Embed Size (px)
Citation preview

Ett Sammelsurium av Matematiskt Nonsens,
Galois Teori.
Professor Ivar
December 8, 2016
ii

Contents
Företal v
1 Lösning av andragradsekvationer. 11.1 Lösning av Andragradsekvationen . . . . . . . . . . . . . . . . . . 11.2 En Geometrisk Tolkning. . . . . . . . . . . . . . . . . . . . . . . 21.3 Ett Annat Angreppssätt. . . . . . . . . . . . . . . . . . . . . . . . 2
1.3.1 Lite om komplexa tal. . . . . . . . . . . . . . . . . . . . . 3
2 Tredjegradsekvationen. 9
3 Lösning av Fjärdegradsekvationer. 133.1 Ett exempel på lösningen av en fjärdegradsekvation. . . . . . . . 15
4 Mellanspel: lösning med radikaler. 174.1 En Strategi för att visa Femtegradsekvationens olösbarhet. . . . . 22
5 Lite Gruppteori. 315.1 Exempel på grupper. . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Lite om Permutationsgrupper. . . . . . . . . . . . . . . . . . . . . 375.3 Lite om Delgrupper. . . . . . . . . . . . . . . . . . . . . . . . . . 395.4 Om lösbara grupper. . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Mer om automor�er. 53
7 Femtegradsekvationen. 61
A Euklidiska algoritmen, primtal och polynomdivision. 65A.1 Den Euklidiska algoritmen. . . . . . . . . . . . . . . . . . . . . . 65A.2 Euklidiska algoritmen för polynom. . . . . . . . . . . . . . . . . . 67A.3 Primtalsfaktorisering. . . . . . . . . . . . . . . . . . . . . . . . . 68A.4 Eisensteins kriterium för irreducibilitet. . . . . . . . . . . . . . . 70
iii
iv CONTENTS

Företal
Låt oss begrunda lösningar av polynomekvationer i en variabel; hitta alla x såatt
xn + an−1xn−1 + an−2x
n−2 + · · ·+ a0 = 0,
där an−1, an−2, ..., a0 är givna tal.Kan man alltid hitta en lösning? Finns det någon formel för att beräkna
lösningarna? Speci�kt så kommer vi att vara intresserade av lösningar somkan uttrycka med hjälp av rotutdragning. Kan vi hitta en formel för lösningensom bara innehåller koe�cienterna, heltal och rötter (kvadratrötter, tredjerötteret.c.)? Vi kommer att kalla sådana lösningar för lösningar med radikaler.
En av de mer fantastiska matematiska teorierna från 1800-talet så visar attdet endast är möjligt att hitta lösningar med radikaler för första, andra, tredjeoch fjärdegrads polynom; men inte för polynom av grad fem eller högre. Hurbevisar man ens att en ekvation inte har en lösning på en speci�k form? Attvisa att ekvationen har en lösning är, principiellt, enkelt: man skriver bara nerlösningsformeln.
Men hur visar man att det inte går att lösa en ekvation? - det räckernaturligtvis inte med att man inte lyckas hitta någon lösning. Någon som ärsmartare kanske kan hitta en som inte vi hittar.
I det här häftet så skall vi bevisa att femtegradsekvationen inte kan lösasmed radikaler. Som en del av vår undersökning skall vi härleda lösningen tilltredje och fjärdegradsekvationen, prata lite om matematiken bakom att blandaen kortlek samt lite andra saker.
Det är allt för mycket material i dessa anteckningar för att ni skall kunnasmälta allt på den tid ni får. Meningen är inte att ni skall förstå allt eller att niska memorera alla bevis. Meningen är att ni skall få en hyfsat detaljerad känslaav hur abstrakt matematisk kan användas för att lösa konreta matematiskaproblem - som att hitta rötterna till ett polynom. Ni ska också veta vad engrupp är och vad en talkropp är och ha en viss känsla för hur de fungerar.Ni kommer att stöta på kroppar och grupper och även Galois teori senare i erutbildning. När ni gör det så hoppas jag att ni kommer att känna er lite hemma.
v
vi FÖRETAL
Chapter 1
Lösning av
andragradsekvationer.
1.1 Lösning av Andragradsekvationen
Låt oss börja lite enkelt och betrakta andragradsekvationen, som jag hoppas attni alla känner till och kan lösa,
x2 + ax+ b = 0. (1.1)
Andragradsekvationen, (1.1), löses genom kvadratkomplettering:
x2 + ax+ b = 0⇔ x2 + ax+a2
4=a2
4− b⇔
(x+
a
2
)2=a2
4− b.
Eftersom y2 = c om och endast om y = ±√c så får vi
x = −a2±√a2
4− b.
Vi har därmed bevisat att
Sats 1.1. För varje a och b så löser x
x2 + ax+ b = 0, (1.2)
om och endast om
x = −a2±√a2
4− b.
Uppgifter:
1. Hitta alla rötter till:
(a) x2 − 5x+ 6 = 0
1
2 CHAPTER 1. LÖSNING AV ANDRAGRADSEKVATIONER.
(b) x2 + 2πx+ π2 = 0.
2. Låt p(x) = ax2 + bx+ c. Hitta alla rötter till p(x) = 0 uttryckta i a, b ochc. (Glöm inte bort att a, b och eller c kan vara noll.)
3. Hitta alla rötter till x2 + ax = 0 genom
(a) direkt inspektion.
(b) att använda Sats 1.1.
4. Lös x6+2x3−8 = 0 genom att använda Sats 1.1 med y = x3 som obekant.
1.2 En Geometrisk Tolkning.
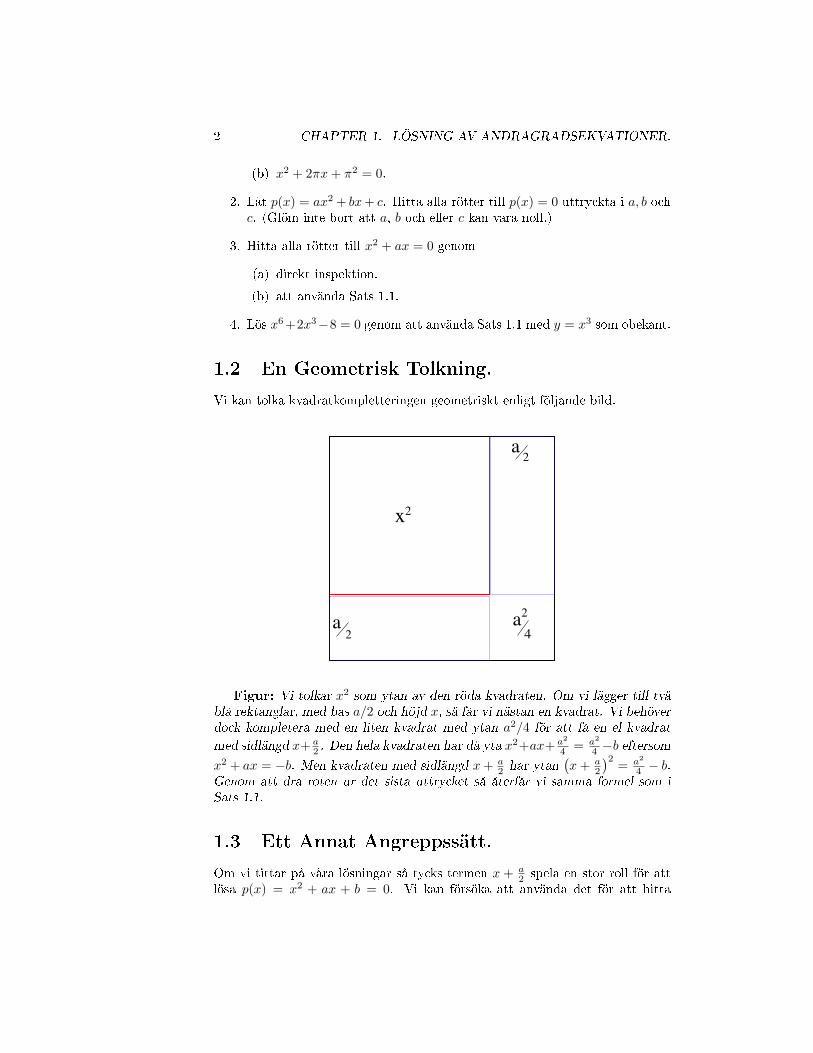
Vi kan tolka kvadratkompletteringen geometriskt enligt följande bild.
x2
a
a a
2
2
2
4
Figur: Vi tolkar x2 som ytan av den röda kvadraten. Om vi lägger till tvåblå rektanglar, med bas a/2 och höjd x, så får vi nästan en kvadrat. Vi behöverdock kompletera med en liten kvadrat med ytan a2/4 för att få en el kvadratmed sidlängd x+ a
2 . Den hela kvadraten har då yta x2+ax+ a2
4 = a2
4 −b eftersomx2 + ax = −b. Men kvadraten med sidlängd x+ a
2 har ytan(x+ a
2
)2= a2
4 − b.Genom att dra roten ur det sista uttrycket så återfår vi samma formel som iSats 1.1.
1.3 Ett Annat Angreppssätt.
Om vi tittar på våra lösningar så tycks termen x + a2 spela en stor roll för att
lösa p(x) = x2 + ax + b = 0. Vi kan försöka att använda det för att hitta

1.3. ETT ANNAT ANGREPPSSÄTT. 3
lösningen. Låt oss de�niera y = x + a2 , det vill säga x = y − a
2 . Med denkoordinattranslationen så får vi
p(x) = p(y − a
2
)=(y − a
2
)2+ a
(y − a
2
)2+ b =
= y2 − a2
4+ b⇔ y2 =
a2
4− b⇔ y = ±
√a2
4− b.
Om vi sätter in y = x + a2 i den sista likheten så kommer vi tillbaka till vår
vanliga lösning:
x = −a2±√a2
4− b.
1.3.1 Lite om komplexa tal.
Om a2
4 − b < 0 så kommer lösningen x = −a2 ±√
a2
4 − b till x2 + ax + b = 0
inte att vara ett reellt tal. Vi behöver därför veta något om komplexa tal föratt kunna säga något om lösningar till andragradsekvationen.
Det som skiljer de komplexa talen från de reella är att talet i, där i2 = −1,är ett komplext tal. Låt oss vara lite formella och noggranna när vi introducerarde komplexa talen. Att vara lite formell nu kommer att ge oss möjligheten attvänja oss vid vissa begrepp som vi kommer att behöva senare. Vi börjar medatt de�niera vad en talkropp är.
De�nition 1.1. Vi säger att en mängd K är en talkropp (eller bara kropp) omdet existerar två binära operationer + och × de�nierade på K så att
1. om a, b ∈ K så kommer a+ b ∈ K,
2. om a, b ∈ K så kommer a× b ∈ K
samt följande axiom är uppfyllda
1. a+ b = b+ a ∈ K för alla a, b ∈ K
2. (a+ b) + c = a+ (b+ c) för alla a, b, c ∈ K
3. Det existerar ett element 0 ∈ K så att a+ 0 = a för alla a ∈ K
4. För alla a ∈ K så existerar det ett element −a ∈ K så att a+ (−a) = 0.
5. För alla a, b ∈ K så kommer a× b = b× a ∈ K.
6. För alla a, b, c ∈ K så kommer a× (b× c) = (a× b)× c.
7. Det existerar ett element 1 ∈ K så att för alla a ∈ K så kommer a×1 = a.
8. För alla a ∈ K, a 6= 0, så existerar det ett element a−1 ∈ K så atta× a−1 = 1.
9. För alla a, b, c ∈ K så kommer a× (b+ c) = a× b+ a× c.
4 CHAPTER 1. LÖSNING AV ANDRAGRADSEKVATIONER.
Ovanstående de�nition ser komplicerad ut, men den sammanfattar bara endel av de räkneregler vi är bekanta med från grundskolan. Det är väldigt lättatt se att R och Q är talkroppar.
Exempel: De reella talen R är en talkropp.
Exempel: De rationella talen Q är en talkropp.
Exempel: Heltalen Z är inte talkropp. Regel 1, 2, 3, 4, 5, 6, 7 och 9 gällerför heltalen. Men 8 gäller inte för de hela talen. T.ex. så kommer 2 ∈ Z mendet �nns inget tal a som ligger i Z så att 2× a = 1.
Anledningen att man har en så komplicerad de�nition för en talkropp är attdet �nns många olika objekt i matematiken, t.ex. R och Q, som uppfyller allavillkår för att vara en talkropp. Så om man kan bevisa satser, vars bevis baraanvänder de egenskaper som uttrycks i de�nitionen, så kommer satsen att gällaen hel uppsjö av olika matematiska objekt.
Man kan fråga sig vad detta har att göra med komplexa tal. Tanken ärföljande: vi vill skapa C genom attlägga till ett element i till talkroppen R ochvi vill göra detta på ett sätt som gör C till en talkropp. Vi skriver R(i) för denminsta talkroppen som innehåller alla reella tal och elementet i, där i uppfyllerräkneregeln i2 = −1 och ia = ai samt a + i = i + a. Vi kommer att skrivaC = R(i) och säga att R(i) (eller C) är kroppsutvidgningen av R med i.
Vi vet redan från gymnasiet att alla element i C kan skrivas som a + bi(tekniskt sätt så borde vi skriva a+ b× i, men det är för jobbigt så vi skriver iregel inte ut ×) men låt oss formulera det som en sats.
Sats 1.2. De komplexa talen C är en talkropp som består att alla a + bi föra, b ∈ R där i2 = −1.
Just nu så kan detta förefalla att vara abstrakt nonsens, men vi kommersenare kunna använda den här vokabulären för att formalisera den här delen avkursens stora sats. Vi kommer att tala mer om kroppsutvidgningar senare.
Det är två saker till som vi måste veta om komplexa tal. Den första är attvi kan tolka a+ ib som punkten (a, b) i talplanet R2. Då kan vi skriva punktensom a + ib = r sin(φ) + ir sin(φ) för r =
√a2 + b2 och φ är vinkeln mellan
(a, b) och x−axeln, se �guren nedan. Talet r anger avståndet från punktenr sin(φ) + ir sin(φ) till origo och φ anger vinkeln till x axeln.

1.3. ETT ANNAT ANGREPPSSÄTT. 5
✕
φ
(rsin( ),rcos( ))φ φ
r
x
y
Figur: Den röda punkten (a, b) kan lika gärna skrivas som (r sin(φ), r cos(φ))där r =
√a2 + b2 och φ är vinkeln mellan vektorn (a, b) och x−axeln.
Att välja att skriva a+ ib som r cos(φ) + ir sin(φ) kan tyckas vara en smak-sak. Men som så ofta i matematiken så kan en enkel omskrivning leda till att enaspekt av teorin framträder med extra tydlighet. I det här fallet så leder fram-ställningen av komplexa tal på formen r cos(φ)+ir sin(φ) direkt till en intressantproposition - och en ny geometrisk tolkning av komplex multiplikation.
Proposition 1.1. Låt z1 = r1 cos(φ1) + ir1 sin(φ1) och z2 = r2 cos(φ2) +ir2 sin(φ2). Då kommer
z1z2 = r1r2 cos(φ1 + φ2) + ir1r2 sin(φ1 + φ2).
Bevis: Beviset är enkelt:
z1z2 = (r1 cos(φ1) + ir1 sin(φ1)) (r2 cos(φ2) + ir2 sin(φ2)) =
= r1r2(
cos(φ1) cos(φ2)− sin(φ1) sin(φ2)︸ ︷︷ ︸=cos(φ1+φ2)
)+
+ir1r2(
cos(φ1) sin(φ2) + sin(φ1) cos(φ2)︸ ︷︷ ︸=sin(φ1+φ2)
)=
= r1r2 cos(φ1 + φ2) + ir1r2 sin(φ1 + φ2),
där vi använde additionsreglerna för trigonometriska funktioner på indikeradeställen.
Följdsats 1.1. För n ∈ N, n 6= 0, gäller följande.
1. Ekvationen zn = 1 har exakt n stycken komplexa lösningar 1, ωn, ω2n, ..., ω
n−1n
där
ωn = cos
(2π
n
)+ i sin
(2π
n
).

6 CHAPTER 1. LÖSNING AV ANDRAGRADSEKVATIONER.
2. Om v = r cos(φ) + ir sin(φ) så har ekvationen zn = v exakt n styckenlösningar
z = u, ωnu, ω2nu, ..., ω
n−1n u
där u = n√r cos
(φn
)+ i n√r sin
(φn
).
Bevis: vi bevisar bara satsens första del och lämnar den andra delen somen övning. Först så visar vi att för varje j = 0, 1, ..., n− 1 så är ωjn en lösning.Detta följer av föregående proposition, speci�kt så gäller det att om z = ωjn såkommer
zn =(ωjn)n
= ωjnn =
(cos
(2π
n
)+ i sin
(2π
n
))jn=
= cos
(2jnπ
n
)+ i sin
(2jnπ
n
)= cos (2jπ) + i sin (2jπ) = 1.
För att se att zn = 1 har exakt n stycken lösningar så låter antar vi attz = r cos(φ) + ir sin(φ) är en lösning, vi kan antaga att r ≥ 0. D.v.s.
1 = zn = rn cos(nφ) + irn sin(nφ). (1.3)
Eftersom imaginärdelen i vänsterledet är lika med noll så måste imaginärdeleni högerledet vara lika med noll, d.v.s. nφ = kπ för något k ∈ Z eller r = 0. Omr = 0 så är z = 0 och då vore z ingen lösning till zn = 1 vilket skulle strida motvårt antagande. Därför så måste φ = kπ
n (observera att vi använder antagandetatt n 6= 0 här).
Om φ = kπn så reduceras (1.3) till
1 = rn cos(kπ)→ k är ett jämt tal och 1 = rn,
där den sista slutledningen gäller eftersom HL måste vara större än noll ochrn > 0 eftersom r > 0. Men det innebär att φ = 2lπ
n och r = 1 vilket är detsamma som z = ωln.
Uppgifter:
1. Lös följande ekvationer.
(a) z3 = i
(b) z4 = −16
Ledtråd: Skriv högerledet på formen r cos(φ) + ir sin(φ).
2. Bevisa del 2 av Följdsats 1.1. Du kan bevisa satsen hur du vill, men omdu inte vet hur du ska göra så kan du försöka kopiera beviset av del 1.
3. Låt K = {0, 1, 2} och de�niera + och × så att
a+ b = resten av(a+ b
3
)
1.3. ETT ANNAT ANGREPPSSÄTT. 7
och
a× b = resten av(a× b
3
)(där högerledet är vanlig + och ×). T.ex. så är 2 + 2 = 1 eftersom restenav 4 vid division med 3 är 1.
Bevisa att K är en talkropp.
4. Låt K vara en talkropp.
(a) Bevisa att 0× a = 0 för alla a ∈ K. Observera att vi inte antar att 0är den �vanliga� nollan eller × vanlig multiplikation i de�nitionen avkropp. Både 0 och × är kan vara vad som helst som uppfyller allaaxiom i de�nitionen.
Ledtråd: Använd att a+ 0 = a multiplicera båda led med a och sevart det leder.
(b) Antag att K har minst två element och bevisa att 0 6= 1 i K.
(c) Antag att K har minst två element och bevisa att det existerar a, b ∈K så att a×b 6= a+b. Dra slutsatsen att operationen + inte är sammasom × för kroppar med två eller �er element.
5. Antag att K är en kropp.
(a) Antag att det �nns ett e ∈ K så att e× a = a för alla a ∈ K. Bevisaatt e = 1, d.v.s. att den multiplikativa enheten är unik i en kropp.
(b) Antag att det �nns ett z ∈ K så att z+ a = a för alla a ∈ K. Bevisaatt z = 0, d.v.s. att den additiva enheten är unik i en kropp.
8 CHAPTER 1. LÖSNING AV ANDRAGRADSEKVATIONER.
Chapter 2
Tredjegradsekvationen.
Låt oss nu titta på tredjegradsekvationen:
x3 + ax2 + bx+ c = 0. (2.1)
Det är uppenbart att tredjegradsekvationen är mer komplicerad än andragrad-sekvationen. Därför så skall vi försöka förenkla ekvationen innan vi löser den.Den första förenklingen vi kan göra är att titta på x = y + a
3 i analogi med vadvi gjorde i sektion 1.3. Det leder till följande hjälpsats.
Hjälpsats 2.1. Om x0 är en lösning till
x3 +
(b− a2
3
)x+
(4a3
27− ab
3+ c
)= 0 (2.2)
då är x0 − a3 en lösning till
x3 + ax2 + bx+ c = 0. (2.3)
Bevis: Ett bevis av den här typen borde vara enkelt. Vi vet någonting omx0 och vill visa att x0 − a
3 löser (2.3). Så låt oss substituera x0 − a3 för x i (2.3)
och se om vi får något uttryck där vi kan använda att x0 löser (2.2):(x0 −
a
3
)3+ a
(x0 −
a
3
)2+ b
(x0 −
a
3
)+ c =
= x30 +
(b− a2
3
)x0 +
(4a3
27− ab
3+ c
)= 0,
där vi utvecklade alla parenteser i den första likheten och använde (2.2) i denandra. Detta bevisar hjälpsatsen.
Man ska alltid fråga sig varför det är värt att bevisa en sats efter att man harläst den. Uppenbarligen så tycker jag att den här satsen var värd att bevisa, menvarför? Förenklar den någonting, eller hjälper den oss att beräkna någonting?Varför ska vi bry oss om relationen mellan lösningar till (2.2) och lösningar till
9
10 CHAPTER 2. TREDJEGRADSEKVATIONEN.
(2.3)? Vi vill ju lösa (2.3) så varför hålla på och bekymra oss om lösningar till(2.2)? - är inte (2.2) en knepigare ekvation?
Jo, givet ekvationen (2.3) så kan vi alltid skriva upp (2.2). Vi kan skriva(2.2) som
x3 + px+ q = 0, (2.4)
där p = b− a2
3 och q = 4a3
27 −ab3 + c. Observera att formen av (2.4) är lättare än
(2.3) eftersom (2.4) inte har någon x2 term. Hjälpsats 2.1 säger dessutom att omhar något sätt att hitta lösningar till (2.4) så kan vi hitta lösningar till (2.3). SåHjälpsatsen förenklar problemet att hitta lösningar till tredjegradsekvationen.
Reducerat problem: Hitta alla lösningar till x3 + px+ q = 0.
Uppgifter:
1. Lös x3 + 6x2 + 12x− 7 = 0.
Ledtråd: Det här är inte alls en ledtråd, utan en generell matematiskprincip. När vi vill lösa ett problem så måste vi gå till våra satser. I dethär fallet så bör du titta på vad Hjälpsats 2.1 säger.
2. Hitta den allmänna lösningen till
x3 + ax2 + bx+ c = 0
om a2 = 3b.
Låt oss försöka att använda idéen att substituera x = u − v i ekvationenp(x) = x3 + px+ q = 0 och se om vi kan få ut mer information om lösningen:
p(u− v) = (u− v)3
+ p (u− v) + q = u3 − 3u2v + 3uv2 − v3 + pu− pv + q =
= u3 − v3 + (3uv − p) v − (3uv − p)u+ q. (2.5)
Återigen så har vi fått ett uttryck som, skenbart, ser jobbigare ut. Men vi kanvälja u och v ganska fritt, och om vi väljer uv = p
3 i (2.5) så försvinner tvåbesvärliga termer. Vi får1 v = p
3u och, från (2.5),
p(u− v) = u3 − p3
27u3+ q, (2.6)
vilket är lika med noll om
u6 + qu3 − p3
27= 0 (2.7)
1Här måste vi antaga att u 6= 0 då vi multiplicerar ekvation (2.6) med u3. Men om u = 0så måste p vara noll eftersom uv = p
3. Och om p = 0 så har vi ekvationen x3 + q = 0 vilken
har lösningarna x = 3√q, så fallet u = 0 är enkelt lösbart.

