Embed Size (px)
Citation preview
INTELIGENTNO UPRAVLJANJE
Fuzzy upravljanje
1
Fuzzy upravljanje
Vanr.prof. dr. Lejla Banjanović-Mehmedović
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
Načini primjene fuzzy sistema u upravljanju
� Direktno fuzzy upravljanje (fuzzy upravljanje u zatvorenoj sprezi)
� Fuzzy upravljanje u otvorenoj sprezi
� Fuzzy adaptivno upravljanje
� Osim toga, fuzzy sistemi se mogu koristiti za identifikaciju i estimaciju
2Copyright: Lejla Banjanovic-Mehmedovic
Inteligentno upravljanje
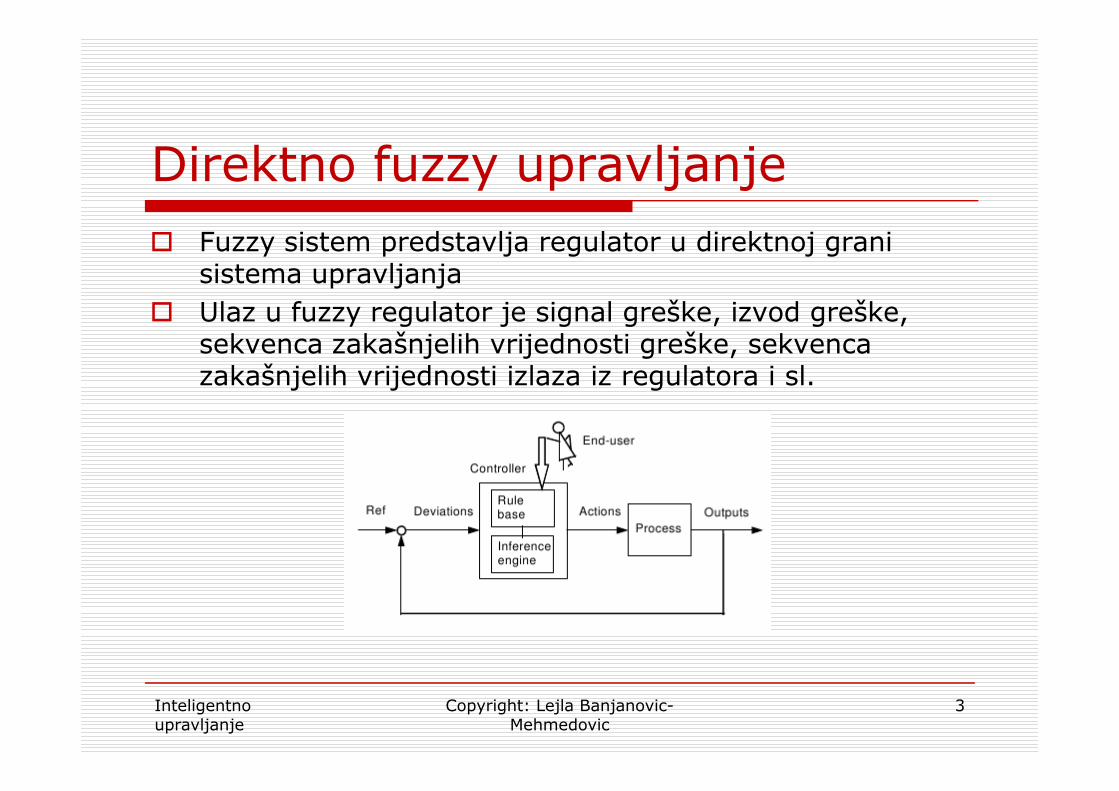
Direktno fuzzy upravljanje
� Fuzzy sistem predstavlja regulator u direktnoj grani sistema upravljanja
� Ulaz u fuzzy regulator je signal greške, izvod greške, sekvenca zakašnjelih vrijednosti greške, sekvenca zakašnjelih vrijednosti izlaza iz regulatora i sl.
3Copyright: Lejla Banjanovic-Mehmedovic
Inteligentno upravljanje
Direktno fuzzy upravljanje
� Za SISO sisteme, fuzzy zakon upravljanja može biti:� P – kao ulaz se dovodi samo signal greške
� PD – kao ulazi se dovode signal greške i mjera njene promjene
� PI – kao ulazi se dovode signal greške i suma zakašnjelih vrijednosti signala greške
� PID – kao ulazi se dovode signal greške, mjera njene promjene i � PID – kao ulazi se dovode signal greške, mjera njene promjene i suma zakašnjelih vrijednosti signala greške
4Copyright: Lejla Banjanovic-Mehmedovic
Inteligentno upravljanje
Adaptivno fuzzy upravljanje
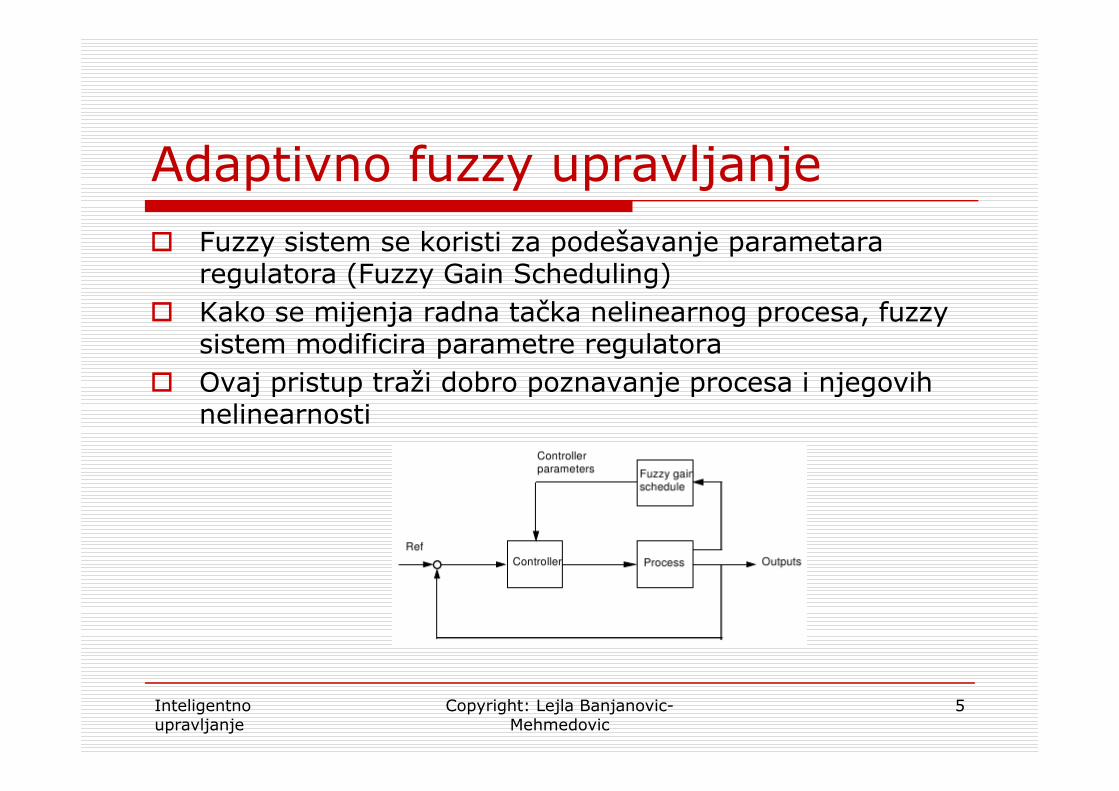
� Fuzzy sistem se koristi za podešavanje parametara regulatora (Fuzzy Gain Scheduling)
� Kako se mijenja radna tačka nelinearnog procesa, fuzzy sistem modificira parametre regulatora
� Ovaj pristup traži dobro poznavanje procesa i njegovih � Ovaj pristup traži dobro poznavanje procesa i njegovih nelinearnosti
5Copyright: Lejla Banjanovic-Mehmedovic
Inteligentno upravljanje
Dizajn fuzzy sistema za upravljanje
� U fuzzy upravljanju ne postoje standardne procedure dizajna, kao u klasičnom upravljanju
� Fuzzy sistemi se koriste za upravljanje nelinearnim sistemima
� Fuzzy upravljanje se koristi i kada je neka od komponenti sistema upravljanja nepoznata (za probleme tipa crne kutije)
� Jednostavni fuzzy regulator se može razviti prema proceduri:� Jednostavni fuzzy regulator se može razviti prema proceduri:
� Započeti sa klasičnim regulatorom
� Zamijeniti klasični regulator njegovim fuzzy modelom
� Postepeno poboljšati fuzzy regulator modificirajući ga i pretvarajući u nelinearni regulator
6Copyright: Lejla Banjanovic-Mehmedovic
Inteligentno upravljanje

Primjer: Fuzzy upravljanje staklenikom
� Grijanje staklenika na odgovarajućutemperaturu koristeći ureñaj koji može i grijati i hladiti prostora.
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
7
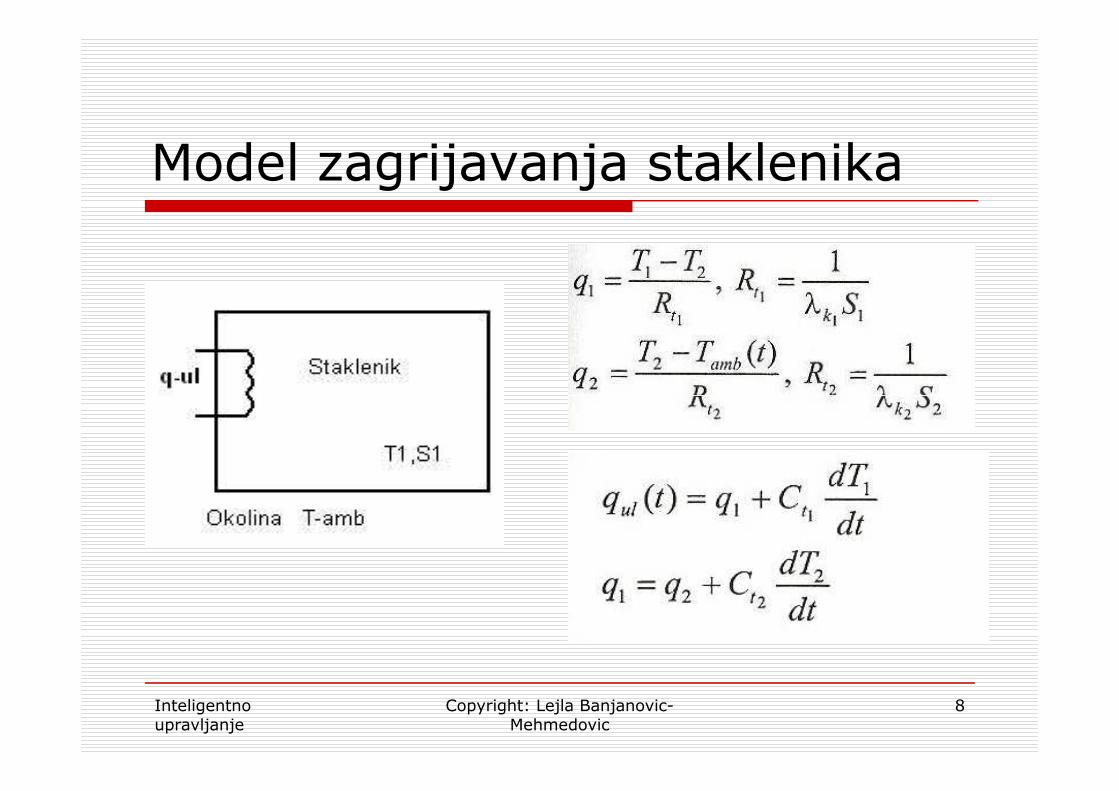
Model zagrijavanja staklenika
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
8
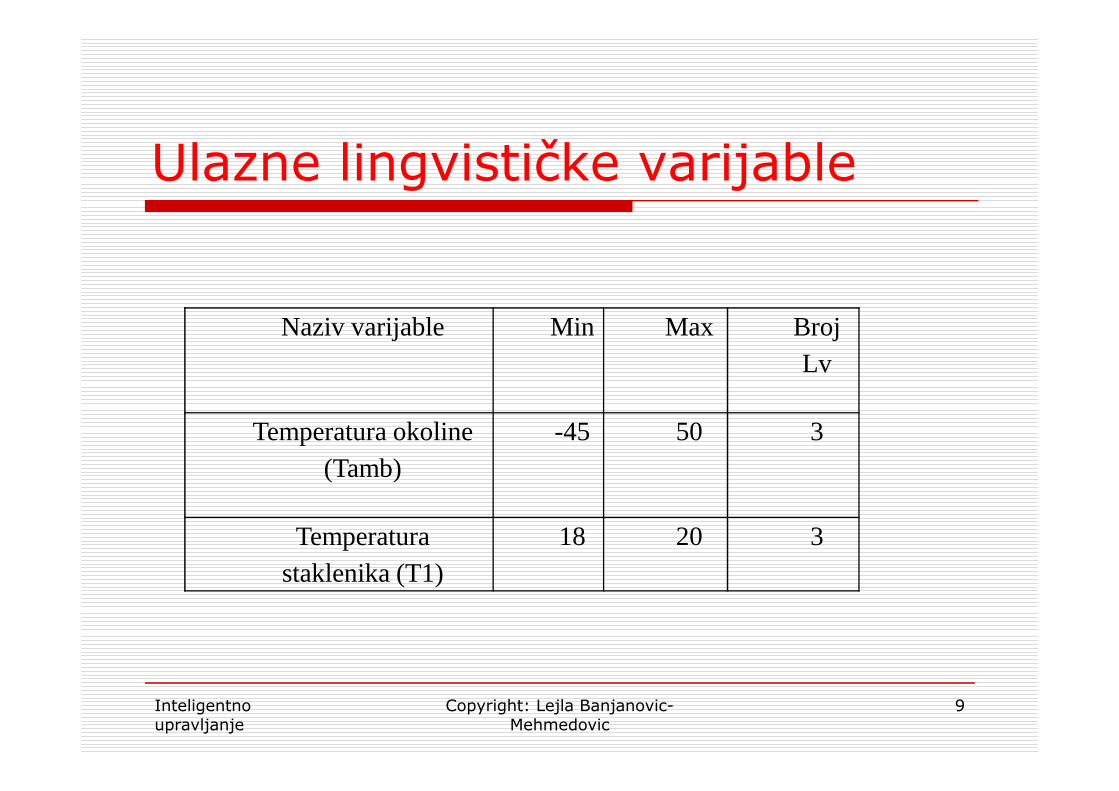
Ulazne lingvističke varijable
Naziv varijable Min Max BrojLv
Temperatura okoline(Tamb)
-45 50 3
Temperaturastaklenika (T1)
18 20 3
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
9
Nazivvarijable
Tip varijable Parametri
niska trapezoidal [-40 0 22 23]
Lingvističke vrijednosti varijableTemperaturaokoline(Tamb)
dobra trougao [22 23 24]
visoka trapezoidal [23 24 35 50]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
10
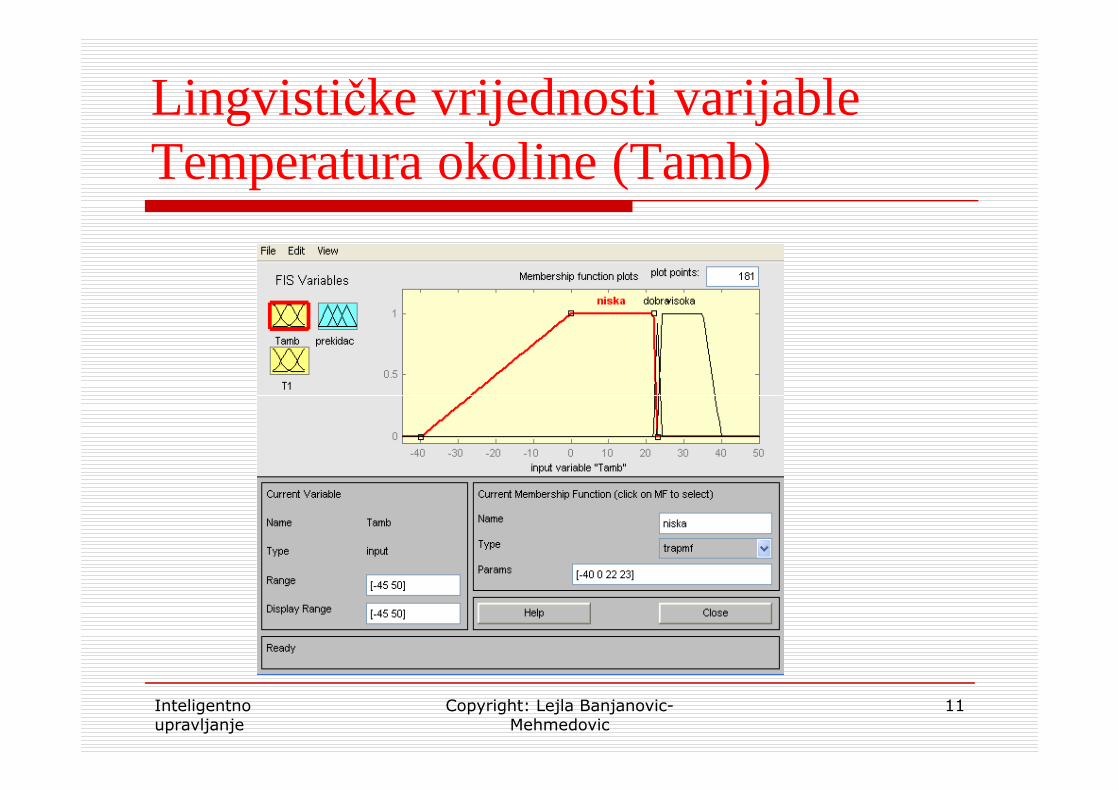
Lingvističke vrijednosti varijableTemperaturaokoline(Tamb)
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
11
Lingvističke vrijednosti varijableTemperatura staklenika (T1)
Nazivvarijable
Tip varijable Parametri
niska Trougao [202122]niska Trougao [202122]dobra Trougao [21 22 23]visoka trougao [22 23 24]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
12
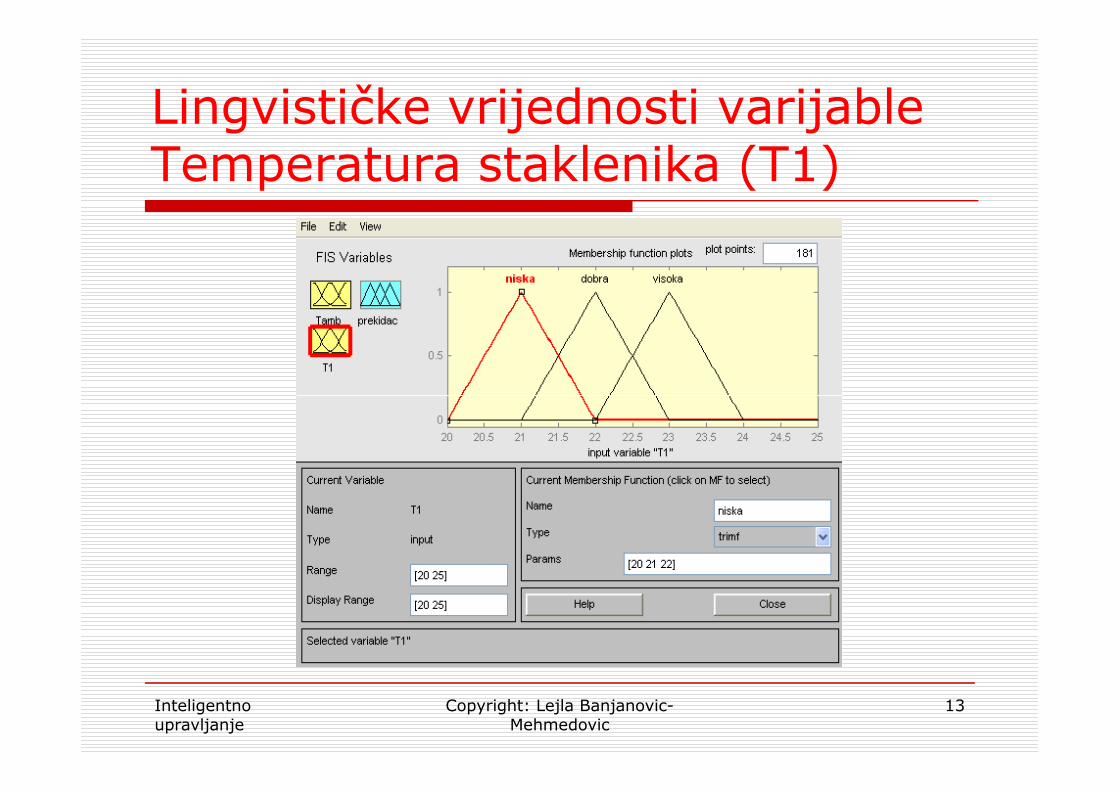
Lingvističke vrijednosti varijableTemperatura staklenika (T1)
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
13
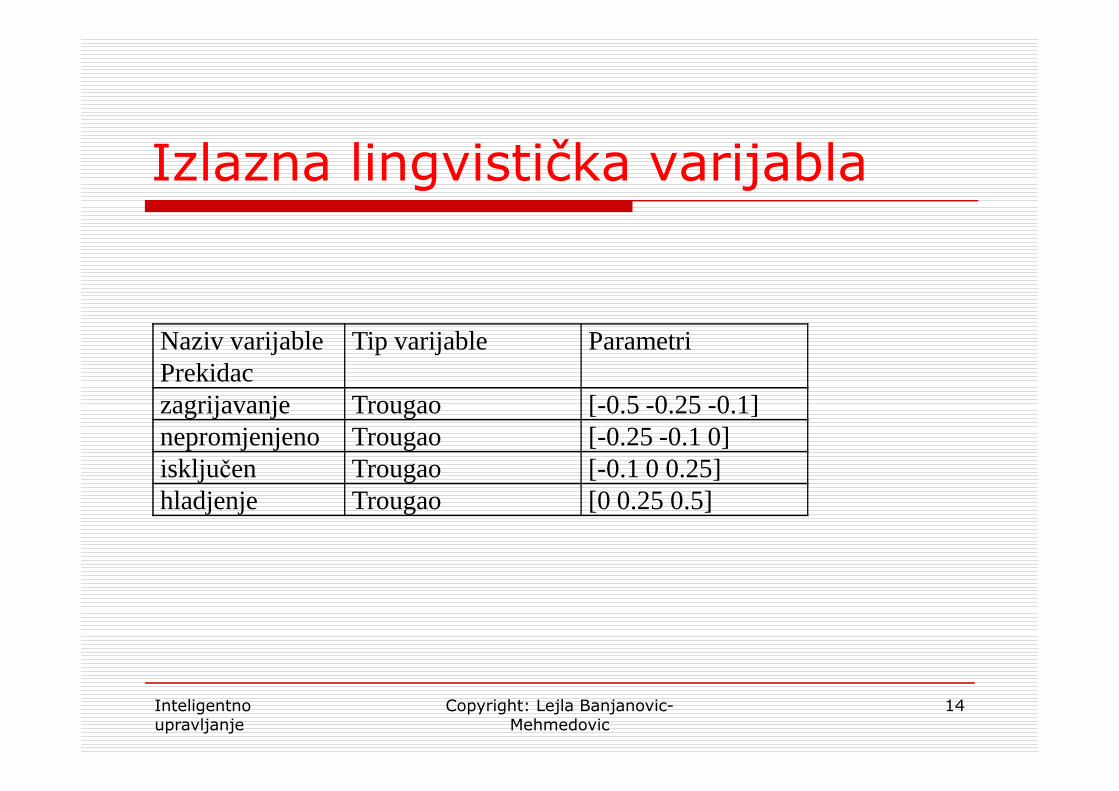
Izlazna lingvistička varijabla
Naziv varijablePrekidac
Tip varijable Parametri
