Embed Size (px)
Citation preview

Introdução às equações diferenciais
Professor Leonardo Crochik
Notas de aula
1 O que é
1. é uma equação:. . . = . . .
2. a incógnita não é um número x ∈ R, mas uma função x(t) : R → R
3. na equação estão presentes, além de termos envolvendo a função x(t), também termos envol-vendo as funções derivadas dx
dt; d
2xdt2
; d3xdt3
; etc . . .
4. Exemplo:
7t · x2 + 3
(d2x
dt2
)3
− x · dxdt
= 5t3
2 Classi�cação
1. Ordem: refere-se à derivada de maior ordem presente na equação. Exemplos:
(a) se só aparece na equação a derivada dx/dt, trata-se de uma �equação de primeira ordem�;
(b) se a derivada de maior ordem é d3x/dt3, trata-se de uma �equação de terceira ordem�
2. Linear / não-linear: Se, nos termos envolvendo a função x e suas derivadas, elas aparecemsempre elevadas à potência 1 e não estão multiplicados entre si, trata-se de uma equaçãolinear. Caso contrário, é uma equação não linear. Exemplos:
• 5t3 · d2xdt2− e−γt dx
dt+ sen(ωt) · x = ln(αt) é uma equação (de segunda ordem) linear;
• dxdt· x = 5t é uma equação (de primeira ordem) não-linear;
• d2θdt2
= αsen(θ) é uma equação (de segunda ordem) não-linear;
•(dxdt
)2= 5t · x é uma equação (de primeira ordem) não-linear;
3. Homogênêa / inomogênêa: se existe um termo, diferente de zero, independente de x e desuas derivadas, trata-se de uma equação inomogênea. Caso contrário, temos uma equaçãohomogênea. Exemplos:
1

• 5t3 · d2xdt2− e−γt dx
dt+ sen(ωt) · x = ln(αt) é uma equação (de segunda ordem, linear)
inomogênea;
• 5t3 · d2xdt2−e−γt dx
dt+sen(ωt) ·x = 0 é uma equação (de segunda ordem, linear) homogênea.
4. Autônomo / dependente do tempo: se a variável t, da qual x é função, não aparece explici-tamente na equação temos uma equação autônoma. Caso contrário, temos uma equaçãodependente do tempo. Exemplos:
• 5t3 · d2xdt2− e−γt dx
dt+ sen(ωt) · x = ln(αt) é uma equação (de segunda ordem, linear,
inomogênea) dependente do tempo;
• 5 · d2xdt2−3dx
dt+2 ·x = 0 é uma equação (de segunda ordem, linear, homogênea) autônoma.
3 Abordagens para resolução
3.1 Resolução numérica
Há vários métodos. Todos eles, entretanto, partem de um mesmo princípio: escolhemos um valorde intervalo de tempo ∆t su�cientemente pequeno. Apartir daí, iteramos a equação: calculamoso valor de x(t + ∆t) a partir do conhecimento de x(t) e dx/dt(t). Vamos explicar esse processoatravés de um exemplo.
Exemplo 1
Seja a equação:
(dx
dt
)2
= 5t · x (1)
1. Para iniciar a resolução, precisamos conhecer a condição inicial. Suponhamos x(0) = 3.
2. Vamos isolar a derivada dx/dt:
dx
dt=√
5t · x
e calcular seu valor para t = 0 :
dx
dt(0) =
√5 · 0 · x(0)
dx
dt(0) =
√5 · 0 · 3 = 0
3. De�nimos agora um valor para dt = ∆t = 0, 01. Conhecendo x(t), calculamos x(t+ ∆t):
x(0) = 3
x(0 + 0.01) = 3 +dx
dt·∆t = 3 + 0 · 0, 01 = 3
2
0 1 2 3 4 5 t0
20
40
60
80
100
x
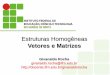
Figura 1: Solução da equação (1) para x0 = 3.
