicable.
• Directed graphs model the second situation. All the rigidity type questions and theories have to be validated and/or modified with new results for directed graphs.
X Y
X Y
Chinese Control Conference 中国控制会议 35
Formation Rigidity
• What undirected graphs give rise to rigid formations?
• What directed graphs give rise to formations which can maintain their structure?
• Answers to these questions have been provided using: Linear algebra for formations in R2 and R3
Graph theory for formations in R2
• Some results are known using graph theory for R3 formations.
Chinese Control Conference 中国控制会议 36
Formation Rigidity
Let’s look at undirected graphs first….
X Y
X and Y are jointly responsible for maintaining the distance.

Chinese Control Conference 中国控制会议 37
Each edge can remove a single degree of freedomFor a whole rigid formation, just rotations and translations will be possible (three degrees of freedom), so at least 2n-3 edges are necessary for a graph to be rigid.
Total degrees of freedom: 2n given n point agents in R2
Rigidity Characterization
This edge does not eliminate any degree of freedom
but may not!
Chinese Control Conference 中国控制会议 38
Rigidity Characterization (cont’d)
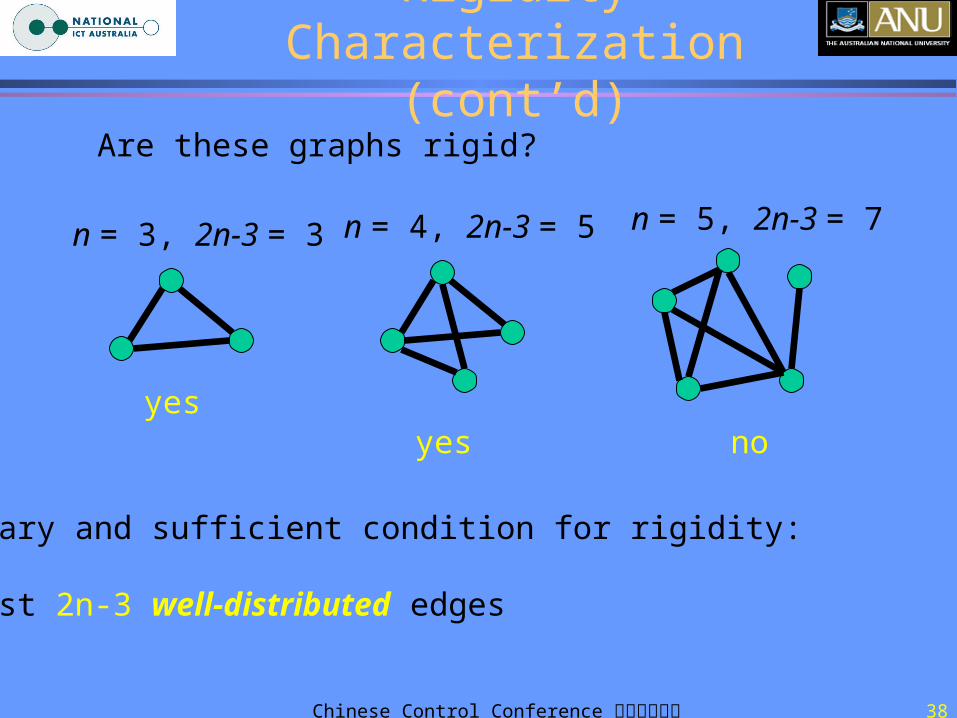
Necessary and sufficient condition for rigidity:
At least 2n-3 well-distributed edges
n = 3, 2n-3 = 3
yes
n = 4, 2n-3 = 5
yes
n = 5, 2n-3 = 7
no
Are these graphs rigid?
Chinese Control Conference 中国控制会议 39
Rigidity Characterization (c’td)
• Notion of ‘well-distributed’ can be formalized, resulting in graphical test for rigidity in R2 (necessary and sufficient condition--known as Laman’s theorem)
• Only differing necessity and sufficiency conditions are known in R3.
• A linear algebra test is available in R2 and R3: When graph has |V| vertices and |E| edges and is in Rd, an |E| by d|
V| matrix is formed. Rigidity corresponds to kernel of matrix having dimension
(1/2)d(d+1). Smallest nonzero singular value appears to measure closeness to
nonrigidity.
Chinese Control Conference 中国控制会议 40
Rigid Formations
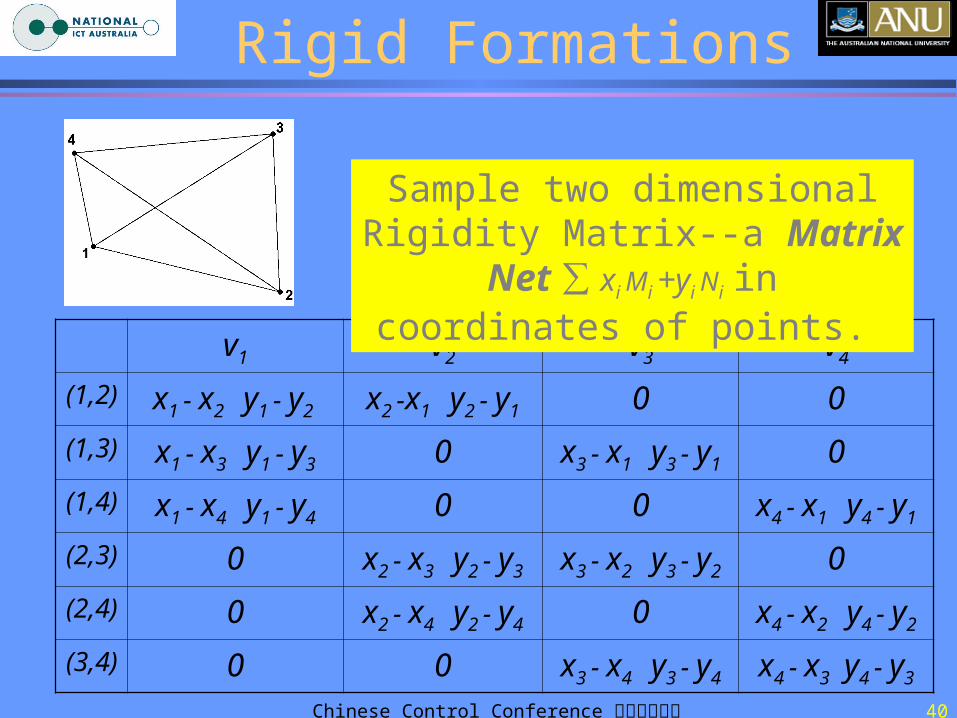
v1 v2 v3 v4
(1,2) x1 - x2 y1 - y2 x2 -x1 y2 - y1 0 0
(1,3) x1 - x3 y1 - y3 0 x3 - x1 y3 - y1 0
(1,4) x1 - x4 y1 - y4 0 0 x4 - x1 y4 - y1
(2,3) 0 x2 - x3 y2 - y3 x3 - x2 y3 - y2 0
(2,4) 0 x2 - x4 y2 - y4 0 x4 - x2 y4 - y2
(3,4) 0 0 x3 - x4 y3 - y4 x4 - x3 y4 - y3
Sample two dimensional Rigidity Matrix--a Matrix Net ∑ xi Mi +yi Ni in
coordinates of points.
