Embed Size (px)
Citation preview

Introduction a la commande des systemes dynamiques
SIE - Semestre IV
PID analogique
Dr. Ph. Mullhaupt
IntroductionAvec la disponibilite d’ordinateurs toujours plus performants, la regulation automatique sefait de plus en plus de maniere numerique. Les circuits analogiques electroniques sont en effetplus difficiles a concevoir et de taille plus grande que les circuits electroniques numeriques. Deplus, ils sont plus sensibles a l’amplification des effets dus au bruit. Toutefois, il est toujoursinteressant d’analyser de tels circuits analogiques afin de comprendre l’implementation directede certains concepts theoriques. Aditionnellement, il se pourrait tres bien que de tels regulateurssoient synthetisables en utilisant une technologie issue de la biologie et des sciences environ-nementales plutot que de la technologie electronique. En effet, les effets capacitifs et inductifspresents dans un circuit electrique et responsables des caracteristiques du PID possedent desanalogues dans d’autres disciplines scientifiques. On pourrait ainsi concevoir des PID reposantssur d’autres lois que celles de l’electronique et de l’electricite. Cependant, dans cette etude,nous allons nous restreindre a etudier la maniere de traduire le schema de la figure 1 en uncircuit electronique regulant un systeme physique reel. La commande sera effectuee a l’aided’un PID analogique et mise en oeuvre par un circuit a amplificateurs operationnels (AOP).Le probleme sera ensuite d’implementer dans SimScape c©, l’environnement de simulation desystemes physiques de MATLAB.
K(s) G(s)yc(t) e(t) u(t) y(t)
Figure 1: Diagramme de la boucle fermee.
Systeme dynamique a commanderPartie mecaniqueLe systeme a commander est un moteur electrique entraınant un arbre de transmission a traversun accouplement flexible comme montre dans la figure 2. Le moteur est alimente par une sourcede tension V qui est amplifiee d’un facteur de 1+ R1
R2
. Le moteur possede une inertie Mm et unfrottement interne fm sur l’arbre. Accouple au moteur, se situe une charge d’inertie Mc ayantegalement un frottement fc. L’accouplement possede une rigidite KA et un amortissement deCA. La rotation du moteur est decrite par un angle θ1 et la rotation de la charge est decritepar un angle θ2. Les variables dynamiques du systeme sont donc θ1, θ1, θ2 et θ2. Les angles etvitesse de rotation des arbres du moteur et de la charge respectivement.
1

Le systeme mecanique est donc decrit par l’equation suivante :
θ1 =1
Mm
(
−fmθ1 − CA(θ1 − θ2)−KA(θ1 − θ2) + Cm
)
, (1)
θ2 =1
Mc
(
CA(θ1 − θ2) +KA(θ1 − θ2)− fcθ2
)
, (2)
ou Cm est le couple delivre par le moteur.
KA, CA
fc McMoteur DC
Mm
θ1 θ2
fm
Amplificateur
R1
R2
V
Alimentation
Figure 2: Systeme a commander : moteur entraınant un arbre avec accouplement flexible.
Partie electriqueSi nous analysons le circuit electronique plus loin, nous avons le schema de la figure 3. Lemoteur est modelise par une resistance interne Rm, un solenoıde Lm (bobine) et une constantede couple Km. Nous savons aussi que la tension vs arrivant au moteur est egale a
vs =
(
1 +R1
R2
)
ve, (3)
ou ve est la tension d’alimentation. Nous avons donc l’equation dynamique du moteur
is =1
Lm
((
1 +R1
R2
)
ve − Rmis −Kmθ1
)
. (4)
Le couple Cm delivre par le moteur est donnee par la relation
Cm = Kmis (5)
2

