Embed Size (px)
DESCRIPTION
ingineria reglarii automate
Citation preview

31
Cap.2. Indicatori de performanţă şi Legi de reglare tipizate(PID)
2.1.Indicatori de performanţă pentru SRA
Performanţele sistemelor de reglare automată în domeniul timpului se definesc pentru
Regimul staţionar şi pentru Regimul tranzitoriu.
Pentru aprecierea regimului staţionar se folosesc uzual următorii indici de calitate:
- eroarea staţionară de pozitie st ;
- eroarea staţionară de viteză v ;
- eroarea staţionară de acceleraţie a ;
Pentru aprecierea regimului tranzitoriu, principalii indici de performanţă sunt:
- suprareglajul, ;
- gradul de amortizare )( ;
- pulsaţia proprie, p ;
- durata regimului tranzitoriu, rt ;
- timpul de creştere, ct ;
- timpul de întârziere, it ;
Eroarea staţionară de pozitie (εst)
Eroarea staţionară st caracterizează precizia de funcţionare a sistemului de reglare
automată în regim staţionar, regim care se stabileste în urma regimului tranzitoriu provocat de
variaţia de tip treaptă fie a mărimii de referinţă )(tVref , fie a unei perturbaţii )(tP . Pentru a
evalua eroarea staţionară se consideră un sistem de reglare automată în circuit închis având
structura din Fig.2.1:
Eroarea staţionară de poziţie în raport cu mărimea de referinţă se calculează considerând
perturbaţiile neglijate, adică 0)( tP .
Prin definiţie:
strstrefrt
reftt
st yVtytVt __)(lim)(lim)(lim
(2.1.)
unde:
strefV _ - este valoarea staţionară a mărimii de referinţă;
stry _ - este valoarea staţionară a mărimii de ieşire(sau de reacţie (t)yy(t) r ) după
consumarea regimului tranzitoriu.
Conform schemei bloc din Fig.2.1. vom avea pentru 0)( tP :
)()()()()()()()()()()()( ssHsHsVsYsHsVsYsVsYsVs RFrefRFrefrefrref
)()()()()( ssHsHsVs RFref
)())()(1)(( sVsHsHs refRF
Vref(s) ε(s)
YFP(s)
Y(s)
Yr(s)
EC
Fig.2.1.
HR(s) HF(s)
HFP(s)
YF(s)
P(s)
YR(s)

32
)(1
1
)()(1
1
)(
)(
sHsHsHsV
s
dRFref
(2.2.)
unde )()()( sHsHsH RFd este funcţia de transfer de pe calea directă
Revenind, avem conform teoremei valorii finale (T.V.F.) din teoria sistemelor:
)()(1
1lim)(lim)(lim
00
..
sVsH
ssst ref
dss
FVT
tst
(2.3.)
În cazul erorii staţionare de poziţie se consideră o variaţie treaptă a semnalului de referinţă sub
forma:
0
00
.,0
.),(1)(
ttpt
ttpttVtv
ref
ref
si a cărui transformată Laplace este:
sVsV refref
1)( 0 (2.4.)
Din relatiile (2.3.) şi (2.4.) vom avea relaţia de calcul pentru eroarea staţionară:
ref
ds
st
ref
ds
ref
ds
ref
ds
st
VsH
VsHs
VsH
ssVsH
s
0
0
00
000
)(lim1
1
)(1
1lim
1
)(1
1lim)(
)(1
1lim
(2.5.)
Făcând notaţia: )(lim0
sHK ds
p
, vom avea:
ref
p
st VK
01
1
iar PK -are dimensiunea şi semnificaţia de factor de amplificare de poziţie al sistemului în circuit
deschis:)(
)(
yK p .
Grafic, eroarea staţionară de poziţie este pusă în evidenţă pe răspunsul din Fig.2.2.
Performanta impusa unui SRA relativ la acest indicator de calitate este:
impusstst _
OBS: Pornind de la relatia ref
p
ref
ds
st VK
VsH
00
01
1
)(lim1
1
se poate observa că eroarea
staţionară de poziţie este „nulă” atunci când pK , adică
)(lim0
sHds
, adica )(sHd are
cel puţin un pol în originea planului complex, adică pe calea directă să fie cel puţin un element
cu efect integrator.
Regim tranzitoriu Fig.2.2.
yst_2
yst_1
Vref_st_2
Vref,y
t
Vref_st_1
)(lim tt
st

