Embed Size (px)
Citation preview
Institut für Mechanik Universität Kassel
H. Irretier
Schwingungstechnik Aufgabensammlung
8. Auflage 2009

Herausgeber
Der Geschaftsfuhrende DirektorInstitut fur MechanikUniversitat Kassel
Organisation und Verwaltung
Dr.-Ing. Lothar SchreiberInstitut fur MechanikUniversitat KasselMonchebergstr. 734109 Kassel
c© 2009 Institut fur MechanikUniversitat KasselMonchebergstr. 734109 Kassel
Alle Rechte, insbesondere das der Ubersetzung in fremde Sprachen, vorbehalten.



Vorwort
In der vorliegenden Aufgabensammlung sind Ubungsaufgaben zur Vorlesung Schwin-
gungstechnik einschließlich ihrer Losungen zusammengefasst. Sie orientieren sich nachAufbau und Inhalt an dem Buch IRRETIER, H.: Schwingungstechnik,Institut fur Me-chanik, Universitat Kassel, und sind entsprechend den dortigen Kapiteln geordnet.
Die Aufgaben gehen zuruck auf Ubungen und Klausuren zur Lehrveranstaltung Schwin-gungstechnik innerhalb des gestuften Studienganges Maschinenbau der UniversitatKassel. An ihrer Erstellung haben die fruheren Mitarbeiter des Instituts fur MechanikHerr Dr.-Ing. M. Hohlrieder, Herr Dr.-Ing. F. Reuter und Herr Dr.-Ing. T. Kreuzinger-Janik maßgeblichen Anteil. Weiter erganzt wurde die Aufgabensammlung von HerrnDr.-Ing. S. Lindemann, der gemeinsam mit Frau Dipl.-Ing. A. Bottcher auch die Bilderund Losungen vollstandig uberarbeitete. An der Fertigstellung der jetzt vorliegendenFassung haben Herr MSc F. E. Boru und Dipl.-Ing. D. Strohschein wesentlichen An-teil durch die Anpassung einiger Aufgaben an den aktuellen Inhalt der Vorlesung underganzende Korrekturen in der Fragestellungen und Losungen
Kassel, im Marz 2009 H. Irretier


INHALTSVERZEICHNIS I
Inhaltsverzeichnis
1 Kinematik von Schwingungen 1
1.1 Harmonische Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Gedampfte Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Exponentiell gedampfte Schwingungen . . . . . . . . . . . . . . 31.2.2 Linear gedampfte Schwingungen . . . . . . . . . . . . . . . . . . 6
1.3 Modulierte Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . 71.3.1 Amplitudenmodulation . . . . . . . . . . . . . . . . . . . . . . . 71.3.2 Phasenmodulation . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.3 Amplituden- und Frequenzmodulation; Schwebung . . . . . . . 10
1.5 Nichtperiodische Schwingungen . . . . . . . . . . . . . . . . . . . . . . 12
2 Modellbildungen in der Schwingungstechnik 13
2.1 Elemente mechanischer Schwingungssysteme . . . . . . . . . . . . . . . 132.1.1 Elemente diskreter Systeme . . . . . . . . . . . . . . . . . . . . 132.1.2 Elemente kontinuierlicher Systeme . . . . . . . . . . . . . . . . . 15
2.2 Aufstellen von Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . 16
3 Schwingungen linearer Systeme mit einem Freiheitsgrad 17
3.1 Freie ungedampfte Schwingungen . . . . . . . . . . . . . . . . . . . . . 173.1.1 Mechanische Modelle und ihre Bewegungsgleichungen . . . . . . 173.1.2 Losung der Bewegungsgleichungen . . . . . . . . . . . . . . . . . 173.1.3 Anfangsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . 213.1.4 Energiebetrachtungen . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Freie gedampfte Schwingungen . . . . . . . . . . . . . . . . . . . . . . . 263.2.1 Viskose Dampfung . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Erzwungene Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . 433.3.1 Beispiele mechanischer Ersatzmodelle . . . . . . . . . . . . . . . 433.3.2 Allgemeine Losung der Bewegungsgleichungen . . . . . . . . . . 433.3.3 Sprung- und impulsformige Anregung . . . . . . . . . . . . . . . 433.3.4 Harmonische Anregung . . . . . . . . . . . . . . . . . . . . . . . 453.3.5 Periodische Anregung . . . . . . . . . . . . . . . . . . . . . . . . 543.3.6 Nichtperiodische Anregung . . . . . . . . . . . . . . . . . . . . . 593.3.7 Technische Anwendungen . . . . . . . . . . . . . . . . . . . . . 60
4 Losungen 69

1
1 Kinematik von Schwingungen
1.1 Harmonische Schwingungen
Aufgabe 1.1 - 1
q(t)
Kleine Bewegungen eines Pendels nach nebenste-hender Skizze konnen als harmonische Schwingun-gen mit der Amplitude q, der Periodendauer Tund dem Phasenwinkel β vollstandig beschriebenwerden. Diese Bewegung soll durch die Gleichungq(t) = qc cosωt+ qs sinωt dargestellt werden.
a) Bestimmen Sie die Kreisfrequenz ω und dieAmplituden qc und qs.
b) Wie groß ist die Frequenz der Schwingung?
c) Stellen Sie die Schwingung in der Phasenebene dar.
Geg.: q = 5 ; T = 2 s ; β = 30
Aufgabe 1.1 - 2
k
m
q(t),q(t).
Die Bewegung einer Kugel mit der Masse m, dienach nebenstehender Skizze an einer Feder mit derFedersteifigkeit k befestigt ist, kann als harmoni-sche Schwingung beschrieben werden. Zum Zeit-punkt t = 0 sind die Auslenkung q0, die Geschwin-digkeit q0 sowie der Phasenwinkel β bekannt.
a) Berechnen Sie die Amplitude q.
b) Wie groß ist die Periodendauer der Schwingung?
c) Stellen Sie die Schwingung als Funktion der Zeitdar.
Geg.: q0 = 1, 732 mm ; q0 = 6, 28 · 10−3 ms
; β = 30
2 1 KINEMATIK VON SCHWINGUNGEN
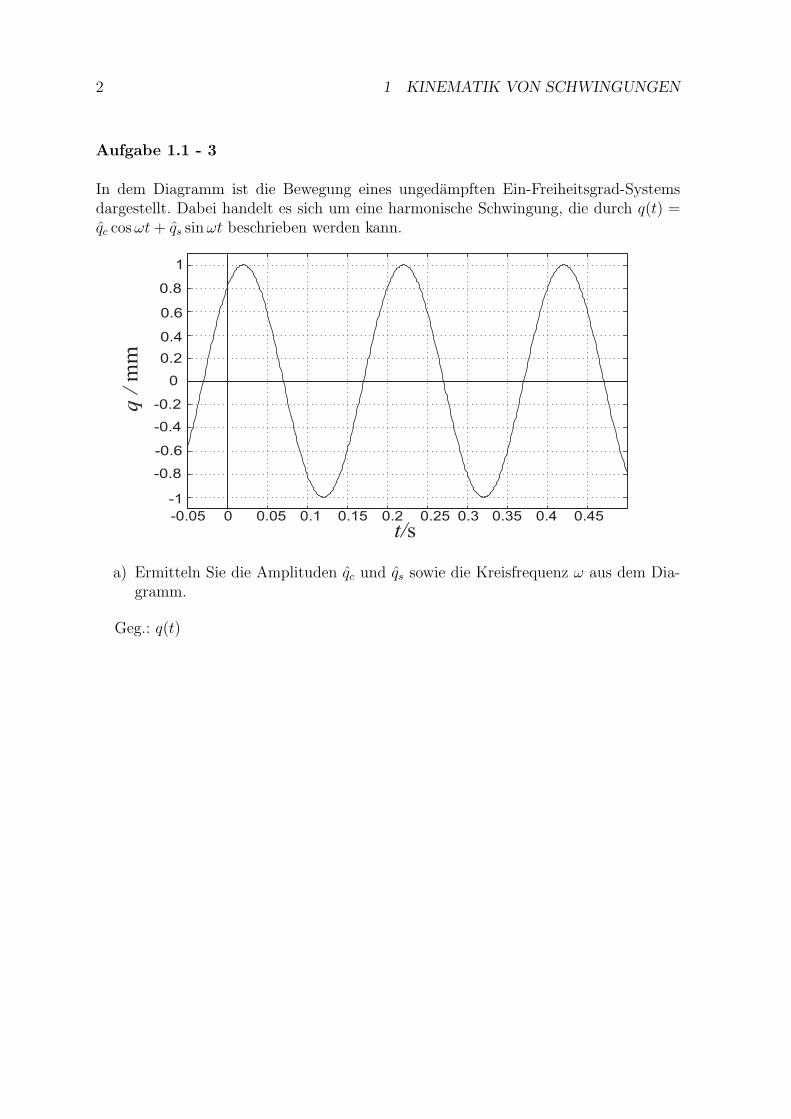
Aufgabe 1.1 - 3
In dem Diagramm ist die Bewegung eines ungedampften Ein-Freiheitsgrad-Systemsdargestellt. Dabei handelt es sich um eine harmonische Schwingung, die durch q(t) =qc cosωt+ qs sinωt beschrieben werden kann.
-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t/s
q /
mm
a) Ermitteln Sie die Amplituden qc und qs sowie die Kreisfrequenz ω aus dem Dia-gramm.
Geg.: q(t)
1.2 Gedampfte Schwingungen 3
1.2 Gedampfte Schwingungen
1.2.1 Exponentiell gedampfte Schwingungen
Aufgabe 1.2.1 - 1
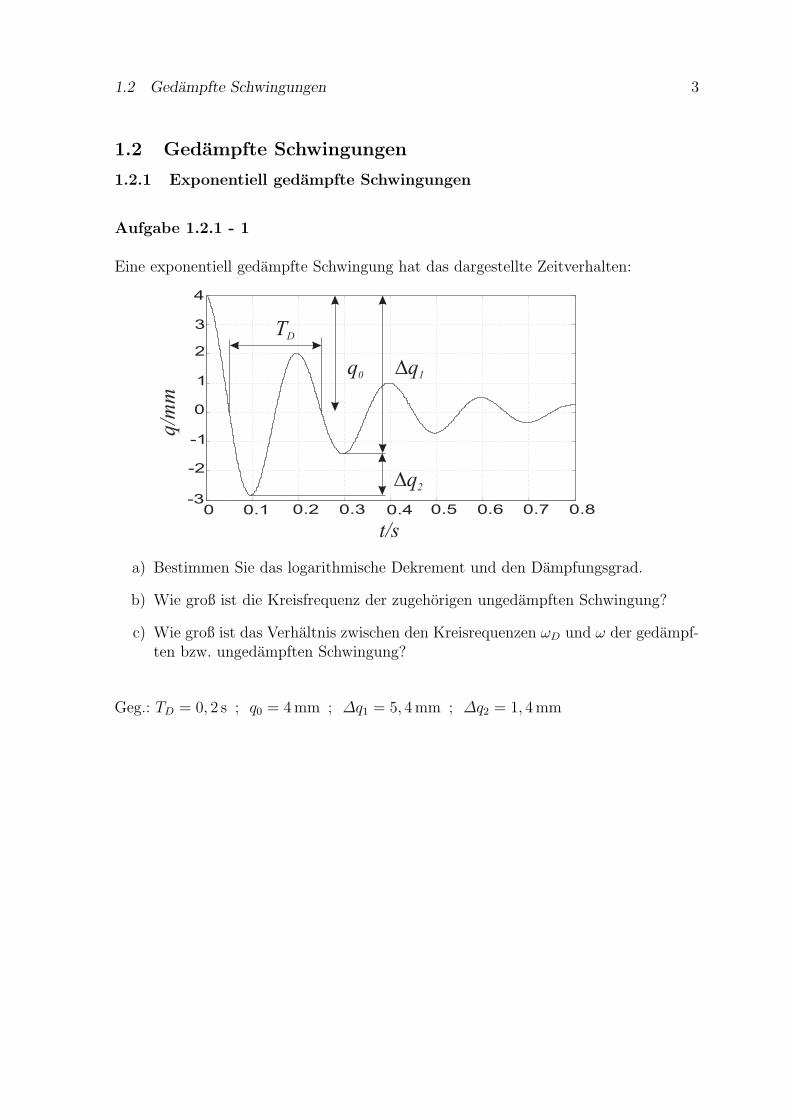
Eine exponentiell gedampfte Schwingung hat das dargestellte Zeitverhalten:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-3
-2
-1
0
1
2
3
4
TD
t/s
q/m
m
Dq1
Dq2
q0
a) Bestimmen Sie das logarithmische Dekrement und den Dampfungsgrad.
b) Wie groß ist die Kreisfrequenz der zugehorigen ungedampften Schwingung?
c) Wie groß ist das Verhaltnis zwischen den Kreisrequenzen ωD und ω der gedampf-ten bzw. ungedampften Schwingung?
Geg.: TD = 0, 2 s ; q0 = 4 mm ; ∆q1 = 5, 4 mm ; ∆q2 = 1, 4 mm
4 1 KINEMATIK VON SCHWINGUNGEN
Aufgabe 1.2.1 - 2
q
q
t1
t2
t3
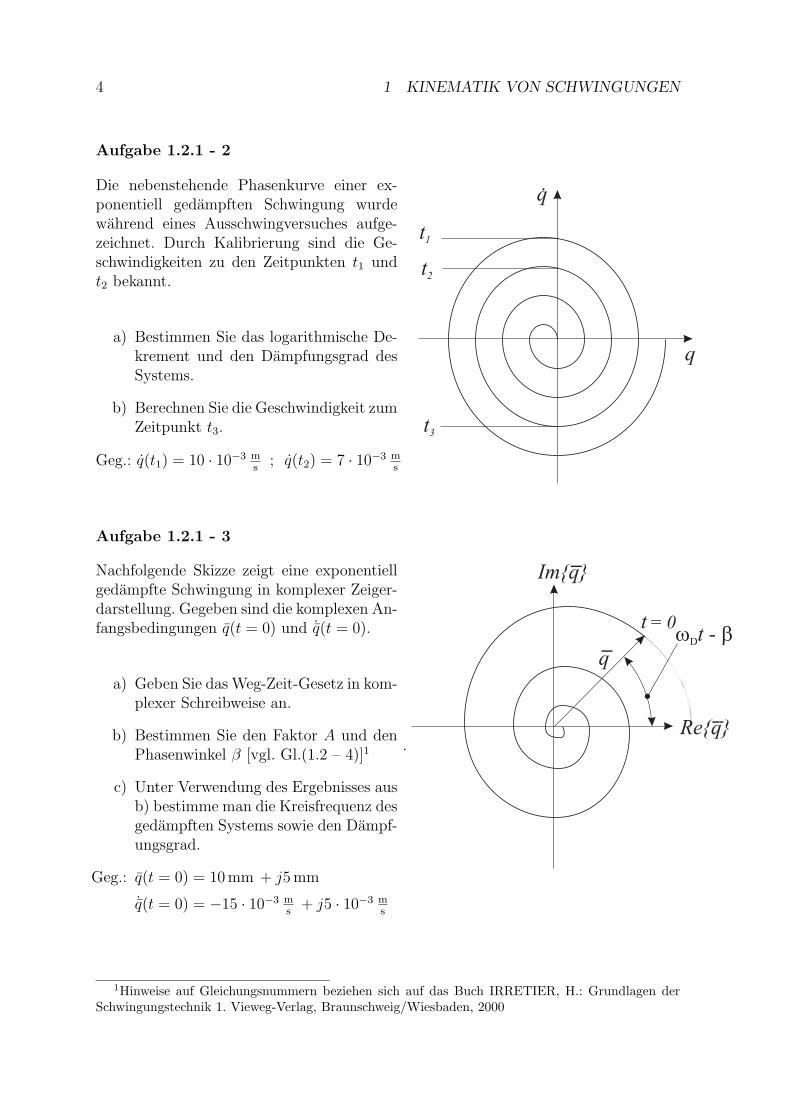
.Die nebenstehende Phasenkurve einer ex-ponentiell gedampften Schwingung wurdewahrend eines Ausschwingversuches aufge-zeichnet. Durch Kalibrierung sind die Ge-schwindigkeiten zu den Zeitpunkten t1 undt2 bekannt.
a) Bestimmen Sie das logarithmische De-krement und den Dampfungsgrad desSystems.
b) Berechnen Sie die Geschwindigkeit zumZeitpunkt t3.
Geg.: q(t1) = 10 · 10−3 ms
; q(t2) = 7 · 10−3 ms
Aufgabe 1.2.1 - 3
Imq
q_
_
_Req
w bDt -
t = 0
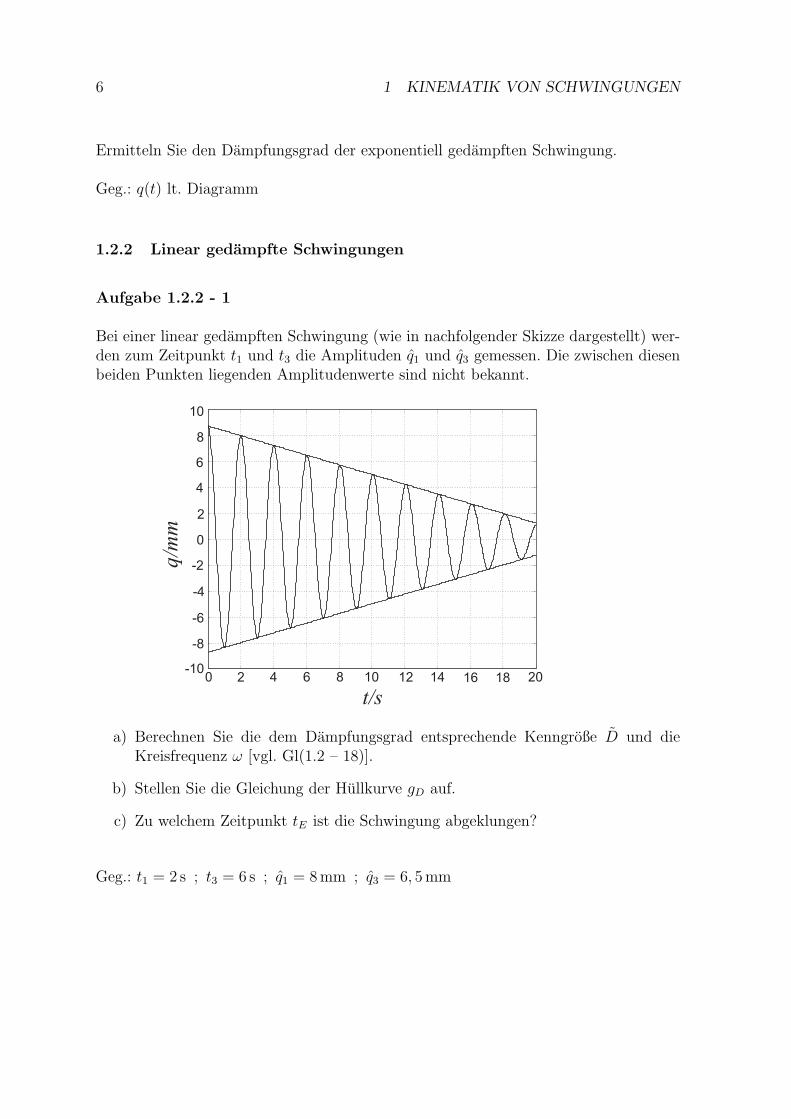
Nachfolgende Skizze zeigt eine exponentiellgedampfte Schwingung in komplexer Zeiger-darstellung. Gegeben sind die komplexen An-fangsbedingungen q(t = 0) und ˙q(t = 0).
a) Geben Sie das Weg-Zeit-Gesetz in kom-plexer Schreibweise an.
b) Bestimmen Sie den Faktor A und denPhasenwinkel β [vgl. Gl.(1.2 – 4)]1
c) Unter Verwendung des Ergebnisses ausb) bestimme man die Kreisfrequenz desgedampften Systems sowie den Dampf-ungsgrad.
Geg.: q(t = 0) = 10 mm + j5 mm
˙q(t = 0) = −15 · 10−3 ms
+ j5 · 10−3 ms
.
1Hinweise auf Gleichungsnummern beziehen sich auf das Buch IRRETIER, H.: Grundlagen derSchwingungstechnik 1. Vieweg-Verlag, Braunschweig/Wiesbaden, 2000

1.2 Gedampfte Schwingungen 5
Aufgabe 1.2.1 - 4
An einem Schwingungsystem wurde ein Ausschwingversuch durchgefuhrt. Dabei wurdedie Masse um den Weg q0 ausgelenkt und zum Zeitpunkt t = 0 losgelassen. Mit einem Be-schleunigungsaufnehmer wurde anschließend die Schwingbeschleunigung aufgenommen.
t/s
q/m
/s2
..
15
10
5
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-5
-10
-15
a) Um welche Art von Schwingung handelt es sich?
b) Geben Sie einen mathematischen Ausdruck fur die Schwingung an und berechnenSie alle darin enthaltenen Parameter.
c) Wie groß war die Anfangsauslenkung q0 zur Zeit t = 0?
Geg.: q(t) lt. Diagramm
Aufgabe 1.2.1 - 5
An dem gezeichneten Feder-Masse-Dampfer-System wurde ein Schwingungsdiagrammaufgenommen.
0 1 2 3 5 64
20
15
10
5
0
-5
-10
-15
-20
t/s
q/m
m
k d
q(t)m
6 1 KINEMATIK VON SCHWINGUNGEN
Ermitteln Sie den Dampfungsgrad der exponentiell gedampften Schwingung.
Geg.: q(t) lt. Diagramm
1.2.2 Linear gedampfte Schwingungen
Aufgabe 1.2.2 - 1
Bei einer linear gedampften Schwingung (wie in nachfolgender Skizze dargestellt) wer-den zum Zeitpunkt t1 und t3 die Amplituden q1 und q3 gemessen. Die zwischen diesenbeiden Punkten liegenden Amplitudenwerte sind nicht bekannt.
0
2
4
6
8
10
-2
-4
-6
-8
-100 2 4 6 8 10 12 14 16 18 20
t/s
q/m
m
a) Berechnen Sie die dem Dampfungsgrad entsprechende Kenngroße D und dieKreisfrequenz ω [vgl. Gl(1.2 – 18)].
b) Stellen Sie die Gleichung der Hullkurve gD auf.
c) Zu welchem Zeitpunkt tE ist die Schwingung abgeklungen?
Geg.: t1 = 2 s ; t3 = 6 s ; q1 = 8 mm ; q3 = 6, 5 mm
1.3 Modulierte Schwingungen 7
1.3 Modulierte Schwingungen
1.3.1 Amplitudenmodulation
Aufgabe 1.3.1 - 1
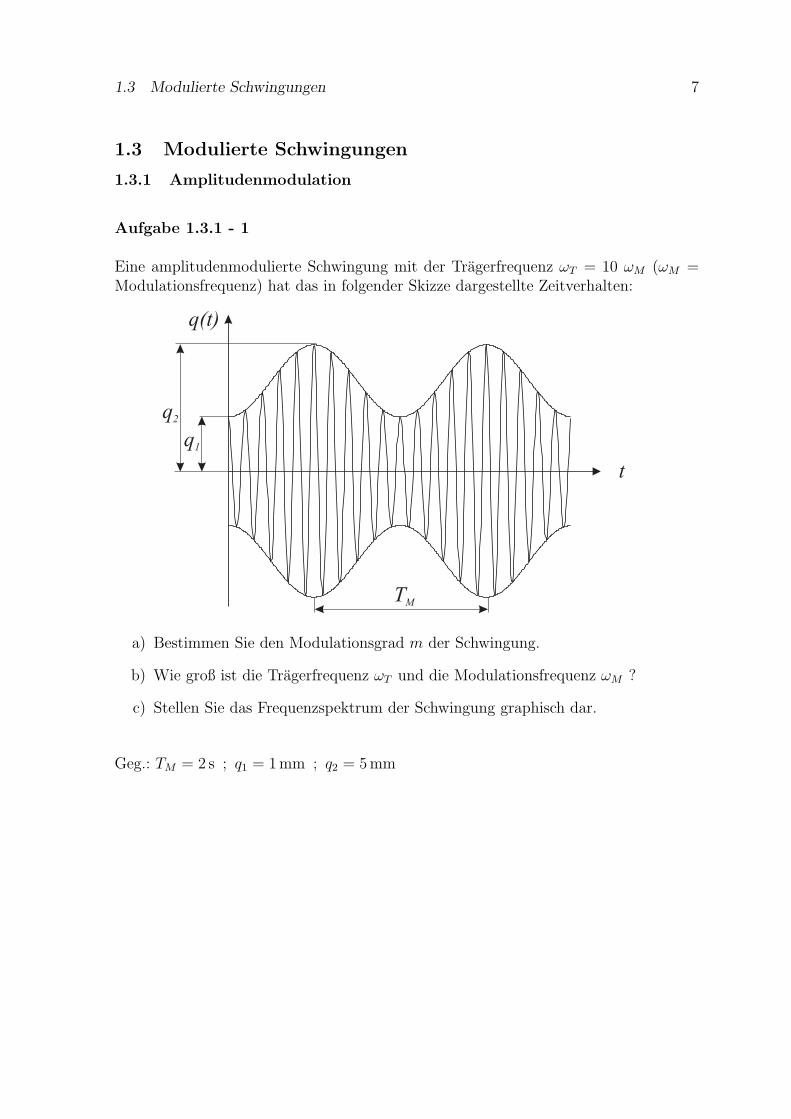
Eine amplitudenmodulierte Schwingung mit der Tragerfrequenz ωT = 10 ωM (ωM =Modulationsfrequenz) hat das in folgender Skizze dargestellte Zeitverhalten:
q2
q1
TM
t
q(t)
a) Bestimmen Sie den Modulationsgrad m der Schwingung.
b) Wie groß ist die Tragerfrequenz ωT und die Modulationsfrequenz ωM ?
c) Stellen Sie das Frequenzspektrum der Schwingung graphisch dar.
Geg.: TM = 2 s ; q1 = 1 mm ; q2 = 5 mm
8 1 KINEMATIK VON SCHWINGUNGEN
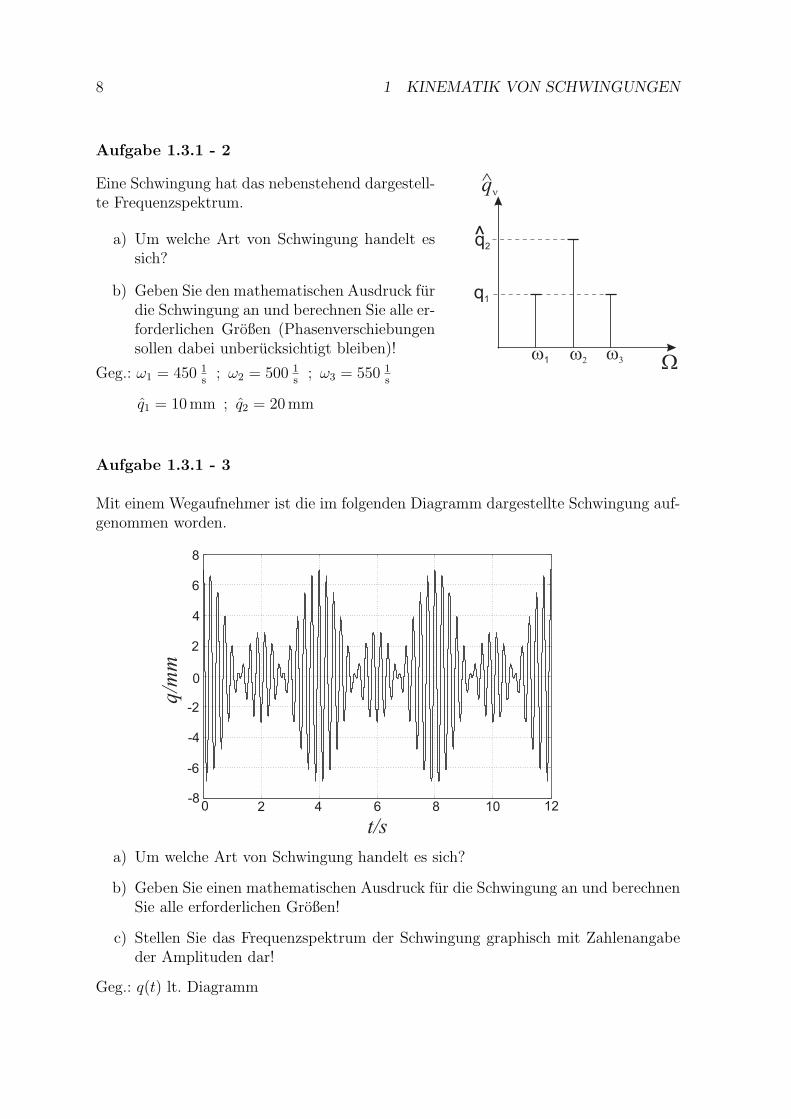
Aufgabe 1.3.1 - 2
qn
W
q2
q1
^
w1 w2 w3
^Eine Schwingung hat das nebenstehend dargestell-te Frequenzspektrum.
a) Um welche Art von Schwingung handelt essich?
b) Geben Sie den mathematischen Ausdruck furdie Schwingung an und berechnen Sie alle er-forderlichen Großen (Phasenverschiebungensollen dabei unberucksichtigt bleiben)!
Geg.: ω1 = 450 1s
; ω2 = 500 1s
; ω3 = 550 1s
q1 = 10 mm ; q2 = 20 mm
Aufgabe 1.3.1 - 3
Mit einem Wegaufnehmer ist die im folgenden Diagramm dargestellte Schwingung auf-genommen worden.
0
2
4
6
8
-2
-4
-6
-80 2 4 86 10 12
t/s
q/m
m
a) Um welche Art von Schwingung handelt es sich?
b) Geben Sie einen mathematischen Ausdruck fur die Schwingung an und berechnenSie alle erforderlichen Großen!
c) Stellen Sie das Frequenzspektrum der Schwingung graphisch mit Zahlenangabeder Amplituden dar!
Geg.: q(t) lt. Diagramm

