Embed Size (px)
Citation preview
Joaquın Perez Munoz
Geometrıa Riemanniana

Introduccion
Estos son los apuntes de la asignatura Geometrıa Riemanniana, optativa dequinto curso de la Licenciatura de Matematicas de la Universidad de Granada. Son delibre distribucion, y pueden bajarse de la pagina webhttp://www.ugr.es/local/jperez/En ellos encontraras los enunciados y demostraciones de los resultados contenidos en elprograma de la asignatura, distribuidos por temas tal y como esta se estructuro y aprobo enConsejo de Departamento. Algunas veces, las demostraciones estan resumidas y dejan queel lector compruebe los detalles como ejercicio. Ademas de estos, al final de cada tema hayuna relacion de ejercicios propuestos.
Como siempre en estos casos, los apuntes no estaran libres de errores, y es labor con-junta del autor y de los lectores mejorarlos, un trabajo que nunca se termina. Si encuentrasalgun error, envıa un e-mail a [email protected] lo que se dice en los apuntes puede encontrarse, a menudo explicado con mas pro-fundidad, en numerosos textos basicos. Recomiendo al lector interesado los siguientes:
V.I. ARNOLD, Mathematical Methods of Classical Mechanics, Springer 1984.
M. BERGER, A panoramic View of Riemannian Geometry, Springer 2003.
M. DO CARMO, Riemannian Geometry, Birkhauser (1992).
W. KLINGENGERG, Riemannian Geometry, Walter de Gruyter (1982).
M. SPIVAK, A comprehensive introduction to Differential Geometry I-V, Publishor Perish (1979).
F. WARNER, Foundations of differentiable manifolds and Lie groups, Scott-Foresman(1971).
Granada, Diciembre de 2004.
Joaquın Perez Munoz
i

ii

Indice general
1. Variedades Riemannianas. 11.1. Longitudes y distancias. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Curvas a distancia constante. . . . . . . . . . . . . . . . . . . . . . . 31.1.2. Billares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2. El concepto de variedad Riemanniana. . . . . . . . . . . . . . . . . . . . . . 61.3. Isometrıas, isometrıas locales, inmersiones isometricas. . . . . . . . . . . . . 101.4. Metricas Riemannianas y acciones propiamente discontinuas. . . . . . . . . 111.5. Variedades Riemannianas en Mecanica clasica. . . . . . . . . . . . . . . . . 13
1.5.1. Sistemas con 1 grado de libertad. . . . . . . . . . . . . . . . . . . . . 131.5.2. Sistemas con 2 grados de libertad. . . . . . . . . . . . . . . . . . . . 171.5.3. El pendulo doble. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.5.4. Formulacion general de la mecanica Lagrangiana. . . . . . . . . . . . 191.5.5. Principios de conservacion y el Teorema de Noether. . . . . . . . . . 21
2. Calculo en variedades Riemannianas. 252.1. Gradiente de una funcion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2. La conexion de Levi-Civita. . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.3. Derivada covariante y transporte paralelo. . . . . . . . . . . . . . . . . . . . 282.4. Geodesicas y aplicacion exponencial. . . . . . . . . . . . . . . . . . . . . . . 312.5. Divergencia de un campo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.6. Hessiano de una funcion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.7. Laplaciano de una funcion. . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.8. Superficies parametrizadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.9. Curvaturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.10. Campos de Jacobi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.10.1. Campos de Jacobi en V.R. de curvatura seccional constante. . . . . 602.10.2. Campos de Jacobi y valores conjugados. . . . . . . . . . . . . . . . . 622.10.3. Campos de Jacobi y curvatura seccional. . . . . . . . . . . . . . . . . 642.10.4. Campos de Jacobi y coordenadas polares. . . . . . . . . . . . . . . . 65
iii

iv
3. Geometrıa y curvatura. 753.1. Distancia asociada a una metrica. . . . . . . . . . . . . . . . . . . . . . . . . 753.2. Entornos totalmente normales. . . . . . . . . . . . . . . . . . . . . . . . . . 823.3. Completitud. El Teorema de Hopf-Rinow. . . . . . . . . . . . . . . . . . . . 863.4. Variedades con curvatura seccional constante. . . . . . . . . . . . . . . . . . 91
3.4.1. Espacios recubridores Riemannianos. . . . . . . . . . . . . . . . . . . 933.4.2. Clasificacion de las V.R. de c.s.c. . . . . . . . . . . . . . . . . . . . . 97
3.5. Variedades de curvatura negativa. . . . . . . . . . . . . . . . . . . . . . . . . 993.6. Variaciones de la energıa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1003.7. Variedades de curvatura positiva. . . . . . . . . . . . . . . . . . . . . . . . . 110

Capıtulo 1
Variedades Riemannianas.
Veremos en este primer tema los conceptos fundamentales de la asignatura, y los ejem-plos mas importantes de variedades, que nos serviran para ilustrar los conceptos. Peroantes daremos un recorrido por cuestiones de geometrıa elemental, que nos sugeriran al-gunas de las cuestiones a estudiar posteriormente en ambientes mas generales.
1.1. Longitudes y distancias.
Cual es la curva mas corta uniendo dos puntos del plano? ¿Y en una superficiede R3?
Sean S ⊂ R3 una superficie, α : [a, b] → S una curva p.p.a. (la longitud es invariantefrente a reparametrizaciones) y f : [a, b] × (−ε, ε) → S una variacion de α (i.e. f ∈C∞([a, b]× (−ε, ε),R3), f(t, 0) = α(t)) con campo variacional V (t) = ∂f
∂s (t, 0). LlamandoL(·) =longitud(·), tenemos
Lema 1.1.1 (Primera formula de variacion de la longitud) En la situacion ante-rior,
d
ds
∣∣∣∣0L(f(·, s)) = −
∫ b
a〈α′′(t), V (t)〉dt+ 〈α′(b), V (b)〉 − 〈α′(a), V (a)〉.
Demostracion.
d
ds
∣∣∣∣0L(f(·, s)) =
d
ds
∣∣∣∣0
∫ b
a
∣∣∣∣∂f
∂t(t, s)
∣∣∣∣dt =∫ b
a
d
ds
∣∣∣∣0
∣∣∣∣∂f
∂t(t, s)
∣∣∣∣dt =∫ b
a〈α′(t),
∂2f
∂s∂t(t, 0)〉dt
=∫ b
a〈α′(t),
∂2f
∂t∂s(t, 0)〉dt =
∫ b
a〈α′(t), V ′(t)〉dt = −
∫ b
a〈α′′(t), V (t)〉dt+ [〈α′(t), V (t)〉]ba.
2
1

2 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Si solo consideramos curvas que unan dos puntos p, q ∈ S, entonces las variaciones seranpropias (f(a, s) = p, f(b, s) = q ∀s), luego V (a) = V (b) = 0 y
d
ds
∣∣∣∣0L(f(·, s)) = −
∫ b
a〈α′′(t), V (t)〉dt.
Como lo anterior es cierto ∀V ∈ X(α) con V (a) = V (b) = 0 y de esta forma podemos“barrer” todos los vectores tangentes a S en puntos de α(a, b), se obtiene que la partetangente α′′(t)T de α′′(t) es cero ∀t ∈ (a, b) (y por continuidad, tambien en [a, b]).
Corolario 1.1.1 Si α es una curva con la menor longitud de entre todas las curvas en Suniendo p, q, entonces (α′′)T ≡ 0.
En el caso particular de S = R2, α′′ es tangente a S luego el Corolario 1.1.1 nos diceque α′′ = 0, y por tanto α es un segmento recorrido a velocidad 1. Tenemos entonces elresultado clasico
Corolario 1.1.2 La curva mas corta entre dos puntos del plano es el segmento que losune.
En general, la condicion (α′′)T = 0 se enunciara diciendo que α es una geodesica de S.Notese que esto no es suficiente para que la curva minimize la longitud entre sus extremos(pensar en un trozo de cırculo maximo en S2(1) con longitud estrictamente mayor que π).El concepto de geodesica sera uno de los centrales en el curso. Es interesante adelantar queeste concepto y muchos otros que nos apareceran, son intrınsecos: no dependen de comola superficie esta metida en R3. De hecho, los formularemos en ambientes mucho masgenerales (variedades Riemannianas), donde el objeto sobre el que se hace geometrıa notiene porque tener dimension 2 ni estar metido dentro de un espacio euclıdeo de dimensionsuperior.
En el ejemplo anterior hemos visto una herramienta que tambien usaremos para obtenerotros objetivos: el calculo de variaciones. Como ilustracion, veamos otra situacion en elque el calculo de variaciones tiene interesantes aplicaciones geometricas y fısicas.
Lema 1.1.2 (Primera formula de variacion de la distancia en R2) Sean α, β cur-vas C1 (no nec. p.p.a.) en R2 con α(t) 6= β(t) ∀t. Entonces,
d
dt|α(t) − β(t)| = 〈α′(t) − β′(t),
α(t) − β(t)|α(t) − β(t)| 〉.
Demostracion. Calculo directo. 2
Veamos dos consecuencias del Lema 1.1.2.

1.1. LONGITUDES Y DISTANCIAS. 3
1.1.1. Curvas a distancia constante.
Lema 1.1.3 Sea I ⊂ R un intervalo, R = Rss∈I una familia 1-parametrica de rectas(o segmentos) y α, β dos curvas en R2 sin puntos comunes y perpendiculares a las lıneasde R, i.e. ∀t ∈ Dom(α), ∃sα(t) ∈ I, ∃t1(t) ∈ Dom(β) tales que t1(t) es C1 y
1. α(t) ∈ Rsα(t) y α′(t) ⊥ ~Rsα(t).
2. β(t1(t)) ∈ Rsα(t) y β′(t1(t)) ⊥ ~Rsα(t).
Entonces, |α(t) − (β t1)(t))| es constante en t.
Demostracion. Usando el Lema 1.1.2 sobre α, β t1,
d
dt|α(t)− (β t1)(t)| = 〈α′(t) − t′1(t)β
′(t1(t)),α(t) − β(t1(t))|α(t) − β(t1(t))|
〉. (1.1)
Como α(t) − β(t1(t)) es paralelo a ~Rsα(t) y α′(t), β′(t1(t)) ⊥ ~Rsα(t), el miembro de laderecha de (1.1) es cero. Ası, |α− (β t1)| es constante. 2
Del Lema 1.1.3, tomando β ≡ origen de R2 y R = rayos partiendo del origen, se tieneque una curva α ⊂ R2 es perpendicular a R si y solo si es (parte de) una circunferenciacentrada en el origen.
1.1.2. Billares.
Sea Ω ⊂ R2 un dominio acotado, convexo y con ∂Ω regular. Supongamos que unapartıcula infinitesimal se mueve con velocidad constante a lo largo de un segmento en Ω,de forma que al llegar a ∂Ω sale rebotada siguiendo la ley
El angulo de incidencia es igual al angulo de reflexion.
Llamaremos una trayectoria a una poligonal como la anterior. Las trayectorias son impor-tantes es mecanica (teorıa de choques) y en fısica atomica (aceleradores de partıculas).Dos importantes cuestiones sobre trayectorias son
¿Que pasa con una trayectoria si el movimiento se considera perpetuo?
Hay resultados que dicen que bajo condiciones naturales, una trayectoria es periodica odensa. Las trayectorias periodicas son indudablemente interesantes desde el punto de vistafısico (si en un acelerador algunas partıculas siguen una trayectoria densa, los choquesde estas con cualquier placa no produciran una nıtida impresion en la misma; pero siencontramos una trayectoria periodica, tendremos incidencia una y otra vez en cierta zonadefinida de la placa).

4 CAPITULO 1. VARIEDADES RIEMANNIANAS.
¿Podemos asegurar la existencia de trayectorias periodicas?
Sea k ∈ N. Considero k puntos p1, . . . , pk ∈ ∂Ω ordenados pero no necesariamentedistintos. Podemos ver P = (p1, . . . , pk) como los vertices (ordenados cıclicamente) de unapoligonal periodica en Ω, candidata a trayectoria periodica. Se trata de saber si podemossituar los vertices de P para que se cumpla la ley de incidencia-reflexion de angulos. Dadauna lista P como antes, llamaremosm ∈ N al numero de vueltas que la poligonal periodicaasociada da alrededor de ∂Ω (en una estrella de 5 puntas con vertices en ∂Ω, es k = 5 ym = 2). Sea
Ck,m = poligonales periodicas con k vertices en ∂D que dan m vueltas
Es posible dotar a Ck,m de una topologıa natural, basada en como se mueven los verticesde sus poligonales sobre ∂Ω. Como admitimos que dos o mas vertices se colapsen en uno,puede probarse que Ck,m es compacto. La misma idea permite ver Ck,m como variedaddiferenciable de dimension k. Dada P ∈ Ck,m, se define la longitud L(P ) de P comola longitud total de los lados de la poligonal asociada. Admitiendo que la aplicacion l :Ck,m → R es C1, veamos que
Lema 1.1.4 Si P ∈ Ck,m en un punto crıtico de l, entonces P produce una trayectoriaperiodica.
Demostracion. Identificando pk+1 con p1 en P = (p1, . . . , pk), tenemos
L(P ) =k∑
i=1
|pi+1 − pi|.
Supongamos ahora que t 7→ Pt = (p1(t), . . . , pk(t)) es una curva C1 en Ck,m con P0 = P .Ası,
d
dt
∣∣∣∣0L(Pt) =
k∑
i=1
d
dt
∣∣∣∣0|pi+1(t) − pi(t)|.
Usando el Lema 1.1.2 (para ello necesitamos la condicion tecnica de que pi 6= pi+1 paracada i),
d
dt
∣∣∣∣0L(Pt) =
k∑
i=1
〈p′i+1(0)− p′i(0),pi+1 − pi|pi+1 − pi|
〉.
Como P en punto crıtico de l, lo anterior se anula para toda variacion de P en Ck,m.Elegimos tal variacion de forma que solo mueva el vertice p2. Entonces, p′i(0) = 0 siempreque i 6= 2 luego
0 =d
dt
∣∣∣∣0L(Pt) = 〈p′2(0),
p2 − p1
|p2 − p1|− p3 − p2
|p3 − p2|〉. (1.2)
1.1. LONGITUDES Y DISTANCIAS. 5
Veamos que (1.2) implica que se cumple la ley de incidencia-reflexion de angulos en p2.Como dicha ley solo afecta a angulos, podemos trasladar en R2 de forma que p2 = 0. Ası,p1|p1| + p3
|p3| es perpendicular a p′2(0). Pero p1|p1| ,
p3|p3| son unitarios luego ~0, p1|p1| ,
p3|p3| ,
p1|p1| + p3
|p3|son los vertices de un rombo R, una de cuyas diagonales es d1 = p1
|p1| + p3|p3| . Como la otra
diagonal d2 de R es ortogonal a d1, concluımos que d2 es paralela a p′2(0), que a su vezgenera Tp2∂Ω. De aquı es facil ver que la ley de incidencia-reflexion de angulos se cumpleen p2.
Repitiendo lo anterior para todo vertice de α, concluımos que α es una trayectoria. 2
Corolario 1.1.3 Para cualesquiera k,m ∈ N, existe al menos una trayectoria periodicaen Ck,m.
Demostracion. Por el Lema 1.1.4, basta asegurar que existe al menos un punto crıtico enCk,m de l, y esto esta asegurado por ser Ck,m compacto. 2
Dejemos ahora el Calculo de Variaciones para profundizar mas en distancias y lon-gitudes de curvas. Supongamos que los habitantes de un mundo imaginario viven sobreuna superficie conexa S ⊂ R3 y que no pueden en ningun momento abandonar S. ¿Comomedirıan la distancia entre dos puntos p, q ∈ S? Pensando en lo que hacemos en el casoS = R2, es logico que tomen dicha distancia como la menor longitud de una curva γ en Sque una p con q, si dicha curva existe. Pero ¿existe realmente una curva γ que realiza ladistancia de p a q? Del Lema 1.1.1 se deduce que caso de existir, dicha curva γ sera unageodesica, i.e. (γ ′′)T = 0 si parametrizamos γ por el arco. En algunas situaciones, γ noexiste (tomar S = R2 − (0, 0) y q = −p 6= (0, 0)), pero aun ası tiene sentido definir
d(p, q) = infL(α) | α curva C∞ a trozos uniendo p, q, ∀p, q ∈ S,
ya que el ınfimo anterior siempre existe. Estudiaremos a fondo d y veremos que siempredefine una distancia sobre S, y que esto puede generalizarse a variedades Riemannianas.
En el caso de una curva embebida y regular α : I → R3, la distancia correspondientees d : α(I) × α(I) → R+
0 donde
d(p, q) = |L(α)qp| =∣∣∣∣∫ t2
t1
|α′(t)| dt∣∣∣∣ ,
donde p = α(t1), q = α(t2) (notese que no tiene porque ser t1 ≤ t2). Tenemos entonces que(α(I), d) es un espacio metrico (intrınseco, ya que para calcular distancias solo necesitamoslongitudes de curvas). El diametro de (α(I), d) es, claramente, la longitud total de α (quepodrıa ser ∞).
Las variedades Riemannianas vistas como espacios metricos solo son interesantes apartir de dimension 2, como pone de manifiesto el siguiente

6 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Lema 1.1.5 Todas las curvas α : I → R3 embebidas y regulares con la misma longitudson isometricas como espacios metricos.
Demostracion. Sea α : I → R3 una curva embebida y regular, con parametro t. Seaβ : J ⊂ R → R3 una reparametrizacion por el arco de α, con parametro s. Claramente,L(α) coincide con la longitud del intervalo J , que a su vez es el diametro del espacio metrico(J, d0) donde d0 es la distancia usual de R. El Lema estara probado (por transitividad) sivemos que los espacios metricos (α(I), d), (J, d0) son isometricos. Definimos F : (J, d0) →(α(I) = β(J), d) mediante F (s) = β(s) = α(t(s)). Entonces,
d(F (s1), F (s2)) = |L(α)t(s2)t(s1)| = |L(β)s2s1 | = |s2 − s1| = d0(s1, s2),
luego F es una isometrıa de espacios metricos. 2
Como hemos dicho, a partir de dimension 2 el Lema 1.1.5 no tiene un enunciado equiv-alente. De hecho, veremos que la esfera no puede ser isometrica (ni siquiera localmente)al plano1: la existencia de isometrıas locales entre variedades Riemannianas estara ıntima-mente ligada al concepto de curvatura, otro de los conceptos centrales que desarrollaremosen la asignatura.
Esperamos que las ideas anteriores hayan motivado un estudio mas detallado de diver-sos objetos geometricos como la longitud, la distancia o la curvatura en situaciones masgenerales. A continuacion empezaremos con este trabajo.
1.2. El concepto de variedad Riemanniana.
A lo largo del resto del tema, Mn denotara una variedad diferenciable.
Definicion 1.2.1 Una metrica es una aplicacion g : X(M) × X(M) → F(M,R) =aplics. de M en R tal que ∀X, Y,X1, X2 ∈ X(M), ∀f ∈ C∞(M,R),
1. g(X, Y ) = g(Y,X),
2. g(X1 +X2, Y ) = g(X1, Y ) + g(X2, Y ), g(fX, Y ) = fg(X, Y ),
3. g(X,X) ≥ 0 en M y si p ∈M cumple g(X,X)(p) = 0, entonces Xp = 0.
De 1,2 deducimos que g es tensorial en funciones, luego pueden definirse las restriccionesg|U y gp, donde U ⊂M abierto y p ∈M , de la siguiente forma:
Dados X, Y ∈ X(U) y p ∈ U , se define (g|U)(X, Y )(p) = g(X, Y )(p), donde X, Y ∈X(M) cumplen X |Vp = X |Vp, Y |Vp = Y |Vp, siendo Vp un abierto de U con p ∈ Vp.
1De hecho, este es el punto de partida de la cartografıa.

1.2. EL CONCEPTO DE VARIEDAD RIEMANNIANA. 7
Dados v, w ∈ TpM , se define gp(v, w) = g(V,W )(p) donde V,W ∈ X(M) con Vp =v,Wp = w.
La idea para probar que g|U esta bien definida es la siguiente:
Lema 1.2.1 Sea g una metrica sobre M , X, Y ∈ X(M) y U ⊂ M abierto. Si X |U = 0o Y |U = 0, entonces g(X, Y )|U = 0.
Demostracion. Fijemos p ∈ U y veamos que g(X, Y )(p) = 0. Como p,M − U soncerrados disjuntos, ∃fp ∈ C∞(M) tal que fp|M−U = 1 y fp(p) = 0. Supongamos primeroque X |U = 0. Entonces, X = fpX en M (razonar por separado en U y en M − U), luegog(X, Y ) = g(fpX, Y ) = fpg(X, Y ). Evaluando en p y usando que fp(p) = 0, tenemosg(X, Y )(p) = 0. Como g es simetrica, el caso Y |U = 0 puede reducirse al anterior. 2
Ahora la definicion de g|U no depende de las extensiones X, Y de X, Y ∈ X(U), ya quesi tomamos otras extensiones X, Y de X, Y , entonces X − X esta en las condiciones delLema 1.2.1 sobre el abierto Vp donde ambas extensiones coinciden con X , luego g(X −X, Y )|Vp = 0 y ası, g(X, Y )(p) = g(X, Y )(p). Aplicando el Lema 1.2.1 a Y −Y y razonandoanalogamente concluimos que g(X, Y )(p) = g(X, Y )(p), luego g(X, Y )(p) = g(X, Y )(p).
En cuanto a probar que gp esta bien definida, necesitamos otro resultado previo.
Lema 1.2.2 Sea g una metrica sobre M , X, Y ∈ X(M) y p ∈ M . Si Xp = 0 o Yp = 0,entonces g(X, Y )(p) = 0.
Demostracion. De nuevo por simetrıa de g basta suponer que Xp = 0. Tomemos una cartalocal (U, φ = (x1, . . . , xn)) de M alrededor de p. Ası, X |U =
∑ni=1 ai
∂∂xi
con ai ∈ C∞(U)∀i. Como g|U esta bien definida,
g(X, Y )(p) = (g|U)(X |U , Y |U)(p) = (g|U)(∑i ai
∂∂xi, Y |U)(p) =
∑i ai(p)(g|U)( ∂
∂xi, Y |U)(p).
Lo anterior se anula porque al ser Xp = 0, tenemos ai(p) = 0 ∀i = 1, . . . , n. 2
Y ahora un razonamiento analogo al que hacıamos para probar que g|U esta bien definida(cambiando el Lema 1.2.1 por el Lema 1.2.2) permite demostrar que gp tambien lo esta.gp es pues, un producto escalar definido positivo sobre TpM .
Si g es una metrica sobre M y (U, φ = (x1, . . . , xn)) es una carta local, las funcionesgij = (g|U)( ∂
∂xi, ∂∂xj
) estan en F(U,R) y la matriz (gij)i,j se llama la matriz de g respectoa (U, φ).
Definicion 1.2.2 Una metrica g sobreMn se dice Riemanniana o diferenciable si ∀X, Y ∈X(M), g(X, Y ) ∈ C∞(M). Al par (M, g) se le llama una variedad Riemanniana (V.R.)

8 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Proposicion 1.2.1 Sea g una metrica sobre M y (Uα, φα)α un atlas en M . Son equiv-alentes:
1. g es una metrica Riemanniana.
2. ∀U ⊂M abierto, ∀X, Y ∈ X(U), (g|U)(X, Y ) ∈ C∞(U).
3. ∀α, ∀i, j = 1, . . . , n, gαij ∈ C∞(Uα).
Demostracion. Ejercicio. 2
Definicion 1.2.3 Sea (M, g) una V.R. Dado X ∈ X(M), la norma de X es la funcion‖X‖ =
√g(X,X) ∈ C∞(M − p ∈ M | Xp = 0). Dos vectores v, w ∈ TpM se dicen
ortogonales si lo son respecto a gp. Dos campos X, Y ∈ X(M) se dicen ortogonales si loson en cada p ∈M .
Ejemplos de variedades Riemannianas.
1. El espacio euclıdeo n-dimensional. M = Rn, g0(X, Y ) =∑ni=1XiYi donde X =
(X1, . . . , Xn), Y = (Y1, . . . , Yn) ∈ X(Rn) ≡ C∞(Rn,Rn).
2. Metricas conformes y homoteticas. Si (M, g) es una V.R. y f ∈ C∞(M,R+),entonces fg es otra metrica Riemanniana sobre M , que se dice conforme a g. Sif es constante, a fg se le llama metrica homotetica a g (ejercicio: probar que “serconforme a” y “ser homotetica a”definen relaciones de equivalencia en el conjuntode metricas Riemannianas sobre una variedad diferenciable).
3. El espacio hiperbolico n-dimensional (modelo del semiespacio).M = (Rn)+ = x ∈ Rn | xn > 0, g = 1
x2ng0. Notese que gx(e1, e1) = 1
x2n, luego ‖e1‖
se hace mayor cuanto mas nos aproximamos al borde de (Rn)+.
4. El espacio hiperbolico n-dimensional (modelo de la bola).M = Bn(0, 1) = x ∈ Rn |‖x‖0 < 1, g = 4
(1−‖x‖20)
2 g0. De nuevo ‖e1‖ se hace mayorcuanto mas nos aproximamos al borde de Bn(0, 1), y g se acerca a g0 cuando x→ 0.
5. El grupo lineal general.M = Mn(R) ≡ Rn2
, g(B,C)(A) = Traza(B·Ct), ∀A ∈ Mn(R), ∀B,C ∈ X(Mn(R)) ≡C∞(Mn(R),Mn(R)).
6. Metrica producto.Sean (Mn
1 , g1), (Mm2 , g2) V.R.. Se define la metrica producto de g1 y g2 como
[(g1 × g2)(Z1, Z2)] (p1, p2) =2∑
i=1
(gi)pi
((dπi)(p1,p2)(Z1(p1,p2)
, (dπi)(p1,p2)(Z2(p1,p2)
),

1.2. EL CONCEPTO DE VARIEDAD RIEMANNIANA. 9
∀Z1, Z2 ∈ X(M1 ×M2), (p1, p2) ∈ M1 ×M2, donde π1, π2 son las proyecciones deM1 ×M2 sobre sus factores. Que g1 × g2 es una metrica se deduce directamente dela ecuacion
(g1 × g2)(p1,p2) ((v1, v2), (w1, w2)) =2∑
i=1
(gi)pi(vi, wi), (1.3)
donde pi ∈ Mi y vi ∈ TpiMi (ejercicio). En cuanto a la diferenciabilidad, usare-mos la Proposicion 1.2.1: tomemos cartas locales (U, φ = (x1, . . . , xn)), (V, ϕ =(xn+1, . . . , xn+m)) en M1,M2. Ası, (U × V, φ × ϕ) es una carta en M1 × M2 confunciones coordenadas zi = xi π1 si i ≤ n, ai = xi π2 si i ≥ n + 1, y es posibleconstruir un atlas de M1 ×M2 con cartas producto de esta forma. Bastara entoncesprobar que las funciones gij = (g1 × g2)( ∂
∂zi, ∂∂zj
) son C∞ en U × V . Pero
(gij)i,j=1,...,n+m =
((g1)ij π1 0
0 (g2)ij π2
)
(ejercicio), de donde la diferenciabilidad de gij se deduce directamente. Notese que(1.3) implica que vectores del tipo (v1, 0), (0, v2) ∈ Tp1M1 × Tp2M2 son siempreortogonales en la metrica producto. Ademas, si los campos Z1, Z2 ∈ X(M1 ×M2)son proyectables (i.e. Z1 ≡ (X1, X2), Z2 ≡ (Y1, Y2) con Xi, Yi ∈ X(Mi), entonces
(g1 × g2) ((X1, X2), (Y1, Y2)) =2∑
i=1
gi(Xi, Yi) πi.
7. Metrica pullback por una inmersion.
Sea F : Mn → Nm una inmersion y g una metrica Riemanniana sobre N . Se defineF ∗g (metrica pullback de g por F ) mediante
(F ∗g)(X, Y )(p) = gF (p)(dFp(Xp), dFp(Yp)), ∀X, Y ∈ X(M), ∀p ∈M.
F ∗g es claramente una metrica sobre M . Para ver su diferenciabilidad, tomemosX, Y ∈ X(M) y probemos que (F ∗g)(X, Y ) ∈ C∞(M). Basta que dado p ∈ M ,exista un abierto U ⊂M conteniendo a p donde (F ∗g)(X, Y )|U sea C∞. Como F esinmersion, ∃V ⊂ M abierto conteniendo a p tal que F : V → N es embebimiento.Ası, F (V ) es una subvariedad de N difeomorfa a V y podemos proyectar los camposX |V , Y |V a F∗(X |V ), F∗(Y |V ) ∈ X(F (V )). Como F (p) ∈ F (V ), ∃X, Y ∈ X(N) y∃ un entorno abierto de F (p) en F (V ) (que puedo escribir de la forma F (U) conp ∈ U
abto.
⊂ V ) tales que (F∗X)|F (U) = X|F (U), (F∗Y )|F (U) = Y |F (U). Ahora es facilver que (F ∗g)(X, Y ) = g(X, Y ) F en U , luego (F ∗g)(X, Y ) ∈ C∞(U).

10 CAPITULO 1. VARIEDADES RIEMANNIANAS.
8. La esfera Sn(R).Dado R > 0, sea Sn(R) = x ∈ Rn+1 | ‖x‖ = R. Como la inclusion i : Sn(R) →Rn+1 es un embebimiento, tiene sentido g = i∗g0 (metrica canonica sobre Sn(R)). Ası,dados p ∈ Sn(R) y v, w ∈ TpSn(R) = 〈p〉⊥, es gp(v, w) = g0(v, w) y dados X, Y ∈X(Sn(R)) = F ∈ C∞(Sn(R),Rn+1) | g0(F (p), p) = 0 ∀p ∈ Sn(R), g(X, Y ) =∑n+1i=1 XiYi.
9. El grupo ortogonal.Dado n ∈ N, el grupo ortogonal es O(n) = A ∈ Mn(R) | A ·At = In. O(n) es unasubvariedad de dimension n(n− 1)/2 de Mn(R), con
TAO(n) = AB | Bt = −B, ∀A ∈ O(n).
Como la inclusion i : O(n) → Mn(R) es un embebimiento y sobre Mn(R) tenemosla metrica estandar (g0)A(B,C) = Traza(B · Ct), deducimos que g = i∗g0 es unametrica Riemanniana sobre O(n), llamada su metrica canonica.
1.3. Isometrıas, isometrıas locales, inmersiones isometricas.
Definicion 1.3.1 Una isometrıa entre dos V.R. (Mn1 , g1), (M
n2 , g2) es un difeomorfismo
φ : M1 → M2 tal que ∀p ∈ M1, dφp es una isometrıa vectorial entre (TpM1, (g1)p) y(TF (p)M2, (g2)F (p)) (esto ultimo equivale a que g1 = φ∗g2). En tal caso, (Mn
1 , g1), (Mn2 , g2)
se dicen variedades Riemannianas isometricas.
“Ser isometrica a” es una relacion de equivalencia en el conjunto de todas las V.R. (ejerci-cio). El conjunto Iso(M, g) de todas las isometrıas de una V.R. en sı misma tiene estructurade grupo con la composicion.
Ejemplos.
1. La aplicacion φ : Mn(R) → Rn2dada por φ(A) = (a11, . . . , ann) si A = (aij)i,j
es una isometrıa si en Mn(R),Rn2consideramos sus respectivas metricas usuales
(ejercicio).
2. Las V.R. (Sn(R), g) y (Sn(1), R2g) son isometricas (ejercicio).
3. La transformacion de Mobius φ(z) = 2ii−1
z−1z+i es una isometrıa entre los modelos
D(0, 1) y (R2)+ del plano hiperbolico (ejercicio).
4. Las traslaciones a izquierda lA : O(n) → O(n), lA(B) = AB y a derecha rA : O(n) →O(n), rA(B) = BA, son isometrıas de (O(n), g) en sı mısmo (ejercicio).

1.4. METRICAS RIEMANNIANAS Y ACCIONES PROPIAMENTE DISCONTINUAS.11
Definicion 1.3.2 Una isometrıa local entre dos V.R. (Mn1 , g1), (M
n2 , g2) es un difeomor-
fismo local φ : M1 → M2 tal que g1 = φ∗g2). En tal caso, (Mn1 , g1), (M
n2 , g2) se dicen
variedades Riemannianas localmente isometricas.
Definicion 1.3.3 Una inmersion isometrica entre dos V.R. (Mn1 , g1), (M
m2 , g2) es una
inmersion φ : M1 → M2 tal que g1 = φ∗g2). Ası, una isometrıa local es una inmersionisometrica entre variedades de la misma dimension. Y si F : Mn → (Nm, g) es unainmersion, entonces F : (M,F ∗g) → (N, g) es una inmersion isometrica.
1.4. Metricas Riemannianas y acciones propiamente discon-
tinuas.
Definicion 1.4.1 SeaMn una variedad diferenciable y G un grupo algebraico. Una acciones una aplicacion λ : G×M →M tal que ∀g, g1, g2 ∈ G, ∀p ∈M ,
1. e · p = p,
2. g1 · (g2 · p) = (g1 · g2) · p.
Dado g ∈ G, se define λg : M → M por λg(p) = g · p. Entonces, λg es una biyeccion, coninversa λg−1.
La accion λ se dice diferenciable cuando ∀g ∈ G, λg es un difeomorfismo de M ensı misma (i.e. cuando λg ∈ C∞(M,M)), y se dice propiamente discontinua cuando ∀p ∈M ,∃U ⊂M abierto conteniendo a p tal que U ∩ λg(U) = Ø ∀g ∈ G− e.
Toda accion λ sobre M define una relacion de equivalencia sobre M :
p ∼G q ⇔ ∃g ∈ G | g · p = q.
Llamemos π : M → M/G = M/ ∼G a la proyeccion canonica de M en su cociente. π escontinua si en M/G consideramos la topologıa cociente, y abierta (porque π−1(π(O)) =∪g∈Gλg(O), ∀O ⊂M).
Proposicion 1.4.1 Si la accion λ es diferenciable y propiamente discontinua, entoncesexiste una unica estructura diferenciable D sobre M/G que convierte a π en difeomorfismolocal. Ademas, la topologıa subyacente a D es la topologıa cociente.
Demostracion. Existencia.Consideremos en M/G la topologıa cociente T /G de la topologıa T de M . Dado p ∈M ,sea U un abierto deM conteniendo a p dado por la discontinuidad de la accion λ. Entonces,π|U : U → π(U) es un homeomorfismo (es continua, sobreyectiva, inyectiva y abierta).

12 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Ahora podemos definir las cartas de M/G como la composicion de π|U con cartas de Mcuyo abierto coordenado este contenido en U . Variando U y aplicando este procedimiento,se obtiene un atlas diferenciable sobre M/G, que genera una estructura diferenciable Dque hace a π difeomorfismo local (ejercicio).
Unicidad.
Si M/G admite una estructura diferenciable D′ que hace de π un difeomorfismo local yllamamos T ′ a la topologıa subyacente a D′, entonces π : (M, T ) → (M/G, T ′) es contin-ua, sobreyectiva y abierta, luego identificacion. Por tanto, T ′ = T /G. Ahora considero las
aplicaciones M π→ (M/G,D)1M/G→ (M/G,D′), cuya composicion es π. Como las dos π son
difeomorfismos locales, concluımos que 1M/G es diferenciable de (M/G,D) en (M/G,D′).El recıproco es igual, con lo que D = D′. 2
Teorema 1.4.1 Sea λ : G×M →M una accion diferenciable y propiamente discontinua,y g una metrica Riemanniana sobre M . Entonces, son equivalentes:
1. Existe una metrica Riemanniana g′ sobre M/G que hace a π : (M, g) → (M/G, g′)isometrıa local.
2. λh ∈ Iso(M, g) ∀h ∈ G.
Ademas, g′ es unica (cuando exista).
Demostracion. Si g′ existe, entonces dados p ∈ M y u, v ∈ TpM se tendra gp(u, v) =g′π(p)(dπp(u), dπp(v)). Como π es sobreyectiva y dπp biyectiva, la ultima ecuacion determinaa g′. Ademas dado h ∈ G,
gh·p((dλh)p(u), (dλh)p(v)) = g′π(p)(d(π λh)p(u), d(π λh)p(v))
= g′π(p)(dπp(u), dπp(v)) = gp(u, v)
luego λh ∈ Iso(M, g). Recıprocamente, si λh es una isometrıa entonces la definicion
g′[p](u′, v′) := gp((dπp)−1(u′), (dπp)−1(v′))
no depende del representante p ∈ [p]. Es facil comprobar que g′ es una metrica (ejercicio).Su diferenciabilidad se tendra si vemos que g′(X ′, Y ′) ∈ C∞(M/G) ∀X ′, Y ′ ∈ X(M/G).Pero X ′, Y ′ producen campos X, Y ∈ X(M) invariantes por la accion λ (i.e. (λh)∗X =X, (λh)∗Y = Y ∀h) tales que X ′
π(p) = dπp(Xp), Y ′π(p) = dπp(Yp) ∀p. Es facil ver que
g′(X ′, Y ′) π = g(X, Y ). Como g(X, Y ) ∈ C∞(M), tenemos que g′(X ′, Y ′) ∈ C∞(M/G).por ultimo, que π : (M, g) → (M/G, g′) se hace isometrıa local es evidente (ejercicio). 2
Ejemplos.

1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 13
1. El espacio proyectivo real RPn.Si A es la aplicacion antıpoda sobre Sn(1), entonces el grupo G = 1Sn
(1), A actuadiferenciable, propia y discontinuamente sobre Sn(1), luego existe una unica metricag′ sobre Sn(1)/G = RPn que convierte a π en isometrıa local. A g′ se le llama lametrica estandar sobre RPn.
2. Toros llanos TnB.Dada una base B = v1, . . . , vn de Rn, el grupo de traslaciones G = Tv | v ∈Zv1 ⊕ . . . ⊕ Zvn actua diferenciable, propia y discontinuamente sobre Rn, dondeTv es la traslacion de vector v. El cociente Rn/G = TnB es un toro n-dimensional(difeomorfo a S1× n). . . ×S1), y la metrica g′0 inducida sobre TnB por g0 se llama lametrica llana sobre TnB.
1.5. Variedades Riemannianas en Mecanica clasica.
Muchos sistemas fısicos, sobre todo en Mecanica, pueden modelarse usando una varie-dad diferenciable, y las ecuaciones de movimiento del sistema resultan ser las ecuaciones deEuler-Lagrange para un funcional definido sobre curvas en la variedad. Esta formulacion,que en fısica se conoco como Mecanica Lagrangiana, a menudo se sustenta en una variedadRiemanniana, y los principios de conservacion clasicos (energıa, momento angular, etc.)pueden verse como invarianza del lagrangiano frente a un grupo de difeomorfismos de lavariedad. Veamos algunos ejemplos de este tipo.
1.5.1. Sistemas con 1 grado de libertad.
Supongamos que una partıcula se mueve en una trayectoria rectilınea x(t) con
x(t) = f(x(t)), (1.4)
donde f ∈ C∞(R) (este es el caso de, por ejemplo, un movimiento oscilatorio rectilıneocomo un muelle2. Estamos interesados en describir los movimientos del sistema, que son lassoluciones del EDO anterior. La teorıa general de EDO nos dice que x(t) esta determinadaunıvocamente por x(0), x(0). Se llama espacio de configuraciones al conjunto cuyos puntosdescriben completamente la posicion del sistema en un momento dado. En nuestro casox(t) ∈ R, luego el espacio de configuraciones es R. La energıa cinetica de x(t) es T =
2La ley de Hooke dice: “La deformacion que experimenta un muelle al ejercer sobre el una cierta fuerzaes directamente proporcional a magnitud de dicha fuerza, i.e. F = −kx donde F es la fuerza aplicada,k es la constante de elasticidad del muelle y x la posicion del extremo movil del muelle. Como la 2a leyde Newton asegura que F = mx donde m es la masa del objeto movil suspendido del muelle, tenemosx = − k
mx, que es una ecuacion del tipo de (1.4).

