Embed Size (px)
Citation preview
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA ---------------------------------------
LÊ MINH THÀNH
ĐIỀU KHIỂN NHIỆT ĐỘ LÒ HƠI TẦNG SÔI TUẦN HOÀN ỨNG DỤNG TRÍ
TUỆ NHÂN TẠO
Chuyên ngành : KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
Mã số: 60.52.02.16
TÓM TẮT LUẬN VĂN THẠC SĨ KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
Đà Nẵng – Năm 2018
Công trình được hoàn thành tại
TRƯỜNG ĐẠI HỌC BÁCH KHOA
Người hướng dẫn khoa học: TS. Nguyễn Quốc Định
Phản biện 1: TS. Nguyễn Anh Duy
Phản biện 2: TS. Hà Xuân Vinh
Luận văn sẽ được bảo vệ trước Hội đồng chấm Luận văn tốt nghiệp thạc sĩ chuyên
ngành Kỹ thuật điều khiển và tự động hóa học tại Trường Đại học Bách khoa vào ngày
19 tháng 05 năm 2018.
Có thể tìm hiểu luận văn tại:
Trung tâm Học liệu, Đại học Đà Nẵng tại Trường Đại học Bách khoa
Thư viện Khoa Điện, Trường Đại học Bách khoa - ĐHĐN
1
MỞ ĐẦU
1. Lý do chọn đề tài
Ngày nay khoa học kỹ thuật không ngừng phát triển, đặc biệt đối với nước ta đang trong
thời kỳ công nghiệp hóa – hiện đại hóa, cũng chính vì mục tiêu đó mà việc ứng dụng các
phương pháp điều khiển mới linh hoạt hơn vào điều khiển tự động là rất cần thiết.
Những phương pháp điều khiển cổ điển hầu như dựa trên nền toán học chính xác. Tuy
nhiên kỹ thuật điều khiển ứng dụng trí tuệ nhân tạo bắt nguồn từ những sách lược và kinh
nghiệm của chuyên gia đã có thể thoát được những ràng buộc từ những phương pháp toán
học chính xác. Cũng chính vì vậy mà điều khiển ứng dụng trí tuệ nhân tạo được ứng dụng
rộng rãi trong điều khiển quá công nghiệp. Phương pháp điều khiển sử dụng mạng nơron tái
tạo lại chức năng giống con người đã mở ra một hướng mới trong việc giải quyết các bài toán
kỹ thuật và kinh tế.
Điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn thường khá phực tạp do đối tượng có tính
trễ và phi tuyến. Ngày nay với sự ra đời của nhiều phương pháp điều khiển khác nhau, mỗi
phương pháp chắc chắn sẽ có những điểm mạnh riêng. Nếu có thể kết hợp tốt các phương
pháp với nhau có thể mang đến một hiệu quả cao trong điều khiển.
Cũng chính vì những yếu tố trên mà việc kết hợp phương pháp PID truyền thống và
mạng nơron được nghiên cứu là mục đích của đề tài “Điều khiển nhiệt độ lò hơi tầng sôi tuần
hoàn ứng dụng trí tuệ nhân tạo”.
2. Mục tiêu nghiên cứu
Tìm hiểu các đặc trưng của mạng nơron nhân tạo, khả năng và các nguyên tắc để ứng
dụng thành công mạng nơ ron nhân tạo trong thực tế. Xây dựng lý thuyết sử dụng mạng nơ
ron giám sát và điều khiển nhiệt độ lò hơi. Làm cơ sở cho các nghiên cứu sâu hơn về lò hơi
và nền tảng để chế tạo mô hình điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn.
3. Đối tượng và phạm vi nghiên cứu
3.1. Đối tượng nghiên cứu
- Quá trình thay đội nhiệt độ lò hơi tầng sôi tuần hoàn.
- Lý thuyết điều khiển mờ, mạng nơron .
- Phần mềm Matlab & Simulink mô phỏng quá trình điều khiển nhiệt độ lò hơi tầng sôi
tuần hoàn.
3.2. Phạm vi nghiên cứu
- Điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn sử dụng phương pháp điều khiển PID,
phương pháp sử dụng mạng nơrơn bán kính xuyên tâm RBF giám sát nhiệt độ lò và điều khiển
bằng mạng nơron PID.
- Mô phỏng quá trình điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn.
4. Nội dung nghiên cứu
- Nghiên cứu mô hình lò hơi tâng sôi tuần hoàn.
- Nghiên cứu về lý thuyết điều khiển mờ, mạng nơron và mạng nơron kết hợp với
phương pháp điều khiển truyền thống.
2
- Nghiên cứu xây dựng mô phỏng quá trình điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn
bằng phần mềm Matlab & Simulink.
5. Phương pháp nghiên cứu
Nghiên cứu lý thuyết kết hợp với việc làm mô phỏng thực nghiệm:
- Phương pháp nghiên cứu tài liệu: nghiên cứu lý thuyết và ứng dụng điều khiển mờ,
mạng nơron nhân tạo và mạng nơron bán kính xuyên tâm RBF.
- Nghiên cứu bộ điều khiển PID, điều khiển mờ và điều khiển mờ nơron để điều khiển
nhiệt độ lò hơi tầng sôi tuần hoàn.
- Đề tài thực hiện trong phạm vi mô phỏng mô hình trên công cụ Matlab – Simulink sẽ
là cơ sở để tiếp tục nghiên cứu trong thực tế.
- Trên cơ sở các kết quả mô phỏng rút ra kết luận.
6. Ý nghĩa khoa học và thực tiễn của đề tài
6.1. Ý nghĩa khoa học của đề tài
Nghiên cứu này cũng như các nghiên cứu khác có cùng mục tiêu nâng cao độ chính xác
sẽ cung cấp thêm cho những nhà nghiên cứu, đề tài sẽ mang lại một hướng mới trong việc
thiết kế bộ điều khiển nhiệt độ trong lò hơi tầng sôi tuần hoàn, ngoài việc dùng bộ điều khiển
PID hoặc bộ điều khiển mờ. Các bộ điều khiển thông minh có thể cho khả năng điều khiển
tốt hơn đối với đối tượng điều khiển là nhiệt độ.
6.2. Ý nghĩa thực tiễn của đề tài
Đề tài thực hiện làm cơ sở để thực hiện các bộ điều khiển sử dụng kết hợp phương pháp
điều khiển PID truyền thống và mạng nơron với chất lượng đạt yêu cầu áp dụng với các đối
tượng có độ trễ, phi tuyến và trong môi trường có nhiễu tác động trong quá trình làm việc.
7. Cấu trúc luận văn
MỞ ĐẦU
Luận văn gồm có 3 chương:
Chương 1: TỔNG QUAN VỀ LÒ HƠI TẦNG SÔI TUẦN HOÀN.
Giới thiệu về lò hơi, mô hình, nguyên lý hoạt động.
Chương 2: TỔNG QUAN VỀ MẠNG NƠRON VÀ LOGIC MỜ
Chương này tổng hợp trình bày lý thuyết điều khiển mờ, mạng nơron và mạng nơron
với phương pháp PID truyền thống.
Chương 3: MÔ PHỎNG BỘ ĐIỀU KHIỂN NHIỆT ĐỘ LÒ HƠI TẦNG SÔI
TUẦN HOÀN VÀ ĐÁNH GIÁ.
Điều khiển bằng các phương pháp PID, mờ, nơron PID kết hợp mạng nơron giám sát.
Tổng hợp và đánh giá các bộ điều khiển.
3
CHƯƠNG 1
TỔNG QUAN VỀ LÒ HƠI TẦNG SÔI TUẦN HOÀN
1.1. Giới thiệu chung về lò hơi
1.1.1. Định nghĩa
Lò hơi là thiết bị trong đó xẩy ra quá trình đốt cháy nhiên liệu, nhiệt lượng tỏa ra từ quá
trình cháy sẽ truyền cho nước trong lò để biến nước thành hơi. Nghĩa là lò hơi là thiết bị thực
hiện quá trình biến đổi, chuyển hoá năng lượng của nhiên liệu thành nhiệt năng của dòng hơi.
1.1.2. Phân loại lò hơi
Lò hơi theo được phân loại theo nhiều cách:
- Theo nhiệm vụ của lò hơi trong sản xuất: lò hơi công nghiệp và lò hơi sản xuất điện
năng.
- Theo chế độ đốt nhiên liệu trong buồng lửa: Lò ghi thủ công, lò ghi nửa cơ khí, lò ghi
cơ khí (ghi xich), lò phun nhiên liệu lỏng, lò phun nhiên liệu khí, lò phun bột than, lò buồng
đốt xoáy, lò buồng lửa tầng sôi.
- Theo chế độ tuần hoàn của nước trong lò ta: Lò tuần hoàn tự nhiên, lò tuần hoàn cưỡng
bức, lò trực lưu.
Tuy nhiên, cách phân loại này chỉ thể hiện một vài đặc tính nào đó của lò hơi, thực tế
khi gọi tên lò hơi người tathường kết hợp nhiều kiểu phân loại.
1.2. Cơ sở lý thuyết kỹ thuật tầng sôi
Tầng sôi là một vùng không gian được tạo bởi các hạt rắn gồm: than, tro, cát, đá vôi…
những hạt này được nâng lên và lơ lững trong buồng đốt nhờ áp lực của dòng không khí.
Khi dòng không khí xuyên qua lớp hạt rắn, dòng khí tạo xu hướng tách các hạt ra khỏi
nhau, làm cho lớp liệu trong buồng đốt giãn nở, sự tiếp xúc giữa không khí và nhiên liệu tăng
lên nhiều. Ở trạng thái này các hạt chuyển động tự do và sôi giống như chất lỏng nên gọi là
tầng sôi.
1.2.1 Sơ đồ nguyên lý tạo tầng sôi:
Ban đầu, lớp hạt nhiên liệu rắn nằm yên trên ghi có độ cao h.
Khi cho dòng không khí qua lưới phân phối vào lớp hạt nhiên liệu với tốc độ nhỏ,lớp
hạt không dịch chuyển.Tăng dần tốc độ ω gần bằng tốc độ ωs, chiều cao lớp liệu vẫn không
đổi ( trạng thái A), trở lực của lớp sôi tăng lên.
Khi tiếp tục tăng tốc độ đến ω = ωs, lúc này áp lực của dòng khí cân bằng trọng lực của
lớp liệu, lớp liệu bắt đầu chuyển động ( trạng thái B), các hạt chuyển động lơ lửng trong pha
khí, xoáy trộn với nhau và chuyển động hỗn loạn, độ rỗng và chiều cao của lớp liệu tăng lên,
trạng thái này gọi là trạng thái sôi.
4
Khi tốc độ dòng khí ω > ωs, bắt đầu xuất hiện những bọt khí, túi khí, các bọt khí này
chuyển động lên trên bề mặt lớp sôi và vỡ ra làm cho chiều cao lớp sôi dao động. Khi vận tốc
dòng khí đạt đến ωc, lớp liệu có độ rỗng lớn nhất, các hạt liệu treo lơ lửng trong buồng đốt,
không lắng xuống cũng như không bị bay ra khỏi buồng lửa ( trạng thái C).
Tiếp tục tăng vận tốc dòng khí cho đến khi vượt vận tốc cuốn theo ωc thì kết thúc trạng
thái sôi, lớp liệu sẽ có các hạt liệu bị cuốn theo dòng khí bay ra khỏi buồng đốt ( trạng thái
D).
