Embed Size (px)
Citation preview

Francisco Rodríguez Rubio, Dr. Ingeniero Industrial*
Fernando Morilla García, Dr. En Ciencias Físicas t
Manuel G. Ortega Linares, Dr. Ingeniero Industrial*
40). Vapor
INTERCAMBIADOR _.___,_.._. DE CALOR T(t) (Temperatura de
salida)
Corriente de Proceso
TM) (Temperatura de entrada )
INGENIERÍA DE CONTROL
* Depto. Ingeniería de Sistemas y Automática. E.S.I.I. de Sevilla. t Depto. Informática y Automática. Facultad de Ciencias. UNED.
RESUMEN — Hoy en día el control está involucrado prácticamente en todo sistema de uso cotidiano. Todo proceso necesita un funcionamiento cada vez más autó-nomo y por ello la Ingeniería de Control juega un papel crucial para conseguir máquinas que funcionen solas. En los siguientes apartados se realiza una introducción de los conceptos básicos, presentando mediante ejem-plos algunos de los campos de actuación de la Ingeniería de Control.
1. INTRODUCCIÓN
D
e una manera intuitiva, se concibe la Ingeniería de Control como la rama de la técnica que tiene por objeto concebir ingenios que
funcionen autónomamente, es decir, y ha-blando llanamente, que funcionen solos.
El problema de controlar el funciona-miento de un proceso, sea la fabricación de un producto, un avión en vuelo, una máqui-na funcionando, etc. queda reducido al de la toma de decisión de la secuencia de valores que deben tomar las señales de mando del mismo.
Al existir distintas opciones respecto a la acción a tomar para gobernar el proceso, para realizar la elección conveniente de la señal de entrada es necesario que se sepa predecir qué resultados se obtendrán de cada una de las posibles acciones, con el fin de escoger la se-ñal de entrada a la que corresponda un resul-tado apetecido.
Dicha predicción requiere un conoci-miento adecuado de las relaciones existentes entre las posibles acciones a tomar sobre el sistema y los resultados que determinarán cada una de ellas. Esto es lo que se conoce como un modelo matemáti-co del proceso y está constituido por las relaciones forma-les que ligan a las señales de entrada y de salida del siste-ma. Por lo tanto, el modelo matemático del sistema es
una forma de representación de dicho sistema que permi-te su estudio, así como el análisis y diseño de las posibili-dades de control que pueden aplicarse.
El Control Automático aparece históricamente ligado al principio de la realimentación. Desde un punto de vista general, cabe decir que los sistemas con realimentación son aquéllos en los que, si la acción que se lleva a efecto persigue una determinada meta, es la diferencia entre las cotas alcanzadas en esta meta y ella misma, la que deter-mina las acciones posteriores. Este tipo de actuaciones son las que se denominan control en bucle cerrado o con-
trol por realimentación. En palabras de Norbert Wiener, "realimentación es
un método de controlar un sistema reinsertando en él los re-sultados de su comportamiento anterior': Dicho concepto
• • •
Vapor
INTERCAMBIADOR DE CALOR T(t) (Temperatura de
salida)
Fig. I Ejemplos ele realimentación manual y automática.
es abstracto y puede utilizarse en sistemas físicos (mecáni-cos, hidráulicos, eléctricos, etc.) así corno en otros cam-pos ajenos a la Ingeniería.
Corriente de Proceso
T,(t) (Temperatura de entrada )
20 Af3ttIl, 2002 DYNA

SP E OP PV
controlador proceso
Si el control es manual, es la persona quien, apoyán-dose en unos elementos de medición, toma la decisión, pero si el control es automático dicha función es compe-tencia del controlador. En la figura 1 se muestra cómo se puede aplicar el concepto de realimentación con un obje-tivo concreto: el control de temperatura en un intercam-biador de calor.
Fig. 2 Sistema de control realimentado.
Actualmente se acepta como definición de sistema de control con realimentación la dada por el American Insti-tute of Electrical Engineering en 1951:
"Un sistema de control es el que tiende a mantener una relación determinada de una variable del sistema frente a otra, mediante la comparación de estas variables y utilizan-do su diferencia como un medio para su control"
A raíz de esta definición se pueden establecer las cua-tro acciones básicas de un sistema de control realimenta-do:
• Medida. Las medidas de las variables controladas se realizan normalmente mediante la combinación de senso-res y transmisores.