R1
R2
VKm
Rm Lm
ve
vs, is
Figure 3: Systeme a Commander : Schema electrique.
Modele d’etat et fonction de transfertAvec la partie electrique decrite par l’equation (4), nous pouvons ecrire l’equation dynamiquede tout le systeme avec comme entree la tension d’alimentation ve et comme sortie la vitesseangulaire de la charge θ2.
is =1
Lm
((
1 +R1
R2
)
ve −Rmis −Kmθ1
)
, (6)
θ1 =1
Mm
(
−fmθ1 − CA(θ1 − θ2)−KA(θ1 − θ2) +Kmis
)
, (7)
θ2 =1
Mc
(
CA(θ1 − θ2) +KA(θ1 − θ2)− fcθ2
)
. (8)
Le systeme est donc un systeme lineaire avec 5 variables d’etats. A savoir x1 = is le courantdans le moteur, x2 = θ1 la position angulaire, et x3 = θ1 la rotation du moteur, et x4 = θ2 laposition angulaire, et x5 = θ2 la rotation de la charge. Le systeme peut donc etre representepar le modele d’etat suivant :
x1
x2
x3
x4
x5
=
−Rm
Lm0 0 −Km
Lm0
0 0 0 1 00 0 0 0 1
Km
Mm− KA
Mm
KA
Mm−CA+fm
Mm
CA
Mm
0 KA
Mc−KA
Mc
CA
Mc−CA+fc
Mc
x1
x2
x3
x4
x5
+
1
Lm
(
1 + R1
R2
)
0000
ve (9)
y =[
0 0 0 0 1]
x (10)
3