Chinese Control Conference 中国控制会议 41
Formation Persistence
• To distinguish directed case from undirected, we use the term Formation Persistence instead of formation rigidity.
• And now we look at directed graphs.
X Y
X is responsible for maintaining the correct distance from Y, and
Y is unconscious of X
Chinese Control Conference 中国控制会议 42
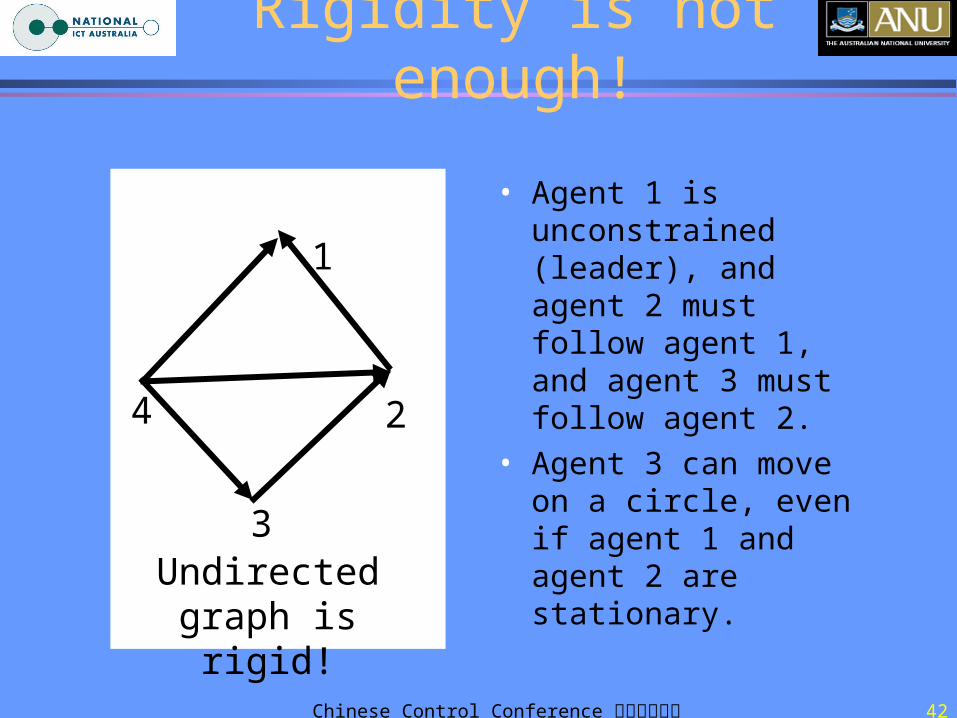
Rigidity is not enough!
• Agent 1 is unconstrained (leader), and agent 2 must follow agent 1, and agent 3 must follow agent 2.
• Agent 3 can move on a circle, even if agent 1 and agent 2 are stationary.
1
2
3
4
Undirected graph is rigid!
Chinese Control Conference 中国控制会议 43
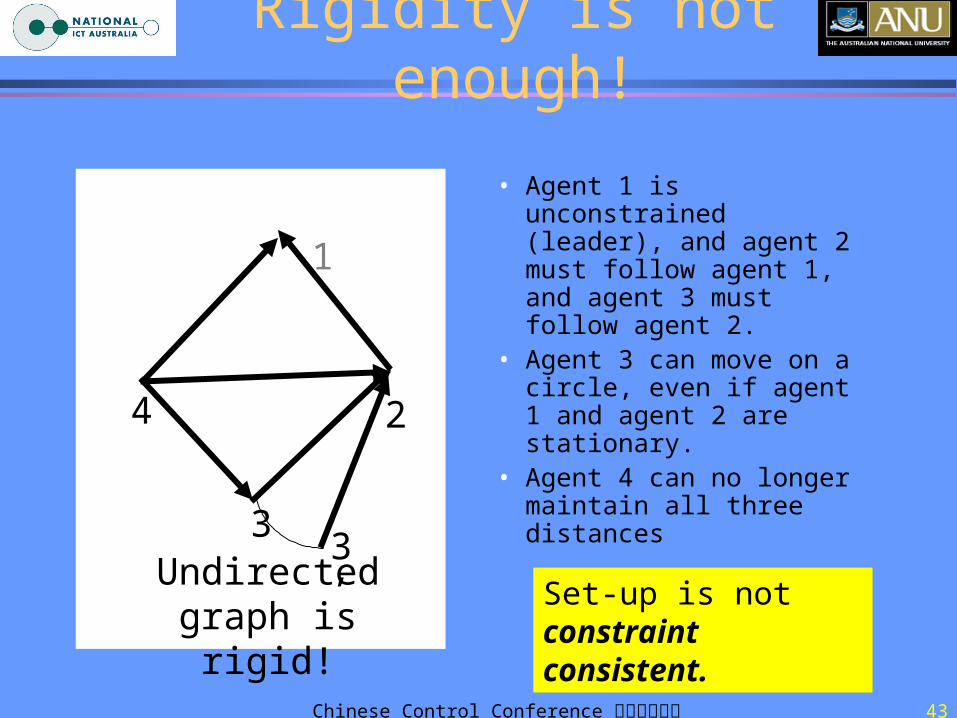
Rigidity is not enough!
