Embed Size (px)
DESCRIPTION
Informe de la materia "Mecanismos Y Elementos De MáQuinas"
Citation preview

Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Diseño Engranes helicoidales. Fórmula AGMA
Blanco, Leonardo
UNIVERSIDAD NACIONAL DE MAR DEL PLATA
Ingeniería Industrial

2 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Trabajo Practico Nº3: “Engranajes helicoidales”
I. Dimensionar, solo desde el punto de vista resistente, el par de engranes para la transmisión
indicada, utilizada, utilizando el criterio y metodología de cálculo según la norma AGMA.
Datos:
Máquina conductora Motor eléctrico asincrónico
Potencia (No) y Velocidad (n1) 3 HP y 1000 rpm
Máquina conducida Tornillo sin fin (chimango) para elevar granos de cereal
Condiciones de utilización Todos los días, en silos ubicados en zona rural
Velocidad del engranaje conducido (n2) 500 rpm
Ángulo de presión (Φ) 20°
Separación entre apoyos 100 mm
Proceso de fabricación Creador
Dimensionamiento del engranaje conductor a partir de Lewis
De acuerdo al valor del ángulo de presión 20º (Φ) y del ángulo de inclinación del diente (ψ), que se
adopta ψ = 25º para asegurar una transferencia suave de la carga y a fin de prevenir cargas axiales
excesivas, se ingresa a la tabla 2 del apunte y se determina el mínimo número de dientes
helicoidales Z =13.
Para obtener el factor de forma se necesita el número virtual de dientes:
ZV = Z/ cos3 Ψ = 13 / cos3 25º = 17,46 ; es decir Zv = 18
En la tabla 3 del apunte se obtiene el factor de forma y = 0.098.
En los engranajes helicoidales, generalmente se sugiere:
4 < ρ < 6.5
En el diseño del engrane se adoptará un ρ =5 para que la concentración de la carga este bien
distribuida sobre el ancho del diente.
El material a utilizar deberá soportar una moderada capacidad de carga y de dureza baja, en la
industria se usan comúnmente y se adoptan materiales de dureza entre 200 y 250 HB, que son
materiales fácil para cortar. Por lo tanto, seleccionamos el acero al carbono forjado SAE 1045 (sin
tratamiento), en donde su dureza es 215 HB y su σad, = 30000 lb/plg2 = 2100 kgf/cm2
El paso normal (pn) se obtiene a partir de la fórmula de Lewis:
pn = 76,6 3 No cos ψ
ρ y σad, n Z

3 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Reemplazando en la ecuación con los datos obtenidos:
No 3 HP
Φ 20º
ψ 25º
ρ 5
y 0.098
σad, 2100 kgf/cm2
n 1000 rpm
Z 13
Se obtiene pn = 0,45 cm = 4.5 mm. El engrane helicoidal se fabrica con fresas-madre cilíndricas
normalizadas, entonces el módulo normal Mn es el normalizado:
Mn = pn / π
Mn = 4.5 mm / 3,1416 = 1.43
Se normaliza al más próximo que es Mn = 1.5, por lo que pn = 4.71 mm y procede a calcular el paso
circunferencial (pt) y el paso axial (pa), a partir de su relación vectorial:
pn = pt cos Ψ pa = pt / tg Ψ
Se obtiene pt = 5.2 mm y pa = 11.15 mm.
El ancho se obtiene a partir del ρ = 5, siendo b = ρ * pt = 5 * 5.2 mm = 26 mm, verificándose lo
siguiente:
b ≥ 1.2 * pa (mínimo) y b ≥ 2 * pa (recomendado) → 26 mm ≥ 22.3 mm
El diámetro primitivo (Dp):
Dp = (pt / π) * Z = (5.2 mm / 3,1416) * 13 = 21.51 mm
El diámetro interior (Di):
Di = Do – 2.5 M = 21.51 – 2.5 * 1.5 = 17.77 mm
El diámetro exterior (De)
De = Do + 2 M = 21.51 + 2 * 1.5 = 24.51 mm
Se procede a calcular la fuerza tangencial P:
P = No / (n * Dp/2) = 71620 * 3 HP / (1000 rpm * 2.151cm / 2) = 200 kgf
pn ≥ 76,6 3 3 HP * cos 25º
5 * 0,098 * 2100 kgf/cm2 * 1000 rpm * 13

