Embed Size (px)
DESCRIPTION
Laboratorio sobre control digital
Citation preview

[Escriba el nombre de la compañía]
INFORME DE LABORATORIO
CONTROL DIGITAL
Informe de laboratorios Nº6 – sistemas automáticos de control
Desarrollo
Parte 1
Proponer 2 procesos para su estudio y análisis. Uno de ellos representará a una planta cualquiera (de segundo o tercer orden) y el otro será la función de transferencia de un motor de corriente continua. Se escogerá los valores adecuados para dicha función de transferencia.
a. La función transferencia de la planta es
La planta multiplicada por 1/s es igual a:
Expansión en fracciones parciales r es el vector que indica los coeficientes (A,B,C...) p indica el valor que adquieren los polos
Para un sampling time de 0.5 Una vez transformada a Z[G(S)/S] se multiplica por (1-z^-1)Transfer function:
Funcion de transferencia en tiempo discreto de Gho(Z)*Gp(Z)
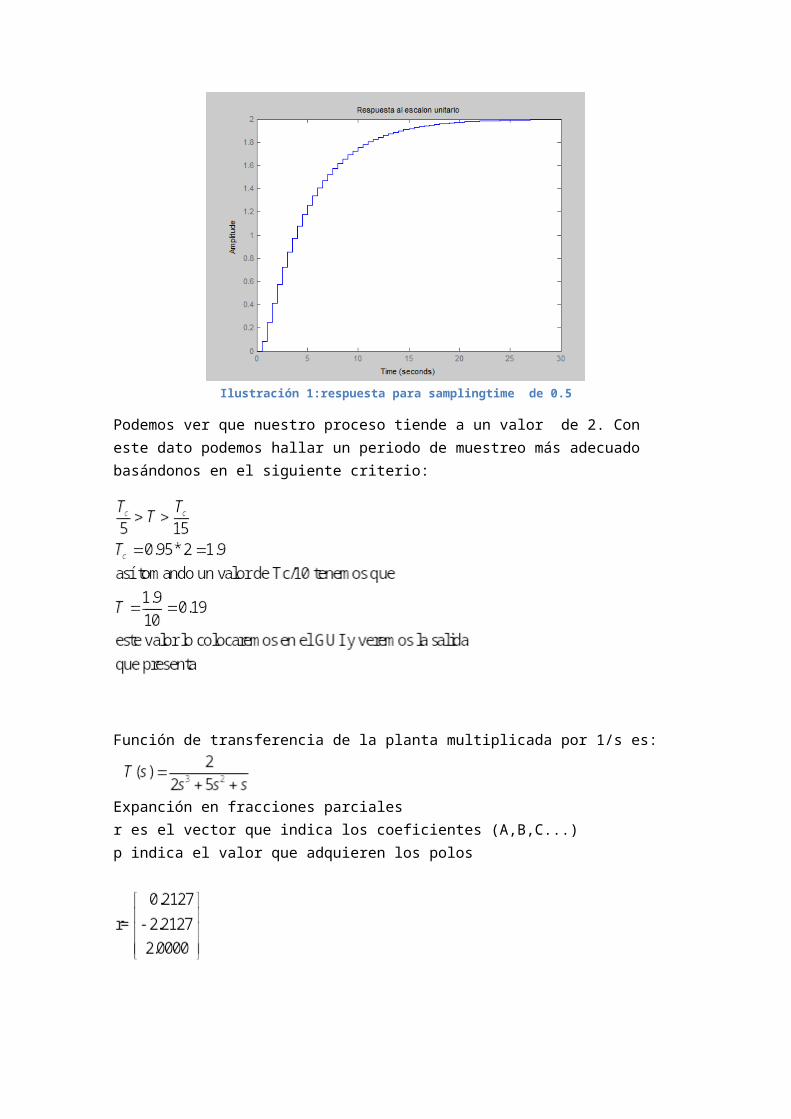
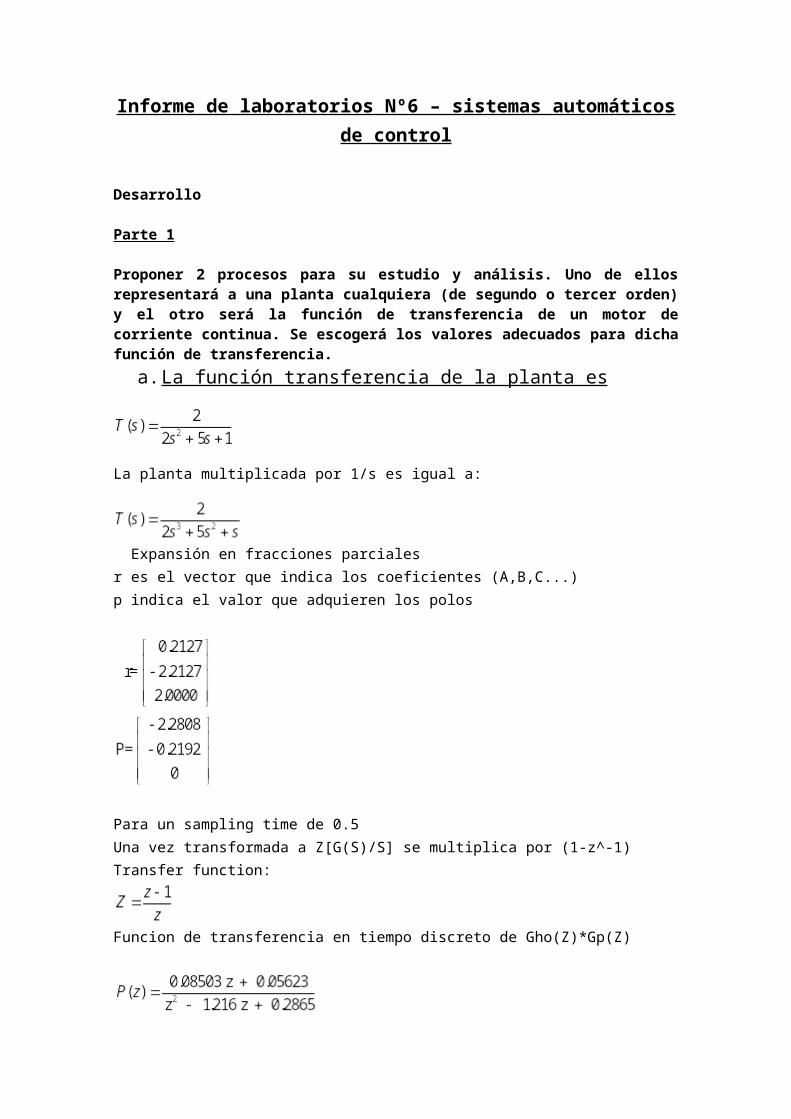
Ilustración 1:respuesta para samplingtime de 0.5