• Agent 1 is unconstrained (leader), and agent 2 must follow agent 1, and agent 3 must follow agent 2.
• Agent 3 can move on a circle, even if agent 1 and agent 2 are stationary.
• Agent 4 can no longer maintain all three distances
1
2
3
4
Undirected graph is rigid!
Set-up is not constraint consistent.
3’
Chinese Control Conference 中国控制会议 44
Directed graph generalization
• Rigidity says shape maintained if certain distances are maintained; constraint consistence says these distances can be maintained
• Formation maintenance requires a directed graph to be both rigid and constraint consistent. We call this persistence
• In R2 persistence can be checked by running multiple rigidity tests
• R3 is more complicated.
Chinese Control Conference 中国控制会议 45
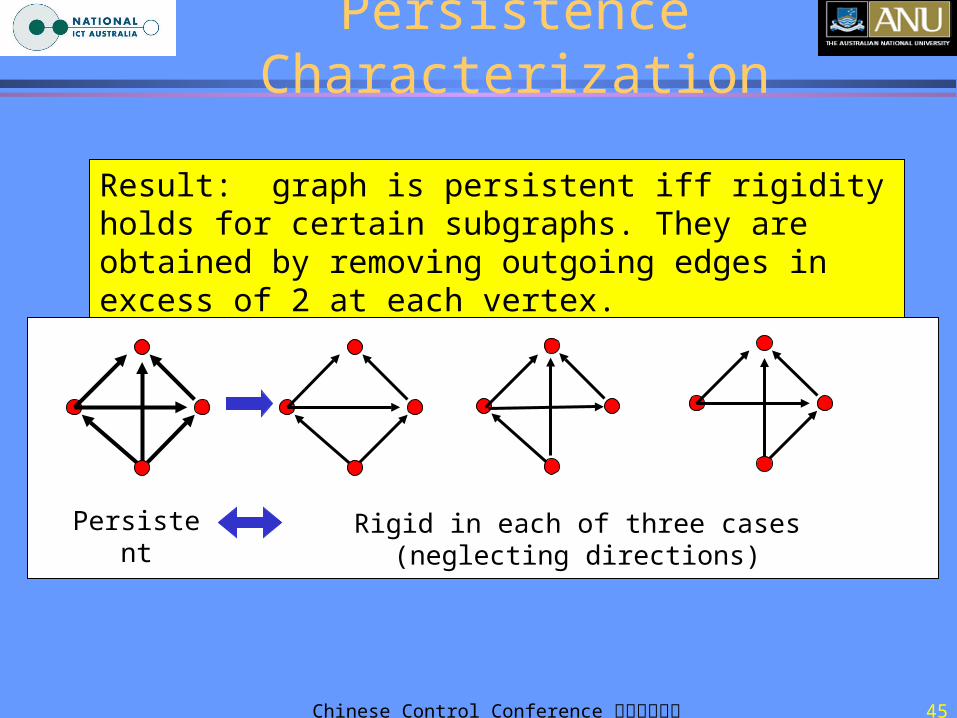
Persistence Characterization
Result: graph is persistent iff rigidity holds for certain subgraphs. They are obtained by removing outgoing edges in excess of 2 at each vertex.
Persistent Rigid in each of three cases (neglecting directions)
Chinese Control Conference 中国控制会议 46
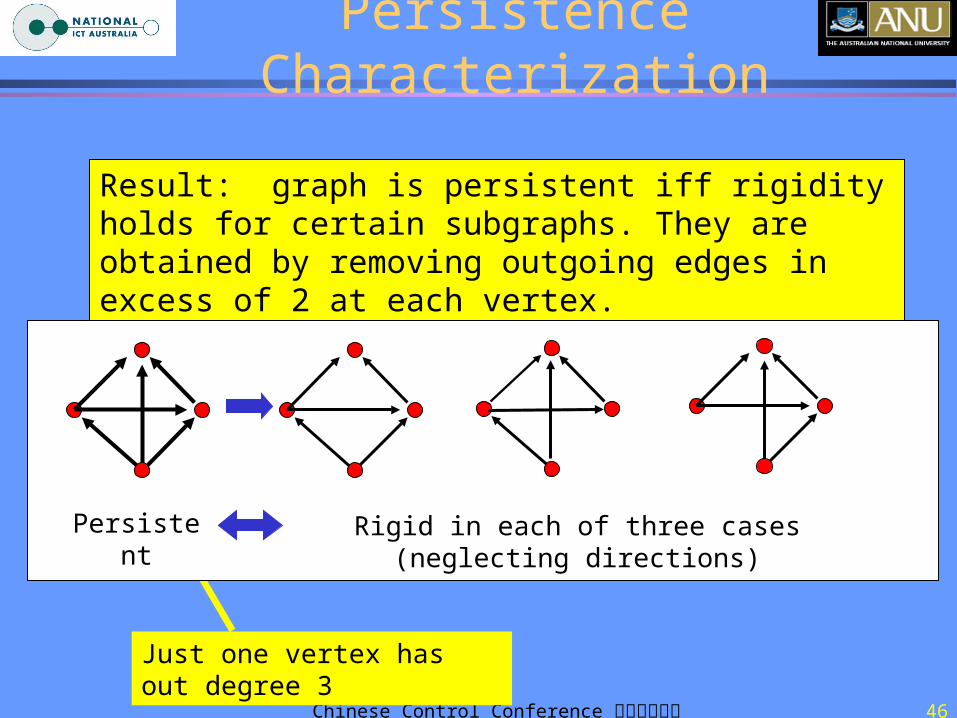
Persistence Characterization
Result: graph is persistent iff rigidity holds for certain subgraphs. They are obtained by removing outgoing edges in excess of 2 at each vertex.
