Embed Size (px)
Citation preview

Algebra Lineare e Geometria
Kieran G. O’Grady
“Sapienza”Universita di Roma
10 Ottobre 2012
1

2

Indice
0 Introduzione 5
1 Preliminari 7
1.1 Insiemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Relazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Induzione matematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5 Anelli e campi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.6 Polinomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Numeri complessi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Spazi vettoriali 25
2.1 Gli archetipi e la definizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Prime proprieta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3 Sottospazi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4 Dipendenza/indipendenza lineare . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5 Basi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Geometria affine, I 39
3.1 Coordinate affini nel piano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2 Coordinate affini nello spazio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3 Spazi affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4 Combinazioni lineari di punti . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4 Applicazioni lineari e matrici 49
4.1 Applicazioni lineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2 Isomorfismi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3 Matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4 La matrice associata ad un’applicazione lineare . . . . . . . . . . . . . . . . . . 59
4.5 Operazioni elementari sulle matrici, I . . . . . . . . . . . . . . . . . . . . . . . . 61
4.6 Il duale di uno spazio vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.7 Operazioni elementari sulle matrici, II . . . . . . . . . . . . . . . . . . . . . . . 67
4.8 Cambiamenti di base e coniugio . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5 Geometria affine, II 77
5.1 Applicazioni affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.2 Cambiamenti di coordinate affini, equazioni cartesiane . . . . . . . . . . . . . . 79
3

4 INDICE
6 Determinanti 81
6.1 Definizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.2 Applicazioni multilineari alternanti . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.3 Proprieta del determinante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.4 Determinante e area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6.5 La formula di Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7 Forme quadratiche e bilineari simmetriche 91
7.1 Forme quadratiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.2 Diagonalizzazione di forme quadratiche . . . . . . . . . . . . . . . . . . . . . . . 94
7.3 Congruenza di forme quadratiche . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.4 Coniche e quadriche affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.5 Forme bilineari simmetriche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.6 Spazi vettoriali euclidei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.7 Spazi affini euclidei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
8 Forma normale di endomorfismi 113
8.1 Autovalori, autospazi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113

Capitolo 0
Introduzione
Queste note sono una introduzione all’algebra lineare e alla trattazione della geometria ele-
mentare per mezzo dell’algebra lineare. Un tipico di problema di algebra lineare e lo studio
delle soluzioni di un sistema di equazioni lineari, per esempio
3x+ 2y − z = 1,
x+ y + z = 3,
2x− y + 2z = 2.
(0.0.1)
(L’unica soluzione e x = 0, y = 4/3, z = 5/3.) Le equazioni del sistema (0.0.1) si dicono lineari
perche se pensiamo alle (x, y, z) come le coordinate di un punto dello spazio relativamente a un
sistema di coordinate cartesiane allora le soluzioni di una singola equazione sono i punti di un
piano (e quindi stiamo intersecando 3 piani nello spazio, ci aspettiamo che ci sia un solo punto
d’intersezione, o una retta in comune, o un piano in comune o nessun punto d’intersezione).
Qui vediamo il collegamento con la geometria (e il motivo per l’uso dell’aggettivo “lineare”).
In verita e conveniente iniziare con lo studio dell’algebra (lineare) e successivamente formulare
il concetto di spazio (affine o euclideo) a partire dal concetto di spazio vettoriale (l’ambiente
in cui si svolge l’algebra lineare).
Cosa ci aspettiamo che lo studente impari durante il corso? Innanzitutto alcuni semplici
algoritmi che permettono di risolvere problemi “concreti” di algebra lineare, per esempio come
risolvere un sistema di equazioni lineari. Inoltre dovra imparare a ragionare in astratto, cioe
senza scegliere coordinate: se non si sa fare questo si rischia di saper calcolare senza sapere
cosa si sta calcolando. Infine si dovra capire il dizionario “algebra lineare” - “geometria”.
5

6 CAPITOLO 0. INTRODUZIONE

Capitolo 1
Preliminari
1.1 Insiemi
Intuitivamente un insieme e una collezione di oggetti, per esempio l’insieme I degli italiani
o l’insieme A degli australiani. Gli oggetti che appartengono a un insieme sono gli elementi
dell’insieme, per esempio Giorgio Napolitano e un elemento di I e non e un elemento di A,
Rod Laver e un elemento di A ma non di I. La notazione
X := {a, b, . . . , z} (1.1.1)
significa che definiamo l’insieme X come quello i cui elementi sono a, b, . . . , z. Per esempio
potremmo porre X := {0, 2, 4, 6, 8, 10}; in parole X e l’insieme dei numeri naturali pari non
maggiori di 10. Nella (1.1.1) il simbolo := sta a significare che il simbolo di sinistra denota
l’espressione a destra1, le parentesi graffe “delimitano”l’insieme.
Principio dell’estensione 1.1.1. Un insieme e caratterizzato dagli elementi che gli appar-
tengono ovvero se X,Y sono insiemi allora X e uguale a Y (in simboli X = Y ) se e solo se
X ha gli stessi elementi di Y .
L’affermazione contenuta nel principio di estensione e ovvia (se avete capito di cosa stiamo
parlando) e vi chiederete perche mai debba essere enfatizzata; il motivo e che fa parte degli
assiomi della teoria degli insiemi. Sia X un insieme e x un oggetto: la notazione x ∈ X sigifica
che x e un elemento di X e x /∈ X significa che x non e un elemento di X. Dato un insieme
X e una proprieta P (per esempio l’insieme degli immatricolati alla Sapienza e la proprieta
di essere maschi) si definisce l’insieme Y degli elementi x ∈ X che hanno la proprieta P : in
simboli
Y := {x ∈ X | x ha la proprieta P}. (1.1.2)
(Nell’esempio considerato Y e l’insieme dei maschi immatricolati alla Sapienza). Nella (1.1.2)
la sbarra verticale | si puo leggere “tale che”. Noi considereremo insiemi i cui elementi sono
numeri o altri oggetti matematici. Esistono notazioni standard per alcuni di questi insiemi:
N e l’insieme dei numeri naturali: i suoi elementi sono 0, 1, 2, . . . cioe i numeri che
conoscete dall’infanzia (con l’aggiunta dello 0).
Z e l’insieme dei numeri interi: i suoi elementi sono 0,±1,±2, . . ..
1Una equaglianza del tipo 6 = 2 · 3 o 10 = 3 · 3 e un’affermazione che puo essere vera (la prima) o falsa (la
seconda) mentre (1.1.1) e una definizione - non ha senso chiedersi se sia vera o falsa.
7

8 CAPITOLO 1. PRELIMINARI
Q e l’insieme dei numeri razionali: un numero razionale e determinato da una coppia di
interi p, q con q �= 0 (il numero p/q) e si ha p/q = p�/q� se e solo se pq� − p�q = 0.
R e l’insieme dei numeri reali: la costruzione dei numeri reali non e elementare, la
diamo per acquisita, ci limitiamo a menzionare che un numero reale e individuato da
un decimale infinito, per esempio 1, 01001000100001..., 2, 39999... o −3, 121314151....
(Attenzione: 2, 39999... e uguale a 2, 40000.... che scriviamo 2, 4.)
Dati a, b ∈ R con a ≤ b si definiscono i seguenti sottoinsiemi di R:
[a,b]:={x∈R|a≤x≤b}, (a,b):={x∈R|a<x<b}, [a,b):={x∈R|a≤x<b}, (a,b]:={x∈R|a<x≤b}. (1.1.3)
Il primo e l’intervallo chiuso di estremi a, b, il secondo e l’intervallo aperto di estremi
a, b e cosı via. Dato a ∈ R definiamo i seguenti sottoinsiemi di R:
[a,+∞):={x∈R|a≤x}, (a,+∞):={x∈R|a<x}, (−∞,a]:={x∈R|x≤a}, (−∞,a):={x∈R|x<a}. (1.1.4)
(Sono semirette (chiuse o aperte) di estremo a.)
Dato a ∈ Z (cioe a e un numero intero) definiamo
(a) := {x ∈ Z | x = na per un qualche n ∈ Z}. (1.1.5)
In parole: (a) e l’insieme dei multipli (interi) di a.
Definizione 1.1.2. Un insieme X e contenuto nell’insieme Y (equivalentemente X e un
sottoinsieme di Y ) se ogni elemento di X e anche elemento di Y cioe per ogni x ∈ X vale
x ∈ Y : in simboli X ⊂ Y (o anche Y ⊃ X). La notazione X �⊂ Y (o Y �⊃ X) significa che X
non e contenuto in Y cioe che esiste x ∈ X tale che x /∈ Y .
Esempio 1.1.3. Siccome un multiplo di 6 e anche un multiplo di 3 abbiamo (6) ⊂ (3). D’altra
parte 3 ∈ (3) ma 3 /∈ (6) e quindi (3) �⊂ (6).
Osservazione 1.1.4. Siano X,Y insiemi. Per il principio di estensione X = Y se e solo se
X ⊂ Y e Y ⊂ X.
L’osservazione fatta e banale ma e utile tenerne conto quando si vuole decidere se due insiemi
sono uguali: grazie all’Osservazione 1.1.4 si tratta di decidere se X ⊂ Y e Y ⊂ X. Dati
insiemi X,Y possiamo produrre altri insiemi a partire da X e Y .
Definizione 1.1.5. L’unione di X e Y e l’insieme i cui elementi sono gli x tali che x ∈ X
o x ∈ Y . (Attenzione: x puo appartenere sia ad X che a Y .) L’unione di X e Y si denota
X ∪ Y . L’intersezione di X e Y e l’insieme i cui elementi sono gli x tali che x ∈ X e x ∈ Y .
L’intersezione di X e Y si denota X ∩ Y .
Alcuni esempi:
(2) ∪ {x ∈ Z | x e dispari} = Z, (2) ∩ (3) = (6), (4) ∩ (6) = (12).
Cosa succede se consideriamo l’intersezione dell’insieme P := (2) dei numeri interi pari e D
l’insieme dei numeri interi dispari ? Non ci sono elementi x di P e di D. Quindi se vogliamo
che abbia senso l’intersezione P ∩ D dobbiamo accettare che ci sia un insieme che non ha
elementi: questo e l’insieme vuoto, si denota ∅. Per ogni insieme X abbiamo
∅ ∪X = X, ∅ ∩X = ∅.
L’unione e l’intersezione hanno senso anche per una famiglia arbitraria di insiemi Xi dove i e
un elemento arbitrario in un insieme di indici I.

1.2. FUNZIONI 9
Definizione 1.1.6. L’unione�
i∈I Xi e l’insieme i cui elementi sono gli x tali che x ∈ Xi per
un qualche i ∈ I, l’intersezione�
i∈I Xi e l’insieme i cui elementi sono gli x tali che x ∈ Xi
per tutti gli i ∈ I.
Un esempio: �
i∈N(i) = Z,
�
i∈N(i) = {0}.
Definizione 1.1.7. Siano X1, . . . , Xn insiemi. Il prodotto cartesiano X1× . . .×Xn e l’insieme
i cui elementi sono le n-ple ordinate (x1, x2, . . . , xn) dove xi ∈ Xi per i = 1, 2, . . . , n. Se
X1 = X2 = . . . = Xn denotiamo X1 × . . .×Xn con Xn.
Un esempio: Rn e l’insieme delle n-ple ordinate di numeri reali (notazione familiare ?).
1.2 Funzioni
Siano X,Y insiemi.
Definizione 1.2.1. Una funzione (o applicazione) da X a Y e una legge f che associa a ogni
x ∈ X un y ∈ Y che denotiamo f(x): in simboli f : X → Y o Xf−→ Y . L’insieme X e il
dominio della funzione f e l’insieme Y e il suo codominio.
Un chiarimento riguardo la definizione di funzione: si intende che due funzioni f1 : X1 → Y1e f2 : X2 → Y2 sono uguali se e solo se
(a) X1 = X2,
(b) Y1 = Y2,
(c) per ogni x ∈ X1 = X2 si ha che f1(x) = f2(x).
Un altro modo di vedere una funzione f : X → Y e come una procedura che a partire dall’input
x produce l’output f(x). Un esempio: X e l’insieme degli immatricolati alla Sapienza, Y e
l’insieme dei numeri naturali e f associa a ogni immatricolato il suo anno di nascita. Esempi
matematici:
Z f−→ Zx �→ x− 5
R× R g−→ R(a, b) �→ ab
Se X e un insieme la funzione identita da X a X e quella che associa a x se stesso; la denotiamo
IdX oppure 1X . Quindi
Id(x) = 1X(x) = x ∀x ∈ X. (1.2.1)
(Il simbolo ∀ significa “per ogni”.) Una funzione f : X → Y e costante se
f(x1) = f(x2) ∀x1, x2 ∈ X. (1.2.2)
Dati insiemi X,Y si denota con Y X l’insieme i cui elementi sono le applicazioni f : X → Y
(notate l’inversione nella notazione):
Y X := {f : X → Y }. (1.2.3)
Data una funzione f : X → Y il grafico di f e il sottoinsieme di Γf di X×Y i cui elementi sono
le coppie (x, f(x)) per x un arbitrario elemento di X. Notate che se X = Y = R e associamo

