Embed Size (px)
Citation preview

INTELIGENCIA ARTIFICIAL. SUS CONSECUENCIAS NEGATIVAS
UNA VISIÓN PARTICULAR
ALEXIS CHAVERO GUILLERMO
UNIVERSIDAD ABIERTA Y A DISTANCIA DE MÉXICO

1
ÍNDICE
INTRODUCCIÓN 2
1. ROBOT, ¿CÓMO SE ORIGINÓ LA PALABRA? 2
2. CONCEPTO 3
3. HISTORIA 3
3.1. Datos históricos. 3
4. EVOLUCIÓN 6
4.1. Primera generación 6
4.2. Segunda generación 6
4.3. Tercera generación 6
4.4. Cuarta Generación 7
4.5. Quinta generación 7
4.5.1. Inteligencia Artificial 7
5. ROBOTS CON TECNOLOGÍA AVANZADA 8
5.1. Robot de Yotel 8
5.2. Pleo 8
5.3. Robot Botir 9
5.4. PackBots 9
5.5. BigDog 10
5.6. I-Sobot 10
5.7. PR2 11
5.8. Robot Schaft 11
5.9. Compressorhead 12
5.10. Nao 12
6. CONSIDERACIONES 13
7. CONCLUSIONES 15
BIBLIOGRAFÍA 15
REFLEXIONES 16

2
INTRODUCCIÓN
Hace unos cuantos años parecía inimaginable que el mundo futurista de Isaac
Asimov (autor de obras de ciencia ficción), fuese una realidad, pero todo parece
indicar que el futuro nos ha alcanzado y no falta mucho para que seres con
inteligencia artificial caminen entre nosotros.
Esta nueva era, nos coloca en un tránsito histórico que asombra, inquieta y nos lleva
a preguntar: ¿Estaremos preparados para este momento?, ¿Podremos vivir en
armonía con seres artificiales superiores a nosotros?
Ante estas interrogantes es probable que no sepamos que responder y esto es
porque desconocemos aspectos esenciales sobre el origen y alcance de los robots;
si bien el tema no es nuevo, su conocimiento se ha dejado en manos de expertos,
negándonos a un entendimiento que debe formar parte de la cultura popular.
De esta manera y a efecto de dilucidar las posibles consecuencias negativas del tan
esperado encuentro entre sociedad y seres con inteligencia artificial, nos
disponemos definir algunos conceptos, continuaremos con un poco de historia y
culminaremos con algunas consideraciones.
1. ROBOT, ¿CÓMO SE ORIGINÓ LA PALABRA?
La palabra se usa por primera vez en 1921, en la obra teatral de Karel Chapek, RUR
(Robots Universales de Rossum), que trata sobre unos hombres artificiales que
remplazan a los humano en el desarrollo de trabajos ordinarios.
La palabra robot es una traducción de la palabra checa “robota” que significa trabajo,
en especial el llevado a cabo por la servidumbre.

3
2. CONCEPTO
Diversos autores, organizaciones y asociaciones internacionales, han tratado de dar
su propio concepto, no obstante el que ha sido mayormente aceptado, es el
proporcionado por la International Federation of Robotics (IFR) que describe a los
robots de la siguiente manera:
“Manipulador funcional reprogramable, capaz de mover material, piezas,
herramientas o dispositivos especializados mediante movimientos variables
programados, con el fin de realizar tareas diversas.”
3. HISTORIA
Habiendo señalado la procedencia de la palabra robot, así como su significado,
resulta imperioso saber cómo empezó todo, por lo que a continuación veremos un
poco de historia.
Los robots tuvieron su origen hace miles de años, en un principio se les conoció
como autómatas. Tiempo después y gracias al anhelo del ser humano de crear vida
artificial, los robots fueron tomando forma, primero como artefactos simples hechos
de materiales que estaban al alcance (madera y cobre), para después dar paso a
los robots hechos de materiales especializados.
3.1. Datos históricos.
Los primeros mecanismos robóticos se presentaron en Egipto y Grecia, por medio
de brazos mecánicos colocados en estatuas religiosas, cuyos mecanismos eran
operados manualmente o a través de sistemas hidráulicos.
En los siglos XVII y XVIII, los europeos comenzaron a fabricar muñecos mecánicos,
cuyos mecanismos no obstante que eran primitivos, comenzaban a mostrar gran

