Embed Size (px)
Citation preview

Introducción a los Problemasde Frontera Libre
Noemí Wolanski
Departmento de MatemáticaUniversidad de Buenos Aires
XVI Congreso Colombiano de MatemáticasMedellín, Julio, 2007

IntroducciónLas ecuaciones diferenciales aparecen como modo derepresentación matemática de problemas físicos, químicos,biológicos, de ingeniería, economía y finanzas.
Por ejemplo, si la posición de equilibrio de una membranaelástica puede describirse como el gráfico de una funciónu(x , y) con (x , y) ∈ Ω, vamos a ver que u satisface
4u = f en Ω,
donde f es la fuerza (transversal) aplicada a la membrana.
Claramente, la posición que adopte la membrana depende decomo se sujete en el borde.Por lo tanto, el problema estará bien planteado sólo si seagrega además una ”condición de contorno”, por ejemplo,
u = g en ∂Ω.

En muchos problemas, sin embargo, el dominio Ω donde debesatisfacerse la ecuación es desconocido a priori, y sudeterminación es parte del problema.Este dominio puede, efectivamente, determinarse porque elproblema agrega un dato de contorno extra en este borde. Demodo que si elegimos Ω arbitrariamente, lo más probable seríaque habría incompatibilidades entre los datos.Veremos enseguida algunos ejemplos.
En muchos problemas, el dominio es conocido pero no hay unaúnica ecuación que se satisface en todo Ω sino que hay unasuperficie Γ (frontera libre) que divide a Ω en dos partes (podríaser más) Ω1 y Ω2 y una ecuación para cada parte del dominio(podrían ser distintas ecuaciones);y sobre Γ deben satisfacersecondiciones de transmisión que relacionan a los valores de u acada lado de Γ. En problemas de evolución, Γ depende deltiempo y la denotaremos Γt .

El problema de Stefan
x0
ut −∆u = 0 en u > 0 ∪ u < 0,u = 0, −Ls =
(∇u+ −∇u−
)· ν en ∂u > 0.

El problema del obstáculoPara empezar, buscamos determinar la posición que adoptauna membrana perfectamente elástica, la cual puede serdescripta como el gráfico de una función u(x) en un dominio Ω,sujeta en la frontera en una posición dada por una funcióng(x),y sujeta a la acción de una fuerza tranversal f (x), con xen Ω.Esta posición es aquella que minimiza la enegía potencial:
E =
∫Ω
√1 + |∇u(x)|2 − 1 dx +
∫Ω
f (x)u(x) dx .
Si suponemos que |∇u(x)| es chico y dado que√1 + s = 1 + 1
2s + ..., una buena aproximación es√1 + |∇u(x)|2 ∼ 1 +
12|∇u(x)|2.

Reemplazando en la energía potencial obtenemos
E =12
∫Ω|∇u(x)|2 dx +
∫Ω
f (x)u(x) dx .
Si la membrana está sobre un obstáculo tendremos unasituación como la siguiente
0

Vamos buscar un minimizante de la energía potencial en elespacio de Sobolev H1(Ω) y luego analizar su regularidad.
H1(Ω) = u ∈ L2(Ω) , Dxi u ∈ L2(Ω), i = 1, · · ·N.
Las derivadas son derivadas en el sentido de lasdistribuciones. Es decir,∫
ΩϕDxi u dx = −
∫Ω
u Dxiϕdx ∀ϕ ∈ C∞0 (Ω).

El dato de borde se piensa como una función g definida entodo Ω. Se pide
u − g ∈ H10 (Ω) := la clausura de C∞
0 (Ω) en la norma de H1(Ω).
Si la membrana debe estar sobre un obstáculo definido comoel gráfico de una función φ en C2(Ω), el problema se reduce aminimizar el funcional
J(v) =12
∫Ω|∇v |2 +
∫Ω
fv ,
con v en K := v ∈ H1(Ω) | v − g ∈ H10 (Ω), v ≥ φ en Ω.
Llamaremos a estas funciones “admisibles”.Supondremos que g > φ en ∂Ω para que K sea no vacío.

Supongamos que u es un minimizante para el funcional antesmencionado en K.Entonces, dada ϕ ∈ C∞
0 (Ω) no negativa y ε > 0, la funciónv := u + εϕ es admisible y, en consecuencia, satisface
0 ≤ J(u + εϕ)− J(u)
=12
∫Ω|∇u + ε∇ϕ|2 +
∫Ω
f (u + εϕ)− 12
∫Ω|∇u|2 −
∫Ω
fu
=ε2
2
∫Ω|∇ϕ|2 + ε
∫Ω∇u · ∇ϕ+ ε
∫Ω
fϕ.
Si dividimos por ε y hacemos tender ε a 0+ obtenemos que
0 ≤∫
Ω∇u∇ϕ+
∫Ω
fϕ,
para toda ϕ ∈ C∞0 (Ω) no negativa.
Es decir, una solución del problema del obstáculo satisface que
∆u := div∇u ≤ f , en sentido débil en Ω. (1)

Si u es semicontinua inferiormente, u − φ > λ es abiertopara todo λ. (Estamos suponiendo que φ es regular).Sea x0 ∈ u > φ.∃r > 0 tal que Br (x0) ⊂
u − φ >
[u(x0)− φ(x0)
]/2)
.
Sea ϕ ∈ C∞0 (Br (x0)). Entonces, si ε > 0 es suficientemente
chico se tiene u − εϕ admisible. Por lo tanto,
0 ≤J(u − εϕ)− J(u)
=12
∫Ω|∇u − ε∇ϕ|2 +
∫Ω
f (u − εϕ)−∫
Ω|∇u|2 −
∫Ω
fu
=ε2
2
∫Ω|∇ϕ|2 − ε
∫Ω∇u · ∇ϕ− ε
∫Ω
fϕ.
Dividiendo por ε y haciendo tender ε a 0+ obtenemos
∆u ≥ f , en sentido débil en u > φ. (2)

Observemos que si no hay obstáculo siempre se puedereemplazar ϕ por −ϕ y se tiene ∆u = f en Ω.
Por otro lado, un planteo en un sentido débil del “problema delobstáculo” es es el siguiente:
∆u ≤ f en sentido débil en Ω,
∆u = f en u > φ,u ≥ φ en Ω,
(3)
con u − g en H10 (Ω).