10 CAPITOLO 1. PRELIMINARI
a ogni (x, y) ∈ R2 il punto del piano di coordinate cartesiane (x, y) (relative a un sistema
di riferimento scelto) il grafico cosı definito corrisponde al grafico considerato a scuola. Sia
Γf ⊂ X × Y il grafico di una funzione f : X → Y ; dato x ∈ X esiste un unico elemento di Γf
la cui prima entrata sia x (cioe uguale a (x, ∗)).
Osservazione 1.2.2. Si puo dare una formulazione matematicamente precisa di funzione f : X →Y evitando di fare appello al concetto di “legge che associa...” definendo una funzione come
un sottoinsieme Γ ⊂ X × Y che ha la proprieta dei grafici appena menzionata - lasciamo i
dettagli al lettore.
Supponiamo che f : X → Y e g : Y → Z siano funzioni (notate: il codominio di f e il
dominio di g). Allora possiamo definire una funzione da X a Z associando a x ∈ X l’elemento
g(f(x)) di Z: questa e la composizione di f e g che si denota g ◦ f (attenzione all’ordine - in
generale f ◦ g non avra senso perche X non sara uguale a Z). Ricapitolando
g ◦ f(x) := g(f(x)). (1.2.4)
Un esempio: siano X = Y = Z l’insieme degli persone (viventi o morte), f la funzione che
associa a una persona suo padre e g la funzione che associa a una persona sua madre. La
composizione f ◦ f e la funzione che associa a una persona il nonno paterno, mentre g ◦ f e la
funzione che associa a una persona la nonna materna. Notiamo che se f : X → Y abbiamo
f ◦ 1X = 1Y ◦ f = f. (1.2.5)
Questo giustifica la notazione 1X per la funzione identita: se pensiamo alla composizione
di funzioni come analogo della moltiplicazione tra numeri vediamo che la funzione identita
ha proprieta analoghe a quelle del numero 1. Supponiamo che f : X → Y , g : Y → W e
h : W → Z siano funzioni: hanno senso sia (h ◦ g) ◦ f che h ◦ (g ◦ f) e sono entrambe funzioni
da X a Z. Abbiamo che
((h ◦ g) ◦ f)(x) = h(g(f(x))) = (h ◦ (g ◦ f))(x)
e quindi la composizione di funzioni gode della proprieta di associativita:
(h ◦ g) ◦ f = h ◦ (g ◦ f). (1.2.6)
Sia f : X → Y una funzione. Siano A ⊂ X e B ⊂ Y . Definiamo i sottoinsiemi f(A) ⊂ Y
(l’immagine di A) e f−1B ⊂ X (la controimmagine di A) cosı:
f(A) := {y0 ∈ Y | ∃x0 ∈ X tale che f(x0) = y0}, f−1(B) := {x0 ∈ X | f(x0) ∈ B}.(1.2.7)
L’immagine di f e im f := f(X). Un esempio: se f : R → R e la funzione quadrato, cioe
f(x) = x2, allora f([12]) = [1, 4], f−1([14]) = [1, 2]∪ [−2,−1] e l’immagine di f e l’insieme dei
reali non-negativi. Se B = {y0} cioe e un insieme con un solo elemento denotimao f−1{y0}con f−1y0.
Definizione 1.2.3. La funzione f : X → Y e suriettiva se f(X) = Y , e iniettiva se dato y ∈ Y
esiste al piu un x ∈ X tale che f(x) = y, e bijettiva (o biunivoca) se e iniettiva e suriettiva.
Un esempio: siano f, g, h : R → R le funzioni definite da
f(x) = x2 + 1, g(x) = x3, h(x) = x3 − x. (1.2.8)

1.3. RELAZIONI 11
La f non e ne iniettiva ne suriettiva, la g e biunivoca, la h e suriettiva ma non iniettiva. Notate
che nella definizione di funzione dominio e codominio fanno parte dei dati che definiscono
una funzione: quindi una funzione f : X → Y che non e suriettiva puo essere “resa”suriettiva
sostituendo al codominio Y il codominio f(Y ) (il punto e che a rigor di definizione la “nuova”f
non e uguale alla “vecchia”f). Nell’esempio (1.2.8) la f diventa suriettiva se la sostituiamo
con la funzione F : R → {x ∈ R | x ≥ 1} data dalla stessa formula cioe F (x) = x2 + 1.
Definizione 1.2.4. Sia f : X → Y una funzione biunivoca. La funzione inversa f−1 : Y → X
associa a y ∈ Y l’unico x ∈ X tale che f(x) = y.
Notate che la definizione di inversa di f ha senso solo se f e biunivoca. Si ha che
f ◦ f−1 = f−1 ◦ f = 1X . (1.2.9)
Esempio: delle tre funzioni f, g, h definite in (1.2.8) l’unica a essere biunivoca e g quindi ha
senso g−1 (e non hanno senso ne f−1 ne h−1) e chiaramente g−1(y) = y1/3. Supponiamo che
f : X → Y sia biunivoca a B ⊂ Y : allora f−1B = f−1(B) dove f−1B e dato da (1.2.7). Fate
attenzione alla notazione se f non e biunivoca f−1 non ha senso, ha senso solo se e seguito
da un sottoinsieme del codominio. Ora supponiamo che f : X → X sia invertibile. Allora ha
senso fm per ogni m ∈ Z: infatti si pone
fm =
f ◦ f ◦ . . . ◦ f� �� �m
if m > 0,
1X if m = 0,
f−1 ◦ f−1 ◦ . . . ◦ f−1
� �� �−m
if m < 0.
(1.2.10)
Notiamo che con questa definizione abbiamo che
fm ◦ fn = fm+n ∀m,n ∈ Z. (1.2.11)
1.3 Relazioni
Sia X un insieme. Una relazione tra gli elementi di X (o una relazione su X) e un sottoinsieme
R ⊂ X ×X. Dati x1, x2 ∈ X diciamo che x1Rx2 se la coppia ordinata (x1, x2) e un elemento
di R.
Esempio 1.3.1. Sia R ⊂ R× R il sottoinsieme degli (x, y) tali che x− y ≥ 0. La relazione Re quella di “essere non piu piccolo” e anziche xRy scriviamo x ≥ y.
Esempio 1.3.2. Sia Rn ⊂ Z× Z il sottoinsieme degli (x, y) tali che x− y ∈ (n) ovvero (x− y)
e un multiplo di n. Si usa scrivere x ≡ y (mod n) anziche xRny: si legge “x e congruo a y
modulo n”.
Osservazione 1.3.3. Siano x, y ∈ Z: allora x e congruo a y modulo 10 se e solo se l’ultima cifra
nello sviluppo decimale di x e uguale all’ultima cifra nello sviluppo decimale di y.
Esistono due tipi di relazione particolarmente importanti, quelle di ordine e di equivalenza.
Definizione 1.3.4. Una relazione R sull’insieme X e di ordine se
(1) per ogni x ∈ X vale xRx (proprieta riflessiva),

12 CAPITOLO 1. PRELIMINARI
(2) se xRy e yRx allora x = y (antisimmetria),
(3) se xRy e yRz allora xRz (proprieta transitiva).
La relazione dell’Esempio 1.3.1 e di ordine, quella dell’Esempio 1.3.2 non lo e (quale
delle tre proprieta della Definizione 1.3.4 non vale?). Notate che anche la relazione R su Rdefinita da xRy se x ≤ y e di ordine.
Definizione 1.3.5. Una relazione R sull’insieme X e di equivalenza se
(1) per ogni x ∈ X vale xRx (proprieta riflessiva),
(2) se xRy allora yRx (simmetria),
(3) se xRy e yRz allora xRz (proprieta transitiva).
La relazione dell’Esempio 1.3.2 e di equivalenza, quella dell’Esempio 1.3.1 non lo e.
Spesso una relazione di equivalenza su X si denota con “∼”cioe si scrive x1 ∼ x2 anziche
x1Rx2. A partire dalla relazione di equivalenza ∼ si costruisce un insieme i cui elementi sono
sottoinsiemi di X. Dato x0 ∈ X la classe di ∼-equivalenza di x0 e
[x0] := {x ∈ X | x ∼ x0}. (1.3.1)
Quando non ci sono possibilita di equivoci chiamiamo [x0] la classe di equivalenza di x0(omettiamo il riferimento a ∼): si denota anche x0. Si dice che x0 e un rappresentante della
classe di equivalenza [x0]. Un esempio: consideriamo la relazione su Z della congruenza modulo
2 - vedi l’Esempio 1.3.2 - allora esistono due classi di equivalenza, il sottoinsieme degli interi
pari e quello degli interi dispari.
Definizione 1.3.6. Sia X un insieme e ∼ una relazione di equivalenza su X. L’insieme
quoziente, denotatoX/ ∼, e quello i cui elementi sono le classi di ∼-equivalenza. L’applicazione
quoziente e la
Xπ−→ X/ ∼
x �→ [x](1.3.2)
Esempio 1.3.7. Nell’esempio della congruenza modulo n - vedi l’Esempio 1.3.2 - l’insieme
delle classi di equivalenza ha n elementi e cioe [0], [1], . . . , [n− 1]: il quoziente Z/Rn si denota
Z/(n).
Le classi di equivalenza di una data relazione (di equivalenza) su X hanno la proprieta di
costituire una partizione diX, dove il significato di partizione e dato dalla seguente definizione.
Definizione 1.3.8. Sia X un insieme. Una partizione di X e una famiglia {Xi}i∈I di
sottoinsiemi di X tale che
(1)�
i∈I Xi = X,
(2) se i1 �= i2 ∈ I allora Xi1 ∩Xi2 = ∅.
Proposizione 1.3.9. Sia X un insieme e ∼ una relazione di equivalenza su X. La famiglia
delle classi di ∼-equivalenza e una partizione di X. Viceversa data una partizione {Xi}i∈I di
X esiste una e una sola relazione di equiavlenza le cui classi di equivalenza sono gli Xi.

1.4. INDUZIONE MATEMATICA 13
Dimostrazione. Verifichiamo che le classi di ∼-equivalenza soddisfano (1) e (2) della Defini-
zione 1.3.8. Sia x ∈ X: siccome x ∼ x abbiamo x ∈ [x] e quindi x appartiene all’unione
delle classi di ∼-equivalenza. Questo dimostra che vale (1). Per dimostrare che vale (2) e
sufficiente dimostrare che se [x] ∩ [y] �= ∅ allora [x] = [y]. Sia z ∈ [x] ∩ [y] e quindi x ∼ z e
z ∼ y. Supponiamo che x� ∈ [x] cioe x� ∼ x. Per la transitivita di ∼ abbiamo che x� ∼ z e di
nuovo per transitivita si ha che x� ∼ y: quindi x� ∈ [y]. Questo dimostra che [x] ⊂ [y]. Per
dimostrare che vale [y] ⊂ [x] si procede in modo simile. Ora supponiamo che {Xi}i∈I sia una
partizione di X. Definiamo la relazione ∼ su X dichiarando che x ∼ x� se e solo se esiste i ∈ I
tale che x, x� ∈ Xi: si vede facilmente che ∼ e di equivalenza e che le Xi sono le sue classi di
equivalenza.
La seguente osservazione e semplice ma importante.
Osservazione 1.3.10. Sia X un insieme, ∼ una relazione di equivalenza su X e π l’applicazione
quoziente di ∼. Dato un insieme Y e una funzione f : X → Y esiste una f : (X/ ∼) → Y tale
che f = f ◦ π se e solo se f e costante sulle classi di ∼-equivalenza cioe x1 ∼ x2 implica che
f(x1) = f(x2). Se cosı e diciamo che f discende a (X/ ∼).
Un esempio: sia f : Z → {0, 1, 2, . . . , 9} la funzione che associa a x l’ultima cifra del suo
sviluppo in base 10, quindi f(3) = 3, f(15) = 5, f(2011) = 1. Se x e congruo a y modulo
10 allora f(x) = f(y) - vedi l’Osservazione 1.3.3 - quindi f discende a Z/(10) e definisce
f : Z/10 → {0, 1, 2, . . . , 9}.
1.4 Induzione matematica
Consideriamo la seguente equazione:
1 + 2 + . . .+ n =n(n+ 1)
2. (1.4.1)
Dimostriamo che la (1.4.1) vale per ogni n nel modo seguente. Innanzitutto osserviamo
che (1.4.1) vale per n = 1 sostituendo 1 a n in entrambi i membri (otteniamo 1 = 1). Ora
assumiamo che la (1.4.1) valga per un certo n e dimostriamo che vale anche se sostituiamo
n+ 1 al posto di n cioe che vale
1 + 2 + . . .+ n+ (n+ 1) =(n+ 1)(n+ 2)
2. (1.4.2)
Per l’ipotesi che la (1.4.1) valga per n abbiamo
1 + 2 + . . .+ n+ (n+ 1) =n(n+ 1)
2+ (n+ 1) =
(n+ 1)(n+ 2)
2
e questo dimostra che vale (1.4.2). Quindi abbiamo verificato che (1.4.1) vale per n = 1,
e percio anche per n = 1 + 1 = 2 e quindi anche per n = 2 + 1 = 3 etc., in definitiva
abbiamo dimostrato che (1.4.1) vale per ogni naturale strettamente positivo n. Questa e una
dimostrazione per induzione (matematica): la verifica che vale per n = 1 e il primo passo, la
dimostrazione che se (1.4.1) vale per un certo n allora vale anche sostituendo n + 1 al posto
di n e il passo induttivo. La (1.4.1) vale per tutti gli n una volta verificato il primo passo e
dimostrato il passo induttivo perche vale il seguente assioma (fa parte degli assiomi di Peano
per l’insieme dei numeri naturali):