11
Observera att (2.7) är en andragradsekvation i u3 och har lösningarna
u3 = −q2±√q2
4+p3
27. (2.8)
Om vi drar tredjeroten ur (2.8) så får vi
u =3
√−q
2±√q2
4+p3
27. (2.9)
För att beräkna v så skulle vi kunna använda att v = p3u . Men det skulle ge ett
ganska fult uttryck för v. Istället så gör vi om samma beräkning som vi gjordeför att beräkna u och får då fram att
v =3
√q
2±√q2
4+p3
27. (2.10)
Vi måste vara noga här! I uttrycket (2.9) för u så har vi ett val ± framförkvadratroten och i uttrycket (2.10) så har vi ett val. Vi måste undersöka omvi kan välja ± oberoende av varandra i båda uttrycken. För att avgöra det såsätter vi in uttrycken (2.9) och (2.10) i relationen uv = p
3 och får
p
3= 3
√√√√(−q2±√q2
4+p3
27
)(q
2±√q2
4+p3
27
),
genom att inspektera ovanstående ekvation så ser vi att vi måste ha sammatecken i u som i v termen (då följer likheten av konjugatregeln). Vidare så serman att högerledet inte beror av vilket tecken vi väljer.
Vi får därför att en lösning till tredjegradsekvationen är:
x = u− v =3
√−q
2+
√q2
4+p3
27−
3
√q
2+
√q2
4+p3
27. (2.11)
Vi får följande hjälpsats.
Hjälpsats 2.2. Låt
x =3
√−q
2+
√q2
4+p3
27−
3
√q
2+
√q2
4+p3
27(2.12)
då är x en lösning till tredjegradsekvationen x3 + px+ q = 0.
Bevis: Beviset består av en enkel beräkning dår vi sätter in (2.12) i ekvatio-nen uttrycket x3 + px+ q och veri�erar att det är en lösning.
Ekvation (2.12) ger en lösning till ekvationen men vi vet att det borde �nnastre lösningar till tredjegradsekvationen. Vi borde ha missat något. Det som vi

12 CHAPTER 2. TREDJEGRADSEKVATIONEN.
inte har använt än är Förljdsats 1.1 som säger att ekvationen i (2.8) har trelösningar u, ω3u och ω2
3u och till dessa lösningar korresponderar v, ω23v och
ω3v.2 Vi kan därför skriva ner tre lösningar till tredjegradsekvationen.
Sats 2.1. Tredjegradsekvationen x3+px+q = 0 har följande tre lösningar (intenödvändigtvis olika)
x1 =3
√−q
2+
√q2
4+p3
27−
3
√q
2+
√q2
4+p3
27,
x2 = ω33
√−q
2+
√q2
4+p3
27− ω2
3
3
√q
2+
√q2
4+p3
27
och
x3 = ω23
3
√−q
2+
√q2
4+p3
27− ω3
3
√q
2+
√q2
4+p3
27,
där
ω3 = cos
(2π
3
)+ i sin
(2π
3
).
Exempel: För att hitta alla lösningar till x3 + 6x − 2 = 0 så använder vibara formeln från Sats 2.1 och beräknar att, med p = 6 och q = −2,
x1 =3
√1 +√
9− 3
√−1 +
√9 =
3√
4− 3√
2,
x2 = ω33√
4− ω23
3√
2
ochx3 = ω2
33√
4− ω33√
2
Uppgifter:
1. Hitta alla lösningar till x3 + 3x+ 4 = 0.
2. Hitta alla lösningar till x3 + 3x2 + 9x+ 3 = 0.
Ledtråd: Kan du använda Hjälpsats 2.1?
3. Om x1, x2 och x3 är rötter till x3+ax2+bx+c = 0 (x−x1)(x−x2)(x−x3)
4. Antag att vi vet att två rötter är lika i tredjegradsekvationen p(x) =x3 + 3x2 + 1 = 0. Hitta rötterna.
Ledtråd: Om rötterna är x1 och x2 så kan man skriva polynomet p(x) =(x−x1)2(x−x2). Använd detta för att visa att derivatan har en gemensamrot med ekvationen. Kan du hitta rötterna till p′(x) = 0.
2Observera att till ω3u korresponderar ω23v eftersom (ω3u)(ω2
3v) = ω33uv = uv.
Chapter 3
Lösning av
Fjärdegradsekvationer.
Vi går nu över till att studera fjärdegradsekvationen:
x4 + px3 + qx2 + rx+ s = 0. (3.1)
Vi kommer att angripa den genom att först hitta en form av ekvationen somär lätt att lösa och sen visa att vi, genom att lösa en tredjegradsekvation, kanreducera varje fjärdegradsekvation till den enkla formen. Låt oss formuleralösningen av den enkla formen som en hjälpsats.
Hjälpsats 3.1. Om (x2 + ax+ b
)2= (cx+ d)
2 (3.2)
då är x ett av följande fyra tal
x =c− a
2±√
(c− a)2
4+ (d− b) (3.3)
eller
x = −a+ c
2±√
(a+ c)2
4− (d+ b). (3.4)
Bevis: Genom att dra kvadratroten ur båda led i (3.2) ser vi att
x2 + ax+ b = cx+ d⇒ x2 + (a− c)x+ (b− d) = 0 (3.5)
ellerx2 + ax+ b = −(cx+ d)⇒ x2 + (a+ c)x+ (b+ d) = 0. (3.6)
Både (3.5) och (3.6) är andragradsekvationer som kan kan lösas med hjälpav formeln i Sats 1.1. Andragradsekvationen i (3.5) ger lösningarna i ekvation(3.3) och andragradsekvationen i (3.6) ger (3.4).
13

14 CHAPTER 3. LÖSNING AV FJÄRDEGRADSEKVATIONER.
Vi kan alltså lösa fjärdegradsekvationer på formen (3.2). Så om vi kan visaatt alla fjärdegradsekvationer kan skrivas på formen (3.2) så har vi visat att vikan lösa alla fjärdegradsekvationer.
Om vi utvecklar (3.2) så får vi
x4 + 2ax3 + (2b+ a2)x2 + 2abx+ b2 = cx2 + 2cdx+ d2. (3.7)
Genom att jämföra koe�cienter med den allmänna fjärdegradsekvationen
x4 + px3 + qx2 + rx+ s = 0, (3.8)
så ser vi atta =
p
2. (3.9)
Vi måste se om vi kan bestämma övriga koe�cienter b, c och d så att (3.7) och(3.8) sammanfaller.
Vi kommer snart att betrakta b som en variabel och skriver, för att under-stryka detta, b = y. Med b = y och a = p
2 (såsom i (3.9)) så blir vänsterledet i(3.2) (
x2 +p
2x+ y
)2= x4 + px3 +
(2y +
p2
4
)x2 + pyx+ y2. (3.10)
Men om x4 + px3 + qx2 + rx+ s = 0 så kan vi fortsätta (3.10) enligt(x2 +
p
2x+ y
)2=
(2y +
p2
4− q)
︸ ︷︷ ︸=A
x2 + (py − r)︸ ︷︷ ︸=B
x+ (y2 − s)︸ ︷︷ ︸=C
, (3.11)
där A,B och C de�nieras som koe�cienterna i polynomet (för att förenklanotationen något).
För att (3.11) skall vara på (3.2) så måste högerledet vara lika med c2x2 +2cdx+ d2 för några tal c och d. Men om detta ska vara möjligt så måste vi ha
A = c2, B = 2cd, och C = d2. (3.12)
Vi får välja c och d hur vi vill, så länge (3.12) är uppfylld, speci�kt så måste
B2 = 4AC ⇒ (py − r)2 = 4
(2y +
p2
4− q)(
y2 − s), (3.13)
där vi använde de�nitionen av A, B och C i implikationen. Det är enkelt attse att om (3.13) är uppfylld så kommer vi att kunna välja c och d så att (3.12)häller.1
Vi har nu visat att vi kan skriva en allmän fjärdegradsekvation på formen(3.2) om (3.13) gäller. Eftersom vi får välja y hur vi vill, så blir frågan: �Kanvi välja y så att (3.13) gäller?�
1Välj c =√A och d = ±
√B där + eller − väljer så att 2cd får samma tecken som B.

3.1. ETT EXEMPEL PÅ LÖSNINGEN AV EN FJÄRDEGRADSEKVATION.15
Men (3.13) är en tredjegradsekvation i y så vi kan de�nitivt (enligt Sats 2.1)hitta ett y, till och med tre olika y, så att (3.13) gäller. Vi har därför visat attvi kan skriva den allmänna fjärdegradsekvationen på (3.2) som vi kan lösa enligtHjälpsats 3.1. Vi kan därför lösa den allmänna fjärdegradsekvationen.
Vi kommer inte att skriva ner någon allmän formel för fjärdegradsekvatio-nen. En formel skulle bli lång och svåröverblicklig. Istället så räknar vi ettexempel för att gestalta hur ovanstående resonemang verkligen ger en lösningtill frärdergradsekvationen.
3.1 Ett exempel på lösningen av en fjärdegrad-
sekvation.
Om vi vill lösa en fjärdegradsekvation. Ta till exempel
x4 + 4x+ 3 = 0. (3.14)
Ekvationen i (3.14) är en fjärdegradsekvation på formen (3.1) med p = 0, q = 0,r = 4 och s = 3. Vi måste beräkna y. Detta gör vi genom att lösa (3.13) vilkenmed våra värden på p, q, r och s blir
(0 · y − 4)2
= 4
(2y +
02
4− 0
)(y2 − 3
)⇒ y3 − 3y − 2 = 0. (3.15)
En lösning till (3.15) får, enligt Sats 2.1
y =3
√1 +√
1− 1− 3
√−1 +
√1− 1 = 2.
Med detta värde på y = 2 får vi, enligt (3.11),
A = 4, B = −4, och C = 1.
Från dessa värden kan vi beräkna, från (3.12), c = 2 och d = −1. Sätter vi indessa värden, d.v.s. a = p
2 = 0, b = y = 2 c = 2 och d = 1, så får vi att (3.14)är samma ekvation som
(x2 + 2)2 = (2x− 1)2 ⇔ x4 + 4x+ 3 = 0. (3.16)
Den vänstra ekvationen i ekvivalensen (3.16) har lösningarna, enligt Hjälpsats3.1,
x = 1±√
1− 3 = 1±√
2i
ellerx = −1±
√1− 1 = −1 (dubbelrot).
Lösningarna är därför x = 1+√
2i, x = 1−√
2i och x = −1, där den sista rotenär en dubbelrot.
Uppgifter:
16 CHAPTER 3. LÖSNING AV FJÄRDEGRADSEKVATIONER.
1. Lös följande fjärdegradsekvationer:
(a) x4 + 5x3 − 2x− 1 = 0
(b) x4 + 4x+ 2 = 0.
Räkningarna blir ganska grötiga vid lösandet av fjärdegradsekvationenså det är inte superintressant att lösa många. Det viktiga är att duförsäkrar dig om att ovanstående utredning faktiskt leder till ett sätt attlösa fjärdegradaren.
Chapter 4
Mellanspel: lösning med
radikaler.
Låt oss börja att undersöka möjligheten att lösa femtegradsekvationen medhjälp av radikaler. Vi kan säga direkt att det inte existerar en allmän lösningtill femtegradsekvationen med hjälp av rarikaler. Det är det som gör problemetintressant. Att hitta en ny, och förmodligen ännu grötigare formel än den förfjärdegradsekvationen, vore, ärligt talat, mest bara jobbigt. Men att kunnabevisa att något inte går att lösa med en metod är intellektuellt fascinerande.
Men innan vi kan visa att det inte går att lösa femtegradsekvationen medhjälp av radikaler så måste vi reda ut vad vi menar med att lösa en ekvationmed hjälp av radikaler. I matematiken så måste vi alltid vara noga med attde�niera vad vi gör.
Låt oss titta på vår lösning till tredjegradsekvationen och se vad vi gör ilösningen av den. Om vi lite halvformellt går igenom de steg som behövs föratt bygga upp lösningsformeln i Sats 2.1.
1. Vi börjar med en given tredjegradsekvation
x3 + px+ q = 0. (4.1)
2. Vi formar p3
27 genom att multiplicera p med sig själv och sen med 127 . På
samma sätt skapar vi q2
4 . Vi adderar dessa till varandra och får p3
27 + q2
4 .
3. Vi drar kvadratroten ur p3
27 + q2
4 och får√
p3
27 + q2
4 .
4. Vi adderar ± q2 till√
p3
27 + q2
4 och får ± q2 +√
p3
27 + q2
4 .
5. Vi drar tredjeroten ur resultatet i föregående steg.
6. Vi drar en tredjerot ur 1 och får talet ω3.
17
18 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
7. Slutligen så multiplicerar vi ωk3 med tredjerötterna i steg 5 och adderarresultaten. Detta leder till formlerna i Sats 2.1.
Vi ser ovanstående procedur ett typfall av en lösning med hjälp av radikaler.I konstruktionen av lösningen så använde vi följande.
• Vi multiplicerar och adderar fritt med alla element i Q och de givna talenp och q. T.e.x. i steg 2.
• Vi drar rötter ur tal vi har skapat med hjälp av addition och multiplikation.T.ex. i steg 3, 5 och 6.
• Vi adderar och multiplicerar och drar rötter ur de rötter vi har skapat.T.ex. i steg 7.
För att skapa en lösning med hjälp av radikaler så får vi alltså använda dessa treprocedurer. Eftersom vi fritt använder element i talkroppen Q, och använderde operationer som är de�nierade för talkroppen Q så kan vi se Q som basenför vår konstruktion. Men talen p och q behöver inte ligga i vår talkropp. Omvi till exempel vill lösa x3 +
√2x + π = 0 så kommer p =
√2 och q = π inte
att ligga i Q. Vi vill även lägga använda rötter i vår lösning och rötter liggerinte alltid i Q. Vi måste formalisera ett sätt att utvidga Q till en talkropp sominnehåller p, q och eventuellt de rötter vi skapar.
De�nition 4.1. Låt K och L vara talkroppar och antag att K ⊂ L (du kantänka på K = Q och L = R eller L = C). Vidare låt α ∈ L. Då säger vi attden minsta talkropp M så att K ⊂ M och α ∈ M är kroppsutvidgningen av Kmed α. Vi kommer att skriva K(α) = M .
Det här ser väldigt abstrakt ut. Men det är väldigt enkelt, låt oss titta pånågra exempel.
Exempel 1: Vi kan titta på fallet K = Q och L = R och α =√
2. Så ärQ(√
2) den minsta talkropp som innehåller hela Q och också talet√
2. Eftersom√2 ∈ Q(
√2) så måste b
√2 ∈ Q(
√2) för b ∈ Q, detta eftersom om två tal b och√
2 ligger i en talkropp så måste produkten ligga i talkroppen. Eftersom summanav element i en talkropp också ligger i talkroppen så måste a + b
√2 ∈ Q(
√2)
för alla a, b ∈ Q.Vi hävdar att Q(
√2) består av precis alla tal a+b
√2 för a, b ∈ Q. Vi vet att
alla tal på formen a + b√
2 måste ligga i Q(√
2) enligt föregående paragraf. Vimåste dock visa att det inte behövs några �er tal i Q(
√2) för att att uppfylla
kroppsaxiomen i De�nition 1.1. Det är nio villkår som måste vara uppfyllda,men de �esta är triviala. Så låt oss fokusera på de mer intressanta villkåren ochlämna de övriga villkåren i De�nition 1.1 som en övning (de följer direkt frånmotsvarande egenskaper för R).
Det är framför allt axiom 5 och axiom 8 i de�nitionen för talkropp som ärintressanta. Axiom 5 för en talkropp säger att om α, β ∈ Q(
√2) så kommer
α × β ∈ Q(√
2). Om Q(√
2) innehåller exakt alla tal på formen a + b√
2 såmåste produkten av två tal på den formen också vara ett alt på den formen

19
(annars så vore vi tvungna att lägga till extra tal så att alla produkter låg iQ(√
2)). Låt α = a+ b√
2 och β = c+ d√
2, för a, b, c, d ∈ Q, då kommer
α× β = (a+ b√
2)(c+ d√
2) = (ac+ 2bd) + (ad+ cb)√
2.
Eftersom (ac+ 2bd) ∈ Q och (ad+ cb) ∈ Q så följer det att produkten är på denform vi vill.
Axiom 8 för talkroppar säger att alla tal α ∈ Q(√
2), så att α 6= 0, har enmultiplikativ invers α−1 så att α×α−1 = 1. Vi måste visa att om α = a+ b
√2,
a, b ∈ Q, så kommer α−1 = c + d√
2 för några tal c, d ∈ Q. Låt oss anta attα−1 = c+ d
√2 och se om vi kan välja c, q ∈ Q så att α× α−1 = 1. Vi får
α× α−1 = (ac+ 2bd) + (ad+ cb)√
2⇒ ac+ 2bd = 1 och ad+ cb = 0.
De sista ekvationerna kan enkelt lösas och vi får c = aa2−2b2 och d = −b
a2−2b2 , vilämnar det som övning 2 att veri�era att nämnarna inte är lika med noll. Attövriga kroppsaxiom är uppfyllda lämnas som en övning.
Exempel 2: Kroppsutvidgningen Q(π) är av en helt annan karaktär änQ(√
2). Skillnaden ligger i att π inte är lösningen till någon polynomekvationmed rationella koe�cienter, man säger att π inte är ett algebraiskt tal. Dettamedför att kroppen Q(π) består av alla kvoter
akπk + ak−1π
k−1 + ...+ a1π + a0bmπm + bm−1πm−1 + ...+ b1π + b0
, (4.2)
där aj , bl ∈ Q och inte alla bl = 0. Eftersom π inte är lösningen till någonpolynomekvation, speci�kt inte en lösning till bmxm+bm−1x
m−1+...+b1x+b0 =0, så är nämnaren i (4.2) inte lika med noll. Det är relativt uppenbart att allatal på formen (4.2) måste ligga i Q(π) och att dessa tal formar en kropp.
Exempel 3: Antag att vi vill faktorisera polynomet x3−1. Vi vet faktoris-eringen är x3 − 1 = (x − x1)(x − x2)(x − x3) där x1, x2 och x3 är lösningarnatill x3 = 1. Vi vet att lösningarna är x1 = 1, x2 = ω3 och x3 = ω2
3 . Såfaktoriseringen blir
x3 − 1 = (x− 1)(x− ω3)(x− ω23).
Men vi kan bara göra den faktoriseringen om vi tillåter komplexa tal ω3 och ω23 .
Om vi vill göra faktoriseringen i talkroppen Q så kan vi bara ta med en förstaroten, för endast x1 ∈ Q och får då
x3 − 1 = (x− 1)(x2 + x+ 1).
Om vi vill faktorisera vidare så måste vi faktorisera i en kroppsutvidgning avQ, t.ex. Q(ω3) eller Q(ω2
3). Eftersom Q(ω3) är en kropp så måste ω3×ω3 = ω23
också ligga i Q(ω3). På samma sätt så måste ω23 × ω2
3 = (ω33)ω3 = ω3 att ligga
i Q(ω23). Det följer att vi får samma kropp om vi utvidgar med ω3 som om vi
utvidgar med ω23 , d.v.s. Q(ω3) = Q(ω2
3).
20 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
Låt oss sammanfatta det viktiga i det här exemplet. Om vi vill faktoriseraett polynom p(x) i Q så går det bara om alla rötter till p(x) ligger i Q. Om vi harett polynom vars rötter inte ligger i Q, t.e.x. x2 + x+ 1 med rötter ω3, ω
23 /∈ Q,
så kan vi faktorisera polynomet i kroppsutvidgningen Q(α1, α2, ..., αn) där αjär rötter till polynomet.
Exempel 4: Ett sista exempel. Titta på ekvationen x5 = 4. Eftersomlösningarna är xj = ωj5
5√
4 för j = 0, 1, 2, 3, 4 så kan vi inte lösa ekvationen i Q.Om vi gör utvidgningen Q( 5
√4) så faktoriserar polynomet i
(x− 5√
4)(x4 +
5√
4x3 + (5√
4)2x2 + (5√
4)3x+ (5√
4)4)
= x5 − 4. (4.3)
Observera1 att alla koe�cienter i (4.3) ligger i Q( 5√
4). Vi kan inte faktoriserax5− 4 vidare i Q( 5
√4) eftersom alla rötter till x4 + 5
√4x3 + ( 5
√4)2x2 + ( 5
√4)3x+
( 5√
4)4 är komplexa och Q( 5√
4) innehåller bara reella tal.Om vi vill faktorisera vidare så måste vi göra en kroppsutvidgning av Q( 4
√4)
med ω5 och får då kroppen Q( 5√
4)(ω5) = Q( 5√
4, ω3). I den utvidgningen såfaktoriseras polynomet x5 − 4 i linjära faktorer
x5 − 4 = (x− 5√
4)(x− ω55√
4)(x− ω25
5√
4)(x− ω35
5√
4)(x− ω45
5√
4).
I ovanstående exempel så är det andra av en lite annan natur. I exempel 1,3 och 4 så lägger vi till en rot, eller en radikal, men i exempel 2 så utvidgar vimed ett element som inte är en radikal till något tal i Q. Eftersom vi mest ärintresserade av radikalutvidgningar så inför vi följande de�nition.
De�nition 4.2. Låt K och L vara talkroppar, K ⊂ L, och α ∈ L. Då säger viatt K(α) är en radikalutvidgning av K om, för något tal p ∈ N, αp ∈ K.
Den här de�nitionen formaliserar begreppet rot av ordning p, α är ju en�pte-rot� till β om αp = β. Till exempel så är Q(ω2
33√
7) en radikalutvidgningav Q eftersom (ω2
33√
7)3 = 7 ∈ Q.Det som vi kallade att �dra rötter ur tal vi har skapat� under den andra
punkten i början av det här kapitlet kan alltså tolkas som att göra en radika-lutvidgning av Q.
Vi är nu redo att formalisera vad vi menar med att lösa en femtegradsekva-tion med hjälp av radikaler.
De�nition 4.3. Vi säger att vi kan lösa
p(x) = xn + an−1xn−1 + an−1x
n−2 + ...+ a2x2 + a1x+ a0 = 0
1När en matematiker skriver observera så betyder det oftast att det är något man skalltänka på. Ibland så kräver det bara ett par sekunders uppmärksamhet, ibland kräver detmer. Det är viktigt att man försöker förstå alla påståenden som görs i texten. Så när du läserobservera så förväntas du tänka på det tills du förstår.

