Embed Size (px)
Citation preview
LE THÉORÈME DE L’INDICED’ATIYAH–SINGER
Peter Jossen David Kohler
Caroline Lassueur Margherita Gonzato
Xavier Alexandre Anthony Arnold
Marcos Carballo Mathieu Glardon
Ismaïl Haddaoui Olivier Isely
Michele Klaus Olivier Kneuss
Laurent Landry Oliver Prosperi
Juin 2005


Table des matières
Table des notations iv
partie 1. Introduction 1
Chapitre 1. Description du projet de l’Index 51.1. Motivations 51.2. Le choix du sujet 61.3. Un projet STS 71.4. Bilan du projet 8
Chapitre 2. Notes informelles et historiquessur le théorème de l’indice 13
2.1. Notes informelles 132.2. Notes historiques 15
Chapitre 3. Organisation du travail et conventions principales 19
partie 2. Préparatifs divers 21
Chapitre 4. Théorie des catégories 234.1. Catégories et Foncteurs 234.2. Catégories abéliennes 334.3. Formes quadratiques 354.4. Catégories hermitiennes 364.5. Limites et colimites 37
Chapitre 5. Algèbres de Clifford 475.1. Algèbres universelles 475.2. Algèbre de Clifford 535.3. Groupes orthogonaux et groupes spin 66
Chapitre 6. Divers 716.1. Espaces projectifs 716.2. Polynômes invariants 71
partie 3. Topologie différentielle 77
Chapitre 7. Groupes et algèbres de Lie 797.1. Théorie classique des groupes de Lie 797.2. Algèbres de Lie et lien avec les groupes de Lie 102
Chapitre 8. Fibrés vectoriels 111
i

ii TABLE DES MATIÈRES
8.1. K–familles 1118.2. Fibrés Vectoriels 1198.3. Le théorème de Serre–Swan 142
Chapitre 9. K-théorie topologique 1599.1. Le premier groupe de K–théorie topologique, K(X) 1599.2. Le premier groupe de K–théorie d’une paire, K(X,Y) 1839.3. La K–théorie ne s’arrête pas là ! 199
Chapitre 10. Cohomologie de de Rham 20110.1. La cohomologie de de Rahm 20110.2. Algèbre homologique 21910.3. Le théorème de de Rham 244
Chapitre 11. Classes caractéristiques 25111.1. Classes caractéristiques 25111.2. La cohomologie des variétés PnC et PnR 25211.3. Le principe du scindage complexe 25311.4. Connexions dans un fibré vectoriel 25511.5. Connexions induites 26211.6. Définition des lasses caractéristiques 26711.7. Les classes de Chern 27011.8. La classe d’Euler et l’isomorphisme de Thom 27211.9. Calcul de quelques classes caractéristiques 273
partie 4. Analyse globale 277
Chapitre 12. Théorème de Sard 27912.1. Variétés et calcul différentiel 27912.2. Théorème de Sard 28612.3. Applications 29412.4. Transversalité 298
Chapitre 13. Analyse de Fourier 30313.1. Notions préalables 30313.2. Transformation de Fourier sur Rn 30813.3. Formule de Parseval 31213.4. Inversion de la transformation de Fourier 31513.5. Théorème de Plancherel 318
Chapitre 14. Opérateurs de Fredholm 32314.1. Prolégomènes 32314.2. Concepts liés aux opérateurs de Fredholm 33114.3. Opérateurs de Fredholm 35514.4. Vers le théorème d’Atiyah–Jänich. 369
Chapitre 15. Espaces de Sobolev 37715.1. Introduction 37715.2. Les espaces de Sobolev dans Rn 37715.3. Les espaces de Sobolev sur les variétés 41815.4. Les espaces de Sobolev sur les fibrés vectoriels 423

TABLE DES MATIÈRES iii
15.5. Annexe 426
Chapitre 16. Opérateurs aux dérivées partielles (1) 42916.1. Préliminaires 42916.2. Problème fondamental du calcul des variations et régularité 450
Chapitre 17. Opérateurs aux dérivées partielles (2) 45717.1. Préliminaires 45717.2. Les espaces de Sobolev 46617.3. Le problème de Dirichlet 474
Chapitre 18. Opérateurs pseudo-différentiels 48318.1. Motivation 48318.2. Généralités sur les distributions 48418.3. Amplitudes : Définition et résultats téchniques 49918.4. Distributions et opérateurs de Fourier 50518.5. Définition et exemples d’opérateurs pseudo–différentiels 51218.6. Expansion asymptotique d’un symbole 51818.7. Opérateurs proprement supportés 52618.8. Transposé, adjoint et produit d’opérateurs pseudo–différentiels 53718.9. Opérateurs pseudo–différentiels sur une variété 54118.10. Généralisation à des fonctions à valeurs vectoriels 55718.11. Opérateurs hypo–elliptiques et elliptiques 55818.12. Prolongement à L2 d’opérateurs d’ordre 0 56018.13. L’action sur les espaces de Sobolev 56218.14. La propriété de Fredholm 56518.15. Symboles avec partie principale 56618.16. Le symbole du point de vue K–théorique 568
partie 5. Synthèse 571
Chapitre 19. Le théorème de l’indice 57319.1. Conventions et résultats admis 57319.2. L’indice topologique 57519.3. Ennoncé du théorème de l’indice 581
Bibliographie 583
Index 587
iv TABLE DES MATIÈRES
Table des notations
Nous utiliserons les notations suivantes tout au long du travail :
0 Catégorie vide0b
a La flèche nulle de a vers b1 Catégorie à un élément1a Flèche identité de a2 Catégorie à deux éléments3 Catégorie à trois éléments
(X, ‖.‖X) Espace normé|.| Module complexe/valeur absolue‖.‖X Application norme sur l’ensemble X< x, t > Prod. scalaire usuel dans Cn∧p(V) ensemble des p-formes alternées sur V4n n-ème simplexe standard∇u Gradient de u∧∗(V) Algèbre exterieure de V∇ Connexion Le diagramme commute
α = (α1, ..., αn) multi-indice avec αi ∈N pour tout i = 1, ...,n|α| longueur du multi-indice αΓ(X,E) = Γ(E) l’ensemble des sections continues sur le fibré (E, p,X)∆u Laplacien de uθn le fibré trivial de rang nξ|X′ ou EX′ la réstriction de ξ à X′ ⊂ Xρε fonction régularisanteσ p-simplexe singulierσk Le k–ème polynôme invariant symétriqueΨm Opérateurs pseudo–différentiels d’ordre mχx(ξ) Caractère de Rn
Φ(C ) Monoïde des classes d’isomorphies des objets d’une catégorie CΦ(X) Monoïde des classes d’isomorphies de fibrés vectoriels sur XΩ∗(X) Le complexe de deRham associé à XΩ∗(E) Le complexe de deRham associé au fibré E|Ω| mesure (de Lebesgue) de l’ensemble Ωω ⊂⊂ Ω ouvert ω fortement inclus dans Ω, c’est-à-dire ω compact et ω ⊂ Ωω p-forme différentielleΩp(M) ensemble des p-formes différentielles
Ab Catégorie des groupes abéliensAmplm Amplitudes d’ordre mAn Le groupe alterné avec n!
2 éléments

TABLE DES NOTATIONS v
B(X,Y) Espace des opérateurs linéaires et bornés de X vers YB(X) Algèbre des opérateurs linéaires et bornés de l’espace XBX La boule unité fermée de l’espace métrique X
Cat Catégorie des catégories concrètesch j(E) j–ème caractère de Chernc j(E) j–ème classe de Cherncoker Conoyaucodim Codimensioncod Codomainecolim ColimiteC(X) La catégorie des C–fibrés sur XC∞(X) Fonctions indéfiniment dérivables sur XC∞0 (X) Fonctions indéfiniment dérivables sur X qui tendent vers 0C∞00(X) Fonctions indéfiniment dérivables sur X à support compactC (E,F) les morphismes de E vers F dans la catégorie CCn(X) groupe abélien libre de base Sn(X)CK(X) l’anneau des fonctions continues à valeur dans K
det DéterminantDerm(M) ensemble des dérivations en mdim Dimensiondom Domained(., .) Application de distanceD( f ) Domaine de définition de l’application fD′(X) Distributions sur X (dual de C∞00(X))
Dα Opérateur différentiel élémentaireDi f f Catégorie des variétés différentiablesDn Le groupe dihédral avec 2n élémentsdξ Mesure normalisée sur Rn
dp dérivation extérieure de Ωp(M)Dαu α-ième dérivée partielle
E′(X) Distributions à support compact sur X (dual de C∞(X))
Ell(X) Opérateurs elliptiques sur XEns La catégorie des ensembles
F Corps étant soit C, soit RF (X,Y) Ensemble des opérateurs de Fredholm de X vers YF (X) Ensemble des opérateurs de Fredholm de X dans XF (X) Groupe abélien libre engendré par l’ensemble Xf Transformée de Fourier de fFq Le corps fini à q élémentsf ∗(ξ) la K-famille induite par f de ξf∗ = d f application tangentef ∗ g produit de convolution
GL(V) Groupe linéaire de l’espace vectoriel V

vi TABLE DES MATIÈRES
Grp Catégorie des groupes
Hell(X) Opérateurs hypo–elliptiques sur Xhom(X; Y) Ensemble des applications linéaires de l’espace X dans l’espace YHomC (E,F) les morphismes de E vers F dans la catégorie CH0(X,N) Ensemble des fonctions continues de X dans NH0(X,Z) Premier groupe de cohomologie de CechH1(X,G) l’ensemble des classes d’équivalence des G-cocylcesHn(X,A; G) n-ème groupe d’ homologie singulière à coefficients dans GHn(X,A; G) n-ème groupe de cohomologie singulière à coefficients dans GH∗(X,A) Cohomologie à coefficients dans A de XH∗dR(X) Cohomologie de deRham de XH∗c(X) Cohomologie à support compact de XH∗c(X,F ) Cohomologie de Cech à coefficients dans F de X
IE Application identité de l’ensemble Eida Flèche identité de aim Image d’une applicationind Indice
ker NoyauK Corps quelconqueK f am la catégorie des K-famillesK f am(X) la catégorie des K-familles sur XK(X,Y) Ensemble des opérateurs linéaires compacts de X dans YK(X,Y) K–théorie de la paire d’espaces (X,Y)K(X) Idéal des opérateurs linéaires compacts de l’espace XK(X) Premier groupe de K–théorie topologique de l’espace XK(X) Groupe de GrothendickK(C ) Groupe de Grothendieck d’une catégorie additive CK0(A) Premier groupe de K–théorie algébrique de l’anneau AK(X) K–théorie réduite de l’espace XK(ϕ) Groupe de Grothendieck d’un foncteur additif ϕ
limy→0+ limy→0 lorsque y > 0limy→0− limy→0 lorsque y < 0L (V,W) Ensemble des applications linéaires entre deux espaces vectoriels
Mon Catégorie des monoïdesMorC(a, b) L’ensemble des morphismes de a vers b
Np( f ) ∫∞
−∞| f (x)|pdx
1p
p.p presque partoutPkV Espace projectif de dimension k associé à l’espace vectoriel V
RMod Catégorie des R-modules à gauche
TABLE DES NOTATIONS vii
Rng Catégorie des anneaux
S L’espace de SchwarzSet Catégorie des ensemblessing supp Support singuliersk Le k–ème polynôme invariant de NewtonSL(V) Groupe linéaire spécial de VS(M) Symétrisé du monoïde abélien MSn groupe symétrique sur n lettresSn(X) ensemble des n-simplexes singuliers sur XSn La sphère de dimension nsn f (x) n-ième somme de Fourier de fSO(V) Groupe orthogonal spécial de Vsupp SupportSX La sphère unité de l’espace métrique XSymbm Symboles d’ordre m
TE Topologie sur l’ensemble ET‖.‖ Topologie engendrée par la norme ‖.‖Tm(M) espace tangent à M en mT∗m(M) espace cotangent à M en mT(M) fibré tangent sur MT op Catégorie des espaces topologiquesT op∗ Catégorie des espaces topologiques pointéstr Trace
uε régularisation de la fonction uUX La boule unité ouverte de l’espace métrique X
vect(v1, v2, . . .) Espace vectoriel engendré par les vecteurs v1, v2, . . .Vect(X) Ensemble des classes d’isomorphie de fibrés vectoriels sur X.
X∗ Dual topologique de l’espace XX+ Compactifié d’Alexandroff de l’espace X


Première partie
Introduction


3
Par Milen Poenaru,dédié aux fondateurs de la théorie de l’indice.


CHAPITRE 1
Description du projet de l’Index
Ce chapitre tente de répondre aux questions du type : qu’est-ce que le projetde l’Index, quels sont ses objectifs et quelles conclusions tire-t-on de ce projetmaintenant qu’il est terminé ?
1.1. Motivations
Les projets de semestre constituent une partie fondamentale de l’enseignementdonné par l’EPFL. En rupture totale avec le concept de cours ex-cathedra, ces pro-jets permettent aux étudiants d’effectuer un travail de recherche important. Bienentendu, à ce niveau de formation, il est rare que cette recherche soit novatrice,ses objectifs principaux consistant à favoriser un travail de recherche autonome etpermettre la rédaction de premiers rapports complets.
C’est l’année passée que l’IGAT1 a lancé le concept d’un séminaire pour étu-diants faisant office de projet de semestre. Le principe de ce séminaire consisteà réunir plusieurs étudiants pour travailler en groupe sur un sujet spécifique. Lesujet en question est alors subdivisé en morceaux que se répartissent les étudiants.Chaque semaine, le groupe de travail se réunit pour que les étudiants présententla section qu’ils ont étudiée. En fin de semestre, chacun rédige un rapport sur l’en-semble du sujet, en s’attachant plus particulièrement sur les sections qui lui sontattribuées.
Peter et moi avons suivi ce premier séminaire et en avons apprécié le conceptqui ajoute aux objectifs d’un simple projet de semestre des présentations orales et lapossibilité de travail en groupes. Il nous est cependant apparu que certains pointsne permettent pas de profiter pleinement du potentiel offert par un séminaire.
Premièrement, le travail collaboratif n’est pas exploité de manière optimale.La méthode de division des sujets favorise un travail autonome, chacun travaillantsa partie sans pouvoir réellement entrer dans celle des autres. En effet, les partiesétant trop petites, leur contenu est principalement constitué de propriétés énon-cées et démontrées. Les problèmes rencontrés sont donc plus souvent techniques
1Institut de géométrie, algèbre et topologie, http ://igat.epfl.ch
5

6 1. DESCRIPTION DU PROJET DE L’INDEX
que conceptuels. Deuxièmement, les redondances sont trop abondantes. Là où l’onpourrait obtenir une rédaction finale détaillée où chacun contribue par le travaileffectué individuellement, on demande à chaque étudiant de rédiger un rapport duséminaire. On obtient ainsi autant de résumés du séminaire qu’il y a d’étudiants,à la différence que chaque rapport se distingue des autres pour se focaliser sur lasection concernant son auteur.
Après avoir longuement réfléchit à ce problème, Peter et moi avons imaginéle modèle suivant : Choisissons un sujet plus vaste, que l’on découpe en diversparties. Chaque étudiant se charge d’étudier l’une de ces parties et rédige unrapport à son sujet. En fin de semestre, on organise un séminaire durant lequelchacun présente son travail. Le tout est lié en fin de séminaire par quelques exposésprésentant la manière dont toutes les parties constituent le sujet d’intérêt global.Les divers travaux peuvent alors être réunis dans une compilation donnant lesdivers éléments nécessaires à l’étude du sujet initial.
Les parties étant plus importantes et certainement pas toutes indépendantesles unes des autres ; un travail collaboratif est alors nécessaire, les uns expliquantaux autres les concepts relatifs à sa partie. De plus, il est alors envisageable de créerdes projets de semestre communs, deux étudiants s’associant pour traiter un sujetplus important.
Fort de ces réflexions, nous entreprenons de les mettre en applications et cher-chons un sujet de travail.
1.2. Le choix du sujet
A la fin de l’année passée, Peter commence à me parler du théorème de l’in-dice ; ses découvreurs, Sir Michael Atiyah et Isadore Singer ont reçu le prix Abel lamême année pour cette découverte, ce qui a porté ce résultat à sa connaissance. Aupremier coup d’œil, le sujet s’avère largement trop compliqué pour un séminaired’étudiants. Ne souhaitant pourtant pas y renoncer, nous nous proposons alorsde pouvoir au moins en comprendre l’énoncé. A ma demande, Peter passe sesvacances de Noël à se renseigner au sujet du théorème de l’indice, afin de déter-miner les outils mathématiques nécessaires à la compréhension de son énoncé. Ilrevient en janvier avec un diagramme impressionnant, explicitant les sujets mathé-matiques que le théorème met en jeu : algèbre homologique, analyse fonctionnelle,analyse de Fourier, géométrie différentielle, K-théorie, opérateurs différentiels, to-pologie algébrique, etc. la liste n’étant certainement pas exhaustive. Cette diversitéaurait pu nous faire craindre que le sujet soit trop complexe, au contraire, sa ri-chesse nous enthousiasme. Dès le mois de février, nous commençons à discuter dece projet avec d’autres étudiants qui s’y intéressent rapidement.
C’est ainsi que naît le « Projet de l’Index ».

1.3. UN PROJET STS 7
1.3. Un projet STS
Très vite, nous avons compris que l’organisation de ce projet allait nous prendredu temps, ce qui ne nous aurait pas dérangés sans l’obligation d’effectuer notreprojet STS durant ce dernier semestre de cours. Kathryn Hess Bellwald cherchaitalors un sujet pour le séminaire pour étudiant de l’IGAT, c’est ainsi que nous luiproposons de nous en charger et d’en faire notre projet STS, ce qu’elle accepte bienaimablement.
La quantité de travail attribuée au projet STS étant supérieure à celle que l’or-ganisation du séminaire nous demande, nous nous engageons à fournir un travailcomplet sur le théorème de l’indice. Nous fixons les objectifs suivants :
(1) Trouver suffisamment d’étudiants pour le projet de l’Index, leur trou-ver un sujet parmi tout ceux que Peter a sélectionnés et leur trouver unprofesseur qui les prendra en charge durant le semestre.
(2) Organiser un séminaire à la fin du semestre pour présenter le travail dechacun, puis rassembler tout ces éléments mathématiques pour énoncerle théorème de l’indice.
(3) Rédiger un rapport global sur le théorème de l’indice réunissant les projetsde semestres effectués, l’énoncé du théorème proprement dit, quelquesnotes historiques et explicatives sur le théorème et le projet de l’Index.
La structure que nous définissons pour le projet de l’Index est la suivante :chaque étudiant du projet effectue un projet de semestre sur l’un des sujets délimi-tés par Peter, sous la direction d’un professeur de la section et s’engage à participerau séminaire de l’Index qui a lieu durant les trois dernières semaines du semestre.
Une fois les ramifications du théorème de l’indice éclaircies, la recherche d’étu-diants de 2ème cycle motivés par son étude ne pose pas de problèmes. Nous avonsbesoin d’environ huit étudiants pour rendre le projet viable, nous en trouvons ra-pidement une douzaine et nous arrêtons à quatorze. Chaque étudiant choisi l’undes sujets que nous proposons et nous l’accompagnons chez un professeur afin dedéfinir plus précisément les objectifs à viser. Nous créons deux projets supplémen-taires (« Théorie des catégories » et « Le théorème de Sard »), qui ne se rattachentpas directement au théorème de l’indice, pour deux étudiants qui ne trouvent passatisfaction dans notre liste.
Afin de ne pas perdre de temps au début du semestre, toute cette phase d’or-ganisation s’effectue durant les vacances de février. Lors de la première semainedu semestre, nous décidons d’organiser deux premières sessions du séminaire del’Index. Le premier exposé, présenté par Peter, explique de manière informelle lecontenu du théorème de l’indice et ses conséquences afin de donner une motiva-tion générale aux membres du projet. Le deuxième exposé a un but didactique : laplupart des notions de base nécessaire aux divers sujets traités sont déjà connuesou seront exposées dans l’un des cours du semestre, mais nous ne sommes pascertaines que la notion de fibré vectoriel, fondamentale pour deux sujets, le sera.

8 1. DESCRIPTION DU PROJET DE L’INDEX
C’est pourquoi j’introduit cette notion durant le deuxième exposé de cette premièresemaine.
Nous convenons que le séminaire reprendra lors de la douzième semaine, afinque chacun puisse se concentrer sur son sujet. Puisque nous prévoyons une ving-taine d’heures d’exposés, nous décidons que les trois dernières semaines serontentièrement consacrées au séminaire.
Les projets de semestres sont rédigés sous LATEX, mais pour faciliter la com-pilation de ces travaux en un seul document, nous imposons un modèle de notrecréation dans lequel la plupart des environnements et macros sont déjà définis.L’utilisation de ce modèle nous permet à terme de réunir tous les projets en un seulfichier LATEX qui est compilable en moins d’une heure de travail. Une fois la tabledes matières du document final rédigée, nous pouvons enfin y insérer les projetsde semestre, les quelques compléments et notes historiques et lisser un peu lesdifférences de rédaction de chacun.
Afin de nous assister à l’organisation du projet et de permettre sa diffusion unefois terminée, je crée un site web2 sur lequel nous décrivons le projet de l’Index,annonçons le programme du séminaire et diffusons quelques fichiers : le modèlede fichier LATEX utilisé, des manuels d’utilisation de LATEX et à terme, les diversdocuments produit par notre groupe de travail.
1.4. Bilan du projet
Le projet de l’Index est maintenant terminé, le semestre s’achève et nous nousinterrogeons sur le bilan que nous pouvons tirer de cette aventure.
Bilan mathématique.
Au niveau scientifique, le projet de l’Index nous surprend par sa réussite. Lethéorème de l’indice n’a pas seulement été clairement énoncé, Peter en a comprisune démonstration qu’il nous a transmise durant le séminaire.
Reprenons les choses plus en détails. Premièrement, les projets individuelssont en majorité bien réussis et explorent bien le domaine mathématique qui leura été confié. La diversité de ces sujets a été globalement respectée, à l’exceptiondes deux projets sur le problème de Dirichlet, ce qui nous a permis d’explorer unvaste champ des mathématiques. En deuxième lieu, le séminaire de l’Index fut une
2Le site web du projet de l’Index se trouve actuellement à l’adresse http ://ima.epfl.ch/˜dekohler

1.4. BILAN DU PROJET 9
excellente expérience. La plupart des exposés étant de bonne qualité, ce séminairea permis à chacun de s’immiscer un peu dans le travail des autres et de terminerla session avec un bon aperçu des sujets étudiés. Finalement, les exposés de Petervisant à rassembler le savoir acquis afin d’énoncer et démontrer le théorème del’indice permirent aux participants d’obtenir une bonne compréhension des outilsmathématiques en jeu.
Bilan humain.
Au niveau socio pédagogique, les influences du projet ne sont pas négligeables.Le premier point important à souligner est la collaboration entre étudiants. Au-delà des discussions que Peter et moi avons eu avec tous les membres du projet, ily a deux cas spécifiques dont j’aimerai parler plus en détails.
Le premier cas est celui de Carolyn et d’Anthony. Ces deux étudiants de troi-sième année ont effectué leur projet de semestre ensemble. Tout au long du se-mestre, ils ont pu s’entraider de manière fructueuse en se partageant le travail eten discutant de leur progrès, chacun apportant son soutient à l’autre. Cette formede collaboration entre étudiants ayant presque le même niveau permet de dyna-miser le groupe et de détecter et corriger plus rapidement les erreurs et lacunes.
Le deuxième cas est constitué de mon interaction avec Oliver. Il s’agit-là d’unecollaboration entre un étudiant de troisième année (Oliver) et un étudiant de qua-trième année. Grossièrement, il s’agit d’une sorte de parrainage. La différence deconnaissances mathématiques apporte ici des avantages différents que ceux men-tionnés plus haut. Nous avons travaillé sur le même sujet, la K–théorie topologique,mais à deux niveaux différents. Oliver s’est concentré sur l’outil primordial de cettethéorie, les fibrés vectoriels, que j’ai survolé en quelques semaines afin de m’attelerà la définition de la K–théorie. L’entraide que nous avons développée est la sui-vante : je peux expliquer à Oliver les notions et motivation de son sujet et de soncôté, il m’aide à définir et prouver rigoureusement tout le matériel mathématiquedont j’ai besoin mais que je ne peux faire moi-même faut de temps.
Ces deux collaborations différentes se sont révélées extrêmement profitable,tant au niveau pédagogique que scientifique puisque les projets qui en ont décou-lés ont couvert une part très satisfaisante du sujet attribué. La première méthodede collaboration est bien connue et déjà exploitée, mais la seconde ne l’est pas ; Cedeuxième mode de collaboration offre des possibilités qu’il convient d’explorer.
Le deuxième point à mettre en évidence est la participation au séminaire.Outre l’aspect mathématique consistant à concevoir un exposé d’une ou deuxheures, le fait de présenter oralement son travail est extrêmement enrichissant. Cetexercice n’est pas aisé, il est donc souhaitable que l’on profite de telles occasionspour faire progresser chacun dans ce domaine. Je pense que cette expérience serait

10 1. DESCRIPTION DU PROJET DE L’INDEX
d’autant plus profitable si l’on organise des commentaires structurés sur chaqueprésentation.
Bilan technique.
Les deux moyens techniques utilisés lors de ce projet sont le langage LATEXetla création d’un site web. Globalement, leur utilisation fut efficace, mais certainspoints peuvent être aisément améliorés.
En ce qui concerne l’utilisation de LATEX, la création d’un modèle commun estun avantage indéniable. La compilation de tous les projets de semestre en un seuldocument se fait de manière simple et rapide ; après analyse, la méthode utiliséepeut être encore améliorée de manière significative. Les problèmes majeurs quisurviennent alors concernent l’uniformisation du document. En effet, sans poli-tique syntaxique forte, les divergences de style de chacun rendent le documentextrêmement hétérogène. Je ne parle pas ici du style linguistique, ce qui serait par-faitement impossible à harmoniser en un semestre, mais du style syntaxique utilisépour la rédaction du projet. J’ai écris un nouveau document à ce sujet, disponiblesur le site web avec le modèle de document, qui énonce les règles de rédaction enLATEXà utiliser et celles à bannir. Ces règles ne sont absolument pas universelles,elles reflètent uniquement nos préférences, mais cette expérience nous a prouvéqu’il est capital d’en imposer si l’on veut donner un semblant de cohérence audocument final.
La création d’une page web n’est pas vitale, mais se révèle très utile. Lesdeux objectifs d’une telle page sont le soutien logistique et la diffusion du travail,qui correspondent aux étapes temporelles du projet. Durant le projet, le site webpermet de diffuser les informations techniques concernant LATEX(le fichier modèle,divers guides et manuels d’utilisation sont à disposition) et permet d’afficher leprogramme du séminaire. Après le projet, la page web offre un support pourconserver une trace du projet. La page décrit brièvement les objectifs du projet etfournit un support de diffusion des divers documents produits par le groupe detravail.
Une idée qui n’a pas été exploitée consiste à se servir du site web avant le projetpour informer les étudiants du contenu du projet afin de les motiver à y participer.
Bilan personel.
Peter et moi-même sommes extrêmement contents de notre projet de l’Index.Son organisation, à tous les niveaux, fut extrêmement enrichissante et nous sommesheureux d’avoir relevé le défi que nous posait le théorème de l’indice. Réunir une

1.4. BILAN DU PROJET 11
dizaine d’étudiants de deuxième cycle pour énoncer et expliquer un théorème aussiimportant et aussi récent ne constituait largement pas un pari gagné d’avance.
Notre objectif consistait à améliorer le concept de séminaire lancé par l’IGAT etnous pensons l’avoir atteint. De nombreux points peuvent encore être améliorés,s’est pourquoi nous envisageons de réitérer l’aventure au semestre d’été 2006. Ils’agira alors de trouver un nouveau sujet, aussi porteur que le théorème de l’indicel’a été ce semestre et d’apporter l’expérience que nous avons gagnée ici pour amé-liorer le projet : en créant un cadre technique encore plus performant, en favorisantla collaboration des étudiants et en donnant encore plus d’importance au séminaire.
David KohlerJuin 2005


CHAPITRE 2
Notes informelles et historiquessur le théorème de l’indice
2.1. Notes informelles
Le théorème de l’indice d’Atiyah–Singer permet d’établir un lien très fort entredes informations analytiques et des informations topologiques sur une variétécompacte. Le centre d’intérêt du théorème sont les opérateurs différentiels. Cesopérateurs sont associés à un système d’équations différentielles, prenant placesur une variété compacte, que l’on aimerait résoudre.
L’indice analytique.
En général, il est très difficile de calculer les solutions d’un système d’équationsdifférentielles, on procède donc lentement, en tentant d’obtenir le plus d’informa-tions possibles à son sujet. Une information fondamentale que l’on souhaiteraitobtenir est l’existence de solutions et dans ce cas, le nombre de solutions que lesystème admet. La notion d’indice permet de nous en approcher. On appelle indiceanalytique d’un système d’équations différentielles l’entier obtenu en soustrayant lenombre de relations entre les équation du nombre de paramètres nécessaires pourdécrire ses solutions. Si l’on considère l’opérateur différentiel P qui est associé à cesystème, l’indice analytique se calcul de la manière suivante :
inda(P) = dim ker(P) − dim coker(P)
L’indice analytique ne nous permet pas d’obtenir directement le nombre desolutions, mais nous donne des informations à leur sujet. Par exemple, si l’indiceest positif, on est certain qu’il existe des solutions non triviales.
Bien entendu, l’indice d’un opérateur n’est pas toujours fini, lorsque c’est lecas, un tel opérateur est dit de Fredholm. Tous les opérateurs différentiels ne sontpas de Fredholm, on s’intéresse donc à une certaine classe d’entre eux ayant cette
13

14 2. NOTES INFORMELLES ET HISTORIQUES SUR LE THÉORÈME DE L’INDICE
propriété, que l’on appelle les opérateurs elliptiques.
A première vue, cet indice analytique est aussi difficile à calculer que lessolutions du système elles-mêmes. Ce que le théorème d’Atiyah–Singer affirme,c’est que cet indice ne dépend que de la structure topologique de l’espace sur lequelle système d’équation agit.
L’indice topologique.
L’indice topologique d’un opérateur différentiel quant à lui ne se définit qu’àpartir d’informations purement générales concernant la variété sur laquelle onconsidère notre opérateur. En utilisant de la cohomologie, Atiyah et Singer par-viennent même à donner une formule explicite de cet indice :
indt(P) = (−1)nch([σ]) td(TX ⊗ C)[TX]
Où X est la variété compacte sur laquelle agit l’opérateur différentiel P.
Malgré son aspect barbare, cette formule est extrêmement explicite et pos-sède l’avantage d’être calculable. En effet, chaque élément la composant, bien queconceptuellement complexe, peut se calculer de manière aisée.
Le théorème de l’indice.
Le théorème de l’indice peut alors se formuler de manière extrêmement simple :
T ’ (Atiyah–Singer)
Soit X une variété compacte, et P un opérateur elliptique, alors inda(P) = indt(P).
Il s’ensuit donc, que l’indice analytique est ainsi aisément calculable, en utili-sant la formule cohomologique d’Atiyah–Singer. Mais ce théorème fait bien plus,il nous montre de nouveaux liens unissant l’analyse à la topologie. Comme onle verra dans ce projet commun, les outils nécessaires à la bonne compréhensionde ce théorème et de sa preuve font appels à une multitude de domaines analy-tiques, topologiques et algébriques, qui n’ont, à première vue, que peu de chosesen commun.
2.2. NOTES HISTORIQUES 15
2.2. Notes historiques
Le théorème de l’indice ne constitue pas une nouvelle percée mathématique,mais plutôt le prolongement d’une réflexion commencée il y a environ un siècleavec le théorème de Riemann–Roch. Le théorème de l’indice constitue en fait unegénéralisation de ce théorème, ainsi que de nombreux autres tels le théorème deGauss–Bonnet et le théorème de signature de Hirzebruch.
C’est vers la fin des années cinquante que Gelfand conjecture que l’indiceanalytique d’un opérateur elliptique doit pouvoir s’exprimer de manière purementtopologique. En 1963, Atiyah et Singer, annoncent leur découverte du théorème del’indice dans le bulletin de l’AMS qu’ils accompagnent d’une esquisse de preuve.Cinq ans plus tard, ils publient dans « Annals of Mathematics » une nouvelle preuvecomplète, plus simple que la première, utilisant la K–théorie ainsi qu’une preuvede la formule cohomologique de l’indice1.
Quelques mots sur Atiyah et Singer.
Sir Michael Francis Atiyah est né en 1929 à Londres, d’une mère écossaise et d’unpère libanais. Il fait ses études de mathématiques à Cambridge au Trinity College oùil obtient son doctorat. Atiyah passe la majeure partie de sa carrière académiqueà Oxford puis Cambridge à nouveau lorsqu’en 1990, il est nommé directeur dunouvel Institut Isaac Newton pour la recherche en mathématiques. Aujourd’hui,Atiyah est à la retraite et professeur honoraire de l’Université d’Edinburgh.
Atiyah a reçu de nombreuses distinctions durant sa carrière dont la médailleFields en 1966 pour ses travaux sur le théorème de l’indice. Il est également anobliten 1983.
Isadore Singer est né en 1924 à Détroit. Il obtient son doctorat à l’Université deChicago en 1950 et rejoint alors le MIT à Boston qu’il ne quitta presque pas. Singery est actuellement professeur d’institut.
L’Arbeitstagung.
Il serait faux de croire que le théorème de l’indice n’est l’œvre que de deuxhommes. Il s’agit en réalité d’un travail collectif beaucoup plus vaste, dans lequelil ne faut pas négliger l’importance des travaux d’autres mathématiciens tels Gro-thendieck, Hirzebruch, Bott, Serre et tant d’autres qu’il n’est pas possible de tous
1Il s’agit bien de la formule de la page 14

16 2. NOTES INFORMELLES ET HISTORIQUES SUR LE THÉORÈME DE L’INDICE
les citer.
Le séminaire intitulé « Arbeitstagung » (réunion de travail en français) fondépar Hirzebruch en 1957 joua un rôle important dans le développement de la théo-rie de l’indice. Ce séminaire de niveau international se déroulait chaque année àBonn jusqu’en 1991. Dès le début, ses participants étaient en majeure partie desmathématicien de premier rangs, tels Atiyah, Grothendieck, Bott, Milnor, Serre,Thom, E Une des caractéristiques principales de ce séminaire tenait au fait que sonprogramme était discuté en commun lors de la première séance. Le premier exposéétait en général donné par Atiyah qui était l’un des plus grands contributeurs dece séminaire.
Une grande part des mathématiques de la fin du vingtième siècle se reflètedans les exposés de l’Arbeitstagung dont une partie fut même écrite lors de ceséminaire. Plus d’un vainqueur sur deux de la médaille Fields entre 1950 et 1990présenta un exposé durant l’Arbeitstagung de Hirzebruch. C’est ainsi qu’Atiyahformula la première version du théorème de l’indice pour les opérateurs de Diraclors du séminaire de 1962. L’année suivante, alors qu’il annonçait avec Singerle théorème général de la formule de l’indice, Hirzebruch donnait une nouvellepreuve du théorème de périodicité de Bott qui joue un rôle important dans lathéorie de l’indice. En 1964, Jänich présente durant le séminaire son travail dedoctorat sous la direction de Hirzebruch dans lequel il construit un isomorphisme
[X,F ] −→ K(X)
Où F représente l’espace des opérateurs de Fredholm2. Cette isomorphisme futmême repris plus tard par Atiyah pour écrire une nouvelle preuve encore plussimple de la périodicité de Bott.
Trois preuves pour un théorème.
Au final, Atiyah et Singer ont rédigés trois preuves différentes du théorème del’indice. La première preuve, parue en 1963 à l’annonce de leur découverte s’inspirede la preuve de Hirzebruch pour son théorème de la signature qui généralise lethéorème de Riemann–Roch. Cette preuve est compliquée et techniques sans êtreextrêmement enrichissante. C’est avec bonheur que Atiyah et Singer en formulentune nouvelle, beaucoup plus simple et conceptuelle3. Mais ils ne s’arrêtent pas làet lors de développements ultérieurs, ils développent une preuve beaucoup plusanalytique et moins conceptuelle en utilisant l’équation de la chaleur.
2Voir le chapitre 14 au sujet des opérateurs de Fredhom3C’est d’ailleurs la preuve que vous trouverez dans ce document au chapitre 19

2.2. NOTES HISTORIQUES 17
Un futur riche en succès.
Le théorème de l’indice n’a pas seulement eu des conséquences mathéma-tiques. Dès la fin des années septante, le théorème eu des applications en physiquethéorique et en particulier en théorie des jauges, théorie des anomalies et théoriedes cordes.
Les applications en physique apparurent à la plus grande surprise des com-munautés mathématique et physique, dès lors Atiyah et Singer se sont consacrésà la collaboration de ces deux mondes, expliquant aux mathématiciens de quellemanière l’intuition physique peut leur permettre de résoudre des problèmes.
Plus de quarante ans après sa découverte, le théorème de l’indice continue desurprendre et d’offrir de nouvelles perspectives en mathématiques et en physiquethéorique. C’est l’une des raison qui poussa l’Académie des Sciences de Norvèged’attribuer le prix Abel 2004 à Atiyah et Singer « pour la découverte et la démons-tration du théorème de l’indice, qui unifie la topologie, la géométrie et l’analyse, etpour leur rôle déterminant dans l’établissement de nouvelles passerelles entre lesmathématiques et la physique théorique ».


CHAPITRE 3
Organisation du travail et conventions principales
Ce document a pour objectif de réunir une majorité de connaissances mathé-matiques requises à la compréhension du théorème de l’indice et de sa preuve.Chaque chapitre, à quelques exceptions près, est constitué d’un projet de semestre,il n’est donc pas surprenant que certaines notations et conventions soient alorsmodifiées. En général, ces conventions sont décrites par l’auteur au fil du texte,mais l’exemple même de l’ensemble des nombres positifs suffira à mettre le lecteuren garde :
N = 0, 1, 2, 3, 4, 5, et N = 1, 2, 3, 4, 5,
Certains chapitres ne sont pas nécessaires au théorème de l’indice tel que for-mulé dans ce document. Il en va ainsi pour les chapitres 5, 7, 12, 16 et 17. Lesalgèbres de Clifford sont utilisées pour la preuve du théorème de périodicité deBott que nous ne traitons pas ici. Les groupes de Lie sont utilisés dans une for-mulation plus générale du théorème de l’indice, en considérant une action par ungroupe de Lie compact. Le théorème de Sard n’est pas utilisé dans ce document,il est présenté un peu en marge du théorème de l’indice. Finalement, les deuxchapitres sur les opérateurs aux dérivées partielles ne sont pas nécessaires, maisétudient le laplacien, qui est un exemple d’opérateur elliptique auquel on peutdonc appliquer le théorème de l’indice.
Les connaissances pré requises à la lecture de ce texte sont celles étudiéeslors d’un premier cycle mathématiques. On trouvera au chapitre 14 des notionsélémentaires d’analyse fonctionnelles et au chapitre 13 des notions de théorie de lamesure.
19


Deuxième partie
Préparatifs divers


CHAPITRE 4
Théorie des catégories
Ce chaptire a été principalement rédigé par Xavier Alexandre, mais n’est pasencore complet. Il s’agit d’une introduction aux concepts fondamentaux de la théo-rie des catégories, qui fait aujourd’hui partie intégrante du langage mathématique.La dernière section, écrite par Peter Jossen, entre plus en détails sur les ojets delimite et colimite qu’il utilisera dans la suite du projet.
4.1. Catégories et Foncteurs
La théorie des catégories est une généralisation et une formalisation des pro-priétés des structures mathématiques représentées par des diagrammes.
L’idée générale est donc de définir une catégorie comme un certain type d’en-semble d’objets et de flèches. Cette vision a le grand avantage d’être cohérente avecla notion d’ensemble et d’applications entre ces ensembles qu’elle généralise ainsiqu’avec la notion de graphe qui nous fournit un outil de représentation puissant.
Graphes, objets, flèches et morphismes.
Formellement nous allons définir une catégorie comme un certain type degraphe, lui-même définit comme suit :
4.1.1. D (graphe)
Un graphe est un quadruplet G = (O,A,dom, cod) formé :– d’un ensemble O d’éléments a,b,c. . . appelés objets,– d’un ensemble A d’éléments f,g,h. . . appelés flèches ou morphismes,– de deux applications : le domaine et le codomaine notées respectivement dom
et cod qui à chaque flèche associent chacune un objet :dom : A −→ O
f 7−→ a = dom fcod : A −→ O
f 7−→ b = cod f
23

24 4. THÉORIE DES CATÉGORIES
Les applications domaine et codomaine qui font référence aux ensembles dedépart et d’arrivée d’une application se représentent pour chaque flèche par laliaison d’un sommet de départ à un sommet d’arrivée :
a −→ b
Cette définition permet ainsi de définir un graphe de manière formelle que l’onpeut ainsi représenter en toute rigueur de la manière usuelle à l’aide de sommetset de flèches sous la forme d’un diagramme.
Par conséquent on notera désormaisG = (O,A,dom, cod) = (O,A), le domaineet le codomaine de chaque flèche étant implicite à chaque flèche.
Nous sommes maintenant formellement armés pour travailler directement surles diagrammes conformément à l’intuition que nous en avons. Cependant il nousreste à définir une propriété que nous ne cesserons pas d’utiliser tout au long dece projet : la commutativité des diagrammes.
4.1.1. Commutativité des diagrammes.
Une propriété éventuelle importante d’un diagramme ou d’une partie d’undiagramme est de commuter, c’est à dire de pouvoir être parcouru par n’importequel chemin de flèches de manière équivalente.
Cette propriété imposerait de définir les chemins ainsi qu’une équivalenceentre des chemins de manière à pouvoir les identifier formellement. Nous retenonsl’idée mais nous contentons ici de la définition informelle donnée en introduction :
4.1.2. D
Un diagramme commute si il peut-être parcouru de manière équivalente par n’im-porte quel chemin de flèches.
Une fois munis des diagrammes nous sommes prêts à définir les catégories.
4.1.2. Catégories.
Une catégorie va être un graphe comportant une flèche identité en chaquesommet et pour lequel toutes les flèches composables sont composées. Les flèchesidentités et la composition sont définies de la manière suivante :
4.1.3. D (Fonction identité)
Soit G = A,O un graphe.On définit la fonction identité :

4.1. CATÉGORIES ET FONCTEURS 25
id : O −→ Aa 7−→ id a = ida,
tel que
dom(ida) = a = cod(ida)
On note aussi ida = 1a.Cette définition joue naturellement dans le cas de l’application identité d’un
ensemble mais les flèches ne sont pas systématiquement des applications commenous le verrons dans un exemple de catégorie.
Néanmoins dans le cadre des catégories nous allons demander que les mor-phismes identités jouent un rôle d’élément neutre dans la composition des mor-phismes que nous allons définir dans les deux énoncés suivants.
Le premier spécifie simplement que les flèches composables sont celles quipartagent une même extrémité d’arrivée et de départ :
4.1.4. D (Ensemble des morphismes composables)
Soit G = A,O un graphe.On définit l’ensemble des flèches composables de G comme
A ×O A = (g, f ) ∈ A2|dom g = cod f
A chaque couple de morphismes composables, la composition associe un mor-phisme comme ceci :
4.1.5. D (Composition des morphismes)
Soit G = A,O un graphe.On définit la fonction composition :
: A ×O A −→ A(g, f ) 7−→ g f ,
tel que
dom(g f ) = dom f et cod(g f ) = cod g
La composition des morphismes s’illustre par le diagramme suivant :
bg
===
====
a
f@@
g f// c
Pour définir les catégories on demande à ce que l’identité et la composition secomportent convenablement, c’est à dire que l’identité soit un élément neutre pourla composition et que la composition soit associative :
4.1.6. A (Neutralité de l’identité)

26 4. THÉORIE DES CATÉGORIES
Pour toutes flèches f : a −→ b et g : b −→ c on a
1b f = f et g 1b = g
L’axiome de neutralité de l’identité peut être illustré par le diagramme com-mutatif standard suivant :
b
1b
g
===
====
a
f@@
f >>>
>>>>
> c
b
g
@@
Moi j’aime bien celui-là qui n’est plus un diagramme commutatif :
af // b
1b
g // c
Ces diagrammes illustrent tout simplement le fait que les flèches identités secomportent comme on désire qu’elles se comportent. Comme tous les objets d’unecatégorie seront munis de l’identité, celle-ci sera toujours implicite et donc ne seraplus représentée sur les diagrammes.
De même l’axiome d’associativité va nous assurer du bon comportement dessuccessions de flèches :
4.1.7. A (Associativité des flèches)
Soit f ,g et h des flèches composables. Alors
f (g h) = ( f g) h
L’axiome d’associativité peut être illustré par le diagramme suivant :
a
f
f(gh)=( fg)h //
g f RRRRRRRRR
))RRRRRRRRR
d
b g//
hg
55lllllllllllllllllll c
h
OO
4.1.8. D
Une catégorie C est un graphe muni de l’identité et de la composition des flèchesqui satisfait les axiomes de neutralité de l’identité et d’associativité des flèches.
Tous les objets des catégories étant muni d’une flèche identité, celle-ci seradésormais implicite et ne sera donc plus représentée hormis dans l’exemple 4.1.10.
4.1.9. E
4.1. CATÉGORIES ET FONCTEURS 27
0 est la catégorie vide sans objets ni flèches.
4.1.10. E
1 est la catégorie avec un objet et la flèche identité.
4.1.11. E
2 est la catégorie −→= a −→ b avec deux objets a et b, les flèches identités etune flèche a −→ b qui n’est pas l’identité.
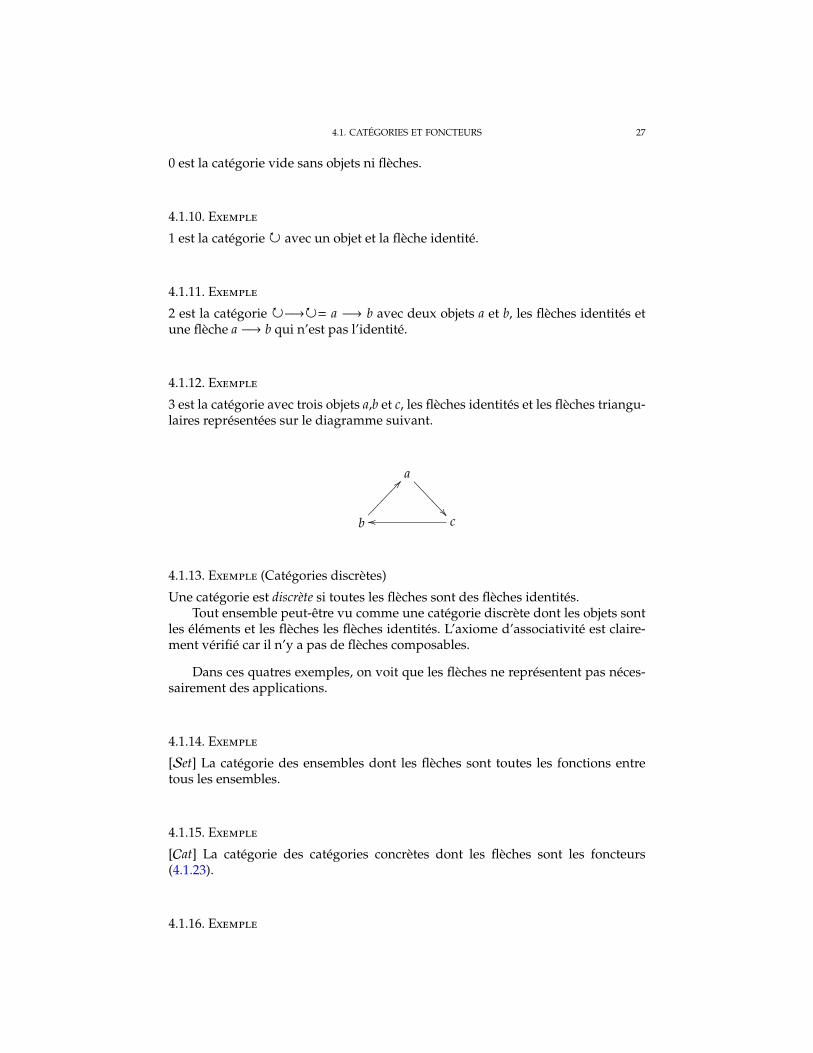
4.1.12. E
3 est la catégorie avec trois objets a,b et c, les flèches identités et les flèches triangu-laires représentées sur le diagramme suivant.
a
===
====
b
@@coo
4.1.13. E (Catégories discrètes)
Une catégorie est discrète si toutes les flèches sont des flèches identités.Tout ensemble peut-être vu comme une catégorie discrète dont les objets sont
les éléments et les flèches les flèches identités. L’axiome d’associativité est claire-ment vérifié car il n’y a pas de flèches composables.
Dans ces quatres exemples, on voit que les flèches ne représentent pas néces-sairement des applications.
4.1.14. E
[Set] La catégorie des ensembles dont les flèches sont toutes les fonctions entretous les ensembles.
4.1.15. E
[Cat] La catégorie des catégories concrètes dont les flèches sont les foncteurs(4.1.23).
4.1.16. E

28 4. THÉORIE DES CATÉGORIES
[Mon] La catégorie des monoïdes dont les flèches sont les homomorphismes demonoïdes.
4.1.17. E
[Grp] La catégorie des groupes dont les flèches sont les homomorphismes degroupes.
4.1.18. E
[Ab] La catégorie des groupes abéliens dont les flèches sont les homomorphismesde groupes.
4.1.19. E
[Rng] La catégorie des anneaux dont les flèches sont les homomorphismes d’an-neaux.
4.1.20. E
[RMod] La catégorie des R-modules dont les flèches sont les applications linéaires.
4.1.21. E
[T op] La catégorie des espaces topologiques dont les flèches sont les applicationscontinues.
4.1.22. E
[T op∗] La catégorie des espaces topologiques pointés dont les flèche sont les appi-cations continues préservant le point de base.
On vérifie que tous ces exemples sont bien des catégories : la flèche identité estici l’application identité et l’axiome d’associativité est clairement satisfait pour lesapplications.
Ces exemples nous montrent que la structure des catégories s’applique bienaux structures usuelles et commence à pointer les similitudes qui peuvent existerentre elles. Il leurs manquent cependant un outil essentiel pour être puissantes :les foncteurs.
4.1.3. Foncteurs.

4.1. CATÉGORIES ET FONCTEURS 29
Toutes les structures citées dans les exemples de la section précédente com-portents des similitudes. Les foncteurs vont être l’outil qui va établir le lien entreces structures.
Un foncteur associe deux catégories en associant entre eux ses objets et sesflèches de manière respectueuse.
4.1.23. D
SoitA et B deux catégories.Un foncteur covariant F deA vers B est une application :
F : A −→ B
(a, f ) 7−→ (b, g),tel que pour tout objet a et pour toutes flèches composables f et g dans la catégorie
F(ida) = idF(a)
F(g f ) = F(g) F( f ).
a
f
F(a)
F( f )
b
g
F%- F(b)
F(g)
c F(c)
On remarque que dès la définition on abuse déja de la notation en appliquantindiféremment le foncteur aux flèches ou aux objets.
4.1.24. E
A chaque catégorie dont les flèches sont un certain type d’application commescelle des exemples 4.1.14 à 4.1.22 on peut appliquer le foncteur oubli qui à chaqueobjet associe l’ensemble correspondant et à chaque flèche la même application vuecomme une application purement ensembliste. La particularité de la structure estainsi "oubliée".
l
4.1.25. E
Le foncteur qui a chaque espace topologique pointé associe un groupe fondamentalest un foncteur de T op vers Grp
4.1.26. E

30 4. THÉORIE DES CATÉGORIES
Plus généralement les foncteurs pi-machin qui associent des espaces machins à desgroupes trux sont des foncteurs bidules T op vers Grp
Si l’association de deux catégories se fait en "retournant" les flèches on définiles foncteurs contravariants :
4.1.27. D
Un foncteur contravariant est défini comme un facteur covariant mais pour toutesflèches composables on a
F(g f ) = F( f ) F(g).
4.1.4. Morphismes.
4.1.28. D (Flèche inversible)
4.1.29. D (Isomorphisme d’objets)
Deux objets a et b dans une catégorie sont isomorphes et l’on note a b s’il existe unisomorphisme e : a −→ b.
Le relation d’isomorphisme d’objets est clairement réflexive, transitive et sy-métrique, c’est donc une relation d’équivalence.
4.1.30. D (Flèche injective)
4.1.31. D (Flèche surjective)
4.1.32. D (Inverse)

4.1. CATÉGORIES ET FONCTEURS 31
4.1.33. D (Flèche idempotente)
4.1.34. D (Objet terminal)
Un objet t dansC est terminal si pour tout objet a dansC il existe une seule et uniqueflèche de a vers t.
Tous les objets terminaux sont isomorphes.
a
===
====
))TTTTTTTTTTTTTTTTTTTTT b
>>>
>>>>
> c
uujjjjjjjjjjjjjjjjjjjjj
t1 ' t2
4.1.35. D (Objet initial)
Réciproquement un objet s est initial si pour tout objet a il existe une seule et uniqueflèche de s vers a.
4.1.36. E
Dans Set l’ensemble vide est un objet initial et les singletons sont des objets termi-naux.
4.1.37. D (Objet nul)
Un objet nul est un objet à la fois initial et terminal.
4.1.38. E
Dans Grp le groupe trivial est un objet nul.
4.1.39. D (Flèche nulle)
Une flèche nulle de a vers b est l’unique flèche a −→ z −→ bOn la note 0b
a.
4.1.40. P
Toute flèche composée par une flèche nulle est une flèche nulle elle même.
D. Par distributivité de la composition par rapport à l’addition.
32 4. THÉORIE DES CATÉGORIES
4.1.41. D (Groupoïde)
Un groupoïde est une catégorie dans laquelle chaque flèche est inversible.
4.1.5. Représentations.
4.1.6. Transformations naturelles.
4.1.7. Produits et Coproduits.
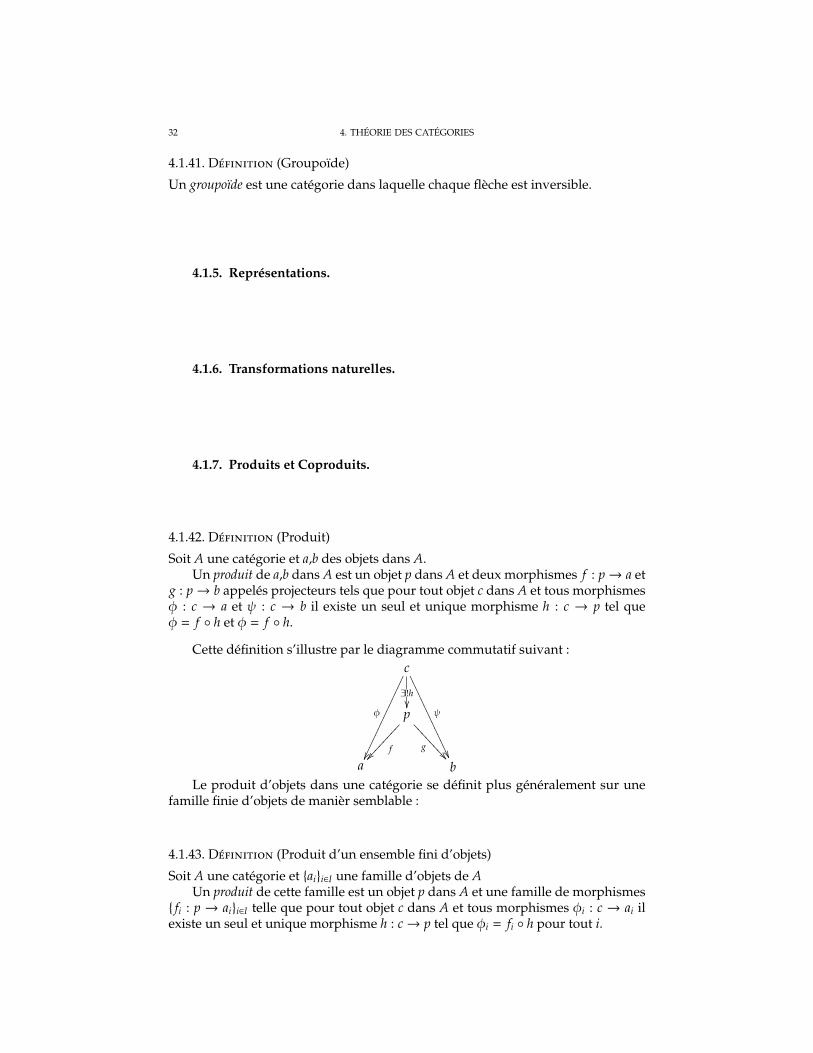
4.1.42. D (Produit)
Soit A une catégorie et a,b des objets dans A.Un produit de a,b dans A est un objet p dans A et deux morphismes f : p→ a et
g : p→ b appelés projecteurs tels que pour tout objet c dans A et tous morphismesφ : c → a et ψ : c → b il existe un seul et unique morphisme h : c → p tel queφ = f h et φ = f h.
Cette définition s’illustre par le diagramme commutatif suivant :c
∃!h
φ
ψ
...
....
....
...
p
f
g=
====
===
a bLe produit d’objets dans une catégorie se définit plus généralement sur une
famille finie d’objets de manièr semblable :
4.1.43. D (Produit d’un ensemble fini d’objets)
Soit A une catégorie et aii∈I une famille d’objets de AUn produit de cette famille est un objet p dans A et une famille de morphismes
fi : p → aii∈I telle que pour tout objet c dans A et tous morphismes φi : c → ai ilexiste un seul et unique morphisme h : c→ p tel que φi = fi h pour tout i.

4.2. CATÉGORIES ABÉLIENNES 33
4.1.44. E (Produit dans la catégorie des ensembles)
Dans la catégorie Ens des ensembles le produit cartésien est un produit au senscatégorique.
Soit A et B deux ensembles. On définit le produit de A et B A × B par
A × B = (a, b) | a ∈ A, b ∈ B
et les projecteurs par
f : A × B −→ A g : A × B −→ B(a, b) 7−→ a (a, b) 7−→ b
de manière usuelle.Pour tout ensemble E dans Ens et toutes applications φ : E → A et ψ : E → B
on définit h : E→ A × B par
h : E→ A × Be 7−→ (φ(e), ψ(e))
h est clairement unique
4.1.8. Produits fibrés et cofibrés.
4.1.9. Pull-back et Push-out.
4.2. Catégories abéliennes
4.2.1. Ab-catégories.
4.2.1. D (Ensemble des morphismes)

34 4. THÉORIE DES CATÉGORIES
Soit a et b des objets d’une catégorie C. L’ensemble des morphismes de a vers b estl’ensemble des flèches de domaine a et codomaine b.
MorC(a, b) = f |dom( f ) = a et cod( f ) = b
On note également
MorC(a, b) =Mor(a, b) = homC(a, b) = hom(a, b) = C(a, b) = (a, b) = (a, b)C
4.2.2. D (Ab-catégorie)
Une Ab-catégorie est une catégorie C pour laquelle pour tous objets a et bMorC(a, b)est un groupe abélien additif pour lequel la composition est bilinéaire : Soit f , f ′ :a −→ b et g, g′ : a −→ c. Alors
(g + g′) ( f + f ′) = g f + g f ′ + g′ f + g′ f ′.
On l’appelle aussi une catégorie préadditive
4.2.3. E
Ab est une Ab-catégorie.
4.2.4. P
Soit z un objet d’une Ab-catégorie.Les propositions suivantes sont équivalentes :
(1) z est initial
(2) z est terminal
(3) 1z = 0 : z −→ z
(4) Le groupe abélienMor(z, z) est le groupe nul
4.2.5. D (Diagramme biproduit)
Soit A une Ab-catégorie et a et b deux objets dans A.Un diagramme biproduit est un diagramme comme suit
ai1// c
p1oo p2 // bi2oo
tel que
p1i1 = 1a, p2i2 = 1b, i1p1 + i2p2 = 1c,

4.3. FORMES QUADRATIQUES 35
4.2.2. Noyaux et conoyaux.
S
k ===
====
=0
))SSSSSSSSSSSSSSSSSSSS
af // b
C
∃h′
OO
h@@ 0
55kkkkkkkkkkkkkkkkkkk
4.2.3. Catégories additives.
4.2.6. D (Catégorie additive)
Une catégorie additive est est une Ab-catégorie qui a un objet nul et un biproduitpour chaque paire d’objets.
4.3. Formes quadratiques
4.3.1. Formes quadratiques et Espaces quadratiques.
4.3.2. Diagonalisation des formes quadratiques.

36 4. THÉORIE DES CATÉGORIES
4.3.3. Plan hyperbolique et Espaces hyperpoliques.
4.3.4. Théorème de décomposition et théorème d’annulation.
4.3.1. T (Théorème d’annulation de Witt)
Soit q,q1 et q2 des formes quadratiques arbitraires.
q⊥q1 ' q⊥q2 ⇒ q1 ' q2
4.4. Catégories hermitiennes
4.4.1. Catégories abéliennes.
4.4.1. D (Catégorie abélienne)
Une catégorie abélienne A est une Ab-catégorie telle que :– A a un objet nul– A a des biproduits binaires– Chaque flèche dans A a un noyau et un conoyau– Chaque morphisme injectif est un noyau, et chaque morphisme surjectif est
un conoyau.

4.5. LIMITES ET COLIMITES 37
4.5. Limites et colimites
Définition et unicité.
Fixons une catégorie C. Par "objet" et "morphisme" on entendra les objetsrespectivement morphismes deC. Fixons aussi un ensemble partiellement ordonné(I,≤). Partiellement ordonné signifie que ≤ est transitif, reflexif et que a ≤ b et b ≤ aentraine a = b. Par abus de langage on dira aussi que I est partiellement ordonné.Si (I,≤) satisfait de plus la condition
(1) ∀ a, b ∈ I ∃ c ∈ I tel que a ≤ c et b ≤ c
on dira que (I,≤) est filtrant.
4.5.1. D
Soit (Ai)i∈I une famille d’objets et supposons donné des morphismes ϕi j : Ai → A jpour tout i > j. On appelle limite du système (Ai, ϕi j) tout couple formé d’un objet Let d’un ensemble de morphismes ψi : L→ Ai satisfaisant la propriété universelle
(2)
Ai
L′ L
A j
ϕi j//___________ ∃!λ
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′i
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′j
??
ψi
???
????
????
??
ψ j
i > j
Pour tout objet L′ et toute famille de morphismes (ψ′i )i∈I telle que ψ′j = ϕi jψ′i pourtout i > j il existe un unique morphisme λ : L′ → L faisant commuter tout lediagramme (2).
Pour la raison usuelle, une limite (L, ψi) est unique si elle existe. On dira quela catégorie C admet des limites s’il existe une limite pour tout système (Ai, ϕi j).De la façon évidente on définit la colimite d’un système (Ai, ϕi j), où cette fois–ci

38 4. THÉORIE DES CATÉGORIES
ϕi j : A j → Ai pour i > j comme étant solution du problème universelle
Ai
L′ L
A j
ttjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′i
ψi
oo_ _ _ _ _ _ _ _ _ _ _∃!λ
OO
ϕi jjjTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′j
__?????????????
ψ j
i > j
Pour tout L′, (ψ′i )i∈I faisant commuter ce diagramme il existe un unique morphismeλ : L′ → L faisant commuter le tout.Si (Ai, ϕi j, I) est un système de limite ou de colimite, on pose par convention ϕii =idAi pour tout i ∈ I. On ne change rien à la définition de limite et colimite si on posei ≥ j au lieu de i > j dans les diagrammes de propriété universelle.
4.5.2. E
Le pull–back est un cas particulier de limite, où I contient seulement trois élémentsi, j, k et seulement les relations i > k et j > k. De même le push–out est un casparticulier d’une colimite.Si I n’est non–ordonné, c’est-à-dire aucun élément est comparable avec un élémentdifférent de lui même, alors la limite est un produit, et la colimite un coproduit.
4.5.3. T
Soit I un ensemble partiellement ordonné filtrant, (Ai, ϕi j, I) un système de limite et soitS ⊆ I cofinal dans I : Pour tout i ∈ I il existe s ∈ S avec s ≥ i. Si l’un des deux systèmesde limite (As, ϕst,S) et (Ai, ϕi j, I) admet une limite, alors l’autre aussi et les limites sontisomorphes dans ce cas.
D. En quatre étapes.(I) D’abord remarquons que S est filtrant, l’ordre partiel étant celui induit par I :En effet si s, s′ ∈ S alors il existe i ∈ I abec s ≤ i et s′ ≤ i vu que I est filtrant, et ilexiste t ∈ S avec i ≤ t vu que S est cofinal dans I. Ainsi on a trouvé t ∈ S avec s ≤ tet s′ ≤ t ce qui montre que S est filtrant.(II) Supposons donné un objet M de C et des morphismes (ψs)s∈S tels que
As
M
At
ϕst
77oooooψs
''OOOOO
O
ψt

4.5. LIMITES ET COLIMITES 39
commute pour tout s ≥ t. Pour tout i ∈ I choisissons s ∈ S avec s ≥ i et posonsψi := ϕsiψs. Montrons que les ψi ainsi définis ne dépendent pas du choix de s. Eneffet, soient s ≥ i et s′ ≥ i. Comme S est filtré par la première étape, il existe encoret ∈ S avec t ≥ s et t ≥ s′. Ainsi
ϕsiψs = ϕsiϕtsψt = ϕtiψt = ϕs′iϕts′ψt = ϕs′iψ′
s
d’où indépendence de s. Par construction de ψi on a ψi := ϕsiψs pour tout s ∈ Savec s ≥ i. Montrons que même ψi := ϕhiψh pour tout h ∈ I avec h ≥ i. En effet,fixons h ∈ I et soit s ∈ S avec s ≥ h. Alors
ϕhiψh = ϕhiϕshψs = ϕsiψs = ψi
comme affirmé.(III) Supposons qu’il existe une limite L du système (Ai, ϕi j, I). Pour i ∈ I notonsψi : L → Ai les morphismes qui accompagnent L. Soit L′ un objet de C et soient(ψ′s)s∈S des morphismes ψ′s = L′ → As tels que ψ′t = ϕstψ′s pour tout s ≥ t. Par ladeuxième étape on peut étendre la famille (ψ′s)s∈S de manière unique en une famille(ψ′i )i∈I telle que ψ′i = ϕhiψ′h pour tout h ∈ I avec h ≥ i. On a donc un diagrammecommutatif
Ai
L′ L
A j
ϕi j//___________ ∃!λ
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′i
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′j
??
ψi
???
????
????
??
ψ j
i ≥ j
avec un unique λ : L′ → L tel que ψ′i = ψiλ pour tout i ∈ I par la propriétéuniverselle de la limite. En particulier ψ′s = ψsλ pour tout s ∈ S. Montrons que siλ : L′ → L est tel que ψ′s = ψsλ′ pour tout s ∈ S, alors λ′ = λ. En effet, on a dans cecas pour tout i ∈ I et tout s ∈ S avec s ≥ i
ψiλ′ = ϕsiψsλ
′ = ϕsiψ′
s = ψ′
i
et donc λ = λ′ car λ est le seul morphisme avec la propriété ψ′i = ψiλ pour touti ∈ I.On a alors montré que pour tout objet L′ de C et toute famille de morphismes

40 4. THÉORIE DES CATÉGORIES
(ψ′s)s∈S avec ψ′t = ϕstψ′s pour tout s ≥ t il existe un unique λ : L′ → L tel que
As
L′ L
At
ϕst//___________ ∃!λ
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′s
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′t
??
ψs
???
????
????
??
ψt
s ≥ t
commute. Avec d’autre mots, l’objet L qui est limite su système (Ai, ϕi j, I) est aussilimite du système (As, ϕst,S).(IV) Finalement supposons qu’il existe une limite L du système (As, ϕst,S). Pours ∈ S notons ψs : L → As les morphismes qui accompagnent L. Par la deuxièmeétape on peut étendre la famille (ψs)s∈S en une famille de morphismes (ψi)i∈I telleque ψi = ϕhiψh pour tout h ∈ I avec h ≥ i. Montrons que L avec les morphismes(ψi)i∈I est une limite su système (Ai, ϕi j, I). Soit donc L′ un objet de C et soient (ψ′i )i∈Ides morphismes ψ′i : L′ → Ai tels que ψ′j = ϕi jψ′i pour tout i ≥ j. Soit λ : L′ → Ll’unique morphisme qui fait commuter
As
L′ L
At
ϕst//___________ ∃!λ
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′s
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′t
??
ψs
???
????
????
??
ψt
s ≥ t
Montrons que λ satisfait même ψ′i = ψiλ pour tout i ∈ I. En effet, si i ∈ I et s ∈ Savec s ≥ i, alors
ψiλ = ϕsiψsλ = ϕsiψ′
s = ψ′
i
comme affirmé. De plus λ est unique avec la propriété ψ′i = ψiλ pour tout i ∈ I,puisque λ est déjà unique avec la propriété ψ′s = ψsλ pour tout s ∈ S. On a alorsmontré existence et unicité de λ : L′ → L tel que ψ′i = ψiλ pour tout i ∈ I, en d’autremots, L est limite du système (Ai, ϕi j, I).
4.5.4. T
Soit I un ensemble partiellement ordonné filtrant, (Ai, ϕi j, I) un système de colimite et soitS ⊆ I cofinal dans I. Si l’un des deux systèmes (As, ϕst,S) et (Ai, ϕi j, I) admet une colimite,alors l’autre aussi et les colimites sont isomorphes dans ce cas.
4.5. LIMITES ET COLIMITES 41
D. C’est le théorème 4.5.3 dans la catégorie Cop.
4.5.5. C
Soit I un ensemble partiellement ordonné, et supposons que I admet un maximum s. Soit(Ai, ϕi j, I) un système de limite ou colimite. Alors As est une limite respectivement unecolimite de ce système.
D. En effet, I est aussi filtré, et S := s est cofinal dans I. CommeAs est limite respectivement colimite du système (As,∅,S), les théorèmes 4.5.3 et4.5.4 permettent de conclure.
Constructions explicites.
4.5.6. P
Soit R un anneau et C la catégorie des R–modules. Soit (Ai, ϕi j, I) un système de limite deC. Posons
L :=
(ai)i∈I ∈∏i∈I
Ai
∣∣∣∣∣∣∣ ϕi j(ai) = a j pour tout i > j
et pour tout i ∈ I et tout a = (a j) j∈I posons ψi(a) = ai. Alors (L, (ψi)i∈I) est une limite dusystème (Ai, ϕi j, I).
D. Pour tout a ∈ L on a ψ j(a) = a j = ϕi j(ai) = ϕi jψi(a) pardéfinition, et donc ψ j = ϕi jψi.Soit L′ un R–module et soient (ψ′i )i∈I des morphismes ψ′i : L′ → Ai tels que ψ′ j =ϕi jψ′i pour tout i ≥ j. Si λ : L′ → L fait commuter le diagramme de propriétéuniverselle, c’est-à-dire ψ′i (l) = ψiλ(l) = λ(l)i pour tout i ∈ I, alors forcementλ(l) = (ψ′i (l))i∈I, on a donc unicité. Si λ est défini ainsi, alors λ est un morphisme deR–modules, puisque toutes les ψ′i le sont. Reste à voir que λ(l) ∈ L. En effet si i ≥ j,alors
ϕi j(λ(l)i) = ϕi j(ψ′i (l)) = ψ′
j(l) = λ(l) j
donc λ(l) ∈ L comme affirmé. Il existe donc un unique morphisme λ : L′ → L quifait commuter le diagramme de propriété universelle, et par conséquent L est unelimite du système (Ai, ϕi j, I).
4.5.7. P
Soit R un anneau et C la catégorie des R–modules. Soit (Ai, ϕi j, I) un système de colimite

42 4. THÉORIE DES CATÉGORIES
de C. Pour tout i ∈ I notons ψi l’application canonique
ψi : Ai → A :=⊕
i∈I
Ai
PosonsB :=
⟨ψ j(x) − ψiϕi j(x)
∣∣∣∣ i < j, x ∈ A j
⟩et posons C := A/B. Pour tout i ∈ I et tout x ∈ Ai soit ψi(x) = ψi(x) la classe de ψi(x)dans C. Alors (C, (ψi)i∈I) est une colimite du système (Ai, ϕi j, I).
D. Pour tout i > j ∈ I et pour tout x ∈ A j on a par définitionψ j(x) = ψiϕi j(x) = ψiϕi j(x), et donc ψ j = ψiϕi j.Soit C′ un R–module et soient (ψ′i )i∈I des morphismes ψ′i : Ai → C′ tels queψ′j = ψ
′iϕi j pour tout i ≥ j. S’il existe λ : C → C′ qui fait commuter le diagrammede propriété universelle
Ai
C′ C
A j
ttjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
ψ′i
ψi
oo_ _ _ _ _ _ _ _ _ _ _∃!λ
OO
ϕi jjjTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
ψ′j
__?????????????
ψ j
i > j
c’est-à-dire λ ψi(x) = ψ′(x) pour tout i ∈ I et tout x ∈ Ai. On a donc nécessairement
λ(a) =∑i∈I
ψ′i (ai)
pour tout a ∈ C, donc unicité. Reste à voir que λ est bien défini par l’équationci–dessus. Pour cela, définissons λ : A→ C′ par
λ(a) =∑i∈I
ψ′i (ai)
Il suffit de montrer que B ⊆ kerλ, car ainsiλ sera l’application induit sur le quotientA/B = C. En effet, pour tout générateur ψ j(x) − ψiϕi j(x) de B on a∑
h∈I
ψ′h(ah) = ψ′i (x) − ψ′jϕi j(x) = 0
donc B ⊆ kerλ. On a donc existence et unicité de λ dans le diagramme de propriétéuniverselle, et C est par conséquent une colimite du système (Ai, ϕi j, I).
4.5.8. C
Soit R un anneau. Alors la catégorie des R–modules admet des limites et colimites.

4.5. LIMITES ET COLIMITES 43
4.5.9. P
Soit (Ai, ϕi j, I) un système de limite de la catégorie des ensembles Ens. Posons
L :=
(ai)i∈I ∈∏i∈I
Ai
∣∣∣∣∣∣∣ ϕi j(ai) = a j pour tout i > j
et pour tout i ∈ I et tout a = (a j) j∈I posons ψi(a) = ai. Alors (L, (ψi)i∈I) est une limite dusystème (Ai, ϕi j, I).
4.5.10. P
Soit (Ai, ϕi j, I) un système de colimite de la catégorie des ensembles Ens. Pour tout i ∈ Inotons ψi l’injection canonique
ψi : Ai → A :=∐i∈I
Ai
Notons ∼ la relation d’équivalence engendrée par ψ j(x) ∼ ψiϕi j(x) pour i < j et x ∈ A j, etposons C := A/∼. Pour tout i ∈ I et tout x ∈ Ai soit ψi(x) = ψi(x) la classe de ψi(x) dansC. Alors (C, (ψi)i∈I) est une colimite du système (Ai, ϕi j, I).
4.5.11. C
La catégorie des ensembles admet des limites et colimites.
4.5.12. P
Soit (Ai, ϕi j, I) un système de limite de la catégorie des espaces topologiques T op. Posons
L :=
(ai)i∈I ∈∏i∈I
Ai
∣∣∣∣∣∣∣ ϕi j(ai) = a j pour tout i > j
et pour tout i ∈ I et tout a = (a j) j∈I posons ψi(a) = ai. Munissons L de la topologie initialedu système
ψi : L→ Ai i ∈ I
Alors (L, (ψi)i∈I) est une limite du système (Ai, ϕi j, I).
4.5.13. P
Soit (Ai, ϕi j, I) un système de colimite de la catégorie des espaces topologiques T op. Pourtout i ∈ I notons ψi l’injection canonique
ψi : Ai → A :=∐i∈I
Ai
Munissons A de la topologie finale su système Notons∼ la relation d’équivalence engendréepar ψ j(x) ∼ ψiϕi j(x) pour i < j et x ∈ A j, et posons C := A/∼. Pour tout i ∈ I et tout

44 4. THÉORIE DES CATÉGORIES
x ∈ Ai soit ψi(x) = ψi(x) la classe de ψi(x) dans C. Munissons L de la topologie finale dusystème
ψi : Ai → C i ∈ I
Alors (C, (ψi)i∈I) est une colimite du système (Ai, ϕi j, I).
4.5.14. C
La catégorie des espaces topologiques admet des limites et colimites.
4.5.15. R
Soit E un ensemble etA ⊆ P(E) une partie de toutes les parties de E stable pour desreunions finies. AlorsA est partiellement ordonné par l’ordre d’inclusion. Posons
L :=⋂A∈A
A
On a limA∈A A L dans la catégorie des ensembles, ce qu’on vérifie directement àpartir des propriétés universelles. Dans le cas où chaque A ∈ A porte une structured’espace topologique faisant que toutes les inclusions A → A′ pour A ⊆ A′ sontcontinues, alors il suffit de munir l’intersection L de la topologie initiale du système
L ⊆→ A A ∈ A
pour que limA∈A A L dans la catégorie des espaces topologiques. Quant à laco–notion, soit A ⊆ P(E) une partie de toutes les parties de E stable pour desintersections finies. Alors A est ordonné partiellement par l’ordre d’inclusion.Posons
C :=⋃A∈A
A
On a colimA∈A A C dans la catégorie des ensembles, ce qu’on vérifie de nouveaudirectement à partir des propriétés universelles. Dans le cas où chaque A ∈ A porteune structure d’espace topologique faisant que toutes les inclusions A → A′ pourA ⊆ A′ sont continues, il suffit de munir la réunion C de la topologie finale dusystème
A ⊆→ C A ∈ A
pour que colimA∈AA C dans la catégorie des espaces topologiques.
Propriétés fonctorielles.
4.5.16. D
Soit I un ensemble partiellement ordonné et C la catégorie des modules sur un

4.5. LIMITES ET COLIMITES 45
anneau R. La "catégorie des systèmes de limite indicés par I sur C" que l’on note CI
a comme objets tout les systèmes de limite à objets dans C indicés par I, et commemorphismes
Hom((Ai, ϕi j), (Bi, ψi j)
)les familles (µi)i∈I de morphismes dans C faisant commuter tout les diagrammes
Ai Bi
A j B j
ϕi j
//µi
ψi j
//µ j
i > j
On dira que une suite courte dans CI
0 (Ai, αi j) (Bi, βi j) (Ci, γi j) 0// // // //
est exacte, si les suites
0 Ai Bi Ci 0// // // //
sont exactes pour tout i ∈ I. De la même façon on définit la "catégorie des colimitesindicés par I sur C".
4.5.17. P
Soit I un ensemble partiellement ordonné et C la catégorie des modules sur un anneau R.Soient (Ai, αi j) et (Bi, βi j) des objets de CI et (µi)i∈I : (Ai, αi j) → (Bi, βi j) un morphisme.Soit A := limi∈I Ai et B := limi∈I Bi et soient αi : A → Ai et βi : B → Bi les morphismescorrespondants. Alors il existe de manière canonique et naturelle un morphisme µ : A→ Bde la catégorie C faisant commuter
A B
Ai Bi
//µ
αi
βi
//µi
L’attribution limi∈I : (Ai, αi j)→ A et limi∈I : (µi)i∈I → µ définit un foncteur
limi∈I
: CI−→ C
4.5.18. P
Soit I un ensemble partiellement ordonné et C la catégorie des modules sur un anneau R.Le foncteur limite limi∈I : CI
−→ C est additif et exact à gauche, c’est à dire si
0 (Ai, αi j) (Bi, βi j) (Ci, γi j) 0// // // //
est exacte dans CI, alors la suite
0 Ai Bi Ci// // //

46 4. THÉORIE DES CATÉGORIES
est exacte.

CHAPITRE 5
Algèbres de Clifford
Ce chaptire a été écrit par Margherita Gonzato et introduit la notion d’algèbrede Clifford associée à une forme quadratique. Les algèbres de Clifford sur réelleset complexes sont étudiées en détails ainsi que certains groupes de Spin en petitesdimensions.
5.1. Algèbres universelles
Algèbres libres et propriété universelle.
Soit E une algèbre sur un anneau A engendrée par un ensemble de générateurs(xi)i∈I. Soit σ = (i1, i2, ..., ih) une suite d’éléments de I et yσ = xi1 ...xih (h est la longueurde σ).On définit la composition de deux suites finies σ = (i1, ..., ih) et σ′ = ( j1, ... jk) parσσ′ = (i1, ..., ih, j1, ..., jk).Pour σ0 (suite sans termes) on définit σ0σ = σσ0 = σ, σ0 est donc l’élément unitépour cette composition (et yσ0 = 1). La composition est évidemment associative :(σσ′)σ′′ = σ(σ′σ′′) et on a yσσ′ = yσyσ′ .
5.1.1. T
Chaque élément de E est une combinaison linéaire de (yσ) avec σ qui parcourt toutes lessuites finies d’éléments de I.
D. Soit E1 le module engendré par tous les yσ. On veut montrerque E = E1. Pour faire ceci, on utilise le lemme suivant :
5.1.2. L
47

48 5. ALGÈBRES DE CLIFFORD
E1 est fermé pour la multiplication.
D. Soit z =∑σ aσyσ et z′ =
∑σ′ bσ′yσ′ deux éléments de E1 avec
aσ = 0 et bσ′ = 0 sauf pour un nombre fini de σ, σ′.Alors on a : zz′ =
∑σ,σ′ aσbσ′yσσ′ , et yσσ′ ∈ E1.
La somme étant finie, on a bien zz′ ∈ E1.
Vu le lemme on a que E1 est une sous-algèbre de E et si σ = (i), yσ = xi et yσ0 = 1.Alors E1 contient l’ensemble de générateurs (xi) et 1, donc E1 contient E tout entier.On obtient E = E1.
5.1.3. D
Si les yσ sont linéairement indépendants sur A, alors E est appelée une algèbre libreet (xi)i∈I est le système libre de générateurs de E.
5.1.4. T
Une algèbre libre F sur A avec un système de générateurs (xi)i∈I est universelle, c’est àdire que pour toute autre algèbre E sur A engendrée par (ξi)i∈I (même I) on a un uniquehomomorphisme (surjectif)
ϕ : F −→ E t.q. ϕ(xi) = ξi ∀i
D. Par définition, on a que l’ensemble yσ = xi1 ..xih forme unebase de F vu comme module sur A.Posons ϕ : F −→ E, avec ϕ(yσ) = ξi1 ...ξih ∀σ = (i1, ..., ih).De plus si σ = (i1, ..., ih) et σ′ = ( j1, ..., jk) sont des suites finies de I, alors on a :
ϕ(yσyσ′ ) = ϕ(yσσ′ ) = ξi1 ...ξihξ j1 ...ξ jk = ϕ(yσ)ϕ(yσ′ )
On a donc que ϕ est bien un homomorphisme.En particulier, si σ = (i), respectivement σ = σ0, on a ϕ(xi) = ξo et ϕ(1) = 1, ce quiprouve le théorème.
L’existence et l’unicité de cette algèbre est laissée à la sympathie du lecteur.
Algèbres graduées.
5.1.5. D
Soit (Γ,+) un groupe additif. Une Γ-algèbre graduée est une algèbre E donné parune somme directe :

5.1. ALGÈBRES UNIVERSELLES 49
E =⊕γ∈Γ
Eγ
où Eγ est un sous-module de E tel que Eγ · Eγ′ ⊂ Eγ+γ′ , c’est à dire si x ∈ Eγ etx′ ∈ Eγ′ , alors on a xx′ ∈ Eγ+γ′
5.1.6. E
I : Soit A un anneau et soit F l’algèbre libre sur A engendrée par le systèmede générateurs (xi)i∈I, et notons yσ = xi1 · · · xih (où σ = (i1, ..., ih)).On peut classifier les éléments yσ par la longueur de σ. Soit Fh le moduleengendré par yσ, avec σ de longueur h. Alors F est la somme directe deF0,F1, . . ., comme A-module :
F = F0 ⊕ · · · ⊕ Fh ⊕ · · ·
et on a Fh · Fh′ ⊂ Fh+h′ , car la longueur de la composition σσ′ est égal à lasomme de longueur de σ plus celle de σ′.
II : R[X,Y] est une algèbre graduée car :
R[X,Y] =∞⊕
n=0
polynômes homogène de degré n
5.1.7. D
Soient E,E′ des Γ-algèbres graduées.E =
⊕γ∈Γ Eγ, E′ =
⊕γ∈Γ E′γ. Un homomorphisme de Γ−algèbres graduées ϕ : E −→ E′
est un homomorphisme d’algèbres tel que ϕ(Eγ) = E′γ pour tout γ ∈ Γ.
5.1.8. C
I : Si Γ = Z alors on appelle la Γ−algèbre graduée une algèbre Z−graduée.II : Si Γ est le groupe à deux éléments 0 et 1 alors on écrit E = E+ ⊕ E− à la place de
E = E0 ⊕ E1 et on appelle E algèbre semi-graduée.
5.1.9. R
Une Γ−algèbre n’est pas une forme particulière d’algèbre. En fait, toute algèbrepeut-être considérée comme Γ−algèbre graduée avec degré 0 pour chaque élément.
5.1.10. D

50 5. ALGÈBRES DE CLIFFORD
Soit E une Γ−algèbre graduée et γ ∈ Γ. Un élément e de E est dit homogène de degréγ si e ∈ Eγ.
5.1.11. D
Soit A una anneau. Un sous-A− module M d’une Γ−algèbre graduée E =⊕
Eγ estdit homogène si M =
⊕γ∈Γ(M ∩ Eγ)
5.1.12. T
Si un sous-module M ou un idéal I d’une algèbre Γ−graduée E est engendré par deséléments homogènes alors il est homogène.
D. Soit M un sous module de E engendré par un ensemble Sd’éléments homogènes.Soit M′ =
⊕γ∈Γ(M ∩ Eγ).
On a donc S ⊂M′ ⊂M.Montrons que M′ est un sous-module de E.Si x = ⊕xγ et x′ = ⊕x′γ ∈M′, alors x + x′ = ⊕(xγ + x′γ) ∈M′ car xγ + x′γ ∈M.De la même manière on a αx ∈M′ pour tout α ∈ A.Vu que M′ est un sous-module qui contient l’ensemble des générateurs S, alorsM ⊂M′ et donc M =M′, ce qui prouve que M est homogène.D’une manière semblable on démontre pour le cas d’un idéal.(En fait les sous-E−modules de E sont les idéaux de E dans le cas commutatif).
5.1.13. R
Soit E =⊕
γ Eγ une algèbre graduée et I un idéal homogène de E. Alors on a :I =
⊕γ Iγ, avec Iγ = I ∩ Eγ.
L’algèbre quotient E/I a aussi une structure d’algèbre graduée, car :
E/I =⊕γ
Eγ/Iγ et (Eγ/Iγ) · (Eγ′/Iγ′ ) ⊂ (Eγ+γ′/Iγ+γ′ )
L’homomorphisme ψ : E −→ E/I n’est pas seulement un homomorphisme d’al-gèbre mais aussi de Γ−algèbres gradueés.
Algèbres tensorielles.
5.1.14. D

5.1. ALGÈBRES UNIVERSELLES 51
Soit M un A−module. T est une algèbre tensorielle sur M si elle satisfait aux conditionssuivantes :
(1) T = A ⊕M ⊕M ⊗M ⊕M ⊗M ⊗M ⊕ ...
(2) Propriété universelle : pour toute application linéaire f : M −→ E dansune algèbre E sur A il existe un unique homomorphisme f : T −→ E quiétend f. On peut représenter ceci par le diagramme commutatif suivant :
M E
T
//∀ f
i
?? ∃! f
5.1.15. T
Il existe une (et une seule) algèbre tensorielle sur M.
D. Soit T, T′ deux algèbres sur M satisfaisant (1) et (2). AlorsM ⊂ T et M ⊂ T′. Il existe un homomorphisme h : T −→ T′ qui étend l’inclusioni : M → T et un homomorphisme h′ : T′ −→ T qui étend l’inclusion i′ : M → T′.On a donc :
Mi
~~~~
~~~
i′
AAA
AAAA
Th // T′h′
oo
avec h i = i′ et h′ i′ = i. Alors h′ h : T −→ T est un homomorphisme qui coïncideavec l’identité, car :
M
i
i // T
T
h′h??~~~~~~~~
idT
??~~~~~~~~
on a (h′ h) i = h′ i′ = i et par unicité on a : h′ h = idTDe façon similaire on voit que h h′ = idT′ . Ce qui prouve que T et T′ sont desalgèbres isomorphes.
Notons cette algèbre T := T(M). On a :
T(M) = A︸︷︷︸T0
⊕ M︸︷︷︸T1
⊕M ⊗M︸ ︷︷ ︸T2
⊕... ⊕M ⊗ .. ⊗M︸ ︷︷ ︸Th
⊕...
T(M) a bien une structure graduée, avec :
Th = 0 ∀ h < 0T0 = A · 1T1 = M
(Th est engendré par le produit de h éléments de M)

52 5. ALGÈBRES DE CLIFFORD
Fonctorialité de T et de L.
Soit M un A−module et T(M) l’algèbre tensorielle associée à M. On a alors unfoncteur :
T : Mod︸︷︷︸catégorie des A-modules
−→ Alg.N−grad.︸ ︷︷ ︸catégorie des A-algèbre N−graduées
Mϕ→ N −→ T(M)
T(ϕ)→ T(N)
L’existence de T(ϕ) est donné par la propriété universelle :
M
ϕ // N // T(N)
T(M)∃!T(ϕ)
66mmmmmmmmmmmmmm
Pour la même raison on a bien : T(ϕψ) = T(ϕ)T(ψ) et T(idM) = idT(M).
Définissons maintenant un autre foncteur :
L : Alg.N−grad. −→Mod
Soit E une A−algèbre N−graduée⇒ E = ⊕∞n=0En, alors :
L : E 7−→ L(E) = E1
De plus on a bien L(T(M)) =M⇒ L T idAModAvec ces définitions on a :HomAMod(M,L(E)) HomAAlgN−grad.(T(M),E)en fait : si ϕ ∈ HomAMod(M,E1) et ψ ∈ HomAAlgN−grad.(T(M),E) alors on a :
ϕ 7−→ T(ϕ) : T(M) −→ Eψ 7−→ ψ|M⊗1 = L(ψ)
ϕ 7−→ T(ϕ)ψ 7−→ L(ψ)
sont des bijections l’une inverse de l’autre.

5.2. ALGÈBRE DE CLIFFORD 53
5.2. Algèbre de Clifford
Une algèbre de Clifford est une algèbre associée à une forme quadratique Q(x),qui satisfait : x2 = Q(x) · 1 (*)
5.2.1. D
Soit M un A−module et Q une forme quadratique sur M. Soit T(M) l’algèbre ten-sorielle sur M, notons ⊗ la multiplication dans T(M).Soit I l’idéal de T(M) engendré par les éléments de la forme suivante :t(x) = x ⊗ x −Q(x) · 1 , x ∈M , 1 =él. unité de T(M)Chaque élément de I peut donc être écrit comme :∑λit(xi)µi où λi et µi ∈ T(M), xi ∈M.
Le quotient C = T(M)/I = T(M)/ < x⊗ x−Q(x) · 1 > est appelé algèbre de Clifford surM associé à Q. Notons C = Cl(M,Q).
Si π est la projection canonique : π : T(M) −→ T(M)/I = C alors π(M) est unsous-module de C qui engendre C. On a donc que (π(x))2 = Q(x) · 1 ∀ x ∈ M.
On a le théorème suivant :
5.2.2. T
Soit f une application linéaire f : M −→ E dans une algèbre E t.q. ( f (x))2 = Q(x)·1 ,∀ x ∈M.Alors ∃ ! homomorphisme
ϕ : C −→ E tel que f (x) = ϕ(π(x)) pout tout x ∈M
Ce qui est représenté par le diagramme commutatif suivant :
M E
T(M)
C = T(M)/I
//f
π
??
∃!ρGG
ϕ
D. Par la définition d’algèbre tensorielle on a que ∃ ! applica-tion : ρ : T(M) −→ E qui étend f .Si x ∈ M, on a :
54 5. ALGÈBRES DE CLIFFORD
ρ(x ⊗ x −Q(x) · 1) = ρ(x ⊗ x) − ρ(Q(x) · 1)= ρ(x)ρ(x) −Q(x)ρ(1)
= f (x)2−Q(x) · 1 = 0
On a donc que ρ(I) = 0, ce qui montre que I ⊂ kerρ.On a alors qu’il ∃ ! homomorphisme ϕ : C −→ E t.q. ϕ π = ρ.La contraction f de ρ dans M satisfait la condition voulue car :ϕ(π(x)) = ρ(x) = f (x) pour tout x ∈M.
Si on pose Q(x) = Q(π(x)), avec Q forme quadratique de π(M) dans A, alorspour tout y ∈ π(M) on a y2 = Q(y) · 1.
Structure graduée de l’algèbre de Clifford.
On a vu que l’algèbre tensorielle T(M) est graduée. Elle est en fait une algèbresemi-graduée. On décompose T(M) = T+ ⊕ T−, avec T+ conténant les élémentsde degré pair et T− conténant les éléments de degré impair. L’élément x ⊗ x estde degré 2 et l’élément Q(x) · 1 est de degré 0. Alors l’élement x ⊗ x − Q(x) · 1est homogène dans la semi-graduation de T(M) car composé d’éléments de degrépair.(Plus précisement x ⊗ x −Q(x) · 1 ∈ T+).Par le théorème 5.1.12 on a que I =< x ⊗ x − Q(x) · 1 > est homogène dans lasemi-graduation de T(M), ce qui prouve que Cl(M,Q) = T(M)/I est une algèbresemi-graduée.Posons Cl(M,Q) = C+ ⊕ C− avec C+ =
⊕i paire π(Ti) et C− =
⊕j impaire π(T j).
Encore plus explicitement on a :
T = (A ⊕M ⊗M ⊕M ⊗M ⊗M ⊗M ⊕ ...)︸ ︷︷ ︸T+
⊕ (M ⊕M ⊗M ⊗M ⊕ ...)︸ ︷︷ ︸T−
et Cl(M,Q) est donnée par la remarque 5.1.13.On a que C+ est une sous-algèbre de Cl(M,Q) engendrée par les produits d’unnombre pair d’éléments de M et C− est une sous-algèbre de Cl(M,Q) engendréepar les produits d’un nombre impair d’éléments de M.
Vu que π(x)2 = Q(x) · 1, on a alors que :
π(x)π(y) + π(y)π(x) = π(x)2 + π(x)π(y) + π(y)π(x) + π(y)2− π(x)2
− π(y)2
= (π(x) + π(y))2− π(x)2
− π(y)2
= Q(x + y) · 1 −Q(x) · 1 −Q(y) · 1= (Q(x + 1) −Q(x) −Q(y)) · 1= β(x, y) · 1

5.2. ALGÈBRE DE CLIFFORD 55
Avec β la forme bilinéaire associée à Q. En particulier, si x, y sont orthogonaux, ona :π(x)π(y) + π(y)π(x) = 0 ⇒ π(x)π(y) = −π(y)π(x).Si x =
∏ni=1 π(vi) et y =
∏ms=1 π(ws) sont respectivement éléments de C(α)(V,Q) et
C(β)(V,Q), avec α = n mod 2 et β = m mod 2, alors si vi est orthogonal à ws pourtoute paire (i, s) alors on a xy = (−1)αβyx
5.2.3. E
Soit K un corps et V un K−espace vectoriel.Si V = K et Q la forme quadratique définie par Q(x) = dx2, avec d ∈ K et d , 0,alors T(V) = K[x] et I = (x2
− d)K[x].On obtient donc Cl(V,Q) = K[x]/(x2
− d).Cette algèbre est bien semi-graduée si on écrit chaque élément de Cl(V,Q) de laforme a + bx, où X est de degré 1 et a, b de degré 0.En particulier, si K = R et d = −1, alors on a :
Cl(R,−x2) = R[x]/(x2 + 1) C
Dans ce cas on peut voir la structure semi-graduée avec Cl(R,−x2) = R + iR.Si K = R et d = 1, alors on a :
Cl(R, x2) = R[x]/(x2− 1) R ⊕R
Si on considère e1 base de R on a en fait l’ isomorphisme :
ϕ : Cl(R, x2) −→ R ⊕R
1 7−→ (1, 1)e1 7−→ (1,−1)
5.2.4. R
L’algèbre de Clifford dépend “fonctoriellement” de la paire (V,Q). Plus préci-sement, si f : V −→ V′ est un homomorphisme de K−espaces vectoriels, avecQ′( f (v)) = Q(v) (où Q et Q′ sont les formes de V et V′), alors f induit un homomor-phisme d’algèbres :
Cl( f ) : Cl(V,Q) −→ Cl(V′,Q′)
et on a les identités : Cl(g · f ) = Cl(g) · Cl( f ), et Cl(IdV) = IdCl(V).
5.2.5. D
Si A et B sont des K−algèbres semi-gradueés, alors on définit le produit tensorielgradué A⊗B comme l’algèbre du K−espace vectoriel A ⊗K B avec le produit définipar :
(x ⊗ y)(z ⊗ t) = (−1)αβxz ⊗ ytoù y ∈ Bβ (homogène dans B et de degré β) et z ∈ Aα (homogène dans A et de degréα).

56 5. ALGÈBRES DE CLIFFORD
En supposant A et B finies, on a de plus que dimK(A⊗B) = dimK A · dimK B
Algèbres extérieures.
5.2.6. D
Si la forme quadratique est nulle, Q = 0, l’algèbre de Clifford Cl(M,Q) associée àQ est appelée algèbre extérieure sur M.
5.2.7. R
Avec Q = 0 on a π(x)π(x) = 0 et π(x)π(y) = −π(y)π(x).L’élément générateur de I est réduit à x ⊗ x ∈ T2.I est donc homogène non seulement dans la semi graduation de T mais aussi dansla structure graduée de T. On a alors que l’algèbre extérieure E = T/I a une struc-ture d’algèbre graduée.
5.2.8. T
Soit E une algèbre extérieure. L’homomorphisme π : T −→ E = T/I est en fait unisomorphisme sur M.On peut donc injecter M dans E et identifier M avec π(M).
D. Tout élément de I est une combinaison linéaire d’élémentsde la forme :u ⊗ (x ⊗ x) ⊗ v avec x ∈ M, u, v homogènes en T.Si u ∈ Th et v ∈ Tk, alors u ⊗ (x ⊗ x) ⊗ v ∈ Th+k+2 est donc de degré ≥ 2.Alors tout élément de I est nul ou de degré ≥ 2.Dans M on a que des éléments de degré 1, donc I ∩M = 0. π est alors injective etM π(M). (En fait E0 = A et E1 =M)
5.2.9. E
Un exemple d’algèbre extérieure est le déterminant.Soit K un corps et V un K−espace vectoriel de dimension finie n. V =< e1, e2, ..., en >.Soit E l’algèbre extérieure sur V. On écrit :
E(V) = E0 ⊕ E1 ⊕ E2 ⊕ ... ⊕ En

5.2. ALGÈBRE DE CLIFFORD 57
avec :
E0 = KE1 = VE2 = K(ei ⊗ e j) avec i<j... = ...
En = K(e1 ⊗ e2 ⊗ ... ⊗ en)
La dimension de Ei est(n
i).
Un endomorphisme f : V −→ V est alors uniquement étendu en un homomor-phisme f : E −→ E. Vu que En est de dimension 1 et f (Ei) ⊂ Ei pour tout 1 ≤ i ≤ n,alors il existe un unique scalaire k ∈ K tel que : f |En (z) = kz pour tout z ∈ En.
V V
E E
En En
K K
//f
π
π
//f
i
i
//f
//
Montrons que f correspond bien au déterminant.Regardons le cas n = 2. On a : f (e1) = a11e1 + a12e2 et f (e2) = a21e1 + a22e2. Alors :
f (e1 ⊗ e2) = f (e1) ⊗ f (e2) = (a11e1 + a12e2) ⊗ (a21e1 + a22e2) == a11a21e1 ⊗ e1 + a11a22e1 ⊗ e2 + a12a21e2 ⊗ e1 + a12a22e2 ⊗ e2 =
= (a11a22 − a12a21)(e1 ⊗ e2)
qui correspond bien à la définition du déterminant. On peut facilement généraliserau cas général dim V = n.
Dimension de Cl(V, q).
Soit V un K−espace vectoriel de dimension n. Soit E = e1, ..., en une baseorthonormée de V. Par ce qui précède on a :eie j = −e jei si i , j et e2
i = Q(ei) dans Cl(V,Q).On a que E engendre (comme algèbre) Cl(V,Q).Donc Cl(V,Q) est engendré comme K−espace vectoriel par les produits de la forme :ek1
1 ek22 ...e
knn avec ki = 0 ou 1.
En particulier on a :
58 5. ALGÈBRES DE CLIFFORD
5.2.10. C
dimK Cl(V,Q) ≤ 2n avec n = dim(V)
On veut montrer qu’en fait on a égalité :
5.2.11. L
Soit (V,Q) , (V′,Q′) des K−espace vectoriels munis de formes quadratiques Q et Q′. Alorson a un homomorphisme surjectif :f : Cl(V ⊕ V′) −→ Cl(V)⊗Cl(V′)dans la catégorie des algèbres semi-graduées.
D. Soit
ε : V ⊕ V′ −→ Cl(V)⊗Cl(V′)(x, x′) 7−→ x ⊗ 1 + 1 ⊗ x′
On a :
(x ⊗ 1 + 1 ⊗ x′)2 = (x ⊗ 1)(x ⊗ 1) + (1 ⊗ x′)(1 ⊗ x′) + (x ⊗ 1)(1 ⊗ x′) + (1 ⊗ x′)(x ⊗ 1)= (−1)0·1x2
⊗ 1 + (−1)1·0(1 ⊗ x′2) + (−1)0·0(x ⊗ x′) + (−1)1·1(x ⊗ x′)= x2
⊗ 1 + 1 ⊗ x′2 + x ⊗ x′ + (−1)(x ⊗ x′)= Q(x) +Q′(x′)= (Q +Q′)(x, x′)
Par la propriété universelle des algèbres de Clifford on a un unique homomor-phisme :f : Cl(V ⊕ V′) −→ Cl(V)⊗Cl(V′) t.q. f |V⊕V′ coïncide avec ε.On voit que f est homogène de degré 0.Montrons que f est surjective.Comme algèbre Cl(V)⊗Cl(V′) est engendrée par les éléments de la forme x ⊗ 1 et1 ⊗ x′ (x ∈ V, x′ ∈ V′).Il suffit donc de montrer que x ⊗ 1 et 1 ⊗ x′ ∈ im( f ).Mais x ⊗ 1 = f (x, 0) et 1 ⊗ x′ = f (0, x′), d’où la surjectivité.
5.2.12. T
Si (V,Q) est un espace quadratique de dimension n, alors dim(Cl(V)) = 2n
D. Par récurrence sur n.Si n = 1, on a : V = K espace quadratique à une dimension. Vu l’exemple 5.2.3 on abien que dim Cl(V) = dim Cl(K) = 2 = 21.Supposons l’assertion vrai pour k ≤ n − 1 et montrons pour n.Si n > 1 on a deux cas à considérer :

5.2. ALGÈBRE DE CLIFFORD 59
· Pour tout v ∈ V on a Q(v) = 0. C’est à dire que Cl(V) est l’algèbre extérieureE(V). Alors, vu que dim(Ei) =
(ni)
on a bien que
dim(Cl(V)) = dim(E(V)) =n∑
i=1
(ni
)= 2n
· Il existe v ∈ V avec Q(v) , 0. Si U = K · v alors on a la décompositionorthogonale V = U ⊕U⊥ où U est de dimension 1.Par le lemme précedent on a :
dim(Cl(V)) ≥ dim(Cl(U)) · dim(Cl(U⊥))hyp= 2 · 2n−1 = 2n
5.2.13. R
On conclut donc que l’homomorphisme f du lemme est en fait un isomorphisme.On a donc que :
Cl(V ⊕ V′) Cl(V)⊗Cl(V′)
Algèbres Clp,q sur R.
Intéressons nous au cas ou K est le corps de nombres réels et V = Rp+q est munide la forme quadratique Qp,q = −x2
1 − . . .− x2p + x2
p+1 + . . .+ x2p+q. Dans ce cas on note
l’algèbre de Clifford Cl(Rp+q,Qp,q) =: Clp,q. D’après ce qu’on a vu, l’algèbre Clp,q estengendrée sur R par e1, e2, . . . , ep+q avec les relations :
(ei)2 = −1 si 1 ≤ i ≤ p(ei)2 = 1 si p + 1 ≤ i ≤ p + qeie j = −e jei si i , j.
5.2.14. E
Dans l’exemple 5.2.3 nous avons déjà vu que
Cl1,0 = Cl(R,−x2) C etCl0,1 = Cl(R, x2) R ⊕R
On a de plus que Cl0,2 M2(R), Cl2,0 H (corps de quaternions) et Cl1,1 M2(R).Considérons le plan euclidienR2. L’algèbre de Clifford Cl0,2 est engendrée par unebase orthonormale e1, e2 de R2 avec les relations suivantes :
e21 = 1
e22 = 1
e1e2 = −e2e1

60 5. ALGÈBRES DE CLIFFORD
Notons e1e2 = e12 un bivecteur ; on a donc que (e12)2 = e1e2e1e2 = e1e2(−e2e1) =e1(−1)e1 = −1L’algèbre de Clifford Cl0,2 est de dimension 4 et on a la table multiplicative sui-vante :
e1 e2 e12
e1 1 e12 e2e2 −e12 1 −e1e12 −e2 e1 −1
On a un isomorphisme :
ϕ : Cl1,1−→ M2(R)
1 7−→
(1 00 1
)e1 7−→
(1 00 −1
)e2 7−→
(0 11 0
)e12 7−→
(0 1−1 0
)
En décomposant cette algèbre dans sa structure semi-graduée on obtient que :Cl0,2 = C+ ⊕ C− avec C+ = 1 ·R ⊕ e12 ·R et C− = e1 ·R ⊕ e2 ·R.Dans C+ on a donc des éléments de la forme : x+ ye12, x, y ∈ R et e2
12 = −1. Alors lasous algèbre C+ de Cl0,2 est isomorphe à C, en fait le bivecteur e12 joue le rôle dunombre imaginaire i.On constate que e12 anticommute avec tout vecteur dans R , car : re12 = −e12r pourr = xe1 + ye2 et e12 = e1e2.
On peut aussi vérifier que Cl2,0 H, avec l’isomorphisme :
ϕ : Cl2,0−→ H
1 7−→ 1e1 7−→ ie2 7−→ j
e12 7−→ k

5.2. ALGÈBRE DE CLIFFORD 61
De la même façon on construit un autre isomorphisme tel que Cl1,1 M2(R).
ϕ : Cl1,1−→ M2(R)
1 7−→
(1 00 1
)e1 7−→
(1 00 −1
)e2 7−→
(0 1−1 0
)e12 7−→
(0 11 0
)
5.2.15. D
Dans l’algèbre Clp,q avec p+q pair, on considère l’élément ε = e1e2 · · · en où n = p+q.Alors (ε)2 = (−1)(n−1)+(n−2)+···+1(e1)2(e2)2
· · · (en)2 = ±1Si (ε)2 = 1, on appelle l’ algèbre Clp,q positive. Si (ε)2 = −1 on l’appelle négative.Plus précisement on a : (ε)2 = (−1)n(n−1)/2(−1)p. Donc si p − q = 0, 4 mod 8, alorsl’algèbre Clp,q est positive, et si p− q = 2, 6 mod 8 alors l’algèbre Clp,q est négative.(Dans le cas où p − q est impaire l’algèbre Clp,q n’a pas de signe).
Remarquons que si V est un espace vectoriel réel de dimension finie avec uneforme quadratique Q non dégénérée, le choix d’une bonne base orthogonale définitun isomorphisme : Cl(V,Q) Clp,q où p et q sont bien définies par le théorème deSylvester.
Désormais on va considérer de formes quadratiques Q non dégénérées et desespaces vectoriels V réels de dimension finie.
5.2.16. P
I : Si Cl(V,Q) est positive et dim(V) est paire, alors
Cl(V ⊕ V′) Cl(V,Q) ⊗ Cl(V′,Q′)
II : Si Cl(V,Q) est négative et dim(V) est paire, alors
Cl(V ⊕ V′) Cl(V,Q) ⊗ Cl(V′,−Q′)
D. Si ε = e1e2 · · · en, alors on a εei = (−1)n−1eiε. Vu que n est pair,on a εei = −eiε pour tout i, et donc εv = −vε pour tout v ∈ V.Dans le cas (I) on définit :
ϕ : V ⊕ V′ −→ Cl(V,Q) ⊗ Cl(V′,Q′)(v, v′) 7−→ v ⊗ 1 + ε ⊗ v′

62 5. ALGÈBRES DE CLIFFORD
alors on a :
(ϕ(v, v′))2 = (v ⊗ 1)2 + (ε ⊗ v′)2 + (v ⊗ 1)(ε ⊗ v′) + (ε ⊗ v′)(v ⊗ 1)
= v2⊗ 1 + ε2
⊗ v′2 + vε ⊗ v′ + εv ⊗ v′alg.pos= v2
⊗ 1 + 1 ⊗ v′2 = Q(v) +Q′(v′)= (Q +Q′)(v, v′)
Par la propriété universelle des algèbres de Clifford, on obtient un homomorphismed’algèbres :
ψ : Cl(V ⊕ V′,Q ⊕Q′) −→ Cl(V,Q) ⊗ Cl(V′,Q′)qui étend ϕ.Vu que les deux algèbres ont la même dimension, on a que si ψ est surjectif alors ilest bien l’isomorphisme cherché. Vu que Cl(V,Q) ⊗ Cl(V′,Q′) est engendré par leséléments de la forme v⊗ 1 ou 1⊗ v′, il suffit montrer que v⊗ 1 ou 1⊗ v′ ∈ im(ψ). Etv ⊗ 1 = ψ(v, 0) et 1 ⊗ v′ = (ε ⊗ v′)(ε ⊗ 1) = ψ(0, v′)ψ(ε, 0).Pour le cas (II) la preuve est similaire, en voyant ϕ comme application de V ⊕ V′
vers Cl(V,Q) ⊗ Cl(V′,−Q′).
5.2.17. L
Soit K un corps et A une K−algèbre. Alors on a les isomorphismes d’algèbres suivant :
(1) A ⊗K Mn(K) Mn(A)(2) Mp(Mn(A)) Mnp(A)(3) Mn(A) ⊗K Mp(K) Mnp(A)
D.(1)
A ×Mn(K) Mn(A)
A ⊗K Mn(K)
//γ
::tttttttttttγ
vu que l’application
γ :
a,
λ11 . . . λ1n. . . . . . . . .λn1 . . . λnn
7−→
aλ11 . . . aλ1n. . . . . . . . .
aλn1 . . . aλnn
est K−bilinéaire , alors elle induit un homomorphisme d’algèbres :γ : A ⊗K Mn(K) −→ Mn(A). Vu que A ⊗K Kn2
An2on a bien que γ est un
isomorphisme.(2) L’isomorphisme Mp(Mn(A)) Mnp(A) est obtenu en écrivant les matrices
par blocs.
(3) Mn(A) ⊗K Mp(K)(i)Mp(Mn(A))
(ii) Mnp(A).

5.2. ALGÈBRE DE CLIFFORD 63
5.2.18. P
Les algèbres Clp+n,q+n et M2n (Clp,q) sont isomorphes.
D. Vu que l’algèbre Cl1,1 est positive on a :
Clp+1,q+1 prop.5.2.16(i) Clp,q
⊗Cl1,1 ex.5.2.14 Clp,q
⊗M2(R) et donc :
Clp+n,q+n Clp,q⊗M2(R) ⊗ · · · ⊗M2(R)︸ ︷︷ ︸
nfois
Clp,q⊗M2n (R)
lemme 5.2.17(i) M2n (Clp,q)
5.2.19. C
On a les isomorphismes suivants :
I : Cln,n M2n (R)
II : Clp,q M2q (Clp−q,0) si p > q
III : Clp,q M2p (Cl0,q−p) si q > p
D.
I : Cln,n prop.5.2.18 M2n (Cl0,0) M2n (R)
II : Clp,q = Cl(p−q)+q,0+q prop.5.2.18 M2q (Clp−q,0)
III : Clp,q = Cl0+p,(q−p)+p prop.5.2.18 M2p (Cl0,q−p)
5.2.20. P
Si Cl(V,Q) est positive et la dimension de V est paire, alors les algèbres graduées Cl(V,Q)et Cl(V,−Q) sont isomorphes.
D. Soit ε = e1e2 · · · en, et l’application :
h : V −→ Cl(V,Q)v 7−→ εv
alors (h(v))2 = (εv)2 = (εv)(εv) = −ε2v2 Cl(V,Q)>0= −v2 = −Q(v).
Donc par la propriété universelle on obtient un homomorphisme :
h : Cl(V,−Q) −→ Cl(V,Q)
Pour voir que h est un isomorphisme, il suffit de prouver sa surjectivité car les deuxalgèbres ont la même dimension sur K. Montrons que V (vu comme sous-espacede Cl(V,Q)) est contenu dans im(h). Si e1, . . . , en est une base orthogonale de V avec

64 5. ALGÈBRES DE CLIFFORD
Q(ei) = ±1 et ε′ = e1e2 · · · en dans Cl(V,−Q), v ∈ V alors on a :
h(ε′v) = h(e1)h(e2) · · · h(en)h(v)= (εe1)(εe2) · · · (εen)(εv) = ±ε2v = ±v
Donc v = h(ε′v) ou v = −h(ε′v). On a donc que v ∈ im(h) pour tout v ∈ V, d’où lasurjectivité de h voulue.
5.2.21. T
Les algèbres Clp+8,q,Clp,q+8 et M16(Clp,q) sont isomorphes.
D. Vu que Cl4,0 est positive et 4 est pair on a, par la proposition5.2.16 : Cl8,0 Cl4,0
⊗Cl4,0. Par le proposition précedente et le corollaire 5.2.19 ona : Cl4,0
⊗Cl4,0 Cl4,0⊗Cl0,4 Cl4,4 M16(R).
Vu que Cl8,0 est positive on a aussi :
Clp+8,q Clp,q⊗Cl8,0 Clp,q
⊗M16(R) M16(Clp,q)
De même on montre que Clp,q+8 M16(Clp,q)
Avec ce théorème et le corollaire 5.2.19, il nous suffit de calculer les algèbresClp,0 et Cl0,q avec p < 8 pour déterminer toutes les autres. En fait, vu que Cl0,2 etCl2,0 sont négatives, la proposition 5.2.16 nous donne :
Cl0,p+2 Clp,0⊗Cl0,2 Clp,0
⊗M2(R) M2(Clp,0)
De la même façon on a :
Clp+2,0 Cl0,p⊗Cl2,0 Cl0,p
⊗H
Finalement, si p < 4 on a les isomorphismes suivantes :
Clp+4,0 Clp,0⊗Cl4,0 Clp,0
⊗Cl0,4 Clp,4 M2p (Cl0,4−p)
En ayant calculé Cl0,0 R, Cl0,1 R ⊕R, Cl0,2 M2(R), Cl1,0 C et Cl2,0 = Halors, par les identités précédentes et par le lemme 5.2.17,on obtient la table sui-vante :
p Clp,0 Cl0,p
0 R R1 C R ⊕R2 H M2(R)3 H ⊕H M2(C)4 M2(H) M2 (H)5 M4(C) M2(H) ⊕M2(H)6 M8(R) M4(H)7 M8(R) ⊕M8(R) M8(C)8 M16(R) M16(R)
Par exemple Cl0,3 est de dimension 23 = 8 et a été calculée comme suit :
Cl0,3 Cl0,1+2 M2(Cl1,0) M2(C)

5.2. ALGÈBRE DE CLIFFORD 65
Regardons de plus près cet isomorphisme.Avec e1, e2, e3 une base orthonormée de R3 on a les relations suivantes :e2
1 = e22 = e2
3 = 1eie j = −e jei pour tout i , jL’isomorphisme ϕ est donné par :
ϕ : Cl0,3−→ M2(C)
1 7−→
(1 00 1
)=: I
e1 7−→
(0 11 0
)=: σ1
e2 7−→
(0 −ii 0
)=: σ2
e3 7−→
(1 00 1
)=: σ2
et σiσ j ei j pou tout i , j et σ1σ2σ3 e123.En décomposant cette algèbre dans sa structure semi-graduée on obtient que :Cl0,3 = C+ ⊕ C− avec :C+ = 1 ·R ⊕ e23 ·R ⊕ e31 ·R ⊕ e12 ·R et C− = e1 ·R ⊕ e2 ·R ⊕ e3 ·R ⊕ e123 ·R.Les éléments 1 et e12 = e1e2, e13 = e1e3, e23 = e2e3 sont appelés pairs car produitd’un nombre pair de vecteurs. Les éléments pairs sont représentés par les matrices
suivantes : w + xe23 + y31 + ze12
(w + iz ix + yix + y w − iz
)et donc :
Cl+ = w + xe23 + y31 + ze12|w, x, y, z ∈ R wI + xiσ1 + yiσ2 + ziσ3|w, x, y, z ∈ R
est une sous algèbre de Cl0,3
On a de plus que C+ est isomorphe à l’anneau de division des quaternions, avecl’isomorphisme suivant :
ϕ : H −→ C+1 7−→ 1i 7−→ −e23
j 7−→ −e31
k 7−→ −e12
Involutions et normes
5.2.22. D
Soit u =< u >0 + < u >1 + < u >2∈ Cl0,2 avec < u >i élément de degré i dans lagraduation de Cl0,2. On définit la conjugaison de Clifford par u =< u >0 − < u >1 − <u >2. Si z = x+ye12 est un nombre complexe, alors z 7−→ z = x−ye12 est la restrictionde la conjugaison de Clifford u 7−→ u dans Cl0,2. On obtient que N(z) := zz = x2+ y2.
66 5. ALGÈBRES DE CLIFFORD
5.2.23. D
Soit u =< u >0 + < u >1 + < u >2 + < u >3∈ Cl0,3. On définie la reversion paru =< u >0 + < u >1 − < u >2 − < u >3∈ Cl0,3. Les correspondances σ1 e1,σ2 e2,
σ3 e3 nous donnent que si u (
a bc d
), alors u
(a∗ b∗
c∗ d∗
)avec ∗ qui désigne
la conjugaison complexe. La reversion peut être utilisée pour étendre la norme deR3 à tout Cl0,3 avec : N(u) =< uu >0
Algèbres Cl′n sur C.
Considérons maintenant les algèbre de Clifford sur des espaces vectoriels com-plexes munis de formes quadratiques non dégénerées.Soit Cl′n l’algèbre de Clifford de Cn avec forme quadratique
∑ni=1(xi)2.
Par la remarque 5.2.13 on a : Cl′n = Cl′1 ⊗ · ⊗Cl′1︸ ︷︷ ︸n fois
où Cl′1 = C ⊗R C = C ⊕ C. Donc :
Cl′n Cln,0⊗RC Cl0,n
⊗RC
De plus l’argument utilisé dans la proposition 5.2.16 montre que Cl′n+2 = Cl′n ⊗Cl′2.En fait si on choisit ε = ie1e2 on obtient Cl(Cn+2) Cl(Cn) ⊗ Cl(C2). Vu que Cl′2 =Cl0,2
⊗RC M2(R) ⊗R C M2(C) on a l’isomorphisme Cl′n+2 M2(Cl′n). DoncCl′2p M2p (C) et Cl′2p+1 M2p M2p (C) ⊕M2p (C).
5.3. Groupes orthogonaux et groupes spin
Soit K un corps de caractéristique , 2, soit V un K−espace vectoriel de di-mension finie. Soit Q une forme quadratique sur V, β la forme bilinéaire associée.Supposons que β soit non-dégénérée. Notons C = Cl(V,Q) l’algèbre de Cliffordassociée.
5.3.1. D
Un automorphisme s : V −→ V est orthogonalement associé à Q (ou s est unetransformation orthogonale) si s laisse Q invariant, c’est à dire si : Q(s(x)) = Q(x) pourtout x ∈ V.Soit O(Q) = s : V −→ V automorphisme|Q(s(x)) = Q(x)∀ x ∈ V le groupe orthogonalde Q.

5.3. GROUPES ORTHOGONAUX ET GROUPES SPIN 67
5.3.2. D
L’ensemble Γ = u ∈ C|∃u−1∈ C et uVu−1
⊂ V est le groupe de Clifford de Q.
Si u ∈ Γ, alors
su : V −→ Vx 7−→ uxu−1
est une transformation orthogonale, car :
Q(su(x)) · 1 = (su(x))2 = (uxu−1)(uxu−1) = ux2u−1 =
= u(Q(x) · 1)u−1 = Q(x)uu−1 = Q(x) · 1
On a que si u ∈ Γ, alors la transformation
χ : Γ −→ O(Q)u 7−→ su
est une représentation vectorielle de Γ.Si s est un automorphisme de V, il peut être représenté par une matrice M telle quesi s est orthogonal (c’est à dire si s ∈ O(Q)) alors det M = ±1.L’ensemble s ∈ O(Q)|det s = 1 est un sous-groupe de O(Q) d’indice 2.Soit C = C+ ⊕ C− la décomposition de C dans la structure semi-graduée. PosonsΓ+ = Γ ∩ C+Définissons O+(Q) = s ∈ O(Q)|det s = 1.
5.3.3. E
Soit V = Rn et Q(v) =∑n
i=0 v2i =‖ v ‖2, alors :
O(Q) = s ∈ GLn(R)| ‖ sv ‖2=‖ v ‖2 sont les rotations et les symétries de Rn et
O+(Q) = s ∈ O(G)|det s = 1 = SOn(R) == M ∈ GLn(R)|MTM = Iet det M = 1 sont les rotations de Rn
Montrons que O+(Q) n’est pas simplement connexe, c’est à dire : pour toutn ≥ 3 on a π1(SO3(R)) , 1.Regardons le cas n = 3.On a que SO3(R) P2R. En fait une rotation ρ de R3 est donnée par un angleα ∈ [0, π] et un axe de rotation d. On représente α ∈ [0, π] comme distance aucentre d’une boule de rayon π et −α la distance sur le rayon opposé. Le rayonest choisi par rapport à l’axe de rotation donné. On a donc mis en bijection unerotation de R3 et une boule avec points opposés identifiés. Par ailleurs on sait queP2R R3
\ 0/R∗ S2/±1 P2R
On a donc que S2 π−→ SO3(R) est un revêtement à deux feuillets.
Alors π1(S2) ⊆ π1(SO3(R)) et l’indice est le nombre de feuillets. Vu que le groupefondamental de la sphère est trivial et que ]π1(SO3(R))/]π1(S2) = 2, on a que]π1(SO3(R)) = 2. On conclut que π1(SO3(R)) = Z/2Z et donc O+(Q) n’est passimplement connexe.

68 5. ALGÈBRES DE CLIFFORD
On va obtenir le groupe Spin à partir du groupe de Clifford en introduisantune condition de normalisation.
5.3.4. D
Le groupe Spin est Spin(V) = u ∈ Γ+||N(u)| = 1
Notons Cln l’algèbre de Clifford de Rn associée à la forme quadratiqueQ(V) =
∑ni=0 v2
i = ||v||2 (c’est à dire : Cln = Cl0,n) et Cln = C+ ⊕ C− sa décomposition
dans la structure semi-graduée. Notons encore Spin(n) = Spin(Rn).
5.3.5. E
I : Le groupe Spin(2)On a vu dans l’exemple 5.2.14 que Cl2 M2(R) et avec la structure semi-graduée on a que Cl2 = C+ ⊕ C− avec C+ COn a donc que Spin(2) = u ∈ Γ+||N(u)| = 1 = u ∈ C|uu = 1 S1
Une rotation d’un angle α dans le plan R2 peut être représentée par mul-tiplication matricielle :(
xy
)−→
(cosα − sinαsinα cosα
) (xy
);
(cosα − sinαsinα cosα
)∈ SO2(R)
où SO2(R) = M ∈ M2(R)|MTM = Iet det M = 1 est le groupe des rota-tions. SO2(R) est isomorphe à S1.Les rotations dans R2 peuvent être representées par multiplication dansl’algèbre de Clifford comme ceci :xe1 + ye2 −→ (cosα/2 + e12 sinα/2)−1(xe1 + ye2)(cosα/2 + e12 sinα/2)Deux éléments opposés du groupe Spin(2) représentent la même rotationdans SO2(R) ; en fait si u ∈ Spin(2) alors
su(x) = uxu−1 = (−u)x(−u)−1 = s−u(x)
pour tout x ∈ R2. On a alors que Spin(2) est un recouvrement à deuxfeuillets de SO2(R). On écrit Spin(2)/±1 SO2(R).On a le diagramme suivant :
Spin(2) SO2(R)
S1 S1
//
//
Notons que le recouvrement de SO2(R) par Spin(2) n’est pas universel,vu que Spin(2) est isomorphe à S1 qui a comme groupe fondamental Z etdonc il n’est pas simplement connexe.

5.3. GROUPES ORTHOGONAUX ET GROUPES SPIN 69
II : Le groupe Spin(3)Préliminaires : soit r un quaternion pur (c’est à dire avec partie réelleréduite à zéro, notons r ∈ H0) ou un vecteur r = iz + jy + kz ∈ R3,où H R ⊕ H0, de norme u =
√x2 + y2 + z2 . Pour u ∈ H, u , 0 on
a que su(r) = uru−1 est aussi un quaternion pur de même norme. End’autres mots, l’application su : R3
−→ R3 avec su(r) = uru−1 est unerotation ou une symétrie dans l’espace des quaternions purs. Montronsque det(su) = 1.On a que det(su) , 0 (en fait su su−1 = id pour u , 0) et l’application
ϕ : H \ 0 −→ R
u 7−→ det(su)
est continue. De plus ϕ(u) = det(s1) = det(id) = 1. H \ 0 est connexe, ϕest continue et jamais nulle, on a donc que ϕ(u) = det(su) = 1 pour toutu ∈H \ 0.Montrons maintenant que chaque rotation (element de SO3(R)) peut doncêtre représentée par un élément u ∈H, u , 0. Considérons l’application :
ψ : H \ 0 −→ SO(H0)
et montrons que ψ est une surjection. Vu que les reflections (par rapport àdes plans) engendrent SO3(R) (même O3(R)) il nous suffit de prouver quetoute reflection σu, par rapport à un plan normal au vecteur u ∈ R3
\ 0est image d’un élément de H \ 0.Considérons le produit scalaire standard < ·, · > sur R3. Soit x ∈ R3, alorson a :
σu(x) = x − 2< x,u > u
uu= x −
xu + uxu
=
= x − x −uxu= −uxu−1 = −uxu−1 =
= −su(x) ∈ O3(R)
Donc su(x) = −σu(x) = symétrie. Tout élément de SO3(R) est donc l’imagesous ψ d’un produit d’un nombre paire de symétries.Soit u ∈H \ 0, si on regarde le noyau de γ : u 7−→ su :
ker(γ) = u ∈H \ 0|su(v) = v∀ v ∈H
= u ∈H \ 0|uvu−1 = v∀ v ∈H= u ∈H \ 0|uv = vu∀ v ∈H = −1, 1
car u appartient au centre deH qui estR. On constate donc qu’il y a deuxquaternions u et −u de norme 1 qui representent la même rotation. Ce quisignifie que la sphère des quaternions unité : S3 = u ∈ H||N(u)| = 1 estun recouvrement à deux feuillets de SO3(R), c’est à dire que :
SO3(R) S3/±1
70 5. ALGÈBRES DE CLIFFORD
On a vu que Cl3 M2(C) et dans la structure semi-graduée on a queCl3 = C+ ⊕ C− avec C+ H
On a que Spin(3) = u ∈ Γ+||N(u)| = 1 u ∈H|uu = 1
S3
Pour un élément u de Spin(3) l’application u 7−→ uru−1 est une rotationdeR3. Chaque élément de SO3(R) peut être représenté par un élément deSpin(3). Les éléments u et −u représentent la même rotation dans R3. End’autres mots Spin(3)/±1 SO3(R) et on peut dire que Spin(3) est unrecouvrement universel du groupe de rotation SO3(R).

CHAPITRE 6
Divers
Ce chapitre regroupe quelques remarques introductives sur les espaces projec-tifs et les polynômes invariants utilisées par la suite.
6.1. Espaces projectifs
6.1.1. L
Soit n ∈N et x ∈ PnK, où K = R ou K = C. Alors PnK \ x est homotope à Pn−1K.
D. Supposons sans perte de généralité que x = [0, . . . , 0, 1]. Ona une immersion (une application continue qui est un homéomorphisme sur sonimage)
ϕ : Pn−1K → PnK[z0, . . . , zn−1] 7→ [z0, . . . , zn−1, 0]
Il suffit de voir que l’image de ϕ est même un retract de déformation de PnK \ x.En effet, on a une homotopie
H : I × (PnK \ x) → PnK \ x(t, [z0, . . . , zn]) 7→ [z0, . . . , zn−1, tzn]
où I est l’intervalle [0, 1].
6.2. Polynômes invariants
Soit A un anneau commutatif à unité n ∈ N et G un sous-groupe de GLn(A).Soient X = (Xi j)1≤i, j≤n des indéterminées sur A. On voit X comme matrice n × n.
71

72 6. DIVERS
Les éléments de G agissent de façon naturelle sur l’anneau des polynômes à n2
variables A[X] = A[X11, . . . ,Xnn] par conjugaison de l’argument
gP(X) = P(gXg−1)
Un polynôme P ∈ A[X] est dit polynôme G–invariant si gP = P pour tout g ∈ G. Onparle de polynôme invariant dans le cas où G = GLn(A). Dans la suite on s’interessrauniquement au cas A = C et G = GLn(C).Il est clair que si P et Q sont des polynômes invariants alors P+Q et PQ sont aussiinvariants. Les polynômes invariants forment donc un sous-anneau de C[X], oumême une sous-C–algèbre de C[X]. Si P j est la partie homogène en degré j dupolynôme invariant P, alors P j est aussi un polynôme invariant.
6.2.1. P
Soit P un polynôme invariant en n2 variables, et notons P′(X) la matrice des dérivéspartielles tranposée
P′(X) =(∂P(X)
Xi j
)t
Alors X et P′(X) commutent.
D. Notons Ei j la matrice élémentaire dont le i, j–éme coefficientvaut 1, et dont tout les autre coefficients valent 0. Comme P est invariant, on a,pour une indéterminée t
P((I + tEi j)X) = P(X(I + tEi j))
On dérive cette équation par t : La formule pour la dérivée d’une fonction composéedonne ∂
∂t P( f (t)) = DP( f (t))( f ′(t)) où DP est la dérivée totale de P, et où on a poséf (t) = (I + tEi j)X. On a
f ′(t) = Ei jXet
DP(Y)(A) =n∑
k,l=1
∂P∂Xkl
(Y)akl
Remarquons que (Ei jX)kl = δikX jl, où δik est le symbôle de Kronecker. Mis ensemble,ceci donne
∂∂t
P( f (t)) =
n∑k,l=1
∂P∂Xkl
((I + tEi j)X)(Ei jX)kl
=
n∑k,l=1
∂P∂Xkl
((I + tEi j)X)δikX jl
=
n∑l=1
∂P∂Xil
((I + tEi j)X)X jl
en particulier∂∂t
P( f (t))∣∣∣∣∣t=0=
n∑l=1
∂P∂Xil
(X)X jl = (XP′(X)) ji

6.2. POLYNÔMES INVARIANTS 73
le même calcul pour g(t) = X(I + tEi j) au lieu de f donne
∂∂t
P(g(t))∣∣∣∣∣t=0= (P′(X)X) ji
et donc, puisque P( f (t)) = P(g(t)), on a en résumé XP′(X) = P′(X)X.
Pour un nombre de variables n2 fixé, introduisons deux classes importantes depolynômes invariants. On considère d’abord (presque) le polynôme caractéristiquede X
σ(t)(X) := det(I + tX) =n∑
j=0
σ j(X)t j
Le polynôme σ ∈ C[t][X], et par conséquent aussi les polynômes σ0, σ1, . . . , σn sontinvariants, puisque
σ(t)(X) = det(I + tX) = det(g(I + tX)g−1) = det(I + gtXg−1) = σ(t)(gXg−1)
pour tout g ∈ GLn(C). Remarquons queσ j est homogène de degré j pour 0 ≤ j ≤ n eten particulier σ0 = 1. Ces polynômes σ0, σ1, . . . , σn sont appelés polynômes invariantssymétriques. Par convention on pose σ j(X) = 0 si j > n.Après, on s’interesse aussi à série formelle1 s(t) ∈ C[X][[t]] suivante :
s(t) =∞∑
k=0
det(I − tX) jt j =
∞∑k=0
sk(X)tk
Remarquons que s0(X) = n est le terme constant de cette série formelle. Si on dériveet intègre (tout formellement) cette série, on trouve
s(X)(t) − s0(X) =∞∑
k=1
sk(X)tk = −t∂∂t
log(det(I − tX))
où log(1 + t) désigne la série formelle
log(1 + t) =∞∑
k=1
(−1)k−1
ktk
Les polynômes s1, . . . sk, . . . sont invariants, de nouveau par le fait que deux matricesconjugés ont même déterminant. On les appelle polynômes invariants de Newton.Dans l’anneau des séries formelles C[X][[t, t−1]] on a les identités
σ(t)(X) = det(I + tX)= det(I − (−t)X)
= exp(∫
s(−t)t
dt)
donc∞∑j=0
σ j(X)t j = exp
∫
1t
∞∑j=0
(−1) js j(X)t jdt
Cette équation montre que tout s j(X) peut être écrit comme polynôme à coefficientsentiers en σ1(X), . . . , σn(X), et que tout σ j(X) peut être écrit comme polynôme à
1Voir [12], chap. IV, §4 pour la théorie générale des anneaux de séries formelles.

74 6. DIVERS
coefficients rationnels en s1(X), . . . , sn(X), en d’autre mots : Pour tout j ∈N il existeP j ∈ Z[Y1, . . . ,Yn] et Q j ∈ Q[Y1, . . . ,Yn] tel que
s j = P j(σ1, . . . , σn)(3)σ j = Q j(s1, . . . , sn)(4)
6.2.2. E
Pour n2 = 9, les polynômes invariants symétriques non nuls, et les 4 premierspolynômes invariants de Newton sont
σ0(X) = 1σ1(X) = X11 + X22 + X33
σ2(X) = X11X22 + X11X33 + X22X33 − X12X21 − X13X31 − X23X32
σ3(X) = X12X23X31 + X31X21X32 + X11X22X33
−X11X23X32 − X13X22X31 − X12X21X33
s0(X) = 3s1(X) = X11 + X22 + X33
s2(X) = X211 + X2
22 + X233 + 2X12X21 + 2X13X31 + 2X23X32
s3(X) = X311 + X3
22 + X333 + 3X11X12X21 + 3X11X13X31
+3X22X12X21 + 3X22X23X32 + 3X33X13X31
+3X33X23X32 + 3X12X23X31 + 3X13X32X21
· · ·
6.2.3. P
Pour tout j ∈N0 on a s j(X) = tr(X j), où X j est la j–ème puissance de la matrice (Xlk)1≤l,k≤n.
D. La proposition est vraie pour j = 0, supposons donc j > 0.Il suffit de montrer que s j(A) = tr(A j) pour toute matrice A ∈ Mn(C). Vu quel’ensemble des matrices diagonalisables est dense dansMn(C) et que s j(A) et tr(A j)sont des fonctions continues en A qui restent inchangées sous conjugaison, il suffitde montrer que s j(A) = tr(A j) pour toute matrice diagonale. Considérons donc
A =
λ1 0 · · · 00 λ2 · · · 0...
.... . .
...0 0 · · · λn
On a
det(I − tA) =n∏
i=1
(1 − tλi)

6.2. POLYNÔMES INVARIANTS 75
et donc
s(A)(t) − n = −t∂∂t
log(det(I − tA)) = −t∂∂t
n∑i=1
log(1 − tλi)
= −t∂∂t
n∑i=1
∞∑j=1
−1j
(tλi) j =
n∑i=1
∞∑j=1
λ ji t
j =
∞∑j=1
n∑i=1
λ ji
t j =
∞∑j=1
s j(A)t j
ce qui montre, en comparant les coefficients que s j(A) = λ j1 + · · · + λ
jn = tr(A j).
6.2.4. L
Pour tout k ∈N on ak−1∑j=0
(−1) jσ j(X)sk− j(X) = (−1)k−1kσk(X)
D. Comme dans la démonstration de 6.2.3 il suffit de montrerque cette égalité est vraie pour toute matrice diagonale A ∈ Mn(C). Soit doncA ∈ Mn(C) diagonale, et notons de nouveau λ1, . . . , λn les entrés sur la diagonalede A. On a
σ(A)(−t) =n∏
i=1
(1 − tλi) =n∑
i=0
(−1)iσi(A)ti
et
s(A)(t) − n = −t∂∂t
log(det(I − tA)) =n∑
i=1
tλi
1 − tλi=
n∑i=1
si(A)ti
Ainsi
σ(A)(−t)s(A)(t) =n∏
i=1
(1 − tλi)n∑
j=1
tλ j
1 − tλ j=
=
n∑j=1
tλ j
∏i, j
(1 − tλi) = −t∂σ(A)(−t)
∂t=
n∑i=1
(−1)i−1iσiti
c’est–a–dire n∑i=0
(−1)iσi(A)ti
n∑
i=1
si(A)ti
= n∑i=1
(−1)i−1iσiti
en comparant le coefficient de tk dans cette égalité, on trouve
k−1∑j=0
(−1) jσ j(A)sk− j(A) = (−1)k−1kσk(A)
ce qu’il fallait démontrer.
6.2.5. R

76 6. DIVERS
Ce dernier lemme permet de calculer recursivement les polynômes P j et Q j définiespar (3) et (4). On trouve
s1(X) = σ1(X)s2(X) = σ1(X)2
− 2σ2(X)
6.2.6. P
Soient m,n ∈ N, et soient A et B des matrices en n2 et m2 indéterminées respectivement.Alors on a pour des polynômes invariants en un nombre approprié de variables
σk(A ⊕ B) =
k∑i=0
σi(A)σk−i(B)(5)
sk(A ⊕ B) = sk(A) + sk(B)(6)
sk(A ⊗ B) = sk(A)sk(B)(7)
D. Par définition de σ j on a
n+m∑j=0
σ j(A ⊕ B)t j = σ(A ⊕ B)(t) =
= det(I + t(A ⊕ B)) = det(I + tA) det(I + tB) =
= σ(A)(t)σ(B)(t) =n∑
i=0
σi(A)tim∑
j=0
σ j(B)t j
ce qui montre, en comparaisant le coefficient de t j l’équation (5). L’équation 6découle immédiatement de la proposition 6.2.3. Finalement on a
sk(A ⊗ B) = tr((A ⊗ B)k) = tr(Ak⊗ Bk) = tr(Ak) tr(Bk) = sk(A)sk(B)
d’où l’équation (7).

Troisième partie
Topologie différentielle


CHAPITRE 7
Groupes et algèbres de Lie
Ce chapitre a été écrit par Marcos Carballo. Il introduit les groupes et lesalgèbres de Lie de manière indépendante puis explicite le lien unissant ces deuxnotions, via l’application exponentielle.
7.1. Théorie classique des groupes de Lie
Variétés topologiques et variétés lisses.
7.1.1. N
Dans ce chapitre, on se donne un corpsK qui est soit le corpsR des nombres réels,soit le corps C des nombres complexes. Si E et F sont des K-espaces vectoriels dedimension finie, et si f : E0 → F0 est une application d’un ouvert de E vers unouvert de F, on dit que f est lisse (sur K) si E0 est vide, ou réduit à un point (i.e.dim(E) = 0), ou si f est C∞, i.e. indéfiniment dérivable. On dit que f est analytique(sur K) ou de classe Cω (sur K) si E0 est vide, ou réduit à un point, ou si f est lisseet son développement de Taylor converge ponctuellement vers f au voisinage dechacun des points de E0. Si K = C, “lisse” et “analytique” coïncident, et on ditsouvent holomorphe.
7.1.2. D
Soient X un espace topologique et E un K-espace vectoriel de dimension finien ∈N, i.e. E Kn (isomorphisme non-canonique).
(1) Une carte sur X est un homomorphisme
ϕα : Eα → Xα,
79

80 7. GROUPES ET ALGÈBRES DE LIE
avec Eα ⊆ E ouvert et Xα ⊆ X ouvert ; on dira dans ce cas que ϕα estmodelée sur E et est une K-carte.
(2) Un atlas (modelé sur E) sur X est une collection de cartes ϕαα sur X, toutesmodelées sur E, telles que ⋃
α
Xα = X;
dans ce cas, on dira aussi que ϕαα est un K-atlas.
(3) Un K-atlas ϕαα sur X est lisse (resp. analytique) si l’application
ϕβα := ϕ−1β ϕα : ϕ−1
α (Xα ∩ Xβ)︸ ︷︷ ︸⊆E
→ ϕ−1β (Xα ∩ Xβ)︸ ︷︷ ︸
⊆E
est lisse (resp. analytique) surK, pour tous α,β ; l’applicationϕβα est appe-lée application de transition, fonction de transition ou application de changementde carte.
(4) Une variété topologique est un espace topologique séparé à base dénom-brable d’ouverts admettant un atlas.
(5) La dimension d’une variété topologique M, notée dim(M), est la dimensionsur K de n’importe quel espace vectoriel sur lequel est modelé un atlasde M.
7.1.3. R
L’unicité de la dimension d’une variété topologique est assurée par le théorèmed’invariance des domaines qui n’est pas donné ici.
7.1.4. D
Soient (X, ϕαα) et (Y, ψββ) deux espaces topologiques munis d’atlas lisses (resp.analytique), modelés sur E et F respectivement. Une application f : X→ Y est lisse(resp. analytique), si
ψ−1β f ϕα : ϕ−1
α (Xα ∩ f−1(Yβ))︸ ︷︷ ︸⊆E
→ F
est lisse (resp. analytique), où l’on utilise les notations évidentes.
7.1.5. D
Deux atlas lisses (resp. analytiques) ϕαα et ψββ sur X sont appelés équivalents sil’identité
idX : (X, ϕα)→ (X, ψβ)
est une application lisse (resp. analytique).

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 81
7.1.6. D
Une variété lisse (resp. analytique) sur K est un espace topologique séparé (on ditaussi T2) à base dénombrable muni d’une classe d’équivalence d’atlas lisses (resp.analytiques).
7.1.7. D
Un difféomorphisme (resp. difféomorphisme analytique)f : M→ N est une application lisse (resp. analytique), bijective et telle que f−1 estlisse (resp. analytique). On note
f : M ≈ // N.
7.1.8. E
(1) Tout espace discret dénombrable est une variété analytique sur K.
(2) Rn variété analytique de dimension n.
(3) Cn variété complexe de dimension n.
(4) Toute variété complexe de dimension n est une variété analytique réellede dimension 2n.
(5) L’espace Mn(K) est une variété analytique sur K de dimension n2, dif-féomorphe à Kn2
, autrement dit Mn(K) ≈ Kn2. Ainsi, l’ouvert GLn(K) de
Mn(K) est une variété analytique de dimension n2 sur K.
(6) Sn⊂ Rn+1 est une variété analytique de dimension n sur R.
(7) S2 est une variété holomorphe de dimension 1.
7.1.9. D
Si f : M→ N est une application lisse (resp. analytique) sur K, et si x0 ∈ M, on ditque f est un difféomorphisme local en x0 (resp. difféomorphisme analytique local en x0)s’il existe un voisinage ouvert U de x0 dans M et un voisinage ouvert V de f (x0)dans N tels que
f |U : U ≈ // V.
Groupes de Lie.
7.1.10. D

82 7. GROUPES ET ALGÈBRES DE LIE
Un groupe topologique est un espace topologique muni d’une structure de groupetelle que le produit
µ : G × G→ G, (g, h) 7→ g · h
et le passage à l’inverseinv : G→ G, g 7→ g−1
sont des applications continues.
7.1.11. D
Un groupe de Lie sur K est une variété lisse G sur K, munie d’une structure degroupe telle que le produit
µ : G × G→ G, (g, h) 7→ g · h
et le passage à l’inverseinv : G→ G, g 7→ g−1
sont lisses. On dit que G est un groupe de Lie analytique sur K si G est une variétéanalytique sur K et si µ et inv sont des applications analytiques.
7.1.12. D
Un homomorphisme de groupes de Lie (resp. analytique) surK est un homomorphismede groupes qui est lisse (resp. analytique) ; c’est un isomorphisme de groupes de Lie(resp.analytique) sur K, s’il est bijectif et un difféomorphisme (resp. analytique).
7.1.13. E
(1) Tout groupe dénombrable, muni de la topologie discrète, est un groupede Lie (réel ou complexe) de dimension 0.
(2) Le groupe Rn est un groupe de Lie réel de dimension n.
(3) Le groupe Cn est un groupe de Lie complexe de dimension n.
(4) Tout groupe de Lie complexe de dimension n est un groupe de Lie réel dedimension 2n.
(5) Le groupe R× := R\0 (pour la multiplication) est un groupe de Lie réelde dimension 1.
(6) Le groupe C× := C\0 (pour la multiplication) est un groupe de Liecomplexe de dimension 1.
(7) Le groupe H× :=H\0 (pour la multiplication) est un groupe de Lie réelde dimension 4.
(8) Le sous-groupe fermé
S0 := x ∈ R× | |x| = 1 = ±1 Z/2
de R× est un groupe de Lie réel de dimension 0.

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 83
(9) Le sous-groupe fermé
S1 := z ∈ C× | |z| = 1
de C× est un groupe de Lie réel de dimension 1.
(10) Le sous-groupe fermé
S3 := q ∈H× | |q| = 1
de H× est un groupe de Lie réel de dimension 3.
(11) Le tore de dimension n, défini par
Tn := S1× · · · × S1︸ ︷︷ ︸n facteurs
,
est un groupe de Lie réel de dimension n.
(12) Le groupe Rn/Zn est un groupe de Lie réel de dimension n. De plus, il ya un isomorphisme de groupes de Lie entre Rn/Zn et Tn.
(13) Si H est un sous-groupe ouvert d’un groupe de Lie G sur K, alors H estégalement un groupe de Lie et a la même dimension que G.
(14) Le groupe Mn(K) (pour l’addition matricielle) est un groupe de Lie ana-lytique sur K de dimension n2, isomorphe à Kn2
comme groupe de Lieanalytique sur K.
(15) Si G et H sont des groupes de Lie sur K de dimension n et m respective-ment, alors le groupe topologique produit G×H est un groupe de Lie surK de dimension n+m. Si G et H sont analytiques, alors G×H également.
7.1.14. P
Le groupe linéaire général GLn(K) (pour la multiplication matricielle), muni de la structurede variété analytique surK héritée en le réalisant comme sous-espace ouvert de Mn(K), estun groupe de Lie analytique sur K de dimension n2.
D. La multiplication matricielle est polynômiale en les entréesdes matrices à multiplier, donc l’application
µ : GLn(K) ×GLn(K)→ GLn(K), (A,B) 7→ AB
est analytique. Si A ∈ GLn(K), alors
A−1 =1
det(A)· Aad,
où Aad est la matrice adjointe de A, i.e. la transposée de la matrice des cofacteursAcof de A. Comme les applications det et t(−) sont analytiques, l’application
inv : GLn(K)→ GLn(K), A 7→ A−1
est également analytique.
84 7. GROUPES ET ALGÈBRES DE LIE
7.1.15. P
Le groupe linéaire général GLn(H) (pour la multiplication matricielle), muni de la structurede variété analytique sur K héritée en le réalisant comme sous-espace ouvert de Mn(H),est un groupe de Lie réel analytique sur K de dimension 8n2.
D. Mn(H) est une R-algèbre de dimension 8n2.
Mn(H) A := (
A −BB A
)∈M2n(C) | A,B ∈Mn(C).
Ainsi,GLn(H)↔ GL2n(C) ∩A.
Espace tangent de G et champ de vecteurs invariants à gauche.
Soit un groupe de Lie G sur K.
7.1.16. N
L’espace tangent de G est le K-espace vectoriel
L G = Te G.
On l’appelle aussi l’algèbre de Lie de G. Si ϕ : G → H est un homomorphisme degroupes de Lie sur K, on pose
ϕ∗ = Lϕ := Te ϕ : L G→ L H.
L définit un foncteur de la catégorie des groupes de Lie sur K vers celle desK-espaces vectoriels de dimension finie, i.e.
L idG = idL G et L(ψ ϕ) = Lψ Lϕ.
7.1.17. E
Soit G = Kn. On a que
TKn = Kn×Kn et que Tt K
n = t ×Kn,
pour tout t ∈ K. En particulier, on a
LKn = 0 ×Kn.
Dans la suite, on va souvent identifier LKn avec Kn de manière évidente.
7.1.18. E

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 85
Soit G = Tn avec sa carte canonique, i.e.
ϕ :]−
12,
12
[ n
→ Tn, (θ1, . . . , θn) 7→ (e2iπθ1 , . . . , e2iπθn ).
Ainsi, on a l’identification suivante (comme espace vectoriel réel)
LTn↔ Rn, [(1, . . . , 1), (θ1, . . . , θn)]↔ (θ1, . . . , θn).
7.1.19. E
Pour le groupe de Lie réel G = GLn(F), où F ∈ R,C,H, on a que l’ouvert GLn(F)lui-même est un ouvert trivialisant pour la carte canonique, donc
T GLn(F) = GLn(F) ×Mn(F) ≈ GLn(F) ×Rdim(F)·n2.
De plus,TA GLn(F) = A ×Mn(F),
pour toute matrice A ∈ GLn(F). En particulier,
L GLn(F) = 1n ×Mn(F).
Comme avant, on va identifier de manière évidente L GLn(F) avec Mn(F).
7.1.20. D
Un champ de vecteurs χ : G → T G est appelé invariant à gauche si le diagrammesuivant commute pour tout g ∈ G :
T G(lg)∗ // T G
G
χ
OO
lg
// G
χ
OO
où lg est la multiplication à gauche par g dans G. La commutativité du diagrammeest équivalente à dire que
(lg)∗ χh = χgh, ∀g, h ∈ G.
Ici χh = χ(h), c’est-à-dire le vecteur du champ de vecteur issu de h ∈ G.
7.1.21. R
Le champ de vecteursχ sur le groupe de Lie G est invariant à gauche si et seulement
(lg)∗ χe = χg,
pour tout g ∈ G.
7.1.22. P

86 7. GROUPES ET ALGÈBRES DE LIE
Si X ∈ L G = Te G, alors l’application
X : G→ T G, g 7→ Xg := (lg)∗(X)
est un champ lisse sur G, invariant à gauche et qui satisfait Xe = X. On a donc unebijection canonique
L G ←→ champs lisses invariants à gauche sur G.
Par abus de notation, pour g ∈ G, on écrira
X(−) := X et X(g) := Xg ∈ Tg G.
D. Il suffit de montrer que
G × L G→ T G, (g,X) 7→ X(g) = (lg)∗(X)
est lisse. On ne donne pas le détail ici.
7.1.23. D
Une variété réelle lisse M de dimension n est appeléeparallélisable s’il existe n champs de vecteurs continus sur M, disons
χ(1), . . . , χ(n) : M→ T M,
qui sont (partout) linéairement indépendants, i.e. tels que, pour tout point x de M, lesvecteurs tangents en x
χ(1)x , . . . , χ
(n)x ∈ Tx M
sont R-linéairement indépendants, c’est-à-dire forment une R-base de l’espacevectoriel réel Tx M (qui est de dimension n).
7.1.24. T
La variété lisse réelle sous-jacente à un groupe de Lie G sur K est parallélisable.
D. Soit n = dimR(G). Si n = 0 c’est évident. Supposons doncn > 0. Soit
X1, . . . ,Xn ∈ L G
une R-base de L G considéré comme R-espace vectoriel. On en déduit n champsde vecteurs continus (même lisses) sur G
X1(−), . . . ,Xn(−) : G→ T G.
Comme Xi(g) = (lg)∗Xi (pour i = 1, . . . ,n et g ∈ G), et comme
(lg)∗ : Te G→ Tg G
est un R-isomorphisme, il en résulte que les vecteurs
X1(g), . . . ,Xn(g) ∈ Tg G
constituent une R-base de Tg G, ce qui permet de conclure.

