Embed Size (px)
Citation preview

z
x y
θ
φ
r
Electrão
Protão
Introdução Geométrica à Mecânica Quântica: Átomo de
Hidrogénio e Oscilador Harmónico
Sérgio Manuel Simões Elias
Dissertação para obtenção do Grau de Mestre em
Licenciatura em Engenharia Electrotécnica e de Computadores
Júri
Presidente: Prof. António Rodrigues
Orientador: Prof. António Luís Campos da Silva Topa
Coorientador: Prof. Carlos Manuel dos Reis Paiva
Vogal: Prof. Júlio Paisana
Outubro de 2007


Agradecimentos
O meu sincero agradecimento ao Professor Doutor António Topa e ao Professor Doutor Carlos Paiva,
Orientador e Co-Orientador deste projecto, respectivamente, por toda a ajuda prestada no desenvolver
de todo o trabalho e constante disponibilidade oferecida, a qual foi determinante para a contínua
motivação com que me empenhei neste trabalho.
Aos meus pais por me terem proporcionado tudo o que precisei e não precisava, pela paciência
que tiveram durante todos estes anos, por terem sido um exemplo para mim e principalmente, por
sempre acreditarem em mim.
À minha colega e namorada Cátia Marques, com quem partilhei muitos dos anos da minha
formação, pelas opiniões, conselhos e compreensão que sempre me ofereceu, e por continuar a meu
lado.
Aos meus amigos, por me terem apoiado em todos os momentos e sempre se lembrarem da
nossa amizade.
i

ii

Resumo
Este trabalho tem como objectivo, a resolução da equação de Schrödinger para o estudo do átomo de
hidrogénio e do oscilador harmónico.
A Mecânica Quântica trata a interpretação da dualidade da matéria, preocupando-se bastante
com a interpretação matemática do princípio de incerteza. As relações de incertezas são encontradas
com a utilização das integrais de Fourier, sendo também exposto o princípio da incerteza de
Heisenberg. Os operadores posição, momento, e energia são interpretados.
A resolução da equação de Schrödinger fez-se com recurso aos métodos variacionais que
permite derivar as equações do movimento de sistemas mecânicos conservativos, com e sem ligações,
independentemente do sistema de coordenadas. A vantagem da abordagem variacional para a
resolução da equação de Schrödinger está na utilização do formalismo Lagrangeano, e nas
propriedades das equações de Euler-Lagrange.
O principal interesse deste estudo é a descrição da estabilidade do átomo de hidrogénio dada
através dos estados estacionários obtidos pela equação de Schrödinger e a análise do oscilador
harmónico através da mecânica quântica que envolve a determinação das soluções da equação de
Schrödinger.
Neste trabalho é também apresentada uma nova linguagem matemática, a álgebra geométrica,
com vista à aplicação na mecânica quântica. Através da álgebra de espaço-tempo de Minkowski, o
efeito fotoeléctrico, efeito de Compton e o dualismo onda-corpúsculo podem ser traduzidos para o
formalismo da álgebra geométrica.
Palavras-chave: Mecânica quântica, métodos variacionais, equação de Schrödinger, átomo de
hidrogénio, oscilador harmónico e álgebra geométrica.
iii

Abstract
The goal of this work is the resolution of the Schrödinger equation for the study of the hydrogen atom
and the harmonic oscillator.
The Quantum Mechanics deals with the interpretation of the matter duality, and is focused on
the mathematical interpretation of the uncertainty principle. The uncertainty relations are found with
the use of the Fourier integrals, leading to the uncertainty principle of Heisenberg. The position,
moment, and energy operators are interpreted.
The resolution of the Schrödinger equation was made through the use of the variational
methods that allow deriving the motion equations in conservative mechanical systems, with and
without links, independently of the coordinate system. The advantage of the variational approach in
the resolution of the Schrödinger equation is in the use of the Lagrange formalism, and in the
properties of the Euler-Lagrange equations.
The main interest of this study is the description of the stability of the hydrogen atom given
through the stationary states derived from the Schrödinger equation and the analysis of the harmonic
oscillator through the quantum mechanics that involves the determination of the solutions of the
Schrödinger equation.
In this work a new mathematical language is also presented: the geometric algebra, which is
intended to be applied to the quantum mechanics. Through the Minkowski space-time algebra, the
photoelectric effect, the Compton effect and the wave-corpuscle dualism can be translated into the
geometric algebra formalism.
Key-words: Quantum mechanics, variational methods, Schrödinger equation, hydrogen atom,
harmonic oscillator and geometric algebra.
iv

Índice
Agradecimentos........................................................................................................................................ i
Resumo................................................................................................................................................... iii
Abstract .................................................................................................................................................. iv
Índice........................................................................................................................................................v
Lista de Tabelas..................................................................................................................................... vii
Lista de Figuras ...................................................................................................................................... ix
Lista de Símbolos ................................................................................................................................... xi
Capítulo 1. Introdução..............................................................................................................................1
1.1.Enquadramento....................................................................................................................1
1.2.Motivação............................................................................................................................3
1.3.Objectivos............................................................................................................................3
1.4.Descrição do trabalho..........................................................................................................4
Capítulo 2. Álgebra geométrica................................................................................................................7
2.1. Produto geométrico ............................................................................................................7
2.1.1. Produto interno .............................................................................................................8
2.1.2. Produto exterior ............................................................................................................8
2.1.3. Adição de bivectores ..................................................................................................10
2.2. Álgebra geométrica do plano............................................................................................10
2.2.1. Produtos notáveis .......................................................................................................11
2.2.2. Álgebra geométrica e os números complexos ............................................................12
2.3. Análise de resultados........................................................................................................13
2.3.1. Lâminas ......................................................................................................................13
2.3.2. Produto entre vector e bivector...................................................................................14
2.3.3. Projecção de um vector ..............................................................................................16
2.3.4. Quadrado de um bivector ...........................................................................................17
2.4. Álgebra geométrica de espaço..........................................................................................17
2.4.1. Trivectores .................................................................................................................18
2.4.2. Álgebra geométrica de Clifford..................................................................................19
2.4.3. Produto geométrico ....................................................................................................20
2.5. Álgebra geométrica do espaço-tempo de Minkowski ......................................................22
2.5.1. Bases de .............................................................................................................23 1,3Cl
2.5.2. Tempo próprio e velocidade própria ..........................................................................24
2.5.3. Aceleração própria......................................................................................................26
2.5.4. Momento linear ..........................................................................................................27
2.5.5. Efeito fotoeléctrico .....................................................................................................27
v

2.5.6. Efeito de Compton......................................................................................................28
2.5.7. Dualismo onda-corpúsculo.........................................................................................31
Capítulo 3. Mecânica quântica ...............................................................................................................33
3.1. Dualismo onda-corpúsculo...............................................................................................33
3.2. Feixes em mecânica ondulatória ......................................................................................35
3.3. Princípio de incerteza de Heisenberg ...............................................................................37
3.4. Evolução dos feixes em mecânica ondulatória.................................................................39
Capitulo 4. Métodos variacionais ...........................................................................................................41
4.1. Equação de Euler-Lagrange .............................................................................................41
4.2. Princípio da acção mínima ...............................................................................................45
4.3. Dedução da equação de Schrödinger................................................................................47
Capítulo 5. Oscilador harmónico............................................................................................................49
5.1. Equação de Schrödinger ...................................................................................................49
5.2. Propriedades dos Polinómios de Hermite.........................................................................55
Capítulo 6. Átomo de hidrogénio ...........................................................................................................57
6.1. Equação radial ..................................................................................................................58
Capítulo 7. Conclusões...........................................................................................................................63
7.1. Síntese ..............................................................................................................................63
7.2. Perspectivas de trabalho futuro ........................................................................................64
Anexos....................................................................................................................................................65
Anexo A. Corpo negro ...........................................................................................................................65
Anexo B. Efeito fotoeléctrico ................................................................................................................67
Anexo C. Efeito de Compton .................................................................................................................69
Anexo D. Notação de Dirac ...................................................................................................................73
Anexo E. Operadores e valores expectáveis ..........................................................................................75
Anexo F. Princípio da sobreposição.......................................................................................................77
Anexo G. Átomo de hidrogénio .............................................................................................................79
G.1. Mudança de coordenadas ...................................................................................................79
G.2. Equação de onda a três dimensões .....................................................................................80
G.3. Momento angular................................................................................................................81
Referências .............................................................................................................................................83
vi

Lista de tabelas
2.1 Produtos
2.2 Correspondência entre a Álgebra de Clifford e a Álgebra de Gibbs
6.1 Algumas funções ( )rRnl
E.1 Alguns resultados da representação de operadores no espaço de coordenadas e no espaço do
momento
vii

viii

Lista de figuras
2.1 Representação de um bivector
2.2 Soma de dois bivectores
2.3 Exemplos de Lâminas
2.4 Produto de um vector por um bivector
2.5 Projecção e rejeição de um bivector
2.6 Representação de bivectores
2.7 Representação de um trivector
2.8 Representação do produto geométrico
2.9 Efeito de Compton
3.1 Densidade de probabilidade ( ) ( ) 20 xxP Ψ= correspondente a ( ) 00 =Ψ x para e a 0<x
( ) xxex ααα −=Ψ 20 para 0>x
4.1 Representação de e uma das possíveis curvas de ( )xy ( )xY
5.1 Partícula de massa , oscilante no eixo m
B.1a) Efeito Fotoeléctrico: Um raio de luz ( )hf incide sobre a superfície de um metal. Parte da
energia é absorvida no metal e a restante energia usada para arrancar um electrão de energia cinética
. Τ
B.1b) Efeito Fotoeléctrico: A energia cinética dos electrões ejectados, 2
21 vme=Τ , varia
linearmente com a frequência da luz incidente
C.1 Efeito de Compton
G.1 Coordenadas polares esféricas
ix

x

Lista de símbolos
a : vectores
a⋅⋅
: aceleração própria
a : aceleração
0a : raio de Bohr
( )xA k : amplitude espectral gaussiana
A : bivector
b : vector
b : boost
B : bivector
c : vector
c : velocidade da luz
ε : energia do fotão
0ε : permitividade do vácuo
e : carga do electrão
Ε : energia própria da partícula
g : aceleração relativa
h : constante de Planck
: constante de Planck reduzida ∧
Η : operador hamiltoniano
nH : polinómios de Hermite
I : pseudoescalar
L : momento angular
k : vector de onda relativo
k : vector de onda
Bk : constante Boltzmann
m : massa inercial de uma partícula
em : massa do electrão
pm : massa do protão
p : momento linear relativo
p : momento linear
xi

( ),P x t : densidade de probabilidade
q : momento linear próprio
q : constante de propagação
Τ : energia cinética
u : velocidade própria
u⋅
: aceleração própria
u : multivector
U : energia potencial
v : velocidade relativa
v : velocidade
gv : velocidade de grupo
pv : velocidade da partícula
V : energia potencial
( )V r : potencial de Coulomb
ω : frequência angular
Z : número atómico
μ : massa reduzida
ψ : função de onda independente do tempo
Ψ : função de onda dependente do tempo
( ) 2,x tΨ : densidade de probabilidade
λ : comprimento de onda
γ : coeficiente de dilatação do tempo
ijδ : delta de Kronecker
Φ : variação de fase
x : posição média da partícula
ψ : vector de estado Ket
φ : quantidade bra
xii

1
Capítulo 1. Introdução
1.1. Enquadramento
A mecânica clássica ou newtoniana, que descreve de modo adequado o mundo macrofísico em que
vivemos, já não explica satisfatoriamente o comportamento das partículas a altas velocidades (sendo aí
substituída pela mecânica relativística) nem os fenómenos do mundo microfísico (escala atómica e
molecular), sendo aqui necessário recorrer à mecânica quântica, sendo esta mais geral que a mecânica
clássica.
O aparecimento da mecânica quântica está intimamente associado à evolução histórica da
natureza da luz. Primeiramente considerada de natureza corpuscular por Newton (1642-1727),
enunciada em 1675, posteriormente e contrariando este, surge a teoria ondulatória de Huygens (1629-
1695) e Young (1773-1829). Contudo, a fundação da estrutura teórica da mecânica quântica situa-se
entre os anos de 1923 e 1927 e resulta, em particular, dos trabalhos de Werner Heisenberg, Max Born,
Pascual Jordan, Erwin Schrödinger e Paul Dirac. Esta estrutura teórica não teria sido possível sem
algumas contribuições anteriores, nomeadamente: a lei da radiação de Max Planck (1900); a
descoberta do efeito fotoeléctrico por Heinrich Hertz (1887), a respectiva interpretação física por
Albert Einstein (1905) e posterior confirmação experimental por Robert A. Millikan (1915); o modelo
atómico proposto por Niels Bohr (1913); os coeficientes A e B de Einstein (1916) para explicar a
interacção entre a radiação electromagnética (os fotões) e os átomos de um gás; o efeito Compton
(1922); a experiência de O. Stern e W. Gerlach de 1922 revelando a quantificação do momento
angular.
Em 1925 Werner Heisenberg apresenta a mecânica matricial e em 1926 Erwin Schrödinger
formula a mecânica ondulatória. Contudo, já em 1924, Louis de Broglie tinha apresentado a sua tese
das ondas de matéria que deu origem ao dualismo onda-corpúsculo e que representa, de certa forma, o
ponto de partida conceptual para esta nova mecânica. A descoberta da difracção dos electrões através
dos átomos de uma rede cristalina por C. J. Davisson e L. H. Germer em 1927 (e também, de forma
independente, por G. P. Thomson) veio corroborar a teoria de Louis de Broglie. Mas foi ainda, em
1926, que Schrödinger mostrou a perfeita equivalência entre o formalismo da mecânica das matrizes
de Heisenberg e a sua própria mecânica ondulatória. Deve-se porém a Paul Dirac o desenvolvimento,

2
em 1930, do formalismo geral da mecânica quântica. A interpretação física deve muito, também, às
contribuições de Max Born, Werner Heisenberg e Niels Bohr. Nomeadamente foi Max Born quem
avançou a interpretação fisicamente aceite da função de onda (ou vector de estado). Werner
Heisenberg, por sua vez, formulou as relações de incerteza que desempenham um papel fundamental
na concepção física associada à mecânica quântica.
A mecânica quântica toca a óptica em toda a sua teoria, mas quando se fala em Laser (cuja
sigla em inglês significa Light Amplification by Stimulated Emission of Radiation), remete-se a
fenómenos de absorção e emissão de luz pelos átomos. Em 1916, Albert Einstein deu inicio à invenção
do laser, maser a partir da lei de Max Planck (1858-1947). Este último sugeriu que, a emissão e
absorção de luz pela matéria ocorre em quantidades discretas de energia, designadas por quanta. Em
adição, Einstein avançou com a hipótese de que a própria luz é composta de quanta de energia e
descobriu o efeito físico por trás do laser, que se designa por emissão estimulada. Einstein através de
considerações teóricas descobriu que um átomo absorve um fotão (partícula de luz) incidente e, após
certo tempo (emissão espontânea), reemite o mesmo fotão ao acaso. Além disto, este mesmo átomo
deve reemite o fotão absorvido se um segundo fotão interage com ele. O fotão reemitido tem a mesma
frequência do fotão que o estimulou (emissão estimulada) e, igualmente importante, tem a mesma fase
(o chamado fotão clone). A teoria ficou esquecida até o final da Segunda Guerra Mundial.
Em 1953, Charles H. Townes (1915), James P.Gordon e Herbert J. Zeiger produziram o
primeiro maser (Microwave Amplification by Stimulated Emission of Radiation), um dispositivo
similar ao laser sendo que produz microondas em vez de luz visível. O maser de Townes não tinha
capacidade de emitir ondas de forma contínua. Nikolai Basov (1922) e Aleksander Prokhorov (1916)
da União Soviética trabalharam de forma independente em um oscilador quantum e resolveram o
problema de emissão contínua utilizando duas fontes de energia com níveis diferentes. Posteriormente,
surge a primeira discrição em papel de um laser, em 1958 por Townes e Arthur Schawlow (1921-
1999). Gordon Gould (1920-2005) teve um desempenho importante no desenvolvimento do laser,
tendo sido este quem o designou como tal. Contudo, não teve o devido reconhecimento e não recebeu
juntamente com Townes, Basov e Prokhorov o prémio Nobel em 1964. Apenas em 1988 houve
reconhecimento da patente pedida por este em 1959, sendo finalmente reconhecido como um dos
criadores do laser. O primeiro dispositivo a funcionar correctamente, apareceu a 7 Julho de 1960, e foi
desenvolvido por um investigador desconhecido até à data, Theodore H. Maiman (1927), este
dispositivo consistia numa laser de rubi. Posto isto, vários laboratórios dedicaram-se ao
desenvolvimento do laser, e surge em 1964 o primeiro laser de dióxido de carbono, inventado por
Kumar Patel. Mais recentemente, em 2000, surge o primeiro laser orgânico alimentado a electricidade
e em 2002, tem-se o primeiro laser semicondutor do mundo que emite luz contínua e de modo fiável
sobre um largo espectro de comprimentos de onda infravermelhos.
Um computador quântico é um dispositivo que executa cálculos e faz uso directo de
propriedades da mecânica quântica, tais como sobreposição e interferência. Teoricamente,

3
computadores quânticos podem ser implementados e o mais desenvolvido actualmente trabalha com
poucos qbits de informação. O principal ganho desses computadores é a possibilidade de resolver em
tempo eficiente, alguns problemas que na computação clássica levariam tempo impraticável, como por
exemplo: busca de informação em bancos não ordenados, etc. Richard Feynman em 1981 elaborou a
primeira proposta de utilizar um fenómeno quântico para executar rotinas computacionais. Em 1985
David Deutsch, na Universidade de Oxford, descreveu o primeiro computador quântico universal.
Exactamente como uma Maquina de Turing pode simular outra máquina de Turing eficientemente, um
computador quântico universal é capaz de simular o funcionamento de outro computador quântico
com complexidade, no máximo, polinomial. Isso fez crescer a esperança de que um dispositivo
simples seja capaz de executar muitos algoritmos quânticos diferentes. Em 1994 Peter Shor, no Bell
Labs da AT&T em Nova Jersey, descobriu um excelente algoritmo que permite a um computador
quântico facturar grandes inteiros rapidamente. Low Grover, 1996, no Bell Labs, descobriu o
algoritmo de pesquisa em bases de dados quânticos.
1.2. Motivação
A mecânica quântica provocou uma revolução que marcou de forma decisiva a Física do século XX.
Sem ela, extraordinários desenvolvimentos jamais teriam sido possíveis. Sem compreender o
comportamento dos electrões nos meios materiais, não se teria assistido ao desenvolvimento da
indústria de semicondutores, e sem a mecânica quântica não se seria capaz de fabricar estruturas cada
vez mais pequenas. Mas, explorando as propriedades quânticas de confinamento conseguiu-se
desenhar dispositivos com características optimizadas para aplicações de dimensões cada vez mais
reduzidas.
Recentes desenvolvimentos na tecnologia de informação, na concepção e desenho de novos
materiais e na nanoelectrónica, têm mostrado cada vez mais a importância de conceitos quânticos na
própria descrição das capacidades destas novas e emergentes tecnologias.
A Mecânica Quântica proporcionou uma melhor compreensão da natureza e descobertas
tecnológicas que estão na base de muitos equipamentos que não dispensamos no nosso quotidiano.
O Átomo de Hidrogénio e o Oscilador Harmónico constituem dois produtos fundamentais para
a compreensão dos fenómenos quânticos.