14 CAPITULO 1. VARIEDADES RIEMANNIANAS.
12 [x(t)]2, que puede verse como la evaluacion en x(t) ∈ R = Tx(t)R de la forma cuadraticaT (p, v) = 1
2 |v|2, (p, v) ∈ TR. La energıa potencial solo depende de la posicion:
V (x) = −∫ x
0f(ξ) dξ.
Claramente, el potencial V determina a f , luego determina la ecuacion (1.4) llamadaecuacion del movimiento. Ademas, si cambiamos el potencial sumandole una constante,no cambian ni la EDO (1.4) ni los movimientos. Desde el punto de vista de la mecanicaLagrangiana, uno considera el lagrangiano L(x, x) = T (x) − V (x) ∈ C∞(TR). FijadosP,Q ∈ R, sea F el espacio de funciones γ : [0, 1] → R de clase C1 tales que γ(0) =P, γ(1) = Q. Sobre F tenemos el funcional
Φ(γ) =∫ 1
0L(γ, γ)dt,
cuyos puntos crıticos son exactamente las ecuaciones de movimientos del sistema. Paraver esto, tomemos una variacion γs : [0, 1] → R de γ definida en |s| < ε, con γs(0) =P, γs(1) = Q ∀s. Llamando η(t) = ∂γs
∂s (t, 0) al campo variacional de γs,
d
ds
∣∣∣∣0Φ(γs) =
∫ 1
0
d
ds
∣∣∣∣0L(γs, γs) dt
=∫ 1
0
∂L
∂x(γ(t), γ(t))
∂γs∂s
(t, 0) dt+∫ 1
0
∂L
∂x(γ(t), γ(t))
∂γs∂s
(t, 0) dt
=∫ 1
0
∂L
∂x(γ, γ)η dt+
[∂L
∂x(γ, γ)η
]1
0−∫ 1
0
∂
∂t
(∂L
∂x(γ, γ)
)η dt.
Como la variacion es propia, η(0) = η(1) = 0 y
d
ds
∣∣∣∣0Φ(γs) =
∫ 1
0
[∂L
∂x− ∂
∂t
(∂L
∂x
)](γ, γ) η dt.
Por tanto, los puntos crıticos de Φ sobre F son las funciones x : [0, 1] → R tales que
∂L
∂x=
∂
∂t
(∂L
∂x
). (1.5)
A (1.5) se les llama las ecuaciones de Euler-Lagrange del sistema. En nuestro caso, ∂L∂x =
−dVdx = f(x) y ∂L
∂x = dTdx = ˙ xluego ∂2L
∂t∂x = x. Ahora de (1.4) y (1.5) deducimos que
Los puntos crıticos de Φ en F coinciden con los movimientos del sistema.

1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 15
La energıa total del sistema es E = T + V ∈ C∞(TR,R), que depende de la posiciony de la velocidad, y el sistema admite una ley de conservacion de la energıa: Si x(t) es unmovimiento, entonces E(x(t), x(t)) es constante (en terminos analıticos, E es una primeraintegral de (1.4)): en efecto,
d
dtE(x(t), x(t)) =
d
dt
(12[x(t)]2 −
∫ x(t)
0f(ξ)dξ
)= ˙ x(t) (¨x(t) − f(x(t))) = 0.
El sistema (1.4) es una EDO de segundo orden, y por tanto equivalente a un sistema dedos EDO de primer orden:
x = yy = f(x),
(1.6)
sistema que puede verse sobre el llamado espacio de fases, que en nuestro caso no es masque TR = R×R y que en general es el fibrado tangente del espacio de configuraciones. Elsistema (1.6) determina un campo X ∈ X(TR), X(x,y) = (y, f(x)). A las curvas integralesde X se es llama curvas de fases. Ası, una curva α(t) = (x(t), y(t)) ∈ TR es curva de fase siy solo si x(t) es un movimiento del sistema, y encontrar los movimientos de nuestro sistemaequivale a calcular las curvas de fases. Como por cada punto de una variedad para unaunica curva integral de un campo dado sobre la misma, tenemos otra forma de justificar elque para cada x(0), x(0) ∈ R existe una unico movimiento con esas condiciones iniciales.Notese que una curva de fase podrıa reducirse a un solo punto del espacio de fases, y queesto ocurre precisamente en un cero del campo X . A los ceros de X en el espacio de fasesse las llama posiciones de equilibrio.
La ley de conservacion de la energıa puede enunciarse diciendo que si x(t) es unmovimiento, entonces (x(t), x(t)) cae en un subconjunto E = c ⊂ TR (c ∈ R). Cabepreguntarse cuando E = c es una hipersuperficie de TR (en este caso, cuando es unacurva regular y embebida). Por el teorema de la funcion implıcita, esto ocurre cuandoc ∈ R sea valor regular de E. Dados (x0, y0) ∈ TR, (x, y) ∈ T(x0,y0)TR,
dE(x0,y0)(x, y) = dTy0(y) + dVx0(x) = y0y − xf(x0).
Si y0 6= 0, entonces dE(x0,y0)(0, y0) = y20 6= 0. Si y0 = 0 pero f(x0) 6= 0, tenemos
dE(x0,y0)(f(x0), 0) = −f(x0)2 6= 0. Y si y0 = 0 y f(x0) = 0 entonces dE(x0,y0) = 0luego deducimos:
Los unicos puntos crıticos de E son las posiciones de equilibrio en el espacio de fases.
Las posiciones de equilibrio estan sobre el eje y = 0 del espacio de fases, ycorresponden a los (x0, 0) tales que x0 es punto crıtico de la energıa potencial (i.e.dVdx (x0) = 0).

16 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Figura 1.1: Izquierda: El potencial V = V (x). Derecha: espacio de fases y curvas de fases.
Si (x0, y0) ∈ TR no es una posicion de equilibrio, entonces el conjunto de nivelE = E(x0, y0) es una curva regular y embebida alrededor de (x0, y0), cuya primeracomponente define el movimiento del sistema con codiciones iniciales x(0) = x0,x(0) = y0.
Por ejemplo, supongamos que el potencial sigue una grafica como la de la Figura 1.1izquierda. V tiene tres puntos crıticos: dos mınimos locales x0, x2 y un maximo local x1.Los puntos (x0, 0), (x1, 0), (x2, 0) del espacio de fases son las posiciones de equilibrio delsistema. La energıa total es E(x, x) = 1
2(x)2 + V (x). Al recorrer una curva de fase Γ E
se mantiene constante, luego cuanto menor sea la energıa potencial en un punto de Γmayor sera la energıa cinetica en tal punto (se recorre la curva mas rapido). La geometrıade las curvas de fase E = c puede describirse analizando los valores de c proximos alas posiciones de equilibrio. Por ejemplo, para (x, x) proximo (pero no igual) a (x0, 0), elpotencial se desarrolla V (x) = V (x0) + 1
2V′′(x0)(x− x0)2 +O((x− x0)3). Ası, la ecuacion
E = c se transforma en c = 12(x)2+V (x0)+ 1
2V′′(x0)(x−x0)2+O((x−x0)3). Despreciando
el termino O((x− x0)3), tenemos la conica del (x, x)-plano
(x)2 + V ′′(x0)(x− x0)2 = 2(c− V (x0)). (1.7)
Notese que V ′′(x0) ≥ 0 (x0 es mınimo local de V ) y que c− V (x0) ≥ 0 (en caso contrario(1.7) no tiene soluciones en el (x, x)-plano, luego tampoco las tiene E = c). Ademas,c−V (x0) = 0 exactamente cuando la energıa cinetica es cero, lo que ocurre en la posicionde equilibrio, luego podemos suponer c−V (x0) > 0. Suponiendo ademas V ′′(x0) 6= 0, (1.7)es la ecuacion de una elipse, luego las curvas de fases E = c proximas a la posicion deequilibrio (x0, 0) son curvas cerradas simples, como en la Figura 1.1 derecha (si V ′′(x0) = 0tendriamos un analisis similar acudiendo a la primera derivada no nula de V en x0, lo cualeleva el grado de la ecuacion polinomica analoga a (1.7)). El estudio para (x, x) ∼ (x2, 0)

1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 17
es similar al anterior, del que solo hemos usado V ′′(x0) > 0. Pero en x1 la situacion esdiferente, ya que V ′′(x1) < 0. En este caso, cambiando x0 por x1 en (1.7) tendremos:
Para c−V (x1) = 0 (i.e., para el valor de E dado por la posicion de equilibrio), (1.7)es la ecuacion de un par de rectas que se cruzan en (x1, 0) (el eje x = 0 biseca elangulo formado por estas dos rectas). Por tanto, el conjunto de nivel E = V (x1)consiste en tres curvas de fases: la posicion de equilibrio y dos curvas de fases queson arcos abiertos con lımite (x1, 0), ver Figura 1.1 derecha.
Para c − V (x1) < 0, las curvas de nivel E = c definen una foliacion de los dos“sectores” opuestos del complemento de E = V (x1) en un disco centrado en (x1, 0)que contienen puntos del eje x = 0 (de igual forma que ramas de hiperbolas folianlos cuadrantes primero y tercero, localmente alrededor del origen).
Para c− V (x1) > 0, el comportamiento es similar al del punto anterior, cambiandolos sectores opuestos por los que no contienen puntos del eje x = 0.
1.5.2. Sistemas con 2 grados de libertad.
Supongamos ahora que nuestra partıcula se mueve en un plano siguiendo una trayec-toria p(t) = (x1(t), x2(t)) ∈ R2 tal que
p(t) = f(p(t)), (1.8)
donde ahora f ∈ C∞(R2,R2). El espacio de configuraciones es ahora R2 y de nuevo la teorıageneral de EDO nos dice que p(t) esta determinada unıvocamente por p(0), p(0) ∈ R2. Laenergıa cinetica de p(t) es la evaluacion en p(t) ∈ R2 = Tp(t)R2 de la forma cuadratica
T (p, v) = T (v) =12g0(v, v)
(g0 es el producto escalar usual de R2). A diferencia del caso 1-dimensional, la energıapotencial no puede definirse siempre (f es ahora un campo, luego integrarlo supone encon-trar una funcion sobre R2 cuyo gradiente sea ese campo). El sistema se dice conservativosi ∃V ∈ C∞(R2) tal que f = −∇0V (gradiente en el sentido del Analisis), lo cual equivalea que el rotacional del campo f sea cero. De ahora en adelante supondremos que nuestrosistema es conservativo. De nuevo el potencial determina las ecuaciones de movimiento ysus soluciones (i.e. los movimientos del sistema) y si sumamos una constante al potencial,las ecuaciones de los movimientos no cambian. Estas ecuaciones diferenciales coinciden conlas ecuaciones de Euler-Lagrange del funcional Φ(γ) =
∫ 10 L(γ, γ)dt, donde L ∈ C∞(TR2)
es el lagrangiano L(p, v) = T (v) − V (p), y Φ se aplica a cualquier curva γ : [0, 1] → R2
con extremos prefijados.

18 CAPITULO 1. VARIEDADES RIEMANNIANAS.
La energıa total del sistema es la funcion E ∈ C∞(TR2,R) dada por E(p, v) = T (v) +V (p), que tambien cumple una ley de conservacion: E es una primera integral de (1.8)).Para ver esto, tomemos un movimiento p(t) del sistema. Omitiendo la t,
d
dtE(p, p) =
d
dt
(12g0(p, p) + V (p)
)= g0(p, p) + g0(∇0V )(p), p) = g0(p, p− f(p)) = 0.
El espacio de fases es ahora TR2 ≡ R4 y (1.8) equivale al sistemap = q
q = f(p),(1.9)
El campo asociado al sistema anterior es X ∈ X(TR2), X(p,q) = (q, f(p)), y las curvasintegrales α(t) = (p(t), q(t)) ∈ TR2 de X proyectan al primer factor dando movimientosde (1.8) y viceversa. La ley de conservacion de la energıa se enuncia diciendo que paracada movimiento p(t), la curva (p(t), p(t)) cae en una hipersuperficie E = c c ∈ R(como en el caso 1-dimensional, este conjunto es realmente una hipersuperficie a menosque c = E(p0, 0) = U(p0) con f(p0) = 0).
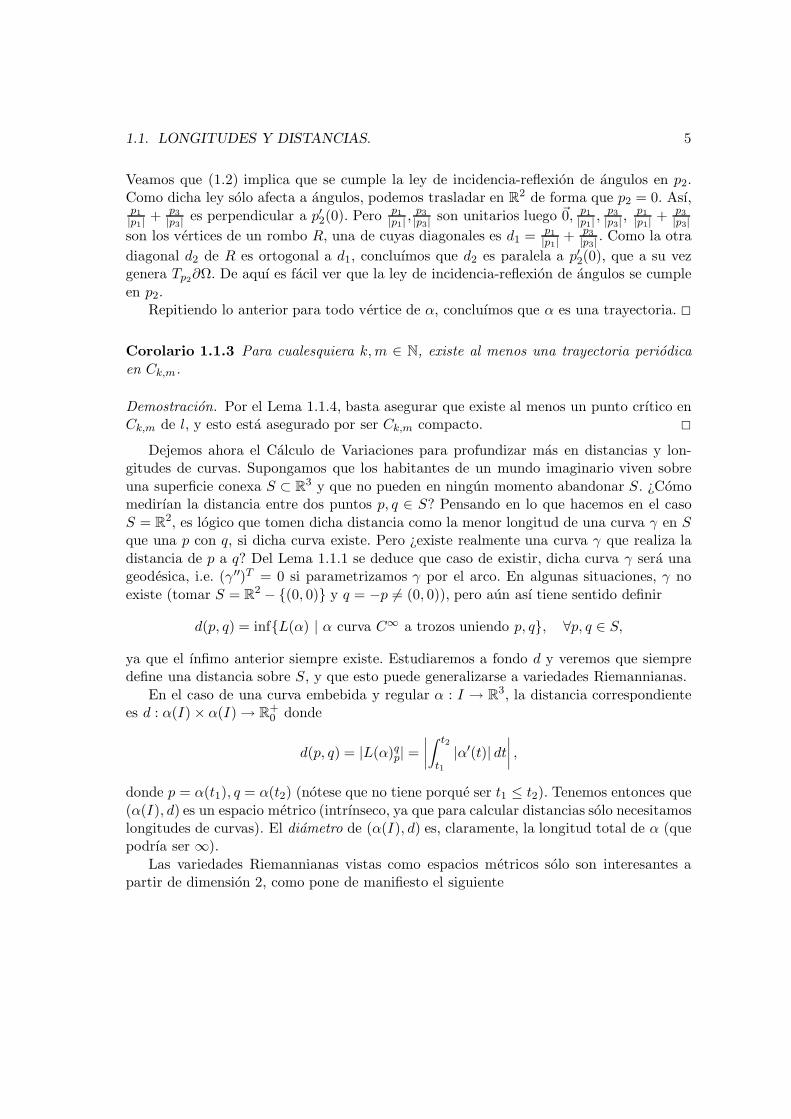
1.5.3. El pendulo doble.
En los ejemplos anteriores el espacio de configuraciones era un espacio euclıdeo (ypor tanto tambien el espacio de fases es euclıdeo), y la metrica g cuya forma cuadraticadefinıa la energıa cinetica T era (salvo una constante) el producto escalar usual. Peroexisten situaciones fısicas modeladas por espacios de configuraciones que son variedadesdiferenciables mas generales, o donde la metrica g que define a T es mas elaborada. Unejemplo es el pendulo doble, que es un sistema compuesto por dos partıculas B,C demasas respectivas m1, m2 > 0 unidas a un punto fijo A por segmentos inextensibles l1, l2de longitudes r1, r2 > 0 como en la Figura 1.2 (se supone que los puntos B,C se muevenun un plano vertical fijo). La posicion del sistema en un momento dado queda determinadapor los angulos θ1, θ2 ∈ S1 que forman l1, l2 con la vertical (Figura 1.2), luego el espaciode configuraciones es ahora M = S1 × S1. Los movimientos del sistema son curvas γ(t) =(θ1(t), θ2(t)) que describen la evolucion del doble pendulo partiendo de una posicion inicialγ(0) y de una velocidad inicial γ(0). Situando el origen en A, las coordenadas cartesianasde B,C son
B(θ1, θ2) = r1(sen θ1,− cos θ1), C(θ1, θ2) = r1(sen θ1,− cos θ1) + r2(sen θ2,− cos θ2).
La energıa cinetica de una curva γ(t) = (θ1(t), θ2(t)) en M es
T =12m1‖B‖2 +
12m2‖C‖2 =
12
[(m1 +m2)r21θ
21 +m2r
22θ
22 +m2r1r2 cos(θ1 − θ2)θ1θ2
],
1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 19
Figura 1.2: Un pendulo doble.
que puede verse como la evaluacion en γ de una forma cuadratica sobre TγM (luegoT ∈ C∞(TM)). La energıa potencial es V (θ1, θ2) = m1GB2 +m2GC2, donde G ∼ 9,8 esla constante gravitatoria y B2, C2 son las alturas de B,C. Esto da
V (θ1, θ2) = −(m1 +m2)Gr1 cos θ1 −m2Gr2 cos θ2.
Alternativamente, los movimientos son los puntos crıticos del funcional
Φ(γ) =∫ 1
0L(γ, γ) dt
definido sobre el espacio F de curvas en M que unen dos puntos P,Q dados, dondeL ∈ C∞(TM) es el lagrangiano L = T−V , y por tanto son las soluciones de las ecuacionesde Euler-Lagrange de Φ,
d
dt
(∂L
∂θ1
)=∂L
∂θ1,
d
dt
(∂L
∂θ2
)=∂L
∂θ2
(esto se vera en general en la Seccion 1.5.4).
1.5.4. Formulacion general de la mecanica Lagrangiana.
Sea Mn una variedad diferenciable. Un lagrangiano sobre M es una funcion diferencia-ble L ∈ C∞(TM), y una curva γ : R →M se dice un movimiento del sistema lagrangiano(M,L) si es un punto crıtico del funcional
Φ(α) =∫ 1
0L(α, α) dt
definido en el espacio de curvas α : [0, 1] →M tales que α(0), α(1) estan prefijados.

20 CAPITULO 1. VARIEDADES RIEMANNIANAS.
Lema 1.5.1 (Ecuaciones de Euler-Lagrange) Tomemos coordenadas locales (p, v) enTM donde ahora p = (p1, . . . , pn) se mueve en un abierto de Rn y v = (v1, . . . , vn) en Rn.Entonces, γ : R →M es un movimiento del sistema si y solo si
∀i = 1, . . . , n,∂L
∂pi(γ(t), γ(t)) =
∂2L
∂t∂vi(γ(t), γ(t)).
Demostracion. Tomemos una variacion propia γu(t) de γ con campo variacional ξ = ξ(t) ∈X(γ).
d
du
∣∣∣∣u=0
∫ 1
0L(γu(t), γu(t))dt =
∫ 1
0
d
du
∣∣∣∣0L(γu(t), γu(t))dt =
∫ 1
0
n∑
i=1
(∂L
∂pi(γu(t), γu(t))
∂γi∂u
(t, u) +∂L
∂vi(γu(t), γu(t))
∂γi∂u
(t, u))
u=0
dt =
∑
i
∫ 1
0
(∂L
∂pi(γ(t), γ(t))ξi(t) +
∂L
∂vi(γ(t), γ(t))
∂2γi∂u∂t
(t, 0)
)dt =
∑
i
(∫ 1
0
∂L
∂pi(γ, γ)ξi dt+
∫ 1
0
d
dt
[∂L
∂vi(γ, γ)
∂γi∂u
(t, 0)]− ∂2L
∂t∂vi(γ, γ)
∂γi∂u
(t, 0)
dt
).
Como la variacion es propia, el sumando central anterior se anula por la regla de Barrowluego
d
du
∣∣∣∣u=0
∫ 1
0L(γu(t), γu(t))dt =
∑
i
(∫ 1
0
∂L
∂pi(γ, γ)ξi dt−
∫ 1
0
∂2L
∂t∂vi(γ, γ)ξi dt
)
=∑
i
∫ 1
0
(∂L
∂pi− ∂2L
∂t∂vi
)(γ, γ)ξi dt.
Ahora el Lema se deduce de que podemos elegir el campo variacional arbitrariamente(siempre que se anule en los extremos). 2
Definicion 1.5.1 Sea (Mn, g) una V.R. La forma cuadratica v ∈ TpM 7→ 12gp(v, v) se
llama la energıa cinetica, T : TM → R. Una energıa potencial (o simplemente un potencial)es una funcion diferenciable V ∈ C∞(M). Un lagrangiano L en M se dice natural siL = T − V .
En general, las ecuaciones de movimiento de un sistema Lagrangiano (i.e. las ecuacionesde Euler-Lagrange del Lema 1.5.1) no son las ecuaciones de las geodesicas de una metricaRiemanniana sobre M . Cuando el potencial es cero (o constante), entonces L = T luegoel funcional Φ cuyos puntos crıticos son los movimientos del sistema coincide, salvo una

1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 21
contante multiplicativa, con el funcional energıa de g y por tanto sus puntos crıticos sonlas geodesicas de la metrica g. En general, para que las ecuaciones de Euler-Lagrange deL sean las de las geodesicas de una metrica necesitamos que el potencial V dependa nosolo de la posicion, sino tambien de la velocidad.
1.5.5. Principios de conservacion y el Teorema de Noether.
En Fısica encontramos a menudo una ley de conservacion, como en los ejemplos delas Secciones 1.5.1 y 1.5.2, en los que una cierta cantidad escalar es conservada a lo largode cualquier movimiento del sistema fısico. Ya que los movimientos son soluciones de unsistema de EDO de segundo orden sobre el espacio de configuracionesM (o de primer ordensobre el espacio de fases TM), que una funcion I sea constante a lo largo de cualquiermovimiento es equivalente a que I sea una integral primera del sistema de segundo orden.
Hemos visto ejemplos de lagrangianos naturales L = T − V sobre (R, g0) o (R2, g0) enlos que E = T + V es una integral primera del sistema. El siguiente criterio nos permiteasegurar la existencia de una integral primera cuando el lagrangiano L no sea natural. Sea(Mn, g) una variedad diferenciable y L ∈ C∞(TM) un lagrangiano sobre ella. Decimosque un difeomorfismo φ : M → M conserva L si
L(φ(p), dφp(v)) = L(p, v), ∀(p, v) ∈ TM.
Teorema 1.5.1 (Noether) Supongamos que existe una familia 1-parametrica de difeo-morfismos φs : M → M que conservan el lagrangiano L, con φ0 = 1M . Entonces, existeuna funcion I ∈ C∞(TM,R) que es una integral primera del sistema lagrangiano, i.e. todomovimiento γ del sistema cumple I γ = cte.
Demostracion. Localmente puedo tomar coordenadas (p, v) en TM donde ahora veo p =(p1, . . . , pn) en un abierto de Rn y v = (v1, . . . , vn) en Rn. Tomemos un movimiento γ delsistema. Como φs conserva L,
L(φs(γ(t)), (dφs)γ(t)(γ(t))) = L(γ(t), γ(t)) (1.10)
Luego llamando ψ(t, s) = φs(γ(t)) y derivando en s,
0 =∂
∂sL(γ(t), γ(t)) =
∂
∂sL(ψ(t, s),
∂ψ
∂t(t, s))
=n∑
i=1
(∂L
∂pi(ψ(t, s),
∂ψ
∂t(t, s))
∂ψi(t, s)∂s
+∂L
∂vi(ψ(t, s),
∂ψ
∂t(t, s))
∂2ψi(t, s)∂s∂t
). (1.11)
Fijado s,
∂L
∂pi(φsγ,
˙︷ ︸︸ ︷φs γ) =
∂L
∂pi(φs(γ), (dφs)γ(γ)) =
∂L
∂pi(γ, γ) =
∂2L
∂t∂vi(γ, γ) =
∂2L
∂t∂vi(φsγ,
˙︷ ︸︸ ︷φs γ),

22 CAPITULO 1. VARIEDADES RIEMANNIANAS.
donde hemos usado (1.10) en la segunda igualdad. Por el Lema 1.5.1, t 7→ ψ(t, s) es unmovimeinto del sistema. Sustituyendo en (1.11) queda
0 =n∑
i=1
(∂2L
∂t∂vi(ψ(t, s),
∂ψ
∂t(t, s))
∂ψi(t, s)∂s
+∂L
∂vi(ψ(t, s),
∂ψ
∂t(t, s))
∂2ψi(t, s)∂s∂t
)
=n∑
i=1
∂
∂t
(∂L
∂vi(ψ(t, s),
∂ψ
∂t(t, s))
∂ψi(t, s)∂s
)=∂F (t, s)∂t
,
donde F (t, s) =∑ni=1
∂L∂vi
(ψ(t, s), ∂ψ∂t (t, s))∂ψi(t,s)∂s . Si ahora definimos
I(p, v) =n∑
i=1
∂L
∂vi(p, v)
d
ds
∣∣∣∣0φis(p)
en el dominio de la carta de TM que estamos usando, entonces I(γ(t), γ(t)) = F (t, 0)(aquı se usa que φ0 = 1M). Por tanto,
d
dtI(γ(t), γ(t)) =
∂
∂tF (t, 0) = 0,
de donde I(γ, γ) es constante. Quedarıa solo ver que I es una funcion globalmente definidasobre TM , i.e. no depende de la carta de TM usada para definirla. Esto se reduce a uncambio de cartas en TM . 2

1.5. VARIEDADES RIEMANNIANAS EN MECANICA CLASICA. 23
Ejercicios.
1. En el semiplano superior (R2)+ = (x, y) / y > 0 se considera la metrica hiperbolicag = y−2〈·, ·〉. Demostrar que toda transformacion de Mobius que conserve dicho semies-pacio, ϕ(z) = az+b
cz+d , donde a, b, c, d ∈ R con ad−bc > 0, es una isometrıa de ((R2)+, g)en sı mismo. Concluir que dados p, q ∈ (R2)+, existe una isometrıa de ((R2)+, g) ensı mismo que lleva p en q.
2. Dada una base B de Rn, denotemos por TB al toro n-dimensional obtenido comocociente de Rn por el grupo Zv1 ⊕ . . .⊕ Zvn, y sea g0 su metrica llana estandar. Porotro lado, dado r > 0 consideremos la circunferencia S1(r) ⊂ R2 centrada en el origen yde radio r, con metrica estandar g inducida por el producto escalar usual de R2. Probarque para cualesquiera r1, . . . , rn > 0, existe una base B de Rn tal que el toro (TB, g0)es isometrico a (S1(r1) × . . .× S1(rn), g× n). . .×g). ¿Es B unica?
3. Se considera el embebimiento dado por el toro de Clifford,
F : S1(1)× S1(1) −→ S3(1)/F (x1, x2, x3, x4) = 1√
2(x1, x2, x3, x4).
En cada esfera se considera su metrica canonica. Probar que la metrica pullback vıa F dela metrica estandar sobre S3(1) es homotetica a la metrica producto sobre S1(1)×S1(1).
4. Se considera la inmersion
F : R2 −→ R6/F (t1, t2) = 1√
3
(e2πit1 , e2πit2 , e2πi(t1+t2)
).
Sea Γ el retıculo de R2 generado por los vectores v1 = (1, 0), v2 = (0, 1). Demostrarque F induce un embebimiento F del toro T = R2/Γ en S5(1) (toro equilatero). EnS5(1),T = R2/Γ se consideran respectivamente la metrica canonica g (inducida por elproducto escalar usual de R6) y la metrica pullback F ∗g. Encontrar una metrica g1 sobreR2 que se induzca al cociente T = R2/Γ y que lo haga isometrico a (T, F ∗g).
5. Demostrar que el embebimiento de Veronese, inducido en RP2 por la inmersion
F : S2(1) −→ S4(1/√
3)/F (x, y, z) =
(12(x2 − y2), xz, yz, xy,
√3
6 (x2 + y2 − 2z2))
es un embebimiento isometrico si en RP2, S4(1/√
3) consideramos sus respectivas metri-cas estandar (cociente de la metrica canonica sobre S2(1) e inducida por el productoescalar usual de R5, respectivamente).
6. Se considera el embebimiento de Tai F : RPn −→ S(n+1,R), inducido por la inmersion
F : Sn(1) −→ S(n+ 1,R) / F (p) =t p · p,

24 CAPITULO 1. VARIEDADES RIEMANNIANAS.
donde S(n+ 1,R) denota el espacio de matrices simetricas reales de orden n + 1. Seag1 la metrica estandar sobre RPn (cociente de la metrica canonica sobre la esfera) yg0(A,B) = Traza(A · B) la metrica canonica sobre S(n + 1,R). Demostrar que lametrica pullback F ∗g0 es homotetica a g1.
7. Un difeomorfismo φ : (M1, g1) −→ (M2, g2) entre V.R. se dice una transformacionconforme si la metrica pullback φ∗g2 es conforme a g1.
(A) Probar que toda transformacion conforme conserva angulos (si (M, g) es una V.R.y p ∈ M , el angulo entre u, v ∈ TpM − 0 se define como el menor θ ∈ [0, 2π[que cumple gp(u, v) = ‖u‖‖v‖ cosθ).
(B) Demostrar que la proyeccion estereografica respecto de un punto a ∈ Sn(1) es unatransformacion conforme de (Sn(1) − a, g1) en (Rn, g0), donde g1, g0 son lasmetricas canonicas de Sn(1) y Rn, respectivamente.
8. Se consideran dos isometrıas φi : (Mi, gi) −→ (Ni, gi), i = 1, 2. Demostrar que laaplicacion producto φ1 × φ2 : (M1 × M2, g1 × g2) −→ (N1 × N2, g1 × g2) es unaisometrıa.
9. Probar que sobre toda variedad diferenciable existe una metrica Riemanniana (Indicacion:usar particiones de la unidad).

Capıtulo 2
Calculo en variedadesRiemannianas.
Una forma de encarar el estudio de una V. R. es por medio de los espacios de funciones,campos o formas que soporta. Sobre estos espacios de funciones, campos y 1-formas actuanciertos operadores diferenciales, en terminos de los que podemos estudiar ecuaciones difer-enciales que nos daran informacion sobre la V.R. Dedicaremos este tema a introduciralgunos de estos operadores diferenciales sobre una V.R. (Mn, g).
2.1. Gradiente de una funcion.
Definicion 2.1.1 Sea f ∈ C∞(M). Dado p ∈ M , se define (∇f)p ∈ TpM como el unicovector de TpM que cumple
gp((∇f)p, v) = v(f), ∀v ∈ TpM.
O equivalentemente, g(∇f,X) = X(f) ∀X ∈ X(M).
Lema 2.1.1 ∇f ∈ X(M).
Demostracion. Solo hay que probar la diferenciabilidad de ∇f , y podemos hacer esto encoordenadas locales. Dada (U, ψ = (x1, . . . , xn)) carta local paraM , no es difıcil comprobarque
∇f =n∑
i,j=1
∂f
∂xjgij
∂
∂xien U,
donde (gij)i,j es la matriz inversa de (gij)i,j (ejercicio). 2
En el caso particular (Mn, g) = (Rn, g0), obtenemos la formula clasica ∇0f =(∂f∂x1
, . . . , ∂f∂xn
).
25

26 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Proposicion 2.1.1 Sean f, h ∈ C∞(M).
1. ∇(f + h) = ∇f + ∇h, ∇(fh) = f∇h + h∇f , ∇(1/f) = − 1f2∇f .
2. Si φ : (M1, g1) → (M2, g2) es una isometrıa, entonces φ∗∇(f2 φ) = ∇′f2, ∀f2 ∈C∞(M2).
3. Si g′ = λg con λ ∈ C∞(N,R+), entonces ∇′f = 1λ∇f .
4. El gradiente es ortogonal a las hipersuperficies de nivel: Si a ∈ R es valor regular def , entonces (∇f)p ⊥ Tpf
−1(a) ∀p ∈ f−1(a).
Demostracion. (Ejercicio). 2
2.2. La conexion de Levi-Civita.
En el espacio euclıdeo sabemos derivar un campo diferenciable Y en la direccion deotro X (basta usar la derivada direccional dY (X) del Analisis), y obtenemos otro campodiferenciable. Si intentamos la misma operacion sobre una superficie regular S ⊂ R3, elresultado no tiene porque ser tangente a la superficie, luego es natural tomar solo la partetangente dY (X)T de dY (X). Pero si tenemos una variedad abstracta sobre la que nopodemos servirnos de una estructura extrınseca, como podemos definir el equivalente adY (X)T? Esta cuestion nos llevara a la conexion de Levi-Civita, una herramienta quenos abrira una puerta para estudiar geodesicas, curvatura y otros objetos claves de laGeometrıa Riemanniana, pero desde el punto de vista intrıseco. Seguimos denotando por(Mn, g) a una V.R.
Definicion 2.2.1 Dados X, Y ∈ X(M), se define ∇XY ∈ X(M) como el unico campoque cumple la formula de Koszul,
2g(∇XY, Z) = X(g(Y, Z))+ Y (g(Z,X))− Z(g(X, Y ))+ g([X, Y ], Z) + g(Y, [Z,X])− g(X, [Y, Z]), ∀Z ∈ X(M),
donde [·, ·] es el corchete de Lie de campos en M .
Justificaremos mas adelante la formula anterior. Hemos dicho que ∇XY ∈ X(M). Ladiferenciabilidad de ∇XY se deduce de su expresion en coordenadas locales: si (U, ψ =(x1, . . . , xn)) es una carta local de M , entonces
∇ ∂∂xi
∂
∂xj=
n∑
k=1
Γkij∂
∂xk,

2.2. LA CONEXION DE LEVI-CIVITA. 27
donde los coeficientes Γkij (llamados sımbolos de Christoffel de g) vienen dados por
Γkij =12
n∑
h=1
(∂gjh∂xi
+∂gih∂xj
− ∂gij∂xh
)ghk. (2.1)
(Probar (2.1) como ejercicio). En particular, Γkij ∈ C∞(U) ∀i, j, k, de donde es facil probarque ∇XY ∈ X(M) ∀X, Y ∈ X(M).
Proposicion 2.2.1 La aplicacion ∇ : X(M)×X(M) → X(M), ∇(X, Y ) = ∇XY , cumplelas siguientes propiedades:
1. ∇fX1+X2Y = f∇X1Y + ∇X2Y, ∇X(fY1 + Y2) = X(f)Y1 + f∇XY1 + ∇XY2 (∇ esuna conexion afın sobre M).
2. ∇XY − ∇YX = [X, Y ] (∇ es libre de torsion).
3. X(g(Y, Z)) = g(∇XY, Z) + g(Y,∇XZ) (∇ paraleliza a la metrica).
4. ∇ es la unica conexion afın sobre M libre de torsion y que paraleliza a la metrica.
Demostracion. 1,2,3 son consecuencia directa de la formula de Koszul. En cuanto a 4, si∇ es una conexion afın sobre M libre de torsion y que paraleliza a g, entonces
X(g(Y, Z)) = g(∇XY, Z) + g(Y,∇XZ),Y (g(Z,X)) = g(∇Y Z,X) + g(Z,∇YX),Z(g(X, Y )) = g(∇ZX, Y ) + g(X,∇ZY ).
Sumando las dos primeras ecuaciones, restando la tercera y usando que ∇ es libre detorsion, obtenemos
X(g(Y, Z))+Y (g(Z,X))−Z(g(X,Y )) = g(2∇XY +[Y,X ], Z)+g(Y, [X,Z])+g(X, [Y,Z]),
luego ∇ tambien cumple la formula de Koszul, de donde ∇ = ∇. 2
La demostracion anterior justifica la Definicion 2.2.1.
Definicion 2.2.2 En la situacion anterior, a ∇ se le llama la conexion de Levi-Civita de(Mn, g).
Ejemplos.
1. La conexion de Levi-Civita de (Rn, g0) es ∇XY = dY (X) (esto se deduce de laexpresion local de ∇ y de (2.1) con gij = δij).

28 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
2. Si S ⊂ R3 es una superficie regular con metrica inducida g, entonces su conexion deLevi-Civita es
(∇XY )p = dYp(Xp) − gp(Xp, ApYp)Np = (dYp(Xp))T ,
donde N es la aplicacion de Gauss (localmente definida) de S y A = −dN es elendomorfismo de Weingarten asociado a N (se deduce del apartado 4 de la Proposi-cion 2.2.1).
3. La conexion de Levi-Civita de (Sn(1), g = i∗〈·, ·〉) es
(∇XY )p = dYp(Xp) + 〈Xp, Yp〉p
(tambien se deduce del apartado 4 de la Proposicion 2.2.1). Esta formula tiene unanalogo para el espacio hiperbolico Hn con el modelo del paraboloide en el espaciode Lorentz-Minkowski, consultar el ejercicio 4.
4. Si φ : (M1, g1) → (M2, g2) es una isometrıa entre V.R. y ∇1,∇2 son respectivamentelas conexiones de Levi-Civita de (M1, g1), (M2, g2), entonces
∇2φ∗Xφ∗Y = φ∗(∇1
XY ), ∀X, Y ∈ X(M1).
(Ejercicio).
5. Conexion de Levi-Civita y metricas conformes.Sea g′ = e2ug una metrica conforme a g sobre M , donde u ∈ C∞(M). Entonces, laformula de Koszul da la siguiente relacion entre las conexiones de Levi-Civita ∇ deg y ∇′ de g′:
∇′XY = ∇XY +X(u)Y + Y (u)X − g(X, Y )∇u,
donde ∇u es el gradiente de u respecto de g (ejercicio).
2.3. Derivada covariante y transporte paralelo.
Sea α ∈ C∞(]a, b[,M) una curva y t0 ∈]a, b[ tal que α′(t0) 6= 0. Dado X ∈ X(α), existeε > 0 y ∃X ∈ X(M) con Xα(t) = X(t) siempre que |t− t0| < ε.
Lema 2.3.1 ∇α′(t0)X no depende de la extension X de X.
Demostracion. Expresar X como combinacion lineal de una base local de campos asociadaa una carta. Las propiedades de tensorialidad de una conexion nos llevaran a que laexpresion de ∇α′(t0)X no depende mas que del comportamiento de X a lo largo de α enun entorno de α(t0), donde coincide con X (ejercicio). 2
El Lema 2.3.1 nos permite hacer la siguiente definicion.

2.3. DERIVADA COVARIANTE Y TRANSPORTE PARALELO. 29
Definicion 2.3.1 En la situacion anterior, la derivada covariante de X en t0 es el vector
DX
dt(t0) = ∇α′(t0)X.
Proposicion 2.3.1 La derivada covariante tiene las siguientes propiedades:
1. ∀X ∈ X(α), DXdt ∈ X(α).
2. ∀X, Y ∈ X(α), f ∈ C∞(]a, b[), D(fX+Y )dt = f ′X + f DXdt + DY
dt .
3. ddt(gα(X, Y )) = gα(DXdt , Y ) + gα(X, DYdt ).
Demostracion. 1 es consecuencia de la expresion local de DXdt en una carta (U, ψ =
(x1, . . . , xn)):
DX
dt=
n∑
k=1
a′k +
n∑
i,j=1
(xi α)′aj(Γkij α)
(∂
∂xk
)
α, (2.2)
donde X =∑i ai
(∂∂xi
)α
y Γkij son los sımbolos de Christoffel en dicha carta. 2 es unaaplicacion directa de las propiedades de una conexion (en realidad, 1,2 son validas paracualquier conexion afın), y 3 se deduce de que la conexion de Levi-Civita paraleliza a lametrica. 2
Definicion 2.3.2 Sea α :]a, b[→ M una curva regular. Un campo X ∈ X(M) se diceparalelo si DX
dt = 0.
Como los campos paralelos son el nucleo del operador Ddt : X(α) → X(α), forman un sube-
spacio vectorial de X(α) (pero no un C∞(]a, b[)-modulo). Del apartado 3 de la Proposi-cion 2.3.1 se sigue que
Lema 2.3.2 Si X, Y ∈ X(α) son paralelos, entonces gα(X, Y ) es constante en ]a, b[. Enparticular, la norma de un campo paralelo es constante.
Una consecuencia de (2.2) es que los campos paralelos son localmente las soluciones delsistema de EDO en ]a, b[
a′k +n∑
i,j=1
(xi α)′aj(Γkij α) = 0 ∀k = 1, . . . , n. (2.3)
Teorema 2.3.1 Sea α : [a, b] → M una curva regular1. Dado t0 ∈ [a, b] y v ∈ Tα(t0)M ,∃!X ∈ X(α) paralelo tal que X(t0) = v.
1α es restriccion a [a, b] de una curva regular definida en un intervalo abierto que contiene a [a, b].