Do đó để tạo lớp sôi, ta phải duy trì tốc độ dòng khí từ ωs đến ωc.
1.2.2 Vật liệu sử dụng trong lò tầng sôi:
Trong quá trình đốt nguyên liệu của lò hơi tầng sôi, người ta thường cho vào buồng lửa các
vật liệu để nâng cao nhiệt độ các thành phần cháy lên đến nhiệt độ phản ứng. Vì vậy, vật liệu
này cần đảm bảo các tính chất sau:
- Nhiệt dung riêng lớn (vật liệu phải chịu được nhiệt độ cao ).
- Khối lượng riêng nhỏ (giảm trở lực khi quạt thổi vào buồng lửa).
- Độ nhẵn bề mặt cao (dễ tạo tầng sôi ).
- Giá thành thấp, dễ kiếm.
Trong thực tế, người ta thường sử dụng cát thạch anh làm vật liệu sôi vì nó đáp ứng được hầu
hết các yêu cầu.
1.3. Phân loại lò hơi tầng sôi
Có hai kiểu lò hơi tầng sôi:
- Lò hơi tầng có bọt khí (bong bóng).
- Lò hơi tầng sôi tuần hoàn.
1.3.1 Lò hơi tầng sôi bong bóng:
1.3.2 Lò hơi tầng sôi tuần hoàn:
1.4 Giới thiệu lò hơi tầng sôi tuần hoàn
1.4.1 Cấu tạo
Các hệ thống chính của lò hơi tầng sôi tuần hoàn:
- Hệ thống cung cấp nhiên liệu.
- Hệ thống cung cấp gió:
+ Quạt sơ cấp có nhiệm vụ tạo tầng sôi, làm khí đốt chính.
+ Quạt thứ cấp có nhiệm vụ kiểm soát lượng gió dư.
- Hệ thống cấp nước
5
- Hệ thống hơi
- Hệ thống lọc bụi và thu hồi tro.
- Bộ quá nhiệt.
- Bộ hâm nước và sấy không khí.
1.4.2 Nhiên liệu
Lò tầng sôi tuần hoàn có thể đốt bằng nhiều dạng nhiên liệu như: rắn, lỏng, khí với chất
lượng từ cao đến thấp.
Các loại nhiên liệu cụ thể như: than nâu, chất thải quá trình rửa than, than có hàm lượng lưu
huỳnh cao, than cốc, các chất thải không thể đốt được trong các lò hơi thông thường, các loại
phụ phẩm nông nghiệp như: trấu, bã mía,vỏ cây, gỗ vụn, gỗ phế phẩm, rác thải,….
1.4.3 Quá trình cháy của nhiên liệu
Trong buồng đốt lò hơi tầng sôi nhiệt độ được duy trì trong khoảng 8500C ÷ 9500C. Khi nhiên
liệu được đưa vào trong lớp, nó được gia nhiệt một cách nhanh chóng và bốc cháy. Thường
nhiên liệu được đốt với lượng không khí thừa khoảng 20%. Thời gian lưu lại của nhiên liệu
trong buồng đốt tầng sôi dài hơn, và nhiên liệu được cháy một cách hiệu quả trong buồng đốt
tầng sôi ở nhiệt độ thấp hơn so với các phương pháp đốt nhiên liệu trên ghi và phun bột than.
Khi hạt nhiên liệu cháy, kích thước của nó sẽ giảm dần xuống, đến giá trị mà ở đó lực do dòng
khí tại ra lớn hơn trọng lượng hạt thì hạt sẽ bị cuốn ra ngoài.
Vì vậy thời gian lưu lại của hạt được xác định bởi kích thước ban đầu ban đầu của hạt nhiên
liệu, và mức độ giảm kích thước hạt do cháy và do ma sát.
a, Ưu điểm:
Có thể đốt nhiều loại nhiên liệu:
Hiệu suất xử lý khí thải SO2:
Lượng NOx thải thấp:
Vận hành dễ dàng :
b, Nhược điểm:
Cần quạt có công suất lớn:
Tổn thất nhiệt ra môi trường nhiều hơn:
Hiệu suất cháy thấp:
Ngoài ra nó còn có một số nhược điểm nữa là :
1.5 Hàm truyền của lò hơi tầng sôi tuần hoàn
Trong quá trình vận hành lò hơi tầng sôi tuần hoàn, có nhiều thông số tác động đến nhiệt độ
của tầng sôi (như lưu lượng gió cung cấp, chất lượng nhiên liệu,…). Nhưng trong đó, thông
số chính quyết định nhiệt độ của tầng sôi là lượng nhiên liệu cấp cho buồng đốt.
6
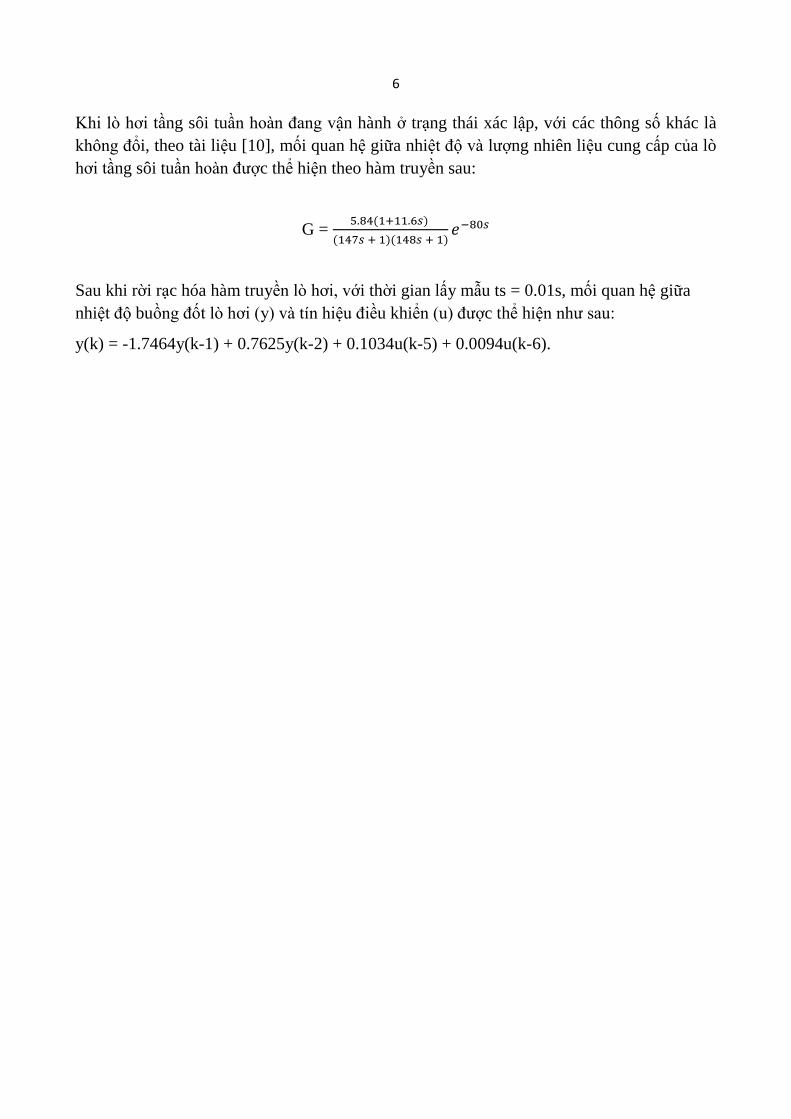
Khi lò hơi tầng sôi tuần hoàn đang vận hành ở trạng thái xác lập, với các thông số khác là
không đổi, theo tài liệu [10], mối quan hệ giữa nhiệt độ và lượng nhiên liệu cung cấp của lò
hơi tầng sôi tuần hoàn được thể hiện theo hàm truyền sau:
G = 5.84(1+11.6𝑠)
(147𝑠 + 1)(148𝑠 + 1)𝑒−80𝑠
Sau khi rời rạc hóa hàm truyền lò hơi, với thời gian lấy mẫu ts = 0.01s, mối quan hệ giữa
nhiệt độ buồng đốt lò hơi (y) và tín hiệu điều khiển (u) được thể hiện như sau:
y(k) = -1.7464y(k-1) + 0.7625y(k-2) + 0.1034u(k-5) + 0.0094u(k-6).
7
CHƯƠNG 2
TỔNG QUAN VỀ MẠNG NƠRON VÀ LOGIC MỜ
2.1. Đặt vấn đề
2.2. Tổng quan về điều khiển mờ
2.2.1. Giới thiệu
2.2.2. Cấu trúc của hệ điều khiển mờ
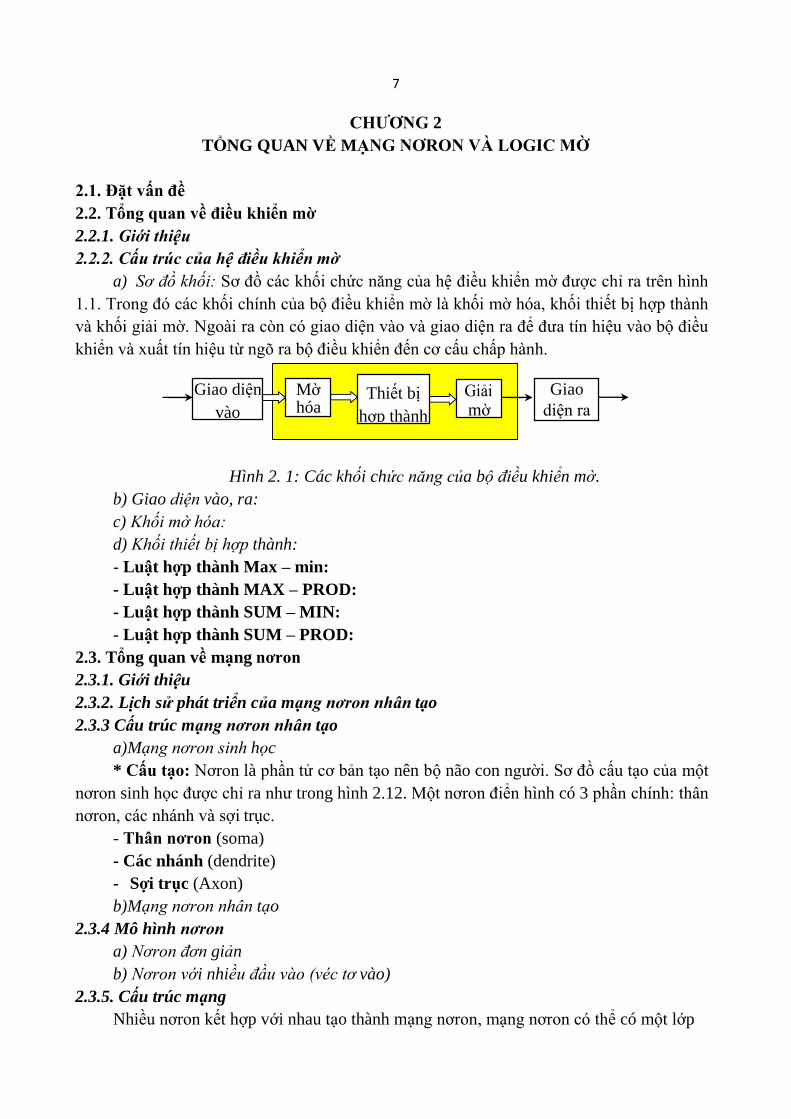
a) Sơ đồ khối: Sơ đồ các khối chức năng của hệ điều khiển mờ được chỉ ra trên hình
1.1. Trong đó các khối chính của bộ điều khiển mờ là khối mờ hóa, khối thiết bị hợp thành
và khối giải mờ. Ngoài ra còn có giao diện vào và giao diện ra để đưa tín hiệu vào bộ điều
khiển và xuất tín hiệu từ ngõ ra bộ điều khiển đến cơ cấu chấp hành.