zagrijavanje Trougao [-0.5 -0.25 -0.1]zagrijavanje Trougao [-0.5 -0.25 -0.1]nepromjenjeno Trougao [-0.25 -0.1 0]isključen Trougao [-0.1 0 0.25]hladjenje Trougao [0 0.25 0.5]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
14
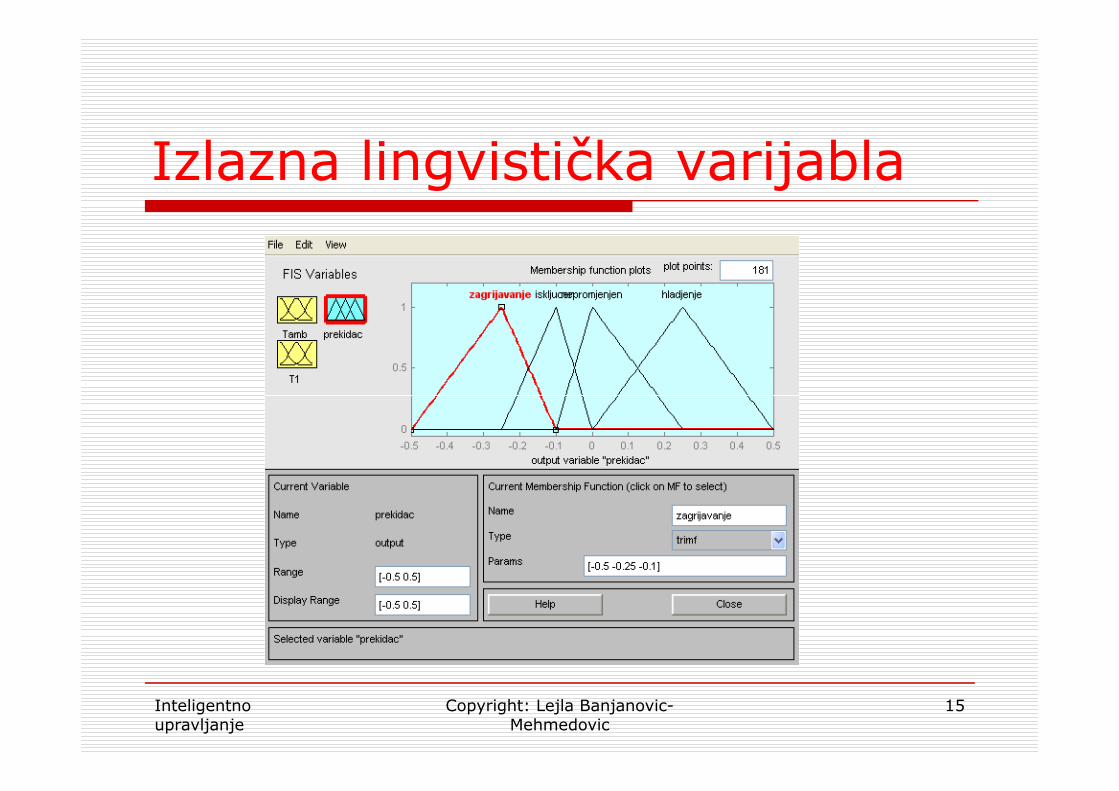
Izlazna lingvistička varijabla
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
15
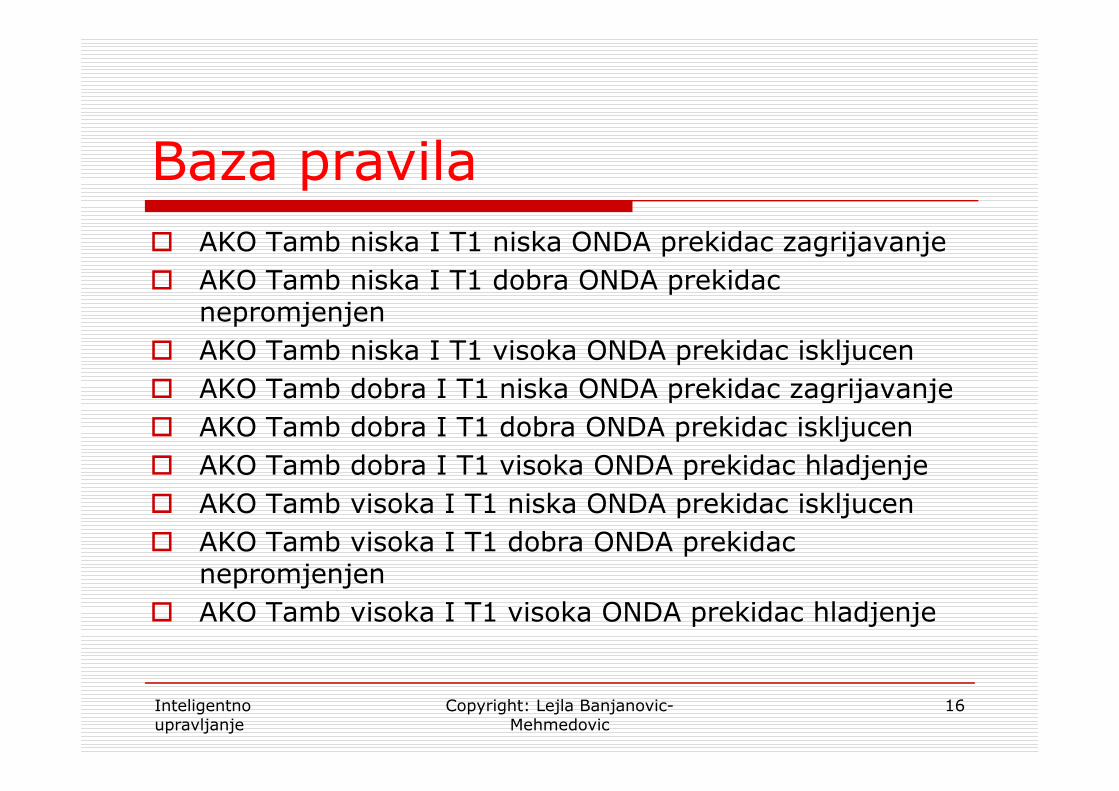
Baza pravila
� AKO Tamb niska I T1 niska ONDA prekidac zagrijavanje
� AKO Tamb niska I T1 dobra ONDA prekidacnepromjenjen
� AKO Tamb niska I T1 visoka ONDA prekidac iskljucen
� AKO Tamb dobra I T1 niska ONDA prekidac zagrijavanje� AKO Tamb dobra I T1 niska ONDA prekidac zagrijavanje
� AKO Tamb dobra I T1 dobra ONDA prekidac iskljucen
� AKO Tamb dobra I T1 visoka ONDA prekidac hladjenje
� AKO Tamb visoka I T1 niska ONDA prekidac iskljucen
� AKO Tamb visoka I T1 dobra ONDA prekidacnepromjenjen
� AKO Tamb visoka I T1 visoka ONDA prekidac hladjenje
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
16
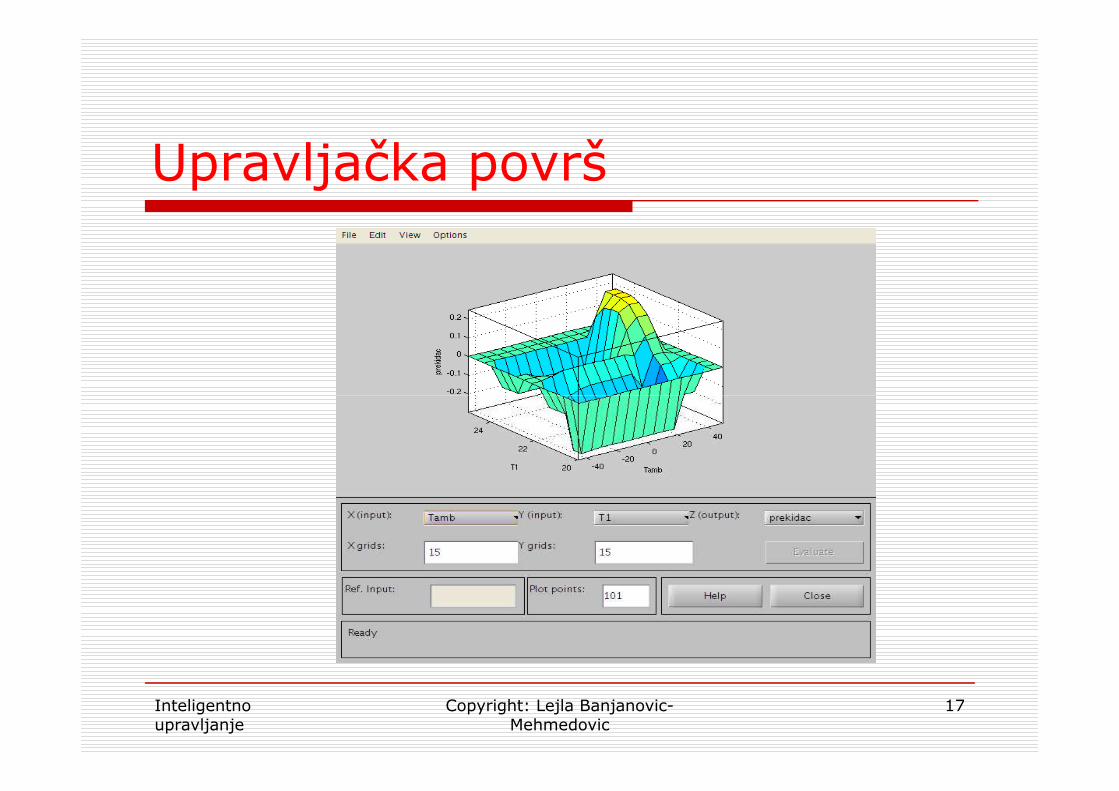
Upravljačka površ
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
17
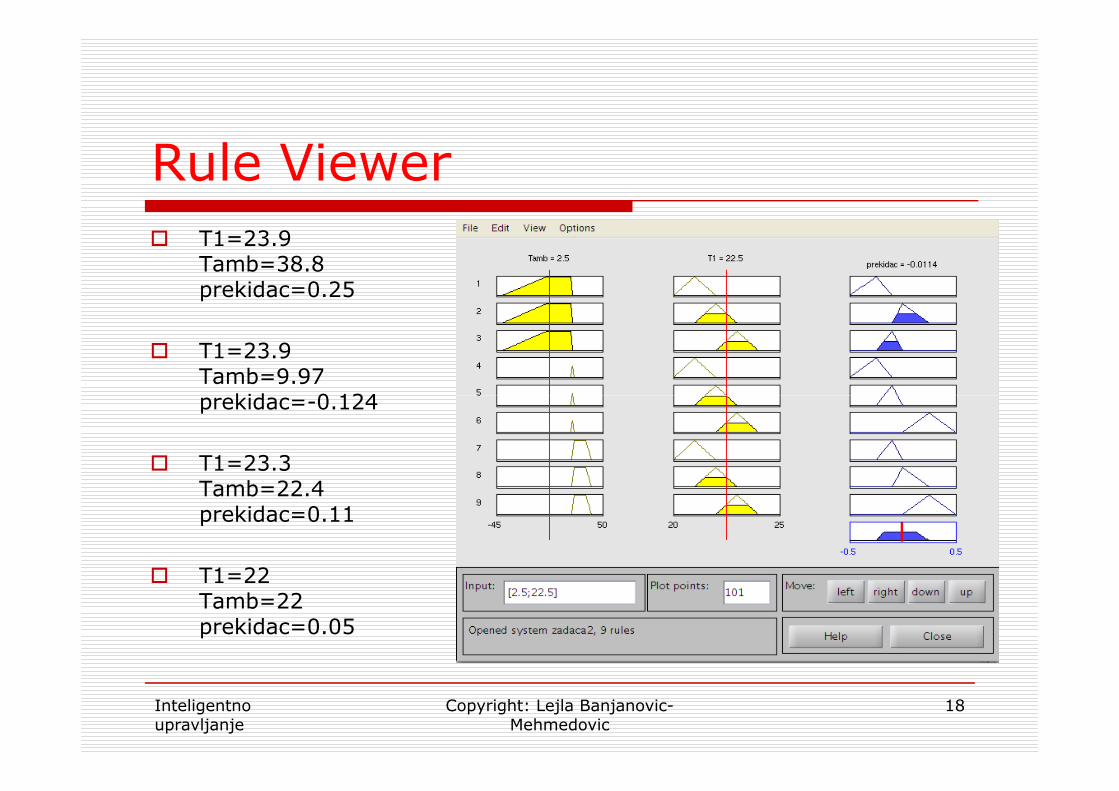
Rule Viewer
� T1=23.9 Tamb=38.8 prekidac=0.25
� T1=23.9 Tamb=9.97 prekidac=-0.124 prekidac=-0.124
� T1=23.3 Tamb=22.4 prekidac=0.11
� T1=22 Tamb=22 prekidac=0.05
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
18
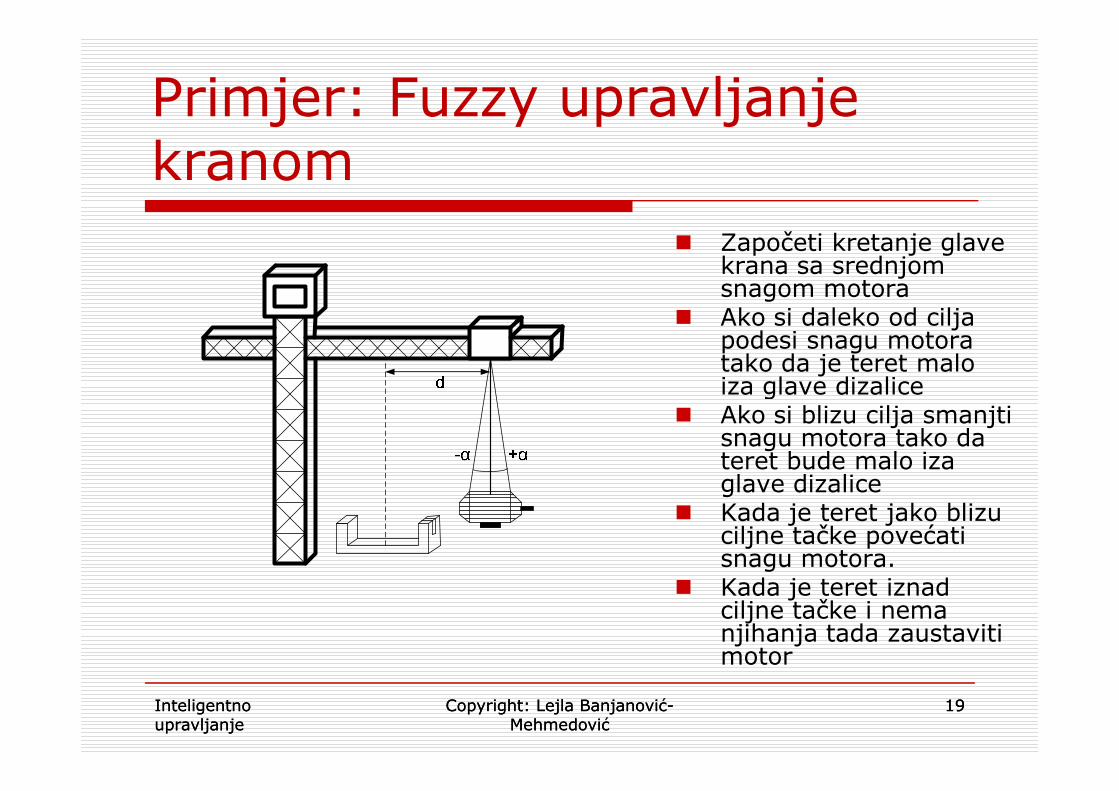
Primjer: Fuzzy upravljanje kranom
� Započeti kretanje glave krana sa srednjom snagom motora
� Ako si daleko od cilja podesi snagu motora tako da je teret malo iza glave dizalice
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
19
iza glave dizalice� Ako si blizu cilja smanjti
snagu motora tako da teret bude malo iza glave dizalice
� Kada je teret jako blizu ciljne tačke povećati snagu motora.
� Kada je teret iznad ciljne tačke i nema njihanja tada zaustaviti motor
Inteligentno upravljanje
19Copyright: Lejla Banjanovic-Mehmedovic
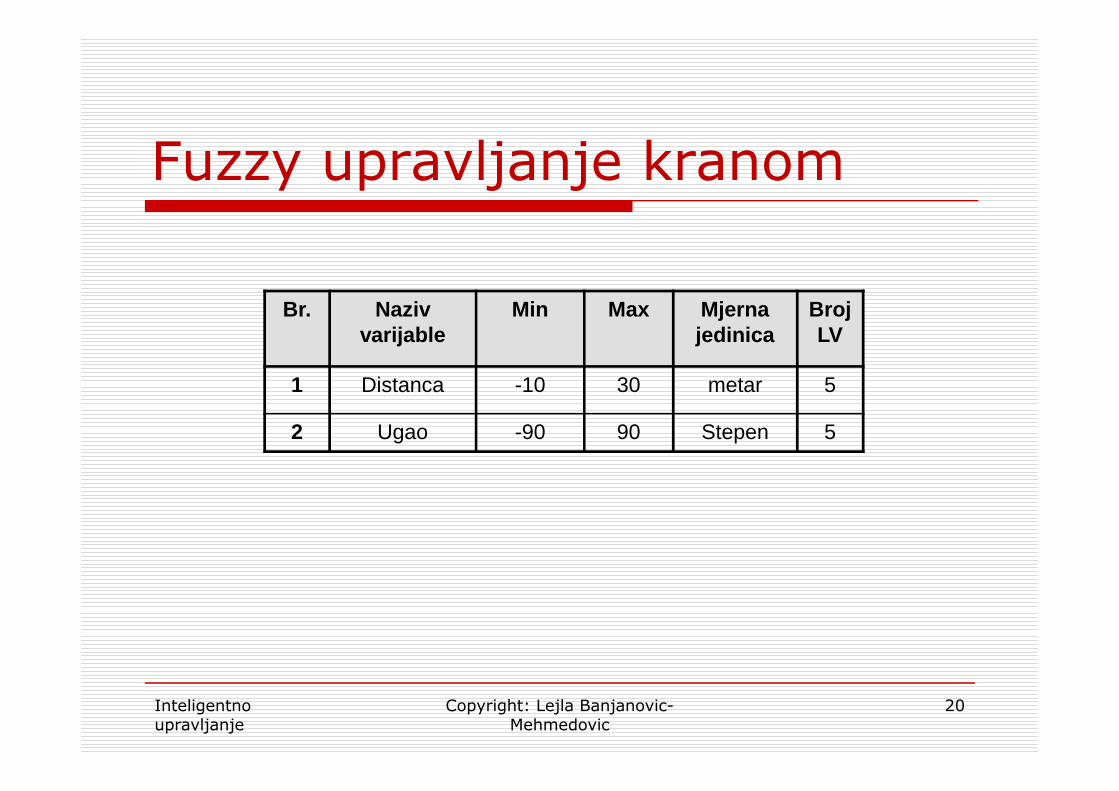
Fuzzy upravljanje kranom
Br. Naziv varijable
Min Max Mjerna jedinica
Broj LV
1 Distanca -10 30 metar 5
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
20
1 Distanca -10 30 metar 5
2 Ugao -90 90 Stepen 5
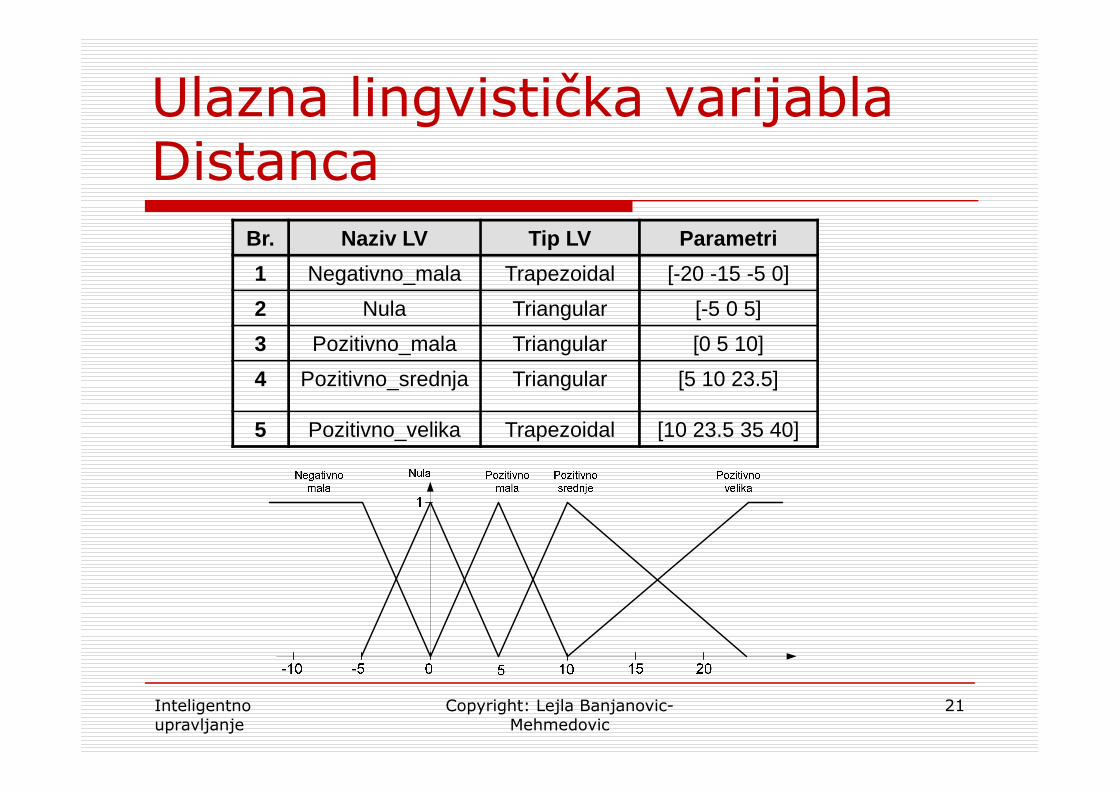
Ulazna lingvistička varijabla Distanca
Br. Naziv LV Tip LV Parametri
1 Negativno_mala Trapezoidal [-20 -15 -5 0]
2 Nula Triangular [-5 0 5]
3 Pozitivno_mala Triangular [0 5 10]
4 Pozitivno_srednja Triangular [5 10 23.5]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
21
5 Pozitivno_velika Trapezoidal [10 23.5 35 40]
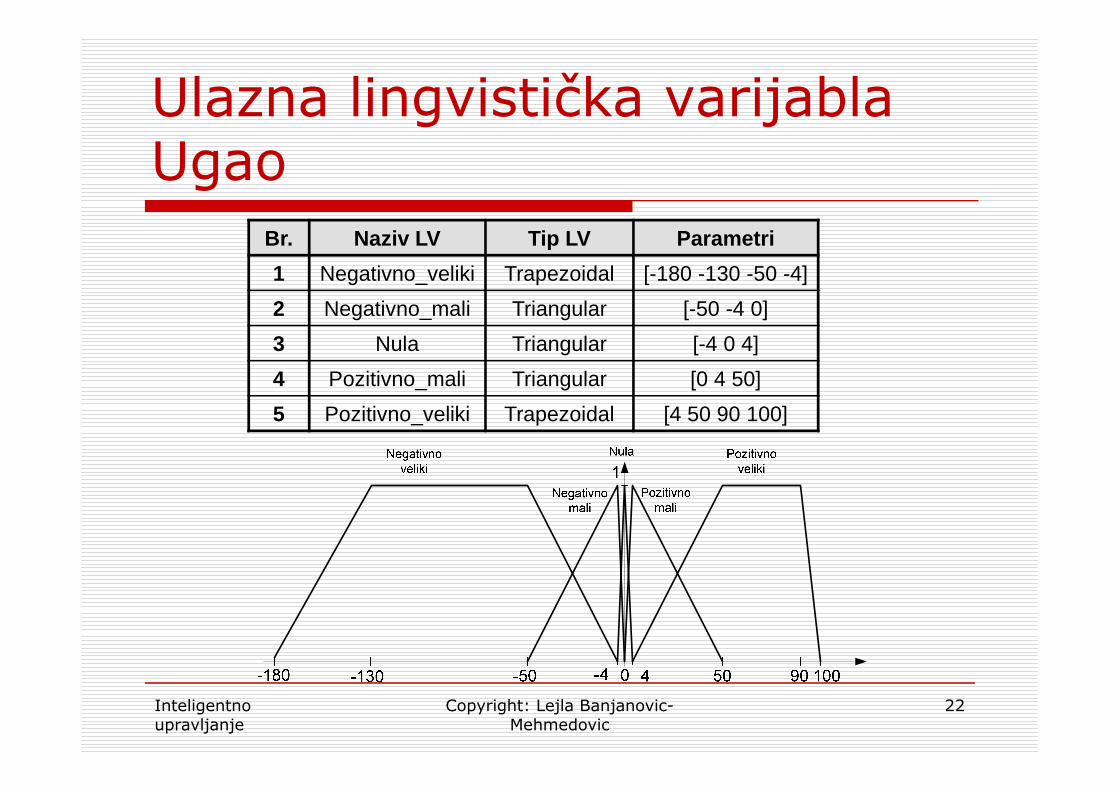
Ulazna lingvistička varijabla Ugao
Br. Naziv LV Tip LV Parametri
1 Negativno_veliki Trapezoidal [-180 -130 -50 -4]
2 Negativno_mali Triangular [-50 -4 0]
3 Nula Triangular [-4 0 4]
4 Pozitivno_mali Triangular [0 4 50]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
22
5 Pozitivno_veliki Trapezoidal [4 50 90 100]
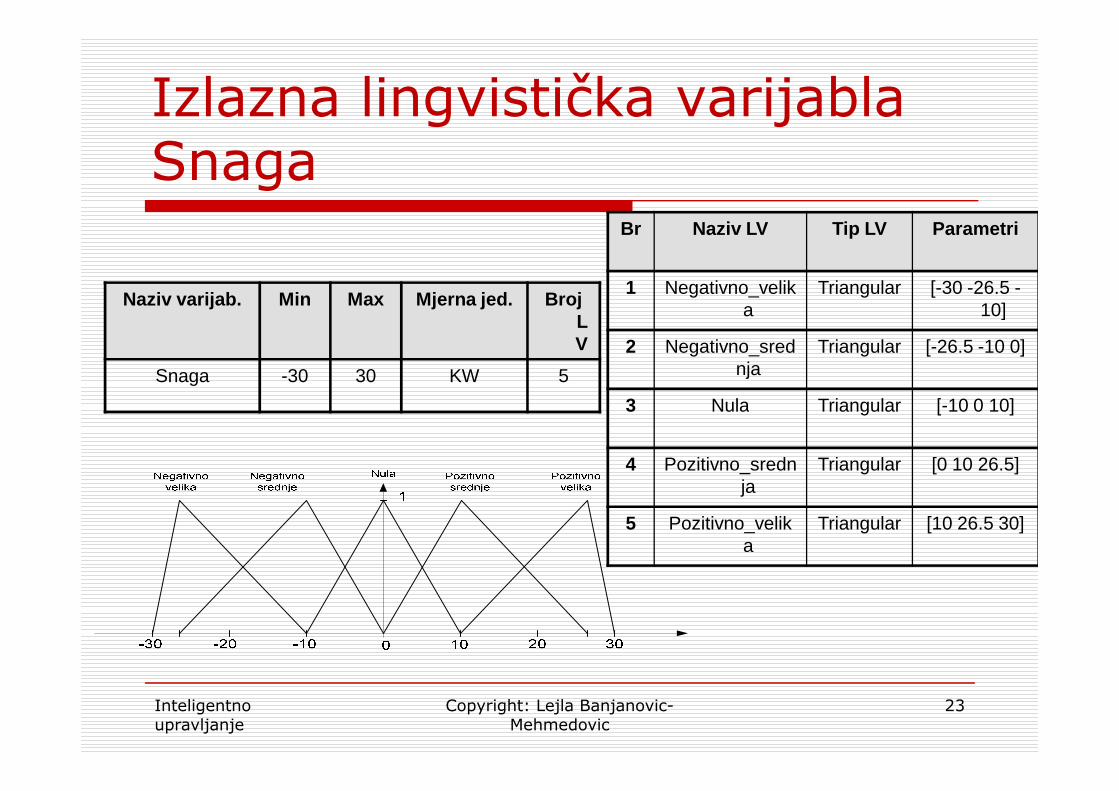
Izlazna lingvistička varijabla Snaga
Naziv varijab. Min Max Mjerna jed. Broj LV
Snaga -30 30 KW 5
Br Naziv LV Tip LV Parametri
1 Negativno_velika
Triangular [-30 -26.5 -10]
2 Negativno_srednja
Triangular [-26.5 -10 0]
3 Nula Triangular [-10 0 10]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
23
3 Nula Triangular [-10 0 10]
4 Pozitivno_srednja
Triangular [0 10 26.5]
5 Pozitivno_velika
Triangular [10 26.5 30]
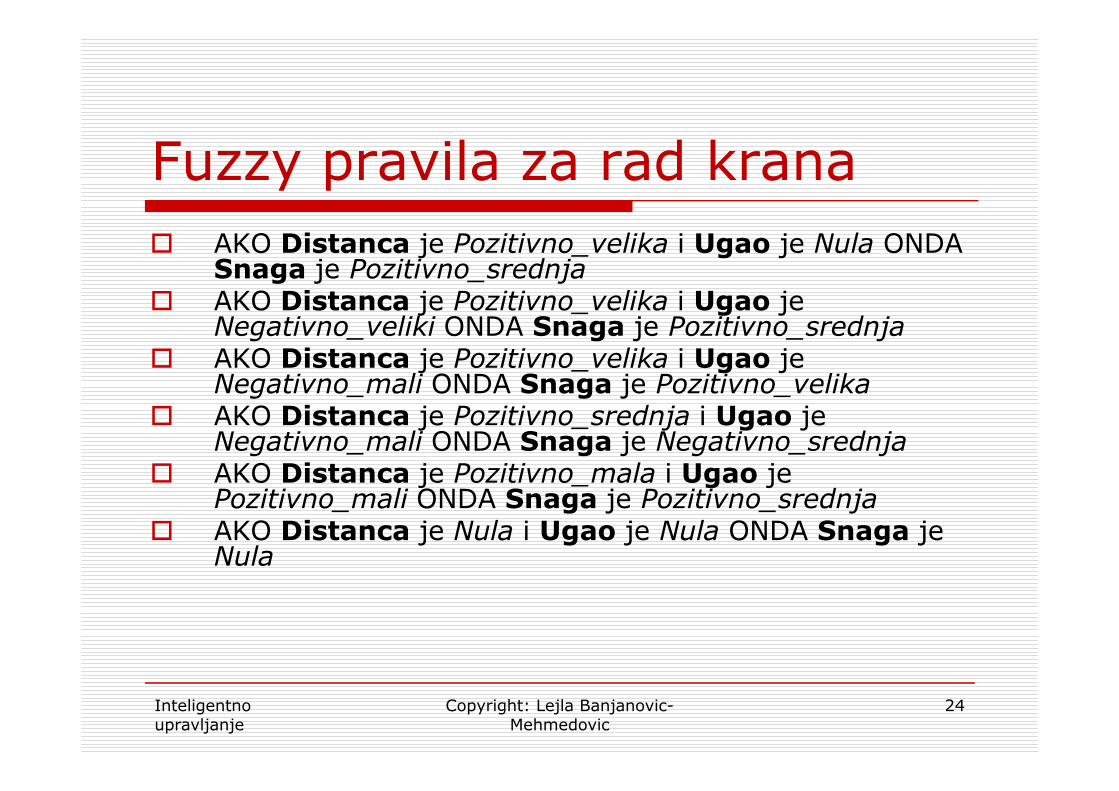
Fuzzy pravila za rad krana
� AKO Distanca je Pozitivno_velika i Ugao je Nula ONDA Snaga je Pozitivno_srednja
� AKO Distanca je Pozitivno_velika i Ugao je Negativno_veliki ONDA Snaga je Pozitivno_srednja
� AKO Distanca je Pozitivno_velika i Ugao je Negativno_mali ONDA Snaga je Pozitivno_velika
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
24
Negativno_mali ONDA Snaga je Pozitivno_velika� AKO Distanca je Pozitivno_srednja i Ugao je
Negativno_mali ONDA Snaga je Negativno_srednja� AKO Distanca je Pozitivno_mala i Ugao je
Pozitivno_mali ONDA Snaga je Pozitivno_srednja� AKO Distanca je Nula i Ugao je Nula ONDA Snaga je
Nula
Fuzzy upravljanje kranom
� Fuzzy implikaciona metoda: Mamdami (Min) funkcija.