21
med hjälp av radikaler om vi kan göra ett ändligt antal radikalutvidgningar
Q(an, an−1, ..., a0) ⊂ Q(an, an−1, ..., a0, α1) ⊂ Q(an, an−1, ..., a0, α1, α2) ⊂ ...
⊂ Q(an, an−1, ..., a0, α1, ..., αm)
så att p(x) faktoriserar i linjära faktorer i talkroppen Q(an, ..., a0, α1, ..., αm).
Detta kan verka väldigt abstrakt, och det är väldigt abstrakt, men det ärviktigt att formalisera den matematik vi gör. Att formalisera den matematik vigör ger oss också en möjlighet att lösa problem:
Genom att formalisera matematiken så vet vi exakt vad vi har attgöra med och det ger oss verktyg att angripa problem.
Det är viktigt att man förstår att får formalisering av problemet är (i nå-gon mening) ekvivalent med vår intuition av problemet. För att underlättaförståelsen så tittar vi på det enklaste exemplet för lösning med radikaler ochser att vi faktiskt löser det med hjälp av radikaler enligt vår de�nition.
Exempel 5: Det går att lösa andragradsekvationen med hjälp av radikaler.När vi skriver detta så menar vi naturligtvis �med hjälp av radikaler� enligt vårde�nition. Givet en andragradsekvation x2 + px + q = 0 så måste vi hitta enserie av radikalutvidgningar sådana att x2 + px + q = 0 faktoriserar i linjärafaktorer i den sista radikalutvidgningen i serien. Vi startar med talkroppenQ(p, q). Eftersom Q(p, q) är en kropp, och vi får därrför multiplicera och adderaelement som vi behagar så kommer
p2
4− q ∈ Q(p, q).
Om vi väljer α1 sådant att α21 = p2
4 − q så kommer Q(p, q, α1) att vara enradikalutvidgning av Q(p, q). De�nitionen av radikalutvidgning är ju att αp1skall vara ett element i Q(p, q) för något p ∈ N, speci�kt så får vi p = 2 i vårtfall. Med det valet av radikalutvidgning så kommer, eftersom Q(p, q, α1) är enkropp
−p2
+ α1 ∈ Q(p, q, α1) och − p
2− α1 ∈ Q(p, q, α1).
Därför så kommer (x−
(−p
2+ α1
))(x−
(−p
2− α1
))=
= x2 −(−p
2+ α1 −
p
2− α1
)x+
(−p
2+ α1
)(−p
2− α1
)=
= x2 + px+p2
4− α2
1 = x2 + px+ q,
där vi använde att α21 = p2
4 − q i den sista likheten. Observera att de linjärafaktorerna i vänsterledet i den sista uträkningen endast innehåller tal som ligger
22 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
i talkroppen Q(p, q, α1). Vi har därmed visat att det �nns en radikalutvidgningav Q(p, q), nämligen Q(p, q, α1), så att x2 + px+ q faktoriserar i linjära faktoreri radikalutvidgningen.
Man kan tycka att ovanstående exempel är lite trivialt. Men det visat attvår tolkning av lösning med radikaler är relevant.
Vi är ännu inte nära att visa att femtegradsekvationen är olösbar med hjälpav radikaler. Men vi vet i alla fall vad det betyder att lösa en ekvation medhjälp av radikaler. Härnäst så måste vi sätta upp en strategi för att angripavårt problem.
Uppgifter:
1. Veri�era att Q(√
2) uppfyller alla axiom för att vara en talkropp (detta ärenkelt!).
2. Visa att om a, b ∈ Q då är a2 − 2b2 6= 0 om inte både a = 0 och b = 0.
Ledtråd: Ligger ab ∈ Q? Ligger
√2 ∈ Q?
3. Följ argumentet i Exempel 1 för att visa att C = R(i) består av alla talsom kan skrivas på formen a+ bi för a, b ∈ R.
4. Visa att Q(π) består av alla tal på formen (4.2).
5. Beskriv alla element i talkroppen Q( 3√
3, i).
6. Låt polynomet x3 + px + q vara givet och skriv ner en serie radika-lutvidgningar
Q(p, q) ⊂ Q(p, q, α1) ⊂ Q(p, q, α1, α2)
så att x3 + px + q faktoriserar i linjärfaktorer i Q(p, q, α1, α2). Speci�ktså skall du hitta α1 och α2 och se försäkra dig om att alla utvidgningar ärradikalutvidgningar.
4.1 En Strategi för att visa Femtegradsekvatio-
nens olösbarhet.
Vi måste hitta ett sätt att angripa problemet med olösbarhet med hjälp avradikaler. Vi har väldigt lite att gå på, men det �nns en liten detalj som ärvärd att reda ut - och den lilla detaljen är nyckeln till olösbarheten hos femte-gradsekvationen.2 Ett vanligt irritationsmoment när man lär sig lösningen avandragradsekvationen är att när man får ± framför kvadratroten. Varför måstekvadratroten bli ett positivt tal? När vi lägger till α i radikalutvidgningen iDe�nition 4.2 så säger man ingenting om tecknet på α, kan man lika gärna
2Nyckeln i meningen att det är den detaljen som släpper in oss i problemet och ger osstillräckligt med matematiskt struktur för att analysera det. Det krävs dock en hel del hårtarbete för att verkligen bevisa att femtegradsekvationen saknar radikallösningar.
4.1. EN STRATEGI FÖR ATT VISA FEMTEGRADSEKVATIONENS OLÖSBARHET.23
lägga till −α (om p är ett jämt tal)? I vilken mening kan man lika gärna läggatill −α i så fall?
Exempel 6. Om vi gör radikalutvidgningen Q(α) där α2 = 2 så �nns dettvå möjligheter: vi kan titta på Q(
√2) eller på Q(−
√2). Observera att båda
dessa kroppsutvidgningar ger kroppar med samma element. Om r ∈ Q(√
2)så kommer r ∈ Q(−
√2) och tvärt om. Detta följer direkt av Exempel 1 där
vi visade att alla element i Q(√
2) var på formen a + b√
2 för a, b ∈ Q (ocha + b(−
√2) är på samma sätt alla element i Q(−
√2)). Så vi får kroppar med
samma element oavsett hur vi gör.
Men en kropp är inte bara en mängd av element, vi har också operationer(addition och multiplikation) de�nierade på kroppen. Är Q(
√2) och Q(−
√2)
samma sak även om vi tar dessa operationer i hänseende. Intuitivt så borde devara samma. Om vi skriver α =
√2 och β = −
√2 så blir kropparna Q(α) och
Q(β) där α och β uppfyller exakt samma räkneregel α2 = β2 = 2.Vi måste vara noga och de�niera vad vi menar med att två talkroppar är
�samma� - eller isomorfa för att använda ett �nt ord.
De�nition 4.4. Vi säger att två talkroppar K och L är isomorfa om det exis-terar en funktion (som vi kallar en isomor�) σ : K 7→ L så att
1. σ är en bijektion3 (och därför inverterbar)
2. σ(a+ b) = σ(a) + σ(b)
3. σ(a× b) = σ(a)× σ(b).
Exempel 7: Q(√
2) och Q(−√
2) är isomorfa. För att visa detta så måstevi de�niera en isomor� σ : Q(
√2) 7→ Q(−
√2). Vi kan de�niera isomor�n
σ(a+ b√
2) = a+ b(−√
2).
Vi måste visa tre saker:
1. σ är en bijektion. Att en σ är en bijektion innebär att σ är injektiv 4ochsurjektiv5. Vi visar dessa fall separat.
(a) σ är injektiv. Vi ska visa att om σ(a + b√
2) = σ(c +√
2) då ära + b
√2 = c + d
√2. Men om σ(a + b
√2) = σ(c +
√2) så är, enligt
de�nitionen av σ, a + b(−√
2) = c + d(−√
2) vilket uppenbarligenimplicerar att a+ b
√2 = c+ d
√2.
(b) σ är surjektiv. Vi måste visa att för varje a+ b(−√
2) ∈ Q(−√
2) så�nns det ett c + d
√2 ∈ Q(
√2) så att σ(c + d
√2) = c + d(−
√2) =
a+b(−√
2) men det är uppenbart att detta gäller om c = a och d = b.
3En bijektiv funktion är injektiv och surjektiv, två begrepp som förklaras i nästkommandeexempel (i fotnoterna nedan).
4Låt oss påminna oss om att en funktion är injektiv om: σ(α) = σ(β) implicerar att α = b.5En funktion σ : K 7→ L är surjektiv om det för varje β ∈ L �nns ett α ∈ K så att σ(α) = β
24 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
2. Vi måste visa att σ(α+ β) = σ(α) + σ(β) för alla α, β ∈ Q(√
2). Men omα = a+ b
√2 och β = c+ d
√2 så är
σ((a+ c) + (b+ d)√
2) = (a+ c) + (b+ d)(−√
2) =
= (a+ b(−√
2)) + (c+ d(−√
2)) = σ(a+ b√
2) + σ(c+ d√
2).
3. Vi måste visa att σ(α× β) = σ(α)× σ(β) för alla α, β ∈ Q(√
2). Men omα = a+ b
√2 och β = c+ d
√2 så är
σ((a+ b√
2)(c+ d√
2)) = σ((ac+ 2cd) + (ad+ bc)√
2) =
= (ac+ 2cd) + (ad+ bc)(−√
2) = (a+ b(−√
2))(c+ d(−√
2)) =
= σ(a+ b√
2)× σ(c+ d√
2).
En intressant aspekt av isomor�n σ : Q(√
2) 7→ Q(−√
2) är att det är enisomor� mellan samma mängder. Vi kommer att kalla en sådan isomor� för enautomor�. Vidare så kommer σ(a) = a för varje a ∈ Q så σ påverkar inte derationella talen, vi säger att Q är en �xkropp för automor�n σ.
De�nition 4.5. Om σ : K 7→ K är en isomor� mellan en kropp K och kroppensjälv så säger vi att σ är en automor�.
Mängden av alla element a ∈ K sådana att σ(a) = a kallas för �xkroppentill automor�n σ. Om σ är en automor� på en kropp K och A ⊂ K är någonmängd så att σ(a) = a för alla a ∈ A så säger vi att σ lämnar A �x.
Observera att när vi gör utvidgningen
från Q(an, ..., a0, α1, ..., αj−1) till Q(an, ..., a0, α1, ..., αj−1, αj)
så lägger vi till en radikal, d.v.s. en lösning till αpjj = a för något a ∈Q(an, ..., a0, α1, ..., αj−1). Här så har vi ett val i vilken rot vi lägger till men imånga fall så kommer valet att vara oväsentligt eftersom om vi skulle lägga tilllösningen αj till α
pjj = a istället för αj så skulle vi få en isomorf talkropp med
�xkropp Q(an, ..., a0, α1, ..., αj−1).Vi behöver tre idéer till innan vi kan förmulera vår strategi. Den första
är att automor�erna själva har en viss struktur: vi kan multiplicera dem medvarandra:6 de formar något som kallas en grupp, ett extremt viktigt begrepp imatematiken som vi skall de�niera härnäst). Sen så skall vi visa att den gruppenav automor�er man får vid en radikalutvidgning är �ovanligt snäll�. Det sistavi skall göra är att gå tillbaka till de�nitionen av lösning med hjälp av radikaleroch titta på de�nitionens sista del (att p(x) kan faktoriseras i linjära faktorer)och försöka argumentera för att i allmänhet så är inte automor�gruppen särskiltsnäll.
Vi börjar med att de�niera begreppet grupp.6Och när jag skriver att vi kan multiplicera två automor�er med varandra så menar jag att
vi kan göra en funktionssammansättning av två automor�er - så mycket för att matematikenär ett exakt språk!
4.1. EN STRATEGI FÖR ATT VISA FEMTEGRADSEKVATIONENS OLÖSBARHET.25
De�nition 4.6. Vi säger att en mängd G är en grupp om det �nns en operation× de�nierad på G så att g1 × g2 ∈ G för alla g1, g2 ∈ G och
1. Det �nns ett element e ∈ G, identitetselementet, så att e× g = g × e = gför alla g ∈ G.
2. För varje g ∈ G så �nns det ett element g−1 ∈ G så att g × g−1 = e.
3. För alla f, g, h ∈ G så f × (g × h) = (f × g)× h.
Precis som för talkroppar så är �grupp� en abstrakt struktur som ofta dykerupp i matematiken. Strukturen är abstrakt och man skall inte tolka × gånger,× skall ses om en godtycklig operation och det kan lika gärna vara + som ×eller funktionssammansättning.
Låt oss titta på några exempel.
Exempel 8: Heltalen Z formar en grupp om vi tolkar × som addition. Dåblir identitetselementet e = 0, eftersom a + 0 = 0 + a = a för alla a ∈ Z.Elementet a−1 blir −a, vilket kan tyckas vara lite knepigt. Men i de�nitionenav grupp så säger vi inte att a−1 = 1
a ; vi kräver endast att a × a−1 = e under
den tolkning av symbolen × vi har för tillfället.
Exempel 9: Om G = C \ {0} bestående av de nollskilda komplexa talen såär G en grupp under vanlig komplex multiplikation. Vi kan också tolka hela Csom en grupp under addition.
Vi kommer att diskutera grupper mer utförligt i nästa kapitel. Just nuså är vi mest intresserade av att utarbeta en strategi för att visa att femte-gradsekvationen inte är lösbar med radikaler och för det så behöver vi visa attautomor�erna formar en grupp.
Hjälpsats 4.1. Låt K vara en talkropp. Låt G vara mängden av alla auto-mor�er på K. Då utgör G en grupp om vi tolkar × som sammansättningen avfunktioner. Vi kallar den gruppen för automor�gruppen.
Om K är en kropp och K(α1, α2, ..., αm) en kroppsutvidgning av K. Dåkommer alla automor�er på K(α1, α2, ..., αm) som lämnar K �x att utgöra engrupp om × är sammansättning av funktioner.
Bevis: Vi börjar med att visa att det �nns ett enhetselement e. Låt evara automor�n som avbildar alla element på sig själva: e(a) = a för allaa ∈ K(α1, α2, ..., αm). Då kommer σ◦e(a) = e◦σ(a) = σ(a) för alla automor�er.Att varje σ har en invers följer av att bijektioner är inverterbara och att inversenav en bijektion är en bijektion. Inversen kommer också �xera K eftersom omb ∈ K så kommer σ(b) = b (eftersom σ �xerarK) men det betyder att b = σ−1(b)så σ−1 �xerar K.
Vi måste också visa att σ−1 är en isomor�, d.v.s. bevarar multiplikation ochaddition. Vi kommer bara att visa att σ−1 bevarar addition, d.v.s. att
σ−1(a+ b) = σ−1(a) + σ−1(b). (4.4)

26 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
Om vi applicerar σ på vänsterledet i (4.4) så får vi a + b och om vi applicerarσ på högerledet får vi σ(σ−1(a) + σ−1(b)) = σ(σ−1(a)) + σ(σ−1(b)) = a + beftersom σ bevarar addition. Men eftersom σ är injektiv och har samma värdepå VL och HL i (4.4) så måste likheten gälla. Att σ−1 bevarar multiplikationbevisas analogt.
Om σ1 och σ2 är automor�er med �x kropp K så kommer σ1 ◦ σ2 också attvara en automor� som lämnar K �x. Detta följer av att om a ∈ K så σ2(a) = a,eftersom σ2 lämnar K �x, så σ1 ◦ σ2(a) = σ1(a) = a, eftersom σ1 lämnar K �x.Att σ1 ◦ σ2 är en bijektion följer av att alla sammansättningar av bijektioner ärbijektioner.
För att se att σ1 ◦σ2 är en automor� så måste vi även veri�era antaganden iom addition och multiplikation i De�nition 4.4. Men det är enkelt så vi kommerbara veri�era att σ1 ◦ σ2(a + b) = σ1 ◦ σ2(a) + σ1 ◦ σ2(b). För att se detta såräknar vi
σ1 ◦ σ2(a+ b) = σ1(σ2(a+ b)) = σ1(σ2(a) + σ2(b)) =
= σ1(σ2(a)) + σ1(σ2(b)) = σ1 ◦ σ2(a) + σ1 ◦ σ2(a),
där vi först använde de�nitionen av ◦, sen att σ2 är en isomor�, σ1 är en isomor�och slutligen de�nitionen av ◦ igen.
Det som gör ovanstående sats intressant är att den ger automor�erna enviss struktur. Vi är speciellt intresserade av automor�grupper G på K(α),där K(α) är en radikalutvidgning av K, som har �xkroppen K. Kan vi säganågot om dessa automor�grupper? Vi kommer senare att visa att man dessaautomor�grupper faktiskt har en väldigt enkel struktur, se Kapitel 6.
Låt oss introducera en sista idée innan vi kan formulera en strategi. Det viär ute efter är att göra en rad kroppsutvidgningar av Q(an−1, an−2, ..., a0) så attpolynomet p(x) faktoriserar i linjära faktorer i talkroppenQ(an−1, ..., a0, α1, ..., αm).Men om, säg för ett femtegradspolynom,
x5 + a4x4 + ...a1x+ a0 = (x− x1)(x− x2)...(x− x5)
så måste, vilket man ser genom att multiplicera ut högerledet,
a4 = −(x1 + x2 + x3 + x4 + x5) (4.5)
a3 = x1x2+x1x3+x1x4+x1x5+x2x3+x2x4+x2x5+x3x4+x3x5+x4x5 (4.6)
a2 = −∏i6=j 6=k
xixjxk = −(x1x2x3 + x1x2x4 + x1x2x5 + ...+ x3x4x5) (4.7)
a1 = x1x2x3x4 + x1x2x3x5 + x1x2x4x5 + x1x3x4x5 + x2x3x4x5 (4.8)
a0 = −x1x2x3x4x5. (4.9)
Det �nns två saker vi kan se från detta. Den första är att om vi lägger tillalla rötter, x1, x2, ..., x5, till Q (d.v.s. gör kroppsutvidgningen till Q(x1, ..., x5))så kommer alla koe�cienter a4, a3, ..., a0 att ligga i den utvidgade kroppen:
Q(a4, a3, ..., a0) ⊂ Q(x1, ..., x5).

4.1. EN STRATEGI FÖR ATT VISA FEMTEGRADSEKVATIONENS OLÖSBARHET.27
Vidare, och mer intressant, så kommer varje bijektiv avbildning
σ : {x1, x2, ..., x5} 7→ {x1, x2, ..., x5} (4.10)
att lämna a4, a3, a2, a1 och a0 oförändrade. Speci�kt så kommer varje bijektionσ, såsom i (4.10), att avbilda xj på något xk och om σ är en bijektion så kommeralla rötter att ligga i bildmängden.
Exempel 10: Om σ är en bijektion såsom i (4.10) de�nierad enligt
σ(x1) = x2σ(x2) = x3σ(x3) = x4σ(x4) = x5σ(x5) = x1.
(4.11)
Låt oss antaga att σ de�nierar en automor� på Q(x1, x2, ..., x5) som har�xkroppen Q. Då kommer
σ(a1) = σ(x1)σ(x2)σ(x3)σ(x4) + σ(x1)σ(x2)σ(x3)σ(x5)+
+σ(x1)σ(x2)σ(x4)σ(x5) + σ(x1)σ(x3)σ(x4)σ(x5) + σ(x2)σ(x3)σ(x4)σ(x5) =
= x2x3x4x5 + x2x3x4x1 + x2x3x5x1 + x2x4x5x1 + x3x4x5x1 = a1.
På samma sätt så kommer σ(a4) = a4, σ(a3) = a3, σ(a2) = a2 samt σ(a0) = a0.Det här exemplet gäller för alla bijektioner σ som kan utökas till automor�er
på Q(x1, x2, ..., x5) med �xkropp Q.
Observera att om x5 + a4x4 + ...a1x + a0 = 0 är lösbar med radikaler så
skall automor�gruppen på Q(x1, x2, ..., x5) som �xerar kroppen Q(a4, a3, ..., a0)ha en väldigt speciell struktur! Vi måste kunna skapa Q(x1, x2, ..., x5) via ettantal radikalutvidgningar som har väldigt speciella automor�grupper. Sam-tidigt så kan man förvänta sig, såsom i exempel 10, att att automor�gruppenav Q(x1, x2, ..., x5) som �xerar Q(a4, a3, ..., a0) skall bestå av alla bijektionermellan elementen x1, x2, ..., x5. Har automor�gruppen av alla bijektioner denstruktur den måste ha för att kunna skapas via radikalutvidgningar? Om inteså kan vi inte skapa Q(x1, x2, ..., x5) via radikalutvidgningar och därför så ärinte polynomet lösbart med radikaler!
Vi är nu redo att formulera en strategi för att angripa lösbarheten av femte-gradsekvationen med hjälp av radikaler.
Steg 1: Grupper är en av huvudingridienserna i vår analys; i måste därförförstå oss på grupper bättre. Vi måste se några exempel på grupper så attvi får lite förtrogenhet med begreppet. Vidare så har vi, något vagt, antyttatt automor�grupper som fås via radikalutvidgningar har en speciell och enkelstruktur. Vi måste de�niera exakt vad vi menar med detta, vi kommer att kallasådana grupper för lösbara grupper och de�niera vad som menas med detta.Vi måste också undersöka den sista gruppen vi diskuterade: gruppen bestående

28 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
av alla bijektioner såsom i (4.10). Vi kommer att kalla dessa grupper för permu-tationsgupper. Hela vår strategi kommer att bero på om permutationesgruppenmellan fem element är lösbar, vi måste alltså undersöka detta. Den första delenav vår strategi kommer att utredas i Kapitel 5.
Steg 2: Vi måste också förstå bättre vad en kroppsutvidgnng är. Speciellt såmåste vi visa att kroppsutvidgningar via radikaler leder till lösbara grupper ochverkligen visa att om p(x) = 0 är en polynomekvation av grad n som är lösbarmed radikaler så innebär det att talkroppen Q(x1, x2, ..., xn), där x1, x2, ..., xnär rötterna till ekvationen, är ger upphov till en lösbar lösbar automor�gruppav kroppen Q(x1, x2, ..., xn) med Q(an−1, ..., a0) som �xkropp (an−1, .., a0 ärkoe�cienterna i polynomet p(x) s tidigare). Vi kommet att göra detta i Kapitel6.
Steg 3: Vid det här laget så har vi visat att om vi kan lösa p(x) = 0 medhjälp av radikaler så kommer gruppen av automor�er på Q(x1, ..., x5) som läm-nar Q(a4, ..., a0) �xt att vara en lösbar grupp. Vi kommer också att ha sättatt permutationegruppen med fem element (d.v.s. gruppen av alla bijektionerfrån {x1, x2, ..., x5} till sig själv) inte är lösbar (se Sats 5.6). Det återstår attbevisa att det �nns ett femtegradspolynom p(x) så att automor�gruppen påQ(x1, ..., x5) består av alla permutationer av rötterna. Det följer då att auto-mor�gruppen inte är lösbar och därför så är p(x) = 0 inte lösbar med hjälp avradikaler. Vi kommer att visa detta i Kapitel 7.
Vi avslutar det här kapitlet med att ge ett exempel på en beräknad auto-mor�grupp.
Exempel 11: Betrakta polynomet p(x) = (x2 + 1)(x2 − 2) om vi vill lösapolynomet med radikaler så lägger vi först till
√2 till Q och får Q(
√2) =
{a + b√
2; a, b ∈ Q}. Sen lägger vi till i till Q(√
2) och får Q(√
2, i). Det gåratt visa (se övning 5) att
Q(√
2, i) = {a+ b√
2 + ci+ d√
2i; a, b, c, d ∈ Q}.
För att beskriva automor�gruppen av Q(√
2, i) som lämnar Q �xt. Först såobserverar vi att om σ är en automor� med �xkropp Q så kommer, för varjex ∈ Q(
√2, i), σ(x2 + 1) = σ(x)2 + σ(1) = σ(x)2 + 1. Så om x löser x2 + 1 = 0
så måste σ(x) också lösa x2 + 1 = 0. Detta innebär att σ(i) = i eller σ(i) = −i.På samma sätt så kommer σ(
√2) =
√2 eller σ(
√2) = −
√2. Detta gör att vi
får fyra automor�er
e(x) = x för alla x ∈ Q(√
2, i),
σ√2(x) =
x om x ∈ Q−√
2 om x =√
2i om x = i,
σi(x) =
x om x ∈ Q√
2 om x =√
2−i om x = i

