Embed Size (px)
Citation preview
Kõrgema matemaatika kordamisküsimused
1. Maatriksi definitsioon. Maatriksi elemendid. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Transponeeritud maatriks
2. Maatriksite korrutise definitsioon. Korrutamise omadused ja seosed lineaarsete tehete ning korrutamise vahel. Ühikmaatriks.
3. Teist ja kolmandat järku determinandid.4. Permutatsiooni definitsioon. Inversiooni definitsioon. n-järku determinandi definitsioon. Determinandi
põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide
teooria põhivalem.6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi
omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv,
kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud maatriks. 8. Süsteemi lahendamine Crameri valemitega.
Maatriksi minor. Maatriksi astak. Maatriksi ridade ja veergude elementaarteisendused. Maatriksi rea juhtelement, treppmaatriks. Treppmaatriksi astak. Kronecker-Capelli teoreem
9. Gaussi meetodi sisu.10. Kompleksarvu mõiste, imaginaarühik, kompleksarvu reaalosa ja imaginaarosa, kompleksarvude võrdsus,
kaaskompleksarv. Kompleksarvude liitmise, korrutamise ja jagamise valemid. Kompleksarvu moodul, argument ja trigonomeetriline kuju. Kompleksarvu geomeetriline tõlgendus, Kaaskompleksarvude ja kompleksarvude summa geomeetriline tõlgendus. Trigonomeetrilisel kujul antud kompleksarvude korrutamise, jagamise, astendamise ja juurimise valemid. Juurte arv.
11. Geomeetriline vektor. Vektorite kollineaarsus, vektorite võrdsus. Nullvektor. Kolmnurka ja rööpküliku reegel. Lineaarsed tehted geomeetriliste vektoritega (liitmine ja skalaariga korrutamine). Lineaarsete tehete 8 omadust
12. Aritmeetiline vektor. Lineaarsed tehted aritmeetiliste vektoritega (liitmine ja skalaariga korrutamine). Aritmeetiline ruum.
13. Vektorruumi ja vektori definitsioon. Vektorruumi 5 näidet. Vektorite lineaarne kombinatsioon (näide geomeetriliste vektorite kohta). Triviaalne ja mittetriviaalne Vektorite lineaarne kombinatsioon. Lineaarselt sõltumatud ja sõltuvad vektorid.
14. Vektorruumi baasi definitsioon. Geomeetriliste vektorite baas, aritmeetiliste vektorite baas, maatriksite vektorruumi baas. Vektorruumi mõõde ehk dimensioon. Vektori koordinaadid
15. Skalaarkorrutise definitsioon vektorruumis. Eukleidiline vektorruum. Vektori pikkuse definitsioon. Vektori pikkuse 3 omadust. Vektorite vahelise nurga definitsioon. Ortogonaalsed vektorid, ortogonaalne baas, ühikvektor. Ortonormaalne baas. Skalaarkorrutise ja vektori pikkus ortonormaalse baasi järgi.
16. Vektorkorrutise definitsioon. Vektorkorrutise vektori koordinaadid. Segakorrutise definitsioon ja omadused.
17. Sirge parameetrilised ja kanoonilised võrrandid. Sirge üldvõrrand ja normaalvektor, normaalvektori koordinaadid üldvõrrandist. Punkti kaugus sirgeni, selle leidmise valem tasandilise sirge korral. Tasandi vektorvõrrand ja parameetrilised võrrandid, tasandi üldvõrrand, tasandi normaalvektor, tema seos tasandi üldvõrrandiga, tasandi normaalvõrrand ja selle kordajate ja vabaliikme geomeetriline tõlgendus. Punkti kauguse arvutamine tasandist. Nurg kahe sirge vahel. Tema arvutamisvalem taandatud kujul antud sirgete jaoks. Nurk kahe tasandi vahel. Nurk sirge ja tasandi vahel.
18. Ringjoone definitsioon ja võrrand. Ellipsi definitsioon ja kanooniline võrrand. Ellipsi fookused. Ellipsi ekstsentrilisus ja juhtjooned. Ellipsi optiline omadus. Hüperbooli definitsioon ja kanooniline võrrand. Hüperbooli fookused, harud, ekstsentrilisus. Hüperbooli kaldasümptoodid ja juhtjooned. Hüperbooli alternatiivne definitsioon. Parabooli definitsioon ja kanooniline võrrand. Parabooli fookus, juhtjoon, ekstsentrilisus. Parabooli optiline omadus.
Matemaatikutele tulemused tõetustega
1. Determinandi leidmine, kus viimases reas kõik elemendid peale viimast võrduvad nulliga.2. Determinandi arendis j-nda veeru järgi.3. Maatriksi pöördmaatriksi arvutamise valem.4. Crameri valemi tuletamine5. Kronecker-Capelli valemi tuletamine6. Igal nullist erineval kompleksarvul on n erinevat n-juurt.7. Vektorruumis on täpselt üks nullvektor.8. Cauchy-Bunjakovski võrratus9. Kolmnurga võrratus10. Vektorkorrutise vektori koordinaatide leidmise valem11. Punkti kauguse sirgeni leidmise valem12. Tasandi üldvõrrandi saamine parameetrilistest võrranditest13. Taandatud võrranditega sirgete vahelise nurga tangensi valem14. Ellipsi kanoonilise võrrandi tuletamine15. Hüperbooli kaldasümptootid16. Parabooli optilise omaduse tõestus

1. Kasutatavad tähistused
- kuulub; – element a kuulub hulka X / a hulgast X - sisaldub; – hulk A sisaldub hulgas B - iga; - iga a hulgast X / iga a korral hulgast X - eksisteerib; - eksisteerib a hulgast X / leidub a hulgast X
summa n
n
ii xxxx +++=∑
=
211
2. Maatriksi mõiste. Maatriksite liitmine ja arvuga korrutamine
Definitsioon. Maatriks on arvude tabel; kui maatriksis on rida ja veergu, siis räägitakse ( )-maatriksist ja kirjutatakse
kusjuures arve aij nimetatakse maatriksi elementideks.
Kui nimetatakse seda n-järku ruutmatriksiks.
Definitsioon. 1) Öeldakse, et maatriksid A ja B on võrdsed, kui nende vastavad elemendid on võrdsed, s.t.
2) Maatriksite A ja B summaks nimetatakse sellist maatriksit C; mille elemendid on võrdsed maatriksite A ja Bvastavate elementide summaga, s.t.
3) Maatriksi A korrutiseks arvuga nimetatakse sellist maatriksit B; mille elemendid on maatriksi A elementide -kordsed, s.t.
Kõikide reaalarvuliste elementidega ( )-maatriksite hulka tähistame :Muidugi, siia hulka kuulub ka nullmaatriks

Definitsioon. Maatriksi transponeeritud maatriksiks nimetatakse sellist maatriksit , mis on saadud maatriksist ridade ja veergude ümbervahetamise teel (maatriksi esimene rida on maatriksi esimeseks veeruks, maatriksi teine rida on maatriksi teiseks veeruks jne) , s.t.
Näide.
=→
=
95
71
97
51 TAA
3. Maatriksite korrutamine
Definitsioon. Maatriksite A = (aij) ja B = (bij) korrutiseks nimetatakse -maatriksit C, mille i-nda rea ja j-nda veeru element on võrdne
Seega me korrutame maatriksi A iga liige reas i maatriksi B veeru j vastava elemendiga ja liidame tulemused kokku.

4. Teist ja kolmandat järku determinandid.
Olgu antud teist järku ruutmaatriks:
=
2221
1211
aa
aaA
Definitsioon. Avaldist 21122211 aaaa − nimetatakse teist järku determinandiks (maatriksi A determinandiks) ning tähistatakse
2221
1211)det(aa
aaA =
Näide.
.2524342
53=⋅−⋅=

Vaatleme kolmandat järku ruutmaatriksi:
=
333231
232221
131211
aaa
aaa
aaa
A
Definitsioon. Kolmandat järku determinandiks (maatriksi A determinandiks) nimetatakse avaldist
aaaaaaaaa
aaaaaaaaa
aaa
aaa
aaa
A
2213322311332112
322113312312332211
333231
232221
131211
)det(
−−−
−++==
Kolmandat järku determinandi arvutamise eeskirja võib esitada kujul:
333231
232221
131211
aaa
aaa
aaa
333231
232221
131211
aaa
aaa
aaa
+ märgiga liikmed – märgiga liikmedTahame üldistada determinandi mõistet igat järku ruutmaatriksitele. Selleks toome esmalt sisse mõningad mõisted.
5. Permutatsioonid. Inversioonid. Kõrgemat järku determinandid.
Definitsioon. Arvude n,,2,1 ümberjärjestus, milles iga arv esineb täpselt üks kord, nimetatakse permutatsiooniks.
Antud n korral kõigi permutatsioonide hulka tähistame Pn.
Näide. Kui n=1, siis on võimalik ainult 1=1! premutatsioon: 1Arvu n=2 korral on 2=2! permutatsiooni: (1,2) ja (2,1)Arvu n=3 korral on 6=3! permutatsiooni:
(1,2,3); (2,3,1); (3,1,2); (2,1,3); (3,2,1); (1,3,2).
Teoreem. Permutastoonide arv n elemendist on Pn=n!
Tõestus. Permutatsiooni esimese elemendi valimiseks on n võimalust. Teise elemendi valikuks jääb n –1 võimalust. Seega esimese kahe elemendi valikuks on n(n – 1) võimalust.
Analoogiliselt jätkates saame, et n elemetide ümberjärjestamiseks n(n – 1)(n –2) … 2 ⋅ 1 = n! võimalust.
Definitsioon. Öeldakse, et permutatsioonis
elemendipaar ( , ) moodustab inversiooni, kui selles paaris esimene arv on suurem teisest
arvust , s.o. .
Inversioonide arvu permutatsioonis tähistatakse
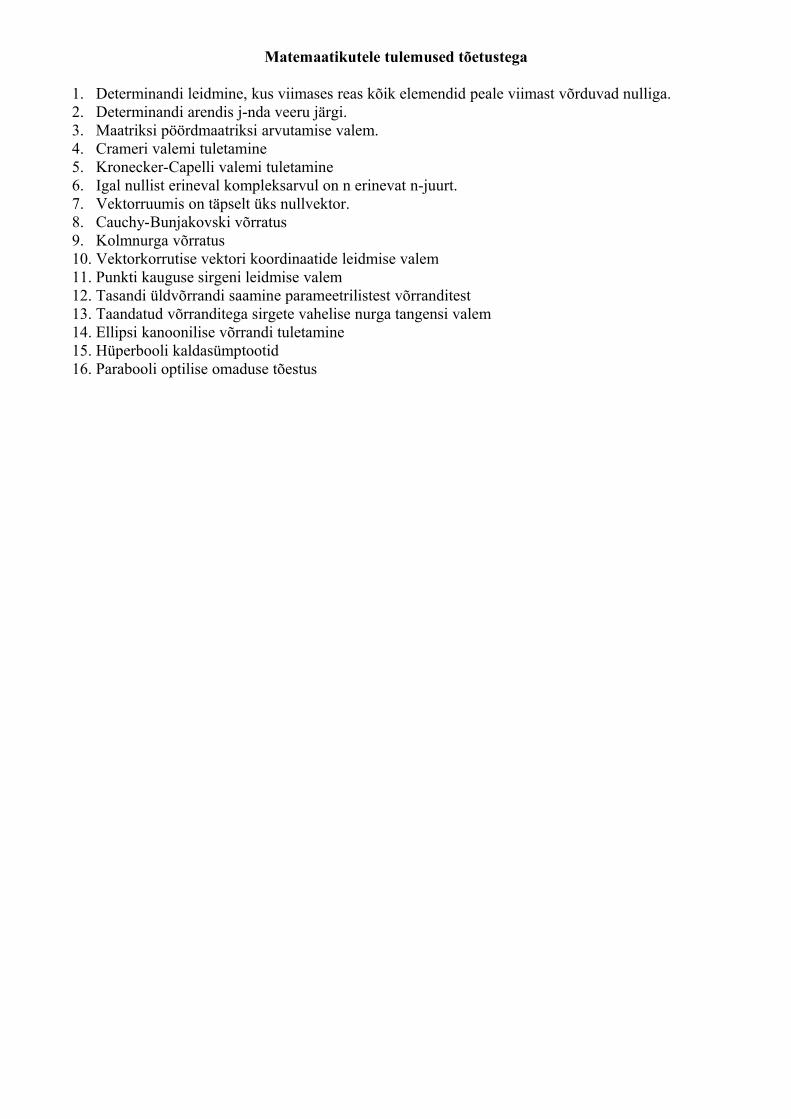
Koostame järgmised tabelid n = 2; 3 korral.
(i1,i2) (i1,i2)Märk
)i,(i 21)1( σ−21 21 ii aa
(1,2) 0 + a11a22
(2,1) 1 - a12a21
Summerides tabeli viimases veerus olevad liikmed koos vastavate märkidega, saame
ehk
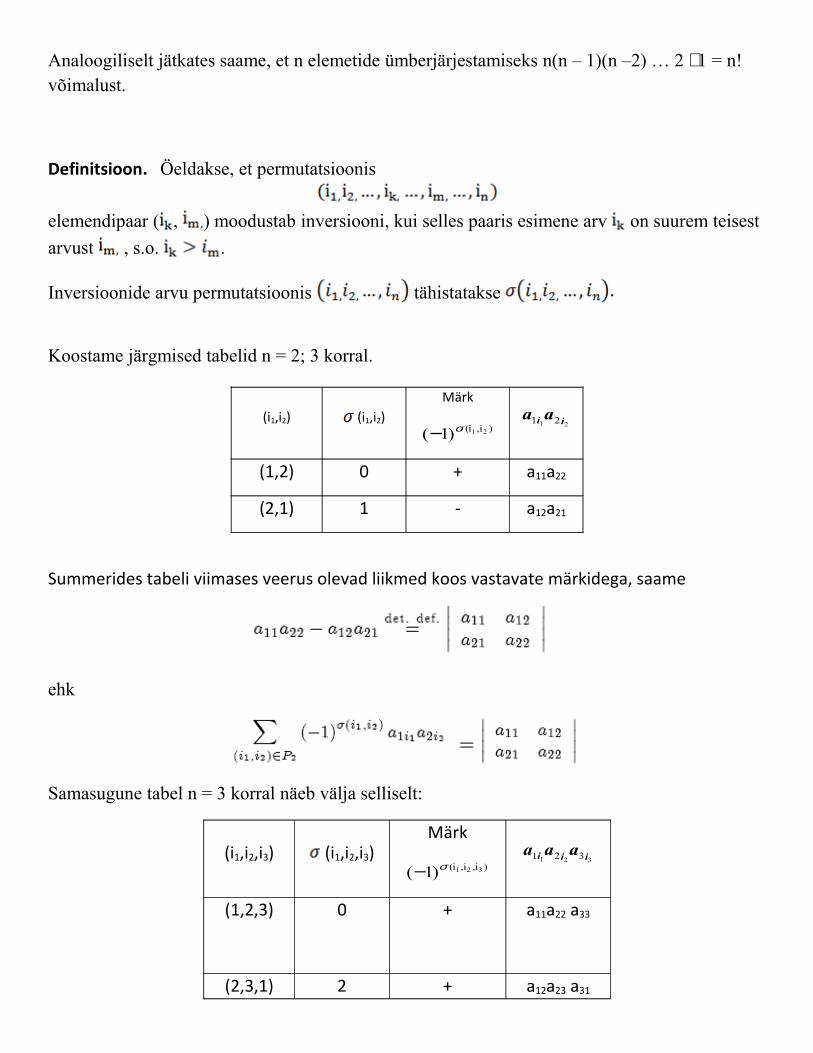
Samasugune tabel n = 3 korral näeb välja selliselt:
(i1,i2,i3) (i1,i2,i3)Märk
)i,i,(i 321)1( σ−321 321 iii aaa
(1,2,3) 0 + a11a22 a33
(2,3,1) 2 + a12a23 a31
(3,1,2) 2 + a13a21 a32
(2,1,3) 1 - a12a21 a33
(1,3,2) 1 - a11a23 a32
(3,2,1) 3 - a13a22 a31
Summerides tabeli viimases veerus olevad liikmed koos vastavate märkidega, saame
333231
232221
131211
312213322311332112
322113312312332211
aaa
aaa
aaa
aaaaaaaaa
aaaaaaaaa
=−−−
++
ehk
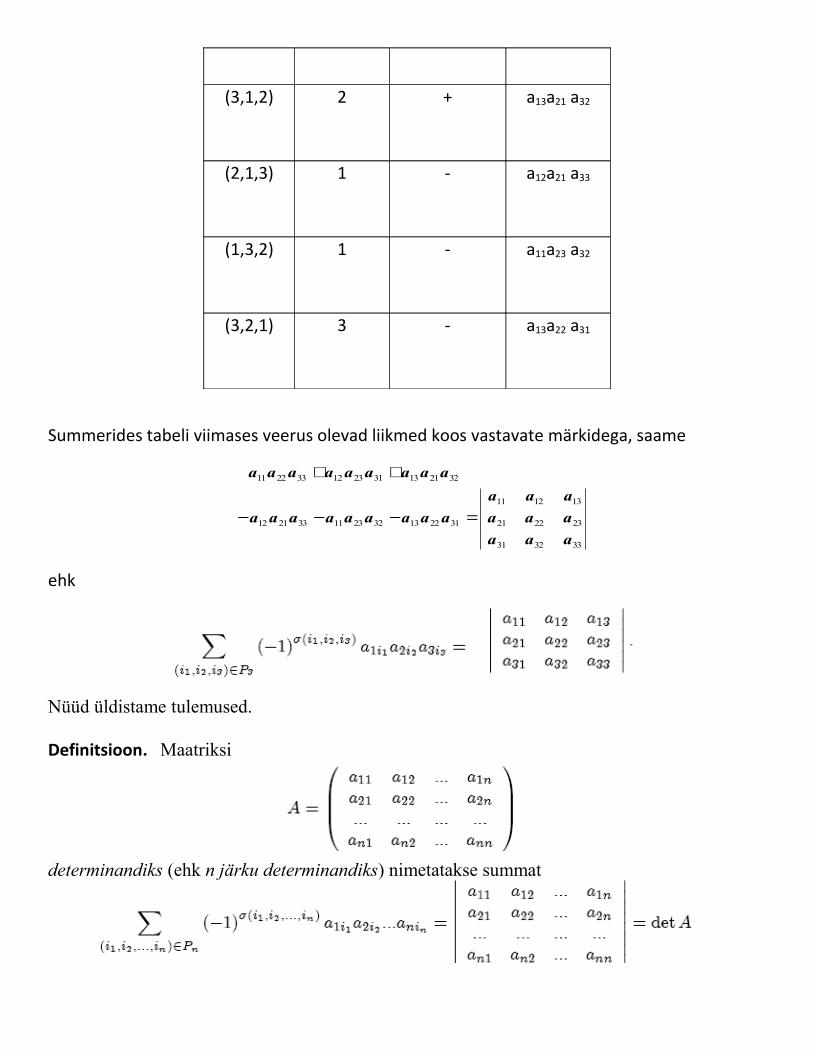
Nüüd üldistame tulemused.
Definitsioon. Maatriksi
determinandiks (ehk n järku determinandiks) nimetatakse summat
6. Determinandi põhiomadused.
Olgu antud nn× -maatriks A .
Omadus 1. Maatriksi transponeerimisel determinant ei muutu, s.t. AAT detdet = .
See omadus võimaldab sõnastada ja tõestada järgmised omadused ainult ridade jaoks (veergude jaoks need teoreemid kehtivad samuti).Omadus 2. Determinandi mistahes rea (veeru) elementidest võib ühise teguri tuua tegurina determinandi märgi ette.
Tõestus.
Järeldus. Kui determinandi mingi reas (veerus) on ainult nullid, siis on determinant null. Tõestus: võtame omaduses 2 � � 0. Omadus 3. Kui determinandis kaks rida (veergu) omavahel ümberpaigutada, siis determinandi märk muutub vastupidiseks. Näide:
�1 2 3 42 3 4 13 4 1 24 1 2 3� � �3 4 1 22 3 4 11 2 3 44 1 2 3�
Omadus 4. Kui determinandis on kaks rida (veergu) omavahel võrdsed, siis võrdub determinant nulliga. Tõestus. Oletame, et determinandis read indeksitega � ja � on võrdsed ning võrdugu determinant -ga. Vahetame antud deteminandis read indeksitega � ja � ümber, siis omaduse 3 põhjal saadud determinant võrdub -ga. Et aga read indeksitega � ja � on võrdsed, siis nende ridade ümbervahetamisel determinant ei muutu, s.t. � , 2 � 0, � 0. Järeldus. Kui determinandis kaks rida (veergu) on proportsionaalsed, siis determinant võrdub nulliga. Tõestus. Kui kaks rida on proportsionaalsed, siis üke neist võrdub teine korda konstant. Omaduse 2 kohaselt saame viia seda konstandi determinanti ette. Siis maatriksi read on võrdsed, seega omaduse 4 kohaselt determinant võrdub 0. Omadus 5. Olgu determinandi mingi rea (veeru) element kahe liidetava summa. Siis avaldub determinant kahe determinandi summana. Esimeses determinandis on vaadeldavas reas (veerus) esimesed liidetavad ja teise determinandi vaadeldavas reas (veerus) on teised liidetavad. Ülejäänud read (veerud) on endised.
Tõestus. Determinandi definitsiooni põhjal
Omadus 6. Detrminant ei muutu, kui determinandi ühe reaga (veeruga) liita mistahes arvuga korrutatud teine rida (veerg). Tõestus. Olgu determinant � saadud determinandist tema k-nda rea elementidele arvu c kordsete m-nda rea elementide liitmisel. Siis omaduse 5, omaduse 2 ja omaduse 4 kohaselt
� � ��
��� � ���� � ���� � ���� � ��� � ����� � ���� � ���� � ���� � ��� �� � �
���� � ���� � ���� � ���� � ���� � ���� � ���� � ��� �
�
������ � ���� � ����� � ����� � ���� � ���� � ���� � ��� �
� � � � ����� � ���� � ���� � ���� � ���� � ���� � ���� � ��� �
� �
Omadus 7. Kui determinandil on peadiagonaalist allapoole on ainult nullid, siis võrdub determinant peadiagonaali elementide korrutisega. Näide.