30 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Demostracion. Si la traza de α esta contenida en un abierto coordenado, entonces elteorema es consecuencia directa de la teorıa general de EDO. En el caso general, se recubreα([a, b]) por abiertos coordenados y se usa la unicidad de solucion de un p.v.i. para probarque los campos paralelos dados por el caso anterior coinciden en la interseccion de dosparches. 2
Definicion 2.3.3 Sea α :]a, b[→M una curva regular y [t0, t1] ⊂]a, b[. El traslado paralelode t0 a t1 lo largo de α es la aplicacion τ t1t0 : Tα(t0)M → Tα(t1)M tal que τ t1t0 (v) es el valoren t1 del unico campo X ∈ X(α) paralelo con X(t0) = v.
Proposicion 2.3.2 En la situacion anterior,
1. τ t1t0 es una isometrıa vectorial de (Tα(t0)M, gα(t0)) en (Tα(t1)M, gα(t1)), con inversa(τ t1t0 )−1 = τ t0t1 .
2. τ t2t1 τ t1t0 = τ t2t0 .
Demostracion. La linealidad de τ t1t0 es consecuencia directa de que estructura de espaciovectorial en el conjunto de campos paralelos y de la unicidad del campo paralelo a partirde una condicion inicial. Para ver que τ t1t0 es biyectiva, primero hay que dar sentido a τ t0t1cuando t1 > t0. Sea β : [t0, t1] →M la reparametrizacion β(s) = α(t0+t1−s) de α recorridaal reves. Entonces, tenemos un isomorfismo de C∞([t0, t1])-modulos ∗ : X(α) → X(β)donde X∗(s) = X(t0 + t1 − s), que cumple
DX∗
ds= −
(DX
dt
)∗
(probarlo usando coordenadas locales). Por tanto, ∗ lleva campos paralelos a lo largo deα en campos paralelos a lo largo de β (y viceversa). De aquı se deduce facilmente que
τ t1t0 (α) τ t1t0 (β) = 1Tα(t1)M , τ t1t0 (β) τ t1t0 (α) = 1Tα(t0)M ,
que es el sentido riguroso de la igualdad (τ t1t0 )−1 = τ t0t1 del enunciado. Que τ t1t0 respeta lasmetricas es consecuencia del Lema 2.3.2. 2
Si α :]a, b[→ M es una curva regular, [t0, t1] ⊂]a, b[ y v1, . . . , vn es una base deTα(t0)M , entonces los campos Pi ∈ X(α|[t0,t1]) paralelos definidos por Pi(t0) = vi o equiv-alentemente Pi(t) = τ tt0(vi), forman base de cada Tα(t)M en cada t ∈ [t0, t1], y se llamanla base de campos paralelos que extiende a v1, . . . , vn. Ademas, si v1, . . . , vn es gα(t0)-ortonormal, entonces P1(t), . . . , Pn(t) es gα(t)-ortonormal ∀t ∈ [t0, t1], luego todo campoX ∈ X(α|[t0,t1]) se expresara
X =n∑
i=1
gα(X,Pi)Pi.

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 31
Lema 2.3.3 Sea P1, . . . , Pn ⊂ X(α|[t0,t1]) la base de campos paralelos que extiende auna base v1, . . . , vn de Tα(t0)M (no necesariamente ortonormal). Entonces, un campoX : [t0, t1] → M a lo largo de α es diferenciable si y solo si X =
∑ni=1 aiPi con ai ∈
C∞([t0, t1]), 1 ≤ i ≤ n.
Demostracion. Ejercicio. 2
La expresion de un campo X ∈ X(α) en funcion de una base de campos paralelos permiteprobar el siguiente
Teorema 2.3.2 Sean X, Y ∈ X(M), p ∈M tal que Xp 6= 0 y α :]− ε, ε[→M una curvaregular con α(0) = p, α′(0) = Xp. Entonces,
(∇XY )p = lımt→0
1t
[(τ t0)
−1(Yα(t)) − Yα(0)
],
donde τ t0 es el traslado paralelo a lo largo de α.
Demostracion. Sea P1, . . . , Pn la base de campos paralelos a lo largo de α que extiendea una base v1, . . . , vn de Tα(0)M . Como Y α ∈ X(α), tendremos Y α =
∑i aiPi para
ciertas ai ∈ C∞(]− ε, ε[), 1 ≤ i ≤ n. Por definicion de derivada covariante,
(∇XY )p =D(Y α)
dt(0) =
D
dt
∣∣∣∣t=0
(∑
i
aiPi
)=∑
i
a′i(0)vi
=∑
i
lımt→0
1t
[ai(t) − ai(0)] vi = lımt→0
1t
[∑
i
ai(t)(τ t0)−1(Pi(t))− Yα(0)
],
de donde el Teorema se deduce directamente. 2
2.4. Geodesicas y aplicacion exponencial.
Seguimos con nuestra V.R. (Mn, g).
Definicion 2.4.1 Una γ :]a, b[→M una curva regular se dice geodesica si γ ′ es paralelo,i.e.
Dγ ′
dt= 0 en ]a, b[.
Del Lema 2.3.2 tenemos que la velocidad de una geodesica es siempre constante en norma.Esto nos dice que “ser geodesica” dependera de la parametrizacion de la curva. Masprecisamente, si φ :]c, d[→]a, b[ es un difeomorfismo entonces d
ds(γ φ) = dφds
(dγdt φ
), luego

32 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Dds
(dds (γ φ)
)= d2φ
ds2
(dγdt φ
)+ dφ
dsDds
(dγdt φ
). Aplicando el apartado b) del Ejercicio 8 al
segundo sumando anterior, tenemos Dds
(dγdt φ
)= dφ
ds
[Ddt
(dγdt
) φ], que se anula por ser
γ geodesica. Por tanto, γ φ vuelve a ser geodesica si y solo si d2φds2 = 0 en ]a, b[, i.e. φ(s)
es una funcion afın.Del sistema de EDO (2.3) y de que localmente γ ′ =
∑i(xi γ)′
(∂∂xi
)γ
en terminos de
una carta local (U, ψ = (x1, . . . , xn)) de M se deduce el siguiente
Lema 2.4.1 γ :]a, b[→M es geodesica si y solo si
(xk γ)′′ +∑
i,j
(xi γ)′(xj γ)′(Γkij γ) = 0 en ]a, b[, ∀k = 1, . . . , n. (2.4)
Lo anterior es un sistema de EDO de segundo orden, luego tiene solucion unica para cadaeleccion de (xk γ)(t0), (xk γ)′(t0) ∈ R, 1 ≤ k ≤ n (siendo t0 ∈]a, b[). Como lo primeroson las coordenadas de p = γ(0) y lo segundo las de γ ′(0), deducimos
Teorema 2.4.1 Dados p ∈M , v ∈ TpM , ∃! geodesica γ de (M, g) definida en un entornode 0 ∈ R, tal que γ(0) = p, γ ′(0) = v. Esta unicidad significa que si β es una geodesica en(M, g) con γ(0) = β(0) y γ ′(0) = β′(0), entonces γ = β en Dom(γ)∩Dom(β).
Recordemos que los movimientos de un sistema fısico podıan verse como las proyec-ciones sobre el primer factor de las curvas integrales de cierto campo en el espacio de fases,y que esta construccion se basaba en que un sistema de EDO de segundo orden sobre unavariedad M puede convertirse en un sistema de EDO sobre TM . Ahora usaremos estamisma idea para ver las geodesicas de (M, g) como las proyecciones sobre el primer factordel flujo geodesico.
Sea (U, ψ = (x1, . . . , xn)) una carta local para M . Asociada a (U, ψ) tenemos la car-ta de TM
(π−1(U), (ψ× 1Rn) ψ
), donde π : TM → M es la proyeccion π(p, v) = p
y ψ : π−1(U) → U × Rn viene dada por ψ(p, v) = (p, v(x1), . . . , v(xn)). Llamemos(q1, . . . , qn, q1, . . . , qn) a las funciones coordenadas de (ψ × 1Rn) ψ, i.e. qi(p, v) = xi(p),qi(p, v) = v(xi), 1 ≤ i ≤ n. Consideremos el campo que en coordenadas locales se escribe
XG =n∑
k=1
qk∂
∂qk−
n∑
k=1
n∑
i,j=1
qiqj(Γkij π)
∂
∂qk∈ X(π−1(U)). (2.5)
Lema 2.4.2 Si γ :]a, b[→ π−1(U) es curva integral de XG, entonces γ es de la formaγ = (γ, γ ′) para cierta curva γ :]a, b[→ U .

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 33
Demostracion. En principio, γ sera del tipo (γ,W ), donde γ :]a, b[→ U y W ∈ X(γ). Pero
γ ′(t) = XGγ(t)
=∑
k
qk(γ,W )(∂
∂qk
)
(γ,W )
−∑
i,j,k
qi(γ,W )qj(γ,W )Γkij(γ)(∂
∂qk
)
(γ,W )
=∑
k
[W (t)](xi)(∂
∂qk
)
(γ,W )
−∑
i,j,k
[W (t)](xi)[W (t)](xj)Γkij(γ)(∂
∂qk
)
(γ,W )
.
Por tanto,
γ ′ = (π γ)′ = dπγ(γ′) =
∑
k
[W (t)](xi)dπ(γ,W )
((∂
∂qk
)
(γ,W )
)
−∑
i,j,k
[W (t)](xi)[W (t)](xj)Γkij(γ)dπ(γ,W )
((∂
∂qk
)
(γ,W )
).
Si vemos que
dπ(p,v)
((∂
∂qk
)
(p,v)
)=(∂
∂xk
)
p, dπ(p,v)
((∂
∂qk
)
(p,v)
)= 0, (2.6)
entonces tendremosγ ′ =
∑
k
[W (t)](xi)(∂
∂xk
)
γ= W (t),
como deseabamos. La demostracion de (2.6) es como sigue: Sabemos que los campos basicosasociados a una carta en TM son la imagen inversa por la diferencial de la carta de losvectores de la base canonica de R2n. Usando esto para (ψ × 1) ψ, es facil llegar a
dπ(p,v)
((∂∂qk
)(p,v)
)= d(π ψ−1)(p,(ai))
((∂∂xk
)p, 0),
dπ(p,v)
((∂∂qk
)(p,v)
)= d(π ψ−1)(p,(ai)) (0, ek) ,
donde (a1, . . . , an) son las coordenadas de v respecto de la base de campos de ψ en p. Peroπ ψ−1 es la proyeccion de U × Rn sobre su primer factor, luego
d(π ψ−1)(p,(ai))
((∂∂xk
)p, 0)
=(
∂∂xk
)p,
d(π ψ−1)(p,(ai)) (0, ek) = 0.
2
Proposicion 2.4.1 En la situacion anterior, se tiene:

34 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
1. Si γ es curva integral de XG, entonces γ = (γ, γ ′) siendo γ una geodesica de (M, g).
2. Si γ :]a, b[→ U es geodesica de (M, g), entonces γ = (γ, γ ′) es curva integral de XG.
Demostracion. Si γ es curva integral de XG, entonces γ = (γ, γ ′) por el Lema 2.4.2.Expresando la igualdad γ ′ = XG
γen combinacion lineal de ∂
∂qk, ∂∂qk
e igualando coeficientesobtenemos (qk γ)′ = ˙ qk γ y
(qk γ)′ = −n∑
i,j=1
(qi γ)(qj γ)(Γkij π γ), 1 ≤ k ≤ n. (2.7)
Comparando lo anterior con (2.4) deducimos que γ es una geodesica. Recıprocamente, siγ es geodesica de (M, g) entonces, la ecuacion (2.4) nos dice que (2.7) se cumple. Como(qk γ)′ = ˙ qk γ se da porque γ = (γ, γ ′), deducimos que γ ′ = XG
γ. 2
Corolario 2.4.1 XG no depende de la carta (U, ψ) usada en la ecuacion (2.5), y defineun campo XG ∈ X(TM) (llamado flujo geodesico).
Demostracion. Sean (U, ψ), (V,φ) dos cartas locales para M , y XG, Y G los campos re-spectivos en π−1(U), π−1(V ). Supongamos que U ∩ V 6= Ø y sea (p, v) ∈ π−1(U ∩ V ).Llamemos γ, Γ a las unicas curvas integrales de XG, Y G pasando por (p, v) en t = 0.Por la Proposicion 2.4.1, γ = (γ, γ ′), Γ = (Γ,Γ′) con γ,Γ geodesicas de (M, g). Ademas,la condiciones iniciales de γ, Γ implican que γ(0) = Γ(0) = p, γ ′(0) = Γ′(0) = v luegoγ = Γ por el Teorema 2.4.1, de donde γ = Γ. Derivando y evaluando en t = 0 obtenemosXG
(p,v) = Y G(p,v). 2
Dado (p, v) ∈ TM , sea γG(p,v) : I(p,v) → TM la curva integral maximal de XG concondicion inicial γG(p,v)(0) = (p, v). Ası, el grupo local uniparametrico deXG es ϕGt t dondeϕGt : DG
t → DG−t es el difeomorfismo ϕGt (p, v) = γG(p,v)(t) yDG
t = (q, w) ∈ TM | t ∈ I(q,w),abierto de TM .
Teorema 2.4.2 Dado (p, v) ∈ TM , se tienen:
1. La curva γ(·, p, v) = π γG(p,v) : I(p,v) → M es la unica geodesica de (M, g) concondiciones iniciales γ(0, p, v) = p, γ ′(0, p, v) = v e I(p,v) es su intervalo maximal dedefinicion.
2. ∃ε > 0, ∃V(p,v) abierto de TM con (p, v) ∈ V(p,v) tales que γ :] − ε, ε[×V(p,v) → Mdada por
γ(t, q, w) = (π γG(q,w))(t) = (π ϕGt )(q, w)
esta definida y es diferenciable.

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 35
Demostracion. 1 es consecuencia de los resultados anteriores, y 2 de la teorıa general delgrupo uniparametrico local asociado a un campo. 2
Lema 2.4.3 (Homogeneidad de las geodesicas) Dados (p, v) ∈ TM y λ > 0, se tieneI(p,λv) = 1
λI(p,v) y γ(t, p, λv) = γ(λt, p, v), ∀t ∈ I(p,λv).
Demostracion. Como α(t) = γ(λt, p, v) es una reparametrizacion proporcional al arco deuna geodesica, α es tambien geodesica. Sus condiciones iniciales son α(0) = p, α′(0) =λv, luego a(·) = γ(·, p, λv) por unicidad de las geodesicas. De aquı el Lema se deducefacilmente. 2
Ejemplos de V.R. y sus geodesicas.
1. Geodesicas en (Rn, g0).Las geodesicas son las rectas afines recorridas con velocidad constante.
2. Geodesicas en (Sn(1), g).Dados p ∈ Sn(1) y v ∈ TpSn(1) = 〈p〉⊥, ‖v‖ = 1. Sea γ : R → Sn(1) el cırculomaximo γ(t) = cos t ·p+sen t ·v. La conexion de Levi-Civita de la esfera implica queDγ′
dt = dXγ(γ ′) + 〈γ ′, Xγ〉γ, donde X ∈ X(Sn(1)) cumple Xγ = γ ′ localmente. Ası,Dγ′
dt = γ ′′ + ‖γ ′‖2γ = −γ + γ = 0, luego γ es geodesica. Si ahora tomamos cualquierv ∈ TpSn(1) − 0, entonces el Lema de homogeneidad implica que γ(t, p, v) =γ(‖v‖t, p, v
‖v‖) = cos(‖v‖t) · p + sen(‖v‖t) · v‖v‖ . Estas son todas las geodesicas en la
esfera (ademas de las constantes).
3. Geodesicas en RPn.Como una isometrıa local conserva las conexiones de Levi-Civita (apartado 4 de lapagina 28), el punto anterior nos dice que las geodesicas no triviales de RPn sonlas proyecciones a RPn de los cırculos maximos de Sn(1), recorridos con velocidadconstante en norma.
4. Geodesicas en el plano hiperbolico con el modelo del semiplano.A continuacion determinaremos todas las geodesicas del plano hiperbolico usandotransformaciones de Mobius. El estudio que sigue puede hacerse en dimension n,donde hay tambien un concepto de transformacion de Mobius (entendida como unacomposicion de inversiones respecto a (n−1)-esferas o (n−1)-planos de Rn) aunqueno tengamos la ayuda del Analisis complejo. En el ejercicio 4 pueden encontrarse lasgeodesicas del espacio hiperbolico Hn con el modelo del paraboloide en el espacio deLorentz-Minkowski.
Consideremos sobre (R2)+ = (x, y) ∈ R2 | y > 0 la metrica hiperbolica g = 1y2g0
y la carta global ((R2)+, 1d). Los sımbolos de Christoffel de g respecto a esta carta

36 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
son (ver ejercicio 5):
Γ111 = Γ2
12 = Γ221 = Γ1
22 = 0, Γ211 = −Γ1
12 = −Γ121 = −Γ2
22 =1y,
luego la ecuacion (2.4) de las geodesicas γ = (γ1, γ2) se transforma en el sistema deEDO
γ ′′1 − 2γ
′1γ
′2
γ2= 0,
γ ′′2 + (γ′1)2
γ2− (γ′2)
2
γ2= 0
(2.8)
Empezamos buscando soluciones de (2.8) de la forma γ(t) = (a, γ2(t)) con a ∈ R(rectas verticales). La primera ecuacion de (2.8) ahora no dice nada, y la segundase transforma en γ′′2
γ′2= γ′2
γ2. Integrando dos veces tenemos γ2(t) = eb+ct, luego salvo
un cambio de parametro afın, γ(t) = (a, et). Notese que gγ(γ ′, γ ′) = 1, luego es-ta geodesica esta normalizada, y definida para todo valor del parametro. Su trazacoincide con una geodesica en la metrica g0 de R2, pero no su parametrizacion. Sihacemos algo parecido buscando geodesicas del tipo γ(t) = (γ1(t), b) llegaremos a γconstante.
En cuanto al resto de geodesicas, sabemos por el ejercicio 1 del Tema 1 que todatransformacion de Mobius ϕ(z) = az+b
cz+d con a, b, c, d ∈ R, ad−bc > 0, es una isometrıade (R2)+, g) en sı mismo. Sea L una recta vertical en C, y ϕ una transformacion deMobius del tipo anterior. ϕ(L) sera una recta o circunferencia en C que corta ortog-onalmente a ϕ(R) = R, luego o bien ϕ(L) es una recta vertical (que ya hemos estudi-ado como geodesica del plano hiperbolico) o ϕ(L) es una circunferencia centrada enun punto de R. Ademas como γ(t) = (a, et) es una parametrizacion como geodesicade una semirrecta vertical y ϕ es isometrıa, concluımos que (ϕ γ)(t) = ϕ(a + iet)es una geodesica de (R2)+, g), definida ∀t ∈ R. De forma que toda recta vertical ocircunferencia centrada en un punto de R ⊂ C, cortada con el semiplano superior,admite una parametrizacion como geodesica de ((R2)+, g). Geometricamente es claroque dados p ∈ (R2)+ y v ∈ R2 = Tp(R2)+, ∃! recta vertical o circunferencia centra-da un un punto de R que pasan por p y son tangentes a v, luego por unicidad delas geodesicas estas son todas las geodesicas de ((R2)+, g). Otro hecho graficamenteevidente es que dados p, q ∈ (R2)+ distintos, existe una unica geodesica que los une(esto sera generalizable a variedades de Cartan-Hadamard, ver Teorema 3.5.1).
Volvamos al grupo uniparametrico ϕGt : DGt → DG
−tt del flujo geodesico. Sea A =DG
1 = (p, v) ∈ TM | 1 ∈ I(p,v), abierto de TM
Lema 2.4.4 En la situacion anterior,
1. A contiene a la seccion cero de TM .

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 37
2. Dado p ∈ M , el conjunto A(p) = v ∈ TpM | (p, v) ∈ A es un abierto estrelladorespecto del origen de TpM .
Demostracion. 1 se deduce de que ∀p ∈ M , I(p,0) = R porque γ(·, p, 0) ≡ p. En cuantoa 2, A(p) es abierto de la subvariedad TpM de TM porque A(p) = A ∩ TpM , A(p)contiene al origen por el punto 1 anterior y es estrellado respecto del origen por el Lemade Homogeneidad. 2
Definicion 2.4.2 En la situacion anterior, se define la aplicacion exponencial de (M, g)como exp : A→M donde
exp(p, v) = γ(1, p, v), ∀(p, v) ∈ A.
Ası, exp = π ϕG1 luego exp ∈ C∞(A,M). Fijado p ∈ M , se define la exponencial en p
como expp : A(p) →M ,expp(v) = exp(p, v), v ∈ A(p),
que es diferenciable en A(p) por ser la restriccion a la subvariedad A(p) de una aplicaciondiferenciable en A.
De la definicion anterior se deduce que las geodesicas radiales en p ∈ M se obtienenproyectando vıa expp las semirrectas que parten del origen en TpM , cortadas con A(p).
Lema 2.4.5 Dado p ∈M , la diferencial de expp en 0 ∈ TpM es la identidad en TpM .
Demostracion. Dado v ∈ TpM , ddt
∣∣∣0expp(tv) = d
dt
∣∣∣0γ(t, p, v) = γ ′(0, p, v) = v. 2
Por el Lema 2.4.5 y el Teorema de la funcion inversa, ∃V0 entorno abierto de 0 en TpM y∃Up entorno abierto de p en M tales que expp : V0 → Up es un difeomorfismo.
Definicion 2.4.3 Dado p ∈ M , un entorno normal de p es un entorno abierto de p quees imagen difeomorfica vıa expp de un entorno abierto de 0 en A(p) ⊂ TpM .
Lo anterior nos dice que siempre existe un entorno normal Up = exp(V0) de cada puntop ∈ M . Si fijamos una base B = v1, . . . , vn de TpM , podemos construir la carta localψB : λB (expp)
−1 : Up → λB(V0), donde λB : TpM → Rn es el isomorfismo de espaciosvectoriales que lleva cada vector de TpM en sus coordenadas respecto a B.
Proposicion 2.4.2 En la situacion anterior, los sımbolos de Christoffel de (M, g) respectoa (Up, ψB) se anulan en p.

38 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Demostracion. Sea v =∑i λi
(∂∂xi
)p∈ TpM . La expresion local de la geodesica α(t) =
γ(t, p, v) respecto a ψB es (ψB α)(t) = (tλ1, . . . , tλn), luego la ecuacion de las geodesicas(2.4) se escribe ahora
∑i,j λiλjΓ
kij(α(t)) = 0 en cierto intervalo ] − ε, ε[, 1 ≤ k ≤ n. Tras
evaluar en t = 0 y usar que (λ1, . . . , λn) es arbitrario en Rn obtendremos Γkij(p)+Γkji(p) = 0,∀i, j, k. Como la conexion de Levi-Civita es libre de torsion, Γkij = Γkji, de donde se sigueel enunciado. 2
Una consecuencia de la Proposicion 2.4.2 es el siguiente
Corolario 2.4.2 Dado p ∈ M y w ∈ TpM , ∃W ∈ X(M) tal que Wp = w y ∇vW = 0∀v ∈ TpM .
Demostracion. Sea B una base de TpM , y (a1, . . . , an) ∈ Rn las coordenadas de w respectoa B. Consideremos una carta (Up, ψB) definida sobre un entorno normal de p como la dela Proposicion 2.4.2. Definimos X =
∑j aj
∂∂xj
∈ X(Up). Por resultados de extension decampos, ∃Vp ⊂ Up abierto de M conteniendo a p y ∃W ∈ X(M) tales que W |Vp = X |Vp.Ası, Wp = Xp = w y solo resta comprobar que ∇vW = 0 ∀v ∈ TpM :
∇vW = (∇|Vp)v
∑
j
aj∂
∂xj
=
∑
j
aj∇v∂
∂xj.
Ahora solo hay que expresar ∇v∂∂xj
en combinacion lineal de(
∂∂x1
)p, . . . ,
(∂∂xn
)p
y usar
la Proposicion 2.4.2 para terminar. 2
Con la misma notacion de la demostracion anterior, si aplicamos el proceso de ortonor-malizacion de Gram-Schmidt a la base local de campos ∂
∂x1, . . . , ∂
∂xn obtendremos que
Existe una base ortonormal de campos E1, . . . , En ⊂ X(Up), que tambiencumplen ∇vEj = 0, 1 ≤ j ≤ n.
La razon de esto es que en el proceso de ortonormalizacion de Gram-Schmidt cambiamos loscampos originales por otros combinacion lineal de los primeros, y las funciones coeficientesde dicha combinacion lineal se calculan a partir de productos escalares de los camposoriginales. Como la conexion de Levi-Civita paraleliza a la metrica, si los campos originalescumplen ∇v
∂∂xj
= 0, entonces estas funciones coeficientes f cumplen v(f) = 0 para todov ∈ TpM , de donde ya es facil deducir que ∇vEj = 0, 1 ≤ j ≤ n. Este resultado es muyutil a la hora de hacer calculos sobre una V.R.
Proposicion 2.4.3 Sea φ : (M1, g1) → (M2, g2) una isometrıa local, y p1 ∈ M1,r > 0tales que expp1 esta definida en B1(0, r) = v1 ∈ Tp1M1 | (g1)p1(v1, v1) < r2. Entonces,expp2 esta definida en B2(0, r) = v2 ∈ Tp2M2 | (g2)p2(v2, v2) < r2 y expp2 dφp =expp1 φ en B1(0, r). Si ademas φ es isometrıa, entonces expp1 es biyectiva en B1(0, r) siy solo si expp2 es biyectiva en B2(0, r).

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 39
Demostracion. Ejercicio. 2
Ejemplos de exponenciales y entornos normales.
1. El espacio euclıdeo (Rn, g0).Como las geodesicas son las rectas afines parametrizadas proporcionalmente al arco,tenemos γ(t, p, v) = p+ tv, ∀p, v ∈ Rn, ∀t ∈ R. Ası, la exponencial exp esta definidaen todo TRn = Rn × Rn y vale
exp(p, v) = γ(1, p, v) = p+ v, ∀p, v ∈ Rn.
esto nos dice que fijado p ∈ Rn, la exponencial expp es la traslacion de vector p enRn, luego el mayor entorno normal de cualquier punto de (Rn, g0) es todo Rn.
2. La esfera (Sn(1), g).Tenıamos γ(t, p, 0) = p y γ(t, p, v) = cos(‖v‖t) · p + sen(‖v‖t) · v
‖v‖ si v 6= 0. Comoestas geodesicas estan definidas ∀t ∈ R, tenemos que exp esta definida en TS1(1) y
exp(p, v) = cos ‖v‖ · p+ sen ‖v‖ · v
‖v‖ , ∀p ∈ Sn(1), ∀v ⊥ p.
Ademas, fijado p ∈ Sn(1), expp esta definida en todo 〈p〉⊥. Para ver cual es elmayor entorno normal de p en Sn(1), empezamos estudiando los puntos crıticos deexpp(v) = cos ‖v‖ · p+ sen ‖v‖ · v
‖v‖ , que son los v ∈ 〈p〉⊥ tales que ker(d expp)v 6= 0.Como (d expp)0 es la identidad, podemos suponer v 6= 0. Dado w ∈ Tv(TpSn(1)) ≡TpSn(1), un calculo sencillo lleva a
(d expp)v(w) = ddt
∣∣∣0expp(v + tw) = − 〈v,w〉
‖v‖ sen ‖v‖p+ 〈v,w〉‖v‖2
[cos ‖v‖ − sen‖v‖
‖v‖
]v + sen‖v‖
‖v‖ w.
Como p ⊥ v y p ⊥ w, obtenemos
ker(d expp)v =
w ∈ TpSn(1)
∣∣∣∣∣〈v, w〉 sen‖v‖ = 0 (∗),〈v,w〉‖v‖
[cos ‖v‖ − sen ‖v‖
‖v‖
]v + sen ‖v‖w = 0 (∗∗)
.
Supongamos que w ∈ ker(d expp)v − 0. Entonces, (∗) implica 〈v, w〉 = 0 o biensen ‖v‖ = 0. En el primer caso, (∗∗) implica sen ‖v‖ = 0, luego esta ultima ecuaciones cierta en cualquier caso, y por tanto ‖v‖ = kπ, k ∈ N, y de nuevo (∗∗) nos diceque 〈v, w〉 = 0. Por tanto, en este caso ker(d expp)v ⊆ w ∈ TpSn(1) | 〈v, w〉 = 0.De hecho, la expresion general de (d expp)w obtenida arriba nos dice que se la laigualdad en la inclusion anterior. De aquı se concluye que expp es un difeomorfismolocal en B(0, π) = v ∈ TpSn(1) | ‖v‖ < π. Cuando aplicamos expp a esta bola delespacio tangente, estamos recorriendo las geodesicas radiales que parten de p hasta

40 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
llegar al punto antıpoda −p, pero sin tomar este valor. Es geometricamente claroque estos medios cırculos maximos no se cortan, de donde concluımos que expp esinyectiva en B(0, π). Por tanto,
El mayor entorno normal de p ∈ Sn(1) es expp(B(0, π)) = Sn(1) − −p.
3. El espacio proyectivo RPn.Por la Proposicion 2.4.3 aplicada a la proyeccion canonica π : Sn(1) → RPn, la expo-nencial exp de RPn esta definida en todo TRPn y dado [p] ∈ RPn, exp[p] esta definidaen todo T[p]RPn. Ademas, exp[p] dπp = π expp, ∀p ∈ Sn(1). Pasando a diferencialesesta igualdad se deduce facilmente que los unicos v ∈ T[p]RPn donde (d exp[p])vtiene nucleo son lor proyectados por dπp de aquellos v ∈ TpSn(1) para los que(d expp)v tiene nucleo. Por tanto, exp[p] : B(0, π) ⊂ T[p]RPn → RPn es un difeo-morfismo local. Como π es un difeomorfismo de B(0, π2 ) ⊂ TpSn(1) sobre la imagenpor exp[p] de B(0, π2 ) ⊂ T[p]RPn, concluımos que exp[p](B(0, π2 )) es un entorno nor-mal de [p] en RPn. Ademas, exp[p](B(0, π2 )) = π(expp(B(0, π2 )) = π(H+
p ), dondeH+p = q ∈ Sn(1) | 〈p, q〉 > 0. Notese que π(H+
p ) = π(H−p ) y que RPn − π(H+
p ) 'RPn−1. Ademas, si v ∈ TpSn(1) tiene ‖v‖ = π
2 , entonces expp(−v) = − expp v, luegoexp[p](dπp(v)) = exp[p](−dπp(v)). Esto nos dice que exp[p] deja de ser inyectiva endπp(∂B(0, π2 )). De todo ello se obtiene que
El mayor entorno normal de [p] ∈ RPn es π(H+p ) = exp[p](B(0, π2 )) '
RPn − RPn−1.
4. El plano hiperbolico.A continuacion probaremos que la exponencial expp es un difeomorfismo sobre todoel espacio tangente en un punto p al plano hiperbolico. Este resultado es valido endimension n (ver ejercicio 4), aunque aquı nos reduciremos a dimension dos parausar transformaciones de Mobius.
Sabemos que las geodesicas del plano hiperbolico con el modelo del semiplano sonγ(t) = (a, et) en el caso de una semirrecta vertical, o bien γ(t) = ϕ(a+ieit) cuando latraza es una circunferencia centrada en un punto de R ⊂ C cortada con (R2)+, dondeA ∈ R, ϕ(z) = az+b
cz+d con a, b, c, d ∈ R, ad− bc > 0 y en ambos casos γ esta definida∀t ∈ R. En particular, exp esta definida en todo T (R2)+, o equivalentemente, exppesta definida en Tp(R2)+ ≡ R2 ∀p ∈ (R2)+. Como desde este modelo del semiplanohasta el modelo del disco D(0, 1) existe una isometrıa (punto 3 de los ejemplos de lapagina 10), la misma conclusion sobre exp, expp se extraera para el modelo del disco.
En cuanto al mayor entorno normal de cualquier punto, tambien podemos elegirarbitrariamente el modelo (o pasar de uno a otro segun convenga) por la Proposi-cion 2.4.3. Primero notemos que si estudiamos nuestro problema en un punto p ∈

2.4. GEODESICAS Y APLICACION EXPONENCIAL. 41
(R2)+, entonces la misma conclusion sera valida ∀q ∈ (R2)+. Esto es consecuen-cia de que ∀p, q ∈ (R2)+, ∃ϕ : ((R2)+, g) → ((R2)+, g) isometrıa tal que ϕ(p) = q
(esto es lo que se llama una variedad homogenea). En efecto, la isometrıa deseadaϕ es composicion de dos transformaciones de Mobius que conservan el semiplanosuperior: primero una homotecia ϕ1 que lleve p en un punto con la misma segundacoordenada que q, y luego una traslacion horizontal ϕ2 que lleve ϕ1(p) en q. Ası quese trata de elegir un punto especial en el plano hiperbolico donde los calculos seanmas sencillos. Pero el modelo del semiplano no tiene ningun punto “distinguido”, alcontrario del modelo del disco, que tiene al origen y una simetrıa radial (recordemosque la metrica hiperbolica sobre D(0, 1) es g = 4
(1−‖z‖2)2 g0). Por ello, usaremos en loque sigue el modelo del disco.
Las geodesicas hiperbolicas en D(0, 1) que pasan por el origen son las rectas vecto-riales de R2 cortadas con D(0, 1). Para averiguar que parametrizaciones las hacengeodesicas, escribimos γ(t, 0, v) = f(t)eiθ con f valuada real, f(0) = 0 y f ′(0)eiθ =v ∈ C − 0. Por el Lema de homogeneidad, no perdemos generalidad suponien-do ‖v‖ = 1 (norma euclıdea, no hiperbolica). Imponiendo el sistema de EDO de lasgeodesicas (ecuacion (2.4)) respecto de la carta global (D(0, 1), 1d), no es difıcil llegara las ecuaciones
(1 − |γ|2)γ ′′1 + 2γ1(γ ′1)2 + 4γ2γ
′1γ
′2 − 2γ1(γ ′2)
2 = 0(1 − |γ|2)γ ′′2 − 2γ2(γ ′1)
2 + 4γ1γ′1γ
′2 + 2γ2(γ ′2)
2 = 0
(2.9)
donde | · | representa el modulo de un numero complejo. Aparentemente, encontrartodas las soluciones del sistema de EDO anterior es muy complicado. Pero el con-tenido geometrico del sistema nos llevara a solucionarlo completamente. Como ennuestro caso es γ1(t) = f(t) cos t, γ2(t) = f(t) sen t donde v = eiθ , (2.9) se reduce a
(1 − f2)f ′′ cos θ + 2f(f ′)2 cos θ = 0(1 − f2)f ′′ sen θ + 2f(f ′)2 sen θ = 0
Como cos θ, sen θ no pueden anularse simultaneamente, queda una sola ecuacion
(1 − f2)f ′′ + 2f(f ′)2 = 0. (2.10)
Pero(
f ′
1−f2
)′= (1−f2)f ′′+2f(f ′)2
(1−f2)2, luego (2.10) equivale a f ′
1−f2 = cte. (esta mismaecuacion se podrıa haber obtenido imponiendo simplemente que ‖γ ′‖ es constanteen la metrica hiperbolica, pero entonces no sabrıamos si γ es o no geodesica). Comof(0) = 0 y f ′(0) = 1 deducimos que f ′
1−f2 = 1, luego
f ′ = 1 − f2, f(0) = 0. (2.11)

42 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Ahora consideremos la funcion diferenciable f : R →] − 1, 1[ dada por
f(t) =e2t − 1e2t + 1
= tanh t.
Es facil comprobar que f es un difeomorfismo creciente y que cumple (2.10). Esta es,por tanto, la unica solucion del p.v.i. (2.10), luego la unica geodesica de (D(0, 1), g)con γ(0) = 0 y γ ′(0) = v unitario es
γ(t, 0, v) = f(t)v = tanh t · v, t ∈ R.
Por el Lema de homogeneidad, dado cualquier v ∈ T0D(0, 1) = R2 con v 6= 0, tenemos
γ(t, 0, v) = γ
(‖v‖t, 0, v
‖v‖
)= tanh(‖v‖t) v
‖v‖, t ∈ R.
De aquı obtenemos que expp : R2 → D(0, 1) viene dada por expp 0 = p y
exp0 v = tanh(‖v‖) v
‖v‖ = f(‖v‖) v
‖v‖, ∀v 6= 0.
Sabemos que dados dos puntos distintos del plano hiperbolico con el modelo de(R2)+, existe una unica geodesica que los une (pagina 36), lo que se traduce ahora enque exp0 es biyectiva. Solo queda ver que exp0 es un difeomorfismo local y tendremosque exp0 es un difeomorfismo sobre todo R2. Por el Teorema de la funcion inversa,se trata de probar que ∀v ∈ R2, d(exp0)v : R2 → R2 es un isomorfismo de espaciosvectoriales. Esto es claro si v = 0, luego supongamos v 6= 0 en lo que sigue. Uncalculo directo nos lleva a que dado w ∈ R2,
d(exp0)v(w) =〈v, w〉‖v‖2
[f ′(‖v‖)− f(‖v‖)
‖v‖
]v +
f(‖v‖)‖v‖ w, (2.12)
donde 〈·, ·〉 es el producto escalar usual de R2. Si v, w fueran linealmente independi-entes y w ∈ ker(d exp0)v − 0, entonces (2.12) implicarıa que f(‖v‖)‖v‖ = 0 luegof(‖v‖) = 0. Como f es inyectiva y f(0) = 0, tendrıamos v = 0, contradiccion. Ası quesupuesto que d(exp0)v no es un isomorfismo, entonces kerd(exp0)v = 〈v〉 6= 0.Veamos que esto ultimo es imposible en cualquier V.R. (Mn, g):
Si p ∈M y v ∈ TpM − 0, entonces
(d expp)v(v) =d
dt
∣∣∣∣0expp((1+t)v) =
d
dt
∣∣∣∣0γ(1, p, (1+t)v) =
d
dt
∣∣∣∣0γ(1+t, p, v) = γ ′(1, p, v),
que no se anula porque la velocidad de una geodesica es constante en norma. Enresumen,
En el plano hiperbolico, expp es un difeomorfismo sobre todo el plano tan-gente.