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 87
7.1.25. C
La sphère S2 ne porte aucune structure de groupe de Lie.
7.1.26. R
Ce résultat découle du fait que toute sphère de dimension paire non-nulle a commecaractéristique d’Euler 2, i.e.
χEuler(S2n) = 2 , 0.
On admet aussi le théorème du Hérisson qui dit que l’on ne peut pas “coiffer” unhérisson (de forme sphérique).
Sous-groupes à 1 paramètre.
Soit G un groupe de Lie sur K.
7.1.27. D
Un sous-groupe à 1-paramètre de G est un homomorphisme de groupes
λ : K→ G
qui est lisse ; en particulier
λ(s + t) = λ(s) · λ(t), ∀s, t ∈ K.
7.1.28. E
Soit G = Kn, si X ∈ Kn = LKn, alors l’application
λ : K→ Kn, t 7→ tX
est un sous-groupe à 1-paramètre de Kn, qui vérifie λ′(0) = X ∈ LKn ; plus géné-ralement, on a
λ′(t) = (tX,X) ∈ tX ×Kn = TtX Kn,
pour tout t ∈ K.
7.1.29. E
Soit (θ1, . . . , θn) ∈ Rn, alors l’application
λ : R→ Tn, t 7→ (e2πiθ1·t, . . . , e2πiθn·t)
est un sous-groupe à 1-paramètre deTn. En utilisant la carte canonique au voisinagede e = (1, . . . , 1) ∈ Tn, on obtient que
λ′(0) = (θ1, . . . , θn) ∈ Rn = LTn.

88 7. GROUPES ET ALGÈBRES DE LIE
7.1.30. E
Si x ∈ F, alors l’application
λ : R→ GLn(F), t 7→
1 tX
. . .0 1
est un sous-groupe à 1-paramètre de GLn(F). En utilisant la carte canonique auvoisinage de 1n ∈ GLn(F), on obtient que
λ′(0) =
0 X
. . .0
∈Mn(F) = L GLn(F).
7.1.31. E
Si (θ1, . . . , θn) ∈ Rn, alors l’application
λ : R→ GLn(F), t 7→
eθ1·t
. . .eθn·t
est un sous-groupe à 1-paramètre de GLn(F). En utilisant la carte canonique auvoisinage de 1n ∈ GLn(F), on obtient que
λ′(0) =
θ1
. . .θn
∈Mn(F) = L GLn(F).
7.1.32. T
Soit G un groupe de Lie sur K. Pour tout X ∈ L G, il existe un unique sous-groupe à1-paramètre
λ = λX : K→ G, t 7→ λX(t)de G tel que λ′(0) = X. En particulier, il y a des bijections canoniques
sous-groupesà 1-paramètre
de G
←→ L G←→
champs de vecteurs lissesinvariants à gauche sur G
.
De plus, si G est analytique, alors λX est analytique.
D. Cette démonstration fait appel à beaucoup de résultats surles systèmes d’équations différentielles, résultats analytique que l’on ne donne pasici. Ainsi, on ne peut donner la démonstration de ce théorème.
7.1.33. R
Soit G un groupe de Lie sur K. Le théorème 7.1.32 dit en particulier que si X ∈

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 89
L G = Te G, parmi toutes les courbes locales sur G tangentes à X en e, il y en a uneet une seule qui est globale et qui est un homomorphisme de groupes de Lie surK(et est analytique si G est analytique).
L’application exponentielle.
7.1.34. N
Dans cette section, nous utiliserons la notation ε0 qui est détaillée ci-après.Pour l’espace euclidienK, on a le champ de vecteurs lisse (non-nul) canonique
donné parε : K→ TK = K ×K, t 7→ εt := [t, 1] = (t, 1).
On a alors le vecteur tangent ε0 = (0, 1) ∈ 0 × K = T0 K. Nous garderons cesnotations dans la suite. Ce champ de vecteurs lisse sur K est souvent noté
ε =ddt
et εt =ddt
∣∣∣∣t
pour t ∈ K ; en particulier,
ε0 =ddt
∣∣∣∣t=0=
ddt
∣∣∣∣0.
Soit G un groupes de Lie sur K. Gardons les notations du théorème 7.1.32.
7.1.35. D
L’application exponentielle de G est l’application
exp = expG : L G→ G, X 7→ exp(X) := λX(1).
7.1.36. T
Si X ∈ L G et t ∈ K, alors on a l’égalité exp(tX) = λX(t).En particulier, l’application
K→ G, t 7→ exp(tX)
est un homomorphisme lisse (et même analytique si G est analytique) ; c’est l’unique sous-groupe à 1-paramètre de G associé à X, et c’est une courbe globale (penser géodésique) surG tangente à X en e.
D. Soit µ : K → G l’application donnée par s 7→ λX(st) oùx ∈ L G et t ∈ K sont fixés. Alors on a :
µ = λX mt : K→ K→ G,

90 7. GROUPES ET ALGÈBRES DE LIE
où mt : K → K est la multiplication par t dans K. Il s’ensuit que µ est un sous-groupe à 1-paramètre, et en plus on a que (mt)∗(ε0) = tε0, où ε0 = (0, 1) ∈ T0 K =0 ×K K. Ainsi,
µ∗(ε0) = (λX)∗ (mt)∗(ε0) = (λX)∗(t · ε0) = t · (λX)∗(ε0) = t · X.
Par l’unicité du théorème 7.1.32, on sait que µ est l’unique sous-groupe à 1-paramètre de G associé au vecteur tangent tX ∈ L G, autrement dit
µ = λtX.
Ainsi, on a :exp(tX) = λtX(1) = µ(1) = λX(1 · t) = λX(t).
Ce qui termine la démonstration.
7.1.37. C
Si X ∈ L G et s, t ∈ K, alors
exp((s + t) · X) = exp(sX) · exp(tX).
Attention, les points désignent respectivement la multiplication scalaire dans L G et celle(interne) de G. En particulier, pour n ∈ Z, on a
exp(X)−1 = exp(−X) et exp(nX) = exp(X)n.
7.1.38. R
Ces résultats découlent du théorème 7.1.36 et du fait queλX est un homomorphismede groupes (par définition d’un sous-groupe à 1-paramètre).
7.1.39. E
Pour le groupe de Lie réel G = Tn, on a
exp : Rn = LTn→ Tn, (θ1, . . . , θn) 7→ (e2πiθ1 , . . . , e2πiθn ).
Ainsi, exp est, ici, un épimorphisme (homomorphisme surjectif) de groupes denoyau Zn.
7.1.40. P
L’applicationΛ = ΛG : L G ×K→ G, (X, t) 7→ exp(tX) = λX(t)
est lisse (et même analytique si G est analytique).
7.1.41. T

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 91
L’application exponentielle exp : L G → G est lisse (et même analytique si G est analy-tique). De plus, la dérivée de exp en zéro est l’identité de L G, c’est-à-dire
T0 exp = idL G : L G→ L G
où l’on a identifié T0 L G (= 0 × L G) avec L G.
D. Soit 1 l’application constante sur L G valant 1 ∈ K. Alors,l’application exponentielle peut être écrite
exp : L G(id,1) // L G ×K
Λ // G.
D’où exp = Λ (id, 1) qui est une composition d’applications lisse, ce qui impliqueque exp est lisse.
On considère maintenant la courbe globale sur L G tangente à X ∈ L G (fixé)en 0 : γ : K→ L G, t 7→ tX. Ainsi,
T0 exp(X) = (exp γ)′(0) = (λX)′(0) = X.
La première égalité est une utilisation de la règle de dérivation en chaîne qui nesera pas détaillée ici et la seconde vient simplement du fait que exp(tX) = λX(t), cequi termine la démonstration.
7.1.42. C
L’application exponentielle exp : L G→ G est un difféomorphisme local en 0. En particu-lier, il existe un voisinage ouvert U de 0 dans L G et un voisinage ouvert V de e dans Gtels que la restriction
exp |U : U ≈ // V
est un difféomorphisme (même analytique si G est analytique).
7.1.43. R
Gardons les mêmes notations. L’application exp |U : U ≈ // V est une carte (lo-cale) au voisinage de e dans G. En particulier, l’ensemble d’applications
lg exp |U : U ≈ // gV g∈G
est un atlas lisse sur G, modelé sur le K-espace vectoriel L G.
7.1.44. P
Soit L G = V ⊕W une décomposition de L G comme somme directe de K-sous-espacesvectoriels. Alors l’application
expV,W : L G = V ⊕W → G, (x, y) 7→ exp(x) · exp(y)
est lisse et est un difféomorphisme local en (0, 0).

92 7. GROUPES ET ALGÈBRES DE LIE
D. L’application expV,W peut s’écrire comme la composition
expV,W = µ (exp |V × exp |W)
donc c’est un application lisse par le théorème 7.1.41. Par ce même théorème, on aque
(T0 expV,W)|T0 V = T0(expV,W |V) = T0(exp |V) = (T0 exp)|T0 V = idV,
où l’on identifie T0 V avec V dans la dernière égalité. On procède de la mêmemanière pour avoir que T0 expV,W |T0 W = idW . Ainsi, on a finalement que
T0 expV,W = idV⊕W = idL G .
7.1.45. C
Supposons que G soit de dimension n > 0 sur K, et soit (X1, . . . ,Xn) une K-base de L G.Alors, l’application
Kn→ G, (t1, . . . , tn) 7→ exp(t1X1) · · · exp(tnXn)
est lisse et est un difféomorphisme local en (0, . . . , 0).
D. En imitant la preuve de la proposition précédente, on obtientque l’application
L G = K · X1 ⊕ · · · ⊕K · Xn → G, (t1X1, . . . , tnXn) 7→ exp(t1X1) · · · exp(tnXn)
est lisse et est un difféomorphisme local en (0, . . . , 0).
7.1.46. D
L’exponentielle matricielle (de taille n) sur F = R,C,H est l’application
Exp = e(−) : Mn(F) → GLn(F)
X 7→ Exp(X) := eX = 1n + X +12!
X2 +13!
X3 + . . .
On note ExpF = Exp.
7.1.47. R
Soit ‖ · ‖ une norme sous-multiplicative sur Mn(F), c’est-à-dire telle que
‖A · B‖ ≤ ‖A‖ · ‖B‖.
Alors la série eA converge normalement et est bornée par
‖eA‖ ≤ e‖A‖.
On vérifie que si A,B ∈Mn(F) sont des matrices qui commutent, alors
eA+B = eA· eB.
Par conséquent, on a que eA est invérsible, plus précisément,
(eA)−1 = e−A,

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 93
et en particulier, l’image de Exp est bien contenue dans GLn(F). Il s’ensuit aussique
e(s+t)A = esA· etA,
pour tous s, t ∈ Z(F) et toute matrice A ∈ Mn(F), où Z(F) désigne le centre del’algèbre F, à savoir
Z(R) = R, Z(C) = C, Z(H) = R.
7.1.48. R
Le diagramme suivant
Mn(H) incl //
ExpH
M2n(C)
ExpC
GLn(H) incl // GLn(C)commute.
7.1.49. T
Pour le groupe de Lie analytique GLn(K) sur K, l’unique sous-groupe à 1-paramètre deGLn(K) associé à X ∈Mn(K) est donné par
λX : K→ GLn(K), t 7→ etX.
En particulier, on a
expGLn(K) = Exp = e(−) : Mn(K)→ GLn(K), A 7→ eA.
D. Soit X ∈Mn(K). Considérons
µ : K→ GLn(K), t 7→ etX.
µ est un sous-groupe à 1-paramètre de GLn(K), donc
µ′(0) =ddt |t=0
etX = X
de sorte queµ = λX.
7.1.50. T
L’application exponentielle est naturelle, en d’autres termes, si ϕ : G → H est un homo-morphisme de groupes de Lie sur K, alors le diagramme
L GLϕ //
expG
L H
expH
G
ϕ // H
94 7. GROUPES ET ALGÈBRES DE LIE
commute, i.e. pour tout X ∈ L G, on a
ϕ(expG(X)) = expH(Lϕ(X)).
D. Pour X ∈ L G, soit λX le sous-groupe à 1-paramètre de Gcorrespondant. Considérons l’application
µ : ϕ λX : K→ H, t 7→ ϕ(λX(t)).
Évidemment, c’est un sous-groupe à 1-paramètre de H, et on a
µ∗(ε0) = Lϕ (λX)∗(ε0) = Lϕ(X).
Par l’unicité du théorème 7.1.32, on a queµ = λLϕ(X). On en déduit que expH Lϕ(X)est successivement égal à
expH(Lϕ(X)) = λLϕ(X)(1) = µ(1) = ϕ(λX(1)) = ϕ expG(X),
ce qui nous donne la commutativité du diagramme.
Sous-variétés et sous-groupes de Lie.
7.1.51. D
Soit M une variété lisse sur K, de dimension m. Un sous-ensemble (disons non-vide) N de M est appelé sous-variété lisse de dimension n sur K (resp. sous-variétéanalytique de dimension n sur K ) de M, si 0 ≤ n ≤ m et si pour tout point x de N, ilexiste :
(1) un K-espace vectoriel E de dimension m ;
(2) un K-sous-espace vectoriel F de E, de dimension n ;
(3) un voisinage ouvert U de 0 dans E ;
(4) un voisinage ouvert V de x dans M ;
(5) un difféomorphisme (resp. analytique) ϕ : U→ V ;
avec (E,F,U,V, ϕ) vérifiant
(a): ϕ(0) = x ;
(b): ϕ(U ∩ F) = V ∩N.
On dit aussi que N est de codimension m−n dans M. SiK = R, on dit aussi sous-variétéréelle ou simplement sous-variété, et si K = C, on dit aussi sous-variété complexe ousous-variété holomorphe.
7.1.52. R
En gardant les mêmes notations que dans la définition précédente, soit N unesous-variété de dimension n de M.

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 95
(1) N hérite d’une structure de variété lisse sur K de dimension n.
(2) Si x ∈ N, alors Vx ∩N est fermé dans Vx. On dit alors que N est localementfermé dans M.
(3) L’inclusion i : N →M est lisse.
(4) Si P est une variété lisse sur K, et si f : P→ N est une application, alors fest lisse si et seulement si la composition i f : P→M est lisse.
(5) Si Q est une sous-variété d’une variété lisse P, et si f : P → M est uneapplication lisse telle que f (Q) ⊆ N, alors la restriction
f |Q : Q→ N
est également lisse.
(6) Pour i = 1, 2, soit Ni une sous-variété d’une variété Mi sur K. Alorsl’ensemble produit N1 × N2 est une sous-variété de la variété produitM1 × M2, et la structure de sous-variété sur N1 × N2 coïncide avec lastructure de variété produit.
7.1.53. E
Si M est une variété lisse sur K, alors tout sous-espace discret non-vide D de M estune sous-variété de dimension 0.
7.1.54. E
Un ouvert non-vide d’une variété lisse sur K en est une sous-variété sur K, decodimension 0.
7.1.55. E
Le sous-ensemble S1× 1 du tore T2 = S1
× S1 en est une sous-variété analytiqueréelle de dimension 1, qui s’identifie au cercle S1.
7.1.56. E
La sphère Sn−1 est une sous-variété analytique réelle de Rn.
7.1.57. E
La sphère Sn−1, vue comme équateur dans la sphère Sn, en est une sous-variétéanalytique réelle.
7.1.58. D
Soit G un groupe de Lie surK. Un sous-groupe de Lie surK de G est un sous-groupe

96 7. GROUPES ET ALGÈBRES DE LIE
H de G qui est en même temps une sous-variété de G sur K. Si K = R, on ditaussi sous-groupe de Lie réel ou simplement sous-groupe de Lie ; siK = C, on dit aussisous-groupe de Lie complexe. Si G est analytique et H est une sous-variété analytique,on dit que c’est un sous-groupe de Lie analytique sur K de G.
7.1.59. E
Si H est un sous-groupe discret d’un groupe de Lie G sur K,alors H est un sous-groupe de Lie de G.
7.1.60. E
Pour m ≥ n, le groupe de Lie analytique Kn sur K est un sous-groupe de Lieanalytique sur K de Km = Kn
×Km−n.
7.1.61. E
Pour m ≥ n, le groupe de Lie analytique réel Tn sur K est un sous-groupe de Lieanalytique de Tm = Tn
× Tm−n.
7.1.62. E
– Le groupe de Lie analytique réel S0 est un sous-groupe de Lie analytique deR× et de S1.
– Le groupe de Lie analytique réel S1 est un sous-groupe de Lie analytique deC× et de S3.
– Le groupe de Lie analytique réel S3 est un sous-groupe de Lie analytique deH×.
7.1.63. P
Soit G un groupe de Lie sur K. Alors, un sous-groupe de Lie de G est fermé dans G.
Sous-groupes fermés et théorème d’Élie Cartan.
Le théorème suivant est la réciproque, dans le cas réel, de la Proposition 7.1.63.Il est donné sans démonstration car celle-ci est très longue et demanderait trop detemps.

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 97
7.1.64. T (Théorème d’Élie Cartan)
Soit G un groupe de Lie réel. Si H est un sous-groupe fermé de G, alors H possède unestructure canonique de groupe de Lie réel. De plus, pour cette structure, l’espace tangentTe H = L H s’identifie de façon canonique avec le sous-espace vectoriel réel
W =WH :=X ∈ L G | ∃εX > 0 tq. expG(tX) ∈ H, ∀t ∈] − εX, εX[
de L G ; l’exponentielle expG applique W dans H ; la restriction
expG |W : W → H
est un difféomorphisme local en 0 ; et expH s’identifie à expG |W . En particulier, on adim(H) = dim(W), et, si X ∈ W, alors expG(tX) ∈ H pour tout t ∈ R. Finalement, si Gest analytique, alors H l’est également.
7.1.65. R
Du théorème, il suit que
L H = X ∈ L G | ∃εX > 0 avec expG(tX) ∈ H, ∀t ∈] − εX, εX[ = X ∈ L G | expG(tX) ∈ H, ∀t ∈ R
7.1.66. E
C× est un groupe de Lie complexe, et S1⊆ C× est un sous-groupe fermé mais
dimR(S1) = 1. Cela montre que le groupe de Lie ambient est complexe, alors unsous-groupe fermé n’est pas nécessairement complexe.
7.1.67. C
Soient H1 et H2 deux sous-groupes de Lie fermés d’un groupe de Lie G sur K. Supposonsque H1 et H2 soient connexes. Alors, on a l’égalité H1 = H2 si et seulement si L H1 = L H2(vus comme K-sous-espaces vectoriels de L G).
Les groupes classiques.
Les groupes classiques sont certains sous-groupes fermés (bien particulier) deGLN(F) (F = R,C,H) pour un N ∈ N. Ainsi, on peut utiliser le théorème 7.1.64pour obtenir de nouveaux exemples de groupes de Lie réels.
7.1.68. E
Le groupe linéaire général positif sur R est le sous-groupe fermé
GL+n (R) := A ∈ GLn(R) | det(A) > 0

98 7. GROUPES ET ALGÈBRES DE LIE
de GLn(R). Pour ce groupe de Lie réel, on a
L GL+n (R) = L GLn(R) =Mn(R),
et sa dimension estdim(GL+n (R)) = n2.
7.1.69. E
Le groupe linéaire spécial sur R est le sous-groupe fermé
SLn(R) := A ∈ GLn(R) | det(A) = 1
de GLn(R). Pour ce groupe de Lie réel, on a
L SLn(R) = A ∈Mn(R) | Tr(A) = 0,
i.e. est constitué des matrices réelles de trace nulle, et sa dimension est
dim(SLn(R)) = n2− 1.
Rappelons quedet(eB) = eTr(B).
En effet, pour A ∈Mn(R), on a
etA∈ SLn(R), ∀t ∈ R⇔ det(etA) = 1, ∀t⇔ Tr(tA) = 0, ∀t⇔ Tr(A) = 0.
Il est clair que la dimension de L SLn(R) est n2− 1.
7.1.70. E
Le groupe linéaire spécial sur C est le sous-groupe fermé
SLn(C) := A ∈ GLn(C) | det(A) = 1
du groupe de Lie réel GLn(C). Pour ce groupe de Lie réel, on a
L SLn(C) = A ∈Mn(C) | Tr(A) = 0,
i.e. est constitué des matrices complexes de trace nulle, et sa dimension est
dim(SLn(C)) = 2n2− 2.
7.1.71. E
Le groupe linéaire spécial sur H est le sous-groupe fermé
SLn(H) := Q ∈ GLn(H) | detD(Q) = 1,
(où detD désigne le déterminant de Dieudonné), du groupe de Lie réel GLn(H), quel’on identifie avec le sous-groupe fermé
SLH2n(C) := GLH2n(C) ∩ SL2n(C)
de SL2n(C). Pour ce groupe de Lie réel, on a
L SLn(H) = Q ∈Mn(H) | Re(Tr(Q)) = 0,

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 99
et sa dimension estdim(SLn(H)) = 4n2
− 1.
7.1.72. E
Le groupe orthogonal est le sous-groupe fermé
O(n) := A ∈ GLn(R) | tA = A−1
de GLn(R). Pour ce groupe de Lie réel, on a
L O(n) = A ∈Mn(R) | tA = −A,
i.e. est constitué des matrices réelles anti-symétriques, et sa dimension est
dim(O(n)) =n(n − 1)
2.
En effet, pour A ∈Mn(R), on a
t(esA) = (esA)−1, ∀s ∈ R⇔ es tA = e−sA, ∀s ∈ R⇔ tA = −A.
7.1.73. E
Le groupe orthogonal spécial est le sous-groupe fermé
SO(n) := O(n) ∩ SLn(R) = A ∈ GLn(R) | tA = A−1 et det(A) = 1
de GLn(R). Pour ce groupe de Lie réel, on a
L SO(n) = L O(n) = A ∈Mn(R) | tA = −A,
i.e. est aussi constitué des matrices réelles anti-symétriques, et sa dimension est
dim(O(n)) =n(n − 1)
2.
7.1.74. E
Le groupe unitaire est le sous-groupe fermé
U(n) := A ∈ GLn(C) | tA = A−1
de GLn(C). Pour ce groupe de Lie réel, on a
L U(n) = A ∈Mn(C) | tA = −A,
i.e. est constitué des matrices complexes anti-hermitiennes, et sa dimension est
dim(U(n)) = n2.
En effet, pour A ∈Mn(C), on a
t(esA) = (esA)−1, ∀s ∈ R⇔ es tA = e−sA, ∀s ∈ R⇔ tA = −A.
100 7. GROUPES ET ALGÈBRES DE LIE
7.1.75. E
Le groupe unitaire spécial est le sous-groupe fermé
SU(n) := U(n) ∩ SLn(C) = A ∈ GLn(C) | tA = A−1 et det(A) = 1
de GLn(C). Pour ce groupe de Lie réel, on a
L SU(n) = A ∈Mn(C) | tA = −A et Tr(A) = 0,
i.e. est constitué des matrices complexes anti-hermitiennes de trace nulle, et sadimension est
dim(SU(n)) = n2− 1.
7.1.76. E
Le groupe symplectique est le sous-groupe fermé
Sp(n) := A ∈ GLn(H) | tA = A−1
de GLn(H). Sa dimension est
dim(Sp(n)) = 2n2 + n.
Les groupes de Lie abéliens connexes.
7.1.77. T
Pour un groupe de Lie réel connexe G, les propriétés suivantes sont équivalentes :
(i): G est commutatif ;
(ii): exp : L G→ G est un homomorphisme de groupes ;
(iii): G L G/Γ comme groupe de Lie, où Γ est un sous-groupe discret de L G ;
(iv): G Tl×Rm comme groupe de Lie, pour des entiers l,m ∈N (uniques).
De plus, G est compact si m = 0.
7.1.78. R
Si Γest un sous-groupe discret de Rn, alors Γ Zl, pour un l ∈ 0, 1, 2, . . . ,n.Encore mieux, il existe une R-base de Rn dont les l premiers éléments constituentune Z-base de Γ. En particulier,
Rn/Γ (Rl×Rn−l)/Zl Tl
×Rm,
où m := n − l.
D.

7.1. THÉORIE CLASSIQUE DES GROUPES DE LIE 101
(i)⇒(ii): Fixons X,Y ∈ L G et considérons
θ : R→ G, t 7→ exp(tX) · exp(tY)
qui est lisse. Comme G est commutatif, µ est un homomorphisme degroupes, ce qui implique que θ l’est aussi. Donc θ est un sous-groupe à1-paramètre de G :
θ : R∆ // R ×R
λX×λY // G × Gµ // G
où∆ : R→ R×R est donnée par∆(t) = (t, t), on l’appelle aussi l’applicationdiagonale.Calculons θ′(0) :
θ′(0) = T(e,e) µ T(0,0)(λX × λY) T0 ∆(ε0)= “addition” (T0 λX × T0 λY) ∆= X + Y.
Ainsi, on a que θ = λX+Y ;
exp(X + Y) = λX+Y(1) = θ(1) = exp(X) · exp(Y).
(ii)⇒(i): On sait que exp est un difféomorphisme local en 0, ainsi exp(L G)est élément d’un voisinage ouvert de e dans G. Mais exp est un homomor-phisme de groupes, donc exp(L G) est un sous-groupe de G. En combinantces deux observations avec le fait que G est connexe, on a que
exp(L G) =⟨exp(L G)
⟩= G.
Ainsi, G est un quotient de L G, donc G, tout comme L G, est abélien.
(ii)⇒(iii): L’énoncé sous-entend que exp est surjective avec ker(exp) = Γdiscret. Comme avant, l’application exp est surjective. De plus, exp estun difféomorphisme local en 0, donc il existe un voisinage ouvert U de 0dans L G tel que la restriction exp |U est injective. Il suit que
ker(exp) ∩U = 0
donc 0 est un point ouvert dans ker(exp). Par un argument de translation,Γ est discret dans L G.
(iii)⇔(iv): C’est un conséquence de la Remarque 7.1.78.
(iv)⇒(i): C’est clair !
7.1.79. C
Un groupe de Lie réel abélien compact et connexe est soit trivial, soit un tore.
D. Cela découle directement du théorème 7.1.77.
Nous reformuler le théorème 7.1.77 pour les groupes de Lie réels compactsconnexes, pour cela, nous donnons d’abord la définition de réseau.

102 7. GROUPES ET ALGÈBRES DE LIE
7.1.80. D
Un réseau dans un espace euclidien E sur K de dimension n, i.e. un K-espacevectoriel isomorphe à Kn, est un sous-groupe discret de rang maximal ; c’est, demanière équivalente, un sous-groupe discret Λ tel que E/λ est de volume fini, ouencore, tel que E/Λ est compact.
7.1.81. C
Pour un groupe de Lie réel compact connexe G, les propriétés suivantes sont équivalentes :
(i): G est commutatif ;
(ii): exp : L G→ G est un homomorphisme de groupes ;
(iii): G L G/Λ comme groupe de Lie, où Λ est un réseau dans L G ;
(iv): G Tn comme groupe de Lie, pour un entier n ∈N.
D. De nouveau, cela découle du théorème 7.1.77.
7.1.82. C
Si G est un groupe de Lie complexe, connexe et abélien, alors, pour m, l ∈N,
G Tl×Rm
comme groupe de Lie réel.
D. Sans surprise, cela découle encore du théorème 7.1.77.
7.2. Algèbres de Lie et lien avec les groupes de Lie
Les algèbres de Lie.
Soit K un corps commutatif de caractéristique différente de 2.
7.2.1. D
Une algèbre de Lie sur K est un K-espace vectoriel g muni d’une application K-bilinéaire, appelée crochet de Lie
[ , ] = [ , ]g : g × g→ g, (X,Y) 7→ [X,Y]

7.2. ALGÈBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE 103
telle que :– antisymétrie : [X,Y] = −[Y,X], pour tous X,Y ∈ g– identité de Jacobi :
[[X,Y],Z] + [[Y,Z],X] + [[Z,X],Y] = 0
pour tous X,Y,Z ∈ g.
7.2.2. D
Un homomorphisme deK-algèbres de Lie est une applicationK-linéaire ϕ : g→ h telleque
ϕ([X,Y]g) = [ϕ(X), ϕ(Y)]h
pour tous X,Y ∈ g.
7.2.3. N
Si P et Q sont des parties d’une K-algèbre de Lie g, on pose
[P,Q] = linK[p, q] | p ∈ P, q ∈ Q.
7.2.4. N
Si X,Y ∈ g, on dit que X et Y commutent si [X,Y] = 0.
7.2.5. N
On dit que g est abélienne si [X,Y] = 0 pour tous X,Y ∈ g, i.e. si [g, g] = 0.
7.2.6. D
UneK-sous-algèbre de Lie h de g est unK-sous-espace vectoriel de g tel que [h, h] ⊆ h.
7.2.7. D
Un idéal de Lie de g est un K-sous-espace α de g tel que
[g, α] ⊆ α.
7.2.8. N
Si α est un idéal de Lie de g, alors le quotient de g par α est la K-algèbre de Liedonnée par le K-espace vectoriel g/α muni du crochet de Lie
[X + α,Y + α]g/α = [X,Y]g + α,
où X,Y ∈ g.
104 7. GROUPES ET ALGÈBRES DE LIE
7.2.9. D
Le centre de g est le sous-ensemble
Z(g) = X ∈ g | [X,Y] = 0,∀Y ∈ g;
c’est un idéal de Lie de g.
7.2.10. D
L’idéal des commutateurs de g est le sous-ensemble [g, g] de g ; c’est un idéal de Liede g.
7.2.11. N
Si φ : g→ h est un homomorphisme de K-algèbres de Lie, on pose
im(φ) = φ(X) | X ∈ g = φ(g)
ker(φ) = X ∈ g | φ(X) = 0 = φ−1(0).im(φ) est une sous-algèbre de Lie de h et ker(φ) est un idéal de Lie de g.
7.2.12. D
Si gii∈I est une collection de K-algèbres de Lie, la somme directe⊕i∈I
gi
est la K-algèbre de Lie donnée par le K-espace vectoriel somme directe, muni ducrochet de Lie
[(Xi)i∈I, (Yi)i∈I]⊕i∈I gi= ([Xi,Yi]gi )i∈I.
7.2.13. R
Si X ∈ g, alors [X,X] = 0.En effet, puisque le crochet de Lie est anti-symétrique, on a que
[X,Y] + [Y,X] = 0, ∀X,Y ∈ g.
Si on choisit X = Y, cela devient 2[X,X] = 0, mais comme la caractéristique ducorps K est différente de 2, on a finalement que
[X,X] = 0
pour tout X ∈ g.
7.2.14. R
Le fait que [X,X] = 0 pour tout X ∈ g implique que [X,Y] = −[Y,X] pour X,Y ∈ gmême si la caractéristique de K est 2.

7.2. ALGÈBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE 105
7.2.15. E
Si V est unK-espace vectoriel, on peut le considérer commeK-algèbre de Lie pourle crochet nul.
7.2.16. E
Si A est une K-algèbre centrale associative (i.e. un K-bimodule). Alors on pose
[ , ]assoc : A × A→ A, (X,Y) 7→ [X,Y] = XY − YX.
Ainsi, Mn(K) est uneK-algèbre de Lie dont l’espace vectoriel sous-jacent est Mn(K)et dont le crochet de Lie est [ , ]assoc. On note
gln(K) = (Mn(K), [ , ]assoc).
7.2.17. E
Si E est un K-espace vectoriel, alors gln(E) = (EndK(E), [ , ]assoc) est une K-algèbrede Lie, i.e.
[ϕ,ψ] = ϕ ψ − ψ ϕ.
De façon analogue, si E est unH-espace vectoriel (à gauche ou à droite), on définitglH(E) comme R-algèbre de Lie.
7.2.18. E
sln(K) = X ∈ gln(K) | Tr(X) = 0
son(K) = X ∈ gln(K) | Tr(X) = 0 et tX = −X
7.2.19. R
[gln(K),gln(K)] ⊆ sln(K)
En effet, tr([X,Y]) = tr(XY−YX) = tr(XY)− tr(YX) = 0. En particulier, sln(K) est unidéal de Lie de gln(K).
7.2.20. E
Si K = R, alorsu(n) = L U(n), su(n) = L SU(n).
7.2.21. E
106 7. GROUPES ET ALGÈBRES DE LIE
Z(⊕
i∈I
gi) =⊕
i∈I
Z(gi)
[⊕
i∈I
gi,⊕
i∈I
gi] =⊕
i∈I
[gi, gi].
7.2.22. E
Si α et β sont des idéaux de Lie de g, alors α + β = linK(α ∪ β), α ∩ β et [α, β] le sontégalement.
7.2.23. E
Si φ : g→ h est un homomorphisme d’algèbres de Lie surjectif et si α est un idéalde Lie de g, l’image φ(α) est un idéal de Lie de h.
7.2.24. S (Théorème d’Ado (1935 et 1947))
Si K est un corps de caractéristique nulle, alors toute K-algèbre de Lie de dimension finieest matricielle, i.e. est isomorphe à une sous-algèbre de Lie de gln(K) pour un n ∈N∗.
L’algèbre de Lie d’un groupe de Lie.
Le but de cette partie (et de ce projet finalement) est de montrer que L G possèdeune structure de K-algèbre de Lie de façon canonique.
7.2.25. R
On rappel que la représentation adjointe d’un groupe de Lie G sur K est un homo-morphisme de groupes de Lie sur K
Ad = AdG : G→ GLK(L G), g 7→ Ad(g) := L cg
avec cg la conjugaison par g. De plus, on a l’égalité suivante
L GLK(L G) = EndK(L G).
Cette remarque nous permet de définir...
7.2.26. D
Soit G un groupe de Lie sur K, et soit L G = Te G son espace tangent vu comme

7.2. ALGÈBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE 107
K-espace vectoriel de dimension finie. On considère l’application
ad = adL g := L Ad : L G→ L GLK(L G) = EndK(L G), X 7→ ad(X)
obtenue en différentiant la représentation adjointe Ad en e ∈ G.On définit alors une structure canonique deK-algèbre sur L G en le munissant
du proguit K-bilinéaire, appelé crochet, donné par
[X,Y] := ad(X) · Y,
pour X,Y ∈ L G.
7.2.27. E
Soit G un groupe de Lie commutatif sur K. Alors, pour tout g ∈ G la conjugaisoncg est l’identité de G, ce qui implique que Ad(g) = L cg = L idG = idL G. Ainsi, lareprésentation adjointe de G est l’homomorphisme trivial, de sorte que
ad = 0 : L G→ EndK(L G).
Finalement, on voit que le crochet de L G est nul, i.e.
[X,Y] = 0,
pour tous X,Y ∈ L G.
Le lemme suivant est nécessaire à la démonstration du théorème 7.2.29, il seradonné sans démonstration car il fait appelle à de l’analyse que nous n’avons pasvu.
7.2.28. L
Pour X,Y ∈ L G, on a
ad(X) =ddt
∣∣∣∣t=0
Ad(exp(tX))
[X,Y] = (ddt
∣∣∣∣t=0
Ad(exp(tX)) · Y)
7.2.29. T
Pour le groupe de Lie de GLn(F) sur Z(F) avec F = R,C,H, on a
[X,Y] = XY − YX,
pour tous X,Y ∈ L GLn(F) =Mn(F).
D. Le théorème 7.1.49 nous dit que l’exponentielle pour GLn(F)est donnée par l’exponentielle matricielle, et on considère comme connu le fait quela représentation adjointe, dans ce cas, est donnée par la conjugaison de matrices.
Ainsi, à partir de la deuxième égalité du lemme précédent, on a
[X,Y] =ddt
∣∣∣∣t=0
(Ad(exp(tX)) · Y) =ddt
∣∣∣∣t=0
(etX· Y · e−tX),

108 7. GROUPES ET ALGÈBRES DE LIE
d’où, par calcul
[X,Y] = (X · etX· Y · e−tX)|t=0 + (etX
· Y · (−X) · e−tX)|t=0 = XY − YX,
ce qui termine la démonstration.
7.2.30. P
Si ϕ : G→ H est un homomorphisme de groupes de Lie sur K, alors Lϕ : L G→ L H estun homomorphisme de K-algèbres, i.e.
Lϕ[X,Y]L G = [Lϕ(X),Lϕ(Y)]L H,
pour tous X,Y ∈ L G.
D. On ne donne pas la preuve ici car elle n’apporte rien d’in-téressant pour la suite, tout en étant assez compliquée, c’est pourquoi nous nousl’épargnons.
7.2.31. R
Pour conclure ce travail, nous allons maintenant énoncé quelques résultats impor-tants, mais qui demandent beaucoup d’analyse pour être démontrés. En effet, enmontrant que [ , ]L G est un crochet de Lie, on doit travailler avec des applicationsexponentielles, les dérivés et cela sort du cadre que nous nous sommes fixés.
7.2.32. T
Pour un groupe de Lie G sur K, le crochet [ , ]L G sur L G fait de ce dernier une K-algèbrede Lie.
7.2.33. C
Soit ϕ : G→ H un homomorphisme de groupes de Lie sur K. Alors l’application tangen-tielle Lϕ : L G → L H est un homomorphisme de K-algèbres de Lie. En particulier, si ϕest un isomorphisme de groupes de Lie surK, alors Lϕ est un isomorphisme deK-algèbresentre L G et L H.
D. Découle du théorème 7.2.32 et de la Proposition 7.2.30.
7.2.34. C
La correspondance définie par L(−) est un foncteur de la catégorie des groupes de Lie surK vers celle des K-algèbres de Lie de dimension finie. Ce foncteur est fidèle (autrement ditinjectif) sur la sous-catégorie pleine des groupes de Lie sur K qui sont connexes.

7.2. ALGÈBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE 109
7.2.35. C
Si H est un sou-groupe de Lie sur K d’un groupe de Lie G sur K, alors L H est uneK-sous-algèbre de Lie de L G, i.e.
[X,Y]L H = [X,Y]L G
si X,Y ∈ L H.
D. L’inclusion inclH : H → G est un homomorphisme de groupesde Lie sur K, par définition de sous-groupe de Lie sur K. Par le Corollaire 7.2.33,son application tangentielle L inclH est un homomorphisme de K-algèbre de Lie.D’où
L inclH = inclL H : L H → L G,ce qui établit le résultat.
7.2.36. C
Si G est un groupe de Lie matriciel, i.e. un sous-groupe de Lie de GLn(F) pour un n ∈N,alors le crochet de Lie sur L G ⊆Mn(F) est donné par le commutateur, qui est
[X,Y] = XY − YX,
pour tous X,Y ∈ L G.
D. Découle du théorème 7.2.32 et du Corollaire 7.2.35
7.2.37. C
Soient H1 et H2 deux sous-groupes de Lie d’un groupe de Lie G surK. Alors, l’intersectionH1 ∩H2 est un sous-groupe de Lie de G sur K, et on a
L(H1 ∩H2) = L H1 ∩ L H2
vus comme K-sous-algèbre de Lie de L G.
D. Cela découle également du Corollaire 7.2.35, mais aussi duCorollaire 7.1.67 du premier chapitre.

CHAPITRE 8
Fibrés vectoriels
Ce chapitre, rédigé par Oliver Prosperi, étudie en détails les propriétés desfibrés vectoriels sur un espace topologique et se conclut par le théorème de Serre–Swan. La notion de fibré vectoriel est l’outil essentiel de la K–théorie topologiquetraitée au chapitre suivant.
8.1. K–familles
Tout au long du chapitre on applique la convention que K est soit le corps Rsoit le corps C
Notions de base.
8.1.1. D
Soient E et X deux espaces topologiques. Soit p : E −→ X une application continuetelle que pour tout x ∈ X :
(1) Ex = p−1(x) est muni d’une structure de K-espace vectoriel de dimensionfinie ;
(2) la topologie sur E induit la topologie naturelle sur chaque Ex
On appelle alors
X: l’espace de base
E: l’espace totale
p: la projection
Ex: la fibre de E en x
(E, p,X): une K-famille sur X
111

112 8. FIBRÉS VECTORIELS
8.1.2. R
(1) On a que ∅ n’est pas un K-espace vectoriel, donc p−1(x) , ∅ ∀x ∈ X etdonc p est surjective.
(2) E =∐x∈X
Ex, la réunion disjointe des espaces Ex. En effet si p(z) = x, alors
z ∈ Ex et z < Ex′ pour tout x′ , x.
8.1.3. E
Soit X la sphère Sn = x ∈ Rn+1 : ‖x‖ = 1. Pour tout point x de Sn on choisit Ex
comme étant l’espace vectoriel orthogonal à x. Alors E =∐x∈X
Ex ⊂ Sn× Rn+1 est
muni de la topologie induite. On pose p : E −→ Sn la projection sur la premièrecomposante : p(z) = x avec z ∈ Ex.Alors (E, p,Sn) est une K-famille.
8.1.4. E
La K-famille produit sur X avec fibre F est (X × F, p,X) ou p : X × F −→ X est laprojection sur le premier facteur, F est un K-espace vectoriel de dimension finie etp−1(x) = x × F F.Ainsi X × F =
∐x∈X
x × F.
8.1.5. N
On note une K-famille avec une lettre grècque (ξ, η, ζ, . . . )ξ = (E, p,X).
Morphismes.
8.1.6. D
Soient ξ = (E, p,X) et ξ′ = (E′, p′,X′) deux K-familles.Un morphisme de ξ vers ξ′ est un couple ( f , g) d’applications continues f : X −→ X′
et g : E −→ E′ telles que :

8.1. K–FAMILLES 113
(1) p′g = f p, donc telles que le diagramme suivant soit commutatif.
Eg
−−−−−→ E′
py yp′
Xf
−−−−−→ X′
(2) L’application induite par g à chaque x ∈ X, gx : Ex −→ E′f (x) définie pargx(z) = g(z), soit K-linéaire.
8.1.7. R
Si ( f , g) : (E, p,X) −→ (E′, p′,X′) et( f ′, g′) : (E′, p′,X′) −→ (E′′, p′′,X′′) sont des morphismes de K-famille, alors lediagramme suivant est commutatif :
Eg
−−−−−→ E′g′
−−−−−→ E′′
py p′
y p′′y
Xf
−−−−−→ X′f ′
−−−−−→ X′′
En effet on a f p = p′g et f ′p′ = p′′g′ et donc p′′g′g = f ′p′g = f ′ f p.
De plus l’application (g′g)x : Ex −→ E′′f ′ f (x) définie par (g′g)x(z) = g′f (x)(g(z)) estK-linéaire. En effet on a
Exgx
−−−−−→ E′f (x)
g′f (x)−−−−−→ E′′f ′ f (x)
et donc
(g′g)x(αy + βz) = g′f (x)(gx(αy + βz))
= αg′f (x)gx(y) + βg′f (x)gx(z)
= α(g′g)x(y) + β(g′g)x(z)
Par conséquent les compositions g′g et f ′ f induisent un morphisme de K-familles ( f ′ f , g′g) : (E, p,X) −→ (E′′, p′′,X′′) qui est défini comme étant la composi-tion ( f ′ f , g′g) = ( f ′, g′) ( f , g) de ( f , g) et ( f ′, g′).
On peut donc construire une catégorie où les objets sont les K-familles et lesflèches sont les morphismes deK-familles. Le morphisme identité est donné par lemorphisme (idX, idE) et l’associativité découle de l’associativité de la compositiond’applications continues.On note cette catégorie K f am
Cas particulier
Si ξ et ξ′ ont la même base X, un morphisme entre ξ et ξ′ est un morphisme( f , g) au sens de la définition (8.1.6) avec f = idX.Le diagramme suivant doit donc être commutatif :