4
detalle en su elaboración. Jacques de Vauncansos, desarrollo algunos mecanismos
que además de producir música, imitaban funciones biológicas como la circulación,
respiración y la digestión.
En el mismo sentido se encuentra la Muñeca mecánica de Henri Maillardert (1805),
cuyo mecanismo le permitía elaborar dibujos.
Posteriormente, durante le revolución industrial, proliferaron mecanismos que
maximizaban la producción textil: La hiladora giratoria de Hargreaves (1770), la
hiladora mecánica de Crompton (1779), el telar mecánico de Cartwright (1785) y el
telar de Jacquard (1801).
Para el siglo XX, surgen dispositivos que son muy parecidos a lo que hoy
conocemos como robots:
1946 - G.C Devol desarrolla un dispositivo que podía señales eléctricas por medios
magnéticos y reproducirlas para accionar una máquina mecánica.
1951 - Desarrollo con teleoperadores para manejar materiales radiactivos.
1952 - Prototipo de control numérico con lenguaje de programación de piezas APT
(Automatically Programmed Tooling).
1954 - El inventor C. W. Kenward solicitó su patente del diseño de un robot, misma
que fue emitida en 1957.
G.C. Devol desarrolla diseños para la transferencia de artículos programada.
1959 - Planet Corporation introduce el primer robot comercial.
1960 - Se introdujo el primer robot ‘Unimate’’.
1961 - Se instala un robot “Unimate” en la Ford Motors Company para atender una
máquina de fundición de troquel.
1966 - Una empresa noruega, denominada Trallfa, construyó e instaló un robot de
pintura por pulverización.

5
1968 - SRI (Standford Research Institute) desarrolla un robot móvil llamado
‘Shakey’’ que podía desplazarse por el suelo, a través de una cámara de visión y
sensores táctiles.
1971 - La universidad de Stanford desarrolla un brazo robot de acionamiento
electrónico.
1973 - Se desarrolla el primer lenguaje de programación de robots del tipo
computadora, con la denominación WAVE, le siguió el lenguaje AL en 1974, ambos
lenguajes después serían desarrollados en el lenguaje VAL.
1974 - ASEA desarrolla el robot Irb6 de accionamiento totalmente electrónico.
Kawasaki, instala un robot para soldadura por arco para estructuras de motocicletas.
Cincinnati Milacron desarrolla el robot T3 con control por computadora.
1975 – Olivetti utiliza al robot “Sigma” en operaciones de montaje.
1976 - en los laboratorios Charles Stark Draper Labs en estados Unidos, se
desarrolla un dispositivo de Remopte Center Compliance (RCC) para línea de
montaje.
1978 - El robot T3 de Cincinnati Milacron es adaptado y programado para operar
como taladro y utilizado en la aeronáutica. El robot PUMA (Programmable Universal
Machine for Assambly), es usado en tareas de montaje, basándose en diseños
obtenidos de un estudio de la General Motors.
1979 – En la Universidad de Yamanashi en Japón, se desarrolla el robot SCARA
(Selective Compliance Arm for Robotic Assambly).
1980 – En la Universidad de Rhode Island, se desarrolla un sistema robótico de
captación de recipientes.
1981 – En la Universidad de Carnegie- Mellon, se desarrolla un robot de impulsión
directa. Usaba motores eléctricos en las articulaciones, sustituyendo las
transmisiones mecánicas usadas por la mayoría de los robots.
1982 - IBM introdujo el robot RS-1 para montaje.
1983 – Se emite el informe de la investigación realizada en Westinghouse Corp.,
patrocinado por la National Science Foundation sobre un sistema de montaje
automatizado flexible efectuado por robots.

