Embed Size (px)
DESCRIPTION
tendencia
Citation preview

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
INTRODUCCIÓN A ROBOTSMANIPULADORES

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
INTRODUCCIÓN A LA ROBÓTICA
Prof. Dr. Oscar F. Avilés S.
Oficina: Grupo de Inv. Davinci D207 Horario de atención: L - V am e-mail: [email protected]
Resumen: Modelado matemático de sistemas robóticos articulados,brazos robóticos, aplicaciones, construcción, modelo cinemático directoy modelado cinemático inverso, modelo dinámico directo e inverso.
Bibliografía:Notas de Aula, Craig, Vidyasagar, González

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Guerra de las Galaxias (2007)
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Terminator (1984)
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
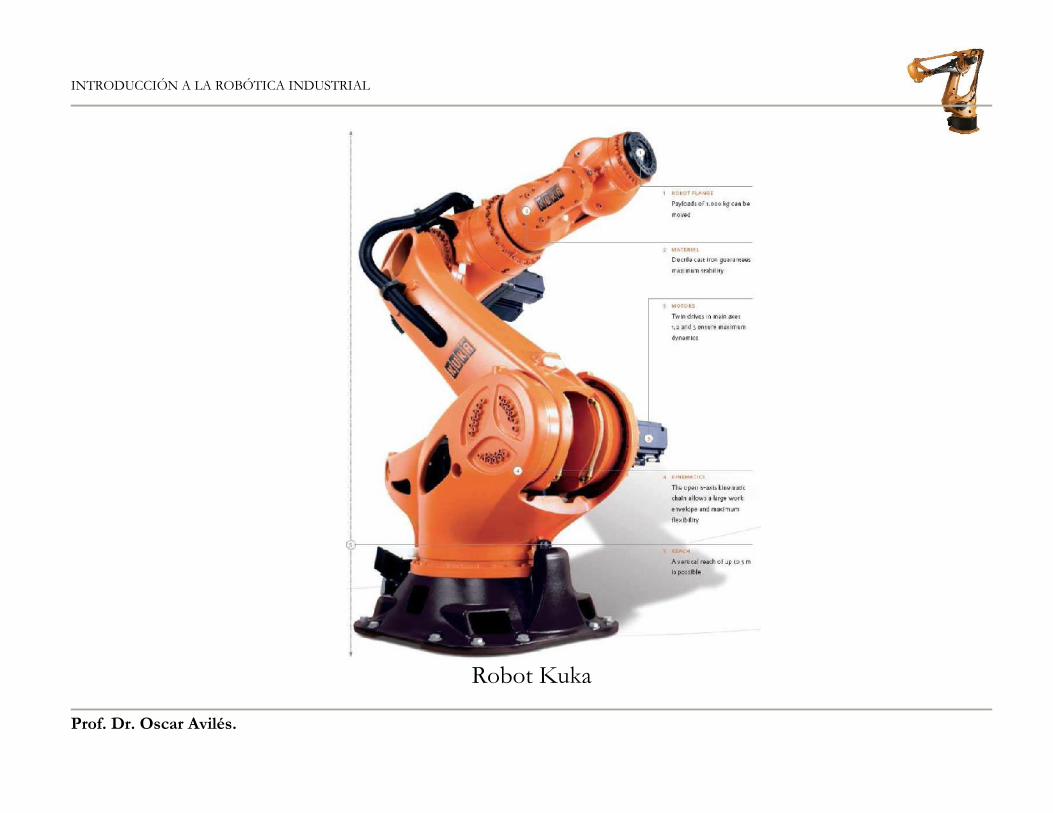
Robot Kuka
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Robot Kuka