� Fuzzy agregacija: Max – Min princip, tj. min operaciju za implikaciju i max operaciju za agregaciju.
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
25
agregaciju.
� Metoda defazifikacije: centar maksimuma.
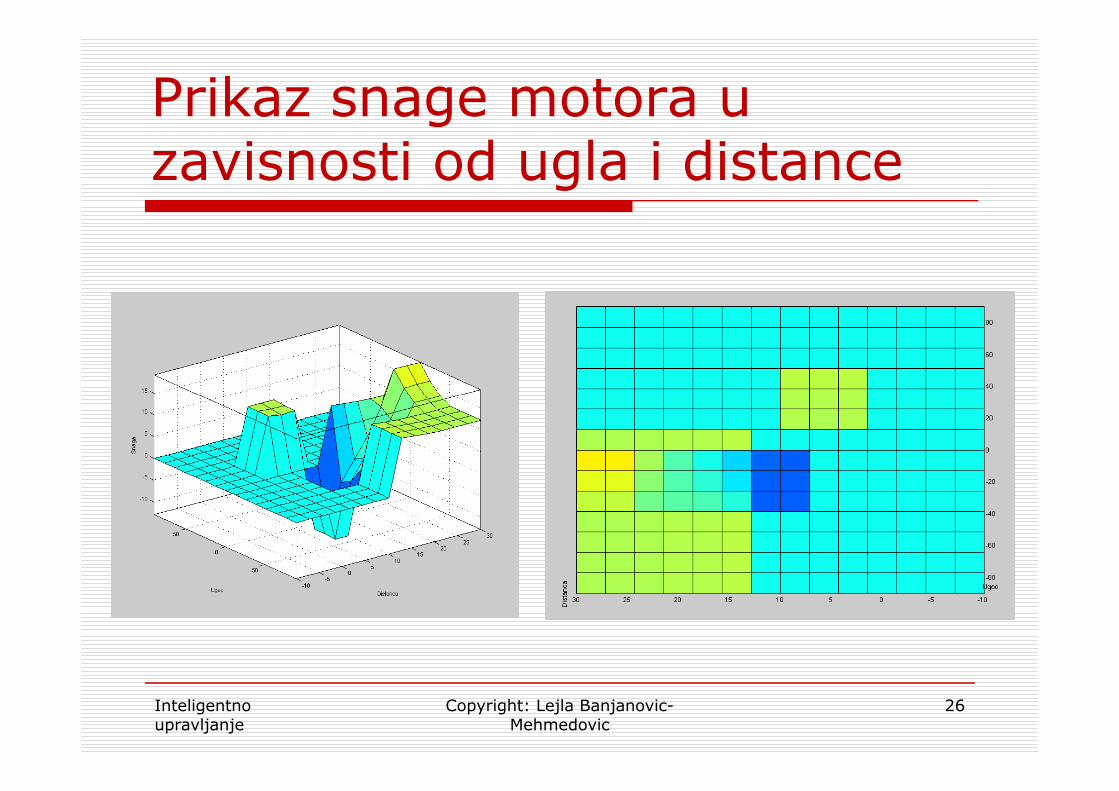
Prikaz snage motora u zavisnosti od ugla i distance
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
26
Primjer: Fuzzy upravljanje motorom
� Potrebno je upravljati brzinom motora promjenom ulaznognapona. Kada se zada željeni izlaz, iz nekog razloga se motor može vrtjeti brže, tada moramo ga usporitismanjenjem ulaznog napona. Ako motor usporava ispodželjene brzine, ulazni napon mora biti povećan tako dabrzina motora dostigne željenu tačku. brzina motora dostigne željenu tačku.
� Ulazni skup:� Presporo
� U redu
� Prebrzo
� Izlazni skup:� Smanji napon (uspori)
� Nema promjene
� Povećaj napon (ubrzaj)
27Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
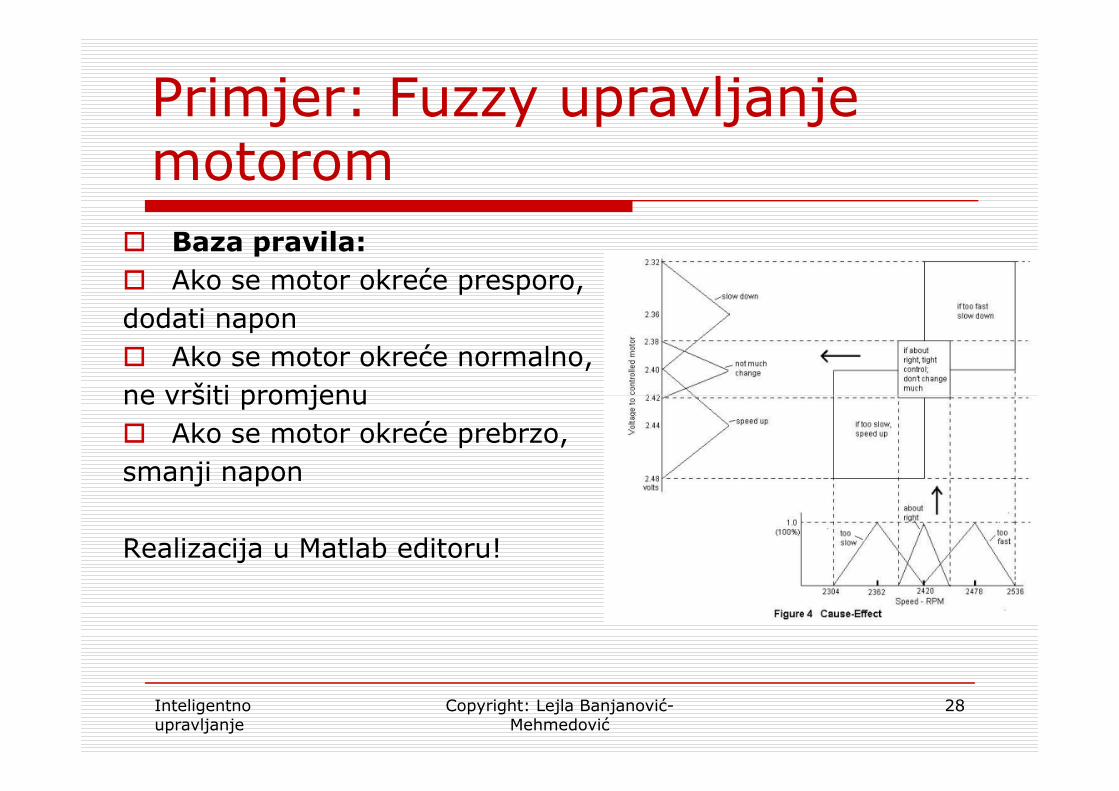
Primjer: Fuzzy upravljanje motorom
� Baza pravila:
� Ako se motor okreće presporo,
dodati napon
� Ako se motor okreće normalno,
ne vršiti promjenune vršiti promjenu
� Ako se motor okreće prebrzo,
smanji napon
Realizacija u Matlab editoru!
28Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
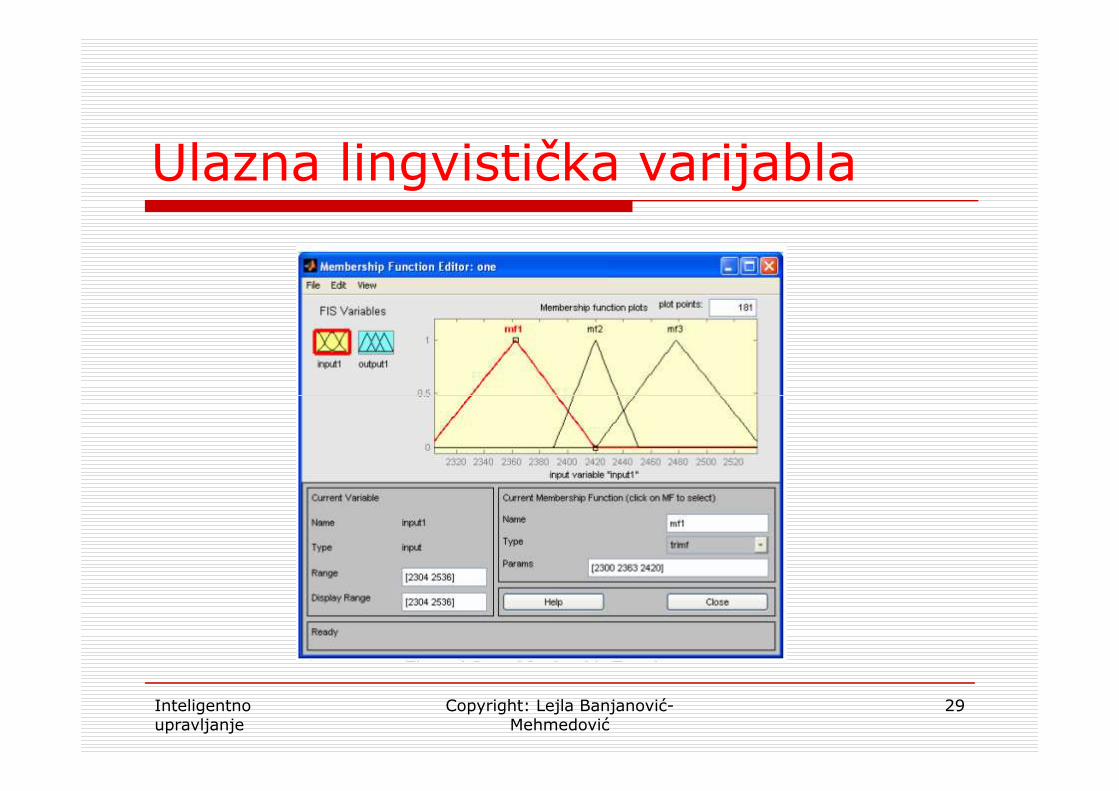
Ulazna lingvistička varijabla
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
29
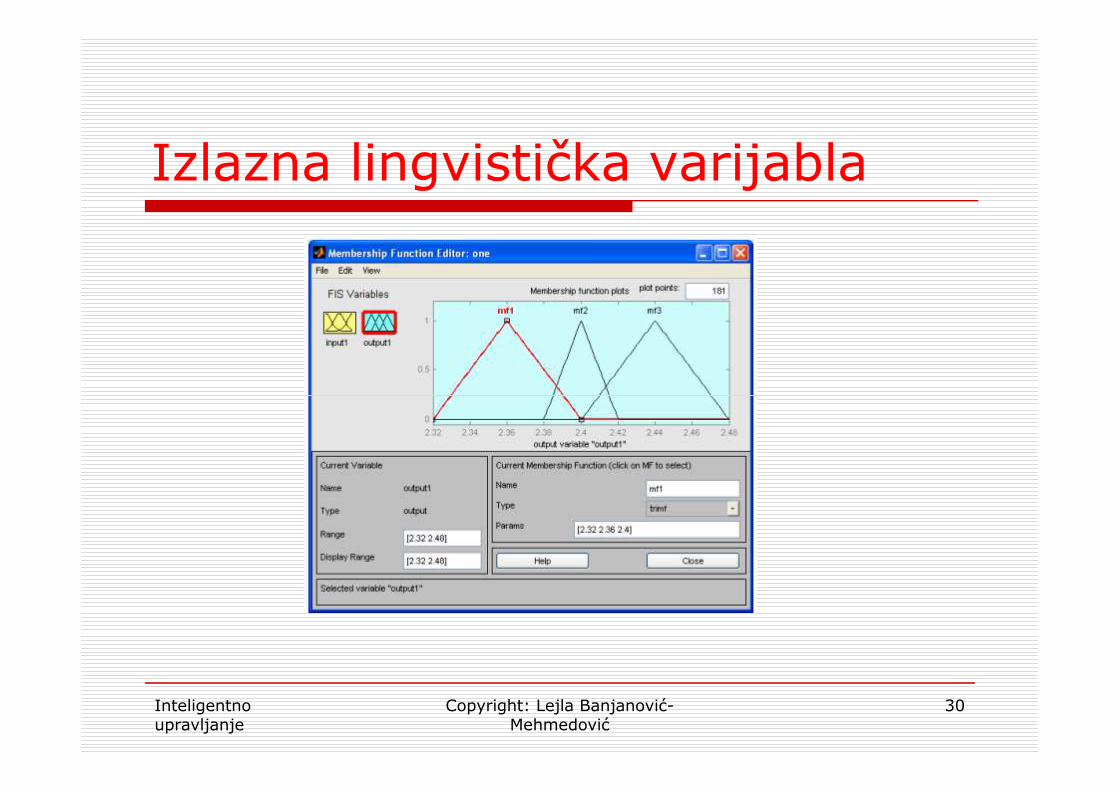
Izlazna lingvistička varijabla
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
30
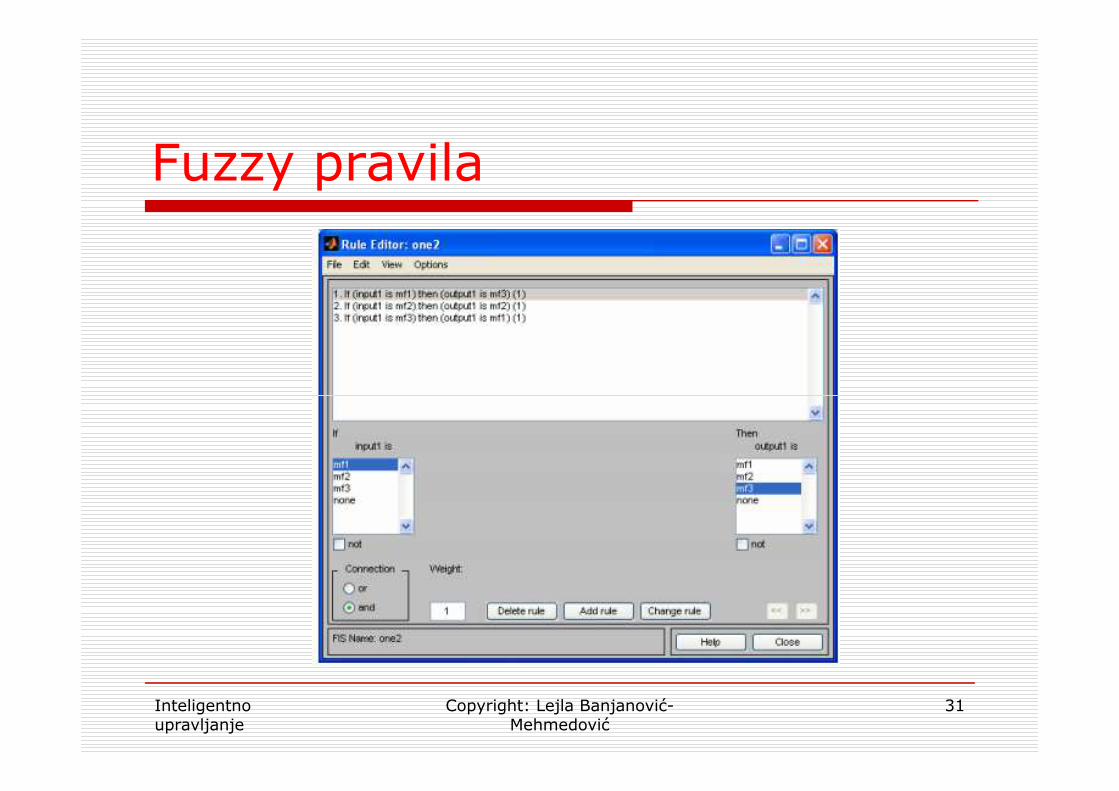
Fuzzy pravila
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
31
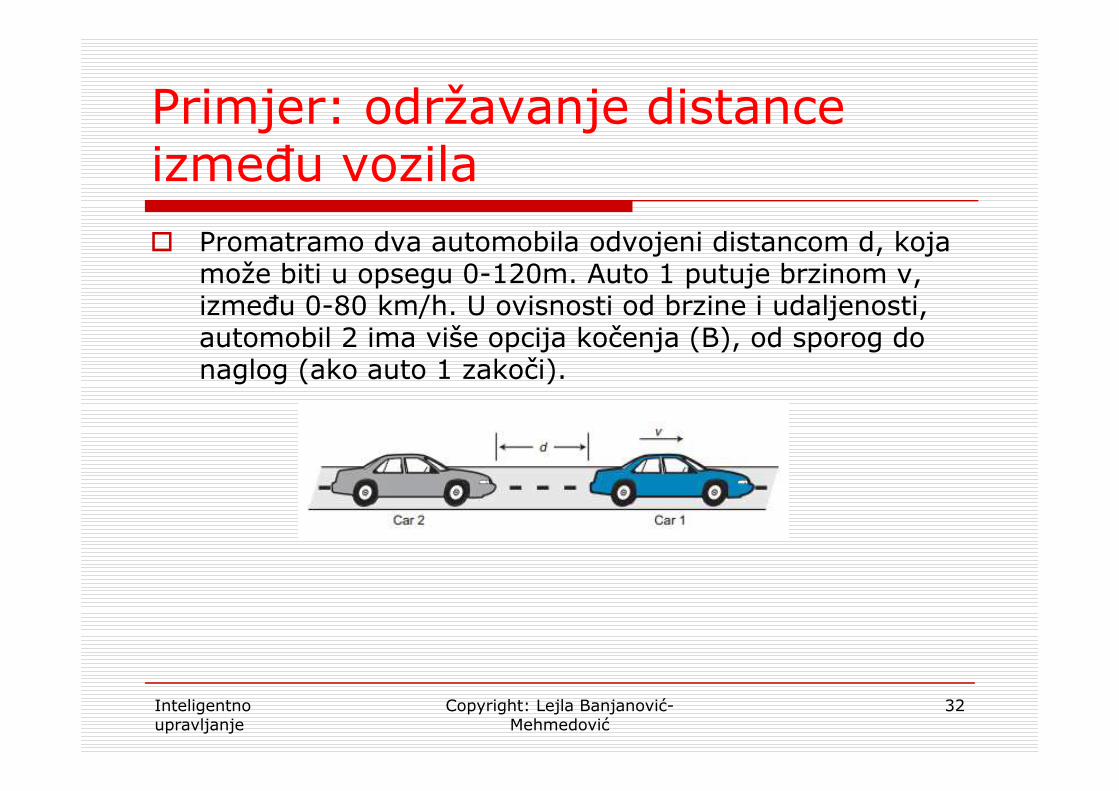
Primjer: održavanje distance izmeñu vozila
� Promatramo dva automobila odvojeni distancom d, kojamože biti u opsegu 0-120m. Auto 1 putuje brzinom v, izmeñu 0-80 km/h. U ovisnosti od brzine i udaljenosti, automobil 2 ima više opcija kočenja (B), od sporog do naglog (ako auto 1 zakoči).