14 CAPITOLO 1. PRELIMINARI
Assioma 1.4.1. Sia X ⊂ N un insieme che contiene 0 ∈ N e tale che valga:
se X contiene n allora contiene anche n+ 1.
Allora X = N.
Infatti sia Y ⊂ N il sottoinsieme degli n tali che valga (1.4.1) e X := Y ∪ {0}: per quelloche abbiamo dimostrato la X soddisfa le ipotesi dell’ Assioma 1.4.1 e quindi X = N. Segueche Y e l’insieme dei naturali maggiori o uguali a 1 cioe la (1.4.1) vale per ogni n ≥ 1.
1.5 Anelli e campi
Sia A un insieme provvisto di due operazioni, la somma
A×A −→ A,
(w, z) �→ w + z(1.5.1)
e la moltiplicazione
A×A −→ A,
(w, z) �→ w · z(1.5.2)
Definizione 1.5.1. Un insieme A con operazioni (1.5.1) e (1.5.2) e un campo se
(1) Esiste 0 ∈ A tale che 0 + z = z per ogni z ∈ A. (Esistenza di un elemento neutro per la
somma.)
(2) z1 + z2 = z2 + z1 per ogni z1, z2 ∈ A. (Commutativita della somma.)
(3) (z1 + z2) + z3 = z1 + (z2 + z3) per ogni z1, z2, z3 ∈ A. (Associativita della somma.)
(4) Dato z ∈ A esiste w ∈ A tale che z+w = 0 (dove 0 e come in (1)). (Esistenza dell’inverso
per la somma.)
(5) Esiste 0 �= 1 ∈ A tale che 1 · z = z per ogni z ∈ A. (Esistenza di una unita per il
prodotto.)
(6) z1 · z2 = z2 · z1 per ogni z1, z2 ∈ A. (Commutativita del prodotto.)
(7) (z1 · z2) · z3 = z1 · (z2 · z3) per ogni z1, z2, z3 ∈ A. (Associativita del prodotto.)
(8) z1 · (z2+z3) = z1 ·z2+z1 ·z3 per ogni z1, z2, z3 ∈ A. (Distribituvita del prodotto rispetto
alla somma.)
Gli insiemi Z, Q e R con le usuali operazioni di somma e prodotto sono esempi di anelli.
L’insieme N dei numeri naturali con le usuali operazioni di somma e prodotto non e un anello:
non vale (4). Noi saremo interessati soprattutto ad anelli particolare che si chiamano campi.
Definizione 1.5.2. Un anello A e un campo se ogni 0 �= z ∈ A ha un inverso moltiplicativo
cioe esiste w ∈ A tale che w · z = 1 (dove 1 e come in (5) della Definizione 1.5.1).
Gli insiemi Q e R con le usuali operazioni sono esempi di campi, ovviamente Z (con le
usuali operazioni) non e un campo. In generale denoteremo i campi con la lettera k.

1.5. ANELLI E CAMPI 15
Proposizione 1.5.3. Sia A un anello. Allora esiste un unico elemento 0 ∈ A tale che
valga (1) della Definizione 1.5.1 ed esiste un unico elemento 1 ∈ A tale che valga (5) del-
la Definizione 1.5.1. Dato z ∈ A esiste un unico w ∈ A tale che valga (4) della Definizione
1.5.1. Per ogni z ∈ A si ha che 0 · z = 0.
Dimostrazione. Siano 0, 0� ∈ A tali che 0+z = z e 0�+z = z per ogni z ∈ A. Allora 0+0� = 0�,
ma per la commutativita della somma 0 + 0� = 0� + 0 = 0. Quindi 0 = 0�: questo dimostra
che esiste un unico elemento 0 ∈ A tale che valga (1) di Definizione 1.5.1. La dimostrazione
che esiste un unico elemento 1 ∈ A tale che valga (5) di Definizione 1.5.1 e del tutto simile.
Dimostriamo che dato z ∈ A esiste un unico w ∈ A tale che valga (4) di Definizione 1.5.1.
Supponiamo che z + w = 0 = z + w�: la commutativita e l’associativita della somma danno
w� = 0 + w� = (z + w) + w� = (w + z) + w� = w + (z + w�) = w + 0 = w.
Sia z ∈ A: dimostriamo che 0 · z = 0. Abbiamo che
0 · z = (0 + 0) · z = 0 · z + 0 · z (1.5.3)
Sia w l’inverso additivo di 0 · z, cioe 0 · z + w = 0: aggiungendo w al membro di destra e di
sinistra di (1.5.3) (che sono uguali) otteniamo che 0 = 0 · z.
Proposizione 1.5.4. Sia k un campo. Dato 0 �= z ∈ K esiste un unico elemento w ∈ k tale
che w · z = 1. Se 0 �= z ∈ k vale la regola di cancellazione: se zw = zw� allora w = w�.
Dimostrazione. La dimostrazione che in un campo ogni elemento non-nullo ha un unico inverso
moltiplicativo e simile a quella che in un anello ogni elemento ha un unico inverso additivo.
Ora supponiamo che 0 �= z ∈ k e zw = zw�. Siccome 0 �= z esiste z� tale che zz� = 1; quindi
abbiamo che
w = 1 · w = (z�z)w = z�(zw) = z�(zw�) = (z�z)w� = 1 · w� = w�.
Corollario 1.5.5. Sia k un campo. Supponiamo che z, w ∈ k e zw = 0. Allora uno almeno
tra z e w e uguale a 0.
Dimostrazione. Supponiamo che 0 �= z. Abbiamo che zw = 0 = z · 0 (la prima eguaglianza
segue dalla Proposizione 1.5.3) e quindi w = 0 per la Proposizione 1.5.4.
Definizione 1.5.6. Sia A un anello e z ∈ A: l’unico inverso additivo di z viene denotato −z.
Se k e un campo e 0 �= z ∈ k l’unico inverso moltiplicativo di z viene denotato z−1.
Gli esempi dati finora di anelli e campi hanno infinit elementi, ora costruiremo anelli e
campi con un numero finito di elementi. Sia n > 1 un numero naturale.
Lemma 1.5.7. Siano a, a�, b, b� ∈ Z tali che
a ≡ a� (mod n), b ≡ b� (mod n).
Allora
a+ b ≡ a� + b� (mod n), a · b ≡ a� · b� (mod n).

16 CAPITOLO 1. PRELIMINARI
Dimostrazione. Per ipotesi esistono s, t ∈ Z tali che a� = a+ sn e b� = b+ tn. Quindi
a�+b
�=a+sn+b+tn=a+b+(s+t)n, a�b�=(a+sn)(b+tn)=ab+atn+sbn+stn
2=ab+(at+sb+stn)n.
Per il Lemma 1.5.7 possiamo definire l’operazione di addizione e di moltiplicazione su
Z/(n) ponendo[a] + [b] := [a+ b], [a] · [b] := [a · b].
Si verifica facilmente che Z/(n) e un anello. Ci chiediamo: per quali n l’anello Z/(n) e un
campo? Se n e composto possiamo scrivere n = ab dove 0 < a, b < n e quindi 0 �= [a], 0 �= [b]
ma [a] · [b] = [n] = 0. Per il Corollario 1.5.5 segue che se n e composto allora Z/(n) non e
un campo. Un risultato non-banale (vedi per esempio Teorema (2.5) di [1]) da che se n e un
numero primo allora Z/(n) e un campo. In generale denotiamo un primo con p e poniamo
Fp := Z/(p). (1.5.4)
Sia k un campo. Siccome 1 ∈ k ha senso la somma
1 + . . .+ 1� �� �n
che denoteremo n (e −n sara l’opposto (inverso additivo) di n). Quindi abbiamo associato a
ogni n ∈ Z un elemnto n ∈ k. Consideriamo il campo F3: si ha che 3 = 1+1+1 = 0, e questo
dimostra che si puo’ avere n = 0 nel campo k anche se l’intero n non e 0.
Definizione 1.5.8. La caratteristica di un campo k (notazione: char k)e 0 se n �= 0 (nel
campo k) per ogni intero n ∈ Z non nullo ed e il minimo p ∈ N non nullo tale che p = 0 in k.
Per esempio charQ = 0 e charFp = p.
Osservazione 1.5.9. Sia k un campo di caratteristica p �= 0. Allora p e un numero primo.
Infatti supponiamo che p = ab con a, b ∈ N. Allora nel campo k si ha che 0 = p = a · b e per
il Corollario 1.5.5 segue che a = 0 o b = 0 (in k). Supponiamo che a = 0 (in k): siccome
a ≤ p e p e il minimo intero strettamente positivo tale che p = 0 segue che a = p (come numeri
naturali). Analogamente se b = 0 (in k) segue che b = p (in N).
1.6 Polinomi
Ricordiamo la definizione di polinomio in una indeterminata a coefficienti in un campo k2
x. Informalmente un tale polinomio e una espressione a0 + a1x + a2x2 + . . . + adxd dove
a0, . . . , ad ∈ k. Identifichiamo due tali espressioni se sono uguali i coefficienti non nulli dei
monomi con esponenti uguali. Siano
p = a0 + a1x+ a2x2 + . . .+ adx
d, q = b0 + b1x+ b2x2 + . . .+ bex
e (1.6.1)
polinomi: la somma di p e q e
p+ q := (a0 + b0) + (a1 + b1)x+ (a2 + b2)x2 + . . .+ (ad + bd)x
d, (1.6.2)
2Sarebbe piu preciso dire “trascendente”.

1.6. POLINOMI 17
il prodotto di p e q e
pq := (a0b0) + (a0b1 + a1b0)x+ . . .+ (�
i+j=m
aibj)xm + . . .+ (adbe)x
d+e. (1.6.3)
Il lettore puo avere dubbi sulla correttezza dell’uso di una lettera misteriosa “x”: per spaz-
zare via i dubbi puo sostituire all’espressione a0 + a1x + a2x2 + . . . + adxd una successione
(a0, . . . , ai, . . .) con termini nulli da un certo indice in poi. Definiamo la somma e il pro-
dotto di due tali successioni seguendo le regole date da (1.6.2) e (1.6.3). A questo pun-
to se chiamiamo x la successione (0, 1, 0, . . . , 0, . . .) ci renderemo conto che la successione
(a0, . . . , ai, . . . , ad, 0, 0, . . .) e uguale a a0 + a1x + a2x2 + . . . + adxd. L’insieme dei polinomi
in una variabile x a coefficienti in k si denota k[x] ed e un anello (ma non e un campo, per
esempio x non ha un inverso moltiplicativo). Il grado di 0 �= p ∈ k[x] e definito nel seguente
modo. Per ipotesi p = a0 + a1x+ . . .+ adxd: poniamo
deg p := max{i | ai �= 0}. (1.6.4)
Poniamo deg 0 := −∞. Siano p, q ∈ k[x] non nulli: si verifica facilmente che
deg(p+ q) ≤ max{deg p, deg q}, deg(p · q) = deg p+ deg q. (1.6.5)
(Per convenzione max{−∞, n} = n −∞+ n = −∞ per ogni n ∈ N.) Sia p ∈ k[x]: una radice
(o zero) di p e un α ∈ k tale che p(α) = 0.
Definizione 1.6.1. Siano p, q ∈ k[x]. Allora q divide p se esiste m ∈ k[x] tale che p = m · q.
Lemma 1.6.2 (Ruffini). Siano p ∈ k[x] e α ∈ k. Allora α e una radice di p se e solo se
(x− α) divide p.
Dimostrazione. Se p = (x − α) · q e ovvio che α e una radice di p. Ora supponiamo che α
sia una radice di p =�
n
i=0 cixi. Scrivendo x = ((x − α) + α) e sostituendo nel polinomio p
otteniamo che
p =n�
i=0
ci((x− α) + α)i = (x− α) · q + p(α), q ∈ k[x].
Siccome p(α) = 0 segue il risultato.
Siano 0 �= p ∈ k[x] e α ∈ k: osserviamo che esiste un massimo n ∈ N tali che (x − α)n
divide p, difatti n ≤ deg p.
Definizione 1.6.3. Siano p ∈ k[x] e α ∈ k. La molteplicita di α come radice di p e ∞ se
p = 0 ed e uguale al massimo n ∈ N tale che (x−α)n divide p se p �= 0 - lo denotiamo multα p.
Osservazione 1.6.4. α ∈ k e radice di p se e solo se la sua molteplicita come radice di p e
almeno 1.
Notate che la molteplicita di α e ∞ se e solo se p = 0.
Proposizione 1.6.5. Sia p ∈ k[x] non nullo di grado n. Allora multα p e non zero per un
insieme finito di α ∈ k e �
α∈kmultα p ≤ deg p. (1.6.6)
Si ha eguaglianza se e solo se si puo scrivere
p = c ·n�
i=1
(x− αi) c �= 0. (1.6.7)