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
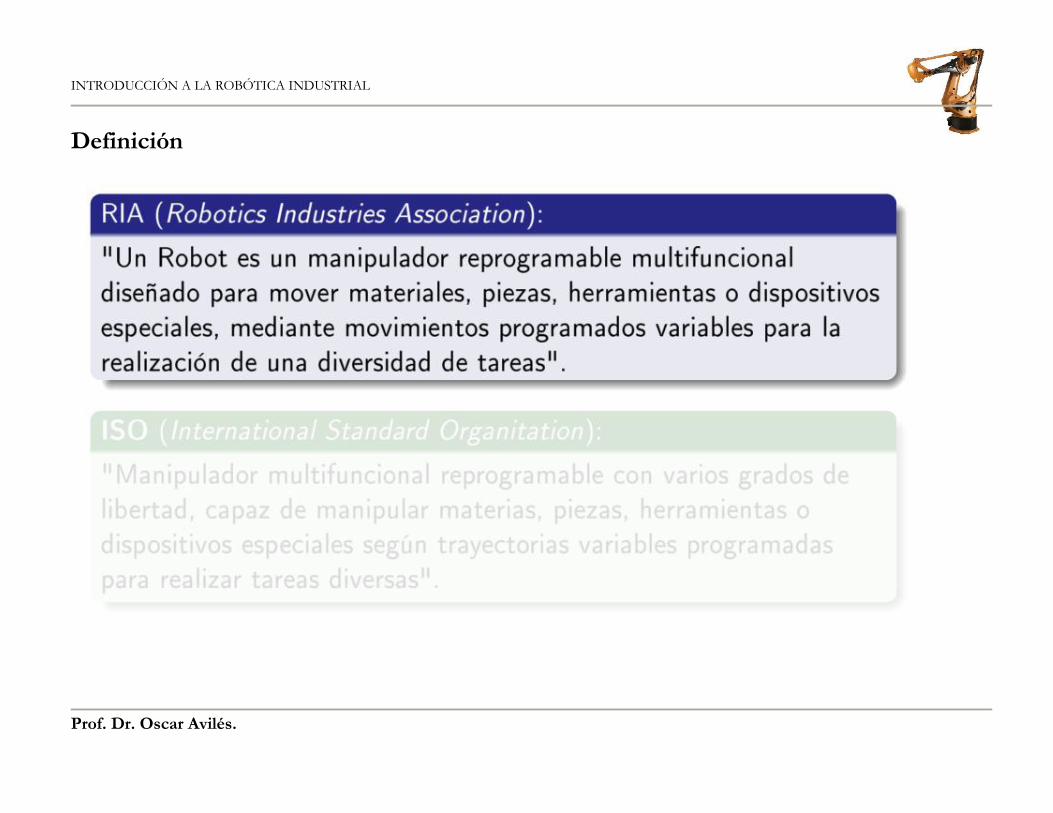
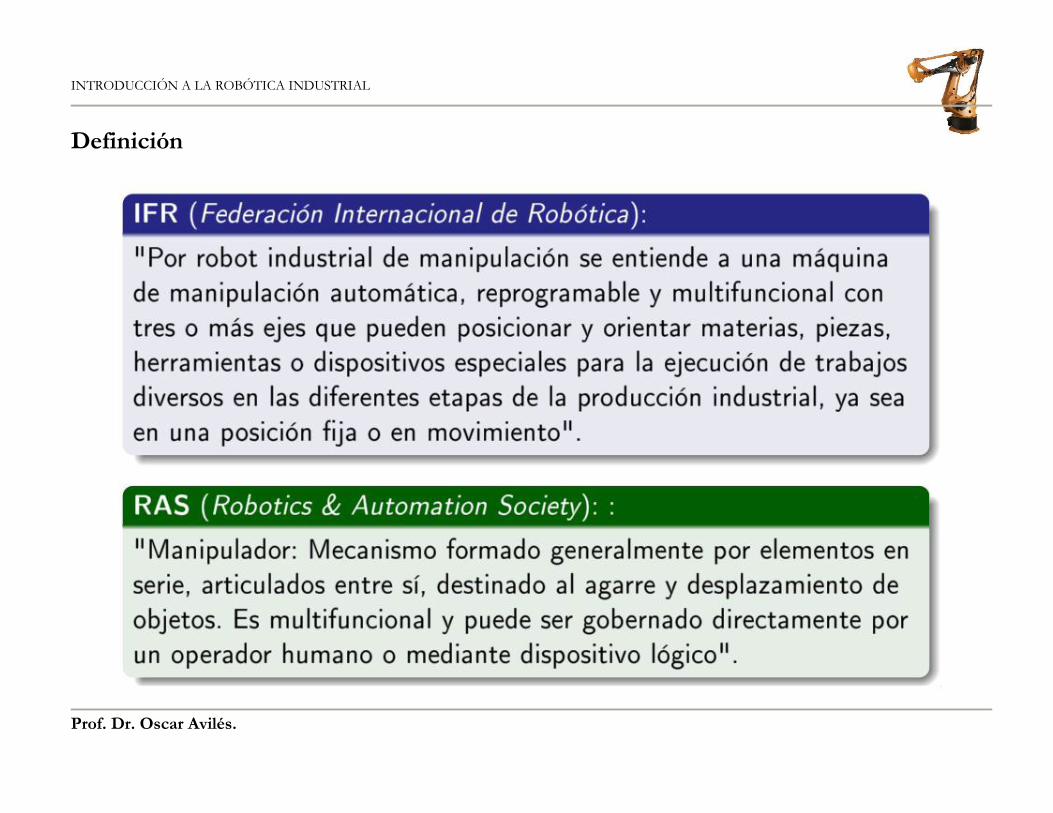
Definición
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
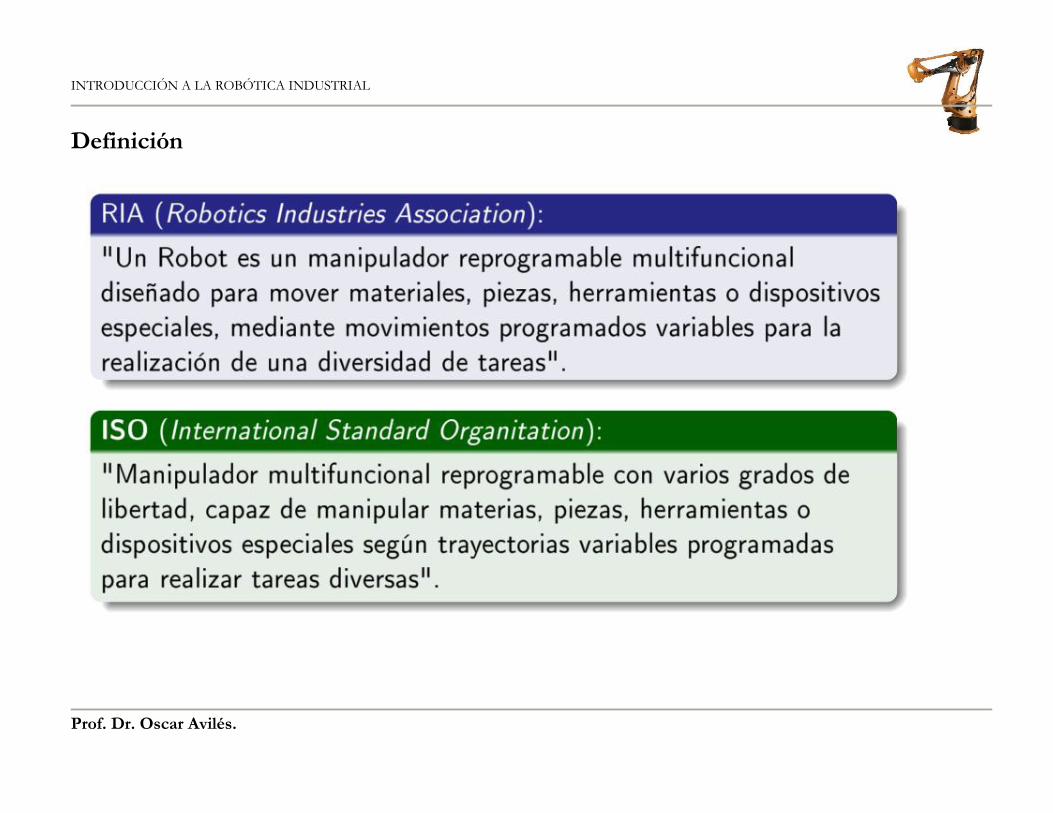
Definición
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
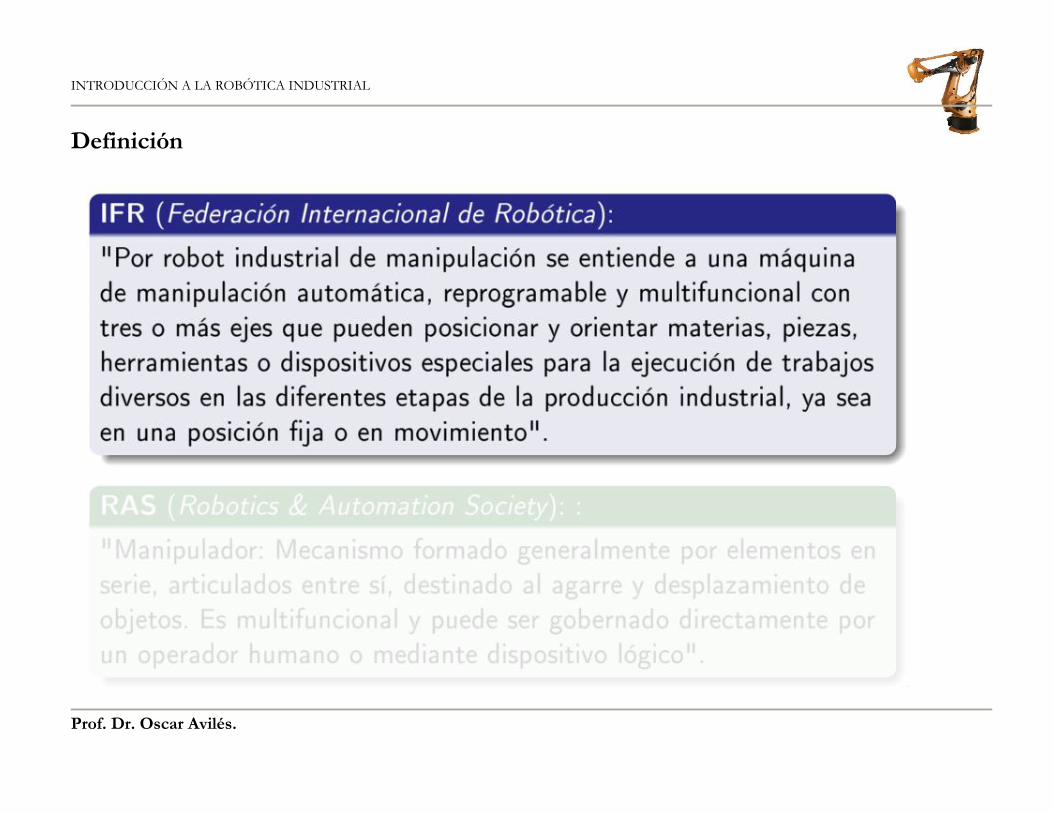
Definición
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Definición