1.3 Modulierte Schwingungen 9
1.3.2 Phasenmodulation
Aufgabe 1.3.2 - 1
Gegeben ist eine frequenzmodulierte Schwingung gemaß untenstehender Skizze.
Dtq(t)
t
a) Welchen Wert kann der Modulationsgrad m maximal annehmen?
b) Bei welchem Modulationsgrad m nimmt die Winkelgeschwindigkeit ω(t) des kom-plexen Zeigers periodisch den Wert Null an?
c) Man zeige graphisch, daß sich die Phase f(t) um einen linear mit der Zeit an-wachsenden Mittelwert herum harmonisch verandert. Welche Bedeutung habendabei die Kreisfrequenzen ωT und ωM sowie der Faktor m · ωT
ωM
?
d) Berechnen Sie die Tragerfrequenz ωT und den Modulationsgrad m.
Geg.: β = 0 ; ∆t =π
2s ; ω = 1
1
s; ω(t = 0) = ω0 = 1
1
s
10 1 KINEMATIK VON SCHWINGUNGEN
1.3.3 Amplituden- und Frequenzmodulation; Schwebung
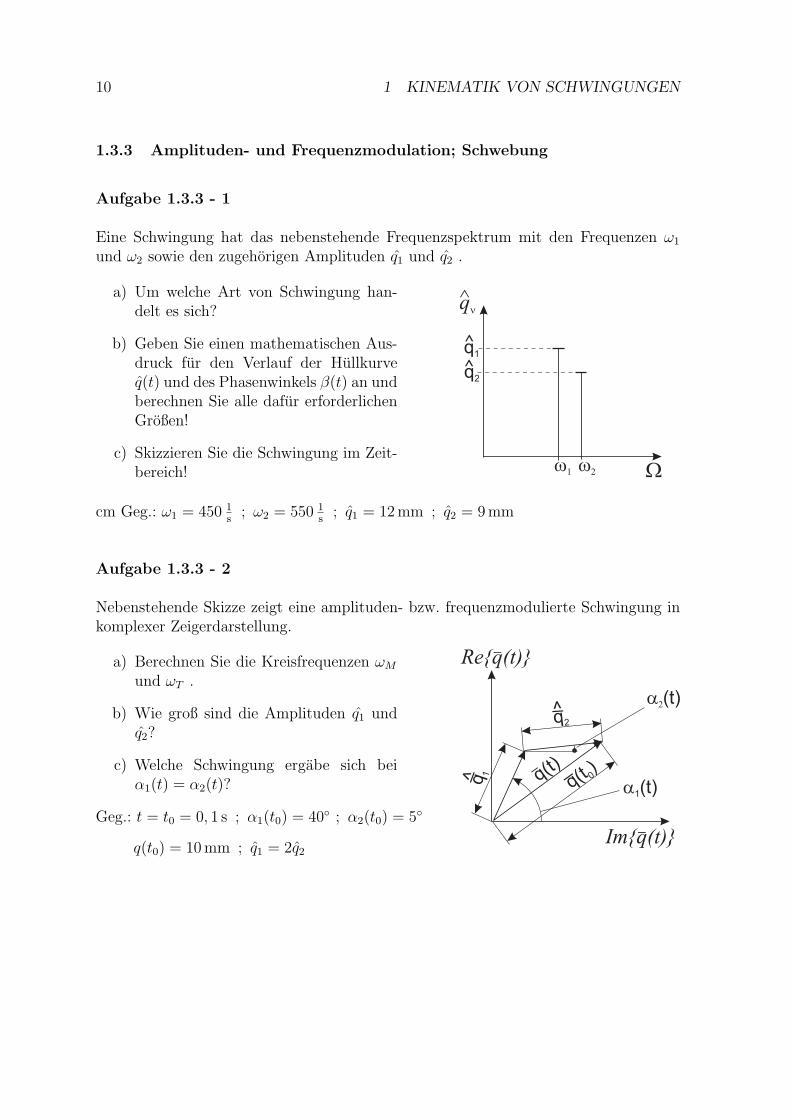
Aufgabe 1.3.3 - 1
Eine Schwingung hat das nebenstehende Frequenzspektrum mit den Frequenzen ω1
und ω2 sowie den zugehorigen Amplituden q1 und q2 .
W
q1
q2
w1 w2
^
^
qn^a) Um welche Art von Schwingung han-
delt es sich?
b) Geben Sie einen mathematischen Aus-druck fur den Verlauf der Hullkurveq(t) und des Phasenwinkels β(t) an undberechnen Sie alle dafur erforderlichenGroßen!
c) Skizzieren Sie die Schwingung im Zeit-bereich!
cm Geg.: ω1 = 450 1s
; ω2 = 550 1s
; q1 = 12 mm ; q2 = 9 mm
Aufgabe 1.3.3 - 2
Nebenstehende Skizze zeigt eine amplituden- bzw. frequenzmodulierte Schwingung inkomplexer Zeigerdarstellung.
q 1
q2
q(t)q(t
)0
Imq(t)
Req(t)_
_ __
_
_
^
^
a2(t)
a1(t)
a) Berechnen Sie die Kreisfrequenzen ωM
und ωT .
b) Wie groß sind die Amplituden q1 undq2?
c) Welche Schwingung ergabe sich beiα1(t) = α2(t)?
Geg.: t = t0 = 0, 1 s ; α1(t0) = 40 ; α2(t0) = 5
q(t0) = 10 mm ; q1 = 2q2
1.3 Modulierte Schwingungen 11
1.4 Periodische Schwingungen
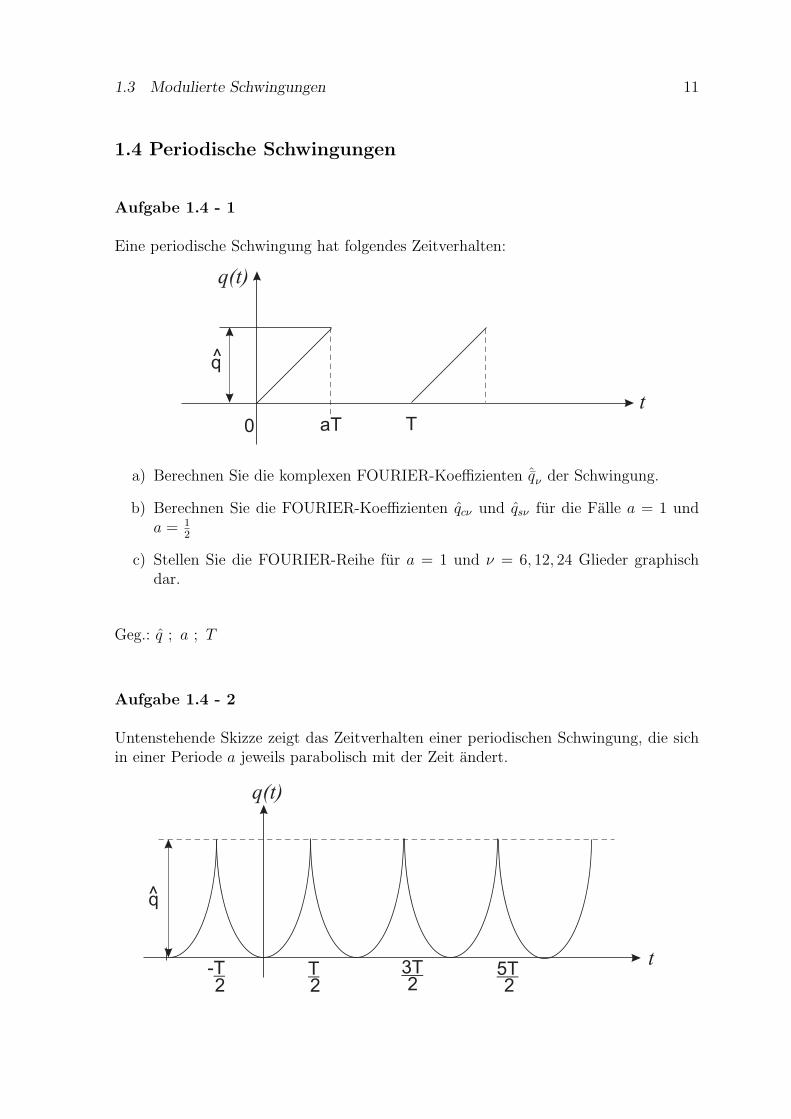
Aufgabe 1.4 - 1
Eine periodische Schwingung hat folgendes Zeitverhalten:
q(t)
t
q
0 aT T
a) Berechnen Sie die komplexen FOURIER-Koeffizienten ˆqν der Schwingung.
b) Berechnen Sie die FOURIER-Koeffizienten qcν und qsν fur die Falle a = 1 unda = 1
2
c) Stellen Sie die FOURIER-Reihe fur a = 1 und ν = 6, 12, 24 Glieder graphischdar.
Geg.: q ; a ; T
Aufgabe 1.4 - 2
Untenstehende Skizze zeigt das Zeitverhalten einer periodischen Schwingung, die sichin einer Periode a jeweils parabolisch mit der Zeit andert.
q(t)
t
q
-T T2 2
3T 5T2 2
12 1 KINEMATIK VON SCHWINGUNGEN
a) Stellen Sie das Weg-Zeit-Gesetz auf.
b) Berechnen Sie die komplexen FOURIER-Koeffizienten ˆqν .
c) Berechnen Sie die FOURIER-Koeffizienten qcν ; und qsν und stellen Sie die reelldargestellte FOURIER-Reihe auf.
Geg.: q ; T
1.5 Nichtperiodische Schwingungen
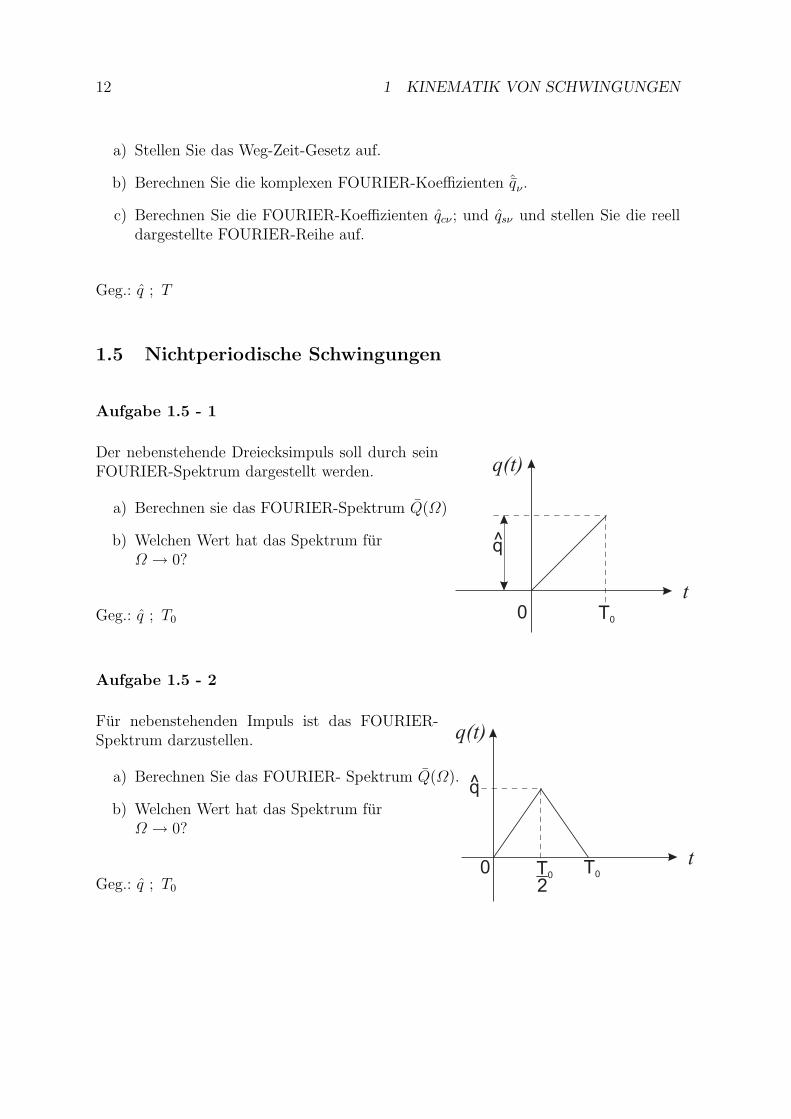
Aufgabe 1.5 - 1
q(t)
t
q
0 T0
Der nebenstehende Dreiecksimpuls soll durch seinFOURIER-Spektrum dargestellt werden.
a) Berechnen sie das FOURIER-Spektrum Q(Ω)
b) Welchen Wert hat das Spektrum furΩ → 0?
Geg.: q ; T0
Aufgabe 1.5 - 2
q(t)
t
q
0 T0T0
2
Fur nebenstehenden Impuls ist das FOURIER-Spektrum darzustellen.
a) Berechnen Sie das FOURIER- Spektrum Q(Ω).
b) Welchen Wert hat das Spektrum furΩ → 0?
Geg.: q ; T0
13
2 Modellbildungen in der Schwingungstechnik
2.1 Elemente mechanischer Schwingungssysteme
2.1.1 Elemente diskreter Systeme
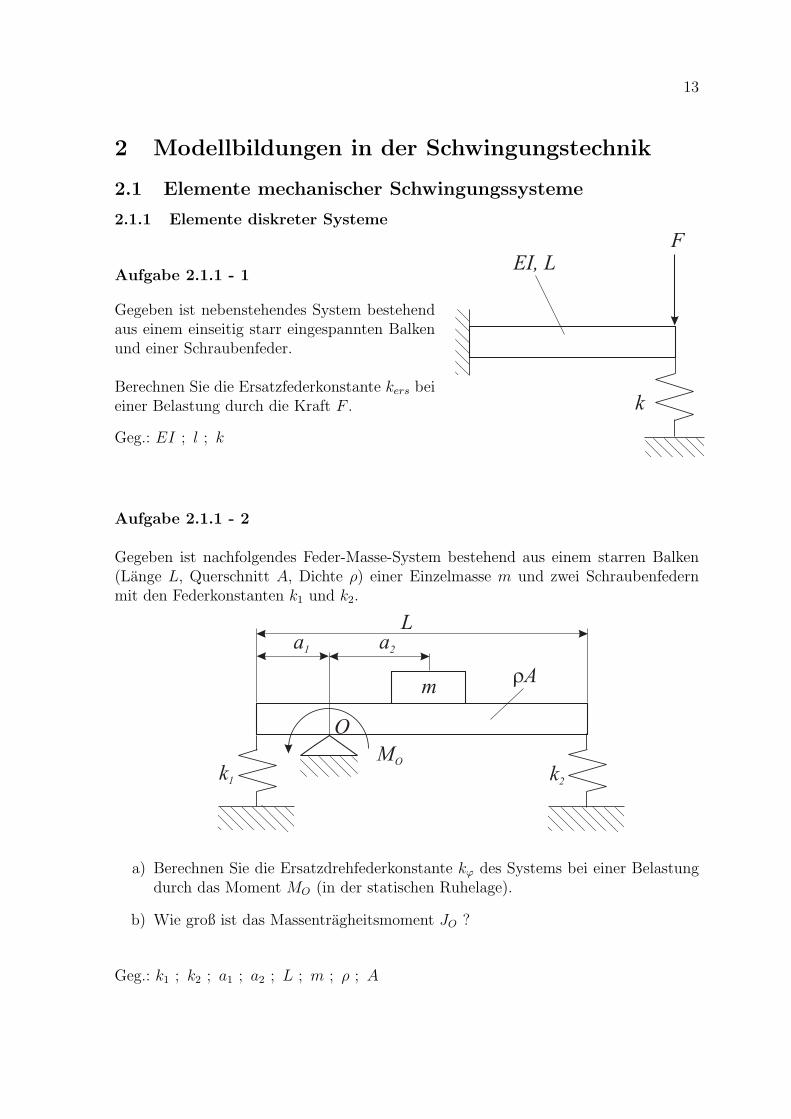
Aufgabe 2.1.1 - 1EI, L
k
F
Gegeben ist nebenstehendes System bestehendaus einem einseitig starr eingespannten Balkenund einer Schraubenfeder.
Berechnen Sie die Ersatzfederkonstante kers beieiner Belastung durch die Kraft F .
Geg.: EI ; l ; k
Aufgabe 2.1.1 - 2
Gegeben ist nachfolgendes Feder-Masse-System bestehend aus einem starren Balken(Lange L, Querschnitt A, Dichte ρ) einer Einzelmasse m und zwei Schraubenfedernmit den Federkonstanten k1 und k2.
m
k1 k2
MO
L
rA
a1 a2
O
a) Berechnen Sie die Ersatzdrehfederkonstante kϕ des Systems bei einer Belastungdurch das Moment MO (in der statischen Ruhelage).
b) Wie groß ist das Massentragheitsmoment JO ?
Geg.: k1 ; k2 ; a1 ; a2 ; L ; m ; ρ ; A
14 2 MODELLBILDUNGEN IN DER SCHWINGUNGSTECHNIK
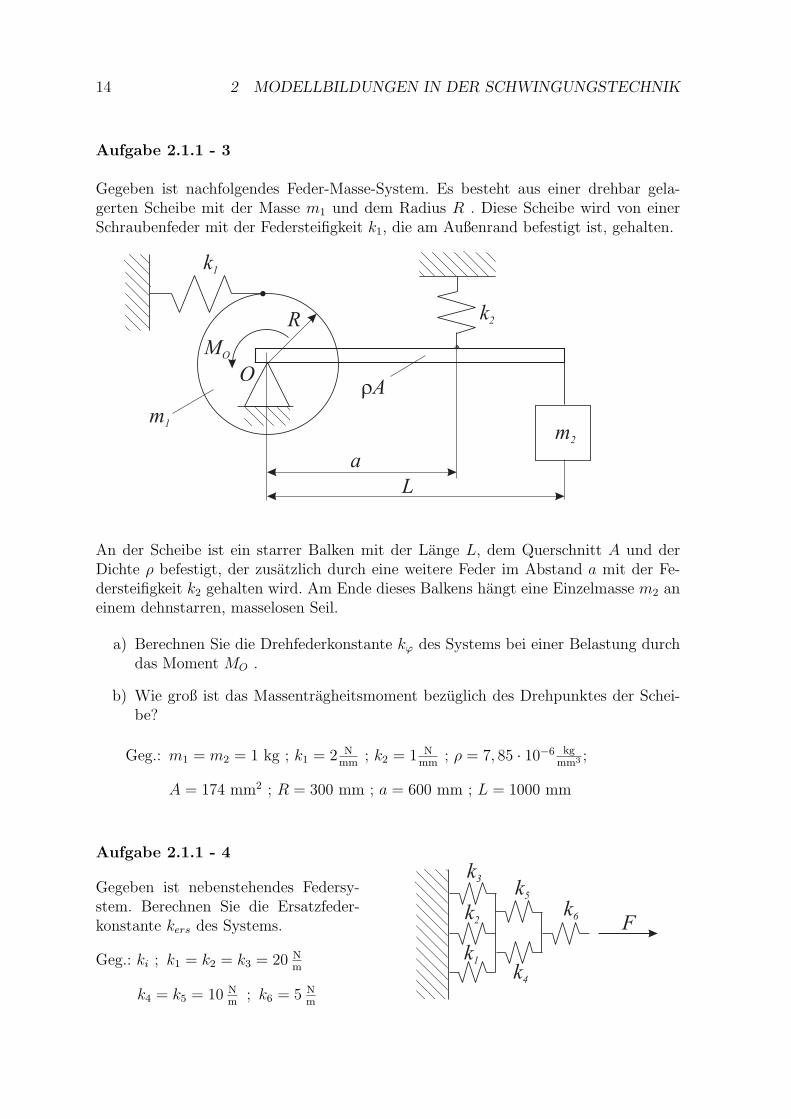
Aufgabe 2.1.1 - 3
Gegeben ist nachfolgendes Feder-Masse-System. Es besteht aus einer drehbar gela-gerten Scheibe mit der Masse m1 und dem Radius R . Diese Scheibe wird von einerSchraubenfeder mit der Federsteifigkeit k1, die am Außenrand befestigt ist, gehalten.
k1
k2
MO
Ar
m2
m1
a
L
R
O
An der Scheibe ist ein starrer Balken mit der Lange L, dem Querschnitt A und derDichte ρ befestigt, der zusatzlich durch eine weitere Feder im Abstand a mit der Fe-dersteifigkeit k2 gehalten wird. Am Ende dieses Balkens hangt eine Einzelmasse m2 aneinem dehnstarren, masselosen Seil.
a) Berechnen Sie die Drehfederkonstante kϕ des Systems bei einer Belastung durchdas Moment MO .
b) Wie groß ist das Massentragheitsmoment bezuglich des Drehpunktes der Schei-be?
Geg.: m1 = m2 = 1 kg ; k1 = 2 Nmm
; k2 = 1 Nmm
; ρ = 7, 85 · 10−6 kgmm3 ;
A = 174 mm2 ; R = 300 mm ; a = 600 mm ; L = 1000 mm
Aufgabe 2.1.1 - 4
k1
k2
k3
k4
k5
k6F
Gegeben ist nebenstehendes Federsy-stem. Berechnen Sie die Ersatzfeder-konstante kers des Systems.
Geg.: ki ; k1 = k2 = k3 = 20 Nm
k4 = k5 = 10 Nm
; k6 = 5 Nm
2.1 Elemente mechanischer Schwingungssysteme 15
2.1.2 Elemente kontinuierlicher Systeme
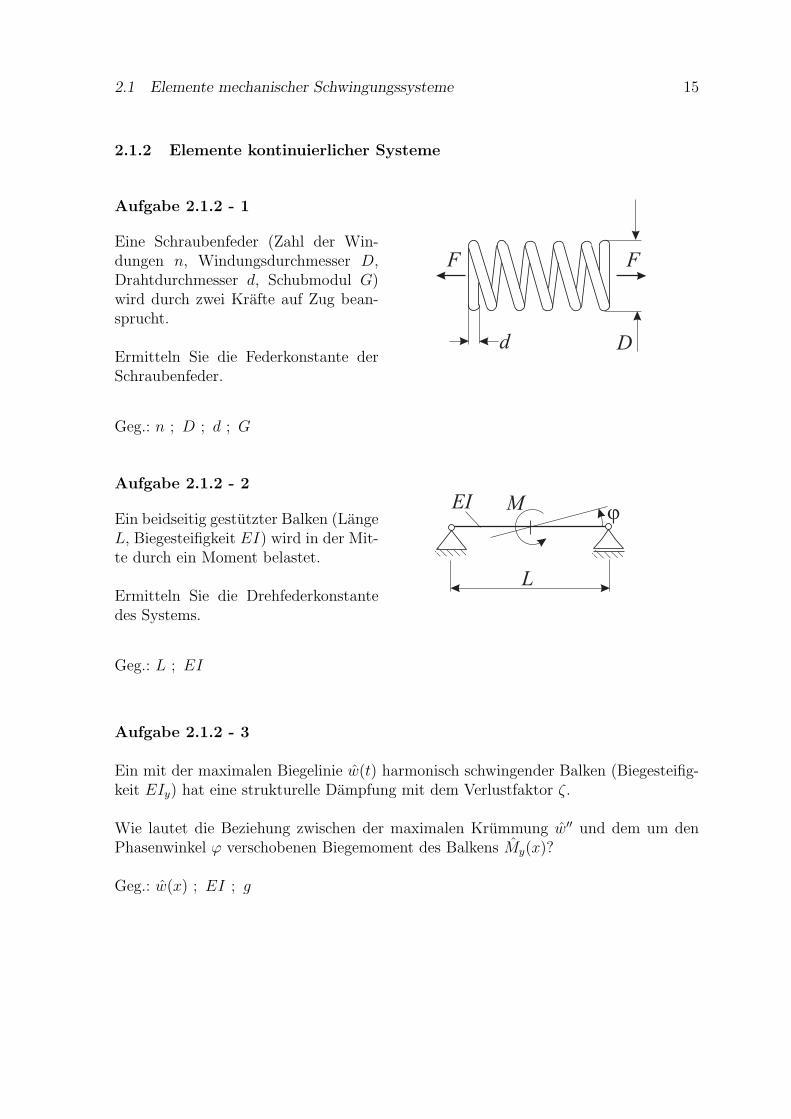
Aufgabe 2.1.2 - 1
d D
F FEine Schraubenfeder (Zahl der Win-dungen n, Windungsdurchmesser D,Drahtdurchmesser d, Schubmodul G)wird durch zwei Krafte auf Zug bean-sprucht.
Ermitteln Sie die Federkonstante derSchraubenfeder.
Geg.: n ; D ; d ; G
Aufgabe 2.1.2 - 2
L
MEIjEin beidseitig gestutzter Balken (Lange
L, Biegesteifigkeit EI) wird in der Mit-te durch ein Moment belastet.
Ermitteln Sie die Drehfederkonstantedes Systems.
Geg.: L ; EI
Aufgabe 2.1.2 - 3
Ein mit der maximalen Biegelinie w(t) harmonisch schwingender Balken (Biegesteifig-keit EIy) hat eine strukturelle Dampfung mit dem Verlustfaktor ζ.
Wie lautet die Beziehung zwischen der maximalen Krummung w′′ und dem um denPhasenwinkel ϕ verschobenen Biegemoment des Balkens My(x)?
Geg.: w(x) ; EI ; g

16 2 MODELLBILDUNGEN IN DER SCHWINGUNGSTECHNIK
2.2 Aufstellen von Bewegungsgleichungen
Aufgabe 2.2 - 1
L
ad
O
m
Gegeben ist ein Pendel gemaß nebenstehender Skizze be-stehend aus einer Masse m, die uber einen starren mas-selosen Stab am Punkt O aufgehangt ist. Im Abstanda ist ein Dampfer angebracht. Im dargestellten Zustandbefindet sich das System in der statischen Ruhelage.
a) Zeichnen Sie das System im Momentanzustandund bestimmen Sie eine zur Beschreibung der Be-wegung notwendige Koordinate.
b) Zeichnen Sie das Freikorperbild mit allen am Pen-del angreifenden Kraften!
c) Stellen Sie die Bewegungsgleichung fur das Pendelauf!
Geg.: m ; L ; d ; a
17
3 Schwingungen linearer Systeme mit einem Frei-
heitsgrad
3.1 Freie ungedampfte Schwingungen
3.1.1 Mechanische Modelle und ihre Bewegungsgleichungen
3.1.2 Losung der Bewegungsgleichungen
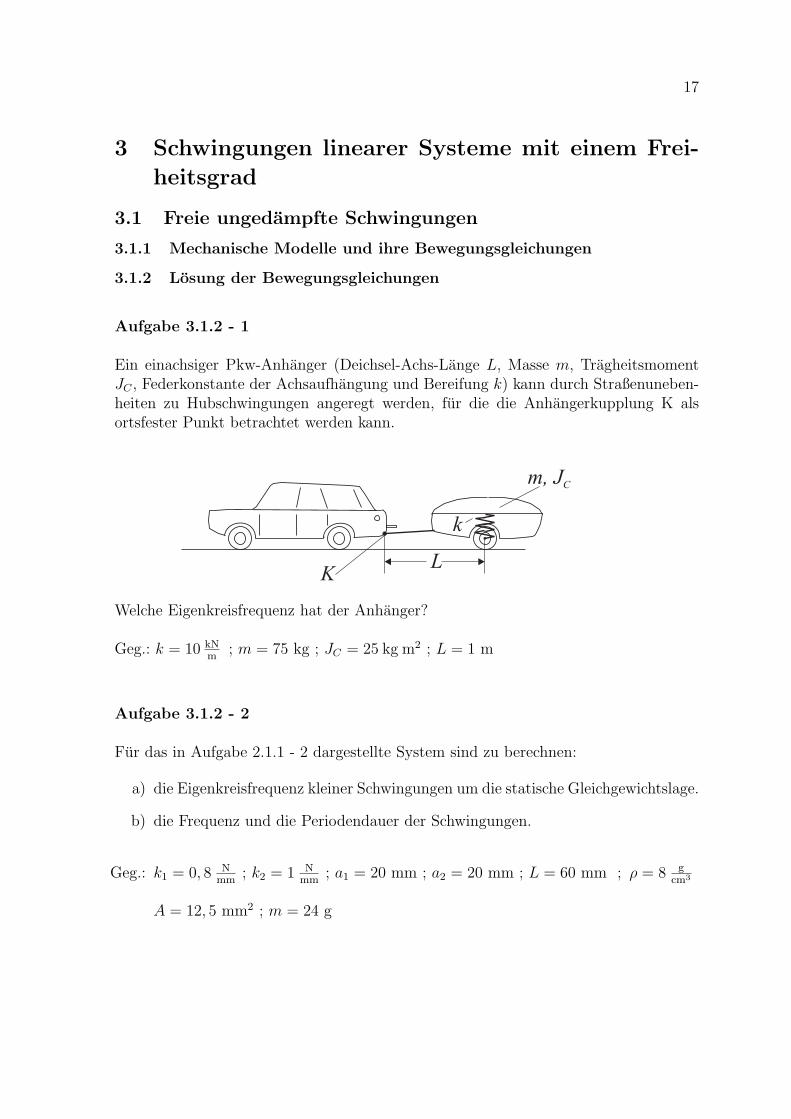
Aufgabe 3.1.2 - 1
Ein einachsiger Pkw-Anhanger (Deichsel-Achs-Lange L, Masse m, TragheitsmomentJC , Federkonstante der Achsaufhangung und Bereifung k) kann durch Straßenuneben-heiten zu Hubschwingungen angeregt werden, fur die die Anhangerkupplung K alsortsfester Punkt betrachtet werden kann.
L
k
m, JC
K
Welche Eigenkreisfrequenz hat der Anhanger?
Geg.: k = 10 kNm
; m = 75 kg ; JC = 25 kg m2 ; L = 1 m
Aufgabe 3.1.2 - 2
Fur das in Aufgabe 2.1.1 - 2 dargestellte System sind zu berechnen:
a) die Eigenkreisfrequenz kleiner Schwingungen um die statische Gleichgewichtslage.
b) die Frequenz und die Periodendauer der Schwingungen.
Geg.: k1 = 0, 8 Nmm
; k2 = 1 Nmm
; a1 = 20 mm ; a2 = 20 mm ; L = 60 mm ; ρ = 8 gcm3
A = 12, 5 mm2 ; m = 24 g

18 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.1.2 - 3
An einem homogenen scheibenformigen Rad (Masse m, Radius R), das auf einem ho-rizontalen Untergrund rollt, ohne zu rutschen, ist im Abstand a vom Mittelpunkt eineFeder (Federkonstante k) befestigt.
mk
aRr
Xx
a) Wie lautet die Bewegungsgleichung fur klei-ne Schwingungen um die gezeichnete Gleich-gewichtslage?
b) Wie groß ist die Eigenkreisfrequenz des Sy-stems?
c) Wie groß ist das Verhaltnis der Periodendau-ern fur die Grenzfalle a = 0 und a = r?
Geg.: m = 10 kg ; k = 6kNm
; r = 1 m ; a = 0, 6 m
Aufgabe 3.1.2 - 4
a
O1
O2
C
a1
a2
Die Lage des Massemittelpunktes eines Pleu-els und das Massentragheitsmoment JC um diezur Bildebene senkrechte Schwereachse sollen ausSchwingungsversuchen bestimmt werden. Zu die-sem Zweck hangt man das Pleuel nacheinander anden beiden Punkten O1 bzw. O2 drehbar auf undmisst fur kleine Schwingungsausschlage die Schwin-gungszeiten T1 und T2.
a) Wo liegt der Massenmittelpunkt?
b) Wie groß ist das MassentragheitsmomentJC?
Geg.: m = 1 kg ; a = 124, 25 mm ; T1 = 1, 3 s ; T2 = 0, 9 s
3.1 Freie ungedampfte Schwingungen 19
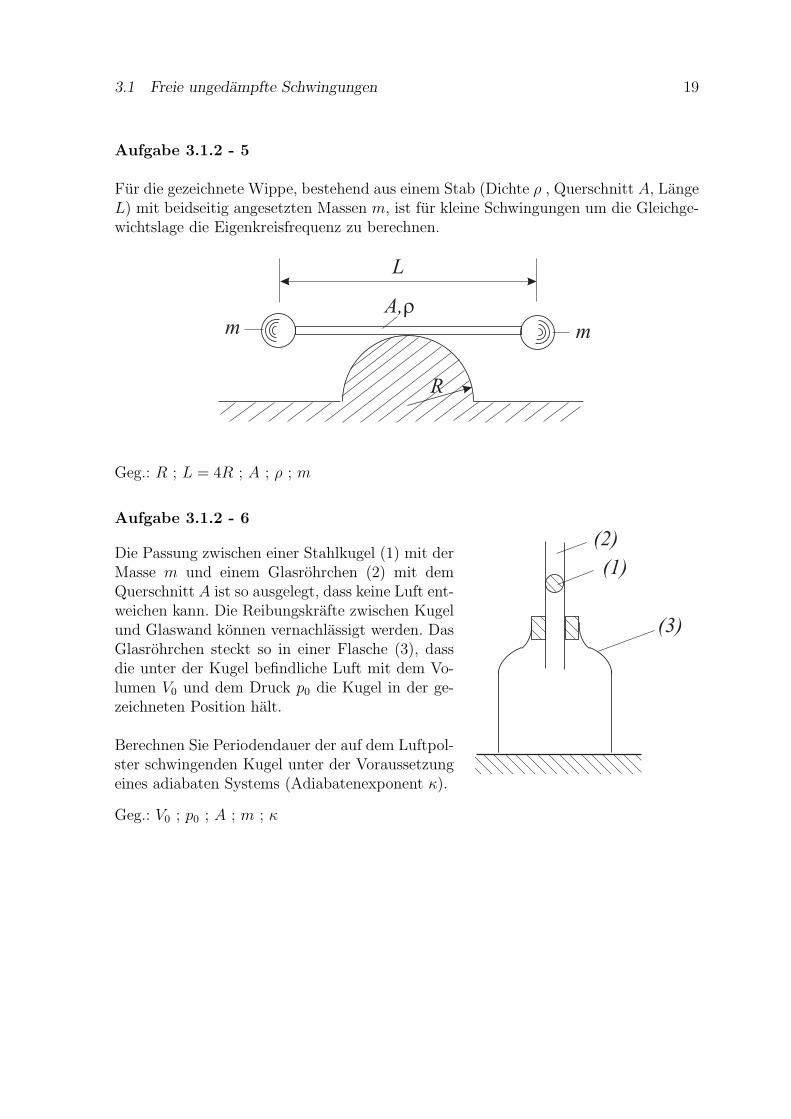
Aufgabe 3.1.2 - 5
Fur die gezeichnete Wippe, bestehend aus einem Stab (Dichte ρ , Querschnitt A, LangeL) mit beidseitig angesetzten Massen m, ist fur kleine Schwingungen um die Gleichge-wichtslage die Eigenkreisfrequenz zu berechnen.
mmA,r
L
R
Geg.: R ; L = 4R ; A ; ρ ; m
Aufgabe 3.1.2 - 6
(2)
(1)
(3)
Die Passung zwischen einer Stahlkugel (1) mit derMasse m und einem Glasrohrchen (2) mit demQuerschnitt A ist so ausgelegt, dass keine Luft ent-weichen kann. Die Reibungskrafte zwischen Kugelund Glaswand konnen vernachlassigt werden. DasGlasrohrchen steckt so in einer Flasche (3), dassdie unter der Kugel befindliche Luft mit dem Vo-lumen V0 und dem Druck p0 die Kugel in der ge-zeichneten Position halt.
Berechnen Sie Periodendauer der auf dem Luftpol-ster schwingenden Kugel unter der Voraussetzungeines adiabaten Systems (Adiabatenexponent κ).
Geg.: V0 ; p0 ; A ; m ; κ
20 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
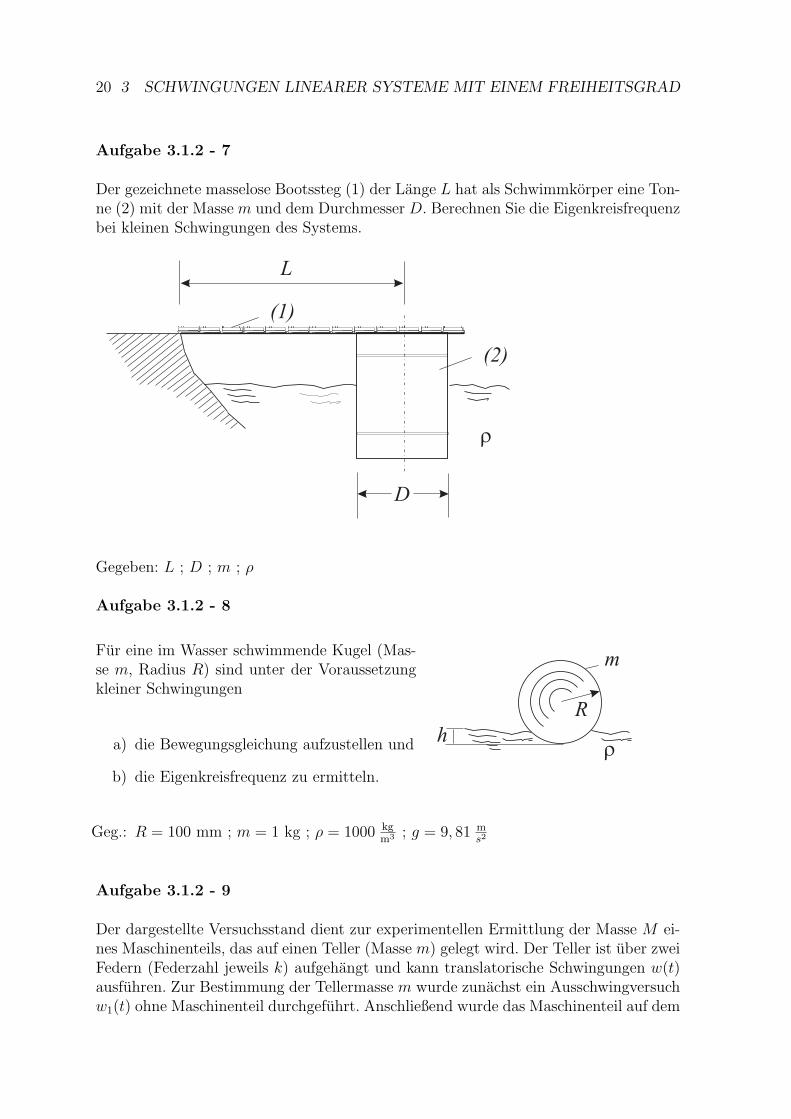
Aufgabe 3.1.2 - 7
Der gezeichnete masselose Bootssteg (1) der Lange L hat als Schwimmkorper eine Ton-ne (2) mit der Masse m und dem Durchmesser D. Berechnen Sie die Eigenkreisfrequenzbei kleinen Schwingungen des Systems.
D
(2)
(1)
r
L
Gegeben: L ; D ; m ; ρ
Aufgabe 3.1.2 - 8
m
R
rh
Fur eine im Wasser schwimmende Kugel (Mas-se m, Radius R) sind unter der Voraussetzungkleiner Schwingungen
a) die Bewegungsgleichung aufzustellen und
b) die Eigenkreisfrequenz zu ermitteln.
Geg.: R = 100 mm ; m = 1 kg ; ρ = 1000 kgm3 ; g = 9, 81 m
s2
Aufgabe 3.1.2 - 9
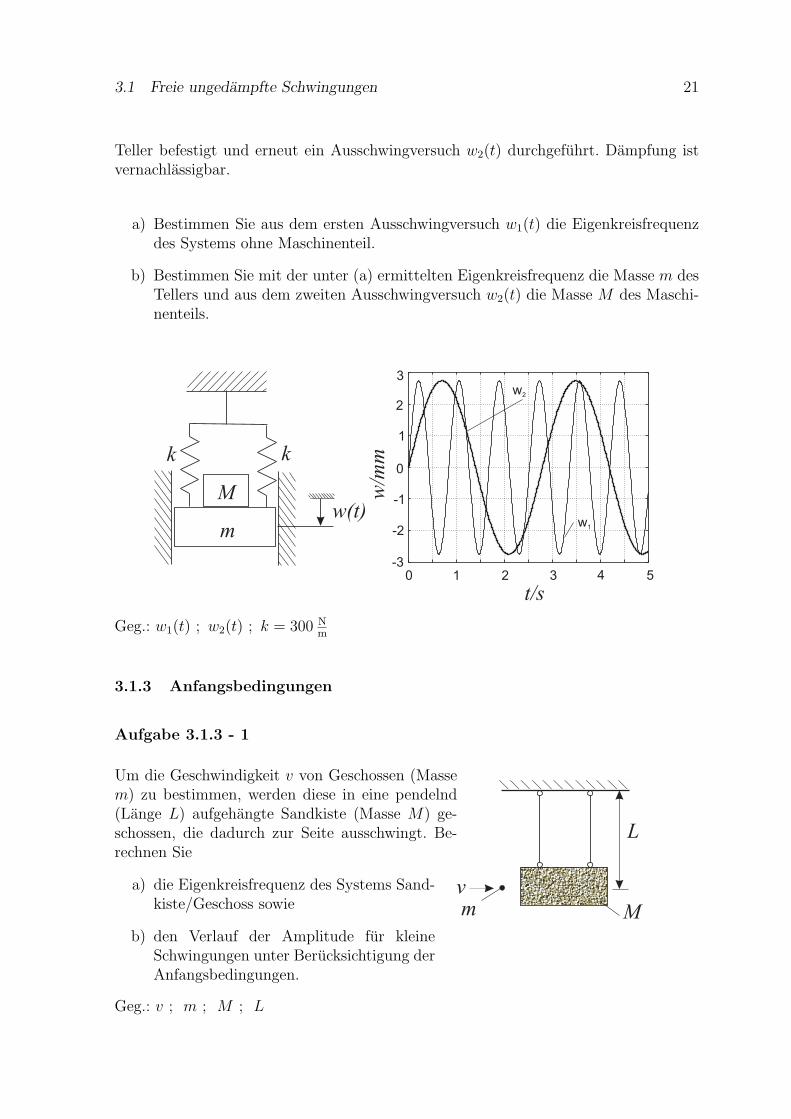
Der dargestellte Versuchsstand dient zur experimentellen Ermittlung der Masse M ei-nes Maschinenteils, das auf einen Teller (Masse m) gelegt wird. Der Teller ist uber zweiFedern (Federzahl jeweils k) aufgehangt und kann translatorische Schwingungen w(t)ausfuhren. Zur Bestimmung der Tellermasse m wurde zunachst ein Ausschwingversuchw1(t) ohne Maschinenteil durchgefuhrt. Anschließend wurde das Maschinenteil auf dem
3.1 Freie ungedampfte Schwingungen 21
Teller befestigt und erneut ein Ausschwingversuch w2(t) durchgefuhrt. Dampfung istvernachlassigbar.
a) Bestimmen Sie aus dem ersten Ausschwingversuch w1(t) die Eigenkreisfrequenzdes Systems ohne Maschinenteil.
b) Bestimmen Sie mit der unter (a) ermittelten Eigenkreisfrequenz die Masse m desTellers und aus dem zweiten Ausschwingversuch w2(t) die Masse M des Maschi-nenteils.
k k
m
Mw(t)
w/m
m
t/s
3
2
1
0
-1
-2
-3
w2
w1
0 1 2 3 4 5
Geg.: w1(t) ; w2(t) ; k = 300 Nm
3.1.3 Anfangsbedingungen
Aufgabe 3.1.3 - 1
L
Mmv
Um die Geschwindigkeit v von Geschossen (Massem) zu bestimmen, werden diese in eine pendelnd(Lange L) aufgehangte Sandkiste (Masse M) ge-schossen, die dadurch zur Seite ausschwingt. Be-rechnen Sie
a) die Eigenkreisfrequenz des Systems Sand-kiste/Geschoss sowie
b) den Verlauf der Amplitude fur kleineSchwingungen unter Berucksichtigung derAnfangsbedingungen.
Geg.: v ; m ; M ; L
22 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
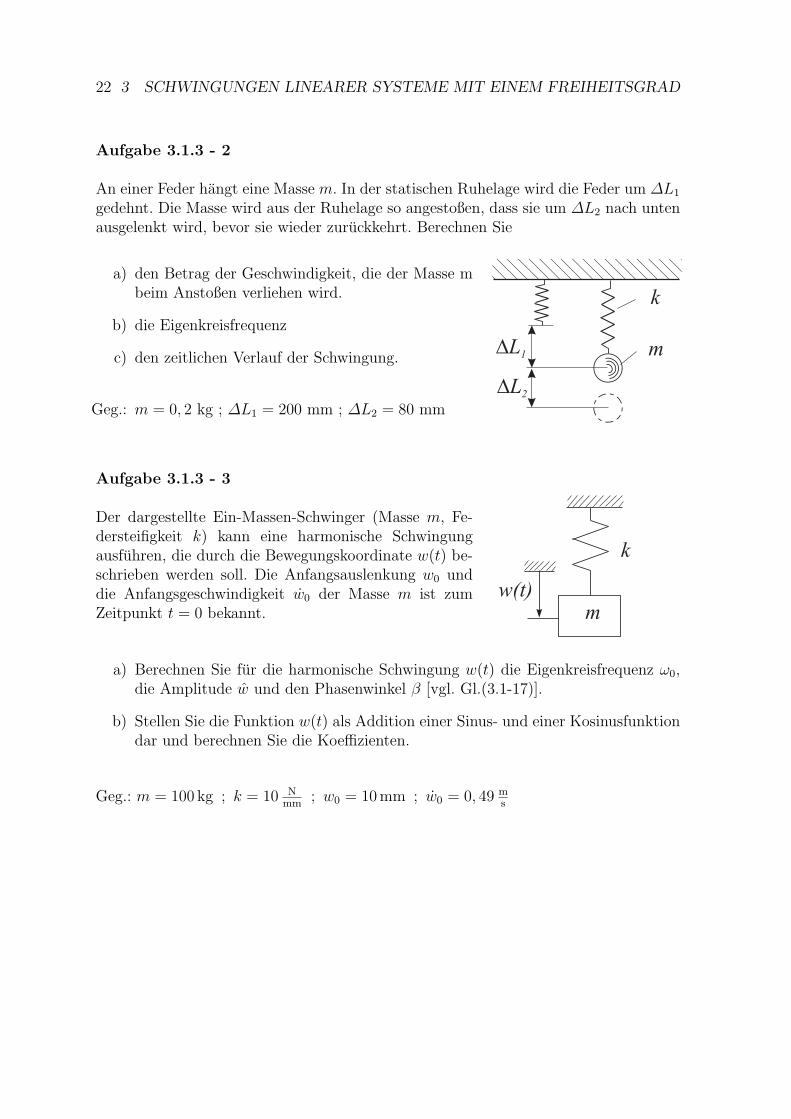
Aufgabe 3.1.3 - 2
An einer Feder hangt eine Masse m. In der statischen Ruhelage wird die Feder um ∆L1
gedehnt. Die Masse wird aus der Ruhelage so angestoßen, dass sie um ∆L2 nach untenausgelenkt wird, bevor sie wieder zuruckkehrt. Berechnen Sie
k
mDL1
DL2
a) den Betrag der Geschwindigkeit, die der Masse mbeim Anstoßen verliehen wird.
b) die Eigenkreisfrequenz
c) den zeitlichen Verlauf der Schwingung.
Geg.: m = 0, 2 kg ; ∆L1 = 200 mm ; ∆L2 = 80 mm
Aufgabe 3.1.3 - 3
Der dargestellte Ein-Massen-Schwinger (Masse m, Fe-dersteifigkeit k) kann eine harmonische Schwingungausfuhren, die durch die Bewegungskoordinate w(t) be-schrieben werden soll. Die Anfangsauslenkung w0 unddie Anfangsgeschwindigkeit w0 der Masse m ist zumZeitpunkt t = 0 bekannt. m
w(t)
k
a) Berechnen Sie fur die harmonische Schwingung w(t) die Eigenkreisfrequenz ω0,die Amplitude w und den Phasenwinkel β [vgl. Gl.(3.1-17)].
b) Stellen Sie die Funktion w(t) als Addition einer Sinus- und einer Kosinusfunktiondar und berechnen Sie die Koeffizienten.
Geg.: m = 100 kg ; k = 10 Nmm
; w0 = 10 mm ; w0 = 0, 49 ms