4
1.3. Objectivos
Este trabalho tem como objectivo, a resolução da equação de Schrödinger para o estudo do átomo de
hidrogénio e do oscilador harmónico e para tal, é necessário compreender conceitos básicos de
mecânica quântica. O principal interesse deste estudo é a descrição da estabilidade do átomo de
hidrogénio dada através dos estados estacionários obtidos pela equação de Schrödinger e a análise do
oscilador harmónico através da mecânica quântica que envolve a determinação das soluções da
equação de Schrödinger.
Outro objectivo deste trabalho é apresentar uma nova linguagem matemática, a álgebra
geométrica, com vista à aplicação na mecânica quântica. Através da álgebra de espaço-tempo de
Minkowski, o efeito fotoeléctrico, efeito de Compton e o dualismo onda-corpúsculo podem ser
traduzidos para o formalismo da álgebra geométrica.
1.4. Descrição do trabalho
No Capítulo 2 deste trabalho, introduz-se a álgebra geométrica. Os principais objectivos são: a
formulação teórica da álgebra geométrica, uso das vantagens da álgebra geométrica como uma
linguagem unificada da física moderna, formulação geométrica da electrodinâmica clássica no espaço-
tempo de Minkowski. O primeiro passo deste trabalho consiste assim no estudo dos fundamentos da
álgebra geométrica, tanto numa forma geral como quando aplicada a um espaço vectorial em
particular, e nas suas diversas utilizações. Nomeadamente a relação entre a álgebra geométrica do
plano Euclidiano com a álgebra dos números complexos. Foi também analisado como a álgebra
geométrica se pode aplicar na definição das equações da dinâmica de uma partícula e quais as
vantagens ganhas em relação a outros formalismos. Descreveu-se como se pode aplicar a álgebra
geométrica ao espaço-tempo de Minkowski, e viu-se como temas da mecânica quântica como o efeito
fotoeléctrico, efeito de Compton e dualismo onda-corpúsculo podem ser traduzidos para o formalismo
da álgebra geométrica.
O Capítulo 3 introduz a mecânica quântica, apresentando conceitos essenciais para a
compreensão deste tema. Estuda-se o dualismo onda-corpúsculo de Louis de Broglie, as relações de
incerteza na posição e no momento que constituem um dos aspectos do princípio de Heisenberg e na
conclusão deste capítulo analisa-se a evolução dos feixes em mecânica ondulatória.
No Capítulo 4 é feita a dedução de Schrödinger através dos métodos variacionais. Começa-se
por introduzir o tema dos métodos variacionais através da equação de Euler-Lagrange e do princípio
da acção mínima para depois se deduzir a equação de Schrödinger para o caso unidimensional e
independente do tempo.

5
O Capítulo 5 tem por objectivo o estudo do oscilador harmónico como modelo físico das
vibrações moleculares. Neste capítulo são obtidos alguns gráficos de simulação referentes à função de
onda e à densidade de probabilidade do oscilador harmónico. No Capítulo 6 estuda-se o átomo de
hidrogénio, introduzindo-se a equação radial e realizando-se também algumas simulações. Para a
melhor compreensão dos temas apresentados ao longo dos vários capítulos, encontram-se em anexo
secções dedicadas a vários assuntos, como a radiação do corpo negro, para uma melhor compreensão
das limitações da mecânica clássica e o surgimento de novas teorias sobre a natureza da luz, o efeito
fotoeléctrico e efeito de Compton referidos no Capítulo 2, os anexos sobre o princípio da sobreposição
e operadores e valores expectáveis bastante úteis para um melhor entendimento do Capitulo 3 e o
anexo sobre o átomo de hidrogénio para complementar o Capítulo 6. Por fim o Capítulo 7 onde se
apresentam as principais conclusões sobre este trabalho.

6

7
Capítulo 2. Introdução à Álgebra Geométrica
2.1. Produto Geométrico
Existem diversos modos de desenvolver o formalismo da álgebra geométrica, neste trabalho segue-se
o caminho utilizado em textos de engenharia [3]. Partindo dos conceitos de número real, vector e
espaço vectorial e com um novo produto, o produto geométrico, para o qual se apresentará uma
definição axiomática, obter-se-á o corpo da álgebra geométrica. Os vectores são elementos de grande
importância pois são capazes, juntamente com o produto geométrico, de gerar qualquer elemento da
respectiva álgebra geométrica.
Uma das características fundamentais da álgebra geométrica é se tratar de uma álgebra
graduada, ou seja que esta é composta por objectos de diferentes graus, sendo possível a adição de
elementos de diferente grau. Os elementos que de grau 0 são os escalares que se associam aos números
reais, os de grau 1 são os vectores e associam-se a um espaço vectorial de dimensão e assinatura
arbitrária. Sobre os elementos de grau 1 (vectores) define-se o produto geométrico.
Começa-se por introduzir a definição de espaço linear (ou vectorial) V definido sobre o corpo
dos números reais. Aos elementos do espaço linear V dá-se o nome de vectores e sendoa , b e c
vectores pertencentes a este espaço (utiliza-se a convenção de representar os vectores por letras
minúsculas, tal como é normal nos textos sobre álgebra geométrica), o produto geométrico é definido
pelos seguintes axiomas:
1. ( ) ( )a bc = ab c abc= propriedade associativa (2.1)
2.( )
( )a b c ab ac
a b c ac bc
+ = +⎧⎪⎨
+ = +⎪⎩ propriedade distributiva (2.2)
3.22a a= ∈ propriedade da contracção. (2.3)

8
Do produto geométrico entre dois vectores define-se um termo simétrico e anti-simétrico em
que no primeiro é possível trocar a ordem dos vectores e no segundo para se trocar a ordem dos
vectores deve-se trocar o sinal do termo.
( ) ( )1 12 2
= + + −ab ab ba ab ba . (2.4)
2.1.1. Produto Interno
Define-se produto interno ( ), ⋅a b a b no espaço linear V com , V∈a b e ⋅ ∈a b tal que:
( )( ) ( )λ λ
+ ⋅ = ⋅ + ⋅⎧⎪⎨
⋅ = ⋅⎪⎩
a b c a c b c
a b a b linear no primeiro factor (2.5)
( )⋅ = ⋅a b b a simétrico (2.6)
0⋅ >a a para 0≠a positivo. (2.7)
Considere-se o seguinte exemplo uma base { }1 2 3, , ∈e e e 3 onde se define o produto interno
entre o vector a e b em que 1 1 2 2 3 3a a a= + +a e e e e 1 1 2 2 3 3b b b= + +b e e e
1 1 2 2 3 3
cosa b a b a b
θ⋅ = + +
⋅ =
a ba b a b
(2.8)
θ , com º1800 ≤≤θ , é o ângulo entre a e b . Da definição em coordenadas vem:
2 2 21 2 3
cos .
a a a
θ
= ⋅ = + +
⋅=
a a aa ba b
e (2.9)
Em conclusão pode-se dizer que a parte simétrica do produto geométrico é o produto interno,
( )12
⋅ = +a b ab ba . (2.10)

9
2.1.2. Produto Exterior
Como foi referido anteriormente o termo simétrico do produto geométrico é o produto interno. Quanto
ao termo anti-simétrico, ( )−ab ba , deve ser nulo quando os vectores a e b são paralelos, e vai-se
também demonstrar que ( )−ab ba não pode ser um escalar nem um vector mas sim um objecto de
grau 2, o bivector. A este termo anti-simétrico chama-se produto exterior.
∧ = − ⋅a b ab b a . (2.11)
Portanto o produto exterior, ao contrario do produto interno, anti-simétrico: ∧ = − ∧a b b a .
Logo
( )
( )
1212
⎧ ⋅ = +⎪= ⋅ + ∧⎧ ⎪⇒⎨ ⎨= ⋅ − ∧⎩ ⎪ ∧ = −⎪⎩
a b ab baab a b a bba a b a b a b ab ba
(2.12)
donde se infere que
|| 0ab ba a b a b ab a b= ⇔ ⇔ ∧ = ⇔ = ⋅ (2.13)
0ab ba a b a b ab a b= − ⇔ ⊥ ⇔ ⋅ = ⇔ = ∧ (2.14)
0a a∧ = . (2.15)
Pode-se dizer que o produto exterior de dois vectores representa uma direcção bidimensional
que se pode associar a um plano. Define-se assim um plano, um sentido de rotação (de a para b no
caso de a b∧ ) e uma magnitude que se pode interpretar como sendo a área do paralelogramo formado
pelos dois vectores.
Figura 2.1 Representação de um bivector.
a b∧
a
b
a b∧
a
b

10
Assim conclui-se que o produto geométrico de dois vectores (elementos de grau 1) se pode
decompor na soma de um escalar com um bivector, objectos de grau 0 e 2.
2.1.3. Adição de bivectores
A situação de adição de dois bivectores, que resultem do produto exterior de dois vectores, pode ser
interpretada geometricamente recorrendo à propriedade distributiva. Dois bivectores num espaço
tridimensional podem ser descritos através de três vectores, sendo um desses vectores comum aos
dois, neste exemplo escolheu-se o vector a para representar a recta de intersecção dos dois bivectores,
a b∧ , a b∧ . Recorrendo à propriedade distributiva do produto exterior obtém-se
( )a b a c a b c∧ + ∧ = ∧ + . Na Figura 2.2 para se obter a soma pretendida, deve-se unir duas arestas
dos bivectores de modo a que o sentido de circulação dos bivectores seja contrário. Seguidamente
deve-se formar o paralelogramo definido pelas arestas opostas àquelas que se uniram, sendo este o
plano de bivector resultante. O sentido do bivector resultante obtém-se destas duas últimas arestas, e
como se pode verificar na figura é coerente com o sentido de ambas.
Figura 2.2 Soma de dois bivectores.
2.2. Álgebra Geométrica do Plano
Para melhor consolidar as ideias anteriormente apresentadas vai-se definir a álgebra geométrica (de
Clifford) do plano, que se vai designar por 2Cl . O produto geométrico que atrás está definido
corresponde ao produto bilinear 2 2 2Cl Cl Cl× → . A base desta álgebra é constituída pelos quatro
elementos ( )422 =
1 escalar
a
ba c
b c+
a b∧ a c∧
( )a b c∧ +

11
1 2,e e vectores
12e bivector
e um elemento denominado multivector 2u Cl∈ que é dado em geral por
0 1 1 2 2 12 12 2 ,e e eu u u u u cl= + + + ∈ 0 1 2 12, , ,u u u u ∈ . (2.16)
Trata-se de uma álgebra graduada de ( )2dim 4Cl = , com
2
20 1 20
rr
u u u u u Cl=
= = + + ∈∑ (2.17)
,00uu = 1 1 2 21
,e eu u u= + 12122euu = (2.18)
em que r
u é uma representa a projecção do multivector u no grau r .
2.2.1. Produtos notáveis
A base ortonormada da álgebra geométrica do plano é { }1 2,e e tal que,
1,0,
e ei j ij
i ji j
δ=⎧
⋅ = = ⎨ ≠⎩ (2.19)
onde se considerou o delta de Kronecker. Tendo um vector de comprimento r∈ 2 , tal que
1 2r e ex y= + (2.20)
é dado por
2 2r x y= + . (2.21)
Introduz-se agora o produto de r por si próprio que se vai designar por 2r rr= e que deve ser
igual ao quadrado do seu comprimento,
22r r= . (2.22)
Em termos de coordenadas deve-se ter
( ) 222 2 21 2r e e rx y x y= + = + = . (2.23)

12
Se apenas se considerar que o produto em causa é distributivo e não comutativo tem-se que
( ) ( )22 2 2 2 2 2 21 2 1 2 1 2 2 1r e e e e e e e ex y x y xy x y= + = + + + = + . (2.24)
Os vectores { }1 2,e e além de serem ortogonais devem obedecer a
2 21 2 1e e= = (2.25)
1 2 2 1e e e e= − . (2.26)
Se se considerar o produto associativo têm-se ainda que
( ) ( )( ) ( ) ( )2 2 21 2 1 2 1 2 1 2 1 2 1 1 2 2 1 2 1e e e e e e e e e e e e e e e e= = = − = − = − . (2.27)
Visto que o quadrado de 1 2e e é negativo, não pode ser nem um escalar nem um vector o que
significa que se trata de um bivector.
A álgebra geométrica do plano obedece assim à seguinte tabela multiplicativa:
Tabela 2.1 Produtos entre vectores.
1e 2e 12e
1e 1 12e 2e
2e 12e− 1 1e−
12e 2e− 1e 1−
2.2.2. Álgebra Geométrica e os números complexos
Existe uma relação entre a álgebra geométrica 2Cl e o conjunto dos números complexos.
A álgebra 2Cl é a soma directa
2Cl = ⊕ 2 ⊕2∧ 2 . (2.28)
No sentido em que, se 0 1 1 2 2 12 12 2 ,e e eu u u u u Cl= + + + ∈ então
+= 0uu a + B, 0u ∈ , a∈ 2 , B2∧∈ 2
00 uu = → escalar

13
a 1 1 2 2 1e eu u u= + = →vector
12 12 2B eu u= = → bivector
É ainda possível escrever
2 2 2Cl Cl Cl+ −= ⊕ → parte par: 2Cl+ =2
⊕∧ 2 e parte ímpar 22Cl− = .
Os números complexos podem ser vistos assim como uma representação da sub-álgebra
geométrica par (álgebra constituída pelos elementos de grau par) de 2Cl . A sub-álgebra par de 2Cl
representa-se por 2Cl+ , e é composta por escalares e bivectores de 2Cl . Esta álgebra é fechada em
relação ao produto geométrico.
Dado que 1212 −=e , existe um isomorfismo 2Cl+ ≅ em que
12 2ez x y Cl+= + ∈ → número complexo
( )x z=ℜ ∈ → número real
( )2
212 12e ey z= ℑ ∈∧ → bivector.
2.3. Análise de resultados
2.3.1. Lâminas
Ao produto exterior de vários vectores originam-se objectos aos quais se dá o nome de lâminas.
Lâmina de grau k é um objecto formado pelo produto exterior de k vectores linearmente
independentes a sua representação é dada por
1 2 ...a a ak kA = ∧ ∧ ∧ . (2.29)
Pode-se definir que uma lâmina de grau 0 é um escalar, de grau 1 é um vector e de grau 2 é
um bivector. No caso de se ter o produto externo de uma lâmina de grau k com um vector obtém-se
um objecto de grau k+1. Utilizando o mesmo tipo de raciocínio sabe-se que o produto externo entre
um bivector e um vector é um trivector.
Uma lâmina pode ser construída recorrendo a diferentes vectores tal como se mostra na Figura
2.3 desde que estes formem sempre o mesmo sub-espaço. Veja-se o seguinte exemplo se 'b b a= + a
lâmina 'a b∧ também se pode escrever como
( )'a b a b a∧ = ∧ + (2.30)

14
a b a a= ∧ + ∧
a b= ∧ .
Como é sempre possível obter um vector 'b b a= + tal que ' 0a b⋅ = qualquer lâmina de grau
2 pode ser escrita como o produto geométrico de dois vectores ortogonais,
' 'a b a b ab∧ = ∧ = . (2.31)
Figura 2.3 Exemplos de lâminas.
A equação 2.31 é valida para lâminas de qualquer grau, podendo estas ser escritas como o
produto geométrico de vectores ortogonais entre si.
2.3.2. Produto entre vector e bivector
Como foi referido anteriormente o produto geométrico, entre vectores, pode ser decomposto em
produto interno e produto exterior. Neste ponto vai-se analisar o que sucede quando se pretende obter
o produto geométrico entre um vector e um bivector. Decompondo o vector a nas suas componentes
paralela e perpendicular ao plano definido pelo bivector B . Pode-se então escrever B recorrendo a
componente paralela de a , ||a , e a um vector b ortogonal a ||a e definido no plano B ,
|| ||a b a bB = ∧ = . (2.32)
Sendo que || 0a b⋅ = . Assim pode-se calcular o produto aB ,
( )|| ||a a a a bB ⊥= + (2.33)
2|| ||a b a a b⊥= +
2|| ||a b a a b⊥= + ∧ ∧ .
a
b a b∧
a
a b∧
'b b aλ= +
aλ

15
Sendo que o primeiro termo é um vector e o segundo termo um trivector. Conclui-se então o
produto entre um vector e um bivector desenvolve um ter de grau 1 e de grau 3. Também no produto
geométrico entre vector e bivector pretende-se que possa ser decomposto em produto interno e exterior
tal como acontece quando se tem o produto geométrico entre dois vectores. É importante referir que o
produto interno entre um vector e um bivector diminui o grau do bivector, e que o produto exterior
aumenta o grau. Assim pode-se definir,
a a aB B B= ⋅ + ∧ . (2.34)
Comparando com a equação 2.33 pode-se escrever
2|| || ||a a a aB b B B⋅ ≡ = = ⋅ (2.35)
||a a a a aB b B B⊥ ⊥ ⊥∧ ≡ = = ∧ . (2.36)
Conclui-se que o produto interno entre um vector e um bivector é anti-simétrico e que o
produto exterior é simétrico como se demonstra nas seguintes equações,
|| || || || || ||a a a a a a a aB B b b B B⋅ = = = − = − = − ⋅ (2.37)
|| ||a a a a a a a aB B b b B B⊥ ⊥ ⊥ ⊥∧ = = = = = ∧ . (2.38)
O que é precisamente o contrario do que se passa com o produto interno e exterior entre
vectores. O produto interno entre um vector e um bivector é igual ao produto interno entre a
componente paralela do vector e o bivector, que põe sua vez é igual ao produto geométrico de ambos,
|| ||a a aB B B⋅ = ⋅ = . (2.39)
No que diz respeito ao produto exterior passa-se o mesmo mas com a componente ortogonal do vector
a a aB B B⊥ ⊥∧ = ∧ = . (2.40)
Geometricamente o produto interno a B⋅ resulta num vector coplanar com B e que é
ortogonal à projecção de a em B , e o produto exterior resulta nem trivector formado pela
componente ortogonal de vector a e pelo bivector B . O resultado de ambos os produtos está
exemplificado na Figura 2.4.