18 CAPITOLO 1. PRELIMINARI
Dimostrazione. Per induzione sul grado di p. Se n = 0 allora p ∈ k e non nullo quindi non
ha radici: percio (1.6.6) vale banalmente e p = c. (Se il caso n = 0 appare troppo banale
considerate il caso n = 1: allora si puo scrivere p = c · (x − α) con c �= 0, p ha una radice,
cioe α, di molteplicita 1 e quindi vale (1.6.6).) Ora dimostriamo il passo induttivo. Se p non
ha radici non c’e nulla da dimostrare: la (1.6.6) vale banalmente. Supponiamo che p abbia
una radice γ. Per il Lemma 1.6.2 esiste q ∈ k[x] tale che p = (x − γ) · q: siccome p �= 0
abbiamo che q �= 0. La formula (1.6.5) da che deg q = d− 1. Siano β1, . . . ,β� le radici distinte
di q. Dalla fattorizzazione p = (x − γ) · q segue che l’insieme delle radici di p e uguale a
{γ,β1, . . . ,β�}. Inoltre si vede subito che
multγ p = 1 +multγ q, multβi p = multβi q ∀1 ≤ i ≤ �. (1.6.8)
Per l’ipotesi induttiva�
α∈kmultα p = 1 +
�
α∈kmultα q ≤ 1 + deg q = deg p.
Inoltre vediamo che se si ha equaglianza deve valere�
α∈k multα q = deg q. Per ipotesi in-
duttiva segue che vale (1.6.7) per p = q: segue che vale anche per p. Il viceversa, cioe se
vale (1.6.7) allora (1.6.6) e una eguaglianza, e banalmente vero.
Corollario 1.6.6. Sia p ∈ k[x] non nullo. Esistono al piu deg p radici di p.
Dimostrazione. Segue immediatamente dall’Osservazione 1.6.4 e da (1.6.6).
A un polinomio p = (a0+a1x+. . .+adxd) ∈ k[x] possiamo associare la funzione polinomiale
k → k (che denotiamo con lo stesso simbolo p) definita da
p(x) = a0 + a1x+ . . .+ adxd, x ∈ k. (1.6.9)
Corollario 1.6.7. Sia k un campo. Sia d ∈ N e supponiamo che k abbia piu di d elementi.
Siano p, q ∈ k[x] di grado al piu d. Le corrispondenti funzioni polinomiali p, q : k → k sono
uguali se e solo se p = q (cioe i coefficienti di p e q sono gli stessi). In particolare se k
e infinito allora due funzioni polinomiali sono uguali se e solo se sono associate a polinomi
uguali.
Dimostrazione. E ovvio che se p = q allora le funzioni polinomiali associate sono uguali. Ora
dimostriamo che se le funzioni polinomiali sono uguali allora p = q. Considerando la differenza
(p−q) vediamo che basta dimostrare che se p ∈ k[x] ha grado al piu d e la funzione polinomiale
associata e uguale a 0 allora p = 0. Ragioniamo per assurdo. Supponiamo che p �= 0. Per
ipotesi esistono α1, . . . ,αd+1 ∈ k distinti. Siccome la funzione polinomiale associata a p e
uguale a 0 abbiamo che α1, . . . ,αd+1 sono radici di p: questo contraddice la Proposizione
1.6.5.
Il Corollario 1.6.7 permette di identificare polinomi a coefficienti reali e funzioni polino-
miali R → R.Abbiamo considerato polinomi in una indeterminata. Definiremo in modo analogo i
polinomi in n indeterminate. Sia p : Nn → k: se I ∈ Nn poniamo pI := p(I).
Definizione 1.6.8. k[x1, . . . , xn] e l’insieme delle funzioni p : Nn → k che sono nulle quasi
ovunque cioe tali che l’insieme degli I ∈ Nn con pI �= 0 e finito. Un polinomio a coefficienti in
k nelle indeterminate3 x1, . . . , xn e un elemento di k[x1, . . . , xn].
3E piu appropriato chiamarle “trascendenti”.

1.7. NUMERI COMPLESSI 19
Dato I ∈ Nn denotiamo con xI il polinomio che manda I in 1 e J �= I in 0. Se I = (0, . . . , 0)
denotiamo xI con 1. Siano p, q ∈ k[x1, . . . , xn]. Definiamo la somma (p+ q) ∈ k[x1, . . . , xn] e
il prodotto p · q ∈ k[x1, . . . , xn] cosı:
(p+ q)I := pI + qI , (p · q)I :=�
J+K=I
(pJ · pK). (1.6.10)
Notate che la sommatoria che definisce il valore di p · q su I ha senso perche l’insieme delle
coppie (J,K) tali che pJ �= 0 �= pK e finito. Inoltre siccome p, q ∈ k[x1, . . . , xn] anche p ·q e unafunzione nulla quasi ovunque, cioe e un polinomio. Dato a ∈ k gli associamo pa ∈ k[x1, . . . , xn]
con pa(0, . . . , 0) = a e pa(I) = 0 per I �= (0, . . . , 0). In questo modo abbiamo una inclusione
k �→ k[x1, . . . , xn]. Dato p ∈ k[x1, . . . , xn] possiamo scrivere
p =�
I∈IaIx
I (1.6.11)
dove I ⊂ Nn e finito. Con questa scrittura vediamo che la somma e il prodotto di polinomi
corrisponde alle operazioni a cui siete abituati dalla scuola media. A un polinomio p ∈k[x1, . . . , xn] associamo la funzione polinomiale
knp−→ k
(c1, . . . , cn) �→�
I∈Nn pIcI(1.6.12)
dove cI := ci11 · ci22 · . . . · cinn . Notate che la somma, apparentemente infinita, ha senso perche p
e nulla quasi ovunque.
Definizione 1.6.9. Un polinomio P a coefficienti in k nelle indeterminate x1, . . . , xn e omo-
geneo di grado d se
P =�
I∈IaIx
I (1.6.13)
dove per ogni I = (i1, . . . , in) ∈ I si ha che i1 + . . .+ in = d.
1.7 Numeri complessi
L’insieme dei numeri complessi C e definito nel modo seguente. Come insieme C e R2. La
somma e quella puntuale cioe
(a1, b1) + (a2, b2) := (a1 + a2, b1 + b2). (1.7.1)
La moltiplicazione e definita cosı:
(a1, b1) · (a2, b2) := (a1a2 − b1b2, a1b2 + a2b1). (1.7.2)
Il sottoinsieme di C dato dalle coppie (a, 0) si puo identificare con l’insieme dei reali nel senso
che (a1, 0) + (a2, 0) = (a1 + a2, 0) e (a1, 0) · (a2, 0) = (a1a2, 0). Quindi da ora in poi se a ∈ Rdenoteremo con a il numero complesso (a, 0). Poniamo
i := (0, 1). (1.7.3)
Osserviamo che
i · i = (0, 1) · (0, 1) = (−1, 0) = −1. (1.7.4)

20 CAPITOLO 1. PRELIMINARI
In altre parole i e una radice di −1. Possiamo scrivere
(a, b) = (a, 0) + (b, 0)(0, 1) = a+ bi. (1.7.5)
Da ora in poi quando diciamo che (a+ bi) e un numero complesso intendiamo che a, b ∈ R.(1.7.6)
Con questa scrittura le definizioni di somma e prodotto danno che
(a1+b1i)+(a2+b2i)=(a1+a2)+(b1+b2)i, (a1+b1i)(a2+b2i)=(a1a2−b1b2)+(a1b2+a2b1)i. (1.7.7)
In particolare si verifica facilmente che C e un anello, di fatto C e un campo: l’inverso
moltiplicativo di 0 �= (a+ bi) e dato da
(a+ bi)−1 = (a2 + b2)−1(a− bi). (1.7.8)
(Qui (a2+ b2)−1 e l’inverso del reale (a2+ b2) in R.) Per visualizzare somma e moltiplicazione
di numeri complessi scegliamo un sistema di coordinate cartesiane nel piano e associamo al
numero complesso a + bi il punto di coordinate (a, b). In questo modo la somma di numeri
complessi corrisponde alla “regola del parallelogramma”. Per “vedere” la moltiplicazione
diamo un paio di definizioni. Sia (a+ bi) ∈ C (ricordate la (1.7.6)): poniamo
|a+ bi| := (a2 + b2)1/2 (1.7.9)
e lo chiamiamo il modulo di (a + bi). Sia 0 �= z ∈ C e w := w/|z|. Allora |w| = 1 cioe
w = c+di dove c2+d2 = 1 e quindi esiste θ ∈ R tale che w = (cos θ+sin θi): il numero θ (ben
determinato a meno di multipli interi di 2π) si chiama l’argomento di z e si indica Arg(z). In
conclusione dato z ∈ C possiamo scrivere
z = ρ((cos θ + sin θi), ρ = |z|, θ = Arg(z). (1.7.10)
(Se z = 0 l’argomento e indeterminato: la (1.7.10) e vera con qualsiasi θ.) Ora siano z1, z2 ∈ Ce scriviamo
z1 = ρ1(cos θ1 + sin θ1i), z2 = ρ2(cos θ2 + sin θ2i).
Applicando le formule trigonometriche per il coseno e il seno della somma di angoli otteniamo
che
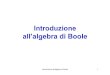
z1z2 = ρ1ρ2((cos(θ1 + θ2) + (sin θ1 + θ2)i). (1.7.11)
Quindi il modulo del prodotto e il prodotto dei moduli e l’argomento del prodotto e la somma
degli argomenti, vedi (1.1). L’importanza di C e dovuta al seguente risultato.
Teorema fondamentale dell’Algebra 1.7.1. Sia n > 0 un numero naturale e a1 . . . , an ∈C. Esiste z ∈ C tale che
zn + a1zn−1 + . . .+ an−1z + an = 0.
Applicando ripetutamente il Lemma 1.6.2 segue che esistono c1, . . . , cn ∈ C tali che
zn + a1zn−1 + . . .+ an−1z + an = (z − c1)(z − c2) · . . . · (z − cn).. (1.7.12)
In parole: ogni polinomio p ∈ C[z] di grado strettamente positivo e prodotto di fattori lineari
(cioe polinomi di grado 1). Illustriamo il Teorema Fondamentale dell’Algebra nel caso del
polinomio p(z) := zn− a. Le radici di p sono i numeri complessi w tali che wn = a. Scrivendo
a = ρ(cos θ + sin θi) troviamo che le n radici di p sono
ρ1/n(cos((θ + sπ)/n) + sin((θ + sπ)/n)i), 0 ≤ s ≤ (n− 1). (1.7.13)
Se rappresentiamo le radici n-esime di a con punti del piano allora otteniamo un singolo puntose a = 0 e i vertici di un poligono regolare con n lati se a �= 0.

1.7. NUMERI COMPLESSI 21
Esercizi del Capitolo 1
Esercizio 1.1. Siano
X1 := {0, 2, 4, 6, 8}, X2 := {1, 2, 4, 5, 6}, X3 := {0, 4, 8}.
Determinate Xi ∪Xj e Xi ∩Xj per ogni 1 ≤ i < j ≤ 3.
Esercizio 1.2. Sia N+ ⊂ N il sottoinsieme dei naturali strettamente positivi. Dimostrate che
�
n∈N+
[− (n− 1)
n,n− 1
n] = (−1, 1),
�
n∈N+
(− (n+ 1)
n,n+ 1
n) = [−1, 1].
Esercizio 1.3. Siano X,Y insiemi. Dimostrate che
(1) X ∪ Y = Y se e solo se X ⊂ Y ,
(2) X ∩ Y = Y se e solo se X ⊃ Y .
Esercizio 1.4. Siano X,Y, Z insiemi. Dimostrate che
X ∩ (Y ∪ Z) = (X ∩ Y ) ∪ (X ∩ Z).
Esercizio 1.5. Se X,Y sono insiemi X \ Y e l’insieme i cui elementi sono gli x ∈ X che non sono
elementi di Y . Dimostrate che
X \ (Y ∪ Z) = (X \ Y ) ∩ (X \ Z), X \ (Y ∩ Z) = (X \ Y ) ∪ (X \ Z).
(Formule di de Morgan.)
Se X e un insieme finito denoteremo con |X| il numero degli elementi di X.
Esercizio 1.6. Giustificate la notazione (1.2.3) dimostrando che se X e Y sono finiti allora
|Y X | = |Y ||X|.
Sia X un insieme. Denotiamo P(X) l’insieme i cui elementi sono i sottoinsiemi di X, per esempioP({1, 2}) = {∅, {1}, {2}, {1, 2}}. Sia A ⊂ X un sottoinsieme. La funzione caratteristica di A e laχA : X → {0, 1} (dovremmo denotarla χA,X) definita da
χA(x) =
�1 se x ∈ A,
0 se x /∈ A.(1.7.14)
Esercizio 1.7. Sia X un insieme. Dimostrate che la funzione
P(X)φ−→ {0, 1}X
A �→ χA
e biunivoca. Dimostrate che se X e finito allora
|P(X)| = 2|X|.
Esercizio 1.8. Di ciascuna delle seguenti funzioni dire se e iniettiva/suriettiva/biunivoca.
Z f−→ Zx �→ |x|
Z g−→ Nx �→ |x|
{0, 1}N × {0, 1}N h−→ {0, 1}N({an}, {bn}) �→ a0, b0, a1, b1, a2, . . .
Esercizio 1.9. Sia f : R → R definita da f(x) := x2 + x+ 3. Determinate im f .