2.5. DIVERGENCIA DE UN CAMPO. 43
2.5. Divergencia de un campo.
Definicion 2.5.1 Sea X ∈ X(M). La divergencia de X es la funcion divX : M → R dadapor
(divX)(p) = Traza
(TpM → TpMv 7→ ∇vX
).
Lema 2.5.1 El operador divergencia cumple las siguientes propiedades:
1. divX ∈ C∞(M), ∀X ∈ X(M).
2. Si (U, ψ = (x1, . . . , xn)) es una carta local de M y X |U =∑i ai
∂∂xi
con ai ∈ C∞(U)∀i, entonces
(divX)|U =n∑
j=1
[∂aj∂xj
+n∑
i=1
aiΓjij
]=
1√G
n∑
i=1
∂
∂xi
(ai√G), (2.13)
donde Γkij son los sımbolos de Christoffel respecto de la carta (U, ψ) y G = det(gij)i,j ∈C∞(U,R+).
3. div(X + Y ) = div(X) + div(Y ), ∀X, Y ∈ X(M).
4. Si f ∈ C∞(M) y X ∈ X(M), entonces div(fX) = g(∇f,X) + fdiv(X) = X(f) +fdiv(X).
5. Sea g∗ = hg una metrica conforme a g, donde h ∈ C∞(M,R+). Entonces, lasdivergencias respecto a g y g∗ se relacionan mediante
hn/2div∗(X) = div(hn/2X), ∀X ∈ X(M).
Demostracion. 1 es consecuencia directa de 2. Una forma alternativa de probar 1 es usandoque ∃U ⊂ M abierto conteniendo a p y ∃E1, . . . , En ⊂ X(U) base local ortonormal decampos tales que ∇vEi = 0 ∀v ∈ TpM , 1 ≤ i ≤ n (pagina 38), luego (divX)|U =∑i g(∇EiX,Ei) ∈ C∞(U).La primera igualdad de 2 es facil (ejercicio). Veamos la segunda igualdad: Primero,
∂
∂xi(ai
√G) =
∂ai∂xi
√G+
ai
2√G
∂G
∂xi.
Para calcular ∂G∂xi
usamos el ejercicio 9, obteniendo ∂G∂xi
= G∑j,k
∂gjk
∂xigkj . Ası,
∂
∂xi(ai
√G) =
√G
∂ai∂xi
+ai2
∑
j,k
∂gjk∂xi
gkj
. (2.14)

44 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Por otro lado,∑
j
[∂aj∂xj
+∑
i
aiΓjij
]=∑
i
∂ai∂xi
+∑
j
ajΓiij
(2.1)=
∑
i
∂ai∂xi
+∑
j
aj2
∑
h
(∂gjh∂xi
+∂gih∂xj
− ∂gij∂xh
)ghi
.
Tras desarrollar la ultima expresion las sumas segunda y cuarta se cancelaran, quedando∑
i
∂ai∂xi
+∑
i,j,h
aj2∂gih∂xj
ghi =∑
i
∂ai∂xi
+∑
i,j,h
ai2∂gjh∂xi
ghj .
Comparando esta expresion con (2.14) tendremos la segunda igualdad del apartado 2. Losapartados 3,4,5 se dejan como ejercicio. 2
De (2.13) se deduce que en (Rn, g0), la divergencia de un campo X = (a1, . . . , an) ∈X(Rn) = C∞(Rn,Rn) es div0X = ( ∂a1
∂x1, . . . , ∂a1
∂xn).
2.6. Hessiano de una funcion.
Definicion 2.6.1 Sean M una variedad diferenciable, f ∈ C∞(M) y p ∈ M un puntocrıtico de f . Se define (∇2f)p : TpM × TpM −→ R mediante
(∇2f)p(v, w) = v(W (f)), (2.15)
donde W ∈ X(M) cumple Wp = w.
Para que la definicion anterior sea consistente, debemos probar que (∇2f)p no depende dela extension W de w. Tomemos V,W ∈ X(M) con Vp = v,Wp = w. Entonces, v(W (f))−w(V (f)) = [V,W ]p(f) = dfp([V,W ]p) = 0 por ser p punto crıtico de f , luego v(W (f)) =w(V (f)). Esta igualdad nos dice que v(W (f)) no depende de W (ni v(V (f)) de V ). Otraconsecuencia de esta igualdad es que
(∇2f)p(v, w) = (∇2f)p(w, v).
Es claro que ∇2f es bilineal (ejercicio). A (∇2f)p se le llama el Hessiano de f en el puntocrıtico p. Una forma practica de calcular la forma bilineal simetrica (∇2f)p es a partir desu forma cuadratica asociada, mediante el siguiente
Lema 2.6.1 En la situacion anterior, sea v ∈ TpM − 0. Entonces,
(∇2f)p(v, v) =d2
dt2
∣∣∣∣∣0
(f α)(t),
donde α ∈ C∞(]− ε, ε[,M) cumple α(0) = p, α′(0) = v. En particular:

2.7. LAPLACIANO DE UNA FUNCION. 45
1. Si p es un mınimo local de f , entonces (∇2f)p es semidefinido positivo.
2. Si (∇2f)p es definido positivo, entonces para toda α ∈ C∞(]− ε, ε[,M) con α(0) = p
y α′(0) 6= 0, f α tiene un mınimo local estricto en t = 0.
Demostracion. Tomemos una curva α :]− ε, ε[→M con α(0) = p, α′(0) = v. Como v 6= 0,∃V ∈ X(M) tal que V α = α′ en ]− ε, ε[(puede que tengamos que tomar ε mas pequenopero esto no afecta a lo que sigue). Entonces,
(∇2f)p(v, v) = v(V (f)) =d
dt
∣∣∣∣0Vα(t)(f) =
d
dt
∣∣∣∣0[α′(t)](f) = (f α)′′(0).
Los apartados 1 y 2 son consecuencias directas de la formula anterior y de resultadosclasicos de Analisis. 2
Definicion 2.6.2 Sea (Mn, g) una V.R., con conexion de Levi-Civita2 ∇. Dada f ∈C∞(M), se define el Hessiano de f como ∇2f : X(M) × X(M) → C∞(M) donde
(∇2f)(X, Y ) = X(Y (f))− (∇XY )(f), ∀X, Y ∈ X(M).
∇2f es simetrico3 y tensorial (en funciones), luego puede particularizarse a (∇2f)p ∈S2(TpM) en cada p ∈ M . Si p es un punto crıtico de f , entonces (∇2f)p coincide con laDefinicion 2.6.1: [(∇2f)(X, Y )](p) = Xp(Y (f))− (∇XpY )(f) = Xp(Y (f)) − dfp(∇XpY ) =Xp(Y (f)) = (∇2f)p(Xp, Yp). Usando que la conexion de Levi-Civita paraleliza a la metrica,se obtiene otra expresion para el Hessiano4:
(∇2f)(X, Y ) = g(∇X∇f, Y ), ∀X, Y ∈ X(M).
2.7. Laplaciano de una funcion.
Definicion 2.7.1 Sea Mn, g) una V.R. y f ∈ C∞(M). Se define el laplaciano de f comola funcion
∆f = div(∇f) = Traza(∇2f) ∈ C∞(M).
Como ∇2f es una forma bilineal simetrica, su traza es independiente de la base solo entrebases ortonormales. Si E1, . . . , En es una base ortonormal de X(U) (siendo U ⊂ M
abierto), entonces Traza(∇2f)|U =∑i(∇2f)(Ei, Ei) =
∑i g(∇Ei∇f, Ei) = div(∇f)|U ,
que es la segunda igualdad en la Definicion.2Esta definicion puede hacerse para cualquier conexion afın sobre M , no necesariamente libre de torsion.3Cuando ∇ es una conexion afın cualquiera sobre M , entonces ∇2f es simetrico si y solo si ∇ es libre
de torsion.4Esta formula ya no es valida para conexiones afines cualesquiera.

46 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Lema 2.7.1 El operador laplaciano cumple las siguientes propiedades:
1. Si (U, ψ = (x1, . . . , xn)) es una carta local de M , entonces
(∆f)|U =n∑
j,k=1
∂2f
∂xj∂xkgjk +
n∑
j,k=1
∂f
∂xk
∂gjk
∂xj+
n∑
i,j,k=1
∂f
∂xkgikΓjij , (2.16)
donde Γkij son los sımbolos de Christoffel respecto de la carta (U, ψ).
2. ∆(f + h) = ∆f + ∆h, ∆(fh) = f∆h + h∆f + 2g(∇f,∇h).
Demostracion. Ejercicio. 2
En el caso particular (M, g) = (Rn, g0), (2.16) nos da la formula clasica del operador deLaplace, ∆f =
∑i∂2f∂x2
i.
2.8. Superficies parametrizadas.
Sobre todo para el Calculo de Variaciones, es util la version bidimensional de una curva(parametrizada).
Definicion 2.8.1 Sea A ⊆ R2 (no necesariamente abierto). Una superficie parametrizadaes una aplicacion diferenciable f : A → M (cuando A no sea abierto, entendemos que fadmite una extension diferenciable a un abierto O ⊆ R2 que contenga a A). Si f : A→Mes una superficie parametrizada, un campo a lo largo de f es una aplicacion X : A→ TM
tal que π X = f , donde π : TM →M es la proyeccion canonica. X se dice diferenciablecuando lo sea entre variedades (si A no es abierto, X es diferenciable cuando admita unaextension en C∞(O, TM)). Denotaremos por X(f) al conjunto de campos diferenciablesa lo largo de f .
Si (U, ψ = (x1, . . . , xn)) es una carta local de M y X es un campo a lo largo de f , enA ∩ f−1(U) podemos escribir X(u, v) =
∑i ai(u, v)
(∂∂xi
)f(u,v)
. Entonces, X ∈ X(f) si y
solo si ai ∈ C∞(A), 1 ≤ i ≤ n (ejercicio). Por ejemplo, ∂f∂u ,
∂f∂v : A→ TM dados por
(∂f
∂u
)
(u0 ,v0)= df(u0,v0)(1, 0),
(∂f
∂v
)
(u0,v0)= df(u0 ,v0)(0, 1)
son campos diferenciables a lo largo de f , ya que las coordenadas ai(u, v) de ∂f∂u respecto
de la base de campos asociada a (U, ψ) cumplen
ai(u0, v0) =(∂f
∂u
)
(u0 ,v0)=[df(u0 ,v0)(1, 0)
](0, 1) = (1, 0)(xi f) =
∂(xi f)∂u
(u0, v0),
siendo esta ultima la derivada parcial clasica del Analisis (analogamente para ∂f∂v ).

2.9. CURVATURAS. 47
Definicion 2.8.2 SeaX ∈ X(f). Se definen las derivadas covariantes DX∂u ,
DX∂v : A→ TM
como
DX
∂u(u0, v0) =
DX(u0 + t, v0)dt
∣∣∣∣t=0
,DX
∂v(u0, v0) =
DX(u0, v0 + t)dt
∣∣∣∣t=0
.
DX∂u ,
DX∂v ∈ X(f), ya que sus expresiones locales en una carta (U, ψ) son (ejercicio)
DX
∂u=
n∑
k=1
∂ak∂u
+n∑
i,j=1
ai∂(xj f)
∂u(Γkij f)
(∂
∂xk
)
f,
(y analogamente para DX∂v ), donde X =
∑i ai
(∂∂xi
)f
con ai ∈ C∞(A,R) y Γkij son los
sımbolos de Christoffel de g en (U, ψ).
Proposicion 2.8.1 En la situacion anterior, se cumplen
1. D(hX+Y )∂u = ∂h
∂uX + hDX∂u + DY∂u (analogamente para D
∂v ),
2. ∂∂u (g(X, Y )) = g(DX∂u , Y ) + g(X, DY∂u ) (analogamente para ∂
∂v ),
3. D∂u
(∂f∂v
)= D
∂v
(∂f∂u
).
Demostracion. 1 y 2 se dejan como ejercicio. Veamos 3: Sea (U, ψ) una carta deM . Usandolas expresiones locales de ∂f
∂v y de DXdu , tenemos
D
∂u
(∂f
∂v
)=∑
k
∂
2(xk f)∂u∂v
+∑
i,j
∂(xi f)∂v
∂(xj f)∂u
(Γkij f)
(∂
∂xk
)
f,
que es una expresion simetrica en u, v porque Γkij = Γkji. 2
2.9. Curvaturas.
En una curva plana α ∈ C∞([a, b],R2), la curvatura es una funcion real de variablereal que nos describe completamente la curva salvo movimientos rıgidos. Para curvas en elespacio, necesitamos un segundo concepto de curvatura, descrito por otra funcion real devariable real: la torsion, y ambas funciones tambien determinan la curva salvo movimientosdel espacio. Para superficies tenemos varios conceptos de curvatura: la curvatura normal,las curvaturas principales, la curvatura de Gauss o la curvatura media. En una V.R. condimension mayor, tambien tendremos varias nociones de curvatura, unas tensoriales y otrasescalares. A lo largo de la Seccion, (Mn, g) sera una V.R. con conexion de Levi-Civita ∇.

48 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Definicion 2.9.1 Se define el tensor de curvatura (de tres variables) de (M, g) como
R : X(M) × X(M)× X(M) → X(M)(X, Y, Z) 7→ R(X, Y )Z = ∇X∇Y Z − ∇Y∇XZ −∇[X,Y ]Z.
Ejemplos de tensores de curvatura de tres variables.
1. El espacio Euclıdeo (Rn, g0).En este caso tenemos ∇XY = dY (X). De aquı se deduce facilmente que si X, Y, Z ∈X(Rn), entonces
∇Y Z =∑
j
YjdZ(e j), ∇X∇Y Z =∑
i,j
XidYj(ei)dZ(e j) +∑
i,j
XiYj(d2Z)(ei, ej),
donde e1, . . . , en es la base canonica de Rn y X =∑iXiei (analogamente para Y).
Por tanto,
∇X∇Y Z −∇Y∇XZ =∑
i,j
[XidYj(ei)− YidXj(ei)]dZ(e j).
Por ultimo,∇[X,Y ]Z =
∑
i,j
∇[Xiei,Yjej ]Z
=∑
i,j
∇Xiei(Yj)ej−Yjej(Xi)eiZ =∑
i,j
[XidYj(ei) − YidXj(ei)]dZ(e j),
de donde R(X, Y )Z = 0 ∀X, Y, Z ∈ X(Rn).
2. La esfera (Sn(1), g).De ∇XY = dY (X) + 〈X, Y 〉p ∀X, Y ∈ X(Sn(1)) es facil deducir que
∇X∇Y Z = ∇X∇Y Z +X(〈Y, Z〉)p+ 〈Y, Z〉X + 〈X, dZ(Y )〉p,
donde ∇ es la conexion de Levi-Civita de (Rn+1, g0 = 〈·, ·〉). Cambiando los papelesde X, Y y usando que ∇[X,Y ]Z = ∇[X,Y ]Z + 〈[X, Y ], Z〉p es facil llegar a
R(X, Y )Z = 〈Y, Z〉X − 〈X,Z〉Y, ∀X, Y, Z ∈ X(Sn(1)).
3. El espacio hiperbolico (Hn, g).Con el modelo del semiespacio
((Rn)+, g = 1
x2ng0), el tensor de curvatura es
R(X, Y )Z = −[g(Y, Z)X − g(X,Z)Y ], ∀X, Y, Z ∈ X((Rn)+).
(Ejercicio 11).

2.9. CURVATURAS. 49
4. Superficies regulares de R3.Sea S ⊂ R3 una superficie regular. Sabemos que la conexion de Levi-Civita de lametrica g inducida por g0 = 〈·, ·〉 es
∇XY = dY (X)− 〈X,AY 〉N, (2.17)
donde A = −dN es el endomorfismo de Weingarten de S y N su aplicacion de Gauss(localmente definida). Dados X, Y, Z ∈ X(S), el primer sumando de la expresion deltensor de curvatura de 3 variables R = 0 de (R3, g0) es
∇X∇Y Z = d (∇Y Z + 〈Y,AZ〉N)(X) = d(∇YZ)(X)+X(〈Y,AZ〉)N+〈Y,AZ〉dN(X).
Si el primer sumando anterior lo vemos como el primer sumando del miembro de laderecha de (2.17), tenemos
∇X∇Y Z = ∇X∇Y Z + 〈X,A∇YZ〉N +X(〈Y,AZ〉)N − 〈Y,AZ〉AX.
Cambiando los papeles de X, Y en la expresion anterior y usando que ∇[X,Y ]Z =∇[X,Y ]Z + 〈[X, Y ], AZ〉N , obtenemos que la parte tangente a S de R(X, Y )Z es0 = R(X, Y )Z − 〈Y,AZ〉AX + 〈X,AZ〉AY , de donde
R(X, Y )Z = 〈Y,AZ〉AX − 〈X,AZ〉AY, ∀X, Y, Z ∈ X(S). (2.18)
Proposicion 2.9.1 El tensor de curvatura de tres variables cumple las siguientes propiedades:
1. R(X, Y )Z es tensorial (en funciones) en sus tres argumentos. En particular, puededefinirse su restriccion a cualquier abierto y a cualquier punto de M .
2. R(X, Y )Z = −R(Y,X)Z.
3. Primera identidad de Bianchi. R(X, Y )Z + R(Z,X)Y +R(Y, Z)X = 0.
4. Expresion local. Si (U, ψ = (x1, . . . , xn)) es una carta local de M , entonces
R
(∂
∂xi,∂
∂xj
)∂
∂xk=
n∑
l=1
(∂Γljk∂xi
− ∂Γlik∂xj
)∂
∂xl+
n∑
l,h=1
(ΓljkΓ
hil − ΓlikΓ
hjl
) ∂
∂xh,
donde Γkij son los sımbolos de Christoffel respecto a (U, ψ).
5. Si φ : (M, g) → (M ′, g′) es una isometrıa local, entonces
R′(φ∗X, φ∗Y )φ∗Z = φ∗(R(X, Y )Z), ∀X, Y, Z ∈ X(M).

50 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Demostracion. Ejercicio. 2
Definicion 2.9.2 El tensor de curvatura (de cuatro variables) de (M, g) es
R : X(M)× X(M)× X(M) × X(M) → C∞(M)(X, Y, Z,W ) 7→ R(X, Y, Z,W ) = g(R(X, Y )Z,W ).
Ejemplos de tensores de curvatura de cuatro variables.
1. El espacio Euclıdeo (Rn, g0).R(X, Y, Z,W ) = 0, ∀X, Y, Z,W ∈ X(Rn).
2. La esfera (Sn(1), g).R(X, Y, Z,W ) = 〈X,W 〉〈Y, Z〉 − 〈X,Z〉〈Y,W 〉, ∀X, Y, Z,W ∈ X(Sn(1)).
3. El espacio hiperbolico (Hn, g).Con el modelo del semiespacio
((Rn)+, g = 1
x2ng0),
R(X, Y, Z,W ) = −[g(X,W )g(Y, Z)− g(X,Z)g(Y,W )], ∀X, Y, Z,W ∈ X((Rn)+).
(El apartado 5 de la Proposicion 2.9.1 nos dice como obtener la expresion del tensorde curvatura del hiperbolico para el modelo de la bola).
4. Superficies regulares de R3.Sea S ⊂ R3 una superficie regular. Para la metrica inducida, (2.18) implica
R(X, Y, Z,W) = 〈AX,W 〉〈Y,AZ〉 − 〈X,AZ〉〈AY,W 〉, ∀X, Y, Z,W ∈ X(S), (2.19)
donde A = −dN es el endomorfismo de Weingarten de S.
Proposicion 2.9.2 El tensor de curvatura de cuatro variables cumple:
1. R(X, Y, Z,W ) es tensorial (en funciones) en sus cuatro argumentos. En particular,puede definirse su restriccion a cualquier abierto y a cualquier punto de M .
2. R(X, Y, Z,W ) = −R(Y,X, Z,W ).
3. 1a identidad de Bianchi. R(X, Y, Z,W )+ R(Z,X, Y,W )+ R(Y, Z,X,W ) = 0.
4. R(X, Y, Z,W ) = −R(X, Y,W, Z).
5. R(X, Y, Z,W ) = R(Z,W,X,Y ).
2.9. CURVATURAS. 51
6. Si φ : (M, g) → (M ′, g′) es una isometrıa local, entonces
R′(φ∗X, φ∗Y, φ∗Z, φ∗W ) φ = R(X, Y, Z,W ), ∀X, Y, Z,W ∈ X(M).
Demostracion. 1 se deja como ejercicio. 2,3 son consecuencias directas de los apartados2,3 de la Proposicion 2.9.1. Para probar 4, basta ver que R(X, Y, Z, Z) = 0 ∀X, Y, Z. Uncalculo directo que solo usa la definicion de R y que ∇ paraleliza a g, muestra que
R(X, Y, Z,Z) =12
[X(Y (‖Z‖2)) − Y (X(‖Z‖2))− [X, Y ](‖Z‖2)
]= 0.
Por ultimo, si escribimos 4 versiones de la primera identidad de Bianchi donde la cuartavariable es X, Y, Z,W en cada ecuacion, y sumamos las cuatro ecuaciones, el resultado es2R(W,Y, Z,X)+ 2R(X,Z,W,Y ), lo que implica 5. 6 se deja como ejercicio. 2
Definicion 2.9.3 Dado p ∈ M y Π ⊂ TpM un plano vectorial, se define la curvaturaseccional de Π como
K(Π) =Rp(v1, v2, v2, v1)
‖v1 ∧ v2‖2=
Rp(v1, v2, v2, v1)‖v1‖2‖v2‖2 − gp(v1, v2)2
,
donde v1, v2 es una base de Π (a ‖v1 ∧ v2‖2 = ‖v1‖2‖v2‖2 − gp(v1, v2)2 > 0 se le llamaelemento de area de gp asociado a la base).
Para que la definicion anterior tenga sentido, no debe depender de la base v1, v2 elegi-da. Una forma comoda de hacer esto es probar que el cociente anterior es invariante alaplicar las transformaciones elementales A(v1, v2) = (λv1, v2), B(v1, v2) = (v1 + λv2, v2),C(v1, v2) = (v2, v1) (ejercicio). En el caso particular de que v1, v2 sea base ortonormalde (Π, gp|Π), queda K(Π) = Rp(v1, v2, v2, v1).
Cuando n = 2 solo podemos tomar Π = TpM , luego K es en realidad una funcion dep ∈M y no de (p,Π) como en dimension arbitraria, donde K ha de verse como funcion enla Grassmanniana de planos5 sobre M , G2(M) = ∪p∈MΠ ⊂ TpM | Π es plano vectorial.
Ejemplos de curvaturas seccionales.
1. El espacio Euclıdeo (Rn, g0).K(p,Π) = 0, ∀Π ⊂ TpRn y ∀p ∈ Rn.
5Es posible dotar a G2(M) de estructura de variedad diferenciable de dimension n + 2(n − 2), y lacurvatura seccional se convierte en una funcion continua sobre G2(M). Ademas si M es compacta entoncesG2(M) tambien lo es, luego la curvarura seccional de una V.R. compacta es acotada.

52 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
2. La esfera (Sn(1), g).Como R(X, Y, Z,W ) = 〈X,W 〉〈Y, Z〉 − 〈X,Z〉〈Y,W 〉, ∀X, Y, Z,W ∈ X(Sn(1)),tenemos que K es constante 1 sobre G2(Sn(1)).
3. El espacio hiperbolico (Hn, g).ComoR(X, Y, Z,W ) = −[g(X,W )g(Y,Z)−g(X,Z)g(Y,W )], ∀X, Y, Z,W ∈ X((Rn)+),se tiene K ≡ −1. El Ejercicio 4 muestra que la misma conclusion es valida para elmodelo del espacio hiperbolico como una de las hojas del paraboloide en el espaciode Lorentz-Minkowski.
4. Superficies regulares de R3.
Sea S ⊂ R3 una superficie regular con endomorfismo de Weingarten A = −dN .Si X = X(u, v) es una parametrizacion local de S, podemos calcular la curvaturaseccional K de S usando la base local Xu, Xv de TS. De (2.19) se tiene
R(Xu, Xv, Xv, Xu) = 〈AXu, Xu〉〈Xv, AXv〉 − 〈Xu, AXv〉2
= 〈dN(Xu), Xu〉〈Xv, dN(Xv)〉 − 〈Xu, dN(Xv)〉2 = 〈Nu, Xu〉〈Xv, Nv〉 − 〈Xu, Nv〉2
= 〈N,Xuu〉〈Xvv, N〉 − 〈Xuv, N〉2.
Usando la notacion clasica E = ‖Xu‖2, F = 〈Xu, Xv〉, G = ‖Xv‖2, e = 〈Xuu, N〉,f = 〈Xuv, N〉, g = 〈Xvv, N〉, se tiene
K =R(Xu, Xv, Xv, Xu)
‖Xu ∧Xv‖2=
eg − f2
EG− F 2,
que es la definicion clasica de la curvatura de Gauss de la superficie S. Por estarazon, para una V.R. abstracta de dimension 2, su curvatura seccional K = K(p) sellama tambien la curvatura de Gauss de (M2, g).
Como consecuencia del apartado 6 de la Proposicion 2.9.2, tenemos
Teorema 2.9.1 (Egregium de Gauss) La curvatura seccional es invariante frente aisometrıas locales.
En particular:
1. Si S1, S2 ⊂ R3 son dos superficies regulares de forma que ∃φ : S1 → S2 que conservalas primeras formas fundamentales, entonces φ tambien conserva la curvatura deGauss. Esto es lo que ocurre con el plano y el cilindro, o con la catenoide y elhelicoide.
2. El modelo del disco para el plano hiperbolico tiene curvatura de Gauss −1.

2.9. CURVATURAS. 53
3. (RPn, g) tiene curvatura seccional constante 1.
Claramente, el tensor de curvaura de 4 variables determina la curvatura seccional.Queremos ver que el recıproco es cierto cuando K solo depende de p, y no de (p,Π).
Lema 2.9.1 Sea V n un espacio vectorial real y R,R′ tensores de tipo (4, 0) sobre V talesque ∀x, y, z, w ∈ V ,
1. R(x, y, z, w) = −R(y, x, z, w),
2. R(x, y, z, w) = −R(x, y, w, z),
3. R(x, y, z, w)+R(y, z, x, w)+R(z, x, y, w) = 0,
y las mismas propiedades son ciertas para R′. Si R(x, y, y, x) = R′(x, y, y, x) ∀x, y, en-tonces R = R′.
Demostracion. Sea T = R−R′. Desarrollando 0 = T (x, y + z, y + z, x) se llega a que
T (x, y, z, x) = 0, ∀x, y, z. (2.20)
Ademas,
0 = T (x+ z, y, w, x+ z) = T (x, y, w, x)+ T (z, y, w, z)+ T (x, y, w, z)+ T (z, y, w, x).
Por (2.20), los sumandos primero y segundo anteriores son cero. Por otro lado, razonandocomo en la demostracion del punto 5 de la Proposicion 2.9.2 deducimos de las hipotesis1,2,3 que R(x, y, z, w) = R(z, w, x, y), y lo mismo para R′ y para T . Ası lo ultimo queda
0 = T (x, y, w, z)+ T (w, x, z, y) = T (x, y, w, z)+ T (x, w, y, z),
de dondeT (x, y, w, z) = T (w, x, y, z), ∀x, y, z, w. (2.21)
(2.21) implica que ∀z ∈ V , dos de los sumandos de la suma cıclica ∂x,y,wT (x, y, w, z)son iguales, pongamos el segundo y el tercero. Cambiando letras, (2.21) tambien impli-ca que los sumandos segundo y tercero de la misma suma cıclica coinciden. Ası, 0 =∂x,y,wT (x, y, w, z) = 3T (x, y, w, z) luego T = 0. 2
Proposicion 2.9.3 Si la curvatura seccional de (Mn, g) depende solo de p ∈ M y no de(p,Π) ∈ G2(M), entonces
R(X, Y, Z,W ) = K [g(X,W )g(Y,Z)− g(X,Z)g(Y,W )] , ∀X, Y, Z,W ∈ X(M). (2.22)

54 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Demostracion. Fijado p ∈ M , basta aplicar el Lema 2.9.1 a TpM , Rp y (x, y, z, w) 7→K(p) [gp(x, w)g(y, z)− g(x, z)g(y,w)]. 2
Corolario 2.9.1
1. Si (M2, g) es cualquier V.R. de dimension 2, entonces su tensor de curvatura vienedado por (2.22).
2. Si (Mn, g) es una V.R. con curvatura seccional constante (c.s.c.) k ∈ R, entoncessu tensor de curvatura es
R(X, Y, Z,W) = k [g(X,W )g(Y,Z)− g(X,Z)g(Y,W )] , ∀X, Y, Z,W ∈ X(M).
Definicion 2.9.4 La derivada covariante del tensor de curvatura de 3 variables es∇XR : X(M)× X(M) × X(M) → X(M),
(∇XR)(Y, Z)W = ∇X(R(Y, Z)W )−R(∇XY, Z)W −R(Y,∇XZ)W −R(Y, Z)∇XW.
Lema 2.9.2 (2a identidad de Bianchi)
∂X,Y,Z(∇XR)(Y, Z)W = 0, ∀W ∈M.
Demostracion. Ejercicio. 2
Una aplicacion de la 2a identidad de Bianchi es el siguiente resultado, que muestra quela condicion K(p,Π) = K(p) es muy restrictiva cuando dimM ≥ 3.
Teorema 2.9.2 (Schur) Si (Mn, g) es un V.R. conexa con n ≥ 3 y K(p,Π) = K(p) ∀(p,Π) ∈G2(M), entonces (M, g) tiene c.s.c.
Demostracion. Por la Proposicion 2.9.3,
R(X, Y, Z,W ) = K [g(X,W )g(Y,Z)− g(X,Z)g(Y,W )] , ∀X, Y, Z,W ∈ X(M).
De aquı deducimos que K ∈ C∞(M) y que
R(X, Y )Z = K [g(Y, Z)X − g(X,Z)Y ] = K · T (X, Y, Z), ∀X, Y, Z ∈ X(M), (2.23)
donde T (X, Y, Z) = g(Y, Z)X − g(X,Z)Y (tensorial). Aplicando la definicion de ∇WR,
(∇WR)(X, Y )Z == ∇W (K · T (X, Y, Z))−K · T (∇WX, Y, Z)−K · T (X,∇WY, Z)−K · T (X, Y,∇WZ)= W (K) · T (X, Y, Z) +K · (∇WT )(X, Y, Z).

2.9. CURVATURAS. 55
Es facil ver que ∇WT = 0 (porque ∇ paraleliza a g), de donde
(∇WR)(X, Y )Z = W (K) [g(Y, Z)X − g(X,Z)Y ] , ∀X, Y, Z ∈ X(M), (2.24)
Dejando Z donde esta y cambiando cıclicamente X, Y,W en (2.24) y luego usando la 2a
identidad de Bianchi, obtenemos
[W (K)g(Y, Z)− Y (K)g(W,Z)]X + [X(K)g(W,Z)−W (K)g(X,Z)]Y
+[Y (K)g(X,Z)−X(K)g(Y, Z)]W = 0, ∀X, Y,W ∈ X(M).
Lo anterior es restringible a abiertos. Trabajando en un abierto U ⊂ M donde tengamosuna base local de campos podemos suponer X, Y,W linealmente independientes, de donde
g(W (K)Y − Y (K)W,Z) = 0, ∀Z ∈ X(U).
De aquı sale W (K)Y − Y (K)W = 0 y de nuevo por independiencia lineal de Y,W ten-dremos W (K) = Y (K) = 0. Como Y se mueve en una base local de campos en U ,deducimos que todo campo en U deriva a K dando cero. Ahora solo hay que aplicar elejercicio 13 (M es conexa) para concluir que K es constante. 2
Definicion 2.9.5 El tensor de Ricci de una V.R. (Mn, g) es S : X(M)×X(M) → C∞(M)dado por
S(X, Y )(p) = Traza
(TpM
hp−→ TpMv 7−→ Rp(v,Xp)Yp
).
Notese que hp es lineal, luego tiene sentido su traza. Que S(X, Y ) ∈ C∞(M) se deduce deque si E1, . . . , En ⊂ X(U) es una base local ortonormal de campos, entonces
S(X, Y )|U =n∑
i=1
R(Ei, X, Y, Ei). (2.25)
Proposicion 2.9.4 El tensor de Ricci cumple:
1. S es tensorial (en funciones) y simetrico. En particular, puede definirse su restricciona cualquier abierto y a cualquier punto de M .
2. S es la contraccion (1, 4) del tensor de curvatura6 de 4 variables.
6Como R es un tensor covariante, sus contracciones solo estan bien definidas haciendo sumas en basesortonormales.

56 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
3. La expresion local de S respecto a una carta (U, ψ = X1, . . . , xn)) es
S(X, Y )|U =n∑
i,k=1
gikR(∂∂xi, X, Y, ∂
∂xk
).
4. Si (Mn, g) tiene c.s.c. k ∈ R, entonces S(X, Y ) = (n− 1)kg(X, Y ), ∀X, Y ∈ X(M).
Demostracion. Ejercicio. 2
Definicion 2.9.6 La curvatura de Ricci de (Mn, g), Ric : X(M) → C∞(M), es la formacuadratica asociada al tensor de Ricci,
Ric(X) = S(X,X).
Proposicion 2.9.5 La curvatura de Ricci tiene las siguientes propiedades:
1. Ric puede restringirse a abiertos y a puntos de M . Tenemos entonces
Ricp : TpM → Rv 7→ Sp(v, v)
Ric : TM → R(p, v) 7→ +Sp(v, v)
2. Sean p ∈M y v ∈ TpM con ‖v‖ = 1. Sean v2, . . . , vn ∈ TpM tales que v, v2, . . . , vnes base gp-ortonormal de TpM . Entonces,
Ricp(v) =n∑
i=2
K(v ∧ vi),
donde v ∧ vi denota el plano vectorial generado por v y vi.
3. Si (Mn, g) tiene c.s.c. k ∈ R, entonces Ric(X) = (n− 1)k‖X‖2, ∀X ∈ X(M).
Demostracion. Ejercicio. 2
Definicion 2.9.7 Una V.R. (Mn, g) con n ≥ 3 se dice una variedad Einstein si ∃f ∈C∞(M) tal que el tensor de Ricci viene dado por S(X, Y ) = f g(X, Y ), ∀X, Y ∈ X(M), oequivalentemente, si la curvatura de Ricci cumple Ric(X) = f‖X‖2, ∀X ∈ X(M).
En realidad, la definicion anterior fuerza a f a ser muy especial.
Proposicion 2.9.6 Si (Mn, g) es una V.R. conexa y Einstein (n ≥ 3), entonces Ric(·) =f‖ · ‖2 con f constante.

2.9. CURVATURAS. 57
Demostracion. Fijemos p ∈M y sea E1, . . . , En una base local g-ortonormal de camposdiferenciables sobre un abierto U ⊂M que contenga a p, que ademas cumplan ∇Eip
Ej = 0,1 ≤ i, j ≤ n. Dados i, j, k, l ∈ 1, . . . , n, sea Rijkl = R(Ei, Ej, Ek, El) ∈ C∞(U). Por elejercicio 15,
Eip(Rjklα) +Ekp(Rijlα) +Ejp(Rkilα) = 0, ∀i, j, k, l, α= 1, . . . , n. (2.26)
Multiplicando (2.26) por δjlδkα (deltas de Kronecker) y sumando en j, k, l, α obtenemos(2−n)Eip(f) = 0. Como n ≥ 3 y E1p, . . . , Enp forman base de TpM , es v(f) = 0 ∀v ∈ TpM .Como M es conexa y p arbitrario, f ha de ser constante. 2
Claramente, toda V.R. de c.s.c. es Einstein (el recıproco no es cierto). En dimension 3ambos conceptos coinciden:
Proposicion 2.9.7 Una V.R. conexa (M, g) con dimM = 3 es Einstein si y solo si tienec.s.c.
Demostracion. Supongamos que (M3, g) es conexa y Einstein. Por la Proposicion 2.9.6,Ric(v) = c ∀(p, v) ∈ TM con ‖v‖ = 1. Sean p ∈ M , Π ⊂ TpM un plano vectorialy e1, e2, e3 una base gp-ortonormal de TpM tales que e1, e2 ∈ Π. Por el apartado 2de la Proposicion 2.9.5, c = Ricp(e1) = K(e1 ∧ e2) + K(e1 ∧ e3). Repitiendo esto cone2, e3 obtenedremos un sistema de 3 ecuaciones lineales con incognitas K(e1 ∧ e2), K(e1 ∧e3), K(e2 ∧ e3), cuya unica solucion es K(e1 ∧ e2) = K(e1 ∧ e3) = K(e2 ∧ e3) = c
2 . Enparticular, K(Π) = c
2 . 2
Definicion 2.9.8 La curvatura escalar de una V.R. (Mn, g) es la contraccion (1, 1) deltensor de Ricci i.e. la funcion ρ : M → R dada por
ρ(p) =n∑
i=1
Ricp(ei),
donde e1, . . . , en es una base ortonormal de (TpM, gp).
ρ es diferenciable, ya que si E1, . . . , En es una base local ortonormal de campos, entonces
ρ|U =∑
i,j
R(Ei, Ej, Ej, Ei).
Claramente, si (Mn, g) es una V.R. Einstein con Ric = c, entonces ρ = nc. Terminaremosviendo que para una superficie regular de R3, todas las nociones de curvatura anterioresse reducen esencialmente a la curvatura de Gauss (logico ya que todas son intrınsecas).
Proposicion 2.9.8 Sea S ⊂ R3 una superficie regular. Entonces,

58 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
1. La curvatura seccional de S coincide con su curvatura de Gauss (K = det(dN)).
2. El tensor de Ricci, curvatura de Ricci y curvatura escalar son S = K〈·, ·〉, Ric =K‖ · ‖2 y ρ = 2K.
Demostracion. 1 se probo en la pagina 52. 2 se deja como ejercicio. 2
2.10. Campos de Jacobi.
A lo largo de toda esta Seccion, (Mn, g) denotara una V.R. con tensor de curvaturaR y γ : [a, b] → M sera una geodesica en (M, g). La ecuacion de Jacobi es una EDO desegundo orden cuyas soluciones son campos a lo largo de γ, llamados campos de Jacobi.Estos campos contienen abundante informacion sobre la geometrıa de (M, g), como porejemplo sobre su curvatura, puntos crıticos de la exponencial o sobre si γ minimiza o nola longitud entre sus extremos.
Definicion 2.10.1 Un campo V ∈ X(γ) se dice de Jacobi si cumple la ecuacion de Jacobi
D2V
dt2+ R(V, γ ′)γ ′ = 0 en [a, b]. (2.27)
Denotaremos por Jγ al conjunto de los campos de Jacobi a lo largo de γ.
Como Jγ es el conjunto de soluciones de una EDO lineal de segundo orden, Jγ tieneestructura de espacio vectorial real de dimension 2n, y los campos de Jacobi V ∈ Jγ estandeterminados unıvocamente por V (a), DVdt (a) ∈ Tγ(a)M (escribir localmente la ecuacion deJacobi usando una carta para M y obtendremos n EDOs escalares de segundo orden, cadauna con solucion unica al dar el valor en t = a y la primera derivada en dicho instante).
Proposicion 2.10.1 Los campos de Jacobi a lo largo de γ cumplen:
1. Dada f ∈ C∞([a, b]), el campo fγ ′ esta en Jγ si y solo si f es una funcion afın,f(t) = At+ B para A,B ∈ R.
2. Todo V ∈ Jγ se descompone de forma unica como V = fγ ′ +V ⊥ con f funcion afıny V ⊥ ∈ Jγ cumpliendo 〈V ⊥, γ ′〉 = 0 en todo [a, b].
3. Sea V ∈ Jγ. Si existen t1, t2 ∈ [a, b] distintos tales que V (t1), V (t2) son ortogonalesa γ ′(t1), γ ′(t2) respectivamente, entonces 〈V, γ ′〉 = 0 en todo [a, b].
4. Sea V ∈ Jγ. Si existe t1 ∈ [a, b] tal que V (t1) y DVdt (t1) son ortogonales a γ ′(t1),
entonces 〈V, γ ′〉 = 0 en todo [a, b].