• Comparación. la comparación entre las variables de referencia y las variables controladas suele consistir en una simple diferencia.
• Decisión. Basándose en el resultado de la compara-ción y en el objetivo de control, se decide una determina-da acción.
• Acción. La acción de control se envía al sistema a través de los elementos finales de control, conocidos co-mo actuadores.
En la figura 2 se representa por un lado el Sistema o Proceso, cuya variable de Salida o variable de Proceso (PV) pretendemos controlar de forma que se parezca en mayor o menor medida a la variable de Referencia (SP). Para ello se dispone de un Elemento de medición, que nos propor-ciona el valor de la señal de salida y posteriormente una vez comparada con la señal de referencia se toma la deci-sión correspondiente para actuar sobre el sistema.
En la definición se confirma que la decisión en un sis-tema de control realimentado se suele tomar después de una comparación y que suele ser una función de la dife-rencia o error (E) entre la señal de referencia y la salida del
sistema. Pero nada sc indica de la naturaleza de esta fun-ción, en definitiva de la naturaleza del controlador (analí-tico, heurístico, basado en un modelo del proceso, etc.), donde el controlador PID, llamado así porque combina tres acciones básicas de control (proporcional, integral y derivativa), ocupa un lugar destacado.
Una ventaja del sistema de control en lazo cerrado es que el uso de la realimentación vuelve la respuesta
del sistema relativamente insensible a las perturba-ciones externas y a las variaciones internas en los pa-rámetros del sistema. Dicha afirmación es cierta si y sólo si está garantizada la estabilidad del sistema. Por tanto, la estabilidad es un objetivo prioritario en cualquier sistema de control realimentado.
Desde el punto de vista de la Ingeniería de Control, la resolución del problema del control se podría enunciar de la siguiente manera:
"Dado un sistema físico o proceso, considerado co-mo problema, diseñar e implementar un subsistema, deno-minado controlador, de modo que, interconectado con el pri-mero constituya un sistema global cuyo comportamiento sea semejante al de un sistema tomado como referencia":
Durante muchos siglos las ideas de realimentación y de control se han combinado en numerosos artilugios, usando el ingenio y la intuición como elementos esen-ciales. Pero no cabe duda que han desempeñado una función vital en el avance de la Ingeniería y la Ciencia. También han sido claves en el diseño de equipos experi-mentales y en la instrumentación utilizada en las ciencias básicas. Actualmente el control automático ocupa un papel crucial en la generación y transmisión de energía, en el control de procesos de muy diversa índole, en la fabrica-ción de bienes y equipos, en la comunicación, en el trans-porte e incluso en el entretenimiento y en el ocio. Además, es fácilmente comprobable cómo los principios del control automático están siendo aplicados en campos tan diversos como la Biología, la Economía, la Psicología y la misma Sociología.
La Ingeniería de Control se preocupó desde sus orí-genes de la automatización y del control automático de sistemas complejos, sin intervención humana directa. Es-tos objetivos y otros, cada vez más ambiciosos, se han po-dido conseguir con el esfuerzo y el tesón de colectivos con formación científica muy variada (físicos, matemáticos, químicos, ingenieros, etc.) desde Centros e Instituciones con intereses muy diversos (investigación básica, investi-gación aplicada, militares, industriales, comerciales, etc.), las cuales han hecho de la Ingeniería de Control una ma-teria científica y tecnológica (tecnociencia, en definitiva) interdisciplinaria.
Si la madurez se mide por la historia (breve o larga) y por lo que se escribe sobre ella, se puede pensar que real-mente el control automático ha alcanzado una cierta ma-durez como disciplina científica. Amparadas en esta ma-
AUTOMATIZACION
DYNA At3Rii.2002

durez han surgido una serie de teorías y técnicas, algunas de las cuales no han tenido el impulso suficiente y otras que, sin embargo, en pocos años se han destacado como las soluciones más eficaces para determinados problemas, en concreto los problemas industriales. Entre estas teorías y técnicas podemos destacar: Control óptimo, Control prcdictivo, Control robusto, Control no lineal, Control inteligente, Control de sistemas de eventos discretos o Control en tiempo real.
En las secciones siguientes expondremos algunos campos donde la Ingeniería de Control tiene una relevan-cia especial.