Caso unidimensionalSupongamos que f = 0.El minimizante u resulta lineal en u > φ y coincide con φ enel resto de Ω, la cual es una función C2.Veamos que u se pega suavemente con φ en ∂u > φ. Conésto concluiremos que u ∈ C1(Ω).Sea x0 el extremo izquierdo de un intervalo donde u > φ.Veamos que u′(x0−) = φ′(x0).
0
u(x) ≥ φ(x) para x < x0 yu(x0) = φ(x0)
⇒ u′(x0−) ≤ φ′(x0).Si u′(x0−) < φ′(x0) se tendríau′′(x0) ≥ 0 débilmente.Absurdo

Caso N dimensionalEsperamos que
∇u+ = ∇φ en ∂u > φ.
Donde ∇u+ es el gradiente de u viniendo de u > φ.
Esta es la condición de frontera libre para el problema delobstáculo.
La regularidad esperada es u ∈ C1,1. Es decir, u ∈ C1 conderivadas Lipschitz.Más regularidad no es posible: Para que el problema resultebien planteado se pide ∆φ < 0.Se tiene,
∆u =
∆φ < 0 en u = φ,0 en u > φ.

El problema del dique porosoEl problema consiste en determinar la posición de equilibrioque va a adoptar la zona mojada de un dique poroso. Por lasdimensiones del dique sólo nos interesa analizar una seccióntransversal de éste, como se puede ver en la siguiente figura.Supongamos que el dique tiene un espesor a y una altura H yque la zona mojada en la posición de equilibrio puededescribirse de la siguiente forma,
D := (x , y)/ 0 ≤ x ≤ a, 0 ≤ y ≤ φ(x).
Agua
Zona
Mojada Agua
Zona
Seca
Dique
Suelo
impermeable

Sea u la altura piezométrica del fluido:
u(x , y) = y + p(x , y)
donde p es la presión que normalizaremos a 0 en el aire. (Aquíhemos normalizado a 1 la acción de la gravedad).La ecuación que describe el flujo estacionario de un líquido es
div q = 0
donde q es la velocidad del fluido.La Ley de Darcy para el flujo en un medio poroso es
q = −K∇u
donde K es la conductividad del medio.Por lo tanto u satisface
∆u = 0
en la zona mojada D.

Condiciones de contornoSupongamos que el piso del dique es impermeable, con locual, la componente vertical de la velocidad q del fluido es ceroen y = 0. Por lo tanto,
∂u∂y
= 0 en y = 0.
Por otro lado, como la presión hidrostática en los reservoriossatisface que
p(x , y) + y = constante,
y la presión en aquellos puntos en los que se está en contactocon el aire es 0 resulta que
p(x , y) + y = H con (x , y) en el reservorio de la izquierda
p(x , y) + y = h con (x , y) en el reservorio de la derecha.
Con lo cual, por la continuidad de la presión,
u(0, y) = H en 0 < y < H, u(a, y) = h en 0 < y < h.

Usando nuevamente que la presión atmoférica es 0,obtenemos que
u(a, y) = y con h < y < H.
Observemos que si y = φ(x) es la posición de equilibrio que vaa adoptar el borde de la zona mojada la velocidad del fluidoserá tangente a esta curva. Por lo tanto la derivada de u en ladirección normal será cero. Así obtenemos las condiciones defrontera libre
u(x , φ(x)) = φ(x) con 0 < x < a∂u∂η (x , φ(x)) = 0 con 0 < x < a.

De este modo, podemos decir de la altura piezométrica losiguiente:
∆u = 0 en D,∂u∂y (x ,0) = 0 con 0 < x < a,u(x , φ(x)) = φ(x) con 0 < x < a,∂u∂η (x , φ(x)) = 0 con 0 < x < a,u(0, y) = H con 0 < y < H,u(a, y) = h con 0 < y < h,u(a, y) = y con h < y < H.
Agua
Zona
Mojada Agua
Zona
Seca
Dique
Suelo
impermeable

Reducción a un problema del obstáculoSea
w(x , y) :=
∫ φ(x)y u(x , t)− t dt en y < φ(x)
0 en φ(x) < y < H,
Recordemos que u(x , y)− y = p(x , y) es la presión.
Veamos qué condiciones debe satisfacer una función wconstruida de esta manera utilizando lo que sabemos de laaltura piezométrica u. Para esto, analicemos el comporta-miento de la presión:
∆p = 0 en D∂p∂y (x ,0) = −1 con 0 < x < a,p(x , φ(x)) = 0 con 0 < x < a,p(0, y) = H − y ≥ 0 con 0 < y < H,p(a, y) = h − y ≥ 0 con 0 < y < h,p(a, y) = 0 con h < y < H
En particular resultap > 0 en D.

Tenemos entonce D = w > 0. Ya que p > 0 en D yw =
∫ φ(x)y p en D.
Por otro lado,
wy (x , y) =
y − u(x , y) en D0 en φ(x) < y < H,
y, dado que p(x , φ(x)) = 0,
wx(x , y) = φ′(x)p(x , φ(x)) +
∫ φ(x)
ypx(x , t) dt
=
∫ φ(x)
ypx(x , t) dt =
∫ φ(x)
yux(x , t) dt .
para y < φ(x).

Así, utilizando que u es armónica en D y tiene derivada normalcero sobre la frontera libre, si (x , y) está en D,
wxx(x , y) = φ′(x)ux(x , φ(x)
)+
∫ φ(x)
yuxx(x , t) dt
= φ′(x)ux(x , φ(x)
)−
∫ φ(x)
yuyy (x , t) dt
= φ′(x)ux(x , φ(x)
)+ uy (x , y)− uy
(x , φ(x)
)= (φ′(x),−1) · ∇u
(x , φ(x)
)+ uy (x , y)
= uy (x , y).
Con lo cual, sobre el conjunto de positividad de w , tenemosque (recordemos que wy = y − u(x , y)),
∆w := wxx + wyy = uy − uy + 1 = 1.

Observar que podemos recuperar u a partir de w de lasiguiente forma:
u(x , y) = y − wy (x , y).
Por otro lado, es fácil deducir condiciones de contorno sobre w .Analicemos el caso y = 0, el más complicado.Dado que
wxx(x ,0) = uy (x ,0) = 0,
w es lineal en y = 0. Como
w(0,0) =
∫ H
0p(x , t) dt =
∫ H
0(H − t) dt =
H2
2, w(a,0) =
h2
2,
resulta
w(x ,0) =H2
2− x
a
(H2
2− h2
2
).

