Embed Size (px)
Citation preview

Introdução à Robótica Industrial
Adriano A. G. Siqueira
Aula 3 - Cinematica Direta
Introducao a Robotica Industrial – p. 1/38

Exemplo
• Considere um manipulador planar de dois elos.
• Encontrar posição da origem do Sistema de Coordenas (X2,Y2)em funçãodeθ1 e θ2.
Introducao a Robotica Industrial – p. 2/38

Rotação
x0
y1
y0
x1
z1
z0
PS
Introducao a Robotica Industrial – p. 3/38

Rotação
• {i0, j0,k0} a base ortonormal deOx0y0z0 e{i1, j1,k1} a base ortonormal deOx1y1z1
• o vetor ligando a origem O ao ponto P pode ser representado:• no sistemaOx0y0z0 por:
p0 = p0xi0 + p0y
j0 + p0zk0
• no sistemaOx1y1z1 por:
p1 = p1xi1 + p1y
j1 + p1zk1.
• relação entre as coordenadas das duas representações
p0x= p0.i0 = p1.i0 = p1x
i1.i0 + p1yj1.i0 + p1z
k1.i0
p0y= p1x
i1.j0 + p1yj1.j0 + p1z
k1.j0
p0z= p1x
i1.k0 + p1yj1.k0 + p1z
k1.k0.Introducao a Robotica Industrial – p. 4/38

Rotação
• Podemos reescrever essas três equações como
p0 = R1
0p1
sendo
R1
0=
i1.i0 j1.i0 k1.i0
i1.j0 j1.j0 k1.j0
i1.k0 j1.k0 k1.k0
.
• Similarmente podemos escrever
p1 = R0
1p0
sendo
R0
1=
i0.i1 j0.i1 k0.i1
i0.j1 j0.j1 k0.j1
i0.k1 j0.k1 k0.k1
Introducao a Robotica Industrial – p. 5/38

Propriedade e Exemplo
• Como o produto interno é comutativo, temos que
R0
1= (R1
0)−1 = (R1
0)T .
• Exemplo: Suponha que o sistemaOx1y1z1 seja rotacionado de um ânguloθem torno do eixoz0. Encontre a matriz de transformação resultanteR1
0.
• Temos:
i1.i0 = cos θ k1.i0 = 0
j1.j0 = cos θ k1.j0 = 0
j1.i0 = − sin θ i1.k0 = 0
i1.j0 = sin θ j1.k0 = 0
k1.k0 = 1
Introducao a Robotica Industrial – p. 6/38

Exemplo
x0
x1
y0
y1
i0i1 j0
j1
k0 k1
z0 z1
Introducao a Robotica Industrial – p. 7/38

Matrizes de Rotação Básicas
• Então
R1
0= Rz,θ =
cos θ − sin θ 0
sin θ cos θ 0
0 0 1
• Rotações básicas em torno dos eixosx ey são dadas por
Rx,θ =
1 0 0
0 cos θ − sin θ
0 sin θ cos θ
Ry,θ =
cos θ 0 sin θ
0 1 0
− sin θ 0 cos θ
Introducao a Robotica Industrial – p. 8/38

Composição de Rotações
• Três sistemas:Ox0y0z0, Ox1y1z1 eOx2y2z2.
• O vetorp pode então ser representado de três maneiras:p0, p1 ep2.
• Temos
p0 = R1
0p1(1)
p0 = R2
0p2(2)
p1 = R2
1p2(3)
• Substituindo (3) em (1) fornece
p0 = R1
0R2
1p2(4)
• Comparando (2) e (4) nós temos a relação
R2
0= R1
0R2
1
Introducao a Robotica Industrial – p. 9/38

Composição de Rotações
• A ordem das rotações é importante?
RARB = RBRA?
• Exemplo: Rotações emz ex.
Introducao a Robotica Industrial – p. 10/38

Rotação em torno de um Eixo Arbitrário
x0
y0
z0
k
kx
ky
kz
q
a
b
Introducao a Robotica Industrial – p. 11/38

Rotação em torno de um Eixo Arbitrário
• Sejak = (kx, ky, kz)T um vetor unitário que define um eixo arbitrário.
• Rotação deθ graus em torno do eixo arbitrário.
• Matriz de rotação:
Rk,θ = Rz0,αRy0,βRz0,θRy0,−βRz0,−α.
• Comok é um vetor unitário, vemos que
sinα =ky
√
k2x + k2
y
cosα =qx
√
k2x + k2
y
sinβ =√
k2x + k2
y
cosβ = kz.Introducao a Robotica Industrial – p. 12/38