Hình 2. 1: Các khối chức năng của bộ điều khiển mờ.
b) Giao diện vào, ra:
c) Khối mờ hóa:
d) Khối thiết bị hợp thành:
- Luật hợp thành Max – min:
- Luật hợp thành MAX – PROD:
- Luật hợp thành SUM – MIN:
- Luật hợp thành SUM – PROD:
2.3. Tổng quan về mạng nơron
2.3.1. Giới thiệu
2.3.2. Lịch sử phát triển của mạng nơron nhân tạo
2.3.3 Cấu trúc mạng nơron nhân tạo
a)Mạng nơron sinh học
* Cấu tạo: Nơron là phần tử cơ bản tạo nên bộ não con người. Sơ đồ cấu tạo của một
nơron sinh học được chỉ ra như trong hình 2.12. Một nơron điển hình có 3 phần chính: thân
nơron, các nhánh và sợi trục.
- Thân nơron (soma)
- Các nhánh (dendrite)
- Sợi trục (Axon)
b)Mạng nơron nhân tạo
2.3.4 Mô hình nơron
a) Nơron đơn giản
b) Nơron với nhiều đầu vào (véc tơ vào)
2.3.5. Cấu trúc mạng
Nhiều nơron kết hợp với nhau tạo thành mạng nơron, mạng nơron có thể có một lớp
Mờ hóa
mờ
Thiết bị
hợp thành
Giao diện
vào
Giao
diện ra
8
hoặc nhiều lớp.
a) Mạng một lớp
b) Mạng nhiều lớp
2.3.6. Huấn luyện mạng
* Mục đích huấn luyện mạng: Mạng nơron được huấn luyện để thực hiện những hàm
phức tạp trong nhiều lĩnh vực ứng dụng khác nhau như trong nhận dạng, phân loại sản phẩm,
xử lý tiếng nói, chữ viết và điều khiển hệ thống…
a) Huấn luyện gia tăng (huấn luyện tiến dần)
b) Huấn luyện mạng theo gói
2.3.7 Tổng quan về mạng nơron hàm cơ sở bán kính xuyên tâm RBFNN
. Hàm đối xứng xuyên tâm cơ sở RBFNN đã có từ lâu trong lý thuyết xấp xỉ và được
sử dụng để xấp xỉ hàm chưa biết dựa trên cơ sở các cặp điểm vào – ra biểu diễn hàm
chưa biết đó. Trong nhận dạng mô hình hệ thống RBFNN có thể biểu diễn theo cấu
trúc mạng perceptron. Mọi hệ phi tuyến có thể xấp xỉ bằng RBF, đây là điểm làm
cho RBF đặc biệt phù hợp với bài toán nhận dạng mô hình. Về nguyên tắc RBF có
thể được coi là mạng nơ-ron 3 lớp (với 1 lớp ẩn).Tuy nhiên đầu ra của mạng luôn
biến đổi tuyến tính đối với trọng số liên kết. Hàm bán kính là hàm chỉ phụ thuộc
vào khoảng cách từ đối số x đến một điểm c (gọi là tâm) cho trước.
W(x)= W(||x-A||)=W(r) với r=||x-A|| (2.19)
Một số hàm cơ bản trong RBFNN:
Hàm Gaussian: W(r)=exp{−𝑥2
2𝜎} = exp {−𝛽𝑒2} (2.20)
Hàm đa thức: W(r)=r^(2k+1) (2.21)
Hàm spline: W(r)= x^2 lnx (2.22)
Khoảng cách: W(r)=√(r^2+β^2 ) (2.23)
Trong đó:
A: Véc tơ chứa các tâm hàm RBF
W: Hàm cơ sở hoặc hàm kích hoạt của mạng
R: Bán kính
σ, β: Các thông số tỷ lệ
||.||: Chuẩn Euclidean, tức là nếu x chứa n phần tử thì:
||x||=√∑ 𝑥𝑖2𝑛
𝑖=1 (2.24)
9
Việc luyện mạng RBF phụ thuộc vào việc chọn tâm như thế nào. Có 2 kỹ thuật
luyện mạng RBF:
Chọn các giá trị của tâm cố định. Sau đó sử dụng kỹ thuật thích nghi để luyện
mạng tìm ra các trọng số Bi tối ưu.
Giá trị của tâm không được chọn cố định mà được chọn trong quá trình luyện. Như
vậy cả Ai và Bi được tìm trên cơ sở sử dụng các phương trình giảm gradient. Kỹ
thuật sau nói chung chậm hơn kỹ thuật trước, nhưng nếu tập dữ liệu bị giới hạn thì
kỹ thuật say sẽ cho kết quả tốt hơn.
Nhận xét:
Mạng hàm cơ sở bán kính có hàm kích hoạt dạng:
W(x)=[W(||x-A_i ||)…W(||x-A_M ||)^T (2.30)
Kết quả của mạng là:
f(x)={B,W(x)} (2.31)
vì vậy đây là hàm tuyến tính phân lớp dữ liệu trên không gian R^M.
Mạng RBF còn có thể dùng để xấp xỉ hàm số nếu ta trực tiếp dùng đầu ra y(x).
Khi sử dụng mạng RBF trong bài toán nhận dạng cần chú ý:
+ Dạng W nào cần chọn (thông thường chọn hàm Gaussian).
+ Bao nhiêu tâm sẽ cho kết quả tốt nhất và tâm cần đặt ở đâu.
+ Bao nhiêu dữ liệu cần thiết đủ để huấn luyện mạng.
Hàm cơ sở có thể có nhiều dạng. Mỗi dạng có thể phù hợp với bài toán này nhưng
không phù hợp với bài toán khác. Việc chọn số lượng và vị trí tâm cũng tương tự
bài toán chọn số lượng và giá trị ban đầu của trọng số liên kết trong mạng Percepton
nhiều lớp. Mặc dù trọng số liên kết của Percepton nhiều lớp có thể xác định bằng
cách sử dụng thuật toán lan truyền ngược. Nhưng chưa có thuật nào chọn trọng số
ban đầu mà thường chỉ là cho trước ngẫu nhiên. Muốn tìm mô hình tốt nhất cho đối
tượng điều khiển thì cần thiết phải tìm số lượng tâm tối ưu. Có quá nhiều tâm hoặc
quá ít tâm sẽ cho kết quả không tốt. Nhiều tâm quá sẽ không đủ dữ liệu luyện mạng,
nhưng ít tâm quá sẽ cho mô hình sai lệch. Thuật bình phương tối thiểu trong trường
hợp có nhiều tâm sẽ tạo ra trọng số liên kết w_i lớn.

10
CHƯƠNG 3
MÔ PHỎNG BỘ ĐIỀU KHIỂN NHIỆT ĐỘ LÒ HƠI TẦNG SÔI TUẦN HOÀN VÀ
ĐÁNH GIÁ
3.1 Điều khiển nhiệt độ trong lò hơi tầng sôi tuần hoàn sử dụng bộ điều khiển PID.
3.1.1. Khái niệm về bộ điều khiển PID.
3.1.2. Điều khiển nhiệt độ lò điện trở sử dụng bộ điều khiển PID.
Trong kỹ thuật điều khiển, người ta mô tả lò hơi tầng sôi tuần hoàn bằng một khâu trễ
có hàm truyền:
G = 5.84(1+11.6𝑠)
(147𝑠 + 1)(148𝑠 + 1)𝑒−80𝑠 =
5.84+67.744𝑠
1+295𝑠+21756𝑠2𝑒−80𝑠(3.3)
Ta lấy: k=67.744, T=480, τ= 80(s) (3.4)
Cảm biến nhiệt độ được coi là một khâu tỉ lệ với hệ số:
0
100,0067( / 0 )
1500cb c
Vk v
C (3.5)
Mà ta có: 𝜏
𝑇=
80
480= 0.167 thõa mãn điều kiện trên nên ta sử dụng phương pháp thứ nhất
Ziegler – Nichols, sử dụng bộ điều khiển PID, ta có:
𝑘𝑝 = 1.2𝑇
𝜏= 1.2
480
80= 7.2 (3.6)
𝑇𝐼 = 2𝜏 = 160 (3.7)
𝑇𝐷 = 0.5𝜏 = 40 (3.8)
Do đó
𝐺𝑃𝐼𝐷(𝑠) = 𝐾𝑝 (1 +1
𝑇𝐼𝑠+ 𝑇𝐷𝑠) = 7.2 (1 +
1
160𝑠+ 40𝑠) (3.9)
Mô phỏng trên Matlab – Simulink ta được:
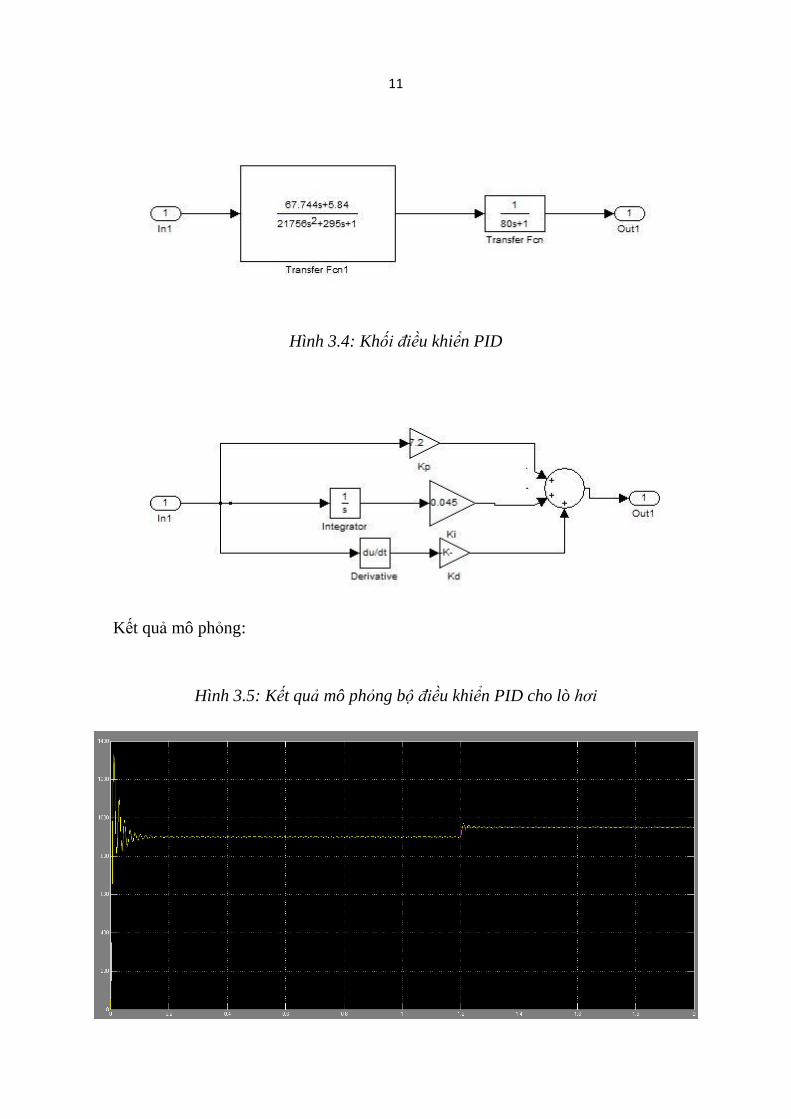
Hình 3.3:Mô phỏng bộ điều khiển PID cho lò hơi tầng sôi tuần hoàn
11
Hình 3.4: Khối điều khiển PID
Kết quả mô phỏng:
Hình 3.5: Kết quả mô phỏng bộ điều khiển PID cho lò hơi
12
Bảng 3. 1: Thông số đạt được của bộ điều khiển PID.