2.10. CAMPOS DE JACOBI. 59
Demostracion.
1. Sea f ∈ C∞([a, b]). Como γ ′ es un campo paralelo a lo largo de γ, es D2(fγ′)dt2
= f ′′γ ′.Como el tensor de curvatura R(u, v)w es antisimetrico en u, v, es R(fγ ′, γ ′)γ ′ = 0.De esta forma, la ecuacion de Jacobi sobre fγ ′ se escribe f ′′γ ′ ≡ 0, que se cumple siy solo si f ′′ ≡ 0, esto es, si y solo si f es una funcion afın.
2. Tomemos V ∈ Jγ . Fijado t ∈ [a, b], la descomposicion ortogonal de (Tγ(t)M, gγ(t)) en〈γ ′(t)〉⊕〈γ ′(t)〉⊥ nos permite escribir V (t) = f(t)γ ′(t)+V ⊥(t) de forma unica, dondef(t) ∈ R y V ⊥(t) ∈ 〈γ ′(t)〉⊥. Variando t, esto define una funcion f : [a, b] −→ Ry un campo V ⊥ a lo largo de γ. f es diferenciable porque puede escribirse comof = c〈V, γ′〉, siendo c la constante c = ‖γ ′‖−2; la diferenciabilidad de V ⊥ se siguede la ecuacion V ⊥ = V − fγ ′. Por otro lado, como V verifica la ecuacion de Jacobitenemos
0 = D2Vdt2
+R(V, γ ′)γ ′ =(f ′′γ ′ + D2V ⊥
dt2
)+R(fγ ′ + V ⊥, γ ′)γ ′
= f ′′γ ′ +[D2V ⊥
dt2+R(V ⊥, γ ′)γ ′
].
Evidentemente, el termino f ′′γ ′ esta en el subespacio 〈γ ′〉 (para cada t). Si vemosque el corchete anterior esta en 〈γ ′〉⊥, la ultima expresion sera una descomposicionde cero respecto de 〈γ ′〉 ⊕ 〈γ ′〉⊥, luego ambos sumandos seran identicamente cero:por un lado f ′′ ≡ 0 nos dira que f es afın, y por ultimo igualar el corchete a ceroprobara que V ⊥ ∈ Jγ . De nuevo la antisimetrıa de R(u, v)w en u, v nos dice que
〈D2V⊥
dt2+ R(V ⊥, γ ′)γ ′, γ ′〉 = 〈D2V⊥
dt2, γ ′〉,
y esta ultima expresion se anula identicamente sin mas que derivar dos veces en laigualdad 〈V ⊥, γ ′〉 = 0.
3. Apliquemos a nuestro campo V ∈ Jγ la descomposicion del apartado 2, de formaque V = fγ ′ + V ⊥ con f afın y V ⊥ ∈ Jγ ortogonal a γ ′. Evaluando en t1, t2 estaigualdad deducimos que f(t1) = f(t2) = 0, lo cual es suficiente para concluir que fes identicamente nula por ser funcion afın.
4. El razonamiento es el mismo del apartado anterior, salvo que ahora para concluirque f es identicamente nula usamos que en t1, tanto f como su derivada se anulan.
2

60 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
Definicion 2.10.2 En la situacion anterior, a y b se dicen valores conjugados7 a lo largode γ si Jγ,0 = V ∈ Jγ | V (a) = V (b) = 0 6= 0. En este caso, a la dimension de Jγ,0 sele llama la multiplicidad de a y b como valores conjugados.
Desde luego, Jγ,0 ⊂ V ∈ Jγ | V (a) = 0, que tiene dimension n. Todavıa puede rebajarseen uno esta dimension:
Corolario 2.10.1 dimJγ,0 ≤ n − 1.
Demostracion. Sea φ : V ∈ Jγ | V (a) = 0 −→ f : [a, b] −→ R | f es afın, f(a) = 0 laaplicacion lineal definida por φ(V ) = f , donde V = fγ ′ +V ⊥ segun la descomposicion delapartado 2 de la Proposicion 2.10.1. φ es trivialmente sobreyectiva luego su nucleo tienedimension n − 1. Ademas si V ∈ Jγ,0, entonces V se anula en dos puntos distintos luego〈V, γ ′〉 es identicamente nulo por el apartado 3 de la Proposicion 2.10.1. En otras palabras,φ(V ) = 0, luego Jγ,0 ⊆ ker(φ). 2
2.10.1. Campos de Jacobi en V.R. de curvatura seccional constante.
A continuacion determinaremos el espacio de campos de Jacobi Jγ a lo largo de unageodesica γ : [a, b] −→ Mn(k) en una V.R. de c.s.c. k ∈ R (Mn(k) no es necesariamentecompleta ni simplemente conexa). En particular, veremos que la desigualdad del Coro-lario 2.10.1 no puede mejorarse ya que la igualdad se alcanza en este tipo de variedades,y estudiaremos la existencia de valores conjugados a lo largo de una geodesica en funciondel signo de k.
Dado V ∈ Jγ , la Proposicion 2.10.1 nos dice que V = fγ ′+V ⊥ con f funcion afın y V ⊥
ortogonal a γ ′. Ası, solo tenemos que determinar como es V ⊥. Tomemos una base ortogonalde campos paralelos a los largo de γ del tipo γ ′, P2, . . . , Pn (notese que no exigimosque γ este parametrizada por el arco, luego la base es ortogonal pero no necesariamenteortonormal). V ⊥ se escribira V ⊥ =
∑ni=2 fiPi con fi = 〈V⊥,Pi〉
‖Pi‖2 diferenciable y
0 =D2V ⊥
dt2+R(V ⊥, γ ′)γ ′ =
n∑
i=2
[f ′′i Pi + fiR(Pi, γ ′)γ ′
]. (2.28)
Usando el apartado 2 del Corolario 2.9.1 tenemos R(X, Y )Z = k [g(Y, Z)X − g(X,Z)Y ]∀X, Y, Z ∈ X(M), luego (2.28) es equivalente a
0 =∑
i
[f ′′i Pi + fik(‖γ ′‖2Pi − 〈Pi, γ ′〉γ ′)
]=∑
i
(f ′′i + k‖γ ′‖2fi
)Pi.
7A veces se usa la terminologıa “γ(a), γ(b) son puntos conjugados”. Sin embargo, esto puede llevar aconfusion porque la geodesica podrıa no ser embebida.

2.10. CAMPOS DE JACOBI. 61
(‖γ ′‖ es constante por ser γ geodesica). De esta forma,
Jγ(Mn(k)) =
fγ ′ +
n∑
i=2
fiPi
/f es afın yfi es solucion de φ′′ + k‖γ ′‖2φ = 0
.
En realidad, solo hemos probado que Jγ esta contenido en el conjunto de la derecha; parala igualdad basta contar dimensiones.
Ahora determinaremos Jγ,0. A partir de ahora supondremos que γ esta parametrizadapor el arco y que [a, b] = [0, L], donde L = L(γ) (en realidad estas normalizaciones nosuponen restriccion alguna; basta conservar ciertas constantes en lo que sigue). DadoV ∈ Jγ,0, V debe ser ortogonal a γ ′ luego se escribira V =
∑ni=2 fiPi con fi solucion de
φ′′ + kφ = 0. La forma general de una solucion de esta ecuacion diferencial es
φ(t) = ASk(t) + BCk(t),
donde A,B son numeros reales y
Sk(t) =
1√k
sen(√kt) si k > 0,
t si k = 0,1√−k senh(
√−kt) si k < 0,
Ck(t) =
cos(√kt) si k > 0,
1 si k = 0,cosh(
√−kt) si k < 0.
(2.29)
(En particular, S′k = Ck y C′
k = −kSk).Como V (0) = 0, tendremos fi(0) = 0 y por tanto B = 0 en la descripcion anterior.
Esto nos dice que V (t) =∑iAiSk(t)Pi(t) = Sk(t)P (t), para cierto campo paralelo P (t)
ortogonal a γ ′. De hecho, como Ck(0) = 1 se tiene DVdt (0) = Ck(0)P (0) = P (0), luego
V (t) = Sk(t)τ t0(DVdt (0)
), donde τ t0 es el traslado paralelo de 0 a t a lo largo de γ. Esta
descripcion nos dice que V solo volvera a anularse cuando Sk(t) se anule. Debemos ahoradistinguir tres casos, segun el signo de la curvatura seccional:
1. k > 0. En este caso, Sk(t) = 1√k
sen(√kt) tiene sus ceros en los multiplos enteros de
π√k. Esto nos dice que el primer valor conjugado de cero a lo largo de una geodesica
p.p.a. en Mn(k) con k > 0 aparece en π√k.
2. k = 0. Ahora es S0(t) = t, que no se anula salvo en t = 0. O sea, en una V.R. llanano existen valores conjugados de cero a lo largo de ninguna geodesica.
3. k < 0. Ası, Sk(t) = 1√−k senh(
√−kt), que tampoco se anula salvo en t = 0, por lo
que en una V.R. con c.s.c. negativa no hay valores conjugados de cero a lo largo deninguna geodesica.

62 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
2.10.2. Campos de Jacobi y valores conjugados.
Retomamos nuestra geodesica γ : [a, b] −→ M sobre una V.R. arbitraria. Nuestrosiguiente objetivo es estudiar la relacion entre campos de Jacobi y puntos crıticos de laexponencial.
Lema 2.10.1 Sea f : [a, b]×]−ε, ε[C∞
−→M una variacion de γ por geodesicas (i.e. f(t, 0) =γ(t) ∀t ∈ [a, b] y cada f(·, s) es geodesica). Entonces, el campo variacional V (t) =
(∂f∂s
)(t,0)
de f cumple V ∈ Jγ.
Demostracion. V es C∞ por serlo f . Veamos que D2Vdt2
+ R(V, γ ′)γ ′ = 0 en [a, b]. Por elejercicio 14,
D2Vdt2
(t) =(DdtDds∂f∂t
)(t,0)
=(DdsDdt∂f∂t
)(t,0)
+R
((∂f∂t
)(t,0)
,(∂f∂s
)(t,0)
)(∂f∂t
)(t,0)
=(DdsDdt∂f∂t
)(t,0)
+R (γ ′(t), V (t))γ ′(t).
Por tanto, solo resta probar que(DdsDdt∂f∂t
)(t,0)
es identicamente nulo. Pero(∂f∂t
)(t,s)
es el
campo tangente a fs, que es geodesica, luego(Ddt∂f∂t
)(t,s)
= 0. Esta igualdad se seguira con-
servando tras derivar respecto de s y evaluar en s = 0. 2
Nota 2.10.1 El Lema 2.10.1 tiene un recıproco: Si V ∈ Jγ, entonces existe una variacionf de γ por geodesicas cuyo campo variacional es V . Ademas si V (a) = 0, entonces fpuede elegirse propia en a (es decir, f(a, s) = γ(a) ∀s). Sin embargo, si V (a) = V (b) = 0,entonces no podemos asegurar que la variacion por geodesicas f deba ser propia en ambosextremos (por otro lado, existe una variacion de γ propia en ambos extremosy con campovariacional V , pero no necesariamene por geodesicas).
Lema 2.10.2 Sea W :]− ε, ε[C∞
−→ Tγ(a)M con W (0) = γ ′(a). Entonces, ∃ε1 ∈]0, ε] tal quef : [a, b]×]− ε1, ε1[→M dada por f(t, s) = expγ(a)((t− a)W (s)) cumple
1. f esta bien definida8 y es una variacion de γ por geodesicas (i.e. f(t, 0) = γ(t) ∀t ∈[a, b] y cada f(·, s) es geodesica).
2. V (t) =(∂f∂s
)(t,0)
∈ Jγ y V (a) = 0.
8(M,g) no se supone completa.

2.10. CAMPOS DE JACOBI. 63
Demostracion. Para que f este bien definida, debemos justificar que expγ(a) esta definidaen (t − a)W (s) ∀s suficientemente pequeno y ∀t ∈ [a, b]. Sea A ⊂ TM el abierto dondela exponencial A −→ M esta definida y es C∞. Como γ(b) = expγ(a)(b − a)W (0), lacurva Γ(s) = (γ(a), (b− a)W (s)) ∈ TM verifica Γ(0) ∈ A. Por continuidad, ∃ε1 ∈]0, ε]tal que Γ(s) ∈ A siempre que |s| < ε1. Esto quiere decir que para tales s, la geodesicaque parte en el instante t = 0 de γ(a) con velocidad W (s) esta definida en t = b − a,luego tambien esta definida en t − a para a ≤ t ≤ b, es decir, expγ(a) esta definida en(t−a)W (s) para cada (t, s) ∈ [a, b]×]−ε1, ε1[. Por tanto, f tiene sentido y es C∞. Ademas,f(t, 0) = expγ(a)(t − a)W (0) = expγ(a)(t− a)γ ′(a) = γ(t), y fs(t) = expγ(a)(t − a)W (s) =γ(t− a, γ(a),W (s)) es geodesica ∀s, lo que prueba 1. Que V sea de Jacobi se deduce delLema 2.10.1, y V (a) = 0 porque f(a, s) = γ(a) ∀s. 2
Una consecuencia del Lema 2.10.2 es la siguiente expresion explıcita para los camposde Jacobi que se anulan en el primer extremo de la geodesica, a partir de su derivadacovariante en este instante:
Proposicion 2.10.2 Sea V ∈ Jγ tal que V (a) = 0. Entonces,
V (t) =(d expγ(a)
)(t−a)γ′(a)
((t− a)
DV
dt(a)), ∀t ∈ [a, b].
Demostracion. Tomemos W ∈ C∞(]− ε, ε[, Tγ(a)M) con W (0) = γ ′(a) y W ′(0) = DVdt (a).
Tomando ε suficientemente pequeno, el Lema 2.10.2 asegura que la variacion de γ dada porf(t, s) = expγ(a)(t− a)W (s) tiene sentido, es C∞ y por geodesicas, su campo variacionalV1 es de Jacobi y V1(a) = 0. Veamos que V = V1: como ambos son de Jacobi sobre γ yV (a) = V1(a) = 0, bastar comprobar que DV
dt (a) = DV1dt (a). Primero notemos que
(∂f∂t
)(a,s)
= ddu
∣∣∣0f(a+ u, s) = d
du
∣∣∣0expγ(a) uW (s) = d
du
∣∣∣0γ(u, α(s),W (s)) = W (s),
luegoDV1
dt(a) =
(D
dt
∂f
∂s
)
(a,0)=(D
ds
∂f
∂t
)
(a,0)= W ′(0) =
DV
dt(a).
Por tanto, V (t) = V1(t) =(∂f∂s
)(t,0)
= dds
∣∣∣0expγ(a)(t − a)W (s) =
(d expγ(a)
)(t−a)W (0)
((t− a)W ′(0)) =(d expγ(a)
)(t−a)γ′(a)
((t− a)DVdt (a)
). 2
Corolario 2.10.2 En la situacion anterior, b es valor conjugado de a a lo largo de γ siy solo si (b− a)γ ′(a) es punto crıtico de expγ(a).
Demostracion. Notemos primero que expγ(a) esta definida en (b − a)γ ′(a), ya que parat ∈ [a, b] arbitrario, es expγ(a)(t − a)γ ′(a) = γ(1, γ(a), (t− a)γ ′(a)) = γ(t− a, γ(a), γ′(a)),

64 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
que es el valor en t− a de la unica geodesica γ1 con las condiciones iniciales γ1(0) = γ(a),γ ′1(0) = γ ′(a). Por tanto, γ1(t) = γ(t+ a) luego γ(t− a, γ(a), γ′(a)) = γ1(t − a) = γ(t). Yahora veamos la equivalencia del enunciado:
Supongamos que b es valor conjugado de a a lo largo de γ. Ası, ∃V ∈ Jγ −0 tal queV (a) = V (b) = 0. Por la Proposicion 2.10.2, V (t) =
(d expγ(a)
)(t−a)γ′(a)
((t− a)DVdt (a)
),
luego evaluando en b deducimos que (b − a)DVdt (a) ∈ ker(d expγ(a)
)(b−a)γ′(a)
. Ademas,
(b− a)DVdt (a) 6= 0 (en caso contrario V serıa identicamente nulo porque V (a) = 0), luego(d expγ(a)
)(b−a)γ′(a)
no es inyectiva, y por tanto, no es sobreyectiva. Es decir, (b− a)γ ′(a)
es punto crıtico de expγ(a).
Recıprocamente si(d expγ(a)
)(b−a)γ′(a)
no es sobreyectiva, entonces tampoco es inyec-
tiva luego ∃v ∈ T(b−a)γ′(a)
(Tγ(a)M
)≡ Tγ(a)M , v 6= 0, tal que
(d expγ(a)
)(b−a)γ′(a)
(v) = 0.
Llamemos V (t) =(d expγ(a)
)(t−a)γ′(a)
((t − a)v)) ∈ Jγ . Ası, V 6≡ 0 porque DVdt (a) = v
(Proposicion 2.10.2). Sin embargo, V (a) = 0 = V (b), luego b es valor conjugado de a a lolargo de γ. 2
2.10.3. Campos de Jacobi y curvatura seccional.
Hemos visto la relacion entre los campos de Jacobi y los puntos crıticos de la exponen-cial. Los campos de Jacobi tambien pueden usarse para ver como la curvatura seccionalgobierna la velocidad a la que las geodesicas radiales en un punto se dispersan.
Lema 2.10.3 Sea V ∈ Jγ con V (a) = 0 (en particular, V viene dado por la Proposi-cion 2.10.2). Entonces, el desarrollo en serie de Taylor de ‖V ‖2 en t = a es
‖V (t)‖2 =∥∥∥∥DV
dt(a)∥∥∥∥2
(t−a)2−13Rγ(a)
(DV
dt(a), γ ′(a), γ ′(a),
DV
dt(a))
(t−a)4+O((t− a)5
),
donde (t− a)−5O((t − a)5
)esta acotada cuando t→ a.
Demostracion. Sea f(t) = ‖V (t)‖2. Como V (a) = 0, es f(a) = 0. Derivando sucesivamentey usando la ecuacion de Jacobi,
f ′ = 2〈DVdt , V 〉,
f ′′ = 2〈D2Vdt2 , V 〉+ 2
∥∥∥DVdt∥∥∥2
= −2〈R(V, γ ′)γ ′, V 〉 + 2‖DVdt ‖2,
f ′′′ = − 2〈Ddt [R(V, γ′)γ ′], V 〉 − 2〈R(V, γ′)γ ′, DVdt 〉+ 4〈D2Vdt2 ,
DVdt 〉
= − 2〈Ddt [R(V, γ′)γ ′], V 〉 − 6〈R(V, γ′)γ ′, DVdt 〉,
f ′′′′ = − 2〈D2
dt2[R(V, γ′)γ ′], V 〉 − 8〈Ddt [R(V, γ ′)γ ′], DVdt 〉 − 6〈R(V, γ ′)γ ′, D
2Vdt2
〉.

2.10. CAMPOS DE JACOBI. 65
Evaluando en a,
f ′(a) = 0, f ′′(a) = 2‖DVdt
(a)‖2, f ′′′(a) = 0, f ′′′′(a) = −8〈Ddt
[R(V, γ′)γ ′]∣∣∣∣t=a
,DV
dt(a)〉.
Calculamos Ddt [R(V, γ′)γ ′]
∣∣∣t=a
. Dado W ∈ X(γ),
〈Ddt [R(V, γ ′)γ ′],W 〉(a) = ddt
∣∣∣t=a
R(V, γ ′, γ ′,W )− 〈R(V, γ ′)γ ′, DWdt 〉(a)
= ddt
∣∣∣t=a
R(V, γ ′, γ ′,W ) = ddt
∣∣∣t=a
R(W, γ ′, γ ′, V )
= 〈Ddt [R(W, γ ′)γ ′], V 〉(a) + 〈R(W, γ ′)γ ′, DVdt 〉(a)
= R(W, γ ′, γ ′, DVdt )(a) = R(DVdt , γ′γ ′,W )(a) = 〈R(DVdt , γ
′)γ ′,W 〉(a)
ComoW (a) barre todo Tγ(a)M , se concluye que Ddt [R(V, γ′)γ ′]
∣∣∣t=a
= R(DVdt (a), γ ′(a))γ ′(a).
Ası, f ′′′(a) = −8Rγ(a)(DVdt (a), γ ′(a), γ ′(a), DVdt (a)
). El resto se reduce a desarrollar f en
serie alrededor de t = a. 2
Corolario 2.10.3 Sea γ : [0, L] → M una geodesica p.p.a. con p = γ(0), v = γ ′(0). Seanw ∈ TpM unitario y ortogonal a v, y V el unico campo de Jacobi a lo largo de γ conV (0) = 0, DVdt (0) = w. Entonces, para t proximo a cero se tiene
‖V (t)‖2 = t2 − 13K(v ∧ w)t4 + O(t5).
La igualdad anterior es la formulacion cuantitativa del hecho comentado arriba: la curvatu-ra seccional en un punto p ∈M informa sobre la velocidad de dispersion de las geodesicasradiales en p.
2.10.4. Campos de Jacobi y coordenadas polares.
Hay otra interesante conexion entre los campos de Jacobi y la geometrıa de una V.R.,debida principalmente a Elie Cartan. Para estudiarla, necesitamos introducir las coorde-nadas polares geodesicas.
Sea p un punto en una V.R. (Mn, g). Tomemos un radio geodesico R > 0 en p (luegoexpp es un difeomorfismo de B(0, R) = w ∈ TpM | ‖w‖ < R en la bola geodesicaB(p, R)) y llamemos Sn−1
p (1) = ξ ∈ TpM / ‖ξ‖ = 1 a la esfera unidad de (TpM, gp).Dado ξ ∈ Sp(1), sea γξ = γξ(t) la unica geodesica en (M, g) con condiciones inicialesγξ(0) = p, γ ′ξ(0) = ξ (γξ es p.p.a. y esta definida al menos para |t| < R). Tenemos

66 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
un segundo difeomorfismo Φ : R+ × Sp(1) → TpM − 0 / Φ(t, ξ) = tξ, y sea F eldifeomorfismo obtenido por composicion,
F = expp Φ :]0, R[×Sp(1) → U − p ⊂M / F (t, ξ) = expp tξ.
A (t, ξ) se les llama coordenadas polares geodesicas sobre (M, g) alrededor de p. Dado(t, ξ) ∈]0, R[×Sp(1),
dF(t,ξ)(1, 0) =d
ds
∣∣∣∣0F (t + s, ξ) =
d
ds
∣∣∣∣0γξ(t+ s) = γ ′ξ(t),
y si v ∈ 〈ξ〉⊥ = TξSp(1) entonces
dF(t,ξ)(0, v) =(d expp
)tξ
(tv)(Proposicion 2.10.2)
:= Jξv (t),
donde Jξv es el unico campo de Jacobi a lo largo de γξ con Jξv (0) = 0, DJξv
dt (0) = v. Por laProposicion 2.10.1, Jξv (t) es siempre ortogonal a γ ′ξ(t).
¿Como se escribe la metrica g en coordenadas polares? Por bilinealidad, basta controlarlos siguientes terminos:
(F ∗g)(t,ξ) ((1, 0), (1, 0)) = gγξ(t)
(γ ′ξ(t), γ
′ξ(t)
)= 1,
(F ∗g)(t,ξ) ((1, 0), (0, v)) = gγξ(t)
(γ ′ξ(t), J
ξv(t)
)= 0,
(F ∗g)(t,ξ) ((0, v), (0, w)) = gγξ(t)
(Jξv (t), J
ξw(t)
),
donde v, w ∈ 〈ξ〉⊥. Por tanto, conociendo los campos de Jacobi a lo largo de las geodesicasradiales en p determinamos completamente la metrica en una bola geodesica.

2.10. CAMPOS DE JACOBI. 67
Ejercicios.
1. Sea a ∈ Sn(1). Calcular el gradiente de la funcion altura f : Sn(1) −→ R dada porf(p) = 〈p, a〉, si en la esfera se considera su metrica estandar. Comprobar que lashipersuperficies de nivel de f son ortogonales al campo gradiente de f .
2. Probar que en (Rn, g0), un campo X a lo largo de una curva regular α es paralelo si sisolo si X es constante. Deducir que el traslado paralelo a lo largo de α es la identidad.
3. Sean (Mn1 , g1), (Mm
2 , g2) dos variedades Riemannianas. En M1 ×M2 se considera lametrica producto g = g1 × g2.
(A) Denotemos por ∇1,∇2,∇ a las conexiones de Levi-Civita de (M1, g1), (M2, g2) y(M1 ×M2, g). Demostrar que para X1, Y1 ∈ X(M1), X2, Y2 ∈ X(M2) se cumple
∇(X1,X2)(Y1, Y2) =(∇1X1Y1,∇2
X2Y2
).
(B) Demostrar que una curva diferenciable α = (α1, α2) :]a, b[→M1×M2 es geodesicaen (M1 ×M2, g) si y solo si cada αi es geodesica en (Mi, gi), i = 1, 2.
(C) Para i = 1, 2, sean pi ∈ Mi y Ai(pi) = vi ∈ TpiMi / 1 ∈ I(pi,vi), donde I(pi,vi)
es el intervalo maximal de definicion de la geodesica γi(·, pi, vi) en (Mi, gi) concondiciones iniciales γi(0, pi, vi) = pi, γ
′(0, pi, vi) = vi. As ı, la exponencialexpipi
de (Mi, gi) esta definida en A(pi).Denotemos por exp(p1,p2) la exponencial en (M1 ×M2, g), definida en A(p1, p2) =(v1, v2) ∈ Tp1M1 × Tp2M2 / 1 ∈ I((p1,p2),(v1,v2)), donde I((p1,p2),(v1,v2)) es elintervalo maximal de definicion de la geodesica
γ(·, (p1, p2), (v1.v2)) = (γ1(·, p1, v1), γ2(·, p2, v2)) .
Probar que A1(p1)× A2(p2) ⊆ A(p1, p2) y que
exp(p1,p2) =(exp1
p1 , exp2p2
)en A1(p1)× A2(p2).
4. El espacio hiperbolico n-dimensional como hipersuperficie del espaciode Lorentz-Minkowksi. (Notese la similitud de lo que sigue con la esfera Sn(1) enRn+1).
En Rn+1 se considera el producto Lorentziano dado por
〈x, y〉L =n∑
i=1
xiyi − xn+1yn+1,
siendo x = (x1, . . . , xn+1), y = (y1, . . . , yn+1). Denotemos por ∇ la conexion llanausual en Rn+1. Demostrar que dados X, Y, Z ∈ X(Rn+1),
X(〈Y, Z〉L) = 〈∇XY, Z〉L + 〈Y,∇XZ〉L.

68 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
(A) Llamemos Hn(−1) = p ∈ Rn+1 / 〈p, p〉L = −1, xn+1(p) > 0, que es una delas dos componentes de un paraboloide no reglado en Rn+1. Probar que Hn(−1)es una hipersuperficie de Rn+1.
(B) Mostrar que dado p ∈ Hn(−1), el espacio tangente a Hn(−1) viene dado por
TpHn(−1) = v ∈ Rn+1 / 〈v, p〉L = 0.
Dado p ∈ Hn(−1), llamemos gp : TpHn(−1) × TpHn(−1) → R al tensor gp(v, w) =〈v, w〉L, ∀v, w ∈ TpHn(−1). Demostrar que (Hn(−1), g) es una variedad Rieman-niana.
(C) Sea ∇ la conexion de Levi-Civita para g. Probar que
(∇XY )p = (∇XY )p − 〈Xp, Yp〉Lp, ∀p ∈ Hn(−1),
donde X, Y ∈ X(Hn(−1)) y X, Y ∈ X(Rn+1) son extensiones locales de X, Yalrededor de p (Indicacion: usar la caracterizacion de la conexion de Levi-Civita).
(D) Dados p ∈ Hn(−1) y v ∈ TpHn(−1) con ‖v‖ = 1, probar que la curva t ∈R 7→ γ(t) = cosh(t)p+ sinh(t)v es una geodesica en (Hn(−1), g) con γ(0) = p,γ ′(0) = v. Demostrar que la exponencial expp : TpHn(−1) → Hn(−1) es undifeomorfismo.
(E) Probar que (Hn(−1), g) tiene curvatura seccional constante −1.
5. Probar que los sımbolos de Christoffel del espacio hiperbolico con el modelo del semies-pacio ((Rn)+, g′ = 1
x2ng0) respecto a la carta ((Rn)+, 1d) son
Γ′nnn = −Γ′n
ii = Γ′ini = Γ′i
in = − 1xn
para cada i = 1, . . . , n− 1, y el resto de sımbolos valen cero.
6. Demostrar que dados R > 0 y a ∈ R, una parametrizacion por el arco de la circunferenciade radio R centrada en a en la metrica hiperbolica del semiplano superior es γ(t) =(a+R tanh t, R
cosh t) (estas son geodesicas de la metrica hiperbolica).
7. Encontrar parametrizaciones por el arco para todas las geodesicas del plano hiperbolico
con el modelo del disco(B2(0, 1), 4
(1−‖z‖2)2g0), donde g0 es el producto escalar usual
en R2.
8. El traslado paralelo no depende de la parametrizacion de la curva.
Sea α :]a, b[→ M una curva regular en una V.R., φ :]c, d[→]a, b[ un difeomorfismo yβ = α φ.

2.10. CAMPOS DE JACOBI. 69
a) Probar que la aplicacion H : X(α) → X(β) | H(X) = X φ es un isomorfismo deespacios vectoriales.
b) Demostrar que ∀X ∈ X(α), D(Xφ)ds = φ′
(DXdt φ
).
c) Deducir que X ∈ X(α) es paralelo a lo largo de α si y solo si X φ es paralelo alo largo de β.
d) Sean [s0, s1] ⊂]c, d[ y [t0, t1] = φ([s0, s1]) ⊂]a, b[. Probar que si φ es creciente,entonces τ t1t0 (α) = τ s1s0 (β).
9. Derivada de un determinante.
a) Sea A ∈ C∞(]a, b[,Mn(R)) una familia de matrices tal que ∃t0 ∈]a, b[ con A(t0) =In. Probar que (detA)′(t0) = Traza(A′(t0)) (indicacion: usar la tensorialidad deldeterminante sobre las columnas de A(t) para calcular (detA)′(t)).
b) Sea A ∈ C∞(]a, b[, Gl(n,R)). Demostrar que
(detA)′ = detA · Traza(A′A−1) en ]a, b[.
(Indicacion: Fijado t0 ∈]a, b[, aplicar el apartado anterior a B(t) = A(t)A(t0)−1).
10. Denotemos por Sl(n,R) = A ∈ Gl(n,R) / detA = 1 al grupo especial lineal deorden n.
(A) Demostrar que Sl(n,R) es una subvariedad de Gl(n,R) de dimension n2 − 1.
(B) Probar que dada A ∈ Sl(n,R), el espacio tangente a Sl(n,R) en A es
TASl(n,R) = B ∈ Mn(R) / traza(BA−1) = 0 = AC / C ∈ Mn(R), traza(C)) = 0.
Deducir que el espacio de campos tangentes a Sl(n,R) puede identificarse conX(Sl(n,R)) = X ∈ C∞(Sl(n,R),Mn(R)) / traza(XAA
−1) = 0, ∀A ∈ Sl(n,R).(C) Sea 〈A,B〉 = traza(tA · B) el producto escalar usual en Mn(R). Probar que
dada A ∈ Sl(n,R), el suplemento ortogonal de TASl(n,R) en (Mn(R), 〈·, ·〉) esT⊥A Sl(n,R) = L(Adj(A)), donde Adj(A) denota la matriz adjunta de A.
(D) Sea considera en Sl(n,R) la metrica g inducida por el producto escalar usual 〈·, ·〉.Probar que la conexion de Levi-Civita de (Sl(n,R), g) viene dada por
(∇XY )A = dYA(XA)− Traza(XAA
−1YAA−1) t(A−1)‖A−1‖2
,
donde X, Y ∈ X(Sl(n,R)) y A ∈ Sl(n,R).
11. Curvatura y metricas conformes. Sea (Mn, g) una V.R. y g′ = e2ug una metricaconforme a g, donde u ∈ C∞(M).

70 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
(A) Probar que los tensores de curvatura R,R′ de g y g′ se relacionan mediante
R′(X, Y )Z = R(X, Y )Z −(∇2u)(Y, Z)− Y (u)Z(u) + g(Y, Z)‖∇u‖2
X
+(∇2u)(X,Z)−X(u)Z(u) + g(X,Z)‖∇u‖2
Y
+g(X,Z) ∇Y∇u− Y (u)∇u − g(Y, Z) ∇X∇u−X(u)∇u,
∀X, Y, Z ∈ X(M), donde ∇2u denota el hessiano de u respecto de g.
(B) Deducir que el tensor de curvatura del espacio hiperbolico((Rn)+, g = 1
x2ng0)
es
R(X, Y )Z = −[g(Y, Z)X − g(X,Z)Y ], ∀X, Y, Z ∈ X((Rn)+).
y que su curvatura seccional es constantemente −1.
(C) Supongamos ahora que dimM = 2. Demostrar que las curvaturas de Gauss K,K ′
de g y g′ se relacionan mediante la formula
K ′e2u = K − ∆u,
donde ∆u es el laplaciano de u segun g.
12. Curvatura en la esfera.
Usando que la conexion de Levi-Civita de la esfera estandar (Sn(1), g) es ∇XY =∇XY − 〈∇XY, p〉p para cualesquiera X, Y ∈ X(Sn(1)) (aquı ∇ denota la conexionllana de Rn+1 y p es el vector de posicion sobre la esfera), probar que
∇X∇Y Z = ∇X∇Y Z − 〈∇X∇Y Z, p〉p+ g(Y, Z)X, ∀X, Y, Z ∈ X(Sn(1)).
Deducir que el tensor de curvatura de (Sn(1), g) viene dado por
R(X, Y )Z = g(Y, Z)X − g(X,Z)Y, ∀X, Y, Z ∈ X(Sn(1)),
y que su curvatura seccional es constantemente 1.
13. Sea M una variedad diferenciable conexa y f ∈ C∞(M). Probar que si X(f) = 0∀X ∈ X(M), entonces f es constante.
14. Sea f = f(u, v) : A ⊆ R2 → M una superficie parametrizada en una variedad Rieman-niana (Mn, g). probar que si R es el tensor de curvatura de (M, g), entonces
R
(∂f
∂u,∂f
∂v
)X =
D
∂u
(DX
∂v
)− D
∂v
(DX
∂u
).
2.10. CAMPOS DE JACOBI. 71
15. Sea (Mn, g) una V.R., p ∈ M y E1, . . . , En una base local de campos diferen-ciables sobre un abierto U que contiene a p, ortonormales en cada punto de U ycumpliendo ∇Eip
Ej = 0, ∀i, j = 1, . . . , n. Dados i, j, k, l ∈ 1, . . . , n, llamemosRijkl = R(Ei, Ej, Ek, El) ∈ C∞(U). Usar la segunda identidad de Bianchi para probarque
Eip(Rjklα) + Ekp(Rijlα) +Ejp(Rkilα) = 0, ∀i, j, k, l, α= 1, . . . , n. (?)
16. Curvaturas y metrica producto.
Para i = 1, 2, sea (Mi, gi) una variedad Riemanniana con tensor de curvatura Ri, cur-vatura seccional Ki, curvatura de Ricci Rici y curvatura escalar ρi. Llamemos R,K, Ricy ρ a las curvaturas correspondientes en (M1 ×M2, g1 × g2). Sean (p1, p2) ∈M1 ×M2,v1, w1 ∈ Tp1M1 linealmente independientes y v2, w2 en Tp2M2 linealmente independi-entes. Probar que
(A) La curvatura seccional del plano generado por v1, w1 en Tp1M1 y la del planogenerado por (v1, 0), (w1, 0) en T(p1,p2)(M1 ×M2) cumplen K((v1, 0)∧ (w1, 0)) =K1(v1 ∧ w1). Analogamente, K((0, v2) ∧ (0, w2)) = K2(v2 ∧ w2).
(B) K((v1, 0)∧ (0, v2)) = 0.
(C) (Ric1)p1(v1) = Ric(p1,p2)(v1, 0). Analogamente, (Ric2)p2(v2) = Ric(p1,p2)(0, v2).(D) ρ = ρ1 π1 + ρ2 π2, donde πi es la proyeccion canonica de M1 ×M2 en Mi,
i = 1, 2.
17. Sea (M, g) una variedad Riemanniana, con conexion de Levi-Civita ∇. Sea define la
derivada covariante del tensor de curvatura como ∇R : X(M)× 4). . . ×X(M) → X(M)dada por
(∇R)(X, Y, Z,W ) = ∇X(R(Y, Z)W )−R(∇XY, Z)W−R(Y,∇XZ)W−R(Y, Z)∇XW,
para cualesquiera X, Y, Z,W ∈ X(M). Probar que ∇R es tensorial en sus cuatro vari-ables.
18. Variedades localmente simetricas.
Una variedad Riemanniana (Mn, g) se dice localmente simetrica si ∇R = 0 (con lanotacion del problema anterior).
(A) Probar que si (M, g) tiene curvatura seccional constante, entonces es localmentesimetrica. Demostrar que cuando dimM = 2, el recıproco es cierto.
(B) Supondremos en los apartados que restan que (M, g) es localmente simetrica (condimM = n). Dada una curva regular γ :]a, b[→ M y tres campos paralelosX, Y, Z ∈ X(γ) a lo largo de γ, probar que R(X, Y )Z vuelve a ser un campoparalelo a lo largo de α.

72 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.
(C) Sea γ : [0,+∞[→M una geodesica. Dado t ≥ 0, se considera el endomorfismo
fγ′(t) : Tγ(t)M → Tγ(t)M / fγ′(t)(v) = Rγ(t)(v, γ′(t))γ ′(t).
Demostrar que fγ′(t) es autoadjunto respecto a gγ(t), ∀t ≥ 0. Sea e1, . . . , en unabase ortonormal de (Tγ(0)M, gγ(0)) formada por vectores propios de fγ′(0), estoes, fγ′(0)(ei) = λiei para ciertos λi ∈ R, i = 1, . . . , n. Demostrar que la baseortonormal de campos paralelos P1, . . . , Pn ⊂ X(γ) dados por las condicionesiniciales Pi(0) = ei (1 ≤ i ≤ n) cumple
fγ′(t)(Pi(t)) = λiPi(t), ∀t ≥ 0, ∀i = 1, . . . , n.
19. Inmersiones isometricas.
Sea f : (Mn, g) → (Nm, g) una inmersion isometrica entre variedades Riemannianas,con conexiones de Levi-Civita respectivas ∇,∇. Sea X⊥(f) = ξ ∈ X(f) | gf (ξ, df(TM)) =0 en M el espacio de campos diferenciables a lo largo de f que son perpendiculares ala inmersion.
(A) Probar que dado p ∈ M , existen entornos abiertos U ⊂ M conteniendo a p yV ⊂ N conteniendo a f(p) tales que
f(U) ⊂ V y f :U → V es un embebimiento.
Existe una base local g-ortonormal de campos E1, . . . , En de X(U) y unabase local g-ortonormal de campos E1, . . . , En, En+1, . . . , Em ⊂ X(V ) deforma que
Ei|f(U) = f∗(Ei) 1 ≤ i ≤ n,
ξi := Ei f ∈ X⊥(f) n + 1 ≤ i ≤ m.
y dado cualquier campo ξ normal a f , se tiene que ξ es diferenciable en U siy solo si ξ =
∑mi=n+1 aiξi con ai ∈ C∞(U,R) ∀i = n + 1, . . . , m.
(B) Deducir de lo anterior que dado X ∈ X(N), existen X ∈ X(M), ξ ∈ X⊥(f) talesque
X f = df(X) + ξ en M.
(C) Sean X, Y ∈ X(M). Viendo df(X), df(Y ) como campos globales en N (en rigor,fijado p ∈ M tenemos un abierto U alrededor de p tal que f : U → N es unembebimiento, y campos X, Y ∈ X(N) tales que (f |U)∗X = X, (f |U)∗Y = Y enf(U); en lo que sigue, identificaremos df(X) con X y df(Y ) con Y abusando denotacion). Probar que si aplicamos a ∇df(X)df(Y ) la descomposicion del apartado(B), obtenemos la siguiente relacion entre las conexiones de Levi-Civita de (M, g)y (N, g):
∇df(X)df(Y ) = df(∇XY ) + σ(X, Y ),

2.10. CAMPOS DE JACOBI. 73
donde σ : X(M) × X(M) → X⊥(f) es una aplicacion tensorial en funciones ysimetrica, llamada la segunda forma fundamental de la inmersion.
(D) Supongamos que M es una hipersuperficie, y que ξ es un campo normal unitario af . Probar que dado p ∈ M , existe un abierto U de M conteniendo a p y camposX1, . . .Xn ⊂ X(U) que forman una base g-ortonormal de direcciones propiaspara σ, es decir, σ(Xi, Xj) = kiδijξ para cada i, j, donde k1, . . . , kn ∈ C0(U). Alas direcciones de Xi se les llaman direcciones principales y a los valores propioski, curvaturas principales. Con ellos, se definen la curvatura media y la curvaturade Gauss-Kronecker de la inmersion,
H =1n
n∑
i=1
ki =1n
Traza(σ), K =n∏
i=1
ki = det(σ) ∈ C∞(M).
Una inmersion isometrica se dice minimal si H ≡ 0 en M .
(E) Demostrar que el toro de Clifford es un embebimiento minimal de S1(1) × S1(1)en S3(1) (se conjetura que es el unico toro minimal embebido en S3(1), pero esteproblema sigue abierto).

