Embed Size (px)
DESCRIPTION
guia
Citation preview

I. MÉTODO DE KANI
1.1. Generalidades
El método de Kani fue publicado inicialmente por G. Kani en la década de los
años 60, para calcular pórticos planos con miembro de sección transversal constante o
variable pero limitado a tres tipos. En el año 1960 fue modificado por el profesor
Takabeya, logrando reducir el cálculo en un 40 , con la limitante de ser aplicable solo
a estructuras con miembro de sección constante. Posteriormente en el año 2001, es
ampliada por el Prof. Peña Plaza, haciéndolo aplicable a miembros estructurales de
sección transversal constante o variable de cualquier tipo. Esta última versión es la
presentada en este trabajo.
Es un método, basado en las ecuaciones de rotación, sus incógnitas inmediatas
son los desplazamientos rotacionales de las juntas del sistema estructural. Es usado
para el cálculo de estructuras hiperestáticas del tipo pórticos planos. Es iterativo, de
fácil aplicación, presenta autoeliminación de errores en su procedimiento.
1.2. Procedimiento Kani-Takabeya-Peña
1.2.1. Deducción de las Ecuaciones Fundamentales.
Tomando un elemento estructural cualquiera ij.
S.E Mij Mji
i j
Sistema Original
Posición Deformada del elemento
1
iij j
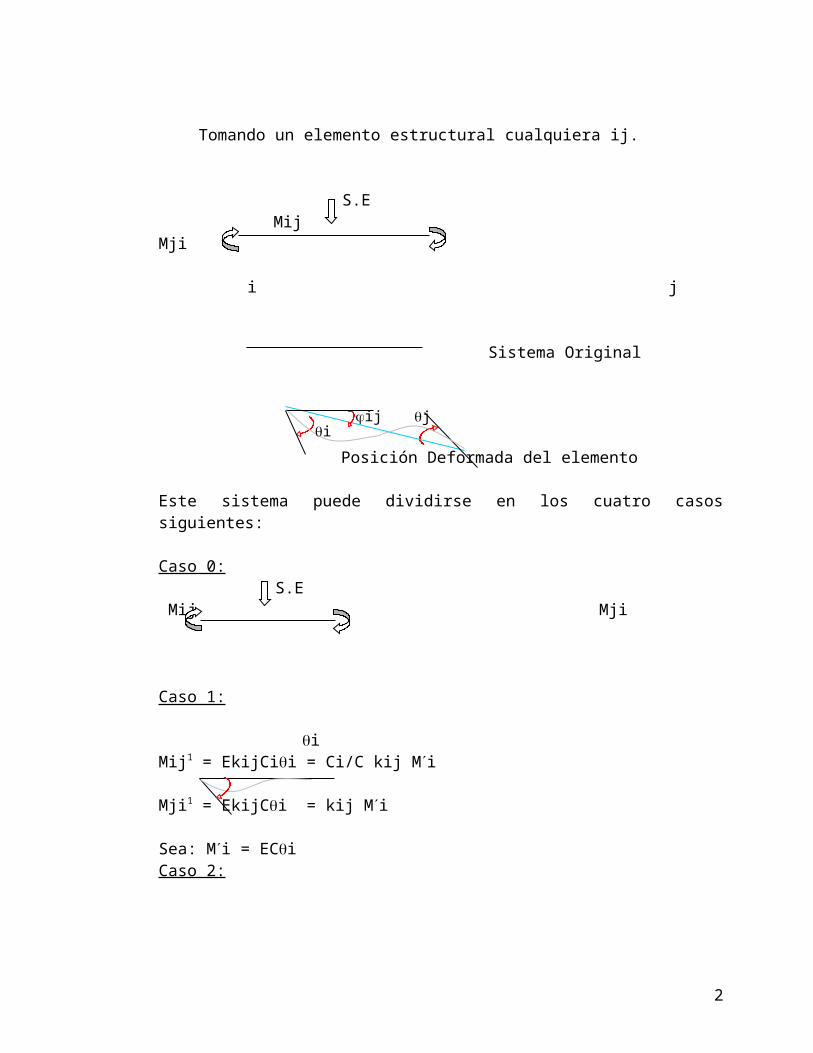
Este sistema puede dividirse en los cuatro casos siguientes:
Caso 0: S.E
Mij Mji
Caso 1:
i Mij1 = EkijCii = Ci/C kij Mi Mji1 = EkijCi = kij Mi Sea: Mi = ECiCaso 2:
j Mij2 = EkijCj = kij Mj Mji2 = EkijCjj = Cj/C kij Mj Sea: Mj = ECj
Caso 3:
Mij3 = - Ekij (Ci + C) ij = (Ci + C)/3C kij Miij Mji3 = - Ekij (Cj + C) ij = (Cj + C)/3C kij Mi
Sea: Mi = -3CEij
Las expresiones de Momentos Definitivos, serán las sumas de los casos anteriores, así se tendrá que:
Mij = Moij + Ci/C kij Mi + kij Mj + (Ci + C)/3C kij Mi (1)
Mji = Moji + Cj/C kij Mj + kij Mi + (Cj + C)/3C kij Mi (2)
Kani definió:
bi = Ci + C/(3C)
bj = Cj + C/(3C)Mi = 2E i (3.1) (3)
2

Mj = 2E j (3.2)
Mi = -6E ij (3.3)
Sustituyendo estas expresiones en (1), se tiene que:
Mij = Moij + Ci/C kij 2Ei + kij 2Ej + (Ci + C)/3C kij (-6E ij) (4)
Comparando esta expresión con la ecuación de rotación siguiente:
Mij = MEij + Ek0 [Cii + Cj – (Ci + C) ij]
Se observa que para que exista una identidad absoluta entre (4) y la Ec de rotación, en (4) kij debe ser igual a k0* C/2
Para una mayor claridad en la exposición del método, se expone la deducción de la formulación de los efectos de giro y desplazabilidad por separado, así se tiene:
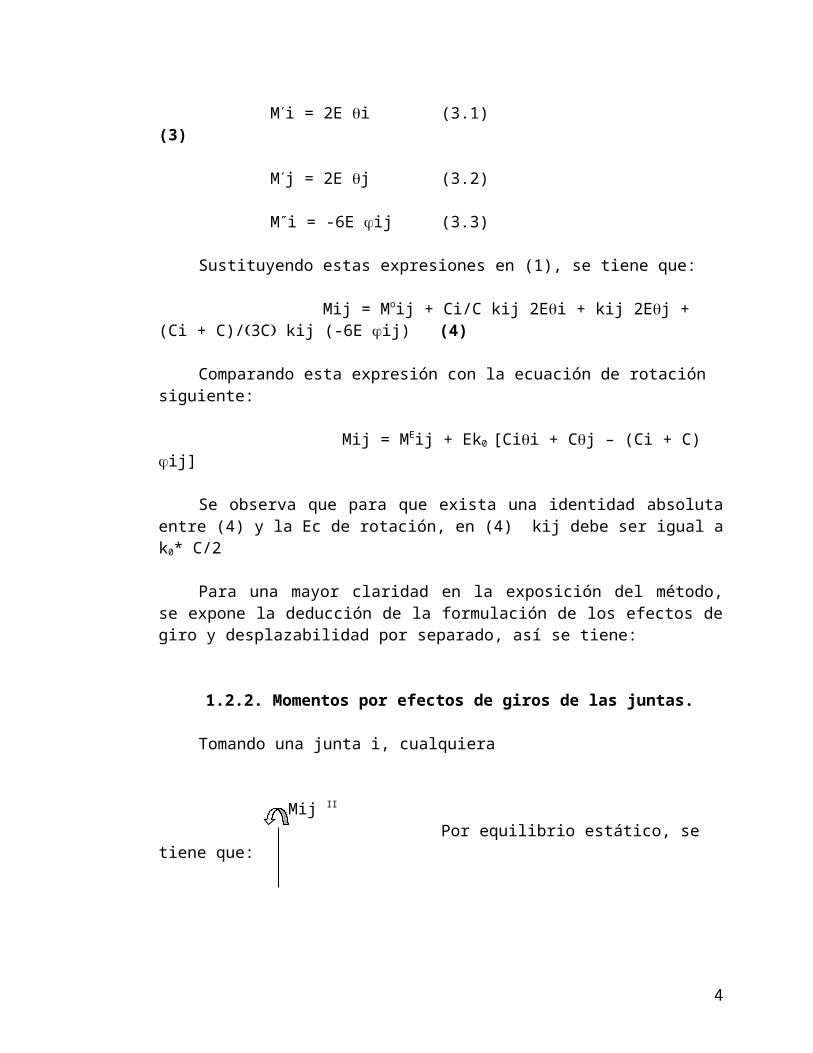
1.2.2. Momentos por efectos de giros de las juntas.
Tomando una junta i, cualquiera
Mij II
Por equilibrio estático, se tiene que: Mij III Me Mij – Me = 0
Mij I i
Mij IV
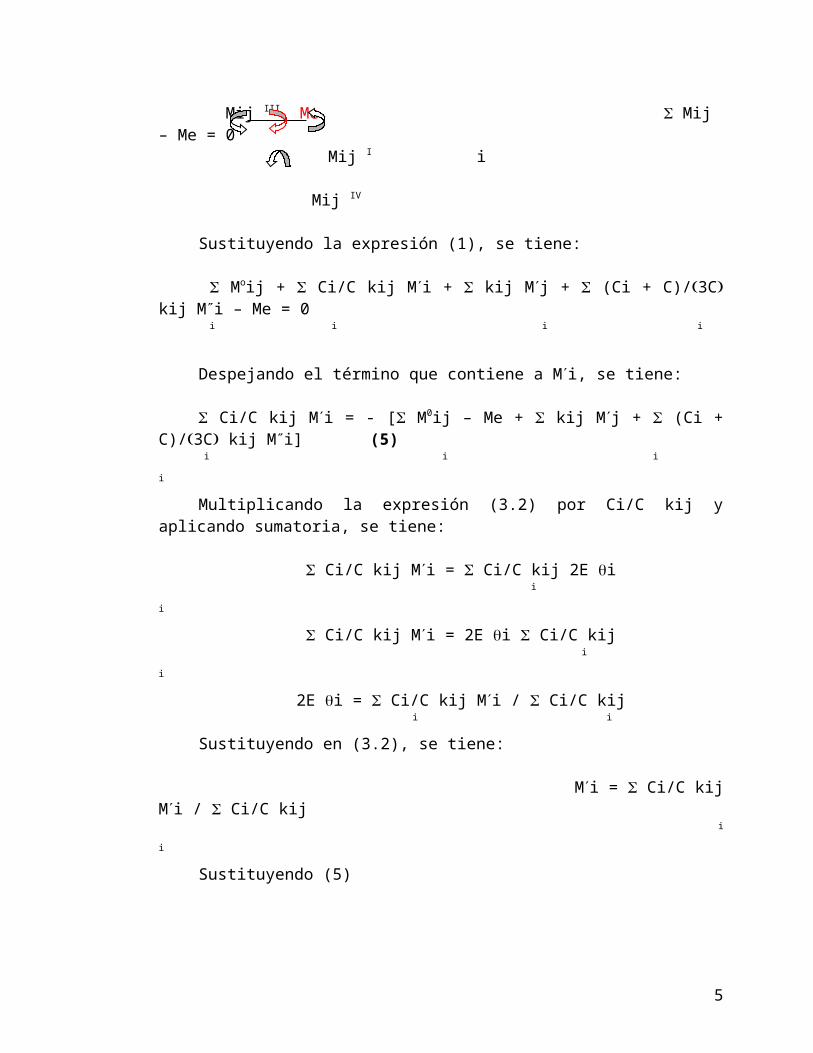
Sustituyendo la expresión (1), se tiene:
Moij + Ci/C kij Mi + kij Mj + (Ci + C)/3C kij Mi – Me = 0 i i i i
Despejando el término que contiene a Mi, se tiene:
Ci/C kij Mi = - [ M0ij – Me + kij Mj + (Ci + C)/3C kij Mi] (5) i i i i
Multiplicando la expresión (3.2) por Ci/C kij y aplicando sumatoria, se tiene:
3
Ci/C kij Mi = Ci/C kij 2E i i i
Ci/C kij Mi = 2E i Ci/C kij i i
2E i = Ci/C kij Mi / Ci/C kij i i
Sustituyendo en (3.2), se tiene:
Mi = Ci/C kij Mi / Ci/C kij i i
Sustituyendo (5)
Mi = - 1/Ci/C kij [ Moij – Me + kij Mj + (Ci + C)/3C kij Mi] i i
Sea:
Factor de Giro: i = - 1/Ci/C kij i
Momento de sujeción: Ms = Moij – Me
bi = Ci + C/3Cbj = Cj + C/3C
Entonces:
Mi = i [Ms + kij Mj + bi kij Mi] i i
Modificación de la Rigidez para elementos con extremos articulados:
Tomando un elemento con sus dos extremos rígidos y otro con un extremo articulado.
i i
Mij = EkijCii Mij = Ekij (Ci – C2/Cj)i
4
Igualando expresiones.
EkijCii = Ekij (Ci – C2 / Cj) i
kij = kij (1 – C2/(Ci Cj)) (6)
5