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Definición

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
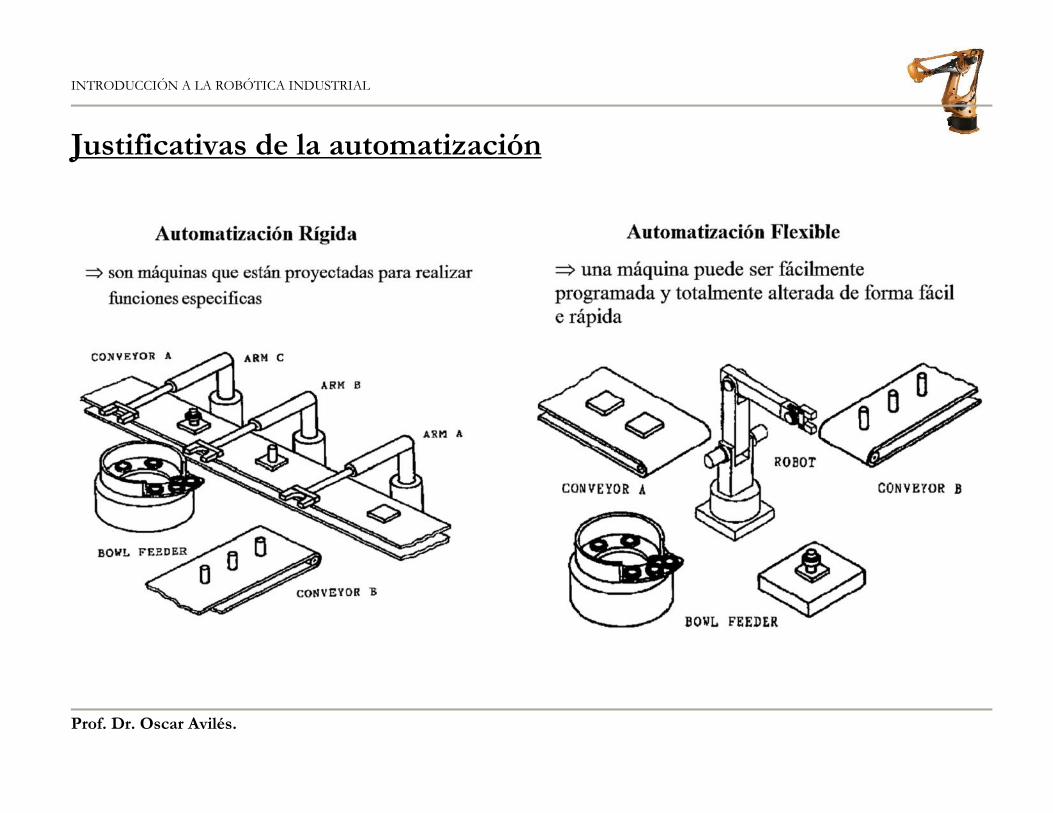
Justificativas de la Automatización
Exigencia de mayor calidad a más bajo precio;
Diversidad de productos: varias opciones generalmentedefinidas por los clientes, en un mercado altamente disputado yglobalizado;
Densidad de componentes por producto, recorriendofrecuentemente a la miniaturización;
Ciclo de vida de los productos es muy corto.
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Justificativas de la automatización
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
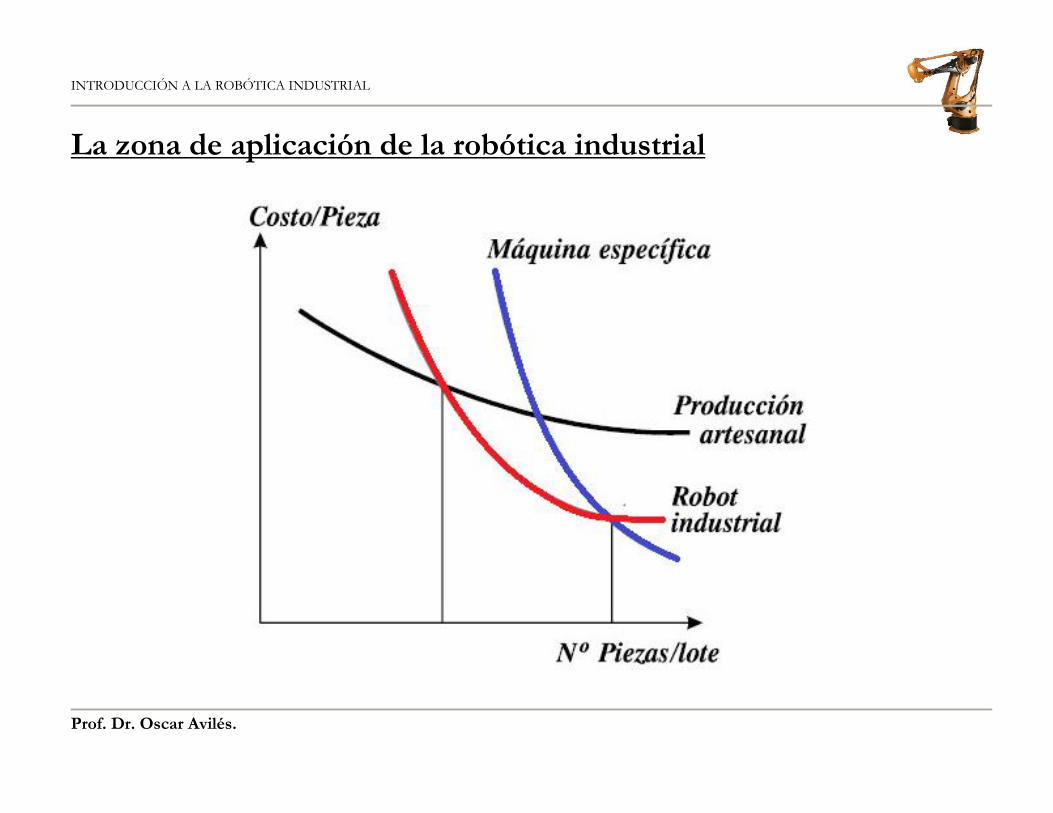
La zona de aplicación de la robótica industrial

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Un robot es …
Un MANIPULADOR MECANICO que está constituido por lacombinación de elementos estructurales rígidos (cuerpos o ejes)conectados entre sí a través de articulaciones (juntas), siendo el primercuerpo denominado base y el último extremidad terminal, donde serávinculado el componente efector (garra o herramienta).
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes
Base: Soporta todas las fuerzas y torques. Contiene la posición de referencia .
Ejes: Ejecuta movimientos rotacionales o lineales. Recibe las fuerzas y torques del próximo eje o de la Herramienta Transmite las fuerzas y torques para el próximo eje o para la base del robot
Herramienta: Recibe todas las fuerzas y torques de la herramienta del Robot. Transmite las fuerzas y torques para el eje. Recibe las herramientas del Robot.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Otros elementos de um sistema robótico

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Analogía- Sistema Bioinspirado

