Embed Size (px)
Citation preview
J.L.Huertas SETI-03-04
Tr. 56
TEMA3: Sistemas Discretos
Contenidos del tema:
q Definición y ejemplos
q Variables de estado: wModelos y ecuacioneswRelación con la función de transferencia
q Estructuras alternativas: wPropiedades y ejemploswFormas canónicaswTransposición de sistemas
q Sistemas con propiedades especiales
q Restricciones en los coeficientes
J.L.Huertas SETI-03-04
Tr. 57
Sistemas Discretos
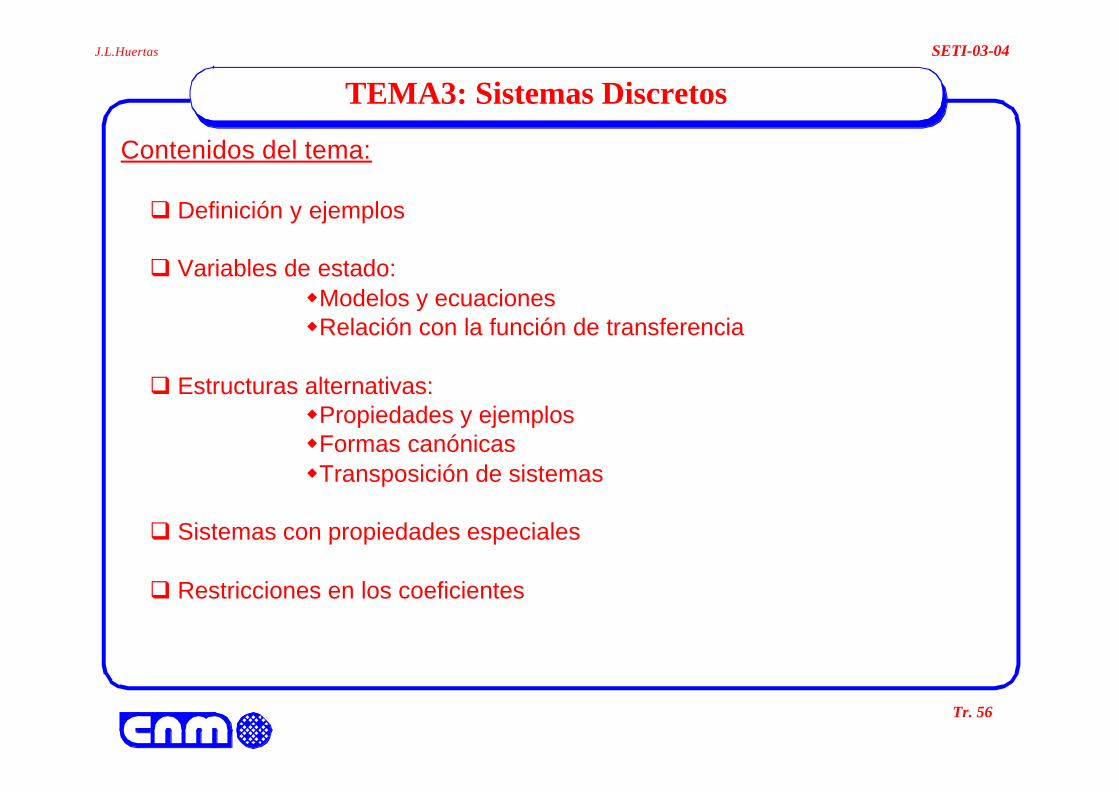
q Un sistema que acepta secuencias de números y las procesa numéricamente
w Desde el punto de vista “físico” es un problema exclusivamente de software. w El tiempo no aparece explícitamente w Hay errores de “redondeo” que afectan fundamentalmente a la precisión del resultado
0,98565650,45336770,43562890,99342860,56748330,6666666..........................
p = 1 - 0.05*pia = poly (p)[H,w]=freq(1,a,256);dB=20log10(mag);semilogx(f,dB)semilogx(f,phse)........................................
32,74533,90131,99828,67529,43431,902.....................
J.L.Huertas SETI-03-04
Tr. 58
Sistemas Discretos
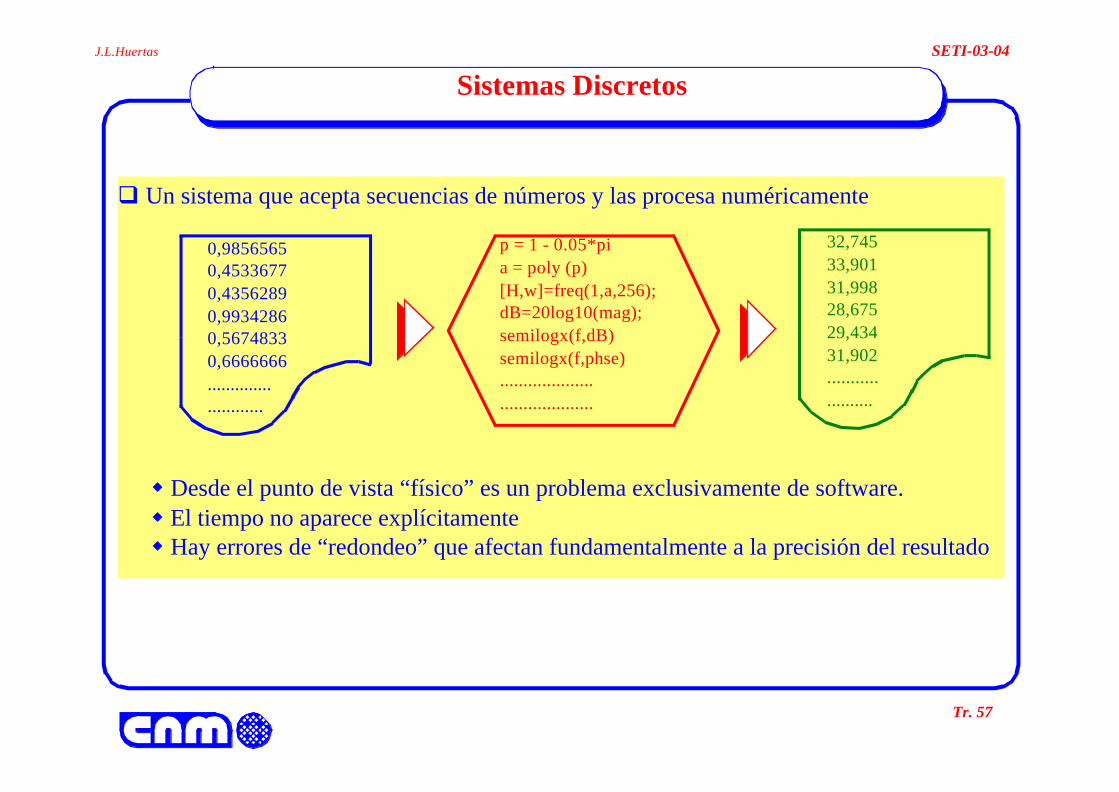
q Un sistema de “propósito general” que acepta señales/secuencias y las procesa numérica-mente
w Desde el punto de vista “físico” hay combinación de software y hardware. w El tiempo aparece explícitamente w El procesamiento se hace por un programa secuencial y su duración puede tener un
gran impacto sobre la operación “global” del sistemaw Hay errores de “redondeo” y de sincronización que pueden afectar incluso a la estabili-