6
1984 – Se desarrolla Robots 8, que son una serie de sistemas que permitían
desarrollar programas de robots utilizando gráficos interactivos en una computadora
personal para luego ser cargados en un robot.
4. EVOLUCIÓN
Vista la parte histórica y a efecto de entender cómo han evolucionado los robots, es
necesario analizar brevemente cada una sus distintas generaciones.
4.1. Primera generación
Son conocidos como “Manipuladores” y se trata de sistemas mecánicos de control
sencillo, sin retroalimentación de algún sensor. Se encargan de realizar tareas
previamente programadas que se ejecutan secuencialmente.
4.2. Segunda generación
Los denominados como robots de aprendizaje, se encargan de seguir secuencias
de movimientos que previamente son ejecutados por un operador humano.
Son de control de ciclo abierto, así como de secuencia numérica de control de
movimientos que se almacenan en un disco o cinta magnética.
4.3. Tercera generación
En esta generación se encuentran los robots de control sensorizado, cuyos
mecanismos requieren de una computadora que ejecuta las órdenes de un
programa, enviándolas a un manipulador que realiza los movimientos necesarios.
Este tipo de robots percibe el ambiente a través del uso de sensores y modifica su
estrategia de control.

7
4.4. Cuarta generación
Son muy parecidos a los de la tercera generación, sin embargo su funcionamiento
incluye sensores que informan a una computadora de control el estado en el que se
encuentra el proceso, lo cual permite tomar decisiones de manera inteligente y
controlar el proceso en tiempo real.
La multiplicidad de sus sensores le permite tomar decisiones sobre tareas y metas.
4.5. Quinta generación
Los robots de esta generación estarán basados en una nueva tecnología que
incorporará 100% inteligencia artificial, utilizará modelos de conducta y una nueva
arquitectura de subsunción.
4.5.1. Inteligencia Artificial.
El término fue adoptado en la conferencia de Darthmounth de 1956:
“Se trata de un área que implica una multiplicidad de disciplinas como la filosofía,
matemáticas, lógica y computación. Su objetivo es el desarrollo de sistemas
capaces de resolver problemas cotidianos por sí mismos, utilizando para ello la
inteligencia humana.”
En términos sencillos, la inteligencia artificial es una disciplina que se encarga del
desarrollo de procesos y programas que se ejecutan en un modelo físico,
produciendo un mayor rendimiento derivado de los algoritmos almacenados y de la
percepción del entorno a través de sensores, lo que lleva a que la toma de
decisiones sea de forma autónoma.