22 CAPITOLO 1. PRELIMINARI
Esercizio 1.10. Siano X,Y insiemi e f : X → Y un’applicazione. Siano A ⊂ X e B ⊂ Y . Verificate
che
A ⊂ f−1(f(A)), f(f−1(B)) ⊂ B. (1.7.15)
Date esempi in cui le inclusioni di (1.7.15) sono strette, cioe A �= f−1(f(A)) e f(f−1(B)) �= B.
Siano X,Y insiemi. Diciamo che X ha la stessa cardinalia di Y se esiste un’applicazione biunivoca
f : X → Y - in simboli X ≈ Y . Se esiste un’applicazione suriettiva f : X → Y diciamo che X hacardinalia maggiore o uguale a quella di Y - in simboli X � Y (o che Y ha cardinalia minore o ugualea quella di X - n simboli Y � X). Se X e Y sono insieme finiti allora X ha la stessa cardinalia diY se e solo se |X| = |Y | e X ha cardinalia maggiore o uguale a quella di Y se e solo se |X| ≥ |Y |.(Potreste chiedervi se e vero in generale, come nel caso finito, che X � Y e Y � X implica che X ≈ Y :la risposta e SI, e il contenuto del Teorema di Schroder-Bernstein - vedi p. 147 di [2]).
Esercizio 1.11. Dimostrate che N, Z e Q hanno la stessa cardinalita.
Esercizio 1.12. Sia X un insieme e f : X → P(X) un’applicazione. Dimostrate che f non e suriettiva.
(Suggerimento: dimostrate che A := {x ∈ X | x /∈ f(x)} non e un elemento dell’immagine di f .)
Esercizio 1.13. Un insieme X e numerabile se N � X cioe se X e finito oppure ha la cardinalita di
N. Dimostrate che R non e numerabile.
Esercizio 1.14. Ridimostrate che vale la (1.4.1) osservando che
(1 + 2 + . . .+ n) + (n+ (n− 1) + . . .+ 1) = n(n+ 1).
Esercizio 1.15. Dimostrate per induzione che
12 + 22 + . . .+ n2 =1
6n(n+ 1)(2n+ 1).
Esercizio 1.16. Dimostrate per induzione che
13 + 23 + . . .+ n3 =1
4n2(n+ 1)2. (1.7.16)
Notate che per la (1.4.1) la formula (1.7.16) equivale alla formula
13 + 23 + . . .+ n3 = (1 + 2 + . . .+ n)2.
Esercizio 1.17. Calcolate i seguenti numeri del campo F5:
3 · 4−1, 35 · 2−2, (1 + 2 + . . .+ 9) · 3−10.
Esercizio 1.18. Calcolate
(1− 3i)(5 + 2i), (1− i)−1, (3 + i) · (1 + i)−1, (1 + i)10
Esercizio 1.19. Calcolate le radici quadrate di 2i e di (1 +√3i).

1.7. NUMERI COMPLESSI 23
Figura 1.1: Prodotto tra numeri complessi

24 CAPITOLO 1. PRELIMINARI

Capitolo 2
Spazi vettoriali
2.1 Gli archetipi e la definizione
Siano k un campo e X = (x1, . . . , , xn), Y = (y1, . . . , , yn) elementi di kn: definiamo la somma
X + Y come l’elemento di kn dato da
X + Y := (x1 + y1, x2 + y2, . . . , xn + yn). (2.1.1)
Quindi abbiamo un’operazionekn × kn −→ kn
(X,Y ) �→ X + Y(2.1.2)
Si definisce anche la moltiplicazione
k × kn −→ kn
(λ, X) �→ λX := (λx1,λx2, . . . ,λxn)(2.1.3)
Si usa chiamare λ uno scalare e quella definita e la moltiplicazione per scalari. La definizione
di spazio vettoriale che daremo sotto mette in evidenza alcune delle proprieta algebriche della
somma e prodotto per scalari di kn.
Definizione 2.1.1. Sia k un campo. Uno spazio vettoriale su k e un insieme V provvisto di
un elemento 0 ∈ V e due operazioni, la somma
V × V −→ V
(v1, v2) �→ v1 + v2(2.1.4)
e la moltiplicazionek × V −→ V
(λ, v) �→ λv(2.1.5)
tali che valgano le seguenti proprieta:
(1) 0 + v = v per ogni v ∈ V (0 e un elemento neutro),
(2) (u+ v) + w = u+ (v + w) per ogni u, v, w ∈ V (proprieta associativa della somma),
(3) u+ v = v + u per ogni u, v ∈ V (la somma e commutativa),
(4) per ogni v ∈ V esiste w ∈ V tale che v + w = 0 (esistenza di un opposto),
(5) 1v = v per ogni v ∈ V ,
25

26 CAPITOLO 2. SPAZI VETTORIALI
(6) (λ+ µ)v = λv + µv per ogni v ∈ V e λ, µ ∈ k (proprieta distributiva del prodotto),
(7) λ(v + w) = λv + λw per ogni v, w ∈ V e λ ∈ k (proprieta distributiva della somma),
(8) (λµ)v = λ(µv) per ogni v ∈ V e λ, µ ∈ k.
Sia V = kn e 0 := (0, 0, . . . , 0). Si verifica facilmente che le operazioni di somma e moltipli-
cazione per scalari definite da (2.1.2) e (2.1.3) rispettivamente godono delle proprieta (1)-(8)
della Definizione 2.1.1. Quindi kn provvisto delle operazioni appena definite e uno spazio
vettoriale su k.
Terminologia 2.1.2. Uno spazio vettoriale reale e uno spazio vettoriale su R, uno spazio
vettoriale complesso e uno spazio vettoriale su C.
Un esempio classico di spazio vettoriale e il seguente. Sia A2 il piano della geometria
euclidea (studiato a scuola). Siano A �= B ∈ A2: denoteremo con AB l’unica retta contenente
A e B, quindi AB = BA. Ricordiamo che due rette sono parallele se hanno intersezione vuota
oppure coincidono: se A,B,C,D ∈ A2 il simbolo AB||CD significa che o A �= B, C �= D e
le rette AB, CD sono parallele oppure A = B o C = D. Un segmento orientato in A2 e una
coppia ordinata (A,B) di punti di A2: lo indichiamo con AB - l’estremo iniziale e A, quello
finale e B (quindi (A,B) = (B,A) se e solo se A = B).
Definizione 2.1.3. I segmenti orientati AB e CD di A2 sono equipollenti se AB||CD e
AC||BD.
Si verifica che la relazione di equipollenza e di equivalenza. Un vettore geometrico (nel
piano) e una classe di equipollenza di segmenti orientati: quindi il quoziente V2 := A2/ ∼ e
l’insieme dei vettori geometrici. La classe di equipollenza di AB si denota−−→AB. Notiamo che
dato P ∈ A2 e un vettore geometrico v esiste uno e un solo Q ∈ A2 tale che−−→PQ = v. Si da
all’insieme V2 la struttura di spazio vettoriale nel seguente modo. Prima definiamo la somma
di segmenti orientati AB e BC (cioe tali che l’estremo finale del primo e l’estremo iniziale del
secondo) come il vettore AB + BC := AC. Ora siano v, w ∈ V2 due classi di equipollenza
di segmenti orientati. Sia AB un segmento orientato che rappresenta v e sia C ∈ A2 l’unico
punto tale che BC rappresenti w: quindi ha senso AB + BC = AC. Si dimostra che se
abbiamo punti A�, B�, C � ∈ A2 tali che−−→A�B� = v e
−−→B�C � = w allora A�B� + B�C � = A�C � e
equipollente ad AB cioe−−→AB =
−−→A�B�. Quindi possiamo definire la somma v+w come la classe
di equipollenza di AB +BC = AC: questo definisce la somma di vettori geometrici
V2 × V2 −→ V2
−−→AB +
−−→BC �→ −→
AC
La moltiplicazione per scalari si definisce in modo simile. Sia v ∈ V2. Supponiamo che λ ∈ Rsia non-negativo. Sia AB un segmento orientato tale che
−−→AB = v. Sia r una semiretta con
estremo A e contenente B. Sia C ∈ r il punto tale che la distanza da A a C sia la distanza da
A a B moltiplicata per λ: si dimostra che la classe di equipollenza di AC non dipende dalla
scelta del rappresentante di v e quindi possiamo definire λv come la classe di equipollenza di
AC. Per definire λv quando λ < 0 definiamo l’opposto di un vettore geometrico v cosı: sia
AB un rappresentante di v, allora la classe di equipollenza di BA non dipende dalla scelta del
rappresentante e quindi ha senso definire −v :=−−→BA. Dato v ∈ V2 e λ ∈ R negativo definiamo
λv := (−λ)v - questo ha senso perche siccome −λ > 0 il vettore (−λ)v e stato definito in
precedenza. Ora definiamo il vettore nullo 0 ∈ V2 come la classe di equipollenza di AA. Si
verifica che V2 con le operazioni appena definite e uno spazio vettoriale reale.

2.2. PRIME PROPRIETA 27
Esempio 2.1.4. Siccome R e un sottocampo di C possiamo dare a C la struttura di spazio
vettoriale su R.Esempio 2.1.5. Sia k un campo. L’insieme dei polinomi a coefficienti in k, in una indeterminata
(trascendente) x e denotato k[x]. Siccome k ⊂ k[x] (i polinomi “costanti”) la somma e il
prodotto di polinomi danno a k[x] la struttura di k-spazio vettoriale.
Esempio 2.1.6. Siano k un campo e X un insieme. Possiamo dotare l’insieme kX delle funzioni
f : X → k della struttura di un k-spazio vettoriale definendo la somma di funzioni punto per
punto e analogamente il prodotto per uno scalare:
(f + g)(x) := f(x) + g(x), (λf)(x) := λf(x).
L’elemento neutro e la funzione identicamente nulla.
2.2 Prime proprieta
Proposizione 2.2.1. Sia V uno spazio vettoriale sul campo k. Esiste un unico elemento
neutro, cioe se 01,02 ∈ V sono tali che
01 + v = v, 02 + v = v ∀v ∈ V (2.2.1)
allora 01 = 02 - questo e l’elemento neutro di V e sara denotato 0. Analogamente, dato v ∈ V
esiste un unico w ∈ V tale che v + w = 0.
Dimostrazione. Applicando le equazioni di (2.2.1) con v = 02 e v = 01 rispettivamente otte-
niamo che 01 + 02 = 02 e 02 + 01 = 01. Per la proprieta (3) della Definizione 2.1.1 (com-
mutativita della somma) segue che 01 = 02. Ora supponimao che v+w1 = 0 = v+w2. Som-
mando w1 ad entrambi i membri e applicando la proprieta associativa della somma (vedi (2)
dell Definizione 2.1.1) segue che w1 = w2.
Osserviamo anche che se V e uno spazio vettoriale sul campo k valgono le seguenti
uguaglianze:
0v = 0, λ0 = 0, (−1)v + v = 0, ∀v ∈ V,λ ∈ k. (2.2.2)
Infatti 0v = (0+ 0)v = 0v+0v e aggiungendo l’opposto di 0v a entrambi i membri otteniamo
che 0 = 0v. La dimostrazione della seconda equaglianza e del tutto simile. Infine (−1)v+ v =
(−1)v + 1v = (−1 + 1)v = 0v = 0 da che (−1)v + v = 0.
Terminologia 2.2.2. Sia V uno spazio vettoriale sul campo k. Dato v ∈ V l’unico w ∈ V
tale che v + w = 0 e l’opposto di v e sara denotato −v (in accordo con la terza eguaglianza
di (2.2.2)).
2.3 Sottospazi
Definizione 2.3.1. Sia V uno spazio vettoriale su k. Un sottoinsieme W di V e un sottospazio
di V se e non vuoto e se dati v1, v2 ∈ W , λ1,λ2 ∈ k si ha che (λ1v1 + λ2v2) ∈ W .
Diamo alcuni esempi. Siano k un campo e a1, . . . , an ∈ k. Siano
W1 := {(x1, . . . , xn) ∈ kn | a1x1+a2x2+. . .+anxn = 0}, W2 := {(x1, . . . , xn) ∈ kn | a1x1+a2x2+. . .+anxn = 1}.(2.3.1)

