Embed Size (px)
DESCRIPTION
regreession
Citation preview

Linear Control SystemsLecture # 5
Stability and Matlab
– p. 1/28

Internal StabilityInternal stability deals with the boundedness andasymptotic behavior (as t → ∞) of the solutions of
x = Ax
The solution of x = Ax is given by
x(t) = eAtx(0)
Definition: The system x = Ax is stable if∥
∥eAt∥
∥ ≤ γ, ∀ t ≥ 0, γ > 0
and asymptotically (or exponentially) stable if∥
∥eAt∥
∥ ≤ γe−λt, ∀ t ≥ 0, γ > 0, λ > 0
– p. 2/28

If A is diagonalizable
eAt =
n∑
i=1
eλitviwTi
The behavior depends on Re[λi]
Re[λi] < 0 ⇒∣
∣eλit∣
∣ ≤ e−λt, λ > 0
Re[λi] = 0 ⇒∣
∣eλit∣
∣ = 1
Re[λi] > 0 ⇒ eλit is unbounded
– p. 3/28

In general
eAt =
r∑
i=1
mi∑
k=1
Wik
tk−1
(k − 1)!eλit
Re[λi] > 0 ⇒ tk−1eλit is unbounded
Re[λi] < 0 ⇒∣
∣tk−1eλit∣
∣ ≤ γe−λt, γ > 0, λ > 0
Re[λi] = 0 and k = 1 ⇒ eλit is bounded
Re[λi] = 0 and k ≥ 2 ⇒ tk−1eλit is unbounded
– p. 4/28

When will the dimension of the Jordan block Ji be higherthan one?
(A − λiI)vi = 0
Let qi be the algebraic multiplicity of λi. If
qi = nullity(A − λiI) = n − rank(A − λiI)
then there are qi linearly independent eigenvectorsassociated with the eigenvalue λi
If this is true for every eigenvalue that has multiplicity higherthan one, then we can find n linearly independenteigenvectors and A is diagonalizable
– p. 5/28

Ifnullity(A − λiI) = n − rank(A − λiI) < qi
for any eigenvalue with multiplicity higher than one, then Ais not diagonalizablenullity(A − λiI) is equivalent to the geometric multiplicityof the eigenvalue λi.We need
qi − nullity(A − λiI)
number of generalized eigenvectors
– p. 6/28

Theorem: The system x = Ax is
Stable if and only if
Re[λi] ≤ 0, for i = 1, 2, . . . , n
and for every eigenvalue with Re[λi] = 0 and algebraicmultiplicity qi ≥ 2,
rank(A − λiI) = n − qi
Asymptotically (or exponentially) stable if
Re[λi] < 0, for i = 1, 2, . . . , n
– p. 7/28

Example: Study the stability of x = Ax, where
A =
−1 0 3 1
0 −2 1 0
0 0 −3 1
0 0 0 −3
Eigenvalues : − 1,−2,−3,−3
The system is asymptotically stable
– p. 8/28

Example: Study the stability of x = Ax, where
A =
−1 0 3 1
0 1 1 0
0 0 0 0
0 0 0 0
Eigenvalues : − 1, 1, 0, 0
The system is unstable
– p. 9/28

Example: Consider the series and parallel connections oftwo identical systems, each represented by
x =
[
0 1
−1 0
]
x +
[
0
1
]
u, y =[
1 0]
x
orH(s) =
1
s2 + 1
As =
0 1 0 0
−1 0 0 0
0 0 0 1
1 0 −1 0
, Ap =
0 1 0 0
−1 0 0 0
0 0 0 1
0 0 −1 0
Eigenvalues : ± j, ±j
– p. 10/28

Series Case:
λ1 = j, q1 = 2, n − q1 = 2
As−λ1I =
−j 1 0 0
−1 −j 0 0
0 0 −j 1
1 0 −1 −j
→
0 1 0 0
0 −j 0 0
0 0 0 1
1 0 0 −j
rank(As − λ1I) = 3
The system is unstable
– p. 11/28

Parallel Case:
λ1 = j, q1 = 2, n − q1 = 2
Ap−λ1I =
−j 1 0 0
−1 −j 0 0
0 0 −j 1
0 0 −1 −j
→
0 1 0 0
0 −j 0 0
0 0 0 1
0 0 0 −j
rank(Ap − λ1I) = 2
The system is stable
– p. 12/28

What is the effect of state transformations on stability?
A → x = Pz → P−1AP
Av = λv
P−1Av = λP−1v
(P−1AP )(P−1v) = λP−1v
A and P−1AP have the same eigenvalues. If vi is aneigenvector of A, then P−1vi is an eigenvector of P−1AP
rank(
P−1AP − λI)
= rank[
P−1(A − λI)P]
= rank (A − λI)
Internal stability is invariant under state transformations
– p. 13/28