4 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Se calcula la fuerza máxima admisible:
Fb(Lewis) = ρ y pt2 σadm = 5 * 0.083 * (0.52)2 * 2100 kgf/cm2 = 235.65 kgf
En los cálculos anteriores se verifica que P ≤ Fb(Lewis) ≤ P * 1.2
Corrección por Barth
Se necesita saber la velocidad tangencial:
vp = n * 2π * Dp / 2 = 1000 rpm * 2 * 3.1416 * 0,02151 m / 2 = 67.58 m/min
El término correctivo de Barth es:
Kv = 43 / (43 + vp1/2) = 43 / (43 + √67.57) = 0,84
La fuerza máxima admisible resulta de la formula Lewis-Barth:
Fb(Lewis-Barth) = b y pn σadm Kv = 2.6 * 0.098 * 0.47 cm * 2100 kgf/cm2 * 0.84 = 211.25 kgf
Por lo que se verifica que P ≤ Fb(Lewis-Barth) ≤ P * 1.2
Corrección de AGMA:
Según la normativa AGMA, la resistencia de los dientes helicoidales se puede determinar mediante
la siguiente fórmula:
Siendo:
St: esfuerzo calculado en la raíz del diente [lb/plg2]
Sad: esfuerzo de diseño máximo admisible [lb/plg2]
Sat: esfuerzo admisible según el material [lb/plg2]
Wt: carga tangencial transmitida [lb]
Ko: factor de sobrecarga
Kv: factor de velocidad
Pd: paso diametral [plg]
F: ancho del engrane [plg]
KS: factor de tamaño
Fm: factor de distribución de carga
J: factor de geometría
KL: factor de duración
KT: factor de temperatura
KR: factor de confiabilidad
St = ( Wt K0 / Kv ) . ( Pd / F ) . ( Ks Km / J ) ≤ Sad = Sat . KL / ( KT KR )

5 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Se procede a calcular St:
La carga tangencial transmitida se calcula de la siguiente manera:
Wt: 126000 N / (np Dp) = 126000 * 2 HB / (1000 rpm * 21.51 mm / 25.4 mm/plg) = 297.57 lb
Se supone que en el sistema motriz los choques son uniformes y en el sistema impulsado por
el motor eléctrico, mueve cereales por lo que sus choques serán uniformes. Entonces el
factor de sobrecarga se considera:
Ko = 1
El factor velocidad se calcula:
Kv: [A / ( A +vp1/2 )]B = [59.77 / ( 59.77 + 221.661/2)]0.8253 = 0.8897
Donde:
- Qv = 6 recomendado para aplicaciones del tipo comercial e industrial.
- B = (12 - Qv)2/3 / 4 = (12 - 6) 2/3 / 4 = 0.8253
- A = 50 + 56 (1 - B) = 50 + 56 * (1 – 0,8253) = 59.77
- vp = 67.58 m/min * 3,28 pie/m = 221.66 pie/min
El paso diametral se calcula a partir de Mo = 25.4 / Pd
Pd [plg] = 25.4 / 1.5 = 16.93
El ancho del engrane se calcula a partir de ρ = F/pt :
F = ρ * pt = 5 * 5.2 mm / 25.4 mm/ plg = 1.023 plg
El factor de tamaño (corrección por la falta de uniformidad de las propiedades del material)
se adoptara unitario debido a que es el usado en la mayoría de los engranajes rectos y
helicoidales:
KS = 1
El soporte del mecanismo en estudio deberá poseer una condición de exactitud y montaje
de modo que exista contacto incompleto con la cara, para poder limitar los errores del
alineamiento de operación. A partir de lo anterior y con el ancho de cara como dato se
obtiene de la tabla 12 pagina 42 del apunte el factor de distribución de carga:
Fm = 2
Con el ángulo de inclinación de las hélices (Ψ = 25 º) y el número de dientes (Z1 = 13) en el
elemento engranante se ingresa a la figura 57 del apunte y se obtiene (interpolando):
J = 0.45
El factor de geometría (J) se modifica a partir del factor de modificación, que se obtiene de
la figura 58 a partir del ángulo de inclinación de las hélices (Ψ = 25 º) y del número de
dientes en el elemento engranante:
; siendo Z2 = Z1 * N1 / N2 = 13 * 1000 rpm / 500 rpm = 26 dientes
Se obtiene el factor de modificación = 0.94, por lo cual el factor de geometría queda:
J=0.423
N2 = Z1
N1 Z2