114 8. FIBRÉS VECTORIELS
Eg //
p?
????
??E′
p′~~~~~~
~~~
XOn note g à la place de ( f , g) = (idx, g).
Les K-familles de même base X et les morphismes g forment une sous-catégoriede K f am noté K f am(X).
8.1.8. D
Soit ( f .g) : (E, p,X) −→ (E′, p′,X′) un morphisme de K-familles. ( f , g) est un iso-morphisme s’il existe un morphisme ( f ′, g′) : (E′, p′,X′) −→ (E, p,X) tel que lacomposition ( f ′, g′) ( f , g) = ( f ′ f , g′g) = (idX, idE) et( f , g) ( f ′, g′) = ( f f ′, gg′) = (idX′ , idE′ )
8.1.9. R
Si ( f , g) est un isomorphisme, alors il existe un unique ( f , g′) tel que ( f ′ f , g′g) =(idX, idE) et ( f f ′, gg′) = (idX′ , idE′ ).En effet, si ( f ′′, g′′) est un autre tel morphisme, on obtient
g′′(z′) = g′′(idE′ (z′))
= g′′gg′(z′)
= idE(g′(z′))
= g′(z′), pour tout z′ ∈ E′ et
f ′′(x′) = f ′′(idX′ (x′))
= f ′′ f f ′(x′)
= idX( f ′(x′))
= f ′(x′), pour tout x′ ∈ X′
Donc ( f ′, g′) = ( f ′′, g′′). On appelle (f’,g’) le morphisme inverse de ( f , g) et on lenote ( f , g)−1.
8.1.10. D
Deux K-familles sont isomorphes s’il existe un isomorphisme entre les deux.
8.1.11. E
Reprenons l’exemple (8.1.3) et posons n = 1. On a ξ = (E, p,X), E ⊂ S1×R2. Posons
en plus ξ′ = (S1×R, π,S1) où S1
×R a la topologie produit et π est la projection surle premier facteur. Si on identifie R2 avec le corps des nombres complexes comme

8.1. K–FAMILLES 115
d’habitude, on définitg : E −→ S1
×R par g(x, z) = (x, izx ).
rotation de i/x
z
x
iz/x
Alors g est un morphisme de K-famille sur S1 et en fait, c’est aussi un isomor-phisme.
K-famille triviale.
8.1.12. D
Soit V un K-espace vectoriel de dimension finie. Soit E = X × V, p : E −→ X laprojection sur le premier facteur et Ex = x × V pour tout x ∈ X.Alors (E, p,X) = (X × V, p,X) est appelé K-famille triviale.
On aimerait maintenant décrire les morphismes entre deuxK-familles trivialesde même base X, E = X × V et E′ = X × V′.
Soit donc g : E −→ E′ un morphisme de K-famille, le diagramme suivant
X × Vg //
p
555
5555
5555
555 X × V′
p′
X
est alors commutatif, donc p′g = p et ainsi
p′g(x, v) = p(x, v)
⇔p′(x′, v′) = x
⇔x′ = x
Donc pour tout (x, v) ∈ X × V on a g(x, v) = (x, v′) où v′ = π2 g(x, v) ∈ V′.Ceci implique que pour tout point x de X, g induit une application linéaire
gx : V −→ V′

116 8. FIBRÉS VECTORIELS
définie par gx(v) = π2 g(x, v) (où on identifie x × V avec V et x × V′ avec V′).
Posons g : X −→ L (V,V′) définie par g(x) = gx (où L (V,V) est l’espace desapplications linéaires de V vers V′).
8.1.13. T
L’application g : X −→ L (V,V′) est continue par rapport à la topologie naturelle deL (V,V′). Réciproquement, soit h : X −→ L (V,V′) une application continue, et soith : E −→ E′ l’application qui induit h(x) pour tout x ∈ X. Alors h est un morphisme deK-famille sur X.
D. Soit e1, . . . , en une base de V et f1, . . . , fp une base de V′.Puisque gx est linéaire on peut voir cette application comme une matrice p × n(αi j(x))i j où αi j(x) ∈ K est la i-ème coordonné du vecteur gx(ei j).La fonction αi j : X −→ K qui nous donne le coefficient αi j(x) pour tout x ∈ X estcontinue car c’est la composition des applications continues suivantes :
Xβ j // X × V
g // X × V′γ // V′
pi // K
où β j(x) = (x, e j), γ(x, v′) = v′ et pi est la i-ème projection de V′ sur K.On observe que L (V,V′) peut être identifié à Kp+n et donc
g(x) =
α11α12...αpn
On peut donc affirmer que g est continue si et seulement si chaque αi j est continue.Par ce qui précède on a donc que g est continue.
Réciproquement si h : X −→ L (V,V′) est une application continue, alorsh : E −→ E′ est obtenue par la composition des applications continues suivantes :
X × V δ−−−−−→ X ×L (V,V′) × V′ ε
−−−−−→ X × V′
où δ(x, v) = (x, h(x), v) et ε(x,u, v) = (x,u(v)).Donc h = εδ est continue et on a bien que hx(v) = h(x)(v) pour tout v ∈ V, ainsi hinduit h(x) pour tout x ∈ X.On a que h fait commuter le diagramme
X × Vh //
p""F
FFFF
FFFF
X × V′
p′xxxx
xxxx
x
X
par définition et hx est linéaire, donc h est bien un morphisme de K-famille surX

8.1. K–FAMILLES 117
8.1.14. R
On a bien que ˆg = g car pour tout (x, v) ∈ E
ˆg(x, v) = (x, g(x)(v))= (x, gx(v))= g(x, v)
et que ˇh = h car ˇh(x)(v) = hx(v) = h(x)(v) pour tout v ∈ V et x ∈ X.
Restrictions et K-familles induites.
8.1.15. D
Soit ξ = (E, p,X) une K-famille et soit X′ ⊂ X un sous-espace de X. Le triple(p−1(X′), p|p−1(X′ )
,X′) forme une K-famille ξ′ appelé réstriction de ξ à X′.
On note (p−1(x), p|p−1(X′ ),X′) par ξ|X′ ou simplement ξX′ ou EX′ .
Les fibres deξ|X′ sont les fibres deξ au dessus du sous-espace X′. Si X′′ ⊂ X′ ⊂ Xalors on a bien
(ξ|X′ )|X′′ = ξ|X′′
8.1.16. D
Soit f : Y −→ X une application continue et soit ξ = (E, p,X) une K-famille. LaK-famille induite par f de ξ est une K-famille f ∗(ξ) qui a comme base Y, commeespace total E′ qui est le sous-espace de Y×E de tous les couples (y, z) ∈ Y×E avecf (y) = p(z). La projection π1 est l’application π1(y, z) = y.La fibre au dessus de y est donnée par :
E′y = (π1)−1(y) = (y, z) ∈ E′ : y = y et f (y) = p(z)
= (y, z) ∈ E′ : z ∈ E f (y)
= y × E f (y)
Parfois on indique E′ par f ∗(E).
8.1.17. R

118 8. FIBRÉS VECTORIELS
(1) Le diagramme suivant est commutatif
f ∗(E)π2 //
π1
E
p
Y
f // X
où π2 est la projection sur le deuxième facteur. En effet si (y, z) ∈ f ∗(E)alors π2(y, z) = z et π1(y, z) = y et on sait que f (y) = p(z), donc f p′(y, z) =pπ2(y, z).
(2) Si f = id : X −→ X alors f ∗(ξ) = ξ car E′ =∐x∈X
E′x =∐x∈X
E f (x) =∐x∈X
Ex = E
(3) Si f ′ : Z −→ Y est une autre application continue, alors on a ( f f ′)∗(ξ) =f ′∗( f ∗(ξ)).En effet pour ( f f ′)∗(ξ) on a E′′z = E f f ′(z). De l’autre côté on a d’abordque pour f ∗(ξ), l’espace E′y = E f (y), et ensuite, pour f ′∗(ζ), on a E′′z = E′f ′(z).On pose maintenant ζ = f ∗(ξ) et on obtient E′′z = E′f ′(z) = E f f ′(z).
(4) Si Y ⊂ X et f est l’inclusion, alors on a f ∗(ξ) = ξ|Y . En effet E′y = E f (y) = Ey
8.1.18. P
Si ( f , g) est un morphisme de K-familles entre (E, p,X) et (E′, p′,Y) avec f : Y −→ Xet g : E′ −→ E, alors ( f , g) induit un morphisme de K-familles sur Y, h : E′ −→ f ∗(E)comme le montre de diagramme suivant
E′h //
p′
f ∗(E)π2 //
π1
E
p
Y
id // Yf // X
où πi est la projection sur le i-ème facteur.
D. L’application f : Y −→ X induit la K-famille ( f ∗(E), π1,Y) etsi on pose h(e′) = (p′(e′), g(e′)) pour e′ ∈ E′, alors on a bien (p′(e′), g(e′)) ∈ f ∗(E) carpπ2(p′(e′), g(e′)) = p(g(e′)) = f p′(e′) = fπ1(p′(e′), g(e′)).Ainsi on observe que p′(e′) = π1(p′(e′), g(e′)) = π1(h(e′)). On peut donc affirmer quela partie de gauche du diagramme commute et donc h est un morphisme.
Considérons maintenant deux K-familles sur X (E, pE,X) et (F, p f ,X), un mor-phisme α : E −→ F et une application continue f : Y −→ X.On peut définir un morphisme f ∗(α) : f ∗(E) −→ f ∗(F) par f ∗(α)(y, e) = (y, α(e)) qui

8.2. FIBRÉS VECTORIELS 119
est continu car α est continue. Ainsi le diagramme suivant est commutatif :
f ∗(F)πF
1
πF2 // F
pF
f ∗(E)
f ∗(α);;xxxxxxxx
πE2
//
πE1 ##G
GGGGGGGG E
α
@@
pE
===
====
=
Yf // X
En particulier si Y ⊂ X et f est l’inclusion alors f ∗(α) correspond à la restriction deα à p−1
E (Y) ; en effet, on a f ∗(α) : p−1E (Y) −→ p−1
F (Y) car f ∗(E) = p−1E (Y) et f ∗(F) = p−1
f (Y)par le point (4) de la remarque 8.1.17.
8.1.19. P
Soit f : Y −→ X une application continue. Alors la correspondance E 7→ f ∗(E) etα 7→ f ∗(α) est un foncteur entre la catégorie des K-familles sur X et la catégorie desK-familles sur Y.
D. Il nous reste seulement a voir que si β : F −→ G est unmorphisme vers une famille G alors
f ∗(β α) = f ∗(β) f ∗(α).
Soit (y, e) ∈ f ∗(E). On a alors
f ∗(β) f ∗(α)((y, e)) = f ∗(β)((y, α(e)))= (y, β(α(e)))= (y, β α(e))
= f ∗(β α)((y, e))
8.2. Fibrés Vectoriels
Fibré vectoriel.
8.2.1. D

120 8. FIBRÉS VECTORIELS
Soit ξ = (E, p,X) une K-famille, alors ξ est dit un fibré vectoriel si pour tout pointx ∈ X il existe un voisinage U de x tel que la restriction ξ|U de ξ à U soit isomorpheà une K-famille triviale
Cette dernière condition est verifiée s’il existe un K-espace vectoriel V dedimension finie et un homéomorphismeϕ : U×V −→ p−1(U) tel que le diagrammesuivant soit commutatif :
U × Vϕ //
π1""E
EEEE
EEEE
p−1(U)
p|p−1(U)||yyyyyyyy
U
et si pour tout point y ∈ U l’application ϕy : V −→ Ey soit K-linéaire ; de sorte queϕ soit un isomorphisme de K-familles.
8.2.2. N
On appelle U un domaine de trivialisation en x ∈ X du fibré vectoriel ξ.Un recouvrement Uii∈I de X est dit un recouvrement de trivialisation si chaque Uiest un domaine de trivialisation.
8.2.3. E
Montrons que l’exemple 8.1.3 est un fibré vectoriel.E =
∐x∈X
Ex où Ex est l’espace vectoriel orthogonal à x. E ⊂ Sn×Rn+1.
Pour x ∈ Sn on pose Ux = y ∈ Sn :< y, x >, 0 où < . , . > est le produit scalaireusuel de Rn+1. Posons ϕx : p−1(Ux) −→ Ux × Ex définie par ϕx(u, v) = (u,w) où west la projection orthogonale de v sur Ex. Explicitement on a w = v− < v, x > x.Inversement on a v = w− <g,w>
<x,g> x. Ainsiϕx est un homéomorphisme et de plus, grâceà la linéarité du produit scalaire, on a bien que les applications ϕx
(u,v) et (ϕx)−1(u,w)
sont K-linéaires, et donc E est localement trivial.
Théorèmes de recollement.
8.2.4. T (Recollement de morphismes)
Soient ξ = (E, p,X) et ξ′ = (E′, p′,X) deux fibrés vectoriels avec même base X. Soient deplus
(1) Un recouvrement ouvert Ui de X

8.2. FIBRÉS VECTORIELS 121
(2) Une collection de morphismes αi : ξUi −→ ξ′U ji ∈ I
(où ξUi = (p−1(Ui), p|p−1(Ui ),Ui) et ξ′Ui
= (p′ −1(U j), p′|p′ −1(Uj ),U j)) tels que αi |Ui∩Uj
=
α j |Ui∩Ujpour tout i, j ∈ I
Alors il existe un unique morphisme α : ξ −→ ξ′ tel que α|p−1(Ui)= αi.
D.Unicité :Soit e ∈ E, comme Uii∈I est un recouvrement de X, on a que e ∈ EUi pour uncertain i ∈ I (EUi est l’espace total de ξUi ). Donc α(e) = r′i (αi(e)) où r′i : E′Ui
→ E′ estl’inclusion. Ainsi α est uniquement déterminée grâce à la condition (2) qui nousdit que α ne dépend pas du choix de l’ouvert Ui
ExistenceOn identifie EUi et E′U j
avec des sous-ensembles de E et E′ respectivement.Pour e ∈ E on pose α(e) = αi(e) avec i tel que e appartienne à l’espace EUi . Lacondition (2) nous dit que cette définition est indépendante du choix de l’ouvertUi.
Les sous-ensembles E′Ui= p′ −1(Ui) forment un recouvrement ouvert de l’es-
pace E′. En effet p′ −1(Ui) est un ouvert comme p′ est continue et si e′ ∈ E′ alorsp′(e′) ∈ Ui pour un certain i ∈ I et donc e′ ∈ p′−1(Ui).
On vérifie maintenant que α est continue.Soit A ⊂ E′ un ouvert de E′, alors on peut écrire A =
⋃i∈I
E′Ui∩ A et donc
α−1(A) = α−1(⋃i∈I
E′Ui∩ A)
=⋃i∈I
α−1(E′Ui∩ A)
=⋃i∈I
α−1i (E′Ui
∩ A)
Ainsi α−1(A) =⋃
i∈I α−1i (E′Ui
∩ A) qui est un ouvert de E comme réunion d’ouvertsvu que αi est continue pout tout i ∈ I. Donc α est continue.D’autre part αx : Ex −→ E′x est linéaire car Ex = p−1(x) ⊂ p−1(Ui) = EUi avec x ∈ Ui,donc αx = αi x qui est linéaire.Ainsi α est un morphisme de fibrés vectoriels.
8.2.5. T (Recollement de fibrés)
Soit Uii∈I un recouvrement ouvert d’un espace topologique X. Soient ξi = (Ei, pi,Ui) desfibrés vectoriels sur les espaces Ui. Soient de plus g ji : ξi|Ui∩Uj
−→ ξ j|Ui∩Ujdes isomorphismes
qui satisfont la condition de compatibilité gki|Ui∩Uj∩Uk= g′kjg
′
ji pour tout i, j, k ∈ I oùg′kj = gkj|Ui∩Uj∩Uk
et g′ji = g ji|Ui∩Uj∩Uk.
Alors il existe un fibré vectoriel sur X et des isomorphismes gi : ξi −→ ξ|Uitels que le

122 8. FIBRÉS VECTORIELS
diagramme suivant commute
ξi|Ui∩Uj
g ji //
gi|Ui∩Uj ""FFFFFFFF
ξ j|Ui∩Uj
g j|Ui∩Uj||xxxxxxxx
ξ|Ui∩Uj
D. La preuve est omise, voir Karoubi [36] p.8.
8.2.6. E
Soit Sn la sphère de Rn+1, i.e.
Sn = x = (x1, . . . , xn+1) ∈ Rn+1 : ‖x‖ =√
x21 + · · · + x2
n+1 = 1.
Soit Sn+ (respectivement Sn
−le sous-ensemble de Sn tel que Sn
+ = x ∈ Sn : xn+1 ≥ 0(respectivemet Sn
−= x ∈ Sn : xn+1 ≤ 0. On obtient ainsi que Sn
+ ∩ Sn−= Sn−1.
Soit de plus f : Sn−1−→ GLp(K) une application continue. Selon le théorème
(8.2.5) il existe un fibré vectoriel E f sur Sn associé naturellement a f .E f est obtenu en récollant les fibrés triviaux E1 = Sn
+ × Kp et E2 = Sn
−× Kp avec
l’application de "transition" g21 = f : Sn−1×Kp
−→ Sn−1×Kp définie par g21(z, k) =
(z, f (z)(k)) pour tout z ∈ Sn−1 et k ∈ Kp (g11 et g22 sont l’application identité)
8.2.7. D
Soit ξ = (E, p,X) un fibré vectoriel. On définit sur X une fonction rang rE : X −→Npar r(x) = dimev(Ex) = la dimension comme espace vectoriel de Ex pour tout x ∈ X.Si rE est constante égale à un entier n pour tout x ∈ X, alors on dit que n est le rangde ξ
8.2.8. R
L’application rE est localement constante. En effet pour tout x ∈ X il existe undomaine de trivialisation U ⊂ X et un homéomorphisme ϕ : p−1(U) −→ U × V oùV est un espace vectoriel de dimension finie n. Ainsi, via ϕ, Ex est homéomorphe

8.2. FIBRÉS VECTORIELS 123
à V pour tout x ∈ U et ainsi dimev(Ex) = dimev(V) = n pour tout x ∈ U et doncr(U) = n.
8.2.9. R
Si X est connexe alors rE : X −→N est constante. En effet supposons que rE ne soitpas constante. Soit R = Uii∈I un recouvrement de trivialistion de X.Posons A1 = Ui ∈ R : rE(U) = 1
A2 = Ui ∈ R : r(U) = 2...
On a∞⋃
i=1
∪Ai = X où ∪Ai est la réunion de tous les éléments de Ai. Chaque
∪Ai est un ouvert comme union d’ouverts. De plus si j ∈ N vérifie A j , ∅, alors
∪A j ∩
∞⋃i = 1i , j
∪Ai = ∅, car sinon, si x ∈ ∪A j ∩
∞⋃i = 1i , j
∪Ai alors x ∈ ∪A j et donc
r(x) = j ; mais on a aussi x ∈∞⋃
i = 1i , j
∪Ai donc il existe k , j tel que x ∈ ∪Ak et ainsi
r(x) = k , j. On a donc contradiction.
Donc ∪A j ∩
∞⋃i = 1i , j
∪Ai = ∅ et ainsi X = ∪A j∐ ∞⋃
i = 1i , j
∪Ai et donc X n’est pas
connexe, ce qui nous mène a une contradiction, s’il existe i , j tel que Ai , ∅.
8.2.10. D
Soient X un espace topologiqe et G un groupe topologique. Un G-coclycle sur Xest donné par un recouvrement ouvert Uii∈I de X et des applications continuesg ji : Ui ∩U j −→ G telles que gkj(x) · g ji(x) = gki(x) pour x ∈ Ui ∩U j ∩Uk et i, j, k ∈ I.
On note un G-cocycle par (Ui, g ji)
8.2.11. R– gii(x) = e où e ∈ G est l’élément neutre de G. En effet on a par définition que
gkj(x) · g ji(x) = gki(x) et si on pose j = i on obtient gki(x) · gii(x) = gki(x) et ainsigii(x) = gki(x)−1gki(x) = e.
– g ji(x)−1 = gi j(x) car gi j(x)g ji(x) = gii(x) = e et donc gi j(x) = g ji(x)−1

124 8. FIBRÉS VECTORIELS
8.2.12. D
Deux G-cocycles (Ui, g ji), (Vr, hsr) sur X sont équivalents s’il existe des applica-tions continues gr
i : Ui ∩ Vr −→ G telles que gsj(x) · g ji(x) · gr
i (x)−1 = hsr(x) pourx ∈ Ui ∩U j ∩ Vr ∩ Vs.
On note (Ui, g ji) ∼ (Vr, hsr)
8.2.13. R
Ceci est une relation d’équivalence.symétrie :
Si (Ui, g ji) ∼ (Vr, hsr) alors on a gsj(x)g ji(c)gr
i (x)−1 = hsr(x) et ainsi g ji(x) =gs
j(x)−1hsr(x)gri (x).
On pose gsj(x)−1 = h j
s(x) et gri (x) = hi
r(x)−1 et ainsi g ji(x) = h js(x)−1hsr(x)hi
r(x) et donc(Vr, hsr) ∼ (Ui, g ji).
réflexivité :
On pose g jk(x) = g jk(x). On obtient ainsi
gsj(x)g ji(x)gr
i (x)−1 = gsj(x)g ji(x)gri(x)−1
= gsi(x)gir(x)= gsr(x) pout tout i, j, s, r ∈ I
Ainsi on a bien que (Ui, g ji) ∼ (Ui, g ji).
transitivité :
Supposons (Ui, g ji) ∼ (Vr, hsr) et (Vr, hsr) ∼ (Wu, lvu).On a donc des applications hu
r : Vr ∩Wu −→ G telles que hvs (x)hsr(x)hu
r (x)−1 = lvupour x ∈ Vr ∩ Vs ∩Wv ∩Wu
Ainsi lvu(x) = hvs (x)hsr(x)hu
r (x)−1 = hvs (x)gs
j(x)g ji(x)gri (x)−1(x)hu
r (x)−1.On définit
kvj (x) = hv
s (x)gsj(x)
etku
i (x) = hur (x)gr
i (x)
pour des s et r quelconques oùkv
j : U j ∩Wv −→ G est définie par kvj (x) = hv
s (x)gsj(x) avec s tel que x ∈ Vs.
De même pour kui , i.e.,
kui : Ui ∩Wu −→ G définie par gu
i (x) = hur (x)gr
i (x) avec r tel que x ∈ Vr.Ceci est bien défini car Vk est un recouvrement de X et si x ∈ Vp ∩ Vq ∩ Ui ∩Wu
alors huq (x)gq
i (x) = hup(x)gp
i (x).En effet de (Ui, g ji) ∼ (Vr, hsr) on a que gp
i (x)gii(x)gqi (x)−1 = hpq(x) donc gp
i (x)gqi (x)−1 =

8.2. FIBRÉS VECTORIELS 125
hpq(x) pour x ∈ Ui ∩ Vp ∩ Vq.De même, de (Vr, hsr) ∼ (Wu, lvu) on a que
hup(x)hpq(x)hu
q (x)−1 = luu(x)
⇔hup(x)hpq(x)hu
q (x)−1 = e
⇔hpq(x) = hup(x)−1hu
q (x) pour x ∈ Vp ∩ Vq ∩Wu
On obtient alors hup(x)−1hu
q (x) = gpi (x)gq
i (x)−1 pour tout x ∈ Vp∩Vq∩Ui∩Wu. Et ainsihu
q (x)gqi (x) = hu
p(x)gpi (x) pour tout x ∈ Vp ∩ Vq ∩Ui ∩Wu
Ainsi lvu(x) = gvj (x)g ji(x)gu
i (x) pour tout x ∈ Ui∩U j∩Wv∩Wu et donc (Ui, g ji) ∼(Wu, lvu).
On note H1(X,G) = G-cocycles∼ , l’ensemble des classes d’équivalence desG-cocycles.
8.2.14. T
Soit ΦKn (X) l’ensemble des classes d’isomorphisme de K-fibrés vectoriels sur X de rang n.Alors ΦKn (X) est isomorphe à l’ensemble H1(X,G) où G = GLn(K)
D. On va définir deux applications
h : ΦKn (X) −→ H1(X,G)h′ H1(X,G) −→ ΦKn (X)
.
Soit ξ = (E, p,X) un fibré vectoriel et Uii∈I un recouvrement de trivialistationde X. Soient ϕi : Ui ×Kn
−→ EUi des isomorphismes donnés par la trivialisation etg ji : Ui ∩U j −→ G défini par g ji(x) = (ϕ j)−1
x · (ϕi)x pour tout i, j ∈ I.Ainsi on a que (Ui, g ji) est un G-cocycle sur X. En effet gkj(x)g ji(x) = (ϕk)−1
x · (ϕ j)x ·
(ϕ j)−1x · (ϕi)x = (ϕk)−1
x · (ϕi)x = gki(x) pour tout x ∈ Ui ∩U j ∩Uk.On pose h([ξ]) = [U1, g ji]. La classe h([ξ]) ∈ H1(X,G) ne dépend ni du choix dureprésentant de la classe [ξ] ni du choix du recouvrement de trivialisation et desϕi utilisés pour construire le cocycle. En effet si (Vi, hsr) est un cocycle associé aufibré vectoriel ζ = (E′, p′,X) ∈ [ξ] qui a les trivialisations ψr : Vr × Kn
−→ EVr ,alors on pose gr
i (x) = (ψr)−1x fx (ϕi)x où fx : Ex −→ E′x est donné par l’isomorphisme
f : E −→ E′ entre ζ et ξ.Si x ∈ Ui ∩U j ∩ Vr ∩ Vs alors on a
gsj(x)g ji(x)gr
i (x)−1 = (ψs)−1x fx(ϕ j)x(ϕ j)−1
x (ϕi)x(ϕi)−1x f−1
x (ψr)x
= (ψs)−1x (ψr)x
= hsr(x)
et donc (Ui, g ji) ∼ (Vr, hsr) si ζ est isomorphe à ξ.Ainsi h est bien définie.Réciproquement si (Ui, g ji) est un G-cocycle, soit ξ le fibré vectoriel obtenu enrecollant les fibrés vectoriels triviaux Ei = Ui ×Kn avec les applications g ji : U j ∩
Ui −→ G de la façon suivante.On pose g ji : Ui ∩U j ×Kn
−→ U j ∩Ui ×Kn définie par g ji(x, a) = (x, g ji(x)(a)).

126 8. FIBRÉS VECTORIELS
Pour x ∈ Ui ∩U j ∩Uk on a bien
gkj · g ji(x, a) = gkj(x, g ji(x)(a))= (x, gkj(x)(g ji(x)(a)))= (x, (gkj(x)(g ji(x))(a))= (x, gki(x)(a))= gki(x, a)
et donc la condition de compatibilité réquise par le théorème (8.2.5) est satisfaitepar g ji et on obtient donc un fibré vectoriel ξ = (E, p,X).On pose h′([(Ui, g ji)]) = [ξ].Cette application est bien définie. En effet soit (Vr, hsr) ∈[(Ui, g ji)] un autre représentant de la classe et soit F est le fibré vectoriel obtenu enrecollant les fibrés triviaux Fr = Vr ×Kn.Montrons que E et F sont isomprphes.Soit α : E −→ F le morphisme unique qui fait commuter le diagramme suivantpour tout couple (i, r).
Ei|Ui∩Vr
gri //
gi|Ui∩Vr
Fr|Ui∩Vr
hr|Ui∩Vr
E|Ui∩Vr
α|Ui∩Vr // F|Ui∩Vr
où gri est donnée par l’équivalence entre (Ui, g ji) et (Vr, hsr) :
gri : Ui ∩Vr ×Kn
−→ Ui ∩Vr ×Kn définie par gri (x, a) = (x, gr
i (x)(a)) ; et gi, hr sont lesisomorphismes donnés par le théorème de recollement (8.2.5).α est bien définie car si x ∈ Ui ∩ Vr et x ∈ U j ∩ Vs alors on a
hsr(x) = gsj(x)g ji(x)gr
i (x)−1
⇔hsr(x)gri (x)g ji(x)−1 = gs
j(x)
⇔hs(x)−1hr(x)gri (x)gi(x)−1g j(x) = gs
j(x)
⇔hr(x)gri (x)gi(x)−1 = hs(x)gs
j(x)g j(x)−1
De plus on a que α est un isomorphisme car de la même façon on peut définirβ : F −→ E qui fait commuter le diagramme dans le sens inverse. Ainsi E estisomorphe à F.Enfin h et h′ sont l’une l’inverse de l’autre par définition.
8.2.15. T
Soient (Ui, g ji) et (Ui, h ji) deux cocycles avec le même recouvrement sur l’espace X.Alors les fibrés vectoriels associés E et F respectivement sont isomprphes si et seule-ment s’il existe des applications continues λi : Ui −→ G = GLn(K) telles que h ji(x) =λ j(x)g ji(x)λi(x)−1 pour x ∈ Ui ∩ U j. En particulier le fibré vectoriel E est trivial si etseulement si g ji(x) = λ j(x)−1λi(x) pour un bon choix des λi

8.2. FIBRÉS VECTORIELS 127
D. Soit α : E −→ F un isomorphisme. On a alors le diagrammecommutatif suivant :
E|Ui∩Uj
α|Ui∩Uj //g j|Ui∩Uj
##GGGGGGGG
gi|Ui∩Uj
F|Ui∩Uj
hi|Ui∩Uj
h j|Ui∩Uj
##GGGGGGGG
E j|Ui∩Uj
λ j|Ui∩Uj // F j|Ui∩Uj
Ei|Ui∩Uj
g ji
;;wwwwwwww
λi|Ui∩Uj
// Fi|Ui∩Uj
h ji
;;wwwwwwww
où Ei = Fi = Ui×Kn et où, selon la notation de 8.1.13, λi = hi ·α|Ui· (gi)−1 ; g ji = g jg−1
i
et h ji = h jh−1i .
On obtient donc que h ji(x) = λ j(x)g ji(x)λi(x)−1.En particulier si on choisit h ji(x) = e, l’élément neutre de G, pour tout x ∈ UI ∩U j,alors on a que F est isomorphe au fibré trivial et du diagramme on a gi j(x) =λ j(x)−1λi(x).
Réciproquement si des tel λi existent, alors on se ramène à la dernière partiede la preuve du théorème (8.2.14)
8.2.16. E
Appliquons le théorème précédent à l’exemple 8.2.6 avec les mêmes notations.Soit λ : E1 = Sn
+ × Kp−→ E1 un automorphisme qui induit un automorphisme
µ : E1|Sn−1 = Sn−1×Kp
−→ E1|Sn−1 .On considère les deux G-cocycles (E1,E2, g21 = f ) et (E1,E2, h21 = f · µ), avec µcomme dans le théorème 8.1.13. On montre que E f et E f ·µ sont isomorphes.On applique le théorème précédent en posant λ1 = (λ)−1 : Sn
+ −→ GLp(K) définiepar (λ)−1(x) = λ(x)−1 (comme dans le théorème 8.1.13), et λ2 ≡ id.On observe que pour tout x ∈ Sn−1 on a λ2(x)g21(x)λ1(x)−1 = id f (x)(λ(x)−1)−1 =
f (x)λ(x) = f (x)µ(x) = h21(x). Ainsi les deux fibrés sont isomorphes.
Opérations sur le Fibrés Vectoriels.
On appelle Kev la catégorie des espaces vectoriels de dimension finie sur un
corps K, et Vect(X) celle des fibrés vectoriels sur l’espace topologique X.Si on veut préciser le corps, par exemple R, on note Re
v et VectR(X).

128 8. FIBRÉS VECTORIELS
8.2.17. D
Une catégorie C est additive si pour tout A,B ∈ C l’ensemble HomC (A,B) est munid’une structure de groupe abélien compatible avec la composition d’applications.
8.2.18. P
Soient E,F ∈ Vect(X), alors HomVect(X)(E,F) est un groupe abélien, et donc Vect(X) estune catégorie additive.
D. Somme: Si f , g ∈ HomVect(X)(E,F), on pose pour z ∈ E
( f + g)(z) = f (z) + g(z)
C’est bien défini car on fait la somme dans Fp(z).f + g est un morphisme ; en effet il nous ne reste qu’à vérifier la continuité,et localement on a
Ui × Vf+g //
##FFF
FFFF
FFUi ×W
wwww
wwww
w
Ui
où f + g(x, z) = (x, fx(z) + gx(z)). Ainsi f + g est continue car c’est linéaire.Donc f + g est continue.
Élément neutre: On a l’élément neutre évident
f : E −→ F
z 7−→ 0
Inverses: Si f ∈HomVect(X)(E,F) on pose
− f : E −→ F
z 7−→ − fp(z)(z)
− f est continue et clairement (− f + f ) = 0
8.2.19. L
Soit f : Y −→ X une application continue entre deux espaces topologiques Y. Alors lefoncteur f ∗ de la proposition 8.1.19 induit un foncteur entre la catégorie Vect(X) et Vect(Y).
D. Il faut voir que f ∗(ξ) est localement triviale si ξ est un fibrévectoriel.Soit y ∈ Y et soit U un voisinage de f (x′) ∈ X tel que ξU soit triviale.Soit U′ = f−1(U) et g : U′ −→ U la restriction de f à U′.

8.2. FIBRÉS VECTORIELS 129
On a le diagramme
g∗(ξU)
π1
ξU
// U × V
U′
g // UId // U
Donc ξU U × V et ainsi par définition on a
g∗(ξU) U′ ×U (U × V).
On poseU′ ×U (U × V) −→ U′ × V
(u′,u, v) 7−→ (u′, v)(u′, g(u′), v) ←[ (u′v)
Les deux applications sont évidemment l’une l’inverse de l’autre et ainsi
g∗(ξU) U′ ×U (U × V) U′ × V.
Donc f ∗(ξ) est localement triviale.En particulier si Y est un sous-espace de X alors f ∗(ξ) = ξY est un fibré vectoriel.
8.2.20. D
Un foncteur ϕ : Kev −→ Ke
v est appelé continu si pour tout couple (M,N) d’objetsdans Ke
v, l’application naturelle ϕM,N : Kev(M,N) −→ Ke
v(ϕ(M), ϕ(N)) défine parϕM,N( f ) = ϕ( f ) pour toute application linéaire f de M dans N, est continue (pourla topologie usuelle sur un espace vectoriel de dimension finie).
8.2.21. E
(1) ϕ(M) =M ⊕ · · · ⊕M︸ ︷︷ ︸i fois
(2) ϕ(M) =M ⊗ · · · ⊗M︸ ︷︷ ︸i fois
Pour voir que ces foncteurs sont continus, on choisit une base pour M et N, alorsla matrice de ϕM,N(α) est donnée par une matrice qui dépend de façon continue dela matrice de α, pour α ∈ Ke
v(M,N).
On aimerait maintenant associer à chaque foncteur continu ϕ un foncteurϕ′ = ϕ(X) :Vect(X)−→Vect(X) dans la catégorie des fibrés vectoriels sur X, Vect(X),qui coïncide avec ϕ quand X est réduit à un point. Si ξ = (E, p,X) est un fibrévectoriel sur X, on définit l’ensemble E′ = ϕ′(E) comme l’union disjointe
∐x∈X
ϕ(Ex),
muni de la projection p′ : ϕ′(E) −→ X definie par p′(e′) = x avec x tel que e′ ∈ ϕ(Ex).Pour munir ϕ′(E) d’une topologie pour qu’il devienne un fibré vectoriel, on abesoin du lemme suivant.
8.2.22. L

130 8. FIBRÉS VECTORIELS
Soient ξ = (E, p,X) un fibré vectoriel sur X et U, V des sous-ensembles ouverts de X.Soient de plus β : EU −→ U ×M et γ : EV −→ V ×N des trivialisations de E sur U et Vrespectivement. Posons alors β′ : E′U −→ U×ϕ(M) et γ′ : E′V −→ V×ϕ(N) les bijectionsinduites par fonctorialité sur chaque fibre. Si on donne à E′U et E′V les topologies induitespar ces bijections, alors elles coïncident sur E′U ∩E′V = E′U∩V et de plus E′U∩V est un ouvertaussi bien dans E′U que dans E′V.
D. On a le diagramme commutatif suivant :
E′U∩V
β′|U∩V // (U ∩ V) × ϕ(M)
δ
E′U∩V
γ′|U∩V // (U ∩ V) × ϕ(N)
où δ est donnée par la composition d’application continues
U × Vs // Ke
v(M,N)ϕM,N // Ke
v(ϕ(M), ϕ(N))
avec s = γ|U∩V · β−1|U∩V
. Comme δ est continue, δ est aussi continue (théorème 8.1.13).Pour la même raison δ−1 est aussi continue et ça nous montre que les deux topo-logies sur E′
|U∩Vcoïncident. De plus la projection p′U : E′U −→ U est continue par
rapport à la topologie induite par β′. Ainsi E′U×V = p′−1U (UV) est un ouvert de E′U,
et de même E′U×V est un ouvert de E′V.
On peut maintenant définir une topologie sur E′ = ϕ′(E). Soit Uii∈I un re-couvrement ouvert de X, et soit βi : EUi −→ Ui ×Mi une trivialisation de E sur Uipour chaque i ∈ I. Par fonctorialité, les isomorphismes βi induisent une bijectionβ′i : E′Ui
−→ Ui × ϕ(Mi) et ainsi on peut munir E′Uid’une topologie. On le munit
maintenant de la topologie la plus fine qui rend l’inclusion E′Ui−→ E′ continue.
Ceci est possible car, grâce au lemme précédent, pour tout couple (i, j) ∈ I × I lestopologies sur E′Ui
et E′U jcoïncident sur E′Ui∩U j
, qui est ainsi un ouvert de E′Uiet de
E′U j.
Cette topologie ne dépend ni du choix du recouvrement ni du choix des trivialisa-tions. En effet, si V j j∈J est un autre recouvrement et ψr : EVr −→ Vr × Nr est uneautre trivialisation pour chaque j, alors le même argument qu’avant nous montreque si on a deux topologies possibles sur E′Ui∩Vr
, elles coïncident, et que E′Ui∩Vrest
un ouvert de E′Uiet de E′Vr
. Ainsi les deux topologies sur E′ coïncident. Enfin E′ estlocalement trivial car E′Ui
est homéomrphe à Ui×ϕ(Mi) et donc c’est un fibré trivialpour tout i ∈ I.
Pour définir complètement le foncteur ϕ′, il faut définir
f ′ = ϕ′( f ) : ϕ′(E) −→ ϕ′(F)
dans le cas où f : E −→ F est un morphisme de fibrés vectoriels sur X. On définitf ′ sur chaque fibre par f ′x = ϕ( fx) : ϕ(Ex) −→ ϕ(Fx), qui est linéaire car fx l’est. Pour
8.2. FIBRÉS VECTORIELS 131
montrer que f ′ est continue, on regarde les diagrammes suivants
EUβ
'//
f|U
U ×M
g
FU
γ
'// U ×N
et E′Uβ′ //
f ′|U
U × ϕ(M)
g′
F′U
γ′ // U × ϕ(N)
où β′, γ′ et g′ sont induites par fonctorialité sur chaque fibre par β, γ et g respecti-vement. Alors l’application g′, induite par g′, est la composition des applicationscontinues suivantes.
Ug // Ke
v(M,N)ϕM,N// Ke
v(ϕ(M), ϕ(N))
En accord avec le théorème 8.1.13 l’application g′ est continue et donc f ′ est conti-nue.
8.2.23. GSoit C la catégorie
Rev
op× · · · ×Re
vop︸ ︷︷ ︸
p1
× Cev
op× · · · × Ce
vop︸ ︷︷ ︸
p2
×Rev × · · · ×R
ev︸ ︷︷ ︸
q1
× Cev × · · · × C
ev︸ ︷︷ ︸
q2
et soit C ′ la catégorie
Rev
op× · · · ×Re
vop︸ ︷︷ ︸
p′1
× Cev
op× · · · × Ce
vop︸ ︷︷ ︸
p′2
×Rev × · · · ×R
ev︸ ︷︷ ︸
q′1
× Cev × · · · × C
ev︸ ︷︷ ︸
q′2
où la notation op indique la catégorie opposée (mêmes objets mais flèches inversées). Un foncteurϕ : C −→ C ′ est appelé continu si pour tout couple (R,S) de objets de C , l’application C (R,S) −→C ′(ϕ(R), ϕ(S)) est continue. Alors la même méthode qu’avant nous montre comme on peut définirun foncteur ϕ′ = ϕ(X) : C (X) −→ C ′(X) où
C (X) = VectR(X)op× · · · × VectR(X)op︸ ︷︷ ︸
p1
× VectC(X)op× · · · × VectC(X)op︸ ︷︷ ︸
p2
× VectR(X) × · · · × VectR(X)︸ ︷︷ ︸q1
× VectC(X) × · · · × VectC(X)︸ ︷︷ ︸q2
et
C ′(X) = VectR(X)op× · · · × VectR(X)op︸ ︷︷ ︸
p′1
× VectC(X)op× · · · × VectC(X)op︸ ︷︷ ︸
p′2
× VectR(X) × · · · × VectR(X)︸ ︷︷ ︸q′1
× VectC(X) × · · · × VectC(X)︸ ︷︷ ︸q′2
Si la composition de deux foncteursϕ2 ·ϕ1 est bien définie, alors on a (ϕ2 ·ϕ1)(X) = ϕ2(X)·ϕ1(X).Enfin, si ϕ1 et ϕ2 sont des foncteurs isomorphes, alors ϕ1(X) et ϕ2(X) sont aussi isomorphes.
8.2.24. D

132 8. FIBRÉS VECTORIELS
Soient (E, p,X) et (E′, p′,X) deux fibrés vectoriels sur X. Alors le produit fibré E×X E′
est le sous-ensemble de E × E′ formé par les couples (e, e′) tels que p(e) = p′(e′). Ona que E ×X E′ est une K-famille sur X avec projection q : E ×X E′ −→ X définie parq(e, e′) = p(e) = p′(e′) et avec fibres q−1(x) = Ex × E′x.
8.2.25. E
(1) Le foncteur ϕ : Kev × K
ev −→ Ke
v donné par ϕ(M,N) = M ⊕ N induitϕ(X) : Vect(X) ×Vect(X) −→ Vect(X). Si E et F sont des fibrés vectriels surX, alors le fibré vectoiel ϕ(X)(E,F) est noté E ⊕ F et est appelé la sommedirecte ou somme de Whitney des fibrés vectoriels E et F. E⊕F est isomorpheau produit fibré E ×X F car la fibre au-dessus de x dans E ×X F est donnéepar ϕ(Ex,Fx) = Ex ⊕ Fx ' Ex × Fx qui est la fibre au dessus de x dans leproduit fibré.De plus les identités classiques pour les espaces vectoriels impliquentgrâce à 8.2.23 les isomorphismes (E⊕ F)⊕G E⊕ (F⊕G) et E⊕ F F⊕E.
(2) Soitϕ : Kev×K
ev −→ Ke
v(K) le foncteur défini parϕ(M,N) =M⊗KN. Alorsϕ(X)(E,F) = E ⊗ F est le produit tensoriel de E et F. Encore une fois on a lesisomorphismes (E ⊗ F) ⊗ G E ⊗ (F ⊗ G) et E ⊗ F F ⊗ E.
(3) Si ϕ : Ke ov × K
ev −→ Ke
v est le foncteur (M,N) 7→ Kev(M,N) alors l’objet
ϕ(X)(E,F) = HOM(E,F) est appelé le fibré vectoriel des homomorphismesentre E et F (la fibre au dessu de x ∈ X est Ke
v(Ex,Fx) = HomKev (Ex,Fx)).
8.2.26. R
On a que f ∗(E ⊕ F) f ∗(E) ⊕ f ∗(F), donc que f ∗ est un foncteur additif. En effet, ilest facile de vérifier que l’application
(g, (e, f )) 7→ ((g, e), (g, f ))
est un isomorphisme de fibrés vectoriels.
Sections de Fibrés Vectoriels.
8.2.27. D
Soit ξ = (E, p,X) un fibré vectoriel. Une section de ξ est une application s : X −→ Etelle que p s = IdX. Une section s est dite continue si s est une application continue.

8.2. FIBRÉS VECTORIELS 133
8.2.28. N
On note Γ(X,E) l’ensemble des sections continues du fibré vectoriel (E, p,X). S’iln’y a pas d’ambiguité sur l’espace X on écrit Γ(X,E) = Γ(E).
8.2.29. E
Si s0 : X −→ E est l’application qui à chaque point x ∈ X associe le vecteur 0 del’espace Ex, alors s0 est une section continue. En effet comme s0(x) ∈ Ex, on a bienque p · s0 = IdX. Montrons maintenant que s0 est continue.Soit x0 ∈ X et V un ouvert trivialisant de x0. On a le diagramme commutatif suivant
EVϕ
//
pV AAA
AAAA
V × T
π1||yy
yyyy
yyy
V
où ϕ : EV −→ V × T est une trivialisation locale avec T un espace vectoriel dedimension finie.Définissons σ : V −→ V×T par σ(x) = (x, 0). Clairement σ est continue et de plus ona ϕ · s0|V (x) = ϕ(0x) = (x, 0) = σ(x) pour x ∈ V, et ainsi s0|V = ϕ
−1· σ qui est continue.
Donc s0 est continue puisqu’elle est localement continue.Cette section est appelé section zéro du fibré vectoriel.
8.2.30. E
Supposons que E soit le fibré vectoriel trivial X×M. Alors une section continue de Epeut être écrite comme x 7→ (x, s1(x)), où s1 : X −→M est une application continue.Inversement, toute application continue X −→ M induit une section continue deE.
On va montrer maintenant un théorème très utile qui, en s’appuyant sur lessections, nous donne un outil pour vérifier si une K-famille est triviale. Si c’est lecas, la famille est aussi un fibré vectoriel trivial.
8.2.31. T
Soit ξ = (E, p,X) une K-famille sur l’espace topologique X. Alors ξ est triviale si etseulement s’il existe des sections s1, . . . , sn ∈ Γ(X,E) telles que s1(x), . . . , sn(x) soit unebase de l’espace Ex pour tout x ∈ X
D. Supposons que ξ soit une K-famille triviale.On a le diagramme commutatif suivant
Eϕ
//
p
???
????
X × T
π1||yy
yyyy
yyy
X

134 8. FIBRÉS VECTORIELS
avec Ex = T où T est un espace vectoriel de dimension finie, pout tout x dans X.Soit v1, . . . , vn une base de T et définissons si : X −→ X × T par
si(x) = (x, vi).
Posons de plus
si = ϕ−1 si : X −→ E
avec si(x) = ϕ−1(x, vi).On a que si est continue car si est continue et ϕ est un homéomorphisme.De plus on a que
p si(x) = p ϕ−1(x, vi) = x.
Ainsi chaque si est une section continue.
Comme ϕ−1x : x × T −→ Ex est un isomorphisme et comme (x, v1), . . . , (x, vn)
est une base de x × T, alors son image
s1(x), . . . , sn(x)
par ϕ−1x est une base de Ex.
Réciproquement, supposons que pour tout x ∈ X on a que s1(x), . . . , sn(x) estune base de Ex.Soit s∗1(x), . . . , s∗n(x) la base duale associée.Pour tout z ∈ Ex on a que
z =n∑
i=1
s∗i (x)(z)si(x)
Remarquons que
s∗i (x) : Ex −→ K
est linéaire et comme la dimension de K-espace vectoriel de Ex est finie, on a ques∗i (x) est continue. Soit V un K-espace vectoriel de dimension n et v1, . . . , vn unebase de V. Posons alors ϕ : E −→ X × V définie par
ϕ(z) =
p(z),n∑
i=1
s∗i (p(z))(z)vi
ϕ est bijective car son inverse ϕ−1 : X × V −→ E est donné par
ϕ−1(x, v) =n∑
i=1
v∗i (v)si(x)
8.2. FIBRÉS VECTORIELS 135
Où v∗1, . . . , v∗n est la base duale.
En effet on a bien que
ϕ ϕ−1(x, v) = ϕ(n∑
i=1
v∗i (v)si(x))
=
p(n∑
j=1
v∗j(v)s j(x)),n∑
i=1
s∗i (p(n∑
j=1
v∗j(v)s j(x)))(n∑
j=1
v∗j(v)s j(x))vi
=
x,n∑
i, j=1
v∗j(v) s∗i (x)(s j(x)) vi
=
x,n∑
i, j=1
v∗j(v) δi j vi
=
x,n∑
i=1
v∗i (v)vi
= (x, v)
Et de même
ϕ−1 ϕ(z) = ϕ−1
p(z),n∑
i=1
s∗i (p(z))(z) vi
=
n∑j=1
v∗j(n∑
i=1
s∗i (p(z))(z) vi) si(p(z))
=
n∑i, j=1
s∗i (p(z))(z)v∗j(vi) si(p(z))
=
n∑i=1
s∗i (p(z))(z) si(p(z))
=
n∑i=1
s∗i (x)(z) si(x) avec x = p(z) car z ∈ Ex
= z
Pour montrer que ϕ et ϕ−1 sont continues, il suffit de remarquer que p, si, s∗i etv∗i sont toutes continues.
8.2.32. E
Soit X = S2 = x ∈ R3 : ‖x‖ = 1 et considérons la K-famille E = TS2 qu’on appellefibré tangent, et qui est définie par
TS2 = (x, v) ∈ R3×R3 : x ∈ S2 et 〈x, v〉 = 0
où 〈·, ·〉 est le produit scalaire standard de R3.On muni TS2 de la topologie induite par celle de R3
×R3. Un élément de TS2 peutêtre representé par un couple (x, v) avec x ∈ S2 et v ∈ Tx, où Tx est le plan tangent à

136 8. FIBRÉS VECTORIELS
S2 en x. La projection p : TS2−→ S2 est donnée par p(x, v) = x.
Une section s : S2−→ TS2 n’est rien d’autre qu’un champ de vecteurs tangents à
la sphère. Or, par le théorème du hérisson, un tel champ s’annule en au moins unpoint. Il n’existe donc pas de sections s1, s2 telles que s1(x), s2(x) soit une base deTx pour tout x ∈ S2. Donc TS2 n’est pas triviale.
8.2.33. N
On note A := CK(X), l’anneau des fonctions continues à valeur dans K.
8.2.34. P
Soit (E, p,X) un K-fibré vectoriel, alors
Γ(X,E) = s : X −→ E| s est une section continue
est un A–module.
D. Posons (s1 + s2)(x) = s1(x) + s2(x) et (λs)(x) = λ(x)s(x) pourtout x ∈ X ; s, s1, s2 ∈ Γ(X,E) et λ ∈ A.Ces applications sont bien définies car les opérations sont effectuées dans les fibresEx pour tout x ∈ X. Montrons qu’elles sont continues.Comme dans l’exemple 8.2.29, soit x0 ∈ X et V un ouvert trivialisant contenant x0.On a le diagramme commutatif
EVϕ
//
pV AAA
AAAA
V × T
π1||yy
yyyy
yyy
V
où ϕ : EV −→ V × T est une trivialisation locale avec T un espace vectoriel dedimension finie.
On a Exψx
// T via l’homéomorphisme ϕx pour tout x ∈ V.
On pose
˜s1 + s2 :V −→ V × Tx 7−→ (x, ψxs1(x) + ψxs2(x))
λs :V −→ V × Tx 7−→ (x, ψx(λ(x)s(x)))
Ces deux applications sont clairement continues et on a
ϕ (s1 + s2)|V (x) = ϕ(s1(x) + s2(x))= (x, ψxs1(x) + ψxs2(x))
= ˜s1 + s2(x)

8.2. FIBRÉS VECTORIELS 137
donc (s1 + s2)|V = ϕ−1 ˜s1 + s2 qui est continue. De même (λs)|V = ϕ
−1 λs.
8.2.35. P
Si θn X ×Kn est un fibré vectoriel trivial, alors
Γ(θn) An,
i.e., c’est un A–module libre de type fini.
D. θn est un fibré trivial, et donc, pour le théorème 8.2.31, ilexiste des sections s1, . . . , sn ∈ Γ(θn) telles que s1(x), . . . , sn(x) soit une base dex ×Kn. On montre maintenant que s1, . . . , sn est une partie génératrice de Γ(θn).Pour tout x ∈ X et s ∈ Γ(θn) on a
s(x) = λ1(x)s1(x) + · · · + λn(x)sn(x)
où on interprète les λi comme des applications de X dans K. Ces applicationssont clairement continues puisque s, s1, . . . , sn sont continues. Ainsi tout élémentde Γ(θn) peut être écrit comme combinaison linéaire d’un nombre fini d’élémentsde Γ(θn) à coefficients dans A. Donc Γ(θn) est de type fini.
Définissons maintenant une application
ϕ : Γ(θn) −→ An
s =∑N
i=1 λisi 7−→ (λ1, . . . , λn).
On vérifie facilement que ϕ est A-linéaire est bijective. Donc Γ(θn) est libre.
8.2.36. P
Si (E, p,X) est un fibré vectoriel sur un espace topologique compact1 X , alors Γ(X,E) estun A–module de type fini.
D. La proposition précédente nous dit que Γ(E) not= Γ(X,E) est
un A–module. Montrons que c’est de type fini.
Soit Uii∈I, avec I = 1, . . . ,n, un recouvrement de trivialisation fini. Suppo-sons que la restriction EUi du fibré à Ui soit triviale de rang ni.
Soit ηii∈I une partition de l’unité, qui existe car X est normal. Autrement diton a des applications
ηi : X −→ R, i ∈ I, telles que
• supp(ηi) ⊆ Ui ;
•
n∑i=1
η2i (x) = 1 pour tout x ∈ X.
1Pour X compact on entend X para-compact et Hausdorff. Ainsi X est aussi normal.

138 8. FIBRÉS VECTORIELS
Comme dans la preuve de la proposition 8.2.35, pour chaque Ui on a une partiegénératrice si,1, . . . , si,ni de Γ(EUi ). Ainsi, si si ∈ Γ(EUi ) est la restriction de s ∈ Γ(E)à Ui on peut écrire
si = λi,1si,1 + · · · + λi,ni si,ni .
Définissons maintenant pour i ∈ I et 1 ≤ j ≤ ni
ti, j = ηi · si, j
etαi, j = ηi · λi, j
où si, j et λi, j sont les prolongements par 0 de si, j et λi, j sur tout l’espace X. Onobserve que ti, j et αi, j sont continues.On considère maintenant la somme ∑
i, j
αi, jti, j
où on a bien que αi, j ∈ A et ti, j ∈ Γ(E).On calcule donc, pour x ∈ X∑
i, j
αi, jti, j (x) =∑
i
∑j
αi, j(x)ti, j(x)
=∑
i
∑j
ηi(x)λi, j(x)ηi(x)si, j(x)
=∑
i
η2i (x)
∑j
λi, j(x)si, j(x)
=∑
i
η2i si(x)
=∑
i
η2i s(x)
= s(x)∑
i
η2i
= s(x).
Ainsi ti, ji∈I;1≤ j≤ni génère Γ(E).
8.2.37. L
Soient E et F deux fibrés vectoriels sur X. On a que
Γ(X,E) ⊕ Γ(X,F) Γ(X,E ⊕ F),
un isomprhisme de A–modules.
D. On définit l’application
γ Γ(X,E) ⊕ Γ(X,F) −→ Γ(X,E ⊕ F)
(r, s) 7−→ s ⊕ r

8.2. FIBRÉS VECTORIELS 139
où s ⊕ r(x) = (s(x), r(x)) vu dans Ex ⊕ Fx.Cette application est clairement A-linéaire et bijective, c’est donc un isomorphisme.
8.2.38. P
Soit (E, p,X) un fibré vectoriel sur un espace topologique compact X. Alors Γ(E) est unmodule projectif de type fini.
D. Par la proposition 8.2.36, Γ(E) est un module de type fini,montrons qu’il est projectif. Par le théorème 8.3.3 il existe un fibré F sur X et unentier n ∈N tels que
E ⊕ F θn
où θn est un fibré triviale de rang n. Ainsi
Γ(E ⊕ F) Γ(θn).
Par le lemme 8.2.37 on aΓ(E ⊕ F) Γ(E) ⊕ Γ(F).
D’autre part, par la proposition 8.2.35 on a
Γ(θn) An.
Ainsi on aΓ(E) ⊕ Γ(F) An
et donc Γ(E) est un facteur direct d’un module libre, ainsi il est projectif.
Théorie de l’Homotopie des Fibrés Vectoriels.
Dans cette sous-section on va énoncer des théorèmes qui reprennent le conceptde fibré induit introduit dans la section 8.1. Pour faire cela on admettera d’abordle résultat suivant.
8.2.39. P
Soient E et F deux fibrés vectoriels sur un espace paracompact X. Soient Y un sous-ensemble fermé de X et α : EY −→ FY un isomorphisme de fibrés vectoriels. Alors il existeun voisinage V de Y et un isomorphisme α′ : EV −→ FV tel que α′Y = α
D. La démonstration est omise, voir [36], p.24.
8.2.40. T

140 8. FIBRÉS VECTORIELS
Soit X un espace topologique compact et E un fibré vectoriel sur X× I, où I = [0, 1]. Posonsαt : X −→ X × I
x 7−→ (x, t)
Alors les fibrés E0 := α∗0(E) et E1 = α∗1(E) sont isomorphes.
D. La projection π1 du fibré est donnée par
π1 : X × I −→ X(x, t) 7−→ x.
Posons Et = α∗t(E). On a le diagramme
π∗1(Et)|X×t
Et
E|X×t
X × t
π1 // Xαt // X × t
On a bien que π∗1(Et)|X×t est isomorphe à E|X×t , car αt · π1 |X×t = Id|X×t et donc
π∗1(Et)|X×t = π∗
1(α∗t(E))|X×t = (αt π1)∗(E)|X×t = Id∗X×t(E)|X×t = E|X×tPar la proposition 8.2.39, il existe un voisinage V de X × t dans X × I tel queEV π∗1(Et)|V .Comme X est compact, V doit contenir un voisinage de la forme X×U où U est unvoisinage de t dans I. En effet V peut s’écrire comme
V =⋃j∈J
A j × B j ⊂ X × I.
Avec les A j qui recouvrent X et les B j qui sont des voisinage de t. Comme Xest compact on peut choisir un sous-ensemble fini L de J tel que All∈L soit unrecouvrement fini de X. En posant
U =⋂l∈L
Bl
on obtient que U est encore un voisinage de t et donc⋃l∈L
Al ×⋂l∈L
Bl = X ×U
est un voisinage de X × t ⊂ X × I.Evidemment si EV π∗1(Et)|V alors on a aussi EX×U π∗1(Et)|X×U car l’isomorphismeest défini sur chaque fibre.On rappelle que si f : Y −→ X est une application continue, alors f ∗ est un foncteurcovariant et donc si E et F sont deux fibrés isomorphes, on a que f ∗(E) et f ∗(F) sontisomorphes.On considère l’application continue d’inclusion i : X × u → X × U pour u ∈ U.On applique le foncteur i∗ aux fibrés isomorphes EX×U π∗1(Et)|X×U . On obtient
i∗(EX×U) i∗(π∗1(Et)|X×U ).
DoncEX×u π
∗
1(Et)|X×u

8.2. FIBRÉS VECTORIELS 141
car dans le cas d’une inclusion, le fibré induit coïncide avec la restriction (remarque8.1.17, point 4).On applique maintenant le foncteur α∗u aux deux fibrés isomorphes qu’on vientd’obtenir. On a
α∗u(EX×u) α∗u(π∗1(Et)|X×u )
Et ainsi
Eu Et
car
α∗u(π∗1(Et)|X×u ) = (π1 |X×u αu)∗(Et) = Id∗X(Et) = Et.
Le diagramme suivant illustrera bien la situation
Et //
???
????
? Eu
π∗1(Et)|X×u //
%%LLLLLLLLLLE|X×u
π∗(Et)|X×U
//
%%KKKKKKKKKKE|X×U
X αu
// X × ui
// X ×U
Donc pour tout u ∈ U on a que Eu Et et donc par connexité de I, E0 E1.
8.2.41. T
Soient X un espace compact et f0, f1 : X −→ Y deux applications continues et homotopes.Si E est un fibré sur Y, alors f ∗0 (E) f ∗1 (E)
D. Soit H : X × I −→ Y une homotopie entre f0 et f1.On a
f ∗0 (E) = (H α0)∗(E) = α∗0(H∗(E))
et
f ∗1 (E) = (H α1)∗(E) = α∗1(H∗(E)).
Vu que H∗(E) est un fibré sur X×I le théorème précédent nous permet d’affirmer queα∗0(H∗(E)) et α∗1(H∗(E)) sont isomorphes, et donc f ∗0 (E) et f ∗1 (E) sont isomorphes.
8.2.42. T
Si X est un espace compact contractile, alors tout fibré vectoriel sur X est trivial.
D. Soit
f : X −→ Xx 7−→ x0
l’application constante en x0 ∈ X. Comme X est contractile, f est homotope àl’identité IdX.Soit E un fibré sur X, on a
E = (IdX)∗(E) f ∗(E)

142 8. FIBRÉS VECTORIELS
car on peut appliquer le théorème précedent.D’autre part si on pose
h : X −→ x0
x 7−→ x0
eti : x0 → X
x0 7−→ x0
où i est l’inclusion, alors on af = i h
et ainsif ∗(E) = (i h)∗(E) = h∗(i∗(E)).
Vu que i est l’inclusion, le fibré induit est isomorphe à la restriction (remarque8.1.17, point 4). Ainsi
i∗(E) Ex0.
MaisEx0 = p−1(x0) = x0 × Ex0
Ainsi i∗(E) est trivial, i.e., i∗(E) x0 × Ex0 .On applique le foncteur h∗ aux fibrés isomorphes qu’on vient d’obtenir, et on a
h∗(i∗(E)) h∗(x0 × Ex0 )
⇔h∗(i∗(E)) X × (x0 × Ex0 )
où (x0 × Ex0 ) est clairement un espace vectoriel. En effet
h∗(x0 × Ex0 ) = (x, x0, e) ∈ X × (x0 × Ex0 ) : h(x) = π1(x0, e) = x0 = p(e)= X × (x0 × Ex0 )
h∗(i∗(E)) //
''NNNNNNNNNNNNNh∗(x0 × Ex0 )
i∗(E) //
%%KKKKKKKKKK(x0 × Ex0 )
X
h// x0
Ainsi h∗(i∗(E)) est trivial, et donc E est trivial, vu que E f ∗(E) = h∗(i∗(E))
8.3. Le théorème de Serre–Swan
Propriétés algébriques.

8.3. LE THÉORÈME DE SERRE–SWAN 143
Dans la section précédente on a vu qu’il est possible effectuer des opérationssur les fibrés vectoriels dans le contexte de la catégorie Vect(X). On exploite cettepossibilité pour enoncer quelque propriétes algébriques des fibrés vectoriels quinous amènerons à d’importants théorèmes, dont celui de Serre-Swan (8.3.14).
8.3.1. T
Dans la catégorie Vect(X) des fibrés vectoriels sur X, la somme directe (au sens des catégo-ries) existe et correspond à l’image de ⊕ comme vu précédemment.
D. Soient F, E1 et E2 trois fibrés vectoriels sur l’espace X.Par définition de la somme directe catégorique on a
E1
f1
i1 ##GGG
GGGG
GG
E1 ⊕ E2∃! f // F
E2f2
FF
i2
;;wwwwwwwww
où pour k = 1, 2
ik : Ek −→ E1 ⊕ E2 =∐x∈X
E1x ⊕ E2x ∐x∈X
E1x × E2x
est donné par les homomorhismes d’injection Ekx −→ E1x ⊕ E2x et f1 et f2 sont desmorphismes dans Vect(X).On doit montrer qu’il existe un unique morphisme
f : E1 ⊕ E2 −→ F
tel que le diagramme précédent soit commutatif.
UnicitéSoient
f , g : E1 ⊕ E2 −→ Ftelles que
fk = f ik et fk = g ik.Soit (e1, e2) ∈ E1 ⊕ E2, on a alors
f (e1, e2) = fx(e1, e2)
= fx((e1, 0) + (0, e2))
= fx(e1, 0) + fx(0, e2)
= fx i1(e1) + fx i2(e2)
= f1x (e1) + f2x (e2) (où fkx = fk|Ekx).
De même pour g on obtient
g(e1, e2) = f1x (e1) + f2x (e2).

144 8. FIBRÉS VECTORIELS
Et donc g = f .
ExistencePosons
f : E1 ⊕ E2 −→ F
(e1, e2) 7−→ ( f1)x(e1) + ( f2)x(e2)
où (e1, e2) ∈ E1x ⊕ E2x .Il faut montrer que f est une application continue.Soit U une trivialisation de E1,E2,F
i.e. E1|U U ×M1E2|U U ×M2FU U ×N
Alors(E1 ⊕ E2)|U E1|U ⊕ E2|U U × (M1 ⊕M2).
Si on définit l’application continue
U × (M1 ⊕M2) −→ U ×N
(u,m1,m2) 7−→ (u, g1(m1) + g2(m2))
où gk : Mk −→ N est l’application induite par la trivialisation sur fk |U ; onpeut définir f|U : (E1⊕E2)|U −→ FU grâce aux corréspondances qu’on vientd’enoncer
(E1 ⊕ E2)|U
f|U
'' // U × (M1 ⊕M2) // U ×N // FU
(u,m1,m2) // (u, g1(m1) + g2(m2))
.
Ainsi f|U est continue et donc f est continue.
8.3.2. T
Soit E un fibré vectoriel sur l’espace X, et soit
p : E −→ E
telle que p2 = p (i.e. p est un projecteur). Alors
ker p :=∐x∈X
ker(px)
est un fibré vectoriel.

8.3. LE THÉORÈME DE SERRE–SWAN 145
D. Sans perte de généralité, on peut considérer E = X×M où Mest un espace vectoriel de dimension finie. Soit x0 ∈ X et posons
f : X −→ Homk(M,M)
x 7−→ idM − px − px0 + 2(px px0 ).
On a f (x0) = idM et donc il existe un voisinage V(x0) = V de x0 tel que f (x) est unautomorphisme pour tout x dans X (car Aut(M) est ouvert dans End(M)). Comme
px0 f (x) = f (x) px
on a que le diagramme suivant est commutatif
0 // ker p
// X ×M
f
p // X ×M
f
0 // X × ker px0
// X ×Mp0 // X ×M
où p0 = idX × px0 et f est définie comme au théorème 8.1.13On considère l’application
fV×M∩ker p : V ×M ∩ ker p −→ V × ker px0
(v,m) 7−→ (v, f (v)(m)).
Cette application est bien définie car si (v,m) ∈ (V ×M ∩ ker p) alors selon lediagramme précédent on a
f p(v,m) = p0 f (v,m)
f (v, 0) = p0(v, f (v)(m))
(v, f (v)(0)) = (v, px0 f (v)(m))
(v, 0) = (v, px0 f (v)(m))
⇒ f (v)(m) ∈ ker px0
De plus cette application est continue, bijective et son inverse est aussi continuecar ( fV×M∩ker p)−1 = ( f−1
V×M∩ker p). Ainsi c’est un homéomorphisme, et donc ker p estlocalement triviale.
8.3.3. T
Soit E ∈ Vect(X) un fibré vectoriel qui a pour base un espace topologique compact X, alorsil existe un autre fibré vectoriel E′ ∈ Vect(X) tel que
E ⊕ E′ est trivial.
D. Bien que ce théorème donne un résultat très important, sadémonstration est technique, non constructive et comporte des notions qui n’ontpas été introduites. Elle est donc omise et peut être trouvée dans [36], théorème 6.5page 27.

146 8. FIBRÉS VECTORIELS
Catégories pseudo-abéliennes.
Nous introduisons maintenant de nouveaux concepts de la théorie des catégo-ries utiles aux prochains théorèmes.
8.3.4. D
Une catégorie additive C est dite pseudo-abélienne si pour tout E ∈ C et pout pourtout p : E −→ E tel que p2 = p, le noyau de p existe.
8.3.5. E
(1) Vect(X) est pseudo-abélienne
(2) Si A est un anneau à unité, P(A), la catégorie des modules projectifs detype fini, est pseudo-abélienne.
8.3.6. P
Soient C une catégorie pseudo-abélienne, E ∈ C un objet de C , et
p : E −→ E
telle que p2 = p. AlorsE = ker(p) ⊕ ker(1 − p)
D. Soienti1 : ker(p) −→ E
i2 : ker(1 − p) −→ E
les inclusions canoniques.Considérons les diagrammes commutatifs
ker(p)i1 // E
p // E
ker(p)i1// E
j1aaC
CC
CC
1−p
OO et ker(1 − p)i2 // E
1−p // E
ker(1 − p)i2// E
j2ccG
GG
GG
p
OO
où j1 et j2 sont données par la propriété universelle du noyau car
p (1 − p) = p 1 − p p= p − p= 0
et(1 − p) p = 1 p − p p
= p − p= 0

8.3. LE THÉORÈME DE SERRE–SWAN 147
( j1 et j2 sont uniques par la proprieté universelle).On a alors
i1 j1 i1 = (1 − p) i1= i1 − p i1︸︷︷︸
=0
= i1
Doncj1 i1 = idker(p) .
De même on obtientj2 i2 = idker(1−p)
De plus on a les diagrammes commutatifs
ker(p)i1 // E
p // E
ker(1 − p)
σ 0
OO
i2// E
j1ccGGGGGGGGGG
1−p
OO et ker(1 − p)i2 // E
1−p // E
ker(p)i1
//
τ 0
OO
E
j2ccG
GG
GG
p
OO
où on a par la propriété universelle les flèches σ et τ. Comme on doit avoir
(1 − p) i2︸ ︷︷ ︸=0
= i1 σ
et i1 est injective, on a forcément que
σ = 0.
De même pour τ on aτ = 0.
Ainsij1 i2 = 0 et j2 i1 = 0
et de plus on a quei1 j1 + i2 j2 = ((1 − p) + p = 1.
Par le lemme 18.1 p.29 de Mitchell[44], on a
E ker(p) ⊕ ker(1 − p).
Le théorème suivant nous montre un procédé universel pour associer uneunique catégorie pseudo-abélienne a chaque catégorie additive. Ceci sera très utilepour le théorème de Serre-Swan (8.3.14).
8.3.7. D
Un foncteur F : C −→ D est quasi-surjectif si tout objet de D est un facteur directd’un objet dans l’image de F.

148 8. FIBRÉS VECTORIELS
Autrement dit, pour tout objet G de D il existe un objet G′ dans D et un objet Edans C tels que
G ⊕ G′ = T(E).
8.3.8. T
Soit C une catégorie additive, alors il existe une catégorie pseudo-abélienne C et un foncteuradditif
ϕ : C −→ C
pleinement fidèle (i.e. Hom(A,B) Hom(ϕ(A), ϕ(B))) tel que le diagramme suivant soitcommutatif
Cϕ //
ψ
111
1111
1111
11C
∃!ψ
D
où ψ est un foncteur additif et D est une catégorie pseudo-abélienne.La paire (C , ϕ) est unique à équivalence de catégorie près.De plus ϕ est quasi-surjectif.
D. Construisons C .Les objets de cette catégorie sont les couples (E, p), où E ∈ C et p est un projecteurde E (i.e. p ∈HomC (E,E) telle que p p = p).Un morphisme de (E, p) vers (F, q) est un morphisme f de E dans F tel que
f p = q f = f
comme dans le digaramme commutatif
Ef //
f
>>>
>>>>
p
F
q
E
f // F
avec la composition usuelle ; en effet
Ef //
f
>>>
>>>>
p
F
q
g //
g
>>>
>>>>
G
r
Ef // F
g // G
.
Avec la structure de catégorie additive de C on définit la somme de deux objetsdans C comme
(E, p) ⊕ (F, q) = (E ⊕ F, p ⊕ q).
Vérifions que, avec l’objet qu’on vient de définir, on a effectivement la sommedirecte dans la catégorie C .

8.3. LE THÉORÈME DE SERRE–SWAN 149
On a le diagramme suivant
(E, p)f
i1p &&LLLLLLLLLL
(E ⊕ F, p ⊕ q) ∃!h // (G, r)
(F, q) g
@@
i2q
88rrrrrrrrrr
où (G, r) est un objet quelconque.En effet on a que i1 p est un morphisme car le diagramme
Ei1p //
p
""DDDDDDDD
i1p
E ⊕ F
p⊕q
E
i1p // E ⊕ F
commute. De même i2 q est un morphisme.Dans la catégorie C on a
Ef
i1 ""DDDDDDDD
E ⊕ F∃!h // G
F g
GG
i2
<<zzzzzzzzz
avech i1 = f et h i2 = g
On poseh = r h (p ⊕ q).
Vérifions qu’avec cette définition h fait l’affaire.
(1) h est bien définie (i.e. c’est un morphisme dans C ).Il faut vérifier que le diagramme suivant commute.
E ⊕ Fh //
h
""DDDDDDDD
p⊕q
G
r
E ⊕ Fh // G
•
r h = r r h (p ⊕ q)
= r h (p ⊕ q)
= h

150 8. FIBRÉS VECTORIELS
•
h (p ⊕ q) = r h (p ⊕ q) (p ⊕ q)
= r h ((p p) ⊕ (g g))
= r h (p ⊕ q)
= h
Ainsi h est un morphisme dans la catégorie C .
(2) h a la propriété universelle.On observe d’abord que f est un morphisme et donc f = r f = f p pourle diagramme
Ef //
f
>>>
>>>>
p
G
r
Ef // G
Et donc on a quer f p = f .
De même pour g on a que
r g q = g.
On calculeh i1 p = r h (p ⊕ q) i1 p
= r h i1 p car (p ⊕ q) i1 p = i1 p= r f p= f
Le même raisonnement s’applique pour h i2 q = g
Ainsi h a bien les propriétes voulues.
On vérifie maintenant que HomC ((E, p), (F, q)) est un groupe abélien, ce quinous permettera de dire que C est une catégorie additive.On sait que HomC (E,F) est un groupe abélien.L’élément 0 de HomC (E,F) est aussi dans HomC ((E, p), (F, q)) car il stisfait au dia-gramme
E
p
0
>>>
>>>>
0 // F
q
E
0 // F
.
Pour deux morphismes f et g dans HomC ((E, p), (F, q)), définissons
f + g = f + g dans HomC (E,F)
Alors le diagramme
E
p
f+g
>>>
>>>>f+g // F
q
E
f+g // F

8.3. LE THÉORÈME DE SERRE–SWAN 151
commute carq ( f + g) = q f + q g = f + g
vu que f et g sont des morphismes et C est additive, ce qui nous permet de distri-buer la composition. De même on obtient que le triangle du bas commute.Ainsi f + g est dans HomC ((E, p), (F, q)) qui est donc un sous-groupe abélien deHomC (E,F).
Montrons maintenant que C est pseudo-abélienne.Soit f un projecteur de (E, p) ∈ C (en particulier f est un morphisme de C ). Onveut prouver qu’il existe un noyau de f , ker f .Posons
ker f = (E, p − f )
(1) ker f est bien défini (i.e. c’est un objet).Il faut vérifier que p − f est un projecteur.
(p − f ) (p − f ) = p p − p f − f p + f f= p − f − f + f= p − f
Ainsi p − f est un projecteur.
(2) Montrons que ker f avec la flèche
p − f : (E, p − f ) −→ (E, p)
a la propriété universelle du noyau.
(a) p − f est un morphisme de C car
p (p − f ) = p p − p f = p − f
et d’autre part
(p − f ) (p − f ) = (p − f )
comme vu avant. Donc le diagramme
Ep− f //
p− f
p− f
>>>
>>>>
E
p
E
p− f // E
commute, et ainsi p − f est un morphisme.
(b) Vérifions la propriété universelle
(E, p − f )p− f //
f(p− f )=0
(E, p)
f // (E, p)
(F, q)∃!h
ddg
OO0
;;xxxxxxxx

152 8. FIBRÉS VECTORIELS
où (F, q) est un objet et g un moprhisme dans C tel que f g = 0.Si h : (F, q) −→ (E, p − f ) est un morphisme dans C tel que le dia-gramme commute, alors on a
(p − f ) h = g
et d’autre part, vu que h est un morphisme, on a
h q = (p − f ) h = h
alorsh = (p − f ) h = g.
Posons donc h = g.
– Montrons que
h : (F, q) −→ (E, p − f )
est un morphisme. On a
(p − f ) h = (p − f ) g = p g − f g = g − 0 = g = h
eth q = g q = g = h
Ainsi on a le diagramme commutatif
Fh //
q
h
>>>
>>>>
E
p− f
Fh // E
et donc h est un morphisme.
– Maintenant il nous reste à voir que le triangle de gauche commute.On a
(p − f ) h = (p − f ) g = get ainsi la propriété est verifié.
(3) On s’occupe maintenant du foncteur ϕ : C −→ C .On pose
ϕ(E) = (E, ide)pour tout objet E de C , et
ϕ( f ) = f
pour tout morphisme f de C .Montrons que f est un morphisme dans C pour tout morphisme f de C
Ef−→ F.
On a le diagramme évident
Ef //
f
>>>
>>>>
F
Ef // F

8.3. LE THÉORÈME DE SERRE–SWAN 153
et donc f est un morphisme.
ϕ est pleinement fidèle car en effet on a
HomC (E,F) = HomC ((E, p), (F, q))
et on peut voir cette égalité comme une bijection et un homomorphismede groupes abéliens. De plus ϕ est clairement additif.
Montrons enfin que (C , ϕ) satisfait la propriété universelle souhaitée
Cϕ //
ψ
@@@
@@@@
@ C
∃!ψD
avec ψ additif et D pseudo-abélienne.On pose
ψ(E, p) = ker(ψ(1 − p))
ψ( f ) = ψ( f )|ker(ψ(1−p))
On a
ψ ϕ(E) = ψ(E, idE)
= ker(ψ(1 − idE))= ker(ψ(0)= ker(0ψ(E))= ψ(E).
De plus
ψ ϕ( f ) = ψ( f )|kerψ(1−p) = ψ( f )|ψ(E) = ψ( f ).
Ainsi ψ vérifie la propriété voulue.
L’unicité de (C , ϕ) resulte des propriétés universelles.
De plus si on pose f = 1 − p vue comme un morphisme de ϕ(E) vers ϕ(E), onobtient que le noyau de 1 − p est (E, p), et ainsi pour la proposition 8.3.6 on a que
ϕ(E) = (E, 1 − p) ⊕ (E, p).
Ce qui montre que tout objet (E, p) de C est un facteur direct d’un objet dans l’imagede ϕ, et ainsi ϕ est quasi-surjective.On achève ainsi la démonstration.
8.3.9. D
La catégorie C ici décrite est appelée la catégorie pseudo-abélienne associée à C .

154 8. FIBRÉS VECTORIELS
8.3.10. T
Soient C une catégorie additive, D une catégorie pseudo-abélienne et ψ : C −→ D unfoncteur plienement fidéle tel que tout objet de D soit un facteur direct d’un objet dansl’image de ψ, alors le foncteur ψ décrit dans le théorème précédent est une équivalence decatégorie entre C et D .
D. Un foncteur est une équivalence de catégorie si et seulementsi il est essentiellement surjectif et pleinement fidèle (Mac Lane page 91 [46]).
(1) Montrons d’abord que le foncteur ψ est essentiellemetn surjectif (i.e. toutobjet de D est isomorphe à un objet de l’image de ψ).Soit G un objet de D , par hypothèse il existe un objet E dans C et un objetG′ dans D tels que ψ(E) = G ⊕ G′.Par la propriéte universelle de la somme directe on a le diagramme com-mutatif suivant
Gid
i1
##GGG
GGGG
GG
G ⊕ G′∃!p1 // G
G′
i2;;wwwwwwwww
0
FF
.
Ainsi on a que p1 i1 = idG et p1 i2 = 0, et donc pour la proposition 18.5page 31 du Mitchell [44] on a que
θ = i1 p1 : ψ(E) −→ ψ(E)
est un projecteur et
Gi1−→ G ⊕ G′
est le noyau de q = id−θ qui est aussi un projecteur. Ainsi on obtient queG ker(q).Comme ψ est pleinement fidèle, on peut écrire q comme ψ(p) pour uncertain projecteur p de E. Alors G est isomorphe à ψ(E, 1 − p), en accordavec la définition de ψ donnée dans la preuve du théorème 8.3.8
(2) Pour prouver que ψ est pleinemetn fidèle, considérons deux objets H et H′
de C qui sont des facteurs directs de ϕ(E) et ϕ(E′) respectivement. Alorson a le diagramme
C (ϕ(E), ϕ(E′))
ψϕ(E),ϕ(E′ ) ((QQQQQQQQQQQQ // C (E,E′)
ψE,E′
--C (H,H′)mm
ψH,H′
D(ψ(E), ψ(E′))
..D(ψ(H), ψ(H′))nn
où les flèches horizontales courbes sont induites par la decompositionen somme directe ϕ(E) = H ⊕ H1 et ϕ(E′) = H′ ⊕ H′1 et les morphismes

8.3. LE THÉORÈME DE SERRE–SWAN 155
associés i1, i′1, p1etp′1. Autrement dit si
Hf−→ H′
est un morphisme entre H et H′, alors on pose
ϕ(E)g−→ ϕ(E)
défini par la composition
g = i′1 f p1;
et siϕ(E) k
−→ ϕ(E)′
est un morphisme entre ϕ(E) et ϕ(E′), alors on pose
H l−→ H′
comme étant la composition
l = p′1 k i1.
On observe que
(8) p′1 (i′1 f p1) i1 = (p′1 i′1) f (p1 i1) = idH′ f idH = f
eti′1 (p′1 k ii)p1 = (i′1 p′1) k (i1 p1)
= (1 − p′) k (1 − p)
= k(9)
où la première identité est évidente et pour la deuxième on rappelle que siH = (E, p) alors i1p1 = 1−p comme dans la preuve de la proposition 8.3.6et vu que 1 − p est un projecteur sur ϕ(E) on a le diagramme commutatif(en considérant le même pour ϕ(E′) et i′1 p′1 = 1 − p′)
ϕ(E) k //
k
""FFFFFFFF
i1p1=1−p
ϕ(E′)
i′1p′1=1−p′
ϕ(E)
k// ϕ(E′)
car k est un morphisme.De plus on observe facilement que chacune des flèches horizontalescourbes décrites ci-dessus est un homomprphisme de groupes ; ainsi grâceà 8 et 9 on a que ces flèches sont des isomorphismes. De même pour lesflèches en bas, avec le fait que ψ est quasi-surjectif, on obtient que lesflèches sont des isomorphismes de groupes.
On montre maintenant que le carré de droite commute. Pour fairececi il suffit de montrer que ψ(i1), ψ(i′1), ψ(p1), ψ(p′1) corresopondent auxanalogues de i1, i′1, p1, p′1 pour les flèches en bas.En effet on a , par exemple pour i1,
Ei1 // E ⊕ E′

156 8. FIBRÉS VECTORIELS
⇓ ψ
ψ(E)ψ(i1)// ψ(E ⊕ E′) .
Or ψ(E) ⊕ ψ(E′) ψ(E ⊕ E′), et ainsi l’injection "en bas" corresponds àl’image par ψ de i1.
Enfin vu qu’on sait que le carré de droite du diagramme commute,les flèches courbes sont des isomorphismes et ψE,E′ est un isomorphismepar hypothèse, on a que ψH,H′ est un isomorphisme.
Ainsi ψ est une équivalence de catégorie.
Théorème de Serre–Swan.
8.3.11. T
Soit C =VectT(X) la catégorie des fibrés triviaux sur X. Si X est compact, alors la catégoriepseudo-abélienne associée à C est équivalente à la catégorie Vect(X) des fibrés vectorielssur X.
D. Soit ψ : C −→ D le foncteur d’inclusion (pleinement fidèle).Par le théorème 8.3.3 on a que les hypothèses du théorème 8.3.10 sont vérifiées etdonc on peut conclure que C est équivalente à D .
8.3.12. T
Soit A un anneau à unité. Posons C = L (A) la catégorie des modules libres de type fini.Alors C est équivalente à D =P(A) la catégorie des modules projectifs de type fini.
D. Tout module libre est projectif, et on sait que tout moduleprojectif est facteur direct d’un module libre (pour plus de détails voir Rotmanpages 474-476 [52]). On considère encore une fois le foncteur d’inclusion pleinementfidèle ψ : C −→ D . On obtient ainsi que les hypotèses du théorème 8.3.10 sontvérifiés, ce qui nous permet de conclure.
8.3.13. R D
Soit A = CK(X) l’anneau des fonctions continues à valeur dansK sur un espace X compact.Si E est unK-fibré vectoriel sur X, l’ensemble Γ(X,E) des sections continues de E est munid’une structure de A–module par
λ · s(x) = λ(x) · s(x)

8.3. LE THÉORÈME DE SERRE–SWAN 157
où s ∈ Γ(X,E) et λ ∈ A.Si E est un fibré trivial X ×Kn, on peut identifier Γ(X,E) à An, et si d’autre part on a E etE′ tels que E ⊕ E′ X ×Kn, alors
Γ(X,E) ⊕ Γ(X,E′) Γ(X,E ⊕ E′) An
et ainsi Γ(X,E) est un A–module projectif de type fini (comme facteur direct d’un modulelibre). On définit alors
Γ : Vect(X) −→ P(A)
E 7−→ Γ(X,E)
Ef // F 7−→
Γ(X,E)Γ( f )−→ Γ(X,F)
s 7−→ f s
8.3.14. T (Serre-Swan)
Le foncteur Γ qu’on vient d’introduire est une équivalence de catégorie entre Vect(X) etP(A) où A = CK(X) et X est compact.
D. Le foncteur Γ induit un foncteur
ΓT : VectT −→ L (A)
où VectT(X) est la sous categorie de Vect(X) des fibrés vectoriels triviaux sur Xqu’on a définit au théorème 8.3.11. Pour (8.3.13) on a An ΓT(E) avec E = X ×Kn
et donc ΓT est essentiellement surjective.Si F = X ×Kp et f : E −→ F est un morphisme, alors ΓT( f ) est representé par lesmatrices M(x) = (a ji(x)), pour i = 1, . . . ,n et j = 1, . . . , p et l’application x 7→ M(x)coïncides avec f : X −→ Ke
v(Kn,Kp) selon la notation du théorème 8.1.13. De plus,toujours par le théorème 8.1.13, on a que f est continue, donc ΓT( f ) correspondsde manière unique à une application continue de X vers Ke
v(Kn,Kp). D’autre partsi h : X −→ Ke
v(Kn,Kp) est une application continue alors pour le même théorème
h : E −→ F est un morphisme de E dans F. Par la remarque 8.1.14 on a ˆf = f etˇh = h, ainsi on a une bijection entre les morphismes de fibrés vectoriels de E dansF et les applications continues de X dans Ke
v(Kn,Kp). Donc par l’identifiction faiteentre les morphismes de ΓT(E) dans ΓT(F) et les applications continues de X dansKe
v(Kn,Kp) on a une bijection entre les morphismes de fibrés vectoriels de E dans Fet les morphismes de modules libres de ΓT(E) dans ΓT(F). Ainsi ΓT est pleinementfidèle, et donc ΓT est une équivalence de catégorie.
Posons C = VectT(X) et D =P(A), et soit ψ : C −→ D la composition de ΓT etl’inclusion de L (A) dans P(A). Comme le diagramme
VectT(X) = C //
ψ
C ∼ Vect(X)Γ
vvnnnnnnnnnnnn
P(A) = D

158 8. FIBRÉS VECTORIELS
est commutatif, Γ doit être identifié avec ψ du théorème 8.3.8. De plus tout moduleprojectif est un facteur direct d’un module libre (Rotman page 476 [52]) et ainsitout objet de D est un facteur direct d’un objet dans l’image de ψ, ainsi pour lethéorème 8.3.10 on a que Γ est une équivalence de catégorie.

CHAPITRE 9
K-théorie topologique
Ce chapitre, écrit par David Kohler, prolonge le chapitre précédent sur lesfibrés vectoriels afin d’introduire les premières notions de K–théorie topologiqued’un espace localement compact. La K–théorie est l’un des outils qui seront utiliséspour démontrer le théorème de l’indice au chapitre 19.
9.1. Le premier groupe de K–théorie topologique, K(X)
Le groupe de Grothendieck d’une catégorie.
La construction détaillée dans cette sous-section est très générale, elle permetde définir les K–théories topologiques et algébriques qui sont étroitement liées parle théorème de Serre–Swan.
9.1.1. T D
Pour tout monoïde abélien M, il existe un unique groupe abélien, noté S(M) et appelé lesymétrisé de M, ainsi qu’un morphisme de monoïde abélien s de M dans S(M), satisfaisantla propriété universelle suivante : pour tout homomorphisme de monoïde f : M→ G dansun groupe abélien G, il existe un unique homomorphisme de groupes abéliens f : S(M)→ Gtel que f s = f . Cette propriété universelle est représentée par le diagramme commutatifsuivant :
Ms //
f ???
????
? S(M)
∃! f
G
Remarquons que la propriété universelle nous garantit l’unicité du groupeabélien S(M) à isomorphisme près, il nous suffit donc de prouver son existence.
159

160 9. K-THÉORIE TOPOLOGIQUE
A cette fin, nous donnons deux preuves différentes parmis les plus courantes quel’on puisse trouver dans la littérature.
1 . Posons F (M) =⊕
m∈M Z[m], le groupe libre engendré par leséléments de M et Q =< [m + n] − [m] − [n]|m,n ∈ N > le sous-groupe engendrépar les différences formelles. On définit le groupe abélien S(M) par
S(M) = F (M)Q
munit de l’application
s : M −→ S(M)m 7−→ [[m]] =: [m]
Pour vérifier la propriété universelle requise, on contemple le diagramme commu-tatif suivant :
Mi //
f""E
EEEE
EEEE
F (M) π //
f S(M)
fzzvv
vv
v
G
avec i(m) = [m] et où f nous est donné par la propriété universelle du produit libre(dans la catégorieAb des groupes abéliens) et f est le passage au quotient de f carle sous-groupe Q est contenu dans son noyau. En effet, on a :
f ([m + n] − [m] − [n]) = f ([m + n]) − f ([m]) − f ([n])
= f (i(m + n)) − f (i(m)) − f (i(n))
= f (m + n) − f (m) − f (n)
= f (m) + f (n) − f (m) − f (n)= 0
Les deux propriétés universelles utilisées nous garantissent l’unicité de l’homo-morphisme f .
2 . Considérons la relation suivante sur le monoïde M ×M :
(m,n) ∼ (m′,n′) ⇐⇒ il existe p, q ∈M tels que (m,n) + (p, p) = (m′,n′) + (q, q)
On pose alors
S(M) = M×M∼
et on définit l’application s par :
s : M −→M×M −→ S(M)m 7−→ (m,0) 7−→ [(m, 0)]
Montrons d’abord que S(M) est bel et bien un groupe abélien. Comme M estun monoïde abélien, S(M) l’est de manière évidente, il suffit donc d’exhiber les

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 161
inverses. Notons [(m,n)] =: [m,n], on a
[m,n] + [n,m] = [(m,n) + (n,m)]= [m + n,n +m]= [m + n,m + n]= [0, 0]= 0
Ainsi −[m,n] = [n,m]. Vérifions la propriété universelle demandée ; on a le dia-gramme suivant :
Ms //
f""D
DDDD
DDDD
S(M)
f
G
où f ([m,n]) := f (m) − f (n). Montrons que cette application est bien définie. Si[m,n] = [m′,n′], il existe p, q ∈M tels que (m + p,n + p) = (m′ + q,n′ + q), on a donc,
f ([m,n]) = f (m) − f (n)
= f (m) + f (p) − f (n) − f (p)
= f (m + p) − f (n + p)
= f (m′ + q) − f (n′ + q)
= f (m′) + f (q) − f (n′) − f (q)
= f (m′) − f (n′)
= f ([m′,n′])
L’application f est bien un homomorphisme de groupes car :
f ([m,n] + [m′,n′]) = f ([m +m′,n + n′])
= f (m +m′) − f (n + n′)
= f (m) + f (m′) − f (n) − f (n′)
= f ([m,n]) + f ([m′,n′])
Le diagramme ci-dessus est commutatif car
f s(m) = f (m, 0)
= f (m) − f (0)
= f (m)

162 9. K-THÉORIE TOPOLOGIQUE
et finalement, f est unique, car si g : S(M) → G fait également commuter lediagramme du dessus, on a :
g([m,n]) = g([m, 0] + [0,n])= g([m, 0] − [n, 0])= g([m, 0]) − g([n, 0])= g s(m) − g s(n)
= f (m) − f (n)
= f ([m,n])
Ce qui achève la démonstration.
9.1.2. R
La relation d’équivalence de la deuxième construction peut être remplacée par lasuivante :
(m,n) ∼ (m′,n′) ⇐⇒ il existe p ∈M tel que m + n′ + p = m′ + n + p
En effet, notons ∼1 la relation d’équivalence de la deuxième construction et ∼2 larelation qui vient d’être définie. On a
(m,n) ∼1 (m′,n′) ⇐⇒ il existe p, q ∈M tels que (m,n) + (p, p) = (m′,n′) + (q, q)
⇐⇒ il existe p, q ∈M tels que m + p = m′ + q et n + p = n′ + q
⇐⇒ il existe p, q ∈M tels que m + n′ + p + q = m′ + n + p + q
⇐⇒ (m,n) ∼2 (m′,n′)
9.1.3. P
Soit M un monoïde abélien, tout élément de S(M) peut s’écrire sous la forme s(m) − s(n)pour des éléments m,n dans M.
D. Ceci est clair dans la deuxième construction proposée ci-dessus où l’on a : [m,n] = [m, 0] − [n, 0] = s(m) − s(n) où [m,n] est un élémentarbitraire de S(M).
Montrons cette affirmation dans la première construction également. Remar-quons d’abord que si m ∈M et λ ∈N, alors
[λ[m]] = [[λm]] =: [λm] et [−λ[m]] = −[λm]
Soit x ∈ S(M), x s’écrit sous la forme :
x =
k∑i=1
λi[mi]

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 163
sans perte de généralité, on peut supposer que λi ≥ 0 pour tout 0 < i ≤ l et λi < 0pour tout l < i ≤ k. Ainsi, en posant µi = |λi| on a :
x =
l∑i=1
µi[mi]
− k∑
i=l+1
µi[mi]
=
l∑i=1
[µimi]
− k∑
i=l+1
[µimi]
=
[[
l∑i=1
µimi︸ ︷︷ ︸m
]]−
[[
k∑i=l+1
µimi︸ ︷︷ ︸n
]]
= s(m) − s(n)
9.1.4. P
Si A est un groupe abélien, alors S(A) A.
D. Montrons que le morphisme de monoïdes abéliens
s : A −→ S(A)a 7−→ [a]
est un isomorphisme de groupes abéliens. Ce morphisme est déjà un homomor-phisme de groupes abéliens car la catégorie des groupes abéliens est une sous-catégorie pleine de la catégorie des monoïdes abéliens. Il suffit donc de montrerque s est bijectif. Le noyau de s est trivial car si s(a) = [a] = 0, il existe un élémentb ∈ A tel que a + b = 0 + b. Mais comme A est un groupe, b est simplifiable, ainsia = 0. La surjectivité de s découle de l’identité [−b] = −[b]. En effet,
[b] + [−b] = [b − b]= [0]= 0
Ainsi, puisque tout élément de S(A) s’écrit sous la forme [a] − [b], on a
s(a − b) = s(a) + s(−b)
= [a] + [−b]
= [a] − [b]
9.1.5. T
La symétrisation est un foncteur covariant additif de la catégorie des monoïdes abéliensdans la catégorie des groupes abéliens. La proposition 9.1.4 implique de plus que ce foncteurest l’identité sur la sous-catégorie pleine des groupes abéliens.

164 9. K-THÉORIE TOPOLOGIQUE
D. Soit f : M→ N un morphisme de monoïdes abéliens, on a lediagramme commutatif suivant :
Mf //
s
N
s
S(M)S( f ) //___ S(N)
où S( f ) est induit par l’homomorphisme de monoïdes abéliens s f . On obtientalors que S(idM) = idS(M) et S(g f ) = S(g) S( f ) où g : N → P est un autremorphisme de monoïdes abéliens.
Montrons finalement que S est additif. Soit M et N deux monoïdes abéliens ;nous allons exhiber un isomorphisme entre S(M ×N) et S(M) × S(N)1. Soit
ϕ : S(M ×N) −→ S(M) × S(N)
[(m,n), (m′,n′)] 7−→ ([m,m′], [n,n′])
L’application ϕ est bien définie car [(m,n), (m′,n′)] = [(p, q), (p′, q′)] si et seulements’il existe (r, s) ∈ M ×N tel que (m,n) + (p′, q′) + (r, s) = (m′,n′) + (p, q) + (r, s), c’est-à-dire, si et seulement si m + p′ + r = m′ + p + r et n + q′ + s = n′ + q + s et donc siet seulement si [m,m′] = [p, p′] et [n,n′] = [q, q′]. Cette application est linéaire, eneffet
ϕ([(m,n), (m′,n′)] + [(p, q), (p′, q′)]
)= ϕ
([(m,n) + (p, q), (m′,n′) + (p′, q′)]
)= ϕ
([(m + p,n + q), (m′ + p′,n′ + q′)]
)=
([m + p,m′ + p′], [n + q,n′ + q′]
)=
([m,m′] + [p, p′], [n,n′] + [q, q′]
)= ([m,m′], [n,n′]) +
([p, p′], [q, q′]
)= ϕ ([(m,n), (m′,n′)]) + ϕ
([(p, q), (p′, q′)]
)La surjectivité de ϕ est évidente, il ne reste plus qu’à montrer son injectivité. Soit[(m,n), (m′,n′)] un élément dans le noyau de ϕ. On a donc [m,m′] = 0 = [n,n′],ainsi il existe p dans M et q dans N tels que
m + p = m′ + p
n + q = n′ + q
Autrement dit, (m,n) + (p, q) = (m′,n′) + (p, q) et donc [(m,n), (m′,n′)] = 0.
9.1.6. P
Le symétrisé du monoïde abélien N des entiers positifs est isomorphe au groupe abélien Zdes entiers.
D. L’application
ϕ : S(N) −→ Z
[n] − [m] 7−→ n −m
1Ce qui prouve que le foncteur est additif puisque A × B A ⊕ B dans toute catégorie additive.

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 165
est un isomorphisme de groupes abéliens. En effet, cette application est bien définiecar si [n]− [m] = [n′]− [m′], il existe un entier positif p tel que n+m′+p = n′+m+pet donc n −m = n′ −m′. Cette application est linéaire :
ϕ (([n] − [m]) + ([n′] − [m′])) = ϕ (([n] + [n′]) − ([m] − [m′]))
= ϕ([n + n′] − [m −m′])
= n + n′ − (m +m′)
= (n −m) + (n′ −m′)
= ϕ([n] − [m]) + ϕ([n′] − [m′])
La surjectivité de ϕ est évidente, il suffit de montrer son injectivité. Si n − m = 0,alors n = m et donc [n] − [m] = 0, ce qui achève la démonstration.
Il est intéressant de remarquer que l’application s : N→ S(N) est injective ici,ce qui n’est pas toujours le cas dans une symétrisation.
Nous nous intéressons maintenant à une catégorie additive C pour laquellenous définissons le groupe abélien K(C ). On verra dans la sous-section suivantecomment utiliser cela pour définir le groupe abélien K(X) d’un espace topologiquecompact.
9.1.7. P D
Soit C une catégorie additive, on note Φ(C ) l’ensemble des classes d’isomorphies d’objetsde C , alors la somme directe muni cet ensemble d’une structure de monoïde abélien, oùl’élément neutre est la classe de l’objet nul. De plus, Φ est un foncteur covariant de lacatégorie des catégories additives2 vers la catégorie des monoïdes abéliens.
D. Nous recommandons le lecteur à n’importe quel bon ou-vrage traitant des catégories. A titre d’exemple, nous citons [44] où les catégoriesadditives sont traitées dans la sectipn 18, dès la page 28.
9.1.8. D
Soit C une catégorie additive, on note K(C ) = S(Φ(C )) le groupe abélien obtenu enappliquant la construction de grothendieck au monoïde des classes d’isomorphiesde C . On appelle K(C ) le groupe de Grothendieck de la catégorie C . On noterasimplement [X] au lieu de [[X]] les éléments de K(C ) pour un objet X de C .
9.1.9. P
Le groupe de Grothendieck d’une catégorie défini un foncteur covariant noté K de lacatégorie des catégories additives vers la catégoire des groupes abéliens.
D. Le foncteur K est la composition des foncteurs S etΦ qui sonttous deux covariants.
2les morphismes de cette catégorie sont les foncteurs additifs
166 9. K-THÉORIE TOPOLOGIQUE
9.1.10. P
Soit C une catégorie additive, tout élément de K(C ) peut s’écrire sous la forme [E] − [F]pour des éléments E et F de C , de plus, on a
[E] − [F] = [E′] − [F′] ⇐⇒ il existe G ∈ C tel que E ⊕ F′ ⊕ G E′ ⊕ F ⊕ G
D. Ceci n’est qu’une reformulation de la proposition 9.1.3 enutilisant la relation d’équivalence mentionnée dans la remarque 9.1.2.
9.1.11. C
On a de plus :
[E] = [F] ∈ K(X) ⇐⇒ il existe G ∈ C tel que E ⊕ G F ⊕ G
9.1.12. E (K–théorie algébrique)
Soit A un anneau à unité, on note P(A) la catégorie des A–modules projectifs àgauche de type fini. P(A) est une catégorie additive, et le groupe abélien K0(A) =K(P(A)) est appelé le premier groupe de K–théorie algébrique de A
Définition de K(X).
Soit X un espace topologique compact non vide. Rappelons qu’un espacetopologique est compact s’il est de Hausdorff et s’il est paracompact3.
9.1.13. D
On appelle premier groupe de K–théorie topologique de X le groupe abélien K(X) =K(Vect(X)). Comme Vect est un foncteur contravariant de la catégorie des espacestopologiques compacts dans la catégorie des catégories additives, K est un foncteurcontravariant de la catégorie des espaces topologiques compacts dans la catégoriedes groupes abéliens.
9.1.14. R
Puisque K est un foncteur, il est clair que deux espaces compacts homéomorphesont des groupes de K-théorie isomorphes.
3Un espace est paracompact s’il possède la propriété que tout recouvrement ouvert de cet espaceadmet un sous-recouvrement fini.

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 167
9.1.15. R
Le théorème de Serre-Swan 8.3.14, nous dit que les catégories Vect(X) des classesd’isomorphies de fibrés vectoriels sur X et P(C(X)) des modules projectifs de typefini sur l’anneau des fonctions continues de X dans le corps K sont équivalentes.Ainsi :
K(X) K0(C(X))
La K–théorie topologique est donc un cas particulier de la K–théorie algébrique.Remarquons cependant que la K–théorie algébrique est covariante et non contra-variante comme sa version topologique. En effet, le foncteur P est covariant : Soitϕ : A→ B un homomorphisme d’anneaux à unité, on a
P(ϕ) : P(A) −→P(B)P 7−→ P ⊗A B
9.1.16. P
Tout élément de K(X) peut s’écrire sous la forme [E] − [θn] où θn est le fibré trivial sur Xde dimension n. De plus, on a :
[E] − [θn] = [F] − [θm] ⇐⇒ il existe p ∈N tel que E ⊕ θm+p F ⊕ θn+p
où E et F sont des fibrés vectoriels sur X.
D. Par 9.1.10, tout élément de K(X) s’écrit sous la forme [E]−[F].Par le théorème 8.3.3, il existe un fibré F′ et un entier positif n tels que F ⊕ F′ θn.Ainsi,
[E] − [F] = [E] + [F′] − [F] − [F′]
= [E ⊕ F′] − [θn]
Ce qui prouve la première assertion.Supposons maintenant que [E] − [θn] = [F] − [θp], alors par la proposition
9.1.10, il existe un fibré G tel que E ⊕ θp ⊕ G F ⊕ θn ⊕ G. Par le théorème 8.3.3, ilexiste un fibré G′ tel que G ⊕ G′ θq, ainsi
E ⊕ θp ⊕ G ⊕ G′ F ⊕ θn ⊕ G ⊕ G′
i.e.E ⊕ θp ⊕ θq F ⊕ θnθq
i.e.E ⊕ θp+q F ⊕ θn+q
La réciproque est évidente, si E θp⊕θq Fθn⊕θq, alors [E]− [θn] = [F]− [θp].
9.1.17. C
Soit E et F deux fibrés vectoriels sur X, alors
[E] = [F] ⇐⇒ il existe n ∈N tel que E ⊕ θn F ⊕ θn

168 9. K-THÉORIE TOPOLOGIQUE
9.1.18. P
Soit x0 un espace topologique à un seul point, alors son K–groupe, K(x0) est isomorpheà Z.
D. Un fibré vectoriel sur un point est nécessairement trivial,ainsi les classes d’isomorphies de fibrés sont complétement caractérisées par leurdimension, i.e. Vect(x0) est isomorphe à N et on a vu à la proposition 9.1.6 queS(N) Z.
9.1.19. D
Soit P un espace topologique à un point et π : X → P la projection évidente. Enappliquant le foncteur K on obtient un homomorphisme de groupes
K(π) : Z K(P) −→ K(X)
et on note K(X) = coker(K(π)) que l’on appelle la K–théorie réduite de X.
9.1.20. P
On a la suite exacte courte
0 −→ Z −→ K(X) −→ K(X) −→ 0
et tout choix de point de base x0 dans X définit une rétraction canonique qui scinde la suite,on obtient alors
K(X) Z ⊕ K(X)
D. Soit x0 un point de base de X, sans perte de généralité onpeut supposer P = xo. L’inclusion i de P dans X induit un homomorphisme
K(X)K(i)−→ K(P) Z
et on a
K(i) K(π) = K(i π)= K(idP)= idK(P)
= idZ
ainsi, K(π) est une section, ce qui scinde la suite exacte.
La K-théorie réduite va nous permettre de définir la K-théorie d’un espacetopologique localement compact. Pour cela, nous rappelons la compactificationd’Alexandroff.
9.1.21. D
Soit W un espace topologique de Hausdorff, on peut étendre W d’un point de

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 169
manière à ce que ce nouvel espace soit paracompact4 et que W en soit un sous-espace. Cette construction est appelée compactification d’Alexandroff ou one pointcompactification en anglais et se fait de la manière suivante : On définit W+ commeétant la réunion de W et d’un nouveau point ∞ que l’on munit de la topologiesuivante : on prend la topologie de W que l’on augmente des voisinages du point∞ où l’on définit un voisinage de ∞ comme étant un sous-ensemble V de W+
contenant ∞ tel que W\(V\∞) = W+\V soit compact dans W. Remarquons que
pour tout ouvert V de W+, W+\V est un ouvert de W, car dans le cas où V est un
voisinage de ∞, V\∞ est le complémentaire d’un sous-espace compact qui estfermé dans W car ce dernier est de Hausdorff.
Mentionnons les propriétés suivantes de la compactification d’Alexandroff.
9.1.22. P
Le compactifié W+ est paracompact et contient W comme sous-espace topologique.
D. W est clairement un sous-espace de W+ puisque ce dernier enest une extension. Il ne reste qu’à montrer que W+ est paracompact. Soit Vii∈I ⊆
W+ un recouvrement ouvert de W+. Par hypothèse, il existe un ouvert Vi0 durecouvrement contenant le point ∞. Posons alors
Ui = Vi\∞ ∀ i ∈ I\i0
Par définition de la topologie de W+, les Ui sont tous ouverts dans W. De plus,comme W+
\Vi0 est compact dans W et que la famille Uii∈I\i0 est un recou-vrement ouvert de ce compact, on peut en extraire un sous-recouvrement finiUi
ni=1 ⊆ Uii∈I\i0. La famiile Vi0 ∪ Vi
ni=1 est ainsi un sous-recouvrement fini du
recouvrement initial.
9.1.23. P
Le compactifié W+ est un espace de Hausdorff si et seulement si W est localement compact5.
D.⇒ Soit x ∈W, par hypothèse, il existe deux ouverts disjoints V1 et V2 de W+
tels que V1 soit un voisinage de x et V2 un voisinage du point∞. De plus,W+\V2 est compact et V1 est inclus dans ce compact. Le voisinage V1 est
donc le voisinage cherché qui prouve que W est localement compact.⇐ Comme W est supposé de Hausdorff, il suffit de montrer que l’on peut
séparer le point ∞ d’un point arbitraire x de W. Par hypothèse, il existeun voisinage ouvert V de x dans W et un compact K tel que V soit inclusdans K. Par définition de la topologie du compactifié, V est un voisinageouvert de x dans W+ et en posant U =W+
\K, on vérifie bien que U est unvoisinage de∞ disjoint de V.
4Un espace est paracompact s’il possède la propriété que tout recouvrement ouvert de cet espaceadmet un sous-recouvrement fini.
5Un espace est localement compact s’il est de Hausdorff et si tout point admet un voisinagecontenu dans une partie compacte. Clairement, tout espace compact est localement compact.

170 9. K-THÉORIE TOPOLOGIQUE
9.1.24. D
Soit Y un espace topologique localement compact, posons
K(Y) = K(Y+)
que l’on appelle également le premier groupe de K–théorie de Y.
Propriétés de K(X).
9.1.25. D
Posons Φ(X) = Φ(Vect(X)) le monoïde abélien des classes d’isomorphies de fibrésvectoriels sur X et notons
γ : Φ(X) s−→ K(X)
β−→ K(X)
le morphisme de monoïde abéliens de Φ(X) dans K(X).
9.1.26. P
Le morphisme γ : Φ(X)→ K(X) est surjectif, de plus
γ(E) = γ(F) ⇐⇒ il existe n,m ∈N tel que E ⊕ θn F ⊕ θm
où E est la classe d’isomorphie du fibré vectoriel F.
D. Par définition de K(X), la classe d’un fibré trivial θp est nulle.En effet, K(X) = coker(K(π)) où
K(π) : Z −→ K(X)n 7−→ [θm] − [θq] où n = m − q, m, q ∈N
Si q = 0, on a [θm]− [θ0] = [θm] car [θ0] est l’élément neutre de Φ(X). On peut doncreformuler K(π) de la manière suivante :
K(π)(n) =
[θn] si n ≥ 0−[θn] si n ≤ 0
Ainsi, tout fibré trivial est dans l’image de K(π), et donc β([θn]) = 0 pour tout entierpositif n ∈N.

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 171
Comme l’homomorphisme β : K(X)→ K(X) est surjectif, tout élément de K(X)s’écrit comme β([E] − [θn]), or
β([E] − [θn]) = β([E]) − β([θn])= β([E])
= β s(E)
= γ(E)
ce qui prouve la surjectivité de γ. Montrons encore la deuxième assertion : Soit Eet F deux fibrés vectoriels sur X, on a :
γ(E) = γ(F) ⇐⇒ [E] − [F] ∈ im(K(π))⇐⇒ [E] − [F] = [θm] − [θq] où n,m ∈N⇐⇒ il existe p ∈N tel que E ⊕ θq ⊕ θp F ⊕ θm ⊕ θp
⇐⇒ E ⊕ θq+p F ⊕ θm+p
9.1.27. C
On peut alors redéfinir la K–théorie réduite comme :
K(X) Φ(X)∼
où E ∼ F ⇐⇒ E ⊕ θn F ⊕ θm pour n,n deux entiers positifs.
Puisque les fibrés vectoriels ont de bonnes propriétés homotopiques, on s’at-tend à ce que la K–théorie en hérite également.
9.1.28. T
Soit f0, f1 : Y → X deux applications continues et homotopes entre deux espaces topolo-giques compacts, alors ces applications induisent les mêmes homomorphismes de groupes :
K(X)K( f0)
K( f1)// K(Y) et K(X)
K( f0)
K( f1)// K(Y)
D. On a :
K( fi) : K(X) −→ K(Y)
[E] 7−→ [ f ∗i (E)]
Comme f0 et f1 sont homotopes, la proposition 8.2.41 implique que les fibrés induitssont isomorphes, i.e. f ∗0 (E) f ∗1 (E), ainsi les deux applications K( f0) et K( f1) sont

172 9. K-THÉORIE TOPOLOGIQUE
identiques. De plus, le diagramme
K(X)
K( fi)
Z
==zzzzzzzz
!!DDD
DDDD
D
K(Y)
commute, ce qui permet de définir K( fi) : K(X) → K(Y). Puisque K( f0) = K( f1), ona K( f0) = K( f1).
9.1.29. C
Si X et Y sont deux espaces compacts ayant le même type d’homotopie, alors K(X) K(Y)et K(X) K(Y).
9.1.30. P
Supposons que X soit la réunion disjointe d’un nombre fini d’ouverts X1, . . . ,Xn, alors
K(X) K(X1) ⊕ . . . ⊕ K(Xn)
D. Le théorème de recollement 8.2.5 implique qu’un fibré vec-toriel sur X est caractérisé par ses restrictions sur chaque ouvert Xi, on en déduitque Φ(X) Φ(X1) × . . . × Φ(Xn) et on obtient le résultat voulu en appliquant lefoncteur S qui est additif.
9.1.31. R
La proposition précédente est fausse pour K(X). Par exemple, si on prend un espacetopologique fini discret X = x0, x1, on a K(X) Z et K(xi) 0, pour i ∈ 0, 1.
Nous avons défini en 9.1.24 la K–théorie d’un espace localement compactcomme étant la K–théorie réduite de son compactifié d’Alexandroff. Comme toutespace compact est localement compact, on s’attend à ce que cette définition donnele même groupe de K–théorie que dans la définition initiale.
9.1.32. P
Soit X un espace compact, alors K(X+) K(X).
D. Nous commencerons par montrer que la compactificationd’un espace compact est l’adjonction disjointe d’un point, c’est-à-dire, que X+ =X t ∞. En effet, par définition de la compactification, on ajoute à la topologie deX les voisinages du point ∞, définis comme la réunion de ce point et d’un ouvert

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 173
de X tel que son complémentaire est compact dans X. Comme X est compact, toutfermé est compact et donc tout ouvert satisfait la propriété souhaitée. En particulier,l’ouvert vide la satisfait, ainsi le sous-ensemble ∞ est un ouvert du compactifié.Ainsi, un ouvert de X+ est la réunion d’un ouvert de X et d’un ouvert de l’espace∞, ce qui correspond bien à la topologie de la réunion disjointe. Ainsi, par laproposition 9.1.30, on a
K(X+) = K(X t ∞) K(X) ⊕ K(∞) K(X) ⊕Z
Comme K(X+) K(X+)Z, on a bien K(X+) K(X).
9.1.33. D
Soit E un fibré vectoriel sur X, posons,
rE : X −→N
x 7−→ dimk(Ex)
La remarque 8.2.8 indique que rE est une fonction localement constante. Posons
H0(X,N) =f : X −→N
∣∣∣ f est localement constante= C(X,N)
muni de la structure de monoïde abélien : ( f + g)(x) = f (x) + g(x). Ainsi, rE induitun homomorphisme de monoïdes abéliens
r : Φ(X) −→ H0(X,N)
E 7−→ rE
Comme S(H0(X,N)) = H0(X,Z) = C(X,Z), r induit un homomorphisme de groupesabéliens
r : K(X) −→ H0(X,Z)
9.1.34. R
Le groupe H0(X,Z) est appelé le premier groupe de cohomologie de Cech de X àcoefficients dans Z.
9.1.35. P
On a la suite exacte courte, canoniquement scindée :
0 −→ ker(r) −→ K(X) r−→ H0(X,Z) −→ 0
De plus, si X est connexe, ker(r) K(X).
D. Commençons par constuire une section de l’homomorphismede monoïdes abéliens :
r : Φ(X) −→ H0(X,N)

174 9. K-THÉORIE TOPOLOGIQUE
Soit f ∈ H0(X,N) une fonction localement constante dansN ; comme X est compact,f ne prend qu’un nombre fini de valeures n1, . . . ,np et donc
X =n⋃
i=1
f−1(ni)︸ ︷︷ ︸=: Xi
CommeN est discret, les sous-ensembles Xi sont ouverts. Considérons Ei = Xi×kni
le fibré trivial sur Xi de dimension ni. Posons E f le recollement sur X des fibrés Ei(ainsi, la restriction à Xi de E f est le fibré Ei). Définissons la section cherchée par
σ : H0(X,N) −→ Φ(X)
f 7−→ E f
Il est aisé de vérifier que σ est un homomorphisme de monoïdes abéliens tel quer σ = idH0(X,N). Ainsi, en appliquant le foncteur S, on obtient un section en K–théorie σ : H0(X,Z) → K(X) ce qui prouve que la suite de départ est exacte etscindée.
Supposons maintenant que X est connexe, les fonctions localement constantesdansZ sont alors les fonctions constantes, on obtient donc un isomorphisme entreH0(X,Z) et Z. Ainsi, σ est définit par
σ : Z −→ K(X)n 7−→ [θm] − [θq] où n = m − q, m, q ∈N
ce qui correspond exactement à l’homomorphisme K(π) définissant la K–théorieréduite de X.
Comme la suite exacte donnée dans l’énoncé est scindée, on a ker(r) coker(σ),or σ = K(π), ainsi
ker(r) coker(σ) coker(K(π)) K(X)
ce qui termine la démonstration.
9.1.36. D
Si X est connexe, on pose
Φn(X) =E ∈ Φ(X)
∣∣∣ rang(E) = n
L’ensemble des classes d’isomorphies de fibrés vectoriels sur X de rang n. Lasomme directe de fibrés nous donne des applications
Φn(X) ×Φm(X) −→ Φn+m(X)
(E, F) 7−→ E ⊕ F
On obtient donc un système inductif dont la colimite, Φ′(X), est munie d’unestructure de monoïde abélien par la somme directe.
9.1.37. R

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 175
Pour tout n ∈N, on a l’application
ϕn : Φn(X) −→ ker(r) ⊆ K(X)
E 7−→ [E] − [θn]
L’image deϕn est dans le noyau de r car E et θn sont de même rang. Par la propriétéuniverselle des colimites, on obtient un homomorphisme de monoïde
ϕ : Φ′(X) −→ ker(r)
9.1.38. P
L’homomorphisme de monoïde ϕ décrit dans la remarque précédente est un isomorphisme.Ainsi, Φ′(X) est un groupe abélien.
Calculs de K(S1).
Nous calculons ici la K–théorie réelle et complexe du cercle et citons celle decertaines sphères. Rappelons que K désigne le corps R ou C.
9.1.39. P
Soit E un K-fibré vectoriel de dimension n sur le cercle S1, alors il existe un isomorphismeλ ∈ GL(Kn) tel que
E [0,1]×Kn∼
où (0, ξ) ∼ (1, λ(ξ)) pour tout ξ ∈ Kn.
D. Considérons que le cercle est donné par le quotient de l’in-tervalle [0, 1] par la relation identifiant les points 0 et 1. Notons π l’applicationquotient de [0, 1] sur le cercle et p : E→ S1 l’application associée au fibré E. PosonsF = π∗E, le fibré induit par E et π sur [0, 1]. Comme [0, 1] est contractile, tous sesfibrés sont triviaux. Ainsi, il existe un isomorphisme de fibrés α entre F et [0, 1]×Kn
le fibré trivial de dimension n. On obtient alors un isomorphisme d’espaces vecto-riel αt : Ft → t×Kn sur chaque fibre de F, que l’on peut voir, en identifiant chaquefibre à Kn comme un isomorphisme αt : Kn
→ t ×Kn. Posons alors
G = I×Kn∼
où α0(ξ) ∼ α1(ξ) pour tout ξ dans Kn. Montrons alors que G est isomorphe à E.Définissons cette isomorphisme sur chaque fibre de E par
βt : Et → Kn→ Ft → t ×Kn
→ Gt
pour tout t dans [0, 1]. Et identifions β0 et β1. On obtient alors un morphisme defibré entre G et E car l’application t 7→ βt est clairement continue. Ce morphismeest même un isomorphisme puisqu’il l’est sur chaque fibre.
176 9. K-THÉORIE TOPOLOGIQUE
Sans pertes de généralité, on peut supposer que α0 est (presque) l’identité, àsavoir
α0 : Kn−→ 0 ×Kn
ξ 7−→ 0 × ξ
Ainsi, en posant
λ : Kn α1−→ 1 ×Kn π1
−→ Kn
on vérifie bien que λ est un isomorphisme et qu’il vérifie la propriété exigée.
9.1.40. P
Soit E un K-fibré vectoriel de dimension n sur le cercle S1. Par la proposition précédente ilexiste un isomorphisme λ ∈ GL(Kn) GLn(K) tel que
E [0,1]×Kn∼
alors, E est trivial si et seulement si λ est dans la même composante de connexité par arcsque l’identité dans GLn(K).
D. Soit α : S1×Kn
→[0,1]×Kn
∼ un morphisme de K-fibrés surS1. Le morphisme α induit une application continue
γ : [0, 1] −→ End(Kn) Mn(K)t 7−→ αt
où αt : Kn→ Kn est induit par α sur la fibre en t ∈ [0, 1], avec α0 = α1 λ.
Sans pertes de généralité, on peut supposer que α1 est l’identité, ainsi α0 = λ.L’application γ est donc un chemin dans Mn(K) entre λ et l’identité. Ainsi, α estun isomorphisme de fibrés vectoriels si et seulement si chaque application induiteαt est un isomorphisme, c’est-à-dire que chaque αt est dans GLn(K), et donc si etseulement si γ est un chemin dans GLn(K) entre λ et l’identité.
9.1.41. C
Tous les fibrés vectoriels complexes sur le cercle sont triviaux.
D. Le groupe GLn(C) est connexe par arcs, la proposition pré-cédente nous permet de conclure.
9.1.42. C
KC(S1) Z et KC(S1) 0.
D. Le corollaire précédent implique qu’à isomorphisme près, lesfibrés complexes du cercles sont caractérisés par leur dimension, i.e. Φ(VectC(S1))est isomorphe à N et donc KC(S1) Z car S(N) Z.
Par définition de la K–théorie réduite, on a la suite exacte courte
0 −→ ZK(π)−→ Z −→ KC(S1) −→ 0

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 177
Comme K(π)(1) = 1 ; K(π) est l’identité et donc KC(S1) 0.
9.1.43. C
KR(S1) Z Z2Z et KR(S1) Z2Z.
D. Le groupe GLn(R) possède deux composantes connexes pararcs : les matrices de déterminant positif et celles de déterminant négatif. Ainsi, lesfibrés vectoriels réels sur le cercle sont caractérisés par leur dimension et le signedu déterminant de l’isomorphisme λ qui leur est associé dans la proposition 9.1.39.En d’autres termes, on a un isomorphisme de monoïdes
ΦR(S1) N ⊕ Z2Z
En appliquant le foncteur de symétrisation on obtient donc
KR(S1) Z ⊕ Z2Z
Car ce foncteur est additif et que Z2Z est abélien.On a donc la suite exacte courte
0 −→ ZK(π)−→ Z ⊕ Z2Z −→ KR(S1) −→ 0
et k(π)(n) = (n, 0). Ainsi,
KR(S1) (Z⊕Z2Z)(Z⊕0)
0 ⊕ Z2Z
Z2Z
Mentionnons encore les résultats suivants :
9.1.44. P
La K–théorie des sphères de dimension 2 et 3 est :
KC(S2) Z ⊕Z KC(S2) Z
KC(S3) Z KC(S3) 0
KR(S2) Z ⊕ Z2Z KR(S2) Z2Z
KR(S3) Z KR(S3) 0
Deuxième construction de K(X).
Nous donnons ici une deuxième construction du K–groupe d’un espace lo-calement compact. Cette construction est basée sur des classes d’équivalences de

178 9. K-THÉORIE TOPOLOGIQUE
morphismes entre fibrés vectoriels et pourrait être généralisée à des chaînes finiesde morphismes de fibrés
Dans cette section, X est un espace topologique localement compact.
9.1.45. D
Soit α : E→ F un morphisme de fibrés sur X, on appelle support de α l’ensemble
supp(α) = x ∈ X|αx : Ex → Fx n’est pas un isomorphisme
9.1.46. L
Soit α : E→ F un morphisme de fibré sur X, alors le support de α est fermé dans X.
D. Montrons que le complémentaire de supp(α) dans X est ou-vert. Soit x0 un point de cet ensemble, il existe un voisinage ouvert U de ce pointqui trivialise E et F. On a donc le diagramme commutatif suivant
EU U ×Kn αU //
%%LLLLLLLLLLL U ×Km FU
yyrrrrrrrrrrr
U
La restriction αU du morphisme α à U correspond alors a une application continue
f : U −→Mm,n(K)x 7−→ (αx)
où (αx) est la matrice de l’application linéaire entre les fibres en x. Comme αx0 estsupposé être un isomorphisme, les dimensions des fibres doivent être identiques,i.e. m = n. Composons alors f avec l’application continue du determinant :
det f : U −→ K
x 7−→ det(αx)
Par hypothèse, det f (x0) , 0 et comme cette application est continue, il existe unvoisinage V de x0 dans U tel que det f (V) , 0, c’est-à-dire, il existe un voisinage Vde x0 dans X tel que αx est un isomorphisme pour tout point x de V, ce qui prouveque le complémentaire du support de α est ouvert.
9.1.47. D
Un triple (E,F, α) est à support compcat si le support de α est compact. Notonsδ(X) l’ensemble des triples à support compact de X et définissons une relation surcet ensemble de la manière suivante : Deux triples (E,F, α) et (E′,F′, α′) sont ditéquivalents s’ils sont homotopes dans δ(X), c’est-à-dire, si et seulement s’il existedes isomorphismes
β : E −→ E′ et γ : F −→ F′
et une homotopieH : E × [0, 1] −→ F

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 179
telle que l’application
Ht : E −→ Fξ 7−→ H(ξ, t)
soit un morphisme de fibrés à support compact pour tout t dans l’intervalle [0, 1]avec H0 = α et telle que le diagramme
EH1 //
β
F
γ
E′
α′ // F′
soit commutatif.
9.1.48. L
La relation définie précédemment sur δ(X) est une relation d’équivalence.
D. La réflexivité et la symétrie sont évidentes, il suffit donc demontrer la transitivité. Soit (E,F, α) ∼ (E′,F′, α′) et (E′,F′, α) ∼ (E′′,F′′, α′′) deuxpaires de triples équivalents, alors il existe quatre isomorphismes
β : E −→ E′ γ : F −→ F′
β′ : E′ −→ E′′ γ′ : F′ −→ F′′
et deux homotopies
H : E × [0, 1] −→ F et H′ : E′ × [0, 1] −→ F′
telles que Ht et H′t soient des morphismes de fibrés à support compact pour tout tdans [0, 1], avec H0 = α et H′0 = α
′ et telles que les diagrammes suivants commutent
EH1 //
β
F
γ
E′H′1 //
β′
F′
γ′
E′
α′ // F′ E′′α′′ // F′′
Posons alorsG : E × [0, 1] −→ F
définie par Gt = γ−1H′t β et posons également
H′′ : E × [0, 1] −→ F
(ξ, t) −→
H(ξ, 2t) , t ∈ [0, 12 ]
G(ξ, 2t − 1) , t ∈ [ 12 , 1]
On a bien
H1 = γ−1 α′ β
= γ−1H′1 β
= G0

180 9. K-THÉORIE TOPOLOGIQUE
ainsi H′′ est continue. De plus, H′′0 = H0 = α et H′′1 = G1 = γ−1 H′1 β et donc lediagramme
EH′′0 //
β′β
Fγ′ γ
E′′α′′ // F′′
commute car
γ′ γ H′′1 = γ′ γ γ′−1
H′1 β
= γ′ H′1 β
= α′′ β′ β
et donc (E,F, α) ∼ (E′′,F′′, α′′).
9.1.49. R
Deux triples (E,F, α), (E′,F′, α′) isomorphes, c’est-à-dire tels que le diagramme
Eα //
F
E′
α′ // F′
commute, sont clairement équivalents.
9.1.50. P D
Notons ∆(X) le quotient de δ(X) par la relation d’équivalence que l’onvient de définir.Notons d(E,F, α) la classe du triple (E,F, α) dans ce quotient et posons
d(E,F, α) + d(E′,F′, α′) = d(E ⊕ E′,F ⊕ F′, α ⊕ α′)
alors cette loi donne une structure de monoïde abélien à ∆(X).
D. Montrons d’abord que cette loi + est bien définie. Pour cela,montrons que le support de α ⊕ α′ est compact. On a
supp(α ⊕ α′) ⊆ supp(α) ∪ supp(α′)
or le support est un sous-ensemble fermé et la réunion finie de compacts estcompacte. Pour terminer la preuve, on vérifie aisément que la loi + est compatibleavec la relation d’équivalence, l’élément neutre est clairement la classe du triple(0, 0, 0) et la somme est commutative car les triples (E ⊕ E′,F ⊕ F′, α ⊕ α′) et (E′ ⊕E,F′ ⊕ F, α′ ⊕ α) sont isomorphes et donc équivalents.
9.1.51. D
Notons ∆0(X) l’ensemble des classes d’équivalences de triples à support vide, i.e.
∆0(X) = d(E,F, α) | (E,F, α) ∈ δ(X) et supp(α) = ∅

9.1. LE PREMIER GROUPE DE K–THÉORIE TOPOLOGIQUE, K(X) 181
Remarquons que si le support d’un triple (E,F, α) est vide, alors α est un isomor-phisme entre E et F.
9.1.52. P
∆0(X) est un sous-monoïde de ∆(X).
D. Il suffit de vérifier que ∆0(X) est stable pour la loi de ∆(X).Pour cela, il suffit d’observer que le support de la somme de deux triples à supportvide est également vide puisque
supp(α ⊕ α′) ⊆ supp(α) ∪ supp(α′)
9.1.53. L
Si X est compact, la classe d(E,F, α) d’un triple (E,F, α) ne dépend pas du morphisme α.
D. Puisque X est compact et que le support de tout morphismeest fermé par le lemme 9.1.46, tout morphisme est à support compact. Ainsi lemorphisme nul 0 : E → F qui envoie tout point sur le vecteur nul dans la fibrecorrespondante est à support compact. Nous allons montrer que tout triple (E,F, α)est équivalents au triple (E,F, 0). Pour cela, il suffit de considérer l’homotopie
H : E × [0, 1] −→ F(ξ, t) 7−→ tα(ξ)
On a bien H0 = 0 et H1 = α, ainsi d(E,F, α) = d(E,F, 0).
9.1.54. D
Notons alors, lorsque X est compact, d(E,F) au lieu de d(E,F, α).
9.1.55. T
Le quotient ∆(X)∆0(X) est isomorphe à K(X).
D. Prouvons-le pour un espace X compact. Remarquons quepar le lemme 9.1.53, on a les deux propriétés suivantes sur ∆0(X) :
(1) d(E,F) ∈ ∆0(X) ⇐⇒ E F
(2) d(E,F) = d(E′,F′) dans ∆0(X) ⇐⇒ E E′ et F F′
Commençons par montrer que ∆(X)∆0(X) est un groupe, plus précisément, montronsque l’inverse de l’élément [d(E,F)] est [d(F,E)]. En effet,
[d(E,F)] + [d(F,E)] = [d(E ⊕ F,F ⊕ E)] = 0

182 9. K-THÉORIE TOPOLOGIQUE
car E ⊕ F F ⊕ E. Posons alors
ϕ : ∆(X)∆0(X) −→ K(X)
[d(E,F)] 7−→ [E] − [F]
I) ϕ est bien définie. En effet, si [d(E,F)] = [d(E′,F′)], alors
[d(E,F)] − [d(E′,F′)] = [d(E,F)] + [d(F′,E′)]
= [d(E ⊕ F′,F ⊕ E′)]
appartient à ∆0(X). Ainsi,
E ⊕ F′ F ⊕ E′
et donc [E] − [F] = [E′] − [F′] dans K(X) par la proposition 9.1.10.
II) ϕ est linéaire. En effet, soit [d(E,F)] et [d(G,H)] deux éléments, alors
ϕ([d(E,F)] + [d(G,H)]) = ϕ([d(E ⊕ G,F ⊕H)])= [E ⊕ G] − [F ⊕H]= [E] + [G] − [F] − [H]= ([E] − [F]) + ([G] − [H])
= ϕ([d(E,F)]) + ϕ([d(G,H)])
III) ϕ est injective. En effet, si [d(E,F)] est dans le noyau deϕ, alors son image estnulle, c’est-à-dire, [E]− [F] = 0. Il existe donc un fibré G tel que E⊕G F⊕G.Ainsi
0 = [d(E ⊕ G,F ⊕ G)]
= [d(E,F)] + [d(G,G)]
= [d(E,F)]
car d(G,G) appartient à ∆0(X). Donc ker(ϕ) est trivial.
IV) ϕ est surjective. En effet, puisque tout élément de K(X) s’écrit sous la forme[E] − [F], on a clairement ϕ([d(E,F)]) = [E] − [F].
On a donc prouvé que ϕ est un isomorphisme de groupes.
9.1.56. R
Pour prouver le théorème précédent sur un espace localement compact X, il fauttravailler un peu plus. En effet, K(X) est alors définit par la K–théorie réduitede son compactifié X+, il faut donc étendre nos fibrés vectoriels sur cet espace.Nous pouvons tout de même donner une description de cette construction. Soit(E,F, α) un triple à support compact, on le déforme sans modifier son support demanière à obtenir un triple (E′,F′, α′) équivalent tel que les fibrée E′ et F′ soienttriviaux en dehors d’un compact C de X et tel que α′ soit l’identité en dehors deC. Ceci nous permet d’étendre notre triple en un triple (E′′,F′′, α′′) sur X+, où lecomplémentaire de C est un voisinage trivialisant du point ∞. L’isomorphimsecherché alors [d(E,F, α)] 7−→ [E′′] − [F′′].

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 183
9.2. Le premier groupe de K–théorie d’une paire, K(X,Y)
Le groupe de Grothendieck d’un foncteur.
9.2.1. D
Soit C et C ′ deux catégories additives. Un foncteur additif ϕ : C → C ′ est ditquasi-surjectif si tout objet de C est un facteur direct de l’image par ϕ d’un objet deC .
9.2.2. R
Soit C et C ′ deux catégories additives etϕ : C → C ′ un foncteur additif. Rappelonsque C est la catégorie pseudo-abélienne associée à C (voir 8.3.8). Si ϕ est plein,respectivement fidèle, respectivement quasi-surjectif, alors le foncteur ϕ : C → C ′
associé à ϕ est plein, respectivement fidèle, respectivement quasi-surjectif.
Dans cette sous-section ϕ désignera un foncteur quasi-surjectif entre deuxcatégories additives C et C ′.
9.2.3. D
Soit ϕ : C → C ′ un foncteur quasi-surjectif, posons
Γ(ϕ) = (E,F, α)| ϕ(E)α ϕ(F)
l’ensemble des triples (E,F, α) où E et F sont des objets de C et où α est un iso-morphisme entre ϕ(E) et ϕ(F). Deux triples (E,F, α) et (E′,F′, α′) sont isomorphes s’ilexiste des isomorphismes
f : E −→ E′ et g : F −→ F′
tels que le diagramme suivant commute :
ϕ(E) α //
ϕ( f )
ϕ(F)
ϕ(g)
ϕ(E′) α′ // ϕ(F′)
On note alors (E,F, α) (E′,F′, α′). Un triple (E,F, α) est dit élémentaire si E = F et si αest homotope à l’identité de ϕ(E) dans l’ensemble Aut(ϕ(E)) des automorphismesde ϕ(E). Notons 0 = (0, 0, 0) le triple élémentaire où 0 est l’objet nul de C . La somme

184 9. K-THÉORIE TOPOLOGIQUE
de deux triples (E,F, α) et (E′,F′, α′) est le triple
(E,F, α) ⊕ (E′,F′, α′) = (E ⊕ E′,F ⊕ F′, α ⊕ α′)
Définissons maintenant une relation d’équivalence sur Γ(ϕ). Deux triples σ et σ′
sont dits équivalents, et on le notera σ ∼ σ′, si et seulement s’il existe deux triplesélémentaires τ et τ′ tels que σ + τ σ′ + τ′.
9.2.4. P
La relation ∼ est une relation d’équivalence sur Γ(ϕ).
D. Soit σ = (E,F, α), σ′ = (E′,F′, α′) et σ′′ = (E′′,F′′, α′′) troistriples de Γ(ϕ), on a σ+ 0 = σ+ 0 ce qui prouve la réflexivité car l’égalité est un casparticulier d’isomorphisme. La symétrie est évidente par définition de la relation.Supposons finalement que σ ∼ σ′ et σ′ ∼ σ′′, il existe alors des triples élémentairesτ, τ′, ω et ω′ tels que
σ + τ σ′ + τ′ et σ′ + τ′ σ′′ + τ′′
On obtient ainsi :
σ + τ + ω′ σ′ + τ′ + ω′
σ′′ + τ′ + ω′′
car la somme de triples est commutative et associative à isomorphisme près.Comme la somme de deux triples élémentaires est également élémentaire on ob-tient l’équivalence entre σ et σ′′ ce qui prouve la transitivité de la relation ∼.
9.2.5. D
Soit ϕ un foncteur quasi-surjectif. On pose alors
K(ϕ) = Γ(ϕ)∼
que l’on appelle le groupe de Grothendieck du foncteur ϕ. On note dσ = d(E,F, α) laclasse du triple σ = (E,F, α) dans K(ϕ).
9.2.6. P
K(ϕ) est un monoïde abélien.
D. Commençons par montrer que la somme de triples est biendéfinie sur K(ϕ). En effet, si σ, respectivement τ, est équivalent à σ′, respectivementτ′, alors il existe des triples élémentaires µ, µ′, ν et ν′ tels que
σ + µ σ′ + µ′ et τ + ν τ′ + ν′
On obtient ainsi :
σ + τ + µ + ν σ′ + τ′ + µ′ + ν′

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 185
et comme µ + ν et µ′ + ν′ sont élémentaires, σ + τ et σ′ + τ′ sont équivalents. Lasomme sur K(ϕ) est alors définie par :
d(E,F, α) + d(E′,F′, α′) = d(E ⊕ E′,F ⊕ F′, α ⊕ α′)
L’associativité de cette somme découle de celle de la somme sur Γ(ϕ), qui est elle-même due à l’associativité de la somme directe dans C et C ′. Les sceptiques sontinvités à se convaincre de ceci par leur propre expérience. Ajoutons que le tripleélémentaire 0 = d0 est clairement l’élément neutre de K(ϕ).
9.2.7. P
K(ϕ) est un groupe abélien et −d(E,F, α) = d(F,E, α−1).
D.
d(E,F, α) + d(F,E, α−1) = d(E ⊕ F,F ⊕ E, α ⊕ α−1)
= d(E ⊕ F,E ⊕ F, β)
où β est l’isomorphisme induit par la propriété universelle du coproduit de lamanière suivante :
ϕ(E) α // s
%%KKKKKKKKKKϕ(F) s
%%KKKKKKKKKK
ϕ(E) ⊕ ϕ(F)∃!β //________ ϕ(E) ⊕ ϕ(F)
ϕ(F) α−1//
+
99ssssssssssϕ(E)
+
99ssssssssss
L’isomorphisme entre les triples (E ⊕ F,F ⊕ E, α ⊕ α−1) et (E ⊕ F,E ⊕ F, β) est exhibépar le diagramme commutatif suivant :
ϕ(E) ⊕ ϕ(F) α⊕α−1//
id
ϕ(F) ⊕ ϕ(E)
ν
ϕ(E) ⊕ ϕ(F)
β // ϕ(E) ⊕ ϕ(F)
où ν est induit par la propritété universelle du coproduit de la manière suivante :
ϕ(E) s
%%KKKKKKKKKKϕ(F) s
%%KKKKKKKKKK
ϕ(F) ⊕ ϕ(E) ∃!ν //________ ϕ(E) ⊕ ϕ(F)
ϕ(F)+
99ssssssssssϕ(E)
+
99ssssssssss

186 9. K-THÉORIE TOPOLOGIQUE
Par construction de β, on a β = ν α ⊕ α−1. On peut voir ceci matriciellement, βcorrespond alors à la matrice
β =
(0 −α−1
α 0
)Dans le groupe Aut(ϕ(E) ⊕ ϕ(F)) on a l’identité suivante :(
0 −α−1
α 0
)=
(1 −α−1
0 1
) (1 0α 1
) (1 −α−1
0 1
)où 1 représente l’identité. Définissons alors une application continue
σ : I −→ Aut(ϕ(E) ⊕ ϕ(F))
t 7−→(
1 −tα−1
0 1
) (1 0tα 1
) (1 −tα−1
0 1
)On a σ(0) = id et σ(1) = β, ainsi β est homotope à l’identité de ϕ(E) ⊕ ϕ(F) dansle groupe des automorphismes ce qui prouve que le triple (E ⊕ F,E ⊕ F, β) estélémentaire et donc que d(E ⊕ F,E ⊕ F, β) = 0.
Propriétés de K(ϕ).
9.2.8. P
Dans K(ϕ), d(E,F, α) = 0 si et seulement s’il existe deux objets S et T de C et deuxisomorphismes f : E⊕S −→ T et g : F⊕S −→ T tels queϕ(g)(α⊕idϕ(S))ϕ( f−1) ' idϕ(T)dans le groupe des automorphismes de ϕ(T).
D. La classe de (E,F, α) est nulle si et seulement s’il existe deuxtriples élémentaires σ = (S,S, η) et τ = (T,T, µ) tels que
(E,F, α) + σ 0 + τ τ
c’est-à-dire, si et seulement s’il existe de plus deux isomorphismes f : E ⊕ S −→ Tet g : F ⊕ S −→ T tels que le diagramme suivant commute :
ϕ(E) ⊕ ϕ(S)α⊕η //
ϕ( f )
ϕ(F) ⊕ ϕ(S)
ϕ(g)
ϕ(T)µ // ϕ(T)
or η ' idϕ(S) et µ ' idϕ(T), on obtient donc
idϕ(T) ' µ
= ϕ(g) (α ⊕ η) ϕ( f−1)
' ϕ(g) (α ⊕ idϕ(S)) ϕ( f−1)
qui est bien la relation cherchée.

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 187
Il est intéressant d’observer que l’on retrouve le groupe de Grothendieck de lacatégorie C si l’on suppose que la catégorie C ′ est nulle.
9.2.9. P
K(ϕ) K(C ) si C ′ = 0.
D. Si C ′ = 0, tout objet deΓ(ϕ) est de la forme (E,F, 0). La relationd’isomorphie est alors (E,F, 0) (E′,F′, 0) si et seulement si E E′ et F F′. Untriple (E,F, 0) est élémentaire si et seulement si E = F. La relation d’équivalence surΓ(ϕ) est alors la suivante : (E,F, 0) ∼ (E′,F′, 0) si et seulement s’il existe deux objetsG et H de C tels que
E ⊕ G E′ ⊕H et F ⊕ G F′ ⊕H
autrement dit, siE ⊕ F′ ⊕ G ⊕H E′ ⊕ F ⊕ G ⊕H
qui est la relation d’équivalence dans K(C ). Ainsi,
K(ϕ) −→ K(C )
d(E,F, 0) 7−→ [E] − [F]
est un isomorphisme de groupes.
La proposition suivante nous montre que la classe d’un triple (E,F, α), pourdes fibrés E et F fixés, ne dépend que de la classe d’homotopie du morphisme α.
9.2.10. P
Soit d(E,F, α) et d(E,F, α′) deux éléments de K(ϕ) tels que α et α′ soient homotopes dansle groupe Iso(ϕ(E), ϕ(F)), alors d(E,F, α) = d(E,F, α′).
D. On a
d(E,F, α) − d(E,F, α′) = d(E,F, α) + d(F,E, α′−1)
= d(E ⊕ F,F ⊕ E, α ⊕ α′−1)
= d(E ⊕ F,E ⊕ F, β)= 0
où β est défini comme dans la preuve de la proposition 9.2.7.
La somme dans K(ϕ) possède de bonnes propriétés de composition commenous le montre la proposition suivante. Cette propriété fort intéressante nous serautile par la suite.
9.2.11. P
d(E,F, α) + d(F,G, β) = d(E,G, β α)

188 9. K-THÉORIE TOPOLOGIQUE
D. Comme déjà fait auparavant, on a
d(E,F, α) + d(F,G, β) = d(E ⊕ F,F ⊕ G, α ⊕ β)
= d(E ⊕ F,G ⊕ F, γ)
où γ est donné matriciellement par
γ =
(0 −βα 0
)On a de plus
d(E,G, β α) = d(E,G, β α) + d(F,F, idϕ(F))
= d(E ⊕ F,G ⊕ F, β α ⊕ idϕ(F))
= d(E ⊕ F,G ⊕ F, γ′)
où γ′ = β α ⊕ idϕ(F). Le morphisme γ γ′−1 est alors défini matriciellement par
γ γ′−1 =
(0 −ββ−1 0
)qui est homotope à l’identité de ϕ(G) ⊕ ϕ(F) par le même argument que dans lapreuve de la proposition 9.2.7. Ainsi γ est homotope à γ′ et par la proposition 9.2.10on peut conclure que d(E ⊕ F,G ⊕ F, γ) = d(E ⊕ F,G ⊕ F, γ′) qui correspond bien àl’égalité cherchée.
Le théorème suivant nous donne une suite exacte qui lie étroitement le groupede Grothendieck d’un foncteur aux groupes de Grothendieck des catégories en jeu.Ce théorème à lui seul motive notre intérêt pour le groupe K(ϕ).
9.2.12. T
Soit ϕ : C → C ′ un foncteur quasi-surjectif entre deux catégories additives, considéronsles homomorphismes de groupes suivants :
i : K(ϕ) −→ K(C ) j : K(C ) −→ K(C ′)
d(E,F, α) 7−→ [E] − [F] [E] − [F] 7−→ [ϕ(E)] − [ϕ(F)]
alors on a la suite exacteK(ϕ) i
−→ K(C )j−→ K(C ′)
Si on suppose de plus qu’il existe un foncteur additif ψ : C ′ → C tel que les foncteursϕ ψ et idC ′ soient isomorphes, alors on obtient la suite exacte courte scindée
0 −→ K(ϕ) i−→ K(C )
j−→ K(C ′) −→ 0
D.I) Montrons que im i ⊆ ker j i.e. j i = 0. Soit d(E,F, α) ∈ K(ϕ), alors
j i(d(E,F, α)) = j([E] − [F])= [ϕ(E)] − [ϕ(F)]= 0
car α est un isomorphisme entre ϕ(E) et ϕ(F).

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 189
II) Montrons que ker j ⊆ im i. Soit [E] − [F] un élément du noyau de j, on aainsi [ϕ(E)] − [ϕ(F)] = 0, par la proposition 9.1.10, il existe un objet T′ de C ′
tel que ϕ(E)⊕T′ ϕ(F)⊕T′. Comme ϕ est quasi-surjective, il existe un objetS′ de C ′ et un objet T de C tels que ϕ(T) T′ ⊕ S′. Ainsi,
ϕ(E ⊕ T) ϕ(E) ⊕ ϕ(T)
ϕ(E) ⊕ T′ ⊕ S′
ϕ(F) ⊕ T′ ⊕ S′
ϕ(F) ⊕ ϕ(T) ϕ(F ⊕ T)
Soit δ un isomorphisme entre ϕ(E ⊕ T) et ϕ(F ⊕ T), on a alors
i(d(E ⊕ T,F ⊕ T, δ)) = [E ⊕ T] − [F ⊕ T]= ([E] − [F]) + ([T] − [T])= [E] − [F]
Ce qui prouve la première partie du théorème. Supposons maintenant l’exis-tence d’un foncteur ψ comme dans l’ennoncé.
III) Montrons que i est injective. Soit d(E,F, α) un élément du noyau de i, on aainsi [E] − [F] = 0. Il existe donc un objet T de C tel que E ⊕ T F ⊕ T, ainsi
d(E,F, α) = d(E ⊕ T,F ⊕ T, α ⊕ idϕ(T)
= d(G,G, β)
où G = E ⊕ T F ⊕ T et où β est la composition de ρ et α ⊕ idϕ(T) ; où ρest un isomorphisme entre ϕ(E ⊕ T) et ϕ(F ⊕ T). On a donc le diagrammecommutatif suivant :
ϕ(G)β //
γ
ϕ(G)
γ
ϕ ψ(ϕ(G))
ϕψ(β) // ϕ ψ(ϕ(G))
où γ est induit par l’isomorphisme de foncteurs ϕ ψ idC ′ . On a doncβ = γ−1
(ϕ ψ)(β) γ et ainsi par la proposition 9.2.11, on obtient :
d(G,G, β) = d(G, ψ ϕ(G), γ) + d(ψ ϕ(G), ψ ϕ(G), ϕ ψ(β)) + d(ψ ϕ(G),G, γ−1)
Or d(ψ ϕ(G),G, γ−1) est l’inverse de d(G, ψ ϕ(G), γ) ainsi leur somme estnulle. Il suffit donc de montrer que le triple (ψ ϕ(G), ψ ϕ(G), ϕ ψ(β)) estisomorphe à un triple élémentaire, ce qui prouvera que d(G,G, β) = 0 et ainsil’injectivité de i. On a le diagramme commutatif suivant
ϕ (ψϕ(G))ϕψ(β) //
ϕψ(β)
ϕ (ψϕ(G))
id
ϕ (ψϕ(G)) id // ϕ (ψϕ(G))
Ainsi (ψϕ(G), ψϕ(G), ϕψ(β)) (ψϕ(G), ψϕ(G), id) qui est élémentaire.

190 9. K-THÉORIE TOPOLOGIQUE
IV) Montrons que j est surjective. Soit [E′] − [F′] un élément de K(C ′). Lesfoncteurs ϕ ψ et idC ′ étant isomorphes on a les isomorphismes
ϕ ψ(E′) E′ et ϕ ψ(F′) F′
Ainsi,
j([ψ(E′)] − [ψ(F′)] = [ϕ ψ(E′)] − [ϕ ψ(F′)]
= [E′] − [F′]
V) Montrons finalement que j admet une section, c’est-à-dire que la suiteexacte est scindée. L’homomorphisme de groupes
k : K(C ′) −→ K(C )
[E′] − [F′] 7−→ [ψ(E′)] − [ψ(F′)]
est une section, car, par le point IV de cette preuve, on a j k = idK(C ′).
%
Catégories de Banach.
9.2.13. D
Soit C une catégorie additive, une structure de Banach sur C est la donnée d’unestructure d’espace de Banach sur chacun des ensembles de morphismes MorC (X,Y).On suppose de plus que chaque composition de morphismes
MorC (Y,Z) ×MorC (X,Y) −→MorC (X,Z)
est bilinéaire et continue. Une telle catégorie est alors appelée catégorie de Banach.
Nous allons maintenant prouver que si X est un espace compact, la catégorieVect(X) possède une structure de Banach. Dans cette section, X désignera un espacecompact et A l’algèbre des fonctions continues de X dans le corpsK. Rappelons quel’algèbre A munie de la norme sup est un espace de Banach. Nous allons commencerpar donner une structure de Banach aux ensembles des sections continues Γ(X,E) =Γ(E) d’un K-fibré vectoriel E sur X. Rappelons que par la proposition 8.2.38, Γ(E)est un A–module de type fini car X est compact.
9.2.14. D
Soit E un fibré sur X, nous allons donner une structure d’espace de Banach aumodule des sections continues. Puisque Γ(E) est un A–module de type fini, il existeun homomorphisme A-linéaire surjectif
u : An // // Γ(E)

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 191
Donnons alors à Γ(E) la topologie quotient induite par u.
9.2.15. P
La topologie sur Γ(E) définie ci-dessus ne dépend pas du choix de l’homomorphisme A-linéaire surjectif u.
D. Soit
u : An−→ Γ(E)
u′ : An′−→ Γ(E)
deux homomorphismes A-linéaires surjectifs. Comme An et An′ sont des A–modulesprojectifs (car libres), il existe deux homomorphismes A-linéaires v et v′ tels que lediagramme suivant commute
Anv //
u!!C
CCCC
CCC An′
v′oo
u′zzzz
zzzz
Γ(E)
Les applications v et v′ sont continues car linéaires et définissent donc la mêmetopologie sur Γ(E). En effet, soit Ω un sous-ensemble de Γ(E), on a
u−1(Ω) = v−1(u′−1(Ω))u′−1(Ω) = v′−1(u−1(Ω))
ainsi, u−1(Ω) est ouvert si et seulement si u′−1(Ω) l’est aussi.
9.2.16. P
Soit f : E→ F un morphisme de fibrés, alors l’application
Γ( f ) : Γ(E) −→ Γ(F)
s 7−→ f s
est un homomorphisme A-linéaire continu.
D. La A-linéarité deΓ( f ) se vérifie aisément en évaluantΓ( f )(s)(x).Contemplons le diagramme commutatif suivant
Anf //___
u
Am
v
Γ(E)Γ( f ) // Γ(F)
où u et v sont des homomorphismes A-linéaires surjectifs et où f est l’homomor-phisme A-linéaire induit par le A–module projectif An. Comme f est linéaire, il estégalement continu, ainsi Γ( f ) est continu.
La proposition suivante, qui concerne les algèbres de Banach en général, nouspermettra de conclure à la proposition d’après.

192 9. K-THÉORIE TOPOLOGIQUE
9.2.17. P
Soit B une algèbre de Banach sur un corps K et P,Q deux B–modules projectifs de type fini,alors le K espace vectoriel HomB(P,Q) possède une structure naturelle d’espace de Banach.
D. Commençons par montrer que tout module projectif de typefini P possède une structure d’espace de Banach. Soit π : Bn P un homomor-phisme B-linéaire surjectif, donnons à P la topologie quotient induite par π. Lapreuve de la proposition 9.2.15 indique que cette topologie ne dépend pas duchoix de π. Puisque P est projectif, il existe une section σ : P → Bn, c’est-à-dire unhomomorphisme B-linéaire injectif tel que π σ = idP. Définissons une norme surP de la manière suivante
‖x‖P = ‖σ(x)‖ ∀ x ∈ P
où ‖ ‖ est la norme sur Bn. La K-linéarité et l’injectivité de σ permettent au lecteurde démontrer aisément que ‖ ‖P est une norme.
9.2.18. L
Notons BP(x, ε) la boule dans P centrée en x et de rayon ε et B(y, ε) la boule dans Bn centréeen y de rayon ε, alors on a
π−1(BP(x, ε)) = (σ π)−1(B(σ(x), ε))etBP(x, ε) = σ−1(B(σ(x), ε))
D. La deuxième égalité découle de la première en appliquant π,car π π−1 = idP. Montrons donc la deuxième. On a
y ∈ π−1(BP(x, ε)) ⇐⇒ π(y) ∈ BP(x, ε)⇐⇒ ‖π(y) − x‖P < ε⇐⇒ ‖σ π(y) − σ(x)‖ < ε⇐⇒ σ π(y) ∈ B(σ(x), ε)
⇐⇒ y ∈ (σ π)−1(B(σ(x), ε))
Montrons que la topologie induite par cette norme coïncide avec la topologiequotient. Pour cela, nous montrerons que tout ouvert de P contient une bouleet réciproquement que toute boule est ouverte dans la topologie quotient. SoitU ⊆ P un ouvert et x ∈ U, on a donc que π−1(U) est ouvert dans Bn. Comme Bn
est de Banach et que σ(x) ∈ π−1(U), il existe une boule de rayon ε > 0 tel queB(σ(x), ε) ⊆ π−1(U). En appliquant σ−1, on obtient
σ−1(B(σ(x), ε)) ⊆ σ−1 π−1(U)
Or σ−1(B(σ(x), ε)) = BP(x, ε) par le lemme et σ−1 π−1 = idP car σ est une section de
π. Ainsi BP(x, ε) ⊆ U.Réciproquement, soit x ∈ P et ε > 0, montrons que la boule BP(x, ε) est ouverte
dans P pour la topologie quotient. En effet, par le lemme on a
π−1(BP(x, ε)) = (σ π)−1(B(σ(x), ε))
Or σ π : Bn→ Bn est continue car B-linéaire, ainsi π−1(BP(x, ε)) est un ouvert de
Bn.

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 193
Pour montrer que l’espace vectoriel HomB(P,Q) est un espace de Banach, nousallons prouver que c’est un fermé de l’espace L (P,Q) des application K-linéairesqui est un espace de Banach par un célèbre théorème d’analyse fonctionelle puisqueQ est un espace de Banach.
Pour cela, considérons les applications
λb : L (P,Q) −→ L (P,Q)
définies par λb(ϕ)(x) = ϕ(bx)− bϕ(x) pour toute application linéaire ϕ, tout point xde P et tout élément b de B. L’application λb est clairement K-linéaire et continue etobservons que si ϕ est une application B-linéaire entre P et Q, alors λb(ϕ) = 0 pourtout b dans B. On a donc clairement l’égalité
HomB(P,Q) =⋂b∈B
ker(λb)
Ainsi HomB(P,Q) est fermé car les noyaux d’applications linéaires le sont et quetoute intersection de fermés l’est aussi.
9.2.19. R
Notons que la norme sur HomB(P,Q) et ainsi celle de L (P,Q), c’est-à-dire
‖ϕ‖ = inf‖ϕ(x)‖
∣∣∣ ‖x‖ = 1
9.2.20. C
Soit P,Q,R trois modules projectifs de type fini sur B, alors l’application de composition
HomB(Q,R) ×HomB(P,Q) −→ HomB(P,R)(ϕ,ψ) 7−→ ϕ ψ
est continue et K-linéaire.
D. Cette application est clairement induite par l’applicationcontinue et K-linéaire
L (Q,R) ×L (P,Q) −→ L (P,R)(ϕ,ψ) 7−→ ϕ ψ
9.2.21. C
La catégorie P(R) des modules projecifs de type fini sur un anneau unitaire R possède unestructure de Banach.
Appliquons la proposition précédente au cas des fibrés vectoriels.
9.2.22. T

194 9. K-THÉORIE TOPOLOGIQUE
Soit E,F et G trois fibrés vectoriels sur X, alors le groupe abélien Hom(E,F) possède unestructure de Banach compatible avec la composition et donc Vect(X) est une catégorie deBanach.
D. Par le théorème de Serre-Swan 8.3.14, on a l’isomorphismede groupes abéliens
Hom(E,F) HomA(Γ(E),Γ(F))On transporte la structure d’espace de Banach que l’on a donné à HomA(Γ(E),Γ(F))sur Hom(E,F) et on conclut par la proposition précédente.
9.2.23. D
Soit C et C ′ deux catégories de Banach. Un foncteur ϕ : C → C ′ est un foncteur deBanach si pour tout couple d’objets E et F de C , l’application
MorC (E,F) −→MorC ′ (ϕ(E), ϕ(F))
est linéaire et continue. Notons qu’un foncteur de Banach est additif par linéaritéde l’application ci-dessus.
9.2.24. P
Soit f : Y→ X une application continue entre deux espaces compacts, alors le foncteur
f ∗ : Vect(X) −→ Vect(Y)
est un foncteur de Banach quasi-surjectif.
D. Pour montrer que le foncteur f ∗ est de Banach, il faut montrerla continuité des applications
Hom(E,F) −→ Hom( f ∗(E), f ∗(F))
Pour tout couple de fibrés (E,F) sur X. Pour cela, il suffit de le voir sur les fibréstriviaux. Remarquons tout d’abord que l’image par le foncteur f ∗ d’un fibré trivialX ×Kn de rang n est le fibré trivial Y ×Kn ; ainsi, on a le diagramme commutatif
Hom(X ×Kn,X ×Km)f ∗ //
Hom(Y ×Kn,Y ×Km)
C(X,Mm×n(K))
f ∗ // C(Y,Mm×n(K))
où f ∗ est la composition à gauche : f ∗(g) = g f . Les flèches verticales sont clairementdes isométries par définition de la structure de Banach et f ∗ est continue, ainsi f ∗
l’est aussi.Si E et F sont des fibrés sur X, le théorème 8.3.3 implique qu’il existe deux
fibrés vectoriels E′ et F′ tels que
E ⊕ E′ X ×Kn et F ⊕ F′ X ×Km
Reprenons l’isomorphisme du théorème de Serre-Swan 8.3.14
Hom(E,F) HomA(Γ(E),Γ(F))
9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 195
On a donc
Hom(E,F) ×Hom(E′,F′) HomA(Γ(E),Γ(F)) ⊕HomA(Γ(E′),Γ(F′))
HomA(Γ(E) ⊕ Γ(E′),Γ(F) ⊕ Γ(F′))
HomA(Γ(E ⊕ E′),Γ(F ⊕ F′))
HomA(Γ(X ×Kn),Γ(X ×Km))
Hom(X ×Kn,X ×Km)
On peut donc voir Hom(E,F) comme un sous-espace de Hom(X ×Kn,X ×Km).Montrons finalement que le foncteur f ∗ est quasi-surjectif. En effet, soit F un
fibré vectoriel sur Y, il existe un fibré F′ tel que F ⊕ F′ Y ×Kn. On a donc
f ∗(X ×Kn) Y ×Kn F ⊕ F′
9.2.25. C
De plus, dans le cas où f = i est l’inclusion d’un sous-espace fermé Y dans X, le foncteuri∗ est aussi plein.
D. Nous renvoyons le lecteur à [36], théorème 5.10. Il faut prou-ver que l’homomorphisme
Γ(X,E)→ Γ(Y,EY)est surjectif, puis prouver que les foncteurs
(E,F) 7−→ Hom(E,F) et (E,F) 7−→ Γ(X,HOM(E,F))
sont isomorphes.
Nous citons maintenant deux lemmes que nous ne souhaitons pas prouver.Leurs preuves peuvent être trouvées dans [36] aux pages 64 et 65.
9.2.26. L
Soit A et B deux algèbres de Banach, f : A→ B un homomorphisme d’anneaux continu etsurjectif et τ : I → B∗ un chemin dans B∗, le groupe des unités de B, tel que τ(0) = f (α)pour un certain élément inversible α de A, alors il existe un élément inversible α′ de A telque f (α′) = τ(1).