33
Eroarea staţionară de viteză ( v )
În acest caz, mărimea de referinţă are o variaţie de tip rampă:
)(1)( 0 ttVtv refref
Deci,
20
1)(
sVsV refref
Eroarea staţionară de viteză în raport cu mărimea de referinţă se calculează considerând
0)( tP .
Prin definiţie:
s
VsHs
VsH
ssVsH
ssst ref
ds
ref
ds
ref
dss
FVT
tv
1
)(1
1lim
1
)(1
1lim)(
)(1
1lim)(lim)(lim 0
020000
..
ref
ds
ref
ds
v VsHs
VsHss
0
0
00 )(lim
1
)(
1lim
(2.6)
Notam )(lim0
sHsK ds
v
-factor de amplificare de viteză, sau
)(
)(lim
t
tyK
tv
(2.7)
Relatia (2.6) devine:
v
ref
ref
ds
vK
VV
sHs
0
0
0)(lim
1
(2.8)
În relaţia (2.7) factorul de amplificare de viteza vK reprezintă raportul dintre viteza de variaţie a
mărimii de ieşire, faţă de valoarea ei într-un regim staţionar anterior, şi valoarea variaţiei erorii,
faţă de valoarea ei în acelaşi regim staţionar anterior care a determinat modificarea ieşirii, pentru
t , în ipoteza că eroarea are o nouă valoare staţionară finită.
Grafic, eroarea staţionară de viteză este pusă în evidenţă pe răspunsul din Fig.2.3.
Performanţa impusă unui SRA relativ la acest indicator de calitate este:
impusvv (2.9)
OBS:Pornind de la relatia v
ref
vK
V0 se poate observa că eroarea staţionară de viteză este nulă
atunci când vK , adică
)(lim0
sHsK ds
v , ceea ce înseamnă că sistemul trebuie să
aibă pe calea directă cel puţin 2 poli, sau sistemul să aibă pe calea directă cel puţin 2 elemente
integratoare conectate în cascadă.
Regim tranzitoriu Fig.2.3.
y
yst_1
Vref Vref,y
t
Vref_st_1
)(lim tt
v

34
Eroarea staţionară de acceleratie ( a )
În acest caz, mărimea de referinta are o variaţie parabolică de forma:
)(12
)( 0
2
tVt
tv refref
sau în domeniul complex,
30
1)(
sVsV refref
Eroarea staţionară de acceleraţie în raport cu mărimea de referinţă se calculează considerând
0)( tP .
Prin definiţie:
20
030000
.. 1
)(1
1lim
1
)(1
1lim)(
)(1
1lim)(lim)(lim
sV
sHsV
sHssV
sHssst ref
ds
ref
ds
ref
dss
FVT
ta
ref
ds
ref
ds
a VsHs
VsHss
02
0
0220 )(lim
1
)(
1lim
(2.10)
Notăm )(lim 2
0sHsK d
sa
-factor de amplificare de acceleraţie, sau
)(
)(lim
t
tyK
ta
(2.11)
Relaţia (2.10) devine:
a
ref
ref
ds
vK
VV
sHs
0
02
0)(lim
1
(2.12)
Grafic, eroarea staţionara de acceleratie este pusă în evidenţă pe răspunsul din Fig.2.4.
Performanţa impusă unui SRA relativ la acest indicator de calitate este:
impusaa _ (2.13)
OBS:Pornind de la relaţia a
ref
aK
V0 se poate observa că eroarea staţionară de acceleraţie este
“nulă” atunci când aK , adică
)(lim 2
0sHsK d
sa , ceea ce înseamnă că sistemul
trebuie să aibă pe calea directă cel puţin 3 poli, sau sistemul să aibă pe calea directă cel puţin 3
elemente integratoare conectate în cascadă.
Regim tranzitoriu Fig.2.4.
y
yst_1
Vref Vref,y
t
Vref_st_1
)(lim tt
a