dad
Ck(n)
f(t)
x(n)
A/D
xc(n)
32,74533,90131,99828,67529,43431,902
g(t)
y(nT)
D/A
yc(n)
xc(n)
J.L.Huertas SETI-03-04
Tr. 59
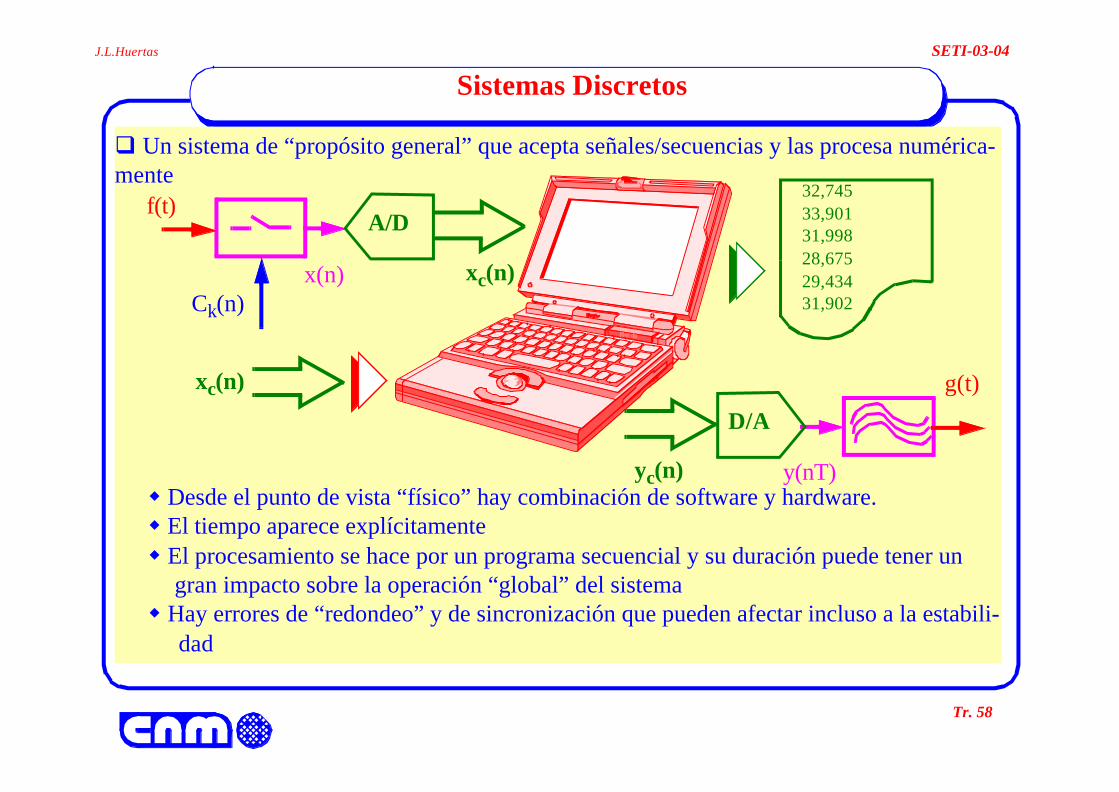
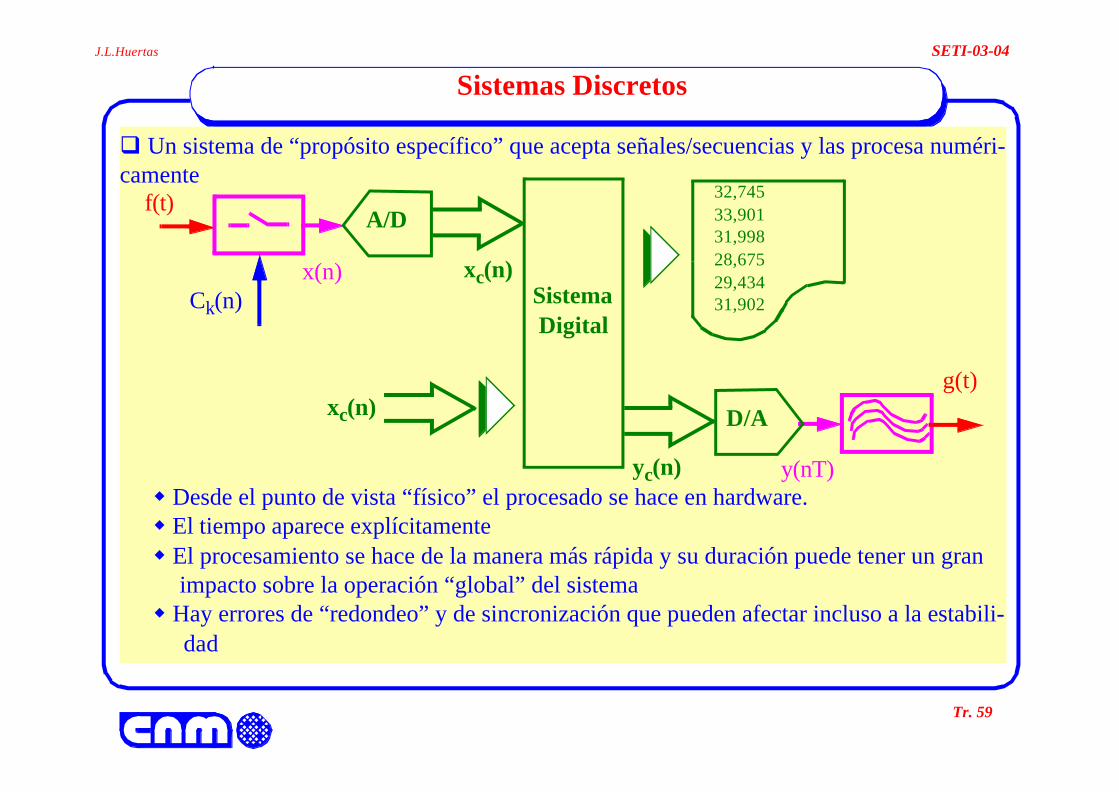
q Un sistema de “propósito específico” que acepta señales/secuencias y las procesa numéri-camente
w Desde el punto de vista “físico” el procesado se hace en hardware. w El tiempo aparece explícitamente w El procesamiento se hace de la manera más rápida y su duración puede tener un gran
impacto sobre la operación “global” del sistemaw Hay errores de “redondeo” y de sincronización que pueden afectar incluso a la estabili-
dad
Ck(n)
f(t)
x(n)
A/D
xc(n)
32,74533,90131,99828,67529,43431,902
g(t)
y(nT)
D/A
yc(n)
xc(n)
SistemaDigital
Sistemas Discretos
J.L.Huertas SETI-03-04
Tr. 60
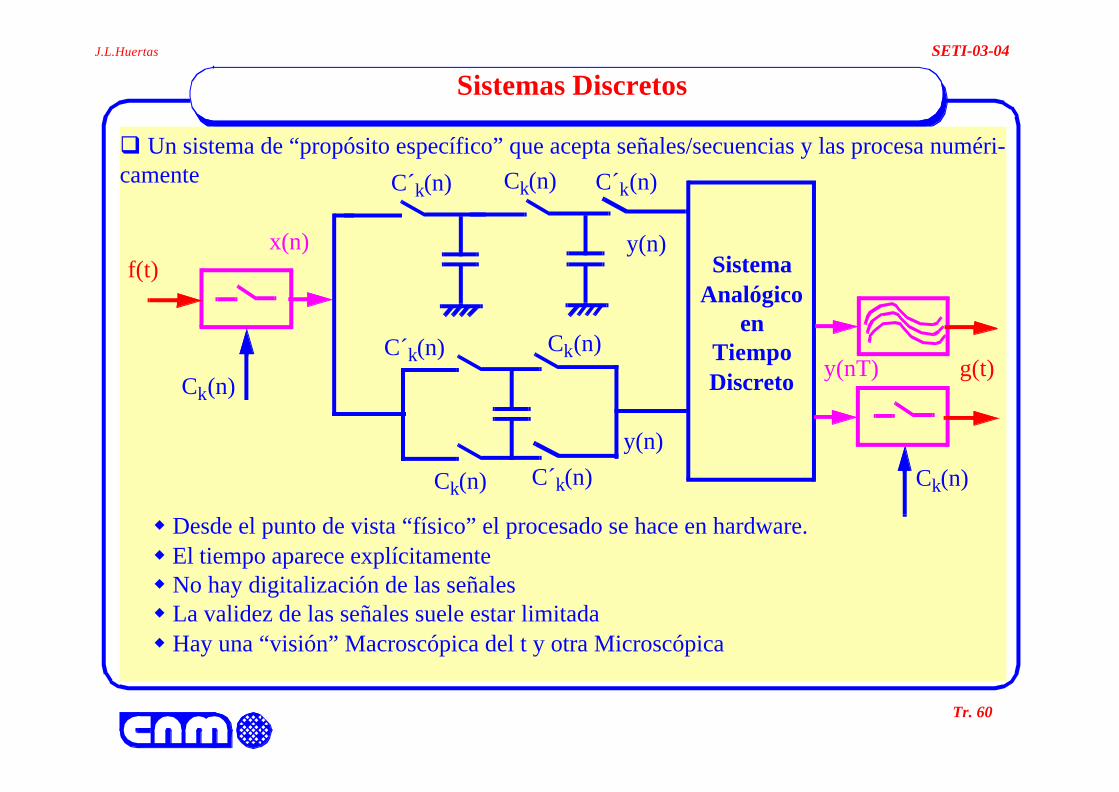
q Un sistema de “propósito específico” que acepta señales/secuencias y las procesa numéri-camente
w Desde el punto de vista “físico” el procesado se hace en hardware. w El tiempo aparece explícitamente w No hay digitalización de las señalesw La validez de las señales suele estar limitadaw Hay una “visión” Macroscópica del t y otra Microscópica
Ck(n)
f(t)x(n)
SistemaAnalógico
en TiempoDiscreto
y(n)
y(n)
g(t)y(nT)
C´k(n) Ck(n) C´k(n)
C´k(n)
C´k(n) Ck(n)
Ck(n) Ck(n)
Sistemas Discretos
J.L.Huertas SETI-03-04
Tr. 61
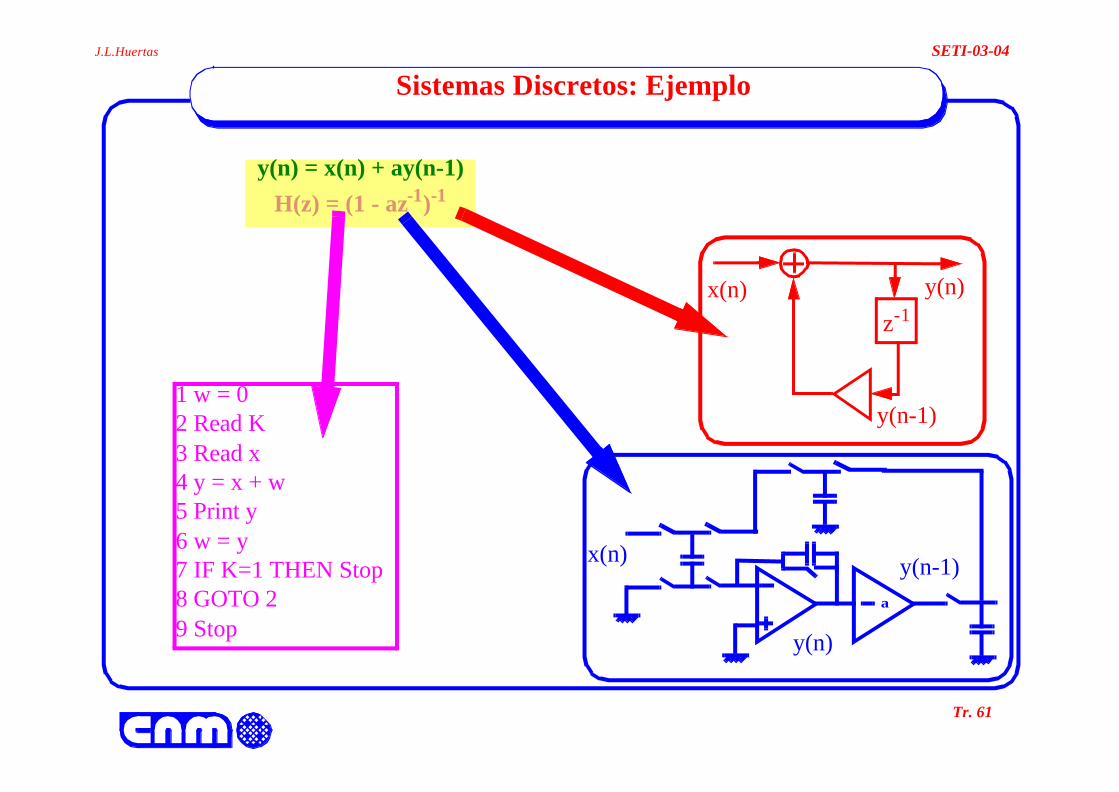
Sistemas Discretos: Ejemplo
y(n) = x(n) + ay(n-1)H(z) = (1 - az-1)-1
1 w = 02 Read K3 Read x4 y = x + w5 Print y6 w = y7 IF K=1 THEN Stop8 GOTO 29 Stop