3.1 Freie ungedampfte Schwingungen 23
Aufgabe 3.1.3 - 4
Der dargestellte Ein-Massen-Schwinger (Masse m, Federstei-figkeit k) befindet sich in der skizzierten Lage in einem Mo-mentanzustand einer freien Schwingung. Die Schwingung derMasse um die statische Ruhelage LS wird durch die Bewe-gungskoordinate w beschrieben. Die Masse befindet sich zumZeitpunkt t = 0 in der Ausgangslage L0 und besitzt die An-fangsgeschwindigkeit v0.
a) Stellen Sie die Bewegungsgleichung auf und berechnenSie die Eigenkreisfrequenz des Systems.
b) Geben Sie eine allgemeine Losung der Bewegungsglei-chung an. Passen Sie die allgemeine Losung an die An-fangsbedingungen an und bestimmen Sie daraus dieAmplitude und Phase der Schwingung.
c) Es wird ein viskoser Dampfer (Dampferzahl d) zu derFeder parallel geschaltet. Berechnen Sie die zugehorigeEigenkreisfrequenz.
w(t)
LS
L0
v0
k
m
Geg.: m = 10 kg ; k = 1 Nmm
; LS = 125 mm ; L0 = 175 mm
v0 = 12
√3 m
s; d = 20 Ns
m
24 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
3.1.4 Energiebetrachtungen
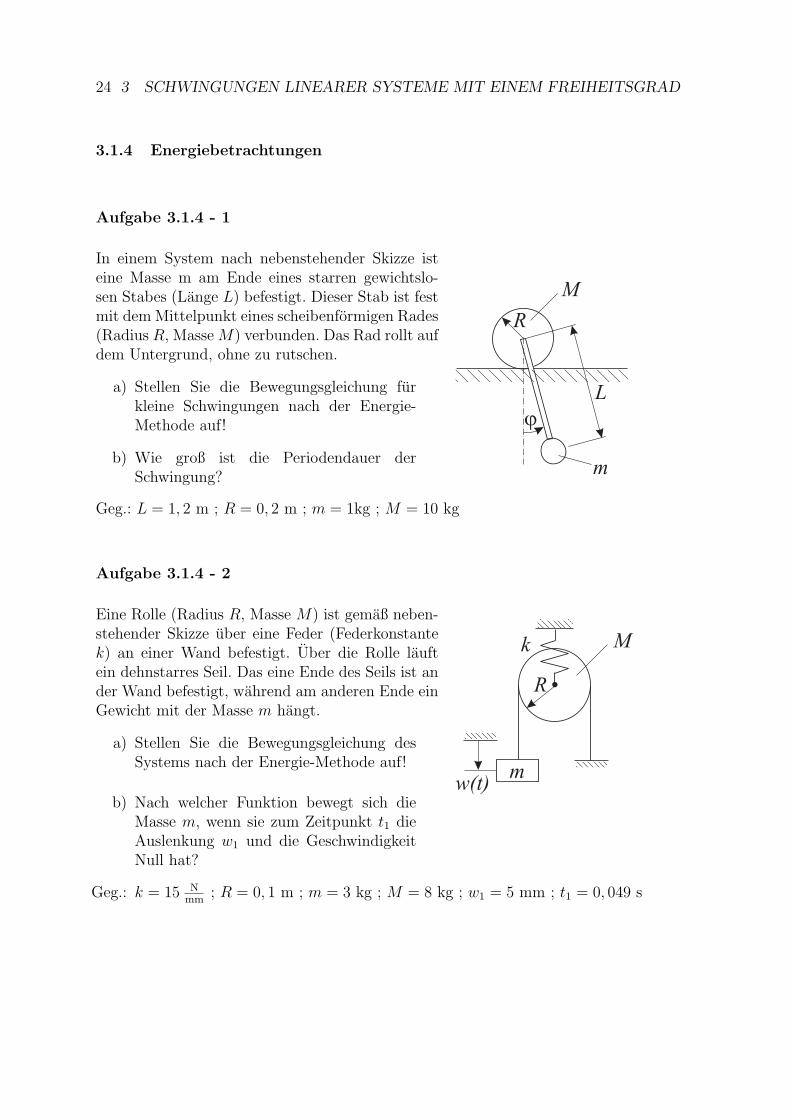
Aufgabe 3.1.4 - 1
M
m
R
L
j
In einem System nach nebenstehender Skizze isteine Masse m am Ende eines starren gewichtslo-sen Stabes (Lange L) befestigt. Dieser Stab ist festmit dem Mittelpunkt eines scheibenformigen Rades(Radius R, MasseM) verbunden. Das Rad rollt aufdem Untergrund, ohne zu rutschen.
a) Stellen Sie die Bewegungsgleichung furkleine Schwingungen nach der Energie-Methode auf!
b) Wie groß ist die Periodendauer derSchwingung?
Geg.: L = 1, 2 m ; R = 0, 2 m ; m = 1kg ; M = 10 kg
Aufgabe 3.1.4 - 2
w(t)
Mk
R
m
Eine Rolle (Radius R, Masse M) ist gemaß neben-stehender Skizze uber eine Feder (Federkonstantek) an einer Wand befestigt. Uber die Rolle lauftein dehnstarres Seil. Das eine Ende des Seils ist ander Wand befestigt, wahrend am anderen Ende einGewicht mit der Masse m hangt.
a) Stellen Sie die Bewegungsgleichung desSystems nach der Energie-Methode auf!
b) Nach welcher Funktion bewegt sich dieMasse m, wenn sie zum Zeitpunkt t1 dieAuslenkung w1 und die GeschwindigkeitNull hat?
Geg.: k = 15 Nmm
; R = 0, 1 m ; m = 3 kg ; M = 8 kg ; w1 = 5 mm ; t1 = 0, 049 s
3.1 Freie ungedampfte Schwingungen 25
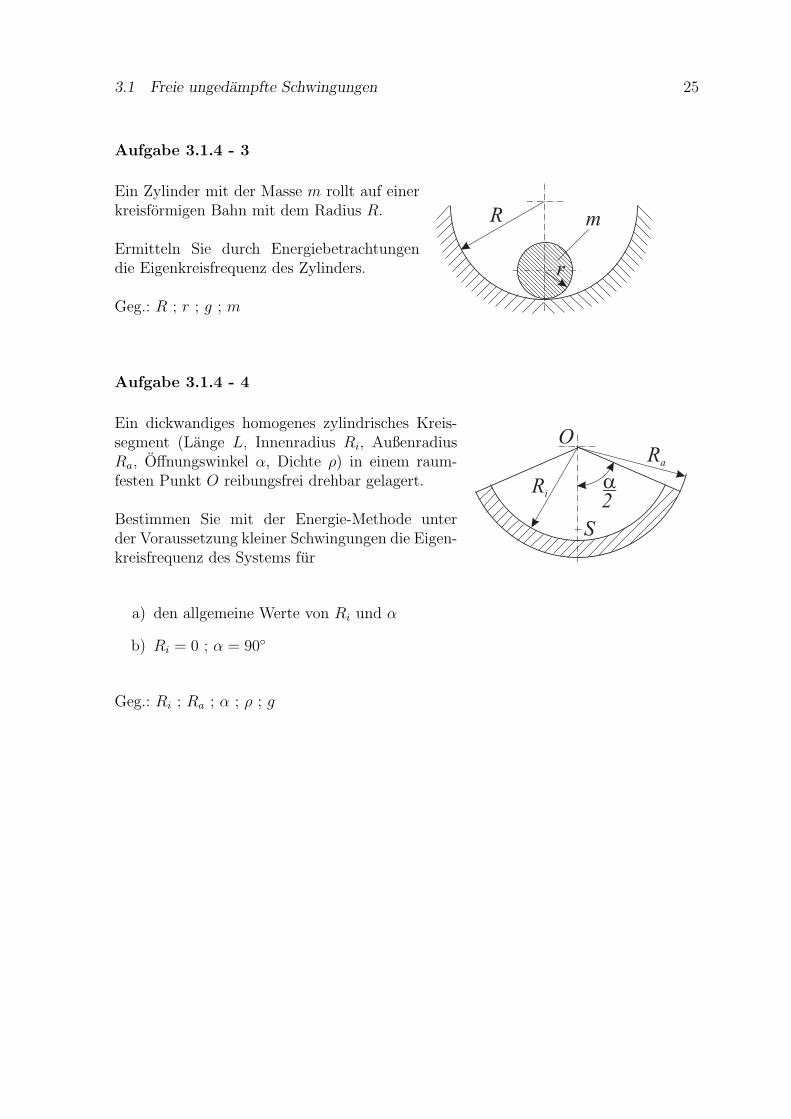
Aufgabe 3.1.4 - 3
R m
r
Ein Zylinder mit der Masse m rollt auf einerkreisformigen Bahn mit dem Radius R.
Ermitteln Sie durch Energiebetrachtungendie Eigenkreisfrequenz des Zylinders.
Geg.: R ; r ; g ; m
Aufgabe 3.1.4 - 4
ORa
Ri
S
a2
Ein dickwandiges homogenes zylindrisches Kreis-segment (Lange L, Innenradius Ri, AußenradiusRa, Offnungswinkel α, Dichte ρ) in einem raum-festen Punkt O reibungsfrei drehbar gelagert.
Bestimmen Sie mit der Energie-Methode unterder Voraussetzung kleiner Schwingungen die Eigen-kreisfrequenz des Systems fur
a) den allgemeine Werte von Ri und α
b) Ri = 0 ; α = 90
Geg.: Ri ; Ra ; α ; ρ ; g

26 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
3.2 Freie gedampfte Schwingungen
3.2.1 Viskose Dampfung
Aufgabe 3.2.1 - 1
m
m
R
RL
Ein Pendel besteht aus zwei homogenen Zylindern(Masse jeweils m, Radius R), die durch eine mas-selose starre Stange (Lange L) verbunden sind.Der obere Zylinder ist in der Mitte reibungsfreigelenkig gelagert, wahrend sich der zweite in ei-nem Olbad befindet. Ein Versuch ergibt fur klei-ne Schwingungen des Pendels eine PeriodendauerTD. Nach Ablassen des Ols stellt sich fur die un-gedampfte Schwingung eine Periodendauer T0 ein.
a) Wie lautet die Bewegungsgleichung desPendels, wenn das Olbad durch einenaquivalenten, viskosen Dampfer beschrie-ben wird?
b) Wie groß ist die aquivalente Dampferzahl?
Geg.: R ; L = 2R ; m ; TD ; T0 = 0, 98 TD
Aufgabe 3.2.1 - 2
k
d1
d2m
(1) (1)
(2)
x(t)
Ein starrer Balken (Masse m) ist gemaß der ne-benstehenden Skizze uber zwei undehnbare Sei-le und eine Feder (Federzahl k) aufgehangt. DieUmlenkrollen (1) sowie der Trager (2) konnenals masselos angenommen werden. Das System istdurch zwei Dampfer (Dampferkonstanten d1 undd2) gedampft.
a) Wie lautet die Bewegungsgleichung desSystems, wenn d1 = d und d2 = 0 ist?
b) Es sei d1 = d2 = d. Ein Ausschwingver-such liefert das logarithmische Dekrementϑ. Wie groß ist die Dampferkonstante d?
Geg.: k = 5 N/mm ; m = 2 kg ; ϑ = 0, 63

3.2 Freie gedampfte Schwingungen 27
Aufgabe 3.2.1 - 3
w(t)
m
d
d
kk
Eine Stoßstange (Masse m) ist mittels zweier Federn undzweier Dampfer an einer Wand befestigt. Wahrend einesAusschwingversuches werden die Periodendauer TD undzwei maximale Auslenkungen w1 und w2 zu den Zeit-punkten t1 und (t1 + TD) gemessen.
a) Bestimmen Sie die Eigenkreisfrequenz desungedampften Systems sowie die Federkon-stante k und die Dampferkonstante d.
b) Um welchen Betrag d muss die Dampferkonstante mindestens erhoht werden,wenn das System nach einem Anfangsstoß nicht uberschwingen soll?
Geg.: t1 = 5 s ; TD = 0, 1 s ; w1 = 2, 21 mm ; w2 = 2 mm ; m = 5 kg
Aufgabe 3.2.1 - 4
d k
a
C1C2
JC1JC2
Zwei im Eingriff befindliche Zahnrader (Massen-tragheitsmomente JC1 und JC2 tragen jeweils einenstarren, masselosen Hebel. Ein viskoser Dampfer(Dampferzahl d) ist gelenkig zwischen den Enden derbeiden Hebel befestigt (Abstand a vom jeweiligen La-ger des Zahnrades). Eine Feder (Federkonstante k)verbindet das Ende des einen Hebels mit einem orts-festen Punkt. Die Zahnrader werden jeweils um denWinkel ϕ0 verdreht aus der Ruhelage losgelassen undfuhren anschließend kleine Schwingungen aus.
a) Wie groß ist der Dampfungsgrad des Systems?
b) Welchen Winkelausschlag besitzt jedes Zahnrad nach der Zeit t1?
Geg.: JC1 = JC2 = 200 Nms2 ; k = 106 Nm
; d = 5 · 104 Nsm
; a = 0, 2 m ; t1 = 0, 5 s ;ϕ0 = 1

28 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.2.1 - 5
w(t)
R
Rd
k
m
Eine Masse m ist gemaß nebenstehender Skizzeuber ein undehnbares Seil aufgehangt. Das Seillauft uber zwei masselose, reibungsfrei gelagerteUmlenkrollen (Radius R). Das Lager der einen Rol-le ist uber einen Dampfer mit der Dampferkonstan-ten d und uber eine Feder mit der Federzahl k mitder Wand verbunden, wahrend das Lager der zwei-ten Rolle starr befestigt ist.
a) Stellen Sie die Bewegungsgleichung desSystems auf!
b) Wie groß sind die Eigenkreisfrequenz des ungedampften Systems und der Damp-fungsgrad?
c) Um wieviel Prozent vermindert sich die Eigenfrequenz, wenn die scheibenformi-gen Rollen ebenfalls massebehaftet sind und ihre Massen jeweils m betragen?
Geg.: m = 0, 5 kg ; d = 2 Nsm
; k = 0, 2 Nmm
; R = 0, 2 m
Aufgabe 3.2.1 - 6
Gegeben ist das dargestellte Feder-Masse-Dampfer-System. Es besteht aus einer Massem, die uber ein dehnstarres Seil, das ohne zu rutschen uber eine masselose Rolle (RadiusR) lauft, an einem starren Balken befestigt ist. Der Balken hat uber die gesamte Langeden konstanten Querschnitt A und die Dichte ρ. Er ist am raumfesten Punkt O drehbargelagert und am rechten Ende durch eine Feder mit der Federsteifigkeit k und einemDampfer mit der Dampferkonstanten d mit der Umgebung verbunden.
w(t)
Ar
a
O
k
dL
R
m

3.2 Freie gedampfte Schwingungen 29
a) Wieviel Freiheitsgrade hat das System?
b) Stellen Sie die Bewegungsgleichung des Systems fur die Koordinate w auf undberechnen Sie die Eigenkreisfrequenz und den Dampfungsgrad.
c) Wie lautet die Funktion w(t), wenn die Masse m zur Zeit t = 0 um w0 aus derstatischen Gleichgewichtslage ausgelenkt und stoßfrei losgelassen wird?
d) Auf welchen Wert andert sich die Eigenkreisfrequenz, wenn die Rolle ebenfallsmassebehaftet ist und ihre Masse M betragt?
Geg.: m = 1 kg ; ρ = 7, 85 · 10−6 kgmm3 ; A = 1820 mm2 ; L = 270 mm ; a = 67, 5 mm
k = 0, 648 Nmm
; d = 129, 6 Nsmm
; w0 = 5 mm ; R = 50 mm ; M = 1, 76 kg
Aufgabe 3.2.1 - 7
d k
mb
h
L
L
23
13
O
Ein mathematisches Pendel gemaß nebenstehenderSkizze besteht aus einer masselosen starren Stan-ge, die im Punkt O drehbar gelagert ist, und derquaderformigen Masse m mit der Breite b und derHohe h. An der Pendelstange sind oberhalb desDrehpunktes eine Schraubenfeder mit der Feder-steifigkeit k und ein Dampfer mit der Dampferkon-stanten d angebracht.
a) Stellen Sie die Bewegungsgleichung desSystems fur kleine Schwingungen auf!
b) Berechnen Sie die Eigenkreisfrequenz undden Dampfungsgrad des Systems!
c) Auf welchen Wert andert sich die Eigenkreisfrequenz, wenn die Pendelstangeebenfalls massebehaftet ist und ihre Masse M betragt?
Geg.: m = 1 kg ; b = 160 mm ; h = 40 mm ; L = 300 mm ; k = 10 Nm
; d = 1 Nsm
;M = 5/3 m
30 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
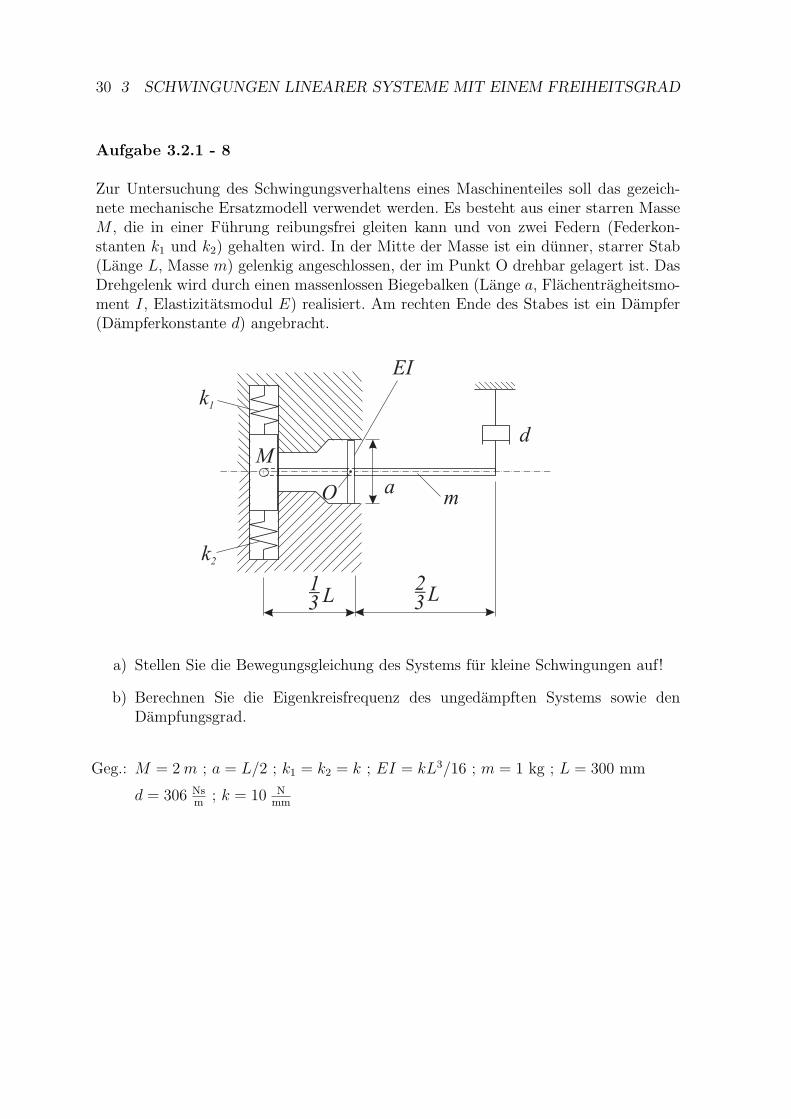
Aufgabe 3.2.1 - 8
Zur Untersuchung des Schwingungsverhaltens eines Maschinenteiles soll das gezeich-nete mechanische Ersatzmodell verwendet werden. Es besteht aus einer starren MasseM , die in einer Fuhrung reibungsfrei gleiten kann und von zwei Federn (Federkon-stanten k1 und k2) gehalten wird. In der Mitte der Masse ist ein dunner, starrer Stab(Lange L, Masse m) gelenkig angeschlossen, der im Punkt O drehbar gelagert ist. DasDrehgelenk wird durch einen massenlossen Biegebalken (Lange a, Flachentragheitsmo-ment I, Elastizitatsmodul E) realisiert. Am rechten Ende des Stabes ist ein Dampfer(Dampferkonstante d) angebracht.
k1
k2
M
LL23
13
a
EI
d
mO
a) Stellen Sie die Bewegungsgleichung des Systems fur kleine Schwingungen auf!
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems sowie denDampfungsgrad.
Geg.: M = 2m ; a = L/2 ; k1 = k2 = k ; EI = kL3/16 ; m = 1 kg ; L = 300 mm
d = 306 Nsm
; k = 10 Nmm

3.2 Freie gedampfte Schwingungen 31
Aufgabe 3.2.1 - 9
Das gezeichnete System ist die schematische Darstellung eines Torsionsschwingungstil-gers bestehend aus der Welle W , die uber drei ”Finger” F , an denen jeweils zwei Gum-mielemente G anvulkanisiert sind, mit einem Außenring verbunden ist. Der Außenringist als dickwandiger Hohlzylinder (Innenradius Ri, Außenradius Ra, Dicke t, Dichte ρ)zu betrachten. Die Gummielemente besitzen Feder- und Dampfungseigenschaften (je-weils Federkonstante k und Dampferkonstante d), deren gemeinsamer Angriffspunkt imAbstand R angenommen werden kann. Die Finger sind zunachst als starr anzusehen.
F
G
WAußenring
Ri
Ra
R
d k
O
Fur kleine Drehschwingungen des Außenringes um die Wellenachse O sind
a) die Bewegungsgleichung aufzustellen und
b) die Eigenkreisfrequenz sowie der Dampfungsgrad zu berechnen.
c) Auf welchen Wert veandert sich die Eigenkreisfrequenz, wenn fur die Finger je-weils eine Feder mit der Federkonstanten kF anzunehmen ist?
Geg.: R = 50 mm ; Ri = 40 mm ; Ra = 60 mm ; t = 30 mm ; k = 10 Nmm
; d = 50 Nsm
;
ρ = 7850 kgm3 ; kF = 20k
32 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
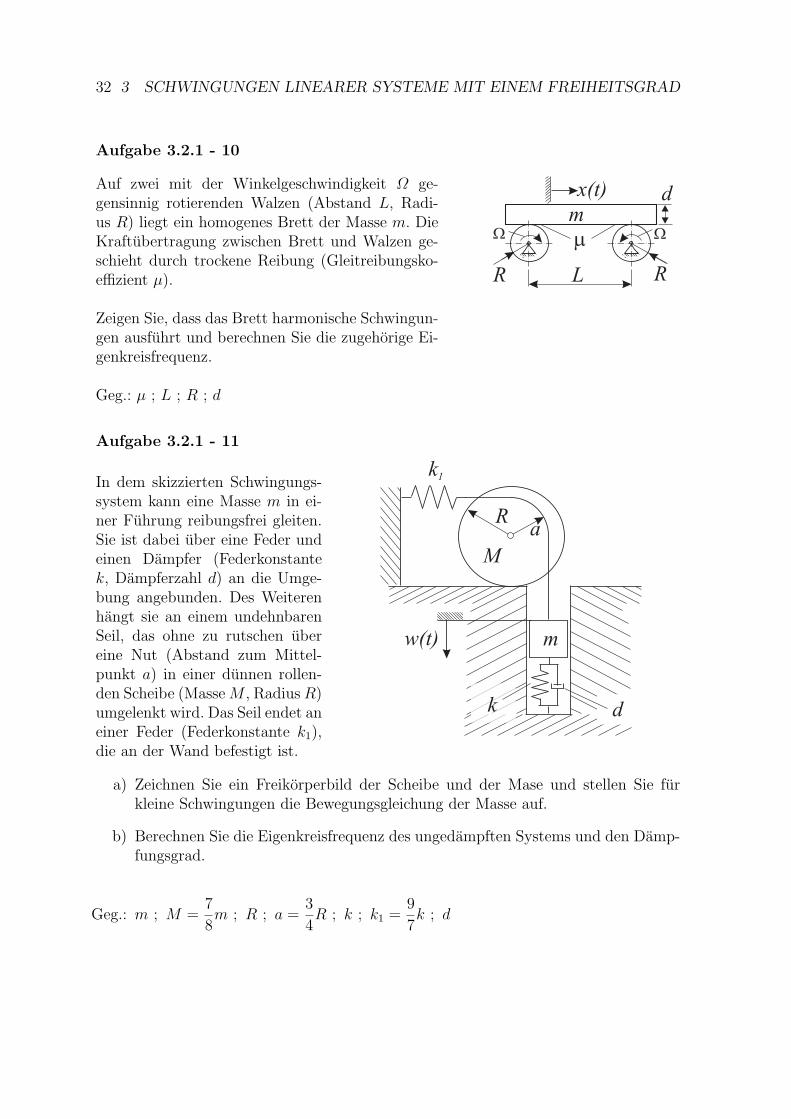
Aufgabe 3.2.1 - 10
m
L
W Wm
R R
dx(t)Auf zwei mit der Winkelgeschwindigkeit Ω ge-gensinnig rotierenden Walzen (Abstand L, Radi-us R) liegt ein homogenes Brett der Masse m. DieKraftubertragung zwischen Brett und Walzen ge-schieht durch trockene Reibung (Gleitreibungsko-effizient µ).
Zeigen Sie, dass das Brett harmonische Schwingun-gen ausfuhrt und berechnen Sie die zugehorige Ei-genkreisfrequenz.
Geg.: µ ; L ; R ; d
Aufgabe 3.2.1 - 11
k1
aR
mw(t)
k d
M
In dem skizzierten Schwingungs-system kann eine Masse m in ei-ner Fuhrung reibungsfrei gleiten.Sie ist dabei uber eine Feder undeinen Dampfer (Federkonstantek, Dampferzahl d) an die Umge-bung angebunden. Des Weiterenhangt sie an einem undehnbarenSeil, das ohne zu rutschen ubereine Nut (Abstand zum Mittel-punkt a) in einer dunnen rollen-den Scheibe (MasseM , RadiusR)umgelenkt wird. Das Seil endet aneiner Feder (Federkonstante k1),die an der Wand befestigt ist.
a) Zeichnen Sie ein Freikorperbild der Scheibe und der Mase und stellen Sie furkleine Schwingungen die Bewegungsgleichung der Masse auf.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
Geg.: m ; M =7
8m ; R ; a =
3
4R ; k ; k1 =
9
7k ; d
3.2 Freie gedampfte Schwingungen 33
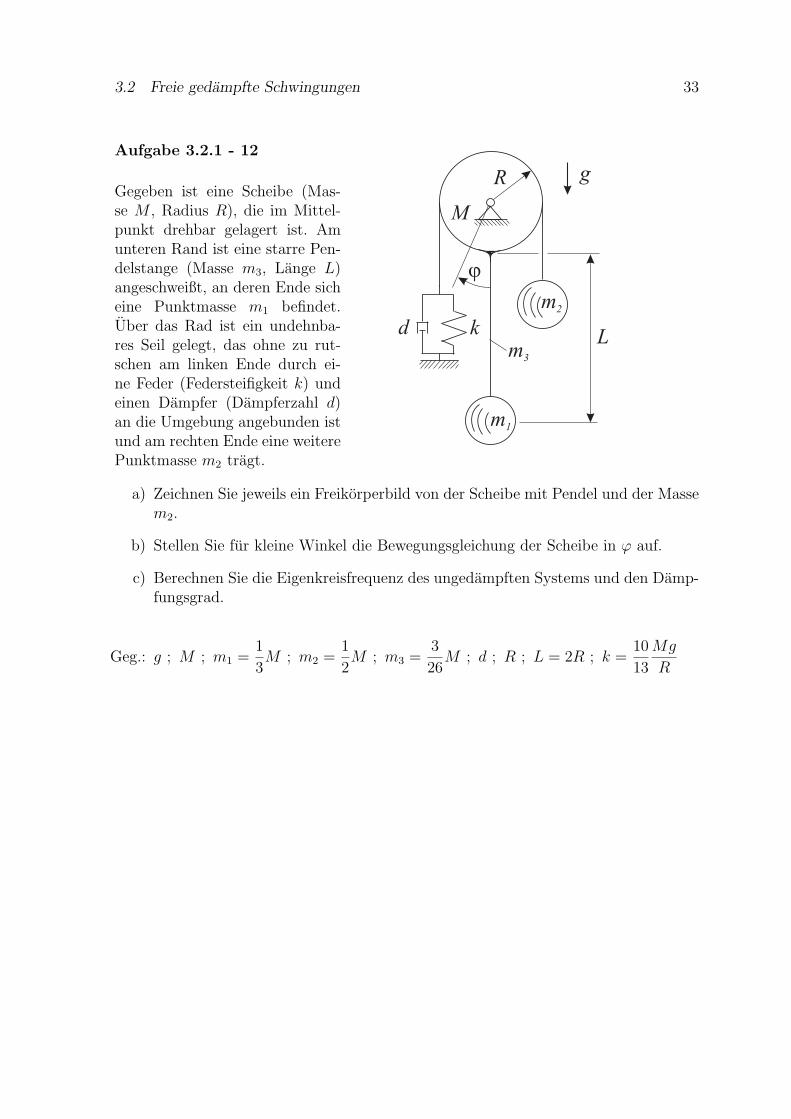
Aufgabe 3.2.1 - 12
d k
m1
m2
M
g
L
j
m3
RGegeben ist eine Scheibe (Mas-se M , Radius R), die im Mittel-punkt drehbar gelagert ist. Amunteren Rand ist eine starre Pen-delstange (Masse m3, Lange L)angeschweißt, an deren Ende sicheine Punktmasse m1 befindet.Uber das Rad ist ein undehnba-res Seil gelegt, das ohne zu rut-schen am linken Ende durch ei-ne Feder (Federsteifigkeit k) undeinen Dampfer (Dampferzahl d)an die Umgebung angebunden istund am rechten Ende eine weiterePunktmasse m2 tragt.
a) Zeichnen Sie jeweils ein Freikorperbild von der Scheibe mit Pendel und der Massem2.
b) Stellen Sie fur kleine Winkel die Bewegungsgleichung der Scheibe in ϕ auf.
c) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
Geg.: g ; M ; m1 =1
3M ; m2 =
1
2M ; m3 =
3
26M ; d ; R ; L = 2R ; k =
10
13
Mg
R
34 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
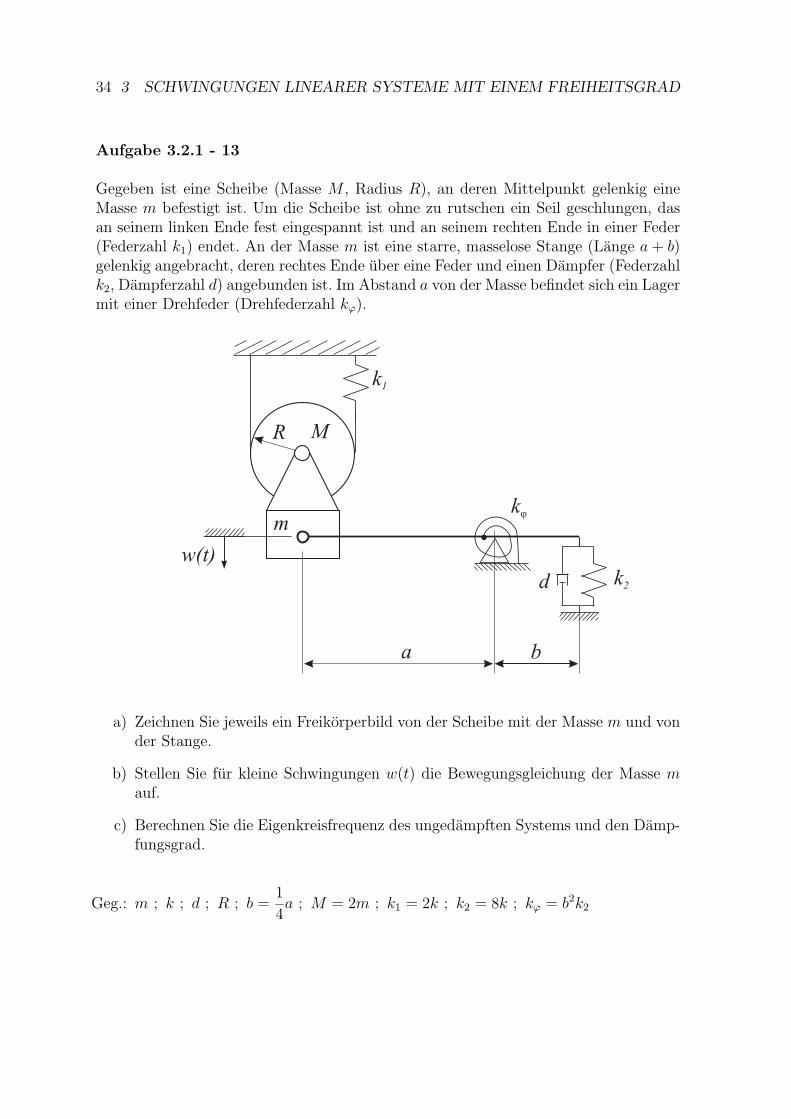
Aufgabe 3.2.1 - 13
Gegeben ist eine Scheibe (Masse M , Radius R), an deren Mittelpunkt gelenkig eineMasse m befestigt ist. Um die Scheibe ist ohne zu rutschen ein Seil geschlungen, dasan seinem linken Ende fest eingespannt ist und an seinem rechten Ende in einer Feder(Federzahl k1) endet. An der Masse m ist eine starre, masselose Stange (Lange a + b)gelenkig angebracht, deren rechtes Ende uber eine Feder und einen Dampfer (Federzahlk2, Dampferzahl d) angebunden ist. Im Abstand a von der Masse befindet sich ein Lagermit einer Drehfeder (Drehfederzahl kϕ).
k2
k1
kj
d
ba
m
w(t)
R M
a) Zeichnen Sie jeweils ein Freikorperbild von der Scheibe mit der Masse m und vonder Stange.
b) Stellen Sie fur kleine Schwingungen w(t) die Bewegungsgleichung der Masse mauf.
c) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
Geg.: m ; k ; d ; R ; b =1
4a ; M = 2m ; k1 = 2k ; k2 = 8k ; kϕ = b2k2
3.2 Freie gedampfte Schwingungen 35
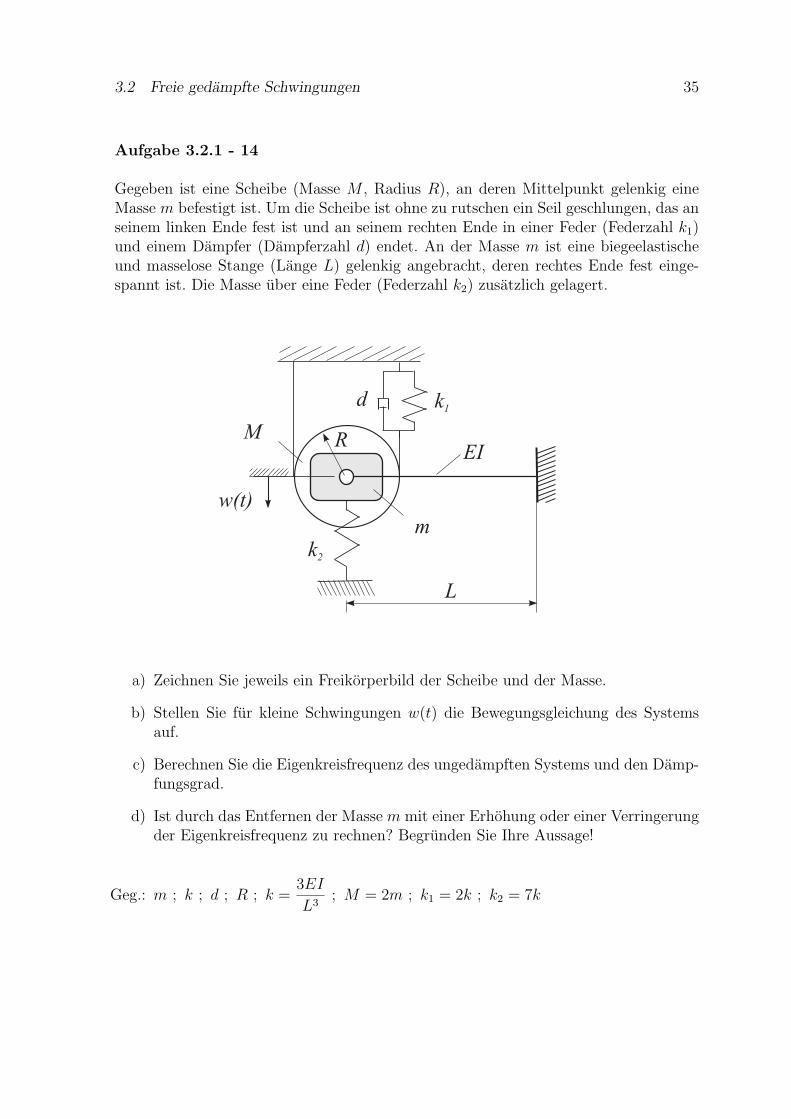
Aufgabe 3.2.1 - 14
Gegeben ist eine Scheibe (Masse M , Radius R), an deren Mittelpunkt gelenkig eineMasse m befestigt ist. Um die Scheibe ist ohne zu rutschen ein Seil geschlungen, das anseinem linken Ende fest ist und an seinem rechten Ende in einer Feder (Federzahl k1)und einem Dampfer (Dampferzahl d) endet. An der Masse m ist eine biegeelastischeund masselose Stange (Lange L) gelenkig angebracht, deren rechtes Ende fest einge-spannt ist. Die Masse uber eine Feder (Federzahl k2) zusatzlich gelagert.
k2
k1d
L
m
w(t)
EIRM
a) Zeichnen Sie jeweils ein Freikorperbild der Scheibe und der Masse.
b) Stellen Sie fur kleine Schwingungen w(t) die Bewegungsgleichung des Systemsauf.
c) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
d) Ist durch das Entfernen der Masse m mit einer Erhohung oder einer Verringerungder Eigenkreisfrequenz zu rechnen? Begrunden Sie Ihre Aussage!
Geg.: m ; k ; d ; R ; k =3EI
L3; M = 2m ; k1 = 2k ; k2 = 7k