Ce modele d’etat conduit a la fonction de transfert
G(s) = C(sI − A)−1B =Km
(
1 + R1
R2
)
(CAs+KA)
a0s4 + a1s3 + a2s2 + a3s + a4, (11)
a0 = LmMcMm,
a1 = CALmMc + CALmMm +McMmRm + LmMcfm,
a2 = K2
mMc + CARm(Mc +Mm) +KALm(Mc +Mm) + fm(CALm +McRm),
a3 = CAK2
m +KARm(Mc +Mm) + CARmfm +KALmfm,
a4 = KAK2
m +KARmfm.
Les valeurs numeriques des parametres physiques sont donnees dans le tableau 1. La fonctionde transfert a 4 poles stables donnes par les valeurs suivantes :
p1 = −1.7 · 107 p2 = −8 · 103 p3 = −5 + 7.7i p4 = −5− 7.7i (12)
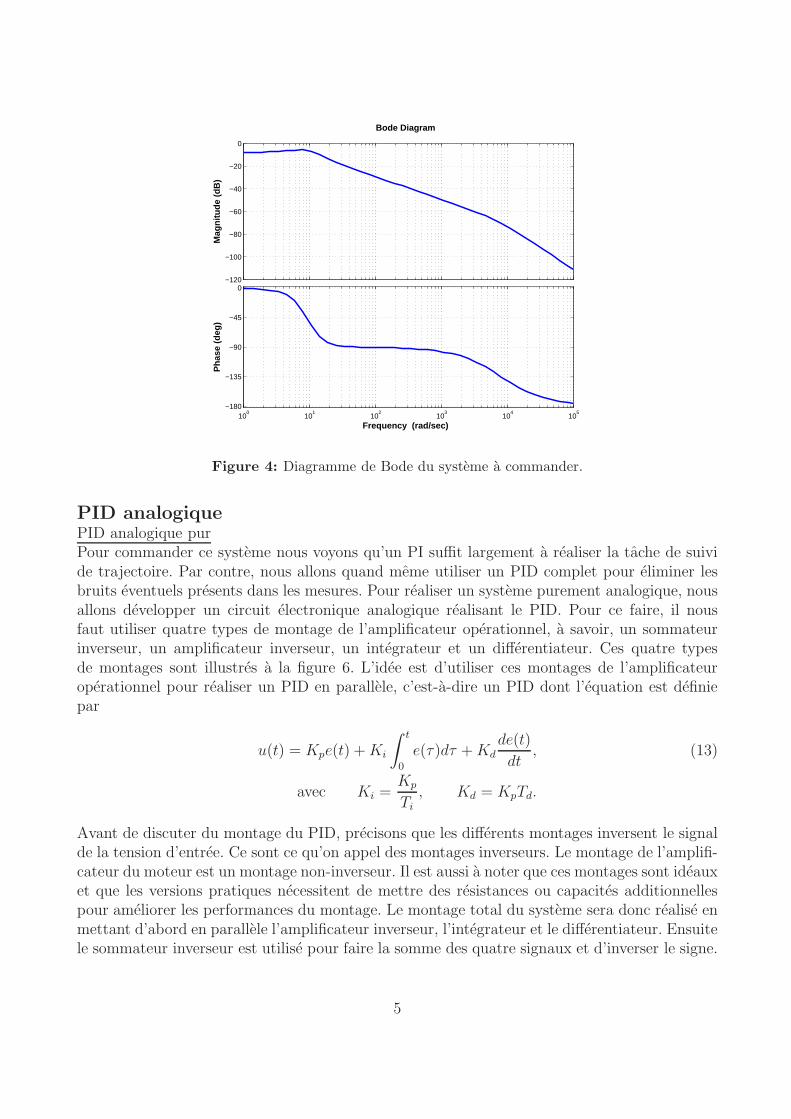
Deux des poles sont reels purs alors que les deux autres sont complexes conjugues. Le diagrammede Bode du systeme est trace a la figure 4 et la reponse indicielle a la figure 5. Les graphesmontrent que le systeme a une bande passante de 10 rad/s et que les frequences plus elevees sonttres rapidement filtrees. L’utilite d’un regulateur sur ce systeme est d’imposer une constantede temps plus petite afin que le systeme reagisse plus rapidement. Les oscillations doiventegalement etre attenuees.
Ampli Valeur Moteur Valeur Charge ValeurR1 90 kΩ Km 25.2375 Nm/A Mc 100 kgm2
R2 10 kΩ Mm 5.84 · 10−5 kgm2 fc 0.01 Nmsfc 0.01 Nms CA 103 NmsRm 0.113 Ω KA 104 NmLm 9.4 · 10−5 H
Table 1: Valeurs numeriques du systeme d’entraınement
4
−120
−100
−80
−60
−40
−20
0
Mag
nit
ud
e (d
B)
100
101
102
103
104
105
−180
−135
−90
−45
0
Ph
ase
(deg
)
Bode Diagram
Frequency (rad/sec)
Figure 4: Diagramme de Bode du systeme a commander.
PID analogiquePID analogique purPour commander ce systeme nous voyons qu’un PI suffit largement a realiser la tache de suivide trajectoire. Par contre, nous allons quand meme utiliser un PID complet pour eliminer lesbruits eventuels presents dans les mesures. Pour realiser un systeme purement analogique, nousallons developper un circuit electronique analogique realisant le PID. Pour ce faire, il nousfaut utiliser quatre types de montage de l’amplificateur operationnel, a savoir, un sommateurinverseur, un amplificateur inverseur, un integrateur et un differentiateur. Ces quatre typesde montages sont illustres a la figure 6. L’idee est d’utiliser ces montages de l’amplificateuroperationnel pour realiser un PID en parallele, c’est-a-dire un PID dont l’equation est definiepar
u(t) = Kpe(t) +Ki
∫ t
0
e(τ)dτ +Kdde(t)
dt, (13)
avec Ki =Kp
Ti, Kd = KpTd.
Avant de discuter du montage du PID, precisons que les differents montages inversent le signalde la tension d’entree. Ce sont ce qu’on appel des montages inverseurs. Le montage de l’amplifi-cateur du moteur est un montage non-inverseur. Il est aussi a noter que ces montages sont ideauxet que les versions pratiques necessitent de mettre des resistances ou capacites additionnellespour ameliorer les performances du montage. Le montage total du systeme sera donc realise enmettant d’abord en parallele l’amplificateur inverseur, l’integrateur et le differentiateur. Ensuitele sommateur inverseur est utilise pour faire la somme des quatre signaux et d’inverser le signe.
5