Omadustel 6 ja 7 põhineb Determinantide leidmise meetod:
1) Lisades determinandi ridadele (veergudele) mingi rida (veerg) korda sobiv arv
teisendada determinanti kujule, kus peadiagonaalist allapoole on ainult nullid. 2) Siis determinant võrdub padigonaali elementide korrutisele.
Näide:
�1 4 1 11 1 2 30 0 2 30 0 1 2��I�
0,5�III� � �1 4 1 10 5 1 20 0 2 30 0 0 0,5� � 1 · �5� · 2 · 0,5 � 5
Omadus 8. Maatriksite korrutise determinant võrdub maatriksite determinantide korrutisega:
7. Determinandi arendamine rea (veeru) järgi.
Vaatleme teise meetodi determinandi arvutamiseks.
Definitsioon. Maatriksi A = (aij) elemendi aij miinoriks Mij nimetatakse determinanti, mis saadakse maatriksi A determinandist i-nda rea ja j-nda veeru eemaldamisel.
Näide. Determinandis ¯ ¯ ¯ ¯ ¯ ¯
on elemendi a21 = 2 miinoriks
Definitsioon. Arvu
nimetatakse ka elemendi aij alamdeterminandiks ehk algebraliseks täiendiks.
Lemma 1. Kui determinandi detA viimases reas (veerus) kõik elemendid peale ann võrduvad nulliga, siis determinant võrdub elemendi ja tema täiendusmiinori korrutisega: detA =annMnn. Tõestus. Olgu
Siis determinandi definitsiooni põhjal
Et n on indeksitest ��, … , ��!� suurem, siis nende indeksitega ta ei moodusta ühegi inversiooni ja võib kirjutada:
ning sellepärast
Lemma 2. Kui determinandi detA mingis reas (näiteks, i-ndas reas) (veerus) kõik elemendid peale ühe (näiteks, aij) võrduvad nulliga, siis determinant võrdub selle elemendi ja tema algebralise täiendi korrutisega: detA = aijAij. Tõestus. Eeeldame, et i-ndas reas kõik elemendid peale ühe aij võrduvad nulliga. Esmärgiga
kasutada eelmise lemma nihutame rida vimasele kohale ja elemendi aij kohale " # ". Selleks kõigepealt vahetame i-nda ja (i+1) rea elemendid. Determinandi omaduse 3 kohaselt
on uus determinant võrdne det' · �1�. Nüüd vahetame uue (i+1) ja (i+2) rea ning peame
determinandi veel (-1)-ga korrutama, ehk uus determinant on nüüd �1�( · det'. Jätkame
kuni arv aij on vimases reas. Selleks teeme kokkuvõttes n-i reavahetust, seega uus
determinant on seotud esialgse determinandiga valemiga �1��!) · det' ehk

����� � ��* � ���� � � � ��)!�,� � �)!�,* � �)!�,��)+�,� � �)+�,* � �)+�,�� � � � ���!�,� � ��!�,* � ��!�,�0 � �)* � 0 �
� � �1��!) · det'.
Edasi toimetame arvu aij kohale " # " . Selleks vahetame kõigepealt j-nda ja (j+1) veeru
elemendid, siis (j+1) ja uue (j+2) veeru elemendid, jätkame seni, kuni arv aij jõuab kohale " # ". Iga veeruvahetusel korrutame determinandi (-1)-ga. Kokkuvõttes peame tegema n-j
veeruvahetust. Seega uus determinant võrdub �1��!* · �1��!) · det' � �1�!)!* · det'
ehk
����� � ��,*!� ��,*+� � ��� ��*� � � � � � ��)!�,� � �)!�,*!� �)!�,*+� � �)!�,� �)!�,*�)+�,� � �)+�,*!� �)+�,*+� � �)+�,� �)+�,*� � � � � � ���!�,� � ��!�,*!� ��!�,*+� � ��!�,� ��!�,*0 � 0 0 � 0 �)* �
� � �1�!)!* · det'.
Nüüd Lemma 1 kohaselt vasakpool võrdub
�)* · ����� � ��,*!� ��,*+� � ���� � � � � ��)!�,� � �)!�,*!� �)!�,*+� � �)!�,��)+�,� � �)+�,*!� �)+�,*+� � �)+�,�� � � � � ���!�,� � ��!�,*!� ��!�,*+� � ��!�,��
�
Determinant, mis esineb avaldises on maatriksi A determinant, kus on eemadlatud i-ndas rida ja j-ndas veerg. Seega ta võrdub miinori definitsiooni kohaselt ,)* . Kokkuvõttes saame võrduse �)* · ,)* � �1�!)!* · det', kust det' � �)* · ,)* · �1�)+* � �)* · ')*
Teoreem. Determinant detA võrdub mingi rea (veeru) elementide ja nende algebraliste täiendite korrutiste summaga:
(1)
ning
(2)
Märkus. Avaldist (1) nimetatakse determinandi detA arendiseks i-nda rea järgi, avaldist (2) – determinandi detA arendiseks j-nda veeru järgi.
Tõestus. Tõestame valemi (2).
8. Determinantide teooria põhivalemid
Olgu A ruutmaatriks, mille järk on n. Eelmise paragrahvi teoreemi põhjal arendades determinandi i-nda rea järgi, saame:
(1)
Siin rea i elemeid korrutatakse sama rea elementide alamdeterminantidega. Vaatleme, mis aga juhtub, kui korrutame mingi teise rea alamdeterminantidega.
Lause. Determinandi mingi rea (veeru) elementide korrutiste summa mingi teise rea
(veeru) elementide alamdeterminantidega on võrdne nulliga e.
,0...2211 =+++inknikik
AaAaAa kui ik ≠
(2)
Tõestus. Eeldame, et ik ≠ . Vaatleme maatriksi B, kus reas i paiknevad elemendid
knkaa ,,1 K ning ülejäänud ridades maatriksi A elemendid. Rakendame eelmise paragrahvi
teoreemi põhjal ja arendame maatriksi B determinandi rea i järgi:
inknikik
nnnknn
knkkkk
knkkkk
nk
AaAaAa
aaaa
aaaa
aaaa
aaaa
k
i
B +++== ...
......
..................
......
..................
.........
..................
......
det 2211
21
21
21
111211
.
Kuna maatriksis B kaks rida oma omavahel võrdsed, siis selle determinant võrdub 0:
.0det =B Seega
.0...2211 =+++inknikik
AaAaAa
Selleks, et ühendada valemid (1) ja (2) üheks valemiks toome sisse definitsiooni: Definitsioon. Kroneckeri sümboliks nimetatakse suurust
Nüüd Kroneckeri sümboli ikδ abil on võimalik ühendada valemid (1) ja (2):
.det...2211 AAaAaAaikinknikik
⋅=+++ δ (3)
Tõepoolest, kui i = k, siis ikδ = 1 ning saame valemi (1), vastasel juhul ik
δ = 0 ning saame
valemi (2). Et determinandi võib arendada ka veeru järgi, siis analoogilise aruteluga saame:
(4)
Valemeid (3) ja (4) nimetatakse determinantide teooria põhivalemiteks.

9. Maatriksi pöördmaatriks
Olgu
ning
n-ndat järku ühikmaatriks. Determinantide omaduse 7 kohaselt
.1111det =⋅⋅⋅= KE
Definitsioon 1. Maatriksit A nimetatakse regulaarseks, kui detA ≠ 0.
Definitsioon 2. Maatriksi A pöördmaatriksiks nimetatakse sellist maatriksit 1−
A , mille korral
.11EAAAA ==
−−
Teoreem. Kui maatriksil on olemas pöördmaatriks, siis on ta määratud üheselt. Tõestus. Olgu B ja C mõlemad maatriksi A pöördmaatriksid, st
AB = E = BA ja AC = E= CA.
Siis maatrikskorrutise assotsiatiivsuse tõttu B = EB = (CA)B = C(AB) = CE = C.
Lause. Kui maatriksil A on pöördmaatriks 1−
A olemas, siis maatriks A on regulaarne.
Tõestus. Eelduse kohaselt 1−∃A nii et EAA =
−1 . Kuna maatriksite korrutise determinant võrdub maatriksite determinantide korrutisega (omadus 8), siis
.1detdet)det(det 11=⋅==
−−AAAAE
Siit järeldub, et .0)(detdet/1det 11≠==
−−AAA
Muuhulgas saime lause tõestamisel järgmise omaduse:
Omadus 1. Maatriksi ja pöördmaatriksi determinandid on teineteise pöördarvud e. .)(detdet 11 −−
= AA Vaatleme ka teised pöördmaatriksi omadused.
Omadus 2. Maatriksi A pöördmaatriksi pöördmaatriks 1
)( 1 −−
A langeb kokku maatriksiga A:

Tõestus. Selleks, et kehtiks AA =−
−1
)( 1 , peab kehtima .11EAAAA ==
−− See võrdus on aga rahuldatud, kuna 1−
A on A pöördmaatriks.
Omadus 3. Ühikmaatriks on iseenda pöördmaatriksiks: .1EE =
−
Tõestus. Kehtib, kuna .EEE =
Omadus 4. Kui A ja B on sama järku regulaarsed ruutmaatriksid, siis on regulaarne ka AB, kusjuures
.)( 111 −−−= ABAB
Tõestus. Selleks tuleb näidata, et
.))(())(( 1111EABABABAB ==
−−−−
Tõepoolest
.)())(( 111111EAAAEAABBAABAB ====
−−−−−−
Analoogiliselt kehtib ka teine võrdus. Omadus 5. Kui maatriks A on regulaarne ja 0≠c , siis on regulaarne ka cA, kusjuures
.)( 111 −−−= AccA
Omadus 6. Kui A on regulaarne, siis on regulaarne ka ,TA kusjuures
Tõestus. Näitame, et .)()( 11EAAAA
TTTT==
−−
Maatriksite korrutamise omaduse tõttu
,)()( 11EEAAAA
TTTT===
−−
sest EET
= . Analoogiliselt tõestatakse teine võrdus. Teoreem. Kui maatriks A on regulaarne, siis maatriksil A on olemas pöördmaatriks 1−
A ning
Tõestus. Teoreemi eelduse põhjal maatriks A on regulaarne, s.t. detA≠ 0 definitsiooni põhjal, järelikult, leidub arvu detA pöördarv .)(det 1−
A Kontrollime tingimuste AA1− = E ja 1−
AA = E kehtivust:

Analoogiliselt võib näidata, et kehtib ka võrdus AA
1− = E. Järgmine järeldus annab mugava valemi 2 � 2 maatriksi pöördmaatriksi leidmiseks.
Näide: Leida
�2 �1 01 3 �12 1 1 �
Lahendus. Leiame kõigepealt
� � �1�� �3 �11 1 � � 4, �� � �1��� �1 �12 1 � � �3, �� � �1��� �1 32 1� � �5, �� � �1��� ��1 01 1� � 1, ��� � �1���� �2 02 1� � 2, ��� � �1���� �2 �12 1 � � �4, �� � �1��� ��1 03 �1� � 1, ��� � �1���� �2 01 �1� � 2, ��� � �1���� �2 �11 3 � � 7.
Arendame determinanti 1. rea järgi: det � � � � � �� �� � �� �� � 2 · 4 � �1� · �3� � 0 · �5� � 11. Seega
� � 111�4 �3 �51 2 �41 2 7 �
�� 111�
4 1 1�3 2 2�5 �4 7�
Järeldus. Kui 2 � 2-maatriks � on kujul
� � � !" #$, Siis tema pöördmaatriks on leitav valemiga
� � %&'( # �!�" � $.
Tõestus. 2 � 2-maatriksi � determinant võrdub det � ��# � !". Leiame elementide algebralised täiendid: � � �1��# � #, �� � �1���" � �", �� � �1���! � �!, �� � �1����� � �. Seega Teoreemi kohaselt
� � 1�# � !" # �"�! � $� � 1�# � !" # �!�" � $. Näide: Leida
2 5�2 3$
Lahendus.
2 5�2 3$ � 12 · 3 � 5 · �2� 3 �52 2 $ � 116 3 �52 2 $.
10. Lihtsamad maatriksvõrrandid
Pöördmaatriksi mõiste abil saab lahendada maatriksvõrrandid. Edasi näeme, et linear-võrrandite süsteem taandub maatriksvõrrandiks, seega pöördmaatriks on rakendatav linear-võrrandite süsteemi lahendamiseks
Me vaatleme kolm tüüpi maatriksvõrrandeid
�* � +, *� � +, �*+ � ,.
Lause 1. Regulaarse A korral on võrrandi ainus lahend .
Tõestus: Kuna maatriks A on regulaarne, siis leidub pöördmaatriks �. Korrutame võrrandi �* � + mõlemad pooled vasakult maatriksiga �:
��* � �+ -* � �+ * � �+
Lause 2. Regulaarse A korral on võrrandi ainus lahend
BAX = BAX 1−=
BXA =1−
= BAX

Tõestus: Kuna maatriks A on regulaarne, siis leidub pöördmaatriks �. Korrutame võrrandi *� � + mõlemad pooled paremalt maatriksiga �:
*�� � +� *- � +� * � +�
Lause 3: Regulaarsete A ja B korral on võrrandi ainus lahend
Tõestus: Kuna maatriksid A ja B on regulaarsed, siis leiduvad pöördmaatriksid � ja +.
Korrutame võrrandi �*+ � , mõlemad pooled vasakult maatriksiga �:
��*+ � �, -*+ � �, *+ � �,
Nüüd kasutades Lause 2 saame võrrandi lahendiks
* � �,+.
11. Lineaarvõrrandite süsteemi mõiste.
Olgu antud võrrandisüsteem
,
(1)
kus ., .�, … , .0 on tundmatud; !, !�, … , !1 on vabaliikmed ning �, ��, … , �10on süsteemi (1) kordajad. Definistioon 1. Süsteemi (1) nimetatakse lineaarvõrrandite süsteemiks (lühidalt LVSiks). Arve ", "�, … , "0 nimetatakse süsteemi (1) lahendiks, kui süsteemi (1) tundmatute asendamisel nende arvudega saame m samasust. Definistioon 2. LVSi nimetatakse 1) vasturääkivaks, kui tal ei ole ühtegi lahendit, 2) kooskõlaliseks, kui tal on vähemalt üks lahend, 3) määratuks, kui tal on täpselt üks lahend.
Näide 1. Võrrandisüsteem
22. � 22. � 33
CAXB =11 −−
= CBAX
on vasturääkiv (lahend puudub). Siin m=2, n=1.
Näide 2. Vaatleme võrrandisüsteemi
Selle võrrandisüsteemi üheks lahendiks on x = 3; y = 2; z = 1. Kuid lahendiks on ka x = 2; y
= 1; z = 3. Seega see võrrandisüsteem on kooskõlaline, kuid pole määratu. Siin m=2, n=3.
Toome sisse järgmisi tähistusi:
- süsteemi (1) maatriks,
- süsteemi (1) laiendatud maatriks;
- tundmatute veerg ehk tundmatute maatriks;
- vabaliikmete veerg ehk vabaliikmete maatriks.
Tähistades sümboliga Aj maatriksi A j-ndat veergu, s.t
saab LVSi (1) esitada järgmisel kujul:
12. Crameri valemid.
Vaatleme LVSi, kus 1) võrrandite arv = tundmatute arvuga ning 2) süsteemi maatriks on regulaarne e. det� 4 0.
LVS on siis kujul
(1)
Kirjutame LVSi (1) maatrikskujul: �* � + (2)
Olgu 56 sellise maatriksi determinant, mis on saadud maatriksist A k-nda veeru asendamisel vabaliikmete veeruga:
Leiame selle maatriksi determinandi. Kui determinandis det � k-nda veeru elementide algebralised täiendid on �6 , ��6 , … , �06 siis arendades determinandi 56 k-nda veeru elementide järgi saame:
Eelduse põhjal maatriks A on regulaarne, järelikult det � 4 0, seega maatriksil A leidub pöördmaatriks
Nüüd Lause 1 paragrahvist 10 kohaselt maatriksvõrrandli (2) �* � + on olemas ainus lahend: * � +�. Tähistame det � � 5, siis
Teoreem. Kui süsteemi (1) korral on võrrandite arv = tundmatute arvuga ning süsteemi maatriks on regulaarne, siis süsteemil on täpselt üks lahend

Definitsioon. Valemeid
nimetatakse Crameri valemiteks.
Näide. Lahendame süsteemi 7 . � 3.� � 02. � 4.� � 63
Siin
5 � �1 32 4� � �2, 5 � �0 36 4� � �18, 5� � �1 02 6� � 6. Seega
. � 9:9 =;� � 9, .� � 9=9 =
>� � �3.