Just one vertex has out degree 3
Persistent Rigid in each of three cases (neglecting directions)
Chinese Control Conference 中国控制会议 47
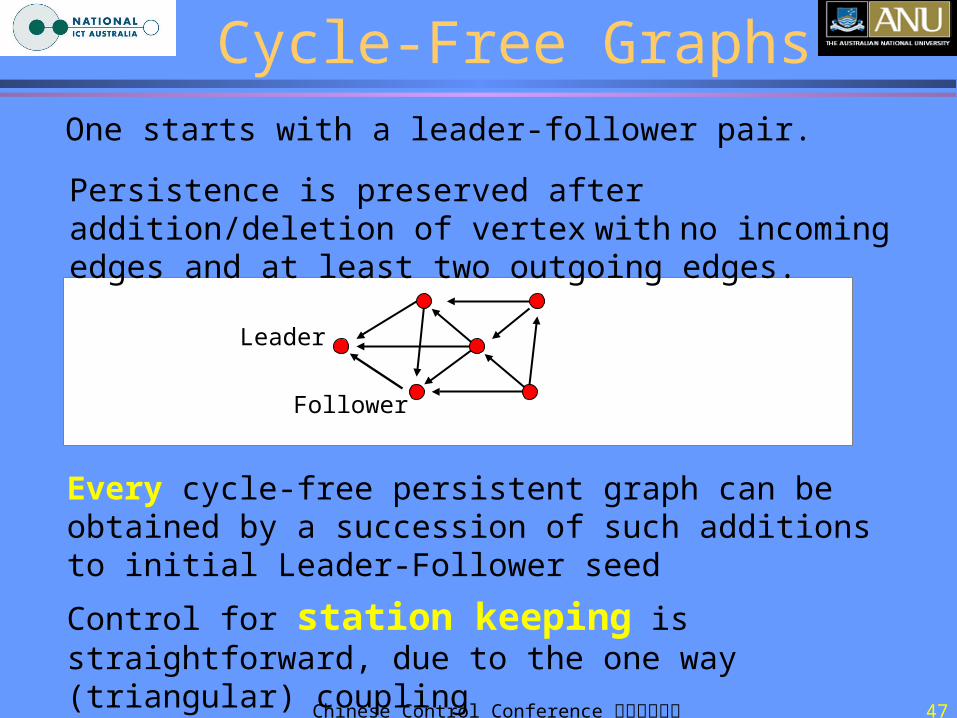
Leader
Cycle-Free Graphs
Persistence is preserved after addition/deletion of vertex with no incoming edges and at least two outgoing edges.
Follower
Every cycle-free persistent graph can be obtained by a succession of such additions to initial Leader-Follower seed
One starts with a leader-follower pair.
Control for station keeping is straightforward, due to the one way (triangular) coupling

Chinese Control Conference 中国控制会议 48
LeaderFirst-follower
There is feedback around the loop.
Linearized analysis for station keeping is possible
Natural closed-loop system is of form
is adjustable and almost diagonal, and A is fixed from geometry
Graphs with Cycles
Chinese Control Conference 中国控制会议 49
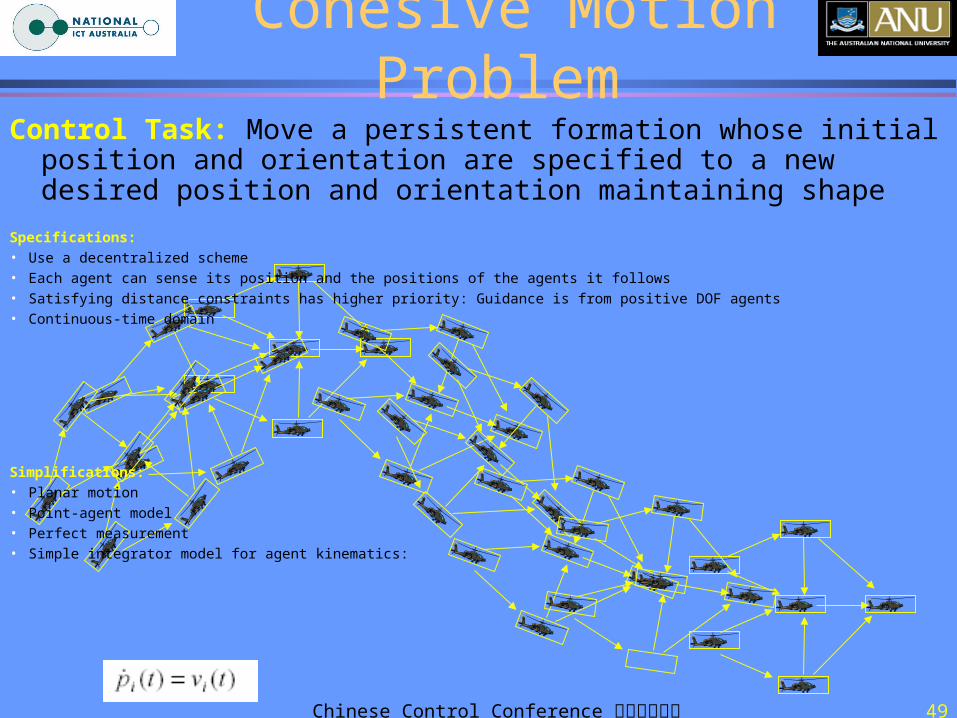
Cohesive Motion Problem Control Task: Move a persistent formation whose initial position and
orientation are specified to a new desired position and orientation maintaining shape
Specifications: • Use a decentralized scheme• Each agent can sense its position and the positions of the agents it follows • Satisfying distance constraints has higher priority: Guidance is from positive DOF agents• Continuous-time domain
Simplifications: • Planar motion• Point-agent model • Perfect measurement• Simple integrator model for agent kinematics:
Chinese Control Conference 中国控制会议 50
Cohesive Motion Movie
QuickTime™ and aCinepak decompressor
are needed to see this picture.