6 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Con los datos obtenidos se calcula el esfuerzo en la raíz del diente:
Wt = 297.57 lb F = 1.023 plg
Ko = 1 KS = 1
Kv = 0,8897 Fm = 2
Pd = 16.93 J = 0.423
St = (297.57 * 1 / 0.8897) . (16.93 / 1.023) . (1 * 2 / 0.423) = 26170 lb/plg2
Se procede a calcular esfuerzo de diseño máximo admisible Sad:
El material a utilizar debe poseer una dureza entre 200 y 250 HB debido a su fácil
maquinabilidad y que es muy usado en la industria. Por ello se utilizara acero con
tratamiento térmico de templado completo y revenido (240HB), en donde su tensión
admisible a la fatiga se obtiene de la tabla 16 de la página 46 del apunte:
Sat: 31000 lb/plg2
El factor de duración depende del largo de vida planteado. Se supone que los equipos
tengan una vida útil de 2 años, que trabajan 2hs por día durante todo el año, a 1000 ciclos
por minuto, es decir, que trabajara unos 86,400,000 ciclos durante su vida útil. Entonces de
la tabla 17, página 47 del apunte se obtiene a partir de la dureza del material a utilizar (240
HB) y el número de ciclos:
KL = 1
El factor de temperatura se considera igual a uno ya que la temperatura de trabajo se
mantendrá debajo de los 120ºC.
KL = 1
El factor de confiabilidad se considera 1 para asegurar una confiabilidad del 0.99 en el
engrane:
KR = 1
Se calcula el esfuerzo de diseño máximo admisible Sad :
Sad = 31000 lb/plg2 * 1 / (1 * 1) = 30000 lb/plg2
Por lo que se verifica que:
Siendo Sad 14.6 % mayor que St
St = ( Wt K0 / Kv ) . ( Pd / F ) . ( Ks Km / J )
Sad = Sat . KL / ( KT KR )
St ≤ Sad

7 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
II. Calcular el módulo normalizado, pasos diametral y circunferencial, y determinar todos
los datos necesarios para su posterior fabricación.
Se resume a continuación las dimensiones normalizadas para los engranes:
Datos de los Engrane
Modulo (Mn) 1.5
Paso normal (pn) 4.71 mm
Paso circunferencial (pt) 5.2 mm
Paso axial (pa) 11.15 mm
Relación del ancho con el paso (ρ) 5
Ancho del engrane 26 mm
Angulo de presión (Φ) 20º
Engrane helicoidal 1
Z1 13
Diámetro primitivo 21.51 mm
Diámetro interior 17.77 mm
Diámetro exterior 24.51 mm
Fabricación fresas-madre cilíndricas
Material acero con tratamiento térmico de templado completo
y revenido (240HB)
Angulo de inclinación de hélice (Ψ) 25º
Engrane helicoidal 2
Z2 26
Diámetro primitivo 43.02 mm
Diámetro interior 40.02 mm
Diámetro exterior 46.02 mm
Fabricación fresas-madre cilíndricas
Material acero con tratamiento térmico de templado completo
y revenido (240HB)
Angulo de inclinación de hélice (Ψ) 115º
Se verifica que b ≥ 1.2 pa
III. Considerando que el engranaje conducido esté ubicado entre 2 apoyos y a la mitad de
su separación, calcular las reacciones en los mismos.
Datos:
Φ 20 º
Ψ 25 º
Separación entre apoyos 100 mm

8 Universidad Nacional de Mar del Plata - Mecanismos y Elementos de Máquinas
Trabajo Práctico Nº 3
Z
y x
A
B
RrA
RtA
RrB L/2
L/2
Fa
Fr
Ft
RtB
RaB
RaA
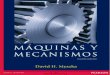
Diagrama vectorial de Fuerzas:
El engranaje se encuentra en la mitad de los apoyos, es decir L/2 = 50 mm
Cálculo de Reacciones:
- Sumatoria de Momentos ZX (radial)
∑MBZX = 0
RrA * L - Fr * L/2 = 0 ; siendo Fr = Wt * tg Φ = 297.57 lb * tg 20º = 108.3 lb
RrA = 108.3 lb * 50 mm / 100 mm
RrA = 54.15 lb ; por lo tanto Rr
B = 54.15 lb
- Sumatoria de Momentos YX (tangencial)
∑MBYX = 0
RtA * L – Ft * L/2 = 0 ; siendo Ft = Wt * cos Ψ = 297.57 lb * cos 25º = 269.69 lb
RtA = 269.69 lb * 50 mm / 100 mm
RtA = 134.84 lb ; por lo tanto Rt
B = 134.84 lb
- Sumatoria de Momentos ZX (axial)
∑MAZX = 0
Fa * Dp2/2 – RaB * L = 0 ; siendo Fa = Wt * tg Ψ = 297.57 lb * tg 25º = 138.76 lb
RaA = 138.76 lb * 43.02 mm / (2* 100 mm)
RaA = 29.84 lb ; por lo tanto Ra
B = 29.84 lb