13. Maatriksi astak.
Definitsioon. Maatriksi miinorid on selle maatriksi ridade ja veergude
eemaldamise teel saadud determinandid. r-t järku minor on r-t järku determinant.
Seega -maatriksi mingi elemendi miinor on maatriksi -t järku
miinor.
Näide. Maatriksi
esimest järku miinorid on selle maatriksi elemendid: 1,2, 3 jne. Teist järku miinorid on näiteks
Kolmandat järku miinorid on
Kõrgemat järku miinorid antud maatriksil puuduvad. Definitsioon. Maatriksi astak on selle maatriksi nullist erinevate miinorite kõrgeim järk. Maatriksi astak on r, kui sellel maatriksil
1) leidub vähemalt üks nullist erinev r-järku miinor, 2) puuduvad nullist erinevad r-ist kõrgemat järku miinorid.
Maatriksi A astakut tähistatakse rank(A) või r(A).
Näide. Vaatleme maatriksi
Sellest on võimalik koostada kuni 4-t järku miinorid. Meid huvatavad aga nullist erinevad miinorid. Saame maatriksist koostada nullist erineva nt. sellise 3-t järku miinori

Teiselpoolt puuduvad maatriskil nullist erinevad 4-t järku miinorid, kunas igas 4-t järku miinoris peab sisalduma nullide rida, mis annab miinori väärtuseks 0. Seega maatriksi astak on 3 e.
Lause 1. Kui maatriksi A astak on r,
1) siis leidub maatriksil A r veergu millede lineaarse kombinatsioonina
avalduvad kõik maatriksi veerud e. leduvad veerud rkkk
AAA ,...,, 21
sellised et iga veeru kA jaoks leiduvad arvud
rkkk λλλ ,...,,21
et kehtiks
r
r
k
k
k
k
k
k
kAAAA λλλ +++= ...2
2
1
1
2) siis leidub maatriksil A r rida millede lineaarse kombinatsioonina avalduvad
kõik maatriksi read e. leduvad read sellised rkkk AAA ,...,,
21et iga rea kA
jaoks leiduvad arvud rkkk λλλ ,...,,
21et kehtiks
rr kkkkkkk AAAA λλλ +++= ...2211
Tuleb välja, et maatriksi nn. elementaarteisendused ei muuda maatriksi astakut. Definitsioon. Maatriksi ridade (veerude) elementaarteisendusteks nimetakse
üleminekut maatriksilt A maatriksile B järgmise kahe võimaliku reegli abil:
1. maatriksi mistahes rea (veeru) korrutamine arvuga.
2. mistahes reale (veerule) arvkordse teise rea (veeru) liitmine (lahutamine).
Lause 2. Kui maatriks B saadakse maatriksist A elemntaarteisenduste abil, siis nende astakud on võrdsed e.
Maatriksi astaku leidmiseks tuleb maatriks elementaarteisenduste abil teisendada nn. treppmaatriksiks. Definitsioon. Maatriksi rea juhtelemendiks nimetatakse selle rea (vasakult) esimest nullist erinevat elementi. Definitsioon. Öeldakse, et maatriks on trepikujuline ehk treppmaatriks, kui
1) read, mis koosnevad ainult nullidest, on maatriksi põhjas (all); 2) mistahes rea juhtelement (kui leidub) asetseb rangelt paremal temale
eelneva rea juhtelemendist.

Näide. Maatriksitest
esimene on trepikujuline, kuid teine ei ole. Teoreem. Treppmaatriksi astak võrdub selle maatriksi juhtelementide arvuga.
Tõestus. Eemaldame need read ja veerud, mis ei sisalda juhtelemente. Saame determinandi, kus peadiagonaalist allapoole asuvad nullid je peadiogonaalil kõik mittenullised elemendid See on nullist erinev ja tema järk võrdub juhtelementide arvuga. Suurema järguga miinorid on kõik nullid (kui eksisteerivad), sest sisaldavad ainult nullidest koosnevat rida.
Teisisõnu teoreem ütleb, et treppmaatriksi astak võrdub mittenull ridade arvule. Maatriksi astaku leidmiseks tuleb maatriks elementaarteisenduste abil teisendada treppmaatriksiks, seejärel kasutada teoreemi treppmaatriksi astakust. Näide. Leiame maatriksi
astaku. Teisendame maatriksi treppkujule
Mittenullridade arv on 2, seega esiaglse maatriksi astak on 2. 14. Kronecker-Capelli teoreem
Selles paragrahvis me tuletame LVSi kooskõlalisuse tunnuse. Olgu antud LVS
Olgu

LVSi maatriks,
laiendatud maatriks ning
vabaliikmete veerg. Teoreem (Kronecker-Capelli teoreem). LVS on lahenduv parajasti siis, kui süsteemi laiendatud maatriksi astak on sama kui süsteemi maatriksi astak . Tõestus. „Tavilikkus“e. „ “ Eeldame, et süsteemil leidub lahend
ning näitame, et
Kuna
on süsteemi lahend, siis
Nüüd lahutame maatriksi viimasest veerust 1. veergu korrutatud , 2.
Veergu korrutatud jne kuni vimase veergu korda , saame maatriksi
See maatriks on saadud maatriksist veerude lementaartesendustega, seega
tema astak ona sama, mis astak. Teiseltpoolt, kuna see maatriks on saadud maatriksist A 0 veeru lisamisel, siis me same sellest koostada nullist erineva r-t järku miinorit (sama, mis maatriks A jaoks), samuti me ei saa sellest koostada r+1-t järku nullist erineva miinori, kuna 0 veergu lisamisel determinant saab nulliks. Järelikult maatriksi C astak sama nagu maatriksi A astak. Seega
.
„Piisavus“e. „⇐“ Eeldame, et
Näitame, et süsteemil leidub lahend. Lause 1 kohaselt süsteemi maatriksil A r veergu millede lineaarse
kombinatsioonina avalduvad kõik maatriksi veerud. Lihtsuse mõtte eeldame, et
need on veerud . Kuna süsteemi maatriksi astak on samuti r, siis
tema kõik veerg, muuhulgas ka vabaliikmete veerg B avaldub nende veerude
lineaarse kombinatsioonina. Seega leiduvad arvud et
ehk kehtib
(1)
Võtame (2)
Siis valemi (1) kohaselt kehtib
Seega arvud on LVS lahend.

Näide. Vaatleme lineaarvõrrandisüsteemi
Selle võrrandisüsteemi maatriks ja laiendatud maatriks on
Leiame nende astakud elementaarteisenduste abil (Lause 2 kohaselt ei muuda
nad maatriksi astakut). Rakendame elementaartesiendusi laiendatud maatriksile,
kunas ta sisaldab süsteemi maatriksi, siis samal ajal rakenduvad nad süsteemi
maatriksile.
Süsteemi maatriksist A saadud maatriksi astak on 2, kuna üks tema nullist erinev
2-järku minor on
ning kõik tema 3-t järku miinorid on 0-d. Laiendatud maatriksist teisendatud
maatriksist on aga võimalik valmistada 3-t järku nullist erineva miinori, nt.
Seega laiendatud maatriksi astak on 3. Kronecker-Capelli teoreemi kohaselt
LVS-l puuduvad lahendid.
15. Gaussi meetod
Definitsioon. Kahte n tundmatuga lineaarvõrrandite süsteemi nimetatakse ekvivalentseteks, kui nendel on ühed ja samad lahendid. Definitsioon. Lineaarvõrrandite süsteemi teisendust, mis seisneb kas
(1) süsteemi kahe erineva võrrandi ümbervahetamises; (2) süsteemi teatud võrrandi korrutamises nullist erineva arvuga;

(3) süsteemi teatud võrrandile mingi arvuga korrutatud mistahes teise võrrandi liitmises.
nimetatakse vastavalt esimest, teist ja kolmandat tüüpi elementaarteisenduseks. Teoreem. Kaks LVSi on ekvivalentsed siis ja ainult siis, kui üks neist on saadav teisest teatava arvu elementaarteisenduste teel. Gaussi meetodi sisu:
Olgu meil tarvis lahendada süsteemi
Selle süsteemi laiendatud maatriks on
1) Viime LVSi laiendatud maatriks ekvivalentsele treppkujule. 2) Kontrollime astakutingimust (et laiendatud maatriksi astak sama, mis on
maatriksi astak). Kui see pole täidetud, siis süsteem pole lahenduv. Edasi teeme ainult kooskõlalise süsteemi korral
3) Kui LVSi astak on väiksem tundmatute arvust, siis valime juhttundmatud (vastavad treppmaatriksi juhtelementidele). Ülejäänud on vabad tundmatud, anname neile väärtusteks konstandid C1, C2,…
4) Avaldame juhttundmatud vabaliikmete ja vabade tundmatute kaudu. 5) Kirjutame välja lahend.
Näide. Lahendada võrrandisüsteem
Selle LVSi laiendatud maatriksiks on
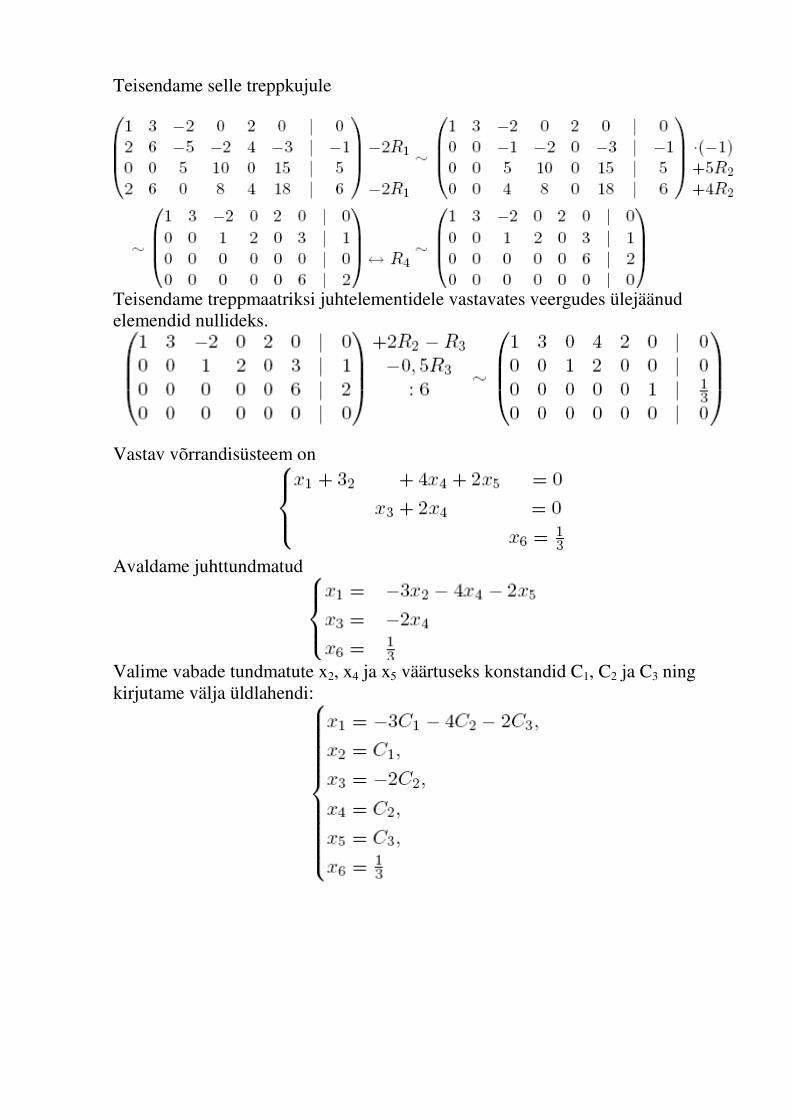
Teisendame selle treppkujule
Teisendame treppmaatriksi juhtelementidele vastavates veergudes ülejäänud elemendid nullideks.
Vastav võrrandisüsteem on
Avaldame juhttundmatud
Valime vabade tundmatute x2, x4 ja x5 väärtuseks konstandid C1, C2 ja C3 ning kirjutame välja üldlahendi:
16. Kompeksarvud
Vajadus arvuvalla laiendamiseks reaalarvude vallast üldisemasse arvude hulka
tekkis juba selliste lihtsate võrrandite lahendamisel, nagu �� � 1 � 0 ja �� � � �2 � 0.
On teada, et kompleksarvudest kõneldi juba 16. sajandil (G. Cardano). Siiski
esinesid nad kuni 18. sajandi keskpaigani vaid episoodiliselt üksikute
matemaatikute töödes. Süstemaatiline kompleksarvude käsitlemine algas seoses
geniaalse Peterburi akadeemiku L. Euleri (1707 – 1783) töödega.
Definitsioon. Kompleksarvuks (algebralisel kujul) nimetatakse arvu z = a + ib, kus
a ja b on reaalarvud ja i on imaginaarühik. Imaginaarühik, mida tähistatakse i,
defineeritakse võrdusega � � 1.
Kõigi kompleksarvude hulka tähistatakse �.
Definitsioon. Kompleksarvu z = a + ib � � korral nimetatakse arvu a � selle
kompleksarvu reaalosaks ja arvu b � nimetatakse selle kompleksarvu
imaginaarosaks.
Definitsioon. Kaks kompleksarvu on võrdsed parajasti siis, kui
1) on võrdsed nende reaalosad,
2) on võrdsed nende imaginaarosad.
a + ib� � � � � � � � ja b=d
Defineerime tehted arvudega a + ib ja � � �:
Definitsioon. Kompleksarvude z1 = a1 + ib1 ja z2 = a2 + ib2 summaks on
kompleksarv
z1 + z2 = (a1 + a2) + i(b1 + b2).
Seega kompleksarvude liitmisel liidetakse reaal- ja imaginaarosad eraldi.
Näide.
(2 + 5i) + (3 - 3i) = (2 + 3) + (5 - 3)i = 5 + 2i:
Leiame kahe kompleksarvu korrutise. Selleks korrutame liikmeti läbi ja arvestame
võrdust � � 1:

Enne kompleksarvude jagatise defineerimist defineerime kaaskompleksarvu
mõiste.
Definitsioon. Kompleksarvu z = a+ib kaaskompleksarvuks nimetatakse arvu
�� � � �.
Kaaskompleksarvude omadused:
Kompleksarvude jagatise leidmisel korrutakse ja jagatakse nimetaja
kaaskompleksarvuga:
Kompleksarve saab kujutada geomeetriliselt komplekstasandil, seejuures x-telg on
reaaltelg, y-telg on imaginaartelg.
Kompleksarvule z = a + bi seame vastavusse (�) punkti A(a, b) ning kohavektori
��������= (a, b) ; s.t.
z = a + bi � ���, �� � ��������= (a, b).
Niisiis geomeetriliselt kompleksarv z = a + bi näeb välja selliselt:
Sellist tasandit, millel on kujutatud kompleksarvud, nimetatakse
komplekstasandiks.
Vaatleme, kuidas saab geomeetirliselt tõlgendada kaaskompleksarvu mõiste ning
algebralised tehed kompleksarvudega.
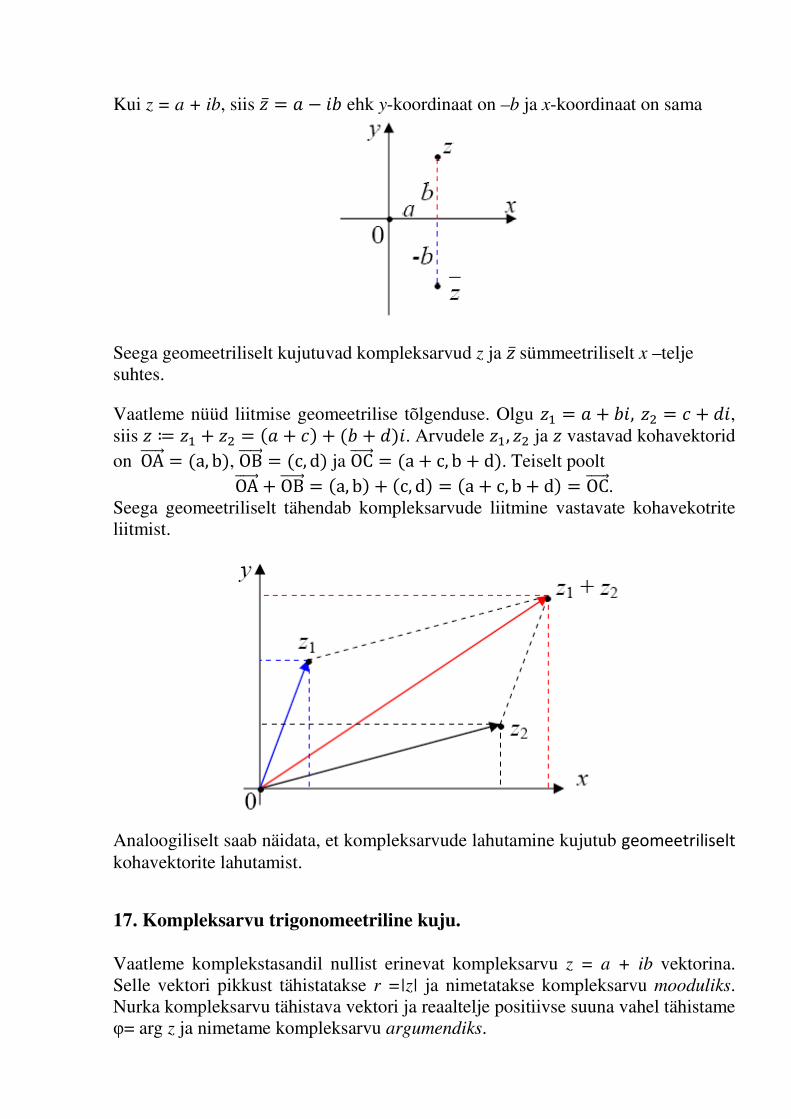
Kui z = a + ib, siis �� � � � ehk y-koordinaat on –b ja x-koordinaat on sama
Seega geomeetriliselt kujutuvad kompleksarvud z ja �� sümmeetriliselt x –telje
suhtes.
Vaatleme nüüd liitmise geomeetrilise tõlgenduse. Olgu �� � � � �, �� � � � �, siis � �� � �� � �� � �� � �� � ��. Arvudele ��, �� ja � vastavad kohavektorid
on OA������ � �a, b�, OB������ � �c, d� ja OC������ � �a � c, b � d�. Teiselt poolt
OA������ � OB������ � �a, b� � �c, d� � �a � c, b � d� � OC������. Seega geomeetriliselt tähendab kompleksarvude liitmine vastavate kohavekotrite
liitmist.
Analoogiliselt saab näidata, et kompleksarvude lahutamine kujutub geomeetriliselt
kohavektorite lahutamist.
17. Kompleksarvu trigonomeetriline kuju.
Vaatleme komplekstasandil nullist erinevat kompleksarvu z = a + ib vektorina.
Selle vektori pikkust tähistatakse r =|z| ja nimetatakse kompleksarvu mooduliks.
Nurka kompleksarvu tähistava vektori ja reaaltelje positiivse suuna vahel tähistame
φ= arg z ja nimetame kompleksarvu argumendiks.
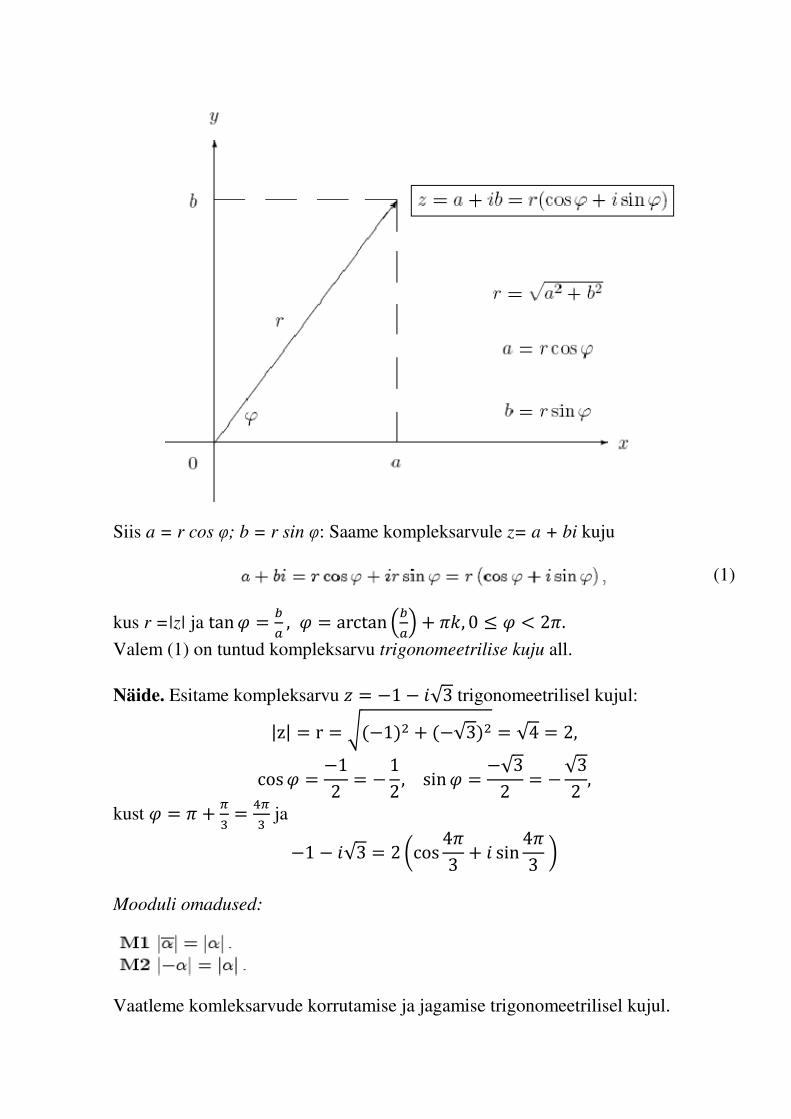
Siis a = r cos φ; b = r sin φ: Saame kompleksarvule z= a + bi kuju
(1)
kus r =|z| ja tan+ � ,- , + � arctan /,-0 � 12, 0 3 + 4 21. Valem (1) on tuntud kompleksarvu trigonomeetrilise kuju all.
Näide. Esitame kompleksarvu � � 1 √3 trigonomeetrilisel kujul:
|z| � r � 9�1�� � �√3�� � √4 � 2, cos+ � 12 �
12, sin+ �
√32 � √32 ,
kust + � 1 � >? � @>? ja
1 √3 � 2Acos 413 � sin413 B
Mooduli omadused:
Vaatleme komleksarvude korrutamise ja jagamise trigonomeetrilisel kujul.