4. Voltamos à etapa 2, porém agora para t = 0, 01:
dx
dt(0, 01) =
√5 · 0, 01 · x(0, 01)
dx
dt(0, 01) =
√5 · 0, 01 · 3 = 0, 3873
x(0, 01 + 0, 01) = x(0, 01) +dx
dt·∆t = 3 + 0, 3873 · 0, 01 = 3, 003873
e assim por diante.
Exemplo 2
Seja a equação:
d2x
dt2+dx
dt+ x = sen(t) (2)
1. Nesse caso, temos uma equação de segunda ordem. Vamos desmembrá-la em duas equaçõesde primeira ordem acopladas. Chamemos dx/dt de v:{
dxdt
= vdvdt
= −v − x+ sen(t)
2. Precisamos agora das condições iniciais. Suponhamos x(0) = 3 e v(0) = 0. Calculamosentão dx/dt(0) e dv/dt(0):{
dxdt
(0) = v(0) = 0dvdt
(0) = −v(0)− x(0) + sen(0) = −3
3
0 10 20 30 40 50 t−2
−1
0
1
2
3
x
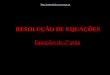
Figura 2: Solução da equação (2) para x0 = 3 e v0 = 0.
3. Escolhemos ∆t = 0, 01 e calculamos x(0 + ∆t) e v(0 + ∆t) a partir de x, v, dx/dt e dv/dt:{x(0 + ∆t) = x(0) + dx
dt·∆t = 3
v(0 + ∆t) = v(0) + dvdt·∆t = −0, 03
4. Voltamos à etapa 2, mas agora para t = 0, 01:
{dxdt
(0, 01) = v(0, 01) = −0, 03dvdt
(0, 01) = −v(0, 01)− x(0, 01) + sen(0, 01) = −2, 96{x(0, 02) = x(0, 01) + dx
dt∆t = 2, 9997
v(0, 02) = v(0, 01) + dvdt
∆t = −0, 0596
e assim por diante...
Comentários
1. A escolha adequada do intervalo de tempo ∆t é o ponto crítico. Um valor su�cientementepequeno para uma equação pode não o ser para outra.
2. Esse método de resolução permite descobrir a função procurada, dada a condição inicial. Elenão nos permite encontrar a forma algébrica dessa função para qualquer condição inicial.
3. Em compensação, qualquer equação diferencial pode, em princípio, ser resolvida dessa forma.