Quá trình điều khiển Số liệu Tỉ lệ (%)
Độ quá điều chỉnh 450 (0C) 50 %
Thời gian quá độ 150 (s)
Số lần dao động 8
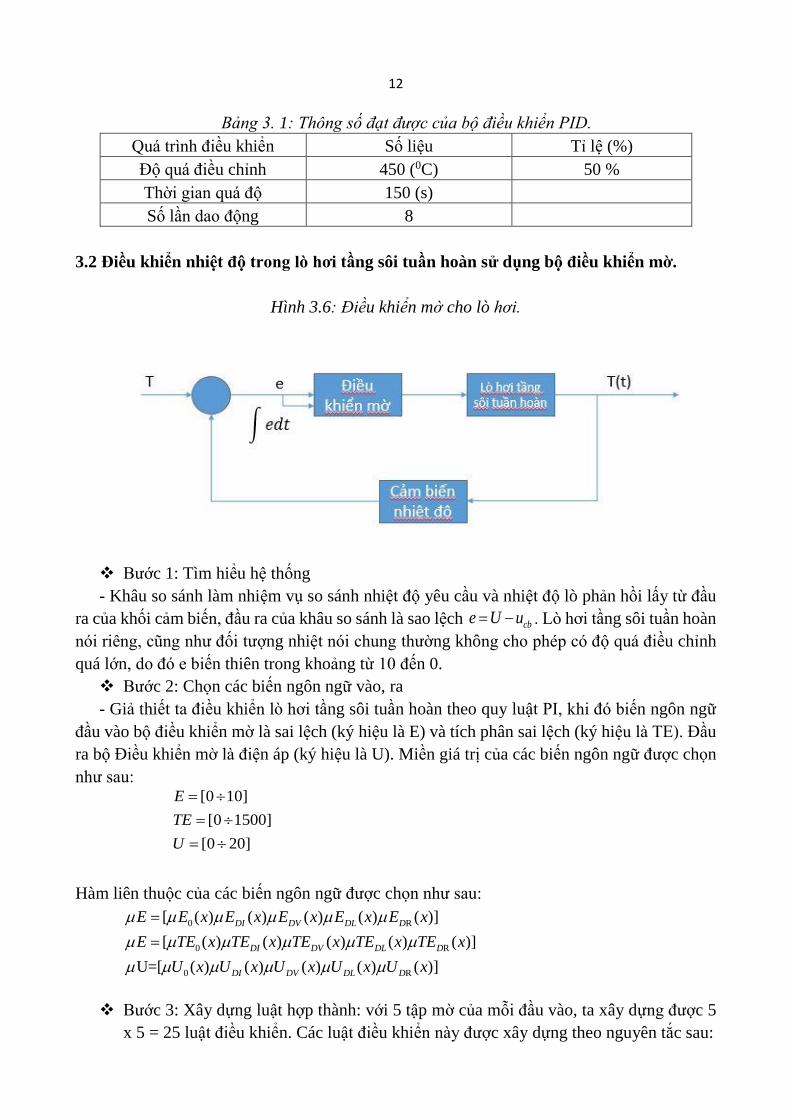
3.2 Điều khiển nhiệt độ trong lò hơi tầng sôi tuần hoàn sử dụng bộ điều khiển mờ.
Hình 3.6: Điều khiển mờ cho lò hơi.
Bước 1: Tìm hiểu hệ thống
- Khâu so sánh làm nhiệm vụ so sánh nhiệt độ yêu cầu và nhiệt độ lò phản hồi lấy từ đầu
ra của khối cảm biến, đầu ra của khâu so sánh là sao lệch cbe U u . Lò hơi tầng sôi tuần hoàn
nói riêng, cũng như đối tượng nhiệt nói chung thường không cho phép có độ quá điều chỉnh
quá lớn, do đó e biến thiên trong khoảng từ 10 đến 0.
Bước 2: Chọn các biến ngôn ngữ vào, ra
- Giả thiết ta điều khiển lò hơi tầng sôi tuần hoàn theo quy luật PI, khi đó biến ngôn ngữ
đầu vào bộ điều khiển mờ là sai lệch (ký hiệu là E) và tích phân sai lệch (ký hiệu là TE). Đầu
ra bộ Điều khiển mờ là điện áp (ký hiệu là U). Miền giá trị của các biến ngôn ngữ được chọn
như sau: [0 10]
[0 1500]
[0 20]
E
TE
U
Hàm liên thuộc của các biến ngôn ngữ được chọn như sau:
0 R
0 R
0 R
[ ( ) ( ) ( ) ( ) ( )]
[ ( ) ( ) ( ) ( ) ( )]
U=[ ( ) ( ) ( ) ( ) ( )]
DI DV DL D
DI DV DL D
DI DV DL D
E E x E x E x E x E x
E TE x TE x TE x TE x TE x
U x U x U x U x U x
Bước 3: Xây dựng luật hợp thành: với 5 tập mờ của mỗi đầu vào, ta xây dựng được 5
x 5 = 25 luật điều khiển. Các luật điều khiển này được xây dựng theo nguyên tắc sau:
de/dt
13
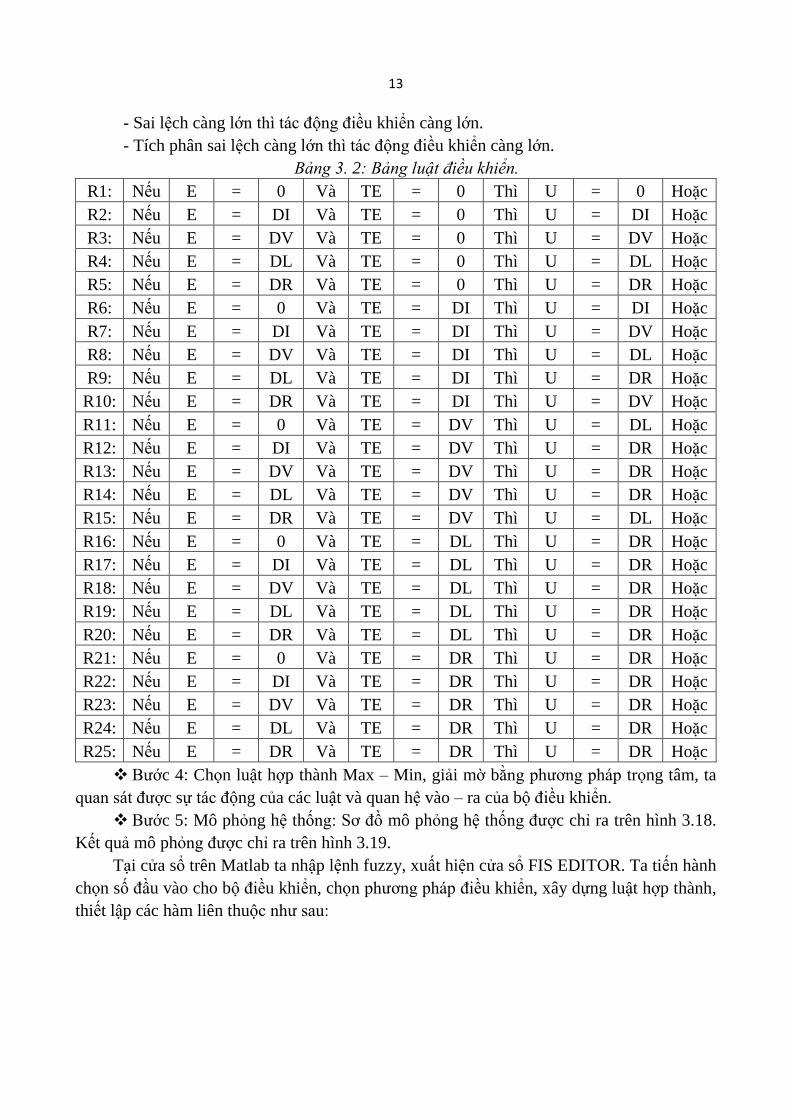
- Sai lệch càng lớn thì tác động điều khiển càng lớn.
- Tích phân sai lệch càng lớn thì tác động điều khiển càng lớn.
Bảng 3. 2: Bảng luật điều khiển.
R1: Nếu E = 0 Và TE = 0 Thì U = 0 Hoặc
R2: Nếu E = DI Và TE = 0 Thì U = DI Hoặc
R3: Nếu E = DV Và TE = 0 Thì U = DV Hoặc
R4: Nếu E = DL Và TE = 0 Thì U = DL Hoặc
R5: Nếu E = DR Và TE = 0 Thì U = DR Hoặc
R6: Nếu E = 0 Và TE = DI Thì U = DI Hoặc
R7: Nếu E = DI Và TE = DI Thì U = DV Hoặc
R8: Nếu E = DV Và TE = DI Thì U = DL Hoặc
R9: Nếu E = DL Và TE = DI Thì U = DR Hoặc
R10: Nếu E = DR Và TE = DI Thì U = DV Hoặc
R11: Nếu E = 0 Và TE = DV Thì U = DL Hoặc
R12: Nếu E = DI Và TE = DV Thì U = DR Hoặc
R13: Nếu E = DV Và TE = DV Thì U = DR Hoặc
R14: Nếu E = DL Và TE = DV Thì U = DR Hoặc
R15: Nếu E = DR Và TE = DV Thì U = DL Hoặc
R16: Nếu E = 0 Và TE = DL Thì U = DR Hoặc
R17: Nếu E = DI Và TE = DL Thì U = DR Hoặc
R18: Nếu E = DV Và TE = DL Thì U = DR Hoặc
R19: Nếu E = DL Và TE = DL Thì U = DR Hoặc
R20: Nếu E = DR Và TE = DL Thì U = DR Hoặc
R21: Nếu E = 0 Và TE = DR Thì U = DR Hoặc
R22: Nếu E = DI Và TE = DR Thì U = DR Hoặc
R23: Nếu E = DV Và TE = DR Thì U = DR Hoặc
R24: Nếu E = DL Và TE = DR Thì U = DR Hoặc
R25: Nếu E = DR Và TE = DR Thì U = DR Hoặc
Bước 4: Chọn luật hợp thành Max – Min, giải mờ bằng phương pháp trọng tâm, ta
quan sát được sự tác động của các luật và quan hệ vào – ra của bộ điều khiển.
Bước 5: Mô phỏng hệ thống: Sơ đồ mô phỏng hệ thống được chỉ ra trên hình 3.18.