74 CAPITULO 2. CALCULO EN VARIEDADES RIEMANNIANAS.

Capıtulo 3
Geometrıa y curvatura.
Una vez introducidas las herramientas necesarias, obtendremos en este tema algunosde los resultados centrales en la Geometrıa Riemanniana.
3.1. Distancia asociada a una metrica.
Al lo largo de esta seccion, (Mn, g) denotara una V.R. conexa.
Definicion 3.1.1 Una curva C∞ a trozos es una curva continua α : [a, b] → M tal que∃t0 = a < t1 < . . . < tk = b con α|[ti−1,ti] ∈ C∞([ti−1, ti],M) ∀i. La longitud de α se definecomo
L(α) =∫ b
a‖α′(t)‖dt =
k∑
i=1
∫ ti
ti−1
‖α′(t)‖ dt.
Por la formula del cambio de variable en integracion, la longitud es invariante frente areparametrizaciones. Tambien es claramente invariante por isometrıas locales.
En la Seccion 1.1 planteabamos la cuestion de cual es la curva mas corta uniendodos puntos del plano o de una superficie regular de R3. Ahora nos plantearemos la mis-ma pregunta en nuestra V.R. (Mn, g). En el caso (M, g) = (Rn, g0), podemos repetir elrazonamiento a traves del Lema 1.1.1 y los Corolarios 1.1.1 y 1.1.2, concluyendo que lacurva mas corta que une dos puntos de (Rn, g0) es el segmento de recta que los une. Y ladistancia usual en Rn es justamente la longitud de dicho segmento. Esto justifica definir
Definicion 3.1.2 Dados p, q ∈M , se define la distancia de p a q como
d(p, q) = infL(α) | α curva C∞ a trozos con origen p y extremo q.
Para que el ınfimo anterior tenga sentido, necesitamos el siguiente
75

76 CAPITULO 3. GEOMETRIA Y CURVATURA.
Lema 3.1.1 Dados p, q ∈M , ∃α curva C∞ a trozos que empieza en p y termina en q.
Demostracion. ComoM es conexa y localmente arcoconexa,M es arcoconexa1. Por tanto,∃β : [0, 1] →M curva continua con β(0) = p, β(1) = q. Sea
A = t ∈ [0, 1] | ∃αt curva C∞ a trozos que empieza en p y termina en β(t).
A es abierto, sin mas que considerar una carta local (U, ψ) con ψ(U) ⊂ Rn convexo,centrada en un punto β(t0) con t0 ∈ A. A es cerrado, ya que si tkk ⊂ A convergea t∞ ∈ [0, 1], entonces tomemos una carta local (U, ψ) con ψ(U) convexo, centrada enβ(t∞). Por continuidad de β tenemos β(tk) ∈ U a partir de un natural, y ahora no haymas que unir β(tk) con β(t∞) dentro de U y usar que tk ∈ A para deducir que t∞ ∈ A.Como A 6= Ø y [0, 1] es conexo, 1 ∈ A. 2
Pero aunque d : M ×M → R esta ya bien definida, aun no sabemos si es realmente unadistancia.
Proposicion 3.1.1 Dados p, q, x ∈M , se tienen
1. d(p, q) ≥ 0.
2. d(p, q) = d(q, p).
3. d(p, q) ≤ d(p, x) + d(x, q) (desigualdad triangular).
Demostracion. 1 es trivial. 2 se deduce de que existe una biyeccion que conserva las lon-gitudes, del conjunto de curvas diferenciables que empiezan en p y terminan en q en elconjunto de curvas diferenciables que empiezan en q y terminan en p. Para 3 basta conec-tar curvas que empiezan en p y terminan en x con curvas que comienzan en x y terminanen q, y luego comparar los ınfimos de las longitudes de estas curvas conectadas con todaslas que comienzan en p y terminan en q. 2
Para que d sea una distancia, falta ver que si p 6= q son puntos de M , entonces d(p, q) > 0.Esta propiedad costara mas esfuerzo que las anteriores. Recordemos que dado p ∈ M , laexponencial expp esta definida y es C∞ sobre un abierto A(p) ⊂ TpM que es estrelladorespecto al origen.
Lema 3.1.2 (Gauss) Sea v ∈ C∞(]− ε, ε[,M) una curva tal que tv(s) ∈ A(p), ∀(t, s) ∈] − δ, 1 + δ[×] − ε, ε[ para cierto δ > 0. Ası, f :] − δ, 1 + δ[×] − ε, ε[→ M dada porf(t, s) = expp(tv(s)) es una superficie parametrizada. Si ‖v(s)‖ es constante, entoncesg(∂f∂t ,
∂f∂s ) = 0 en ] − δ, 1 + δ[×] − ε, ε[.
1Esta es una propiedad de espacios topologicos: si (X,T ) es un espacio topologico conexo y localmentearcoconexo, y C es una componente arcoconexa de (X,T ), entonces C es abierta. Como X se escribe enunion disjunta de sus componentes arcoconexas y estas son abiertas, entonces caso de haber mas de unase contradirıa la conexion de (X,T ).

3.1. DISTANCIA ASOCIADA A UNA METRICA. 77
Demostracion. Usando la definicion de f y el Lema de homogeneidad, es facil ver que(∂f
∂t
)
(t,s)= γ ′(t, p, v(s)), ∀t, s. (3.1)
(Estamos usando la notacion del Lema de homogeneidad). Por tanto, D∂t
(∂f∂t
)= 0 ∀t, s.
(3.1) tambien implica que∥∥∥∥(∂f∂t
)(t,s)
∥∥∥∥2
= ‖γ ′(t, p, v(s))‖2 = ‖v(s)‖2 = cte., luego
∂∂t
(g(∂f∂t ,
∂f∂s ))
= g(D∂t∂f∂t ,
∂f∂s
)+ g
(∂f∂t ,
D∂t∂f∂s
)= g
(∂f∂t ,
D∂s∂f∂t
)= 1
2∂∂s
(‖∂f∂t ‖
2)
= 0.
Como lo anterior es cierto ∀t, s, tenemos que para s arbitrario, g(∂f∂t ,∂f∂s ) no depende de t.
Ası que el Lema estara probado si vemos que g(∂f∂t ,∂f∂s )(0, s) = 0, y esto ultimo se deduce
de que(∂f∂s
)(0,s)
= ddλ
∣∣∣oexpp(0 · v(s+ λ)) = 0. 2
Corolario 3.1.1 Sean p ∈M y v ∈ A(p) ⊂ TpM . Entonces,
gp(v, w) = gexpp v
((d expp)v(v), (d expp)v(w)
), ∀w ∈ TpM.
Demostracion. Si v = 0, el Corolario es evidente. Supongamos entonces v 6= 0. Como laformula es lineal en w, basta probarla en los casos w‖v y w ⊥ v. Supongamos primero quew = λv, λ ∈ R. Entonces,
gexpp v
((d expp)v(v), (d expp)v(w)
)= λ
∥∥∥(d expp)v(v)∥∥∥2
= λ‖γ ′(1, p, v)‖2 = λ‖v‖2 = gp(v, w).
Ahora supongamos gp(v, w) = 0. Por tanto, podemos ver w como vector tangente aSn−1(‖v‖) ⊂ (TpM, gp) en el punto v ∈ Sn−1(‖v‖), luego ∃v = v(s) :] − ε, ε[→ Sn−1(‖v‖)curva C∞ tal que v(0) = v, v′(0) = w. Como v ∈ A(p) y A(p) es abierto, no perdemosgeneralidad suponiendo que v(] − ε, ε[) ⊂ A(p). Como v([− ε
2 ,ε2 ]) es un compacto con-
tenido en el abierto A(p), ∃δ > 0 tal que tv(s) ∈ A(p) ∀(t, s) ∈] − δ, 1 + δ[×] − ε2 ,
ε2 [ Ası,
f(t, s) = expp(tv(s)) es una superficie parametrizada definida en ] − δ, 1 + δ[×] − ε2 ,
ε2 [ a
la que podemos aplicar el Lema de Gauss, que nos dice g(∂f∂t ,∂f∂s ) = 0 ∀t, s. Evaluando en
t = 1 y s = 0 tendremos gexpp v
((d expp)v(v), (d expp)v(w)
)= 0. 2
Definicion 3.1.3 Sea p ∈ M . Una bola geodesica centrada en p y de radio r > 0 es unentorno normal del tipo B(p, r) = exp(B(0, r)), donde B(0, r) = v ∈ TpM | ‖v‖ < r. Unaesfera geodesica centrada en p y de radio r es la frontera topologica de la bola geodesicaB(p, r), siempre que exista ε > 0 tal que B(p, r + ε) sea tambien bola geodesica. Enparticular, expp es un difeomorfismo de B(0, r) en B(p, r) y de Sn−1(0, r) = ∂B(0, r) enS(p, r) = ∂B(p, r).

78 CAPITULO 3. GEOMETRIA Y CURVATURA.
Notese que aun no sabemos si B(p, r) = q ∈ M | d(p, q) < r, S(p, r) = q ∈M | d(p, q) = r (veremos esto en la Afirmacion 3.1.2).
Proposicion 3.1.2 Las geodesicas radiales partiendo de p ∈ M son ortogonales a lasesferas geodesicas centradas en p.
Demostracion. Sea S(p, r) una esfera geodesica de radio r > 0, y q ∈ S(p, r), w ∈ TqS(p, r).Como expp : S(0, r) → S(p, r) es un difeomorfismo, ∃!x ∈ S(0, r), ∃!ξ ∈ TxS(0, r) = 〈x〉⊥tales que expp x = q, (d expp)x(ξ) = w. Por el Corolario 3.1.1,
gexpp x
((d expp)x(x), (d expp)x(ξ)
)= gp(x, ξ) = 0.
Pero (d expp)x(x) = γ ′(1, p, x) y hemos terminado. 2
Teorema 3.1.1 (Las geodesicas minimizan radialmente d en bolas geodesicas)
Sea B(p, r) una bola geodesica centrada en p ∈M y de radio r > 0. Dado q ∈ B(p, r), seav el unico vector de B(0, r) ⊂ TpM con expp v = q. Llamemos γ(t) = γ(t, p, v) = expp(tv),1 ≤ t ≤ 1. Entonces:
1. L(γ) = ‖v‖.
2. Si α : [0, 1] → M es una curva C∞ a trozos con α(0) = p, α(1) = q, entoncesL(γ) ≤ L(α), con igualdad sii α es una reparametrizacion no decreciente de γ.
Demostracion. 1 es claro. Veamos 2 discutiendo dos casos sobre la curva α.
Caso I: Supongamos α([0, 1]) ⊂ B(p, r).Sea β = exp−1
p α, curva C∞ a trozos en B(0, r) con la misma particion de vertices queα y β(0) = 0, β(1) = v. Sea t ∈]0, 1] cumpliendo β(t) = 0, β(t) 6= 0 ∀t ∈]t, 1]. En]t, 1]∗ =]t, 1]− vertices de α, podemos descomponer
β′ = gp
(β′,
β
‖β‖
)β
‖β‖ + β⊥, en ]t, 1],
donde β⊥ es ortogonal a β. Por tanto en ]t, 1]∗ se tiene
α′ = (d expp)β(β′) = gp
(β′,
β
‖β‖
)(d expp)β
(β
‖β‖
)+ (d expp)β(β
⊥)
y
‖α′‖2 = gp
(β′,
β
‖β‖
)2 ∥∥∥∥(d expp)β(β
‖β‖
)∥∥∥∥2
+ ‖(d expp)β(β⊥)‖2

3.1. DISTANCIA ASOCIADA A UNA METRICA. 79
+2gp(β′,
β
‖β‖
)gα
((d expp)β
(β
‖β‖
), (d expp)β(β
⊥)).
Como α = exp β, podemos usar el Lema de Gauss en los sumandos primero y tercero.Como β ⊥ β⊥, el tercer sumando se anula. Ası obtenemos
‖α′‖2 = gp
(β′,
β
‖β‖
)2
+ ‖(d expp)β(β⊥)‖2
(A)
≥ gp
(β′,
β
‖β‖
)2
.
Y de aquı,
L(α)(B)
≥ L(α)1t
=∫ 1
t‖α‖ dt ≥
∫ 1
t
∣∣∣∣gp(β′,
β
‖β‖
)∣∣∣∣dt(C)
≥∫ 1
tgp
(β′,
β
‖β‖
)dt
=∫ 1
t(‖β‖)′ dt (∗)
= ‖β(1)‖ − ‖β(t)‖ = ‖v‖ = L(γ),
donde (A),(B),(C) se usaran al discutir la igualdad, y (∗) se obtiene aplicando la reglade Barrow en cada componente de ]t, 1]∗. Si se da la igualdad, entonces se da la igual-dad en (A),(B),(C) anteriores. De (A) se deduce que β⊥ = 0 o equivalentemente, β′ =gp(β′, β
‖β‖
)β
‖β‖ en ]t, 1]∗. Esto implica(
β‖β‖
)′= 0 en ]t, 1]∗, luego para cada componente
I de ]t, 1]∗ ∃cI ∈ Sn−1(1) ⊂ (TpM, gp) tal que β‖β‖ = cI en I . De la igualdad en (B) se
tiene α ≡ p en [0, t]. Por ultimo, la igualdad en (C) implica 0 ≤ gp(β′, β
‖β‖
)= gp(β′, cI)
en I , luego β|I recorre de forma no decreciente en norma un segmento dentro de la semir-recta R+cI . Como β
‖β‖ es una curva continua en ]t, 1]∗, todos los cI deben ser el mismo.Como β(t) = 0 y β(1) = v, tenemos que β|]t,1] recorre el segmento 0, v ⊂ TpM de formano decreciente en norma. Ahora solo hay que componer con expp para obtener lo quebuscabamos.
Caso II: Supongamos α([0, 1]) 6⊂ B(p, r).Tomemos t ∈]0, 1] tal que α(t) ∈ B(p, r) en [0, t[, α(t) ∈ ∂B(p, r) (esta frontera es topologi-ca, no tiene porque ser una esfera geodesica). Tomemos una sucesion tkk ⊂ [0, t[ con-vergiendo a t. Aplicando el caso I a α|[0,tk] tenemos L(α)tk0 ≥ ‖vk‖, donde vk es el unico
vector de B(0, r) ⊂ TpM con expp vk = α(tk). Por tanto, L(α)t0 = lımk L(α)tk0 ≥ lımk ‖vk‖.Veamos que ‖vk‖ → r: Puedo suponer tras pasar a una parcial que ‖vk‖k tiene lımitel ≤ r. Si l < r, entonces una parcial de vk convergera a un vector v∞ ∈ B(0, r), luegoexpp v∞ = lımk expp(vk) = lımk α(tk) = α(t), de donde α(t) ∈ B(p, r), contradiccion. Ası,l = r luego L(α) ≥ L(α)t0 ≥ l = r > ‖v‖ = L(γ) y hemos terminado (la igualdad no puededarse en este caso II). 2
En (Rn, g0) sabemos que toda bola B(p, r) es geodesica, luego el Teorema anteriorgeneraliza el Corolario 1.1.2. En la esfera Sn(1) la mayor bola geodesica centrada en

80 CAPITULO 3. GEOMETRIA Y CURVATURA.
p ∈ Sn(1) es B(p, π) = Sn(1) − −p, luego dado cualquier punto q ∈ Sn(1) − −p, lacurva mas corta uniendo p con q es el unico arco de cırculo maximo de longitud < π
con estos extremos (la unicidad se pierde cuando la distancia es π, y los arcos de cırculomaximo de longitud > π no son minimizantes).
Corolario 3.1.2 d es una distancia sobre M , y la topologıa que genera coincide con latopologıa subyacente de M como variedad diferenciable2.
Demostracion. Para que d sea una distancia, solo queda ver que si p 6= q, entonces d(p, q) >0. Esto sera consecuencia de la siguiente
Afirmacion 3.1.1 Si B(p, r) es una bola geodesica y q /∈ B(p, r), entonces d(p, q) ≥ r.
Demostracion de la Afirmacion 3.1.1. Basta ver que toda α curva C∞ a trozos uniendop y q cumple L(α) ≥ r. Fijemos una curva α de este tipo y sea r′ ∈]0, r[. Como α escontinua, α(0) ∈ B(p, r′) y α(q) /∈ B(p, r′), ∃t0 ∈ [0, 1] tal que α(t0) ∈ ∂B(0, r′) =expp(∂B(0, r′)) = S(p, r′) (esfera geodesica). Llamemos x ∈ ∂B(0, r′) al unico vector deB(0, r) que se aplica en α(t0) por expp. Como x ∈ B(p, r), el Teorema 3.1.1 implica queL(α)t00 ≥ r′, luego L(α) ≥ r′. Como esto es cierto ∀r′ ∈]0, r[, tenemos L(α) ≥ r y laAfirmacion esta probada.
Sea Td la topologıa generada por d y T la topologıa original de M . Td tiene por basede entornos de cada p ∈ M a Bd(p, r) = q ∈ M | d(p, q) < r | r > 0, mientras queT tiene por base de entornos de p a B(p, r) = expp(B(0, r) | r es radio geodesico en p.Por tanto, T coincidira con Td si vemos la siguiente
Afirmacion 3.1.2 Si B(p, r) es una bola geodesica, entonces B(p, r) = Bd(p, r).
Demostracion de la Afirmacion 3.1.2. La Afirmacion 3.1.1 implica que Bd(p, r) ⊂ B(p, r).Recıprocamente, si q ∈ B(p, r) entonces ∃v ∈ B(0, r) tal que q = expp v. Por el Teore-ma 3.1.1, d(p, q) = ‖v‖ < r luego q ∈ Bd(p, r). 2
Corolario 3.1.3 (Funcion distancia a un punto) Sea p0 ∈ M y dp0 : M → R lafuncion continua3
dp0(p) = d(p, p0), p ∈M.
Si r > 0 es un radio geodesico4 en p, entonces dp0 ∈ C∞(B(p0, r)− p0).2En particular, la topologıa generada por la distancia asociada a una metrica no depende de la distancia
ni de la metrica.3La desigualdad triangular implica que la funcion distancia a un punto es continua en cualquier espacio
metrico.4Un radio geodesico es el radio de una bola geodesica.

3.1. DISTANCIA ASOCIADA A UNA METRICA. 81
Demostracion. Por el Teorema 3.1.1, la expresion local de dp0 respecto a la carta (B(p0, r), exp−1p0 )
es (dp0 expp0)(v) = ‖v‖, ∀v ∈ B(0, r). 2
Ejemplos de distancias asociadas a V.R.
1. El espacio euclıdeo n-dimensional.En (Rn, g0), dp0(p) = ‖p − p0‖ ∀p ∈ Rn (porque todos los radios son geodesicos encualquiero punto p0 ∈ Rn).
2. La esfera estandar (Sn(1), g).Dados p ∈ Sn(1) y v ∈ TpSn(1), tenıamos γ(t, p, v) = cos(‖v‖t)p + sen(‖v‖t) v
‖v‖ .Ademas, B(p, π) = Sn(1)−−p es bola geodesica luego ∀q ∈ Sn(1)−−p, d(p, q) =‖v‖ donde v ∈ B(0, π) ⊂ TpSn(1) viene dado por γ(1, p, v) = q. De esta ultimaigualdad, tomando producto escalar con p, tenemos cos ‖v‖ = 〈p, q〉 luego
d(p, q) = arc cos〈p, q〉, ∀p, q ∈ Sn(1). (3.2)
(en realidad solo hemos probado (3.2) cuando p 6= q; el caso p = q se tiene porcontinuidad).
Definicion 3.1.4 El diametro de una V.R. (Mn, g) es el diametro del espacio metrico(M, d) donde d es la distancia asociada a g:
diam(M, g) = supd(p, q) | p, q ∈M.
Ejemplos de diametros.
1. diam(Rn, g0) = ∞.
2. diam(Sn(1), g) = π.
3. diam(RPn, g) = π2 :
Sabıamos que dado p ∈ Sn(1) con proyeccion [p] ∈ RPn, B([p], π2 ) es bola geodesica.Por tanto, diam(RPn, g) ≥ π
2 . Por otro lado, dado cualquier q ∈ Sn(1) al menosun elemento del conjunto q,−q esta en el hemisferio superior cerrado centrado enp, luego una de las distancias en (Sn(1), g) de p a q o de p a −q es ≤ π
2 . Como πconserva longitudes de curvas y podemos unir p con q (o p con −q) por una curva enSn(1) de longitud ≤ π
2 , deducimos que [p], [q] pueden unirse en RPn por una curvade longitud ≤ π
2 . Como [p], [q] son arbitrarios, tenemos diam(RPn, g) ≥ π2 luego se
tiene la igualdad.

82 CAPITULO 3. GEOMETRIA Y CURVATURA.
3.2. Entornos totalmente normales.
Recordemos que en toda V.R. (Mn, g), la exponencial exp estaba definida y era difer-enciable en un abierto A ⊂ TM que contiene a la seccion cero.
Proposicion 3.2.1 Dado p ∈ M , existen abiertos V ⊂ A y U ⊂ M con (p, 0) ∈ V yp ∈ U , tales que la aplicacion
(π, exp) : V −→ U × U
(q, v) 7−→ (q, expq v)
es un difeomorfismo.
Demostracion. Por el Teorema de la funcion inversa aplicado a (π, exp) : A → M ×M ,basta probar que d(π, exp)(p,0) : T(p,0)A = T(p,0)TM → TpM × TpM es un isomorfismo deespacios vectoriales. Esto lo haremos viendo que d(π, exp)(p,0) es sobreyectiva, lo que a suvez sera consecuencia de los siguientes dos puntos:
(A) ∀v ∈ TpM , (v, 0) esta en la imagen de d(π, exp)(p,0).
(B) ∀v ∈ TpM , (v, v) esta en la imagen de d(π, exp)(p,0).
Sea v ∈ TpM y α : (−ε, ε) →M una curva diferenciable con α(0) = p, α′(0) = v. Tomemosun campo W ∈ X(α) tal que W (0) = 0. Ası, α := (α,W ) es una curva diferenciable sobreTM y α(0) = (p, 0) luego por continuidad podemos suponer α(t) ∈ A ∀t ∈ (−ε, ε).Ademas,
d(π, exp)(p,0)(α′(0)) =
d
dt
∣∣∣∣0
(α(t), expα(t)W (t)
)=(v,
d
dt
∣∣∣∣0expα(t)W (t)
).
Supongamos ahora que α es una geodesica (luego necesariamente α(t) = γ(t, p, v)) y queW es de la forma W (t) = f(t)α′(t), con f ∈ C∞(−ε, ε), f(0) = 0. Ası,
d(π, exp)(p,0)(α′(0)) =
(v,
d
dt
∣∣∣∣0expα(t) f(t)α′(t)
).
Por otro lado, β(s) = α(t + s) es una geodesica con condiciones iniciales β(0) = α(t),β′(0) = α′(t), y s 7→ expα(t) sα
′(t) es otra geodesica con las mismas condiciones iniciales,luego α(t + s) = expα(t) sα
′(t) siempre que |t + s| < ε y |t| < ε. En particular,
α(t+ f(t)) = expα(t)(f(t)α′(t))
para |t| < δ y para cierto δ > 0. Ası,
d(π, exp)(p,0)(α′(0)) =
(v,
d
dt
∣∣∣∣0α(t+ f(t))
)= (v, [1 + f ′(0)]α′(0)) = (v, [1 + f ′(0)]v).

3.2. ENTORNOS TOTALMENTE NORMALES. 83
Si tomamos f ∈ C∞(−ε, ε) con f(0) = 0, f ′(0) = −1, lo anterior prueba que (v, 0) esta enla imagen de d(π, exp)(p,0); por ultimo, si tomamos f ∈ C∞(−ε, ε) con f(0) = 0, f ′(0) = 0,tenemos que (v, v) esta en la imagen de d(π, exp)(p,0). 2
Lema 3.2.1 Sean W ⊂M un abierto que contenga a p y δ > 0. Llamemos
W(δ) = (q, v) ∈ TM | q ∈ W, gq(v, v)< δ2.
Entonces, B(p,0) = W(δ) | W ⊂ M abierto conteniendo a p, δ > 0 es base de entornosabiertos de (p, 0) en la topologıa de TM .
Demostracion. Sea F : TM → R, F (q, v) = (q, gq(v, v)). Como F es continua y W(δ) =F−1(W×]−δ, δ[), W(δ) es abierto de TM . Por tanto, B(p,0) sera base de entornos de (p, 0)en TM si vemos que ∀O ⊂ TM abierto con (p, 0) ∈ O, ∃W ⊂ M abierto con p ∈ W y∃δ > 0 tales que (p, 0) ∈ W(δ) ⊂ O (que (p, 0) ∈ W(δ) es gratis).
Una base de la topologıa de TM es
B = ψ−1(O1 × O2) | O1abto.
⊂ U1, O2abto.
⊂ Rn, (U1, ψ) ∈ A,
donde A es un atlas diferenciable sobre M y dada (U1, ψ = (x1, . . . , xn)) ∈ A, tenemosψ : π−1(U1) → U1 × Rn, ψ(q, v) = (q, v(x1), . . . , v(xn)). Como O es abierto de TM
conteniendo a (p, 0), ∃ψ−1(O1 × O2) ∈ B tal que (p, 0) ∈ ψ−1(O1 × O2) ⊂ O. TomemosW = O1, abierto de M . W contiene a p porque (p, 0) ∈ ψ−1(O1 × O2). Dado q ∈ O1,∃C1(q), C2(q) > 0 tales que
C1(q)n∑
i=1
a2i ≤ gq(v, v) ≤ C2(q)
n∑
i=1
a2i ,
∀v ∈ TqM con coordenadas (a1, . . . , an) respecto a la base (∂∂xi
)q
| 1 ≤ i ≤ n de
TqM asociada a (U1, ψ). Ademas, podemos suponer que C1, C2 son independientes deq ∈ O1 (basta tomar O1 relativamente compacto). Por otro lado, O2 es un abierto de Rn
conteniendo a 0, luego ∃ε > 0 tal que B(0, ε) ⊂ O2. Veamos que δ :=√εC1 cumple que
W(δ) ⊂ ψ−1(O1 ×O2) y habremos terminado.Sean q ∈ O1 y v =
∑i ai
(∂∂xi
)q
con gq(v, v) < δ2. Como C1∑i a
2i ≤ gq(v, v) < δ2,
tenemos∑i a
2i <
δ2
C1= ε de donde (a1, . . . , an) ∈ O2. Por tanto, W(δ) ⊂ ψ−1(O1 ×O2). 2
Teorema 3.2.1 (Entornos totalmente normales) Dado p ∈ M , ∃W ⊂ M abiertocon p ∈ W y ∃δ = δ(W ) > 0 tales que
1. ∀q ∈ W , B(q, δ) es bola geodesica.

84 CAPITULO 3. GEOMETRIA Y CURVATURA.
2. ∀q ∈ W , W ⊂ B(q, δ).
(A este W se le llama un entorno totalmente normal de p).
Demostracion. Por la Proposicion 3.2.1, ∃Vabto.
⊂ A y Uabto.
⊂ M con (p, 0) ∈ V y p ∈ U ,tales que (π, exp) : V → U × U es un difeomorfismo. Por el Lema 3.2.1, ∃W
abto.
⊂ M y∃δ > 0 tales que p ∈ W y (p, 0) ∈ W(δ) ⊂ V . Veamos que este W cumple 1: Sea q ∈ W .Como q × B(0, δ) ⊂ W(δ) ⊂ V ⊂ A, expq esta definida en B(0, δ) ⊂ TqM . Ademas,la restriccion del difeomorfismo (π, exp) a q × B(0, δ) es (q, v) 7→ (q, expp v) (q es fijo),luego expq es un difeomorfismo de B(0, δ) en su imagen y B(q, δ) es bola geodesica.
Cualquier abierto W1 ⊂ W que contenga a p cumplira 1 con el mismo δ. Por tanto,para terminar basta probar que ∃W1
abto.
⊂ W con p ∈ W1, tal que W1 ⊂ B(q, δ) ∀q ∈ W1.Como W(δ), la Proposicion 3.2.1 implica que (π, exp)(W(δ)) es un abierto de U × U que
contiene a (p, p), luego ∃W1abto.
⊂ W tal que (p, p) ∈ W1×W1 ⊂ (π, exp)(W(δ)). Esta ultimainclusion implica que dado q ∈ W1, q × W1 ⊂ (q, expq v) | gq(v, v) < δ2 = B(q, δ),donde en la ultima igualdad hemos usado la Afirmacion 3.1.2. 2
Nota 3.2.1
1. Un entorno totalmente normal es entorno normal de todos sus puntos.
2. Si W es un entorno totalmente normal de p ∈M con radio asociado δ > 0 y q1, q2 ∈ W ,entonces existe una geodesica γ que parte de q1 y llega a q2 (basta considerar la bolageodesica B(q1, δ), que contiene a W ). Ademas, γ es la unica5 curva C∞ a trozos conesos extremos que minimiza la distancia. γ podrıa no estar contenida en W , aunquesı lo estara en B(q1, δ). De hecho, puede conseguirse que γ este contenida en W sinmas que tomar un entorno estrictamente convexo6 dentro de W , subconjunto queseguira siendo un entorno totalmente normal de p con el mismo δ asociado.
Corolario 3.2.1 Sea α : [a, b] → M una curva C∞ a trozos y [a, b]∗ = [a, b]−vertices de α.Si L(α) = d(α(a), α(b)) y ∃c ≥ 0 tal que ‖α′‖ = c en [a, b]∗, entonces α es una geodesica(en particular, α es C∞).
Demostracion. Basta probar que dado t0 ∈]a, b[, ∃ε > 0 tal que α|[t0−ε,t0+ε] es geodesica.Fijemos t0 ∈ [a, b] y sea W un entorno totalmente normal de α(t0), con radio asociadoδ > 0. Por continuidad, ∃ε > 0 tal que α([t0 − ε, t0 + ε]) ⊂ W . Por la Nota 3.2.1, existeuna geodesica γ uniendo α(t0 − ε) con α(t0 + ε) que ademas cumple
5En el sentido del Teorema 3.1.1.6No veremos este tipo de entornos.

3.2. ENTORNOS TOTALMENTE NORMALES. 85
L(γ) = d(α(t0 − ε), α(t0 + ε)),
γ es la unica curva (salvo reparamerizaciones) con sus mismos extremos y la menorlongitud posible.
Como α|[t0−ε,t0+ε] tiene los mismos extremos que γ y minimiza la longitud entre ellos(porque minimiza de a a b), α|[t0−ε,t0+ε] es una reparametrizacion no decreciente de γ,i.e. α|[t0−ε,t0+ε] = γ φ donde φ es una funcion derivable a trozos con φ′ ≥ 0 dondetenga sentido. Como α′ = (γ φ)φ′ y ‖α′‖, ‖γ ′‖ son constantes en [t0 − ε, t0 + ε]∗ =[t0 − ε, t0 + ε] ∩ [a, b]∗, ∃c1 ≥ 0 tal que φ′ = c en [t0 − ε, t0 + ε]∗ (ojo: c1 no depende de lacomponente de [t0 − ε, t0 + ε]∗), luego φ es afın en cada componente de [t0 − ε, t0 + ε]∗,con la misma pendiente en cada componente. Como φ es continua, concluımos que φ notiene vertices en [t0 − ε, t0 + ε], luego tampoco los tiene α. Por tanto, α|[t0−ε,t0+ε] es unareparametrizacion afın de γ luego α|[t0−ε,t0+ε] es geodesica. 2
Corolario 3.2.2 Sean f, h : (M1, g1) → (M2, g2) isometrıas locales con M1 conexa.Supongamos que ∃p ∈M1 tal que f(p) = h(p) y dfp = dhp. Entonces, f = h en M1.
Demostracion. Sea q ∈ M1. Como M1 es conexa, ∃α : [0, 1] → M continua con α(0) =p, α(1) = q. Recubrimos α([0, 1]) por entornos totalmente normales Wα(t) de cada α(t).Por ser α([0, 1]) compacto, podemos extraer un subrecubrimiento finitoWα(t1), . . . ,Wα(tk).Reordenando los ındices, podemos suponer Wα(ti−1)∩Wα(ti) 6= Ø y p ∈ Wα(t1), q ∈ Wα(tk).Veamos que f = h en Wα(t1) y habremos terminado (basta repetir el proceso hasta llegara q): Dado x ∈ Wα(t1), ∃γ geodesica con γ(0) = p, γ(1) = x. Como f, h son isometrıaslocales, f γ, h γ son geodesicas de (M2, g2). Ademas tienen las mismas condicionesiniciales, luego f γ = h γ, en particular f(x) = h(x). 2
Definicion 3.2.1 Dada una V.R. (Mn, g), denotaremos por Iso(M, g) el grupo de isometrıasde (M, g) en sı misma.
Corolario 3.2.3 Iso(Rn, g0) = O(n,R) × Rn (producto semidirecto de grupos).
Demostracion. Sea λ : O(n,R)×Rn → Iso(Rn, g0), λ(A, b) = φA,b donde φA,b(p) = Ap+b,∀p ∈ Rn. λ es claramente inyectiva. Dada φ ∈ Iso(Rn, g0), llamo A = dφ0 ∈ O(n,R) yb = φ(0). Por el Corolario 3.2.2, φ = φA,b luego λ es sobreyectiva. Como λ es una biyeccion,pude considerar en O(n,R) × Rn la estructura de grupos que hace a λ isomorfismo degrupos. Es facil ver que esta estructura de grupo es
(A1, b1) ∗ (A2, b2) = (A1A2, A1b2 + b1),
(producto semidirecto de O(n,R) y Rn). 2

86 CAPITULO 3. GEOMETRIA Y CURVATURA.
Corolario 3.2.4 Iso(Sn(1), g) = O(n+ 1,R).
Demostracion. Sea λ : O(n+1,R) → Iso(Sn(1), g),λ(A) = φA donde φA(p) = Ap ∀p ∈ Rn.Es claro que λ es un morfismo de grupos. λ es inyectiva (considerar una base g0-ortonormalde Rn). Para ver que λ es sobreyectiva, tomo φ ∈ Iso(Sn(1), g) y fijo un punto p ∈ Sn(1).Sea v1, . . . , vn una base ortonormal de 〈p, 〉⊥. Como φ(p) ∈ Sn(1) y dφp es una isometrıavectorial de (〈p〉⊥, g0) en (〈φ(p)〉⊥, g0), dφp(v1), . . . , dφp(vn) sera una base ortonormalde 〈φ(p)〉⊥. Por tanto, dφp(v1), . . . , dφp(vn), φ(p) es una base ortonormal de (Rn+1, g0),lo mismo que v1, . . . , vn, p. Ası, ∃!A ∈ O(n + 1,R) tal que A(p) = φ(p), Avi = dφp(vi)1 ≤ i ≤ n. Por el Corolario 3.2.2, φ = φA luego λ es sobreyectiva. 2
3.3. Completitud. El Teorema de Hopf-Rinow.
A lo largo de esta Seccion, (Mn, g) sera una V.R. conexa.
Definicion 3.3.1 (M, g) se dice completa si el espacio metrico asociado en completo (todasucesion de Cauchy es convergente).
Por ejemplo, (Rn, g0) es una V.R. completa porque la distancia asociada es la usual,que produce un espacio metrico completo.
En un espacio metrico, el que una sucesion sea convergente no depende de la distanciasino de la topologıa que esta genera. Sin embargo, las sucesiones de Cauchy dependen dela distancia considerada. En nuestro caso, el Corolario 3.1.2 implica que las sucesionesconvergentes en M no dependen de la metrica Riemanniana g. Pero las sucesiones deCauchy sı dependen de la metrica g. Por ejemplo: las sucesiones convergentes de (R2)+
son independientes de considerar las metricas euclıdea g0 o hiperbolica g = 1y2g. Sin
embargo, ((R2)+, g) sera completo pero ((R2)+, g0) no, luego el conjunto de las sucesionesde Cauchy en ((R2)+, g) estan estrictamente contenido en el conjunto de las sucesiones deCauchy en ((R2)+, g0).
Proposicion 3.3.1
1. La completitud es un invariante Riemanniano.
2. Si g, g′ son metricas Riemannianas homoteticas en M , entonces (M, g) es completasi y solo si (M, g′) es completa.
3. Si g, g′ son metricas Riemannianas en M con g ≤ g′ y (M, g) es completa, entonces(M, g′) es completa.

3.3. COMPLETITUD. EL TEOREMA DE HOPF-RINOW. 87
4. Si φ : M → (N, g) es un embebimiento con φ(M) cerrado de N y (N, g) es completa,entonces (M,φ∗g) es completa.
Demostracion. 1,2 son evidentes. Para ver 3, basta ver que toda sucesion de Cauchy en(M, dg′) es tambien de Cauchy en (M, dg) (en tal caso sera convergente por ser (M, g)completa, y ser convergente solo depende de la topologıa). Esto es consecuencia de quedg ≤ dg′ porque g ≤ g′. Por ultimo, usando 1 podemos reducir 4 al caso en que φ es lainclusion. Sean dg, di∗g las distancias inducidas por g, i∗g en N,M respectivamente. ComoLg(α) = Li∗g(α) ∀α curva en M , tenemos dg(p, q) ≤ di∗g(p, q), ∀p, q ∈ M . Esto implicaque si pkk ⊂ M es de Cauchy en di∗g, entonces es tambien de Cauchy en dg, luegoconvergente en N . El lımite en N de pkk tiene que estar en M por ser esta cerrada,luego pkk ⊂M es convergente en M . 2
Empezamos ya los preparativos del Teorema de Hopf-Rinow.
Lema 3.3.1 Sea p ∈ M tal que expp esta definida en todo TpM . Entonces, todo q ∈ Mpuede unirse a p por una geodesica minimizante.
Demostracion. Fijemos q ∈M y sea R = d(p, q). Tomemos r > 0 tal que S(p, r) es esferageodesica. ¿Cual es la direccion del camino mas corto de p a q? Sea f : S(p, r) → R lafuncion distancia a q, f(x) = d(x, q), x ∈ S(p, r). Como S(p, r) es compacta, ∃x0 ∈ S(p, r)donde f alcanza un mınimo. Para este x0, ∃!v ∈ TpM con ‖v‖ = 1 tal que expp(rv) = x0.Veamos que γ(t) = γ(t, p, v) es la geodesica buscada: primero, γ esta definida en todo R.Como es p.p.a., es L(γ)t0 = t ∀t > 0. Basta entonces comprobar que γ(R) = q. Sea
A = t ∈ [r, R] | d(γ(t), q) = R− t.
A es cerrado (es el conjunto de coincidencia de dos funciones continuas).
Afirmacion 3.3.1 r ∈ A (luego A 6= Ø).
Demostracion de la Afirmacion 3.3.1. R = d(p, q) ≤ d(p, x0) + d(x0, q) = r+ d(x0, q). Portanto, d(γ(r), q) = d(x0, q) ≥ R− r. Veamos que la desigualdad estricta es imposible: porreduccion al absurdo, supongamos d(x0, q) > R− r. Tomamos ε > 0 tal que R− r + ε <d(x0, q). Como R+ ε > R = infL(α) | α curva uniendo p, q, ∃α : [0, 1] → M curva C∞
a trozos con α(0) = p, α(1) = q, R ≤ L(α) < R+ ε. Por conexion, ∃x ∈ α([0, 1])∩S(p0, r).Ası, r+L(α)qx ≤ L(α)xp+L(α)qx = L(α) < R+ε luego d(x, q) ≤ L(α)qx < R−r+ε < d(x0, q),lo que contradice que x0 es mınimo de f .
Afirmacion 3.3.2 supA = R.