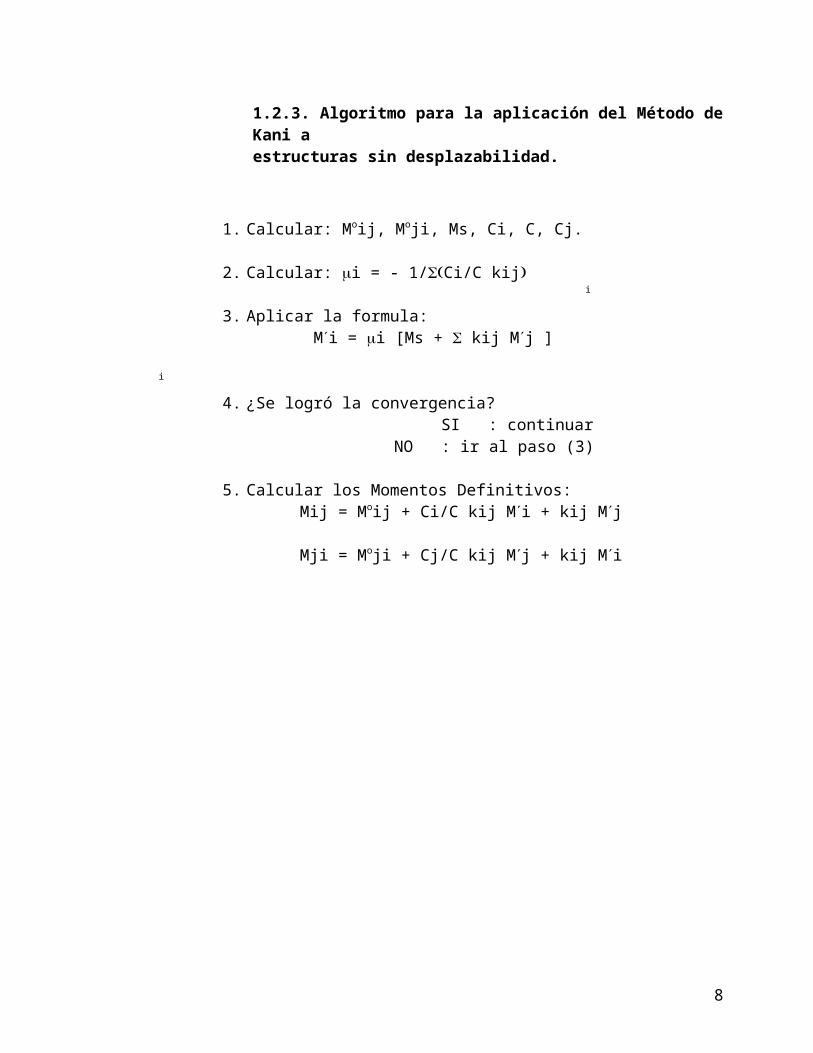
1.2.3. Algoritmo para la aplicación del Método de Kani a estructuras sin desplazabilidad.
1. Calcular: Moij, Moji, Ms, Ci, C, Cj.
2. Calcular: i = - 1/Ci/C kij i
3. Aplicar la formula:Mi = i [Ms + kij Mj ]
i
4. ¿Se logró la convergencia? SI : continuar
NO : ir al paso (3)
5. Calcular los Momentos Definitivos:Mij = Moij + Ci/C kij Mi + kij Mj
Mji = Moji + Cj/C kij Mj + kij Mi
6

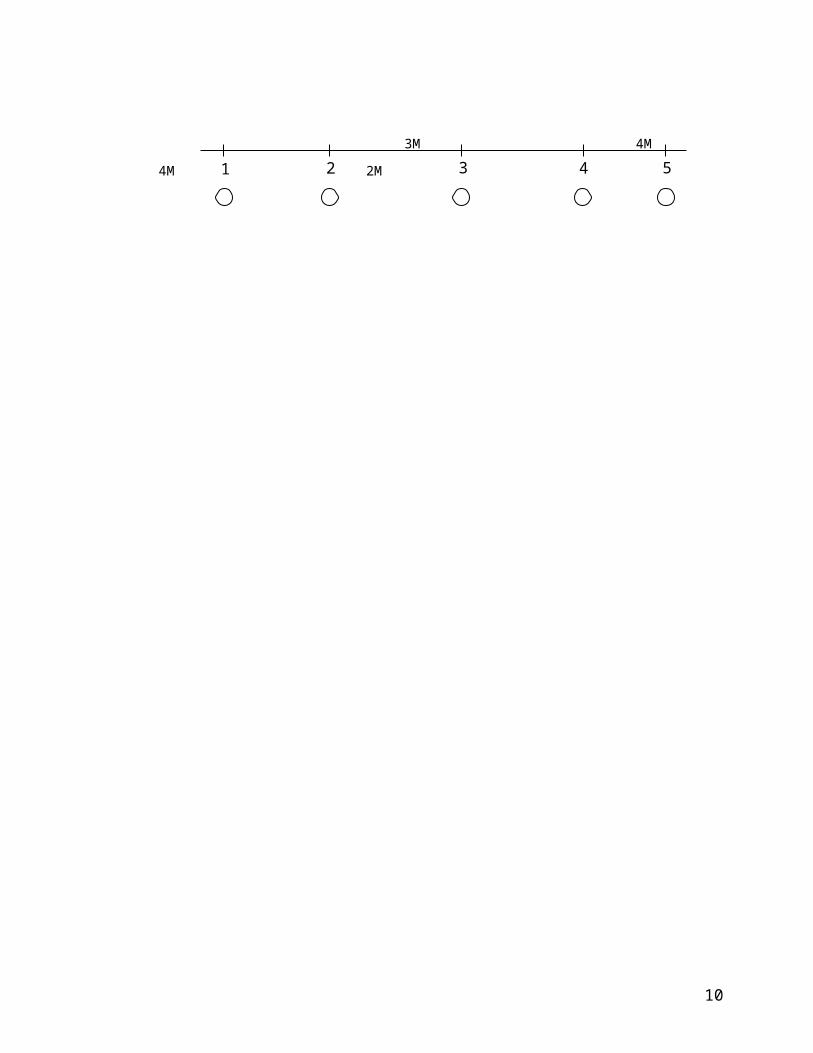
1.2.4. Ejemplo: 1 Aplique el Método de Kani, para calcular los valores de
momento flector, en los extremos de los miembros, de la viga mostrada, cuya sección transversal es de 20 cm x 30 cm.
0,330 t/m
0,60 M 3M 4M 4M 2M 0,60M
Estudio Estático:
IND Uvext + Uvint – GlmbrosIND 10 + 0 – 3*1 07El sistema estructural el hiperestático de grado 7
Estudio Cinemático:
Analizando las características de los apoyos y las formas de vinculación de los miembros, se concluye que no existe compatibilidad de movimiento, por tal motivo el sistema estructural es estable.
Eliminando, los miembros isostáticos, se obtiene:
0,330 t/m
3M 4M 4M 2M
7
1 2 3 4 5
1 2 3 4 5
0,198 t
0,0594 t.m
0,198 t
0,0594 t.m
Momentos primarios
ME12 -0,33*32/12 -0,248 t.m ; ME
21 0,248 tm
Mo21 ME
21 + 1/2* M12 - ME12 0,342 tm
Mo23 ME
23 - 0,44 t m
Mo32 ME
32 0,44 t m
Mo34 ME
34 - 0,44 t m
Mo43 ME
43 0,44 t m
ME45 -0,11 t m ; ME
54 0,11 t m
Mo45 ME
45 + 1/2* M54 - ME54 -0,135 tm
Momentos de Sujeción
Junta 2
Ms2 0,342 - 0,44 -0,098 t m
Junta 3
Ms3 0,44 - 0,44 0,0 t m
Junta 4
Ms4 0,44 – 0,135 0,305 t m
8

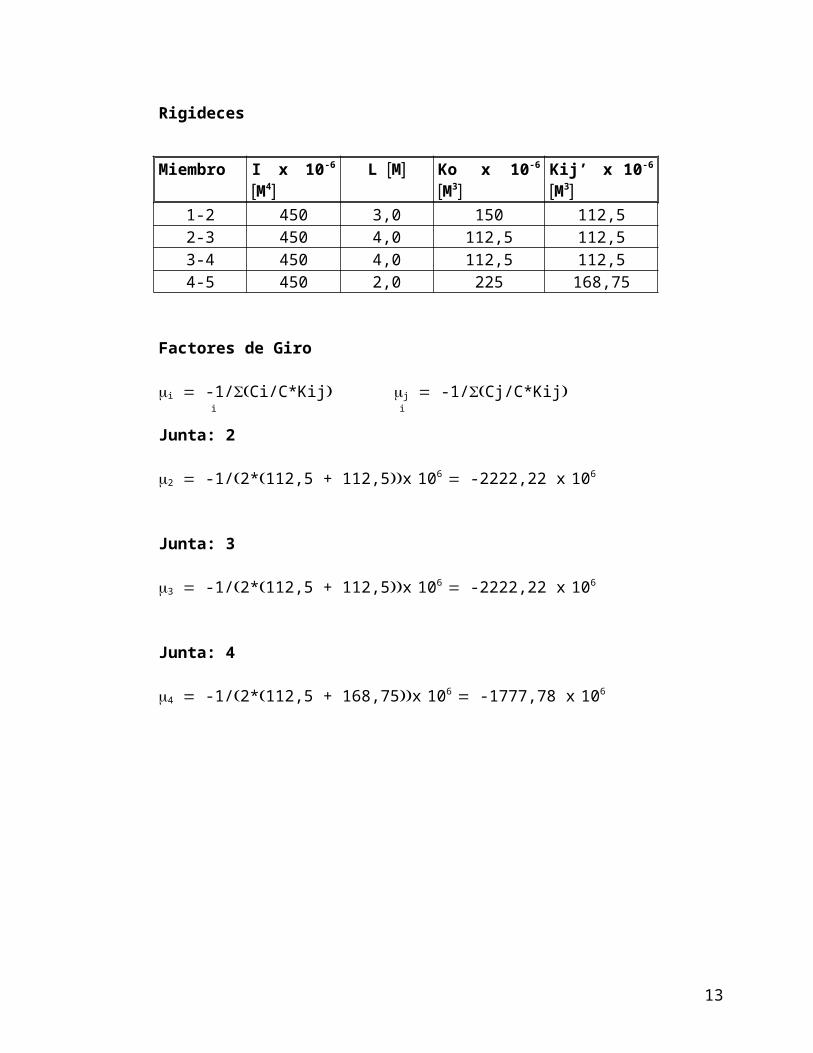
Rigideces
Miembro I x 10-6 M4 L M Ko x 10-6 M3 Kij’ x 10-6 M31-2 450 3,0 150 112,52-3 450 4,0 112,5 112,53-4 450 4,0 112,5 112,54-5 450 2,0 225 168,75
Factores de Giro
i -1/Ci/C*Kij j -1/Cj/C*Kij i i
Junta: 2
2 -1/2*112,5 + 112,5x 106 -2222,22 x 106
Junta: 3
3 -1/2*112,5 + 112,5x 106 -2222,22 x 106
Junta: 4
4 -1/2*112,5 + 168,75x 106 -1777,78 x 106
9
35
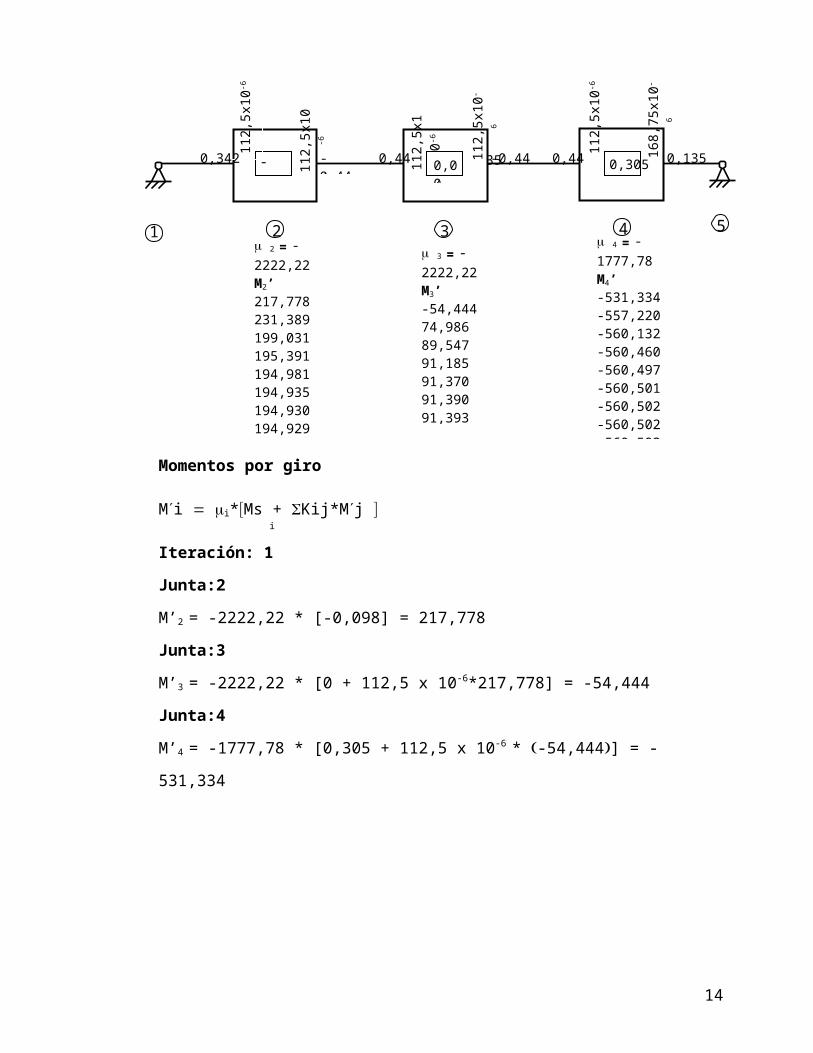
Momentos por giro
Mi i*Ms + Kij*Mj i
Iteración: 1
Junta:2
M’2 = -2222,22 * [-0,098] = 217,778
Junta:3
M’3 = -2222,22 * [0 + 112,5 x 10-6*217,778] = -54,444
Junta:4
M’4 = -1777,78 * [0,305 + 112,5 x 10-6 * -54,444] = -531,334
Iteración: 2
Junta:2
M’2 = -2222,22 * [-0,098 + 112,5 x 10-6 * -54,444] = 231,389
Junta:3
M’3 = -2222,22 * [0 + 112,5 x 10-6 * 231,389 + 112,5 x 10-6 * -531,334] = 74,986
Junta:4
M’4 = -1777,78 * [0,305 + 112,5 x 10-6 * 74,986] = -557,220
10
-0,098
112,
5x10
-6
0,00 0,305
1 2 3 4 5
112,
5x10
-6
112,
5x10
-6
112,
5x10
-6
112,
5x10
-6
168,
75x1
0-6
2 = -2222,22 M2’217,778231,389199,031195,391194,981194,935194,930194,929194,929
3 = -2222,22 M3’-54,44474,98689,54791,18591,37091,39091,39391,39391,393
4 = -1777,78 M4’-531,334-557,220-560,132-560,460-560,497-560,501-560,502-560,502-560,502
0,44 0,342 -0,44 -0,44 0,44 0,135