Podemos ver que nuestro proceso tiende a un valor de 2. Con este dato podemos hallar un periodo de muestreo más adecuado basándonos en el siguiente criterio:
Función de transferencia de la planta multiplicada por 1/s es:
Expanción en fracciones parcialesr es el vector que indica los coeficientes (A,B,C...) p indica el valor que adquieren los polos
Una vez transformada a Z[G(S)/S] se multiplica por (1-z^-1)
Función de transferencia en tiempo discreto de Gho(Z)*Gp(Z) es:
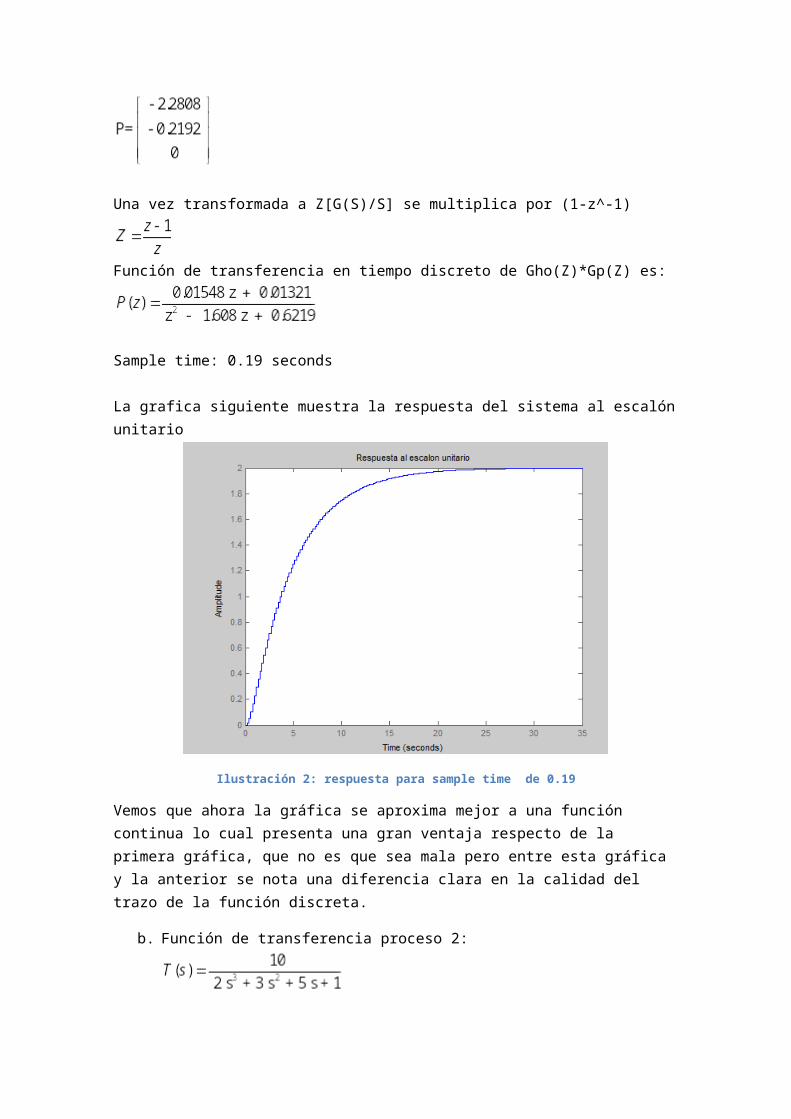
Sample time: 0.19 seconds
La grafica siguiente muestra la respuesta del sistema al escalón unitario
Ilustración 2: respuesta para sample time de 0.19
Vemos que ahora la gráfica se aproxima mejor a una función continua lo cual presenta una gran ventaja respecto de la primera gráfica, que no es que sea mala pero entre esta gráfica y la anterior se nota una diferencia clara en la calidad del trazo de la función discreta.
b. Función de transferencia proceso 2:
Función de transferencia de la planta multiplicada por 1/s es:
Expansión en fracciones parcialesr es el vector que indica los coeficientes (A,B,C...) p indica el valor que adquieren los polos