88 CAPITULO 3. GEOMETRIA Y CURVATURA.
Demostracion de la Afirmacion 3.3.2. supA existe porque [r, R] es acotado y por la Afir-macion 3.3.1. Basta probar que dado t0 ∈ A con t0 < R, ∃δ > 0 tal que t0+δ ∈ A. Elegimosδ > 0 tal que t0 + δ ≤ R y S(γ(t0), δ) es esfera geodesica. Usando el razonamiento hechohasta ahora, ∃y0 ∈ S(γ(t0), δ) donde d(·, q)|S(γ(t0),δ) alcanza su mınimo. Por la Afirma-cion 3.3.1 en este caso, tenemos d(y0, q) = d(γ(t0), q)−δ = R− t0−δ (porque t0 ∈ A). Seaγ : [0, δ] → M la unica geodesica tal que γ(0) = γ(t0), γ(δ) = y0, L(γ) = d(γ(t0), y0) = δ(notese que γ no tiene porque estar definida en todo R). La curva γ|t00 ∪ γ es C∞ a trozos,une p con y0 y tiene velocidad cte. 1 en norma donde tenga sentido. Si vemos que γ|t00 ∪ γminimiza la longitud entre sus extremos, sera diferenciable por el Corolario 3.2.1. Por ladesigualdad triangular, R = d(p, q) ≤ d(p, y0) + d(y0, q) = d(p, y0) + R − t0 − δ, luegod(p, y0) ≥ t0 + δ. Entonces L(γ|t00 ∪ γ) = L(γ|t00 ) + L(γ) = t0 + δ ≤ d(p, y0) ≤ L(γ|t00 ∪ γ),luego γ|t00 ∪γ minimiza la longitud entre sus extremos, y por tanto es diferenciable en γ(t0).Como γ|t00 y γ son geodesicas con las mismas condiciones iniciales en γ(t0), coincidiran:γ(t) = γ(t+ t0), ∀t ∈ [0, δ]. Veamos ya que t0 + δ ∈ A: t0 + δ ≤ R por definicion de δ, yd(γ(t0 + δ), q) = g(γ(δ), q) = d(y0, q) = R− t0 − δ. 2
Dado p ∈ M y r > 0 (no necesariamente radio geodesico), denotaremos por Bd(p, r)la bola metrica centrada en p y de radio r. Para radios geodesicos, Bd(p, r) = B(p, r).
Lema 3.3.2 Sea p ∈M tal que expp esta definida en todo TpM . Entonces, expp(B(0, r)) =Bd(p, r) ∀r > 0 (esto era conocido para radios geodesicos).
Demostracion. Fijemos r > 0. Que expp(B(0, r)) ⊂ Bd(p, r) es por definicion de distanciaasociada a g. Recıprocamente, si q ∈ Bd(p, r) entonces el Lema 3.3.1 implica que ∃γgeodesica minimizante, uniendo p con q y p.p.a. Ası γ se escribe γ(t) = expp(tγ ′(0)) luegoq = γ(d(p, q)) = expp(d(p, q)γ
′(0)) ∈ expp(B(0, r)). 2
Lema 3.3.3 Sea γ : [0, t0[→ M una geodesica tal que ∃q = lımt→t−0γ(t) ∈ M . Entonces,
γ puede extenderse como geodesica a [0, t0 + ε[ para cierto ε > 0, con γ(t0) = q.
Demostracion. Claramente podemos suponer γ p.p.a. Tomemos un entorno totalmentenormal W de q, con radio asociado δ > 0. Como la curva γ : [0, t0] →M dada por
γ(t) =
γ(t) si 0 ≤ t < t0q si t = t0
es continua y γ(t0) = q ∈ W que es abierto, ∃t1 ∈ [0, t0[ tal que γ(]t1, t0]) ⊂ W . Comoq = lımt→t−0
γ(t), podemos tomar t′ ∈]t1, t0[ tal que d(γ(t′), q) ≤ δ2 . Como γ(t′) ∈ W y
este es un entorno totalmente normal, B(γ(t′), δ) es bola geodesica. Por tanto, todas lasgeodesicas radiales saliendo de γ(t′) estan definidas al menos, en ] − δ, δ[. Como γ es unade ellas salvo una traslacion de parametro, γ estara definida en [t′, t′ + δ] y minimiza la

3.3. COMPLETITUD. EL TEOREMA DE HOPF-RINOW. 89
longitud de γ(t′) a γ(t′ + δ). Como d(γ(t′), q) ≤ δ2 , en particular γ esta definida en t0,
donde toma el valor q. 2
Teorema 3.3.1 (Hopf-Rinow, 1931) Sea (M, g) una V.R. conexa. Entonces, son equiv-alentes:
1. (M, g) es completa.
2. ∀p ∈M , expp esta definida en todo TpM .
3. ∃p ∈M tal que expp esta definida en todo TpM .
4. La familia de compactos de M coincide con la familia de cerrados y d-acotados.
Ademas, cualquiera de los puntos anteriores implica que ∀p, q ∈ M existe una geodesicaminimizante que une p con q.
Demostracion.
1 ⇒2. Sea p ∈ M . Probar que expp esta definida en todo TpM equivale a demostrarque ∀v ∈ TpM con ‖v‖ = 1, la geodesica γ(t) = expp(tv) esta definida en todoR. Supongamos entonces que para un v ∈ TpM con ‖v‖ = 1, γ(t) esta definida en[0, t0[ pero no en t0 (al menos esta definida en un entorno de cero). Si probamosque ∃ lımt→t−0
γ(t) ∈M , entonces el Lema 3.3.3 producira la contradiccion buscada.Sea tkk ⊂ [0, t0[ con tk t0. γ(tk)k es de Cauchy porque d(γ(tk), γ(tl)) ≤L(γ)tltk = |tk − tl|. Como (M, g) es completa, γ(tk)k es convergente luego ∃q ∈ Mtal que γ(tk) → q cuando k → ∞. Para probar que lımt→t−0
γ(t) = q, veremos que
lımt→t−0d(γ(t), q) = 0: Fijo t ∈ [0, t0[. Entonces, d(γ(t), γ(tk)) ≤ L(γ)tkt = |t − tk |.
Tomando k → ∞, tendremos d(γ(t), q) ≤ |t − t0|, y esto es cierto ∀t ∈ [0, t0[. Portanto 0 ≤ lımt→t−0
d(γ(t), q) ≤ lımt→t−0|t− t0| = 0 luego lımt→t−0
γ(t) = q.
2 ⇒3. Evidente.
3 ⇒4. En un espacio metrico, todo compacto es cerrado y acotado. Recıprocamente, siA ⊂M es cerrado y acotado, entonces A ⊂ Bd(p, R) para cierto R > 0 (p es el puntode M donde suponemos que expp esta definida en todo TpM). Por el Lema 3.3.2,Bd(p, R) = expp(B(0, R)) ⊂ expp(B(0, R)). Como expp(B(0, R)) es imagen continuade un compacto, tambien es compacto. Como A es cerrado dentro de un compacto,tambien sera compacto.
4 ⇒1. Sea pkk de Cauchy. Como pkk es acotada, ∃R > 0 tal que pkk ⊂ Bd(p, R),que es compacto (p es cualquier punto de M). Por tanto, pkk admite una parcialconvergente. Pero una sucesion de Cauchy con una parcial convergente es ella mismaconvergente.

90 CAPITULO 3. GEOMETRIA Y CURVATURA.
Finalmente, la ultima afirmacion del Teorema 3.3.1 es consecuencia de Lema 3.3.1. 2
Corolario 3.3.1 En una variedad diferenciable compacta, toda metrica es completa.
(El recıproco es cierto: Teorema de Nomizu-Ozeki).
Corolario 3.3.2 El plano hiperbolico (H2, g) es una variedad completa.
Demostracion. Basta aplicar el Teorema de Hopf-Rinow y que ∀p ∈ H2, la exponencialexpp esta definida en todo TpH2. 2
Corolario 3.3.3 Si O es un abierto no trivial de una V.R. conexa (M, g), entonces (O, g)no es completa.
Demostracion. Como M es conexa y O es un abierto no trivial, ∃p ∈ ∂O. Sea B(p, r) unabola geodesica de (M, g) y sea q ∈ B(p, r) ∩ O. Como B(p, r) es bola geodesica, existeγ : [0, 1] → M geodesica con γ(0) = p, γ(1) = q. Reparametrizo γ por α(t) = γ(1 − t), ytenemos una nueva geodesica de (M, g). Como α(0) = q ∈ O y O es abierto, ∃ε > 0 talque α([0, ε[) ⊂ O. Ası, α : [0, ε[→ O es geodesica de (O, g) que no esta definida para t = 1.Por el Teorema de Hopf-Rinow, (O, g) no puede ser completa. 2
Corolario 3.3.4 Sea φ : (M1, g1) → (M2, g2) una isometrıa local. Si (M1, g1) es completa,entonces (M2, g2) tambien es completa.
Demostracion. Por el Teorema de Hopf-Rinow, basta encontrar p2 ∈ M2 tal que expp2esta definida en todo Tp2M2. Tomamos p2 ∈ φ(M1) y usamos que φ lleva geodesicas engeodesicas por ser isometrıa local. Como las geodesicas de (M1, g1) estan definidas en todoR, tambien lo estaran las geodesicas de (M2, g2) radiales en p2. 2
Corolario 3.3.5 (M1 × M2, g1 × g2) es completa si y solo si (M1, g1) y (M2, g2) soncompletas.
Demostracion. Es consecuencia del Teorema de Hopf-Rinow y de que toda geodesica dela metrica producto es de la forma γ = (γ1, γ2) con γi geodesica en (Mi, gi), i = 1, 2. 2
Definicion 3.3.2 Una curva α : [0,∞[→ M se dice divergente si ∀C ⊂ M compacto,∃t0 ≥ 0 tal que α(]t0,∞[)∩ C = Ø (este concepto solo depende de la topologıa de M).

3.4. VARIEDADES CON CURVATURA SECCIONAL CONSTANTE. 91
Si g es una metrica Riemanniana sobre M y α es C∞ a trozos, siempre ∃ lımt→∞ L(α)t0 ∈[0,∞]. A este lımite lo llamamos la longitud de α.
Corolario 3.3.6 (M, g) es completa si y solo si toda curva divergente tiene lontigud in-finita.
Demostracion. Si suponemos (M, g) completa y α[0,∞[→ M es una curva divergentecon longitud finita L(α), entonces la traza de α se queda contenida en Bd(α(0), L(α)),que es compacto por el Teorema de Hopf-Rinow. Esto contradice que α sea divergente.Recıprocamente, supongamos por reduccion al absurdo que (M, g) no es completa. Porel Teorema de Hopf-Rinow, ∃(p, v) ∈ TM tal que γ(t) = expp(tv) esta definida en [0, t0[pero no en t0 ∈ R+. γ es una curva de longitud L(γ) = t0‖v‖ <∞ luego por hipotesis nopuede ser divergente. Por tanto, ∃C ⊂M compacto y ∃tk ⊂ [0, t0[ con tk t0 tales queγ(tk) ∈ C ∀k. Como C es compacto, γ(tk)k tiene una parcial convergente a un puntoq ∈ C. Usando los argumentos de la demostracion del Lema 3.3.3 tendremos que γ puedeextenderse mas alla de t0, contradiccion. 2
3.4. Variedades con curvatura seccional constante.
En esta Seccion estudiaremos las V.R. con c.s.c. k ∈ R. Veremos que en el caso completoy simplemente conexo, solo hay treos modelos para estas geometrıas. Tambien obtendremosinformacion para topologıas mas complicadas, vıa espacios recubridores.
Teorema 3.4.1 (Cartan) Sean (Mn, g), (Mn, g) dos V.R. con tensores de curvatura re-spectivos R, R. Sean p ∈ M, p ∈ M e I : (TpM, gp) → (TpM, gp) una isometrıa vectorial.Supongamos ademas que para ciertos r > 0, k ∈ R se tienen
1. B(p, r) es bola geodesica en (M, g).
2. expp esta definida en B(0, r) ⊂ TpM (no es necesariamente difeomorfismo sobre suimagen).
3. Rγ(X, γ ′)γ ′ = k[‖γ ′‖2X − gγ(X, γ ′)γ ′
], Rγ(X, γ
′)γ ′ = k[‖γ ′‖2X − gγ(X, γ
′)γ ′],
∀γ, γ geodesicas radiales en B(p, r) y en expp(B(0, r)) y ∀X ∈ X(γ), X ∈ X(γ)respectivamente.
Entonces, la aplicacion φ = expp I (expp)−1 : (B(p, r), g) → (M, g) es una isometrıa
local con dφp = I.

92 CAPITULO 3. GEOMETRIA Y CURVATURA.
Demostracion. φ es C∞ por composicion. Fijemos q ∈ B(p, r) y veamos que dφq es unaisometrıa vectorial. Basta entonces probar que
‖dφp(w)‖ = ‖w‖, (3.3)
∀w ∈ TqM . Como B(p, r) es bola geodesica, ∃!v ∈ B(0, r) ⊂ TpM tal que expp v = q.
Consideremos la geodesica p.p.a. γ(t) = expp(t v‖v‖
)en (M, g), que esta definida el menos
en [0, ‖v‖] (tiene imagen contenida en B(p, r)). Sea γ(t) = expp(tI( v
‖v‖)), t ∈ [0, ‖v‖],
geodesica en (M, g). Entonces,
γ(0) = p, γ(‖v‖) = q,
γ = φ γ, γ(0) = p y γ ′(0) = I( v‖v‖) (en particular, γ tambien es p.p.a.).
Probaremos (3.3) dividiendolo en dos casos.
Caso I: w, γ ′(‖v‖) son linealmente dependientes.
Pongamos w = λγ ′(‖v‖), λ ∈ R. Entonces, dφ(w) = λdφq(γ ′(‖v‖)) = λ(φ γ)′(‖v‖) =λγ ′(‖v‖). Tomando normas, ‖dφq(w)‖ = |λ| = ‖w‖.
Caso II: w, γ ′(‖v‖) son ortogonales.
Por el Lema de Gauss, puedo ver w como vector tantente en q a la esfera geodesicaS(p, ‖v‖). Por tanto, ∃v(s) :]− ε, ε[→ TpM tal que ‖v(s)‖ = ‖v‖, v(0) = v, (expp v)′(0) =w. Ası, s 7→ (I v)(s) es una curva en B(0, r) ⊂ TpM luego tienen sentido las superficiesparametrizadas f : [0, ‖v‖]×]− ε, ε[→M , f : [0, ‖v‖]×]− ε, ε[→ M dadas por
f(t, s) = expp
(tv(s)‖v‖
), f(t, s) = expp
(t(I v)(s)
‖v‖
)= (φ f)(t, s).
Como f, f son variaciones por geodesicas de γ, g, el Lema 2.10.1 asegura que los respectivoscampos variacionales V, V de f, f son campos de Jacobi a lo largo de γ, γ. Como f, f sonpropias en p, p tenemos V (0) = V (0) = 0. Veamos que V ⊥ γ ′ y V ⊥ γ ′:
gγ(t)(V (t), γ ′(t)) = gγ(t)
((∂f
∂s
)
(t,0),
(∂f
∂t
)
(t,0)
)(∗)= gp
(tv′(0)‖v‖ ,
v
‖v‖
)= 0
donde en (∗) hemos usado el Lema de Gauss. Para ver que V ⊥ γ ′ el razonamiento esel mismo, pero ademas usamos que I es una isometrıa vectorial (el penultimo termi-no sale gp
(t I(v
′(0))‖v‖ , I(v)‖v‖
)). Por otro lado, V (‖v‖) =
(∂f∂s
)(‖v‖,0)
= ddt
∣∣∣0expp(v(s)) =
(expp v)′(0) = w, luego V (‖v‖) = dφp(V (‖v‖)) = dφq(w). Ası, (3.3) se reduce en estecaso a comprobar
‖V (‖v‖)‖ = ‖V (‖v‖)‖. (3.4)

3.4. VARIEDADES CON CURVATURA SECCIONAL CONSTANTE. 93
La hipotesis 3 nos dice que los tensores de curvatura de (M, g) y (M, g) se comportansobre direcciones radiales en p, p como los tensores de curvatura de una variedad de c.s.c.k (con la misma cte. para ambas). En particular, esto es cierto a lo largo de γ, g. Portanto, ahora podemos usar la descripcion de los campos de Jacobi en una geodesica p.p.a.de una V.R. con c.s.c. k ∈ R que hicimos en la pagina 60 y ss. Usando esto, que γ, γ sonp.p.a. y que V, V son ortogonales a γ ′, γ ′ con V (0) = V (0) = 0, tenemos
V (t) = Sk(t)P (t), V (t) = Sk(t)P (t),
donde Sk se definio en (2.29) y P (t), P (t) son los unicos campos paralelos a lo largode γ, γ con P (0) = DV
dt (0) y P (0) = DVdt (0). Ası, ‖V (‖v‖)‖ = |Sk(‖v‖)|‖P (‖v‖)‖ =
|Sk(‖v‖)|‖P (0)‖ = |Sk(‖v‖)|∥∥∥DVdt (0)
∥∥∥ y analogamente ‖V (‖v‖)‖ = |Sk(‖v‖)|∥∥∥DVdt (0)
∥∥∥ Por
tanto, el Teorema estara probado si vemos que∥∥∥DVdt (0)
∥∥∥ =∥∥∥DVdt (0)
∥∥∥.
DV
dt(0) =
D
∂t
∣∣∣∣t=0
d
ds
∣∣∣∣t=0
expp
(tv(s)‖v‖
)=D
∂t
∣∣∣∣t=0
t(d expp)t v‖v‖
(v′(0)‖v‖
).
Llamando X(t) = (d expp)t v‖v‖
(v′(0)‖v‖
), tenemos
DV
dt(0) =
D
∂t
∣∣∣∣t=0
tX(t) = X(0) = (d expp)0(v′(0)‖v‖
)=v′(0)‖v‖ .
Con V podemos hacer lo mismo, de donde DVdt (0) = (d expp)0
(I(v
′(0)‖v‖ )
)= I
(v′(0)‖v‖
). Como
I es una isometrıa, concluımos que∥∥∥DVdt (0)
∥∥∥ =∥∥∥DVdt (0)
∥∥∥. 2
Corolario 3.4.1 Dos V.R. con la misma dimension y con la misma c.s.c. son localmenteisometricas.
Por ejemplo, un plano y un cilindro de R3 son localmente isometricos, y lo mismo pasacon un plano y un toro cociente de R2 por dos traslaciones linealmente independientes.Notese que una esfera no puede localmente isometrica a un plano por el Teorema egregiumde Gauss, lo que justifica los distintos modos de proyectar mapas en cartografıa).
3.4.1. Espacios recubridores Riemannianos.
Recordemos que en Topologıa, un recubridor de espacio topologico (e.t.) (X, T ) es unpar (X, π) donde (X, T ) es un e.t. y π : X → X es una aplicacion continua y sobreyectivaque cumple: ∀x ∈ X , ∃Ux entorno abierto y arcoconexo de x tal que si π−1(Ux) =∪αVα es la descomposicion en arcocomponentes de π−1(Ux), entonces π|Vα : Vα → Ux

94 CAPITULO 3. GEOMETRIA Y CURVATURA.
es un homeomorfismo ∀α (Ux se llama entorno fundamental de x). Un automorfismodel recubridor π : X → X es un homeomorfismo ϕ : X → X que conmuta con π (esdecir, conserva las fibras). El conjunto de automorfismos del recubridor es un grupo conla composicion, al que llamaremos Aut(X, π). El recubridor se dice regular si ∃x0 ∈ X ,∃x0 ∈ π−1(x0) tales que π∗(π1(X, x0)) / π1(X, x0) (esto no depende de x,x0). Si X, π)es un recubridor regular de X , entonces el grupo π1(X,x0)
π∗(π1(X,x0))es isomorfo a Aut(X, π) y
biyectivo a π−1(x0). Por tanto,
#(hojas del recubridor) = #(Aut(X, π)).
Sea (Y, T ′) un e.t. arcoconexo y localmente arcoconexo, y G ≤ Homeo(Y, T ′) un subgrupo
de homeomorfismos que actua propia y discontiuamente sobre Y (i.e. ∀y ∈ Y ∃Uabto.
⊂ Yconteniendo a y, tal que ϕ(U) ∩ U = Ø ∀ϕ ∈ G − 1). Entonces, π : Y → Y/G es unrecubridor regular, donde la relacion de equivalencia sobre Y es
y ∼ y′ ⇐⇒ ∃ϕ ∈ G | ϕ(y) = y′.
Ademas, G = Aut(Y, π). Este resultado topologico, junto con el Teorema 1.4.1, implican
Proposicion 3.4.1 Sea (Mn, g) una V.R. y G ⊂ Iso(M, g) un subgrupo que actua propiay discontinuamente. Entonces, π : (M, g) → (M/G, g′) es un recubridor regular.
Teorema 3.4.2 Sea M una variedad diferenciable y (M, π) un recubridor topologico deM . Entonces,
1. ∃! estructura diferenciable sobre M que hace a π difeomorfismo local. Ademas,Aut(M, π) ⊂ Difeom(M) para esta estructura diferenciable.
2. Si g es una metrica Riemanniana sobre M , entonces ∃! metrica Riemanniana g sobreM que convierte a π : (M, g) → (M, g) en isometrıa local. Ademas, Aut(M, π) ⊂Iso(M, g) (a g se le llama la metrica del recubrimiento).
3. Si (M, g) es completa, entonces (M, g) tambien lo es.
Demostracion. Veamos 1: Para definir una estructura diferenciable en M que haga a πdifeomorfismo local, se considera un punto p ∈ M . Usando la trivializacion local delrecubridor, podemos restringir π a un abierto de M conteniendo a p como homeomorfismosobre su imagen, y luego componerla con una carta en M definida dentro de dicha imagen(con abierto coordenado que contenga a π(p)), y luego variar p en M . Esto producira unatlas con cambios de cartas diferenciables (los cambios de cartas son los de M), quea su vez genera una estructura diferenciable D sobre M que hace a π difeomorfismo

3.4. VARIEDADES CON CURVATURA SECCIONAL CONSTANTE. 95
local. La unicidad se deduce de que si otra estructura diferenciable D′ sobre M hace a πdifeomorfismo local, entonces los cambios de cartas entre D y D′ han de ser diferenciables(escribir π localmente usando para bajarla una carta de D′ y otra de M).
Para probar 2, uno define para cada p ∈ M , gp = (dπp)∗(gπ(p)), que es producto escalar
porque dπp es difeomorfismo local. Usando trivializaciones locales es facil probar que g esC∞ , y por definicion π : (M, g) → (M, g) se hace isometrıa local. Para comprobar quetoda transformacion φ del recubridor se hace isometrıa de g, basta pasar a diferenciales laigualdad π φ = π y usar que π es isometrıa local.
Por ultimo, supongamos que (M, g) es completa y sea p ∈ M . Dado v ∈ TpM , lageodesica γ(t) = expp(tv) esta definida, al menos, en un entorno de cero. Como (M, g) escompleta, la geodesica γ(t) = expπ(p)(tdπp(v) esta definida en todo R. Usamos la propiedad
de levantamiento de curvas del recubridor para levantar γ a γ : R → M con condicionincial γ(0) = p. Como π es isometrıa local, γ es geodesica de (M, g), y por unicidad de lasgeodesicas coincide con γ en un entorno de 0. Por el Teorema de Hopf-Rinow, (M, g) escompleta. 2
Veamos una especie de recıproco del apartado 2 del Teorema 3.4.2.
Teorema 3.4.3 Sea φ : (M, g) → (M, g) una isometrıa local entre dos V.R., siendo(M, g) completa. Estonces, (M, φ) es un recubridor de M .
Demostracion. Notemos que (M, g) es completa, ya que (M, g) lo es y φ es isometrıa local(Corolario 3.3.4).
Veamos que φ es sobreyectiva: Fijemos p ∈ M y sea q ∈M . Como (M, g) es completa,el Teorema de Hopf-Rinow asegura que ∃γ : [0, L] → M geodesica p.p.a. y minimizantecon γ(0) = p, γ(L) = q. Sea γ : R → M la unica geodesica con condiciones inicialesγ(0) = p, γ ′(0) = (dφp)
−1(γ ′(0)) ∈ TpM . Como φ es isometrıa local, φ γ es una geodesicade M y por unicidad de geodesicas, φ γ = γ. Ası, q = φ(γ(L)) ∈ φ(M).
Ahora veamos que φ admite entornos fundamentales y sera una proyeccion recubridora.
Afirmacion 3.4.1 Sea p ∈ M y R > 0 es radio geodesico en p entonces R es radiogeodesico en cada punto de φ−1(p) y φ : B(p, R) → B(p, R) es un difeomorfismo.
Demostracion de la Afirmacion 3.4.1. Consideremos la bola metrica Bd(p, R). Como φ
es isometrıa local no puede aumentar las distancias, luego φ(Bd(p, R)) ⊂ Bd(p, R) =
B(p, R) (esta ultima igualdad se da por la Afirmacion 3.1.2). Sean B(0, R),B(0, R) lasbolas centradas en el origen y de radio R en (TpM, gp), (TpM, gp) respectivamente.

96 CAPITULO 3. GEOMETRIA Y CURVATURA.
B(0, R) -dφp B(0, R)
?
expp
?
expp (difeom.)
Bd(p, R) B(p, R)
→ ↓ es difeomorfismo luego ↓→ tambien lo es. En particular, expp : B(0, R) → Bd(p, R)
es inyectiva. Tambien es sobreyectiva por ser (M, g) completa (Lema 3.3.2). Pasando adiferenciales el diagrama anterior, expp es difeomorfismo local, luego es un difeomorfismo.Por ultimo, el diagrama implica que φ tambien es difeomorfismo.
Afirmacion 3.4.2 Sea p ∈ M y R > 0 tal que 2R es radio geodesico en p. Entonces,B(p, R) es un entorno fundamental de p.
Demostracion de la Afirmacion 3.4.2. Por la Afirmacion 3.4.1, φ : B(p, 2R) → B(p, 2R)es un difeomorfismo, ∀p ∈ φ−1(p). Veamos que
φ−1(B(p, r)) = ∪p∈φ−1(p)B(p, r) (union disjunta)
Dados p1, p2 ∈ φ−1(p) con B(p1, R) ∩ B(p2, R) 6= Ø, ∃x ∈ B(p1, R) ∩ B(p2, R)luego d(p1, p2) ≤ d(p1, x) + d(x, p2) < 2R. Por tanto, p1, p2 ∈ B(p1, 2R) tienen lamisma imagen por φ luego p1 = p2.
Sea x ∈ φ−1(B(p, R)). Ası x = φ(x) ∈ B(p, R) (bola geodesica) luego ∃! geodesicaminimizante y p.p.a. γ : [0, L] → M con γ(0) = p, γ(L) = x. Definimos β : [0, L] →M por β(t) = γ(L− t) (geodesica p.p.a.). Considero la ! geodesica β : R → M conβ(0) = x, β′(0) = (dφx)
−1(β′(0)). φ β es geodesica en (M, g) (φ es isometrıa local),y tiene las mismas condiciones iniciales que β luego φ β = β. Ası β(L) ∈ φ−1(p)luego d(β(L), x) ≤ L(β)L0 = L = L(γ)L0 = d(p, x) < R, de donde x ∈ B(β(L), R), yhemos probado que φ−1(B(p, R)) ⊂ ∪p∈φ−1(p)B(p, R).
Que ∪p∈φ−1(p)B(p, R) ⊂ φ−1(B(p, R)) es consecuencia de que φ no aumenta lasdistancias por ser isometrıa local.
2
Corolario 3.4.2 Sea φ : (M, g) → (M, g) una isometrıa local entre dos V.R., siendo(M, g) completa y π1(M) = 0. Estonces, φ es una isometrıa.
Corolario 3.4.3 Sea φ : M → M un difeomorfismo local entre dos variedades difer-enciables, siendo M compacta. Entonces, φ es una proyeccion recubridora. Si ademasπ1(M) = 0, entonces φ es un difeomorfismo.

3.4. VARIEDADES CON CURVATURA SECCIONAL CONSTANTE. 97
3.4.2. Clasificacion de las V.R. de c.s.c.
Teorema 3.4.4 (Cartan) Sea (Mn, g) (n ≥ 2) una V.R. completa, simplemente conexay con c.s.c. k ∈ R. Entonces, (M, g) es isometrica a la variedad modelo (Mn(k), gk) dadapor
(Mn(k), gk) =
(Sn( 1√
k), gk = i∗〈, 〉
)si k > 0,
(Rn, g0 = 〈, 〉) si k = 0,(Hn, gk = 1√
−k g−1
)si k < 0,
donde g−1 es la metrica estandar en Hn con c.s.c. −1.
Demostracion. Supongamos k ≤ 0.Fijemos x ∈ Mn(k), p ∈M y sea I : (TxMn(k), (gk)x) → (TpM, gp) una isometrıa vectorial.Tomando r = +∞ en el Teorema local de Cartan (notese que (M, g) es completa yB(x,+∞) = Mn(k) es bola geodesica por ser k ≤ 0), deducimos que φ = expp I (expx)
−1 : (Mn(k), gk) → (M, g) es una isometrıa local. Como (Mn(k), gk) es completa yπ1(M) = 0, el Corolario 3.4.2 implica que φ es una isometrıa.Supongamos k > 0.Fijemos x ∈ Mn(k) = Sn( 1√
k). El mayor radio geodesico que podemos tomar es π√
k, que
hace B(x, π√k) = Sn( 1√
k) − −x. Fijemos p ∈ M y tomando r = π√
ken el Teorema
local de Cartan (notese que (M, g) es completa), deducimos que φ = expp I (expx)−1 :(Sn( 1√
k)−−x, gk) → (M, g) es una isometrıa local. Tomando ahora y ∈ Sn( 1√
k)−±x y
repitiendo el razonamiento con los puntos y en Sn( 1√k) y p1 = φ(y) ∈M y con la isometrıa
vectorial I1 = dφy , construiremos otra isometrıa local ψ : (Sn( 1√k) − −y, gk) → (M, g),
que cumple ψ(y) = φ(y), dψy = dφy. Por tanto, φ, ψ son isometrıas locales de (Sn( 1√k) −
−x,−y, gk) en (M, g). Como Sn( 1√k) − −x,−y es conexa (n ≥ 2), el Corolario 3.2.2
implica que φ = ψ en Sn( 1√k) − −x,−y. Esto implica que definiendo ℵ : Sn( 1√
k) → M
mediante ℵ|Sn( 1√
k)−−x = φ, ℵ(−x) = ψ(−x), tendremos que ℵ es una isometrıa local de
(Sn( 1√k), gk) en (M, g). Como la primera V.R. es completa y la segunda es simplemente
conexa, ψ sera una isometrıa (Corolario 3.4.2). 2
Corolario 3.4.4 Sea (Mn, g) (n ≥ 2) una V.R. completa con c.s.c. k ∈ R. Entonces∃Γ subgrupo de Iso(Mn(k), gk) actuando diferenciable, propia y discontinuamente sobreMn(k), de forma que (Mn, g) es isometrica a (Mn(k)/Γ, gk/Γ). Ademas, Γ es isomorfo aπ1(M).
Demostracion. Levantando g al recubridor universal M de M tendremos una V.R. (M, g)completa y con c.s.c. k. Por el Teorema global de Cartan, (M, g) es isometrica a (Mn(k), gk).

98 CAPITULO 3. GEOMETRIA Y CURVATURA.
Por tanto, π : (Mn(k), gk) → (M, g) es una proyeccion recubridora y una isometrıa local.Sea Γ el grupo de automorfismos del recubridor (Mn(k), π) de M . Por el apartado 2 delTeorema 3.4.2, Γ es un subgrupo de Iso(Mn(k), gk). En particular Γ actua diferenciable-mente sobre Mn(k). En general, si (X, π) es un recubridor de X , entonces Aut(X, π) actuapropia y discontinuamente sobre X. Aplicando este resultado topologico, tenemos que Γactua propia y discontinuamente sobre Mn(k).
Como cada transformacion del recubridor (Mn(k), π) es isometrıa de gk, tenemos quegk es proyectable a Mn(k)/Γ (Teorema 1.4.1) y la proyeccion canonica π1 : (Mn(k), gk) →(Mn(k)/Γ, gk/Γ) es una isometrıa local.
Dados x, y ∈ Mn(k) se tiene π(x) = π(y) si y solo si x, y estan en la misma fibra por π.Como la accion de Γ = Aut(Mn(k), π) sobre Mn(k) es transitiva7, lo ultimo equivale a que∃φ ∈ Γ tal que φ(x) = y. De aquı deducimos que π(x) = π(y) si y solo si π1(x) = π1(y),luego por resultados de Topologıa general ∃H : Mn(k)/Γ → M homeomorfismo que cumpleH π1 = π. Anadiendo las metricas gk sobre Mn(k), gk/Γ sobre Mn(k)/Γ y g sobre M ,H se convierte en una isometrıa. Por ultimo, el que (Mn(k), π) sea un recubridor regularimplica que Γ = Aut(Mn(k), π) es isomorfo como grupo a π1(M)
π∗(π1(Mn(k)))
= π1(M). 2
En algunos casos particulares, el grupo Γ del Corolario 3.4.4 es controlable:
Corolario 3.4.5 Sea (Mn, g) una V.R. completa, con c.s.c. k > 0 y n par. Entonces,(Mn, g) es isometrica a (Sn( 1√
k), gk) o a (RPn, gk).
Demostracion. Por el Corolario 3.4.4, ∃Γ subgrupo de Iso(Sn( 1√k), gk) actuando diferencia-
ble, propia y discontinuamente sobre Sn( 1√k) tal que (Mn, g) es isometrica a (Sn( 1√
k)/Γ, gk/Γ).
Solo resta ver que se reduce a Γ = In+1 o a ±In+1.Sea A ∈ Γ − In+1. Entonces ∃P ∈ O(n+ 1,R) tal que
P t ·A · P =
Ir−Is
B1
. . .Bk
, donde Bi =
(cos θi − sen θisen θi cos θi
)(3.5)
para cierto θi ∈]0, 2π[, 1 ≤ i ≤ k. Como Γ actua propia y discontinuamente y A 6= In+1,A no puede tener puntos fijos luego r = 0. Esto implica que det(A) = (−1)s. Como n espar, el orden de A es impar luego s es impar y det(A) = −1. Veamos que A = −In+1 yhabremos terminado: Como A2 ∈ Γ y det(A2) = 1, el razonamiento anterior prueba queA2 = In+1. Usando (3.5), tenemos Bi = I2 luego θi = π y Bi = −I2 ∀i = 1, . . . , k. Portanto, A = −In+1. 2
7Ya que esto equivale a que el recubridor π : Mn(k) → M sea regular.

3.5. VARIEDADES DE CURVATURA NEGATIVA. 99
3.5. Variedades de curvatura negativa.
Lema 3.5.1 Sea γ : [a, b] → M una geodesica en una V.R. Supongamos que la curvaturaseccional K(Πt) de cada plano Πt ⊂ Tγ(t)M conteniendo a γ ′(t) es menor o igual que cero,∀t ∈ [a, b]. Entonces, b no es valor conjugado de a a lo largo de γ.
Demostracion. Sea V ∈ Jγ,0 (ver definicion 2.10.2). Basta probar que V = 0 en [a, b].Consideremos la funcion f = 1
2‖V ‖ ∈ C∞([a, b]). Ası f ′ = 〈DVdt , V 〉 y usando la ecuacionde Jacobi, f ′′ = ‖DVdt ‖
2 − R(V, γ′, γ ′, V ) ≥ −R(V, γ ′, γ ′, V ), donde R es el tensor de cur-vatura de 4 variables. Si V (t), γ ′(t) son linealmente dependientes para un t ∈ [a, b], en-tonces R(V, γ′, γ ′, V )(t) = 0. Y si V (t), γ ′(t) son linealmente independientes, entoncesR(V, γ ′, γ ′, V )(t) = ‖γ∧γ ′‖2(t)K(Πt) ≤ 0, donde Πt es el plano generado por V (t), γ ′(t)en Tγ(t)M . El cualquier caso, f ′′ ≥ 0 en [a, b] luego f ′ es no decreciente. Pero f ′(a) =f ′(b) = 0 luego f ′ = 0 en [a, b] y ‖V ‖2 es constante en [a, b]. Como V (a) = 0, tenemos‖V ‖ = 0 en [a, b]. 2
Teorema 3.5.1 (Cartan-Hadamard) Si (Mn, g) es una V.R. completa, simplementeconexa y con curvatura seccional K ≤ 0 (en todo punto y para cada plano), entonces Mes difeomorfa a Rn.
Demostracion. Sea p ∈ M . Por el Teorema de Hopf-Rinow, expp esta definida en todoTpM . Por el Lema 3.5.1, ninguna geodesica radial en p tiene valores conjugados de cero.Por el Corolario 2.10.2, expp : TpM →M no tiene puntos crıticos luego es un difeomorfismolocal. Consideremos la metrica Riemanniana g = (expp)
∗g sobre TpM , que hace a expp :(TpM, g) → (M, g) una isometrıa local. Veamos que (TpM, g) es completa: dado v ∈ TpM ,consideremos la recta vectorial γ : R → TpM dada por γ(t) = tv. Como t 7→ expp(γ(t)) esgeodesica en (M, g) y expp es isometrıa local, γ es geodesica de (TpM, g). Por el Teorema deHopf-Rinow, (TpM, g) es completa. Como π1(M) = 0, el Corolario 3.4.2, expp : (TpM, g) →(M, g) es una isometrıa. 2
Corolario 3.5.1 Toda V.R. completa con curvatura seccional K ≤ 0 es difeomorfa a uncociente de Rn por un subgrupo del grupo de difeomorfismos de este, actuando diferenciable,propia y discontinuamente.
Demostracion. Aplicar al recubridor universal de M el Teorema de Cartan-Hadamard. 2

100 CAPITULO 3. GEOMETRIA Y CURVATURA.
3.6. Variaciones de la energıa.
Terminaremos este tema como empezamos el Tema 1, haciendo una pequena incursionen el Calculo de Variaciones. En una V.R., las geodesicas son curvas diferenciables conaceleracion intrınseca nula, y sabemos que minimizan localmente la longitud. Una preguntaclave es
¿Hasta donde minimiza la longitud una geodesica?
Por otro lado, la lontigud no es un buen funcional para estudiar geodesicas, porque no dis-tingue reparametrizaciones. La energıa es un funcional muy similar a la longitud, pero conla propiedad de que distingue reparametrizaciones. Estudiaremos las formulas de variacionde la energıa, caracterizaremos las geodesicas como los puntos crıticos de este funcional, yestudiaremos su hessiano deduciendo dos teoremas para V.R. curvadas positivamente. Alo largo de toda esta Seccion, (Mn, g) denotara una V.R. de dimension n.
Sea α : [a, b] −→ M una curva C∞ a trozos, con particion asociada t0 = a < t1 <. . . < tk = b. El campo tangente α′ esta definido unıvocamente salvo en los vertices de laparticion, donde tenemos dos posibilidades:
α′(t−i ) =d
dt
∣∣∣∣ti
(α|[ti−1,ti])(t), α′(t+i ) =
d
dt
∣∣∣∣ti
(α[ti,ti+1])(t) ∈ Tα(ti)M.
La longitud de α estaba definida como L(α) =∫ ba ‖α′(t)‖ dt =
∑ki=1
∫ titi−1
‖α′(t)‖ dt.
Definicion 3.6.1 En la situacion anterior, se define la energıa de α respecto de g como
E(α) =k∑
i=1
∫ ti
ti−1
‖α′(t)‖2 dt =∫ b
a‖α′(t)‖2 dt ∈ [0,∞[.
¿Que relacion hay entre la energıa y la longitud?
Proposicion 3.6.1 Para una curva C∞ a trozos α : [a, b] → M , L(α)2 ≤ (b − a)E(α),con igualdad si y solo si α esta parametrizada proporcionalmente al arco.
Demostracion. Aplicar a las funciones f = 1, h = ‖α′‖ la desigualdad de Schwarz enel espacio vectorial metrico euclıdeo (L2([a, b]), (, )L2) con el producto escalar (f, h)L2 =∫ ba fh dt (ojo: h esta definida salvo en los vertices de la particion, pero esto no impide que
este en L2([a, b])). 2
Nota 3.6.1 De la demostracion anterior se deduce que si α es C∞ a trozos y L(α)2 =(b − a)E(α), entonces ‖α′‖ es constante en [a, b] (incluidos los vertices de la particion).Si (M, g) = (Rn, g0), esto no quiere decir que α sea un trozo de recta: puede ser unalınea poligonal cuyos segmentos se recorren todos con la misma velocidad. En particular,la igualdad L(α)2 = (b− a)E(α) no implica que α sea diferenciable.