4.1. EN STRATEGI FÖR ATT VISA FEMTEGRADSEKVATIONENS OLÖSBARHET.29
och
τ(x) =
x om x ∈ Q−√
2 om x =√
2−i om x = i.
Eftersom dessa är automor�er med �xkropp Q så de�nierar detta automor-�erna på alla element i Q(
√2, i), t.e.x.
τ(a+ b√
2 + ci+ d√
2i) = a+ bτ(√
2) + cτ(i) + dτ(√
2)τ(i) = (4.12)
= a− b√
2− ci+ d√
2i.
Vi skulle egentligen behöva bevisa att alla fyra automor�erna bevarar additionoch multiplikation och att de är bijektioner, men det är jättelätt att veri�era7
så vi låter bli att göra det.Eftersom alla automor�er, med �xkropp Q, måste uppfylla σ(
√2) = ±
√2
och σ(i) = ±i och värdet av automor�n i dessa två punkter unikt bestäm-mer automor�n på hela Q(
√2, i) (såsom i (4.12)) så kan det bara �nnas fyra
automor�er, så vår lista innehåller alla automor�er.Dessa formar en grupp under sammansättning. Vi kan lätt beräkna t.ex.
σ√2◦τ genom att beräkna värdet i punkterna√
2 och i, då dessa värden bestäm-mer automor�n unikt så räcker det att beräkna automor�n i dessa värden. Vifår
σ√2 ◦ τ(√
2) = σ√2(−√
2) = −σ√2(√
2) =√
2
ochσ√2 ◦ τ(i) = σ√2(−i) = −i
så σ√2 ◦ τ = σi. På samma sätt så kan vi beräkna alla sammansättningar ochfå följande multiplikationstabell:
◦ e σ√2 σi τ
e e σ√2 σi τσ√2 σ√2 e τ σiσi σi τ e σ√2
τ τ σi σ√2 e
Uppgifter:
1. Bevisa att om σ : K 7→ L är en isomor� så kommer σ(0) = 0 och σ(1) = 1(där samma symbol 0 och 1 används för nollan och ettan i båda krop-parna).
2. Visa att
7Bara att räkna ut σ(x+ y) och sen σ(x) + σ(y) för x, y ∈ Q(√2, i) och σ = e, σ√2, σi och
τ och på samma sätt för multiplikation. Långa och tråkiga beräkningar.
30 CHAPTER 4. MELLANSPEL: LÖSNING MED RADIKALER.
(a) C \ {0} är en grupp under multiplikation (d.v.s. om vi tolkar × somvanlig komplex multiplikation).
(b) C är en grupp under addition.
(c) C \ {0} inte är en grupp under addition.
Ledtråd: Kommer C \ {0} att ha ett element e under addition?
(d) C inte är en grupp under multiplikation.
Ledtråd: Kommer alla element i C att ha en invers?
3. Vi de�nierar operationen × på mängden {x, s, p} (x=sax, s=sten ochp =påse) där
a× b =
{den som vinner i �sax, sten och påse� om a 6= ba om a = b.
Hitta alla sätt på vilka {x, s, p} inte är en grupp under operationen ×.
4. Visa att komplex konjugering är en automor� av C.
5. Visa att
Q(√
2, i) = {a+ b√
2 + ci+ d√
2i; a, b, c, d ∈ Q}.
Det kan vara värt att först använda metoden i Exempel 1 för att visaatt Q(
√2, i) = {s + ti; s, t ∈ Q(
√2)} (observera att enl. exempel 1
Q(√
2) = {s+ t√
2; s, t ∈ Q}).
6. Bevisa att om φ : K 7→ L är en isomor� så kommer φ−1 : L 7→ K att varaen isomor�.
[Ledtråd:] Vi gör alla delar av beviset i Hjälpsats 4.1. Men det kan varaen bra träning att göra beviset själv i alla fall - man lär sig matte bättrepå att skriva bevis än på att läsa bevis.
7. Beskriv automor�gruppen till Q( 3√
2, i).
8. Om g ∈ G, G en grupp, så antar vi att det �nns ett g−1 ∈ G så att g ×g−1 = e. Ibland så kallar man ett sådant element, g−1, för högerinversentill g.
(a) Bevisa att högerinversen g−1 också är en vänsterinvers: g × g−1 =e⇒ g−1 × g = e.
(b) Bevisa att inversen till g är unik: d.v.s. att om g×f = e och g×h = eså kommer f = h.
Chapter 5
Lite Gruppteori.
5.1 Exempel på grupper.
Vi börjar vårt studie av grupper med ett exempel.
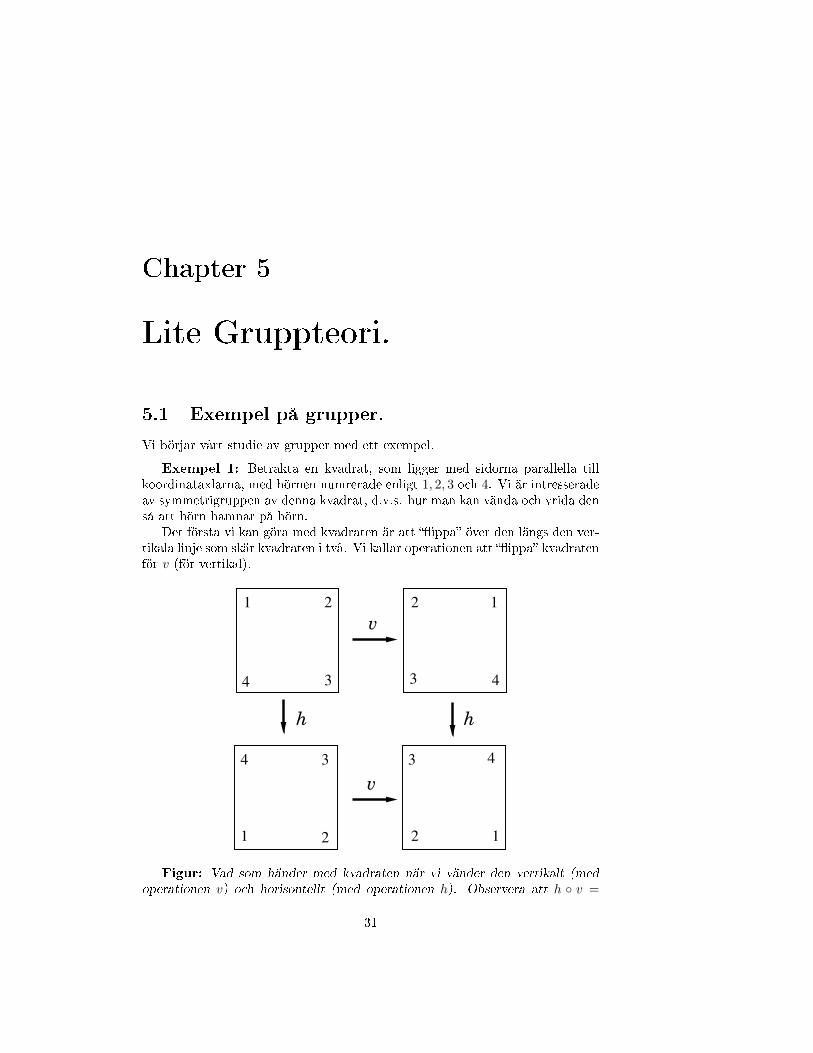
Exempel 1: Betrakta en kvadrat, som ligger med sidorna parallella tillkoordinataxlarna, med hörnen numrerade enligt 1, 2, 3 och 4. Vi är intresseradeav symmetrigruppen av denna kvadrat, d.v.s. hur man kan vända och vrida denså att hörn hamnar på hörn.
Det första vi kan göra med kvadraten är att ��ippa� över den längs den ver-tikala linje som skär kvadraten i två. Vi kallar operationen att ��ippa� kvadratenför v (för vertikal).
1 1
11
2 2
22
3 3
33
4 4
44
v
v
h h
Figur: Vad som händer med kvadraten när vi vänder den vertikalt (medoperationen v) och horisontellt (med operationen h). Observera att h ◦ v =
31
32 CHAPTER 5. LITE GRUPPTEORI.
v ◦h, meniningen att om vi först vänder vertikalt och sen horisontellt eller försthorisontellt och sen vetikalt så blir resultatet det samma.
Med hänvisning till �guren ovan så ser vi att operationen v �yttar hörnet iposition 1 till hörnet i position 2, eller symboliskt v(1) = 2 och v(2) = 1 ochv(3) = 4 och v(4) = 3. Ett kompakt sätt att skriva operationen v är
v =
(1 2 3 42 1 4 3
), (5.1)
där varje hörn i den första raden �yttas till positionen av hörnet som indikerasi den undre raden.
Om vi istället gör en horisontell �ip så får vi operationen, i notationen (5.1),
h =
(1 2 3 44 3 2 1
). (5.2)
Vi hävdar att dessa sätt att vända kvadraten utgör en grupp. För att detskall vara en grupp så måste det �nnas ett identitetselement e. Vi kan skriva esom ingen �ip alls, d.v.s. den operationen som tar alla hörn till sig själva:
e =
(1 2 3 41 2 3 4
). (5.3)
Vi måste också kunna multiplicera våra vändningar, d.v.s. de�niera en op-eration ◦ så att v◦h är de�nierad. Eftersom vi kan tolka v och h som funktionerfrån mängden {1, 2, 3, 4} till {1, 2, 3, 4} så kan vi de�niera ◦ som sammansät-tningen av funktioner. I den notationen vi har, (5.1) och (5.2), så blir
v ◦ h =
(1 2 3 42 1 4 3
)(1 2 3 44 3 2 1
)=
(1 2 3 43 4 1 2
).
Där vi resonerade att h tar 1 till 4 och v tar 4 till 3, d.v.s. v ◦ h skall ta 1 till 3et.c. (se även �guren ovan). Vi har nu de�nierat multiplikation på gruppen avvändningar av kvadraten.
För att vändningarna skall utgöra en grupp så måste vi även ha en inversför varje element i gruppen. Men inversen är enkel att de�niera genom att bytaplats på raderna i representationen:
v−1 =
(1 2 3 42 1 4 3
)−1=
(2 1 4 31 2 3 4
)=
(1 2 3 42 1 4 3
),
så v−1 = v. På samma sätt så är h−1 = h, vilket är helt naturligt då vi återfårsamma kvadrat om vi �ippar den två gånger.
Vi kan nu sätta upp en multiplikationstabell, där vi kallar v ◦h = t, för helagruppen enligt:
5.1. EXEMPEL PÅ GRUPPER. 33
◦ e v h te e v h tv v e t hh h t e vt t h v e
Multiplikationstabell: Tabellen fungerar precis som den gjorde i lågstadiet.Resultatet av a ◦ b fås genom att avläsa rad a kollumn b i tabellen.
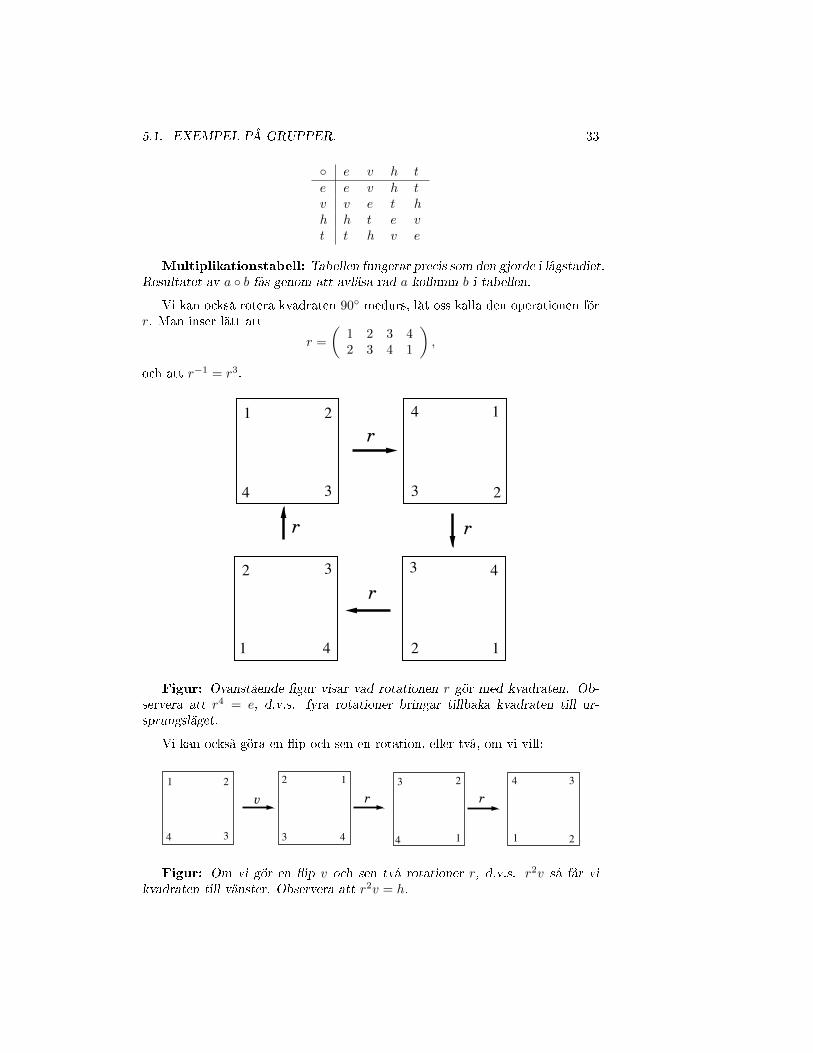
Vi kan också rotera kvadraten 90◦ medurs, låt oss kalla den operationen förr. Man inser lätt att
r =
(1 2 3 42 3 4 1
),
och att r−1 = r3.
1 2
34
r
r
r
r
1
11
2
2
2
3
33
4
4
4
Figur: Ovanstående �gur visar vad rotationen r gör med kvadraten. Ob-servera att r4 = e, d.v.s. fyra rotationer bringar tillbaka kvadraten till ur-sprungsläget.
Vi kan också göra en �ip och sen en rotation, eller två, om vi vill:
1 2
34
r rv
12
3 4 1
2
4
3
1
4 3
2
Figur: Om vi gör en �ip v och sen två rotationer r, d.v.s. r2v så får vikvadraten till vänster. Observera att r2v = h.

34 CHAPTER 5. LITE GRUPPTEORI.
Vi ser att
r2v =
(1 2 3 42 3 4 1
)2(1 2 3 42 1 4 3
)=
(1 2 3 44 3 2 1
)= h. (5.4)
Vi behöver därför ingen speciell symbol för h, så låt oss ta bort den ur vårtalfabet.
Vi har nu två symboler v och r samt identiteten e. Vi vet att r4 = e och attv2 = e. Det är naturligt att fråga sig om det �nns några andra relationer mellansymbolerna. Lite experimenterande ger att vrvr = e (veri�era gärna detta).
Vi kan därför beskriva gruppen som alla ord i bokstäverna v och r somuppfyller
1. v2 = e
2. r4 = e
3. vrvr = e
samt regeln att vi kan ta bort e ur varje ord utan att ordet påverkas. Dettasätt att beskriva gruppen, via generatorer (v och r) samt relationer, är iblandlättare än att skriva upp en multiplikationstabell.
Exempel 2: Om man gör tre rotaationer, sen en �ip v, en rotation , en �ip,två rotationer, en �ipp och sen två rotationer till vad händer med kvadraten? Iandra ord, vad är r2vr2vrvr3?
Vi beräknar
r2vr2vrvr3 = r2vr2 vrvr︸︷︷︸=e
r2 = r2v r2r2︸︷︷︸=r4=e
= r2v = h,
där h är en horisontell �ip. Helt fantastiskt!Ovanstående exempel, som förhoppningsvis ger en liten bild av en fantastisk
värld av grupper, visar att grupper kan ha naturliga tolkningar, som att vända enkvadrat. De visat också att det �nns �era sätt att tolka grupper och att uttrycka
dem. Antingen med notationen v =
(1 2 3 42 1 4 3
), eller som genererande
element och relationer.Den enklaste typen av element/relationer de�nitionen av en grupp är en
grupp med en generator a och en relation an = e, för något tal n ∈ N. Vikommer att kalla en sådan grupp för en cyklisk grupp av ordning n och skrivaCn för den gruppen.
Hjälpsats 5.1. Cn är en grupp. Vidare så kommer g1 × g2 = g2 × g1 för allag1, g2 ∈ Cn.1
1Den sista slutatsen säger att gruppmultiplikationen är kommutativ. Ibland kallar mangrupper där gruppmultiplikationen är kommutativ för en Abelsk grupp.
5.1. EXEMPEL PÅ GRUPPER. 35
Bevis: Gruppen Cn genereras av a. Detta innebär att a, a×a = a2, a×a×a =a3 et.c. är gruppelementen. Eftersom a är den enda generatoren så kan allaelement g ∈ Cn kan skrivas som ak för något k. Det följer direkt att omg1, g2 ∈ Cn så kommer g1 × g2 ∈ Cn, detta eftersom g1 = ak1 och g2 = ak2 förnågra k1, k2 ∈ N och därför så kommer g1 × g2 = ak1+k2 ∈ Cn.
Vidare så har alla element ak ∈ Cn en invers, nämligen an−k, eftersomak×an−k = an = e. Slutligen så påpekar vi att (ak×al)×am = ak×(al×am) =ak+l+m så operationen är associativ. Det följer att Cn är en grupp.
För att se att Cn är kommutativ så observerar vi att om g1 = ak1 ochg2 = ak2 så kommer
g1 × g2 = ak1 × ak2 = ak1+k2 = ak2+k1 = ak2 × ak1 = g2 × g1.
Exempel 3: (Grupprepresentationer.) Vi har de�nierat den cykliskagruppen Cn på ett abstrakt sätt. Men ibland så kan det vara bra att ha enkonkret realisering av gruppen. Låt ωn = cos(2π/n) + i sin(2π/n) och
A = {1, ωn, ω2n, ..., ω
n−1n }.
Då blir A, under vanlig komplexmultiplikation, en representation av gruppen Cnmed 1 = e. Med detta menar vi att om a = ωn och × är komplex multiplikationså kommer A att genreras av a = ωn och ωnn = 1 = e.
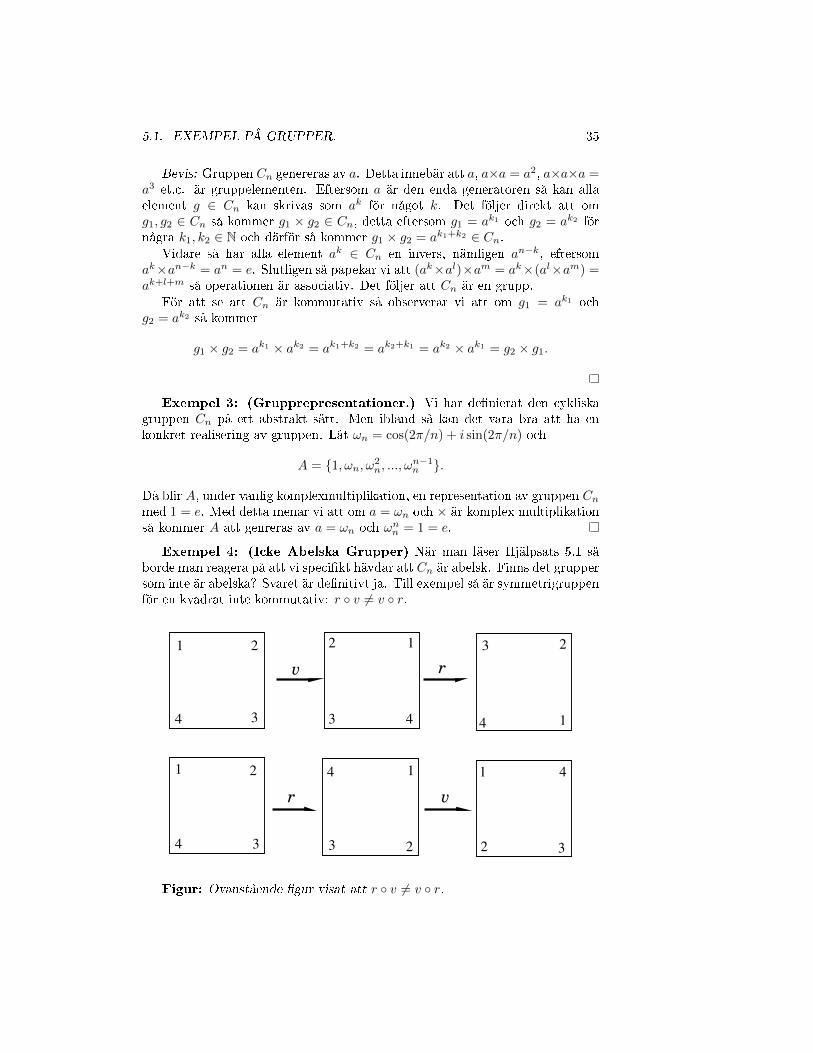
Exempel 4: (Icke Abelska Grupper) När man läser Hjälpsats 5.1 såborde man reagera på att vi speci�kt hävdar att Cn är abelsk. Finns det gruppersom inte är abelska? Svaret är de�nitivt ja. Till exempel så är symmetrigruppenför en kvadrat inte kommutativ: r ◦ v 6= v ◦ r.
1 2
34
rv
12
3 4 1
2
4
3
1 2
34
1
23
4
r v
2
1 4
3
Figur: Ovanstående �gur visat att r ◦ v 6= v ◦ r.
36 CHAPTER 5. LITE GRUPPTEORI.
Utskrivet i symboler
r ◦ v =
(1 2 3 42 3 4 1
)(1 2 3 42 1 4 3
)=
(1 2 3 43 2 1 4
)och
v ◦ r =
(1 2 3 42 1 4 3
)(1 2 3 42 3 4 1
)=
(1 2 3 41 4 3 2
).
Uppgifter:
1. Beräkna följande gruppmultiplikationer:
(a) (1 2 3 44 3 2 1
)(1 2 3 43 4 1 2
)=
(1 2 3 42 1 4 3
),
och veri�era därmed att h ◦ t = v såsom anges i multiplikationsta-bellen i exempel 1.
(b) (1 2 32 3 1
)(1 2 33 2 1
)=
(c) (1 2 3 4 54 3 1 2 5
)(1 2 3 4 53 4 5 2 3
)=
2. Veri�era att vrvr = e såsom anges i exempel 1.
3. Beskriv symmetrin av en liksidig triangel som en grupp.
4. Precis som man talar om isomorfa kroppar så kan man tala om isomorfagrupper. Vi säger att två grupper G ochH är isomorfa och det existerar enbijektion φ : G 7→ H så att2 φ(g1× g2) = φ(g1)×φ(g2) för alla g1, g2 ∈ G.Bevisa att gruppen {e, v, h, t} av ��ippar� av kvadraten från Exempel 1är isomorf med automor�gruppen {e, σ√2, σi, tau} från Exempel 11 frånkapitel 4.
Ledtråd: Det kan hjälpa att jämföra multiplikationstabellerna.
5. Hitta en exlicit gruppisomor� mellan Zn och A från Exempel 3.
2Här använder vi × i två olika betydelser. I g1×g2 så är det × i gruppen G som avses. Mennär vi skriver φ(g1)× φ(g2) så kommer × att vara multiplikationen i H. Eftersom g1, g2 ∈ Goch φ(g1), φ(g2) ∈ H så är det uppenbart från kontexten vilken multiplikation som avses.
5.2. LITE OM PERMUTATIONSGRUPPER. 37
5.2 Lite om Permutationsgrupper.
En permutationsgrupp på en mängd av n element består av alla bijektionermellan elementen elementen i gruppen.
De�nition 5.1. Vi kommer att kalla gruppen som består av alla bijektionermellan n element för den symmetriska gruppen Sn.
Vi börjar med ett exempel igen.
Exempel 4: Betrakta S3, gruppen av alla bijektioner mellan 3 element.Varje bijektion σ från {1, 2, 3} till {1, 2, 3} har tre möjliga värden för σ(1) men såfort vi har tillskrivit ett värde för σ(1) så �nns det endast två alternativ för σ(2),detta eftersom en bijektiv funktion är injektiv vilket betyder att σ(1) 6= σ(2).Och så fort σ(1) och σ(2) är bestämda så �nns det endast en möjlighet för σ(3).Det �nns alltså 3× 2× 1 = 6 olika bijektioner σ : {1, 2, 3} 7→ {1, 2, 3}.
Låt oss skriva ner dessa:(1 2 31 2 3
),
(1 2 31 3 2
),
(1 2 32 1 3
),
(1 2 33 2 1
),
(1 2 33 1 2
)och
(1 2 32 3 1
).
Proposition 5.1. Sn är en grupp under gruppoperationen sammansättning.
Bevis: Identitetsfunktionen, e(a) = a, kommer att utgöra identitetsele-mentet eftersom σ ◦ e(a) = σ(e(a)) = σ(a) = e(σ(a)) = e ◦ σ(a) för alla funk-tioner σ. Vidare så är bijektioner inverterbara vilket betyder att varje elementσ ∈ Sn har en invers. Att sammansättningen är associativ följer precis som ianalysen.
Låt oss generalisera beräkningen att S3 har 3! element.
Hjälpsats 5.2. Gruppen Sn har n! element.
Bevis: Låt oss gidtyckligen välja ett k1 ∈ {1, 2, ..., n}, vi har n val, ochbetrakta låt σ vara en bijektion så att σ(1) = k1. Välj sen ett k2 ∈ {1, 2, ..., n}\{k1}, vi har n − 1 val. Vi kan då välja en bijektion så att σ(1) = k1 ochσ(2) = k2.
Fortsätt induktivt och antag att vi har valt k1, k2, ..., kj−1 ∈ {1, 2, ..., n}. Vikan då välja ett kj ∈ {1, 2, ..., n} \ {k1, k2, ..., kj−1}, vi har n − j + 1 val, ochhitta en bijektion så att σ(i) = ki för alla 1 ≤ i ≤ j. Efter n iterationer så harvi hittat en bijektion σ så att σ(i) = ki för i = 1, 2, ..., n. I processen så har vigjort först ett val bland n möjligheter, sen ett val bland n− 1 möjligheter, senett bland n−2 möjligheter et.c Totalt så har vi n×(n−1)×(n−2)× ...×1 = n!alternativ att göra våra val. Det �nns alltså n! olika bijektioner σ.
Vi måste dock visa att σ konstruerat ovan är en bijektion. D.v.s. att σ ärinjektiv och surjektiv. För att se att σ, konstruerat enligt ovan, är injektiv så