35
Pentru aprecierea regimului tranzitoriu, principalii indici de performanţă sunt:
- suprareglajul, ;
- gradul de amortizare )( ;
- durata regimului tranzitoriu, rt ;
- timpul de creştere, ct ;
- timpul de întârziere, it ;
- pulsaţia proprie, p ;
Aceste performanţe se definesc pe răspunsul indicial(răspunsul sistemului la semnal de
intrare treapta unitară) ca în Fig.2.5:
Suprareglajul ( ) şi abaterea maximă
Prin definiţie, suprareglajul reprezintă depăşirea maximă de către mărimea de ieşire, în
timpul regimului tranzitoriu provocat de o variaţie în treaptă a mărimii de referinţă a valorii
staţionare ce se stabileşte după consumarea acestuia.
styy max (2.14)
unde )(lim)( tyyyt
st
Deoarece răspunsul unui sistem poate fi periodic sau aperiodic, rezultă conform
definiţiei, că în cazul unui răspuns aperiodic, suprareglajul este nul şi numai în cazul unui
răspuns periodic suprareglajul este diferit de zero.
Este evident că acest indice de calitate poate caracteriza numai sistemele stabile, deoarece
în cazul unui sistem instabil – periodic sau aperiodic – mărimea de ieşire nu mai atinge o valoare
staţionară şi astfel nu mai are sens noţiunea de depăşire a acesteia.
De regulă, suprareglajul se raportează la valoarea staţionară a mărimii de ieşire sty şi se exprimă
procentual astfel:
100[%] max
st
st
y
yy (2.15)
Deoarece o valoare mare a suprareglajului poate conduce la suprasolicitări ale instalaţiei sau
procesului tehnologic reglat, determinând fie uzura, fie chiar deteriorarea elementelor acestora,
valoarea suprareglajului trebuie limitată.
Referitor la suprareglaj, performanţa impusă sistemului de reglare se exprimă printr-o
condiţie restrictivă de forma:
[%][%] impus (2.16)
Gradul de amortizare ( );
Acest indicator de calitate caracterizează rapiditatea cu care descreşte amplitudinea
0,5yst
1(t)
t
Vref
T
ζ1 ζ
tr
ti
tc
0,05yst
0,95yst
1,05yst st
ty lim y(t)
Răspuns aperiodic
t
Răspuns periodic
Fig.2.5.
y
36
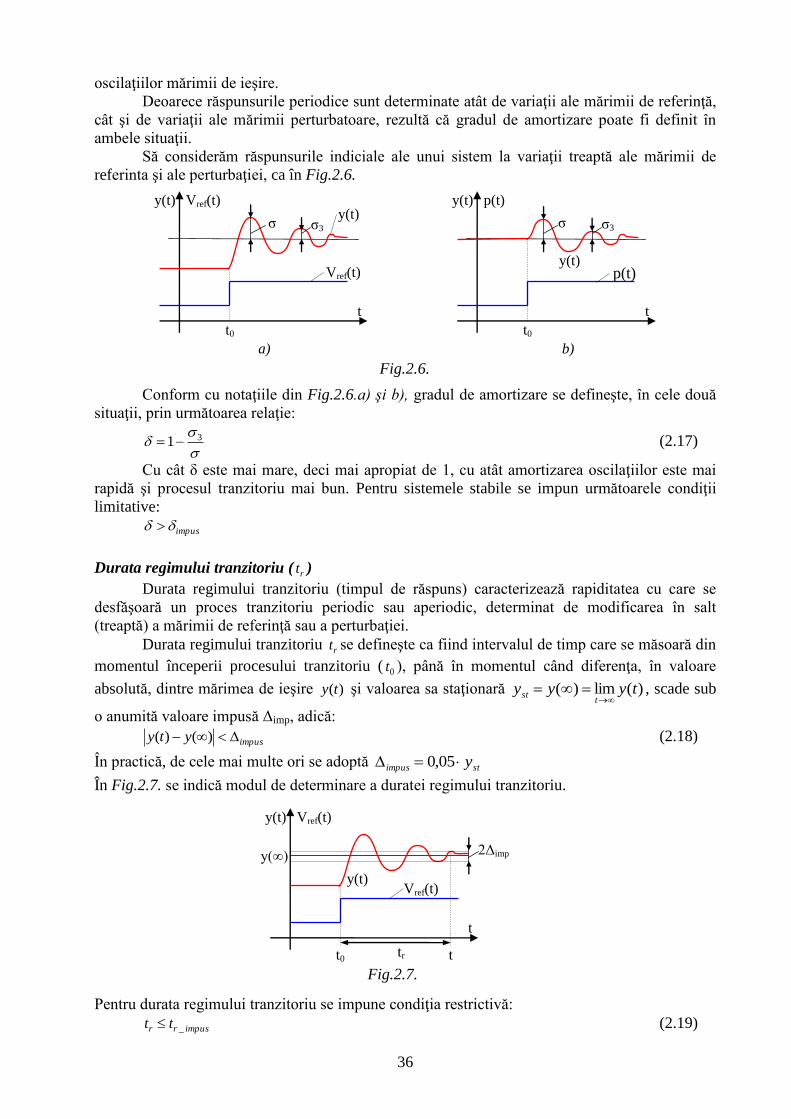
oscilaţiilor mărimii de ieşire.
Deoarece răspunsurile periodice sunt determinate atât de variaţii ale mărimii de referinţă,
cât şi de variaţii ale mărimii perturbatoare, rezultă că gradul de amortizare poate fi definit în
ambele situaţii.
Să considerăm răspunsurile indiciale ale unui sistem la variaţii treaptă ale mărimii de
referinta şi ale perturbaţiei, ca în Fig.2.6.
Conform cu notaţiile din Fig.2.6.a) şi b), gradul de amortizare se defineşte, în cele două
situaţii, prin următoarea relaţie:
31 (2.17)
Cu cât δ este mai mare, deci mai apropiat de 1, cu atât amortizarea oscilaţiilor este mai
rapidă şi procesul tranzitoriu mai bun. Pentru sistemele stabile se impun următoarele condiţii
limitative:
impus
Durata regimului tranzitoriu ( rt )
Durata regimului tranzitoriu (timpul de răspuns) caracterizează rapiditatea cu care se
desfăşoară un proces tranzitoriu periodic sau aperiodic, determinat de modificarea în salt
(treaptă) a mărimii de referinţă sau a perturbaţiei.
Durata regimului tranzitoriu rt se defineşte ca fiind intervalul de timp care se măsoară din
momentul începerii procesului tranzitoriu ( 0t ), până în momentul când diferenţa, în valoare
absolută, dintre mărimea de ieşire )(ty şi valoarea sa staţionară )(lim)( tyyyt
st
, scade sub
o anumită valoare impusă Δimp, adică:
impusyty )()( (2.18)
În practică, de cele mai multe ori se adoptă stimpus y 05,0
În Fig.2.7. se indică modul de determinare a duratei regimului tranzitoriu.
Pentru durata regimului tranzitoriu se impune condiţia restrictivă:
impusrr tt _ (2.19)
t
t0
y(t)
ζ
Vref(t)
Vref(t)
t
t0
y(t)
y(t)
p(t)
p(t)
a) b)
y(t) ζ3 ζ3
3
ζ
Fig.2.6.
t0
t
y(t)
Vref(t)
Vref(t)
y(t)
2Δimp
t tr
y(∞)
Fig.2.7.