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
32
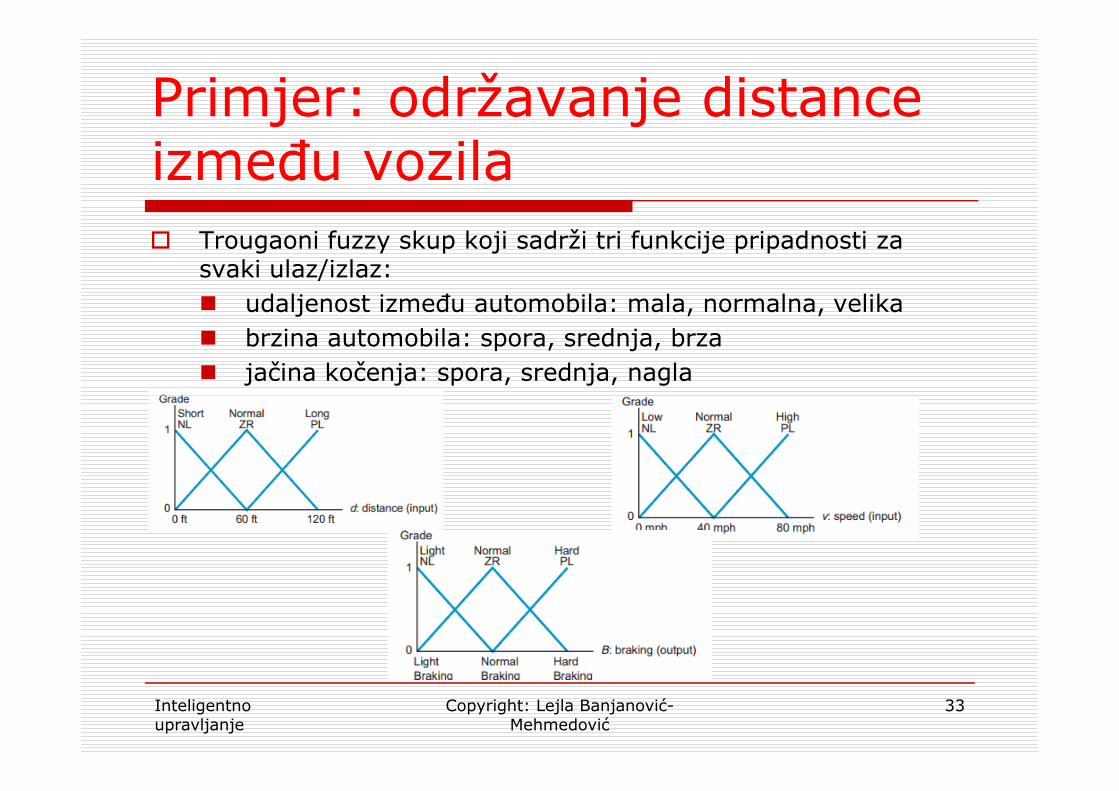
Primjer: održavanje distance izmeñu vozila
� Trougaoni fuzzy skup koji sadrži tri funkcije pripadnosti zasvaki ulaz/izlaz:
� udaljenost izmeñu automobila: mala, normalna, velika
� brzina automobila: spora, srednja, brza
� jačina kočenja: spora, srednja, nagla
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
33
Fuzzy pravila
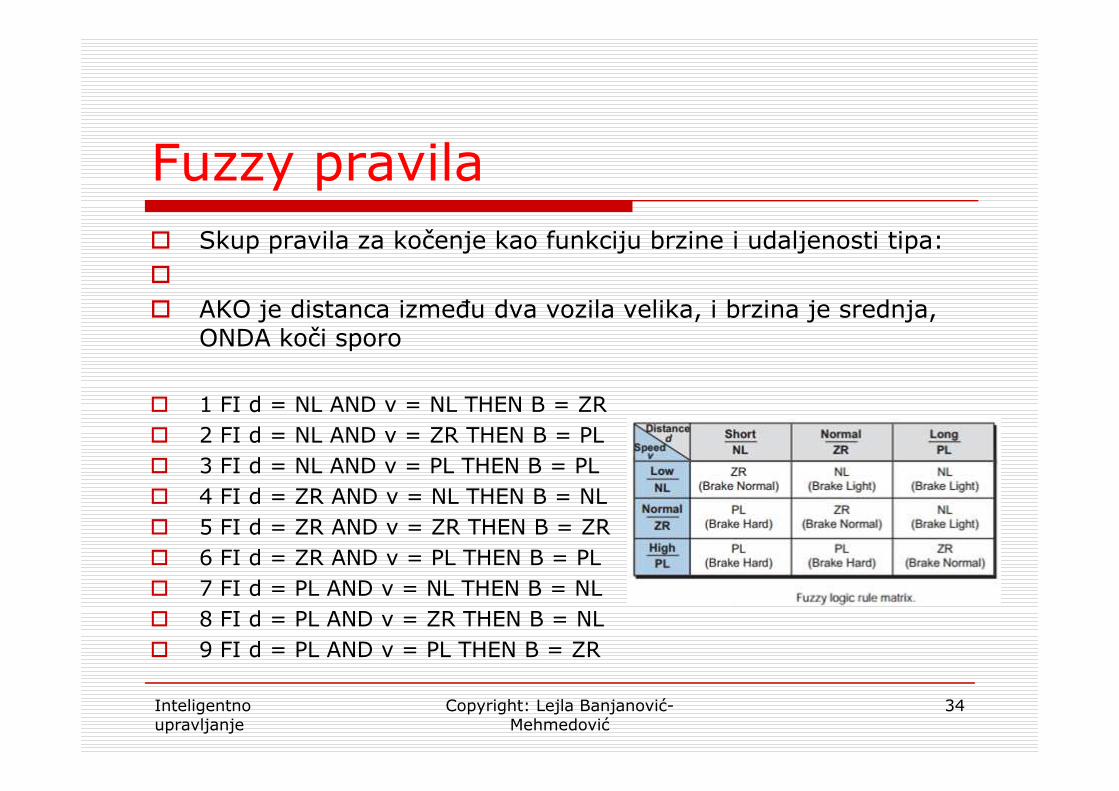
� Skup pravila za kočenje kao funkciju brzine i udaljenosti tipa:
�
� AKO je distanca izmeñu dva vozila velika, i brzina je srednja, ONDA koči sporo
� 1 FI d = NL AND v = NL THEN B = ZR� 1 FI d = NL AND v = NL THEN B = ZR
� 2 FI d = NL AND v = ZR THEN B = PL
� 3 FI d = NL AND v = PL THEN B = PL
� 4 FI d = ZR AND v = NL THEN B = NL
� 5 FI d = ZR AND v = ZR THEN B = ZR
� 6 FI d = ZR AND v = PL THEN B = PL
� 7 FI d = PL AND v = NL THEN B = NL
� 8 FI d = PL AND v = ZR THEN B = NL
� 9 FI d = PL AND v = PL THEN B = ZR
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
34
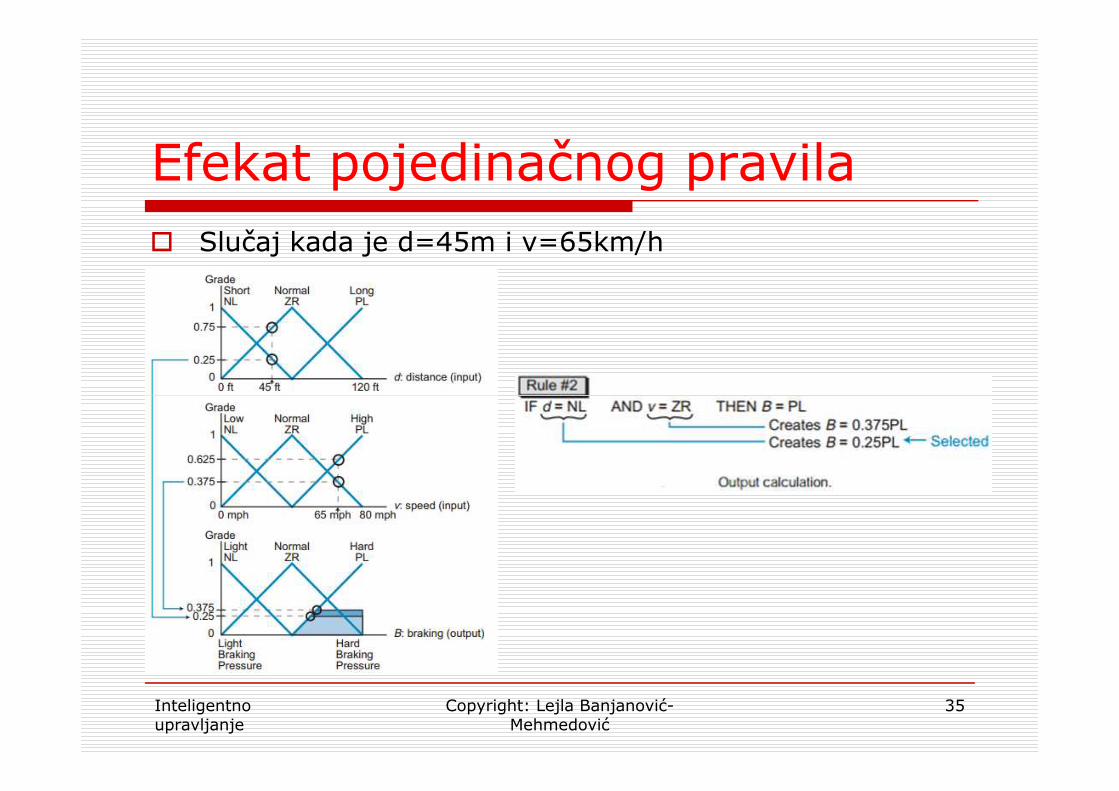
Efekat pojedinačnog pravila
� Slučaj kada je d=45m i v=65km/h
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
35
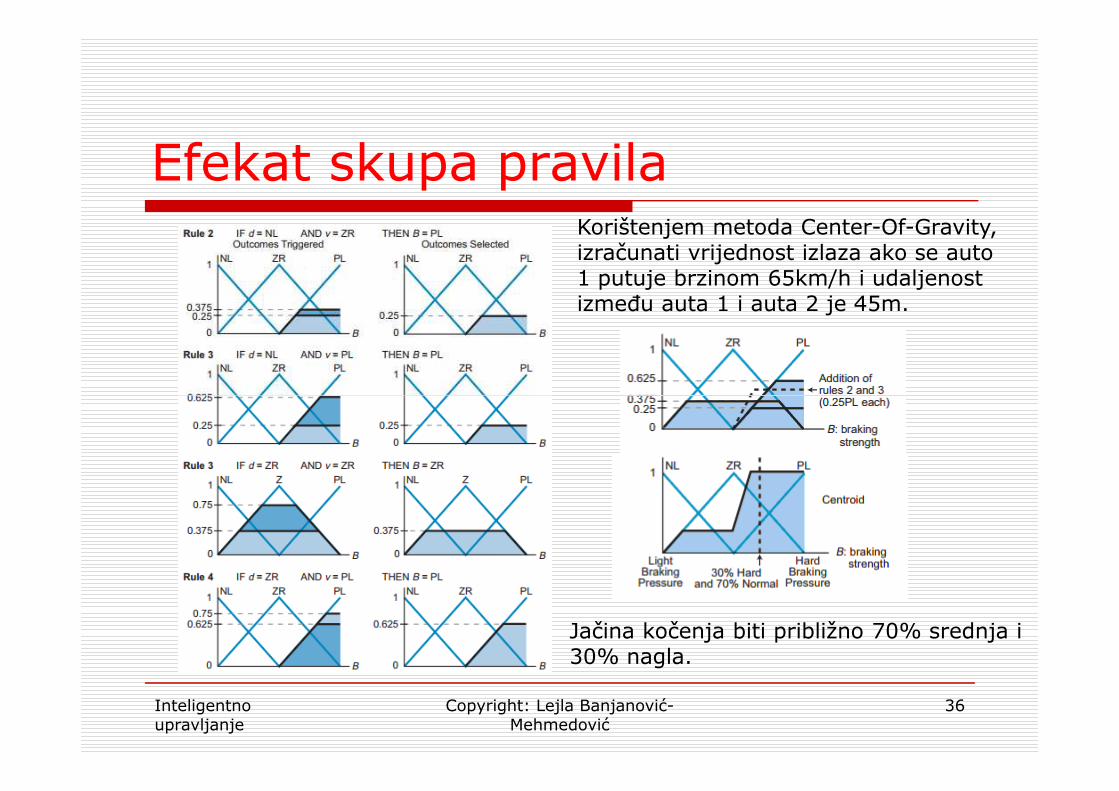
Efekat skupa pravilaKorištenjem metoda Center-Of-Gravity, izračunati vrijednost izlaza ako se auto 1 putuje brzinom 65km/h i udaljenostizmeñu auta 1 i auta 2 je 45m.
Inteligentno upravljanje
Copyright: Lejla Banjanović-Mehmedović
36
Jačina kočenja biti približno 70% srednja i30% nagla.
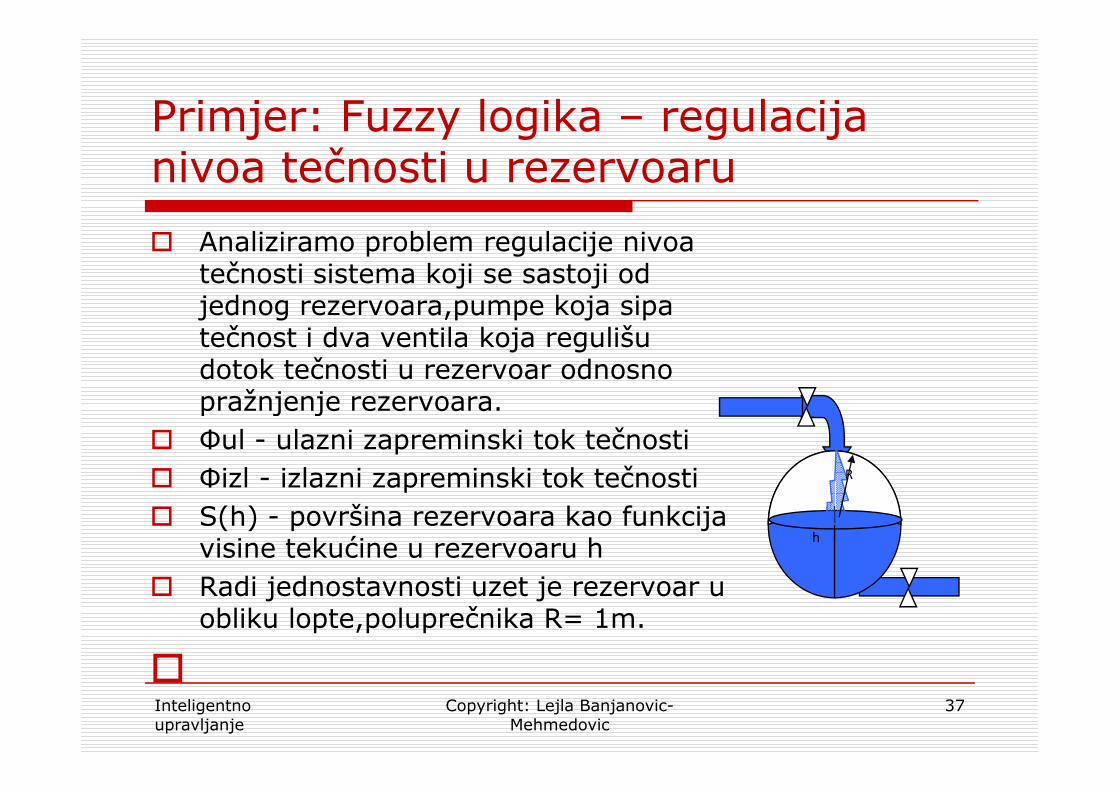
Primjer: Fuzzy logika – regulacija nivoa tečnosti u rezervoaru
� Analiziramo problem regulacije nivoa tečnosti sistema koji se sastoji od jednog rezervoara,pumpe koja sipa tečnost i dva ventila koja regulišu dotok tečnosti u rezervoar odnosno pražnjenje rezervoara.pražnjenje rezervoara.
� Φul - ulazni zapreminski tok tečnosti
� Φizl - izlazni zapreminski tok tečnosti
� S(h) - površina rezervoara kao funkcija visine tekućine u rezervoaru h
� Radi jednostavnosti uzet je rezervoar u obliku lopte,poluprečnika R= 1m.
�37
R
SS
h
R
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
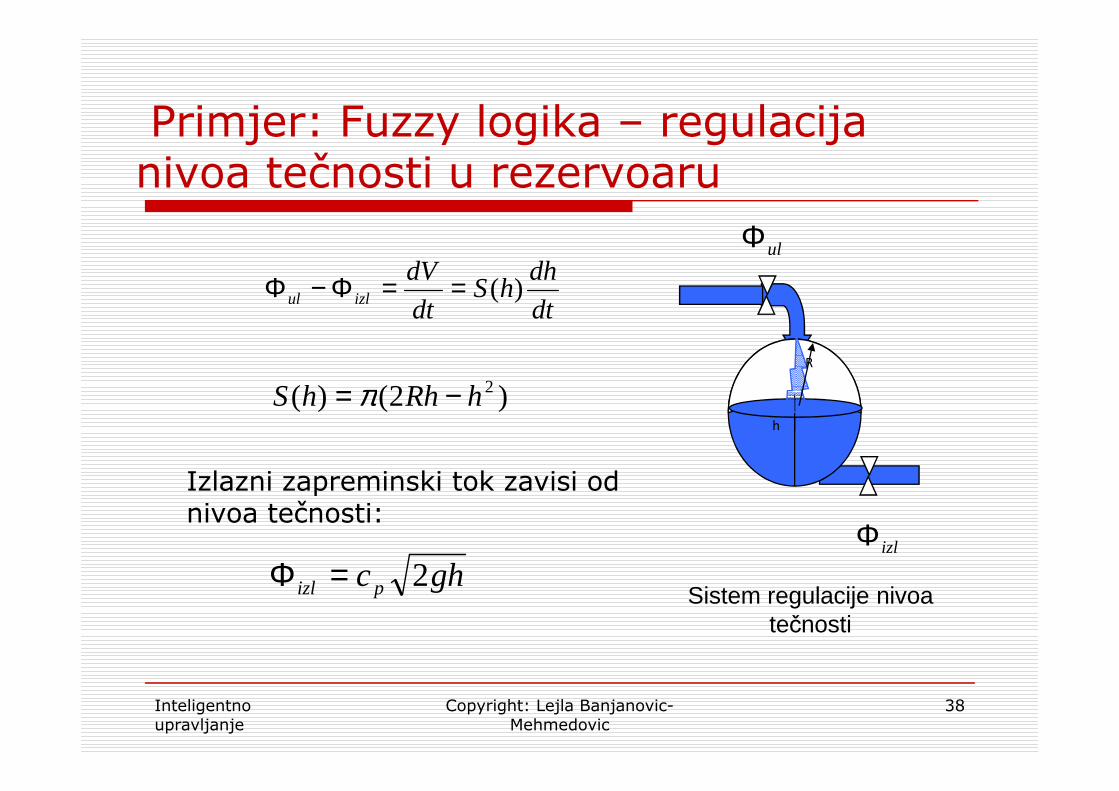
Primjer: Fuzzy logika – regulacija nivoa tečnosti u rezervoaru
dt
dhhS
dt
dVizlul )(==Φ−Φ
)2()( 2hRhhS −= πR
SS
R
ulΦ
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
38
)2()( 2hRhhS −= π
ghc pizl 2=Φ
SS
h
izlΦ
Sistem regulacije nivoa tečnosti
Izlazni zapreminski tok zavisi od nivoa tečnosti:
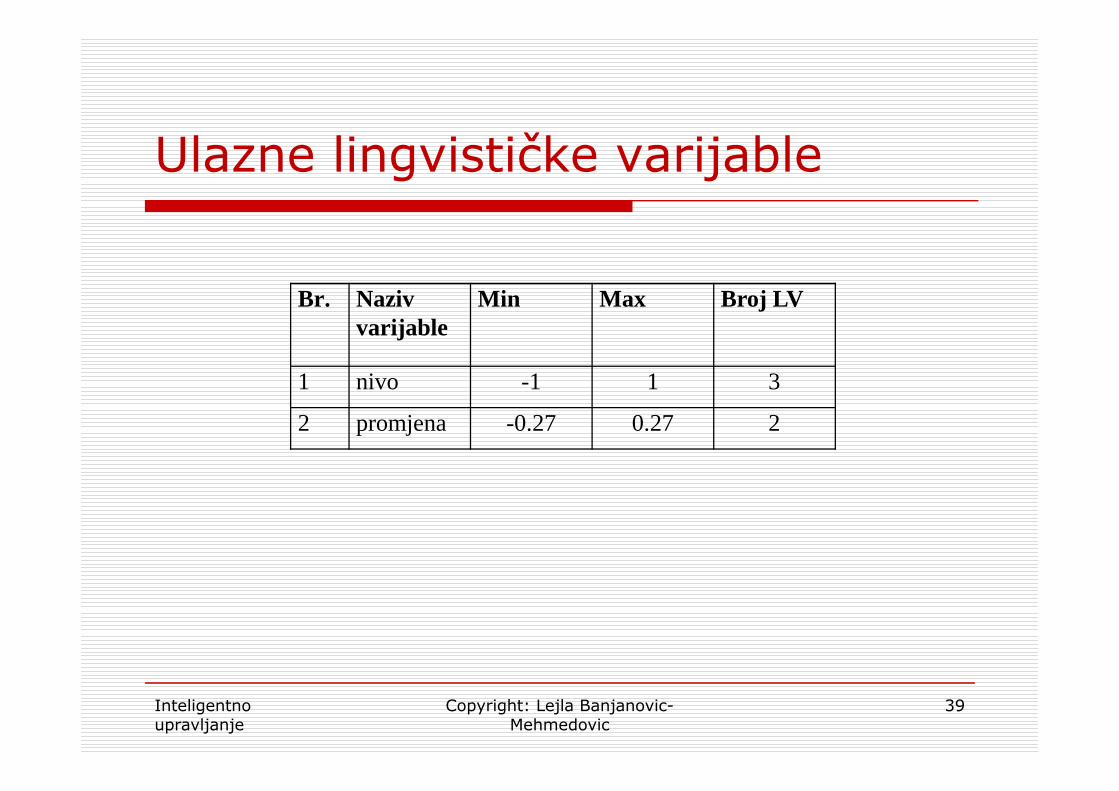
Ulazne lingvističke varijable
Br. Naziv varijable
Min Max Broj LV
1 nivo -1 1 3
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
39
2 promjena -0.27 0.27 2
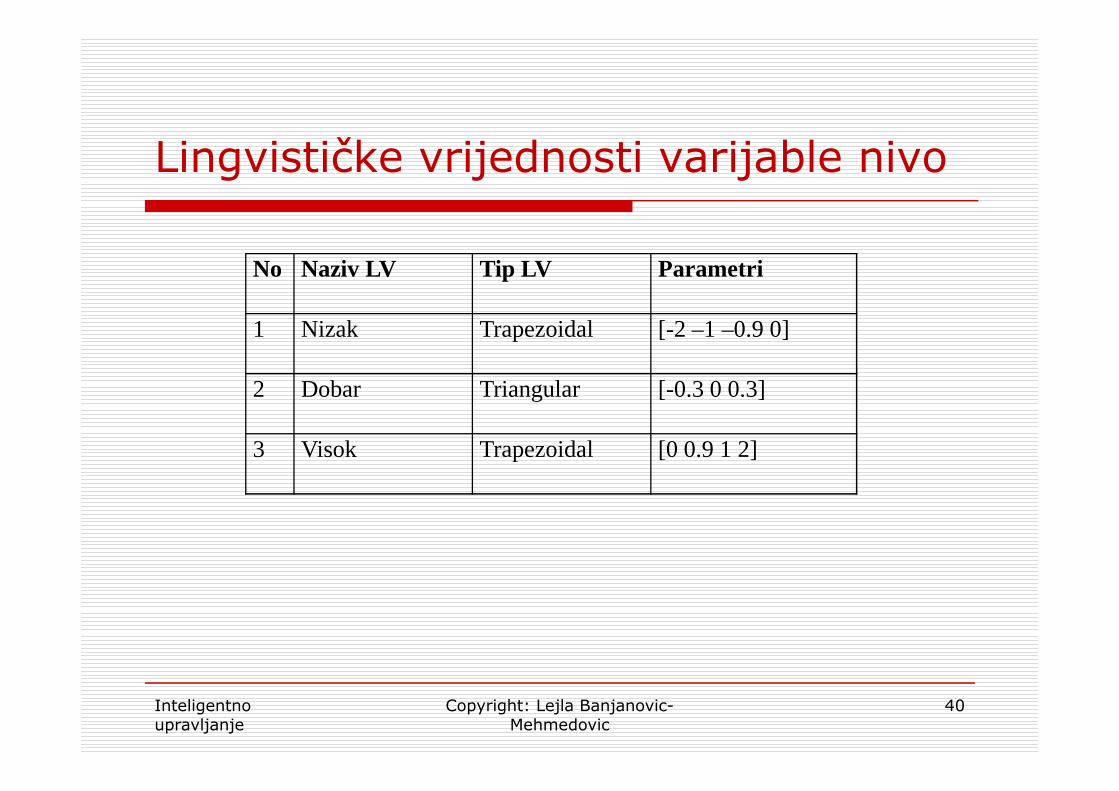
Lingvističke vrijednosti varijable nivo
No Naziv LV Tip LV Parametri
1 Nizak Trapezoidal [-2 –1 –0.9 0]
2 Dobar Triangular [-0.3 0 0.3]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
40
2 Dobar Triangular [-0.3 0 0.3]
3 Visok Trapezoidal [0 0.9 1 2]
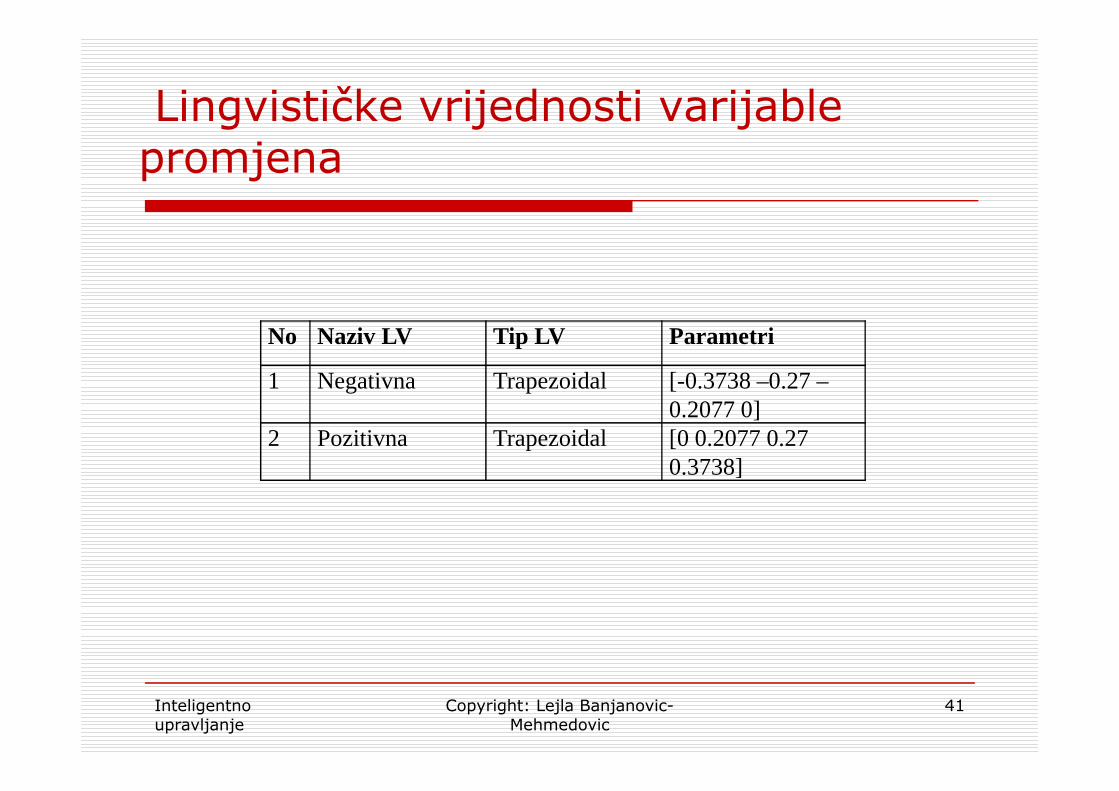
Lingvističke vrijednosti varijable promjena
No Naziv LV Tip LV Parametri
1 Negativna Trapezoidal [-0.3738 –0.27 –
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
41
0.2077 0]2 Pozitivna Trapezoidal [0 0.2077 0.27
0.3738]
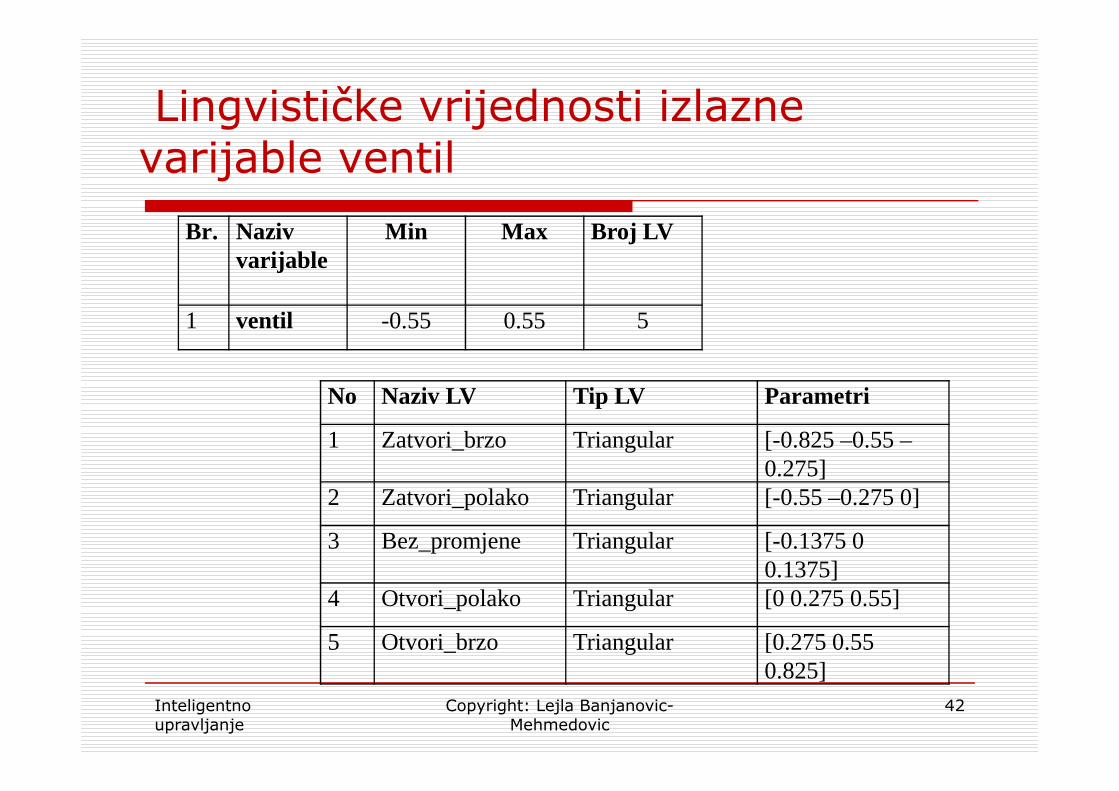