Olgu C � D��cos+� � sin+�� ja E � D��cos+� � sin+��. Siis
Seega kompleksarvude korrutamisel nende moodulid korrutatakse ning
argumendid liidetakse kokku e.
FCE| � |C|FE|, arg CE �arg C � argE
Enne arvude jagatise leidmist leiame arvu pöördarvu jaoks valemi:
Olgu E H 0. Siis
Seega pöördarvu leidmisel peame leida mooduli pöördarvu ning argumendi
vastandarvu e.
|EI�|� |E|I�, arg EI� � arg E. Leiame nüüd C/E:
Nüüd tuletame korrutamise valemist astendamise valemi:
C� � C � D�cos+ � sin+� C� � C · C � D · D�cos�+ � +� � sin�+ � +�� � D��cos 2++i sin 2+)
C? � C� · C � D� · D�cos�2+ � +� � sin�2+ � +�� � D?�cos 3++i sin 3+)
………………………………………………………..
CL � DL�cos M++i sin M+) (2)
Seega astendamisel me astendame arvu mooduli ning korrutame argumendi
astmega.
Näide. Leiame �1 � ��N. Selleks kõiegepealt esitame arvu � � 1 � trigonomeetrilisel kujul:
D � |�| � O1� � 1� � √2, cos+ � 1√2 , sin+ �1√2,
seega

+ �14 , 1 � � √2 /cos 14 � sin14 0.
Siit me saame
�1 � ��N � �√2��N /cos 20 · 14 � sin 20 ·14 0 � 2�N�cos 5 1 � sin 51 �� 1024�cos 1 � sin 1 � � 1024�1� · 0 � � 1024.
Erijuhul, kui r = 1, saame valemist (2)
See valem kannab Moivre’i nime. Moivre’i valemi abil saab tuletada trigonomeet-
rilised valemid cos nx ja sin nx avaldamiseks cos x ja sin x kaudu.
Näide. Kirjutades Moivre’i valemi üles n = 2 jaoks saame
Teiselt poolt
Kuna võrduste vasakud pooled on võrdsed, siis peavad olema võrdsed ka nende
paremad pooled. Kaks kompleksarvu on võrdsed, kui on võrdsed nende reaal- ja
imaginaarosad, seega saame
Nüüd vaatleme astendamise pöördtehe. Olgu antud kompleksarv z = a + ib.
Definitsioon. Kompleksarvu C n-juureks nimetatakse iga kompleksarvu w, mille
korral QL � C.
Kui antud võrrandil leidub kompleksarvuline lahend w � ρ�cosψ � i sinψ �; siis
Siit saame:
Siis
Igale k väärtusele vastab üks n-astme juur
Aga mitte kõik väärtused QU erinevad üksteisest. Me näitame, et kui 2� V M, siis
QUW � QUX mõni 2� � 0,… , M 1 jaoks. Siis me saame n-astme juurele √CZ vaid n
erinevat väärtust

Olgu 2� V M fikseeritud. Jagame 2�arvuga n jäägiga. Olgu q jagatis ning 2� jagatise jääk (2� � 0,… , M 1�. Siis 2� saab esitada kujul 2� � [M � 2�. Seega
argQUW � + � 212M � + � 21�[M � 2��M � + � 212�M � 21[. Siit
QUW � √DZ Acos A+ � 212�M � 21[B � sin A+ � 212�M � 21[BB� √DZ Acos A+ � 212�M B � sin A+ � 212�M BB � QUX
Teoreem. Igal nullist erineval kompleksarvul on n erinevat n-juurt.
Näide. Leiame
√1\ � √1 � 0\ � O1�cos 0 � sin 0�\
� √1\ Acos0 � 2213 � sin 0 � 2213 B , 2 � 0, 1, 2. Seega
18. Geomeetrilised vektorid
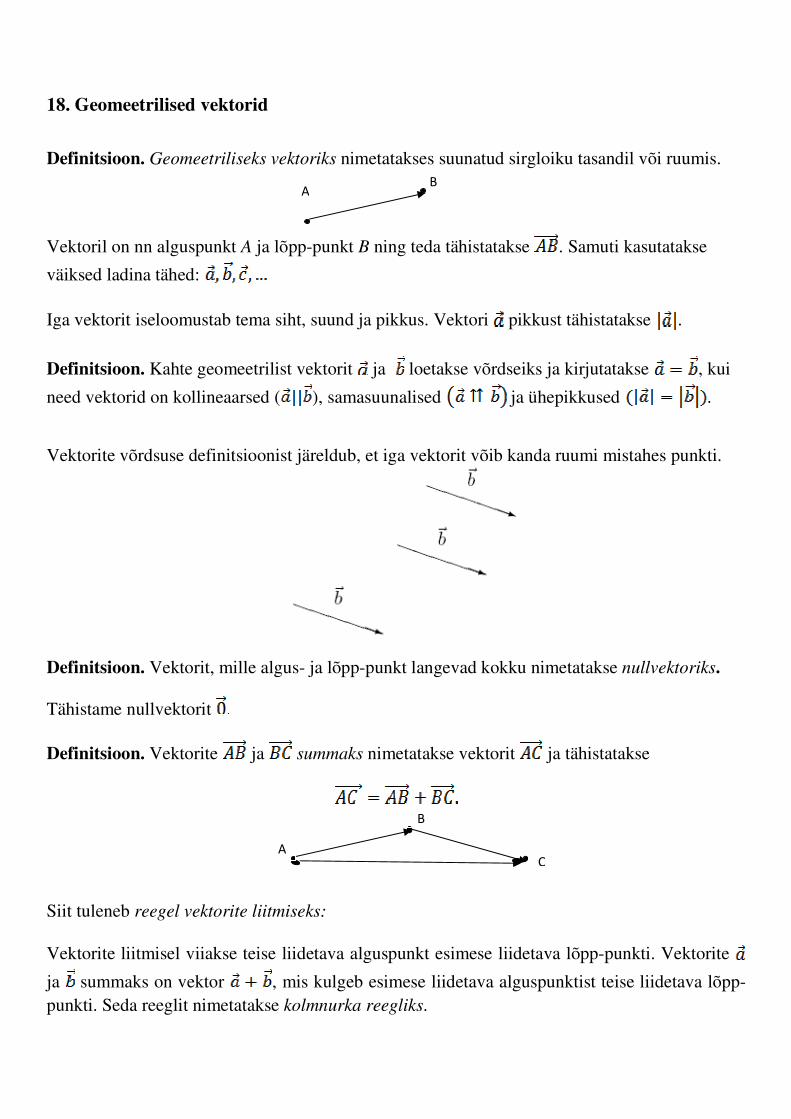
Definitsioon. Geomeetriliseks vektoriks nimetatakses suunatud sirgloiku tasandil või ruumis.
Vektoril on nn alguspunkt A ja lõpp-punkt B ning teda tähistatakse . Samuti kasutatakse
väiksed ladina tähed: Iga vektorit iseloomustab tema siht, suund ja pikkus. Vektori pikkust tähistatakse .
Definitsioon. Kahte geomeetrilist vektorit ja loetakse võrdseiks ja kirjutatakse , kui
need vektorid on kollineaarsed ( ), samasuunalised ja ühepikkused .
Vektorite võrdsuse definitsioonist järeldub, et iga vektorit võib kanda ruumi mistahes punkti.
Definitsioon. Vektorit, mille algus- ja lõpp-punkt langevad kokku nimetatakse nullvektoriks.
Tähistame nullvektorit
Definitsioon. Vektorite ja summaks nimetatakse vektorit ja tähistatakse
Siit tuleneb reegel vektorite liitmiseks: Vektorite liitmisel viiakse teise liidetava alguspunkt esimese liidetava lõpp-punkti. Vektorite
ja summaks on vektor , mis kulgeb esimese liidetava alguspunktist teise liidetava lõpp-punkti. Seda reeglit nimetatakse kolmnurka reegliks.
AB
A
B
C
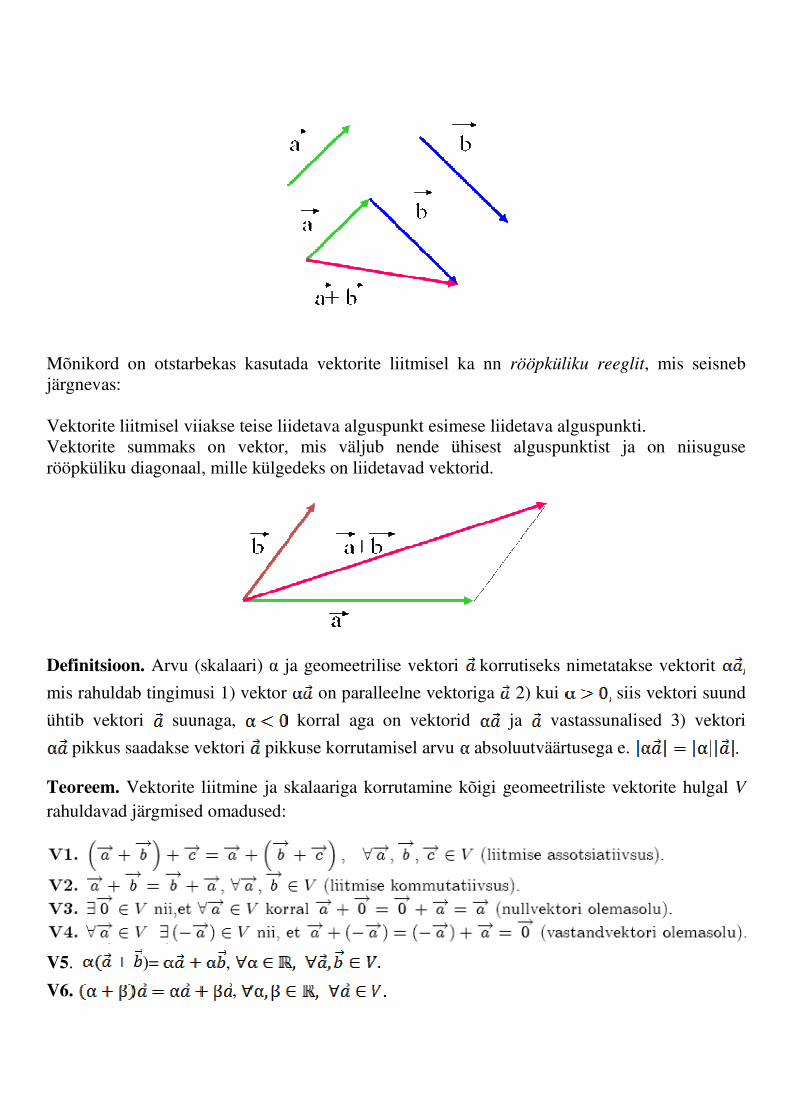
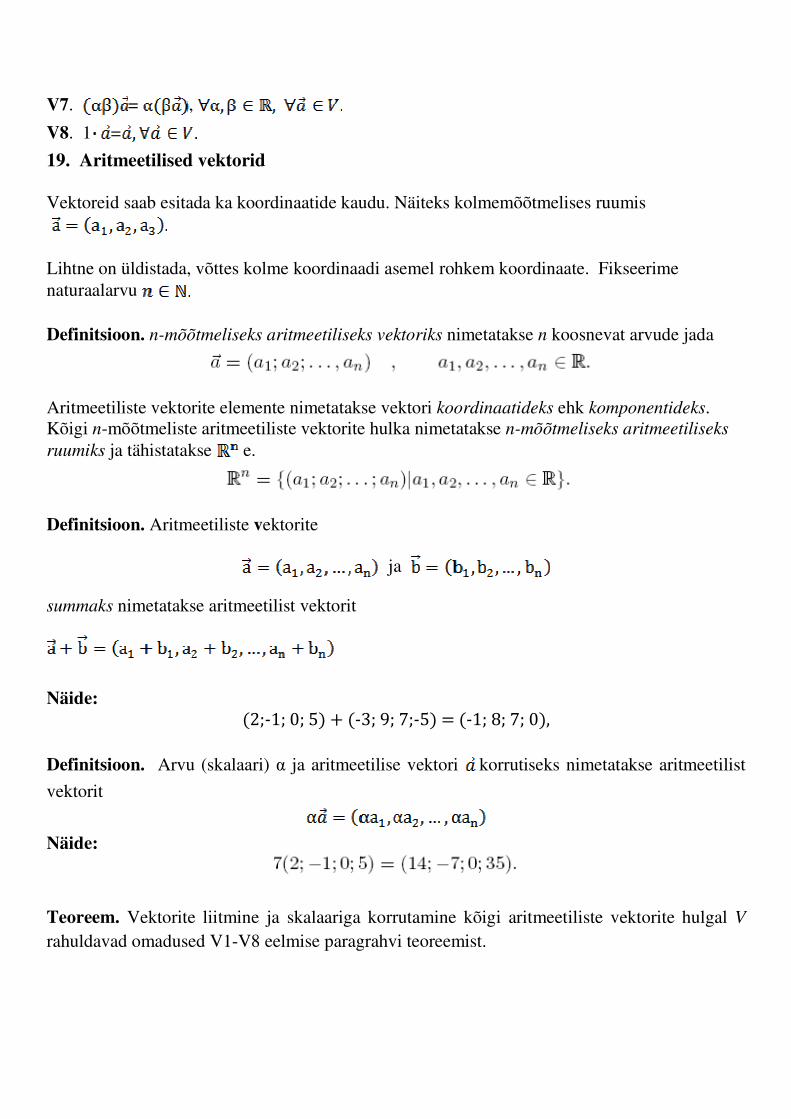
Mõnikord on otstarbekas kasutada vektorite liitmisel ka nn rööpküliku reeglit, mis seisneb järgnevas: Vektorite liitmisel viiakse teise liidetava alguspunkt esimese liidetava alguspunkti. Vektorite summaks on vektor, mis väljub nende ühisest alguspunktist ja on niisuguse rööpküliku diagonaal, mille külgedeks on liidetavad vektorid.
Definitsioon. Arvu (skalaari) α ja geomeetrilise vektori korrutiseks nimetatakse vektorit
mis rahuldab tingimusi 1) vektor on paralleelne vektoriga 2) kui siis vektori suund
ühtib vektori suunaga, korral aga on vektorid ja vastassunalised 3) vektori
pikkus saadakse vektori pikkuse korrutamisel arvu absoluutväärtusega e.
Teoreem. Vektorite liitmine ja skalaariga korrutamine kõigi geomeetriliste vektorite hulgal V
rahuldavad järgmised omadused:
V5. )= ,
V6. ,
V7. = ,
V8. 1 =
19. Aritmeetilised vektorid
Vektoreid saab esitada ka koordinaatide kaudu. Näiteks kolmemõõtmelises ruumis Lihtne on üldistada, võttes kolme koordinaadi asemel rohkem koordinaate. Fikseerime naturaalarvu Definitsioon. n-mõõtmeliseks aritmeetiliseks vektoriks nimetatakse n koosnevat arvude jada
Aritmeetiliste vektorite elemente nimetatakse vektori koordinaatideks ehk komponentideks. Kõigi n-mõõtmeliste aritmeetiliste vektorite hulka nimetatakse n-mõõtmeliseks aritmeetiliseks
ruumiks ja tähistatakse e.
Definitsioon. Aritmeetiliste vektorite
ja
summaks nimetatakse aritmeetilist vektorit
Näide:
(2;-1; 0; 5) + (-3; 9; 7;-5) = (-1; 8; 7; 0),
Definitsioon. Arvu (skalaari) α ja aritmeetilise vektori korrutiseks nimetatakse aritmeetilist
vektorit
Näide:
Teoreem. Vektorite liitmine ja skalaariga korrutamine kõigi aritmeetiliste vektorite hulgal V
rahuldavad omadused V1-V8 eelmise paragrahvi teoreemist.

20. Vektorruum
Eelpool nägime, et nii geomeetriliste kui aritmeetiliste vektorite korral kehtisid teatud omadused V1-V8. Need omadused võetakse vektorruumi aksioomideks. Kõiki objekte, mille korral need omadused on rahuldatud, nimetatakse edaspidi vektoriteks. Definitsioon. Hulk V on vektorruum üle reaalarvude hulka kui temal on defineeritud liitmine ja skalaariga korrutamine nii, et
V5. )= ,
V6. ,
V7. = ,
V8. 1 =
Definitsioon. Vektorruumi elemente nimetatakse vektoriteks.
Näited: 1) Reaalarvude hulk on liitmise ja korrutamise tehte suhtes vektorruum. 2) Kompleksarvude hulk on vektorruum üle reaalarvude hulka. 3) Kõigi geomeetriliste vektorite hulk tasandil ja ruumis tavaliste tehetega on vektorruum. 4) Kõigi n-mõõtmeliste aritmeetiliste vektorite hulk on vektorruum. 5) Kõigi maatriksite hulk on vektorruum maatriksite liitmise ja skalaariga korrutamise suhtes. 6) Näide hulgast, mis pole vektorruum. Olgu V = ja defineerime tehted järgmiselt. Olgu ja , siis
Antud juhul omadus V8 aksioom ei kehti, sest
korral, kui , siis
Seega hulk V ei ole selliste tehete suhtes vektorruum.