Rotação em torno de um Eixo Arbitrário
• Temos
Rk,θ =
k2
xvθ + cθ kxkyvθ − kzsθ kxkzvθ + kysθ
kxkyvθ + kzsθ k2
yvθ + cθ kykzvθ − kxsθ
kxkzvθ − kysθ kykzvθ + kxsθ k2
zvθ + cθ
sendovθ = 1 − cθ, cθ = cos θ, sθ = sin θ.
• Representação eixo/ângulo de uma matriz de rotação arbitrária
Rk,θ =
r11 r12 r13
r21 r22 r23
r31 r32 r33
Introducao a Robotica Industrial – p. 13/38

Representação Eixo/Ângulo
• O ângulo equivalenteθ e o eixo equivalentek são dados pelas expressões
θ = cos−1
(
Tr(R) − 1
2
)
= cos−1
(
r11 + r22 + r33 − 1
2
)
sendoTr(R) o traço deR, e
k =1
2 sin θ
r32 − r23
r13 − r31
r21 − r12
• Quatro variáveis (θ e coordenadas dek) e uma restrição:k2
x + k2
y + k2
z = 1.
Introducao a Robotica Industrial – p. 14/38

Ângulos de Euler
• (φ, θ, ψ) - três variáveis idependentes.
• Rotação em torno dez0 pelo ânguloφ
• Rotação em torno dey′
0pelo ânguloθ
• Rotação em torno dez′′
0pelo ânguloψ
Introducao a Robotica Industrial – p. 15/38

Ângulos de Euler
• Matriz de rotação
Rz0,φRy′0,θRz′′
0,ψ =
cφ −sφ 0
sφ cφ 0
0 0 1
cθ 0 sθ
0 1 0
−sθ 0 cθ
cψ −sψ 0
sψ cψ 0
0 0 1
=
cφcθcψ − sφsψ −cφcθsψ − sφcψ cφsθ
sφcθcψ + cφsψ −sφcθsψ + cφcψ sφsθ
−sθcψ sθsψ cθ
Introducao a Robotica Industrial – p. 16/38

Ângulos de Roll, Pitch e Yaw
• Rotações em torno dos eixos coordenadosx0, y0, z0
• Rotação em torno dex0 pelo ânguloψ, movimento de yaw
• Rotação em torno dey0 pelo ânguloθ, movimento de pitch
• Rotação em torno dez0 pelo ânguloφ, movimento de roll
x0
y0
z0
Guinar
Inclinar
Rolar
Introducao a Robotica Industrial – p. 17/38

Ângulos de Roll, Pitch e Yaw
• Matriz de rotação
Rz0,φRy0,θRx0,ψ =
cφ −sφ 0
sφ cφ 0
0 0 1
cθ 0 sθ
0 1 0
−sθ 0 cθ
1 0 0
0 cψ −sψ
0 sψ cψ
=
cφcθ −sφcψ + cφsθsψ sφsψ + cφsθcψ
sφcθ cφcψ + sφsθsψ −cφsψ + sφsθcψ
−sθ cθsψ cθcψ
Introducao a Robotica Industrial – p. 18/38

Transformações Homogêneas
• Sistemas de coordenadasO0x0y0z0 eO1x1y1z1
• Movimento de corpo rígido: combinação de uma rotação e uma translação
• Representação dep no sistemaOx0y0z0
p0 = R1
0p1 + d1
0
• O vetord1
0liga a origemO0 à origemO1 e é expresso no sistema de
coordenadasO0x0y0z0
• Representação matricial
[
p0
1
]
=
[
R1
0d1
0
0 1
][
p1
1
]
Introducao a Robotica Industrial – p. 19/38

Transformações Homogêneas
• Transformação homogênea
H1
0=
[
R1
0d1
0
0 1
]
• A transformação homogênea mais geral
H =
[
R3×3 d3×1
f1×3 s1×1
]
=
[
Rotacao Translacao
perspectiva fator de escala
]
utilizada para a interface de um sistema de visão ou para simulação gráfica.
Introducao a Robotica Industrial – p. 20/38