Lingvističke vrijednosti izlazne varijable ventil
No Naziv LV Tip LV Parametri
Br. Naziv varijable
Min Max Broj LV
1 ventil -0.55 0.55 5
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
42
No Naziv LV Tip LV Parametri
1 Zatvori_brzo Triangular [-0.825 –0.55 –0.275]
2 Zatvori_polako Triangular [-0.55 –0.275 0]
3 Bez_promjene Triangular [-0.1375 0 0.1375]
4 Otvori_polako Triangular [0 0.275 0.55]
5 Otvori_brzo Triangular [0.275 0.55 0.825]
Fuzzy pravila
� If nivo is visok then ventil is otvori_brzo
� If nivo is nizak then ventil is zatvori_brzo
� If nivo is dobar and promjena is negativna then � If nivo is dobar and promjena is negativna then ventil is zatvori_polako
� If nivo is dobar and promjena is pozitivna then ventil is otvori_polako
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
43
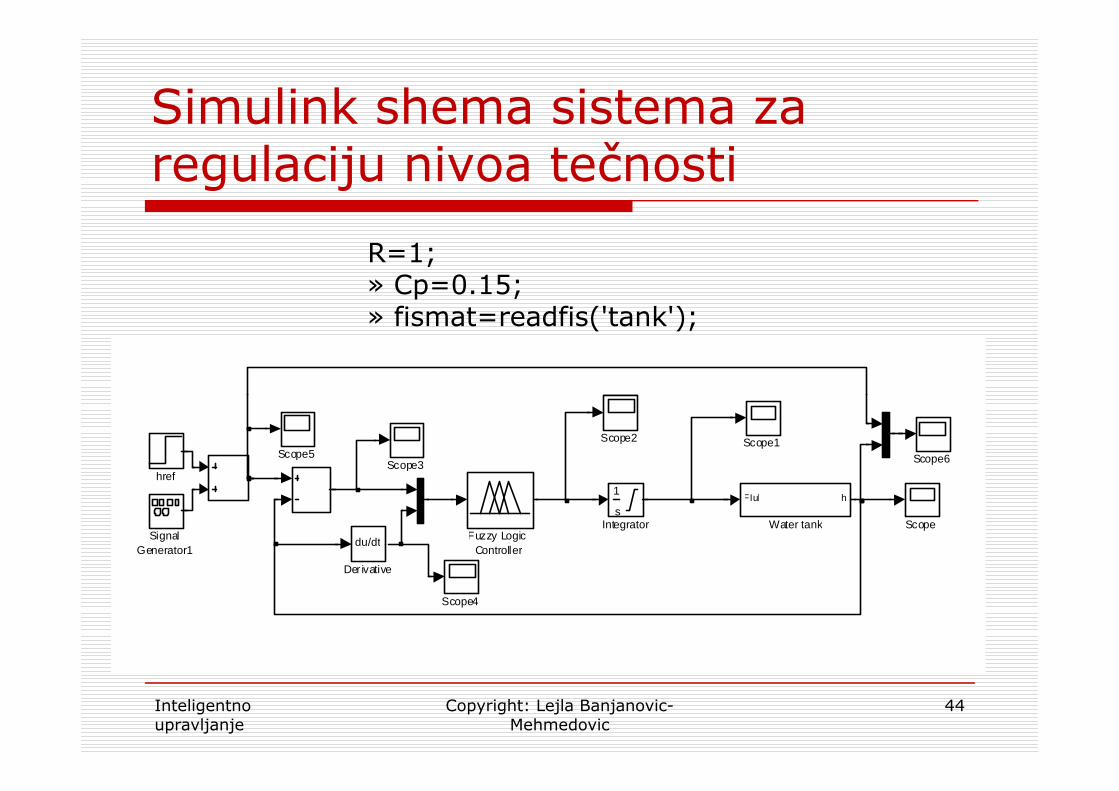
Simulink shema sistema zaregulaciju nivoa tečnosti
R=1;» Cp=0.15;» fismat=readfis('tank');
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
44
href FIul h
Water tank Signal
Generator1
Scope6 Scope5
Scope4
Scope3
Scope2 Scope1
Scope s 1
Integrator Fuzzy Logic
Controller du/dt
Der ivative
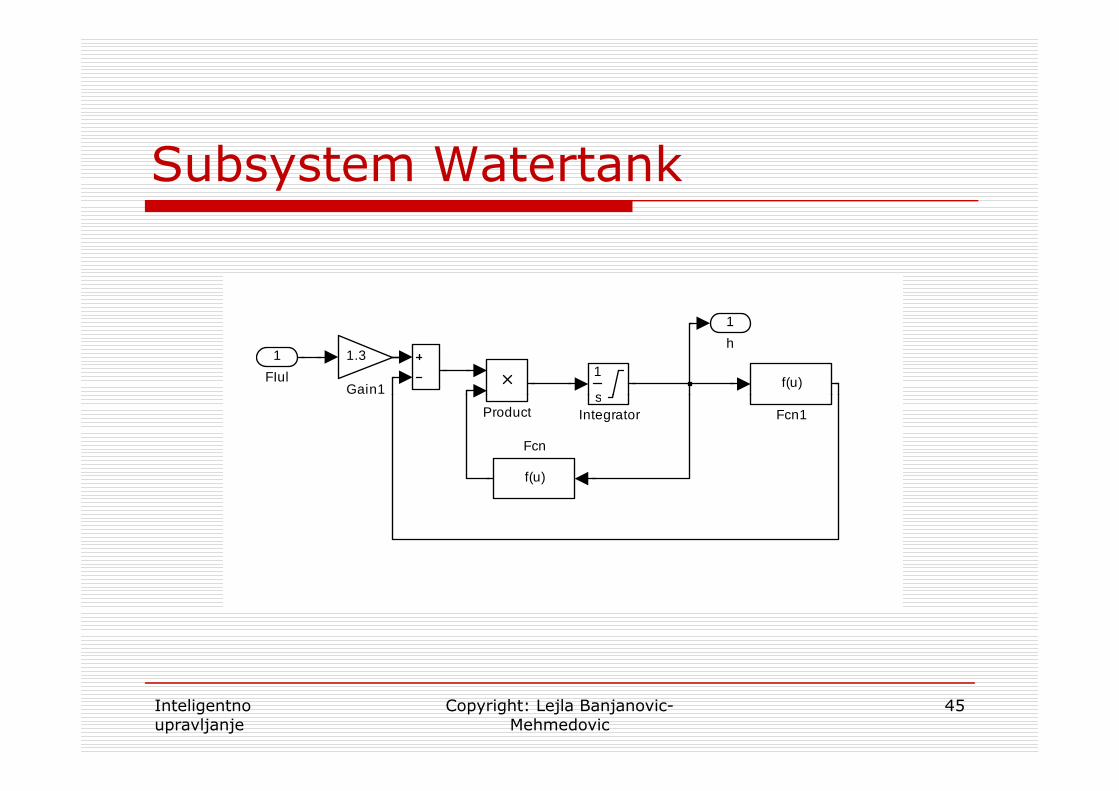
Subsystem Watertank
1
h
s
11.3
Gain1 f(u)
1
FIul
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
45
Products
Integrator
Gain1
Fcn1
f(u)
Fcn
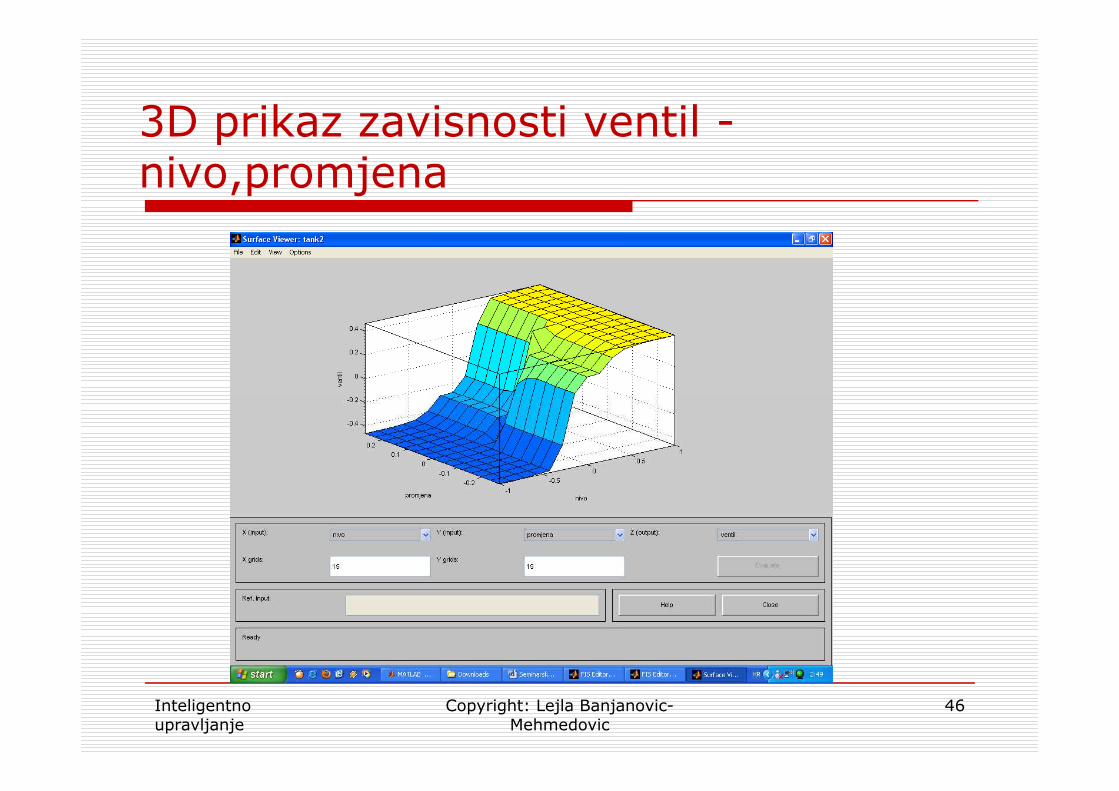
3D prikaz zavisnosti ventil -nivo,promjena
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
46
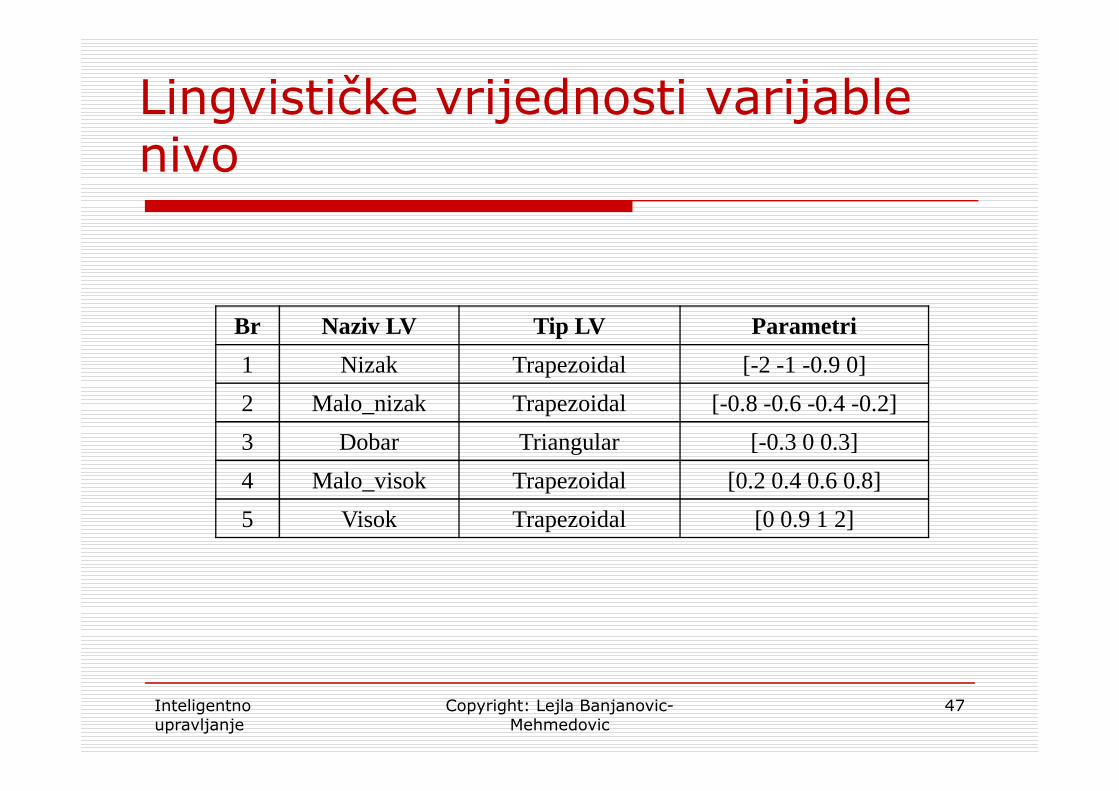
Lingvističke vrijednosti varijable nivo
Br Naziv LV Tip LV Parametri
1 Nizak Trapezoidal [-2 -1 -0.9 0]
2 Malo_nizak Trapezoidal [-0.8 -0.6 -0.4 -0.2]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
47
2 Malo_nizak Trapezoidal [-0.8 -0.6 -0.4 -0.2]
3 Dobar Triangular [-0.3 0 0.3]
4 Malo_visok Trapezoidal [0.2 0.4 0.6 0.8]
5 Visok Trapezoidal [0 0.9 1 2]
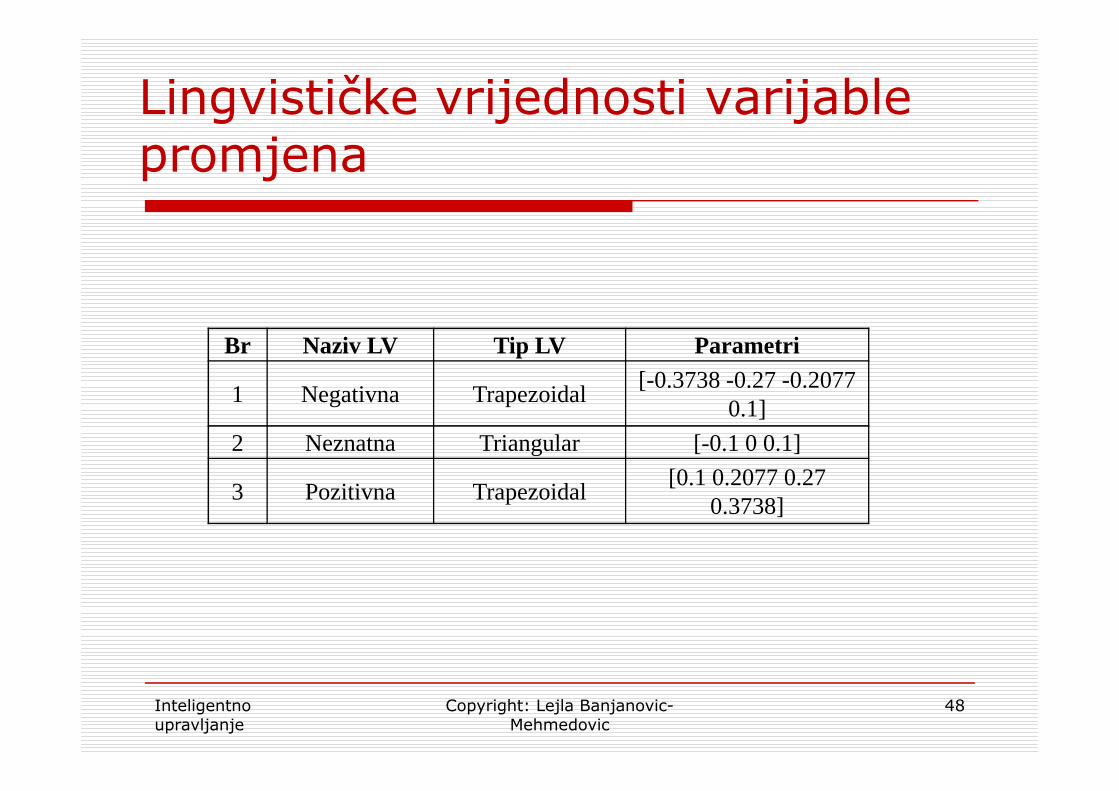
Lingvističke vrijednosti varijable promjena
Br Naziv LV Tip LV Parametri
1 Negativna Trapezoidal[-0.3738 -0.27 -0.2077
0.1]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
48
1 Negativna Trapezoidal0.1]
2 Neznatna Triangular [-0.1 0 0.1]
3 Pozitivna Trapezoidal[0.1 0.2077 0.27
0.3738]
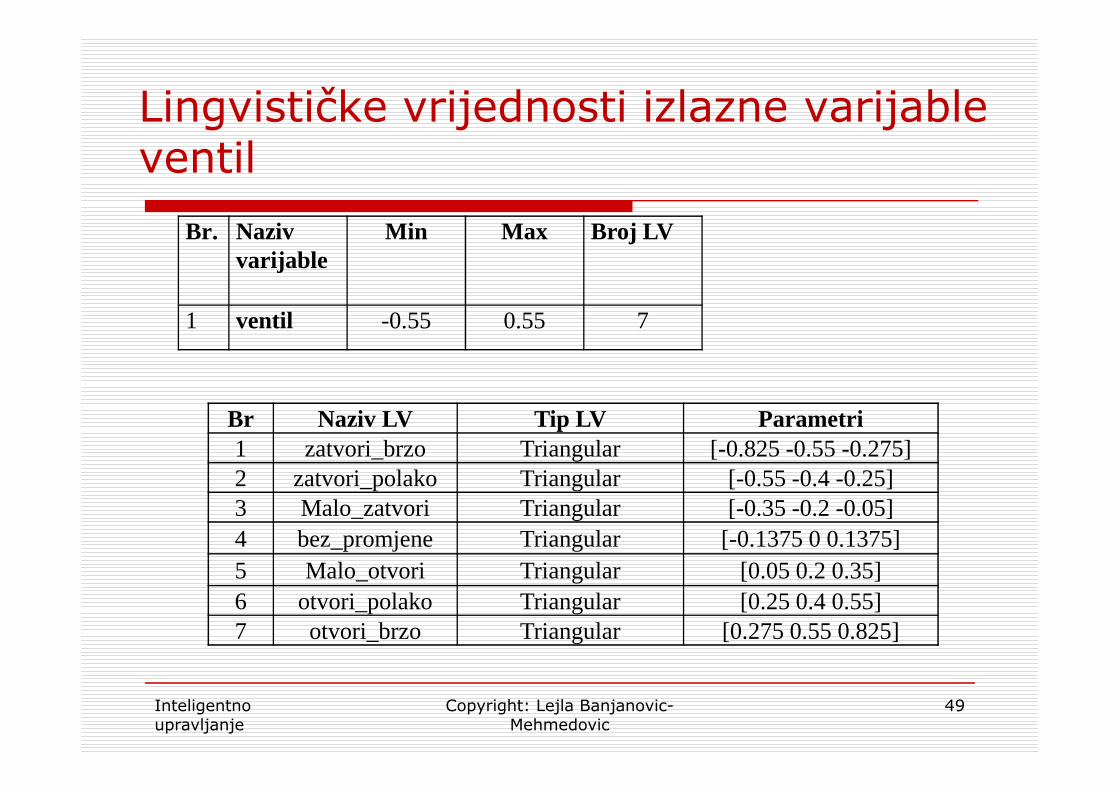
Lingvističke vrijednosti izlazne varijable ventil
Br. Naziv varijable
Min Max Broj LV
1 ventil -0.55 0.55 7
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
49
Br Naziv LV Tip LV Parametri1 zatvori_brzo Triangular [-0.825 -0.55 -0.275]2 zatvori_polako Triangular [-0.55 -0.4 -0.25]3 Malo_zatvori Triangular [-0.35 -0.2 -0.05]4 bez_promjene Triangular [-0.1375 0 0.1375]5 Malo_otvori Triangular [0.05 0.2 0.35]6 otvori_polako Triangular [0.25 0.4 0.55]7 otvori_brzo Triangular [0.275 0.55 0.825]
Fuzzy pravila
� Imamo sad i nova pravila:
� 1. If (nivo is visok) then (ventil is otvori_brzo) (1)
� 2. If (nivo is nizak) then (ventil is zatvori_brzo) (1)
� 3. If (nivo is dobar) and (promjena is negativna) then (ventil is otvori_polako) (1) otvori_polako) (1)
� 4. If (nivo is dobar) and (promjena is pozitivna) then (ventil is zatvori_polako) (1)
� 5. If (nivo is dobar) and (promjena is neznatna) then (ventil is bez_promjene) (1)
� 6. If (nivo is malo_nizak) and (promjena is neznatna) then (ventil is malo_zatvori) (1)