a
y(n)
x(n)
y(n)x(n)z-1
y(n-1)
y(n-1)
J.L.Huertas SETI-03-04
Tr. 62
a
a
y(n)
x(n) y(n-1)
a
y(n)
x(n) y(n-1)
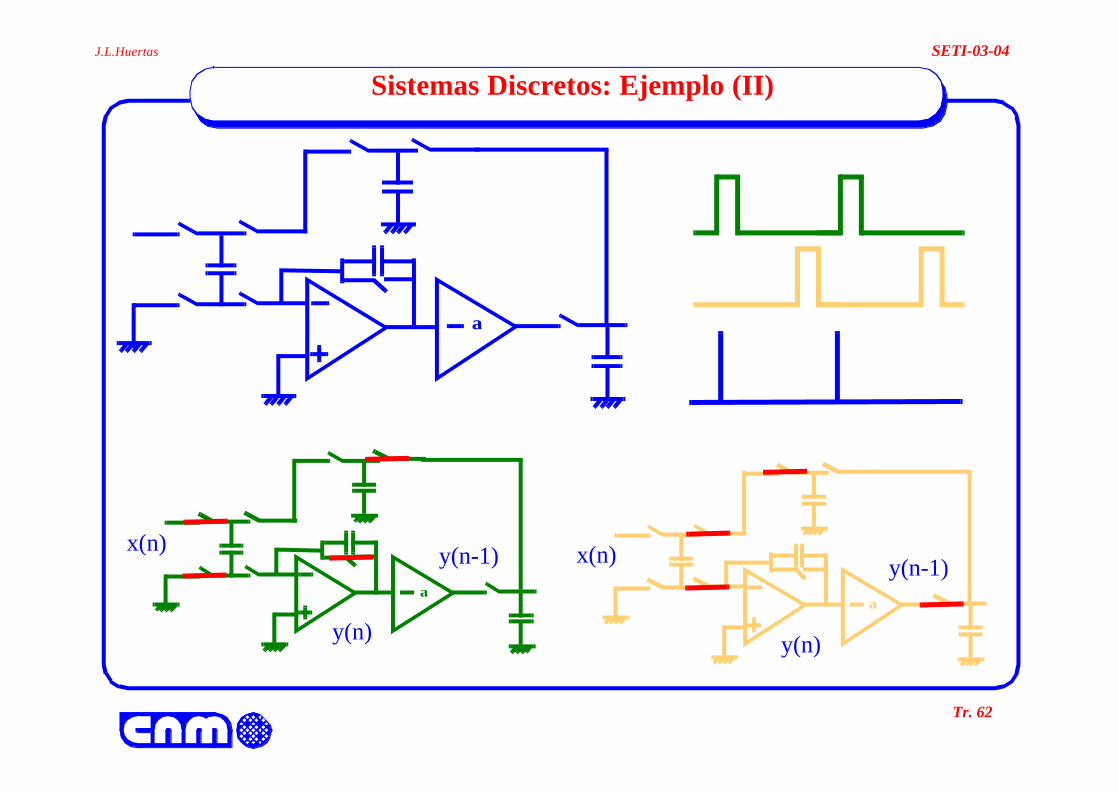
Sistemas Discretos: Ejemplo (II)
J.L.Huertas SETI-03-04
Tr. 63
y(n)
z-1
-a2
x(n)
z-1
-a1
d-a2
c2
c1
s1(n+1)
s1(n)
s2(n)
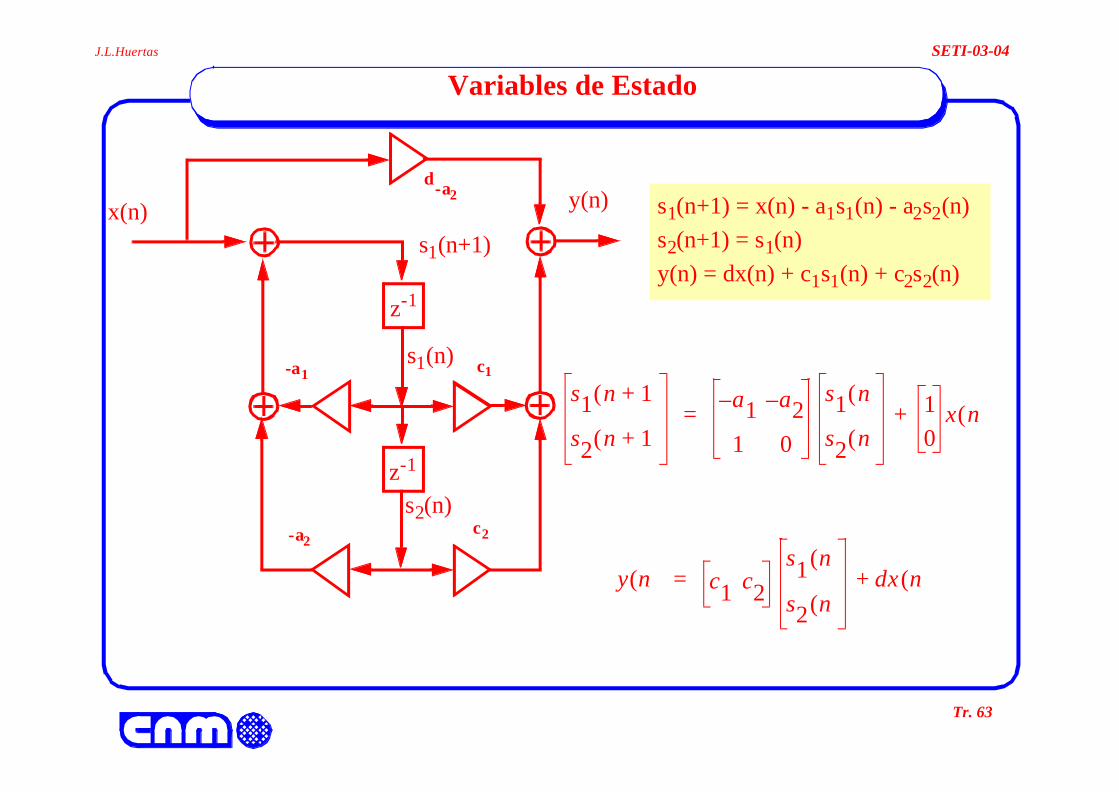
Variables de Estado
s1(n+1) = x(n) - a1s1(n) - a2s2(n) s2(n+1) = s1(n)y(n) = dx(n) + c1s1(n) + c2s2(n)
s1 n 1+( )
s2 n 1+( )
a1– a2–
1 0
s1 n( )
s2 n( )10
x n( )+=
y n( ) c1 c2s1 n( )
s2 n( )dx n( )+=
J.L.Huertas SETI-03-04
Tr. 64
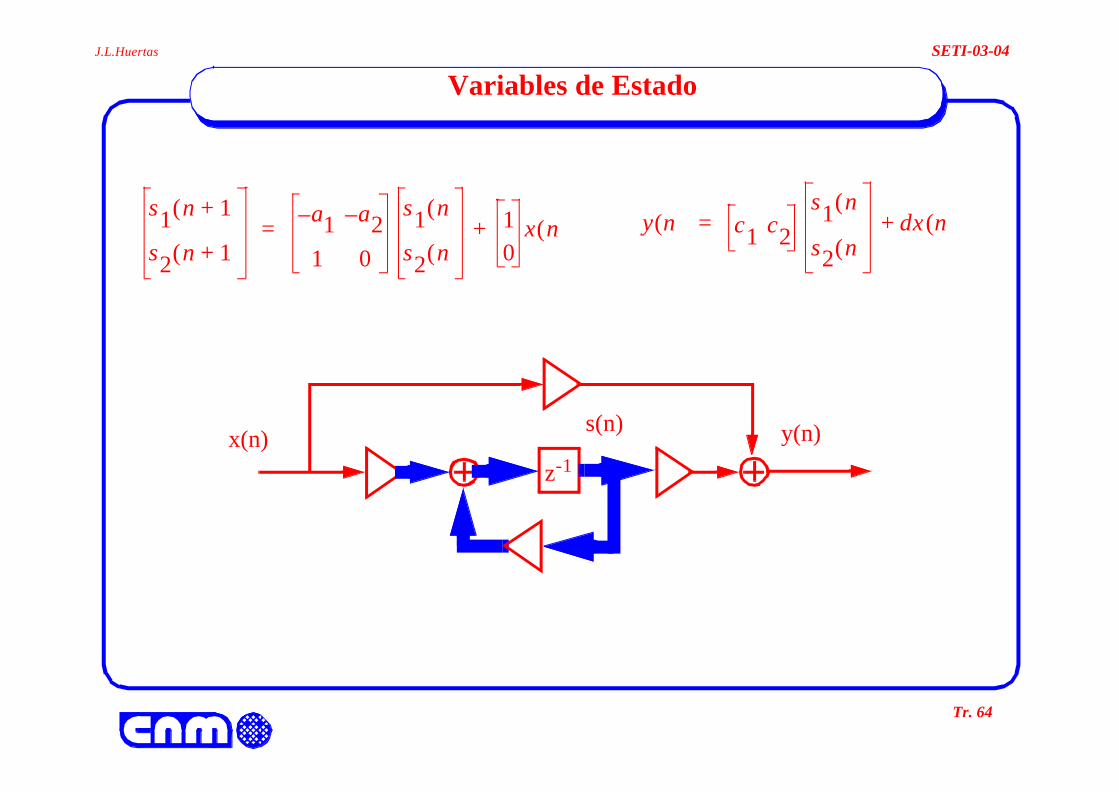
s1 n 1+( )
s2 n 1+( )
a1– a2–
1 0
s1 n( )
s2 n( )10
x n( )+= y n( ) c1 c2s1 n( )
s2 n( )dx n( )+=
Variables de Estado
z-1
y(n)x(n)s(n)
J.L.Huertas SETI-03-04
Tr. 65
y(n)
z-1
-a2
x(n)
z-1
-a1
g0
g2
g1
s1(n+1)
s1(n)
s2(n)
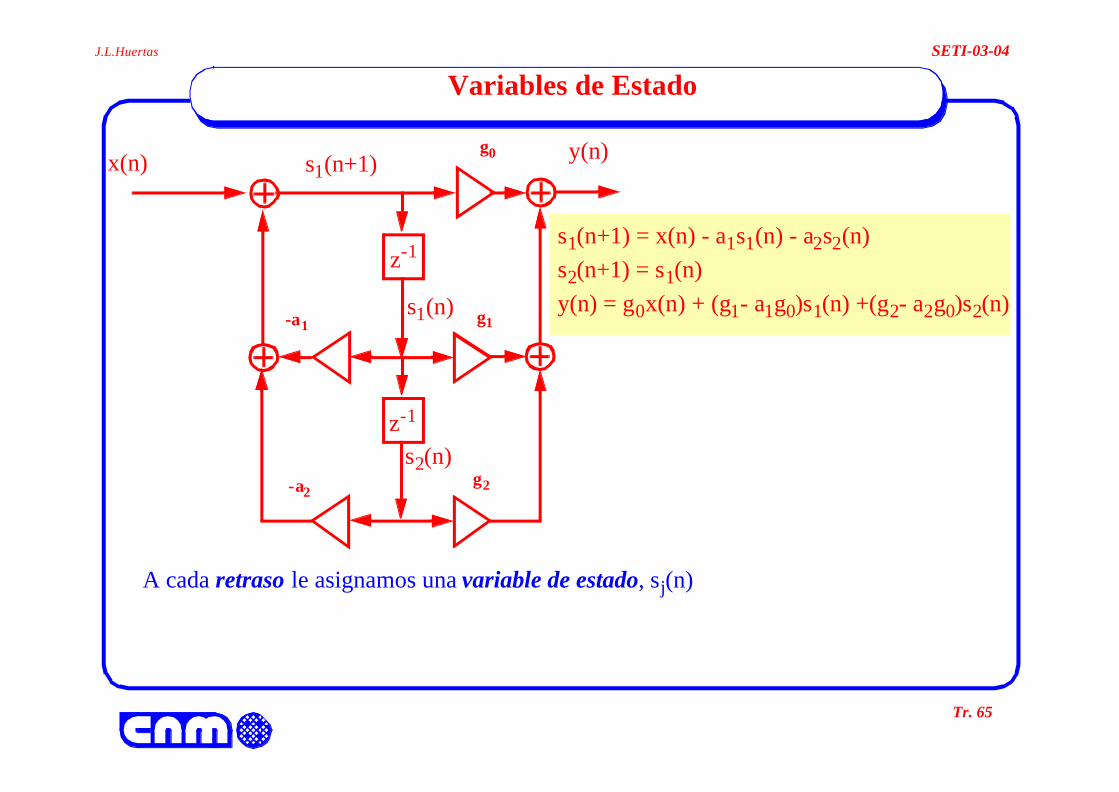
s1(n+1) = x(n) - a1s1(n) - a2s2(n) s2(n+1) = s1(n)y(n) = g0x(n) + (g1- a1g0)s1(n) +(g2- a2g0)s2(n)
A cada retraso le asignamos una variable de estado, sj(n)
Variables de Estado
J.L.Huertas SETI-03-04
Tr. 66
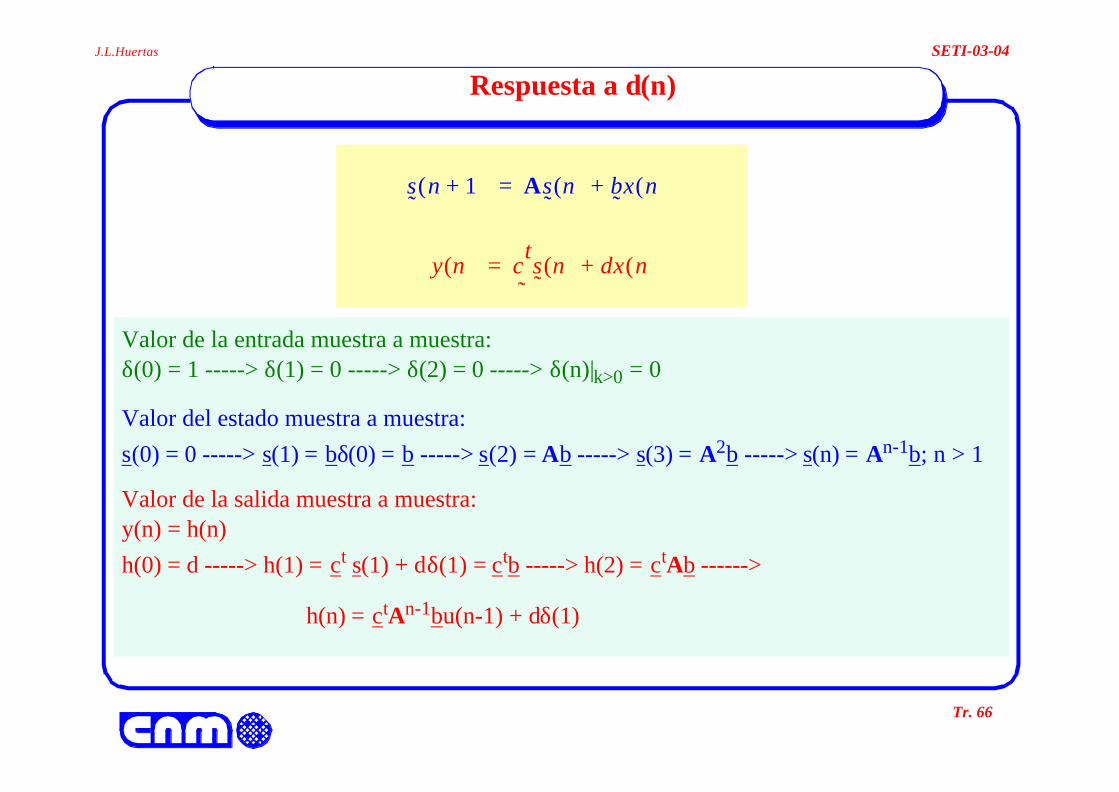
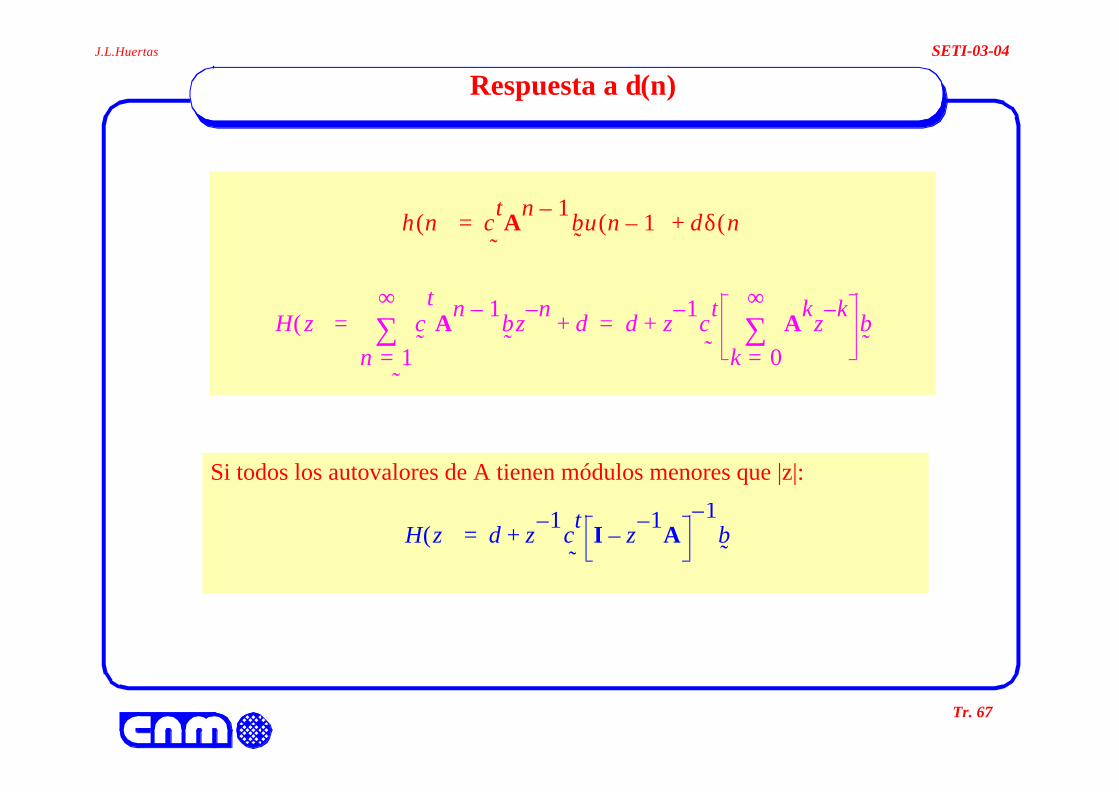
Respuesta a δ(n)
Valor de la entrada muestra a muestra:δ(0) = 1 -----> δ(1) = 0 -----> δ(2) = 0 -----> δ(n)|k>0 = 0
Valor del estado muestra a muestra:s(0) = 0 -----> s(1) = bδ(0) = b -----> s(2) = Ab -----> s(3) = A2b -----> s(n) = An-1b; n > 1
Valor de la salida muestra a muestra:y(n) = h(n)h(0) = d -----> h(1) = ct s(1) + dδ(1) = ctb -----> h(2) = ctAb ------>
h(n) = ctAn-1bu(n-1) + dδ(1)
s˜
n 1+( ) As˜