28 CAPITOLO 2. SPAZI VETTORIALI
Si verifica facilmente che W1 e un sottospazio di V e che W2 non e un sottospazio di V . Un
altro esempio: l’anello dei polinomi R[x] identificato con l’insieme delle funzioni polinomiali
da R a R e un sottospazio dello spazio vettoriale delle funzioni da R a R con addizione e
moltiplicazione per scalari puntuali.
Osservazione 2.3.2. Siano k un campo e V uno spazio vettoriale su k. Un sottoinsieme W ⊂ V
e un sottospazio se e solo se W e chiuso per l’operazione di somma e per la moltiplicazione
per scalari di V e, provvisto di queste operazioni e uno spazio vettoriale su k. In particolare
un sottospazio contiene l’elemento neutro di V .
Lemma 2.3.3. Sia V uno spazio vettoriale su k e Wi per i ∈ I (I e un insieme di indici) una
famiglia di sottospazi vettoriali di V . L’intersezione�
i∈I Wi e un sottospazio vettoriale di V .
Dimostrazione. Siccome 0 ∈ Wi per ogni i ∈ I abbiamo che 0 ∈�
i∈I Wi e quindi�
i∈I Wi
non e vuoto. Siano v1, v2 ∈�
i∈I Wi cioe v1, v2 ∈ Wi per ogni i ∈ I, e sia λ ∈ k. Siccome Wi e
un sottospazio vettoriale di V abbiamo che (v1 + v2) ∈ Wi e λv1 ∈ Wi per ogni i ∈ I e quindi
(v1 + v2) ∈�
i∈I Wi e λv1 ∈�
i∈I Wi.
Applichiamo il Lemma 2.3.3 all’insieme delle soluzioni di un sistema di equazioni lineari
omogenee cioe l’insieme degli (x1, x2, . . . , xn) ∈ kn tali che
a11x1 + a12x2 + . . .+ a1nxn = 0,
a21x1 + a22x2 + . . .+ a2nxn = 0,
· · · · · · · · · · · · · · · · · · · · · · · · · · · = 0,
ai1x1 + ai2x2 + . . .+ ainxn = 0,
· · · · · · · · · · · · · · · · · · · · · · · · · · · = 0,
am1x1 + am2x2 + . . .+ amnxn = 0.
(2.3.2)
Siccome le soluzioni di una singola equazione
ai1x1 + ai2x2 + . . .+ ainxn = 0
e un sottospazio vettoriale di kn l’insieme delle soluzioni di m equazioni e l’intersezione di m
sottospazi vettoriali di kn; per il Lemma 2.3.3 e un sottospazio vettoriale di kn.
Proposizione 2.3.4. Sia V uno spazio vettoriale su k e S ⊂ V un sottoinsieme. Esiste un
unico sottospazio vettoriale U ⊂ V che ha le seguenti proprieta:
(1) S e contenuto in U .
(2) Se W e un sottospazio vettoriale di V che contiene S allora U ⊂ W .
Informalmente: U e il piu piccolo sottospazio vettoriale di V che contiene S.
Dimostrazione. Sia F la famiglia dei sottospazio vettoriali di V che contengono S - notate che
F non e vuota perche S ⊂ V . Sia U l’intersezione dei sottospazi in F : e un sottospazio di
V per il Lemma 2.3.3. Chiaramente U contiene S, inoltre se W e un sottospazio vettoriale
di V che contiene S allora W ∈ F e quindi U ⊂ W . Quindi U soddisfa sia (1) che (2). Ora
supponiamo che esista un sottospazio vettoriale U � ⊂ V tale che valgano (1) e (2) con U
sostituito da U �: siccome S ⊂ U segue che U � ⊂ U . D’altra parte siccome valgono (1) e (2) e
S ⊂ U � abbiamo che U ⊂ U �: quindi U = U �.

2.3. SOTTOSPAZI 29
Definizione 2.3.5. Sia V uno spazio vettoriale su k. Sia S ⊂ V un sottoinsieme: l’unico
sottospazio U ⊂ V tale che valgano (1) e (2) della Proposizione 2.3.4 e chiamato il sotto-
spazio vettoriale generato da S e si denota �S�. Dato un sottospazio W ⊂ V e un sottoinsieme
S ⊂ W diciamo che S genera W o che e un insieme di generatori di W se �S� = W . Diciamo
che W e finitamente generato se e generato da un insieme finito. Se v1, . . . , vn ∈ V denotiamo
�{v1, . . . , vn}� con �v1, . . . , vn�.
Lo spazio vettoriale kn e finitamente generato perche e generato dai vettori
e1 := (1, 0, . . . , 0), e2 := (0, 1, 0, . . . , 0), . . . , en := (0, 0, . . . , 1). (2.3.3)
Esempio 2.3.6. R[x] e un sottospazio dello spazio vettoriale RR delle funzioni da R a R con
addizione e moltiplicazione per scalari puntuali. Sia
R[x]≤d := {p ∈ R[x] | p = 0 o p �= 0 e deg p ≤ d}.
Si verifica facilmente che R[x]≤d e un sottospazio dello spazio vettoriale di R[x].Ora chiedamoci: lo spazio vettoriale k[x] (con somma e moltiplicazioni puntuali) e fi-
nitamente generato? La risposta e negativa. Siano f1, . . . , fm ∈ k[x]: dimostriamo che
�f1, . . . , fm� �= k[x]. Possiamo assumere che i polinomi f1, . . . , fm siano tutti non-nulli perche
il sottopsazio generato non cambia se scartaimo eventuali polinomi nulli: ogni f ∈ �f1, . . . , fm�non nullo ha grado al piu uguale al massimo dei gradi degli fj e quindi �f1, . . . , fm� non e
tutto k[x] (esistono polinomi di grado arbitrariamente alto).
Esiste una descrizione piu esplicita del sottospazio generato da S ⊂ V . Prima diamo una
definizione fondamentale.
Definizione 2.3.7. Sia V uno spazio vettoriale. Siano v1, v2, . . . , vn ∈ V . Un vettore v ∈ V
e combinazione lineare di v1, . . . , vn se esistono λ1,λ, . . . ,λn ∈ k tali che
v = λ1v1 + λ2v2 + . . .+ λnvn. (2.3.4)
E conveniente ammettere che n possa essere 0 cioe la collezione di vettori sia vuota: dichiariamo
che solo 0 e combinazione lineare di una collezione vuota di vettori.
Proposizione 2.3.8. Siano V uno spazio vettoriale su k e S ⊂ V un sottoinsieme. Allora
�S� e uguale all’insieme i cui elementi sono le combinazioni lineari di arbitrarie collezioni
finite di vettori in S:
�S� = {λ1v1 + λ2v2 + . . .+ λnvn | v1, v2, . . . , vn ∈ V, λ1,λ, . . . ,λn ∈ k}. (2.3.5)
Dimostrazione. Sia T il membro di destra di (2.3.5). Dobbiamo dimostrare che �S� = T . E
sufficiente dimostrare che T e un sottospazio di V e che valgono (1) e (2) della Proposizione
2.3.4 con U sostituito da T . Verifichiamo che T e un sottospazio di V : non e vuoto perche
0 ∈ T (vedi l’ultima frase della Definizione 2.3.7) e se u, u� ∈ T cioe
u =n�
i=1
λivi, u� =n�
j=1
µjwj , vi, wj ∈ S, λi, µj ∈ k
allora u+ u� =�
n
i=1 λivi +�
n
j=1 µjwj e quindi appartiene a T , inoltre se α ∈ k abbiamo che
αu =�
n
i=1(αλi)vi e quindi appartiene a T . Ora dimostriamo che S ⊂ T . Sia v ∈ S: siccome
v = 1v abbiamo che v ∈ T . Rimane da dimostrare che se W ⊂ V e un sottospazio contenente
S allora T ⊂ W . Sia v ∈ T cioe vale (2.3.4) con vi ∈ S, allora v1, v2, . . . , vn ∈ W e siccome W
e un sottospazio segue che v ∈ W .

30 CAPITOLO 2. SPAZI VETTORIALI
Sia V uno spazio vettoriale e U,W ⊂ B sottospazi. In generale l’unione U ∪W non e un
sottospazio: la somma U +W e il sottospazio di V definito da
U +W := �U ∪W � = {u+ w | u ∈ U, w ∈ W}. (2.3.6)
Proposizione 2.3.9. Sia V uno spazio vettoriale finitamente generato. Ogni sottospazio
vettoriale di V e finitamente genenerato.
Dimostrazione. Consideriamo la seguente affermazione:
Se V ha n generatori e W ⊂ V e un sottospazio vettoriale allora W e generato da un insieme con al piu n elementi.
(2.3.7)
Sia Pn l’affermazione (2.3.7). Dimostriamo per induzione che Pn e vera per ogni n ∈ N. Se
V ha 0 generatori allora V = {0} (per convenzione il sottospazio generato dall’insieme vuoto
e {0}) e quindi {0} e l’unico sottospazio di V : segue che P0 e vera. Se non vi piace il caso
n = 0 potete verificare che vale P1: in questo caso esiste v ∈ V tale che V = �v�. Se W = {0}allora W e generato da un insieme con 0 elementi,se W �= {0} esiste av ∈ W dove a �= 0,
quindi v = a−1(av) ∈ W e percio W = V = �v� e quindi W e generato dall’insieme {v} che
un elemento. Ora passiamo al passo induttivo cioe supponiamo che valga Pn e dimostriamo
che vale Pn+1. Siano v1, . . . , vn+1 generatori di V cioe V = �v1, . . . , vn+1�. Sia
U := �v1, . . . , vn�.
L’intersezione W ∩ U e un sottospazio vettoriale di V per il Lemma 2.3.3 e quindi e un
sottospazio vettoriale di U . Siccome U e generato da n vettori e siccome per ipotesi induttiva
vale Pn segue che esistono w1, . . . , wk ∈ W ∩ U con k ≤ n e tali che W ∩ U = �w1, . . . , wk�.Se W ⊂ U allora W ∩ U = W e abbiamo fatto. Rimane da esaminare il caso in cui W �⊂ U .
Dunque esiste w ∈ (W \ U). Per ipotesi esistono a1, . . . , an+1 ∈ k tali che w = a1v1 + a2v2 +
. . .+ an+1vn+1 e siccome w /∈ U abbiamo che an+1 �= 0. Dimostriamo che
W = �w1, w2, . . . , wk, w�. (2.3.8)
Sia w ∈ W . Per ipotesi esistono x1, . . . , xn+1 ∈ k tali che w = x1v1 + x2v2 + . . . + xn+1vn+1.
Il vettore
w−xn+1a−1n+1w=(x1−xn+1a
−1n+1a1)v1+(x2−xna
−1n a2)v2+...+...(xn−xn+1a
−1n+1an)vn (2.3.9)
e in W ∩ U : infatti e in W perche e combinazione lineare dei vettori w e w che apparten-
gono al sottospazio W ed e in U per via dell’espressione a destra di (2.3.9). Quindi esistono
λ1, . . . ,λk ∈ k tali che
w − xna−1n w = λ1w1 + λ2w2 + . . .+ . . .λkwk.
Aggiungendo xna−1n w a entrambi i mebri vediamo che w e una combinazione lineare di
w1, . . . , wk, w. Questo dimostra che vale (2.3.8) : siccome k ≤ n abbiamo dimostrato che
W e generato da un insieme con al piu n+ 1 elementi.
2.4 Dipendenza/indipendenza lineare
La seguente e una definizione fondamentale.

2.4. DIPENDENZA/INDIPENDENZA LINEARE 31
Definizione 2.4.1. Sia V uno spazio vettoriale su k. Siano v1, . . . , vn ∈ V . Diciamo che
v1, . . . , vn sono linearmente dipendenti se esistono λ1,λ2, . . . ,λn ∈ k non tutti nulli tali che
λ1v1 + λ2v2 + . . .+ λnvn = 0. (2.4.1)
Diciamo che v1, . . . , vn sono linearmente indipendenti se non sono linearmente dipendenti.
Esplicitiamo la definizione di vettori v1, . . . , vn linearmente indipendenti: vuol dire che se
λ1,λ2, . . . ,λn ∈ k allora
λ1v1 + λ2v2 + . . .+ λnvn = 0
solo se 0 = λ1 = λ2 = . . . = λn ∈ k. Diamo alcuni esempi. I vettori e1, . . . , en ∈ kn
definiti da (2.3.3) sono linearmente indipendenti, i vettori v1 = (2, 2), v2 = (3, 3) di R2 sono
linearmente dipendenti perche 3v1 − 2v2 = 0.
Esempio 2.4.2. Siano v1, v2 ∈ k2 dati da v1 = (a, b) e v2 = (c, d). Allora v1, v2 sono linearmente
dipendenti se e solo se (ad− bc) = 0. Infatti supponiamo che
x1v1 + x2v2 = 0
cioe
ax1 + cx2 = 0, bx1 + dx2 = 0. (2.4.2)
Moltiplicando la prima equazione per b e aggiungendogli la seconda equazione moltiplicata
per −a otteniamo che
(bc− ad)x2 = 0. (2.4.3)
D’altra parte moltiplicando la prima equazione di (2.4.2) per d e aggiungendogli la seconda
equazione moltiplicata per −c otteniamo che
(ad− bc)x1 = 0. (2.4.4)
Segue che se v1, v2 sono linearmente dipendenti allora (ad−bc) = 0: infatti esiste una soluzione
non banale (x1, x2) di (2.4.2) e per (2.4.3) e (2.4.4) segue che (ad− bc) = 0. Ora dimostriamo
che se (ad − bc) = 0 allora v1, v2 sono linearmente dipendenti. Se 0 = a = b = c = d cioe
(0, 0) = v1 = v2 non c’e nulla da dire (abbiamo per esempio che 1 · v1 + 0 · v2 = 0). Quindi
possiamo supporre che (a, c) �= (0, 0) o (b, d) �= (0, 0). Nel primo caso una soluzione non banale
di (2.4.2) e data da x1 = c, x2 = −a, nel secondo caso una soluzione non banale di (2.4.2) e
data da x1 = d, x2 = −b.
Definizione 2.4.3. Una matrice 2×2 M con entrate in un campo k e una collezione ordinata
di 4 elementi di k, diciamo a, b, c, d. Scriviamo la matrice cosı:
M =
�a b
c d
�
Le righe di M sono (a, b) e (c, d) rispettivamente, le sue colonne sono (a, c) e (b, d) rispettiva-
mente. Il determinante di M e il numero
detM := (ad− bc). (2.4.5)