� 7. If (nivo is malo_visok) and (promjena is neznatna) then (ventil is malo_otvori) (1)
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
50
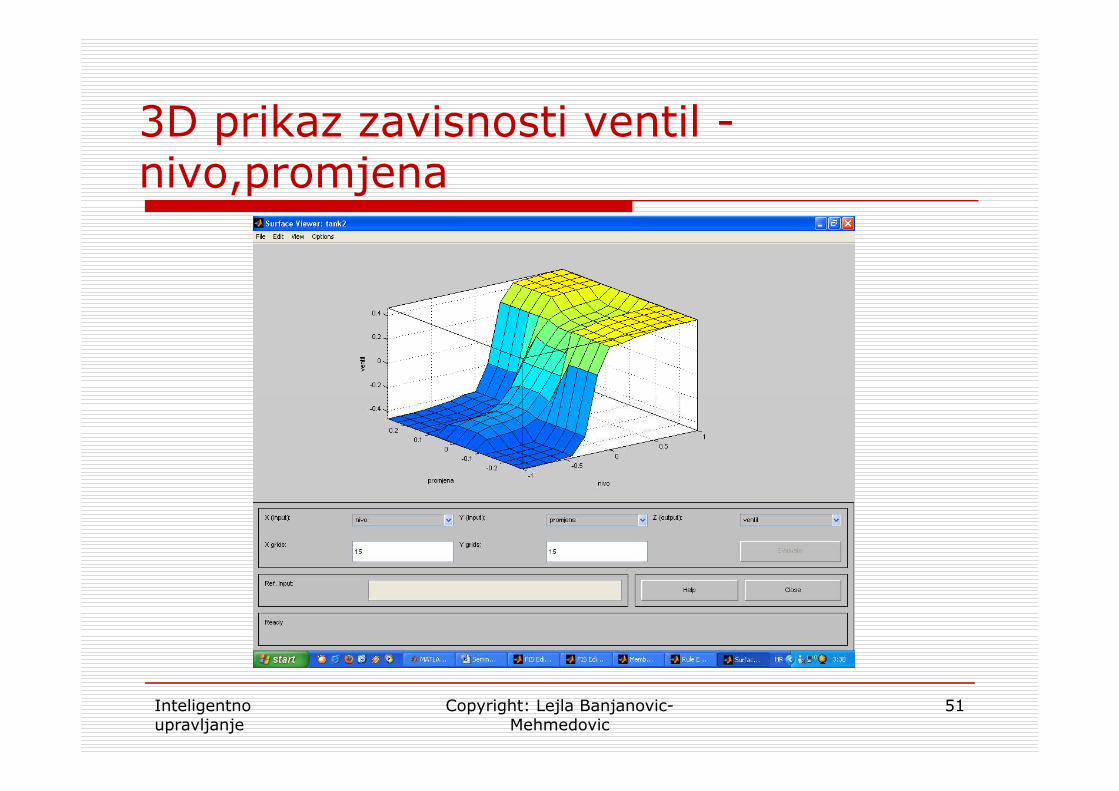
3D prikaz zavisnosti ventil -nivo,promjena
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
51
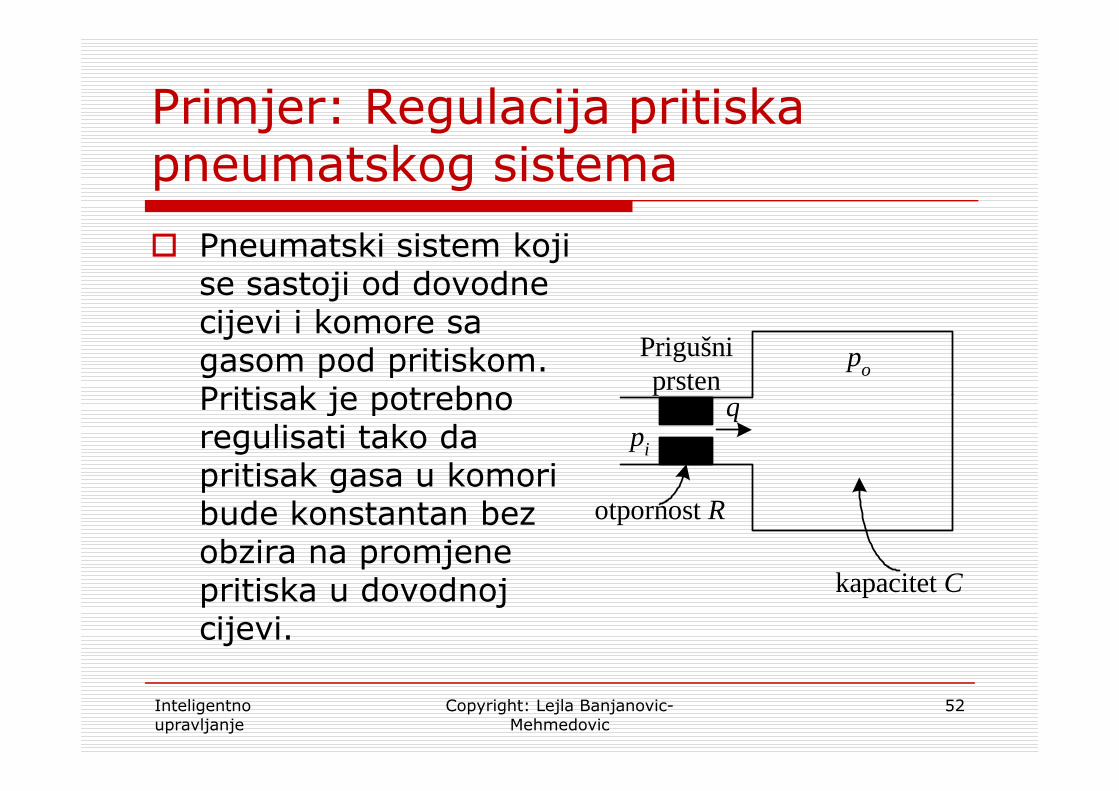
Primjer: Regulacija pritiska pneumatskog sistema
� Pneumatski sistem koji se sastoji od dovodne cijevi i komore sa gasom pod pritiskom. Pritisak je potrebno
po
q
Prigušniprsten
Pritisak je potrebno regulisati tako da pritisak gasa u komori bude konstantan bez obzira na promjene pritiska u dovodnoj cijevi.
52
pi
q
kapacitet C
prsten
otpornost R
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
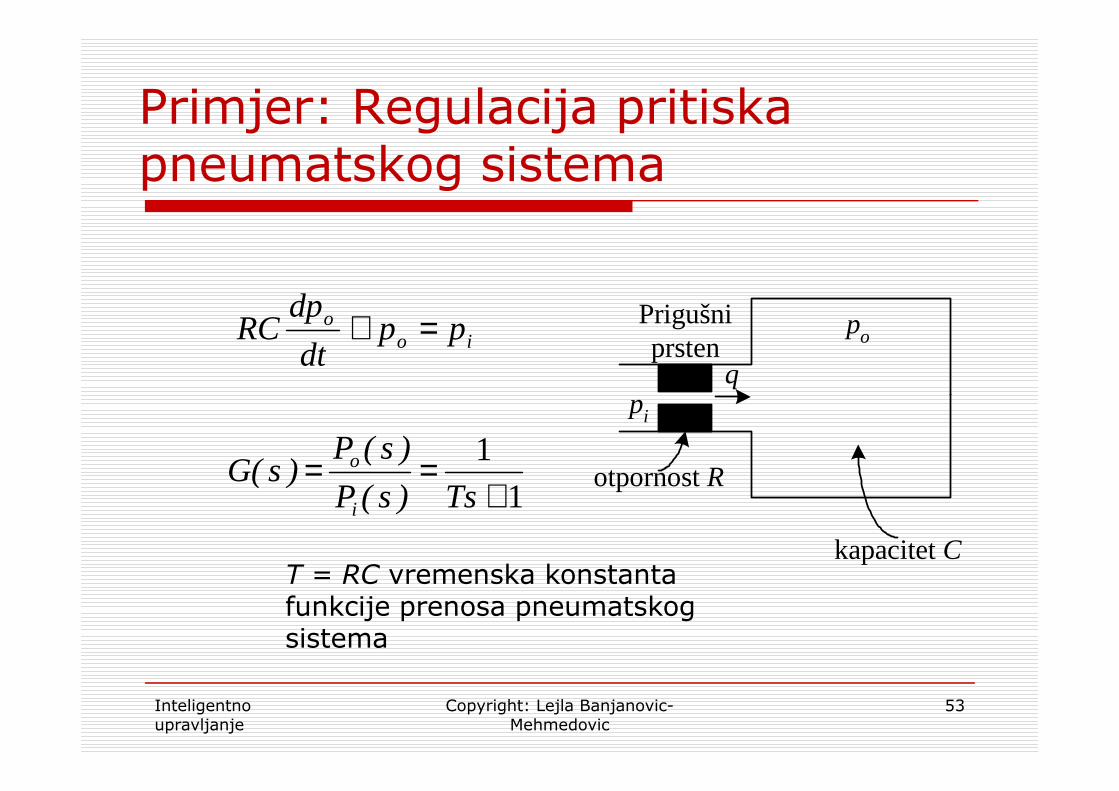
Primjer: Regulacija pritiska pneumatskog sistema
ioo pp
dt
dpRC =+ po
pq
Prigušniprsten
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
53
1
1
+==
Ts)s(P
)s(P)s(G
i
o
pi
kapacitet C
otpornost R
T = RC vremenska konstanta funkcije prenosa pneumatskog sistema

Fuzzy Logic kontroler
� Za definisanje Fuzzy Logic kontrolerakorišten je FIS Editor.
� Ulazni podaci: varijable pi i promjena.� Ulazni podaci: varijable pi i promjena.� Izlazni podatak: varijabla p0.� Definisanje ulaznih i izlaznih varijabli vrši
se u Membership Function Editoru.
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
54
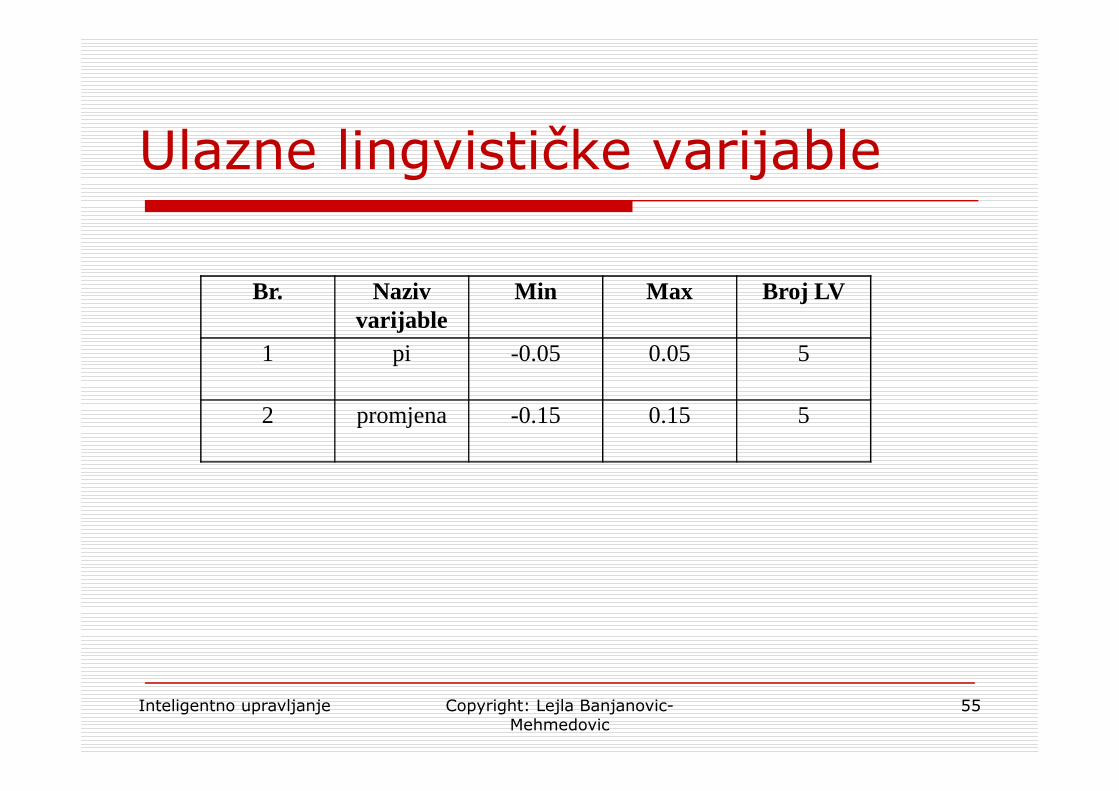
Ulazne lingvističke varijable
Br. Naziv varijable
Min Max Broj LV
1 pi -0.05 0.05 5
Inteligentno upravljanje Copyright: Lejla Banjanovic-Mehmedovic
55
2 promjena -0.15 0.15 5
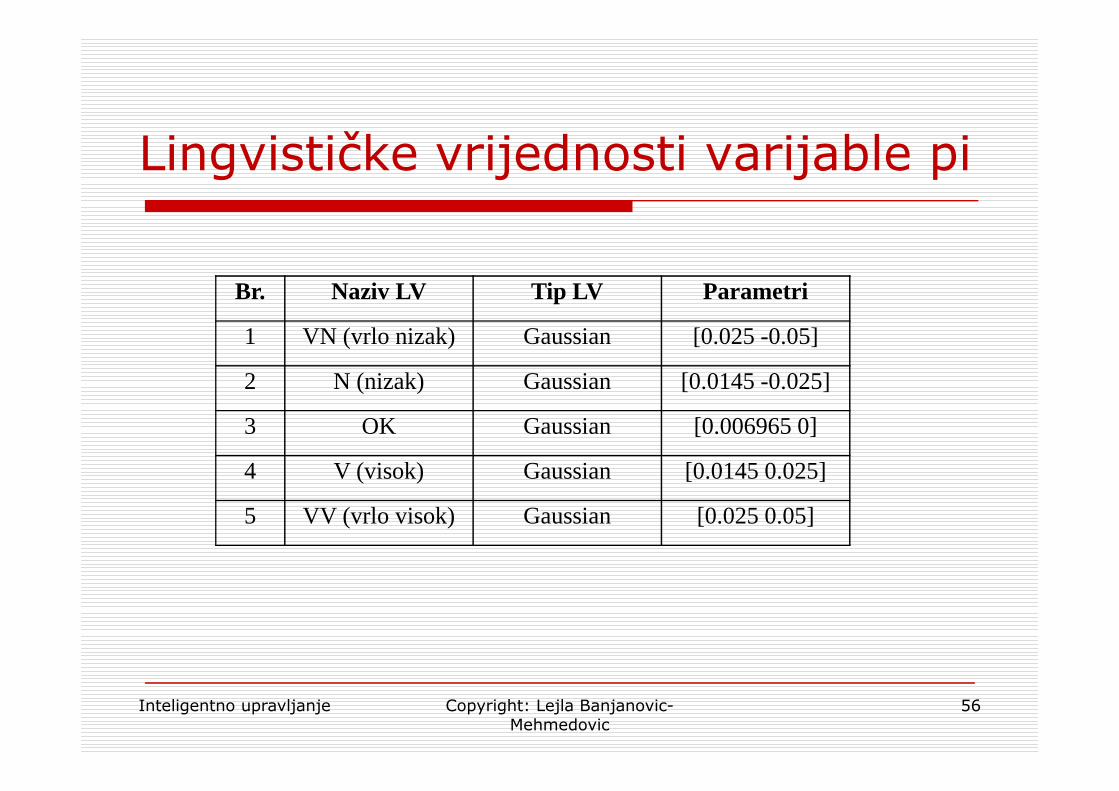
Lingvističke vrijednosti varijable pi
Br. Naziv LV Tip LV Parametri
1 VN (vrlo nizak) Gaussian [0.025 -0.05]
2 N (nizak) Gaussian [0.0145 -0.025]
Inteligentno upravljanje Copyright: Lejla Banjanovic-Mehmedovic
56
3 OK Gaussian [0.006965 0]
4 V (visok) Gaussian [0.0145 0.025]
5 VV (vrlo visok) Gaussian [0.025 0.05]
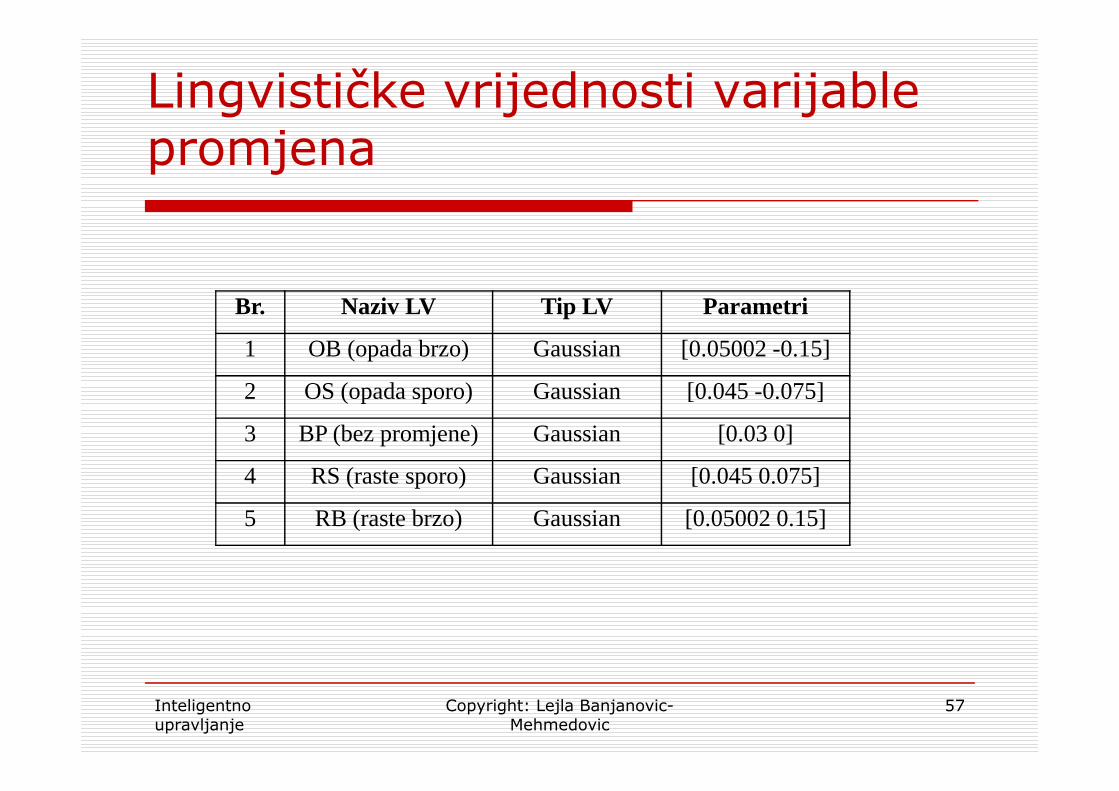
Lingvističke vrijednosti varijable promjena
Br. Naziv LV Tip LV Parametri
1 OB (opada brzo) Gaussian [0.05002 -0.15]
2 OS (opada sporo) Gaussian [0.045 -0.075]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
57
2 OS (opada sporo) Gaussian [0.045 -0.075]
3 BP (bez promjene) Gaussian [0.03 0]
4 RS (raste sporo) Gaussian [0.045 0.075]
5 RB (raste brzo) Gaussian [0.05002 0.15]
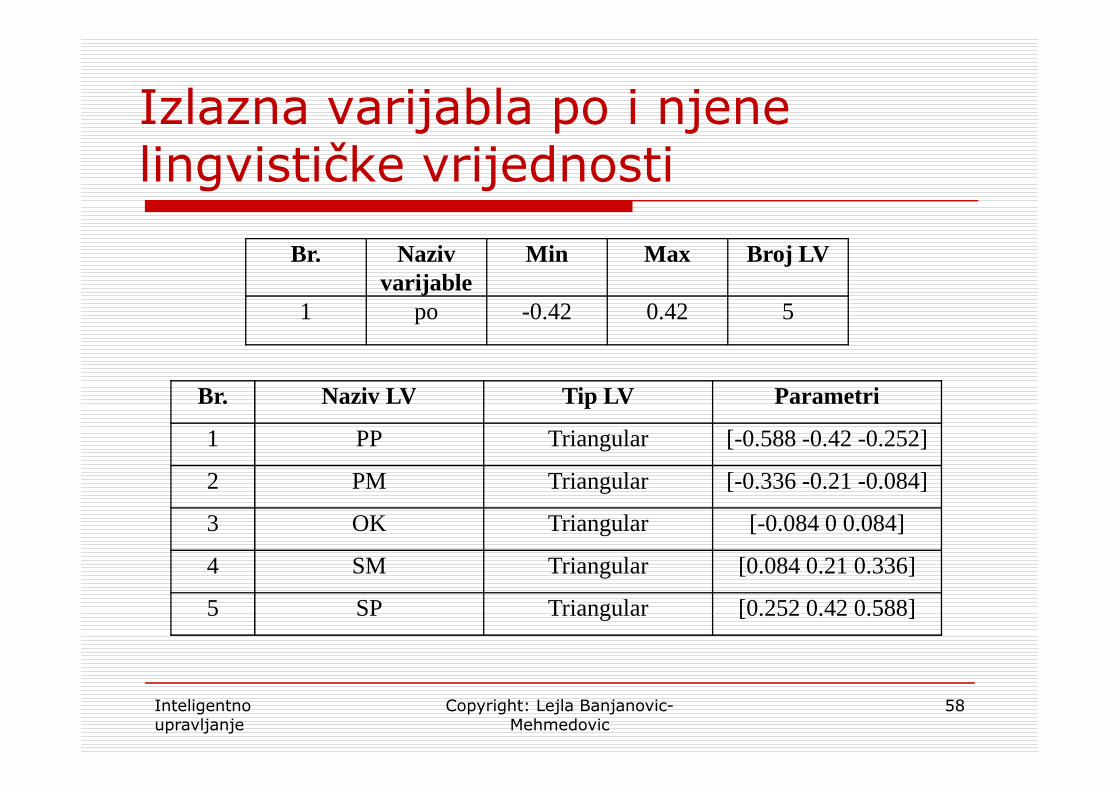
Izlazna varijabla po i njene lingvističke vrijednosti
Br. Naziv varijable
Min Max Broj LV
1 po -0.42 0.42 5
Br. Naziv LV Tip LV Parametri
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
58
Br. Naziv LV Tip LV Parametri
1 PP Triangular [-0.588 -0.42 -0.252]
2 PM Triangular [-0.336 -0.21 -0.084]
3 OK Triangular [-0.084 0 0.084]
4 SM Triangular [0.084 0.21 0.336]
5 SP Triangular [0.252 0.42 0.588]
Struktura pravila
� If pi is VV then po is SP
� If pi is V and promjena is RB than po is SP
� If pi is V and promjena is RS than po is SM
� If pi is V and promjena is OS than po is OK
� If pi is OK and promjena is RB than po is SM� If pi is OK and promjena is RB than po is SM
� If pi is OK and promjena is BP than po is OK
� If pi is OK and promjena is OB than po is PM
� If pi is N and promjena is RS than po is OK
� If pi is N and promjena is OS than po is PM