37
Timpul de creştere ( ct )
Reprezintă intervalul de timp în care mărimea de ieşire evoluează între 0,05 yst şi
0,95 yst. Determinarea ct este ilustrată în Fig.2.8.
Timpul de întârziere ( it )
Reprezintă timpul necesar ca mărimea de ieşire să evolueze între valoarea zero şi
valoarea 0,5yst. Determinarea it este ilustrată în Fig.2.8.
Aprecierea erorilor de regim permanent (εst) se face relativ simplu, în schimb indicii de
performanţă pentru regimul tranzitoriu se calculează destul de dificil la sistemele de ordin mai
mare ca 2. Din acest motiv se încearcă uneori o aproximare a sistemului studiat cu unul
echivalent de ordinul II, având în vedere faptul că de multe ori comportarea unui sistem liniar de
ordin superior este apropiată de cea a sistemelor de ordin II.
Acest lucru se explică prin faptul că la multe sisteme funcţia de transfer conţine doi poli
mult mai apropiaţi de axa imaginară decât restul polilor şi ei dictează comportarea sistemului
liniar.
2.2. Legi tipizate de reglare automată
2.2.1.Consideratii generale
Regulatorul automat (R) din cadrul unui SRA este un element al dispozitivului de
automatizare plasat pe calea directă între elementul de comparaţie (EC) şi elementul de execuţie
(EE), ca în Fig.2.9.
Acest element prelucrează informaţia privind evoluţia erorii din SRA după legi
prestabilite şi generează decizia/comanda ce acţionează asupra elementului de execuţie în
vederea anulării erorii.
Legea de dependenta prestabilită între mărimea de ieşire a regulatorului şi mărimea sa de
intrare, constituie legea de reglare a regulatorului şi defineşte regulatorul din punct de vedere
funcţional. Practic, legea de reglare este o relaţie de forma:
dttu
dt
tdutuftyR )(;
)();()( , (2.20)
Vref ε Y(s)
Yr
EC
Fig.2.9.
R EE YEE YR
IT
TR
0,5yst
1(t)
t
Vref
T
tr
ti
tc
0,05yst
0,95yst
1,05yst st
ty lim y(t)
t
Fig.2.8.
y