32 CAPITOLO 2. SPAZI VETTORIALI
L’ Esempio 2.4.2 da un caso in cui e utile disporre della nozione di matrice 2 × 2 e
suo determinante: infatti abbiamo visto che i vettori v1, v2 ∈ k2 sono linearmente dipendenti
se e solo se e nullo il determinante della matrice 2 × 2 che ha come righe i vettori v1 e
v2. Nel Capitolo 4 considereremo matrici di ordine qualsiasi nel Capitolo 6 definiremo il
determinante di matrici quadrate di ordine arbitrario.
Osserviamo che nella definizione di vettori linearmente (in)dipendenti i vettori sono una
lista di vettori (cioe un’applicazione da {1, 2, . . . , n} a V ) non un insieme: puo accadere che
vi = vj per i �= j - in questo caso i vettori v1, . . . , vn sono linearmente dipendenti.
Proposizione 2.4.4. Sia V uno spazio vettoriale su k. I vettori v1, . . . , vn ∈ V sono linear-
mente dipendenti se e solo se esiste 1 ≤ i ≤ n tale che vi e nel sottospazio generato dai restanti
vettori, cioe
vi ∈ �v1, v2, . . . , vi−1, vi+1, . . . , vn�. (2.4.6)
Dimostrazione. Supponiamo che v1, . . . , vn siano linearmente dipendenti cioe esistono λ1,λ2, . . . ,λn ∈k non tutti nulli tali che valga (2.4.1). Quindi esiste 1 ≤ i ≤ n tale che λi �= 0. Moltiplicando
entrambi i membri di (2.4.1) per λ−1i
otteniamo che
λ−1i
λ1v1 + . . .+ λ−1i
λi−1vi−1 + vi + λ−1i
λi+1vi+1 + . . .+ λ−1i
λnvn = 0 (2.4.7)
e dunque
vi = −λ−1i
λ1v1 − . . .− λ−1i
λi−1vi−1 − λ−1i
λi+1vi+1 − . . .− λ−1i
λnvn. (2.4.8)
Questo dimostra che vi ∈ �v1, v2, . . . , vi−1, vi+1, . . . , vn�. Ora supponiamo che valga (2.4.6) cioe
esistono a1, . . . , ai−1, ai+1, . . . , an ∈ k tali che vi = a1v1 + a2v2 + . . . + ai−1vi−1 + ai+1vi+1 +
. . .+ anvn: allora abbiamo che
a1v1 + a2v2 + . . .+ ai−1vi−1 − vi + ai+1vi+1 + . . .+ anvn = 0 (2.4.9)
e quindi v1, v2, . . . , vn sono linearmente dipendenti.
2.5 Basi
La seguente e una definizione fondamentale.
Definizione 2.5.1. Sia V uno spazio vettoriale. Siano v1, . . . , vn ∈ V . Diciamo che {v1, . . . , vn}e una base di V se generano V e sono linearmente indipendenti.
Un esempio: i vettori e1, . . . , en ∈ kn definiti da (2.3.3) formano una base di kn: questa e
la base standard di kn. Notate che se V ha una base secondo la nostra definizione allora V e
finitamente generato, quindi per esempio lo spazio vettoriale k[x] non ha una base. In verita
esiste una nozione piu generale di base che ammette il caso di basi con infiniti elementi: ogni
spazio vettoriale ammette una base secondo la definizione piu generale.
Proposizione 2.5.2. Sia V uno spazio vettoriale finitamente generato e supponiamo che sia
generato dai vettori v1, . . . , vn. Allora esiste una base di V ottenuta eliminando alcuni dei vi,
cioe esistono 1 ≤ i1 < i2 < . . . < im ≤ n tali che {vi1 , vi2 , . . . , vim} sia una base di V .

2.5. BASI 33
Dimostrazione. Se i v1, . . . , vn sono linearmente indipendenti allora {1, . . . , vn} e una base
di V . Se i v1, . . . , vn sono linearmente dipendenti allora grazie alla Proposizione 2.4.4
esiste 1 ≤ i ≤ n tale che vi e nel sottospazio generato dai restanti vettori e quindi V =
�v1, v2, . . . , vi−1, vi+1, . . . , vn�. Se i v1, v2, . . . , vi−1, vi+1, . . . , vn sono linearmente indipendenti
allora formano una base di V e abbiamo finito. Se i v1, v2, . . . , vi−1, vi+1, . . . , vn sono linear-
mente dipendenti iteriamo il ragionamento: quando non possiamo piu iterare abbiamo una
base di V .
Sia V uno spazio vettoriale su k finitamente generato e B = {v1, . . . , vn} una base di V .
Allora l’applicazione
knf−→ V
(x1, . . . , xn) −→ x1v1 + x2v2 + . . .+ xnvn(2.5.1)
e biunivoca. Infatti la f e suriettiva perche V e generato da v1, . . . , vn ed e iniettiva perche
v1, . . . , vn sono linearmente indipendenti (se x1v1 + x2v2 + . . . + xnvn = y1v1 + y2v2 + . . . +
ynvn allora (x1 − y1)v1 + (x2 − y2)v2 + . . . + (xn − yn)vn = 0 e quindi xi = yi per ogni i
per l’indipendenza lineare di v1, . . . , vn. Siccome f e biunivoca e definita la sua inversa che
denotiamo XB:
XB : V −→ kn. (2.5.2)
La n-pla XB(v) associata a v e l’n-pla delle sue coordinate relative alla base B. Qualche
esempio. Sia (x1, . . . , xn) ∈ kn. Sia S := {e1, . . . , en} la base standard di kn: la n-pla delle
coordinate di X = (x1, . . . , xn) nella base S e (x1, . . . , xn). Ora sia B = {en, en−1, . . . , e1}la base ottenuta invertendo l’ordine degli elementi di B: la n-pla delle coordinate di X =
(x1, . . . , xn) nella base S e (xn, xn1 . . . , x1).
Un fatto fondamentale e che il numero di elementi in una base di uno spazio vettoriale e
indipendente dalla base. Questo risultato sara una conseguenza del seguente lemma.
Lemma 2.5.3. Sia V uno spazio vettoriale su k. Supponiamo che v1, . . . , vm ∈ V siano li-
nearmente indipendenti (il caso m = 0 cioe lista vuota e ammesso) e che v1, . . . , vm, w1, . . . , wn
siano generatori di V . Sia u ∈ V tale che v1, . . . , vm, u sono linearmente indipendenti: allora
1 ≤ n ed esiste 1 ≤ i ≤ n tale che V sia generato da v1, . . . , vm, w1, . . . , wi−1, u, wi+1, . . . , wn.
(In altre parole: sostituendo wi con u nella lista v1, . . . , vm, w1, . . . , wn otteniamo un nuovo
sistema di generatori.)
Dimostrazione. Per ipotesi V = �v1, . . . , vm, w1, . . . , wn� quindi esistono x1, . . . , xm, y1, . . . , yn ∈k tali che
u = x1v1 + . . .+ xmvm + y1w1 + . . .+ ynwn. (2.5.3)
Se fosse 0 = y1 = y2 = . . . = yn (questa ipotesi include il caso n = 0) allora u sarebbe
combinazione lineare di v1, . . . , vm e quindi v1, . . . , vm, u sarebbero linearmente dipendenti -
vedi Proposizione 2.4.4 - contro l’ipotesi. Quindi 1 ≤ n ed esiste 1 ≤ i ≤ n tale che yi �= 0.
Moltiplicando per −y−1i
ambo i membri di (2.5.3) ed aggiungendo (wi + y−1i
u) ai membri
dell’equazione cosı ottenuta arriviamo all’equazione
wi = −y−1i
x1v1−. . .−y−1i
xmvm−y−1i
y1w1−. . .−y−1i
yi−1wi−1+y−1i
u−y−1i
yi+1wi+1−y−1i
ynwn.
Questo dimostra che wi ∈ �v1, . . . , vm, w1, . . . , wi−1, u, wi+1, . . . , wn�. Siccome V e generato da
v1, . . . , vm, w1, . . . , wn segue che e anche generato da v1, . . . , vm, w1, . . . , wi−1, u, wi+1, . . . , wn.

34 CAPITOLO 2. SPAZI VETTORIALI
Proposizione 2.5.4. Sia V uno spazio vettoriale. Supponiamo che r1, . . . , rp ∈ V siano
linearmente indipendenti e che z1, . . . , zq ∈ V siano generatori di V . Allora p ≤ q ed esistono
1 ≤ j1 < j2 ≤ . . . < jp ≤ q tali che V e generato da
{r1, . . . , rp} ∪ {z1, . . . , zq} \ {zj1 , zj2 , . . . , zjp}. (2.5.4)
(In altre parole: sostituendo nella lista z1, . . . , zq ciascun zji con ri otteniamo un nuovo sistema
di generatori.)
Dimostrazione. Per induzione su p. Piu precisamente sia Ap l’affermazione della proposizione:
dimostriamo per induzione che e vera per ogni p. Il caso p = 0 e banalmente vero. Se non
vi piace il caso p = 0 cominciate l’induzione da p = 1: l’affermazione A1 e vera per il caso
m = 0 del Lemma 2.5.3. Dimostriamo il passo induttivo, cioe assumiamo che Ap sia vera e
dimostriamo che e vera Ap+1. Per l’ipotesi induttiva V e generato da (2.5.4). Ora applichiamo
il Lemma 2.5.3 con m = p e u = rp+1 e otteniamo che vale Ap+1.
Corollario 2.5.5. Sia V uno spazio vettoriale. Supponiamo che {r1, . . . , rp} e {z1, . . . , zq}siano basi di V . Allora p = q.
Dimostrazione. I vettori r1, . . . , rp sono linearmente indipendenti e z1, . . . , zq sono generatori
di V : per la Proposizione 2.5.4 abbiamo che p ≤ q. D’altra parte i vettori z1, . . . , zqsono linearmente indipendenti e r1, . . . , rp sono generatori di V : per la Proposizione 2.5.4
abbiamo che q ≤ p: segue che p = q.
Il Corollario 2.5.5 ci permette di dare la seguente definizione fondamentale.
Definizione 2.5.6. Sia V uno spazio vettoriale finitamente generato (e quindi V ammette
basi per la Proposizione 2.5.2). La dimensione di V e la cardinalita di una qualsiasi base
di V .
Alcuni esempi: kn ha dimensione n perche e1, . . . , en e una base di kn, k[x]≤n ha dimensione
(n+ 1) perche una sua base e {1, x, x2, . . . , xn}, V2 ha dimensione 2.
Proposizione 2.5.7. Sia V uno spazio vettoriale finitamente generato. Siano v1, . . . , vm ∈ V
linearmente indipendenti: esistono vm+1, . . . , vm+q ∈ V tali che {v1, . . . , vm, vm+1, . . . , vm+q}sia una base di V . (Il caso q = 0 e ammesso: significa che {v1, . . . , vm} e gia una base di V .)
Dimostrazione. Per la Proposizione 2.5.4 esistono u1, . . . , ul ∈ V tali che V sia genera-
to da v1, . . . , vm, u1, . . . , ul. Siccome v1, . . . , vm ∈ V sono linearmente indipendenti esiste
un sottoinsieme massimale {j1, . . . , jq} ⊂ {1, . . . , l} tale che v1, . . . , vm, uj1 , . . . , ujq sono li-
nearmente indipendenti. Massimale significa che se j ∈ ({1, . . . , l} \ {j1, . . . , jq}) i vettori
v1, . . . , vm, uj1 , . . . , ujq , uj sono linearmente dipendenti. Quindi esistono α1, . . . ,αm,β1, . . . ,βq, γ
non tutti nulli tali che
α1v1 + . . .+ αmvm + β1uj1 + . . .+ βqujq + γuj = 0.
Siccome v1, . . . , vm, uj1 , . . . , ujq sono linearmente indipendenti abbiamo γ �= 0 e quindi uj e
nel sottospazio W := �v1, . . . , vm, uj1 , . . . , ujq�. Siccome V e generato da v1, . . . , vm, u1, . . . , ulsegue che W = V e quindi {v1, . . . , vm, uj1 , . . . , ujq} e una base di V .