38 CHAPTER 5. LITE GRUPPTEORI.
måste vi visa att om σ(i) = σ(j) så är i = j. Men om σ(i) = σ(j) så kommerki = kj . Vi visar att det är omöjligt att j > i. Om j > i så har kj valts urmängden {1, 2, ..., n}\{k1, ..., kj−1} d.v.s. ur en mängd som inte innehåller ki såkj 6= ki. På samma sätt så är det omöjligt att i > j. Det följer att om ki = kjså är i = j.
För att se att σ är surjektiv så observerar vi att, per konstruktion, bildmäng-den av σ är {k1, k2, ..., kn} där ki 6= kj för i 6= j. Det följer att {k1, k2, ..., kn} ={1, 2, ..., n} och σ är därför surjektiv.
Vi avslutar den här sektionen med att skapa ett annat sätt att beskrivapermutationer. Tidigare så har vi skrivit ett element i en permutationsguppsom (
1 2 3 ... nk1 k2 k3 ... kn
).
Det är ett naturligt sätt att skriva ner en permutation, men det är ganskabesvärligt. Låt oss försöka att förenkla notationen något. Om vi betraktar enpermutation, säg med fem element,
σ =
(1 2 3 4 54 3 5 1 2
).
Då ser vi direkt att σ(1) = 4 och σ(4) = 1, vi har alltså en cykel (1, 4) ipermutationen. På samma sätt så kommer σ(2) = 3, σ(3) = 5 och σ(5) = 2vilket ger en cykel (2, 3, 5). Om vi skriver permutationen
σ =
(1 2 3 4 54 3 5 1 2
)= (1, 4)(2, 3, 5),
så har vi all information vi behöver för att avgöra värdet av σ(i) för alla i. Omvi har en permutation σ så att σ(j) = j för något j så kommer den cykliskarepresentationen av σ att innehålla den triviala cykeln (j), oftast så skriver maninte ut den cykeln.
Exempel 5: Om vi har en permutation σ ∈ S6 med den cykliska formenσ = (12)(364) så kan vi enkelt skriva den på den vanliga formen. Vi får σ(1) = 2,σ(2) = 1, σ(3) = 6, σ(6) = 4, σ(4) = 3 och σ(5) = 5. Detta ger
σ =
(1 2 3 4 5 62 1 6 3 5 4
)
Exempel 6: Vi kan också lätt beräkna multiplikationen av två permuta-tioner på cyklisk form. Till exempel så kommer, om σ = (1, 3, 4)(2, 5) ochτ = (1, 5)(3, 4), στ de�nieras av
στ(1) = σ(τ(1)) = σ(5) = 2στ(2) = σ(τ(2)) = σ(2) = 5στ(3) = σ(τ(3)) = σ(4) = 1στ(4) = σ(τ(4)) = σ(3) = 4στ(5) = σ(τ(5)) = σ(1) = 3.

5.3. LITE OM DELGRUPPER. 39
Vi får att στ tar 1 till 2, 2 till 5, 5 till 3 och 3 till 1, detta ger oss cykel (1, 2, 5, 3).Detta avgör vad στ gör med alla element utom 4. Men στ tar 4 till 4 vilket gerden triviala cykeln (4). Därför så kommer στ = (1, 2, 5, 3)(4) = (1, 2, 5, 3).
I ovanstående exempel så använde vi att två cykler kommuterar om de intehar något gemensamt element. Vi skriver upp det som en hjälpsats.
Hjälpsats 5.3. Om σ = (k1, k2, .., kj) och τ = (l1, l2, ..., li) inte har någragemensamma element så kommer
στ = τσ
Bevis: Beviset är nästan trivialt om m är något element i någon av permu-tationerna, säg m = kt för något 1 ≤ t ≤ j så kommer
στ(kt) = σ(kt+1) = kt+1 = τσ(kt).
Vi kan förenkla cyklerna ytterligare genom att skriva dem som transposi-tioner, där en transposition är en sykel med två element (a, b).
Hjälpsats 5.4. Vi kan skriva varje cykel (k1, k2, .., kj) som en produkt av trans-positioner
(k1, k2, .., kj) = (k1, kn)(k1, kn−1)....(k1, k3)(k1, k2). (5.5)
Bevis: Välj ett godtyckligt element kl. Om vi applicerar vänsterled på klså får vi kl+1 (eller k1 om l = j). Om vi applicerar högerledet på kl så får viföljande fall:
Fall 1: Om l = 1 så tas kl till k2 och sen händer inget mer. D.v.s. kl tastill kl+1.
Fall 2: Om l = j så kommer kl bara att påverkas av den sista transpositionenoch kl tas till k1 vilket är samma som vänsterledet.
Fall 3: Om 1 < l < j så kommer kl att tas till k1 av traspositionen (k1, kl)sen av nästföljande transposition, d.v.s. (k1, kl+1) tas till kl+1.
I alla tre fallen så kommer kl att tas till samma element om man applicerarvänster som högerledet i (5.5). Det följer att permutationerna är de samma.
Eftersom vi kan skriva varje permutation som en produkt av cykler så följerdet direkt att vi kan skriva varje permutation som en produkt av transpositioner.
Följdsats 5.1. Varje permutation kan skirvas som en produkt av transposi-tioner.
5.3 Lite om Delgrupper.
Låt oss gå tillbaka till symmetrigruppen för en kvadrat. Vi vet att gruppengenereras av r = (1, 2, 3, 4) och v = (1, 2)(3, 4), dessa uppfyller relationernar4 = e, v2 = e samt vrvr = e (vilket är lätt att kontrollera). Den gruppen
40 CHAPTER 5. LITE GRUPPTEORI.
har åtta element.3 Varje element i gruppen representerar en permutation avhörnen. Gruppen av alla permutationer av fyra element, S4, består av 4! = 24element (Hjälpsats 5.2). Det innebär att symmetrigruppen för kvadraten, somvi kan kalla D4, är en äkta delmängd av S4. Den delmängden formar en gruppi sig, vi kommer att kalla en sådan delmängd av en grupp så att delmängdensjälv utgör en grupp för en delgrupp.
De�nition 5.2. Låt G vara en grupp och H ⊂ G vara en grupp, d.v.s.
1. e ∈ H,
2. för varje h ∈ H så h−1 ∈ H och
3. om h1, h2 ∈ H så kommer h1 × h2 ∈ H,
då säger vi att H är en delgrupp av G.
Exempel 7: Låt Zn vara gruppen av heltal {0, 1, ..., n − 1} med additionmodulo n som gruppoperation (d.v.s. a + b = c i Zn om a + b har rest c viddivision med n). Då kommer H = {0, 5, 10} ⊂ Z15 att vara en delgrupp.
Vi måste veri�era de tre gruppaxiomen. För addition så är e = 0 och 0 ∈ Hså det första gruppaxiomet är uppfyllt. Vidare så har 0, 5 och 10 inverserna0, 10 respektive 5 eftersom 0 + 0 = 0 har rest lika med noll vid division med15 och 5 + 10 = 10 + 5 = 15 som har rest noll vid division med 15. Slutligenså kommer addition (modulo 15) av elementten i H att ligga i H vilket enkeltveri�eras. Det följer att H är en delgrupp.
Exempel 8: Både {e, (1, 2)} och {e, (1, 2, 3), (1, 3, 2)} utgör delgrupper iS3.
Om vi har en delgrupp H = {h1, h2, ..., hm} ⊂ G så kan vi betrakta allamängder gH respektive Hg, g ∈ G, de�nierade enligt
gH = {gh1, gh2, ..., ghm} Hg = {h1g, h2g, ..., hmg}, (5.6)
vi kommer att kalla dessa mängder för sidoklasser (vänster respektive högersidoklass).4
Proposition 5.2. Låt G vara en grupp med ändligt många element och H ⊂ Gvara en delgrupp. Då kommer, för varje g1, g2 ∈ G, antingen
g1H ∩ g2H = ∅
ellerg1H ∩ g2H = g1H = g2H.
Motsvarande gäller för höger sidoklasser.
3Detta inses lätt genom att hörn 1 kan anta fyra positioner och för varje position av 1 såkommer de andra hörnen löpa med eller moturs från ettan.
4Jag har aldrig i mitt liv hört ordet sidoklass och var tvungen att googla fram en över-sättning. Engelskans ord är �coset� och sannolikheten är större att ni blir förstådda om nianvänder det ordet.
5.3. LITE OM DELGRUPPER. 41
Bevis: Om g1H∩g2H = ∅ så gäller satsen. Så vi kan antaga att g1H∩g2H 6=∅, d.v.s. att det �nns något h ∈ H så att g2h ∈ g1H; om vi kan visa att dettaimplicerar att g2H = g1H.
Om g2h ∈ g1H så �nns det ett h1 ∈ H så att g2h = g1h1. Men detta innebäratt g2 = g1h1h
−1 och vi kan därför skriva
g2H = {g2h2; h2 ∈ H} = {g1h1h−1h2; h2 ∈ H} = {g1h3; h3 ∈ H} = g1H,(5.7)
där vi använde att för varje h3 ∈ H så kan vi välja ett h2 ∈ H så att h1h−1h2 =h3. Låt oss vara lite mer precisa i den sista kommentaren, eftersom h, h1, h3 ∈ Hså kommer hh−11 h3 ∈ H (vi kan ju multiplicera och ta inverser av element iH utan att lämna H). Därför så kommer det, för varje h3 ∈ H, �nnas etth2 ∈ H, nämligen h2 = hh−11 h3, så att g1h1h−1h2 = g1h3, detta motiverarmittenlikheten i (5.7).
Vi kommer att fortsätta med en sats som säger att alla sidoklasser har likamånga element. Vi kommer att använda notationen |gH| för antalet element ien sidoklass och |G| för antalet element i gruppen G. Satser som nästa sats ochden föregående är av stort intresse eftersom de visar att gruppaxiomen tvingargrupper att bete sig på en någorlunda strukturerat sätt.
Hjälpsats 5.5. Låt H ∈ G vara en delgrupp av en ändlig grupp G. Då kommeralla sidoklasser gH, g ∈ G, att ha lika många element. Med andra ord |g1H| =|g2H| för alla g1, g2 ∈ G.
Bevis: Vi kommer att visa att en godtycklig sidoklass gH har lika mångaelement somH. Det följer att alla sidoklasser har exakt |H| element. Vi kommeratt anta att |H| = n och att H = {h1, h2, ..., hn}, där hi 6= hj för i 6= j.
Beviset är enkelt, per de�nition så består gH av följande element
gH = {gh1, gh2, ..., ghn}.
Om alla element ghi är olika så följer det att |gH| = n och vi är klara. Menom ghi = ghj så kommer g−1ghi = g−1ghj vilket implicerar att hi = hj , d.v.s.i = j. Så om i 6= j så kommer ghi 6= ghj och beviset är därmed klart.
Nästa sats anses vara en av de fundamentala i gruppteorin och kallas La-granges Sats.
Sats 5.1. [Lagranges Sats] Om G är en ändlig grupp och H ⊂ G är endelgrupp då kommer |H| att dela |G|. Mer speci�kt så kommer
|G| = |H| × antalet olika sidoklasser gH.
Bevis: Om H = G så följer det att |H| = |G| och vi är klara. Om inte såvälj ett element g1 ∈ G \ H. Eftersom g1H = H eller g1H ∩ H = ∅, enligtProposition 5.2, och eftersom g1 /∈ H så följer det att g1H ∩H = ∅.
Vi fortsätter induktivt och antar att vi har valt element gj , j = 0, 1, 2, ..., k−1(där g0 = e), så att giH∩glH = ∅, för i 6= l. Antingen så kommer G = ∪k−1j=0gjH
eller så kommer det att �nnas ett gk ∈ G \ ∪k−1j=0gjH. Eftersom gk /∈ gjH för

42 CHAPTER 5. LITE GRUPPTEORI.
j = 0, 1, 2, ..., k− 1 så kommer gkH ∩ gjH = ∅ för j = 0, 1, 2, ..., k− 1. EftersomG är en ändlig grupp så kommer den här processen att sluta efter maximalt |G|steg.
Säg att G = ∪mj=0gjH där alla mängder gjH är disjunkta och, enligt Hjälp-sats 5.5, så kommer |gjH| = |H|. Vi har därmed visat att G består av m+1 dis-junkta mängder som alla består av |H| element. Det följer att |G| = (m+1)|H|.
Att gjH är alla sidoklasser är uppenbart eftersom varje sidoklass gH måsteha ett element gemensamt, och därför sammanfalla, med någon sidoklass gjHeftersom g ∈ G = ∪mj=0gjH.
Följdsats 5.2. Om G är en grupp och |G| är ett primtal då är G cyklisk ochdärför abelsk.
Bevis: Välj ett a ∈ G, a 6= e, och betrakta mängden H = {e, a, a2, ...., ak}där talet k är det minsta talet så att ak+1 = e. Att ett sådant k existerar följerav att alla aj kan inte vara olika eftersom för alla j, oändligt många, så kommeraj ∈ G och G har endast ett ändligt antal element (ett primtal). Detta betyderatt aj = aj+k+1, som vi kan multiplicera med inversen till aj och få e = ak+1.
Det är enkelt att veri�era att H är en delgrupp. Men det betyder att |H|delar |G| enligt Lagranges Sats. Eftersom |G| är ett primtal så måste |H| = |G|eller |H| = 1, men |H| 6= 1 eftersom både a, e ∈ H. Det följer att |H| = |G|,d.v.s. alla element i G ligger i H. Detta medför att G = H. Att G är abelskföljer av att alla cykliska grupper är abelska enligt Hjälpsats 5.1.
Från varje grupp G och delgrupp H ⊂ G så får vi,från Sats 5.1, exakt |G||H|sidoklasser gH. Eftersom G och H har en välde�nierad gruppoperation så skulleman önska att det fanns ett sätt att multiplicera sidoklasserna. Ett naturligtsätt att de�niera multiplikation mellan två sidoklasser vore
g1H × g2H = (g1g2)H, (5.8)
detta skulle förhoppningsvis ge sidoklasserna en gruppstruktur. Problemet äratt elementet g ∈ G i representationen gH är inte unikt och ett annat elementg, säg g = gh för något h ∈ H, ger upphov till samma sidoklass gH = gH.Om (5.8) skall hålla så måste både vänster och högerled bero enbart på ekvi-valensklassen och inte på vilket g vi har råkat välja när vi representerar den. Vifrågar oss: Om g1H = g1H och g2H = g2H kommer då g1g2H = g1g2H? Ominte så frågar vi oss under vilka villkår som detta gäller?
Vi vill alltså hitta ett villkår som säkerställer att om g1H = g1H och omg2H = g2H så måste g1g2H = g1g2H. Eftersom g1H = g1H och g1 ∈ g1H (dåe ∈ H) så måste det �nnas ett h1 ∈ H så att g1 = g1h1 och på samma sätt etth2 ∈ H så att g2 = g2h2. Vi vill allstå visa att
g1g2H = g1h1g2h2H = {g1h1g2h2h; h ∈ H} = {g1g2h; h ∈ H} = g1g2H.(5.9)
Observera att, eftersom h2H = H för alla h2 ∈ H, så kommer
g1h1g2h2H = g1h1g2(h2H) = g1h1g2H = {g1h1g2h; h ∈ H}.
5.3. LITE OM DELGRUPPER. 43
Vi kan därför skriva om (5.9); Vi vill visa att för alla h1:
{g1h1g2h; h ∈ H} = {g1g2h; h ∈ H}. (5.10)
Ekvation (5.10) gäller om det för alla h1 och h �nns ett h så att
g1h1g2h = g1g2h⇔ h1g2h = g2h⇔ h1g2 = g2hh−1, (5.11)
där implikationen följer av att multiplicera båda led med g−11 från vänster ochsen med h−1 från höger. Eftersom h är ett godtyckligt element i H så är (5.11)är det samma som att
{hg2; h ∈ H} = {g2h; h ∈ H} ⇔ Hg2 = g2H.
Vi har därmed visat att multiplikationen g1H×g2H = g1g2H är välde�nieradom gH = Hg för alla g ∈ G.
De�nition 5.3. Om G är en grupp så säger vi att H ⊂ G är en normal delgruppom det för varje g ∈ G gäller att vänster och höger sidoklass sammanfaller:gH = Hg.
Sats 5.2. Om H ⊂ G är en normal delgrupp så kommer mängden av sidoklassergH att forma en grupp under multiplikationen g1H × g2H = g1g2H. Multip-likationen är välde�nierad (d.v.s. oberoende av vilka representatner g1 och g2som väljes för sidoklasserna).
Vi kommer att kalla gruppen som består av sidoklasserna gH för kvotgruppenav G med H och skriva G/H.
Bevis: Att visa att multiplikationen är välde�nierad är det svåra och dethar vi redan gjort. Att kvotgruppen har en identitet följer av att eH är ensidoklass, att varje element gH i G/H har en invers följer av att g−1H är enuppenbarligen en sidoklass och en invers till gH.
Nästa fråga vi kommer att ställa oss är om det är möjligt att hitta, ellerskapa, normala delgrupper. Detta kommer att leda oss till en sats som kallasIsometrisatsen för grupper. Vi börjar med två de�nitioner.
De�nition 5.4. Vi säger att en avbildning mellan två grupper φ : G 7→ H ären homomor�5 om φ bevarar multiplikation
φ(a · b) = φ(a)× φ(b) för alla a, b ∈ G6
Om en homomor� dessutom är bijektiv så säger vi att det är en isomor�.
Det �nns en naturlig relation mellan homomor�er och normala delgrupper.Relationen går via kärnan till homormor�n.
5Tekniskt sett så är detta en grupphomomor�, men då det är uppenbart att det är enhomomor� mellan grupper om H och H är grupper så brukar man inte skriva speci�cera�grupp� i �grupphomor��.
6Här använder vi notationen · för multiplikation i G och × för multiplikation i H.
44 CHAPTER 5. LITE GRUPPTEORI.
De�nition 5.5. Om φ : G 7→ H är en homomor� så säger vi att kärnan tillhomomor�n är
K = {g ∈ G; φ(g) = e},
där e är enhetselementet i H.
Sats 5.3. Låt φ : G 7→ H vara en homomor� mellan grupperna G och H. Dåär kärnan, K, en delgrupp i G.
Bevis: Vi börjar med att visa att enhetselementet i G, låt oss kalla det föreG, ligger i kärna eG ∈ K. Detta följer av att om g ∈ K så kommer
e = φ(g) = φ(g · eG) = φ(g)× φ(eG) = e× φ(eG) = φ(eG),
det följer att eG ∈ K.Härnäst så visar vi att g1, g2 ∈ K implicerar att g1 · g2 ∈ K. Om g1, g2 ∈ K
så kommerφ(g1 · g2) = φ(g1)× φ(g2) = e× e = e,
där vi använde att homomor�er φ bevarar multiplikation i den första likhetenoch att g1, g2 ∈ K i den andra. Det följer att g1 · g2 ∈ K.
Slutligen så måste vi visa att om g ∈ K så kommer g−1 ∈ K. Beviset ärinte svårt och likt de tidigare och lämnas därför som övningg, se övning 7.
Sats 5.4. [Isomorfisatsen för Grupper] Låt φ : G 7→ H vara en surjektivhomomor�. Då kommer kärnan φ att vara en normal delgrupp i G och kvot-gruppen G/K är isomorf med H.
Bevis: Vi börjar med att bevisa att K är en normal delgrupp i G, d.v.s. attgK = Kg för alla g ∈ G. Idéen är att försöka identi�era alla sidoklasser utifrånavbildningen φ. Vi de�nierar de�niera inversen
φ−1(h) = {g ∈ G; φ(g) = h},
d.v.s. för h ∈ H så är φ−1(h) mängden av alla element i G som avbildas på h.Det följer direkt att
K = φ−1(e).
Vi hävdar att om g ∈ φ−1(h) så kommer gK = φ−1(h) = Kg. För att sedetta så tar vi ett godtyckligt element g ∈ gK och vi vill visa att g ∈ φ−1(h);det följer att gK ⊂ φ−1(h). Vi kommer senare att visa att φ−1(h) ⊂ gK. Omg ∈ gK så �nns det ett k ∈ K så att g = gk. Eftersom φ är en homomor� sågäller
φ(g) = φ(g · k) = φ(g)× φ(k) = φ(g) = h,
där vi använde att g ∈ φ−1(h) is den sista likheten. Det följer att g ∈ φ−1(h).Vi visar nu att φ−1(h) ⊂ gK om g ∈ φ−1(h). Om g ∈ φ−1(h) så kommer
φ(g−1 · g) = φ(g−1)× φ(g) = φ(g)−1 × φ(g) = h−1 × h = e.
5.3. LITE OM DELGRUPPER. 45
Men detta medför att g−1 × g ∈ K, säg g−1 × g = k ∈ K. Det följer attg = g ·k ∈ gK. Vi har därmed bevisat att φ−1(h) ⊂ gK ⊂ φ−1(h) vilket medföratt φ−1(h) = gK. På samma sätt visar man att φ−1(h) = Kg från vilket vi drarslutsatsen att gK = φ−1(h) = Kg och kärnan är därför en normal delgrupp.
Det återstår att visa att G/K är isomorf med H. Vi måste hitta en isomor�σG/K 7→ H. Den naturliga isomor�n är avbildningen σ(gK) = φ(g) somde�nierar ett element φ(g) i H för varje sidoklass gK.
Vi måste visa att σ är en bijektion. Att σ är surjektiv följer av att φ är det.För att se att σ är injektiv så antar vi att σ(g1K) = σ(g2K), vi måste visa attg1K = g2K.Men om σ(g1K) = σ(g2K) så måste φ(g1) = φ(g2) vilket innebäratt
φ(g−11 · g2) = φ(g1)−1 × φ(g2) = φ(g1)−1 × φ(g1) = e, (5.12)
där vi använde att φ(g1) = φ(g2) i den andra likheten. Från (5.12) så drar vi,precis som tidigare, slutsatsen att g−11 · g2 = k ∈ K och därför så g1k = g2och det följer att g1K ∩ g2K 6= ∅ och därför, enligt Proposition 5.2, så kommerg1K = g2K och injektivitet för σ följer. Att σ är en homomor� följer direktfrån antagandet att φ är det. Så σ är en bijektiv homomor� och därför enisometri.
Vad har detta att göra med lösbarheten av polynom? När vi harkommit så här långt så måste har vi rätt att fråga oss om hur detta hängerihop med lösningen av femtegradsekvationen. Kom ihåg att vi, för att lösax5 + a4x
4 + ...+ a0 = 0, ville skapa en serie kroppsutvidgningar
Q(a4, ..., a0) ⊂ Q(a4, ..., a0, α1) ⊂ ... ⊂ Q(a4, ..., a0, α1, ..., αm) (5.13)
där varje αj är en radikalutvidgning. Vi kom fram till att automor�gruppen,låt oss kalla den för Kj , på Q(a4, ..., a0, α1, ..., αj) som lämnadeQ(a4, ..., a0, α1, ..., αj−1) �xt borde ha en väldigt speciell struktur.
Vi kan också titta på hela automor�gruppen av Q(a4, ..., a0, α1, ..., αm) somlämnar Q(a4, ..., a0, α1, ..., αj) �xt, låt oss kalla den gruppen för Hj . Observeraatt vi kan betrakta Hj+1 som en delgrupp av Hj (den delgruppen som intepåverkar αj). Vi kan därför betrakta en följd av delgrupper
{e} = Hm ⊂ Hm−1 ⊂ Hm−2 ⊂ ... ⊂ Hj+1 ⊂ Hj ⊂ ... ⊂ H0, (5.14)
där {e} är den triviala gruppen som bara innehåller enhetelementet (eftersomHm lämnar alla element �xa). Tillhörande den gruppen så kan vi forma kvot-grupperna
H0/H1, H1/H2, .... Hj/Hj+1, ... G/Hm−1. (5.15)
Om alla utvidgningar i serien (5.13) är radikalutvidgningar så innebär det attserien av delgrupper i (5.14) kommer att ha en bra struktur, speci�kt så kommerdelgrupperna att vara normala (se Sats 6.1) vilket gör att (5.15) är välde�nier-ade. Vidare så ska vi visa, i Proposition 6.2, att om alla kroppsutvidgningar är