16
Figura 2.4 Produto de um vector por um bivector.
No produto geométrico entre um vector e uma lâmina de grau 2 obtém-se
( )12
a a aB B B⋅ = − (2.41)
( )12
a a aB B B∧ = + . (2.42)
2.3.3. Projecção de um vector
Tendo o inverso do bivector B
||12 2
||
bab a
B− = (2.43)
Podemos multiplica-lo pelas seguintes equações
( ) 1||a a B B−= ⋅ (2.44)
( ) 1a a B B−⊥ = ∧ . (2.45)
Na Figura 2.5 está representada a decomposição do vector, obtida pelas fórmulas anteriores.
Deve-se notar que o bivector se pode expressar em função de outros pares de vectores além de ||a e b ,
não sendo 2.44 e 2.45 possíveis apenas quando se sabe à partida que || ||a b a bB = ∧ = . As fórmulas da
projecção e rejeição continuam válidas caso o bivector seja substituído por uma lâmina de grau
superior (ou inferior, caso em que se pretende a componente paralela e ortogonal a um vector).
B
a B⋅
||a bB = b
a B∧
a
||a
a⊥

17
Figura 2.5 Projecção e rejeição de um bivector.
2.3.4. Quadrado de um bivector
Para se calcular o quadrado de um bivector, a b∧ , utiliza-se a expansão do produto exterior dado em
2.11,
( ) ( )( )2a b ab a b a b ba∧ = − ⋅ ⋅ − (2.46)
( ) ( )( )22 2a b a b a b ab ba= − ⋅ + ⋅ +
( )2 2 2a b a b= ⋅ − .
Como o produto interno entre vectores é ( )cosa b a b θ⋅ = então,
( ) ( )2 2 2 sina b a b θ∧ = − . (2.47)
2.4. Álgebra Geométrica do Espaço
Considere-se agora o espaço tridimensional 3 , neste espaço existem vectores e bivectores. É
importante referir que dois bivectores (representados por letras maiúsculas) são iguais se tiverem a
mesma magnitude e direcção
BABA =⇔= e BA ↑↑ . (2.48)
O que significa que a forma não é relevante, ou seja, o mesmo bivector pode ser representado
por formas diferentes. Como o bivector pode ser expresso através do produto exterior é importante
realçar o sentido de rotação.
1||a a BB−= ⋅
B
a
1a a BB−⊥ = ∧
B
a

18
Figura 2.6 Representação de bivectores.
Os bivectores podem ser adicionados e multiplicados por escalares e constituem um espaço
linear designado por 2∧ 3 . Seja { }1 2 3, ,e e e a base ortonormada de 3 então a base para o espaço
linear dos bivectores é
1 2 1 3 2 3, ,e e e e e e∧ ∧ ∧ (2.49)
2.4.1. Trivectores
Um trivector é o produto exterior de três vectores e vai ser representado por V pois corresponde a um
volume orientado. O volume é o paralelepípedo de arestas a , b e c .
1
1
1
a b ca
V bc
= ∧ ∧ =
2
2
2
cba
3
3
3
cba
1 2 3e e e∧ ∧ (2.50)
1 1 2 2 3 3
1 1 2 2 3 3
1 1 2 2 3 3
a e e eb e e ec e e e
a a ab b bc c c
= + +⎧⎪ = + +⎨⎪ = + +⎩
⇒1
1
1
a b ca
V bc
= ∧ ∧ =
2
2
2
cba
3
3
3
cba
1 2 3e e e∧ ∧ (2.51)
1 2 3e e eV β= ∧ ∧ (2.52)
Geometricamente o trivector pode ser interpretado como já foi referido anteriormente como
sendo um paralelepípedo que se obtém quando se faz o bivector ( )a b∧ , por exemplo, percorrer o
vector c . Na Figura 2.7 esta uma representação de um trivector. Caso os vectores sejam linearmente
independentes o resultado deverá ser nulo, e o contrário também é verdadeiro, se o produto exterior de
um grupo de vectores for diferente de zero então estes são linearmente independentes. Utilizando a
propriedade associativa e a a b b a∧ = − ∧ tem-se que
a b c c a b b c a∧ ∧ = ∧ ∧ = ∧ ∧ (2.53)
a
ba bA = ∧
b aA− = ∧b
a

19
Figura 2.7 Representação de um trivector.
O espaço linear dos trivectores tem dimensão um
⎜⎝⎛∧
3dim
3 ⎞⎟⎠
= 1
e a sua base 1 2 3e e e∧ ∧ .
O produto exterior é também para o trivector associativo e anti-simétrico.
2.4.2. Álgebra geométrica de Clifford
A álgebra geométrica de Clifford designa-se por 3Cl
3Cl = ⊕ 3 ⊕2∧
33 ⊕∧ 3 .
Seja { }1 2 3, ,e e e a base ortonormada de 3 tal que e ei j ijδ⋅ = , sendo ijδ o delta de Kronecker.
1,0,
e ei j ij
i ji j
δ=⎧
⋅ = = ⎨ ≠⎩
Sendo i e j índices que representam elementos do conjunto {1,2,3}. Aplicando sucessivamente
o produto geométrico entre os versores obtém-se
Tabela 2.2 Correspondência entre a Álgebra de Clifford e a Álgebra de Gibbs
3Cl ∧ 3
1 1
1 2 3, ,e e e 1 2 3, ,e e e
12 1 2, 13 1 3 23 2 3,e e e e e e e e e= = = 1 2 1 3 2 3, ,e e e e e e∧ ∧ ∧
123 1 2 3e e e e= 1 2 3e e e∧ ∧
a
ba ∧b
c

20
sendo a base de 3Cl
base( 3Cl ) = {1 { 1 2 3, ,e e e } { 1 2, 1 3 2 3,e e e e e e } 1 2 3e e e }
verifica-se que 3Cl é um espaço linear de dimensão 8.
dim( 3Cl ) = 32 = 8.
2.4.3. Produto geométrico
Tal como acontece no plano também no espaço o produto geométrico dá um multivector ( 3u Cl∈ ). As
equações mantém-se iguais a 2.12, 2.13 e 2.14.
,a b∈ 3 ⇒ ( )
( )
1212
a b ab baab a b a bba a b a b a b ab ba
⎧ ⋅ = +⎪= ⋅ + ∧⎧ ⎪⇒⎨ ⎨= ⋅ − ∧⎩ ⎪ ∧ = −⎪⎩
|| 0
0ab ba a b a b ab a bab ba a b a b ab a b
= ⇔ ⇔ ∧ = ⇔ = ⋅= − ⇔ ⊥ ⇔ ⋅ = ⇔ = ∧
,a b∈ 3 1a− ∈ 3 , 12
1a aa
− ⎛ ⎞= ⎜ ⎟⎝ ⎠
(2.54)
Figura 2.8 Representação do produto geométrico.
( )cosa b a b θ⋅ = (2.55)
( )sina b a b θ∧ = (2.56)
2 2 2 2a b a b a b⋅ + ∧ = (2.57)
a
b
( )cosb θ
( )sinb θ
a

21
a b a b∧ ≤ . (2.58)
Sendo que ab a b=
( ) ( )( ) ( )( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( )
2 2
2 2 22 2 2 2 2 2 2 2 2
2 2 2 2 2 2 2
2 cos
sin 0
a b ab a b a b ba a b ab ba a b abba
a b a b a b a b a b a b a b
a b a b a b a b
θ
θ
∧ = − ⋅ ⋅ − = ⋅ + − ⋅ − =
⋅ − ⋅ − = ⋅ − = −
∧ = ⋅ − = − ≤
(2.60)
Conclui-se que no espaço
( ) 33dim 2 8Cl = =
30 1 2 3u u u u u Cl= + + + ∈ → soma graduada
123 123 ,a be eu α β= + + + ,α β ∈ , ∈ba, 3
0u α= ∈ → escalar
1au = ∈ 3 →vector
2
1232beu B= = ∈∧ 3 →bivector
3
1233eu V β= = ∈∧ 3 → trivector ou pseudoescalar
2.5. Álgebra geométrica do espaço-tempo de Minkowski
Nesta secção vai-se definir a álgebra geométrica do espaço-tempo de Minkowski, seguindo o
formalismo de [3], que se vai designar por 3,1Cl . A utilização da álgebra geométrica permite escrever
as equações fundamentais numa forma invariante sem referência a nenhum sistema de coordenadas,
também permite de uma forma simples a integração do espaço Euclidiano tridimensional mais o tempo
relativo que um dado observador é capaz de medir, com o espaço-tempo invariante e absoluto.
Define-se o espaço-tempo de Minkowski como sendo um espaço linear de dimensão 4.
Seja { }0 1 2 3, , ,e e e e uma base ortogonal para o espaço de Minkowski, um qualquer vector
acontecimento x quando projectado nesta base será,
0 0x e ei ix x= + . (2.61)
A forma quadrática associada ao espaço 3,1Cl , assume a forma (2.62), e deriva dos dois
postulados de Einstein da teoria de relatividade restrita: 1) Princípio da relatividade de todas as leis
físicas; 2) Velocidade da luz no vácuo constante.

22
2222)(),,,( zyxctzyxtQ −−−= (2.62)
0),,,( =zyxtQ define o ponto de vista do observador 0e . As componentes do vector x representam:
0x ct= a coordenada temporal multiplicada pela velocidade da luz no vácuo; 1x x= , 2x y= e 3x z=
as coordenadas espaciais. No referencial eμ o produto interno entre vários versores é
0 0 1e e⋅ = e e ei j ijδ⋅ = − . (2.63)
O versor 0e designa-se por versor temporal, e os versores ei e e j por versores espaciais. Se se
multiplicar (2.61) pelo versor 0e obtém-se,
0 0 xi ixe ct x e e ct= + = + . (2.64)
A parte escalar ct é a coordenada temporal do acontecimento, o bivector x é de dimensão 3, e
as suas componentes são as coordenadas espaciais do acontecimento. Atendendo ao facto que x é
invariante e independente do referencial considerado, pode-se dizer que no caso geral o produto de um
vector por um versor temporal permite decompor um vector invariante de 3,1Cl nas componentes
temporais e espaciais relativas a um dado referencial.
0ect x= ⋅ (2.65)
0x ex= ∧ (2.66)
A este mecanismo de decomposição de quantidades invariantes em quantidades relativas a um
dado observador dá-se o nome de vector espaço-tempo. Este é único para um dado versor temporal,
considerando-se que um referencial fica completamente definido pelo seu versor temporal. Usando
este método é possível derivar a magnitude invariante de um vector, através de (2.64)
0 0 0e e ex x x= ⋅ − ∧ (2.67)
a magnitude de x será
( )( ) ( )( ) ( )22 20 0e e x x xx x x ct ct ct= = + − = − . (2.68)
A magnitude de um vector invariante deve ser também um invariante, o que se verifica pelo
facto de 2x não depender de nenhum versor de nenhuma base.

23
2.5.1. Bases de 3,1Cl
A álgebra 3,1Cl é composta por elementos de grau 0 a 4 (escalar, vector, bivector, trivector e
pseudoescalar), tendo cada sub-espaço as seguintes dimensões
dim ( ) ( ) 1614334143,1
33,1
23,1
13,1
03,13,1 =+++++=++++= ClClClClClCl (2.69)
assim, em 3,1Cl existem relações de dualidade entre escalar e pseudoescalar, entre vectores e
trivectores e entre os bivectores. O pseudoescalar é 0 1 2 3e e e eI = , sendo o seu quadrado negativo
20 1 2 3 3 2 1 0 1e e e e e e e eI = = − (2.70)
o pseudoescalar anti-comuta com todos os vectores,
a aI I= − . (2.71)
O espaço de bivectores divide-se em dois grupos { 0e ei }e ei j , o dos bivectores temporais
composto por todos aqueles que têm como factor o versor temporal, 0e e j , e o grupo dos bivectores
espaciais, e ei j . Os bivectores espaciais quando elevados ao quadrado devolvem 1− , e os bivectores
temporais 1. Conclui-se assim que os bivectores do tipo x têm magnitude positiva.
( )20 1e ei = (2.72)
( )21e ei j = (2.73)
Como a magnitude dos vectores relativos é sempre positiva, a magnitude dos vectores
próprios, calculada em (2.68), tanto pode ser positiva como negativa. Os vectores cujo quadrado é
positivo 2 0a > designam-se por vectores tipo tempo, os vectores com quadrado negativo 2 0a < são
vectores tipo espaço e os vectores com 2 0a = são do tipo luz.
Os bivectores base temporais são duais dos bivectores espaciais, ou seja 1 0 3 2e e e eI = , podendo
assim a base para o espaço dos bivectores ser representada por { 0e ei }e ei jI . A base para o espaço dos
trivectores pode ser { }eI μ visto estes serem duais dos vectores.
( ) {13,1 =Clbase eμ 0 ,e e e ei i j eI μ }I

24
2.5.2. Tempo próprio e velocidade própria
Considere-se a trajectória ( )a λ de uma partícula no espaço-tempo. Esta trajectória admite várias
parametrizações em função de diferentes parâmetros no entanto deve existir uma parametrização para
a qual vários observadores concordem acerca do valor do parâmetro. É o caso do comprimento de arco
da trajectória que para intervalos infinitesimalmente próximos representa-se por τcd , observando
(2.68) este comprimento resulta em
( ) ( ) ( )2 2 2acd cdt dτ = − . (2.74)
Ao parâmetro τ dá-se o nome de tempo próprio visto que corresponde ao tempo medido num
referencial solidário com a partícula, neste caso 0ad = . Com base neste parâmetro define-se a
velocidade própria, que é também um invariante visto que resulta da diferenciação de um vector
invariante por um parâmetro invariante.
( ) ( ). au a d
dτ τ
τ= = (2.75)
Considerando o vector posição de uma partícula representado no seu próprio referencial e
sabendo que neste caso τ=t , tem-se através de (2.61) que
( )0 0u e ed c cd
ττ
= = (2.76)
e
2 2u c= . (2.77)
Um referencial diz-se inercial se se verificar .
0u = . Considere-se agora a velocidade própria
de uma partícula em relação ao referencial inercial
( ) ( ) ( ) ( ).
0au a e vd t c t
dτ τ γ
τ= = = ⎡ + ⎤⎣ ⎦ . (2.78)
O factor de escala entre os tempos medidos nos dois referenciais é τ
γddt
= .
1
2 2
21 vc
γ−
⎛ ⎞= −⎜ ⎟⎝ ⎠
(2.79)
Introduzindo o parâmetro 2
22
vc
β = , pode-se rescrever (2.79) na forma ( ) 2121
−−= βγ .
Definindo-se v vcβ∧
= tal que 1v∧
= , o vector velocidade própria da partícula pode escrever-se como

25
( ) 0u u v e vcγ γ β∧⎛ ⎞= + = +⎜ ⎟
⎝ ⎠. (2.80)
A velocidade própria 0u ce= , do referencial definido por 0e , relaciona-se com v através do
multivector par composto por um escalar e um bivector 1 Bb γ β∧⎛ ⎞= +⎜ ⎟
⎝ ⎠, podendo este ser escrito
recorrendo à função exponencial. Como o quadrado do bivector 0B ve∧ ∧
= é positivo e define-se
( ) γζ =cosh (2.81)
sendo que
( ) γβζ =sinh . (2.82)
Obtém-se assim, a expressão da velocidade própria através da função exponencial
2 2B B
u ve eζ ζ∧ ∧⎛ ⎞ ⎛ ⎞
−∧ ∧⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠= . (2.84)
Esta equação é idêntica à utilizada nas rotações espaciais, sendo b um boost
12 cosh sinh
2 2
BBb e
ζ ζ ζ∧⎛ ⎞
∧⎜ ⎟⎝ ⎠ ⎛ ⎞ ⎛ ⎞= = +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠. (2.85)
Que neste caso realiza a transformação entre o observador u∧
e v∧
,
2 u vb∧ ∧
= − (2.86)
com
( ) ( )2 1 cosh sinhB
B Bb eζ
γ β ζ ζ∧⎛ ⎞
∧ ∧⎜ ⎟⎝ ⎠⎛ ⎞= + = = +⎜ ⎟
⎝ ⎠. (2.87)
As rotações deste género, entre vectores de velocidade própria, vectores do tipo tempo, que
são geradas por rotors cujo plano de rotação é definido por vector relativo e são designadas por
rotações do tipo boost.
2.5.3. Aceleração própria
Tal como se definiu a velocidade própria vai-se agora definir a aceleração própria de uma partícula,

26
( ) ( )2. ..
2
u au a d dt td dτ τ
= = = . (2.88)
Nota-se assim que a velocidade própria é sempre ortogonal à aceleração própria,
( )
.
.
2 0
0
u u u u
u u
ddτ
⎛ ⎞⋅ = ⋅ =⎜ ⎟⎝ ⎠
⋅ =
Este vector é também invariante pelas mesmas razões referidas anteriormente no caso da
velocidade própria. A aceleração própria num referencial inercial realiza-se também do mesmo modo.
( ) ( ) ( ) ( ) ( ).. .
2a u g udt t t t tdtγγ= = + (2.89)
onde g é a aceleração relativa medida no referencial 0e , e que
( ) vg dtdt
= . (2.90)
2.5.4. Momento linear próprio
O momento linear próprio de uma partícula com velocidade própria u define-se através da seguinte
expressão,
q um= . (2.91)
Onde m representa a massa da partícula em repouso. Utilizando o mesmo processo da velocidade
própria e da aceleração própria, obtém-se em relação a 0e ,
( ) ( )0 0q u e v e pm m c mcγ γ= = + = + . (2.92)
O termo p é assim o vector relativo do momento linear,
p vmγ= . (2.93)
Tal como nos casos anteriores pode-se calcular a magnitude invariante do momento linear relativo,
2 2 2 2 2 2 2 0p vm m vγ γ= = − < . (2.94)
Define-se, ainda, a energia total da partícula como sendo 2mcγΕ = e que 20 mcΕ = é a
energia própria.