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
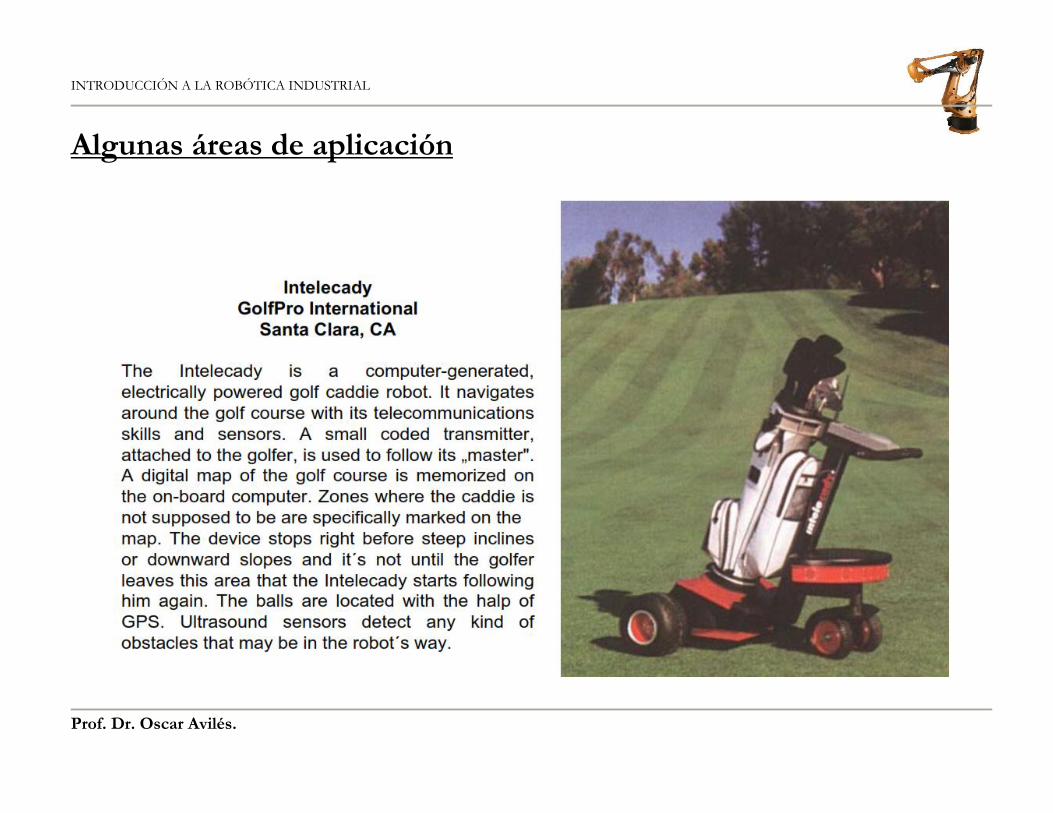
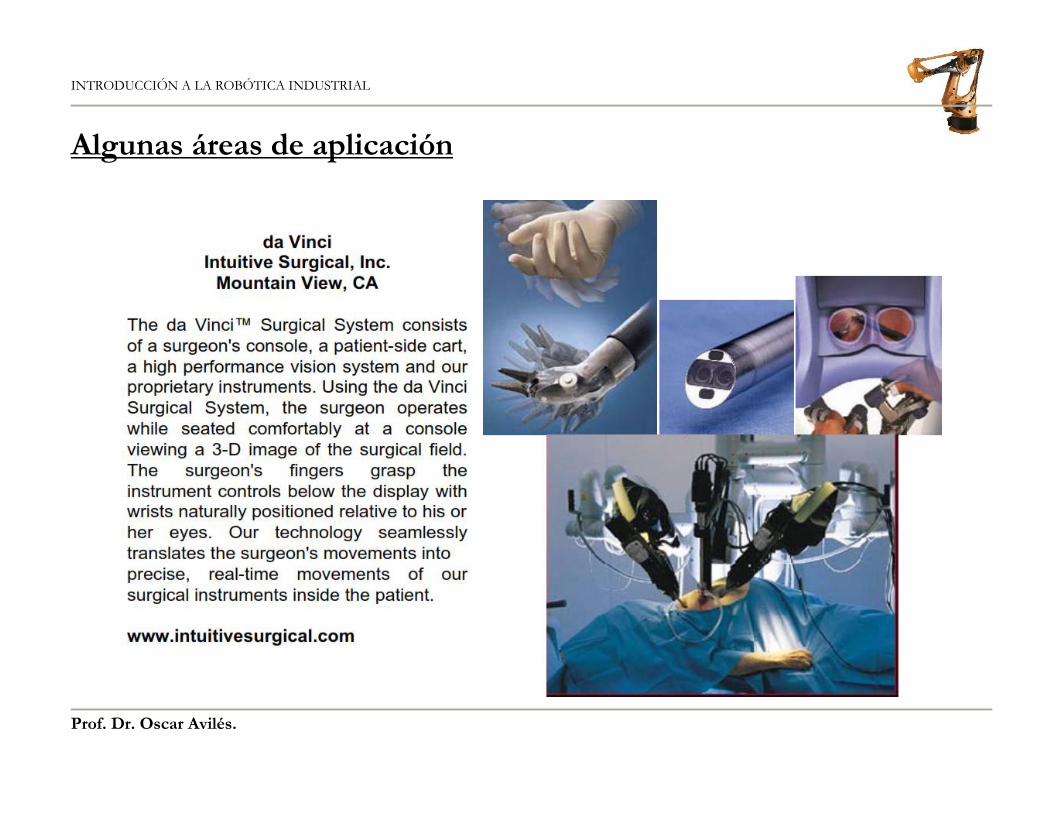
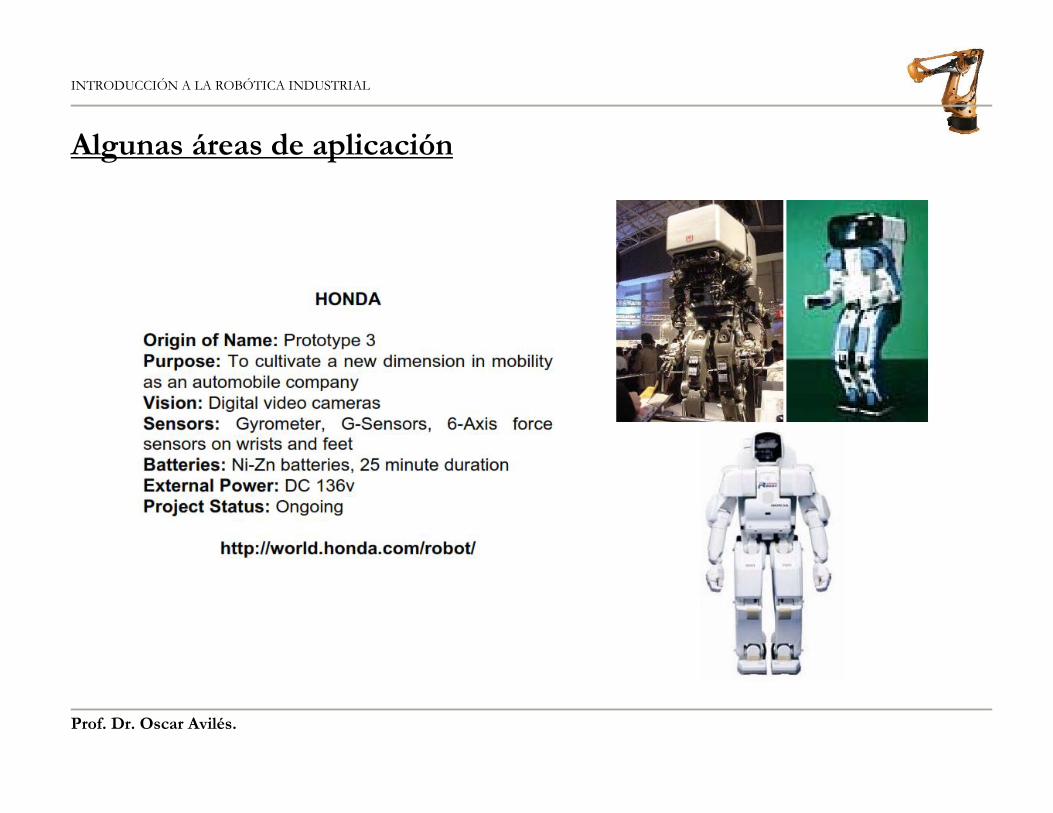
Algunas áreas de aplicación
Exploración – NASA, Submarina, Pirámides egipcias Tareas peligrosas – Tareas con elementos tóxico o nucleares,
operaciones con fuego Mantenimiento – Inspección y reparación de tuberías Medicina – Laboratorios automatizados para pruebas, cirugía Tele-presencia y entrenamiento de realidad virtual. Departamento de Defensa – Vehículos guiados automáticamente Domestica – Asistentes y seguridad Agricultura – Máquinas recolectoras Entretenimiento – Sony Aibo, Lego Mindstorms, Competencias
de Robots Investigación Académica

