Embed Size (px)
Citation preview

개 요
IPS MOTION BOARD( PCI 2, 4, 8축)
IPS MOTION 콘트롤 BOARD는 STEPPER 모터 드라이버나 펄스 타입의 드라이버의 위치, 속도,
보간을 제어할 수 있는 모션 제어 IC를 이용한 PCI 모션 콘트롤 보드이다.
모든 기능은 특수한 RESISTER에 의해 제어된다.
특수한 RESISTER에는 COMMAND, DATA, STATUS 그리고 CONFIGURATION 등이 있다.
*하드웨어 사양
축수 : PCI SLOT HALF SIZE ( 2축,4축,8축) 최대 32축
콘넥션 : 스카시 콘텍타 (2축씩)
외부 인터페이스 : 리미트 , 입력 32점,출력 32점,
* 4축 개별 제어
각각의 축은 동일한 기능을 가지고 있으며 일정한 속도 혹은 선형 혹은 S-CURVE 구동과
같은 방법으로 제어된다.
* 속도 제어
펄스 출력의 주파수 범위는 일정 속도 구동 ,사다리꼴 혹은 S-CURVE 가속/감속 구동에
1 PPS 에서 4 MPPS이다. 펄스 출력 주파수 정확도 +/- 0.1 %(AT CLK=16MHz) 보다 적다.
구동 펄스 출력의 속도는 자유롭게 바꿀 수 있다.
* S-CURVE 가속 / 감속
각 축은 개별적으로 S-CURVE 혹은 사다리꼴 가속 / 감속으로 미리 세팅할 수 있다.
S-CURVE 명령을 사용함으로써 포물선 가감속 출력펄스 구동이 가능하며.
또한 MCX314는 S-CURVE를 사용하고 있을 때 삼각 커브가 발생하는 것을 막기 위한
특별한 방법을 가지고 있다.
* 직선보간
직선 보간 제어의 사용에 의해서 직선운동 실행하기 위해 2축이나 3축을 선택할 수 있다.
위치 범위는 ?8,388,608과 +8,388,607 사이다. 그리고 직선 에러는 +/- 0.5LSB이다.
보간 속도 범위는 1 PPS 에서 4MPPS이다.

개 요
* 원호 보간
원호 보간 구동을 실행하기 위해 임의의 두축을 선택할 수 있다.
위치경계는 좌표 ?8,388,608과 +8,388,607 사이다.
원호커브에러는 +/- 1.0 LSB (LEAST SIGNIFICANT BIT)이다.
보간 속도 범위는 1PPS 에서 4 MPPS이다.
보간 범위 : 축당 ?8,388,608 ~ +8,388,607
보간 속도 : 1~ 4MPPS
보간 정확도 : ±1 LSB 이하(전체 보간 범위 안에서)
* 비트 패턴 보간
보간 정확도 : ±0.5 LSB 이하 (전체 보간 범위 안에서)
2축/3축 비트 패턴 보간
CPU에 의해서 계산된 비트 패턴 보간 데이터를 선택된 임이의 2 OR 3 축이 비트 패턴
보간을 실행한다. 그리고 출력 펄스는 미리 세팅을 할 때 연속적인 구동속도를 기록한다.
그래서 이 모드에서는 어떤 형태의 보간법도 진행시킬 수 있다.
*연속 보간
다른 보간 방법들은 연속적으로 사용될 수 있다. 직선 보간-> 원형보간->직선보간…
보간법의 최대 속도는 구동을 멈추지 않고 2MHz 이다.
* 선속 일정 속도제어
다양한 보간 운동중 등속을 유지할수 있고, 2축 동시 펄스 출력에 대해 1.414 배 펄스 사이클로
출력되고 3축 동시펄스 출력에 대해 1.732 배 펄스 출력 사이클을 가짐.
*위치제어
각 축은 32비트 로직 위치 카운터와 32비트 실제위치 카운터를 갖고 있다.
로직 위치 카운터는 위치펄스 명령과 같이 기록되며 실제위치 카운터는 외부 엔코더 혹은 리니어
스케일의 피드백 펄스와 함께 기록된다.
*비교 레지스터와 소프트웨어 리미트
각 축은 두 개의 32 비트 비교 레지스터를 가지고 있다. 하나는 로직 위치 카운터,
다른 하나는 REAL 위치 카운터를 위한 것이다. 비교 결과는 STATUS RESISTER에서 읽을 수 있다.
비교 결과는 또한 INTERRUPT 에 의해 기록될 수 있다.
또 2개의 비교 레지스트를 소프트웨어 리미트로 사용할 수 있다.

개 요
*외부 조작 신호
각 축은 외부신호에 의해서 +/- 정량 드라이브,연속 구동을 할 수 있고 모든 축의 매뉴얼
혹은 JOG 이송에 있어서도 상위 CPU의 TASK를 경감시켜, 부드럽게 운전할 수 있다
*원점 SEARCH 용 입력신호
각 축은 구동 중 감속과 정지시키기 위한 4 점 입력신호를 가지 있다.
원점 부근 고속 Search.원점 Search, 엔코더 Z상 SEARCH가 가능함
*서보 모터 피드백 신호
2 상 엔코더 신호, IN Position, SERVO 알람 신호등의 서보 모터 드라이버 출력신호를 입력.
* 인터럽트 발생 기능
각 축 공히 가감속 드라이브중의 정속개시시, 정속종료시,드라이브 종료시 위치 카운터와
비교 레지스트의 대소관계가 변화 했을시 인터럽터 발생이 가능하고 ,연속보간 혹은 비트 패턴 보간
에서는 다음 데이터 요구 인터럽터 발생도 가능함.
* 실시간 모니터링
구동 중 현재의 논리위치,실제 위치,드라이브 속도,가속도,가감속 상태(가속중,정속중,감속중)등을
리얼 타임으로 읽어내는 것이 가능.
개 요
* 사양
*제어 축 : 2 축,4축 8축 최대 32축
*DATA BUS : 16/8 비트 선택 가능
*보간 기능
*2축, 3축 직선보간
보간 범위 : 각 축 당 ?8,388,608~ +8,388,607
보간 속도 : 1~ 4 MPPS
?2,147,483,648 ~ +2,147,483,647
COMP-RESISTER 위치 비교 범위
-2,147,483,648 ~ +2,147,483,647
VALUE는 POSITION COUNTER와 결과의 출력으로 비교할 수 있으며 소프트웨
어 LIMIT 로 사용될 수 있다.
* 원호 보간
보간 범위 : 축당 ?8,388,608 ~ +8,388,607
보간 속도 : 1~ 4MPPS
보간 정확도 : ±1 LSB 이하(전체 보간 범위 안에서)
*2 /3 축 비트 패턴 보간
보간 속도 : 1~ 4 MPPS (CPU 자료 입력시간에 달려 있다.)
축을 선택할 수 있다.
지속적인 직선 속도
연속보간
단일 스텝 보간 (COMMAD / 외부 신호)
개 요
* 각 축당 공통 사양
구동 출력 펄스 (CLK = 16MHz)
출력 속도 범위 1~4 MPPS
출력 속도의 정확도 ±0.1% 이하 (DEFAULT 세팅에 의존)
속도 배수 1~500
가속도를 위한 S-CURVE 954 ~ 62.5 * 106 PPS/SEC (배수 = 1)(가속의 증감 )
477 * 103 ~ 31.25 * 109 PPS/SEC2 (배수 =500)
가속 / 감속 235 ~ 1 * 106 PPS/SEC2 (배수 = 1)
6.25 * 106 ~ 500 * 106 (배수 = 500)
시작속도 1 ~ 8,000PPS (배수 =1)
500~ 4 * 106 PPS
구동속도 1~800PPS(배수 = 1)
500~ 4* 106 PPS (배수 = 500)
출력 펄스 수 0 ~ 268,435,455 (고정된 PULSE 구동)
속도커브 등속 / 직선
가속 / 포물선의 S-CURVE
가속 / 감속 구동
고정된 PULSE 구동의 감속 : 자동 감속 / MANUAL 감속
출력 펄스 수와 구동속도는 구동 중 바꿀 수 있다.