46 CHAPTER 5. LITE GRUPPTEORI.
radikalutvidgningar så kommer alla kvotgrupper i (5.15) att vara abelska (kom-mutativa). Just nu så kommer vi inte att visa detta, men det är värt att påpekaför att nästa de�nition skall vara meningsfull.
De�nition 5.6. Vi säger att en grupp G är lösbar om det �nns en serie del-grupper
{e} = Hm ⊂ Hm−1 ⊂ ... ⊂ H1 ⊂ H0 = G
så att Hj+1 är normal i Hj, för j = 1, 2, ..., ,m, och alla kvotgrupper Hj/Hj−1är abelska.
Kommentar: Vi kommer att se att vi kan lösa polynomekvationen p(x) = 0med hjälp av radikaler endast om gruppen av alla permutationer av Q(x1, ..., xn)som lämnar Q �xt, vi kallar den gruppen Galois gruppen, är lösbar, se Sats 6.3.
Uppgifter:
1. (a) Visa att om n = pq så kommer Zn att ha en delgrupp som är isomorfmed Zp.
(b) Beskriv kvotgruppen Zn/Zp.(c) Bevisa att omG abelsk av ordningm så kommerG att ha en delgrupp
av ordning n om och endast om n delar m.
2. (a) Veri�era att mängderna i exempel 8 är delgrupper av S3.
(b) Skriv ner sidoklasserna till föregående uppgift.
(c) Veri�era vilka sidoklasser som är normala.
3. Har S6 någon delgrupp med sju element?
4. (a) Visa att om G har två delgrupper H1 och H2 så att |H1| = 9 och|H2| = 5 då är |G| ≥ 45.
(b) Visa att om G har två delgrupper H1 och H2 så att |H1| = 6 och|H2| = 10 då är |G| ≥ 30.
5. Visa eller motbevisa att D4 (gruppen från exempel 1) är lösbar.
6. Visa att H ⊂ G är en normal delgrupp om och endast om gHg−1 = H föralla g ∈ G.
7. Bevisa att om g ∈ K så kommer g−1 ∈ K om K är kärnan för gruppho-momor�n φ : G 7→ H.
5.4 Om lösbara grupper.
Vi har nu de�nierat begreppet lösbar grupp men vi har ingen aning om alla grup-per är lösbara, eller om ingen är det. För att kunna visa att en polynomekvationinte kan lösas med hjälp av radikaler så måste vi hitta någon grupp som inte är
5.4. OM LÖSBARA GRUPPER. 47
lösbar. Sen så måste vi visa att den gruppen verkligen är en automor�grupp avQ(a1, ..., xn), men det problemet lämnar vi till ett senare kapitel.
Vi börjar med en sats om lösbara grupper.
Sats 5.5. Varje abelsk grupp är lösbar.Speci�kt så är gruppen Cn, den grupp som genereras av a och relationen
an = 0 lösbar.
Bevis: Om G är en abelsk grupp så kommer varje delgrupp H ⊂ G att varanormal eftersom
gH = {gh; h ∈ H} = {hg; h ∈ G} = Hg.
Vidare så måste alla kvotgrupper Hj/Hj+1 att vara abelska eftersom
g1Hj+1 × g2Hj+1 = (g1g2)Hj+1 = (g2g1)Hj+1 = g2Hj+1 × g1Hj+1.
Så vilken serie delgrupper som helst duger för att uppfylla de�nitionen för lösbargrupp. Vi kan till exempel välja den absolut triviala kedjan med två element:H0 = {e} och H1 = G.
Att Cn är lösbar följer direkt av att den är abelsk (Hjälpsats 5.1).Vi måste dock hitta en icke lösbar grupp. Det naturliga är att leta efter så
komplicerade grupper som möjligt och de mest komplicerade grupperna vi kantänka oss med n element är den symmetriska gruppen Sn.
Exempel: Vi hävdar att S3 är en lösbar grupp. För att visa detta så måstevi hitta en serie normala delgrupper {e} ⊂ H1 ⊂ ... ⊂ S3 så att kvoterna ärabelska. Till exempel
H0 = {e} ⊂ H1 = {e, (1, 2, 3), (1, 3, 2)} ⊂ H2 = S3. (5.16)
Vi måste veri�era att grupperna är normala. Att H0 = {e} är en normaldelgrupp av H1 är trivialt eftersom hH0 = {h} = H0h för alla element h. Attvisa att H1 är en normal delgrupp i H2 görs med en enkel veri�kation. Det�nns tre element i H2 \ H1, nämligen (1, 2), (2, 3) och (1, 3). Låt oss veri�eraatt (1, 2)H1 = H1(1, 2), de övriga fallen är analoga. Vi beräknar
(1, 2)H1 = (1, 2){e, (1, 2, 3), (1, 3, 2)} =
= {(1, 2), (1, 2)(1, 2, 3), (1, 2)(1, 3, 2)} = {(1, 2), (2, 3), (1, 3)},
och
H1(1, 2) = {(1, 2), (1, 2, 3)(1, 2), (1, 3, 2)(1, 2)} = {(1, 2), (1, 3), (2, 3)},
vi ser att (1, 2)H1 = H1(1, 2). Vi kan dra slutsatsen att alla grupper Hj ärnormala delgrupper i Hj+1, för j = 0, 1..
Observera att |H1/H0| = 2 och |H2/H1| = 3. Detta medför att kvotgrup-perna H1/H0 och H2/H1 har primtalsordning och är därför cykliska och abelska(Följdsats 5.2).
48 CHAPTER 5. LITE GRUPPTEORI.
Det följer att serien (5.16) uppfyller villkåren för att S3 ska vara lösbar.
Exempel: Vi hävdar att S4 är lösbar. Beviset följer samma linje somi föregående exempel. Men det involverar mycket tyngre beräkningar så vikommer inte att genomföra några detaljer. Vi har serien av delgrupper
{e} ⊂ V ⊂ A4 ⊂ S4,
därV = {e, (1, 2)(3, 4), (1, 3)(2, 4), (1, 4)(2, 3)}
och A4 är den alternerande gruppen, d.v.s. den grupp som består av alla elementσ ∈ S4 så att
σ = (a1, a2)(a3, a4)....(a2n−1, a2n)︸ ︷︷ ︸jämt antal
kan skrivas som produkten av ett jämt antal transpositioner.7
Beviset att varje gruppinklusion är normal och att och att korresponderandekvotgrupper är abelska består i en lång rad beräkningar vilka vi avstår från attinkludera i den här texten.
För att visa att femtegradsekvationen inte är lösbar med hjälp av radikalerså behöver vi hitta en grupp som inte är lösbar. Eftersom automor�gruppenpå de fem nollställena till en femtegradsekvation borde vara relaterade till densymmetriska gruppen S5 så är det naturligt att försöka att visa att S5 inte ären lösbar grupp. Jag har svårt att hävda att beviset av detta är intressant i sig,men eftersom det är viktigt för vår huvudsats i dessa anteckningar så inkluderarvi alla detaljer. Vi börjar med två Hjälpsatser.
Hjälpsats 5.6. Låt H vara en grupp och N en normal delgrupp så att |H/N | =p, p ett primtal.
Då kommer, för alla φ, ψ ∈ H, φ−1ψ−1φψ ∈ N .
Bevis: Vi kommer att genomföra beviset i �era steg.
Steg 1: Om φ ∈ N och ψ ∈ H så kommer ψ−1φψ ∈ N . (Det här stegetberor bara på att N är en normal delgrupp och har ingenting att göra med attp är ett primtal.)
Bevis av Steg 1: Det här beviset är lite viktigt i sig och vi kommer attanvända samma resonemang �era gånger i resten a beviset. Eftersom N ärnormal så kommer ψ−1N = Nψ−1. Detta innebär att ψ−1φ ∈ Nψ−1 eftersomψ−1φ ∈ ψ−1N = Nψ−1. men det betyder att det �nns ett n ∈ N så att
7Vi vet att man kan skriva varje permutation som produkten av ett antal transpositioner.Den produkten är inte unik, men om man kan skriva ett element som produkten av ettjämt antal transpositioner så kommer varje sätt att skriva permutationen som en produkt avtranspositioner att innehälla ett jämt anta. Samma gäller för udda. Detta innebär att depermutationer som kan skrivas som produkten av ett jämt antal transpositioner formar engrupp vilket är väldigt lätt att inse. Vi kommer dock inte att bevisa detta, inte för att det ärsvårt utan för att beviset är mer långt än intressant.

5.4. OM LÖSBARA GRUPPER. 49
ψ−1φ = φψ−1. Om vi multiplicerar båda led (från vänster) med ψ så får viψ−1φψ = φ ∈ N vilket skulle bevisas.
Steg 2: Om φ ∈ N då kommer φ−1ψ−1φψ ∈ N , d.v.s. satsen är sann omφ ∈ N .
Bevis av steg 2: Enligt steg 1 så ψ−1φψ ∈ N . Vidare, eftersom N är engrupp och φ ∈ N , så kommer φ−1 ∈ N . Men eftersom N är en grupp ochφ−1, ψ−1φψ ∈ N så kommer φ−1ψ−1φψ ∈ N vilket skulle bevisas.
Eftersom Steg 2 visar satsen om φ ∈ N så kommer vi att antaga att φ /∈ Noch bevisa satsen i det fallet.
Steg 3: Om φ ∈ H och φ /∈ N så kommer
N = {φkn; n ∈ N, k ∈ Z}
att vara en delgrupp i H.
Bevis av steg 3: Det räcker att visa att N är en grupp eftersom det äruppenbart att N ∈ H. Vi måste visa att e ∈ N , om a, b ∈ N så kommer ab ∈ Nsamt att om a ∈ N så kommer a−1 ∈ N .
Eftersom 0 ∈ Z och e ∈ N (enhetselementet ligger i varje grupp) så kommere = φ0e ∈ N .
Låt nu φk1n1, φk2n2 ∈ N . Vi måste visa att φk1n1φk2n2 ligger i N . Vi
argumenterar att
φk1n1φk2n2 = φk1+k2 n1n2 för något n1 ∈ N,
eftersom n1φk1 ∈ Nφk1 = φk1N där vi använde att N är normal.
Men om n1, n2 ∈ N så kommer n1n2 ∈ N eftersom N är en grupp. Därförså kommer
φk1n1φk2n2 = φk1+k2︸ ︷︷ ︸
=φk
n1n2︸ ︷︷ ︸∈N
∈ N .
Det återstår att visa att(φkn
)−1 ∈ N . Först så observerar vi att(φkn
)−1=
n−1φ−k eftersom(n−1φ−n
) (φkn
)= e. Men eftersom N är normal så kommer(
φkn)−1
= n−1φ−k ∈ Nφ−k = φ−kN, (5.17)
där vi också använde att n−1 ∈ N eftersom n ∈ N och N är en grupp.På samma sätt som vanligt så implicerar (5.17) att det �nns ett n så att
n−1φ−k = φ−kn ∈ N vilket skulle bevisas.Det följer att N är en grupp.
Steg 4: Med N som i steg 3 så kommer N = H.
Bevis av steg 4: Eftersom N ⊂ N och N ⊂ H är delgrupper så ger LagrangesSats att
|N | = q|N | för något q ∈ N (5.18)
50 CHAPTER 5. LITE GRUPPTEORI.
och|H| = r|N | för något r ∈ N (5.19)
vidare så antar vi att
|H| = p|N | för något primtal p ∈ N. (5.20)
Det följer från (5.18)-(5.20) att
p|N | = |H| = r|N | = rq|N | ⇒ p = rq. (5.21)
Eftersom p är ett primtal så måste antingen r = p och q = 1 eller r = 1 ochq = p. Men φ ∈ N och φ /∈ N vilket implicerar att |N | > |N | och vi kan slutaoss till att q = p. Det följer från q = p, (5.18) och (5.20) att
|N | = p|N | = |H|.
Så N är en delgrupp av H som har lika många element som H. Det följer attN = H.
Steg 5: Hjälpsatsen gäller även i fallet då φ /∈ N . Detta slutför beviset.
Bevis av steg 5: Eftersom N = H så kommer ψ ∈ N för alla ψ ∈ H. Dettamedför att ψ = φkn för något n ∈ N . Vi vill visa att φ−1ψ−1φψ ∈ N för attgöra det så sätter vi in ψ = φkn i uttrycket
φ−1ψ−1φψ = φ−1n−1φ−kφφkn = φ−1n−1φn, (5.22)
där vi använde att ψ−1 =(φkn
)−1= n−1φ−k.
Från steg 1 så följer det att φ−1n−1φ ∈ N (det kan vara lite knepigt att sedetta eftersom det som var φ ∈ N i Steg 1 har blivit n−1 ∈ N och det som varψ i Steg 1 har blivit ψ). Eftersom både φ−1n−1φ ∈ N och n ∈ N så följer det,från (5.22), att
φ−1ψ−1φψ =(φ−1n−1φ
)︸ ︷︷ ︸∈N
n︸︷︷︸∈N
∈ N.
Detta slutför beviset av hjälpsatsen.
Hjälpsats 5.7. Om H0 är en normal delgrupp i H2 och H2/H0 är abelsk.Antag vidare att |H2/H0| inte är ett primtal. Då existerar det en grupp H1 såatt H0 ⊂ H1 ⊂ H2 så att H2/H1 och H1/H0 är abelska samt att H0 6= H1 6= H2.
Speci�kt så innebär det att om G är lösbar (och |G| ändlig) så kan manantaga att serien av normala delgrupper
{e} = Hm ⊂ Hm−1 ⊂ ... ⊂ H0 = G
är sådan att |Hj/Hj+1| alla är primtal.
Bevis: Ta en sidoklass gH0 6= H0. Eftersom |G| är ändlig så kan inte allaH0, gH0, g
2H0, ... vara olika så för något tal p så kommer gpH0 = H0. Om p

5.4. OM LÖSBARA GRUPPER. 51
inte är ett primtal så kan vi betrakta gq där p/q är ett primtal istället för g , vikan därför anta att p är ett primtal. Vi de�nierar
H1 = {gkh; h ∈ H0 och k = 0, 1, ..., p− 1}.
Vi hävdar att H1 är en grupp. Först så ser vi direkt att e ∈ H1 eftersome ∈ H0. Om gkh1, g
lh2 ∈ H1 så kommer gkh1glh2 ∈ H1 eftersom glH0 = H0gl
(H0 normal) vilket implicerar att det �nns ett (h)1 ∈ H0 så att h1gl = glh1vilket medför att gkh1glh2 = gk+lh1h2 ∈ H1 eftersom h1h2 ∈ H0. Vidare såkommer (gkh)−1 = h−1g−k ∈ H1 vilket visas som i Steg 5 i föregående bevis.Det följer att H1 är en grupp. Att H0 ⊂ H1 ⊂ H2. följer direkt från de�nieionenav H1.
Vi hävdar att H1 är normal. För att se det så observerar vi att
H1 = (H0)⋃
(gH0)⋃(
g2H0
)⋃...⋃
(gpH0)
såfH1 = (fH0)
⋃(fgH0)
⋃(fg2H0
)⋃...⋃
(fgpH0) = (5.23)
= (fH0)⋃
(gfH0)⋃(
g2fH0
)⋃...⋃
(gpfH0) =
= (H0f)⋃
(gH0f)⋃(
g2H0f)⋃
...⋃
(gpH0f) =
= H1f,
där vi använde att H2/H0 är abelsk i det första radbytet och att H0 är normali det andra.
Det återstår att visa att H2/H1 och H1/H0 är abelska. Att H1/H0 ärabelsk följer av att alla sidoklasser har formen gkH0 vilket innebär att gkglH0 =gk+lH0 = glgkH0. För att se att H2/H1 är abelsk så argumenterar vi somvi gjorde när vi visade att H1 var normal i (5.23). Låt oss snabbt visa attargumentet fungerar
f1f2H1 = (f1f2H0)⋃
(f1f2gH0)⋃(
f1f2g2H0
)⋃...⋃
(f1f2gpH0) =
= (f1f2H0)⋃
(f1f2H0g)⋃(
f1f2H0g2)⋃
...⋃
(f1f2H0gp) =
= (f2f1H0)⋃
(f2f1H0g)⋃(
f2f1H0g2)⋃
...⋃
(f2f1H0gp) =
= (f2f1H0)⋃
(f2f1gH0)⋃(
f2f1g2H0
)⋃...⋃
(f2f1gpH0) = f2f1H1,
där vi först använde att H0 är normal, sen att H2/H0 är abelsk och slutligenatt H0 är normal igen.
För hjälpsatsens sista påstående så behöver vi bara lägga in så många grup-per i serien så att alla kvoter får primtalsordning.
Sats 5.6. Gruppen S5 är inte lösbar.
52 CHAPTER 5. LITE GRUPPTEORI.
Bevis: Vi kommer att visa att om
{e} = H0 ⊂ H1 ⊂ H2 ⊂ ... ⊂ Hm = S5
där alla delgrupper Hj är normala i Hj+1 och |Hj+1|/|Hj | är primtal (enligtHjälpsats 5.7). Då kommer H0 att innehålla alla trecykler: d.v.s. alla permuta-tioner på formen (i, j, k) för i 6= j 6= k och i 6= k. Detta är uppenbarligen absurtoch vi kan dra slutsatsen att ingen sådan serie av delgrupper existerar och attS5 därför inte är lösbar.
För att visa att H0 innehåller alla trecykler så argumenterar vi induktivt.Hm = S5 innehåller alla trecykler eftersom S5 innehåller alla permutationer.Låt oss anta att vi har visat att Hn+1 innehåller alla trecykler och därifrån visaatt Hn innehåller alla trecykler. Det räcker med att bevisa att (i, j, k) ∈ Hn fören godtycklig trecykel (i, j, k).
Eftersom Hn+1 innehåller alla trecykler så kommer φ = (m, j, i) ∈ Hn+1
och ψ = (i, l, k) ∈ Hn+1 där alla fem talen i, j, k, l och m är olika (vilket ärmöjligt då S5 är permutationen på 5 element). Det följer från Hjälpsats 5.6 attφ−1ψ−1φψ ∈ Hn. Men
φ−1ψ−1φψ = (m, i, j)(i, k, l)(m, j, i)(i, l, k) = (i, j, k) ∈ Hn.
Så varje trecykel ligger i Hn.Induktion implicerar att alla trecykler ligger i H0 vilket är absurt.
Uppgifter:
1. Kommer,.... kanske...
Chapter 6
Mer om automor�er.
I det här kapitlet så skall vi knyta den gruppteori vi har till kroppsutvidgningarav talkroppar - det är den teorin som kallas Galois teori.
Vi kommer att börja med att visa att varje radikalutvidgning av kroppenK till K(α) kan reduceras till en serie av radikalutvidgningar som alla görsmed primtalsrötter (Hjälpsats 6.1). Det är något lättare att jobba med radika-lutvidgningar K(α) sådana att αp ∈ K eftersom vi vet en del om grupper avprimtalsordning.
Därefter så kommer vi att visa att automor�grupperna för radikalutvidgningar,för primtalsrötter, är normala (Sats 6.1) och att korresponderande kvotgrupperär abelska (Proposition 6.2). Det följer att automor�gruppen för en serie radika-lutvidgningar är lösbar (Sats 6.2).
För att visa att femtegradsekvationen inte är lösbar med radikaler återstårdå bara att hitta en femtegradsekvation vars Galoisgrupp inte är lösbar. T.e.x.en femtegradsekvation så att G(Q(x1, x2, ..., xn),Q) = S5 vilken inte är lösbar(Se Sats 5.6).
Hjälpsats 6.1. Låt K vara en talkropp och αpq ∈ K. Då kommer K(α) = L(α)där L = K(β) och αp = β. Speci�kt så kommer K(α) = K(αp, α).
Bevis: Talkropparna är lika om alla element i K(α) ligger i K(β, α) = L(α)och tvärt om. Men detta är uppenbart eftersom varje element i K(α) kan, enligtProposition 6.1, skrivas på formen
a0 + a1α+ ...+ apq−1αpq−1, där a0, ..., apq−1 ∈ K, (6.1)
som uppenbarligen också ligger i K(β, α). På motsvarande sätt kan varje ele-ment i L(α) skriva som
b0 + b1α+ ...+ bp−1αp−1, där b0, ..., bp−1 ∈ L, (6.2)
men om bj ∈ L så kan vi skriva
bj = cj0 + cj1β + cj2β2 + ...+ cj(q−1)β
q−1.
53
54 CHAPTER 6. MER OM AUTOMORFIER.
Om vi sätter in uttrycken för bj i (6.2) och att β = αp så följer det att (6.2) ärpå samma form som (6.1).
Vi börjar med att ge en bättre beskrivning av hur kroppen efter en radika-lutvidgning ser ut.
Proposition 6.1. Låt K vara en talkropp och
p(x) = c0 + c1x+ c2x2 + ...+ cn−1x
n−1 + xn
ett irreducibelt polynom av grad n med koe�cienter i K och p(α) = 0 för α /∈ K.Då kommer radikalutvidgningen K(α) bestå av alla element
a0 + a1α+ a2α2 + ...+ an−1α
n−1 för a0, a1, ..., an−1 ∈ K. (6.3)
Bevis: Det är tydligt att alla element på formen (6.3) måste ligga i K(α)eftersom α och alla a0, a1, ..., an−1 ∈ K och vi lämnar inte K(α) när vi adderaroch multiplicerar element.
Det är lite mindre uppenbart att det inte ligger �er element in K(α). Vimåste visa att produkten av två element på formen (6.3) också har den formensamt att inverser till element på formen (6.3) också har den formen.
Vi börjar med att veri�era att produkten av två element på formen (6.3)också har den formen. Om vi multiplicerar två element på formen (6.3) så fårvi (
d0 + d1α+ d2α2 + ...+ dn−1α
n−1) (e0 + e1α+ e2α2 + ...+ en−1α
n−1) =(6.4)
= d0e0+(d0e1+e0d1)α+(d0e2+d1e2+e2d0)α2+...+(d0en−1+...+dn−1e0)αn−1+(6.5)
+αn((a0bn + a1bn−1 + ...+ anb0) + (a1bn + ...+ anb1)α+ ...+ an−1bn−1α
n−2) .(6.6)
Termen i (6.5) är redan på den formen vi önskar. Termen i (6.6) innehållerdock α till högre potenser än vi tillåter i (6.3), högsta potensen är α2n−2. Meneftersom, p(α) = 0 så
αn = −(c0 + c1α+ c2α2 + ...cn−1α
n−1). (6.7)
Vi kan därför skriva om termen i (6.6) som
−(c0 + c1α+ ...cn−1αn−1)
((a0bn + ...+ anb0) + ...+ an−1bn−1α
n−2)vilken har en grad lägre. På samma sätt kan vi fortsätta och byta alla αn termermot −(c0 + c1α+ c2α
2 + ...cn−1αn−1) tills vi bara har termer med potenser αj
för j < n kvar.Vi måste också visa att inversen till varje nollskiljt element på formen (6.3)
också kan skriva på samma form. Vi ska använda ett litet trick. Om vi har ettelement a 6= 0 i K(α) på formen (6.3) så kan vi de�niera polynomet
f(x) = a0 + a1x+ a2x2 + ...+ an−1x
n−1