� If pi is N and promjena is OB than po is PP
� If pi is VN than po is PP
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
59
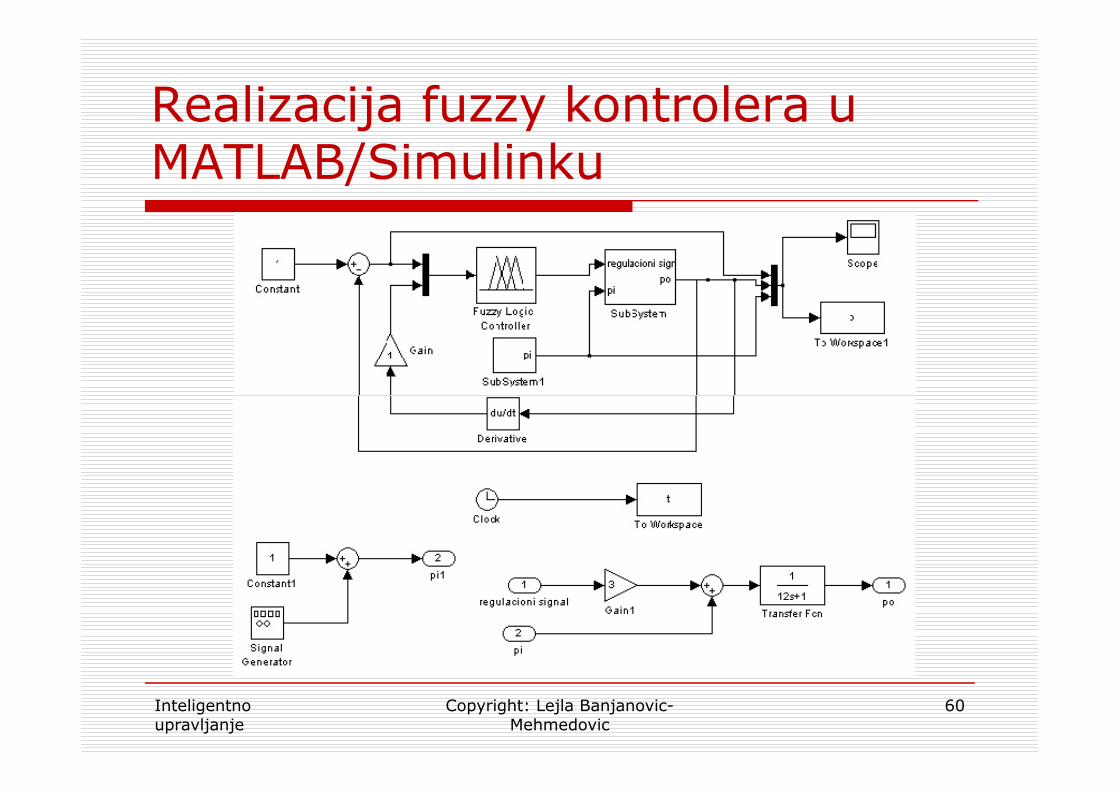
Realizacija fuzzy kontrolera u MATLAB/Simulinku
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
60
Fuzzy Logic kontroler
Prije pokretanja simulacije u Simulinkpotrebno je u Matlab komandnom prozoru ukucati sljedeće naredbe:
>>RC=12;>>RC=12;
>>T=RC;
>>fismatrix=readfis(‘pneum_sis1’);
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
61
Naziv_modela
Kad se klikne na fuzzy logic controller u Simulink-u, ukuca se u FIS Editor fismatrix
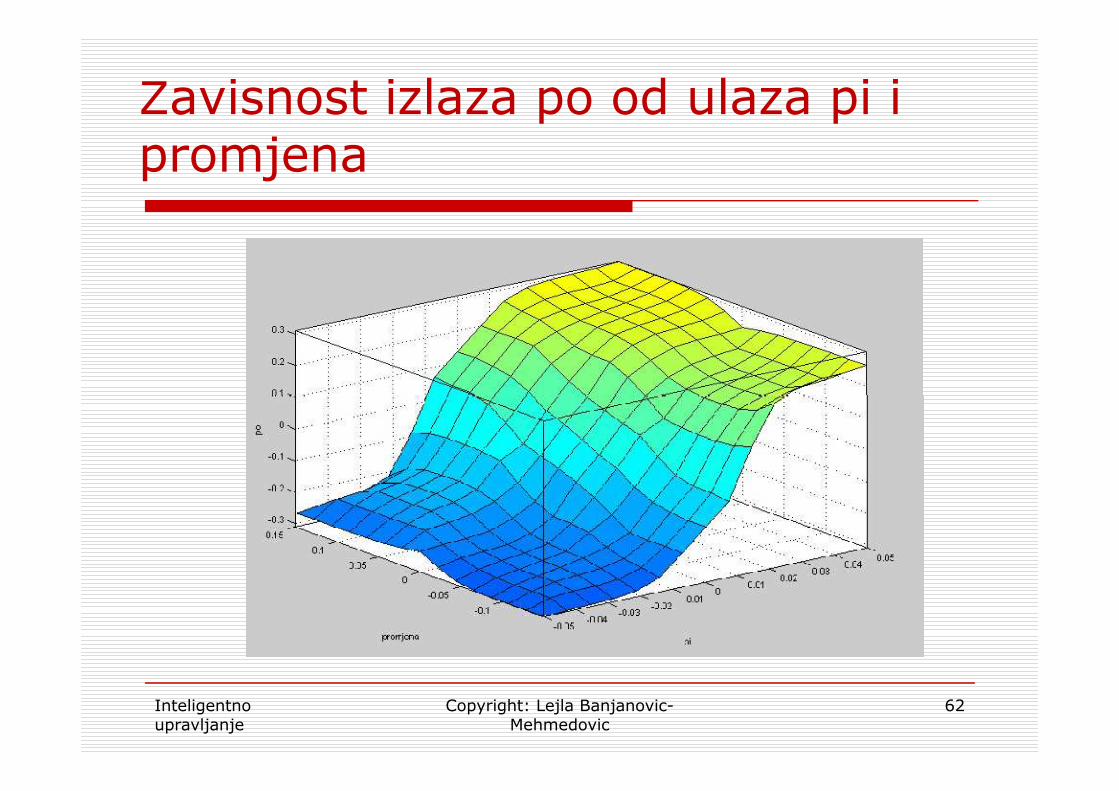
Zavisnost izlaza po od ulaza pi i promjena
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
62
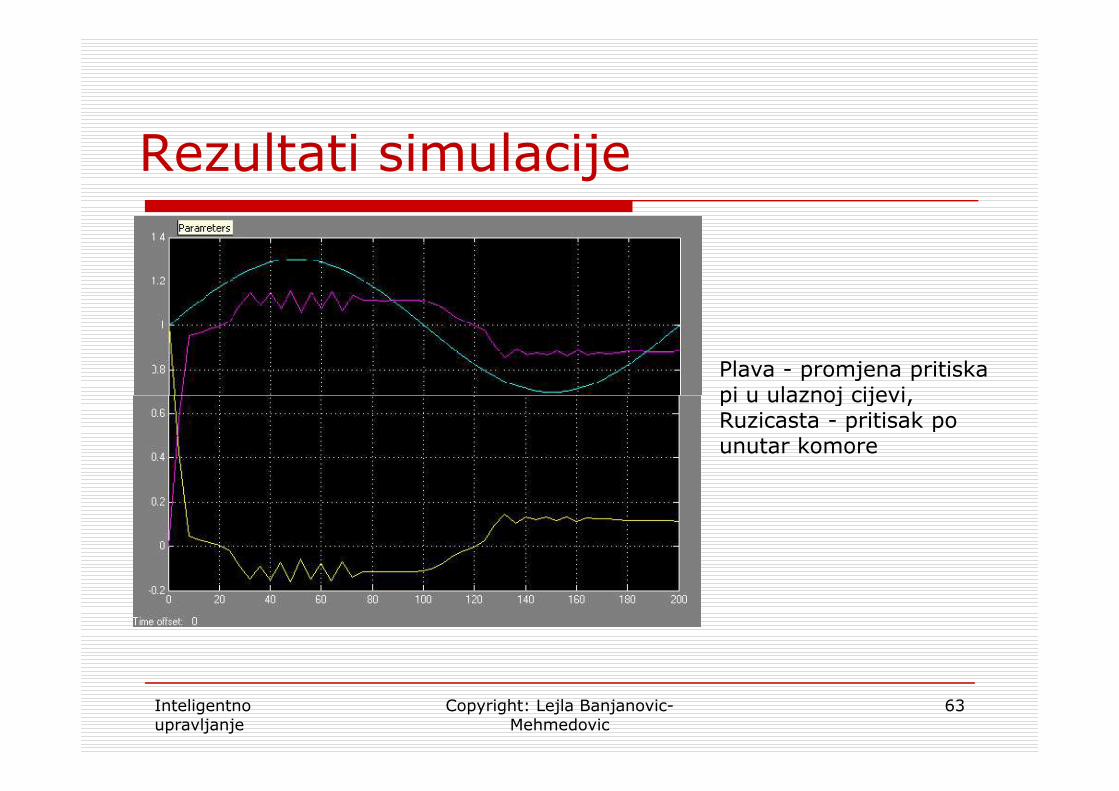
Rezultati simulacije
Plava - promjena pritiska pi u ulaznoj cijevi,
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
63
pi u ulaznoj cijevi, Ruzicasta - pritisak po unutar komore
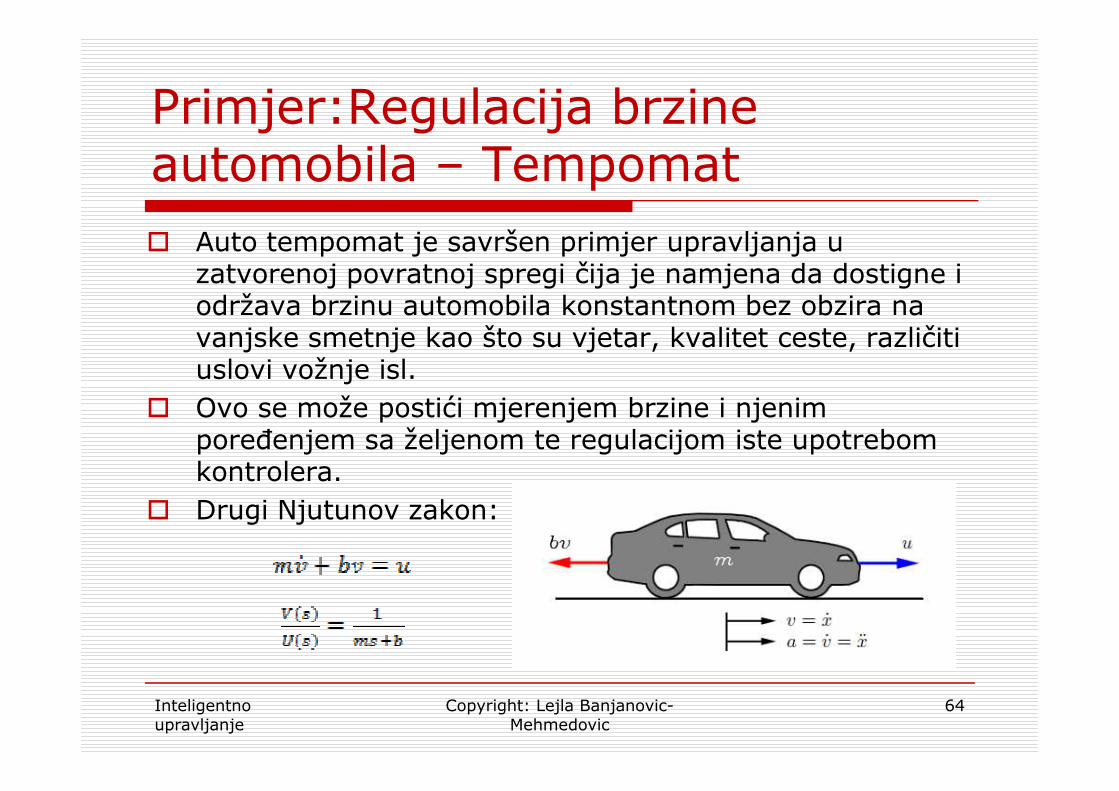
Primjer:Regulacija brzine automobila – Tempomat
� Auto tempomat je savršen primjer upravljanja u zatvorenoj povratnoj spregi čija je namjena da dostigne i održava brzinu automobila konstantnom bez obzira na vanjske smetnje kao što su vjetar, kvalitet ceste, različiti uslovi vožnje isl.
� Ovo se može postići mjerenjem brzine i njenim � Ovo se može postići mjerenjem brzine i njenim poreñenjem sa željenom te regulacijom iste upotrebom kontrolera.
� Drugi Njutunov zakon:
64Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic

Simulink model sistema sa PID i fuzzy regulatorom
65Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
Fuzzy Logic kontroler
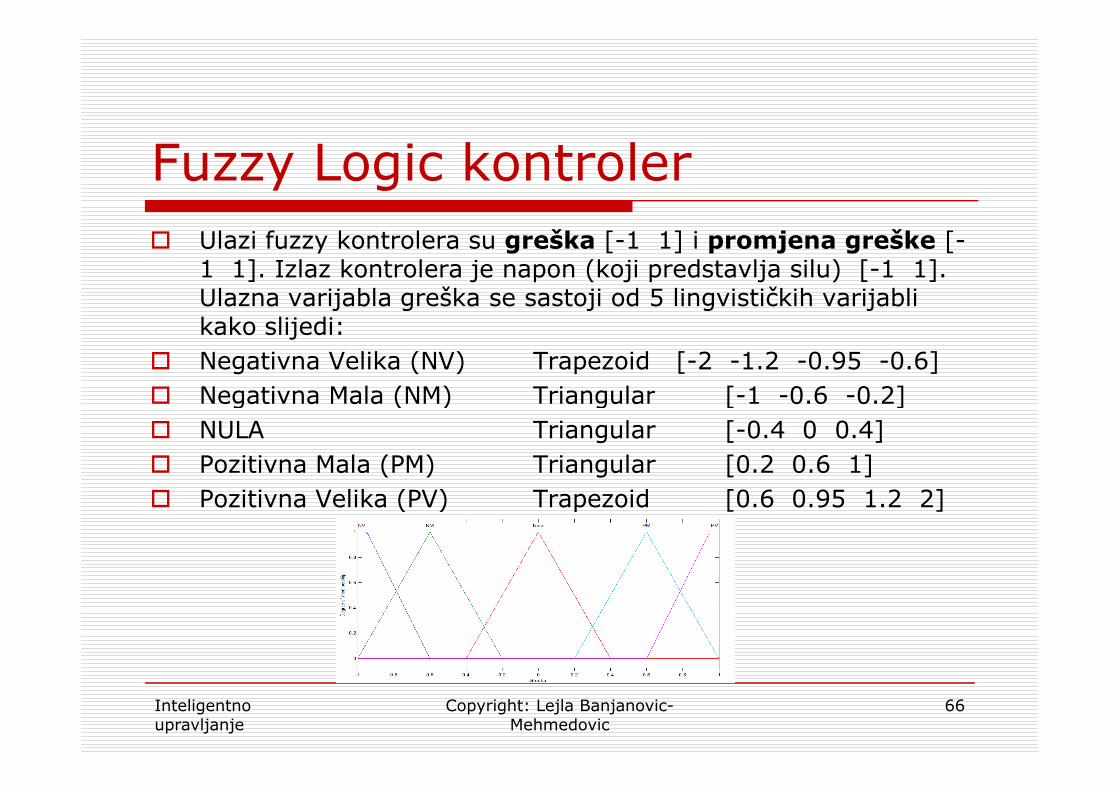
� Ulazi fuzzy kontrolera su greška [-1 1] i promjena greške [-1 1]. Izlaz kontrolera je napon (koji predstavlja silu) [-1 1]. Ulazna varijabla greška se sastoji od 5 lingvističkih varijabli kako slijedi:
� Negativna Velika (NV) Trapezoid [-2 -1.2 -0.95 -0.6]
� Negativna Mala (NM) Triangular [-1 -0.6 -0.2]� Negativna Mala (NM) Triangular [-1 -0.6 -0.2]
� NULA Triangular [-0.4 0 0.4]
� Pozitivna Mala (PM) Triangular [0.2 0.6 1]
� Pozitivna Velika (PV) Trapezoid [0.6 0.95 1.2 2]
66Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
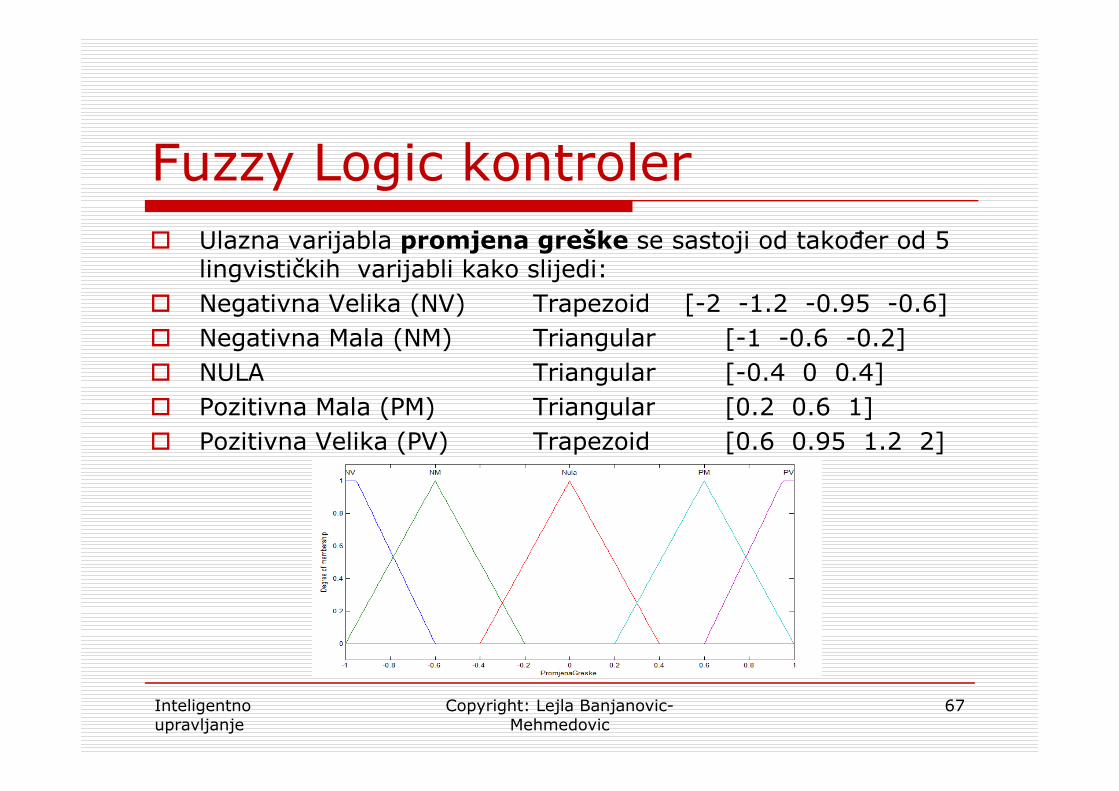
Fuzzy Logic kontroler
� Ulazna varijabla promjena greške se sastoji od takoñer od 5 lingvističkih varijabli kako slijedi:
� Negativna Velika (NV) Trapezoid [-2 -1.2 -0.95 -0.6]
� Negativna Mala (NM) Triangular [-1 -0.6 -0.2]
� NULA Triangular [-0.4 0 0.4]
� Pozitivna Mala (PM) Triangular [0.2 0.6 1]� Pozitivna Mala (PM) Triangular [0.2 0.6 1]
� Pozitivna Velika (PV) Trapezoid [0.6 0.95 1.2 2]
67Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
Fuzzy Logic kontroler
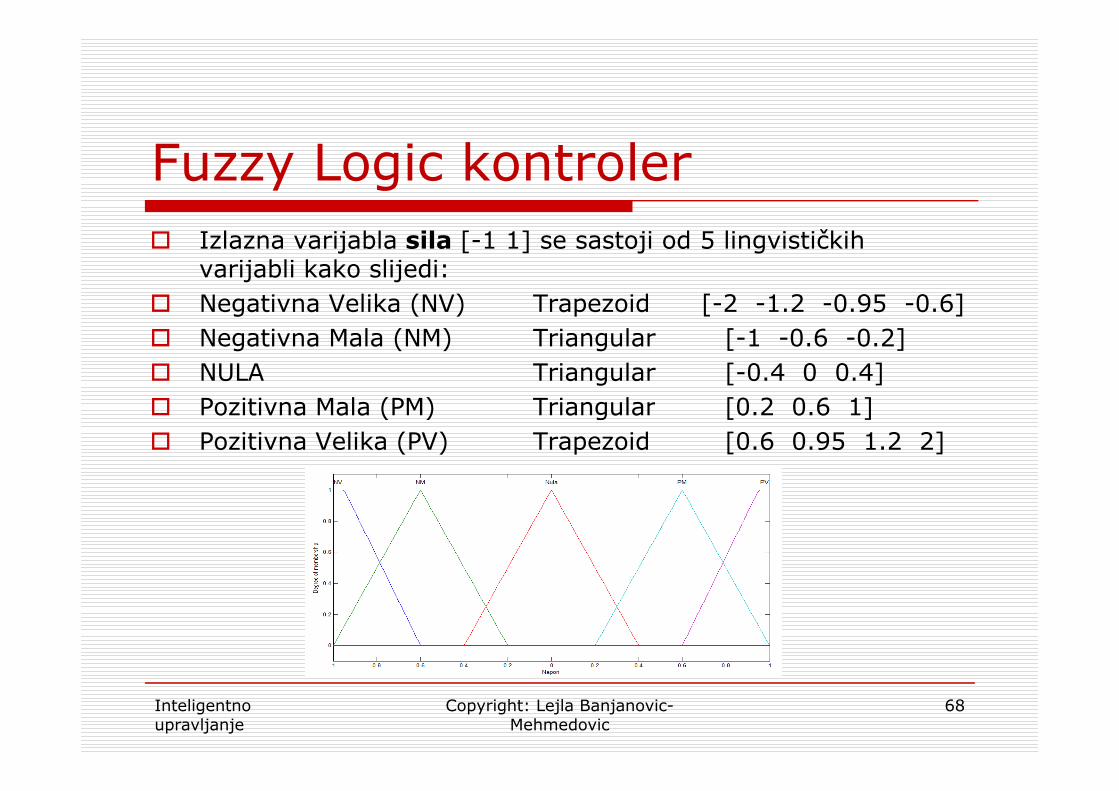
� Izlazna varijabla sila [-1 1] se sastoji od 5 lingvističkih varijabli kako slijedi:
� Negativna Velika (NV) Trapezoid [-2 -1.2 -0.95 -0.6]
� Negativna Mala (NM) Triangular [-1 -0.6 -0.2]
� NULA Triangular [-0.4 0 0.4]
� Pozitivna Mala (PM) Triangular [0.2 0.6 1]� Pozitivna Mala (PM) Triangular [0.2 0.6 1]
� Pozitivna Velika (PV) Trapezoid [0.6 0.95 1.2 2]
68Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
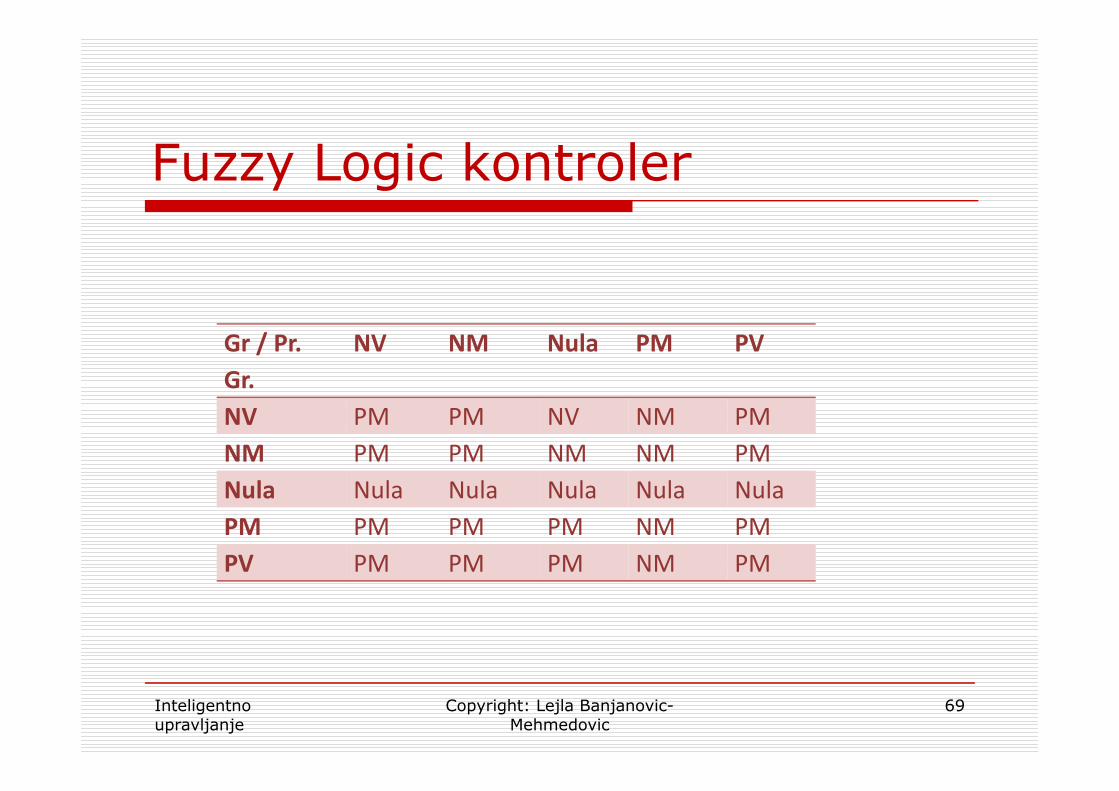
Fuzzy Logic kontroler
Gr / Pr.