Una vez transformada a Z[G(S)/S] se multiplica por (1-z^-1)
Función de transferencia en tiempo discreto de Gho(Z)*Gp(Z) es:
Sample time: 1 seconds
La grafica siguiente muestra la respuesta del sistema al escalón unitario
Ilustración 3. respuesta dle segundo proceso para sample time de 1 seg
Podemos ver que la gráfica tiene buena aproximación respecto de un función continua, pues se ve la forma de la función de modo claro, podemos también mejorar esta discretización empleando un tiempo de muestreo adecuado, aplicando el criterio aplicado anteriormente

Al poner este valor vemos que es muy parecido al sample time inicial por ello decidimos disminuirlo y dejarlo en un valor de 0.5 seg.
Función de transferencia de la planta multiplicada por 1/s es:
Expansión en fracciones parcialesr es el vector que indica los coeficientes (A,B,C...) p indica el valor que adquieren los polos
Una vez transformada a Z[G(S)/S] se multiplica por (1-z^-1)
Función de transferencia en tiempo discreto de Gho(Z)*Gp(Z) es:
Sample time: 0.5 seconds
La grafica siguiente muestra la respuesta del sistema al escalón unitario

Ilustración 4: respuesta dl segundo proceso para sample time de 0.5
Conclusión: Podemos observar que cuando reducimos nuestro tiempo de muestreo, nuestra función discretiza mejor la respuesta, esto es la respuesta a una entrada escalón presenta una mayor aproximación a la real. Si por el contrario nosotros aumentamos mucho el tiempo de muestreo, esta suavidad en el muestro disminuye haciendo que la respuesta discretizada difiera de la respuesta continua.
Esto se debe básicamente a que cuando el tiempo de muestreo disminuye, la frecuencia a la que se toman las muestras de la señal continua aumenta, generando mayores valores discretos que mejoran la aproximación y al mismo tiempo que facilitan la recuperación de la información para poder obtener la función continua en base a la discreta.
MOTOR CC
G( s )= 1
(LJ )s2+(LB+RJ )s+K 2
Al discretizar la función en matlab obtenemos lo siguiente:
La cual ante una entrada escalón unitario y con un sample time de 0.5segundos tiene un respuesta en el tiempo como se muestra en la ilustración 5
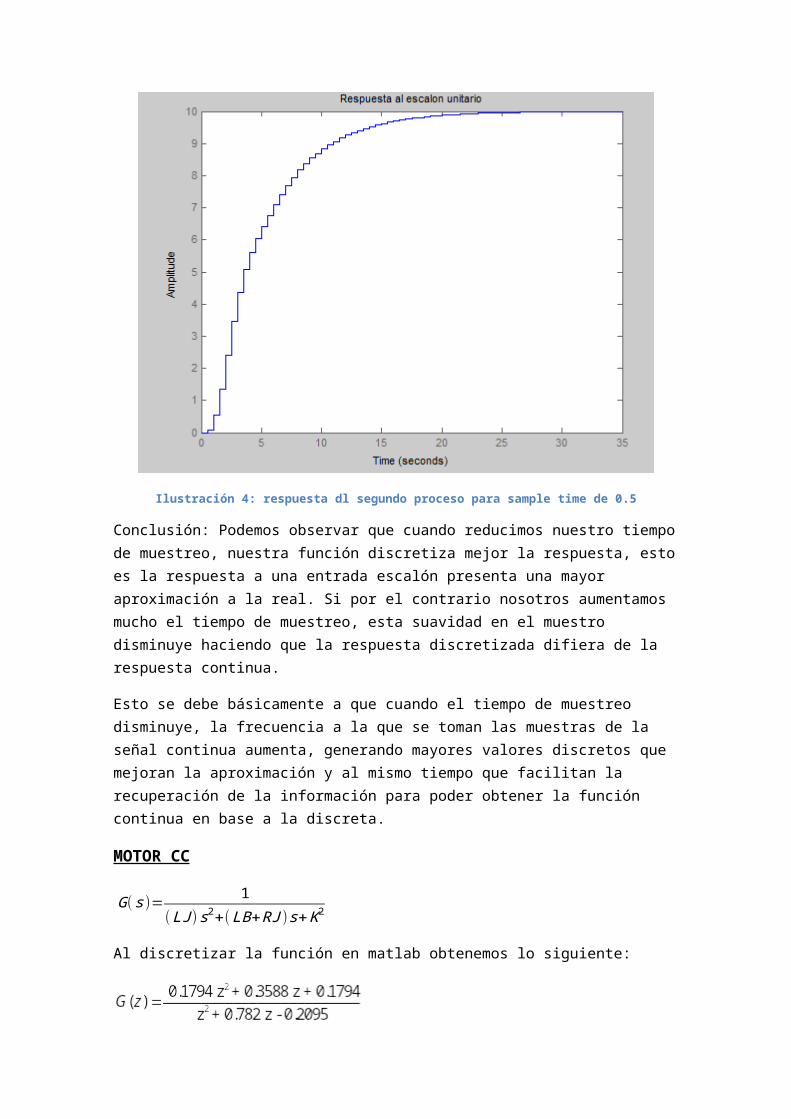
Ilustración 5. respuesta del motor cc con sample time de 0.5
Podemos ver que la respuesta discreta del sistema es buena pero si quisiésemos mejorar la la respuesta podemos basarnos al igual que en el criterio usado para el sistema anterior sera:

Ilustración 6: respuesta del motor cc con sample time de 0.04332
Podemos ver que esta respuesta del motor es incluso más precisa que a anterior que ya considerábamos como buena, esto debido a que cambiamos el tiempo de muestreo basándonos en el criterio ya mencionado.
Conclución: al igual que en el caso de las dos funciones analizadas en el apartado anterior podemos ver que la aproximación a una función continua mejora al disminuir el tiempo de muestro, lo cual nos permite, como dijimos antes, facilitar la recuperación de datos.
En ambos casos vemos que disminuir el tiempo de muestro es algo muy beneficioso, pero entonces ¿por qué no elegimos un tiempo de muestro muy muy pequeño?
El tener un tiempo de muestro pequeño es muy beneficioso pero si se tiene esto es preciso primero tener un procesador que sea capaz de realizar las operaciones de muestreo a una velocidad tan alta como se requiera. Otra razón que limita esto es que para lograr ello se necesitaría una memoria de gran capacidad pues el número de datos a almacenar sería muy grande.
Parte 2
Haciendo uso del programa result2, simular el comportamiento de los proceso en estudio, probando con distintos tiempos de muestreo. Analizar que consideraciones debe tener en cuenta para elegir el periodo de muestreo más adecuado.

Diseño de reguladoresPara cada uno de los procesos analizados anteriormente, diseñe los siguientes compensadores en el plano continuo. Dicho tendrá como objetivo incrementar la frecuencia natural del sistema. Elija Ud. el porcentaje en el que se desea aumentar la frecuencia.
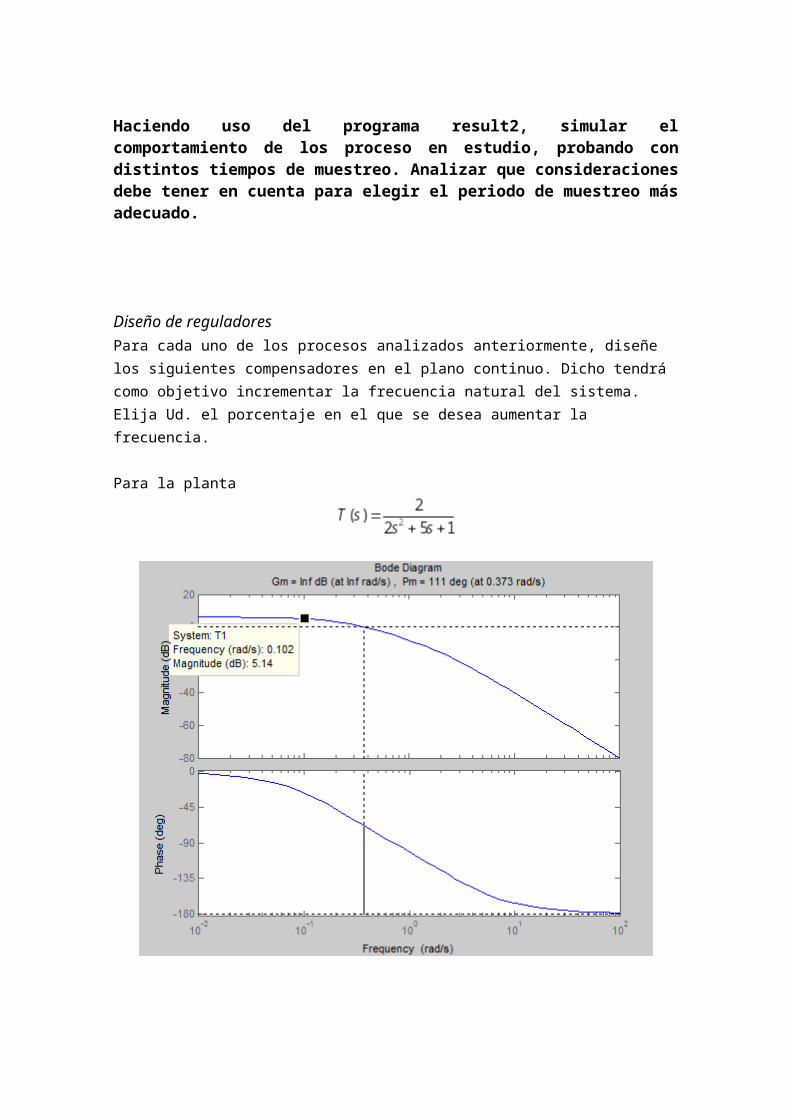
Para la planta
Asumiendo que la frecuencia es de 0,102rad/s lo que corresponde una constante de tiempo de 61.599 y si deseamos aumentar en 20% la frecuencia de trabajo la constante de tiempo debe reducirse a 51.333 (0.1224rad/s), lo que es lo mismo a decir que se aumenta un w= 0.02rad/s
Método Aproximación
Regla rectangular en adelanto (Euler)
s= z−1T
Regla rectangular en atraso (Backward)
s= z−1Tz
Regla trapezoidal o bilineal s= 2Tz−1z+1
Primer compensadoRegla rectangular en adelanto (Euler)
T=0.1 T=1 T=10
Ilustración 7: respuesta con compensador con T= 0.1