4. O método aqui apresentado é o �Método de Euler�.
4
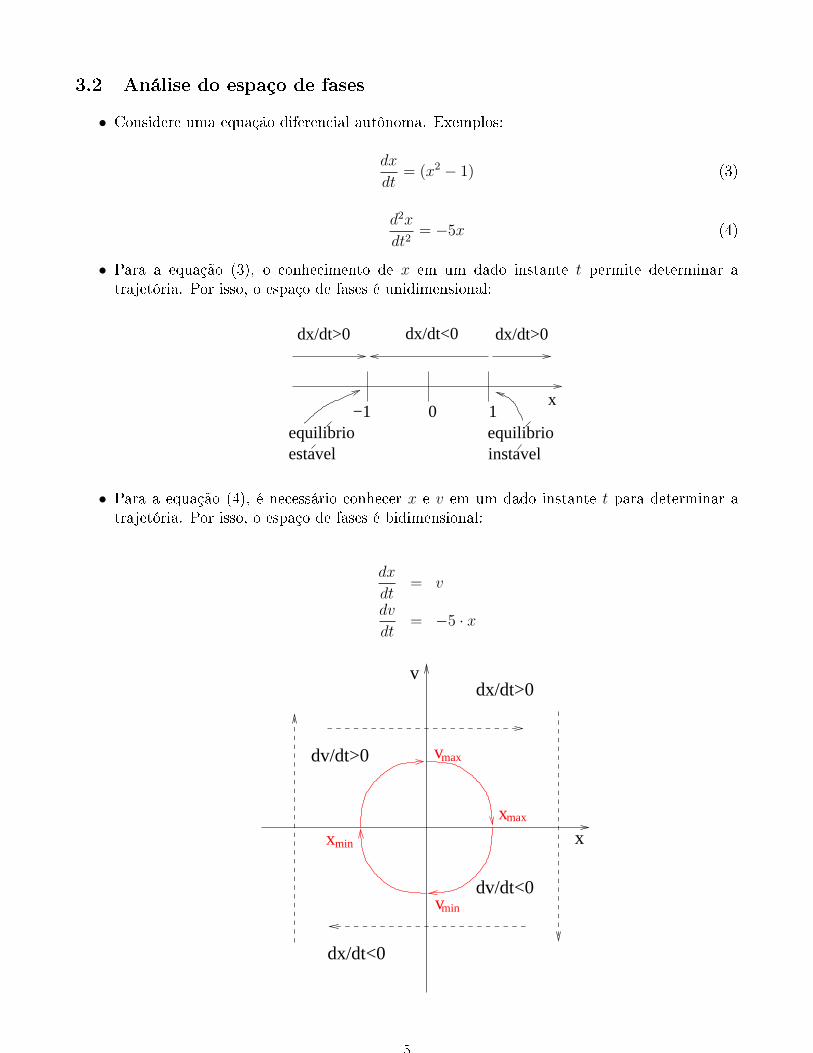
3.2 Análise do espaço de fases
• Considere uma equação diferencial autônoma. Exemplos:
dx
dt= (x2 − 1) (3)
d2x
dt2= −5x (4)
• Para a equação (3), o conhecimento de x em um dado instante t permite determinar atrajetória. Por isso, o espaço de fases é unidimensional:
equilibrioestavel
equilibrio
dx/dt>0dx/dt>0 dx/dt<0
−1 10x
instavel
• Para a equação (4), é necessário conhecer x e v em um dado instante t para determinar atrajetória. Por isso, o espaço de fases é bidimensional:
dx
dt= v
dv
dt= −5 · x
vmax
xmax
vmin
xmin x
vdx/dt>0
dx/dt<0
dv/dt<0
dv/dt>0
5

• A análise do espaço de fases nos permite concluir como são, geometricamente, as trajetóriaspara todas as condições iniciais próximas de um ponto de equilíbrio.
• Ela não permite, entretanto, saber a forma exata da trajetória x(t). Trata-se de uma análisequalitativa.
• A representação no espaço de fases nos permite ver a diferença entre soluções de equaçõesde primeira e de segunda ordem. No primeiro caso, o �espaço das soluções� é unidimensional(depende apenas de uma constante ligada à condição inicial), enquanto, no segundo caso, ébidimensional (depende de duas constantes).
3.3 Resolução analítica
• A resolução analítica é a única que permite saber a expressão algébrica da função x(t).
• Entretanto, nem todas as equações diferenciais podem ser resolvidas analiticamente.
• Equação diferenciais lineares sempre podem ser resolvidas analiticamente.
• Vamos ver alguns métodos, sem, entretanto, buscar a completeza.