n( ) b˜x n( )+=
y n( ) ct
˜s˜
n( ) dx n( )+=
J.L.Huertas SETI-03-04
Tr. 67
h n( ) ct
˜A
n 1–b˜u n 1–( ) dδ n( )+=
H z( ) c˜n 1=
∞∑
t
˜
An 1–
b˜z
n–d+ d z
1–ct
˜A
kz
k–
k 0=
∞∑ b
˜+= =
Si todos los autovalores de A tienen módulos menores que |z|:
H z( ) d z1–
ct
˜I z
1–A–
1–b˜
+=
Respuesta a δ(n)
J.L.Huertas SETI-03-04
Tr. 68
; ;
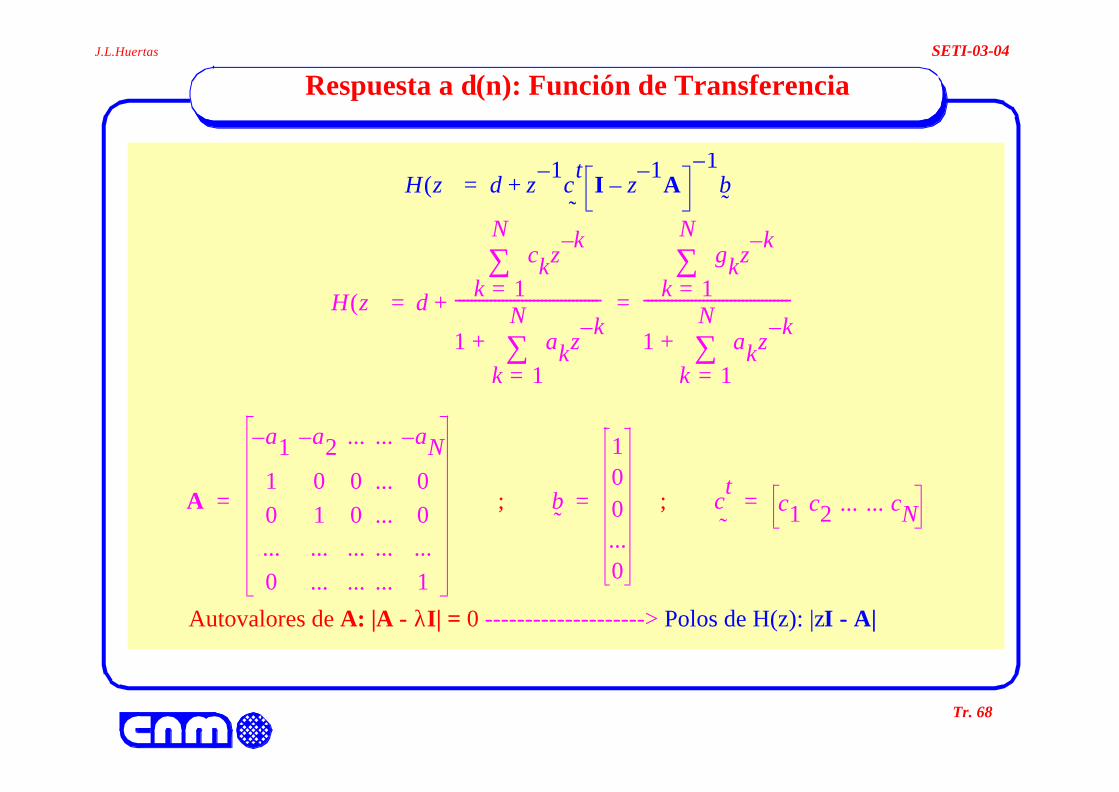
Autovalores de A: |A - λI| = 0 --------------------> Polos de H(z): |zI - A|
H z( ) d z1–
ct
˜I z
1–A–
1–b˜
+=
H z( ) d
ckzk–
k 1=
N∑
1 akzk–
k 1=
N∑+
-------------------------------------+
gkzk–
k 1=
N∑
1 akzk–
k 1=
N∑+
-------------------------------------= =
A
a1– a2– ... ... aN–
1 0 0 ... 00 1 0 ... 0... ... ... ... ...0 ... ... ... 1
= b˜
100...0
= ct
˜c1 c2 ... ... cN=
Respuesta a δ(n): Función de Transferencia
J.L.Huertas SETI-03-04
Tr. 69
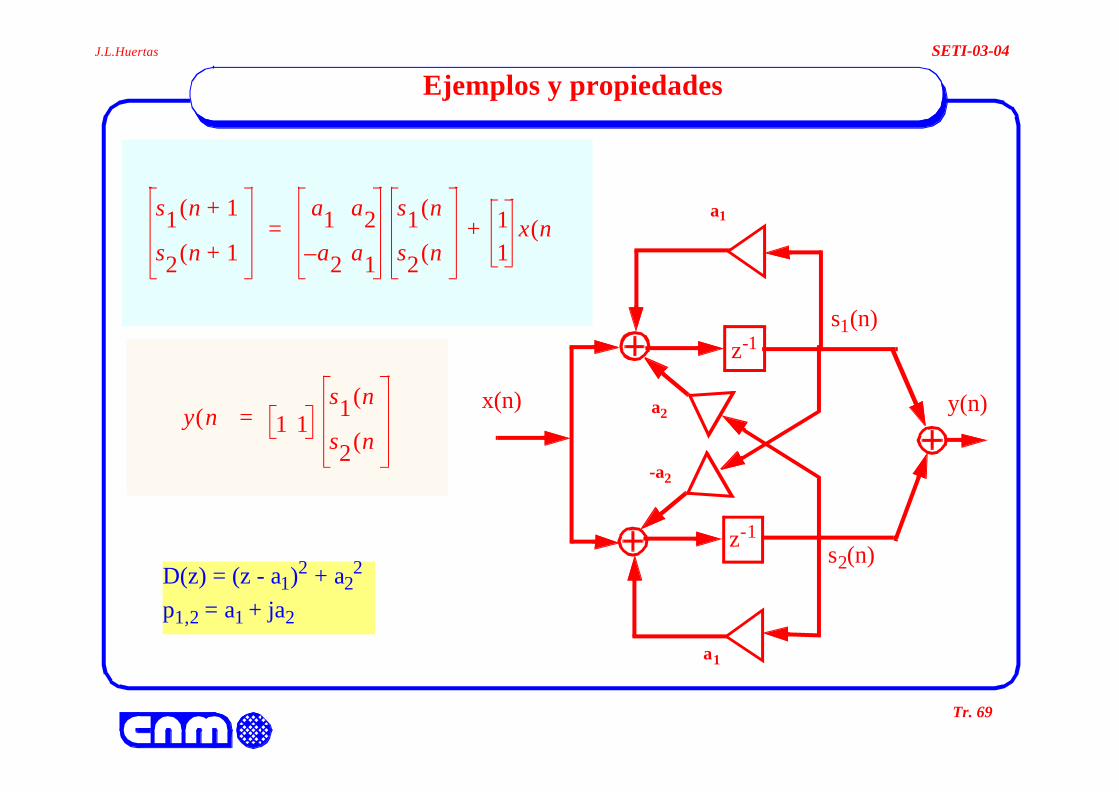
Ejemplos y propiedades
s1 n 1+( )
s2 n 1+( )
a1 a2a2– a1
s1 n( )
s2 n( )11
x n( )+=
y n( ) 1 1s1 n( )
s2 n( )= y(n)a2
x(n)
a1
s1(n)
s2(n)
z-1
z-1
a1
-a2
D(z) = (z - a1)2 + a22
p1,2 = a1 + ja2
J.L.Huertas SETI-03-04
Tr. 70
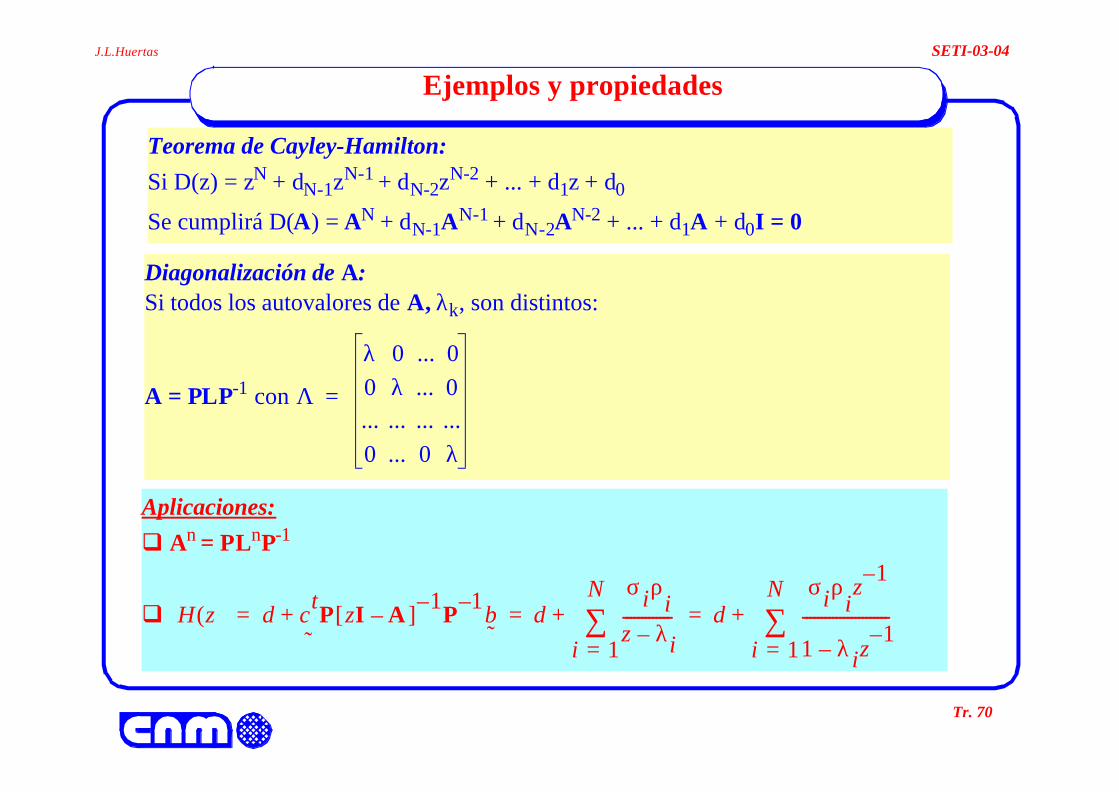
Ejemplos y propiedades
Teorema de Cayley-Hamilton:Si D(z) = zN + dN-1zN-1 + dN-2zN-2 + ... + d1z + d0
Se cumplirá D(A) = AN + dN-1AN-1 + dN-2AN-2 + ... + d1A + d0I = 0
Diagonalización de A:Si todos los autovalores de A, λk, son distintos:
A = PΛP-1 con Λ
λ 0 ... 00 λ ... 0... ... ... ...0 ... 0 λ
=
Aplicaciones:q An = PΛnP-1
q H z( ) d ct
˜P zI A–[ ] 1– P 1– b
˜+ d
σiρiz λi–-------------
i 1=
N∑+ d
σiρiz 1–