Chinese Control Conference 中国控制会议 51
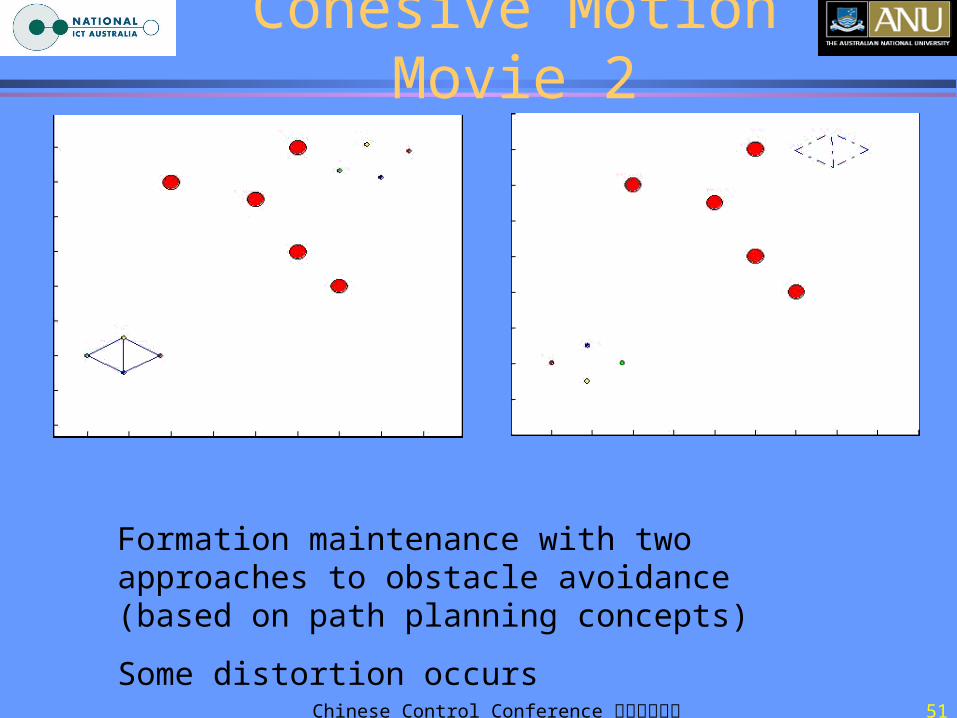
Cohesive Motion Movie 2
Formation maintenance with two approaches to obstacle avoidance (based on path planning concepts)
Some distortion occurs
Chinese Control Conference 中国控制会议 52
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 53
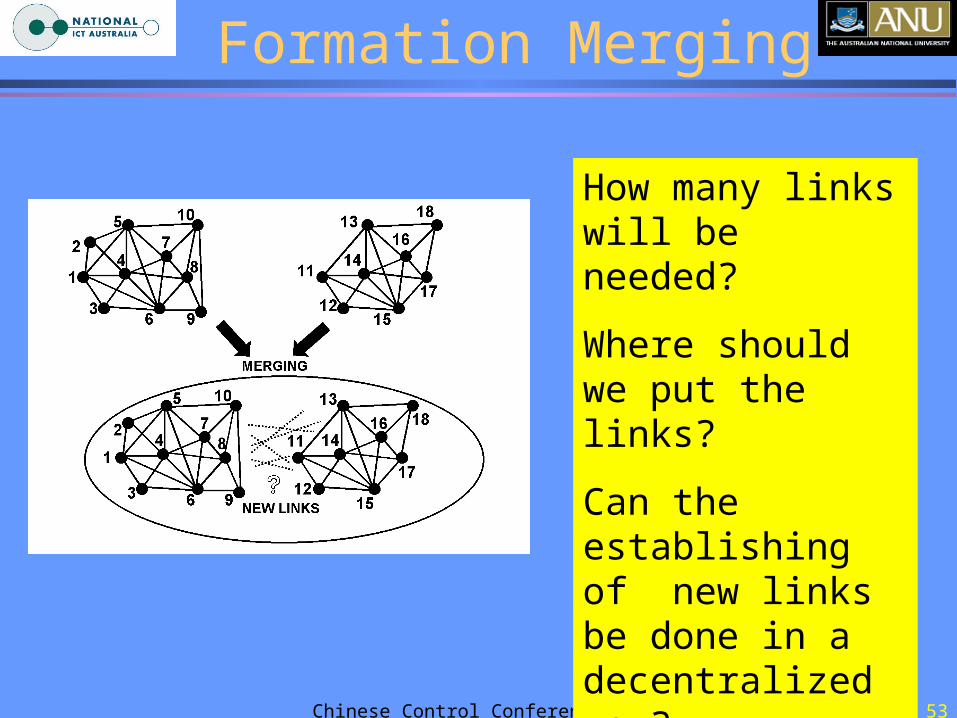
Formation Merging
How many links will be needed?
Where should we put the links?
Can the establishing of new links be done in a decentralized way?
Chinese Control Conference 中国控制会议 54
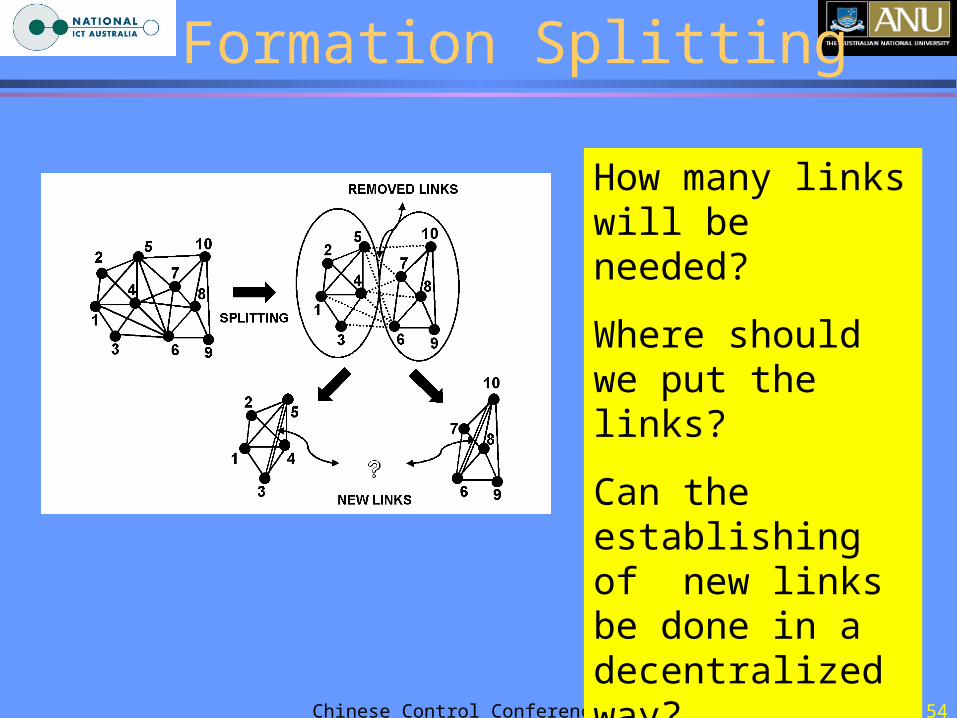
Formation Splitting
How many links will be needed?