Vektorrumi definitsioonis aksioomis V3 öeldakse, et leidub vähematl üks nullvektor. Me
näitame, et leidub täpselt üks nullvektor.
Lause. Vektorruumis on täpselt üks nullvektor.
Tõestus. Vektorruumis on vähemalt üks nullvektor vektorruumi aksioomide tõttu. Näitame, et see nullvektor on ainus. Selleks oletame vastuväiteliselt, et vektorruumis leidub
veel teinegi nullvektor mille korral kehtib samuti
.
Siis kehtib see ka korral, seega
+ = .
Teiselt poolt, kuna on vektorruumi nullvektor, siis vektorruumi aksioomide tõttu
+ = . Saime kaks võrdust, mille vasakud pooled on võrdsed. Siis on võrdsed ka nende võrduste
paremad pooled, st = .
21. Vektorite lineaarse sõltuvuse ja sõltumatuse mõiste.
Olgu V vektorruum üle reaalarvude hulka ning 1, 2,…, m
Definitsioon. Mistahes avaldist, millel on kuju
kus 1,…, m , nimetatakse vektorite 1, 2,…, m lineaarkombinatsiooniks. Skalaare 1,…, m nimetatakse antud lineaarkombinatsiooni kordajateks. Lineaarkombinatsiooni nimetatakse triviaalseks, kui kõik tema kordajad võrduvad nulliga, s.t 1= 2 = …= m = 0. Lineaarkombinatsioon on mittetriviaalne, kui vähemalt üks tema kordajatest on nullist erinev, s.t. kui i i = 1, 2, …, m. Näide: Olgu V geomeetriliste vektorite hulk tasandil ja olgu antud kaks vektorit 1, 2 , mis
ei ole paralleelsed. Siis avaldub iga vektor sellel tasandil vektorite 1 ja 2 lineaarse kombinatsioonina.

Definitsioon. Vektorite süsteemi 1, 2,…, m nimetatakse lineaarselt sõltuvaks, kui
vektorite 1, 2,…, m mingi mittetriviaalne lineaarkombinatsioon võrdub nulliga, s.t., leiduvad
arvud k1, k2, …, km , ning mingi kordaja
nii, et
Vastasel juhul vektorite süsteemi 1, 2,…, m nimetatakse lineaarselt sõltumatuks, s.t., et
parajasti siis, kui k1=k2= …= km: (Öeldakse ka, et vektorid 1, 2,…, m on kas lineaarselt sõltuvad või lineaarselt sõltumatud). Teoreem: Vektorid 1, 2,…, m on lineaarselt sõltuvad parajasti siis kui sellest hulgast leidub vähemalt üks vektor, mis avaldub ülejäänud vektorite lineaarse kombinatsioonina.
Näited. 1. Olgu V geomeetriliste vektorite hulk tasandil. Iga kaks vektorit 1, 2 , mis ei ole paralleelsed, on lineaarselt sõltumatud. 2. Kaks paralleelset vektorit 1, 2 on lineaarselt sõltuvad, sest üks avaldub teise kaudu:
3. Iga kolm vektorit 1, 2 3 on lineaarselt sõltuvad.
4. Olgu V = aritmeetiliste vektorite ruum. Näitame, et vektorid
on lineaarselt sõltumatud. Moodustame lineaarkombinatsiooni
1 1+ 2 2 + …+ n n 1, 2,…, n)
See lineaarkombinatsioon võrdub nullvektorile ainult siis, kui 1= 2=…, n=0.
Seega vektorid 1, 2,…, n on lineaarselt sõltumatud.
Lause: Iga vektorite hulk, mis sisaldab nullvektorit on lineaarselt sõltuv.
Tõestus. Olgu antud vektorid 2,…, m. Siis saame moodustada nullvektoriga vorduva lineaarkombinatsiooni
1 + 0 2 + … +0 m= ,
mille kõik kordajad ei ole nullid ( 1 ), seega vektorid on lineaarselt sõltuvad.

22. Vektorruumi baas ja mõõde. Olgu V mistahes vektorruum. Definitsioon. Vektorite süsteemi 1, 2,…, n vektorruumis V nimetatakse vektorruumi V baasiks, kui
1) vektorruumi V mistahes vektor on avaldatav vektorite 1, 2,…, n lineaarkombinatsioonina.
2) vektorite süsteem 1, 2,…, n on lineaarselt sõltumatu. Näited.
1) Olgu V geomeetriliste vektorite hulk tasandil, siis moodustavad baasi iga kaks mitteparalleelset vektorit sellel tasandil.
Järeldus. Vektorruumis võib olla lõpmata palju baase.
2) Olgu V = . Me näitasime juba, et vektorite süsteem
on lineaarselt sõltumatu. Selleks et veenduda, et see on baas, on vaja veel näidata, et iga aritmeetiline vektor on avaldatav vektorite 1, 2,…, n lineaarkombinatsioonina. Olgu
Siis teda saab esitada kujul
1, 2,…, n)= 1 , ,…, )+ 2 , ,…, )+… n ,…, )= 1 1+ 2 2 + …+ n n
Seega vektorid 1, 2,…, n moodustavad baasi.
3) Olgu V kõigi m n -maatriksite vektorruum. Olgu Eij maatriks, mille enamus elemente on nullid, ainult i-nda rea j-nda veeru elemendiks on 1. Moodustame hulga
Siis avaldub iga m n maatriks A = (aij) baasi kaudu:
Näiteks
Fakte baaside kohta.
1) Igas nullruumist erinevas vektorruumis leidub baas. 2) Iga lineaarselt sõltumatut vektorite süsteemi saab täiendada baasiks. 3) Sama vektorruumi iga kaks erinevat baasi sisaldamad sama arvu vektoreid.
Definitsioon. Vektorruumi V mõõde ehk dimensioon (tähistatakse dim V ) on tema baasis esinevate vektorite arv.
Näited. 1) Olgu V kõigi geomeetriliste vektorite hulk tasandil. Siis dim V = 2. 2) Olgu V = , siis dim V = n.
3) Olgu V = , siis dim V = m n.
Olgu vektorruumi V baasiks B={ 1, 2,…, n}. Siis on iga vektor avaldatav lineaarkombinatsioonina
Definitsioon. Arve 1, 2, …, n . nimetatakse vektori koordinaatideks antud baasil B. Teoreem. Vektori koordinaadid baasil B on on üheselt määratud.
Tõestus. Oletame, et
ja on veel mingid arvud 1,…, n nii, et
Siis
1- 1 1+ 2- 2 2 + …+ n- n n
millest baasivektorite lineaarse sõltumatuse tõttu järeldub, et

23. Vektorite skalaarkorrutis ja eukleediline vektorruum.
Eesmärgiga üldistada vektori pikkuse ja nurk vektorite vahel mõisted mistahes vektoruumile defineerime skalaarkorrutise: Definitsioon. Skalaarkorrutiseks vektorruumis nimetatakse reeglit, mis igale kahele
vektorile seab vastavusse parajasti ühe reaalarvu, mida tähistatakse ja
nimetatakse vektorite ja skalaarkorrutiseks, kui on täidetud järgmised omadused
2. parajasti siis, kui ;
Näited: 1) aritmeetilises vektorruumis kahe vektori = (x1; x2; …; xn) ja = (y1; y2; …; yn) skalaarkorrutist saab defineerida, näiteks, järgmiselt:
2) kahemõõtmelises aritmeetilises vektorruumis kahe vektori = (x1; x2) ja = (y1; y2) skalaarkorrutist saab defineerida, näiteks, järgmiselt:
aga näiteks, avaldised
skalaarkorrutist ei määra. 3) 2 2-maatriksite hulgas võib skalaarkorrutise defineerida järgmise valemiga: Olgu
Siis määrab skalaarkorrutise. Definitsioon. Vektorruumi koos temas defineeritud skalaarkorrutisega nimetatakse eukleidiliseks vektorruumiks. Definitsioon. Vektori pikkuseks nimetatakse arvu
Näide: Kui aritmeetilises vektorruumis kahe vektori = (x1; x2) ja = (y1; y2)
skalaarkorrutis on defineeritud võrdusega , siis vektori pikkus

langeb kokku tavalise tasandilise vektori pikkusega.
Vektori pikkuse omadused:
Tõestus:
2) On kerge kontrollida, et antud võrratus kehtib kui või : Seepärast eeldame, et
ja . Võtame suvalise reaalarvu t ja moodustame vektori
Skalaarkorrutise esimese aksioomi põhjal ehk
ja kasutades skalaarkorrutise omadusi 3)-5) ja pikkuse definitsiooni, saame:
Viimase võrratuse vasak pool on kolmliige (ruutvõrrandi vasak pool) t suhtes, mis peab iga t korral olema positiivne (või null). See tähendab, et võrrandil
on maksimaalselt üks lahend. Järelikult ruutvõrrandi diskriminant peab olema nullist väiksem (või võrdne nulliga):
3. Arvutame :

Võttes saadud võrratuse mõlemast poolest ruutjuure, saamegi
kolmnurga võrratuse.
Definitsioon. Eukleidilise vektorruumi kahe vektori ja vaheliseks nurgaks
nimetatakse sellist nurka , et
See definitsioon on korrektne: Cauchy-Bunjakovski võrratusest järeldub, et kui ja
, siis
ehk
Seega saab iga kahe nullist erineva vektori korral määrata nendevahelise nurga. 24. Ortogonaalne ja ortonormaalne baas.
Definitsioon. Öeldakse, et vektorid ja on ortogonaalsed ehk risti, kui = 0. Termin “risti” on seotud järgmise aruteluga: kui = 0, siis
Definitsioon. Vektorruumi baasi B = 1, 2,…, n} nimetatakse ortogonaaleseks ehk
ristbaasiks, kui iga kaks erinevat baasivektorit on omavahel risti, st =0, kui

Igast baasist on võimalik konstrueerida ortogonaalse baasi. Seda protsessi nimetatakse
ortogonaliseerimiseks.
Definitsioon. Öeldakse, et vektor on normeeritud ehk ühikvektor, kui tema pikkus =1.
Kui vektor ei ole normeeritud, siis seda võib normeerida jagades vektor tema pikkusega
. S.t., et vektorile vastav normeeritud vektor on leitav valemiga =
Veendume, et vektor on tõepoolest normeeritud. Vektori pikkuse omaduse 1 kohaselt:
= =
Definitsioon. Ortogonaalse baasi, mille kõik vektorid on normeeritud (ühikvektorid), nimetatakse ortonormeeritud ehk ortonormaalseks baasiks.
Seega, kui B = 1, 2,…, n} on vektorruumi ortonormaalne baas, siis
(1)
Juhul n = 2 tähistatakse tavaliselt 1 = ; 2 = ; juhul n = 3 tähistatakse tavaliselt 1 = ; 2 =
3 = .
Teoreem 1. Eukleidilises vektorruumis alati võib valida ortonormaalse baasi. Teoreem 2. Olgu eukleidilises vektorruumis antud ortonormaalne baas B = 1, 2,…, n}
ning
1) Siis vektorite ja skalaarkorrutis on arvutatav valemiga
2) Vektori pikkust saab leida valemiga
Tõestus. 1) Arvutame vektorite ja skalaarkorrutis:
Ortonormaalne baasi omaduse (1) kohaselt

2) Nüüd vektori pikkuse definitsiooni kohaselt
25. Vektorite vektorkorrutis
Vaatleme kolmemõõtmelise (n=3) eukleidilise vektorruumi ning valime seal mingi
ortonormaalse baasi B = ; } (mille suunad langevad kokku koordinattelgede suunadega)
Definitsioon. Vektorite ja vektorkorrutiseks nimetatakse vektorit , mille korral on täidetud tingimused:
2. Vektorkorrutise pikkus on võrdne veltoritele ja
ehitatud rööpküliku pindalaga, st SABCD = , kui AB = ja
AD = ;
Seega
3. Vektorid , , moodustavad parema käe kolmiku; Vektorkorrutise omadused:
1. - vektorkorrutis on antikommutatiivne
2. Kui ja , siis
Tõestus:
3.
Leiame baasi vektorite omavahelised vektorkorrutised:

Nüüd olgu
ja
Leiame nende vektorkorrutise
Kasutades determinandi mõiste saame kirjutada
(1)
ehk
Samuti saame ümber kirjutada (1) 3. Järku determinandi abil kujul
26. Vektorite segakorrutis
Vaatleme kolmemõõtmelise (n=3) eukleidilise vektorruumi ning valime seal mingi
ortonormaalse baasi B = ; } (mille suunad langevad kokku koordinattelgede suunadega)
Definitsioon. Vektorite ja segakorrutiseks nimetatakse arvu .
Leiame segakorrutise väärtuse:
Seega
Segakorrutise omadused:
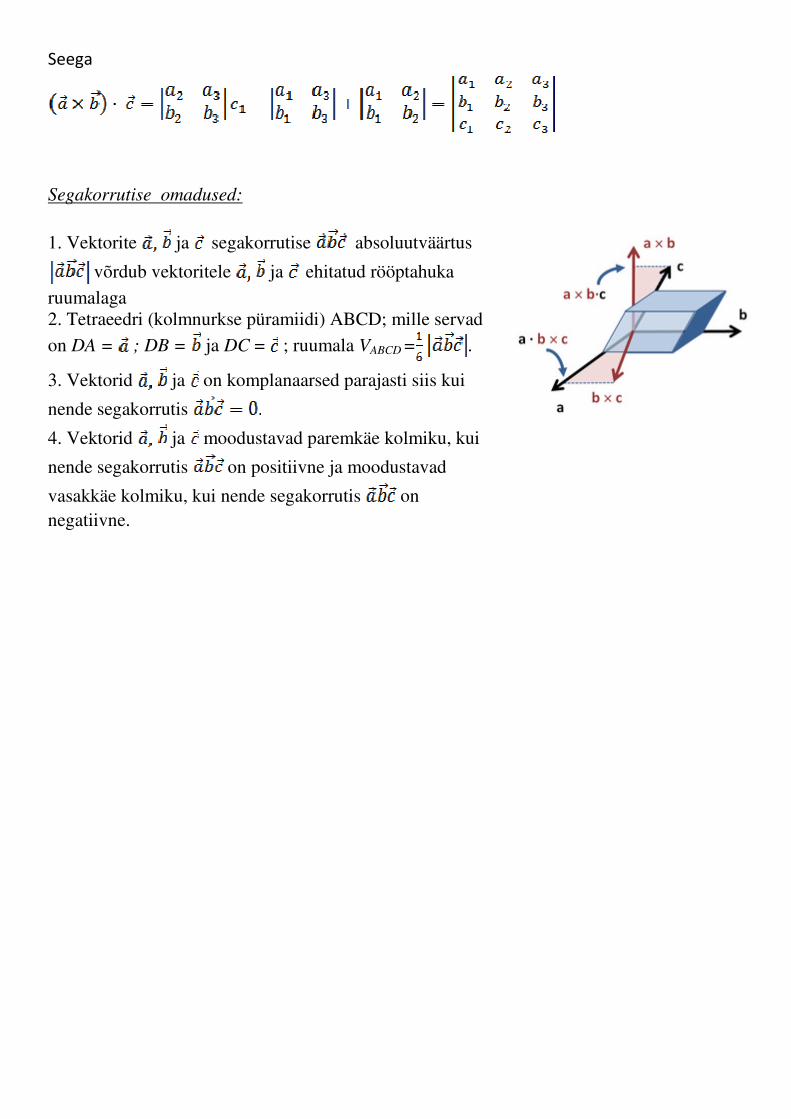
1. Vektorite ja segakorrutise absoluutväärtus
võrdub vektoritele ja ehitatud rööptahuka
ruumalaga 2. Tetraeedri (kolmnurkse püramiidi) ABCD; mille servad
on DA = ; DB = ja DC = ; ruumala VABCD = .
3. Vektorid ja on komplanaarsed parajasti siis kui
nende segakorrutis
4. Vektorid ja moodustavad paremkäe kolmiku, kui
nende segakorrutis on positiivne ja moodustavad
vasakkäe kolmiku, kui nende segakorrutis on negatiivne.

27. Sirged
1) Vaatleme sirge kolmemõõtmilseses ruumis.
Sirge � on määratud mingi punktiga A(ax; ay; az), mille ta läbib (st A � � ), ja vektoriga �� =
(sx; sy; sz) � 0��, millega on see sirge paralleelne, st ��� (seda vektorit nimetatakse sirge �
sihivektoriks).
Olgu X (x; y; z) sirgel � paiknev suvaline punkt. Et vektor ����������, siis leidub mingi arv � �, et �������� � ��
Definitsioon. Võrrandit
�������� � ��, � � nimetakse sirge � parameetriliseks vektorvõrrandiks.
Vektorite liitmise definitsiooni kohaselt
Seega
Kuna �������� � ��, siis
millest saame sirge � nn parameetrilisi võrrandeid :
Kui vektori �� = (sx; sy; sz) kõik koordinaatid pole võrdsed nulliga, saame avaldada
parameetrilistest võrranditest parameetri t:
�
�
�

saame sirge nn kanoonilisi võrrandeid:
Kui vektori �� üks koordinaat on null, nt. �� � 0, siis jab kehtima ainult üks võrdusest:
ning teine saab kuju
� � ��. Kui vektori �� kaks koordinaati on 0, nt. �� � �� � 0, siis sirge konoonilisteks võrranditeks on
� � ��; � � ��.
2) Kahemõõtmelises ruumis sirge � on määratud mingi punktiga A(ax; ay), mille ta läbib, ja
vektoriga �� = (sx; sy) � 0��, millega on see sirge paralleelne. Seega sirge parameetrilised
võrrandid on
ja sirge kanoonilised võrrandid
Võttes võrrandis ristkorrutise, saame
���� � ��� � ���� � ��� ehk ������� � ����� � ����� � 0. Tähistades
� � �� , � ��� , ! � ���� � ���� saame sirge � võrrandile kuju
�� � � � ! � 0. (1)
Definitsioon. Võrrandit (1) nimetakse sirge � üldvõrrandiks.
Kuna �� � 0�� � �0; 0�, siis võrrandis (1) ei ole a,b samaaegselt nullid.
Tähistame "�� � ��; � ja leiame tema skalaarkorrutise sirge � sihivektoriga ��:
"�� · �� � ��; � · ���; ��� � ���; ���� · ���; ��� � ���� � ���� � 0.
Seega vektorid n�� ja �� on risti ning järelikult vektor "�� on risti sirgega �.
Definitsioon. Mis tahes nullvekotirst erinevat vektorit "��, mis on risti sirgega � nimetatakse
sirge � normaalvektoriks.
Leiame nüüd mingi punkti kaugust sirgeni.
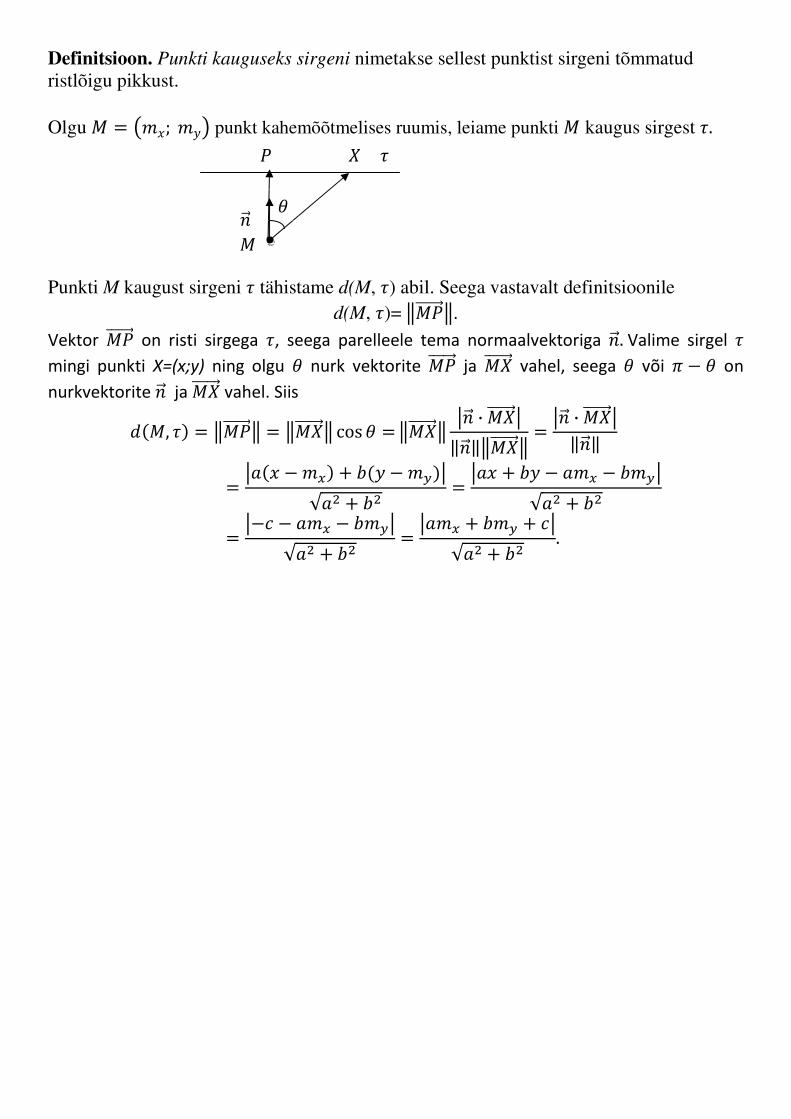
Definitsioon. Punkti kauguseks sirgeni nimetakse sellest punktist sirgeni tõmmatud
ristlõigu pikkust.
Olgu & � �'�; '�� punkt kahemõõtmelises ruumis, leiame punkti & kaugus sirgest �.
Punkti M kaugust sirgeni � tähistame d(M, �) abil. Seega vastavalt definitsioonile
d(M, �)= (&)�������(.
Vektor &)������� on risti sirgega �, seega parelleele tema normaalvektoriga "��. Valime sirgel �
mingi punkti X=(x;y) ning olgu * nurk vektorite &)������� ja &�������� vahel, seega * või + � * on
nurkvektorite "�� ja &�������� vahel. Siis
,�&, �� � (&)�������( � (&��������( cos * �(&��������(0"�� · &��������0
"��(&��������(�0"�� · &��������0"��
�0��� � '�� � �� �'��0
√�2 � 2�0�� � � � �'� � '�0
√�2 � 2
�0�! � �'� � '�0
√�2 � 2�0�'� � '� � !0
√�2 � 2.
�
&
� )
* "��
28. Tasandid.
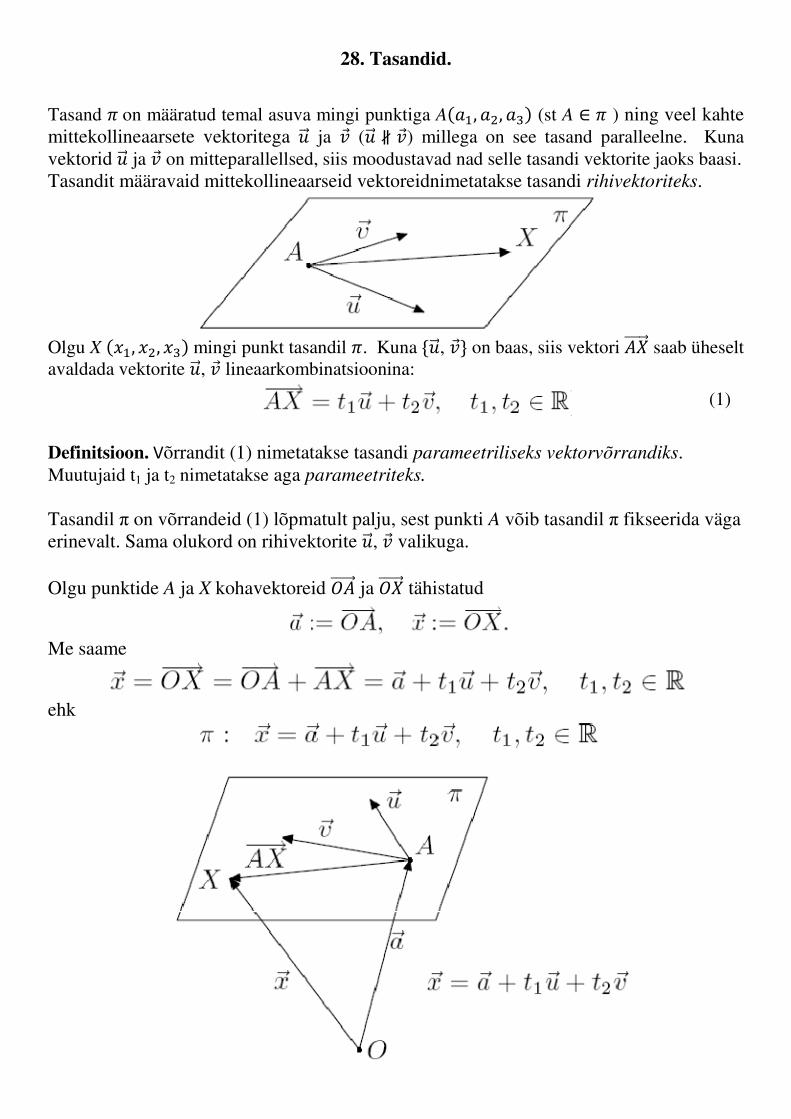
Tasand � on määratud temal asuva mingi punktiga A���, ��, �� (st A � ) ning veel kahte
mittekollineaarsete vektoritega �� ja � (�� � � ) millega on see tasand paralleelne. Kuna
vektorid �� ja � on mitteparallellsed, siis moodustavad nad selle tasandi vektorite jaoks baasi.
Tasandit määravaid mittekollineaarseid vektoreidnimetatakse tasandi rihivektoriteks.
Olgu X ���, ��, �� mingi punkt tasandil �. Kuna ��� , � � on baas, siis vektori ������� saab üheselt
avaldada vektorite �� , � lineaarkombinatsioonina:
(1)
Definitsioon. Võrrandit (1) nimetatakse tasandi parameetriliseks vektorvõrrandiks.
Muutujaid t1 ja t2 nimetatakse aga parameetriteks.
Tasandil π on võrrandeid (1) lõpmatult palju, sest punkti A võib tasandil π fikseerida väga
erinevalt. Sama olukord on rihivektorite �� , � valikuga.
Olgu punktide A ja X kohavektoreid ������� ja ������� tähistatud
Me saame
ehk

Seda võrrandit nimetatakse tasandi vektorvõrrandiks. Leiame nüüd tasandi π võrrandi
koordinaatides, selleks asendame vektorvõrrandisse vektorite koordinaatid: ������� � � � ���, ��, ��; ������� � � � ���, ��, ��; �� � ���, ��, ��; � � ���, ��, ��. Seega ���, ��, �� � ���, ��, �� � �����, ��, �� � �����, ��, ��
ehk
(2)
Saadud võrrandeid nimetatakse tasandi π parameetrilisteks võrranditeks.
Meie järgmiseks sammuks on saada võrranditest (2) tasandi selline võrrand, mis ei sisalda
parameetreid t1 ja t2. Teisendame süsteemi esimesed kaks võrrandit:
����� � ���� � �� � ������ � ���� � �� � �� �
See on lineaarne süsteem muutujate ��, �� suhtes. Eeldame, et süüstemi determinant ei võrdu
0:
Δ � ��� ���� ��� � ���� � ����
Vastasel juhul saame valida teised vektorid �� , � . Seega sellel süsteemil parajasti üks lahend,
mis on Crameri valemite põhjal leitav valemitega:
�� � Δ�Δ , �� � Δ�Δ , kus
Δ� � ��� � �� ���� � �� ��� ja Δ� � ��� �� � ���� �� � ���. Nüüd asendame ��, �� väärtusi süsteemi (2) vimasesse võrrandisse:
�� � �� � Δ�Δ �� � Δ�Δ ��
ning korrutame läbi determinandiga Δ: ��� � ��Δ � Δ��� � Δ���
ehk
��� � �� ��� ���� ��� � ��� � �� ���� � �� ��� �� � ��� �� � ���� �� � ��� ��. Arvutades esimese ja teise determinanti saame:
��� � �� ��� ���� ��� � !��� � ���� � ��� � ����"�� � !��� � ���� � ��� � ����"��� !��� � ������� � ���� � ��� � ������� � ����. Siit
��� � �� ��� ���� ��� � ���� � �� ��� ���� ��� � ��� � �� ��� ���� ��� ehk

��� � �� ��� ���� ��� � ��� � �� ��� ���� ��� � ��� � �� ��� ���� ��� � 0, mis saab kolmandat järku determinandi abil kirjutada kujul
$�� � �� �� ���� � �� �� ���� � �� �� ��$ � $�� � �� �� � �� �� � ���� �� ���� �� ��
$ � 0.
Tähistades
� � ��� ���� ��� , % � � ��� ���� ��� , & � ��� ���� ���, saame ���� � �� � %��� � �� � &��� � �� � 0
ehk teisiti
��� � %�� � &�� � ' � 0, (3)
kus ' � ����� � %�� � &��.
Definitsioon. Võrrandit (3) nimetatakse tasandi üldvõrrandiks.
Tähistame (� � ��, %, &, siis
(� � )��2 �3�3 �3� , � ��1 �3�1 �3� , ��1 �2�2 �2�- � �� . � .
Kuna �� / 0� , � / 0� ning �� � � , siis (� � �� . � / 0� . Samuti vektorkorrutisena vektor (� on
risti vektoritele �� ja � , seega ka tasandile �.
Definitsioon. Vektorit (� , mis on risti tasandile �, nimetatakse tasandi � normaalvektoriks.
Vektori (� pikkuseks on 0(� 0 � 1�� � %� � &�. Jagame võrrandi (3) suurusega 0(� 0:
�0(�� 0 �� � %0(�� 0 �� � &0(�� 0 �� � '0(�� 0 � 0. (4)
Tähistame
(� 2 � 3 �0(� 0 ; %0(� 0 ; &0(� 04 � 10(� 0 ��, %, & � 10(� 0 (� . Seega (� 2 on ühikvektor, mis on risti tasandile � ehk samuti tasandi � normaalvektor.
Leiame, mis nurgad moodustab vektor (� 2 koordinaateljede sihivektoritega i ; j ; k� . Tähistame vastavad nurgad vastavalt 8, 9, :, siis
cos 8 � (�� 0 · i ?(�� 0? @i @ �
�0(�� 0 · 1 � %0(�� 0 · 0 � &0(�� 0 · 01 · 1 � �0(�� 0.
Analoogiliselt
cos 9 � %0(�� 0 ja cos : � &0(�� 0. Seega vektori (� 2 � �cos 8; cos 9; cos : koordinaatid on vektori (� 2 koordinaatteljedega
nurgade koosinused.
Nüüd tasandi võrrand (4) saab kuju �� cos 8 � �� cos 9 � �� cos : � B, (5)
kus B � �'/0(�� 0.
Definitsioon. Võrrandit (5) nimetatakse tasandi normaalvõrrandiks.
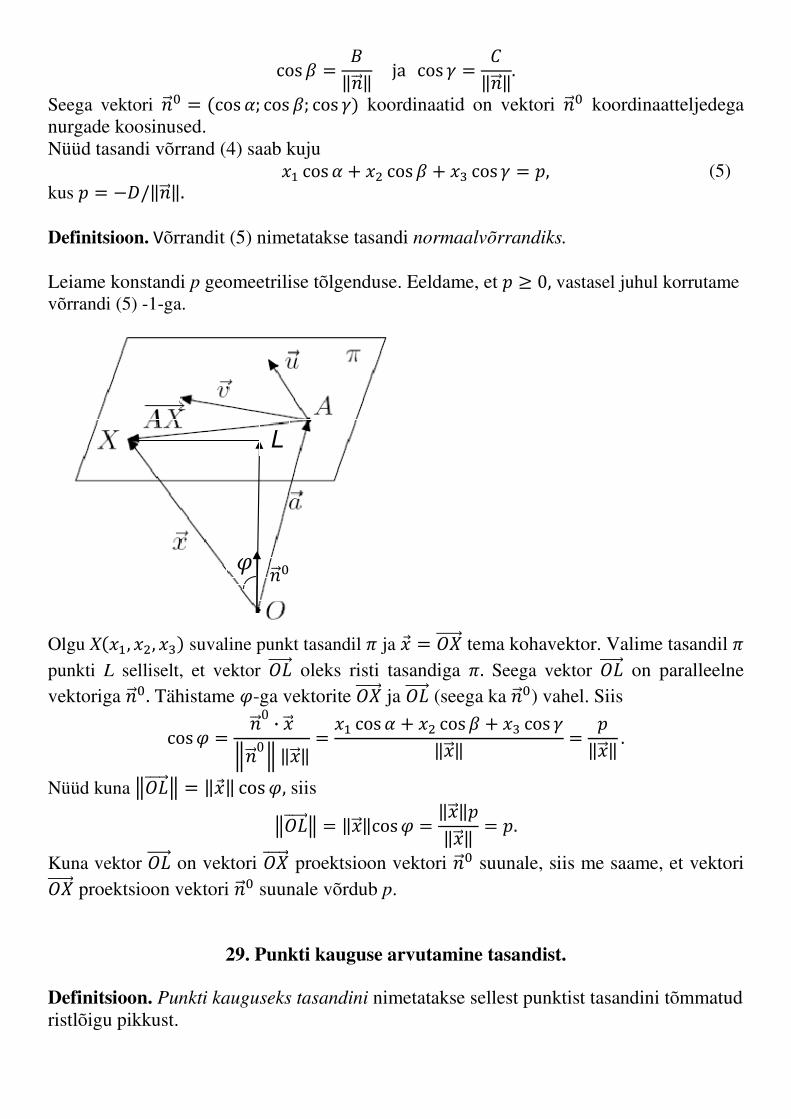
Leiame konstandi p geomeetrilise tõlgenduse. Eeldame, et B D 0, vastasel juhul korrutame
võrrandi (5) -1-ga.
Olgu X���, ��, �� suvaline punkt tasandil � ja � � ������� tema kohavektor. Valime tasandil �
punkti L selliselt, et vektor �E����� oleks risti tasandiga �. Seega vektor �E����� on paralleelne
vektoriga (� 2. Tähistame F-ga vektorite ������� ja �E����� (seega ka (� 2) vahel. Siis
cos F � (�� 0 · �� ?(�� 0? 0�� 0 � �� cos 8 � �� cos 9 � �� cos :0�� 0 � B0�� 0 .
Nüüd kuna @�E����� @ � 0� 0 cos F, siis
@�E����� @ � 0�� 0cos F � 0�� 0B0�� 0 � B. Kuna vektor �E����� on vektori ������� proektsioon vektori (� 2 suunale, siis me saame, et vektori ������� proektsioon vektori (� 2 suunale võrdub p.
29. Punkti kauguse arvutamine tasandist.
Definitsioon. Punkti kauguseks tasandini nimetatakse sellest punktist tasandini tõmmatud
ristlõigu pikkust.
L
F (� 2

Vaatleme punkti X0��2, G2, H2 ja leiame tema kaugust I tasandini �: � cos 8 � G cos 9 � H cos : � B
Tõmbame punktist X0 ristlõigu tasandini �, selle ristlõigu pikkus ongi kaugus I. Olgu
� 2=��2, G2, H2 puntki X0 kohavektor ning olgu vektor �J������ vektori ��2�������� � � 2 proektsioon
vektori (� 2 suunale (valime vektori (� 2 suunda selliselt, et nurk vektorite � 2 ja (� 2 vahel oleks
terav). Tema pikkus on
@�J������ @ � 0� 20 cos � 2, (� 2K � 0� 20 � 2 · (� 20� 200(� 20 � � 2 · (� 2 � �2 cos 8 � G2 cos 9 � H2 cos :
Nüüd olgu L lõigu �J ja tasandi lõikepunkt. Siis
I � @�J������ @ � @�E����� @ � �2 cos 8 � G2 cos 9 � H2 cos : � B� |�2 cos 8 � G2 cos 9 � H2 cos : � B| Nüüd asendame cos 8 , cos 9 , cos : ja B väärtuste suuruste A,B,C,D kaudu saame, et punkti
X0��2, G2, H2 kaugus tasandist �� � %G � &H � ' � 0
võrdub
I � |��2 � %G2 � &H2 � '|1�2 � %2 � &2
(1)
Näide 1. Koostada võrrandi tasanditele, mis asuvad tasandist
2� � 2G � H � 3 � 0
kaugusel I � 5. Lahendus: Iga punkt otsitavatest tasandites asub antud tasandist kaugusel 5. Valemi (1)
kohaselt iga punkti (x,y,z) jaoks
�2
I
�
� 2
J
E
(� 2
· ·

5 � |2� � 2G � H � 3|N22 � ��22 � 12 � |2� � 2G � H � 3|3 ,
seega |2� � 2G � H � 3| � 15. Kõrvaldadess absoluutväärtust, saame kaks võrrandit: 2� � 2G � H � 3 � 15 ja 2� � 2G � H � 3 � �15, mis vastavalt annavad otsitava tasandite võrranditeks 2� � 2G � H � 18 � 0 ja 2� � 2G � H � 12 � 0.
Uurime nüüd, kuidas saab leida sirgete ja tasandite vahelised kaugused:
Kaks tasandit: Kaks tasandit on kas lõikuvad (erijuhul langevad kokku) ja siis nende vaheline kaugus on
null või on paralleelsed. Paralleelsete tasandite vahelise kauguse võrdub ühel tasandil asuva
punkti kaugusega teisest tasandist.
Näide 2: Leida tasandite 3x - 6y- 2z + 1 = 0 ja 6x - 12y - 4z + 3 = 0 vaheline kaugus.
Lahendus. Uurime, kas tasandid on parallelsed või lõikuvad. Kui tasandid on parallesed, siis
nende normaalvektorid peavad olema parallelsed. Esimese tasandi normaalvektor on (3,-6,-
2) ja teise tasandi normaalvektor on (6,-12,-4). Vektorid on parallelsed, kuna 2�3, �6, �2 � �6, �12, �4.
Võtame mingi punkti esimesest tasandist, nt. kui x=y=0, siis 3 · 0 � 6 · 0 � 2H � 1 � 0, kust H � 1/2. Nüüd leiame saadud punkti (0;0;1/2) ja teise tasandi vahelise kauguse:
I � |6 · 0 � 12 · 0 � 4 · 1/2 � 3 |N62 � ��122 � ��42 � 114.
Sirge ja tasand Sirge ja tasand on kas lõikuvad (erijuhuna sirge asub tasandil) ja siis nende vaheline kaugus
on null või on paralleelsed. Sirge on paralleelne tasandiga ainult siis kui tema sihivektor on
risti tasandi normaalvektoriga. Kui nad on parallelsed, siis sirge iga punkti kaugus tasandist
võrdub sirge kaugusega tasandist.
Näide 3: Leida sirge
kaugust tasandist -3x + y + 5z + 6 = 0.
Lahendus: Kuna sirge sihivektor R = (2; 1; 1) on tasandi normaalvektoriga (� =(-3;1;5) risti: R · (� � 2 · ��3 � 1 · 1 � 1 · 5 � 0,

siis antud sirge on tasandiga parallelne. Sirge kauguse d tasandist leidmiseks võtame sirgel
suvalise punkti, näiteks, A(3;1; 1) ja leiame selle punkti kaugus tasandist:
I � |�3 · 3 � 1 � 5 · 1 � 6 |N��32 � 12 � 52 � 3
√35
Kaks sirget Kaks sirget ruumis on 1) lõikuvad (erijuhul langevad kokku) ja siis sirgete vaheline kaugus
on null; 2) on paralleelsed (kui sirgete sihivektorid on paralleelsed) või 3) kiivsed.
Kui sirged on parallelsed, siis ühe sirge iga punkti kaugus teisest sirgest võrdub sirgete
vahelise kaugusega.
Kui sirged on kiivsed, siis eelkõige on vaja leida kaks parallelset tasandit nii et kumbki sirge
asub ühel tasandil. Tasandite normaalvektor on leitav kui sirgete sihivektorite vektorkorrutis.
Sirgete vaheline kaugus võrdub siis tasandite vahelise kaugusega.
Näide 4: Leida sirgete
vaheline kaugus.
Lahendus. Need sirged ei ole paralleelsed, kuna nende sihivektorid (1;-2;1) ja (2,1,1) ei ole
parallelsed; kontrollime, kas need sirged lõikuvad või on kiivsed. Kui sirged lõikuvad, leidub
nendel ühine punkt, üritame seda leida järgmise süsteemi abil:
See süsteem ei ole lahenduv ja seega need sirged ei lõiku, järelikult, nad on kiivsed. Kiivsete
sirgete vahelise kauguse leidmiseks paneme läbi esimese sirge tasandi, mis oleks teise
sirgega paralleelne. Selleks võtame esimese sirge võrrandist punkti A(1; 3;-1) ja sihivektori R���� = (1;-2; 1) ja teise sirge võrrandist võtame sihivektori R���� = (2; 1; 1): Nüüd koostame
võrrand tasandile, mis läbib punkti A ja on vektoritega i R���� ja i R���� paralleelne
ehk
-3x + y + 5z + 6 = 0.
Nüüd on vaja leida teise sirge, st
kaugust tasandist -3x + y + 5z + 6 = 0. See on aga oli tehtud Näites 3: d=�
√35.