펄스 출력은 CW/CCW 혹은 DIR/PULSE 를 위해 선택될 수 있다.
펄스 명령은 논리 카운터 리딩에 의해 기록된다.
*엔코더 입력 펄스
구형 펄스 혹은 UP/DOWN 펄스중 선택 가능하다.
1배,2배 4배수 펄스가능.
*위치 카운터
논리 위치 카운터 범위 ( 펄스 명령출력 )
-2,147,483,648 ~ +2,147,483,647
실제 위치 카운터 범위 ( 펄스 피드백 )
-2,147,483,648 ~ +2,147,483,647
*비교 RESISTER
COMP+ RESISTER 위치 비교 범위
-2,147,483,648 ~ +2,147,483,647
COMP-RESISTER 위치 비교 범위
-2,147,483,648 ~ +2,147,483,647
데이터는 위치 카운터와 비교되고 결과 출력할 수 있으며 소프트웨어 LIMIT 로
사용될 수 있다.
개 요
* INTERRUPT 기능(보간법)
인터럽터 신호는 여러조건에서 발생할수 있다.
예를 들면, WHEN POSITION COUNTER >= COMP+, POSITION COUNTER <
COMP-,
가감속 구동중 등속이동시작점 혹은 완료 혹은 구동 완료시
*외부 신호에 의한 구동
펄스 출력은 소프트웨어 혹은 하드웨어 핀, EXPP 혹은 EXPM 으로 제어할 수 있다.
* 외부 감속 / FAST STOP SIGNAL
각 축당 0~34 POINT 안에서 각 핀은 STOP 기능을 가능하게도 불가능하게도 할 수 있다.
그리고 사용자 입력으로 사용 가능.
* SERVO MOTOR DRIVE 사용을 위한 INPUT SIGNAL
ALARM(비정상)
INPOS (위치완료 검사)
*사용자 출력 신호
각 축 당 출력 8점 ( 4 점은 운전상태 출력핀과 공용).
*운전 상태 신호 출력
구동,가속, CMPP(위치>+COMP +), CMPM(위치 < COMP -).
운전 상태는 STATUS RESISTER에 의해 읽혀진다.
*OVER TRAVELING LIMIT SIGNALS INPUT
+ LIMIT ? LIMIT ACTIVE LEVEL 은 LOW ,HIGH를 선택할수 있고 .
멈추는 방식은 FAST STOP 방식이나 감속 STOP 방식이 있다.
* 비상 정지 입력 신호
모든 축의 비상정지는 POINT를 이용한다. 모든 축의 구동펄스는 LOW 레벨에서
갑자기 멈춰질 수 있다.
* ELECTRICAL CHARACTERS
구동을 위한 온도 범위 : 0℃~ +85℃
구동을 위한 파워 전압 : ±5V ±5% (CONSUMMING CURRENT 최대 90mA)
입력 / 출력 신호레벨 : CMOS, TTL , 12-24 TR 선택가
입력 CLOCK PULSE : 16,000MHz(STANDARD)
* 포장 : 144-PIN PLASTIC QFP, PITCH = 0.65mm
* DIMENSION : 30.9*30.9*4.36mm
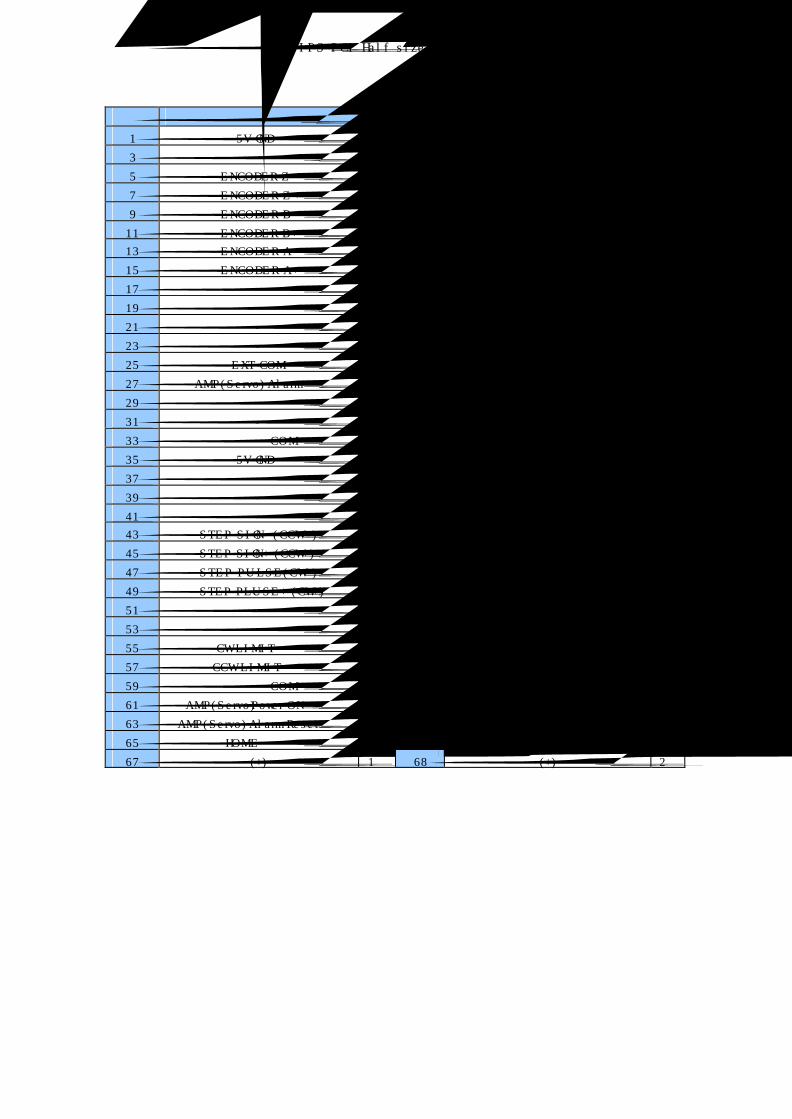
표. IPS PCI Half size 축콘넥터 pin 사양
핀번호 신호명 축 핀번호 신호명 축
1 5V GND 1축 2 5V GND 2축
3 - 1축 4 - 2축
5 ENCODER Z- 1축 6 ENCODER Z- 2축
7 ENCODER Z+ 1축 8 ENCODER Z+ 2축
9 ENCODER B- 1축 10 ENCODER B- 2축
11 ENCODER B+ 1축 12 ENCODER B+ 2축
13 ENCODER A- 1축 14 ENCODER A- 2축
15 ENCODER A+ 1축 16 ENCODER A+ 2축
17 1축 18 2축
19 1축 20 2축
21 - 1축 22 - 2축
23 - 1축 24 - 2축
25 EXT COM 1축 26 EXT COM 2축
27 AMP(Servo)Alarm 입력 1축 28 AMP(Servo)Alarm 입력 2축
29 위치 결정 완료신호 입력 1축 30 위치 결정 완료신호 입력 2축
31 - 1축 32 - 2축
33 외부전원 COM 1축 34 외부전원 COM 2축
35 5V GND 1축 36 5V GND 2축
37 1축 38 2축
39 - 1축 40 - 2축
41 - 1축 42 - 2축
43 STEP SIGN- (CCW-) 1축 44 STEP SIGN- (CCW-) 2축
45 STEP SIGN+ (CCW+) 1축 46 STEP SIGN+ (CCW+) 2축
47 STEP PULSE- (CW-) 1축 48 STEP PULSE- (CW-) 2축
49 STEP PLUSE+ (CW+) 1축 50 STEP PLUSE+ (CW+) 2축
51 1축 52 2축
53 1축 54 2축
55 CW LIMIT 입력 1축 56 CW LIMIT 입력 2축
57 CCW LIMIT 입력 1축 58 CCW LIMIT 입력 2축
59 외부전원 COM 1축 60 외부전원 COM 2축
61 AMP(Servo)Power ON출력 1축 62 AMP(Servo)Power ON출력 2축
63 AMP(Servo)Alarm Reset 출력 1축 64 AMP(Servo)Alarm Reset 출력 2축
65 HOME 입력 1축 66 HOME 입력 2축
67 외부(+)전원 1축 68 외부(+)전원 2축
LIMIT Sensor 입력 32점LIMIT , (JP5)
User I/O각 32점I/O ,(JP7/JP6)
IPS-MOT I/O, LIMIT모듈
IPS-MOT-I/O, LIMIT 개요
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
LIMIT IN OUT
IC IC
IC
cable
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
..