1 λiz1–
–-----------------------
i 1=
N∑+= = =
Diagonalización de A:Si todos los autovalores de A, λk, son distintos:
A = PΛP-1 con Λ
λ 0 ... 00 λ ... 0... ... ... ...0 ... 0 λ
=
J.L.Huertas SETI-03-04
Tr. 71
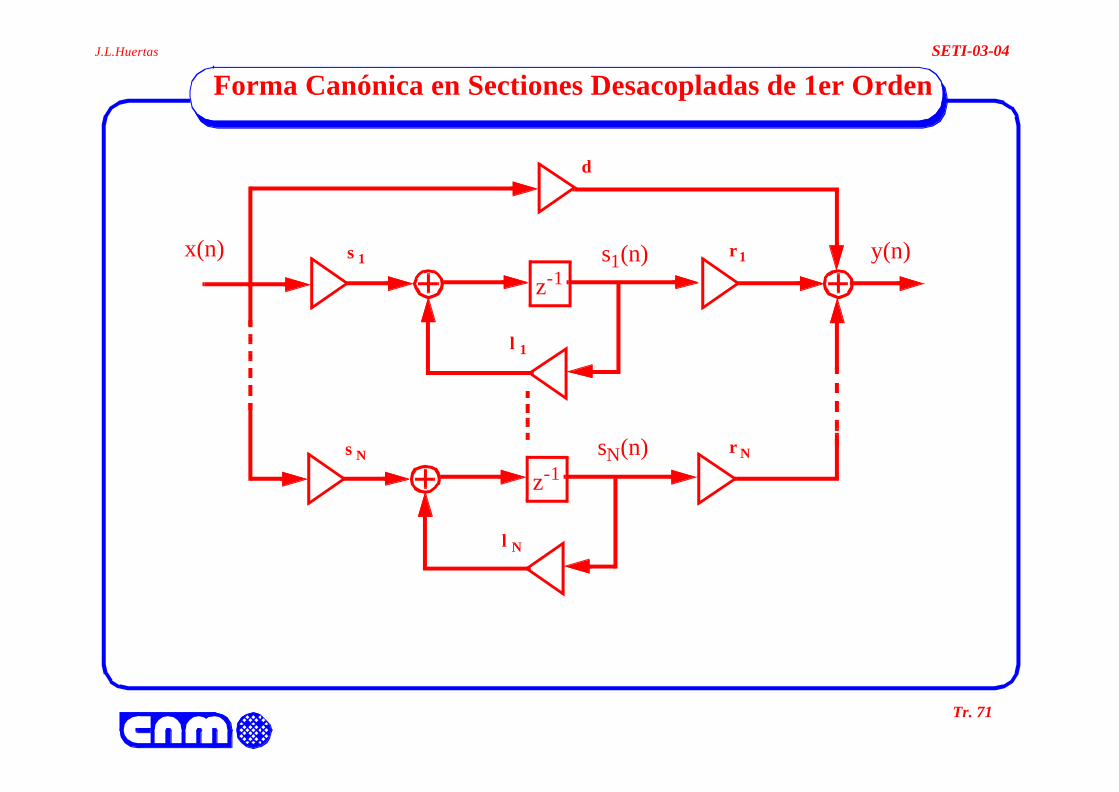
z-1
d
ρ1s1(n)
sN(n)z-1
ρN
σ1
σN
λ1
λN
y(n)x(n)
Forma Canónica en Sectiones Desacopladas de 1er Orden
J.L.Huertas SETI-03-04
Tr. 72
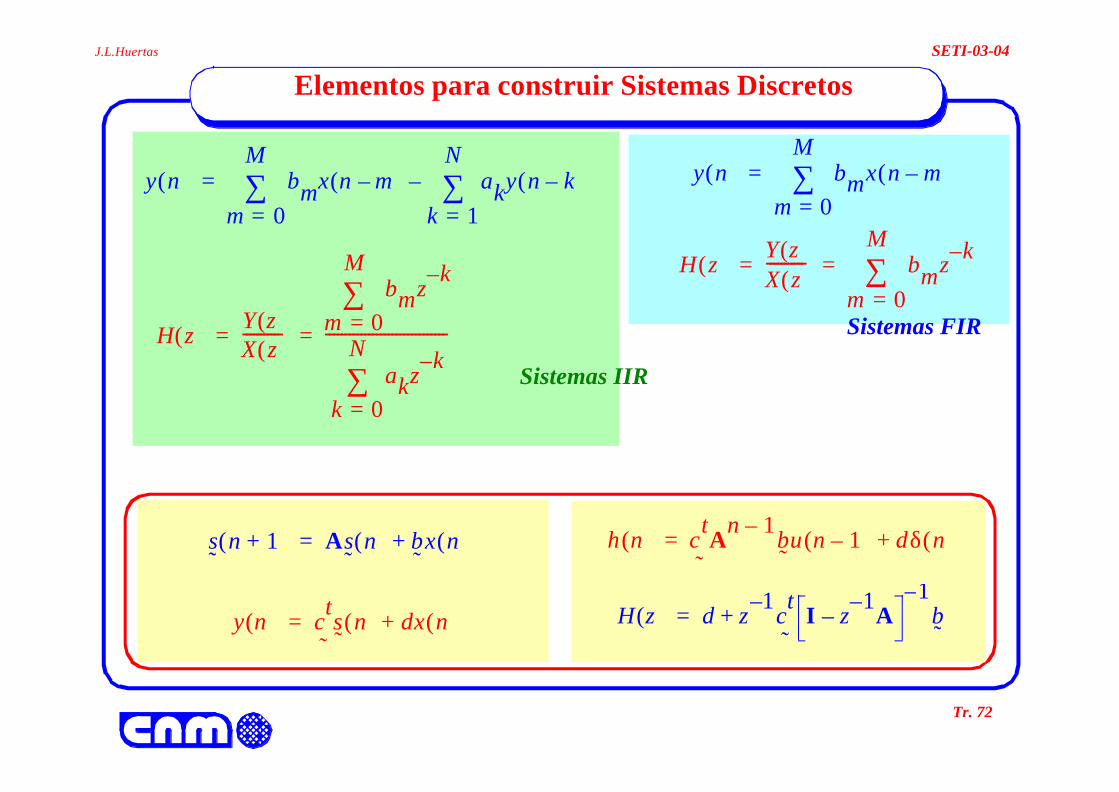
Elementos para construir Sistemas Discretos
y n( ) bmx n m–( ) aky n k–( )k 1=
N∑–
m 0=
M∑=
H z( )Y z( )X z( )-----------
bmzk–
m 0=
M∑
akzk–
k 0=
N∑
-------------------------------= =
y n( ) bmx n m–( )m 0=
M∑=
H z( )Y z( )X z( )----------- bmz k–
m 0=
M∑= =
s˜
n 1+( ) As˜
n( ) b˜x n( )+=
y n( ) ct
˜s˜
n( ) dx n( )+=
h n( ) ct
˜A
n 1–b˜u n 1–( ) dδ n( )+=
H z( ) d z1–
ct
˜I z
1–A–
1–b˜
+=
Sistemas FIR
Sistemas IIR
J.L.Huertas SETI-03-04
Tr. 73
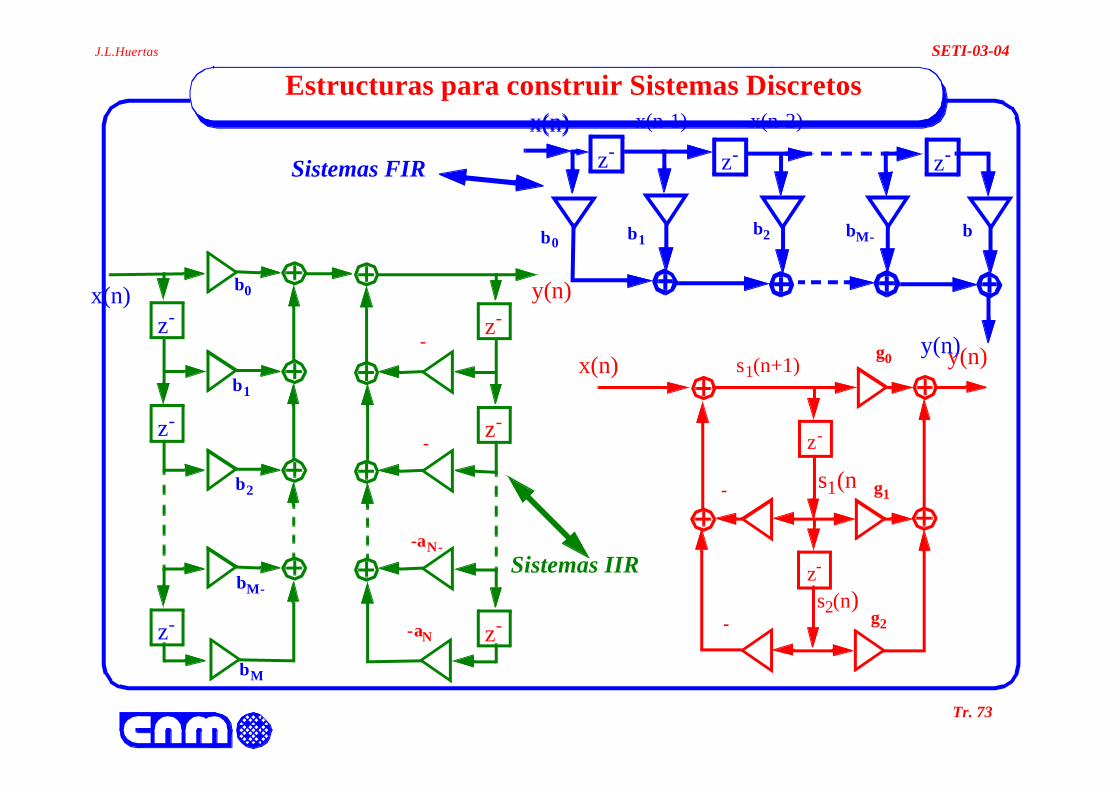
Estructuras para construir Sistemas Discretos
x(n) y(n)
z-
z-
z-
z-
z-
z--
-
-aN-
-aN
b0
b1
b2
bM-
bM
z- z-
bbM-b1b0
z-
b2
x(n-1)
y(n)
x(n-2)x(n)x(n)
Sistemas FIR
Sistemas IIR
y(n)
z-
-
x(n)
z-
-
g0
g2
g1
s1(n+1)
s1(n
s2(n)
J.L.Huertas SETI-03-04
Tr. 74
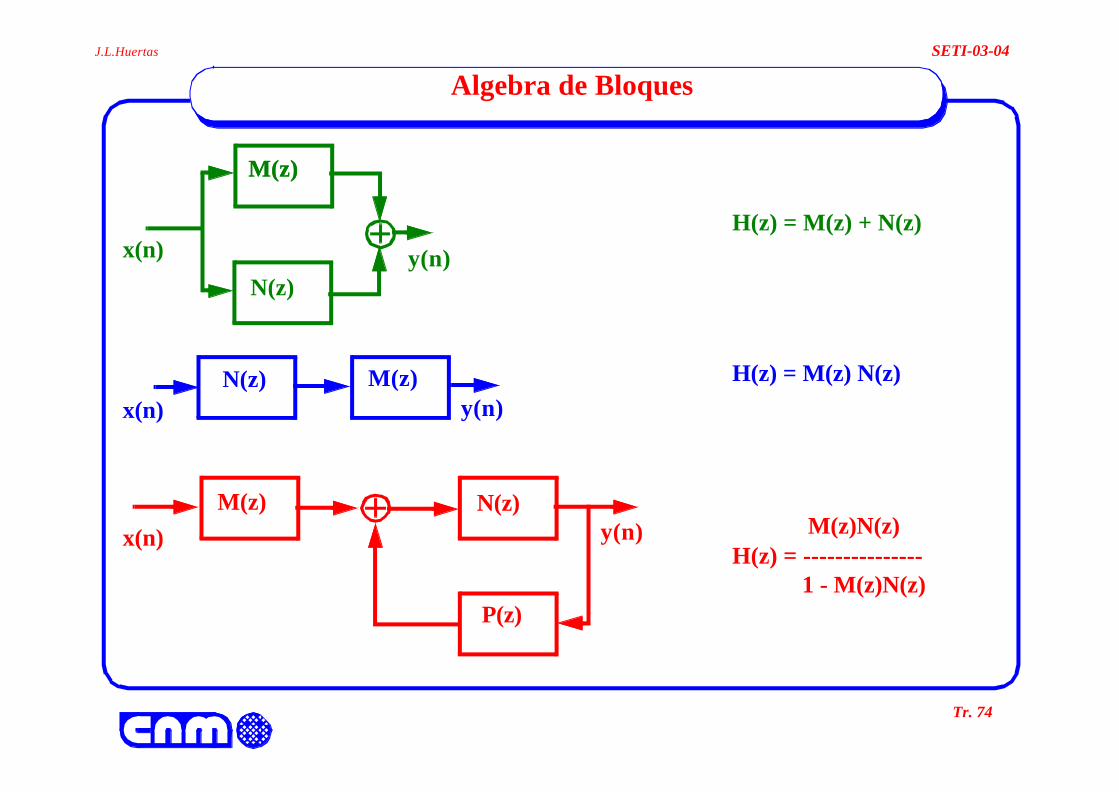
Algebra de Bloques
M(z)
N(z)
x(n)
x(n)
y(n)
y(n)N(z) M(z)
M(z)
x(n) y(n)M(z) N(z)
P(z)
H(z) = M(z) + N(z)
H(z) = M(z) N(z)
M(z)N(z)H(z) = ---------------
1 - M(z)N(z)
J.L.Huertas SETI-03-04
Tr. 75
y(n)
z-1
-a2
x(n)
z-1
-a1
b0
b2
b1
s1(n+1)
s1(n)
s2(n)
y(n)
z-1
b2
x(n)
z-1
b1
b0
-a2
-a1
s2(n+1)
s1(n)
s2(n)
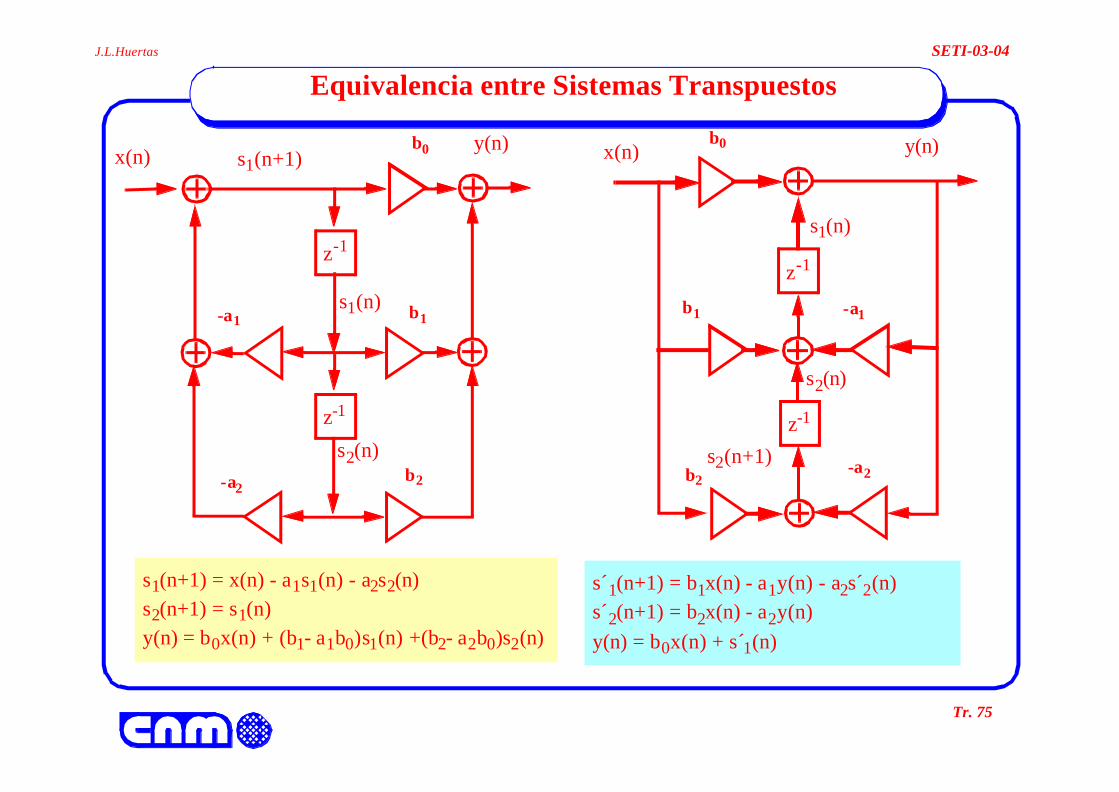