36 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.2.1 - 15
Das dargestellte Schwingungssystem besteht aus einer masselosen starren Stange, dieim Punkt O drehbar gelagert ist. An der Stange sind oberhalb des Lagers eine Feder(Federzahl k2) sowie ein undehnbares Seil befestigt. Das Seil wird ohne zu rutschen umeine drehbar gelagerte Umlenkscheibe (Masse M , Radius R) umgelenkt und endet aneiner Feder (Federzahl k1) und einem Dampfer (Dampferzahl d1). Unterhalb des Lagersbefindet sich am Ende der Stange eine Masse m.
k1 d
L
L
O
g k2
RM
m
a) Zeichnen Sie ein Freikorperbild fur die Scheibe und die Stange mit der Masse undstellen Sie fur kleine Schwingungen die Bewegungsgleichung des Systems auf.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad .
Geg.: k1 = k ; k2 = 2k ; d ; k ; m ; M = 4m ; R ; L
3.2 Freie gedampfte Schwingungen 37
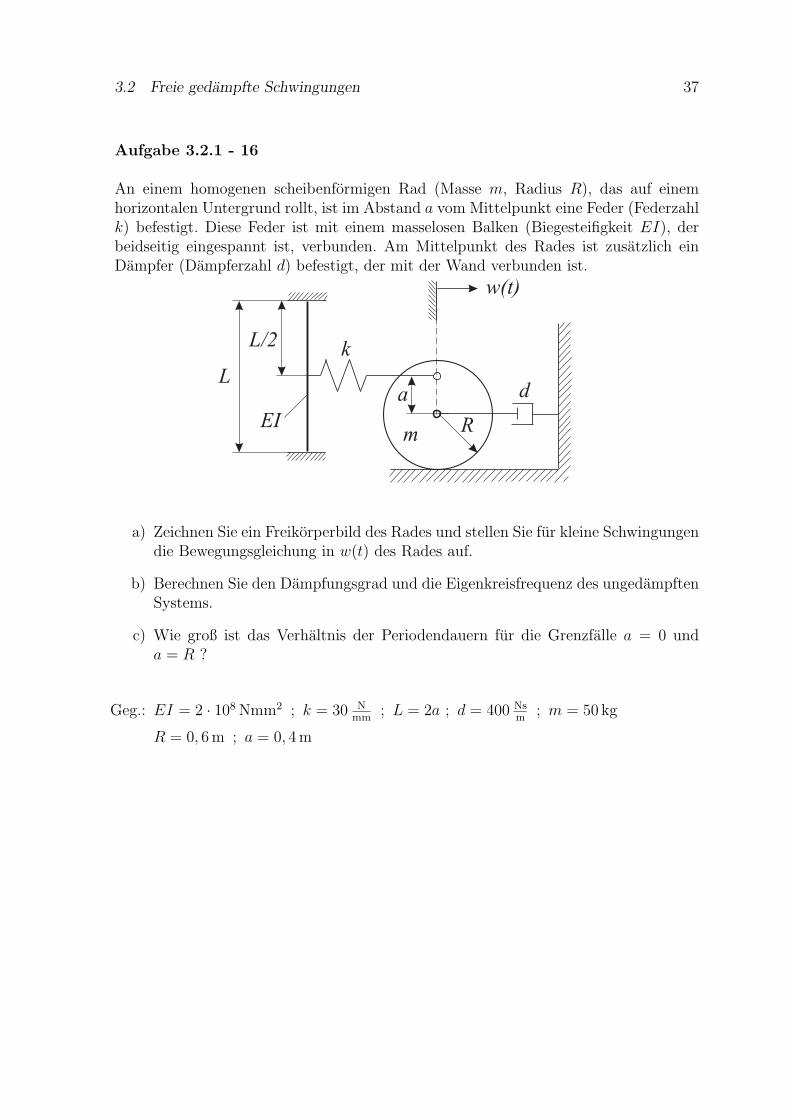
Aufgabe 3.2.1 - 16
An einem homogenen scheibenformigen Rad (Masse m, Radius R), das auf einemhorizontalen Untergrund rollt, ist im Abstand a vom Mittelpunkt eine Feder (Federzahlk) befestigt. Diese Feder ist mit einem masselosen Balken (Biegesteifigkeit EI), derbeidseitig eingespannt ist, verbunden. Am Mittelpunkt des Rades ist zusatzlich einDampfer (Dampferzahl d) befestigt, der mit der Wand verbunden ist.
a
R
w(t)
d
k
EI
L
L/2
m
a) Zeichnen Sie ein Freikorperbild des Rades und stellen Sie fur kleine Schwingungendie Bewegungsgleichung in w(t) des Rades auf.
b) Berechnen Sie den Dampfungsgrad und die Eigenkreisfrequenz des ungedampftenSystems.
c) Wie groß ist das Verhaltnis der Periodendauern fur die Grenzfalle a = 0 unda = R ?
Geg.: EI = 2 · 108 Nmm2 ; k = 30 Nmm
; L = 2a ; d = 400 Nsm
; m = 50 kg
R = 0, 6 m ; a = 0, 4 m
38 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
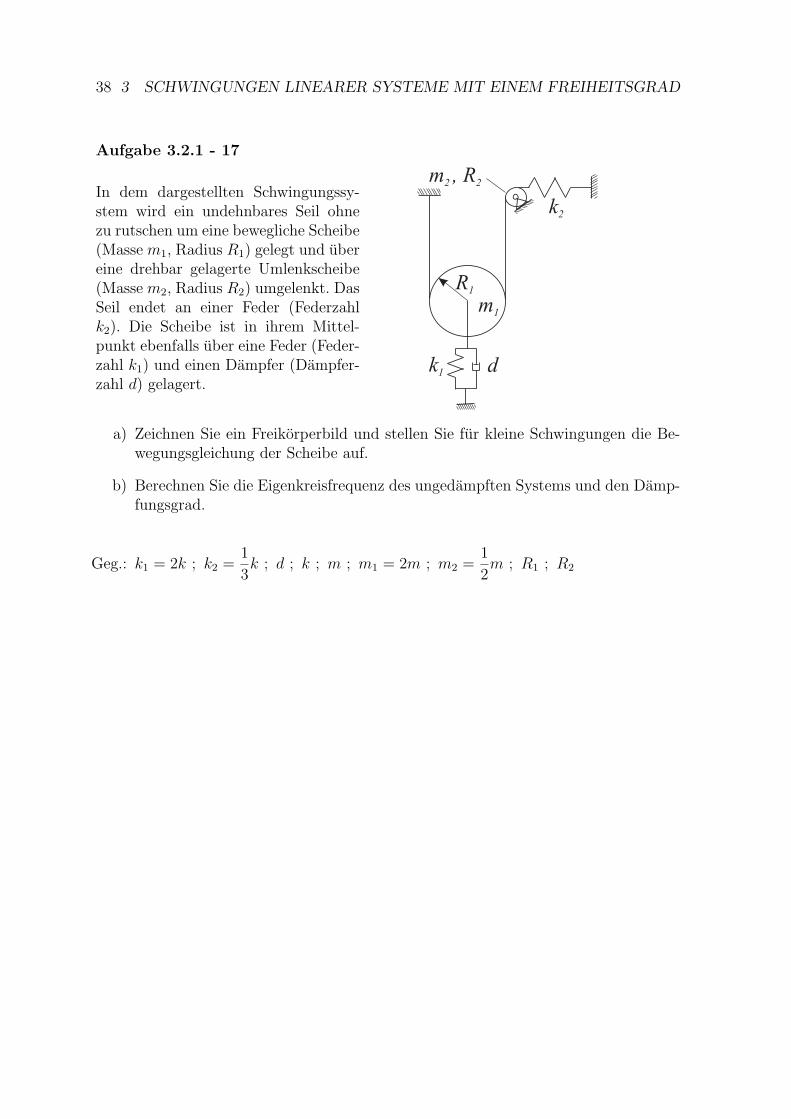
Aufgabe 3.2.1 - 17
k1 d
m1
R1
m , R2 2
k2
In dem dargestellten Schwingungssy-stem wird ein undehnbares Seil ohnezu rutschen um eine bewegliche Scheibe(Masse m1, Radius R1) gelegt und ubereine drehbar gelagerte Umlenkscheibe(Masse m2, Radius R2) umgelenkt. DasSeil endet an einer Feder (Federzahlk2). Die Scheibe ist in ihrem Mittel-punkt ebenfalls uber eine Feder (Feder-zahl k1) und einen Dampfer (Dampfer-zahl d) gelagert.
a) Zeichnen Sie ein Freikorperbild und stellen Sie fur kleine Schwingungen die Be-wegungsgleichung der Scheibe auf.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
Geg.: k1 = 2k ; k2 =1
3k ; d ; k ; m ; m1 = 2m ; m2 =
1
2m ; R1 ; R2
3.2 Freie gedampfte Schwingungen 39
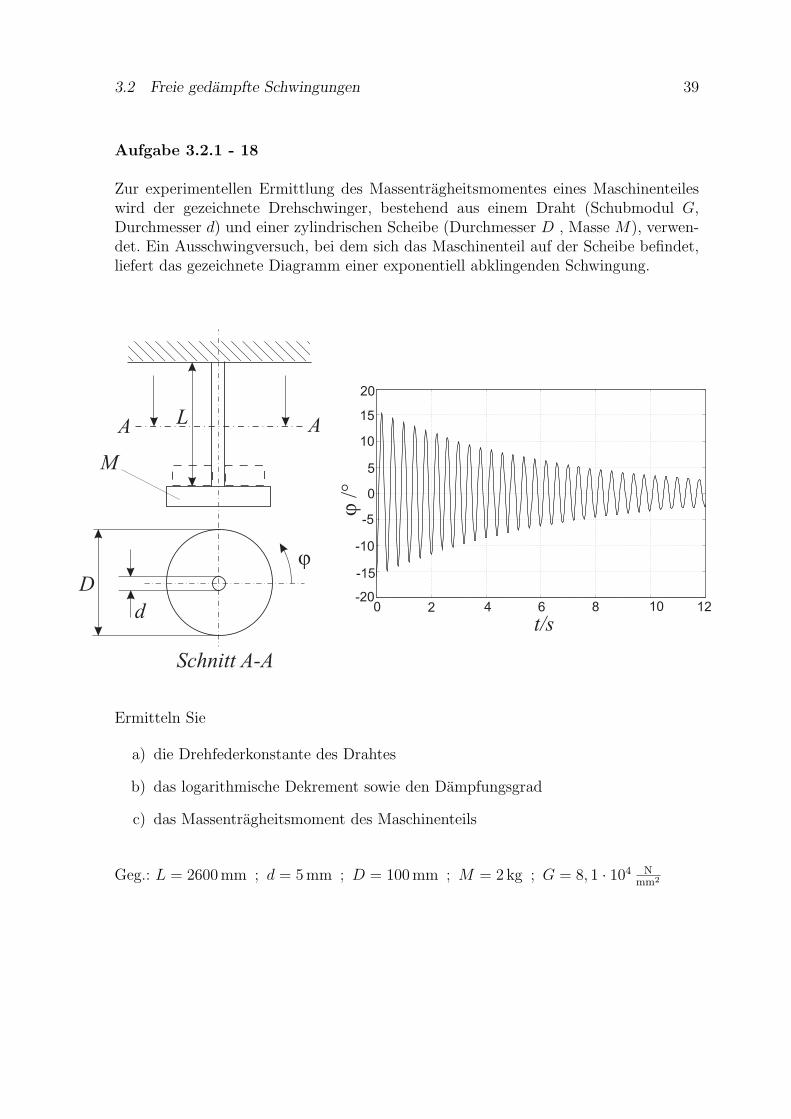
Aufgabe 3.2.1 - 18
Zur experimentellen Ermittlung des Massentragheitsmomentes eines Maschinenteileswird der gezeichnete Drehschwinger, bestehend aus einem Draht (Schubmodul G,Durchmesser d) und einer zylindrischen Scheibe (Durchmesser D , Masse M), verwen-det. Ein Ausschwingversuch, bei dem sich das Maschinenteil auf der Scheibe befindet,liefert das gezeichnete Diagramm einer exponentiell abklingenden Schwingung.
0 2 4 6 10 128
20
15
10
5
0
-5
-10
-15
-20
t/s
j /
°
A AL
j
Schnitt A-A
D
d
M
Ermitteln Sie
a) die Drehfederkonstante des Drahtes
b) das logarithmische Dekrement sowie den Dampfungsgrad
c) das Massentragheitsmoment des Maschinenteils
Geg.: L = 2600 mm ; d = 5 mm ; D = 100 mm ; M = 2 kg ; G = 8, 1 · 104 Nmm2