Ilustración 8: respuesta con compensador con T=1
Ilustración 9: respuesta con compensador para T=10

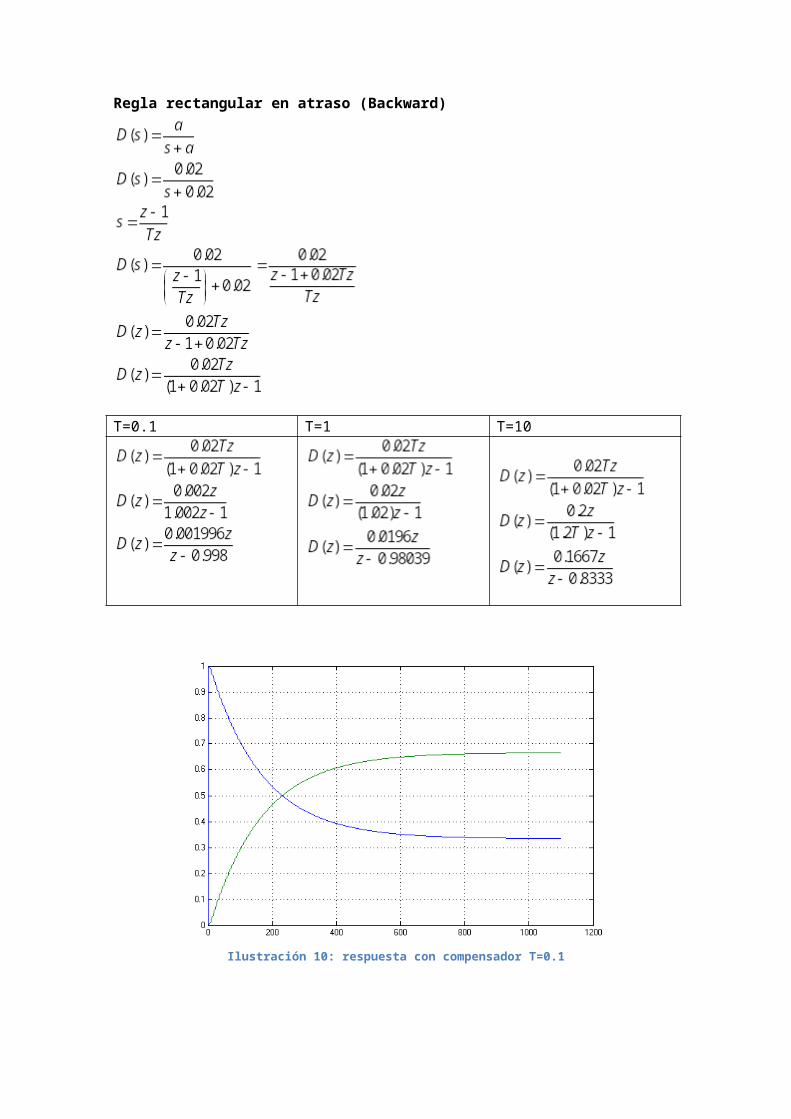
Regla rectangular en atraso (Backward)
T=0.1 T=1 T=10
Ilustración 10: respuesta con compensador T=0.1
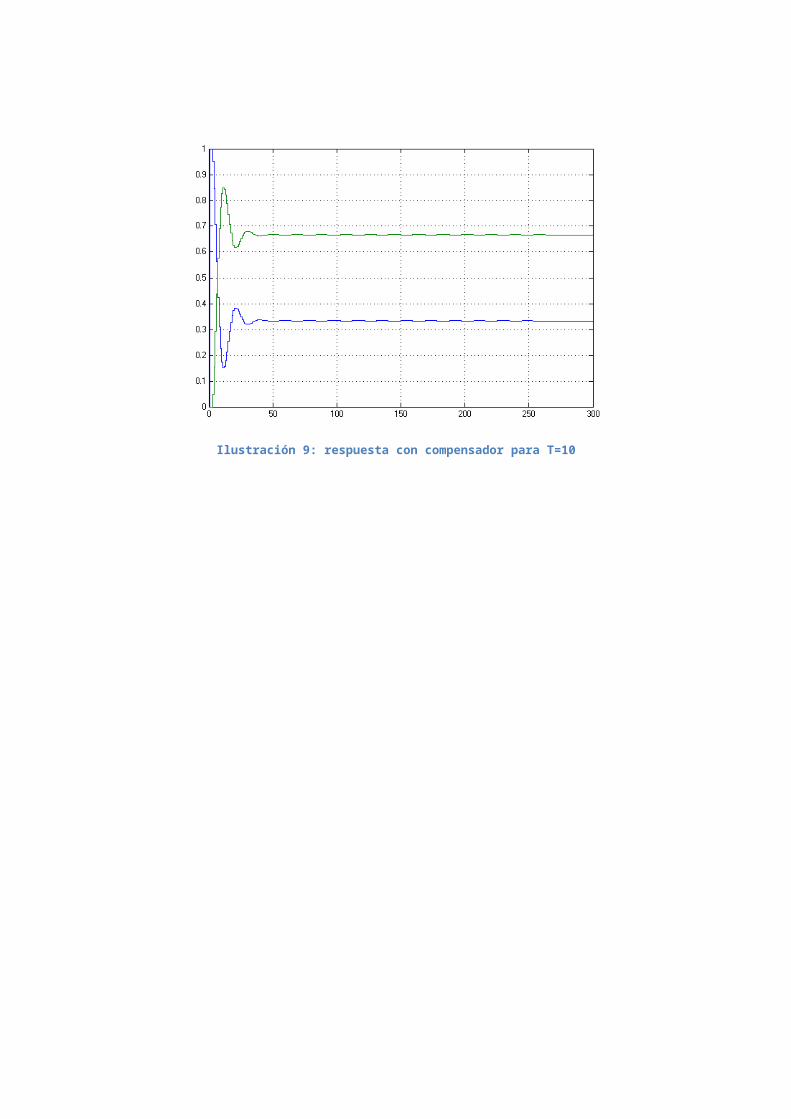
Ilustración 11: respuesta con compensador para T=1
Ilustración 12: respuesta con compensador para T=10
Regla trapezoidal o bilineal
T=0.1 T=1 T=10
Ilustración 13: repsuesta con compensador para T=0.1

Ilustración 14:respuesta con compensador para T=1
Ilustración 15: respuesta con compensador para T=10

Segundo compensador
Tras hallar el valor del polo b=0.02 y el valor del cero podemos asignarlo y fijarlo de acuerdo a
como querramos que influya en nuestra respuesta transitoria, en este caso usaremos a0
0.0162 de modo que:
Regla rectangular en adelanto (Euler)
T=0.1 T=1 T=10

Ilustración 16: respuesta con compensador para t=0.1
Ilustración 17: respuesta con compensador para T=1
T estable: 230

Ilustración 18: respuesta con compensador para T=10
Regla rectangular en atraso (Backward)
T=0.1 T=1 T=10