55
så att elementet blir a = f(α) 6= 0. Vi vill visa att f(α) har en invers somär på samma form. För att hitta inversen så observerar vi att den störstagementsamma nämnaren gcd(f(x), p(x)) = 1 eftersom p(x) är irreducubelt ochdärför inte har några delare. Men enligt Euklides algoritm så �nns det s(x)och t(x) så att s(x)f(x) + t(x)p(x) = 1. Om vi sätter in x = α så får vi1 = s(α)f(α) + t(α)p(α) = s(α)f(α) eftersom p(α) = 0. Vi har därmed visatatt det �nns ett tal s(α) ∈ K(α) så att
s(α) = h0 + h1α+ ...+ hmαm (6.8)
och s(α)f(α) = 1. Men vi kan alltid reducera termerna i högerledet av (6.8),genom att använda (6.7), till ett polynom av grad högst n − 1. Det följer attf(α) har en invers på formen (6.3).
De�nition 6.1. Låt K vara en talkropp och K(α1, α2, ..., αm) vara en kropp-sutvidgning av K. Då säger vi att gruppen av automor�er på K(α1, α2, ..., αm)som lämnar K �xt är Galoisgruppen för kroppsutvidgningen. Vi kommer attskriva Galoisgruppen med notationen
G(K(α1, α2, ..., αm),K).
Sats 6.1. Låt
Q(a0, ..., an−1) ⊂ Q(a0, ..., an−1, α1) ⊂ Q(a0, ..., an−1, α1, α2) ⊂ ... ⊂
⊂ Q(a0, ..., an−1, α1, αm)
vara en serie radikalutvidgningar, vi kommer att skriva
Kj = Q(a0, ..., an−1, α1, α2, ..., αj).
antag vidare att
1. antingen αpjj = 1, d.v.s. αj är en enhetsrot för något primtal pj eller att
2. alla enhetsrötter ωpj , ω2pj , ..., ω
pj−1pj ∈ Kj−1 och αj inte är en enhetsrot
men apjj ∈ Kj−1.
Då kommer Gj+1 = G(Km,Kj+1) att vara en normal delgrupp i Gj = G(Km,Kj).
Bevis: Vår strategi kommer att vara att visa att det �nns en homomor�φ : Gj 7→ H, för någon grupp H, så att kärnan till φ är Gj+1. Då kommer,enligt Sats 5.4, Gj+1 att vara normal i Gj . Den naturliga avbildningen φ är attlåta φ(g) avbilda g på restriktionen av g till Kj+1:
φ(g) = gbKj+1.
Eftersom g ∈ Gj+1 är identiteten på Kj+1 så kommer φ(g) = e, där e äridentitetsautomor�n, för alla g ∈ Gj+1. Det följer att Gj+1 = K.

56 CHAPTER 6. MER OM AUTOMORFIER.
För att använda Sats 5.4 så måste vi också visa att H är en grupp, vikommer att visa att H är en grupp av automor�er på Kj+1. D.v.s. att restrik-tionen gbKj+1
är en automor� på Kj+1. För att göra detta så visar vi följandepåstående.
Påstående 1: Antag att g ∈ Gj då kommer1
g(αj) = ωkpjαj (6.9)
för något k = 0, 1, ..., pj−1. Kom ihåg att ωpj är enhetsroten ωpjpj = 1.Dessutom så kommer g : Kj+1 \Kj+1 7→ Kj \Kj .
Bevis av Påstående 1: Vi vet att αpjj ∈ Kj . För att �xera notation såkommer vi att skriva αpjj = a ∈ Kj .
Eftersom alla automor�er i Gj �xerar alla element i Kj så måste g(a) = a.Men eftersom g är en automor� av Kj så kommer
a = g(a) = g(αpjj ) = (g(αj))
pj , (6.10)
där vi använde att isomor�er (och därför automor�er) bevarar multiplikation idet sista steget.
Men ekvationen a = xpj har lösningarna x = ωkpjαj för k = 0, 1, ..., pj − 1.Så likheten (6.10) implicerar att g(αj) uppfyller (6.9).
Det återstår att visa att g : Kj+1 \ Kj 7→ Kj+1 \ Kj . Vi så låter vi b ∈Kj+1 \ Kj och vill visa att g(b) ∈ Kj+1 \ Kj . Enligt Hjälpsats 6.1 så kan viskriva
b = a0 + a1αj + ...+ apj−1αpj−1j ,
där inte alla a1, a2, .., apj−1 = 0 (för om alla var noll så skulle b ∈ Kj). Men detinnebär att
g(b) = a0 + a1ωkpjαj + a2ω
2kpj α
2j ...+ apj−1ω
k(pj−1)pj α
pj−1j .
Eftersom inte alla a1, .., apj−1 = 0 så kommer g(b) ∈ Kj+1 \Kj . Detta bevisarPåstående 1.
Från Påstående 1 så följer det att gbKj+1: Kj+1 7→ Kj+1 och därför så
kommer H = {gbKj+1 ; g ∈ Gj} att bilda en grupp av automor�er på Kj+1.Sats 5.4 medför nu att Gj+1 är en normal delgrupp av Gj .
Proposition 6.2. Låt Kj och Gj vara som i Sats 6.1. Då kommer Gj/Gj+1
att vara en abelsk grupp.
Bevis: Vi använder samma notation som i beviset av Sats 6.1. Då kommer,enligt Sats 5.4, Gj/Gj+1 att vara isomorf med H eftersom Gj+1 är kärnan tillhomomor�n φ : Gj 7→ H. Det räcker därför att visa att H är abelsk.
Gruppen H bestod av alla restriktioner gbKj+1av automor�er g ∈ Gj .
Eftersom alla automor�er i Gj �xerar alla element i Kj så följer det att H ⊂1Det är här vi använder antagandet att alla enhetsrötter av ordning pj ligger i talkroppen.

57
G(Kj+1,Kj), d.v.s. H är en delgrupp av G(Kj+1,Kj). Vi kommer att visa attG(Kj+1,Kj) är en cyklisk grupp. Detta medför att G(Kj+1,Kj) är abelsk ocheftersom H är en delgrupp av G(Kj+1,Kj) så följer det att även H och därförGj/Gj+1 är abelsk. För att förenkla notationen något så kommer vi att skrivaα = αj+1 och p = pj+1.
Om g ∈ G(Kj+1,Kj) så måste g(α) = ωkpα (se t.ex. Påstående 1 i bevisetav Sats 6.1). Detta innebär, om vi använder notationen g2 = g ◦ g, g3 = g ◦ g ◦ get.c., att
gp(α) = gp−1(ωkpα) = ... = ωkpp α = α.
Vi kan, enl. Proposition 6.1, skriva ett godtyckligt element a ∈ Kj+1 påformen
a = a0 + a1α+ a2α2 + ...+ ap−1α
p−1,
för a0, a1, ..., ap−1 ∈ Kj . Detta medför att
gp(a) = a0 + a1gp(α) + a2g
p(α)2 + ...+ ap−1gp(α)p−1 = a.
Så Galoisgruppen G(Kj+1,Kj) är cyklisk av ordning pj+1. Men alla cykliskagrupper är abelska enligt Hjälpsats 5.1. Det följer att Gj/Gj+1 är abelsk.
Sats 6.2. Låt Kj och Gj vara som i Sats 6.1. Antag vidare att
p(x) = xn + an−1xn−1 + an−2x
n−2 + ...+ a0
faktoriserar i linjära faktorer
p(x) = (x− x1)(x− x2)...(x− xn)
i talkroppen Km. Speci�kt så antar vi att alla rötter x1, x2, ..., xn ∈ Km.
Då är Galoisgruppen G(Km,K0) en lösbar grupp.
Bevis: Vi har en serie av grupper
{e} = Gm ⊂ Gm−1 ⊂ ... ⊂ G0 = G(Km,K0).
Från Sats 6.1 så vet vi att Gj+1 är en normal delgrupp i Gj för alla j =0, 1, ...,m − 1. Och enligt Proposition 6.2 så är Gj/Gj+1 abelsk. Men dettaär de�nitionen för att G0 är lösbar.
Problemet med Sats 6.2 är att vi har väldigt dålig kontroll på hur gruppenG(Km,K0) ser ut. Vi vet att om vi kan lösa p(x) = 0 med radikaler så ärG(Km,K0) lösbar. Vi vill hitta ett polynom p(x) för vilket G(Km,K0) inte ären lösbar grupp. För att bevisa att gruppen inte är lösbar så måste vi ha bättreinformation om gruppen. Vi kommer inte att försöka hitta bättre informationom G(Km,K0). Istället så kommer vi att använda G(Km,K0) från Sats 6.2 föratt skapa en annan lösbar grupp vilken har bättre struktur och är lättare attjobba med. Vi gör detta i följande sats.

58 CHAPTER 6. MER OM AUTOMORFIER.
Sats 6.3. Om ekvationen
p(x) = xn + an−1xn−1 + an−2x
n−2 + ...+ a1x+ a0 = 0
går att lösa med radikaler, och om lösningarna till ekvationen är x1, x2, ... xn,så kommer Galois gruppen
G(Q(x1, x2, ..., xn),Q)
att vara lösbar.
Bevis: Eftersom p(x) = 0 går att lösa med radikaler så �nns det en serieradikalutvidgningar
K0 ⊂ K1 ⊂ K2 ⊂ ... ⊂ Km
så attKj = Q(a0, ..., an−1, α1, α2, ..., αj)
och Kj+1 = Kj(αj+1) är en radikalutvidgning av Kj så att αpj+1
j+1 ∈ Kj förnågot primtal pj+1.
Eftersom p(x) faktoriserar i linjära faktorer i kroppen Km så kommer röt-terna x1, x2, ..., xn ∈ Km. Detta innebär att
Q(x1, x2, ..., xn) ⊂ Km.
Vidare så kommer alla aj ∈ Q(x1, x2, ..., xn) eftersom koe�cienterna i poly-nomet a0, a1, ..., an−1 går att uttrycka i rötterna x1, x2, ..., xn, se (4.5)-(4.9).
Vi kan därför bilda talkropparna Fj = F ∩Kj , där F = Q(x1, x2, ..., xn). Vifår då en serie
Q(a0, a1, .., an−1) = F0 ⊂ F1 ⊂ ... ⊂ Fm = F = Q(x1, x2, ..., xn).
Vi kommer att visa att den kedjan har Galoisgrupper Hj = G(Fm, Fj)
Hm ⊂ Hm−1 ⊂ ... ⊂ H0
som formar en serje av normala delgrupper med abelska kvoter. Vi kommer attgöra beviset i �era steg.
Steg 1: Vi hävdar att Fj verkligen är talkroppar.
Bevis av Steg 1: Detta är enkelt och lämnas som en övning.
Steg 2: varje automor� h ∈ G(Fm, Fj) = Hj kan betraktas som en automor�h ∈ Gj
h(a) =
{h(a) om a ∈ Fma om a ∈ Km \ Fm.
D.v.s. vi kan betrakta Hj som en delgrupp av Gj .
Bevis av Steg 2: Även steg 2 är enkelt. Uppenbarligen så är h en bijektionh : Km 7→ Km. Att h bevarar kroppsoperationer följer av att h gör det.

59
Steg 3: Hj+1 är en normal delgrupp av Hj .
Bevis av Steg 3: Vi vet att Gj+1 är normal i Gj . Vi börjar med att visa attHj ∩Gj+1 är normal i Hj .2 Observera att om h ∈ Hj så kommer
h (Hj ∩Gj+1)h−1 ⊂ hHjh−1 ⊂ Hj
eftersom Hj är en grupp. Och
h (Hj ∩Gj+1)h−1 ⊂ hGj+1h−1 = Gj+1
eftersom Gj+1 är normal. Det följer att
h (Hj ∩Gj+1)h−1 ⊂ Hj ∩Gj+1.
Men eftersom Hj ∩Gj+1 är en ändlig mängd och avbildningen g ∈ Hj ∩Gj+1 7→hgh−1 är injektiv så måste
h (Hj ∩Gj+1)h−1 = Hj ∩Gj+1.
Det följer att Hj ∩Gj+1 är normal i Hj .Härnäst så hävdar vi attHj+1 = Hj∩Gj+1 vilket implicerar (enligt föregående
paragraf) att Hj+1 är normal i Hj . Eftersom Hj+1 ⊂ Gj+1 (steg 2) ochHj+1 ⊂ Hj så räcker det att visa att
Hj ∩Gj+1 ⊂ Hj+1. (6.11)
Om (6.11) inte gäller så existerar det ett h ∈ Hj ∩ Gj+1 så att h /∈ Hj+1,d.v.s. ett
h ∈ (Gj+1 \Hj) ∩Hj+1. (6.12)
Men en automor� h ∈ Hj \ Hj+1 kan inte verka som identiteten på alla a ∈Fj+1 \ Fj . Så det �nns något element a ∈ Fj+1 \ Fj ⊂ Kj+1 \ Kj så atth(a) 6= a. Men det betyder att h /∈ Gj+1 vilket motsäger (6.12). Detta avslutarbeviset till Steg 3.
Steg 4: Kvotgruppen Hj/Hj+1 är abelsk.
Bevis av Steg 4: Låt h1, h2 ∈ Hj . Vi måste visa att
h1h2Hj+1 = (h1Hj+1)(h2Hj+1) = (h2Hj+1)(h1Hj+1) = h2h1Hj+1
Eftersom Gj/Gj+1 är abelsk och h1, h2 ∈ Hj ⊂ Gj så kommer
h1h2Gj+1 = (h1Gj+1)(h2Gj+1) = (h2Gj+1)(h1Gj+1) = h2h1Gj+1. (6.13)
2Här använder vi att Hj∩Gj+1 är en grupp. Men det är enkelt att se. Eftersom e ∈ Gj oche ∈ Hj , där e är identitets automor�n, så kommer e ∈ Hj ∩Gj+1. Och om h1, h2 ∈ Hj ∩Gj+1
så kommer h1, h2 ∈ Hj och h1, h2 ∈ Gj+1 vilket innebär att h1×h2 ∈ Hj och h−11 ∈ Hj samt
att h1×h2 ∈ Gj+1 och h−11 ∈ Gj+1; det följer att h1×h2 ∈ Hj ∩Gj+1 och h−1
1 ∈ Hj ∩Gj+1.Därför så är Hj ∩Gj+1 en grupp.

60 CHAPTER 6. MER OM AUTOMORFIER.
Vi hävdar att, för alla h ∈ Hj , så gäller
(hGj+1) ∩Hj = (h(Gj+1 ∩Hj)) = hHj+1. (6.14)
Den andra likheten gäller eftersom Hj+1 = Hj ∩Gj+1 som vi bevisade i Steg 3.Och att (hGj+1) ∩Hj = h(Gj+1 ∩Hj) följer av att om h1 ∈ (hGj+1) ∩Hj såkommer h1 = hg1 för något g1 ∈ Gj+1 sådant att g1 ∈ Hj eftersom hg1 ∈ Hj
vilket implicerar att h−1hg1 = g1 ∈ Hj .Om vi använder (6.14) med h = h1h2 i vänsterled i (6.13) och med h = h2h1
i högerled så får vi atth1h2Hj+1 = h2h1Hj+1.
Det följer att Hj/Hj+1 är abelsk.
Uppgifter:
Chapter 7
Femtegradsekvationen.
Vi har slutligen kommit fram till en punkt där vi kan bevisa att femtegradsek-vationen inte kan lösas med radikaler. Vi vet att det räcker att hitta ett femte-gradspolynom p(x) så att Galoisgruppen G(Q(x1, x2, ..., x5),Q) inte är lösbar.Vi känner bara till en grupp som inte är lösbar, nämligen S5 (Sats 5.6), så vimåste hitta ett polynom vars Galoisgrupp är S5.
Vi kommer att börja med en hjäpsats som visar att �xkroppen till Galosi-gruppen G(Q(x1, x2, ..., x5),Q) är Q. Tyvärr så kommer vi inte kunna bevisaden Hjälpsatsen i den här kursen. Det är oförlåtligt dåligt att använda sig aven sats som man inte har bevisat. Men tiden räcker inte till och ni kommer attse ett bevis senare i er utbildning.
Hjälpsats 7.1. Låt p(x) = x5 + a4x4 + ... + a0 vara ett polynom med koe�-
cienter a0, a1, ..., a4 ∈ Q och rötter x1, x2, ..., x5. Om vi de�nierar �xkroppen tillGaloisgruppen enligt
R = {a ∈ Q(x1, x2, ..., x5); σ(a) = a för alla σ ∈ G(Q(x1, x2, ..., x5),Q)},
då kommer R = Q.
Beviside: Kärnan i beviset är att om vi betraktar Q(x1, x2, ..., x5) som ettvektorrum över Q så kommer dimensionen av Q(x1, x2, ..., x5) att vara an-talet element i Galoisgruppen. Men om det �nns ett β ∈ R \ Q så kommerG(Q(x1, x2, ..., x5),Q(β)) = G(Q(x1, x2, ..., x5),Q) fast Q(x1, x2, ..., x5) sett somett vektorrum över Q(β) har annan dimension än Q(x1, x2, ..., x5) sett som ettvektorrum över Q. Detta skulle leda till en motsägelse.
Det skulle dock ta lite för lång tid att bevisa detta så vi kommer att ta denhär Hjälpsatsen för givet utan bevis.
Vi är nu redo att hitta ett villkår som säkerställer att Galoisgruppen
G(Q(x1, x2, ..., x5),Q) = S5.
Sats 7.1. Om p(x) är ett irreducibelt polynom av grad 5 med exakt tre reellaoch två komplexa rötter då kommer G(Q(x1, x2, ..., x5),Q) = S5.
61

62 CHAPTER 7. FEMTEGRADSEKVATIONEN.
Bevis: Låt oss börja med att förklara påståendet att G(Q(x1, x2, ..., x5),Q) =S5 för det är inte helt uppenbart vad det betyder eftersom S5 är en grupp avpermutationer och G(Q(x1, x2, ..., x5),Q) är en grupp av automor�er. Vi vetdock att om σ ∈ G(Q(x1, x2, ..., x5),Q) så kommer σ(xj) att vara en lösningp(σ(xj)) = 0 eftersom σ bevarar addition och multiplikation. Detta medföratt σ(xj) = xk för något k = 1, 2, ..., 5. Vi kan alltså betrakta varje σ ∈G(Q(x1, x2, ..., x5),Q) som en permutation av rötterna x1, x2, ..., x5. Eftersomalla element i Q(x1, x2, ..., x5) består av att multiplicera och addera x1, ..., x5med varandra och tal i Q, som lämnas �xt av G(Q(x1, ..., x5),Q), så speci�-ceras automor�n av dess verkan på x1, ..., x5. Detta medför att varje automor�σ ∈ G(Q(x1, x2, ..., x5),Q) motsvarar ett unikt element i S5. Med likhetenG(Q(x1, x2, ..., x5),Q) = S5 så avser vi att G(Q(x1, x2, ..., x5),Q) är isomorfmed S5 under den naturliga avbildningen som tar σ till den permutation sompermuterar x1, x2, ..., x5 på samma sätt som σ gör.
Vi kommer att bevisa att G(Q(x1, x2, ..., x5),Q) innehåller alla transposi-tioner mellan rötter. Eftersom alla permutationer kan skrivas som produktenav cykler och alla cykler kan skrivas som produkten av transpositioner (Följd-sats 5.1) så följer det att om Galoisgruppen innehåller alla transpositioner såinnehåller den alla permutationer. Vi genomför beviset i �era steg.
Steg 1: För varje j, k = 1, 2, 3, 4, 5 så �nns det en automor�σ ∈ G(Q(x1, x2, ..., x5),Q) så att σ(xj) = xk.
Bevis av Steg 1: Vi väljer ett xj och de�nierar Sj som mängden av xr så attσ(xj) = xr för någon sutomor�:
Sj = {xr1 , xr2 , ..., xrs} = {σ(xj); σ ∈ G(Q(x1, x2, ..., x5),Q)}.
Vi vill visa att Sj = {x1, x2, ..., x5}.De�niera polynomet
f(x) = (x− xr1)(x− xr2)...(x− xrs) =
= xs − (xr1 + xr2 + ...+ xrs)︸ ︷︷ ︸=bs−1
xs−1 + ...± xr1xr2 ...xrs︸ ︷︷ ︸=b0
.
Observera att, eftersom varje σ ∈ G(Q(x1, x2, ..., x5),Q) är en automor�, såkommer
σ(bs−1) = −(σ(xr1) + σ(xr2) + ...+ σ(xrs)) (7.1)
Men σ måste vara en bijektion från Sj till Sj vilket innebär att högerledet i(7.1) är samma sak som −((xr1 +xr2 + ...+xrs)), endast ordningen av termernaär annorlunda. Det följer att σ(bs−1) = bs−1 för alla σ ∈ G(Q(x1, x2, ..., x5),Q).Men enligt Hjälpsats 7.1 så följer det att bs−1 ∈ Q. På samma sätt så kommeralla b0, b1, ..., bs−1 ∈ Q. Men det innebär att f(x) delar p(x) i Q. Men efter-som p(x) är irreducibelt så betyder det att p(x) = f(x) vilket innebär att allanollställen till p är nollställen till f . Men nollställena till f(x) är exakt Sj . Detföljer att Sj = {x1, x2, x3, x4, x5}.