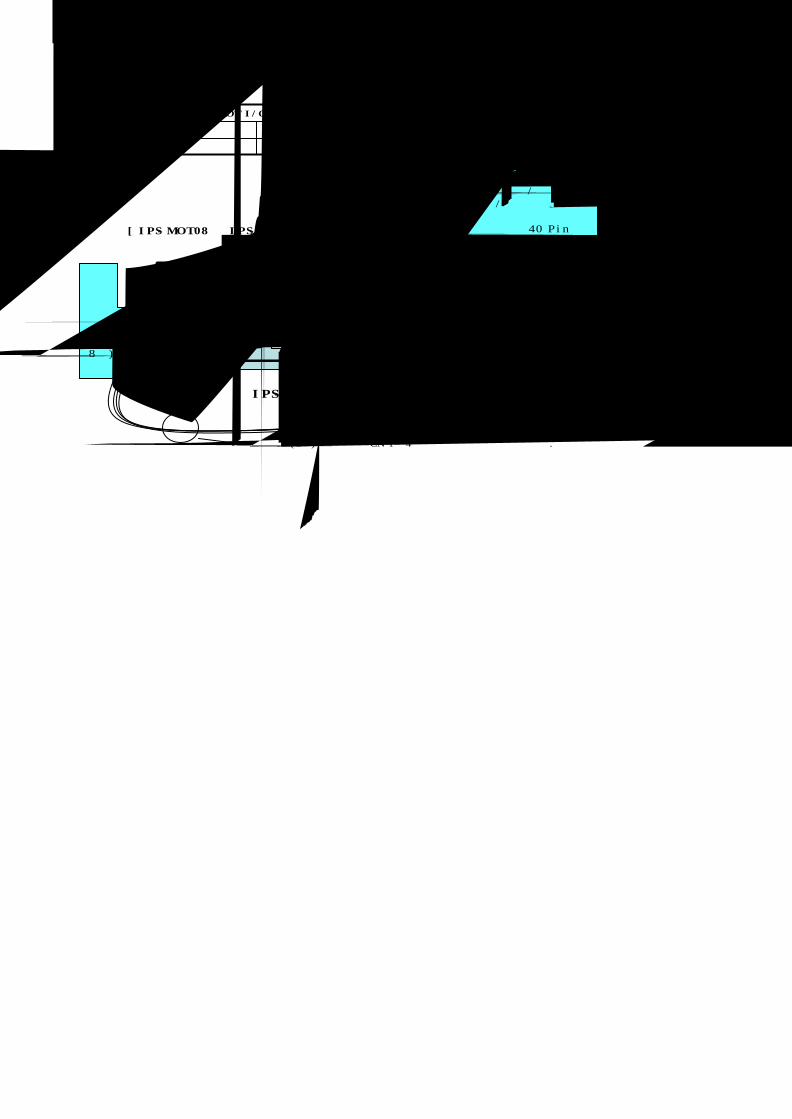
IPS-MOT 04/08 보드
[ IPS-MOT08 과 IPS-MOT I/O,LIMIT 의 연결도 ]
모터연결커넥터
(최대8축)
모션보드와입력/축력
/리미트모듈연결케이블각각 40 Pin
IPS-IN01 모듈(32점)IPS-OUT01 모듈 (32점)IPS-LIMIT01 모듈 (8축)
리미트 모듈(8축) 은 보드의 CN 1~4 과 바로 연결할 수 있습니다.
IPS-MOT-IN01 입력 모듈 사양
USER IN 32
40USER IN 28
35USER IN 24
30USER IN 20
25USER IN 16
20USER IN 12
15USER IN 08
10
USER IN 04
5
USER IN 30
39USER IN 27
34USER IN 23
29USER IN 19
24USER IN 15
19USER IN 11
14USER IN 07
9USER IN 03
4
USER IN 30
38USER IN 26
33USER IN 22
28USER IN 18
23USER IN 14
18USER IN 10
13USER IN 06
8USER IN 02
3
USER
IN 29
37USER
IN 25
32USER
IN 21
27USER
IN 17
22USER
IN 13
17USER
IN 09
12USER IN 05
7USER IN 01
2
EXT VCC8
36EXT VCC7
31EXT VCC6
26EXT VCC521EXT VCC4
16EXT VCC3
11EXT VCC2
6EXT VCC1
1
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
7.625080200길이(mm)
핀 간격높이세로가로위치 가로
세로
핀 간격
세로
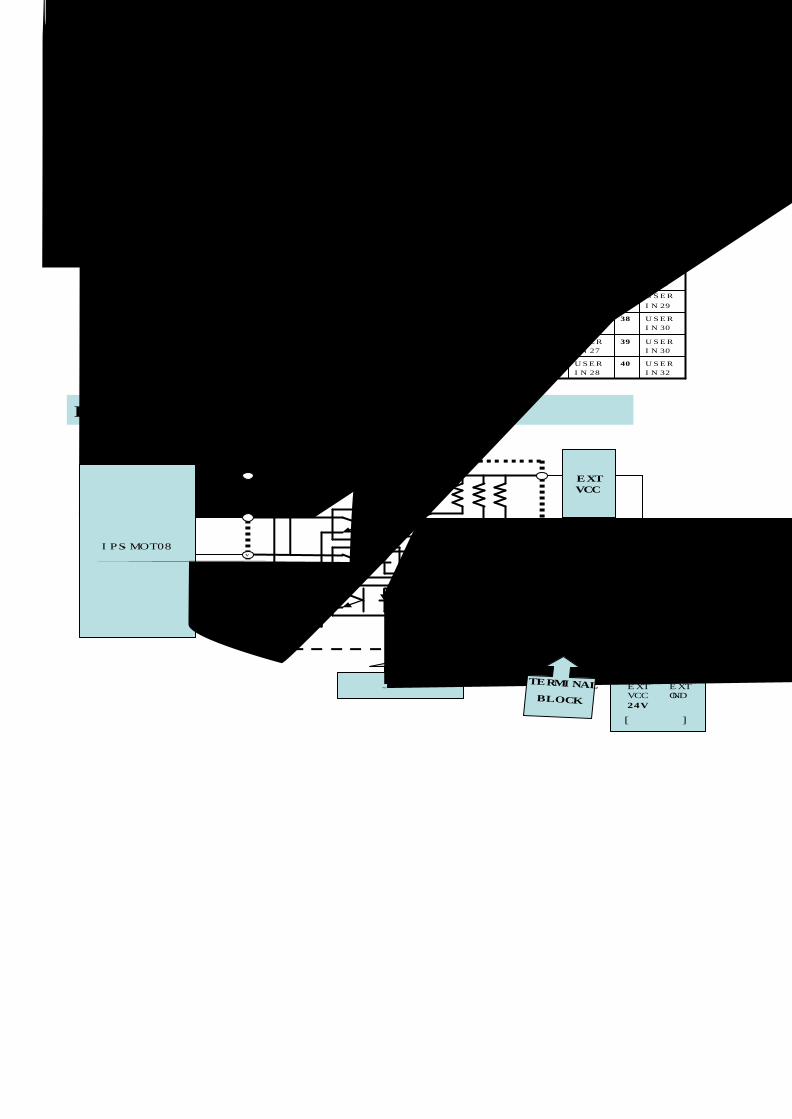
IPS-MOT-IN01 내부 회로도
IPS-MOT08보드
GND
USERIN
USERIN
USERIN
v
[외부전원]
EXT VCC24V
EXT GND
User
IN 0[V]
EXTVCC
User
IN 0[V]
User
IN 0[V]
입력모듈 내부회로 TERMINAL
BLOCK
IPS-MOT-OUT01 출력 모듈 사양
USER
OUT 32
40USER
OUT 27
35USER
OUT 24
30USER
OUT 19
25USER
OUT 16
20USER
OUT 11
15USER OUT 08
10
USER OUT 03
5
USER
OUT 30
39USER
OUT 26