9.2.27. D
Notons B(X) l’algèbre de Banach des fonctions continues sur un espace topologiquecompact X à valeurs dans une algèbre de Banach B.
9.2.28. L
Reprenons le lemme précédent, si l’homomorphisme d’anneaux f induit un homomorphismed’anneaux f : A(I)→ B(I) surjectif, alors il existe un chemin σ : I→ A∗ tel que f σ = τ.

196 9. K-THÉORIE TOPOLOGIQUE
9.2.29. P
Soit Y un sous-espace fermé d’un espace topologique compact X et E un fibré vectorielsur X. Soit α : E → E un automorphisme de E et τ : I → Aut(EY) un chemin tel queτ(0) = α|Y ; alors il existe un chemin σ : I → Aut(E) tel que σ(0) = α et σ(t)|Y = τ(t),pour tout t dans I.
D. Cette proposition découle directement des deux lemmes pré-cédents.
Dans cette section, ϕ : C → C ′ désignera un foncteur de Banach plein et quasisurjectif entre deux catégories de Banach.
9.2.30. P
Soit ϕ : C → C ′ un foncteur de Banach plein et quasi-surjectif, et soit τ = (E,E, α) untriple élémentaire. Alors τ est isomorphe au triple (E,E, idϕ(E)).
D. Soit A = End(E) et B = End(ϕ(E)), A et B sont des algèbres deBanach. Le foncteur ϕ induit un homomorphisme d’anneaux surjectif et continu
ϕ : A −→ Bβ 7−→ ϕ(β)
Comme le triple τ est élémentaire, on peut trouver un chemin σ : I → B∗ =Aut(ϕ(E)) tel que σ(0) = idϕ(E) et σ(1) = α, ce chemin est obtenu à partir del’homotopie entre α et idϕ(E). Par le lemme 9.2.26, il existe un automorphisme deE, β tel que ϕ(β) = σ(1) = α. On obtient ainsi le diagramme commutatif suivant
ϕ(E) α //
ϕ(β)
ϕ(E)
ϕ(idE)
ϕ(E)idϕ(E) // ϕ(E)
Ainsi, les triples de l’énnoncé sont bien isomorphes.
9.2.31. C
Considérons K(ϕ) le monoïde abélien obtenu par la définition de K(ϕ) en remplaçant lestriples élémentaires par les triples de la forme (E,E, idϕ(E)), alors K(ϕ) est isomorphe àK(ϕ).
9.2.32. R
Le corollaire précédent nous donne une description purement algébrique de K(ϕ)lorsque le foncteur ϕ est de Banach, plein et quasi-surjectif. En effet, dans la défi-nition 9.2.5 de K(ϕ), les triples élémentaires font intervenir la notion d’homotopie,ce qui n’est pas le cas dans la définition de K(ϕ). Désormais, dans ce cas précis, onidentifiera ces deux constructions.

9.2. LE PREMIER GROUPE DE K–THÉORIE D’UNE PAIRE, K(X,Y) 197
9.2.33. P
Soit d(E,F, α) un élément de K(ϕ), alors d(E,F, α) = 0 si et seulement s’il existe un objetG de C et un isomorphisme β : E ⊕ G→ F ⊕ G tel que ϕ(β) = α ⊕ idϕ(G).
D.=⇒ Si d(E,F, α) = 0, il existe deux triples élémentaires (G,G, idϕ(G)) et (H,H, idϕ(H))
tels que les triples (E⊕G,F⊕G, α⊕ idϕ(G)) et (H,H, idϕ(H)) soient isomorphes.Ainsi, il existe deux isomorphismes
f : E ⊕ G −→ H et g : F ⊕ G −→ H
tels que le diagramme suivant commute
ϕ(E ⊕ G)α⊕idϕ(G)
//
ϕ( f )
ϕ(F ⊕ G)
ϕ(g)
ϕ(H)idϕ(H) // ϕ(H)
Posons β = g−1 f , on a bien
ϕ(β) = ϕ(g−1 f )
= ϕ(g−1) ϕ( f )
= ϕ(g)−1 ϕ( f )
= ϕ(g)−1 idϕ(H) ϕ( f )
= α ⊕ idϕ(G)
⇐= On a le diagramme commutatif suivant :
ϕ(E ⊕ G)α⊕idϕ(G)
//
ϕ(β)
ϕ(F ⊕ G)
idϕ(F⊕G)
ϕ(F ⊕ G)
idϕ(F⊕G) // ϕ(F ⊕ G)
ainsi les triples (E ⊕ G,F ⊕ G, α ⊕ id) et (F ⊕ G,F ⊕ G, id) sont isomorphes etdonc
d(E,F, α) = d(E ⊕ G,F ⊕ G, α ⊕ id)
= d(F ⊕ G,F ⊕ G, id)= 0
K(X,Y).
Appliquons ces résultats au cas où C = Vect(X) et C ′ = Vect(Y), où Y est unsous-espace fermé d’un espace topologique compact X.
198 9. K-THÉORIE TOPOLOGIQUE
9.2.34. D
Soit ϕ : Vect(X)→ Vect(Y) le foncteur induit par la restriction des fibrés vectorielssur Y. Ce foncteur est de Banach, plein et quasi surjectif comme mentionné en9.2.25. On note alors
K(X,Y) = K(ϕ)
9.2.35. R
Un élément d(E,F, α) de K(X,Y) correspond à un couple de fibrés vectoriels E etF sur X où α est un isomorphisme entre leur restriction à Y. On a la propritétésuivante, d(E,F, α) = d(E′,F′, α′) si et seulement s’il existe deux fibrés vectoriels Get G′ et deux isomorphismes
f : E ⊕ G −→ E′ ⊕ G′ et g : F ⊕ G −→ F′ ⊕ G′
tels que le diagramme suivant commute :
(E ⊕ G)|Yα⊕idGY //
f |Y
(F ⊕ G)|Y
g|Y
(E′ ⊕ G′)|Yα′⊕idG′Y // (F′ ⊕ G′)|Y
On a de plus la suite exacte :
K(X,Y) // K(X) // K(Y)
d(E,F, α) // [E] − [F] // [E|Y] − [F|Y]
Notons encore que K(X,∅) K(X).
9.2.36. P
Soit Y un sous-espace fermé d’un espace topologique compact X. Supposons de plus queY soit un rétracte par déformation de X, alors la suite exacte de la remarque précédentes’étend en une suite exacte courte scindée :
0 −→ K(X,Y) −→ K(X) −→ K(Y) −→ 0
D. En vertu de la proposition 9.2.12, il suffit de montrer qu’ilexiste un foncteur inverse à la restriction i∗ : Vect(X)→ Vect(Y). Comme Y est sup-posé être un rétracte par déformation de X, il existe une rétraction par déformationr : X→ Y telle que r i ' idY. Par la proposition 8.2.41, les foncteurs (r i)∗ et (idY)∗
sont isomorphes. Le foncteur r∗ : Vect(Y) → Vect(X) est alors le foncteur cherchépuisque :
i∗ r∗ = (r i)∗
(idY)∗
= idVect(Y)

9.3. LA K–THÉORIE NE S’ARRÊTE PAS LÀ ! 199
9.2.37. R
La construction de K(X,Y) définit un foncteur contravariant
K : P −→ Ab
où P est la catégorie des paires d’espaces topologiques (X,Y) où Y est un sous-espace fermé de X qui est compact. Rappelons qu’un morphisme de paires f :(X,Y) → (X′,Y′) est une application continue f : X → X′ telle que f (Y) ⊆ Y′. Untel morphisme induit un diagramme de catégories commutatif :
Vect(X) //
f ∗
Vect(Y)
( f |Y)∗
Vect(X′) // Vect(Y′)
et induit ainsi un homomorphisme, noté f ∗ entre K(X′,Y′) et K(X,Y) donné par
f ∗(d(E′,F′, α′)) = d( f ∗(E′), f ∗(F′), ( f |Y)∗(α)) pour tout d(E′,F′, α′) ∈ K(X′,Y′)
Mentionnons finalement le théorème d’excision qui nous donne une des pro-priétés les plus forte du groupe K(X,Y) par rapport à la K–théorie du quotientXY.
9.2.38. T (Excision)
Soit Y un sous-espace fermé d’un espace topologique compact X, alors la projection π :X→ X/Y induit un isomorphisme
π∗ : K( XY, y) −→ K(X,Y)
où y est le point correspondant à Y dans l’espace quotient.
9.3. La K–théorie ne s’arrête pas là !
Ces quelques pages ne constituent qu’une maigre introduction à la K–théorietopologique. Par la suite, on défini le groupe K−1(C ) à partir des automorphismesde C . En appliquant ceci à la catégorie Vect(X) des fibrés vectoriels sur X, on obtientle groupe K−1(X). On obtient alors une suite exacte courte
K−1(X)→ K−1(Y)→ K(X,Y)→ K(X)→ K(Y)
où Y est un sous-espace fermé de X. On définit alors les groupes K−n(X) et K−n(X,Y)pour tout entier n ≥ 2 qui prolonge la suite exacte comme on pouvait s’y attendrepour obtenir une théorie cohomologique.
K−n−1(X)→ K−n−1(Y)→ K−n(X,Y)→ K−n(X)→ K−n(Y)

200 9. K-THÉORIE TOPOLOGIQUE
A partir de là, le théorème central de la K–théorie est le théorème de périodicité deBott qui donne des isomorphismes :
K−nC (X,Y) K−n−2
C (X,Y)etK−nR (X,Y) K−n−8
R (X,Y)
On dit alors que la K–théorie complexe est périodique de période 2 et que la K–théorie réelle est périodique de période 8. On obtient, entre autres, les résultatssuivants :
KC(X) KC(X ×R2)et
KC(Sn)
0 si n est impairZ si n est pair
On peut égalament donner une structure d’anneau au K–groupe K(X). Cetanneau possède une unité si et seulement si l’espace X est compact.
Le deuxième outil principal de la K–théorie est l’isomorphisme de Thom quiétablit un isomorphisme entre le K–groupe d’une variété et celui d’un fibré com-plexe sur cette variété. Nous énonçons ce théorème ici :
I T
Soit X une variété et E un fibré vectoriel complexe sur X, alors il existe un isomorphismede K(X)–module
ψ : K(X) −→ K(E)Si de plus, la variété X est compcate, alors on a ψ(ξ) = ξψ(1) et on appelle ψ(1) la classede Thom du fibré E.
Une conséquence imédiate du théorème de Thom est l’isomorphisme KC(S2n) Z pour tout entier n. En effet, S2n peut être vu comme le compactifié de l’espaceCn qui est lui même un fibré complexe de rang n sur un point. Le théorème nousdonne donc un isomorphisme entre le K–groupe du point et le K–groupe de Cn.On obtient donc
KC(S2n) KC(Cn+) K(Cn) K(x) Z

CHAPITRE 10
Cohomologie de de Rham
Dans ce chapitre, Michele Klaus construit la cohomologie de de Rham, l’ho-mologie et la cohomologie singulière afin de démontrer le théorème de de Rhamqui affirme que ces deux cohomologies sont isomorphes.
10.1. La cohomologie de de Rahm
Préliminaires d’algèbre linéaire.
10.1.1. C
Dans tout le paragraphe on notera K pour un corps de caractéristique nulle et Vpour un K-espace vectoriel de dimension finie n.
10.1.2. D
Une p-forme sur un K-espace vectoriel V est une application sur p facteurs ϕ :V × ... × V → K linéaire en chaque variable.
10.1.3. D
Une p-forme alternée sur unK-espace vectoriel V est une p-formeϕ : V×...×V → Ktelle que ϕ(v1, ..., vi, ..., v j, ..., vp) = −ϕ(v1, ..., v j, ..., vi, ..., vp) pour tout i différent de j.
10.1.4. R
201

202 10. COHOMOLOGIE DE DE RHAM
Si ϕ est une p-forme alternée sur V et v ∈ V × ... × V avec vi = v j pour un certain idifférent de j, alors ϕ(v) = 0.
En effetϕ(v1, ..., vi, ..., v j, ..., vp) = −ϕ(v1, ..., v j, ..., vi, ..., vp) = ϕ(v1, ..., vi, ..., v j, ..., vp),donc 2ϕ(v) = 0 mais carK = 0 donc ϕ(v) = 0.
10.1.5. N
On notera∧p(V) l’ensemble des p-formes alternées sur V. En particulier on a
que∧1(V)=V∗, l’espace vectoriel dual de V. On pose
∧0(V) = K. On remarquefacilement que
∧p(V) est un K-espace vectoriel pour les opérations ponctuellesusuelles.
10.1.6. E
Soit A ∈ Mn×n(K) une matrice antisymétrique, alors l’application ϕ : V × V → K,(x, y) 7→ xtAy est une 2-forme alternée sur V : ϕ est clairement linéaire en chaquevariable et de plus ϕ(x, y) = xtAy = (Atx)ty = (−Ax)ty = yt(−Ax) = −(ytAx) =−ϕ(y, x).
10.1.7. R
Soit ϕ une p-forme alternée sur V et e1, ..., en une base de V. Par linéarité on aque ϕ est entièrement déterminée par l’image des p-uples de vecteurs de base.Comme ϕ est alternée on a en fait que l’application est uniquement déterminéepar ϕ(ei1 , ..., eip ) pour tout choix de i1, ..., ip ∈ 1, ...,n avec 1 6 i1 < ... < ip 6 n.
10.1.8. P
L’ensemble des p-formes alternéesϕi1,...,ip |1 6 i1 < ... < ip 6 n
définies par :
ϕi1,...,ip (e j1 , ..., e jp ) =
1, si (i1, ..., ip) = ( j1, ..., jp) ;0, sinon.
avec 1 6 j1 < ... < jp 6 n et étendues par linéarité alternée, est une base du K-espacevectoriel
∧p(V).
D. Soit ϕ ∈∧p(V) et pour tout 1 6 i1 < ... < ip 6 n posonos
λi1,...,ip B ϕ(ei1 , ..., eip ). Alors on a que ϕ =∑
16i1<...<ip6n λi1,...,ipϕi1,...,ip . Clairement lesϕi1,...,ip de l’ensemble considéré sont linéairement indépendantes.
10.1.9. C
De la proposition précédente il en résulte que dimK(∧p(V)) = ]
choix de p parmi n
=(
np
). Si p>n on a donc que dimK(
∧p(V)) = 0.

10.1. LA COHOMOLOGIE DE DE RAHM 203
10.1.10. D
Le produit extérieur de∧p(V) et
∧q(V) est l’application ∧ :∧p(V) ×
∧q(V) →∧p+q(V), (ϕ,ψ) 7→ ϕ ∧ ψ définie par :
(ϕ ∧ ψ)(v1, ..., vp+q) B1
p!q!
∑σ∈Sp+q
sgn(σ)ϕ(vσ(1), ..., vσ(p))ψ(vσ(p+1), ..., vσ(p+q))
10.1.11. P
Le produit extérieur est bien défini.
D.
(1) Pour tout v1, ..., vp+q,w1 ∈ V on a que :
(ϕ∧ψ)(v1+w1, ..., vp+q) =1
p!q!
∑σ∈Sp+q
sgn(σ)ϕ(vσ(1)+wσ(1), ..., vσ(p))ψ(vσ(p+1), ..., vσ(p+q)) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)(ϕ(vσ(1), ..., vσ(p)) + ϕ(wσ(1), ..., vσ(p)))ψ(vσ(p+1), ..., vσ(p+q)) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)ϕ(vσ(1), ..., vσ(p))ψ(vσ(p+1), ..., vσ(p+q))+
+1
p!q!
∑σ∈Sp+q
sgn(σ)ϕ(wσ(1), ..., vσ(p))ψ(vσ(p+1), ..., vσ(p+q)) =
= (ϕ ∧ ψ)(v1, ..., vp+q) + (ϕ ∧ ψ)(w1, ..., vp+q)et de même pour les autres variables.
(2) Pour tout v1, ..., vp+q ∈ V et λ ∈ K on remarque facilement que (ϕ ∧ψ)(λv1, ..., vp+q) = λ(ϕ∧ψ)(v1, ..., vp+q) et de même pour les autres variables.
(3) Soient v1, ..., vp+q ∈ V et τ ∈ Sp+q. Soit σ ∈ Sp+q et posons γ = στ, alorssgn(σ) = sgn(τ)sgn(σ)sgn(τ) = sgn(τ)sgn(στ) = sgn(τ)sgn(γ). Ainsi :
(ϕ ∧ ψ)(vτ(1), ..., vτ(p+q)) =1
p!q!
∑σ∈Sp+q
sgn(σ)ϕ(vστ(1), ..., vστ(p))ψ(vστ(p+1), ..., vστ(p+q)) =
=1
p!q!
∑γ∈Sp+q
sgn(τ)sgn(γ)ϕ(vγ(1), ..., vγ(p))ψ(vγ(p+1), ..., vγ(p+q)) =
= sgn(τ)(ϕ ∧ ψ)(v1, ..., vp+q)
(4) Il s’ensuit que (ϕ ∧ ψ) est bien une p+q forme alternée.
10.1.12. P
Le produit extérieur est bilinéaire et associatif.
D.

204 10. COHOMOLOGIE DE DE RHAM
(1) Soient ϕ, ψ deux p-formes alternées, η une q-forme alternée et λ, µ deuxscalaires dans K. Alors :
((λϕ + µψ) ∧ η)(v1, ..., vp+q) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)(λϕ + µψ)(vσ(1), ..., vσ(p))η(vσ(p+1), ..., vσ(p+q)) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)(λϕ(vσ(1), ..., vσ(p)) + µψ(vσ(1), ..., vσ(p)))η(vσ(p+1), ..., vσ(p+q)) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)λϕ(vσ(1), ..., vσ(p))η(vσ(p+1), ..., vσ(p+q))+1
p!q!
∑σ∈Sp+q
sgn(σ)µψ(vσ(1), ..., vσ(p))η(vσ(p+1), ..., vσ(p+q)) =
= λϕ ∧ η + µψ ∧ η
De la même façon on prouve la linéarité de la deuxième variable.
(2) Soit ϕ une p-forme alternée, ψ une q-forme alternée et η une r-formealternée. Alors
((ϕ ∧ ψ) ∧ η)(v1, ..., vp+q+r) =
=1
(p + q)!r!
∑σ∈Sp+q+r
sgn(σ)(ϕ ∧ ψ)(vσ(1), ..., vσ(p+q))η(vσ(p+q+1), ..., vσ(p+q+r)) =
=1
(p + q)!r!
∑σ∈Sp+q+r
sgn(σ)
1p!q!
∑τ∈Sp+q
sgn(τ)ϕ(vτσ(1), ..., vτσ(p))ψ(vτσ(p+1), ..., vτσ(p+q))
η(vσ(p+q+1), ..., vσ(p+q+r)) =
=1
(p + q)!r!q!p!
∑τ∈Sp+q
∑σ∈Sp+q+r
sgn(σ)sgn(τ)ϕ(vτσ(1), ..., vτσ(p))ψ(vτσ(p+1), ..., vτσ(p+q))η(vσ(p+q+1), ..., vσ(p+q+r)) =
=1
(p + q)!r!q!p!(p+q)!
∑%∈Sp+q+r
sgn(%)ϕ(v%(1), ..., v%(p))ψ(v%(p+1), ..., v%(p+q))η(v%(p+q+1), ..., v%(p+q+r))
Puisqu’on peut considérer toute permutation τ sur p+ q éléments commeune permutation sur p+q+ r éléments qui laisse fixe les r derniers termes.Ainsi pour toute permutation τ fixée, les permutations % = τσ recouvrentSp+q+r lorsqueσparcours Sp+q+r. Comme il y a (p+q)! de telles permutationsτ le résultat s’ensuit.
De la mème façon on prouve que
(ϕ∧(ψ∧η))(v1, ..., vp+q+r) =1
r!q!p!
∑%∈Sp+q+r
sgn(%)ϕ(v%(1), ..., v%(p))ψ(v%(p+1), ..., v%(p+q))η(v%(p+q+1), ..., v%(p+q+r))
et donc que le produit exetérieur est associatif.
10.1.13. P
Soit (e1, ..., en) une base de V et (e∗1, ..., e∗n) la base duale associée, alors l’ensemble
e∗i1 ∧ ... ∧ e∗ip |1 6 i1 < ... < ip 6 n
est une base de
∧p(V).

10.1. LA COHOMOLOGIE DE DE RAHM 205
D. Soient i1, ..., ip, j1, ..., jp ∈ 1, ...,n tels que 1 6 i1 < ... < ip 6 net 1 6 j1 < ... < jp 6 n. Alors on a que :
(e∗i1∧...∧e∗ip )(e j1 , ..., e jp ) =1!
1!...1!
∑σ∈Sp
sgn(σ)e∗i1 (eσ( j1))...e∗ip (eσ( jp)) =
1, si (i1, ..., ip) = ( j1, ..., jp) ;0, sinon.
C’est à dire e∗i1∧ ...∧e∗ip = ϕi1,...,ip . Le résultat est ainsi démontré grâce à la Proposition10.1.8.
10.1.14. P
Si ϕ est une p-forme alternée sur V et ψ est une q-forme alternée sur V, alors ϕ ∧ ψ =(−1)pqψ ∧ ϕ
D. Soit e1, ..., en une base de V et soite∗1, ..., e
∗n
sa base duale.
Soit v = λ1e1 + ... + λnen et w = µ1e1 + ... + µnen deux vecteurs dans V. On aalors que : (e∗i ∧ e∗j)(v,w) = e∗i (v)e∗j(w) − e∗i (w)e∗j(v) = λiµ j − µiλ j = −(λ jµi − µ jλi) =−(e∗j(v)e∗i (w) − e∗j(w)e∗i (v)) = −(e∗j ∧ e∗i )(v,w) et donc e∗i ∧ e∗j = (−1)e∗j ∧ e∗i pour touti, j = 1, ...,n. Par bilinéarité du produit extérieur il suffit de prouver l’assertionpour deux formes ϕ = e∗i1 ∧ ... ∧ e∗ip et ψ = e∗j1 ∧ ... ∧ e∗jq . Or dans ce cas tout est clairpuisque pour passer deϕ∧ψ = e∗i1∧...∧e∗ip∧e∗j1∧...∧e∗jq àψ∧ϕ = e∗j1∧...∧e∗jq∧e∗i1∧...∧e∗ipil faut permuter p fois chaque élément e∗jk . Comme il y a q termes de cette forme,ce qui précède nous permet de conclure que ϕ ∧ ψ = (−1)pqψ ∧ ϕ.
Variétés différentiables.
10.1.15. D
Une variété différentiable de dimension n sans bord est un espace topologique Mde Hausdorff possédant une base dénombrable d’ouverts et muni d’une collectiond’applications
Uα, φα
α∈A
appelées cartes et vérifiant :
(1) Toute carte φα est un homéomorphisme entre un ouvert Uα de M et unouvert U′α de Rn.
(2) Tout point x de M est contenu dans le domaine U d’une carte.
(3) Pour toute paire de cartes (U, φ) et (V, ψ) avec U∩V , ∅ on a que φψ−1 :ψ(U ∩ V)→ φ(U ∩ V) est une application de classe C∞.
10.1.16. D
Une application f : M → N entre deux variétés différentiables est dite lisse ou

206 10. COHOMOLOGIE DE DE RHAM
différentiable si pour toute carte (U, φ) de M et (V, ψ) de N on a que la compositionψ f φ−1 est différentiable lorsqu’elle est définie.
10.1.17. C
Dans cette section, on notera M pour une variété différentiable, n pour sa dimensionet m pour un point arbitraire dans M.
10.1.18. N
On note CMm l’ensemble des chemins continus c : I→M où I est un intervalle ouvert
de R contenant 0 et c(0) = m.
Dans la suite du travail on se prendra la libérté de ne pas toujours specifier lesdomaines des applications lorsqu’on considérera leur composition.
10.1.19. L
Pour deux chemins c1, c2 ∈ CMm la relation suivante est une relation d’équivalence :
c1 ∼ c2 ⇔ il existe une carte (U, φ) autour de m avec (φ c1)′(0) = (φ c2)′(0)⇔pour toute carte (U, φ) autour de m on a (φ c1)′(0) = (φ c2)′(0)
D. Premièrement on prouve l’equivalence des défintions et en-suite on montre qu’on a bien une relation d’equivalence.
(1) Supposons que c1, c2 ∈ CMm sont deux chemins équivalents pour la carte
(U, φ) et soit (V, ψ) une deuxième carte au tour de m. Alors on a que :
(ψ c1)′(0) = ((ψ φ−1) (φ c1))′(0) =
= (ψ φ−1)′(φ(c1(0))) · (φ c1)′(0) =
= (ψ φ−1)′(φ(c2(0))) · (φ c2)′(0) =
= ((ψ φ−1) (φ c2))′(0) = (ψ c2)′(0)On en déduit qu’il existe une carte (U, φ) autour de m avec (φ c1)′(0) =(φc2)′(0)⇔pour toute carte (U, φ) autour de m on a (φc1)′(0) = (φc2)′(0)
(2) La relation ∼ est clairement réflexive et symétrique.
(3) Soient c1, c2, c3 ∈ CMm et (U, φ), (V, ψ) deux cartes autour de m avec (φ
c1)′(0) = (φ c2)′(0) et (ψ c2)′(0) = (ψ c3)′(0). Alors on a que (ψ|U∩V
c1)′(0) = (ψ|U∩V c2)′(0) = (ψ|U∩V c3)′(0). Ce qui prouve la transitivité.
10.1.20. D
On appelle espace tangent à M en m l’ensembleTm(M) B CM
m / ∼. Les éléments de Tm(M) sont appelés les vecteurs tangents à M enm.
10.1. LA COHOMOLOGIE DE DE RAHM 207
10.1.21. D
Soit M une variété différentiable et m un point dans M. Une fonction f : M→ R estdifférentiable en m s’il existe une carte (U, φ) autour de m telle que f φ−1 soit declasse C∞ en φ(m). On note C∞(M) l’ensemble des fonctions différentiables en toutpoint m de M ; on remarque sans autre que C∞(M) possède une structure naturellede R-algèbre.
10.1.22. L
Une fonction f : M→ R est différentiable en m⇔ pour toute carte (V, ψ) autour de m ona que f ψ−1 est de classe C∞ en ψ(m).
D. Le résultat découle diréctement du fait que la variété estdifférentiable et de l’egalité suivante : f ψ−1 = ( f φ−1) (φ ψ−1).
10.1.23. D
Soit M une variété différentiable et m un point dans M. Une dérivation en m est uneapplication linéaire Dm : C∞(M) → R telle que Dm( f g) = f (m)Dm(g) + g(m)Dm( f )pour tout couple de fonctions différentiables f et g. On note Derm(M) l’ensembledes dérivations en m.
Cette définition est particulièrement intéréssante parce qu’elle nous permetde mieux caractériser l’espace tangent Tm(M) et de lui donner une structure deR-espace vectoriel. Pour faire cela on a besoin du lemme suivant :
10.1.24. L
Soit Dm une dérivation en m et f , g ∈ C∞(M) deux fonctions différentiables s’annullanten m ; alors Dm( f g) = 0. De plus Dm(k) = 0 pour toute fonction constante k.
D. Comme Dm est une dérivation on a directement que Dm( f g) =f (m)Dm(g) + g(m)Dm( f ) = 0 et Dm(k) = Dm(1k) = 1Dm(k) + kDm(1) = 2Dm(k) et doncDm(k) = 0.
Les trois propositions suivantes nous montrent que l’espace tangent est unespace vectoriel comme annoncé.
10.1.25. P
L’ensemble des dérivations en m est un R-espace vectoriel pour les lois : (D1 + D2)( f ) =D1( f ) +D2( f ) et (λD)( f ) = λ(D( f )).
D. Vérification facile.

208 10. COHOMOLOGIE DE DE RHAM
10.1.26. P
Soit [c] ∈ Tm(M) un vecteur tangent à M en m. L’application D[c] : C∞(M) → R définiepar D[c]( f ) = ( f c)′(0) est une dérivation en m.
D. On prouve d’abord que cette application est bien définie etensuite qu’il s’agit d’une dérivation.
(1) Soit [c] ∈ Tm(M) et c1 ∈ [c]. Soit aussi (U, φ) une carte autour de m ; pardéfinition de [c] on a que (φ c)′(0) = (φ c1)′(0) et donc ( f c)′(0) =( f φ−1
φ c)′(0) = ( f φ−1)′(φ c(0)) · (φ c)′(0) = ( f φ−1)′(φ c1(0)) ·(φ c1)′(0) = ( f c1)′(0).
(2) Soit f , g ∈ C∞(M) et λ ∈ R. Alors : D[c]( f + g) = (( f + g) c)′(0) = ( f c +g c)′(0) = ( f c)′(0) + (g c)′(0) = D[c]( f ) +D[c](g).De même D[c](λ f ) = ((λ f ) c)′(0) = (λ( f c))′(0) = λ( f c)′(0) = λD[c]( f ).Ainsi D[c] est linéaire et il ne nous reste plus qu’à prouver la règle deLeibnitz : D[c]( f g) = (( f g) c)′(0) = (( f c)(g c))′(0) = ( f c)′(0)(g c)(0)+( f c)(0)(g c)′(0) = D[c]( f )g(m) +D[c](g) f (m).
10.1.27. P
L application D : Tm(M)→ Derm(M), [c] 7→ D[c] est bijective.
D. Prouvons d’abord l’injectivité et ensuite la surjectivité :
(1) Soient [c1] , [c2] ∈ Tm(M) deux vecteurs tangents et supposons que D[c1]( f ) =D[c2]( f ) pour tout f ∈ C∞(M). Soit (U, φ) une carte autour de m, alors ona que φi ∈ C∞(M) quelque soit i = 1, ...,n et donc (φi c1)′(0) = D[c1](φi) =D[c2](φi) = (φi c2)′(0) ce implique que (φ c1)′(0) = (φ c2)′(0) et donc[c1] = [c2]. D’où l’injectivité de D.
(2) Soit maintenant D′ une dérivation en m et (U, φ) une carte autour dem. Posons ai B D′(φi) et a = (a1, ..., an). Considérons le chemin dans Msuivant : γ :] − ε, ε[→ M, t 7→ φ−1(φ(m) + ta). On remarque que γ(0) = mainsi
[γ]
est un vecteur tangent en m. On veut prouver que D[γ] = D′.
Soit f une fonction différentiable sur M et notons f B f φ−1. Parla formule de Taylor on a qu’il existe une famille de fonction
ψi, j
i, j=1,...,n
définies sur le domaine de f avec :
f (x) = f (φ(m)) +n∑
i=1
∂ f∂xi
φ(m)(xi − φi(m)) +n∑
i, j=1
ψi, j(xi − φi(m))(x j − φ j(m))
En composant à droite par φ on obtient :
f (p) = f (m) +n∑
i=1
∂ f∂xi
φ(m)(φi(p) − φi(m)) +n∑
i, j=1
ψi, j(φi(p) − φi(m))(φ j(p) − φ j(m))
Comme la dernière partie de cette expression est une somme de produitsde fonctions s’annullant en m on a par le Lemme 10.1.24 et par linéarité

10.1. LA COHOMOLOGIE DE DE RAHM 209
de D′ :
D′( f ) =n∑
i=1
∂ f∂xi
φ(m)D′(φi(p) − φi(m)) =n∑
i=1
∂ f∂xi
φ(m)ai
Or D[γ]( f ) = ( f γ)′(0) = ( f φ−1(φ(m) + ta))′(0) = ( f (φ(m) + ta))′(0) =∑ni=1
∂ f∂xiφ(m)ai. Ce qui prouve l’assertion et donc la surjectivité de D.
10.1.28. C
L’epace tangent Tm(M) est un espace vectoriel isomorphe à Derm(M).
Une fois établi le fait que l’espace tangent est un espace vectoriel on cherche àdéterminer une base :
Soit M une variété différentiable, m un point arbitraire de M et (U, φ) une carteautour de m. Soit f une fonction différentiable sur M et posons f : φ(U) → R ;x 7→ f φ−1(x). Localement on peut donc écrire f sous la forme f |U = f φ.
Considérons les chemins dans M donnés par ci :]−ε, ε[→M ; t 7→ φ−1(φ(m)+tei)où ei est le i-ème vecteur de la base canonique. On va montrer que l’ensembleD[c1], ...,D[cn]
est une base de l’espace vectoriel Derm(M) :
Remarquons d’abord que si [c] ∈ Tm(M) est un vecteur tangent en m, alors :
D[c]( f ) = ( f c)′(0) =
= ( f φ c)′(0) =
= ( f (φ1c(t), ..., φnc(t)))′(0) =
=
n∑i=1
∂ f∂xi
(φ(c(0))) ·∂(φi c)∂t
(0) =
=
n∑i=1
D[c](φi)∂ f∂xi
(φ(m)) =
=
n∑i=1
ai∂ f∂xi
(φ(m))
Ce qui nous permet d’établir l’égalité suivante :
D[c j]( f ) =n∑
i=1
∂ f∂xi
(φ(m)) ·∂(φ φ−1(φ(m) + te j))
∂t(0) =
=
n∑i=1
∂ f∂xi
(φ(m)) · δi, j =
=∂ f∂x j
(φ(m))
Comme D[c]( f ) =∑n
i=1 ai∂ f∂xi
(φ(m)) il en résulte que l’ensembleD[c1], ...,D[cn]
en-
gendre l’espace vectoriel Derm(M).

210 10. COHOMOLOGIE DE DE RHAM
Soient maintenant λ1, ..., λn ∈ R tels que∑n
i=1 λiD[c j] = 0. Pour tout j = 1, ...,nconsidérons la fonction f j : U → R définie localement sur U par m 7→ φi(m).Grâce au théorème de partition de l’unité cette fonction s’étend en une fonctiondifférentiable sur tout M de la façon habituelle. Ainsi on a que :
0 =n∑
i=1
λiD[ci]( f j) =
=
n∑i=1
λi∂ f j
∂xi(φ(m)) =
=
n∑i=1
λi∂(φ j φ−1)
∂xi(φ(m)) =
=
n∑i=1
λiδi j = λ j
Ce qui termine la preuve. Il faut encore remarquer que la baseD[c1], ...,D[cn]
dépend
de la carte choisie. La notation ne le met pas en évidence parce que les syboles φiont déjà plusieurs significations.
10.1.29. R
Ce qui précède nous montre que la dimension de l’espace tangent vu comme R-espace vectoriel est égale à la dimension de la variété. Deuxièmement on en déduitun isomorphisme de R-espace vectoriel entre Rn, qu’on peut voir comme variétéde dimension n, et son espace tangent en un point quelconque : ϕ : Rn
→ Tm(Rn),ei 7→
∂∂xi
.
10.1.30. D
On appelle fibré tangent de M le fibré vectoriel sur M donné par l’ensemble T(M) B⋃m∈M Tm(M) avec la projection canonique.
Après avoir étudié les espaces tangents on va s’interesser aux applicationsentre espaces tangents.
10.1.31. D
Soient N,M deux variétés différentiables et f : M → N une application différen-tiable. L’appliaction tangente (ou application différentielle) de f en m est l’applica-tion f∗ : Tm(M)→ T f (m)(N) définie par f∗(D[c]) = D[ fc]. On note aussi d f = f∗.
10.1.32. P
Sous les mêmes hypothèses, on a que f∗ est bien définie, linéaire et vérifie ( f∗D[c])(g) =
10.1. LA COHOMOLOGIE DE DE RAHM 211
D[c](g f ) pour toute application différentiable g ∈ C∞(N). De plus si h : N → P est uneautre application différentiable entre variétés, alors on a que h∗ f∗ = (h f )∗.
D.
(1) Soit g une application différentiable sur N, alors : ( f∗(D[c]))(g) = D[ fc](g) =(g f c)′(0) = D[c](g f ). Ainsi la première relation annoncée est vérifiéeet f∗ est bien définie car D[c] l’est.
(2) Soient D[c1], D[c2] deux dérivations en m et a, b ∈ R. Soit g une applicationdifférentiable sur N, alors : ( f∗(aD[c1] + bD[c2]))(g) = (aD[c1] + bD[c2])( f g) =aD[c1]( f g) + bD[c2]( f g) = a( f∗(D[c1]))(g) + b( f∗(D[c2]))(g).
(3) La dernière relation est vite prouvée : (h∗( f∗(D[c])))(g) = ( f∗(D[c]))(g h) =D[c](g h f ) = ((h f )∗(D[c]))(g).
10.1.33. D
Soit M une variété différentiable et m un point dans M. L’espace cotangent à M enm est l’espace vectoriel dual T∗m(M) de Tm(M).
Comme dans le cas de l’espace tangent on cherche une base de cet espace. Enparticulier si (U, x) est une carte autour de m on essaye de déterminer la base dualede la base
D[c1], ...,D[cn]
de l’espace tangent qu’on vient de calculer.
La carte locale x : U → Rn induit n applications xi : U → R qui à leur tourinduisent n applications tangentes dxi = xi∗ : Tm(M) → Txi(m)(R) R. Ainsi on acomme candidat pour la base duale l’ensemble suivant : dxi, ..., dxn ⊂ T∗m(M).
Rappelons que, par définition, on a c j = x−1(x(m) + te j) et donc xi c j = xi
x−1(x(m) + te j) = x(m) + δi jte j.Considérons maintenant dxi(D[c j]) = D[xic j]. Soit g ∈ C∞(R) une application
différentiable, alors on a que
D[xic j](g) =∂(g xi c j)
∂t(0) =
=∂(g(x(m) + δi, jte j))
∂t(0) =
= g′(x(m)) ·∂(x(m) + δi jt)
∂t=
= δi jg′(x(m))
Par l’isomorphisme déjà établi entre Txi(m)(R) et R on a que dxi(D[c j]) = δi, j etainsi on a bien que dxi, ..., dxn est la base duale de
D[c1], ...,D[cn]
.
Formes différentielles.

212 10. COHOMOLOGIE DE DE RHAM
10.1.34. N
Dans tout ce paragraphe on notera M pour une variété différentiable de dimensionn, m pour un point arbitraire dans M et Tm(M) l’espace tangent.
10.1.35. D
Une p-forme différentielle sur une variété différentiable M est une applicationdifférentiable (à expliquer) qui à tout point m dans M associe une p-forme alternéeωm ∈
∧p(Tm(M)) sur l’espace vectoriel tangent.
Le mot "différentiable" dans la définition a la signification suivante : en ap-pliquant les résultats du premier paragraphe on a que si (U, x) est une cartesur M on a une base locale sur U de l’espace vectoriel
∧p(Tm(M)) donnée pardxi1 ∧ ... ∧ dxip |1 6 i1 < ... < ip 6 n
. Ainsi localement on peut écrire
ω =∑
16i1<...<ip6n fi1...ip dxi1 ∧ ... ∧ dxip pour certaines fonctions fi1...ip : U → R. Diffé-rentiable signifie que toutes les fonctions fi1...ip sont différentiables.
Cette propriétée est bien définie parce que si (V, y) est une autre carte avecU ∩ V , ∅ alors par les propriétés algébriques de la base duale on a que dxi =∑n
k=1 dxi(D[ck])dyk. Ainsi si on écrit le changement de coordonnées on obtient que ωreste différentielle si elle l’était (puisque D[ck]xi(m) = ∂xi
∂yk(y(m)) donc D[ck]xiy−1 = ∂xi
∂yk
qui est différentiable vu que xi = xi x−1 l’est).
10.1.36. E
Soit U un ouvert de Rn et f : U → R une fonction différentiable. Posons ωx :(Tx(U))n
→ R définie par ωx(u1, ...,un) = f (x)det(u1, ...,un) pour tout x dans U. Clai-rement ωx est une n-forme alternée sur Tx(U) pour tout x dans U et par différentia-bilité du déterminant et de la fonction f on a que ω est une n-forme différentiellesur U.
10.1.37. N
On note Ωp(M) l’ensemble des p-formes différentielles sur M. Si p=0 on poseΩ0(M) = C∞(M). On remarque au passage que les 1-formes sont les sections dufibré vectoriel constitué du fibré cotangent.
10.1.38. L
L’ensemble des p-formes différentielles sur une variété M est un R-espace vectoriel pourles lois ponctuelles.
D. Soient ω, η ∈ Ωp(M) deux p-formes différentielles et λ ∈ R.Puisque
∧p(Tm(M)) est un R-espace vectoriel on a que la somme et le produitdéfinis comme suit induisent clairement une structure de R-espace vectoriel surΩp(M) : (ω + η)m = ωm + ηm et (λω)m = λωm.

10.1. LA COHOMOLOGIE DE DE RAHM 213
10.1.39. D
Soient p, q ∈N. Le produit extérieur deΩp(M) etΩq(M) est l’application∧ : Ωp(M)×Ωq(M)→ Ωp+q(M) ; (ω, η) 7→ ω ∧ η définie ponctuellement par (ω ∧ η)m B ωm ∧ ηmoù ∧ est le produit extérieur de
∧p(Tm(M)) et∧q(Tm(M)) déjà défini.
10.1.40. P
Le produit extérieur est bien défini, bilinéaire, associatif et vérifie ω ∧ η = (−1)pqη ∧ ω siω est une p-forme différentielle et η est une q-forme différentielle.
D. Cette opération est bien définie puisque si on écrit locale-ment une p-forme différentielle ω et une q-forme différentielle ρ sous la forme ω =∑
16i1<...<ip6n fi1...ip dxi1∧...∧dxip etρ =∑
16 j1<...< jq6n g j1... jp dx j1∧...∧dx jp , par bilinéarité etassociativité du produit ponctuel on a queω∧ρ =
∑16i1<...<ip6n,16 j1<...< jq6n g j1... jq fi1...ip dxi1∧
... ∧ dx jq . Les fonctions g j1... jq fi1...ip sont différentiables puisque g j1... jq et fi1...ip le sont.Le reste est clair par ponctualité des opérations et par la proposition 10.1.12
10.1.41. R
Si f est une fonction différentiable (i.e. si f ∈ Ω0(M)), ω une p-forme différentielleet si D1, ...,Dp sont p vecteurs tangents en m on a :
( fm ∧ ωm)(D1, ...,Dp) =1p!
∑σ∈Sp
sgn(σ) fmωm(Dσ(1), ...,Dσ(p)) = fmωm(D1, ...,Dp)
puisque si sgn(σ) = −1 alors ωm(Dσ(1), ...,Dσ(p)) = −ωm(D1, ...,Dp) et si sgn(σ) = 1alors ωm(Dσ(1), ...,Dσ(p)) = 1ωm(D1, ...,Dp) et de plus |Sp| = p!.
Pour cette raison souvent on note fω la p-forme différentielle f ∧ ω.
Comme dans le cas des espaces tangents on a qu’une application différentiableentre deux variétés induit une application entre les espaces des p-formes :
10.1.42. D
Soient M,N deux variétés différentiable et θ : M → N une application différen-tiable. On définit l’application θ∗ : Ωp(N) → Ωp(M) par : (θ∗(ω))m(D1, ...,Dp) =ωθ(m)(θ∗(D1), ..., θ∗(Dp)) où ω est une p-forme sur N et D1, ...,Dp sont p vecteurstangents à M en m. Si f est une 0-forme sur N, i.e. si f est une fonction différentiablesur N, on pose θ∗( f ) = f θ.
On doit encore montrer que cette application est bien définie, cela résulte de laproposition suivante :
10.1.43. P
Soient M,N,P trois variétés différentiables et θ : M→ N et ψ : N → P deux applicationsdifférentiables. Alors :

214 10. COHOMOLOGIE DE DE RHAM
(1) (ψ θ)∗ = θ∗ ψ∗
(2) θ∗(ω ∧ η) = θ∗(ω) ∧ ψ∗(η) pour toute p-forme ω et pour toute q-forme η.
(3) θ∗( f dx1 ∧ ... ∧ dxp) = f θd(x1 θ) ∧ ... ∧ d(xp θ)
D.
(1) Soitω ∈ Ωp(P) une p-forme sur P et D1, ...,Dp ∈ Tm(M) p vecteurs tangentsà M en m. On a :
((ψ θ)∗(ω))m(D1, ...,Dp) = ω(ψθ)(m)((ψ θ)∗D1, ..., (ψ θ)∗Dp) =
= ω(ψθ)(m)(ψ∗(θ∗D1), ..., ψ∗(θ∗Dp) = (ψ∗(ωθ(m)))(θ∗D1, ..., θ∗Dp) =
= θ∗(ψ∗(ωm))(D1, ...,Dp)
(2) Soient ω ∈ Ωp(N), η ∈ Ωq(N) et D1, ...,Dp+q ∈ Tm(M).
(θ∗(ω ∧ η))m(D1, ...,Dp+q) = (ω ∧ η)θ(m)(θ∗D1, ..., θ∗Dp+q) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)ωθ(m)(θ∗Dσ(1), ..., θ∗Dσ(p))ηθ(m)(θ∗Dσ(p+1), ..., θ∗Dσ(p+q)) =
=1
p!q!
∑σ∈Sp+q
sgn(σ)(θ∗ω)m(Dσ(1), ...,Dσ(p))(θ∗η)m(Dσ(p+1), ...,Dσ(p+q)) =
= (θ∗(ω) ∧ θ∗(η))m(D1, ...,Dp+q)
(3) On rappelle que si f est une fonction différentiable sur N et ω est unep-forme sur N alors la notation fω signifie f ∧ ω. Remarquons d’aborsque si g : N → R est une fonction différentiable alors θ∗(dg) = d(θ∗g). Eneffet : d(θ∗(g))(D[c]) = d(g θ)(D[c]) = D[gθc] = dg(D[θc]) = dg(θ∗D[c]) =θ∗(dg(D[c])). Ainsi : θ∗( f ∧ dx1 ∧ ... ∧ dxp = θ∗ f ∧ θ∗(dx1)... ∧ θ∗(dxp) =f θ ∧ d(θ∗x1) ∧ ... ∧ d(θ∗xp) = f θ ∧ d(x1 θ) ∧ ... ∧ d(xp θ).
10.1.44. S
Soitθ : M→ N une application différentiable etω,η deux p-formes sur N, alorsθ∗(ω+η) =θ∗ω + θ∗η
10.1.45. C
Si θ : M→ N est une application différentiable et ω une p-forme sur N, alors θ∗ω est bienune p-forme différentielle sur M.
D. Si ω = f dx1 ∧ ... ∧ dxp avec f : N → R différentiable alorsf θ est différentiable puisque θ l’est aussi. Ainsi le point trois de la propositionprécédente permet de conclure.

10.1. LA COHOMOLOGIE DE DE RAHM 215
Cohomologie de de Rham.
10.1.46. D
La dérivation extérieure de Ωp(M) est l’application dp : Ωp(M) → Ωp+1(M) définiepar dp( f dxi1 ∧ ... ∧ dxip ) = d f ∧ dxi1 ∧ ... ∧ dxip et étendue par linéarité.
10.1.47. P
Cette définition est bien posée (i.e. indépendante des coordonnées locales) et de plus dp+1
dp = 0.
D.
(1) Il suffit de devélopper les formules de changement de base.
(2) Clairement il suffit de prouver l’assertion pour une p-forme de la formeω = f dxi1∧ ...∧dxip . On a alors dp(ω) = d f ∧dxi1∧ ...∧dxip . Or d f : Tm(M)→T f (m)(M) R appartient au dual de Tm(M). Ainsi df s’écrit sous la formed f =
∑ni=1 aidxi avec ai = d f (D[ci]) vu qu’on a montré que les dxi sont la
base duale des D[ci]. Puisque ai = D[ci]( f ) = ∂ f∂xi
(x(m)) on a que
d f =n∑
k=1
(∂ f∂xk
dxk
)∧ dxi1 ∧ ... ∧ dxip =
=
n∑k=1
∂ f∂xk
dxk ∧ dxi1 ∧ ... ∧ dxip
Comme on a :
D[ci](D[c j]( f )) =∂D[c j]( f )
∂xi=
=∂(D[c j] f x−1)
∂x j=
=∂( ∂ f
∂xi)
∂x j=
∂2 f∂xi∂x j
il s’ensuit que :
dp+1(dp(ω)) =n∑
k=1
dp+1(∂ f∂xk
dxk
)∧ dxi1 ∧ ... ∧ dxip =
=
n∑k=1
n∑s=1
∂2 f∂xk∂xs
dxs ∧ dxk ∧ dxi1 ∧ ... ∧ dxip = 0
puisque dxs ∧ dxk = −dxk ∧ dxs.

216 10. COHOMOLOGIE DE DE RHAM
10.1.48. P
Soit M,N deux variétés différentiables et θ : M→ N une application différentiable. Alorson a que θ∗(dpω) = dp(θ∗(ω)).
D. Soit ω, η ∈ Ωp(N) et D1, ...,Dp ∈ Tm(M) alors : (θ∗(ω +η))m(D1, ...,Dp) = (ω + η)θ(m)(θ∗D1, ..., θ∗Dp) = ωθ(m)(D1, ...,Dp) + ωθ(m)(D1, ...,Dp) =(θ∗(ω))m(D1, ...,Dp) + (θ∗(η))m(D1, ...,Dp) = θ∗ω + θ∗η)m(D1, ...,Dp). Il suffit donc deprouver l’assertion pour un élément de Ωp(N) de la forme ω = f dx1 ∧ ... ∧ dxp :θ∗(dpω) = θ∗(d f ∧ dx1 ∧ ...∧ dxp) = θ∗(d f )∧ θ∗(dx1 ∧ ...∧ dxp) = d( f θ)∧ d(x1 θ)∧... ∧ d(xp θ) = dp( f θd(x1 θ) ∧ ... ∧ d(xp θ)) = dp(θ∗ω).
10.1.49. P
Soitω une p-forme et η une q-forme. On a alors que dp+q(ω∧η) = dpω∧η+ (−1)pω∧dqη.
D. Par linéarité il suffit de prouver cela pour deux éléments dela forme ω = f dxi1 ∧ ... ∧ dxip et η = gdx j1 ∧ ... ∧ dx jq . Remarquons d’abord quef g = ( f g) x−1 = ( f x−1)(g x−1) = f g. Par bilinéarité de l’opération ∧ on a que :
dp+q(( f dxi1 ∧ ... ∧ dxip ) ∧ (gdx j1 ∧ ... ∧ dx jq ) =
= dp+q( f gdxi1 ∧ ... ∧ dxip ∧ dx j1 ∧ ... ∧ dx jq ) =
=
n∑k=1
∂ f g∂xk
dxk ∧ ... ∧ dx jq =
=
n∑k=1
(g∂ f∂xk+ f
∂g∂xk
)dxk ∧ ... ∧ dx jq =
=
n∑k=1
∂ f∂xk
dxk ∧ ... ∧ dxip
∧(gdx j1 ∧ ... ∧ dx jq
)+(
f dxi1 ∧ ... ∧ dxip
)∧
n∑k=1
∂g∂xk
dxk ∧ ... ∧ dx jq
== dpω ∧ η + (−1)pω ∧ dqη
puisque dans le deuxième terme de la somme le facteur dxk doit permuter avec lefacteur dxi1 ensuite avec le facteur dxi2 et ainsi de suite jusqu’à la place du facteurdxip , ce qui fait un total de p permutations.
10.1.50. D
Une p-forme différentielle ω est dite fermée si dp(ω) = 0 et exacte s’il existe une(p-1)-forme η avec dp−1(η) = ω.
10.1.51. D
Considérons le complexe de cochaînes positif suivant :
... // Ωp−1(M)dp−1
// Ωp(M) dp// Ωp+1(M) // ...

10.1. LA COHOMOLOGIE DE DE RAHM 217
Le p-ème groupe de cohomologie de de Rham est l’espace vectoriel réel HpΩ
(M) BKerdpImdp−1 =p-formes ferméesp-formes exactes.
10.1.52. E
H0Ω
(M) = Kerd0 =f : C∞(M)→ R|d f = 0
=
=
f : C∞(M)→ R|∂ f∂xi= 0 pour tout i = 1, ...,n
=
=f : C∞(M)→ R| f est localement constante
. Or une fonction continue localement
constante sur un domaine connexe est constante. Ainsi toutes les fonctions dansH0Ω
(M) sont l’une multiple scalaire de l’autre sur chaque composante connexe deM. Il s’ensuit que H0
Ω(M) est le produit d’ autant de copies deR que de composantes
connexes de M.
Intégration de formes et formule de Stokes.
Dans ce paragraphe on aimerait définir l’intégrale d’une n-forme sur unevariété M de dimension n. Considérons d’abord le cas où M=U est un ouvert deRn :
Soit ω une n-forme sur U à support compact. Par le théorème de Uryshonil existe une fonction continue h : Rn
→ [0, 1] avec h|supp(ω) = 1 et s’annullanten dehors de U. Ainsi on peut étendre ω sur tout Rn par fω. On a donc queω = f (x1, ..., xn)dx1∧...∧dxn avec f s’annullant sur le complémentaire d’un ensemblecompact. On peut donc poser :∫
Uω =
∫Rnω =
∫R
...
∫R
f (x1, ..., xn)dx1...dxn
Soit maintenant W ⊂ Rn un autre ouvert et θ : W → U un difféomorphismede classe C∞. Cela induit la n-forme θ∗ω sur W donnée par : θ∗ω = f θd(x1 θ)∧... ∧ d(xn θ). Or d(xi θ) =
∑nj=1
∂(xiθ)∂x j
dx j =∑n
j=1 Ji j(θ)dx j où J(θ) est la matriceJacobienne de θ, donc :
d(x1 θ) ∧ ... ∧ d(xn θ) =
n∑j1=1
J1 j1 (θ)dx j1
∧ ... ∧ n∑
jn=1
Jnjn (θ)dx jn
==
n∑j1=1
...n∑
jn=1
J1 j1 ...Jnjn dx j1 ∧ ... ∧ dx jn =∑σ∈Sn
sgn(σ)(J1σ(1)1 ...Jnσ(n)n )dx1 ∧ ... ∧ dxn =
= det(J(θ))dx1 ∧ ... ∧ dxn
puisque si ja = jb pour des certains a et b, alors dx j1 ∧ ... ∧ dx jn = 0 et ainsiil ne reste plus que les termes de la forme J1σ(1)...Jnσ(n). Il en résulte que θ∗ω =( f θ)det(J(θ))dx1 ∧ ... ∧ dxn et donc (par la formule de changement de variablestandard) :

218 10. COHOMOLOGIE DE DE RHAM
∫Wθ∗ω =
∫R
...
∫R
f (θ(x1, ..., xn))det(J(θ))dx1...dxn =
= ±
∫R
...
∫R
f (x1, ..., xn)dx1...dxn = ±
∫Uω
où ± est le signe du déterminant de la Jacobienne.Si les domaines W et U sont connexes, par continuité de l’application det on
a que le déterminant de la Jacobienne est toujours strictement positif ou negatif(parce que θ est un difféomorphisme) et aucun problème ne se pose. Si par contreW et U ne sont pas connexes il faut supposer que le déterminant ne change pasde signe lorsqu’on passe d’une composante connexe à l’autre car autrement onaurait des termes qui s’ajoutent et d’autres qui se soustraient et donc la dernièreégalité serait fausse. Le même problème se pose si on veut définir l’intégrale d’uneforme sur une variété : il est facile de deviner que la méthode sera d’intégrer uneforme sur chaque "morceau" de la variété homéomorphe à un ouvert de Rn et desommer tout ces termes. Or il faut bien vérifier que les termes de cette sommene se compensent pas mais qu’il s’ajoute effectivement. Cela motive la définitionsuivante :
10.1.53. D
Une variété différentiable M est orientable si pour toutes cartes (U, φ) et (V, ψ) avecU ∩ V , ∅, on a det(J(φ ψ−1)) > 0.
Soit maintenant M une variété différentiable orientable de dimension n. Soitω une n-forme sur M à support compact dans un ouvert U de M domaine d’unecarte (U, φ). Alors (φ−1)∗(ω) est une n-forme sur φ(U) à support compact puisque(φ−1)∗(ω) = (φ−1)∗( f dx1 ∧ ... ∧ dxn) = f φ−1d(x1 φ−1) ∧ ... ∧ d(xn φ−1) et doncsupp((φ−1)∗(ω)) = φ(supp(ω)) qui est un compact puisque supp(ω) est compact et φest continue. On peut donc poser :∫
Mω =
∫Rn
(φ−1)∗(ω)
10.1.54. L
Cette dernière définition est indépendante de la carte choisie.
D. Soit ω une n-forme sur M et (U, φ), (V, ψ) deux cartes avecsupp(ω) ⊂ U et supp(ω) ⊂ V. Posons θ = ψ φ−1, alors ψ−1
θ = φ−1 et donc(φ−1)∗ = θ∗ (ψ−1)∗, ainsi :∫
Rn(φ−1)∗(ω) =
∫Rnθ∗((ψ−1)∗(ω)) =
∫Rn
(ψ−1)∗(ω)
puisque θ est clairement un difféomorphisme entre ψ(V) et φ(U).
On va maintenant étendre cette définition pour une n-forme ω à supportcompact sur une variété. Notons Uii∈I un recouvrement localement fini d’ouvertsqui sont domaines de cartes. Par le théorème de partition de l’unité on a qu’il

10.2. ALGÈBRE HOMOLOGIQUE 219
existe une famille de fonctionsfii∈I différentiables positives de M dans R telles
que supp( fi) ⊂ Ui et∑
i∈I fi = 1. On a alors ω = (∑
i fi)ω. Par compacité de supp(ω)on a qu’il existe un nombre fini d’ouvert U j dans Uii∈I recouvrant supp(ω). Onpeut donc poser : ∫
Mω =
∑i∈I
∫M
fiω
Cette définition est bien posée puisque sig j
j∈J
est une autre famille de tellesfonctions alors∑
i∈I
∫M
fiω =∑i∈I
∫M
∑j∈J
g j
fiω =∑i∈I
∑j∈J
∫M
fig jω =
=∑j∈J
∫M
∑i∈I
fi
g jω =∑j∈J
∫M
g jω
On énonce maintenant le théorème de Stokes qui sera utilisé dans la démons-tration du théorème de de Rham :
10.1.55. T
Soit M une variété différentiable orientable de dimension n et à bord (éventuellement vide).Soit ω une (n-1)-forme sur M à support compact. On a alors :∫
Mdn−1ω =
∫∂Mω
10.2. Algèbre homologique
Le but de cette section est de construire l’homologie singulière et la coho-mologie singulière. Premièrement on va énoncer une définition "abstraite" de ho-mologie, cette approche axiomatique permet de démontrer des résultats valablespour toute homologie. Nous auron en particulier besoin de construire la suite deMayer-Vietoris, un outil très important pour les calculs homologiques. Ensuite onconstruira l’homologie singulière et on montrera, au moins partiellement, qu’ils’agit effectivement d’une homologie au sense de la définition donnée. Le mêmeprogramme sera suivi pour mettre en place la cohomologie singulière ; on eviteratout de même de donner les démonstrations vu qu’elle sont souvent duales à cellesprésentées dans le cadre homologique.
220 10. COHOMOLOGIE DE DE RHAM
Théorie d’homologie.
10.2.1. C
Dans toute la section on notera (X,A) pour un couple formé d’un espace topologiqueX et d’un sous-espace A de X ; si A = ∅ on écrira (X,A) = X. On appelle (X,A) unepaire topologique.
10.2.2. T
Une sous-paire de la paire topologique (X,A) est un couple (X’,A’) formé d’unsous-espace X’ de X et d’un sous-espace A’ de A. Une application entre pairestopologiques f : (X,A) → (Y,B) est une application continue de X dans Y avecf (A) ⊂ B. On remarque qu’une composition d’applications entre paires topolo-giques reste une application entre paires topologiques.
10.2.3. E
L’inclusion de la sous-paire (X’,A’) dans (X,A) est une application entre pairestopologiques.
10.2.4. D
Une catégorie admissible pour une théorie d’homologie (ou plus simplement unecatégorie admissible) est une catégorie C dont les objets sont des paires topolo-giques et les morphismes sont des applications entre paires topologiques vérifiant :
(1) Si (X,A) ∈ C alors le diagramme d’inclusions suivant (appelé le dia-gramme de la paire) est dans C :
(X,∅)
$$HHH
HHHH
HH
(∅,∅) // (A,∅)
::vvvvvvvvv
$$HHH
HHHH
HH(X,A)
(A,A)
::vvvvvvvvv
(2) Si (X,A), (Y,B) ∈ C et si f : (X,A)→ (Y,B) est une application entre pairestopologiques dans C, alors C contient les applications d’un élément dudiagramme de la paire (X,A) vers l’élément corréspondent du diagrammede la paire (Y,B) définies par restriction de f.
(3) Pour tout triple de paires topologiques (X,A), (Y,B), (Z,C) ∈ C et pourtoutes applications f : (X,A)→ (Y,B), g : (Y,B)→ (Z,C) dans C, l’applica-tion g f : (X,A)→ (Z,C) est également dans C.

10.2. ALGÈBRE HOMOLOGIQUE 221
(4) Soit I = [0, 1]. Si (X,A) ∈ C alors (X,A) × I = (X × I,A × I) est dans C et lesdeux inclusions k1 : (X,A)→ (X,A)× I, x 7→ (x, 1) et k0 : (X,A)→ (X,A)× I,x 7→ (x, 0) sont dans C.
(5) Il existe une paire (x ,∅) dans C et C contient toutes les applicationscontinues f : x → Y quelque soit Y dans C.
10.2.5. E
La catégorie de toutes les paires topologiques avec toutes les applications entrepaires topologiques est une catégorie admissible.
La catégorie de toutes les paires topologiques compactes (i.e. X compact et Afermé dans X) avec toutes les applications entre elles est une catégorie admissible.
La catégorie de toutes les paires topologiques (X,A) formées par un CW-complexe X et un sous-complexe A de X et avec toutes les applications entreelles, est une troisième catégorie admissible.
10.2.6. D
Soient (X,A), (Y,B) deux paires topologiques et f , g : (X,A) → (Y,B) deux applica-tions entre paires topologiques. On dit que f et g sont homotopes s’il existe unehomotopie h : X × I→ Y de f vers g avec h(A × I) ⊂ B.
10.2.7. D
Une théorie d’homologie sur une catégorie admissible C est un triple κ = H, ∗, ∂où :
(1) H associe à toute paire (X,A) dans C et à tout nombre entier q dans Z ungroupe abélien noté Hq(X,A) et appelé le q-ème groupe de la paire (X,A)dans la théorie d’homologie κ.
(2) ∗ assigne à toute application f : (X,A)→ (Y,B) dans C et à tout nombre qdans Z un homomorphisme de groupe f∗q : Hq(X,A)→ Hq(Y,B) appelé leq-ème homomorphisme induit par f dans la théorie d’homologie κ.
(3) ∂ associe à toute paire (X,A) dansC et à tout q dansZ un homomorphismede groupe ∂(X,A,q) : Hq(X,A)→ Hq(A,∅)
De plus, on requiert que :
(1) Si (X,A) ∈ C, alors (id(X,A))∗q : Hq(X,A)→ Hq(X,A) est l’identité.
(2) Si f : (X,A) → (Y,B) et g : (Y,B) → (Z,C) sont dans C, alors on a que(g f )∗q = g∗q f∗q pour tout q dans Z.

222 10. COHOMOLOGIE DE DE RHAM
(3) Si f ∈ C, alors, en posant g B f |A, on a que le diagramme suivant commutepour tout q dans Z :
Hq(X,A)f∗ //
∂
Hq(Y,B)
∂
Hq−1(A)g∗// Hq−1(B)
(4) Si (X,A) ∈ C notons i l’inclusion de A dans X et j l’inclusion de X dans(X,A). On a alors une longue suite exacte :
... // Hq(A) i∗ // Hq(X)j∗ // Hq(X,A) ∂ // Hq−1(A) // ...
(5) Si f , g : (X,A) → (Y,B) sont dans C et sont homotopes dans (C), alorsf∗ = g∗
(6) Si U est un ouvert de X avec U ⊂ Å pour un certain sous espace A de X etsi e : (X\U,A\U)→ (X,A) est dansC, alors e∗ : Hq(X\U,A\U)→ Hq(X,A)est un isomorphisme de groupes pour tout q dans Z.
(7) Si X = x ∈ C, alors Hq(X) = 0 pour tout entier q différent de zéro. Onappelle G = H0(X) le goupe de coefficient de l’homologie κ.
10.2.8. R
Soit C une catégorie admissible. Si on pose Hq(X,A) = 0 pour tout q dansZ et pourtout (X,A) dans C alors κ = H, ∗, ∂ est une théorie d’homologie appelée homologietriviale et notée κ0.
10.2.9. P
Soit C une catégorie admissible et κ une théorie d’homologie sur C. Si f : (X,A)→ (Y,B)est une équivalence d’homotopie dans C d’inverse g, alors f∗ : Hq(X,A)→ Hq(Y,B) est unisomorphisme de groupes d’inverse g∗.
D. Par les axiomes 1,2,5 on a directement que :
g∗ f∗ = (g f )∗ = (id)∗ = id : Hq(X,A)→ Hq(X,A)
f∗ g∗ = ( f g)∗ = (id)∗ = id : Hq(Y,B)→ Hq(Y,B)
10.2.10. C
Soit C une catégorie admissible et κ une théorie d’homologie sur C. Si X et un espacecontractile dans C, alors Hq(X) 0 pour tout q différent de zéro et H0(X) H0(x) = G.
D. Clair par l’axiome 7 et la proposition précédente.

10.2. ALGÈBRE HOMOLOGIQUE 223
Suite de Mayer-Vietoris.
10.2.11. D
Soit C une catégorie admissible, X un espace topologique dans C et (A,B) unepaire ordonnée de sous-espaces de X dans C. Le triple (X ;A,B) est une triadetopologique propre par rapport à la théorie d’homologie κ si les deux inclusionsα : (A,A∩B)→ (A∪B,B) et β : (B,A∩B)→ (A∪B,A) induisent deux isomorphismesα∗ : Hq(A,A ∩ B)→ Hq(A ∪ B,B) et β∗ : Hq(B,A ∩ B)→ Hq(A ∪ B,A).
10.2.12. E
Si A,B sont deux fermés dans X avec A \ (A ∩ B)∩B \ (A ∩ B) = ∅ alors α∗ et β∗ sontdeux isomorphismes par l’axiome 6 et donc (X ;A,B) est une triade topologiquepropre.
10.2.13. C
Dans ce paragraphe on notera (X ;A,B) pour une triade topologique propre vérifiantX = A ∪ B. On pose également C = A ∩ B.
Pour établir et montrer la suite de Mayer-Vietoris on a besoin des trois lemmessuivants :
10.2.14. L
Soient A,C,X trois groupes abéliens et i : A → X, f : X → C deux homomorphismes degroupes tels que f i est un isomorphisme. On a alors que X = Imi ⊕ Ker f .
D. Soit x un élément de X, comme f i est surjectif on a qu’ilexiste un a dans A avec ( f i)(a) = f (x). Ainsi f (x − i(a)) = f (x) − f (i(a)) = 0 doncx = (x − i(a)) + i(a) ∈ Imi + Ker f .
De plus si x ∈ Imi∩Ker f alors x = i(a′) pour un certain a’ dans A et f (x) = eC, ona donc ( f i)(a′) = eC mais f i est injectif donc a′ = eA et ainsi x = i(a′) = i(eA) = eX.Il en résulte que X = Imi ⊕ Ker f .
10.2.15. L

224 10. COHOMOLOGIE DE DE RHAM
Considérons le diagramme de groupes abéliens et d’homomorphismes de groupes suivant :
A
h
i
???
????
B
k
j
X
f
g?
????
??
C D
Supposons que :
(1) les deux triangles commutent, i.e f i = h et g j = k.
(2) Imi = Kerg et Imj = Ker f .
(3) h et k sont des isomorphismes.
Alors on a que les deux applications suivantes sont des isomorphismes :
ϕ : A ⊕ B→ X ψ : X→ C ⊕D(a, b) 7→ i(a) + j(b) x 7→ ( f (x), g(x))
D. Par le lemme 10.2.14 on a que X = Imi ⊕ Ker f et par lacondition 2 on a que Kerg ∩ Ker f = Imi ∩ Ker f = 0.
(1) ϕ est injectif :soit (a, b) ∈ A ⊕ B avec ϕ(a, b) = i(a) + j(b) = 0, alors
h(a) = f (i(a)) + 0 = f (i(a)) + f ( j(b)) = f (i(a) + j(b)) = f (0) = 0
k(b) = g( j(b)) + 0 = g( j(b)) + g(i(a)) = g( j(b) + i(a)) = g(0) = 0
Par injectivité de h et de k on a que a = 0 = b.
(2) ϕ est surjectif :soit x dans X et posons a = h−1( f (x)) et b = k−1(g(x)). Considérons
y = ϕ(a, b) − x, on a :
f (y) = f (i(a)) + f ( j(b)) − f (x) = h(a) − f (x) = 0
g(y) = g(i(a)) + g( j(b)) − g(x) = k(b) − g(x) = 0
Ainsi y ∈ Ker f ∩ Kerg = 0 donc ϕ(a, b) − x = 0 et donc x = ϕ(a, b).
(3) ψ est injectif :soit x dans X avec ψ(x) = 0, alors f (x) = 0 = g(x) mais Ker f ∩Kerg = 0
donc x = 0.
(4) ψ est surjectif :soit (c, d) ∈ C ⊕D et posons x = j(k−1(d)) + i(h−1(c)), on obtient :
f (x) = ( f j)(k−1(d)) + ( f i)(h−1(c)) = h(h−1(c)) = c
g(x) = (g j)(k−1(d)) + (g i)(h−1(c)) = k(k−1(d)) = d
Ce qui prouve que ψ(x) = (c, d).

10.2. ALGÈBRE HOMOLOGIQUE 225
10.2.16. L
Considérons le diagramme de groupes abéliens et d’homomorphismes de groupes suivant :
Cl1
xxppppppppppppp
f
l2
&&NNNNNNNNNNNNN
A1 A2
G
j1ffNNNNNNNNNNNNN
j288ppppppppppppp
g
B1
k1
OO
i1
88ppppppppppppp
h1&&NNNNNNNNNNNNN B2
h2xxppppppppppppp
i2
ffNNNNNNNNNNNNN
k2
OO
D
Supposons que :
(1) les triangles commutent.
(2) Imi1 = Kerj2 et Imi2 = Kerj1.
(3) k1 et k2sont des isomorphismes.
Alors on a que h1 k−11 l1 + h2 k−1
2 l2 = g f .
D. Prouvons d’abord que i1 k−11 j1 + i2 k−1
2 j2 = idG :soit x ∈ G, par le Lemme 10.2.15 il existe u1 dans B1 et u2 dans B2 avec i1(u1) +
i2(u2) = x. Ainsi :
i1 k−11 j1 i1(u1) = i1 k−1
1 k1(u1) = i1(u1)
i2 k−12 j2 i2(u2) = i2 k−1
2 k2(u2) = i2(u2)et
i1 k−11 j1 i2(u2) = 0 = i2 k−1
2 j2 i1(u1)
On a donc (i1 k−11 j1 + i2 k−1
2 j2)(i1(u1) + i2(u2)) = i1(u1) + i2(u2), commeon avait x = i1(u1) + i2(u2) on bien i1 k−1
1 j1 + i2 k−12 j2 = idG. Finalement :
g f = g idGg = g(i1k−11 j1+ i2k−1
2 j2) f = g i1k−11 j1 f +g i2k−1
2 j2 f =h1 k−1
1 l1 + h2 k−12 l2.
10.2.17. C
Sous les mèmes hypothèses qu’au Lemme 10.2.16, on a que si g f = 0 alors h1 k−11 l1 =
−h2 k−12 l2.
Revenons maintenant à l’algèbre homologique et construisons la suite deMayer-Vietoris :
Soit (X ;A,B) une triade topologique propre et notons h1 : C→ A, h2 : C→ B lesdeux inclusions et h1∗ : Hq(C) → Hq(A), h2∗ : Hq(C) → Hq(B) les deux applicationsinduites. Notons aussi m1 : A → X, m2 : B → X les deux autres inclusions et

226 10. COHOMOLOGIE DE DE RHAM
m1∗ : Hq(A) → Hq(X), m2 : Hq(B) → Hq(X) les applications induites. Pour tout qdans Z définissons :
ψ : Hq(C)→ Hq(A) ⊕Hq(B) ϕ : Hq(A) ⊕Hq(B)→ Hq(X)c 7→ (h1∗ (c),−h2∗ (c)) (a, b) 7→ m1∗ (a) +m2∗ (b)
Considérons le diagramme suivant :
Hq(X)l1∗
vvmmmmmmmmmmmmmm
j∗
l2∗
((QQQQQQQQQQQQQQ
Hq(X,A) Hq(X,B)
Hq(X,C)
j1∗hhQQQQQQQQQQQQQ
j2∗66mmmmmmmmmmmmm
∂
Hq(B,C)
k1∗
OO
i1∗
66mmmmmmmmmmmmm
∂1 ((QQQQQQQQQQQQQHq(A,C)
∂2vvmmmmmmmmmmmmm
i2∗
hhQQQQQQQQQQQQQ
k2∗
OO
Hq−1(C)
où ∂, ∂1 et ∂2 sont données par la définition d’une homologie et les autres applica-tions sont induites par les inclusions.
Par définition d’une triade topologique propre on a que k1∗ et k2∗ sont desisomorphismes. Par l’axiome 4 on a que ∂ j∗ = 0 et Imi1∗ = Kerj2∗ , Imi2∗ = Kerj1∗ .De plus par l’axiome 2 on a que (g f )∗ = g∗ f∗ donc, comme il s’agit d’inclusions, lesquatres triangles supérieurs commutent. Pour vérifier que les deux autres trianglescommutent regardons les applications i1 : (B,C)→ (X,C) et idC ; grâce aux axiomes1 et 3 on a que le diagramme suivant commute :
Hq(B,C)
∂
i1∗ // Hq(X,C)
∂
Hq−1(C)id// Hq−1(C)
donc le triangle en bas à gauche commute et de même on prouve que celui en basà droite commute aussi.
Ce qui précède montre que toutes les hypothèses du Corollaire 10.2.17 sontsatisfaites et on peut poser 4 : Hq(X) → Hq−1(C) définie par 4 = ∂1 k−1
∗1 l∗1 =
∂2 k−1∗2 l∗2 . On obtient une suite infinie appelée la suite de Mayer-Vietoris de la
triade topologique propre (X ;A,B) (par rapport à la théorie d’homologie κ) :
... // Hq(C)ψ // Hq(A) ⊕Hq(B)
ϕ // Hq(X) 4 // Hq−1(C) // ...
10.2.18. T
Pour toute triade topologique propre (X ;A,B) la suite de Mayer-Vietoris associée est exacte.

10.2. ALGÈBRE HOMOLOGIQUE 227
D. Sans preuve.
Théorie de cohomologie.
10.2.19. D
Une théorie de cohomologie sur une catégorie admissibleC est un tripleΥ = H, ∗, δoù :
(1) H associe à toute paire (X,A) dans C et à tout nombre entier q dans Z ungroupe abélien noté Hq(X,A) et appelé le q-ème groupe de la paire (X,A)dans la théorie de cohomologie Υ.
(2) ∗ assigne à toute application f : (X,A)→ (Y,B) dans C et à tout nombre qdans Z un homomorphisme de groupe f ∗q : Hq(Y,B) → Hq(X,A) appeléle q-ème homomorphisme induit par f dans la théorie de cohomologie Υ.
(3) δ associe à toute paire (X,A) dansC et à tout q dansZ un homomorphismede groupe δ(X,A,q) : Hq−1(A)→ Hq(X,A)
De plus, on requiert que :
(1) Si (X,A) ∈ C, alors (id(X,A))∗q : Hq(X,A)→ Hq(X,A) est l’identité.
(2) Si f : (X,A) → (Y,B) et g : (Y,B) → (Z,C) sont dans C, alors on a que(g f )∗q = f ∗q g∗q pour tout q dans Z.
(3) Si f ∈ C, alors, en posant g B f |A, on a que le diagramme suivant commutepour tout q dans Z :
Hq−1(B)g∗ //
δ
Hq−1(A)
δ
Hq(Y,B)
f ∗// Hq(X,A)
(4) Si (X,A) ∈ C notons i l’inclusion de A dans X et j l’inclusion de X dans(X,A). On a alors une longue suite exacte :
... // Hq−1(A)δ // Hq(X,A)
j∗ // Hq(X) i∗ // Hq(A) // ...
(5) Si f , g : (X,A)→ (Y,B) sont dans C et sont homotopes, alors f ∗ = g∗
(6) Si U est un ouvert de X avec U ⊂ Å pour un certain sous espace A de X etsi e : (X\U,A\U)→ (X,A) est dansC, alors e∗ : Hq(X,A)→ Hq(X\U,A\U)est un isomorphisme de groupes pour tout q dans Z.
(7) Si X = x ∈ C, alors Hq(X) = 0 pour tout entier q différent de zéro. Onappelle G = H0(X) le goupe de coefficient de la cohomologie Υ.

228 10. COHOMOLOGIE DE DE RHAM
Analoguement au cas de l’homologie on définit la suite de Mayer-Vietoris :soit (X ;A,B) une triade topologique propre dans une catégorie admissible Cmunied’une théorie de cohomologie Υ. Définissons les applications suivantes :
ϕ : Hq(X)→ Hq(A) ⊕Hq(B) ψ : Hq(A) ⊕Hq(B)→ Hq(A ∩ B)x 7→ (m∗1(x),m∗2(x)) (a, b) 7→ h∗1(a) − h∗2(b)
où m∗1,m∗
2, h∗
1, h∗
2 sont les applications induites par les inclusions m1 : A → X,m2 : B→ X, h1 : C→ A, h2 : C→ B. Considérons le diagramme suivant :
Hq−1(C)δ1
vvlllllllllllll
δ
δ2
((RRRRRRRRRRRRR
Hq(B,C) Hq(A,C)
Hq(X,C)
i1∗hhRRRRRRRRRRRRR
i2∗66lllllllllllll
j∗
Hq(X,A)
k1∗
OO
j1∗
66lllllllllllll
l∗1 ((RRRRRRRRRRRRRR Hq(X,B)
l∗2vvllllllllllllll
j2∗
hhRRRRRRRRRRRRR
k∗2
OO
Hq(X)
où δ, δ1 et δ2 sont données par la définition de cohomologie et les autres applicationssont induites par les inclusions. Posons4 = l∗2k∗−1
2 δ2. On obtient une longue suiteexacte appelée la suite de Mayer-Vietoris de la triade topologique propre (X ;A,B)(par rapport à la théorie de cohomologie Υ) :
... // Hq−1(C)4 // Hq(X)
ϕ // Hq(A) ⊕Hq(B)ψ // Hq(C) // ...
Homologie singulière.
Après avoir énoncé les définitions de base on va construire l’homologie sin-gulière. Premièrement on construira les groupes d’homologie singulière en quatreétapes, chacune généralisant la précédente. Ensuite on va construire ∗ et ∂.
10.2.20. C
Pour le reste de la section, X dénotera un espace topologique.

10.2. ALGÈBRE HOMOLOGIQUE 229
10.2.21. D (1) Pour tout n ∈Non appelle le n-ème simplexe standardle sous-ensemble 4n de Rn+1 défini par :4n =
x ∈ Rn+1
|xi > 0 pour tout i et∑n+1
i=1 xi = 1
(2) Pour tout n ∈ N et pour tout i = 1, ...,n + 1 on appelle la i-ème facedu n-ème simplexe standard le sous ensemble 4i
n de 4n donné par 4in =
x ∈ 4n|xi = 0.
(3) Soit X un espace topologique. Un n-simplexe singulier de X est une ap-plication continue σ : 4n → X.
10.2.22. N
On pose ϕin : 4i
n−1 → 4n, x 7→ (x1, ..., xi−1, 0, xi+1, ..., xn) pour tout n naturel et pourtout i=1,...,n+1.
10.2.23. D
Soit X un espace topologique et σ : 4n → X un n-simplexe singulier. On appelle lai-ème face de σ le (n-1)-simplexe singulier défini par σ ϕi
n : 4n−1 → X.
10.2.24. N
On note Sn(X) l’ensemble des n-simplexes singuliers sur X et S(X) =⋃
n∈N Sn(X).
Première étape :
10.2.25. D
Pour tout n ∈ Z le groupe des n-chaînes singulières intégrales Cn(X) est le groupeabélien libre de base Sn(X), si n < 0 on pose Cn(X) = 0
Le n-ème homomorphisme de bord est l’homomorphisme dn : Cn(X) →Cn−1(X) défini sur la base Sn(X) de Cn(X) par dn(σ) = σϕ1
n−σϕ2n+...+(−1)nσϕn+1
n .Si n 6 0 on pose dn = 0.
10.2.26. L
Pour tout entier n on a dn dn+1 = 0
D. Si n 6 0 c’est trivial. Soit n > 0 et σ ∈ Sn(X), alors :
dn(dn+1(σ)) = dn(σ ϕ1n+1 − σ ϕ
2n+1 + ... + (−1)n+1σ ϕn+2
n+1) =
= σ ϕ1n+1 ϕ
1n − σ ϕ
1n+1 ϕ
2n + ... + (−1)nσ ϕ1
n+1 ϕn+1n +
−σ ϕ2n+1 ϕ
1n + σ ϕ
2n+1 ϕ
2n + ... + (−1)n+1σ ϕ2
n ϕn+1n +
+...+
(−1)n+1σ ϕn+2n+1 ϕ
1n − (−1)n+1σ ϕn+2
n+1 ϕ2n + ... + (−1)n2+nσ ϕn+2
n+1 ϕn+1n =

230 10. COHOMOLOGIE DE DE RHAM
= 0puisque ϕi
n+1 ϕin = ϕ
i+1n+1 ϕ
in pour tout i = 1, ...,n et ϕk
n+1 ϕln = ϕ
ln+1 ϕ
k−ln pour
tout l = 1, ...,n et pour tout l + 1 < k 6 n + 1. On remarque que tous les termess’annullent deux à deux.
On peut maintenant définir les groupes d’homologie singulières intégralesd’un espace topologique X à l’aide du complexe de chaîne suivant :
... // Cn(X)dn // Cn−1(X) // ... // C0(X)
d0 // 0
qu’on appelle le complexe de chaînes singulières intégrales de X et on le note(C∗(X), d∗).
10.2.27. D
Le n-ème groupe d’homologie singulière intégrale de l’espace topologique X est legroupe abélien : Hn(X) = Kerdn/Imdn+1.
Deuxième étape :Soit maintenant A un sous espace de X ; on a clairement que Sn(A) → Sn(X) et
donc Cn(A) est sommand direct de Cn(X). On peut donc poser :
10.2.28. D
Soit X un espace topologique et A un sous espace de X. Le groupe de n-chaînessingulières intégrales de la paire (X,A) est le groupe abélien Cn(X,A) = Cn(X)/Cn(A).
Siσ ∈ Sn(A) on a que dn(σ) ∈ Sn−1(A) et donc dn(Cn(A)) ⊂ Cn−1(A). Ainsi le n-èmehomomorphisme de bord induit un homomorphisme dn : Cn(X,A) → Cn−1(X,A),[σ] 7→ [dn(σ)]. Clairement dn dn−1 = 0 et donc on a le complexe de chaînessingulières intégrales de la paire (X,A) donné par :
... // Cn(X,A)dn // Cn−1(X,A) // ... // C0(X,A)
d0 // 0
10.2.29. D
Soit X un espace topologique et A un sous-espace de X. Le n-ème groupe d’ho-mologie singulière intégrale de la paire (X,A) est le groupe abélien Hn(X,A) =Kerdn/Imdn+1
10.2.30. R
Dans la cas où A = ∅, on a Hn(X,A) = Hn(X).
Troisième étape :Soit X un espace topologique et G un groupe abélien. Pour tout n ∈ Z le groupe
de n-chaînes singulières de X sur G est le groupe Cn(X; G) = Cn(X) ⊗ G. Comme

10.2. ALGÈBRE HOMOLOGIQUE 231
Cn(X) est un groupe abélien libre de base Sn(X) on a que :
Cn(X; G) = Cn(X) ⊗ G = (⊕σ∈Sn(X)Z) ⊗ G ⊕σ∈Sn(X)(Z ⊗ G) ⊕σ∈Sn(X)G
g1σ1 + ... + gkσk|k ∈N, gi ∈ G, σi ∈ Sn(X) pour tout i = 1, ..., k
Les applications dn et idG induisent un homomorphisme de groupes ∂n = dn ⊗ idG :Cn(X) ⊗ G→ Cn−1(X) ⊗ G appelé homomorphisme de n-bord.
10.2.31. L
Pour tout entier n on a que ∂n−1 ∂n = 0.
D. En appliquant les défintions on obtient directement que si cest une n-chaîne et g un élément dans G, alors ∂n−1 ∂n(c ⊗ g) = (dn−1(dn(c))) ⊗ g =0⊗ g = 0. Comme les éléments de la forme c⊗ g engendrent le produit tensoriel, lerésultat est prouvé.
On obtient un complexe de chaîne (C∗(X; G), ∂∗) appelé le complexe de chaînessingulières de X sur G :
... // Cn(X; G)∂n // Cn−1(X; G) // ... // C0(X; G)
∂0 // 0
10.2.32. D
Soit X un espace topologique, G un groupe abélien et n un entier. Le n-ème grouped’homologie singulière de X sur G est le groupe abélien Hn(X; G) = Ker∂n/Im∂n+1.
On remarque que si on choisit G = Z alors Cn(X; G) = Cn(X)⊗Z = (⊕σ∈Sn(X)Z)⊗Z ⊕σ∈Sn(X)(Z ⊗Z) ⊕σ∈Sn(X)Z = Cn(X). Donc Hn(X;Z) Hn(X).
10.2.33. P
Soit G un groupe abélien. Si X est formé d’un seul point alors H0(X,G) G et Hn(X; G) = 0pour tout n différent de zéro.
D. Clairement Hn(X; G) = 0 pour tout n négatif. Supposonsn > 0. Comme X = ∗, il existe un unique n-simplexe singulier σn : 4n → X et doncCn(X) Z. Ainsi Cn(X; G) = Cn(X) ⊗ G Z ⊗ G G. On a :
∂n(σn⊗g) =
n+1∑i=1
(−1)i−1σn ϕin
⊗g =n+1∑i=1
(−1)i−1(σn−1⊗g) =
0, si n est impair ;σn−1 ⊗ g, si n est pair.
On en déduit que :
H0(X; G) = ker∂0/Im∂1 = C0(X; G)/0 G,Hn(X; G) = ker∂n/Im∂n+1 = 0/0 = 0, si n est pair ;Hn(X; G) = ker∂n/Im∂n+1 = G/G = 0, si n est impair.
Quatrième étape :Si on considère mintenant un sous-espace A de X on à déjà vu que Cn(A)
est sommand direct de Cn(X). Alors Cn(X; G) = Cn(X) ⊗ G = (Cn(A) ⊕M) ⊗ G

232 10. COHOMOLOGIE DE DE RHAM
(Cn(A) ⊗ G) ⊕ (M ⊗ G) = Cn(A; G) ⊕ N et donc Cn(A; G) est sommand direct deCn(X; G). Cela nous permet de poser :
10.2.34. D
Soit G un groupe abélien et (X,A) une paire topologique. Le groupe Cn(X,A; G) =Cn(X; G)/Cn(A; G) est appelé le groupe des n-chaînes singulières de la paire (X,A)sur G.
Si σ est un n-simplexe singulier dans A, ses faces sont des (n-1)-simplexessinguliers dans A et donc ∂n(Cn(A; G)) ⊂ Cn−1(A; G) par définition de ∂n. On peutdonc considérer l’application induite ∂n : Cn(X,A; G)→ Cn−1(X,A; G) ; [c] 7→ [∂n(c)]qu’on notera également ∂n. Comme ∂n∂n+1 = 0 on a ∂n∂n+1 = 0, ce qui donne lieuau complexe de chaînes (C∗(X,A; G), ∂∗) appelé le complexe de chaînes singulièresde la paire (X,A) sur G et donné par :
... // Cn(X,A; G)∂n // Cn−1(X,A; G) // ... // C0(X,A; G)
∂0 // 0
10.2.35. D
Soit G un groupe abélien et (X,A) une paire topologique. Le n-ème groupe d’ho-mologie singulière de la paire (X,A) sur G est le groupe abélien Hn(X,A; G) =ker∂n/Im∂n+1.
10.2.36. N
On notera ∂ = ∂.
10.2.37. R
On remarque facilement que (C∗(X,∅; G), ∂∗) = (C∗(X; G), ∂∗) puisque Cn(∅) = ∅.Donc Hn(X,∅; G) = Hn(X,G).
De même (C∗(X,A;Z), ∂∗) = (C∗(X,A), d∗) puisque Cn(X,Z) Cn(X), Cn(A,Z) Cn(A) et ∂n = dn ⊗ idZ. Ainsi Hn(X,A;Z) = Hn(X,A).
Les trois propositions suivantes nous définissent l’application ∗ de l’homologiesingulière :
Soient (X,A),(Y,B) deux paires topologiques et f : X→ Y une application entrepaires topologiques. L’application f induit Sn( f ) : Sn(X) → Sn(Y) ; σ 7→ f σ quiest telle que Sn( f )(Sn(A)) ⊂ Sn(B) parce que f (A) ⊂ B par hypothèse. Cette dernièreapplication s’étend en un homomorphisme Cn( f ) : Cn(X) → Cn(Y) vu que Sn(X)est une base de Cn(X).
10.2.38. L

10.2. ALGÈBRE HOMOLOGIQUE 233
Pour tout n dans Z on a que Cn−1( f ) ∂n,x = ∂n,y Cn( f ), c’est-à-dire que le diagrammesuivant commute :
Cn(X)
Cn( f )
∂n,X // Cn−1(X)
Cn−1( f )
Cn(Y)∂n,Y
// Cn−1(Y)
D. Si n 6 0 c’est clair puisque Cn−1( f ) = 0. Supposons n > 0 etsoit σ ∈ Sn(X), alors : ∂n,Y(Cn( f )(σ)) = ∂n,Y( f σ) =
∑n+1i=1 (−1)i−1( f σ ϕi
n). D’autrepart :
Cn−1( f )(∂n,x(σ)) = Cn−1( f )
n+1∑i=1
(−1)i−1σ ϕin
==
n+1∑i=1
(−1)i−1Cn−1( f )(σ ϕin) =
n+1∑i=1
(−1)i−1( f σ ϕin)
Soit maintenant G un groupe abélien et considérons les complexes de chaînes(C∗(X; G), d∗) et (C∗(Y; G), d∗). Les applications Cn( f ) et idG induisent un homomor-phisme sur le produit tensoriel Cn( f ) ⊗ idg : Cn(X) ⊗ G → Cn(Y) ⊗ G. CommeSn( f )(Sn(A)) ⊂ Sn(B) on a Cn( f )(Cn(A)) ⊂ Cn(B) et donc (Cn( f ) ⊗ idg)(Cn(A; G)) ⊂Cn(B; G). Ainsi Cn( f ) ⊗ idG induit un homomorphisme Cn( f ; G) : Cn(X,A; G) →Cn(Y,B; G).
10.2.39. P
Pour tout n dans Z le rectangle suivant commute :
Cn(X,A; G)
Cn( f ;G)
∂n,X // Cn−1(X,A; G)
Cn−1( f ;G)
Cn(Y,B; G)∂n,Y
// Cn−1(Y,B; G)
D. Cn(X,A; G) = Cn(X; G)/Cn(A; G) = Cn(X) ⊗ G/Cn(A) ⊗ G =((Cn(A)⊗G)⊕ (H ⊗G))/Cn(A)⊗G H ⊗G où H est le groupe abélien libre de baseSn(X) \ Sn(A). Soit σ ⊗ g ∈ H ⊗ G, grâce au lemme précédent on a :
Cn−1( f ; G)(∂n,X(σ⊗g)) = (Cn( f )(∂n,X(σ)))⊗g = (∂n,Y(Cn−1( f )(σ)))⊗g = (∂n,YCn( f ; G))σ⊗g
ce qui prouve la proposition puisque les éléments de la forme σ ⊗ g engendrentH ⊗ G.
On vient de montrer que toute application continue entre paires topologiquesf : (X,A) → (Y,B) induit un homomorphisme de complexe de chaîne C∗( f ) :(C∗(X,A; G), ∂∗)→ (C∗(Y,B; G), ∂∗). Cela nous permet de construire des applicationsinduites entre les groupes d’homologie :

234 10. COHOMOLOGIE DE DE RHAM
10.2.40. P
Pour tout n ∈ Z l’homomorphisme Cn( f ; G) : Cn(X,A; G) → Cn(Y,B; G) envoie Ker∂n,Xdans Ker∂n,Y et Im∂n+1,X dans Im∂n+1,Y.
D. Soit n dans Z et z ∈ Ker∂n,X. Par la proposition précédenteon a ∂n,Y(Cn( f ; G)(z)) = Cn−1( f ; G)(∂n,X(z)) = Cn−1( f ; G)(0) = 0.
Soit w ∈ Im∂n+1,X et v ∈ Cn+1(X,A; G) avec w = ∂n+1,X(v). Posons u = Cn+1( f ; G)(v),alors, toujours par la proposition précédente, on a : ∂n+1,Y(u) = Cn( f ; G)(∂n+1,X(v)) =Cn( f ; G)(w).
10.2.41. C
L’homomorphisme Cn( f ; G) induit un homomorphisme f∗n : Hn(X,A; G) → Hn(Y,B; G) ;[h] 7→
[Cn( f ; G)(h)
].
Une fois construite l’application ∗, vérifions dans les deux propositions sui-vantes qu’elle satisfait les axiomes :
10.2.42. P
Soit (X,A) une paire topologique et G un groupe abélien. Pour tout n dans Z on a que(idX)∗ : Hn(X,A; G)→ Hn(X,A; G) est l’identité.
D. Par construction on a directement que : f = idX ⇒ Sn( f ) =idSn(X) ⇒ Cn( f ) = idCn(X) ⇒ Cn(X) ⊗ idG = idCn(X)⊗G ⇒ Cn( f ; G) = idCn(X,A;G) ⇒ f∗ =id∗ = idHn(X,A;G).
10.2.43. P
Soit G un groupe abélien et f : (X,A)→ (Y,B). g : (Y,B)→ (Z,C) deux applications entrepaires topologiques. Alors on a que (g f )∗ = g∗ f∗.
D. Comme dans la preuve précédente le résultat decoule direc-tement de la construction de l’application *.
On veut maintenant construire des homomorphismes de groupe∂ : Hn(X,A; G)→Hn−1(X,A; G) pour obtenir une longue suite exacte
... // Hn(A; G)i∗ // Hn(X; G)
j∗ // Hn(X,A; G) ∂ // Hn−1(A; G) // ...
et aussi une famille de diagrammes commutatifs :
Hn(X,A; G) ∂ //
f∗
Hn−1(A; G)
g∗
Hn(Y,B; G)∂// Hn−1(B; G)
où f : (X,A)→ (Y,B) est une application entre paires topologiques et g = f |A.

10.2. ALGÈBRE HOMOLOGIQUE 235
10.2.44. N
Pour construire ∂ on démontre les quatre lemmes qui suivent. On utilisera lesnotations suivantes : pour un n dansZ on note Zn(X,A; G) = Ker∂n,X et Bn(X,A; G) =Im∂n+1,X. On note aussi πn : Cn(X; G) → Cn(X,A; G) = Cn(X; G)/Cn(A; G) et pn :Zn(A; G)→ Hn(A; G) = Zn(A; G)/Bn(A; G) les projections naturelles.
10.2.45. L
Soit z ∈ Zn(X,A; G) et u ∈ Cn(X; G) avec πn(u) = z, alors ∂n(u) ∈ Cn−1(A; G).
D. Par définition des applications on a que le rectangle suivantcommute :
Cn(X; G)πn //
∂n
Cn(X,A; G)
∂n,x
Cn−1(X; G) πn−1
// Cn−1(X,A; G)
et donc πn−1(∂n(u)) = ∂n(πn(u)) = ∂n(z) = 0 car z ∈ Ker∂n par hypothèse. Ainsi∂n(u) ∈ Cn(A; G).
10.2.46. L
Sous les mêmes hypothèses qu’avant on a en fait que ∂n(u) ∈ Zn−1(A; G). De pluspn−1(∂n(u)) = pn−1(∂n(u′)) pour tout u et u’ avec π(u) = z, i.e. la classe de u dansHn−1(A; G) ne dépend que de z.
D. L’application ∂n−1,A : Cn−1(A; G) → Cn−2(A; G) est la restric-tion de ∂n−1,x : Cn−1(X; G)→ Cn−2(X; G) donc ∂n−1,A(∂n,A(u)) = 0.
Soit u’ un deuxième élément tel que πn(u′) = z = πn(u). Alors πn(u − u′) =0, donc u − u′ ∈ Cn(A; G). Ainsi ∂n,x(u − u′) ∈ Bn−1(A; G) et donc pn−1(∂n,x(u)) −pn−1(∂n,x(u′)) = pn−1(∂n,x(u − u′)) = 0, c’est-à-dire [∂n(u)] = [∂n(u′)] ∈ Hn−1(A; G).
Cela nous permet de définir une application φ : Zn(X,A; G) → Hn−1(A; G) quià tout z dans Zn(X,A; G) associe pn−1(∂n,x(u)), ou u est un élément de Cn(X; G) avecπn(u) = z.
10.2.47. L
L’application φ ainsi définie est un homomorphisme de groupes.
D. Soient x,y dans Zn(X,A; G) et u,v dans Cn(X; G) avecπn(u) = yet πn(v) = x. Comme πn(u + v) = πn(u) + πn(v) = x + y on a que φ(x + y) =pn−1(∂n,x(u + v)) = pn−1(∂n,x(u)) + pn−1(∂n,x(v)) = φ(x) + φ(y).
10.2.48. L

236 10. COHOMOLOGIE DE DE RHAM
Le noyau de φ contient le sous groupe Bn(X,A; G) de Zn(X,A; G).
D. Soit b ∈ Bn(X,A; G). Il existe alors y ∈ Cn+1(X,A; G) avec∂n+1,X(y) = z et w ∈ Cn+1(X; G) avec πn+1(w) = y. Posons u = ∂n+1(w). Comme dansle lemme 10.2.45 on a que le ractangle suivant commute :
Cn+1(X; G)πn+1 //
∂n+1
Cn+1(X,A; G)
∂n+1
Cn(X; G) πn
// Cn(X,A; G)
donc πn(u) = πn(∂n+1(w)) = ∂n+1(πn+1(w)) = ∂n+1(y) = b. Finalement φ(b) =pn−1(∂n(u)) = pn−1(∂n ∂n+1(w)) = pn−1(0) = 0
On peut donc poser : ∂ : Hn(X,A; G) = Zn(X,A; G)/Bn(X,A; G) → Hn−1(A; G),[z] 7→
[φ(z)
]. Vérifions que cette application satisfait les conditions requises :
10.2.49. P
Soit f : (X,A) → (Y,B) une application entre paires topologiques et notons g = f |A. SoitG un groupe abélien et n ∈ Z. Le diagramme suivant commute :
Hn(X,A; G) ∂ //
f∗
Hn−1(A; G)
g∗
Hn(Y,B; G)∂// Hn−1(B; G)
D. Notons p : Zn(X,A; G) → Hn(X,A; G) la projection cano-nique. Soit x ∈ Hn(X,A; G) et z ∈ Zn(X,A; G) avec p(z) = x. Soit aussi u ∈ Cn(X; G)avec πn(u) = z. Posons v = Cn(h; G)(u) et w = Cn( f ; G) où h : X → Y est l’applica-tion induite par f. Par définition des applications Cn(h; G) et Cn( f ; G) on a que leractangle suivant commute :
Cn(X; G)πn //
Cn(h;G)
Cn(X,A; G)
Cn( f ;G)
Cn(Y; G) πn// Cn(Y,B; G)
donc πn(v) = πn(Cn(h; G)(u)) = Cn( f ; G)(πn(u)) = Cn( f ; G)(z) = w.Par la Proposition 10.2.39 on a que le diagramme suivant commute :
Cn(X; G)
Cn(h;G)
∂n // Cn−1(X; G)
Cn−1(h;G)
Cn(Y; G)∂y
// Cn−1(Y; G)
donc Cn−1(h; G)(∂n(u)) = ∂n(Cn(h; G)(u)) = ∂n(v). Or grâce au Lemme 10.2.45 on saitque ∂n(u) ∈ Cn−1(A; G) donc ∂n(v) = Cn−1(g; G)(∂n(u)).

10.2. ALGÈBRE HOMOLOGIQUE 237
Par définition on a que ∂(x) ∈ Hn−1(A; G) contient ∂n(u) ∈ Zn−1(A; G). Ainsig∗(∂(x)) ∈ Hn−1 contient Cn−1(g; G)(∂n(u)) ∈ Zn−1(B; G). De même on prouve quef∗(x) ∈ Hn(Y,B; G) contient Cn( f ; G)(z) = w ∈ Zn(Y,B; G).
Comme πn(v) = w on a que ∂( f∗(x)) ∈ Hn−1(B; G) contient ∂(v) ∈ Zn−1(B; G)puisque ∂(v) = Cn−1(g; G)(∂(u)). Ce qui prouve que g∗(∂(x)) = ∂( f∗(x)).
10.2.50. P
Soit G un groupe abélien, (X,A) une paire topologique et ∂ : Hn(X,A; G) → Hn−1(A; G)l’homomorphisme de bord qu’on vient de définir. Soit i∗ : Hn(A; G) → Hn(X; G) et j∗ :Hn(X; G) → Hn(X,A; G) les homomorphismes induits par les inclusions i : A → X etj : X→ (X,A). Alors la longue suite suivante est exacte :
... // Hn(A; G)i∗ // Hn(X; G)
j∗ // Hn(X,A; G) ∂ // Hn−1(A; G) // ...
D. Sans preuve.
On peut résumer le paragraphe par la dérnière définition et la proposition :
10.2.51. D
Soit C la catégorie admissible de toutes les paires topologiques (X,A) avec lesapplications entre paires topologiques. Soit G un groupe abélien. Définissons letriple κ = H, ∗, ∂ comme suit :
(1) H est l’application qui à tout élément (X,A) de C et à tout entier q dans Zassocie le groupe Hq(X,A; G).
(2) * associe à toute application entre paires topologiques f : (X,A) → (Y,B)et à tout entier q dans Z l’homomorphisme de groupe f∗q .
(3) ∂ associe à toute paires topologiques (X,A) et à tout entier q dans Zl’homomorphisme de bord ∂.
10.2.52. P
La collection κ = H, ∗, ∂ ainsi définie est une théorie d’homologie.
D. On à déjà prouvé les axiomes 1,2,3 et 7. Les trois autres sontacceptés sans démonstration.
Cohomologie singulière.
On va maintenant définir la cohomologie singulière de façon semblable à cequ’on a fait pour l’homologie singulière : premièrement on construit en deux étapesles groupes de cohomologie singulière et ensuite les application ∗ et δ.

238 10. COHOMOLOGIE DE DE RHAM
10.2.53. D
Soit X un espace topologique et G un groupe abélien. Pour tout entier n on appellele groupe de n-cochaînes singulières de X sur G, le groupe abélien Cn(X; G) =Hom(Cn(X),G). Si n<0 on a Cn(X; G) = 0.
10.2.54. D
L’homomorphisme de groupe δn : Cn(X; G) → Cn+1(X; G) défini pour tout c dansCn(X; G) sur la base de Cn+1(X; G) par δn(c)(σ) = c(dn+1(σ)) est appelé le n-èmehomomorphisme de cobord.
10.2.55. L
Cette définition est bien posée et de plus δn+1 δn = 0.
D. Soient c1, c2 ∈ Cn(X; G) et σ ∈ Cn+1(X; G). On a : δn(c1+c2)(σ) =(c1 + c2)(dn+1(σ)) = c1(dn+1(σ)) + c1(dn+1(σ)) = δn(c1)(σ) + δn(c2)(σ). Egalement :δn+1(δn(c))(σ) = δn(c)(dn+2(σ)) = c(dn+1(dn+2(σ))) = c(0) = 0.
Cela nous permet de définir le complexe de cochaînes (C∗(X; G), δ∗) appelé lecomplexe de cochaînes singulières de x sur G :
0 // C0(X; G)δ0
// ... // Cn(X; G) δn// Cn+1(X; G) // ...
10.2.56. D
Soit X un espace topologique et G un groupe abélien. Le n-ème groupe de coho-mologie singulière de X sur G est le groupe abélien Hn(X; G) = Kerδn/Imδn−1. SiG = Z on écrit Hn(X,Z) = Hn(X).
10.2.57. N
Considérons maintenant un sous-espace A de X et notons Cn(X,A; G) le sous-ensemble Cn(X,A; G) = c ∈ Cn(X; G)|c(Cn(A; G)) = 0.
10.2.58. L
Soit A un sous-espace de X et Cn(X,A; G) le sous-ensemble de Cn(X; G) ci-dessus. L’ho-momorphisme de cobord δn envoie Cn(X,A; G) dans Cn+1(X,A; G).
D. Soit c ∈ Cn(X,A; G) etσ ∈ Sn+1(A), alors : δn(c)(σ) = c(dn+1(σ)) =0 car dn+1(σ) ∈ Sn(A) par définition de dn+1.
10.2.59. N
10.2. ALGÈBRE HOMOLOGIQUE 239
On note δnA : Cn(X,A; G) → Cn+1(X,A; G) l’homomorphisme induit par restriction
de δn à Cn(X,A; G).
Clairement on a que δn+1A δn
A = 0 et donc on obtient un complexe de cochaînes(C∗(X,A; G), δ∗A) appelé complexe de cochaînes singulières de la paire (X,A) sur legroupe G :
0 // C0(X,A; G)δ0
A // ... // Cn(X,A; G)δn
A // Cn+1(X,A; G) // ...
10.2.60. D
Le n-ème groupe de cohomologie singulière de la paire topologique (X,A) sur legroupe abélien G est le groupe abélien Hn(X,A; G) = Kerδn
A/Imδn−1A .
10.2.61. R
Si A = ∅ on a que Cn(X,A; G) = Cn(X; G) et donc Hn(X,A; G) = Hn(X; G). Si n<0 alorsCn(X,A; G) = 0 est donc Hn(X,A; G) = 0. Si G = Z on écrit Hn(X,A;Z) = Hn(X,A).
Construisons maintenant l’application ∗ :Rappelons que toute application entre paires topologiques f : (X,A) → (Y,B)
induit un homomorphisme Cn( f ; G) : Cn(X; G) → Cn(Y; G) faisant commuter lediagramme :
Cn(X; G)
Cn( f ;G)
∂n,x // Cn−1(X; G)
Cn−1( f ;G)
Cn(Y; G)∂n,y
// Cn−1(Y; G)
L’application Cn( f ; G) induit un homomorphisme Cn( f ) : Cn(Y; G) → Cn(X; G)défini par Cn( f )(c) = cCn( f ; G), puisque si c ∈ Hom(Cn((Y; G),G) alors cCn( f ; G) ∈Hom(Cn(X; G),G). Comme f (A) ⊂ B on a que Cn( f ) envoie Cn(Y,B; G) dans Cn(X,A; G),on pose alors Cn( f ; G) : Cn(Y,B; G) → Cn(X,A; G) défini par restriction de Cn( f ) àCn(Y,B; G).
10.2.62. P
Avec les notations ci-dessus on a que le rectangle suivant commute pour tout n dans Z :
Cn−1(Y,B; G)
Cn−1( f ;G)
δn−1B // Cn(Y,B; G)
Cn( f ;G)
Cn−1(X,A; G)
δn−1A
// Cn(X,A; G)

240 10. COHOMOLOGIE DE DE RHAM
D. Soit c ∈ Cn−1(Y,B; G) etσ ∈ Cn(X; G). On obtient : Cn( f ; G)(δn−1B (c))(σ) =
(δn−1B (c) Cn( f ; G))(σ) = δn−1
B (c)(Cn( f ; G)(σ)) = c(dn,y Cn( f ; G)(σ)) = c(Cn−1( f ; G) dn,x(σ)) = (c Cn−1( f ; G))(dn,x(σ)) = Cn−1( f ; G)(c)(dn,x(σ)) = (Cn−1( f ; G) δn
B)(c)(σ).
10.2.63. P
Pour tout n dans Z l’homomorphisme Cn( f ; G) envoie KerδnB dans Kerδn
A et Imδn−1B dans
Imδn−1A .
D. La preuve est analogue a celle déjà donnée pour l’homologiesingulière.
10.2.64. C
L’homomorphisme Cn( f ; G) induit un homomorphisme f ∗ : Hn(Y,B; G) → Hn(X,A; G) ;[c] 7→
[Cn( f ; G)(c)
].
10.2.65. P
Si on considère id(X,A) : (X,A) → (X,A) alors (id(X,A))∗ = idHn(X,A;G) et pour tout coupled’ applications entre paires topologiques f : (X,A) → (Y,B), g : (Y,B) → (Z,C) on a que(g f )∗ = f ∗ g∗.
D. Le résultat découle directement de la contruction qu’on vientde faire.
De façon semblable au cadre homologique on va maintenant construire l’ho-momorphisme δ : Hn−1(A; G)→ Hn(X,A; G) via les quatre lemmes suivants.
Notons Zn(X,A; G) = Kerδn−1 et soit z un élément de Zn−1(A; G). Comme il s’agitd’un élément de Cn−1(A; G) on a que z est un homomorphisme z : Cn−1(A) → G.Or Cn−1(A) est sommand direct de Cn−1(X) donc il existe un homomorphismeu : Cn−1(X)→ G avec u|Cn−1(A) = z, donc u ∈ Cn−1(X; G).
10.2.66. L
Avec les notations ci-dessus on a que δn−1(u) ∈ Zn(X,A; G) ⊂ Cn(X,A; G).
D. Pour montrer que δn−1u appartient à Cn(X,A; G) considéronsun élément c de Cn(A), alors (δn−1(u))(c) = u(∂(c)) = z(∂c) = (δn−1(z))(c) = 0 puisquez est un élément de Zn−1(A; G) et ∂n(Cn(A)) ⊂ Cn−1(A). Donc δn−1(u) est bien dansCn(X,A; G) et de plus δn(δn−1(u)) = 0 donc le lemme est démontré.
Notons pn : Zn(X,A; G)→ Hn(X,A; G) la projection naturelle.
10.2.67. L

10.2. ALGÈBRE HOMOLOGIQUE 241
L’élément pn(δn−1(u)) de Hn(X,A; G) est indépendant du choix de u dans Cn−1(X; G) et nedépend que de z.
D. Soient u et v deux éléments de Cn−1(X; G) avec u|Cn−1(A) =v|Cn−1(A) = z et considérons u − v ∈ Cn−1(X; G). Clairement (u − v)|Cn−1(A) = 0 et doncu−v appartient au sous-groupe Cn−1(X,A; G) de Cn−1(X; G). Ainsi δn−1(u−v) ∈ Imδn−1
et donc pn(δn−1(u)) − pn(δn−1(v)) = pn(δn−1(u) − δn−1(v)) = pn(δn−1(u − v)) = 0
Par ce qui précède on peut définir l’application φ : Zn−1(A; G) → Hn(X,A; G)qui à tout z associe φ(z) = pn(δn−1(u)) où u ∈ Cn−1(X; G) est tel que u|Cn−1(A) = z.
10.2.68. L
L’application φ est un homomorphisme.
D. La démonstration est analogue à celle qui prouve l’énoncéhomologique equivalent.
10.2.69. L
Le noyau de φ contient le sous-groupe Imδn−2 de Zn−1(A; G).
D. Soit z un élément de Imδn−2 et y ∈ Cn−2(A; G) avec δn−2(y) = z.Soit v dans Cn−2(X; G) avec v|Cn−2(A) = y, alors δn−2(v) ∈ Cn−1(X; G) est tel queδn−2(v)|Cn−1(A) = z puisque∂n−1(Cn−1(A; G)) ⊂ Cn−2(A; G). Doncφ(z) = p(δn−1(δn−2(v))) =p(0) = 0.
Il s’ensuit que φ induit un homomorphisme δ : Hn−1(A; G) → Hn(X,A; G),encore une fois de façon analogue à l’homologie singulière on prouve les deuxpropositions suivantes :
10.2.70. P
Soit f : (X,A) → (Y,B) une application entre paires topologiques et notons g = f |A. SoitG un groupe abélien et n ∈ Z. Le diagramme suivant commute :
Hn−1(B; G)δ //
g∗
Hn(Y,B; G)
f∗
Hn−1(A; G)δ// Hn(X,A; G)
10.2.71. P
Soit G un groupe abélien, (X,A) une paire topologique et δ : Hn−1(A; G) → Hn(X,A; G)l’homomorphisme de cobord qu’on vient de définir. Soit i∗ : Hn(X; G) → Hn(A; G) etj∗ : Hn(X,A; G)→ Hn(X; G) les homomorphismes induits par les inclusions i : A→ X et

242 10. COHOMOLOGIE DE DE RHAM
j : X→ (X,A). Alors la longue suite suivante est exacte :
... // Hn−1(A; G)δ // Hn(X,A; G)
j∗ // Hn(X; G) i∗ // Hn(A; G) // ...
On résume le paragraphe avec une définition et une dernière proposition :
10.2.72. D
Soit C la catégorie admissible de toutes les paires topologiques (X,A) avec lesapplications entre paires topologiques. Soit G un groupe abélien. Définissons letriple Υ = H, ∗, δ comme suit :
(1) H est l’application qui à tout élément (X,A) de C et à tout entier q dans Zassocie le groupe Hq(X,A; G).
(2) * associe à toute application entre paires topologiques f : (X,A) → (Y,B)et à tout entier q dans Z l’homomorphisme de groupe f ∗q .
(3) δ associe à toute paires topologiques (X,A) et à tout entier q dans Zl’homomorphisme de cobord δ.
10.2.73. P
La collection Υ = H, ∗, δ ainsi définie est une théorie de cohomologie.
Exemples.
On va d’abord calculer le 0-ème groupe d’homologie singulière pour un es-pace topologique X arbitraire et ensuite on va s’intéresser au calcul des groupesd’homologie singulière de la sphère Sn.
Soit X un espace topologique et posons G = Z. Comme 40 est un point ona que S0(X) est en bijection avec X. Ainsi on peut considérer C0(X) comme étantl’ensemble des sommes formelles
∑x∈X nxx à coefficient dans Z et nulles presque
partout. Définissons ε : C0(X) → Z par ε(∑
x∈X nxx) =∑
x∈X nx ; il s’agit clairementd’un homomorphisme.
Si σ ∈ S1(X) est un 1-simplexe singulier sur X, alors ∂σ = σ ϕ11 −σ ϕ
21 et donc
ε(∂σ) = 0. Comme ε est un homomorphisme on a que ε(∂c) = 0 pour toute chaînec ∈ Im∂1. Il en résulte que ε induit un homomorphisme ε∗ : H0(X)→ Z.
10.2.74. P
Si X est un espace topologique non-vide et connexe par arcs, alors ε∗ est un isomorphisme.
D. ε∗ est évidemment surjectif. Soit x0 ∈ X et pour tout autre xdans X posonsλx le chemin de x0 vers x. Par évidenceλx est un 1-simplexe singulier

10.2. ALGÈBRE HOMOLOGIQUE 243
avec ∂λx = x − x0. Soit c =∑
x∈X nxx une 0-chaîne avec ε∗([c]) =∑
x∈X nx = 0, alorsc − ∂
∑x∈X nxλx = c −
∑x∈X nx∂λx = c −
∑x∈X nx(x − x0) = (
∑x∈X nx)x0 = 0. Ainsi
c = ∂∑
x∈X nxλx donc [c] = 0 et donc ε∗ est injectif.
10.2.75. C
H0(X) est isomorphe au groupe abélien libre basé sur les composantes connexes par arcs deX.
D. Il suffit de repéter la preuve ci-dessus avec ε : H0(X) →⊕U∈UZU ;
∑x∈X nxx 7→ ⊕U∈U(
∑x∈U nx) ou U est la famille des composantes connexes
par arcs de X.
Pour calculer les groupes d’homologie singulière de Sn on va utiliser la suiteexacte de Mayer-Vietoris.
Pour un x dans Sn notons x = (x0, ..., xn) et considérons les sous-ensemblesde Sn donnés par En
+ = x ∈ Sn|xn > 0 et En
−= x ∈ Sn
|xn 6 0. Comme En+ et En
−
sont contractiles on a que Hq(En+) = Hq(En
−) = 0 pour tout q différent de zéro et
H0(En+) = H0(En
−) = Z. Considérons la suite de Mayer-Vietoris :
Hq(En+) ⊕Hq(En
−) // Hq(En
+ ∪ En−
) // Hq−1(En+ ∩ En
−) // Hq−1(En
+) ⊕Hq−1(En−
)
Comme En+ ∪ En
−= Sn et En
+ ∩ En−= Sn−1 on obtient :
Hq(En+) ⊕Hq(En
−) // Hq(Sn) // Hq−1(Sn−1) // Hq−1(En
+) ⊕Hq−1(En−
)
Maintenant si q > 1 on a
0 // Hq(Sn) // Hq−1(Sn−1) // 0
donc Hq(Sn) Hq−1(Sn−1) et donc si q > 1 alors Hq(Sn) Hq−n(S0). Pour connaîtreles groupes d’homologie singulière de toutes les sphère on doit donc calculer lesgroupes d’homologie de S0 et le premier groupe d’homologie de Sn.
Calculons Hq(S0) :Si q < 0 alors Hq(S0) = 0, si q = 0 alors H0(S0) = Z2 puisque S0 a deux
composantes connexes par arcs. Supposons maintenant que q > 0, alors σ1 : 4q →
S0 ; t 7→ 1 et σ−1 : 4q → S0, t 7→ −1 sont les deux seuls q-simplexes singuliers, i.e.Sq(S0) = σ1, σ−1. Considérons
...dq−1 // Cq(S0)
dq // ...
et regardons l’effet de dq sur la base σ1, σ−1 de Cq(S0) :
dq(σi) = σi ϕ1q + ... + (−1)q+1σiϕ
q+1q =
0, si q est pair ;σi, si q est impair.
Ainsi
Imdq =
0, si q est pair ;Z2, si q est impair.
et
Kerdq =
Z2, si q est pair ;0, si q est impair.

244 10. COHOMOLOGIE DE DE RHAM
D’ou Hq(S0) = 0 pour tout p > 0.Calculons H1(Sn) pour n > 0 :Si n = 1 alors :
H1(E1+) ⊕H1(E1
−) // H1(S1) // H0(S0) // H0(E1
+) ⊕H0(E1−
)
0 // H1(S1)φ // Z2
ψ // Z2
Par construction de la suite de Mayer-Vietoris on a que l’application ψ entre H0(S0)et H0(E1
+)⊕H0(E1−
) est donnée parψ : H0(S0)→ H0(E1+)⊕H0(E1
−), c 7→ (h1∗ (c),−h2∗ (c))
ou h1∗ et h2∗ sont les applications induites par les inclusions. Ainsi Kerψ Z etdonc H1(S1) Imφ = Kerψ Z.
Supposons que n > 1, alors :
H1(En+) ⊕H1(En
−) // H1(Sn) // H0(Sn−1) // H0(En
+) ⊕H0(En−
)
0 // H1(Sn)φ // Z
ψ // Z2
Comme avant on a que ψ : H0(S0) → H0(E1+) ⊕ H0(E1
−) est donnée par c 7→
(h1∗ (c),−h2∗ (c)). Il en résulte que Kerψ = 0 et par injectivité de φ on a : H1(Sn) Imφ = Kerψ = 0
On en déduit que :
Hq(Sn) =
Z2, si n = 0 et q = 0 ;0, si n = 0 et q , 0 ;Z, si n , 0 et q = 0 ;Z, si n , 0 et q = n ;0, si n , 0, q , 0 et q , n.
10.3. Le théorème de de Rham
Dans cette section on va énoncer la théorème de de Rham, qui affirme que lacohomologie singulière à coefficient dans R et la cohomologie de de Rham sontisomorphes et on va donner une esquisse de la preuve.
L’idée à la base de la démonstration est la suivante : étant donnée une p-formeω sur une variété différentiable M on construit une application de l’ensemble des p-simplexes sur M versR en intégrantω sur l’image du p-simplexe. Cette applicationinduira un isomorphisme de Hp
Ωvers Hp(M;R). Les problèmes qui se posent sont
au nombre de trois :Premièrement pour appliquer la théorie d’intégration devéloppée on doit se
restreindre aux p-simplexes singuliers σ : 4p → M différentiables et pour que lerésultat soit vrai il faut montrer que cette restriction ne change pas les groupesde cohomologie singulière. En effet il faut être encore plus réstrictif puisqu’engénéral un p-simplexe standard n’est pas une variété différentiable et donc à laplace des p-simplexes singuliers on doit considérer les applications σ : U → M

10.3. LE THÉORÈME DE DE RHAM 245
définies sur un ouvert contenant 4p et différentiable au sens usuel. On admettraque Hp
di f f (M;R) Hp(M;R).Deuxièmement il faut définir l’intégrale sur un p-simplexe standard vu qu’il ne
s’agit pas d’une variété. Pour faire cela on peut considérer une fonction f : U→ Rs’annullant sur un voisinage ouvert du (p-2)-ème squelette et prenant la valeur1 en dehors de ce voisinage. On définit ensuite l’intégrale sur 4p d’une p-formeω comme étant la limite, lorsque les voisinages autour du (p-2)-ème squelettedeviennent de plus en plus petits, des intégrales de la p-forme fω sur U.
Troisièmement il y a un problème d’orientation : si on considère la variétédifférentiable orientable donnée par un p-simplexe standard privé de son (p-2)-squelette, on doit regarder comment choisir une orientation et quelle est son rapportavec l’orientation sur le bord (le (p-1)-squelette). On admettra qu’il est possibled’orienter les p-simplexes successivement de telle sorte que l’inclusionϕi
p : 4p−1 →
∂4p présèrve l’orientation si et seulement si i est pair.Avec les hypothèses ci-dessus on peut maintenant construire un homomor-
phisme entre HqΩ
(M) et Hq(M;R).Soit ω une p-forme sur une variété différentiable M et σ : 4p → M un p-
simplexe standard défini sur un ouvert U content 4p et différentiable. On a que σ∗ωest une p-forme sur 4p et on pose :∫
σω =
∫4p
σ∗ω
Plus généralement si on a une chaîne c =∑n
i=1 aiσi ∈ Cp(M) alors on pose∫cω =
n∑i=1
ai
∫4p
σ∗ω
Cela nous donne un homomorphisme ψ(ω) : Cp(M) → R. L’application ψ estlinéaire aussi par rapport à la variable ω puisque si ω1 et ω2 sont deux p-formessur M alors par la définition qu’on vient de poser il suffit de traiter le cas d’unp-simplexe singulier σ et on a :
ψ(ω1 + ω2)(σ) =∫σ(ω1 + ω2) =
∫4p
σ∗(ω1 + ω2) =∫4p
σ∗(ω1) + σ∗(ω2) =
=
∫4p
σ∗(ω1) +∫4p
σ∗(ω2) = ψ(ω1)(σ) + ψ(ω2)(σ)
Considérons maintenant une (p-1)-forme sur M et un p-simplexe singulier σ.En appliquant le théorème de Stokes on obtient :
ψ(dω)(σ) =∫σ
dω =∫4p
σ∗(dω) =∫4p
d(σ∗ω) =∫∂4p
σ∗ω
Or ∂4p = ∪i = 1n+14
in et comme ϕi
p : 4p−1 → ∂4p présèrve l’orientation si etseulement si i est pair alors on que :∫
∂4p
σ∗ω =
p+1∑i=1
∫∂4i
n
σ∗ω et∫∂4i
n
σ∗ω = (−1)i∫4p−1
(ϕin)∗σ∗ω

246 10. COHOMOLOGIE DE DE RHAM
donc
ψ(dω)(σ) =p+1∑i=1
(−1)i∫4p−1
(ϕin)∗σ∗ω =
p+1∑i=1
(−1)i∫4p−1
(σ ϕin)∗ω =
p+1∑i=1
(−1)i∫σϕi
n
ω
puisque σ ϕin est un (p-1)-simplexe singulier sur M et on applique la définition
d’intégrale qu’on vient de donner.On rappelle que l’homomorphisme ∂ : Cp(M) → Cp−1(M) était donné par
∂(σ) =∑p+1
i=1 (−1)iσϕin. Ainsi en appliquant encore une fois directement la définition
de l’ intégrale : ∫∂σω =
p+1∑i=1
(−1)i∫σϕi
n
ω
Comme l’application δ : Cp(M;R) → Cp+1(M;R) était définie par δ(c) = c ∂ on afinalement que
ψ(dω)(σ) =∫∂σω = ψ(ω)(∂σ) = δ(ψ(ω)(σ))
Il en résulte que ψ : Ω∗(M)→ (C∗(M;R), δ) ainsi défini est un homomorphismede complexe de cohaînes puisqu’on vient de prouver que le diagramme suivantcommute pour tout p dans Z :
Ωp−1(M)
d
ψ // Cp−1(M;R)
δ
Ωp(M)
ψ// Cp(M;R)
On note ψ∗ : HpΩ
(M) → Hp(M;R) l’homomorphisme induit en homologie par ψ.On peut maintenant énoncer le théorème de de Rham.
10.3.1. T
L’homomorphisme ψ∗ : HpΩ
(M)→ Hp(M;R) est un isomorphisme pour tout p dans Z.
On va maintenant énoncer et prouver partiellement les résultats auxiliaires quiprouverons le théorème
10.3.2. P
Soit U et V deux ouverts d’une variété différentiable M et considérons la suite :
0 // Ωp(U ∪ V) α // Ωp(U) ⊕Ωp(V)β // Ωp(U ∩ V) // 0
où α(ω) = ω|U − ω|V et β(η, ρ) = η|U∩V − ρ|U∩V. Alors la suite est exacte.
D.
(1) α est clairement injective.

10.3. LE THÉORÈME DE DE RHAM 247
(2) Soitω ∈ Ωp(U∪V), alors β(α(ω)) = β(ω|U−ω|V) = ω|U∩V−ω|U∩V = 0 et doncImα ⊂ Kerβ. Soit maintenant (η, ρ) ∈ Ωp(U) ⊕Ωp(V) avec β(η, ρ) = 0, alorsη|U∩V − ρ|U∩V = 0 et donc η|U∩V = −ρ|U∩V. Ainsi la p-forme ω ∈ Ωp(U∪V)suivante est bien définie :
ωx =
ηx, si x ∈ U ;ρx, si x ∈ V.
et vérifie α(ω) = (η, ρ). Ce qui prouve que Kerβ ⊂ Imα.
(3) Soit ω ∈ Ωp(U ∩ V). Par le théorème de partition de l’unité appilqué àl’espace U ∪ V avec le recouvrement U,V on a qu’il existe une fonctionf : U ∪ V → R avec f |U\V = 0 et f |V\U = 1, donc 1 − f |V\U = 0. Ainsifω ∈ Ωp(U) et (1 − f )ω ∈ Ωp(V) et β( fω, (1 − f )ω) = ω. On en déduit queβ est surjective.
10.3.3. P
L’homomorphisme ψ∗ : HpΩ
(U) → Hp(U;R) est un isomomorphisme pour tout ouvertconvexe non-vide U de Rn.
D. Sans perte de généralité on peut supposer que U contient0. Comme U est contractile on a que Hp(U;R) = 0 si p est différent de zéro etH0(U;R) = R. Il faut donc prouver que :
(1) Toute fonction différentiable f ∈ C∞(U) avec d f = 0 est constante, ainsion aura H0
Ω= Kerd0/Imd−1 = R/ 0 = R.
(2) Pour tout p > 1, toute p-forme fermée est exacte et donc HpΩ
(U) =Kerdp/Imdp+1 = 0
(1) Si f ∈ C∞(U) avec d f =∑n
i=1∂ f∂xi
dxi = 0 alors ∂ f∂xi= 0 pour tout i = 1, ...,n et
donc f est constante puisque U est connexe.
(2) Pour des raisons de notations on écrira U ⊂ Rn avec coordonnées (x0, ..., xn).Pour tout p > 0 définissons φ : Ωp+1(U) → Ωp(U) comme suit : siω ∈ Ωp+1(U) est de la forme ω = f (x0, ..., xn)dx j0 ∧ ... ∧ dx jp on pose
ϕ(ω) =(∫ 1
0tp f (tx)dt
)η
avec
η =
p∑i=0
(−1)ix ji dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
où dx ji signifie que le terme n’est pas présent. Dans le cas d’une (p+1)-forme ω arbitraire on étend cette définition par linéarité.
On a alors :

248 10. COHOMOLOGIE DE DE RHAM
d(φ(ω)) = d
(∫ 1
0tp f (tx)dt
) p∑i=0
(−1)ix ji dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
== d
p∑i=0
(∫ 1
0tp f (tx)dt
)(−1)ix ji dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
==
p∑i=0
d((∫ 1
0tp f (tx)dt
)(−1)ix ji
)dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp =
=
p∑i=0
n∑k=1
∂∂xk
((∫ 1
0tp f (tx)dt
)(−1)ix ji
)dxk ∧ dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
==
p∑i=0
n∑k=1
(∂∂xk
(∫ 1
0tp f (tx)dt
)(−1)ix ji +
(∫ 1
0tp f (tx)dt
)∂∂xk
(−1)ix ji
)dxk ∧ dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
==
n∑k=1
∫ 1
0tp+1 ∂
∂xkf (tx)dt ·
p∑i=0
(−1)ix ji dxk ∧ dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp+
+
∫ 1
0tp f (tx)dt
n∑k=1
∂∂xk
p∑i=0
(−1)ix ji dxk ∧ dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp =
=
n∑k=1
∫ 1
0tp+1 ∂
∂xkf (tx)dtdxk
∧ p∑
i=0
(−1)ix ji dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp
++
∫ 1
0tp f (tx)dt
n∑k=1
p∑i=0
∂∂xk
(−1)ix ji dxk ∧ dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp =
=
n∑k=0
∫ 1
0tp+1 ∂
∂xkf (tx)dtdxk ∧ η +
(∫ 1
0tp f (tx)dt
)dη = S + T
On sait déjà que
dω =n∑
k=0
∂∂xk
f (x)dxk ∧ dx j0 ∧ ... ∧ dx jp
et de plus si on transforme la base dx j0 ∧ ... ∧ dx jp de∧p+1(Tm(M)) en une
base dx j0 ∧ ... ∧ dx jp ∧ dxk de∧p+2(Tm(M)) on a que
ηp+2 =
p+1∑i=0
(−1)ix ji dx j0 ∧ ... ∧ dx ji ∧ ... ∧ dx jp ∧ dxk =
= xkdx j0 ∧ ... ∧ dx jp − dxk ∧ η

10.3. LE THÉORÈME DE DE RHAM 249
où le premier terme est celui dans lequel l’élément dxk est sauté et ledeuxième regroupe tous les autres. Ainsi :
φ(dω) =1∑
k=0
(∫ 1
0tp+1 ∂
∂xkf (tx)dt
)(xkdx j0 ∧ ... ∧ dx jp − dxk ∧ η) =
=
1∑k=0
xk
(∫ 1
0tp+1 ∂
∂xkf (tx)dt
)dx j0 ∧ ... ∧ dx jp − S =
=
(∫ 1
0tp+1 d
dtf (tx)dt
)dx j0 ∧ ... ∧ dx jp − S =
=
(tp+1 f (tx)|10 − (p + 1)
∫ 1
0tp f (tx)dt
)dx j0 ∧ ... ∧ dx jp − S = ω − T − S
puisque
dη =n∑
k=0
p∑i=0
∂∂xk
(−1)ix ji dxk ∧ dx j0 ∧ ... ∧ dx jp =
=
p∑i=0
(−1)idx ji ∧ dx j0 ∧ ... ∧ dx jp =
=
p∑i=0
dx j0 ∧ ... ∧ dx jp+1 = (p + 1)dx j0 ∧ ... ∧ dx jp+1
Il en résulte que dφ(ω) + φ(dω) = ω pour tout ω ∈ Ωp(Rn+1), si dω = 0alors φ(dω) = 0 et donc ω = dφ(ω).
10.3.4. L
Si le théorème de de Rham est vrai sur deux ouverts U et V de M et sur l’intersectionU ∩ V, alors il est vrai sur l’union U ∪ V.
D. On se limite à donner une esquisse de la preuve : la suiteexacte de la Proposition 10.3.2 induit une longue suite exacte en homologie :
... // HpΩ
(U ∪ V) // HpΩ
(U) ⊕HpΩ
(V) // Hp+1Ω
(U ∩ V) // ...
L’homomorphisme ψ∗ induit le diagramme commutatif suivant :
... // HpΩ
(U ∪ V) //
HpΩ
(U) ⊕HpΩ
(V) //
Hp+1Ω
(U ∩ V) //
...
... // Hp(U ∪ V;R) // Hp(U;R) ⊕Hp(V;R) // Hp+1(U ∩ V;R) // ...
qui nous permet de conclure grâce au Lemme des cinq.
Avec ce qu’on vient de faire, la preuve du théorème est une conséquenceimmédiate du lemme suivant, qu’on admettra sans preuve.

250 10. COHOMOLOGIE DE DE RHAM
10.3.5. L
Soit M une variété différentiable. Si une propriété p est vraie sur une famille d’ouvertsUαα∈A de M tels que :
(1) Tout ouvert U de M difféomorphe à un ouvert convexe de Rn est dans la familleUαα∈A.
(2) Pour tout α, β ∈ A avec p vraie sur Uα ∩Uβ, p est aussi vraie sur Uα ∪Uβ
(3) Si on a un sous-ensembleUβ
β∈B⊂ Uαα∈A avec Uβ1 ∩ Uβ2 = ∅ pour tous β1
et β2 dans B, β1 , β2.
Alors p est vraie sur⋃β∈B Uβ.

CHAPITRE 11
Classes caractéristiques
Ce chapitre écrit par Peter Jossen introduit les classes caractéristiques de Chern,celles d’Euler et l’isomorphisme de Thom qui constituent des éléments importantspour la compréhension et la démonstration du théorème de l’indice.
11.1. Classes caractéristiques
Soit X une variété différentiable et p : E→ X un fibré vectoriel réel ou complexede dimension n sur X. Pour un anneau A, notons
H∗(X,A)
la cohomologie totale de X à coefficients dans A. Nous voyons H∗(X,A) commeA–algèbre graduée
H∗(X,A) =∞⊕
i=0
Hi(X,A)
On écrira H∗(X) au lieu de H∗(X,Z). On connait quatre types de classes caractéris-tiques :
I : Dans le cas où E est réel et orientable on a la classe d’Euler e ∈ Hn(X).
II : Dans le cas où E est un fibré complexe on a les classes ce Chern c1, . . . , cnoù ci ∈ H2i(X).
III : Dans le cas où E est réel on a les classes de Pontryagin p1, . . . , p[n/2] oùpi ∈ H4i(X).
IV : Dans le cas réel on a encore les classes de Stiefel–Whitney w1, . . . ,wn oùwi ∈ Hi(X,Z/2Z).
Tout ces classes se comportent naturellement face aux fibrés induits. Plus pré-cisement, une application différentiable f : Y → X induit des des applicationsf ∗ : Vect(X)→ Vect(Y), et H∗( f ) : H∗(X)→ H∗(Y). Pour ces applications on a
H∗( f )(ci(E)) = ci( f ∗(E))
et la formule analogue est vraie pour les autres classes caractéristiques. Dans lasuite on définira ces classes, et démontrera quelques resultats principaux, tels que
251

252 11. CLASSES CARACTÉRISTIQUES
la formule de Whitney et le principe du scindage ("splitting principle").
11.2. La cohomologie des variétés PnC et PnR
11.2.1. T
Soit n ∈N. Il existe un isomorphisme de R–algèbres
R[y]/yn+1 → H∗(PnC)
qui envoit la classe de y dans R[y]/yn+1 sur une classe de cohomologie de degré 2. Enparticulier
Hp(PnC)
R si p est pair et p ≤ 2n0 sinon
D. On commence par établir un isomorphisme d’espaces vec-toriels. Pour cela, procédons par récurrence sur n. Pour n = 1, on a PnC S2, et onsait que H∗(S2) R[y]/y2. Considérons les ouverts
U := 〈(z0, . . . , zn−1, 1)〉 | (z0, · · · , zn−1) ∈ Cn)V := PnC \ 〈(0, . . . , 0, 1)〉
L’ouvert U est homéomorphe à Cn et donc homotope à un point, et l’ouvert V esthomotope à Pn−1C par le lemme 6.1.1. On a U ∪ V = PnC et
U ∩ V Cn\ 0 ' S2n−1
La suite de Mayer–Vietoris pour les ouverts U et V permet de conclure que
Hp(PnC)
R si p pair et p ≤ n0 sinon
Pour la structure multiplicative, il suffit de trouver une classe de cohomologie[ω] ∈ H2(PnC) qui engendre H∗(PnC) commeR–algèbre, ce qui revient trouver uneforme fermée ω ∈ Ω2(PnC) telle que ωn n’est pas exacte. La 2–forme
ω :=1
2πi1‖z‖4
n∑j,k=0j,k
z jzkdzk ∧ dz j
sur Cn+1\ 0 est invariante sous l’action de C∗. Elle passe donc au quotient, et
définit une 2–forme ω sur PnC. J’affirme qu’elle est fermée et qu’elle engendreH∗(PnC).Que la forme ω, et donc aussi la forme ω est fermée se montre par un calcul direct.On a pour z = (z0, . . . , zn) et z j = x j + iy j
d1‖z‖2
= d1
x20 + y2
0 + · · · + y2n=−2‖z‖4
n∑j=0
x jdx j + iy jdy j

11.3. LE PRINCIPE DU SCINDAGE COMPLEXE 253
Observant que z jdz j + z jdz j = 2(x jdx j + y jdy j), ceci devient
d1‖z‖2
=−1‖z‖4
n∑j=0
z jdz j + z jdz j
et donc
d1‖z‖4
=−2‖z‖6
n∑j=0
z jdz j + z jdz j
Ayant ceci, on calcule "directement" que
dω = 0
Ainsi,ω ∈ Ω2(PnC) est une forme fermée et represente donc un élément de H2(PnC).Montrons que [ω] est une classe de cohomologie non–triviale. A ce fin, considéronsl’immersion
ϕ : C → PnC
z 7→ [1, z, 0, . . . , 0]
et considérons la forme induite H∗(ϕ)(ω) ∈ Ω∗(C). Pour z = x + iy, on trouve
H∗(ϕ)(ω) =1π
dx ∧ dy(1 + x2 + y2)2
et on a tout arrangé pour que∫H∗(ϕ)(ω) =
1π
∫1
(1 + x2 + y2)2 dxdy
=−12π
∫ 2π
0
∫∞
0
−2r(1 + r2)2 drdϑ
=−1
1 + r2
∣∣∣∣∣∞0
= 1
ce qui montre que ω n’est pas exacte. La dernière chose à vérifier est que la formeωn∈ H2n(PnC) n’est pas exacte, ce que l’on fait par recurrence sur n.
11.3. Le principe du scindage complexe
Soit E un fibré vectoriel complexe de dimension k sur X. Le foncteur P(−)induit un fibré PE sur X de fibre PEx = P(Ex). L’espace total de PE est alors unevariété de dimension n + k − 1.

254 11. CLASSES CARACTÉRISTIQUES
11.3.1. P
Soit p : E → X un fibré vectoriel complexe de dimension k sur X. Alors H∗(PE) est unH∗(X)–module libre de dimension k. En particulier H∗(Pp) : H∗(X)→ H∗(PE) est injectif.
D. L’espace total dePE est l’ensemble de tout les couples (x, 〈v〉)tels que x ∈ X et 〈v〉 ∈ PEx. On a un fibré complexe de dimension 1 sur PE, dontl’espace total est donné par
L :=(x, 〈v〉,w)
∣∣∣ x ∈ X, 〈v〉 ∈ PEx,w ∈ 〈v〉
Notons c = c1(L) ∈ H2(PE) la première classe de Chern du fibré vectoriel L sur PE.On aimerait appliquer le théorème de Leray–Hirsch aux classes
1, c, c2, . . . , ck−1
Soit ι : PkC → PE un isomorphisme de PkC sur une fibre de PE. Les classesH∗(ι)(1),H∗(ι)(c),H∗(ι)(c2), . . . ,H∗(ι)(ck−1) forment en effet une C–base de PkC, vuque H∗(ι)(c) = c1(ι∗L) n’est pas nul et le théorème 11.2.1. Par le théorème de Leray–Hirsch, H∗(PE) est un H∗(X)–module libre de base 1, c, c2, . . . , ck−1. L’injectivité deH∗(Pp) : ω 7→ ω · 1 est évidente.
11.3.2. T (Principe du scindage)
Soit E un fibré vectoriel de dimension k sur X. Alors il existe une variété Y et une applicationdifférentiable f : Y→ X telle que
I : L’application H∗( f ) : H∗(X)→ H∗(Y) est injective.
II : Il existent des fibrés vectoriels F1,F2, . . . ,Fk sur Y, tous de dimension 1 telles quef ∗(E) F1 ⊕ F2 ⊕ . . . ⊕ Fk.
D. On procède par recurrence sur dimC E. Clairement le théo-rème est vrai dans le cas où E est de dimension 1. Soit donc 2 ≤ dimC E = k etsupposons le théorème vrai pour dimC E < k. Il suffit de montrer l’existence d’unevariété Y et d’une application différentiable f : Y→ X tel que
I : L’application H∗( f ) : H∗(X)→ H∗(Y) est injective.
II : Il existent des fibrés vectoriels F,G sur Y, avec F de dimension 1 et tel quef ∗(E) F ⊕ G.
En effet, par hypothèse de recurrence il existent une variété Z et g : Z → Ydifférentiable et des fibrés F2, . . . ,Fk de dimension 1 sur Z tels que H∗(g) est injectifet tel que g∗G F2 ⊕ . . . ⊕ Fk. Ainsi
H∗( f g) = H∗( f ) H∗(g) : H∗(X)→ H∗(Z)
est injectif, et si on pose F1 := g∗F, alors
( f g)∗(E) F1 ⊕ F2 ⊕ . . . Fk
vu que g∗(F⊕G) g∗F⊕ g∗G et ( f g)∗(E) g∗ f ∗E. Afin de montrer l’existence de Yet f , munissons E d’un produit scalaire. On a donc aussi un produit scalaire induitsur le fibré
p∗(E) =(x, v,w)
∣∣∣ p(v) = p(w) = x

11.4. CONNEXIONS DANS UN FIBRÉ VECTORIEL 255
Considérons de nouveau le fibré L(E) sur PE qui était
L(E) :=(x, 〈v〉,w)
∣∣∣ x ∈ X, 〈v〉 ∈ P(Ex),w ∈ 〈v〉
Le fibré p∗(E) contient L(E) comme sous-fibré, et on peut considérer
L(E)⊥ =(x, 〈v〉,w)
∣∣∣ x ∈ X, 〈v〉 ∈ P(Ex),w ∈ 〈v〉⊥
où 〈v〉⊥ est le complément orthogonal de 〈v〉 dans p∗(E)x. On a ainsi une décom-position orthogonale p∗(E) = L(E)⊕ L(E)⊥. Comme variété Y on peut alors prendreY = PE, et comme application différentiable on prend f = Pp : PE→ X. Les fibréssont F = L(E) et G = L(E)⊥. On a f ∗E = F ⊕ G par construction.
11.4. Connexions dans un fibré vectoriel
Introduisons la notation suivante : Pour une variété X, un fibré vectoriel E surX et j ∈N0 notons
Ω j(E) := Ω j(X) ⊗X Γ(E)où Ω j(X) est le C∞(X)–module des j–formes différentielles sur X et où Γ(E) est leC∞(X)–module des sections différentiables de E. Le produit tensoriel ⊗X est bienentendu le produit tensoriel sur l’anneau C∞(X) de toutes les fonctions différen-tiables sur X à valeurs dans le corps K = R ou K = C.Remarquons que Ω0(E) := Ω0(X) ⊗X Γ(E) Γ(E). Dans la suite, on identifieraΩ0(E) = Γ(E). Remarquons aussi que si E est un fibré trivial de dimension 1, alorsΓ(E) C∞(X), et donc Ω j(E) Ω j(X).On a un prolonguement naturel du produit exterieur de formes différentielles à unproduit
∧ : Ωi(E) ×Ω j(F)→ Ωi+ j(E ⊗ F)défini par
(ω ⊗ s) ∧ (τ ⊗ t) = (ω ∧ τ) ⊗ (s ⊗ t)En particulier on a, tenant compte des identifications faites un produit
∧ : Ωi(X) ×Ω j(E)→ Ωi+ j(E)
défini parω ∧ (τ ⊗ s) = (ω ∧ τ) ⊗ s
11.4.1. D
Soit E un fibré vectoriel sur X. Une application K–linéaire
∇ : Ω0(E)→ Ω1(E)
s’appelle connexion sur E si elle satisfait l’identité dite règle de Leibnitz :
∇( f s) = d f ⊗ s + f∇(s)
pour tout s ∈ C∞(E) et tout f ∈ C∞(X).
256 11. CLASSES CARACTÉRISTIQUES
11.4.2. E
Si E est un fibré trivial de dimension 1, alors la différentielle d, vue comme appli-cation
d : Ω0(E) Ω0(X)→ Ω1(E) Ω1(X)
est une connexion.
11.4.3. R
Etant donné une connexion ∇ sur E, on aimerait bien construire de façon naturelleune longue suite
(10) Ω0(E) Ω1(E) Ω2(E) Ω3(E) · · ·//d0∇ //
d1∇ //
d2∇ //
d3∇
où d0∇= ∇, tel que dans le cas de l’exemple 11.4.2 on retrouve le complexe de de
Rham
Ω0(X) Ω1(X) Ω2(X) Ω3(X) · · ·//d0//d1
//d2//d3
Dans cette section on motrera entr’autre l’existence d’une telle prolongation de∇ (proposition 11.4.7 et remarque 11.4.8). On aura donc une généralisation ducomplexe de de Rham. Mais une telle généralisation n’est possible que dans lamesure où (10) est juste une longue suite, et pas un complexe de cochaîne, c’est-à-dire d j+1
∇d j∇
n’est pas nul en général.
11.4.4. R
Un champs de vecteurs tangent à X est, par définition même, une section du fibrétangent TX. Un tel champs de vecteurs Ξ induit, vu l’isomorphisme canoniqueΩ1(X) Γ(TX∗) une application
evΞ : Ω1(X) → Ω0(X)ω 7→ ω Ξ
que l’on appelle evaluation en Ξ. Il est clair que evΞ, pour Ξ fixé, est un homomor-phisme C∞(X)–linéaire, et que l’application Ξ 7→ evΞ est aussi C∞(X)–linéaire. Ona donc
ev ∈ HomX
(Γ(TX),HomX(Ω1(X),Ω0(X))
)L’évaluation a de plus la propriété de localité suivante : Si Ξ1 et Ξ2 sont deuxchamps de vecteurs et x ∈ X, alors on a
Ξ1(x) = Ξ2(x) =⇒ evΞ1 (ω)(x) = evΞ2 (ω)(x) ∀ω ∈ Ω1(X)
A partir de l’evaluation evΞ on construit le morphisme C∞(X)–linéaire
evΞ ⊗ id : Ω1(E)→ Ω0(E)
On note∇Ξ := (evΞ ⊗ id) ∇ : Ω0(E)→ Ω0(E)

11.4. CONNEXIONS DANS UN FIBRÉ VECTORIEL 257
L’application Ξ 7→ ∇Ξ est C∞(X)–linéaire, et a la propriété de localité analogue àcelle de l’evaluation, c’est-à-dire pour tout champs de vecteurs Ξ1,Ξ2 tangents à Xon a
Ξ1(x) = Ξ2(x) =⇒ ∇Ξ1 (ω)(x) = ∇Ξ2 (ω)(x) ∀ω ∈ Ω0(E)Pour un vecteur ξ tangent à X basé en x ∈ X, on note ∇ξ(s) = ∇Ξ(s), où Ξ estn’importe quel champs de vecteurs tangent à X avec Ξ(x) = ξ.Soient Ξ et Σ deux champs de vecteurs tangents à X. L’application d’évaluation
evΞ,Σ : Ω2(X) → Ω0(X)ω 7→ ω (Ξ,Σ)
induit
evΞ,Σ : Ω2(Hom(E,E)) → Ω0(Hom(E,E))ω ⊗ s 7→ evΞ,Σ(ω) ⊗ s
Comme c’était déjà le cas pour les connexions, la valeur de evΞ,Σ(ω ⊗ s) en x nedépend que de Ξ(x) et Σ(x). Il fait donc un sens de poser
evξ,σ(ω ⊗ s) := evΞ,Σ(ω ⊗ s)(x)
pour ξ, σ ∈ TxX, où Ξ et Σ sont des champs de vecteurs avec Ξ(x) = ξ et Σ(x) = σ.
11.4.5. P
Soit Ξ un champs de vecteurs tangent à X, E un fibré sur X et ∇ une connexion dans E.Soit f ∈ C∞(X) et s ∈ Γ(E). Alors
∇Ξ( f · s) = (d f Ξ) ⊗ s + f · ∇Ξ(s)
D. En effet
∇Ξ( f · s) = (evΞ ⊗ id)(∇( f s))= (evΞ ⊗ id)(d f ⊗ s + f · ∇(s))= (d f Ξ) ⊗ s + f · (evΞ ⊗ id)∇(s)= (d f Ξ) ⊗ s + f · ∇Ξ(s)
pour tout Ξ ∈ Γ(TX), tout f ∈ C∞(X) et tout s ∈ Γ(E).
11.4.6. R
L’isomorphisme Ω1(X) Γ(TX∗) induit, tenant compte de un isomorphisme
Ω1(E) Γ(Hom(TX,E))
Une connexion ∇ : Ω0(E) → Ω1(E) induit alors ∇ : Γ(E) → ΓHom(TX,E) défini àl’aide du diagramme commutatif
Γ(E) ΓHom(TX,E)
Ω0(E) Ω1(E)
OO
//∇
//∇
OO

258 11. CLASSES CARACTÉRISTIQUES
qui satisfait aux conditions
∇aξ+bη(s) = a∇ξ(s) + b∇η(s)(11)
∇ξ( f s) = d f (ξ) · s(x) + f (x) · ∇ξ(s)(12)
pour tout ξ, η ∈ TxX, tout a, b ∈ K tout f ∈ C∞(X) et tout s ∈ Γ(E). D’autre part,on vérifie facilement que si ∇ : Γ(E) → ΓHom(TX,E) satisfait (11) et (12), alors ∇induit, via le même diagramme une connexion ∇ : Ω0(E)→ Ω1(E).
11.4.7. P
Soit E un fibré sur X et ∇ une connexion dans E. Il existe un uniqe opérateur K–linéaire
d j∇
: Ω j(E)→ Ω j+1(E)
qui satisfait aux deux conditions
I : d0∇= ∇
II : di+ j∇
(ω ∧ t) = dω ∧ t + (−1)iω ∧ ∇(t) pour tout ω ∈ Ωi(X) et tout t ∈ Ω j(E)
D. Pour τ ∈ Ω j et s ∈ Γ(E) la condition (II) demande que
d j∇
(τ ⊗ s) = dτ ∧ s + (−1) jτ ∧ ∇(s)
Cette équation définit d j∇
entièrement, vu qu’on exige la K–linéarité. On a doncunicité de d j
∇. La condition (I) est satisfaite, vu que pour s ∈ Γ(E) et f ∈ Ω0(X) on a
d0∇
( f ⊗ s) = d f ∧ s + f ∧ ∇(s) = ∇( f ⊗ s)
La condition (II) est aussi satisfaite : En effet on a pour toutω ∈ Ωi(X) tout τ ∈ Ω j(X)et tout s ∈ Γ(E)
di+ j∇
(ω ∧ (τ ⊕ s)) = di+ j∇
((ω ∧ τ) ⊗ s)
= d(ω ∧ τ) ⊗ s + (−1)i+ j(ω ∧ τ) ∧ ∇(s)= dω ∧ τ ⊗ s + (−1)iω ∧ dτ ⊗ s + (−1)i+ j(ω ∧ τ) ∧ ∇(s)
= dω ∧ (τ ⊗ s) + (−1)iω ∧(dτ ⊗ s + (−1) jτ ∧ ∇(s)
)= dω ∧ (τ ⊗ s) + (−1)iω ∧
(d j∇
(τ ⊗ s))
ce qui montre que la condition (II) est satisfaite.
11.4.8. R
Dans le cas où ∇ = d0 est la différentielle de de Rham en degré 0, comme dansl’exemple 11.4.2, la condition (II) de la proposition 11.4.7 est simplement la formulepour la différentielle d’un produit
d(ω ∧ τ) = dω ∧ τ + (−1)iω ∧ dτ
pour ω ∈ Ω j(X) et τ ∈ Ωi(X). Ainsi d j∇
est, dans ce cas, la différentielle de de Rhamusuelle : d j
∇= d j.

11.4. CONNEXIONS DANS UN FIBRÉ VECTORIEL 259
11.4.9. P
Soit E un fibré vectoriel sur X et ∇ une connexion dans E. L’application
d1∇ ∇ : Ω0(E)→ Ω2(E)
est C∞(X)–linéaire.
D. En effet
d1∇ ∇( f t) = d1
∇(d f ∧ t + f ∧ ∇(t))
= dd f ∧ t − d f ∧ ∇(t) + d f ∧ ∇(t) + f ∧ d1∇ ∇(s)
= f ∧ d1∇ ∇(s)
pour tout f ∈ C∞(X) et tout t ∈ Ω0(E).
11.4.10. D
Soit E un fibré vectoriel sur X et ∇ une connexion dans E. On appelle forme decourbure associée à ∇ et on note F∇ l’image de d1
∇ ∇ dans Ω2(Hom(E,E)) par l’iso-
morphisme canonique
HomX(Ω0(E),Ω2(E)) Ω2(Hom(E,E))
11.4.11. R
Cet isomorphisme canonique est la composition des isomorphismes canoniquessuivantes :
HomX(Ω0(E),Ω2(E)) HomX(Γ(E),Ω2(X) ⊗X Γ(E)) Ω2(X) ⊗X HomX(Γ(E),Γ(E)) Ω2(X) ⊗X Γ(Hom(E,E))= Ω2(Hom(E,E))
Dans la suite, on exprimera ces objets dans des bases locaux, afin de rendre plusexplicites toutes ces définitions.
Soit U ⊆ X un ouvert trivialisant de E et soit e1, . . . , ek une base locale de E surU. Tout élément du produit tensoriel Ω1(U) ⊗U Γ(E|U) = Ω1(E|U) peut être écrit demanière unique comme
k∑i=1
τi ⊗ ei
avec τ1, . . . , τk ∈ Ω1(U). Soit ∇ une connexion dans E. Par ce qui précède, il existe
une matrice A = (ai j)1≤i, j≤k ∈Mk(Ω1(U)) telle que
∇(ei) =k∑
j=1
ai j ⊗ e j(13)

260 11. CLASSES CARACTÉRISTIQUES
On appelle A la matrice de∇ en la base e1, . . . , ek. Vice versa, étant donnée une matriceA ∈Mk(Ω1(U)), la formule (13) définit une connexion dans E|U.
11.4.12. P
Soit E un fibré vectoriel sur X et∇ une connexion dans E. Soit U ⊆ X un ouvert trivialisantde E et soient e1, . . . , ek et f1, . . . , fk des bases localaux de E sur U. Soit A la matrice de ∇exprimée dans la base e1, . . . , ek et soit B la matrice de ∇ exprimée dans la base f1, . . . , fk.Alors
B = (dG)G−1 + GAG−1
où G ∈ GLk(Ω0(U)) est la matrice de changement de base définie par
fi =k∑
j=1
gi j ⊗ e j
D. On a
∇( fi) =
k∑h=1
bih ⊗ fh
=
k∑j=1
k∑h=1
bihghj
⊗ e j
par définition, et d’autre part
∇( fi) =
k∑j=1
∇(gi je j)
=
k∑j=1
dgi j ⊗ e j + gi j∇(e j)
=
k∑j=1
dgi j ⊗ e j +
k∑j=1
k∑h=1
gi ja jh ⊗ eh
=
k∑j=1
dgi j +
k∑h=1
gihahj
⊗ e j
ce qui montre que BG = dG + GA, et donc que B = (dG)G−1 + GAG−1.
11.4.13. P
Soit ∇ une connexion dans E, U un ouvert trivialisant de E et e1, . . . , ek une base locale deE sur U. Soit A la matrice de ∇ sur U dans la base e1, . . . , ek. Alors la matrice de d1
∇ ∇
dans la base e1, . . . , ek vaut dA − A ∧ A.

11.4. CONNEXIONS DANS UN FIBRÉ VECTORIEL 261
D.
d1∇ ∇(ei) =
k∑j=1
d1∇
(ai j ⊗ e j)
=
k∑j=1
dai j ⊗ e j − ai j ∧ ∇(e j)
=
k∑j=1
dai j ⊗ e j −
k∑j=1
k∑h=1
ai j ∧ a jh ⊗ eh
=
k∑j=1
dai j −
k∑h=1
aih ∧ ahj
⊗ e j
ce qui montre que la matrice de d1∇ ∇ dans la base e1, . . . , ek vaut dA − A ∧ A.
11.4.14. R
La matrice M := dA − A ∧ A est une matrice de 2–formes différentielles. La formecourbure F∇ ∈ Ω2(Hom(E,E)) associée à la connexion∇, est par conséquent donnéepar
F∇ =k∑
i, j=1
mi j ⊗ ei j
où ei j ∈ Γ(Hom(E,E)) est donné par ei j(ek) = δ jkei. Ici δ jk désigne le symbole deKronecker. En d’autre mots, la matrice de ei j dans la base e1, . . . , ek est la matricedont tout les coefficients valent 0 sauf le i– j–ème, qui vaut 1.On appelle M matrice de de la forme courbure F∇.
11.4.15. P
Soit E un fibré vectoriel sur X et∇ une connexion dans E. Soit U ⊆ X un ouvert trivialisantde E et soient e1, . . . , ek et f1, . . . , fk des bases localaux de E sur U. Soit M la matrice de F∇exprimée dans la base e1, . . . , ek et soit N la matrice de F∇ exprimée dans la base f1, . . . , fk.Alors
N = GMG−1
où G ∈ GLk(Ω0(U)) est la matrice de changement de base définie par
fi =k∑
j=1
gi j ⊗ e j
D. Soit A la matrice de ∇ dans la base e1, . . . , ek et B la matricede ∇ dans la base f1, . . . , fk. Par la proposition 11.4.12 on a
B = (dG)G−1 + GAG−1

262 11. CLASSES CARACTÉRISTIQUES
et par la proposition 11.4.13 on a
N = dB − B ∧ B
Observons que
dG−1 = d(G−1GG−1) = dG−1 + G−1(dG)G−1 + dG−1
et donc (dG)G−1 = −G(dG−1). On combine ces résultats et trouve
N = d((dG)G−1 + GAG−1) − ((dG)G−1 + GAG−1) ∧ ((dG)G−1 + GAG−1)= −dG ∧ dG−1 + dG ∧ AG−1 + G(dA)G−1
− GA ∧ dG−1
−(dG)G−1∧ (dG)G−1
− (dG)G−1∧ GAG−1
−GAG−1∧ (dG)G−1
− GAG−1∧ GAG−1
= −dG ∧ dG−1 + dG ∧ AG−1 + G(dA)G−1− GA ∧ dG−1
+(dG)G−1∧ G(dG−1) − (dG)G−1
∧ GAG−1
+GAG−1∧ G(dG−1) − GAG−1
∧ GAG−1
= −dG ∧ dG−1 + dG ∧ AG−1 + G(dA)G−1− GA ∧ dG−1
+dG ∧ dG−1− dG ∧ AG−1 + GA ∧ dG−1
− GA ∧ AG−1
= G(dA)G−1− GA ∧ AG−1
= G(dA − A ∧ A)G−1
= GMG−1
ce qu’il fallait démontrer.
11.5. Connexions induites
Soit E un K–fibré vectoriel sur X et ∇ une connexion dans E. Soit Y une variétéet f : Y→ X une application différentiable. On veut transporter la connexion ∇ surle fibré induit f ∗E.
11.5.1. P
Soit f : Y → X différentiable et E un K–fibré sur X. Il existe une connexion unique f ∗∇sur f ∗E faisant commuter le diagramme
(14)
Ω0(E) Ω1(E)
Ω0( f ∗E) Ω1( f ∗E)
Ω0( f )
//∇
Ω1( f )
//f ∗∇

11.5. CONNEXIONS INDUITES 263
oùΩ j( f ) : Ω j(E)→ Ω j( f ∗E) est donné par f j(ω⊗ s) = ω f ⊗ s f pour tout ω ∈ Ω j(X)et tout s ∈ Γ(E).
D. La proposition montre qu’on a un isomorphisme de C∞(Y)–modules
ϕ : Ω0(Y) ⊗X Ω0(E) → Ω0( f ∗E)
g ⊗ s 7→ g · (s f )
On a encore un homomorphisme
ψ : Ω0(Y) ⊗X Ω1(X) → Ω1(Y) ⊗Y Ω
0(Y)g ⊗ ω 7→ (ω f ) ⊗ g
qui, en général, n’est pas un isomorphisme. Voici le diagramme
Ω0(E) Ω1(E)
Ω0(X) ⊗X Ω0(E) Ω0(X) ⊗X Ω
1(X) ⊗X Γ(E)
Ω0(Y) ⊗X Ω0(E) Ω0(Y) ⊗X Ω
1(X) ⊗X Γ(E)
Ω1(Y) ⊗Y Ω0(Y) ⊗X Γ(E)
Ω0( f ∗E) Ω1( f ∗E)
//∇
Ω0( f )⊗id
//id⊗∇
Ω0( f )⊗id⊗ id
//id⊗∇
ψ⊗id
//f ∗∇
11.5.2. R
Si A = (ai j)1≤i, j≤k est la matrice de ∇ exprimée dans une base locale e1, . . . , ek, alorsla matrice Ω1( f )A = (ai j f )1≤i, j≤k est la matrice de f ∗∇ exprimée dans la basee1 f , . . . , ek f .
11.5.3. R

264 11. CLASSES CARACTÉRISTIQUES
Le diagramme (14) se prolonge, vu la proposition 11.4.7 en un diagramme
(15)
Ω0(E) Ω1(E) Ω2(E) · · ·
Ω0( f ∗E) Ω1( f ∗E) Ω2( f ∗E) · · ·
Ω0( f )
//∇
Ω1( f )
//d1∇
Ω2( f )
//d2∇
//f ∗∇ //d1
f ∗∇ //d2
f ∗∇
qui, par définition de la connexion induite f ∗∇ et des opérateurs d∗∇
et d∗f ∗∇ commute.En particulier on a un diagramme commutatif
(16)
Ω0(E) Ω2(E)
Ω0( f ∗E) Ω2( f ∗E)
Ω0( f )
//∇d1
∇
Ω2( f )
//f ∗∇d1
f ∗∇
On appelle forme de courbure courbure induite la forme de courbure associée à laconnexion f ∗∇, qui est par définition l’image de f ∗∇ d1
f ∗∇ dansΩ2(Y) via l’isomor-phisme canonique
HomX
(Ω0( f ∗E),Ω2( f ∗E)
) Ω2
(Hom( f ∗E, f ∗E)
)Notons F∇ ∈ Ω2(Hom(E,E)) et F f ∗∇ ∈ Ω
2(Hom( f ∗E, f ∗E)) les formes de courbureassociées à ∇ et f ∗∇ respectivement. On a
(17) Ω∗( f )(F∇) = F f ∗∇
par définition de ces quantités.
On appelle evaluation l’application
ev : Γ(E) ⊗X Γ(E∗)→ C∞(X)
donnée par ev(s, s∗)(x) = s∗(s(x)) pour tout s ∈ Γ(E), tout s∗ ∈ Γ(E∗) et tout x ∈ X.Définissons un couplage
(18) 〈−,−〉 : Ωi(E) ⊗Ω j(E∗)→ Ωi+ j(X)
par〈ω ⊗ s, τ ⊗ s∗〉 = ev(s, s∗) · ω ∧ τ
Ce couplage est non–dégénéré.Le couplage (18) permet de définir les connexions induites sur les fibrés E∗, E ⊗ Fet Hom(E,F), étant donnés des connexions sur E et F.
11.5.4. D
Soit E un K–fibré vectoriel sur X et ∇E une connexion dans E. On appelle connexioninduite dans E∗ la connexion ∇E∗ dans E∗ déterminée par la relation
d 〈ω ⊗ s, τ ⊗ s∗〉 = 〈∇E(ω ⊗ s), τ ⊗ s∗〉 + 〈ω ⊗ s,∇E∗ (τ ⊗ s∗)〉
pour tout ω, τ ∈ Ω0(X), s ∈ Γ(E) et tout s∗ ∈ Γ(E∗).

11.5. CONNEXIONS INDUITES 265
11.5.5. D
Soient E et F des K–fibrés vectoriels sur X et ∇E,∇F des connexions dans E et Frespectivement. On appelle connexion induite dans E ⊗ F la connexion ∇E⊗F dansE ⊗ F définie par
∇E⊗F(ω ⊗ s ⊗ t) = ∇E(ω ⊗ s) ∧ t + s ∧ ∇F(ω ⊗ t)
pour tout ω ∈ Ω0(X), tout s ∈ Γ(E) et tout t ∈ Γ(F).
11.5.6. D
Soient E et F des K–fibrés vectoriels sur X et ∇E,∇F des connexions dans E et Frespectivement. On appelle connexion induite dans Hom(E,F) la connexion∇Hom(E,F)dans Hom(E,F) déterminée par la relation
∇F(〈s, ϕ〉) =⟨∇E(s), ϕ
⟩+
⟨s,∇Hom E,F(ϕ)
⟩pour tout s ∈ Ωi(E), et tout ϕ ∈ Ω j(Hom(E,F)).
11.5.7. R
Malgré tout l’élégance de ces définitions, il reste une vérification à faire : Les fibrésE∗ ⊗ F et Hom(E,F) sont canoniquement isomorphes. Il faudra s’inquiéter si laconnexion induite sur ∇E∗⊗F via les définitions 11.5.4 et 11.5.5 ne correspond pas àla connexion induite sur ∇Hom(E,F) via la définition 11.5.6.
11.5.8. P
Pour cette fois ci, tout va bien.
D. Notons α : E∗ ⊗ F → Hom(E,F) l’isomorphisme canoniquequi, je rappelle, est défini par α(ϕ ⊗ t)(x) = ϕ(x)t. On a un diagramme commutatifde fibrés vectoriels sur X
E ⊗ E∗ ⊗ F E ⊗Hom(E,F)
L ⊗ F F
〈−,−〉⊗id
//id⊗α
ev
//
où L est le fibré produit X × K. L’isomorphisme L ⊗ F → F est la multiplicationscalaire, c’est-à-dire l ⊗ v 7→ lv. En appliquant le foncteur covariant Γ(−) on trouveun diagramme commutatif de C∞(X)–modules :
Γ(E) ⊗ Γ(E∗) ⊗ Γ(F) Γ(E) ⊗ ΓHom(E,F)
C∞(X) ⊗ Γ(F) Γ(F)
//
//
266 11. CLASSES CARACTÉRISTIQUES
Soit s ∈ Γ(E), t ∈ Γ(F) et ϕ ∈ Γ(E∗). On a
(19) ∇F(〈s, α (ϕ ⊗ s)〉) =⟨∇E(s), α (ϕ ⊗ s)
⟩+
⟨s,∇Hom(E,F)(α (ϕ ⊗ t))
⟩par la définition 11.5.6,
(20) d(〈s, ϕ〉) =⟨∇E(s), ϕ
⟩+
⟨s,∇E∗ (ϕ)
⟩par la définition 11.5.4, et la définition 11.5.5 donne
(21) ∇E∗⊗F(ϕ ⊗ t) = ∇E∗ (ϕ) ∧ t + ϕ ∧ ∇F(t)
Le diagramme montre que 〈s, α (ϕ ⊗ t)〉 = 〈s, ϕ〉t. Ainsi on trouve
(22)⟨∇E(s), α (ϕ ⊗ t)
⟩=
⟨∇E(s), ϕ
⟩∧ t
On sait aussi
(23)⟨s,∇E∗⊗F(ϕ ⊗ t)
⟩=
⟨s,∇E∗(ϕ)
⟩∧ t +
⟨s, ϕ
⟩∇F(t)
Ayant tout ceci, on calcule⟨s,∇Hom(E,F)(α (ϕ ⊗ t))
⟩(19)= ∇F
( ⟨s, α (ϕ ⊗ t)
⟩ )−
⟨∇E(s), α (ϕ ⊗ t)
⟩(22)= ∇F(
⟨s, ϕ
⟩t) −
⟨∇E(s), ϕ
⟩∧ t
= d⟨s, ϕ
⟩∧ t +
⟨s, ϕ
⟩∇F(t) −
⟨∇E(s), ϕ
⟩∧ t
=⟨s,∇E∗ (ϕ)
⟩∧ t +
⟨s, ϕ
⟩∇F(t)
(23)=
⟨s,∇E∗⊗F(ϕ ⊗ t)
⟩ce qui permet de conclure que
∇E∗⊗F(ϕ ⊗ t) = ∇Hom(E,F)(α (ϕ ⊗ t))
Les connexions ∇E∗⊗F et ∇Hom(E,F) se correspondent donc à travers de l’isomor-phisme α.
Soit ∇ une connexion dans le K–fibré vectoriel E→ X, et soit U ⊆ X un ouverttrivialisant de E. Coisissons une base locale e1, . . . , ek de E|U. On a E|U U ×Kk etdonc un isomorphisme
Hom(E,E)|U U ×Mk(K)
et comme Ω j(E|U) Ω j(U)⊕k on a
Ω j(Hom(E,E)|U) Mk(Ω j(U))
L’application d j∇
: Ω j(E|U)→ Ω j+1(E|U) devient sous ces isomorphismes
d j∇
: Ω j(U)⊕k→ Ω j+1(U)⊕k
(s1, . . . , sk) 7→ (ds1, . . . , dsk) − (s1, . . . , sk) ∧ A
où A est la matrice de ∇ dans la base e1, . . . , ek. L’opérateur d j∇Hom(E,E)
défini parconnexion induite ∇Hom(E,E) est alors en termes de matrices donné par
d j∇Hom(E,E)
: Mk(Ω j(U)) → Mk(Ω j+1(U))
M 7→ dM − (A ∧M − (−1) jM ∧ A)(24)

11.6. DÉFINITION DES LASSES CARACTÉRISTIQUES 267
11.5.9. T (Identité de Bianchi)
Soit E un fibré vectoriel sur X et ∇ une connexion dans E. Soit ∇Hom(E,E) la connexioninduite dans le fibré Hom(E,E). Alors
d2Hom(E,E)F∇ = 0
où d∗Hom(E,E) : Ω∗(Hom(E,E)) → Ω∗(Hom(E,E)) est l’opérateur induit par la connexion∇Hom(E,E) et où F∇ ∈ Ω2(Hom(E,E)) est la forme de courbure induite par ∇.
D. Il suffit de montrer cette égalité localement. Soit A la matricede ∇ dans une base locale sur un certain ouvert trivialisant de E. La matrice M deF∇ vaut par la proposition 11.4.13
M = dA − A ∧ A
La matrice de d2Hom(E,E)F∇ vaut, par (24)
(25) L = dM − (A ∧M −M ∧ A)
On calcule :
L = d(dA − A ∧ A) − (A ∧ (dA − A ∧ A) − (dA − A ∧ A) ∧ A)= −dA ∧ A + A ∧ dA − A ∧ dA + A ∧ A ∧ A + dA ∧ A − A ∧ A ∧ A= 0
d’où d2Hom(E,E)F∇ = 0.
11.6. Définition des lasses caractéristiques
On fixe un fibré vectoriel complexe p : E→ X sur la variété compacte X. Toutesles connexions sont complexes.
Dans la section 6.2 on a vu qu’un polynôme invariant P induit une application
P : Mn(A)→ C
où A es une C–algèbre commutative. L’algèbre des formes différentielles de degrépair est une C–algèbre commutative.
11.6.1. P
Soit P un polynôme invariant en k2 variables, homogène de degré d. Alors P induit uneapplication
P : Ω2(Hom(E,E))→ Ω2d(X)

268 11. CLASSES CARACTÉRISTIQUES
D. Soit U ⊆ X un ouvert trivialisant de E et soit e1, . . . , ek unebase locale de E sur U. Ayant choisi cette base, on a un isomorphisme canoniqueHom(E,E)|U U ×Mk(C), et ainsi
Ω2(Hom(E,E)|U) Ω2(U ×Mk(C)) Mk(Ω2(U × C))
Cet isomorphisme est donné par
ϕ : Ω2(Hom(E,E)|U) → Mk(Ω2(U))s 7→ ϕ(s) = (mi j)1≤i, j,≤k
oùmi j(x) = e∗j(s(x)(ei))
pour tout x ∈ U, en désignant par e∗1, . . . , e∗n la base duale. Comme on l’a déjà vu,
on peut évaluer P en une matrice M ∈Mk(Ω2(U)), et on a P(M) ∈Mk(Ω2d(U)). Vial’isomorphisme ci–dessus, P induit
P : Ω2(Hom(E,E)|U)→ Ω2d(Hom(E,E)|U)
Il faut montrer que cette définition ne dépend pas du choix de la base e1, . . . , ek.Mais ceci est clair, vu la proposition 11.4.15 et l’hypothèse que P est invariant, c’està dire P(gXg−1) = P(X) pour tout g ∈ GLn(C).
11.6.2. T
Soit E un fibré vectoriel de dimension k sur X. Soit ∇ une connexion dans E et F∇ ∈Ω2(Hom(E,E)) la forme de courbure associée. Soit P un polynôme invariant homogèneen k2 variables de degré j. Alors P(F∇) ∈ Ω2 j(X) est une forme fermée, et sa classe decohomologie ne dépend pas de ∇.
D. Montrons d’abord que la forme P(F∇) est fermée, c’est-à-diredP(F∇) = 0. Soit U un ouvert trivialisant de E et e1, . . . , ek une base locale de E surU. Soit A = (ai j)1≤i, j,≤n la matrice de ∇ sur U dans cette base. La matrice M de F∇vaut par 11.4.13
M = (mi j)1≤i, j,≤k = dA − A ∧ A
L’identité de Bianchi 11.5.9 (voir l’équation (25) de la démonstration pour la for-mulation matricielle) donne
dM = A ∧M −M ∧ A
Notons P′(X) la matrice des dérivés partielles tranposée
P′(X) =(∂P(X)
Xi j
)t
On a
dP(F∇) =k∑
i, j=1
∂P∂Xi j
(M) ∧ dmi j = tr(P′(M) ∧ dM)
Les matrices X et P′(X) commutent par 6.2.1, donc
P′(M) ∧M =M ∧ P′(M)

11.6. DÉFINITION DES LASSES CARACTÉRISTIQUES 269
Ainsi
dP(F∇) = tr(P′(M) ∧ dM)
= tr(P′(M) ∧ A ∧M − P′(M) ∧M ∧ A
)= tr
((P′(M) ∧ A
)∧M −M ∧
(P′(M) ∧ A
))= tr(0)= 0
ce qui montre que P(F∇) est une forme fermée. Montrons que ca classe de coho-mologie est indépendente de ∇. A ce fin, soient ∇1 et ∇0 des connexions dans E etmontrons que [P(F∇1 )] = [P(F∇0 )]. On considère le pull–back
p∗E E
X ×R X
//
p
//π
où par définitionp∗E = (v, x, t) ∈ E × X ×R | p(u) = x
Soient ∇1 et ∇0 les connexions induites sur p∗E, et définissons une troisièmeconnexion ∇ sur p∗E par