s1(n+1) = x(n) - a1s1(n) - a2s2(n) s2(n+1) = s1(n)y(n) = b0x(n) + (b1- a1b0)s1(n) +(b2- a2b0)s2(n)
s´1(n+1) = b1x(n) - a1y(n) - a2s´2(n) s´2(n+1) = b2x(n) - a2y(n)y(n) = b0x(n) + s 1́(n)
Equivalencia entre Sistemas Transpuestos
J.L.Huertas SETI-03-04
Tr. 76
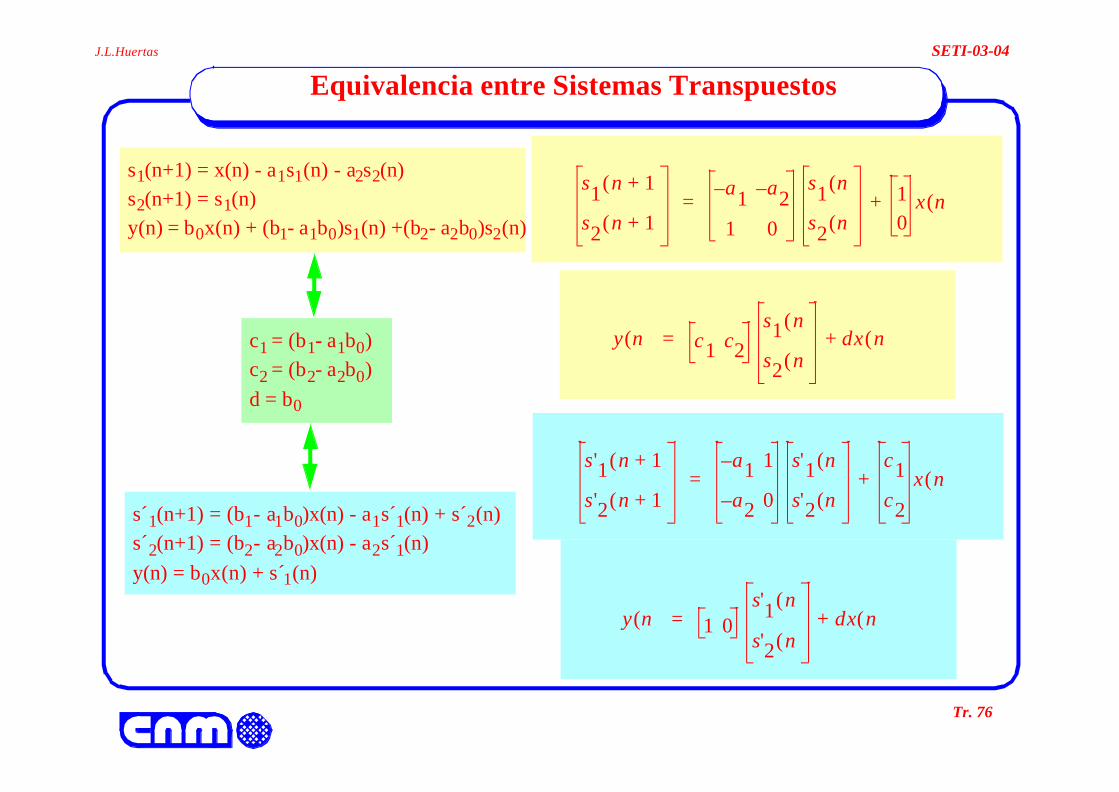
s´1(n+1) = (b1- a1b0)x(n) - a1s´1(n) + s´2(n) s´2(n+1) = (b2- a2b0)x(n) - a2s´1(n)y(n) = b0x(n) + s 1́(n)
s1(n+1) = x(n) - a1s1(n) - a2s2(n) s2(n+1) = s1(n)y(n) = b0x(n) + (b1- a1b0)s1(n) +(b2- a2b0)s2(n)
s1 n 1+( )
s2 n 1+( )
a1– a2–
1 0
s1 n( )
s2 n( )10
x n( )+=
s'1 n 1+( )
s'2 n 1+( )
a1– 1
a2– 0
s'1 n( )
s'2 n( )
c1c2
x n( )+=
y n( ) c1 c2s1 n( )
s2 n( )dx n( )+=
y n( ) 1 0s'1 n( )
s'2 n( )dx n( )+=
Equivalencia entre Sistemas Transpuestos
c1 = (b1- a1b0) c2 = (b2- a2b0)d = b0
J.L.Huertas SETI-03-04
Tr. 77
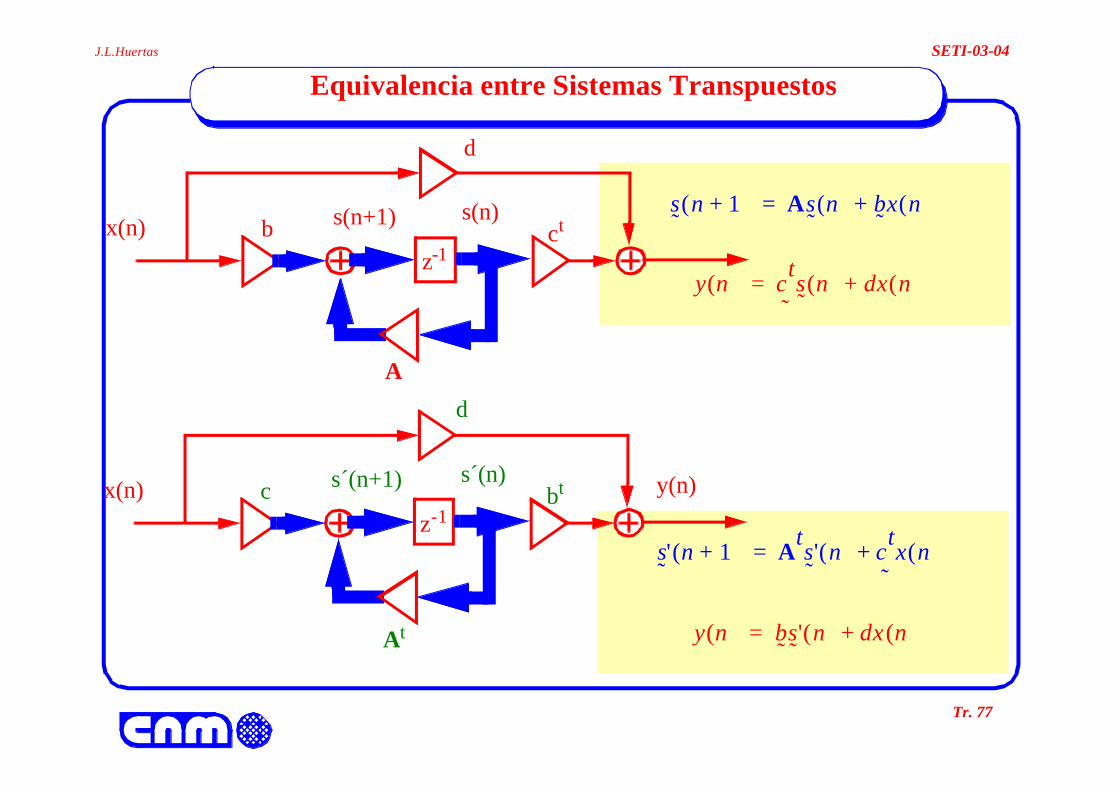
s˜
n 1+( ) As˜
n( ) b˜x n( )+=
y n( ) ct
˜s˜
n( ) dx n( )+=z-1
x(n)s(n)
ctb
A
s(n+1)
d
s'˜
n 1+( ) Ats'˜
n( ) ct
˜x n( )+=
y n( ) b˜s'˜
n( ) dx n( )+=
z-1
y(n)x(n)s´(n)
btc
At
s´(n+1)
d
Equivalencia entre Sistemas Transpuestos
J.L.Huertas SETI-03-04
Tr. 78
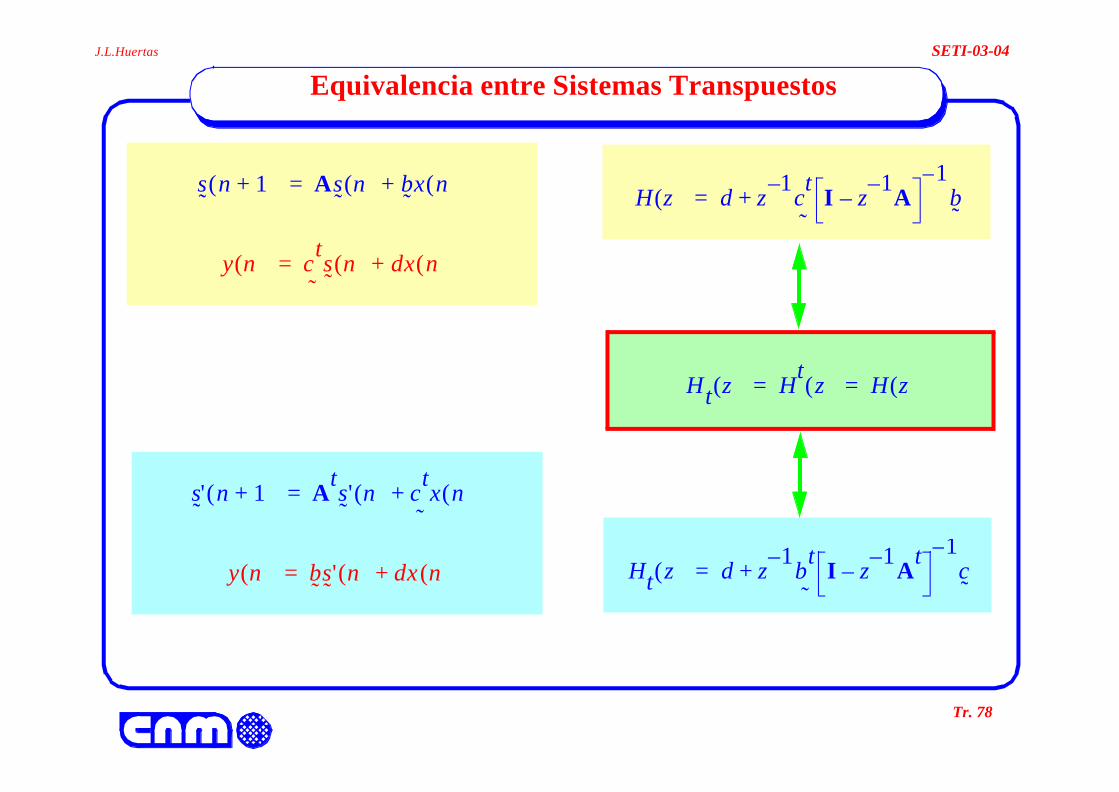
s˜
n 1+( ) As˜
n( ) b˜x n( )+=
y n( ) ct
˜s˜
n( ) dx n( )+=
s'˜
n 1+( ) Ats'˜
n( ) ct
˜x n( )+=
y n( ) b˜s'˜
n( ) dx n( )+=
H z( ) d z1–
ct
˜I z
1–A–
1–b˜
+=
Ht z( ) d z1–
bt
˜I z
1–A
t–
1–c˜
+=
Ht z( ) Ht
z( ) H z( )= =
Equivalencia entre Sistemas Transpuestos
J.L.Huertas SETI-03-04
Tr. 79
x(n) y(n)
z-
z-
z-
z-
z-
z--a1
-a2
-aN-
-aN
b0
b1
b2
bM-
bM
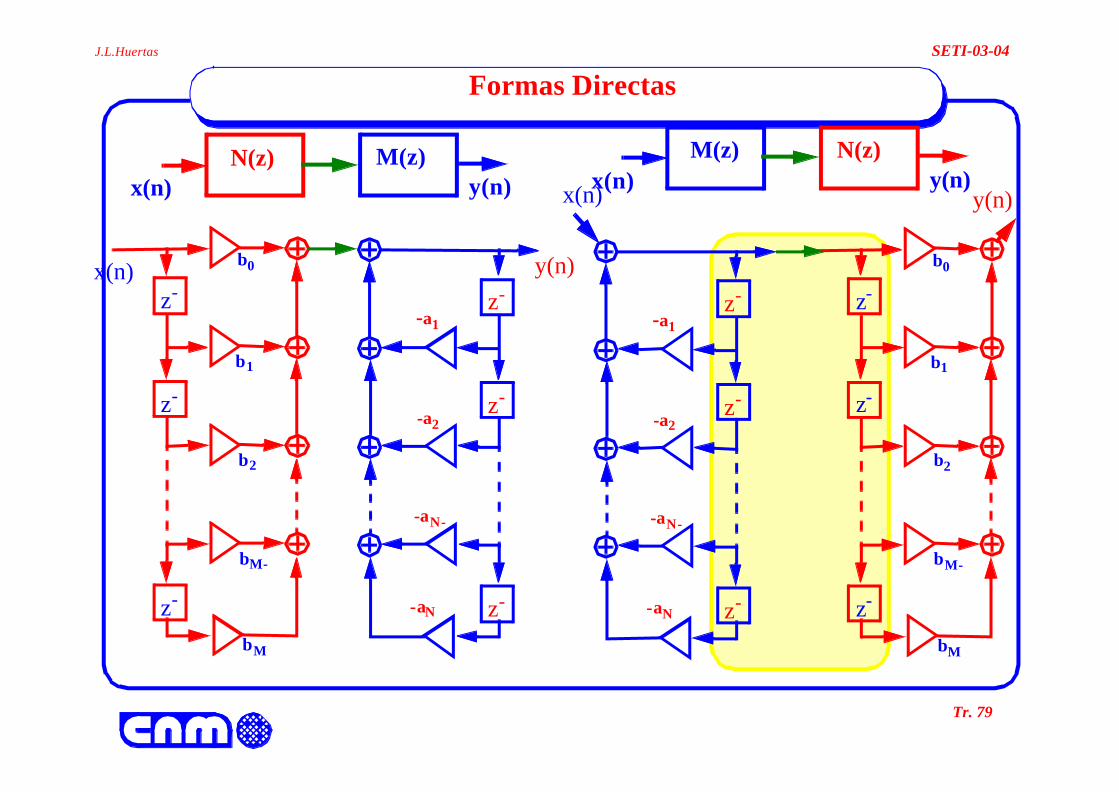