Momentos Definitivos
M21 = 0,342 + 2*112,5x10-6 * 194,929 = 0,386 tm
M23 = -0,44 + 2*112,5x10-6 *194,929 + 112,5x10-6 * 91,393 = -0,386 tm
M32 = 0,44 + 2* 112,5x10-6 * 91,393 + 112,5x10-6 * 194,929 = 0,482 tm
M34 = -0,44 + 2*112,5x10-6 * 91,393 + 112,5x10-6 *(-560,502) = -0,482 tm
M43 = 0,44 + 2* 112,5x10-6 * (-560,502) + 112,5x10-6 *91,393 = 0,324 tm
M45 = -0,1353 + 2*168,75 x10-6 (-560,502) = -0,324 tm
11

1.2.5. Ejemplo: 2 Aplique el Método de Kani para calcular los valores de
momento flector, en los extremos de los miembros, del siguiente sistema estructural
Miembros de sección constante: 1-2 y 4-5
Sección: 20 cm x 30 cm
Miembros de sección variable: 2-3 y 3-4
Perfil longitudinal
20 cm
i jPlanta
Ci Cj 12,02 ; C 8,35
ME23 4,406 t.m ; ME
32 4,816 t.m
ME34 4,816 t.m ; ME
43 4,406 t.m
z 8*2*z2-2*z+13
12
1,5 t/m
40 cm
20 cm
1 t/m
2 3 4 53 M 6 M 6 M 3 M 1 M
1 t/m
11 M
Estudio Estático:
IND Uvext + Uvint – GlmbrosIND 10 + 0 – 3*1 07El sistema estructural el hiperestático de grado 7
Estudio Cinemático:
Analizando las características de los apoyos y las formas de vinculación de los miembros, se concluye que no existe compatibilidad de movimiento, por tal motivo el sistema estructural es estable.
Eliminando, los miembros isostáticos, se obtiene:
Momentos primarios
ME12 -1*32/12 -0,75 t.m ; ME
21 0,75 tm
Mo21 ME
21 + 1/2* M12 - ME12 0,875
Mo23 ME
23 - 4,406 t m
Mo32 ME
32 4,816 t m
Mo34 ME
34 - 4,816 t m
Mo43 ME
43 4,406 t m
ME45 -0,75 t m ; ME
54 0,75 t m
Mo45 ME
45 + 1/2* M54 - ME54 -0,875
13
1,5 t/m
1 t/m
2 3 4 53 M 6 M 6 M 3 M
1 t/m
1
1 ton1 ton
0,5 t.m 0,5 t.m
Momentos de Sujeción
Junta 2
Ms2 -0,875 - 4,406 -3,531 t m
Junta 3
Ms3 4,816 - 4,816 0,0 t m
Junta 4
Ms4 4,406 – 0,875 3,531 t m
Rigideces
Miembro I x 10-5 M4 L M Ko x 10-5 M3 Kij x 10-5 M3 K’ij x 10-5 M31-2 45 3,0 15 15 11,252-3 13,33 6,0 2,22 9,27 -3-4 13,33 6,0 2,22 9,27 -4-5 45 3,0 15 15 11,25
Factores de Giro
i -1/Ci/C*Kij j -1/Cj/C*Kij i i
Junta: 2
2 -1/4/2*11,25 + 12,02/8,35*9,27*105 -2789,84
Junta: 3
3 -1/12,02/8,35*9,27 + 12,02/8,35*9,27*105 -3746,90
14

Junta: 4
4 -1/12,02/8,35*9,274+4/2*11,25*105 -2789,84
MOMENTOS POR GIRO
Mi i*Ms + Kij*Mj i
Junta: 02
M2 - 2789,84*-3,531 + 9,27x10-5 *M’3
Junta: 03
M2 - 3746,90*0 + 9,27x10-5 * M’2 + M’4
Junta: 04
M2 - 2789,84*3,531 + 9,27x10-5 *M’3
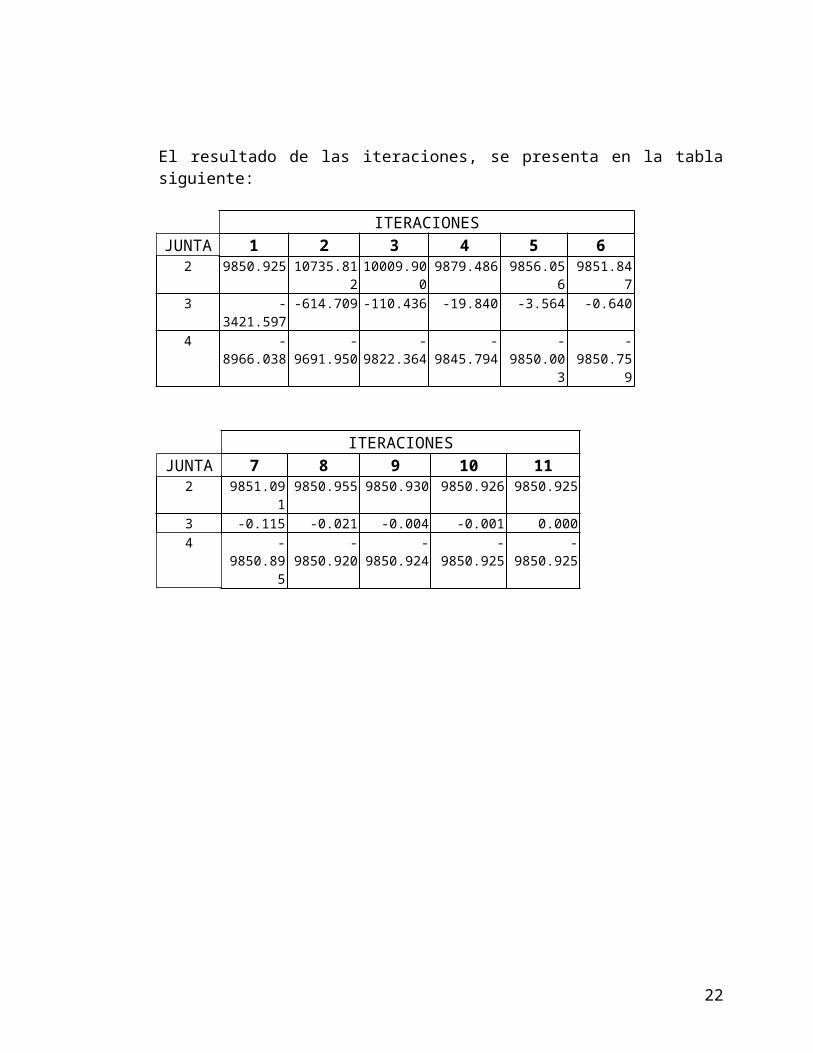
El resultado de las iteraciones, se presenta en la tabla siguiente:
ITERACIONESJUNTA 1 2 3 4 5 6
2 9850.925 10735.812 10009.900 9879.486 9856.056 9851.8473 -3421.597 -614.709 -110.436 -19.840 -3.564 -0.6404 -8966.038 -9691.950 -9822.364 -9845.794 -9850.003 -9850.759
ITERACIONESJUNTA 7 8 9 10 11
2 9851.091 9850.955 9850.930 9850.926 9850.9253 -0.115 -0.021 -0.004 -0.001 0.0004 -9850.895 -9850.920 -9850.924 -9850.925 -9850.925
15

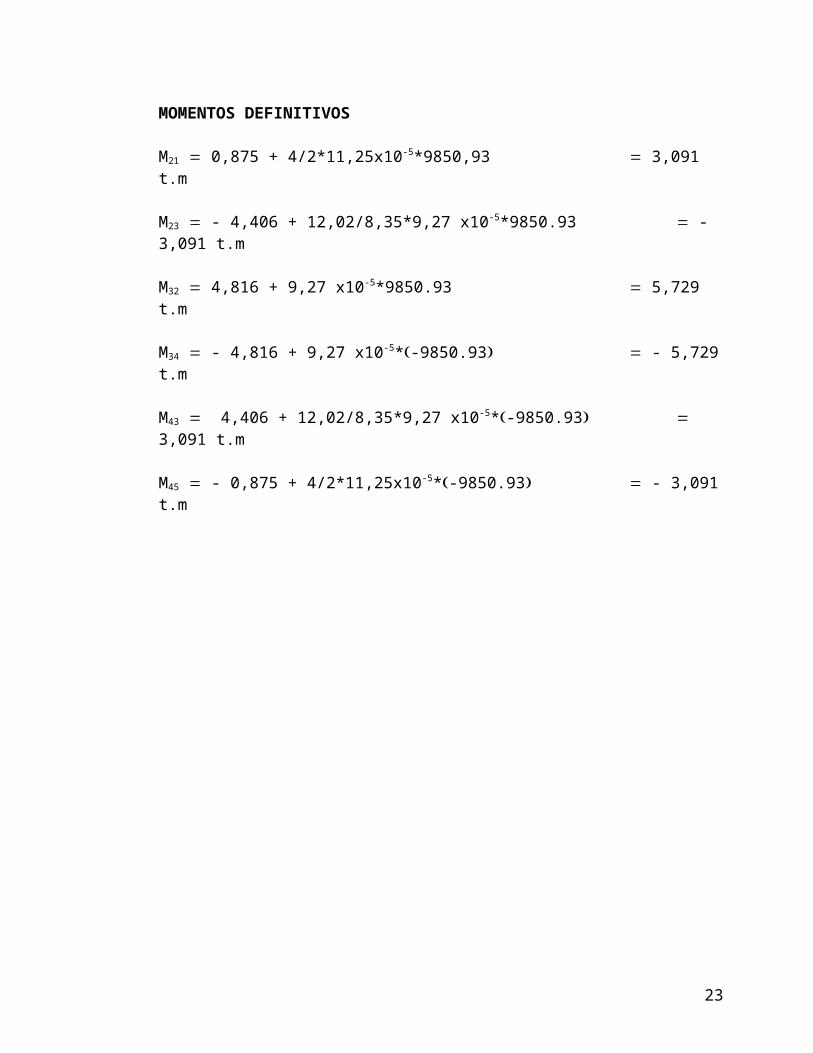
MOMENTOS DEFINITIVOS
M21 0,875 + 4/2*11,25x10-5*9850,93 3,091 t.m
M23 - 4,406 + 12,02/8,35*9,27 x10-5*9850.93 -3,091 t.m
M32 4,816 + 9,27 x10-5*9850.93 5,729 t.m
M34 - 4,816 + 9,27 x10-5*-9850.93 - 5,729 t.m
M43 4,406 + 12,02/8,35*9,27 x10-5*-9850.93 3,091 t.m
M45 - 0,875 + 4/2*11,25x10-5*-9850.93 - 3,091 t.m
16

1.2.6. Momentos por efectos de desplazabilidad de la estructura.
Para facilitar la comprensión de la formulación matemática, setienen las siguientes consideraciones:
1.2.6.1. En un piso todas las columnas tienen la mismaaltura y están empotradas en sus extremos.
Tomando una columna cualquiera ij del sistema complementario.
Mij
i Vij Aplicando momento en la junta j, se tiene:
hij + ij Mj = 0 Mij + Mji + Vij * hij = 0
j Vji Despejando Vij, se tiene:
Mji Vij = -1/hij (Mij + Mji) (7)
Sumando los cortes de todas las columnas de un piso p:
Vij = - ( Mij + Mji)/hij p p
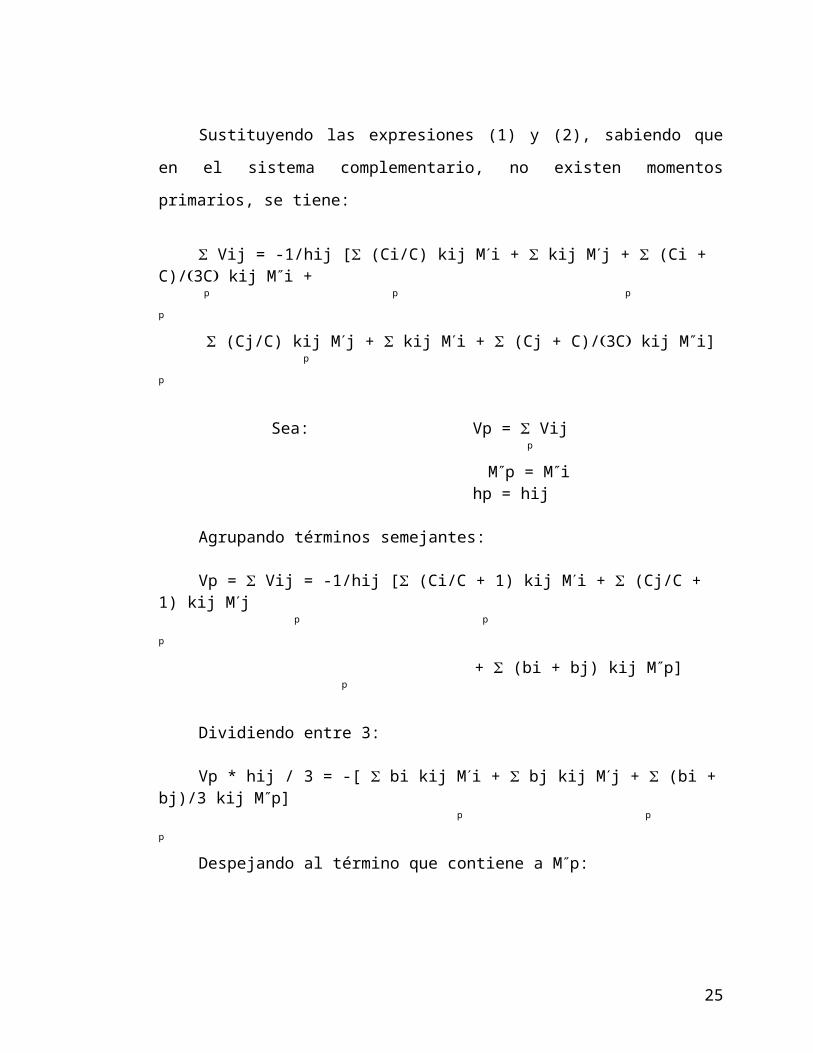
Sustituyendo las expresiones (1) y (2), sabiendo que en el sistema
complementario, no existen momentos primarios, se tiene:
Vij = -1/hij [ (Ci/C) kij Mi + kij Mj + (Ci + C)/3C kij Mi + p p p p
(Cj/C) kij Mj + kij Mi + (Cj + C)/3C kij Mi] p p
Sea:Vp = Vij p
Mp = Mi hp = hij
Agrupando términos semejantes:
17