Where should we put the links?
Can the establishing of new links be done in a decentralized way?
Chinese Control Conference 中国控制会议 55
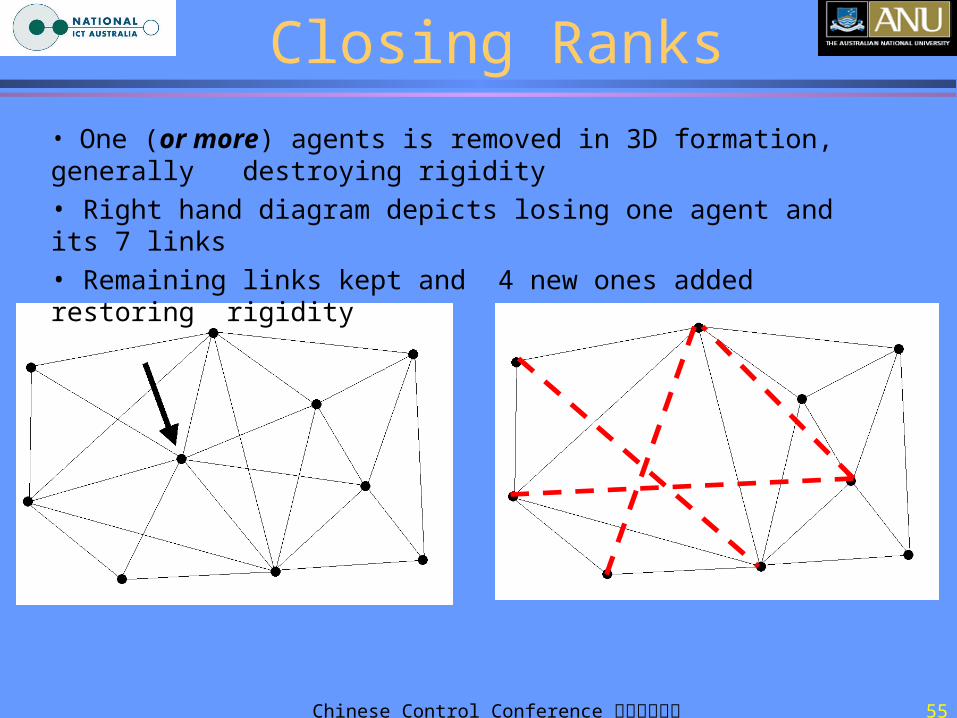
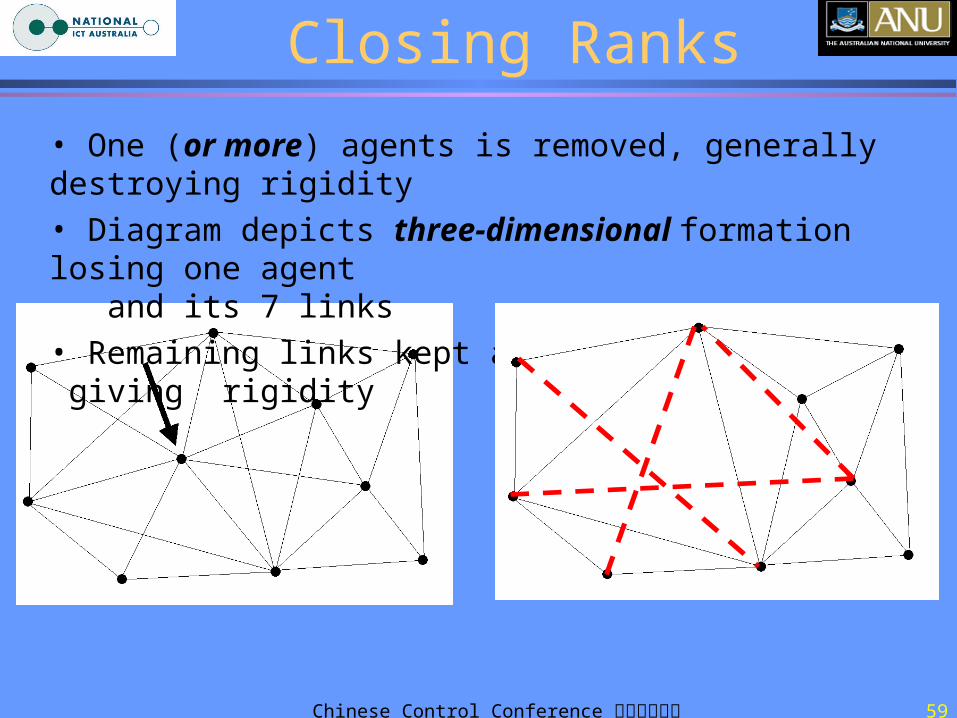
• One (or more) agents is removed in 3D formation, generally destroying rigidity• Right hand diagram depicts losing one agent and its 7 links• Remaining links kept and 4 new ones added restoring rigidity
Closing Ranks
Chinese Control Conference 中国控制会议 56
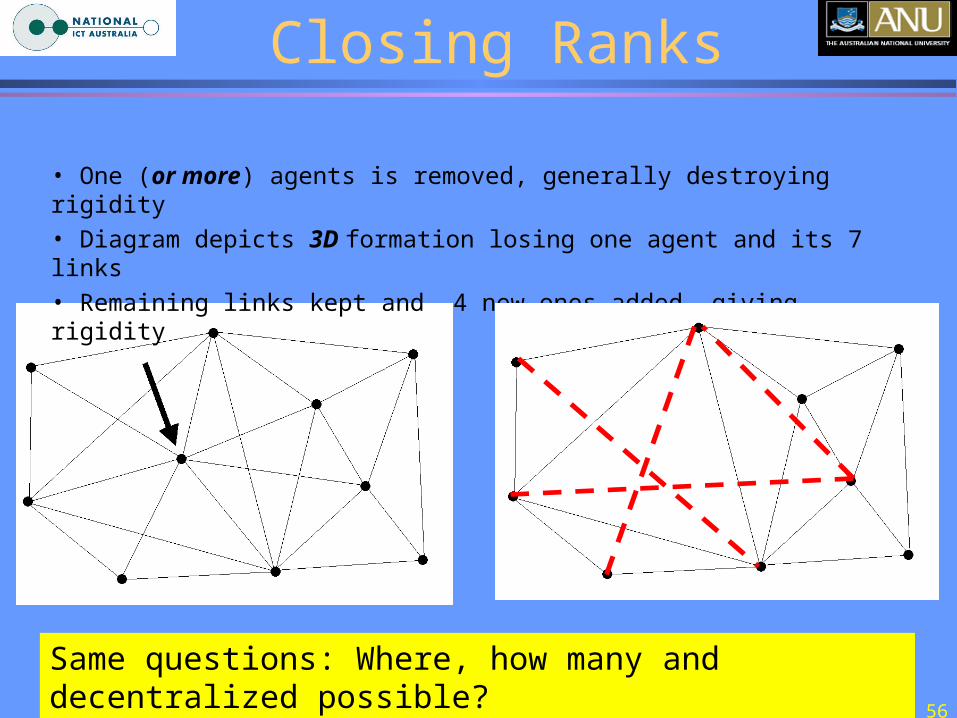
• One (or more) agents is removed, generally destroying rigidity• Diagram depicts 3D formation losing one agent and its 7 links• Remaining links kept and 4 new ones added giving rigidity
Closing Ranks
Same questions: Where, how many and decentralized possible?
Chinese Control Conference 中国控制会议 57