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Algunas áreas de aplicación
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
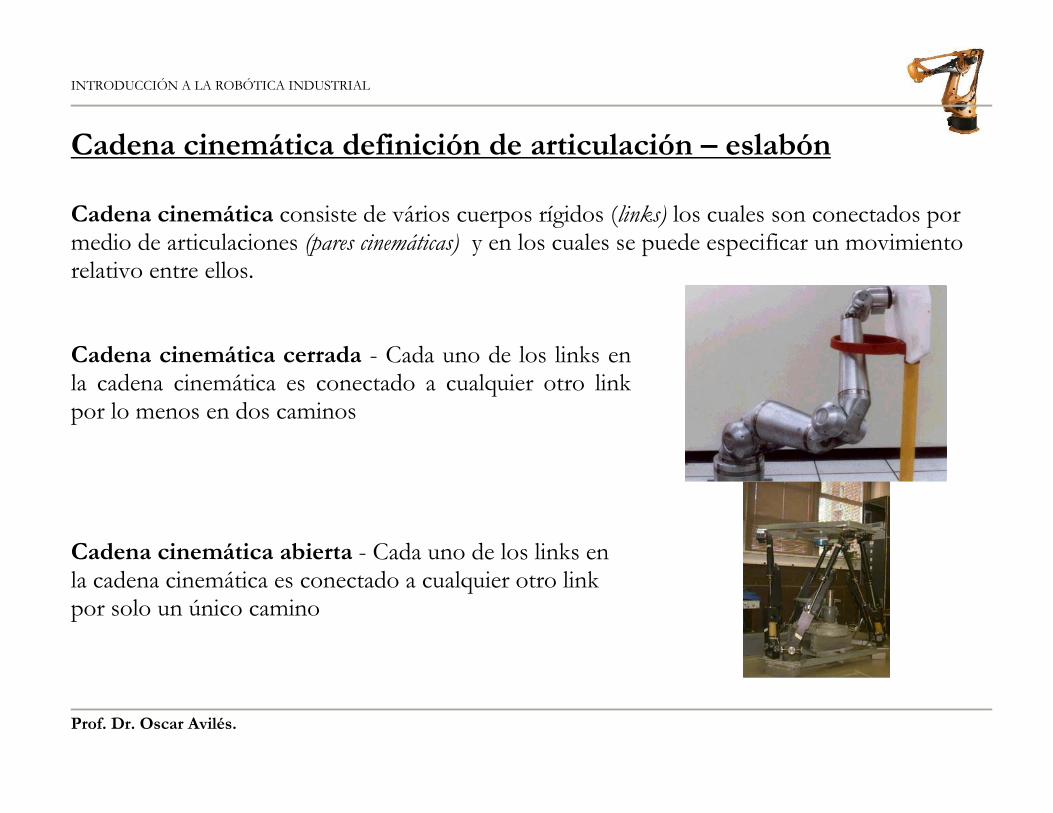
Cadena cinemática definición de articulación – eslabón
Cadena cinemática consiste de vários cuerpos rígidos (links) los cuales son conectados pormedio de articulaciones (pares cinemáticas) y en los cuales se puede especificar un movimientorelativo entre ellos.
Cadena cinemática cerrada - Cada uno de los links enla cadena cinemática es conectado a cualquier otro linkpor lo menos en dos caminos
Cadena cinemática abierta - Cada uno de los links enla cadena cinemática es conectado a cualquier otro linkpor solo un único camino