Vp = Vij = -1/hij [ (Ci/C + 1) kij Mi + (Cj/C + 1) kij Mj p p p
+ (bi + bj) kij Mp] p
Dividiendo entre 3:
Vp * hij / 3 = -[ bi kij Mi + bj kij Mj + (bi + bj)/3 kij Mp] p p p
Despejando al término que contiene a Mp:
(bi + bj)/3 kij Mp = -[ Vp * hij / 3 + bi kij Mi + bj kij Mj] (8) p p p
Según la Ec. (3.3):
Mp = -6E ij ; Mp = -6E /hij (9)
Multiplicando por (bi +bj)/3 kij y aplicando sumatoria:
(bi + bj)/3 kij Mp = - 6 (bi + bj)/3 kij E ij p p
= - 6 (bi + bj)/3 kij E */hij p
Despejando /hij:
/hij = (bi + bj)/3 kij Mp / (-6 (bi + bj)/3 kij E) p p
Sustituyendo en (9):
Mp = -6.E. (bi + bj)/3 kij Mp / (-6 (bi + bj)/3 kij E) p p
Sustituyendo (8):
Mp = -1 / ( (bi + bj)/3 kij) [Vp * hij / 3 + bi kij Mi + bj kij Mj] p p p
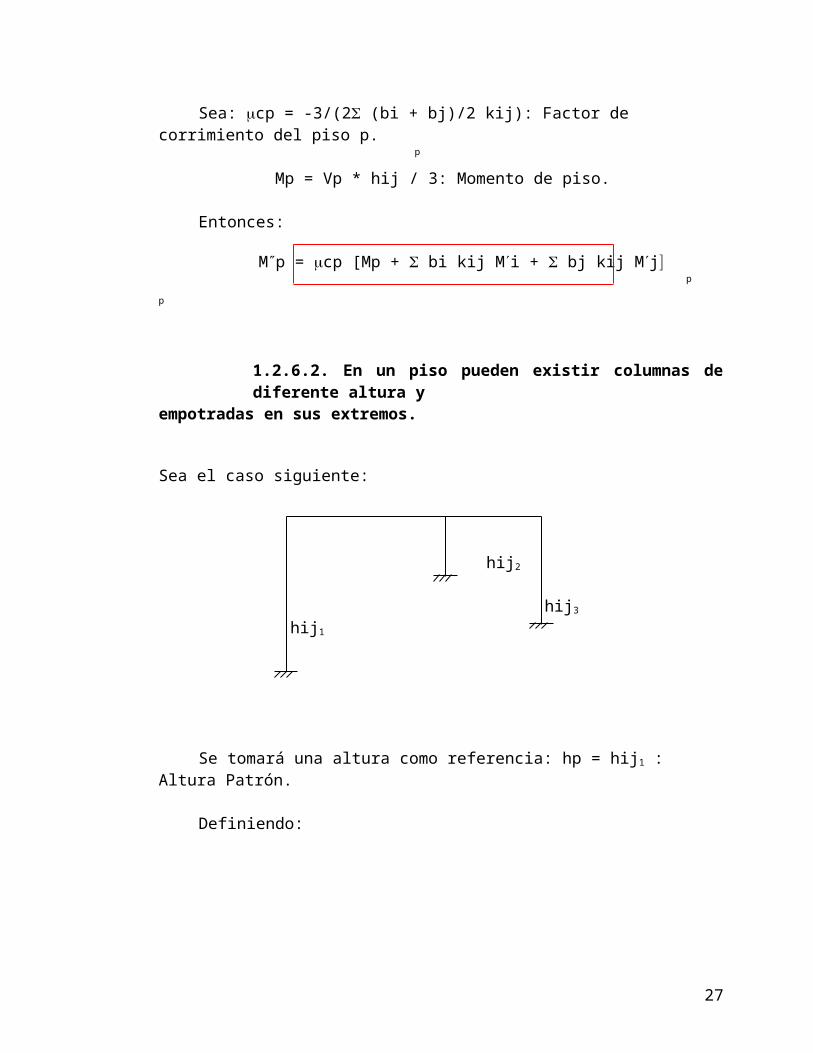
Sea: cp = -3/(2 (bi + bj)/2 kij): Factor de corrimiento del piso p. p
Mp = Vp * hij / 3: Momento de piso.
Entonces:
18

Mp = cp [Mp + bi kij Mi + bj kij Mj p p
1.2.6.2. En un piso pueden existir columnas de diferente altura yempotradas en sus extremos.
Sea el caso siguiente:
hij2
hij3
hij1
Se tomará una altura como referencia: hp = hij1 : Altura Patrón.
Definiendo:
Cij1 = hp/hij1 ; Cij2 = hp/hij2 ; Cij3 = hp/hij3
Entonces: hij = hp/Cij
Sustituyendo en (7).
Vij = -1 / hp / Cij*(Mij + Mji)
Sustituyendo las expresiones de momentos definitivos y agrupando términos semejantes.
Vij = -1 / hp / Cij [ (Ci/C + 1) kij Mi + (Cj/C + 1) kij Mj + (bi + bj) kij Mi]
Aplicando sumatoria y dividiendo entre 3
Vp * hp/3 = -[ Cij bi kij Mi + Cij bj kij Mj + Cij (bi + bj)/3 kij Mi]p p p
Despejando el término que contiene a Mi
19

Cij(bi + bj)/3kijMi = -[ Vp*hp/3 + CijbikijMi + CijbjkijMj] (10) p p p
Tomando la expresión: Mi = -6E ij = -6E /hij * hp/hp = -6E Cij /hp (11)
Multiplicando por Cij (bi + bj)/3 kij y aplicando sumatoria, se tiene:
Cij (bi + bj)/3 kij Mi = -6E Cij2 (bi + bj)/3 kij * /hp p p
Despejando /hp:
/hp = Cij (bi + bj)/3 kij Mi / (-6E Cij2 (bi + bj)/3 kij) p p
Sustituyendo (10):
/hp = -[Vp*hij/3 + Cij bi kij Mi + Cij bj kij Mj]/(-6E Cij2 (bi + bj)/3 kij) p p p
Sustituyendo en (11):
Mi = -6ECijVp*hp/3+ Cij bi kij Mi + Cij bj kij Mj/(-6E Cij2 (bi + bj)/3kij) p p p
Mi = -Cij Mp + Cij kij (bi Mi + bj Mj)/( Cij2 (bi + bj)/3kij) p
Mi = Cij Mp
Mp = cp [Mp + Cij kij (bi Mi + bj Mj)]
pc = -3/2 * 1/( Cij2 (bi + bj)/2 kij)
1.2.6.3. En un piso pueden existir columnas de diferente altura y conun extremo articulado.
Se requiere establecer una relación entre una columna con sus dos extremos
empotrados y otra con un extremo articulado.
20

i i ij ij
hij hij
j j
Mij = -EK0 (Ci + C) ij Mij = -EK0 (Ci - C2/Cj) ij Mij = -EK0(Ci + C) /hij Mij = -EK0 (Ci - C2/Cj)/hij
Modificando la rigidez como lo muestra la expresión 6 e igualando las
expresiones, para determinar la relación entre las alturas de las columnas mostradas
arriba, se tiene:
-EK0/hij (Ci+C) = -EK0 (Ci - C2/Cj)/hij
-EK0 (1 – C2 / (Ci Cj))(Ci + C) /hij = -EK0 (Ci - C2/Cj) /hij
hij (Ci - C2/Cj) = hij (1 – C2 / (Ci Cj)) (Ci + C)
hij = hij (Ci Cj - C2 )/ (Ci Cj)*Ci+C Cj / (Ci Cj - C2)
hij = hij (Ci + C)/Ci Sea mij = (Ci + C)/Ci
hij = hij * mij
Si la articulación esta en i, se obtiene en forma análoga que:
hij = hij (Cj + C)/Cj ; mji = (Cj + C)/Cj
hij = hij * mji
Se requiere determinar una expresión para Mi, valida para columnas con un
extremo articulado.
Tomando una columna ij cualquiera.
Mij Aplicando momento en j i Vij
21
+ hij Mj = 0 Mij + Vij * hij = 0
Vij = - Mij / hijj
Sustituyendo la expresión:
Mij = Moj + Ci/C kij Mi + kij Mj + bi kij Mi
Vij = -1/hij [Ci/C kij Mi + bi kij Mi] (12)
Se sabe que: hij = hij (Ci + C)/Ci y Cij = hp/hij hij = hp/Cij
hij = hij Ci/(Ci + C)hij = hp/Cij * Ci/(Ci + C)
Sustituyendo en (12)
Vij = -1 /(hp*Ci)/(Cij (Ci + C))Ci/C kij Mi + bi kij Mi]
Aplicando sumatoria y dividiendo entre 3:
Vp/3 = -1/hp [(Ci + C)/3CiCij Ci/C kij Mi + (Ci + C)/3Ci Cij bi kij Mi] p p
Despejando el término que contiene a Mi
(Ci + C)/3CiCij bi kij Mi = -[Vp * hp/3 + (Ci + C)/3Ci Cij Ci/C kij Mi] p p
(Ci + C)/Ci Cij bi kij Mij = -3 [Vp * hp/3 + Cij bi kij Mi] (13) p p
Tomando la expresión:
Mi = -6E ij = -6E /hij = -6E /hp Cij
Multiplicando por (Ci + C)/Ci Cij bi kij y aplicando sumatoria:
(Ci + C)/Ci Cij bi kij Mi = -6E Cij2 (Ci + C)/Ci bi kij /hp p p
Despejando /hp
22
/hp = (Ci + C)/Ci Cij bi kij Mi / (-6E Cij2 (Ci + C)/Ci bi kij) p p
Sustituyendo en Mi = -6ECij /hp
Mi = -6ECij * (Ci + C)/Ci bi kij Mi / (-6E Cij2 (Ci + C)/Ci bi kij) p p
Sustituyendo (13):
Mi = Cij (-3)*[Vp * hp/3 + Cij bi kij Mi] / ( Cij2 (Ci + C)/Ci bi kij) p p
Mi = Cij*(-3/2)*1/ ( Cij2 (Ci + C)/Ci bi/2 kij) [Vp * hp/3 + Cij bi kij Mi] p p
Sabiendo que: Mp = Vp * hp/3 y mij = (Ci + C)/Ci , entonces:
Mi = Cij * (-3/2) * 1 / ( Cij2 mij bi/2 kij) [Mp + Cij bi kij Mi] p p
1.2.6.4. En un piso pueden existir columnas de diferente altura, algunascon sus dos extremos empotrados y otras con un extremo articulado
Sí dentro de un mismo piso (p) existen columnas con un extremo articulado y
otras, con ambos extremos rígidos, las expresiones de los casos anteriores pueden
integrarse para encontrar una, que sea aplicable en cualquier condición. Así se obtiene:
Mp = ci [Mp + Cij kij (bi Mi + bj Mj] p
Mi = Cij MpDonde:
ci = -3/(2* Cij2 *m*(bi + bj)/2 * kij) p
Con las siguientes condiciones:
m bi bj
1 Ci + C/3C Cj + C/3C
23
i
j
i

Ci + C/Ci Ci + C/3C 0
Cj + C/Cj 0 Cj + C/3C
24
j
i
j
1.2.7. Algoritmo para la aplicación del Método de Kani a estructurasdesplazables en dirección horizontal.
1. Calcular: Moij, Moji, Ms, Ci, C, Cj, Mp.
2. Calcular: i = -1/( Ci/C kij) i
3. Calcular: ci = -3/(2 Cij2 m (bi + bj)/2 kij) p
4. Aplicar: Mp = ci [Mp + Cij kij (bi Mi + bj Mj)] p
5. Aplicar: Mi = i [Ms + kij Mj + kij Cij bi Mp] i i
6. ¿ Se logró la convergencia?SI: ContinuarNO: Ir al paso 4
7. Calculas los momentos definitivos:
Mij = Moij + kij Ci/C Mi + kij Mj + Cij bi kij Mp
Mji = Moji + kij Cj/C Mj + kij Mi + Cij bj kij Mp
25