27
Assim termina a apresentação das diversas grandezas próprias, velocidade, aceleração e
momento linear próprios.
2.5.5. Efeito fotoeléctrico
Nas secções anteriores viu-se que para uma partícula em movimento num dado referencial, a
velocidade relativa é dada por ( )2v pc= Ε , em que ( ) 2mcvγ=Ε e ( )v mγ=p v . Admitindo que a
radiação electromagnética é constituída por fotões, e que a velocidade destas partículas elementares
será em qualquer referencial, dada por cv = , sabe-se assim que a energia de um fotão é cp=Ε .
O efeito fotoeléctrico, em pormenor no anexo B, descoberto por Heinrich Hertz (1875-1894)
em 1887, foi mais tarde interpretado por Albert Einstein em 1905. Nesta interpretação, a energia
cinética dos electrões que são separados do metal através da radiação incidente provocam uma
corrente eléctrica dada por Whfmv −==Τ 2/2 , onde W representa a energia que não depende da
frequência e é uma característica do metal, h representa a constante de Planck e f a frequência da
radiação incidente. De acordo com a interpretação de Einstein, o efeito fotoeléctrico explica-se pelo
facto da radiação incidente ser constituída por fotões em que a energia do fotão transporta um
momento linear cp Ε= , pelo que se pode inferir que cphf ==Ε . Pode-se assim concluir que o
momento linear relativo do fotão é dado por,
λh
chfp == . (2.95)
Sendo fc=λ o comprimento de onda da radiação electromagnética. Como π2h= ,
constante reduzida de Planck, e fπω 2= , frequência angular, pode-se inferir que ω=Ε e kp = ,
sendo λπ2=k a constante de propagação da radiação incidente. Para que o efeito fotoeléctrico
aconteça é assim necessário que a frequência da radiação incidente seja superior a um limiar mínimo,
limiar essa que é precisamente o valor da energia de um fotão,
h
Wff =≥ min . (2.96)
A variação electromagnética não varia continuamente uma vez se encontra discretizada em
quanta, ou seja a sua variação é discreta. Abordando o efeito fotoeléctrica através da álgebra
geométrica de espaço-tempo pode-se ver que,
2 2 20c
Ε= + → = → =q e p q I q I . (2.97)

28
Sendo q o momento linear próprio do fotão. h λ= =p k em que k∧
=k k é o vector de onda
relativo e 0cω∧⎛ ⎞= +⎜ ⎟
⎝ ⎠I e k , o vector de onda próprio do fotão sendo que para 2 0I = o vector é do
tipo luz.
2.5.6. Efeito de Compton
O efeito Compton (Anexo C) é outra das experiências que permite perceber as ideias anteriormente
expostas. Esta é a experiência de Arthur Compton (1892-1962) que em 1922 estabelece a natureza
corpuscular do fotão.
Figura 2.9 Efeito de Compton.
Através da Figura 2.9 pode-se ver que um fotão de onda 1λ colide com um electrão em
repouso de massa m . Após a colisão o fotão passa a ter um comprimento de onda 2λ e é desviado
com um ângulo θ . Em relação ao electrão, este inicia um movimento ao longo de uma direcção que
faz um ângulo φ com a direcção do fotão incidente.
A equação (2.98) representa o momento linear do fotão antes da colisão já a equação (2.99)
representa o momento linear após a colisão.
111 0q e k
cω ∧⎛ ⎞= +⎜ ⎟
⎝ ⎠ (2.98)
222 0q e k
cω ∧⎛ ⎞= +⎜ ⎟
⎝ ⎠ (2.99)
θ
m
Electrão
φ
2λ
1λ
1
∧
k
∧
2k
∧
v

29
Em relação ao electrão, o seu momento linear antes da colisão é
0q ecΕ
= . (2.100)
A equação seguinte representa o momento linear do electrão após a colisão
'
' '0q e p
cΕ
= + . (2.101)
Para que haja conservação do momento linear é necessário que
'1 2q q q q+ = + . (2.102)
Manipulando algebricamente a equação (2.102) obtém-se ' '2 1q q q q⋅ = ⋅ . Da álgebra
geométrica sabe-se que 1 2 1 2q q q q q q⋅ = ⋅ − ⋅ como 2 2
1 2 1k k∧ ∧
= = , ( )1 2 cosk k θ∧ ∧
⋅ = − ,
( )1 cosk v v φ∧ ∧
⋅ = − e a energia é 2mcΕ = obtém-se,
( )2
1 2 1 22 1 cos m mcωω θ ω ω− = −⎡ ⎤⎣ ⎦ . (2.103)
O comprimento de onda de Compton é c h mcλ = . Voltando à equação (2.102), conservação
do momento linear é possível retirar através desta a energia cinética do electrão após a colisão.
( )
( )( )
1 2
'1 2 1 2
22
q q q qk v
mc v mcc c
v mc
ω ω γω ω
ω γ∧
⎧ + = +⎪⎪+ = + → →Τ = −⎨⎪ +⎪⎩
(2.104)
Sendo que Τ representa a energia cinética do electrão após a colisão e ( )' v mcγΕ = e
( )'p vv mγ= . A energia cinética adquirida pelo electrão, após a colisão, corresponde à diminuição de
energia retirada ao fotão. Como 12mc
ωα = e 2
1
1 1 ωγα ω−
= − pode-se verificar que
2
1 1
1 1 ωγω α ωΤ −
= = − .
Recorrendo às equações anteriores, nomeadamente a equação (2.103) é possível exprimir a energia
cinética em função do ângulo θ .

30
( ) ( ) ( )( ) ( )
2
1 2
2 tan 21 2 tan 2 1
α θθ ω
α θΤ =
+ + (2.105)
É também possível exprimir a energia cinética em função do ângulo φ .
( ) ( )( ) ( )1 2 2
21 2 1 tan
αφ ωα α φ
Τ =+ + +
(2.106)
Igualando as expressões (2.105) e (2.106) da energia cinética, obtém-se a seguinte relação entre os
dois ângulos.
( ) ( )cot 1 tan2θφ α ⎛ ⎞= + ⎜ ⎟⎝ ⎠
(2.107)
Sendo que esta relação exprime o efeito de Compton. Através das expressões anteriores para a
energia cinética verifica-se que para 0θ = a energia cinética é nula, ou seja o electrão permanece
imóvel e que o valor máximo da energia cinética dá-se para θ π= .
12
1
112
máx mcω
ω
Τ =⎛ ⎞
+ ⎜ ⎟⎝ ⎠
(2.108)
2.5.7. Dualismo onda-corpúsculo
Em 1923 Louis de Broglie (1892-1987) propôs uma nova teria em que toda a matéria tem
simultaneamente uma natureza corpuscular e ondulatória. Segundo de Broglie qualquer partícula, tal
como o fotão, deverá ter uma energia ωΕ = sendo que a única diferença é que a massa não tem que
ser propriamente nula. A qualquer partícula é possível atribuir um vector de onda próprio e a equação
q I= é assim universal, aplicando-se a qualquer partícula. Associando esta teoria à álgebra
geométrica obtém-se as seguintes equações.
22
2 2 00I e k I k
c c cωω ω ⎛ ⎞⎛ ⎞= + → = + =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (2.109)
Sendo que I representa o vector de onda próprio. q tal como se apresentou anteriormente representa
o momento linear próprio.

31
0 0q e p e kc c
ωΕ ⎛ ⎞= + = +⎜ ⎟⎝ ⎠
(2.110)
E finalmente o dualismo onda-corpúsculo,
q I= .
A conclusão a que se pode chegar ao longo deste capítulo sobre a álgebra geométrica, é que
esta é uma ferramenta poderosa para tratar temas da Física em geral. O que ficou demonstrado em
especial no tratamento de temas da mecânica quântica como o efeito fotoeléctrico, efeito de Compton
e por ultimo o dualismo onda-corpúsculo. Outra das grandes vantagens da álgebra geométrica é o facto
desta não se limitar ao espaço 3 , sendo que este factor bastante importante para a física, pois é no
espaço-tempo quadridimensional, nomeadamente no espaço-tempo de Minkowski que se aprofundam
temas como os referidos anteriormente.

32

33
Capítulo 3. Mecânica quântica
3.1. Dualismo onda-corpúsculo
Primeiro com a lei da radiação de Max Planck e depois com a teoria do efeito fotoeléctrico de Albert
Einstein começou a ganhar corpo a ideia de que a radiação electromagnética existia em pequenas
quantidades indivisíveis, denominadas quanta. Mais tarde o quantum de radiação electromagnética
receberia o nome de fotão sendo a sua energia ε ω= . A Louis de Broglie deve-se a hipótese de que
qualquer partícula tem uma onda fictícia associada de frequência 2ω π λ= sendo a sua energia
própria ωΕ = . Ao comprimento de onda λ dá-se o nome de comprimento de onda de de Broglie.
Com Erwin Scrödinger nasce a chamada mecânica ondulatória e mais tarde, com Paul Dirac, o
formalismo abstracto da mecânica quântica foi desenvolvido em toda a sua generalidade no âmbito
dos espaços de Hilbert. O dualismo onda-corpúsculo de de Broglie deve ser entendido em termos
macroscópicos e deve ser interpretado como tendo simultaneamente aspectos ondulatórios e aspectos
corpusculares [2]. É o facto da constante de Planck ser tão pequena Jsh 341062606876.6 −×= que faz
como que, no nosso mundo macroscópico, seja tão nítida a separação entre as realidades ondulatórias
e corpusculares.
Jsh 3410054572.12
−×==π
em que representa a constante de Planck reduzida.
A ideia de introduzir uma, função de onda, Ψ para descrever a mecânica de cada partícula
implica que se deve considerar esta grandeza como um feixe de ondas planas e não como uma simples
onda plana. Com efeito, uma onda plana tem uma amplitude Ψ que é constante em todo o espaço.
( ) ( ) ( )[ ]∫+∞
∞−
− →Φ=Ψ dkektx tkxi ϖ
π21, feixe de ondas planas (3.1)
A velocidade clássica da partícula deverá, assim, ser identificada com a velocidade de grupo do feixe
de ondas planas.

34
( )
2 2 2
22g
p
d c k c k cvdk va ck
ωω
= = = =+
(3.2)
em que gv é a velocidade de grupo de ondas.
m
p2
2
=Ε (3.3)
pm
pvp ∂Ε∂
== (3.4)
2
2
1
1
cv
−
=γ (3.5)
Ε é representa a energia de uma partícula livre e pv a velocidade da partícula e γ o coeficiente de
dilatação do tempo.
Da mecânica clássica sabe-se que a variação de energia Εd , por acção de uma força exterior é
vdpd =Ε , em que v é a velocidade e p o momento linear. Da mecânica relativística sabe-se também
que, para um partícula, 2
2
2
2
1
mc
cv
mc γ=
−
=Ε e mv
cv
mvp γ=
−
=
2
2
1
, pelo que relacionando as
expressões se pode concluir que Ε= 2cvp .
⎟⎠⎞
⎜⎝⎛= 2c
am e ( )22a ckω = + → equação de dispersão (3.6)
Em seguida deduziu-se o comprimento de onda de de Broglie λ ,
0pkpkp
kv
ppv
vv
g
g +=⇒=∂∂
⇒
⎪⎪⎩
⎪⎪⎨
⎧
∂∂
=
∂∂
=∂Ε∂
=⇒=
ϖ
ω
(3.7)
000
0 =⇒+−=→−
+=→+p
pkpxpkpx
e assim kp = ou λλ
ππ
hhp ==2
2 .

35
O comprimento de onda de de Broglie é
ph
=λ . (3.8)
Fica assim relacionado o momento linear, que é uma grandeza típica de uma partícula, com o
comprimento de uma onda.
Com base em [2] têm interesse também mostrar como as relações universais de de Broglie,
ωΕ = e kp = , são compatíveis com a teoria da relatividade restrita. Veja-se como se relacionam
os intervalos de tempo medidos em dois referenciais, S e _
S , em que S representa o referencial do
laboratório e _
S o referencial próprio.
( ) ( )
_ _
0
_ _ _
0
,
,
i kx t
i w t
S x t e
S x t e
ω−⎡ ⎤⎣ ⎦
⎡ ⎤⎛ ⎞−⎢ ⎥⎜ ⎟
⎢ ⎥⎝ ⎠⎣ ⎦
→ Ψ = Ψ
⎛ ⎞→Ψ = Ψ⎜ ⎟⎝ ⎠
(3.9)
2_
0 mcω Ε= = (3.10)
Com base na transformação de Lorentz _
2
vt tc x
γ ⎛ ⎞= −⎜ ⎟⎝ ⎠
, e sabendo que a invariância da fase é
_ _
t kx tϕ ω ω= − = , pode-se tirar que
⎪⎪⎩
⎪⎪⎨
⎧
==
Ε==
⇒⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −⎟⎟
⎠
⎞⎜⎜⎝
⎛=−=
pmvk
mc
xcvtmckxt
γ
γωγωϕ
2
2
2
(3.11)
Ε e p são assim as duas equações fundamentais da mecânica ondulatória.
3.2. Feixes em mecânica quântica ondulatória
A análise de Fourier permite lançar alguma luz sobre o dualismo onda-corpúsculo da mecânica
ondulatória. Têm particular relevância dois pares de Fourier, o par constituído por ( )x0Ψ e por
( )xp0Φ para 0=t , e o par constituído por ( )tx,Ψ e ( )tpx ,Φ para qualquer instante t . Atendendo a

36
que xx kp = e sabendo que no caso geral a função ( )xkωω = não é linear a relação entre ( )tx,Ψ e
( )x0Ψ pode ser complicada. A probabilidade de uma partícula se encontrar entre x e dxx + é dada
por ( ) ( ) dxtxdxtxP 2,, Ψ= . Por sua vez a probabilidade do momento linear da partícula se encontrar
entre xp e xx dpp + é dada por ( ) ( ) xxxx dptpdptpP 2,, Φ= .
( ) ( ) ( )[ ] →Φ=Ψ ∫∞
∞−
−x
txkix dkektx x ω
π 021, feixe de ondas planas (3.12)
para 0=t tem-se que ( ) ( )0,0 xx Ψ≡Ψ .
Tendo o par Fourier igual a
( ) ( ) ( )
( ) ( ) ( )⎪⎪⎩
⎪⎪⎨
⎧
Ψ=Φ
Φ=Ψ
∫
∫∞
∞−
−
∞
∞−
dxexk
dkekx
xikx
xxik
x
x
x
00
00
21
21
π
π (3.13)
E sabendo através das relações universais de de Broglie que, ϖ=Ε e kp = conclui-se que o
primeiro par de Fourier constituído por ( )x0Ψ e por ( )xp0Φ para 0=t é igual a
( ) ( )
( ) ( )⎪⎪
⎩
⎪⎪
⎨
⎧
Ψ=Φ
Φ=Ψ
∫
∫∞
∞−
⎟⎠⎞
⎜⎝⎛ −
∞
∞−
⎟⎠⎞
⎜⎝⎛
dxexp
dpepx
xpi
x
x
xpi
x
x
x
00
00
21
21
π
π (3.14)
que para caso geral fica ( ) ( )⎟⎠⎞
⎜⎝⎛ Ε−
Φ=Φti
xx eptp 0,, e ( ) ( )0,0 xx pp Φ≡Φ .
Em relação ao segundo par Fourier constituído por ( )tx,Ψ e ( )tpx ,Φ para qualquer instante
t . Tem-se que o feixe de ondas planas é
( ) ( )
( ) ( )⎪⎪
⎩
⎪⎪
⎨
⎧
Ψ=Φ
Φ=Ψ
∫
∫∞
∞−
⎟⎠⎞
⎜⎝⎛ −
∞
∞−
⎟⎠⎞
⎜⎝⎛
dxetxtp
dpetptx
xpi
x
x
xpi
x
x
x
,21,
,21,
π
π . (3.15)
Um determinado estado quântico pode ser descrito tanto no espaço das coordenadas, ou seja
através de ( )tx,Ψ , como no espaço do momento linear, através de ( )tpx ,Φ .