0 0.2 0.4 0.6 0.8 1 1.20
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Step Response
Time (sec)
Am
plit
ud
e
Figure 5: Reponse indicielle du systeme a commander
Le schema est montre a la figure 7. L’equation associee est
Vout =R4Rp2
R1Rp1
Vin +R4
R2RiCi
∫ t
0
Vin +R4RdCd
R3
dVin
dt. (14)
En prenant R1 = R2 = R3 = R4 nous avons l’identification directe avec l’equation (13) :
Kp =Rp2
Rp1
Ki =1
RiCi
Kd = RdCd. (15)
Il suffit donc de mettre le signal d’erreur comme tension d’entree et la sortie sera le signal aenvoyer au moteur.
Implementation pratique :En pratique, il y a plusieurs modifications a apporter au schema de la figure 7. Premierement, lemontage en integrateur de la figure 6 a tendance a produire de la derive sur le signal de sortie.Pour eviter ce probleme une resistance elevee Rci est mise en parallele avec le condensateurCi ce qui introduit un feedback continu et corrige la derive. Deuxiemement, le montage endifferentiateur de la figure 6 est tres susceptible a l’amplification du bruit se situant dans lesignal d’entree, et source d’instabilite s’il y a des changement brusque dans le signal d’entreeetant donne qu’il agit comme un filtre passe bas et donc introduit un retard de phase de90. Pour corriger ces problemes de bruit et retard de phase, une capacite Ccd est mise enparallele avec la resistance Rd et une resistance est ajoutee sur l’entree. L’addition de cesdeux composants produit un effet d’avance de phase de 90 et elimine les bruits en hautesfrequences. Le fait d’ajouter ces composants au montage ne change pas l’equation (14). Unetroisieme correction est introduite en relation avec le terme derivateur de l’equation (13). Si lesignal d’entree Vin est sujet a de brusques variations, ce terme peut prendre des valeurs enormes.
6

Vout Vout
VoutVout
V1
V2
V3
R1
R2
R3
R4
Vout = −(
R4
R1
V1 +R4
R2
V2 +R4
R3
V3
)
Vin
R1
R2
Vin
Ri
Ci
Vin
Cd
Vout = −R2
R1
Vin
Vout = − 1
RiCi
∫ t
0Vindτ Vout = −RdCd
dVin
dt
1 2
3 4
Rd
Figure 6: Configuration de l’amplificateur operationnel necessaire pour concevoir un PID analogique.1 : Somateur inverseur. 2 : Amplificateur inverseur. 3 : Integrateur. 4 : Differentiateur.
Pour eviter ce probleme une forme du PID appele forme a derivation separee est utilisee. A laplace de deriver le signal d’erreur, le signal de mesure y(t) est deriver uniquement. Cette formedu PID est donnee par l’equation :
u(t) = Kpe(t) +Ki
∫ t
0
e(τ)dτ +Kddy(t)
dt. (16)
Dans le contexte de la commande en vitesse du moteur, cette forme devient utile car les sauts devitesse sont en general imposes dans le signal de reference creant ainsi des brusques variations.
Le signal d’erreur est obtenu en utilisant un montage avec inverseur pour inverser le signe dusignal de mesure, un sommateur inverseur pour creer le signal d’erreur et encore un inverseurpour changer le signe. Ce montage est definit a la figure 9. Il suffit de prendre toutes les memesresistances Ra,b,c,e,f,g,h,i pour ne pas avoir d’amplification. Nous pouvons maintenant definir lemontage complet du systeme qui est represente a la figure 10.
Maintenant que le montage est complet, nous pouvons definir les valeurs numeriques des com-posants electriques ne faisant pas partie des relations (15). Le tableau 2 definit ces valeurs.
Reglage du PID :Nous devons maintenant concevoir le PID pour ameliorer la vitesse de reaction du systeme et
7

Vout
R1
R2
R3
R4
Vin
Rp1
Rp2
Ri
Ci
Cd
P
I
D
Rd
Vout =R4Rp2
R1Rp1Vin +
R4
R2RiCi
∫ t
0Vin +
R4RdCd
R3
dVin
dt
Figure 7: PID Analogique avec AOP.
reduire les oscillations. Nous allons faire la conception du PID de deux facons differentes. Enpremier lieu, nous allons realiser un PID par la premiere methode de Ziegler Nichols. Ensuite,nous allons concevoir un PID ameliore dans le diagramme de Bode.
Pour realiser le premier PID nous devons appliquer une rampe au systeme et mesurer la sortie.Ainsi, nous appliquons une rampe en tension au systeme represente a la figure 2 et nous mesu-rons la reponse en vitesse ([rad/s]) de la charge. Le resultat de ce test (simule) est presente ala figure 11. Les parametres a et L mesures sont les suivants :
a = 0.4 L = 0.05 (17)
Nous avons donc les coefficient du PID obtenus grace au tableau 3 :
Kp = 100 Ti = 0.06 ⇒ Ki = 1667 Td = 0.015 ⇒ Kd = 1.5 (18)
Le second regulateur est concu dans le diagramme de Bode. Nous calculons un gain Kp tel quela frequence de coupure ωc soit de 35 [rad/s]. Donc en regardant le diagramme de la figure 4,
8