Las condiciones de contorno de w en el resto del borde de Rse determinan en forma más directa.De este modo, w debe ser solución del siguiente problema,
∆w ≤ 1 en R∆w = 1 en w > 0w ≥ 0 en R,
con w − g en H10 (R), donde g es una función de H1(R) cuya
restricción al borde coincide con las condiciones que hallamospara w .La condición ∆w ≤ 1 en R se deduce del hecho de quequeremos la continuidad de las derivadas primeras de w en R.De esta forma se reduce el “problema del dique poroso” a un“problema del obstáculo” con segundo miembro f = 1 yobstáculo 0.

El problema de jets
Tenemos una manguera o un caño por la que pasa un fluidocon velocidad −→v , el cual es irrotacional (i.e., existe ϕ : R2 → Rtal que −→v = ∇ϕ) e incompresible (i.e., div−→v = 0).
Entonces
−→v = ∇ϕ y ∆ϕ = div−→v = 0.

Sea ψ : R2 → R la conjugada armónica de ϕ, i.e., ϕ+ iψ esholomorfa. Entonces ∆ψ = 0.Por las condiciones de Cauchy-Riemann
ϕx = ψy
ϕy = −ψx
tenemos que −→v = ∇ϕ = (ψy ,−ψx) es perpendicular a ∇ψ.O sea que la velocidad del fluido es perpendicular a ∇ψ. Luegolas curvas de nivel de ψ son las líneas de flujo.
v
ψ
ψ=cte
A la función ψ se la denomina la función corriente.

Si suponemos que tenemos simetría radial, la frontera libre esψ = c para alguna constante c y además tomando ψ = ψ − cpodemos suponer que ψ = 0 en la frontera libre.O sea que,
La frontera libre es : ∂ψ > 0,
∆ψ = 0 en ψ > 0.
La Ley de Bernoulli nos dice que
12|−→v |2 + P = cte en el fluido
donde P es la presión, que se toma de manera tal que en elaire es cero.
En nuestro problema P = 0 en la frontera libre, puesto que elfluido se encuentra en contacto con el aire, entonces la Ley deBernoulli nos dice que |−→v | es constante en la frontera libre.

Luego por las condiciones de Cauchy-Riemann, tenemos que
|−→v | = |∇ψ| = c en ∂ψ > 0.
Así arribamos al siguiente problema de frontera libre∆ψ = 0 en ψ > 0ψ = 0 en ∂ψ > 0|∇ψ| = c en ∂ψ > 0.

Para encontrar una solución de este problema se puedeminimizar el funcional
J(v) =12
∫Ω|∇v(x)|2 dx + λ
∫Ωχv>0(x) dx
donde λ es tal que c =√
2λ.Veamos en 1 dimensión que efectivamente un minimizante deJ es solución de este problema de frontera libre.Sea u0 un minimizante. Con argumentos análogos a los delproblema del obstáculo se puede ver que ∆u0 = 0 en u0 > 0.Por lo tanto, en el caso unidimensional, u0 es lineal en dondees positivo. Supongamos entonces que u0(x) = αx+ en [−1,1].Entonces, la frontera libre ∂u0 > 0 es el origen.
-1 1
0

J1(u0) =12
∫ 1
−1|u′0(x)|2 dx + λ|u0 > 0 ∩ [−1,1]|.
Notemos que |u′0(x)| = αχx>0 entonces,
J1(u0) =12
∫ 1
−1α2χx>0 dx + λ|u0 > 0 ∩ [−1,1]|
=12
∫ 1
0α2 dx + λ| [0,1]| = α2
2+ λ.
Como u0 es un minimizante de J1, tenemos que J1(u0) ≤ J1(v)para todo v admisible.

Consideremos la siguiente función
v1(x) =α
1− ε(x − ε)+
con 0 < ε < 1.
-1 1
0
1

J1(v1) =12
∫ 1
ε
( α
1− ε
)2 dx + λ| [ε, 1]|
=α2
2 (1− ε)2 (1− ε) + λ(1− ε) =α2
2(1− ε)+ λ(1− ε).
Entonces,α2
2+ λ ≤ α2
2(1− ε)+ λ(1− ε)
para todo 0 < ε < 1, con lo cual
λ ≤ α2
2(1− ε)
para todo 0 < ε < 1. Haciendo ε→ 0+, resulta que√
2λ ≤ α.

Para ver la otra desigualdad basta considerar la siguientefunción admisible v2
v2(x) =α
1 + ε(x + ε)+
con 0 < ε < 1 y hacer un razonamiento análogo
-1 1
0
2

Existencia de solución débil para el problema delobstáculo
Recordemos que buscamos u ∈ K que minimice
J(v) =12
∫Ω|∇v |2 dx +
∫Ω
fv dx
en K = v ∈ g + H10 (Ω) / v ≥ φ en Ω.
Pedimos que φ ∈ C2(Ω) con ∆φ < f y g > φ en ∂Ω.Observemos que K es un convexo y queJ(v) = 1
2a(v , v)− `(v) donde
a(u, v) =
∫Ω∇u∇v dx , y `(v) = −
∫Ω
fv dx .
Se tiene a(u, v) forma bilineal y `(v) una forma lineal definidasen H1(Ω).

Además, ambas son continuas:
|a(u, v)| ≤ ‖∇u‖L2(Ω)‖∇v‖L2(Ω)
≤ ‖u‖H1(Ω)‖v‖H1(Ω).
|`(v)| ≤ ‖f‖L2(Ω)‖v‖L2(Ω) ≤ ‖f‖L2(Ω)‖v‖H1(Ω).
Además, a(u, v) es coerciva en H10 (Ω). Es decir, existe una
constante α > 0 tal que
a(u,u) ≥ α‖u‖2H1(Ω)
para toda u ∈ H10 (Ω).
En efecto, por la desigualdad de Poincaré, existe C = C(Ω) talque si u ∈ H1
0 (Ω), ∫Ω
u2 dx ≤ C∫
Ω|∇u|2 dx .

Por lo tanto,
a(u,u) =
∫Ω|∇u|2 dx
≥ 12
∫Ω|∇u|2 dx +
12C
∫Ω
u2 dx
≥ α‖u‖2H1(Ω).
Usaremos el siguiente
TeoremaSean H un espacio de Hilbert, K ⊂ H, convexo, cerrado y novacío y a : H × H → R una forma bilineal, continua y coerciva,i.e, existen C > 0 y α > 0 tal que
1. |a(u, v)| ≤ C‖u‖H‖v‖H para todo (u, v) ∈ H × H2. |a(u, v)| ≥ α‖u‖2
H para todo u ∈ H.Entonces dado ` ∈ H ′ existe un único u ∈ K tal que
a(u, v − u) ≥ `(v − u) para todo v ∈ K .