37
3.3. Princípio de incerteza de Heisenberg
O movimento de uma partícula de massa m , com velocidade v , pode ser descrito como a propagação
de uma onda de comprimento de onda λ , que de acordo com a relação de de Broglie, p h λ= . Para
definir a posição a posição de uma partícula, tem-se que descrever o seu movimento como o de um
grupo de ondas, como por exemplo a sobreposição de várias ondas planas, com comprimentos de
ondas ligeiramente diferentes que interferem na vizinhança de um ponto x . A extensão do grupo de
ondas xΔ é a incerteza na posição da partícula.
A relação de incertezas na posição e no momento constitui um dos aspectos do princípio de
incerteza de Heisenberg [1], [2]. É um facto da análise de Fourier que a largura de uma risca espectral,
fΔ , multiplicada pelo tempo, tΔ , durante o qual a onda é emitida ou absorvida, é da ordem da
unidade ou seja, 1≈ΔΔ tf . Com 1≈ΔΔ tf e se sabendo que hf=Ε , vem que fhΔ=ΔΕ , que leva à
relação ht ≈ΔΕΔ . No desenvolvimento do formalismo da mecânica quântica [1] surge a relação,
2
≥ΔΕΔt (3.16)
que traduz um dos aspectos do princípio de incerteza de Heisenberg.
Como 1≈ΔΔ tf , λcf = e xt Δ=Δ vem que ( ) 11 ≈ΔΔ xλ . Da relação de de Broglie, λhp = ,
e portanto ( )λ1Δ=Δ hp , o que implica que hxp ≈ΔΔ e
→≥ΔΔ2
px relação de incerteza de Heisenberg. (3.17)
Para melhor compreender o princípio de incerteza de Heisenberg, considera-se o exemplo para
a seguinte função de onda para 0=t dada por
( )⎪⎩
⎪⎨⎧
<>
=Ψ−
0,00,2
0 xxxex
xααα
Tem-se assim ( )∫ ∫∞ ∞ − ==Ψ0 0
22320 14 dxexdxx xαα . A densidade de probabilidade
( ) ( ) xexxxP αα 22320 4 −=Ψ= é máxima para ( ) ( )
αα αα 1012 222 =⇒=−= −− xexxex
dxd xx . A posição
média x é, por definição
( )∫ ∫∞ ∞ −==0 0
2334 dxexdxxxPx xαα (3.18)

38
Densidade de Probabilidade
0
0,2
0,4
0,6
0,8
1
1,2
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5
x
|Ψ0(x)|2
α=0.5
α=1
α=2
Figura 3.1 Densidade de probabilidade ( ) ( ) 20 xxP Ψ= correspondente a ( ) 00 =Ψ x para 0<x e a
( ) xxex ααα −=Ψ 20 para 0>x .
analogamente, vem
( )∫ ∫∞ ∞ −==
0 0
24322 4 dxexdxxPxx xαα (3.19)
nestas circunstâncias define-se a incerteza da posição xΔ como
22 xxx −=Δ (3.20)
( )αααα 23
43
493
2222 =Δ⇒=−=Δ xx .
Pode-se definir também a incerteza do momento linear xpΔ ,
22xxx ppp −=Δ . (3.21)
Uma maneira de calcular 2xp e 2
xp consiste em determinar primeiro a transformada de Fourier
( )xp0Φ . Assim vem que ( ) ( ) ( ) ( ) ( )( )( )230 00
1 2 4 2 1x
i p x
x xp x e dx i pπ α π α⎛ ⎞−∞ ⎜ ⎟⎝ ⎠Φ = Ψ = − +∫ .
Como ( ) ( ) 20 xpP x Φ= , tem-se

39
( )∫ ∫∞ ∞
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+
==0 0 2
2
22
3
024
x
x
xxxxx dp
p
pdppPpp
απα (3.22)
( )∫ ∫∫∞ ∞
∞−
∞
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+
==0
2
22
23
0 2
2
22
2322
28
24
xx
xx
x
xxxxx dp
ppdp
p
pdppPppα
πα
απα (3.23)
Se se introduzir a mudança de variável ( ) ( )θα tan=xp , tem-se que
( )∫ == 2
0
22222
2 sin4 παθθ
πα dpx .
Finalmente tem-se ( ) αα =Δ⇒=−=Δ xxxx pppp 22222 .
Donde se infere que 23
=ΔΔ xpx . Para o caso geral tem-se a seguinte relação de incerteza
2≥ΔΔ xpx , que como já foi dito anteriormente é a relação de incerteza do princípio de Heisenberg.
3.4. Evolução dos feixes em mecânica ondulatória
Na conclusão é deste capítulo é importante ter uma ideia da forma como um feixe de ondas planas
evolui no espaço e no tempo [2]. Na análise considerou-se apenas uma dimensão espacial. Tendo
como objectivo demonstrar a relação entre ( )tx,Ψ e ( )x0Ψ recorre-se ao exemplo do feixe gaussiano,
( ) ( )xikx
eex 0
2
20
2 ⎟⎟⎠
⎞⎜⎜⎝
⎛−
=Ψ α
απ .
( ) ( ) ( )[ ]
( ) ( ) ( )∫
∫
∞+
∞−
+∞
∞−
−
=Ψ
=Ψ
xxik
x
xtxki
x
dkekAtx
e
dkekAtx
x
x
,
,
0
ω
(3.24)

40
em que ( )( ) ⎥⎦
⎤⎢⎣⎡ −−
=2
02kk
xx
ekAα
é a amplitude espectral gaussiana. Considerando
( )( ) ( )
xxik
kkdkeex x
x
∫∞+
∞−
⎥⎦⎤
⎢⎣⎡ −−
=Ψ2
020
α
, e fazendo uma mudança de variável tal que, 0kkx −=Θ e
xdkd =Θ . Obtém-se,
( ) ( ) ( ) Θ=Ψ Θ∞+
∞−
⎟⎠⎞
⎜⎝⎛ Θ−
∫ deeex xixik2
0 20
α
. (3.25)
Da série de Taylor sabe-se que,
( )
( )
0
0
2
2
2
22101
00
21
kkx
kkx
x
x
k
k
k
=
=
∂∂
=
Θ+Θ+=Θ→∂∂
=
=
ωω
ωωωωωω
ωω
assim obtém-se que,
( ) ( ) ( )[ ]
( ) ( ) ( )[ ]
( ) ( ) 22
21
,,
,
,,2
21
00
txUtx
deeAtxU
etxUtx
titxi
txki
=Ψ
⎪⎩
⎪⎨
⎧
ΘΘ=
=Ψ
⎟⎠⎞
⎜⎝⎛ Θ−∞+
∞−
−Θ
−
∫ω
ω
ω
. (3.26)
A evolução de ( )tx,Ψ revela, assim, que a função de onda não pode ter um significado físico
directo e apenas ( ) 2,txΨ tem significado físico directo. A interpretação física ( ) 2,txΨ deve-se a
Max Born e tem o significado de uma densidade de probabilidade de presença, ( ) ( ) 2,, txtxP Ψ= . Ou
seja, ( ) 2, txΨ representa a densidade de probabilidade de encontrar uma partícula descrita pela função
de onda ( )tx,Ψ . Assim deverá ter-se, ( ) ( ) 1,, 2 =Ψ= ∫∫+∞
∞−
+∞
∞−dxtxdxtxP , normalização, uma vez que,
qualquer que seja o instante de tempo t , a partícula encontra-se no espaço considerado.

41
Capítulo 4. Método Variacionais
4.1. Equação de Euler-Lagrange
No presente capítulo estuda-se os métodos variacionais [6] como o objectivo de deduzir a equação de
Schrödinger através deste poderoso método de cálculo.
Um dos primeiros conceitos do cálculo variacional é o conceito de funcional. Enquanto que
uma função é uma correspondência injectiva que faz corresponder um número a outro número, um
funcional faz corresponder um número (real) a cada função (ou curva) pertencente a uma determinada
classe de funções. Supondo-se, todas as trajectórias possíveis que unem dois pontos A e B de um
plano e que uma partícula se pode deslocar ao longo de qualquer destas trajectórias. E supondo ainda,
que a cada ponto ( )yx, desse plano se faz corresponder uma determinada velocidade da partícula
( )yxv , . Pode-se definir então um funcional ao associar a cada trajectória do plano o tempo que a
partícula leva a percorrer essa mesma trajectória.
Consideremos o seguinte funcional: seja ( )',, YYxf uma função contínua de três variáveis à
qual corresponde o integral
( )∫=2
1
',,x
xdxYYxfI (4.1)
e onde se designa por 'Y a derivada dYdx . Efectivamente, a correspondência If → é, de acordo com
a definição, um funcional. Neste caso a função f pertence à classe das funções contínuas que unem
os dois pontos ( )( )111, xyyx = e ( )( )222 , xyyx = e que admitem segunda derivada contínua no intervalo
real 21 xxx ≤≤ . O primeiro problema do cálculo variacional é o seguinte: determinar a função
( ) ( )xyxY = que faz com que o funcional I seja estacionário (tenha um máximo, um mínimo ou um
ponto de inflexão). Assim, pode-se considerar uma infinidade de funções de teste ( )xY e vai-se eleger,
dessa infinidade de funções possíveis, a verdadeira função ( )xy que transforma o funcional I num
valor extremo (um mínimo). Para esse efeito vai definir-se a relação entre ( )xY e ( )xy na forma:
( ) ( ) ( )xxyxY εη+= (4.2)

42
onde ε é um parâmetro real bem determinado e ( )xη uma função arbitrária mas contínua e que
admite, também, segunda derivada contínua. É de realçar que todas as funções ( )xY são tais que
( ) ( ) ( )( ) ( ) ( )2222
1111
xyxyxYxyxyxY
ηη
⇒==⇒==
(4.3)
Figura 4.1 Representação de ( )xy e uma das possíveis curvas de ( )xY
Pode-se assim determinar a função ( )xy tal que:
00=
=εεddI (4.4)
onde
( ) ( ) ( ) ( ) ( )( )∫ ++=2
1
'',,x
x
dxxxyxxyxfI εηεηε (4.5)
e de acordo com a equação (4.2) tem-se
( ) ( ) ( )xxyxY ''' εη+= (4.6)
de (4.5) resulta que:
dxYYfY
Yf
ddI
x
x∫ ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
⎟⎠⎞
⎜⎝⎛∂∂
=2
1
'' εεε
ou
( ) ( ) dxxYfx
Yf
ddI
x
x∫ ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=2
1
''ηη
ε. (4.7)
Através de uma integração de partes vem que:
1x 0x 2x
1y
2y ( )xY
( )xy
( )0xεη

43
( ) ( ) ( )dxxYf
dxdx
Yfdxx
Yf
x
x
x
x
x
x∫∫ ⎟
⎠⎞
⎜⎝⎛∂∂
−⎥⎦⎤
⎢⎣⎡∂∂
=⎟⎠⎞
⎜⎝⎛∂∂ 2
1
2
1
2
1''
''
ηηη . (4.8)
E por isso atendendo a (4.2) obtém-se
( ) ( )dxxYf
dxddxx
Yf
x
x
x
x∫∫ ⎟
⎠⎞
⎜⎝⎛∂∂
−=⎟⎠⎞
⎜⎝⎛∂∂ 2
1
2
1'
''
ηη (4.9)
que após substituição em (4.7) tem-se
( )dxxYf
dxd
Yf
ddI
x
x
ηε ∫ ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
−∂∂
=2
1'
(4.10)
considerando o caso particular em que ε = 0 deve fazer-se a substituição yY → , pelo que
( )dxxyf
dxd
yf
ddI
x
x
ηε ε
∫ ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
==
2
1'0
. (4.11)
Como a função ( )xη é arbitrária, a única forma de satisfazer a equação (4.4) para todos os
pontos do intervalo [ ]21, xxx∈ , corresponde a impor
0'=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
yf
dxd
yf . (4.12)
Com efeito se
0'>⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
yf
dxd
yf
para um subintervalo contido em 21 xxx ≤≤ e nulo no resto desse intervalo, seria sempre possível
escolher uma função ( )xη que, nesse subintervalo, verificasse a condição ( ) 0>xη , de modo que seria
necessariamente falsa a equação (4.4). Um raciocínio análogo poderia ser feito no caso de se
considerar:
0'<⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
yf
dxd
yf
Daqui se infere que a equação (4.12) é verdadeira – resultado conhecido como o lema
fundamental do cálculo das variações.

44
A equação (4.12) é a solução do primeiro problema do cálculo variacional e é conhecida por
equação de Euler-Lagrange. Ou seja: a função ( )xy , com ( ) 11 yxy = e ( ) 22 yxy = , que transforma o
integral
( )∫=1
1
',,x
x
dxyyxfI
num valor estacionário no intervalo [ ]21, xxx∈ é tal que observa a equação (4.12) ou equação de
Euler-Lagrange.
É frequente aparecer a definição de variação do funcional I como sendo Iδ tal que
( )∫ +=2
1
''
x
xyy dxffI ηηεδ . (4.13)
Em (4.13) usou-se a notação:
yff y ∂∂
=: e '
:' yff y ∂∂
= .
De acordo então com esta notação, o extremo do funcional I observa-se quando se tiver
0=Iδ , pelo que
00 ' =−⇒= yy fdxdfIδ (4.14)
que é uma forma equivalente de escrever a equação de Euler-Lagrange.
Considerando, agora, dois casos particulares: um primeiro caso em que f só depende de x e
de 'y e um segundo caso em que f só depende de y e de 'y . Considerando o primeiro caso
particular em que 0yf y f∂ ∂ = = .
Neste caso tem-se
( )∫ ∫=→=2
1
2
1
'', '
x
x
x
xy dxfIdxyxfI ηεδ
pelo que
1'' 00 CffdxdI yy =⇒=⇒=δ
ou

45
1'0 C
yf
yf
=∂∂
⇒=∂∂ . (4.15)
No segundo caso particular tem-se que 0==∂∂
xfxf .
E neste caso vem
''''''
''' ' yfyfy
yfy
yf
dxdy
yf
dxdy
yf
xf
yy +=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=⎟⎠⎞
⎜⎝⎛⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠⎞
⎜⎝⎛⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=∂∂
e como
'0 yy fdxdfI =⇒=δ
vem ainda que '' ''' y
y fydxdf
ydxdf
+= . Mas como
( ) ''
' '''' yy
y fydxdf
yfydxd
+=
ainda se infere que
( ) ( ) 0'' '' =−⇒= yy fyfdxdfy
dxd
dxdf
e finalmente
Dyfyf
dxdf
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−⇒='
'0 . (4.16)
4.2. O princípio da acção mínima
A equação de Euler-Lagrange encontra uma aplicação importante na mecânica através do princípio da
acção mínima. Apresenta-se então o caso de uma única partícula movendo-se numa única direcção
espacial e no âmbito da mecânica newtoniana.
No caso em que uma partícula de massa m cujo movimento se processa ao longo do eixo x
com uma velocidade
: dxv xdt
⋅
= = (4.17)

46
a energia cinética é assim ⎟⎠⎞
⎜⎝⎛=
.xTT tal que:
⋅
== 22
21
21: xmmvT . (4.18)
A equação de Newton do movimento da partícula vem assim na forma
..xmmaf == . (4.19)
Em que f representa a força. Nestas condições a energia potencial é dado por ( )txUU ,= e
admitindo que o campo é conservativo tem-se que,
xUf∂∂
−= . (4.20)
A função Lagrangiana L da partícula vem então definida como
UTL −=: . (4.21)
Substituindo T e U obtém-se, ( ) ( ).21 2L m x U x= + ∂ ∂ .
Pode-se demonstrar então que a equação newtoniana do movimento (4.19) corresponde ao
princípio da acção mínima. E pode definir-se assim a acção S como o integral
∫ ⎟⎠⎞
⎜⎝⎛=
2
1
.,,:
t
t
dtxxtLS . (4.22)
Ao usar a equação de Euler-Lagrange para determinar o valor estacionário de (4.22) obtém-se
( ) ( ) 0L x d dt L x⋅⎛ ⎞∂ ∂ − ∂ ∂ =⎜ ⎟
⎝ ⎠, e como L x U x∂ ∂ = −∂ ∂ e
.L x x m x
⋅ ⋅
∂ ∂ = ∂Τ ∂ = chega-se à
seguinte equação:
0.=⎟
⎠⎞
⎜⎝⎛−
∂∂
− xmdtd
xU . (4.23)
Prova-se assim o princípio da princípio da acção mínima, ou seja, atendendo à equação (4.20),
verifica-se que (4.23) é equivalente a (4.19).