Ilustración 19: respuesta con compensador para T=0.1
Ilustración 20:respuesta con conmpensador para T=1
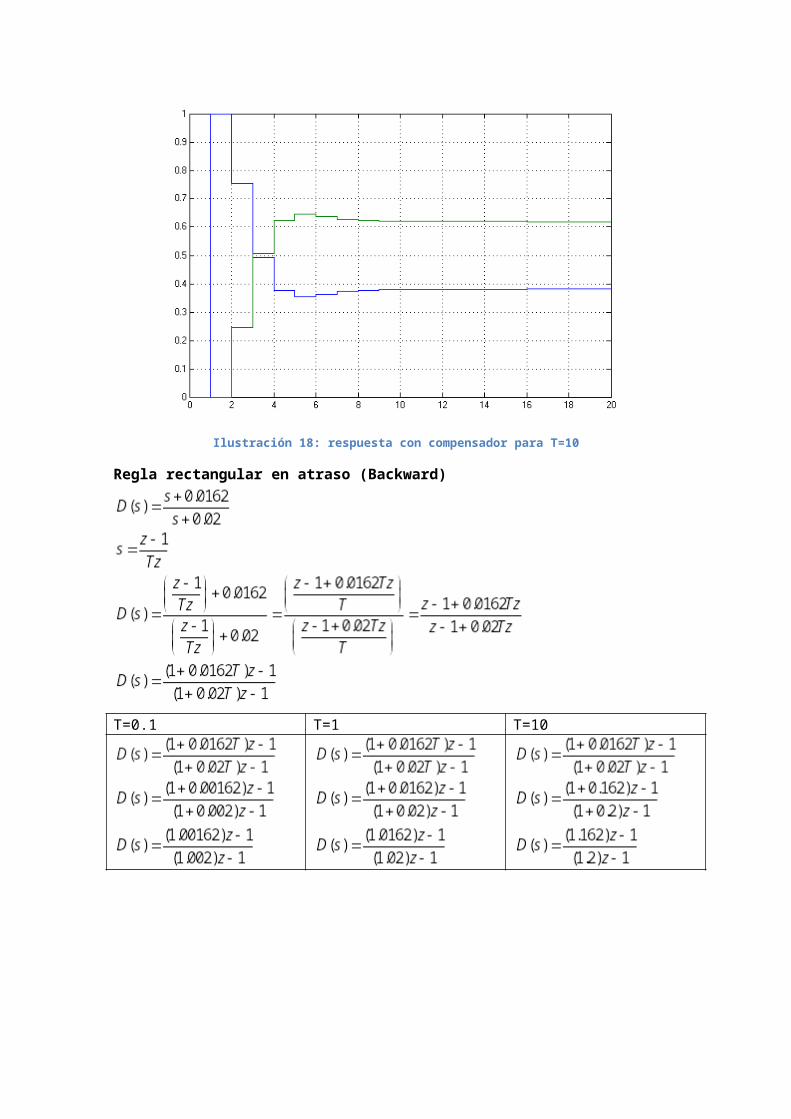
Ilustración 21: respuesta con compensador para T=10
Regla trapezoidal o bilineal
T=0.1 T=1 T=10
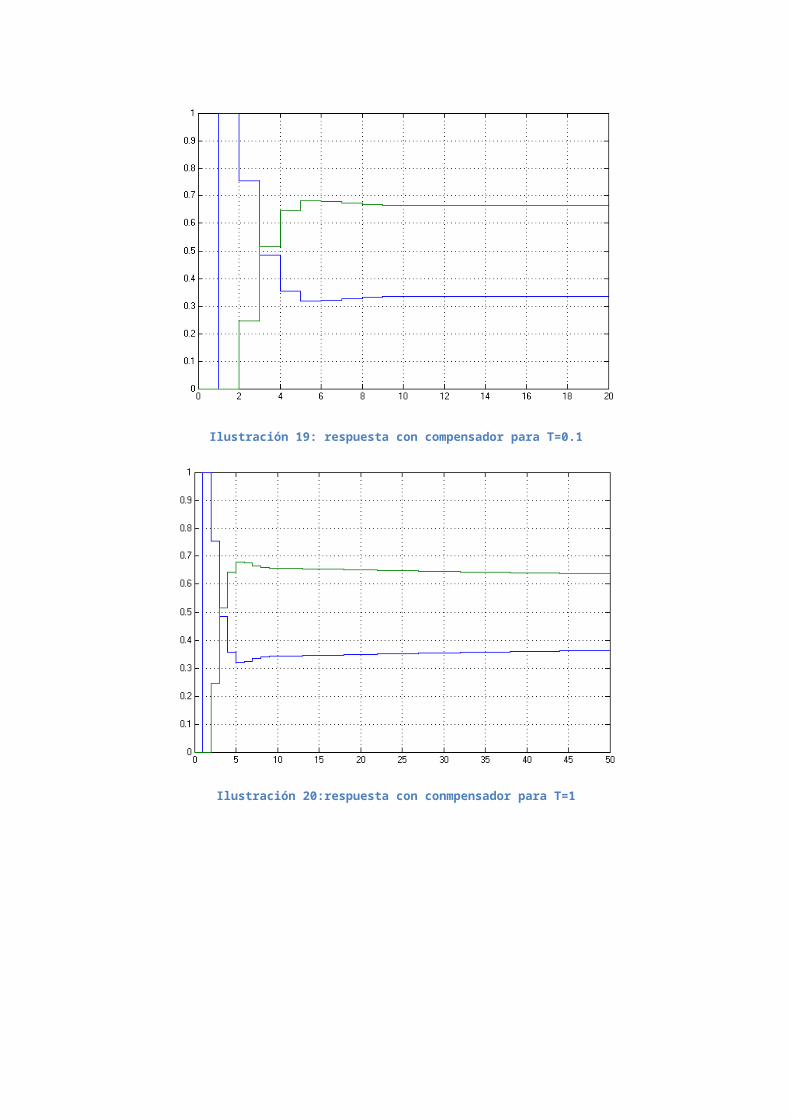
Ilustración 22: respuesta con compensador para T=0.1