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Articulaciones anatómicas

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
El efector final
Al final de la cadena cinemática se encuentrael gripper o efector final, o herramientaterminal.
En función de la tarea a ser realizada o de laaplicación del efector ese puede ser unaherramienta especializada, una herramienta desoldadura, etc

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
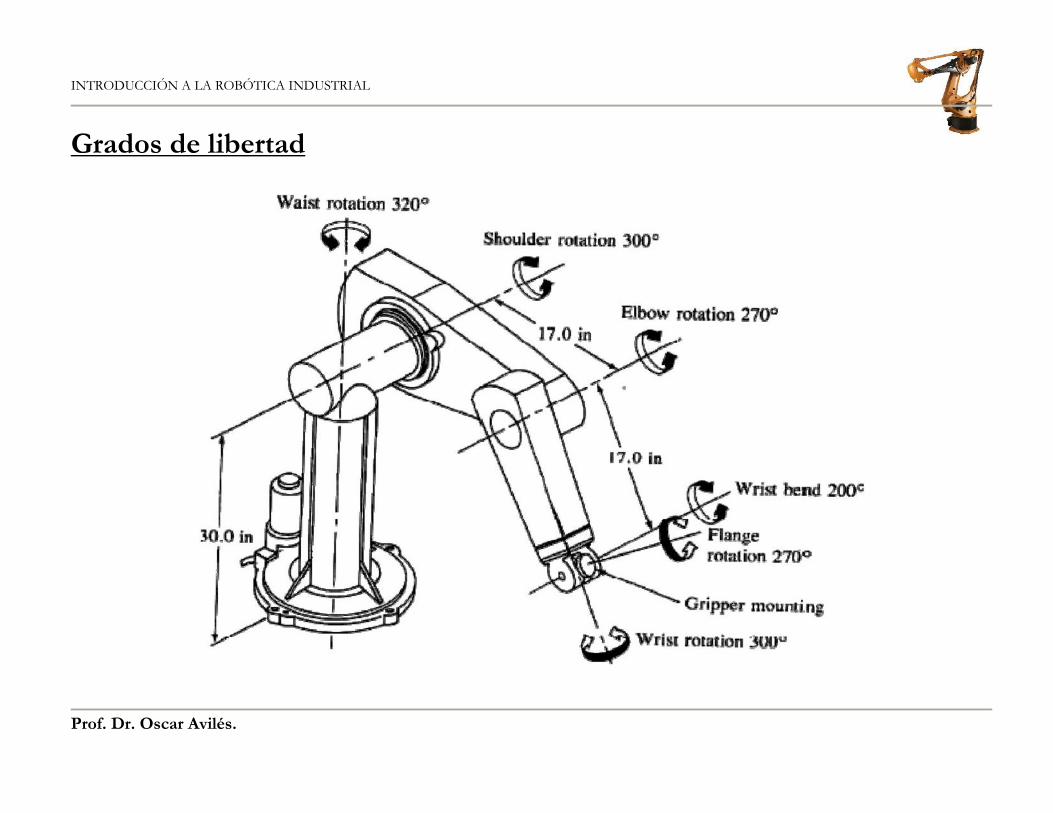
Grados de libertad
El número de grados de libertad que un manipulador posee es el númerode variables de posición independientes con las cuales puede serespecificado en el sentido de todas las partes del mecanismo. Idealmente,un manipulador puede poseer 6GDL (DOF) para lograr manipular unobjeto en el espacio 3D
• Robot de propósito General # DOF = 6• Robot Redundante- # DOF >7• Robot Deficiente - # DOF < 6
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Grados de libertad

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Grados de libertad robot móvil

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Grados de libertad brazo humano

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Definición de espacio de trabajo
Espacio de Trabajo – Volumen del espacio que el efector final puedealcanzar.
Espacio de Trabajo alcanzable - Volumen del espacio en el cual cadauno de los puntos puede ser alcanzado por el efector con una únicaorientación.
Espacio de Trabajo diestro - Volumen del espacio en el cual cada unode los puntos puede ser alcanzado por el efector con todas las posiblesorientaciones.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Tipos de juntas

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Tipos de juntas

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Tipos de juntas
Cartesiana: tres articulaciones prismáticas PPP
Cilíndrica: dos articulaciones prismáticas y una de rotación RPP
Polar o esférica: dos articulaciones de rotación y una prismáticaRRP
Angular es una estructura con tres articulaciones de rotación RRR
SCARA es una estructura especial RRL