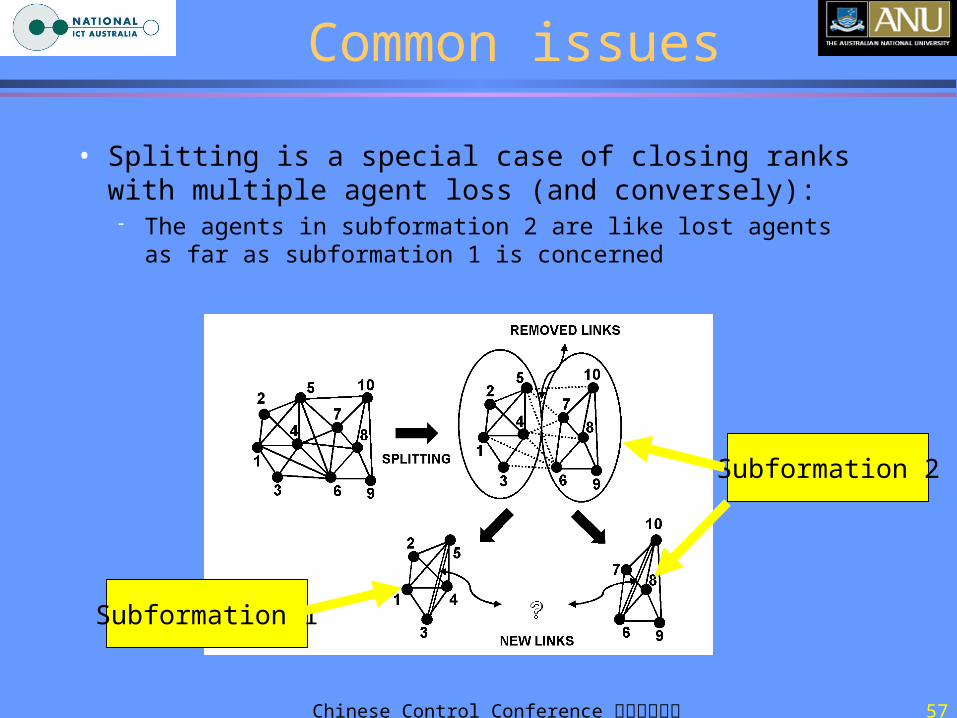
Common issues
• Splitting is a special case of closing ranks with multiple agent loss (and conversely): The agents in subformation 2 are like lost agents as far as
subformation 1 is concerned
Subformation 2
Subformation 1
Chinese Control Conference 中国控制会议 58
Closing Ranks
• Key Conclusion 1: Closing ranks can always be achieved when one vertex with its incident edges is lost by making connections among neighbours of the lost vertex
• Key Conclusion 2 (consequence of 1): Closing ranks can always be achieved when several vertices with their incident edges are lost by making connections among the neighbours of the lost vertices
• Note that all edges remaining after the vertex or vertices loss are retained for use.
• Number of possibilities to check is not massive.