2. CONTROL DE PROCESOS Como ya se ha comentado, la Ingeniería de Control
se ocupa de la automatización de una gran variedad de sistemas, siendo el control de procesos uno de los campos donde más ha contribuido al desarrollo de la industria en sus diversas formas. A modo de ejemplo se ilustra con una aplicación concreta cómo puede influir la automati-zación en la optimación y funcionamiento de un proceso.
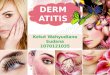
El sistema consiste en una instalación completa de producción de frío por absorción mediante energía solar, apoyada por una caldera de gas natural, y está situada en el Instituto Andaluz de Automática y Robótica. La insta-lación, cuya fotografía se presenta en la figura 3, ha sido diseñada y construida de forma que permita el ensayo de los subsistemas de aporte y de consumo conjuntamente y por separado, en un contexto de automatización y control que es el que puede permitir la optimización del conjunto.
El objetivo principal de la instalación es el desarrollo de estrategias de operación para el adecuado uso de los sistemas térmicos solares para la producción de frío, así como el ensayo de los distintos componentes de la insta-lación. La operación de este tipo de sistemas es un proce-so complejo por diversos motivos:
• La energía primaria (el sol) no es manipulable, co-mo ocurre con los sistemas energéticos convencionales, si-no que es una perturbación.
• Existen grandes retardos asociados al movimiento de los fluidos. Además, los retardos son variables según las condiciones de funcionamiento.
• La demanda también es variable debido a las condi-ciones de ocupación y uso de las salas cuya temperatura se desea regular.
Teniendo en consideración estos condicionantes, el proceso de optimización del funcionamiento de la instala-ción se lleva a cabo permitiendo un uso racional de la energía proveniente del sol y satisfaciendo en todo mo-mento la demanda, haciendo uso de la energía auxiliar só-lo cuando sea estrictamente necesario.
La instalación de refrigeración solar consta de tul equipo de absorción (BrLi-Agua), con una potencia frigo-rífica nominal de 35 kW, junto con un sistema de aporte de energía térmica necesario para el funcionamiento del ciclo de absorción y un sistema de evacuación de calor. La fuente de calor está formada por un conjunto de captado- res solares planos que transforman la energía incidente en forma de radiación en energía interna del fluido portador del calor (agua). Se cuenta además con una caldera de gas natural como sistema auxiliar de energía.
El frío generado por el sistema se emplea para refrige-rar la segunda planta de los Laboratorios del Instituto. Adicionalmente y, para realizar pruebas de forma flexible, se dispone de un simulador de cargas consistente en una bomba de calor que disipa el frío generado y además per-mite simular distintos perfiles de carga. Se ha puesto es-pecial énfasis en la optimización energética de la opera-ción de la instalación en distintas condiciones de trabajo.
Al tratarse de una instalación experimental, ha sido dotada de un sistema de control muy flexible, que permi-te el funcionamiento en diferentes configuraciones y ex-trae toda la información del estado de la misma para su posterior análisis. Por ello, la instrumentación está sobre-dimensionada de manera que se han colocado muchos más sensores de los necesarios para un funcionamiento normal de la planta. De esta forma se pueden conocer la mayoría de los flujos de energía entre los distintos módu-los (captadores, máquina de absorción, acumuladores, etc.), bien para analizar el comportamiento de cada uno de ellos por separado, o bien para integrarlos todos en una operación óptima. Con este objetivo se han colocado más de 60 sensores, 9 bombas, 52 electroválvulas y 3 vál-vulas de regulación.
La instalación está dotada de un sistema de control que está distribuido entre la azotea y la planta baja, donde se encuentra el puesto de operación. La plataforma elegi-da para integrar todo el sistema es CUBE (Siemens-Or-si), cuyo controlador se comunica con la planta a través de un bits de campo.
Fig. 3 Instalación dc producción de furo por absorción mediata(' energía solar.
I'I ® ABRIL. 2002 llYNA

^ DYNA ABRIL 2002 ®
Fig. 4. Instalación de producción de filo por absorción mediante energía solar.
mecánicos. En muchos de estos sistemas los efectos no lineales tales como holguras, fricción y 'imi-tadores de pendiente son críticos y esto obliga a un diseño especialmente cuidadoso de los contro-ladores.