Primero supongamos que a(u, v) = 〈u, v〉 el producto internoen H.Como ` ∈ H ′, por el Teorema de Riesz existe h ∈ H tal que`(v) = 〈h, v〉 para toda v ∈ H.Entonces, en este caso, buscamos u ∈ K tal que
〈u, v − u〉 ≥ 〈h, v − u〉 para toda v ∈ K
lo que es equivalente a
〈h − u, v − u〉 ≤ 0 para toda v ∈ K .

Veamos que para u ∈ K son equivalentes• ‖h − u‖H ≤ ‖h − v‖H para toda v ∈ K .• 〈h − u, v − u〉 ≤ 0 para toda v ∈ K .
Es decir, la u buscada es la proyección de h sobre el convexoK .
h
v
u
K

En efecto, si
‖h − u‖H ≤ ‖h − v‖H para toda v ∈ K .
Entonces,
‖h − v‖2H = ‖h − u − (v − u)‖2
H
= ‖h − u‖2H + ‖v − u‖2
H − 2〈h − u, v − u〉≤ ‖h − v‖2
H + ‖v − u‖2H − 2〈h − u, v − u〉
para todo v ∈ K .Por lo tanto,
0 ≤ ‖v − u‖2H − 2〈h − u, v − u〉 para toda v ∈ K .

Sea w ∈ K y v = u + δ(w − u) con 0 ≤ δ ≤ 1. Por ser Kconvexo se tiene v ∈ K .Entonces,
0 ≤ ‖v − u‖2H − 2〈h− u, v − u〉 = δ2‖w − u‖2
H − 2δ〈h− u,w − u〉
y por lo tanto,
0 ≤ δ‖w − u‖2H − 2〈h − u,w − u〉.
Haciendo tender δ a 0 obtenemos
〈h − u,w − u〉 ≤ 0,
y esto vale para todo w ∈ K .

Veamos ahora el recíproco. Supongamos que
〈h − u, v − u〉 ≤ 0 para toda v ∈ K .
Dado v ∈ K
‖h − v‖2H = ‖h − u‖2
H + ‖v − u‖2H − 2〈h − u, v − u〉.
Como‖v − u‖2
H − 2〈h − u, v − u〉 ≥ 0
resulta que‖h − v‖2
H ≥ ‖h − u‖2H .

Para terminar la demostración en el caso en quea(u, v) = 〈u, v〉 basta demostrar el siguiente lema
LemaSean H un Hilbert, K ⊂ H convexo, cerrado y no vacío. Dadoh ∈ H existe una única u ∈ K tal que
‖h − u‖H ≤ ‖h − v‖H
para todo v ∈ K .DEMOSTRACIÓN: Sea λ = inf v∈K‖h − v‖H entonces existevn ⊂ K tal que
λ = limn→∞‖h − vn‖H .
Veamos que vn es convergente.

Para eso, vemos que es una sucesión de Cauchy. Usaremos laLey del Paralelogramo, es decir
‖a‖2 + ‖b‖2 =12‖a + b‖2 + ‖a− b‖2.
Tomando a = h − vn y b = h − vm resulta que
‖h − vn‖2H + ‖h − vm‖2
H =12∥∥2h − (vn + vm)
∥∥2H +
12‖vn − vm‖2
H
= 2∥∥∥h − vn + vm
2
∥∥∥2
H+
12‖vn − vm‖2
H .
Como K es convexo, vn+vm2 ∈ K , y resulta que
‖h − vn‖2H + ‖h − vm‖2
H ≥ 2λ2 +12‖vn − vm‖2
H .
Dado que
‖h − vn‖2H + ‖h − vm‖2
H → 2λ2 cuando n,m →∞tenemos que ‖vn − vm‖H → 0 cuando n,m →∞.

Entonces, como K es cerrado existe u ∈ K tal que vn → ucuando n →∞.Luego λ = ‖h − u‖H y por lo tanto
‖h − u‖H ≤ ‖h − v‖H para todo v ∈ H.
CONTINUACIÓN DE LA DEMOSTRACIÓN DEL TEOREMA:Hemos probado la existencia. Veamos ahora la unicidad.Sean u1 ∈ K y u2 ∈ K tales que
‖h − ui‖H ≤ ‖h − v‖H
para todo v ∈ K e i = 1,2.Entonces,
‖h − u1‖H = ‖h − u2‖H

Como K es convexo u1+u22 ∈ K .
Por lo tanto,‖h − u1‖H ≤
∥∥∥h − u1 + u2
2
∥∥∥H.
Luego usando la Ley del Paralelogramo queda
2‖h − u1‖2H = ‖h − u1‖2
H + ‖h − u2‖2H
=12‖2h − (u1 + u2)‖2
H + ‖u1 − u2‖2H
=124‖h − u1 + u2
2‖2
H + ‖u1 − u2‖2H
≥ 124‖h − u1‖2
H + ‖u1 − u2‖2H.
Entonces,0 ≥ ‖u1 − u2‖H
y por lo tanto u1 = u2. Con lo que queda demostrada launicidad.

Con esto terminamos la demostración del Teorema en el casoen que a(u, v) es el producto interno de H.
Si a(u, v) es simétrica, define un producto interno en H que esequivalente al usual (por continuidad y coercividad).Es decir, existen constantes 0 < c < C <∞ tales que paratodo u ∈ H,
c‖u‖ ≤√
a(u,u) ≤ C‖u‖.
Con lo cual, H con la norma dada por√
a(u,u) es un espaciode Hilbert y ` es una forma lineal y continua con esta norma.De esto se desprende la demostración del Teorema en estecaso.
El resultado del teorema es válido sin la hipótesis de simetríade a(u, v) pero no lo demostraremos.

Observemos que en términos de la norma dada por√
a(u,u)hemos demostrado la existencia de un único u ∈ K tal que
a(h − u,h − u) ≤ a(h − v ,h − v) para toda v ∈ K.
Recordemos que a(h, v) = `(v) para toda v ∈ H. Por lo tanto,en el caso a simétrica se tiene
a(h − u,h − u) = a(h,h)− 2a(h,u) + a(u,u)
≤a(h − v ,h − v) = a(h,h)− 2a(h, v) + a(v , v).
para toda v ∈ K.Por lo tanto,
a(u,u)− 2`(u) ≤ a(v , v)− 2`(v) para toda v ∈ K.
Es decir, u es la solución única del problema de minimización.