47
4.3. Dedução da equação de Schrödinger
Como exemplo de aplicação deste formalismo apresenta-se em seguida a dedução da equação de
Schrödinger para o caso independente do tempo.
Quando se tem apenas ( )xUU = , a energia total UT +=Ε conserva-se. Pelo facto da
Lagrangiana ⎟⎠⎞
⎜⎝⎛=
., xxLL não depender explicitamente do tempo, vem que:
.
....
.0x
LxxLx
dtxd
x
Ldtdx
xL
dtdL
tL
∂
∂+
∂∂
=∂
∂+
∂∂
=⇒=∂∂ . (4.24)
Aplicando a equação de Euler-Lagrange vem:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
∂=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
∂+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
∂=⇒
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
∂=
∂∂
.
.
.
..
.
.
.x
Lxdtd
x
Lxx
Ldtdx
dtdL
x
Ldtd
xL (4.25)
de onde se tira que,
Cx
LxLx
LxLdtd
=∂
∂−⇒=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
∂− .
.
.
.0 (4.26)
onde C é uma constante. Pode-se então escrever que
CUTxmUTx
LxUTxmx
L=−−=−−=
∂
∂−−⇒=
∂
∂ .2
.
..
. (4.27)
ou seja,
T U CΕ = + = − (4.28)
em que a energia é efectivamente constante. Assim tem-se,
( )2 2 2* * *1 , , 0
2S S S U x y z
m x y z
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞∂ ∂ ∂⎢ ⎥+ + + −Ε =⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎢ ⎥⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎣ ⎦
(4.29)
em que ( )* logS K ψ= e 2K h π= . A equação (4.29) multiplicada por 2ψ torna-se,
( )22 22
2 02K Um x y z
ψ ψ ψ ψ⎡ ⎤⎛ ⎞∂ ∂ ∂⎛ ⎞ ⎛ ⎞+ + + −Ε =⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦
. (4.30)

48
Considerando o integral de volume
( )22 22
* 2
2KI U dx dy dzm x y z
ψ ψ ψ ψ⎧ ⎫⎡ ⎤⎛ ⎞∂ ∂ ∂⎪ ⎪⎛ ⎞ ⎛ ⎞= + + + − Ε⎢ ⎥⎨ ⎬⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎢ ⎥⎝ ⎠⎪ ⎪⎣ ⎦⎩ ⎭
∫∫∫ . (4.31)
Substituindo (4.31) na equação de Euler-Lagrange obtém-se:
( )
( )
2 2 2 2
2 2 2
22
02
02
K Um x y z
K Um
ψ ψ
ψ ψ
⎛ ⎞∂ ∂ ∂− + + + −Ε = ⇔⎜ ⎟∂ ∂ ∂⎝ ⎠
− ∇ + −Ε =
(4.32)
em que 2∇ é o laplaciano. Substituindo 2K h π= = tem-se,
2
2
2U
mψ ψ ψ− ∇ + = Ε (4.33)
Sendo que (4.33) é a equação de Schrödinger independente do tempo.

49
Capítulo 5. Oscilador Harmónico Linear
Este capítulo tem por objectivo o estudo do oscilador harmónico como modelo físico das vibrações
moleculares, baseado em [1] e [5]. Este é um exemplo bastante interessante pois a equação diferencial
que é necessária resolver não é assim tão trivial. E a aprendizagem de técnicas para a resolução desta
equação é por si só um motivo bastante importante para o estudo deste caso.
5.1. Equação de Schrödinger
Resolvendo a equação de Schrödinger para o caso de uma partícula de massa m , oscilante no eixo x :
Figura 5.1 Partícula de massa m , oscilante no eixo x .
A evolução no tempo é dada pela equação de Schrödinger dependente do tempo:
( ) ( )txtxt
i ,, ΗΨ=Ψ∂∂ (5.1)
em que Η é o hamiltoniano e
( )xVm
+∇−=Η 22
2 (5.2)
tal que
( ) ( ) ( )xExzyxVm
ψψ =⎥⎦
⎤⎢⎣
⎡+∇− ,,
22
2
(5.3)
m
x

50
( )tx,Ψ é a função de onda dependente no tempo, a qual se separa a variável tempo, pela resolução da
equação (5.1) e recorrendo á equação (5.3):
( ) ( ) tiextx ωψ −=Ψ , com /E=ω . (5.4)
No modelo clássico a posição da partícula oscila com a frequência ω , ao longo do eixo x , tal
que
tiexx ω−= 0 (5.5)
em que 0x é a amplitude máxima da oscilação, sendo mK=ω , mK 2ω= e ( ) 21 2V kx= .
O hamiltoniano pode ser escrito na forma
22
21
2Kx
mp
+=Η (5.6)
,Η p e x são operadores, ( )xp p i x= = − ∂ ∂ . Atendendo que mK 2ω= ,
222
21
2mx
mp ω+=Η . (5.7)
Voltando à equação de Schrödinger e para buscar uma solução analítica da equação é
conveniente expressá-la em termos da variável adimensional
xmy ⎟⎠⎞⎜
⎝⎛= ω .
Para o parâmetro da energia usamos 0/ΕΕ=ε com 20 ω=Ε . Obtém-se assim
( ) ( ) ( ) 022
2
=−+ yydy
yd ψεψ (5.8)
Esta equação embora possa parecer fácil de resolver, não é assim tão fácil. Considera-se,
primeiro, o caso de valores muito grandes de y , ou seja de x . Pois para qualquer valor finito da
energia total Ε , pode-se sempre encontrar um valor de x , suficientemente grande, para tornar
desprezível 0/ΕΕ=ε em comparação a 2y . Assim (5.8) torna-se,
( ) ( ) ∞→= yyydy
yd ,22
2
ψψ . (5.9)
A solução geral desta equação diferencial é

51
( ) ( ) ( )2/2/ 22 yy BeAey += −ψ (5.10)
em que A e B são constantes arbitrárias.
Calculando as derivadas ( )( )d y dyψ e ( )( )2 2d y dyψ , pode-se verificar que a (5.10) é uma
solução da (5.9). Obtém-se
( ) ( ) ( ) ( ) ( )2/22/22
222
11 yy eyBeyAdy
yd++−= −ψ (5.11)
para ∞→y , tem-se que
( ) ( ) ( )( ) ( )yyBeAeydy
yd yy ψψ 22/2/22
222
=+= − (5.12)
o que satisfaz (5.9) identicamente.
Já que as funções devem permanecerem finitas quando ∞→y , é evidente que, em (5.10),
B deve ser zero. Portanto, a forma das funções para y muito grande deve ser
( ) ( ) ∞→= − yAey y ,2/2ψ . (5.13)
Para estender esta solução e incluir também pequenos valores de y , introduzimos a função ( )yΗ , tal
que,
( ) ( ) ( )yAey y Η= − 2/2ψ . (5.14)
Esta relação vai produzir funções de onda aceitáveis sobre +∞<<∞− y .
Para determinar ( )yΗ , calcula-se
( ) ( ) ( ) ( ) ( )dy
ydAeyAedy
yd yy Η+Η−= −− 2/2/ 22ψ
( ) ( ) ( ) ( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛ Η+
Η−Η+Η−= −
2
222/
2
2
22
dyyd
dyydyyyyAe
dyyd yψ (5.15)
substituindo ( )yψ e ( )2
2
dyyd ψ em (5.8), obtém-se
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 02 2/22/2
222/ 222
=Η−Η+⎟⎟⎠
⎞⎜⎜⎝
⎛ Η+
Η−Η+Η− −−− yeAyyAe
dyyd
dyydyyyyAe yyy ε . (5.16)

52
Esta equação pode ser simplificada, e dá a seguinte equação diferencial para a determinação de ( )yΗ :
( ) ( ) ( ) ( ) 0122
2
=Η−+Η
−Η y
dyydy
dyyd ε . (5.17)
À equação (5.17) chama-se de equação de Hermite (Charles H., 1822 - 1901).
A análise do oscilador reduz-se, então, à solução de (5.17). Para resolvê-la, utiliza-se a técnica
das séries de potência na variável independente y . Isto é, supõe-se que
( ) ∑∞
=
++++==Η0
2210 ...
m
nn
mm yayayaayay . (5.18)
Para determinar os coeficientes ,0a ,1a ,2a …substitui-se (5.18) em (5.17). Nas derivadas calcula-se os
termos um a um
( ) ∑∞
− +++==Η
1
3321
1 ...321 yayaaymady
yd mm
( ) ( ) ...4.33.22.11 24
232
22
2
+++=−=Η ∑
∞− yayaaymam
dyyd m
m
Após a substituição, a equação (5.17) toma a seguinte forma
( ) ( ) ( ) 0...111
...3.22.21.2
...5.44.33.22.1
2210
33
221
35
2432
=+−+−+−+
−−−−
++++
yayaa
yayaya
yayayaa
εεε
.
Como isto deve ser válido para todos os valores de y , a soma dos coeficientes de cada potência de y
deve anular-se.
Tem-se, então,
( )( )( )( ) 03.215.4
02.214.301.213.2
012.1
35
24
13
02
=−−+=−−+=−−+
=−+
aaaaaa
aa
εεεε
. (5.19)
Em geral, tem-se para o coeficiente de my a relação
( )( ) ( ) 02121 2 =−−+++ + mm amamm ε

53
ou
( )( )( ) mm a
mmma
2121
2 ++−−
−=+ε . (5.20)
A relação (5.20) é uma relação de recorrência que permite calcular, sucessivamente, os
coeficientes pares ,2a ,4a ,6a … em termos de 0a , e os coeficientes ímpares ,3a ,5a ,7a …em termos
de 1a . A equação (5.20) nada diz sobre os coeficientes 0a e 1a pois eles são até agora,
indeterminados. O que é de esperar, pois a solução geral da equação diferencial de segunda ordem
(5.17) deve conter duas constantes arbitrárias. Isso significa que a solução geral contém duas séries
independentes.
Se 0a for igual a zero, a equação (5.18) conterá somente termos ímpares, pois segundo esta
tem-se 0...642 ==== aaa . Se a1
for zero, a equação (5.17) conterá apenas de termos pares, já que
0...53 === aa .
E em ambos os casos, permanecerá um problema, pois ambas as equações que resultam com
0a ou 1a
igual a zero comportam-se como ( )2ye para grandes valores de m . E isso verifica-se,
comparando (5.18) com a expansão da função ( )2ye em série de potências:
( )( ) ( ) ...
!12!2...
!3!21
16422
++
++++++=+
my
myyyye
mmy (5.21)
Para se poder fazer esta comparação, tem que se calcular para cada série a razão entre os coeficientes
de potências sucessivas de y para m grande. Os coeficientes de (5.18) calculam-se a partir da relação
(5.20):
( )( )( ) mm
mmm
ma
a
m
m 2221
212
2 =≈++
−−−=+ ε para m grande.
também se obtém para (5.21):
( )( ) ( )
( )( ) ( ) mmmmm
mmm
2
2
112
1!212
!21
!2!12
1=≈
+=
+=
+
Sabe-se assim que os termos de alta potência de y na série de ( )2ye podem diferir dos termos
correspondentes na série par de ( )yΗ por apenas uma constante multiplicativa C. Os termos podem
diferir dos termos da série ímpar de ( )yΗ por y vezes outra constante C´. Para ∞→y os termos de
potências baixas em y não são importantes na determinação do valor de qualquer dessas séries.

54
Conclui-se que
( ) ( ) ( ) ∞→+=Η yyeCaCeay yy ,22 '
10 (5.22)
Isso significa que a função de onda (5.14) se tornará infinita quando ∞→y , o que não é
aceitável. Uma solução para problema consiste em procurar que os coeficientes ma se tornam zero a
partir de um certo índice maxm .
Se para certo valor maxmn = o numerador da relação (5.20) é zero, ou seja, quando 12 += nε ,
todos os coeficientes ,..., 42 ++ nn aa serão zero. Se isso ocorrer para parn = , toma-se 01 =a para
eliminar todas as potências ímpares de y na equação (5.18).
Por exemplo, supondo que o valor de ε for tal que 021 =−− mε para 6=n . Então escolhe-
se 01 =a e a equação (5.18) tomará a forma de um polinómio par de ordem seis
( ) 66
44
2206 yayayaay +++=Η (5.23)
os coeficientes ,2a 4a e 6a determinamos por meio de (5.20) em termos de 0a .
Se o valor de ε for tal que 021 =−− mε para imparn = , por exemplo 7max == nm , toma-
se 00 =a e ( )yΗ será um polinómio de potências ímpares de y :
( ) 77
55
3317 yayayayay +++=Η (5.24)
(5.23) e (5.24) são chamados polinómios de Hermite de ordem maxmn = .
Vê-se, então, que se podem obter funções aceitáveis para tais valores de ε que cumprem a
relação
12 += nε (5.25)
=n potência mais alta no polinómio ( )ynΗ .
E deve-se também ter em conta que
,00 =a se ,...3,2,1=n
,01 =a se ,...4,2,0=n
A escolha de ε fará com que a série ( )yΗ termine no n -ésimo termo. As funções correspondentes a
são ( )ynΗ ,
( ) ( )yeAy ny
nn Η= − 2/2ψ . (5.26)

55
Utilizando a definição 0 2ε ω= Ε Ε = Ε , vê-se que a restrição a possíveis valores de ε é equivalente
a uma restrição a possíveis valores da energia total:
( )hfnn 21+=Ε , ,...3,2,1,0=n (5.27)
E estes são os níveis de energia de uma partícula num potencial de oscilador harmónico simples.
( ) ( ) == − 2112 mKf π frequência de oscilação clássica. O espectro de valores de energia (5.27) é um
espectro discreto e distinto.
5.2 Propriedades dos Polinómios de Hermite
Os polinómios de Hermite, [5], podem ser definidos através da fórmula de Rodrigues que é uma
fórmula muito útil no estudo das propriedades dos polinómios de Hermite.
( ) ( ) ( )→−=Η − 221 y
n
nyn
n edydey fórmula de Rodrigues (5.28)
Outra definição do polinómio de Hermite é a série
( ) ( ) ( )( ) ( )( )( )( ) ...!2
2321!1
212 42
+−−−
+−−
=Η−− nnn
nynnnnynnyy (5.29)
Diferenciando (5.29) termo a termo, obtemos
( ) ( ) ( )( )( ) ( )ynynnynydyd
n
nn
n 1
31 2...
!122122 −
−− Η=⎟
⎟⎠
⎞⎜⎜⎝
⎛ −−−=Η para ( )1≥n (5.30)
Diferenciando outra vez, resulta
( ) ( ) ( )( ) ( ) ( ) ( )ynnynnydydny
dyd
nnnn 222
2
141222 −− Η−=Η−=Η=Η (5.31)
Substituindo (5.29), (5.30) e (5.31) na equação diferencial de Hermite tem-se
0222
2
=+− nuudydyu
dyd
e obtém-se ( ) ( ) ( ) ( ) 022.214 12 =Η+Η−Η− −− ynynyynn nnn ou
( ) ( ) ( ) ( )ynyyy nnn 21 122 −− Η−−Η=Η . (5.32)

56
As funções ( ) ( )2/2yn ey −Η formam sobre (-∞,+∞) um conjunto ortogonal (ou seja os
polinómios de Hermite são ortogonais no intervalo (-∞,+∞) com relação a ( )2/2ye − ). E isso significa
que
( ) ( )∫+∞
∞−
− ΗΗ dyyye mny 2
. (5.33)
Funções de Onda do Oscilador Harmónico Linear
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
3
-6 -4 -2 0 2 4 6y
Ψ (y) Ψ0
Ψ1
Ψ2
Figura 5.2 As primeiras três funções de onda para o oscilador harmónico linear.
Densidade de Probabilidade do Oscilador Harmónico Linear
-1
0
1
2
3
4
5
6
-6 -4 -2 0 2 4 6y
|Ψ(y)|2 |Ψ0|⊥2
|Ψ1|⊥2
|Ψ2|⊥2
Figura 5.3 Densidade de probabilidade para o oscilador harmónico linear.

57
Capítulo 6. Átomo de hidrogénio
O átomo de hidrogénio é constituído por um electrão e um protão. Devido à sua simplicidade, o átomo
de hidrogénio desempenhou um importante papel no desenvolvimento da física quântica [1] e [5]. O
problema do átomo de hidrogénio pode reduzir-se ao problema de dois corpos, um protão com massa
kgmp2710673,1 −×= e um electrão com massa kgme
3110109,9 −×= , que se movimenta na sua
vizinhança, a uma distância da ordem de m11105 −× , o raio de Bohr é m111029177,5 −× , atraído pela
força electrostática, derivada do potencial de Coulomb ( ) 204V r e rπε= − . Em que nesta expressão
e− é a carga eléctrica do electrão ( )Ce 1910602,1 −×= e 0ε é a permitividade do vácuo
( )11120 1085419,8 −−−×= mCVε .
No problema do átomo de hidrogénio, o que interessa é determinar os níveis de energia e as
funções de onda associadas ao movimento relativo.
Para o átomo de hidrogénio define-se assim uma massa reduzida,
pe
pe
mmmm+
=μ (6.1)
e a equação de Schrödinger independente no tempo escreve-se
( ) ( ) ( )zyxzyxzyxVzyx
,,,,,,2 2
2
2
2
2
22
ψψμ
Ε=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
+∂∂
− . (6.2)
É deste movimento relativo que resultam os níveis de energia do átomo de hidrogénio. Os
correspondentes valores da energia são os valores possíveis de Ε , dados pelas soluções da equação.
Para o caso do átomo de hidrogénio dado o campo ser central ou de simetria esférica, há
vantagem em usar coordenadas polares esféricas cujo desenvolvimento se encontra no anexo G.