Chinese Control Conference 中国控制会议 59
Closing Ranks
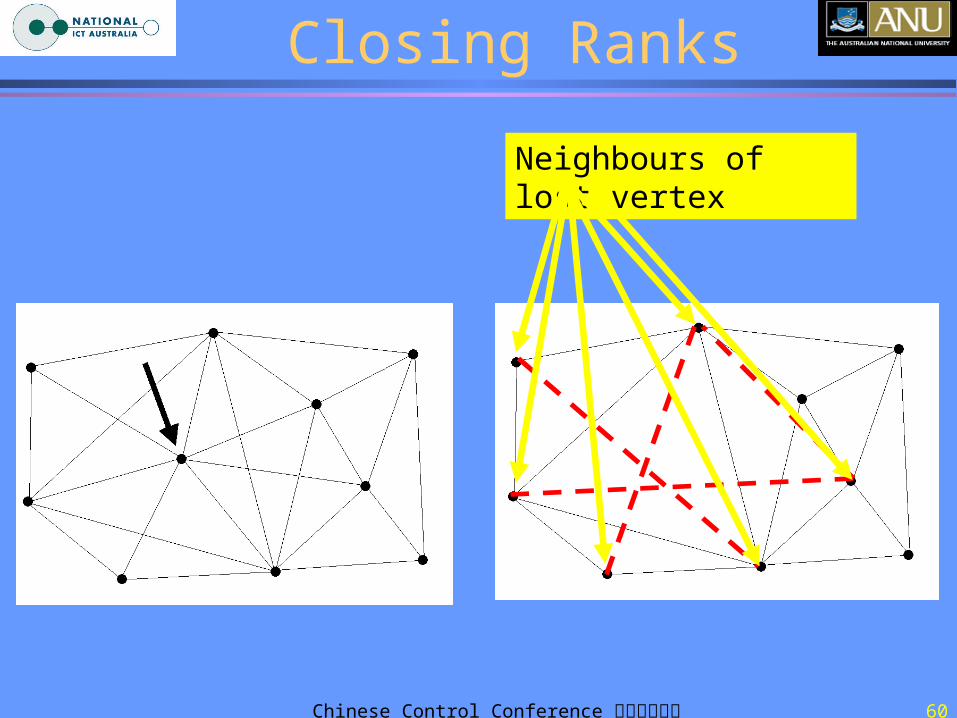
• One (or more) agents is removed, generally destroying rigidity
• Diagram depicts three-dimensional formation losing one agent and its 7 links
• Remaining links kept and 4 new ones added giving rigidity
Chinese Control Conference 中国控制会议 60
Closing Ranks
Neighbours of lost vertex
Chinese Control Conference 中国控制会议 61
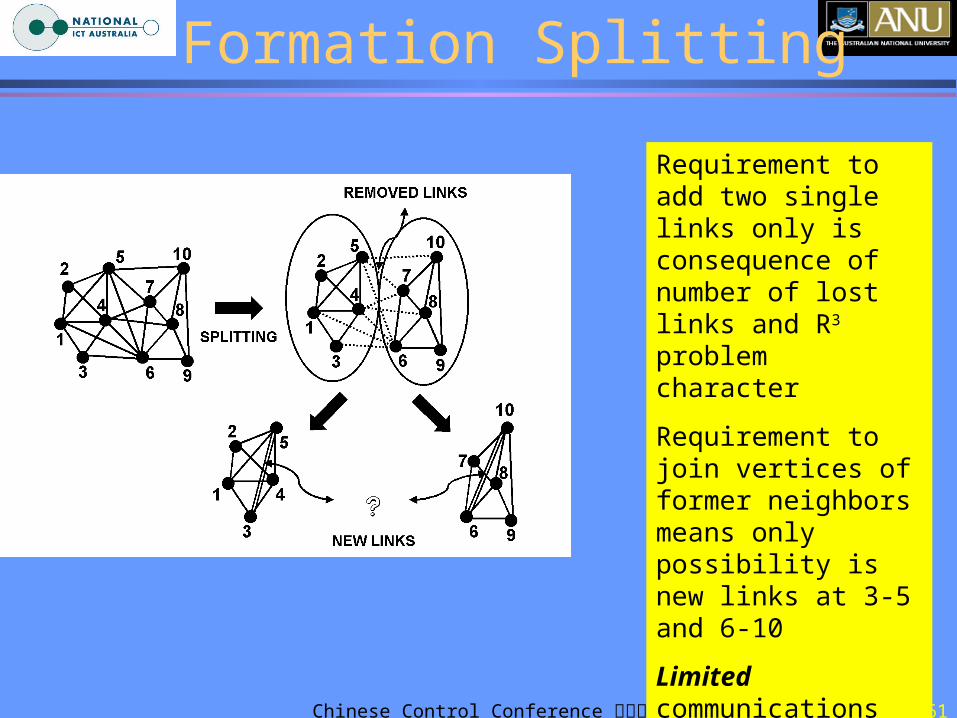
Formation Splitting
Requirement to add two single links only is consequence of number of lost links and R3 problem character
Requirement to join vertices of former neighbors means only possibility is new links at 3-5 and 6-10
Limited communications between agents will figure this out.

Chinese Control Conference 中国控制会议 62
Common issues
• All problems, splitting, merging and closing ranks, deal with finding extra edges to establish or re-establish rigidity in a formation that already has some edges
• An algorithm can be found for systematically adding further edges to a nonrigid formation already including some edges to provide rigidity
• There is no real decentralized version of the algorithm currently. But there are some key insights, as e.g. for closing ranks and formation splitting.
• Merging is really a matter of making a rigid meta formation out of two formations: Three new edges (with careful choice of associated agents) are
needed for merging two rigid formations in R2 in order that the merged formation be again rigid
Six new edges are required for R3
Chinese Control Conference 中国控制会议 63
Outline
• Swarm Problems
• Rendezvous
• Consensus and Flocking
• Station Keeping, Rigidity and Persistence
• Merging, Splitting and Closing Ranks
• Conclusions
Chinese Control Conference 中国控制会议 64
Conclusions
• Flocking and formations are presented by nature, and have civilian and military applications
• Architectures for sensing, communication and control are important
• Practical formation problems are hard: solutions will probably use building blocks that are currently the subject of much effort
• These include: rendezvous, consensus and flocking, station keeping and rigid/persistent motion, formation change maneuvers

Chinese Control Conference 中国控制会议 65
Conclusions
• Challenging current basic problems include: Doing three-dimensional problems well Understanding what formations are easy to control,
what are hard to control Designing formations to be tolerant of link loss or agent
loss Dealing with conflicting objectives retaining the
autonomy and architecture constraints
• Applications and theory are nevertheless in their infancy.
Chinese Control Conference 中国控制会议 66
Questions?