CorolarioSean Ω ⊂ RN abierto y acotado, g ∈ H1(Ω) y φ ∈ L2(Ω). Sea
K = v ∈ H1(Ω) : v − g ∈ H10 (Ω) y v ≥ φ en Ω.
Dada f ∈ L2(Ω) existe una única u ∈ K tal que∫Ω∇u∇(v − u) dx ≥
∫Ω
f (v − u) dx (4)
para todo v ∈ KDEMOSTRACIÓN: Definimos a : H1(Ω)× H1(Ω) → R
a(u, v) =
∫Ω∇u∇v dx
y ` : H1(Ω) → R
`(u) =
∫Ω
fu dx .

Observar que ` ∈ (H10 (Ω))′ = H−1(Ω) y que a(u, v) es una
forma bilineal simétrica y coerciva en H10 (Ω).
Vamos a plantear nuestro problema en H10 (Ω) y usar el
Teorema.Supongamos que u es solución del problema y tomemosu = u − g. Definamos K = K − g ⊂ H1
0 (Ω).Para v ∈ K existe v ∈ K tal que v = v − g.Entonces,
a(u, v − u) = a(u − g, v − u)
= a(u, v − u)− a(g, v − u)
≥ `(v − u)− a(g, v − u)
= `(v − u)− a(g, v − u).

Si definimos `g(v) = `(v)− a(g, v) resulta que `g ∈ H−1(Ω) y ues solución de
a(u, v − u) ≥ `g(v − u) (5)
para todo v ∈ K .Veamos que si u es solución de este problema entoncesu = u + g es solución del problema original.Dado v ∈ K , v = v − g ∈ K . Entonces,
a(u, v − u) ≥ `g(v − u)
que es equivalente a
a(u, v − u) ≥ `(v − u)
y como v es arbitrario, u es solución del problema original.

De este modo queda probado el Corolario y por lasobservaciones previas está demostrada la existencia yunicidad del problema de minimización en K de
12
∫Ω|∇u|2 dx +
∫Ω
fu dx .
Es decir, existencia y unicidad para el Problema del Obstáculo.
Recordemos que entonces existe una única solución débil parael Problema del Dique Poroso.
A continuación veremos algunos resultados de regularidad dela solución y la frontera libre para este problema.

Observemos que en el caso general del obstáculo, siφ ∈ C2(Ω), siempre podemos suponer que el obstáculo estádado por la función φ = 0.En efecto, sea u solución del problema del obstáculo yw = u − φ. Entonces w ∈ H1(Ω) y
∆w = ∆u −∆φ ≤ f −∆φ débilmente en Ω
∆w = f −∆φ en w > 0w ≥ 0 en Ω.
Para los resultados de regularidad se asume que ∆φ < f . Eneste caso, el segundo miembro f −∆φ es estrictamentepositivo.Si f ∈ C(Ω), la función f −∆φ es casi constante en un entornode cada punto.Como la regularidad es una propiedad local, ésta se pruebaprimero suponiendo que el segundo miembro es una constantepositiva y llevando después esta información al caso general.

Supondremos de ahora en más que el segundo miembro es 1.Notar que ésto es así sin ninguna aproximación para el casodel dique poroso.Como primer resultado para entender en qué sentido tenemossolución demostraremos el siguiente
LemmaSi w es una solución débil del problema del obstáculonormalizado entonces
∆w ≥ χw>0 ≥ 0
en el sentido de H1(Ω), i.e.,
−∫
Ω∇w∇ϕ dx ≥
∫Ωϕχw>0 dx
para toda ϕ ∈ C∞0 (Ω), ϕ ≥ 0.

Sea
h(s) = maxmin (2− s,1),0.

Sea ϕ ∈ C∞0 (Ω), ϕ ≥ 0.
Definimos para k ∈ N, ϕk : Ω → R como
ϕk (x) = ϕ(x)1− h(kw(x)).
Observemos que
h(kw(x)) =
1 si w(x) < 1
k
0 si w(x) > 2k
2− kw(x) si 1k < w(x) < 2
k .
Entonces ϕk ∈ H1(Ω) y
ϕk ≥ 0
ϕk = 0 si w <1k
ϕk = ϕ si w >2k.

Como w es solución débil del problema del obstáculo ysopϕk ⊂ w > 0 tenemos que∫
Ωϕk dx = −
∫Ω∇w∇ϕk dx
= −∫
Ω∇w∇(ϕ1− h(kw)) dx
= −∫
Ω∇w∇ϕ1− h(kw) dx + k
∫Ωϕ|∇w |2h′(kw) dx
Como ϕ|∇w |2 ≥ 0 y h′(kw) ≤ 0 resulta que∫Ωϕk dx ≤ −
∫Ω∇w∇ϕ1− h(kw) dx (6)

De la definición de h tenemos que 0 ≤ 1− h(kw) ≤ 1 y1− h(kw) → χw>0 cuando k →∞.Por lo tanto, ϕk ≤ ϕ y ϕk → ϕχw>0 cuando k →∞.Y, como ϕ ∈ C∞
0 (Ω),
−∫
Ω∇w∇ϕ1− h(kw) dx → −
∫Ω∇w∇ϕ dx
cuando k →∞.Entonces,
−∫
Ω∇w∇ϕ dx ≥
∫Ωϕχw>0 dx .
Por lo tanto, como la elección de ϕ fue arbitraria,∆w ≥ χw>0 ≥ 0. Con lo cual queda demostrado el lema.

Como ∆w ≥ 0 en el sentido de las distribuciones, existe unamedida de Radon µ tal que ∆w = µ.Es decir, para toda ϕ ∈ C∞
0 (Ω)
−∫∇w∇ϕ dx =
∫ϕ dµ.
En efecto, si T es una distribución no negativa, tiene orden 0. Ylas distribuciones de orden 0 se extienden como forma lineal ycontinua sobre C0.Veamos que T tiene orden 0. Sea K ⊂ Ω compacto y seaϕ ∈ C∞
0 (Ω) con soporte contenido en K .Sea ψ ∈ C∞
0 (Ω) con ψ ≡ 1 en K . Entonces ‖ϕ‖∞ ψ − ϕ ≥ 0.Por lo tanto,
〈T , ‖ϕ‖∞ ψ − ϕ〉 ≥ 0.
De aquí que,〈T , ϕ〉 ≤ 〈T , ψ〉‖ϕ‖∞.