Kết quả mô phỏng được chỉ ra trên hình 3.19.
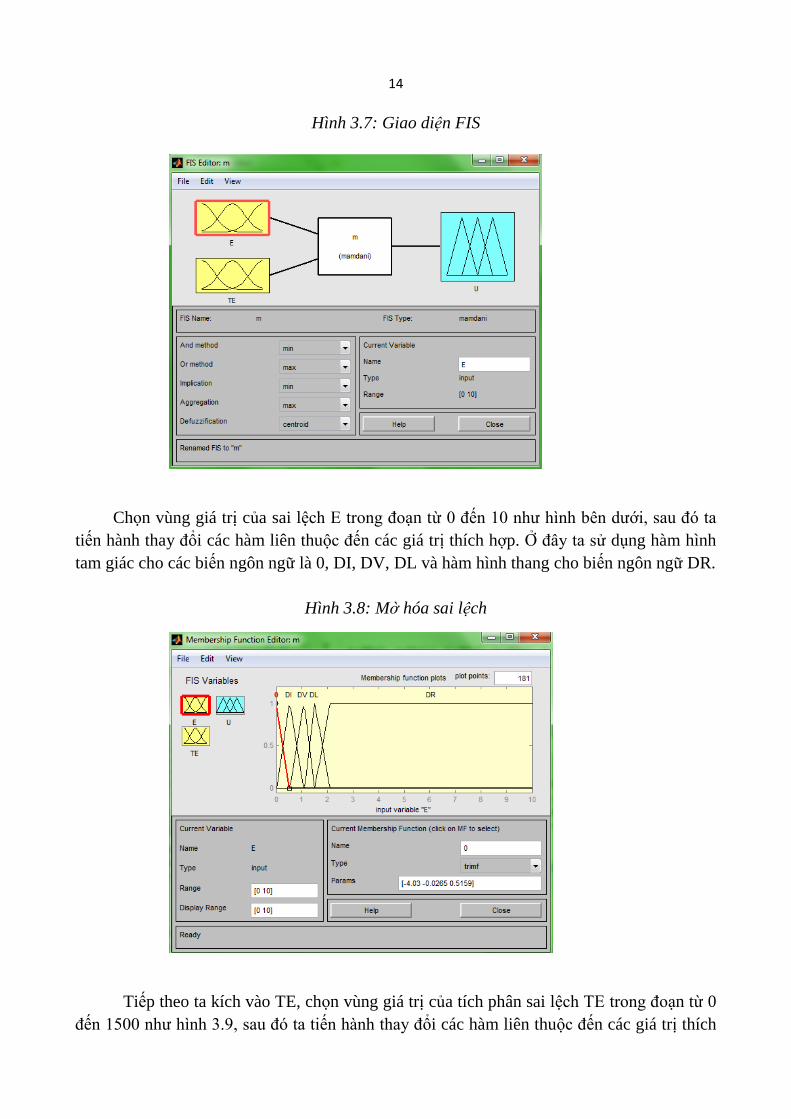
Tại cửa sổ trên Matlab ta nhập lệnh fuzzy, xuất hiện cửa sổ FIS EDITOR. Ta tiến hành
chọn số đầu vào cho bộ điều khiển, chọn phương pháp điều khiển, xây dựng luật hợp thành,
thiết lập các hàm liên thuộc như sau:
14
Hình 3.7: Giao diện FIS
Chọn vùng giá trị của sai lệch E trong đoạn từ 0 đến 10 như hình bên dưới, sau đó ta
tiến hành thay đổi các hàm liên thuộc đến các giá trị thích hợp. Ở đây ta sử dụng hàm hình
tam giác cho các biến ngôn ngữ là 0, DI, DV, DL và hàm hình thang cho biến ngôn ngữ DR.
Hình 3.8: Mờ hóa sai lệch
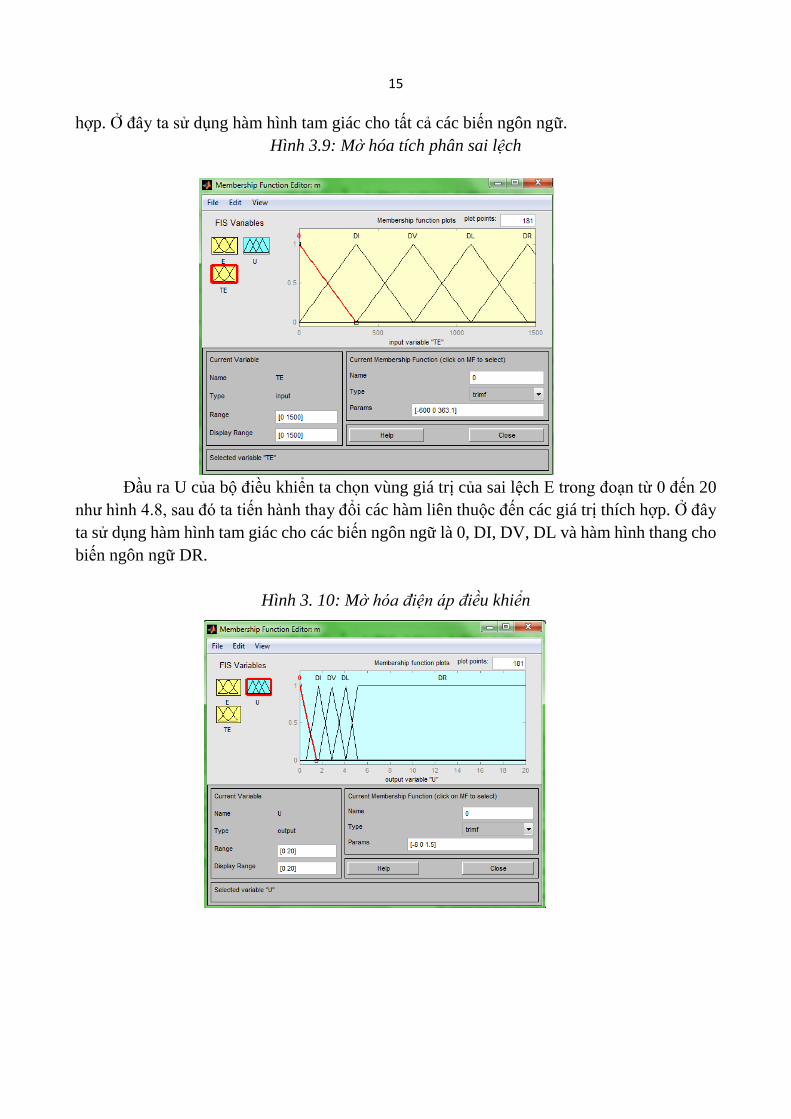
Tiếp theo ta kích vào TE, chọn vùng giá trị của tích phân sai lệch TE trong đoạn từ 0
đến 1500 như hình 3.9, sau đó ta tiến hành thay đổi các hàm liên thuộc đến các giá trị thích
15
hợp. Ở đây ta sử dụng hàm hình tam giác cho tất cả các biến ngôn ngữ.
Hình 3.9: Mờ hóa tích phân sai lệch
Đầu ra U của bộ điều khiển ta chọn vùng giá trị của sai lệch E trong đoạn từ 0 đến 20
như hình 4.8, sau đó ta tiến hành thay đổi các hàm liên thuộc đến các giá trị thích hợp. Ở đây
ta sử dụng hàm hình tam giác cho các biến ngôn ngữ là 0, DI, DV, DL và hàm hình thang cho
biến ngôn ngữ DR.
Hình 3. 10: Mờ hóa điện áp điều khiển
16
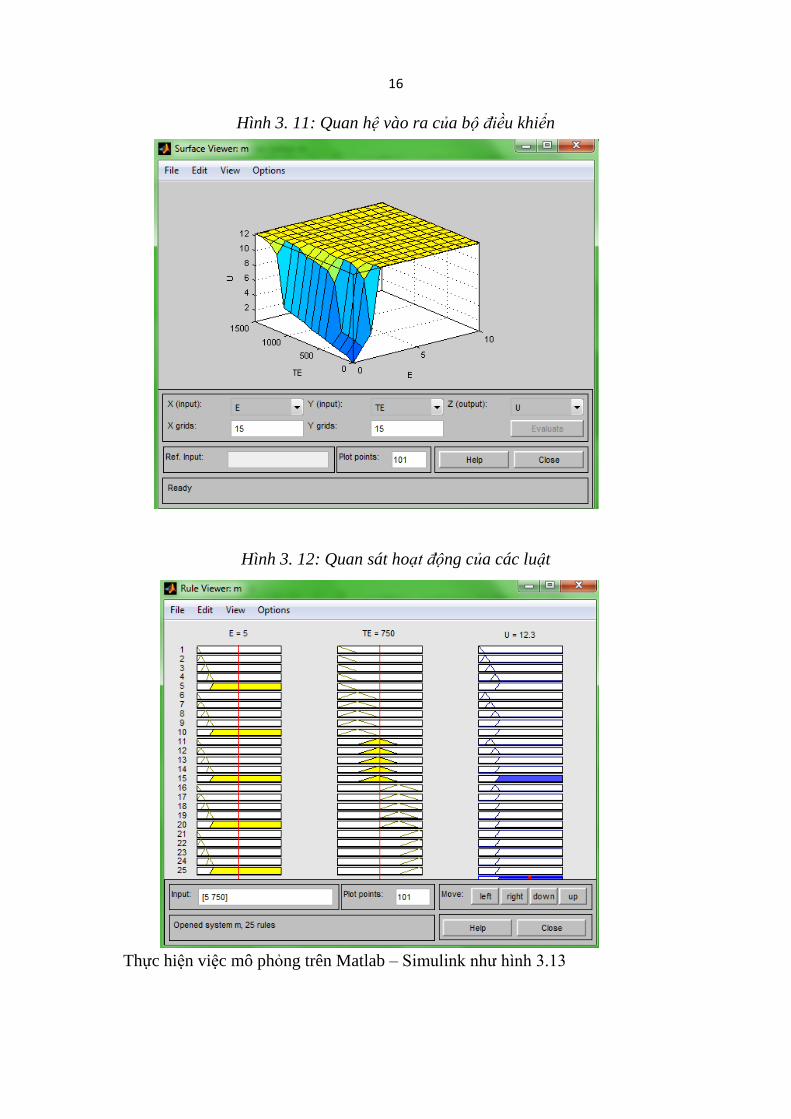
Hình 3. 11: Quan hệ vào ra của bộ điều khiển
Hình 3. 12: Quan sát hoạt động của các luật
Thực hiện việc mô phỏng trên Matlab – Simulink như hình 3.13
17
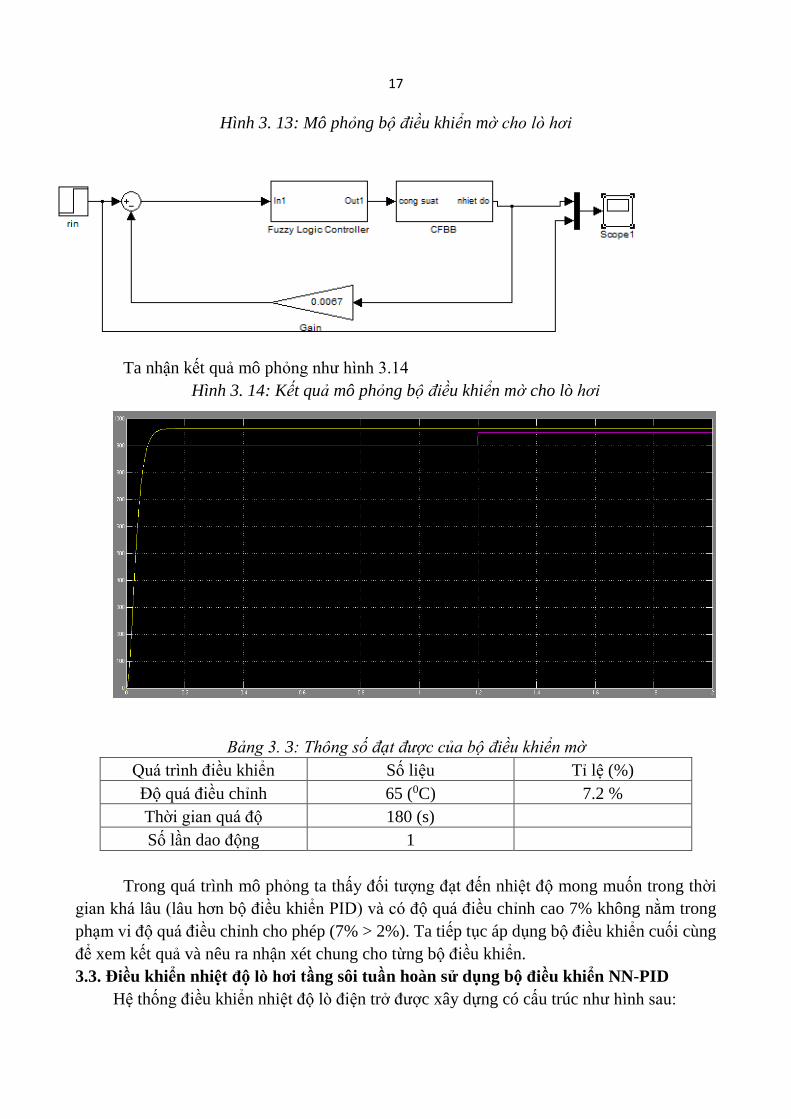
Hình 3. 13: Mô phỏng bộ điều khiển mờ cho lò hơi
Ta nhận kết quả mô phỏng như hình 3.14
Hình 3. 14: Kết quả mô phỏng bộ điều khiển mờ cho lò hơi
Bảng 3. 3: Thông số đạt được của bộ điều khiển mờ
Quá trình điều khiển Số liệu Tỉ lệ (%)
Độ quá điều chỉnh 65 (0C) 7.2 %
Thời gian quá độ 180 (s)
Số lần dao động 1
Trong quá trình mô phỏng ta thấy đối tượng đạt đến nhiệt độ mong muốn trong thời
gian khá lâu (lâu hơn bộ điều khiển PID) và có độ quá điều chỉnh cao 7% không nằm trong
phạm vi độ quá điều chỉnh cho phép (7% > 2%). Ta tiếp tục áp dụng bộ điều khiển cuối cùng
để xem kết quả và nêu ra nhận xét chung cho từng bộ điều khiển.