Gr.
NV NM Nula PM PV
NV PM PM NV NM PM
NM PM PM NM NM PM
Nula Nula Nula Nula Nula Nula
PM PM PM PM NM PM
PV PM PM PM NM PM
69Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
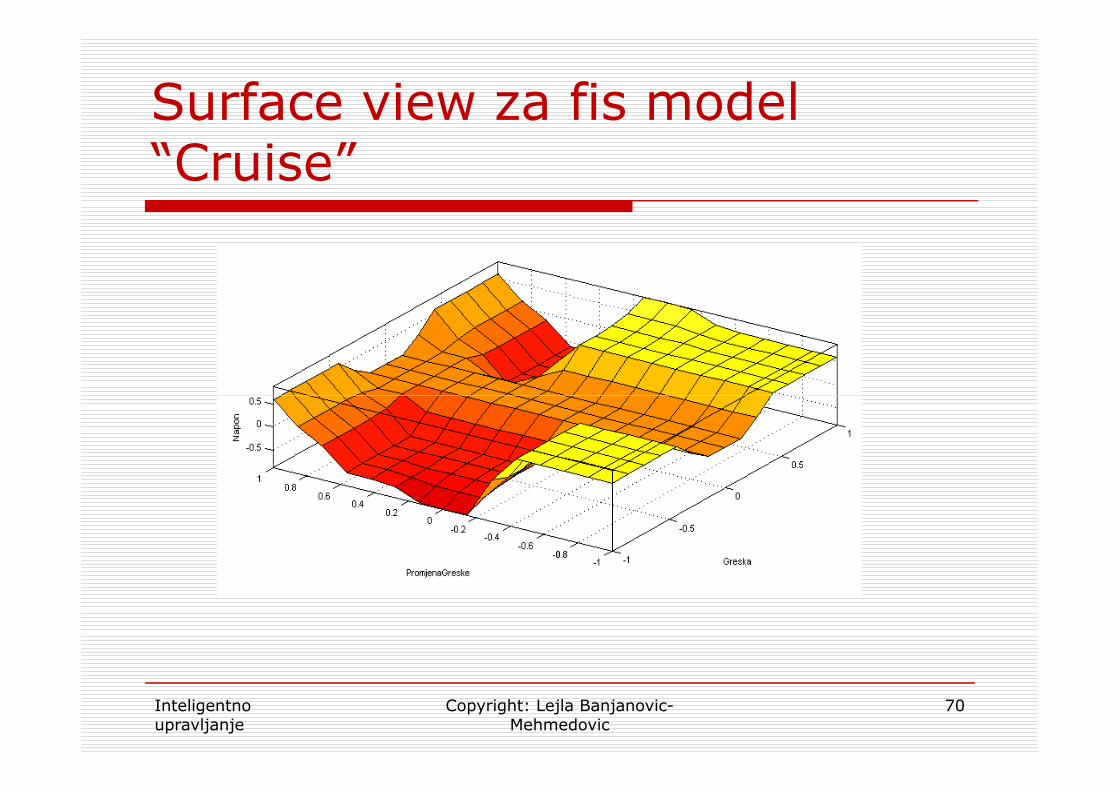
Surface view za fis model “Cruise”
70Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
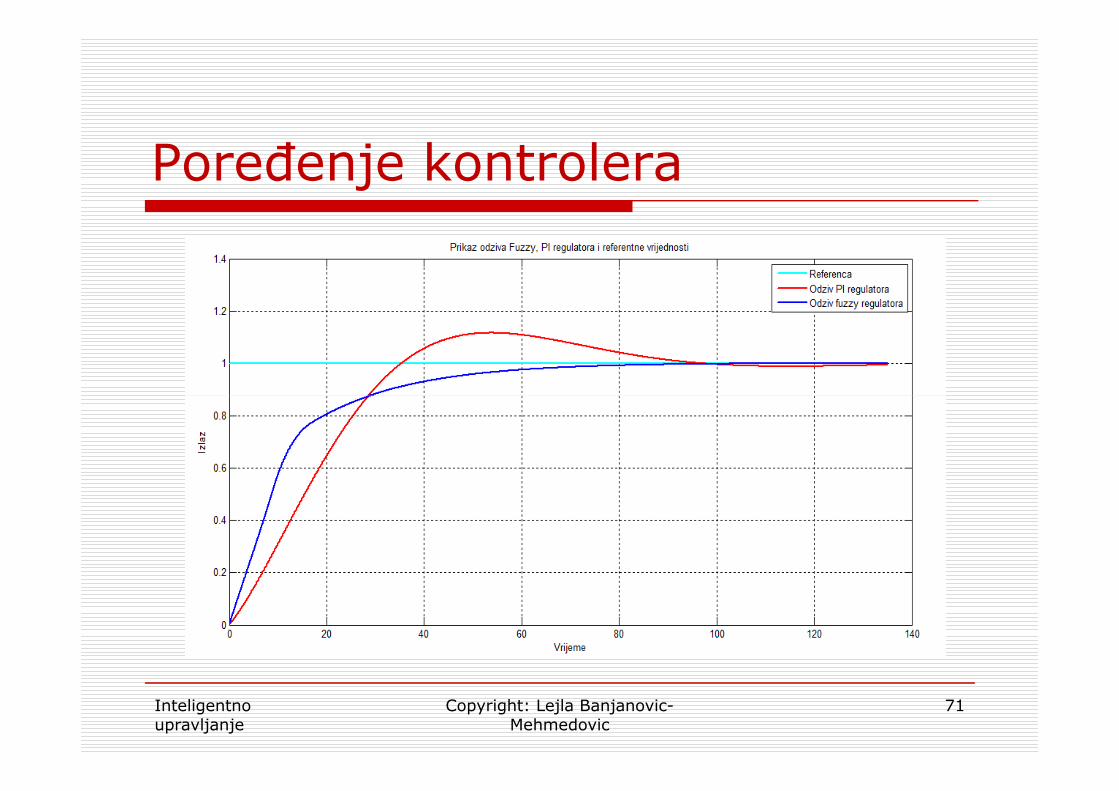
Poreñenje kontrolera
71Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
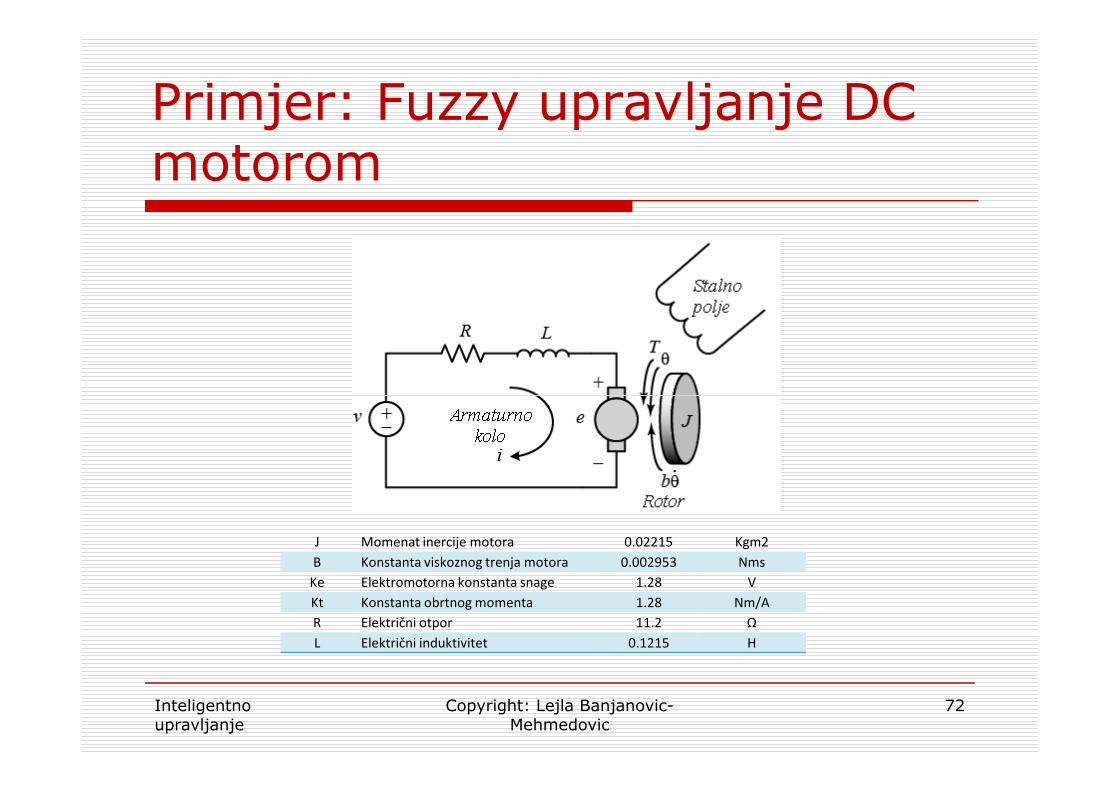
Primjer: Fuzzy upravljanje DC motorom
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
72
J Momenat inercije motora 0.02215 Kgm2
B Konstanta viskoznog trenja motora 0.002953 Nms
Ke Elektromotorna konstanta snage 1.28 V
Kt Konstanta obrtnog momenta 1.28 Nm/A
R Električni otpor 11.2 Ω
L Električni induktivitet 0.1215 H
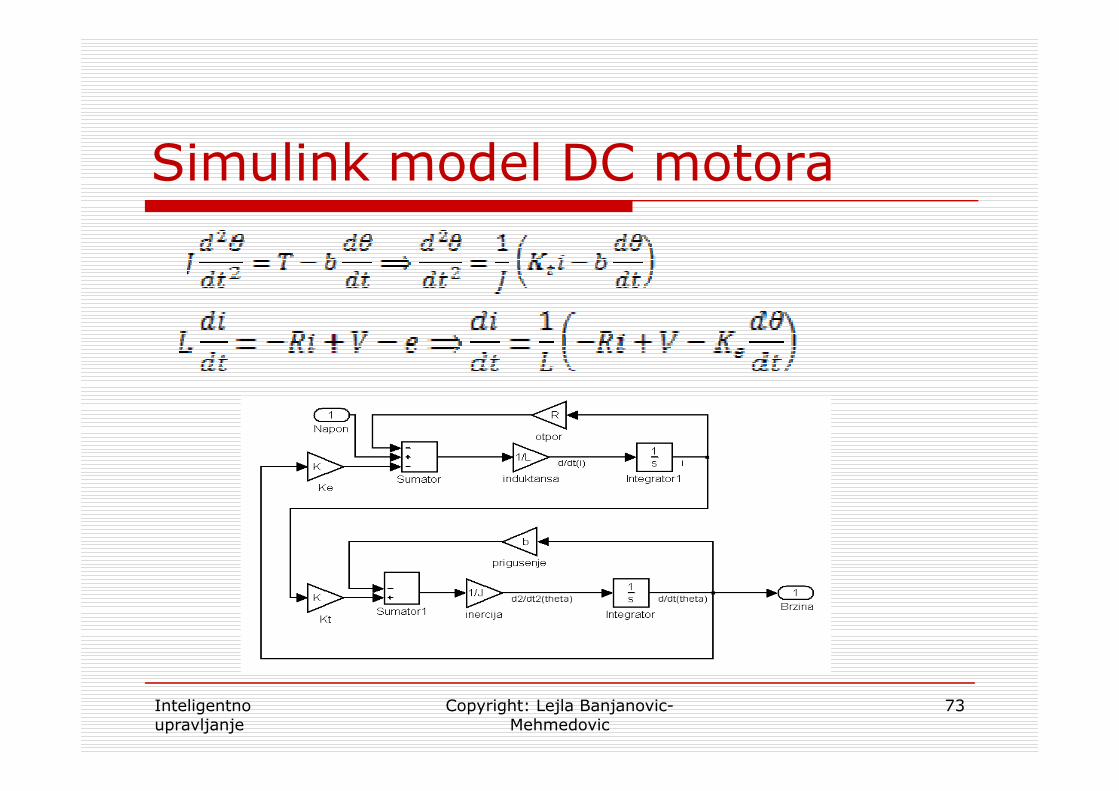
Simulink model DC motora
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
73
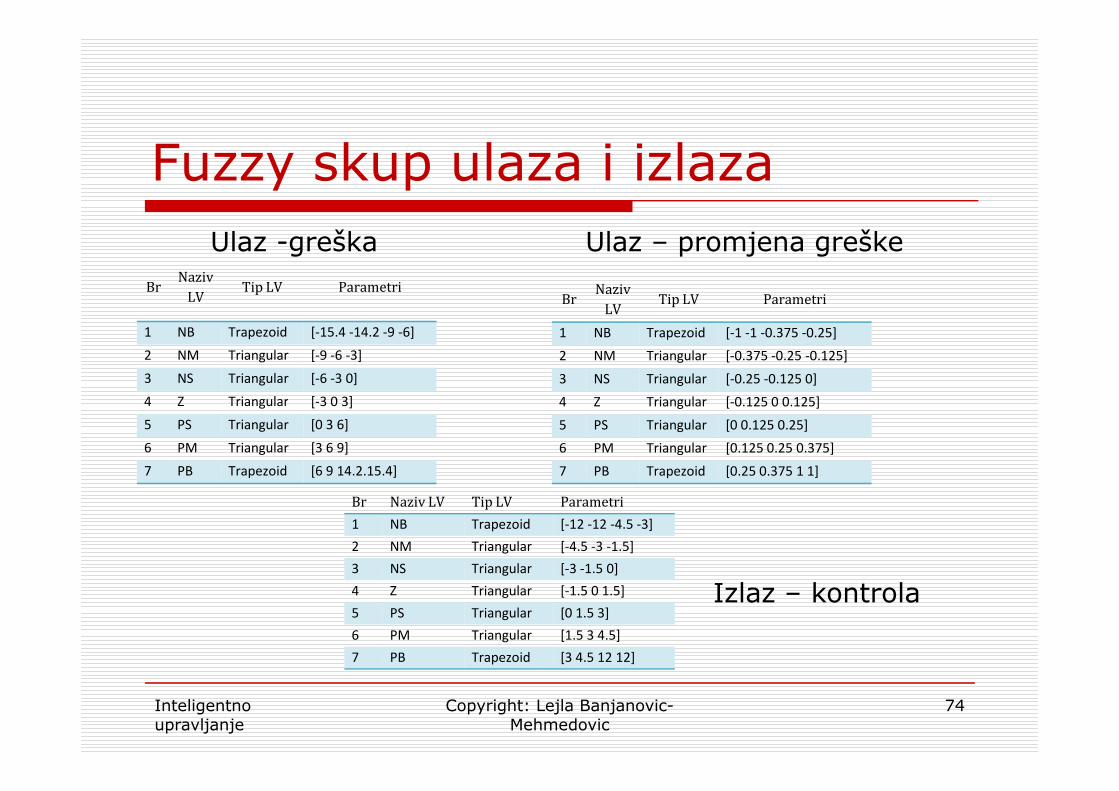
Fuzzy skup ulaza i izlaza
BrNaziv
LVTip LV Parametri
1 NB Trapezoid [-15.4 -14.2 -9 -6]
2 NM Triangular [-9 -6 -3]
3 NS Triangular [-6 -3 0]
4 Z Triangular [-3 0 3]
BrNaziv
LVTip LV Parametri
1 NB Trapezoid [-1 -1 -0.375 -0.25]
2 NM Triangular [-0.375 -0.25 -0.125]
3 NS Triangular [-0.25 -0.125 0]
4 Z Triangular [-0.125 0 0.125]
Ulaz -greška Ulaz – promjena greške
4 Z Triangular [-3 0 3]
5 PS Triangular [0 3 6]
6 PM Triangular [3 6 9]
7 PB Trapezoid [6 9 14.2.15.4]
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
74
4 Z Triangular [-0.125 0 0.125]
5 PS Triangular [0 0.125 0.25]
6 PM Triangular [0.125 0.25 0.375]
7 PB Trapezoid [0.25 0.375 1 1]
Br Naziv LV Tip LV Parametri
1 NB Trapezoid [-12 -12 -4.5 -3]
2 NM Triangular [-4.5 -3 -1.5]
3 NS Triangular [-3 -1.5 0]
4 Z Triangular [-1.5 0 1.5]
5 PS Triangular [0 1.5 3]
6 PM Triangular [1.5 3 4.5]
7 PB Trapezoid [3 4.5 12 12]
Izlaz – kontrola
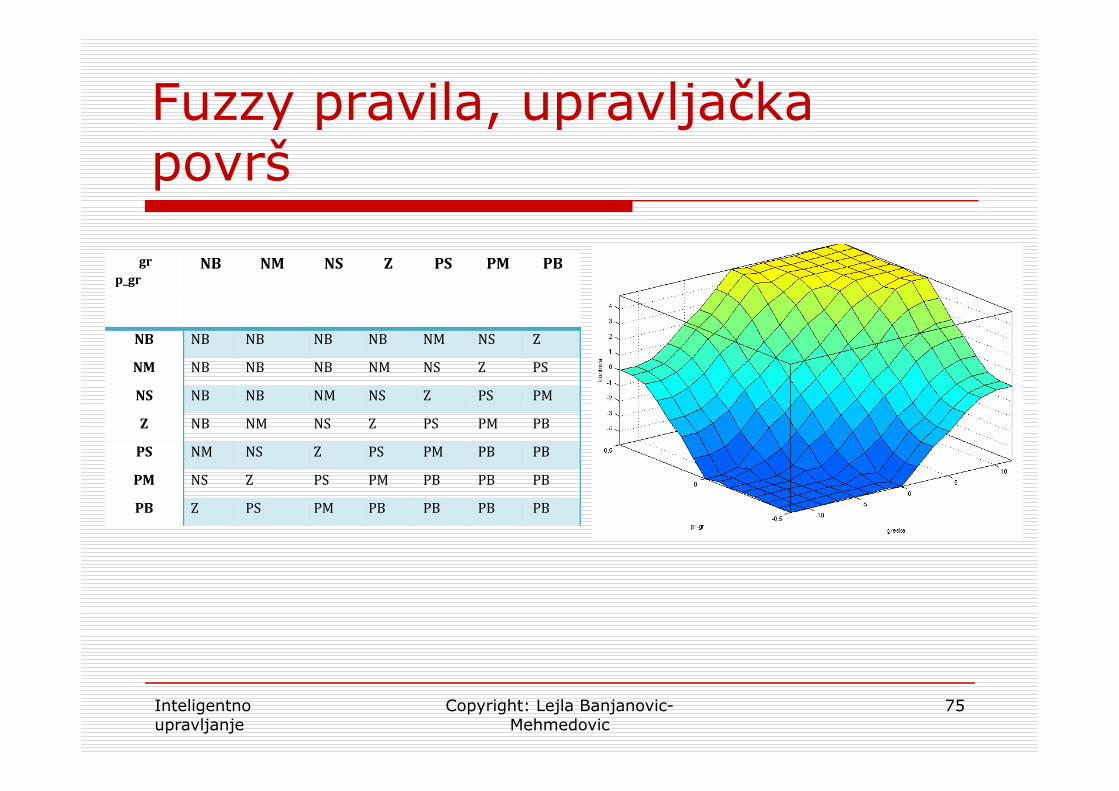
Fuzzy pravila, upravljačka površ
gr
p_gr
NB NM NS Z PS PM PB
NB NB NB NB NB NM NS Z
NM NB NB NB NM NS Z PS
NS NB NB NM NS Z PS PMNS NB NB NM NS Z PS PM
Z NB NM NS Z PS PM PB
PS NM NS Z PS PM PB PB
PM NS Z PS PM PB PB PB
PB Z PS PM PB PB PB PB
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
75
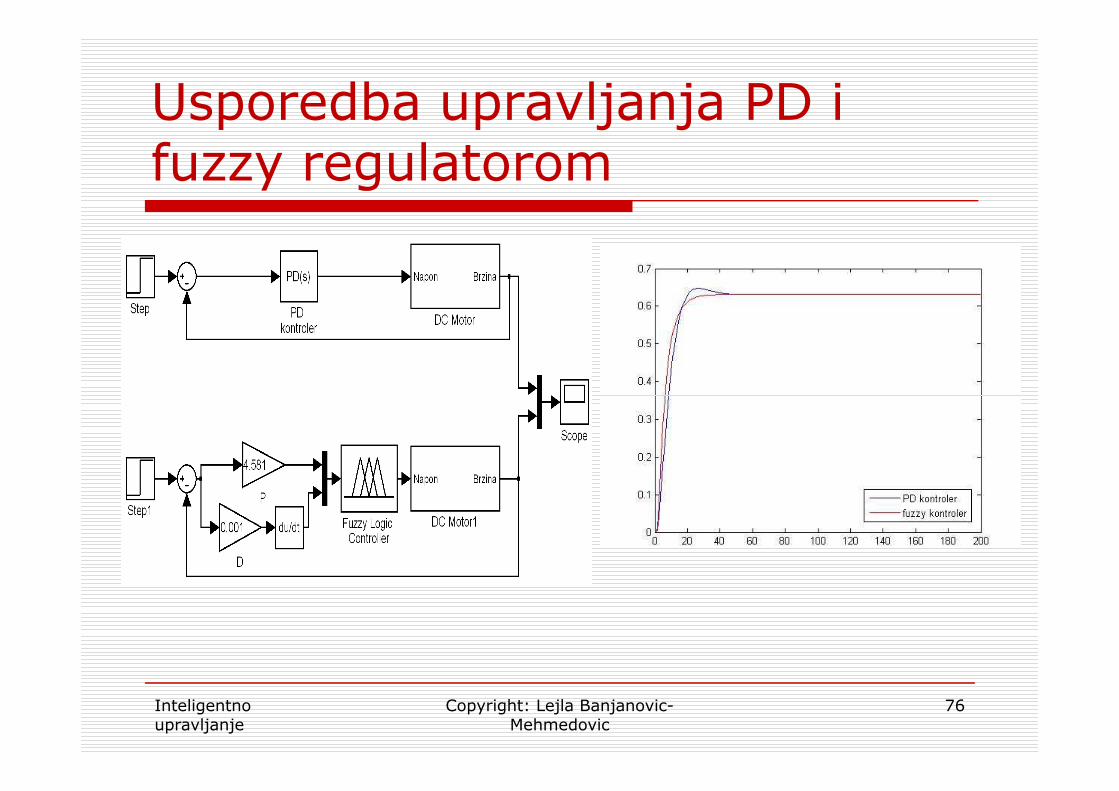
Usporedba upravljanja PD i fuzzy regulatorom
Inteligentno upravljanje
Copyright: Lejla Banjanovic-Mehmedovic
76





