Input-Output Stability
Definition: The linear system y(s) = H(s)u(s) isBounded-Input Bounded-Output (BIBO) stable if for everybounded input u(t), the output y(t) is boundedEquivalently, for every ku > 0 there is ky > 0 such that
‖u(t)‖ ≤ ku, ∀ t ≥ 0 ⇒ ‖y(t)‖ ≤ ky, ∀ t ≥ 0
By taking the inverse Laplace transform
y(t) =
∫ t
0
H(t − τ )u(τ ) dτ
where H(t) = L−1{H(s)} is the impulse response matrix
– p. 14/28
Theorem: The system y(s) = H(s)u(s) is BIBO stable ifand only if
∫
∞
0
‖H(t)‖ dt < ∞
Proof of sufficiency:
‖y(t)‖ =
∥
∥
∥
∥
∫ t
0
H(t − τ )u(τ ) dτ
∥
∥
∥
∥
≤
∫ t
0
‖H(t − τ )‖ ‖u(τ )‖ dτ
≤
∫
∞
0
‖H(t − τ )‖ dτ ku
≤
∫
∞
0
‖H(σ)‖ dσ kudef= ky
– p. 15/28

Proof on Necessity: Use a contradiction argument (in theSISO case). Given ku > 0, suppose there is ky > 0 suchthat
|u(t)| ≤ ku, ∀ t ≥ 0 ⇒ |y(t)| ≤ ky, ∀ t ≥ 0
but∫
∞
0|h(t)| dt is not finite
There is t1 (dependent on ky/ku) such that
∫ t1
0
|h(t1 − τ )| dτ >ky
ku
– p. 16/28

Let
u(t) =
ku, when h(t1 − t) > 0
0 when h(t1 − t) = 0
−ku when h(t1 − t) < 0
|u(t)| ≤ ku, for 0 ≤ t ≤ t1
y(t1) =
∫ t1
0
h(t1−τ )u(τ ) dτ =
∫ t1
0
ku|h(t1−τ )| dτ > ky
Contradcition
– p. 17/28

Example: Time delay element
y(t) = u(t − T )
H(s) = e−sT
h(t) = L−1{H(s)} = δ(t − T )
|u(t)| ≤ ku ⇒ |y(t)| ≤ ku
Or∫
∞
0
δ(t − T ) dt = 1
– p. 18/28

WhenH(s) = C(sI − A)−1B + D
the elements hij(s) of H(s) are proper rational functions ofs
hij(s) =nij(s)
dij(s)
where nij(s) are dij(s) are polynomials with
deg(nij) ≤ deg(dij)
– p. 19/28

Since
(sI − A)−1 =1
det(sI − A)Adjoint(sI − A)
the poles of hij(s) are roots of
det(sI − A) = 0
that is, eigenvalues of A
Not all eigenvalues of A will appear as poles of someelements of H(s) because some eigenvalues could becancelled
– p. 20/28

Given a strictly proper rational function H(s), leth(t) = L−1{H(s)}. When will
∫
∞
0
|h(t)| dt < ∞
H(s) can be expressed as the sum of terms of the form
K
(s − p)α
L−1
{
K
(s − p)α
}
= Ktα−1
(α − 1)!ept
Theorem: H(s) is BIBO stable if and only if all poles ofevery element of H(s) have negative real parts
– p. 21/28

What is the relationship between asymptotic and BIBOstability?The system x = Ax is asymptotically stable if all theeigenvalues of A have negative real parts.The system H(s) = C(sI − A)−1B + D is BIBO stable ifall poles of all elements of H(s) have negative real partsThe poles of H(s) are eigenvalues of A
Asymptotic stability ⇒ BIBO stability
What about the opposite implication?Some eigenvalues of A may not appear as poles of H(s).If such eigenvalues have nonnegative real parts, then wecould have a situation where the system is BIBO stable butnot asymptotically stable
– p. 22/28

Example: Suppose A is diagonalizable
eAt =
n∑
i=1
eλitviwTi
(sI − A)−1 = L{
eAt}
=
n∑
i=1
1
s − λi
viwTi
H(s) = C(sI − A)−1B + D =
n∑
i=1
1
s − λi
CviwTi B + D
If Cvi = 0 or wTi B = 0, the eigenvalue λi cancels out of
H(s)
– p. 23/28