∇(s)(x, t) = (1 − t)∇0(s)(x, t) + t∇1(s)(x, t)
Pour ν = 0, 1 on a un pull–back
E p∗E
X X ×R
//
p
//ιν
où ιν(x) = (x, ν). La proposition 11.5.1 permet de conclure que les connexions quiinduit ∇ via ιν sur E sont les connexions ∇0 et ∇1. On a alors
H∗(ιν)([P(F
∇)])= [P(F∇ν )]
Comme les applications ι0 et ι1 sont homotopes, on a H∗(ι0) = H∗(ι1). Ainsi
[P(F∇0 )] = H∗(ι0)([P(F
∇)])= H∗(ι1)
([P(F
∇)])= [P(F∇1 )]
ce qu’il fallait démontrer.
11.6.3. D
Soit E un fibré vectoriel de dimension k sur X et soit P un polynôme invariant ethomogène de degré j. On appelle classe caractéristique de E définie par P la classe decohomologie
[P(F∇)] ∈ H2 j(X)où ∇ est n’importe quelle connexion dans E. On note P(E) cette classe.

270 11. CLASSES CARACTÉRISTIQUES
11.6.4. T
Soit E un fibré vectoriel de dimension k sur X. Soit P un polynôme invariant en k2 variables.Soit f : Y→ X une application différentiable. Alors
H∗( f )(P(E)
)= P( f ∗E)
D. Soit∇ une connexion dans E, et soit f ∗∇ la connexion induitedans f ∗E. Notons F∇ et F f ∗∇ les formes courbures associées respectivement. Par (16)on a Ω∗( f )F∇ = F f ∗∇. Comme Ω∗( f ) est un homomorphisme d’algèbres on a
Ω∗( f )P(F∇) = P(Ω∗( f )F∇
)= P(F f ∗∇)
et donc H∗( f )(P(E)) = P( f ∗E).
11.7. Les classes de Chern
11.7.1. D
Soit E un fibré vectoriel complexe de dimension k sur X. On appelle j–ème classe deChern la classe de cohomologie
c j(E) :=(−12πi
) j
[σk(E)] ∈ H2 j(X,C)
On appelle j–ème caractère de Chern la classe de de cohomologie
ch j(E) :=1j!
(−12πi
) j
[sk(E)] ∈ H2 j(X,C)
pour 0 ≤ j ≤ n. On appelle classe de Chern totale respectivement caractère de Cherntotal les classes de cohomologie
c(E) :=k∑
j=1
c j(E) et ch(E) :=k∑
j=1
ch j(E)
11.7.2. R
On ac0(E) = 1 et ch0(E) = dim E
vu que σ0(X) = 1 et s0(X) = k.
11.7.3. T
Soient E et F des fibrés vectoriels complexes sur X. Les égalités suivantes sont vraies :

11.7. LES CLASSES DE CHERN 271
I : c j(E ⊕ F) =j∑
l=1
cl(E) c j−l(F)
II : ch j(E ⊕ F) = ch j(E) + ch(F)III : ch(E ⊕ F) = ch(E) + ch(F)
IV : ch j(E ⊗ F) =j∑
l=1
chl(E) ch j−l(F)
V : ch(E ⊗ F) = ch(E) ch(F)
D. Choisissons des connexions ∇E et ∇F dans E et F, et soiente1, . . . , ek et f1, . . . , fl des bases locaux de E et F respectivement, (définies sur lemême ouvert U ⊆ X). On se permet d’identifier
Ω∗(E) ⊕Ω∗(F) = Ω∗(E ⊕ F)
La matrice dans la base ea, . . . , ek, f1, . . . , fl de la forme courbure F∇E⊕∇F associée à laconnexion
∇E ⊕ ∇F : Ω0(E ⊕ F)→ Ω1(E ⊕ F)vaut
M ⊕ L =(
M 00 L
)où M est la matrice dans la base e1, . . . , ek de la forme courbure F∇E associée à ∇E etL la matrice dans la base f1, . . . , fl de la forme courbure F∇F associée à ∇F. Par 6.2.6on a
σ j(M ⊕ L) =j∑
i=0
σi(M)σ j−i(L)
ce qui montre (I) ets j(M ⊕ L) = s j(M) + s j(L)
ce qui montre (II). La formule (III) est une conséquence immédiate de (II) et ladéfinition du charactère total de Chern.(IV) et (V) restent à démontrer.
11.7.4. T
Supposons que pour toute variété X et tout fibré complexe E sur X et tout j ≥ 0 on ait donnéune classe de cohomologie c j(E) ∈ H2 j(X) de telle manière que les assertions suivantes sontvraies
I : Si E et F sont des fibrés complexes isomorphes sur la même variété X, alorsc j(E) = c j(F).
II : Soit En le fibré en droites canonique sur PnC. Alors
c0(En) = 1 et c j(En) = 0
pour tout j > 0
III : Soit∫
: H∗(PnC)→ R l’homomorphisme d’intégration. Alors∫c1(E1) = −1

272 11. CLASSES CARACTÉRISTIQUES
IV : Soit f : Y→ X différentiable. Alors c j( f ∗E) = H∗( f )(c j(E)).
V : Pour tout fibrés complexes E et F sur la même variété X on a
c j(E ⊕ F) =j∑
l=0
cl(E)c j−l(F)
Alors pour toute variété X, pour tout fibré complexe E sur X et pour tout j ≥ 0 on ac j(E) = c j(E). Les classes de Chern d’autre part satisfont les propriétés (I) à (V) ci–dessus.
S . Remarquons que les classes de Chern satisfont (I) par(II) par (III) par (IV) par le théorème 11.6.4 et (V) par le théorème 11.7.3.
11.8. La classe d’Euler et l’isomorphisme de Thom
Soit E→ X un fibré vectoriel réel de dimension k sur la variété X, et fixons unemétrique sur E. On a deux fibrés en sphères canoniques associés à E :
• Le fibré en sphères Sk−1 obtenu en prenant dans chaque fibre la sphèreunité. On note ce fibré S(E). L’espace total de S(E) est un retract pardéformation de E \ s0(E).
• Le fibré en sphères Sk obtenu en compactifiant chaque fibre Ex par unpoint∞x. On note S(E) ce fibré.
11.8.1. P
La projection stéréographique fibre par fibre
σ : S(E)→ S(E ⊕R)
est un homéomorphisme.
11.8.2. D
Soit X une variété et p : E → X un fibré vectoriel réel orienté sur X. Une classe decohomologie ω ∈ Hk(S(E)) s’appelle classe d’orientation de E si
I : H∗(s∞)(ω) = 0
II : Pour tout x ∈ X ∫Sx
ι∗x(ω) = 1
où Sx est la fibre de S(E) en x et où ιx : Sx → S(E) est l’inclusion.

11.9. CALCUL DE QUELQUES CLASSES CARACTÉRISTIQUES 273
11.8.3. R
Dire que H∗(s∞)(ω) = 0 est la même chose que de dire que le support de ω estcompact dans Ex pour tout x ∈ X.
11.8.4. P
Soit X une variété et E un fibré vectoriel réel orienté sur X. Alors il existe une unique classed’orientation ω de E, et H∗(S(E)) est un H∗(E)–module libre de base 1, ω.
11.8.5. T (Isomorphisme de Thom)
Soit X une variété compacte et p : E→ X un fibré vectoriel réel orienté de dimension k surX. Alors il existe une unique classe de cohomologie [τ] ∈ Hk
c (E) telle que
I :∫
Ex
τ = 1 pour tout x ∈ X
II : L’homomorphisme
Hq(X) → Hq+kc (E)
[ω] 7→ H(p)([ω])[τ]
est un isomorphisme pour tout q ∈N0.
On appelle [τ] classe de Thom ou classe d’orientation du fibré E, et l’isomorphismeenoncé s’appelle isomorphisme de Thom.
11.8.6. D
Soit X une variété différentiable réelle compacte et E un fibré vectoriel réel orientésur X. Soit s0 : X→ E la zéro–section et τ(E) la classe de Thom de E. On appelle
H∗(s0)(τ(E)
)classe d’Euler de E.
11.9. Calcul de quelques classes caractéristiques
Soit X une variété et E un fibré complexe sur X. Par le principe du scindagecomplexe (théorème 11.3.2) il existe une variété Y et une application différentiablef : Y→ X tel que le pull–back f ∗E est une somme de fibrés complexes de dimension1, et tel que H∗( f ) est injectif. On voit H∗(X) comme sous-anneau de H∗(Y) via

274 11. CLASSES CARACTÉRISTIQUES
l’inclusion H∗( f ). Posons
f ∗(E) =k⊕
j=1
L j et x j := ch1(L j) = c1(L j)
Ainsi on a c(L j) = 1 + x j, et donc par le théorème 11.7.3
c(E) =k∏
j=1
(1 + xi)
Les classes de Chern c0(E), c1(E), . . . , ck(E) sont alors les polynômes symétriquesélémentaires en k variables évalués x1, x2, . . . , xn, c’est-à-dire
c0(E) = 1c1(E) = x1 + x2 + · · · + xk
c2(E) = x1x2 + x1x3 + · · · + xk−1xk
· · · · · ·
ck(E) = x1x2 · · · xk
Le théorème des polynômes symétriques (voir [64], page 99) permet de conclureque tout polynôme symétrique, ou même toute série formelle symétrique enx1, . . . , xk peut être écrit comme polynôme respectivement série formelle en c1(E), . . . , ck(E).En particulier, si P est un polynôme symétrique en k variables, alors P(x1, . . . , xk)définit une classe de cohomologie dans H∗(X).
11.9.1. E
Considérons la série formelle en x1, . . . , xk
k∑j=1
exp(x j) = k + x1 + · · · + xk +12
(x21 + · · · + x2
k) + · · ·
=
∞∑m=0
1m!
k∑j=1
xmj
Cette somme est en effet une somme finie, puisque xm
j = 0 pour m suffisammentgrand. Comme xm
1 + · · · + xmk est un polynôme symétrique quelque soit m ∈ N, il
existe des polynômes Q0, . . . ,Qm, . . . tels que
Qm(c1, . . . , ck) =1
m!(xm
1 + · · · + xmk )
où c j = c j(E). On a donck∑
j=1
exp(x j) =∞∑
m=0
Qm(c1, . . . , ck)
Or Qm(c1, . . . , ck) = chm(E), on a en effetk∑
j=1
exp(x j) =∞∑
m=0
chm(E) = ch(E)

11.9. CALCUL DE QUELQUES CLASSES CARACTÉRISTIQUES 275
11.9.2. E
Soit 0 ≤ p ≤ k et considérons le fibré∧pE. On s’interesse à la classe de Chern de ce
fibré. On a
(26) f ∗∧pE
∧p f ∗E ∧p
k⊕i=1
Li ⊕
1≤i1≤···≤ip≤k
Li1 ⊗ · · · ⊗ Lip
donc, tenu compte de l’identification faite
c(∧pE
)=
∏c(Li1 ⊗ · · · ⊗ Lip ) =
∏(1 + xi1 + · · · + xip )
le produit allant sur 1 ≤ i1 ≤ · · · ≤ ip ≤ k. Ce dernioer produit est un polynômesymétrique en x1, . . . , xk, et on peut donc exprimer c(
∧pE) en un polynôme dec1(E), . . . , ck(E) qui bien entendu ne dépend que de k et p, mais pas de E. Parexemple pour k = 3 on a, en notant c j(E) = c j
c(∧0E
)= 1
c(∧1E
)= c(E)
= 1 + c1 + c2 + c3
c(∧2E
)= (1 + x1 + x2)(1 + x1 + x3)(1 + x2 + x3)
= (1 + c1)3− c1(1 + c1)2 + c2(1 + c1) − c3
c(∧3E
)= 1 + x1 + x2 + x3
= 1 + c1
c(∧pE
)= 0 si p > 3
Calculons encore le caractère de Cern de∧p(E). Comme ch(L j) = 1 + x j on trouve
à partir de l’isomorphisme (26) que
ch(∧p(E)
)=
∑1≤i1≤···≤ip≤k
xi1 xi2 · · · xip = σp(x1, . . . , xk)
où σp est le p–ème polynôme symétrique élémentaire.

Quatrième partie
Analyse globale


CHAPITRE 12
Théorème de Sard
Ce chapitre, écrit par Ismaïl Haddaoui, énonce et démontre le théorème deSard. Ce chapitre est quelque peu en marge du projet de l’index puisqu’il neparticipe pas directement au théorème de l’indice.
12.1. Variétés et calcul différentiel
Dans cette section nous définissons les notions nécessaires à l’introductiondes variétés différentiables, des dérivées et des espaces tangents. Nous adaptonségalement quelques théorèmes connus dans les espaces euclidiens aux variétés.
Variétés différentiables.
12.1.1. D
Soit U ⊂ Rn un ouvert et f : U→ Rm. f est dite différentiable en x ∈ U s’il existe uneapplication linéaire L : Rn
→ Rm telle que
limh→0
f (x + h) − f (x) − Lh‖h‖
= 0
On a alors :
L(h) = d fx(h) = limt→0
f (x + th) − f (x)t
On appelle L = d fx la dérivée de f en x. f est différentiable C1 ou continûmentdifférentiable si, de plus, d f : U→ Lin(Rn,Rm) est continue.
f est dite différentiable Ck si f est C1 et si d f : U→ Lin(Rn,Rm) est Ck−1.Les dérivées partielles de f sont
279

280 12. THÉORÈME DE SARD
∂ f∂xi
(x) = limt→0
f (x + tei) − f (x)t
où ei est le i-ème vecteur de la base canonique deRm. Ainsi, une application estdifférentiable C1 si ses dérivées partielles d’ordre 1 existent et sont continues. Uneapplication est différentiable Ck si ses dérivées partielles jusqu’à l’ordre k existentet sont continues. Enfin, nous appellerons application différentiable C∞ ou lisse touteapplication dont les dérivées partielles existent et sont continues, à tous les ordres.
Plus généralement, si f est une application définie sur un sous-ensemble Xde Rn, elle est dite différentiable si elle peut être prolongée en une applicationdifférentiable sur un ouvert. C’est à dire, pour chaque x ∈ X, il existe un ouvert Vcontenant X et une fonction F définie sur cet ouvert tels que F est différentiable surcet ouvert et F|X = f .
12.1.2. D
Une application différentiable entre espaces euclidiens f : X→ Y est un difféomor-phisme si elle est bijective et que sa fonction réciproque est également différentiable.X et Y sont dits difféomorphes si une telle application existe.
Avec ces deux notions d’application lisse et d’espaces difféomorphes, nouspouvons introduire :
12.1.3. D
Un sous-ensemble X d’un espace euclidien réel RN est appelé une variété lisse dedimension k s’il est localement difféomorphe à Rk. C’est à dire, tout x ∈ X possèdeun voisinage V difféomorphe à un ouvert U de Rk. Le difféomorphisme lisseφ : U → V est une paramétrisation. Son inverse φ−1 est un système de coordonnées.On appelle l’ensemble des paramétrisations de X la structure différentielle de X.Un sous-ensemble Z ⊆ X est une sous-variété de dimension m de X si pour tout x ∈ Z,il existe un difféomorphisme lisse φ : domφ→ Rn, φ faisant partie de la structuredifférentielle de X, telle que φ−1(V) = Y ∩ domφ, où
V = (x1, . . . , xn) ∈ Rn|xm+1 = . . . = xn = 0
12.1.4. T
Si X et Y sont deux variétés, alors X×Y en est aussi une, et dim(X×Y) = dim X+dim Y
D. Supposons que X et Y sont deux variétés dans RN et RM,respectivement. Alors X × Y est un sous-ensemble de RN+M. Supposons X dedimension k et notons φ : W → X une paramétrisation locale autour de x ∈ X,W étant un ouvert de Rk. De même, l étant la dimension de Y, soit ψ : U → Yune paramétrisation locale autour de y, U étant un ouvert de Rk. Définissons alors

12.1. VARIÉTÉS ET CALCUL DIFFÉRENTIEL 281
l’application :φ × ψ : W ×U→ X × Y
φ × ψ(w,u) = (φ(w), ψ(u))
W×U est un ouvert deRk×Rl = Rk+l. Il suffit maintenant de vérifier que φ×ψ
est une paramétrisation locale autour de X × Y de (x, y). Mais c’est le cas puisqueφ × ψ est bijective et différentiable. De plus, (φ × ψ)−1 est différentiable.
Dérivées et espaces tangents.
Nous introduisons la notion d’espace tangent à une variété en un point.
12.1.5. P D
Soit X une variété dans RN et φ : U → X une paramétrisation locale autour de x ∈ X.Supposons que φ(0) = x, alors la dérivée de φ en 0 est dφ0 : Rk
→ RN. On définit l’espacetangent à X en x par : Tx(X) = =(dφ0). Un vecteur tangent à X en x est un vecteurv ∈ Tx(X). Cette définition ne dépend pas du choix de la paramétrisation.
La preuve de cette proposition est laissée pour plus tard. Nous définissonsd’abord la notion d’application différentiable entre variétés.
12.1.6. D
Soit f une application entre deux variétés X et Y.
Xf // Y
U ⊆ Rk
φ
OO
h// V ⊆ Rl
ψ
OO
f est dite lisse en x ∈ X si h est lisse en φ−1(x). On définit alors d fx par d fx =dψ0 dh0 dφ−1
0 :
Tx(X)d fx // Ty(Y)
Rk
dφ0
OO
dh0
// Rl
dψ0
OO
12.1.7. T

282 12. THÉORÈME DE SARD
(dérivée de fonctions composées)Si f : X→ Y et g : Y→ Z sont des applications lisses entre variétés, alors leur composéef g : X→ Z est lisse et on a :
d(g f )x = dg f (x) d fx
Une preuve de ce théorème peut être trouvé dans [28]. Elle se base sur lesparamétrisations locales respectives de X, Y et Z et sur la version du théorèmepour les espaces euclidiens.
Nous pouvons maintenant prouver la justesse de la définition de l’espacetangent, en utilisant la formule de la dérivée de fonctions composées.
D. Soit φ une paramétrisation locale de x ∈ X telle que φ(0) = x.Prenons une autre paramétrisation ψ : V → X. Supposons sans perte de généralitéque ψ(0) = x. Quitte à prendre des ouverts plus petits, on peut supposer queφ(U) = ψ(V). Posons alors h = ψ−1
φ : U → V. C’est un difféomorphisme. Ilvient alors φ = ψ h. En dérivant, on obtient dφ0 = dψ0 dh0. Donc l’image de dφ0est contenue dans l’image de dψ0. En inversant les rôles de φ et ψ, nous obtenonsl’inclusion inverse. Et donc Tx(X) est bien défini.
Théorème des fonctions inverses et immersions.
Notre étude nous amène à étudier le comportement local des applicationslisses entre variétés. Le formule de la composition des dérivées entraîne que sif : X → Y est un difféomorphisme, alors d fx est un isomorphisme entre Tx(X) etT f (x)(Y). Le théorème de la fonction inverse nous dit que la réciproque est vraie.
12.1.8. T
(fonction inverse) Soit f : X → Y une fonction lisse entre variétés, telle que d fx soit unisomorphisme. Alors f est un difféomorphisme local en x.
D. Nous connaissons le résultat du théorème de la fonctioninverse pour une application entre ouverts U et V contenus dans des espaceseuclidiens. En utilisant les paramétrisations locales autour de X et Y, on parvientau résultat pour les variétés.Soit donc
φ : U ⊆ Rk→ X et ψ : V ⊆ Rl
→ Ydes paramétrisations locales de X et Y.
Posons h = ψ−1 f φ. h est une application lisse comme composée d’ap-
plications lisses. h est définie entre ouverts d’espaces euclidiens réels. De plus,dh0 = dψ−1
0 d fx dφ0 est un isomorphisme comme composée d’isomorphismes.Par le théorème de la fonction inverse dans les espaces euclidiens, h est un dif-féomorphisme local. Enfin, écrivons f = ψ h φ−1, il vient donc que f est undifféomorphisme local.

12.1. VARIÉTÉS ET CALCUL DIFFÉRENTIEL 283
Le théorème de la fonction inverse est assez puissant car il nous donne uncritère simple - voir si le déterminant de d fx est nul ou pas - pour déterminer lanature locale de l’application f . Ceci dit, cela reste une propriété locale.
12.1.9. D
Soit f : X → Y et f ′ : X′ → Y′ où X,X′,Y,Y′ sont des variétés. f et f ′ sont diteséquivalentes s’il existe des difféomorphismes φ et ψ tels que le diagramme suivantcommute :
Xf // Y
X′
φ
OO
f ′// Y′
ψ
OO
f et f ′ sont localement équivalentes si de tels difféomorphismes existent locale-ment autour de tout x ∈ X.
12.1.10. D
Soit f : X→ Y une application lisse entre variétés, avec dim X < dim Y.• f est une immersion en x si d fx : Tx(X)→ Ty(Y) est injective.
• Si f est une immersion pour tout x ∈ X, f est une immersion.
• L’inclusion canonique est l’application injective définie sur Rk vers Rl, k ≤ l,(a1, . . . , ak) 7→ (a1, . . . , ak, 0, . . . , 0)
12.1.11. T
(immersion locale)Soit f : X→ Y une immersion en x ∈ X, y = f (x). Alors il existe des coordonnées localesautour de x et y telles que
f (x1, . . . , xk) = (x1, . . . , xk, 0, . . . , 0)
c’est à dire, f est localement équivalente à l’immersion canonique.
D. Soit φ, ψ des paramétrisations locales autour de x ∈ X ety ∈ Y. Définissons g = ψ−1
f φ. Le but est d’essayer d’"augmenter" g pour pouvoirappliquer le théorème de la fonction inverse. dg0 est injective comme composéed’applications injectives. En effectuant un changement de base judicieux, sa matricepeut s’écrire : ( Ik
0
)

284 12. THÉORÈME DE SARD
On définit maintenant une application G : U × Rl−k→ Rl par G(x, z) = g(x) +
(0, z). G envoie un ouvert de Rl dans Rl. La matrice de dG0 est clairement Il. Lethéorème de la fonction inverse nous dit alors que G est un difféomorphisme localdeRl en 0. Notons i : Rl−k
→ Rl l’immersion canonique qui envoie (a1, . . . , al−k) sur(a1, . . . , al−k, 0, . . . , 0). Alors on a G i = g.
ψ G est un difféomorphisme local comme composée de difféomorphismeslocaux en 0. ψ G est donc une paramétrisation locale autour de y ∈ Y. On a alors :
Xf // Y Rl
ψoo
U ⊆ Rk
φ
OO
g// V ⊆ Rl
G−1// Rl−k
G
OO
Ainsi, vu que G−1g = immersion canonique, le diagramme suivant commute :
Xf // Y
U
φ
OO
immersion
canonique// V
ψG
OO
Alors f est localement équivalente à l’immersion canonique.
12.1.12. D
Une application f : X → Y est dite propre si la préimage de tout compact de Y estun compact de X
12.1.13. D
Une immersion f : X→ Y est un plongement si elle est injective et propre.
12.1.14. T
Soit f : X→ Y un plongement. Alors l’image de X par f est une sous-variété de Y.
D. Remarquons tout d’abord que pour prouver que f (X) est unesous-variété de Y, il suffit de prouver que l’image de tout ouvert de X est un ouvertde f (X). En effet, par le théorème d’immersion locale, f est localement équivalenteà l’immersion locale donc elle envoie tout voisinage W suffisamment petit d’unx ∈ X difféomorphiquement vers son image f (W). Ainsi f (W) est difféomorphe àW, lui-même difféomorphe à un ouvert de Rk. Donc f (W) sera difféomorphe à unouvert de Rk. Ceci étant vrai pour tout x ∈ X, f (X) sera donc une variété.
Supposons donc que l’image d’un ouvert W ne soit pas un ouvert de Y. Alorsf (X)\ f (W) n’est pas fermé. Donc il existe un suite convergente de points yn ⊆

12.1. VARIÉTÉS ET CALCUL DIFFÉRENTIEL 285
f (X)\ f (W) mais dont la limite y est dans f (W). Considérons maintenant l’ensembleynn∈N∪y. C’est un compact dans f (X), donc sa préimage doit être compacte dansX, car f est un plongement. Tout yn possède une unique préimage xn, de mêmeque y possède une unique préimage x. Comme dit précédemment xnn∈N ∪ x estun compact, donc il existe une sous suite xnk qui converge vers un certain z ∈ X.Alors f (xnk )→ f (z). Or f (xn)→ f (x). L’injectivité de f implique que z = x. W étantouvert, il vient qu’à partir d’un certain rang, xn ∈ W. Alors à partir de ce rang,yn ∈ f (W). Ceci contredit notre hypothèse de départ qu’aucun yn n’appartient àf (W). Donc f (X) est une sous-variété de Y.Enfin, il suffit de remarquer que f est bijective, et que donc son inverse est biendéfinie, et que c’est un difféomorphisme local. Nous concluons alors que f : X →f (X) est un difféomorphisme.
Submersions.
Nous étudions maintenant le cas où dim X ≥ dim Y. Nous nous intéressonsplus particulièrement au cas où la dérivée de f est surjective.
12.1.15. D• Une application lisse f : X→ Y est une submersion en x si d fx : Tx(X)→ Ty(Y)
est surjective.
• Si c’est le cas pour tout x ∈ X, f est une submersion.
• La submersion canonique est définie par la projection de Rk dans Rl, k ≥ l, quià (a1, . . . , ak) associe (a1, . . . , al).
12.1.16. T
(sans preuve) Soit f : X → Y une submersion en x, et y = f (x). Alors il existe des coor-données locales autour de x et de y telles que f est localement équivalente à la submersionlocale. C’est à dire, f (x1, . . . , xk) = (x1, . . . , xl).
La preuve de ce théorème est analogue à celle du théorème d’immersion localeet peut être trouvée dans [28].
12.1.17. D
Soit f : X→ Y une application lisse. y ∈ Y est une valeur régulière de f si pour toutx ∈ f−1(y), d fx : Tx(X)→ Ty(Y) est surjective.Une valeur critique est une valeur non régulière.

286 12. THÉORÈME DE SARD
12.1.18. T
Si y est une valeur régulière de f : X → Y, alors f−1(y) est une sous-variété de X dedimension dim X − dim Y.
D. Par le théorème de submersion locale, il existe des coordon-nées locales de x et y telles que f (x1, . . . , xk) = (x1, . . . , xl). Supposons, sans pertede généralité, que y correspond aux coordonnées (0, . . . , 0) ∈ Rl. Notons V ⊂ Rk
l’ouvert où les coordonnées (x1, . . . , xk) sont définies. Alors, dans un voisinage dex,
f−1(y) ∩ V = (x1, . . . , xk)|x1 = . . . = xl = 0
De plus, f−1(y)∩V est un ouvert de f−1(y) et est donc une paramétrisation locale dece dernier. Ainsi f−1(y) est localement difféomorphe à (x1, . . . , xk)|x1 = . . . = xl = 0.Donc f−1(y) est une variété de dimension k − l = dim X − dim Y.
On dit par convention que les y ∈ Y\ f (X) sont des valeurs régulières de f .En résumé,• si dim X > dim Y, y est une valeur régulière si f est une submersion pour
tout x ∈ f−1(y).• si dim X = dim Y, y est une valeur régulière si f est un difféomorphisme local
pour tout x ∈ f−1(y). En effet, dans le cas où dim X = dim Y, l’applicationlinéaire d fx : Tx(X)→ Ty(Y) est bijective si et seulement si elle est surjective,i.e. y est une valeur régulière de f .• si dim X < dim Y, y est une valeur régulière si y < f (X), et les y ∈ f (X) sont
critiques.Nous énonçons enfin une proposition qui pourra s’avérer utile par la suite.
12.1.19. P
Soit f : X → Y lisse, y une valeur régulière de f , et Z = f−1(y). Alors ker d fx = Tx(Z)pour tout x ∈ Z.
12.2. Théorème de Sard
Après avoir défini les bases nécessaires en matière de variétés, nous sommesen mesure de prouver le théorème de Sard. Il nous faut encore quelques notionscomme la définition d’ensembles dit de mesure nulle, ainsi que de quelques résul-tats intermédiaires.

12.2. THÉORÈME DE SARD 287
Préliminaires.
12.2.1. D
Soit a, b ∈ Rn avec ai < bi, ∀i = 1, . . . ,n.• Un rectangle de Rn est S(a, b) = x ∈ Rn
|ai < xi < bi.• S est un cube si bi − ai = cte• Le volume de S est vol(S) =
∏ni=1(bi − ai).
12.2.2. D
Un sous-ensemble A ⊂ Rn est dit de mesure nulle si pour tout ε > 0, il existe unrecouvrement dénombrable de rectangles S1,S2, . . . tel que
∞∑i=1
vol(Si) < ε
Un sous-ensemble C d’une variété Y de dimension l est dit de mesure nulle dans Ysi pour toute paramétrisation locale ψ de Y, ψ−1(C) est de mesure nulle dans Rl.
12.2.3. R
Soit A ⊂ Rn. Alors A est de mesure nulle au sens de 12.2.2 si et seulement si A estmesure de Lebesgue nulle. On le note λn(A) = 0.
12.2.4. P
Soient S un rectangle de Rn et S1,S2, . . . un recouvrement de rectangles de S. Alors
∞∑j=1
vol(S j) ≥ vol(S)
D. Posons S = S(a, b) avec a = (a1, . . . , an) et b = (b1, . . . , bn). Lenombre d’entiers dans l’intervalle [ai, bi] est compris entre bi − ai − 1 et bi − ai + 1.Supposons pour l’instant que bi − ai > 1, c’est à dire que les côtés de S sont plusgrands que 1. Alors le nombre de points à coordonnées entières dans S est comprisentre
∏ni=1(bi−ai−1) et
∏ni=1(bi−ai+1). S est un compact deRn donc on peut extraire
de S1,S2, . . . un recouvrement fini. Après une éventuelle permutation, notons-leS1, . . . ,SN. Le nombre de points à coordonnées entières dans S est au plus égal àla somme des nombres de points à coordonnées entières contenus dans chaqueS j, j = 1, . . . ,N. Si on note S j = S(a j, b j) avec a j = (a j
1, . . . , ajn) et b j = (b j
1, . . . , bjn), on a :
n∏i=1
(bi − ai − 1) ≤N∑
j=1
n∏i=1
(b ji − a j
i + 1)

288 12. THÉORÈME DE SARD
On peut pour tout λ > 0, définir λS(a, b) = S(λa, λb). Alors λS1, . . . , λSN est unrecouvrement de λS. Donc
n∏i=1
(λbi − λai − 1) ≤n∏
i=1
(λb ji − a j
i + 1)
Pour un λ assez grand, λS aura des côtés de longueur plus grande que 1.Divisons maintenant la dernière inégalité par λn. Il vient :
n∏i=1
(bi − ai −1λ
) ≤N∑
j=1
n∏i=1
(b ji − a j
i +1λ
)
En laissant λ→∞, on a vol(S) ≤∑N
j=1 vol(S j).
Pour montrer le théorème de Sard, nous allons avoir besoin du théorème deFubini, appliqué aux ensembles de mesure nulle. Pour la suite, écrivons Rn =Rk×Rl.
12.2.5. D
Soit c ∈ Rk. La tranche verticale en c est Vc = c ×Rl⊂ Rn.
Un sous-ensemble c × U de Vc sera dit de mesure nulle si U est de mesurenulle dans Rl.
12.2.6. L
Soit S1, . . . ,SN un recouvrement d’intervalles de [a, b] ⊂ R. Alors il existe un sous-recouvrement S′1, . . . ,S
′
M de [a, b] tel que∑∞
j=1 vol(S′j) < 2(b − a)
D. Parmi tous les Si, enlevons ceux qui sont entièrement inclusdans une union d’autres intervalles du recouvrement. Alors le recouvrement ob-tenu est un recouvrement minimal, au sens que si on enlève l’un des intervalles dece recouvrement, le résultat n’est plus un recouvrement de I = [a, b].Réécrivons ce recouvrement (moyennant une permutation) S1, . . . ,SM, avec M ≤ Net ordonnons les intervalles de telle sorte que a1 ≤ . . . ≤ aM. Alors b1 ≤ . . . ≤ bM. Eneffet, si ce n’était pas le cas, un de intervalles serait inclus dans une union d’autres.De plus, on a [ak, bk] ∩ [ak+2, bk+2] = ∅. Donc [a2, b2], [a4, b4], . . . ont une longueurtotale inférieure à b − a. De même avec [a1, b1], [a3, b3], . . .. D’où le résultat cherché.
12.2.7. L
Soit A un compact de Rn. Supposons que A ∩ Vc soit contenu dans un ouvert U de Vc.Notons VI = I ×Rn−1
Alors pour tout intervalle I suffisamment petit autour de c, A ∩ VI ⊂ I ×U
12.2. THÉORÈME DE SARD 289
D. Prouvons le résultat par l’absurde. Ainsi supposons que A∩VI * I×U. Alors, il existe une suite de points (cn, xn) de A telle que cn → c et xn < Upour tout n ∈ N. Maintenant A est compact donc A ∩ Vc l’est aussi. Donc (cn, xn)admet une sous-suite convergente. Ainsi il y’a une infinité de xn tels que xn ∈ U.Contradiction.
12.2.8. T
(Fubini pour la mesure nulle)Soit A un fermé de Rn tel que A ∩ Vc est de mesure nulle dans Vc (c’est à dire que
λl(A ∩ Vc) = 0). Alors λn(A) = 0.
D. A peut être écrit comme union dénombrable de compacts,donc il suffit de prouver le résultat pour un compact. Nous allons le prouver pourk = 1 et l = n − 1. Soit A un compact. On peut l’inclure dans un ensemble dutype VI = I ×Rn−1 = [a, b] ×Rn−1. A est de mesure nulle donc A ∩ Vc l’est aussi etdonc pour chaque c ∈ I, on peut recouvrir A ∩ Vc par Nc rectangles de dimensionn − 1 : S1(c), . . . ,SNc (c), de volume total plus petit qu’un ε donné. Le lemme 12.2.7nous garantit l’existence d’un intervalle J(c) ⊂ R tel que les J(c) × Si formentun recouvrement de A ∩ VJ. De plus, puisque les J(c) forment un recouvrementde [a, b], on peut en extraire (par le lemme 12.2.6) un recouvrement fini J′j delongueur totale plus petite que 2(b − a). Chaque J′j est contenu dans un J(c j). Doncles J′j×Si(c j) forment un recouvrement de A, de volume total plus petit que 2ε(b−a).Le théorème est donc prouvé pour k = 1 et l = n− 1. Il suffit d’appliquer autant defois que l’on veut cet argument pour avoir le résultat pour k et l quelconques.
12.2.9. T
Soit f : U ⊂ Rn→ Rn une application différentiable définie sur un ouvert. Si A ⊆ U est
mesure nulle, alors f (A) est de mesure nulle.
D. Nous pouvons nous restreindre à prouver le résultat pourles A tels que A est compact. Dans le cas général il suffira de considérer les unionsdénombrables de compacts. Soit donc W un voisinage ouvert de A tel que W ⊆ Uest compact.Sur W, f atteint son minimum et son maximum, donc d fx est bornée en normepour tout x ∈W. Donc il existe M > 0 tel que :
| f (x) − f (y)| < M|x − y|
pour tous x, y ∈ W. Considérons maintenant un cube S contenu dans W. Alorsil existe une constante M′ telle que f (S) soit contenu dans un cube de volumemoindre que M′vol(S).De plus, A étant de mesure nulle, il est possible de le recouvrir par une familledénombrable de cubes Si, chaque Si étant contenu dans W, et de volume total

290 12. THÉORÈME DE SARD
moindre qu’un ε donné. Alors il existe un recouvrement de cubes S′1,S′
2, . . . def (A), de volume total inférieur à M′ε. Ceci vaut pour tout ε > 0, donc λn( f (A)) = 0.
12.2.10. T (Mini-Sard)
Soit f : U ⊂ Rn→ Rm une application différentiable définie sur un ouvert.
Si m > n alors f (U) est de mesure nulle dans Rm (i.e. λm( f (U)) = 0.
D. Écrivons f comme la composée f = F φ, où
F : Rm→ Rm
(x1, . . . , xm) 7→ f (x1, . . . , xn)
et :φ : Rn
→ Rm
(x1, . . . , xm) 7→ (x1, . . . , xn, 0, . . . , 0)
Alors λm(φ(Rn)) = 0. Soit U un ouvert de Rn. Alors
λm( f (U)) = λm(F(φ(U))) = 0
Preuve.
Avant de prouver le théorème de Sard pour une application entre variétés,nous allons prouver une version pour applications entre espaces euclidiens dutype Rn.
12.2.11. T
Soit f : U ⊆ Rn→ Rm une application lisse. Soit C l’ensemble des points critiques de f .
Alors f (C) est de mesure nulle dans Rn. C’est à dire, λm( f (C)) = 0.
D. Nous allons prouver le résultat par récurrence sur n. Pourn = 0, il y’a au plus un point dans C et donc f (C) est de mesure nulle dans Rm.Supposons donc le théorème vrai pour n − 1 et prouvons-le pour n.
Pour montrer ce théorème, nous avons besoin de 3 lemmes. Notons Ci l’en-semble des x ∈ U dont les dérivées partielles d’ordre inférieur ou égal à i sontnulles. Alors C ⊃ C1 ⊃ C2 . . ..
12.2.12. L
λm( f (C − C1)) = 0

12.2. THÉORÈME DE SARD 291
12.2.13. L
λm( f (Ck − Ck+1)) = 0 si k ≥ 1
12.2.14. L
λm( f (Ck)) = 0 si k > nm − 1
D. de 12.2.12Soit x ∈ C − C1. Il y a une des dérivées partielles d’ordre 1 de f en x qui
est non nulle. Supposons sans perte de généralité que c’est ∂ f∂x1
. Définissons alorsh : U → Rn par h(x) = ( f1(x), x2, . . . , xn). dhx n’est pas singulière, le théorème de lafonction inverse dit que h est un difféomorphisme local. Soit donc V un voisinagede x que h envoie difféomorphiquement sur V′. L’application définie alors parg = f h−1 envoie V′ surRm, et elle a les mêmes valeurs critiques que la restrictionde f à V. g envoie donc des points de V′ de la forme (t, x2, . . . , xn) vers des pointsde Rm de la forme (t, y2, . . . , ym). Donc, pour tout t, g induit une application
gt : (t ×Rn−1) ∩ V′ → t ×Rm−1
Ses dérivées partielles s’écrivent
(27) (∂gi
∂x j) =
1 0∗ ( ∂(gt)i
∂x j)
Donc
det(∂gi
∂x j) = det(
∂(gt)i
∂x j)
Ainsi un point critique pour g si seulement si il est critique pour une certainegt. Appliquons l’hypothèse de récurrence à gt : ses valeurs critiques ont mesurenulle, pour tout t ∈ R. Par le théorème de Fubini, les valeurs critiques de g ontmesure nulle.
D. de 12.2.13Soit x ∈ Ck − Ck+1. Donc il existe une dérivée partielle d’ordre k de f en x,
disons ρ, qui est nulle sur Ck mais dont une des dérivées premières n’est pasnulle. Posons alors h(x) = (ρ(x), x2, . . . , xn). C’est un difféomorphisme local d’unvoisinage V de x vers un ouvert V′ de Rn. h envoie donc Ck ∩ V dans 0 × Rn−1.Posons g = f h−1 : 0 ×Rn−1
→ Rm. Alors les points critiques de g du type Ck sontdans 0 × Rn−1. Considérons maintenant la restriction g de g à (0 × Rn−1) ∩ V′. ParSard appliqué à g, les valeurs critiques de g sont de mesure nulle dans Rm. Lespoints critiques de g étant les mêmes que ceux de g, les valeurs critiques de g ontmesure nulle. Donc λm( f (Ck ∩ V)) = 0. Comme on peut décrire Ck − Ck+1 par uneréunion dénombrable d’ensembles Ck ∩ V de ce type, λm( f (Ck − Ck+1)) = 0.
D. de 12.2.14

292 12. THÉORÈME DE SARD
Soit S ⊆ U un cube de côtés de longueur δ. Écrivons le développement deTaylor de f à l’ordre k :
f (x + h) = f (x) + R(x, h)où R(x, h) est un reste d’ordre k + 1, c’est à dire :
‖R(x, h)‖ < a‖h‖k+1
pour tout x ∈ Ck ∩ S, et x + h ∈ S. Écrivons maintenant S comme réunion de rn
cubes de côtés de longueur δ/r. Soit S1 le cube contenant un x ∈ Ck (sans perte degénéralité). Alors n’importe quel point de S peut s’écrire comme x + h, avec
‖h‖ <√
n(δr
)
Ainsi, f (S1) est entièrement contenu dans un cube de côtés de longueur brk+1 où
b = 2a(√
nδ)k+1
Alors f (Ck ∩ S) est entièrement contenu dans un cube de volume total
v ≤ rn(b
rk+1)m = bmrn−(k+1)m
Ainsi si k + 1 > n/m, alors v → 0 lorsque r → ∞, alors f (Ck ∩ S) est de mesurenulle. Comme on peut recouvrir f (Ck) par une réunion dénombrable d’ensemblesdu type f (Ck ∩ S), on a que λm( f (Ck)) = 0 si k > n/m − 1.
12.2.15. T (Sard)
Soit f : X → Y une application lisse entre variétés. Soit C l’ensemble des points critiquesde f . Alors f (C) est de mesure nulle dans Y.
D. Considérons les paramétrisations locales φi et ψi de X et Y.
Xf // Y
Ui ⊆ Rk
φi
OO
hi
// Vi ⊆ Rl
ψi
OO
On a que hi = ψ−1i f φi. Le théorème de Sard nous dit que les valeurs critiques
de h ont mesure nulle dans Rl. Or x ∈ X est un point critique de f si et seulementsi φ−1
i (x) est un point critique de hi, pour un certain i ∈ N. On a en effet unefamille dénombrable d’applications φi et ψi qui paramétrisent entièrement X et Y.Donc pour chaque hi, ses valeurs critiques sont de mesure nulle dans Rl. Donc, lesvaleurs critiques de f ont mesure nulle dans Y.
12.2.16. T (Sard reformulé)
L’ensemble des valeurs critiques d’une application lisse entre variétés est de mesure nulle.
12.2. THÉORÈME DE SARD 293
12.2.17. T
L’ensemble des valeurs régulières d’une application lisse f : X→ Y est dense dans Y.De plus, si fi : X → Y est une famille dénombrable d’applications lisses, alors les valeursrégulières simultanées des fi sont denses dans Y.
D. Supposons l’ensemble des valeurs régulières de f : X → Yne soit pas dense dans Y. Alors il existe un ouvert non vide W ⊂ Y dont tous leséléments sont des valeurs critiques. Comme Y est une variété lisse, cet ensemble West difféomorphe à un ouvert de Rl. Or un ouvert de Rl n’est pas de mesure nulle(on peut l’exprimer comme union dénombrable de boules ouvertes de Rl, aucunen’étant de mesure nulle). Ainsi W n’est pas de mesure nulle, en contradiction avecle théorème de Sard.Pour prouver la deuxième assertion du corollaire, il suffit de montrer que l’uniondénombrable ∪Ai d’ensembles de mesure nulle est de mesure nulle (cela est uneconséquence du fait qu’un ensemble de mesure nulle au sens de 12.2.2 est de mesurede Lebesgue nulle, le fait que la mesure de Lebesgue est σ-additive permettantde conclure). Prouvons-le tout de même. Pour chaque Ai, on peut trouver unrecouvrement Si,1,Si,2, . . . de rectangles de Rn tel que
∞∑j=1
vol(Si, j) <ε
2i
Alors la famille ∪ jSi, j est un recouvrement de ∪Ai. Son volume total est moindreque
∞∑i=1
ε
2i = ε
Il suffit de prendre Ai comme étant les points critiques de fi pour terminer la preuvedu corollaire.
Exemples.
Soit f : R → R une fonction lisse. Alors l’ensemble C des points critiquesde f est x ∈ R| f ′(x) = 0. Le théorème nous dit λ1( f (C)) = 0. Remarquons quecomme C = C1, alors le lemme 12.2.12 du théorème de Sard est vide de sens. Lelemme 12.2.13 constitue alors à lui seul le théorème de Sard, de même que le lemme12.2.14.
Prenons un cas particulier intéressant de fonction lisse sur R. Définissonsf : R→ R de la façon suivante : prenons r0, r1, . . . une énumération des nombresrationnels, et construisons f par blocs sur chaque intervalle [i, i + 1] comme ceci :
Une telle construction avec f lisse est possible, et on a f (i) = f (i + 1) = 0 pourtout i entier naturel, et les valeurs critiques de f sont les ri pour i ∈N. L’ensembledes valeurs critiques de f est donc Q, qui est dense dans R, mais qui reste demesure nulle !
294 12. THÉORÈME DE SARD
12.3. Applications
Théorème de Morse.
Le théorème de Sard s’applique directement en théorie de Morse. On s’intéresseà certains points critiques d’une application lisse f .
12.3.1. D
Soit f : U ⊆ Rk→ R lisse. Soit a un point critique de f . La matrice Hessienne de f
en a est : H(a) = (hi j(a)) =(∂2 f∂xi∂x j
(a)). a est dit non dégénéré si det H(a) , 0.
12.3.2. L
(Lemme de Morse) Soit f une fonction réelle de k variables réelles. Soit a ∈ Rk un pointcritique non dégénéré de f . Alors il existe un système de coordonnées locales (x1, . . . , xk)autour de a tel que f = f (a) +
∑hi jxix j dans un voisinage de a.
Ainsi, à difféomorphisme près, on peut complètement déterminer le compor-tement local de f au voisinage de ses points critiques non dégénérés. Ainsi f estlocalement un polynôme de degré 2. Ce lemme est bien plus puissant que la carac-térisation déjà connue des points critiques de f à l’aide de la matrice Hessienne.
12.3.3. L
Soit f : Rk→ R. Supposons que 0 est un point critique non dégénéré de f . Soit ψ un
difféomorphisme avec ψ(0) = 0. Alors 0 est aussi un point critique non dégénéré de f ψ.
12.3.4. D
Sont appelées fonctions de Morse les fonctions dont tous les points critiques sontnon dégénérés.

12.3. APPLICATIONS 295
12.3.5. L
Soit f : U ⊆ Rk→ R lisse. Alors pour presque tout a = (a1, . . . , ak) ∈ Rk, la fonction
définie par :fa(x) = f (x) + a1x1 + . . . akxk = f (x)+ < a, x >
est une fonction de Morse sur U.
D. Soit g : U→ Rk définie par g(x) = ( ∂ f∂x1
(x), . . . , ∂ f∂xk
(x)). Alors
(d fa)p = (∂ fa∂x1
(p), . . . ,∂ fa∂xk
(p)) = g(p) − a
Ainsi g et fa ont les mêmes points critiques, et f et fa ont les mêmes dérivéessecondes. Ainsi l’Hessian de f en p est dgp.Si −a est une valeur régulière de g, alors (dgp) est non singulière et donc tous lespoints critiques de fa sont non dégénérés. Donc les points critiques de f sont nondégénérés. Or, par Sard, ceci est vrai pour presque tout a ∈ R. Ainsi fa est unefonction de Morse pour presque tout ∈ R.
12.3.6. T
Soit une fonction quelconque f : X ⊆ RN→ R. Alors pour presque tout a ∈ RN, la
fonction fa définie par :
fa(x) = f (x) + a1x1 + . . . aNxN = f (x)+ < a, x >
est une fonction de Morse.
Théorème de Whitney.
Nous essayons maintenant de voir comment il est possible de définir un plon-gement d’une variété de dimension k dansRN, et quelles conditions on doit imposersur N pour que cela soit possible, et de déterminer si possible la valuer minimalede N, en fonction de k. Nous définissons d’abord le fibré tangent à une variété.
12.3.7. D
Soit X une variété lisse et Tx(X) l’espace tangent à X en x. Le fibré tangent de X est
T(X) = (x, v)|v ∈ Tx(X)
12.3.8. P
Le fibré tangent à une variété X est une variété, et
dim T(X) = 2 dim X

296 12. THÉORÈME DE SARD
D. Soit W un ouvert de X, alors
T(W) = T(X) ∩ (W ×RN) ⊆ T(X)
T(W) est donc un ouvert de T(X) car W × RN est un ouvert de X × RN. Soitmaintenant (U, φ) une carte de W, U ⊂ Rk un ouvert, k étant la dimension deX. Donc dφ : T(U) → T(W) est un difféomorphisme. U étant de ouvert de Rk,T(U) = U × Rk, qui est un ouvert de R2k. On a donc trouvé un difféomorphismeentre n’importe quel ouvert de T(X) et un ouvert de R2k. Ceci est bien la définitiond’une variété différentiable de dimension 2k.
12.3.9. T
Toute variété de dimension k admet une immersion injective dans R2k+1.
D. Soit X ⊆ RN de dimension k. Soit M > 2k + 1 et f : X → RM
une immersion injective, et posons
h : X × X ×R→ RM
(x, y, t) 7→ h(x, y, t) = t( f (x) − f (y))et :
g : T(X)→ RM
(x, v) 7→ g(x, v) = d fx(v)Comme M > 2k + 1, par le théorème de Sard, il existe un élément a de RM qui
n’appartienne pas à =g ∪ =h (hormis 0 ∈ RM). Soit π la projection de RM sur lesous-espace vectoriel orthogonal à a, noté H = b ∈ RM
| < b, a >= 0. Considéronsmaintenant π f : X→ H. Cette application est injective. En effet, soit x, y distinctstels que π f (x) = π f (y). Alors il existe t ∈ R tel que f (x) − f (y) = ta ; x , y doncf (x) , f (y) donc t , 0. Or,
h(x, y, 1/t) = 1/t · ta = a
Contradiction : a ∈ =h. Donc x = y et π f est injective.Montrons maintenant que π f est une immersion. Considérons donc sa dérivéed(π f ) et supposons que v est un vecteur de Tx(X) tel que d(π f )x(v) = 0. Ceciveut dire que π d fx(v) = 0. Cela implique d fx(v) ∈ H⊥. Donc d fx(v) = ta pour uncertain t ∈ R. f est une immersion donc t , 0. Mais
g(x, 1/tv) = 1/t · ta = a
Contradiction avec le fait que a n’est pas élément de =g.En conclusion, on a trouvé un vecteur a ∈ RM tel que la composée de f avec laprojection orthogonaleπ envoie X sur H, qui est une variété de dimension M−1. Ceraisonnement est valable pour tout M > 2k+1, donc au minimum pour M = 2k+2,on obtient alors une immersion de X vers R2k+1.
Pour les variétés compactes, les immersions injectives sont des plongements.On a donc prouvé que toute variété compacte de dimension k admet un plongementdans R2k+1. Pour que le résultat soit vrai pour les variétés non compactes, on doit

12.3. APPLICATIONS 297
rendre l’immersion propre. On fait appel pour ceci aux partitions de l’unité, quel’on donnera sans preuve.
12.3.10. T D
Soit X ⊆ RN. Alors pour tout recouvrement d’ouverts Uα, il existe une suite de fonctionsdifférentiables θii∈N définies sur X ( appelées partition de l’unité subordonnée aux ouvertsUα ) qui vérifient ces propriétés :• 0 ≤ θi(x) ≤ 1 pour tout x ∈ X et i ∈N• Tout x ∈ X admet un voisinage où toutes les θi sont identiquement nulles, sauf un
nombre fini d’entre elles.• Pour tout x ∈ X,
∑∞
i=1 θi(x) = 1.
12.3.11. C
Toute variété X admet une application propre ρ : X→ R.
D. Soit Uα un recouvrement dont la fermeture est compacte, etθi une partition de l’unité subordonnée. Posons alors ρ =
∑∞
i=1 iθi. Montrons que ρest l’application propre cherchée. Soit donc K un compact deR. Alors K est contenudans [− j, j] pour un certain j ∈N. Or par définition de ρ,
ρ−1([− j, j]) ⊆j⋃
i=1
x|θi(x) , 0
a sa fermeture compacte, donc ρ−1(K) est un compact pour tout K compact deR. ρ est donc propre.
12.3.12. T (Whitney)
Toute variété X de dimension k admet un plongement dans R2k+1.
D. Nous allons, à partir des propositions et théorèmes précé-dents, construire ce plongement. Soit g : X → R2k+1 une immersion injective.Composons la avec le difféomorphisme φ : R2k+1
→ B(0, 1) défini par φ(z) = z1+|z|2 .
Posons f = φ g. f est une immersion injective de X versR2k+1, telle que pour toutx ∈ X, | f (x)| < 1. Soit par ailleurs ρ : X → R dont l’existence est garantie par lecorollaire 12.3.11. Définissons maintenant F : X→ R2k+2 comme F(x) = ( f (x), ρ(x)).Composons F avec la projection π sur le sous-espace H orthogonal à un certaina ∈ R2k+2. La composée πF reste injective pour presque tout a ∈ S2k+1 ; en fait c’estle cas pour tous les a sauf les pôles nord et sud de S2k+1. Il nous faut maintenantmontrer que π F est propre. Soit c ∈ R une borne positive et considérons :
x ∈ X| |π F(x)| ≤ c

298 12. THÉORÈME DE SARD
Si l’on montre que cet ensemble est inclus dans
x| |ρ(x)| ≤ d
pour un certain d ≥ 0, alors cela prouvera que π F est propre.Supposons donc par l’absurde qu’il existe une suite de points xi ⊂ X telle que|π F(xi)| < c mais ρ(xi) → ∞. π F(xi) est un élément du sous espace vectorielorthogonal à a, donc F(xi) − π F(xi) est un multiple de a, et ce pour tout i. On a :
F(xi)ρ(xi)
=
(f (xi)ρ(xi)
, 1)
f (xi) est borné en norme donc
f (xi)ρ(xi)
→ (0, . . . , 0)
De plus,
|π F(xi)ρ(xi)
|≤c
ρ(xi)→ 0
Posons alors
wi =1
ρ(xi)[F(xi) − π F(xi)]→ (0, . . . , 0, 1)
Or chaque wi est un multiple de a, donc la limite aussi. Donc soit a = (0, . . . , 0, 1)soit a = (0, . . . , 0,−1), ce qui contredit l’assertion dite plus haut, selon laquelle a nedoit pas être un pôle de S2k+1. Donc |ρ(xi)| est borné. Nous avons donc prouvé :
x| |π F(x)| ≤ c ⊆ x| |ρ(x)| ≤ dpour un certain d ≥ 0. Donc, πF est une application propre, c’est à dire que la
préimage de n’importe quelle boule dans H est incluse dans un compact de X.
Notons qu’il existe une version plus forte du théorème de Whitney qui ditqu’une variété de dimension k admet une immersion dans R2k.
12.4. Transversalité
Dans cette section nous nous intéressons à des variétés avec bord et à quelquespropriétés d’applications entre variétés à bord ou sans bord.
12.4.1. D • Un sous-ensemble X ⊆ RN est une variété à bord de dimen-sion k si tout point x ∈ X possède un voisinage difféomorphe à un ouvert deHk = x ∈ Rk
| xk ≥ 0.• Le bord de X, noté ∂X est défini comme la préimage de ∂Hk = x ∈ Rk
| xk = 0par des paramétrisations de la structure différentielle de X.• Si f : X→ Y est une application entre variétés et X est à bord, alors on note∂ f la restriction de f à ∂X
12.4. TRANSVERSALITÉ 299
12.4.2. D
Une application f : X→ Y est dite transversale à la sous-variété Z ⊆ X si
=(d fx) + Ty(Z) = Ty(Y)
pour tout x ∈ f−1(Z), y = f (x). On le note f t Z.Deux sous-variétés X et Z de Y sont transversales si
Tx(X) + Tx(Z) = Tx(Y)
pour tout x ∈ X ∩ Z. On note X t Z.
12.4.3. E
Soit A : Rk→ Rn une application linéaire et V un sous-espace vectoriel deRn. Alors
A t V si et seulement si =dAx + TAx(V) = TAx(Rn), c’est à dire A(Rk) + V = Rn.Si V et W sont deux sous-espaces vectoriels deRn, alors V tW ⇔ Tx(V)+Tx(W) =Rn pour tout x ∈ V ∩W, c’est à dire V +W = Rn.
12.4.4. T
L’intersection de deux sous-variétés transversales X et Z est une sous-variété. De plus,codim X ∩ Z = codim X + codim Z.
12.4.5. T (Théorème de transversalité)
Soit F : X × S → Y une application différentiable entre variétés. Supposons que X ait unbord, mais pas S ni Y, et soit Z une sous-variété sans bord de Y. Supposons enfin que F et∂F sont transversales à Z.Alors pour presque tout s ∈ S, fs et ∂ fs sont transversales à Z.
D. Remarquons tout d’abord que W = F−1(Z) est une sous-variété de X×S, son bord est ∂W =W∩∂(X×S). Notons π : X×S→ S la projectioncanonique. Nous allons montrer que pour toute valeur régulière s de π|W et pourtoute valeur régulière t de ∂π, les applications fs et ∂ ft sont transversales à Z.Le théorème de Sard nous permettra de conclure car presque tout s ∈ S est unevaleur régulière des deux applications susmentionnées. Soit donc x ∈ X×S tel quefs(x) = z ∈ Z. On sait que F est transversale à Z donc :
dF(x,s)T(x,s)(X × S) + Tz(Z) = Tz(Y)
Ceci veut dire que pour tout a ∈ Tz(Y), l’on peut trouver un élément b de T(x,s)(X×S)tel que dF(x,s)−a ∈ Tz(Z). Maintenant T(x,s)(X×S) = Tx(X)×Ts(S), donc on peut écrireles deux composantes de b : b = (w, e). Considérons d’abord le cas où e = 0 ∈ Ts(S).Alors dF(x,s)(w, 0) = d fs(w) car la restriction de F à X×s n’est autre que fs. Supposonsmaintenant e , 0. Alors la dérivée de π est :
dπ(x,s) : Tx(X) × Ts(S)→ Ts(S)
C’est la projection sur Ts(S). De plus, dπ(x,s)T(x,s)(W) = Ts(S) donc il existeun élément de la forme (u, e) de T(x,s)(W). Ainsi dF(x,s)(u, e) ∈ Tz(Z). Posons alors

300 12. THÉORÈME DE SARD
v = w − u ∈ Tx(X). Alors
d fs(v) − a = dF(x,s)[(w, e) − (u, e)] − a = dF(x,s)(w, e) − a︸ ︷︷ ︸∈Tz(Z)
− dFs(u, e)︸ ︷︷ ︸∈Tz(Z)
Ainsi, pour tout a ∈ Tz(Y), il existe v ∈ Tx(X) tel que d fs(v) − a ∈ Tz(Z), c’està dire : d fs(Tx(X)) + Tz(Z) = Tz(Y) pour tout x ∈ f−1
s (Z), autrement dit, fs esttransversale à Z.
Appliquons maintenant ce résultat à l’application ∂F : ∂X × S → Y. Alors ∂s fest transversale à Z = f−1
s (Z).
12.4.6. T (ε-voisinage)
Soit Y une variété sans bord, compacte de RM, et ε > 0. Soit Yε = y ∈ RM|d(y,Y) < ε.
Pour autant que ε soit assez petit, chaque élément z ∈ Yε possède un point π(z) qui est lepoint de Y le plus proche de z. L’application π : Yε
→ Y est une submersion. Si Y n’estpas compacte, alors ε doit être une fonction de y ∈ Y.
12.4.7. C
Soit f : X → Y une application lisse entre variétés, Y sans bord. Alors il existe S uneboule ouverte euclidienne et une application lisse F : X × S → Y telle que F(x, 0) = f (x)et telle que l’application s 7→ F(x, s) soit une submersion. En particulier, F et ∂F sont dessubmersions.
D. Soit donc S une boule de RM⊇ Y. Posons F(x, s) = π[ f (x) +
ε( f (x))s]. Alors F(x, 0) = f (x) car π|Y = idY. Fixons maintenant un x ∈ X. Alors x 7→f (x) + ε( f (x))s est une submersion en tant qu’application linéaire. Ainsi s 7→ F(x, s)est une submersion car composée de deux submersions.Enfin, puisque pour tout x ∈ X fixé, s 7→ F(x, s) est une submersion, vu queX × S = ∪x∈Xx × S, F est une submersion. De même, ∂X × S = ∪x∈∂Xx × S, donc∂F est une submersion.
12.4.8. T (Transversalité / Homotopie)
Soit f : X→ Y différentiable entre variétés. Soit Z une sous-variété sans bord de Y. Alorsil existe une application lisse g : X→ Y homotope à f telle que g t Z et ∂g t Z.
D. Posons, comme dans le corollaire, F(x, s) = π[ f (x)+ ε( f (x))s].Par le théorème de transversalité, on a que fs et ∂ fs sont transversales à Z pourpresque tout s ∈ S. De plus, chaque fs est homotope à f ; en effet, l’applicationX × [0, 1] : (x, t) 7→ F(x, ts) est la bonne homotopie.
12.4.9. P

12.4. TRANSVERSALITÉ 301
Soit f : X → Y une application lisse entre variétés, Z une sous-variété de Y. Supposonsque dim X < codim Z et que f t Z. Alors f (X) ∩ Z = ∅.
D. Prouvons le résultat par l’absurde. Supposons qu’il existe unx ∈ X tel que f (x) ∈ Z. On a :
dim(T f (x)(Z) + d fx(Tx(X))) ≤ dim T f (x)(Z) + dim Tx(X)
= dim Z + dim X < dim Y = dim T f (x)(Y)Ainsi on ne peut pas avoir T f (x)(Z) + d fx(Tx(X)) = T f (x)(Y), et donc impossibled’avoir f t Z.
12.4.10. L
Soit f : X → Y lisse entre variétés. Z une sous-variété de Y. Soit x ∈ f−1(Z). Supposonsqu’il existe un voisinage U de f (x) dans Y et une submersion φ : U → Rk, k étant lacodimension de Z, et Z ∩U = φ−1(0).Alors f est transversale à Z en x si et seulement si φ f est une submersion en x.Ainsi φ f est une submersion en x si et seulement si f t Z.
D. Remarquons d’abord que ker(dφ) f (x) = T f (x)(Z). Alors
f t Z⇔ T f (x)(Y) = T f (x)(Z) + d fxTx(X)
⇔ T f (x)(Y) = ker dφ f (x) + d fx(Tx(X))dφ f (x) est surjective donc la dernière équivalence est vraie si et seulement si
d(φ f )x est surjective. Ainsi φ f est une submersion en p si et seulement si f t Zen p.
Nous énonçons enfin le théorème d’extension ainsi qu’un corollaire.
12.4.11. T (théorème d’extension)
Soit Z une sous-variété fermée de Y, toutes deux sans bord, et soit C un fermé de X. Soitf : X→ Y une application différentiable avec f t Z sur C et ∂ f t Z sur C ∩ ∂X.Alors il existe une application différentiable g : X→ Y, homotope à f , g et ∂g transversalesà Z au sens usuel et telle que f = g au voisinage de C.
12.4.12. C
Soit f : X→ Y est une application et que ∂ f : ∂X→ Y est transversale à Z, alors il existeune application g : X→ Y homotope à f , telle que ∂g = ∂ f et g t Z.


CHAPITRE 13
Analyse de Fourier
Dans ce chapitre, Mathieu Glardon, introduit les concepts fondamentaux del’analyse de Fourier nécessaires par la suite.
13.1. Notions préalables
Mesure.
13.1.1. D
Soit X un ensemble. Une collection A ⊂P(X) est une tribu (ou σ-algèbre) ssi les 3propriétés suivantes sont vérifiées :
– ∅ et X ∈ A– A ∈ A ⇒ X \ A ∈ A– ∀ Aii∈N ⊂ A ,
⋃∞
i=1 Ai ∈ AOn appelle espace mesurable un ensemble X muni d’une tribu A .Soit (X,A ) un espace mesurable. Une mesure sur (X,A ) est une fonction
µ : A −→ [0,+∞] t.q.
– µ(∅) = 0– Si Aii∈N ⊂ A est une suite de parties deux à deux disjointes, alors
µ( ∞⋃
i=1
Ai
)=
∞∑i=1
µ(Ai)
13.1.2. D
303

304 13. ANALYSE DE FOURIER
La mesure de Lebesgue λn sur Rn est la mesure obtenue par la construction sui-vante :On définit d’abord λ∗ : P(Rn) −→ [0,∞] par
λ∗(A) := in f( ∞∑
i=1
Voln(Qi))∣∣∣∣Qii∈N ⊂ C recouvre A
où C ⊂P(Rn) est la collection des cubes axiparallèles dans Rn.On introduit la collection L de tous les ensembles qui sont λ∗-mesurables.(i.e. A ∈ L ssi pour tout S ⊂ Rn on a λ∗(S) = λ∗(S ∩ A) + λ∗(S ∩ AC))On pose finalement λn := λ∗ restreint à L . C’est une mesure, celle de Lebesgue surRn.
13.1.3. D
On appelle espace mesuré le triple (X,A , µ), où µ est une mesure sur l’espacemesurable (X,A ).
Un ensemble A ⊂ A est de mesure nulle si µ(A) = 0.
On dit qu’une propriété (P) définie sur un espace mesuré (X,A , µ) est vérifiéepresque partout (µ − p.p. ou p.p.) si elle est vérifiée sur le complémentaire d’unensemble de mesure nulle.
Espaces L p et Lp.
13.1.4. P D (L’espace L 1)
Soit (X,A , µ) un espace mesuré. Une fonction mesurable f : X −→ [0,+∞] est dite inté-grable sur C ⊂ X si
∫D | f |dµ < ∞. On note L 1(D,R) l’ensemble des fonctions intégrables
sur D.On a les propriétés suivantes :
L 1(D,R) est un espace vectoriel réel.
L’intégration f 7→∫
D f dµ est linéaire sur cet espace vectoriel :∫D
(α f + βg)dµ = α∫
Df dµ + β
∫D
g dµ , ∀ f , g ∈ L 1(D,R), α, β ∈ R
Passons à la notion d’intégrale d’une fonction à valeurs complexes :

13.1. NOTIONS PRÉALABLES 305
On note L 1(D,C) l’ensemble des fonctions mesurables f : D→ C telles que :∫D| f |dµ < ∞
L’intégrale d’une fonction f ∈ L 1(D,C) est alors définie par∫D f dµ :=
∫DRé( f )dµ + i
∫DIm( f )dµ
Les propriétés de l’espace L 1(D,R) et de l’intégration se généralisent sans autre à l’espaceL 1(D,C). En particulier, on a :
– L 1(D,C) est un espace vectoriel complexe.– L’intégration est linéaire :
∫X(α f + βg)dµ = α
∫X f dµ + β
∫X g dµ , ∀ f , g ∈
L 1(D,C), α, β ∈ C–
∫X | f |dµ = 0 si et seulement si f = 0 presque partout.
– (Chebychev)∫
X | f |dµ ≤ a · µ(| f | ≥ a) , ∀ a ∈ R+–
∣∣∣∫X f dµ
∣∣∣ ≤ ∫X | f |dµ
– (Fatou)∫
X
(lim infi→∞ | fi|
)dµ ≤ lim infi→∞
∫X | fi|dµ
13.1.5. T (Convergence dominée de Lebesgue)
Soit fi : X −→ C une suite de fonctions mesurables (i ∈ I pas nécessairement dénombrable).Supposons satisfaites les hypothèses suivantes :
– Il existe une fonction f : X −→ C t.q. fi → f presque partout– Il existe g ∈ L 1(X,R+) t.q. | fi| ≤ g presque partout pour tout i.
Alors f est intégrable et on a :
limi→∞
∫X| fi − f |dµ = 0
limi→∞
∫X
fidµ =∫
Xf dµ
Le corollaire suivant joue un rôle important dans un grand nombre de ques-tions, notamment en théorie des séries de Fourier.
13.1.6. C
Soit uk ⊂ L 1(X,C) une suite de fonctions intégrables sur X telle que∑∞
k=1
∫X |uk|dµ < ∞.
Alors la série∑∞
k=1 uk converge presque partout vers une fonction f ∈ L 1(X,C). Deplus on a :
limn→∞
∣∣∣∣ ∫X
(f −
n∑k=1
uk
)dµ
∣∣∣∣ = 0
∫X
f dµ =∞∑
k=1
∫X
ukdµ

306 13. ANALYSE DE FOURIER
∣∣∣∣ ∫X
f dµ∣∣∣∣ ≤ ∞∑
k=1
∫X|uk|dµ
13.1.7. P D
Soit 1 ≤ p < ∞. On note L p(X) l’ensemble des fonctions f : X −→ [0,∞] qui sontp-intégrables :
L p(X) =
f : X→ [0,∞]∣∣∣∣ f mesurable et
∫X| f |pdµ < ∞
L p(X) est un espace vectoriel réel :Soient f ,g ∈ L p(X) et α, β ∈ R, alors (α f + βg) est mesurable et comme |α f + βg|p ≤2p(|α|p| f |p + |β|p|g|p), on a :∫
X |α f + βg|pdµ ≤ 2p|α|p
∫X | f |
pdµ + 2p|β|p
∫X |g|
pdµ < ∞On définit ensuite une relation d’équivalence sur L p(X) en posant
f v g ⇐⇒ µ(x ∈ X | f (x) , g(x)) = 0 (i.e. f v g ssi f et g coïncident presquepartout )
13.1.8. D
L’espace Lp(X) est par définition le quotient :
Lp(X) = L p(X) v
13.1.9. P (Riesz-Fischer)
(Lp(X), ‖.‖p) est un espace de Banach, où
‖ f ‖p :=( ∫
X| f |pdµ
) 1p
, ∀ f ∈ Lp(X)
Intégrales multiples.
Soient (X,A1, µ1) et (X,A2, µ2) deux espaces mesurés.On note simplement A = A1 ⊗A2 la σ-algèbre sur X = X1 × X2 engendrée par lesensembles du type A1 × A2 ⊂ X où A1 ∈ A1 et A2 ∈ A2.
Lorsque (X,A1, µ1) et (X,A1, µ1) sont σ-finis, il existe une unique mesure µ sur(X1 × X2,A1 ⊗A2) t.q. :
– µ(A1 × A2) = µ1(A1)µ2(A2) , ∀A1 ∈ A1, A2 ∈ A2– µ est σ-finie– µ(A) =
∫X1µ2(A′x)dµ1(x) =
∫X2µ1(A′′y)dµ2(y), ∀A ∈ A1 ⊗A2

13.1. NOTIONS PRÉALABLES 307
où A′x :=y ∈ Y|(x, y) ∈ A
⊂ Y et A′′y :=
x ∈ X|(x, y) ∈ A
⊂ X sont des “tranches”
de A.Cette mesure est appelée mesure produit sur (X1 × X2,A1 ⊗ A2) et est notée µ =µ1 ⊗ µ2.
13.1.10. T (Théorème de Fubini-Tonelli)
Soit f : X1 × X2 → [0,∞] une fonction mesurable, alors– la fonction x 7→
∫X2
f (x, y)dµ2(y) est mesurable (sur (X1,A1))
– la fonction y 7→∫
X1f (x, y)dµ1(x) est mesurable (sur (X2,A2))
–∫∫
X1×X2fµ1 ⊗ µ2 =
∫X1
( ∫X2
f (x, y)dµ2(y))dµ1(x) =
∫X2
( ∫X1
f (x, y)dµ1(x))dµ2(y)
13.1.11. T (Théorème de Fubini-Lebesgue)
Soit f ∈ L 1(X1 × X2) une fonction intégrable, alors– pour presque tout x ∈ X1, la fonction y 7→ f (x, y) est intégrable sur X2– pour presque tout y ∈ X2, la fonction x 7→ f (x, y) est intégrable sur X1
– la fonction x 7→∫
X2f (x, y)dµ2(y) est intégrable sur X1
– la fonction y 7→∫
X1f (x, y)dµ1(x) est intégrable sur X2
–∫∫
X1×X2fµ1 ⊗ µ2 =
∫X1
( ∫X2
f (x, y)dµ2(y))dµ1(x) =
∫X2
( ∫X1
f (x, y)dµ1(x))dµ2(y)
Changement de variable.
Soit h : Ω2 −→ R une fonction mesurable et intégrable.Si F : Ω1 −→ Ω2 est un difféomorphisme, alorsF h : Ω1 −→ R est mesurable et JF · h F est intégrable et on a :∫
Ω2
h(y)dλn(y) =∫Ω1
h(F(x))|JF(x)|dλn(x)
On écrit cette formule sous la forme compacte
dny = |JF(x)|dnx = det(∂yi
∂x j
)dnx
Ω1 etΩ2 sont des ouverts deRn et JF(x) = det(DFx) est le jacobien de F au pointx ∈ Ω1.

308 13. ANALYSE DE FOURIER
13.2. Transformation de Fourier sur Rn
13.2.1. P D
Soit f ∈ L 1C
(Rn), t ∈ Rn, alors∫∞
−∞e−i<x,t> f (t)dt existe ∀x ∈ Rn.
En effet, f est mesurable, de même l’appl. x 7→ e−i<x,t> f (x) est mesurable ∀t ∈ Rn. De plus,∫∗
Rn
∣∣∣ f (t)e−i<x,t>∣∣∣ dx =
∫Rn | f (x)|dx.
Ainsi, x 7→ e−i<x,t> f (x) ∈ L 1C
(Rn).∀ f ∈ L 1
C(Rn), t ∈ Rn, on pose :
f (t) =∫Rn
e−i<x,t> f (x)dx
f : Rn−→ C ; f est la transformée de Fourier de f.
Propriétés de f :
(1) Puisque | f (x)| ≤∫∞
−∞
∣∣∣e−i<x,t> f (t)∣∣∣ dt =
∫∞
−∞| f (t)|dt = ‖ f ‖1
on a que f est bornée sur Rn et que‖ f ‖∞ = supx∈Rn | f (x)| ≤ ‖ f ‖1. (i.e contractive)
(2) f est continue sur Rn, en effet, ∀x ∈ Rn, ∀h ∈ Rn, on af (x + h) − f (x) =
∫Rn e−i<x,t>(e−i<h,t>
− 1) f (t)dt, de sorte que| f (x + h) − f (x)| ≤
∫Rn |e−i<h,t>
− 1| · | ˆf (t)|dt ≤∫Rn 2| f (t)|dt.
Puisque limh→0 |e−i<h,t>− 1| · | f (t)| = 0, en utilisant le théorème 1.5., on a que
limh→0 f (x + h) − f (x) = 0, ce qui montre la continuité de f en x.
(3) ∀ f , g ∈ L 1C
(Rn), ( f + g) = f + g
∀ λ ∈ C, f ∈ L 1C
(Rn), (λ f ) = λ f
En résumé :La transformation de Fourier est une application linéaire de L 1
C(Rn) dans CRn ,
de plus,
L 1C
(Rn)−→Cb(Rn) (= appl.cont.bornées)
13.2.2. R – Si f , g ∈ L 1C
(Rn) avec f (x) = g(x) p.p., alors f = g.– f ∈ C(R,C)
13.2.3. T (Riemann-Lebesgue)
∀ f ∈ L 1C(Rn), f ∈ C0(Rn,C)
i.e. ∀ε ∈ (0,∞), il existe un compact Kε tel que ∀x ∈ Rn\ Kε, | f (x)| ≤ ε.
D.

13.2. TRANSFORMATION DE FOURIER SUR Rn 309
(1) Supposons n=1Soit a, b ∈ R, a < b, x ∈ R, x , 0.Puisque 1[a,b](x) = e−ixa
−e−ixb
ix et |e−ixa− e−ixb
| ≤ |e−ixa| + |e−ixb
| ≤ 2,|1[a,b](x)| ≤ 2
x ainsi 1[a,b] ∈ C0(R,C).
Soit E =∑N
j=1 c j1[a j,b j] |N ∈N, ai, bi ∈ R, ci ∈ C, a j < b j, 1 ≤ i, j ≤ N
Ainsi, h | h ∈ E ⊂ C0(R,C).E est dense dans L 1
C(R) pour la semi-norme ‖.‖1. (‖ f ‖1 =
∫∞
−∞| f (x)|dx)
Soit f ∈ L 1C
(R) et soit ε ∈ (0,∞).Alors il existe h ∈ E t.q. ‖ f − h‖1 < ε
2 . (par densité)Il existe un compact K de R t.q. |h(x)| < ε
2 ∀x ∈ R \ K.(car h ∈ C0(Rn)
)| f (x)| = | f (x) − h(x) + h(x)| ≤ | f (x) − h(x)| + |h(x)|= | ( f − h)(x)| + |h(x)| ≤ ‖ f − h‖1 + |h(x)| < ε
2 +ε2 = ε.
(2) Supposons n=2
Soit f , g ∈ CR et le produit tensoriel ( f ⊗ g)(x, y) = f (x) · g(y)Soit f , g ∈ L 1
C(R2). Alors ( f ⊗ g) = f ⊗ g, en effet :
∀t1, t2 ∈ R2, ( f ⊗ g)(t1, t2) =∫R2 ( f ⊗ g)(x1, x2)e−i<x,t>dx1dx2
=∫R2 f (x1)g(x2)e−ix1t1 e−ix2t2 dx1dx2 =
∫R
f (x1)e−ix1t1 dx1
∫R
g(x2)e−ix2t2 dx2
= f (t1)g(t2) = ( f ⊗ g)(t1, t2)Soit a, b, c, d ∈ R, a < b, c < d
(1[a,b] ⊗ 1[c,d]) = 1[a,b] ⊗ 1[c,d] ∈ C0(R2,C)Donc 1[a,b]×[c,d] ∈ C0(R2,C)Les combinaisons linéaires finies de ces fonctions sont denses dans L 1
C(R2).
Convolution et transformation de Fourier.
13.2.4. D
Soient f , g ∈ L 1C
(Rn) à support compact ( f , g ∈ C00(Rn,C)).∀ x ∈ Rn on définit la convolution ∗ par :∫
Rnf (x + y)g(−y)dy := ( f ∗ g)(x)
On a alors que f ∗ g ∈ C00(Rn,C) et supp( f ∗ g) ⊂ supp( f ) + supp(g), de plus,‖ f ∗ g‖1 ≤ ‖ f ‖1 ‖g‖1. En effet, f et g ∈ L 1
C(Rn) et donc il existe un ensemble E ⊂ Rn
de mesure nulle tel que∫Rn f (x + y)g(−y)dy existe sur le complémentaire de E. En
posant alors que f ∗ g s’annule sur E et vaut∫Rn f (x + y)g(−y)dy si x < E, on a que
f ∗ g ∈ L 1C
(Rn) et ‖ f ∗ g‖1 ≤ ‖ f ‖1 ‖g‖1.

310 13. ANALYSE DE FOURIER
13.2.5. P
∀ f , g ∈ L 1C
(Rn)( f ∗ g) = f · g
D. Soit t ∈ Rn
( f ∗ g)(t) =∫Rn ( f ∗ g)(x)e−i<x,t>dx =
∫Rn
( ∫Rn f (x + y)g(−y)dy
)e−i<x,t>dx
=∫Rn g(−y)
( ∫Rn f (x + y)e−i<x,t>dx
)dy (“x + y = z“, “x = z − y“)
=∫Rn g(−y)
( ∫Rn f (x)e−i<x−y,t>dx
)dy
=∫Rn g(−y)
( ∫Rn f (x)e−i<x,t>ei<y,t>dx
)dy =
∫Rn g(−y)ei<y,t> f (t)dy
= f (t)∫Rn g(−y)ei<y,t>dy = f (t)
∫Rn g(y)e−i<y,t>dy
= f (t)g(t)
3 remarques utiles :
(1) D’après la prop. 1.9, L1C
(Rn) est un espace de Banach. En définissant laconvolution sur L1
C(Rn) par [ f ] ∗ [g] = [ f ∗ g] ∀ f , g ∈ L 1
C
LC1 (Rn), muni de ∗, est une algèbre de Banach. ( ‖ f ∗ g‖1 ≤ ‖ f ‖1‖g‖1)
(2) Dans ce qui suit, il sera pratique de considérer les normes ‖.‖1 et ‖.‖∞ dela manière suivante : ∀ f ∈ L 1
C(Rn)
‖ f ‖1 = sup|
∫Rn f (x)φ(x)dx|
∣∣∣ φ ∈ C00(Rn,C) avec ‖φ‖∞ ≤ 1
de même ∀h ∈ Cb(Rn)‖h‖∞ = sup
|
∫Rn f (x)h(x)dx|
∣∣∣ f ∈ C00(Rn,C) avec ‖ f ‖1 ≤ 1
(3) ∀ f ∈ L 1C
(Rn), on pose [ f ] = f
13.2.6. P D
Posons A(Rn) =
f | f ∈ L1C
(Rn).
C’est une sous-algèbre de C0(Rn,C) ayant la propriété suivante :A(Rn) sépare les points de Rn.( i.e. ∀u, v ∈ Rn,u , v, il existe f ∈ L1
C(Rn) avec f (u) , f (v) )
D. Soient u, v ∈ Rn avec f (u) = f (v) ∀ f ∈ L 1C
(Rn).Puisque
∫Rn f (y)e−i<u,y>dy =
∫Rn f (y)e−i<v,y>dy
on a que∫Rn f (y)
(e−i<u,y>
− e−i<v,y>)dy = 0.
Par la remarque (2) ci-dessus, il s’ensuit que ‖e−i<u,_>− e−i<v,_>
‖∞ = 0.Ainsi e−i<u,y> = e−i<v,y>
∀y ∈ Rn, et donc u = v.
13.2.7. C
A(Rn) est dense dans C0(Rn,C) pour la norme ‖.‖∞.

13.2. TRANSFORMATION DE FOURIER SUR Rn 311
D. Puisque A(Rn) a les 3 propriétés suivantes :
– A(Rn) est une sous-algèbre de C0(Rn,C).– A(Rn) sépare les points de Rn.– A(Rn) est stable par conjugaison complexe :
f = ˆf , où f (x) = f (−x), f ∈ L 1C
(Rn)la propriété ci-dessus découle du théorème de Stone-Weierstrass. [31]
13.2.8. T
La transformation de Fourier L1C
(Rn)−→C0(Rn,C) est injective.
D. Soit f ∈ L 1C
avec f = 0. On veut voir que f (x) = 0 presquepartout.
(1)∫Rn f (x)g(x)dx = 0 ∀g ∈ L 1
C(Rn)
Soit g ∈ L 1C
(Rn). 0 =∫Rn f (y)g(y)dy =
∫Rn g(y)
( ∫Rn f (x)e−i<x,y>dx
)dy
=∫Rn f (x)
( ∫Rn g(y)e−i<x,y>dy
)dx =
∫Rn f (x)g(x)dx.
(2)∫Rn f (x)ψ(x)dx = 0 ∀ψ ∈ C00(Rn,C)
Soit ε > 0. Soit ψ ∈ C00(Rn,C). D’après le corollaire 2.7.on sait qu’il existe k ∈ L 1
C(Rn) avec ‖ψ − k‖∞ < ε
1+‖ f ‖1. Ainsi :
|
∫Rn f (x)ψ(x)dx| ≤ |
∫Rn f (x)ψ(x)dx −
∫Rn f (x)k(x)dx| + |
∫Rn f (x)k(x)dx|
= |∫Rn f (x)
(ψ(x) − k(x)
)dx| par (1)
≤
∫Rn | f (x)| · ‖ψ − k‖∞dx ≤ ε
1+‖ f ‖1
∫Rn | f (x)|dx < ε.
(3) D’après la remarque (2) de la page 9, on a que ‖ f ‖1 = 0.Ainsi f (x) = 0 presque partout.
En résumé :
La transformation de Fourier est un homomorphisme injectif, contractif del’algèbre de Banach L1
C(Rn) dans l’algèbre de Banach (C0(Rn,C), ‖.‖∞).
De plus, l’image est dense dans C0(Rn,C).
Dérivation et transformation de Fourier.
13.2.9. P

312 13. ANALYSE DE FOURIER
Soit f ∈ L 1C
(R). Supposons f dérivable sur Ret f ′ ∈ L 1
C(R). Alors, ∀x ∈ R, on a : f ′(x) = ix f (x)
D. Soit x ∈ R. f (x + 1) − f (x) =∫ x+1
x f ′(t)dt.
Posons y = t − x ⇒∫ 1
0 f ′(x + y)dy = f (x + 1) − f (x).
f ′ ∗ 1[−1,0](−y) =∫R
f ′(x + y)1[−1,0](−y)dy =∫R
f ′(x + y)1[0,1](y)dy =∫ 1
0 f ′(x + y)dy
Ainsi f (x + 1) − f (x) =∫ 1
0 f ′(x + y)dy. En notant f1(x) := f (x + 1), on obtient :f1 − f = f ′ ∗ 1[−1,0]. Dès lors, on a :( f1 − f ) = f ′ ∗ 1[−1,0] et donc f1 − f = f ′ ∗ 1[−1,0].
(avec 1[−1,0] =
eix−1
ix
)Supposons x , 0 : f (x)eix
− f (x) = f ′(x) eix−1
ix .Supposons x < 2πZ (eix , 1). On a f (x)(eix
− 1) = f ′(x) eix−1
ix .
d’où f (x) = f ′(x)ix et ix f (x) = f ′(x).
Mais puisque f et f ′ sont continues, ceci est vrai ∀ x ∈ R.
13.2.10. R
Soit k ∈N, k > 1, f ∈ L 1C
(R).Supposons que f (k) existe sur R, f ( j)
∈ L 1C
(R) ∀1 ≤ j ≤ k. Alors :
f (k)(x) = (ix)k f (x). (Sans preuve)
13.3. Formule de Parseval
13.3.1. P D
Pour tout f ∈ L 1([0, 2π]), on définit les coefficients de Fourier de f par :an =
1π
∫ 2π
0 f (x) cos(nx)dx ∀n ∈N ∪ 0 et
bn =1π
∫ 2π
0 f (x) sin(nx)dx ∀n ∈N.On définit également la n-ième somme de Fourier de f par :sn f (x) = a0
2 +∑n
k=1 ak cos(kx) + bk sin(kx).On rappelle que les coefficients de Fourier de la fonction x 7→ sn f (x) sont les mêmes queceux de f . ( cf.[19])
13.3.2. T
Soient
(1) f ∈ L 2([0, 2π])

13.3. FORMULE DE PARSEVAL 313
(2) n ∈N
Alors
inf ∫ 2π
0
(f (x) −
c0
2−
n∑k=1
ck cos kx + dk sin kx)2
dx∣∣∣∣ c0, c1, ....., cn, d1, ......, dn ∈ R
=
∫ 2π
0
(f (x) − sn f (x)
)2dx
D. Posons, ∀ c0, c1, ...., cn, d1, ...., dn ∈ R,I(c0, c1, ....., cn, d1, ...., dn) :=
∫ 2π
0
(f (x) − c0
2 −∑n
k=1 ck cos kx + dk sin kx)2
dxIl suffit alors de montrer que I(c0, c1, ...., cn, d1, ...., dn) ≥ I(ao, a1, ...., an, b1, ...., bn).I(c0, c1, ...., cn, d1, ...., dn) − (ao, a1, ...., an, b1, ...., bn)
=∫ 2π
0
(f (x) − p(x)
)2dx −
∫ 2π
0
(f (x) − sn f (x)
)2dx
où p(x) = c02 +
∑nk=1 ck cos kx + dk sin kx , x ∈ [0, 2π]
=∫ 2π
0
(( f (x) − p(x))2
− ( f (x) − sn f (x))2)dx
=∫ 2π
0 p2(x)dx − 2∫ 2π
0 f (x)p(x)dx −∫ 2π
0 sn2 f (x)dx + 2
∫ 2π
0 f (x)sn f (x)dx
= π
c02
2 +∑n
k=1(ck2 + dk
2) − 2( a0c02 +
∑nk=i akck + bkdk) + ( a0
2
2 +∑n
k=1 ak2 + bk
2)
= π
c02+a0
2−2a0c0
2 +∑n
k=1(ck2 + ak
2− 2akck) + (dk
2 + bk2− 2bkdk)
= π
(c0−a0)2
2 +∑n
k=1(ck − ak)2 + (dk − bk)2≥ 0.
13.3.3. C
Soient f ∈ L 2([0, 2π]) et n ∈N. Alors∫ 2π
0
(f (x) − sn f (x)
)2dx ≥
∫ 2π
0
(f (x) − sn+1 f (x)
)2dx
D. Posons N = n + 1. Ainsi :c0 = a0, c1 = a1, cN−1 = an, cN = 0, d1 = b1, dN−1 = bn, dN = 0.Vu le théorème 3.4,∫ 2π
0
(f (x) − c0
2 −∑n
k=1 ck cos kx + dk sin kx)2
dx ≥∫ 2π
0
(f (x) − sN f (x)
)2dx
i.e.∫ 2π
0
(f (x) − sn f (x)
)2dx ≥
∫ 2π
0
(f (x) − sn+1 f (x)
)2dx.
13.3.4. T (Parseval)
Soit f ∈ L 2([0, 2π]). Alors :
a02
2+
∞∑k=1
ak2 + bk
2 =1π
∫ 2π
0f 2(x)dx
D.∫ 2π
0 f (x)sn f (x)dx
= a02
∫ 2π
0 f (x)dx +∑n
k=1 ak
∫ 2π
0 f (x) cos(kx)dx + bk
∫ 2π
0 f (x) sin(kx)dx

314 13. ANALYSE DE FOURIER
= a02 πa0 +
∑nk=1 akπak + bkπbk = π
(a0
2
2 +∑n
k=1 ak2 + bk
2).
D’après la prop. 3.3, on obtient d’une manière similaire que :∫ 2π
0 sn f (x)2dx = π(
a02
2 +∑n
k=1 ak2 + bk
2).
Ainsi∫ 2π
0
(f (x) − sn f (x)
)2dx =
∫ 2π
0 f 2(x)dx +∫ 2π
0 sn f (x)2dx − 2∫ 2π
0 f (x)sn f (x)dx
=∫ 2π
0 f 2(x)dx − π(
a02
2 +∑n
k=1 ak2 + bk
2).
Nous voulons alors montrer que :
limn→∞
∫ 2π
0
(f (x) − sn f (x)
)2dx = 0
Soit ε > 0.Il existe g ∈ C([0, 2π]) avec
∫ 2π
0
(f (x) − g(x)
)2dx <
(ε3
)2.
Il existe donc M ∈ (0,∞) avec |g(x)| ≤M ∀x ∈ [0, 2π].
Soit δ < min2π,
(ε
6M
)2.
Posons h(x) = g(x) ∀ x ∈ [0, 2π − δ) et sur [2π − δ, 2π] on poseh(x) = g(2π − δ) +
(x − (2π − δ)
)( g(o)−g(2π−δ)2π−(2π−δ)
).
Ainsi h ∈ C([0, 2π]), h(0) = h(2π). Par le cours Séries trigonométriques I [21],il existe p(x) = c0
2 +∑n
k=1 ck cos kx + dk sin kx avec :
supx∈[0,2π]
|h(x) − p(x)| <ε
3√
2π
Or par Minkowski nous savons que( ∫ 2π
0
(f (x) − p(x)
)2dx
) 12
≤
( ∫ 2π
0
(f (x) − g(x)
)2dx
) 12
+( ∫ 2π
0
(g(x) − h(x)
)2dx
) 12
+( ∫ 2π
0
(h(x) − p(x)
)2dx
) 12
.
< ε3 +
( ∫ 2π
2π−δ
(g(x) − h(x)
)2dx
) 12
+ ε3√
2π
√2π
∀x ∈ [2π − δ, 2π], |g(x) − h(x)| ≤ |g(x)| + |h(x)| ≤M +max|h(2π − δ)|, |h(2π)|=M +max|g(2π − δ)|, |g(0)| ≤M +M = 2M. Ainsi nous avons∫ 2π
2π−δ
(g(x) − h(x)
)2dx ≤
∫ 2π
2π−δ 4M2dx = 4M2δ < 4M2 ε2
36M2 =ε2
9 ,
=⇒( ∫ 2π
2π−δ
(g(x) − h(x)
)2dx
) 12
< ε3 .
Ainsi∫ 2π
0
(f (x) − c0
2 −∑n
k=1 ck cos kx + dk sin kx) 1
2 dx < ε2.
Par le théorème 3.4,∫ 2π
0
(f (x) − sn f (x)
)2dx < ε2.
Par le corollaire 3.5, ∀ m > n ,∫ 2π
0
(f (x) − sn f (x)
)2dx ≥
∫ 2π
0
(f (x) − sm f (x)
)2dx.
En résumé,∫ 2π
0
(f (x) − sk f (x)
)2< ε2, ainsi,
limk→∞
∫ 2π
0
(f (x) − sk f (x)
)2dx = 0.
13.3.5. R

13.4. INVERSION DE LA TRANSFORMATION DE FOURIER 315
(1) L’inégalité a02
2 +∑∞
k=1 ak2 + bk
2≤
1π
∫ 2π
0 f 2(x)dx à été obtenue par F.W. Bessel, avec des conditions restrictives sur f . (1826)
(2) M.A Parseval obtient l’égalité. (1806)
(3) Hurwitz démontre l’égalité pour f intégrable au sens de Riemann. (1903)
(4) La version ci-dessus est due à P.Fatou. (1906)
13.4. Inversion de la transformation de Fourier
13.4.1. T
Soit (kn)∞n=1 une suite de L 1C
(R),u ∈ L 1([0,∞]) avec :
(1) kn =ˇkn (où kn(x) = kn(−x) ∀ x ∈ R)
(2)∫∞
−∞kn(t)dt = 1
(3) u ≥ 0
(4) u décroissante sur [0,∞]
(5) u(x) − u(a) =∫ x
a u′(t)dt 0 ≤ a < x
(6) |kn(t)| ≤ n u(nt), n ∈N; t ∈ [0,∞)
Soit f ∈ L 1C
(R), x0 ∈ R. On suppose de plus que :
limh→01h
∫ h
o | f (x0 + t) + f (x0 − t) − 2 f (x0)|dt = 0. Alors :
f (x0) = limn→∞
∫∞
−∞
f (t)eitx0 kn(t)dt
13.4.2. R
Si f est continue en x0, l’hypothèse ci-dessus est vérifiée :Soit ε > 0, il existe δ > 0 tel que |x − x0| < δ⇒ | f (x0) − f (x)| < ε
2 . Soit 0 < h < δ.1h
∫ h
0 | f (x0 + t) + f (x0 − t) − 2 f (x0)|dt ≤ 1h
∫ h
0
(ε2 +
ε2
)dt = ε.
D.∫∞
−∞f (t)eitx0 kn(t)dt =
∫∞
−∞kn(t)
( ∫∞
−∞f (y)e−itydy
)eitx0 dt =
∫∞
−∞f (y)
( ∫∞
−∞kn(t)e−it(y−x0)dt
)dy =∫
∞
−∞f (y)kn(y − x0)dy =
∫∞
−∞f (y + x0)kn(y)dy =
∫∞
−∞f (y + x0)kn(−y)dy = f ∗ kn(x0).
On veut donc montrer que limn→∞ f ∗ kn(x0) − f (x0) = 0.f ∗ kn(x0) − 1 · f (x0) = f ∗ kn(x0) −
∫∞
−∞f (x0)kn(−y)dy
=∫∞
−∞
(f (y + x0) − f (x0)
)kn(−y)dy. Or
∫ 0
−∞
(f (y + x0) − f (x0)
)kn(−y)dy
=∫ 0
∞
(f (x0 − t) − f (x0)
)kn(t)(−1)dt
=∫∞
0
(f (x0 − t) − f (x0)
)kn(t)dt.

316 13. ANALYSE DE FOURIER
=⇒ f ∗ kn(x0) − f (x0) =∫∞
0
(f (x0 + t) + f (x0 − t) − 2 f (x0)
)kn(t)dt
=⇒ | f ∗ kn(x0) − f (x0)| ≤∫∞
0 | f (x0 + t) + f (x0 − t) − 2 f (x0)||kn(t)|dtPosons, ∀ t ∈ [0,∞) , ϕ(t) = f (x0 + t) + f (x0 − t) − 2 f (x0).=⇒ | f ∗ kn(x0) − f (x0)| ≤
∫∞
0 |ϕ(t)| · |kn(t)|dt ≤∫∞
0 |ϕ(t)|nun(t)dt.Montrons que
limn→∞|ϕ(t)|nun(t)dt = 0
Soit ε > 0.Par hypothèse, il existe 0 < h0 ≤ 1 tel que ∀ h ≤ h0, h > 0 :1h
∫ h
0 |ϕ(t)|dt < εc , où c = 1 + 6ε + 6
∫∞
−∞| f (x)|dx + 6u(0) + 6| f (x0)| + 3
∫∞
0 u(t)dt.Soit fn(t) = 1[ nh0
2 ,∞
)(t)u(t) ∀ t ∈ [0,∞).
limn→∞ fn(t) = 0 (ponctuellement) et fn(t) ≤ u(t). Par le théorème de convergencedominée de Lebesgue (thm 1.5 page 4), on a
∫∞
0 fn(t)dt = 0.Donc il existe n0 ∈N tel que ∀ n ≥ n0
∫∞
0 fn(t)dt < εh02 ,
i.e.∫∞
nh02
u(t)dt < εh02c . Or
∫ nh0nh0
2u(t)dt = nh0
2 u(ξ) (où nh02 ≤ ξ ≤ nh0 )
≥nh02 u(nh0) car u est décroissante.
⇒ nu(nh0) = nh02 u(nh0) · 2
h0≤
2h0
∫ nh0nh0
2u(t)dt ≤ 2
h0
∫∞
nh02
u(t)dt < 2h0
εh02c =
εc .
Ainsi, ∀ n ≥ n0, nu(nh0) < εc .
Soit n1 ≥ n0, 1h0 , il reste à voir que :
∀ n ≥ n1,∫∞
0 |ϕ(t)|nu(nt)dt < ε. (n ≥ 1h0⇒
1n ≤ h0)
Soit n ≥ n1.∫∞
0 |ϕ(t)|nu(nt)dt = I1(n) + I2(n) + I3(n) où :
I1(n) =∫ 1
n
0 |ϕ(t)|nu(nt)dt, I2(n) =∫ h0
1n|ϕ(t)|nu(nt)dt, I3(n) =
∫∞
h0|ϕ(t)|nu(nt)dt
(1) ∀ n ≥ n1, on a I1(n) < ε3
I1(n) ≤∫ 1
n
0 |ϕ(t)|nu(0)dt(u(nt) ≤ u(0) car u décroissante
)= u(0) 1
1n
∫ 1n
0 |ϕ(t)|dt ( 1n ≤ h0 )
≤ u(0) εc <ε6 <
ε3
(car c > 6u(0)
)(2) ∀ n ≥ n1, on a I2(n) < ε
3
∀ x ∈ [ 1n , h0], posons φ(x) =
∫ x
0 |ϕ(t)|dt. φ′(x) existe et vaut |ϕ(x)|.
I2(n) =∫ h0
1nφ′(t)nu(nt)dt = φ(t)nu(nt)
∣∣∣h01n−
∫ h01nφ(t)n2u′(nt)dt
= φ(h0)nu(nh0) − φ( 1n )nu(n 1
n ) −∫ h0
1nφ(t)n2u′(nt)dt
≤1h0φ(h0)nu(nh0) + 1
1nφ( 1
n )u(1) −∫ h0|
nφ(t)n2u′(nt)dt
< εc ·
εc + ε
c · u(0) −∫ h0
1nφ(t)n2u′(nt)dt.
Or −
∫ h01nφ(t)n2u′(nt)dt =
∫ h01nφ(t)n2(−u′(t))dt.

13.4. INVERSION DE LA TRANSFORMATION DE FOURIER 317
De plus, u décroissante⇒ u′(t) ≤ 0 ,∀ t ∈ [0,∞),et 1
n ≤ t ≤ h0 ⇒1tφ(t) < ε
c .
D’où −
∫ h01nφ(t)n2u′(nt)dt ≤
∫ h01n
t εc n2(−u′(nt))dt
= −n2 εc
∫ h01n
tu′(nt)dt.
On a alors I2(n) <(εc
)2+ ε
c · u(0) − n2 εc
∫ h01n
tu′(nt)dt.
Par parties on a :∫ h0
1n
tu′(nt)dt = tu(nt)n
∣∣∣h01n−
∫ h01n
u(nt)n dt
=h0u(nh0)
n −1n2 u(1) − 1
n
∫ h01n
u(nt)dt.
D’où I2(n) <(εc
)2+ ε
c · u(0) − n ·εc
h0u(nh0)︸ ︷︷ ︸(nu(nh0))< ε
c
+εc· u(1)︸ ︷︷ ︸
u(1)<u(0)
+n · εc∫ h0
1n
u(nt)dt
<(εc
)2+ 2 · εc · u(0) +
(εc
)2+ n · εc
∫ h01n
u(nt)dt.En effectuant le changement de variable y = nt, on obtient
n · εc∫ h0
1n
u(nt)dt = εc · n
∫ nh0
1 u(y) · 1n dy = ε
c
∫ nh0
1 u(y)dy ≤ εc
∫∞
1 u(y)dy.
Puisque c > 1 , ε2
c2 <ε2
c , et ainsi :
I2(n) < 2(εc
)2+ 2 εc u(0) +
∫∞
0 u(y)dy ≤ εc
(2ε + 2u(0) +
∫∞
0 u(y)dy).
Or c > 6ε + 6u(0) + 3∫∞
0 u(y)dy, donc c > 3(2ε + 2u(0) +
∫∞
0 u(y)dy).
D’où finalement I2(n) <ε
(2ε+2u(0)+
∫∞
0 u(y)dy)
3(
2ε+2u(0)+∫∞
0 u(y)dy) = ε
3 .
(3) ∀ n ≥ n1, on a I3(n) < ε3
I3(n) =∫∞
h0|ϕ(t)|nu(nt)dt.
On a : |ϕ(t)| ≤ | f (x0 + t)| + | f (x0 − t)| + 2| f (x0)|.⇒ I3(n) ≤
∫∞
h0| f (x0+t)|nu(nt)dt+
∫∞
h0| f (x0−t)|nu(nt)dt+2| f (x0)|
∫∞
h0nu(nt)dt.
Vu la décroissance de u, on a :∫∞
h0f (x0 + t)nu(nt)dt
≤
∫∞
h0f (x0 + t)nu(nh0)dt = nu(nh0)
∫∞
h0f (x0 + t)dt ≤ nu(nh0)
∫∞
−∞| f (y)|dy
< εc
∫∞
−∞| f (y)|dy.
⇒ I3(n) < 2 · εc∫∞
−∞| f (y)|dy + 2| f (x0)|
∫∞
h0nu(nt)dt.
En effectuant le changement de variable y = nt, on obtient∫∞
h0nu(nt)dt =
∫∞
nh0nu(y) 1
n dy =∫∞
nh0u(y)dy
≤
∫∞
nh02
u(y)dy < ε2 ·
h0c ≤
ε2c <
εc
⇒ I3(n) < 2 · 2εc
∫∞
−∞| f (y)|dy + 2| f (x0)| εc .
Or c > 6∫∞
−∞| f (y)|dy + 6| f (x0)|.
D’où I3(n) < ε3 .
En résumé : ∀ n ≥ 1,∫∞
0 |ϕ(t)|nu(nt)dt < ε.

318 13. ANALYSE DE FOURIER
13.4.3. C
Soit f ∈ L 1C
(R) ∩ C(R,C).Supposons de plus que f ∈ L 1
C(R). Alors
f =1
2πˆf
D. Puisque f ∈ C(R,C), on a que
limh→01h
∫ h
0 | f (x + t) + f (x − t) − 2 f (x)|dt = 0 , ∀ x ∈ R.
On pose kn(t) = e−|t|n
2π ∀ t ∈ R, ∀ n ∈N.kn(t) s’appelle le noyau d’Abel. Il vérifie les hypothèses du théorème 4.1. En effet :kn(t) = 1
2π
∫∞
−∞e−|y|
n e−iytdy = 12π
∫ 0
−∞e−|y|
n e−iytdy + 12π
∫∞
0 e−|y|
n e−iytdy.∫ 0
−R ey( 1n−it)dy =
[ey( 1
n −it)
1n−it
]0
−R= 1
1n−it−
e−R( 1n −it)
1n−it
R→∞−→
11n−it
.
De même,∫∞
0 e−yn−yitdy = 1
1n+it
.
Donc 2πkn(t) =2n
1n2 +t2 =
2n1+n2t2 =⇒ kn(t) = n
π(1+n2t2) . D’où ˇkn = kn.
De plus,∫∞
−∞kn(t)dt = n
π
∫∞
−∞
11+n2t2 dt = n
π
∫∞
−∞
dun(1+u2)
= 1π
(arctg(∞) − arctg(−∞)
)= 1
π
(π2 −
(−
π2
))= 1.
Ainsi, par le théorème 4.1 ,
f (x) = limn→∞
∫∞
−∞
f (t)eitxkn(t)dt
Puisque limn→∞ f (t) e−|t|n
2π eitx =f (t)2π eitx, on a que | f (t)kn(t)eitx0 | ≤
f (t)2π .
En utilisant alors le théorème de convergence dominée de Lebesgue, on a quelimn→∞
∫∞
−∞f (t)eitxkn(t)dt = 1
2π
∫∞
−∞f (t)eitxdt , ∀ x ∈ R.
Ainsi, f (x) = 12π
∫∞
−∞f (t)eitxdt ∀ x ∈ R , i.e.
f =1
2πˆf
13.5. Théorème de Plancherel
13.5.1. P
Soit 1 < p < ∞, p′ = pp−1 , f ∈ L
pC
(Rn) et g ∈ Lp′
C(Rn). Alors
f ∗ g ∈ C0(Rn,C)
sans preuve.

13.5. THÉORÈME DE PLANCHEREL 319
13.5.2. T
Soit f ∈ L 1C
(R). Supposons f ∈ L ∞
C(R) , f ∈ RR
et f (x) ≥ 0 ∀ x ∈ R. Alors f ∈ L 1(R).
(i.e. la transformée de Fourier est intégrable)sans preuve.
13.5.3. R
(1) Soit f ∈ L 1C
(R) ∩L ∞
C(R). Alors f ∈ L 2
C(R).
(2) Soit f ∈ L 1C
(R) avec f ∈ L 1C
(R). Alors f ∈ L 2C
(R).
13.5.4. T
Soit f ∈ L 1C
(R) ∩L 2C
(R). Alors
f ∈ L 2C(R) et
∫∞
−∞
| f (x)|2dx =1
2π
∫∞
−∞
| f (x)|2dx
D. Posons f (x) = f (x).f ∗ f = g ∈ C0(R,C) ∩L 2
C(R).
(par le thm 5.1 et car f , f ∈ L 1
C(R)
)g = f · ˆf = f · ¯f = | f |2 =⇒ g ≥ 0. Vu le théorème 5.2., g ∈ L 1
C(R) et g est continue.
Par le théorème 4.3., g = 12π
ˆg.g(0) = g(0) = f ∗ f (0) =
∫∞
−∞f (x) f (−x)dx =
∫∞
−∞| f (x)|2dx
= 12π
ˆg(0) = 12π
∫∞
−∞g(x)dx = 1
2π
∫∞
−∞| f (x)|2dx.
13.5.5. Lϕ ∗ ψ | ϕ, ψ ∈ L 1
C(R) ∩L 2C(R)
est dense dans L 2
C .
D. ϕ,ψ ∈ L 1C∩L 2
C, ϕ ∗ ψ ∈ L 1
C∩ C0(R,C). (par la prop. 5.1.)
Ainsi, ϕ ∗ ψ ∈ L 2C
.(1) Soit ϕ ∈ C00(R,C).
Posons ψn(x) = n2 · 1[− 1
n ,1n ](x), ψn ∈ L 1
∩L 2, ψn ≥ 0,∫∞
−∞ψn(x)dx = 1.
Montrons que N2(ϕ − ϕ ∗ ψn) n→∞−→ 0.
(N2( f ) =
∫∞
−∞| f (x)|2dx
12)
Pour cela, montrons que : N2(ϕ − ϕ ∗ ψn) ≤∫∞
−∞ψn(x)N2(ϕ − ϕ−x)dx
(où ϕ−x(y) = ϕ(y − x) ∀y ∈ R)
Soit g ∈ C00(R,C) avec N2(g) ≤ 1.∫R
g(x)(ϕ(x) − ϕ ∗ ψn(x)
)dx =
∫R
g(x)( ∫
R(ϕ(x) − ϕ(x − y))ψn(y)dy
)dx

320 13. ANALYSE DE FOURIER
=∫Rψn(x)
( ∫R
g(x)(ϕ(x) − ϕ(x − y))dx)dy.
Ainsi |∫R
g(x)(ϕ(x) − ϕ ∗ ψn(x)
)dx| ≤
∫Rψn(y)N2(g)N2(ϕ − ϕ−y)dy
≤
∫Rψn(y)N2(ϕ − ϕ−y)dy.
supg∈C00(R,C)
N2(g)≤1
∣∣∣∣ ∫R
g(x)(ϕ(x) − ϕ ∗ ψn(x)
)dx
∣∣∣∣ ≤ ∫R
ψn(y)N2(ϕ − ϕ−y)dy
i.e. N2(ϕ − ϕ ∗ ψn) ≤∫Rψn(y)N2(ϕ − ϕ−y)dy.
Soit ε > 0, il existe δ > 0 tel que pour tout y avec |y| ≤ δ, on a N2(ϕ − ϕ−y) < ε.Soit alors n ≥ 1
δ , de sorte que∫R
ψn(y)N2(ϕ − ϕ−y)dy < ε
(2) Soit f ∈ L 2 et ε > 0. Il existe ϕ ∈ C00(R,C) avec N2( f − ϕ) < ε2 .
Par (1), il existe n ∈N avec N2(ϕ − ϕ ∗ ψn) < ε2 .
N2( f − ϕ ∗ ψn) < ε. Or ϕ ∈ L 1∩L 2 et ψn ∈ L 1
∩L 2.
13.5.6. P
f ∈ L 1
C(R)∣∣∣ f ∈ L 1
C(R)
est dense dans L 2C(R).
sans preuve.
13.5.7. T (Plancherel)
Il existe une unique transformation linéaire continue de L2−→ L2
C(R), notée F , avec
F ( f ) = f pour tout f ∈ L1C
(R) ∩ L2C
(R).F s’appelle la transformation de Fourier, elle vérifie les propriétés suivantes :
(1) Pour tout f ∈ L2C
(R) , ‖F ( f )‖2 =√
2π · ‖ f ‖2
(2) Pour tout f , g ∈ L2C
(R), on a < F ( f ),F (g) >L2C
(R),L2C
(R)
donné par 2π· < f , g >L2C
(R),L2C
(R) .(où < f , g >L2
C(R),L2
C(R)=
∫R
r(x)(s(x))dx avec r ∈ f , s ∈ g)
(3) F est une bijection linéaire de L2C
(R).Pour tout f ∈ L1
C(R) avec f ∈ L1
C(R) alors f ∈ L2
C(R) et
F−1( f )(x) =1
2π
∫R
f (y)eiyxdy
D. Soit f ∈ L2C
(R). D’après la proposition 5.6., il existe ( fn)∞n=1
une suite de L1∩ L2 avec ‖ fn − f ‖2 −→ 0. Ainsi vu le théorème 5.4. ( fn)∞n=1 est une
suite de L2C
(R). Montrons que ( fn)∞n=1 est de Cauchy. (L2 complet)Soient m,n ∈N, ‖ fm − fn‖2 = ‖ ( fm − fn)‖2 =
√2π ‖ fm − fn‖2︸ ︷︷ ︸
→0
. (thm 5.4)

13.5. THÉORÈME DE PLANCHEREL 321
Donc ( fn)∞n=1 est de Cauchy, donc convergente.Il existe donc g ∈ L2
C(R) avec ‖ fn − g‖2 −→ 0.
Soit ( f ′n)∞n=1 une suite de L1∩ L2 avec ‖ f ′n − f ‖2 −→ 0.
Il existe g′ ∈ L2C
(R) avec ‖ f ′n − g′‖2 −→ 0.(On veut montrer que g ne dépend pas du choix de fn)
Montrons que g = g′ :‖ fn − f ′n‖2 =
√2π · ‖ fn − f ′n‖2 ≤
√2π ·
(‖ fn − f ‖2 + ‖ f − f ′n‖2
) n→∞−→ 0.
On pose g = F ( f ) =⇒ F ∈ L2C
(R), F linéaire.
(1) Il existe fn ∈ L1∩ L2 avec ‖ fn − f ‖2 −→ 0.
On a : ‖ fn −F ( f )‖2 −→ 0 et fn = F ( fn). (car fn ∈ L1∩ L2)
‖F ( f )‖2 = limn→∞ ‖F ( fn)‖2 = limn→∞√
2π · ‖ fn‖2 =√
2π · ‖ f ‖2.
(2) On va montrer que F est surjective.Soit f ∈ L2
C(R). Il existe ( fn)∞n=1 de L1
C∩ L2
Cavec ‖ fn − f ‖2 −→ 0.
On a que ( ˇfn)∞n=1 est de Cauchy dans L2C
. (car ( fn) est de Cauchy)
‖1
2π ·ˇfn − G ( f )‖2 −→ 0 où G est une application linéaire continue de L2
C
dans L2C
.Soit f ∈ L1
Cavec f ∈ L1
C. Vu la prop. 5.6. on sait que f ∈ L2
C.
G(F ( f )
)= G ( f ) = 1
2π ·ˇf = f .
Vu la prop. 5.6. G(F ( f )
)= f ∀ f ∈ L2
C(R).
=⇒ G F = idC.


CHAPITRE 14
Opérateurs de Fredholm
Ce chapitre, rédigé par Carolyn Lassueur et Anthony Arnold, étudie une desnotions phare de ce projet : l’indice analytique d’un opérateur. On appelle Fred-holm, tout opérateur ayant un indice bien défini, c’est-à-dire fini. La fin de cechapitre permet également d’approcher les liens unissant la théorie des indice à laK–théorie topologique.
14.1. Prolégomènes
La présente section donne une introduction aux espaces normés. Il vise essen-tiellement à rappeler quelques définitions et propriétés de base dont nous auronsbesoin dans la suite de ce travail.Les démonstrations des divers résultats énoncés seront omises, la raison princi-pale étant qu’elles se trouvent de façon générale dans la grande majorité des livresd’introduction à l’analyse fonctionnelle.
Sauf mention contraire, par espace vectoriel nous entenderons toujours espacevectoriel réel ou complexe. Nous utiliserons le symbole F pour signifier un corpsétant soit le corps C soit le corps R et nous parlerons de F-espaces vectoriels.
Espaces vectoriels topologiques.
14.1.1. D
Un espace vectoriel topologique est une paire ordonnée (E,TE) où (E,+, ·) est un K-espace vectoriel muni d’une topologie TE par rapport à laquelle la loi interne+ : E × E→ E et la multiplication scalaire · : K × E→ E sont continues.Dans ce cas la topologie TE est appelée topologie vectorielle.
323

324 14. OPÉRATEURS DE FREDHOLM
14.1.2. R
(1) Une topologieTE sur unK-espace vectoriel E est vectorielle si et seulementsi les deux assertions suivantes sont vérifiées :
· pour tout x, y ∈ E et pour tout voisinage U de x+ y il existe des voisinagesV de x et W de y tels que V +W ⊆ U ;
· pour tout λ ∈ K, pour tout x ∈ E et pour tout voisinage U de λx, il existeε > 0 et un voisinage V de x tel que µv | |µ − λ| < ε& v ∈ V ⊆ U.
(2) Dans tout espace vectoriel topologique E, pour tout y ∈ E la translationx 7→ x+ y est continue. En particulier les voisinages d’un point x de E sontde la forme x + V où V est un zéro-voisinage.
Normes et espaces normés.
Commençons par rappeler la définition d’une norme.
14.1.3. D
Soit X un F-espace vectoriel. Une norme sur X est une fonction réelle ‖.‖X : X→ R+satisfaisant les trois conditions suivantes :
(1) ‖x‖X = 0 si et seulement si x = 0X ;
(2) ‖λx‖X = |λ| · ‖x‖X ∀λ ∈ F ∀x ∈ X ;
(3) ‖x + y‖X ≤ ‖x‖X + ‖y‖X ∀x, y ∈ X (inégalité triangulaire).
Si la fonction ‖.‖X ne satisfait que les points (2) et (3), on l’appelle une semi-normesur X.Un espace normé (X, ‖.‖X) est un couple constitué d’un F-espace vectoriel X et d’unenorme ‖.‖X sur X.
En particulier, un espace normé est un espace métrique pour la distance décriteci-après.
14.1.4. P D
Pour tout espace normé (X, ‖.‖X), on peut définir une distance, appellée distance engen-drée par la norme, de la façon suivante :
d(x; y) := ‖x − y‖X ∀x, y ∈ X
Nous noterons BX := x ∈ X | ‖x‖X ≤ 1 la boule unité fermée,UX := x ∈ X | ‖x‖X < 1 la boule unité ouverte et SX := x ∈ X | ‖x‖X = 1 la sphèreunité.

14.1. PROLÉGOMÈNES 325
14.1.5. P
Soit (X, ‖.‖X) un espace normé.
(1) La loi interne + : X × X→ X est uniformément continue.
(2) La multiplication scalaire · : F × X→ X est continue.
(3) Pour tout λ ∈ F, l’application x 7→ λx est uniformément continue.
(4) La fonction norme ‖.‖X : X→ R+ est uniformément continue.
Par conséquent, les espaces normés sont des espaces vectoriels topologiques. latopologie sous-jacente étant la topologieT‖.‖ engendrée par la norme ‖.‖, autrementdit la topologie engendrée par la distance engendrée par la norme !
14.1.6. P
Soit (X, ‖.‖X) un espace normé. Alors, si Z est un sous-espace de X, son adhérence Z estaussi un sous-espace de X.
Nous pouvons maintenant définir un type d’espace normé qui va nous inté-resser plus particulièrement par la suite : les espaces de Banach.
14.1.7. D
Un espace de Banach est un espace normé (X, ‖.‖X) qui est complet en regard de lamétrique engendrée par la norme.
Opérateurs linéaires.
Les espaces normés étant avant tout munis d’une structure d’espace vectoriel,les flèches entre espaces normés qui nous intéressent plus particulièremnts sontles opérateurs linéaires. Voici quelques résultats élémentaires et essentiels à lacomprhéhension pour la suite de ce travail.
14.1.8. D
Soit X,Y des espaces normés.Un opérateur linéaire T : X→ Y est borné, si T(B) est un sous-ensemble borné de Ypour tout sous-ensemble borné B de X.On note B(X,Y), l’ensemble des opérateurs linéaires bornés de X vers Y (ou sim-plement B(X), si X = Y).
14.1.9. T

326 14. OPÉRATEURS DE FREDHOLM
Soit X,Y des espaces normés et T : X→ Y, un opérateur linéaire.Alors les assertions suivantes sont équivalentes :
– T est continu.– T est continu en 0.– T est uniformément continu sur tout X.– T est borné.– Il existe un voisinage V de 0 dans X tel que T(V) est borné dans Y.– ∃M ∈ R+ tel que ‖Tx‖ ≤M‖x‖ pour tout x ∈ X.– sup‖Tx‖ : x ∈ Bx < ∞.
Nous retiendrons en particulier que pour les opérateurs linéaires, les motscontinu et borné sont complétement équivalents.
14.1.10. D
Soit X,Y des espaces normés et T ∈ B(X,Y).On définit la norme-opérateur de T par :
‖T‖ := sup‖Tx‖ : x ∈ Bx
14.1.11. P
Soit X,Y des espaces normés et T ∈ B(X,Y).Alors :
– ‖T‖ = sup‖Tx‖ : x ∈ X, ‖x‖ < 1.– ‖T‖ = sup‖Tx‖ : x ∈ Sx, si X , 0.– ‖Tx‖ ≤ ‖T‖ · ‖x‖,∀x ∈ X. De plus, ‖T‖ est le plus petit nombre réel positif M ∈ R+
tel que ‖Tx‖ ≤M‖x‖,∀x ∈ X.
Notons que par la suite, lorsque nous considérerons des espaces d’opérateurs,sauf mention contraire, nous les supposerons munis de la norme opérateur.
14.1.12. T
Soit X,Y des espaces normés.Alors :
– B(X,Y) est un espace normé pour la norme-opérateur.– Si Y est un espace de Banach, alors B(X,Y) est un espace de Banach.
14.1.13. R
En particulier si X = Y est un espace de Banach, alors B(X; X) := B(X), muni del’opération supplémentaire de compostion des opérateurs, forme une F-algèbre.
14.1.14. P

14.1. PROLÉGOMÈNES 327
Soit X,Y,Z des espaces normés, S ∈ B(X,Y) et T ∈ B(Y,Z).Alors TS ∈ B(X,Z) et ‖TS‖ ≤ ‖T‖ · ‖S‖.
14.1.15. T
Soit X,Y des espaces normés avec X de dimension finie.Alors, tout opérateur linéaire de X vers Y est borné.
14.1.16. D
Soit X,Y des espaces norm s et T : X→ Y, un opérateur linéaire.On dit que l’opérateur T est un isomorphisme dans Y, s’il est injectif, continu et sison inverse est continu sur l’image de T.Si de plus, ‖Tx‖ = ‖x‖,∀x ∈ X, on dit que T est un isomorphisme isométrique.
14.1.17. P
Soit X,Y des espaces normés et T : X→ Y, un opérateur linéaire. Alors :– T est un isomorphisme si et seulement si il existe s, t ∈ R+ tels que s‖x‖ ≤ ‖Tx‖ ≤
t‖x‖,∀x ∈ X.– Si X est un espace de Banach, et T est un isomorphisme, alors T(X) est un espace
de Banach.
14.1.18. T
Soit n ∈N et soit X,Y des espaces normés de dimension n sur F.Alors, tout opérateur linéaire de X vers Y est un isomorphisme.
14.1.19. C
Soit X, un espace vectoriel de dimension finie.Deux normes différentes sur X engendrent la même topologie.
14.1.20. C
Tout espace normé de dimension finie est un espace de Banach.
14.1.21. C
Tout sous-espace de dimension finie d’un espace normé est un sous-ensemble fermé del’espace en question.

328 14. OPÉRATEURS DE FREDHOLM
14.1.22. C
Soit X, un espace normé de dimension finie.Alors, tout sous-ensemble fermé et borné de X est compact.
14.1.23. T
On dit alors que X a la propriété de Heine-Borel.
14.1.24. T (Riesz, 1918)
Soit X, un espace normé.Alors les assertions suivantes sont équivalentes :
– X est de dimension finie.– X a la proprieté de Heine-Borel.– SX est compacte.
Opérateurs entre espaces de Banach.
14.1.25. D
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces normés sur F et T : X → Y un opérateurlinéaire.Alors on dit que T est fermé si son graphe est fermé dans (X × Y, ‖.‖X×Y).
Voici un premier critère de fermeture des opérateurs linéaires.
14.1.26. P
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces normés sur F et T : X→ Y un opérateur linéaire.Alors, T est fermé si et seulement si le domaine de T, D(T), est fermé dans X.
14.1.27. T
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces de Banach sur F et T : X→ Y un opérateur linéaireet fermé.Alors, T est borné si et seulemnet si D(T) est fermé dans X.

14.1. PROLÉGOMÈNES 329
14.1.28. C
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces de Banach sur F et T : X→ Y, un opérateur linéaireet fermé tel que le domaine de T soit l’espace X tout entier.Alors T est un opérateur borné.
14.1.29. T
Tout opérateur linéaire borné et surjectif entre deux espaces de Banach est une applicationouverte.
14.1.30. C
Si T est un opérateur linéaire borné et bijectif entre deux espaces de Banach, alors son inverseT−1 est aussi un opérateur linéaire borné. En d’autres termes tout opérateur linéaire bornéet bijectif entre deux espaces de Banach est un isomorphisme.
L’espace dual.
Rappelons simplement la définition ainsi que quelques propriétés essentielles.
14.1.31. D
Soit (X, ‖.‖X) un espace normé sur le corps F. L’espace dual topologique de X estl’espace normé (X∗, ‖.‖X∗ ) où X∗ = B(X,F) est muni de la norme opérateur.
Etant donné un espace normé, on peut toujours créer un espace de Banach pardualisation.
14.1.32. T
Si (X, ‖.‖X) est un espace normé, alors (X∗, ‖.‖X∗ ) est un espace de Banach.
Une relation entre les dimensions d’un espace normé et de son dual.
14.1.33. T
La dimension d’un espace normé (X, ‖.‖X) est finie si et seulement si la dimension de sondual est finie.De plus, dans le cas où X est de dimension finie, alors X∗ = B(X;F) = Hom(X;F). Il endécoule que la dimension de ce dernier est égale à celle de X.

330 14. OPÉRATEURS DE FREDHOLM
Nous remarquerons encore que l’espace dual X∗ d’un espace normé X est assezgrand pour séparer les points de X. Autrement dit si x et y sont deux élémentsdifférents de X, alors il existe une forme linéaire x∗ ∈ X telle que x∗(x) , x∗(y). C’estune conséquence du théorème de Hahn-Banach.
14.1.34. T H-B
Soit (X, ‖.‖X) un espace normé sur le corps F. Soit f : D( f ) ⊂ X −→ F une forme linéairebornée.Alors il existe une forme linéaire f ∈ X∗ telle que
f (x) = f (x) pour tout x ∈ D( f ) ;
‖ f ‖X∗ = sup| f (x) | x ∈ D( f ) et ‖x‖X = 1.
Pour finir, une caractérisation de la norme par l’espace dual.
14.1.35. T
Si (X, ‖.‖X) est un espace normé, alors pour tout x ∈ X, il existe x∗ ∈ X∗ tel que
· Xx∗(x) = ‖x‖X· ‖x∗‖X∗ ≤ 1.
En particulier,‖x‖X = sup|x∗| | x∗ ∈ X∗ et ‖x∗‖X∗ ≤ 1.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 331
14.2. Concepts liés aux opérateurs de Fredholm
Un opérateur de Fredholm étant un opérateur borné à image fermée dont lesdimensions du noyau et du conoyau sont finies, nous aurons besoin d’approfon-dir les quelques notions ci-dessous avant d’étudier les opérateurs de Fredholm àproprement parler.
(1) Les espaces quotients, liés au conoyau d’un opérateur.
(2) Les sommes directes et projections, qui permettent d’obtenir certains opéra-teurs de Fredholm.
(3) Les opérateurs adjoints liés à l’indice.
(4) Les opérateurs compacts qui serviront à caractériser les opérateurs de Fred-holm.
(5) Les opérateurs à image fermée, car les opérateurs de Fredholm sont à imagefermée.
Espaces quotients.
Commençons par rappeler la définition algébrique d’un quotient d’espacesvectoriels.
14.2.1. D
Soit V unK-espace vectoriel et W un sous-espace de V. Alors le quotient de groupesabéliens V/W, dont l’ensemble sous-jacent est v+W | v ∈ V, est un K-espace vec-toriel, appelé espace quotient, muni de la loi interne :
+ : V/W × V/W −→ V/W(v +W, v +W) 7−→ (v +W) + (v +W) := (v + v) +W
et de la loi externe· : K × V/W −→ V/W
(λ, v +W) 7−→ λ · (v +W) := (λv) +W.
Le K-homomorphismeπW : V −→ V/W
v 7−→ v +W
est appelé application quotient ou projection canonique.
Nous rappelons que si W est un sous groupe d’un groupe abélien V, on peutdéfinir une relation d’équivalence∼W en posant v ∼W u si et seulement si u−v ∈W.Les classes d’équivalence sont les v+W tels que v ∈ V et l’on note V/W l’ensemblede ces classes d’équivalence. C’est un groupe si W < V.
332 14. OPÉRATEURS DE FREDHOLM
Il faut donc garder en mémoire que dans un espace quotient V/W deux classesv +W et u +W sont égales si et seulement si u − v ∈W.
Considérons maintenant un espace normé (X, ‖.‖X) et M ⊆ X un sous-espace.Nous cherchons à savoir si la norme ‖.‖X induit une norme sur le quotient X/M.Une façon naturelle de définir une distance entre deux classes (à gauche) consisteà utiliser la distance entre sous-ensmbles d’un espace métrique :
d(x +M, y +M) = inf‖v − w‖X | v ∈ x +M,w ∈ y +M.
Remarquons que
d(x +M, y +M) = d(x, y +M) = inf‖x − w‖X | w ∈ y +M.(où le deuxième d représente la distance d’un point à un sous-ensemble d’un espacemétrique), étant donné que :
v − w | v ∈ x +M,w ∈ y +M = (x +m1) − (y +m2) | m1,m2 ∈M= x − (y +m2 −m1) | m1,m2 ∈M= x − (y +m) | m ∈M = x − w | w ∈ y +M∀x ∈ X.
En outre, si l’on veut que l’application d ci-dessus définisse une métrique, ilest nécessaire que le sous-espace M soit fermé car si x ∈ M \M, on obtient que
d(x +M, 0 +M) = d(x, 0 +M) = d(x,M) = 0.
Or x ∈ M \M implique que x < M et donc x +M , 0 +M. Ainsi M doit être fermési d veut avoir une chance de satisfaire les axiomes de métrique.Maintenant, si nous voulons que d soit la métrique engendrée par une norme, cettedernière norme doit nécessairement mesurer la distance entre une classe et le pointzéro de X/M. Nous pouvons donc poser la définition suivante.
14.2.2. D
Soit M ⊆ X un sous-espace fermé d’un espace normé (X, ‖.‖X).La norme quotient de l’espace X/M est l’application
‖.‖X/M : X/M −→ Fx +M 7−→ ‖x +M‖X/M := d(x +M, 0 +M).
14.2.3. R
Pour tout x ∈ X nous avons,
d(x +M, 0 +M) = d(x, 0 +M) = d(x,M) et d(x +M, 0 +M) = d(0, x +M).
Ainsi, ‖x +M‖X/M = inf‖x −m‖X | m ∈M = inf‖x +m‖X | m ∈M
Vérifions que ‖.‖X/M est bien une norme au sens de la définition 14.1.3.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 333
14.2.4. T
Soit M ⊆ X un sous-espace fermé d’un espace normé (X, ‖.‖X). Alors la norme quotient‖.‖X/M est une norme.
D. Soit x, y ∈ X et λ ∈ F.
(1) Le sous-espace M étant fermé, on a que 0 = ‖x+M‖X/M = d(x+M, 0+M) =d(x,M) si et seulement si x ∈M si et seulement si x +M = 0 +M.
(2) Supposons λ , 0, alors
‖λ(x +M)‖X/M = ‖(λx) +M)‖X/M = d(λx,M)
= d(λx, λM) puisque M est stable par loi externe
= |λ|d(x,M) = |λ|‖x +M‖X/M
et ‖0(x +M)‖X/M = ‖0 +M‖X/M = 0 = |0|‖x +M‖X/M.Ainsi, ‖λ(x +M)‖X/M = |λ|‖x +M‖X/M ∀λ ∈ F et ∀x ∈ X.
(3) Par définition de la norme quotient et en appliquant l’inégalité triangu-laire à ‖.‖X, on obtient les inégalités suivantes :‖(x +M) + (y +M)‖X/M = ‖(x + y) +M‖X/M
≤ ‖x + y +m1 +m2‖X ∀m1,m2 ∈M≤ ‖x +m1‖X + ‖x +m2‖X
Ainsi en prenant l’infimum sur les m1,m2 ∈ M de ces deux dernièresnormes, on obtient que
‖(x +M) + (y +M)‖X/M ≤ ‖x +M‖X/M + ‖x +M‖X/M.
De ce fait, ‖.‖X/M satisfait l’inégalité triangulaire et il s’agit donc bien d’unenorme.
14.2.5. P
Soit M ⊆ X un sous-espace fermé d’un espace normé (X, ‖.‖X). Alors,
(1) ‖x +M‖X/M ≤ ‖x‖X pour tout x ∈ X ;
(2) Pour tout x ∈ X et pour tout ε > 0, il existe x ∈ X tel que x +M = x +M et‖x‖X < ‖x +M‖X/M + ε.
D.
(1) Nous avons ‖x+M‖X/M = d(x,M) = inf‖x−m‖X |m ∈M ≤ ‖x−0‖X = ‖x‖X.
(2) Soit x ∈ X et ε > 0. Par définition de l’infimum, il existe m ∈ M tel que‖x −m‖X < inf‖x − v‖X | v ∈M + ε = d(x,M) + ε = ‖x +M‖X/M + ε.Posons x := x −m. Alors ‖x‖X < ‖x +M‖X/M + ε. De plus, m ∈ M entraîneque m +M = 0 +M et x +M = (x −m) +M = (x − 0) +M = x +M.
Nous pouvons maintenant montrer que les quotients par des sous-espacesfermés des espaces de Banach ont le bon goût d’être complets eux aussi.

334 14. OPÉRATEURS DE FREDHOLM
14.2.6. T
Soit M ⊆ X un sous-espace fermé d’un espace de Banach (X, ‖.‖X). Alors, (X/M, ‖.‖X/M)est aussi un espace de Banach.
D. Soit xn + M une suite de Cauchy dans X/M. Il suffit deprouver que xn +M admet une sous-suite convergente, ce qui implique que lasuite elle-même converge vers la même limite.Essayons donc d’extraire une sous-suite convergente.Remarquons d’abord que si x, y ∈ X sont tels que ‖(x − y) +M‖X/M < δ > 0, alors lepoint (2) de la proposition 14.2.5 il existe y ∈ X tel que (x − y) +M = (x − y) +M et‖x − y‖X < δ.Par définition d’une suite de Cauchy, il existe n1 ∈ N tel que quelque soit n ≥ n1,‖(xn1 −xn)+M‖X/M < 2−1. De même, il existe n2 ∈N, n2 ≥ n1 tel que quelque soit n ≥n2, ‖(xn2 − xn)+M‖X/M < 2−2. Et ainsi de suite, il existe pour tout m > 0 un nm ∈N,nm ≥ nm−1 tel que quelque soit n ≥ nm, ‖(xnm − xn)+M‖X/M < 2−m. Autrement dit, lasous-suite xnk de xn+M définie ci-dessus est telle que ‖(xnk −xnk+1)+M‖X/M < 2−k
pour tout k > 0.Ainsi par la remarque susmentionée, il existe xn2 ∈ X tel que (xn1 − xn2 ) + M =(xn1 − xn2 )+M et ‖(xn1 − xn2 )‖X < 2−1. Alors comme xn2 +M = xn2 +M on peut poser,sans perte de généralité, xn2 := xn2 .De même, il existe xn3 ∈ X tel que (xn2−xn3 )+M = (xn2−xn3 )+M et ‖(xn2−xn3 )‖X < 2−2.Alors comme xn3 +M = xn3 +M on peut poser, sans perte de généralité, xn3 := xn3 .Ainsi par une induction sur k, on obtient que ‖xnk − xnk+1‖X < 2−k. Il en découle quexnk est une suite de Cauchy dans X. En effet, soit ε > 0, alors pour p > 1 − log2 εet pour tout m > q ≥ p, on a :
‖xnm − xnq‖X ≤ ‖xnm − xnm−1‖X + · · · + ‖xnq+1 − xnq‖X
≤1
2m−1 +1
2m−2 + · · · +12q <
12q−1 <
12(1−log2 ε)+1
= ε.
Ainsi par complétude de X, la suite xnk converge vers un certain x ∈ X lorsquek→∞. Par conséquent,
‖(xnk +M) − (x +M)‖X/M = ‖(xnk − x) +M‖X/M ≤ ‖xnk − x‖X → 0 lorsque n→∞.
Donc la sous-suite xnk +M converge vers x+M et de ce fait la suite totale xn +Mconverge vers la même limite.
14.2.7. P
Soit M ⊆ X un sous-espace fermé d’un espace normé (X, ‖.‖X). Alors, si deux des troisespaces X,M et X/M sont complets, alors le troisième est aussi complet.
D. Tout d’abord, supposons que X est complet, alors X/M estcomplet par le théorème précédent et M est en particulier complet en tant quesous-espace fermé de X.Il reste à voir que si M et X/M sont complets, cela implique que X est aussi complet.Soit xn une suite de Cauchy dans X. Alors par le point (1) de la proposition 14.2.5,‖(xn − xm)+M‖X/M ≤ ‖xn − xm‖X pour tout m,n ∈N. Ainsi xn +M est une suite deCauchy dans X/M, qui est complet, et de ce fait converge vers un certain y +M ∈
14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 335
X/M. Le point (2) de la proposition 14.2.5 entraine alors que pour tout n ∈ N ilexiste yn ∈ X tel que yn +M = (xn − y) +M (autrement dit xn − y − yn ∈ M) et‖yn‖X < ‖(xn − y) +M‖X/M + 2−n
→ 0 lorsque n→∞. Ainsi yn converge vers 0.Soit ε > 0. Les suites xn et yn étant convergentes, il existe n1 ∈ N tel quepour tout m,n ≥ n1, ‖xn − xm‖X < ε
2 et il existe n2 ∈ N tel que pour tout m,n ≥ n1,‖yn − ym‖X < ε
2 . Ainsi, pour tout m,n ≥ maxn1,n2
‖(xn − y − yn) − (xm − y − ym)‖X ≤ ‖xn − xm‖X + ‖yn − ym‖X <ε2+ε2= ε
Donc xn − y − yn est une suite de Cauchy dans M et par complétude de M, elleadmet une limite z ∈M.Finalement,
xn = xn − y − yn︸ ︷︷ ︸−→zn−→∞
+ yn︸︷︷︸−→0n−→∞
+y −→n→∞
z + y ,
autrement dit X est complet.
14.2.8. L
Soit M ⊆ X un sous-espace fermé d’un espace normé (X, ‖.‖X) et π : X→ X/M l’applica-tion quotient associée.Alors π(UX) = UX/M.
D.
"⊆" Soit x ∈ UX, alors d’après la proposition 14.2.5 ‖π(x)‖X/M = ‖x +M‖X/M ≤‖x‖X ≤ 1, donc π(x) ∈X/M et π(UX) ⊆ UX/M.
"⊇" Soit x +M ∈ UX/M, alors par le point (2) de la proposition 14.2.5, il existex ∈ X tel queπ(x) = x+M = x+M et ‖x‖X < ‖x+M‖X/M+ε pour tout ε > 0.En d’autres termes, il existe x ∈ UX tel que π(x) = x +M = x +M. Parconséquent, UX/M ⊆ π(UX).
14.2.9. P
Soit X et M comme dans le lemme ci-dessus. Alors, l’application quotient π : X → X/Mest un opérateur linéaire borné et ouvert. De plus, si M , X, alors ‖π‖ = 1.
D.
· L’application π est linéaire par définition des lois interne et externe surX/M.
· D’après le lemme précédent l’image par π de UX est un sous-ensembleborné de X/M, ce qui implique, par linéarité, que π est borné.
· Pour voir que π est ouvert, il faut voir que l’image par π de tout sous-ensemble ouvert de X est un sous-ensemble ouvert de X/M.Soit U un ouvert de X et x ∈ U, alors il existe r > 0 tel que U ⊇ x + rUX.Ainsi, π(U) ⊇ π(x + rUX) = π(x) + rUX/M d’après le lemme 14.2.8.Autrement dit π(U) est ouvert dans X/M et π est une application ouverte.

336 14. OPÉRATEURS DE FREDHOLM
· Si M ( X, alors X/M est différent de l’espace vectoriel trivial. Ainsi, πétant borné, par la proposition 14.1.11, ‖π‖ = sup‖π(x)‖ | x ∈ SX = 1 parle lemme 14.2.8.
Nous allons maintenant voir que sous certaines hypothèses supplémentaires,on peut obtenir deux propriétés qui sont les analogues pour les espaces normésde la propriété universelle du quotient et du premier théorème d’isomorphie algé-briques.
14.2.10. P ’
Soit X et Y des espaces normés et T : X→ Y un opérateur linéaire. Soit encore M ⊆ ker(T)un sous-espace fermé de X et π : X→ X/M l’application quotient.Alors, il existe un unique opérateur linéaire S : X/M → Y tel que T = S π. Autrementdit le diagramme suivant commute :
X
π
T // Y
X/M∃!S
==
De plus, im(S) = im(T) ; S est une application ouverte si et seulement si T est uneapplication ouverte ; S est borné si et seulement si T est borné et si T est borné, alors‖S‖ = ‖T‖ .
D.
· L’existence et l’unicité d’une application linéaire S : X/M → Y tel queT = S π et de même image que T constitue la propriété universellealgébrique du quotient.
· Montrons que S est une application ouverte si et seulement si T est uneapplication ouverte.Supposons d’abord que S soit une application ouverte. π est aussi uneapplication ouverte par la proposition 14.2.9. Par conséquent, T = S π est aussi une application ouverte en tant que composition de deuxapplications ouvertes.Réciproquement, supposons que T soit une application ouverte et soit Uun ouvert de X/M. Alors, S(U) = S(π(π−1(U))) = T(π−1(U)). π−1(U) est unouvert de X puisque π est continu et donc S(U) = T(π−1(U)) est un ouvertde Y puisque T est ouverte. Par conséquent S est une application ouverte.
· Montrons que S est borné si et seulement si T est borné.Par le lemme 14.2.8 π(UX) = UX/M. Par conséquent :
sup‖S(x +M)‖ | x +M ∈ UX/M = sup‖S(π(x))‖ | x ∈ UX
= sup‖Tx‖ | x ∈ UX.
Ainsi S est borné si et seulement si T est borné et si T est borné, alors‖S‖ = ‖T‖

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 337
14.2.11. P ’
Soit X et Y des espaces de Banach et T : X→ Y un opérateur linéaire borné. Supposons deplus que im(T) soit un fermé de Y.Alors :
X/ker(T) T(X)
D. Le noyau de T est fermé en tant que pré-image par uneapplication continue du fermé 0Y de Y. Nous pouvons donc considérer l’espacequotient X/ker(T) ainsi que l’unique opérateur induit S : X/ker(T) → Y tel queT = S π, fourni par la propriété universelle du quotient. Il vient,
ker(S) = x + ker(T) | x ∈ X et S π(x) = 0= x + ker(T) | x ∈ ker(T)= 0 + ker(T)
L’opérateur S est donc un opérateur linéaire borné et injectif de l’espace de BanachX/ker(T) dans l’espace de Banach T(X). Il s’agit donc d’un isomorphisme, d’aprèsle corollaire14.1.30. D’où l’assertion.
Finalement, en application de la propriété universelle du quotient, nous obte-nons un test de continuité des opérateurs linéaires de rang fini entre deux espacesnormés.
14.2.12. P
Soit T : X→ Y un opérateur linéaire de rang fini entre deux espaces normés. Alors, T estcontinu si et seulement si ker(T) est un fermé de X.
D. Il suffit de montrer que T est borné si et seulement si ker(T)est un fermé de X.Si T est borné, alors son noyau est fermé en tant que pré-image par T du sous-ensemble fermé 0Y de Y.Réciproquement, supposons que ker(T) est fermé. Alors nous pouvons prendrele quotient X/ker(T) et considérons l’application S : X/ker(T) → Y fournie parla propriété universelle de X/ker(T). Alors, S(x + ker(T)) = 0 si et seulement siT(x) = 0 si et seulement si x ∈ ker(T). Ainsi ker(S) = ker(T) = 0X/ker(T) et Sest de ce fait injectif. Par hypothèse, im(T) est de dimension finie, par conséquent,l’injectivité de l’opérateur linéaire S implique que X/ker(T) est aussi de dimensionfinie. Donc, par la proposition 14.1.15 S est borné, ce qui implique, toujours d’aprèsla propriété universelle du quotient, que T est borné aussi.
Sommes directes et projections.
Comme nous le verrons par la suite, certains opérateurs de Fredholm peuventêtre obtenus à partir de projections. C’est pourquoi nous y consacrons ce chapitre.

338 14. OPÉRATEURS DE FREDHOLM
Sommes directes.
Commençons donc par quelques considérations sur les sommes directes.
14.2.13. D (Somme directe extérieure d’espaces normés)
Supposons que X1, . . . ,Xn soient des espaces vectoriels.Nous rappelons que la somme directe de X1, . . . ,Xn est l’espace vectoriel obtenupar le produit cartésien X1 × . . . × Xn et muni des des deux opérations suivantes :
– (x1, . . . , xn) + (y1, . . . , yn) := (x1 + y1, . . . , xn + yn)– α · (x1, . . . , xn) := (αx1, . . . , αxn)
Supposons maintenant que X1, . . . ,Xn sont des espaces vectoriels normés munisdes normes ||.||X1 , . . . , ||.||Xn . Leur somme directe (extérieure) est l’espace vectoriel pro-duit X1 × . . . × Xn muni de la norme suivante :
||(x1, . . . , xn)|| := (Σnj=1||x j||
2X j
)1/2
On obtient alors un espace vectoriel normé noté X1 ⊕ . . . ⊕ Xn.
14.2.14. P
Soient X1, . . . ,Xn, des espaces vectoriels normés.Posons :
X′j := (x1, . . . , xn)|(x1, . . . , xn) ∈ X1 ⊕ . . . ⊕ Xn, xk = 0∀k , j.
Alors, X′j est un sous-espace fermé de X1 ⊕ . . . ⊕ Xn isométriquement isomorphe à X j.
D. L’application qui envoie x sur (x, 0, . . . , 0) est clairement unisomorphisme isométrique de X1 vers X′1 et de manière analogue, on obtient queX1 ⊕ . . . ⊕ Xn est isométriquement isomorphe à X j.Pour voir que X′1 est fermé, on considère une suite convergente (x(k)
1 , 0, . . . , 0) deX′1.On a ‖(x(k)
1 , 0, . . . , 0) − (a1, a2, . . . , an)‖ → 0, si (a0, . . . , an) est la limite de notre suite.Clairement, a2 = a3 = . . . = an = 0 et donc (a1, a2, . . . , an) ∈ X′1 d’où X′1 est unsous-espace fermé de X1 ⊕ . . . ⊕ Xn. Le même argument est utilisé pour X′j.
14.2.15. P
Soient X1, . . . ,Xn, des espaces vectoriels normés.Deux sommes directes obtenues par permutation et association des termes de X1 ⊕ . . .⊕Xnsont isométriquement isomorphes.
D. Comme
‖(x1, . . . , xn)‖ = (Σnj=1‖x j‖
2)1/2
= [Σk−1j=1‖x j‖
2 + ((Σk+lj=k‖x j‖
2)1/2)2 + Σnj=k+1‖x j‖
2]1/2
= ‖(x1, . . . , ‖(xk, . . . , xk+l)‖, . . . , xn)‖,

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 339
le fait d’associer des termes dans une somme directe ne change donc pas celle-ci(on a un isomorphisme isométrique).Il reste à considérer Xσ(1) ⊕ . . . ⊕ Xσ(n), une somme obtenue par permutation destermes.Clairement, l’application qui envoie (xσ(1), . . . , xσ(n)) sur (x1, . . . , xn) est un isomor-phisme.De plus,
‖(x1, . . . , xn)‖ = (Σnj=1‖x j‖
2)1/2
= (Σnj=1‖xσ( j)‖
2)1/2
= (xσ(1), . . . , xσ(n)).
Cet isomorphisme est donc un isomorphisme isométrique.
14.2.16. T
Soient X1, . . . ,Xn, des espaces vectoriels normés.Alors, X1 ⊕ . . . ⊕Xn est un espace de Banach si et seulement si chaque X j est un espace deBanach.
D. Soient X1, . . . ,Xn, des espaces vectoriels normés.⇐ : Supposons que X1, . . . ,Xn sont des espaces de Banach et considérons une
suite de Cauchy (x(k)1 , . . . , x
(k)n ) de X1 ⊕ . . . ⊕ Xn.
Vu la définition de la norme sur X1 ⊕ . . . ⊕ Xn, nous avons que chacune dessuites x(k)
n est de Cauchy dans X j. Ainsi, chacune de ces suites convergentvers un élément a j ∈ X j.Ainsi, (x(k)
1 , . . . , x(k)n ) converge vers (a1, . . . , an) dans X1 ⊕ . . . ⊕ Xn.
⇒ : Reciproquement, par la proposition 14.2.14, on sait que chaque X j de lasomme directe X1⊕ . . .⊕Xn est isométriquement isomorphe à un sous-espacefermé, donc complet X′j de X1⊕. . .⊕Xn. Ainsi, X1, . . . ,Xn sont tous des espacesde Banach.
14.2.17. D (Somme directe intérieure d’espaces normés)
Si M1, . . . ,Mn sont des sous-espaces fermés d’un espace normé X tel que ΣkMk =X et M j
⋂Σk, jMk = 0, alors on dit que X est la somme directe (intérieure) de
M1, . . . ,Mn.
14.2.18. P
Grâce à cette proposition, une somme directe intérieures peut être considérée comme unesomme directe extérieure.
– Si X1, . . . ,Xn sont des espaces normés et X = X1 ⊕ . . . ⊕ Xn, alors X admet dessous-espaces fermés X′1, . . . ,X
′n tels que X soit leur somme directe interne et chaque
X′j soit isométriquement isomorphe à X j.

340 14. OPÉRATEURS DE FREDHOLM
– Soit X, un espace de Banach surF. Si X est la somme directe interne de M1, . . . ,Mn,alors X M1 ⊕ . . . ⊕Mn.
D. Procédons dans l’ordre :– Pour la première partie, reprenons
X′j := (x1, . . . , xn)|(x1, . . . , xn) ∈ X1 ⊕ . . . ⊕ Xn, xk = 0∀k , j
comme dans la proposition 14.2.14. Par cette dernière, X′1, . . . ,X′n sont des
sous-espaces fermés isométriquement isomorphes à X1, . . . ,Xn (respective-ment). Il ne reste qu’à appliquer la définition d’une somme directe internepour vérifier que X est la somme directe interne de X′1, . . . ,X
′n.
– Pour la deuxième partie, supposons que X soit un espace de Banach, sommedirecte interne de M1, . . . ,Mn.En tant que sous-espaces fermés dans un Banach, M1, . . . ,Mn sont des es-paces de Banach.Par théorème 14.2.16, M1 ⊕ . . . ⊕Mn est aussi un espace de Banach.Soit T : M1 ⊕ . . . ⊕Mn → X définie par T(m1, . . . ,mn) = m1 + . . . + mn. T estclairement linéaire.Par le théorème 14.1.18, T est un isomorphisme entre X et M1 ⊕ . . . ⊕Mn.
14.2.19. D (Somme directe d’opérateurs)
Soit X1, . . . ,Xn et Y1, . . . ,Yn, des expaces normés et T j : X j → Y j, des opérateurslinéaires.La somme directe de T1, . . . ,Tn est l’opérateur :
T1 ⊕ . . . ⊕ Tn : X1 ⊕ . . . ⊕ Xn → Y1 ⊕ . . . ⊕ Yn
définie par :T1 ⊕ . . . ⊕ Tn(x1, . . . , xn) := (T1(x1), . . . ,Tn(xn))
avec (x1, . . . , xn) ∈ X1 ⊕ . . . ⊕ Xn.
14.2.20. T
Soit X1, . . . ,Xn et Y1, . . . ,Yn, des expaces normés et T j : X j → Y j, des opérateurs linéaires.Alors :
– T1 ⊕ . . . ⊕ Tn est borné si et seulement si tous les T j sont bornés.On aura alors ‖T1 ⊕ . . . ⊕ Tn‖ = max‖T1‖, . . . , ‖Tn‖.
– T1 ⊕ . . . ⊕ Tn est injectif si et seulement si tous les T j sont injectifs.– T1 ⊕ . . . ⊕ Tn est surjectif si et seulement si tous les T j sont surjectifs.– T1 ⊕ . . . ⊕ Tn est un isomorphisme si et seulement si tous les T j sont des isomor-
phismes.– T1 ⊕ . . . ⊕ Tn est un isomorphisme isométrique si et seulement si tous les T j des
isomorphismes isométriques.
D. La preuve de ce théorème étant longue et essentiellementtechnique, nous ne la donnons pas ici. Le premier point est demontré par exempledans [41] pp.66-67.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 341
14.2.21. C
Soit X1, . . . ,Xn et Y1, . . . ,Yn, des espaces normés.(1) Si X j Y j,∀ j = 1, . . . ,n, alors X1 ⊕ . . . ⊕ Xn Y1 ⊕ . . . ⊕ Yn.(2) Si X j est isométriquement isomorphe à Y j pour tout j = 1, . . . ,n, alors X1⊕ . . .⊕
Xn est isométriquement isomorphe à Y1 ⊕ . . . ⊕ Yn.
Projections.
14.2.22. D
On dit qu’un sous-espace fermé M d’un espace normé X admet un supplémentairetopologique s’il existe un sous-espace fermé N de X tel que X est la somme directeinterne de M et N.
14.2.23. D
Soit X, un espace vectoriel. On dit qu’un opérateur P : X → X est une projection siP(P(x)) = P(x),∀x ∈ X (c-à-d si P2 = P).
14.2.24. P
Soit X, un espace vectoriel.Un opérateur linéaire P : X → X est une projection si et seulement si (I − P) est uneprojection.De plus, si X est un espace vectoriel topologique, P est une projection continue si etseulement si (I − P) est une projection continue.
D. Soit P, une projection. Alors :
(I − P)2(x) = x − 2P(x) + P2(x) = x − 2P(x) + P(x) = x − P(x) = (I − P)(x)
Réciproquement, si (I−P) est une projection, (I−(I−P)) = P est aussi une projection.Pour le cadre topologique, comme l’identité est une application continue et quela somme de deux applications continues reste continue, nous avons que P estcontinue si et seulement si (I − P) est continue.
14.2.25. P
Soit P, une projection dans X.Alors ker P = (I − P)(X) et P(X) = ker(I − P).
D. Comme dans la preuve précédente, il suffit de démontrerque ker P = (I − P)(X). L’autre résultat est un corollaire immédiat, en remplaçant Ppar (I − P).Si x ∈ ker P, (I − P)(x) = x − 0 = x. Donc (I − P)(X) ⊆ ker P.

342 14. OPÉRATEURS DE FREDHOLM
Réciproquement, si P((I − P)(X)) = P(X) − P2(X) = P(X) − P(X) = 0. Donc ker P ⊆(I − P)(X).
14.2.26. C
Toute projection continue dans un espace de Hausdorff est à image fermée.
En particulier, les projections continues des espces de Banach sont à imagefermée.
14.2.27. T
Si P est une projection continue dans un espace vectoriel topologique de HausdorffX, alorsX est la somme directe interne de im P et de ker P.
D. Par le corollaire précédent, ker P et im P sont fermés dans X.Par la proposition 14.2.25, X = P(X) + (I − P)X = im P + ker P.De plus, im P
⋂ker P = ker(I − P)
⋂ker P = 0. D’où le résultat.
14.2.28. T
Si M et N sont des espaces supplémentaires (au sens algébrique) dans un espace vectirielX, alors il existe une unique projection P d’image M et de noyau N.
D. La preuve se base sur la proposition (algébrique) suivanteque nous ne démontrons pas ici.
14.2.29. R
Soit X, un espace vectoriel et M1, . . . ,Mn, des sous-espaces de X.Les propositions suivantes sont alors équivalentes :
(1) X est la somme directe (algébrique) interne de M1, . . . ,Mn.
(2) Tout x ∈ X se décompose de manière unique x = m1 + . . . +mn avec mi ∈Mi.
Vu ce résultat, tout x ∈ X s’écrit de manière unique x = m(x) + n(x) avecm(x) ∈M,n(x) ∈ N.Ainsi, l’application qui envoie x sur m(x) est une projection d’image M et de noyauN.Pour l’unicité, si P0 est une projection d’image M et de noyau N, alors
P0(x) = Po(m(x) + n(x)) = P0(m(x)) = m(x),∀x ∈ X.
14.2.30. T

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 343
Si M et N sont des espaces supplémentaires dans un espace de Banach X, alors la projectiond’image M et de noyau N est bornée.
D. Soit P, la projection d’image M et de noyau N. Considéronsune suite (xn)→ x convergente telle que (P(xn))→ y.Alors (I−P)(xn)→ x− y.Nous avons donc y ∈M et x− y ∈ N, car ker P = (I−P)(X).Ainsi, y = P(y) = P(x) et donc, par le théorème du graphe fermé, l’opérateur P estborné.
14.2.31. C
Un sous-espace M d’un Banach X admet un supplémentaire si et seulement si M est l’imaged’une projection bornée dans X.
14.2.32. C
Si M et N sont des espaces supplémentaires dans X, alors M X/N.
D. C’est une conséquence immédiate du premier théorème d’iso-morphie appliqué à la projection d’image M et de noyau N.
Opérateurs adjoints.
Tout comme les quotients et les sommes directes, les opérateurs adjoints sontdes objets que nous connaissons déjà d’un point de vue purement algébrique. Nousvoulons maintenant étudier quelques unes de leurs propriétés lorsque les espacesvectoriels considérés sont des espaces normés, donc muni d’une topologie.
14.2.33. D
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces normés et T ∈ B(X,Y) un opérateur borné.Alors, on appelle adjoint de T, au sens des espaces normés, l’opérateur
T∗ : Y∗ −→ X∗
y∗ 7−→ T∗(y∗) := y∗ T
En utilisant la notation< x, f >:= f (x), l’action de l’adjoint sur X est caractériséepar
< x,T∗y∗ >=< Tx, y∗ > .
Pour tout x ∈ X et pour tout y∗ ∈ Y∗.
14.2.34. P

344 14. OPÉRATEURS DE FREDHOLM
Soit S et T des opérateurs linéaires bornés entre deux espaces normés (X, ‖.‖X), (Y, ‖.‖Y) et(Y, ‖.‖Y), (Z, ‖.‖Z) respectivement. Alors,
(1) l’application T 7−→ T∗ est une isométrie linéaire ;
(2) la composition est contravariante : (T S)∗ = S∗ T∗ ;
(3) (IX)∗ = IX∗ .
D.
(1) Soit x ∈ X, α ∈ F, R ∈ B(X,Y) et y∗ ∈ Y∗.< x, (αT + R)∗y∗ > =< (αT + R)x, y∗ >
= α < Tx, y∗ > + < Rx, y∗ >= α < x,T∗y∗ > + < x,R∗y∗ >
Par conséquent l’application T 7−→ T∗ est linéaire. En outre, en utilisant lacaractérisation de la norme du théorème 14.1.35 il vient :
‖T∗‖ = sup‖y∗‖Y∗≤1
‖T∗y∗‖X∗
= sup‖y∗‖Y∗≤1
( sup‖x‖X≤1
|T∗y∗(x)|)
= sup‖x‖X≤1
( sup‖y∗‖Y∗≤1
|y∗(Tx)|)
= sup‖x‖X≤1
‖Tx‖
= ‖T‖
Il s’agit donc aussi d’une isométrie.
(2) Soit z∗ ∈ Z∗ et x ∈ X, alors< x, (T S)∗z∗ > =< (T S)x, z∗ >=< T(Sx), z∗ >
=< Sx,T∗z∗ >=< x, (S∗ T∗)z∗ > .
(3) Soit x ∈ X et x∗ ∈ X∗, alors< x, (IX)∗x∗ > =< IXx, x∗ >=< x, x∗ >
=< x, IX∗x∗ >
Nous allons maintenant nous intéresser aux relations entre les noyaux ker T,ker T∗ et les images im T, im T∗ d’un opérateur linéaire borné T et de son adjointT∗ ; en particulier à l’aide de leurs ensembles polaires. Ces derniers nous permet-terons par la suite d’exprimer la dimension du conoyau d’un opérateur linéaire enfonction de son adjoint.
14.2.35. D
Soit (X, ‖.‖X) un espace normé, A ⊂ X un sous-ensemble de X et B ⊂ X∗ un sous-ensemble de X∗. Définissons
A = x∗ ∈ X∗ | x∗(x) = 0 pour tout x ∈ A ;B = x ∈ X | x∗(x) = 0 pour tout x∗ ∈ B.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 345
On dit que A et B sont les ensembles polaires de A et B dans X et X∗ respective-ment.
14.2.36. P
Les ensembles A et B de la définition sont fermés.
D.· L’ensemble B =
⋂x∗∈X∗ ker x∗ est fermé en tant qu’intersection de fermés.
· Soit z∗n une suite dans A qui converge vers un certain z∗ ∈ X. Alors enparticulier, z∗n(x) −→ z∗(x) pour tout x ∈ X. Or z∗n|A = 0 pour tout n ∈ N,ce qui entraîne que z∗|A = 0. Par conséquent, z∗ ∈ A et ce dernier et de cefait fermé.
14.2.37. T
Si A est un sous-espace d’un espace normé (X, ‖.‖X), alors :(A) = A
D. Omise.Se réferrer par exemple à [42].
Nous pouvons lier les ensembles polaires par isomorphismes à l’espace norméX et à son dual X∗.
14.2.38. T
Soit M un sous-ensemble fermé d’un espace normé (X, ‖.‖X). Alors, sont isomorphes :(1) M (X/M)∗ ;(2) M∗ X∗/M.
D.(1) Soit π : X −→ X/M l’application quotient et soit T : y∗ 7−→ y∗π.
Clairement T est un opérateur linéaire de (X/M)∗ dans M. Si x∗ ∈ M
alors M ⊂ ker x∗. Alors la propriété universelle du quotient garanti qu’ilexiste un unique y∗ ∈ (X/M)∗ tel que x∗ = y∗π et de plus ‖y∗‖(X/M)∗ = ‖x∗‖X∗ .Autrement dit, T est bijectif et ‖y∗‖(X/M)∗ = ‖Ty∗‖X∗ .En conséquence, T est même un isomorphisme isométrique de (X/M)∗
dans M.(2) Soit T : X∗/M −→ M∗ l’application qui envoie un élément de x∗ +M ∈
X∗/M sur la restriction de x∗ à M. Puisque deux éléments x∗1+M et x∗2+M
de X∗/M sont égaux si et seulement si x∗1|M = x∗2|M, T est bien-défini. Il estaussi injectif par définition et clairement linéaire. Maintenant, si m∗ ∈ M∗
et x∗m∗ est une extension de Hahn-Banach de m∗ à X, alors T(x∗m∗ +M) = m∗,ainsi T est surjectif. Il s’agit donc d’un isomorphisme.
346 14. OPÉRATEURS DE FREDHOLM
14.2.39. L
Soit (X, ‖.‖X) et (Y, ‖.‖Y) deux espaces normés et T ∈ B(X,Y) un opérateur borné. Alors
(1) ker T∗ = (im T) ;
(2) ker T = (im T∗).
D.
(1)
ker T∗ = y∗ ∈ Y∗ | 0 = T∗y∗ = y∗ T= y∗ ∈ Y∗ | y∗|im T = 0
= y∗ ∈ Y∗ | y∗(y) = 0 pour tout y ∈ im T= (im T)
(2)(im T∗) = x ∈ X | x∗(x) = 0 pour tout x∗ ∈ im T∗
= x ∈ X | 0 = (T∗y∗)x pour tout y∗ ∈ Y∗= x ∈ X | 0 = y∗(Tx) pour tout y∗ ∈ Y∗= x ∈ X | 0 = Tx= ker T
L’avant-dernière égalité découlant du fait que l’espace dual a la propriétéde distinguer les éléments de l’espace de base.
14.2.40. R
Il découle du théorème bipolaire ainsi que du lemme ci-dessus que
im T = ((im T)) = (ker T∗).
14.2.41. T ’
Soit X et Y deux espaces de Banach, alors pour tout T ∈ B(X; Y) les assertions suivantessont équivalentes.
(1) im T est fermée ;
(2) im T = (ker T∗) ;
(3) im T∗ est fermée ;
(4) im T∗ = (ker T) ;
D.
(1)⇔ (2) Valide, d’après la remarque précédente.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 347
(1)⇒ (4) D’après 14.2.39, (ker T) = ((im T∗)) ⊃ im T∗.En vertu du premier théorème d’isomorphisme, nous avons que l’appli-cation
S : X/ker T −→ im Tx + ker T 7−→ T(x)
est un isomorphisme. Maintenant, si x∗ ∈ (ker T), alors l’unique applica-tion x : (x+ker T) 7→ x∗(x) définie par la propriété universelle du quotientest un élément de (X/ker T)∗. Par conséquent, x S−1
∈ (im T)∗. Donc ilexiste y∗ ∈ Y∗ tel que y∗|im T = x S−1. Ainsi, pour tout x ∈ X
(T∗y∗)x = y∗(Tx) = (y S−1)(Tx)
= (x S−1)(S(x + ker T))
= x(x + ker T) = x∗(x).
C’est-à-dire T∗y∗ = x∗. Par conséquent (ker T) ⊂ im T∗.Et donc (ker T) = im T∗.
(4)⇒ (3) D’après la proposition 14.2.36 les ensembles polaires sont des fermés.
(3)⇒ (1) Cette partie est longue et technique. Nous l’omettons.
Opérateurs compacts.
Nous abordons maintenant une catégorie plus particulière d’opérateurs li-néaires, les opérateurs compacts. Nous baserons toute notre discussion sur desespaces de Banach, cependant, en parcourant la littérature, on s’aperçoit qu’unegrande partie des propriétés que nous allons présenter se généralise aisément auxespaces normés en toute généralité.
14.2.42. D
Soit X et Y des espaces de Banach. Un opérateur linéaire T : X→ Y est dit compactsi pour tout sous-ensemble borné B ⊆ X, son image T(B) est un sous-ensemblerelativement compact de Y, c’est-à-dire que l’adhérence de T(B) est compact dansY.L’ensemble des opérateurs compacts de X vers Y est noté K(X,Y). Si X = Y, on notesimplement K(X).
On remarque qu’étant donné la linéarité d’un opérateur T : X → Y pourvérifier qu’il est compact, il suffit de s’assurer que T(UX) est un sous-ensemblerelativement compact de Y.
Du fait que tout sous-ensemble relativement compact de T(X) est borné, dé-coule directement la proposition suivante.

348 14. OPÉRATEURS DE FREDHOLM
14.2.43. P
Tout opérateur linéaire compact entre deux espaces de Banach est borné.