Entre los sistemas electromecánicos, proba-blemente los más popula-res sean los robots mani-puladores, los cuales se diseñan de forma que sean capaces de manipular he-rramientas que permitan
H^^i^
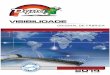
La comunicación con el usuario se realiza a través de un sinóptico que consta de una pantalla principal (Figura 4), en la que aparece un esquema general donde se visua-lizan tanto las variables del sistema como el estado de los elementos constitutivos del mismo, así como una serie de pantallas auxiliares para equipos y controladores.
Desde el punto de vista de control, existen varios la-zos que necesitan ser controlados, teniendo en cuenta a su vez que el funcionamiento óptimo de la máquina de ab-sorción se puede conseguir con diferentes configuraciones de la instalación.
Por un lacto, se ha de controlar el caudal de agua que pasa por el campo de colectores para conseguir la tem-peratura deseada a la salida del campo. Por otra parte, el agua caliente puede enviarse directamente a la máquina de absorción o almacenarse en depósitos para su posterior utilización. También existe la posibilidad de suplementar energía con la caldera, en el caso de que la energía solar recibida no sea suficiente. En estos casos se actúa sobre una válvula de tres vías que controla la proporción de los dos caudales.
Esta instalación es un claro ejemplo de sistema multi- variable con múltiples objetivos de control. En la actuali-dad se están ensayando diferentes tipos de controladores en orden a mejorar el aprovechamiento de la energía solar captada.
3. CONTROL DE SISTEMAS ELECTROMECÁNICOS
Un campo de especial interés en la Ingeniería de Control es el control del movimiento de sistemas electro-
realizar un trabajo determinado. El problema de control en estos sistemas (Lewis, 93)
consiste en conseguir que el robot mueva simultáneamen-te sus articulaciones de manera adecuada, haciendo así que su brazo recorra un camino especificado en el tieni-
Fig. 5. Robot industrial R111-10.
captado, es Solares
Copiadores Solares
50.3 RH 33.70 °C
189.76 ° ' 3.8 :m/s
^
^868.41N/m2 W0: 33
I vh i CIRCUITO 0[
CAPTACION
..^ '1712,7 Ua
. 4
TIC-01211 ;67591 11fi:; y#^920
0.7'C
0.7!C 1 ^
Bomba de calor
Torre de refrigeración
80.6 °C Mt)A I 10 kv401021
50.01i
^ TIC-10141
% 00.8 ^(V-0D209 0.0
rl^ TIC-10111 80.0 e 10 1<— Q .
LOA•'0130 i -^
-40201 64-1 M 101111G ..5,4,4N 35.8
KV.40248 r— j Gea n°Wrd " ► 84 2°C 1 ^^^ ;o,u^m3n ► I
r -0040 1 r1 KV.0040
a ,_ , a^1nF do IIIF.I Cid
}111.5 °C [ M10(tm7 .^_
;42t`ti.B1M
TIC-10171 mullas Solar
I 1luipo di: .:I7Sertieli 94.5óC
kv.0os01 ! r-1 '.
1111 •j;' ."49.8°C ü.
1 1 kv-0o4od
51.8°C
64 2 °C 68.9 °C
I 4022.61/h'
KV-0020d,-, ^?66.1 °C r . M/003oC1
^oa RV-00202I Mi .,i4 3 °C:
ril kv- nn4nA
52,8 °C 54.5 °C 26.9 °C
KV-00204 rseo
Mai..
POTENCIA -.4.3 kW O') IN• 04 ;sC [^Á-71N]I15 I M.1am47 i
4133 9 Uh 448.0 VI ► I PLAN OLAR ¡ REMOTO 50.0'C

se muevan y detengan en cualquier posición dentro del recorrido que puede realizar cada eje. Adicionalmente, es posible controlar la velocidad, aceleración, deceleración y la derivada temporal de la aceleración entre dos puntos de la trayectoria para los distintos ejes. Como consecuencia, la vibración del manipulador puede ser reducida significa-tivamente. A su vez hay que tener en cuenta la existencia de no linealidades importantes, como puede ser la fric-ción. Los controladores deben tener en cuenta estos as-pectos si se desea tener una precisión alta en el posiciona-miento.