1.2.8. Ejemplo: 3 Aplique el método Kani para calcular los valores de momento flector
en los extremos de los miembros del siguiente sistema estructural.
S3 S33
4 5 6
S1 S1 3
2
1
1,5 M 4,5 M 1,5 M 2 M 1 M
S1: 40 x 45cm2
S2: 30 x 40cm2
S3: 30 x 30cm2
f’c: 200 kg/cm2
26
1,5 M
0,5 M
3,0 M 0,7 t/m
2,5 M
1,5 M
0,5 t
1,4 t/m0,8 t/m
1,2 t/m 0,5 t/m
S3
S1
S2 S2
7 8
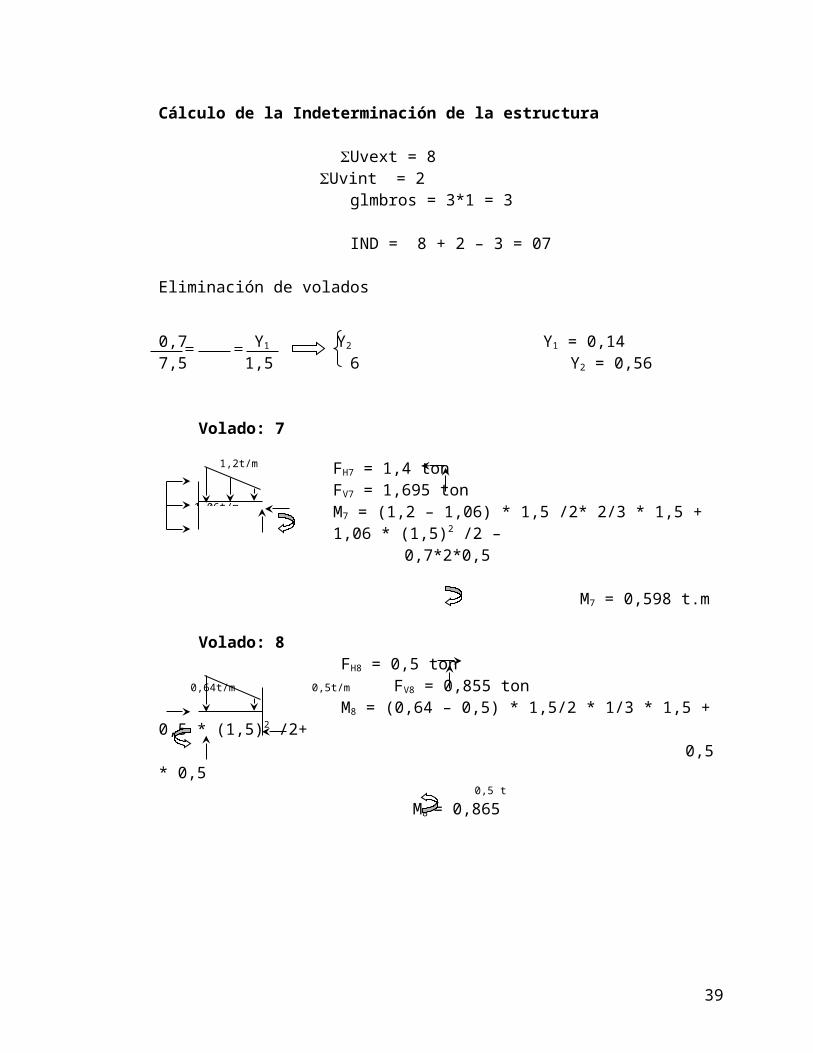
Cálculo de la Indeterminación de la estructura Uvext = 8 Uvint = 2 glmbros = 3*1 = 3
IND = 8 + 2 – 3 = 07
Eliminación de volados
0,7 Y1 Y2 Y1 = 0,147,5 1,5 6 Y2 = 0,56
Volado: 7
FH7 = 1,4 tonFV7 = 1,695 tonM7 = (1,2 – 1,06) * 1,5 /2* 2/3 * 1,5 + 1,06 * (1,5)2 /2 –
0,7*2*0,5
M7 = 0,598 t.m
Volado: 8FH8 = 0,5 ton
0,64t/m 0,5t/m FV8 = 0,855 tonM8 = (0,64 – 0,5) * 1,5/2 * 1/3 * 1,5 + 0,5 * (1,5)2 /2+
0,5 * 0,5 0,5 t
M8 = 0,865
Volado: 4
FV4 = 2,1ton M4 = 1,575ton.m
Volado: 6
FV6 = 0,8tonM6 = 0,4t.m
27
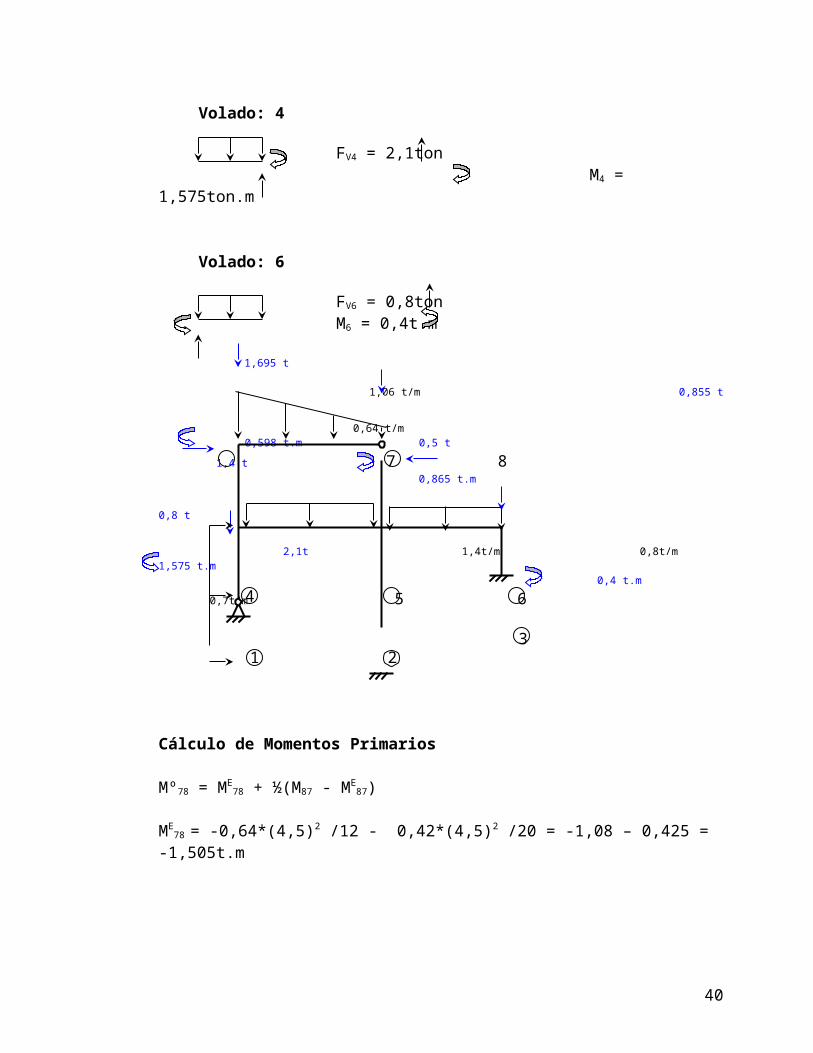
1,2t/m 1,06t/m

1,695 t
1,06 t/m 0,855 t
0,64 t/m
0,598 t.m 0,5 t
1,4 t 7 8 0,865 t.m
0,8 t
2,1t 1,4t/m 0,8t/m1,575 t.m
0,4 t.m
0,7t/m 5 6
Cálculo de Momentos Primarios
Mº78 = ME78 + ½(M87 - ME
87)
ME78 = -0,64*(4,5)2 /12 - 0,42*(4,5)2 /20 = -1,08 – 0,425 = -1,505t.m
ME87 = 0,64*(4,5)2 /12 + 0,42*(4,5)2 /30= 1,08 + 0,284 = 1,364t.m
Mº78 = -1,505 + ½*(0,865 – 1,364) = -1,755 t.m Mº78 = -1,755t.m
Mº45 = ME45 = -1,4*(4,5)2 /12 = - 2,363t.m Mº45 = - 2,363t.m
Mº54 = 2,363t.m
Mº56 = ME56 = -0,8*(3,5)2 /12 = -0,817t.m Mº56 = -0,817t.m
Mº65 = 0,817t.m
Mº41 = 0,7*(4)2 /8 = 1,4t.m Mº41 = 1,4t.m
Mº47 = ME47 = wa2 (6 - 8a + 3a2)L2 /12 ; Mº74 = ME
74 = w.a3 (4 – 3a)L2 /12
aL = 3 a = 3/3,5 = 0,857.
Mº47 = -0,707t.m ; Mº74 = 0,643t.m Mº47 = -0,707t.m
28
1 23
4
Mº74 = 0,643t.m
Cálculo de Momentos de Sujeción
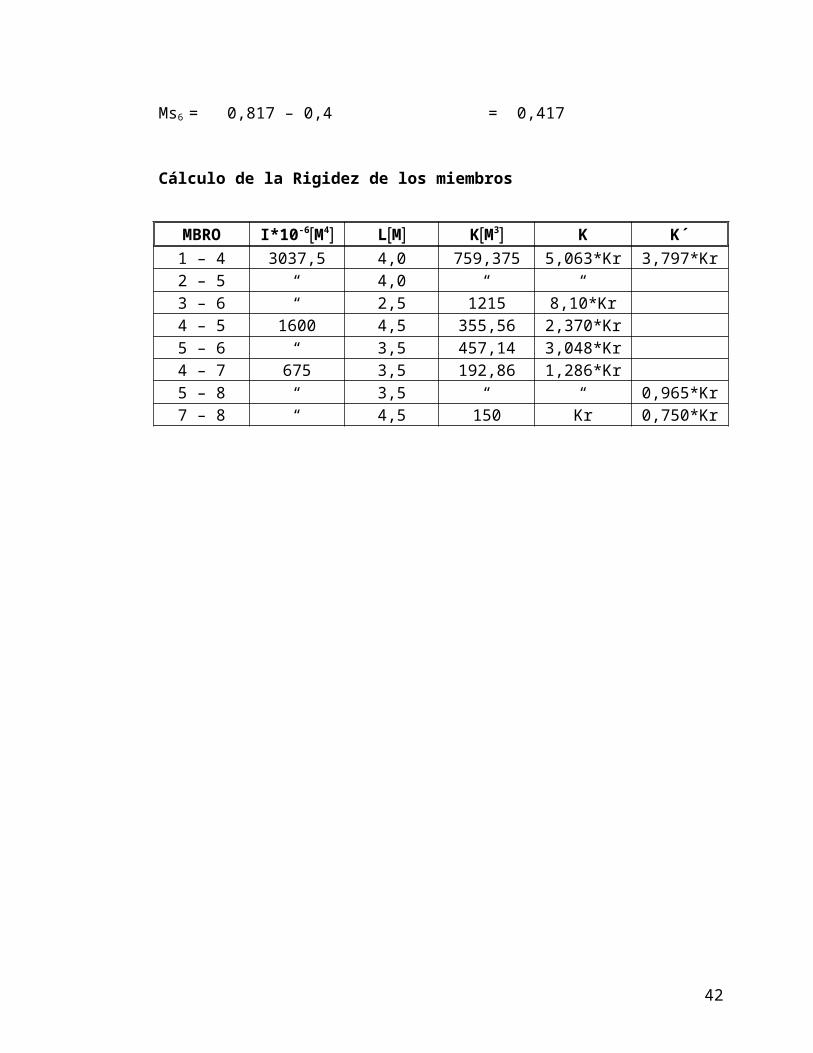
Ms7 = -1,755 + 0,643 – (-0,598) = -0,514Ms4 = -0,707 – 2,363 + 1,4 – (-1,575) = -0,095 Ms5 = 2,363 – 0,817 = 1,546Ms6 = 0,817 – 0,4 = 0,417
Cálculo de la Rigidez de los miembros
MBRO I*10-6M4 LM KM3 K K´1 – 4 3037,5 4,0 759,375 5,063*Kr 3,797*Kr2 – 5 “ 4,0 “ “3 – 6 “ 2,5 1215 8,10*Kr4 – 5 1600 4,5 355,56 2,370*Kr5 – 6 “ 3,5 457,14 3,048*Kr4 – 7 675 3,5 192,86 1,286*Kr5 – 8 “ 3,5 “ “ 0,965*Kr7 – 8 “ 4,5 150 Kr 0,750*Kr
29

Cálculo de factores de giro : i = - 1/2* 1/ Σ kij
Junta 7 :
μ7 = - ½*1/( ¾ + 1,286) = - 0,246
Junta 4 :
μ4 = - ½*1/(1,286 + 2,37 + 3,797) = - 6,709 x10-2
Junta 5 :
μ5 = - ½*1/(0,965 + 3,048 + 5,063 + 2,37) = - 4,368 x10-2
Junta 6 :
μ6 = - ½*1/(3,048 + 8,10) = - 4,485 x10-2
Cálculo de factores de corrimiento
μcp = -3/2*1/[Σ kij C2ij
*(bi + bj)/2*m]
Piso 2
hp = 3,5*1,5 = 5,25
C47 = 5,25/3,5 = 1,5 ; C58 = 5,25/5,25 = 1
μC2 = -3/2*1/[(1,5)2*1*1*1,286 + 12*1/2*3/2*0,965] = -0,415
Piso 1
hp = 4 * 1,5 = 6
C14 = 6/6 =1 ; C25 = 6/4 = 1,5 ; C36 = 6/2,5 = 2,4
μC1 = -3/2*1/[12*1/2*3/2*3,797 + (1,5)2*1*1*5,063 + (2,4)2*1*1*8,10] = -0,0246
30

Cálculo de Momentos de piso
Piso: 2 7 0,643 + F7 M4 = 0 0,643 – 0,707 + 0,7 * 32 - F7 * 3,5 = 0
2 F7 = 0,882
F4 FH = 0 F4 = 1,218 0,707
4
1,4 + 0,882 0,5
Qp2
Vp2 = 1,4 + 0,882 –0,5 = 1,782 Mp2 = 1,782 * 5,25 /3 = 3,119
Piso: 1
1,4 + 0,882 0,5
1,218 + 1,75
Qp1
1,4 t.m F4
1 + M1 = 0 = 1,4 + 0,7 * 42 / 2 - F4
1 * 4 = 0 F4
1 = 1,75
Vp1 = 1,4 + 0,882 + 1,218 + 1,75 – 0,5 = 4,75Mp1 = 4,75 * 6 / 3 = 9,50
31
1
4

FORMULACIÓN A APLICAR EN LAS ITERACCIONES
Momentos por DesplazabilidadM’’p = μcp [Mp+ Σ kij * Cij
*(bi * M’i+ bj *M’j)] p
Piso:2M’’2 = - 0,415 [ 3,119 + 1,5 * 1,286 (M’7 + M’4 ) + 1*0,965* M’5]Piso:1M’’1 = - 0,0246 [ 9,50 + 1*3,797* M’4 +1,5*5,063* M’5+2,4*8,10*M’6]
Momentos por Giro
Mi = i [Ms + kij Mj + bi * kij * Cij * Mp] i i
Junta:7 M’7 = - 0,246 [ - 0,514 +1,286 * M’4 + 1,286 * 1,5 * M”2]
Junta:4M’4 = -6,709x10-2 [ -0,095 + 1,286 * M’7 + 2,37*M’5+1,286*
1 ,5*M”2+3,797*1*M”1]
Junta:5M’5 = - 4,368x10-2 [1,546 + 2,37 * M’4+3,048*M’6+0.965*M”2+5,063*1,5*M”1]
Junta:6M’6 = - 4,485x10-2 [0,417 + 3,048 * M’5
+ 8,10 * 2,4 * M”1] = 0,178
ITERACCIÓN: 1
Momentos por DesplazabilidadPiso:2
M’’2 = - 0,415 [ 3,119 + 1,5 * 1,286 (0 * 1 + 0 * 1 ) + 1*0,965* 0] = -1,294 Piso:1
M’’1 = -0,0246 [ 9,50 ] = - 0,234
32