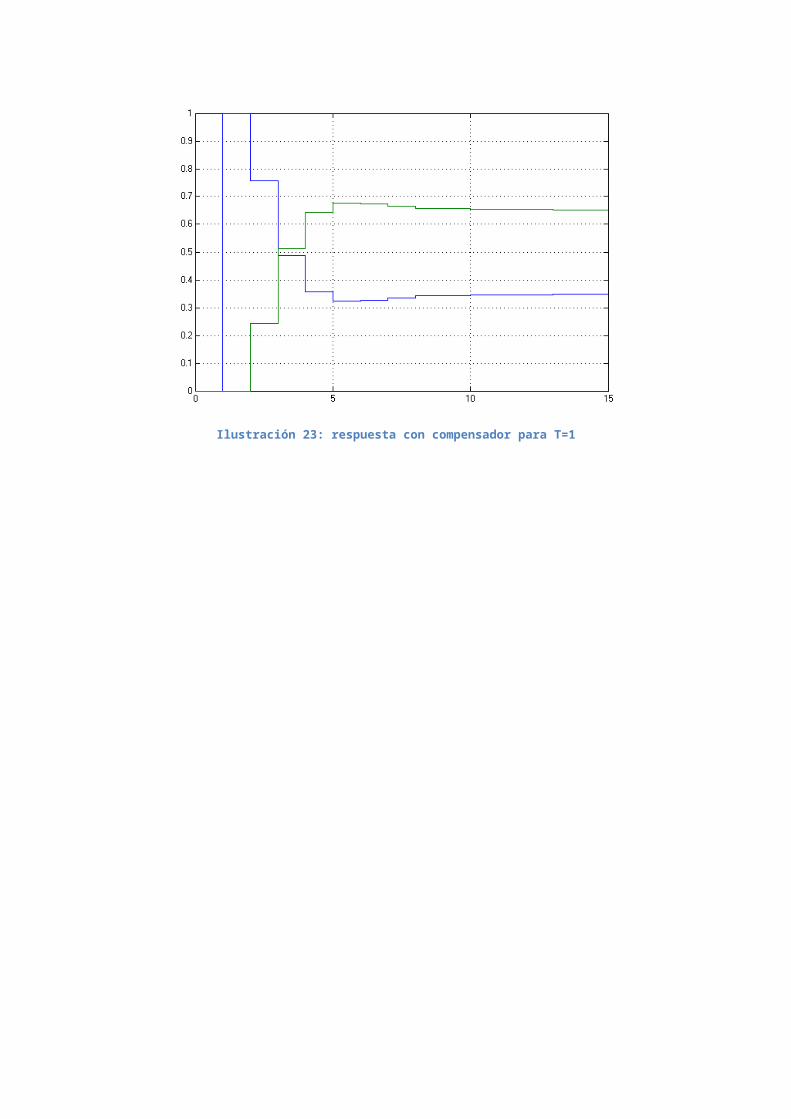
Ilustración 23: respuesta con compensador para T=1

Ilustración 24:respuesta para compensador con T=10
Tercer compensador
Basándonos es los valores hallados anteriormente tenemos que a= 0.0162 y b= 0.02 de modo que podamos realizar la discretización de los compensadores
Regla rectangular en adelanto (Euler)
Esta vez a diferencia de los casos anteriores, por ser la función de un tanto más compleja y tediosa de trabajar usaremos el matlab para obtener la ecuación equivalente:
T=0.1 T=1 T=10
Ilustración 25: respuesta con compensador para T=0.1
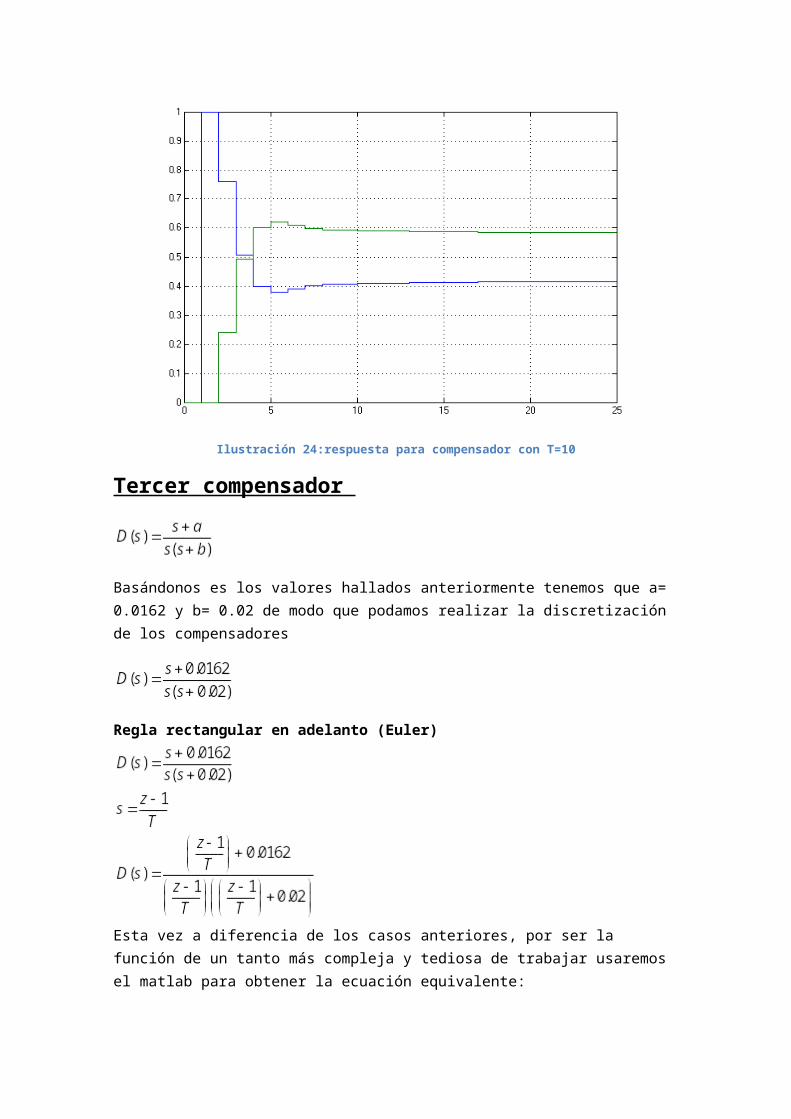
Ilustración 26: respuesta con compensador para T=1
Ilustración 27: respuesta con compensador para T=10