Equações de primeira ordem
dx
dt= x2t+ t (5)
1. Precisamos fatorar o lado direito de (5), buscando separar um fator que dependa só de x eoutro que dependa só de t:
dx
dt= (x2 + 1)t⇒ dx
x2 + 1= t · dt
2. Separamos assim a equação em um membro envolvendo apenas x e outro envolvendo apenast. Podemos, portanto, integrar os dois membros:
∫ x(t)
x0
dx
x2 + 1=
∫ t
0
t · dt
arctg(x(t))− arctg(xo) = t2/2
arctg(x(t)) = arctg(x0) + t2/2
x(t) = tg(arctg(x0) + t2/2)
Equações de segunda ordem
O problema Vamos ver como resolver equações lineares, homogêneas, a coe�cientes constantes(autônomas):
a · d2x
dt2+ b · dx
dt+ c · x = 0 (6)
6

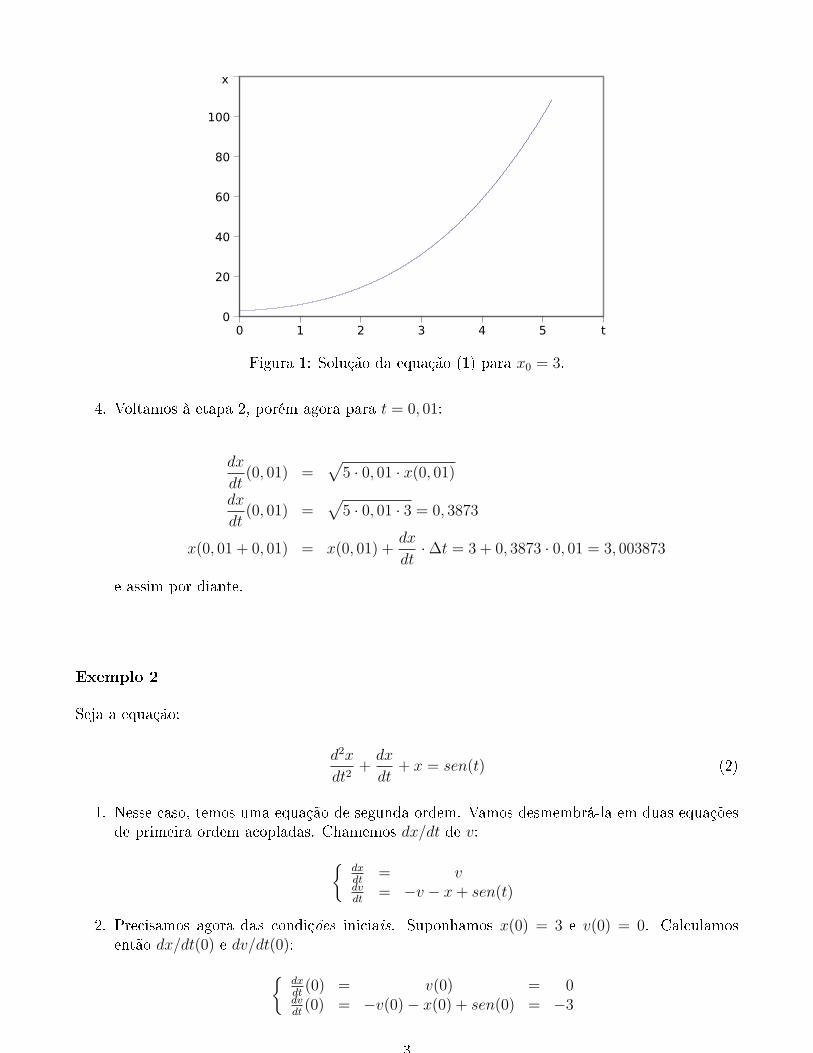
Figura 3: Solução da equação (5) para x0 = 3.
Transformação em um problema algébrico Nosso objetivo é transformar essa equação difer-encial em uma equação algébrica, ou seja, em uma equação cuja incógnita é um número p ∈ R.
• Sabemos que ddtet = et. Ou seja, é como se a função exponencial fosse o elemento neutro da
derivação. Pensando nisso, vamos propor uma solução tentativa para a equação (6):
xp(t) = ept (7)
• Temos que:
d
dtxp = p · ept ⇒ d
dtxp = p · xp
d2
dt2xp = p2 · ept ⇒ d2
dt2xp = p2 · xp
, de maneira que a operação de derivar essa função é equivalente à operação de multiplicá-lapor p.