Cambiando ϕ por −ϕ, tenemos la otra desigualdad. Por lotanto, si CK = 〈T , ψ〉 tenemos
|〈T , ϕ〉| ≤ CK‖ϕ‖∞.
Ahora, T se extiende a C0(Ω) por densidad y resulta una formalineal y continua. Por lo tanto, es una medida de Radon µ.Veamos que µ es absolutamente continua con respecto a lamedida de Lebesgue. En efecto, sea A ⊂ Ω cerrado con|A| = 0 y ϕn ∈ C(Ω), 0 ≤ ϕn ≤ 1 con sop (ϕn) ⊂ An abierto demedida menor que 1
n . Adicionalmente, pedimos que ϕn valga 1en A.Entonces, como µ = ∆w ≤ 1 en el sentido de lasdistribuciones se tiene
0 ≤∫
Ωϕn dµ ≤
∫Ωϕn dx ≤ |An| ≤
1n.
y esto último tiende a cero con n tendiendo a infinito.

Pero por otro lado,∫Ωϕn dµ ≥
∫Aϕndµ =
∫A
1 dµ = µ(A).
Luego, como el miembro izquierdo tiende a cero, tendremosque µ(A) = 0.
Podemos entonces aplicar el Teorema de Radon-Nikodym quenos da que la medida µ está dada por una función L1
loc . Esdecir, ∃f ∈ L1
loc(Ω) tal que dµ = f (x)dx .
Entonces, ∆w = f en D′(Ω), y si ϕ ∈ C∞0 (Ω), ϕ ≥ 0,
0 ≤∫
Ωf (x)ϕ(x)dx = −
∫∇w∇ϕ dx ≤
∫Ωϕ(x)dx .
Si consideramos ϕ(x) = ε−Ng( x−x0
ε
), x0 ∈ Ω con g ≥ 0,∫
g = 1; y tomamos límite con ε→ 0 obtenemos que, en casitodo punto x0, 0 ≤ f (x0) ≤ 1. Más aún, resulta f = χw>0.

Como f ∈ Lploc(Ω) con 1 < p <∞, entonces w ∈ W 2,p
loc (Ω).Pero sus derivadas segundas podrían no estar localmenteacotadas. (Lo están porque f no es cualquier función acotada,sino que f = χw>0).De todos modos w ∈ C1(Ω). Más aún, las derivadas primerastienen un módulo de continuidad Hölder α para todo 0 < α < 1.Es decir, para Ω′ ⊂⊂ Ω y 0 < α < 1 existe C > 0 tal que
|Dxi w(x)− Dxi w(y)| ≤ C|x − y |α ∀x , y ∈ Ω′.
Esto es consecuencia de la siguiente proposición.
ProposiciónPara p > N, hay una inclusión continua de W 1,p(Ω) en Cα(Ω)si α = 1− N
p .

Estudio de la frontera libre para elproblema del dique poroso
La idea es probar que la frontera libre es el gráfico de unafunción. O sea, que ∃φ tal que∂w > 0 = (x , φ(x)),0 ≤ x ≤ a, con φ estrictamentedecreciente y continua.
NOTACIÓN: Llamaremos R = (0,a)× (0,H) y Ω = w > 0.Sabemos que w ∈ C1(R), en particular w ∈ C1(R ∩ w > 0).
Lemmawx ≤ 0, wy ≤ 0 en Ω.En efecto, tenemos que ∆w = 1 en Ω en el sentido de H1(Ω).Entonces ∆(w − 1
2N |x |2) = 0 en sentido débil.
Esto implica que w − 12N |x |
2 ∈ C∞(Ω). Por lo tanto, w ∈ C∞(Ω).

Derivando la ecuación y permutando derivadas, tenemos quewx y wy son armónicas en sentido clásico.Recordemos: Una función armónica alcaza su máximo en elborde y, por el lema de Hopf no puede alcanzarlo con derivadanormal menor o igual que 0 en un punto regular (donde admiteuna bola tangente interior).Probaremos a continuación que en todo punto de ∂Ω o bienwx ≤ 0 o bien ∂wx
∂ηe≤ 0. Pero en este último punto también
sabemos que no se puede alcanzar un máximo.Luego, el máximo de wx será necesariamente en la región delborde donde wx ≤ 0, implicando que wx ≤ 0 en Ω.
Un razonamiento similar se aplicará para probar que wy ≤ 0.

Empezamos primero con wx .Estudiemos la región y = 0.Ahí, disponemos una fórmula explícita de w , a partir de la cualdeducimos que wx = −H2
2a + h2
2a ≤ 0.En la región x = 0, 0 < y < H tenemos que ∆w = 1, dedonde deducimos que wxx = 1− wyy .Además, w = (H−y)2
2 en x = 0, con lo que obtenemos quewyy = 1.Por la forma de la frontera (recta vertical), ∂wx
∂ηe= −wxx = 0.
De modo que aquí no se puede alcanzar un máximo.

En x = a, 0 < y < h se procede análogamente para inferirque ∂wx
∂ηe= 0. Y no se puede alcanzar un máximo aquí.
En x = a, h ≤ y ≤ H, w alcanza un mínimo puesto queviene de una región donde es ≥ 0 al valor 0. Con lo cualwx ≤ 0 ahí.En y = H sabemos que w es idénticamente nula. Entonces,wx(x ,H) = 0.
En conclusión, en las partes del borde donde podría alcanzarsu máximo vimos que es menor o igual que 0. Por lo tanto,wx ≤ 0.
De manera análoga se prueba que wy ≤ 0.

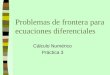
ProposiciónLa frontera libre es el gráfico de una función de x.Para la demostración se usará que wy ≤ 0.Sea 0 < x < a. Miramos a w(x , ·), con ese valor de x fijo.En algún momento w se hará 0, eventualmente en el techo.Si en algún momento alcanza el 0, luego como wy ≤ 0 y w ≥ 0necesariamente deberá seguir valiendo 0 para valores mayoresde y .Ese valor en donde se alcanza el cero “por primera vez” esúnico y definimos entonces φ(x) como el primer valor y endonde w(x , y) se hace 0.

Proposiciónφ es decreciente en x.Se usará que wx ≤ 0.Fijemos x1 < x2 dos valores para x . w(x2, y) será positiva paray < φ(x2), pues por definición φ(x2) es el primer valor en ydonde w se anula con x = x2 fijo.Sea y < φ(x2). Como wx ≤ 0, w(x , y) será también positivopara valores de x menores que x2.En particular, w(x1, y) > 0 si y < φ(x2).Luego necesariamente φ(x1) ≥ φ(x2).