58
6.1. Equação Radial
A equação radial de Schrödinger é
( ) 02122
22 =⎥⎦
⎤⎢⎣⎡ −−Ε+⎟
⎠⎞
⎜⎝⎛ R
rV
drdRr
drd
rζμ (6.3)
atendendo (G.11), (G.12), (G.15) e (G.17), conclui-se que ( )1+= llζ , e portanto
( ) ( ) 012122
22 =⎥⎦
⎤⎢⎣⎡ +
−−Ε+⎟⎠⎞
⎜⎝⎛ R
rllV
drdRr
drd
rμ (6.4)
que pode ser transformada em
( ) RRVrll
drd
rdrd
Ε=⎥⎥⎦
⎤
⎢⎢⎣
⎡+
++⎟⎟
⎠
⎞⎜⎜⎝
⎛+− 2
2
2
22 12
22 μμ
.
Fazendo
rFR = (6.5)
obtém-se simplificando e atendendo a que 2
2
2
2 12dr
Fdrr
Fdrd
rdrd
=⎟⎟⎠
⎞⎜⎜⎝
⎛+ ,
( ) FFVrll
drd
Ε=⎥⎦
⎤⎢⎣
⎡+
++− 2
2
2
22 122 μμ
. (6.6)
Esta equação tem a mesma forma que a equação do oscilador harmónico mas com um potencial
( ) Vrll
++2
2 12μ
(6.7)
o primeiro termo corresponde ao potencial 22 2mrL . O valor próprio de 2L é ( ) 22 1+= llL . É este o
potencial que mantém o electrão afastado do núcleo.
Para átomos hidrogenóides, de número atómico Z e com apenas um electrão, e considerando
o caso do estado estacionário, em que a energia é negativa, ou por outras palavras, em que Ε é a
energia e ligação:
r
eZV0
2
4πε−= e Ε−=Ε (6.8)

59
e substitui-se na equação (6.6) para simplificar ainda mais é conveniente tornar a equação
adimensional, introduzindo um novo parâmetro n tal que
2220
2
24 132 n
Zeεπ
μ−=Ε (6.9)
e uma nova variável ξ definida por:
2
2 8 Ε=
=
μα
αξ r. (6.10)
Chega-se assim à seguinte equação
( ) 0141
22
2
=⎥⎦
⎤⎢⎣
⎡ +−+− Flln
dd
ξξξ. (6.11)
A questão que se coloca agora é a de determinar os valores de n para os quais as funções
próprias são fisicamente aceitáveis. As soluções da equação (6.11) são do tipo
( ) 2ξ
ξξ−
== eurFR l (6.12)
verifica-se que ( )ξu tem de satisfazer a seguinte equação diferencial:
( ) ( ) 01222
2
=−−+−++ ulnddul
dud
ξξ
ξξ (6.13)
acontece que esta equação, só tem soluções satisfatórias se o termo ( )1−− ln for inteiro e positivo,
isto é, se
( ) 01 ≥−− ln (6.14)
l , número quântico orbital, só pode assumir os valores ,...2,1,0 e n , número quântico principal, pode
assumir os valores 1,...3,2,1 +l .
Sendo assim, os valores possíveis de energia são dados por
2220
2
24 132 n
Zeεπ
μ−=Ε com ,...3,2,1=n (6.15)
Por sua vez, as funções próprias completas da equação radial são da forma

60
( ) ( )( )[ ]
nlln
l
nl en
Lnna
Zlnn
lmrRρ
ρρ−
++ ⎟
⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
+−−
−=222
!2!1 12
23
3 . (6.16)
Em que 12 ++l
lnL são os chamados polinómios associados de Laguerre de grau ( )1−− ln e de ordem
12 +l , ( )2 204a eπε μ= e Zr aρ = . Na Tabela 6.1 encontram-se algumas funções ( )rRnl .
Tabela 6.1 Algumas funções ( )rRnl .
n l ( )rRnl
1 0 ρ−⎟
⎠⎞
⎜⎝⎛= e
aZR s
23
1 2
2 0 ( ) 2
23
2 222
1 ρρ
−−⎟
⎠⎞
⎜⎝⎛= e
aZR s
2 1 2
23
2 621 ρ
ρ−
⎟⎠⎞
⎜⎝⎛= e
aZR p
Assim estão obtidos os valores próprios da energia do átomo de hidrogénio.
Funções 1s, 2s e 2p para o Átomo de Hidrogénio
-0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0 2 4 6 8 10
r
Ψ(r)
1s2s2p

61
Figura 6.1 Funções 1s , 2s e 2 p em função de r para o átomo de hidrogénio, em unidades atómicas, para
as quais 0 1a = .
Na Figura 6.2 representam-se as funções de distribuição radial 221 14s sP rπ ψ= ,
222 24s sP rπ ψ= e
222 24p pP rπ ψ= que definem a probabilidade de encontrar o electrão a uma
distância r do núcleo para os estados 1s , 2s e 2 p , respectivamente. É de realçar que, para o estado
1s, a distância à qual é mais provável encontrar o electrão é o raio de Bohr, 0a .
Funções de distribuição radial
-0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 2 4 6 8 10
r
P
1s
2s
2p
Figura 6.2 Funções de distribuição radial 221 14s sP rπ ψ= , 22
2 24s sP rπ ψ= e 22
2 24p pP rπ ψ= que
definem a probabilidade de encontrar o electrão a uma distância r do núcleo para os estados 1s , 2s e
2 p , respectivamente. Nota-se o máximo de P1s, para r=1 unidade atómica, ou seja 0a .

62

63
Capítulo 7. Conclusão
7.1. Síntese
Um dos objectivos deste trabalho foi a aprendizagem da álgebra geométrica para futura aplicação,
tendo em conta as grandes vantagens da utilização deste formalismo. Tentou-se focar as vantagens
desta linguagem relativamente ao aspecto da manipulação algébrica de expressões. Com a vista à
realização do posterior estudo sobre mecânica quântica, introduziram-se grandezas como a velocidade
própria, aceleração própria e momento linear próprio. O tema da álgebra geométrica e em especial a
álgebra do espaço-tempo de Minkowski não foi tratado com maior profundidade, pois para o fazer de
modo satisfatório seria necessário uma extensa introdução ao tema. Este tópico merece assim ser
tratado em trabalhos futuros, devido às grandes vantagens de aplicação deste formalismo.
Após o estudo inicial da álgebra geométrica, fez-se uma introdução aos conceitos que
constituem o formalismo da mecânica quântica salientando-se a importância dos operadores nesse
formalismo. A resolução da equação de Schrödinger fez-se com recurso aos métodos variacionais. Os
métodos variacionais permitem derivar as equações do movimento de sistemas mecânicos
conservativos, com e sem ligações, independentemente do sistema de coordenadas. É uma abordagem
essencialmente geométrica em que as equações do movimento não dependem formalmente do sistema
de coordenadas. A vantagem da abordagem variacional para a resolução da equação de Schrödinger
está na utilização do formalismo Lagrangeano, e nas propriedades das equações de Euler-Lagrange.
O estudo do oscilador harmónico como modelo físico das vibrações moleculares é um
exemplo bastante interessante pois a equação diferencial que é necessária resolver não é assim tão
trivial. E a aprendizagem de técnicas para a resolução desta equação é por si só um motivo bastante
importante para o estudo deste caso. Apresentou-se as funções próprias e os valores próprios da
equação de Schrödinger. É interessante notar que mesmo para o estado fundamental a energia do
oscilador harmónico não é nula e que uma vez que a halmitoniana é hermitiana, os seus autovalores de
energia são reais. É de notar também que os autovalores são igualmente espaçados e esta é uma
peculiaridade do oscilador harmónico que encontra muitas aplicações em sistemas de muitos corpos.
Em relação ao átomo de hidrogénio, os seus correspondentes níveis de energia são dados pelas
soluções da equação de Schrödinger. A equação é resolvida para a função de onda radial onde n é o

64
número quântico. Desde que n seja um número inteiro, a energia pode ser quantizada, mas apenas
alguns valores são possíveis. O fato de que n poder ter valores de um a infinito significa que existe um
número infinito de níveis de energia e para valores positivos de energia o espectro é contínuo.
7.2. Perspectiva de trabalho futuro
A álgebra geométrica pode ser aplicada à teoria do electromagnetismo. Um trabalho futuro pode
incidir sobre o uso das vantagens da álgebra geométrica na formulação da electrodinâmica clássica no
espaço-tempo de Minkowski. Pode-se ainda aplicar a álgebra geométrica do espaço-tempo de
Minkowski à mecânica relativística.

65
Anexos:
Anexo A. Radiação de corpo negro Ao aquecer-se um corpo, pode-se observar que ele irradia. Em equilíbrio termodinâmico, a luz emitida
cobre todo o espectro de frequências, f , com uma distribuição espectral que depende tanto da
frequência como da temperatura.
A investigação teórica no campo da radiação térmica teve início em 1859, com o trabalho de
Kirchhoff. Definindo ( )ΤΕ ,λ como a energia emitida no comprimento de onda, λ , à temperatura Τ ,
por unidade de área, por unidade de tempo, mostrou-se que para um determinado λ a razão entre a
energia emitida, Ε , e o coeficiente de absorção de radiação incidente no corpo, A , é igual para todos
os corpos, ( )1 1 2 2A AΕ = Ε . Observou-se também que para um corpo negro, definido como uma
superfície que absorve totalmente a radiação que incide sobre ele, 1=A , a função ( )ΤΕ ,λ é uma
função universal.
De modo a estudar a função Ε , é necessário obter a melhor fonte de radiação de corpo negro
possível. Uma solução prática consiste em estudar a radiação emergente de um pequeno orifício de
uma cavidade à temperatura Τ. Considerando as imperfeições da superfície no interior da cavidade,
qualquer radiação incidente sobre o orifício não terá oportunidade de emergir novamente, e em
consequência a radiação que provém do orifício será “radiação de corpo negro”.
Kirchhoff demonstrou ainda que a segunda lei da termodinâmica exige que a radiação na
cavidade seja isotrópica, e ainda que essa radiação é a mesma para todas as cavidades que se
encontrem sob a mesma temperatura e no mesmo comprimento de onda. O que lhe permitiu chegar à
seguinte expressão para a densidade de energia:
( ) ( )c
u ΤΕ=Τ
,4, λλ (A.1)
Em 1894 Wien mostrou que a densidade de energia teria de ser da forma
( ) ( )Τ=Τ − λλλ yu 5, (A.2)
onde y é uma função desconhecida de uma única variável. Colocando a densidade de energia como
função da frequência tem-se
( ) ( ) ( )Τ=Τ=Τ ,,, 2 λλλ ufc
dfdufu (A.3)
Deste modo a lei de Wien toma a forma

66
( ) ⎟⎠⎞
⎜⎝⎛Τ
=Τfgvfu 3, . (A.4)
Wien usou a seguinte forma para ( )Τfg
( ) Τ−=Τ fCefg β . (A.5)
A forma em causa adapta-se muito bem para altas frequências, no entanto para as baixas frequências
traz alguns problemas. Razão pela qual em 1900 Rayleigh derivou o seguinte resultado, também
conhecido como a lei de Rayleigh-Jeans.
( ) Τ=Τ kcffu 3
28, π (A.6)
Sendo deg/1038.1 16 ergkB−×= a constante de Boltzmann e sec/1000.3 10 cmc ×= a velocidade da
luz. Esta lei, ao contrário de (A.5) não se ajusta às altas frequências, no entanto é de realçar que ela
não é correcta uma vez que integrando na frequência a energia total seria infinita.
Deste modo em 1900 Max Planck a partir da interpolação entre as leis de Wien e de Rayleigh-
Jeans, chegou à seguinte expressão
( )1
8,3
3 −=Τ Τkhfe
fc
hfu π (A.7)
sendo sec.1063.6 27 ergh −×= a constante de Planck. Como seria de prever 0→f existe uma
aproximação à lei de Rayleigh-Jeans
( ) ( ) Τ−−Τ−Τ− ≅−=Τ khfkhfkhf efcfeef
chfu 3
3
2133
818, ππ . (A.8)
Nas altas frequências hf ΤBk
( )1
81
8, 3
23
3 −Τ
Τ=−
=Τ ΤΤ BkhfB
Bkhf ekhfk
cf
ef
chfu ππ (A.9)
Neste caso integrando na frequência a densidade de energia deixa de ser infinita, o que leva a
um resultado credível.

67
Anexo B. Efeito fotoeléctrico
Einstein explicou vários fenómenos, assumindo que a interacção da luz com a matéria consiste na
emissão e absorção de quanta de luz.
Quando se faz incidir luz ultravioleta sobre um metal, libertam-se electrões da sua superfície.
A esse fenómeno chama-se efeito fotoeléctrico. Em 1905, Einstein propôs que a energia cinética dos
electrões libertados do metal irradiado por um feixe de luz de frequência f , fosse dada por,
Whf −=Τ (B.1)
em que Τ é a energia cinética dos electrões, ( ) 21 2 em vΤ = , em , a massa do electrão, e v a sua
velocidade. f é a frequência da luz incidente, e W , a energia de ligação dos electrões no metal.
Figura B.1 Efeito Fotoeléctrico: a) Um raio de luz ( )hf incide sobre a superfície de um metal. Parte da
energia é absorvida no metal e a restante energia usada para arrancar um electrão de energia cinética Τ .
b) A energia cinética dos electrões ejectados, ( ) 212 em vΤ = , varia linearmente com a frequência da luz
incidente.
Verifica-se que:
Só são ejectados electrões quando a frequência da luz atinge um valor característico do metal
que é designado por frequência limiar. Este valor é calculado como hWf =0 , onde W é a energia
de ligação ao metal.
A energia cinética dos electrões ejectados varia linearmente com a frequência da luz incidente
mas é independente da intensidade. O número de electrões ejectados é proporcional à intensidade da
luz.
Metal
Electrão hf (Fotão)
Τ
fhWf =0 0
a) b)

68
Mesmo para intensidades mais baixas, são ejectados electrões, desde que a frequência da luz
ultrapasse o seu valor limiar hWf =0 .
O quantum de luz era assim equiparado a uma partícula que transfere energia e momento para
os electrões do metal.

69
Anexo C. Efeito de Compton
A experiência que garante a maior evidência directa para a natureza de radiação das partículas é
denominada efeito de Compton, Arthur H. Compton descobriu essa radiação de um comprimento de
onda dado (raio x) enviando através de uma folha metálica foram dispersados de um maneira não
consistente com a teoria de radiação clássica. De acordo com a teoria clássica, o mecanismo para o
feito é a re-radiação da luz por electrões forçados a oscilações pela radiação incidente, e isto leva à
predicçao da intensidade observada de um ângulo θ que varia com ( )( )θ2cos1+ , e não depende do
comprimento de onda da radiação incidente. Compton encontrou essa dispersão de radiação através de
um ângulo dado que consiste em dois componentes: um cujo comprimento de onda é o mesmo que
essa radiação incidente o outro cujo o comprimento de onda deslocada relativo ao comprimento de
onda incidente por um quantidade dependente do ângulo. Compton foi capaz de explicar o
componente “modificado” tratando a radiação recebida como um raio de fotões de energia hf , com
fotões individuais dispersados elasticamente dos electrões individuais. Numa colisão elástica o
momento assim como a energia tem que ser conservado. Mas primeiro tem que ser designado o
momento do fotão. Assim pode-se dizer que
c
hfp = . (C.1)
O argumento segue a relação relativista entre a energia e o momento.
( ) ( )21
2220 ⎥⎦
⎤⎢⎣⎡ +=Ε pccm (C.2)
onde 0m é a massa da partícula, a velocidade do momento é
( ) 212242
0
22
cpcm
pcpcdpdv
+=
Ε=
Ε= . (C.3)
Para um fotão é sempre c , doravante a massa do fotão em repouso tem que ser nula. Da relação (C.2)
vem que
pc=Ε . (C.4)
Que representa (C.1) quando se substitui hf=Ε . (C.4) pode também derivar da consideração de
energia e do momento de uma onda electromagnética.

70
Considera-se agora um fotão com momento inicial p , incidente sobre um electrão em
descanso. Depois da colisão, o momento do fotão é 'p e o electrão recua com momento P .
Conservação do momento está representada na figura C.1.
Ppp += ' (C.5)
de onde se segue
( ) '2'' 2222 ppppppp ⋅−+=−= . (C.6)
Conservação da energia
( ) 2122422 ' cPcmhfmchf ++=+ (C.7)
Figura C.1 Efeito de Compton.
Onde m é a massa do electrão em repouso.
( ) ( ) ( ) 4222222242 '2'' cmhfhfmchfhfmchfhfcPcm +−+−=+−=+ .
Por outro lado, (C.6) pode ser escrito na forma
( )θcos'2' 222
chf
chf
chf
chfp ⋅−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=
ou seja
( ) ( )( ) ( )( )θcos1'2' 222 −+−= hfhfhfhfcp (C.8)
onde θ é o ângulo fotão disperso.
θ
mFotão incidente
Fotão dispersado
Electrão

71
( )( ) ( )'cos1' 2 ffmchf −=− θ
Que também é equivalente a
( )( )θλλ cos1' −=−mch (C.9)
As medidas do componente modificado concordam muito bem com esta predicção. A linha
não modificada e devido ao dispersão do átomo; se m é substituído pela massa do átomo o
deslocamento no comprimento de onda é muito pequeno, pois um átomo tem uma massa muito
superior à do electrão. A quantidade mch tem as dimensões de um comprimento. É denominado
comprimento de onda Compton de um electrão e a sua magnitude é ( ) 102.4 10h mc cm−≅ × .
Medidas do electrão recuado foram feitas também e estas estão de acordo com a teoria. Foi
posteriormente determinado por uma boa coincidente resolução de experiências que o aumento de
velocidade do fotão e o recuo do electrão aparecem simultaneamente. Não há qualquer questão sobre a
correcção na interpretação da colisão como uma colisão do tipo bola de bilhar. Como a radiação
também tem propriedades de onda e exibe interferência e difracção pode-se esperar algumas
dificuldades conceptuais.