2.5. BASI 35
Siano v1, . . . , vm ∈ V e B := {v1, . . . , vm, vm+1, . . . , vm+q} come nell’enunciato della Pro-
posizione 2.5.7: si dice che v1, . . . , vm ∈ V si estende alla base B di V . Quindi la proposizio-
ne afferma che in uno spazio vettoriale finitamente generato ogni lista di vettori linearmente
indipendenti si estende a una base.
Proposizione 2.5.8. Sia V uno spazio vettoriale finitamente generato e n := dimV .
(1) Supponiamo che v1, . . . , vm ∈ V siano linearmente indipendenti. Allora m ≤ n e se
m = n la lista {v1, . . . , vn} e una base di V .
(2) Supponiamo che �v1, . . . , vm� = V . Allora m ≥ n e se m = n la lista {v1, . . . , vn} e una
base di V .
Dimostrazione. (1): Per la Proposizione 2.5.7 possiamo estendere v1, . . . , vm a una base Bdi V . Siccome dimV = n la base B contiene n vettori e quindi m ≤ n. Se m = n allora
B = {v1, . . . , vn} e quindi W = �v1, . . . , vn� = V . (2): Per la Proposizione 2.5.2 possiamo
eliminare alcuni dei vi e ottenere una base C di V . Siccome dimV = n segue che m ≥ n. Se
m = n abbiamo che B = {v1, . . . , vn} e quindi W = V .
Esempio 2.5.9. Sia V uno uno spazio vettoriale con base {w1, w2} (quindi dimV = 2). Siano
v1, v2 ∈ V dati da
v1 := aw1 + bw2, v2 := cw1 + dw2. (2.5.5)
Copiando gli argomenti dell’Esempio 2.4.2 si vede che v1, v2 sono linearmente dipendenti se
e solo se (ad − bc) = 0 ovvero sono inearmente indipendenti se e solo se (ad − bc) �= 0. Per
la Proposizione 2.5.8 segue che {v1, v2} e una base di V se e solo se (ad− bc) �= 0.
Corollario 2.5.10. Sia V uno spazio vettoriale finitamente generato. Se W ⊂ V e un
sottospazio allora dimW ≤ dimV e si ha eguaglianza se e solo se W = V .
Dimostrazione. Sia {w1, . . . , wm} una base di W : allora w1, . . . , wm sono linearmente indi-
pendenti e quindi il corollario segue dal punto (1) della Proposizione 2.5.8.
Il seguente risultato e un corollario immediato del punto (1) della Proposizione 2.5.8.
Corollario 2.5.11. Sia V uno spazio vettoriale finitamente generato. Siano v1, . . . , vn ∈ V e
supponiamo che n > dimV . Allora v1, . . . , vn sono linearmente dipendenti.
Esempio 2.5.12. Consideriamo il sistema di equazioni lineari omogenee (2.3.2). La soluzione
banale di (2.3.2) e quella con xj = 0 per ogni 1 ≤ j ≤ n. Notate che la soluzione banale
esiste indipendentemente dal sistema scelto, ci interessa sapere se esiste o non esiste una
soluzione non banale. Supponiamo che n > m cioe che esistano piu incognite che equazione:
dimostriamo che esiste una soluzione non banale. Siano v1, . . . , vn ∈ km i vettori definiti da
vj = (a1j , a2j , . . . , aij , . . . , amj).
Allora (x1, . . . , xn) e soluzione di (2.3.2) se e solo se
x1v1 + x2v2 + . . .+ xnv = 0. (2.5.6)
Siccome dim km = m e per ipotesi m < n il Corollario 2.5.11 ci assicura che v1, . . . , vn sono
linearmente dipendenti. Quindi esistono x1, . . . , xn ∈ k non tutti nulli tali che valga (2.5.6) e
cioe una soluzione non banale di (2.3.2).

36 CAPITOLO 2. SPAZI VETTORIALI
Consideriamo uno spazio vettoriale V e sottospazi U,W ⊂ V . Supponiamo che U e W
siano finitamente generati, diciamo U = �u1, . . . , um� e W = �w1, . . . , wn�: allora (U +W ) =
�u1, . . . , um, w1, . . . , wn� e quindi anche la somma (U +W ) e uno spazio finitamente generato.
Per la Proposizione 2.3.9 anche U ∩ W e finitamente generato. Quindi nell’ipotesi fatta
le dimensioni di U , W , (U + W ) e U ∩ W sono definite. La formula di Grassmann da una
relazione tra queste dimensioni.
Proposizione 2.5.13 (Formula di Grassmann). Sia V uno spazio vettoriale e U,W ⊂ V
sottospazi finitamente generati. Allora
dim(U +W ) + dim(U ∩W ) = dimU + dimW. (2.5.7)
Dimostrazione. Sia {z1, . . . , za} una base di U∩W ed estendiamola a una base {z1, . . . , za, u1, . . . , um}di U e a una base {z1, . . . , za, w1, . . . , wn} di W . Dimostriamo che
B := {z1, . . . , za, u1, . . . , um, w1, . . . , wn}
e una base di (U + W ). Siccome z1, . . . , za, u1, . . . , um generano U e z1, . . . , za, w1, . . . , wn
generano W lo spazio (U + W ) e generato da z1, . . . , za, u1, . . . , um, w1, . . . , wn. Rimane da
dimostrare che z1, . . . , za, u1, . . . , um, w1, . . . , wn sono linearmente indipendenti. Supponiamo
che
λ1z1 + . . .+ λaza + µ1u1 + . . .+ µmum + θ1w1 + . . .+ θnwn = 0. (2.5.8)
Quindi abbiamo che
λ1z1 + . . .+ λaza + µ1u1 + . . .+ µmum = −(θ1w1 + . . .+ θnwn). (2.5.9)
Il membro di sinistra di (2.5.9) e in U e il membro di destra (uguale a quello di sinistra) e
in W , quindi sono entrambi in U ∩ W . Siccome {z1, . . . , za} e una base di U ∩ W esistono
τ1, . . . , τa ∈ k tali che
τ1z1 + . . .+ τaza = −(θ1w1 + . . .+ θnwn). (2.5.10)
Ma z1, . . . , za, w1, . . . , wn sono linearmente indipendenti, quindi 0 = τ1 = . . . = τa = θ1 =
. . . = θn. Sostituendo 0 = θ1 = . . . = θn nella (2.5.8) otteniamo che
λ1z1 + . . .+ λaza + µ1u1 + . . .+ µmum = 0. (2.5.11)
Siccome z1, . . . , za, u1, . . . , um sono linearmente indipendenti segue che 0 = λ1 = . . . = λa =
µ1 = . . . = µm. Questo dimostra che z1, . . . , za, u1, . . . , um, w1, . . . , wn sono linearmente
indipendenti e quindi che B e una base di (U +W ). Dunque abbiamo che
dim(U +W ) = a+m+ n, dimU ∩W = a, dimU = a+m, dimW = a+ n
e percio vale (2.5.7).
Esempio 2.5.14. Sia W ⊂ kn il sottospazio delle soluzioni dell’equazione omogenea
a1x1 + . . .+ anxn = 0. (2.5.12)
Dimostriamo che
dimW =
�n se 0 = a1 = . . . = an
n− 1 altrimenti.(2.5.13)

2.5. BASI 37
Se 0 = a1 = . . . = an allora W = kn e quindi dimW = dim kn = n. Ora supponiamo che uno
degli ai sia non nullo. Supponiamo che an �= 0 (se ai �= 0 per un altro i il ragionamento e del
tutto analogo). Sia U := �(0, . . . , 0, 1)� ⊂ kn: allora U ∩W = {0} perche an �= 0. La formula
di Grassmann (2.5.7) in questo caso da che
dim(U +W ) = dim(U +W ) + dimU ∩W = dimU + dimW = 1 + dimW. (2.5.14)
Quindi dimW = dim(U +W )− 1 e percio sara sufficiente dimostrare che (U +W ) = kn. Sia
v = (x1, . . . , xn) ∈ kn e poniamo
θ := a1x1 + . . .+ anxn.
Un facile clacolo mostra che (v − θa−1n u) ∈ W . Quindi esiste w ∈ W tale che
v = θa−1n u+ w.
Questo dimostra che (U +W ) = kn.
Definizione 2.5.15. Sia V uno spazio vettoriale finitamente generato e W ⊂ V un sottospa-
zio. La codimensione di W in V e
cod(W,V ) := dimV − dimW.
Nell’Esempio 2.5.14 la codimensione di W in kn e 0 se 0 = a1 = . . . = an ed e 1altrimenti.
Esercizi del Capitolo 2
Esercizio 2.1. Siano X,Y, Z ∈ R3 definiti da
X := (1, 2,−3), Y := (3,−5, 2), Z := (1, 1,−2).
Calcolate 2X − Y + Z. Trovate λ, µ, ν ∈ R non tutti nulli tali che
λX + µY + νZ = 0.
Esercizio 2.2. Dire quali dei seguenti sottoinsiemi di R3 e un sottospazio.
(1) {(x, y, z) ∈ R3 | x+ y + z = 0} ⊂ R3.
(2) {(x, y, z) ∈ R3 | x+ y + z ≤ 1} ⊂ R3.
(3) {(x, y, z) ∈ R3 | x2 + y2 + z2 = 0} ⊂ R3.
Esercizio 2.3. Sia V uno spazio vettoriale e u, v, w ∈ V tali che
v + u = v + w.
Dimostrate che u = w.
Esercizio 2.4. Nello spazio vettoriale R2 siano dati i vettori
v1 = (1, 2) v2 = (4, 2) v3 = (6, 3).
(1) Dire se i vettori v1 e v2 generano R2.
(2) Dire se i vettori v2 e v3 generano R2.

38 CAPITOLO 2. SPAZI VETTORIALI
Esercizio 2.5. Nello spazio vettoriale R3 siano dati i vettori
v1 = (1, 2, 1) v2 = (1, 2, 0) v3 = (1, 0, 1).
Verificare che v1, v2, v3 generano R3.
Esercizio 2.6. (1) Dire per quali sottospazi W ⊂ Rn il complementare Rn \ W e a sua volta un
sottospazio.
(2) Dire per quali sottospazi W ⊂ Rn l’insieme (Rn \W ) ∪ {0} e a sua volta un sottospazio.
Esercizio 2.7. Sia V uno spazio vettoriale e W1,W2 sottospazi vettoriali di V . Dimostrare che se
W1 ∪W2 e un sottospazio vettoriale di V allora W1 ⊂ W2 o W2 ⊂ W1.
Esercizio 2.8. Siano v1, v2, v3, v4 ∈ R4 definiti da
v1 = (1, 1, 0,−1), v2 = (1,−2, 3, 2), v3 = (1,−1, 0, 0), v4 = (0, 1, 0, 1).
Stabilite quali tra {v1, v2, v3}, {v2, v3, v4}, {v3, v4, v1} e {v4, v1, v2} sono terne di vettori linearmente
dipendenti.
Esercizio 2.9. (1) Dimostrate che se v1, . . . , vn ∈ R2 generano R2 allora n ≥ 2.
(2) Dimostrate che se v1, . . . , vn ∈ R2 sono linearmente indipendenti allora n ≤ 2.
(3) Dimostrate che se {v1, . . . , vn} e una base di R2 allora n = 2.
Esercizio 2.10. Siano v1, v2, u, w ∈ R2 definiti da
v1 = (1, 1, ), v2 = (1, 2), u = (1,−1), w = (0, 1).
(1) Verificate che B := {v1, v2} e una base di R2.
(2) Calcolate le coordinate di u e w nella base B.
Esercizio 2.11. Osserviamo che l’insieme k[x]≤d (vedi Esempio 2.3.6) i cui elementi sono i polinomi
di grado al piu d oppure uguali a zero e un sottospazio vettoriale di k[x].
(1) Dimostrate che B := {1, 1 + x, (1 + x)2} e una base di k[x]≤2.
(2) Trovate le coordinate di 1 di x e di x2 bella base B.
Esercizio 2.12. Sia V uno spazio vettoriale su k finitamente generato e sia B := {v1, . . . , vn} una
base di V . Supponiamo che v, w ∈ V e che XB(v) e XB(w) siano le n-ple di coordinate di V e Wrispettivamente.
(1) A cosa e uguale XB(v + w) ?
(2) A cosa e uguale XB(λv) ?
Esercizio 2.13. Sia V uno spazio vettoriale e sia B := {v1, . . . , vn} una base di V . Sia u ∈�v1, v2, . . . , vi1 , vi+1, . . . , vn� (notate che vi “manca”): dimostrate che C := {v1, . . . , vi1 , vi+u, vi+1, . . . , vn}e una base di V .
Esercizio 2.14. Siano v1, v2, v3 ∈ R3 definiti da
v1 = (a1, b1, c1), v2 = (a2, b2, c2), v3 = (0, 0, 1).
Stabilite sotto quali condizioni {v1, v2, v3} e una base di R3.
Esercizio 2.15. Sia V uno spazio vettoriale finitamente generato e siano W1, . . . ,Wp ⊂ V sottospazi.
Si dimostri che
cod(W1 ∩ . . . ∩Wp, V ) ≤ cod(W1, V ) + . . .+ cod(Wp, V ).
(Suggerimento: si proceda per induzione su p e si applichi la Formula di Grssmann.)

2.5. BASI 39
Esercizio 2.16. Sia W ⊂ Rn lo spazio delle soluzioni del sistema lineare omogeneo (2.3.2). Si dimostri
che dimW ≥ (n−m). (Invocate l’Esercizio 2.15 e l’ Esempio 2.5.14.)
Esercizio 2.17. Sia k un campo no α0,α1, . . . ,αn ∈ k distinti. Siano v0, v1, . . . , vn ∈ kn+1 definiti da
vi = (αi0,α
i1, . . . ,α
in).
Dimostrate che {v0, v1, . . . , vn} e una base di kn+1.
Esercizio 2.18. Sia d ∈ Q e poniamo
Q[√d] := {α+ β
√d | α,β ∈ Q}.
(1) Verificate che Q[√d] e u sottocampo di C.
(2) La somma e la moltiplicazione per Q danno a Q[√d] una struttura di spazio vettoriale su Q:
calcolatene la dimensione. (La risposta dipende dal numero d.)