8
5. ROBOTS CON TECNOLOGÍA AVANZADA
A continuación se muestran 10 robots cuya tecnología es hoy por hoy de lo más
avanzado.
5.1.1. Robot de Yotel
Se trata de un brazo robótico que sirve de conserje en el hotel Yotel de Nueva York.
Sus funciones consisten en recoger, almacenar y entregar las pertenencias de los
huéspedes del hotel.
5.2. Pleo
Es un robot que tiene la forma de un Camarasaurio. Funciona como una mascota
que aprende experiencias del ambiente que lo rodea. Simula un estado de sueño y
puede reconocer colores, patrones y sonidos.
9
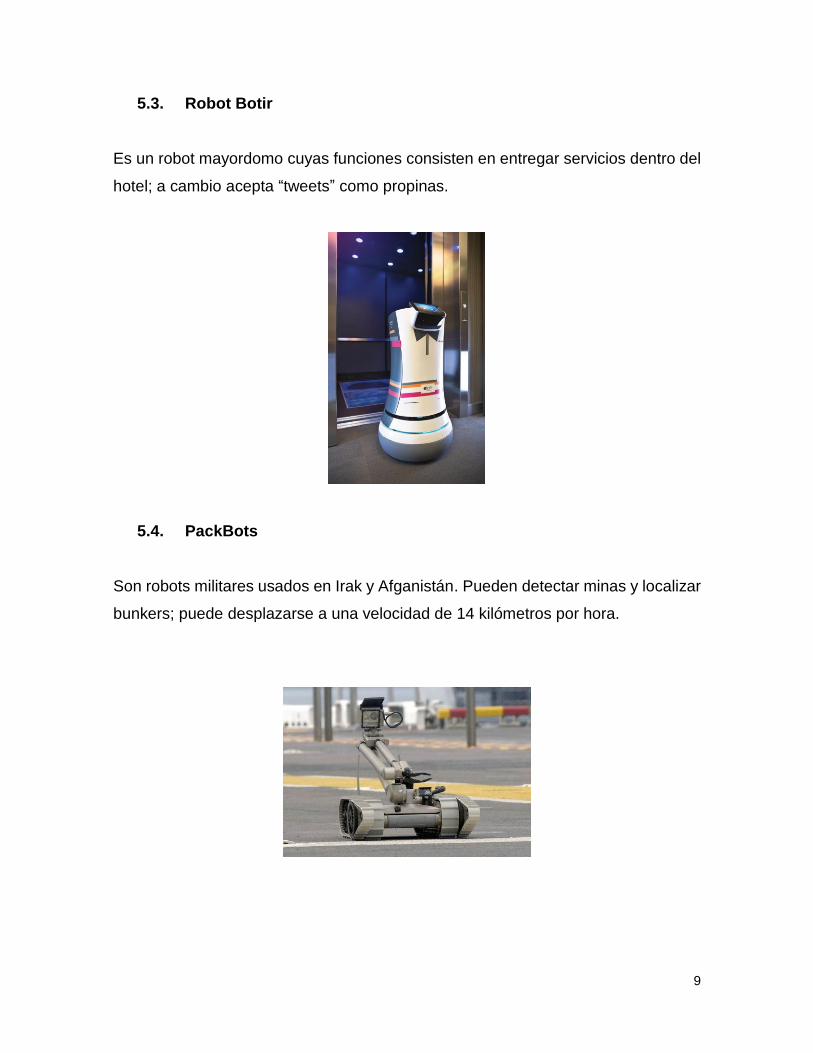
5.3. Robot Botir
Es un robot mayordomo cuyas funciones consisten en entregar servicios dentro del
hotel; a cambio acepta “tweets” como propinas.
5.4. PackBots
Son robots militares usados en Irak y Afganistán. Pueden detectar minas y localizar
bunkers; puede desplazarse a una velocidad de 14 kilómetros por hora.