Como ejemplo, en el trabajo (Ortega, 02) se presenta un control multivariable H no lineal para el robot RM 10 de la figura 5, el cual persigue la atenuación del efecto (en términos de energía) de las perturbaciones que puedan actuar sobre el sistema de una serie de señales de error que caractericen el comportamiento del sistema de con-trol. En dicho trabajo se incorpora un término integral adicional en el vector de errores de tal manera que se per-mita rechazar perturbaciones mantenidas, como puede ser un peso adicional en la garra del robot. Las ecuaciones del controlador resultante se han interpretado como un control por par calculado (que básicamente consiste en una linealización por realimentación) más un control externo tipo PID no lineal, cuyas matrices de ganancias varían con la posición y la velocidad de las articulaciones del robot. Además, en este trabajo se ha mostrado un caso particular de las matrices de ponderación, dentro de la formulación H , en el que el PID externo resultante no depende del nivel de atenuación de energía conseguido. Este caso es especialmente interesante pues la solución de la ecuación
po, también conocido corno trayectoria. Para ello, los robots suelen incluir un actuador asociado a cada articu-lación (también llamada grado de libertad), que normal-mente son motores eléctricos (al menos en los sistemas electromecánicos), si bien también podrían ser hidráuli-cos o neumáticos. Por lo tanto, la acción de control en es-tos casos consiste en aportar las consignas necesarias a es-tos motores para que muevan las distintas articulaciones, las cuales pueden ser de rotación o de traslación.
Al igual que en otros procesos de control, la decisión de la acción a tomar se basa en la comparación entre el movimiento deseado del robot (trayectoria de referencia) y el movimiento real del mismo (trayectoria real). Para co-nocer esta última se incorporan en las articulaciones del robot unos sensores que miden la posición de la articula-ción (giro realizado en caso de articulaciones de rotación o desplazamiento lineal en el caso de articulaciones de traslación).
Como ejemplo ilustrativo, en la figura 5 se muestra una fotografía de un robot manipulador industrial RM-10. Este robot tiene un brazo manipulador con seis gra-dos de libertad, todas ellos de rotación, los cuales permi-ten que el efector final (una pinza según puede observarse en la figura) pueda ser posicionado y orientado en cual-quier punto del espacio cíe trabajo del robot.
La acción de control en este caso consiste en unos pa-res aplicados a cada una de sus articulaciones, los cuales son proporcionados por unos motores de corriente conti-nua sin escobillas con poca inercia. Los motores están acoplados a los ejes del brazo manipulador a través de unas reductoras de engranajes, permitiendo así aumentar el par proporcionado por los motores, pero a costa de dis-minuir la velocidad de movimiento del brazo. Esta carac-terística es conocida como accionamiento indirecto. Ade-más, las articulaciones también están provistas de frenos eléctricos para poder bloquear al robot en cualquier posi-ción.
La medida de la posición del brazo se obtiene a partir de unos sensores inductivos de dos polos acoplados a cada motor. El controlador original del robot utilizaba una ar-quitectura basada en un bus VME, incluyendo tarjetas de control independiente para cada uno de los ejes. Esta es-tructura ha sido modificada (Romero, 00) con el fin de probar nuevas técnicas de control que mejoren el com-portamiento del sistema (Ortega, 02). Para ello se ha mantenido la parte de potencia y las tarjetas de cada eje, y se ha introducido una nueva tarjeta de control en tiempo real modelo DS1103 de la marca comercial dSPACE, en la que se pueden implementar las ecuaciones que rigen la toma de decisiones.
El uso del control en bucle cerrado permite que se pueda ordenar a los elementos del brazo manipulador que
Fig. 6. Plritaforina giroestabi/izada.
ABRIL 2002 DYNA 1

de Hamilton-Jacobi-Bellma-Isaacs que este tipo de con-trol plantea puede ser hallada de forma sistemática.
Además de los robots manipuladores, existen infini-. dad de aplicaciones en las que se necesita posicionar ade-cuadamente sistemas electromecánicos. Otro ejemplo puede ser una plataforma giroestabilizada, cuya principal aplicación recae en el ámbito de la aeronáutica o en el de la navegación. Normalmente este tipo de plataformas se ubican en un móvil que posee una determinada orienta-ción variable respecto a tierra (por ejemplo, por el efecto perturbador de las olas en el caso de la navegación) y el objetivo de control consiste en mantener posicionado un eje de forma que se mantenga con una orientación deter-minada fijada como referencia.
En la figura 6 se muestra un banco de pruebas en el que las perturbaciones sobre la orientación de la platafor-ma son simuladas mediante dos pistones accionados por motores eléctricos que están posicionados en cuadratura.