40 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.2.1 - 19
Das dargestellte gedampfte, physikalische Pendel (Masse m, MassentragheitsmomentJC , Drehdampferzahl dϕ) besitzt zum Zeitpunkt t = 0 einen Anfangswinkel ϕ0 undeine Anfangswinkelgeschwindigkeit ϕ0. Danach (t > 0) wird das Pendel sich selbstuberlassen und der Winkel ϕ uber der Zeit in dem dargestellten Diagramm aufgezeich-net. Daraus konnen die Winkelamplituden ϕ1 und ϕ2 zu den Zeitpunkten t1 und t2abgelesen werden.
3
2
1
0
-1
-20 1 2 3 4
t/s
j/°
g
C
m, JC
dj
s
a) Ermitteln Sie die Eigenkreisfrequenz des gedampften und ungedampften Pendelund den Dampfungsgrad.
b) Berechnen Sie den Anfangswinkel ϕ0 und die Anfangswinkelgeschwindigkeit ϕ0
des Pendels. (Beachte: Die Winkelgeschwindigkeit des Pendels an der Stelle einesmax. Winkels ist gleich Null.)
Geg.: m = 10 kg ; JC = 1000 kg mm2 ; g = 9.81 ms2
; t1 = 0.1 s ; ϕ1 = 3 ; ϕ2 = 1
s = 100 mm
3.2 Freie gedampfte Schwingungen 41
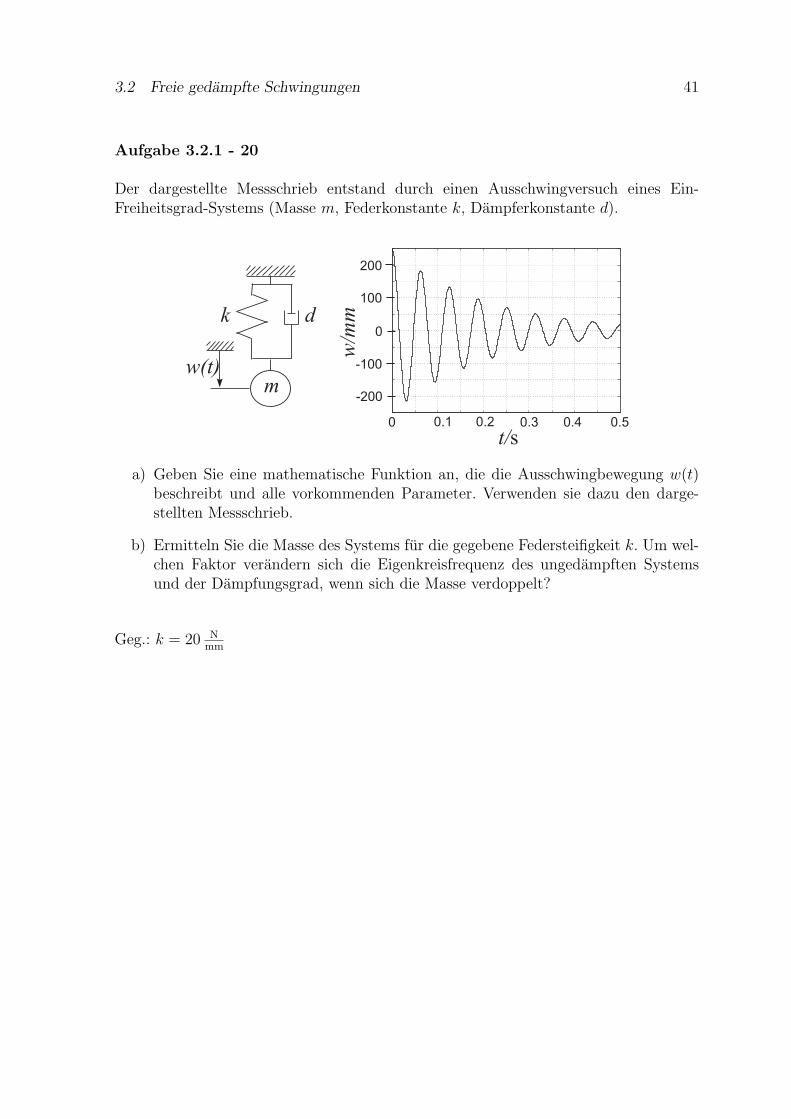
Aufgabe 3.2.1 - 20
Der dargestellte Messschrieb entstand durch einen Ausschwingversuch eines Ein-Freiheitsgrad-Systems (Masse m, Federkonstante k, Dampferkonstante d).
mw(t)
k d
t/s
w/m
m
200
100
0
-100
-200
0 0.1 0.2 0.3 0.4 0.5
a) Geben Sie eine mathematische Funktion an, die die Ausschwingbewegung w(t)beschreibt und alle vorkommenden Parameter. Verwenden sie dazu den darge-stellten Messschrieb.
b) Ermitteln Sie die Masse des Systems fur die gegebene Federsteifigkeit k. Um wel-chen Faktor verandern sich die Eigenkreisfrequenz des ungedampften Systemsund der Dampfungsgrad, wenn sich die Masse verdoppelt?
Geg.: k = 20 Nmm
42 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
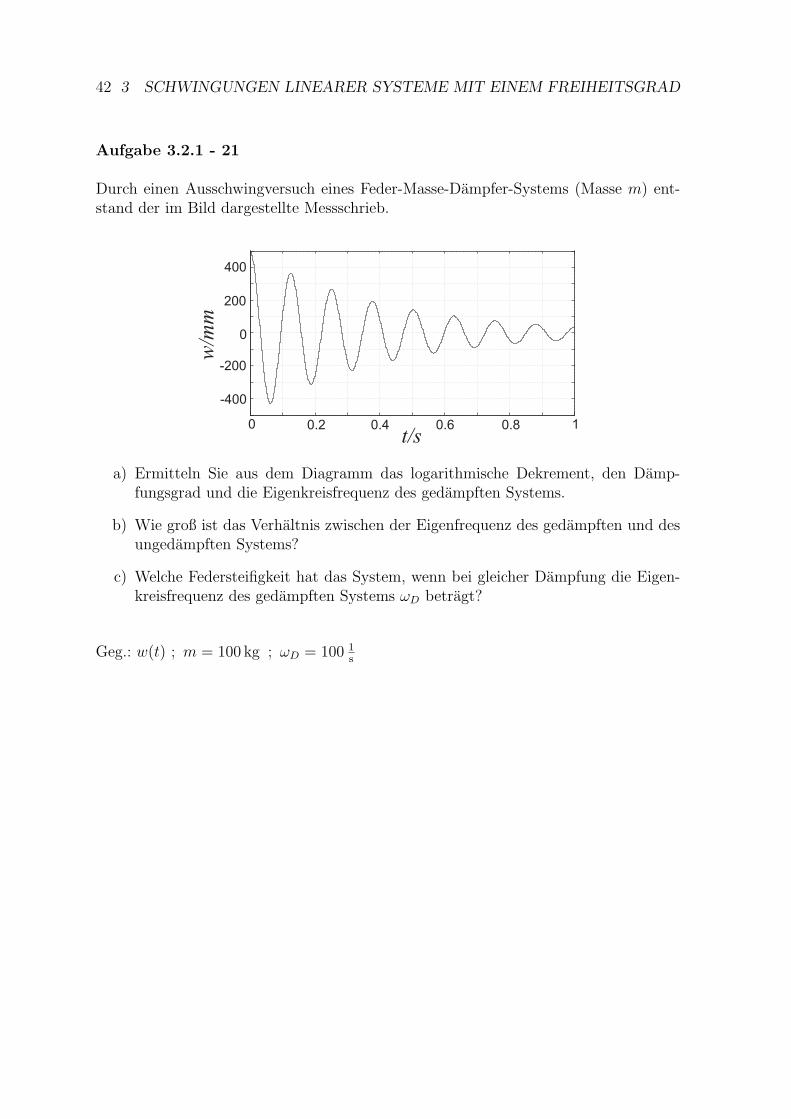
Aufgabe 3.2.1 - 21
Durch einen Ausschwingversuch eines Feder-Masse-Dampfer-Systems (Masse m) ent-stand der im Bild dargestellte Messschrieb.
0
200
400
-200
-400
0 0.2 0.4 0.6 0.8 1
w/m
m
t/s
a) Ermitteln Sie aus dem Diagramm das logarithmische Dekrement, den Damp-fungsgrad und die Eigenkreisfrequenz des gedampften Systems.
b) Wie groß ist das Verhaltnis zwischen der Eigenfrequenz des gedampften und desungedampften Systems?
c) Welche Federsteifigkeit hat das System, wenn bei gleicher Dampfung die Eigen-kreisfrequenz des gedampften Systems ωD betragt?
Geg.: w(t) ; m = 100 kg ; ωD = 100 1s
3.3 Erzwungene Schwingungen 43
3.3 Erzwungene Schwingungen
3.3.1 Beispiele mechanischer Ersatzmodelle
3.3.2 Allgemeine Losung der Bewegungsgleichungen
3.3.3 Sprung- und impulsformige Anregung
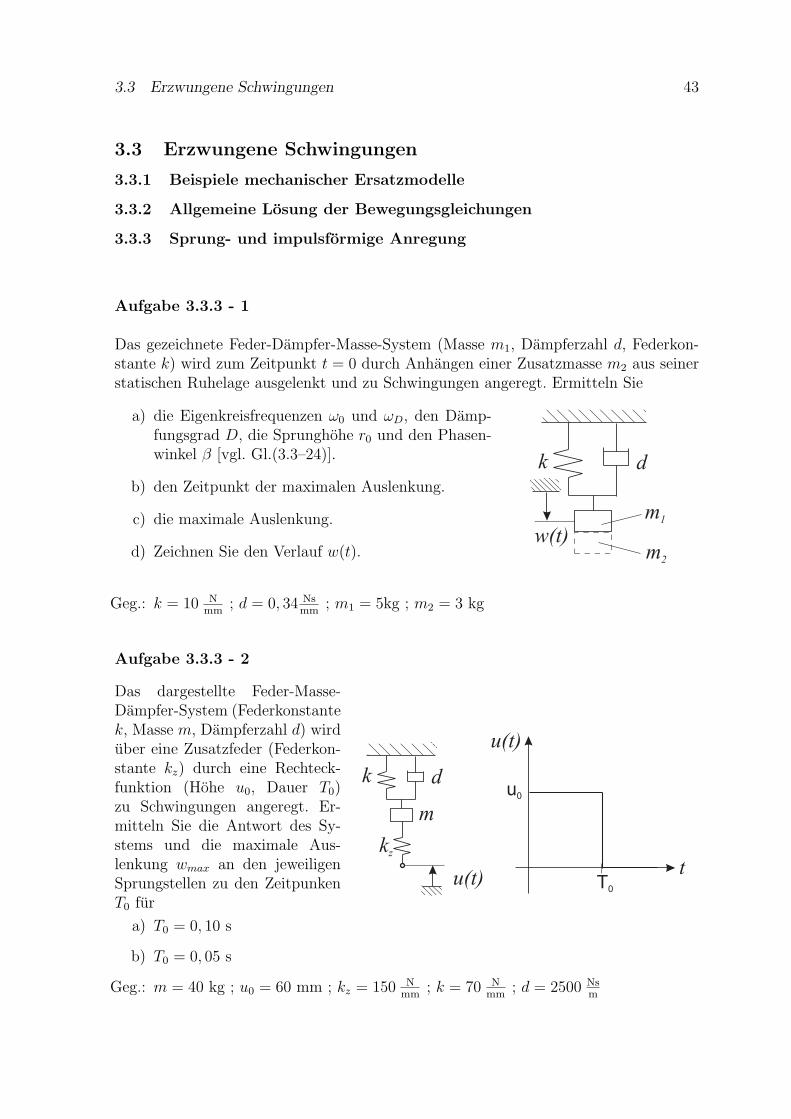
Aufgabe 3.3.3 - 1
Das gezeichnete Feder-Dampfer-Masse-System (Masse m1, Dampferzahl d, Federkon-stante k) wird zum Zeitpunkt t = 0 durch Anhangen einer Zusatzmasse m2 aus seinerstatischen Ruhelage ausgelenkt und zu Schwingungen angeregt. Ermitteln Sie
k d
m1
m2
w(t)
a) die Eigenkreisfrequenzen ω0 und ωD, den Damp-fungsgrad D, die Sprunghohe r0 und den Phasen-winkel β [vgl. Gl.(3.3–24)].
b) den Zeitpunkt der maximalen Auslenkung.
c) die maximale Auslenkung.
d) Zeichnen Sie den Verlauf w(t).
Geg.: k = 10 Nmm
; d = 0, 34 Nsmm
; m1 = 5kg ; m2 = 3 kg
Aufgabe 3.3.3 - 2
u(t)
t
u0
T0
d
m
u(t)
k
kz
Das dargestellte Feder-Masse-Dampfer-System (Federkonstantek, Masse m, Dampferzahl d) wirduber eine Zusatzfeder (Federkon-stante kz) durch eine Rechteck-funktion (Hohe u0, Dauer T0)zu Schwingungen angeregt. Er-mitteln Sie die Antwort des Sy-stems und die maximale Aus-lenkung wmax an den jeweiligenSprungstellen zu den ZeitpunkenT0 fur
a) T0 = 0, 10 s
b) T0 = 0, 05 s
Geg.: m = 40 kg ; u0 = 60 mm ; kz = 150 Nmm
; k = 70 Nmm
; d = 2500 Nsm
44 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
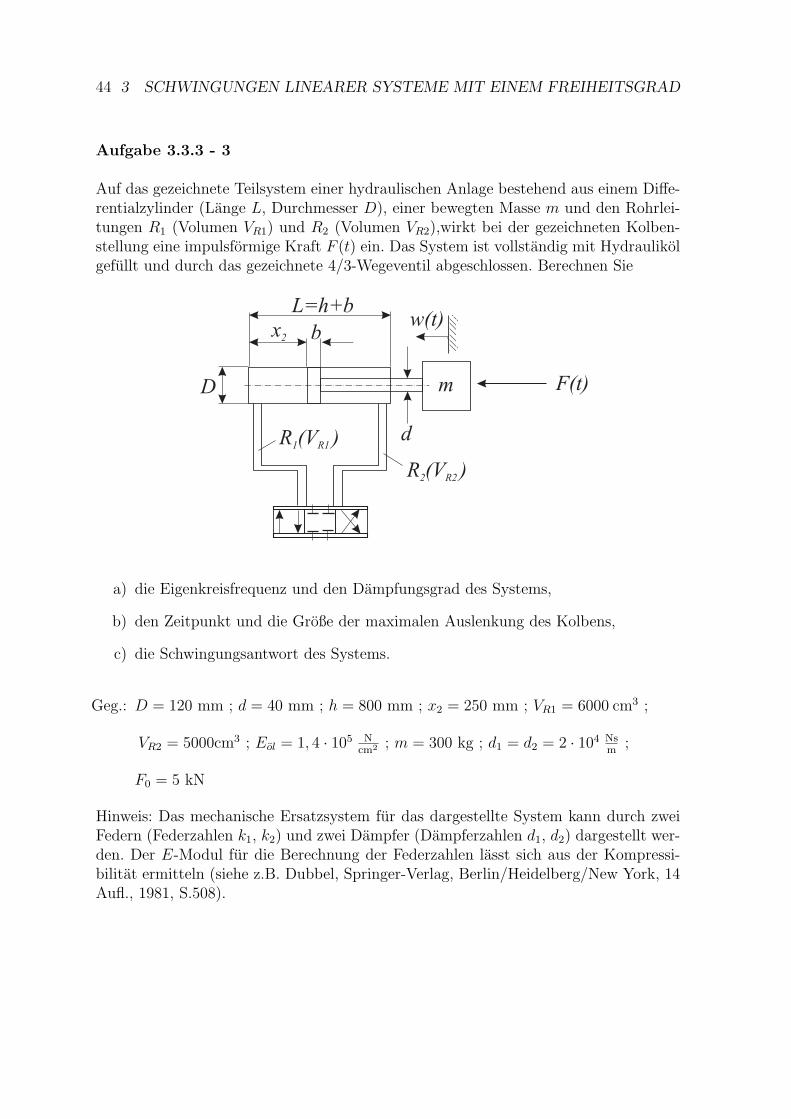
Aufgabe 3.3.3 - 3
Auf das gezeichnete Teilsystem einer hydraulischen Anlage bestehend aus einem Diffe-rentialzylinder (Lange L, Durchmesser D), einer bewegten Masse m und den Rohrlei-tungen R1 (Volumen VR1) und R2 (Volumen VR2),wirkt bei der gezeichneten Kolben-stellung eine impulsformige Kraft F (t) ein. Das System ist vollstandig mit Hydraulikolgefullt und durch das gezeichnete 4/3-Wegeventil abgeschlossen. Berechnen Sie
w(t)
D F(t)
d
x2 b
L=h+b
R (V )1 R1
R (V )2 R2
m
a) die Eigenkreisfrequenz und den Dampfungsgrad des Systems,
b) den Zeitpunkt und die Große der maximalen Auslenkung des Kolbens,
c) die Schwingungsantwort des Systems.
Geg.: D = 120 mm ; d = 40 mm ; h = 800 mm ; x2 = 250 mm ; VR1 = 6000 cm3 ;
VR2 = 5000cm3 ; Eol = 1, 4 · 105 Ncm2 ; m = 300 kg ; d1 = d2 = 2 · 104 Ns
m;
F0 = 5 kN
Hinweis: Das mechanische Ersatzsystem fur das dargestellte System kann durch zweiFedern (Federzahlen k1, k2) und zwei Dampfer (Dampferzahlen d1, d2) dargestellt wer-den. Der E-Modul fur die Berechnung der Federzahlen lasst sich aus der Kompressi-bilitat ermitteln (siehe z.B. Dubbel, Springer-Verlag, Berlin/Heidelberg/New York, 14Aufl., 1981, S.508).
3.3 Erzwungene Schwingungen 45
3.3.4 Harmonische Anregung
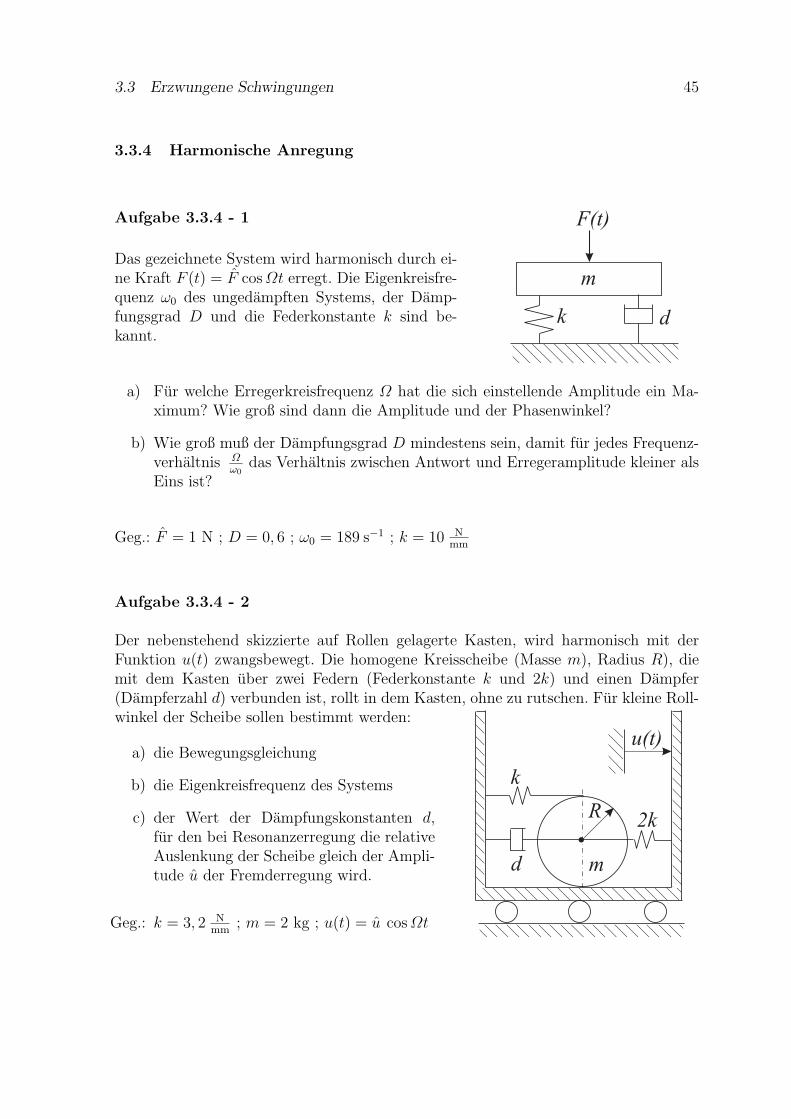
Aufgabe 3.3.4 - 1
k d
F(t)
mDas gezeichnete System wird harmonisch durch ei-ne Kraft F (t) = F cosΩt erregt. Die Eigenkreisfre-quenz ω0 des ungedampften Systems, der Damp-fungsgrad D und die Federkonstante k sind be-kannt.
a) Fur welche Erregerkreisfrequenz Ω hat die sich einstellende Amplitude ein Ma-ximum? Wie groß sind dann die Amplitude und der Phasenwinkel?
b) Wie groß muß der Dampfungsgrad D mindestens sein, damit fur jedes Frequenz-verhaltnis Ω
ω0
das Verhaltnis zwischen Antwort und Erregeramplitude kleiner alsEins ist?
Geg.: F = 1 N ; D = 0, 6 ; ω0 = 189 s−1 ; k = 10 Nmm
Aufgabe 3.3.4 - 2
Der nebenstehend skizzierte auf Rollen gelagerte Kasten, wird harmonisch mit derFunktion u(t) zwangsbewegt. Die homogene Kreisscheibe (Masse m), Radius R), diemit dem Kasten uber zwei Federn (Federkonstante k und 2k) und einen Dampfer(Dampferzahl d) verbunden ist, rollt in dem Kasten, ohne zu rutschen. Fur kleine Roll-winkel der Scheibe sollen bestimmt werden:
k
2k
d
R
u(t)
m
a) die Bewegungsgleichung
b) die Eigenkreisfrequenz des Systems
c) der Wert der Dampfungskonstanten d,fur den bei Resonanzerregung die relativeAuslenkung der Scheibe gleich der Ampli-tude u der Fremderregung wird.
Geg.: k = 3, 2 Nmm
; m = 2 kg ; u(t) = u cosΩt
46 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
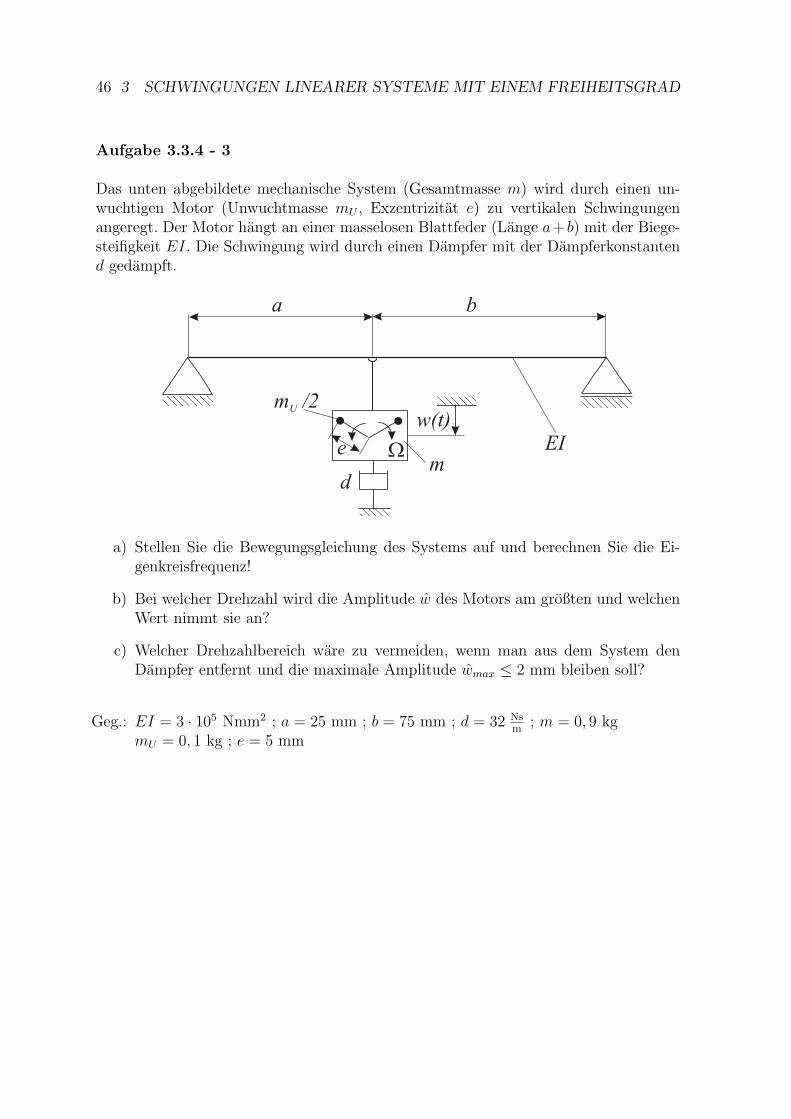
Aufgabe 3.3.4 - 3
Das unten abgebildete mechanische System (Gesamtmasse m) wird durch einen un-wuchtigen Motor (Unwuchtmasse mU , Exzentrizitat e) zu vertikalen Schwingungenangeregt. Der Motor hangt an einer masselosen Blattfeder (Lange a+ b) mit der Biege-steifigkeit EI. Die Schwingung wird durch einen Dampfer mit der Dampferkonstantend gedampft.
w(t)m /2U
me W EI
d
a b
a) Stellen Sie die Bewegungsgleichung des Systems auf und berechnen Sie die Ei-genkreisfrequenz!
b) Bei welcher Drehzahl wird die Amplitude w des Motors am großten und welchenWert nimmt sie an?
c) Welcher Drehzahlbereich ware zu vermeiden, wenn man aus dem System denDampfer entfernt und die maximale Amplitude wmax ≤ 2 mm bleiben soll?
Geg.: EI = 3 · 105 Nmm2 ; a = 25 mm ; b = 75 mm ; d = 32 Nsm
; m = 0, 9 kgmU = 0, 1 kg ; e = 5 mm
3.3 Erzwungene Schwingungen 47
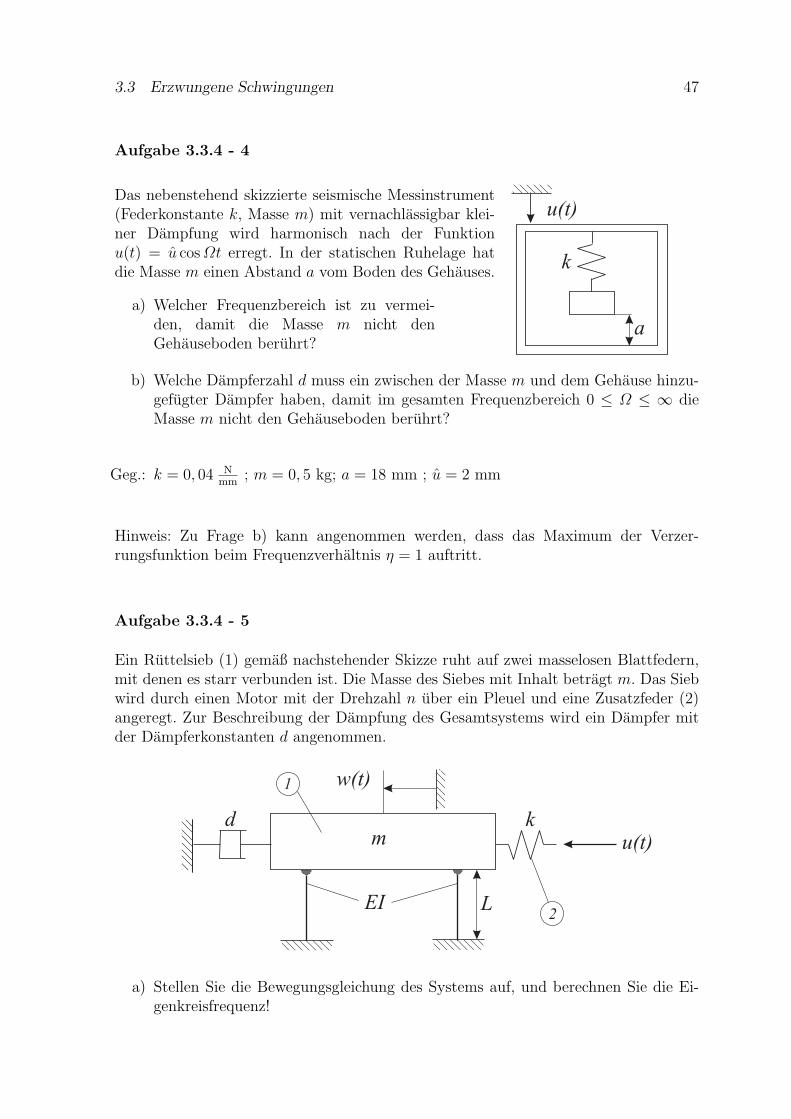
Aufgabe 3.3.4 - 4
u(t)
a
k
Das nebenstehend skizzierte seismische Messinstrument(Federkonstante k, Masse m) mit vernachlassigbar klei-ner Dampfung wird harmonisch nach der Funktionu(t) = u cosΩt erregt. In der statischen Ruhelage hatdie Masse m einen Abstand a vom Boden des Gehauses.
a) Welcher Frequenzbereich ist zu vermei-den, damit die Masse m nicht denGehauseboden beruhrt?
b) Welche Dampferzahl d muss ein zwischen der Masse m und dem Gehause hinzu-gefugter Dampfer haben, damit im gesamten Frequenzbereich 0 ≤ Ω ≤ ∞ dieMasse m nicht den Gehauseboden beruhrt?
Geg.: k = 0, 04 Nmm
; m = 0, 5 kg; a = 18 mm ; u = 2 mm
Hinweis: Zu Frage b) kann angenommen werden, dass das Maximum der Verzer-rungsfunktion beim Frequenzverhaltnis η = 1 auftritt.
Aufgabe 3.3.4 - 5
Ein Ruttelsieb (1) gemaß nachstehender Skizze ruht auf zwei masselosen Blattfedern,mit denen es starr verbunden ist. Die Masse des Siebes mit Inhalt betragt m. Das Siebwird durch einen Motor mit der Drehzahl n uber ein Pleuel und eine Zusatzfeder (2)angeregt. Zur Beschreibung der Dampfung des Gesamtsystems wird ein Dampfer mitder Dampferkonstanten d angenommen.
u(t)d
w(t)
EI
km
1
2L
a) Stellen Sie die Bewegungsgleichung des Systems auf, und berechnen Sie die Ei-genkreisfrequenz!
48 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
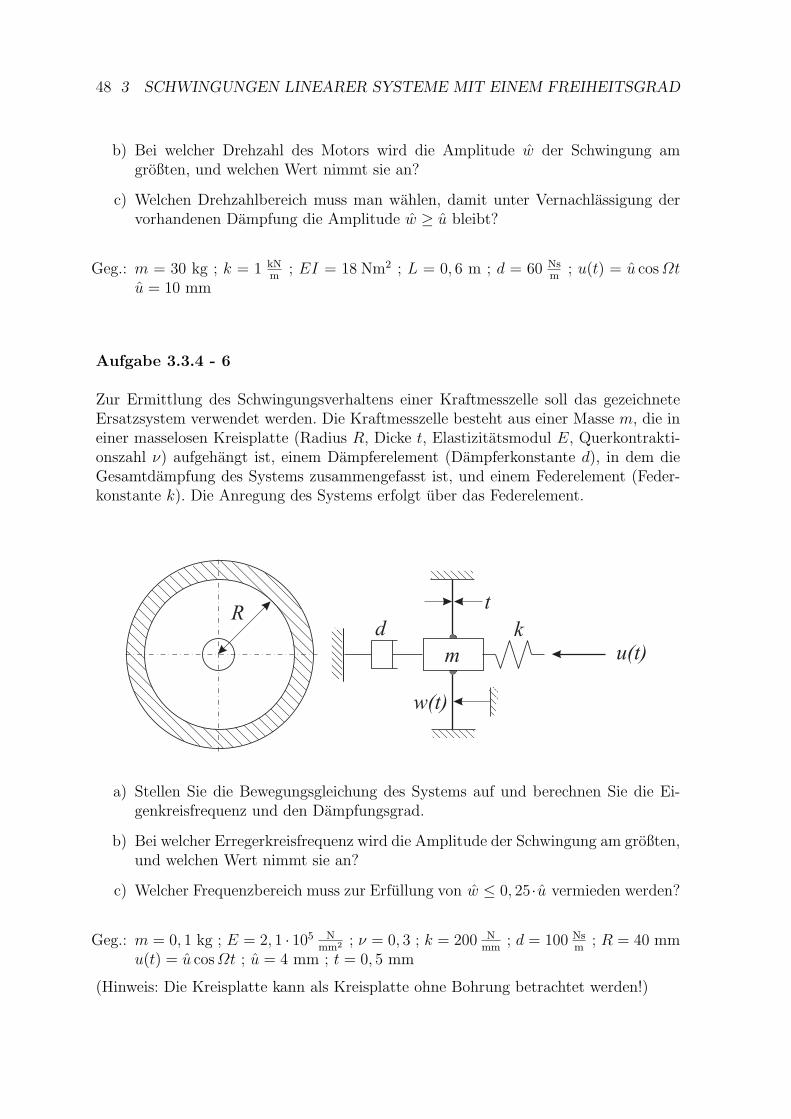
b) Bei welcher Drehzahl des Motors wird die Amplitude w der Schwingung amgroßten, und welchen Wert nimmt sie an?
c) Welchen Drehzahlbereich muss man wahlen, damit unter Vernachlassigung dervorhandenen Dampfung die Amplitude w ≥ u bleibt?
Geg.: m = 30 kg ; k = 1 kNm
; EI = 18 Nm2 ; L = 0, 6 m ; d = 60 Nsm
; u(t) = u cosΩtu = 10 mm
Aufgabe 3.3.4 - 6
Zur Ermittlung des Schwingungsverhaltens einer Kraftmesszelle soll das gezeichneteErsatzsystem verwendet werden. Die Kraftmesszelle besteht aus einer Masse m, die ineiner masselosen Kreisplatte (Radius R, Dicke t, Elastizitatsmodul E, Querkontrakti-onszahl ν) aufgehangt ist, einem Dampferelement (Dampferkonstante d), in dem dieGesamtdampfung des Systems zusammengefasst ist, und einem Federelement (Feder-konstante k). Die Anregung des Systems erfolgt uber das Federelement.
du(t)
kR
w(t)
t
m
a) Stellen Sie die Bewegungsgleichung des Systems auf und berechnen Sie die Ei-genkreisfrequenz und den Dampfungsgrad.
b) Bei welcher Erregerkreisfrequenz wird die Amplitude der Schwingung am großten,und welchen Wert nimmt sie an?
c) Welcher Frequenzbereich muss zur Erfullung von w ≤ 0, 25·u vermieden werden?
Geg.: m = 0, 1 kg ; E = 2, 1 · 105 Nmm2 ; ν = 0, 3 ; k = 200 N
mm; d = 100 Ns
m; R = 40 mm
u(t) = u cosΩt ; u = 4 mm ; t = 0, 5 mm
(Hinweis: Die Kreisplatte kann als Kreisplatte ohne Bohrung betrachtet werden!)
3.3 Erzwungene Schwingungen 49
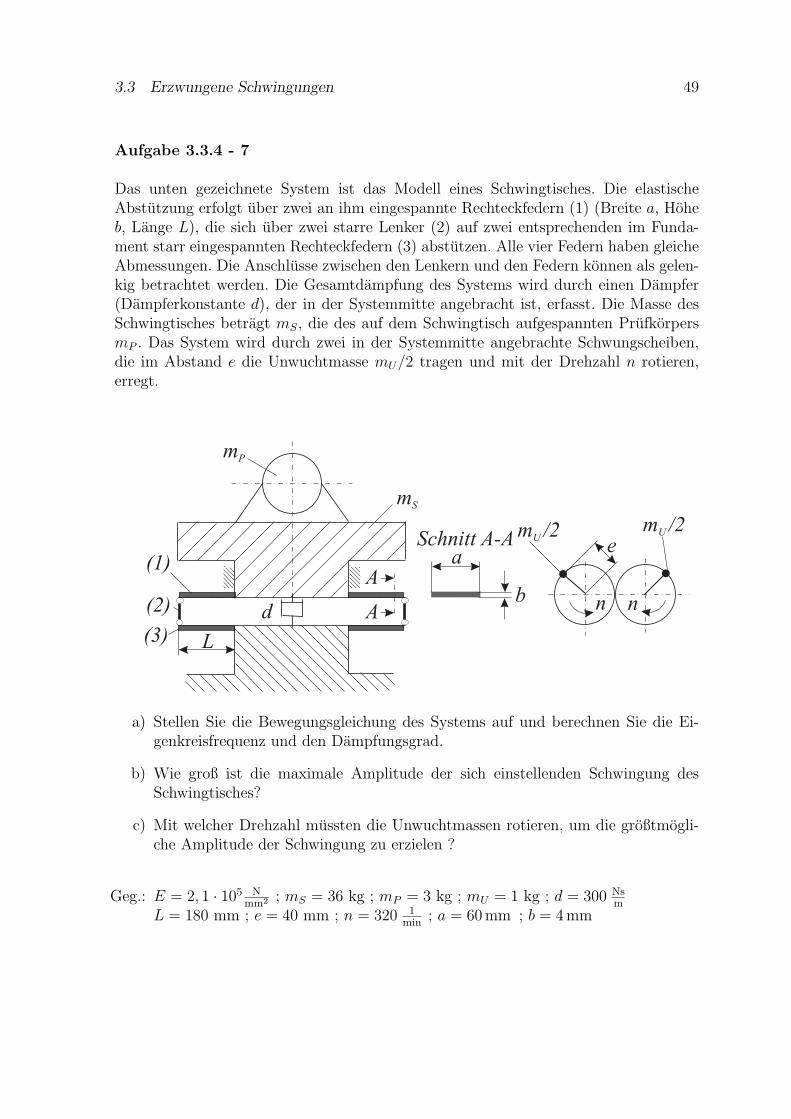
Aufgabe 3.3.4 - 7
Das unten gezeichnete System ist das Modell eines Schwingtisches. Die elastischeAbstutzung erfolgt uber zwei an ihm eingespannte Rechteckfedern (1) (Breite a, Hoheb, Lange L), die sich uber zwei starre Lenker (2) auf zwei entsprechenden im Funda-ment starr eingespannten Rechteckfedern (3) abstutzen. Alle vier Federn haben gleicheAbmessungen. Die Anschlusse zwischen den Lenkern und den Federn konnen als gelen-kig betrachtet werden. Die Gesamtdampfung des Systems wird durch einen Dampfer(Dampferkonstante d), der in der Systemmitte angebracht ist, erfasst. Die Masse desSchwingtisches betragt mS, die des auf dem Schwingtisch aufgespannten PrufkorpersmP . Das System wird durch zwei in der Systemmitte angebrachte Schwungscheiben,die im Abstand e die Unwuchtmasse mU/2 tragen und mit der Drehzahl n rotieren,erregt.
L
d
Schnitt A-A
A
A
e
nn
m /2Um /2U
mP
mS
(1)
(2)
(3)
a
b
a) Stellen Sie die Bewegungsgleichung des Systems auf und berechnen Sie die Ei-genkreisfrequenz und den Dampfungsgrad.
b) Wie groß ist die maximale Amplitude der sich einstellenden Schwingung desSchwingtisches?
c) Mit welcher Drehzahl mussten die Unwuchtmassen rotieren, um die großtmogli-che Amplitude der Schwingung zu erzielen ?
Geg.: E = 2, 1 · 105 Nmm2 ; mS = 36 kg ; mP = 3 kg ; mU = 1 kg ; d = 300 Ns
m
L = 180 mm ; e = 40 mm ; n = 320 1min
; a = 60 mm ; b = 4 mm
50 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
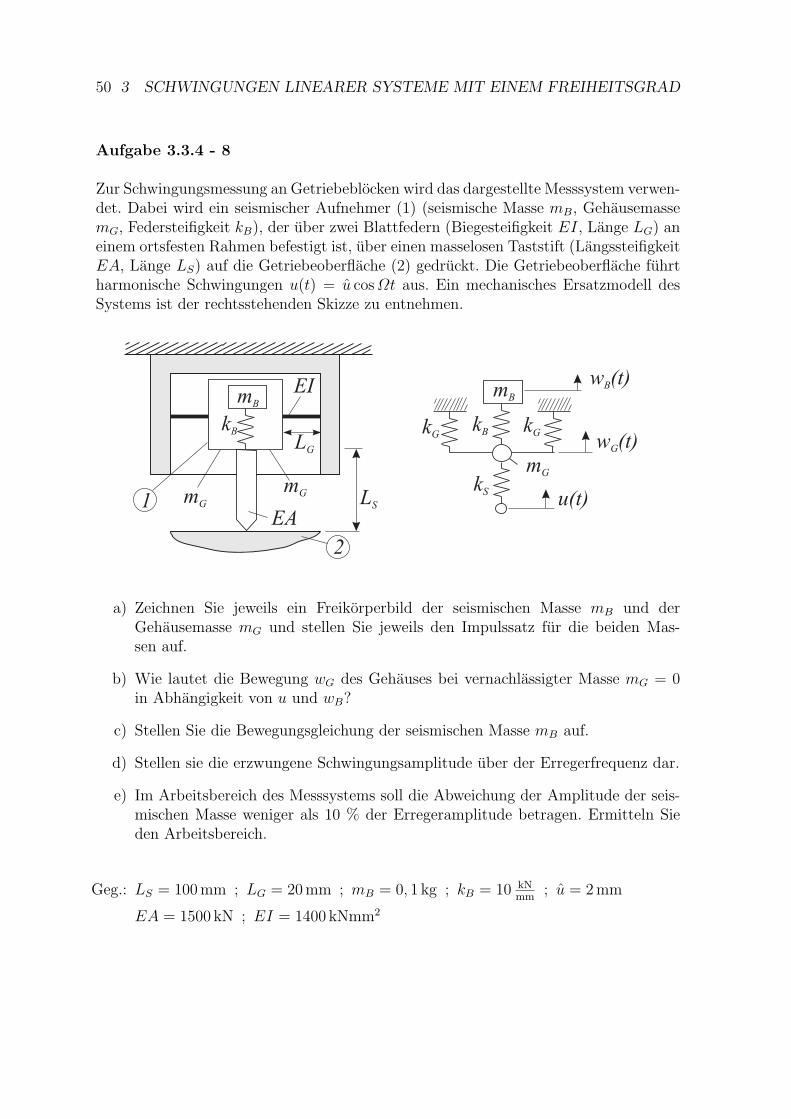
Aufgabe 3.3.4 - 8
Zur Schwingungsmessung an Getriebeblocken wird das dargestellte Messsystem verwen-det. Dabei wird ein seismischer Aufnehmer (1) (seismische Masse mB, GehausemassemG, Federsteifigkeit kB), der uber zwei Blattfedern (Biegesteifigkeit EI, Lange LG) aneinem ortsfesten Rahmen befestigt ist, uber einen masselosen Taststift (LangssteifigkeitEA, Lange LS) auf die Getriebeoberflache (2) gedruckt. Die Getriebeoberflache fuhrtharmonische Schwingungen u(t) = u cosΩt aus. Ein mechanisches Ersatzmodell desSystems ist der rechtsstehenden Skizze zu entnehmen.
mB
kB kGkG
kS
mG
mG u(t)
w (t)G
w (t)B
mB
kB
mG LS
LG
EI
EA1
2
a) Zeichnen Sie jeweils ein Freikorperbild der seismischen Masse mB und derGehausemasse mG und stellen Sie jeweils den Impulssatz fur die beiden Mas-sen auf.
b) Wie lautet die Bewegung wG des Gehauses bei vernachlassigter Masse mG = 0in Abhangigkeit von u und wB?
c) Stellen Sie die Bewegungsgleichung der seismischen Masse mB auf.
d) Stellen sie die erzwungene Schwingungsamplitude uber der Erregerfrequenz dar.
e) Im Arbeitsbereich des Messsystems soll die Abweichung der Amplitude der seis-mischen Masse weniger als 10 % der Erregeramplitude betragen. Ermitteln Sieden Arbeitsbereich.
Geg.: LS = 100 mm ; LG = 20 mm ; mB = 0, 1 kg ; kB = 10 kNmm
; u = 2 mm
EA = 1500 kN ; EI = 1400 kNmm2
3.3 Erzwungene Schwingungen 51
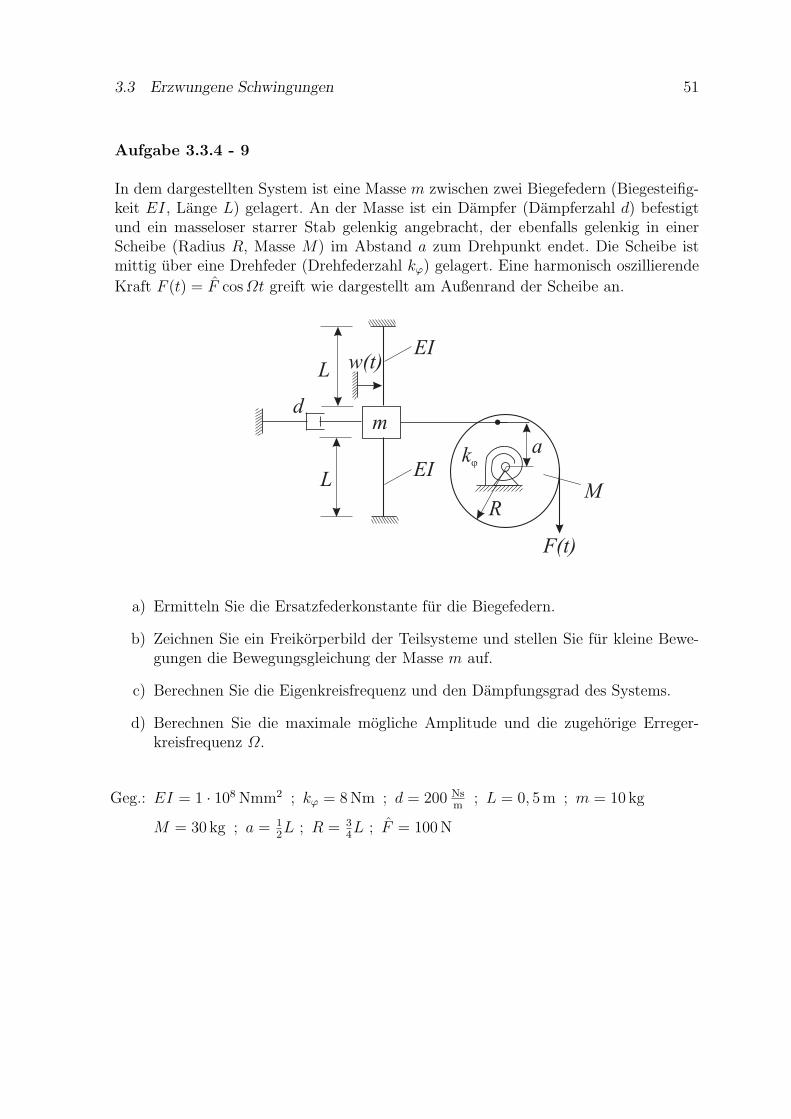
Aufgabe 3.3.4 - 9
In dem dargestellten System ist eine Masse m zwischen zwei Biegefedern (Biegesteifig-keit EI, Lange L) gelagert. An der Masse ist ein Dampfer (Dampferzahl d) befestigtund ein masseloser starrer Stab gelenkig angebracht, der ebenfalls gelenkig in einerScheibe (Radius R, Masse M) im Abstand a zum Drehpunkt endet. Die Scheibe istmittig uber eine Drehfeder (Drehfederzahl kϕ) gelagert. Eine harmonisch oszillierende
Kraft F (t) = F cosΩt greift wie dargestellt am Außenrand der Scheibe an.
d
L
L
EI
EI
a
F(t)
RM
kj
m
w(t)
a) Ermitteln Sie die Ersatzfederkonstante fur die Biegefedern.
b) Zeichnen Sie ein Freikorperbild der Teilsysteme und stellen Sie fur kleine Bewe-gungen die Bewegungsgleichung der Masse m auf.
c) Berechnen Sie die Eigenkreisfrequenz und den Dampfungsgrad des Systems.
d) Berechnen Sie die maximale mogliche Amplitude und die zugehorige Erreger-kreisfrequenz Ω.
Geg.: EI = 1 · 108 Nmm2 ; kϕ = 8 Nm ; d = 200 Nsm
; L = 0, 5 m ; m = 10 kg
M = 30 kg ; a = 12L ; R = 3
4L ; F = 100 N

52 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.3.4 - 10
Das dargestellte System wird durch eine Maschine (Masse m), in der sich zwei Restun-wuchten (Unwuchtmassen mu/2, Exzentrizitat e) befinden, zu Schwingungen angeregt.Die Maschine hangt an einem masselosen Balken (Biegesteifigkeit EI, Lange a + b),der auf zwei Stutzen gelagert ist. An der Unterseite ist die Maschine durch eine Feder(Federzahl k) und uber einen Dampfer (Dampferzahl d) an die Umgebung angebunden.
EI
a b
k d
m /2 , eU
mWw(t)
a) Ermitteln Sie die Ersatzfederkonstante fur den Balken.
b) Zeichnen Sie ein Freikorperbild der Maschine und stellen Sie die Bewegungsglei-chung fur das System auf.
c) Berechnen Sie die Eigenkreisfrequenz und den Dampfungsgrad des Systems.
d) Berechnen Sie die maximale mogliche Amplitude und die zugehorige Erreger-kreisfrequenz Ω.
Geg.: EI = 5 · 105 Nmm2 ; k = 25, 6 Nmm
; d = 320 Nsm
; m = 100 kg
mU = 1 kg ; a = 35 mm ; b = 40 mm ; e = 2, 5 mm
3.3 Erzwungene Schwingungen 53
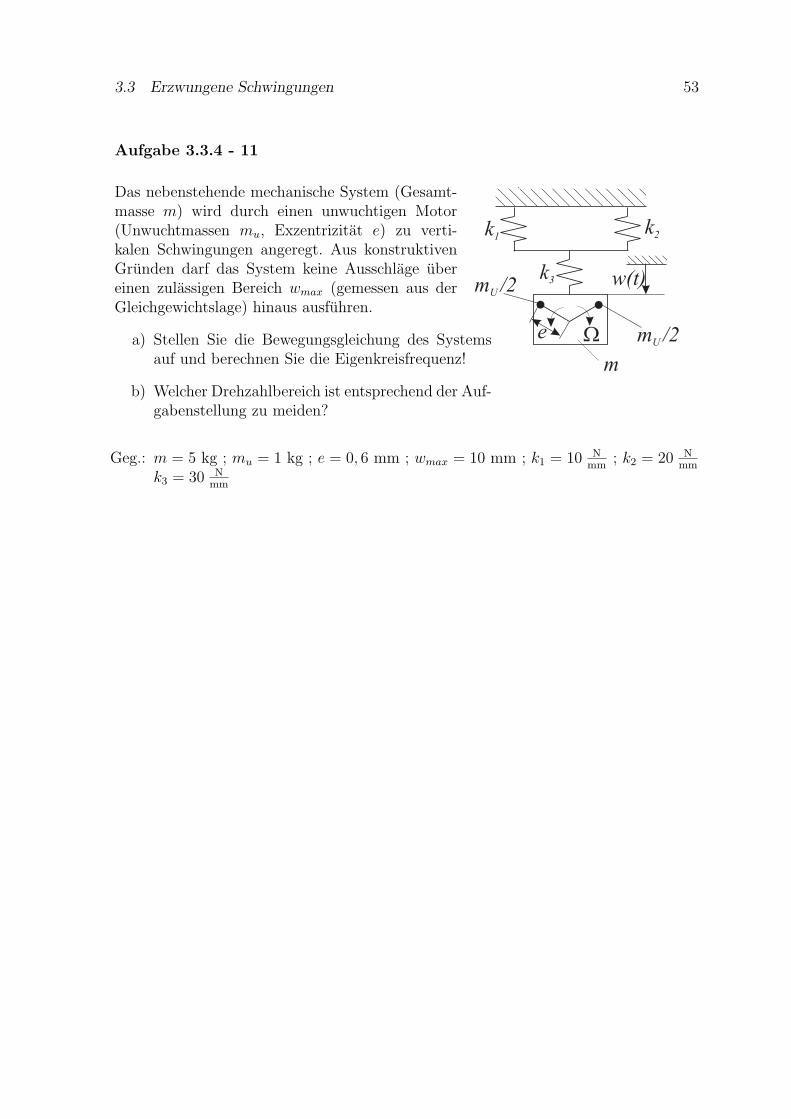
Aufgabe 3.3.4 - 11
k1k2
k3 w(t)
m /2U
m /2U
m
e W
Das nebenstehende mechanische System (Gesamt-masse m) wird durch einen unwuchtigen Motor(Unwuchtmassen mu, Exzentrizitat e) zu verti-kalen Schwingungen angeregt. Aus konstruktivenGrunden darf das System keine Ausschlage ubereinen zulassigen Bereich wmax (gemessen aus derGleichgewichtslage) hinaus ausfuhren.
a) Stellen Sie die Bewegungsgleichung des Systemsauf und berechnen Sie die Eigenkreisfrequenz!
b) Welcher Drehzahlbereich ist entsprechend der Auf-gabenstellung zu meiden?
Geg.: m = 5 kg ; mu = 1 kg ; e = 0, 6 mm ; wmax = 10 mm ; k1 = 10 Nmm
; k2 = 20 Nmm
k3 = 30 Nmm
54 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
3.3.5 Periodische Anregung
Aufgabe 3.3.5 - 1
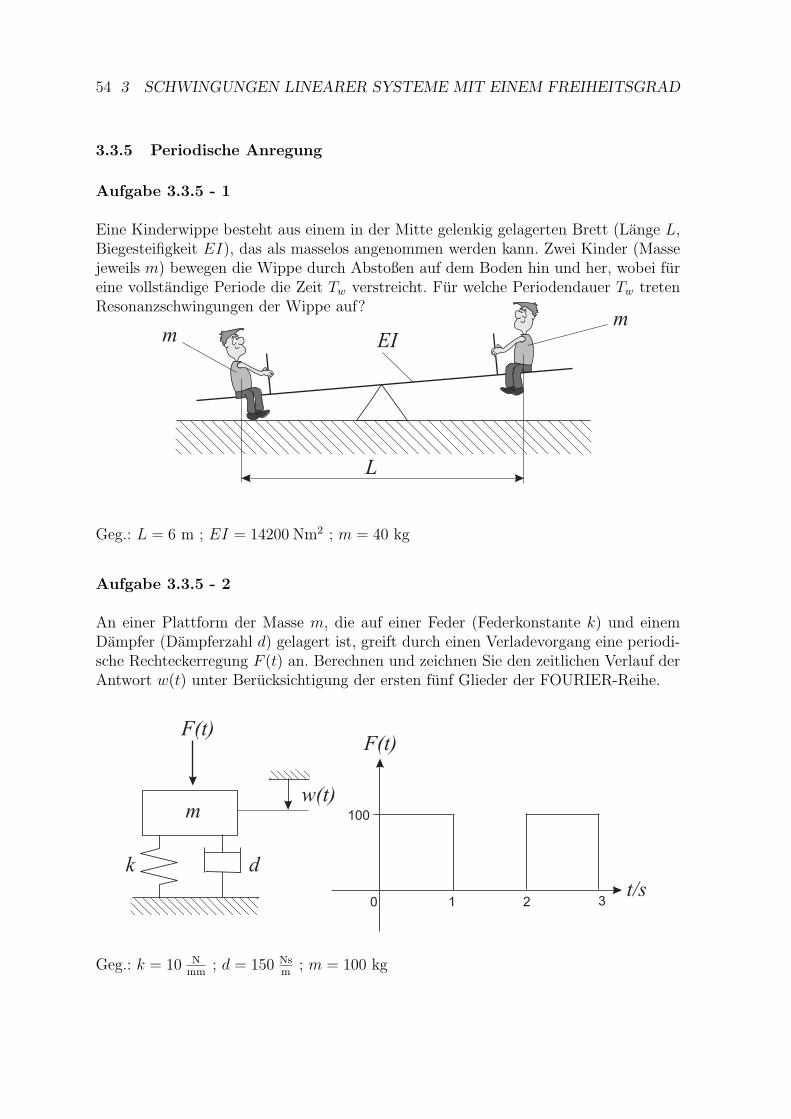
Eine Kinderwippe besteht aus einem in der Mitte gelenkig gelagerten Brett (Lange L,Biegesteifigkeit EI), das als masselos angenommen werden kann. Zwei Kinder (Massejeweils m) bewegen die Wippe durch Abstoßen auf dem Boden hin und her, wobei fureine vollstandige Periode die Zeit Tw verstreicht. Fur welche Periodendauer Tw tretenResonanzschwingungen der Wippe auf?
mm
L
EI
Geg.: L = 6 m ; EI = 14200 Nm2 ; m = 40 kg
Aufgabe 3.3.5 - 2
An einer Plattform der Masse m, die auf einer Feder (Federkonstante k) und einemDampfer (Dampferzahl d) gelagert ist, greift durch einen Verladevorgang eine periodi-sche Rechteckerregung F (t) an. Berechnen und zeichnen Sie den zeitlichen Verlauf derAntwort w(t) unter Berucksichtigung der ersten funf Glieder der FOURIER-Reihe.
m
k d
w(t)
F(t)
t/s0 1 2 3
100
F(t)
Geg.: k = 10 Nmm
; d = 150 Nsm
; m = 100 kg
3.3 Erzwungene Schwingungen 55
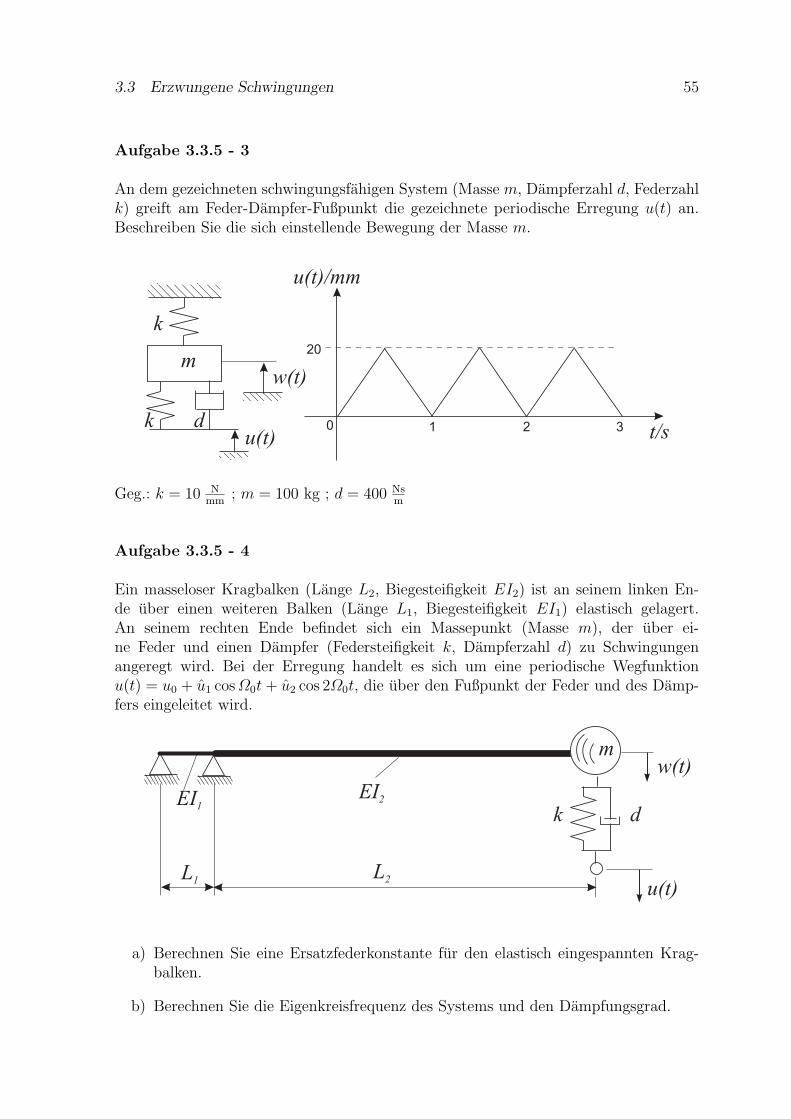
Aufgabe 3.3.5 - 3
An dem gezeichneten schwingungsfahigen System (Masse m, Dampferzahl d, Federzahlk) greift am Feder-Dampfer-Fußpunkt die gezeichnete periodische Erregung u(t) an.Beschreiben Sie die sich einstellende Bewegung der Masse m.
u(t)/mm
t/s0
20
2 31
k
m
k du(t)
w(t)
Geg.: k = 10 Nmm
; m = 100 kg ; d = 400 Nsm
Aufgabe 3.3.5 - 4
Ein masseloser Kragbalken (Lange L2, Biegesteifigkeit EI2) ist an seinem linken En-de uber einen weiteren Balken (Lange L1, Biegesteifigkeit EI1) elastisch gelagert.An seinem rechten Ende befindet sich ein Massepunkt (Masse m), der uber ei-ne Feder und einen Dampfer (Federsteifigkeit k, Dampferzahl d) zu Schwingungenangeregt wird. Bei der Erregung handelt es sich um eine periodische Wegfunktionu(t) = u0 + u1 cosΩ0t+ u2 cos 2Ω0t, die uber den Fußpunkt der Feder und des Damp-fers eingeleitet wird.
w(t)
u(t)
k d
L2L1
m
EI2EI1
a) Berechnen Sie eine Ersatzfederkonstante fur den elastisch eingespannten Krag-balken.
b) Berechnen Sie die Eigenkreisfrequenz des Systems und den Dampfungsgrad.