30. Nurgad sirgete ja tasandite vahel.
Nurgad kahe sirge vahel.
Olgu antud kaks sirget s1 ja s2, kusjuures pole oluline kas nad on tasandil või ruumis.
Juuresoleval joonisel on sirged s1 ja s2 ruumi kiivsirged.
Fikseerime mingi punkti A ja joonistame läbi tema kaks sirget ��� ja ��� , mis on vastavalt
paralleelsed sirgetega s1 ja s2. Sirged ��� ja ��� tekitavad neli nurka. Tähistame neid α1, α2, α3
ja α4 abil. Seejuures α3 = α1, α4 = α2 ja α1+α2= π tõttu on olulisi ainult üks.
Definitsioon. Sirgete s1 ja s2 vaheliseks nurgaks, mida tähistame ����, ��� abil, nimetatakse
sirgete ��� ja ��� vahelistest nurkadest α1, α2, α3 ja α4 vähimat.
Selle definitsiooni kohaselt kahe sirge vaheline nurk on esimese veerandi nurk, s.o.
Leiame nüüd valemid kahe sirge vahelise nurga arvutamiseks. Skalaarkorrutise abil lihtne
on leida sirgete sihivektorite vahelise nurga koosinust. Viimane annab kas sirgete
vahelise nurga ����, ��� või nurga π − ����, ��� koosinuse. Viimase kaudu saab siiski leida
ka sirgete vahelise nurga.
Tähistame sirgete s1 ja s2 sihivektoreid vastavalt ��� ja ��� abil. Samad sihivektorid on ka
abisirgetel ��� ja ��� . Siis
����, ��� � �����, ����, kui �����, ���� � �0, π2� ,π � �����, ����, kui �����, ���� � �π2 , π� .�
Kui �����, ���� � ��� , π�, siis cos����, ��� cos�π � �����, ���� �cos�����, ���� |cos�����, ����|. Kui �����, ���� � �0, ���, siis cos����, ��� cos�����, ���� |cos�����, ����|.
"� "�
"#
"$

Seega igal juhul
cos����, ��� |cos�����, ����| |��� · ���|&���&&���& (1)
Viimast valemit saab kasutada juhul, kui sirged on antud kas parameetriliste või
kanooniliste võrrandite abil, sest siis on käepärast võtta sirgete sihivektorid. Siin pole
oluline, kas sirged on tasandil või ruumis.
Eeldame, et sirged on antud üldvõrranditega (siis nad on tasandilised sirged) ��: (�) * +�, * -� 0 ja ��: (�) * +�, * -� 0. Nende sihivektorid on siis ��� ����, ���� ��+�, (��, ��� ����, ���� ��+�, (��.
mistõttu valemist (1) saame cos����, ��� |��� · ���|&���&&���& |������ * ������|&������ * ������&&������ * ������& |+�+� * (�(�|&�+��� * �(���&&�+��� * �(���& |.�� · .��|&.��&&.��&
ehk
cos����, ��� |.�� · .��|&.��&&.��&, (2)
kus vektorid .�� �(�, +��, .�� �(�, +��. on sirgete s1 ja s2 normaalvektorid.
Nüüd eeldame, et sirged on antud taandatud võrrandite abil ��: , () * + ja ��: , (/) * +/ . Siit saame leida nende sirgete üldvõrrandid ��: () * ��1�, * + 0 ja ��: (/) * ��1�, * +/ 0 . ja nendest meie sirgete normaalvektorid
Valemi (2) abil saame
(3)
Tavaliselt antakse siin nurga ����, ��� tangens. Selleks on vaja leida sin����, ���. Tegelikult me leiame koosinuse ja siinuse ruudud ning nende abil tangensi ruudu, millest
saame lõpuks tangensi. Teeme lubatud arvutused:
ja
Vastavalt definitsioonile nurk ����, ��� on esimese veerandi nurk, siis viimases valemis
sobib ainult üks lahend, selline, kus tangens on positiivne. Seega sirgete vahelise nurga
arvutamiseks saame valemi
Valemist (3) saame, et
Saime, et ristuvate sirgete tõusude korrutis on −1.
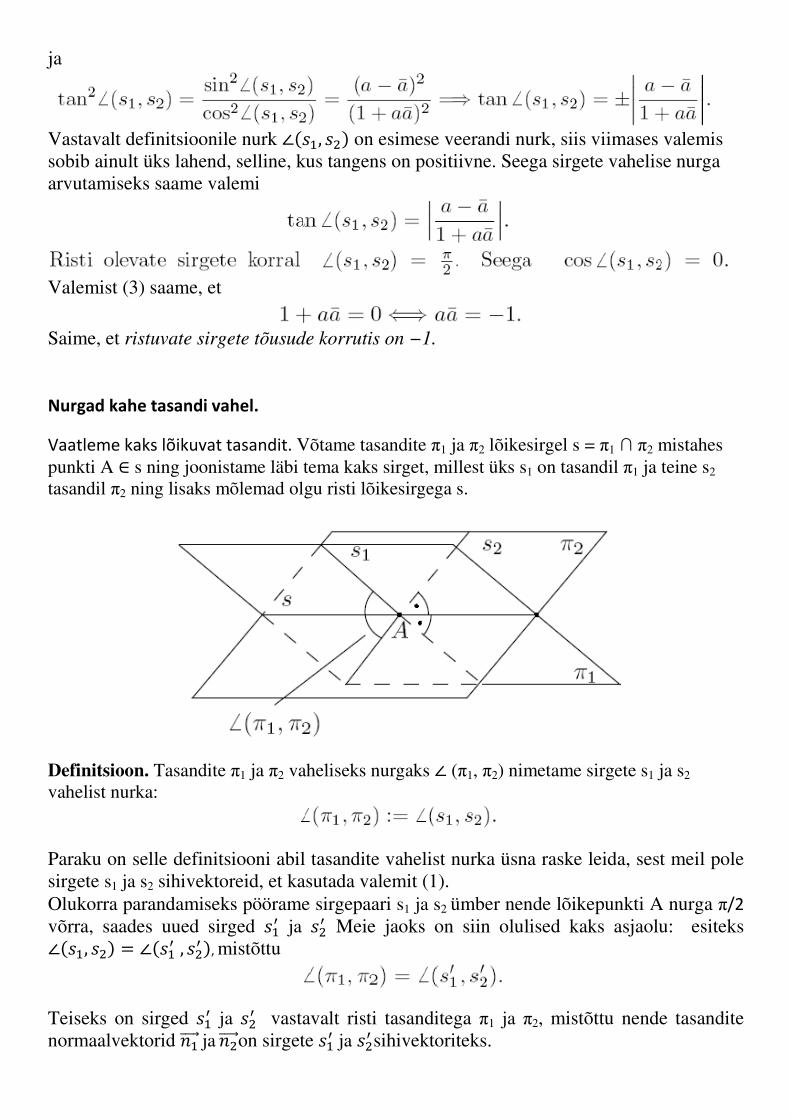
Nurgad kahe tasandi vahel.
Vaatleme kaks lõikuvat tasandit. Võtame tasandite π1 ja π2 lõikesirgel s = π1 ∩ π2 mistahes
punkti A � s ning joonistame läbi tema kaks sirget, millest üks s1 on tasandil π1 ja teine s2
tasandil π2 ning lisaks mõlemad olgu risti lõikesirgega s.
Definitsioon. Tasandite π1 ja π2 vaheliseks nurgaks � (π1, π2) nimetame sirgete s1 ja s2
vahelist nurka:
Paraku on selle definitsiooni abil tasandite vahelist nurka üsna raske leida, sest meil pole
sirgete s1 ja s2 sihivektoreid, et kasutada valemit (1).
Olukorra parandamiseks pöörame sirgepaari s1 ja s2 ümber nende lõikepunkti A nurga π/2
võrra, saades uued sirged ��� ja ��� Meie jaoks on siin olulised kaks asjaolu: esiteks ����, ��� ����� , ��� �, mistõttu
Teiseks on sirged ��� ja ��� vastavalt risti tasanditega π1 ja π2, mistõttu nende tasandite
normaalvektorid .�� ja .��on sirgete ��� ja ��� sihivektoriteks.
Normaalvektorid saame aga tasandite π1 ja π2 üldvõrranditest:
Nendeks on
Nüüd valemi (2) abil saame
(4)
Sama valem normaalvektorite koordinaatide kaudu
Märgime, et saadud valem on kasutatav ka paralleelsete tasandite korral. Kui tasandid on
paralleelsed, siis nende vaheline nurk on 0, mille koosinus on 1. Teiselt poolt nende
normaalvektorid on ka paralleelsed, seega .�� 2.�� mingi arvu 2 jaoks. Nüüd valemi (4)
järgi cos��3�, 3�� |.�� · .��|&.��&&.��& |.�� · 2.��|&.��&&2.��& |2||.�� · .��|4|.�� · .��|4|2.�� · 2.��| |2||.�� · .��|4|.�� · .��||2|4|.�� · .��| 1.
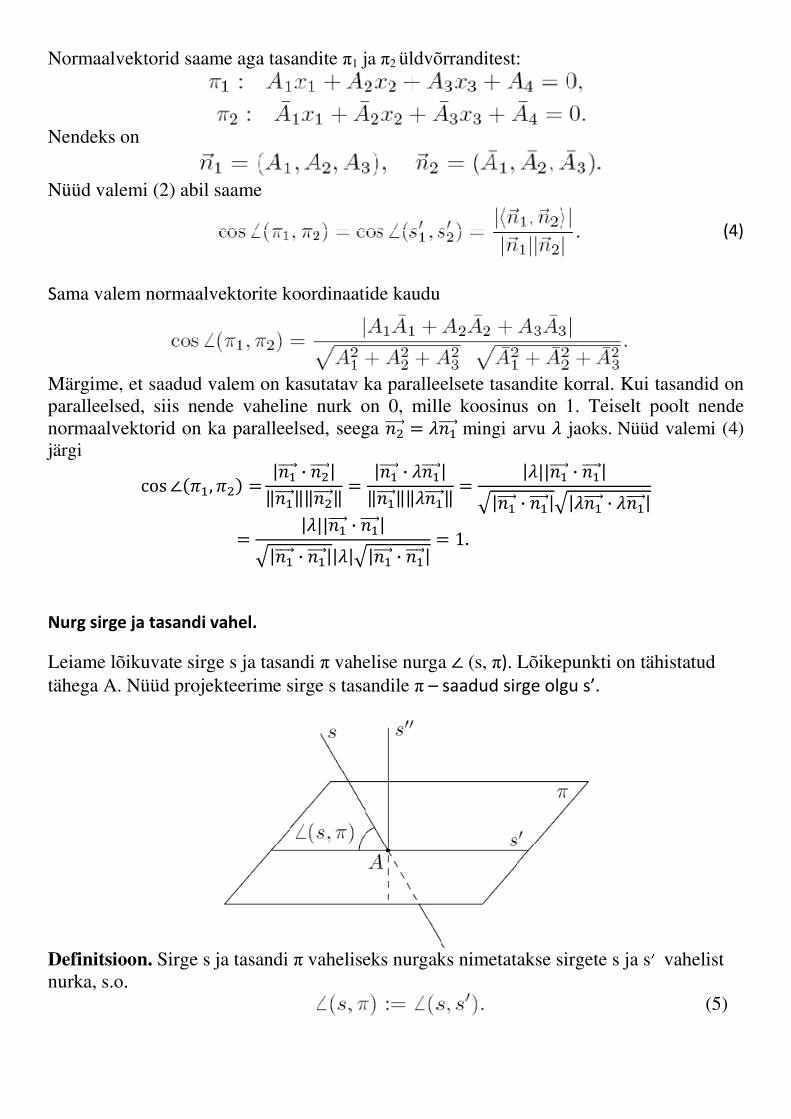
Nurg sirge ja tasandi vahel.
Leiame lõikuvate sirge s ja tasandi π vahelise nurga � (s, π). Lõikepunkti on tähistatud
tähega A. Nüüd projekteerime sirge s tasandile π – saadud sirge olgu s’.
Definitsioon. Sirge s ja tasandi π vaheliseks nurgaks nimetatakse sirgete s ja s′vahelist
nurka, s.o.
(5)

Selle definitsiooni puuduseks on asjaolu, et raske on leida sirge �5 sihivektorit, et saaks
kasutada kahe sirge vahelise nurga leidmise valemit, mis on meil leitud. Sellest puudusest
üle saamiseks võtame läbi punkti A tasandiga π ristuva sirge �’’. Tema sihivektoriks on
tasandi π normaalvektor .�. Oluline on märgata, et kolm sirget s, s′ja �’’ asuvad
ühisel tasandil, mistõttu
Seega valem (5) saab kuju
Kerge on leida nurga � (s, π) siinust. Saame sin���, 3� sin�32 � ���, ����� cos���, ���� |�� · .�|&��&&.�&
Saime
sin���, 3� |�� · .�|&��&&.�&.
(6)
Viimane valem on rakendatav ka siis, kui sirge on paralleelne tasandiga või asub hoopis
temal. Ilmselt siis �(s, π) = 0. Sama tulemuse saame valemi (6) abil, sest siis �� 7 .� 8 �� · .� 0 9 sin ���, 3� 0 9 ���, 3� 0.
31. Ringjoon ja ellips
Definitsioon. Ringjooneks nimetatkse kõigi selliste punktide P(x; y) hulka, mis asuvad
kindlal kaugusel r fikseeritud punktist K(x0; y0).
P(x; y) asub ringjoonel parajasti siis, kui d(K; P) = r (kaugus K ja P vahel on r).
Kauguse definitsioonist 4�) � ):�� * �, � ,:�� ; saame ringjoone võrrandi
Punkti K(x0; y0) nimetatakse ringi keskpunktiks ja kaugust r nimetatakse ringi raadiuseks.
Näide: Leida järgmise ringjoone raadius ja keskpunkti koordinaadid:
Lahendus: Eraldame täisruud x-i järgi: �)� * 2() )� * 2() * (� � (� �) * (�� � (�� )� � 4) * 4 � 4 * ,� * 2, * 1 0, �) � 2�� * �, * 1�� 4,

�) � 2�� * �, * 1�� 2�. Seega ringjoone raadius ; 2 ning keskpunkt on (2,-1).
Definitsioon. Joont tasandil, mille iga punkti kauguste summa kahest fikseeritud punktist =� ja =� on konstantne nimetatakse ellipsiks. Punkte =� ja =� nimetakse ellipsi fookusteks.
Olgu X(x;y) punkt ellipisil, ning punkti kauguste summa punktist =� ja =� olgu 2a, siis ellipsi
võrrand on
(1)
Kõige lihtsamal kujul ellipsi võrrandi saame, kui valime ellipsi fookusteks punktid =�(-c; 0)
ja =�(c; 0).
Jooniselt näeme, 2- > 2( e. - > (. Võrrandist saame kauguse definitsiooni kasutades
võrrandi
ehk
Tõstes mõlemad pooled ruutu, saame
millest koondades jääb järele
Jagame võrrandit neljaga ja tõstame jällegi mõlemad pooled ruutu. Saame
millest peale koondamist saame
Kuna a > c, siis a
2–c
2 > 0. Seetõttu võime tähistada a
2–c
2 = b
2. Peale sellist asendamist
saame võrrandi
millest a
2b
2-ga jagades saame ellipsi kanoonilise võrrandi.
=� =�
�-� -
· · · ?
( �( �+
+

Omadus 1. Ellips on sümmeetriline koordinaattelgede suhtes.
Omadus 2. Ellipsi lõikepunktid x-teljega on ( ); 0a− ja ( ); 0a ning y-teljega ( )0; b− ja ( )0; b .
Punkte ( ); 0a± ja ( )0; b± nimetatakse ellipsi tippudeks.
Tippe ( ); 0a− ja ( ); 0a ühendavat lõiku ning tippe ( )0; b− ja ( )0; b ühendavat lõiku
nimetatakse ellipsi telgedeks. Arvud a ja b on ellipsi pooltelgede pikkused. Ellipsi telgede
lõikepunkti ( )0; 0 nimetatakse ellipsi keskpunktiks.
Ellipsi kui joone kuju sõltub ainult arvude a ja c valikust.
Definitsioon. Arvu e := c/a nimetatakse ellipsi ekstsentrilisuseks.
Kuna a > c > 0, siis näeme, et mistahes ellipsi ekstsentrilisus kuulub vahemikku (0, 1).
Leiame ekstsentrilisus ellipsi pooltelgede a ja b kaudu:
Kui e=0, siis 1 � @+(A� 0 8 ( +, ehk tegemist on ringjoonega. Mida väiksem e, seda rohkem ellips on lähedane ringjoonele.
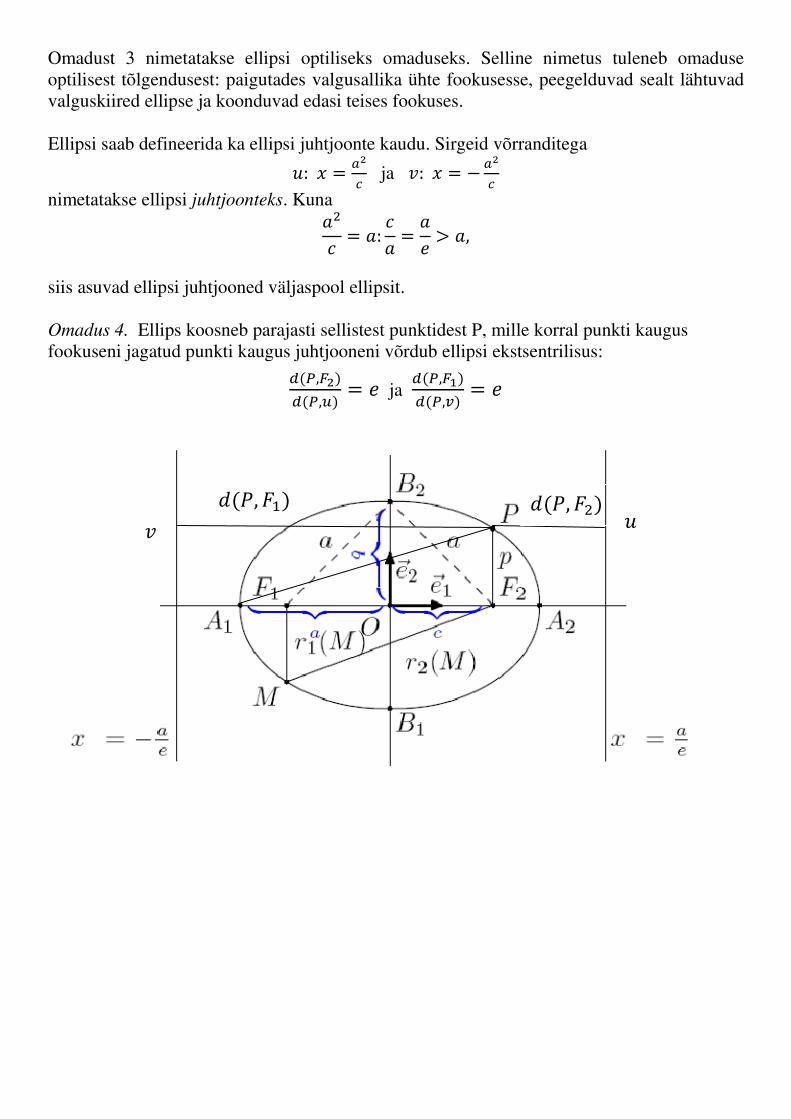
Omadus 3 (ellipsi optiline omadus): Vaatleme suvalist punkti P ellipsil. Konstrueerime selles
punktis ellipsi puutuja. Lisaks tõmbame sirglõigud punktist P mõlemasse fookusesse F1 ja
F2. Lõik PF1 moodustab puutujaga nurga " ja lõik PF2 moodustab puutujaga nurga B. Kehtib
omadus " = B.
· · =� =�
· C
" B
Omadust 3 nimetatakse ellipsi optiliseks omaduseks. Selline nimetus tuleneb omaduse
optilisest tõlgendusest: paigutades valgusallika ühte fookusesse, peegelduvad sealt lähtuvad
valguskiired ellipse ja koonduvad edasi teises fookuses.
Ellipsi saab defineerida ka ellipsi juhtjoonte kaudu. Sirgeid võrranditega D: ) EFG ja H: ) � EFG
nimetatakse ellipsi juhtjoonteks. Kuna (�- (: -( (I J (,
siis asuvad ellipsi juhtjooned väljaspool ellipsit.
Omadus 4. Ellips koosneb parajasti sellistest punktidest P, mille korral punkti kaugus
fookuseni jagatud punkti kaugus juhtjooneni võrdub ellipsi ekstsentrilisus: K�L,MF�K�L,N� I ja K�L,MO�K�L,P� I
D H
Q�C, =�� Q�C, =��

32. Hüperbool
Definitsioon. Hüperbooliks nimetatakse kõigi selliste punktide X hulka tasandil, mille
kauguste vahe etteantud punktidest 1F ja 2F võrdub konstantselt arvuga 2a:
Punkte 1F ja 2F nimetatakse selle hüperbooli fookusteks.
Olgu X(x;y) punkt hüperboolil. Valime fookuste koordinaatideks F1(–c; 0) ja F2(c; 0).
Eeldame, et antud punkti X jaoks siis kolmnurka reegli kohaselt
ehk ,
kust järeldub c>a.
Saame analoogiliselt ellipsiga hüperbooli kanooniliseks võrrandiks
(1)
kus
Hüperbool koosneb kahest harust. Kui võrrandist (1) avaldada muutuja x, siis saadakse
22 2
21
y ax a b y
b b= ± + = ± + . (2)
Võttes avaldises (2) märgiks “+”, saadakse hüperbooli parempoolse haru võrrand, märgile
“-“ vastab hüperbooli vasakpoolne haru.

Omadus 1. Hüperbooli lõikepunktid x-teljega on ( ); 0a− ja ( ); 0a , lõikepunktid y-teljega
hüperboolil puuduvad.
Punkte ( ); 0a− ja ( ); 0a nimetatakse hüperbooli tippudeks.
Omadus 2. Hüperbool on sümmeetriline koordinaattelgede suhtes.
Hüperbooli kuju sõltub arvudest a ja c. Suhet
ce
a=
nimetatakse hüperbooli ekstsentrilisuseks. Kuna c>a, siis 1e > .
Definitsioon. Kui joone punkti X(x,y) kaugenemisel lõpmatusse tema kaugus mingist sirgest
läheneb nullile, siis seda sirget nimetame joone asümptoodiks. Asümptooti võrrandiga y =
ax + b, kus a 0, nimetatakse joone kaldasümptoodiks.
Teoreem. Sirged
by x
a= − ja
by x
a= .
on hüperbooli kaldasümptoodid.
Tõestus: Hüperboolil on neli lõpmatusse minevat ”otsa”. Näitame, et hüperbooli
”parempoolse” haru ”ülemise otsa” asümptoodiks on sirge l2. Sellel osal
Seega
Leiame punkti (x,y) kaugus väidetavast asümptootist
Asümptooti üldvõrrand on
seega punkti (x,y) kaugus asümptootist võrdub
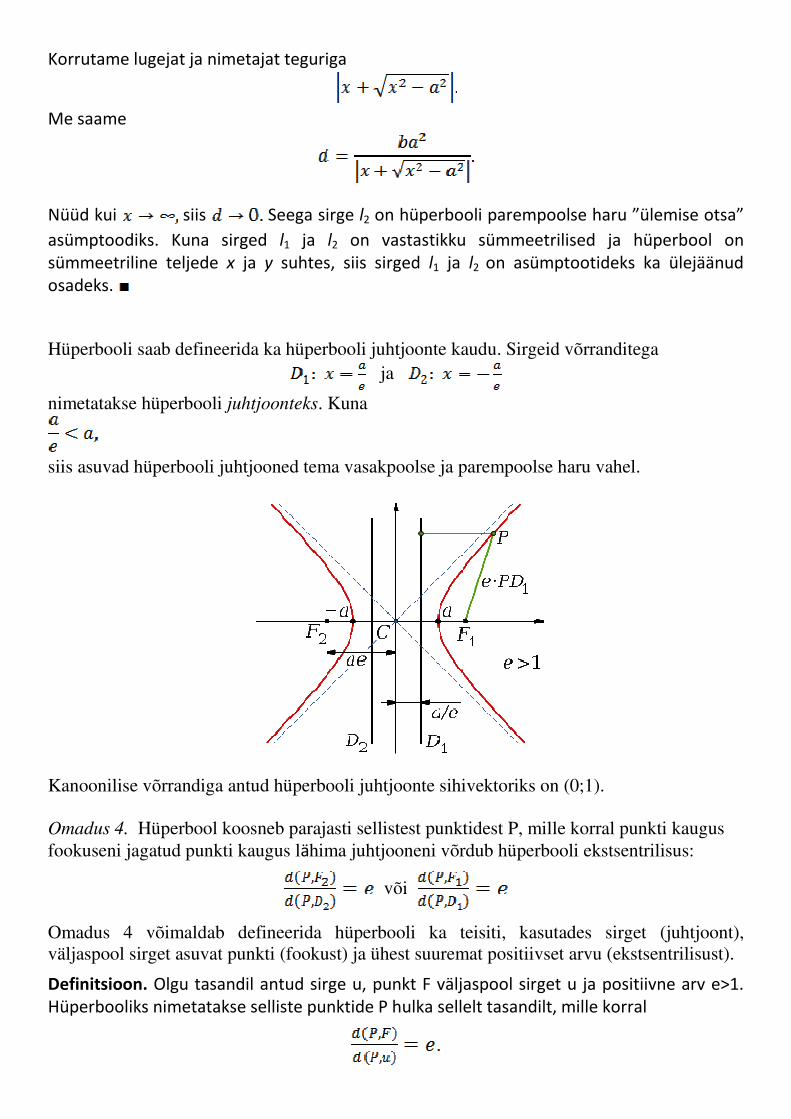
Korrutame lugejat ja nimetajat teguriga
Me saame
Nüüd kui siis Seega sirge l2 on hüperbooli parempoolse haru ”ülemise otsa”
asümptoodiks. Kuna sirged l1 ja l2 on vastastikku sümmeetrilised ja hüperbool on
sümmeetriline teljede x ja y suhtes, siis sirged l1 ja l2 on asümptootideks ka ülejäänud
osadeks.
Hüperbooli saab defineerida ka hüperbooli juhtjoonte kaudu. Sirgeid võrranditega
ja
nimetatakse hüperbooli juhtjoonteks. Kuna
siis asuvad hüperbooli juhtjooned tema vasakpoolse ja parempoolse haru vahel.
Kanoonilise võrrandiga antud hüperbooli juhtjoonte sihivektoriks on (0;1).
Omadus 4. Hüperbool koosneb parajasti sellistest punktidest P, mille korral punkti kaugus
fookuseni jagatud punkti kaugus lähima juhtjooneni võrdub hüperbooli ekstsentrilisus:
või
Omadus 4 võimaldab defineerida hüperbooli ka teisiti, kasutades sirget (juhtjoont),
väljaspool sirget asuvat punkti (fookust) ja ühest suuremat positiivset arvu (ekstsentrilisust).
Definitsioon. Olgu tasandil antud sirge u, punkt F väljaspool sirget u ja positiivne arv e>1.
Hüperbooliks nimetatakse selliste punktide P hulka sellelt tasandilt, mille korral
Näide. Olgu hüperbooli ekstsentrilisus üheks fookuseks ja sellele
fookusele lähim juhtjoon läbib punkte ja . Leiame selle hüperbooli
võrrandi.
Lahendus. Hüperbooli juhtjoone sihivektoriks on seega kanooniline võrrand
siin ei sobi. Kasutame hüperbooli võrrandi leidmiseks eelmise definitsiooni. Juhtjoone
kanooniline võrrand on
kust
Olgu suvaline punkt hüperboolilt. Eelmise definitsiooni kohaselt
ehk
Viimane võrdus on samaväärne võrdusega
kust
Siit saamegi vaadeldava hüperbooli võrrandi
Iga hüperbooli jaoks saab määrata tema kaashüperbool, kus sümmeetria teljed on ära
vahetatud ja kaldasümptoodid on samad. Kaashüperbooli võrrand on
Kaasahüperbooli fookusteks on punktid (0;c), (0,-c), kus . Seega mõlema
hüperbooli fookused asuvad ringjoonel .

33. Parabool
Definitsioon. Olgu tasandil fikseeritud sirge u ja väljaspool seda sirget punkt F. Parabooliks
nimetatakse kõigi selliste punktide P hulka tasandil, mille kaugus sirgest u võrdub tema
kaugusega punktist F:
(1)
Punkti F nimetatakse vaadeldava parabooli fookuseks, sirget u aga tema juhtjooneks.
Seega parabooli korral
Olgu p juhtjoone ja fookuse vaheline kaugus. Valime juhtjooneks u sirge võrrandiga x = -p/2
2 ja fookuseks punkti F(p/2; 0).
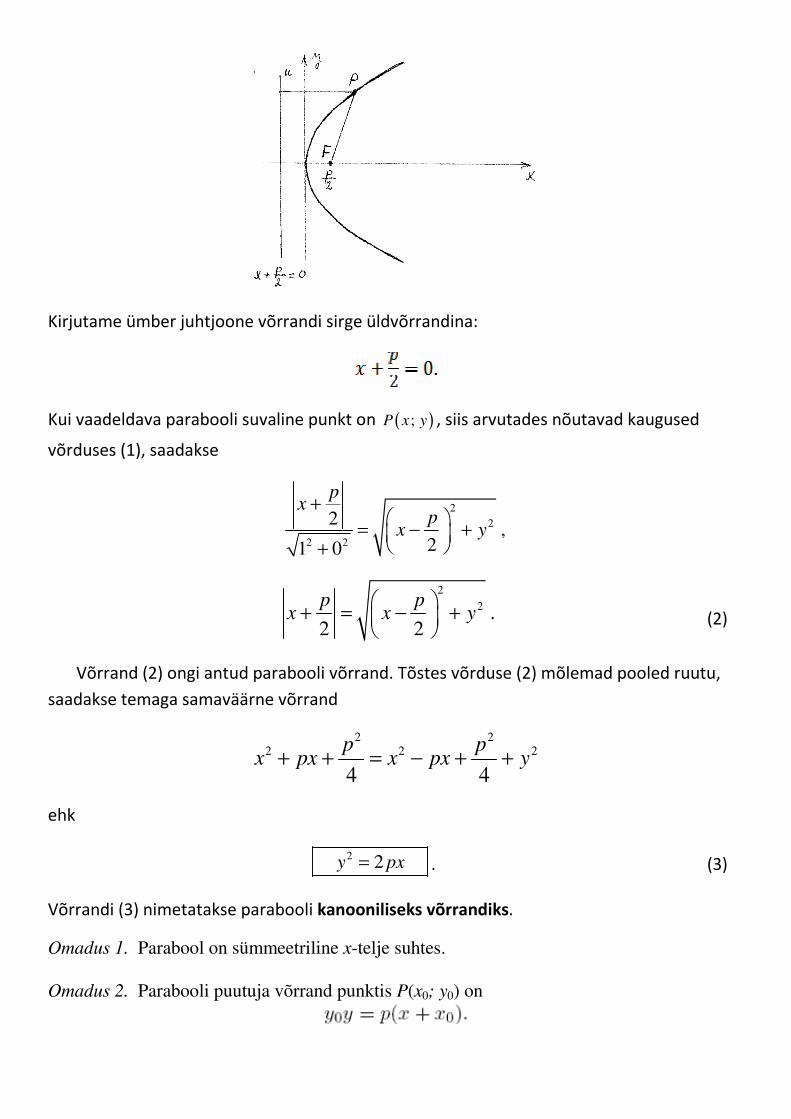
Kirjutame ümber juhtjoone võrrandi sirge üldvõrrandina:
Kui vaadeldava parabooli suvaline punkt on ( );P x y , siis arvutades nõutavad kaugused
võrduses (1), saadakse
2
2
2 2
2,
21 0
px
px y
+
= − + +
2
2 .2 2
p px x y
+ = − +
(2)
Võrrand (2) ongi antud parabooli võrrand. Tõstes võrduse (2) mõlemad pooled ruutu,
saadakse temaga samaväärne võrrand
2 22 2 2
4 4
p px px x px y+ + = − + +
ehk
2 2y px= . (3)
Võrrandi (3) nimetatakse parabooli kanooniliseks võrrandiks.
Omadus 1. Parabool on sümmeetriline x-telje suhtes.
Omadus 2. Parabooli puutuja võrrand punktis P(x0; y0) on
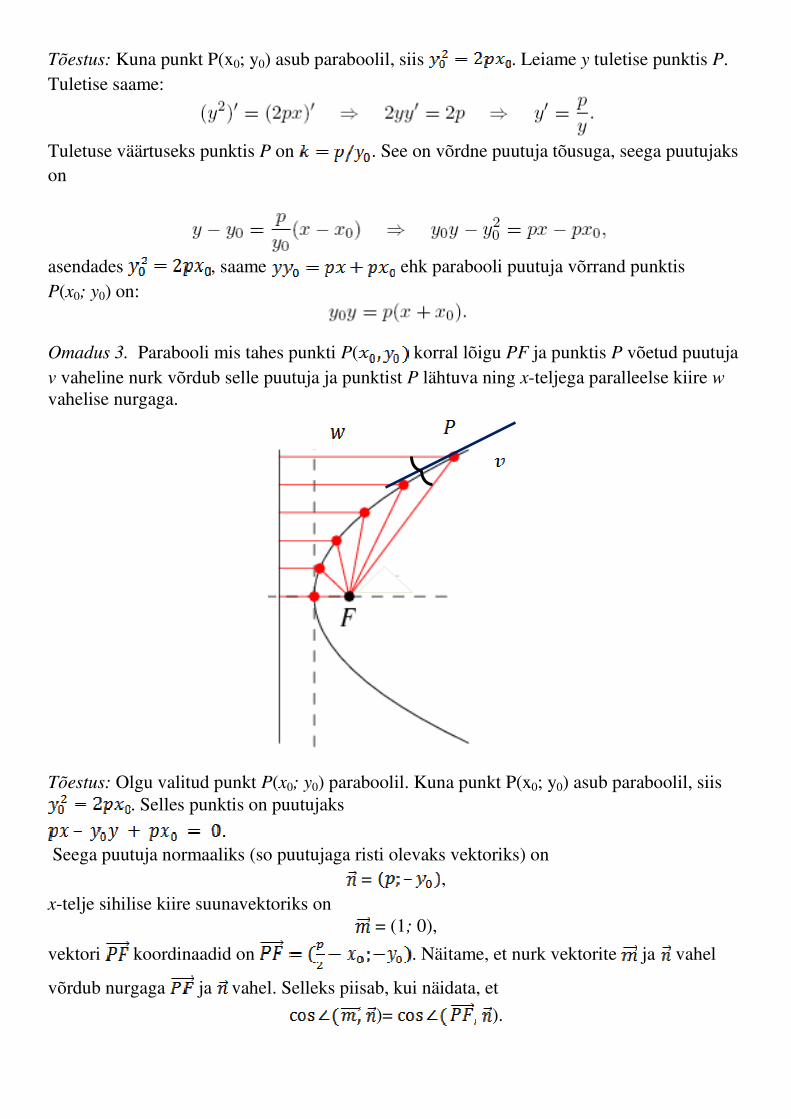
Tõestus: Kuna punkt P(x0; y0) asub paraboolil, siis . Leiame y tuletise punktis P.
Tuletise saame:
Tuletuse väärtuseks punktis P on . See on võrdne puutuja tõusuga, seega puutujaks
on
asendades , saame ehk parabooli puutuja võrrand punktis
P(x0; y0) on:
Omadus 3. Parabooli mis tahes punkti P( korral lõigu PF ja punktis P võetud puutuja
v vaheline nurk võrdub selle puutuja ja punktist P lähtuva ning x-teljega paralleelse kiire w
vahelise nurgaga.
Tõestus: Olgu valitud punkt P(x0; y0) paraboolil. Kuna punkt P(x0; y0) asub paraboolil, siis
. Selles punktis on puutujaks
Seega puutuja normaaliks (so puutujaga risti olevaks vektoriks) on
= ,
x-telje sihilise kiire suunavektoriks on
= (1; 0),
vektori koordinaadid on . Näitame, et nurk vektorite ja vahel
võrdub nurgaga ja vahel. Selleks piisab, kui näidata, et
)= ).

Leiame
millest saamegi vajaliku võrduse.
Omadust 3 nimetatakse parabooli optiliseks omaduseks, sest sellest järeldub, et kõik x-teljega
paralleelsed kiired peegelduvad parabooli pinnalt nii, et kõik kiired läbivad oma edasisel
teekonnal parabooli fookust.
Võrrand esitab parabooli, mille teljeks on x-telg ja haripunktiks
koordinaatide alguspunkt, kuid mis avaneb x-telje negatiivses suunas. Võrrandite
ja puhul on tegemist parabooliga, mille teljeks on y-telg ja haripunktiks
koordinaatide alguspunkt ning mis esimesel juhul avaneb y-telje positiivses suunas, teisel
juhul y-telje negatiivses suunas.
Näide. Koostada parabooli juhtjoone võrrand.
Lahendus. Teisendame antud võrrandi kujule
tähistame x’=x-3, y’=y+5, saame uutes koordinaatides võrrandi kuju
Seega tegemist on parabooliga, mille haripunkt on (3;-5), mille teljeks on y-tejega
paralleelne sirge y=-5 ning mis avaneb y-telje negatiivses suunas, seejuures ,
seega . Selle parabooli juhtjooneks on järelikult x-teljega paralleelne sirge, mille
punktide ordinaadid (y-koordinaadid) on võrra suuremad haripunkti ordinaadist -5.
Juhtjoone võrrand on seega





