Pour les opérateurs de rang fini, la réciproque de cette dernière propriété estaussi vraie.
14.2.44. P
Un opérateur linéaire de rang fini entre deux espaces de Banach est compact si et seulements’il est borné.
D. Il reste a démontrer la condition suffisante.Soit T en opérateur linéaire de rang fini entre deux espaces de Banach.Le caractèrefini de la dimension de im(T) implique que la boule unité fermée Bim(T) est compact.Donc par linéarité, toute boule fermée est compact. Ainsi puisque T est borné, ilenvoie des sous-ensembles bornés sur des sous-ensemebles bornés, l’adhérence deces derniers est donc compacte puisqu’elle est fermée et bornée dans un compact.
La définition ci-dessus d’un opérateur compact n’est pas toujours la plussimple à utiliser, voici donc une caractériastion des opérateurs compacts qui vas’avérer utile par la suite.
14.2.45. P
Soit T : Y → Y, un opérateur linéaire entre deux espaces de Banach X,Y. Alors sontéquivalents :
(1) T est compact.
(2) T(UX) est un sous-ensemble relativement compact de Y.
(3) T(B) est un sous-ensemble totalement borné de Y quand B est un sous-ensembleborné de X.
(4) Toute suite bornée xn de X admet une sous-suite xnk telle que Txnk convergedans Y.
D.
(1)⇔(2) Le cas (1)⇒(2) est un cas particulier de la définition d’opérateur compact.Inversément, si B est un sous-ensemble borné de X, alors il existe K > 0 telque B ⊂ BX(0,K). Alors T(B) ⊂ T(UX(0,K)) = T(KUX(0, 1)) = KT(UX(0, 1))par linéarité. L’adhérence KT(UX(0, 1)) = T(UX(0,K)) est compact par hy-pothèse puisque UX(0,K) est bornée dans X. Par conséquent l’adhérenceT(B) ⊂ KT(UX(0, 1)) est aussi compacte.
(1)⇔(3) Découle du fait que dans un espace métrique M, un sous-ensemble A ⊂ Xest compact si et seulement si il est complet et totalement borné. Ainsisi B est un sous-ensemble borné de X, il suffit d’appliquer cette dernièrepropriété à l’adhérence de son image.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 349
(1)⇔(4) Par définition, un sous-espace A d’un espace métrique M est compact si etseulement si toute suite dans A admet une sous-suite qui converge dansA. Ainsi dire que l’image par T d’un sous-ensemble borné est relativementcompact, c’est dire que l’image par T d’une suite bornée admet une sous-suite qui converge dans son adhérence. Et inversément dire que l’imagepar T d’une suite bornée admet une sous-suite qui converge dans Y, c’estdire que toute suite dans l’image par T d’un sous-ensemble borné admetune sous-suite qui converge dans son adhérence, i.e que l’image par Td’un sous-ensemble borné est relativement compact.
Nous pouvons maintenant montrer que pour des espaces de Banach X et Y,l’ensemble K(X,Y) est un sous-espace vectoriel de l’espace B(X,Y), stable pour lacompostion avec des opérateurs linéaires bornés.
14.2.46. P
. Soit X,Y,Z,W des espaces de Banach et des opérateurs bornés
XS// Y T
// ZR// W
tel que T soit compact. Alors
(1) K(X,Y) est un sous-espace fermé de B(X,Y) ;
(2) la composition R T S est un élément de K(X,Y).
14.2.47. R
Si nous posons X = Y, le théorème ci-dessus peut se reformuler en disant quel’algèbre K(X) est un idéal bilatère de l’algèbre B(X) des opérateurs bornés.
D.
(1) Montrons que K(X,Y) est stable par loi interne et par loi externe. SoitT,U ∈ K(X,Y) et λ ∈ F. Soit donc xn une suite bornée de X, par le point(4) de la propostion précédente, il existe une sous-suite xnk de xn telleque Txnk converge et il existe une sous-sous-suite xnkj
de xnk telle queUxnkj
converge. (Il est clair que Txnkj converge aussi.) Par conséquent,
(T + U)(xnkj) converge à son tour et (λT)(xnk ) converge aussi. Ainsi en
vertu du point (4) de la propostion précédente les opérateurs T +U et λTsont compact et K(X,Y) est de ce fait un sous-espace de B(X,Y).Il faut encore voir que K(X,Y) est fermé dans B(X,Y). Soit Tn ⊂ K(X,Y)une suite qui converge vers un certain T ∈ B(X,Y). Pour voir que T estcompact, il suffit de voir qu’il satisfait le point (3) de propostion pré-cédente. Soit donc B un sous-ensemble borné de X et ε > 0. CommeTn → T, il existe n ∈ N tel que ‖Tnx − Tx‖ < ε
3 pour tout x ∈ B. Deplus Tn étant compact, il existe, Tn(B) est totalement borné dans Y, doncil existe F(n, ε3 ) un sous-ensemble fini de B tel que pour tout Tnb ∈ Tn(B),

350 14. OPÉRATEURS DE FREDHOLM
‖Tnb− Tn f (n, ε3 )‖ < ε3 pour un certain f (n, ε3 ) ∈ F(n, ε3 ). Soit b ∈ B, alors par
une double application de l’inéaglité triangulaire, on obtient :
‖Tb − T f (n,ε3
)‖ ≤ ‖Tb − Tnb‖ + ‖Tnb − Tn f (n,ε3
)‖ + ‖Tn f (n,ε3
) − T f (n,ε3
)‖
<ε3+ε3+ε3= ε
Ainsi T est totalement borné et donc compact et donc K(X,Y) estfermé.
(2) Par définition, un opérateur borné envoie des sous-ensembles bornés surdes sous-ensembles bornés et envoie des sous-ensembles relativementcompacts sur des sous-ensembles relativement compacts en raison desa continuité. Ainsi l’image d’un sous-ensemble borné de X par S estun sous-ensemble borné de Y, dont l’image par T est un sous-ensemblerelativement compact de Z (T étant compact), dont l’image par R est unsous-ensemble relativement compact de Z. La composition R T S estdonc un élément de K(X,Y).
14.2.48. S
Si X,Y et Z sont des espaces de Banach, alors la compostion K′ K de deux opérateurscompacts K : X→ Y et K′ : Y→ Z est un encore un opérateur compact.
D. Immédiat du fait que K(X,Y) est un idéal de B(X,Y).
14.2.49. L
Soit X un espace de Banach, T ∈ K(X), alors I − T est à image fermée et
dim(ker(I − T)) = codim(im(I − T)) < ∞.
D. Nous divisons cette preuve en 2 parties :– Vérifions d’abord que (I − T)(B) est fermé dans X pour tout sous-ensemble
fermé et borné B ⊆ X.Soit B, un sous-ensemble fermé et borné de X et considérons une suite (xn)d’éléments de B telle que
limn→∞
(I − T)(xn) = y.
Comme T est compact, la suite T(xn) admet une sous-suite convergenteT(xni ).Ainsi, il existe x0 ∈ B avec :
x0 = limn→∞
xni = limn→∞
((I − T)(xni ) + T(xni ))
Et donc y = (I − T)(x0) ∈ (I − T)(B). Ainsi, (I − T)(B) est fermé dans X.– Vu que nous venons de vérifier que (I − T) satisfait les hypothèses du théo-
rème précédent, par celui-ci, nous pourrons conclure que im(I−T) est fermée.Il reste à vérifier que n(I − T) < ∞ et d(I − T) < ∞.

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 351
– La première assertion est facile à montrer :Comme x = K(x),∀x ∈ ker(I − K), l’opérateur identité est compact surker(I − K).Ainsi, n(IK) < ∞.
– Nous omettons la preuve de ce deuxième résultat ici. On peut latrouver dans [41].
14.2.50. R
Le lemme précédent peut se généraliser pour obtenir les mêmes résultats pour(αI − T), avec α ∈ F quelconque.
Opérateurs à image fermée.
14.2.51. T
Soit X,Y des C-espaces de Banach et T ∈ B(X,Y).Alors T est d’image fermée si et seulement s’il existe c > 0 tel que
‖Tx‖ ≥ c · d(x,ker T)∀x ∈ X
D. Soit X := X/ker T. Comme X est un espace de Banach, Xreste un espace de Banach, muni de la norme définie par : ‖x‖ := d(x,ker A).Ainsi, nous pouvons définir T : X→ Y par T(x) := T(x).Comme T ∈ B(X,Y), T ∈ B(X,Y). De plus, T est injective et im T = im T.
⇒ Supposons que T soit un opérateur à image fermée.Alors, par linéarité (et donc continuité) de T, nous pouvons affirmer queT−1 : im T→ X est un opérateur fermé entre espaces de Banach.Ainsi, par le théorème du graphe fermé, T−1 est un opérateur borné et
‖T(x)‖ = ‖T(x)‖ ≥ ‖T−1‖−1‖x‖−1 = ‖T−1
‖−1d(x,ker T)
ce qui est la relation cherchée si l’on pose c = ‖T−1‖−1
⇐ Réciproquement, supposons qu’il existe c tel que :
‖Tx‖ ≥ c · d(x,ker T)∀x ∈ X.
Soit (xn), une suite telle que T(xn) → Tx = y. Ainsi, (xn) est une suite deCauchy.Comme nous venons d’affirmer que X est un espace de Banach, (xn)converge vers un x ∈ X.Par conséquent,
T(xn) = T(xn)→ T(x) = Tx = y.

352 14. OPÉRATEURS DE FREDHOLM
Ainsi, T est un opérateur à image fermée.
14.2.52. T
Soit T ∈ B(X,Y), comme précédemment.Si il existe un sous-espace fermé Y0 tel que im T ⊕ Y0 est fermé, alors T est un opérateur àimage fermée.
D. Posons T0 : X × Y0 → Y, l’opérateur défini par T0(x, y0) :=Ax + y0.Muni de la norme donnée par ‖(x, y)‖ := ‖x‖+ ‖y‖, X×Y0 est un espace de Banach.Comme T ∈ B(X,Y), T0 est un opérateur linéaire borné d’image im T0 = im T + Y0.Par hypothèse, im T0 = im T + Y0 est fermé. De plus, ker T0 = ker T × 0, cary0 < im T,∀y0 ∈ Y0.On utilise le théorème précédent pour affirmer qu’il existe c > 0 tel que :
‖Tx‖ = ‖T0(x, 0)‖ ≥ c · d((x, 0),ker T0) = c · d(x,ker T).
Par le même théorème, on conclut que im T est fermée.
14.2.53. C
Soit T ∈ B(X,Y), comme avant.Si im T admet un supplémentaire, alors T est un opérateur à image fermée.
Ce corollaire s’applique en particulier lorsque la codimension de l’image estfinie.
D. Il s’agit d’un résultat immédiat du théorème précédent, vuque si im T admet un supplémentaire, il existe Y0 tel que im T ⊕ Y0 = Y qui estfermé. Par le théorème, im T doit donc être fermée.
14.2.54. T
Soit T ∈ B(X,Y), comme avant.Si T(B) est fermé dans Y pour tout sous-ensemble fermé et borné B ⊆ X, alors T est d’imagefermée.
D. Ab absurdo, supposons que im(T) ne soit pas fermée.Par la preuve du théorème 14.2.51, on peut construire une suite (xn) telle que T(xn)converge vers 0 avec d(xn,ker T) = 1,∀n ∈N.Soit (zn), une suite de ker T telle que ‖xn − zn‖ < 2,∀n ∈N.Posons à présent V, la cloture de l’ensemble xn − zn|n ∈N.Comme V est un sous-ensemble fermé et borné de X, T(V) est fermé dans Y parhypothèse du théorème.Remarquons également que T(xn) = T(xn − zn), ainsi 0 ∈ T(V).

14.2. CONCEPTS LIÉS AUX OPÉRATEURS DE FREDHOLM 353
Nous avons donc l’existence d’un u ∈ V ∩ ker T tel que
‖u − (xn0 − zn0 )‖ < 1/2,
pour un certain n0 ∈N.Cela implique d(xn,ker T) < 1/2, ce qui contredit d(xn,ker T) = 1. Ainsi, im T estfermée.


14.3. OPÉRATEURS DE FREDHOLM 355
14.3. Opérateurs de Fredholm
Définitions.
Nous arrivons finalement aux définitions des deux objets qui sont au centre denos intérêts et qui vont nous occuper jusqu’à la fin de ce travail : les opérateurs deFredholm et la fonction indice.
14.3.1. D
Soit X et Y deux espaces de Banach. Un opérateur linéaire borné T : X → Y estappelé un opérateur de Fredholm si les trois conditions suivantes sont satisfaites :
(1) im T est fermé dans Y ;
(2) dim(ker T) est finie.
(3) dim(Y/ im T) = dim(coker T)1.
Nous noterons n(T) := dim(ker T), d(T) := dim(coker T) ainsi que F (X,Y) l’en-semble de tous les opérateurs de Fredholm de X dans Y.
14.3.2. D
L’indice d’un opérateur de Fredholm est la fonction à valeurs entières suivante :ind : F (X,Y) −→ Z
T 7−→ ind(T) := dim(ker T) − dim(coker T)
Exemples.
Pour un premier contact avec les opérateurs de Fredholm et l’indice, prenonsun exemple intuitif2 en dimension finie.
14.3.3. E
Considérons deux espaces de Banach X et Y de dimension finie. (Par exemple Rm
1C’est une conséquence algébrique du premier théorème d’isomorphie que dim(Y/ im T) =codim(im T)
2Pour ne pas dire concret !

356 14. OPÉRATEURS DE FREDHOLM
etRn muni de la norme euclidienne.) Soit T : X→ Y un opérateur linéaire continu.Banalement, dim(ker T) et dim(coker T) sont finies et im T est fermée, étant dedimension finie.Alors,
ind(T) = dim(ker T) − dim(coker T) = dim(ker T) − dim(Y/ im T)= dim(ker T) − (dim(Y) − dim(im T))= dim(ker T) − dim(Y) + dim(im T)= dim(X) − dim(Y) ∈ Z
14.3.4. R
Tout opérateur borné T : X → Y entre deux espace de Banach qui est bijectifest un opérateur de Fedholm d’indice nul. En effet, il découle de la bijectivitéque ker T = 0X, dont la dimension est nulle, et im T = Y qui est fermée et sacodimension est nulle, ainsi :
ind(T) = dim(ker T) − codim(T) = 0 − 0 = 0
14.3.5. C-
L’opérateur nul T : X→ Y, défini par T(x) = 0Y pour tout x ∈ X, entre deux espacede Banach n’est pas un opérateur de Fredholm si la dimension de X ou de Y estinfinie.
En effet, si X est de dimension infinie, alors ker T = X est de dimension infinie etsi Y est de dimension infinie im T = 0Y dont la codimension, qui est la dimensionde Y, est infinie.
14.3.6. E (Translations dans l2F
)
Considérons le F-espace vectoriel l2F
, l’espace des suites ξ = xnn∈N à coefficientdans F telles que
∑∞
i=0 |xi|2 < ∞ . Muni de la norme
‖.‖2 : l2F−→ R+
xn 7−→ ‖xn‖2 := ∑∞
i=0 |xi|2
12
il s’agit d’un espace de Banach.Nous allons montrer que cet espace possède deux familles infinies dénom-
brables d’opérateurs de Fredholm, les translations à droite et les translations àgauche.
Translation à droite.
Posons
T1d : l2F −→ l2F
(x0, x1, x2, . . .) 7−→ (0, x0, x1, x2, . . .)
la translation d’un cran à droite.

14.3. OPÉRATEURS DE FREDHOLM 357
Il s’agit d’un opérateur de Fredholm d’indice −1. En effet, T1d est clairement
linéaire et les trois conditions de la définition 14.3.1 sont vérifiées :
· Le noyau de T1d est constitué uniquement de la suite identiquement nulle.
Ainsi dim(ker T1d) = 0 < ∞.
· Le conoyau coker(T1d) = l2
F/ im(T1
d) où une classe d’équivalence contienttoutes les suites de l2
Fde même premier coefficient x0 ∈ F. La suite
(1, x1, x2, . . .) constitue donc une base de coker(T1d).
Ainsi dim(coker(T1d)) = 1 < ∞.
· Il reste à voir que im(T1d) est un fermé de l2
F.
Soit donc xn ⊂ l2F
une suite qui converge vers un certain ξ = ξn ∈ l2F
.Par conséquent, pour tout ε > 0 il existe m ∈ N tel que pour tout n ≥ mon ait ‖xn − ξ‖ =
∑∞
i=0 |xni − ξi|2
12 < ε. Par conséquent, pour tout n ≥ m et
pour tout i fixé, on a |xni − ξi|2≤ ‖xn − ξ‖ < ε et donc xni → ξi pour tout i
et en particulier 0 = xn0 → ξ0. Or la suite identiquement nulle convergevers 0. Donc par unicité de la limite nous obtenons ξ1 = 0 et ξ ∈ im(T1
d)qui est de ce fait fermé dans l2
F.
Nous obtenons en outre que l’indice de T1d est :
ind(T1d) = dim(ker T1
d) − dim(coker T1d) = 0 − 1 = −1
Translation à gauche.
Posons
T1g : l2F −→ l2F
(x0, x1, x2, . . .) 7−→ (x1, x2, . . .)
la translation d’un cran à droite.Il s’agit d’un opérateur de Fredholm d’indice 1. En effet, T1
g est clairementlinéaire et les trois conditions de la définition 14.3.1 sont vérifiées :
· Le noyau est ker(T1g) = xn ∈ l2
F| x0 ∈ F arbitraire , xi = 0∀i ≥ 1. Ainsi
dim(ker T1g) = 1 < ∞.
· Le conoyau est coker(T1g) = l2
F/ im(T1
g) = l2F/l2F= 0l2
F. Ainsi dim(coker(T1
d)) =0 < ∞.
· L’image de T1g est l2
Ftout entier qui est fermé en tant qu’espace topologique.
Nous obtenons en outre que l’indice de T1d est :
ind(T1g) = dim(ker T1
g) − dim(coker T1g) = 1 − 0 = 1
14.3.7. C-
L’espace Hom(l2F
) compte bien sûr aussi des opérateurs linéaires qui ne sont pasde Fredholm. Les p-ièmes projection sur F, par exemple, ne le sont pas.Soit i ∈N et considérons

358 14. OPÉRATEURS DE FREDHOLM
Pi : l2F
−→ Fxkk∈N 7−→ xi
Il s’agit d’opérateurs linéaires bornés mais
ker Pi = xkk∈N ∈ l2F | xi = 0.
Sa dimension est donc infinie quelque soit i ∈N.Les projections canoniques de l2
Fne sont donc pas des opérateurs de Fredholm.
14.3.8. E (Adjoint d’un opérateur de Fredholm.)
Soit X,Y deux espaces de Banach ainsi que T ∈ F (X,Y) un opérateur de Fredholm.Considérons alors son adjoint
T∗ : Y∗ −→ X∗
y∗ 7−→ y∗ T.Nous allons montrer que T∗ est aussi un opérateur de Fredholm et que son indiceest l’opposé de celui de T.Nous savons d’après 14.1.32 que X∗ et Y∗ sont des espsces de Banach puisque X etY sont des espaces normés. Nous savons aussi que T∗ ∈ B(Y∗,X∗). Il reste donc àvoir que
· im T∗ est fermée ;
· dim(ker T∗) < ∞ ;
· dim(X∗/ im T∗) < ∞.
(1) Etant donné que T est Fredholm, son image im T est fermée, ce qui équi-vaut à dire que im T∗ est fermée, d’après le théorème de l’image fermée.
(2) En appliquant le théorème 14.2.38 au sous-espace ker T de X, il vient :
(ker T)∗ X∗/(ker T)
Or le théorème de l’image fermée fournit (ker T) = im T∗. Ainsi :
(ker T)∗ X∗/(ker T) = X∗/ im T∗
Donc
dim(X∗/ im T∗) = dim((ker T)∗) = dim(ker T) < ∞
par hypothèse.
(3) En appliquant le théorème 14.2.38 au sous-espace im T de Y, il vient :
(Y/ im T)∗ (im T)
En outre la proposition 14.2.39 fournit (im T) = ker T∗. Par conséquent :
(Y/ im T)∗ (im T) = ker T∗
Ainsi
dim(ker T∗) = dim((Y/ im T)∗) = dim(Y/ im T)) < ∞
par hypothèse.

14.3. OPÉRATEURS DE FREDHOLM 359
L’opérateur adjoint T∗ est donc bien Fredholm. Calculons son indice :
ind(T∗) = dim(ker T∗) − dim(X∗/ im T∗)= dim(Y/ im T) − dim(ker T)= − ind(T)
14.3.9. S
Pour tout opérateur de Fredholm T : X −→ Y, nous pouvons reformuler l’indice sous laforme suivante :
ind(T) = dim(ker T) − dim(ker T∗)
D. Découle du point (3) où nous avons montré que
dim(coker T) = dim(Y/ im T)) = dim(ker T∗).
Produits d’opérateurs de Fredholm.
Une propriété intéressante de l’indice est que l’indice d’une composition d’opé-rateurs de Fredholm est simplement la somme des indices des composants.
14.3.10. L
Soit X,Y des F-espaces de Banach et T ∈ B(X,Y).Soit M, un sous-espace de X de co-dimension finie n.Alors T est de Fredholm si et seulement si la restriction T0 : M→ Y est de Fredholm.De plus,
ind A = ind A0 + n.
D. Si le résultat est vrai pour n = 1, il se généralise par récur-rence.Posons : X =M ⊕ vectx1 Considérons les 2 cas possibles suivants :
– Si T(x1) < im T0, alors T(X) = T0(M) ⊕ vectA(x1) et ker T0 = ker T.Ainsi, d(T0) = d(T) + 1 et n(T0) = n(T), d’où ind(T) = ind(T0) + 1.
– Si T(x1) ∈ im T0, alors im T = im T0 et il existe u ∈M tel que T(x0) = T0(u).De plus, ker T = ker T0 ⊕ vectx1 − u.Ainsi, d(T0) = d(T) et n(T0) = n(T) − 1, d’où ind(T) = ind(T0) + 1.
14.3.11. N
Soit T : X→ Y, un opérateur de Fredholm.

360 14. OPÉRATEURS DE FREDHOLM
Alors ker T et im T admettent des supplémentaires. (ker T est fermé en tantque pré-image du fermé 0Y par une application continue et sa dimension estfinie, im T par le corollaire 14.2.53 puisque sa codimension est finie.) On peut écrireX = ker T⊕X0 et Y = im T⊕Y0. Comme X0 im T, on peut définir une applicationbijective T : X0 × Y0 → Y par :
T(x0, y0) := T(x0) + y0
On appelle T la bijection associée à T.
14.3.12. T
Soit X,Y,Z des F-espaces de Banach.Si A : X→ Y et B : Y→ Z sont des opérateurs de Fredholm, alors BA est un opérateur deFredholm.De plus,
ind BA = ind A + ind B.
D. Soit A la bijection associée à A et posons A0, la restriction deA à X0 (Notons que A0 est aussi la restriction de A à X0).Comme A est un isomorphisme et que B est Fredholm, l’opérateur BA est unopérateur de Fredholm avec ind BA = ind B.En identifiant X0 et X0 × 0, on obtient que BA0 est la restriction commune de BAet BA à X0.Par le lemme précédent BA est Fredholm⇔ BA0 est Fredholm⇔ BA est Fredholm.De plus,
ind BA = ind BA0 + dim(X/X0)= ind BA − dim(X0 × Y0/X0 × 0) + n(A)= ind B + ind A.
14.3.13. E (Opérateurs de Fredholm d’indice n ∈ Z dans l2F
.)
Sachant que la composition de deux opérateurs de Fredholm est encore un opé-rateur de Fredholm dont l’indice est obtenu en sommant les indices des deuxopérateurs que l’on compose. En reprenant les deux opérateurs T1
d et T1g, nous
pouvons ainsi construire un opérateur de Fredholm dans l2F
d’indice n ∈ Z pourtout entier n par le processus suivant :
Soit m ∈N\0. Posons Tmd = T1
d · · · T1d︸ ︷︷ ︸
m f ois
. Il s’agit d’un opérateur de Fredholm
en tant que composition d’opérateurs de Fredholm et son indice est
ind(Tmd ) = m · ind(T1
d) = m · (−1) = −m < 0.

14.3. OPÉRATEURS DE FREDHOLM 361
Soit p ∈N \ 0. Posons Tpg = T1
d · · · T1d︸ ︷︷ ︸
p f ois
. Il s’agit d’un opérateur de Fredholm
en tant que composition d’opérateurs de Fredholm et son indice est
ind(Tpg) = p · ind(T1
g) = p · 1 = p > 0.
Cela nous apprend que pour obtenir un opérateur de Fredholm d’indice 0 dans l2F
,il suffit de composer T1
g avec T1d ce qui nous donne l’identité.
Perturbations.
Ouverture de GL(X; Y) dans B(X,Y).
Notons par GL(X; Y) l’ensemble des opérateurs linéaires bornés inversiblesd’un espace de Banach X dans un espace de Banach Y. Nous savons d’après lethéorème des applications ouvertes que si T ∈ GL(X; Y), alors T−1
∈ B(X; Y).Nous voulons montrer que GL(X; Y) est un ouvert de B(X,Y) pour la topologie
engendrée par la norme opérateur. Il s’agit donc de trouver un δ > 0 tel quepour tout T ∈ GL(X; Y), on ait BB(X,Y)(T, δ) ⊂ GL(X; Y). Autrement dit, on cherche
une condition sur les S ∈ B(X,Y) tels que ‖T + S − T‖ = ‖S‖ < δ. Il faut doncsavoir sous quelles conditions sur la norme d’un opérateur linéaire S ∈ B(X,Y),l’opérateur T + S ∈ GL(X; Y) pour tout T ∈ GL(X; Y).
Injectivité. Soit x ∈ ker(T + S). Remarquons que si Tx = y alors x = T−1y et
‖x‖ = ‖T−1y‖ ≤ ‖T−1‖ · ‖y‖ = ‖T−1
‖ · ‖Tx‖
donc‖Tx‖ ≥ ‖T−1
‖−1‖x‖.
Alors, (T + S)(x) = 0 si et seulement si Sx = −Tx, implique que
‖S‖ · ‖x‖ ≥ ‖Sx‖ = ‖ − Tx‖ = ‖Tx‖ ≥ ‖T−1‖−1‖x‖.
Ainsi(‖S‖ − ‖T−1
‖−1)‖x‖ ≥ 0.
Alors si (‖S‖ − ‖T−1‖−1) < 0, on a nécessairement que ‖x‖ = 0 si et seulement
si x = 0.En résumé, nous avons obtenu que si ‖S‖ < ‖T−1
‖−1 alors T + S est un
opérateur injectif.Surjectivité. Soit y ∈ Y. Alors,
L’opérateur T + S est surjectif⇔ ∃x ∈ Xtel que(T + S)x = y
⇔ ∃x ∈ X tel que x + T−1Sx = T−1y
⇔ ∃x ∈ X tel que x = T−1y − T−1Sx⇔ ∃x ∈ X tel que x = f (x)
où f (x) = T−1y − T−1Sx.

362 14. OPÉRATEURS DE FREDHOLM
Donc d’après le théorème du point fixe de Banach, il suffit de voir que f estune application contractante.‖ f (x) − f (z)‖ = ‖T−1Sx − T−1Sz‖ ≤ ‖T−1S| · ‖x − z‖ ≤ ‖T−1
‖ · ‖S‖ · ‖x − z‖.L’application f est donc contractante si et seulement si ‖T−1
‖ · ‖S‖ < 1 si etseulement si ‖S‖ < ‖T−1
‖−1.
En résumé, on peut prendre δ = ‖T−1‖−1, alors pour tout opérateur S de norme
inférieure ou égale à ‖T−1‖−1, l’opérateur T + S est encore un élément de GL(X; Y).
Petites perturbations sur les opérateurs de Fredholm .
Le théorème suivant nous apprend que non seulement l’ensemble des opéra-teurs de Fredholm entre deux espaces de Banach est ouvert dans l’ensemble desopérateur bornés, mais aussi que l’indice se trouve être une application continue.
14.3.14. T D
Soit X,Y des F-espaces de Banach. Soit T : X → Y un opérateur de Fredholm et la Tbijection associée à T. Si B ∈ B(X; Y) est tel que ‖B‖ < ‖T−1
‖−1, alors :
(1) T + B est un opérateur de Fredholm ;
(2) n(T + B) ≤ n(T) ;
(3) d(T + B) ≤ d(T) ;
(4) ind(T + B) = ind(T)
En d’autres termes, l’indice est une application continue, alors que la dimensionn du noyau et la dimension d du conoyau sont des applications seulement semi-continues.
D. Soit T ∈ F (X; Y) et B ∈ B(X; Y) tel que ‖B‖ < ‖T−1‖−1. Soit X0
et Y0 les sous-espaces associés à la bijection T (rappelons que T(x0+ y0) = Tx0+ y0).Posons C :=T+B et définissons :
C : X0 × Y0 −→ Y(x0, y0) 7−→ Cx0 + y0
Nous avons alors que ‖T − C‖ ≤ ‖T − C‖ = ‖B‖ < ‖T−1‖−1. Puisque C est borné
et T ∈ GL(X; Y), d’après la section précédente, nous obtenons que C est aussi unélément de GL(X; Y).
Alors, l’opérateurC0 : X0 × 0 −→ Y
(x0, 0) 7−→ Cx0
est une restriction commune de C et C. Ainsi, par le lemme 14.3.10 l’opérateur Cest Fredholm puisque C0 est Fredholm, de plus,
ind(C) = ind(C0) + codim(ker X0) = ind(C0) + n(T).
Or ind(C0) = ind(C) − dim(Y0) = −dim(Y0) = 0 − d(T) puisque im(C) = C(X0) ⊕ Y0
et que C est bijectif . Donc finalement :
ind(C) = ind(C0) + n(T) = −d(T) + n(T) = ind(T)

14.3. OPÉRATEURS DE FREDHOLM 363
Ce qui prouve (1) et (2).De plus, C étant inversible, on a nécessairement que X0 ∩ ker(C) = 0 et donc :
n(C) = dim(ker(C)) ≤ dim(X/X0) = dim(ker T) = n(T)
puisque X = X0 ⊕ ker(T). Ce qui prouve (3).Finalement on utilise (2) et (3) pour prouver (4) :
d(C) = − ind(C) + n(C) =(2)− ind(T) + n(C) ≤
(3)− ind(T) + n(T) = d(T)
14.3.15. C
Si X et Y sont des espaces de Banach. Alors l’indice
ind : F (X,Y) −→ Z
est une application constante sur les composantes connexes de F (X,Y).
D. L’espaceZ étant discret et l’indice une application continue,l’indice de deux opérateurs de Fredholm F1 et F2 est nécessairement égal s’il existeun chemin reliant F1 et F2. Autrement dit, l’indice est une application constante surles composantes connexes de F (X,Y).
La reciproque de ce théorème est aussi vraie : si les indices de deux opérateursde Fredholm F1 et F2 sont égaux, alors F1 et F2 appartiennent à la même composanteconnexe deF (X,Y). C’est une conséquence du théorème d’Atiyah–Jänich que nousexposons dans le chapitre 4.
Les perturbations par des opérateurs compacts n’ont pas non plus d’influencesur les opérateur de Fedholm, dans le sens que si l’on somme un opérateur deFredholm et un opérateur compact, le résultat reste Fredholm.
Commençons par reformuler le lemme 14.2.49 dans le langage des opérateursde Fredholm.
14.3.16. L
Soit X,Y des F-espaces de Banach et K ∈ K(X,Y).Alors I − K est un opérateur de Fredholm d’indice nul.
D. Le lemme 14.2.49 nous assure que I − K est un opérateur àimage fermée, dont la dimension finie du noyau égale la dimension du conoyau.Il s’agit donc d’un opérateur de Fredholm d’indice nul.
14.3.17. T
Soit X un F-espace de Banach.Si T ∈ B(X) est un opérateur de Fredholm et K ∈ K(X) est un opérateur compact, alorsT + K est un opérateur de Fredholm.
En outre,ind(T + K) = ind T

364 14. OPÉRATEURS DE FREDHOLM
D. Soit T ∈ F (X; Y) et K ∈ K(X; Y).Soit X0 et Y0 les sous-espaces associés à la bijection T telle que T(x0 + y0) = Tx0 + y0
et posons K(x0 + y0) = Kx0 + y0. Comme K est compact et dim(Y0) < ∞, l’opérateurK est compact. De plus, l’opérateur (T+ K) |X0 est une restriction commune de T+ Ket T + K, ainsi par le lemmme 14.3.10, T + K est Fedholm si et seulement si T + K.
Or T est bijectif, donc T + K = T(I + T−1K) et T−1K est compact d’après laproposition 14.2.46. Ainsi part le lemme 14.3.16 I + T−1K est Fredholm et T + K =T(I + T−1K) est aussi Fredholm, donc T + K l’est à son tour.
Il reste à montrer que ind(T + K) = ind(T). L’opérateur K étant compact, λKl’est aussi pour tout λ ∈ [0, 1], il est ainsi borné. Il suffit alors d’appliquer lethéorème 14.3.14 à T + λK pour obtenir que la fontion f (λ) := ind(T + λK) estconstante de valeur ind(T) sur l’intervalle [0, 1]. Par conséquent,
ind(T + K) = f (1) = f (0) = ind(T).
Algèbre de Calkin.
Dans ce paragraphe nous obtenons une caractérisation importante des opéra-teurs de Fredholm utilisant les opérateurs compacts.
14.3.18. T
Soit X,Y des C-espaces de Banach et T ∈ B(X,Y).Alors T est de Fredholm si et seulement s’il existe A ∈ B(Y,X) tel que IY − TA et IX − ATsont des opérateurs de rang fini.
D. Supposons d’abord que T est Fredholm. Soit X0 et Y0 les sous-espaces associés à la bijection T telle que T(x0 + y0) = Tx0 + y0 et T0 la restriction deT à X0 × 0. Comme X0 est un supplémentaire du noyau, le seulement de X0 dontl’image par T est 0Y est 0X, ainsi T0 est injective, de plus im(T0) = TX0 = TX = im(T)qui est fermé par hypothèse. Par conséquent, le théorème du graphe fermé entraîneque la bijection T−1
0 : im T −→ X0 est un opérateur linéaire borné.Soit P : Y −→ Y la projection sur im T le long de Y0 et posons A := T−1
0 P. Alorsker(A) = Y0 et im(A) = X0.
Il vient ker(AT) = ker(T) et im(AT) = X0 puisque pour tout x ∈ X on a
AT(x) = T−10 PT(x) = T−1
0 (T(x)) ∈ X0).
De plus,(AT)2 = T−1
0 PTT−10 PT = T−1
0 PPT = T−10 PT = AT.
Ainsi AT est la projection de X sur X0 le long de ker(T) et donc, en vertu desthéorèmes 14.2.24 et 14.2.25, on obtient que IX−AT est la projection de X sur ker(T)

14.3. OPÉRATEURS DE FREDHOLM 365
le long de X0. Il s’agit ainsi d’un opérateur de rang fini puisque son image estker(T), de dimension finie par hypothèse.
De façon similaire, on obtient que ker(TA) = ker(TT−10 P) = Y0 et
im(TA) = im(TT−10 P) = TT−1
0 (im(T)) = T(X0) = im(T).
De plus,(TA)2 = TT−1
0 PTT−10 P = TT−1
0 PP = TT−10 P = TA.
Par conséquent, TA est la projection de Y sur im(T) le long de Y0, ce qui entraîneque IY − TA est la projection de Y sur Y0 le long de im(T). Son image étant Y0, dedimension finie par hypothèse, l’opérateur IY − TA est de rang fini.
Réciproquement, supputons qu’il existe un opérateur A ∈ B(Y,X) ainsi que desopérateurs F1 ∈ B(X) et F2 ∈ B(Y) de rang fini tels que IX − F1 = AT et IY − F2 = TA.Alors
ker(T) ⊂ ker(AT) = ker(IX − F1).
Orker(IX − F1) = x ∈ X | x = F1(x) ⊂ im(F1).
Ainsi,n(T) ≤ n(IX − F1) ≤ dim(im(F1)) < ∞.
En outre, gim(TA) ⊂ im(T) = im(IY − F2),
ainsid(T) ≤ d(TA) = d(IY − F2) < ∞
puisque F2 est de rang fini. En outre, la codimension finie im T entraîne qu’il estfermé (c.f. corollaire 14.2.53). Ainsi, T est un opérateur de Fredholm.
14.3.19. R
On peut remplacer l’affirmation : "I−TA et I−AT sont des opérateurs de rang fini"par "I − TA et I − AT sont des opérateurs compacts".
En effet, si T est de Fredholm, alors par le théorème il existe A ∈ B(Y,X) telque IY − TA et IX −AT sont des opérateurs de rang fini. Comme ils sont bornés, ilssont aussi compacts (proposition 14.2.44). Réciproquement, s’il existe un opérateurA ∈ B(Y,X) ainsi que des opérateurs F1,F2 des opérateurs compacts tels que IX −
F1 = AT et IY − F2 = TA, alors AT et TA sont Fredholm d’indice nul d’aprèsle théorème 14.3.17. Donc comme dans la preuve on obtient que n(T) < ∞ etd(T) < ∞, T est donc Fredholm. Cela revient à dire qu’un opérateur T est Fredholmsi et seulement s’il est inversible modulo les opérateurs compacts.
14.3.20. D (Algèbre de Calkin)
Soit X un espace de Banach. Comme nous l’avons vu dans la section 14.2, l’ensembleK(X) constitue un idéal fermé de l’algèbre B(X) des opérateurs bornés. Le quotientB(X)/K(X) est par conséquent une algbère à laquelle on donne le nom d’algèbre deCalkin. Ses éléments sont les classes L + K(X) avec L ∈ B(X).

366 14. OPÉRATEURS DE FREDHOLM
Nous pouvons dès lors utiliser la remarque précédente pour reformuler lethéorème 14.3.18 dans le cas particulier où X = Y est un unique espace de Banach.
14.3.21. T ’A
Soit X un C-espace de Banach et T ∈ B(X).Alors T est un opérateur de Fredholm si et seulement si [T] est inversible dans l’algèbre deCalkin.
D. Supposons que T est Fredholm, alors d’après le théorème 14.3.18,il existe A ∈ B(X) tel que I−TA et I−AT soit compacts. Ainsi,[I−TA] = [I−AT] = [0]et donc [I] = [T][A] = [A][T]. Autrement dit [A] est un inverse de [T] dans l’algèbrede Calkin.
Réciproquement, s’ il existe [A] ∈ B(X)/K(X) tel que [I] = [T][A] = [A][T] alorsil existe K1,K2 ∈ K(X) tels que I = TA + K1 et I = AT + K2. Il découle alors duthéorème 14.3.18 et de la remarque 14.3.19 que T est un opérateur de Fredholm .
Nous pouvons aussi caractériser les opérateurs de Fredholm d’indice nul selonla propostion suivante.
14.3.22. P
Soit X,Y des C-espaces de Banach et A ∈ B(X,Y).Un opérateur de Fredholm T ∈ F (X,Y) est d’indice nul si et seulement s’il existe unopérateur A ∈ B(X,Y) de rang fini tel que T + A soit inversible.
D. Supposons que T+A soit inversible avec A de rang fini.L’inversibilitéde T +A entraîne que A est borné (sinon T +A ne le serait pas) et donc A est com-pact par la proposition 14.2.44. Alors par le théorème 14.3.17 T+A est Fredholm etson indice est, premièrement, égal à l’indice de T, est deuxièmement nul puisqu’ils’agit d’une bijection. D’où ind(T) = 0.
Réciproquement, supposons que T ∈ B(X,Y) est Fredholm d’indice nul etcomme précédemment reprenons X = ker T ⊕ X0 et Y = im T ⊕ Y0. L’indice de Tétant nul, la dimension du noyau est égale à la codimension de l’image, autrementdit dim(ker(T)) = dim(Y0). Par conséquent, il existe un opérateur inversible A0 :ker(T) −→ Y0. (Il suffit d’établir une bijection entre deux bases respectives de cesdeux espaces et de l’étendre par linéarité.)
Soit P : X −→ X la projection de X sur X0 le long de ker(T). Définissons alorsA := A0(IX − P), alors im(A) = Y0 dont la dimension est finie, i.e A est de rang fini.

14.3. OPÉRATEURS DE FREDHOLM 367
Alors T + A est inversible. En effet, T + A est injectif car0 = (T + A)(x) = (T + A0(IX − P))(x) = T(x) + (A0(IX − P))(x)
⇔ T(x) = 0 et (A0(IX − P))(x) = 0( comme T(x) ∈ im(T), (A0(IX − P))(x) ∈ Y0 et Y = im T ⊕ Y0)
⇔ x ∈ ker(T) et x = P(x)⇔ x ∈ ker(T) et x ∈ X0
⇔ x ∈ ker(T) ∩ X0 = 0X
donc le noyau de T + A est trivial. La surjectivité vient du fait que tout y ∈ Y peutsécrire comme y = T(z) + y0 avec z ∈ X et y0 ∈ Y0. Remarquons encore que
A(A−10 (Az)) = A0(IX − P)A−1
0 (Az) = A0A−10 (Az) = Az
etA(A−1
0 (y0)) = A0(IX − P)A−10 (y0) = A0A−1
0 (y0) = y0.
Il vienty = T(z) + y0 = (T(z) − 0 + 0) + (A(z) − A(z) + y0)
= T[z − A−10 (Az) + A−1
0 (y0)] + A[z − A−10 (Az) + A−1
0 (y0)].


14.4. VERS LE THÉORÈME D’ATIYAH–JÄNICH. 369
14.4. Vers le théorème d’Atiyah–Jänich.
Le but de cette section est de définir une nouvelle application “indice” surune famille d’opérateurs de Fredholm indexée par un ensemble d’indices compactet connexe et de voir qu’il s’agit d’une généralisation de la notion d’indice quenous avons développée jusqu’à présent lorsque l’ensemble d’indices est réduit àun point.Fixons X,Y deux espaces de Banach, ainsi C un espace topologique compact etconnexe. L’ensemble F (X,Y) est aussi un sous-espace topologique de B(X; Y) pourla norme-opérateur. Nous pouvons donc poser la définition suivante.
14.4.1. D
Une famille de Fredholm indexée par C, est un couple (C,F), où C est un espacetopologique compact et connexe et F : C −→ F (X,Y) est une application continue.
14.4.2. R
Etant donné la continuité de F et le théorème de Dieudonné, ind(F(λ)) = constantepour tout λ ∈ C puisque C est un ensemble connexe.
C’est le théorème suivant qui va motiver la nouvelle définition de l’indice quenous allons introduire
14.4.3. T
Soit F : C −→ F (X,Y) une famille de Fredholm.Alors, il existe un sous-espace E ⊂ Y tel que dim(E) < ∞ et un sous-espace Z ⊂ Y tel queY = E⊕Z. De plus, E et Z sont tel que, si P : Y −→ Y est la projection sur Z le long de E,alors im(PF(λ)) = Z pour tout λ ∈ C.
14.4.4. R
(1) La projection P est un opérateur de Fredholm.En effet, im(P) = Z est fermé en tant que facteur direct et sa codimensionest dim(E) < ∞ et ker(P) = E de dimension finie.En outre ind(P) = n(P) − d(P) = dim(E) − dim(E) = 0. Ainsi,ind(PF(λ) = ind(P)+ind(F(λ)) = 0+ind(F(λ)) =constante pour tout λ ∈ C.
(2) Nous avons im(PF(λ)) = PF(λ)(C) = P(im(F(λ))) = P(Z) = Z, ce quientraîne que codim(im(PF(λ))) = dim(E) pour tout λ ∈ C.
D 14.4.3. La preuve procède en deux étapes :
370 14. OPÉRATEURS DE FREDHOLM
(1) la première étape consiste à montrer que le théorème est vérifié locale-ment ;
(2) la deuxième étape consiste à utiliser la propriété locale ainsi que la com-pacité de C pour étendre le résultat à l’ensemble C tout entier.
Etape 1.Soit F : C −→ F (X,Y) une famille de Fredholm et λ0 ∈ C.Soit E0 ⊂ Y un sous-espace tel que dim(E0) < ∞ et E0 + im(F(λ0)) = Y. (Cela estpossible ; F(λ0) étant Fredholm, im(F(λ0)) est fermé et sa codimension est finie,donc au pire des cas on peu prendre pour E0 un supplémentaire topologique deim(F(λ0)).)Soit encore Z0 un supplémentaire topologique de E0 dans Y. (dim(E0) < ∞ impliquequ’il existe au moins un tel Z0.)Finalement, considérons P0 : Y −→ Y la projection de Y sur Z0 le long de E0. Ainsiim(P0) = Z0 et ker(P0) = E0.
14.4.5. L
P0(im(F(λ0))) = Z0.
D.
“⊆”. On a im(F(λ0)) ⊆ Y, donc P0(im(F(λ0))) ⊆ P0(Y) = Z0.
“⊇”. Soit z ∈ Z0. Comme E0 + im(F(λ0)) = Y, z peut s’écrire commez = e + F(λ0)(x) pour un certain e ∈ E0 et un certain x ∈ X. Alors
z = P0(z) = P0(e + F(λ0)(x)) = P0(e) + P0(F(λ0)(x))= 0 + P0(F(λ0)(x)) ∈ P0(im(F(λ0))).
D’où Z0 ⊆ P0(im(F(λ0))).
Considérons P0F : C −→ F (X,Y). Il s’agit d’une application continue en tantque composition de deux application continues. Par conséquent, c’est une famillede Fredholm avec
ind(P0F(λ)) = ind(P0) + ind(F(λ)) = 0 + ind(F(λ)) = ind(F(λ)) = constante
pour tout λ ∈ C. De plus
im(P0F(λ0)) = P0F(λ0)(C) = P0(im(F(λ0))) = Z0.
Nous voulons maintenant étendre ces propriétés à un voisinage ouvert Vλ0 deλ0.
Dans la section précédente, nous avons introduit la notion de bijection associéeà un opérateur de Fredholm F : X → Y, permettant d’exhiber un isomorphismeentre l’espace d’arrivée Y et l’espace produit X0 × Y0.De manière similaire, nous voulons écrire X comme le produit de deux espacesconnus pour notre opérateur P0F(λ0).

14.4. VERS LE THÉORÈME D’ATIYAH–JÄNICH. 371
14.4.6. N
Considérons W0 ⊂ X tel que X = ker P0F(λ0) ⊕W0.Soit π0, la projection sur ker(P0F(λ0)) le long de W0.Pour tout λ ∈ C, définissons
G0(λ) : X −→ Z0 × ker(P0F(λ0))u 7−→ G0(λ)(u) := (P0F(λ)(u), π0(u))
14.4.7. R
Nous remarquons que G0(λ0) : X → Z0 × ker(P0F(λ0)) est un isomor-phisme algébrique, car nous venons de voir queZ0 = ker(P0F(λ0)). Il est aussi claire que G0(λ0) est borné, donc par le théo-rème du graphe fermé, il s’agit aussi d’un isomorphisme topologique.
Comme
‖G0(λ) − G0(λ0)‖ = ‖P0[F(λ) − F(λ0)]‖ → 0, quand λ→ λ0,
G0(λ) est donc continue en λ0. De plus, par la remarque précédente, il existe voisi-nage ouvert Vλ0 deλ0 tel que G0(λ) soit un isomorphisme pour toutλ ∈ Vλ0 , puiquel’ensemble des opérateurs inversibles entre deux espaces de Banach est ouvert. Plusparticulièrement, cela implique que im(P0F(λ)) = Z0 = im(P0F(λ0)),∀λ ∈ Vλ0 .
En résumé, à l’étape 1, nous avons vérifié le théorème pour un λ0 quelconque,à savoir, nous avons montré l’existence de E0,Z0 avec dim(E0) < ∞ tels queY = E0 ⊕ Z0 avec im(P0F(λ0) = Z0.Nous venons de voir que dans un voisinage ouvert Vλ0 de λ0, le théorème restaitvrai sans changer E0,Z0.
Etape 2.Considérons à présent le recouvrement ouvert
C =⋃λ∈C
Vλ.
Par la compacité de C, on peut en tirer un sous-recouvrement fini
C =n⋃
k=1
Vλk .
Pour chaque k, le théorème est vérifié.Nous pouvons donc choisir E ⊂ Y de dimension finie avec Ek ⊂ E pour tout
k = 1, . . . ,n. (Par exemple, E = E1 + . . . + En reste de dimension finie en tant quesomme finie d’espaces de dimension finie.)Soit Z, tel que Y = E⊕Z ; la dimension finie de E implique qu’il existe au moins untel Z. (Alors nous avons clairement Z ⊂ Zk,∀k = 1, . . .n.).Soit P : Y −→ Y est la projection sur Z le long de E. pour tout λ ∈ C.
14.4.8. L

372 14. OPÉRATEURS DE FREDHOLM
Pour tout λ ∈ C, im(PF(λ)) = Z .
D.
“⊆”. Clairement, im(PF(λ)) ⊆ Z, car P est une projection sur Z.
“⊇”. Réciproquement, si λ ∈ Jλk ,Y = Ek ⊕ Zk et im(PkF(λ)) = Zk ⊇ Z.Donc, si z ∈ Z, nous avons z = ek + PkF(λ)(u), avec ek ∈ Ek ⊂ E, etu ∈ X.Ainsi,z = Pz, par vu la définition de P,= Pek + PPkF(λ)(u), vu que z ∈ Z,= 0 + PPkF(λ)(u), car ek ∈ Ek ⊂ E,= PF(λ)(u), car PPk = P.
(En effet, si u = Pk(u) +Qk(u) ∈ Y,nous avons Qk(u) ∈ Ek ⊂ E et donc,P(u) = PPk(u) + PQk(u) = PPk(u) + 0).
Ce qui montre que im(PF(λ)) ⊇ Z.Nous pouvons donc conclure que im(PF(λ)) = Z.
Ce qui termine la démonstration du théorème.
14.4.9. C
La dimension du noyau de PF(λ) est une constante pour tout λ ∈ C.
D. En utilisant la remarque 14.4.4 il vient :
dim(ker(PF(λ))) = ind((PF(λ))) + codim(im(PF(λ)))= ind(F(λ)) + dim E= constante ∀λ ∈ C
Nous pouvons maintenant utiliser le théorème pour construire des fibrés vec-toriels qui nous serviront à definir l’indice d’une famille de Fredholm. Un fibrévectoriel ξ consiste en un espace topologique E appliqué continûment par une ap-plication p sur un espace toplogique compact X telle que pour tout élément x ∈ Xla fibre ξ(x) := p−1(x) ait une structure d’espace vectoriel et telle que cette dernièrefamille d’espaces vectoriels indexée par X soit locallement triviale. Nous laissonsle lecteur se réferrer à la partie Fibrés Vectoriels rédigée par Oliver Prosperi pourplus de détails concernant les fibrés vectoriels.
14.4.10. C
L’espace
ker F :=⋃λ∈C
ker PF(λ)

14.4. VERS LE THÉORÈME D’ATIYAH–JÄNICH. 373
est un fibré vectoriel sur C et l’espace
E :=⋃λ∈C
E
est un fibré vectoriel trivial sur C.Les unions considérées sont disjointes.
D. Commençons par la deuxième assertion. Il est claire qu’ils’agit d’un fibré trivial, puisqu’on peut écrire⋃
λ∈C
E = C × E.
Pour la première assertion, nous avons une application continue p : ker F −→ C quienvoie un élément de ker F, donc (puisque l’union est disjointe) de ker PF(λi) pourun certain λi ∈ C, sur λi, qui est telle que pour tout λ ∈ C, p−1(λ) = ker PF(λ) estmuni d’une structure d’espace vectoriel puisqu’il s’agit de noyaux d’applicationslinéaires.Pour la condition de trivialité locale, il suffit3 en fait de voir que, locallement, nouspouvons trouver des bases continues de ker PF(λ). Pour ce faire revenons revenonsà la preuve du théorème. A l’étape 1, nous avons obtenu un isomorphisme G0(λ)sur un voisinage Vλ0 de λ0. de façon similaire, pour un λk ∈ C fixé, on peut trouverun voisinage ouvert Uλk de λk tel que l’application
G(λ) : X −→ Z × ker(PF(λk))u 7−→ G(λ)(u) := (PF(λ)(u), πk(u))
où πk est la projection sur ker(PF(λk)), soit un isomorphisme pour tout λ ∈ Uλk .Alors
u ∈ ker(PF(λ)) ⇔ G(λ)(u) = (0, πk(u))
⇔ u = G(λ)−1(0, πk(u))
Donc ker(PF(λ)) = G(λ)−1(0 × ker(PF(λk)). Ainsi si (e1, . . . , en) est une base deker(PF(λk)) alors pour tout λ ∈ Uλk nous avons une base (s1(λ), . . . , sn(λ)) deker(PF(λ)), où :
si : Vλ0 −→⋃λ∈C ker PF(λ)
λ 7−→ G(λ)−1(0, ei)
sont continues.
Il existe une notion naturelle d’isomorphisme de fibrés vectoriels sur un espacetopologique X. Notons par Vect(X) l’ensemble des classes d’isomorphie de fibrésvectoriels sur X.
14.4.11. R
Dans le cas où X est un ensemble réduit à un unique point, alors un fibré vectorielsur X est simplement un espace vectoriel et Vect(X) est en correspondance bijective
3A nouveau, se réferrer au travail sur les fibrés vectoriels.

374 14. OPÉRATEURS DE FREDHOLM
avec Z+, puisqu’alors une classe d’isomorphie de fibrés contient tout les espacesvectoriels sur le même corps de même dimension n ∈ Z.
Etant donné deux fibrés vectoriels ξ et ζ sur le même espace topologique X,on peut former leur somme directe ξ ⊕ ζ, qui est encore un fibré vectoriel sur X etla fibre en x ∈ X est simplement ξ(x) ⊕ ζ(x). Cette opération possède un élémentneutre qui est le fibré trivial. Elle induit donc une structure de monoïde abélien surVect(X).
Revonons à notre but premier de définition de généralisation de l’indice. Etantdonné
F : C −→ F (X,Y)une famille de Fredholm, nous avons construit, par le théorème 14.4.3, les deuxfibrés vectoriels
ker F =⋃λ∈C
ker PF(λ) & E =⋃λ∈C
E.
Pour coïncider avec la notion d’indice que nous connaissons déjà pour un uniqueopérateur de Fredholm, nous aimerions définir l’indice d’une famille de Fredholmde la façon suivante :
indice(F) : = [ker F] − [E]= [ker F] − [C × E]
Où la notation [ ] représente les classes d’isomorphie dans Vect(C).
14.4.12. R
Lorsque C = λ0 est réduit à un point la famille de Fredholm F associée à C est enfait un honnête opérateur de Fredholm F(λ0). Alors la classe d’isomorphie du fibréker F =
⋃λ∈C ker PF(λ) = ker PF(λ0) contient les F-espaces vectoriels de même
dimension que ker PF(λ0). De manière similaire, la classe d’isomorphie du fibréE = C × E = λ0 × E contient les F-espaces vectoriels de même dimension que E,qui n’est autre que la codimension de im PF(λ0). En appliquant la correspondancebijective de la remarque 14.4.11, nous pouvons identifier l’indice de F avec l’indicede F(λ0) comme suit :
indice(F) = [ker F] − [E]
≈ n(ker PF(λ0)) − d(im PF(λ0))= ind(PF(λ0))= ind(F(λ0)) vu la remarque 14.4.4
Nous sommes donc transportés de joie à la constatation que notre définition del’indice d’une famille de Fredholm généralise l’indice d’un opérateur de Fredholmdans le sens que ces deux notions coïncident lorsque la famille ne compte qu’ununique opérateur.
Cependant cette définition n’est pas satisfaisante, puique [ker F] et [E] sontdes éléments de Vect(C), qui est seulement un monoïde et non pas un groupe. Lasoustraction n’a donc pas de sens dans ce contexte. Pour pallier cette imperfection, ilfaut appliquer la construction de Grothendieck à Vect(C). Cette dernière généralise

14.4. VERS LE THÉORÈME D’ATIYAH–JÄNICH. 375
la construction qui permet de passer de Z+ à Z, dans le sens où elle permet decompléter un monoïde abélien en un groupe en ajoutant des inverses. Nous laissonsle lecteur se réferrer à la partie K-Théorie Topologique rédigée par David Kohler pourplus de détails sur cette construction. Dans notre cas elle permet d’associer Vect(C)au groupe K(C), appelé groupe de Grothendieck des fibrés vectoriels sur C.
Ainsi nous pouvons donner une définition plus satisfaisante de l’indice d’unefamille de Fredholm.
14.4.13. D
L’indice d’une famille de Fredholm F : C −→ F (X,Y) est l’application donnée par :indice : F : C −→ F (X,Y) −→ K(C)
F 7−→ indice(F) := [[ker F]] − [[C × E]]Où les crochet extérieurs représente les classes d’éléments dans le groupe de Gro-thendieck, qui sont en l’occurence les classes d’isomorphie dans Vect(C) ([ ] inté-rieurs).
Cette définition est très abstraite à première vue. Son importance s’illustre parle théorème d’Atiyah-Jänich.
14.4.14. T ’A-J
Soit C un espace topologique compact et connexe et soit [C,F (X)] l’ensemble des classesd’homotopie de familles de Fredholm F : C −→ F (X).Alors l’application F 7−→ indice F induit un isomorphisme de groupes
˜indice : [C,F (X)] −→ K(C).
Ce théorème montre que l’ indice que nous venons de définir est un invarianthomotopique des familles de Fredholm.
Malheureusement, la fin du semestre approchant et nos connaissances mathé-matiques étant restreintes, nous ne sommes pas en mesure de donner la preuve dece théorème. Pour les espaces de Banach particuliers que sont les espaces de Hil-bert, l’idée est de montrer que la preuve peut se ramener à la preuve du théorème deKuiper, qui affirme que le groupe GL(H) des opérateurs linéaires inversibles d’unespace de Hilbert H est contractile dans B(H). La preuve de ce dernier théorème,bien qu’ingénieuse, n’implique que des propriétés élémentaires des espaces deHilbert. On peut la trouver par exemple dans son livre Linear algebra and geometry.
14.4.15. R
Dans le cas où C est réduit à un point, [C,F (X,Y)] correspond aux composantesconnexes de F (X,Y) et K(C) correspond à Z, puisque Vect(C) correspond à Z+.Alors le théorème d’Atiyah–Jänich établit une correspondance bijective entre lescomposantes connexes de F (X,Y) et Z qui est donnée par le nombre entier indiceque nous avons étudié dans la section précédente.


CHAPITRE 15
Espaces de Sobolev
Ce chapitre a été écrit par Laurent Landry. Les espaces de Sobolev, précieuxoutils pour l’analyse d’équations et d’opérateurs aux dérivées partielles, sont in-troduits et leurs principales propriétés sont démontrées.
15.1. Introduction
Le principal intérêt de la théorie des espaces de Sobolev réside dans l’existencede plongements continus de Sobolev, et dans l’existence de plongements compactsde Rellich-Kondrakov. À ceux-ci, on rajoute bien entendu l’existence de théorèmesde régularité, particulièrement précieux dans l’étude des équations aux dérivéespartielles. Nous traiterons dans un premier temps la théorie des espaces de Sobolevdans l’espace euclidien Rn, essentielle pour la suite. Nous aborderons ensuite lesespaces de Sobolev sur les variétés compactes et finalement la théorie des espacesde Sobolev sur les fibrés vectoriels. Nous supposerons le lecteur familier avec lathéorie de la mesure et de l’intégrale de Lebesgue. On trouvera en annexe un brefrappel des propriétés constamment utilisées dans ce projet.
15.2. Les espaces de Sobolev dans Rn
Introduction aux espaces de Sobolev.
377

378 15. ESPACES DE SOBOLEV
Dérivées aux sens des distributions.
Les espaces de Sobolev requièrent quelques notions clés et techniques de lathéorie des distributions de Schwartz. Sans entrer trop dans les détails, nous in-troduirons le concept de dérivée au sens des distributions ainsi que les espaces dedistributions (au sens de Schwartz).
15.2.1. D
Soit Ω un domaine ouvert de Rn.Une suite φnn∈N ⊂ C∞0 (Ω) est dite convergente au sens de l’espacesD(Ω) vers lafonction φ ∈ C∞0 (Ω) si les conditions suivantes sont satisfaites :
(1) Il existe K ⊂⊂ Ω tel que supp (φn − φ) ⊂ K, pour tout naturel n ∈N
(2) limn→∞
Dαφn(x) = Dαφ(x) uniformément sur K, pour tout multi-indice α
15.2.2. R
(1) Pour tout u ∈ L1loc(Ω) il existe une distribution Tu ∈ D(Ω)∗, le dual de
l’espace fonctionnelD(Ω), définie par
Tu(φ) =∫Ω
u(x)φ(x)dx, ∀φ ∈ D(Ω)(28)
En effet, il est clair, par définition et par la linéarité de l’intégral deLebesgue, que Tu est une application linéaire. Montrons alors que Tuest continue. Pour le voir, supposons qu’il existe une suite φnn∈N quiconverge vers φ dansD(Ω). Alors, par définition, il existe K ⊂⊂ Ω tel quesupp(φn − φ) ⊂ K, pour tout n ∈N. Ainsi,
|Tu(φn) − Tu(φ)| ≤ supx∈K|φn(x) − φ(x)|
∫K|u(x)|dx
Or, vu que l’intégrale∫
K|u(x)|dx est finie et que φn converge vers φ uni-
formément sur K lorsque n tend vers l’infini, le membre de droite del’inégalité précédente tend vers 0, montrant ainsi la continuité de Tu
(2) Vu que toute fonction φ ∈ D(Ω) s’annule identiquement en dehors d’unsous-ensemble compact de Ω, il est clair, grâce à une intégration parparties, que pour toute fonction u ∈ C1(Ω) la relation suivante est vérifiée :∫
Ω
(∂∂xi
u(x))φ(x)dx = −
∫Ω
(∂∂xi
φ(x))
u(x)dx(29)
Pour i = 1, ...,n quelconque.De même, pour tout multi-indice α, par intégration par parties |α|-fois ona ∫
Ω
(Dαu(x))φ(x)dx = (−1)|α|∫Ω
(Dαφ(x)
)u(x)dx(30)
15.2. LES ESPACES DE SOBOLEV DANS Rn 379
Ces résultats motivent ainsi la définition de la dérivée DαT d’une distri-bution T ∈ D(Ω)∗. On pose alors
DαT(φ) = (−1)|α|T(Dαφ)(31)
Vu que Dαφ ∈ D(Ω), pour autant que φ ∈ D(Ω), DαT est bien définie surD(Ω). Clairement DαT est linéaire surD(Ω). Soient alors φ ∈ D(Ω) et unesuite φnn∈N ⊂ D(Ω) telles que φn → φ dansD(Ω). Alors,
supp(Dα(φn − φ)) ⊂ supp(φn − φ) ⊂ K
pour un certain K ⊂⊂ Ω. De plus, on a
Dβ(Dα(φn − φ)
)= Dβ+α(φn − φ)
qui converge uniformément vers 0 sur K lorsque n tend vers l’infini etceci pour tout multi-indice β. Ainsi, Dαφn → Dαφ dans D(Ω). Vu queT ∈ D(Ω)∗ il en découle que
DαT(φn) = (−1)|α|T(Dα(φn)
)→ (−1)|α|T
(Dα(φ)
)= DαT(φ)
montrant ainsi la continuité de DαT et donc le fait que DαT ∈ D(Ω)∗.
Ces préliminaires nous permettent ainsi de bien définir le concept de dérivéespartielles au sens des distributions. Pour cela, considérons une fonction u ∈ L1
loc(Ω).En vertu des résultats précédents, il se peut qu’il existe une fonction vα ∈ L1
loc(Ω)telle que Tvα = Dα(Tu) dans D(Ω)∗. Si une telle fonction vα existe, on peut mon-trer qu’elle est unique, bien entendu en dehors d’un ensemble de mesure nulle.On définit alors la dérivée partielle au sens des distributions de u de la manièresuivante :
15.2.3. D
Soient Ω un domaine ouvert de Rn, u ∈ L1loc(Ω) et α un multi-indice quelconques.
On dit que u admet une dérivée partielle au sens des distributions d’ordre α, s’ilexiste une fonction vα ∈ L1
loc(Ω) telle que
Tvα = Dα(Tu)(32)
En d’autres termes, vα ∈ L1loc(Ω) est la α-ième dérivée partielle au sens des distri-
butions de u si ∫Ω
vα(x)φ(x)dx = (−1)|α|∫Ω
u(x)Dαφ(x)dx(33)
et ceci pour toute fonction φ ∈ D(Ω).On note alors Dαu = vα.
15.2.4. E
Posons n = 1 et Ω =] − 1, 1[ et considérons la fonction u définie sur Ω par :
u(x) =12
(|x| + x)

380 15. ESPACES DE SOBOLEV
On vérifie alors assez facilement que la fonction v définie par :
v(x) =+1 si 0 < x < 10 si −1 < x < 0
correspond à la première dérivée partielle au sens des distributions de la fonctionu.
15.2.5. R
On se convainc alors assez facilement, en vertu des développements précédents,que si u est suffisamment lisse pour avoir une dérivée partielle Dαu au sens usuel,celle-ci correspond également à la dérivée partielle au sens des distributions.
Tous ces préliminaires nous permettent donc de définir les espaces de Sobolev.
Définitions et propriétés élémentaires des espaces de Sobolev.
Soit Ω ⊂ Rn un domaine ouvert, p ∈ R avec 1 ≤ p < ∞ et k un entier non nul.
15.2.6. D
L’espace de Sobolev Wk,p(Ω) est défini par
(34) Wk,p(Ω) =u ∈ Lp(Ω)| pour tout multi-indice α avec |α| ≤ k, Dαu ∈ Lp(Ω)
Dans cette définition la dérivée partielle Dα est entendue au sens des distributions.
15.2.7. R
Les espaces Lp(Ω) sont caractérisés par des classes de fonctions identifiées endehors d’ensembles de mesure nulle, nous conviendrons de parler d’une fonctionu ∈ Wk,p(Ω) continue, bornée, etc. s’il existe une fonction u telle que u = u p.p.x ∈ Ω et bénéficiant de telles propriétés. Dans la suite, lorsque cela deviendra utile,par exemple pour donner un sens à u(x), on remplacera systématiquement u parson représentant.
On vérifie sans difficulté que l’espace de Sobolev Wk,p(Ω) est, comme son noml’indique, un espace fonctionnel. Munissons alors celui-ci de la norme suivante :
15.2.8. L
La fonction ‖ ‖Wk,p(Ω) : Wk,p(Ω)→ R définie par
(35) ‖u‖Wk,p(Ω) :=∑
0≤|α|≤k
‖Dαu‖Lp(Ω)
est une norme sur l’espace vectoriel Wk,p(Ω).

15.2. LES ESPACES DE SOBOLEV DANS Rn 381
La preuve de ce lemme est relativement simple, en se souvenant que la fonction‖ ‖Lp(Ω) définit une norme sur l’espace fonctionnel Lp(Ω). Nous laisserons donc lapreuve de ce lemme en exercice.
15.2.9. L
L’espace Wk,p(Ω) muni de cette norme est un espace de Banach.
D. Soit unn∈N une suite de Cauchy dans l’espace fonctionnelWk,p(Ω). Alors, pour tout multi-indice α d’ordre inférieur ou égal à k, la suiteDαunn∈N est de Cauchy dans Lp(Ω). Rappelons alors que l’espace Lp(Ω) est completet de ce fait, il existe des fonctions u et uα pour tout multi-indice α, 0 ≤ |α| ≤ k,telles que un, Dαun convergent vers u, respectivement vers uα dans Lp(Ω) et cecipour tout multi-indice. De plus, vu que Lp(Ω) ⊂ L1
loc(Ω), chacune des fonctions undétermine une distribution Tun ∈ D(Ω)∗. Ainsi, pour toute fonction φ ∈ D(Ω), on a∣∣∣Tun (φ) − Tu(φ)
∣∣∣ ≤ ∫Ω
|un(x) − u(x)||φ(x)|dx ≤∥∥∥φ∥∥∥Lp′ (Ω) ‖un − u‖Lp(Ω)
grâce à l’inégalité de Hölder (130), où p′ est l’exposant conjugué à p. Ainsi, Tun (φ)→Tu(φ) pour toute fonction φ ∈ D(Ω) lorsque n → ∞. Par un même raisonnement,TDαun (φ) → Tuα (φ) pour toute fonction φ ∈ D(Ω) et tout multi-indice α d’ordrecompris entre 0 et k. Il en découle
Tuα (φ) = limn→∞
TDαun (φ) = limn→∞
(−1)|α|Tun (Dαφ) = (−1)|α|Tu(Dαφ) = Dα(Tu)(φ)
pour toute fonction φ ∈ D(Ω). Ainsi, uα = Dαu au sens des distributions pourtout multi-indice α vérifiant 0 ≤ |α| ≤ k. Finalement, vu que lim
n→∞‖un − u‖Wk,p(Ω) = 0,
l’espace fonctionnel Wk,p(Ω) est complet.
15.2.10. D
Etant donnés k, p, Ω, on définit l’espace de Sobolev
(36) Hk,p(Ω) = le complété de u ∈ C∞(Ω)| ‖u‖Hk,p(Ω) := ‖u‖Wk,p(Ω) < ∞
Pendant longtemps, jusque vers les années 60, les espaces définis en (34) et (36)furent considérés comme distincts. Cette confusion fut rétablie grâce au théorèmede Meyers-Serrin qui identifie ces deux espaces. On peut cependant déjà remar-quer que la complétude de l’espace de Sobolev Wk,p(Ω) nous induit l’inclusion del’espace fonctionnel Hk,p(Ω) dans l’espace fonctionnel Wk,p(Ω). En effet, comme lesdérivées distributionnels et classiques coïncident lorsque ses dernières existent etsont continues sur Ω l’espace
S = u ∈ C∞(Ω)| ‖u‖Wk,p(Ω) < ∞
est contenu dans Wk,p(Ω). Ainsi, vu que l’espace de Sobolev Wk,p(Ω) est complet,l’opérateur d’identité sur S s’étend en un isomorphisme isométrique entre Hk,p(Ω),le complété de S, et la fermeture de S dans Wk,p(Ω). On peut de ce fait identifierl’espace fonctionnel Hk,p(Ω) avec cette fermeture.

382 15. ESPACES DE SOBOLEV
Le théorème de Meyers-Serrin.
15.2.11. L
Soit u ∈Wk,p(Ω). Alors la régularisation de u, uε a la propriété suivante
(37) limε→0‖uε − u‖Wk,p(Ω′) = 0
pour tout Ω′ ⊂⊂ Ω. Dans le cas où Ω = Rn, alors limε→0‖uε − u‖Wk,p(Rn) = 0
D. Vu que Ω′ est borné, il existe ε0 tel que ε0 < dist(Ω′, ∂Ω).Soient alors ε < ε0, x ∈ Ω′, α un multi-indice avec |α| ≤ k arbitrairement choisis.Différentiant sous l’intégrale on trouve :
Dαuε(x) =∫Ω
Dαxρε(x − y)u(y)dy
=ε−n∫Ω
Dαxρ
(x − yε
)u(y)dy
=(−1)|α|ε−n∫Ω
Dαyρ
(x − yε
)u(y)dy
=ε−n∫Ω
ρ(x − yε
)Dα
yu(y)dy par (34)
=
∫Ω
ρε(x − y) Dαyu(y)dy par (34)
=(Dαu)ε(x) par (134)
La conclusion découle alors du corollaire 15.5.7
Par le lemme précédent, on observe que pour toute fonction u ∈ Wk,p(Ω), ilexiste une suite de fonction uε ⊂ C∞0 (Ω) convergente vers u dans Wk,p(Ω′) quelque soit Ω′ de fermeture compacte dans Ω. Le résultat que l’on démontrera par lethéorème 15.2.12 nous donne un résultat semblable valable sur tout ouvert Ω, etnon uniquement pour tout sous-domaine de fermeture compacte dans Ω
15.2.12. T (Meyers-Serrin)
Soit Ω ⊂ Rn un ouvert quelconque. Alors
Hk,p(Ω) =Wk,p(Ω)
D. Pour i = 1, 2, .. définissons Ωk le sous-domaine de Ω par :
Ωi = x ∈ Ω| |x| < i et dist(x, ∂Ω) > 1/i

15.2. LES ESPACES DE SOBOLEV DANS Rn 383
et posons Ω−1 = Ω0 = ∅.On remarque que pour i = 1, 2, ... on a Ωi ⊂⊂ Ωi+1 et de plus ∪∞i=1Ωi = Ω. Considé-rons alors la famille O de sous-domaines de Ω définie par :
O =Ui|Ui = Ωi+1 \Ωi−1, i = 1, 2, ...
Soit alors F une partition de l’unité subordonnée à la famille O. Posons
Fi =f ∈ F | supp f ⊂ Ui
fi =
∑f∈Fi
f(38)
Vu que Ωi+1 est compacte, on a que Fi est un ensemble fini et par suite fi ∈ C∞0 (Ui)
et∞∑
i=1
fi ≡ 1 sur Ω.
Soient alors ε > 0 et u ∈ Wk,p(Ω) arbitrairement choisis. Si 0 < ε < 1/(k + 1)(k + 2),alors le support de la régularisation ( fiu)ε est contenu dans l’intersection Vi = Ωi+2∩
(Ωi−2)c, sous-ensemble d’adhérence compacte dans Ω. Ainsi, vu que fiu ∈ Wk,p(Ω)quel que soit i = 1, 2, ..., on peut choisir εi tel que∥∥∥( fiu)εi − fiu
∥∥∥Wk,p(Ω) =
∥∥∥( fiu)εi − fiu∥∥∥
Wk,p(Vi)<ε
2i(39)
Posant alors vi ≡ ( fiu)εi , on remarque qu’uniquement un nombre fini des fonctionsvi ne s’annule pas surΩ′ ⊂⊂ Ω arbitraire. De ce fait, la fonction v ≡
∑∞
i=1 vi est biendéfini et appartient à C∞(Ω) grâce notamment au corollaire 15.5.5, et le fait qu’unesomme de fonctions continues reste continue.Choisissons x ∈ Ωi quelconque, on a
u(x) =i+2∑j=1
f j(x) u(x) par (38)
v(x) =i+2∑j=1
( f ju)ε j (x)
d’où
‖u − v‖Wk,p(Ωi) ≤
i+2∑j=1
∥∥∥( f ju)ε j − f ju∥∥∥
Wk,p(Ω) < εi+2∑j=1
2− j < ε.
Laissant i tendre vers l’infini, on obtient le résultat.
Les plongements de Sobolev.
Dans ce chapitre, nous allons traiter les plongements des espaces de Sobolevdans d’autres espaces, à savoir d’autres espaces de Sobolev d’ordres plus petitsmais défini sur une norme Lp plus grande. En effet, de manière générale, l’inclusionLp(Ω) ⊂ Lq(Ω) pour 1 ≤ p ≤ q ≤ ∞ est fausse.

384 15. ESPACES DE SOBOLEV
Par le terme de plongement, de l’espace vectoriel normé (X, ‖ ‖X) dans l’espace vec-toriel normé (Y, ‖ ‖Y), que le notera X → Y on entend de manière générale les faitssuivants. D’une part X est un sous-espace vectoriel de Y et d’autre part l’identitéest un opérateur continue. En d’autres termes, l’identité étant linéaire, par un ré-sultat d’analyse fonctionnelle, la continuité de l’opérateur identité est équivalenteà l’existence d’une constante C (indépendante de toute fonction considérée) telleque
‖u‖Y ≤ C‖u‖X, u ∈ XRésultat que l’on exploitera à maintes reprises. Parfois, on ne requiert par la pre-mière condition, et de plus, l’application identité est allégée pour justifier certainsplongements canoniques, notamment en ce qui concerne les opérateurs de traces.Pour ces cas particuliers, nous redéfinirons au besoin ce que l’on entendra par lessymboles X → Y.Un grand nombre d’auteurs ont traités ces plongements par différents types d’ar-guments. La première approche regroupe des résultats concernant la théorie despotentiels et la seconde fait appel à des résultats de moyennes et de combinatoire.Chacune a ses avantages et les résultats clés sont de difficulté théorique égale.Nous privilégierons l’utilisation de la seconde. Pour l’obtention des résultats parla théorie des potentiels, le lecteur pourra consulter l’ouvrage de Adams [2]. Dé-finissons en premier lieu un nouvel espace de fonctions, qui sera notre principalcentre d’intérêt par la suite.
15.2.13. D
L’espace Wk,p0 (Ω) est défini par la fermeture de l’espace C∞0 (Ω), relativement à la
norme (35).
L’avantage que porte les espaces Wk,p0 (Ω) sur les espaces Wk,p(Ω) est prin-
cipalement illustrés par les plongements de Sobolev. En effet, tous les résultatsque nous démontrerons ne sont en général pas valables pour les espaces Wk,p(Ω)avec Ω domaine ouvert quelconque. Ils le sont cependant, moyennant certaineshypothèses géométriques sur le domaineΩ considéré. Nous nous bornerons à dé-montrer les résultats sur les espaces Wk,p
0 (Ω). Pour les résultats généraux sur lesespaces Wk,p(Ω), le lecteur pourra trouvé toutes les démonstrations dans l’ouvragede Adams [2]. Citons cependant, que dans la plupart des cas, les espaces Wk,p
0 (Ω)et Wk,p(Ω) ne coïncident pas.
Définissons encore des espaces de fonctions que l’on considérera dans lasuite, tout particulièrement les espaces de Hölder. Nous démontrerons par la suitequelques propriétés concernant ces espaces. En particulier, nous verrons que lesespaces de Sobolev, sous certaines hypothèses concernant les indices k, n et p,se plongent dans de tels espaces. Nous reviendrons, suite à la définition de cesespaces, à ce que l’on entend par de tels plongements.
15.2.14. D

15.2. LES ESPACES DE SOBOLEV DANS Rn 385
Soient Ω ⊂ Rn, 0 < α ≤ 1 et m un entier non négatif.
(1) On définit l’espace CmB (Ω) par l’ensemble des fonction Cm(Ω) telles que
toutes les dérivées d’ordre inférieur ou égal à m sont bornées. On munitl’espace Cm
B (Ω) de la norme ‖ ‖CmB (Ω) défini par
‖u‖CmB (Ω) = max
0≤|α|≤msupx∈Ω|Dαu(x)|
(2) De même, on définit l’espace Cm(Ω) par
Cm(Ω) = u ∈ Cm(Ω)|Dαu s’étend par continuité à Ω, ∀ 0 ≤ α ≤ m
muni de la norme ‖ ‖Cm(Ω) défini par
‖ ‖Cm(Ω) = ‖u‖CmB (Ω)
(3) Espaces de HölderUne fonction u est dite Hölder-continue d’exposant ν surΩ si il existe uneconstante C telle que
|u(x) − u(y)| ≤ C |x − y|ν, x, y ∈ Ω
On note C0,α(Ω) l’espace de toutes les fonctions u satisfaisant la conditionprécédente sur ΩDe même on note
Cm,α(Ω) = u ∈ Cm(Ω)|Dαu ∈ C0,ν(Ω), ∀ 0 ≤ α ≤ m
On muni les espaces de Hölder de la norme ‖ ‖Cm,ν(Ω) définie par
‖u‖Cm,ν(Ω) = ‖u‖Cm(Ω) + max0≤|α|≤m
supx, y ∈ Ω
x , y
|Dαu(x) −Dαu(y)||x − y|ν
15.2.15. P
Tous les espaces définis précédemment, munis de leur norme respective sont des espaces deBanach.
Bien entendu, toute fonction u ∈ Wk,p(Ω), n’est à priori que définie presquepartout sur Ω. Cette fonction représente un membre particulier d’une classe defonctions égales en dehors d’un ensemble de mesure nulle. On parlera ainsi d’unplongement du type
Wk,p(Ω) → Cm,ν(Ω)
si pour toute fonction u ∈ Wk,p(Ω), sa "classe d’équivalence" contient un membreu ∈ Cm,ν(Ω) tel que
‖u‖Cm,ν(Ω) ≤ C ‖u‖Wk,p(Ω)
Comme précédemment mentionné, nous ne distinguera dès lors pas u et u.

386 15. ESPACES DE SOBOLEV
15.2.16. T (Plongements de Sobolev)
SoientΩ ⊂ Rn un domaine ouvert, k un entier positif, j un entier non négatif et 1 ≤ p < ∞un réel. Alors
Cas 1 Si kp < n
W j+k,p0 (Ω)→W j,q
0 (Ω), ∀ q ∈[p,
n pn − kp
](40)
Cas 2 Si kp = n
(41) W j+k,p0 (Ω)→W j,q
0 (Ω), ∀ q ∈[p,∞
)Cas 3 Si kp > n.
(a) Si kp > n > (k − 1) p
W j+k,p0 (Ω) → C j,ν(Ω), ∀ 0 < ν ≤ k −
np
(42)
En particulier
W j+k,p0 (Ω) → C j(Ω)(43)
(b) Si (k − 1) p = n
W j+k,p0 (Ω) → C j,ν(Ω), ∀ 0 < ν < 1(44)
En particulier
W j+k,p0 (Ω) → C j(Ω)(45)
15.2.17. R(1) Si Ω est de mesure finie, il est évident, en vertu du théorème 15.5.1,
que les résultats du théorème précédent restent également valables pourq ∈ [1, p].
(2) Il nous suffira de traiter les plongements considérant j = 0. En effet,supposons par exemple le plongement
Wk,p0 (Ω) → Lq(Ω)
établi, avec q satisfaisant aux hypothèses respectives.Alors, quelle que soit u ∈ W j+k,p
0 (Ω), on a Dαu ∈ Wk,p0 (Ω) pour |α| ≤ j et
ainsi Dαu ∈ Lq(Ω). Il en découle que u ∈W j,q0 (Ω) et
‖u‖W j,q(Ω) =∑|α|≤ j
‖Dαu‖Lq(Ω)
≤ C1
∑|α|≤ j
‖Dαu‖Wk,p(Ω)
≤ C2 ‖u‖W j+k,p(Ω)
et ainsi
W j+k,p0 (Ω) →W j,q
0 (Ω)

15.2. LES ESPACES DE SOBOLEV DANS Rn 387
(3) Par densité, ils nous suffira, dans le plupart des cas, de traiter dans un pre-mier temps les plongements considérant u ∈ C∞0 (Ω). L’avantage étant queles dérivées partielles au sens des distributions peuvent être remplacéespar celles au sens usuel.
15.2.18. N
Pour α = (0, ..., 0, 1, 0, ...0) un multi-indice tel que |α| = 1 dont l’élément non nul setrouve à la i-ième position, nous noterons Dαu = Diu.
Dans les paragraphes qui suivent, nous allons démontrés ce théorème. Noustraiterons chaque cas les eux après les autres.
Nous utiliserons à maintes reprises le lemme suivant, dont on trouvera unepreuve simple dans l’ouvrage d’Adams [2].
15.2.19. L
Soient u ∈Wk,p0 (Ω). Posons
u =
u(x) si x ∈ Ω0 si x ∈ Ωc
Si |α| ≤ k, alors Dαu = Dαu dans le sens des distributions. En d’autres termes u ∈Wk,p(Rn)et
∥∥∥u∥∥∥
Wk,p(Rn) = ‖u‖Wk,p(Ω)
Ce lemme nous permet alors de ne plus nous soucier du domaineΩ considéré.Pour nos besoins, nous ne traitons que des domaines ouverts de Rn. Cependantgrâce à ce lemme, on se laisse convaincre que certains des résultats suivants sontvalables pour des ouverts Ω quelconques.
Cas kp < n.
15.2.20. T (Sobolev, Gagliardo, Nirenberg)
Soient Ω ⊂ Rn un domaine ouvert et 1 ≤ p < n un réel. Alors,
(46) W1,p0 (Ω) → Lp∗ (Ω)
où p∗ est donné par
p∗ =n p
n − pDe plus, il existe une constante C = C(n, p) telle que
‖u‖Lp∗ (Ω) ≤ C ‖Du‖Lp(Ω)∀u ∈W1,p0 (Ω)(47)

388 15. ESPACES DE SOBOLEV
15.2.21. R
Pour des raisons mnémotechniques, on remarque sans difficulté que p∗ est donnépar la relation suivante :
1p∗=
1p−
1n
Pour la preuve de ce théorème, on utilisera le lemme suivant.
15.2.22. L
Soient n ≥ 2 et f1, ..., fn ∈ Ln−1(Rn−1). Pour x ∈ Rn et 1 ≤ i ≤ n, on pose
xi = (x1, ..., xi−1, xi+1, ..., xn) ∈ Rn−1
Alors la fonction
f (x) =n∏
i=1
fi(xi), x ∈ Rn
appartient à L1(Rn) et ∥∥∥ f∥∥∥
L1(Rn) ≤
n∏i=1
∥∥∥ fi∥∥∥
Ln−1(Rn−1)
La preuve de ce lemme s’obtient sans réelle difficulté par induction. On entrouvera une preuve par exemple dans l’ouvrage de Brezis [15].
D. (Théorème 15.2.20)Supposons p = 1 et u ∈ C∞0 (Ω). Prolongeons u par 0 en dehors de Ω. Alors, lafonction ainsi obtenue, que l’on notera également u appartient à C∞0 (Rn). Pourx ∈ Ω et 1 ≤ i ≤ n arbitrairement choisis, on a
u(x) =∫ xi
−∞
Diu(x1, ..., t, ..., xn) dt
et par suite
|u(x)| =∫ xi
−∞
|Diu(x1, ..., t, ..., xn)| dt ≤∫R
|Diu(x1, ..., t, ..., xn)| dt =: hi(xi)
Ce qui entraîne que
|u(x)|n ≤n∏
i=1
hi(xi)
⇒ f (x) := |u(x)|n
n−1 ≤
n∏i=1
hi(xi)1
n−1 =:n∏
i=1
fi(xi)

15.2. LES ESPACES DE SOBOLEV DANS Rn 389
Par le lemme 15.2.22
‖u‖n/(n−1)Ln/(n−1)(Rn)
=∥∥∥ f
∥∥∥L1(Rn)
≤
n∏i=1
∥∥∥ fi∥∥∥
Ln−1(Rn−1)
=
n∏i=1
(∫Rn−1| fi(xi)|n−1dxi
) 1n−1
=
n∏i=1
(∫Rn−1
(∫R
|Diu(x1, ..., t, ...xn)|dt)
dxi
) 1n−1
=
n∏i=1
(∫Rn|Diu(x)|dx
) 1n−1
ou encore
‖u‖Ln/(n−1)(Rn) ≤
n∏i=1
(∫Rn|Diu(x)|dx
) 1n
Utilisant la relation entre la moyenne géométrique et la moyenne arithmétique, onobtient
‖u‖Ln/(n−1)(Rn) ≤1n
∫Rn
n∑i=1
|Diu(x)|dx ≤√
nn‖Du‖L1(Rn)
Supposons maintenant 1 ≤ p < n et u ∈ C∞0 (Ω). Par un même prolongement etappliquant l’inégalité précédent à |u|t pour t > 1 on trouve, grâce à l’inégalité deHölder, ∥∥∥|u|t∥∥∥Ln/(n−1)(Rn) ≤
√n
n
∥∥∥D(|u|t)∥∥∥
L1(Rn) =t√
nn
∥∥∥ |u|t−1|Du|
∥∥∥L1(Rn)
≤t√
nn
∥∥∥ |u|t−1∥∥∥
Lp′ (Rn) ‖Du‖Lp(Rn) avec p′ =p
p − 1
Ou encore (∫Rn|u|
t nn−1 dx
) n−1n
≤t√
nn
(∫Rn|u|
(t−1) pp−1 dx
) p−1p
‖Du‖Lp(Rn)(48)
Choisissons t tel que
t nn − 1
=(t − 1) p
p − 1⇔ t =
(n − 1) pn − p
L’inégalité (48) devient
‖u‖Lnp/(n−p)(Ω) = ‖u‖Lnp/(n−p)(Rn) ≤t√
n︸︷︷︸:=C
‖Du‖Lp(Rn) = C ‖Du‖Lp(Ω) ≤ C ‖u‖W1,p(Ω)(49)
Supposons maintenant u ∈W1,p0 (Ω)
Soit alors unn∈N ⊂ C∞0 (Ω) une suite telle que un → u dans W1,p(Ω). Soit ε > 0

390 15. ESPACES DE SOBOLEV
quelconque. Par définition, il existe N ∈N tel que pour tout n > m ≥ N
‖un − um‖W1,p(Ω) < ε/C
D’où, appliquant l’inégalité (49) à la différence un − um, on obtient
‖un − um‖Lp∗ (Ω) < ε
Autrement dit la suite unn∈N est de Cauchy dans l’espace de Banach Lp∗ (Ω), ainsiu ∈ Lp∗ (Ω)
15.2.23. C
Soient Ω ⊂ Rn un domaine ouvert, k un entier non négatif, 1 ≤ p < ∞ un réel tel quekp < n. Posons
p∗ =n p
n − kpAlors,
(50) Wk,p0 (Ω) → Lp∗ (Ω)
15.2.24. R
Il est parfois plus commode de se souvenir que le réel p∗ du corollaire 15.2.23 estdonné par
1p∗=
1p−
kn
D. Par récurrence sur k.
(1) Pour k = 1, c’est le résultat du théorème 15.2.20.
(2) Supposons k ≥ 2 et le résultat vrai pour k − 1, i.e., pour toute fonctionv ∈Wk−1,p
0 (Ω),
‖v‖L
npn−(k−1)p (Ω)
≤ C ‖v‖Wk−1,p(Ω)
Posons qk =np
n − kp. Soit alors une fonction u ∈ Wk,p
0 (Ω) arbitrairement
choisie et supposons kp < n. Par l’injection naturelle de l’espace de So-bolev Wk,p
0 (Ω) dans l’espace de Sobolev Wk−1,p0 (Ω), il en découle que la
fonction u appartient à l’espace Wk−1,p0 (Ω) et qu’il existe une constante C
telle que
‖u‖Lqk−1 (Ω) ≤ C ‖v‖Wk−1,p(Ω)
Ainsi, on a
‖u‖W1,qk−1 (Ω) = ‖u‖Lqk−1 (Ω) +
n∑i=1
‖Diu‖Lqk−1 (Ω) ≤ C(n + 1) ‖u‖Wk,p(Ω)

15.2. LES ESPACES DE SOBOLEV DANS Rn 391
car chacune des fonctions Diu appartient à l’espace de Sobolev Wk−1,p0 (Ω).
Or, vu que kp < n, on a qk−1 < n et ainsi, par le théorème 15.2.20, il existeune constante C′ telle que
‖u‖Lq(Ω) ≤ C′ ‖u‖W1,qk−1 (Ω)
avec q donné par
q =nqk−1
n − qk−1=
npn − kp
= p∗
Posant C′′ = C′ C (n + 1), on a
‖u‖Lp∗ (Ω) ≤ C′′ ‖u‖Wk,p(Ω)
(3) On conclue par induction.
15.2.25. C
(Généralisation du corollaire 15.2.23)Soient Ω ⊂ Rn un domaine ouvert, j, k deux entiers non négatifs, 1 ≤ p < ∞. Supposonskp < n. Posons
p∗ =n p
n − kp
Alors, on a les plongements suivants :
(51) W j+k,p0 (Ω) →W j,p∗
0 (Ω)
De plus, grâce a l’inégalité d’interpolation, on a
(52) W j+k,p0 (Ω) →W j,q
0 (Ω)
Quel que soit q ∈[p, p∗
].
Cas kp = n.
Dans ce paragraphe, nous allons traiter le cas limite kp = n.Nous supposerons dans un premier temps que k = 1 et nous déduirons le résultatpar induction.
15.2.26. T (Cas limite p = n)
Soit Ω ⊂ Rn un domaine ouvert. Alors
(53) W1,n0 (Ω) → Lq(Ω), ∀q ∈ [n,∞)
D. Soit u ∈ CΩ0 (∞) quelconque. Par le Lemme 15.2.19 étendonsu par 0 en dehors de Ω

392 15. ESPACES DE SOBOLEV
(1) Supposons de plus p = 1Alors, vu que kp = n avec k = 1, on a n = 1. Vu que u est à supportcompact, on a pour x ∈ R
u(x) =∫ x
−∞
u′(t)dt
Ainsi
|u(x)| ≤∫ x
−∞
|u′(t)|dt ≤ ‖u′‖L1(R) ≤ ‖u‖W1,1(R) = ‖u‖W1,1(Ω)
D’où,‖u‖L∞(Ω) ≤ ‖u‖W1,1(Ω)
Ainsi, vu que u ∈ L1(Ω), grâce à l’inégalité d’interpolation il existe θ ∈[0, 1] tel que
‖u‖Lq(Ω) ≤ ‖u‖θL1(Ω) ‖u‖
1−θL∞(Ω) ≤ ‖u‖W1,1(Ω)
quel que soit q ∈ [1,∞].
(2) Supposons maintenant p > 1
Dans ce cas, l’égalité kp = n avec k = 1 impose n > 1. De ce fait,1
n − 1a un
sens. Procédant comme dans la preuve du théorème 15.2.20, on obtient,quel que soit t > 1
‖u‖tL
t nn−1 (Rn)
≤ t ‖u‖t−1
L(t−1)nn−1 (Rn)
n∏i=1
‖Diu‖Ln(Rn)
1/n
Utilisant à nouveau l’inégalité entre les moyennes géométriques et arith-métiques, l’inégalité précédente devient
‖u‖tL
t nn−1 (Rn)
≤ t ‖u‖t−1
L(t−1)nn−1 (Rn)
1n
n∑i=1
‖Diu‖Ln(Rn)
Ou encore
‖u‖L
t nn−1 (Rn)
≤ ‖u‖t−1
t
L(t−1)nn−1 (Rn)
t√
t/n
n∑i=1
‖Diu‖Ln(Rn)
1t
Posons alors
a = t√
t/n
n∑i=1
‖Diu‖Ln(Rn)
1t
b = ‖u‖t−1
t
L(t−1)nn−1 (Rn)
p = t
p′ =t
t − 1

15.2. LES ESPACES DE SOBOLEV DANS Rn 393
Appliquant l’inégalité de Young a b ≤ap
p+
bp′
p′on en déduit l’inégalité
suivante
‖u‖L
t nn−1 (Rn)
≤1n
n∑i=1
‖Diu‖Ln(Rn) +t − 1
t‖u‖
L(t−1)nn−1 (Rn)
≤
n∑i=1
‖Diu‖Ln(Rn) + ‖u‖L
(t−1)nn−1 (Rn)
(54)
car t,n > 1.Posons t = n. L’inégalité précédente devient
‖u‖L
n2n−1 (Rn)
≤
n∑i=1
‖Diu‖Ln(Rn) + ‖u‖Ln(Rn)
= ‖u‖W1,p(Rn)
= ‖u‖W1,p(Ω)
Appliquant alors l’inégalité d’interpolation (131), on a pour q ∈[n, n2
n−1
]quelconque,
W1,p0 (Ω) → Lq(Ω)
Posant maintenant t = n + 1 dans l’inégalité (54), on trouve
‖u‖L
(n+1) nn−1 (Rn)
≤
n∑i=1
‖Diu‖Ln(Rn) + ‖u‖L
n2n−1 (Rn)
(55)
≤ 2 ‖u‖W1,p(Ω)(56)
Appliquant à nouveau l’inégalité d’interpolation (131), il en découle quepour q ∈
[n2
n−1 ,(n+1)n
n−1
]quelconque
W1,p0 (Ω) → Lq(Ω)
Réitérant cet argument avec t = n + 2,n + 3, ... on aboutit à
‖u‖Lq(Ω) ≤ C ‖u‖W1,p(Ω)(57)
pour tout u ∈ C∞0 (Ω) et tout q ∈ [n,∞)
L’inégalité (57) se prolonge alors par densité à toute fonction u ∈W1,p0 (Ω)
15.2.27. C
Soient Ω ⊂ Rn un domaine ouvert, k un entier positif et 1 ≤ p < ∞ un réel. Supposonskp = n. Alors
(58) Wk,p0 (Ω) → Lq(Ω), ∀q ∈ [p,∞)
D. Par induction sur k.
(1) Si k = 1, le résultat découle du théorème 15.2.26.

394 15. ESPACES DE SOBOLEV
(2) Soit k ≥ 2 quelconque et supposons le résultat vrai pour tout 1 ≤ l ≤ k− 1,à savoir
Wl,pl
0 (Ω) → Lq(Ω)
pour tout q ∈ [pl,∞) avec pl =nl
.Soit alors 1 ≤ p < ∞ tel que kp = n. Montrons que
Wk,p0 (Ω) → Lq(Ω)
pour tout q ∈ [p,∞).Posons k′ = 1 et j = k − 1. Par le 15.2.25, on a, vu que k′p = p < n
Wk,p0 (Ω) =W j+k′,p
0 (Ω) →W j,p∗
0 (Ω)
avec p∗ =n p
n − k′p=
npn − p
.
Or, k − 1 =np− 1 =
n − pp
et par conséquent (k − 1)p∗ =n − p
pnp
n − p= n.
Par hypothèse d’induction
Wk−1,p∗
0 (Ω) =W j,p∗
0 (Ω) → Lq(Ω)
pour tout q ∈ [p∗,∞). En composant nos différents plongements on trouve
Wk,p0 (Ω) → Lq(Ω)
pour tout q ∈ [p∗,∞). Finalement, vu que trivialement
Wk,p0 (Ω) → Lp(Ω)
On applique l’inégalité d’interpolation (131) pour en déduire qu’égale-ment
Wk,p0 (Ω) → Lq(Ω)
pour tout q ∈ [p, p∗].
15.2.28. C
(généralisation du théorème 15.2.27)SoientΩ ⊂ Rn un domaine ouvert, k un entier positif, j un entier non négatif et 1 ≤ p < ∞un réel. Supposons kp = n. Alors
(59) W j+k,p0 (Ω) →W j,q
0 (Ω), ∀q ∈ [1,∞)

15.2. LES ESPACES DE SOBOLEV DANS Rn 395
Cas kp > n.
Dans ce paragraphe, nous allons voir les cas particuliers où kp > n. Mais avantcela, citons quelques propriétés de plongements entre les espaces de Hölder.
15.2.29. T
Soient Ω ⊂ Rn un domaine ouvert, m un entier non négatif, 0 < ν < λ ≤ 1 deux réels.Alors
Cm+1(Ω) → Cm(Ω)(60)
Cm+1,λ(Ω) → Cm,λ(Ω)(61)
Cm,λ(Ω) → Cm(Ω)(62)
Cm,λ(Ω) → Cm,ν(Ω)(63)
D. Les plongements (60)-(62) découle immédiatement des défi-nitions. Pour établir (63), on remarque dans un premier temps que si x, y sont deuxpoints de Ω qui satisfont 0 < |x − y| < 1 alors
|Dαu(x) −Dαu(y)||x − y|ν
=|Dαu(x) −Dαu(y)|
|x − y|ν|x − y|λ−ν
|x − y|λ−ν
≤|Dαu(x) −Dαu(y)|
|x − y|λ
quel que soit α, un multi-indice d’ordre inférieur ou égal a m et pour toute fonctionu ∈ Cm,λ(Ω). Par conséquent
supx, y ∈ Ω
0 < |x − y| < 1
|Dαu(x) −Dαu(y)||x − y|ν
≤ supx,y∈Ω
|Dαu(x) −Dαu(y)||x − y|λ
De même si x, y vérifient |x − y| ≥ 1 on a
supx, y ∈ Ω
0 < |x − y| < 1
|Dαu(x) −Dαu(y)||x − y|ν
≤ supx,y∈Ω
|Dαu(x) −Dαu(y)|
≤ 2‖u‖Cm(Ω)
De nos deux inégalités, on en déduit que
‖u‖Cm,ν(Ω) ≤ 2‖u‖Cm,λ(Ω)
15.2.30. T
Soient Ω ⊂ Rn un domaine ouvert et n < p < ∞ un réel. Alors,
W1,p0 (Ω) → C0(Ω)(64)

396 15. ESPACES DE SOBOLEV
Plus encore
W1,p0 (Ω) → C0,ν(Ω)(65)
avec ν = 1 − n/p.
D. Soit u ∈ C∞0 (Ω). Grâce au lemme 15.2.19, pour tout x ∈ Rn\Ω
posons u(x) = 0.Soit alors Q un cube ouvert, contenant 0, dont les côtés, de longueur r, sont paral-lèles aux axes de coordonnées.Pour x ∈ Q, on a
u(x) − u(0) =∫ 1
0
ddt
u(t x) dt
D’où
(66) |u(x) − u(0)| ≤∫ 1
0
n∑i=1
|xi| |Diu(t x)| dt ≤ rn∑
i=1
∫ 1
0|Diu(t x)| dt
Posons u =1|Q|
∫Q
u(x) dx, la moyenne de u sur Q. Par intégration sur Q on trouve
|u − u(0)| =
∣∣∣∣∣∣ 1|Q|
∫Q
u(x)dx − u(0)
∣∣∣∣∣∣=
∣∣∣∣∣∣ 1|Q|
∫Q
u(x)dx −1|Q|
∫Q
u(0)dx
∣∣∣∣∣∣≤
1|Q|
∫Q|u(x) − u(0)|dx
≤r|Q|
∫Q
dxn∑
i=1
∫ 1
0|Diu(t x)| dt par (66)
=1
rn−1
∫ 1
0dt
n∑i=1
∫Q|Diu(t x)| dx
=1
rn−1
∫ 1
0dt
n∑i=1
∫tQ
∣∣∣Diu(y)∣∣∣ dy
tn
Ainsi, vu que tQ ⊂ Q pour 0 < t < 1, grâce à l’inégalité de Hölder, on a
∫tQ
∣∣∣Diu(y)∣∣∣ dy ≤ ‖Diu‖Lp(Q) |tQ|1/p
′

15.2. LES ESPACES DE SOBOLEV DANS Rn 397
D’où
|u − u(0)| ≤1
rn−1
n∑i=1
‖Diu‖Lp(Q)
rn/p′∫ 1
0
tn/p′
tn dt
≤ C r1−n/p
n∑i=1
‖Diu‖Lp(Q)
≤ C′ r1−n/p
n∑i=1
‖Diu‖Lp(Rn)
Par translation, cette inégalité reste valable pour tout cube Q de côté r contenant x,i.e.
|u − u(x)| ≤ C′ r1−n/p
n∑i=1
‖Diu‖Lp(Rn)
(67)
pour tout x ∈ Q.Soient x ∈ Ω et Q un cube de côté r = 1 contenant x. Par l’inégalité (67) on en déduitque
|u(x)| ≤ |u| + C′ n∑
i=1
‖Diu‖Lp(Rn)
≤ C′′‖u‖Lp(Rn) +
n∑i=1
‖Diu‖Lp(Rn)
= C′′ ‖u‖W1,p(Rn) = C′′ ‖u‖W1,p(Ω)
De plus, Vu que u est à support compact, u est uniformément continu et doncu ∈ C0(Ω) Par l’inégalité du triangle appliquée à l’inégalité (67), on obtient
|u(x) − u(y)| ≤ 2 C′ r1−n/p
n∑i=1
‖Diu‖Lp(Rn)
pour tout x, y ∈ Q.Pour x, y ∈ Ω, il existe un cube Q ⊂ Rn de côté r = 2|x − y| contenant x et y, ainsi
|u(x) − u(y)| ≤ K
n∑i=1
‖Diu‖Lp(Ω)
|x − y|1−n/p
où K = K(n, p). Ainsi u ∈ C0,ν(Ω).Si maintenant, u ∈ W1,p
0 (Ω), on utilise une suite régularisante ui ∈ C∞0 (Ω) quiconverge vers u dans W1,p
0 (Ω) et telle que ui(x) converge vers u(x) pour presquetout x ∈ Ω. On obtient que la suite est fondamental pour la norme du sup surΩ.
15.2.31. C
Soient Ω ⊂ Rn un domaine ouvert, k un entier positif et 1 ≤ p < ∞ un réel. Supposonskp > n. Alors
(1) Si kp > n > (k − 1) p
Wk,p0 (Ω) → C0,ν(Ω),(68)

398 15. ESPACES DE SOBOLEV
Avec ν = k −np
. En particulier
Wk,p0 (Ω) → C0(Ω)(69)
(2) Si n = (k − 1) p
Wk,p0 (Ω) → C0,ν(Ω)(70)
Pour 0 < ν < 1 quelconque. En particulier
Wk,p0 (Ω) → C0(Ω)(71)
D.
(1) Supposons n > (k − 1)p.On a, par le corollaire 15.2.25,
Wk,p0 (Ω) =W1+(k−1),p
0 (Ω) →W1,p∗
0 (Ω)
avec p∗ =np
n − (k − 1)p. D’où
1 −np∗= 1 −
(n − (k − 1)p
)n
np= k −
np
Par le théorème 15.2.30
W1,p∗
0 (Ω) → C0,ν(Ω)
avec ν = 1 −np∗= k −
np
(2) Supposons n = (k − 1)p.Par le même raisonnement, et appliquant cette fois-ci le corollaire 15.2.32
Wk,p0 (Ω) =W1+(k−1),p
0 (Ω) →W1,q0 (Ω)
pour tout p ≤ q < ∞. Soit alors 0 < ν < 1 quelconque. Il existe p ≤ q < ∞tel que q > n et ν < 1 − n
q . Par le théorème 15.2.30
W1,q0 (Ω) → C0,λ(Ω)
avec λ = 1−1q
. Finalement, vu que ν < λ, on a, grâce au théorème 15.2.29
C0,λ(Ω) → C0,ν(Ω)
Composant ces deux plongements, on obtient bien le résultat cherché.
15.2.32. C
(Généralisation du corollaire 15.2.31)Soient Ω ⊂ Rn un domaine ouvert, k un entier positif et 1 ≤ p < ∞ un réel. Supposonskp > n ≥ (k − 1)p. Alors

15.2. LES ESPACES DE SOBOLEV DANS Rn 399
(1) Si n > (k − 1)p
W j+k,p0 (Ω) → C j,ν(Ω),(72)
Avec ν = k −np
. En particulier
W j+k,p0 (Ω) → C j(Ω)(73)
(2) Si n = (k − 1)p
W j+k,p0 (Ω) → C j,ν(Ω)(74)
Pour 0 < ν < 1 quelconque. En particulier
W j+k,p0 (Ω) → C j(Ω)(75)
15.2.33. R
Si kp > n de manière générale, il existe 0 ≤ j < k tel que
(k − j) p > n ≥ (k − j − 1) p
posant k0 = k − j, on a Wk,p0 (Ω) = W j+k0,p
0 (Ω). On est alors ramené à l’un des deuxcas précédent.
Extension de domaines.
On connaît désormais les principaux résultats pour les espaces Wk,p0 (Ω).
L’idée serait alors de travailler sur de tels espaces, remplaçant les espaces Wk,p(Ω)par les espaces Wk,p
0 (Ω′) pour Ω′ un domaine borné contenant l’adhérence de Ω.Sous certaine hypothèse, à savoir pour des domaines Ω suffisamment réguliers etbornés, il existe un opérateur continu
L : Wk,p(Ω)→Wk,p(Rn)
ayant les propriétés suivantes
(1) L(u)(x)|Ω = u(x) p.p. x ∈ Ω
(2) il existe une constante C = C(k, p) telle que ‖L(u)‖Wk,p(Rn) ≤ C ‖L(u)‖Wk,p(Ω)
Par suite, on considère une fonction f ∈ C∞0 (Rn) telle que f ≡ 1 sur Ω. Ainsi, siu ∈ Wk,p(Ω), alors f · L(u) ∈ Wk,p
0 (Ω′) où Ω′ est un domaine borné contenant lesupport de la fonction f . Les résultats des sections précédents (plongements) sontalors valable moyennant la chaîne d’inégalités suivantes, dans le cas où l’injection
Wk,p0 (Ω′) → Lq(Ω′)

400 15. ESPACES DE SOBOLEV
est vérifiée :
‖u‖Lq(Ω) ≤ C1
∥∥∥ f · L(u)∥∥∥
Lq(Ω′)
≤ C2
∥∥∥ f · L(u)∥∥∥
Wk,p(Ω′)
= C2
∥∥∥ f · L(u)∥∥∥
Wk,p(Rn) par le lemme 15.2.19
≤ C3 ‖u‖Wk,p(Ω)
L’établissement de telles extensions est relativement difficile, nous ne démontre-rons de ce fait pas les résultats. On en trouvera les énoncés dans la plupart desouvrages cités en référence.
Le théorème de compacité de Rellich-Kondrachov.
Nous avons traité les différentes injections continues possibles des espaces deSobolev les espaces de Banach de la forme (X, ‖ ‖X). Cependant, dans cette sous-section nous allons pousser ces résultats encore plus loin, pour montrer, du moinspartiellement, que certaine de ces injections possèdent des propriétés de compaci-tés. Pour motiver cela, rappelons quelques définitions et résultats essentielles.
15.2.34. D
Soient (X, ‖ ‖X) et A ⊂ X un sous-ensemble.
(1) On dit que A est compact dans X si pour toute suite ann∈N ⊂ A, il existeune sous-suite ank k∈N qui converge dans X et dont la limite a ∈ A
(2) A est dit précompact si A est compact.
15.2.35. D
Soient X, Y deux espaces normés, L : X→ Y un opérateur linéaire. Alors
(1) L est dit compact si L(A) est précompacte dans Y, pour toute partie bornéeA ⊂ X.
(2) L est dit complètement continue si il est continue et compact. On noteraalors X→ Y
15.2.36. T (Ascoli-Arzela)
Soient Ω ⊂ Rn un domaine borné, K ⊂ C0(Ω). Alors K est précompact si les conditionssuivantes sont satisfaites :
(1) Il existe une constante M telle que pour toute fonction u ∈ K et tout point x ∈ Ω
|u(x)| ≤M

15.2. LES ESPACES DE SOBOLEV DANS Rn 401
(2) Pour tout ε > 0, il existe δ > 0, pour tout x, y,∈ Ω avec |x − y| < δ, on a|u(x) − u(y)| < ε
15.2.37. C
Soient Ω ⊂ Rn un domaine ouvert borné, m un entier non négatif, 0 < ν < λ ≤ 1 deuxréels. Alors
Cm,λ(Ω)→ Cm(Ω)(76)
Cm,λ(Ω)→ Cm,ν(Ω)(77)
D. Soit F un sous-ensemble borné dans C0,λ(Ω). Alors, il existeM telle que ‖u‖C0,λ(Ω) ≤M, pour toute fonction u ∈ F . D’où |u(x) − u(y)| ≤M|x − y|,pour toute fonction u ∈ F , et tout x, y ∈ Ω, ainsi par le théorème 15.2.36, F estprécompact dans C0(Ω), prouvant le résultat de (76) pour m = 0.Si m ≥ 1, tout sous-ensemble borné dans Cm,λ(Ω) l’est également dans C0,λ(Ω). Parles considérations précédents, il existe une suite, uii∈N ⊂ F convergente vers udans C0(Ω). De plus, la suite D1uii∈N est borné dans C0,λ(Ω). Il existe donc unesous-suite de la suite uii∈N, que l’on notera également uii∈N telle que D1ui → ψ1
dans C0(Ω). La convergence dans C0(Ω) étant une convergence uniforme sur Ω,on a ψ1 = D1u. Réitérant ce procédé, on peut extraire une sous-suite, toujoursnoté uii∈N, telle que Dαui → Dαu dans C0(Ω) pour tout multi-indice α vérifiant0 ≤ |α| ≤ m. On a donc prouver la compacité de (76) de manière générale.Pour (77), on procède comme suit :
|Dαu(x) −Dαu(y)||x − y|ν
=
(|Dαu(x) −Dαu(y)|
|x − y|λ
)ν/λ|Dαu(x) −Dαu(y)|1−ν/λ
≤ C|Dαu(x) −Dαu(y)|1−ν/λ(78)
Pour toute fonction u dans un sous-ensemble borné de Cm,λ(Ω). Ainsi l’inégalité(78) nous dit toute suite bornée dans Cm,λ(Ω) et convergente dans Cm(Ω) convergeégalement dans Cm,ν(Ω). Ainsi, la compacité de (77) découle de celle de (76).
Le théorème qui suit est une version "Lp" du théorème d’Ascoli-Arzela. Nousne démontrerons pas ce résultat. Une preuve relativement technique, qui montreen particulier la nécessité et la suffisance des hypothèses du théorème, peut êtretrouvé dans l’ouvrage de Adams [2].
15.2.38. T (Riesz-Fréchet-Kolmogorov)
SoitΩ ⊂ Rn un domaine ouvert et soitF un sous-ensemble borné de Lp(Ω) avec 1 ≤ p < ∞.Pour toute fonction u ∈ F on note u son extension par 0 en dehors de Ω. Supposonssatisfaites les hypothèses suivantes :Pour tout ε > 0, il existe δ > 0 et un sous-domaine ω ⊂⊂ Ω tels que

402 15. ESPACES DE SOBOLEV
(1) (∫Ω
|u(x + h) − u(x)|p dx)1/p
< ε
pour tout h ∈ Rn avec |h| < δ et pour toute fonction u ∈ F .
(2) ‖u‖Lp(Ω\ω) < ε, pour toute fonction u ∈ F .Alors F est précompact dans Lp(Ω)
15.2.39. T (Rellich-Kondrachov)
Soient Ω ⊂ Rn un domaine ouvert borné, k un entier naturel, j,m deux entiers nonnégatifs, 1 ≤ p < ∞ un réel. Alors
(1) Si kp < n
W j+k,p0 (Ω)→W j,q
0 (Ω), ∀q ∈[1,
n pn − kp
)(79)
(2) Si kp = n
(80) W j+k,p0 (Ω)→W j,q
0 (Ω), ∀q ∈ [1,∞)
(3) Si kp > n.
(a) Si kp > n ≥ (k − 1) p
W j+k,p0 (Ω)→ C j,ν(Ω), ∀ ν ∈
(0, k −
np
)(81)
En particulier
W j+k,p0 (Ω)→ C j(Ω)(82)
(b) Si kp > n (de manière générale)
Wk,p0 (Ω)→ Cm(Ω), ∀ 0 ≤ m < k −
np
(83)
W j+k,p0 (Ω)→W j,q
0 (Ω), ∀ q ∈ [1,∞](84)
15.2.40. R(1) Pour prouver la compacité des injections (79)-(82) et (84), il suffit de consi-
dérer le cas j = 0.En effet, prenons par exemple (79) (les autres se traitent de manière simi-laire).Pour j ≥ 1 et pour toute suite bornée uii∈N dans W j+k,p
0 (Ω), la suite
Dαuii∈N est borné dans Wk,p0 (Ω) pour tout multi-indice α vérifiant |α| ≤ j.
Du fait que
Wk,p0 (Ω)→ Lq(Ω), ∀ q ∈
[1, np
n−kp
)
15.2. LES ESPACES DE SOBOLEV DANS Rn 403
il est possible, par induction finie, d’y extraire une sous-suite u′i i∈N telleque la suite Dαu′i i∈N converge dans Lq(Ω) pour tout multi-indice α avec|α| ≤ j.Par construction, la suite u′i i∈N converge dans W j,q
0 (Ω).
(2) Vu que Ω est borné, C0(Ω) → Lq(Ω), ∀ 1 ≤ q ≤ ∞. Ainsi la compacité de(84) découle immédiatement de celle de (83) (pour j = 0).
D.
(1) Supposons kp < nSoit F un sous-ensemble borné dans Wk,p
0 (Ω). Posons
Ω j = x ∈ Ω| dist(x, ∂Ω) > 1/ j
Notons, pour toute fonction u ∈ F , u son extension par 0 en dehors deΩ.Par l’inégalité de Hölder et le corollaire 15.2.23∫
Ω\Ω j
|u(x)| dx ≤ C1 ‖u‖Wk,p(Ω) |Ω \Ω j|1−1/p∗
avec p∗ =n p
n − kpet C1 indépendante de u.
Vu que Ω est de volume fini, on peut choisir j suffisamment grand desorte que pour toute fonction u ∈ F∫
Ω\Ω j
|u(x)| dx < ε
et de même pour tout h ∈ Rn
(85)∫Ω\Ω j
|u(x + h) − u(x)| < ε/2
Ainsi, si |h| < 1/ j, x + th ∈ Ω2 j, pour tout x ∈ Ω j et pour tout t ∈ [0, 1]. Siu ∈ C∞0 (Ω) on trouve∫
Ω j
|u(x + h) − u(x)| dx ≤∫Ω j
dx∫ 1
0
∣∣∣∣∣ ddt
u(x + th)∣∣∣∣∣ dt
≤ |h|∫ 1
0dt
∫Ω2 j
|Du(y)| dy
≤ |h| ‖u‖W1,1(Ω)
≤ C2|h| ‖u‖Wk,p(Ω)(86)
De même l’inégalité précédente reste valable pour toute fonction u ∈Wk,p
0 (Ω) par densité.Ainsi pour |h| suffisamment petit, on a, grâce aux inégalités (85) et (86)que ∫
Ω
|u(x + h) − u(x)| dx < ε
D’où, par le théorème 15.2.38, F est précompact dans L1(Ω).Par suite on sait que Wk,p
0 (Ω) → Lp∗(Ω) et grâce à l’inégalité d’interpolationon obtient, on a, pour q ∈ [1, p∗)

404 15. ESPACES DE SOBOLEV
(87) ‖u‖Lq(Ω) ≤ ‖u‖αL1(Ω) ‖u‖
1−αLp∗(Ω) ≤ C ‖u‖αL1(Ω) ‖u‖
1−αWk,p(Ω)
Soient alors uii∈N une suite bornée dans F . Vu que Wk,p(Ω) → L1(Ω), ilexiste une sous-suite u′i i∈N convergente dans L1(Ω). Cette sous-suite estalors de Cauchy dans L1(Ω). Par l’inégalité (87), elle l’est également dansLq(Ω) qui est complet. D’où,
Wk,p(Ω)→ Lq(Ω), ∀ q ∈ [1, p∗)
(2) Supposons kp = nSoit F un sous-ensemble borné dans Wk,p
0 (Ω). Alors F est borné dans
Wk−1,p0 (Ω) vu que Wk,p
0 (Ω) → Wk−1,p0 (Ω). Ainsi, vu la partie précédente, F
est précompact dans L1(Ω)Soit alors 1 ≤ q < ∞ arbitraire, il existe donc q < q1 < ∞. Vu le théorème15.2.26, on sait que Wk,p
0 (Ω) → Lq1 (Ω). D’où, par un raisonnement similaireà la fin de la partie précédente, on obtient que F est précompact dansLq(Ω).
(3) Supposons kp > n– Supposons kp > n ≥ (k − 1) p, et m = 0 et montrons que
Wk,p0 (Ω)→ C0,ν(Ω), ∀ 0 < ν < k −
np
En effet, soit ν < k− np quelconque, il existe ν < λ < k− n
p . Par le corol-
laire 15.2.32 on sait que Wk,p0 (Ω) → C0,λ(Ω). Vu queΩ est borné, par
le corollaire 15.2.37, C0,λ(Ω)→ C0,ν(Ω). Ainsi, Wk,p0 (Ω)→ C0,ν(Ω).
En effet, toute suite bornée dans Wk,p0 (Ω) est également borné dans
C0,λ(Ω) et par compacité de l’injection C0,λ(Ω)→ C0,ν(Ω), elle admetune sous-suite qui converge dans C0,ν(Ω).De même vu que C0,ν(Ω)→ C0(Ω) on a également que Wk,p
0 (Ω)→ C0(Ω)– Si kp > n de manière générale (plus particulièrement si (k − 1) p > n)
Alors, il existe 0 ≤ j ≤ k tel que
(k − j) p > n ≥ (k − j − 1) p.
Posant k0 = k − j, on a Wk,p0 (Ω) =W j+k0,p
0 (Ω).Vu la partie précédente et la remarque, on a que
W j+k0,p0 (Ω)→ C j(Ω), ∀ 0 ≤ m ≤ j
Or (k − j) p > n⇔ j < k − np d’où
Wk,p0 (Ω)→ Cm(Ω), ∀ 0 < m < k −
np
(m entier)

15.2. LES ESPACES DE SOBOLEV DANS Rn 405
Opérateurs de traces.
Alors que les plongements sont valables dans le cas d’un domaine ouvertΩ ⊂ Rn on peut maintenant se poser la question de cette validité si l’on considèrel’intersection deΩ avec un plan de dimension r ≤ n. Pour cela posonsΩr = Ω∩Πroù Πr est un plan de Rn quelconque de dimension r. Bien entendu, on supposeraque Ωr , ∅. Pour r = n, les résultats ont déjà été prouvés, nous démontrerons lesrésultats pour r < n. Par conséquent imposons n ≥ 2.On s’intéresse alors à la validité des plongements du type
(88) Wk,p0 (Ω) →Wm,q
0 (Ωr)
Ici, le symbole "→" doit être interpréter de la manière suivante :Toute fonction u ∈ Wk,p
0 (Ω) est la limite d’une suivante un de fonctions C∞0 (Ω).Ces mêmes fonctions ont des traces sur Ωr qui appartiennent à C∞0 (Ωr). Ainsi, lesplongements du type (88) signifient donc que ces traces convergent dans Wm,q
0 (Ωr)vers une fonction u satisfaisant
∥∥∥u∥∥∥
Wm,q(Ωr) ≤ C ‖u‖Wk,p(Ω), où C est une constanteindépendante de u.De même, sous certaines hypothèses de régularité surΩ, on peut interpréter de ma-nière similaire, grâce notamment au théorème de Meyers-Serrin, les plongementsdu type
(89) Wk,p(Ω) →Wm,q(Ωr)
De tels opérateurs sont appelés opérateurs de traces, ils permettent notamment degénéraliser, comme on le verra plus tard, les notions de plongements des espacesde Sobolev sur les variétés aux sous-variétés, ainsi que sur les fibrés vectorielsrestreints aux sous-variétés. Nous verrons, une fois la définition des espaces deSobolev sur les variétés et fibrés vectoriels donnée, que les résultats de ce para-graphe s’étendent naturellement. Il est de ce fait essentiel de bien comprendre cestypes d’opérateur. Nous allons donc établir les résultats concernant les espaceseuclidiens Rn.
15.2.41. T (Généralisation des plongements de Sobolev)
Soient
(1) j, k,n, r quatre entiers non négatifs tels 1 ≤ r ≤ n
(2) 1 ≤ p < ∞ un réel
(3) Ω un domaine ouvert borné de Rn
(4) Πr un plan de dimension r tel Πr ∩Ω , ∅
Posons Ωr = Πr ∩Ω.Les plongements du type
(90) W j+k,p0 (Ω) →W j,q
0 (Ωr)
sont vérifiés dans tous les cas suivant :

406 15. ESPACES DE SOBOLEV
(1) si kp < n, n−kp < r ≤ n, 1 ≤ q ≤ rpn−kp . De plus, le plongement est complètement
continu si q < rpn−kp
(2) si kp = n, 1 ≤ r ≤ n, 1 ≤ q < ∞. Plus encore, le plongement est complètementcontinu dans tous les cas.
(3) si kp > n, 1 ≤ r ≤ n, 1 ≤ q ≤ ∞, avec plongement complètement continu danstous les cas.
15.2.42. R
(1) Nous avons déjà montré le résultat pour le cas r = n par les résultatsprécédents, nous supposerons dès lors r < n imposant de ce fait n ≥ 2
(2) Comme dans le cas particulier r = n, il nous suffira de considérer le casj = 0. En effet, soient k, n, r, et p satisfaisant l’une ou l’autre des hypothèses,alors
(a) Supposons que le plongement
Wk,p0 (Ω) → Lq(Ωr)
établi, avec q satisfaisant aux hypothèses respectives.Alors, quel que soit u ∈ W j+k,p
0 (Ω), on a Dαu ∈ Wk,p0 (Ω) pour |α| ≤ j et
ainsi Dαu ∈ Lq(Ωr). Il en découle que u ∈W j,q0 (Ωr) et
‖u‖W j,q(Ωr) =∑|α|≤ j
‖Dαu‖Lq(Ωr)
≤ C1
∑|α|≤ j
‖Dαu‖Wk,p(Ω)
≤ C2 ‖u‖W j+k,p(Ω)
et ainsi
W j+k,p0 (Ω) →W j,q
0 (Ωr)
(b) De même, supposons
Wk,p0 (Ω)→ Lq(Ωr)
Alors, pour toute suite bornée uii∈N dans W j+k,p0 (Ω), la suite Dαuii∈N
est borné dans Wk,p0 (Ω), quel que soit α avec |α| ≤ j. Par conséquent, la
suite Dαui|Ωr i∈N admet une sous-suite convergente dans Lq(Ωr). Parinduction finie, il est alors possible d’extraire de la suite uii∈N, unesous-suite u′i i∈N telle que Dαu′i |Ωr i∈N converge dans Lq(Ωr) pourtout α avec |α| ≤ j.Par construction, on voit que la suite u′i i∈N converge dans W j,q
0 (Ωr).
La preuve du théorème 15.2.41 passe essentiellement dans l’obtention du ré-sultat qui suit. Nous citerons ce résultat sans preuve. Une preuve simple se trouvedans l’ouvrage de Adams [2], qui utilise notamment une généralisation du lemme15.2.22.

15.2. LES ESPACES DE SOBOLEV DANS Rn 407
15.2.43. L
SoitΩ un domaine ouvert deRn. Soit k, r deux entiers positifs et p > 1. Supposons kp < net n − kp < r ≤ n. Soit ν le plus grand entier inférieur à kp, tel que n − ν ≤ r. SoitΩr = Ω ∩Πr, où Πr est un plan de Rn quelconque de dimension r.Alors, il existe une constante C telle que pour tout u ∈Wk,p
0 (Ω) on a
‖u‖Lrq/n(Ωr) ≤ C ‖u‖1−θLq(Ω) ‖u‖θWk,p(Ω)(91)
avec
q = p∗ =n p
n − kpθ =
ν pν p + (kp − ν) q
(92)
où θ vérifie 0 < θ < 1
D. (Théorème 15.2.41)Soit r < n quelconque
(1) Supposons n − kp < r
(a) Montrons que
Wk,p0 (Ω) → Lq(Ωr), ∀ 1 ≤ q ≤
rpn − kp
(93)
(i) Supposons p > 1Par le lemme 15.2.43, on a
‖u‖Lrq/n(Ωr) ≤ C ‖u‖1−θLq(Ω) ‖u‖θWk,p(Ω)
avec
q = p∗ =n p
n − kp
θ =ν p
ν p + (kp − ν) q
Or,r qn=
r pn − kp
<n p
n − kp.
Ainsi
‖u‖Lrq/n(Ωr) ≤ C ‖u‖1−θWk,p(Ω) ‖u‖θWk,p(Ω)
= C ‖u‖Wk,p(Ω)
Vu que Ω est borné, Ωr l’est également. On conclut alors parl’inégalité d’inclusion 132.
(ii) Supposons maintenant p = 1On doit avoir 0 < n − k < r < n, imposant de ce fait k ≥ 2.Par le corollaire 15.2.25, on obtient
Wk,10 (Ω) =W(k−1)+1,1
0 (Ω) →Wk−1,l0 (Ω)
avec l =n p
n − 1 p=
nn − 1
> 1
Or n− k = n− kp < r et donc n− (k− 1) l < n− (k− 1) ≤ r. Alors,par le point précédent, on trouve
Wk−1,l0 (Ω)→ Lq(Ωr)

408 15. ESPACES DE SOBOLEV
pour tout q satisfaisant 1 ≤ q ≤ p∗ pour p∗ donné par
p∗ =r l
n − (k − 1)l=
r n/(n − 1)n − (k − 1) n/(n − 1)
=r
n − k
(b) Montrons que
Wk,p0 (Ω)→ Lq(Ωr), ∀ 1 ≤ q <
rpn − kp
(94)
(i) Supposons de plus dans un premier temps que p > 1Par la partie précédente, on a
Wk,p0 (Ω) → L
rpn−kp (Ω)(95)
Pour q <rp
n − kp, choisissons l un réel tel que 1 ≤ l < p et
n− k l < r et q ≤ rln−kl <
rpn−kp . Vu queΩ est borné, le plongement
suivant existe :
Wk,p0 (Ω) →Wm,l
0 (Ω)
Utilisant à nouveau le lemme 15.2.43, et l’inégalité d’inclusion(132), on a
‖u‖Lq(Ωr) ≤ C1 ‖u‖Lrl/(n−kl)(Ωr)
≤ C2 ‖u‖1−θLnl/(n−kl)(Ω) ‖u‖θWk,p(Ω)
Commenl
n − kl<
n pn − kp
, le théorème de Rellich-Kondrachov
nous permet de dire que si uii∈N est une suite bornée deWk,p
0 (Ω), il existe une sous-suite u′i i∈N qui converge dans Lnl/(n−kl)(Ω).Cette sous-suite est de Cauchy dans Lnl/(n−kl)(Ω) et donc égale-ment dans l’espace de Banach Lq(Ωr). Elle y converge donc.
(ii) Supposons maintenant p = 1On doit avoir 0 < n − k < r < n, imposant de ce fait k ≥ 2.Par le corollaire 15.2.25, on obtient
Wk,10 (Ω) =W(k−1)+1,1
0 (Ω) →Wk−1,l0 (Ω)
avec l =n p
n − 1 p=
nn − 1
> 1
Or n− k = n− kp < r et donc n− (k− 1) l < n− (k− 1) ≤ r. Alors,par le point précédent, on trouve
Wk−1,l0 (Ω)→ L1(Ωr)
et donc de même,
Wk,10 (Ω)→ L1(Ωr)
nous permettant de conclure en appliquant un résonnementsimilaire à la fin de la preuve du cas 1 du théorème de Rellich-Kondrachov.
(2) Montrons que
Wk,p0 (Ω)→ Lq(Ωr), ∀ 1 ≤ q < ∞(96)

15.2. LES ESPACES DE SOBOLEV DANS Rn 409
(a) Supposons p > 1 et soient m p = n et 1 ≤ q < ∞ quelconques
Choisissons 1 ≤ l < p tel que r > n − kl > 0 etr l
n − kl> q. D’où
Wk,p0 (Ω) →Wk,l
0 (Ω)→ Lq(Ωk)
par la partie précédente.
(b) Supposons p = 1 et soient n = m ≥ 2 et 1 ≤ q < ∞ quelconques
Alors, posant l =n
n − 1> 1⇔ n = (n − 1) l, on a grâce au cas p > 1 et
au corollaire 15.2.28
Wn,10 (Ω) →Wn−1,l
0 (Ω)→ Lq(Ωk)
(3) Montrons que
Wk,p0 (Ω)→ Lq(Ωr), ∀ 1 ≤ q ≤ ∞(97)
(a) Montrons que
Wk,p0 (Ω) → Lq(Ωr), ∀ 1 ≤ r ≤ n, ∀ 1 ≤ q ≤ ∞
Soit u ∈ C∞0 (Ω) quelconque. Grâce au corollaire 15.2.32 on sait que
|u(x)| ≤ C ‖u‖Wk,p(Ω) , ∀ x ∈ Ω
Donc en particulier ∀ x ∈ Ωr.Ainsi,
Wk,p0 (Ω) → L∞(Ωr)
Or,Ω est borné, et par suiteΩr aussi, d’où, grâce toujours à l’inégalitéd’inclusion (132)
Wk,p0 (Ω) → Lq(Ωr), ∀ 1 ≤ q ≤ ∞
On conclut alors par densité.
(b) Montrons maintenant que
Wk,p0 (Ω)→ Lq(Ωr), ∀ 1 ≤ q < ∞
En effet, soit 1 ≤ q < ∞ quelconque. Par le théorème de Rellich-Kondrachov et l’inégalité d’inclusion (132) on obtient la suite deplongements suivante :
Wk,p0 (Ω)→ C0(Ω) → C0(Ωr) → L∞(Ωr) → Lq(Ωr)
Ainsi, toute suite bornée dans Wk,p0 (Ω) admet une sous-suite conver-
gente dans C0(Ω) par compacité du plongement. Cette sous-suite estalors de Cauchy dans C0(Ω). Vu la suite d’inclusion, elle est égale-ment de Cauchy dans l’espace de Banach Lq(Ωr), et par conséquentconverge dans ce même espace.
15.2.44. C
Soient

410 15. ESPACES DE SOBOLEV
(1) Ω un domaine ouvert borné de Rn, à bord lisse
(2) m, k deux entiers non négatifs tels que– k ≥ 1– m ≤ minn, k
(3) 1 < p < ∞ un réel
Alors
(98) Wk,p(Ω) →Wk−m,p(Ωn−m)
En particulier, si k = m = 1, alors
(99) W1,p(Ω) → Lp(Ωn−1)
La preuve du corollaire précédent est immédiate en vertu du théorème 15.2.41.Nous mettons en avant ce résultat pour une simple comparaison avec le cas parti-culier p = 2 qui suit.
15.2.45. R
Cas particulier : p = 2Moyennant une définition convenable, grâce notamment à la transformée de Fou-rier, il est possible de définir les espaces de Sobolev
Ws,2(Ω) et Ws,20 (Ω)
pour tout réel s ≥ 0. On peut alors également montrer que pour s ≥ 1/2, il existeun plongement continu
Ws,2(Rn) →Ws−1/2,2(Rn−1)
Ainsi, sous certaines hypothèses de régularité sur Ω domaine ouvert borné dontl’intersection avec le plan Rn−1
× 0 est non vide, posantΩn−1 = Ω∩ (Rn−1× 0), on a
Ws,2(Ω) →Ws−1/2,2(Ωn−1)
En effet, on a la suite de plongements suivante :
Ws,2(Ω) →Ws,2(Rn) →Ws−1/2,2(Rn−1) →Ws−1/2,2(Ωn−1)
Par induction, notant Rn−r× 0 = (x′, 0, ..., 0) ∈ Rn
| x′ ∈ Rn−r et identifiant
Rn−r× 0 à Rn−r on peut montrer que si s ≥ r/2 alors
Ws,2(Rn) →Ws−r/2,2(Rn−r)
et de même si Ωn−r := Ω ∩ (Rn−r× 0) , ∅ alors
Ws,2(Ω) →Ws−r/2,2(Ωn−r)
Réciproquement, il est possible de montrer qu’il existe un plongement inverse
Ws−1/2,2(Rn−1) →Ws,2(Rn)
Ainsi, par induction, que si s ≥ r/2
Ws− r2 ,2(Rn−r) →Ws− r−1
2 ,2(Rn−r+1) → ... →Ws,2(Rn)

15.2. LES ESPACES DE SOBOLEV DANS Rn 411
et donc de même si Ωn−r := Ω ∩ (Rn−r× 0) , ∅
Ws− r2 ,2(Ωn−r) →Ws,2(Ω)
Les inégalités de Poincaré.
Nous avons vu, par le théorème 15.2.20 et la preuve du théorème 15.2.30 deuxrésultats très intéressants, à savoir que pour u ∈W1,p
0 (Ω)
(1) Si p > n
|u − u(x)| ≤ C1 r1−n/p‖Du‖Lp(Ω) u =
1|Q|
∫Q
u(x) dx(100)
(101)
(2) Si p < n
‖u‖Lp∗ (Ω) ≤ C2
n∑i=1
‖Diu‖Lp(Ω)(102)
où chacune des constantes ne dépend que de n et p, r étant le côté du cube Q et
p∗ =n p
n − p.
Par l’inégalité d’inclusion (132), on remarque ainsi que l’inégalité (102) est vérifiéeremplaçant p∗ par p, pour autant que Ω soit de mesure fini.Nous allons généraliser cette inégalité à tout 1 ≤ p < ∞ et k ≥ 1. Nous démontreronsdans un premier temps le résultat suivant :
‖u‖Lp(Ω) ≤ Cn∑
i=1
‖Diu‖Lp(Ω)(103)
pour u ∈ C∞0 (Ω) quelconque.Il deviendra alors aisé de se convaincre que le résultat reste valable pour toutefonction u ∈W1,p
0 (Ω). L’inégalité précédente est une version particulière des inéga-lités de Poincaré.On verra par la suite qu’elle permet de définir une norme équivalente à la normestandard sur Wk,p
0 (Ω).
15.2.46. T (Inégalité de Poincaré)
Soient 1 ≤ p < ∞ etΩ un domaine de mesure finie. Alors, il existe une constante C = C(p)telle que pour toute fonction u ∈ C∞0 (Ω) on a
‖u‖Lp(Ω) ≤ C ‖Du‖Lp(Ω)(104)
D. Soient u ∈ C∞0 (Ω) et 1 ≤ p < ∞quelconques. Soit p′ l’exposantconjugué de p au sens de Hölder. Sans perte de généralité, supposons que ledomaine Ω est contenu entre les hyperplans xn = 0 et xn = c > 0. On étend u par 0

412 15. ESPACES DE SOBOLEV
en dehors de Ω.Notons alors x = (x′, xn) avec x′ = (x1, ..., xn). Vu que u est à support compact dansΩ,
u(x) =∫ xn
0Dnu(x′, t)dt
Ainsi,
‖u‖pLp(Ω) = ‖u‖pLp(Rn)
=
∫Rn−1
(∫R
|u(x′, xn)|pdxn
)dx′
Or ∫R
|u(x′, xn)|pdxn =
∫ c
0|u(x′, xn)|pdxn
=
∫ c
0
∣∣∣∣∣∫ xn
0Dnu(x′, t)dt
∣∣∣∣∣p dxn
Et ∣∣∣∣∣∫ xn
0Dnu(x′, t)dt
∣∣∣∣∣p ≤ (∫ xn
0|Dnu(x′, t)|dt
)p
= ‖Dnu‖pL1([0,xn])
≤ ‖Dnu‖pLp([0,xn]) ‖1‖pLp′ ([0,xn])
≤
(∫ c
0|Dnu(x′, t)|pdt
)xp−1
n
Ainsi, ∫R
|u(x′, xn)|pdxn ≤
∫ c
0
(∫ c
0|Dnu(x′, t)|pdt
)xp−1
n dxn
=cp
p
∫ c
0|Dnu(x′, t)|pdt
Finalement
‖u‖pLp(Ω) ≤cp
p
∫Rn−1
(∫ c
0|Dnu(x′, t)|pdt
)dx′
=cp
p
∫Rn|Dnu(x)|pdx
=cp
p‖Dnu‖pLp(R)
L’inégalité précédente nous permet de conclure que
‖u‖Lp(Ω) ≤c
p1/p
n∑i=1
‖Diu‖Lp(Ω)
Achevant de ce fait la preuve de ce théorème.

15.2. LES ESPACES DE SOBOLEV DANS Rn 413
15.2.47. R
Il est évident que cette inégalité ne peut être généralisée aux espaces de SobolevW1,p(Ω). Pour s’en convaincre, il suffit de considérer les fonctions constantes surΩborné (ou de mesure finie).
Nous allons maintenant tirer un corollaire de l’inégalité de Poincaré, définis-sons pour cela la fonction |·|Wk,p(Ω) de la manière suivante :
15.2.48. D
Soit u ∈Wk,p(Ω) quelconque, on pose
|u|Wk,p(Ω) =∑|α|=k
‖Dαu‖Lp(Ω)(105)
En vertu de la remarque précédente, il est clair que la fonction |·|Wk,p(Ω) ne peutêtre une norme sur l’espace de Sobolev Wk,p(Ω). Nous allons cependant montrerqu’elle l’est sur l’espace de Sobolev Wk,p
0 (Ω), pour autant que le domaineΩ soit demesure finie.
15.2.49. C
SiΩ est de mesure finie, la fonction |·|Wk,p(Ω) est une norme sur l’espace de Sobolev Wk,p0 (Ω)
équivalente à la norme standard ‖·‖Wk,p(Ω).
D. Nous allons démontrer ce corollaire par induction sur k. Re-marquons en premier lieu que si u ∈ C∞0 (Ω), toutes ces dérivées appartiennentégalement à l’espace de fonctions C∞0 (Ω). De plus, par définition, il est clair quel’inégalité suivant est toujours vérifiée :
|u|Wk,p(Ω) ≤ ‖u‖Wk,p(Ω)
Il nous suffit de montrer qu’il existe une constante K vérifiant
‖u‖Wk,p(Ω) ≤ K |u|Wk,p(Ω)
quel que soit u ∈Wk,p0 (Ω).
(1) Supposons k = 1Appliquant l’inégalité de Poincaré, on trouve
‖u‖W1,p(Ω) = |u|W1,p(Ω) + ‖u‖Lp(Ω)
≤ |u|W1,p(Ω) + C |u|W1,p(Ω)
= (1 + C) |u|W1,p(Ω)
On pose alors K = (1 + C)
(2) Soit k ≥ 2 et supposons le résultat vrai pour tout 1 ≤ l ≤ k − 1, à savoirqu’il existe une Kl vérifiant
‖u‖Wl,p(Ω) ≤ Kl |u|Wl,p(Ω)

414 15. ESPACES DE SOBOLEV
pour tout u ∈Wl,p0 (Ω). On a
‖u‖Wk,p(Ω) = ‖u‖Wk−1,p(Ω) + |u|Wk,p(Ω)
≤ Kl |u|Wk−1,p(Ω) + |u|Wk,p(Ω)
Or, pour tout multi-indice α d’ordre k−1, par l’inégalité de Poincaré, on a
‖Dαu‖Lp(Ω) ≤ Cn∑
i=1
‖DiDαu‖Lp(Ω)
Ainsi
|u|Wk−1,p(Ω) ≤ Cn∑
i=1
∑|α|=k−1
‖DiDαu‖Lp(Ω)
= Cn∑
i=1
∑|α| = kαi ≥ 1
‖Dαu‖Lp(Ω)
≤ n C |u|Wk,p(Ω)
Et finalement, combinant nos différentes inégalités, on obtient
‖u‖Wk,p(Ω) ≤ (1 + n C Kl) |u|Wk,p(Ω)
Pour ce qui est de l’inégalité (100), elle peut ce généralisée comme suit :
15.2.50. T (Inégalité de Poincaré-Wirtinger)
Soient Ω ⊂ Rn un domaine ouvert convexe. p > n un réel. Alors, pour toute fonctionu ∈W1,p(Ω) et pour toute partie mesurable B ⊂ Ω de mesure non nulle, posons
uB =1|B|
∫B
u(y)dy
Alors
‖u − uB‖Lp(Ω) ≤ω1−1/n
n
|B||Ω|1/n (diamΩ)n
‖Du‖Lp(Ω)(106)
En particulier, l’inégalité reste valable si l’on prend B = Ω.
Pour la preuve de ce théorème, nous utiliserons les lemmes suivants, quiutilisent des résultats concernant la théorie des potentiels. On trouvera les preuvesde ceux-ci dans l’ouvrage de Jost [35].
15.2.51. L
Soit µ ∈ (0, 1], f ∈ L1(Ω), posons
(Vµ f )(x) :=∫Ω
|x − y|n(µ−1) f (y) dy
15.2. LES ESPACES DE SOBOLEV DANS Rn 415
Soient 1 ≤ p ≤ q ≤ ∞, vérifiant
0 ≤ δ =1p−
1q< µ
Alors Vµ est un opérateur linéaire et continue de Lp(Ω) dans Lq(Ω), et de plus, pour toutefonction f ∈ Lp(Ω), on a∥∥∥Vµ f
∥∥∥Lq(Ω) ≤
(1 − δµ − δ
)1−δ
ω1−µn |Ω|µ−δ
∥∥∥ f∥∥∥
Lp(Ω)
15.2.52. L
Soient Ω ⊂ Rn un domaine ouvert convexe, u ∈ W1,1(Ω) quelconque et B ⊆ Ω une partiemesurable de mesure non nulle. Alors, pour presque tout x ∈ Ω, on a
|u(x) − uB| ≤ (diamΩ)n 1|B|
V 1n(|Du|)(107)
D. (Inégalité de Poincaré-Wirtinger)Par le lemme 15.2.52,
|u(x) − uB| ≤ (diamΩ)n 1|B|
V 1n(|Du|)
et par le lemme 15.2.51, avec p = q et par conséquent δ = 0, µ = 1/n∥∥∥∥V 1n(|Du|)
∥∥∥∥Lp(Ω)
≤ nω1− 1n |Ω|
1n ‖Du‖Lp(Ω)
Combinant les deux inégalités, on trouve bien le résultat cherché.
Dualité.
Nous allons dans ce paragraphe nous intéresser au dual d’un espace de Sobo-lev. Le dual d’un espace de Banach existe toujours, nous nous proposons d’iden-tifier ses éléments dans le cas des espaces de Sobolev. Il est souvent commode deconsidérer les espaces de Sobolev Wk,p(Ω) comme le produit de copie des espacesfonctionnels Lp(Ω). Nous introduirons pour cela un nouvel espace de fonctions,qui nous donnera notamment quelques nouveaux résultats concernant les espacesde Sobolev Wk,p(Ω).
15.2.53. D
Pour Ω, k et p fixés, on pose

416 15. ESPACES DE SOBOLEV
(1) N =∑
0≤|α|≤k
1 le nombre de multi-indice α satisfaisant 0 ≤ |α| ≤ k
(2) LpN(Ω) =
N∏i=1
Lp(Ω) l’espace fonctionnel muni de la norme définie par :
(108) ‖u‖LpN(Ω) =
N∑
i=1
‖ui‖Lp(Ω) si 1 ≤ p < ∞
max1≤i≤N
‖ui‖L∞(Ω) si p = ∞
pour tout vecteur (ui)1≤i≤N ∈ LpN(Ω)
(3) P l’opérateur linéaire défini par :
P : Wk,p(Ω) −→ LpN(Ω)
u 7−→ P u = (Dαu)0≤|α|≤m
On remarque sans difficulté que pour toute fonction u ∈ Wk,p(Ω), on a ‖Pu‖LpN(Ω) =
‖u‖Wk,p(Ω). Autrement dit, P est un isomorphisme isométrique de Wk,p(Ω) dans W ⊂ LPN(Ω).
On peut de plus montrer que
(1) ∀ 1 ≤ p < ∞, Lp(Ω) est séparable
(2) ∀ 1 < p < ∞, Lp(Ω) est réflexif
(3) Le produit d’espaces vectoriels séparable, respectivement réflexif, est encore unespace séparable, resp. réflexif.
On peut donc conclure que Wk,p(Ω) = P−1(W) possède les mêmes propriétés.
Avant de donner une caractérisation de l’espace dual d’un de l’espace de Sobolev Wk,p(Ω),rappelons deux principaux résultats d’analyse fonctionnelle bien connus, dont on trouverales preuves respectives par exemple dans l’ouvrage de Brezis [15].
15.2.54. T (Hahn-Banach)
Soient (E, ‖ ‖) un espace normé sur le corpsK, T : D(T) ⊂ E→ K une application linéaireet bornée. Alors il existe un élément T ∈ E∗ tel que
T(u) = T(u), ∀u ∈ D(T) et
‖T‖∗ = sup |T(u)| : u ∈ D(T) et ‖u‖ = 1
15.2.55. T (Théorème de Représentation de Riesz)
Soient 1 ≤ p < ∞, T ∈ (Lp(Ω))∗ et p′ le conjugué de p. Alors, il existe v ∈ Lp′ (Ω) tel quepour tout u ∈ Lp(Ω)
T(u) =∫Ω
u(x) v(x) dx = 〈u, v〉 et ‖v‖Lp′ (Ω) = ‖T‖∗

15.2. LES ESPACES DE SOBOLEV DANS Rn 417
15.2.56. C
Soit 1 ≤ p < ∞. Pour tout opérateur T ∈ (LpN(Ω))∗, il existe un unique v ∈ Lp′
N(Ω) telleque pour toute fonction u ∈ Lp
N(Ω)
T(u) =n∑
i=1
〈ui, vi〉 et ‖v‖Lp′
N (Ω) = ‖T‖∗
15.2.57. T
Soit 1 ≤ p < ∞. Pour tout opérateur T ∈ (Wk,p(Ω))∗, il existe un élément v ∈ Lp′
N(Ω) telleque pour tout u ∈Wk,p(Ω)
T(u) =n∑
1≤α≤k
〈Dαu, vα〉 et min ‖v‖Lp′
N (Ω) = ‖T‖∗
où le minimum (atteint) est pris sur tout les v ∈ Lp′
N(Ω) pour qui vérifie la conditionprécédente.
D. Définissons
T∗ : W −→ RP u 7−→ T∗(P u) = T(u)
Vu que P est un isomorphisme isométrique, T∗ ∈W∗ et ‖L∗‖∗ = ‖L‖∗.Par le théorème de Hahn-Banach, il existe une extension T de T∗ défini sur toutLp
N(Ω), et par le corollaire précédent, il existe un élément v ∈ Lp′
N(Ω) tel que siu = (uα)0≤|α|≤k ∈ Lp
N(Ω) alors
T(u) =∑
0≤α≤k
〈uαu, vα〉
Ainsi ∀u ∈Wk,p(Ω) on a
T(u) = T∗(P u) = T(P u) =∑
0≤α≤k
〈Dαu, vα〉
‖T‖∗ = ‖T∗‖∗ = ‖T‖∗ = ‖v‖Lp′
N (Ω)

418 15. ESPACES DE SOBOLEV
15.3. Les espaces de Sobolev sur les variétés
Préliminaires et définitions.
Dans tout ce chapitre on supposera que M est une variété de dimension n sansbord et compacte. Rappelons un résultat essentielle concernant l’existence d’unepartition de l’unité.
15.3.1. L
Soit M une variété muni d’un atlas (Ui, φi)i∈I localement fini, i.e., pour tout compactK ⊂M, l’ensemble i|Ui ∩ K est de cardinalité finie.Il existe alors une partition de l’unité, à savoir une famille χi| i ∈ I de fonctions C∞(M)telle que pour tout i ∈ I
(1) 0 ≤ χi(x) ≤ 1, ∀x ∈M
(2) supp (χi) ⊂ Ui
(3)∑i∈I
χi(x) = 1, ∀x ∈M
Notons encore un résultat relativement simple découlant immédiatement dulemme 15.3.1
15.3.2. L
Si f ∈ C∞(M), alors f =∑i∈I
fi avec fi ∈ C∞(M) et supp ( fi) ⊂ Ui, ∀i ∈ I
D. Posons fi = χi f , ∀i ∈ I. Alors
– fi ∈ C∞(M) et supp ( fi) ⊂ Ui, ∀i ∈ I
– f = 1 f =
∑i∈I
χi
f =∑i∈I
χi f =∑i∈I
fi
15.3.3. R
Si M est une variété compacte sans bord, il existe un atlas fini et donc localement fini.

15.3. LES ESPACES DE SOBOLEV SUR LES VARIÉTÉS 419
15.3.4. D
Soient M une variété compacte sans bord de dimension n munie d’un atlas finiA =
φi : Ui → Vi
i=1,...,m
avec Vi domaine borné (à bord lisse), χi ⊂ C∞(M) unepartition C∞ de l’unité et f : M→ R une fonction quelconque, ∀i = 1, ...,m on pose
fi = χi f : M→ R, supp( fi) ⊂ Ui(109)
fi := fi φ−1i : Vi → R(110)
On dit alors que f est mesurable ssi fi est mesurable ∀i = 1, ...,m et on pose
Lp(M) =
f : M→ R |
∫M| f |pdµ :=
m∑i=1
∫M| fi|pdx < ∞
(111)
Wk,p(M) =
f : M→ R | fi ∈Wk,p(Vi), i = 1, ...,m
(112)
15.3.5. L
La fonction ‖ ‖Wk,p(M) : Wk,p(M) −→ R définie par :
(113)∥∥∥ f
∥∥∥Wk,p(M) :=
m∑i=1
∥∥∥∥ fi∥∥∥∥
Wk,p(Vi)
est une norme sur l’espace vectoriel Wk,p(M)
15.3.6. R
Cette norme trouve son sens par la compacité de notre variété. En effet, insistonssur le fait que la somme dans l’équation (113) est finie.
Cependant, la définition 15.3.4 et par conséquent la norme sous-jacente sont jusquelà dépendante de l’atlas. Nous devrions de ce fait noter en premier lieu l’espace deSobolev de la manière suivante :
Wk,p(M,A)
Nous allons cependant montrer, que toutes les normes définies par ce procédésont équivalentes. Pour cela, commencer par énoncer un résultat complémentaireconcernant les transformations dans les espaces de Sobolev sur Rn.
15.3.7. T
Soient Ω, Ω′ deux domaines de Rn, Φ : Ω→ Ω′ un difféomorphisme. NotonsΨ = Φ−1.

420 15. ESPACES DE SOBOLEV
Posonsy1 = Φ1(x1, ..., xn) x1 = Ψ1(y1, ..., yn)y2 = Φ2(x1, ..., xn) x2 = Ψ2(y1, ..., yn)
......
yn = Φn(x1, ..., xn) xn = Ψn(y1, ..., yn)Supposons
(1) Φ1, ...,Φn ∈ Ck(Ω)
(2) Ψ1, ...,Ψn ∈ Ck(Ω′)(3) il existe 0 < c ≤ C deux constantes telles que c ≤ |detJΦ(x)| ≤ C, ∀ x ∈ Ω, où la
matrice JΦ(x) désigne la matrice jacobienne de la transformation.Définissons les opérateurs de pullback Φ∗ etΨ∗ de la manière suivante :
(1) Φ∗ : Wk,p(Ω′) → Wk,p(Ω) qui a une fonction u ∈ Wk,p(Ω′) fait correspondre lafonction Φ∗u ∈Wk,p(Ω) définie par
(Φ∗u)(x) := u(Φ(x)) = u(y)
(2) De manière similaireΨ∗ : Wk,p(Ω)→Wk,p(Ω′) associe à la fonction v ∈Wk,p(Ω)la fonctionΨ∗v ∈Wk,p(Ω) définie par
(Ψ∗v)(y) := v(Ψ(y)) = v(x)
Alors, les opérateurs Φ∗ etΨ∗ sont continus. En d’autres termes, on a
Wk,p(Ω) 'Wk,p(Ω′)
On trouvera une preuve de ce théorème dans l’ouvrage de Adams [2].
15.3.8. T
Soit M une variété compacte différentiable de dimension n,A1 = (U1i , φi,1)i=1,...,m,A2 =
(U2j , φ j,2) j=1,...,r deux atlas finis et χ1
i , χ2j deux partitions de l’unité subordonnées.
Alors les espaces Wk,p(M,A1) et Wk,p(M,A2) sont équivalents.
D. Soit f ∈Wk,p(M,A1) arbitraire. On a∥∥∥ f∥∥∥
Wk,p(M,A1) =
m∑i=1
∥∥∥( f χ1i ) φ−1
i,1
∥∥∥Wk,p(φi,1(U1
i ))
Or ∀ x ∈M,r∑
j=1
(χ2j f )(x) = f (x)
⇒ (χ1i f )(x) =
r∑j=1
(χ1
i f χ2j
)(x)
⇒
∥∥∥( f χ1i ) φ−1
i,1
∥∥∥Wk,p(φi,1(U1
i )) ≤ Ci
r∑j=1
∥∥∥∥(χ1i f χ2
j
) φ−1
i,1
∥∥∥∥Wk,p
(φi,1(U1
i ∩U2j ))

15.3. LES ESPACES DE SOBOLEV SUR LES VARIÉTÉS 421
Posant C = max1≤i≤m
Ci, on a
∥∥∥ f∥∥∥
Wk,p(M,A1) ≤ Cm∑
i=1
r∑j=1
∥∥∥∥(χ1i f χ2
j
) φ−1
i,1
∥∥∥∥Wk,p
(φi,1(U1
i ∩U2j ))
D’où, par l’équivalence des systèmes de coordonnéesA1 etA2 et des changementsde cartes
φ j,2 φ−1i,1 : φi,1(U1
i ∩U2j )→ φ j,2(U1
i ∩U2j )
On a, par le théorème précédent :∥∥∥ f∥∥∥
Wk,p(M,A1) ≤ C′m∑
i=1
r∑j=1
∥∥∥∥(χ1i f χ2
j
) φ−1
j,2
∥∥∥∥Wk,p
(φ j,2(U1
i ∩U2j ))
= C′r∑
j=1
m∑i=1
∥∥∥∥(χ2j f φ−1
j,2
) (χ1
i φ−1j,2
)∥∥∥∥Wk,p
(φ j,2(U1
i ∩U2j ))
≤ C′r∑
j=1
m∑i=1
Ki
∥∥∥∥(χ2j f φ−1
j,2
)∥∥∥∥Wk,p
(φ j,2(U1
i ∩U2j ))
≤ C′r∑
j=1
m∑i=1
Ki
∥∥∥∥(χ2j f φ−1
j,2
)∥∥∥∥Wk,p
(φ j,2(U2
j ))
≤ C′′r∑
j=1
∥∥∥∥(χ2j f φ−1
j,2
)∥∥∥∥Wk,p
(φ j,2(U2
j ))
= C′′∥∥∥ f
∥∥∥Wk,p(M,A2)
Inversant les rôles des systèmes, on obtient bien que Wk,p((M,A1)) 'Wk,p((M,A2))
Les plongements de Sobolev sur les variétés.
Les normes étant équivalentes, on peut alors généraliser les théorèmes de plon-gements établis dans la sous-section précédente. La preuve du théorème suivantdevient alors évidente par le simple fait que les plongements sont valables surchacun des domaines de carte de l’atlas. Par sommation finie, les résultas restentalors également valables pour la variété elle-même.
15.3.9. T (Rellich-Kondrachov appliqué aux variétés)
Soient M une variété compacte de dimension n, j, k deux entiers non négatifs, 1 ≤ p < ∞un réel. Alors
(1) Si kp < n
W j+k,p(M) →W j,q(M), ∀q ∈[1, n p
n−kp
](114)

422 15. ESPACES DE SOBOLEV
De plus, si q ∈[1, n p
n−kp
), l’injection est complètement continue
(2) Si kp = n
(115) W j+k,p(M)→W j,q(M), ∀q ∈ [1,∞)
(3) Si kp > n
Wk,p(M) → C j(M), ∀ 0 ≤ j ≤ k − np(116)
De plus, si 0 ≤ j < k − np , l’injection est complètement continue.
De même
W j+k,p(M)→W j,q(M), ∀q ∈ [1,∞](117)
Sous-variétés et plongements de Sobolev.
15.3.10. D
Soit M une variété compacte sans bord de dimension n. Posons
(1) Rn = Rn−r×Rk
(2) ∀ x ∈ Rn x = (x′, x′′) avec x′ ∈ Rn−r, x′′ ∈ Rr
(3) Rn−r× 0 = (x′, 0, ..., 0) ∈ Rn
| x′ ∈ Rn−r
Une sous-variété Y de M de codimension r est un sous-ensemble Y ⊂ M muni dela topologie induite de celle de M avec la propriété suivante :
∀y ∈ Y, ∀ (U, φ) carte de M telle que y ∈ U on a
(118) φ(U ∩ Y) = φ(U) ∩ (Rn−r× 0)
15.3.11. P
Soient M une variété compacte sans bord de dimension n munie d’un atlasA =φi : Ui → Vi
i=1,...,m
avec Vi domaine borné (à bord lisse), Y une sous-variété de M de codimension r.
Soitφi j : Ui j → Vi j
j=1,...,t
une sous-famille deA, telle que Y ⊂t⋃
j=1
Ui j
Alors, si l’on identifie Rn−r× 0 à Rn−r,
φi j |Uij∩Y , Ui j ∩ Y
j=1,...,t
est un atlas sur Y

15.4. LES ESPACES DE SOBOLEV SUR LES FIBRÉS VECTORIELS 423
15.3.12. C
(Opérateurs de traces sur les variétés)Soient
(1) j, k,n, r quatre entiers non négatifs tels 0 ≤ r ≤ n − 1
(2) 1 ≤ p < ∞ un réel
(3) M une variété compacte sans bord de dimension n
(4) Y une sous-variété de codimension r
Les plongements du type
(119) W j+k,p(M) →W j,q(Y)
sont vérifiés dans tous les cas suivant :
(1) si r < kp < n, 1 ≤ q ≤ (n−r)pn−kp , avec compacité si q < (n−r)p
n−kp .
(2) si kp = n, 1 ≤ q < ∞, avec compacité dans tous les cas.
(3) si kp > n, 1 ≤ q ≤ ∞, avec compacité dans tous les cas.
En particulier, pour tout réel 1 < p < ∞, et quels que soient k ≥ r
(120) Wk,p(M) →Wk−r,p(Y)
15.3.13. R
On peut également généraliser aux sous-variétés le cas particulier p = 2 cité sur lesouverts de Rn comme suit :Soient M une variété compacte sans bord de dimension n, Y une sous-variétéde codimension r, s ≥ r/2, alors la restriction canonique ρ : C∞(M) → C∞(Y) seprolonge en une application linéaire, continue et bijective
ρ : Ws,2(M)→Ws−r/2,2(Y)
15.4. Les espaces de Sobolev sur les fibrés vectoriels
Nous allons finalement nous intéresser brièvement aux espaces de Sobolev surles fibrés vectoriels. Là encore, les résultats que nous énonceront sont immédiatspar extension de leur équivalent démontré dans les espaces euclidiens. Nous lesdonnons de ce fait comme complément et ne seront pas démontrer pour alléger larédaction.

424 15. ESPACES DE SOBOLEV
Définition et plongements de Sobolev.
15.4.1. D
Soient(1) k un entier non négatif, 1 ≤ p ≤ ∞ un réel
(2) M une variété compacte sans bord de dimension n munie d’un atlasφi : Ui → Vi
i=1,...,m
avec Vi domaine borné (à bord lisse), χi ⊂ C∞(M)une partition C∞ de l’unité subordonnée
(3) (E, π,M) un fibré vectoriel de classe C∞ de rang d– de fibre typique F = Rd et de groupe structural G ⊂ GL(F) ⊂ Rd2
– muni d’un système de trivialisationsψi : E|Ui = π
−1(Ui)∼−→ Ui × F
i=1,...,m
dont les transitionsψ j ψ−1
i : (Ui ∩U j) × F −→ (Ui ∩U j) × F(x, θ) 7−→ (x, τ ji(x)θ)
sont de classe C∞ de dérivées bornées.En particulier, pour tout i, j ∈ 1, ...,m, pour lesquels l’intersectionUi ∩U j est non vide, l’application τ ji : Ui ∩U j → G est C∞
(4) Γ(E) l’ensemble des sections C∞
Soit alors une section σ ∈ Γ(E), on dit que σ appartient à l’espace de SobolevWk,p(M,E) si la condition suivante est vérifiée :
(121)Quel que soit i = 1, ...,m,l’application σi = proj2 ψi σ φ−1
i : Vi → Rd appartient àl’espace de Sobolev Wk,p(Vi,Rd)
En d’autres termes, pour i = 1, ...,m quelconque, on a σi = (σ1i , ..., σ
di ), alors σ ∈
Wk,p(M,E) si et seulement si
(122) σ ji ∈Wk,p(Vi), ∀ (i, j) ∈ 1, ...,m × 1, ..., d
On muni alors l’espace de Sobolev Wk,p(M,E) de la norme définie par
(123) ‖σ‖Wk,p(M,E) =∑
0≤|α|≤k
m∑i=1
d∑j=1
∥∥∥∥σ ji
∥∥∥∥Wk,p(Vi)
Tout comme dans le cas des variétés, on peut vérifier que toutes les normesrelatives aux atlas et aux systèmes de trivialisations sont équivalentes. De plus, lesplongements de Sobolev restent valables.
15.4.2. T (Rellich-Kondrachov appliqué aux fibrés)
Soient
15.4. LES ESPACES DE SOBOLEV SUR LES FIBRÉS VECTORIELS 425
(1) M une variété compacte C∞ de dimension n
(2) (E, π,M) un fibré vectoriel de classe C∞ de rang d, de fibre typique F = Rd et degroupe structural G ⊂ GL(F)
(3) j, k, deux entiers k ≥ 1 et j ≥ 0
(4) 1 ≤ p < ∞ un réel
Alors
(1) Si kp < n
W j+k,p(M,E) →W j,q(M,E), ∀q ∈[1, n p
n−kp
](124)
De plus, si q ∈[1, n p
n−kp
), l’injection est complètement continue
(2) Si kp = n
(125) W j+k,p(M,E)→W j,q(M,E), ∀q ∈ [1,∞)
(3) Si kp > n
Wk,p(M,E) → C j(M,E), ∀ 0 ≤ j ≤ k − np(126)
De plus, si 0 ≤ j < k − np , l’injection est complètement continue.
De même
W j+k,p(M,E)→W j,q(M,E), ∀q ∈ [1,∞](127)
15.4.3. C
(Opérateurs de traces sur les fibrés)Soient
(1) M une variété compacte C∞ de dimension n
(2) Y une sous-variété de codimension r
(3) (E, π,M) un fibré vectoriel de classe C∞ de rang d, de fibre typique F = Rd et degroupe structural G ⊂ GL(F)
(4) j, k, deux entiers avec k ≥ 1 et j ≥ 0
(5) 1 ≤ p < ∞ un réel
Alors, les plongements du type
(128) W j+k,p(M,E) →W j,q(Y,E|Y)
sont vérifiés dans tous les cas suivant :
(1) si r < kp < n, 1 ≤ q ≤ (n−r)pn−kp , avec compacité si q < (n−r)p
n−kp .
(2) si kp = n, 1 ≤ q < ∞, avec compacité dans tous les cas.
(3) si kp > n, 1 ≤ q ≤ ∞, avec compacité dans tous les cas.
En particulier, pour tout réel 1 < p < ∞, et quels que soient k ≥ r
(129) Wk,p(M,E) →Wk−r,p(Y,E|Y)

426 15. ESPACES DE SOBOLEV
15.5. Annexe
On trouvera une preuve de ces différents résultats dans l’ouvrage de Brezis[15].
Rappels sur les espaces Lp(Ω).
Inégalités principales.
15.5.1. T
Soient Ω un ouvert de Rn, 1 ≤ p ≤ q ≤ ∞ deux réels et p′ l’exposant conjugué de p, i.e1p +
1p′ = 1.
(1) Inégalité de HölderSi f ∈ Lp(Ω), g ∈ Lp′ (Ω), alors f · g ∈ L1(Ω) et∥∥∥ f · g
∥∥∥L1(Ω) ≤
∥∥∥ f∥∥∥
Lp(Ω)
∥∥∥g∥∥∥
Lp′ (Ω)(130)
(2) Inégalité d’interpolationSi f ∈ Lp(Ω) ∩ Lq(Ω), alors f ∈ Lr(Ω), quel que soit r ∈ [p, q] et∥∥∥ f
∥∥∥Lr(Ω) ≤
∥∥∥ f∥∥∥α
Lp(Ω)
∥∥∥ f∥∥∥1−α
Lq(Ω) avec1r=αp+
1 − αq
(131)
pour un certain 0 ≤ α ≤ 1
(3) Inégalité d’inclusionSi de plus |Ω| < ∞ et f ∈ Lq(Ω), alors f ∈ Lp(Ω) et∥∥∥ f
∥∥∥Lp(Ω) ≤ |Ω|
1/p−1/q∥∥∥ f
∥∥∥Lq(Ω)(132)
En particulier
Lq(Ω) ⊂ Lp(Ω), ∀ 1 ≤ p ≤ q < ∞
Convolution et régularisation.
15.5.2. D
Soit ρ ∈ C∞0 (Rn) une fonction non négatives telle que
(133)∫Rnρ(x)dx = 1, supp ρ ⊂ B(0, 1)

15.5. ANNEXE 427
Pour ε > 0 arbitrairement choisi,la fonction ρε(x) := ε−nρ(x/ε) appartient à C∞0 (Rn)et supp ρε ⊂ B(0, ε). La fonction ρε est appelée fonction régularisante et la convo-lution
(134) uε(x) := (ρε ∗ u)(x) =∫Rnρε(x − y)u(y)dy
est appelé, pour autant que le membre de droite de l’égalité (134) ait un sens, larégularisation de u.
15.5.3. C
Soient p ≥ 1 f ∈ L1(Rn) et g ∈ Lp(Rn). Les assertions suivantes sont vérifiées :
(1) pour presque tout x ∈ Rn, la fonction y 7→ f (x − y)g(y) est intégrable sur Rn.
(2) on pose
(135) ( f ∗ g)(x) =∫Rn
f (x − y)g(y) dy
Alors f ∗ g ∈ Lp(Rn) et∥∥∥ f ∗ g
∥∥∥Lp(Rn) ≤
∥∥∥ f∥∥∥
L1(Rn)
∥∥∥g∥∥∥
Lp(Rn).En outre, on a ( f ∗ g)(x) = (g ∗ f )(x)
15.5.4. T
Soient f ∈ Ck0(Rn), g ∈ L1
loc(Rn) et α un multi-indice tel que |α| ≤ k. Alors
f ∗ g ∈ Ck(Rn) et Dα( f ∗ g) = (Dα f ) ∗ g
En particulier si f ∈ C∞0 (Rn) et g ∈ L1loc(R
n), alors f ∗ g ∈ C∞(Rn). Ici Dα représente laα-ième dérivée au sens usuel.
15.5.5. C
Si u ∈ L1loc(R
n), ε > 0, alors uε ∈ C∞(Rn) etDα(ρε ∗ u) = (Dαρε) ∗ u
15.5.6. T
Soit u ∈ C (Rn), alors ρε ∗ u→ u uniformément sur tout compact de Rn
15.5.7. C
428 15. ESPACES DE SOBOLEV
Soient Ω un domaine ouvert de Rn et u une fonction définie sur Rn qui s’annule identi-quement en dehors de Ω. Les assertions suivantes sont vérifiées :
(1) Si u ∈ L1loc(Ω) alors uε ∈ C∞(Rn)
(2) Si de plus supp u ⊂⊂ Ω, alors uε ∈ C∞0 (Ω) pour autant queε < dist(supp u, ∂Ω)
(3) Si u ∈ Lp(Ω) avec 1 ≤ p < ∞, alors uε ∈ Lp(Ω). De plus
‖uε‖Lp(Ω) ≤ ‖u‖Lp(Ω) et limε→0‖uε − u‖Lp(Ω) = 0.
(4) Si u ∈ C (Ω) et Ω′ ⊂⊂ Ω, alors limε→0 uε(x) = u(x) uniformément sur Ω′
(5) Si u ∈ C (Ω), alors limε→0 uε(x) = u(x) uniformément sur Ω
(6) C∞0 (Ω) est dense dans Lp(Ω) si 1 ≤ p < ∞
CHAPITRE 16
Opérateurs aux dérivées partielles (1)
Ce chapitre, rédigé par Olivier Kneuss, étudie un opérateur différentiel parti-culier : le laplacien. En particulier, dans des situations suffisamment régulières, enutilisant les espaces de Lebesgue, les espaces de Sobolev et le calcul des variations,on résout le problème de Dirichlet ∆u = f .
16.1. Préliminaires
Espaces de fonctions continues et hölderiennes.
16.1.1. D
Soient N ≥ 1 un entier et Ω ⊂ RN un ouvert.(1) C0(Ω) = C(Ω) est l’ensemble des fonctions continues u : Ω→ R.
(2) C0(Ω) = C(Ω) est l’ensemble des fonctions continues u : Ω → R qui seprolongent continûment à Ω.
(3) Le support d’une fonction continue u : Ω→ R noté supp u est par défini-tion supp u := x ∈ Ω|u(x) , 0 .