56 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
c) Berechnen Sie die Resonanzstellen fur die gegebene Anregung.
d) Geben Sie die erzwungene Schwingungsantwort an und berechnen Sie alle dazunotigen Großen.
Geg.: m = 5 kg ; k = 10 Nmm
; d = 200 Nsm
; Ω0 = 35 1s
; EI1 = 10 · 107 Nmm2
EI2 = 6 · 1011 Nmm2 ; L1 = 30 mm ; L2 = 1000 mm ; u0 = 5 mm
u1 = 3 mm ; u2 = 2 mm
Aufgabe 3.3.5 - 5
m
k2
k1
d
u
u(x)
^
lx
v
Gegeben ist ein Massepunkt (Massem), der uber eine Feder (Federzahl k2)und einen Dampfer (Dampferzahl d)wie dargestellt durch ein horizontal ver-schiebliches Lager an die Umgebungangebunden ist. Oben an der Masse be-findet sich eine Feder (Federzahl k1),deren Ende in einer Fuhrung lauft. Beider Fuhrungsbahn handelt es sich umeinen dreieckigen Verlauf mit der Pe-riodendauer λ = 1 cm und einer Am-plitude u = 5 mm. Das gesamte Sy-stem bewegt sich mit konstanter Ge-schwindigkeit v in horizontaler Rich-tung. Dabei bewegt sich der Federfuß-punkt gemaß der Fuhrungsbahn aufund nieder.
a) Ermitteln Sie die Erregerfunktion u(t) als Funktion der Zeit. Entwickeln Sieanschließend die Erregerfunktion in eine FOURIER-Reihe und geben Sie dieFOURIER-Koeffizienten an.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
c) Geben Sie die erzwungene Schwingung der Masse m an und berechnen Sie alleGroßen der dritten von Null verschiedenen Harmonischen.
Geg.: u = 5 mm ; λ = 1 cm ; v = 10 ms
; k1 = 1/2 k2 ; k2 = 100 Nmm
; d = 100 Nsm
m = 5 kg
3.3 Erzwungene Schwingungen 57
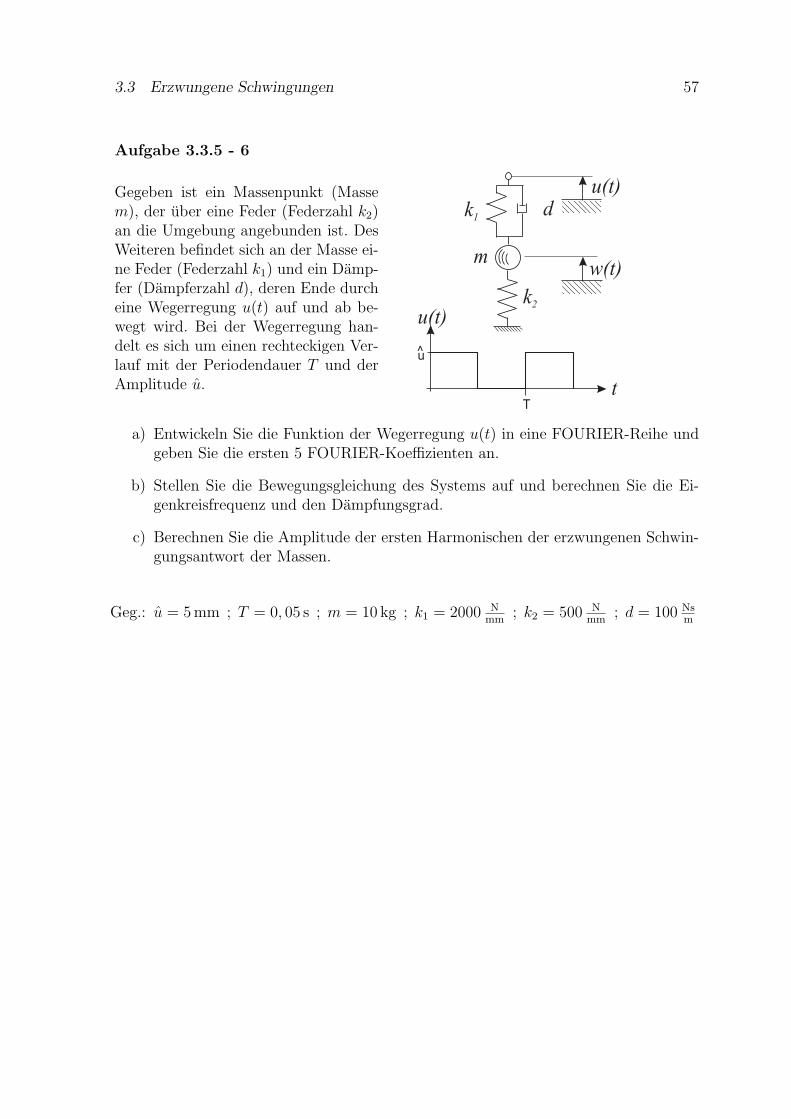
Aufgabe 3.3.5 - 6
u(t)
m
k2
k1d
T
u
u(t)
w(t)
^
t
Gegeben ist ein Massenpunkt (Massem), der uber eine Feder (Federzahl k2)an die Umgebung angebunden ist. DesWeiteren befindet sich an der Masse ei-ne Feder (Federzahl k1) und ein Damp-fer (Dampferzahl d), deren Ende durcheine Wegerregung u(t) auf und ab be-wegt wird. Bei der Wegerregung han-delt es sich um einen rechteckigen Ver-lauf mit der Periodendauer T und derAmplitude u.
a) Entwickeln Sie die Funktion der Wegerregung u(t) in eine FOURIER-Reihe undgeben Sie die ersten 5 FOURIER-Koeffizienten an.
b) Stellen Sie die Bewegungsgleichung des Systems auf und berechnen Sie die Ei-genkreisfrequenz und den Dampfungsgrad.
c) Berechnen Sie die Amplitude der ersten Harmonischen der erzwungenen Schwin-gungsantwort der Massen.
Geg.: u = 5 mm ; T = 0, 05 s ; m = 10 kg ; k1 = 2000 Nmm
; k2 = 500 Nmm
; d = 100 Nsm
58 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
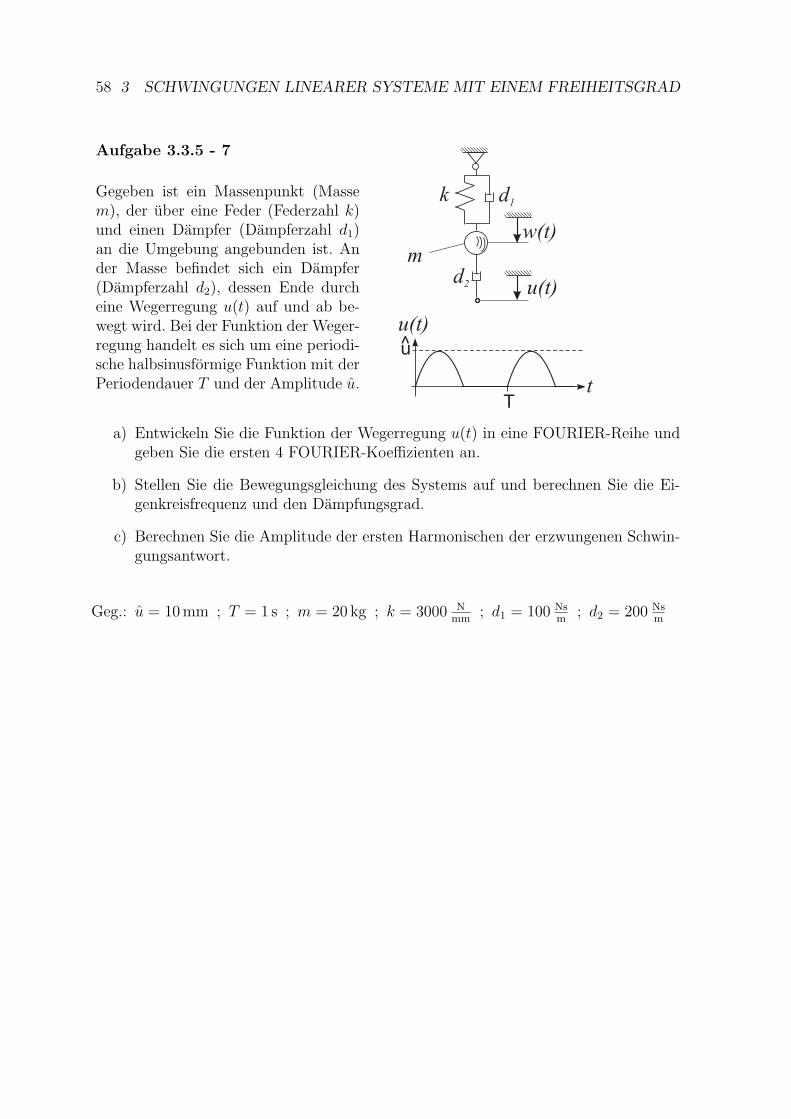
Aufgabe 3.3.5 - 7
k d1
d2
m
t
u(t)
w(t)
u(t)
T
u
Gegeben ist ein Massenpunkt (Massem), der uber eine Feder (Federzahl k)und einen Dampfer (Dampferzahl d1)an die Umgebung angebunden ist. Ander Masse befindet sich ein Dampfer(Dampferzahl d2), dessen Ende durcheine Wegerregung u(t) auf und ab be-wegt wird. Bei der Funktion der Weger-regung handelt es sich um eine periodi-sche halbsinusformige Funktion mit derPeriodendauer T und der Amplitude u.
a) Entwickeln Sie die Funktion der Wegerregung u(t) in eine FOURIER-Reihe undgeben Sie die ersten 4 FOURIER-Koeffizienten an.
b) Stellen Sie die Bewegungsgleichung des Systems auf und berechnen Sie die Ei-genkreisfrequenz und den Dampfungsgrad.
c) Berechnen Sie die Amplitude der ersten Harmonischen der erzwungenen Schwin-gungsantwort.
Geg.: u = 10 mm ; T = 1 s ; m = 20 kg ; k = 3000 Nmm
; d1 = 100 Nsm
; d2 = 200 Nsm
3.3 Erzwungene Schwingungen 59
3.3.6 Nichtperiodische Anregung
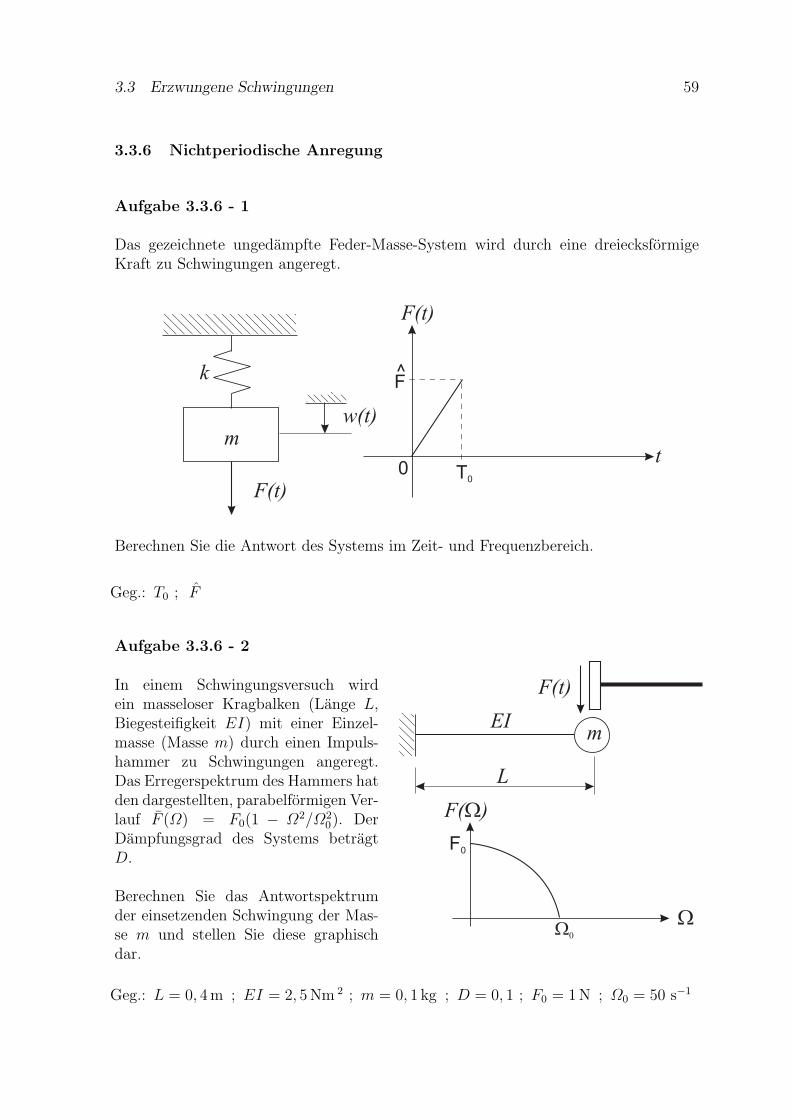
Aufgabe 3.3.6 - 1
Das gezeichnete ungedampfte Feder-Masse-System wird durch eine dreiecksformigeKraft zu Schwingungen angeregt.
m
k
w(t)
F(t)
t0 T0
F^
F(t)
Berechnen Sie die Antwort des Systems im Zeit- und Frequenzbereich.
Geg.: T0 ; F
Aufgabe 3.3.6 - 2
L
EIm
F( )W
W
F0
W0
F(t)In einem Schwingungsversuch wirdein masseloser Kragbalken (Lange L,Biegesteifigkeit EI) mit einer Einzel-masse (Masse m) durch einen Impuls-hammer zu Schwingungen angeregt.Das Erregerspektrum des Hammers hatden dargestellten, parabelformigen Ver-lauf F (Ω) = F0(1 − Ω2/Ω2
0). DerDampfungsgrad des Systems betragtD.
Berechnen Sie das Antwortspektrumder einsetzenden Schwingung der Mas-se m und stellen Sie diese graphischdar.
Geg.: L = 0, 4 m ; EI = 2, 5 Nm 2 ; m = 0, 1 kg ; D = 0, 1 ; F0 = 1 N ; Ω0 = 50 s−1
60 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
3.3.7 Technische Anwendungen
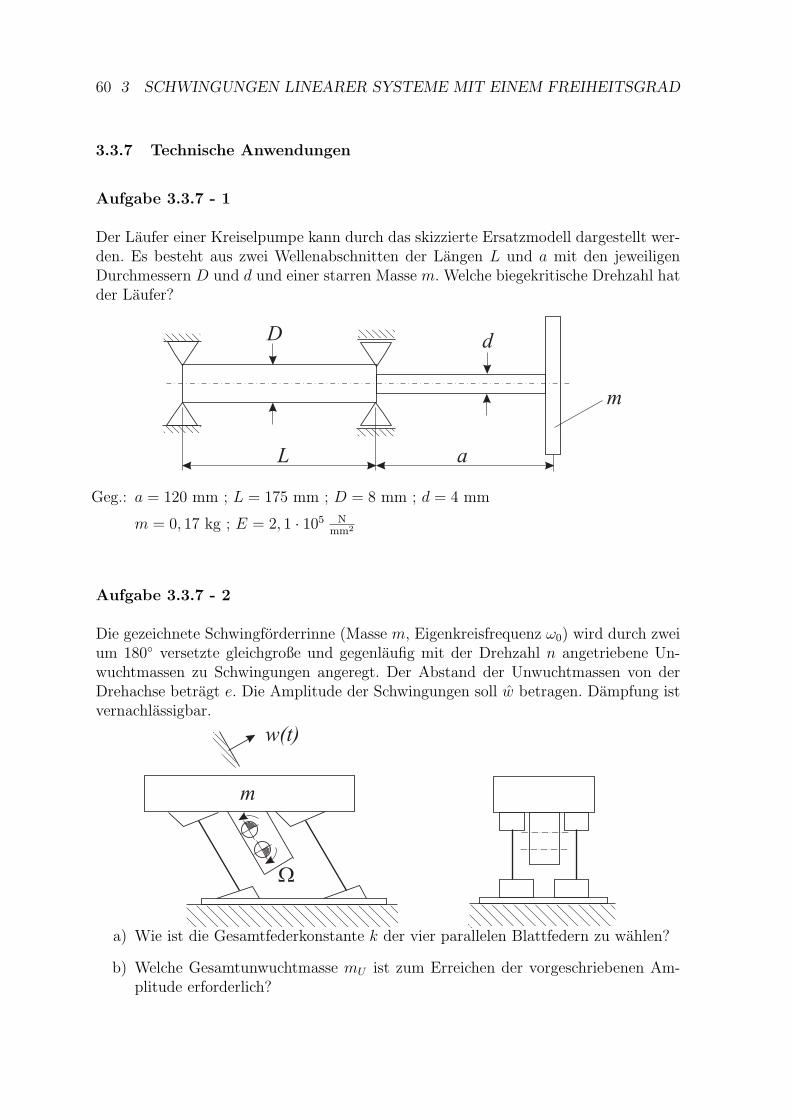
Aufgabe 3.3.7 - 1
Der Laufer einer Kreiselpumpe kann durch das skizzierte Ersatzmodell dargestellt wer-den. Es besteht aus zwei Wellenabschnitten der Langen L und a mit den jeweiligenDurchmessern D und d und einer starren Masse m. Welche biegekritische Drehzahl hatder Laufer?
L a
m
dD
Geg.: a = 120 mm ; L = 175 mm ; D = 8 mm ; d = 4 mm
m = 0, 17 kg ; E = 2, 1 · 105 Nmm2
Aufgabe 3.3.7 - 2
Die gezeichnete Schwingforderrinne (Masse m, Eigenkreisfrequenz ω0) wird durch zweium 180 versetzte gleichgroße und gegenlaufig mit der Drehzahl n angetriebene Un-wuchtmassen zu Schwingungen angeregt. Der Abstand der Unwuchtmassen von derDrehachse betragt e. Die Amplitude der Schwingungen soll w betragen. Dampfung istvernachlassigbar.
m
W
w(t)
a) Wie ist die Gesamtfederkonstante k der vier parallelen Blattfedern zu wahlen?
b) Welche Gesamtunwuchtmasse mU ist zum Erreichen der vorgeschriebenen Am-plitude erforderlich?
3.3 Erzwungene Schwingungen 61
Geg.: m = 90 kg ; n = 960 min−1; e = 30 mm ; w = 2 mm ; ω0 = 30 s−1
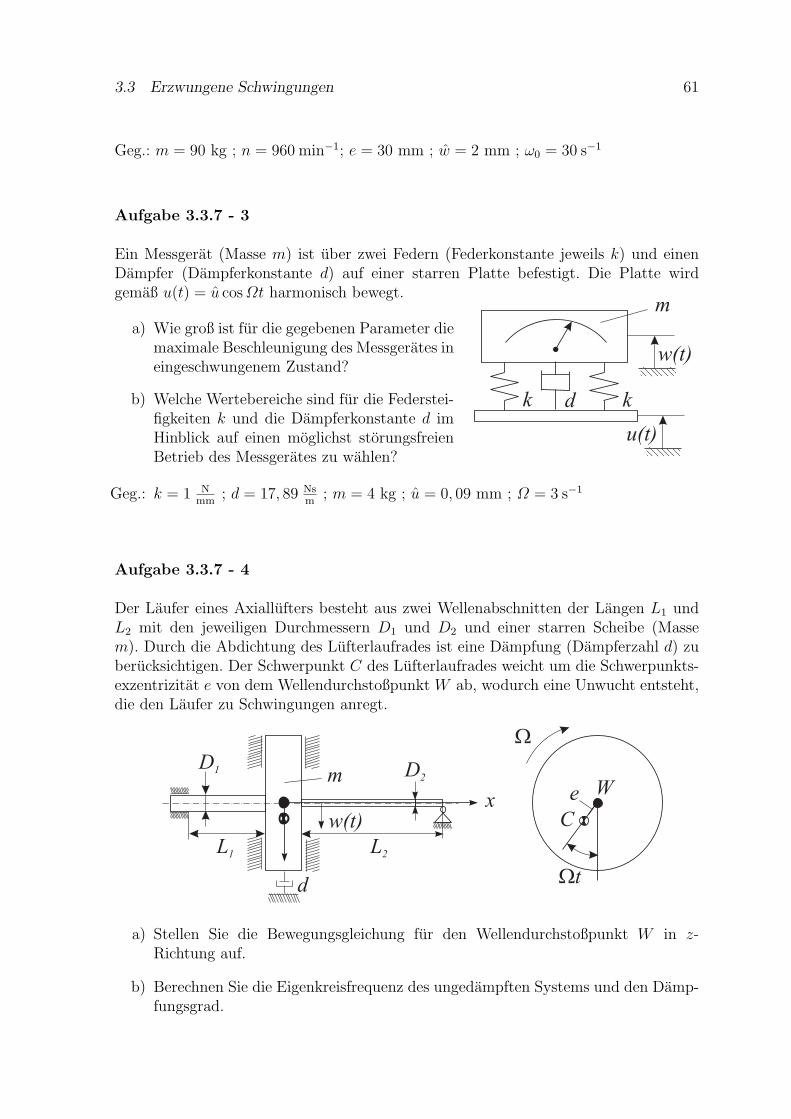
Aufgabe 3.3.7 - 3
Ein Messgerat (Masse m) ist uber zwei Federn (Federkonstante jeweils k) und einenDampfer (Dampferkonstante d) auf einer starren Platte befestigt. Die Platte wirdgemaß u(t) = u cosΩt harmonisch bewegt.
k kd
m
w(t)
u(t)
a) Wie groß ist fur die gegebenen Parameter diemaximale Beschleunigung des Messgerates ineingeschwungenem Zustand?
b) Welche Wertebereiche sind fur die Federstei-figkeiten k und die Dampferkonstante d imHinblick auf einen moglichst storungsfreienBetrieb des Messgerates zu wahlen?
Geg.: k = 1 Nmm
; d = 17, 89 Nsm
; m = 4 kg ; u = 0, 09 mm ; Ω = 3 s−1
Aufgabe 3.3.7 - 4
Der Laufer eines Axiallufters besteht aus zwei Wellenabschnitten der Langen L1 undL2 mit den jeweiligen Durchmessern D1 und D2 und einer starren Scheibe (Massem). Durch die Abdichtung des Lufterlaufrades ist eine Dampfung (Dampferzahl d) zuberucksichtigen. Der Schwerpunkt C des Lufterlaufrades weicht um die Schwerpunkts-exzentrizitat e von dem Wellendurchstoßpunkt W ab, wodurch eine Unwucht entsteht,die den Laufer zu Schwingungen anregt.
D1
L1 L2
d
m D2
xW
C
e
W
Wt
w(t)
a) Stellen Sie die Bewegungsgleichung fur den Wellendurchstoßpunkt W in z-Richtung auf.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
62 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
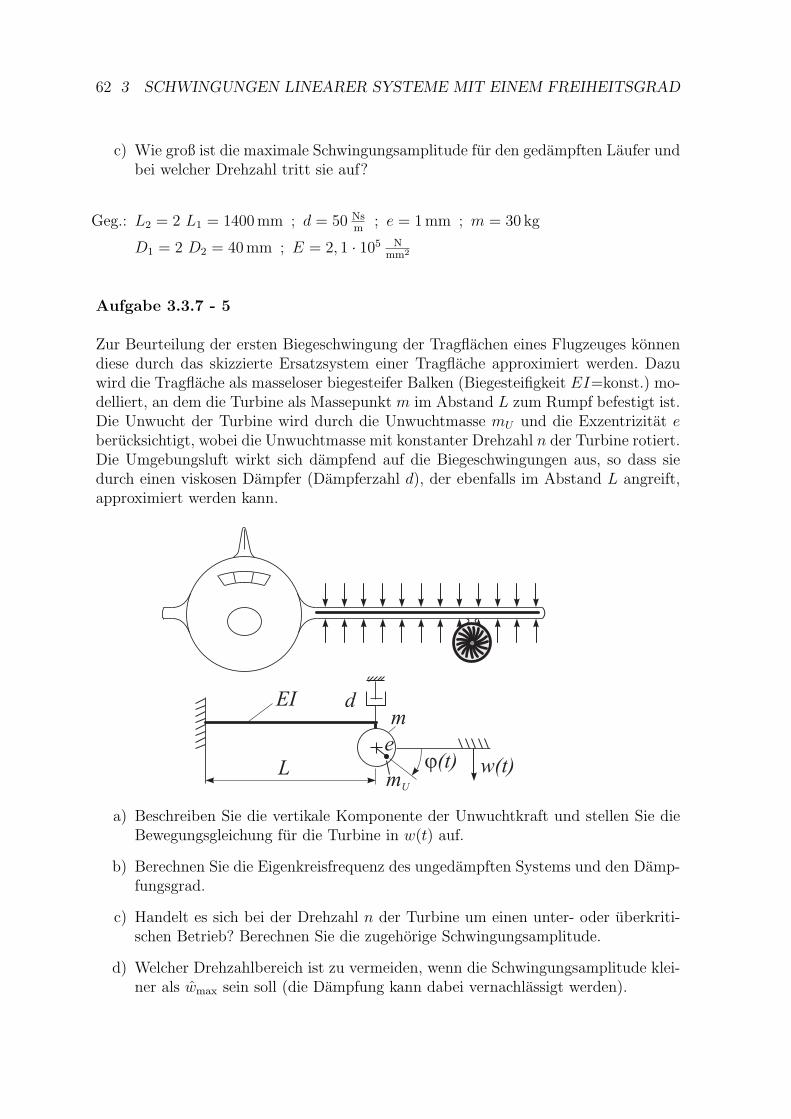
c) Wie groß ist die maximale Schwingungsamplitude fur den gedampften Laufer undbei welcher Drehzahl tritt sie auf?
Geg.: L2 = 2 L1 = 1400 mm ; d = 50 Nsm
; e = 1 mm ; m = 30 kg
D1 = 2 D2 = 40 mm ; E = 2, 1 · 105 Nmm2
Aufgabe 3.3.7 - 5
Zur Beurteilung der ersten Biegeschwingung der Tragflachen eines Flugzeuges konnendiese durch das skizzierte Ersatzsystem einer Tragflache approximiert werden. Dazuwird die Tragflache als masseloser biegesteifer Balken (Biegesteifigkeit EI=konst.) mo-delliert, an dem die Turbine als Massepunkt m im Abstand L zum Rumpf befestigt ist.Die Unwucht der Turbine wird durch die Unwuchtmasse mU und die Exzentrizitat eberucksichtigt, wobei die Unwuchtmasse mit konstanter Drehzahl n der Turbine rotiert.Die Umgebungsluft wirkt sich dampfend auf die Biegeschwingungen aus, so dass siedurch einen viskosen Dampfer (Dampferzahl d), der ebenfalls im Abstand L angreift,approximiert werden kann.
w(t)e
m
mU
L
dEI
j(t)
a) Beschreiben Sie die vertikale Komponente der Unwuchtkraft und stellen Sie dieBewegungsgleichung fur die Turbine in w(t) auf.
b) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad.
c) Handelt es sich bei der Drehzahl n der Turbine um einen unter- oder uberkriti-schen Betrieb? Berechnen Sie die zugehorige Schwingungsamplitude.
d) Welcher Drehzahlbereich ist zu vermeiden, wenn die Schwingungsamplitude klei-ner als wmax sein soll (die Dampfung kann dabei vernachlassigt werden).
3.3 Erzwungene Schwingungen 63
Geg.: d = 100 kNsm
; wmax = 1 mm ; n = 5000 1min
; L = 4000 mm
E = 2, 1 · 105 Nmm2 ; I = 9 · 109 mm4 ; m = 2000 kg ; mU = 3 kg
e = 2 mm
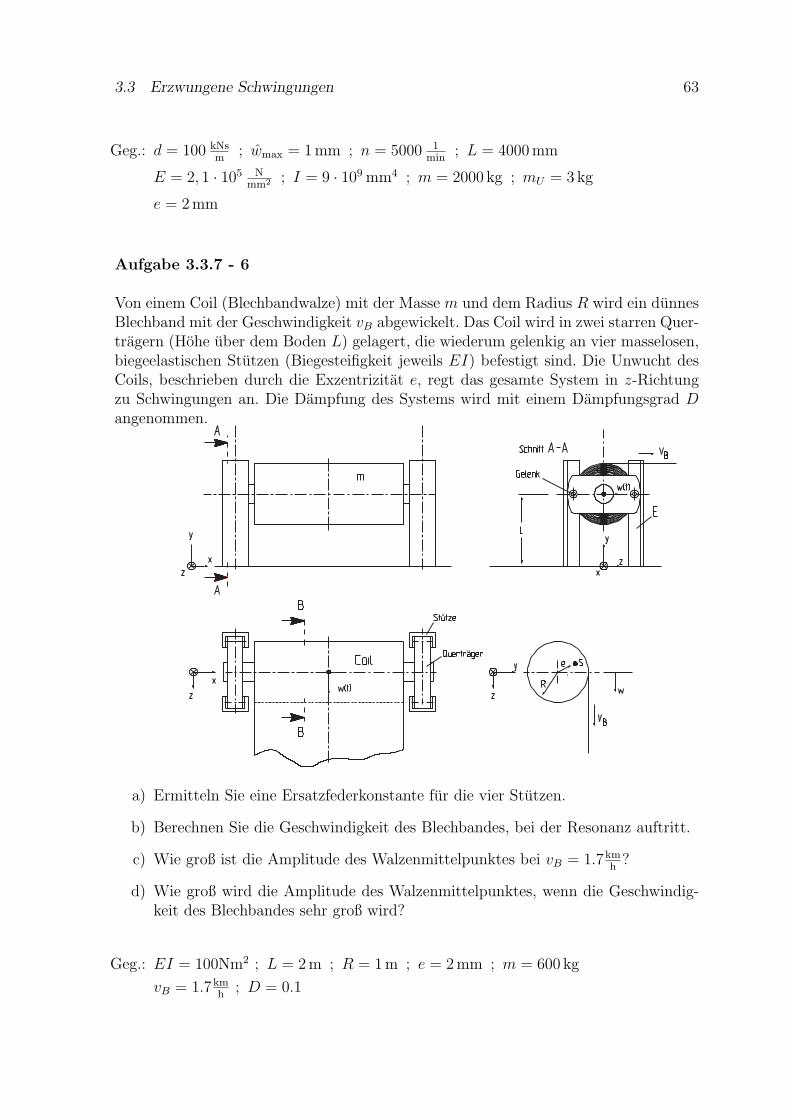
Aufgabe 3.3.7 - 6
Von einem Coil (Blechbandwalze) mit der Masse m und dem Radius R wird ein dunnesBlechband mit der Geschwindigkeit vB abgewickelt. Das Coil wird in zwei starren Quer-tragern (Hohe uber dem Boden L) gelagert, die wiederum gelenkig an vier masselosen,biegeelastischen Stutzen (Biegesteifigkeit jeweils EI) befestigt sind. Die Unwucht desCoils, beschrieben durch die Exzentrizitat e, regt das gesamte System in z-Richtungzu Schwingungen an. Die Dampfung des Systems wird mit einem Dampfungsgrad Dangenommen.
a) Ermitteln Sie eine Ersatzfederkonstante fur die vier Stutzen.
b) Berechnen Sie die Geschwindigkeit des Blechbandes, bei der Resonanz auftritt.
c) Wie groß ist die Amplitude des Walzenmittelpunktes bei vB = 1.7kmh
?
d) Wie groß wird die Amplitude des Walzenmittelpunktes, wenn die Geschwindig-keit des Blechbandes sehr groß wird?
Geg.: EI = 100Nm2 ; L = 2 m ; R = 1 m ; e = 2 mm ; m = 600 kg
vB = 1.7kmh
; D = 0.1
64 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
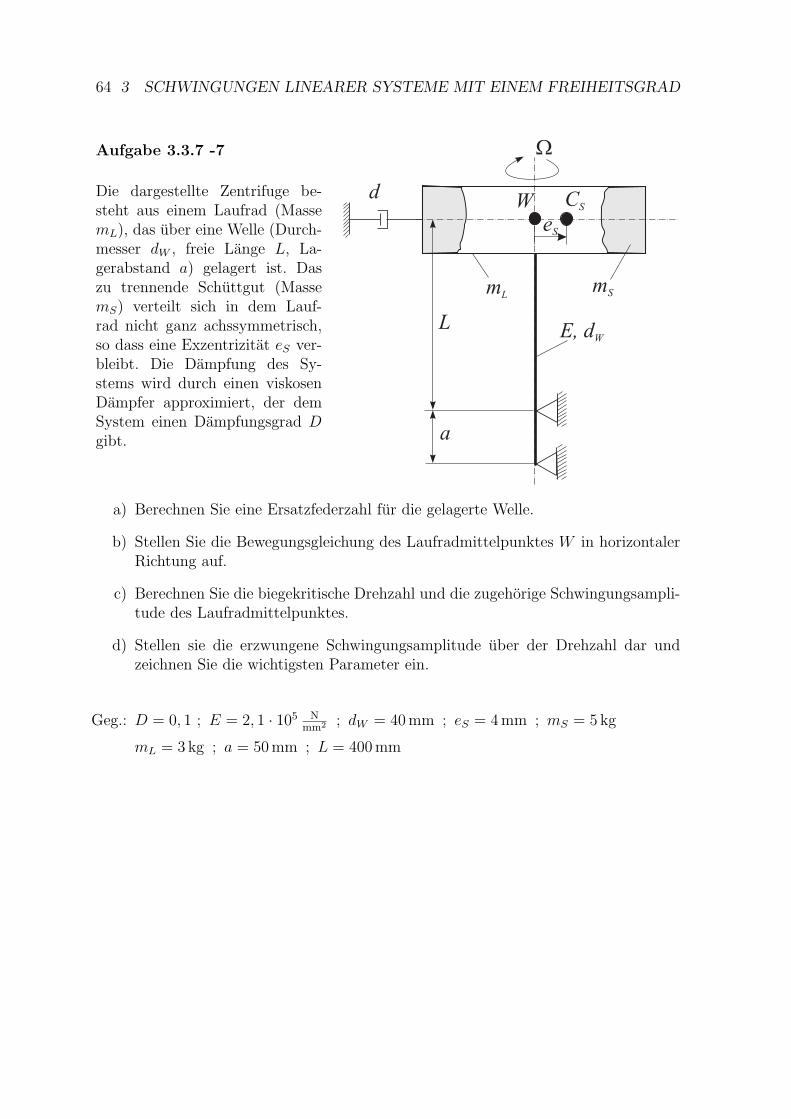
Aufgabe 3.3.7 -7
d
W
mSmL
W CS
eS
L
a
E, dW
Die dargestellte Zentrifuge be-steht aus einem Laufrad (MassemL), das uber eine Welle (Durch-messer dW , freie Lange L, La-gerabstand a) gelagert ist. Daszu trennende Schuttgut (MassemS) verteilt sich in dem Lauf-rad nicht ganz achssymmetrisch,so dass eine Exzentrizitat eS ver-bleibt. Die Dampfung des Sy-stems wird durch einen viskosenDampfer approximiert, der demSystem einen Dampfungsgrad Dgibt.
a) Berechnen Sie eine Ersatzfederzahl fur die gelagerte Welle.
b) Stellen Sie die Bewegungsgleichung des Laufradmittelpunktes W in horizontalerRichtung auf.
c) Berechnen Sie die biegekritische Drehzahl und die zugehorige Schwingungsampli-tude des Laufradmittelpunktes.
d) Stellen sie die erzwungene Schwingungsamplitude uber der Drehzahl dar undzeichnen Sie die wichtigsten Parameter ein.
Geg.: D = 0, 1 ; E = 2, 1 · 105 Nmm2 ; dW = 40 mm ; eS = 4 mm ; mS = 5 kg
mL = 3 kg ; a = 50 mm ; L = 400 mm
3.3 Erzwungene Schwingungen 65
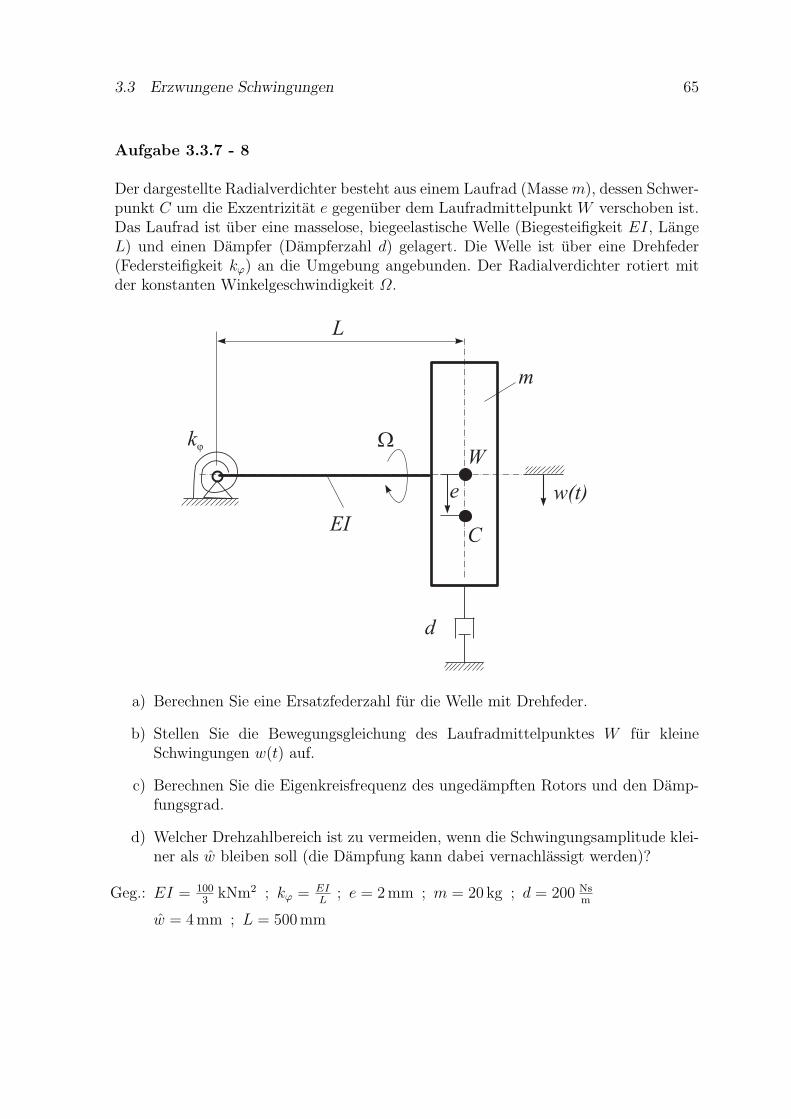
Aufgabe 3.3.7 - 8
Der dargestellte Radialverdichter besteht aus einem Laufrad (Massem), dessen Schwer-punkt C um die Exzentrizitat e gegenuber dem Laufradmittelpunkt W verschoben ist.Das Laufrad ist uber eine masselose, biegeelastische Welle (Biegesteifigkeit EI, LangeL) und einen Dampfer (Dampferzahl d) gelagert. Die Welle ist uber eine Drehfeder(Federsteifigkeit kϕ) an die Umgebung angebunden. Der Radialverdichter rotiert mitder konstanten Winkelgeschwindigkeit Ω.
W
w(t)
d
m
W
C
e
L
EI
kj
a) Berechnen Sie eine Ersatzfederzahl fur die Welle mit Drehfeder.
b) Stellen Sie die Bewegungsgleichung des Laufradmittelpunktes W fur kleineSchwingungen w(t) auf.
c) Berechnen Sie die Eigenkreisfrequenz des ungedampften Rotors und den Damp-fungsgrad.
d) Welcher Drehzahlbereich ist zu vermeiden, wenn die Schwingungsamplitude klei-ner als w bleiben soll (die Dampfung kann dabei vernachlassigt werden)?
Geg.: EI = 1003
kNm2 ; kϕ = EIL
; e = 2 mm ; m = 20 kg ; d = 200 Nsm
w = 4 mm ; L = 500 mm
66 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
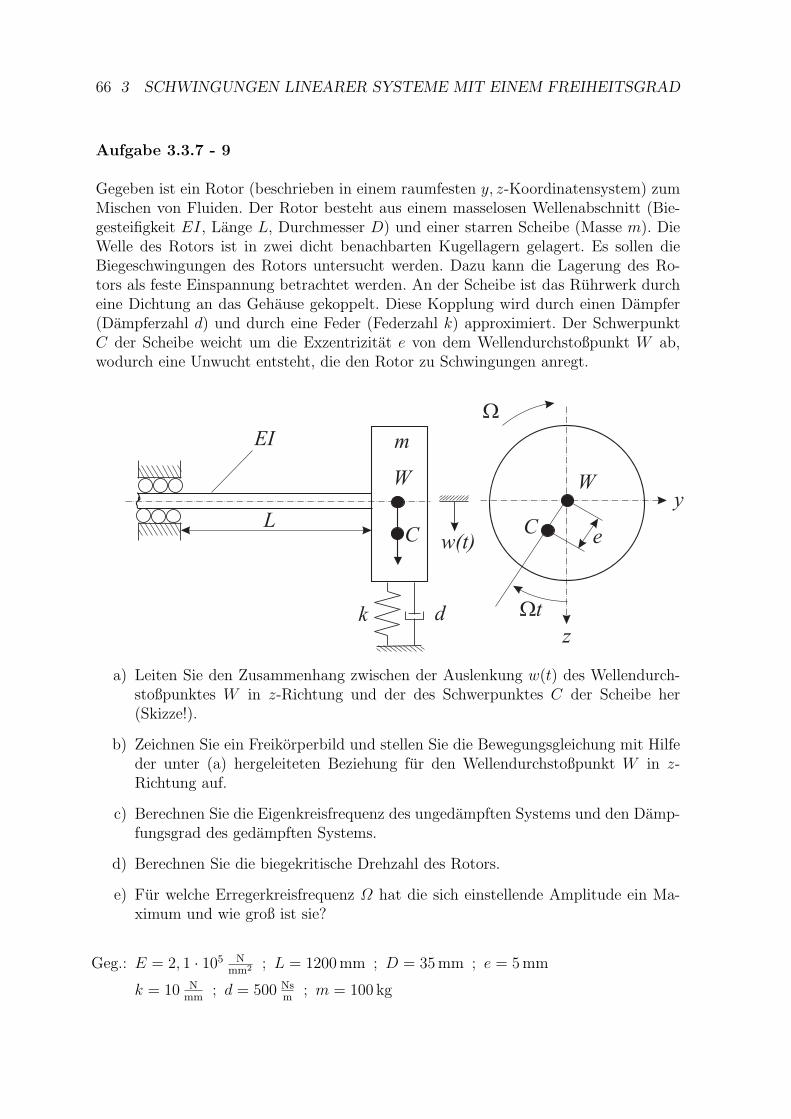
Aufgabe 3.3.7 - 9
Gegeben ist ein Rotor (beschrieben in einem raumfesten y, z-Koordinatensystem) zumMischen von Fluiden. Der Rotor besteht aus einem masselosen Wellenabschnitt (Bie-gesteifigkeit EI, Lange L, Durchmesser D) und einer starren Scheibe (Masse m). DieWelle des Rotors ist in zwei dicht benachbarten Kugellagern gelagert. Es sollen dieBiegeschwingungen des Rotors untersucht werden. Dazu kann die Lagerung des Ro-tors als feste Einspannung betrachtet werden. An der Scheibe ist das Ruhrwerk durcheine Dichtung an das Gehause gekoppelt. Diese Kopplung wird durch einen Dampfer(Dampferzahl d) und durch eine Feder (Federzahl k) approximiert. Der SchwerpunktC der Scheibe weicht um die Exzentrizitat e von dem Wellendurchstoßpunkt W ab,wodurch eine Unwucht entsteht, die den Rotor zu Schwingungen anregt.
L
EI
k d
m
W
C w(t)C
W
e
Wt
W
z
y
a) Leiten Sie den Zusammenhang zwischen der Auslenkung w(t) des Wellendurch-stoßpunktes W in z-Richtung und der des Schwerpunktes C der Scheibe her(Skizze!).
b) Zeichnen Sie ein Freikorperbild und stellen Sie die Bewegungsgleichung mit Hilfeder unter (a) hergeleiteten Beziehung fur den Wellendurchstoßpunkt W in z-Richtung auf.
c) Berechnen Sie die Eigenkreisfrequenz des ungedampften Systems und den Damp-fungsgrad des gedampften Systems.
d) Berechnen Sie die biegekritische Drehzahl des Rotors.
e) Fur welche Erregerkreisfrequenz Ω hat die sich einstellende Amplitude ein Ma-ximum und wie groß ist sie?
Geg.: E = 2, 1 · 105 Nmm2 ; L = 1200 mm ; D = 35 mm ; e = 5 mm
k = 10 Nmm
; d = 500 Nsm
; m = 100 kg
3.3 Erzwungene Schwingungen 67
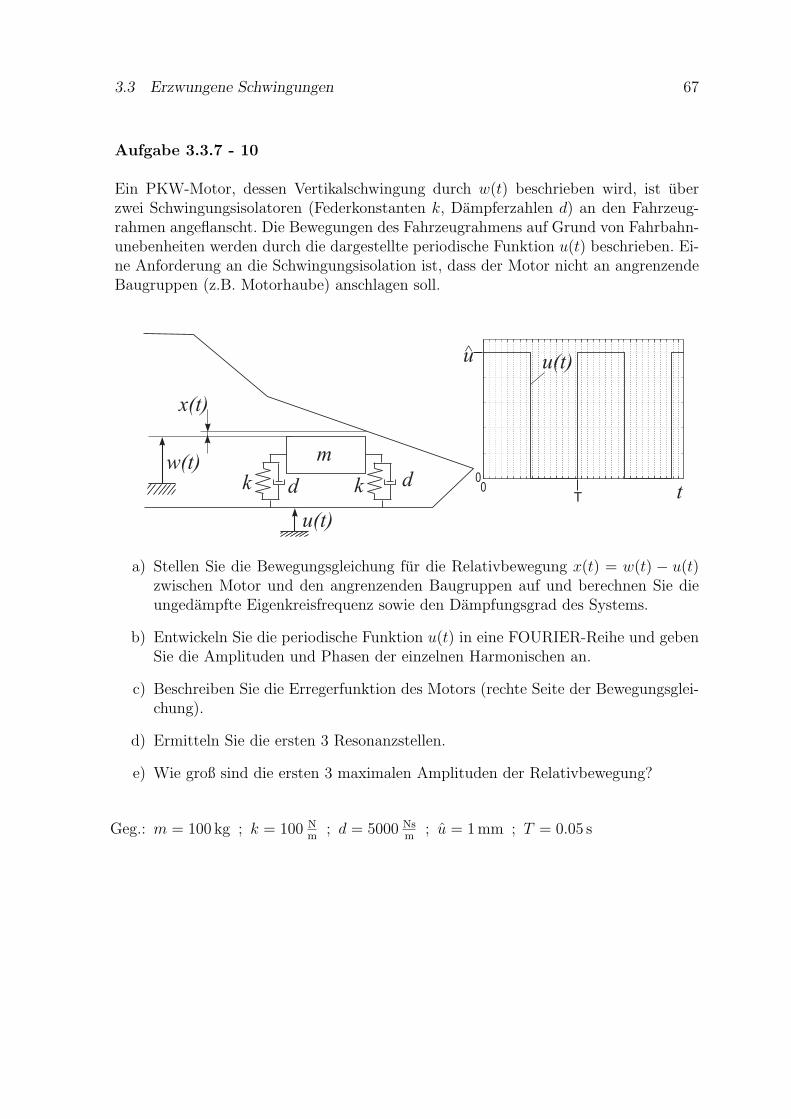
Aufgabe 3.3.7 - 10
Ein PKW-Motor, dessen Vertikalschwingung durch w(t) beschrieben wird, ist uberzwei Schwingungsisolatoren (Federkonstanten k, Dampferzahlen d) an den Fahrzeug-rahmen angeflanscht. Die Bewegungen des Fahrzeugrahmens auf Grund von Fahrbahn-unebenheiten werden durch die dargestellte periodische Funktion u(t) beschrieben. Ei-ne Anforderung an die Schwingungsisolation ist, dass der Motor nicht an angrenzendeBaugruppen (z.B. Motorhaube) anschlagen soll.
w(t)
u(t)
x(t)
k d k d
m
00
u u(t)
tT
a) Stellen Sie die Bewegungsgleichung fur die Relativbewegung x(t) = w(t) − u(t)zwischen Motor und den angrenzenden Baugruppen auf und berechnen Sie dieungedampfte Eigenkreisfrequenz sowie den Dampfungsgrad des Systems.
b) Entwickeln Sie die periodische Funktion u(t) in eine FOURIER-Reihe und gebenSie die Amplituden und Phasen der einzelnen Harmonischen an.
c) Beschreiben Sie die Erregerfunktion des Motors (rechte Seite der Bewegungsglei-chung).
d) Ermitteln Sie die ersten 3 Resonanzstellen.
e) Wie groß sind die ersten 3 maximalen Amplituden der Relativbewegung?
Geg.: m = 100 kg ; k = 100 Nm
; d = 5000 Nsm
; u = 1 mm ; T = 0.05 s
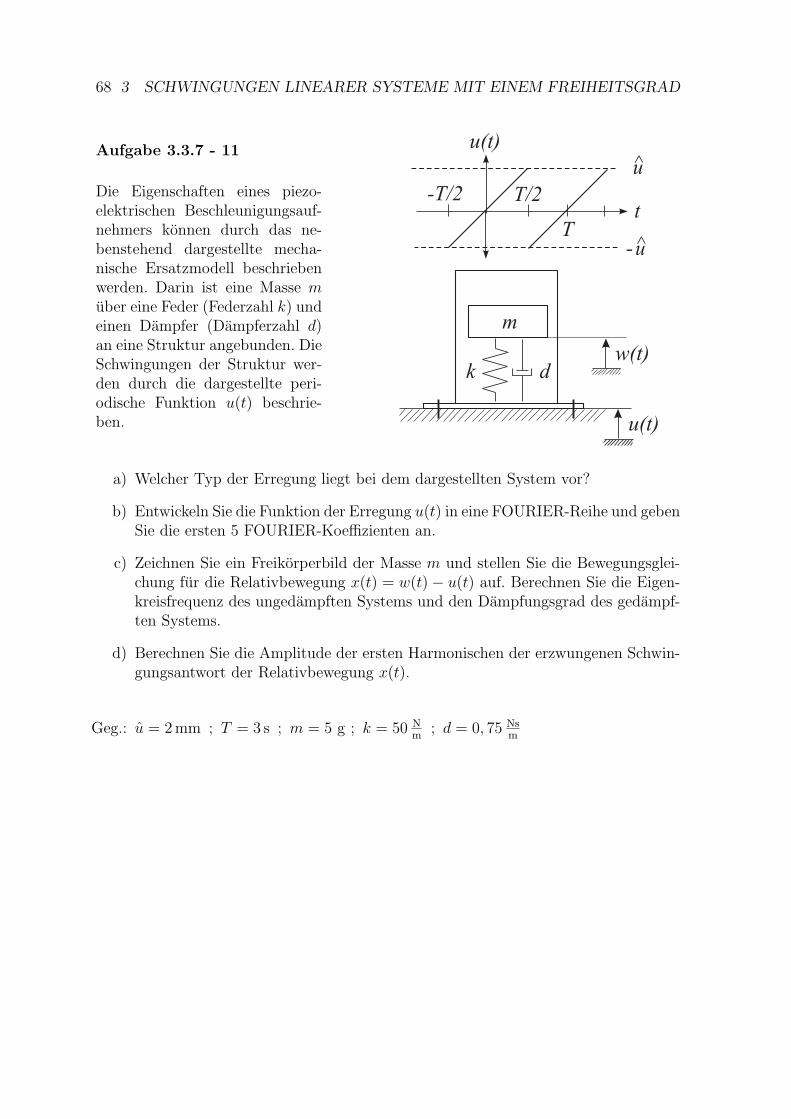
68 3 SCHWINGUNGEN LINEARER SYSTEME MIT EINEM FREIHEITSGRAD
Aufgabe 3.3.7 - 11
m
w(t)
u(t)
k d
u(t)
tT
T/2-T/2
u
u
^
^-
Die Eigenschaften eines piezo-elektrischen Beschleunigungsauf-nehmers konnen durch das ne-benstehend dargestellte mecha-nische Ersatzmodell beschriebenwerden. Darin ist eine Masse muber eine Feder (Federzahl k) undeinen Dampfer (Dampferzahl d)an eine Struktur angebunden. DieSchwingungen der Struktur wer-den durch die dargestellte peri-odische Funktion u(t) beschrie-ben.
a) Welcher Typ der Erregung liegt bei dem dargestellten System vor?
b) Entwickeln Sie die Funktion der Erregung u(t) in eine FOURIER-Reihe und gebenSie die ersten 5 FOURIER-Koeffizienten an.
c) Zeichnen Sie ein Freikorperbild der Masse m und stellen Sie die Bewegungsglei-chung fur die Relativbewegung x(t) = w(t) − u(t) auf. Berechnen Sie die Eigen-kreisfrequenz des ungedampften Systems und den Dampfungsgrad des gedampf-ten Systems.
d) Berechnen Sie die Amplitude der ersten Harmonischen der erzwungenen Schwin-gungsantwort der Relativbewegung x(t).
Geg.: u = 2 mm ; T = 3 s ; m = 5 g ; k = 50 Nm
; d = 0, 75 Nsm