3.3. Điều khiển nhiệt độ lò hơi tầng sôi tuần hoàn sử dụng bộ điều khiển NN-PID
Hệ thống điều khiển nhiệt độ lò điện trở được xây dựng có cấu trúc như hình sau:
18
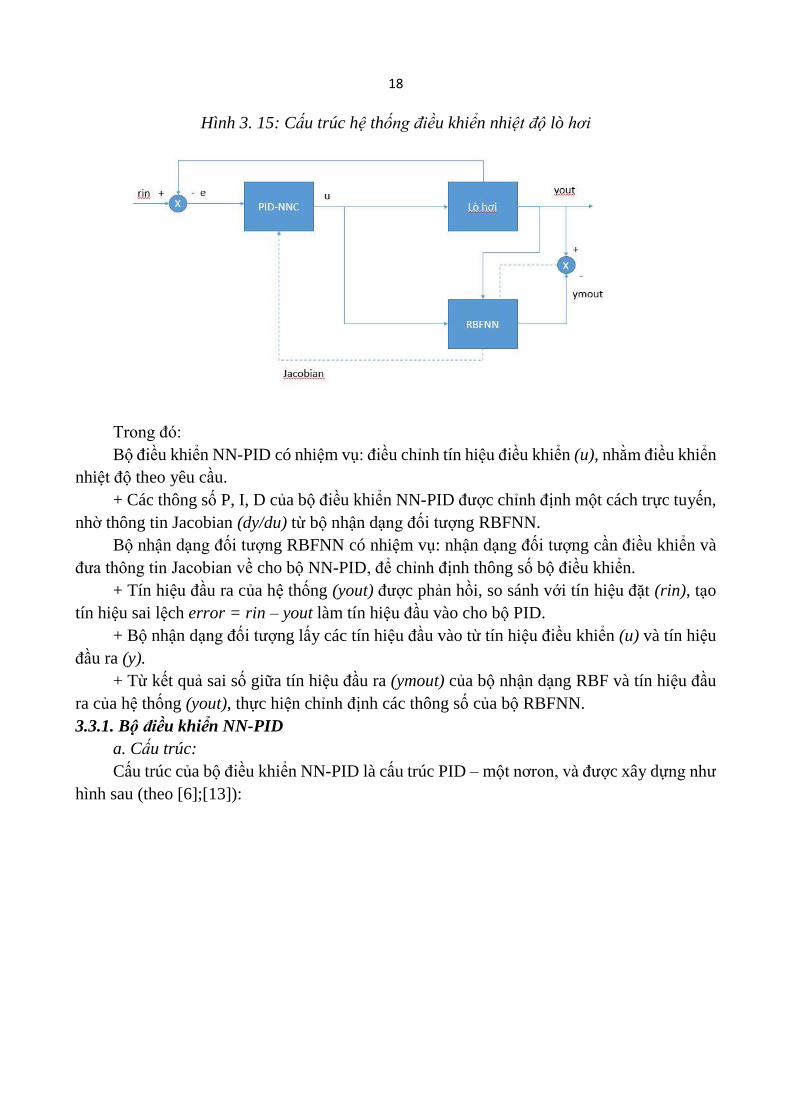
Hình 3. 15: Cấu trúc hệ thống điều khiển nhiệt độ lò hơi
Trong đó:
Bộ điều khiển NN-PID có nhiệm vụ: điều chỉnh tín hiệu điều khiển (u), nhằm điều khiển
nhiệt độ theo yêu cầu.
+ Các thông số P, I, D của bộ điều khiển NN-PID được chỉnh định một cách trực tuyến,
nhờ thông tin Jacobian (dy/du) từ bộ nhận dạng đối tượng RBFNN.
Bộ nhận dạng đối tượng RBFNN có nhiệm vụ: nhận dạng đối tượng cần điều khiển và
đưa thông tin Jacobian về cho bộ NN-PID, để chỉnh định thông số bộ điều khiển.
+ Tín hiệu đầu ra của hệ thống (yout) được phản hồi, so sánh với tín hiệu đặt (rin), tạo
tín hiệu sai lệch error = rin – yout làm tín hiệu đầu vào cho bộ PID.
+ Bộ nhận dạng đối tượng lấy các tín hiệu đầu vào từ tín hiệu điều khiển (u) và tín hiệu
đầu ra (y).
+ Từ kết quả sai số giữa tín hiệu đầu ra (ymout) của bộ nhận dạng RBF và tín hiệu đầu
ra của hệ thống (yout), thực hiện chỉnh định các thông số của bộ RBFNN.
3.3.1. Bộ điều khiển NN-PID
a. Cấu trúc:
Cấu trúc của bộ điều khiển NN-PID là cấu trúc PID – một nơron, và được xây dựng như
hình sau (theo [6];[13]):
19
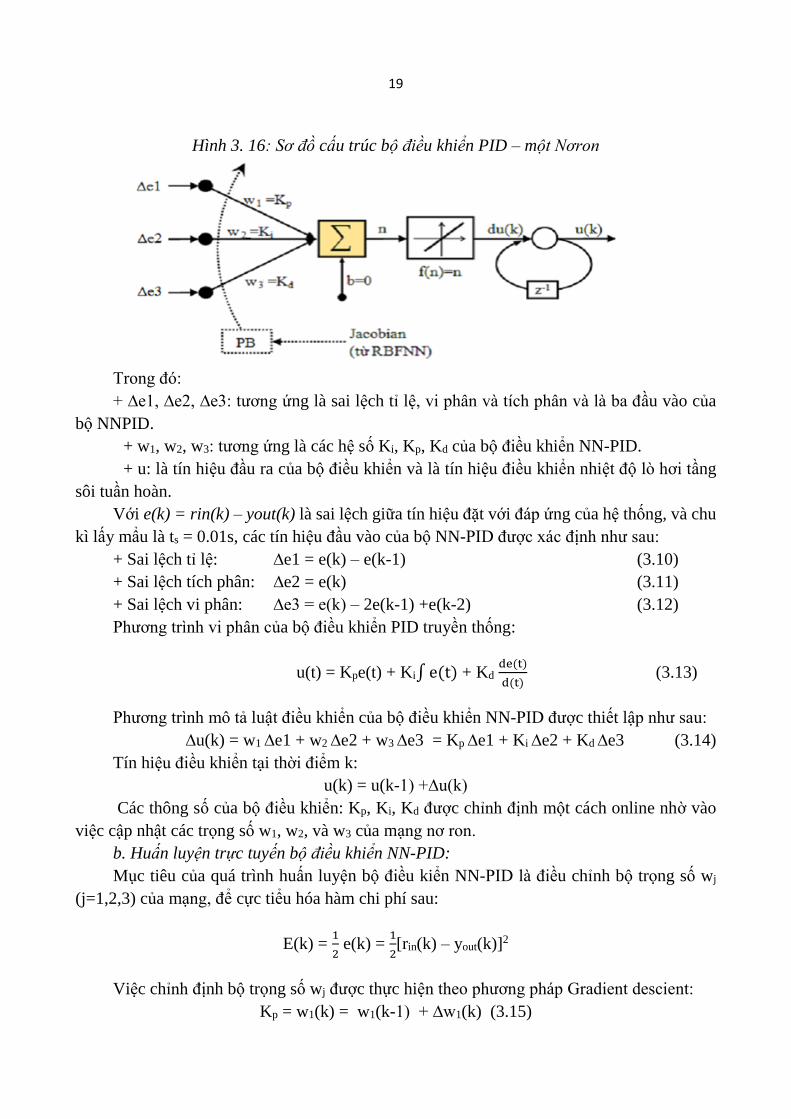
Hình 3. 16: Sơ đồ cấu trúc bộ điều khiển PID – một Nơron
Trong đó:
+ ∆e1, ∆e2, ∆e3: tương ứng là sai lệch tỉ lệ, vi phân và tích phân và là ba đầu vào của
bộ NNPID.
+ w1, w2, w3: tương ứng là các hệ số Ki, Kp, Kd của bộ điều khiển NN-PID.
+ u: là tín hiệu đầu ra của bộ điều khiển và là tín hiệu điều khiển nhiệt độ lò hơi tầng
sôi tuần hoàn.