(4) Cc(Ω) := u ∈ C(Ω) | supp u est compact.
(5) Si Ω est borné, on définit sur C(Ω) la norme
‖u‖C0 = supx∈Ω|u(x)|.
Cette dernière rend C(Ω) complet.
429

430 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
16.1.2. T (Ascoli-Arzela)
Soient Ω ⊂ RN un domaine borné et K ⊂ C(Ω) un sous ensemble borné. Alors K estcompact dans C(Ω) si
∀ε > 0,∃δ > 0 tel que si x, y ∈ Ω et |x − y| < δ⇒ |u(x) − u(y)| < ε ∀u ∈ K.
16.1.3. D
Soient Ω ⊂ RN un ouvert et k ≥ 0 un entier.Soient encore u : RN
→ R et α = (α1, . . . , αN) ∈NN. On définit
Dαu :=∂α1+···+αN
∂xα11 . . . ∂xαN
N
u
et Ak := (α1, . . . , αN) ∈NN|∑N
j=1 α j = k.
(1) Ck(Ω) := u : Ω→ R| Dβ(m)u ∈ C(Ω) pour tout β(m) ∈ Am avec 0 ≤ m ≤ k.
(2) Ck(Ω) est l’ensemble des fonctions Ck(Ω) dont toutes les dérivées jusqu’àl’ordre k se prolongent continûment à Ω.
(3) Ckc := Ck(Ω) ∩ Cc(Ω).
(4) C∞(Ω) :=⋂∞
k=0 Ck(Ω), C∞(Ω) :=⋂∞
k=0 Ck(Ω), C∞c := C∞(Ω) ∩ Cc(Ω).
(5) Si Ω est borné, Ck(Ω) est muni de la norme
‖u‖Ck = max0≤m≤k
maxβ(m)∈Am
supx∈Ω|Dβ(m)u(x)|.
Cette norme rend Ck(Ω) complet.
16.1.4. D
Soient Ω ⊂ RN un ouvert, k ≥ 0 un entier et 0 < α ≤ 1.
(1) C0,α(Ω) := u ∈ C(Ω)| [u]C0,α(D) < ∞ pour tout compact D ⊂ Ω et où on anoté
[u]C0,α(D) := supx,y∈D, x,y
|u(x) − u(y)|‖x − y‖α
.
(2) C0,α(Ω) := u ∈ C(Ω)| [u]C0,α(Ω) < ∞.
(3) Ck,α(Ω) := u ∈ Ck(Ω) | Dβ(k)u ∈ C0,α(Ω) pour tout β(k) ∈ Ak.

16.1. PRÉLIMINAIRES 431
(4) Ck,α(Ω) := u ∈ Ck(Ω)| [Dβ(k)u]C0,α(Ω) < ∞ pour tout β(k) ∈ Ak. Si Ω estborné, on munit cet ensemble de la norme
‖u‖Ck,α = ‖u‖Ck + maxβ(k)∈Ak
[Dβ(k)]C0,α(Ω).
16.1.5. R
(1) Ck,α(Ω) muni de sa norme ‖ · ‖Ck,α est un espace complet.
(2) Par abus de notation, on écrit Ck(Ω) = Ck,0(Ω).
(3) Quand α = 1, on voit que C0,1(Ω) est l’ensemble des fonctions lipschit-ziennes sur Ω.
16.1.6. P
Soient Ω ⊂ RN un ouvert et 0 < α ≤ 1.
(1) Si u, v ∈ C0,α alors uv ∈ C0,α.
(2) Si 0 ≤ α ≤ β ≤ 1 et k ≥ 0 un entier alors
Ck(Ω) ⊃ Ck,α(Ω) ⊃ Ck,β(Ω) ⊃ Ck,1(Ω).
(3) Si de plus Ω est convexe et borné alors
Ck,1(Ω) ⊃ Ck+1(Ω).
Montrons par un contre-exemple que, sans hypothèse surΩ, le résultat 3. n’est,en général, pas vrai.
16.1.7. P
Soient 12 < β < 1,
Ω := (x, y) ∈ R2| y <
√|x| et x2 + y2 < 1
et
u(x, y) :=
0 si (x, y) ∈ Ω et y ≤ 0x|x| y
2β si (x, y) ∈ Ω et y > 0.
Alors u ∈ C1(Ω) et u < C0,α(Ω) pour tout 12 < β < α ≤ 1.
D. On se représente sans peine le domaine Ω. Clairement, on aque u ∈ C(Ω), ∂xu(x, y) = 0 sur Ω et
∂yu(x, y) =
0 si (x, y) ∈ Ω et y ≤ 0x|x|2βy2β−1 si (x, y) ∈ Ω et y > 0.

432 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Comme 2β − 1 > 0, il vient ∂xu et ∂yu ∈ C(Ω) et donc u ∈ C1(Ω).Soient x = (x1, x2), y = (y1, y2) et
A := supx,y∈Ω avec x1=−y1 et x2=y2
|u(x) − u(y)|‖x − y‖α
.
Pour de tels x, y, on a |u(x) − u(y)| = 2x2β2 et ‖x − y‖α = |(2x1)α|. Donc A =
supx∈Ω2x2β
2|(2x1)α | ≥ supx∈Ω
|xβ1 ||(2x1)α | = ∞ (l’inégalité est conséquence de la définition de
Ω). Clairement, comme A ≤ [u]C0,α(Ω), il vient que u < C0,α(Ω).
Topologies faibles , espaces réflexifs et espaces séparables.
16.1.8. D
Soit E un espace de Banach (ie un R espace vectoriel normé complet). On désignepar E′ son dual topologique. E′ := f : E→ R linéaire et continue pour la topologieengendrée par la norme associée à E, notée ‖ · ‖E. Muni de la norme dual
‖ f ‖E′ := supx∈E,‖x‖E=1
| f (x)| pour f ∈ E′,
ce dernier est un espace de Banach.
16.1.9. D
Soit S := f−1(U) | f ∈ E′ et U ouvert de R. Alors on définit la topologie faibleσ(E,E′) comme étant
σ(E,E′) :=⋃
quelconque
⋂fini
S.
En d’autres termes S est une sous base de σ(E,E′).
16.1.10. N
Etant donnée une suite (xn) de E, on désigne par xn x la convergence de xn versx pour la topologie faible σ(E,E′).
Pour cette nouvelle topologie, nous avons les résultats suivants :
16.1.11. P
Soit (xn) une suite de E où E est un espace de Banach.

16.1. PRÉLIMINAIRES 433
(1) La topologie σ(E,E′) est la topologie la moins fine sur E rendant tous les élémentsde E′ continus.
(2) [xn x pour σ(E,E′)]⇔ [ f (xn)→ f (x) dans (R, | · |) ∀ f ∈ E′].
(3) Si xn → x pour (E, ‖ · ‖E), alors xn x pour σ(E,E′).
(4) Si xn x pour σ(E,E′), alors ‖xn‖E est bornée et ‖x‖E ≤ lim inf ‖xn‖E.
(5) La topologie faible σ(E,E′) est séparée.
(6) Lorsque E est de dimension finie, la topologie σ(E,E′) et la topologie engendréepar ‖ · ‖E coïncident. Par contre en dimension infinie σ(E,E′) est strictementmoins fine que la topologie engendrée par ‖ · ‖E.
16.1.12. D
Soient E un espace de Banach, E′ son dual et E′′ son bidual, ie le dual de E′, munide la norme
‖ξ‖E′′ = supf∈E′, ‖ f ‖E′≤1
|ξ( f )|.
On définit J : E→ E′′ de la manière suivante. Soit x ∈ E fixé ; l’application f 7→ f (x)de E′ dans R est une forme linéaire continue sur E′, ie un élément de E′′. On notecette application J(x). On montre que J est linéaire et que ‖J(x)‖E′′ = ‖x‖E pour toutx ∈ E (donc en particuler J est injective).Il peut arriver que J ne soit pas surjectif, cependant, on peut, à l’aide de J, toujoursidentifier E à un sous espace de E′′.
Nous allons maintenant définir sur E′ une troisième topologie, les deux pre-mières étant la topologie engendrée par ‖ · ‖E′ et σ(E′,E′′).
16.1.13. D
Soit E un espace de Banach. Pour chaque x ∈ E, on considère l’application ϕx :E′ → R définit par f 7→ ϕx( f ) = f (x). Soit
S := ϕ−1x (U)| x ∈ E et U ouvert de R.
On définit la topologie faible ∗ noté σ(E′,E) comme étant⋃quelconque
⋂fini
S.
16.1.14. N
Etant donnée une suite ( fn) de E′, on désigne par fn ∗ f la convergence de fn versf pour la topologie faible ∗ σ(E′,E)
434 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
16.1.15. P
Soient E un espace de Banach et fn une suite de E′.(1) La topologie σ(E,E′) est la topologie la moins fine de E′ rendant contenues toutes
les applications (ϕx)x∈E.
(2) [ fn ∗ f pour σ(E′,E)]⇔ [ fn(x)→ f (x) dans (R, | · |) ∀x ∈ E].
(3) Si fn f pour σ(E′,E′′), alors fn ∗ f pour σ(E′,E).
(4) Si fn ∗ f pour σ(E′,E), alors ‖ fn‖E′ est bornée et ‖ f ‖E′ ≤ lim inf ‖ fn‖E′ .
(5) La topologie faible ∗ σ(E′,E) est séparée.
(6) Lorsque J(E) = E′′ (en particulier si E est de dimension finie), la topologieσ(E′,E′′) et la topologie σ(E′,E) coïncident.
(7) Lorsque J n’est pas surjective (ie J(E) E′′), la topologie faible ∗ σ(E′,E) eststrictement moins fine que la topologie faible σ(E′,E′′).
16.1.16. D
Soit E un espace de Banach et J l’injection canonique de E dans E′′ vu précédem-ment. On dit que E est réflexif si J(E) = E′ (ie si J est surjective). Dans ce cas, onpeut donc identifier E et E′′.
16.1.17. T
Soit E un espace de Banach. Alors(1) E est réfexif⇔ E′ est réflexif.(2) Si E est réflexif et si (xn) est une suite bornée de E, alors il existe une sous suite
(xnk ) qui converge pour la topologie σ(E,E′).
16.1.18. D
Soit E un espace métrique. On dit que E est séparable s’il existe un sous-ensembleD ⊂ E dénombrable et dense.
16.1.19. T
Soit E un espace de Banach. Alors(1) E est séparable si E′ l’est.(2) Si E est séparable et si ( fn) est une suite bornée de E′, alors il existe une sous
suite ( fnk ) qui converge pour la topologie ∗ σ(E′,E).

16.1. PRÉLIMINAIRES 435
Espaces Lp.
Dans la suite Ω désignera toujours un ouvert de RN muni de la mesure deLebesgue dx. On suppose connu les notions de fonction intégrable, de fonctionmesurable et d’ensemble négligable.
16.1.20. D
Soit p ∈ R avec 1 ≤ p < ∞ ; on définit
Lp := f : Ω→ R| f mesurable et∫Ω
| f |p < ∞.
On définit encore une relation d’équivalence ∼ sur Lp par f ∼ g ⇔ f = g presquepartout (noté par la suite pp).On définit l’espace Lp comme étant Lp/ ∼. On note
‖ f ‖Lp :=[∫Ω
| f (x)|pdx]1/p
.
16.1.21. D
On définit
L∞ := f : Ω→ R| f mesurable et ∃ une constante C ∈ R telle que | f (x)| ≤ C pp sur Ω.
Comme avant, on définit L∞ comme étant L∞/ ∼. On note
‖ f ‖L∞ := infC | | f (x)| ≤ C pp sur Ω
16.1.22. N
Soit 1 ≤ p ≤ ∞.
(1) Dorénavant on écrira Lp pour Lp(Ω) lorsqu’il n’y a aucune confusionpossible.
(2) On désigne par p′ l’exposant conjugé de p (ie 1p +
1p′ = 1).
On suppose connu les résultats d’intégration suivants : théorème de conver-gence de Beppo Levi monotone, théorème de convergence dominée de Lebesgue,lemme de Fatou, théorème de Fubini-Tonelli (voir [15]).
16.1.23. T
Soit 1 ≤ p ≤ ∞ et f ∈ Lp et g ∈ Lp′ . Alors
(1) (Inégalité de Hölder) f · g ∈ L1 et∫| f g| ≤ ‖ f ‖Lp‖g‖Lp′ .
(2) Lp est un espace vectoriel et ‖ · ‖Lp est une norme sur Lp.

436 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
(3) Lp est un espace de Banach.
16.1.24. P
Soient 1 ≤ p ≤ ∞, ( fn) une suite de Lp et f ∈ Lp tels que ‖ fn − f ‖Lp → 0 (dans la suite onnotera cela par fn → f Lp). Alors il existe une sous-suite ( fnk ) de ( fn) telle que
fnk (x)→ f (x) pp sur Ω et
| fnk | ≤ h(x) ∀k et pp sur Ω, avec h ∈ Lp.
Nous allons à présent étudier la réflexivité, la séparabilité et le dual de Lp pour1 ≤ p ≤ ∞.
16.1.25. T
Soit 1 < p < ∞. Alors
(1) Lp est réfexif.
(2) (théorème de représentation de Riesz) Soit ϕ ∈ (Lp)′, alors il existe un uniqueu ∈ Lp′ tel que
ϕ( f ) =∫
u f ∀ f ∈ Lp ; de plus on a
‖u‖Lp′ = ‖ϕ‖(Lp)′ .
16.1.26. R
La partie 2. du théorème précédent est très importante. En effet, elle permet d’in-dentifier le dual de Lp avec Lp′ .
16.1.27. T
Soit 1 ≤ p < ∞. Alors
(1) L’espace Cc(Ω) est dense dans Lp(Ω).
(2) Lp est séparable.
Pour montrer le théorème précédent, on utilise la définition et le lemme sui-vants :
16.1.28. D
Soit 1 ≤ p ≤ ∞. On définit
Lploc(Ω) := f : Ω→ R| f 1K ∈ Lp(Ω) pour tout compact K ∈ Ω.

16.1. PRÉLIMINAIRES 437
16.1.29. L
Soit f ∈ L1loc(Ω) tel que ∫
f u = 0 ∀u ∈ C∞c (Ω).
Alors f = 0 p.p. sur Ω.
16.1.30. R
Les deux résultats du théorème 1.3.2 sont faux pour p = ∞. Il est facile de voirpourquoi le premier est faux. En effet, en remarquant que pour les fonctions conti-nues la norme ‖ · ‖L∞ équivaut à la norme du sup, il suit par complétude que
Cc(Ω)L∞(Ω)
⊂ C(Ω) ∩ L∞(Ω) L∞(Ω). D’où le résultat.
16.1.31. T
Soit ϕ ∈ (L1)′. Alors il existe un unique u ∈ L∞ tel que
ϕ( f ) =∫
u f ∀ f ∈ L1 ; de plus on a
‖u‖L∞ = ‖ϕ‖(L1)′ .
16.1.32. R
Comme avant, le théorème précédent nous permet d’identifier le dual de L1 avecL∞
16.1.33. T
(1) L1 et L∞ ne sont pas réflexifs.
(2) Le dual de L∞ contient strictement L1. En d’autres termes, il existe des élémentsϕ de (L∞)′ qui ne sont pas du type
ϕ( f ) =∫
u f ∀ f ∈ L∞ avec u ∈ L1.
16.1.34. T
C∞c (Ω) est dense dans Lp(Ω) pour 1 ≤ p < ∞.
Pour montrer ce théorème, il est commode d’utiliser le produit de convolutionet les suites régularisantes dont nous rappelons les définitions et les résultatsfondamentaux.
16.1.35. T

438 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Soient f ∈ L1(RN) et g ∈ Lp(RN) avec 1 ≤ p ≤ ∞. Alors, pour presque tout x ∈ RN, lafonction y 7→ f (x − y)g(y) est intégrable sur Rn. On définit f ∗ g : Rn
→ R par
f ∗ g(x) :=∫RN
f (x − y)g(y)dy.
Alors f ∗ g ∈ Lp(RN) et ‖ f ∗ g‖Lp ≤ ‖ f ‖L1‖g‖Lp .
16.1.36. P
Soient k ∈N, f ∈ Ck(Rn) g ∈ L1loc(R
N). Alors
f ∗ g ∈ Ck(Rn) et Dβ(m)( f ∗ g) = (Dβ(m) f ) ∗ (g)
pour tout 0 ≤ m ≤ k et β(m) ∈ Am.
16.1.37. D
On appelle suite régularisante toute suite (ρn) de fonctions telle que
ρn ∈ C∞c (RN), supp ρn ⊂ B(0,1n
),∫ρn = 1 et ρn ≥ 0 sur RN.
16.1.38. R
Il existe des suites régularisantes. En effet on vérifie que ρn :=(∫ρ)−1
nNρ(nx) enest une, où
ρ(x) :=
e1
‖x‖2−1 si ‖x‖ < 10 sinon .
16.1.39. T
Soit ρn une suite régularisante. Alors
(1) Si f ∈ C(RN), on a ρn ∗ f → f uniformément sur tout compact de RN.
(2) Si f ∈ Lp(RN) avec 1 ≤ p < ∞, alors ρn ∗ f → f dans Lp(RN).
Revenons à présent aux convergences faibles vue précédemment.
16.1.40. P
Soient ( fn) une suite de Lp et f ∈ Lp avec 1 ≤ p ≤ ∞. Alors
(1) Si 1 ≤ p < ∞ alors fn f (ie pour σ(Lp, (Lp)′)) que l’on notera par la suitefn f Lp
⇔
limn→∞
∫Ω
( fn(x) − f (x))ϕ(x)dx = 0, ∀ϕ ∈ Łp′

16.1. PRÉLIMINAIRES 439
(2) Si p = ∞ alors fn ∗ f (ie pour σ((L1)′,L1) que l’on notera par la suite fn ∗ fL∞⇔
limn→∞
∫Ω
( fn(x) − f (x))ϕ(x)dx = 0, ∀ϕ ∈ Ł1.
16.1.41. T (Riemann-Lebesgue)
Soient 1 ≤ p ≤ ∞,Ω = ΠNi=1(ai, bi) et f ∈ Lp(Ω). Par périodicité deΩ, on étend f à RN ( f
est ainsi définie p.p. sur RN). Soient encore
fn(x) = f (nx) et f =1∫Ω
dx
∫Ω
f (x)dx. Alors
fn f si 1 ≤ p < ∞ et, si p = ∞, fn ∗ f
16.1.42. R
Le théorème précédent permet de montrer qu’en général le convergence faiblen’entraine pas la convergence usuelle . En effet, en posant Ω = (0, 2π) et fn(x) =sin(nx), on a
sin(nx) 0 = f ,
alors que∫
(0,2π) | sin(nx)| = 4. Donc sin(nx) 9 0 dans (L1(0, 2π), ‖ · ‖L1 ).
Citons encore 2 résultats simples de convergence.
16.1.43. P
Soient 1 ≤ p ≤ ∞, ( fn) une suite de Lp, f ∈ Lp, (gn) une suite de Lp′ et g ∈ Lp′ . Si fn fLp et gn → g Lp′ alors
fngn f g L1.
D. Il faut montrer que∫( fngn − f g)ϕ→ 0 ∀ϕ ∈ L∞
Comme fn f Lp, on a que ‖ fn‖Lp est bornée. Par Hölder, il vient∫| fn(gn − g)| ≤
(∫| fn|p
)1/p (∫|gn − g|p
′
)1/p′
→ 0, donc∫fn(gn − g)ϕ→ 0 car ϕ ∈ L∞
D’autre part, comme gϕ ∈ Lp′ (car ϕ ∈ L∞), il vient que∫( fn − f )gϕ→ 0,
d’où le résultat (car fngn − f g = fn(gn − g)ϕ + ( fn − f )gϕ).

440 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
16.1.44. P
Soient ( fn) une suite dans L2 et f ∈ L2. Alorssi fn f L2 et f 2
n f 2 L1 on a fn → f L2.
D. On a∫| fn − f |2 =
∫f 2n − 2
∫f fn +
∫f 2.
La première intégrale tend vers∫
f 2 (car f 2n f 2 L1 et que g ≡ 1 ∈ L∞. La deuxième
tend vers −2∫
f 2 (car fn f L2) et que f ∈ L2). On a donc le résultat.
Espaces de Hilbert.
16.1.45. D
Soit H un R-espace vectoriel. Un produit scalaire 〈u, v〉 est une forme bilinéaire deH ×H dans R, symétrique et définie positive.
16.1.46. R
(1) Un produit scalaire vérifie l’inégalité de Cauchy-Schwarz :
|〈u, v〉| ≤ 〈u,u〉1/2〈v, v〉1/2 ∀u, v ∈ H.
(2) On a que ‖u‖ = 〈u,u〉1/2 est une norme, car ‖u + v‖2 = ‖u‖2 + ‖v‖2 + 2〈u, v〉 ≤‖u‖2 + ‖v‖2 + 2‖u‖‖v‖.
(3) On a également l’identidé du parallélogramme :∥∥∥∥∥a + b2
∥∥∥∥∥ + ∥∥∥∥∥a − b2
∥∥∥∥∥ = 12
(‖a‖2 + ‖b‖2) ∀a, b ∈ H.
16.1.47. D
Un espace de Hilbert est un espace vectoriel H muni d’un produit scalaire 〈u, v〉 etqui est complet pour la norme 〈u,u〉1/2. Dans la suite, un tel espace sera noté H.
16.1.48. P
Tout espace de Hilbert est réflexif.

16.1. PRÉLIMINAIRES 441
16.1.49. T (Projection sur un convexe fermé)
Soit K ⊂ H un convexe fermé non vide. Alors pour tout f ∈ H, il existe un unique u ∈ Htel que
‖ f − u‖ = minv∈K‖ f − v‖
De plus u est caractérisé par la propriété :
u ∈ K et 〈 f − u, v − u〉 ≤ 0 ∀v ∈ K.
16.1.50. N
On notera u = PK f =Projection de f sur K.
16.1.51. P
Sous les hypothèses du théorème précédent on a
‖PK f1 − PK f2‖ ≤ ‖ f1 − f2‖ ∀ f1, f2 ∈ H.
16.1.52. C
Soit M ⊂ H un sous espace vectoriel fermé. Soit f ∈ H. Alors u = PK f est caratérisé par
u ∈M et 〈 f − u, v〉 = 0 ∀v ∈M
16.1.53. T (de représentation de Riesz-Fréchet)
Etant donné ϕ ∈ H′, il existe un unique f ∈ H tel que
ϕ(v) = 〈 f , v〉 ∀v ∈ H.
De plus on a‖ f ‖ = ‖ϕ‖H′
16.1.54. D
On dit qu’une forme bilinéaire a(u, v) : H ×H→ R est
(1) continue s’il existe une constante C telle que
|a(u, v)| ≤ C‖u‖‖v‖ ∀u, v ∈ H,
(2) coercive s’il existe une constante α > 0 telle que
a(v, v) ≥ α‖v‖2 ∀v ∈ H.
16.1.55. T (Stampacchia)

442 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Soit a(u, v) une forme bilinéaire continue et coercive. Soit K un convexe fermé et non vide.Etant donné ϕ ∈ H′, il existe un unique u ∈ H tel que
(136) a(u, v − u) ≥ ϕ(v − u) ∀v ∈ K.
De plus, si a est symétrique, alors u est caractérisé par la propriété
(137) u ∈ K et12
a(u,u) − ϕ(u) = minv∈K
12
a(v, v) − ϕ(v).
D. D’après le théorème précédent, il existe f ∈ H unique tel que
ϕ(v) = 〈 f , v〉 ∀v ∈ H.
D’autre part, pour tout u ∈ H fixé, l’application v 7→ a(u, v) est une forme linéairecontinue sur H (utiliser la continuité de a(u, v)), et grâce au théorème précédent ilexiste un élément de H, noté Au, tel que a(u, v) = 〈Au, v〉 ∀v ∈ H. On voit facilementque A est un opérateur linéaire de H dans H et que
(138) ‖Au‖ ≤ C‖u‖ ∀u ∈ H
(139) 〈Au,u〉 ≥ α‖u‖2 ∀u ∈ H.
Le problème (1.1) revient u ∈ K tel que
(140) 〈Au, v − u〉 ≥ 〈 f , v − u〉 ∀v ∈ K.
Soit ρ > 0 une constante qui sera fixée ultérieurement. L’inégalité (1.5) équivaut à
(141) 〈ρ f − ρAu + u − u, v − u〉 ≤ 0 ∀v ∈ K.
ie u = PK(ρ f − ρAu + u).
Pour tout v ∈ K, on pose Sv = PK(ρ f − ρAv + v). Montrons que si ρ > 0 est bienchoisi alors S est une contraction stricte, ie il existe k < 1 tel que
‖Sv1 − Sv2‖ ≤ k‖v1 − v2‖ ∀v1, v2 ∈ K.
En effet, d’après la proposition 1.4.1 on a
‖Sv1 − Sv2‖ ≤ ‖(v1 − v2) − ρ(Av1 − Av2)‖
et donc
‖Sv1 − Sv2‖2≤ ‖v1 − v2‖
2− 2ρ〈Av1 − Av2, v1 − v2〉 + ρ
2‖Av1 − Av2‖
2
≤ ‖v1 − v2‖2(1 − 2ρα + ρ2C2) (utiliser (1.3) et (1.4)) .
Fixant ρ > 0 tel que k2 = 1 − 2ρα + ρ2C2 < 1 (prendre 0 < ρ < 2αC2 ) on voit, par le
théorème du point fixe de Banach, que S admet un point fixe unique, ce qui estexactement le résultat récherché pour (1.1).Supposons maintenant que a(u, v) soit symétrique. Alors a(u, v) définit un nouveauproduit scalaire sur H et la norme assosiée a(u,u)1/2 est équivalente à la norme ‖ · ‖(utiliser le fait que a(u, v) est continue et coercive ). Donc H est aussi un espacede Hilbert pour ce produit scalaire. Appliquant le théorème précédent on obtientg ∈ H tel que
ϕ(v) = a(g, v) ∀v ∈ H.Alors (1.1) devient
(142) a(g − u, v − u) ≤ 0 ∀v ∈ K.

16.1. PRÉLIMINAIRES 443
ie u = PK g, projection au sens du produit scalaire définit par a. D’après le théorème1.4.1 (1.7) équivaut à trouver u ∈ K tel que
a(g − u, g − u)1/2 = minv∈K
a(g − v, g − v)1/2
ce qui est équivalent à trouver u ∈ K tel que
(143) a(g − u, g − u) = minv∈K
a(g − v, g − v)
Comme a(g − u, g − u) = a(g, g) + a(u,u) − 2a(g,u) (1.8) est équivalent à
(144) a(u,u) − 2a(g, v) = minv∈Ka(v, v) − 2a(g, v).
En multipliant (1.9) par 12 et en remplacant a(g, v) par ϕ(v) on trouve (1.2), ce qui
conclut la démonstration.
16.1.56. C (Lax-Milgram)
Soit a(u, v) une forme bilinéaire continue et coercive. Alors pour tout ϕ ∈ H′, il existe ununique u ∈ H tel que
(145) a(u, v) = ϕ(v) ∀v ∈ H.
De plus, si a est symétrique, alors u est caractérisé par la propriété
(146) u ∈ K et12
a(u,u) − ϕ(u) = minv∈H
12
a(v, v) − ϕ(v).
D. Il suffit de montrer que dans ce cas (K = H), (1.10) est équi-valent à (1.1). En effet, comme H est un espace vectoriel tv ∈ H pour tous t ∈ R etv ∈ H. Si l’on suppose que (1.1) est vérifié alors
a(u, tv) − ϕ(tv) ≥ ϕ(u) + a(u,u) ∀t ∈ R et v ∈ H
et donct(a(u, v) − ϕ(v)) ≥ ϕ(u) + a(u,u) ∀t ∈ R et v ∈ H
donca(u, v) = ϕ(v) ∀v ∈ H.
Le fait que (1.10) implique (1.1) est évident.
Espaces de Sobolev.
16.1.57. D
Soient Ω ⊂ RN un ouvert et 1 ≤ p ≤ ∞.L’espace de Sobolev W1,p(Ω) est défini par
W1,p(Ω) :=

444 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)u ∈ Lp(Ω)|∃g1, . . . , gn ∈ Lp(Ω) avec
∫Ω
u∂ϕ
∂xi= −
∫Ω
giϕ ∀ϕ ∈ C∞c (Ω) ∀i = 1, . . . ,N
On pose H1(Ω) :=W1,2(Ω).Pour u ∈W1,p(Ω) on note
∂u∂xi= gi (ceci a bien un sens grâce au lemme 1.3.1) et ∇u =
(∂u∂x1
, · · · ,∂u∂xN
).
L’espace W1,p(Ω) est muni de la norme
‖u‖W1,p(Ω) = ‖u‖Lp +
N∑i=1
‖∂u∂xi‖Lp que l’on notera aussi ‖u‖Lp + ‖∇u‖Lp .
On remarque que cette norme est équivalente à
(‖u‖pLp +
N∑i=1
‖∂u∂xi‖
pLp )1/p.
L’espace H1(Ω) est muni du produit scalaire
(u, v)H1 = (u, v)L2 +
N∑i=1
(∂u∂xi
,∂u∂xi
)L2
.
16.1.58. R
(1) On voit facilement que si u ∈ C1(Ω) ∩ Lp(Ω) et si ∂u∂xi∈ Łp pour tout
i = 1, · · · ,N alors u ∈W1,p(Ω).
(2) En utilisant une suite régularisante, on voit que les fonctions ϕ, appeléesfonctions tests, utilisées dans la définition 1.5.1 peuvent prises dans C1
c (Ω)en lieu de C∞c (Ω).
16.1.59. T
L’espace W1,p(Ω) muni de sa norme ‖ · ‖W1,p(Ω) est un espace de Banach pour 1 ≤ p ≤ ∞ ;W1,p(Ω) est réflexif pour 1 < p < ∞ et séparable pour 1 ≤ p < ∞. L’espace H1(Ω) est unespace de Hilbert séparable.
16.1.60. T
Soit 1 < p ≤ ∞ et u ∈ Lp(Ω). Les propriétés suivantes sont équivalentes.
(1) u ∈W1,p(Ω)
(2) Il existe une constante C = C(u,Ω, p) telle que∣∣∣∣∣∫Ω
u∂ϕ
∂xi
∣∣∣∣∣ ≤ C‖ϕ‖Lp′ , ∀ϕ ∈ C∞c , ∀i = 1, . . . ,N.

16.1. PRÉLIMINAIRES 445
(3) Il existe une constante C = C(u,Ω, p) telle que pour tout ouvert ω ⊂ ω ⊂ Ωavec ω compact et tout h ∈ RN avec |h| < dist(ω,Ωc) on a(∫
ω|u(x + h) − u(x)|pdx
)1/p
≤ C|h| si 1 < p < ∞
|u(x + h) − u(x)| ≤ C|h| pour presque tout x ∈ ω si p = ∞
De plus, on peut prendre C = ‖∇u‖Lp
16.1.61. R
Lorsque p = 1 le théorème 1.5.2 est faux. On n’a plus alors que
1.⇒ 2.⇔ 3.
Enonçons à présent un résultat pour Ω de dimension 1.
16.1.62. T
Soient I un intervalle quelconque, 1 ≤ p ≤ ∞ et u ∈ W1,p(I) ; alors il existe une fonctionu ∈ C(I) telle que
u = u pp sur I et
u(x) − u(y) =∫ x
yu′(t)dt ∀x, y ∈ I.
D. Soit y0 fixé dans I et notons
v(x) =∫ x
y0
u′(t)dt, x ∈ I
Montrons que v ∈ C(I) et que
(147)∫ b
av(x)ϕ′(x)dx = −
∫ b
au′(x)ϕ(x)dx, ∀ϕ ∈ C∞0 (I).
En effet ∫ b
av(x)ϕ′(x)dx =
∫ b
a
(∫ x
y0
u′(t)dt)ϕ′(x)dx
=
∫ y0
adx
∫ x
y0
u′(t)ϕ′(x)dt +∫ b
y0
dx∫ x
y0
u′(t)ϕ′(x)dt.
Par Fubini, il vient∫ b
av(x)ϕ′(x)dx = −
∫ y0
au′(t)dt
∫ t
aϕ′(x)dx +
∫ b
y0
u′(t)dt∫ b
tϕ′(x)dx
= −
∫ y0
au′(t)ϕ(t)dt +
∫ b
y0
u′(t)(−ϕ(t))dt
= −
∫ b
au′(x)ϕ(x)dx.

446 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Le fait que v soit continue vient du fait que si x ≥ y
|v(x) − v(y)| ≤∫ x
y|u′(t)|dt ≤
(∫ x
y|u′(t)dt|pdt
)1/p (∫ x
y1p′dt
)1/p′
≤ |x − y|1/p′
‖u′‖Lp
par Hölder. Si p = 1, la dernière inégalité n’a pas lieu, mais la continuité de v estquand même assurée par les résultats classiques de la théorie de l’intégration.De (1.12) et du fait que u ∈W1,p(I) on déduit que∫ b
a(v − u)ϕ′dx = 0 ∀ϕ ∈ C∞c ((a, b)).
Montrons que v − u = C pp où C = constante. Ceci découlera du lemme suivant :
16.1.63. L
Soit f ∈ L1loc(I) tel que ∫
Ifϕ′ = 0 ∀ϕ ∈ C1
c (I).
Alors il existe une constante C telle que f = C pp.
D. On fixe une fonction ψ ∈ Cc(I) telle que∫
I ψ = 1. Pour toutefonction w ∈ Cc(I) il existe ϕ ∈ C1
c (I) tel que
ϕ′ = w −(∫
Iw)ψ.
En effet la fonction h = w−(∫
I w)ψ est continue, à support compact inclus dans I et
comme∫
I h = 0, h admet une primitive à support compact. Il vient par hypothèseque ∫
If[w −
(∫Iw)ψ
]= 0 ∀w ∈ Cc(I)
ie∫
I
[f −
(∫I
fψ)]
w = 0 ∀w ∈ Cc(I)
et par le lemme 1.3.1, f −(∫
I fψ)= 0 pp, ie f = C pp avec C =
∫I fψ.
Fin de la démonstration du théorème 16.1.62.On a donc, comme annoncé, que v − u = C. Comme v est continue on a que
u := v + C a les propriétés requises.
16.1.64. P
Soient u, v ∈W1,p(Ω) ∩ L∞(Ω) avec 1 ≤ p ≤ ∞. Alors uv ∈W1,p(Ω) ∩ L∞(Ω) et
∂∂xi
(uv) =∂u∂xi
v +∂v∂xi
u, i = 1, . . . ,N.

16.1. PRÉLIMINAIRES 447
16.1.65. D
Soit Ω ⊂ RN un ouvert borné. On dit que Ω est
(1) un ouvert de classe Cm, m ≥ 1, si pour tout x ∈ ∂Ω, il existe un voisinageU de x dans RN et une application bijective H : Q→ U, où Q := x ∈ RN
|
|x j| < 1, j = 1, . . . ,N le cube unité, telle que
H ∈ Cm(Q), H−1∈ Cm(U), H(Q+) = U ∩Ω, H(Q0) = U ∩ ∂Ω
où Q+ := x ∈ Q|xN > 0 et Q0 := x ∈ Q|xN = 0;
(2) un ouvert lipschitzien si H est lipschitzienne.
16.1.66. T
Soient Ω un ouvert de classe C1, 1 ≤ p < ∞ et u ∈W1,p(Ω). Alors il existe une suite (un)de C∞c (RN) telle que
un|Ω → u dans W1,p(Ω).
Autrement dit, les restrictions àΩ des fonctions de C∞c (RN) forment un sous-espace densede W1,p(Ω).
16.1.67. T
Soient Ω un ouvert borné lipschitzien.
(1) Si 1 ≤ p < N alors
W1,p(Ω) ⊂ Lq(Ω), avec injection continue ∀q ∈ [1, p∗] où1p∗=
1p−
1N.
En d’autres termes, il existe une constante C = C(Ω, p, q) telle que
‖u‖Lq ≤ C‖u‖W1,p , ∀q ∈ [1, p∗].
De plus, l’injection de W1,p dans Lq est compact, ∀q ∈ [1, p∗). C’est-à-dire quetout ensemble borné de W1,p est d’adhérence compact dans Lq pour tout 1 ≤ q < p∗
(le résultat est faux si q = p∗).
(2) Si p = N alors
W1,n(Ω) ⊂ Lq(Ω) avec injection compacte continue ∀q ∈ [1,∞).
(3) Si p > N alors
W1,p(Ω) ⊂ C(Ω) avec injection compacte et continue .
Des trois cas, il résulte en particulier que pour 1 ≤ p ≤ ∞
W1,p(Ω) ⊂ Lp(Ω) avec injection compacte et continue.

448 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
16.1.68. R
Dans le cas unidimensionnel où Ω = I =intervalle borné, seuls les points 2. et 3.sont applicables. Cependant on a un résultat meilleur (théorème 16.1.62), à savoirque W1,p(I) ⊂ C(I) pour tout p ≥ 1 (donc ici le cas p = 1 assure que toute fonctionW1,1 est continue). Par contre l’injection n’est compacte que si p > 1.
16.1.69. C
Soient Ω ⊂ RN un ouvert borné lipschitzien et 1 ≤ p < ∞. Si
un u W1,p
(par cela, on comprend que un,u ∈ W1,p et que un u Lp et ∇un ∇u (Lp)N. On peutmontrer que cela est équivalent à un u pour σ(W1,p, (W1,p)′)).Alors
un → u Lp.
D. Nous allons uniquement montrer ce corollaire en dimensionun. Soient donc −∞ < a < b < ∞ et 1 < p < ∞. On observe que si v ∈ W1,p(a, b) etx < y, alors
|v(x) − v(y)| =∣∣∣∣∣∫ y
xv′(z)dz
∣∣∣∣∣ ≤ (∫ y
x|v′(z)|pdz
)1/p (∫ y
xdz
)1/p′
≤ ‖v′‖Lp |x − y|1/p′
.
Montrons maintenant que si un u W1,p alors un → u L∞ (et donc en particuliercomme (a, b) est borné un → u Lp). Sans perte de généralité, on peut prendre prendreu ≡ 0 (on considère la suite un − u). Par l’absurde, supposons que un 9 0 L∞. Parconséquent, il existe une sous-suite unk et ε > 0 tels que
‖unk‖L∞ ≥ ε ∀k ∈N.
Par la proposition 1.2.3, on sait que ‖u′nk‖L∞ est borné. On a donc, en prenant pour unk
son représentant continu (théorème 16.1.62), que la sous-suite unk est équicontinue.Il suit par le théorème d’Ascoli-Arzela (théorème 16.1.2) qu’il existe une sous suiteunki
et v ∈ C([a, b]) tels que
unki→ v L∞ (voir remarque 1.3.2).
On a alors unki v Lp et par unicité des limites unki
u = 0 Lp. D’où v ≡ 0, ce quicontredit le fait que
‖unk‖L∞ ≥ ε ∀k ∈N.
16.1.70. D
Soient Ω ⊂ RN un ouvert.
(1) Si 1 ≤ p < ∞, on définit W1,p0 (Ω) comment étant la fermeture de C∞c (Ω)
dans W1,p muni de sa norme (du théorème 1.5.3 il vient en particulier que

16.1. PRÉLIMINAIRES 449
W1,p0 (RN) =W1,p(RN)).
(2) Si p = ∞, W1,∞0 (Ω) :=W1,∞(Ω) ∩W1,1
0 (Ω).
16.1.71. T
On suppose Ω de classe C1. Soit
u ∈W1,p(Ω) ∩ C(Ω) avec 1 ≤ p < ∞.
Alors les propriétés suivantes sont équivalentes :
(1) u = 0 sur ∂Ω
(2) u ∈W1,p0 (Ω).
16.1.72. R
Attention, si u ∈ W1,p(Ω) avec Ω régulier, il est possible de donner un sens à u|∂Ω ,malgré le fait que u n’est définie que presque partout et que ∂Ω est généralementde mesure nulle. En général, en changant la fonction u sur son bord, il se peut quela fonction ainsi obtenue n’appartienne plus à u ∈W1,p(Ω).Grossièrement, on peut dire que u ∈W1,p
0 (Ω) si u ∈W1,p(Ω) et u = 0 sur ∂Ω.
16.1.73. T (Inégalité de Poincaré)
SoientΩ ⊂ RN un ouvert borné et 1 ≤ p < ∞.Alors il existe une constante C = C(Ω, p) >0 telle que
‖u‖Lp ≤ C‖∇u‖Lp , ∀u ∈W1,p0 (Ω).
16.1.74. D
Soient m ≥ 2 un entier, Ω un ouvert et 1 ≤ p ≤ ∞. On définit par récurrence
Wm,p(Ω) :=
u ∈Wm−1,p(Ω)|∂u∂xi∈Wm−1,p(Ω) ∀i = 1, . . . ,N
.
L’espace Wm,p(Ω) muni de la norme
‖u‖Wm,p =∑
β(i)∈Ai,i=1,...m
‖Dβ(i)u‖Lp
est un espace de Banach.
Pour les démonstrations manquantes de cette section, voir [18] ou [15].

450 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
16.2. Problème fondamental du calcul des variations et régularité
Problème fondamental du calcul des variations.
Dans cette section, nous étudions le problème suivant
infu∈W1,p(Ω)
I(u) =
∫Ω
f (x,u(x),∇u(x))dx | u − u0 ∈W1,p0 (Ω)
=: m
où Ω ⊂ RN est un ouvert borné, f : Ω ×R ×RN→ R est continue et u0 ∈ W1,p(Ω)
(p > 1).Nous allons d’abord énoncer un théorème s’appliquant à une fonction f bienparticulière avant d’aborder un théorème plus général.
16.2.1. T
Soit g ∈ L2(Ω), Ω ⊂ RN un ouvert borné lipschitzien. Alors le problème
inf
I(u) =∫Ω
12‖∇u(x)‖2 − g(x)u(x)dx | u ∈ H1
0(Ω)=: m
noté (P) admet une solution unique u ∈ H10(Ω) satisfaisant de plus
(148)∫Ω
〈∇u(x),∇v(x)〉dx =∫Ω
g(x)v(x)dx, ∀v ∈ H10(Ω).
D. Nous allons d’abord montrer l’existence de u. Ceci se fait endeux étapes.Montrons que si ui u dans H1 alors
lim infi→∞
I(ui) ≥ I(u).
En considérant la fonction h(ξ) := 12‖ξ‖
2 qui est convexe et qui vérifie h′(ξ) = ξ, ona que
12‖∇ui‖
2− gui ≥
12‖∇u‖2 + 〈∇u,∇ui − ∇u〉 − gui.
En intégrant et comme ui u dans H1, on a
limi→∞
∫Ω
〈∇u,∇ui − ∇u〉 = 0 et limi→∞
∫Ω
gui =
∫Ω
gu.
On a donc bien quelim inf
i→∞I(ui) ≥ I(u).
Soit à présent ui une suite minimisante pour (P) (ie I(ui)→ m avec ui ∈ H10). Comme
I(0) < ∞, on a que m < ∞. Par conséquent pour i suffisamment grand il vient (par

16.2. PROBLÈME FONDAMENTAL DU CALCUL DES VARIATIONS ET RÉGULARITÉ 451
l’inégalité de Hölder)
m + 1 ≥ I(ui) =12
∫Ω
‖∇ui‖2dx −
∫Ω
f (x)ui(x)dx ≥12
∫Ω
‖∇ui‖2dx − ‖g‖L2‖ui‖L2 .
A l’aide de l’inégalité de Poincaré (théorème 16.1.73), on a alors qu’il existe desconstantes ck > 0, k = 1, 2, 3 telles que
m + 1 ≥ c1‖ui‖2H1 − ‖g‖L2‖ui‖L2 ≥ c2‖ui‖
2H1 − c3.
Il existe donc une constante c telle que
‖ui‖H1 ≤ c.
En appliquant le fait que H10 est réflexif et le théorème 1.2.1, on sait qu’il existe
u ∈ H10 et une sous suite unk telle que
unk u.
Avec ce qui précéde, il découle que
m = lim infi→∞
I(unk ) ≥ I(u) ≥ m.
Il alors que u réalise le minimum de (P).
Montrons à présent l’uncité de u.Supposons qu’il existe aussi v ∈ H1
0 tel que
I(u) = I(v) = m.
Noter que w := 12 u + 1
2 v ∈ H10. Comme h(ξ) = 1
2‖ξ‖2 est convexe, il vient
m ≥ I(w) ≥12
I(u) +12
I(v) = m,
et donc w est aussi un minimum. On a alors12‖∇u(x)‖2 − g(x)u(x) +
12‖∇v(x)‖2 − g(x)v(x) = ‖∇w(x)‖2 − 2g(x)w(x) pp
et donc12‖∇u(x)‖2 +
12‖∇v(x)‖2 = ‖∇w(x)‖2 =
∥∥∥∥∥12∇u(x) +
12∇v(x)
∥∥∥∥∥ pp .
Or la fonction h(ξ) = 12‖ξ‖
2 étant strictement convexe, il vient que ∇u = ∇v pp, etdonc comme u − v ∈ H1
0, on a par l’inégalité de Poincaré (théorème 16.1.73) queu = v pp. D’où unicité.
Montrons maintenant que u satisfait (2.1). En effet, noter que pour tout ε ∈ Ret tout ϕ ∈ H1
0(Ω), on a u+ εϕ ∈ H10(Ω). Par conséquent comme u est le minumum,
on doit avoir pour tout ε ∈ R et tout ϕ ∈ H10(Ω)
I(u) ≤ I(u + εϕ) =∫Ω
12‖∇u + ε∇ϕ‖2 − g(u + εϕ)
=
∫Ω
12‖u‖2 + ε〈∇u,∇ϕ〉 + ε2 1
2‖ϕ‖2 − g(u + εϕ)
= I(u) + ε(∫Ω
〈∇u,∇ϕ〉 − gϕ)+ ε2 1
2‖ϕ‖2.

452 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Soit T(ε) := I(u + εϕ). Comme la fonction T atteint son minumum en 0. On a queT′(0) = 0 et donc que ∫
Ω
〈∇u,∇ϕ〉 − gϕ = 0.
Comme ϕ est arbitraire, on a donc (2.1), ce qui termine la démonstration.
16.2.2. R
Il aurait été possible de montrer le théorème précédent à l’aide du corollaire 1.4.2.
Enonçons à présent un théorème général d’existence.
16.2.3. T
On considère le problème général
(P) infu∈W1,p(Ω)
I(u) =
∫Ω
f (x,u(x),∇u(x))dx | u − u0 ∈W1,p0 (Ω)
= m
où– Ω ⊂ RN est un ouvert borné lipschitzien.
– f : Ω ×R ×RN→ R est continue ( f = f (x,u, ξ)).
– u0 ∈W1,p(Ω) est fixé avec I(u0) < ∞.Si, de plus f satisfait(H1) f (x,u, ·) est convexe pour tout (x,u) ∈ Ω ×R.(H2) Il existe 1 ≤ q < p et α > 0 tel que
f (x,u, ξ) ≥ α(‖ξ‖p − |u|q − 1) ∀(x,u, ξ) ∈ Ω ×R ×RN,
alors (P) admet un minimum u ∈ W1,p(Ω) (u − u0 ∈ W1,p0 ). De plus si f (x, ·, ·) est
strictement convexe pour tout x ∈ Ω alors le minimum est unique.
16.2.4. R
Les hypothèses du théorème précédent sont presque optimales dans le sens oùtout affaiblissement de l’une d’entres elles conduit à un contre-exemple. La seulehypothèse qui peut être affaiblie légèrement est la continuité de f .
Nous ne donnerons pas le preuve de ce théorème. Pour voir la démonstrationde ce théorème avec quelques hypothèses en plus voir [18].
Régularité.

16.2. PROBLÈME FONDAMENTAL DU CALCUL DES VARIATIONS ET RÉGULARITÉ 453
Dans cette sous-section le but sera de montrer que si f ,Ω et u0 sont suffisam-ment "réguliers", par exemble C∞ alors la solution du problème (P) u est mieuxque W1,p, par exemble W2,p ou C1. Il s’agit d’un problème très difficile. Ici nous netraiterons que le cas où f est telle que dans le théorème 2.1.1.
16.2.5. T
Soient m ≥ 0 un entier, Ω ⊂ RN un ouvert borné Cm+2, f ∈ Hm(Ω) et
(P) inf
I(u) =∫Ω
12‖∇u(x)‖2 − f (x)u(x)dx| u ∈ H1
0(Ω)= m.
Le problème (P) admet alors une solution u ∈ Hm+2. Plus précisément il existe une constanteC = C(Ω) > 0 telle que
‖u‖Hm+2 ≤ C‖ f ‖Hm .
En particulier si m = ∞, grâce au théorème 1.5.4, alors u ∈ C∞(Ω).
D. Nous savons de part le théorème 2.1.1 que le problème (P)possède une unique solution u ∈ H1
0. On sait de plus qu’elle satisfait
(149)∫Ω
〈∇u(x),∇v(x)〉dx =∫Ω
g(x)v(x)dx, ∀v ∈ H10(Ω).
Nous allons uniquement montrer la régularité à l’intérieur de u (qui équivauten fait au cas Ω = RN), à savoir que si f ∈ Hm(Ω), alors u ∈ Hm+2
loc (Ω). Ceci estéquivalent à montrer que pour tout ϕ ∈ C∞c (Ω), ϕu ∈ Hm+2(Ω). Soit donc u := ϕu,on observe que u ∈ H1(RN) et que u est solution faible de
∆u = ∆(ϕu) = ϕ∆u + u∆ϕ + 2〈∇u,∇ϕ〉 = ϕ f + u∆ϕ + 2〈∇u,∇ϕ〉 ≡: g.
ie
(150)∫RN〈∇u(x),∇v(x)〉dx =
∫RN
g(x)v(x)dx, ∀v ∈ H1(RN).
Comme f ∈ Hm(Ω) et u ∈ H1(Ω), on a que g ∈ L2(RN). On a donc ramené leproblème à montrer toute solution u ∈ H1(RN) de (2) est en fait dans Hm+2(RN) sig ∈ Hm(RN), m ≥ 0. Nous allons montrer cela en deux étapes. Premièrement, onmontre le cas m = 0 et deuxièmement, on établit le résultat par récurrence pourtout m ≥ 0.Commençons donc par le cas m = 0. C’est à dire montrons que g ∈ L2(RN) impliqueu ∈ H2(RN). Pour ce faire on utilise la méthode des quotients différentiels. Onintroduit pour cela les notations suivantes. Pour h ∈ RN, h , 0 on définit
(Dh)(x) :=u(x + h) − u(x)
‖h‖.
Grâce au théorème 1.5.2, il vient
(1) ∇(Dhu) = Dh(∇u)
(2) ‖D−hu‖L2 ≤ ‖∇u‖L2
(3)[‖Dhu‖L2 ≤ C ∀h ∈ RN
\0]⇒ u ∈ H1

454 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Revenons donc à (2.2) et choisissons alors la fonction test v := D−h(Dhu), ie
v(x) =2u(x) − u(x + h) − u(x − h)
‖h‖2.
Comme u ∈ H1(RN), on a bien v ∈ H1(RN). En remplaçant v dans (2.3), on a
(151)∫RN〈∇u(x),∇(D−h(Dhu)(x))〉dx =
∫RN
g(x)D−h(Dhu)(x)dx.
Calculons le membre de gauche, on a∫RN〈∇u,∇D−h(Dhu)〉dx
=1‖h‖2
∫RN〈∇u(x), 2∇u(x) − ∇u(x + h) − ∇u(x − h)〉dx
=2‖h‖2
∫RN
[‖∇u(x)‖2 − 〈∇u(x),∇u(x + h)〉
]dx
où on a remarqué que∫〈∇u(x),∇u(x + h)〉 =
∫〈∇u(x),∇u(x − h)〉. Pour une raison
analogue on a∫‖∇u(x)‖2 =
∫‖∇u(x + h)‖2 et donc∫
RN〈∇u(x),∇(D−h(Dhu)(x))〉dx =
1‖h‖2
∫RN‖∇u(x + h) − ∇u(x)‖2
=
∫RN‖Dh∇u(x)‖2.
Par conséquent, en revenant à (2.4), on a∫RN‖Dh∇u(x)‖2
=
∫RN
g(x)D−h(Dhu)(x)dx ≤ ‖g‖L2‖D−h(Dhu)‖L2 .
En d’autres termes, en utilisant la propriété 2. de Dh il vient
‖Dh∇u(x)‖2L2 ≤ ‖g‖L2‖Dh∇u‖L2 ,
ou encore‖Dh∇u(x)‖L2 ≤ ‖g‖L2 .
Par conséquant, on a ∇u ∈ H1 grâce à la propriété 3. de Dh et donc u ∈ H2.Soit maintenant g ∈ H1(RN) on va montrer qu’alors u ∈ H3(RN) (le cas généralg ∈ Hm
⇒ u ∈ Hm+2 se déduit alors par récurrence). L’idée est très simple ; il s’agitd’appliquer ce qui a été fait précédemment à uxi =
∂u∂xi
et d’observer que si ∆u = galors ∆uxi = gxi . Il s’agit donc de montrer que
(152)∫RN〈∇uxi (x),∇v(x)〉dx =
∫RN
gxi (x)v(x)dx, ∀v ∈ H1(RN)
si (2.3) à lieu. Pour démontrer ceci, il suffit de l’établir pour tout v ∈ C∞0 (RN) (carC∞0 (RN) est dense dans H1(RN) voir le théorème 16.1.66). On a donc en utilisant(2.3) ∫
RN〈∇uxi ,∇v〉dx =
∫RN〈(∇u)xi ,∇v〉dx = −
∫RN〈∇u, (∇v)xi〉dx

16.2. PROBLÈME FONDAMENTAL DU CALCUL DES VARIATIONS ET RÉGULARITÉ 455
= −
∫RN〈∇u,∇vxi〉dx = −
∫RN
gvxi dx =∫RN
gxi vdx.
Comme g ∈ H1, on a gxi ∈ L2 et donc par la première partie de la démonstrationappliquée à (2.5), on a uxi ∈ H2 et ceci pour tout i = 1, . . . ,N. Par conséquent u ∈ H3,ce qui achève la preuve de la régularité à l’intérieur.
16.2.6. P
Soient Ω = RN+ , g ∈ L2(RN
+ ) et u ∈ H10(RN
+ ) vérifiant
(153)∫RN+
〈∇u,∇v〉 =∫RN+
gv ∀v ∈ H10(RN
+ ).
Alors u ∈ H2(RN+ ). De plus, si g ∈ Hm(RN
+ ) alors u ∈ Hm+2(RN+ )
D. On utilise encore la méthode des quotients différentielles,mais seulement pour des h ∈ RN−1
× 0 ; on dit alors que h est parallèle au bord eton notera h//Γ. On observe que si h//Γ alors
u ∈ H10(RN
+ )⇒ Dhu ∈ H10(RN
+ ) et de même u ∈ H1(RN+ )⇒ Dhu ∈ H1(RN
+ ).
Soient 1 ≤ j ≤ N, 1 ≤ k ≤ N − 1, h = ‖h‖ek et ϕ ∈ C∞c (RN+ ) On appliquant la
première partie de la preuve du théorème 2.1.1 pour un h tel que ci-dessus (h//Γen particulier), on obtient
‖Dh∇u(x)‖L2 ≤ ‖g‖L2 ,
et donc en particulier‖Dh(ux j )‖L2 ≤ ‖g‖L2 .
Il vient alors ∣∣∣∣∣∣∫RN+
uD−h(ϕx j )dx
∣∣∣∣∣∣ =∣∣∣∣∣∣∫RN+
Dh(ux j )ϕdx
∣∣∣∣∣∣ ≤ ‖g‖L2‖ϕ‖L2 .
Passant à la limite quand ‖h‖ → 0 on obtient∣∣∣∣∣∣∫RN+
u∂2ϕ
∂x j∂xkdx
∣∣∣∣∣∣ ≤ ‖g‖L2‖ϕ‖L2 ,
ceci pour tous 1 ≤ j ≤ N, 1 ≤ k ≤ N − 1 et ϕ ∈ C∞c (RN+ ). Montrons enfin que l’on a∣∣∣∣∣∣
∫RN+
u∂2ϕ
∂x2N
dx
∣∣∣∣∣∣ ≤ C‖g‖L2‖ϕ‖L2 ∀ϕ ∈ C∞c (RN+ ).
En effet, grâce à (2.5) il vient∣∣∣∣∣∣∫RN+
u∂2ϕ
∂x2N
dx
∣∣∣∣∣∣ ≤ N−1∑i=1
∣∣∣∣∣∣∫RN+
u∂2ϕ
∂x2i
dx
∣∣∣∣∣∣ +∣∣∣∣∣∣∫RN+
gϕ
∣∣∣∣∣∣ ≤ C‖g‖L2‖ϕ‖L2 .
On obtient finalement∣∣∣∣∣∣∫RN+
u∂2ϕ
∂x j∂xkdx
∣∣∣∣∣∣ ≤ ‖g‖L2‖ϕ‖L2 ∀1 ≤ j, k ≤ N ∀ϕ ∈ C∞c (RN+ ).

456 16. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (1)
Par conséquent u ∈ H2(RN+ ). En effet grâce au théorème de Hahn-Banach et au
théorème de réprésentation de Riesz 1.3.2, on sait qu’il existe g jk ∈ L2(RN+ ) tels que∫
RN+
u∂2ϕ
∂x j∂xkdx =
∫RN+
g jkϕdx ∀ϕ ∈ C∞c (RN+ ).
Montrons enfin que si g ∈ Hm(RN+ ) alors u ∈ Hm+2(RN
+ ). Pour cela on appliqueexactement la même méthode que dans la deuxième partie de la démonstration duthéorème 2.2.1, ce qui termine la preuve.
16.2.7. R
(1) La démonstration générale du théorème 2.1.1 s’inspire du cas Ω = RN etΩ = RN
+ voir [15]
(2) Le théorème 2.1.1 se généralise. En effet pour un Ω approprié, on a
(a) g ∈Wk,p 1 < p < ∞⇒ u ∈Wk+2,p.
(b) g ∈ Ck,α 0 < α < 1⇒ u ∈ Ck+2,α.
(3) Les résultats précédents sont faux pour p = 1,∞ et α = 0, 1
16.2.8. R
(1) On est maintenant en mesure de résoudre le problème ∆u = f avec f etΩbien choisit. En effet siΩ est borné C2 et f ∈ L2(Ω), on sait que le problème(P) du théorème 2.2.1 admet une solution u ∈ H2(Ω). Il suit de l’équation(2.2) du théorème 2.2.1 que pour ϕ ∈ C∞c (Ω)∫
Ω
〈∇u,∇ϕ〉dx = −∫Ω
(∆u)vdx =∫Ω
f vdx.
Il découle donc du lemme 1.3.1 que
−∆u = f pp sur Ω.
En particulier si f et Ω sont C∞, on a u ∈ C∞ et −∆u ≡ f .
(2) Il est remarquable d’observer qu’ en ayant seulement des hypothèses surla trace de la matrice hessienne de u notée Hes(u) (ie ∆u = f ), on obtiennedes résultats sur chaque élément de Hes(u). Ceci est une caractéristiquedes opérateurs elliptiques dont le laplacien fait partie.

CHAPITRE 17
Opérateurs aux dérivées partielles (2)
Tout comme le chapitre précédent, celui-ci, écrit par Olivier Isely, s’attache àrésoudre le problème de Dirichlet.
17.1. Préliminaires
Dans ce chapitre, nous poserons les définitions et les résultats de base qui nousserons utiles par la suite. De manière générale, nous considérons le lecteur initié àces notions et ainsi nous ne démontrerons rien.
17.1.1. T (Hahn-Banach)
Soient E un espace vectoriel sur R et p : E −→ R une application vérifiant
p(λx) = λp(x), ∀x ∈ E, ∀λ > 0
et
p(x + y) ≤ p(x) + p(y), ∀x, y ∈ E
Soient d’autre part G ⊆ E un sous-espace vectoriel et g : G −→ R une applicationlinéaire telle que
g(x) ≤ p(x), ∀x ∈ G
Alors il existe une forme linéaire f définie sur E qui prolonge g et telle que
f (x) ≤ p(x), ∀x ∈ E
La preuve de ce théorème est basée sur l’axiome du choix, et plus précisémentle lemme de Zorn. Pour plus de détails, on pourra consulter [15].
457

458 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Les espaces de fonctions continues et de classe Ck.
17.1.2. D
Soit Ω ⊆ Rn. Une fonction u : Ω −→ R est dite continue si ∀x0 ∈ Ω, ∀ε > 0, ∃δ > 0tel que
x ∈ E, ‖x − x0‖ < δ =⇒ |u(x) − u(x0)| < ε
où la norme de Rn est la norme euclidienne.
17.1.3. D
Soit Ω un ouvert de R. On définit :C0(Ω) := u : Ω −→ R | u est continue C0(Ω) := u : Ω −→ R | u est continue et se prolonge continûment à Ω
17.1.4. E
La fonction f : R∗+ −→ R définie par f (x) = x sin( 1x ) est continue sur R∗+. Donc
f ∈ C0(Ω), où Ω = R∗+.De plus, f se prolonge continûment à Ω = R+ en posant f (0) = 0. Ainsi
f ∈ C0(Ω).
17.1.5. D
Sur C0(Ω), on pose l’application
‖.‖C0 : C0(Ω) −→Ru 7−→sup
x∈Ω|u(x)|
On peut alors vérifier que ‖.‖C0 ainsi définie est une norme sur C0(Ω). De plus,(C0(Ω), ‖.‖C0 ) est un espace de Banach.
17.1.6. D
Soit Ω un ouvert de Rn. Une fonction u : Ω −→ R est dite de classe Ck sur Ω sitoute ses dérivées partielles jusqu’à l’ordre k existent et sont continues.
Plus formellement, u : Ω −→ R est de classe Ck sur Ω si ∇mu ∈ C0(Ω), ∀m ∈0, 1, ..., k, où on a introduit la notation
∇mu = ∂mu
∂xm11 ∂xm2
2 ...∂xmnn
avecn∑
i=1
mi = m
On pose alors

17.1. PRÉLIMINAIRES 459
Ck(Ω) := u : Ω −→ R | u est de classe Ck sur ΩCk(Ω) := u : Ω −→ R | u ∈ Ck(Ω) et toutes ses dérivées partielles jusqu’à
l’ordre k se prolonge continûment à Ωainsi que
C∞(Ω) =⋂k≥0
Ck(Ω), C∞(Ω) =⋂k≥0
Ck(Ω)
17.1.7. D
Sur Ck(Ω), on pose l’application
‖.‖Ck : Ck(Ω) −→R
u 7−→max0≤m≤k
(supx∈Ω|∇
mu(x)|)
On peut alors vérifier que ‖.‖Ck ainsi définie est une norme sur Ck(Ω). De plus,Ck(Ω) muni de cette norme est un espace de Banach.
17.1.8. D
Soit Ω un ouvert de Rn. On définit le support d’une fonction u ∈ Ck(Ω), respecti-vement d’une fonction u ∈ Ck(Ω), comme étant l’ensemble
supp u = adh(x ∈ Ω | u(x) , 0)
Pour k ≥ 0,on pose alors Ck0(Ω), respectivement Ck
0(Ω), l’ensemble des fonctionsu ∈ Ck
0(Ω), respectivement des fonctions u ∈ Ck0(Ω), pour lesquelles supp u est
compact dans Rn.
Les espaces de Hölder.
17.1.9. D
SoitΩ un ouvert deRn et α ∈]0, 1]. Pour tout u ∈ C0(Ω) et pour tout sous-ensemblecompact D de Ω, on pose
[u]C0,α(D) := sup|u(x) − u(y)|‖x − y‖α
| x, y ∈ D, x , y
On définit alorsC0,α(Ω) := u ∈ C0(Ω) | [u]C0,α(D) est finie, pour tout sous-ensemble
compact D ⊂ Ωet

460 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
[u]C0,α := sup[u]C0,α(D) | D est un sous-ensemble compact de Ω.
17.1.10. R
Ainsi, ∀u ∈ C0,α(Ω), il existe une constante C > 0 telle que |u(x) − u(y)| ≤ C‖x − y‖α,∀x, y ∈ Ω.
17.1.11. D
Soit Ω un ouvert de Rn et α ∈]0, 1]. On définit
C0,α(Ω) := u ∈ C0(Ω) | [u]C0,α < ∞
On peut alors munir C0,α(Ω) de la norme ‖.‖C0,α définie par
‖u‖C0,α := ‖u‖C0 + [u]C0,α , ∀u ∈ C0,α(Ω)
L’espace C0,α(Ω) muni de la norme ‖.‖C0,α est alors un espace de Banach.
17.1.12. D
Soit Ω un ouvert de Rn et α ∈]0, 1]. On définit alors :Ck,α(Ω) := u ∈ Ck(Ω) | ∇ku ∈ C0,α(Ω)Ck,α(Ω) := u ∈ Ck(Ω) | [∇ku]C0,α < ∞
17.1.13. D
Pour tout u ∈ Ck,α(Ω), on pose
‖u‖Ck,α := ‖u‖Ck + [∇ku]C0,α
On peut alors vérifier que ‖.‖Ck,α ainsi définie est une norme et que (Ck(Ω), ‖.‖Ck,α )est un espace de Banach.
17.1.14. R
Par abus de notation, on note Ck(Ω) = Ck,0(Ω) et Ck(Ω) = Ck,0(Ω), pour k ≥ 0.
Au vu de ces définitions, il serait naturel de se demander s’il existe des relationsentre ces différents espaces ; en particulier des relations d’inclusion. C’est le but dela prochaine proposition, que nous donnerons sans démonstration.
17.1.15. P
Soient Ω un ouvert de Rn et α ∈ [0, 1].
(1) Si u, v ∈ C0,α(Ω), alors uv ∈ C0,α(Ω).

17.1. PRÉLIMINAIRES 461
(2) Pour 0 ≤ α ≤ β ≤ 1 et k entier, on a
Ck(Ω) ⊇ Ck,α(Ω) ⊇ Ck,β(Ω) ⊇ Ck,1(Ω)
(3) Si Ω est convexe et borné, alors Ck,1(Ω) ⊇ Ck+1(Ω).
17.1.16. E
Dans le point (3) de la proposition précédente, il faut queΩ soit convexe. Pour s’enrendre compte, on peut considérer la fonction u : Ω −→ R définie surΩ := (x, y) ∈R2| y <
√|x| et x2 + y2 < 1 par
u(x, y) :=
0 si y ≤ 0x|x| y
2β si y > 0
où 12 < β < 1. On a u ∈ C1(Ω), mais u < C0,1(Ω).En effet, on a les dérivées partielles
∂u∂x
(x, y) = 0
et
∂u∂y
(x, y) =
0 si y ≤ 02xβ|x| y2β−1 si y > 0
On s’aperçoit que
limy→0+
∂u∂y
(x, y) = limy→0
2xβ|x|
y2β−1 = 0 =∂u∂y
(x, 0)
Ainsi ∂u∂x ,
∂u∂y ∈ C0(Ω).
D’autre part, ∂u∂x se prolonge évidemment de manière continue à Ω. De même
pour ∂u∂y :
limy→√|x|
∂u∂y
(x, y) = limy→√|x|
2xβ|x|
y2β−1 =2xβ|x|β
|x|√|x|< ∞
vu que β > 12 .
On en déduit que ∂u∂x ,
∂u∂y ∈ C0(Ω) et donc que u ∈ C1(Ω).
Or, pour α ∈]β, 1], ∣∣∣u(x, y) − u(−x, y)∣∣∣∥∥∥(x, y) − (−x, y)
∥∥∥α = 2y2β
(2x)α
En prenant y =√|x|2 , on obtient
limx→0
2y2β
(2x)α= lim
x→0
|x|β
2α+2β−1xα= ∞
vu que α > β.Ainsi u < C0,α(Ω) pour β < α ≤ 1.
462 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Les espaces Lp.
Pour cette section, certaines connaissances préalables sont requises, comme lesnotions de fonction mesurable, de fonction intégrable et d’ensemble négligeable.On supposera le lecteur familiarisé avec ces notions.
17.1.17. D
On pose L1(Ω), l’ensemble des fonctions intégrables sur un ouvert Ω de Rn, danslequel on identifie deux fonctions qui coïncident presque partout (c’est-à-dire surle complémentaire d’un ensemble de mesure nulle). Dans L1(Ω), on définit ‖ f ‖L1 :=∫Ω| f (x)|dx. On peut alors vérifier qu’il s’agit d’une norme sur L1(Ω).
17.1.18. T (Fubini)
Soient Ω1,Ω2 des ouverts de Rn et F ∈ L1(Ω1 ×Ω2).Alors y 7−→ F(x, y) ∈ L1(Ω2) et, pour presque tout x ∈ Ω1,
x 7−→∫Ω2
F(x, y)dy ∈ L1(Ω1)
De même, x 7−→ F(x, y) ∈ L1(Ω1) et, pour presque tout y ∈ Ω2,
y 7−→∫Ω1
F(x, y)dx ∈ L1(Ω2)
De plus on a∫Ω1
(∫Ω2
F(x, y)dy)
dx =∫ ∫
Ω1×Ω2
F(x, y)dxdy =∫Ω2
(∫Ω1
F(x, y)dx)
dy
17.1.19. D
Soient p ≥ 1 et Ω un ouvert de Rn. On définit l’espace Lp(Ω) par :Lp(Ω) := f : Ω −→ R | f est mesurable et | f |p ∈ L1(Ω)
On définit alors la norme
‖ f ‖Lp :=(∫Ω
| f (x)|pdx)1/p
17.1.20. D
On poseL∞(Ω) := f : Ω −→ R | f est mesurable et ∃C > 0 tel que | f (x)| ≤ C
presque partout sur ΩOn définit alors la norme
‖ f ‖L∞ := infC | | f (x)| ≤ C presque partout sur Ω
17.1.21. R
17.1. PRÉLIMINAIRES 463
Pour alléger la notation, on notera désormais Lp pour Lp(Ω) lorsque cela ne porterapas à confusion.
17.1.22. N
Soit p > 1.On note p′ le nombre réel qui vérifie 1p +
1p′ = 1.De même, on pose p′ = 1
si p = ∞ et p′ = ∞ si p = 1.
Les résultats suivants sont donnés sans preuve. Pour plus de détails, on pourraconsulter [15].
17.1.23. T
Lp muni de sa norme ‖.‖Lp est un espace de Banach, pour tout 1 ≤ p ≤ ∞.
17.1.24. P
(Inégalité de Hölder) Soit p tel que 1 ≤ p ≤ ∞ et soient f ∈ Lp(Ω), g ∈ Lp′ (Ω).Alors f g ∈ L1(Ω) et
∥∥∥ f g∥∥∥
L1 ≤
∥∥∥ f∥∥∥
Lp
∥∥∥g∥∥∥
Lp′ .
17.1.25. T (Représentation de Riesz)
Soit p tel que 1 ≤ p < ∞ et soit φ ∈ (Lp)′, où (Lp)′ désigne l’espace dual de Lp (soitl’ensemble des formes linéaires sur Lp).
Alors il existe u ∈ Lp′ unique tel que
φ( f ) =∫
u f ∀ f ∈ Lp
De plus, on a ‖u‖Lp′ = ‖φ‖(Lp)′ .
17.1.26. R
(1) Le théorème précédent exprime que toute forme linéaire sur Lp se repré-sente à l’aide d’une unique fonction de Lp′ , où 1 ≤ p < ∞. Par l’application
(Lp)′ −→ Lp′
φ 7−→ u
qui est en fait un opérateur linéaire isométrique et surjectif, on peut iden-tifier le dual de Lp avec Lp′ . Par conséquent, dans la suite de ce document,on fera toujours l’identification (Lp)′ = Lp′ si 1 ≤ p < ∞.
(2) En revanche, le théorème est faux dans le cas p = ∞. En effet, le dual deL∞ contient L1, mais il est strictement plus grand que L1.
On en déduit le théorème suivant :

464 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
17.1.27. T
Lp est réflexif si et seulement si 1 < p < ∞.
17.1.28. T
L’espace C0(Ω) est dense dans Lp(Ω) pour 1 ≤ p < ∞.
17.1.29. R
En revanche, le théorème est faux dans le cas p = ∞ : l’espace C0(Ω) n’est pas densedans L∞(Ω). En effet, les deux normes respectives de ces espaces sont essentiel-lement les mêmes sur C0(Ω). Or ce dernier est un espace de Banach, et est doncfermé dans L∞(Ω).
Ainsi, si C0(Ω) était dense dans L∞, alors toutes les fonctions de L∞ seraientcontinues presque partout. Or ce n’est pas le cas (considérer f = 1Q sur R).
17.1.30. T
L’espace C∞0 (Ω) est dense dans Lp(Ω) pour 1 ≤ p < ∞.
17.1.31. T
Lp est séparable pour 1 ≤ p < ∞.
Notions de convergence.
17.1.32. D
Soit 1 ≤ p ≤ ∞.On dit que fν converge (fortement) vers f dans Lp, et on note fν → fLp, si fν, f ∈ Lp et si
limν→∞‖ fν − f ‖Lp = 0
17.1.33. D
Soit 1 ≤ p < ∞.On dit que fν converge faiblement vers f dans Lp, et on note fν fLp, si fν, f ∈ Lp et si
limν→∞
∫Ω
( fν(x) − f (x))φ(x)dx = 0, ∀φ ∈ Lp′ (Ω)

17.1. PRÉLIMINAIRES 465
17.1.34. D
On dit que fν converge faible * vers f dans L∞, et on note fν∗ f L∞, si fν, f ∈ L∞
et si
limν→∞
∫Ω
( fν(x) − f (x))φ(x)dx = 0, ∀φ ∈ L1(Ω)
17.1.35. R (1) La limite (forte ou faible) d’une suite de fonction esttoujours unique.
(2) Dans le cas p = ∞, la symbole * est posé pour montrer que la définition deconvergence faible dans L∞ n’est pas entièrement la même que dans lesespaces Lp, 1 ≤ p < ∞. En effet, le dual de L∞ est strictement plus grandque L1.
(3) La convergence forte dans Lp implique la convergence faible dans Lp, pour1 ≤ p ≤ ∞.
17.1.36. T
Soit Ω un ouvert borné de Rn.
(1) Si fν∗ f L∞, alors fν f Lp, ∀p ≥ 1.
(2) Si fν → f Lp, alors ‖ fν‖Lp → ‖ f ‖Lp dans R, ∀1 ≤ p ≤ ∞.
(3) Si 1 ≤ p < ∞ et si fν f Lp, alors ∃K > 0 tel que ‖ fν‖Lp ≤ K et ‖ f ‖Lp ≤
lim infν→∞
‖ fν‖Lp .
Le résultat est aussi vrai si p = ∞ et fν∗ f L∞.
(4) Si 1 < p < ∞ et si ∃K > 0 tel que ‖ fν‖Lp ≤ K, alors il existe une sous-suite fνi etf ∈ Lp tels que fνi f Lp.
Le résultat est aussi vrai si p = ∞ et on a alors fνi
∗ f L∞.
(5) si 1 ≤ p ≤ ∞ et fν → f Lp, alors il existe une sous-suite fνi telle que fνi → fpresque partout et | fνi | ≤ h presque partout avec h ∈ Lp.
17.1.37. R
Le résultat (4) du théorème est faux dans le cas p = 1. Ceci provient du fait que L1
n’est pas réflexif.
17.1.38. T (Riemann-Lebesgue)
Soient 1 ≤ p ≤ ∞ et f ∈ Lp(Ω), où Ω est un cube ouvert dans Rn, c’est-à-dire Ω =n∏
i=1
]ai, bi[. On étend f par périodicité à Rn.
On pose fν(x) := f (νx) et f := 1m(Ω)
∫Ω
f (x)dx, où m(Ω) est la mesure de Lebesgue del’ensemble Ω.
466 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Alors fν f Lp si 1 ≤ p < ∞ et fν∗ f L∞ si p = ∞.
17.1.39. E
Considérons la fonction f définie sur ]0, 2π[ par f (x) = sin(x). On a f ∈ Lp(Ω),∀1 ≤ p ≤ ∞. D’autre part fν(x) = sin(νx) et f = 0. Par Riemann-Lebesgue, on endéduit que
sin(νx) 0 Lp pour 1 ≤ p ≤ ∞
Or on sait que sin(νx) 9 0 Lp. Ceci nous donne un exemple concret d’une suitequi converge faiblement, mais pas fortement.
17.2. Les espaces de Sobolev
Définitions et propriétés.
17.2.1. D
Soient Ω un ouvert de Rn et 1 ≤ p ≤ ∞. On définit l’espace Lploc(Ω) par l’ensemble
des f : Ω −→ R tels que f ∈ Lp(Ω′), pour toutΩ′ tel queΩ′ ⊆ Ω et dont la fermetureest compacte dans Rn.
17.2.2. R
(1) En particulier, on a évidemment Lp(Ω) ⊆ Lploc(Ω).
(2) En revanche, on a pas toujours l’égalité. En effet, la fonction f (x) = 1x est
L1loc(]0, 1[), mais f n’est pas L1(]0, 1[).
17.2.3. L
Soient Ω un ouvert de Rn et u ∈ L1loc(Ω) tel que∫
Ωu(x)φ(x)dx = 0, pour tout φ ∈ C∞0 (Ω)
Alors u = 0 presque partout dans Ω.

17.2. LES ESPACES DE SOBOLEV 467
17.2.4. D
Soient Ω un ouvert de Rn et u ∈ L1loc(Ω). On dit que la fonction v ∈ L1
loc(Ω) est ladérivée partielle faible de u par rapport à xi si∫
Ω
v(x)φ(x)dx = −∫Ω
u(x)∂φ
∂xi(x)dx, ∀φ ∈ C∞0 (Ω)
Par abus de notation, on écrit v = ∂u∂xi
ou v = uxi .
17.2.5. R
(1) Si la dérivée faible existe, alors elle est unique. En effet, soient v, v′ ∈ L1loc(Ω)
tels que ∀φ ∈ C∞0 (Ω),∫Ω
v(x)φ(x)dx = −∫Ω
u(x)∂φ
∂xi(x)dx =
∫Ω
v′(x)φ(x)dx
Alors ∫Ω
(v(x) − v′(x))φ(x)dx = 0, ∀φ ∈ C∞0 (Ω)
et ainsi, par le lemme 17.2.3, v = v′ presque partout.
(2) Si u est différentiable, alors sa dérivée faible est toujours égale à sa dérivéepartielle au sens usuel. En effet, on a de la formule d’intégration par partie∫
Ω
u(x)∂φ
∂xi(x)dx =
[u(x)φ(x)
]∂Ω−
∫Ω
∂u∂xi
(x)φ(x)dx
= −
∫Ω
∂u∂xi
(x)φ(x)dx
vu que φ ∈ C∞0 (Ω).
17.2.6. E
La fonction u(x) = |x| définie sur R n’admet pas de dérivée faible. Ainsi, toutefonction n’est pas forcément dérivable au sens faible.
17.2.7. L
Soient I ⊆ R un intervalle ouvert borné ou non et f ∈ L1loc(I) telle que∫
If (x)φ′(x)dx = 0, ∀φ ∈ C1
0(I)
Alors ∃C ∈ R tel que f = C presque partout.
D. On fixe une fonction ψ ∈ C0(I) telle que∫
I ψdx = 1. Pour tout
w ∈ C0(I), la fonction h := w −(∫
I w)ψ est continue et à support compact dans

468 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
I. Comme∫
I hdx = 0, on a que h admet une primitive à support compact. Ainsi∃φ ∈ C1
0(I) tel que
φ′(x) = w(x) −(∫
Iw(y)dy
)ψ(x)
On déduit de l’hypothèse que∫I
(f (x) −
∫I
f (y)ψ(y)dy)w(x)dx
=
∫I
f (x)w(x)dx −(∫
Iw(x)dx
) (∫I
f (x)ψ(x)dx)
=
∫I
f (x)[w(x) −
(∫Iw(y)dy
)ψ(x)
]dx = 0
pour toute fonction w ∈ C0(I).Par le lemme 17.2.3, on conclut que f −
∫I f (y)ψ(y)dy = 0 presque partout,
c’est-à-dire f = C presque partout avec C =∫
I f (y)ψ(y)dy.
17.2.8. D
Soit Ω un ouvert de Rn et 1 ≤ p ≤ ∞. On définit l’espace de Sobolev W1,p(Ω) par :W1,p(Ω) := u : Ω −→ R dérivable au sens faible | u ∈ Lp(Ω) et uxi ∈ Lp(Ω),
∀1 ≤ i ≤ nSi 1 ≤ p < ∞, alors on définit une norme :
‖u‖W1,p :=(‖u‖pLp + ‖∇u‖pLp
)1/p
Si p = ∞, alors on définit une norme :
‖u‖W1,∞ := max ‖u‖L∞ , ‖∇u‖L∞
17.2.9. R
Si Ω est un ouvert borné de Rn, alors on a, pour tout 1 ≤ p < ∞ :
C1(Ω) ⊂W1,∞(Ω) ⊂W1,p(Ω) ⊂ Lp(Ω)
où à chaque fois l’inclusion est stricte.
17.2.10. T
(1) W1,p(Ω) est un espace de Banach. De plus, W1,p(Ω) est séparable si 1 ≤ p < ∞et réflexif si 1 < p < ∞.
(2) Les fonctions C∞0 (Ω) de norme finie dans W1,p sont denses dans W1,p(Ω) si1 ≤ p < ∞.
17.2.11. L

17.2. LES ESPACES DE SOBOLEV 469
Soient I =]a, b[⊆ R un intervalle borné ou non et g ∈ L1loc(I). Pour y0 ∈ I fixé, on pose
pour x ∈ I
v(x) =∫ x
y0
g(t)dt
Alors v ∈ C(I) et∫Iv(x)φ′(x)dx = −
∫I
g(x)φ(x)dx, ∀φ ∈ C10(I)
D. Clairement, on a∫Iv(x)φ′(x)dx =
∫I
(∫ x
y0
g(t)dt)φ′(x)dx
= −
∫ y0
a
(∫ y0
xg(t)φ′(x)dt
)dx +
∫ b
y0
(∫ x
y0
g(t)φ′(x)dt)
dx
Par le théorème de Fubini, on obtient∫Iv(x)φ′(x)dx = −
∫ y0
ag(t)
(∫ t
aφ′(x)dx
)dt +
∫ b
y0
g(t)(∫ b
tφ′(x)dx
)dt
= −
∫I
g(t)φ(t)dt
17.2.12. R
Le lemme précédent montre que la primitive v d’une fonction g ∈ Lp(I) est dansW1,p(I) dès que v ∈ Lp(I), ce qui est automatiquement le cas lorsque I est borné.
17.2.13. T
Soit u ∈ W1,p(]a, b[) avec 1 ≤ p ≤ ∞. Alors ∃u ∈ C([a, b]) tel que u = u presque partoutsur ]a, b[ et
u(x) − u(y) =∫ x
yu′(t)dt, ∀x, y ∈ [a, b]
où u′(t) désigne la dérivée faible de u en t.
D. On fixe y0 ∈ I et on pose u(x) =∫ x
y0u′(t)dt. D’après le lemme
17.2.11, on a ∫Iu(x)φ′(x)dx = −
∫Iu′(x)φ, ∀φ ∈ C1
0(I)
Donc ∀φ ∈ C10(I), ∫
I(u(x) − u(x))φ′(x) = 0
Par le lemme 17.2.7, on déduit que u − u = C presque partout, où C est uneconstante. Ainsi la fonction u(x) := u(x) + C rempli les conditions désirées.

470 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
17.2.14. R
(1) Le théorème 17.2.13 nous montre que toute fonction u ∈W1,p(]a, b[) admetun représentant continu, c’est-à-dire qu’il existe un fonction continue quiest dans la même classe que u pour la relation u ∼ v ⇔ u = v presquepartout. Ainsi, lorsque l’on souhaite donner un sens à u(x), on emploiegénéralement son représentant continu.
(2) Par conséquent, on a les inclusions
C1([a, b]) ⊆W1,p(]a, b[) ⊆ C([a, b])
pour 1 ≤ p ≤ ∞.
17.2.15. P
Soient Ω un ouvert de Rn et u ∈ Lp(Ω) avec 1 < p ≤ ∞. Alors les propriétés suivantessont équivalentes :
(1) u ∈W1,p(Ω)
(2) ∃C > 0 tel que ∣∣∣∣∣∣∫Ω
u(x)∂φ
∂xi(x)dx
∣∣∣∣∣∣ ≤ C‖φ‖Lp′
∀φ ∈ C∞0 (Ω), ∀i ∈ 1, 2, ...,n
(3) ∃C > 0 tel que pour tout ouvert ω ⊆ Ω avec ω ⊆ Ω et tout h ∈ Rn avec |h| <dist(ω,Ωc), on a
‖uh − u‖Lp ≤ C|h|où uh(x) = u(x + h)
De plus, dans (2) et (3), on peut prendre C = ‖∇u‖Lp .
D. (1)⇒ (2) : De la définition de W1,p(Ω), on a∣∣∣∣∣∣∫Ω
u(x)∂φ
∂xi(x)dx
∣∣∣∣∣∣ =∣∣∣∣∣∫Ω
∂u∂xi
(x)φ(x)dx∣∣∣∣∣
≤
∥∥∥∥∥ ∂u∂xi
∥∥∥∥∥Lp
∥∥∥φ∥∥∥Lp′ ≤ ‖∇u‖Lp
∥∥∥φ∥∥∥Lp′
(2)⇒ (1) : La forme linéaire
φ ∈ C∞0 (Ω) 7−→∫Ω
u(x)φ′(x)dx
est continue pour la norme Lp′ et est définie sur un sous-espace dense dansLp′ (Ω). Par le théorème de Hahn-Banach, elle se prolonge en une formelinéaire et continue F sur Lp′ . Par le théorème de représentation de Riesz,∃g ∈ Lp tel que F(φ) =
∫Ω
g(x)φ(x)dx, ∀φ ∈ Lp′ . En particulier∫Ω
u(x)φ′(x)dx =∫Ω
g(x)φ(x)dx, ∀φ ∈ C∞0 (Ω)
et donc u ∈W1,p(Ω).

17.2. LES ESPACES DE SOBOLEV 471
(1)⇒ (3) : Commençons par supposer que u ∈ C∞0 (Rn). Pour h ∈ Rn on pose
v(t) = u(x + th), ∀t ∈ R
Ainsi v′(t) = h∇u(x + th) et donc
u(x + h) − u(x) = v(1) − v(0) =∫ 1
0v′(t)dt =
∫ 1
0h∇u(x + th)dt
Il s’ensuit que
|uh(x) − u(x)|p ≤ |h|p∫ 1
0|∇u(x + th)|p dt
et donc, ∀ω tel que ω ⊆ Ω,∫ω|uh(x) − u(x)|p dx ≤ |h|p
∫ω
(∫ 1
0|∇u(x + th)|p dt
)dx
= |h|p∫ 1
0
(∫ω|∇u(x + th)|p dx
)dt
= |h|p∫ 1
0
(∫ω+th
∣∣∣∇u(y)∣∣∣p dy
)dt
par le théorème de Fubini.Pour un h ∈ Rn tel que |h| < dist(ω,Ωc) fixé, il existe un ouvert ω′ ⊆ Ω
tel que ω′ ⊆ Ω et ω + th ⊆ ω′, ∀t ∈ [0, 1].Par conséquent,
‖uh − u‖pLp ≤ |h|p∫ω′|∇u(x)|p dx
c’est-à-dire‖uh − u‖Lp ≤ |h| ‖∇u‖Lp
Considèrons maintenant u ∈ W1,p(Ω) et p , ∞. Vu la densité de C∞0 (Ω)dans Lp(Ω), il existe une suite (un)∞n=0 ⊂ C∞0 telle que un → u dans Lp(Ω) et∇un → ∇u dans Lp(ω), ∀ω ⊆ Ω tel que ω ⊆ Ω.
On applique alors l’inégalité précédente à un et on obtient l’assertionvoulue lorsque n→∞.
Dans le cas où p = ∞, on applique le même raisonnement, puis on faittendre p vers l’infini.
(3)⇒ (2) : Soit φ ∈ C∞0 (Ω). Puisque suppφ est compact, il existe un ouvertω ⊆ Ω tel que ω ⊆ Ω et suppφ ⊆ ω.
Soit h ∈ Rn tel que |h| < dist(ω,Ωc). Par hypothèse on a∣∣∣∣∣∫Ω
(uh(x) − u(x))φ(x)dx∣∣∣∣∣ ≤ C |h|
∥∥∥φ∥∥∥Lp′
D’autre part, vu la définition de h et que suppφ ⊆ ω ⊆ Ω, on a∫Ω
(u(x + h) − u(x))φ(x)dx =∫Ω
u(y)(φ(y − h) − φ(y))dy
Par conséquent∣∣∣∣∣∫Ω
u(y)φ(y − h) − φ(y)
|h|dy
∣∣∣∣∣ ≤ C∥∥∥φ∥∥∥Lp′

472 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Choisissant h = tei pour t ∈ R, on obtient (2) en passant à la limite h→ 0.
17.2.16. R
(1) Dans le cas p = 1, le théorème devient : 1⇒ 2⇔ 3.
(2) Si Ω est un ouvert convexe de R, alors une fonction u ∈ L∞(Ω) est dansW1,∞(Ω) si et seulement si ∃C > 0 tel que |u(x) − u(y)| ≤ C|x − y| presquepour tout x, y ∈ Ω.
17.2.17. D
Soit Ω un ouvert de Rn. Alors on définit W1,p0 (Ω) comme étant la fermeture de
C∞0 (Ω) dans W1,p(Ω), c’est-à-dire W1,p0 (Ω) = C∞0 (Ω)
W1,p
.
17.2.18. R
Si Ω est un ouvert borné de Rn et 1 ≤ p < ∞, alors on peut identifier W1,p0 (Ω) à
l’ensemble des fonctions u ∈ W1,p(Ω) qui sont nulles presque partout sur le bordde Ω :
W1,p0 (Ω) = u ∈W1,p(Ω) | u = 0 sur ∂Ω
Si p = ∞, alors l’assertion précédente est fausse. En revanche, la fermeture deC∞0 (Ω) dans W1,∞(Ω) est équivalente à C1(Ω).
17.2.19. D
Soit Ω un ouvert de Rn et m ≥ 2 un entier. On pose par récurrence :
Wm,p(Ω) := u : Ω −→ R | u ∈Wm−1,p(Ω), uxi ∈Wm−1,p(Ω), 1 ≤ i ≤ n
Sur Wm,p(Ω), on pose la norme ‖u‖Wm,p :=
m∑k=0
‖∇ku‖pLp
1/p
si 1 ≤ p < ∞ et ‖u‖Wm,∞ :=
max1≤k≤m
‖∇ku‖L∞ si p = ∞.
17.2.20. T
(1) Wm,p(Ω) est un espace de Banach. De plus, Wm,p(Ω) est séparable si 1 ≤ p < ∞et réflexif si 1 < p < ∞.
(2) Les fonctions C∞0 (Ω) de norme finie dans Wm,p sont denses dans Wm,p(Ω) si1 ≤ p < ∞.
17.2. LES ESPACES DE SOBOLEV 473
Le théorème de Sobolev-Rellich.
17.2.21. D
(1) SoientΩ un ouvert borné deRn et m ≥ 1.On dit queΩ est de classe Cm si,∀x ∈ ∂Ω, il existe un voisinage U ⊆ Rn de x et une bijection H : Q −→ U,où Q := x ∈ Rn
| |x j| < 1, j = 1, ...,n, tels que
H ∈ Cm(Q), H−1∈ Cm(U), H(Q+) = U ∩Q et H(Q0) = U ∩ ∂Ω
où Q+ := x ∈ Q | xn > 0 et Q0 := x ∈ Q | xn = 0.)(2) Si H est simplement lipschtzienne, alors on dit que Ω est un ouvert lip-
schitzien.
17.2.22. T (Sobolev-Rellich)
Soit Ω un ouvert borné de Rn de bord lipschitzien.
(1) Si 1 ≤ p < n, alors
W1,p(Ω) ⊆ Lq(Ω), ∀q ∈ [1, npn−p ]
c’est-à-dire ∃C > 0 (qui dépend de Ω, p et q) tel que ‖u‖Lq ≤ C‖u‖W1,p , ∀q ∈[1, np
n−p ].
De plus, l’immersion est compacte (tout ensemble borné de W1,p(Ω) estprécompact dans Lq(Ω)), ∀1 ≤ q < np
n−p .
(2) Si p = n, alors
W1,n(Ω) =W1,p(Ω) ⊆ Lq(Ω), ∀q ≥ 1
c’est-à-dire ∃C > 0 (qui dépend de Ω, p et q) tel que ‖u‖Lq ≤ C‖u‖W1,n , ∀q ≥ 1.De plus, l’immersion est compacte ∀q ≥ 1.
(3) Si p > n, alors
W1,p(Ω) ⊆ C(Ω)
c’est-à-dire ∃C > 0 (qui dépend de Ω et de p) tel que ‖u‖L∞ ≤ C‖u‖W1,p .
De plus, l’immersion est compacte.
En particulier, on a toujours W1,p(Ω) ⊆ Lp(Ω) et l’immersion est compacte, ∀1 ≤ p ≤∞.
On pourra trouver une preuve de ce théorème dans [15].
17.2.23. R
(1) En remplaçant W1,p par W1,p0 , alors le théorème 17.2.22 est vrai sans hypo-
thèses sur le bord de Ω.

474 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
(2) Le théorème 17.2.22 reste vrai pour Wm,p.
17.2.24. R
Dans le cas où Ω =]a, b[ est un ouvert borné de R, on a donc : C∞0 (]a, b[) ⊆ ... ⊆W2,p(]a, b[) ⊆ C1([a, b]) ⊆W1,p(]a, b[ ⊆ C0([a, b]) ⊆ L∞(]a, b[) ⊆ ... ⊆ L2(]a, b[) ⊆ L1(]a, b[).
17.2.25. D
(1) Soit 1 ≤ p < ∞. On dit que uν converge faiblement vers u dans W1,p(Ω) siuν,u ∈W1,p(Ω), uν u Lp et ∇uν ∇u Lp. On note alors uν u W1,p.
(2) On dit que uν converge faible * vers u dans W1,∞(Ω) si uν,u ∈ W1,∞(Ω),uν
∗ u L∞ et ∇uν
∗ ∇u L∞. On note alors uν
∗ u W1,∞,
17.2.26. C
Soient Ω un ouvert borné lipschitzien de Rn et 1 ≤ p < ∞. Si uν u W1,p, alors uν → uLp.
Si p = ∞ et si uν∗ u W1,∞, alors uν → u L∞.
17.2.27. T (Inégalité de Poincaré)
Soient Ω un ouvert borné de Rn et 1 ≤ p < ∞. Alors il existe c > 0 tel que
‖u‖Lp ≤ c‖∇u‖Lp , ∀u ∈W1,p0 (Ω)
ou de façon équivalente
‖u‖W1,p ≤ c‖∇u‖Lp , ∀u ∈W1,p0 (Ω)
17.3. Le problème de Dirichlet
Existence et unicité des solutions.
17.3.1. T

17.3. LE PROBLÈME DE DIRICHLET 475
Soient Ω un ouvert borné lipschtzien de Rn et u0 ∈W1,2(Ω). Alors le problème (P)
inf
I(u) =∫Ω
12|∇u(x)|2dx | u − u0 ∈W1,2
0 (Ω)
admet une unique solution u ∈W1,2(Ω).De plus, u satisfait l’équation de Laplace faible (Lf)∫
Ω
〈∇u(x);∇φ(x)〉dx = 0 ∀φ ∈W1,20 (Ω)
Réciproquement, si u satisfait (Lf), alors u réalise le minimum de (P).
Le théorème ci-dessus ne sera pas démontré ici. La preuve est en effet prati-quement identique à celle du théorème suivant. Au besoin on pourra consulter[18].
17.3.2. R
On observe que si u ∈W2,2(Ω), alors (Lf) est équivalent à∫Ω
∆u(x)φ(x)dx = 0
En effet, il suffit d’intégrer par partie et de se rappeler que φ = 0 presquepartout sur ∂Ω.
Ceci implique alors que ∆u = 0 presque partout.
17.3.3. T
Soient Ω un ouvert borné lipschitzien de Rn et f ∈ L2(Ω). Alors le problème (P’)
inf
I(u) =∫Ω
12|∇u(x)|2 − f (x)u(x)dx | u ∈W1,2
0 (Ω)
admet une unique solution u ∈W1,20 (Ω).
De plus, u satisfait l’équation (Lf’)∫Ω
〈∇u(x);∇φ(x)〉dx =∫Ω
f (x)φ(x)dx ∀φ ∈W1,20 (Ω)
Réciproquement, si u satisfait (Lf’), alors u réalise le minimum de (P’).
D. 1ère étape Montrons que si ui u W1,2, alors
lim infi→∞
I(ui) ≥ I(u)
En effet, vu que g(ξ) = 12 |ξ|
2 est convexe et que g′(ξ) = ξ, on a queg(∇ui) ≥ g(∇u) + 〈∇u;∇ui − ∇u〉, c’est-à-dire
12|∇ui|
2≥
12|∇u|2 + 〈∇u;∇ui − ∇u〉

476 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Par conséquent, 12 |∇ui|
2− f ui ≥
12 |∇u|2 − f ui + 〈∇u;∇ui;∇u〉. En intégrant,
on obtient
I(ui) ≥∫Ω
12|∇u|2dx −
∫Ω
f uidx +∫Ω
〈∇u;∇ui − ∇u〉dx
D’autre part, puisque ui u W1,2, on obtient par définition de la conver-gence faible que
limi→∞
∫Ω
〈∇u(x);∇ui(x) − ∇u(x)〉dx = 0
et que
limi→∞
∫Ω
f (x)ui(x)dx =∫Ω
f (x)u(x)dx
De ces deux choses, on en déduit immédiatement que I(ui) ≥ I(u).2ème étape Soit (ui)∞i=0 une suite minimisante, c’est-à-dire que ui ∈ W1,2
0 (Ω) etlimi→∞
I(ui) = m := infI(u) | u ∈W1,20 (Ω).
Comme 0 ≤ m < ∞, il existe i0 ∈N tel que pour i ≥ i0 on a
m + 1 ≥ I(ui) =12
∫Ω
|∇ui(x)|2dx −∫Ω
f (x)ui(x)dx
≥12‖∇ui‖
2L2 − ‖ f ‖L2‖ui‖L2
≥ c‖ui‖2W1,2 − ‖ f ‖L2‖ui‖L2
pour une constante c > 0, par l’inégalité de Poincaré.Ainsi il existe c′ > 0 tel que ‖ui‖W1,2 ≤ c′. Par la partie (4) du théorème
17.1.36, il existe alors une sous-suite de (ui)∞i=0, que l’on notera toujours (ui)∞i=0,
et u ∈W1,20 tels que ui u W1,2.
Avec la première étape on trouve
m = lim infi→∞
I(ui) ≥ I(u) ≥ m
et ainsi l’existence d’un minimum de (P) est démontrée.3ème étape Montrons maintenant l’unicité de u. Pour cela, supposons qu’il
existe v ∈W1,20 tel que I(v) = I(u) = m.
Posons w := 12 u + 1
2 v. On remarque que w ∈ W1,20 . Par conséquent, vu la
convexité de g, on a 12 |∇w|2 ≤ 1
4 |∇u|2 + 14 |∇v|2 = m.
De là on tire que
m ≤ I(w) =∫Ω
12|∇w(x)|2dx −
∫Ω
f (x)w(x)dx
≤14
∫Ω
|∇u(x)|2dx +14
∫Ω
|∇v(x)|2dx −∫Ω
12
f (x)(u(x) + v(x))dx
=12
I(u) +12
I(v) = m
et donc w est aussi un minimum pour (P’).Ainsi on obtient 1
2 |∇u|2 + 12 |∇v|2 = |∇w|2 = | 12∇u + 1
2∇v|2 presque partout.

17.3. LE PROBLÈME DE DIRICHLET 477
Or la fonction g(ξ) = 12 |ξ|
2 est strictement convexe. Par conséquent ∇u =∇v presque partout. Avec le fait que v − u ∈ W1,2
0 , ceci implique que u = vpresque partout.
4ème étape Vérifions maintenant que la solution u de (P’) satisfait l’équationde Laplace faible. On note tout d’abord que le fait que W1,2
0 (Ω) soit unespace vectoriel implique que, pour tout ε ∈ R et tout φ ∈ W1,2
0 (Ω), on au + εφ ∈W1,2
0 (Ω).Par conséquent, par la minimalité de u, on trouve
I(u) ≤ I(u + εφ)
= I(u) + ε∫Ω
〈∇u(x);∇φ(x)〉 − f (x)φ(x)dx + ε2∫Ω
12|∇φ(x)|2dx
En dérivant par rapport à ε et en évaluant en ε = 0, on obtient que usatisfait (Lf’).
5ème étape Finalement, montrons que si u ∈ W1,2 avec u − u0 ∈ W1,20 satisfait
(Lf’), alors u réalise le minimum de (P’).Soit v ∈W1,2
0 (Ω). Par la convexité de g, on a que
g(∇v) ≥ g(∇u) + 〈∇u;∇v − ∇u〉
En intégrant, on trouve
I(v) =∫Ω
12|∇v(x)|2dx −
∫Ω
f (x)v(x)dx
≥
∫Ω
12|∇u(x)|2 +
∫Ω
f (x)(v(x) − u(x))dx −∫Ω
f (x)v(x)dx
≥ I(u)
vu l’hypothèse. Ainsi u est bien un minimum de (P’).
17.3.4. R
Si u ∈W2,2(Ω), alors on obtient de (Lf’)∫Ω
f (x)φ(x)dx =∫Ω
〈∇u;∇φ(x)〉dx
=
n∑i=1
∫Ω
∂u∂xi
(x)∂φ
∂xi(x)dx
=
n∑i=1
−
∫Ω
∂2u∂x2
i
φ(x)dx
= −
∫Ω
∆u(x)φ(x)dx
et ainsi ∆u = − f presque partout.

478 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Un théorème général d’existence et d’unicité.
17.3.5. T
SoientΩ ⊆ Rn un ouvert borné de frontière lipschitzienne, u0 ∈W1,p et f : Ω×R×Rn−→
R une fonction continue. Supposons que :• f (x,u, .) : Rn
−→ R est convexe pour tout (x,u) ∈ Ω ×R,• il existe 1 ≤ q < p et α > 0 tel que f (x,u, ξ) ≥ α(|ξ|p − |u|q − 1), pour tout
(x,u, ξ) ∈ Ω ×R ×Rn,•
∫Ω
f (x,u0,∇u0)dx < ∞.Alors le problème
inf
I(u) =∫Ω
f (x,u(x),∇u(x))dx|u − u0 ∈W1,p0 (Ω)
admet une solution u ∈W1,p(Ω).
De plus, si f (x, ., .) : R ×Rn−→ R est stictement convexe pour tout x ∈ Ω, alors le
minimum est unique.
La démonstration de ce théorème étant compliquée, nous ne l’exposerons pasdans ce travail. Sous certaines hypothèses en plus, on pourra trouver une preuvedans [18].
17.3.6. R
Les hypothèses du théorème 17.3.5 sont presque optimales, c’est-à-dire que l’affai-blissement de l’une d’entre elles aboutit à un contre-exemple. La seule hypothèsequi peut être affaiblie un peu est celle de la continuité de f . En effet, le théorème17.3.5 reste vérifié si f (.,u, ξ) est mesurable pour tout (u, ξ) ∈ R ×Rn et f (x, ., .) estcontinue pour presque tout x ∈ Ω.
17.3.7. T
Soient Ω ⊆ Rn un ouvert borné lipschitzien, f une fonction C1(Ω × R × Rn), p ∈ N∗ etβ > 0 tels que
| fu(x,u, ξ)|, | fξ(x,u, ξ)| ≤ β(1 + |u|p−1 + |ξ|p−1), ∀(x,u, ξ) ∈ Ω ×R ×Rn
Si u ∈W1,p(Ω) réalise le minimum de (P”)
inf
I(u) =∫Ω
f (x,u(x),∇u(x))dx | u − u0 ∈W1,p0 (Ω)
pour une fonction u0 ∈W1,p(Ω) donnée, alors u satisfait l’équation d’Euler-Lagrange faible∫
Ω
fu(x,u(x),∇u(x))φ(x) + 〈 fξ(x,u(x),∇u(x));∇φ(x)〉dx = 0
pour tout φ ∈W1,p0 (Ω).

17.3. LE PROBLÈME DE DIRICHLET 479
Si de plus f ∈ C2(Ω × R × Rn) et u ∈ C2(Ω), alors u satisfait l’équation d’Euler-Lagrange (forte)
n∑i=1
∂∂xi
fξ(x,u,∇u) = fu(x,u,∇u), ∀x ∈ Ω, et u = u0 sur ∂Ω
Réciproquement, si de plus f (x, ., .) est convexe pour tout x ∈ Ω, alors toute solutionde l’équation d’Euler-Lagrange (faible ou forte) est un minimum de (P”).
Régularité des solutions.
17.3.8. T
Soient m ∈N, Ω ⊆ Rn un ouvert borné de bord Cm+2 ou Ω = Rn+, et f ∈Wm,2(Ω).
Alors le problème (P’)
inf
I(u) =∫Ω
12|∇u(x)|2 − f (x)u(x)dx | u ∈W1,2
0 (Ω)
admet une solution u ∈Wm+2,2.Plus précisément, il existe c > 0 dépendant de Ω tel que
‖u‖Wm+2,2 ≤ c‖ f ‖Wm,2
En particulier, si m = ∞, on a donc que u ∈ C∞(Ω).
D. Nous n’allons démontrer le résultat que dans le casΩ = Rn+.
Pour plus de détail, on pourra consulter [15].Le fait que (P’) admette une solution u ∈ W1,2
0 (Rn+) résulte du théorème 17.3.3.
De plus, elle satisfait l’équation (Lf’)∫Rn+
〈∇u(x);∇v(x)〉dx =∫Rn+
f (x)v(x)dx ∀v ∈W1,20 (Rn
+)
1ère étape Considérons tout d’abord le cas m = 0. Pour démontrer la régularitéde u, on va utiliser la méthode des quotients différentiels. On choisit unvecteur h ∈ Rn−1
× 0. Ainsi h est parallèle au bord de Rn+. Clairement,
u ∈W1,20 (Rn
+) =⇒ uh ∈W1,20 (Rn
+)
où uh est la fonction définie par uh(x) = u(x + h).Posons Dhu = 1
|h| (uh − u) et v = D−h(Dhu). Ainsi
v(x) =2u(x) − u(x + h) − u(x − h)
|h|2
On remarque que l’on a bien v ∈ W1,20 (Rn
+). Par l’équation de Laplace faible(Lf’), on a ∫
Rn+
〈∇u(x); v(x)〉dx =∫Rn+
f (x)v(x)dx
480 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Or on a∫Rn+
〈∇u(x);v(x)〉dx =∫Rn+
〈u(x);∇D−h(Dhu)(x)〉dx
=1|h|2
∫Rn+
〈∇u(x); 2∇u(x) − ∇u(x + h) − ∇u(x − h)〉dx
De plus, on a les égalités∫Rn+
〈∇u(x);∇u(x + h)〉dx =∫Rn+
〈∇u(x);∇u(x − h)〉dx
et ∫Rn+
|∇u(x)|2dx =∫Rn+
|∇u(x + h)|2dx
Par conséquent,∫Rn+
〈∇u(x); v(x)〉dx =2|h|2
∫Rn+
∣∣∣∇u(x)∣∣∣2 − 〈∇u(x);∇u(x + h)〉dx
=1|h|2
∫Rn+
∣∣∣∇u(x + h) − ∇u(x)∣∣∣2 dx
=
∫Rn+
∣∣∣(Dh∇u)(x)∣∣∣2 dx
D’autre part, puisque∫Rn+
f (x)v(x)dx ≤ ‖ f ‖L2‖D−hDhu‖L2 , on obtient via(Lf’) que
‖Dh∇u‖2L2 ≤ ‖ f ‖L2‖Dh∇u‖L2
où on a observé que ‖D−hDhu‖L2 = ‖Dh∇u‖L2 par la proposition 17.2.15.Finalement, on a que
‖Dh∇u‖L2 ≤ ‖ f ‖L2(154)
Soient j, k ∈ N tels que 1 ≤ j ≤ n, 1 ≤ k ≤ n − 1 et soient h = |h|ek,φ ∈ C∞0 (Rn
+). Par définition de l’espace W1,2, on a∫Rn+
(Dh
∂u∂x j
φ
)= −
∫Rn+
u(D−h
∂φ
∂x j
)(155)
De (1) et (2) et du fait que ‖Dh∂u∂x j‖L2 ≤ ‖Dh∇u‖L2 on tire que∣∣∣∣∣∣
∫Rn+
u(D−h
∂φ
∂x j
)∣∣∣∣∣∣ ≤ ‖ f ‖L2‖φ‖L2
En passant à la limite |h| −→, on trouve∣∣∣∣∣∣∫Rn+
u∂2φ
∂x j∂xk
∣∣∣∣∣∣ ≤ ‖ f ‖L2‖φ‖L2(156)
D’autre part, de (Lf’) on obtientn∑
i=1
∫Rn+
∂u∂xi
∂φ
∂xi=
∫Rn+
fφ

17.3. LE PROBLÈME DE DIRICHLET 481
Or par définition ∫Rn+
∂u∂xi
∂φ
∂xi= −
∫Rn+
u∂2φ
∂x2i
pour tout i ∈N tel que 1 ≤ i ≤ n.Ainsi ∣∣∣∣∣∣
∫Rn+
u∂2φ
∂x2n
∣∣∣∣∣∣ ≤ n−1∑i=1
∣∣∣∣∣∣∫Rn+
u∂2φ
∂x2i
∣∣∣∣∣∣ +∣∣∣∣∣∣∫Rn+
fφ
∣∣∣∣∣∣≤ C‖ f ‖L2‖φ‖L2
en prenant par exemple C = n.Par ceci et (3) on aboutit à∣∣∣∣∣∣
∫Rn+
u∂2φ
∂x j∂xk
∣∣∣∣∣∣ ≤ C‖ f ‖L2‖φ‖L2 ∀1 ≤ j, k ≤ n
Fixons maintenant i, j ∈N tels que 1 ≤ j, k ≤ n. On a les applications
p : L2(Rn+) −→R
φ 7−→C‖ f ‖L2‖φ‖L2
et
g jk : C∞0 (Rn+) −→ R
φ 7−→
∣∣∣∣∣∣∫Rn+
u∂2φ
∂x j∂xk
∣∣∣∣∣∣qui satisfont aux hypothèses du théorème de Hahn-Banach.
Ainsi il existe f jk ∈ (L2(Rn+))′ telle que f jk(φ) = g jk(φ), ∀φ ∈ C∞0 (Rn
+) etf jk(φ) ≤ C‖ f ‖L2‖φ‖L2 , ∀φ ∈ L2(Rn
+).Par le théorème de représentation de Riesz, il existe ψ jk ∈ L2(Rn
+) tel que
f jk(φ) =∫Rn+
ψ jkφ ∀φ ∈ L2(Rn+)
ce qui implique∣∣∣∣∣∣∫Rn+
u∂2φ
∂x j∂xk
∣∣∣∣∣∣ =∫Rn+
ψ jkφ ∀φ ∈ C∞0 (Rn+)
Ceci montre que u ∈W2,2(Rn+).
2ème étape Supposons f ∈W1,2(Rn+) et montrons que u ∈W3,2(Rn
+).Pour cela, on prouve que∫
Rn+
〈∇uxi (x);∇v(x)〉dx =∫
IRn+
fxi (x)v(x)dx, ∀v ∈W1,20 (Rn
+)(157)

482 17. OPÉRATEURS AUX DÉRIVÉES PARTIELLES (2)
Pour démontrer cette assertion, il suffit de la vérifier pour toute fonctionv ∈ C∞0 (Rn
+), vu que C∞0 est dense dans W1,2. En utilisant (Lf’), on a∫Rn+
〈∇uxi ;∇v〉dx =∫Rn+
〈(∇u)xi ;∇v〉dx = −∫Rn+
〈∇u; (∇v)xi〉dx
= −
∫Rn+
〈∇u;∇vxi〉dx = −∫Rn+
f vxi dx =∫Rn+
fxi vdx
Comme f ∈ W1,2(Rn+), on a fxi ∈ L2(Rn
+) et donc, en appliquant la 1èreétape à (4), on a uxi ∈W2,2(Rn
+). Par conséquent, u ∈W3,2(Rn+).
On montre alors le cas général par récurrence sur m.

CHAPITRE 18
Opérateurs pseudo-différentiels
Ce chapitre, rédigé par Peter Jossen, traite des opérateurs pseudo-différentiels,généralisation des opérateurs elliptiques. Les opérateurs elliptiques étant de Fred-holm, ils possèdent un indice analytique. Les opérateurs pseudo-différentiels sontalors utilisés pour faire le lien entre cet indice analytique et l’indice topologique,ce dernier étant défini au chapitre 19.
18.1. Motivation
Soit n ∈N et U ⊆ Rn un ouvert. Un opérateur différentiel sur U est, de manièreinformelle, un opérateur linéaire P : C∞(U)→ C∞(U) de la forme
(158) u 7→ Pu =∑|α|≤k
aαDαu
avec aα ∈ C∞(U) et α = (α1, . . . , αn) un multi–indice. Dans le cas où la fonctionu est à décroissance rapide, on peut exprimer les opérateurs Dα à l’aide d’unetransformée de Fourier :
Pu(x) =∑|α|≤k
aα(x)∫χx(ξ)ξαu(ξ)dξ
et lorsque on pose
(159) σ(x, ξ) :=∑|α|≤k
aα(x)ξα
on obtient
Pu(x) =∫χx(ξ)σ(x, ξ)u(ξ)dξ
Un opérateur pseudo–différentiel sera un opérateur de ce type, mais où la fonctionσ(x, ξ) n’est plus nécessairement de la forme (159), mais prise dans une certaineclasse de fonctions plus vaste.Des tels opérateurs sont interessants pour deux raisons : D’abord parce–qu’ilsgénéralisent plusieurs opérateurs classiques sur l’espace C∞00(U) fort bien connus,notamment les opérateurs différentiels, la convolution avec une fonction fixée, etl’opérateur de Riesz.
483

484 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
La deuxième raison est plus profonde : Considérons une variété réelle, et un opé-rateur linéaire différentiel P : Γ(E) → Γ(F) de degré k, où E et F sont des fibrésvectoriels réels, sur X, et où Γ(−) désigne l’espace des sections de classe C∞. Lo-calement, l’opérateur P sera de la forme (158), où les aα(x) : Ex → Fx sont desapplications différentiables, que l’on peut exprimer sous forme matricielle dansdes bases locaux. Le symbole principal de P en x est défini comme étant la matrice
ppr(σ)(x, ξ) :=∑|α|=k
aα(x)ξα
où ξ1, . . . , ξn sont des indéterminées et ξ := (ξ1, . . . , ξn). On dit que P est elliptique sisi la matrice ppr(σ)(x, ξ) est inversible pour tout (ξ1, . . . , ξn) , (0, . . . , 0) en tout x ∈X. On montrera qu’un opérateur elliptique sur une variété compacte a la propriétéde Fredholm, l’indice analytique inda(P) est donc bien défini. Nous verrons versla fin de ce chapitre (section 18.16) que le symbole principal ppr(σ)(x, ξ) peutêtre identifié à un élément du K–groupe K(TX), où TX est le fibré tangent, et onva construire un homomorphisme de groupes B : K(TX) → Z. On a alors undiagramme
K(TX) Z
Ell(X)
//B
OO
σ
44jjjjjjjjjjjjjjjjjjjjjjinda
On appelle indice topologique la composition indt := B σ. Le théorème de l’indiceaffirme précisement que inda = indt, c’est-à-dire que ce diagramme commute.Lors d’une démonstration du théorème de l’indice on aimerait bien travailler avecτ : K(TX) → Ell(X)/ker σ, ce qui ne fait qu’un sens si σ est surjectif. Il s’avèreque σ n’est pas surjectif. On a donc interrêt à considérer une classe d’opérateursplus lagre que celle des opérateurs différentiels, suffisamment docile pour qu’onpeut prolonger le symbole à cette nouvelle classe, et suffisamment riche pour quecette prolongation de σ soit surjectif. Cette classe sera, bien entendu, la classe desopérateurs pseudo–différentiels.
18.2. Généralités sur les distributions
Par K on désignera dans cette section le corps "R ou C" et on note | · | lavaleur absolue respectivement le module. On se fixe une variété différentiable Xet un K–fibré différentiable E sur X. On note Γ(E) ou aussi C∞(X,E) l’ensemblede toutes les sections indéfiniment dérivables de E, et on note Γ00(E) ou aussiC∞00(X,E) l’ensemble de toutes les sections indéfiniment dérivables de E à supportcompact. Si E est le C–fibré trivial, alors on omettra E de la notation. Il est clair queΓ00(E) ⊆ Γ(E), avec égalité si et seulement si X est compact.Les ensembles Γ(E) et Γ00(E) portent une structure naturelle deK–algèbre, additionet multiplication se faisant point par point. On munit Γ(E) et Γ00(E) d’une structured’espace topologique comme on va expliquer dans la suite.

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 485
18.2.1. D
Soit V un K–espace vectoriel et p : V → R+ une fonction telle que
I : p(λv) = |λ|p(v) pour tout λ ∈ K et tout v ∈ V.
II : p(v + w) ≤ p(v) + p(w) pour tout v,w ∈ V.
alors on appelle p une semi–norme sur V. Si p satisfait de plus
III : p(v) = 0 =⇒ v = 0
alors p est dit norme sur V.
18.2.2. R
Une semi–norme p sur un espace vectoriel V engendre une topologie sur V, commec’est bien connu du cas des espaces normés. Cette topologie est par définition latopologie la moins fine sur V qui rend continue l’application p : V → R+ pourla topologie usuelle sur R+. On l’appelle aussi topoplogie initiale sur V induite parp : V → R+. Un filtre de voisinages ouvertes de 0 ∈ V pour cette topologie estdonné par
v ∈ V | p(v) < 1n
∣∣∣∣ n ∈N
18.2.3. D
Soit V un K–espace vectoriel et P un ensemble de semi–normes sur V. On appelletopologie engendrée par P sur V la topologie la moins fine sur V qui rend continuetoutes les semi–normes dans P.
18.2.4. R
Cette topologie est bien sûr la topologie sur V engendrée par toutes les topologiessur V définies par chaque p ∈ P individuellement. On vérifie sans trop de peineque l’addition et la multiplication scalaire sont des applications continues, c’est-à-dire cette topologie fait de V un vrai espace vectoriel topologique. Un filtre devoisinages ouvertes de 0 ∈ V pour la topologie engendrée par P est donné par
v ∈ V | p(v) < 1n pour tout p ∈ F
∣∣∣∣ n ∈N,F ⊆ P fini
On en déduit que la topologie engendrée par P fait de V un espace localementconvexe. Un ensemble de semi–normes ne génère en général pas une topologie quiest de Hausdorff.
18.2.5. R
Soit V un K–espace vectoriel et P,Q des ensembles de semi–normes sur V. Si toutq ∈ Q est continu pour la topologie sur V engendrée par P, alors la topologie sur Vengendrée par Q est moins fine que celle engendrée par P.

486 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.2.6. E
Sur l’espace vectoriel K2 (sans topologie pour l’instant) on considère les semi–normes p1 : (x1, x2) 7→ |x1| et p2 : (x1, x2) 7→ |x2|, où | · | désigne la valeur absoluerespectivement le module usuel. Les semi–normes p1 et p2 ne sont pas des normes.La topologie engendrée par p1 sur K2 est la topologie dont les ouverts sont de laforme U ×K où U est un ouvert de K. Cette topologie n’est pas de Hausdorff. Elleest moins fine que la topologie engendrée par p1, p2, qui est la topologie usuellesur K2.
18.2.7. P
Soit V un K–espace vectoriel et P un ensemble de semi–normes sur V. Munissons V de latopologie engendrée par P. Alors les assertions suivantes sont équivalentes
I : V est de Hausdorff.
II : Pour tout v ∈ V \ 0 il existe p ∈ P avec p(v) , 0.
III :⋂U |U ouvert , 0 ∈ U = 0.
IV : 0 est fermé.
D. (I) =⇒ (II) : Soit v ∈ V \ 0. Si V est Hausdorff, alors il existeun voisinage A de 0 qui ne contient pas v. Il existent donc n ∈N et une partie finieF de P tel que
v <w ∈W | p(w) < 1
n pour tout p ∈ F
Il existe donc au moins un élément p ∈ F tel que p(v) ≥ 1n > 0, d’où (II). Si v ∈ V et
si p ∈ P est tel que p(v) > 0, alorsw ∈W | p(w) < p(v)
est un voisinage ouvert de 0
qui ne contient par v, ce qui montre que (II) =⇒ (III). Afin de montrer (III) =⇒(IV) considérons v ∈ V \ 0. Par hypothèse il existe un voisinage ouvert U de 0 quine contient pas v. Ainsi v−U est un voisinage ouvert de v qui ne contient pas 0, etle complément de v−U est un fermé de V qui contient 0 mais pas v. On déduit quel’intersection de toutes les fermés qui contiennent 0 est le singleton 0. Finalementsupposons que 0 est fermé. Soit v ∈ V \ 0. Il suffit de montrer que qu’il existentdes voisinages disjointes de 0 et v. Comme v est aussi fermé on a que V \v est unvoisinage ouvert de 0. Comme 0− 0 = 0 et par continuité de l’addition, il existe unvoisinage ouvert U de 0 tel que v < U−U. Il suffit maintenant de montrer que v < U,puisque dans ce cas U et V \U sont des voisinages disjointes de 0 respectivementv. Soit x ∈ U. Comme x+U est un voisinage de x on a x+U∩U , ∅. Il existe alorsy ∈ x + U ∩ U tel que x + y := z ∈ U ce qui entraine x = z − y ∈ U − U, et alorsx , v.
18.2.8. R
Si les assertions de la proposition 18.2.7 sont vraies pour P, alors on dit que Psépare les points. Il est interessant de savoir que si P est dénombrable et sépare lespoints, alors la topologie engendrée par P est métrisable. En effet, si on numeroteP = p1, p2, . . ., alors une métrique sur V compatible avec la topologique engendrée

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 487
par P est donnée par
d(v,w) =∞∑j=1
2− j p j(v − w)1 + p j(v − w)
Cette métrique s’appelle métrique de Fréchet. On appelle espace de Fréchet tout espacevectoriel topologique complét, métrisable et localement convexe. Un espace vecto-riel topologique V est localement convexe si et seulement si il existe un ensemblede semi–normes sur V qui engendre sa topologie.Si la topologie sur un espace vectoriel topologique est engendrée par un ensembledénombrable de semi–normes qui sépare les points, alors il suffit de vérifier que cetespace est complét pour conclure qu’il est un espace de Fréchet. Voir Bourbaki [13]chap. II §4 No.2. pour plus de détails. On se contentra ici des définitions suivantes,bien sûr équivalentes :
18.2.9. D
On appelle espace de Fréchet tout K–espace vectoriel topologique V tel que
I : V est complét.
II : V est hausdorff.
III : Il existe un ensemble dénombrable P de semi–normes sur V qui engendrela topologie sur V.
18.2.10. D
On appelle espace localement convexe tout K–espace vectoriel topologique (V,T) telque la topologie sur l’espace vectoriel V engendré par les semi–normes
N |N est une semi–norme continue pour T
coïncide avec T.
18.2.11. R
Un espace vectoriel topologique est donc localement convexe si et seulement si satopologie est engendrée par un ensemble de semi–normes. C’est trivial avec la dé-finition de localement convexe ci–dessus. Les espaces localement convexes formentune catégorie, les morphismes étant les applications linéaires continues. La caté-gorie des espaces localement convexes est donc par définition une sous-catégoriepleine de la catégorie des espaces vectoriels topologiques.
18.2.12. P
Soit V un K–espace vectoriel et P un ensemble de semi–normes sur V. Munissons V dela topologie engendrée par P. Soit q une semi–norme sur V. Alors les assertions suivantessont équivalentes :
I : q est continu.

488 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
II : q est continu en 0.
III : v ∈ V | q(v) < 1 est ouvert.
IV : Il existe M ∈ R et F ⊆ P fini tel que q(v) ≤M maxp∈F
p(v) pour tout v ∈ V.
De plus, ces assertions sont tous vraies si q ∈ P.
D. Les implications (I) ⇐⇒ (II) et (II) =⇒ (III) sont évidentes.Montrons (III) =⇒ (IV) et (IV) =⇒ (II).Supposons alors que v ∈ V | q(v) < 1 est ouvert. Il existe alors n ∈ N et F ⊆ P finitel que
v ∈ V | p(v) < 1n pour tout p ∈ F
⊆
v ∈ V | q(v) < 1
ce qui équivaut dire que pour tout v ∈ V on a
n maxp∈F
p(v) < 1 =⇒ q(v) < 1
ou en d’autre mots que q(v) ≤ n maxp∈F
p(v) pour tout v ∈ V. Supposons maintenant
(IV) et montrons (II). Soit ε > 0, et montrons que q−1([0, ε)) est un voisinage de 0.Par hypothèse il existe M ∈ R et F ⊆ P fini tel que
q(v) ≤M maxp∈F
p(v)
pour tout v ∈ V. On a doncv ∈ V | p(v) < εM−1 pour tout p ∈ F
⊆
v ∈ V | q(v) < ε
= q−1([0, ε))
ce qui montre que q−1([0, ε)) contient un voisinage ouvert de 0.
18.2.13. P
Soient V,W des K–espaces vectoriels munis de topologies engendrées par des ensembles desemi–normes P et Q sur V et W respectivement, et soit T : V →W un opérateur linéaire.Les assertions suivantes sont équivalentes :
I : T est continu.
II : T est continu en 0.
III : Pour tout semi–norme continue q sur W, qT est une semi–norme continue surV.
IV : Pour tout q ∈ Q il existe M ∈ R et une partie finie F de P, tel que
q(Tv) ≤M maxp∈F
p(v)
pour tout v ∈ V.
D. L’équivalence (I) ⇐⇒ (II) est connue, et (I) =⇒ (III) estévident. L’implication (III) =⇒ (IV) est une conséquence directe de 18.2.12. Mon-trons donc que (IV) =⇒ (II). Pour cela, choisissons un voisinage B de 0 ∈ W etmontrons que T−1(B) est un voisinage de 0 ∈ V. On peut supposer qu’il existentG ⊆ Q fini et ε > 0 tel que
B = w ∈W | q(w) < ε pour tout q ∈ G

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 489
Par hypothèse on peut trouver pour tout q ∈ G un nombre réel Mq et une partiefinie Fq ⊆ P tel que q(Tv) ≤Mq max
p∈Fqp(v) pour tout v ∈ V. En posant
M := maxq∈G
Mq et F :=⋃q∈G
Fq
on trouve q(Tv) ≤M maxp∈F
p(v) pour tout v ∈ V et tout q ∈ G. L’ensemble
A := v ∈ V | p(v) < εM−1 pour tout p ∈ F
est bien un voisinage de 0 ∈ V, et on a par construction que T(A) ⊆ B.
18.2.14. C
Soit V un K–espace vectoriel et P un ensemble de semi–normes sur V. On munit V de latopologie engendrée par P. Soit T : V → K une forme linéaire. Les assertions suivantessont équivalentes :
I : T est continu.
II : T est continu en 0.
III : Il existe M ∈ R et une partie finie F de P, tel que
|Tv| ≤M maxp∈F
p(v)
pour tout v ∈ V.
D. C’est la proposition 18.2.13 avec W = K et Q = | · |.
18.2.15. R
Supposons qu’on ait des parties P0 ⊆ P1 ⊆ · · · de P telles que P soit la réunion detoutes les Pi. Pour toute forme linéaire T : V → K il existe alors, selon le corollaire18.2.14 un k ∈N0 tel que
|Tv| ≤M maxp∈Pk
p(v)
Dans un tel cas on dit que T est d’ordre k. Evidemment si T est d’ordre k, alors T estaussi d’ordre k′ pour tout k′ ≥ k.
18.2.16. R
On a maintenant toutes les outils dans la main pour définir des bonnes topologiessur Γ(E), où X est une variété différentiable sans bord de dimension n, et où E estK–fibré sur X. On commence par le cas d’un ouvert U ⊆ Rn et d’un fibré produitE = U ×Km. On munit Km d’une norme | · |.
18.2.17. D

490 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Soit U un ouvert de Rn et posons E = U ×Km. Soit K ⊆ U un compact. Pour toutmulti–indice α et tout u ∈ C∞(U,E) posons
(160) NK,α(u) := supx∈K|∂αu(x)|
On munit C∞(U,E) de la topologie engendrée par l’ensemble de semi–normes
(161) P :=NK,α
∣∣∣∣ K ⊆ U compact et α un multi indice
On appelle cette topologie topologie de Schwartz sur C∞(U,E) et on note E(U,E)l’espace vectoriel C∞(U,E) muni de la topologie de Schwartz.
18.2.18. R
Ayant cette définition, on trouve facilement la topologie correspondante sur Γ(E) =C∞(X,E) : Soit (ψi : Ui → Ci)i∈I un atlas de X qui trivialise E. Une carte ψi : Ui → Cide cet atlas induit une bijection entre C∞(Ui,E|Ui ) et C∞(Ci,Ci ×Km) et permet alorsde transporter la topologie sur E(Ci,Ci ×Km) sur C∞(Ui,E|Ui ). On munit C∞(X,E)de la topologie la moins fine qui rend continue toutes les réstrictions
resi : C∞(X,E)→ C∞(Ui,E|Ui )
On vérifie que cette topologie est intrinsèque (ne dépend par de l’atlas choisi). Onappelle cette topologie topologie de Schwartz sur Γ(E), et on note E(X,E) l’espacevectoriel Γ(E) muni de la topologie de Schwartz.
18.2.19. R
Une suite ( fi)∞i=1 de sections de classe C∞ de E tend vers 0 dansE(X,E) si et seulementsi la suite de (∂α fi)∞i=1 converge uniformement sur tout compact vers la zéro–section,quelque soit le multi–indice α et le système de coordonnées locales choisi.
18.2.20. D
Soit U un ouvert de Rn et posons E := U ×Km. Soit K ⊆ U un compact. Pour toutmulti–indice α et tout u ∈ C∞(U,E) avec supp u ⊆ K, posons
(162) Nα(u) := supx∈U|∂αu(x)|
On munit u ∈ C∞(U,E) | supp u ⊆ K de la topologie engendrée par l’ensemble desemi–normes
(163) P :=Nα
∣∣∣∣ α un multi indice
On noteDK(U,E) l’espace vectoriel u ∈ C∞(U) | supp u ⊆ Kmuni de la topologieengendrée par P.
18.2.21. R
On définitDK(X,E) où X est une variété et E un K–fibré sur X moyennant un atlas

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 491
de X, comme on l’a déjà fait dans 18.2.18. On est tenté de munir Γ00(X) = C∞00(X,E)de la topologie engendrée par les semi–normes de la forme (162). Mais ce n’est pasle bon choix. Cette topologie est trop faible pour que Γ00(E) deviendra complét.
18.2.22. D
Soit P l’ensemble de toutes les semi–normes p sur Γ00(E) telles que pour toutcompact K ⊆ X la réstriction p|DK(X,E) est une semi–norme continue sur DK(X,E).On appelle topologie de Schwartz sur C∞00(X,E) la topologie engendrée par P, et onnoteD(X,E) l’espace vectoriel C∞00(X,E) muni de la topologie de Schwartz.
18.2.23. R
La topologie surD(X,E) merite d’être étudiée et justifiée. Soient K ⊆ L des partiescompactes de X. On aDK(X,E) ⊆ DL(X,E). L’inclusion ϕKL : DK(X,E) → DL(X,E)est facilement vue d’être continue, ce qu’on montre dans 18.2.24. Voici la trivialitéqu’il faut observer : Les parties compactes de X forment, muni de la relationd’inclusion, un ensemble partiellement ordonné filtrant dans le sens de (1). Ontrouve alors un système de colimite
(164)(DK(X,E), ϕLK
)dans la catégorie des espaces vectoriels topologiques localement convexes. On vamontrer qu’on a un isomorphisme canonique d’espaces vectoriels topologiques
(165) D(X,E) colimK⊆XDK(X,E)
Au lieu de 18.2.22, on pourrait bien prendre (165) comme définition deD(X,E). Ilfaudra s’inquiéter si on ne trouve pas une co–notion pour la topologie de Schwartzsur C∞(X,E). La voilà : Notons Ek(X,E) l’espace de toutes les sections de classe Ck
de E muni de la topologie engendrée par l’ensemble de semi–normes
NK,α(u) := supx∈K|∂αu(x)| |α| ≤ k, K compact
On a des inclusions continues ϕkl : Ek(X,E)→ El(X,E) pour l ≤ k. L’espace E(X,E)s’identifie alors à
(166) E(X,E) limk∈NEk(X,E)
de manière canonique.
18.2.24. P
Soient K,K1 et K2 des parties compactes de X et supposons K1 ⊆ K2. Les assertionssuivantes sont vraies :
I : L’inclusionDK1 (X,E)→DK2 (X,E) est une immersion fermée.
II : L’inclusionDK(X,E)→D(X,E) est une immersion fermée.
492 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
III : Soit V un espace localement convexe et T : D(X,E) → V linéaire. Alors T estcontinu si et seulement si T|DK(X,E) : DK(X,E)→ V est continu pour tout K ⊆ Xcompact.
D. (I) : L’ensembleDK1 (X,E) est une partie fermée deDK2 (X,E),puisque la limite u d’une suite convergente (uk)n
k=1 dans DK2 (X,E) satisfait claire-ment supp u ⊆ K1 si supp uk ⊆ K1 pour tout k. Comme on a
supx∈K2
|∂αu(x)| = supx∈K1
|∂αu(x)|
pour tout u ∈ DK2 (X,E) avec supp u ⊆ K1, la topologie induite par DK2 (X,E) surDK1 (X,E) coïncide avec celle deDK1 (X,E), ce qui montre (I).(II) : Soit x ∈ X. La semi–norme Nx : u 7→ |u(x)| est continue surD(X,E). L’ensembleFx := u ∈ D(X,E) | u(x) = 0 est donc fermé. Comme
DK(X,E) =⋂
x∈X\K
Fx
on a que DK(X,E) est un fermé de D(X,E). Soit P l’ensemble de toutes les semi–normes continues sur D(X,E). La topologie induite par D(X,E) sur DK(X,E) estengendrée par les semi–normes
N|DK(X,E) |N ∈ P
Mais N|DK(X,E) est continu sur DK(X,E) par définition dela topologie sur D(X,E).La topologie induite parD(X,E) surDK(X,E) est donc moins fine que la topologiedeDK(X,E). D’autre part, les semi–normes
u 7→ supx∈K|∂αu(x)|
sont continues surD(X,E), ce qui montre que la topologie induite parD(X,E) surDK(X,E) est plus fine que celle deDK(X,E).(III) : La condition est évidemment nécessaire, vu l’assertion (II). Qu’elle est aussisuffisante est une conséquence de 18.2.13. En effet, demander que
T|DK(X,E) : DK(X,E)→ V
est continu pour tout compact K ⊆ X, est équivalent à demander que q T|DK(X,E)est une semi–norme continue surDK(X,E) pour toute semi–norme continue q surV et tout compact K ⊆ X. Mais cela entraine que qT est une semi–norme continuesurD(X,E), par définition de la topologie surD(X,E), quelque soit la semi–normecontinue q sur V, et donc que T est continu surD(X,E).
18.2.25. C
Il y a un isomorphisme
(167) D(X) colimK⊆XDK(X)
D. Comme DK(X) ∩ DL(X) = DK∩L(X), la famille de partiesDK(X) |K ⊆ X compact deD(X) est stable par intersections finies. L’assertion (III)

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 493
de la proposition 18.2.24 dit précisement que la topologie surD(X) est la topologiefinale engendrée par toutes les inclusions
DK(X)→D(X) K ⊆ X compact
ce qui montre l’isomorphisme (167), vu la remarque 4.5.15.
18.2.26. T
Soit ( fn)∞n=1 une suite dansD(X). Les assertions suivantes sont équivalentes :
I : ( fn)∞n=1 converge vers 0.
II : Il existe un compact K ⊆ X tel que fn ∈ DK pour tout n ∈ N et tel que ( fn)∞n=1converge vers 0 dansDK(X).
III : Il existe un compact K ⊆ X tel que fn ∈ DK pour tout n ∈N et tel que pour toutsystème de coordonnées local et tout multi–indice α la suite (∂α fn)∞n=1 convergeuniformement vers 0.
D. L’implication (II) =⇒ (I) est triviale, et (III) n’est qu’unereformulation de (II). La seule chose à montrer pour (I) =⇒ (II) est l’existencedu compact K tel que supp fn ⊆ K pour tout n. Supposons par l’absurde qu’un tel
compact n’existe pas. Alors il existe une suite de compacts (Kn)∞n=1 telle Kn (
Kn+1pour tout n et telle que
Y :=∞⋃j=1
K j
n’est pas compact, et une sous-suite (gn)∞n=1 de ( fn)∞n=1 telle que gn ∈ DKn (X) maisgn < DKn−1 (X). Pour tout n ∈ N choisissons un élément xn ∈ Kn \ Kn−1 tel quean := |gn(xn)| > 0. La semi–norme
πn : h 7→ a−1n |h(xn)|
est continue, puisque la topologie surD(X) est plus fine que celle de la convergenceponctuelle. Posons
(168) π :=∞∑
n=1
πn
Par (168) on définit bien une semi–norme sur
D(Y) =∞⋃
n=1
DKn (Y) ∞⋃
n=1
DKn (X)
puisque pour tout h ∈ D(Y) la somme (168) qui définit π(h) est finie. Pour la mêmeraison on a pour tout compact K ⊆ Y
π|DK =
N∑n=1
πn si K ⊆ KN
ce qui montre en particulier que π est continu sur D(Y). On a π(gn) = πn(gn) = 1pour tout n ∈N, et d’autre part
limn→∞
π(gn) = π(
limn→∞
gn
)= π(0) = 0

494 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
d’où 1 = 0.
18.2.27. R
La topologie induite par E(X) sur C∞00(X) est par conséquent moins fine que cellede D(X). En d’autre mots : L’inclusion D(X) → E(X) est continue. Lorsque X estcompact les topologies surD(X) et E(X) coïncident, et on a donc E(X) = D(X) dansce cas.Remarquons aussi que les topologies de Schwartz sur C∞(X) et C∞00(X) sont moinsfines que la topologie compacte–ouverte (topologie de la convergence uniformesur les compacts), et alors aussi moins fines que la topologie de la convergenceponctuelle. Les espaces topologiques E(X) et D(X) sont donc séparables puisqueC∞(X) et C∞00(X) sont déjà séparables pour la topologie moins fine de la convergenceponctuelle.
18.2.28. P
Les espaces vectoriels topologiquesD(X,E) et E(X,E) sont des espaces de Fréchet
D. Comme X est à base dénombrable et localement compact, ilexiste un recouvrement dénombrable (Ui)i∈I de X tel que Ki := Ui est compact pourtout i ∈ I. On peut supposer que K := Ki | i ∈ I est stable par réunions finies. AinsiK est cofinal dans l’ensemble de toutes les parties compactes de X. Par le théorème4.5.3 la topologie engendrée par
(169)NKi,α
∣∣∣∣ i ∈ I et α un multi indice
coïncide avec celle donnée par (161), et est aussi indépendente du choix du re-couvrement. La topologie de Schwarz sur C∞(X,E) est alors engendrée par unensemble dénombrable de semi–normes. Le même argument montre que la topo-logie de Schwartz sur C∞00(X,E) est engendrée par un ensemble dénombrable desemi–normes. On a déjà vu que D(X,E) et E(X,E) sont séparables. Reste à voirla complétude de ces espaces. L’espace E(X) est complét : En effet, on sait quel’espace C(X,E) des sections continues de E est complét. On sait aussi que si unesuite de fonctions dérivables ( fi)∞i=1 converge uniformement sur les compacts versune fonction f , et si la suite des dérivées converge uniformement sur les compactsvers une fonction g, alors f est dérivable et g est la dérivée de f . Ceci permetde conclure que C∞(X,E) est complét pour la topologie de Schwarz, puisque ondemande convergence uniforme sur les compacts de toutes les dérivées. Le mêmeargument, tenant compte de la caracterisation (II) dans 18.2.26 montre queD(X,E)est complét.
18.2.29. D
On appelle distributions sur X et on note D′(X) l’espace dual de D(X), muni de latopologie faible.

18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 495
18.2.30. R
Les distributions sur X sont donc les formes linéaires continues f : D(X)→ K. Unesuite de distributions ( f j)∞j=1 converge vers f si et seulement si ( f j(u))∞j=1 convergevers f (u) pour tout u ∈ D(X). Au lieu de f (u) on écrit 〈 f ,u〉. Dire qu’une formelinéaire f sur D(X) est continue revient à dire que pour toute partie compacteK ⊆ X il existe C ∈ R et k ∈N tel que
〈 f ,u〉 ≤ C∑|α|≤k
supx∈K|∂αu(x)|
pour tout u ∈ D(X) avec supp u ⊆ K. Si le même nombre naturel k marche pourtout compact K, alors on dit que f est une distribution d’ordre k, conformément à laremarque 18.2.15.
18.2.31. E
La mesure de Lebesgue µ sur Rn est une distribution d’ordre 0, vu que pour toutepartie compacte K ⊆ Rn on a
〈µ,u〉 =∫
u(x)dx ≤ Vol(K) · supx∈K|u(x)|
La mesure de Dirac δx en un point x ∈ X, qui est définie par 〈δx,u〉 = u(x) estaussi une distribution d’ordre 0. Pour x ∈ X et un multi–indice α on peut aussiconsidérer, après avoir choisi un système de coordonnées locales la forme linéaire
u 7→ ∂αu(x)
Cette forme est une distribution d’ordre |α|.
18.2.32. E
Soit f ∈ L1loc(U) une fonction localement intégrable sur U. On peut voir f comme
distribution T f en posant pour tout u ∈ D(U)⟨T f ,u
⟩=
∫U
f (x)u(x)dx
Il est clair que la distribution T f ne dépend que de la classe dans L1loc(U) de f . On
appelle T f distribution associée à f . Si aucune confusion en résulte on parle de ladistribution f , et on note 〈 f ,u〉. On a défini ainsi une application
L1loc(U)→D′(U)
qui est plus ou moins facilement vérifiée d’être injective. Cette injection est ca-nonique parce–qu’on dispose d’une mesure préférée sur U. Sur une variété quel-conque, il n’y a pas de mesure naturelle. L’injection
L1loc(X)→D′(X)
devient canonique après le choix d’une densité sur X (voir Simanca [56] pour plusde détails).

496 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.2.33. D
Soit f ∈ D′(X) une distribution. On appelle support de f l’ensemble des x ∈ X tellesque pour tout voisinage ouvert U de x il existe une fonction u ∈ D(X) telle quesupp u ⊆ U et 〈 f ,u〉 , 0.
18.2.34. R
Le support de f est un fermé de X. En effet, si on pose
U :=⋃
V ⊆ X∣∣∣∣ V ⊆ X ouvert, et 〈 f ,u〉 = 0 pour tout u ∈ C∞00(V)
alors supp f est le complément de U dans X, et U est manifestement ouvert.
18.2.35. D
On appelle distributions à support compact sur X l’ensemble de toutes les distributionsf ∈ D′(X) telles que supp f est compact.
18.2.36. R
On peut identifier les distributions à support compact avec le dual E′(X) de E(X).Pour cela, observons que l’application d’inclusion
ι : D(X)→ E(X)
donne lieu à une application duale (on applique le foncteur (−)′)
ι′ : E′(X)→D′(X)
On peut montrer sans trop se fatiguer que im ι′ est précisement l’ensemble desdistributions à support compact.
18.2.37. D
Soit f une distribution sur U ⊆ Rn et α un multi–indice. On appelle α–ème dérivéede f , et on note ∂α f la distribution définie par⟨
∂α f ,u⟩= (−1)|α|
⟨f , ∂αu
⟩pour tout u ∈ D(U).
18.2.38. R
Si f est une fonction sur U dont la α–ème dérivée existe et est localement intégrable,et si T f est la distribution associée à f , alors on a (T f )α = T f α . Pour voir ceci, il suffitd’intégrer α–fois par parties ∫
f α(x)u(x)dx
18.2. GÉNÉRALITÉS SUR LES DISTRIBUTIONS 497
18.2.39. D
On appelle espace de Schwartz sur Rn et on note S(Rn) l’ensemble de toutes lesfonctions ϕ ∈ C∞(Rn) telles que
(170) supx∈Rn
∣∣∣∣xα (Dβϕ
)(x)
∣∣∣∣ < ∞pour tout multi indices α, β.
18.2.40. R
L’espace de Schwartz est donc l’ensemble de toutes les fonctions de classe C∞ surRn dont tout les dérivées (y compris la 0–ème) sont à décroissance rapide. Onmunit S(Rn) de la topologie engendrée par l’ensemble de toutes les semi–normespα,β définies par
pα,β(u) := supx∈Rn
∣∣∣∣xα (Dβϕ
)(x)
∣∣∣∣Clairement C∞00(Rn) ⊆ S(Rn), et cette inclusion est stricte et continue. On peutmontrer que la transformation de Fourier
F : S(Rn)→ S(Rn)
est une bijection bicontinue. Les éléments du dual de S(Rn) sont appelés distri-butions temperées. Par dualité, on peut étendre la transformation de Fourier auxdistributions temperées (voir Simanca [56] pour plus de détails).
18.2.41. P
Soient X et Y des variétés, et notons Z := X × Y. L’application
ϕ : C∞00(X) ⊗C C∞00(Y)→ C∞00(Z)
définie par ϕ(u ⊗ v)(x, y) = u(x)v(y) est injective, et son image est dense dans C∞(Z).
D. Soient u1, . . . ,um ∈ C∞00(X) et v1, . . . , vm ∈ C∞00(Y) et supposonsm∑
i=1
ui ⊗ vi ∈ kerϕ
pour tout (x, y) ∈ Z. Sans perte de généralité supposons que v1, . . . , vm sont linéai-rement indépendents sur C. Comme par hypothèse
m∑i=1
ui(x)vi = 0
pour tout x ∈ X, on a ui = 0 pour tout 1 ≤ i ≤ m, doncm∑
i=1
ui ⊗ vi = 0
ce qui montre que ϕ est injectif. Pour la densité on fait un petit détour : Au lieude montrer que =ϕ est dense dans C∞00(Z), on peut aussi montrer que toute forme

498 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
linéaire continue sur C∞00(Z) dont la restriction à =ϕ est nulle est déjà nulle surC∞00(Z), c’est-à-dire on utilise
=ϕ est dense ⇐⇒ res : D′(Z)→ (=ϕ)′ est injectif
Choisissons alors f ∈ ker res, et montrons que f = 0. Il suffit de montrer quesupp f = ∅, c’est-à-dire que x < supp f pour tout x ∈ X. Quitte à choisir unecarte appropriée, il suffit de montrer l’assertion dans le cas X = Rn, Y = Rm etx = (0, 0).Choisissons des fonctions µ ∈ C∞00(X) et ν ∈ C∞00(Y) à valeurs dans [0, 1]telles que µ(s) = 1 et ν(t) = 1 dans un voisinage de 0 de X respectivement Y, ettelles que ∫
µ(s)ds = 1 et∫ν(t)dt = 1
Pout tout ε > 0 posons
hε(x, y) := ε−(n+m)(µ(sε−1) ⊗ ν(tε−1)
)Les fonctions hε ainsi définies forment une unité approchée de D′(Z). On a d’unepart
limε→0
f ∗ hε = f
et d’autre partf ∗ hε(x, y) = 0
par hypothèse sur f , ce qui montre que f = 0.
18.2.42. D
Soit U un ouvert de Rn et T : C∞00(U) → C∞(U) un opérateur continu. On appellenoyeau de distribution de T la distribution K sur U ×U définie par
〈Tv,u〉 = 〈K,u ⊗ v〉
pour tout u, v ∈ C∞00(U).
18.2.43. R
Cette définition demande bien sûr une justification, surtout ce qui concerne l’exis-tence d’une telle distribution K. L’unicité est une conséquence directe de la propo-sition 18.2.41. Le théorème suivant, du à Laurent Schwartz (1950) répond complè-tement à cette question.
18.2.44. T (Noyeau de Schwarz)
Soit K ∈ D′(X1 × X2). L’application
T : D(X2)→D′(X1)
définie par 〈Tv,u〉 = K(u ⊗ v) est linéaire et continue dans le sens que lim Tv j = 0 dansD′(X1) si lim v j = 0 dansD(X2).
Reciproquement, pour toute application linéaire continue T : D(X2) → D′(X1) il existeune distribution unique K ∈ D′(X1 × X2) telle que 〈Tv,u〉 = K(u ⊗ v).

18.3. AMPLITUDES : DÉFINITION ET RÉSULTATS TÉCHNIQUES 499
D. Je renvois à Hörmander [32], chapitre 5 section 2.
18.2.45. D
Une fonction continue f : X → Y entre espaces topologiques est dite propre si lapréimage par f de toute partie compacte de Y est une partie compacte de X.
18.2.46. D
Soit U un ouvert de Rn et D ⊆ U ×U. On dit que D est une partie propre de U ×U siles projections canoniques π1, π2 : D→ X sont des applications propres.Soit K une distribution (ou fonction) sur U×U. On dit que K est proprement supportési supp K est une partie propre de U ×U.Soit T un opérateur et K son noyeau de distribution. On dit que T est proprementsupporté si le noyeau de distribution de T est proprement supporté.
18.3. Amplitudes : Définition et résultats téchniques
On se fixe dans cette section des nombres naturels n,N ∈ N et un ouvertU ⊆ Rn. Par "fonction" on entend toujours "fonction à valeurs complexes".
18.3.1. D
Soit m ∈ R. On appelle amplitude d’ordre m toute fonctionσ ∈ C∞(U×RN) satisfaisantla condition suivante : Pour tout multi–indices α, β et toute partie compacte K ⊆ Uil existe C ∈ R tel que
(171)∣∣∣∣Dβ
xDαξσ(x, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)m−|α|
pour tout x ∈ K. On note Amplm(U × RN) l’ensemble de toutes les amplitudesd’ordre m. On appelle amplitude tout élément de
Ampl(U ×RN) :=⋃m∈R
Amplm(U ×RN)
18.3.2. R
Il découle directement de la définition que Ampl(U ×RN) et Amplm(U ×RN) sontdes C–espaces vectoriels pour tout m ∈ R. On note
Ampl−∞(U ×RN) :=⋂m∈R
Amplm(U ×RN)

500 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
qui est aussi un espace vectoriel. Vu que (1 + |ξ|)m≤ (1 + |ξ|)m′ pour tout nombres
réels m ≤ m′, on a une inclusion
Amplm(U ×RN) ⊆ Amplm′ (U ×RN) pour m ≤ m′
qui est facilement vue d’ètre stricte si m < m′.
18.3.3. R
Dans la suite j’énnonce et démontre quelques propriétés des amplitudes sousdifférents points de vues, la plupart de nature téchnique. Les propositions 18.3.4 et18.3.5 traitent des propriétés algébriques des amplitudes et 18.3.6 la différentiationdes amplitudes. Les propositions 18.3.9 et 18.3.10 traitent la composition d’uneamplitude avec une fonction et le changement de variables. La proposition 18.3.11traite la topologie sur Amplm(U ×RN).Comme il s’agira toujours du même ouvert U et du même nombre naturel N, onsimplifie la notation en Amplm := Amplm(U ×RN).
18.3.4. P
Soient m,m′ ∈ R, σ ∈ Amplm et σ′ ∈ Amplm′ . Alors σσ′ ∈ Amplm+m′ .
D. Soient α, β des multi–indices et K ⊆ U une partie compacte.Pour tout multi indices γ, δ il existent par définition des nombres réels Cγδ et C′γδtelles que
supx∈K
∣∣∣∣DδxDγ
ξσ(x, ξ)∣∣∣∣ ≤ Cγδ(1 + |ξ|)m−|γ|
et supx∈K
∣∣∣∣DδxDγ
ξσ′(x, ξ)
∣∣∣∣ ≤ C′γδ(1 + |ξ|)m′−|γ|
18.3. AMPLITUDES : DÉFINITION ET RÉSULTATS TÉCHNIQUES 501
Pour x ∈ K on calcule∣∣∣∣DβxDα
ξ(σ(x, ξ)σ′(x, ξ))∣∣∣∣
≤
∑γ≤α
(αγ
) ∣∣∣∣Dβx
(Dα−γξ σ(x, ξ)Dγ
ξσ′(x, ξ)
)∣∣∣∣≤
∑γ≤α
(αγ
)∑δ≤β
(β
δ
) ∣∣∣∣Dβ−δx Dα−γ
ξ σ(x, ξ)∣∣∣∣ ∣∣∣∣Dδ
xDγξσ′(x, ξ)
∣∣∣∣≤
∑γ≤α
∑δ≤β
(αγ
)(β
δ
)Cα−γ,β−δ(1 + |ξ|)m−|α−γ|C′γδ(1 + |ξ|)
m′−|γ|
=∑γ≤α
∑δ≤β
(αγ
)(β
δ
)Cα−γ,β−δC′γδ(1 + |ξ|)
m+m′−|α|
= C(1 + |ξ|)m+m′−|α|
où on a posé
C :=∑γ≤α
∑δ≤β
(αγ
)(β
δ
)Cα−γ,β−δC′γδ
On a doncsupx∈K
∣∣∣∣DβxDα
ξσσ′(x, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)m+m′−|α|
ce qui montre que σσ′ ∈ Amplm+m′ .
18.3.5. C
Les amplitudes forment une C–algèbre, et Ampl−∞ est un idéal1 de cette algèbre.
18.3.6. P
Soient m ∈ R, σ ∈ Amplm et soient γ, δ des multi indices. Alors DδxDγ
ξσ ∈ Amplm−|γ|.
D. Soient α, β des multi indices et K ⊆ U compact. Il existe pardéfinition C ∈ R tel que
supx∈K
∣∣∣∣Dβ+δx Dα+γ
ξ σ(x, ξ)∣∣∣∣ ≤ C(1 + |ξ|)m−|α+γ|
c’est-à-diresupx∈K
∣∣∣∣DβxDα
ξ
(Dδ
xDγξσ(x, ξ)
)∣∣∣∣ ≤ C(1 + |ξ|)(m−|γ|)−|α|
donc DδxDγ
ξσ ∈ Amplm−|γ|.
1Patience, patience, on quotiente plus tard.

502 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.3.7. P
Soit σ ∈ Ampl(U) et soient u ∈ S(U). Alors la fonction τ définie par
τ(x, ξ) := σ(x, ξ)u(ξ)
est un élément de Ampl−∞(U).
D. Soient α, β des multi indices, K ⊆ U compact et m ∈ R. Parhypothèse il existent k ∈ R tel que σ ∈ Amplk(U). Pour tout multi indice γ il existealors Cγ ∈ R tel que
supx∈K
∣∣∣∣DβxDα−γ
ξ σ(x, ξ)∣∣∣∣ ≤ Cγ(1 + |ξ|)k−|α−γ|
On calcule pour x ∈ K ∣∣∣∣DβxDα
ξτ(x, ξ)∣∣∣∣
≤
∑γ≤α
(αγ
) ∣∣∣∣DβxDα−γ
ξ σ(x, ξ)Dγξu(ξ)
∣∣∣∣≤
∑γ≤α
(αγ
)Cγ
∣∣∣∣(1 + |ξ|)k−|α−γ|Dγξu(ξ)
∣∣∣∣=
∑γ≤α
(αγ
)Cγ
∣∣∣∣(1 + |ξ|)k−m+|γ|Dγξu(ξ)
∣∣∣∣ (1 + |ξ|)m−|α|
Comme u ∈ S(U), le supremum
supξ∈Rn
∣∣∣∣(1 + |ξ|)k−m+|γ|Dγξu(ξ)
∣∣∣∣est fini. En posant
C :=∑γ≤α
(αγ
)Cγ sup
ξ∈Rn
∣∣∣∣(1 + |ξ|)k−m+|γ|Dγξu(ξ)
∣∣∣∣on trouve que ∣∣∣∣Dβ
xDαξτ(x, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)m−|α|
pour tout x ∈ K, ce qui montre que τ ∈ Amplm(U). Comme m etait arbitraire, on aτ ∈ Ampl−∞(U).
18.3.8. R
Soient f et g deux fonctions de classe C∞, réelles à une variable réelle. On s’interesseà la k–me dérivée de f g que l’on veut exprimer en fonction des dérivés de f et g.On a
f (g(x))′ = g′(x) · f ′(g(x))
f (g(x))′′ = g′′(x) · f ′(g(x)) + (g′)2(x) · f ′′(g(x))
f (g(x))′′′ = g′′′(x) · f ′(g(x)) + 3g′(x)g′′(x) f ′′(g(x)) + (g′)3(x) · f ′′′(g(x))

18.3. AMPLITUDES : DÉFINITION ET RÉSULTATS TÉCHNIQUES 503
mais la formule générale est terrifiante. On peut vérifier facilement (sans blague)par récurrence que la dérivée k–ème f (g(x))(k) s’écrit comme
(172) f (g(x))(k) =
k∑j=1
Pkj
(g(1)(x), . . . , g(k)(x)
)f ( j)(g(x))
où Pkj ∈ Z[X1, . . . ,Xk] est un polynôme, à coefficients entiers non–négatifs. Cespolynômes P jk ont la propriété que
P jk(X,X2,X3, . . . ,Xk) ∈ Z[X]
est un polynôme homogène de degré k, quelque soit 1 ≤ j ≤ k. En d’autre mots,si λXε(1)
1 Xε(2)2 · · ·Xε(k)
k est un monôme de P jk, alors ε(1) + 2ε(2) + · · · + kε(k) = k.Ces considérations restent bien sûr justes dans le cadre de fonctions à plusieursvariables, et à valeurs vectoriels. L’équation (172) devient
(173) ∂αx f (g(x)) =k∑β≤α
Pαβ(∂(0,0,...,1)
x g(x), . . . , ∂γx g(x), . . . , ∂αx g(x))
(∂βx f )(g(x))
où Pαβ est un polynôme en les α! variables (Xγ)γ≤α. Pour X = (X1, . . .Xn), où n estle nombre de variables de g, il est toujours vrai que
Pαβ(X(0,0,...,1), . . . ,Xγ, . . . ,Xα
)∈ Z[X1, . . . ,Xn]
est homogène de degré α, c’est-à-dire homogène pour tout j de degré α j en X j.Cette observation est importante, vu la conséquence suivante : Soit U un ouvert deRn et σ = σ(x, ξ) ∈ Amplm(U ×RN) une amplitude d’ordre m. Alors
Pαβ(∂(0,0,...,1)
x,ξ σ(x, ξ), . . . , ∂γx,ξσ(x, ξ), . . . , ∂αx,ξσ(x, ξ))
est une amplitude d’ordre m − (αn+1 + · · · + αN).
18.3.9. P
Soit σ ∈ Ampl0 et soit V ⊆ C un voisinage ouvert de l’adhérence de l’image de σ. Soitf = f (z) : V → C une fonction indéfiniment dérivable en tant que fonction à deuxvariables réelles. Alors f σ ∈ Ampl0.
D (E). Remarquons tout d’abord que l’image de σ estune partie bornée de C. L’adhérence de l’image de σ est alors une partie compactede C. Notons f = f (z) et z = x + iy, et fixons deux multi–indices α et β. La fonction∂αξ∂
βx( f σ) s’écrit comme polynôme en les fonctions
(∂γx∂δy f ) σ γ ≤ α, δ ≤ β
∂γx∂δξσ γ ≤ α, δ ≤ β
Comme im σ est compact, il existe C ∈ R tel que∣∣∣(∂γx∂δy f ) σ(x, ξ)∣∣∣ ≤ C
pour tout x ∈ U, ξ ∈ RN, γ ≤ α, δ ≤ β. Il existe donc un polynôme en les amplitudes∂γx∂
δξσ avec γ ≤ α et δ ≤ β qui majore ∂αξ∂
βx( f σ). En raisonnant par récurrence,
et tenant compte de 18.3.4 et 18.3.6, et de la remarque qui précède, on trouve que

504 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
toutes les monômes de ce polynôme, qui sont donc des produits en les amplitudes∂γx∂
δξσ sont d’ordre inferieur ou égal à −|α|, ce qui donne l’éstimation nécessaire de
|∂αξ∂βx( f σ)| et démontre la proposition.
18.3.10. P
Soit σ ∈ Amplm(U ×RN) et soient f : V ×RN→ U et g : V ×RN
→ RN des fonctionspositivement homogènes de degré 0 et 1 respectivement, c’est-à-dire
f (x, tξ) = f (x, ξ) et g(x, tξ) = tg(x, ξ)
pour t > 0 suffisamment grand. Alors la fonction (x, ξ) 7→ σ( f (x, ξ), g(x, ξ)) est un élémentde Amplm(V ×RN).
D. Similaire à celle de 18.3.9.
18.3.11. P
Soit m ∈ R, K ⊆ U compact et soientα et β des multi–indices. Posons pour toutσ ∈ Amplm
p(m)K,α,β(σ) := sup
x∈Ksupξ∈RN
(1 + |ξ|)|α|−m∣∣∣∣Dα
x Dβξσ(x, ξ)
∣∣∣∣Ce supremum existe par définition, et p(m)
K,α,β(σ) est une semi–norme sur Amplm. La topologieengenrée par l’ensemble de toutes les semi–normes
p(m)K,α,β
∣∣∣∣ K ⊆ U compact et α, β multi–indices
fait de Amplm un espace de Fréchet.
S .
18.3.12. P
Soit m ∈ R, α, β des multi–indices et u ∈ C∞(U). Les applications
Amplm→ Amplm−|α|
σ(x, ξ) 7→ ∂αξ∂βxσ(x, ξ)
etAmplm
→ Amplm
σ(x, ξ) 7→ u(x)σ(x, ξ)
sont continues.
D. Cela découle immédiatement de la définition des semi–normesp(m)
K,α,β(σ) sur Amplm.

18.4. DISTRIBUTIONS ET OPÉRATEURS DE FOURIER 505
18.4. Distributions et opérateurs de Fourier
18.4.1. R
Notons Ampl00 l’ensemble de toutes les amplitudes σ ∈ Ampl telles que pour toutcompact K ⊆ U il existe R ∈ R avec
σ(x, ξ) = 0 pour tout x ∈ K et tout ξ ∈ RN avec ‖ξ‖ > R
On a évidemment Ampl00 ⊆ Ampl−∞. On munit Ampl00 de la topologie initiale,induite par toutes le inclusions Ampl00 → Amplm avec m ∈ R. Une fonction surAmpl00 est donc continue si et seulement si elle est continue pour la topologieinduite par Amplm sur Ampl00, quelque soit m ∈ R.
18.4.2. P
Soit F un espace de Fréchet et f : Ampl00 → F une application linéaire continue. Alors ilexiste une unique application linéaire
f = Ampl→ F
qui prolonge f , et dont la réstriction à Amplm est continue pour tout m ∈ R.
D. Soit ϕ ∈ C∞00(RN) telle que ϕ(ξ) = 1 pour tout ξ avec |ξ| ≤ 1.Soit m ∈ R et σ ∈ Amplm. Pour tout j ∈N posons
σ j(x, ξ) := ϕ( 1jξ)σ(x, ξ)
Comme ϕ est à support compact, on a σ j ∈ Ampl00 pour tout j ∈ N. Montronsque (σ j)∞j=1 converge vers σ dans Amplm+1. En effet, soient α, β des multi–indices etK ⊆ U compact. Alors
p(m+1)K,α,β (σ j − σ) = sup
x∈Ksupξ∈RN
(1 + |ξ|)|α|−m−1∣∣∣∣∂αξ∂βx(σ j(x, ξ) − σ(x, ξ)
)∣∣∣∣= sup
x∈Ksup|ξ|≥n
(1 + |ξ|)|α|−m∣∣∣∣∂αξ∂βx(ϕ( 1
jξ) − 1)σ(x, ξ)
∣∣∣∣(1 + |ξ|)
≤1n
supx∈K
sup|ξ|≥n
(1 + |ξ|)|α|−m∣∣∣∣∂αξ∂βx(ϕ( 1
jξ) − 1)σ(x, ξ)
∣∣∣∣≤
1n
p(m)K,α,β(σ j − σ)
Pour tout multi–indice γ, il existe un nombre réel Cγ tel que∣∣∣∂γϕ(εξ)∣∣∣ ≤ Cγ(1 + |ξ|)−|γ|
pour tout ε ∈ [0, 1] et tout ξ ∈ RN. On en déduit queϕ(εξ)σ(x, ξ)
∣∣∣ ε ∈ [0, 1]
estune partie bornée de Amplm. Il existe donc en particulier M ∈ R tel que
supj∈N
p(m)α,β,K(σ − σ j) ≤M

506 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
On en déduit que
p(m+1)K,α,β (σ j − σ) ≤
Mj
ce qui montre que (σ j)∞j=1 converge vers σ dans Amplm+1. Or σ j ∈ Ampl00, ceci
montre que Ampl00 est dense dans Amplm pour la topologie induite par Amplm+1.On peut donc prolonger f de manière unique en une fonction fm : Amplm
→
F qui est continue pour la topologie induite par Amplm+1. Comme l’inclusionAmplm
→ Amplm+1 est continue, la fonction fm est aussi continue pour la topologiede Amplm.
18.4.3. D
Soient n,N ∈N et U un ouvert deRn. On appelle fonction de phase sur U×RN toutefonction continue Φ : U ×RN
→ R satisfaisant
I : Φ est indéfiniment dérivable sur U × (RN\ 0).
II : Φ(x, tξ) = tΦ(x, ξ) pour tout x ∈ U tout ξ ∈ RN et tout t > 0.
III : gradx,ξΦ , 0 si ξ , 0 où gradx,ξΦ est le gradient de Φ par rapport à x et àξ, en d’autre mots Φ n’a pas de points critiques en dehors de U × 0.
18.4.4. L
Soit Φ une fonction de Phase sur U × RN. Il existe un opérateur différentiel du premierordre
(174) L =n∑
j=1
σ j(x, ξ)∂∂ξ j+
N∑j=1
τ j(x, ξ)∂∂x j+ c(x, ξ)
sur U × (RN\ 0) tel que
tLeiΦ = eiΦ
avec σ j ∈ Ampl0(U ×RN) et c, τ j ∈ Ampl−1(U ×RN) pour tout 1 ≤ j ≤ N.
D. Construisons d’abord un opérateur
(175) M0 =
N∑j=1
α j∂∂ξ j+
n∑j=1
β j∂∂x j
avec M0eiΦ = eiΦ. Les α j et les β j son à déterminer. On a
M0eiΦ =
iN∑
j=1
α j∂Φ∂ξ j+ i
n∑j=1
β j∂Φ∂x j
eiΦ
La somme
ω(x, ξ) :=N∑
j=1
|ξ|2(∂Φ∂ξ j
)2
+
n∑j=1
(∂Φ∂x j
)2

18.4. DISTRIBUTIONS ET OPÉRATEURS DE FOURIER 507
définit une fonction homogène de degré 2 dans la variable ξ sur U × RN. Vu lacondition (III) dans la définition 18.4.3 et vu queΦ est à valeurs réels, on aω(x, ξ) , 0sur U × (RN
\ 0). On peut alors poser
α j = (iω)−1|ξ|2
∂Φ∂ξ j
et β j = (iω)−1 ∂Φ∂x j
L’opérateur M0 défini dans (175) avec ce choix de α j et β j satisfait M0eiΦ = eiΦ
par construction. Choisissons une fonction χ ∈ C∞(RN) qui vaut 0 sur un certainvoisinage de l’origine de RN et 1 en dehors d’une certaine partie compacte de RN.L’opérateur
M = χM0 + (1 − χ)
a aussi la propriété que MeiΦ = eiΦ. En effet
MeiΦ = χM0eiΦ + (1 − χ)eiΦ = χeiΦ + (1 − χ)eiΦ = eiΦ
Posons L := tM, et vérifions que L est bien de la forme (174). En effet on a
L =n∑
j=1
−χα j∂∂ξ j+
N∑j=1
−χβ j∂∂x j+ c(x, ξ) + (1 − χ) −
N∑j=1
∂χα j
∂ξ j−
n∑j=1
∂χβ j
∂x j
Comme les fonctions
(1 − χ) et∂χ∂ξ j
α j
sont à support compact, on a bien
σ j(x, ξ) := χ(ξ)α j(x, ξ) ∈ Ampl0
τ j(x, ξ) := χ(ξ)β j(x, ξ) ∈ Ampl−1
et
c(x, ξ) := (1 − χ) −N∑
j=1
∂χα j
∂ξ j−
n∑j=1
∂χβ j
∂x j∈ Ampl−1
ce qui démontre le lemme.
18.4.5. T
Soit Φ : U × RN→ R une fonction de phase. Pour tout σ ∈ Ampl00 et tout u ∈ C∞00(U)
posons
(176) 〈A(σ),u〉 :="
eiΦ(x,ξ)σ(x, ξ)u(x)dξdx
Les assertions suivantes sont vraies :
I : La forme linéaire u 7→ 〈A(σ),u〉 est une distribution d’ordre 0.
II : La fonction A : Ampl00 → D′(U) est continue pour la topologie faible sur
D′(U), et il existe une unique extension continue de A à Ampl.
III : Pour tout σ ∈ Amplm et tout k ∈ N0 avec m + N < k, la distribution A(σ) estd’ordre k.

508 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
D. La double intégrale (176) fait un sens, vu que l’intégrale∫eiΦ(x,ξ)σ(x, ξ)dξ
existe et dépend continument de x, par le théorème de la convergence dominée deLebesgue, et les hypothèses sur σ. Comme u est à support compact, l’intégrale"
eiΦ(x,ξ)σ(x, ξ)dξu(x)dx
existe. Ainsi〈A(−),−〉 : Ampl00 ×C∞00(U)→ C
est bien défini. Montrons que u 7→ 〈A(σ),u〉 est continu. Soit (u j)∞j=1 une suite deD(U) qui converge vers 0. Par le théorème 18.2.26 il existe un compact K ⊆ U telque supp u j ⊆ K pour tout j ∈N. Pour tout ε > 0 il existe j0 ∈N, tel que
supx∈U|u j(x)| < ε
pour tout j ≥ j0. Par définition de Ampl00 il existe R ∈ R tel que σ(x, ξ) = 0 pourtout x ∈ K et tout ξ ∈ RN avec |ξ| ≥ R. On estime∣∣∣∣⟨A(σ),u j
⟩∣∣∣∣ = ∣∣∣∣∣" eiΦ(x,ξ)σ(x, ξ)u j(x)dξdx∣∣∣∣∣
≤
"|σ(x, ξ)|
∣∣∣u j(x)∣∣∣ dξdx
≤ Vol(B(0,R)) · Vol(K) · ε
ce qui montre que A(σ) est une distribution d’ordre 0. Afin de montrer (II), fixonsm ∈ R et montrons que A est continu sur Ampl00 pour la topologie induite parAmplm. La proposition 18.4.2 premettra de conclure. Soit (σ j)∞j=1 une suite dansAmpl00 qui tend vers 0 pour la topologie induite par Amplm. Il faut montrer quepour u ∈ C∞00(U) fixé, la suite ⟨
A(σ j),u⟩∞
j=1
tend vers 0. Choisissons un opérateur différentiel L sur U × (RN\ 0) satisfaisant
les propriétés ennoncées dans le lemme 18.4.4. On obtient"eiΦ(x,ξ)σ j(x, ξ)u(x)dxdξ =
" (tLeiΦ(x,ξ)
)σ(x, ξ)u(x)dxdξ
=
"eiΦ(x,ξ)L
(σ j(x, ξ)u(x)
)dxdξ
et donc, en répetant le calcul ci dessus
(177)"
eiΦ(x,ξ)σ(x, ξ)u(x)dxdξ ="
eiΦ(x,ξ)Lk(σ j(x, ξ)u(x)
)dxdξ
pour tout k ∈N. L’opérateur différentiel Lk, vu comme opérateur
Lk : Amplm(U ×RN)→ Amplm−k(U ×RN)
est continu vu 18.3.12. Soit ε > 0. Il existe j0 ∈N tel que
supx∈K
supξ∈RN
(1 + |ξ|)−m+k∣∣∣Lkσ j(x, ξ)u(x)
∣∣∣ < ε

18.4. DISTRIBUTIONS ET OPÉRATEURS DE FOURIER 509
pour tout j ≥ j0, où K := supp u. Ainsi on trouve, en choisissant k > m +N∣∣∣∣⟨A(σ j),u⟩∣∣∣∣ = ∣∣∣∣∣" eiΦ(x,ξ)Lk
(σ j(x, ξ)u(x)
)dxdξ
∣∣∣∣∣≤
" ∣∣∣∣Lk(σ j(x, ξ)u(x)
)∣∣∣∣ dxdξ
≤ ε · Vol(K) ·∫
1(1 + |ξ|)−m+k
dξ
et comme−m+k > N cette dernière intégrale converge, ce qui montre que⟨A(σ j),u
⟩tend vers 0, et donc (II). Cette dernière estimation montre aussi que l’intégrale"
eiΦ(x,ξ)Lk(σ(x, ξ)u(x)
)dxdξ
converge dans le sens usuel, et donc que A(σ) est d’ordre k.
18.4.6. D
Soient U ⊆ Rn un ouvert,Φ : U×RN→ R une fonction de phase et σ ∈ Amplm(U×
RN). On appelle distribution de Fourier de phase Φ et d’amplitude σ et on note AΦ(σ)la distribution sur U définie par
〈AΦ(σ),u〉 ="
eiΦ(x,ξ)Lk(σ(x, ξ)u(x)
)dxdξ
où k est un entier, k > N +m, et où L est l’opérateur donné dans 18.4.4.
18.4.7. R
La démonstration de 18.4.2 montre en particulier que pour σ ∈ Ampl on a
(178) 〈AΦ(σ),u〉 = limj→∞
"eiΦ(x,ξ)ϕ( 1
jξ)σ(x, ξ)u(x)dξdx
où ϕ ∈ C∞00(RN) est une fonction qui vaut 1 dans un certain voisinage de 0.
18.4.8. R
Le théorème 18.4.5 assure que cette définition fait un sens. On peut aller un pasplus loin, et faire dépendre la phase Φ et l’amplitude σ d’un paramètre y, qui ale droit de se balader dans un ouvert V ⊆ Rn. Interpretant
⟨AΦ(y)(σ(y)),u
⟩comme
fonction de y, on trouve un opérateur TΦ(σ) deD(U) vers CV. Si Φ et σ dépendentd’une bonne manière de y, à savoir si Φ = Φ(x, y, ξ) est une phase sur U × V ×RN
et si σ = σ(x, y, ξ) est une amplitude, alors TΦ(σ) s’interprète de manière naturellecomme opérateur TΦ(σ) : D(U)→D′(V).
18.4.9. D
510 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Soient U ⊆ Rn et V ⊆ Rp des ouverts, et voyons U ×V comme ouvert de Rn+p. SoitΦ : U × V ×RN
→ R une fonction de phase et σ ∈ Ampl(U × V ×RN). On appelleopérateur de Fourier de phase Φ et d’amplitude σ l’opérateur TΦ(σ) : D(U) → D′(V)défini par
〈TΦ(σ)u, v〉 = 〈AΦ(σ), v ⊗ u〉
18.4.10. R
Attention : Si Φ = Φ(x, y, ξ) est une phase sur U×V ×RN, alors pour un y ∈ V fixé,la fonction (x, ξ) 7→ Φ(x, y, ξ) n’est pas nécessairement une phase sur U×RN. AinsiΦ(x, y, ξ) n’est pas simplement une phase sur U ×RN qui dépend d’un paramètrey, et on ne peut pas considérer TΦ(σ)u comme une "vraie" fonction de y.
18.4.11. D
Soit U ⊆ Rn un ouvert et soit f une distribution ou une fonction sur U. On appellesupport singulier de f et on note sing supp f le complément dans U de l’ensemble
x ∈ U | il existe un voisinage ouvert V de X tel que f |V ∈ C∞(V)
18.4.12. R
Le support singulier de f est par définition un fermé de U. Si f est une distribution,alors on dit que f |V es de classe C∞ et on note f |V ∈ C∞(V) s’il existe une fonctionf ∈ C∞(V) telle que
⟨f ,u
⟩=
∫f (x)u(x)dx pour tout u ∈ D(U).
18.4.13. T
Soient U ⊆ Rn un ouvert. SoitΦ : U×RN→ R une fonction de phase et σ ∈ Amplm(U×
RN). Notons
SΦ :=x ∈ U
∣∣∣ ∃ξ ∈ RN avec gradξΦ(x, ξ) = 0
Alors sing supp AΦ(σ) ⊆ SΦ.
D. Soit x ∈ U \ SΦ et soit V un voisinage de x dans U qui nerencontre pas le fermé SΦ. Par hypothèse on a gradξΦ(z, ξ) , 0 pour tout ξ ∈ RN