En esta aplicación, la orientación de la plataforma es medida mediante dos sensores giroscópicos situados en el extremo de la misma. Estas medidas son comparadas con las consignas de orientación y en función de sus discre-pancias se actúa sobre dos motores en cuadratura, los cua-les permiten posicionar el eje respecto a la base de la plataforma. En un principio se utilizó un control inde-pendiente de cada motor mediante controladores tipo PIDs, pero en la actualidad se están empleando técnicas de control multivariables que tienen en cuenta el carácter no lineal de este tipo de sistemas.
Para concluir esta sección, es conveniente resaltar que estas técnicas se basan, en su gran mayoría, en el conoci-miento de un modelo matemático que represente al siste-ma real. Este modelo puede obtenerse, en primera aproxi-mación, a partir de las ecuaciones de la mecánica clásica, y su conocimiento es esencial en la mayoría de las técni-cas que permiten controlar de manera adecuada el movi-miento de estos sistemas.
4. SUPERVISION Y AJUSTE DE CONTROLADORES
Dentro de las posibles decisiones de control, las más utilizadas dentro del ámbito industrial son las basadas en controladores lineales e invariantes con el tiempo, siendo muy conocido el controlador PID cuya ponderación en-tre los efectos proporcional, integral y derivativo se man-tiene constante.
Así, el sistema de control realimentado de la figura 2 está pensado para resistir variaciones moderadas en la di-námica del proceso, que se pueden producir, por ejemplo, cuando se cambia la zona de trabajo en un proceso indus-trial o cuando cambian las propiedades físicas de los pro-ductos que intervienen en el proceso; de hecho, la presen-cia de tales variaciones es una de las razones para introducir la realimentación. Sin embargo, cuando los
cambios en la dinámica del proceso son grandes, el con-trolador lineal y de parámetros fijos, que forma parte del lazo de control y que funcionaba satisfactoriamente, pue-de llegar a degradar el comportamiento del conjunto. Si esto ocurre, habría que volver a ajustar (sintonizar) el lazo de control, efectuando cambios en el controlador que compensen los cambios en el proceso, aunque es normal que los cambios afecten únicamente a los parámetros del controlador.
La necesidad de ajustar los lazos de control también se presenta en una instalación cuando se acomete la susti-tución parcial o total de la instrumentación de control, si bien esta actividad no se repite con la frecuencia que las empresas desearían por el elevado coste de amortización de los equipos y que, por tanto, cuando se emprende se encuentra con dos tecnologías (la que va a sustituir y la que va a instalar) bastante diferentes.
En la actualidad se detecta una fuerte implantación de los sistemas de control distribuidos en los procesos in-dustriales, por lo cual las necesidades básicas de control están suficientemente cubiertas generalmente con contro-ladores PID en sus múltiples configuraciones (lazo de re-gulación convencional, control en cascada, control antici-pativo, control selectivo, etc.). Pero en la jerarquía inmediatamente superior se están instalando otras estrate-gias de control multivariable, cuyos criterios de diseño suelen ser de carácter económico y que tienen como obje-tivo principal generar las consignas a los lazos del sistema de control distribuido. Un ejemplo de este tipo de estrate-gias son los controladores predictivos (Camacho, 99). La puesta en marcha de un controlador multivariable requie-re una modelización de todas las interacciones entre las variables de entrada y de salida, y antes de dicha modeli-zación se hace indispensable tener bien ajustados los lazos de control.
Desde la Ingeniería de Control se han concebido sis-temas, por encima del sistema de control distribuido, que asumen las competencias de supervisión y ajuste de los la-zos de control, mientras que el ingeniero de control se convierte en su usuario y su supervisor. Como consecuen-cia de la vigilancia que incorpora el sistema, el ingeniero recibe información sobre la necesidad o no del ajuste de los lazos de control y encuentra a su disposición un con-junto de herramientas (de excitación, de toma de datos, de tratamiento de los datos, de estimación, de cálculo de parámetros de control y de simulación) para que tome las acciones oportunas sobre el lazo. Conforme el ingeniero de control va adquiriendo confianza en las herramientas que el sistema le ofrece, le irá cediendo competencias e irá dotando a éste último de un mayor grado de automatiza-ción.