• Substituindo (7) em (6), temos:
a · p2xp + b · p · xp + c · xp = 0
a · p2 + b · p+ c = 0 (8)
• Para que (7) seja solução da equação diferencial (6), p precisa ser solução da equação algébrica
(8). Nosso problema reduziu-se assim a resolver uma equação de segundo grau:
p1 =−b+
√b2 − 4ac
2a⇒ x1(t) = ep1t
p2 =−b−
√b2 − 4ac
2a⇒ x1(t) = ep2t (9)
7

Algorithm 1 Demonstração da propriedade de superposição de soluções
Como x1 e x2 são soluções de (6), sabemos que:
a · d2x1
dt2+ b · dx1
dt+ c · x1 = 0 (10)
a · d2x2
dt2+ b · dx2
dt+ c · x2 = 0 (11)
Somando a equação (10) multiplicada por α à equação (11) multiplicada por β, temos:
a · αd2x1
dt2+ a · βd
2x2
dt2+ b · αdx1
dt+ b · βdx2
dt+ c · αx1 + c · βx2 = 0
a · d2
dt2(
≡x(t)︷ ︸︸ ︷αx1 + βx2) + b · d
dt(
≡x(t)︷ ︸︸ ︷αx1 + βx2) + c(
≡x(t)︷ ︸︸ ︷αx1 + βx2) = 0
Portanto, x(t) é solução da equação (6). Como depende de duas constantes arbitrárias, α e β, x(t)é a solução geral da equação. �
Solução geral: superposição de soluções Encontramos duas soluções particulares para aequação (6). Qual será sua solução geral?