72

73
Anexo D. Notação de Dirac
P.A.M Dirac introduziu uma notação poderosa e económica que se aplica igualmente bem ao vector de
espaço dimensional finito e ao espaço de Hilbert. Associa-se a cada função de onda ψ , um vector de
estado ψ , denominado Ket. Associa-se também a cada função de onda *φ a quantidade φ
denominado bra. O produto escalar de ψ e *φ é associado com uma relação de parênteses
∫ = ψφψφ |*dx (D.1)
donde se segue
φψψφ || * = . (D.2)
A expressão para o integral envolvendo um operador pode ser escrita de duas maneiras
equivalentes
∫ == ψφψφψφ |||* AAAdx , (D.3)
a definição do operador conjugado Hermitiano diz-se
ψφψφ ||| AA = (D.4)
se A é um número em vez de um operador então pode sair fora dos parênteses e tem-se
ψφψφ || aa = (D.5)
e
ψφψφ || *aa = . (D.6)
A equação de valores próprios vem na forma
aaaA = . (D.7)
A condição ortonormalidade da notação de Dirac lê-se
2121 | aaaa δ= (D.8)
o teorema da expansão lê-se
∑=a
a aCψ (D.9)

74
segue-se multiplicando à esquerda por um particular estado
∑ ∑ ===a
ba
abaa CCabCb δψ || (D.10)
desta fórmula pode-se escrever
∑∑ ==aa
a aaaC ψφφψφ |||| (D.11)
como isto é verdade para todo o φ e ψ pode-se afastar esta relação e escrever a notação de Dirac
como
∑ =a
aa 1 (D.12)
conclui-se ilustrando o uso da notação de Dirac para provar a ortonormalidade dos operadores
Hermitianos das funções que correspondem a diferentes valores de próprios. Considera-se
abaaAb ||| = (D.13)
E por outro lado
( ) abbabAaAb |||| *==+ (D.14)
como b é um estado próprio de A com valor de b e as quantidades aparecem no bra. No entanto
para um operador Hermitiano tem-se += AA . Segue-se:
abbaba || *= (D.15)
se se escolhe ab = imediatamente se vê que os valores próprios têm que ser reais para bb =* , por
exemplo dá-nos ( ) 0| =− abba , que era o que se pretendia provar, pois para ba ≠ , ab | a relação
tende a desaparecer.

75
Anexo E. Operados e valores expectáveis
Neste anexo analisa-se a importância dos operadores na mecânica quântica. Ao contrário das funções
ordinárias que comutam tal que ( ) ( ) ( ) ( )xfxgxgxf = , o mesmo não se aplica aos operadores. Define-
se assim um comutador de dois operadores que quantifica esse desvio em relação à comutação. Veja-
se o exemplo dos operadores momento linear ∧
xp e posição ∧x .
∧∧∧∧∧∧−=⎥⎦
⎤⎢⎣⎡
xxx pxxpxp , , que representa o comutador de dois operadores. O espaço de
coordenadas é xx =∧
,
( ) ( )[ ] ( )
( )⎪⎪⎩
⎪⎪⎨
⎧
∂Ψ∂
−=Ψ
Ψ−∂Ψ∂
−=Ψ∂∂
−=Ψ
∧∧
∧∧
xxitxpx
txix
xitxxx
itxxp
x
x
,
,,, (E.1)
( ) ( ) ( ) ( )txitxxptxitxpxxp xxx ,,,,, Ψ−=Ψ⎥⎦⎤
⎢⎣⎡⇒Ψ−=Ψ⎟
⎠⎞
⎜⎝⎛ −
∧∧∧∧∧∧ (E.2)
a relação de comutação é ixpx −=⎥⎦⎤
⎢⎣⎡ ∧∧
, .
A representação do espaço do momento linear é dada por,
( ) ( )∫+∞
∞−
∧∧ΨΨ= dxtxptxp xx ,,*
( )( )∫+∞
∞− ∂Ψ∂
−Ψ= dxx
itx,*
( )( ) ( ) dxdpetpx
itx x
xpi
xx
∫ ∫∞+
∞−
∞+
∞−
⎟⎠⎞
⎜⎝⎛
⎥⎥⎦
⎤
⎢⎢⎣
⎡Φ
∂∂
−Ψ= ,21,*
π (E.3)
( ) ( ) x
xpi
xx dpdxetxptpx
⎥⎥⎦
⎤
⎢⎢⎣
⎡ΨΦ=
⎟⎠⎞
⎜⎝⎛
∞+
∞−
∞+
∞− ∫∫ ,21, *
π
( ) ( ) xxxx dptpptp ,, *ΦΦ= ∫+∞
∞−.
Por outro lado no espaço do momento linear deve ter-se
( ) ( ) 2,, tptpP xx Φ= (E.4)

76
∫+∞
∞−
∧∧∧∧
⎟⎠⎞
⎜⎝⎛Φ⎟
⎠⎞
⎜⎝⎛Φ= tpptpp xxxx ,,* (E.5)
De onde se infere que o espaço do momento linear xx pp =∧
.
Em relação à representação do operador ∧x , no espaço do momento linear tem-se que
( ) ( )∫+∞
∞−
∧ΨΨ= dxtxxtxx ,,*
( ) ( ) dxdpetpxtx x
xpi
xx
∫ ∫∞+
∞−
∞+
∞−
⎟⎠⎞
⎜⎝⎛ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡ΦΨ= ,
21, *
π (E.6)
( )( ) ( ) x
xpi
xx
dpdxetpp
itxx
∫ ∫∞+
∞−
∞+
∞−
⎟⎠⎞
⎜⎝⎛ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡Ψ
∂∂
−Φ= ,21,*
π
( ) ( ) xxx
x dptpp
itp ,,* Φ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
Φ= ∫∞+
∞−
Assim tem-se que ( )xx i p∧
= ∂ ∂ .
Na Tabela E.1 apresentam-se alguns resultados referentes à representação das grandezas
físicas em termos de operadores quer no espaço de coordenadas quer no espaço do momento linear.
Tabela E.1 Alguns resultados da representação de operadores no espaço de coordenadas e no espaço do
momento.
Grandeza física Espaço de coordenadas Espaço do momento
posição x→ xx =
∧ ⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
=∧
xpix
Momento linear xp→ ⎟⎠⎞
⎜⎝⎛
∂∂
−=∧
xipx xx pp =
∧
Energia cinética Τ→ ⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=Τ∧
2
22
2 xm
mpx
2
2
=Τ∧
Energia potencial V→ ( )xVV =∧
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
=∧
xpiVV
Energia total Ε→ ( )xV
xm+⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂∂
−=Η∧
2
22
2 ⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+=Η∧
x
x
piV
mp2
2

77
Anexo F. Princípio da sobreposição
Na formulação teórica da mecânica quântica o princípio da sobreposição tem um papel importante.
Este princípio estabelece que se ( )tx,1Ψ e ( )tx,2Ψ são duas funções de onda que descrevem dois
estados físicos distintos, então ( ) ( ) ( )txtxtx ,,, 21 Ψ+Ψ=Ψ é também uma função de onda que
descreve um possível estado físico do sistema quântico em análise. A interpretação probabilística
associada à função de onda, estabelece que,
( )( ) ( )*21
22
21
*2
*121
221 2 ΨΨℜ+Ψ+Ψ=ΨΨΨ+Ψ=ΨΨ
( ) ( )( ) ( )⎪⎩
⎪⎨⎧
Ψ=
Ψ=2
22
211
,,
,,
txtxP
txtxP( ) ( ) ( ) ( )txPtxPtxtxP ,,,, 21
2 +≠Ψ=⇒ . (F.1)
Mostra-se assim que em fase relativa entre ( )tx,1Ψ e ( )tx,2Ψ é relevante para a determinação
de ( )txP , , no entanto esta informação de fase é irrelevante para a determinação de ( )txP ,1 ou de
( )txP ,2 . Em relação ao princípio da sobreposição é importante também referir que, em geral a função
de onda que descreve o estado quântico de um sistema físico é uma grandeza complexa. Veja-se agora
o seguinte exemplo através da equação de Schrödinger.
( ) ( ) ( )
( ) ( )[ ]
( ) ( )[ ]⎪⎪⎩
⎪⎪⎨
⎧
−+−−=∂Ψ∂
−−−=∂Ψ∂
−+−=Ψ
tkxtkxkx
tkxtkxt
tkxtkxtx
ωδω
ωδωω
ωδω
sincos
cossin
sincos,
22
2
(F.2)
Pelo que da equação de Schrödinger de uma partícula livre,
2
2
2 xmti
∂Ψ∂
−=∂Ψ∂ (F.3)
se obtém sucessivamente
( ) ( )[ ] ( ) ( )[ ]tkxtkxmktkxtkxi ωδωωδωω −+−=−−− sincos
2cossin
22
cuja solução possível é i=δ .
Analisando agora a evolução para um estado quântico em 0=t descrito por ( ) ( )kxx cos0, =Ψ ,
( ) ( ) ( ) ( )0,0,cos0, 21 xxkxx ΨΨ==Ψ

78
( ) ( )
( ) ( )⎪⎪⎩
⎪⎪⎨
⎧
=Ψ
=Ψ
−ikx
ikx
ex
ex
210,
210,
2
1( ) ( )[ ] ( )[ ]tkxitkxi eetx ωω −−− +=Ψ⇒
21
21, (F.4)
( ) ( ) ( ) ( )tkxekxtx ti ωω −≠=Ψ − coscos, (F.5)
Conclui-se assim que a função de onda em 0=t , ( )0,xΨ , determina o andamento ( )tx,Ψ , o
que significa que a equação de Schrödinger tem de ser, uma equação diferencial de primeira ordem em
relação ao tempo.

79
Anexo G. Átomo de hidrogénio
G.1. Mudança de coordenadas
Como foi dito no capítulo 6 a equação (6.2) só é possível resolver em determinados sistemas de
coordenadas em que as variáveis possam ser separadas. Como neste caso o campo é central ou de
simetria esférica, há vantagem em usar coordenadas polares esféricas, tais que:
Figura G.1 Coordenadas polares esféricas
( ) ( )( ) ( )( )θ
φθφθ
cos
cos
rzsenrseny
rsenx
===
. (G.1)
De (G.1) pode-se obter as transformações inversas:
;2222 zyxr ++= ( ) ;cos222 zyx
z
++=θ ( )
xytg =φ (G.2)
a partir (G.2) pode-se calcular as derivadas parciais:
( )θcos=∂∂zr ; ( ) ( )φθ sensen
yr=
∂∂ ; ( ) ( )φθ cossen
xr=
∂∂ ; ( ) ( ) ( ) 0cos
=∂∂
=∂∂
−=∂∂
zrsen
yrsen
zφφθθθθ ;
( )( )θθφ
rsenycos
=∂∂
z
x y
θ
φ
r
Electrão
Protão

80
Neste caso o laplaciano ( ) ( ) ( )2 2 2 2 2 2x y z⎡ ⎤∂ ∂ + ∂ ∂ + ∂ ∂⎣ ⎦ , que também pode ser representado por 2∇
ou Δ , tem a forma
( ) ( )( ) ⎥
⎦
⎤⎢⎣
⎡
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
=∇ 2
2
22
22 111
φθθθ
θθ sensen
senrr
rr (G.3)
E assim a equação de Schrödinger pode-se escrever da seguinte forma,
( ) ( )( )
( ) ( ) ( )φθψφθψφθθ
θθθμ
,,,,1112 2
2
22
2
2
rrrVsen
sensenr
rrr
Ε=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+⎥⎦
⎤⎢⎣
⎡
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−
(G.4)
as soluções desta equação, ( )φθψ ,,r , produtos de três funções, uma só de r , outra só de θ e outra só
de φ .
( ) ( ) ( ) ( )φθφθψ ΦΘ= rRr ,, . (G.5)
Como no caso do átomo de hidrogénio o problema é a três dimensões, a energia vai depender
de três números quânticos, um para cada coordenada. As soluções da equação de Schrödinger são da
forma,
( ) ( ) ( ) ( )φθφθψ mlmnlnlm rRr ΦΘ=,, (G.6)
A função radial ( )rRnl , depende dos números quânticos n e l , a função ( )θlmΘ , dos números
quânticos l e m , e a função ( )φmΦ , do número quântico m . Os números quânticos n , l e m são
respectivamente o número quântico principal, o número quântico azimutal ou de momento angular
orbital e o número quântico magnético.
É também comum escrever
( ) ( ) ( ) RYYrRr lmnlnlm == φθφθψ ,,, (G.7)
associando as funções ( )θlmΘ e ( )φmΦ nas chamadas harmónicas esféricas ( )φθ ,lmY .
G.2. Equação de onda a três dimensões
Substituindo (G.7) em (G.4) vem

81
( ) ( )( )
01112
12 2
2
22
22
2
2
=Ε−+⎥⎦
⎤⎢⎣
⎡
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛− RYVRYY
senYsen
senrR
drdRr
drd
rY
θθθθ
θθμμ
(G.7)
Separando a equação (G.7) em duas partes, uma em função de r e outra em função de θ e de φ ,
obtém-se
( ) ( ) ( )( ) ⎥
⎦
⎤⎢⎣
⎡+⎟
⎠⎞
⎜⎝⎛−=−Ε+⎟
⎠⎞
⎜⎝⎛
2
2
22
22 11121
φθθθ
θθμ
dYd
senddYsen
dd
senYVr
drdRr
drd
R. (G.8)
A (G.9) equação designa-se equação radial. E ζ é uma constante que representa qualquer dos
membros da equação (G.8).
( ) 02122
22 =⎥⎦
⎤⎢⎣⎡ −−Ε+⎟
⎠⎞
⎜⎝⎛ R
rV
drdRr
drd
rζμ (G.9)
Para o segundo membro de (G.8) vem
( ) ( )( ) 011
2
2
2 =+∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂ YY
senYsen
senζ
φθθθ
θθ (G.10)
se considerar o operador Ω
( ) ( )( ) 2
2
211
φθθθ
θθ ∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
=Ωsen
sensen
(G.11)
assim a equação (G.10) pode escrever-se como
( ) ( )φθωφθ ,, YY =Ω (G.12)
(G.12) é uma equação de valores próprios ω , sendo ζω −= .
G.3. Momento angular
O problema do momento angular surge na resolução da equação de Schrödinger e para o átomo de
hidrogénio é particularmente importante visto que o momento angular está associado ao momento
magnético resultante da carga em movimento.
O momento angular é prL ×= , sendo mvp = . Em mecânica quântica os vectores são
substituídos por operadores e ∇−= 2ip , fazendo a correspondência pode escrever-se que

82
( )∇×−⇔++= riLLLL zyx2 (G.13)
⎥⎦
⎤⎢⎣
⎡∂∂
−∂∂
−=
⎥⎦⎤
⎢⎣⎡
∂∂
−∂∂
−=
⎥⎦
⎤⎢⎣
⎡∂∂
−∂∂
−=
xy
yxiL
zx
xziL
yz
zyiL
z
y
x
2
2
2
(G.14)
sendo também verdade que 2222zyx LLLL ++= .
Para obter 2L em coordenadas esféricas basta relacionar (G.1) e (G.14):
( ) ( )( )
Ω−=⎥⎦
⎤⎢⎣
⎡
∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
∂∂
−= 22
2
222 11
φθθθ
θθ sensen
senL . (G.15)
A equação de valores próprios
( ) ( )φθλφθ ,,2 YYL = (G.16)
sendo ( ) 21+= llλ , fica
( ) 22 1+= llL . (G.17)

83
Referências
[1] S. Gasiorowicz, Quantum Physics, Second Edition, University of Minnesota, John Wiley &
Sons, Inc., EUA, 1995.
[2] C. R. Paiva, Mecânica Quântica, Universidade Técnica de Lisboa, Instituto Superior Técnico,
Lisboa, Portugal, Maio 2007.
[3] C. R. Paiva, Álgebra Geométrica e Electromagnetismo, Universidade Técnica de Lisboa,
Instituto Superior Técnico, Lisboa, Portugal, Setembro 2006.
[4] C. Doran and A. Lasenby, Geometric Algebra for Physicists, Cambridge University Press,
Cambridge, UK, 2003.
[5] L. Alcácer, Introdução à Química Quântica Computacional, Ensino da Ciência e Tecnologia
IST Press, Janeiro 2007.
[6] C. R. Paiva, Introdução aos Métodos Variacionais, Universidade Técnica de Lisboa, Instituto
Superior Técnico, Lisboa, Portugal, Abril 2004.
[7] Hestesnes,D., New Foundations for Classical Mechanics, Kluwer Academic Publishers,
Dordrecht, KNL, 1984.
[8] Hestenes,D., Space-Time Algebra, Gordon & Breach Science Pub, New York, USA, 1966.
[9] Hestenes,D., “Poper Dynamics of a Rigid Point Particle”, Journal of Mathematical Physics,
Vol. 15, Issue 10, Oct. 1974.
[10] P. J. E. Peebles, Quantum Mechanics, Princeton University Press, Princeton, N.J 1992.
[11] D. J. Griffiths., Introduction to Quantum Mechanics, Prentice Hall, Upper Saddle River, 1998.
[12] D. Park, Introduction to the Quantum Theory, 3rd edition McGraw-Hill, New York, 1984.
[13] F. Schwabl, Quantum Mechanics, Springer-Verlag, New York, 1992.

84
[14] R. Shankar, Principles of Quantum Mechanics, Plenum Press, New York, 1980.
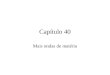





![Tese de Doutorado...omputaçãoc quântica geométrica [47,48 ,49 ,50,51 ,52,53 ,54 ,55]. Pretende-se, com esta tese, contribuir para a ampliação do campo de estudos rela- cionados](https://img.pdfslide.tips/doc/110x75/60bd9c03b65aaa2b316d3c26/tese-de-doutorado-omputaoc-quntica-geomtrica-4748-49-5051-5253.jpg)