10
5.5. BigDog
Es un robot de cuatro patas, dinámicamente estable. Es usado por la milicia en
operaciones de campo; puede atravesar terrenos complicados a una velocidad de
6.4 km/h cargando hasta 150 kilogramos de peso y puede subir pendientes de 35°.
5.6. I-Sobot
Su tamaño y precio, lo hacen el más cotizado del mercado. Realiza 200 acciones,
gracias a sensores que captan sonidos y órdenes emitidas a través de control
remoto.
11
5.7. PR2
Puede cocinar algunos platillos y jugar billar.
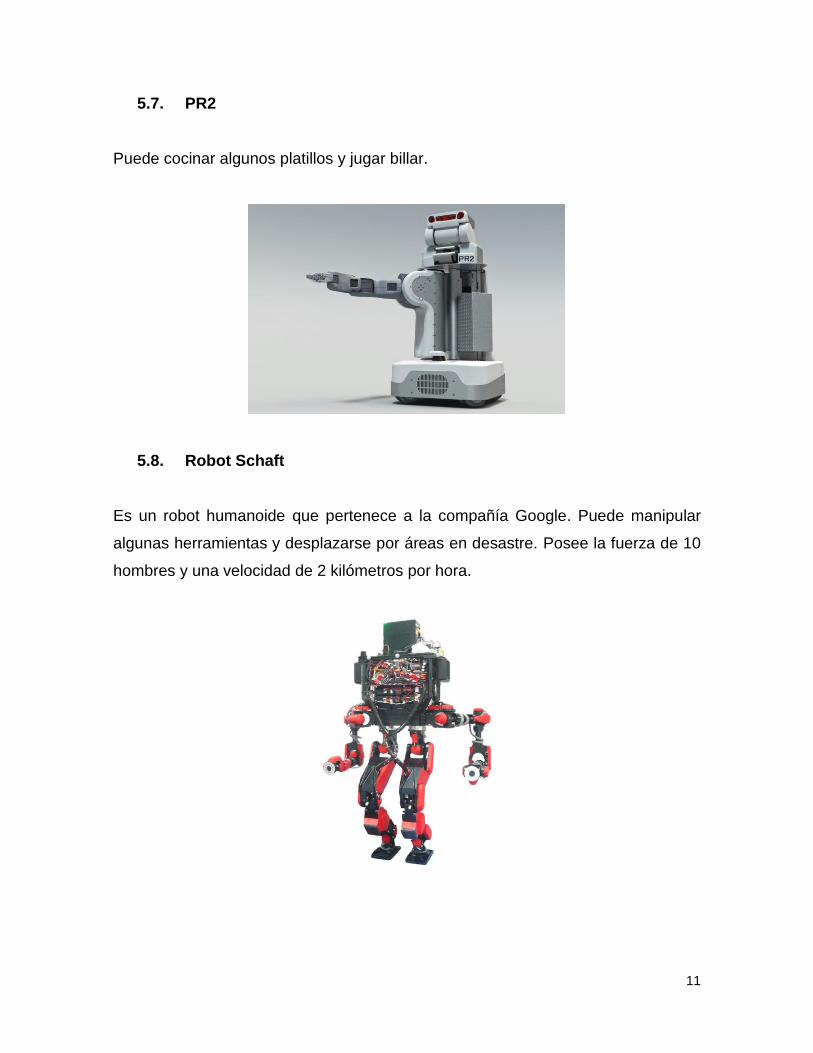
5.8. Robot Schaft
Es un robot humanoide que pertenece a la compañía Google. Puede manipular
algunas herramientas y desplazarse por áreas en desastre. Posee la fuerza de 10
hombres y una velocidad de 2 kilómetros por hora.

12
5.9. Compressorhead
Es una banda de rock robótica. Toca música de AC/DC, Pantera y Ramones.
5.10. Nao
Es un robot humanoide programable y autónomo. Cuenta con un sistema
multimedia basado en Linux, cuenta con 4 micrófonos, 2 altavoces y 2 cámaras de
alta definición.

13
6. CONSIDERACIONES
Habiendo conocido un poco los robots, nos disponemos a formular las siguientes
consideraciones basadas en los cuestionamientos formulados al inicio de la
presente exposición.
Es probable que en los próximos años, el binomio hombre-máquina, sea un tema
recurrente, por lo que no es de extrañar que existan interrogantes y miedos ante
esta nueva faceta de la humanidad. Sería absurdo pasar por alto las posibles
consecuencias que ello conlleva y más aún pensar que no es necesario prepararnos
para ese momento.
Ante el encuentro tan próximo, algunos teóricos coinciden en señalar que no
obstante que los beneficios serán muchos (en especial en el ramo de la medicina),
los efectos sociales se vislumbran como alarmantes.
Uno de estos efectos se encuentra en el ámbito laboral. Se prevé que con la
introducción de los robots se dañen gravemente los modelos laborales y la
organización empresarial; esto es, mientras más empresarios adopten la tecnología
para potencializar la producción, mayor desempleo habrá. El obrero será
desplazado por las máquinas, lo que provocará reclamos sindicales y revueltas
constantes.1
Existirá una sociedad dual, por un lado tendremos a una minoría bien pagada y con
seguridad social y por la otra a un gran número de personas serán incapaces de
encontrar trabajo y sufrirán la falta de seguridad social, lo que probablemente
generará desigualdad y tensiones sociales.
1 Se estima que para el año 2042 la automatización global estimada sea del 80% en todos los sectores (económicos y
sociales).