• A solução geral deve depender de duas constantes, determinadas a partir das condiçõesiniciais (por que?).
• Para equações diferenciais lineares e homogêneas, vale a �propriedade de superposição desoluções�, demonstrada no quadro 1:
� �Se x1(t) é solução de (6) e x2(t) é solução de (6), então x(t) ≡ α · x1(t) + β · x2(t) é asolução geral da equação (6), onde α e β são constantes que dependem das condiçõesiniciais.�
• A solução geral é, portanto:x(t) = α · x1(t) + β · x2(t) (12)
Análise das possíveis soluções Nossa solução geral depende dos valores de p, determinadosem (9). Temos três casos possíveis:
1. Caso 1: b2 − 4ac > 0 ⇒Soluções reais e distintas. Temos essencialmente a soma de duasfunções exponenciais. Como exemplo, vamos resolver a equação:
d2x
dt2+ 5
dx
dt+ 4x = 0 (13)
, submetida à condição inicial x(0) = 4 e dx/dt(0) = 1.
(a) Equação algébrica característica:
p2 + 5p+ 4 = 0⇒ p1 = −4 ou p2 = −1
8
0 0.5 1 1.5 2 2.50
1
2
3
4
x
t
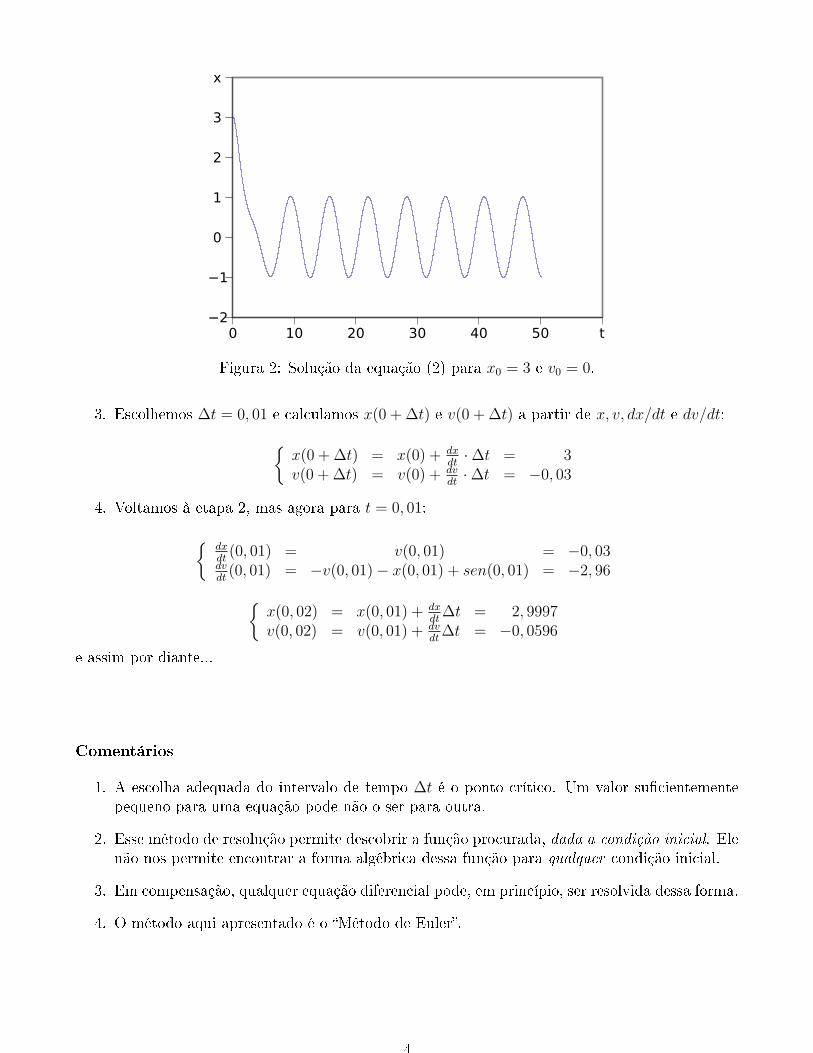
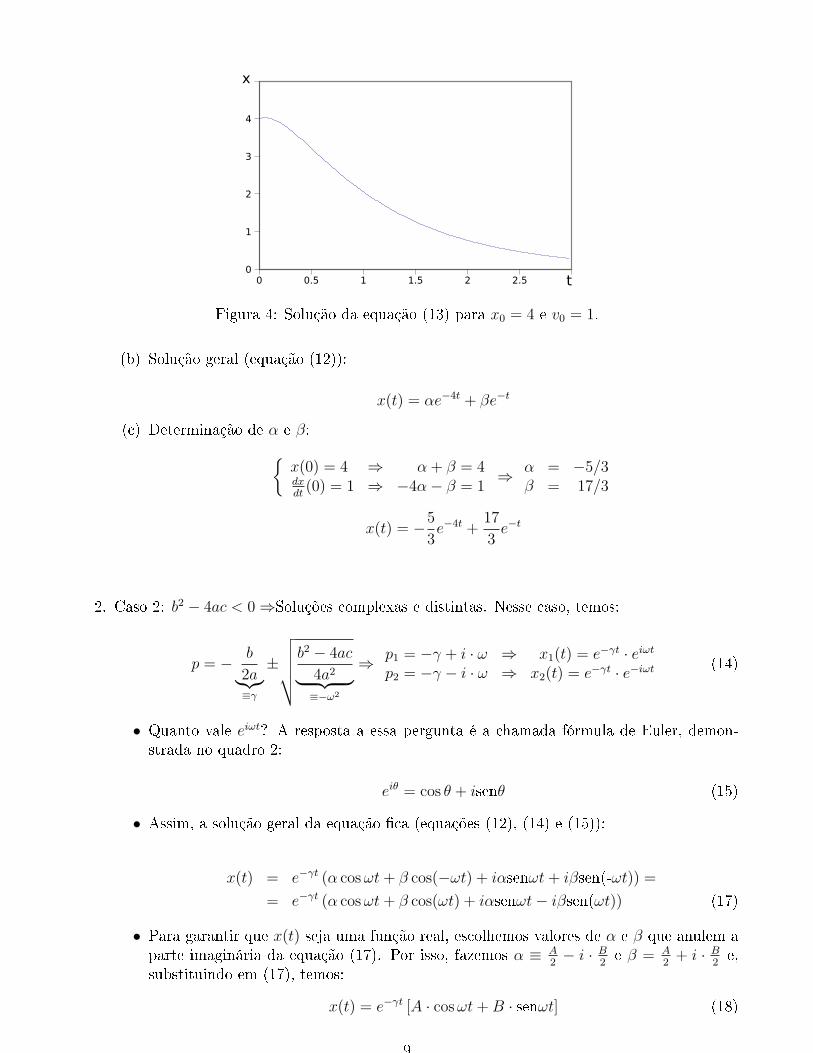
Figura 4: Solução da equação (13) para x0 = 4 e v0 = 1.