Comparateur e(t) Valeur Sommateur Valeur PID ValeurRa,b,c,e,f,g,h 10 kΩ R1,2,3,4 10 kΩ Rci 10 MΩ
Rcd 1kΩCcd 1pF
Table 2: Valeurs numeriques du systeme d’entraınement
Ri
Ci
Rci
Rcd CdRd
Ccd
Figure 8: Montage pratique des AOP integrateur et differentiateur.
nous voyons que le diagramme doit etre monter d’environ 20 dB. Donc le Kp est donne par larelation :
20log10(Kp|G(jωc)|) = 0 ⇒ Kp = 1020/20 = 10 (19)
Enusite nous voulons augmenter la pente en basse frequence a -20 dB/decade et la pente deshaute frequence a -40 dB/decades. Pour se faire nous allons choisir les coefficients Ti et Td
comme tel :
Ti = 1/10 Td = 1/500 (20)
Avec ce choix, le diagramme de bode de la fonction de transfert en boucle ouverte est de laforme de la figure 12. Ayant choisi les coefficients du PID nous pouvons choisir les valeursdes composants electroniques necessaires pour realiser la commande du systeme. Pour les deuxregulateurs les valeurs se choisissent avec les relations (15). Nous avons donc dans le cas dupremier PID les relations :
Kp =Rp2
Rp1
= 100 Ki =1
RiCi
= 1667 Kd = RdCd = 1.5, (21)
⇒ Rp1 = 10kΩ Rp2 = 103kΩ Ri = 10kΩ Ci = 0.06µF Rd = 103kΩ Cd = 1.5µF.
Pour le second PID nous avons les relations :
Kp =Rp2
Rp1
= 10 Ki =1
RiCi
= 100 Kd = RdCd = 0.02, (22)
⇒ Rp1 = 10kΩ Rp2 = 100kΩ Ri = 100kΩ Ci = 0.1µF Rd = 10kΩ Cd = 2µF.
9

Vmesure
Vref
Verreur
Ra
Rb
Rc
Re
Rf
Rg
Rh
Figure 9: Montage pratique pour construire le signal d’erreur.
Type Kp Ti Td
P 1/aL - -PD 0.9/aL 3.3L -PID 1.2/aL 2L 0.5L
Table 3: Tableau des coefficients pour differents regulateurs de Ziegler-Nichols.
Le resultat de simulation pour un saut unite sont montres a la figure 13. Nous constatons quele regulateur de Ziegler Nichols est tres mauvais. Par contre, celui concu dans le diagramme deBode a peu d’oscillation et un temps de reponse rapide.
Simulation Avec SimScape c©
Depuis quelques annees, il existe sur le marche des logiciels qui permettent de simuler dessystemes sans devoir ecrire explicitement le systeme d’equations decrivant la dynamique as-sociee. Les equations de la dynamique sont derivees par le programme basees sur une descrip-tion externe detaillee des constituants du modele (sans entrer dans le details des equationsdifferentielles qui le constitue). La toolbox SimScape c© de Simulink permet de simuler dessysteme electriques, mecaniques, thermiques, pneumatiques etc...Les simulations de la figure 13 ont ete realisees de cette maniere. La figure 16 montre larealisation dans Simulink du systeme a commander, c’est-a-dire le systeme de la figure 2.
10

y ref
Erreure(t)
PID
:e(t)
→U(t)
System
eG(s) Signal
demesure
y(t)
Figure 10: Montage complet du systeme en boucle fermee.
11

0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X:
Y:
Temps t [s]
Am
plitu
de
y(t
) [r
ad
/s]
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.30
0.02
0.04
0.06
0.08
0.1
0.12
a = 0.4
L = 0.03
Figure 11: Signal de sortie du test rampe de Ziegler-Nichols. Les parametres a et L sont identifies.
−100
−50
0
50
100
Mag
nit
ud
e (d
B)
10−1
100
101
102
103
104
105
−180
−135
−90
−45
Ph
ase
(deg
)
Bode Diagram
Frequency (rad/sec)
Figure 12: Diagramme de Bode de la fonction de transfert en boucle ouverte K(s)G(s).
12