Transformações Homogêneas
• Exemplo: Rotação deα graus em torno dex0
• Translação de a unidades ao longo do eixox0
• Translação de d unidades ao longo do eixoz0
• Rotação deθ graus em torno dez0
H = Rotz0,θTransz0,dTransx0,aRotx0,α =
cθ −sθ 0 0
sθ cθ 0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1 d
0 0 0 1
1 0 0 a
0 1 0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 cα −sα 0
0 sα cα 0
0 0 0 1
=
cθ −sθ 0 a
cαsθ cαcθ −sα −sαd
sαsθ sαcθ cα cαd
0 0 0 1
Introducao a Robotica Industrial – p. 21/38

Cinemática Direta
• Dados: variáveis das juntas (ângulos ou deslocamentos)
• Procurado: posição e orientação do efetuador
• Notação
• Numeração das juntas: 1 a n• Numeração dos elos : 0 a n (0 = base)• Variável da junta:qi• Sistema de coordenadas inercial (base):O0x0y0z0• Sistemas de coordenadas: 1 a n• Transformação homogênea entre os sistemas de coordenadasi e i− 1
Hii−1
(qi)
Introducao a Robotica Industrial – p. 22/38

Cinemática Direta
• Transformação homogênea entre os sistemas de coordenadas da base (0) edo efetuador (n)
Tn0
=
[
Rn0
dn0
0 1
]
=
[
n0 s0 a0 dn0
0 0 0 1
]
=
nx sx ax dx
ny sy ay dy
nz sz az dz
0 0 0 1
• Sistema de coordenadas n no caso de uma garra• eixozn = a, na direção deapproach• eixoyn = s, na direção desliding• eixoxn = n, na direçãonormal aos outros eixos
Introducao a Robotica Industrial – p. 23/38

Representação Denavit-Hartenberg
• Transformação homogênea entre os sistemas de coordenadasi e i− 1
Hii−1
= Rotzi−1,θiTranszi−1,di
Transxi,aiRotxi,αi
=(5)
cθi−sθi
0 0
sθicθi
0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1 di
0 0 0 1
1 0 0 ai
0 1 0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 cαi−sαi
0
0 sαicαi
0
0 0 0 1
=
cθi−sθi
cαisθisαi
aicθi
sθicθicαi
−cθisαi
aisθi
0 sαicαi
di
0 0 0 1
sendoθi, ai, di, αi parâmetros do eloi e juntai.
Introducao a Robotica Industrial – p. 24/38

Representação Denavit-Hartenberg
• Defina o eixozi ao longo do eixo da juntai+ 1. O eixozn é definido nadireção do eixozn−1 se a juntan é rotacional.
• DefinaO0 no eixoz0 ex0 convenientemente.
• Parai = 1, · · · , n− 1:
• Posicionar a origemOi onde a normal comum azi e zi−1 intersectazi.Sezi intersectazi−1 posicionarOi nesta intersecção. Sezi e zi−1 sãoparalelos, posicionarOi na juntai+ 1.
• Definaxi ao longo da normal comum azi e zi−1 com direção da juntaiparai+ 1, ou na direção normal ao planozi−1 − zi sezi−1 e zi seintersectam.
• DefinaOn convenientemente ao longo do eixozn (no centro da garra) exnnormal ao eixozn − 1.
• Escolhayi para completar a “regra da mão direita”Introducao a Robotica Industrial – p. 25/38

Representação Denavit-Hartenberg
• Criar uma tabela dos parâmetros dos elos,ai, di, αi e θi.
• ai = distância ao longo dexi da intersecção dos eixosxi e zi−1 atéOi.
• di = distância ao longozi−1 deOi−1 até a intersecção dos eixosxi ezi−1. di é variável se a juntai é prismática.
• αi = o ângulo entrezi−1 e zi medido em torno dexi.
• θi = o ângulo entrexi−1 exi medido em torno dezi−1. θi é variável se ajuntai é rotativa.
• Calcular as matrizes de transformação homogêneasHii−1
substituindo osparâmetros acima em (5).
• CalcularTn0
= H1
0· · ·Hn
n−1.
Introducao a Robotica Industrial – p. 26/38

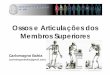
Exemplo: Stanford
Introducao a Robotica Industrial – p. 27/38

Exemplo: Stanford
• Parâmetros de D-H:
Elo ai di αi θi Offset
1 0 d1 -90◦ θ1 -90◦
2 0 d2 90◦ θ2 -90◦
3 0 d3 0 -90◦ 0
4 0 0 -90◦ θ4 0
5 0 0 90◦ θ5 0
6 0 d6 0 θ6 0
Introducao a Robotica Industrial – p. 28/38