3.6. VARIACIONES DE LA ENERGIA. 101
Como consecuencia de la Proposicion 3.6.1, tenemos el siguiente
Corolario 3.6.1
i) Si γ : [a, b] → M es una curva C∞ a trozos, parametrizada proporcionalmente al arcoy minimiza la longitud entre sus extremos (en particular, es una geodesica luego esC∞), entonces minimiza la energıa.
ii) Si γ : [a, b] → M es una geodesica que minimiza la longitud, y α : [a, b] → M esuna curva C∞ a trozos uniendo γ(a) con γ(b) y E(α) = E(γ), entonces α es unageodesica que minimiza la longitud (en particular, α es C∞).
Demostracion. Probemos i). Sea α : [a, b] −→M una curva C∞ a trozos con α(a) = γ(a)y α(b) = γ(b). Por la Proposicion 3.6.1,
E(γ)(A)=
1b− a
L(γ)2(B)
≤ 1b− a
L(α)2(C)
≤ E(α),
donde en (A) hemos usado que γ esta parametrizada proporcionalmente al arco y en (B)que γ minimiza la longitud. Esto prueba i).
En cuanto a ii), usando la cadena anterior de desigualdades y teniendo en cuenta queE(γ) = E(α), deducimos que las igualdades en (B) y en (C) deben darse. La igualdaden (B) implica que α minimiza la longitud, y la igualdad en (C) nos dice que ‖α′‖ esconstante en [a, b]. Ambas propiedades garantizan que α es una geodesica que minimizala longitud (Corolario 3.2.1). 2
Definicion 3.6.2 Sea α : [a, b] →M una curva C∞ a trozos, con particion t0 = a < . . . <tk = b. Una variacion de α es una aplicacion f : [a, b]×]− ε, ε[→M (siendo ε > 0) tal que
i) f es continua en [a, b]×]− ε, ε[,
ii) f |[ti−1,ti]×]−ε,ε[ es C∞ ∀i = 1, . . . , k,
iii) f(t, 0) = α(t), ∀t ∈ [a, b].
Dado s ∈] − ε, ε[, a la curva fs : [a, b] → M dada por fs(t) = f(s, t) se le llama unacurva longitudinal de la variacion. Todas las curvas longitudinales son C∞ a trozos, con lamisma particion que α. Para cada t ∈ [a, b] fijo, la curva ft :]−ε, ε[→M definida medianteft(s) = f(s, t) se llama curva transversal de la variacion, y son todas ellas C∞. Diremosque la variacion f es propia cuando todas las curvas longitudinales tienen los mismosextremos que γ. Como la restriccion de f a cada [ti−1, ti]×]ε, ε[ es C∞ (es una superficieparametrizada, podemos considerar los campos diferenciables a lo largo de f dados por
(∂f
∂t
)
(t,s)= (df)(t,s)(1, 0),
(∂f
∂s
)
(t,s)= (df)(t,s)(0, 1) ∈ Tf(t,s)M,

102 CAPITULO 3. GEOMETRIA Y CURVATURA.
para todo (t, s) ∈ [ti−1, ti]×]− ε, ε[. Llamando [a, b]∗ = [a, b]− t1, . . . , tk−1, tenemos que∂f∂t es C∞ en [a, b]∗×]−ε, ε[. Sin embargo, en los puntos (ti, s) tenemos dos expresiones para(∂f∂t
)(t,s)
, dependiendo de la banda usada para extender f y calcular su parcial respecto
de t. Distinguiremos estas derivadas laterales escribiendo
(∂f
∂t
)
(t−i ,s)=
∂
∂t
∣∣∣∣(ti,s)
(f |[ti−1,ti]×]−ε,ε[
),
(∂f
∂t
)
(t+i ,s)=
∂
∂t
∣∣∣∣(ti,s)
(f |[ti,ti+1]×]−ε,ε[
)∈ Tf(ti,s)M.
Sin embargo, ∂f∂s no plantea dificultades de definicion en todo [a, b]×]−ε, ε[, es un campo alo largo de f , continuo en su dominio y diferenciable en cada [ti−1, ti]×]−ε, ε[. Si evaluamoseste ultimo campo en (t, 0) obtendremos el campo variacional de f ,
V : [a, b] → TM / V (t) =(∂f
∂s
)
(t,0),
que es un campo continuo a lo largo de α, diferenciable en cada [ti−1, ti]. Esto es, V esun campo diferenciable a trozos a lo largo de α. Cuando la variacion es propia, el campovariacional se anula en los extremos.
Definicion 3.6.3 En la situacion anterior, un campo C∞ a trozos X a lo largo de α esuna aplicacion continua X : [a, b] → TM tal que X(t) ∈ Tα(t)M ∀t ∈ [a, b], para la queexiste una particion (que en principio no tiene porque coincidir con la particion asociada aα, pero tras un refinamiento comun sı coincide con esta) a = t0 < . . . < tk = b de maneraque X |[ti−1,ti] es C∞ ∀i. Llamaremos derivada covariante de X al campo diferenciable
DX
dt: [a, b]∗ → TM
/DX
dt(t) =
D (X |[ti−1, ti])dt
(t) si t ∈]ti−1, ti[
(no hay ambiguedad en esto ultimo).
Llamaremos
DX
dt(t−i ) =
D(X |[ti−1,ti]
)
dt(ti),
DX
dt(t+i ) =
D(X |[ti,ti+1]
)
dt(ti) ∈ Tγ(ti)M.
Proposicion 3.6.2 Sea α : [a, b] → M una curva C∞ a trozos y X un campo C∞ a trozosa lo largo de α (supondremos ambos con la misma particion asociada). Entonces, ∃ε > 0y ∃f : [a, b]×]− ε, ε[→M variacion de α (con la misma particion que α y X) cuyo campovariacional es X. Ademas, si X(a) = X(b) = 0, la variacion f puede elegirse propia.

3.6. VARIACIONES DE LA ENERGIA. 103
Demostracion. Dado t ∈ [a, b], tomemos un entorno totalmente normal Wt conteniendoa α(t). Cada Wt lleva asociado un δt > 0 tal que ∀q ∈ Wt, la bola metrica B(q, δt) esbola geodesica. Como la familia Wtt∈[a,b] es un recubrimiento por abiertos del compactoα([a, b]), podemos extraer un subrecubrimiento finito α([a, b]) ⊂ ∪ki=1Wti . En principio,estos ti no han de ser los vertices de la particion de α (y de X), pero podemos suponerque esto es cierto tras un refinamiento de la misma. Llamemos δ = mın(δt1 . . . . , δtk) > 0.Ası, B(α(t), δ) es bola geodesica para todo t ∈ [a, b] (en particular, expα(t) esta definidaen B(α(t), δ)).
Llamemos U = v ∈ TM / v ∈ Tα(t)M para algun t ∈ [a, b] y ‖v‖ < δ y sea m =maxt∈[a,b] ‖X(t)‖, que existe por ser X continuo en [a, b]. Sea ε > 0 tal que εm < δ. Paraeste ε, definimos
f : [a, b]×]− ε, ε[→M / f(t, s) = expα(t) sX(t),
aplicacion bien definida porque ∀t ∈ [a, b] tenemos sX(t) ∈ Tα(t)M y ‖sX(t)‖ < εm < δ.f es C∞ a trozos por ser composicion de (t, s) 7→ (α(t), sX(t)), C∞ a trozos, con laexponencial (p, v) 7→ expp v, diferenciable donde este definida. Claramente, la particionde f coincide con la de α y X . Es facil ver que f es una variacion de α, cuyo campovariacional viene dado por
(∂f
∂s
)
(t,0)= (df)(t,0)(0, 1) =
d
ds
∣∣∣∣0f(t, s) =
d
ds
∣∣∣∣0expα(t) sX(t)
=d
ds
∣∣∣∣0γ(1, α(t), sX(t)) =
d
ds
∣∣∣∣0γ(s, α(t), X(t)) = X(t),
donde hemos usado la notacion Lema de Homogeneidad. Es inmediato comprobar quecuando X(a) = X(b) = 0, la variacion f ası definida es propia. 2
Definicion 3.6.4 Sea f : [a, b]×] − ε, ε[→ M una variacion de una curva C∞ a trozosα : [a, b] →M . Se define la funcion energıa de la variacion f como
E :]− ε, ε[→ R/
E(s) = E(fs) =∫ b
a
∥∥∥∥(∂f∂t
)(t,s)
∥∥∥∥2
dt
(integral de Lebesgue en [a, b]).
El integrando anterior es derivable como funcion de s, luego un Teorema de derivacion deintegrales de funciones reales de variable real dependientes de un parametro nos aseguraque E = E(s) es derivable y su derivada se calcula integrando la derivada del integrando(donde esta tenga sentido, i.e. en [a, b]∗). A continuacion desarrollaremos la expresion dela derivada primera de E(s):

104 CAPITULO 3. GEOMETRIA Y CURVATURA.
Teorema 3.6.1 (Primera formula de variacion de la energıa)Sea α : [a, b] → M una curva C∞ a trozos con particion asociada t0 = a < . . . < tk = b yf : [a, b]×]− ε, ε[→M una variacion de α con campo variacional V . Entonces,
12dE
ds(0) = −
∫ b
a〈V, Dα
′
dt〉 dt+ 〈V (b), α′(b)〉 − 〈V (a), α′(a)〉+
k−1∑
i=1
〈V (ti), α′(t−i ) − α′(t+i )〉.
(3.6)
Demostracion. E(s) =∫ ba ‖(
∂f∂t )(t,s)‖
2dt =∑ki=1
∫ titi−1
‖(∂f∂t )(t,s)‖2dt. Derivando en el inte-
grando,
dE
ds(s) =
∑
i
∫ ti
ti−1
d
ds
∥∥∥∥(∂f∂t
)(t,s)
∥∥∥∥2dt = 2
∑
i
∫ ti
ti−1
〈(Dds∂f∂t
)(t,s)
,(∂f∂t
)(t,s)
〉dt.
= 2∑
i
∫ ti
ti−1
〈(Ddt∂f∂s
)(t,s)
,(∂f∂t
)(t,s)
〉dt
= 2∑
i
∫ ti
ti−1
ddt
〈(∂f∂s
)(t,s)
,(∂f∂t
)(t,s)
〉dt− 2
∑
i
∫ ti
ti−1
〈(∂f∂s
)(t,s)
,(Ddt∂f∂t
)(t,s)
〉dt
= 2∑
i
[〈(∂f∂s
)(t,s)
,(∂f∂t
)(t,s)
〉]ti
ti−1
− 2∫ b
a〈(∂f∂s
)(t,s)
,(Ddt∂f∂t
)(t,s)
〉dt (3.7)
(Esta ultima ecuacion anterior nos sera util para obtener la segunda formula de variacionde la energıa, ver Teorema 3.6.2). Evaluando (3.7) en s = 0,
12dE
ds(0) =
∑
i
[〈(∂f∂s
)(t,0)
,(∂f∂t
)(t,0)
〉]ti
ti−1
−∫ b
a〈(∂f∂s
)(t,0)
,(Ddt∂f∂t
)(t,0)
〉dt
=∑
i
[〈V (t), α′(t)〉
]titi−1
−∫ b
a〈V (t), Dα
′(t)dt 〉dt
= −∫ b
a〈V, Dα′
dt 〉 dt+[〈V (t1), α′(t−1 )〉 − 〈V (a), α′(a)〉
]
+k−1∑
i=2
[〈V (ti), α′(t−i )〉 − 〈V (ti−1), α′(t+i−1)〉
]+[〈V (b), α′(b)〉 − 〈V (tk−1), α′(t+k−1)〉
]
= −∫ b
a〈V, Dα′
dt 〉 dt+ 〈V (b), α′(b)〉 − 〈V (a), α′(a)〉+k−1∑
i=1
〈V (ti), α′(t−i ) − α′(t+i )〉.
2
Gracias a la primera formula de variacion de la energıa, podemos caracterizar las geodesicascomo los puntos crıticos del funcional energıa para variaciones propias:

3.6. VARIACIONES DE LA ENERGIA. 105
Corolario 3.6.2 Sea γ : [a, b] →M una curva C∞ a trozos. Entonces, γ es geodesica (enparticular, C∞) si y solo si para toda variacion propia f de γ, la funcion energıa E de fcumple dE
ds (0) = 0.
Demostracion. Supongamos primero que γ es geodesica, y examinemos los sumandos queaparecen en el miembro de la derecha de (3.6). El primer sumando vale cero porque γes geodesica; los sumandos segundo y tercero se anulan porque la variacion es propia yfinalmente, la sumatoria es cero porque γ es C∞.
Recıprocamente, llamemos a = t0 < . . . < tk = b a la particion asociada a γ. Elargumento se divide en tres partes: primero probaremos que γ|]ti−1,ti[ es geodesica ∀i, ensegundo lugar veremos que γ es de clase C1 en cada vertice ti, y terminaremos probandoque γ es geodesica en [a, b].
1. Tomemos una funcion h : [a, b] → R que se anule en cada vertice ti (incluyendoa y b), que sea estrictamente positiva en cada ]ti−1, ti[, i = 1, . . . , k, continua en[a, b] y diferenciable en cada ]ti−1, ti[, i = 1, . . . , k. Definimos V : [a, b] → TM
mediante V (t) = h(t)Dγ′(t)dt , campo diferenciable a trozos a lo largo de γ. Como
V (a) = V (b) = 0, la Proposicion 3.6.2 asegura la existencia de una variacion propiaf de γ con campo variacional V . Llamemos E a la funcion energıa de f . Teniendoen cuenta que V se anula en todos los vertices de la particion (incluidos a y b), laprimera formula de variacion de la energıa nos dice que
0 =12dE
ds(0) = −
∫ b
ah‖Dγ
′
dt ‖2dt = −
k∑
i=1
∫ ti
ti−1
h‖Dγ′
dt ‖2dt.
Como el integrando anterior es no negativo en ]ti−1, ti[ y su integral es cero, deduci-mos que h‖Dγ
′
dt ‖2 ≡ 0 en ]ti−1, ti[. Como h es estrictamente positiva en este intervalo,
debe ser Dγ′
dt ≡ 0 en ]ti−1, ti[, esto es, γ|]ti−1,ti[ es geodesica ∀i = 1, . . . , k.
2. Tomemos un campo W : [a, b] → TM C∞ a trozos a lo largo de γ que cumplaW (a) = W (b) = 0, W (ti) = γ ′(t−i ) − γ ′(t+i ), 1 ≤ i ≤ k − 1 (aplicar el Ejercicio 15a cada subintervalo de la particion). Sea f una variacion propia de γ con campovariacional W , que podemos elegir por la Proposicion 3.6.2. Aplicando de nuevo laprimera formula de variacion de la energıa,
0 =12dE
ds(0) = −
∫ b
a〈W, Dγ
′
dt 〉 dt+k−1∑
i=1
‖γ ′(t−i ) − γ ′i(t+i )‖2.
Ademas, la integral anterior vale cero porque puede escribirse como suma de in-tegrales sobre cada subintervalo ]ti−1, ti[, donde Dγ′
dt es identicamente nulo. Ası,0 =
∑i ‖γ ′(t−i ) − γ ′i(t
+i )‖2 y por tanto γ ′(t−i ) = γ ′(t+i ) para cada i = 1, . . . , k − 1.

106 CAPITULO 3. GEOMETRIA Y CURVATURA.
3. Ahora sabemos que γ es de clase C1 en [a, b], y vamos a probar que es diferenciable(de clase C∞) en dicho intervalo. En cada ]ti, ti−1[ es de clase C∞ por definicionde curva C∞ a trozos (de hecho, en cada subintervalo es geodesica). Tomemos unvertice ti con 1 ≤ i ≤ k − 1. Entonces, existe una unica geodesica Γ que pasa porγ(ti) en el instante ti con velocidad inicial γ ′(t−i ) = γ ′(t+i ), que estara definida enun intervalo abierto J ⊂ R que contiene a ti. Por la unicidad de las soluciones deun p.v.i., Γ debe coincidir con γ sobre J∩]ti−1, ti[ y sobre J∩]ti, ti+1[, luego γ es declase C∞ en ti. Por ultimo, como Dγ′
dt era identicamente nulo en [a, b]∗, esta igualdadahora se extiende a los vertices de la particion, y el Corolario esta probado.
2
Corolario 3.6.3 Sea Ωp,q(M) = α : [a, b] →M C∞s a trozos | α(a) = p, α(b) = q. Siγ ∈ Ωp,q(M) cumple E(γ) ≤ E(α) ∀α ∈ Ωp,q(M), entonces γ es una geodesica8.
El conjunto Ωp,q(M) puede dotarse de estructura de variedad infinito dimensional (nolo haremos). Las curvas en esta variedad pasando por un “punto” α ∈ Ωp,q(M) son lasvariaciones propias de α, y el espacio tangente a Ωp,q(M) en α es el espacio de camposvariacionales C∞ a trozos que se anulan en los extremos de α. Desde este punto de vista, elfuncional energıa es una aplicacion diferenciable E ∈ C∞(Ωp,q(M)), y para una variacionpropia f de α con campo variacional V se tiene (dE)α(V ) = d
ds
∣∣∣0E(fs) = dE
ds (0), luego lasgeodesicas uniendo p y q son los puntos crıticos de la funcion diferenciable E.
La razon principal de que se estudie la energıa y no la longitud para descubrir hastacuando minimiza la distancia una geodesica, es que los unicos mınimos de la energıa son lasgeodesicas que minimizan la longitud (en particular, reparametrizaciones no proporcionalesal arco de geodesicas no daran mınimos de la energıa aunque preserven la longitud):
Corolario 3.6.4 Si γ : [a, b] → M es una curva C∞ a trozos que minimiza la energıaentre sus extremos, entonces γ es una geodesica que minimiza la longitud (en particular,γ es C∞).
Demostracion. Como γ minimiza la energıa entre sus extremos, el funcional energıa E =E(s) de cualquier variacion propia de γ ha de tener un mınimo en s = 0. Por el Coro-lario 3.6.2, γ es una geodesica (C∞). Queda ver que γ minimiza la longitud entre susextremos. Supongamos, por reduccion al absurdo, que existe una curva α C∞ a trozos,uniendo los mismos extremos que γ y con L(α) < L(γ). Reparametrizamos α en [a, b] de
8En otras palabras, todo mınimo de la energıa es una geodesica. Pero el recıproco no es cierto: untrozo de cırculo maximo en una esfera de radio r, con longitud estrictamente mayor que πr, nos da uncontraejemplo.

3.6. VARIACIONES DE LA ENERGIA. 107
forma que tenga ‖α′‖ constante (esto puede hacerse incluso si α es solo C∞ a trozos). Porla Proposicion 3.6.1, E(α) = L(α)2
b−a < L(γ)2
b−a ≤ E(γ), contradiccion. 2
Hemos visto que las geodesicas son los “puntos crıticos” del funcional energıa. Ahorase trata de estudiar el Hessiano de dicho funcional en un punto crıtico, para obtenerinformacion sobre cuando una geodesica es un mınimo (al menos, local) para la energıa.
Teorema 3.6.2 (Segunda formula de variacion de la energıa) Sea γ : [a, b] → Muna geodesica y f : [a, b]×] − ε, ε[→ M una variacion diferenciable9 de γ con campovariacional V . Entonces,
12d2Eds2 (0) = −
∫ b
a〈D2Vdt + R(V, γ ′)γ ′, V 〉 dt+ 〈V (b), DVdt (b)〉 − 〈V (a), DVdt (a)〉
+〈(Dds∂f∂s
)(b,0)
, γ ′(b)〉 − 〈(Dds∂f∂s
)(a,0)
, γ ′(a)〉,
(3.8)
donde R es el tensor de curvatura de 3 variables de (M, g).
Demostracion. Derivando la ecuacion (3.7) en s = 0, obtenemos
12d2E
ds2(0) = −
∫ b
a〈(Dds∂f∂s
)(t,0)
,(Ddt∂f∂t
)(t,0)
〉dt −∫ b
a〈(∂f∂s
)(t,0)
,(DdsDdt∂f∂t
)(t,0)
〉 dt
+[〈(Dds∂f∂s
)(t,0)
,(∂f∂t
)(t,0)
〉]b
a+[〈(∂f∂s
)(t,0)
,(Dds∂f∂t
)(t,0)
〉]b
a. (3.9)
El primer sumando anterior es cero, ya que(Ddt∂f∂t
)(t,0)
= Dγ′(t)dt = 0 por ser γ geodesica.
Para el segundo sumando de (3.9) usaremos el ejercicio 14 del Tema 2:∫ b
a〈(∂f∂s
)(t,0)
,(DdsDdt∂f∂t
)(t,0)
〉dt
=∫ b
a〈V (t),
(DdtDds∂f∂t
)(t,0)
〉 dt+∫ b
a〈V (t), R
((∂f∂s
)(t,0)
,(∂f∂t
)(t,0)
)(∂f∂t
)(t,0)
〉 dt
=∫ b
a〈V (t),
(DdtDdt∂f∂s
)(t,0)
〉 dt+∫ b
a〈V,R(V, γ′)γ ′〉 dt =
∫ b
a〈V, D2V
dt2+R(V, γ ′)γ ′〉 dt.
En cuanto al tercer sumando de (3.9),
[〈(Dds∂f∂s
)(t,0)
,(∂f∂t
)(t,0)
〉]b
a= 〈(Dds∂f∂s
)(b,0)
, γ ′(b)〉 − 〈(Dds∂f∂s
)(a,0)
, γ ′(a)〉.
9Hay una version C∞ a trozos de la segunda formula de variacion de la energıa, ver ejercicio 16. Paralo que sigue, solo usaremos la version diferenciable.

108 CAPITULO 3. GEOMETRIA Y CURVATURA.
Por ultimo, el cuarto sumando de (3.9) vale
[〈(∂f∂s
)(t,0)
,(Dds∂f∂t
)(t,0)
〉]b
a=[〈V (t),
(Ddt∂f∂s
)(t,0)
〉]b
a=[〈V, DVdt 〉
]ba.
2
En las condiciones del Teorema 3.6.2, la funcion 〈DVdt , V 〉 es diferenciable en [a, b]luego por la regla de Barrow, [〈V, DVdt 〉]
ba =
∫ baddt
(〈V, DVdt 〉
)dt =
∫ ba
(‖DVdt ‖
2 + 〈D2Vdt2 , V 〉
)dt.
Sustituyendo en (3.8) tenemos
12d2Eds2 (0) =
∫ b
a
(‖DVdt ‖
2 −R(V, γ ′, γ ′, V ))dt+ 〈
(Dds∂f∂s
)(b,0)
, γ ′(b)〉 − 〈(Dds∂f∂s
)(a,0)
, γ ′(a)〉.
donde ahora R es el tensor de curvatura de 4 variables de (M, g). Supongamos a partirde ahora que f es propia. Ası, f(a, s), f(b, s) son constantes en s luego los dos ultimosterminos de la expresion anterior valen cero, de donde se sigue el enunciado
Corolario 3.6.5 Sea γ : [a, b] →M una geodesica y f : [a, b]×]− ε, ε[→M una variacionpropia y diferenciable10 de γ con campo variacional V . Entonces,
12d2E
ds2(0) =
∫ b
a
(∥∥∥∥DV
dt
∥∥∥∥2
−R(V, γ ′, γ ′, V )
)dt.
Definicion 3.6.5 Sea γ : [a, b] →M una geodesica. Denotaremos por
X(γ)0 = V ∈ X(γ) | V (a) = V (b) = 0,
subespacio vectorial (con dimension infinita) de X(γ). Consideremos la forma ındice de γ,
Iγ : X(γ)0 × X(γ)0 → R
(V,W ) 7−→∫ b
a
(〈DVdt
,DW
dt〉 − R(V, γ ′, γ ′,W )
)dt,
(integral de Lebesgue).
Iγ es una forma bilineal simetrica sobre X(γ)0 y el Corolario 3.6.5 dice que 12d2Eds2 (0) =
Iγ(V, V ) para V ∈ X(γ)0. Por tanto,
Si γ es una geodesica que minimiza la energıa entre sus extremos, entonces laforma ındice Iγ es semidefinida positiva.
10Este Corolario tambien es valido cuando f es C∞ a trozos, usando el ejercicio 16 y el argumento anteriorde la regla de Barrow sobre cada subintervalo donde las curvas longitudinales de f sean diferenciables.

3.6. VARIACIONES DE LA ENERGIA. 109
A la vista del enunciado anterior, es natural preguntarse en que condiciones geometricaspodemos asegurar que Iγ es definida positiva, y cuando esto implica que la geodesicaγ : [a, b] → M sea un mınimo (local) para la energıa. De esto se ocupa el Teorema delındice de Morse, que no estudiaremos aquı. En pocas palabras, este Teorema dice quedado t ∈ [a, b], la geodesica γ|[a,t] minimiza localmente la longitud y la energıa entre susextremos mientras no existan valores conjugados de a en [a, t].
Para terminar esta Seccion, veremos que la forma ındice esta relacionada estrechamentecon los campos de Jacobi estudiados en el tema 2. Desde luego, un paso importante a lahora de estudiar si Iγ es definida positiva sobre X(γ)0 es ver si tiene radical, definido por
Rad(Iγ) = V ∈ X(γ)0 | Iγ(V,W ) = 0, ∀W ∈ X(γ)0.
Recordemos (Definicion 2.10.2 que a y b son valoes conjugados si Jγ,0 = V ∈ J | V (a) =V (b) = 0 6= 0.
Proposicion 3.6.3 En la situacion anterior, Rad(Iγ) = Jγ,0.
Demostracion. Supongamos primero que V ∈ Rad(Iγ). Tomemos una funcion h ∈ C∞([a, b])que se anule en a y b y sea estrictamente positiva en ]a, b[. Definimos W1 : [a, b] −→ TM
por
W1(t) = h(t)
[D2V
dt2(t) + R(V (t), γ ′(t))γ ′(t)
], t ∈ [a, b].
W1 ∈ X(γ)0, luego podemos aplicar Iγ sobre V,W1 y usar que V ∈Rad(Iγ):
0 = Iγ(V,W1) =∫ b
a
(〈DVdt ,
DW1dt 〉 −R(V, γ ′, γ ′,W1)
)dt
[〈DVdt ,W1〉
]ba−∫ b
a〈D2Vdt2
+R(V, γ ′)γ ′,W1〉 dt(A)= −
∫ b
ah∥∥∥D2Vdt2
+ R(V, γ′)γ ′∥∥∥
2dt,
donde en (A) se usa que W1(a) = W1(b) = 0. Como el ultimo integrando es no negativoen [a, b] y tiene integral cero, debe ser h‖D2V
dt2+ R(V, γ ′)γ ′‖2 = 0 en [a, b]. Pero h es
estrictamente positiva en cada ]a, b[, luego D2Vdt2 +R(V, γ ′)γ ′ = 0 en [a, b].
Recıprocamente, supongamos que V ∈ X(γ) es un campo de Jacobi que se anula enlos extremos y sea W ∈ Ωγ,0. Entonces,
Iγ(V,W ) =∫ b
a
(〈DVdt ,
DWdt 〉 −R(V, γ ′, γ ′,W )
)dt
=[〈DVdt ,W 〉
]ba−∫ b
a〈D2Vdt2
+R(V, γ ′)γ ′,W 〉 dt.

110 CAPITULO 3. GEOMETRIA Y CURVATURA.
El primer sumando anterior se anula porque W (a) = W (b) = 0, y el segundo vale cero porser V de Jacobi. 2
Usando el Corolario 2.10.1 y la Proposicio 3.6.3 deducimos que el radical de la formaındice es siempre de dimension finita (a la dimension de Rad(Iγ) se le llama la nulidad deγ) y que si dimM = n, entonces dim Rad(Iγ) ≤ n−1. Tambien vimos que esta desigualdadse transforma en igualdad cuando (Mn, g) tiene c.s.c. (pagina 60 y ss.)
3.7. Variedades de curvatura positiva.
Teorema 3.7.1 (Myers) Sea (Mn, g) una V.R., γ : [0, L] → M una geodesica p.p.a. yR > 0. Si la curvatura de Ricci de (M, g) cumple Ric(γ ′(t)) ≥ n−1
R2 para todo t ∈ [0, L] yL > πR, entonces γ no es un mınimo local de la energıa ni de la longitud.
Demostracion. Sea Iγ la forma ındice de γ. Supongamos que existe V ∈ X(γ)0 tal queIγ(V, V ) < 0 y veamos que γ no puede ser un mınimo local de la energıa ni de la longitud:Por la Proposicion 3.6.2, ∃f : [0, L]×] − ε, ε[→ M variacion propia y diferenciable de γcuyo campo variacional es V . Sea E = E(s) = E(fs) la funcion energıa asociada a f .Entonces E ′(0) = 0 por ser γ geodesica (Corolario 3.6.2) y E ′′(0) = 2Iγ(V, V ) < 0, luegoE(s) tiene un maximo local en s = 0 y E(fs) < E(γ) ∀s 6= 0 suficientemente pequeno.En particular, γ no minimiza localmente la energıa. Ademas, la Proposicion 3.6.1 implicaque para los s anteriores, L(fs)2 ≤ L · E(fs) < L · E(γ) = L(γ)2 y por tanto γ tampocominimiza localmente la longitud.
Solo resta probar que ∃V ∈ X(γ)0 tal que Iγ(V, V ) < 0. Como γ es p.p.a. podemostomar una base ortonormal de campos paralelos a lo largo de γ del tipo γ ′, P2, . . . , Pn.Para poder usar nuestra hipotesis sobre la curvatura de Ricci necesitaremos sumar curvat-uras seccionales del tipo R(Pi, γ ′, γ ′, Pi) sobre una base ortonormal como la que tenemos.Pero Pi no se anula en los extremos 0, L de γ, luego no podemos evaluar en Pi la formaındice. Por este motivo, truncaremos Pi mediante una funcion que se anule en t = 0, L.Definimos Vi(t) = sen
(πtL
)Pi(t), i = 2, . . . , n. Como Vi(0) = Vi(L) = 0, se tiene Vi ∈ X(γ)0
y podemos evaluar Iγ(Vi, Vi):
Iγ(Vi, Vi) =∫ L
0
∥∥∥DV idt
∥∥∥2− R(Vi, γ ′, γ ′, Vi)
dt = −
∫ L
0
〈D2Vidt2
, Vi〉+ R(Vi, γ ′, γ ′, Vi)dt
= −∫ L
0
−π
2
L2sin2
(πt
L
)+ sin2
(πt
L
)R(Pi, γ ′, γ ′, Pi)
dt,
y sumando en i = 2, . . . , n,n∑
i=2
Iγ(Vi, Vi) = −∫ L
0
−π
2
L2(n− 1) +
n∑
i=2
R(Pi, γ ′, γ ′, Pi)
sin2
(πt
L
)dt.

3.7. VARIEDADES DE CURVATURA POSITIVA. 111
La suma de curvaturas en la expresion anterior es igual a Ric(γ ′), que es mayor o igualque n−1
R2 , luego
n∑
i=2
Iγ(Vi, Vi) ≤ −∫ L
0
−π
2
L2(n− 1) +
n− 1R2
sin2
(πt
L
)dt
= (n− 1)
(π2
L2− 1R2
)∫ L
0sin2
(πt
L
)dt.
Como L > πR, el segundo parentesis de la expresion anterior es negativo, de donde sededuce que
∑ni=2 Iγ(Vi, Vi) < 0, y por tanto existe i ∈ 2, . . . , n tal que Iγ(Vi, Vi) < 0. 2
Teorema 3.7.2 (Bonnet-Myers) Sea (Mn, g) una V.R. conexa, completa y con cur-vatura de Ricci Ric ≥ n−1
R2 para algun R > 0. Entonces, M es compacta, tiene grupofundamental finito y diam(M, g) ≤ πR.
Demostracion. Dados p, q ∈ M , la completitud de (M, g) y el Teorema de Hopf-Rinowimplican que existe una geodesica p.p.a. γ : [0, L] −→ M con γ(0) = p, γ(L) = q y queminimiza la longitud entre sus extremos. Como Ric≥ n−1
R2 , el Teorema de Myers implicaL ≤ πR. Como p, q son arbitrarios en M , deducimos que diam(M, g) ≤ πR. Ası, M esacotada y por ser completa, ha de ser compacta (Teorema de Hopf-Rinow).
Veamos que π1(M) es finito: Consideremos el recubridor universal (M, g) de (M, g),con la metrica del recubrimiento. (M, g) es una V.R. completa, conexa y tiene curvatura deRicci igual a la de (M, g), luego ≥ n−1
R2 en todo punto y para todo plano. Por lo demostradohasta ahora, (M, g) es compacta. Como la proyeccion recubridora p : M →M es continua,la fibra p−1(p) de cualquier p ∈ M es cerrada en M , y por tanto es compacta. Si p−1(p)fuese infinita, entonces tendrıa un punto de acumulacion en M , contradiccion con que pes un difeomorfismo local. Por tanto, el recubridor (M,p) tiene un numero finito de hojas.Pero dicho numero de hojas coincide con el cardinal del grupo fundamental de M , porqueel recubridor es regular (M es simplemente conexa). 2

112 CAPITULO 3. GEOMETRIA Y CURVATURA.
Ejercicios.
1. Sea (N, g) una V.R., y M ⊂ N una subvariedad suya. Denotemos por d a la distanciaen N asociada a g y por d(g|M) a la distancia en M asociada a la metrica inducida.Probar que d|M ≤ d(g|M) y encontrar un ejemplo donde la desigualdad estricta ocurraen un par de puntos.
2. Sea φ : (M1, g1) → (M2, g2) una isometrıa local entre dos V.R. Demostrar que la relacionentre las distancias asociadas a ambas metricas es
dM2(φ(p), φ(q)) ≤ dM1(p, q), ∀p, q ∈M1.
Probar que si φ es una isometrıa entre ambas V.R., entonces la desigualdad anteriorse convierte en igualdad (esto es, φ es una isometrıa de espacios metricos11). Deducirque si dos V.R. son isometricas, entonces sus diametros coinciden (el diametro es uninvariante Riemanniano).
3. Se considera el modelo Lorentziano del espacio hiperbolico n-dimensional, Hn(−1) =p ∈ Rn+1 / 〈p, p〉L = −1, xn+1(p) > 0 con la metrica g = (〈·, ·〉L)|Hn
(−1), siendo
〈x, y〉L =n∑
i=1
xiyi − xn+1yn+1, x, y ∈ Rn+1.
(A) Demostrar que (Hn(−1), g) es completa. Deducir que este es realmente un modelovalido para el espacio hiperbolico n-dimensional, en el sentido de que es isometricoa, por ejemplo, el modelo del semiespacio para el espacio hiperbolico n-dimensional.
(B) Llamemos O1(n + 1,R) = A ∈ Gl(n + 1,R) / tA · G · A = G, donde G =(In 00 −1
). Admitiendo que O1(n + 1,R) tiene cuatro componentes conexas
CI , CB, CG, CD donde CA denota la componente conexa de la matriz A y
B =
−1 0 00 In−1 00 0 1
, D =
−1 0 00 In−1 00 0 1
,
11Existe un recıproco de esta propiedad, llamada el Teorema de Myers-Stenrod-Palais:Si φ : (M1, g1) → (M2, g2) es una aplicacion sobreyectiva entre V.R. que es isometrıa entre los espaciosmetricos asociados, entonces ψ es una isometrıa de V.R.Notese que en el Teorema de Myers-Stenrod-Palais no se supone diferenciabilidad sobre φ, y que implicaque la funcion distancia determina a la metrica Riemanniana de la que procede. La demostracion de esteTeorema puede encontrarse en S. Kobayashi & K. Nomizu, Foundations of Differential Geometry Vol. I,Ed. John Wiley & Sons Inc., Teorema 3.10.

3.7. VARIEDADES DE CURVATURA POSITIVA. 113
probar que CI ∪CB es un subgrupo de O1(n+1,R) y que dada A ∈ O1(n+1,R),se tiene
A ∈ CI ∪ CB ⇐⇒ A conserva Hn(−1).
Finalmente, deducir que Iso(Hn(−1), g) es isomorfo a CI ∪ CB .
4. Demostrar que la completitud no es un invariante por isometrıas locales (sı lo es porisometrıas).
5. Un rayo en una V.R. (M, g) es una geodesica γ : [0,+∞[→ M tal que ∀t > 0,d(γ(0), γ(t)) = long(γ)t0. Demostrar que si (M, g) es una V.R. completa y no compacta,entonces de todo punto de M parte al menos un rayo.
6. Sean (M1, g1), (M2, g2) dos V.R. completas. Llamemos d1, d2, d a las distancias asociadaa las metricas g1, g2 y g1 × g2, respectivamente. Demostrar que
d ((p1, p2), (q1, q2)) =√d1(p1, q1)2 + d2(p2, q2)2.
Concluir que
diam(M1 ×M2, g1 × g2) =√
diam(M1, g1)2 + diam(M2, g2)2.
7. Sea f : (M, g) → (M, g) un difeomorfismo entre dos V.R., siendo (M, g) completa.Supongamos que existe c > 0 tal que ‖dfp(v)‖ ≤ c‖v‖, ∀p ∈ M , ∀v ∈ TpM . Probarque (M, g) tambien es completa.
8. Sea f : (M, g) → (M, g) una isometrıa local entre dosV.R., siendo la primera completay la segunda conexa. Supongamos ademas que todo par de puntos de M puede unirsepor una unica geodesica. Demostrar que f es una isometrıa.
9. En Rn y para cada k ∈ Z, se define la funcion hk : Rn → R / hk(x) = (1 + ‖x‖2)−2k .Probar que ∀k ∈ Z, gk = hk〈, 〉 es una metrica Riemanniana sobre Rn (aquı 〈, 〉 es elproducto escalar usual de Rn). Estudiar la completitud de gk en terminos de k (Indicacion:reducir el estudio a los casos k = 0, 1).
10. Una V.R. (M, g) se dice HOMOGENEA si ∀p, q ∈ M, ∃φ ∈ Iso(M, g) tal que φ(p) = q
(i.e. Iso(M, g) actua transitivamente sobre M).
(A) Demostrar que (Rn, g0), (Sn(1), g1) y (H2(−1), g−1) son variedades homogeneas.
(B) Probar que toda variedad homogenea es completa.

114 CAPITULO 3. GEOMETRIA Y CURVATURA.
11. Sea (R2)+ = (x, y) ∈ R2 / y > 0. Definimos
g(x,y) =
(1 00 1/y
), ∀(x, y) ∈ (R2)+.
(A) Probar que g es una metrica Riemanniana no completa sobre (R2)+ (Indicacion:estudiar el segmento vertical (0, y) / 0 < y ≤ 1).
(B) Demostrar que dados dos puntos p, q ∈ (R2)+ con la misma segunda coordenada,el segmento γ(t) = (1 − t)p + tq, t ∈ [0, 1], es una geodesica uniendo p y q queminimiza la distancia asociada a g entre tales puntos.
12. Sea (M, g) una V.R. completa, y X ∈ X(M) un campo acotado, esto es, existe c > 0tal que ‖X‖ ≤ c en M . Probar que X es un campo completo.
13. Probar que toda V.R. de dimension 1 es localmente isometrica a (R, g0).
14. Sea φ : M → M un homeomorfismo local y propio12. Probar que φ es una proyeccionrecubridora con un numero finito de hojas.
15. Sea γ : [a, b] −→M una curva diferenciable. Dados v ∈ Tγ(a)M , w ∈ Tγ(b)M , demostrarque existe un campo diferenciable W a lo largo de γ tal que W (a) = v y W (b) = w.
16. Segunda formula de variacion de la energıa en el caso C∞ a trozos.Sea γ : [a, b] → M una geodesica y f : [a, b]×]− ε, ε[→M una variacion C∞ a trozosde γ, con particion asociada t0 = a < . . . < tk = b y campo variacional V . Probar que
12d2Eds2
(0) = −∫ b
a〈D2Vdt2
+R(V, γ ′)γ ′, V 〉 dt+k∑
i=1
[〈V, DVdt 〉
]titi−1
+〈(Dds∂f∂s
)(b,0)
, γ ′(b)〉 − 〈(Dds∂f∂s
)(a,0)
, γ ′(a)〉
= −∫ b
a〈D2Vdt +R(V, γ ′)γ ′, V 〉 dt+
k−1∑
i=1
〈V (ti), DVdt (t−i ) − DVdt (t+i )〉
+〈V (b), DVdt (b)〉 − 〈V (a), DVdt (a)〉+〈(Dds∂f∂s
)(b,0)
, γ ′(b)〉 − 〈(Dds∂f∂s
)(a,0)
, γ ′(a)〉,
donde R es el tensor de curvatura de (M, g).
12Es decir, la imagen inversa todo compacto de M es un compacto de M .





