69
4 Losungen
Aufgabe 1.1 - 1
a) qc = 4, 33 ; qs = 2, 5 ; ω = π 1s
b) f = 0, 5 1s
c) Ellipsengleichung:
q(t)
q(t)
t5
10
15
12 34 5°
5 sp.-1
.
q2(t)
q2+
q2(t)
q2 · ω2= 1
Aufgabe 1.1 - 2
a) q = 2 mm
b) T = 1 s
c)
q(t)
t
q
bw = 1
12s
T=1s

70 4 LOSUNGEN
Aufgabe 1.1 - 3
a) qC = q cos β = 0, 809 mm ; qS = q sin β = 0, 588 mm ; ω = 31, 42 1s
Aufgabe 1.2.1 - 1
a) ϑ = 0, 693 ; D ≈ 0, 11
b) ω0 = 31, 6 1s
c) ωDω = 0, 994
Aufgabe 1.2.1 - 2
a) ϑ = 0, 3567 ; D = 0, 0567
b) q(t3) =√
q(t1)q(t2) ≈ −8, 367mm/s
Aufgabe 1.2.1 - 3
a) q(t) = A · e−Dωt · ej(ωDt−β)
b) A = 11, 18 mm ; β = −26, 57
c) ωD = 1 1s
; D = 0, 707
Aufgabe 1.2.1 - 4
a) exponentiell gedampfte Schwingung
b) q = −Aω2 · e−Dωt[
(1 − 2D2) cos (ωDt− β) − 2D√
1 −D2 sin (ωDt − β)]
ϑ =2πD√1 −D2
=1
nln
qiqi+1
ϑ = 0, 0613 ; D = 0, 00975 ; ωD = 62, 8321
s; ω = 62, 835
1
s
c) q(t = 0) = −4, 054 mm
Aufgabe 1.2.1 - 5
D = 0, 009713

71
Aufgabe 1.2.2 - 1
a) D ≈ 0, 119 ; ω = 2πT
≈ 3, 14 1s
b) gD = 8, 75mm − 0, 375mm/s · t
c) tE = 23, 3 s
Aufgabe 1.3.1 - 1
a) m = 23
; b) ωT = 10π ≈ 31, 42 1s
c)
q
w/1s
1
2
3
9p 10p 11p
Aufgabe 1.3.1 - 2
a) amplitudenmodulierte Schwingung
b) q(t) = q0(1 −m cosωM t) cosωT t
q(t) = q0 cosωT t− q0m2 cos(ωT − ωM)t− q0m
2 cos(ωT + ωM)t
q0 = 20 mm ; m = 1 ; ωT = 500 1s
; ωM = 50 1s

72 4 LOSUNGEN
Aufgabe 1.3.1 - 3
a) amplitudenmodulierte Schwingung
b) q(t) = q0(1 −m cosωM t) cosωT t
q0 = 2 mm ; m = −2, 5 ; ωT = 17π2
1s
; ωM = 0, 5π 1s
c)
q/mm^
w/1s
2
2,5
8p 9p17p2
Aufgabe 1.3.2 - 1
a) m ≤ 1 b) m = 1
c) ωT : linearer Zuwachs
ωM : Frequenz der harmonischen Anderung
m ωTωM
: max.Schwankung um den Mittelwert
d) ωT = 9, 26 1s
; m = 0, 89
Aufgabe 1.3.3 - 1
a) Schwebung
b) q(t) = q(t) cos(ωT t− β(t))
q(t) =√
(q21 + q2
2 + 2q1q2 cos 2ωM t)
tan β(t) = q2 − q1q2 + q1
tanωM t
ωT = 500 1s
; ωM = 50 1s
; TM = 2π50 ≈ 0, 126 s
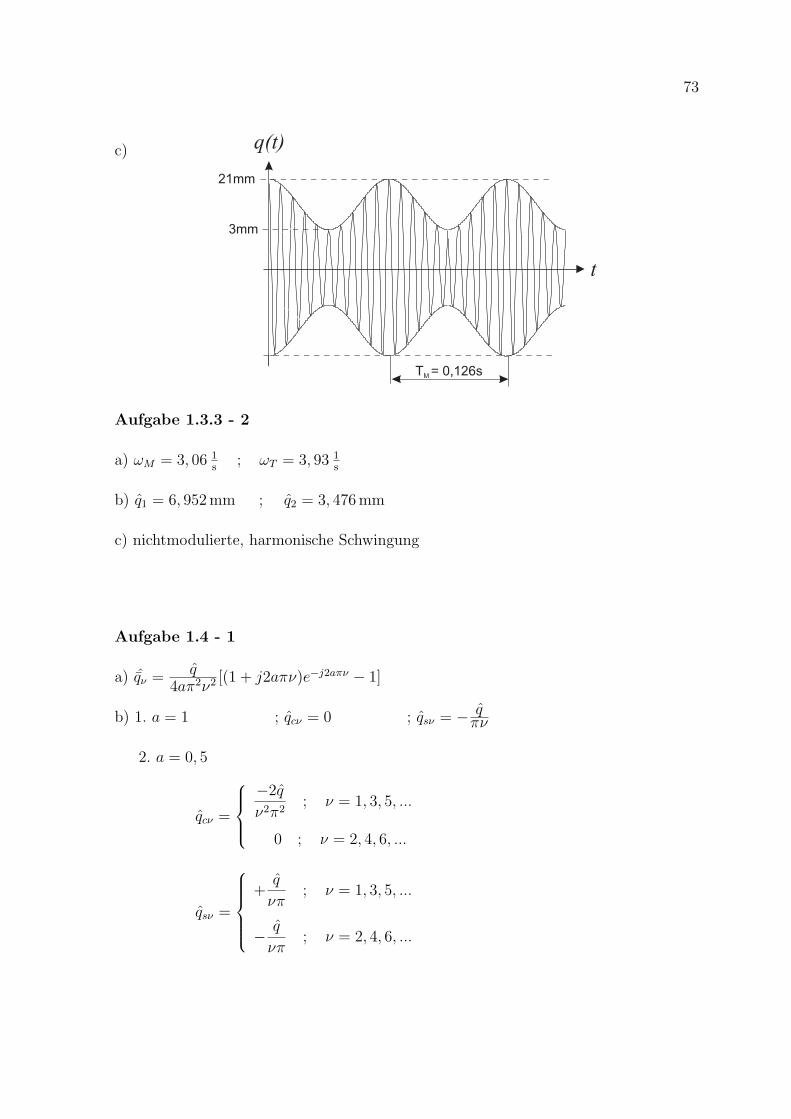
73
c)
T = 0,126sM
t
21mm
3mm
q(t)
Aufgabe 1.3.3 - 2
a) ωM = 3, 06 1s
; ωT = 3, 93 1s
b) q1 = 6, 952 mm ; q2 = 3, 476 mm
c) nichtmodulierte, harmonische Schwingung
Aufgabe 1.4 - 1
a) ˆqν = q4aπ2ν2 [(1 + j2aπν)e−j2aπν − 1]
b) 1. a = 1 ; qcν = 0 ; qsν = − qπν
2. a = 0, 5
qcν =
−2q
ν2π2; ν = 1, 3, 5, ...
0 ; ν = 2, 4, 6, ...
qsν =
+q
νπ; ν = 1, 3, 5, ...
− q
νπ; ν = 2, 4, 6, ...
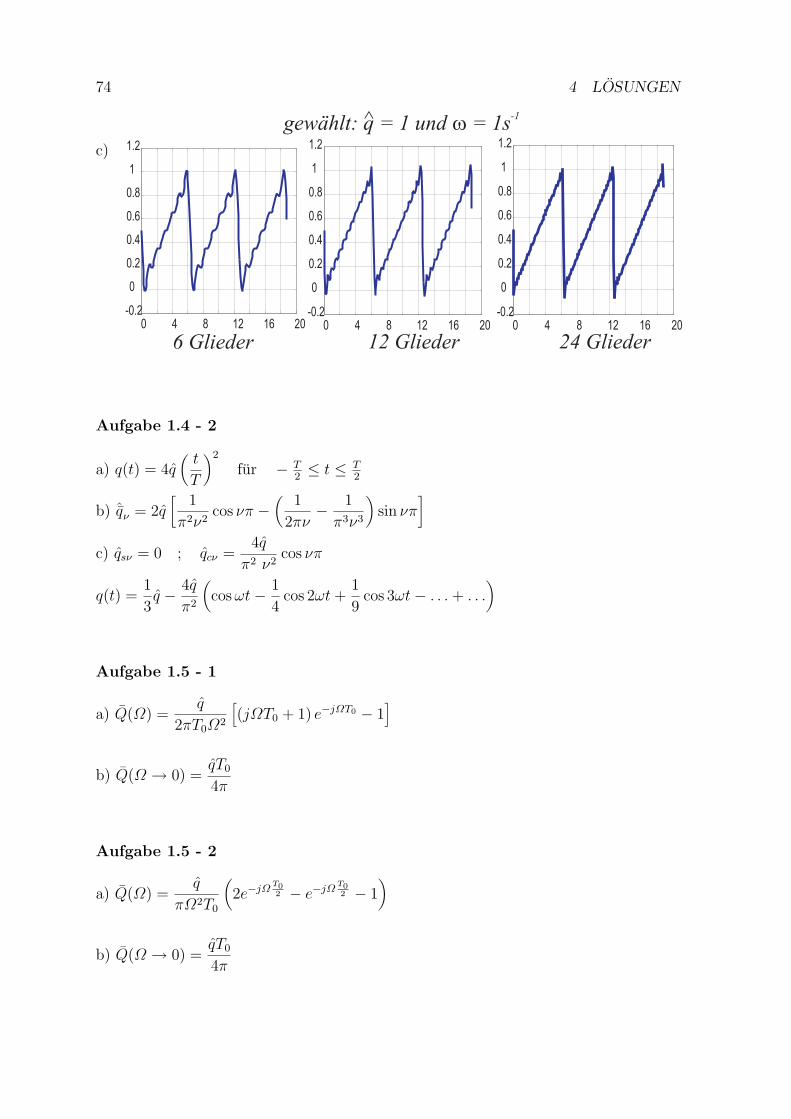
74 4 LOSUNGEN
c)
6 Glieder 12 Glieder 24 Glieder
gewählt: q = 1 und = 1sw-1^
0 4 8 12 16 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 4 8 12 16 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 4 8 12 16 20-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Aufgabe 1.4 - 2
a) q(t) = 4q(
t
T
)2
fur − T2≤ t ≤ T
2
b) ˆqν = 2q[
1
π2ν2cos νπ −
(
1
2πν− 1
π3ν3
)
sin νπ]
c) qsν = 0 ; qcν =4q
π2 ν2cos νπ
q(t) =1
3q − 4q
π2
(
cosωt− 1
4cos 2ωt+
1
9cos 3ωt− . . .+ . . .
)
Aufgabe 1.5 - 1
a) Q(Ω) =q
2πT0Ω2
[
(jΩT0 + 1) e−jΩT0 − 1]
b) Q(Ω → 0) =qT0
4π
Aufgabe 1.5 - 2
a) Q(Ω) =q
πΩ2T0
(
2e−jΩT0
2 − e−jΩT0
2 − 1)
b) Q(Ω → 0) =qT0
4π

75
Aufgabe 2.1.1 - 1
kers =3EI
L3+ k
Aufgabe 2.1.1 - 2
a) kϕ = k1a21 + k2(L− a1)
2
b) JO = a22m+ ρAL
(
1
3L2 − La1 + a2
1
)
Aufgabe 2.1.1 - 3
a) kϕ = 540 Nm
b) J0 = 1, 5003 kgm2
Aufgabe 2.1.1 - 4
kers =(k1 + k2 + k3) (k4 + k5) k6
(k1 + k2 + k3 + k4 + k5) k6 + (k1 + k2 + k3) (k4 + k5)= 3, 75 N/m
Aufgabe 2.1.2 - 1
k =Gd4
8nD3
Aufgabe 2.1.2 - 2
kϕ =6EI
L
Aufgabe 2.1.2 - 3
−M(x)e−jϕ = (1 + jg)EIyw′′(x)
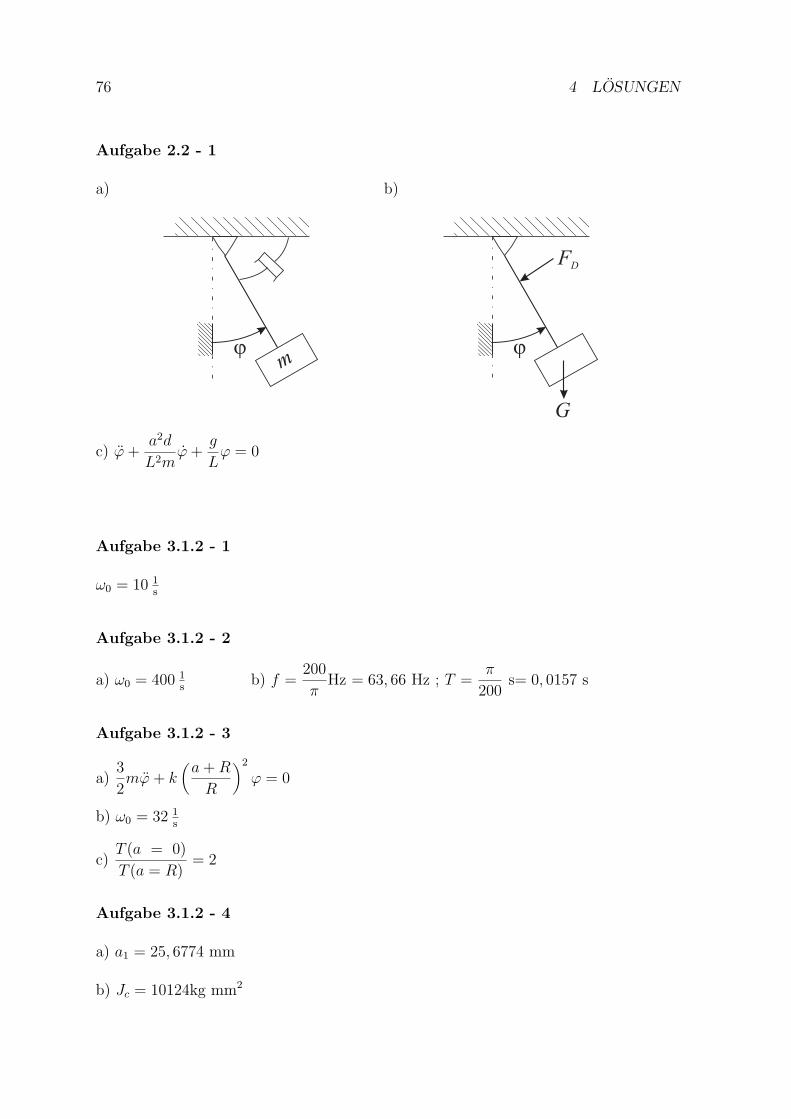
76 4 LOSUNGEN
Aufgabe 2.2 - 1
a) b)
mj j
FD
G
c) ϕ+a2d
L2mϕ+
g
Lϕ = 0
Aufgabe 3.1.2 - 1
ω0 = 10 1s
Aufgabe 3.1.2 - 2
a) ω0 = 400 1s
b) f =200
πHz = 63, 66 Hz ; T =
π
200s= 0, 0157 s
Aufgabe 3.1.2 - 3
a)3
2mϕ+ k
(
a+R
R
)2
ϕ = 0
b) ω0 = 32 1s
c)T (a = 0)
T (a = R)= 2
Aufgabe 3.1.2 - 4
a) a1 = 25, 6774 mm
b) Jc = 10124kg mm2

77
Aufgabe 3.1.2 - 5
ω =
√
√
√
√
√
(m+ 2RAρ)g
4r(
m+2
3AρR
)
Aufgabe 3.1.2 - 6
T = 2π
√
mV0
κp0A21
Aufgabe 3.1.2 - 7
ω0 =
√
πD2ρg
4m
Aufgabe 3.1.2 - 8
a) x+πhρg
m
(
7
3h+ 2R
)
x = 0
b) ω0 = 28, 27 1s
Aufgabe 3.1.2 - 9
a) ω0 = 7, 48 1s
b) m = 10, 72 kg ; M = 107, 76 kg
Aufgabe 3.1.3 - 1
a) ω0 =√
g
L
b) ϕ(t) =m
(m+M)
v√gL
cos(√
g
Lt− β
)
β =nπ
2n = 1, 3, 5, ...
Aufgabe 3.1.3 - 2
a) q(t) = 0, 56 ms
b) ω0 = 7 1s
c) q(t) = 0, 08 sin(7t)

78 4 LOSUNGEN
Aufgabe 3.1.3 - 3
a) q = 50 mm ; ω0 = 10 1s
; β = 1, 369 = 78, 465
-x x
x(t)
t
sin x
cos xb) Koeffizienten:
qC = x cos β = 10 mmqS = x sin β = 49 mm
Aufgabe 3.1.3 - 4
a) mw + kw = 0 ; ω0 = 10 1s
b) w(t) = w cos(ωt− β) oder w(t) = wC cosωt+ wS sinωt
Anfangsbedingungen:
w(t = 0) = L0 − Ls = wC ; w(t = 0) = v0 = ω0wS
Daraus folgt:
w =√
w2C + w2
S = 100 mm ; β = arctan wSwC
= 60
c) ωD = 9, 950 1s
Aufgabe 3.1.4 - 1
a)(
3
2MR2 +m (L−R)2
)
ϕ+mgLϕ = 0
b) T = 2, 316 s
Aufgabe 3.1.4 - 2
a)(
4m+3
2M)
x+ kx = 0
b) x(t) = 5 cos(25t− 1, 0475)

79
Aufgabe 3.1.4 - 3
ω0 =
√
2g
3(R− r)
Aufgabe 3.1.4 - 4
a) ω0 =
√
480g
πα
(R 3a −R3
i )
(R4a −R4
i )sin
(
α
2
)
b) ω0 =
√
8g
3πRa
Aufgabe 3.2.1 - 1
a) 17mR2ϕ+ dϕϕ+ 4mRgϕ = 0
b) d = 3, 28m√R3g
Aufgabe 3.2.1 - 2
a) mx+ dx+ 4kx = 0 (x :=Koordinate der Masse m)
b) d = 19, 95kg
s
Aufgabe 3.2.1 - 3
a) ω0 = 62, 84 1s
; k = 9872 Nm
; d = 4, 99 Nsm
b) ∆d ≥ 309, 21 Nsm
Aufgabe 3.2.1 - 4
a) D = 1 b) ϕ(t1) = 0, 0404