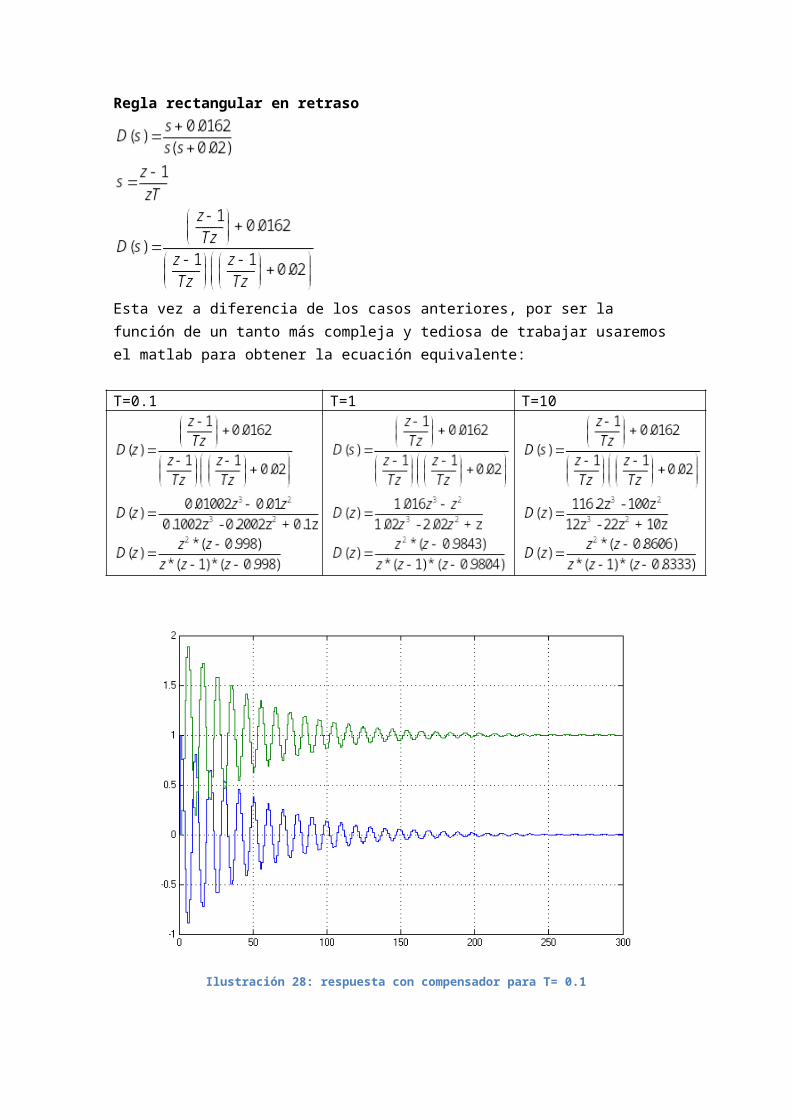
Regla rectangular en retraso
Esta vez a diferencia de los casos anteriores, por ser la función de un tanto más compleja y tediosa de trabajar usaremos el matlab para obtener la ecuación equivalente:
T=0.1 T=1 T=10
Ilustración 28: respuesta con compensador para T= 0.1

Ilustración 29: respuesta con compensador para T=1
Ilustración 30: respuesta con compensador para T=10
Regla trapezoidal o bilineal
Esta vez a diferencia de los casos anteriores, por ser la función de un tanto más compleja y tediosa de trabajar usaremos el matlab para obtener la ecuación equivalente:
T=0.1 T=1 T=10
Ilustración 31: respuesta con compensador para T=0.1
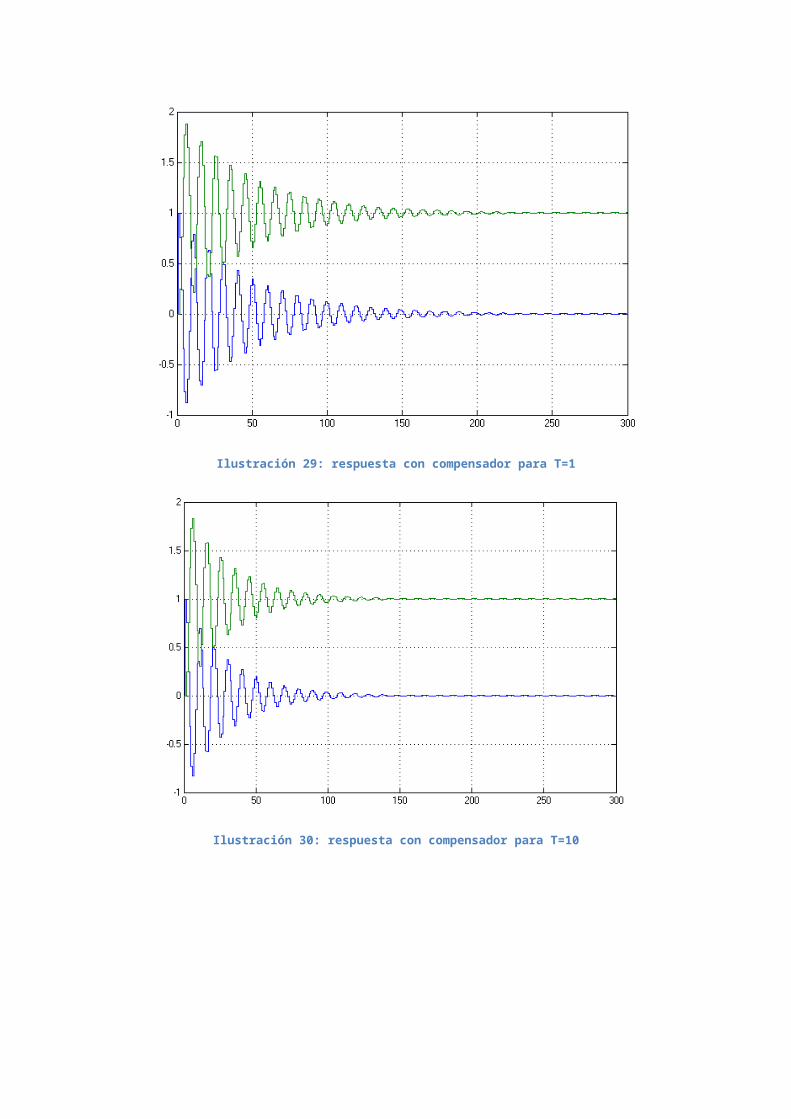
Ilustración 32: respuesta con compensador para T=1
Ilustración 33: respuesta con compensador para T=10
CUESTIONARIO
Según lo observado en las simulaciones realizadas:

1. Cuando el proceso presenta una dinámica lenta, de las tres aproximaciones de integración usadas en el compensador cual es la que presenta una mejor performance en procesos de dinámica muy lenta? Por que?.La aproximación que presenta una mejor performance en procesos de dinámica muy lenta es la trapezoidal, debido a que al tomar 2 puntos, y hallar el valor medio, podremos llegar al valor real de manera más rápida y con un tiempo de muestreo menor que con las otras dos. Así, no necesitaremos tomar muchos datos.
2. De las aproximaciones discretas de integración numérica, cual calificaría Ud como más riesgosa desde el punto de vista de la estabilidad? Cual seria la más conservadora? Fundamente su respuesta.La más riesgosa desde el punto de vista de la estabilidad es la aproximación de Euler y la más conservadora es la trapezoidal ya que al ser su sistema de retención de orden uno, la pérdida de datos no es tan grande como lo es con las otras aproximaciones( adelanto y atraso) que tienen un sistema de orden cero y por tanto asumen una pérdida de datos en ciertos intervalos.
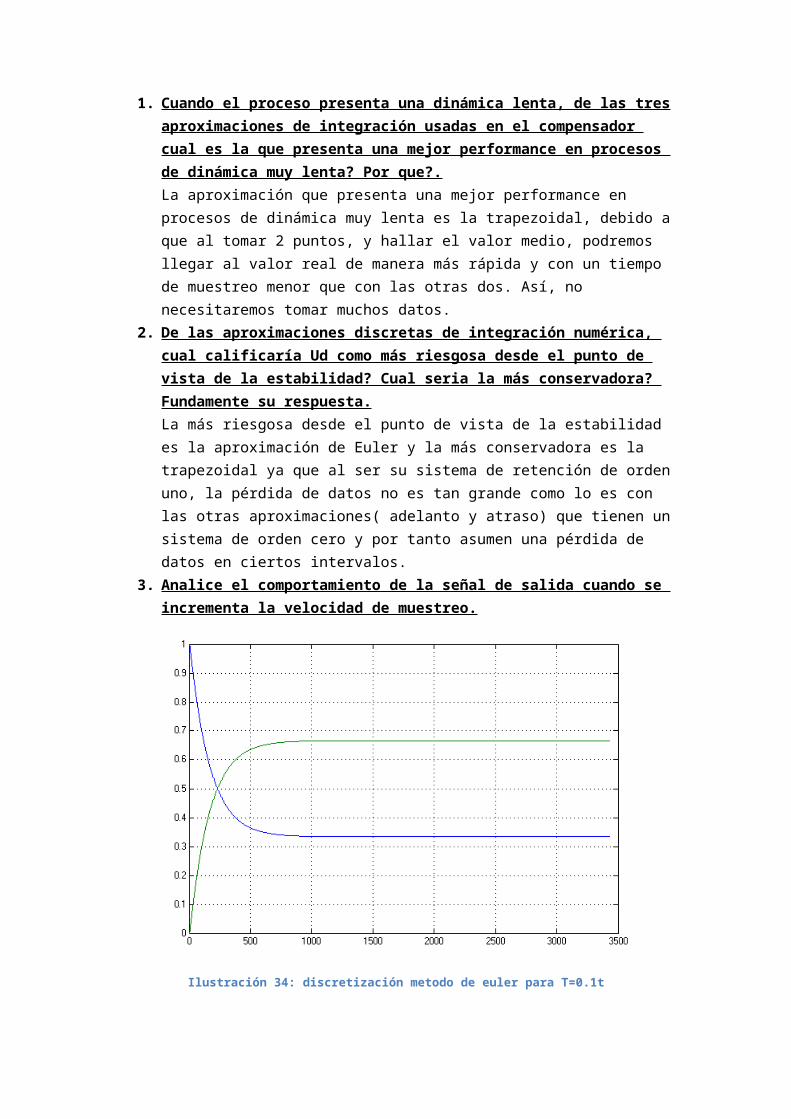
3. Analice el comportamiento de la señal de salida cuando se incrementa la velocidad de muestreo.
Ilustración 34: discretización metodo de euler para T=0.1t
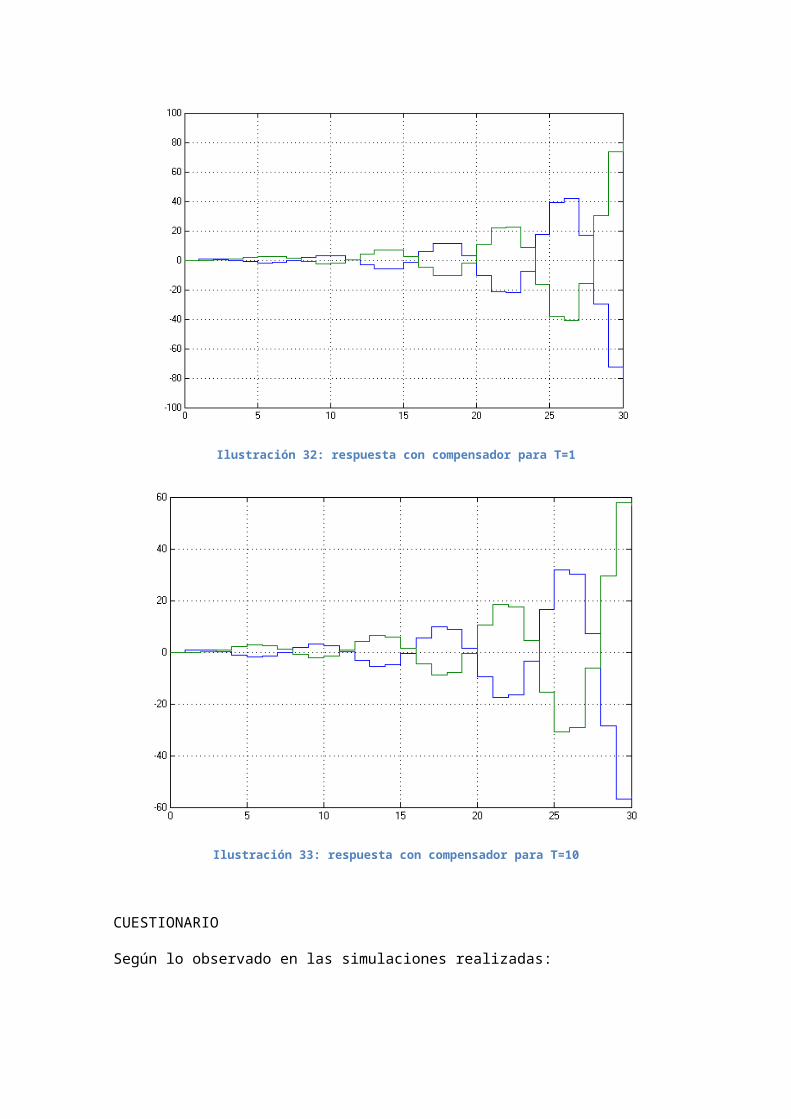
Ilustración 35:discretización metodo de euler para T=1
Ilustración 36:discretización metodo de euler para T=10
Podemos observar que si se incrementa la velocidad de muestro ( se reduce el tiempo de muestreo) la señal demora más en alcanzar su valor estacionario. Podemos ver en las gráficas que para T=0.1 el proceso alcanza su valor estacionario aproximadamente en 1000 segundos, para un T=1 , el proceso alcanza su valor estacionario en aproximadamente 70 segundos y para un T=10 el proceso alcnasa su valor estacionario en aproximadamente 50 segundos.
4. Compare las prestaciones obtenidas con el compensador discretizados por equiparamiento de polos y ceros con el discretizado por aproximaciones de integración numéricaDe hecho que la integración numérica es el método más exacto para discretizar respecto de cualquier método de discretizado por integración numérica pues como su nombre lo dice, son aproximaciones y estas tendrán sus respectivas limitaciones en cuanto a su prestación.
CONCLUCIONES
•La salida del compensador varía de acuerdo al tipo de aproximación para discretizar que se haya utilizado, así vemos que en algunas gráficas, para una misma función discreta, con algunos métodos de aproximación, la salida se muestra divergente, mientras que para otros la salida diverge.
•La estabilidad o no estabilidad de un proceso depende de dos factores: el tiempo de muestreo y la aproximación utilizada.
•El tiempo de muestreo influye en la forma de salida de la señal del compensador, pudiéndolo así volverlo inestable al proceso estando en discreto, por tener un valor demasiado alto y salirse del círculo unitario de estabilidad del plano discreto o plano z.
•La mejor aproximación que se puede dar para discretizar un proceso, es la aproximación trapezoidal, ya que en ella hay menos pérdidas de datos y se ajusta mejor a lo que es la señal real de mi proceso.
•Es importante tener en cuenta el fenómeno de la aliasing, con lo cual es un factor más del cual debemos tomar en cuenta y preocuparnos a la hora de elegir correctamente mi tiempo de muestreo.





