63
Steg 2: Om x1 och x2 är de komplexa rötterna till p(x) så kommer x1 =a + bi och x2 = a − bi för några a, b ∈ R och det �nns en automor� σ ∈G(Q(x1, ..., x5),Q) som tar varje x ∈ Q(x1, x2, ..., x5) till sitt komplexkonjugat.Speci�kt σ(x1) = x2, σ(x2) = x1 och σ(xj) = xj för j = 3, 4, 5, d.v.s. transpsi-tionen (1, 2) ligger i Galoisgruppen.1
Bevis av Steg 2: Observera att a0 = x1x2x3x4x5 ∈ Q (se (4.9)) och a4 =−(x1 + x2 + ...+ x5) ∈ Q (se (4.5)). Eftersom x3, x4, x5 ∈ R så måste x1x2 ∈ Roch x1 +x2 ∈ R. Om x1 = a+ bi och x2 = c+ di så kommer x1x2 = (ac− bd) +(ad+ bc)i ∈ R och x1 + x2 = (a+ c) + (b+ d)i ∈ R. Det följer att d = −b ocha = c. Så x1 = a+ bi och x2 = a− bi.
Att komplexkonjugering är en automor� på Q(x1, x2, ..., x5) är uppenbarteftersom komplexkonjugering är en automor� av hela C och Q(x1, x2, ..., x5) ⊂C. De sista kommentarerna är uppenbara.
Steg 3: Galoisgruppen G(Q(x1, x2, ..., x5),Q) innehåller alla transpositioner(i, j).
Bevis av Steg 3: Vi de�nierar en ekvivalensrelation∼ på mängden {1, 2, 3, 4, 5}där i ∼ j om i = j eller om (i, j) ∈ G(Q(x1, x2, ..., x5),Q). En ekvivalensrelationär en relation som uppfyller
1. i ∼ i för alla i.
2. i ∼ j implicerar att j ∼ i och att
3. i ∼ j och j ∼ k implicerar att i ∼ k.
Uppenbarligen så kommer vår relation att uppfylla 1, den kommer även uppfylla2 eftersom (i, j) = (j, i). Den uppfyller 3 detta eftersom om i ∼ j och j ∼k så kommer (i, j), (j, k) ∈ G(Q(x1, x2, ..., x5),Q) vilket innebär att (i, k) =(j, k)(i, j)(j, k) ∈ G(Q(x1, x2, ..., x5),Q).
Från ekvivalensrelationen ∼ kan vi de�niera i, mängden av alla j som ärekvivalenta med i,
i = {j; j ∼ i}.Vi hävdar att alla ekvivalensklasser 1, 2,..., 5 har lika många element. Om
i = j så är detta uppenbart så vi kan antaga att i 6= j. Det �nns, enligt steg1, en automor� σij ∈ G(Q(x1, ..., x5),Q) så att σij(xi) = xj , låt oss �xera ensådan automor�. Om k ∈ i, k 6= i och k 6= j, så hävdar vi att m = σij(k) ∈ j.Detta följer av att k ∈ i medför att (i, k) ∈ G(Q(x1, ..., x5),Q) men det innebäratt σij ◦ (i, k) ◦ σ−1ij ∈ G(Q(x1, ..., x5),Q). En något knepig, men elementär,beräkning visar att (j,m) ∈ G(Q(x1, ..., x5),Q) vilket innebär att m ∈ j. Mendetta innebär att för alla element k1, k2, ..., ks ∈ i så �nns det motsvarandeelement σij(k1), ..., σij(ks) ∈ j. Eftersom σij är en bijektion så kommer allaσij(k1), ..., σij(ks) att vara olika förutsatt att alla k1, ..., ks är det. Det följer attj har minst lika många element som i. Men på samma sätt så kommer i att haminst lika många element som j. Det följer att i och j har lika många element.
1Här tolkar vi en transposition (i, j) som en automor� som tar xi till xj , xj till xi ochlämnar övriga xk �xa.
64 CHAPTER 7. FEMTEGRADSEKVATIONEN.
Härnäst så visar vi att ekvivalensklasserna antingen sammanfaller eller ärdisjunkta. Om k ∈ i och k ∈ j så kommer för varje l ∈ i även l ∈ j; dettaeftersom då kommer l ∼ i och k ∼ i vilket implicerar att l ∼ k, men eftersomk ∼ j så måste l ∼ j vilket implicerar att l ∈ j. Så om k ∈ i och k ∈ j såkommer i ⊂ j och på samma sätt j ⊂ i.
Eftersom (1, 2) ∈ G(Q(x1, x2, ..., x5),Q) så har 1 t ≥ 2 element. Men allaklasser, säg att det �nns r stycken klasser, har lika många element vilket innebäratt det �nns t · r stycken element där t ≥ 2. Men eftersom det �nns 5 styckenelement totalt så kommer t · r = 5, det följer att t = 5 och r = 1. Så det�nns en ekvivalensklass, men det innebär att för alla i och j så kommer (i, j) ∈G(Q(x1, x2, ..., x5),Q) och Steg 3 följer.
Vi är nu redo att bevisa att inte alla femtegradsekvationer är lösbara medradikaler.
Sats 7.2. Ekvationen p(x) = x5 − 6x + 3 = 0 är inte lösbar med hjälp avradikaler.
Bevis: Enligt Eisensteins kriterium så är p(x) irreducibelt över Q. Vidareså har derivatan p′(x) = 5x4 − 6 endast två reella nollställen x = ± 4
√6/5, en
insättning i p(x) = 0 visar att p(x) 6= 0 då p′(x) = 0 för reella x så p(x) haringa reella dubbelrötter.
Eftersom derivatan av ett polynom måste vara noll mellan två nollställen såimplicerar detta att p(x) = 0 har maximalt 3 reella rötter. Men p(−2) < 0,p(0) > 0, p(1) < 0 och p(2) > 0 och eftersom, enligt satsen om mellanliggandevärden, p(x) måste anta värdet noll mellan varje teckenväxling så har så kommerp(x) att ha exakt tre reella rötter.
Sats 7.1 implicerar att G(Q(x1, x2, .., x5),Q) = S5. Enligt Sats 5.6 så ärGaloisgruppen inte lösbar. Men om x5−6x+3 = 0 vore lösbar med radikaler såskulle Galoisgruppen vara lösbar enligt Sats 6.3. Det följer att x5 − 6x+ 3 = 0inte är lösbar med radikaler.
Uppgifter:
1. I Steg 3 av beviset av Sats 7.1 så de�nierade vi att ∼ är en ekvivalensre-lation om
(a) i ∼ i för alla i.
(b) i ∼ j implicerar att j ∼ i och att
(c) i ∼ j och j ∼ k implicerar att i ∼ k.
Vi kan, för två talkroppar K och L, de�niera K ∼ L om K och L är iso-morfa. Visa att detta är en ekvivalensrelation och att alla talkroppar kandelas in i disjunkta ekvivalensklasser så att varje klass innehåller isomorfatalkroppar.
Appendix A
Euklidiska algoritmen,
primtal och polynomdivision.
A.1 Den Euklidiska algoritmen.
Om a, b ∈ Z så kommer vi att skriva a|b om a delar b, d.v.s. om ba ∈ Z. Om a
inte delar b så skriver vi a - b. För två tal a, b ∈ Z så kan vi fråga oss vilket somär det största talet c ∈ Z så att c|a och c|b. Vi kommer att kalla det talet förden den största gemensamma delaren till a och b eller symboliskt gcd(a, b). DenEuklidiska algoritmen hjälper oss att gcd(a, b). Ideén är enkel om c delar bådea och b så kommer c|(a − kb) för k ∈ Z. Om vi antar att a > b så kan vi väljaett tal k1 ≥ 1 så att 0 ≤ r1 = a− kb < b < a. Vi har då hittat ett tal r1 som ärmindre än a och b som c delar. Men eftersom c delar r1 och b så kommer c attdela b − k2r1. Vi kan välja k2 så att 0 ≤ r2 = b − k2r1 < r1 < b och hitta ettnytt tal som är ändå mindre och delas av c. Om vi upprepar detta så måste vinågon gång komma till ett slut då rn+1 = 0. Men det innebär att rn delar rn−1delar rn−2 .... delar a och b. Låt oss beskriva algoritmen formellt.
Start: Låt a > b > 0 vara två heltal så att ab = k0 rest r1, d.v.s. a =
k0b+ r1.
Induktionssteg: Låt r0 = b och r1 som i startsteget. De�niera induktivtrj+1 som resten av rj
rj−1
r0 = k1r1 + r2r1 = k2r2 + r3r2 = k3r3 + r4...rj−1 = kjrj + rj+1.
(A.1)
Eftersom resten är mindre än nämnaren så kommer r0 > r1 > r2 > ... > rj >... ≥ 0. Men detta innebär att efter n + 1 steg så kommer rn+1 = 0. Vi får
65

66APPENDIX A. EUKLIDISKA ALGORITMEN, PRIMTAL OCH POLYNOMDIVISION.
alltså
...rn−3 = kn−2rn−2 + rn−1rn−2 = kn−1rn−1 + rnrn−1 = knrn.
(A.2)
Identi�era gcd(a, b): Observera att rn delar rn−1 enligt sista raden i (A.2),men det medför att rn delar rn−2 enligt näst sista raden i (A.2), och därför rn−3enligt första raden i (A.2). Genom att arbeta oss upp i algoritmen så får vi attrn|r0 = b. Men a = k1b+ r1 så rn delar även a. Så r0|a och r0|b.
Visa att gcd(a, b) = r0: Enligt vår konstruktion så måste varje delare ava och b även dela alla talen r1, r2, ..., rn. Speci�kt så kommer c|a och c|b attimplicera att c|rn. Det följer att rn är den största gemensamma delaren till aoch b.
Exempel 1: Vi vill hitta den största gemensama delaren till a = 234 ochb = 84. Vi använder Euklides algoritm:
234 = 2× 84 + 6684 = 1× 66 + 1866 = 3× 18 + 1218 = 1× 12 + 612 = 2× 6 + 0.
(A.3)
Vi får alltså gcd(234, 84) = 6.
En intressant sak med den största gemensamma delaren är att den kanuttryckas som en linjärkombination av a och b över Z.
Proposition A.1. Låt d = gcd(a, b). Då �nns det s, t ∈ Z så att sa+ tb = d.
Bevis: Antag att vi har hittat den största gemensamma delaren rn = d medEuklides algoritm:
a = k0b+ r1r0 = k1r1 + r2r1 = k2r2 + r3r2 = k3r3 + r4...rn−3 = kn−2rn−2 + rn−1rn−2 = kn−1rn−1 + rnrn−1 = knrn.
(A.4)

A.2. EUKLIDISKA ALGORITMEN FÖR POLYNOM. 67
Om vi skriver om (A.4) så får vi
a− k0b = r1r0 − k1r1 = r2r1 − k2r2 = r3...rn−4 − kn−3rn−2 = rn−2rn−3 − kn−2rn−2 = rn−1rn−2 − kn−1rn−1 = rn
(A.5)
Ur den sista raden så får vi att vi kan skriva rn som en kombination av rn−1och rn−2. Men eftersom vi, enligt den näst sista raden i (A.5) kan skriva rn−1som en kombination av rn−2 och rn−3 så får vi
rn = rn−2 − kn−1rn−1 = rn−2 − kn−1 (rn−3 − kn−2rn−2) =
= (1 + kn−1kn−2) rn−2 − kn−1rn−3,
d.v.s. vi kan skriva rn som en kombination av rn−2 och rn−3.Induktivt så kan vi skriva rn som en kombination av rn−k och rn−k−1. När
vi kommer till första raden i algoritmen så får vi rn som en kombination av aoch b.
Exempel 2: Om vi vill skriva den största gemensamma delaren till a =234 och b = 84 som en kombination av a och b så använder vi den euklidiskaalgoritmen från Exempel 1:
234− 2× 84 = 6684− 1× 66 = 1866− 3× 18 = 1218− 1× 12 = 6
(A.6)
Om vi använder algoritmen baklänges så får vi
6 = 18− 1× 12 = 18− (66− 3× 18) = 4× 18− 66 == 4× (84− 66)− 66 = 4× 84− 5× 66 == 4× 84− 5(234− 2× 84) = 14× 84− 5× 234.
(A.7)
A.2 Euklidiska algoritmen för polynom.
Det enda vi använde i den Euklidiska algoritmen var att vi kan dela och attresten är �mindre� än nämnaren. Detta innebär att vi kan använda exakt sammaalgoritm för polynomdivision, eftersom vi kan dela polynom och resten har lägregrad än nämnaren. Efter n upprepningar av algoritmen så måste vi få ett kon-stantpolynom (d.v.s. ett polynom av grad noll) som rest eller så går divisionenjämt ut. Vi gestaltar detta med ett exempel.

68APPENDIX A. EUKLIDISKA ALGORITMEN, PRIMTAL OCH POLYNOMDIVISION.
Exempel 3: Vi vill hitta den största gemensamma delaren till f(x) =x4 − 3x− 4 och g(x) = x3 − 4x. För att göra det så beräknar vi
x4 − 3x− 4
x3 − 4x= x rest x2 − 4 = r1(x).
Vi får alltsåf(x) = xg(x) + r1(x),
där resten r1(x) = x2 − 4. Fortsätter vi algoritmen så ska vi beräkna
g(x)
r1(x)=x3 − 4x
x2 − 4= x rest 0.
Enligt algoritmen så skall därför r1(x) = x2 − 4 vara den största gemensammadelaren.
Vi kan även använda algoritmen för att skriva den största gemensammadelaren p(x) = gcd(f(x), g(x)) som p(x) = s(x)f(x) + t(x)g(x).
Proposition A.2. Låt p(x) = gcd(f(x), g(x)). Då �nns det polynom s(x) ocht(x) så att s(x)f(x) + t(x)g(x) = p(x).
Beviset är exakt det samma som för Proposition A.1. Vi gestaltar procedurenmed ett exempel.
Exempel 4: Vi vet från Exempel 3 att gcd(x4 − 3x− 4, x3 − 4x) = x2 − 4.Om vi vill skriva x2 − 4 = s(x)f(x) + t(x)g(x) så använder vi den Euklidiskaalgoritmen baklänges igen. Från våra tidigare beräkningar så vet vi att
f(x) = xg(x) + r1(x)g(x) = xr1(x).
Den första ekvationen säger att r1(x) = f(x)− xg(x).
En viktig följdsats är att om f(x) och g(x) är relativt prima, d.v.s. omgcd(f, g) = 1, så kan man hitta polynom s(x) och t(x) så att s(x)f(x) +t(x)g(x) = 1. Vi formulerat detta som en följdsats.
Följdsats A.1. Om gcd(f(x), g(x)) = 1 så existerar det polynom s(x) och t(x)så att s(x)f(x) + t(x)g(x) = 1.
A.3 Primtalsfaktorisering.
Vi vet alla vad ett primtal är, men för att vara lite formella så de�nierar vibegreppet i alla fall.
De�nition A.1. Vi säger att p är ett primtal om p ≥ 2 och de enda delarnar > 0 till p är r = 1 och r = p.
A.3. PRIMTALSFAKTORISERING. 69
Syftet med den här sektionen är att bevisa att alla naturliga tal har en unikprimtalsfaktorisering. En primtalsfaktorisering av ett tal n ∈ N består av ettantal primtal p1, p2, ..., pk så att n = p1p2...pk. Nästa hjälpsats visar att allanaturliga tal kan primtalsfaktoriseras, senare skall vi visa att primtalsfaktoris-eringen är unik.
Hjälpsats A.1. Alla tal n ∈ N, n ≥ 2, kan skrivas som produkten av primtal:n = p1p2...pk där p1, p2, ..., pk är primtal.
Bevis: Om hjälpsaten inte är sann så kan vi låta n vara det minsta naturligatalet som inte kan skrivas som en produkt av primtal.
Uppenbarligen kan inte n själv vara ett primtal (i så fall skulle vi kunnasätta p1 = n och få n = p1 vilket uppfyller Hjälpsatsen med k = 1). Eftersom ninte är ett primtal så kan vi skriva n = n1n2 där 1 < n1, n2 < n. Men eftersomn var det minsta talet som inte uppfyllde satsen så kommer n1 = p1p2...pk ochn2 = q1q2...ql där p1, p2, ..., pk och q1, ..., ql är primtal. men det innebär attn = n1n2 = p1p2...pkq1q2...ql så n är produkten av primtal trots allt. Vi kansluta oss till att alla tal n ≥ 2 kan skirvas som en produkt av primtal.
Innan vi visar att primtalsuppdelningen är unik så behöver vi följande propo-sition.
Proposition A.3. Om p är ett primtal och a1, a2, ..., an ∈ N är sådana attp|a1a2...an då �nns det minst ett 1 ≤ j ≤ n så att p|aj.
Bevis: Vi bevisar detta med induktion över n. Om n = 1 så är propositionenuppenbar. Låt oss därför antaga att propositionen gäller för alla n ≤ k och villvisa att propositionen gäller för n = k + 1.
Vi låter a1, a2, ..., ak+1 ∈ N vara tal så att p|a1a2...ak+1. Om p också skulledela a1a2...ak så skulle p|aj för något 1 ≤ j ≤ n enligt vårt induktionsantagande.Så vi kan antaga att p - a1a2...ak = a. Men då kommer, enligt Proposition A.1,det att �nnas tal s, t ∈ Z så att sp + ta = 1. Multiplicerar vi sista olikhetenmed ak+1 så får vi
ak+1 = spak+1 + taak+1 = sak+1p+ ta1a2...ak+1,
men båda termerna i högerledet är delbara med p vilket innebär att vänsterledetockså måste vara delbart med p. Det följer att p|ak+1. Beviset är därmedavslutat.
Sats A.1. Varje n ≥ 2 kan skrivas som n = p1p2...pk där pj är primtal. Vidareså är primtalen p1, p2, ..., pk unika (förutom att ordningen kan variera).
Bevis: Vi har redan visat att vi kan primtalsfaktorisera n i Hjälpsats A.1 såvi behöver bara visa att faktoriseringen är unik. Vi kommer att använda sammaidée som i Proposition A.3 och antaga att n är det minsta talet som inte har enunik primtalsfaktorisering och sen visa att detta leder till en motsägelse.
Låt n = p1p2...pk och n = q1q2...ql där p1, p2, ..., pk och q1, q2, ..., ql är prim-tal. Då kommer p1|n vilket innebär att p|q1q2...ql eftersom n = q1q2...ql. Enligt

70APPENDIX A. EUKLIDISKA ALGORITMEN, PRIMTAL OCH POLYNOMDIVISION.
Proposition A.3 så måste p|qj för något j. Men eftersom qj är ett primtal ochp1 6= 1 så måste p1 = qj . Vi får därför att, om vi skriver n′ = n
p1,
p2p3...pk = q1q2...qj−1qj+1...ql = n′. (A.8)
Eftersom n var det minsta talet som inte hade en unik primtalsfaktoriseringoch eftersom n′ < n så måste n′ ha en unik primtalsfaktorisering. Vi kan därför,från (A.8), sluta oss till att primtalen p2, p3, .., pk och q1, q2, ..., qj−1, qj+1, ..., qlär de samma. Men eftersom också p1 = qj så följer det att n har en unikprimtalsfaktorisering.
A.4 Eisensteins kriterium för irreducibilitet.
Nära anknutet till primtal är begreppet irreducibla polynom. Vissa polynom,som t.e.x. p(x) = x4 + 1x2 − 2 kan skrivas som produkten av två polynom avlägre grad:
p(x) = x4 + 3x2 + 2 = (x− 1) (x+ 1)(x2 + 2).
Över de komplexa talen kan man fortsätta att faktorisera
p(x) = x4+3x2+2 = (x− 1) (x+1)(x2+2) = (x− 1) (x+1)(x−√
2i)(x+√
2i).
I allmänhet så kan man faktorisera ett polynom p(x) = xn + an−1xn−1 + ... +
a1x+ a0 i linjära faktorer över de komplexa talen:
p(x) = (x− x1)(x− x2)...(x− xn),
där x1, x2, ..., xn är polynomets rötter.Men om man tittar på polynom över R, Q eller Z (d.v.s. om man bara
tillåter användningen av reella, rationella eller heltal) så �nns det polynom somär irreducibla. T.e.x. så är p(x) = x2 − 2 irreducibelt över Q eller Z men inteöver R. Vi gör följande de�nition.
De�nition A.2. Låt K = R,Q eller Z. Vi säger att ett polynom p(x) medkoe�cienter i K är irreducibelt över K om vi inte kan skriva
p(x) = q(x)r(x)
där q(x) och r(x) är polynom, av grad större än eller lika med ett, med koe�-cienter i K. Ett polynom som inte är irreducibelt är reducibelt.
Ett fantastiskt faktum är att polynom som är irreducibla över Z också ärirreducibla över Q.
Proposition A.4. Om
p(x) = a0 + a1x+ a2x2 + ...+ anx
n, a0, ...an ∈ Z
är irreducibelt över Z så är p(x) irreducibelt över Q.

A.4. EISENSTEINS KRITERIUM FÖR IRREDUCIBILITET. 71
Bevis: Antag, för att få en motsägelse, att
p(x) = f(x)g(x),
där f(x) och g(x) har koe�cienter i Q:
f(x) = b0 + b1x+ ...+ brxr, (A.9)
g(x) = c0 + c1x+ ....+ csxs. (A.10)
Då kan vi skriva, för något n ∈ Z,
np(x) = f(x)g(x) (A.11)
där f och g har koe�cienter i Z. För att se att det är möjligt så kan man väljan som produkten av alla nämnare i bj och cj .
Vi kommer att välja n som det minsta talet så att f och g har koe�cienteri Z. Vi kommer att bevisa att n = 1 och det följer därför att p(x) måste varairreducibelt vilket motsäger vårt antagande.
Låt q vara en primfaktor i n (om n inte har några primfaktorer så måsten = 1 och vi är klara med beviset redan). Om q skulle dela alla koe�cienter if eller i g så skulle vi kunna välja n/q < n istället för n, men n var det minstanaturliga talet år f och g hade heltalskoe�cienter.
Så q delar varken alla koe�cienter i f eller alla koe�cienter i g. Därför såexisterar det ett minsta i ∈ N och ett minsta j ∈ N så att q - bi och q - cj ,här använder vi bk och ck för koe�cienterna i f och g i analogi med (A.9) och(A.10). Men om vi jämför koe�cienten framför xi+j i vänster och högerled i(A.11)
nai+j = b0ci+j + b1ci+j−1 + ...+ bj ci + ...+ bi+j c0
så ser vi att alla termer är delbara med q förutom bj ci vilket är en motsägelse.Det följer att q måste dela alla koe�cienter i f eller alla koe�cienter i g. Men detinnebär, som vi redan har förklarat, att n inte är det minsta valet eftersom n′ =n/q också skulle göra det möjligt att välja f och g med heltalskoe�cienter.
Sats A.2. [Eisensteins irreducibilitetssats.] Antag att p(x) = a0 +a1x+...+ anx
n är ett polynom i Z (alla koe�cienter i Z). Antag vidare att det �nnsett primtal q så att
1. q - an
2. q|aj för j = 0, 1, 2, ..., n− 1
3. q2 - a0
då är p(x) irreducibelt över Z (och därmed, enl. Proposition A.4, över Q).

72APPENDIX A. EUKLIDISKA ALGORITMEN, PRIMTAL OCH POLYNOMDIVISION.
Bevis: Antag, för att få en motsägelse, att vi kan skriva p(x) = f(x)g(x) därf(x) och g(x) är polynom i Z:
f(x) = b0 + b1x+ ...+ brxr, (A.12)
g(x) = c0 + c1x+ ....+ csxs. (A.13)
Om p(x) = f(x)g(x) så måste b0c0 = a0 och eftersom q|a0 så måste q|b0 ellerq|c0. Men q2 - a0 så q kan inte dela både b0 och c0. Låt oss antaga att q|b0 ochq - c0 (om det omvända gäller så är beviset analogt).
Vi vet också att q inte kan dela alla koe�cienter bi eftersom då skulle q|anvilket strider mot våra antaganden. Så det existerar ett minsta i så att q - bi.Men
ai = bic0 + bi−1c1 + bi−2c2 + ...+ b0ci (A.14)
⇒ bic0 = ai − (bi−1c1 + bi−2c2 + ...+ b0ci). (A.15)
Men alla termer till höger i (A.14) är delbara med q vilket implicerar att q ävendelar bic0. Men om q|bic0 så måste q|bi eller q|c0 enligt Proposition A.3. Menq - bi och q - c0 enligt vår konstruktion. Detta är en motsägelse.

















![[Företagets namn] [Dokumenttitel]1189860/... · 2018. 3. 13. · Europa, men lämningarna kan se olika ut var än i Europa man befinner sig. I östra Europa hittas lämningar av](https://img.pdfslide.tips/doc/110x75/609040a5efe62f5a255d343a/fretagets-namn-dokumenttitel-1189860-2018-3-13-europa-men-lmningarna.jpg)