80 4 LOSUNGEN
Aufgabe 3.2.1 - 5
a) mx+d
4x+
k
4x = 0
b) ω0 = 10 1s
; D = 0, 05
c) -27 %
Aufgabe 3.2.1 - 6
a) 1 Freiheitsgrad
b)
(
m+1
3ρAL
3a2 − 3aL+ L2
(L− a)2
)
x+ da2
(L− a)2x+ k
a2
L− a)2x = 0
ω0 = 6 1s
; D = 0, 6
c) x(t) = xeDωt cos(ωDt− β) mit x = 6, 25 mm ; β = 36, 87
d) ω0 = 5 1s
Aufgabe 3.2.1 - 7
a) ϕ+4dL2
9J0
ϕ+
[
4kL2
9J0
+mg(2L+ 3h)
6J0
]
ϕ = 0
b) ω0 = 9, 728 1s
; D = 0, 123
c) ω0 = 4, 771 1s
; D = 0, 126
Aufgabe 3.2.1 - 8
a) ϕ+4d
3mϕ+
20k
3mϕ = 0
b) ω0 = 258, 20 1s
; D = 0, 79
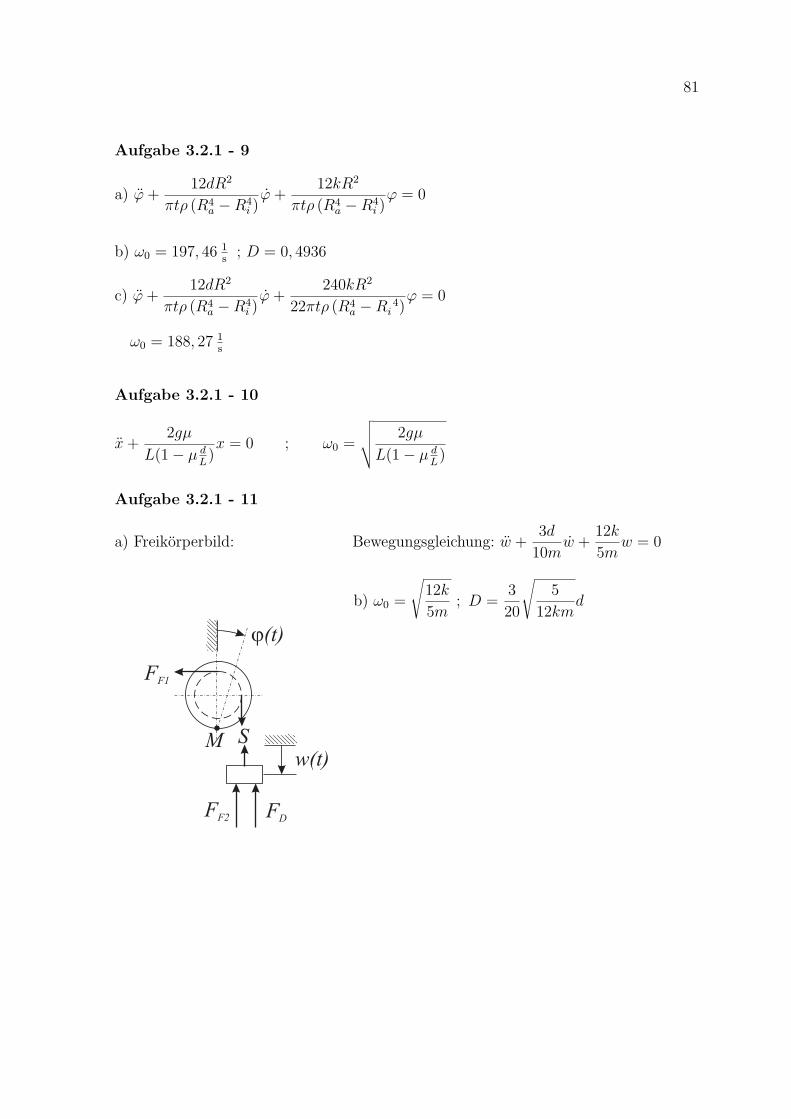
81
Aufgabe 3.2.1 - 9
a) ϕ+12dR2
πtρ (R4a −R4
i )ϕ+
12kR2
πtρ (R4a −R4
i )ϕ = 0
b) ω0 = 197, 46 1s
; D = 0, 4936
c) ϕ+12dR2
πtρ (R4a −R4
i )ϕ+
240kR2
22πtρ (R4a −R 4
i )ϕ = 0
ω0 = 188, 27 1s
Aufgabe 3.2.1 - 10
x+2gµ
L(1 − µ dL)x = 0 ; ω0 =
√
√
√
√
2gµ
L(1 − µ dL)
Aufgabe 3.2.1 - 11
a) Freikorperbild: Bewegungsgleichung: w +3d
10mw +
12k
5mw = 0
b) ω0 =
√
12k
5m; D =
3
20
√
5
12kmd
FF1
Sw(t)
FF2 FD
j(t)
M
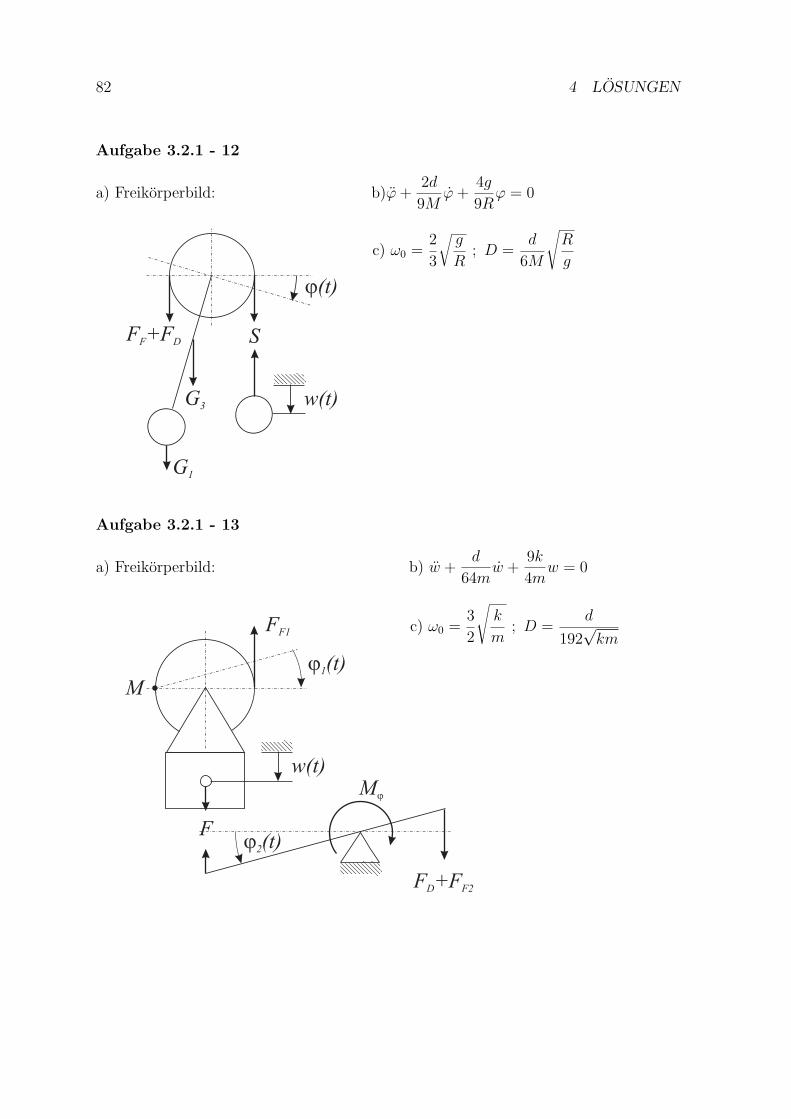
82 4 LOSUNGEN
Aufgabe 3.2.1 - 12
a) Freikorperbild: b)ϕ+2d
9Mϕ+
4g
9Rϕ = 0
c) ω0 =2
3
√
g
R; D =
d
6M
√
R
g
F +FF D
G3
G1
S
j(t)
w(t)
Aufgabe 3.2.1 - 13
a) Freikorperbild: b) w +d
64mw +
9k
4mw = 0
c) ω0 =3
2
√
k
m; D =
d
192√km
w(t)
FF1
j1(t)
F
M
F +FD F2
Mj
j2(t)
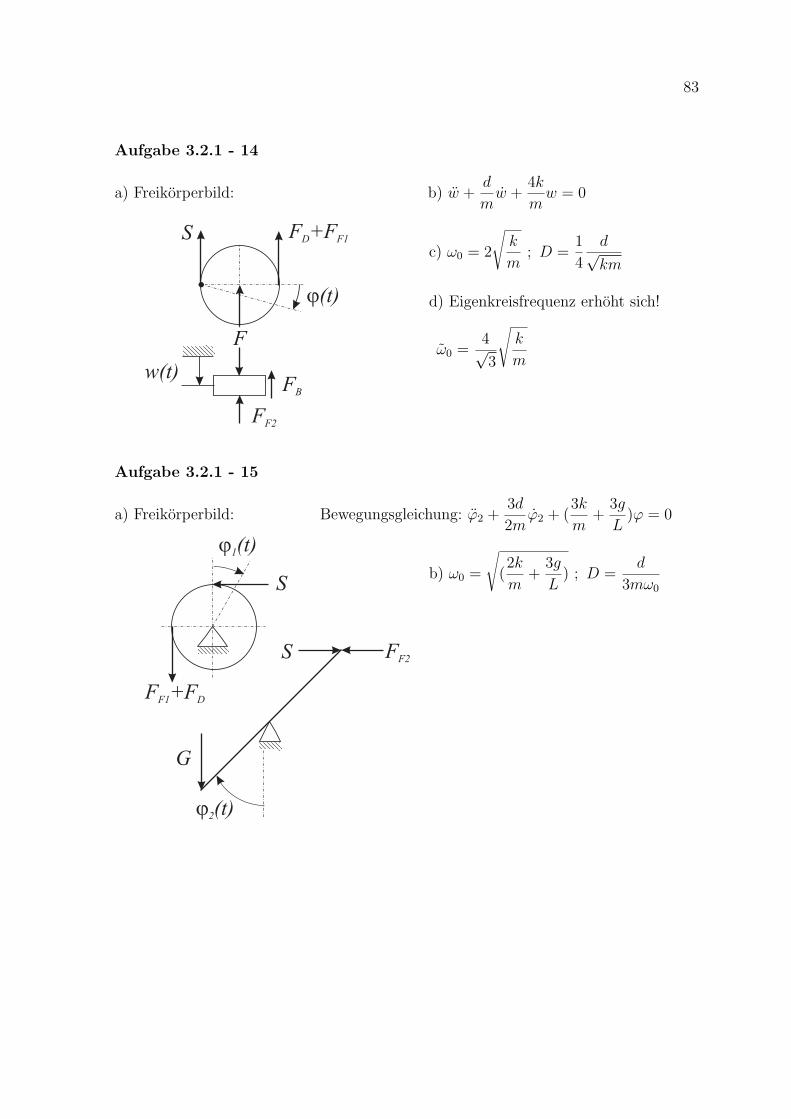
83
Aufgabe 3.2.1 - 14
a) Freikorperbild: b) w +d
mw +
4k
mw = 0
c) ω0 = 2
√
k
m; D =
1
4
d√km
d) Eigenkreisfrequenz erhoht sich!
ω0 =4√3
√
k
mw(t)
S F +FD F1
FB
FF2
F
j(t)
Aufgabe 3.2.1 - 15
a) Freikorperbild: Bewegungsgleichung: ϕ2 +3d
2mϕ2 + (
3k
m+
3g
L)ϕ = 0
b) ω0 =
√
(2k
m+
3g
L) ; D =
d
3mω0
F +FF1 D
G
S
S FF2
j1(t)
j2(t)

84 4 LOSUNGEN
Aufgabe 3.2.1 - 16
a) Freikorperbild: Bewegungsgleichung: w +2d
3mw +
2kers(R + a)2
3mR2w = 0
b) ω0 = 28, 17 1s
; D = 0, 095
c)T (a = 0)
T (a = R)= 2
M
w(t)FD
FF
j(t)
Aufgabe 3.2.1 - 17
a) Freikorperbild: Bewegungsgleichung: w1 +d
4mw1 +
5k
6mw1 = 0
b) ω0 =
√
5k
6m; D =
d
8mω0
F +FF1 D
S1 S2
S2
FF2
w (t)1
w (t)2
j2(t)
j1(t)
Aufgabe 3.2.1 - 18
a) kϕ = 1911, 58 Nmm/rad
b) ϑ = 0, 0646 ; DL = 0, 01028
c) JM = 7, 746 · 10−3 Nm s2
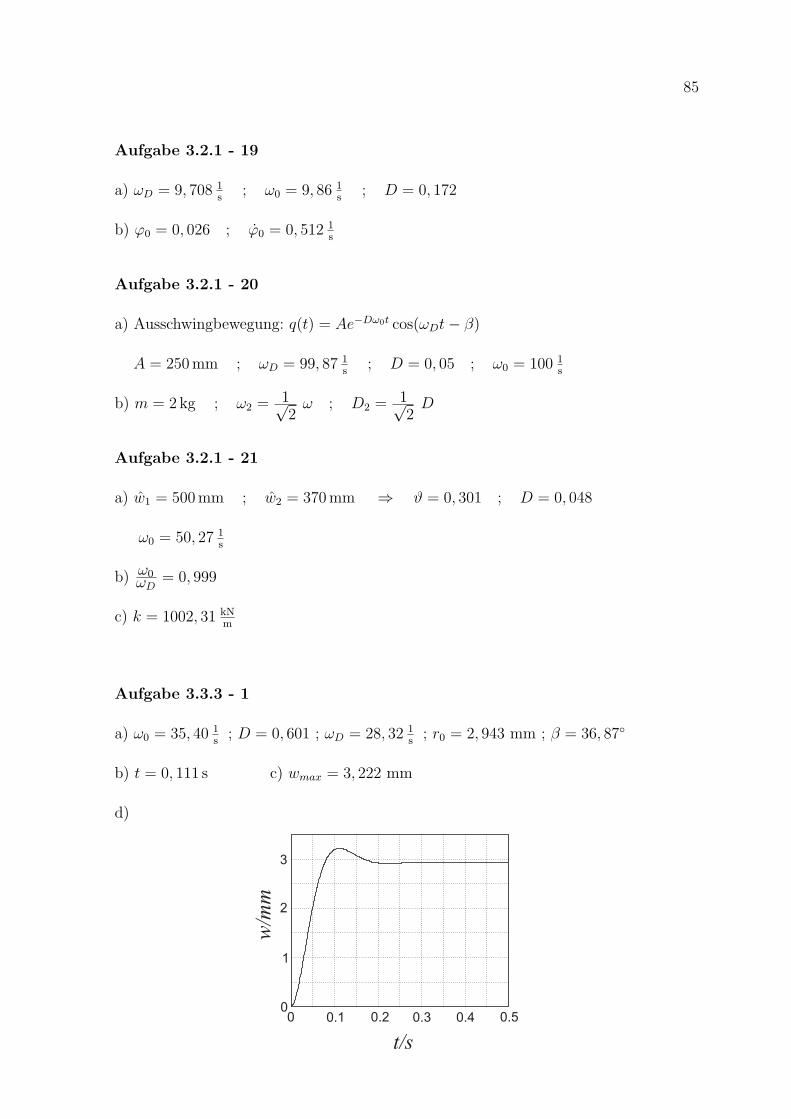
85
Aufgabe 3.2.1 - 19
a) ωD = 9, 708 1s
; ω0 = 9, 86 1s
; D = 0, 172
b) ϕ0 = 0, 026 ; ϕ0 = 0, 512 1s
Aufgabe 3.2.1 - 20
a) Ausschwingbewegung: q(t) = Ae−Dω0t cos(ωDt− β)
A = 250 mm ; ωD = 99, 87 1s
; D = 0, 05 ; ω0 = 100 1s
b) m = 2 kg ; ω2 = 1√2ω ; D2 = 1√
2D
Aufgabe 3.2.1 - 21
a) w1 = 500 mm ; w2 = 370 mm ⇒ ϑ = 0, 301 ; D = 0, 048
ω0 = 50, 27 1s
b) ω0ωD
= 0, 999
c) k = 1002, 31 kNm
Aufgabe 3.3.3 - 1
a) ω0 = 35, 40 1s
; D = 0, 601 ; ωD = 28, 32 1s
; r0 = 2, 943 mm ; β = 36, 87
b) t = 0, 111 s c) wmax = 3, 222 mm
d)
0
1
2
3
0 0.1 0.2 0.3 0.4 0.5
w/m
m
t/s
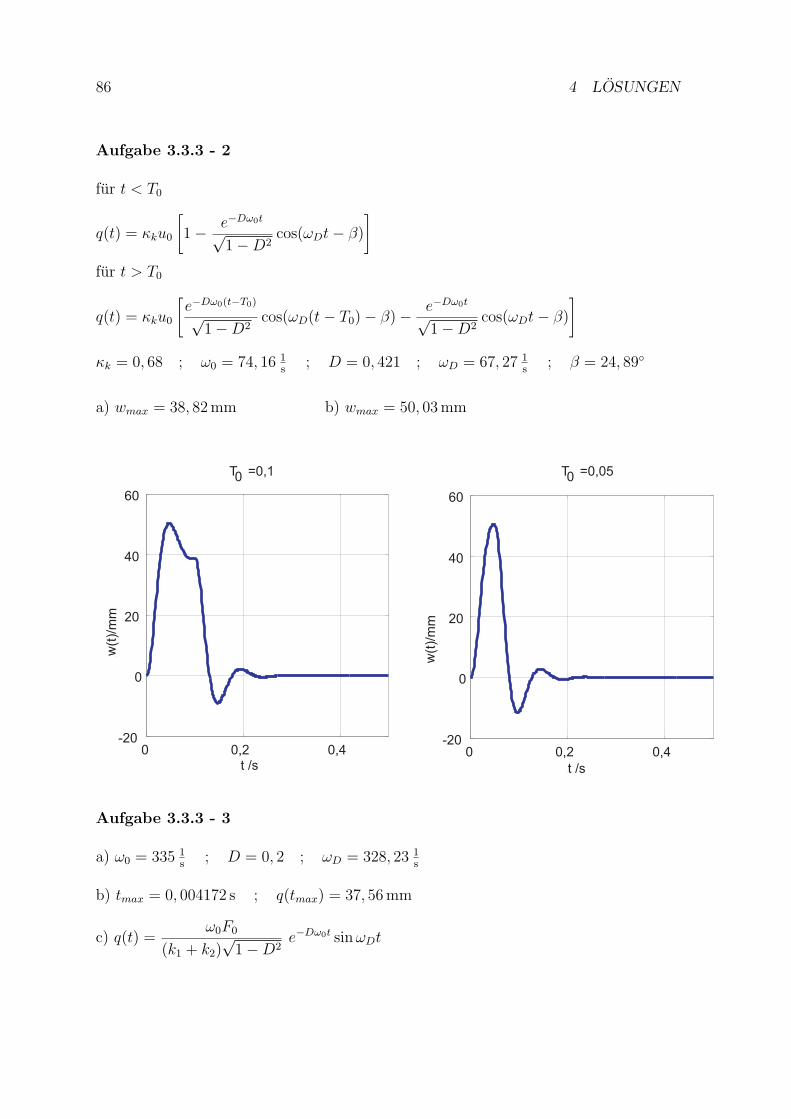
86 4 LOSUNGEN
Aufgabe 3.3.3 - 2
fur t < T0
q(t) = κku0
[
1 − e−Dω0t
√1 −D2
cos(ωDt− β)
]
fur t > T0
q(t) = κku0
[
e−Dω0(t−T0)
√1 −D2
cos(ωD(t− T0) − β) − e−Dω0t
√1 −D2
cos(ωDt− β)
]
κk = 0, 68 ; ω0 = 74, 16 1s
; D = 0, 421 ; ωD = 67, 27 1s
; β = 24, 89
a) wmax = 38, 82 mm b) wmax = 50, 03 mm
0 0,2 0,4-20
0
20
40
60
T0 =0,1
it /s
Iw(t
)/m
m
0 0,2 0,4-20
0
20
40
60
iw(t
)/m
m
it /s
T0 =0,05
Aufgabe 3.3.3 - 3
a) ω0 = 335 1s
; D = 0, 2 ; ωD = 328, 23 1s
b) tmax = 0, 004172 s ; q(tmax) = 37, 56 mm
c) q(t) =ω0F0
(k1 + k2)√
1 −D2e−Dω0t sinωDt

87
Aufgabe 3.3.4 - 1
a) Ω = 100 1s
; wmax = 0, 104 mm ; ψ = 41, 41
b) D >1√2
Aufgabe 3.3.4 - 2
a) w +2d
3mw +
4k
mw =
2
3Ω2u cosΩt
(w := Relativbewegung zwischen Wand und Rolle)
b) ω0 = 80 1s
c) d = 160Ns
m
Aufgabe 3.3.4 - 3
a) (m+mu)w + dw + kw = mueΩ2 cosΩt ; ω0 = 160 1
s
b) nkr = 1543 1min
⇒ wmax = 2, 5125 mm
c) 1366, 60 1min
< n < 1764, 23 1min
Aufgabe 3.3.4 - 4
a) 8, 944 1s< Ω < 9, 428 1
s; b) d ≥ 0, 497 Ns
m
Aufgabe 3.3.4 - 5
a) w +d
mw +
2kers + k
mw = κkω
20 cosΩt
mit: kers =12EI
L3; κk =
k
2kers + k; ω0 =
√
2kers + k
m= 10
1
s
b) n = 94, 53 1min
; w = 16, 75 mm
c)ω0
2π
√
(1 + κk) ≥ n ≥ ω0
2π
√
(1 − κk)
110, 27 1min
≥ n ≥ 77, 97 1min
88 4 LOSUNGEN
Aufgabe 3.3.4 - 6
a) w +d
mw +
kers + k
mw =
k
mu cosΩt
mit: kers =4πEt32
3(1 − ν2)R2; ω0 = 1659, 88
1
s; D = 0, 3012
b) Ω = ω0
√1 − 2D2 = 1501, 76 1
s⇒ wmax =
κk
2D√
1 −D2u = 5, 058 mm
c) Ω ≥ 1, 9144ω0 = 3177, 60 1s
Aufgabe 3.3.4 - 7
a) w +d
mS +mP +mU
w +k
mS +mP +mU
w = ω 20
mU
mS +mP +mU
eη2 cosΩt
ω0 = 29, 4 1s
; D = 0, 12756
b) wmax = 3, 113 mm
c) n = 285, 4 1min
Aufgabe 3.3.4 - 8
a) Freikorperbild: Bewegungsgleichungen:
b) wB +kB
mB
wB =kB
mB
wG
wG +2kG + kB + kS
mG
wG =kB
mG
wB +kS
mG
u
c) wG =1
2kG + kB + kS
(kBwB + kSu)
w (t)G
w (t)B
FFS
FG FG
FB

89
d) wB +kB
mB
(
1 − kB
2kG + kB + kS
)
wB =kBkS
mB(2kG + kB + kS)u
e) 0 ≤ Ω ≤ 2445 1s
Aufgabe 3.3.4 - 9
a) kB = 19, 2 Nmm
b)
w(t)
F +FF DS
F
Mjj(t)
w +8d
9M + 8mw +
8kB + 32kϕ/L2
9M + 8mw =
12
9M + 8mF (t)
c) ω0 = 21, 02 1s
; D = 0, 1078
d) wmax = 32, 39 mm ; Ωmax = 20, 77 1s
Aufgabe 3.3.4 - 10
a) kB = 12, 5 Nmm
b) Freikorperbild: Bewegungsgleichung:
w +d
m+mU
w +kB + k
m+mU
w = − mU
m+mU
eΩ2sinΩt
c) ω0 = 19, 42 1s
; D = 0, 08157
d) wmax = 0, 1522 mm ; Ωmax = 19, 56 1sw(t)
FF FD
FU
FB

90 4 LOSUNGEN
Aufgabe 3.3.4 - 11
a) (m+mU)w +(k1 + k2)k3
k1 + k2 + k3
w = ±muΩ2e cosΩt ; ω0 = 50
1
s
b) 49, 75 1s< Ω < 50, 25 1
s
Aufgabe 3.3.5 - 1
Tw = 2 s
Aufgabe 3.3.5 - 2
w(t) = 5 mm + 7, 05 mm cos(1πt− 1, 6230)+ 11, 77 mm cos(3πt− 2, 4728)+ 0, 86 mm cos(5πt− 1, 4118) + . . .
Aufgabe 3.3.5 - 3
w(t) = 5 mm + 5, 1438 mm cos(2πt− 3, 0507)+ 0, 6532 mm cos(6πt− 2, 0437)+ 0, 0653 mm cos(10πt− 2, 0847) + . . .
Aufgabe 3.3.5 - 4
a) kB = 9945 Nm
[0.3cm] ; b) ω0 = 63, 16 1s
; D = 0, 317
c) Ω01 = 58, 36 1s
; Ω02 = 29, 18 1s
d) werz =r02
+2∑
ν=1
rkνVkν cos(Ων − β∗
kν − Ψkν) ; r0 = 5, 01 mm
Vkν =
√
√
√
√
1 + 4D2η2ν · 1/κ2
k
(1 − η2ν)
2 + 4D2η2ν
; κk = 0, 501
ν rkν/mm ην Vkν Ψkν β∗
kν
1 1,504 0,554 1,3645 0,47 -0,62 1,003 1,108 1,655 -1,25 -0,95

91
Aufgabe 3.3.5 - 5
a) u(t) =u0
2+
∞∑
ν=1
uν cos(Ωνt− βν)
u0 = u ; βν = π ; Ων =2πνv
λ
uν =
0 ; ν = 2, 4, 6, . . .4u
ν2π2; ν = 1, 3, 5, . . .
b) ω0 = 173, 21 1s
; D = 0, 058
c) w3(t) = r35V35 cos(Ωνt− β∗
35 − Ψ35)
r35 = 0, 027 mm ; V35 = 3, 0397 · 10−5 ; β∗
35 = π ; Ψ35 = −0, 0365
Aufgabe 3.3.5 - 6
a) u(t) =u0
2+
∞∑
ν=1
uν cos(Ωνt− βν)
u0 = u = 5 mm ; βν = π/2 ; Ων = νΩ0 ; Ω0 = 125, 66 1s
uν =
0 ; ν = 2, 4, 6, . . .u
νπ; ν = 1, 3, 5, . . .
ν ur/mm Ων/1s
1 3,18 125,662 0 -3 1,06 376,994 0 -5 0,64 628,32
b) w +d
mw +
k1 + k2
mw =
k1
mu+
d
mu ; ω0 = 500
1
s; D = 0, 01
c) w1 = 2, 717 mm

92 4 LOSUNGEN
Aufgabe 3.3.5 - 7
a) u(t) =u0
2+
∞∑
ν=1
uν cos(Ωνt− βν)
u0 = u = 3, 183 mm
βν =
β/2 ; ν = 1π ; ν = 2, 4, 6, . . .0 ; ν = 3, 5, 7, . . .
uν =
u/2 ; ν = 10 ; ν = 3, 5, 7, . . .2u
(ν + 1)(ν − 1)π; ν = 2, 4, 6, . . .
ν ur/mm Ων/1s
1 5 2π2 2,122 4π3 0 -4 0,4244 8π
b) w +d1 + d2
mw +
k
mw =
d2
mu ; ω0 = 387, 30
1
s; D = 0, 0194
c) w1 = 2, 06 · 10−3 mm
Aufgabe 3.3.6 - 1
Zeitbereich:
q(t) =
F
kT0ω0
[
ω0t− sinω0t]
; 0 ≤ t ≤ T0
F
kT0ω0
[
sinω0(t− T0) + ω0T0 cosω0(t− T0) − sinω0t]
; T0 ≤ t
Frequenzbereich: Q(Ω) =F
2πT0kΩ20(1 − η2)
[
(jΩT0 + 1)e−jΩT0 − 1]
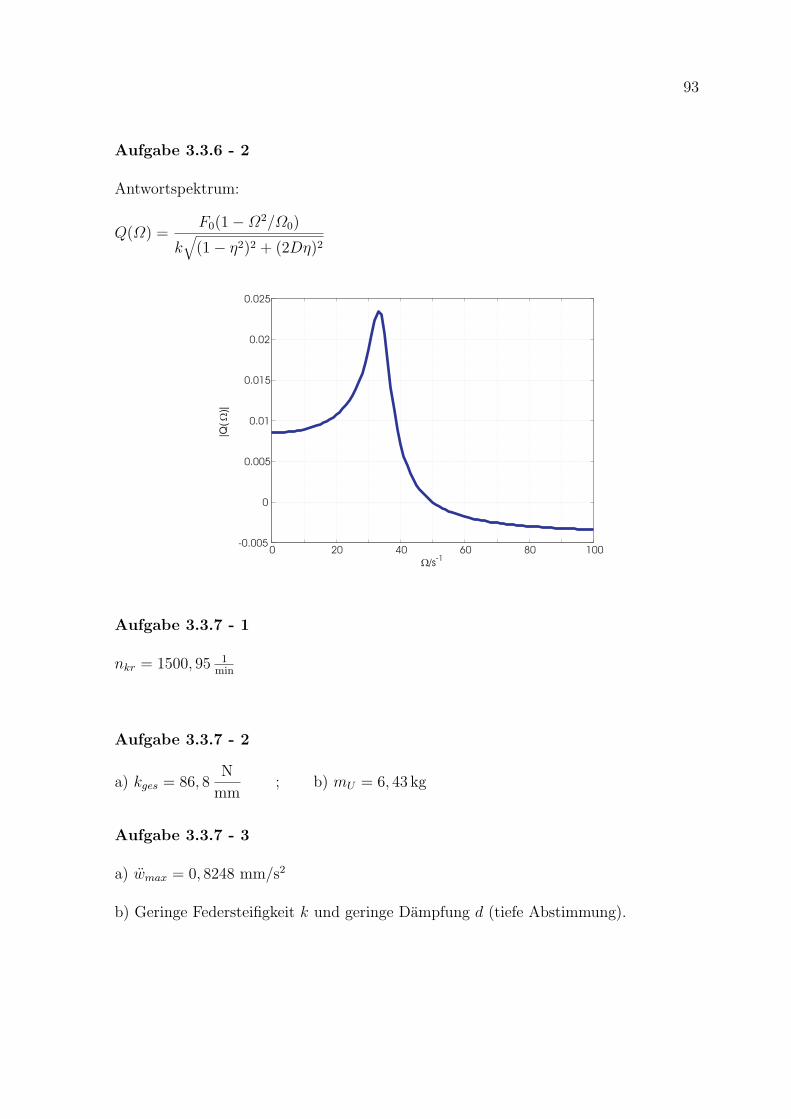
93
Aufgabe 3.3.6 - 2
Antwortspektrum:
Q(Ω) =F0(1 −Ω2/Ω0)
k√
(1 − η2)2 + (2Dη)2
0 20 40 60 80 100-0.005
0
0.005
0.01
0.015
0.02
0.025
W/s-1
|Q(
W)|
Aufgabe 3.3.7 - 1
nkr = 1500, 95 1min
Aufgabe 3.3.7 - 2
a) kges = 86, 8N
mm; b) mU = 6, 43 kg
Aufgabe 3.3.7 - 3
a) wmax = 0, 8248 mm/s2
b) Geringe Federsteifigkeit k und geringe Dampfung d (tiefe Abstimmung).
94 4 LOSUNGEN
Aufgabe 3.3.7 - 4
a) w +d
mw +
1
m
(
12EI1L3
1
+3EI2L3
2
)
w = Ω2e cosΩt
b) ω0 = 175, 59 1s
; D = 0, 0047
c) wmax = 106, 38 mm ⇒ nmax = 1677 min
Aufgabe 3.3.7 - 5
a) FU = mUΩ2e sinΩt
w +d
m+mU
w +kB
m+mU
w =mU
m+mU
Ω2e sinΩt
b) ω0 = 210, 31 1s
; D = 0, 1187
c) η = 2, 4896 > 1 ⇒ uberkritischer Betrieb
d) 2005 min ≤ Ω ≤ 2011 min
Aufgabe 3.3.7 - 6
a) kers = 150 Nm
b) v = 1, 8 kmh
c) w = 8, 2 mm
d) w∞ = e = 2 mm
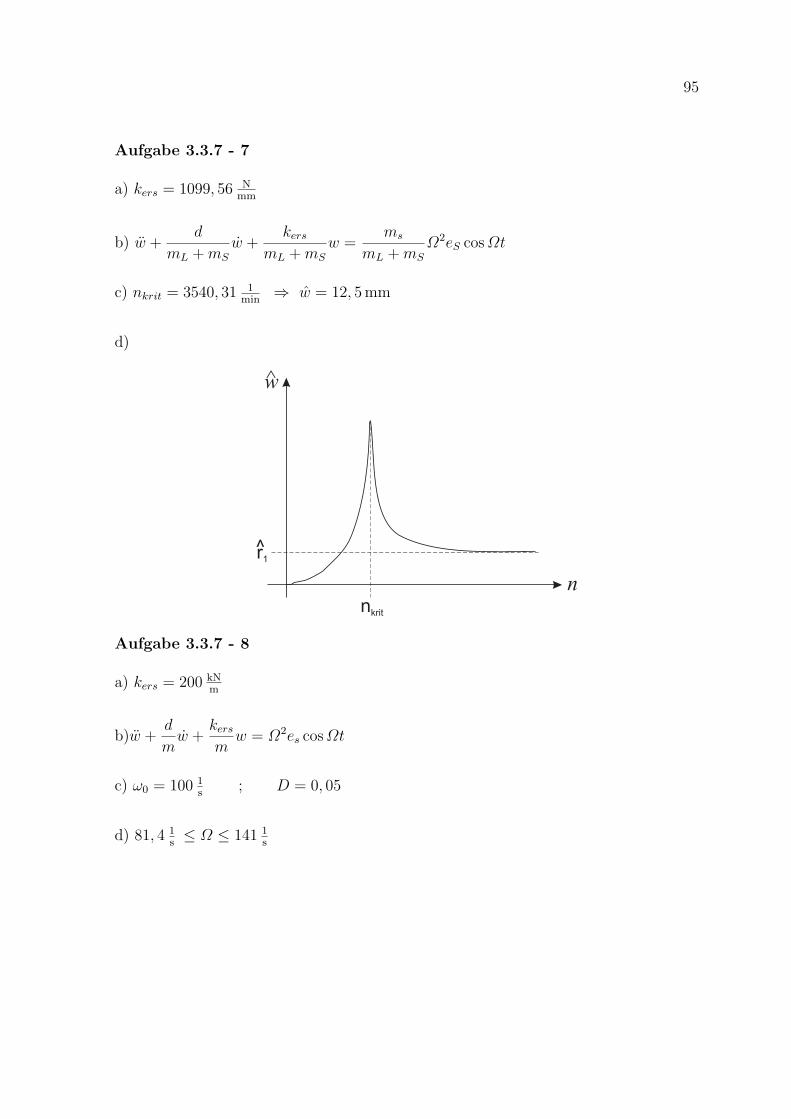
95
Aufgabe 3.3.7 - 7
a) kers = 1099, 56 Nmm
b) w +d
mL +mS
w +kers
mL +mS
w =ms
mL +mS
Ω2eS cosΩt
c) nkrit = 3540, 31 1min
⇒ w = 12, 5 mm
d)
r1^
w
nnkrit
Aufgabe 3.3.7 - 8
a) kers = 200 kNm
b)w +d
mw +
kers
mw = Ω2es cosΩt
c) ω0 = 100 1s
; D = 0, 05
d) 81, 4 1s≤ Ω ≤ 141 1
s
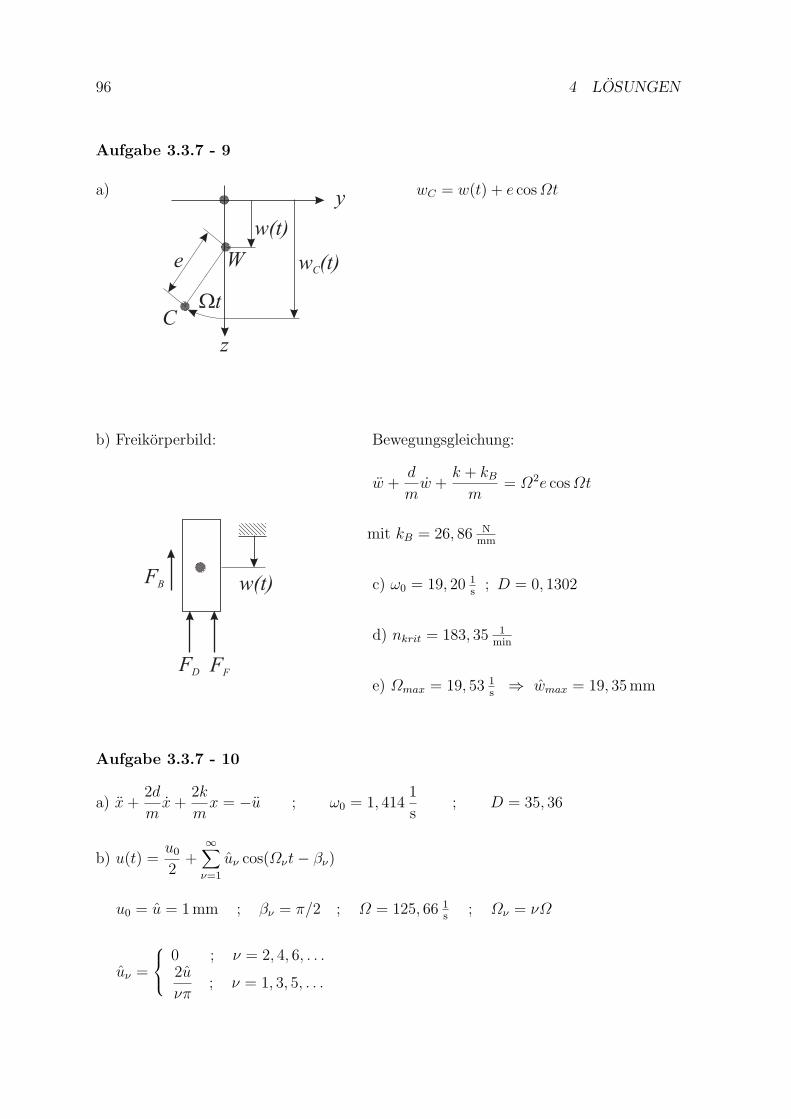
96 4 LOSUNGEN
Aufgabe 3.3.7 - 9
a) wC = w(t) + e cosΩt
e W
C
y
z
w(t)
w (t)C
Wt
b) Freikorperbild: Bewegungsgleichung:
w +d
mw +
k + kB
m= Ω2e cosΩt
mit kB = 26, 86 Nmm
c) ω0 = 19, 20 1s
; D = 0, 1302
d) nkrit = 183, 35 1min
e) Ωmax = 19, 53 1s
⇒ wmax = 19, 35 mmFD FF
FB w(t)
Aufgabe 3.3.7 - 10
a) x+2d
mx+
2k
mx = −u ; ω0 = 1, 414
1
s; D = 35, 36
b) u(t) =u0
2+
∞∑
ν=1
uν cos(Ωνt− βν)
u0 = u = 1 mm ; βν = π/2 ; Ω = 125, 66 1s
; Ων = νΩ
uν =
0 ; ν = 2, 4, 6, . . .2u
νπ; ν = 1, 3, 5, . . .

97
c) r(t) =∞∑
ν=1
uνη2ν cos(Ωνt− βν) ; ην =
Ων
ω0
d) Ω1 = 1, 414 1s
; Ω2 = 0, 47 1s
; Ω3 = 0, 28 1s
e) xmax1 = 9 · 10−3 mm ; xmax
2 = 9, 996 · 10−4 mm ; xmax3 = 3, 593 · 10−4 mm
Aufgabe 3.3.7 - 11
a) Feder- und Dampferfußpunkterregung
b) u(t) =u0
2+
∞∑
ν=1
uν cos(Ωνt− βν)
u0 = 0 mm ; uν =2ν
νπ; ν = 1, 2, 3, . . .
βν =
π/2 ; ν = 1−π/2 ; ν = 2, 4, 6, . . .
ν ur/mm Ων/1s
1 1,27 2,092 0,64 4,183 0,42 6,274 0,32 8,365 0,25 10,45
c) Freikorperbild: Bewegungsgleichung:
x+d
mx+
k
mx = −u
ω0 = 100 1s
; D = 0, 75
FF FD
w(t)
d) xerz = 5, 55 · 10−4 mm

Am Institut fur Mechanik erschienene Skripte zu Vorlesungen
P. Haupt
Einfuhrung in die Mechanik - Technische Mechanik III
H. Irretier
SchwingungstechnikSchwingungstechnik AufgabensammlungSchwingungen diskreter und kontinuierlicher SystemeSchwingungen nichtlinearer SystemeMaschinen- und RotordynamikExperimentelle Methoden der MechanikExperimentelle Modalanalyse
L. Schreiber
Aufgabensammlung zur Einfuhrung in die Mechanik - Technische Mechanik I/IIAufgabensammlung zur Einfuhrung in die Mechanik - Technische Mechanik III






