Proposiciónφ es continua.En efecto, si fuese discontinua en x0 ∈ (0,a), tendríamos queφ(x+
0 ) < φ(x−0 ).
x0
w>0
φ(x0−)
φ(x0+)
0 a
H
h
S
Tendríamos un rectángulo C = (0, x0)× (φ(x+0 ), φ(x−0 ))
contenido en w > 0.Llamamos S al segmento vertical derecho del rectángulo C. Enel rectángulo C se tiene ∆w = 1.

Si llamamosw = w − 1
2(x − x0)
2,
se tiene que w es armónica en C.Además, se tiene que w vale 0 en S.Pero además, por continuidad de wx se tiene wx = 0 en S. Osea que la derivada normal de w en S es 0.Por continuación analítica concluimos que w = 0 en C.Esto implica que w = 1
2(x − x0)2 en C. Pero entonces, en el
borde izquierdo de este rectángulo valdrá que w = 12x2
0 = cte.
Absurdo pues sabemos que w(0, y) = (H−y)2
2 que no esconstante.
Entonces, φ es una función continua.

Probaremos ahora que φ es estrictamente decreciente.Lo haremos en dos etapas.
ProposiciónSean 0 < x1 < x2 < a con φ(x1) < H. Entonces, φ(x1) > φ(x2).
En efecto, razonemos por el absurdo.Supongamos que no, entonces se tendría que φ(x) ≡ y0 parax1 ≤ x ≤ x2.Dado que φ(x1) < H resulta y0 < H y además, como ∆w = 1en w > 0,
∆(w − 12(y − y0)
2) = 0 en C = (x1, x2)× (0, y0).
x1 x
2
H
h w>0
w=0
y0

Si llamamos w(y) = w − 12(y − y0)
2, resulta
∆w = 0 en Cw
∣∣y=y0
= 0 en x1 < x < x2
wy∣∣y=y0
= 0 en x1 < x < x2.
Luego, por continuación analítica, w ≡ 0 en C.Así,
w(x ,0) = w(x ,0) +12
y20 =
12
y20 en x1 < x < x2.
Pero teníamos que
w(x ,0) =H2
2+
xa
(h2
2− H2
2).
Esto lleva a un absurdo.Por lo tanto se tiene que φ(x1) > φ(x2) que era lo quequeríamos demostrar.

ProposiciónSea x > 0 entonces φ(x) < H.En efecto, supongamos que existe un x0 > 0 tal que φ(x0) = H.Entonces, como φ es monótona decreciente y ademásφ(x) ≤ H, tenemos que φ(x) = H para 0 ≤ x ≤ x0.Si llamamos C = (0, x0)× (0,H) tenemos que w > 0 y ∆w = 1en C.Sea ahora w(x , y) = w(x , y)− 1
2(y −H)2. Resulta que ∆w = 0en C.Además,
w(x ,H) = 0 en 0 < x < x0.
Si vemos que wy (x ,H) = 0 para 0 < x < x0, tendremos w ≡ 0en C. Por otro lado, tenemos
w(x ,0) = w(x ,0) +12
H2 =12
H2 en 0 < x < x0.
Ésto es un absurdo pues w(x ,0) no es constante.

Entonces, basta ver que wy (x ,H) = 0 para 0 < x < x0.Para ello tomemos la función que a cada valor de x le asigna elvalor wy (x ,H).Esta función resulta monótona creciente. En efecto, seanx1 < x2, entonces
wy (x1,H)− wy (x2,H)
= lim ε→0+1ε
w(x1,H)− w(x1,H − ε)− w(x2,H) + w(x2,H − ε)
= lim ε→0+
1ε
w(x2,H − ε)− w(x1,H − ε)
≤ 0 pues wx ≤ 0.
Como,wy (0,H) = −(H − y)
∣∣y=H = 0
wy (a,H) = 0
tenemos que wy (x ,H) = 0 para 0 < x < a, lo que nos da elresultado buscado.

CONCLUSIÓN: Se tiene que la frontera libre para el problemadel dique poroso es el gráfico de una función continua yestrictamente decreciente de la variable x para 0 ≤ x ≤ a.
Agua
Zona
Mojada Agua
Zona
Seca
Dique
Suelo
impermeable

Otros problemas de frontera libreMuchos problemas en aplicaciones pueden pensarse comoproblemas de optimización de dominio.
EJEMPLO: Dado un cuerpo que ocupa una región D,mantenido a temperatura constante (digamos igual a 1), y unacantidad γ de material aislante, hallar la forma de distribuir estematerial alrededor del cuerpo de manera de minimizar lapérdida de calor a través del borde del cuerpo.
material aislante
u>0
D
Ω=RN − D

PLANTEO MATEMÁTICO DEL PROBLEMA:Llamemos u a la temperatura. Pensemos en la situaciónestacionaria.El flujo de calor a través del borde de G es∫
∂D
∂u∂ν
dS
=
∫∂D
u∂u∂ν
dS ya que u = 1 en ∂D
=
∫Ω|∇u|2 dx −
∫Ω
u∆u dx
=
∫Ω|∇u|2 dx
ya que u es solución estacionaria de la ecuación del calor. Porlo tanto, ∆u = 0.Aquí hemos tomado Ω = RN \ D.

Por lo tanto, debemos minimizar∫Ω |∇u|2 entre las funciones
u ∈ H1(Ω) con u = 1 en ∂D tales que |u > 0| = γ ya queu > 0 es la región ocupada por el material aislante.Se trata de hallar este conjunto que nos dice como debemosponer el material aislante.EL PROBLEMA PENALIZADO: Una forma de atacar el problemaes penalizando en el funcional el que la medida de u > 0 seadistinta de γ.Para ésto tomamos δ > 0 pequeño y consideramos la función
γ
Fδ(s)=δ−1(s−γ)
Fδ(s)=δ(s−γ)

Minimizamos el funcional
Jδ(u) =
∫Ω|∇u|2 dx + Fδ
(|u > 0|
)en el conjunto K = u ∈ H1(Ω) /u = 1 en ∂D.Se prueba que para δ pequeño se tiene |u > 0| = γ.De modo que no es necesario pasar al límite con δ → 0, y unasolución del problema penalizado es solución del problemaoriginal (y viceversa).
Este problema es muy parecido al de los jets. Es decir,minimizar
J(u) =
∫Ω|∇u|2 dx +2λ|u > 0| =
∫Ω|∇u|2 dx +F
(|u > 0|
).
F(s)=2 λ s
0