34USER
OUT 23
29USER
OUT 18
24USER
OUT 15
19USER
OUT 10
14USER OUT 07
9USER OUT 02
4
USER
OUT 30
38USER
OUT 25
33USER
OUT 22
28USER
OUT 17
23USER
OUT 14
18USER
OUT 09
13USER OUT 06
8USER OUT 01
3
USER IN 29
37EXT GND04
32USER OUT 21
27EXT GND03
22USER OUT 13
17EXT GND02
12USER OUT 05
7EXT GND01
2
EXT OUT 28
36EXT VCC04
31USER IN 20
26EXT VCC03
21USER OUT 12
16EXT VCC02
11USER OUT 04
6EXT VCC01
1
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
신호명번호
7.625080170길이(mm)
핀 간격높이세로가로위치
세로
가로
핀 간격
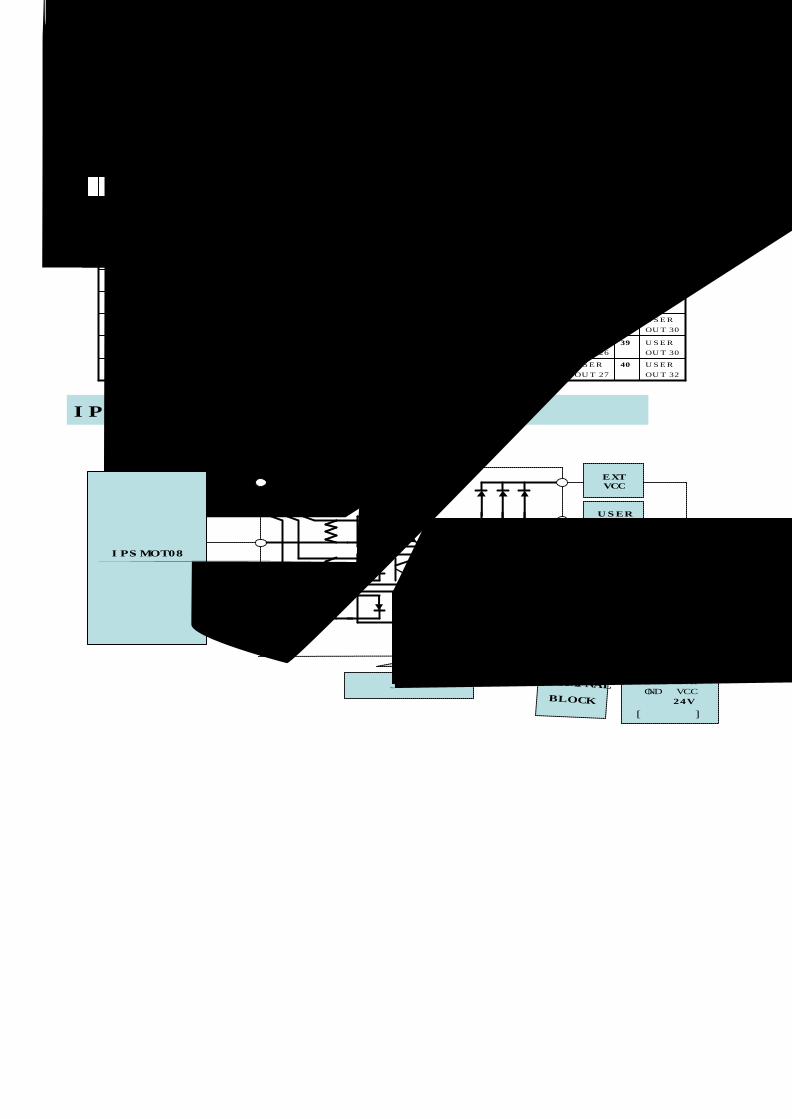
IPS-MOT-OUT01 내부 회로도
IPS-MOT08보드
v
[외부전원]
EXT VCC
EXTGND
EXTVCC
USEROUT
USER OUT
USEROUT
EXT GND
OUT
OUT
OUT
24V
TERMINAL
BLOCK
출력모듈 내부회로
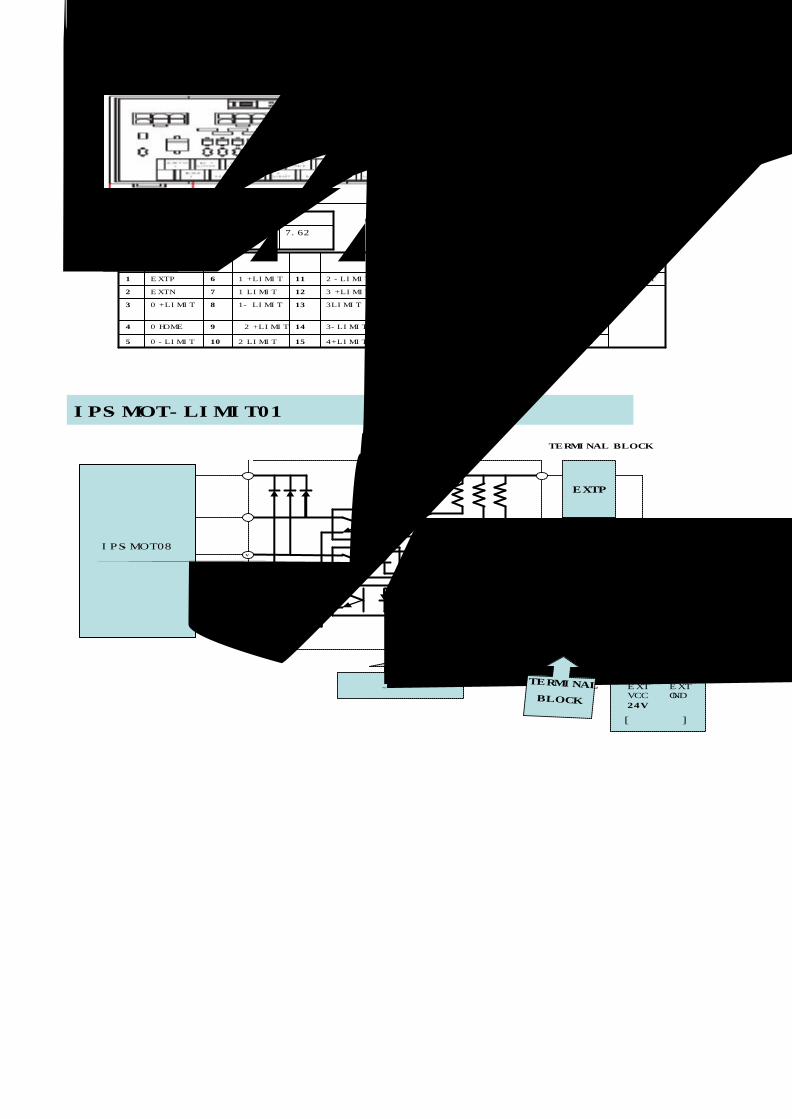
IPS-MOT-LIMIT01 리미트 모듈 사양
7.625080130길이(mm)
핀 간격높이세로가로위치가로
세로
핀 간격
307LIMIT255-LIMIT204+LIMIT152 LIMIT100 -LIMIT5
297+LIMIT245LIMIT193-LIMIT142 +LIMIT90 HOME4
286-LIMIT235+LIMIT183LIMIT131- LIMIT80 +LIMIT3
276LIMIT224-LIMIT173 +LIMIT121 LIMIT7EXTN2
7-LIMIT266+LIMIT214LIMIT162 -LIMIT111 +LIMIT6EXTP1
신호명번호신호명번호신호명번호신호명번호신호명번호
신호명번호
IPS-MOT08보드
EXTN
-LIMIT
HOME
+LIMIT
v
[외부전원]
EXT VCC24V
EXT GND
SENSOR
0V
SENSOR
OV
SENSOR
OV
IPS-MOT-LIMIT01
EXTP
TERMINAL BLOCK
출력모듈 내부회로 TERMINAL
BLOCK
※ 하드웨어 설치.