Momentos por GiroJunta:7 M’7 = - 0,246 [ - 0,514 + 0 + 1,286 * (-1,294) * 1,5 * 1] = 0,740
Junta:4M’4 = -6,709x10-2 [ -0,095 + 1,286 * 0,740 + 1,286*(-1,294) *1,5*1+3,797*(-0,234)]
= 0,170
Junta:5M’5 = - 4,368x10-2 [1,546+2,37*0,170+0,965 (-1,294)*1*1+5,063 (- 0,234)*1,5 * 1]
= 0,047
Junta:6M’6 = - 4,485x10-2 [0,417 + 3,048 * 0,047 + 8,10 * (-0,234)*2,4 * 1] = 0,179
ITERACCIÓN: 2
Momentos por Desplazabilidad
Piso:2
M’’2 = - 0,415 [3,119 + 1,5 * 1,286 (0,74 + 0,170) + 1 * 0,965*0,047] = - 2,042
Piso:1
M’’1 = - 0,0246 [9,50 + 1* 3,797 * 0,170 + 1,5 * 5,063 * 0,047 + 2,4 * 8,10 * 0,179]
= - 0,344
Momentos por Giro
Junta:7M’7 = - 0,246 [ - 0,514 + 1,286 * 0,170 + 1,286 * (-2,042)*1,5 * 1] = 1,042
Junta:4M’4 = - 6,709x10-2 [- 0,095 + 1,286 * 1,042 + 2,37 * 0,047 + 1,286 (-2,042)*1,5 *
1+3,797*(-0,344)*1*1] = 0,261
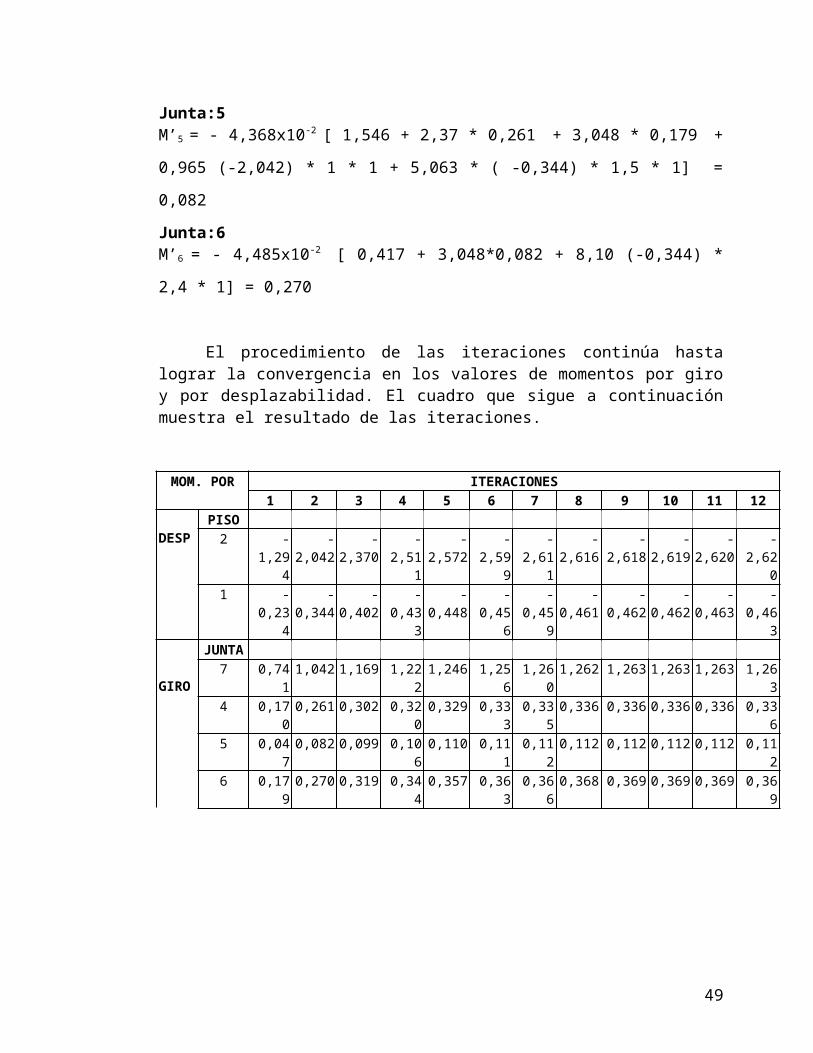
Junta:5M’5 = - 4,368x10-2 [ 1,546 + 2,37 * 0,261 + 3,048 * 0,179 + 0,965 (-2,042) * 1 * 1 +
5,063 * ( -0,344) * 1,5 * 1] = 0,082
Junta:6M’6 = - 4,485x10-2 [ 0,417 + 3,048*0,082 + 8,10 (-0,344) * 2,4 * 1] = 0,270
33

El procedimiento de las iteraciones continúa hasta lograr la convergencia en los valores de momentos por giro y por desplazabilidad. El cuadro que sigue a continuación muestra el resultado de las iteraciones.
MOM. POR ITERACIONES1 2 3 4 5 6 7 8 9 10 11 12
DESPPISO2 -1,294 -2,042 -2,370 -2,511 -2,572 -2,599 -2,611 -2,616 -2,618 -2,619 -2,620 -2,6201 -0,234 -0,344 -0,402 -0,433 -0,448 -0,456 -0,459 -0,461 -0,462 -0,462 -0,463 -0,463
GIRO
JUNTA7 0,741 1,042 1,169 1,222 1,246 1,256 1,260 1,262 1,263 1,263 1,263 1,2634 0,170 0,261 0,302 0,320 0,329 0,333 0,335 0,336 0,336 0,336 0,336 0,3365 0,047 0,082 0,099 0,106 0,110 0,111 0,112 0,112 0,112 0,112 0,112 0,1126 0,179 0,270 0,319 0,344 0,357 0,363 0,366 0,368 0,369 0,369 0,369 0,369
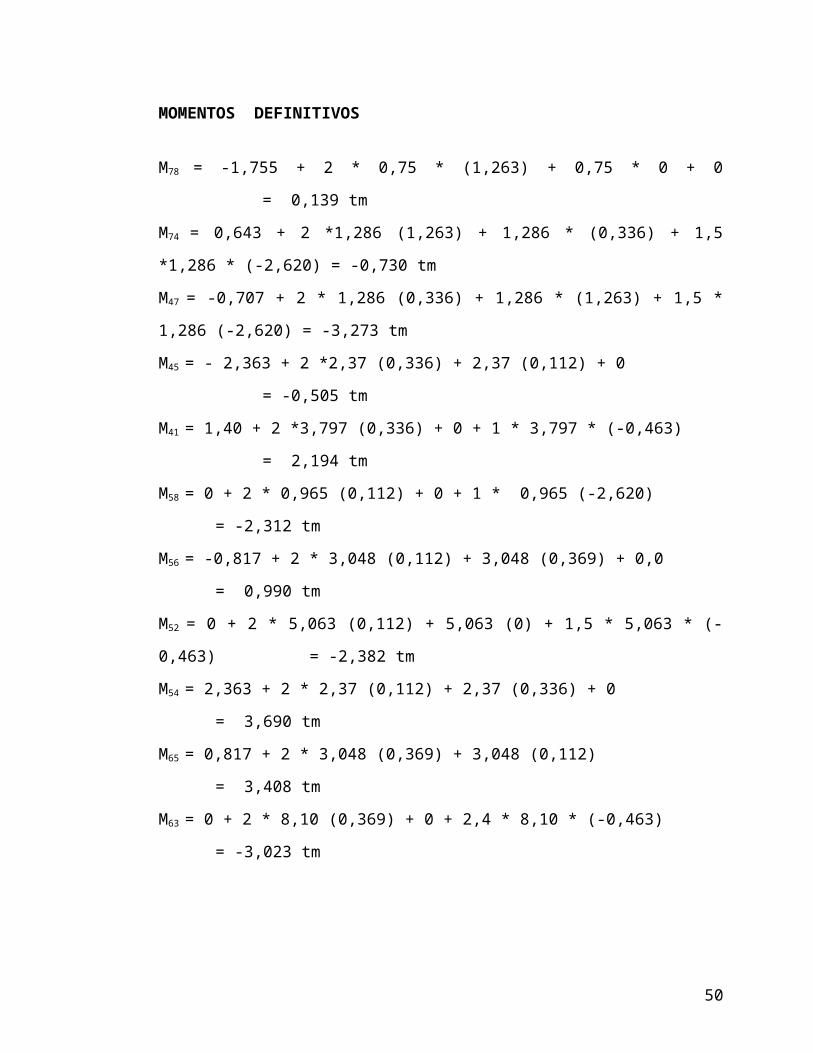
MOMENTOS DEFINITIVOS
M78 = -1,755 + 2 * 0,75 * (1,263) + 0,75 * 0 + 0 = 0,139 tm
M74 = 0,643 + 2 *1,286 (1,263) + 1,286 * (0,336) + 1,5 *1,286 * (-2,620) = -0,730 tm
M47 = -0,707 + 2 * 1,286 (0,336) + 1,286 * (1,263) + 1,5 * 1,286 (-2,620) = -3,273 tm
M45 = - 2,363 + 2 *2,37 (0,336) + 2,37 (0,112) + 0 = -0,505 tm
M41 = 1,40 + 2 *3,797 (0,336) + 0 + 1 * 3,797 * (-0,463) = 2,194 tm
M58 = 0 + 2 * 0,965 (0,112) + 0 + 1 * 0,965 (-2,620) = -2,312 tm
M56 = -0,817 + 2 * 3,048 (0,112) + 3,048 (0,369) + 0,0 = 0,990 tm
M52 = 0 + 2 * 5,063 (0,112) + 5,063 (0) + 1,5 * 5,063 * (-0,463) = -2,382 tm
M54 = 2,363 + 2 * 2,37 (0,112) + 2,37 (0,336) + 0 = 3,690 tm
M65 = 0,817 + 2 * 3,048 (0,369) + 3,048 (0,112) = 3,408 tm
M63 = 0 + 2 * 8,10 (0,369) + 0 + 2,4 * 8,10 * (-0,463) = -3,023 tm
M25 = 0 + 2 * 0 + 5,063 * 0,112 + 1,5 * 5,063 * (-0,463) = -2,949 tm
M36 = 0 + 2 * 0 + 8,10 * 0,369 + 2,4 * 8,10 (-0,463) = -6,012 tm
34

35

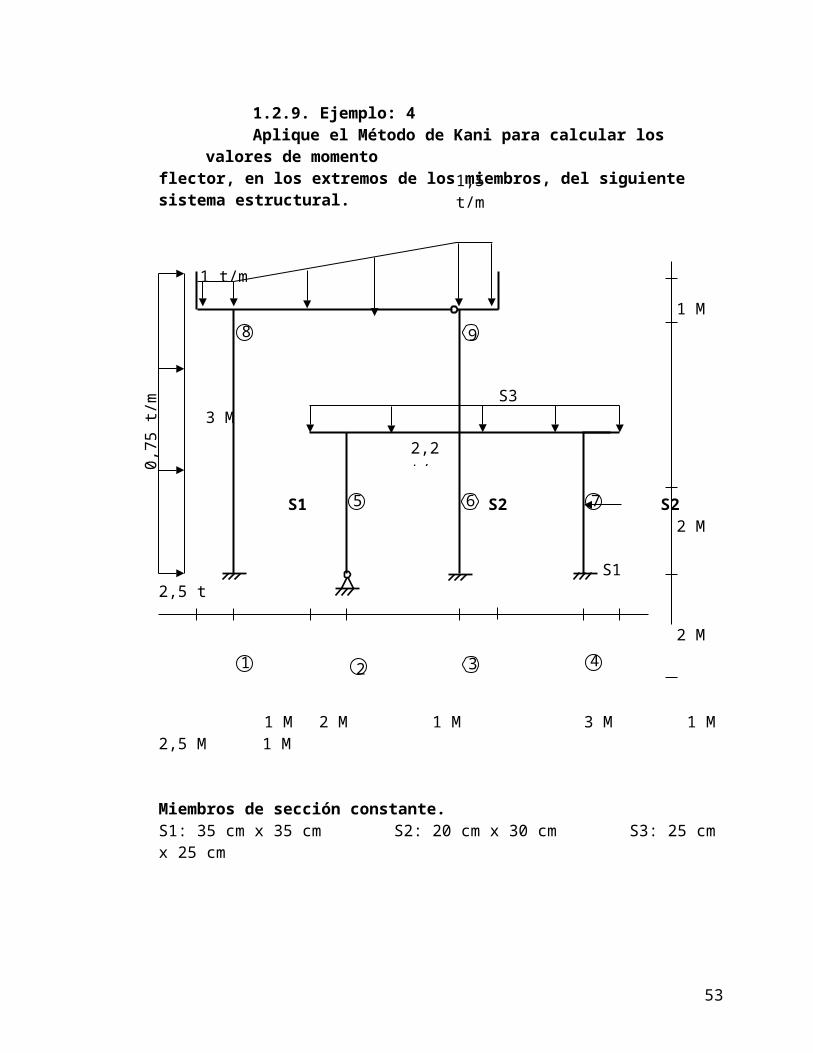
1.2.9. Ejemplo: 4Aplique el Método de Kani para calcular los valores de momento
flector, en los extremos de los miembros, del siguiente sistema estructural.
1 M
S3 3 M
S1 S2 S22 M
S1 2,5 t
2 M
1 M 2 M 1 M 3 M 1 M 2,5 M 1 M
Miembros de sección constante.S1: 35 cm x 35 cm S2: 20 cm x 30 cm S3: 25 cm x 25 cm
Miembros de sección variable.Perfil longitudinal Perfil longitudinal y planta
30 cm
i jPlanta Ci C 8
Cj 32
Ci Cj 12,02 ; C 8,35 jME
89 4,406 t.m ; ME98 4,816 t.m
36
1 t/m
1,5 t/m
2,2 t/m
0,75
t/m
60 cm
20 cm
20 cm i
40 cm
1 2 3 4
5 6 7
8 9
8 9
5 6
2 3