Existencia de soluciónUtilizaremos el llamado “Método directo del cálculo devariaciones”.Sea ` = inf J(v); v ∈ H1(Ω), v = 1 en ∂D.Sea vn una sucesión minimizante. Es decir, vn ∈ K y J(vn) → `.En particular, ∫
Ω|∇vn|2 dx ≤ C
con C independiente de n.Sea ϕ ∈ C∞
0 (RN) tal que ϕ ≡ 1 en G.Entonces, vn − ϕ ∈ H1
0 (Ω).Si Ω fuera acotado, podríamos usar la desigualdad de Poincarépara deducir que ‖vn − ϕ‖H1(Ω) ≤ C independiente de n.En nuestro problema primero se busca un minimizante entrelas funciones que se anulan fuera de una bola grande BR.Después se prueba que si R es suficientemente grande, elminimizante tiene soporte dentro de esa bola.Por lo tanto, es solución del problema original.

Vamos a seguir en el caso en que Ω = BR \ D.Como vimos,
‖vn‖H1(Ω) ≤ C + ‖ϕ‖H1(Ω).
Por lo tanto, existe una subsucesión que seguimos llamando vntal que
∇vn → ξ débilmente en (L2(Ω))N
vn → u en L2(Ω)
vn → u en L2(∂D).
En particular, ξ = ∇u y u resulta admisible.Además, ∫
Ω|∇u|2 dx ≤ liminf
∫Ω|∇u|2 dx .

Tomando otra subsucesión, si es necesario, podemos suponerque vn → u en casi todo punto.
Por lo tanto, como F es continua y creciente,
F(|u > 0|
)≤ liminf F
(|vn > 0|
).
ya que u > 0 ⊂⋃
k⋂
n≥kvn > 0.
Por lo tanto,` ≤ J(u) ≤ liminf J(vn) = `
y u es solución del problema de minimización.

Problemas no variacionalesEJEMPLO: ECUACIÓN DE MEDIOS POROSOSSe trata de modelar el flujo de un gas en un medio poroso. Setiene para u la densidad de masa, −→q la velocidad del fluido y vla presión,
• Conservación de masa: ut + div (−→q u) = 0.
• Ley de Darcy: −→q = −k∇v .• Ley de estado de los gases: v = uγ con γ > 0.
Entonces,
ut = k div (γuγ∇u) = kγ
γ + 1div (∇uγ+1).
Reescalando el espacio o el tiempo y llamando m = γ + 1tenemos
ut = ∆um.

Sea D ⊂ RN × (0,∞) tal que 0 < λ ≤ u(x , t) ≤ M en D.Se tiene que u es solución en D de una ecuación de la forma
ut = div (a(x , t)∇u)
con 0 < λ ≤ a(x , t) ≤ M.Resultados clásicos de regularidad de las soluciones de estetipo de ecuaciones (Teorema de Di Giorgi) dan
|u(x , t)− u(y , s)| ≤ C(|x − y |α + |t − s|α/2).
Entonces a(x , t) ∈ Cα,α/2 y se tiene
∇u(x , t) ∈ Cα,α/2.
De aquí que ∇a(x , t) ∈ Cα,α/2 y se tiene
Dxi xj u(x , t) ∈ Cα,α/2.
Siguiendo así se ve que u ∈ C∞(D).

Pero el coeficiente de difusividad a(x , t) tiende a 0 cuando nosacercamos a ∂u > 0.
Observemos que en este problema, como u es la densidad delgas, se tiene u ≥ 0.
Cuando m = 1 se tiene que u(x , t) > 0 para todo x ∈ RN sit > 0.
Cuando m > 1 esto cambia: Si u(·,0) se anula fuera de uncompacto, lo mismo sucede para u(·, t) para todo t > 0.
Aparece así una frontera libre, ∂u > 0.
Esta frontera libre aparece porque la ecuación degenera, noporque fuera parte del problema original.

Soluciones débilesComo la ecuación no se satisface a través de ∂u > 0, sedebe hablar de soluciones débiles.DEFINICIÓN: u es solución débil de la ecuación de mediosporosos con dato inicial u0(x) si u ∈ L1(RN × (0,T )),um ∈ L1(RN × (0,T )) y para toda función ϕ suficientementeregular con soporte compacto en el espacio para todo t y talque ϕ(·, t) = 0 para t > T − δ para algún δ > 0,∫ T
0
∫RN
[− uϕt + um∆ϕ
]dx dt =
∫RN
u0(x)ϕ(x ,0) dx .
ProposiciónSean u y v soluciones débiles de la ecuación de mediosporosos con u(x ,0) = u0(x) ≤ v0(x) = v(x ,0). Entonces,u(x , t) ≤ v(x , t).

Como consecuencia se obtiene
ProposiciónSea u una solución débil de la ecuación de medios porososcon u(x ,0) = u0(x) ∈ L∞ de soporte compacto. Entonces,u(·, t) tiene soporte compacto para todo t > 0.
El resultado se demuestra poniendo por encima de u unasolución explícita que se anula fuera de un compacto para todot > 0.Se tiene una familia a un parámetro de soluciones explícitaslas soluciones de Barenblatt que se utilizan para probarmuchas propiedades de las soluciones y que dan elcomportamiento asintótico con t →∞ de todas las solucionesde soporte compacto.
UC(x , t) = t−λ[C − k
|x |2
t2µ
] 1m−1
+
donde [s]+ = maxs,0, λ = NN(m−1)+2 , µ = λ
N , k = λ(m−1)2mN .

DEMOSTRACIÓN DE LA PROPOSICIÓN:Sea u0 ∈ L∞ de soporte compacto. Sea M ≥ ‖u0‖∞ y R > 0 talque u0(x) = 0 si |x | > R.Existen C > 0 y t0 > 0 tales que
u0(x) ≤ t−λ0
[C − k
|x |2
t2µ0
] 1m−1
+
(= UC(x , t0)
)En efecto, esto es así si
Ck
tµ0 > R y t−λ0
[C − k
R2
t2µ0
] 1m−1
> M.
R |x|= C k−1 t0µ
M
UC
(R,t0)
u0(x)
u(x , t) ≤ UC(x , t + t0) = 0 si |x | > Ck
(t + t0)µ.