38
relaţie care defineşte şi tipul regulatorului: P-proporţional, D-derivator, I-integrator
2.2.2.Elementul proporţional(Legea de tip P)
În domeniul timp, elementul de tip P este descris de relaţia:
)()( tuKty RR (2.21)
Aplicând transformata Laplace în condiţii iniţiale nule relaţiei (2.21), vom avea:
)()( sUKsY RR (2.22)
de unde vom avea că funcţia de transfer a elementului de tip proporţional va fi:
RR
P KsU
sYsH
)(
)()( (2.23)
unde RK -se numeste factor de amplificare sau coeficient de proporţionalitate
În cazul regulatoarelor unificate pentru care domeniul de variaţie al mărimii de intrare
minmax UUDU , este egal cu domeniul de variaţie al mărimii de ieşire minmax RRY YYDR
,
factorul de amplificare RK este o mărime adimensională.
Deoarece majoritatea elementelor (sistemelor) au o comportare liniară numai pe o
anumită porţiune din domeniul de funcţionare, descrierea acţiunii elementului de tip proporţional
se apreciază prin banda de proporţionalitate BP , care se exprimă în procente [%].
Banda de proporţionalitate [%]BP -reprezintă o măsură a amplificării egală cu procentul
din domeniul mărimii de intrare care vdetermină o variaţie egală cu 100% din domeniul mărimii
de ieşire:
U
Y
R D
D
KBP R
100[%] (2.24)
În cazul regulatoarelor unificate UY DD
R iar banda de proporţionalitate are expresia:
1001
[%] RK
BP (2.25)
Din Fig.2.10 se observă că, cu cât banda de proporţionalitate [%]BP este mai mare pentru un
element, cu atât factorul lui de proporţionalitate RK este mai mic şi invers.
Răspunsul unui element de tip proporţional ideal este reprezentat cu linie continuă în Fig.2.11.
Fig.2.10.
YR%
U% BP%=100 BP%<100 BP%>100
100
KRrel
>1 KR
rel<1
KRrel
=1