드라이버 설치 방법.( WIN 98/2000, WIN NT, WIN XP)
1. Windows nt
윈도우 탐색기를 열어 CD-ROM :\driver\nt40 폴더 안의 RegDriver.exe 를
실행시킵니다. 그리고 시스템 다시 시작을 하시면 설치가 완료됩니다.
2. Windows 98
motion board를 장착하시고 나서 시스템을 시작하게 되면 새 하드웨어 검색창이 뜹니다.
위 화면에서 CD-ROM 드라이브를 선택하시면 윈도우가 CD-ROM 안의
장치 드라이버를 찾아 인스톨합니다.
Driver & Program setup
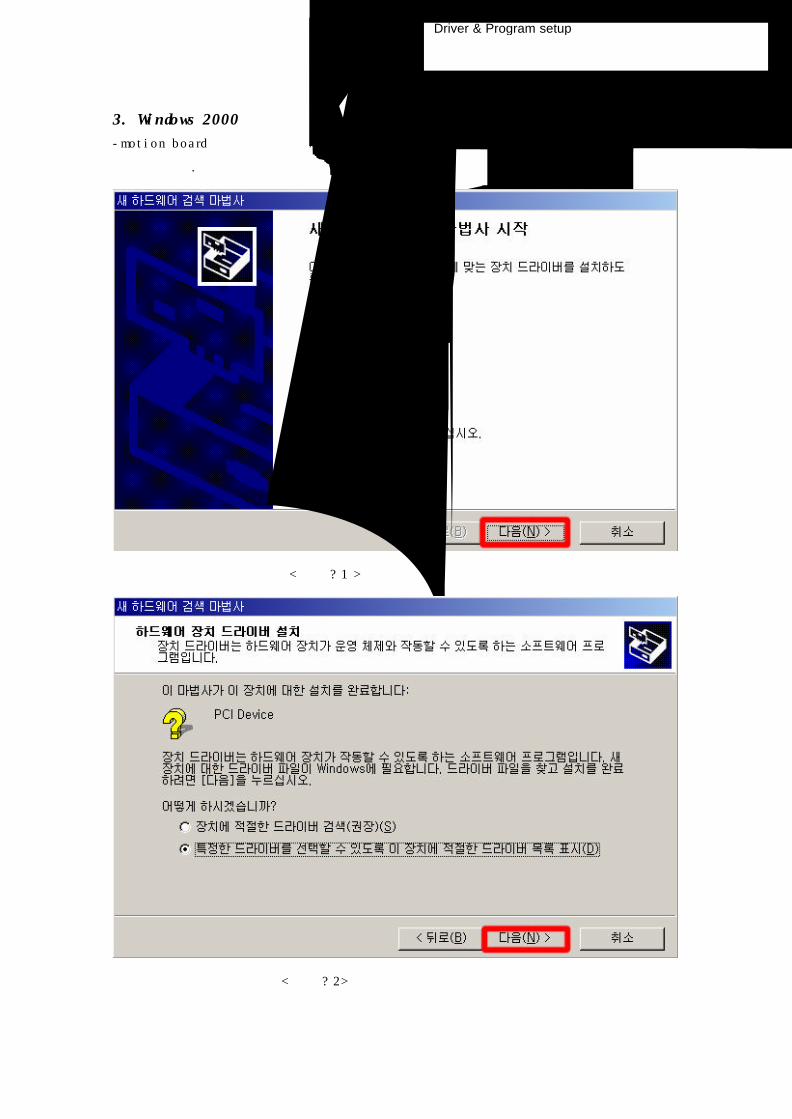
3. Windows 2000
-motion board를 설치하시고 나서 부팅을 하게 되면 아래 그림과 같이 새 하드웨어 검색이
시작됩니다.
<그림 ? 1 > 새 하드웨어 검색
<그림 ? 2> 드라이버 목록 표시 선택