et pour tout z ∈ V. La fonction Ψ(z) : ξ → Φ(z, ξ) est donc une fonction dephase sur 0 × RN quelque soit z ∈ V. Ici, 0 est un ouvert de R0. La fonctionτ(z) : ξ 7→ σ(z, ξ) est évidemment un élément de Amplm(0 × RN). On peut doncconsidérer la distribution de Fourier AΨ(z)τ(z). C’est une distribution sur 0. Pourtout v ∈ D(0) on a par définition⟨
AΨ(z)(τ(z)), v⟩=
∫Rn
∫0
eiΦ(z,ξ)Lkz
(σ(z, ξ)v(y)
)dydξ
= v(0)∫Rn
eiΦ(z,ξ)Lkz
(σ(z, ξ)
)dξ

18.4. DISTRIBUTIONS ET OPÉRATEURS DE FOURIER 511
où k est un entier plus grand que m + N et où Lz est un opérateur différentielsur 0 ×RN ayant les propriétés ennoncées dans le lemme 18.4.4 pour la fonctionde phase Ψ(z). Vu la construction de Lz dans la démonstration de 18.4.4 on peutsupposer que la fonction (z, ξ) 7→ Lzσ(z, ξ) est de classe C∞. Soit α un multi–indicede dimension n, et choisissons k > m +N + |α|. Par le théorème de la convergencedominée on a
∂αz⟨AΨ(z)(τ(z)), v
⟩= v(0)
∫Rn∂αz
(eiΦ(z,ξ)Lk
z
(σ(z, ξ)
))dξ
La fonction f : V → C définie par f (z) =⟨AΨ(z)(τ(z)), 10
⟩est donc une fonction de
classe C∞. Soit ϕ ∈ C∞00(RN) une fonction qui vaut 1 dans un certain voisinage de0 ∈ RN. On calcule finalement pour u ∈ D(V)∫
Vf (z)u(z)dz =
∫V
⟨AΨ(z)(τ(z)), 10
⟩u(z)dz
=
∫V
∫Rn
eiΦ(z,ξ)Lkz
(σ(z, ξ)
)u(z)dξdz
=
∫Rn
∫V
eiΦ(z,ξ)Lkz
(σ(z, ξ)
)u(z)dzdξ
Cette permutation est légitime, vu que l’intégrale double converge absulumentpour k suffisamment grand. Soit L un opérateur différentiel sur V×RN satisfaisantles conclusions du lemme 18.4.4. Pour tout ν ∈ Ampl00(V ×RN) on a∫
Rn
∫V
eiΦ(z,ξ)Lkz
(ν(z, ξ)
)u(z)dzdξ =
∫Rn
∫V
tLkzeiΦ(z,ξ)ν(z, ξ)u(z)dzdξ
=
∫Rn
∫V
eiΦ(z,ξ)ν(z, ξ)u(z)dzdξ
=
∫Rn
∫V
tLkeiΦ(z,ξ)ν(z, ξ)u(z)dzdξ
=
∫Rn
∫V
eiΦ(z,ξ)Lk(ν(z, ξ)u(z)
)dzdξ
Comme ces intégrales, vues comme fonctions en ν à valeurs complexes sur Ampl00sont continues par l’assertion (II) du théorème 18.4.5 on a∫
Rn
∫V
eiΦ(z,ξ)Lkz
(σ(z, ξ)
)u(z)dzdξ =
∫Rn
∫V
eiΦ(z,ξ)Lk(σ(z, ξ)u(z)
)dzdξ
par la proposition 18.4.2, ce qui montre∫f (z)u(z)dz = 〈AΦ(σ),u〉
par définition de AΦ(σ), et alors que sing supp AΦ(σ) ∩ V = ∅, et comme V étaitarbitraire, on a sing supp AΦ(σ) ⊆ SΦ comme ennoncé.

512 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.5. Définition et exemples d’opérateurs pseudo–différentiels
Pour toute cette section, nous fixons un nombre naturel n et un ouvert U nonvide de Rn.
18.5.1. D
Soit U un ouvert deRn. On appelle symbole d’ordre m toute amplitudeσ ∈ Amplm(U×Rn), et on note
Symbm(U) = Amplm(U ×Rn)
18.5.2. R
On note de manière analogue
Symb(U) :=⋃m∈R
Symbm(U) et Symb−∞(U) :=⋂m∈R
Symbm(U)
et on appelle symbole tout élément de Symb(U). Tout les résultats sur les amplitudessont évidemment vraies pour les symboles, quitte à spécialiser N = n.
18.5.3. P
Soit m ∈ R, σ ∈ Symbm(U) et soit u ∈ C∞00(U). Alors la fonction
(179) Pσ(u) : x 7→∫χx(ξ)σ(x, ξ)u(ξ)dξ
est indéfiniment dérivable.
18.5.4. R
La transformée de Fourier u de u ∈ C∞00(U) est par définition la transformée deFourier de la fonction u! ∈ C∞00(Rn) définie par
u!(x) =
u(x) si x ∈ U0 sinon
En particulier u est un élément de l’espace de Schwarz S(Rn).
D. Soit β un multi–indice, et montrons que DβPσ(u) existe. Pourcela, on va utiliser le théorème de la convergence dominée de Lebesgue. Fixonsx0 ∈ U et un voisinage compact K de x0. Pour tout ξ ∈ Rn, la fonction v : U → Cdéfinie par
v : x 7→ χx(ξ)σ(x, ξ)u(ξ)

18.5. DÉFINITION ET EXEMPLES D’OPÉRATEURS PSEUDO–DIFFÉRENTIELS 513
est indéfiniment dérivable, vu que u ∈ S(Rn) et les hypothèses sur σ. Aussi par lefait que u ∈ S(U) on a pour tout multi–indice α, que la fonction
ξ 7→∣∣∣ξαu(ξ)
∣∣∣est bornée, quelque soit α. La fonction u décroit donc plus rapide que n’importequelle fonction rationelle. Choisissons N ∈N avec N > m+n+1. Par ce qui précède,il existe C1 ∈ R tel que ∣∣∣u(ξ)
∣∣∣ < C1(1 + |ξ|)−N
pour tout ξ ∈ Rn. D’autre part, il existe par hypothèse C2 ∈ R tel que∣∣∣∣Dβxp(x, ξ)
∣∣∣∣ < C2(1 + |ξ|)m
pour tout ξ ∈ Rn et tout x ∈ K. Ces deux éstimations mises ensemble donnent∣∣∣∣Dβxσ(x, ξ)u(ξ)
∣∣∣∣ < C1C2(1 + |ξ|)m−N≤ C1C2(1 + |ξ|)−(n+1)
La fonction C1C2(1 + |ξ|)−(n+1) est intégrable. On a majoré∣∣∣∣Dβ
xσ(x, ξ)u(ξ)∣∣∣∣ par une
fonction intégrable qui ne dépend pas de x ∈ K. Le théorème de la convergencedominée de Lebesgue nous assure que la β–ème dérivée de Pσ(u) par rapport à lavariable x existe dans un voisinage de x0 et vaut
(180) DβxPσ(u)(x) =
∫Dβ
xχx(ξ)σ(x, ξ)u(ξ)dξ
ce qui montre que la fonction Pσ(u) est indéfiniment dérivable.
18.5.5. P
Soit σ ∈ Symb(U). L’application Pσ : D(U)→ E(U) définie par
Pσ(u)(x) =∫χx(ξ)σ(x, ξ)u(ξ)dξ
est un opérateur linéaire continu.
D. La linéarité découle immédiatement de la linéarité de latransformation de Fourier et de de la linéarité de l’intégration. Vérifions doncla continuité. On utilise la caracterisation (IV) de la proposition 18.2.13. Soit K ⊆ Ucompact et α un multi–indice. Il faut trouver M ∈ R et un ensemble fini de multi–indices F tel que
supx∈K|∂αPσu(x)| ≤
∑γ∈F
supx∈K|∂γu(x)|
pour tout u ∈ DK(U). Ceci établira que Pσ est continu sur DK(U), et comme K estarbitraire que Pσ est continu surD(U), par la proposition 18.2.24. On calcule
supx∈K|∂γu| · Vol(K) sup
x∈K|∂αPσu(x)| = sup
x∈K
∣∣∣∣∣∂α ∫χx(ξ)σ(x, ξ)u(ξ)dξ
∣∣∣∣∣≤ sup
x∈K
∣∣∣∣∣∫ ∂αx(χx(ξ)σ(x, ξ)
)u(ξ)dξ
∣∣∣∣∣≤
∫C(1 + |ξ|)m−|α|
∣∣∣u(ξ)∣∣∣ dξ

514 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
pour un certain C ∈ R, puisque χx(ξ)σ(x, ξ) est un symbole d’ordre m. Il existe unpolynôme en n variables y1, . . . , yn à coefficients positifs réels
P =∑γ∈F
cγyγ
tel que
P(ξ) > (1 + |ξ|)m−|α|+n+1
pour tout ξ ∈ Rn. On a donc
supx∈K|∂αPσu(x)| ≤
∫ ∣∣∣∣∣∣∣∣ C(1 + |ξ|)n+1
∑γ∈F
cγDγu(ξ)
∣∣∣∣∣∣∣∣ dξ≤
∫C
(1 + |ξ|)n+1
∑γ∈F
cγ∣∣∣∣Dγu(ξ)
∣∣∣∣ dξMais
|Dγu(ξ)| ≤ supx∈K|∂γu| · Vol(K)
et alors
supx∈K|∂αPσu(x)| ≤
∫C · Vol(K)(1 + |ξ|)n+1 dξ ·
∑γ∈F
cγ supx∈K|∂γu|
≤ M ·∑γ∈F
supx∈K|∂γu|
pour M ∈ R suffisamment grand.
18.5.6. D
Soit m ∈ R ∪ −∞ et soit σ ∈ Symbm(U). L’opérateur continu Pσ : D(U) → E(U)défini par
Pσ(u)(x) =∫χx(ξ)σ(x, ξ)u(ξ)dξ
s’appelle opérateur pseudo–différentiel d’ordre m associé au symbole σ. On note Ψm(U)l’ensemble de toutes les opérateurs pseudo–différentiels d’ordre m sur U.
18.5.7. R
La proposition 18.5.3 nous assure qu’on a Pσu ∈ D(U), et la proposition 18.5.5 nousassure que Pσ est bien un opérateur linéaire continu. Clairement σ 7→ Pσ est uneapplication linéaire, surjective par définition. On note Ψ(U) l’ensemble de toutesles opérateurs pseudo–différentiels sur U.
18.5.8. R

18.5. DÉFINITION ET EXEMPLES D’OPÉRATEURS PSEUDO–DIFFÉRENTIELS 515
Un opérateur pseudo–différentiel est un cas particulier d’un opérateur de Fourier.En effet, on a
Pσu(x) =∫χx(ξ)σ(x, ξ)u(ξ)dξ =
1(2π)n
"χξ(x − y)σ(x, ξ)u(y)dydξ
ce qui montre que Pσ = TΦ(τ) où Φ est la fonction de phase Φ(x, y, ξ) = 〈x − y, ξ〉et où τ ∈ Ampl(U × U × Rn) est l’amplitude définie par τ(x, y, ξ) = (2π)−nσ(x, ξ).Le fait que Pσu est une fonction et non seulement une distribution n’est pas unepropriété générale des opérateurs de Fourier, mais quelques conditions légères surla phase (voir Shubin [55] chapitre I §2.2) font l’affaire.
18.5.9. P
L’application P : Symb(U) → Ψ(U) définie par σ 7→ Pσ est un isomorphisme d’espacesvectoriels.
D. Il faut seulement démontrer l’injectivité de P. Soit donc σ ∈Symb(U) et supposons que Pσ est l’opérateur nul, c’est-à-dire Pσ(u)(x) = 0 pourtout x ∈ U et tout u ∈ C∞00(U). Donc par définition∫
χx(ξ)σ(x, ξ)u(ξ)dξ = 0 ∀x ∈ U,∀u ∈ C∞00(U)
En d’autre mots, la transformée de Fourier de la distribution temperée χx(ξ)σ(x, ξ)est nulle, ce qui montre, puisque χx(ξ)σ(x, ξ) est continu, que χx(ξ)σ(x, ξ) = 0 pourtout x et tout ξ, et donc que σ = 0.
18.5.10. E
Soit U ⊆ Rn. Comme on a déjà dit, si P : C∞00(U) → C∞00(U) est un opérateurdifférentiel, alors P est aussi un opérateur pseudo–différentiel. En effet, lorsque
P : u 7→ Pu =∑|α|≤k
aαDαu
alors
Pu(x) =∑|α|≤k
aα(x)Dαx
∫χx(ξ)u(ξ)dξ
=
∫ ∑|α|≤k
aα(x)ξαχx(ξ)u(ξ)dξ
=
∫χx(ξ)σ(x, ξ)u(ξ)dξ
où
σ(x, ξ) =∑|α|≤k
aα(x)ξα

516 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Montrons que σ est un symbole. Soient donc α, β des multi indices et K ⊆ U unepartie compacte. Il existe
C := max|γ|≤k
supx∈K
∣∣∣Dβaγ(x)∣∣∣
Et d’autre part
Dαξγ =
γ!
(γ−α)!ξγ−α si γ ≥ α
0 sinon
donc de toute façon
|Dαξγ| ≤ γ!(1 + |ξ|)|γ|−|α|
Ces estimations mises ensemble donnent ce qu’on veut :
supx∈K
∣∣∣∣DβxDα
ξσ(x, ξ)∣∣∣∣ = sup
x∈K
∣∣∣∣∣∣∣∣DβxDα
ξ
∑|γ|≤k
aγ(x)ξγ
∣∣∣∣∣∣∣∣= sup
x∈K
∣∣∣∣∣∣∣∣∑|γ|≤k
Dβxaγ(x)Dα
ξξγ
∣∣∣∣∣∣∣∣≤ sup
x∈K
∑|γ|≤k
∣∣∣∣Dβxaγ(x)
∣∣∣∣ ∣∣∣Dαξξ
γ∣∣∣
≤
∑|γ|≤k
Cγ!(1 + |ξ|)|γ|−|α|
≤ (k + 1)nCk! · (1 + |ξ|)k−|α|
ce qui montre que σ(x, ξ) ∈ Symbk(U).
18.5.11. P
Soit U ⊆ Rn ouvert, K ∈ C∞(U ×U) tel que la condition suivante est vérifiée :
(H) : Pour tout compact F ⊆ U il existe un compact G ⊆ U tel que K(x, y) = 0 pourtout x ∈ F et tout y ∈ U \ G.
Alors l’opérateur P : D(U)→ E(U) défini par
Pu(x) =∫
K(x, y)u(y)dy
est un opérateur pseudo–différentiel d’ordre −∞ sur U.

18.5. DÉFINITION ET EXEMPLES D’OPÉRATEURS PSEUDO–DIFFÉRENTIELS 517
D. On commence par introduire la formule d’inversion de Fou-rier, et on permute les intégrales :
Pu(x) =
∫K(x, y)u(y)dy
=
∫K(x, y)
∫χy(ξ)u(ξ)dξ dy
=
"χy(ξ)K(x, y)dy u(ξ)dξ
Cette permutation est légitime, vu que u ∈ S(U) et vu que K(x, y) est à supportcampact dans la variable y. On poursuit le calcul :
Pu(x) =
"χy(ξ)K(x, y)dy u(ξ)dξ
=
∫χx(ξ)
∫χξ(y − x)K(x, y)dy u(ξ)dξ
=
∫χx(ξ)
∫χξ(y)K(x, y + x)dy u(ξ)dξ
=
∫χx(ξ)σ(x, ξ)u(ξ)dξ
où
σ(x, ξ) =∫χξ(y)K(x, y + x)dy
Reste à verifier que σ(x, ξ) ∈ Symbm. Pour tout multi–indices α, β, γ on a∣∣∣∣∂αξ∂βx(ξγσ(x, ξ))∣∣∣∣
=
∣∣∣∣∣∫ ∂αξ∂βxχξ(y)∂γyK(x, x + y)dy
∣∣∣∣∣≤
∫ ∣∣∣∣yα∂βx∂γyK(x, x + y)∣∣∣∣ dy
La fonction (x, y) 7→ yα∂βx∂γyK(x, x+y) satisfait aussi la condition (H). Par le théorème
de la convergence dominée, la dernière integrale est est une fonction continue enx. Pour tout compact K ⊆ U, et tout multi–indices α, β et γ on a donc
supx∈K
∣∣∣∣∂αξ∂βx(ξγσ(x, ξ))∣∣∣∣ < ∞
En d’autre mots, la fonction
ξ→ supx∈K
∣∣∣∣∂αξ∂βxσ(x, ξ)∣∣∣∣
décroit plus vite que n’importe quelle fonction rationelle, ce qui montre qu’il existepour n’importe quel m ∈ R un C ∈ R avec∣∣∣∣∂αξ∂βxσ(x, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)m
pour tout x ∈ K. Ainsi σ ∈ Symb−∞(U) et P ∈ Ψ−∞(U).

518 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.5.12. C
Soit U ⊆ Rn ouvert, ϕ ∈ C∞00(U). Alors P : u 7→ u ∗ϕ est un opérateur pseudo–différentiel.
D. C’est la proposition 18.5.11 avec K(x, y) = ϕ(x − y).
18.6. Expansion asymptotique d’un symbole
On a déja remarqué que Symb(U) est un C–espace vectoriel. Nous examinonsdans la suite de manière un peu plus approfondi l’algèbre Symb(U), la multipli-cation étant la multiplication ponctuelle de fonctions. Pour cela, fixons pour toutecette section un nombre naturel n ∈ N et un ouvert U ⊆ Rn. On aimerait bien uneformule du genre
(181) Tστ = TσTτce qui fera de σ 7→ Tσ un homomorphisme d’algèbres. Malhereusement l’équation(181) est fausse, mais, dans un sens à préciser, pas loin d’être vraie. Le résultatprincipal de cette section est le théorème 18.8.3, qui justement exprime jusqu’àquel point la formule (181) est correcte.
18.6.1. D
Soit σ ∈ Symbm(U), et supposons qu’il existe une suite de nombres réels (m j)∞j=1
avec m0 = m et m j → −∞ pour j→∞, et des symboles σ j ∈ Symbm j (U) tels que
σ −N∑
j=0
σ j ∈ SymbmN+1 (U)
pour tout j ∈N0. Alors on dit que (σ j)∞j=0 est une expansion asymptotique de σ, et onnote
σ ∼∞∑j=0
σ j
18.6.2. T
Soit (m j)∞j=1 une suite de nombres réels avec m j → −∞ pour j → ∞, et soit σ j ∈
Symbm j (U). Alors il existe σ ∈ Symbm0 (U) tel que
σ ∼∞∑j=0
σ j
De plus, si τ est un autre symbole avec cette propriété, alors σ − τ ∈ Symb−∞(U).

18.6. EXPANSION ASYMPTOTIQUE D’UN SYMBOLE 519
D. Sans perte de généralité nous pouvons supposer que (m j)∞j=1est une suite décroissante, quitte à reordonner les m j. Soit ψ : Rn
→ [0, 1] unefonction lisse telle que
ψ(ξ) =
1 si |ξ| > 20 si |ξ| < 1
Considérons deux multi indices α et β, et j ∈ N. J’affirme qu’il existe C jαβ ∈ R telque pour tout 1 ≥ ε > 0 on ait
(182)∣∣∣∣Dα
ξDβx
(ψ(εξ)σ j(x, ξ)
)∣∣∣∣ ≤ C jαβ(1 + |ξ|)−|α|+m j
En effet pour un multi indice α non nul on a Dαξψ(ξ) = 0 si |ξ| < 1 ou |ξ| > 2 par
définition de ψ. Il existe donc
Cα := 4|α| supξ∈Rn
∣∣∣Dαψ(ξ)∣∣∣
Par conséquent
∣∣∣Dαψ(εξ)∣∣∣
= 0 si |ξ| < 1
ε
≤
(ε4
)|α|Cα si 1
ε ≤ |ξ| ≤2ε
= 0 si 2ε < |ξ|
Si 1ε ≤ |ξ| ≤
2ε , alors ε ≤ 4
1+|ξ| , et l’estimation ci dessus donne
(183)∣∣∣Dαψ(εξ)
∣∣∣ ≤ Cα(1 + |ξ|)−|α|
Cette éstimation reste évidemment vraie pour α = 0, avec la constante C0 := 1. Onpeut maintenant estimer ∣∣∣∣Dα
ξDβx
(ψ(εξ)σ j(x, ξ)
)∣∣∣∣=
∣∣∣∣Dαξ
(ψ(εξ)Dβ
xσ j(x, ξ))∣∣∣∣
=
∣∣∣∣∣∣∣∑γ≤α(αγ
)Dα−γξ
(ψ(εξ)
)DγξDβ
x
(σ j(x, ξ)
)∣∣∣∣∣∣∣≤
∑γ≤α
(αγ
) ∣∣∣∣Dα−γξ
(ψ(εξ)
)DγξDβ
x
(σ j(x, ξ)
)∣∣∣∣Vu (183) et l’hypothèse que σ j ∈ Symbm j , il existent des constantes Cαγ et C jβγ tellesque
· · · ≤
∑γ≤α
(αγ
)Cαγ(1 + |ξ|)−|α|+|γ|C jβγ(1 + |ξ|)m j−|γ|
=∑γ≤α
(αγ
)CαγC jβγ(1 + |ξ|)−|α|+m j

520 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Si on pose
C jαβ :=∑γ≤α
(αγ
)CαγC jβγ
on obtient bien l’estimation (182). Soit (ε j)∞j=0 une suite de nombres réels telle queet telle que
1 > ε0 > ε j > ε j+1 > 0 pour tout j ∈N0
ε j <1
2 jC jαβpour tout α, β tel que
∣∣∣α + β∣∣∣ ≤ j
limj→∞
ε j = 0
Par définition de ψ on a ψ(ε jξ) = 0 si 1 + |ξ| ≤ ε−1j , et donc
∣∣∣∣DαξDβ
x
(ψ(εξ)σ j(x, ξ)
)∣∣∣∣ (182)≤ C jαβ(1 + |ξ|)−|α|+m j
= C jαβ(1 + |ξ|)−1(1 + |ξ|)−|α|+1+m j(184)
≤ C jαβε j(1 + |ξ|)−|α|+1+m j
≤ 2− j(1 + |ξ|)−|α|+1+m j
Ceci étant, définissons la fonction σ : U ×Rn→ C postulée dans l’énnoncé par
(185) σ(x, ξ) =∞∑j=0
ψ(ε jξ)σ j(x, ξ)
Soit K ⊆ U × Rn compact, et N ∈ N tel que ε−1N > max|ξ| | (x, ξ) ∈ K. Pour tout
j ≥ N on a ψ(ε jξ) = 0, et donc
σ(x, ξ) =N∑
j=0
ψ(ε jξ)σ j(x, ξ)
pour tout x, ξ ∈ K. Ceci montre que la somme (185) converge absolument sur toutcompact de U ×Rn, et que σ est bien une fonction lisse.Pour deux multi indices fixés α0, β0 choisissons j0 ∈ N suffisamment grand pourque j0 ≥
∣∣∣α0 + β0
∣∣∣ et m j0 + 1 ≤ m0. Posons
σ(x, ξ) =j0−1∑j=0
ψ(ε jξ)σ j(x, ξ)
︸ ︷︷ ︸I(x,ξ)
+
∞∑j= j0
ψ(ε jξ)σ j(x, ξ)
︸ ︷︷ ︸J(x,ξ)
La fonction (x, ξ) 7→ ψ(ε jξ) est facilement vérifiée d’etre un élément de Symb0(U),et on a alors I ∈ Symbm0 (U) puisque I est une somme finie dans Symbm0 (U), tenant

18.6. EXPANSION ASYMPTOTIQUE D’UN SYMBOLE 521
compte de la proposition 18.3.4. Quant à la partie J, on a par (184) que∣∣∣∣DαξDβ
x
(ψ(εξ)J(x, ξ)
)∣∣∣∣ ≤ ∞∑j= j0
∣∣∣∣DαξDβ
x
(ψ(εξ)σ j(x, ξ)
)∣∣∣∣≤
∞∑j= j0
2− j(1 + |ξ|)−|α0 |+1+m j
≤
∞∑j= j0
2− j(1 + |ξ|)−|α0 |+m0
= 2− j+1(1 + |ξ|)−|α0 |+m0
ce qui montre que J ∈ Symbm0 (U), et donc σ ∈ Symbm0 (U). Il reste à vérifier que(σ j)∞j=0 est une expansion asymptotique de σ. Pour cela, prenons N ∈N et obervonsque
σ(xξ) −N−1∑j=0
σ j(x, ξ) =
∞∑j=0
ψ(ε jξ)σ j(x, ξ) −N−1∑j=0
σ j(x, ξ)
=
N−1∑j=0
(ψ(ε jξ) − 1
)σ j(x, ξ) +
∞∑j=N
ψ(ε jξ)σ j(x, ξ)
Le même raisonnement qu’on vient de faire pour montrer que σ ∈ Symbm0 (U)montre que
(186)∞∑
j=N
ψ(ε jξ)σ j(x, ξ) ∈ SymbmN (U)
Les fonctions (ψ(ε jξ) − 1) sont à support compact, et on a alors par la proposition18.3.7 que
(187)(ψ(ε jξ) − 1
)σ j(x, ξ) ∈ Symb−∞(U)
Les relations (186) et (187) mises ensemble donnent
σ(xξ) −N−1∑j=0
σ j(x, ξ) ∈ SymbmN (U)
pour tout N ∈N, ce qui montre justement que
σ ∼∞∑j=0
σ j
Finalement, si τ est un autre symbole avec expansion asymptotique (σ j)∞j=0, alorson a pour tout nombre naturel N
σ − τ =
σ − N−1∑j=0
σ j
−τ − N−1∑
j=0
σ j
∈ SymbmN (U)
Mais vu que m j → −∞, ceci entraine que σ − τ ∈ Symb−∞(U).

522 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.6.3. L
Soit K un voisinage compact de 0 dans R et f ∈ C2(K). Posons A j := supt∈K
∣∣∣ f ( j)(t)∣∣∣ pour
j = 0, 2. Soit r > 0 tel que B(0, r) ⊆ K. Alors
f ′(0)2≤ 4r−2A2
0 + 4A0A2
D. Dans le cas où f ′(0) = 0 on n’a rien à démontrer. Supposonsdonc sans perte de généralité que f ′(0) > 0. Considérons d’abord le cas où r = 1.Posons
∆ :=
1 si 2A2 ≤ f ′(0)
f ′(0)2A2
si 2A2 > f ′(0)
Par hypothèse, ∆ , 0. Remarquons que∣∣∣ f ′(t) − f ′(0)∣∣∣ = ∣∣∣∣∣∣
∫ t
0f ′′(s)ds
∣∣∣∣∣∣ ≤∫ t
0
∣∣∣ f ′′(s)∣∣∣ ds ≤ A2|t|
Si t ∈ [−∆,∆], alors on a 2A2|t| ≤ f ′(0), ce qui entraine 2∣∣∣ f ′(t) − f ′(0)
∣∣∣ ≤ f ′(0) et doncque 2 f ′(t) ≥ f ′(0). On a alors
f (∆) − f (−∆) =∫ ∆
−∆
f ′(t)dt ≥ ∆ f ′(0)
On a aussi 2A0 ≥ f (∆) − f (−∆), et par conséquent
f ′(0) ≤2A0
∆= 2A0 max
2A2
| f ′(0)|, 1
On a donc ou bien f ′(0)2
≤ 4A0A2 ou bien f ′(0)2≤ 4A2
0, ce qui se résume en
f ′(0)2≤ 4A2
0 + 4A0A2
ce qui démontre le lemme dans le cas r = 1. Pour un r > 0 quelconque, on considèrela fonction g(t) = f (rt). On a
B0 := sup−1≤t≤1
|g(t)| = sup−r≤t≤r
| f (t)| ≤ A0
B2 := sup−1≤t≤1
|g′′(t)| = r2 sup−r≤t≤r
| f (t)| ≤ r2A2
Par le cas d’avant on a
r2 f ′(0)2 = g′(0)2≤ 4B4
0 + 4B0B2 ≤ 4A20 + 4r2A0A2
et alorsf ′(0)2
≤ 4r−2A20 + 4A0A2
ce qu’il fallait démontrer.
18.6.4. C
Soient K1,K2 des parties compactes de Rn avec K1 ⊆
K2. Il existe C ∈ R tel que pour toutefonction f de classe C2 dans un voisinage de K2 on ait
B21 ≤ CA0(A0 + A2)

18.6. EXPANSION ASYMPTOTIQUE D’UN SYMBOLE 523
oùA j := sup
x∈K2
∑|α|= j
∣∣∣Dα f (x)∣∣∣ et B1 := sup
x∈K1
∑|α|=1
∣∣∣Dα f (x)∣∣∣
D. Remarquons que
B1 = supx∈K1
∑|α|=1
|Dα f (x)| ≤ supD f (x)(ξ)
∣∣∣∣ x ∈ K1, ξ ∈ Rn, ‖ξ‖ ≤
√n
où D f est la dérivée totale de f . Comme K1 ×B(0,√
n) est compact, il existe x0 ∈ K1
et ξ0 ∈ Rn avec ‖ξ‖ ≤√
n tel que
supx∈K1
∑|α|=1
|Dα f (x)| = D f (x0)(ξ0)
Le lemme 18.6.3 appliqué à la fonction g(t) = f (x0 + tξ0) permet de conclure.
18.6.5. L
Soit (m j)∞j=1 une suite de nombres réels avec m j → −∞ pour j → ∞, et soit σ j ∈
Symbm j (U). Soit τ ∈ C∞(U ×R) et supposons les deux conditions suivantes vérifiées :
I : Pour tout compact K ⊆ U et tout multi indices α, β il existent des nombres réelsC, µ tels que∣∣∣∣Dα
ξDβxτ(x, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)µ pour tout x ∈ K, ξ ∈ Rn
II : Pour tout compact K ⊆ U il existent des suites de nombres réels (µ j)∞j=1 et (C j)∞j=1avec µ j → −∞ pour j→∞ tels que∣∣∣∣∣∣∣∣τ(x, ξ) −
k−1∑j=1
σ j(x, ξ)
∣∣∣∣∣∣∣∣ ≤ Ck(1 + |ξ|)µk pour tout x ∈ K, ξ ∈ Rn
Alors τ est un symbole qui a (σ j)∞j=1 comme expansion asymptotique.
D. Par le théorème 18.6.2 il existe un symbole σ qui admet(σ j)∞j=1 comme expansion asymptotique. Posons h := σ − a, et montrons que h ∈Symb−∞(U). Pour cela, il suffit de montrer que l’assertion suivante est vraie pourtout k ∈N0 :
A(k) : Pour tout partie compacte K de U, tout nombre réel r et tout multi–indices α, βtel que |α + β| = k il existe C ∈ R tel que
supx∈K
∣∣∣∣∂αξ∂βxh(x, ξ)∣∣∣∣ ≤ C(1 + |ξ|)m
pour tout ξ ∈ Rn.
On va montrer que A(k) par récurrence sur k. Par hypothèse (II), il existent dessuites (µ j)∞j=1 et (C(1)
j )∞j=1 dans R avec µ j → −∞ pour j→∞ et tels que
(188)
∣∣∣∣∣∣∣∣τ(x, ξ) −N−1∑j=1
σ j(x, ξ)
∣∣∣∣∣∣∣∣ ≤ C(1)N (1 + |ξ|)µN ∀x ∈ K, ξ ∈ Rn

524 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
pour tout N ∈N. Par définition de l’expansion asymptotique on a pour tout N ∈Nque
σ −N−1∑j=1
σ j ∈ SymbmN (U)
Il existe donc pour tout j ∈N un nombre réel C(2)j tel que
(189)
∣∣∣∣∣∣∣∣σ(x, ξ) −N−1∑j=1
σ j(x, ξ)
∣∣∣∣∣∣∣∣ ≤ C(2)N (1 + |ξ|)mN ∀x ∈ K, ξ ∈ Rn
Soit r ∈ R et choisissons Nr ∈ N suffisamment grand pour que m j < r et µ j < rpour tout j ≥ N. Les inégalités (188) et (189) montrent qu’il existe Cr ∈ R tel que
(190) |h(x, ξ)| ≤ Cr(1 + |ξ|)r∀x ∈ K, ξ ∈ Rn
ce qui montre A(0). Fixons donc k ∈ N, supposons que A(k) est vrai, et montronsque A(k + 1) est vrai.Soit K ⊆ U compact, et soient α, β des multi–indices avec |α + β| = k + 1. Soit K′ unvoisinage compact de K dans U, c’est-à-dire une partie compacte de U telle queK est contenu dans l’interieur de K′. Définissons des parties compactes K1,K2 deU ×Rn par
K1 := K × 0 et K2 := K′ × B(0, 1)
où B(0, 1) désigme la boule de centre 0 et de rayon 1 dansRn. Par le corollaire 18.6.4il existe C(3)
∈ R tel que
(191)(supz∈K1
|∂ηz f (z)|)2
≤ C(3) supz∈K2
∣∣∣ f (z)∣∣∣ sup
z∈K2
∣∣∣ f (z)∣∣∣ + sup
z∈K2
∑|η|=2
∣∣∣∂ηz f (z)∣∣∣
pour toute fonction f qui est de classe C2 dans U, et tout multi–indice η avec|η| = 1. Choisissons des multi–indices γ, δ avec |γ + δ| = k et tels que α ≥ γ et β ≥ δ,et posons hθ(x, ξ) := h(x, ξ + θ). L’inégalité (191) est en particulier vraie pour lesfonctions
∂γξ∂δxhθ(x, ξ) θ ∈ Rn
Comme ∂αξ∂βxhθ(x, ξ)|ξ=0 = ∂αξ∂
βxh(x, θ) l’inégalité (191) devient dans ce cas
(192)(supx∈K|∂αξ∂
βxh(x, θ)|
)2
≤ C(3) sup(x,ξ)∈K2
∣∣∣∣∂γξ∂δxhθ(x, ξ)∣∣∣∣ ·
·
sup(x,ξ)∈K2
∣∣∣∣∂γξ∂δxhθ(x, ξ)∣∣∣∣ + sup
(x,ξ)∈K2
∑|η+ν|=2
∣∣∣∣∂γ+ηξ ∂δ+νx hθ(x, ξ)∣∣∣∣
Par hypothèse de récurrence il existe, quelque soit r ∈ R un nombre réel C(4)r tel
que
supx∈K′
∣∣∣∣∂γξ∂δxhθ(x, ξ)∣∣∣∣ ≤ C(4)
r (1 + |ξ + θ|)r

18.6. EXPANSION ASYMPTOTIQUE D’UN SYMBOLE 525
pour tout ξ, θ ∈ Rn. On trouve ainsi que
sup(x,ξ)∈K2
∣∣∣∣∂γξ∂δxhθ(x, ξ)∣∣∣∣ = sup
ξ∈B(0,1)
supx∈K′
∣∣∣∣∂γξ∂δxhθ(x, ξ)∣∣∣∣
≤ supξ∈B(0,1)
C(4)r−1(1 + |ξ + θ|)r−1
≤ C(4)r−1(2 + |θ|)r−1
≤ C(5)r (1 + |θ|)r
pour une constante C(5)r appropriée. Cette estimation mise dans (192) donne, pour
un certain C(6)r ∈ R
(193)(supx∈K|∂αξ∂
βxh(x, θ)|
)2
≤
C(6)r (1 + |θ|)r
(1 + |θ|)r + supx∈K2
∑|γ+δ|=2
∣∣∣∣∂α+γξ ∂β+δx hθ(x, ξ)
∣∣∣∣
Par hypothèse (I), il existent des nombres réels C(7), µ(7) tels que
(194)∣∣∣∣∂γ+ηξ ∂δ+νx a(x, ξ)
∣∣∣∣ ≤ C(7)(1 + |ξ|)µ(7)
∀x ∈ K, ξ ∈ Rn
Comme σ est un symbole, il existent C(8),µ(8)∈ R tels que
(195)∣∣∣∣∂γ+ηξ ∂δ+νx σ(x, ξ)
∣∣∣∣ ≤ C(8)(1 + |ξ|)µ(8)
∀x ∈ K, ξ ∈ Rn
Les éstimations (194) et (195) montrent qu’il existent C(9), µ(9)∈ R tels que
(196)∣∣∣∣∂γ+ηξ ∂δ+νx h(x, ξ)
∣∣∣∣ ≤ C(9)(1 + |ξ|)µ(9)
∀x ∈ K, ξ ∈ Rn
Cette estimation mise dans (193) montre que pour tout r ∈ R il existe un nombreréel C(10)
r tel que
(197)(supx∈K|∂αξ∂
βxh(x, θ)|
)2
≤ C(10)r (1 + |θ|)r
((1 + |θ|)r + (1 + |θ|)µ
(9))
Comme µ(9) est indépendent de r, on peut aussi trouver pour tout r ∈ R un nombreCr ∈ R tel que
supx∈K|∂αξ∂
βxh(x, θ)| ≤ Cr(1 + |θ|)r
ce qui montre A(k + 1), et termine la démonstration.

526 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.7. Opérateurs proprement supportés
Je rappelle qu’un opérateur P : D(U) → E(U) est dit proprement supporté si lesupport de son noyeau de distribution est une partie propre de U × U (définition18.2.46).On s’interesse au noyeau de distribution d’un opérateur pseudo–différentiel. Soit Pun opérateur pseudo–différentiel et σ son symbole. On a vu que P est un opérateurde Fourier de phase Φ(x, y, ξ) = 〈x − y, ξ〉 et d’amplitude τ(x, y, ξ) = σ(x, ξ). Pardéfinition de l’opérateur P = TΦ(σ) on a
〈TΦ(σ)u, v〉 = 〈AΦ(σ), v ⊗ u〉
où AΦ(σ) est la distribution de Fourier sur U × U de phase Φ est d’amplitudeτ. La distribution K := AΦ(σ) est donc le noyeau de distribution de l’opérateurP : D(U) → D′(U) conformément à la définition 18.2.42. Plus explicitement, oncalcule pour u, v ∈ C∞00(U)
〈Pu, v〉 =∫
Pu(x)v(x)dx
=
"χx(ξ)σ(x, ξ)u(ξ)v(x)dξdx
=
"χξ(x)σ(x, ξ)
∫χξ(y)u(y)dy v(x)dξdx
=
$χξ(x − y)σ(x, ξ)v ⊗ u(x, y)dydξdx
Vu que les combinaisons linéaires de fonctions de type u ⊗ v sont denses dansC∞00(U ×U), le noyeau de distribution K de P est donné par
(198) 〈K,w〉 =$
χξ(x − y)σ(x, ξ)w(x, y)dydξdx
Je rappelle qu’on dit que P est proprement supporté si supp K est une partie proprede U ×U. Voici le truc important :
18.7.1. P
Soit P ∈ Ψ(U). Alors P est proprement supporté si et seulement si pour tout compactC ⊆ U il existe un compact C′ ⊆ U tel que supp Pu ⊆ C′ et supp tPu ⊆ C′ pour toutu ∈ D(U) avec supp u ⊆ C.En particulier si P est proprement supporté, alors Pu est à support compact pour toutu ∈ C∞00(U).
D. Notons K le noyeau de distribution de P. Supposons d’abordque P est proprement supporté. Soit C ⊆ U compact et u ∈ D(U) avec supp u ⊆ C.Notons π1, π2 les projections canoniques de supp K sur U. On a
Pu = 〈K,u〉 =∫
K(x, y)u(y)dy

18.7. OPÉRATEURS PROPREMENT SUPPORTÉS 527
et donc supp Pu ⊆ π1 π−12 (supp u) ⊆ π1 π−1
2 (C) =: C′.Supposons maintenant que pour tout compact C ⊆ U il existe un compact C′ ⊆ Utel que supp Pu ⊆ C′ et supp tPu ⊆ C′ pour tout u ∈ C∞00(U) avec supp u ⊆ C.L’inclusion supp Pu ⊆ C′ montre, par définition du noyeau de distribution queπ−1
1 (C) ⊆ C′, et l’inclusion supp tPu ⊆ C′ entraine que π−11 (C) ⊆ C′, ce qui montre
que P est proprement supporté.
18.7.2. C
Les opérateurs pseudo–différentiels proprement supportés sur U forment un sous-espacevectoriel de Ψ(U). Tout opérateur pseudo–différentiel proprement supporté P : D(U) →D(U) se prolonge par continuité et dualité en des opérateurs
P : D′(U) → D′(U)
P : E(U) → E(U)P : E
′(U) → E′(U)
D. C’est clair.
Le théorème 18.4.13 montre en particulier que sing supp K est contenu dans ladiagonale ∆ ⊆ U ×U, et donc que K est de classe C∞ en dehors de la diagonale. Lethéorème qui suit précise ce résultat.
18.7.3. T
Soit P un opérateur pseudo–différentiel d’ordre m et K son noyeau de distribution. Pourtout j ∈N et tout multi indice α avec |α| > m + n + j on a
(x − y)αK(x, y) ∈ C j(U ×U)
En particulier K est est indéfiniment dérivable en dehors de la diagonale ∆ ⊆ U × U, oubien, en d’autre mots, sing supp K ⊆ ∆.

528 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
D. Pour w ∈ C∞00(U ×U) calculons à partir de (198)⟨(x − y)αK,w
⟩=
⟨K, (x − y)αw
⟩=
$χξ(x − y)σ(x, ξ)(x − y)αw(x, y)dydξdx
=
$χξ(x − y)σ(x, ξ)
∑β≤α
(αβ
)xβ(−y)α−βw(x, y)dydξdx
=
"χx(ξ)σ(x, ξ)
∑β≤α
(αβ
)xβ
∫χξ(y)(−y)α−βw(x, y)dydξdx
=∑β≤α
(αβ
) "χx(ξ)σ(x, ξ)xβ(−Dξ)α−β
∫χξ(y)w(x, y)dydξdx
=∑β≤α
(αβ
) " (∫χξ(y)w(x, y)dy
)xβ(−Dξ)α−β
(χx(ξ)σ(x, ξ)
)dξdx
=
" (∫χξ(y)w(x, y)dy
)(x −Dξ)α
(χx(ξ)σ(x, ξ)
)dξdx
En utilisant la formule de Leibnitz on trouve
(x −Dξ)α(χx(ξ)σ(x, ξ)
)=
∑β≤α
(αβ
)xα−β(−1)|β|Dβ
ξ
(χx(ξ)σ(x, ξ)
)=
∑β≤α
∑γ≤β
(αβ
)(βγ
)xα−β(−1)|β|Dβ−γ
ξ χx(ξ)Dγξσ(x, ξ)
=∑β≤α
∑γ≤β
(αβ
)(βγ
)xα−γ(−1)|β|χx(ξ)Dγ
ξσ(x, ξ)
=∑γ≤α
(αγ
) ∑γ≤β≤α
(α − γ
α − β
)(−1)|β|
xα−γχx(ξ)Dγξσ(x, ξ)
=∑γ≤α
(αγ
) ∑β≤α−γ
(α − γ
β
)(−1)|β|
xα−γχx(ξ)Dγξσ(x, ξ)
= χx(ξ)Dαξσ(x, ξ)
et ainsi ⟨(x − y)αK,w
⟩=
" (∫χξ(y)w(x, y)dy
)χx(ξ)Dα
ξσ(x, ξ)dξdx
=
$χξ(x − y)Dα
ξσ(x, ξ)w(x, y)dydξdx
18.7. OPÉRATEURS PROPREMENT SUPPORTÉS 529
ce qui montre que
(199) (x − y)αK(x, y) =∫χξ(x − y)Dα
ξσ(x, ξ)dξ
Cette intégrale converge, si |α| > m + n, et on peut permuter Dβ avec l’intégralepourvu que |α| > m + n + |β|, vu l’éstimation
|DβξD
αξσ(x, ξ)| ≤ C(1 + |ξ|)m−|α|−|β|
On en deduit que(x − y)αK(x, y) ∈ C j(U ×U)
pour tout nombre naturel j < |α| − m − n, et en particulier que K est indéfinimentdérivable en dehors de la diagonale ∆ ⊆ U ×U.
18.7.4. C
Soit P ∈ Ψ(U). Alors le noyeau de distribution K de P est dans C∞(U×U) si et seulementsi P ∈ Ψ−∞(U).
D. Si P est d’ordre −∞, alors le théorème 18.7.3 avec α = 0permet de conclure que K ∈ C j(U × U) quelque soit j ∈ N. D’autre part, si K ∈C∞(U×U), et si σ est le symbole de P, alors on a les expressions suivantes de Pu(x)∫
K(x, y)u(y)dy =∫χx(ξ)σ(x, ξ)u(ξ)dξ
En écrivant u comme transformée inverse de Fourier de u dans le membre degauche de cette égalité, on trouve que"
χy(ξ)K(x, y)u(ξ)dξdy =∫χx(ξ)σ(x, ξ)u(ξ)dξ
pour tout u ∈ cD(U). En voyant ces intégrales comme distributions temperéesévaluées en u on peut conclure
σ(x, ξ) = χx(ξ)∫χξ(y)K(x, y)dy
Mais cette intégrale represente la transformée de Fourier de K(x, y) par rapport à lavariable y, ce qui montre que σ(x, ξ) est à décroissance rapide en ξ. Comme de plusla fonction y 7→ K(x, y) dépend continument de x pour la topologie de Schwartz,on peut estimer
|∂αξ∂βxσ(x, ξ)| ≤ C(1 + |ξ|)m
∀x ∈ K, ∀ξ ∈ Rn
pour n’importe quels multi–indices α, β, n’importe quel m ∈ R et n’importe quellepartie compacte K de U, ce qui montre que σ ∈ Symb−∞(U) et donc que P estd’ordre −∞.
18.7.5. R
La proposition suivante affirme que les opérateurs pseudo–différentiels ont le bongoût de ne pas produire de singularités, c’est-à-dire si u est une fonction de classe

530 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
C∞ dans un voisinage d’un point x, alors Pu l’est aussi. Cette propriété s’appellepropriété de pseudo–localité.
18.7.6. P
Soit P ∈ Ψ(U) et u ∈ E(U). Alors
sing supp Pu ⊆ x ∈ U | (x, x) ∈ sing supp K et x ∈ sing supp u
en particulier on a sing supp Pu ⊆ sing supp u.
D. Soit u ∈ E′(U) et soit V un voisinage ouvert de sing supp udans U. Soit ϕ ∈ C∞(U) une fonction qui vaut 1 sur sing supp u et 0 en dehors deV. En posant u1 := ϕu et u2 := (1 − ϕ)u on a
u = u1 + u2 et Pu = Pu1 + Pu2
Par la formule évidente
sing suppϕu ⊆ suppϕ ∩ sing supp u
on trouve que sing supp u2 = ∅ c’est-à-dire u2 ∈ C∞(U), Ainsi Pu2 ∈ C∞(U) et
sing supp Pu = sing supp Pu1
Soit z ∈ U \ V, et W un voisinage de z avec V ∩W = ∅. On a que u1(y) = 0 pourtout y ∈W, et par conséquent
Pu1(x) =∫
UK(x, y)u1(y)dy =
∫U\W
K(x, y)u1(y)dy
est aussi de classe C∞ dans un voisinage de z. Ainsi sing supp Pu ⊆ V et comme Vétait un voisinage arbitraire du fermé sing supp u, on a
sing supp Pu ⊆ sing supp u
Il reste à montrer que
sing supp Pu ⊆ S := x,∈ U | (x, x) ∈ sing supp K
Soit cette fois–ci V un voisinage de S dans U et ϕ ∈ C∞(U) une fonction qui vaut 1sur S et 0 en dehors de V. Posons K1(x, y) = ϕ(x)K(x, y) et K2(x, y) = (1−ϕ(x))K(x, y).On a K2 ∈ C∞(U ×U), et donc
Pu(x) = 〈K(x,−),u〉
= 〈K1(x,−),u〉 +∫
K2(x, y)u(y)dy
= ϕ(x) 〈K,u〉 +∫
K2(x, y)u(y)dy
= ϕ(x)Pu(x) +∫
K2(x, y)u(y)dy
Mais
x 7→∫
K2(x, y)u(y)dy

18.7. OPÉRATEURS PROPREMENT SUPPORTÉS 531
est une fonction de classe C∞ par le théorème de la convergence dominée, etϕ(x)Pu(x) vaut 0 en dehors de V, ce qui montre que sing supp Pu ⊆ V. Comme Vétait un voisinage arbitraire du fermé S, on a sing supp Pu ⊆ S.
18.7.7. D
Un opérateur continu A : E′(U)→D′(U) est dit lisse si im A ⊆ E(U).
18.7.8. C
Soit P ∈ Ψ−∞(U). Alors P se prolonge en un opérateur continu P : E′(U) → E(U). End’autre mots, P est lisse.
D. Par le corollaire 18.7.4, le noyeau de distribution K de P estdans C∞(U × U), c’est-à-dire sing supp K = ∅. On a alors sing supp Pu = ∅ pourtout u ∈ E′(U) par 18.7.6.
18.7.9. P
Tout opérateur différentiel est proprement supporté. Plus précisement, si P est un opérateurdifférentiel sur X, et K son noyeau de distribution, alors supp K ⊆ ∆, où ∆ ⊆ X ×X est ladiagonale.
D. L’opérateur différentiel P est de la forme
P =∑α≤m
aαDα
Le symbole de P est donné par
σ(x, ξ) =∑α≤k
aα(x)ξα
Pour toute fonction w ∈ C∞00(X ×X) on trouve à partir de l’expression (199) pour lenoyeau de distribution de P que
(x − y)βK(x, y) =
∫χξ(x − y)Dβ
ξ
∑α≤k
aα(x)ξαdξ
=∑α≤k
aα(x)∫χξ(x − y)Dβ
ξξαdξ
ce qui montre en particulier que (x − y)βK(x, y) = 0 pour β suffisamment grand.Ainsi supp K ⊆ ∆, et P est proprement supporté.
Dans la suite, on considère des amplitudes σ ∈ Amplm(U×U×Rn), où U est unouvert deRn, et où U×U est simplement vu comme ouvert deR2n. Par définition,il existe pour tout multi indices α, β, γ et tout kompact K ⊆ U ×U un C ∈ R tel que
sup(x,y)∈K
∣∣∣∣Dγx Dβ
yDαξσ(x, y, ξ)
∣∣∣∣ ≤ C(1 + |ξ|)m−|α|

532 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Pour σ ∈ Amplm(U × U × Rn), nous considérons l’opérateur de Fourier Tσ avecamplitude σ et fonction de phase Φ(x, y, ξ) = 〈x − y, ξ〉, qui, je rappelle, est définipar
(200) Tσu(x) ="
ei〈x−y,ξ〉σ(x, y, ξ)u(y)dydξ
Ces intégrales ne peuvent pas être permutées. Remarquons qu’en général Tσ n’estpas un opérateur pseudo–différentiel. Il l’est, si σ(x, y, ξ) est indépendent de y,mais pas seulement dans ce cas. Les opérateurs de la forme (200) sont donc plusgénérales que les opérateurs pseudo–différentiels. Soit, on n’introduira pas la no-tion d’opérateur pseudo–pseudo–différentiel. Pour σ ∈ Ampl(U × U × Rn), nousnoterons
Σσ := (x, y) ∈ U ×U | ∃ξ ∈ Rn avec σ(x, y, ξ) ∈ supp σ
18.7.10. L
Soit σ ∈ Amplm(U × U × Rn) et notons Tσ l’opérateur de Fourier avec amplitude σ etphase 〈x − y, ξ〉. Soit K le noyeau de distribution de Tσ. Alors supp K ⊆ Σσ, et si Tσ estproprement supporté, il existe une amplitude τ ∈ Amplm(U ×U ×Rn) et un voisinage Vde la diagonale ∆ ⊆ U ×U tel que
I : Tτ = Tσ
II : Si (x, y) ∈ V alors τ(x, y, ξ) = σ(x, y, ξ) pour tout ξ ∈ Rn.
III : Στ est une partie propre de U ×U, en particulier Tτ est proprement supporté.
D. Pour tout u, v ∈ C∞00(U) on a
〈K,u ⊗ v〉 = 〈Av,u〉 =$
χξ(x − y)σ(x, y, ξ)u ⊗ v(x, y)dydξdx
ce qui montre, vu que C∞00(U)⊗C∞00(U) est dense dans C∞00(U×U) par 18.2.41, qu’ona pour tout w ∈ C∞00(U ×U)
〈K,w〉 =$
χξ(x − y)σ(x, y, ξ)w(x, y)dydξdx
Si supp w∩Σσ = ∅, alors σ(x, y, ξ)w(x, y) = 0 pour tout (x, y) ∈ U×U et tout ξ ∈ Rn,et on a donc dans ce cas 〈K,w〉 = 0, ce qui montre que supp K ⊆ Σσ.Supposons maintenant que Tσ est proprement supporté. Choisissonsϕ ∈ C∞(U×U)proprement supporté et tel que ϕ = 1 sur un voisinage V de ∆ ∪ supp K. Posons
τ(x, y, ξ) := ϕ(x, y)σ(x, y, ξ)
Ainsi Στ ⊆ suppϕ, et Στ est par conséquent propre. Comme le support du noyeaude distribution de Tτ est contenu dans Στ on sait par la première assertion dulemme que Tτ est proprement supporté. On a aussi σ(x, y, ξ) = τ(x, y, ξ) pour tout

18.7. OPÉRATEURS PROPREMENT SUPPORTÉS 533
(x, y) ∈ V. Finalement, calculons pour u, v ∈ C∞00(U)
〈Tσu, v〉 = 〈K, v ⊗ u〉=
⟨ϕK, v ⊗ u
⟩=
⟨K, ϕ · (v ⊗ u)
⟩=
$ei〈x−y,ξ〉σ(x, y, ξ)ϕ(x, y) · (v ⊗ u)(x, y)dydξdx
=
$ei〈x−y,ξ〉τ(x, y, ξ)(v ⊗ u)(x, y)dydξdx
= 〈Tτu, v〉
ce qui montre, vu 18.2.41, que Tσ = Tτ.
18.7.11. T
Soit σ ∈ Amplm(U×U×Rn) et soit T l’opérateur de Fourier d’amplitude σ et de fonctionde phase Φ(x, y, ξ) = 〈x − y, ξ〉. Supposons que T soit proprement supporté. Alors
I : T est un opérateur pseudo–différentiel d’ordre m.
II : Le symbole τ de T est donné par τ(x, ξ) = χx(ξ)(Tχξ)(x)
III :
τ ∼∞∑
k=0
∑|α|=k
1α!
(∂αξDαyσ)(x, x, ξ)
D. Tout d’abord, l’expansion asymptotique donée fait du sens,
puisque ∑|α|=k
1α!
(∂αξDαyσ)(x, x, ξ) ∈ Symbm−k(U)
pour tout k ∈N0. De plus, il fait du sens de définir
τ(x, ξ) := χx(ξ)(Tχξ)(x)
puisque l’opérateur T est proprement supporté, et se prolonge donc en un opéra-teur T : E(U) → E(U). Pour u ∈ E(U), la formule d’inversion de Fourier affirmeque
u(x) =∫χx(ξ)u(ξ)dξ
Par linéarité et continuité de l’opérateur T, on a
Tu(x) =
∫(Tχξ)(x)u(ξ)dξ
=
∫χx(ξ)τ(x, ξ)u(ξ)dξ
Afin de démontrer le théorème, il suffit donc de montrer que τ est un symboleadmettant l’expansion asymptotique donnée. Par le lemme 18.7.10 on peut sup-poser sans perte de généralité que Σσ est une partie propre de U × U. Posons

534 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
h(x, y, ξ) := σ(x, x + y, ξ). En tant que fonction de y, h est à support compact. Eneffet, pour x et ξ fixés, on a
h(x, y, ξ) , 0 =⇒ x + y ∈ π2(π−11 (x) ∩ Σσ)
et π2(π−11 (x) ∩ Σσ) est compact. Ici, π1, π2 : U × U → U sont les projections cano-
niques. On calcule
τ(x, ξ) = χx(ξ)(Tχξ)(x)
= χx(ξ)"
χη(x − y)χξ(y)σ(x, y, η)dydη
= χx(−ξ)"
χη(−y)χξ(x + y)σ(x, x + y, η)dydη
=
"χy(η − ξ)σ(x, x + y, η)dydη
=
∫h2(x, η − ξ, η)dη
=
∫h2(x, η, η + ξ)dη
où h2 est la transformée de Fourier de h par rapport à la deuxième variable. Commeh est à support compact dans la deuxième variable, h2 est à décroissance rapide(dans la deuxième variable). Fixons un compact K ⊆ U et démontrons l’affirmationsuivante :
(A) : Pour tout N ∈N et tout multi indices α, β il existe CαβN ∈ R tel que
(201) supx∈K
∣∣∣∣∂βx∂αξ h2(x, η, ξ)∣∣∣∣ ≤ CαβN(1 + |ξ|)m−|α|(1 + |η|)−N
pour tout η, ξ ∈ Rn.
En effet, les propriétés de h permettent de dériver sous le signe d’intégration :
∂αξ∂βxηγh2(x, η, ξ) =
∫∂αξ∂
βxχy(η)Dγ
yh(x, y, ξ)dy
d’où l’estimation∣∣∣∣∂αξ∂βxηγh2(x, η, ξ)∣∣∣∣ ≤ ∫ ∣∣∣∣∂αξ∂βxDγ
yh(x, y, ξ)∣∣∣∣ dy =
∫ ∣∣∣∣∂αξ∂βxDγyσ(x, y, ξ)
∣∣∣∣ dy
Comme Σσ est propre, L := π2(π−11 K∩Σσ) est une partie compacte de U, et on a par
définition de Σσ que σ(x, y, ξ) = 0 si x ∈ K et y < L. Comme σ est une amplituded’ordre m, il existe, quelque soient les multi–indices α, β, γ un nombre C(1)
∈ R telque
sup(x,y)∈K×L
∣∣∣∣∂αξ∂βxDγyσ(x, y, ξ)
∣∣∣∣ ≤ C(1)(1 + |ξ|)m−|α|

18.7. OPÉRATEURS PROPREMENT SUPPORTÉS 535
Ainsi on trouve
supx∈K
∣∣∣∣∂βx∂αξηγh2(x, η, ξ)∣∣∣∣ ≤ sup
x∈K
∫L
∣∣∣∣∂αξ∂βxDγyσ(x, y, ξ)
∣∣∣∣ dy
≤ supx∈K
supy∈L
Vol(L)∣∣∣∣∂αξ∂βxDγ
yσ(x, y, ξ)∣∣∣∣
≤ Vol(L)C(1)(1 + |ξ|)m−|α|
ce qui montre l’affirmation (A), vu que le multi–indiceγ est arbitraire. De l’inégalitéélémentaire, vraie pour tout ξ, η ∈ Rn et tout s ∈ R(
1 + |η|1 + |ξ|
)s
≤ (1 + |ξ − η|)|s|
on tire, en prenant η + ξ au lieu de η
(202) (1 + |η + ξ|)s≤ (1 + |ξ|)s(1 + |η|)|s|
L’équation (201) est
supx∈K
∣∣∣∣∂βx∂αξ h2(x, η, ξ + η)∣∣∣∣ ≤ CαβN(1 + |ξ + η|)m−|α|(1 + |η|)−N
En appliquant (202) on trouve
supx∈K
∣∣∣∣∂βx∂αξ h2(x, η, ξ + η)∣∣∣∣ ≤ CαβN(1 + |ξ|)m−|α|(1 + |η|)−N+|m−|α||
Prenons N suffisamment grand pour que −N + |m − |α|| < −n. Ainsi
supx∈K
∣∣∣∣∂βx∂αξτ(x, ξ)∣∣∣∣ = sup
x∈K
∣∣∣∣∣∫ ∂βx∂αη h2(x, η, η + ξ)dη
∣∣∣∣∣≤
∫supx∈K
∣∣∣∣∂βx∂αη h2(x, η, η + ξ)∣∣∣∣ dη
≤ CαβN(1 + |ξ|)m−|α|∫
(1 + |η|)−N+|m−|α||dη
= Cαβ(1 + |ξ|)m−|α|(203)
où Cαβ ∈ R ne dépend que de α et de β et du compact K. On a donc montré que τest un symbole d’ordre m. Reste à verifier l’expansion asymptotique.L’inégalité (203) montre en particulier que τ satisfait la condition (I) du lemme18.6.5, avec µ = m − |α|. Vérifions que les fonctions
σ j(x, ξ) :=∑|α|= j
1α!
(∂αξDαyσ)(x, x, ξ)
satisfont la condition (II) du lemme 18.6.5, ce qui terminera la démonstration. Ace fin, considérons un développement de Taylor (théorème 19.1.5) d’ordre k deh2(x, η, ξ + ν) dans la variable ν au point ν = 0 :
h2(x, η, ξ + ν) =∑|α|<k
1α!∂αξ h2(x, η, ξ)να + rk(x, η, ξ, ν)
536 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
où rk est le reste d’ordre k, donné par
rk(x, η, ξ, ν) =∑|α|=k
να
α!
∫ 1
0(1 − t)k−1∂αξ h2(x, η, ξ + tν)dt
On estime, tenant compte de (201)
|rk(x, η, ξ, η)| ≤ C(2)|η|k sup
0≤t≤1sup|α|=k
∣∣∣∣∂αξ h2(x, η, ξ + tη)∣∣∣∣
≤ C(3)|η|k sup
0≤t≤1(1 + |ξ + tη|)m−k(1 + |η|)−N
≤ C(3)(2 + |ξ| + |η|)m−k(1 + |η|)−N+k
où C(3) ne dépend que de N et k. On a alors
|rk(x, η, ξ, η)| ≤ CN(1 + |ξ|)m−N si |η| ≤ |ξ|
|rk(x, η, ξ, η)| ≤ C′N(1 + |η|)m−N si |η| ≥ |ξ|
où CN et C′N ne dépendent que de N. De plus on a∫∂αξ h2(x, η, ξ)ηαdη =
(Dα
y
∫χy(η)∂αξ h2(x, η, ξ)dη
)∣∣∣∣∣∣y=0
= Dαy∂αξh(x, y, ξ)|y=0
= (Dαy∂αξσ)(x, x, ξ)
Mis ensemble ceci donne, en choisissant N ∈N tel que N > m + n, on a∣∣∣∣∣∣∣τ(x, ξ) −∑|α|<k
1α!
(Dαy∂αξσ)(x, x, ξ)
∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∫
h2(x, η, η + ξ)dη −∑|α|<k
1α!
∫∂αξ h2(x, η, ξ)ηαdη
∣∣∣∣∣∣∣≤
∫ ∣∣∣∣∣∣∣h2(x, η, η + ξ) −∑|α|<k
1α!∂αξ h2(x, η, ξ)ηα
∣∣∣∣∣∣∣ dη=
∫ ∣∣∣rk(x, η, ξ, η)∣∣∣ dη
=
∫|η|≤|ξ|
∣∣∣rk(x, η, ξ, η)∣∣∣ dη + ∫
|η|≥|ξ|
∣∣∣rk(x, η, ξ, η)∣∣∣ dη
≤
∫|η|≤|ξ|
Ck(1 + |ξ|)m−kdη +∫|η|≥|ξ|
C′N(1 + |η|)m−Ndη︸ ︷︷ ︸converge
≤ Ck(2π)−n Vol(B(0, |ξ|))(1 + |ξ|)m−k + C(4)
≤ ck(1 + |ξ|)m−k+n
Ainsi ∣∣∣∣∣∣∣τ(x, ξ) −∑|α|<N
1α!
(Dαy∂αξσ)(x, x, ξ)
∣∣∣∣∣∣∣ ≤ ck(1 + |ξ|)µk

18.8. TRANSPOSÉ, ADJOINT ET PRODUIT D’OPÉRATEURS PSEUDO–DIFFÉRENTIELS 537
pour µk = m − k + n. Les hypothèses du lemme 18.6.5 sont alors satisfaites, ce quipermet de conclure que τ est un symbole ayant l’expansion asymptotique donnéedans l’énnoncé
18.7.12. C
Soit P ∈ Ψm(U). Alors il existent des opérateurs pseudo–différentiels P0 et L avec P = P0+Ltels que P0 ∈ Ψ
m(U) est proprement supporté et L est lisse.
D. Soit σ le symbole de P, et soit V un voisinage propre de ladiagonale ∆ ⊆ U ×U. Choisissons une fonction ϕ ∈ C∞(U ×U) qui est proprementsupportée et qui vaut 1 dans V. Posons
a(x, y, ξ) = ϕ(x, y)σ(x, ξ)
Alors a ∈ Ampl(U × U × Rn), et Σa ⊆ suppϕ est propre par construction. Ainsil’opérateur P0 défini par
P0u(x) ="
χξ(x − y)a(x, y, ξ)u(y)dydξ
est proprement supporté par le lemme 18.7.10, et est donc un opérateur pseudo–différentiel par le théorème 18.7.11. L’opérateur L := P − P0 est alors aussi unopérateur pseudo–différentiel. Le noyeau de distribution de L est (1 − ϕ)K, où Kest le noyeau de distribution de P. Le noyeau de distribution de L est en particulierde classe C∞ dans U × U par le théorème 18.7.3, et le corollaire 18.7.4 permet deconclure que L est lisse.
18.8. Transposé, adjoint et produit d’opérateurs pseudo–différentiels
Dans cette section on montre que le transposé et l’adjoint d’un opérateurpseudo–différentiel, ainsi que le produit de deux opérateurs pseudo–différentielsest de nouveau un opérateur pseudo–différentiel, et on donne à chaque fois undéveloppement asymptotique de son symbole. Je rappelle que pour un opérateurA son transposé tA et son adjoint A∗ sont caracterisés par
〈Au, v〉 =⟨u, tAv
⟩où 〈u, v〉 =
∫u(x)v(x)dx(204) (
Au, v)=
(u,A∗v
)où
(u, v
)=
∫u(x)v(x)dx(205)
On a ttA = A et A∗∗ = A.
18.8.1. T

538 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Soit P un opérateur pseudo–différentiel d’ordre m. Soit σ son symbole. Alors tP est unopérateur pseudo–différentiel, et le symbole tσ de tP a comme expansion asymptotique
tσ(x, ξ) ∼∞∑
k=0
∑|α|=k
1α!∂αξDα
xσ(x,−ξ)
De plus, tP est proprement supporté si et seulement si P l’est.
D. Soient u, v ∈ D(U). L’opérateur transposé tP de P satisfait pardéfinition
(206)⟨
tPu, v⟩= 〈Pv,u〉
Soit K le noyeau de distribution de P et tK celui de tP. Par la formule ci dessus on a
⟨tK, v ⊗ u
⟩= 〈K,u ⊗ v〉
et par conséquent tK(x, y) = K(y, x). Ainsi supp tK = (y, x) | (x, y) ∈ supp K, cequi montre que supp tK est propre si et seulement si supp K l’est, et que tK estde classe C∞ si et seulement si K l’est. On conclut que P est proprement supportési et seulement si tP l’est. C’est d’ailleurs aussi une conséquence immédiate de laproposition 18.7.1.Dans un premier temps, démontrons le théorème pour le cas où P, et donc tP, estproprement supporté. A partir de (206) on calcule
⟨tPu, v
⟩=
∫Pv(x)u(x)dx
=
"χx(ξ)σ(x, ξ)v(ξ)u(x)dξdx
∗=
∫ (∫χx(ξ)σ(x, ξ)u(x)dx
)v(ξ)dξ
La permutation des intégrales ∗ est permise, vu que u ∈ D(U) et v ∈ S(Rn). Lafonction g, définie par
g(ξ) =∫χx(ξ)σ(x, ξ)u(x)dx
est un élément de S(Rn), vu que u est à support compact. Ainsi
⟨tPu, v
⟩=
∫g(ξ)v(ξ)dξ =
∫g(ξ)v(ξ)dξ

18.8. TRANSPOSÉ, ADJOINT ET PRODUIT D’OPÉRATEURS PSEUDO–DIFFÉRENTIELS 539
Ceci étant vrai pour tout v ∈ D(U), on a
tPu(x) = (2π)−n g(x)
=
∫χx(ξ)g(ξ)dξ
=
"χx(ξ)χy(ξ)σ(y, ξ)u(y)dydξ
=
"χξ(y − x)σ(y, ξ)u(y)dydξ(207)
=
"χξ(x − y)σ(y,−ξ)u(y)dydξ
=
"χξ(x − y)a(x, y, ξ)u(y)dydξ
avec a(x, y, ξ) = σ(y,−ξ). Comme tP est proprement supporté, on a
tσ(x, ξ) ∼∞∑
k=0
∑|α|=k
1α!∂αξDα
ya(x, y, ξ)
∼ ∞∑k=0
∑|α|=k
1α!∂αξDα
xσ(x,−ξ)
par le théorème 18.7.11. Que tP est d’ordre m est une conséquence de l’expansionci dessus pour tσ et le théorème 18.6.2. Ceci démontre le théorème dans le cas d’unopérateur proprement supporté.Le cas général peut être rendu facilement à la situation d’avant : En effet, si P est unopérateur pseudo–différentiel, alors on a par 18.7.12 une décomposition P = P0 +Soù P0 est proprement supporté et où S est lisse, donc S ∈ Ψ−∞(U) par 18.7.4. AinsitP = tP0 +
tS. Le noyeau de distribution de S est de classe C∞, et donc aussi celuide tS. Utilisant encore une fois 18.7.4 on trouve tS ∈ Ψ−∞(U), ce qui permet deconclure que tP est un opérateur pseudo–différentiel d’ordre m, et que l’expansionasymptotique pour le symbole de tP0 est aussi une expansion pour celui de tP.
18.8.2. C
Soit P un opérateur pseudo–différentiel d’ordre m. Soit σ son symbole. Alors P∗ est unopérateur pseudo–différentiel, et le symbole σ∗ de P∗ a comme expansion asymptotique
σ∗(x, ξ) ∼∞∑
k=0
∑|α|=k
1α!
DαξDα
xσ(x, ξ)
De plus, P∗ est proprement supporté si et seulement si A l’est.
D. Similaire à la démonstration de 18.8.1.
18.8.3. T
Soient P,Q des opérateurs pseudo–différentiels proprement supportés, soit σ ∈ Symbm(U)le symbole de P et τ ∈ Symbm′ (U) le symbole de Q. Alors PQ est un opérateur pseudo–différentiel proprement supporté d’ordre m + m′, et le symbole λ ∈ Symbm+m′ de PQ a

540 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
comme expansion asymptotique
λ ∼∞∑j=0
∑|α|= j
1α!∂αξσDα
xτ
D. Il fait un sens de composer P et Q vu la proposition 18.7.1,
et la même proposition permet de conclure que PQ est proprement supporté. Par18.8.1 on sait que tQ est un opérateur pseudo–différentiel proprement supporté.Notons tτ le symbole de tQ. Comme ttQ = Q, on a
Qu(x) ="
χξ(x − y) tτ(y,−ξ)u(y)dydξ
vu l’expression (207). En d’autre mots
Qu(ξ) =∫χξ(−y) tτ(y,−ξ)u(y)dy
Par définition (PQ)u est la transformée inverse de Fourier de σQu par rapport à lavariable ξ, c’est-à-dire
(PQ)u(x) =
"χξ(x − y)σ(x, ξ) tτ(y,−ξ)u(y)dydξ
=
"χξ(x − y)a(x, y, ξ)u(y)dydξ
où a(x, y, ξ) = σ(x, ξ) tτ(y,−ξ). Clairement a ∈ Amplm+m′ (U×U×Rn), et le théorème18.7.11 permet alors de conclure que PQ ∈ Ψm+m′ (U), et que le symbole λ de PQ acomme expansion asymptotique
λ ∼∞∑
k=0
∑|α|=k
1α!
(∂αξDαya)(x, x, ξ)
En insérant la définition de a on trouve
λ ∼
∞∑k=0
∑|α|=k
1α!∂αξDα
yσ(x, ξ) tτ(y,−ξ)|y=x
∼
∞∑k=0
∑|α|=k
1α!∂αξ
(σ(x, ξ)Dα
xtτ(x,−ξ)
)∼
∞∑k=0
∑|α|=k
1α!
∑β≤α
(αβ
)∂βξσ(x, ξ)∂α−βξ Dα
xtτ(x,−ξ)
∼
∞∑k=0
∑|β+γ|=k
1β!γ!
∂βξσ(x, ξ)∂γξDβ+γ
xtτ(x,−ξ)
Dans 18.8.1 on donnait l’expansion suivante pour tτ(x,−ξ)
tτ(x,−ξ) ∼∞∑
k=0
∑|δ|=k
(−1)|δ|
δ!∂δξD
δxτ(x, ξ)

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 541
Le (−1)|δ| dans cette expression provient de la "dérivée interieure". On poursuit lecalcul :
λ ∼
∞∑k=0
∑|β+γ+δ|=k
(−1)|δ|
β!γ!δ!∂βξσ(x, ξ)∂γ+δξ Dβ+γ+δ
x τ(x,−ξ)
∼
∞∑k=0
∑|β+µ|=k
∑γ+δ=µ
(−1)|δ|
β!γ!δ!∂βξσ(x, ξ)∂µξDβ+µ
x τ(x,−ξ)
Utilisant que ∑
γ+δ=µ
(−1)|δ|
γ!δ!=
1 si µ = 0
0 sinon
on trouve
λ ∼∞∑
k=0
∑|β|=k
1β!∂βξσ(x, ξ)Dβ
xτ(x,−ξ)
ce qu’il fallait démontrer.
18.8.4. R
L’énnoncé du théorème 18.8.3 fait aussi un sens si seulement l’un parmi les opéra-teurs P et Q est proprement supporté, et la conclusion reste vraie dans ce cas.
18.9. Opérateurs pseudo–différentiels sur une variété
Si on veut définir sur une variété X de dimension n la notion de "être un truc",et si on sait déjà ce que signifie "être un truc sur un ouvert de Rn", il faut savoirfaire deux choses : Transporter les trucs par des difféomorphismes entre ouvertsdeRn et restreindre un truc T sur U en un truc T|V sur V si V est un ouvert de U. Deplus, il est nécessaire que les trucs en question sont des objets locaux dans le senssuivant : Si (Vi)i∈I est un recouvrement ouvert de U, et si M est un machin sur U telque pour tout i ∈ I la restriction M à Vi est un truc, alors le machin total M est untruc. En d’autre termes : T est un truc sur U si et seulement si tout x ∈ U possèdeun voisinage ouvert V tel que T|V est un truc sur V. Voilà la définition générique :
18.9.1. D
Soit X une variété et T un machin sur X. On dit que T est un truc sur X si pourtoute carte ϕ : U→ C de X le machin transporté ϕ∗(T|U) est un truc sur C.

542 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Les trucs en question sont ici bien sûr les opérateurs pseudo–différentiels.L’importance de la localité est qu’elle fait que sur un ouvert U ⊆ Rn on ne modifiepas la définition de ce que c’est être un truc. Malhereusement, les opérateurspseudo–différentiels ne sont pas des objets locaux comme on l’a demandé ci dessus,c’est-à-dire l’assertion
A : Un opérateur P : D(U) → E(U) est un opérateur pseudo–différentiel sur U sipour tout x ∈ U il existe voisinage ouvert V de x dans U tel que la restriction deP à V est un opérateur pseudo–différentiel sur V.
est fausse. On corrigera ce défaut par force brutale. Mais mettons nous d’abord enaccord sur les mots restriction de P à V.
18.9.2. D
Soient U,V des ouverts de Rn avec V ⊆ U, et soit P : D(U) → E(U) un opérateur.On appelle réstriction de P à V et on note P|V l’opérateur
P|V : D(V) → E(V)u 7→ (Pu)|V
18.9.3. R
Il est clair que si P est un opérateur pseudo–différentiel d’ordre m sur U de symboleσ, alors sa restriction P|V est aussi un opérateur pseudo–différentiel d’ordre m, etle symbole de P|V est σ|V×Rn . Il est faux en général que la restriction d’un opérateurpseudo–différentiel proprement supporté est de nouveau proprement supporté.
18.9.4. D
Soit P : D(U)→ E(U) un opérateur continu. On dit que P est localement un opérateurpseudo–différentiel d’ordre m sur U si pour tout fonctions f , g ∈ D(U) on a
M f PMg ∈ Ψm(U)
où M f et Mg désignent respectivement les opérateurs "multiplication par f " et "mul-tiplication par g". On note Ψm
loc(U) l’ensemble de toutes les opérateurs localementpseudo–différentiels d’ordre m sur U. On note encore
Ψloc(U) :=⋃m∈R
Ψmloc(U) et Ψ−∞loc (U) :=
⋂m∈R
Ψmloc(U)
18.9.5. P
Tout opérateur pseudo–différentiel d’ordre m sur U est localement un opérateur pseudo–différentiel d’ordre m sur U, c’est-à-dire
Ψm(U) ⊆ Ψmloc(U)

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 543
D. Il suffit de remarquer que les opérateurs M f et Mg sont desopérateurs différentiels d’ordre 0, donc en particulier des opérateurs pseudo–différentiels proprement supportés d’ordre 0. Leurs symboles sont (x, ξ) 7→ f (x)et (x, ξ) 7→ g(x) respectivement. Le théorème 18.8.3 et la remarque 18.8.4 qui suitpermettent de conclure.
18.9.6. P
Soit U ⊆ Rn ouvert et P : D(U) → E(U) un opérateur. les assertions suivantes sontéquivalentes
I : L’opérateur P est localement pseudo–différentiel d’ordre m sur U.
II : Pour tout ouvert V ⊆ U on a P|V ∈ Ψmloc(V).
III : Tout x ∈ U admet un voisinage ouvert V tel que P|V ∈ Ψmloc(V).
IV : Tout x ∈ U admet un voisinage ouvert V tel que P|V ∈ Ψm(V).
V : Pour tout f ∈ D(X), on a PM f ∈ Ψ′m(U).
D. (I) =⇒ (II) : Immédiat, puisque pour tout g, f ∈ D(V)on a Mg(P|V)M f = MgPM f . (II) =⇒ (III) : C’est trivial. (III) =⇒ (IV) : Soitx ∈ U et V un voisinage de x tel que P|V ∈ Ψm
loc(V). Soit W ⊆ V un voisinage de Xd’adhérence compacte dans V, et choisissons une fonction f ∈ D(V) qui vaut 1 dansun voisinage de W. Par hypothèse M f PM f ∈ Ψ
m(V), et comme M f PM f |W = P|Won a P|W ∈ Ψm(W). (IV) =⇒ (V) Choisissons pour tout x ∈ U un voisinageouvert Vx de x tel que P|Vx ∈ Ψ
m(Vx). Pour x, y ∈ X, considérons Vxy := Vx ∩ Vy.Par hypothèse les opérateurs P|Vx et P|Vx sont pseudo–différentiels. On peut doncconsidérer leurs symboles, disons σx et σy. L’opérateur P|Vxy est aussi pseudo–différentiel, et a comme symbole la restriction de σx à Vxy × Rn ou bien aussi laréstriction de σy à Vxy × Rn. Ainsi σx et σy doivent coïncider sur Vxy × Rn. Pourz ∈ U et ξ ∈ Rn il fait donc un sens de définir
σ(z, ξ) := σx(z, ξ)
où x ∈ U est tel que z ∈ Vx et où σx est le symbole de P|Vx . La fonction σ sur U ×Rn
ainsi définie est clairement un symbole d’ordre m si tout les σx sont d’ordre m. Soitf ∈ D(U). Comme supp f est compact, il existent N ∈N et x1, . . . , xN ∈ U tels que
supp f ⊆N⋃
i=1
Vi
où on a posé Vi := Vxi . Moyennant une partition de l’unité on peut trouver desfonctions f1, . . . , fN supp fi ⊆ Vi et tels que
f =N∑
i=1
fi

544 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Par choix des fonctions fi et linéarité de P on a pour tout u ∈ D(U)
PM f (u) =
N∑i=1
P( fiu)
=
N∑i=1
P|Vi ( f ju)
=
N∑i=1
∫Vi
χx(ξ)σxi (x, ξ) fiudξ
=
N∑i=1
∫Uχx(ξ)σ(x, ξ) fiudξ
=
∫Uχx(ξ)σ(x, ξ) f udξ
ce qui montre que PM f est en effet la composition de l’opérateur pseudo–différentielM f qui est d’ordre 0, et de l’opérateur pseudo–différentiel sur U qui a σ commesymbole. Le théorème 18.8.3 permet alors de conclure que PM f ∈ Ψ
m(U).(V) =⇒ (I) est évident, vu que Mg est pseudo–différentiel d’ordre 0 pour toutg ∈ D(U).
18.9.7. R
Les opérateurs P ∈ Ψmloc(U) ont donc l’avantage d’être des objets locaux au sens
de l’introduction pour cette section. De manière plus snobiste la chose suivante sepasse : Pour un ouvert U ⊆ Rn l’attribution
V → Ψm(V) V ⊆ U ouvert
est un foncteur de la catégorie des ouverts de U vers la catégorie des C–espacesvectoriels. Le foncteurΨm est donc un préfaisceau, et le faisceau associé n’est riend’autre que le foncteur Ψm
loc. En effet, la démonstration de (III) =⇒ (IV) de laproposition 18.9.6 montre queΨm
loc est un faisceau, c’est-à-dire
0→ Ψmloc(U)→
∏V⊆U
Ψmloc(V)⇒
∏V,V′⊆U
Ψmloc(V ∩ V′)
est exact, et l’équivalence (III) ⇐⇒ (IV) montre que Ψmloc est associé à Ψm. Afin
d’appliquer la définition générique 18.9.1 il faut étudier comment se comportementles opérateurs pseudo–différentiels face au transport.
18.9.8. D
Soient U,V ⊆ Rn des ouverts et f : V → U un difféomorphisme. Soit P : D(V) →E(V) un opérateur quelconque. L’opérateur f ∗P : D(U)→ E(U) défini par
( f ∗P)u = P(u f ) f−1∀u ∈ C∞(U)
est appelé opérateur transporté de P via f .

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 545
18.9.9. R
Cette définition se visualise à l’aide du diagramme commutatif suivant, où f ∗ :C∞(U)→ C∞(V) est défini par f ∗(u) = u f .
D(V) E(V)
D(U) E(U)
//P
//f ∗P
OO f ∗
OO f ∗
Le transport f ∗ : Op(D(V),E(V))→ Op(D(U),E(U)) est une bijection, ayant ( f−1)∗
comme inverse. Un difféomorphisme est toujours une application propre. La pro-position 18.7.1 entraine donc que l’opérateur f ∗P est proprement supporté si etseulement si P l’est. Les relations
f ∗(P +Q) = f ∗P + f ∗Q(208)f ∗(PQ) = f ∗P f ∗Q(209)
f ∗Mg = Mg f−1(210)
sont évidentes.
18.9.10. P
Soit f : V → U un difféomorphisme entre ouverts de Rn, et soit L : D(V) → E(V) unopérateur de noyeau de distribution K ∈ C∞(V × V). Alors le noyeau de distribution def ∗L est dans C∞(U ×U).
D. En effet, si
Pu(x) =∫
VK(x, y)v(y)dy
pour tout v ∈ D(V), alors on a par définition de f ∗P
f ∗Pu(x) =∫
VK( f−1(x), y)u( f (y))dy
Faisant un changement de variables y f−1(y) on trouve
(211) f ∗Pu(x) =∫
VJ(y)K( f−1(x), f−1(y))u(y)dy
où J(y) est la valeur absolue du jacobien en question, qui n’est jamais nul. En parti-culier J(y) est de classe C∞. L’equation (211) montre que le noyeau de distributionde f ∗P est donné par la fonction (x, y) 7→ J(y)K( f−1(x), f−1(y)), qui est bien unefonction de classe C∞.
18.9.11. R
Les opérateurs pseudo–différentiels se comportent bien face au transport, c’est-à-dire si P est un opérateur pseudo–différentiel proprement supporté sur V, alors f ∗P

546 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
est un opérateur pseudo–différentiel proprement supporté sur U dans la situationdécrite auparavant. L’ordre est conservé, et on a on a une bonne formule, i.e. ex-pansion asymptotique pour le symbôle de l’opérateur transporté. Avant d’attaquerla démonstration, voyons d’abord ce qui se passe : Soit P un opérateur pseudo–différentiel sur V, σ son symbole et soit f : V → U un difféomorphisme. Pouru ∈ D(U) et x ∈ U on a
f ∗P(u)(x) = P(u f )( f−1(x))
=
∫χ f−1(x)(ξ)σ( f−1(x), ξ) (u f )(ξ)dξ
=
"Vχ f−1(x)(ξ)σ( f−1(x), ξ)χξ(y)u( f (y))dydξ
=
"Vχξ
(f−1(x) − y
)σ( f−1(x), ξ)u( f (y))dydξ
=
"Uχξ
(f−1(x) − f−1(y)
)σ( f−1(x), ξ)u(y)J(y)dydξ
où J(y) désigne le déterminant du Jacobien de f−1 en y ∈ U. Si on pose
(212) Φ(x, y, ξ) :=⟨
f−1(x) − f−1(y) , ξ⟩
et
(213) a(x, y, ξ) := J(y)σ( f−1(x), ξ)
on obtient
(214) f ∗P(u)(x) ="
eiΦ(x,y,ξ)a(x, y, ξ)u(y)dydξ
On va montrer dans la suite que les opérateurs de la forme (214) sont, sous desconditions qu’on impose à Φ et a, des opérateurs pseudo–différentiels.
18.9.12. R
La fonction Φ(x, y, ξ) définie dans (212) est une fonction de phase. En effet, Φ estdifférentiable sur tout U × U × Rn et linéaire en ξ, et satisfait alors les conditions(I) et (II) de la définition 18.4.3. Quant à la condition (III), on a
gradx,y,ξΦ =(gradxΦ,gradyΦ,gradξΦ
)et
gradxΦ(x, y, ξ) = Dx f−1(x)(ξ)Comme f−1 est un difféomorphisme, la dérivée totale de f−1 est inversible en toutx ∈ U, et donc
gradxΦ(x, y, ξ) = Dx f−1(x)(ξ) = 0 ⇐⇒ ξ = 0(215)
ce qui montre que Φ est une fonction de phase.
18.9.13. L
Soit Φ une fonction de phase sur U ×U ×Rn telle que

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 547
I : Pour tout x, y ∈ U ×U l’application ξ 7→ Φ(x, y, ξ) est linéaire.
II : gradξΦ(x, y, ξ) = 0 si et seulement si x = y.
Alors il existe un voisinage V de la diagonale ∆ ⊆ U ×U et une application indéfinimentdérivable ψ : V → GL(n,R) telle que
(216) Φ(x, y, ψ(x, y)ξ
)=
⟨x − y, ξ
⟩pour tout (x, y) ∈ V, et de plus telle que
(217) detψ(x, x) · det M(x, x) = 1
pour tout x ∈ U, où M(x, y) est la matrice M = (mi j)1≤i, j,≤n définie par
(218) mi j(x, y) =∂2Φ
∂xi∂ξ j(x, y, ξ)
D. Remarquons d’abord que la définition (218) fait un sens,puisque Φ est linéaire en la variable ξ, et le membre de droite de (218) est alorsindépendent de ξ. Soit e1, . . . , en la base canonique de Rn, et soit e∗1, . . . , e
∗n la base
duale. On a
Φ(x, y, ξ) =n∑
k=1
Φ(x, y, ek)e∗k(ξ)
et alors
mi j(x, y) =n∑
j=1
∂Φ∂xi
(x, y, ek)∂e∗k∂ξ j
(ξ)︸ ︷︷ ︸δ jk
=∂Φ∂xi
(x, y, e j)
On a
gradxΦ(x, y, ξ) =
∂Φ∂x1
(x, y, ξ)...
∂Φ∂x1
(x, y, ξ)
=n∑
k=1
∂Φ∂x1
(x, y, ek)e∗k(ξ)...
∂Φ∂x1
(x, y, ek)e∗k(ξ)
=M(x, y) · ξ
Par l’hypothèse (II) on a Φ(x, x, e j) = 0 pour tout x ∈ U et tout 1 ≤ j ≤ n, et doncΦ(x, x, ξ) = 0 pour tout x ∈ U et tout ξ ∈ Rn. Ainsi on trouve
0 = gradx
(Φ(x, x, ξ)
)= gradxΦ(x, y, ξ)|x=y + gradyΦ(x, y, ξ)|x=y
et on a en particulier l’équivalence
gradxΦ(x, x, ξ) = 0 ⇐⇒ gradyΦ(x, x, ξ) = 0
Comme Φ est une fonction de phase, on a (définition 18.4.3, condition (III)) quegradx,y,ξΦ(x, y, ξ) , 0 si ξ , 0 et on a alors des implications
ξ , 0 et gradξΦ(x, x, ξ) = 0
=⇒ gradxΦ(x, x, ξ) , 0 ou gradyΦ(x, x, ξ) , 0
=⇒ gradxΦ(x, x, ξ) , 0
En vertu de l’hypothèse (II), ceci est
ξ , 0 =⇒ gradxΦ(x, x, ξ) = ξ∗k(M(x, x) · ξ
), 0

548 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
ce qui permet de conclure que la matrice M(x, x) est non singulière pour tout x ∈ U.Par un développement de Taylor de premier ordre, on peut trouver des fonctionssi j(x, y) sur U ×U telles que
Φ(x, y, e j) =n∑
i=1
si j(x, y)e∗i (x − y) et mi j(x, x) = si j(x, x)
pour tout x, y ∈ U. Notons S(x, y) la matrice S = (si j)1≤i, j≤n. On a par définitiondet M(x, x) = det S(x, x) pour tout x ∈ U, et en particulier det S(x, x) , 0 pour toutx ∈ U. La fonction (x, y)→ det S(x, y) étant continue, il existe un voisinage V de ladiagonale ∆ ⊆ U×U tel que det S(x, y) , 0 pour tout (x, y) ∈ V. Pour tout (x, y) ∈ Vposons ψ(x, y) = S(x, y)−1. La fonction ψ : V → GL(n,R) satisfait par construction(216), mais aussi (217) : En effet
Φ(x, y, ψ(x, y)ξ) =
n∑j=1
Φ(x, y, e j)e∗j(ψ(x, y)ξ)
=
n∑j=1
n∑i=1
si j(x, y)e∗i (x − y)n∑
k=1
ψ jk(x, y)e∗k(ξ)
=
n∑i=1
n∑k=1
n∑j=1
si j(x, y)ψ jk(x, y)
︸ ︷︷ ︸=δik
e∗i (x − y)e∗k(ξ)
=
n∑i=1
e∗i (x − y)e∗i (ξ)
=⟨x − y, ξ
⟩ce qui termine la démonstration.
18.9.14. T
Soit σ ∈ Amplm(U ×U ×Rn) et soit Φ une fonction de phase sur U ×U ×Rn telle queI : Φ(x, y, ξ) est linéaire en ξ.
II : gradξΦ(x, y, ξ) = 0 si et seulement si x = y
Si l’opérateur de Fourier T = TΦ(σ), donné par
Tu(x) ="
eiΦ(x,y,ξ)σ(x, y, ξ)u(y)dydξ
est proprement supporté, alors il est un opérateur pseudo–différentiel d’ordre m.
D. Soit K le noyeau de distribution de T. On sait que K est ladistribution de Fourier sur U × U donnée par la phase Φ et l’amplitude σ. Par lethéorème 18.4.13 on a sing supp K ⊆ SΦ où
SΦ :=(x, y) ∈ U ×U
∣∣∣ ∃ξ ∈ RN avec gradξΦ(x, y, ξ) = 0
Par l’hypothèse (II), on a alors sing supp K ⊆ ∆ où ∆ ⊆ U ×U est la diagonale. Parle lemme 18.9.13 il existe un voisinage V de la diagonale ∆ et une fonction ψ : V →

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 549
GLn(R) telle que Φ(x, y, ψ(x, y)ξ) =⟨x − y, ξ
⟩pour tout (x, y) ∈ V. Choisissons une
fonction proprement supportée ϕ :∈ C∞(U × U) qui vaut 1 sur un voisinage de ∆et 0 en dehors de V. Posons
P1u(x) =
"eiΦ(x,y,ξ)ϕ(x, y)σ(x, y, ξ)u(y)dydξ
P2u(x) =
"eiΦ(x,y,ξ)(1 − ϕ(x, y))σ(x, y, ξ)u(y)dydξ
Dans l’expression intégrale pour l’opérateur P1 on peut faire le changement devariables ξ ψ(x, y)ξ. On obtient
P1u(x) =
"eiΦ(x,y,ψ(x,y)ξ)ϕ(x, y)σ(x, y, ξ)u(y)dydξ
=
"ei〈x−y,ξ〉
|detψ(x, y)|ϕ(x, y)σ(x, y, ψ(x, y)ξ)u(y)dydξ
=
"ei〈x−y,ξ〉τ(x, y, ξ)u(y)dydξ
Le terme |detψ(x, y)| qui provient du jacobien pour le changement de variablesξ ψ(x, y)ξ est une fonction de classe C∞ puisque detψ(x, y) ne s’annulle jamais,et on a posé
τ(x, y, ξ) := |detψ(x, y)|ϕ(x, y)σ(x, y, ψ(x, y)ξ)
Comme σ est une amplitude d’ordre m, et vu la proposition 18.3.10, τ est uneamplitude d’ordre m. De plus
Στ := (x, y) ∈ U ×U | ∃ξ ∈ Rn avec τ(x, y, ξ) ∈ supp τ ⊆ suppϕ
est propre. Le lemme 18.7.10 permet de conclure que P1 est proprement supporté,et par le théorème 18.7.11 on a finalement P1 ∈ Ψ
m(U).Reste à voir que P2 est un opérateur pseudo–différentiel d’ordre pas plus grandque m. En effet, on montrera que P2 ∈ Ψ
−∞(U). Le noyeau de distribution K2 de P2est donné par K2 = (1−ϕ)K, se qui montre que P2 est proprement supporté, et quede plus K2 ∈ C∞(U ×U). On a donc
P2u(x) =∫
K2(x, y)u(y)dy
Comme supp K2 est propre, K2 satisfait en particulier l’hypothèse (H) de la propo-sition 18.5.11, et on a donc P2 ∈ Ψ
−∞(U).
18.9.15. R
Cette démonstration montre que même sans supposer que T soit proprement sup-porté, il est toujours possible d’écrire T comme T = P1 + P2 où P1 est un opérateurpseudo–différentiel, et où P2 est un opérateur de noyeau K2 ∈ C∞(U ×U) construitcomme auparavant.
18.9.16. C

550 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Soit f : V → U un difféomorphisme entre ouverts de Rn, et soit P un opérateur pseudo–différentiel proprement supporté sur V. Alors f ∗P est un opérateur pseudo–différentielproprement supporté sur U.
D. Cela resulte de la remarque 18.9.12, du théorème 18.9.14, etdu fait que f ∗P est proprement supporté si et seulement si P l’est.
18.9.17. C
Soit f : V → U un difféomorphisme entre ouverts de Rn, et soit P un opérateur pseudo–différentiel sur V et soit L un opérateur de noyeau de distribution de classe C∞. Alorsf ∗(P + L) s’écrit comme somme d’un opérateur pseudo–différentiel proprement supportésur U et d’un opérateur de noyeau de distribution de classe C∞.
D. Par le corollaire 18.7.12 on peut écrire P = P1 + L′, où P1 estun opérateur proprement supporté et où L′ est un opérateur lisse, donc de noyeaude distribution C∞. Le corollaire 18.9.16 appliqué à P1 et la proposition 18.9.10apliquée à L′ + L permettent de conclure.
18.9.18. P
Soient U,V des ouverts de Rn et f : V → U un difféomorphisme. Soit P un opérateurpseudo–différentiel proprement supporté sur V de symbole σ, et notons f ∗σ le symbole def ∗P. Alors il existe un symbole τ ∈ Symbm−1(U) tel que
f ∗σ(x, ξ) = τ(x, ξ) + σ(
f−1(x), ( tJ(x))−1ξ)
où J(x) est le jacobien de f−1 en x.
D. L’opérateur f ∗P est donné sous forme intégrale par les equa-tions (212), (213), et (214), c’est-à-dire pour u ∈ D(U) et x ∈ U on a
f ∗P(u)(x) ="
eΦ(x,y,ξ)a(x, y, ξ)u(y)dydξ
avec
Φ(x, y, ξ) :=⟨
f−1(x) − f−1(y) , ξ⟩
et a(x, y, ξ) := |det J(y)|σ( f−1(x), ξ)
et où J(y) désigne le Jacobien de f−1 : U→ V. Dans la démonstration de 18.9.14 ona scindé f ∗P en une somme f ∗P = P1+P2 où P2 ∈ Ψ
−∞(U). Il suffit donc de montrerque l’expansion donnée est une expansion de P1. Cet opérateur P1 est donné par
P1u(x) ="
ei〈x−y,ξ〉b(x, y, ξ)u(y)dydξ
L’amplitude b est donnée par
b(x, y, ξ) := |detψ(x, y)|ϕ(x, y)a(x, y, ψ(x, y)ξ)
où ϕ ∈ C∞00(U × U) est égal à 1 dans un voisinage de la diagonale, ψ une fonctionmatricielle ayant les propriétés ennoncées dans le lemme 18.9.13. On a donc
b(x, y, ξ) := |detψ(x, y)|ϕ(x, y)|det J(y)|σ( f−1(x), ψ(x, y)ξ)

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 551
Par le théorème 18.7.11, et vu que Σb est propre on a une expansion asymptotique
f ∗σ ∼
∞∑k=0
∑|α|=k
1α!
(∂αξDαyb)(x, x, ξ)
∼
∞∑k=0
∑|α|=k
1α!∂αξDα
y |detψ(x, y)||det J(y)|σ(x, ψ(x, y)ξ)
∣∣∣∣∣∣∣x=y
(219)
Dans l’expression (219) on a pu omettreϕ(x, y), puisque cette fonction est constanteégale à 1 près de la diagonale. Un terme∑
|α|=k
1α!∂αξDα
y |detψ(x, y)||det J(y)|σ(x, ψ(x, y)ξ)
∣∣∣∣∣∣∣x=y
de la somme (219) est bien un symbole d’ordre m − |α| vu 18.3.10, et pour k = 0 ceterme vaut σ( f−1(x), ( tJ(x))−1ξ), vu que ψ(x, x) = ( tJ(x))−1. Il suffit donc de poser
τ(x, ξ) = f ∗σ(x, ξ) − σ(
f−1(x), ( tJ(x))−1ξ)
Le symbole τ est d’ordre m − 1 par définition de l’être expansion asymptotique, cequi achève la démonstration.
18.9.19. R
La proposition 18.9.18 n’est qu’une version bien marchée (mais amplement suffi-sante pour nos besoins futurs) du théorème suivant :
18.9.20. T
Soient U,V des ouverts de Rn et f : V → U un difféomorphisme. Soit P un opérateurpseudo–différentiel proprement supporté sur V de symbole σ, et notons f ∗σ le symbole def ∗P. Soit J(x) le jacobien de f−1 en x ∈ U. Alors
f ∗σ(x, ξ) ∼∞∑
k=0
∑|α|=k
1α!σ(α)
(f−1(x), ( tJ(x))−1ξ
)· pα(x, ξ)
où on a noté σ(α)(y, η) = ∂αησ(y, η), et où pα est donné par
pα(x, ξ) = Dαz eig(x,z)η
∣∣∣x=z
avec g(x, z) = f (x) − f (z) −D f (x)(z − x).
D. Je renvois à Shubin, [55] Ch.1, §4.2. La démonstration de ceresultat consiste en un calcul direct des termes de (219). Les pα(x, ξ) sont en fait despolynômes en ξ de degré inferieur à |α|/2, puisque pour un x ∈ U fixé, la fonctionz 7→ g(x, z) a un zéro double en z = x.
18.9.21. R
552 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Notons pour un instant Λ(U) l’espace de tout les opérateurs L : D(U)→ E(U) quiont un noyeau de distribution de classe C∞. On sait déjà que
(220) Λ(U) ∩Ψ(U) = Ψ−∞(U)
mais il est faux queΛ(U) ⊆ Ψ(U). Dans l’espace des opérateurs continus Op(D(U),E(U))considérons la somme (non directe)
Ψm(U) := Λ(U) +Ψm(U)
qui contient donc Ψ(U) de manière stricte. Tout élément P ∈ Ψ(U) s’écrit commeP = L + P, avec L ∈ Λ(U) et P ∈ Ψm(U). On appelle symbôle de P la classe moduloSymb−∞(U) du symbôle de P, ce qui est bien défini, justement a cause de (220). Lecorollaire 18.9.17 montre que pour un difféomorphisme f : V → U, l’applicationde transport
f ∗ : Ψm(V)→ Ψm(U)est une bijection. Enfin, remarquons encore que
(221) Ψm(U) ⊆ Ψmloc(U)
En effet, si L ∈ Λ(U) et si f , g ∈ D(U), alors il est clair que MgLM f ∈ Λ(U) et queMgLM f est proprement supporté. Ainsi MgLM f ∈ Ψ
−∞(U), ce qui entraine (221).
18.9.22. P
Soit f : V → U un difféomorphisme entre ouverts de Rn. Alors f ∗ : Ψmloc(V) → Ψm
loc(U)est une bijection.
D. Il suffit de montrer que f ∗P ∈ Ψmloc(U) pour tout P ∈ Ψm
loc(V).En effet, soient P ∈ Ψm
loc(V) et g, h ∈ D(V). On a
Mh f ∗PMg = f ∗(Mh f PMg f )
Comme Mh f PMg f est un opérateur pseudo–différentiel proprement supportéet d’ordre m sur V par hypothèse, on a que Mh f ∗PMg est une est un opérateurpseudo–différentiel d’ordre m sur U par le corollaire 18.9.16.
18.9.23. D
Soit X une variété différentiable et (ϕi : Ui → Ci)i∈I un atlas de X. Un opérateurP : D(X) → E(X) est dit localement opérateur pseudo–différentiel d’ordre m sur X sipour tout i ∈ I, on a
ϕ∗(P|D(Ui)) ∈ Ψmloc(C)
On noteΨmloc(X) l’ensemble de toutes les opérateurs localement pseudo–différentiels
d’ordre m sur X, et
Ψloc(X) :=⋃m∈R
Ψmloc(X) et Ψ−∞loc (X) :=
⋂m∈R
Ψmloc(X)
18.9.24. R
18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 553
Si aucune confusion ne parait possible on noteΨm(X) au lieu deΨloc(X) et on parled’opérateurs pseudo–différentiels sur X.
18.9.25. R
Soit X une variété différentiable et P ∈ Ψmloc(X). Il ne fait plus de sens de parler
du symbole de de P, mais on peut récupérer les symboles "localement", commela démonstration de 18.9.6 le sugère : Considérons x ∈ X et ϕ : U → C une carteavec x ∈ U. Soit V ⊆ U un voisinage de x d’adhérence compacte dans U et soientf , g ∈ D(X) tels que f (x) = g(x) = 1 pour x ∈ V et f (x) = (gx) = 0 en dehors de U.Soit σV le symbole de l’opérateur transporté
ϕ∗(MgPM f )|ϕ(V) ∈ Ψm(ϕ(V))
Il faut évidemment considérer le "symbole" σ : TU→ C défini par
σ(x, ξ) = σV(ϕ(x), tJ(x)ξ)
où TU est le fibré tangent2 de U. La fonction σ dépend de g et de f , même si f etg valent 1 sur V, c’est parce que P n’est pas un opérateur local. Mais le théorème18.8.3 et la proposition 18.9.18 montrent que la classe de σ modulo des symbolesd’ordre m − 1 ne dépend pas de g et f , ni de la carte ϕ : U → V. En recollant cesclasses sur tout X, on trouve
[σ] ∈Symbm(X)
Symbm−1(X)
Voilà les définitions précises :
18.9.26. D
Soit X une variété différentiable de dimension n et m ∈ R. Une fonction différen-tiable σ : TX → C s’appelle symbole d’ordre m sur X si pour toute carte ϕ : U → Cde X la fonction
τ : TC = C ×Rn→ C
est un symbole d’ordre m sur C. On note Symbm(X) l’ensemble de tout les symbolesd’ordre m sur X.
18.9.27. R
On vérifie facilement que cette définition fait du sens, et que les propriétés évi-dentes des symboles sur un ouvert deRn restent vraies dans ce cadre plus général,notamment Symbm(X) est un C–espace vectoriel pour tout m, et Symb(X) est uneC–algèbre. On a toujours στ ∈ Symbm+m′ (X) si σ ∈ Symbm(X) et τ ∈ Symbm′ (X), etSymb−∞(X) est un idéal de Symb(X).
2En fait il faudra prendre le fibré cotangent, puisque on a la transposée du jacobien, et nonsimplement le jacobien dans la formule pour le symbole de l’opérateur transporté. Mais ici, et danstoute la suite, nous identifierons systématiquement le fibré tangent avec le fibré cotangent.

554 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Il est par contre faux qu’un symbole σ ∈ Symbm(X) définit un opérateur pseudo–différentiel sur X, sans qu’on ait donné quelques informations supplémentaires.
18.9.28. D
Soit X une variété et P ∈ Ψmloc(X). Pour tout x ∈ X soit ϕx : Ux → Cx une carte de
X contenant x et soit Vx un voisinage compact de x dans Ux. Soit fx ∈ C∞00(Ux) unefonction qui vaut 1 sur Vx. Soit Qx ∈ Ψ
mloc(Cx) l’opérateur transporté
Qx = ϕ∗
x(PM f |Ux ) = ϕ∗x(P|Ux )M fϕ−1x
Quitte à choisir Vx suffisamment petit, on peut supposer que Qx|ϕ(Vx) est un élémentdeΨm(ϕ(Vx)) (proposition 18.9.6). Soit σx ∈ Symbm(ϕx(Vx)) le symbole de Qx|ϕ(Vx).La classe du symbole σx modulo des symboles d’ordre ≤ m − 1 est indépendentede la fonction fx, par le théorème 18.8.3. Choisissons finalement une partition del’unité (ηx)x∈X de X telle que
I : supp ηx ⊆ Vx pour tout x ∈ X.
II : Tout x ∈ X admet un voisinage W tel que x ∈ X| supp ηx∩W , ∅ est fini.
III :∑x∈X
ηx = 1.
On appelle alors symbole complét de P le symbole σ ∈ Symbm(X) défini par
σ(x, ξ) =∑y∈X
ηy(x)σy
(ϕ(x), tJ(x)ξ
)Le symbole complét dépend du choix des fonctions ( fx)x∈X. On appelle symbole deP ou encore symbole global de P la classe modulo Symbm−1(X) du symbole complétde X. Cette classe est indépendante de tout choix.
18.9.29. R
Par la construction du symbole ci dessus, il est clair que si on a deux opérateurs Pet Q ∈ Ψm
loc(X) tels que P −Q ∈ Ψm−1loc (X), alors leurs symboles globaux coïncident.
On a donc un isomorphisme d’espaces vectoriels
Ψmloc(X)
Ψm−1loc (X)
→Symbm(X)
Symbm−1(X)
qui à la classe d’un opérateur P ∈ Ψmloc(X) associe le symbole global de P. De plus, on
sait que si σ ∈ Symbm(X) represente le symbole global de P, et si τ ∈ Symbm(X) re-presente le symbole global d’un autre opérateur Q ∈ Ψm′ (X), alors le produit στ re-presente le symbole global de PQ, qui est un élément de Symbm+m′ (X)/ Symbm+m′−1(X).Plus tard on aimerait bien, étant donné σ ∈ Symbm(X) construire un opérateur Psur X ayant la classe de σ comme symbole. A ce fin, voyons maintenant commentde manière générale recoller des opérateurs sur X.
18.9.30. D

18.9. OPÉRATEURS PSEUDO–DIFFÉRENTIELS SUR UNE VARIÉTÉ 555
Soit X une variété différentiable et (Ui)i∈I un recouvrement de X. Pour tout i ∈ Isoir Pi un opérateur
Pi : D(Ui)→ E(Ui)
Soit (ηi)i∈I une partition de l’unité de X comme suit :
I : supp ηi ⊆ Ui pour tout i ∈ I.
II : Tout x ∈ X a un voisinage V tel que i ∈ I| supp ηi ∩ V , ∅ est fini.
III :∑i∈I
ηi = 1.
De plus, choisissons des fonctions (ϑi)i∈I tels que
I : suppϑi ⊆ Ui pour tout i ∈ I.
II : Tout x ∈ X a un voisinage V tel que i ∈ I| suppϑi ∩ V , ∅ est fini.
III : ϑ(x) = 1 si x ∈ supp ηi.
l’opérateur P = D(X)→ E(X) défini par
P =∑i∈I
Mϑi PMηi
s’appelle recollement de la famille d’opérateurs (Pi)i∈I.
18.9.31. R
Soit X une variété différentiable et (Ui)i∈I un recouvrement de X, et soient (ηi)i∈I et(ϑi)i∈I comme dans la définition. Alors le recollement d’une famille d’opérateursdépend en général de ces fonctions, et si P est un opérateur sur X et Pi la restrictionde P à Ui, alors le recollement des Pi, notons le P′, est en général différent de P. Leproblème est que si Ui et U j sont disjoints, alors la fonction P′u considérée sur Uiest complètement indépendent de ce que fait u sur U j, en particulier P′u est nulsur Ui si supp u ⊆ U j. Bien sûr que que P n’a pas cette propriété en général.
18.9.32. P
Soit X une variété différentiable et (Ui)i∈I un recouvrement de X, et soient (ηi)i∈I et (ϑi)i∈Icomme dans la définition 18.9.30. Soit P : D(X) → E(X) est un opérateur sur X et Pi larestriction de P à Ui. Supposons que P soit local, dans le sens
supp Pu ⊆ supp u pour tout u ∈ D(X)
Alors le recollement des Pi est égal à P, et ne dépend en particulier pas des fonctions (ηi)i∈Iet (ϑi)i∈I.
D. Soit u ∈ D(X). On a, vu la linéarité de P et les propriétés desfonctions (ηi)i∈I que
Pu = P
∑i∈I
ηiu
=∑i∈I
P(ηiu)

556 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Par hypothèse on a supp P(ηiu) ⊆ supp ηiu ⊆ supp ηi. Comme ϑi vaut 1 sur supp ηi,on a P(ηiu) = ϑiP(ηiu) et donc
Pu =∑i∈I
ϑiP(ηiu)
ce qui montre que P est le recollement des opérateurs (Pi)i∈I.
18.9.33. P
Soit X une variété différentiable, P ∈ Ψmloc(X) et (Ui)i∈I un recouvrement de X, et soient
(ηi)i∈I et (ϑi)i∈I comme dans la définition 18.9.30. Soit Pi la restriction de P à Ui et P′ lerecollement des (Pi)i∈I. Alors P − P′ est lisse, et en particulier P′ ∈ Ψm
loc(X).
D. Par la proposition 18.9.6 il suffit de montrer que pour toutx ∈ X on peut trouver un voisinage V de x tel que P′|V est pseudo–différentiel surV. Pour x ∈ X, choisissons V tel que J := i ∈ I| suppϑi∩V , ∅ soit fini. l’opérateurP′|V s’écrit donc comme
P′|V =∑j∈J
(Mϑ j P jMη j )|V
Mais, aussi par la proposition 18.9.6 on sait que (Mϑ j P jMη j )|V est pseudo–différentielpour tout j ∈ J. Comme J est fini, P′|V est une somme finie d’opérateurs pseudo–différentiels, donc un opérateur pseudo–différentiel.Afin de montrer que P − P′ est lisse, il suffit de trouver pour tout x ∈ X unvoisinage V de x tel que (P− P′)|V est lisse sur V. Choisissons cette fois ci V tel queJ := i ∈ I| supp ηi ∩ V , ∅ soit fini. Comme la propriété "être lisse" est conservéelors du transport, et vu la proposition 18.9.6 on peut supposer que V est un ouvertdeRn et que P est un opérateur pseudo–différentiel (global) sur V. On a, restrictionsà V sousentendues
P − P′ = P −∑j∈J
Mϑ j P jMη j
=∑j∈J
PMη j −
∑j∈J
Mϑ j P jMη j
=∑j∈J
(1 −Mϑ j )PMη j
Soit maintenant u ∈ D′(V) et y ∈ sing supp PMη j u. Par la propriété de pseudo–localité de P (proposition 18.7.6) on a dans ce cas y ∈ sing supp Mη j u et donc enparticulier y ∈ supp η j. Mais si y ∈ supp η j, alors 1 − ϑ j(y) = 0, puisque ϑ j vaut1 sur supp η j. Ainsi, le support singulier de Mϑ j PMη j u est vide, et par conséquentP − P′ un opérateur lisse.
18.10. GÉNÉRALISATION À DES FONCTIONS À VALEURS VECTORIELS 557
18.10. Généralisation à des fonctions à valeurs vectoriels
18.10.1. D
Soit U un ouvert de Rn et posons E := U × Rk et F := Rl. Notons e∗1, . . . , e∗
k la baseduale de sections canonique de E, et f ∗1 , . . . , e
∗
l celle de F. Un opérateur P : D(U,E)→E(U,F) est dit opérateur pseudo–différentiel (local) d’ordre m si l’opérateur
Pi j : u 7→ f ∗i P(e∗ju)
est un opérateur pseudo–différentiel (local) d’ordre m pour tout 1 ≤ i ≤ l et tout1 ≤ j ≤ k. La matrice (Pi j) s’appelle matrice de P et les Pi j s’appellent composantes deP, tout relatif aux bases e1, . . . , ek et f1, . . . , fl.Soit σi j le symbole de Pi j. On appelle symbole de P l’application
σ : U ×Rn→ Hom(Rk,Rl)
dont la matrice exprimée dans les bases e1, . . . , ek et f1, . . . , fl vaut (σi j).
18.10.2. R
La proposition 18.3.10 montre que cette définition est indépendante du choix desbases, c’est-à-dire si les composantes de P dans une certaine base sont tous desopéarateurs d’ordre m, alors les composantes de P par rapport à n’importre quelleautre base le sont aussi.
18.10.3. D
Soit X une variété différentiable de dimension n et soient E,F des fibrés vectorielsréels sur X. Un opérateur P : D(X,E) → E(X,F) est dit opérateur pseudo–différentielsi pour toute carte ψ : U → C de X qui trivialise E et F, l’opérateur transporté ψ∗Pest un opérateur pseudo–différentiel sur C.On note Ψm
loc(X,E,F) l’espace vectoriel des opérateurs pseuso–différentiels sur Xde E vers F.
18.10.4. R
Pour P ∈ Ψm(X,E,F) on peut considérer son symbole, qui est bien sur representépar une application
σ : TX→ HomX(E,F)
Notons Symbm(X,E,F) les applications différentiables TX → HomX(E,F) satis-faisant les conditions évidentes. On a de nouveau un isomorphisme d’espacesvectoriels
Ψmloc(X,E,F)
Ψm−1loc (X,E,F)
→Symbm(X,E,F)
Symbm−1(X,E,F)
558 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
18.11. Opérateurs hypo–elliptiques et elliptiques
18.11.1. D
Soient m et m′ des nombres réels et soit X une variété différentiable. Un symboleσ ∈ Symbm(X) est dit hypo–elliptique d’ordre (m,m′) s’il existe un symbole τ ∈Symb−m′ (X) tel que στ − 1 ∈ Symb−∞(X). Un tel symbole τ s’appelle quasi–inversede σ. On dit que σ est elliptique d’ordre m si σ est hypo–elliptique d’ordre (m,m).
18.11.2. E
Le symbole du laplacien est σ(x, ξ) = ξ21 + · · ·+ξ
2n est un symbole elliptique d’ordre
2. En effet, un quasi–inverse de σ est donné par
τ(x, ξ) =1 − ϕ(ξ)σ(x, ξ)
où ϕ ∈ C∞00(Rn) vaut 1 dans un voisinage de 0. Par contre (dans le cas n = 2) lesymbole σ(x, ξ) = ξ2
1 + ξ42 est hypo–elliptique d’ordre (4, 2) mais pas elliptique.
18.11.3. P
Soient m,m′,m,m′ des nombres réels et soit X une variété différentiable. Soient σ etσ ∈ Symbm(X) hypo–elliptique d’ordre (m,m′) et (m,m′) respectivement et soient τ et τdes quasi–inverses de σ et σ respectivement. Les assertions suivantes sont vraies :
I : Le symbole σσ est hypo–elliptique d’ordre (m +m,m′ +m′) et ττ est un quasi–inverse de σσ.
D. (I) : On sait par 18.3.4 que σσ est un symbole d’ordre m + met que ττ est un symbole d’ordre −(m′ +m′). La seule chose qui reste à vérifier estque σσττ − 1 ∈ Symb−∞(U). En effet, en désignant par ” ≡ ” congruence modulol’idéal Symb−∞(U) on a
σσττ − 1 = (σσ − 1 + 1)(ττ − 1 + 1) − 1 ≡ 1 · 1 − 1 = 0
ce qui montre (I).
18.11.4. D
Soient m et m′ des nombres réels et X une variété différentiable. Un opérateurpseudo–différentiel P ∈ Ψm
loc(X) est dit hypo–elliptique d’ordre (m,m′) s’il existentdes opérateurs opérateur pseudo–différentiels Q,Q′ ∈ Psi−m′
loc (X) tels que
PQ − 1 ∈ Ψ−∞loc (X) et Q′P − 1 ∈ Ψ−∞loc (X)
On dit que Q est un quasi–inverse de P à droite et que Q est un quasi–inverse de P àgauche. Si Q = Q′ on dit que Q est un quasi–inverse bilatère.
18.11. OPÉRATEURS HYPO–ELLIPTIQUES ET ELLIPTIQUES 559
18.11.5. P
Tout quasi–inverse à gauche (ou à droite) d’un opérateur hypo–elliptique est bilatère, etdeux quasi–inverses diffèrent par un opérateur d’ordre −∞.
D. C’est purement algébrique : Soit P hypo–elliptique, Q et Q′
des quasi–inverses de P à gauche et à droite respectivement, c’est-à-dire il existentdes opérateurs R,R′ d’ordre −∞ tels que
PQ − 1 = R et Q′P − 1 = R′
Il suffit de montrer que Q − Q′ est d’ordre −∞. Voilà la manipulation : MultiplierPQ − 1 = R par Q′ à gauche donne
Q′PQ −Q′ = (R′ + 1)Q −Q′ = Q′R
donc Q −Q′ = Q′R − R′Q, et Q′R − R′Q est bien d’ordre −∞.
18.11.6. T
Soit P un opérateur pseudo–différentiel sur une variété X. Si le symbole de P est hypo–elliptique, alors P est hypo–elliptique.
D. Il suffit de démontrer ce théorème dans le cas où X = U estun ouvert de Rn, et où P est un opérateur pseudo–différentiel (global) proprementsupporté sur U d’ordre m. Soit σ le symbole de P. Par hypothèse il existe un symboleτ sur U tel que le symbole στ − 1 est d’ordre −∞. On peut supposer sans perte degénéralité que l’opérateur Q dont τ est le symbole est proprement supporté. Vu ledéveloppement asymptotique du symbole λ1 de R := QP − 1 donné par 18.8.3 ona que R est d’ordre −1. En effet
λ1 ∼
∞∑k=1
∑|α|=k
1α!∂αξσ(x, ξ)Dα
xτ(x,−ξ)
Notons λ j le symbole de R j. Par le 18.6.2 il existe un symbole µ sur U ayant commeexpansion asymptotique
µ ∼∞∑j=0
(−1) jλ j
Soit S l’opérateur sur U dont µ est le symbole. De nouveau on suppose que S estproprement supporté. L’opérateur S(1 + R) − 1 est par construction d’ordre −∞, etsi on pose T := SQ, alors
TP − 1 = S(1 −QP + 1) − 1 = S(1 + R) − 1
ce qui montre que T est un quasi–inverse de P à gauche. De la même façon untrouve un quasi–inverse à droite.
18.11.7. T
Pour tout opérateur hypo–elliptique P ∈ Hell(X) et tout u ∈ E′(X) on a
(222) sing supp Pu = sing supp u

560 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
D. Utilisant une partition de l’unité appropriée, il suffit de dé-montrer ce resultat dans le cas où X est un ouvert de Rn, et où P est un opérateurhypo–elliptique global sur X. Soit u ∈ E′(X). Par la proposition 18.7.6 on a l’inclu-sion
sing supp Pu ⊆ sing supp u
Afin de montrer l’inclusion dans l’autre sens, choisissons un quasi–inverse à gauchede P. Notons
PQ − I =: S ∈ Ψ−∞(X)QP − I =: T ∈ Ψ−∞(X)
On a donc u = QPu − Tu, et alors
sing supp u ⊆ sing supp QPu ∪ sing supp Tu ⊆ sing supp Pu
vu que sing supp Tu = ∅ par 18.7.8, et par la proposition 18.7.6 appliquée à Q.
18.11.8. R
Si P est proprement supporté, alors (222) est évidemment vrai pour tout u ∈ D′(X).
18.12. Prolongement à L2 d’opérateurs d’ordre 0
But de cette section est de démontrer quelques estimations dans L2 d’opéra-teurs pseudo–différentiels d’ordre 0, afin de pouvoir introduire le prolongementd’opérateurs pseudo–différentiels aux espaces de Sobolev dans la section qui suit.
18.12.1. L
Soit P ∈ Ψ0(U) proprement supporté et σ le symbole de P. Supposons que
I : P = P∗
II : lim inf|ξ|→∞
x∈K
<σ(x, ξ) > 0 pour tout compact K ⊆ U
Alors il existe Q ∈ Ψ0(U) proprement supporté et tel que le noyeau de distribution deQQ∗ − P est de classe C∞ dans U ×U.
D. L’idée de la démonstration est de construire successivementdes opérateurs proprement supportés Q0,Q1, . . . avec symbôles τ0, τ1, . . ., tel queQ j est d’ordre − j et tel que
(223)
k∑j=0
Q j
k∑
j=0
Q∗j
− P

18.12. PROLONGEMENT À L2 D’OPÉRATEURS D’ORDRE 0 561
est d’ordre −(k + 1). Le symbole τ de l’opérateur Q cherché aura (τ j)∞j=0 commeexpansion asymptotique.La fonction z 7→
√
<z est, en dehors de la droite<z = 0 indéfiniment dérivable entant que fonction à deux variables réelles. Par la proposition 18.3.9 et vu l’hypothèse(II) on a que
√<σ(x, ξ) est un symbole d’ordre 0 pour ξ assez grand. Il existe
alors un opérateur Q0 ∈ Ψ0(U) proprement supporté avec symbole τ0 tel que
|τ0|2−<σ ∈ Symb−∞(U), d’où on conclut que
Q0Q∗0 − P ∈ Ψ−1(U)
par les formules pour le symbole de l’adjoint 18.8.2 et du produit 18.8.3. Soit k ∈N,et supposons qu’on ait trouvé des opérateurs proprement supportés Q0,Q1, . . . ,Qkavec symbôles τ0, τ1, . . . , τk, tel que Q j est d’ordre − j et tel que
R :=
k∑j=0
Q j
k∑
j=0
Q∗j
− P
est d’ordre −(k + 1). Soit ν le symbole de R. Choisissons τk+1 ∈ Symbk+1(U) tel que
2τk+1τ0 ≡ ν mod Symb−∞(U)
Un tel symbole τk+1 existe, puisque τ0 est inversible modulo Symb−∞(U) vu (223).Soit Qk+1 l’opérateur de symbole τk+1. On calcule
R′ :=
Qk+1 +
k∑j=0
Q j
Q∗k+1 +
k∑j=0
Q∗j
− P
= Qk+1Q∗k+1 +Qk+1
k∑j=0
Q∗j
+ k∑
j=0
Q j
Q∗k+1 + R
par les formules 18.8.2 et 18.8.3, et par le choix de τk+1 le symbole de R′ est d’ordrek−2. Il existe donc une suite de symboles (τ j)∞j=0 comme annoncé, et par le théorème18.6.2 il existe un symbole τ qui a (τ j)∞j=0 comme expansion asymptotique. Vu lecorollaire 18.7.12 on peut supposer que l’opérateur Q qui a τ comme symbole estproprement supporté. On a QQ∗ − P ∈ Ψ−∞(U) par construction.
18.12.2. L
Soit P ∈ Ψ0(U) proprement supporté et soit σ le symbole de P. Supposons qu’il existeM ∈ R tel que
supx∈K
lim sup|ξ|→∞
|σ(x, ξ)| < M
pour tout compact K ⊆ U. Alors il existe un opérateur lisse R tel que
(Pu,Pu) ≤M2(u,u) + (Ru,u)
pour tout u ∈ D(U). De plus, si le noyeau de distribution de P est à support compact, onpeut choisir R tel que le noyeau de distribution de R est aussi à support compact.

562 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
D. Vu que (Pu,Pu) = (P∗Pu,u) il suffit de construire un opéra-teur B ∈ Ψ0(U) tel que R := P∗P + B∗B −M2 est lisse. L’opérateur R ainsi défini estproprement supporté si B l’est. Il faut trouver B tel que
B∗B =M2− P∗P + R
Si σ est le symbole de P, alors le symbole τ de M2− P∗P est congru à M2
− |σ(x, ξ)|2
modulo symboles d’ordre ≤ 1, ce qui entraine que
lim inf|ξ|→∞
x∈K
<τ(x, ξ) > 0
pour n’importe quelle partie compacte K ⊆ U. Le lemme 18.12.1 permet deconclure.
18.12.3. T
Soit P ∈ Ψ0(Rn). Si le noyeau de distribution de P est à support compact, alors on peutprolonger P en de manière unique en un opérateur opérateur continu
P : L2(Rn)→ L2(Rn)
D. Sachant que C∞00(Rn) est une partie dense de L2(Rn), il faut,et il suffit de montrer que l’opérateur P est borné sur C∞00(Rn) pour la norme ‖ · ‖2de L2(Rn), c’est-à-dire qu’il existe C ∈ R tel que
‖Pu‖2 ≤ C‖u‖2pour tout u ∈ C∞00(Rn). Utilisant le lemme 18.12.2 il suffit de démontrer le théorèmedans le cas où P est un opérateur lisse, et dont le noyeau de distribution est àsupport compact. Mais dans ce cas, le résultat est évident : Clairement
‖Pu‖22 ≤∫
U×U|K(x, y)|2dxdy · ‖u‖22
où K est le noyeau de distribution de P.
18.13. L’action sur les espaces de Sobolev
Pour cette section, fixons une fois pour toutes une variété différentiable X dedimension n, et pour chaque s ∈ R un opérateur elliptique Λs ∈ Ψ
s(X) dont lesymbole σ(x, ξ) est positif et homogène de degré s. Des tels opérateurs existent, vula proposition qui suit :
18.13.1. P
Soit X une variété et s ∈ R. Alors il existe un opérateur elliptique Λs d’ordre s sur X, dontle symbole global est representé par un symbole σ positivement homogène de degré s.

18.13. L’ACTION SUR LES ESPACES DE SOBOLEV 563
D. Soit (ψi : Ui → Ci)i∈I un atlas de X. Sur l’ouvert Ci de Rn,considérons le symbole σi défini par σi(x, ξ) = |ξ|s, et notonsΛC
i l’opérateur pseudo–différentiel sur Ci de symbole σi. Il est clair que ΛC
i est elliptique d’ordre s, ce quifait que l’opérateur transporté
ΛUi := ψ∗iΛ
Ci
est elliptique d’ordre s sur l’ouvert Ui de X. Reste à recoller les opérateurs (ΛUi )i∈I
comme dans 18.9.30, en un opérateur Λs qui satisfait tout ce qui est demandé.
18.13.2. D
Soit s ∈ R. On note
Hsloc(X) :=
u ∈ D′(X)
∣∣∣Λsu ∈ L2loc(X)
Hs
comp(X) :=u ∈ E′(X)
∣∣∣Λsu ∈ L2loc(X)
où L2
loc(X) désigne l’espace des fonctions localement de module carré intégrables.On appelle espace de Sobolev de degré s local respectivement espace de Sobolev de degrés compact ces ensembles.
18.13.3. R
Les ensembles Hsloc(X) et Hs
comp(X) sont évidemment des C–espaces vectoriels, etHs
comp(X) est un sous-espace vectoriel de Hsloc(X). Ces espaces dépendent à priori
du choix de Λs, mais bien sûr il ne le font pas. Dans le cas où X est compact on aHs
loc(X) = Hscomp(X). On note alors Hs(X) cet espace, et on l’appelle espace de Sobolev
de degré s.
18.13.4. T
Soit s ∈ R et P ∈ Ψm(X). Alors P se prolongue en un opérateur
P : Hscomp(X)→ Hs−m
loc (X)
Si de plus P est proprement supporté, alors P se prolongue en des opérateurs
P : Hscomp(X) → Hs−m
comp(X)
P : Hsloc(X) → Hs−m
loc (X)
I . Si P ∈ Ψm(X), alorsΛs−mPΛ−s est d’ordre 0, et on peutprolonger P à L2(X). Or Hs = Λ−sL2(X), on a bien un prolongement de P commeénnoncé.
18.13.5. R
L’opérateur Λ−s est un quasi–inverse de Λs, c’est-à-dire il existe un opérateurcompact Rs tel que
(224) u = Λ−sΛsu − Rsu

564 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
pour tout u.
18.13.6. P
Soit K ⊆ X compact et A ∈ Ψm(X). Supposons une des deux conditions vérifiéesI : A est proprement supporté.
II : Il existe B ∈ Ψm(X) et ϕ ∈ C∞00(X) avec A = ϕB.Alors il existe une partie compacte K′ ⊆ X et un prolongement continu de A en unopérateur
P : Hs(K)→ Hs−m(K′)
D.
18.13.7. T
Soit X une variété et P ∈ Ψm(X). Pour tout s > m on peut prolonger par continuitél’opérateur P à
(225) P : Hs(X)→ Hs−mloc (X)
Si P est proprement supporté, alors P : Hsloc → Hs
loc.
D.
Le théorème suivant est une généralisation du théorème 19.1.2 :
18.13.8. T
Soit X une variété différentiable et soit P ∈ Ψm(X) proprement supporté. Soient s, s′ ∈ Rtels que s′ < s−m, et soit K une partie compacte de X, et K′ une partie compacte de X telleque PE′(K) ⊆ E′(K′). Alors l’opérateur
(226) P : Hs(K)→ Hs′ (K′)
est compact.
D. Une partie compacte K′ ⊆ X telle que PE′(K) ⊆ E′(K′) existepar la proposition 18.13.6, et la même proposition dit que pour un tel K′ on peutprolonger P en un opérateur continu
P : Hs(K)→ Hs−m(K′)
Le théorème 19.1.2 affirme que l’inclusion
ι : Hs−m(K)→ Hs′ (K)
est un opérateur compact. L’opérateur (226) en question est alors la compositiond’un opérateur continu et d’un opérateur compact, donc compact.

18.14. LA PROPRIÉTÉ DE FREDHOLM 565
18.14. La propriété de Fredholm
18.14.1. T
Soit X une variété fermée et E ∈ Ellm(X). Pour s ∈ R notons Es le prolonguement parcontinuité de E à Hs(X). Alors
I : Es : Hs(X)→ Hs−m(X) a la propriété de Fredholm.
II : ker Es ⊆ C∞(X). En particulier ker Es ne dépend pas de s.
III : ind Es ne dépend pas de s.
IV : Pour tout m′ < m et P ∈ Ψm′ (X) on a ind(E + P) = ind E.
D. Comme E est elliptique, il existe un inverse moduloΨ−∞(X)de E, c’est-à-dire un opérateur F ∈ Ell−m(X) tel que
EF − I =: S ∈ Ψ−∞(X)FE − I =: T ∈ Ψ−∞(X)
Soit s ∈ R. En vertu du théorème 18.13.8 et l’hypothèse que X est compact on peutprolonger E, F, S et T en des opérateurs linéaires continus
Es : Hs(X)→ Hs−m(X)Fs : Hs−m(X)→ Hs(X)Ss : Hs−m(X)→ Hs−m(X)Ts : Hs(X)→ Hs(X)
On aEsFs − I = Ss et FsEs − I = Ts
Les opérateurs Ss et Ts sont compacts, vu 18.13.8. Comme Hs(X) et Hs−m(X) sontdes espaces de Banach, on peut appliquer le théorème 19.1.3, et conclure que Es etFs ont la propriété de Fredholm. On a, vu le théorème 18.11.7, pour tout u ∈ ker Es
sing supp u = sing supp Esu = sing supp 0 = ∅
ce qui revient à dire que u ∈ C∞(X). Remarquons que cet argument vaut égalementsi E est supposé seulement hypo–elliptique. Pour la partie (III) considérons l’adjointformel E∗ de E. On a E∗ ∈ Hellm(X) et on sait que
ind Es = dim ker Es − dim ker E∗s
Comme les dimensions des noyeaux dans le terme à droite de l’equation ci dessusne dépendent pas de s par (II), ind Es ne dépend de s non plus. Finalement, leprolongement de P à
Ps : Hs(X)→ Hs−m′ (X)→ Hs−m(X)
est un opérateur compact vu 18.13.8. La proposition 19.1.4 permet de conclure.
18.14.2. D

566 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Soit X une variété différentiable fermée et E ∈ Ell(X). On note ker E := ker Es ⊆
C∞(X) et on appelle indice de E le nombre entier
ind E = ind Es
où s est un nombre réel quelconque.
18.15. Symboles avec partie principale
18.15.1. D
Soient m ∈ R et σ ∈ Symbm(U). On dit que σ admet une partie principale si la limite
pprm(σ)(x, ξ) := limλ→∞
σ(x, λ)λm
existe pour tout (x, ξ) ∈ U×Rn, et si la fonction pprm(σ) ainsi définie est indéfinimentdérivable pour ξ , 0. On appelle pprm(σ) la partie principale de σ. On écrit ppr(σ) sim est clair du contexte.On note Symbm
+ (U) le sous ensemble de Symbm(U) de toutes les symboles de degrém admettant une partie principale en degré m, et
Symb+(U) :=⋃m∈R
Symbm+ (U) et Symb−∞+ (U) :=
⋂m∈R
Symbm+ (U)
18.15.2. R
Si σ est un symbole admettant une partie principale ppr(σ), alors ppr(σ) est unefonction homogène de degré m en ξ. Si χ ∈ C∞00 est une fonction qui vaut 1 dansun certain voisinage de 0 ∈ Rn, alors (1 − χ) ppr(σ) est un symbôle d’ordre m, etclairement ppr
((1 − χ) ppr(σ)
)= ppr(σ).
18.15.3. P
Les assertions suivantes sont vraies :
I : Symbm+ (U) est un sous espace vectoriel de Symb(U) pour tout m ∈ R.
II : Symb+(U) est une sous-algèbre de Symb(U).
III : Soient m,m′ ∈ R tels que 0 < m et m′ < m. Alors on a Symbm′ (U) ⊆Symbm
+ (U). En particulier pprm(σ) = 0 pour tout σ ∈ Symbm′ (U).
D. (III) : Soit σ ∈ Symbm′ (U). Alors il existe C ∈ R tel que pourtout x ∈ U et tout ξ ∈ Rn on ait
|σ(x, ξ)| ≤ C(1 + |ξ|)m′

18.15. SYMBOLES AVEC PARTIE PRINCIPALE 567
Ainsi ∣∣∣pprm(σ)(x, ξ)∣∣∣ = ∣∣∣∣∣ limλ→∞
σ(x, λξ)λ−m∣∣∣∣∣
= limλ→∞|σ(x, λξ)|λ−m
≤ limλ→∞
C(1 + |λξ|)m′λ−m
≤ limλ→∞
Cλ−m + |ξ|λm′−m
= 0
vu que par hypothèse −m < 0 et m′ −m < 0.
Cette proposition a quelques conséquences utiles :
18.15.4. C
Soient σ ∈ Symbm(U), τ ∈ Symbm+ (U) , et supposons que σ − τ ∈ Symbm′ (U) avec
m′ < m et 0 < m. Alors σ Symbm+ (U).
18.15.5. C
Soit σ ∈ Symbm(U) un symbole d’ordre m > 0, (m j)∞j=1 une suite de nombres réels avecm j → −∞ pour j→∞, et soient σ j ∈ Symbm j (U) des symboles tels que
σ ∼∞∑j=0
σ j
Supposons que pour tout j avec m j = m on ait σ j ∈ Symbm j+ (U). Alors on a σ ∈ Symbm
+ (U),et
ppr(σ) =∑
m j=m
ppr(σ j)
18.15.6. T
Soient m,m′ des nombres réels et soient σ ∈ Symbm+ (U) et τ ∈ Symbm′
+ (U). Alors TσTτest un opérateur pseudo–différentiel. Le symbole λ de TσTτ est un élément de Symbm+m′
+ ,et a comme partie principale
ppr(λ) = ppr(σ) ppr(τ)
D. Par le théorème 18.8.3 on sait que TσTτ est un opérateurpseudo–différentiel, et que λ admet comme expansion asymptotique
λ ∼∞∑j=0
λ j avec λ j :=∑|µ|= j
−i|µ|
µ!DµξσDµ
xτ

568 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
Par 18.3.4 et 18.3.6 on aλ j ∈ Symbm+m′−2 j(U) et par 18.15.3 on aλ0 = στ ∈ Symbm+m′+ .
Le corollaire 18.15.5 permet de conclure que λ ∈ Symbm+m′+ , et que
ppr(λ) = ppr(λ0) = ppr(στ) = ppr(σ) ppr(τ)
ce qu’il fallait démontrer.
18.15.7. P
Soient X une variété compacte et P et Q des opérateurs elliptiques sur X. Soient σ et τ desrepresentants de leurs symboles, et supposons que σ et τ admettent des parties principales.Fixons une norme sur TX notons SX le fibré sphérique associé à TX pour cette norme. Sippr(σ)|SX = ppr(τ)|SX, alors inda P = inda Q.
18.16. Le symbole du point de vue K–théorique
Soit X une variété, p : E → X et q : F → X des fibrés vectoriels sur X et soitP : D(E)→ E(F) un opérateur pseudo différentiel sur X. Considérons le pull–backde fibrés
π∗E E
TX X
π∗p
//
p
//π
π∗F F
TX X
π∗q
//
q
//π
Je rappelle que les éléments de π∗E sont des triples (x, ξ, v) avec x ∈ X, ξ ∈ TXet v ∈ E tels que π(ξ) = p(v) = x, et idem pour π∗F. Le symbôle de P induit unmorphisme de fibrés vectoriels
π∗E π∗F
TX?
????
??
π∗p
//σ∗
π∗q
donné parσ∗ : (x, ξ, v) 7→ (x, ξ, σ(x, ξ)v)
pour tout (x, ξ) ∈ TX et tout v ∈ p∗E. Je rappelle que le support de σ∗ est l’en-semble des éléments (x, ξ) ∈ TX tels que σ∗(x,ξ) : π∗E(x,ξ) → π∗F(x,ξ) n’est pas unisomorphisme. Voici les observations cruciales :
I : Si P est elliptique de σ homogène, alors le support de σ∗ est s0(X), oùs0 : X→ TX est la zéro–section.
II : En particulier si X est compact, le support de σ∗ est compact, et le triplet
σ∗ : π∗E→ π∗F
represente alors un élément de K(TX).

18.16. LE SYMBOLE DU POINT DE VUE K–THÉORIQUE 569
18.16.1. P
Soit X une variété compacte et P : D(E) → E(F) un opérateur elliptique de symbole σ.Alors le morphisme de fibrés
σ∗ : π∗E→ π∗F
est à support compact.
18.16.2. D
Soit X une variété compacte et P : D(E)→ E(F) un opérateur elliptique de symboleσ. On appelle symbole K–théorique de P et on note [σ] ou encore [σ(P)] l’élément deK(TX) representé par le triple
σ∗ : π∗E→ π∗F
18.16.3. T
Soit X une variété compacte. L’application
Ell(X) → K(TX)P 7→ [σ(P)]
est un homomorphisme de groupes surjectif, et son noyeau est
P ∈ Ell(X) | inda P = 0
D. On montre facilement que cette application est un homomor-phisme de groupes. Afin de montrer la surjectivité, montrons le résultat suivantlégèrement plus fort
Soit X une variété compacte, a ∈ K(TX) et m ∈ R. Alors il existe un opérateurP ∈ Ellm(X) de symbole σ homogène de degré m et tel que [σ] = a.
Soit a representé par le triple α : E → F, où E et F sont des fibrés vectorielscomplexes sur TX et où α est un morphisme de fibrés à support compact. Notonsπ : TX → X la projection et s0 : X → TX la zéro–section. Notons encore E et F lesrestrictions de E respectivement F à X, et α : E→ F le morphisme induit par α. Ona un diagramme
π∗E E E
TX X TX
//
//
//π //s0
Puisque la composition s0 π est homotope à l’identité de TX, on a π∗E E et demême π∗F F. Le morphisme π∗α induit est précisement celui qui fait commuter

570 18. OPÉRATEURS PSEUDO-DIFFÉRENTIELS
le diagramme de fibrés sur TX suivant
π∗E π∗F
E F
//π∗α
//α
Le triple π∗α : π∗E→ π∗F represente alors aussi a, et le support de π∗α est le mêmeque le support de α. Choisissons une norme ‖ · ‖ sur TX telle que suppπ∗α soitcontenu dans BX où
BX := v ∈ TX | ‖v‖ < 1SX := v ∈ TX | ‖v‖ = 1
ce qui est bien possible, puisque suppπ∗α est compact. Définissons un morphismede fibrés αm : π∗E→ π∗F par
αm(v) =
‖v‖mπ∗α
(v‖v‖
)si v , 0
0 si v = 0
Il est clair que αm est homogène de degré m, et que suppαm = s0(X). L’opérateurP de symbôle αm satisfait donc toutes nos demandes, pourvu que le triplet αm :π∗E→ π∗F represente aussi a. Il faut donc trouver une homotopie de π∗α vers αm.La voici :
H(v, t) = ‖v‖tmπ∗α( v‖v‖t
)pour v ∈ E et t ∈ [0, 1].
18.16.4. C
Soit X une variété compacte, a ∈ K(TX) et m ∈ R. Alors il existe un opérateur P ∈ Ellm(X)de symbole σ homogène de degré m et tel que [σ] = a.

Cinquième partie
Synthèse


CHAPITRE 19
Le théorème de l’indice
Ce dernier chapitre a été écrit par Peter Jossen. On y définit l’indice topologiqued’une variété compacte puis l’indice topologique d’un opérateur elliptique sur cettevariété. Finalement, on démontre le théorème de l’indice d’Atiyah–Singer : l’indiceanalytique d’un opérateur elliptique sur une variété compacte correspond à sonindice topologique.
19.1. Conventions et résultats admis
multi–indices.
19.1.1. D
Soit n ∈ N. On appelle multi–indice de dimension n tout n–tuplet ordonné α ∈ Nn0 .
Pour un multi–indice α = (α1, . . . , αn), on note
I |α| =∑n
i=1 α j.
et on apellera |α| aussi degré total de α. On note
II α! =∏n
i=1 α j.
Pour deux multi–indices α = (α1, . . . , αn) et β = (β1, . . . , βn) de dimension n, ondefinit
III leur somme α + β = (α1 + β1, . . . , αn + βn).
et
IV leur produit αβ = (α1β1, . . . , αnβn).
On introduit une relation d’ordre en demandant
V α ≥ β si et seulement si αi ≥ βi pour tout 1 ≤ i ≤ n.
Dans le cas où α ≥ β, et uniquement dans ce cas, on définit
573
574 19. LE THÉORÈME DE L’INDICE
VI leur différence α − β = (α1 − β1, . . . , αn − βn).
Si G est un groupe, et x = (x1, . . . , xn) un n–tuplet d’éléments de G, alors on noterasouvent
VII αx = α1x1 + · · · + αnxn respectivement xα = xα11 · · · x
αnn , selon la notation de
la loi de groupe.
Transformation de Fourier.
Pour x, ξ ∈ Rn, nous notons
χξ(x) = ei〈x,ξ〉
Pour f ∈ L1C
(Rn) nous définissons la transformée de Fourier de f comme étant la
fonction f : Rn→ C définie par
f (ξ) =∫Rn
e−i〈x,ξ〉 f (x)dx
ce qui s’écrit aussi commef (ξ) = χξ ∗ f
L’application · : f 7→ f s’appelle transformation de Fourier. La transformation deFourier définit une bijection de l’espace de Schwarz S(Rn) sur lui même, et pourf ∈ S(Rn) la formule d’inversion de Fourier qui affirme que
f = (2π)n f
ce qui revient à dire que
f (x) =1
2πn
∫Rn
ei〈ξ,x〉 f (ξ)dξ
On noteradξ := (2π)−ndξ
ce qui fait que
f =∫Rn
ei〈ξ,x〉 f (x)dξ
Pour une fonction f = f (x1, . . . , xn) ∈ C1(Rn) on désigne par ∂ j f la dérivée parrapport à x j de f . On voit ∂ j comme un opérateur linéaire. Pour un multi indice αde dimension n, on note ∂α l’opérateur défini par
∂α := ∂α11 · · · ∂
αnn
et on noteDα := (−i)|α|∂α
On pour une fonction appropriée f la formule élémentaire
∂k f = ixk f
Par récurrence on trouveDα f = xα f

19.2. L’INDICE TOPOLOGIQUE 575
Resultats admises.
19.1.2. T
Soient s > s′ réels et K une partie compacte de la variété différentiable X. Alors l’inclusiond’espaces de Sobolev
ι : Hs(K)→ Hs′ (K)
est un opérateur compact.
19.1.3. T
Soient B1,B2 des espaces de Banach et T : B1 → B2 un opérateur linéaire continu.Supposons qu’il existent des opérateurs linéaires continus S1 : B1 → B1 et S2 : B2 → B2tels que
TS1 − I et S2T − I
sont des opérateurs compacts. Alors T a la propriété de Fredholm.
19.1.4. P
Soient B1,B2 des espaces de Banach et F : B1 → B2 un opérateur de Fredholm et C : B1 →
B2 un opérateur compact. Alors F+C est un opérateur de Fredholm et ind(F+C) = ind F.
19.1.5. T (MultiTaylor)
Soit U un ouvert de Rn et f ∈ C∞(U) et N ∈ N. Soient ξ ∈ U et η ∈ Rn tels que leségment métrique [ξ, ξ + η] soit contenu dans U. Alors
f (ξ + η) =∑|α|<N
∂α f (ξ)α!
ηα +N∑|α|=N
ηα
α!
∫ 1
0(1 − θ)N−1Dα f (ξ + θη)dθ
19.2. L’indice topologique
Soient X une variété différentiable de dimension n, et soit Y une sous-variétéde X. On identifie le fibré tangent de Y à une sous-variété de TX. Le fibré vectorielnormal à Y dans X peut être vu comme voisinage tubulaire de Y dans X. Un telvoisinage tubulaire N est donc à la fois un fibré vectoriel de réel dimension réelledim X − dim Y sur Y et aussi une sous-variété ouverte de X. Le fibré tangent à N

576 19. LE THÉORÈME DE L’INDICE
est simplement la réstriction du fibré tangent de X à N. On a donc un diagramme
TY TN TX
Y N X
//⊆
//⊆
//⊆ //⊆
En particulier TN est une sous-variété ouverte de TX. Comme on l’a vu dans ladeuxième construction du K–groupe, 9.1.55, tout élément de K(TN) peut être re-presenté par un triplet α : E → F, où E et F sont des fibrés vectoriels sur TN,triviales en dehors d’une partie compacte C de TN, et où α est un morphisme defibrés vectoriels, égal à l’identité en dehors de C. On peut prolonger les fibrés Eet F en des fibrés E et F sur TX, en demandant que ces fibrés soient triviales surle complement dans TX de C, et on peut prolonger α en un morphisme de fibrésα : E → F en demandant que α soit l’identité en dehors de C. Le triplet α : E → Frepresente un élément de K(TX).Ces prolongements définissent une application K(TN)→ K(TX), qui evidemmentest un homomorphisme d’anneaux. On l’appelle homomorphisme d’extension. Cetteconstruction marche bien sûr pour une variété et une sous-variété ouverte quel-conque. En d’autre mots, on peut voir K(−) comme foncteur covariant de la caté-gorie dont les objets sont les variétés et dont les morphismes sont les immersionsouvertes vers la catégorie des anneaux commutatifs eventuellement sans unité.
19.2.1. P
Soit X une variété et soit P : E→ X un fibré vectoriel réel sur X. Notons π : TX → X lefibré tangent à X. Alors on a un isomorphisme
TE π∗TX ⊕ π∗E
De plus, le fibré T(TX) sur TX porte une structure de fibré complexe.
D.
19.2.2. C
Soit X une variété et Y une sous-variété de X. Soit N un voisinage tubulaire de Y dans X,vu comme fibré normal à Y dans X. Alors le fibré TN = TX|N sur N a une structure defibré complexe.
19.2.3. D
Soit X une variété, Y une variété compacte, et i : Y → X une immmersion fermée.Soit N un voisinage tubulaire de Y dans X, vu comme fibré normal à Y dans X.L’homomorphisme de groupes abéliens
i! : K(TY)→ K(TX)

19.2. L’INDICE TOPOLOGIQUE 577
est défini comme étant la composition
K(TY) K(TN) K(TX)//Φ //h
où Φ est l’isomorphisme de Thom, et où h est l’homomorphisme d’extension.
19.2.4. R
La définition de l’homomorphisme i! ne dépend pas du choix de N.
19.2.5. E
Considérons comme exemple facile le cas où X = Rn et où Y est un point de X. Onpeut donc choisir N = X.
19.2.6. R
Non seulement le théorème suivant est le centre et point de repère pour toute ladémonstration du théorème de l’indice, il est aussi le resultat clé pour la démons-tration de l’équivalence des divers formulations du théorème de l’indice.
19.2.7. T
Il existe une unique application B qui à toute variété compacte X associe un homomorphismede groupes abéliens
BX ∈ Hom(K(TX),Z
)ayant les deux propriétés suivantes
I : Si X est un point, alors BX = dim
II : Pour tout plongement j : Y→ X on a BX j! = BY.
19.2.8. R
On va dans la suite construire un candidat pour l’application B dont on affirmel’existence, et ensuite démontrer que l’application B consrtuite satisfait (I) et (II),et que de plus (I) et (II) caractérisent B complètement. Remarquons que l’énnoncéde ce théorème fait un sens, même si la collection de toutes les variétés compactesn’est pas un ensemble, mais seulement une classe. Il y a deux écoles : D’une part onpeut le reformuler facilement dans le langage des catégories et foncteurs, faisantdonc de B un foncteur. D’autre part, la condition (II) entraine que si B existe, alorsBX ne dépend de X seulement à homéomorphisme près. Les variétés différentiablescompactes à homéomorphisme près forment un ensemble.
19.2.9. P

578 19. LE THÉORÈME DE L’INDICE
L’attribution (−)! est fonctorielle dans le sens que id! = id et (i j)! = i! j!.
D. Dans le cas X = Y et i = id, on choisit N = X comme voisinagetubulaire de X dans X. L’isomorphisme de Thom K(TX) → K(TX) et l’homomor-phisme d’extension K(TX)→ K(TX) sont, cans ce cas, les deux l’identité sur K(TX),ce qui montre id! = id.Soient maintenant X, Y et Z des variétés avec inclusions
Z Y X//j //i
Soit N un voisinage tubulaire de Z dans Y, et soit M un voisinage tubulaire de Ydans X. Ces voisinages seront toujours aussi considérés comme fibrés normauxde Z dans Y respectivement de Y dans X. Remarquons que la réstriction L := N|Mest un voisinage tubulaire de Z dans X. A notre propos, il faut montrer que lediagramme suivant commute :
(227)
K(TL)
K(TZ) K(TM) K(TY) K(TN) K(TX)$$J
JJJJJJJJJJJJJJJJJJJJJJJ
gX
777
7777
7777
7777
77
gN
::tttttttttttttttttttttttt
ΨZ
//ΦZ
CC
ΨM
//hY
//ΦY
//hX
où ΦZ,ΦY, ΨZ et ΨM sont les isomorphismes de Thom, et où hY, hX, gN et gX sontles homomorphismes d’extension. La composition des quatre flèches qui formentla base du grand triangle (227) est i! j!, et la composition des deux autres arrètesest (i j)!.
19.2.10. D
Soit X une variété compacte et i : X → Rk un plongement. Soit j : 0 → Rk l’im-mersion qui envoit 0 sur le 0 deRk. On appelle indice topologique l’homomorphismede groupes BX := dim j−1
! i!.
19.2.11. R
L’indice topologique BX : K(TX)→ Z est donc la composition de
K(TX) K(TRk) K(0) Z//i! //j−1! //
dim
Le morphisme j! est, comme on l’a vu dans l’exemple 19.2.5, simplement l’iso-morphisme de Thom pour le fibré R2k
→ 0. Si on identifie K(0) = Z via ladimension, alors l’indice topologique est défini comme étant l’unique application

19.2. L’INDICE TOPOLOGIQUE 579
qui fait commuter le diagramme
K(TN) K(TRk)
K(TX) K(0)
//h
//BX
OO
Φ
OO
Ψ
oùΦ etΨ sont les isomorphismes de Thom, et où h est l’homomorphisme d’exten-sion. On écrit B pour BX si X est clair du contexte.
D 19.2.7. Rappelons que (remarque 19.2.11) sousl’identification via la dimension Z = K(0), l’indice topologique est défini à l’aidedu diagramme
(228)
K(TN) K(TRk)
K(TX) K(0)
//h
//BX
OO
Φ
OO
Ψ
Commencons par montrer que l’indice topologique B satisfait les conditions (I)et (II). Si X est un point, alors on peut plonger X dans R0, d’une seule façond’ailleurs. De plus, N := R0 est un voisinage tubulaire de X dans R0, ce qui faitque TX = TN = TR0. Avec ces choix, les isomorphismes de Thom Φ etΨ ainsi quel’homomorphisme d’extension h du diagramme (228) deviennent l’identité, doncaussi BX. Ainsi BX = dim, tenant compte de l’identification Z = K(0).Quant à la propriété (II) de B, choisissons une immersion i : X→ Rk. L’applicationi j : Y → Rk est une composition de deux immersions, donc une immersion. Lediagramme suivant commute, vu la proposition 19.2.9 :
K(TX)
K(TY) TRk K(T0) Z$$J
JJJJJJJi!
::tttttttt
j!
//(i j)! // //
Le chemin en haut est BX j!, et celui en bas est BY, ce qui montre que B a aussi lapropriété (II). La partie existence de 19.2.7 est démontrée.Supposons maintenant qu’on ait une fonction qui à toute variété compacte Xattribue un homomorphisme B′X ∈ Hom
(K(TX),Z
)tel que (I) et (II) sont satisfaits.
Fixons une variété compacte X et un plongement i : X → Rk. Identifions Sk, lasphère de dimension k, à la compactification deRk. En composant i avec l’inclusion

580 19. LE THÉORÈME DE L’INDICE
Rk→ Sk on obtient un plongement j : X→ Sk. On a un diagramme
(229)
K(TRk)
K(TX) K(TSk)
K(0)
zzttttttttttttttttttt
h
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
i!
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
B′X
//j!
$$JJJJJJJJJJJJJJJJJJJJ
B′Sk
OO
Φ
où h est l’homomorphisme d’extension et Φ l’isomorphisme de Thom, et où on ade nouveau identifié K(0) = Z. Comme BX = Φ
−1 i! par définition, il suffit de
démontrer que ce diagramme commute. Par hypothèse B′ satisfait (II), on a doncen particulier B′X = B′
Sk j!. On a aussi j! = h i! : En effet, soit N un voisinagetubulaire de X dans Rk. Comme Rk est une sous-variété ouverte de Sk, N est aussiun voisinage tubulaire de X dans Sk. On a
K(TRk)
K(TX) K(TN) K(TSk)$$J
JJJJJJJh
//Ψ
::ttttttttt
g
//f
où Ψ est l’isomorphisme de Thom et où f ,g et h sont les homomorphismes d’ex-tension. On a h g = f par construction, et ainsi
j! = f Ψ = h g Ψ = h i!
Il reste à vérifier la commutativité du triangle à droite dans le diagramme (229),c’est-à-dire B′
Sk h = Φ−1. Remarquons que la variété X n’intervient plus. Considé-rons le diagramme (229) dans cas particulier X = 0 :
(230)
K(TRk)
K(0) K(TSk)
K(0)
zzttttttttttttttttttt
h
44jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
i!
**TTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTT
B′0
//j!
$$JJJJJJJJJJJJJJJJJJJJ
B′Sk
OO
Φ
19.3. ENNONCÉ DU THÉORÈME DE L’INDICE 581
Vu que B′0 = dim par hypothèse, et tenant compte de l’identification K(0) = Z,
on a B′0 = id. De plus on a i! = Φ, ce qui montre que le grand triangle de (230)
commute. On a déjà montre que B′Sk j! = B0 et que h i! = j!, ce qui permet de
conclure que B′Sk h = Φ−1. Le théorème 19.2.7 est démontré.
19.3. Ennoncé du théorème de l’indice
19.3.1. D
Soit X une variété compacte et P ∈ Ell(X). On appelle indice topologique de P et onnote indt P le nombre entier
indt P := BX([σ(P)])
où [σ(P)] est le symbole K–théorique de P.
19.3.2. T (Atiyah–Singer, version K–théorique)
Soit X une variété compacte. Alors
inda P = indt P
pour tout P ∈ Ell(X).
19.3.3. T (Atiyah–Singer, version cohomologique)
Soit X une variété lisse et compacte de dimension n et soit P un opérateur élliptique sur Xde symbole σ. Alors
inda P = (−1)nch([σ]) td(TX ⊗ C)[TX]
où ch est le caractère de Chern, td la classe de Todd et [σ] ∈ K(TX) la classe du symbole deP.
19.3.4. R
Quant à l’équivalemce de ces énnoncés, il suffit évidemment de montrer que
(231) B(E) = (−1)nch(E) td(TX ⊗ C)[TX]
pour tout E ∈ K(TX), ce qui est un excercice purement calculatoire.


Bibliographie
[1] A A. Sobolev Spaces. Elsevier, 2003.
[2] A, R A. Sobolev spaces. Acadamic Press, 1975.
[3] A, MF. Algebraic Topology and Operators in Hilbert Spaces. Lecture series in modernanalysis and applications I, Springer, 1969.
[4] A, M F. K-theory. Lecture notes by D. W. Anderson, W. A. Benjamin, Inc., 1967.
[5] A, M F S, G. B. The index of elliptic operators. II. Annals of Mathematics,Second Series, p. 531–545, vol. 87, 1968.
[6] A, M F S, IM. The index of elliptic operators I. Annals of Mathe-matics, Second Series, p. 484–530, vol. 87, 1968.
[7] A, M F S, I M. The index of elliptic operators III. Annals ofMathematics, Second Series, p. 546–604, vol.
[8] A, T. Nonlinear analysis on manifolds. Monge-Ampère equations. Springer-Verlag, 1982.
[9] B, B. Topologie und Analysis, eine Einführung in die Atiyah–Singer Indexformel. SpringerVerlag, 1977.
[10] B, R. Lectures on K(X). W.A.Benjamin Inc., 1969.
[11] B, R L, W. T. Differential forms in algebraic topologie, GTM 82. Springer Verlag,1982.
[12] B, N. Algèbre, chapitres IV à VII. Masson, 1981.
[13] B, N. Espaces vectoriels topologiques, chapitres I à V. Masson, 1981. 87, 1968.
[14] B, G E.. Topology and Geometry. Springer-Verlag, 1993.
[15] B, H. Analyse fonctionnelle. Collection Mathématiques Appliquées pour la Maîtrise, Mas-son, 1983.
[16] B, E. Singularities in the work of Friedriech Hirzebruch. Surveys in Differential Geometry,vol VII, International Press, 2000.
[17] C, C. The algebraic theory of spinors and Clifford algebras. Springer-Verlag, 1997.
[18] D, B. Introduction au calcul des variations. Cahiers Mathématiques de l’École Poly-technique Fédérale de Lausanne, Presses Polytechniques et Universitaires Romandes, 1992.
[19] D A. Analyse IV. Cours de Bachelor, 2002-2003.
[20] D A. Analyse Harmonique. Cours de Master, 2003-2004.
[21] D A. Séries trigonométriques I et II. Cours de Master, 2003-2004.
[22] D, J. Fibre Bundles and Chern–Weil Theory. Lecture notes series no. 69, Aarhus Universitet,1977.
[23] F-M, L. Introduction à la théorie de Morse. EPFL, 2005.
[24] F, G B. Lectures on partial differential equations. Springer Verlag, 1983.
[25] G, I G, S K, M A. Classes of linear operators.Vol. I. Operator Theory : Advances and Applications, Birkhäuser Verlag, 1990.
[26] G, M. G, V. Stable Mappings and Their Singularities. Springer-Verlag, 1973.
[27] G, A. La théorie des classes de Chern. Bulletin de la S.M.F., tome 86, p. 137-154,1958.
583

584 BIBLIOGRAPHIE
[28] G, V P, A. Differential topology. Prentice-Hall Inc., 1974.
[29] H, R. Algebraic geometry, GTM 52. Springer Verlag, 1977.
[30] H, H S, G E. Category theory : an introduction. Allyn and Bacon Inc.,1973.
[31] H, E S, K. Real and abstract analysis. A modern treatment of the theory offunctions of a real variable. Springer-Verlag, 1965.
[32] H, L. The analysis of linear partial differential operators, vol I. Grundlehren 256, SpringerVerlag, 1983.
[33] H, L. The analysis of linear partial differential operators, vol III. Grundlehren 274, SpringerVerlag, 1985.
[34] H, D. Fibre bundles. McGraw-Hill Book Co., 1966.
[35] J, J. Partial differential equations. Springer, 2002.
[36] K, M. K-theory, an introduction. Grundlehren der Mathematischen Wissenschaften, Band226, Springer-Verlag, 1978.
[37] L, S. Algebra. Springer-Verlag, 1986.
[38] L, T.Y. Algebraic Theory of Quadratic Forms. W.A. Benjamin, Inc., 1973.
[39] L, P. Clifford Algebras and Spinors. Cambridge University Press, 2001.
[40] M, M. Groupes de Lie compacts. Cours d’École doctorale, EPFL, Lausanne, 2004.
[41] M, R E. An introduction to Banach space theory. Graduate Texts in Mathematics,Springer-Verlag, 1998.
[42] M, R V, D. Introduction to functional analysis. Oxford Graduate Texts inMathematics, The Clarendon Press Oxford University Press, 1997.
[43] M, JW. Topology from the differentiable viewpoint. Based on notes by David W. Weaver, TheUniversity Press of Virginia, Charlottesville, Va., 1965.
[44] M, B. Theory of categories. Pure and Applied Mathematics, Vol. XVII, Academic Press,1965.
[45] M, I H. From calculus to cohomology. Cambridge univ. press, 2000.
[46] M L, S. Categories for the Working Mathematician. Springer-Verlag, 1971.
[47] P, I R.. Clifford Algebras and the Classical Groups. Cambridge University Press, 1995.
[48] P A. Académie des Sciences de Norvège.
http://www.abelprisen.no/en/
[49] R, M S, C. Interview with Michael Atiyah and Isadore Singer. Interview dela remise du prix Abel, 2004.
[50] R S. S B.W. Index theory of elliptic boundary problems. Akademie–Verlag Berlin,1982.
[51] R, J. On the Atiyah–Singer index theorem. Commentaires pour le prix Abel 2004, Académiedes Sciences de Norvège, 2004.
[52] R, J J. Advanced modern algebra. Prentice Hall Inc., 2002.
[53] S, G B. Equivariant K–theory. Publ. math. IHES, 34, p. 129–151, 1968.
[54] S, P. The Atiyah-Singer index theorem. Lecture notes 638, Springer Verlag, 1978.
[55] S, M A. Pseudo differential operators and Spectral theory. Springer 1987.
[56] S, S R. Pseudo differential operators. Longman scientific & technical 1992.
[57] S, C. Fourier Integrals in Classical Analysis. Cambridge University Press, 1993.
[58] S, M. Calculus on Manifolds. W. A. Benjamin, Inc., 1965.
[59] S, U. Topologie des fibrés, cours d’été à l’université de Neuchâtel. Notes personelles, 2004.
[60] S-T H. Cohomology theory. Markham publishing company, 1968.
[61] S-T H. Homology theory. Holden-Day, 1970.
[62] TM. Mesure, intégration et espaces fonctionnels. Cours de Bachelor, 2003-2004.

BIBLIOGRAPHIE 585
[63] U S. Topologie des fibrés. Université de Neuchâtel, 2004.
[64] W, B.L. Modern Algebra, 7nd ed. Frederick Unger 1970.
[65] W, D. Funktionalanalysis Springer 1995.
[66] W, . Michael Atiyah, Isadore Singer and the index theorem.
http://en.wikipedia.org/wiki/Atiyah-Singer_index_theorem
modification avril 2005.
[67] WM. Analyse Harmonique Réelle. Hermann, 1995.
[68] W, MW. An introduction to pseudo differential operators, 2nd ed. World scientific, Singapore1999.
[69] Z, W P. Weackly differentiable functions. Springer-Verlag, 1989.

Index
B(X,Y) ou B(X), 325Ab, 28Cat, 27Grp, 28Mon, 27Rng, 28Set, 27T op, 28T op∗, 28RMod, 28K-famille, 111
induite, 117Morphisme, 112Morphisme inverse, 114restriction, 117triviale, 115
Adjoint, 343Algèbre
de Calkin, 365de Lie, 84, 102
Applicationanalytique, 80différentiable, 205différentielle, 210exponentielle, 89lisse, 80, 205tangente, 210
Associativité des flèches, 26Atlas, 80
analytique, 80lisse, 80
AxiomesAssociativité des flèches, 26Neutralité de l’identité, 25
Biproduit, 34
Carte, 79Catégorie
Ab-catégorie, 34Ab, 28Cat, 27Grp, 28
Mon, 27Rng, 28Set, 27T op, 28T op∗, 28RMod, 28abélienne, 36additive, 35, 127admissible, 220de Banach, 190des K-familles, 113des K-famillessur X, 114discrète, 27Groupoïde, 32préadditive, 34pseudo-abélienne, 146pseudo-abélienne associée, 153vide, 26à deux éléments, 27à trois éléments, 27à un élément, 27
Centre, 104Codomaine, 23Cohomologie de de Rham, 216Commutativité, 24Compactification d’Alexandroff, 168Composition, 25Crochet de Lie, 106
Diagramme, 23biproduit, 34commutatif, 24
Difféomorphisme, 81local, 81
Domaine, 23Dérivation, 207
extérieur, 215
Ensemble polaire, 345Ensembles compacts et précompacts, 400Equivalence de G-cocycles, 123Espace cotangent, 211Espace dual topologique, 329Espace quotient, 331
587

588 INDEX
Espace tangent, 206Espaces de Hölder, 384Espaces de Sobolev Wk,p(Ω), 380Espaces de Sobolev Wk,p(M), 419Espaces de Sobolev Wk,p(M,E), 424Espaces de Sobolev Hk,p(Ω), 381Espaces de Sobolev Wk,p
0 (Ω), 384Espaces supplémentaires, 341Exponentielle matricielle, 92
Famille de Fredholm, 369Fibré tangent, 210Fibré vectoriel, 119Flèche, 23
composition, 25idempotente, 31Identité, 24injective, 30inverse, 30inversible, 30isomorphisme, 30nulle, 31rétraction, 30section, 30surjective, 30zéro, 31
Foncteur, 29continu, 129contravariant, 30covariant, 29de Banach, 194groupe fondamental, 29oubli, 29pimachin, 29pleinement fidèle, 148quasi-surjectif, 147, 183
Fonction différentiable, 207
G-cocycle, 123Graphe, 23Groupe
d’homologie singulière, 232de cohomologie de de Rham, 216de cohomologie singulière, 239de Lie, 82topologique, 81
Groupe de Grothendieckd’un foncteur, 184d’une catégorie, 165
Groupe fondamental, 29Groupoïde, 32
Homomorphismed’algèbres de Lie, 103de groupes de Lie, 82
Idempotence, 31Identité, 24Idéal de Lie, 103
Idéal des commutateurs, 104Indice, 355Injectivité, 30Invariant à gauche, 85Inverse, 30Inversibilité, 30Isomorphisme, 30Isomorphisme isométrique, 327
K-théoriealgébrique, 166d’un espace compact, 166d’un espace localement compact, 169d’une paire d’espaces, 198réduite, 168
Lisse, 79
Mesure, 303de Lebesgue, 303produit, 306
MorphismeVoir Flèche, 23
n-simplexe singulier, 228n-ème simplexe standard, 228Neutralité de l’identité, 25Norme, 324
opérateur, 326quotient, 332
Noyau d’Abel, 318
Objet, 23initial, 31nul, 31terminal, 31
Objetsisomorphes, 30
Opérateurcompact, 347, 400complètement continu, 400de Fredholm, 355fermé, 328linéaire borné, 325
p-forme, 201alternée, 201différentielle, 212exacte, 216fermée, 216
Parallélisable, 86pimachin, 29Presque partout ou p.p., 304Produit, 32Produit extérieur, 213
de p-formes alternées, 203Projecteurs, 32Projection, 341Projection canonique, 331Propriété de Heine-Borel, 328
INDEX 589
Rang d’un fibré vectoriel, 122Réseau, 102Rétraction, 30
Section, 30, 132zero, 133
Somme directed’algèbres de Lie, 104d’opérateurs, 340extérieure, 338intérieure, 339
Sous-algèbrede Lie, 103
Sous-groupede Lie, 95à 1-paramètre, 87
Sous-variété lisse, 94Support d’un morphisme de fibrés, 178Surjectivité, 30Symétrisation, 159
Théoriede cohomologie, 227de homologie, 221
Théorèmed’annulation de Witt, 36de Witt, 36
Théorème de Witt, 36Transformée de Fourier, 308Triade topologique propre, 223
Variétédifférentiable, 205lisse, 81orientable, 218topologique, 80
Zéro, 31