Actualmente existen equipos industriales monolazos o bloques funcionales en los sistemas de control distribui-dos que lo hacen. Pero su ámbito de aplicación es un úni-
T.O M A TI Z ACI .ON
r
DYNA ABRIL 2002 ®

co lazo, que debe ser simple y estar controlado por un al-goritmo PID, y ofrecen un conjunto mínimo de herra-mientas auxiliares. La concepción más amplia del sistema para supervisión y ajuste de sistemas de control está muy cerca de la idea general de sistema experto. Sin embargo, las aplicaciones cíe los sistemas expertos en control de procesos están más preocupadas de otros aspectos como la diagnosis de fallos, tratamiento de alarmas, planificación de operaciones, etc.
El Dpto. de Informática y Automática de la UNED ha desarrollado una aplicación informática, bajo el acrónimo Sintolab, para el ajuste de lazos de control que está siendo usada en refinerías y algunos complejos químicos y se perfila como un complemento ideal a las aplicaciones de control multivariable. Sintolab incluye:
- Herramientas para manipulación y tratamiento cíe datos históricos. Los datos se importan del Sistema de Control Distribuido o de cualquier archivo ASCII en múltiples formatos.
- Procedimientos para la estimación y validación cíe modelos del proceso a partir de -una o varias experiencias de toma de datos sobre el lazo que se desea sintonizar. El modelo incluye la dinámica cíe las perturbaciones medi-bles más importantes.
- Procedimientos de sintonía y diferentes interfaces, dependiendo del usuario final (Ingeniero de Control o Técnico Instrumentista), en la búsqueda de los paráme-tros de control más adecuados para el lazo de control. En la tabla 1 se resumen estos procedimientos y las corres-pondientes especificaciones.
- Un entorno cíe simulación que permite: a) el estu-dio cíe la respuesta temporal del modelo cíe la instalación a cambios predefinidos en sus entradas, b) el estudio de las respuestas del lazo cíe control a cambios en el punto de consigna, en la carga o en las perturbaciones, e) reprodu-cir condiciones similares a las que tiene o tendrá el lazo de control en la instalación.
- Validación de los parámetros de control en función cíe las características del módulo del Sistema de Control Distribuido donde el controlador está implementado.
- La generación automática de informes, lo cual es extremadamente útil para dejar constancia de cualquier modificación realizada en el lazo de control y de los pasos que condujeron a ella.
5. CONCLUSIONES Como primera conclusión se puede afirmar que la
Ingeniería de Control es una disciplina con gran presente y mejor futuro y que éste pasa por una mayor integración de los distintos niveles de decisión en los sistemas dinámi-cos (ya sea un proceso industrial continuo, un proceso in-dustrial tipo "batch", un proceso de fabricación o monta-je, un vehículo autónomo terrestre, un vehículo espacial,
o un proceso económico) y por una mejor coordinación entre los diversos profesionales que intervienen en él y los Centros c L)stituciones en los que se desarrollan.
MÉTODO DE SINTONÍA Especificaciones
Sintonía por margen de fase El margen de fase deseado y la frecuencia asociada.
Sintonía por margen
El margen de ganancia de ganancia
deseado y la frecuencia asociada.
Sintonía por margen de fase Los márgenes de fase y y margen de ganancia ganancia deseados.
Sintonía por tiempo de
El tiempo de asentamiento asentamiento y/o y/o la sobreelongación sobreelongación deseados para cambios en
la referencia, en la carga o en las perturbaciones (si éstas estuvieran modela-das). Y, puesto que es un proceso iterativo, se pue-den especificar valores ini-ciales de los parámetros de control para facilitar el proceso.
Sintonía por robustez Los valores entre los que deben estar comprendidos el tiempo de asentamiento, y/o la sobreelongación y los parámetros de control. Además del tamaño de la rejilla para éstos últimos.
No requiere especificacio-nes. Sólo se puede usar con modelos cíe nivel.
Average Control La desviación permitida en el nivel, así como la máxi-ma perturbación esperada en el caudal. Sólo se puede usar con modelos de nivel.
Tabla 1 Métodos de sintonía en Sintolab. Como segunda conclusión se puede afirmar que los
avances en la teoría y en la práctica del Control Automá-tico aportan los medios para obtener un funcionamiento adecuado de los sistemas dinámicos, mejorar la producti-vidad y aligerar la carga de muchas operaciones manuales repetitivas y rutinarias. Por lo tanto, casi todos los inge-nieros y científicos deberían tener un buen conocimiento en esta disciplina.
Tight Control
26 ABRIL 2002 DYNA