x(n) y(n)N(z) M(z)
x(n) y(n)
z-
z-
z-
z-
z-
z--a1
-a2
-aN-
-aN
b0
b1
b2
bM-
bM
x(n) y(n)M(z) N(z)
Formas Directas
J.L.Huertas SETI-03-04
Tr. 80
x(n) y(n)
z-
z-
z--a1
-a2
-aN-
-aN
b0
b1
b2
bM-
bM
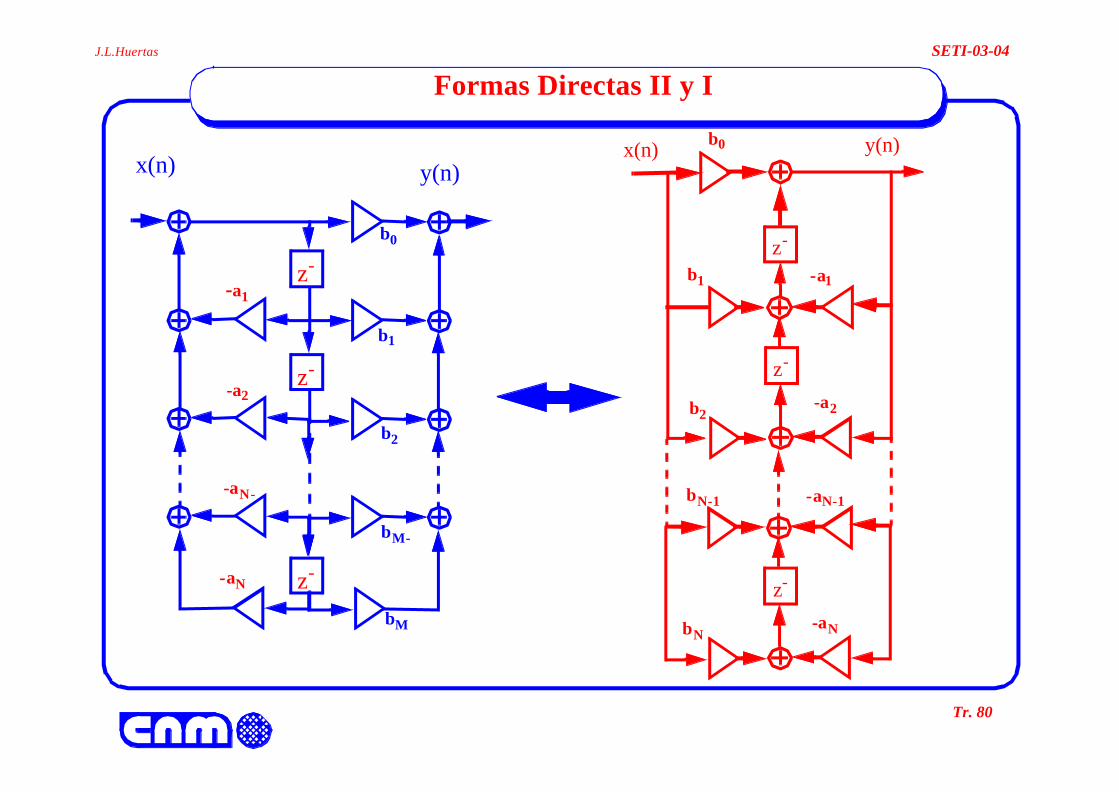
Formas Directas II y I
y(n)
z-
b2
x(n)
z-
b1
b0
-a2
-a1
z-
bN
bN-1
-aN
-aN-1
J.L.Huertas SETI-03-04
Tr. 81
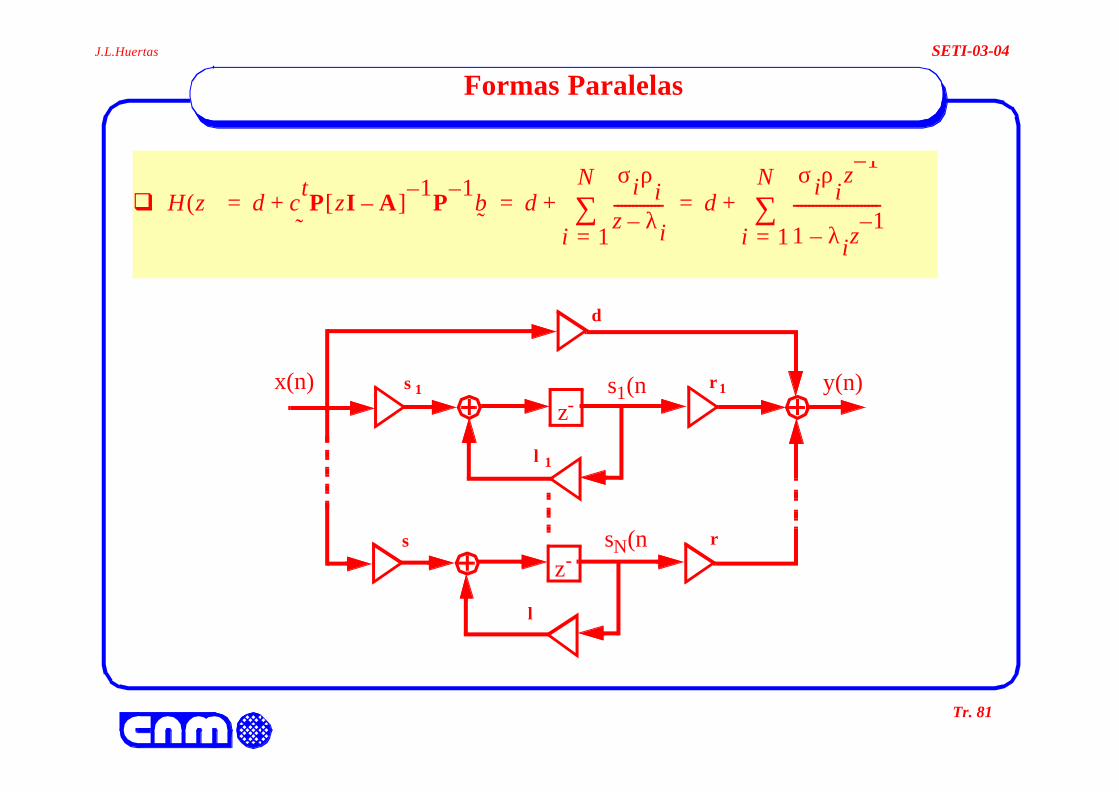
q H z( ) d ct
˜P zI A–[ ]
1–P
1–b˜
+ dσiρiz λi–-------------
i 1=
N∑+ d
σiρiz
1–
1 λiz1–
–-----------------------
i 1=
N∑+= = =
z-
d
ρ1s1(n
sN(nz-
ρ
σ1
σ
λ1
λ
y(n)x(n)
Formas Paralelas
J.L.Huertas SETI-03-04
Tr. 82
q
q ; ; M = N
q --->
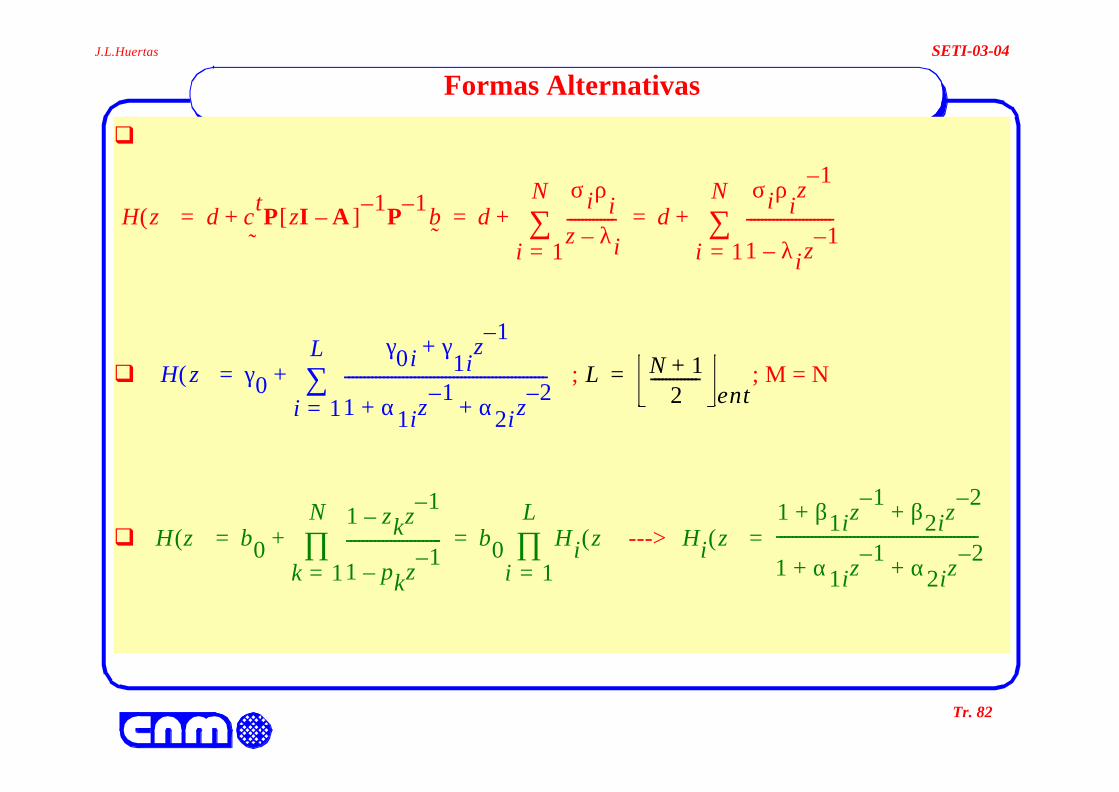
H z( ) d ct
˜P zI A–[ ] 1– P 1– b
˜+ d
σiρiz λi–-------------
i 1=
N∑+ d
σiρiz
1–
1 λiz1–
–-----------------------
i 1=
N∑+= = =
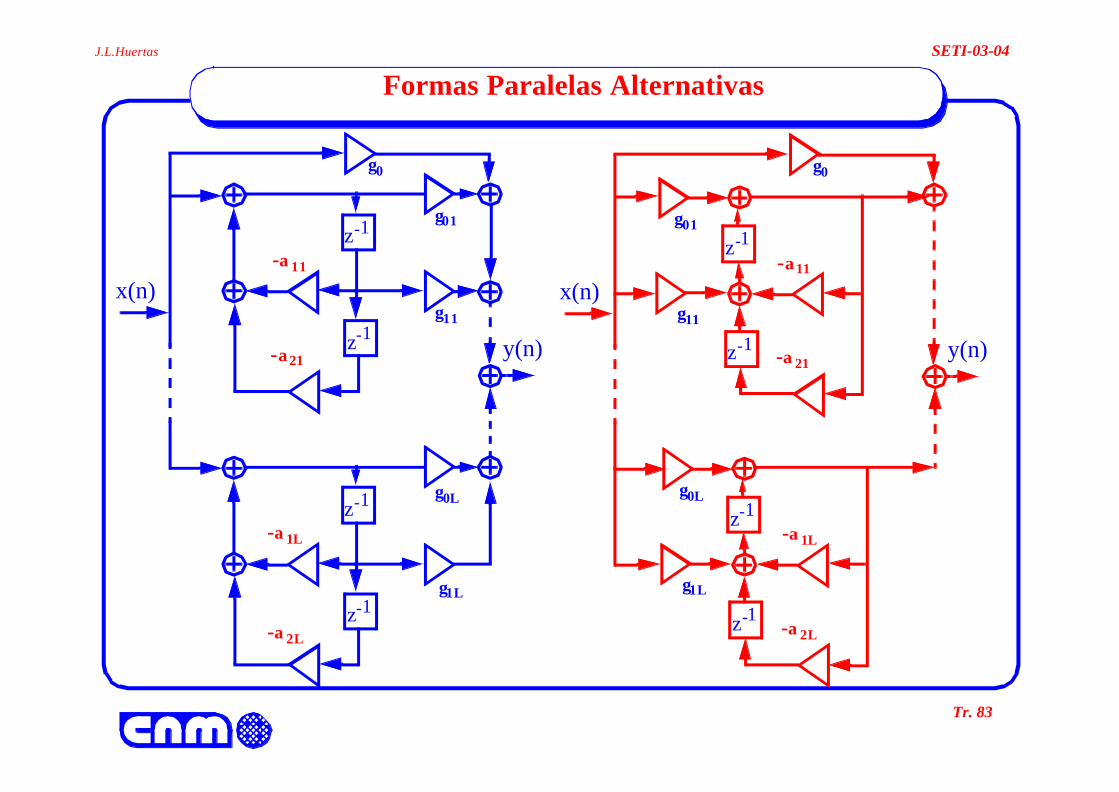
H z( ) γ0
γ0i γ+1i
z1–
1 α1iz1–
α2iz2–
+ +----------------------------------------------------
i 1=
L∑+= L N 1+
2-------------
ent=
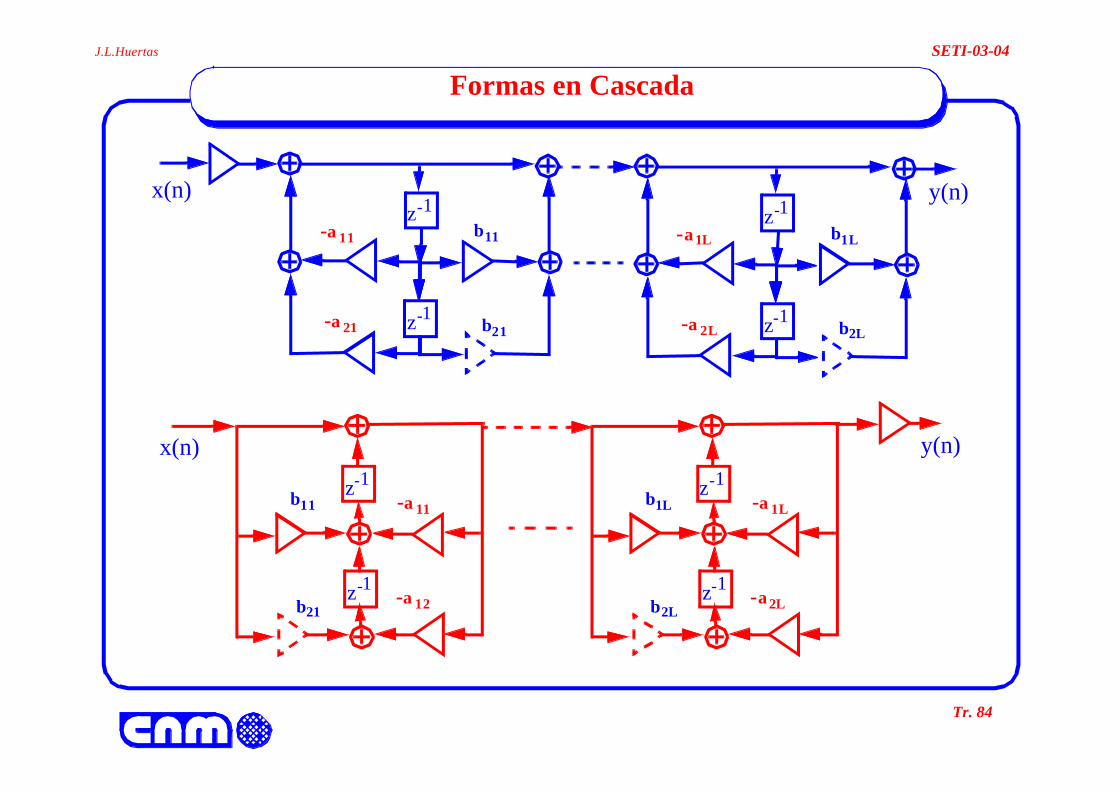
H z( ) b01 z– kz
1–
1 p– kz1–
------------------------k 1=
N∏+ b0 Hi z( )
i 1=
L∏= = Hi z( )
1 β1iz1–
β2iz2–
+ +
1 α1iz1–
α2iz2–
+ +----------------------------------------------------=
Formas Alternativas
J.L.Huertas SETI-03-04
Tr. 83
z-1
z-1
z-1
z-1
-α11
γ01
γ0
-α21
-α1L
-α2L
γ11
γ0L
γ1L
x(n)
y(n)
γ0
x(n)
y(n)z-1
z-1-α11
γ01
-α21
γ11
z-1
z-1-α1L
γ0L
-α2L
γ1L
Formas Paralelas Alternativas
J.L.Huertas SETI-03-04
Tr. 84
z-1β11
-α21 z-1
-α11
β21
z-1β1L
-α2L z-1
-α1L
β2L
z-1
z-1-α11
β11
-α12β21z-1
z-1-α1L
β1L
-α2Lβ2L
x(n) y(n)