39
Datorită întârzierii introduse în transmiterea semnalelor în funcţia de transfer a elementului de tip
P real apare o întârziere ca la un element aperiodic de ordinul I.
1)(
sT
KsH R
P
(2.26)
unde T este o constantă de timp parazită.
Răspunsul elementului de tip P a cărui funcţie de transfer este dată de relaţia (2.26) este
indicat cu linie punctată în Fig.2.11
Utilizarea unui element proporţional într-un sistem de reglare conduce la o funcşionare stabilă,
dar apare o eroare staţionară st , dată de relaţia:
R
stK
1 (2.27)
2.2.3.Elementul Integrator(Legea de tip I)
Legea în domeniul timp a elementului de tip I este:
)()(
tuKdt
tdyT R
Ri (2.28)
Aplicând transformata Laplace în condiţii iniţiale nule relaţiei (2.28) se obţine:
)()( sUKsYTs RRi (2.29)
Din relaţia (2.30) rezultă funcţia de transfer a elementului integrator:
sTsT
K
sU
sYsH
ii
RRI
111
)(
)()(
* (2.30)
unde: iT -constantă de timp de integrare
R
ii
K
TT * -constanta de timp echivalentă
Răspunsul în timp al unui element integrator obţinut prin integrarea ecuaţiei (2.28), este:
duT
Ktyty
t
ti
RRR
0
)()()( 0 (2.31)
Răspunsul elementului de tip I obţinut pentru un semnal treaptă aplicat la intrare este dat de
relaţia:
tT
Kty
i
RR )(
şi este prezentat în Fig.2.12
Fig.2.11.
U,YR
t
100
st Raspunsul ideal
Raspunsul real
U
YR

40
În Fig.2.12 se observă că răspunsul elementului integrator este este o rampă având panta iR TK .
Elementul integrator are un caracter de memorie deoarece există o comandă )(tyR nenulă şi în
cazul în care intrarea )(tu devine nulă.
Datorită polului în origine al funcţiei de transfer )(sH I eroarea staţionară la intrarea treaptă este
nulă.
Considerând cazul general, când mărimea de intrare are o evoluţie de tip treaptă cu valoarea U ,
adică:
0
0
.0
.)(1)(
ttpt
ttpttUtu (2.32)
Vom avea următorul răspuns pentru elementul integrator:
UttT
Ktyty
i
RRR )()()( 00 , 0tt (2.33)
Ecuaţia (2.33) seamănă cu ecuaţia unei drepte nxmy cu panta UT
Km
i
R
Cunoscând răspunsul la 2 momente de timp 1kt , 0ttk din relaţia (2.33) vom avea:
)(
)()(
1
1
kkk
kRkR
i
R
ttU
tyty
T
K (2.34)
Relaţia (2.34) permite calculul constantei de timp echivalente i
Ri
T
KT * , ca în Fig.2.13
Fig.2.12.
U,YR
t
U YR
Panta i
R
T
K

41
2.2.3.Elementul Proporţional-Integrator(Legea de tip PI)
Legea în domeniul timp este:
)(
)()(tu
dt
tduTK
dt
tdyT iR
Ri (2.35)
Apliocăm Transformata Laplace în condiţii iniţiale nule relaţiei (2.35) şi vom avea:
)()1()( sUTsKsYTs iRRi (2.36)
Folosind relaţia (2.36) se obţine funcţia de transfer pentru elementul de tip PI:
sTKsH
i
RPI
11)( (2.37)
unde: iT - constanta de timp de integrare exprimată în unităţi de timp;
RK - coeficient de proporţionalitate;
Schema bloc corespunzătoare relaţiei (2.38) este prezentată în Fig.2.14.
Răspunsul în domeniul timp al elementului de tip PI, obţinut prin integrarea ecuaţiei (2.35) în
intervalul de timp tt ,0 este:
duT
KtutuKtyty
t
ti
RRRR
0
)()]()([)()( 00 (2.38)
Dacă la intrare se aplică un semnal treaptă de forma:
Fig.2.14.
KR
sTi
1
U(s) YR(s)
Fig.2.13.
YR
t
Uk
Panta
k
i
R UT
K
U
t
Uk-1
Un
kR UY
*iT
Panta
1 k
i
R UT
K