(b) Solução geral (equação (12)):
x(t) = αe−4t + βe−t
(c) Determinação de α e β:{x(0) = 4 ⇒ α + β = 4dxdt
(0) = 1 ⇒ −4α− β = 1⇒ α = −5/3
β = 17/3
x(t) = −5
3e−4t +
17
3e−t
2. Caso 2: b2 − 4ac < 0⇒Soluções complexas e distintas. Nesse caso, temos:
p = − b
2a︸︷︷︸≡γ
±
√√√√√b2 − 4ac
4a2︸ ︷︷ ︸≡−ω2
⇒ p1 = −γ + i · ω ⇒ x1(t) = e−γt · eiωtp2 = −γ − i · ω ⇒ x2(t) = e−γt · e−iωt (14)
• Quanto vale eiωt? A resposta a essa pergunta é a chamada fórmula de Euler, demon-strada no quadro 2:
eiθ = cos θ + isenθ (15)
• Assim, a solução geral da equação �ca (equações (12), (14) e (15)):
x(t) = e−γt (α cosωt+ β cos(−ωt) + iαsenωt+ iβsen(-ωt)) =
= e−γt (α cosωt+ β cos(ωt) + iαsenωt− iβsen(ωt)) (17)
• Para garantir que x(t) seja uma função real, escolhemos valores de α e β que anulem aparte imaginária da equação (17). Por isso, fazemos α ≡ A
2− i · B
2e β = A
2+ i · B
2e,
substituindo em (17), temos:
x(t) = e−γt [A · cosωt+B · senωt] (18)
9

Algorithm 2 Demonstração da fórmula de Euler
De�na x(θ) = eiθ. Nossa estratégia é: �descobrir de que equação diferencial de segunda ordem essafunção é solução�. Sabemos que x(0) = ei·0 = 1. Calculemos dx/dθ:
dx
dθ= ieiθ ⇒ dx
dθ(0) = i
Calculemos d2x/dθ2:
d2x
dθ2= i2eiθ = −
=x(θ)︷︸︸︷eiθ ⇒ d2x
dθ2= −x (16)
Mostramos em aula que a solução da equação diferencial (16) é:
x(θ) = a · cos(θ) + b · sen(θ)
Substituindo as condições iniciais:
x(0) = 1 ⇒ a = 1
dx
dθ(0) = i ⇒ b = i,
concluimos que:x(θ) ≡ eiθ = cos θ + isenθ �
• Exemplo: Resolver a equação:
d2x
dt2+ 2
dx
dt+ 5x = 0 (19)