x(n) y(n)
Formas en Cascada
J.L.Huertas SETI-03-04
Tr. 85
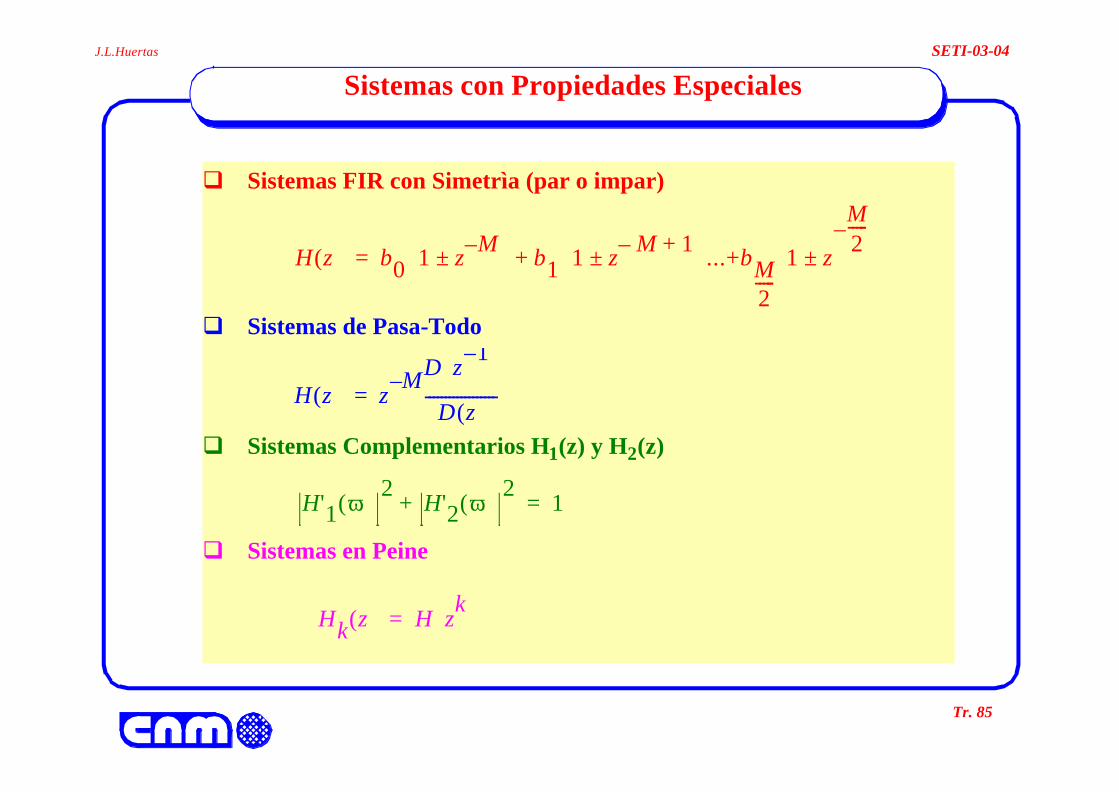
q Sistemas FIR con Simetrìa (par o impar)
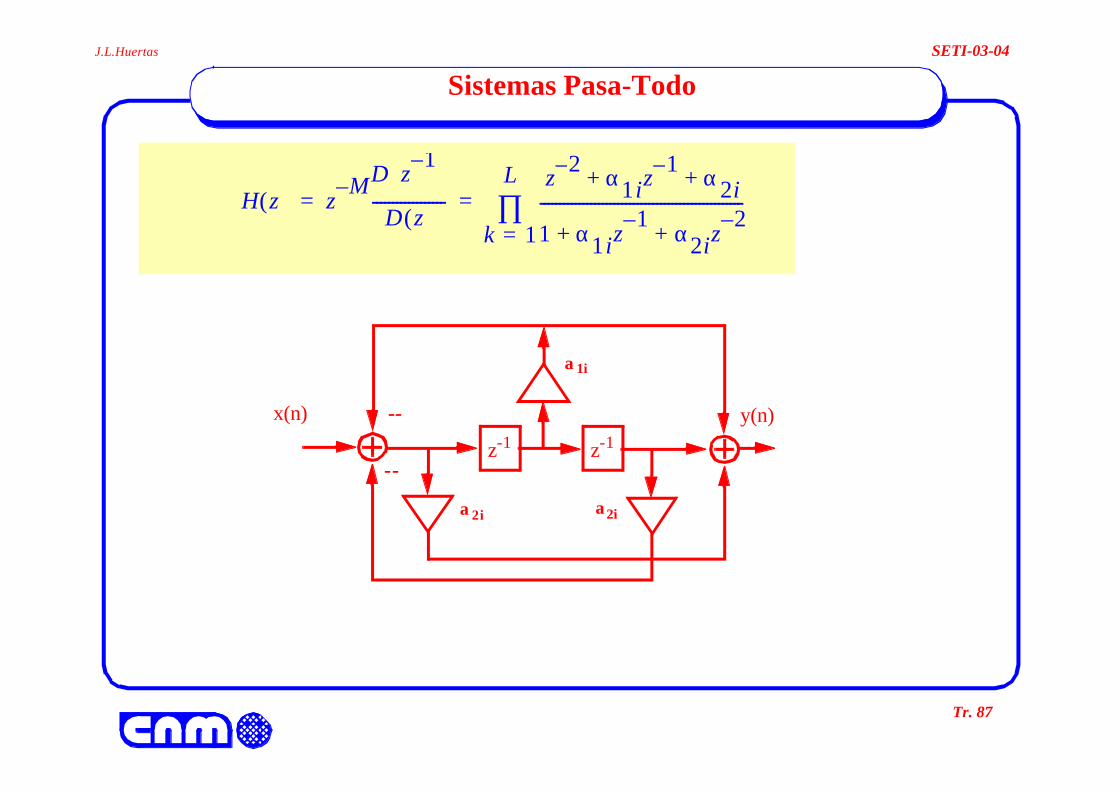
q Sistemas de Pasa-Todo
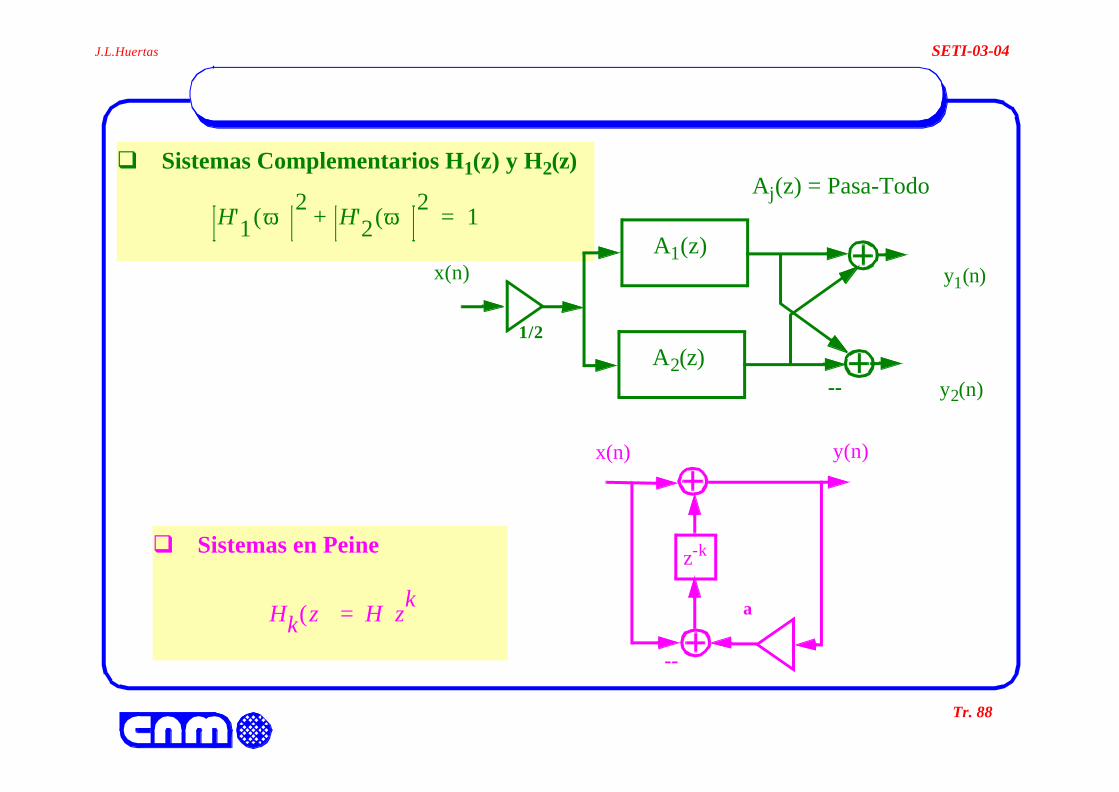
q Sistemas Complementarios H1(z) y H2(z)
q Sistemas en Peine
H z( ) b0 1 z M–± b1 1 z M– 1+±
...+bM2-----
1 z
M2-----–
±
+=
H z( ) zM– D z
1–
D z( )------------------=
H'1 ω( )2
H'2 ω( )2
+ 1=
Hk z( ) H zk
=
Sistemas con Propiedades Especiales
J.L.Huertas SETI-03-04
Tr. 86
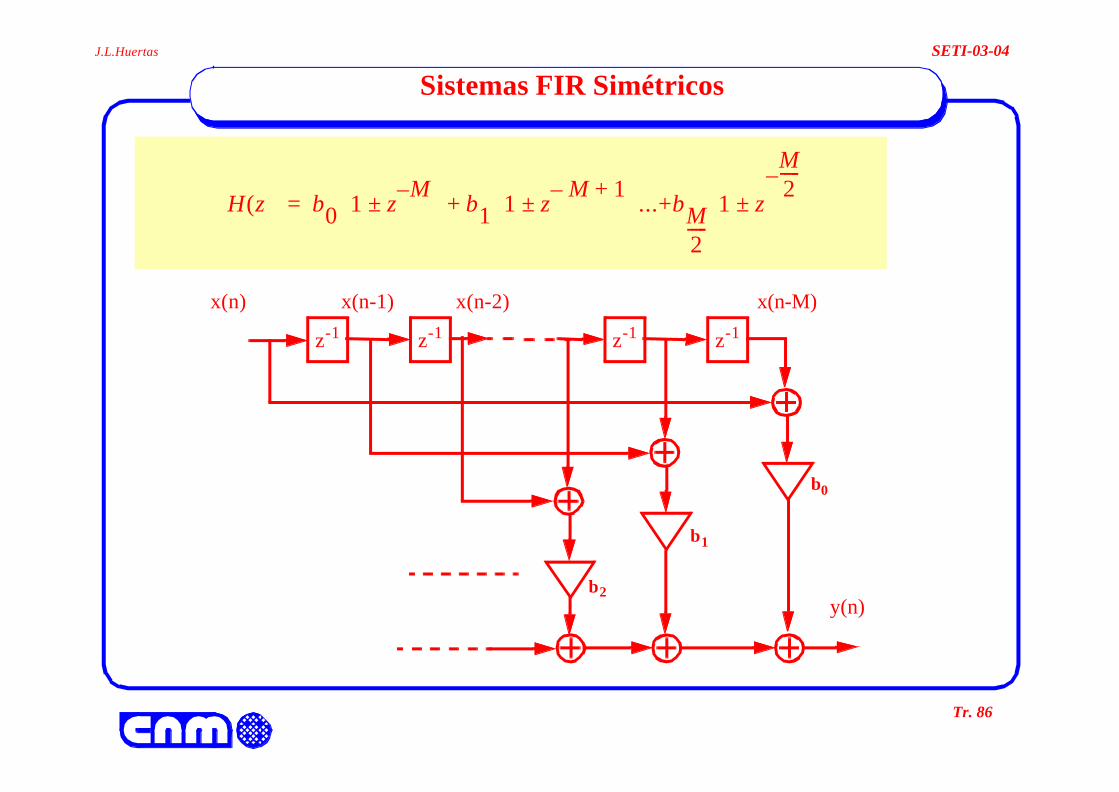
H z( ) b0 1 zM–
± b1 1 z
M– 1+±
...+bM2-----
1 z
M2-----–
±
+=
Sistemas FIR Simétricos
y(n)
x(n)
z-1
b0
b2
b1
x(n-1)
z-1 z-1 z-1
x(n-2) x(n-M)
J.L.Huertas SETI-03-04
Tr. 87
H z( ) zM– D z
1–
D z( )------------------
z 2– α1iz1– α2i+ +
1 α1iz1–
α2iz2–
+ +----------------------------------------------------
k 1=
L∏= =
y(n)x(n)
z-1
α1i
z-1
α2i α2i
--
--
Sistemas Pasa-Todo
J.L.Huertas SETI-03-04
Tr. 88
q Sistemas Complementarios H1(z) y H2(z)
H'1 ω( )2
H'2 ω( )2
+ 1=
q Sistemas en Peine
Hk z( ) H zk
=
y(n)
x(n)
α
z-k
--
A1(z)
A2(z)y2(n)
y1(n)
--
x(n)
1/2
Aj(z) = Pasa-Todo
J.L.Huertas SETI-03-04
Tr. 89
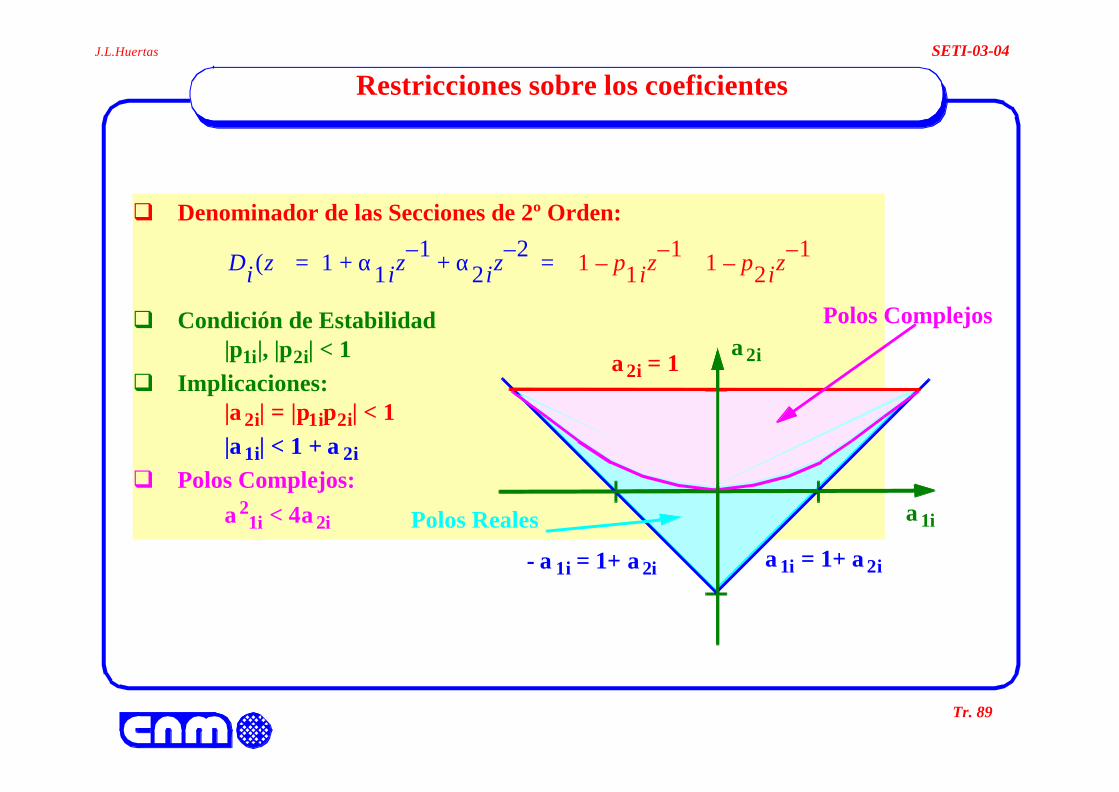
Restricciones sobre los coeficientes
q Denominador de las Secciones de 2º Orden:
q Condición de Estabilidad|p1i|, |p2i| < 1
q Implicaciones:|α2i| = |p1ip2i| < 1|α1i| < 1 + α2i
q Polos Complejos:α2
1i < 4α2i
Di z( ) 1 α1iz1– α2iz
2–+ + 1 p1iz1––
1 p2iz1––
= =
α2i = 1
−α1i = 1+ α2i α1i = 1+ α2i
α2i
α1i
Polos Complejos
Polos Reales