14
En el mismo sentido, se prevé que los países con menor tecnología sean
desplazados por los países que cuenten con mayores avances en la materia, lo que
generará pobreza, disputas y guerras encaminadas a obtener más y mejor
tecnología.
A lo anterior, debe sumarse la devastación del medio ambiente, generada por la alta
demanda de recursos necesarios en la fabricación de los robots y la acumulación
de desperdicios electromecánicos, todo ello derivado del alto consumo y
actualización.
Por último, hemos de señalar que si las máquinas con inteligencia artificial son
destinan a fines bélicos, el futuro de la humanidad estará condenado, máxime si sus
objetivos son perniciosos y de exterminio. Especialmente, cabría destacar que si las
máquinas llegaran a adquirir conciencia, podríamos vivir alguno de los pasajes de
libros o películas de ciencia ficción, tratando a toda costa de evitar nuestra
irremediable extinción.
Cabe señalar que nuestra visión no busca satanizar los avances tecnológicos, sino
concientizar sobre la importancia de implementar diversas acciones que nos
conduzcan a una consciente, informada y racionalizada transición.
Las acciones que se proponen, son las siguientes:
Establecer políticas encaminadas a evitar la sobre explotación de los
recursos naturales.
La tecnología y los robots deberán de llegar a todos por igual.
Realizar una adecuada redistribución de la riqueza.
Generar una sociedad informada, unida y preparada.
Compartir conocimientos y avances tecnológicos entre los países, buscando
un equilibrio.

15
Implementación de nuevas actividades (remuneradas) para las personas que
serán desplazadas por los robots.
La legislación en la materia tendrá que ir un paso adelante, buscando
siempre el beneficio de la colectividad.
Implementar una eficiente política de reciclaje.
Erradicar el analfabetismo robótico.
CONCLUSIONES
La tecnología, al ser un campo de oportunidad para mejorar la calidad de vida de la
humanidad, su uso, a pesar de las posibles consecuencias, no puede ni debe ser
detenido; sin embargo, a efecto minimizar sus posibles efectos negativos es
necesario prepararnos y mantenernos debidamente informados, implementando a
su vez, acciones que nos permitan una transición segura y pacífica.
BIBLIOGRAFÍA
Asimov, I. (2007) Historia y cronología de la ciencia y los descubrimientos,
Recuperado el 21/04/16, de
http://static0.planetadelibros.com/libros_contenido_extra/28/27866_Hist%20Cronol
ogia%20Ciencia%20Descubrimientos.pdf
Gómez, R. (2013). La inteligencia artificial. ¿Hacia dónde nos lleva? ¿Cómo ves?,
N°. 2, (Pp. 8-11). México: UNAM, recuperado el 14/04/16, de:
http://www.comoves.unam.mx/assets/revista/2/la-inteligencia-artificial-hacia-
donde-nos-lleva.pdf
López, J. M. (2008) Ingeniería y Sociedad. La Tecnología y el cambio social. Revista
Digital Innovación y Experiencias Educativas. Recuperado el 21/04/16, de:
http://www.csi-

16
csif.es/andalucia/modules/mod_ense/revista/pdf/Numero_13/JMIGUEL_LOPEZ_2.
Martínez, C. D. Evolución de la Robótica en la Industria a lo largo de la historia.
Revista Digital HMI. Recuperado el 21/04/16, de
https://issuu.com/carlosdavidmartinezgomez/docs/pa-eai-hmi
REFLEXIONES
¿Por qué has elegido ese tema?
El tema lo elegí porque siempre estoy en contacto con máquinas y mi gusto por ellas
ha llegado a tal grado que siempre busco saber cómo funcionan; además de ello,
las máquinas forman parte de mi carrera y mi trabajo.
¿De dónde partiste para empezar a escribir?
Partí de la lectura de Renato Gómez Herrera, de los conocimientos obtenidos de
libros y revistas en materia de computación, así como de películas de ciencia ficción.





