z 8*2*z2-2*z+13
Estudio Estático:
IND Uvext + Uvint – GlmbrosIND 11 + 02 – 3*2 07
Estudio Cinemático:
Analizando las características de los apoyos y las formas de vinculación de los miembros, se concluye que no existe compatibilidad de movimiento, por tal motivo el sistema estructural es estable.
Eliminando, los miembros isostáticos, se obtiene:
1 M
S3 3 M
S1 S2 S22 M
S1 2,5 t
2 M
1 M 2 M 1 M 3 M 1 M 2,5 M 1 M
Momentos primarios
37
1 t/m1,5 t/m
2,2 t/m
0,75
t/m
1 2 3 4
5 6 7
89
1,5 ton
0,75 t/m
1 ton0,125 tm
2,2 ton
1,1 ton
2,2 ton
1,1 tm
0,75 ton
Mo18 ME
18 -3,063 t m
Mo81 ME
81 3,063 t m
Mo56 ME
56 -1,650 t m
Mo65 ME
65 1,650 t m
Mo67 ME
67 -2,246 t m
Mo76 ME
76 2,246 t m
Mo47 ME
47 1,250 t m
Mo74 ME
74 -1,250 t m
Mo69 ME
69 + ½* M96 - ME96 0,375 t m
Mo89 ME
89 + C/Cj* M98 - ME98 -7,752 t m
Momentos de Sujeción
Junta 5
Ms5 -1,650 + 1,100 -0,550 t m
Junta 6
Ms6 -1,650 – 2,246 + 0,375 -0,221 t m
Junta 7
Ms7 2,246 – 1,100 – 1,250 -0,104 t m
Junta 8
Ms8 -7,752 + 3,063 + 0,125 -4,564 t mMomentos de PisoPiso: 2
38
2,625+0,750 t 0,375 t
Qp2
M6 0 0,75 + 0,375 – F9*3 0
F9 0,375 t
Qp2 2,625 + 0,750 + 0,375 3,75 t Mp2 3,75*7/3 8,75 tm
39
8 9
3,063 tm
2,625 t
3,063 tm
F90,75 tm
0,375 tm
Piso: 1
2,625+0,750 t 0,375 t
Qp1
Qp1 2,625 + 0,750 + 0,375 – 0,375 –1,250 2,125 t Mp1 2,125*4/3 2,833 tm
Rigideces
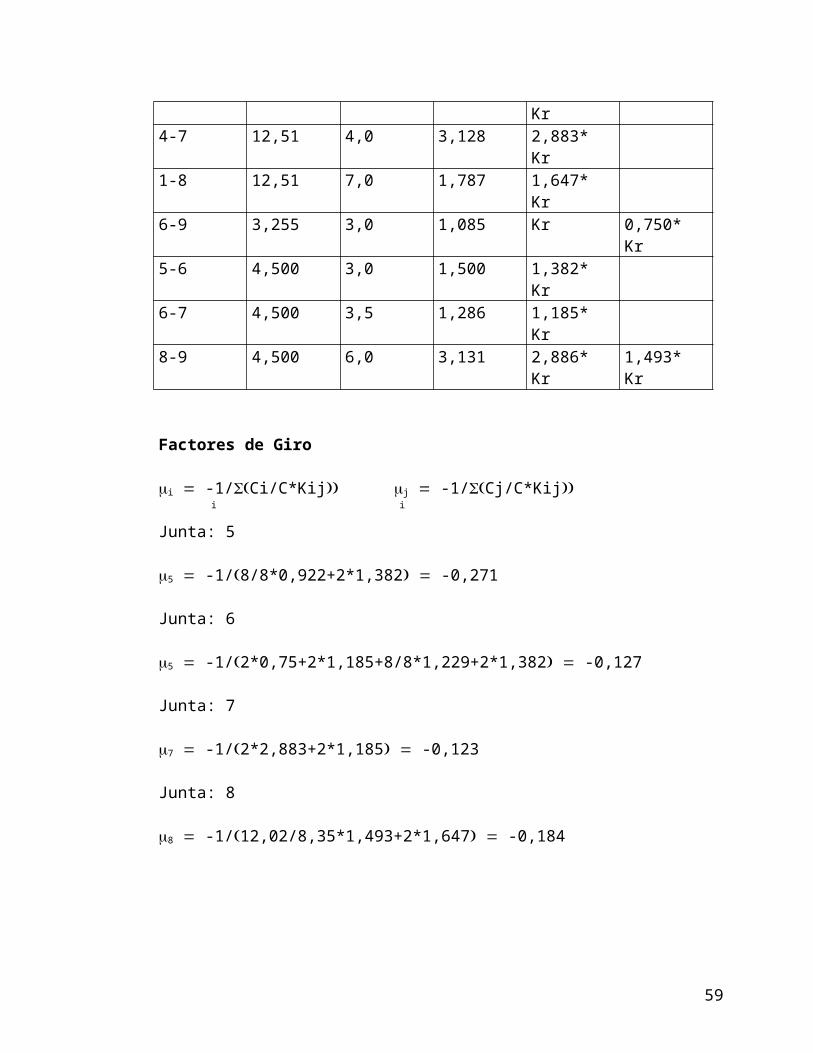
Miembro I x 10-4 M4 L M K M3 K Kmod2-5 1,333 4,0 1,333 1,229* Kr 0,922* Kr3-6 1,333 4,0 1,333 1,229* Kr4-7 12,51 4,0 3,128 2,883* Kr1-8 12,51 7,0 1,787 1,647* Kr6-9 3,255 3,0 1,085 Kr 0,750* Kr5-6 4,500 3,0 1,500 1,382* Kr6-7 4,500 3,5 1,286 1,185* Kr8-9 4,500 6,0 3,131 2,886* Kr 1,493* Kr
40
8 9
0,375 1,250
1,250
1,250
2,50
1,250
1,250
5 6 7
Factores de Giro
i -1/Ci/C*Kij j -1/Cj/C*Kij i i
Junta: 5
5 -1/8/8*0,922+2*1,382 -0,271
Junta: 6
5 -1/2*0,75+2*1,185+8/8*1,229+2*1,382 -0,127
Junta: 7
7 -1/2*2,883+2*1,185 -0,123
Junta: 8
8 -1/12,02/8,35*1,493+2*1,647 -0,184
Factores de Corrimiento
Ci -3/2*m*Cij*bi+bj/2*Kij P
Columnas h hp Cij m bi BjPiso 2
1-8 7 7 1 1 1 16-9 3*1,5 4,5 1,556 3/2 0 1
Piso 12-5 4*Ci+C/Ci8
81 2 2/3 0
3-6 4 2 1 2/3 5/34-7 4 2 1 1 1
Piso: 02
C2 -3/2*1/1*12*1*1,647+3/2*1,5562*1/2*0,75 -0,499
Piso: 01
41
C1 -3/2*1/2*12*2/3+0/2*0,922+1*22*2/3+5/3/2*1,229+1*22*1*2,883 - 8,388x10-2
ITERACIONES
MOMENTOS POR DESPLAZABILIDAD
Mp CP*Mp + Cij*Kij*bi*Mi+bj Mj P
Piso: 02
Mp -0,499*8,755 + 1*1,647* M8 + 1,556*0,75* M6
Piso: 01
Mp -8,388x10-2*2,833 + 1*0,922*2/3*M5 + 2*1,229*2/3*M6+ 2*2,883*M7
MOMENTOS POR GIRO
Mi i*Ms + Kij*Mj + Kij*bi*Cij* Mp i i
Junta: 08
M8 - 0,184*-4,57 + 1,647*M2
Junta: 05
M5 - 0,271*-0,55 + 1,382* M6 + 0,922*2/3*M1
Junta: 06
M6 - 0,127*-0,22 + 1,382* M5 + 1,185* M7 + 0,75*1,556*M2
+ 1,229*2/3*2*M1Junta: 07
M7 - 0,123*-0,10 + 1,185* M6 + 2,883*2*M1ITERACIÓN 01
42
MOMENTOS POR DESPLAZABILIDAD
Piso: 02
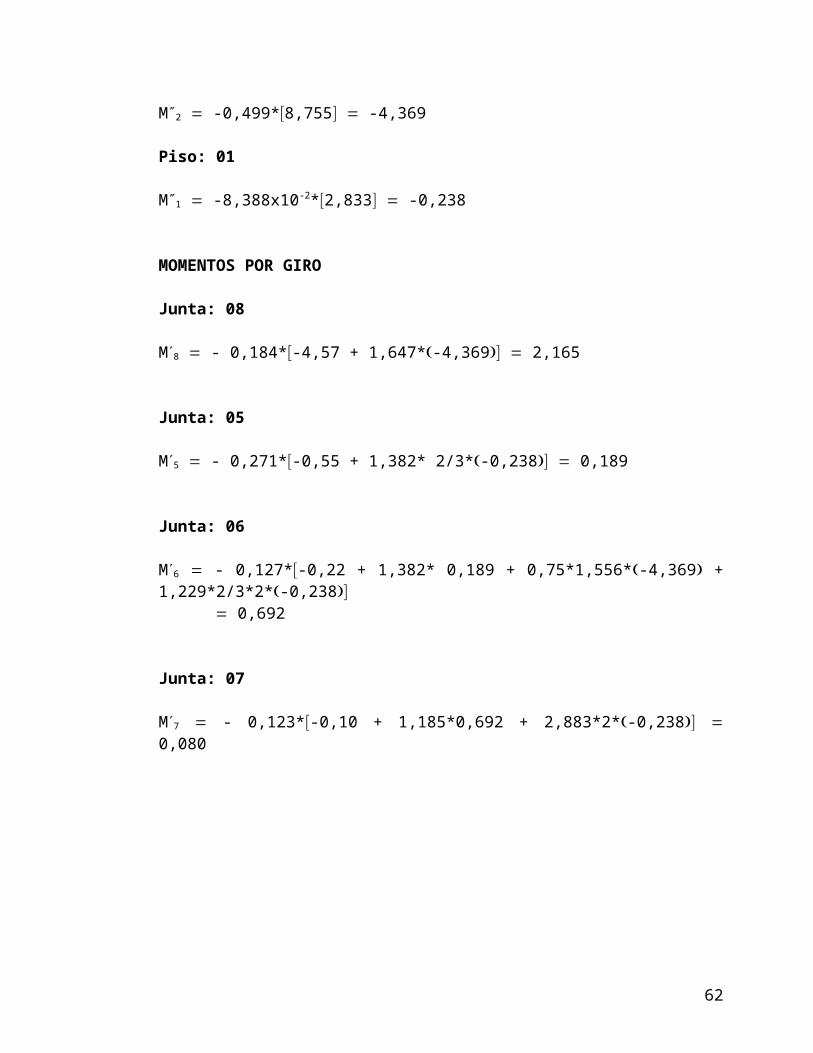
M2 -0,499*8,755 -4,369
Piso: 01
M1 -8,388x10-2*2,833 -0,238
MOMENTOS POR GIRO
Junta: 08
M8 - 0,184*-4,57 + 1,647*-4,369 2,165
Junta: 05
M5 - 0,271*-0,55 + 1,382* 2/3*-0,238 0,189
Junta: 06
M6 - 0,127*-0,22 + 1,382* 0,189 + 0,75*1,556*-4,369 + 1,229*2/3*2*-0,238 0,692
Junta: 07
M7 - 0,123*-0,10 + 1,185*0,692 + 2,883*2*-0,238 0,080
ITERACIÓN 02
43

MOMENTOS POR DESPLAZABILIDAD
Piso: 02
M2 -0,499*8,755+1,647*2,165+1,556*0,75*0,692 -6,551
Piso: 01
M1 -8,388x10-2*2,833+0,922*2/3*0,189+2*1,229*2/3*0,692+2*2,883*0,080 - 0,381
MOMENTOS POR GIRO
Junta: 08
M8 - 0,184*-4,57 + 1,647*-6,551 2,826
Junta: 05
M5 - 0,271*-0,55 + 1,382*0,692+0,922*2/3*-0,381 -0,047
Junta: 06
M6-0,127*-0,22+1,382*-0,047+1,185*0,080+0,75*1,556*-6,551+1,229*2/3*2*-0,381 1,074
Junta: 07
M7 - 0,123*-0,10 + 1,185*1,074 + 2,883*2*-0,381 0,126
El resultado de los momentos por giro y por desplazabilidad de once iteraciones, se presenta en la tabla siguiente:
44

MOMENTOS POR
ITERACIONES1 2 3 4 5 6 7 8 9 10 11
DESP. PISO2 -4.366 -6.547 -7.312 -7.586 -7.684 -7.719 -7.731 -7.735 -7.737 -7.738 -7.7381 -0.238 -0.381 -0.444 -0.468 -0.478 -0.481 -0.482 -0.483 -0.483 -0.483 -0.483
GIRO JUNTA8 2.163 2.824 3.056 3.139 3.168 3.179 3.183 3.184 3.184 3.185 3.1855 0.189 -0.046 -0.179 -0.229 -0.246 -0.252 -0.254 -0.255 -0.255 -0.256 -0.2566 0.692 1.074 1.217 1.267 1.285 1.292 1.294 1.295 1.295 1.295 1.2957 0.081 0.127 0.150 0.160 0.164 0.166 0.166 0.166 0.167 0.167 0.167
MOMENTOS DEFINITIVOS
M89 -7,752 + 12,02/8,35*1,493*3,185 -0,907 t.m
M81 3,063 + 2*1,647*3,185+1*1*1,647*-7,738 0,810 t.m
M18 3,063 + 1,647*3,185+1*1*1,647*-7,738 -4,436 t.m
M56 -1.650 + 1,382*2*-0,256+1,382*1,295 -0,568 t.m
M65 1,650 + 1,382*2*1,295+1,382*-0,256 4,876 t.m
M52 0 + 8/8*0,922*-0,256+1*2/3*0,922*-0,483 -0,533 t.m
M69 0,375 + 2*0,75*1,295+1,556*1*0,75*-7,738 -6,713 t.m
M67 -2,246 + 2*1,185*1,295+1,185*0,167 1,021 t.m
M76 2,246 + 2*1,185*0,167+1,185*1,295 4,176 t.m
M63 0 + 8/8*1,229*1,295+2*2/3*1,229*-0,483 0,800 t.m
M36 0 + 1,229*1,295+2*5/3*1,229*-0,483 -0,387 t.m
M74 -1,250+2*2,883*0,167+2*1*2,883*-0,483 -3,072 t.m
M47 1,250+2,883*0,167+2*1*2,883*-0,483 -1,054 t.m
45
1.3. Comparación del Método de Kani en su versión original con el Procedimiento Kani-Takabeya-Peña
Para efectos de comparación de los dos procedimientos, se presenta a
continuación el ejemplo N° 3 resuelto en el punto 1.2.8 empleando la metodología
Kani-Takabeya-Peña, ahora usando la versión original del Método de Kani.
La primera parte de ambos procedimientos es idéntica, las variaciones
comienzan en el cálculo de los factores de giro, por lo que se iniciará desde ese punto.
Cálculo de los Factores de Giro
ij = -1/2 * Kij / Di
Di = Kij
Junta: 7
D7 = 0,750 + 1,286
78 = - 0,5 * 0,750/D7 = -0,184
74 = - 0,5 * 1,286/ D7 = -0,316
Junta: 6
D6 = 3,048 + 8,10
65 = - 0,50 * 3,048 / D6 = -0,137
63 = - 0,50 * 8,10 / D6 = -0,363
Junta: 4
D4 = 1,286 + 2,370 + 3,797
47 = - 0,50 * 1,286 / D4 = -0,0862
45 = -0,50 * 2,370 / D4 = -0,159
41 = -0,50 * 3,797 /D4 = -0,255
46