0 0.5 1 1.5 2 2.5 3−0.5
0
0.5
1
1.5
2
2.5
Temps t [s]
Am
plit
ud
e w
[ra
d/s
]
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
Temps t [s]
Am
plit
ud
e w
[ra
d/s
]
Figure 13: Resultat de la commande d’un saut unite en vitesse du systeme avec le PID de Ziegler-Nichols (haut) et le PID concu dans le diagramme de Bode (bas).
13
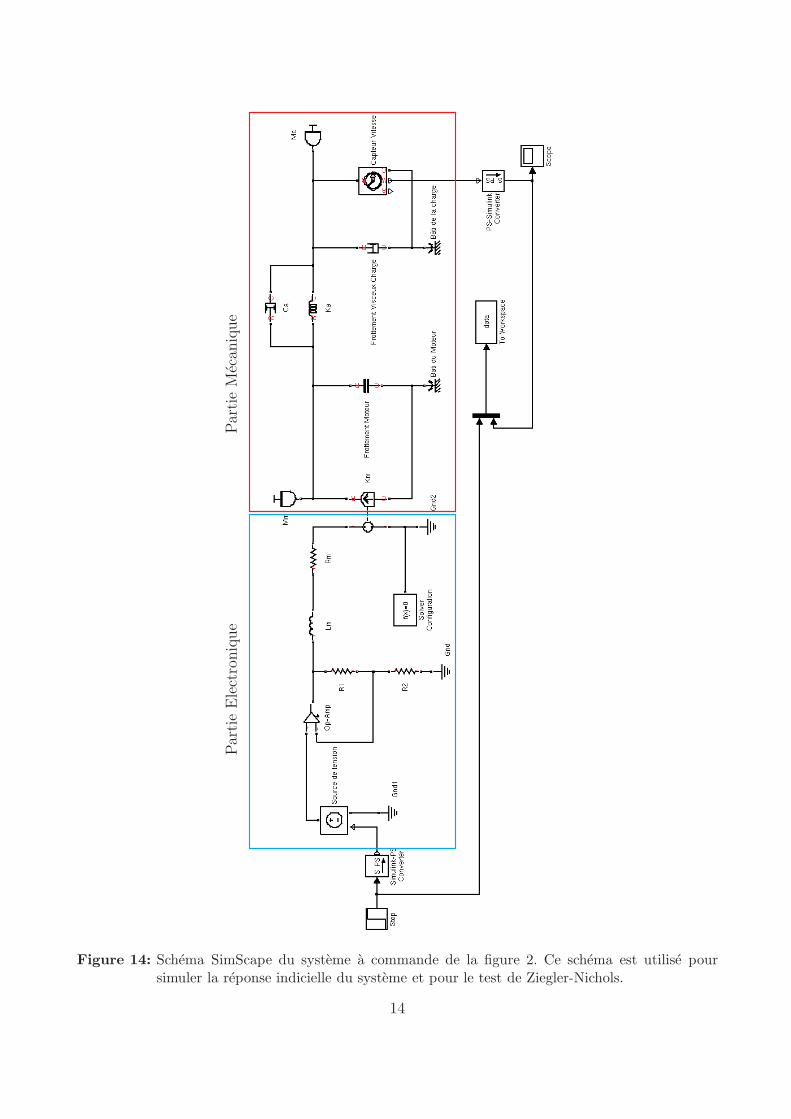
PartieElectronique
PartieMecan
ique
Figure 14: Schema SimScape du systeme a commande de la figure 2. Ce schema est utilise poursimuler la reponse indicielle du systeme et pour le test de Ziegler-Nichols.
14

Figure 15: Schema SimScape du PID.
15

CreationduSignal
d’erreure(t)
PID
(K(s))
System
eacomman
der
(G(s))
Figure 16: Schema SimScape du systeme en boucle fermee de la figure 10.
16











![Dreptul la speran]@ - CCIASB · 2010. 10. 20. · “Orice carte, orice oper@ ... bazate pe munca în echip@ cu disponibilit@]i organiza]ionale }i indi- ... personalului din grupurile](https://img.pdfslide.tips/doc/110x75/60dc0fb5a6eb9a706300dff7/dreptul-la-speran-2010-10-20-aoeorice-carte-orice-oper-bazate-pe.jpg)

