, submetida à condição inicial x(0) = 4 e dx/dt(0) = 1.
(a) Equação algébrica característica:
p2 + 2p+ 5 = 0⇒ p1 = −≡γ︷︸︸︷1 +
≡ω︷︸︸︷4 i ou p2 = −1− 4i
(b) Solução geral (equação (18)):
x(t) = e−1t(A cos 4t+Bsen4t)
(c) Determinação de A e B:
dx
dt= e−1t(−4Asen4t+ 4B cos 4t)− e−1t(A cos 4t+Bsen4t)
{x(0) = 4 ⇒ A = 4dxdt
(0) = 1 ⇒ 4B − A = 1⇒ A = 4
B = 5/4
x(t) = e−t(4 cos 4t+ 5/4sen4t)
10
0 1 2 3 4−2
−1
0
1
2
3
4
x
t
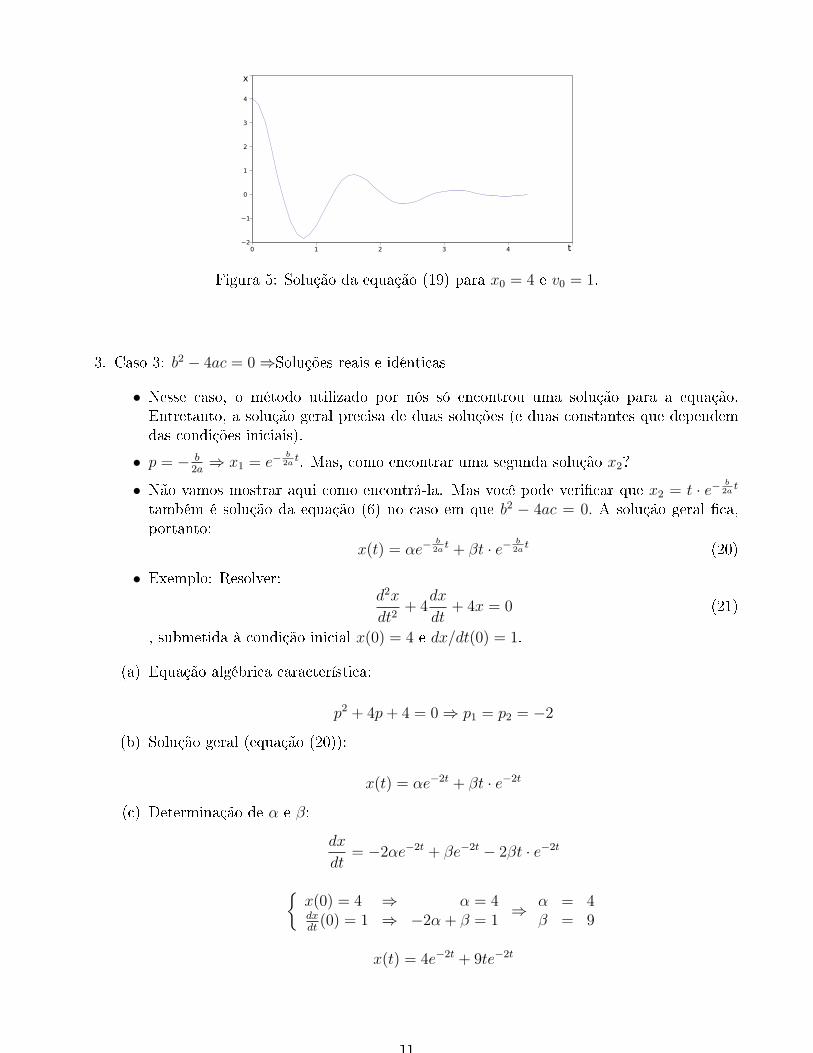
Figura 5: Solução da equação (19) para x0 = 4 e v0 = 1.
3. Caso 3: b2 − 4ac = 0⇒Soluções reais e idênticas
• Nesse caso, o método utilizado por nós só encontrou uma solução para a equação.Entretanto, a solução geral precisa de duas soluções (e duas constantes que dependemdas condições iniciais).
• p = − b2a⇒ x1 = e−
b2at. Mas, como encontrar uma segunda solução x2?
• Não vamos mostrar aqui como encontrá-la. Mas você pode veri�car que x2 = t · e− b2at
também é solução da equação (6) no caso em que b2 − 4ac = 0. A solução geral �ca,portanto:
x(t) = αe−b2at + βt · e−
b2at (20)
• Exemplo: Resolver:d2x
dt2+ 4
dx
dt+ 4x = 0 (21)
, submetida à condição inicial x(0) = 4 e dx/dt(0) = 1.
(a) Equação algébrica característica:
p2 + 4p+ 4 = 0⇒ p1 = p2 = −2
(b) Solução geral (equação (20)):
x(t) = αe−2t + βt · e−2t
(c) Determinação de α e β:
dx
dt= −2αe−2t + βe−2t − 2βt · e−2t
{x(0) = 4 ⇒ α = 4dxdt
(0) = 1 ⇒ −2α + β = 1⇒ α = 4
β = 9
x(t) = 4e−2t + 9te−2t
11

0 1 2 3 40
1
2
3
4
x
t
Figura 6: Solução da equação (21) para x0 = 4 e v0 = 1.
12