Với e(k) = rin(k) – yout(k) là sai lệch giữa tín hiệu đặt với đáp ứng của hệ thống, và chu
kì lấy mẩu là ts = 0.01s, các tín hiệu đầu vào của bộ NN-PID được xác định như sau:
+ Sai lệch tỉ lệ: ∆e1 = e(k) – e(k-1) (3.10)
+ Sai lệch tích phân: ∆e2 = e(k) (3.11)
+ Sai lệch vi phân: ∆e3 = e(k) – 2e(k-1) +e(k-2) (3.12)
Phương trình vi phân của bộ điều khiển PID truyền thống:
u(t) = Kpe(t) + Ki∫ e(t) + Kd de(t)
d(t) (3.13)
Phương trình mô tả luật điều khiển của bộ điều khiển NN-PID được thiết lập như sau:
∆u(k) = w1 ∆e1 + w2 ∆e2 + w3 ∆e3 = Kp ∆e1 + Ki ∆e2 + Kd ∆e3 (3.14)
Tín hiệu điều khiển tại thời điểm k:
u(k) = u(k-1) +∆u(k)
Các thông số của bộ điều khiển: Kp, Ki, Kd được chỉnh định một cách online nhờ vào
việc cập nhật các trọng số w1, w2, và w3 của mạng nơ ron.
b. Huấn luyện trực tuyến bộ điều khiển NN-PID:
Mục tiêu của quá trình huấn luyện bộ điều kiển NN-PID là điều chỉnh bộ trọng số wj
(j=1,2,3) của mạng, để cực tiểu hóa hàm chi phí sau:
E(k) = 1
2 e(k) =
1
2[rin(k) – yout(k)]2
Việc chỉnh định bộ trọng số wj được thực hiện theo phương pháp Gradient descient:
Kp = w1(k) = w1(k-1) + ∆w1(k) (3.15)
20
Ki = w2(k) = w2(k-1) + ∆w2(k) (3.16)
Kd = w3(k) = w3(k-1) + ∆w3(k) (3.17)
Trong đó, các ∆wj(k) được xác định như sau:
∆w1(k) = ηkp (−∂E(k)
∂w1(k)) = - ηkp
∂E(k)
∂y(k)
∂y(k)
∂∆u(k)
∂∆u(k)
∂w1(k) = ηkp e(k)
∂y(k)
∂∆u(k) ∆e1 (3.18)
∆w2(k) = ηki (−∂E(k)
∂w2(k)) = - ηki
∂E(k)
∂y(k)
∂y(k)
∂u∆(k)
∂∆u(k)
∂w2(k) = ηki e(k)
∂y(k)
∂∆u(k) ∆e2 ( 3.19)
∆w3(k) = ηkd (−∂E(k)
∂w2(k)) = - ηkd
∂E(k)
∂y(k)
∂y(k)
∂∆u(k)
∂∆u(k)
∂w3(k) = ηkd e(k)
∂y(k)
∂∆u(k) ∆e3 (3.20)
Với: + ηkp, ηki, ηkd: là các hằng số tốc độ học tỉ lệ, tích phân và vi phân.
+ e(k): là tín hiệu sai lệch.
+ ∆e1, ∆e2, ∆e3: là độ biến thiên sai lệch tỉ lệ, tích phân và vi phân.
+ 𝜕𝑦(𝑘)
𝜕∆𝑢(𝑘) : là độ nhạy của đáp ứng đối với tín hiệu điều khiển, hay còn gọi là thông tin
Jacobian, được xác định thông qua bộ nhận dạng RBFNN.
3.3.2. Xây dựng bộ nhận dạng đối tượng sử dụng mạng RBFNN
a. Cấu trúc:
Cấu trúc của bộ nhận dạng đối tượng sử dụng mạng RBFNN được xây dựng như hình
sau:
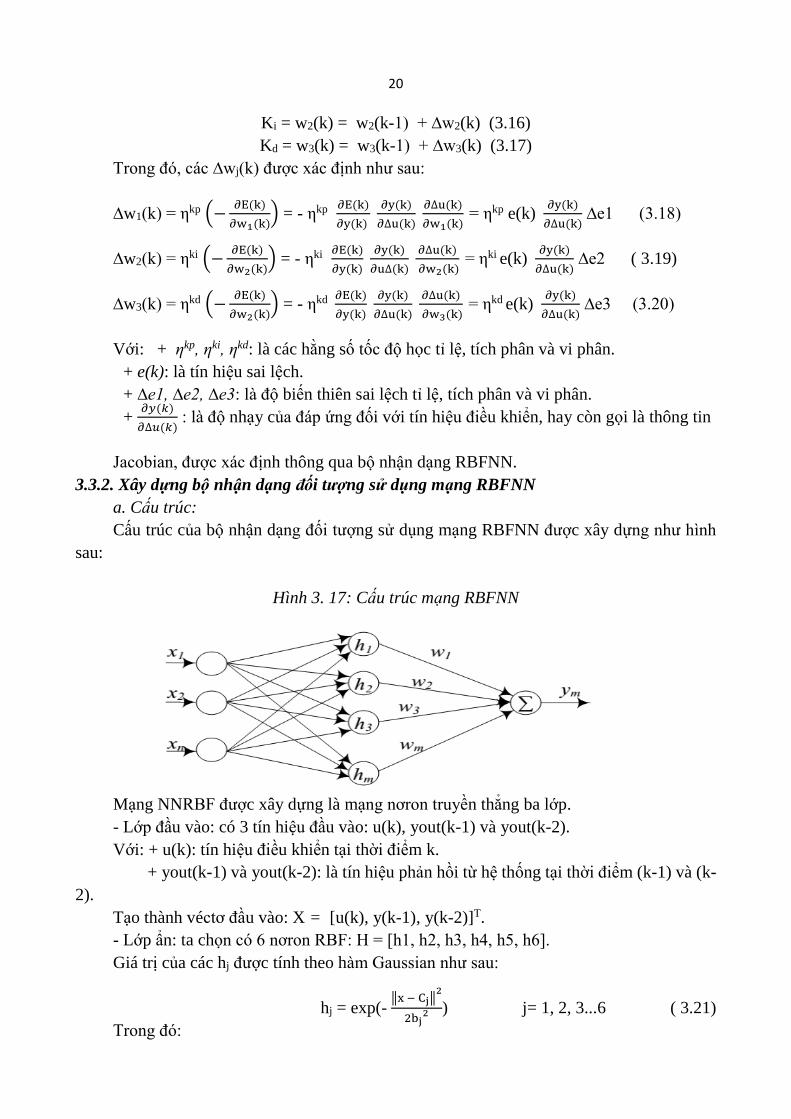
Hình 3. 17: Cấu trúc mạng RBFNN
Mạng NNRBF được xây dựng là mạng nơron truyền thẳng ba lớp.
- Lớp đầu vào: có 3 tín hiệu đầu vào: u(k), yout(k-1) và yout(k-2).
Với: + u(k): tín hiệu điều khiển tại thời điểm k.
+ yout(k-1) và yout(k-2): là tín hiệu phản hồi từ hệ thống tại thời điểm (k-1) và (k-
2).
Tạo thành véctơ đầu vào: X = [u(k), y(k-1), y(k-2)]T.
- Lớp ẩn: ta chọn có 6 nơron RBF: H = [h1, h2, h3, h4, h5, h6].
Giá trị của các hj được tính theo hàm Gaussian như sau:
hj = exp(- ‖x − Cj‖
2
2bj2 ) j= 1, 2, 3...6 ( 3.21)
Trong đó:

21
+ cji là các tâm của hàm RBF: Cj = [cj1, cj2, cj3]T i = 1,2,...n
+ bj là bán kính của hàm RBF: Bj = [b1, b2,....bm]T
- Lớp ra: là một nơron tuyến tính với các trọng số đầu vào:
w = [w1, w2,..., wm]T
Giá trị đầu ra của bộ nhận dạng NNRBF được xác định theo công thức sau:
ymout(k) = w1h1 + w2h2 + ... + wmhm (3.22)
b. Huấn luyện mạng:
Mục tiêu của giải thuật huấn luyện trực tuyến bộ nhận dạng RBFNN là điều chỉnh các
bộ trọng số của mạng và các tham số của hàm cơ sở bán kính RBF để đạt giá trị cực tiểu hàm
chi phí:
J = 1
2 (yout(k) – ymout(k))2
Sử dụng phương pháp Gradient Descent, trọng số của từng lớp mạng RBFNN được cập
nhật như sau:
+ Bộ trọng số W:
∆wj(k) = - η ∂E(k)
∂wj(k) = - η
∂E(k)
∂ymout(k) ∂ymout(k)
∂wj(k) = η(yout(k) – ymout(k)).hj
wj(k) = wj(k-1)+ ∆wj(k) +α[wj(k-1)- wj(k-2)]+ β [wj(k-2)- wj(k-3)] (3.23)
+ Bán kính hàm RBF:
∆bj(k) = - η ∂E(k)
∂bj(k) = η
∂E(k)
∂ymout(k)
∂ymout(k)
∂hj(k)
∂hj(k)
∂bj(k)
= η[yout(k) – ymout(k)].wj(k).hj(k) ‖X − Cj(k)‖
2
bj3 )
bj(k) = bj(k-1) + ∆bj(k) + α[bj(k-1)- bj(k-2)]+β [bj(k-2)- bj(k-3)] (3.24)
+ Tâm hàm RBF:
∆cji(k) = - η ∂E(k)
∂cji(k) = η
∂E(k)
∂ymout(k)
∂ymout(k)
∂hj(k)
∂hj(k)
∂cji(k)
= η[yout(k) – ymout(k)].wj.hj ‖xi(k) − cji(k)‖
bj2(k)
cji(k) = cji(k-1) + ∆cji(k) + α[cji(k-1)- cji(k-2)]+β [cji(k-2)- cji(k-3)] (3.25)
Thông tin Jacobian cho việc chỉnh định các thông số của bộ NN-PID được xác định
như sau: ∂y(k)
∂∆u(k) ≈
∂ymout(k)
∂∆u(k) = ∑
∂ymout(k)
∂hj(k)
∂hj(k)
∂∆u(k)
mj=1 = ∑ wjhj
cji−x1
bj2
mj=1 (3.26)
Với x1 là tín hiệu điều khiển u(k).