Ângulos de Orientação do KUKA
• Rotações em torno dos eixos fixos ao corpo
• Rotação em torno dez0 pelo ânguloφ
• Rotação em torno dey′
0pelo ânguloθ
• Rotação em torno dex′′
0pelo ânguloψ
Introducao a Robotica Industrial – p. 29/38

Ângulos de Orientação do KUKA
• Matriz de rotação
Rz0,φRy′0,θRx′′
0,ψ =
cφ −sφ 0
sφ cφ 0
0 0 1
cθ 0 sθ
0 1 0
−sθ 0 cθ
1 0 0
0 cψ −sψ
0 sψ cψ
=
cφcθ cφsθsψ − sφcψ cφsθcψ + sφsψ
sφcθ sφsθsψ + cφcψ sφsθcψ − cφsψ
−sθ cθsψ cθcψ
Introducao a Robotica Industrial – p. 30/38

Ângulos de Orientação do KUKA
• Matriz de rotação
Rz0,φRy′0,θRx′′
0,ψ =
cφcθ cφsθsψ − sφcψ cφsθcψ + sφsψ
sφcθ sφsθsψ + cφcψ sφsθcψ − cφsψ
−sθ cθsψ cθcψ
• Matriz de rotação genérica
R =
r11 r12 r13
r21 r22 r23
r31 r32 r33
Introducao a Robotica Industrial – p. 31/38

Ângulos de Orientação do KUKA
• Cálculo dos ângulos: ser11 6= 0 e r21 6= 0
φ = atan2(r21, r11)
θ = atan2(−r31,√
r211
+ r221
)
ψ = atan2(r32, r33)
Introducao a Robotica Industrial – p. 32/38

Ângulos de Orientação do KUKA
• Cálculo alternativo:
θ = asin(−r31)
ψsin = asin(r32/cos(θ))
ψcos = acos(r32/cos(θ))
ψ =
π − ψsin, se ψcos > π/2 e ψsin > 0
−π − ψsin, se ψcos > π/2 e ψsin < 0
ψsin, se ψcos < π/2
φsin = asin(r21/cos(θ))
φcos = acos(r21/cos(θ))
φ =
π − φsin, se φcos > π/2 e φsin > 0
−π − φsin, se φcos > π/2 e φsin < 0
φsin, se φcos < π/2
Introducao a Robotica Industrial – p. 33/38

Ângulos de Orientação do KUKA
• Rotação em torno de um eixo, considerando o sistema WORLD:
• T1: matriz de transformação atual
• T2: matriz de transformação resultante
• Ri: matriz de transformação da rotação em torno dei (A = Z; B = Y; C = X)
T2 = RiT1
Introducao a Robotica Industrial – p. 34/38

Ângulos de Orientação do KUKA
• Rotação em torno de um eixo, considerando o sistema da ferramenta:
• T1: matriz de transformação atual
• T2: matriz de transformação resultante
• Ri: matriz de transformação da rotação em torno dei (A = Z; B = Y; C = X)
T2 = T1Ri
Introducao a Robotica Industrial – p. 35/38

Calibração da Ferramenta
• Método XYZ - 4 Pontos
• Mover o TCP (Tool Center Point) para um ponto de referência com 4orientações diferentes.
• Translação da origem do sistema de coordenadas na flange até oTCP:
TCPx
TCPy
TCPz
• Transformação homogênea do sistema de coordenadas na flangeaté o TCP:
Q =
1 0 0 TCPx
0 1 0 TCPy
0 0 1 TCPz
0 0 0 1
Introducao a Robotica Industrial – p. 36/38

Calibração da Ferramenta
• A seguinte equação é satisfeita
TiQ = TjQ, i, j ∈ 1, 2, ..., N e i 6= j
• Denote
Ti =
[
Ra ta
0 1
]
e Tj =
[
Rb tb
0 1
]
• Então
[Ra −Rb]
TCPx
TCPy
TCPz
= −[ta − tb]
• Método dos Mínimos Quadrados
Introducao a Robotica Industrial – p. 37/38

Calibração da Ferramenta
• Método XYZ - Ponto de Referência
• Mover um ponto conhecido da flange até um ponto de referência
• Mover o TCP até o mesmo ponto de referência
• Ponto conhecido da flange:
Fx
Fy
Fz
• Então
Ti
[
I F
0 1
]
= TjQ
[
Ra ta
0 1
][
I F
0 1
]
=
[
Rb tb
0 1
]
1 0 0 TCPx
0 1 0 TCPy
0 0 1 TCPz
0 0 0 1
Introducao a Robotica Industrial – p. 38/38