Junta: 5
D5 = 0,965 + 3,048 + 5,063 + 2,370
58 = -0,50 * 0,965 / D5 = - 4,215x10-2
54 = 0,50 * 2,370 / D5 = - 0,104
56 = -0,50 * 3,048 / D5 = -0,133
52 = - 0,50 * 5,063 / D5 = -0,221
Cálculo de Factores de Corrimiento
Cij = -3/2 * cij kij/ Dpi Dpi cij2 (bi + bj) m kij 2
Piso: 2
hp = 3,5*1,5 = 5,25
C47 = 5,25/3,5 = 1,5 ; C58 = 5,25/5,25 = 1
Dp2 = (1,5)2 *1*1*1,286 + 12 * ½ * 3/2 *0,965
C47 = -3/2 * 1,5*1,286 / Dp2 = -0,80
C52 = -3/2 * 1 * 0,965 / Dp2 = -0,40
Piso: 1
hp = 4 * 1,5 = 6
C14 = 6/6 =1 ; C25 = 6/4 = 1,5 ; C36 = 6/2,5 = 2,4
Dp1 = 12 * ½ * 3/2 * 3,797 + (1,5)2 * 1 * 1 * 5,063 + (2,4)2 * 1 * 1 * 8,10
C14 = -3/2 * 1* 3,797 / Dp1 = -0094
47
C25 = -3/2 * 1,5 * 5,063 / Dp1 = -0,187 C36 = -3/2 * 2,4 * 8,10 / Dp1 = -0,479
Cálculo de Momentos de piso (Identico en ambos procedimiento)
Piso: 2
7 0,643 + F7 M4 = 0 0,643 – 0,707 + 0,7 * 32 - F7 * 3,5 = 0
2 F7 = 0,882
F4 FH = 0 F4 = 1,218 0,707
4
1,4 + 0,882 0,5
Qp2
Qp2 = 1,4 + 0,882 –0,5 = 1,782 Mp2 = 1,782 * 5,25 /3 = 3,119
Piso: 1
1,4 + 0,882 0,5
1,218 + 1,75
Qp1
48
Qp1 = 1,4 + 0,882 + 1,218 + 1,75 – 0,5 = 4,75
1,4 t.m 4 F4
1
+ M1 = 0 = 1,4 + 0,7 * 42 / 2 - F4
1 * 4 = 0 1
F41 = 1,75
Mp1 = 4,75 * 6 / 3 = 9,50
ITERACIÓN: 1
Momentos por Desplazabilidad
Piso 2
M″47 = - 0,80 [ 3,119] = -2,495 M″58 = - 0,40 [3,119 ] = -1,248Piso:1
M″14 = -0,094 [ 9,50 ] = - 0,893
M″25 = -0,187 [ 9,50 ] = - 1,777
M″36 = -0,479 [ 9,50 ] = - 4,551
Momentos por giro
Junta:7
M′74 = - 0,316 [- 0,514 -2,495] = 0,951
M′78 = - 0,184 [- 0,514 -2,495] = 0,554
Junta:4
M′47 = -0,086 [ -0,095 + 0,951 - 2,495 – 0,893] = 0,218
M′45 = -0,159 [ -0,095 + 0,951 - 2,495 – 0,893] = 0,403
M′41 = -0,255 [ -0,095 + 0,951-2,495 – 0,893] = 0,646
49
Junta:5
M′58 = - 0,042 [ 1,546 + 0,403 – 1,248 – 1,777] = 0,0452
M′56 = - 0,133 [ 1,546 + 0,403 – 1,248 – 1,777] = 0,143
M′52 = - 0,221 [ 1,546 + 0,403 – 1,248 – 1,777] = 0,238
M′54 = - 0,104 [ 1,546 + 0,403 – 1,248 – 1,777] = 0,112
Junta:6
M′65 = - 0,137 [0,417 + 0,143 – 4,551] = 0,547
M′63 = - 0,363 [0,417 + 0,143 – 4,551] = 1,449
ITERACIÓN: 2
Momentos por Desplazabilidad
Piso:2
M′47 = - 0,80 [3,119 + 1,5 (0,951 + 0,218) + 1 (0,0452] = - 3,934
M′58 = - 0,40 [3,119 + 1,5 (0,951 + 0,218) + 1 (0,0452] = - 1,967
Piso:1
M″14 = - 0,094 [9,50 + 1 * 0,646 + 1,5 * 0,238 + 2,4 * 1,449] = - 1,314
M″25 = - 0,187 [9,50 + 1 * 0,646 + 1,5 * 0,238 + 2,4 * 1,449] = - 2,614
M″36 = - 0,479 [9,50 + 1 * 0,646 + 1,5 * 0,238 + 2,4 * 1,449] = - 6,697
Momentos por Giro
Junta:7
M′74 = - 0,316 [- 0,514 + 0,218 – 3,934] = 1,337
M′78 = - 0,184 [- 0,514 + 0,218 – 3,934] = 0,778
Junta:4
M′47 = -0,086 [-0,095 + 1,337 + 0,112 - 3,934 -1,314] = 0,335
M′45 = -0,159 [-0,095 + 1,337 + 0,112 - 3,934 -1,314] = 0,619
M′41 = -0,255 [-0,095 + 1,337 + 0,112 - 3,934 -1,314] = 0,993
50

Junta:5
M′58 = - 0,042 [1,546 + 0,619 + 0,547 - 1,967 - 2,614] = 0,0785
M′56 = - 0,133 [1,546 + 0,619 + 0,547 - 1,967 - 2,614] = 0,249
M′52 = - 0,221 [1,546 + 0,619 + 0,547 - 1,967 - 2,614] = 0,413
M′54 = - 0,104 [1,546 + 0,619 + 0,547 - 1,967 - 2,614] = 0,194
Junta:6
M′65 = - 0,137 [ 0,417 + 0,249 - 6,697 ] = 0,826
M′63 = - 0,363 [ 0,417 + 0,249 - 6,697 ] = 2,189
ITERACIÓN: 3
Momentos por Desplazabilidad
Piso:2
M″47 = - 0,80 [3,119 + 1,5 (1,337 + 0,335) + 1 *0,0785] = -4,564
M″58 = - 0,40 [3,119 + 1,5 (1,337 + 0,335) + 1 *0,0785] = -2,282
Piso:1
M″14 = -0,094 [9,50 + 1 * 0,993 + 1,5 * 0,413 + 2,4 * 2,189] = -1,538
M″25 = -0,187 [9,50 + 1 * 0,993 + 1,5 * 0,413 + 2,4 * 2,189] = -3,060
M″36 = -0,479 [9,50 + 1 * 0,993 + 1,5 * 0,413 + 2,4 * 2,189] = -7,840
Momentos por Giro
Junta:7
M′74 = - 0,316 [ - 0,514 + 0,335 - 4,564] = 1,499
M′78 = - 0,184 [ - 0,514 + 0,335 - 4,564] = 0,873
Junta:4
M′47 = -0,086 [ -0,095 + 1,499 + 0,194 - 4,564 – 1,538] = 0,387
M′45 = -0,159 [ -0,095 + 1,499 + 0,194 - 4,564 – 1,538] = 0,716
M′41 = -0,255 [ -0,095 + 1,499 + 0,194 - 4,564 – 1,538] = 1,149
51

Junta:5
M′58 = - 0,042 [ 1,546 + 0,826 + 0,716 - 2,286 - 3,060] = 0,0947
M′56 = - 0,133 [ 1,546 + 0,826 + 0,716 - 2,286 - 3,060] = 0,300
M′52 = - 0,221 [ 1,546 + 0,826 + 0,716 - 2,286 - 3,060] = 0,498
M′54 = - 0,104 [ 1,546 + 0,826 + 0,716 - 2,286 - 3,060] = 0,234
Junta:6
M′65 = - 0,137 [ 0,417 + 0,300 – 7,840] = 0,976
M′63 = - 0,363 [ 0,417 + 0,300 – 7,840] = 2,586
El procedimiento de las iteraciones continúa hasta lograr la convergencia en los
valores de momento por giro y por desplazabilidad (ver gráfico), cuando ésto se logre se
calculan los momentos flectores definitivos, en los extremos de los miembros, como
sigue a continuación:
MOMENTOS DEFINITIVOS
M78 = -1,755 + 2 * 0,943 + 0 + 0 = 0,131 tm
M74 = 0,643 + 2 *1,620 + 0,432 – 5,044 = -0,729 tm
M47 = -0,707 + 2 * 0,432 + 1,620 – 5,044 = -3,267 tm
M45 = - 2,363 + 2 *0,798 + 0,267 + 0 = -0,500 tm
M41 = 1,40 + 2 *1,280 + 0 - 1,769 = 2,191 tm
M58 = 0 + 2 * 0,108 + 0 – 2,52 = -2,304 tm
M56 = -0,817 + 2 * 0,341 + 1,131 + 0 = 0,996 tm
M52 = 0 + 2 * 0,567 + 0 – 3,520 = -2,386 tm
M54 = 2,363 + 2 * 0,267 + 0,798 + 0 = 3,695 tm
M65 = 0,817 + 2 * 1,131 + 0,341 + 0 = 3,420 tm
M63 = 0 + 2 * 2,998 + 0 – 9,016 = -3,020 tm
M25 = 0 + 2 * 0 + 0,567 - 3,52 = -2,953 tm
M36 = 0 + 2 * 0 + 2,998 - 9,016 = -6,018 tm
52
53

54

1.3.1. Análisis de los resultados.
Momento Flector en los extremos de los miembros
ProcedimientoKani-Takabeya-Peña
[t.m]
ProcedimientoKani original
[t.m]
Diferencia%
M78 0,139 0,131 5,755M74 -0,730 -0,729 0,14M47 -3,273 -3,267 0,183M45 -0,505 -0,500 0,99M41 2,194 2,191 0,137M58 -2,312 -2,304 0,346M56 0,990 0,996 -0,606M52 -2,382 -2,386 -0,168M54 3,690 3,695 -0,136M65 3,408 3,420 -0,352M63 -3,023 -3,020 0,099M25 -2,949 -2,953 -0,136M36 -6,012 -6,018 0,1
Teóricamente no debe haber diferencia entre un procedimiento y otro,
motivado a que para la deducción de la formulación se emplea el mismo criterio. La
diferencia entre los resultados es ocasionada por errores por redondeo de decimales que
se acumulan a lo largo de ambos procedimientos, puesto a que se trata de un método
numérico. En general, la única forma de minimizar los errores de redondeo consiste en
incrementar el número de cifras significativas en el cálculo.
55

1.4. PROBLEMAS PROPUESTOS
Aplique el Método de Kani para calcular los valores de momento flector en los extremos de los miembros, de los siguientes sistemas estructurales.
1)
1,5t/m
1m S2
2,5m S1
1t/m S1
S22m S1 S1
1m
1m 3m 1m 5m 1m
S1: 30cm x 30cmS2: 25cm x 30cmF’c: 210 kg/cm2
56
1m
0,8
t/m

2)
1,6t/m
S3 S3
S3 S3 3,4m
2,3t/m
S1 S1 2m 2t
1m 5m 4m 1m
S1: 35cm x 35cmS2: 30cm x 35cmS3: 25cm x 30cmF’c: 250 kg/cm2
57
S2 S1
0,8
t/m
1,4 m

3)
Kr 0,9Kr 0,7Kr 0,7Kr
2,1t/m 0,8Kr
Kr Kr
1,7m 4,5m 1,8m 3,2m 1,7m
58
1,2t/m1m
1,3Kr
0,95
t/m
3 m
2 m
2,5 m
2 t
4)
1,5t/m
S3 S3
2m 1t/m
S1 S2 3m
1,5m S1 S1
1,5m
1m 3,5m 4,5m 1m
S1: 35cm x 35cmS2: 30cm x 35cmS3: 30cm x 30cmS4: 25cm x 30cm
59
S4 S4 0,5t 1m
2t/m
1t

5)
1,6t/m1,5t
1,2t/m
2,60m S2 S2
S2
2,60m S1 S1 S1
1,5m 5m 3,5m 1,5m
S1: 40cm x 40cmS2: 30cm x 30cmS3: 25cm x 30cmF’c: 25cm x 30cm
60
0,6t/m1m
S3 S3
1,8t/m

6)
1,5t/m
S3
S1 S1 3m
0,8t/m
S2 S2
S1 S1 S1 3m
1t/m
S1: 30cm x 30cmS2: 30cm x 35cmS3: 30cm x 30cm
Todos los elementos son de concreto armado.
61
1m
1t/m
1m 2m 1,5m 5m 1,5m
7)
1,5t/m
S2 S2
S2 S2 S2
2t/m1t/m
S1 S1 S1 3m
1,5t/m
S2 2,5m 0,5 1m 4m 4m 1m
S1: 40cm x 40 cmS2: 30cm x 30 cmF’c: 250 Kg/cm2
62
1m
0,5m
S2
2,5m
S21,5m

8)
2 t/m
3m
2t0,87t/m
2,5m
1,5m 8m 6m 1,5m
Secciones de los miembros:Mbro: 6-7 y 7-8
6 7 7 8
0,40m 0,40m
Perfil Longitudinal Planta
El resto de los miembros tienen sección transversal de 0,30cm x 0,35cm
63
1,5t/m
2m
3m
0,20m 0,20m
6 7 8
4 5
12
3
6
7
7
8