Driver & Program setup
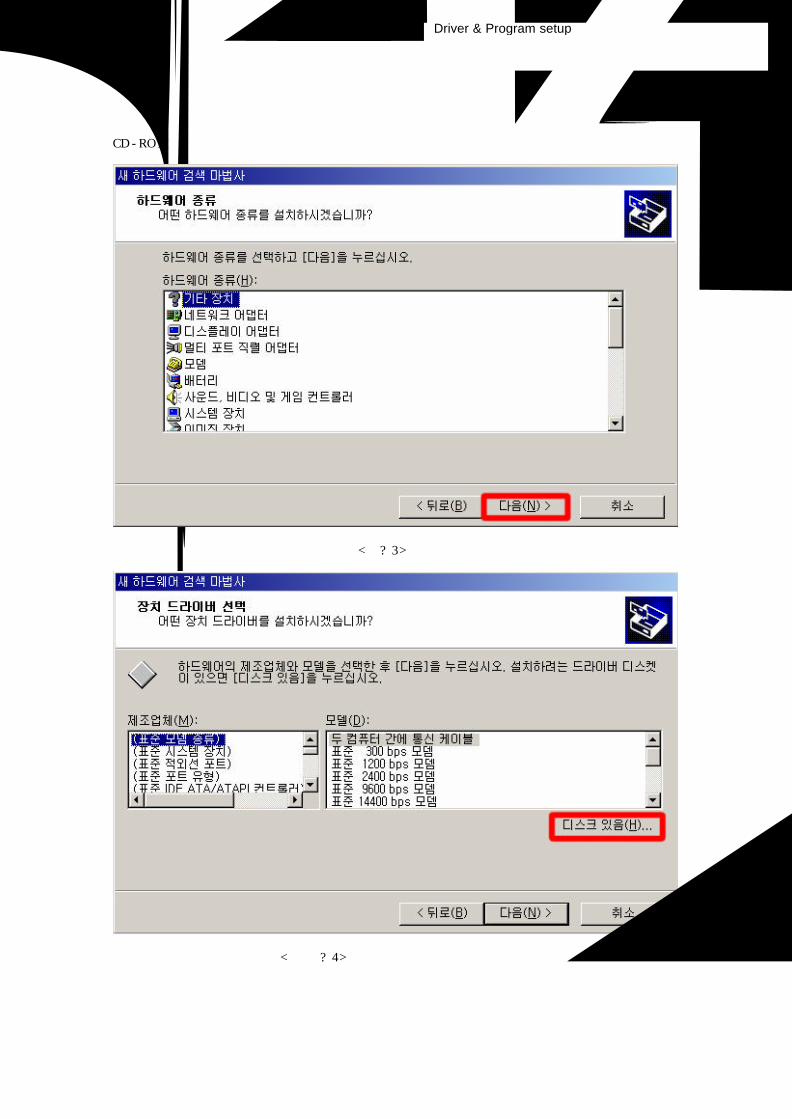
하드웨어 종류는 기타장치로 설정하시고 장치 드라이버 선택에서 “디스크 있음”을 눌러
CD-ROM 안 드라이버의 위치를 지정해 줍니다
<그림 ? 3>
<그림 ? 4> “디스크 있음” 선택
Driver & Program setup
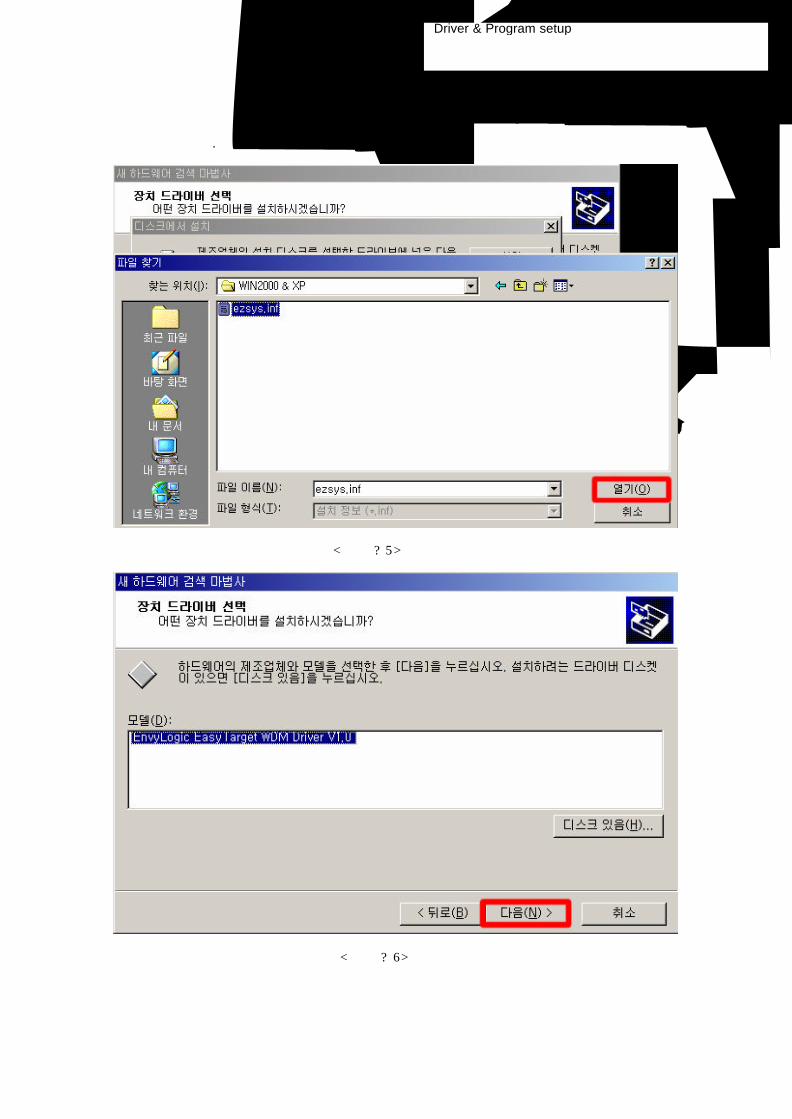
“디스크 있음”을 선택하고 드라이버 위치 지정까지 끝나면 그림-6 과 같이 장치목록이
나타나게 됩니다.
<그림 ? 5>
<그림 ? 6>
Driver & Program setup
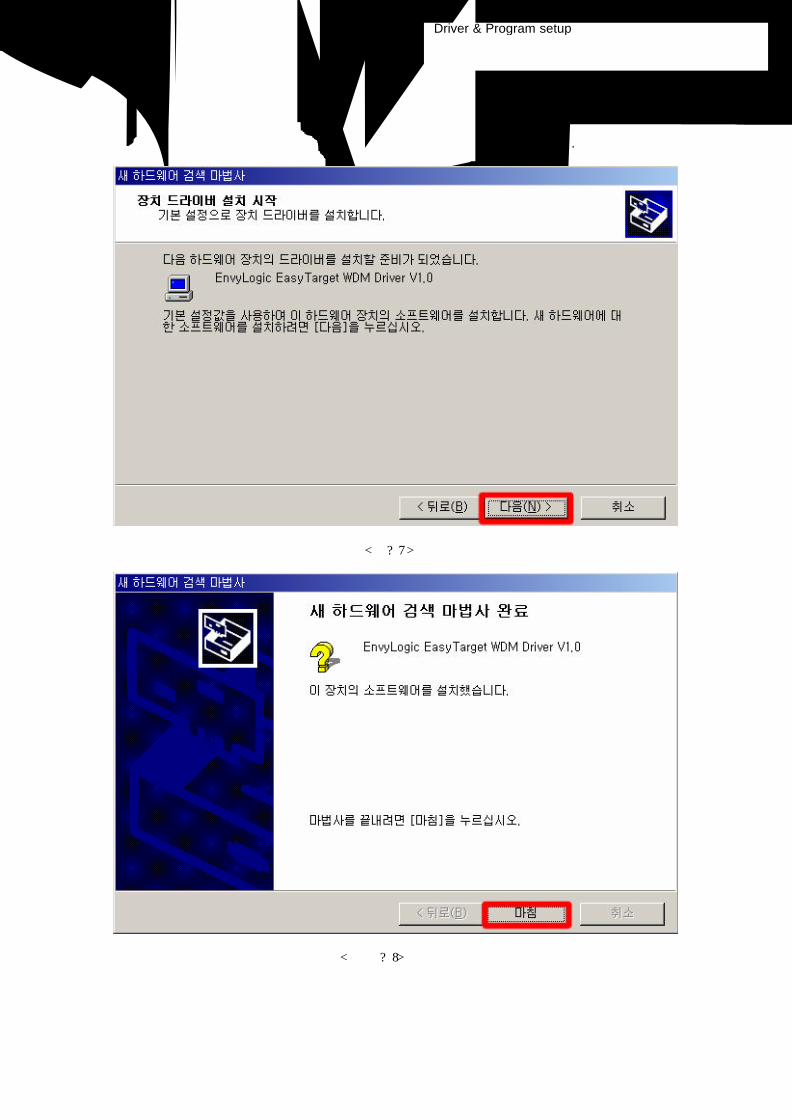
하드웨어 모델을 선택하신 후 “다음”을 클릭하시면 아래와 같은 창이 뜨게 됩니다.
그리고 “다음”을 클릭하시면 설치가 되면서 드라이버의 설치가 완료됩니다.