Mô phỏng trên Matlab ta có mô hình:
22
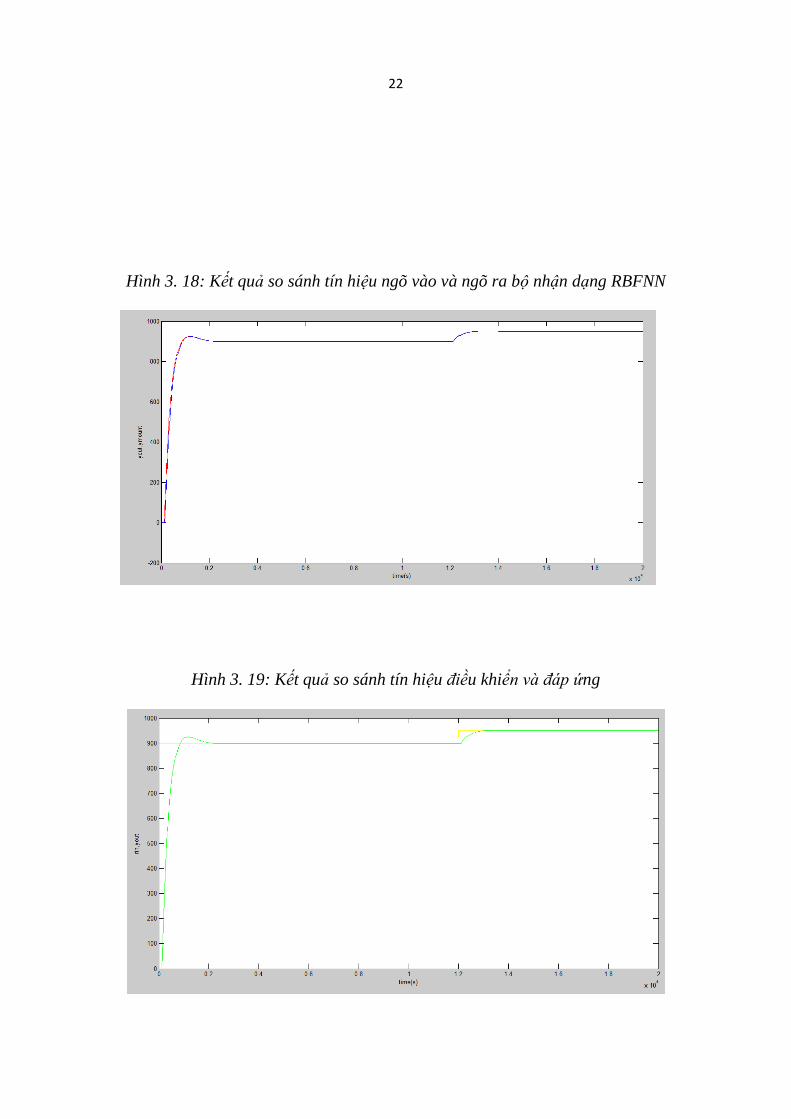
Hình 3. 18: Kết quả so sánh tín hiệu ngõ vào và ngõ ra bộ nhận dạng RBFNN
Hình 3. 19: Kết quả so sánh tín hiệu điều khiển và đáp ứng
23
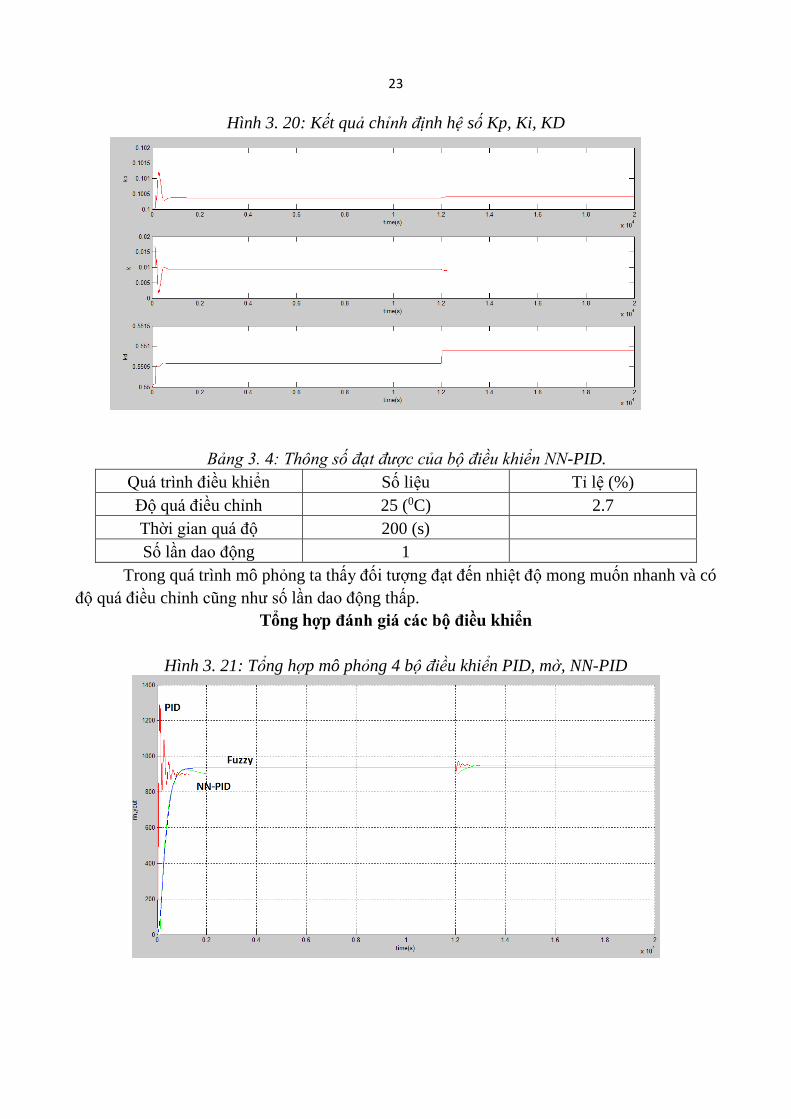
Hình 3. 20: Kết quả chỉnh định hệ số Kp, Ki, KD
Bảng 3. 4: Thông số đạt được của bộ điều khiển NN-PID.
Quá trình điều khiển Số liệu Tỉ lệ (%)
Độ quá điều chỉnh 25 (0C) 2.7
Thời gian quá độ 200 (s)
Số lần dao động 1
Trong quá trình mô phỏng ta thấy đối tượng đạt đến nhiệt độ mong muốn nhanh và có
độ quá điều chỉnh cũng như số lần dao động thấp.
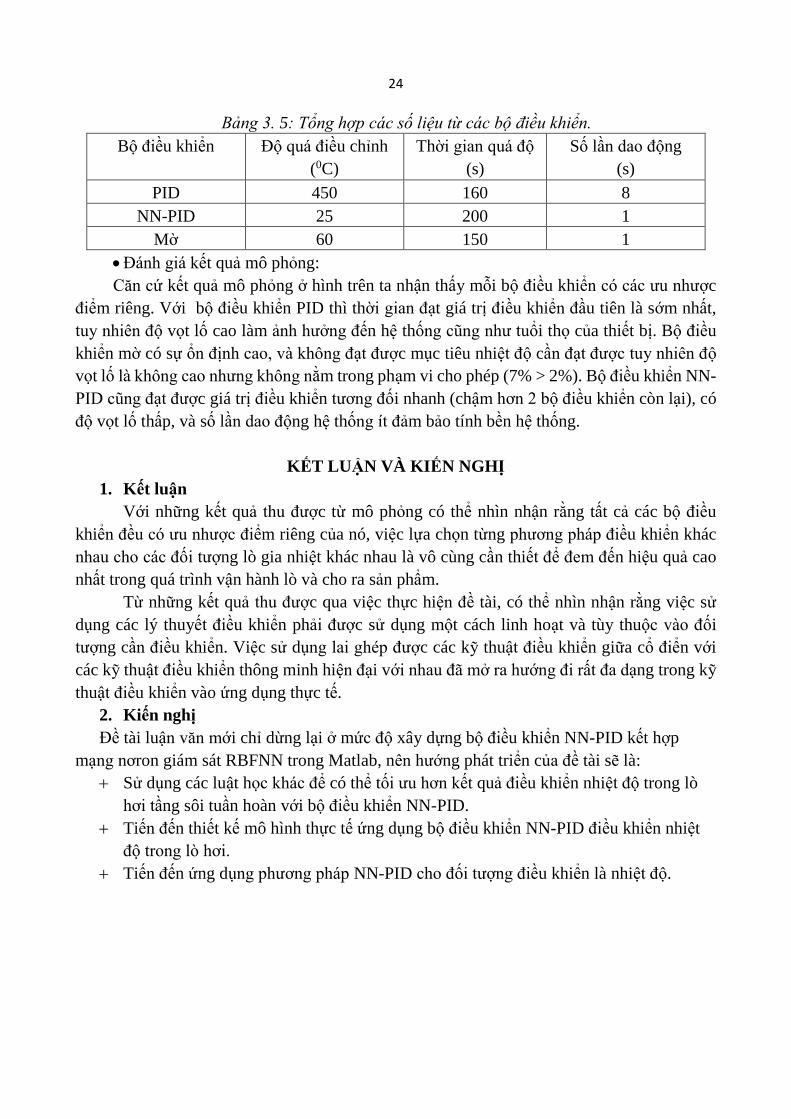
Tổng hợp đánh giá các bộ điều khiển
Hình 3. 21: Tổng hợp mô phỏng 4 bộ điều khiển PID, mờ, NN-PID
24
Bảng 3. 5: Tổng hợp các số liệu từ các bộ điều khiển.
Bộ điều khiển Độ quá điều chỉnh
(0C)
Thời gian quá độ
(s)
Số lần dao động
(s)
PID 450 160 8
NN-PID 25 200 1
Mờ 60 150 1
Đánh giá kết quả mô phỏng:
Căn cứ kết quả mô phỏng ở hình trên ta nhận thấy mỗi bộ điều khiển có các ưu nhược
điểm riêng. Với bộ điều khiển PID thì thời gian đạt giá trị điều khiển đầu tiên là sớm nhất,
tuy nhiên độ vọt lố cao làm ảnh hưởng đến hệ thống cũng như tuổi thọ của thiết bị. Bộ điều
khiển mờ có sự ổn định cao, và không đạt được mục tiêu nhiệt độ cần đạt được tuy nhiên độ
vọt lố là không cao nhưng không nằm trong phạm vi cho phép (7% > 2%). Bộ điều khiển NN-
PID cũng đạt được giá trị điều khiển tương đối nhanh (chậm hơn 2 bộ điều khiển còn lại), có
độ vọt lố thấp, và số lần dao động hệ thống ít đảm bảo tính bền hệ thống.
KẾT LUẬN VÀ KIẾN NGHỊ
1. Kết luận
Với những kết quả thu được từ mô phỏng có thể nhìn nhận rằng tất cả các bộ điều
khiển đều có ưu nhược điểm riêng của nó, việc lựa chọn từng phương pháp điều khiển khác
nhau cho các đối tượng lò gia nhiệt khác nhau là vô cùng cần thiết để đem đến hiệu quả cao
nhất trong quá trình vận hành lò và cho ra sản phẩm.
Từ những kết quả thu được qua việc thực hiện đề tài, có thể nhìn nhận rằng việc sử
dụng các lý thuyết điều khiển phải được sử dụng một cách linh hoạt và tùy thuộc vào đối
tượng cần điều khiển. Việc sử dụng lai ghép được các kỹ thuật điều khiển giữa cổ điển với
các kỹ thuật điều khiển thông minh hiện đại với nhau đã mở ra hướng đi rất đa dạng trong kỹ
thuật điều khiển vào ứng dụng thực tế.
2. Kiến nghị
Đề tài luận văn mới chỉ dừng lại ở mức độ xây dựng bộ điều khiển NN-PID kết hợp
mạng nơron giám sát RBFNN trong Matlab, nên hướng phát triển của đề tài sẽ là:
Sử dụng các luật học khác để có thể tối ưu hơn kết quả điều khiển nhiệt độ trong lò
hơi tầng sôi tuần hoàn với bộ điều khiển NN-PID.
Tiến đến thiết kế mô hình thực tế ứng dụng bộ điều khiển NN-PID điều khiển nhiệt
độ trong lò hơi.
Tiến đến ứng dụng phương pháp NN-PID cho đối tượng điều khiển là nhiệt độ.