{A,B,C,D} → x = Pz → {Λ, P−1B,CP,D}
x = Ax + Bu → z = Λz + (P−1B := B)u
y = Cx + Du → y = (CP := C)z + Du
Λ =
λ1
. . .
λn
, P = [v1, · · · , vn], P
−1 =:
wT1...
wTn
CP = [Cv1, · · · , cvn] =: [c1, · · · , cn]
P−1B =
wT1 B...
wTnB
=:
b1...bn
– p. 24/28
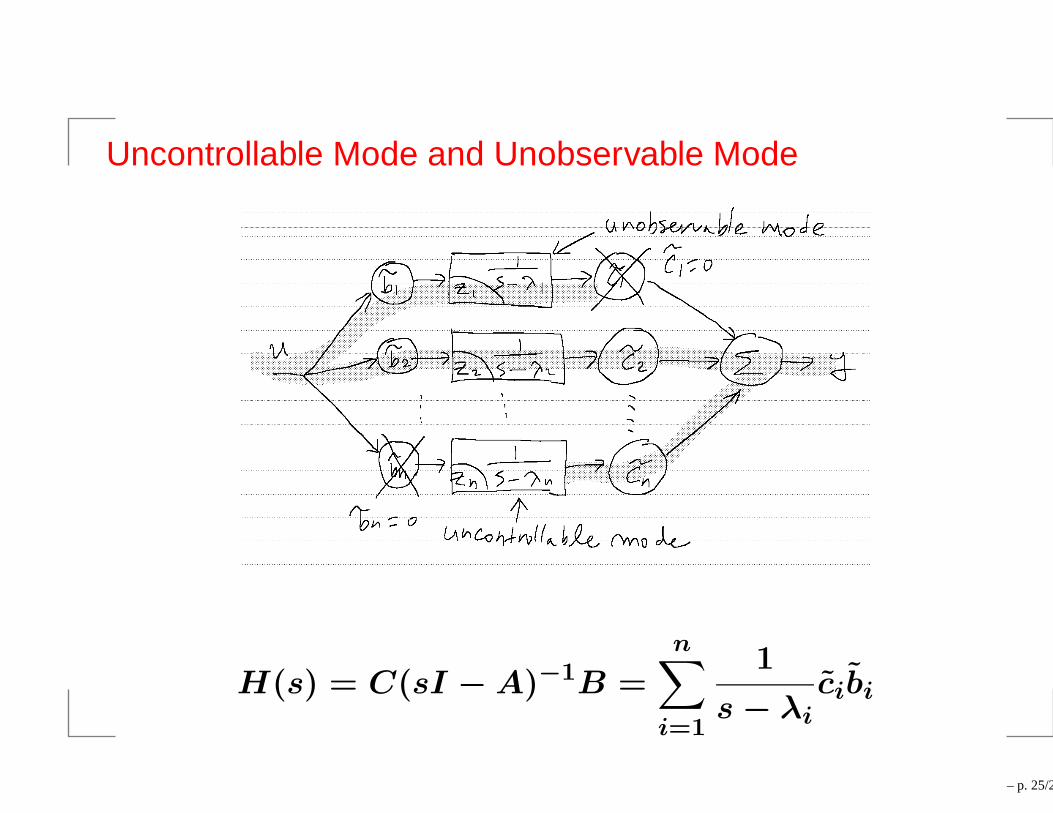
Uncontrollable Mode and Unobservable Mode
H(s) = C(sI − A)−1B =
n∑
i=1
1
s − λi
cibi
– p. 25/28

Example: Suppose we want to stabilize an unstablesystem described by
Gp(s) =1
s − 1
Consider a cascade compensator
Gc(s) =s − 1
s + 1
so that
Gp(s)Gc(s) =1
s − 1·s − 1
s + 1=
1
s + 1
The system is BIBO stable. Is it asymptotically stable?
– p. 26/28

Find a state model of the system
-s−1
s+1-
1
s−1-
u v y
Gp(s) =1
s − 1→ x1 = x1 + v, y = x1
Gc(s) =s − 1
s + 1→ x2 = −x2 + u, v = −2x2 + u
x1 = x1 − 2x2 + u
x =
[
1 −2
0 −1
]
x +
[
1
1
]
u
– p. 27/28

A =
[
1 −2
0 −1
]
Eigenvalues : 1,−1
The system is not asymptotically stable. The eigenvalue+1 is called a hidden mode. Unstable hidden modes arenot acceptable because they can be excited by initialconditions or disturbancesFor example
x1(0) = α, x2(0) = 0, u(t) ≡ 0 ⇒ x2(t) ≡ 0
⇒ x1(t) = αet
– p. 28/28