<그림 ? 7>
<그림 ? 8>
Driver & Program setup
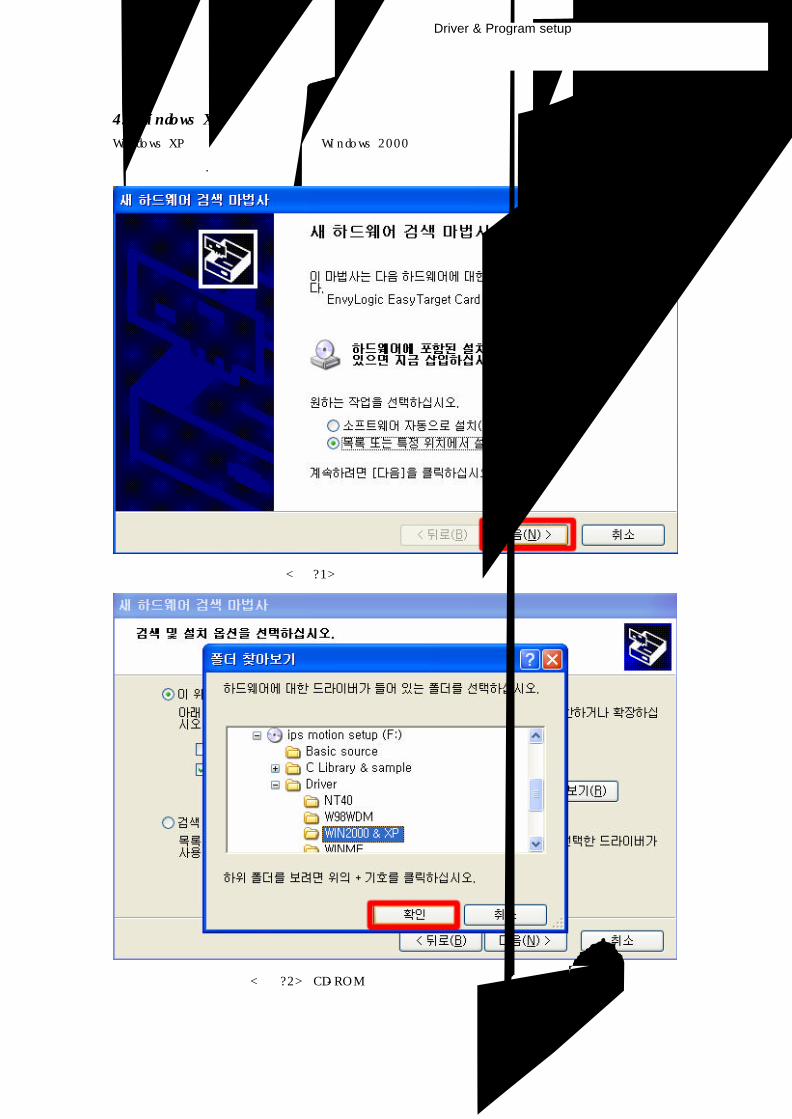
4. Windows XP
Windows XP 에서의 설치 방법은 Windows 2000 과 거의 동일하며 간단하므로 그림으로만
설명하겠습니다.
<그림 ?1> 목록 또는 특정 위치에서 설치 선택
<그림 ?2> CD-ROM 내에 드라이버 디렉토리 지정
Driver & Program setup
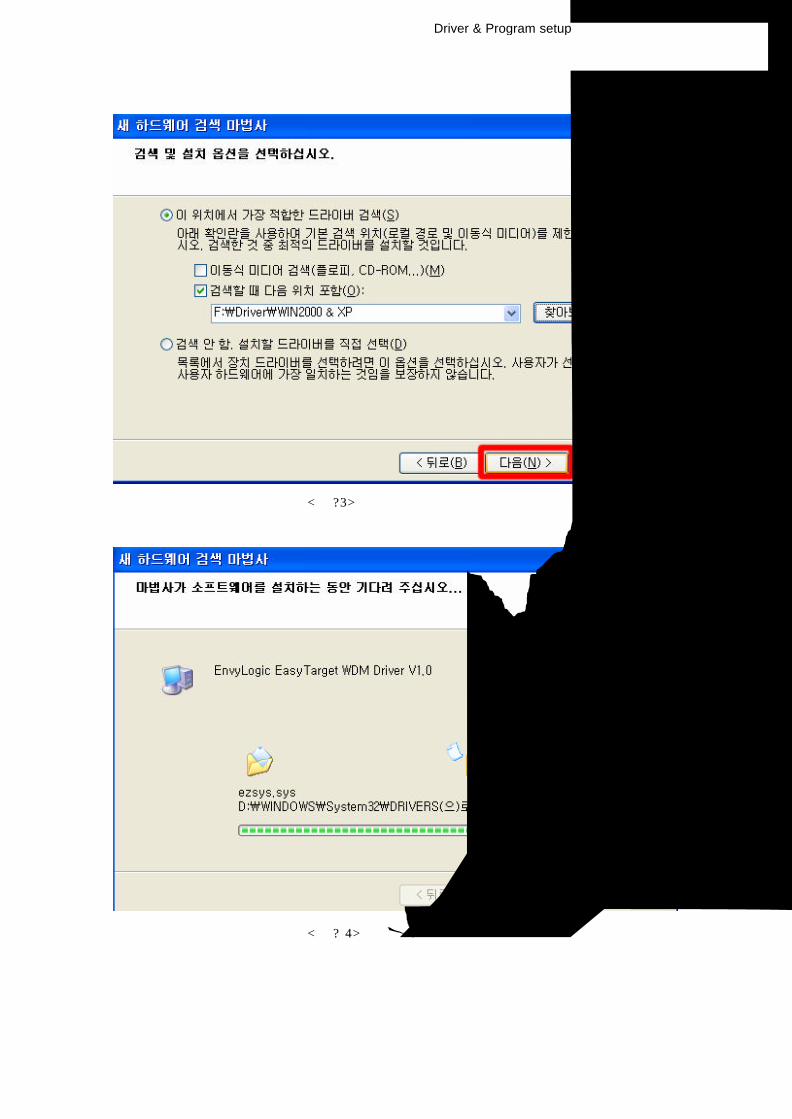
<그림 ?3> 드라이버 위치 지정
<그림 ? 4> 파일 복사 중
Driver & Program setup
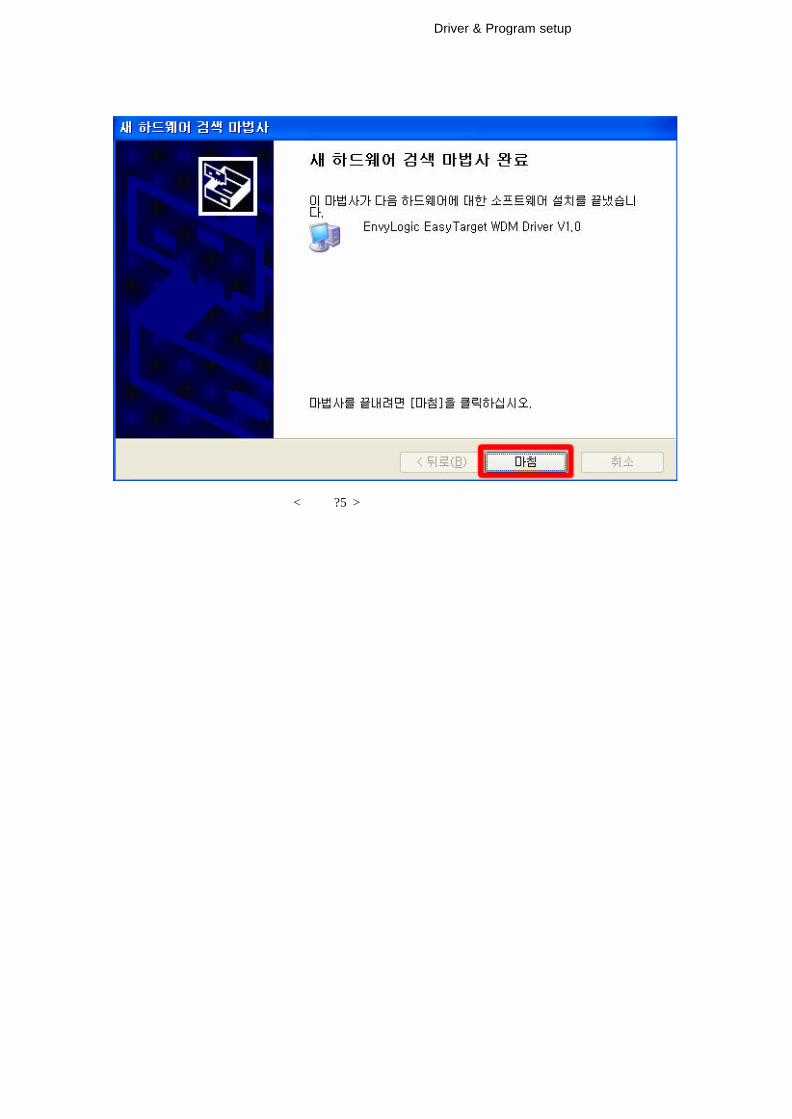
<그림 ?5 > 드라이버 설치 완료
Driver & Program setup
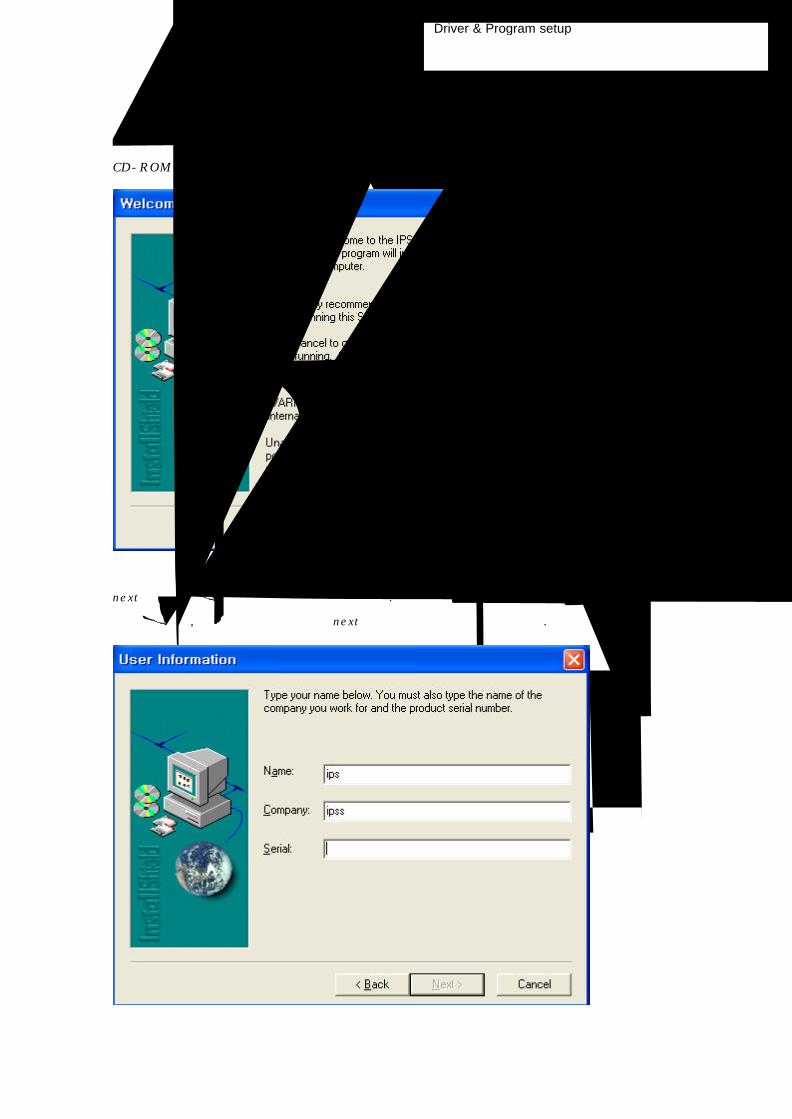
※ Program Setup
CD-ROM 안의 Setup.exe 를 더블클릭 하면 아래와 같이 설치 시작 메시지가 나옵니다.
< 그림 ? 1> 설치 초기 화면
next 를 클릭하면 사용자 정보 입력란이 나옵니다.
이름과 회사명, 시리얼번호를 입력하고 next를 클릭하여 다음으로 넘어갑니다.
Driver & Program setup

설치될 폴더위치를 지정합니다.(실제로는 C:\Program Files 안에 설치가 됩니다.)