42
)(1)( 0ttUtu , 0tt (2.39)
se obţine următorul răspuns:
)()]()([)()( 000 ttUT
KtutuKtyty
i
RRRR (2.40)
reprezentat în Fig.2.15.a
Dacă treapta este unitară, adică 1 uU , 00 t şi se consideră condiţiile iniţiale nule se obţine
răspunsul indicial al elementului de tip PI, ca în Fig.2.15.b
2.2.4.Elementul Derivator Real(Legea de tip D-real)
Legea de reglare în domeniul timp a elementului derivator real este:
dt
tduTKty
dt
tdyT dRR
R )()(
)( (2.41)
Aplicând transformata Laplace în condiţii iniţiale nule relaţiei (2.41) se obţine ecuaţia complexă:
)()()( sUsTKsYsYTs DRRR (2.42)
Din relaţia (2.42) se obţine funcţia de transfer a elementului derivator real:
1
)(
sT
sTKsH d
RD
(2.43)
unde: RK -coeficient de proporţionalitate
DT -constanta de timp de derivare
T -constanta de timp parazită
Constanta de timp parazită T , este uneori interpretată ca o constantă de filtrare. La nivel de
schemă bloc elementul derivator real se poate reprezenta ca în Fig.2.16
Răspunsul la intrare treaptă )(1)( tUtu , în condiţii iniţiale nule, pentru un astfel de elment
este:
Fig.2.16.
sTK dR 1
1
sT
U(s) YR(s)
Fig.2.15.
YR
t
U
t
u
UYR
R
ii
K
TT *
Panta UT
K
i
R
uKR
YR
t
U
iT
Panta i
R
T
K
RR KuK
t
U u =U
1
a. b.

43
0,1)(
tUeT
TKU
T
TKty
T
t
dRdRR
(2.44)
şi este prezentat în Fig.2.17. Se observă că dacă .)( cttu atunci pentru t rezultă 0)( Ry
Din Fig.2.17. se observă că în regim staţionar ieşirea unui element de tip D-real este nulă.
Elementul acţionează numai în regim tranzitoriu şi se mai numeşte “Element forţator”.
2.2.5.Elementul Proporţional-Derivator Real(Legea de tip PD-real)
Legea de reglare în domeniul timp pentru un element de tip PD-real este:
)(
)()(
)(tu
dt
tduTKty
dt
tdyT RR
R (2.45)
Aplicând transformata Laplace în condiţii iniţiale nule relaţiei (2.45) se obţine ecuaţia
operaţională:
)()()()( sUsUsTKsYsYTs RRR (2.46)
Din relaţia (2.46) se obţine funcţia de transfer a elementului PD-real:
1
1)(
sT
sTKsH d
RPD
(2.47)
unde: RK -coeficient de proporţionalitate;
dT -constantă timp de derivare;
T -constantă de timp parazită;
Răspunsul la intrare treaptă în condiţii iniţiale nule se prezintă în următoarele cazuri:
a.). TTd , comportarea intrare-ieşire din stare iniţială nulă este o comportare de element
proporţional, însă sistemul este necontrolabil.
b.). TTd , caracterul derivator este mai puternic decât cel integrator. Ca urmare, elementul se
comportă ca un filtru trece-sus cu avans de fază. Răspunsul la intrare treaptă este prezentat în
Fig.2.18:
Fig.2.17.
YR
t
U
t
U
UT
TK d
R
t0
T

44
c.). TTd , caracterul integrator este predominant, comportarea fiind a unui filtru trece-jos cu
întârziere de fază. Răspunsul la intrare treaptă este prezentat în Fig.2.19:
Fig.2.19
yR(t)
t
u(t)
t
U
UT
TK d
R
t0
T
U
UKR
Fig.2.18
yR(t)
t
u(t)
t
U
UT
TK d
R
t0
T
U
UKR





