<그림 ? 3>
next 를 클릭하시면 Program Folder 안에 위치하게 될 폴더의 이름을 설정하게 됩니다.
아래 그림과 같이 자동으로 IPS Motion Setup 이라고 지정됩니다.
Driver & Program setup
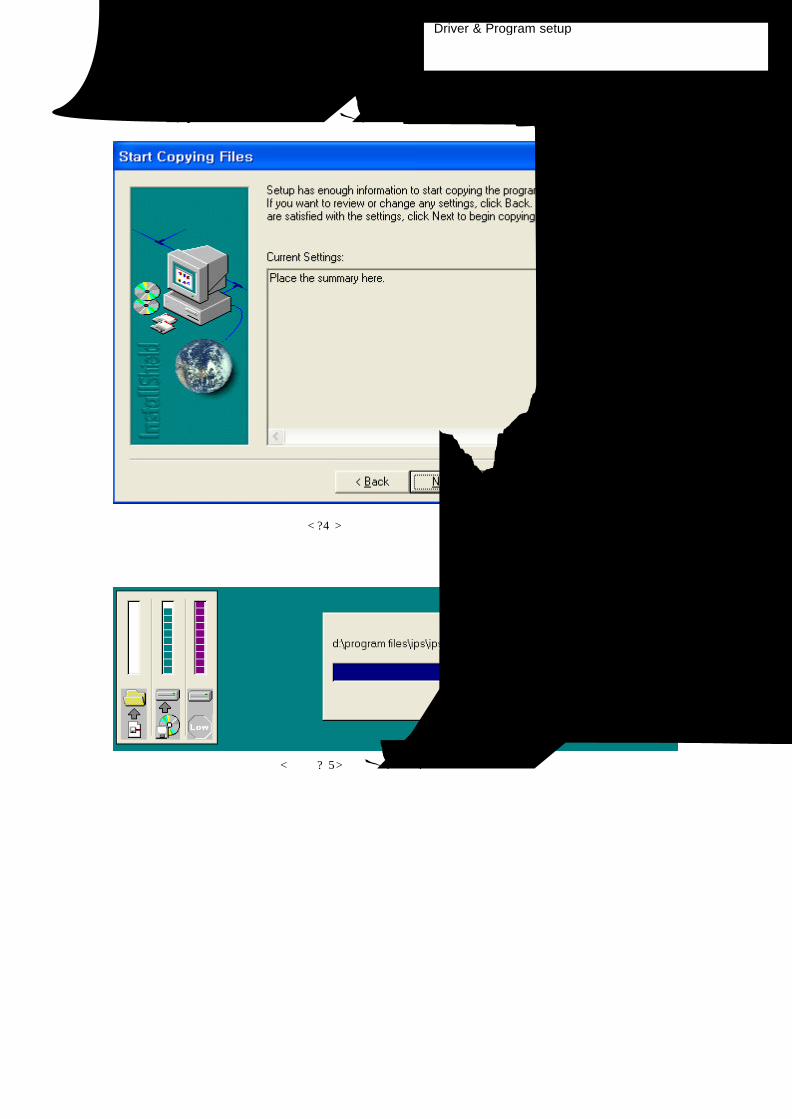
파일들이 복사될 위치 선택이 끝나면 파일 복사를 시작합니다.
<그림 ?4 >
<그림 ? 5> 파일 복사 중.
Driver & Program setup

파일 복사가 끝나면 아래와 같은 창이 뜨는데 Finish 버튼을 클릭하시면 설치가 완료됩니다.
<그림 ? 6> 설치 완료
Driver & Program setup








![azhdotorg.files.wordpress.com · Web viewPROFIL INONESIA. IPS. ismail - [2010] home. IPS. PROFIL INONESIA. PROFIL INONESIA. IPS. ismail - [2010] home. IPS. IPS. ismail - [2010]](https://img.pdfslide.tips/doc/110x75/5ff341f8f34dcd44de5dc7b6/web-view-profil-inonesia-ips-ismail-2010-home-ips-profil-inonesia-profil.jpg)