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialSistema de Transmisión
Componentes de transmisión más usados:Engranajes: dientes rectos, helicoidales, cremallera y piñón, cónicas.Tornillo de bolas re circulantes, correas y poleas dentadas, cadenas,cables, cintas de acero, engranajes planetarios y engranajes armónicos

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialActuadores
Son componentes que convierten energía eléctrica, hidráulica oneumática, en potencia mecánica.
Actuadores Hidráulicos•Permiten la implementación de control continuo y preciso deposicionamiento y velocidad debido a la incompresibilidad del fluido (óleohidráulico), resultando en una elevada rigidez, sin embargo esto puede tornarinestable el control de fuerza.•Presenta elevada relación entre la potencia mecánica transmitida por elactuador y su peso, lo que posibilita la construcción de unidades compactas dealta potencia.•Una bomba es utilizada para suministrar el óleo hidráulico para el actuadorhidráulico a través de las válvulas direccionales.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialActuadores
Son componentes que convierten energía eléctrica, hidráulica oneumática, en potencia mecánica.
Actuadores Neumáticos• Son utilizados en robots industriales que operan con transporte de cargasentre posiciones bien definidas limitadas por obstáculos mecánicos, lo quecaracteriza el movimiento punto-a-punto.• La baja rigidez de estos actuadores debido a la compresibilidad del fluido(aire comprimido), permite que sean obtenidas operaciones suaves, sinembargo esta característica lo torna poco preciso en cuanto, al control deposicionamiento entre las posiciones límites.• La naturaleza binaria del movimiento de estos actuadores (posición extendidao retraída) implica un control simple y de bajo costo.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialActuadores
Son componentes que convierten energía eléctrica, hidráulica oneumática, en potencia mecánica.
Actuadores Eléctricos• Los actuadores electromagnéticos son los más utilizados en robots,principalmente actuadores del tipo motores de corriente continua y depaso• Cuando asociados a sensores pueden ser empleados tanto para elcontrol de fuerza como de posición del robot;• La programación de sus movimientos es relativamente simple, ya queestos pueden ser controlados por señales eléctricas, permitiendo de estaforma el uso de controladores de movimiento.
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialUnidad de potencia
• Responsable por el suministro de potencia necesario para losactuadores.
• Ejemplos de unidades de potencia asociadas a los actuadores: Bomba hidráulica (actuador hidráulico), Compresor (actuador neumático) Fuente eléctrica (actuador electromagnético).
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
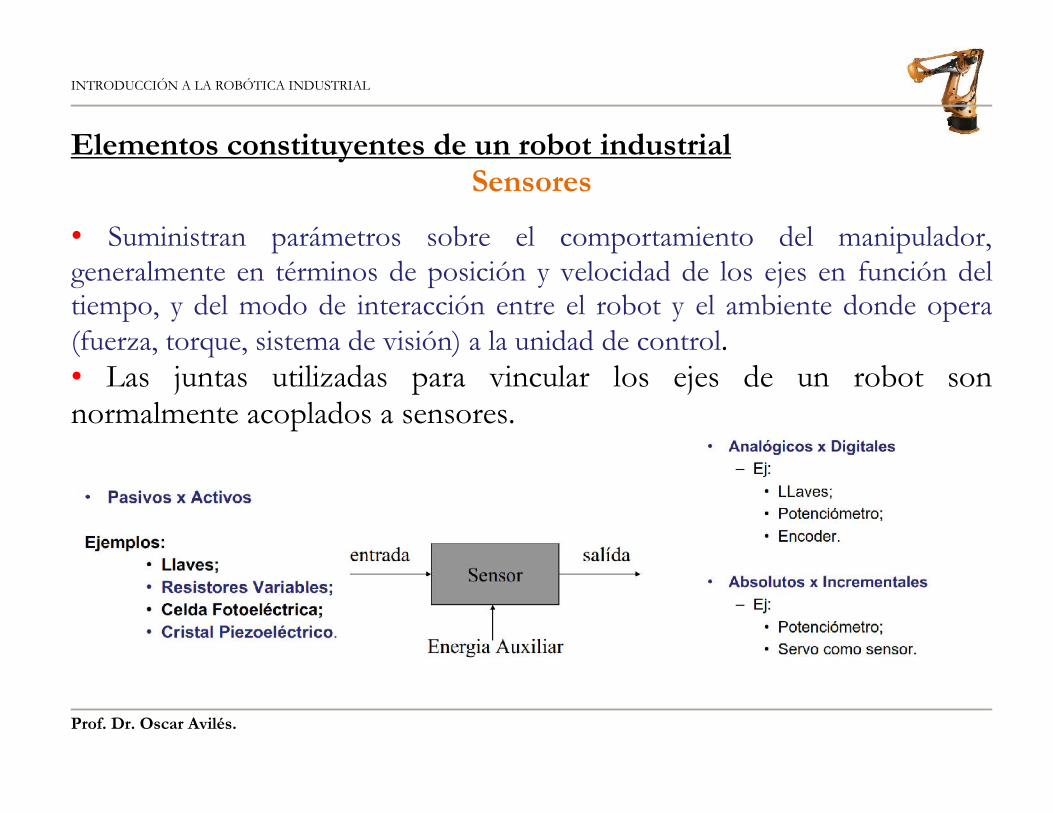
Elementos constituyentes de un robot industrialSensores
• Suministran parámetros sobre el comportamiento del manipulador,generalmente en términos de posición y velocidad de los ejes en función deltiempo, y del modo de interacción entre el robot y el ambiente donde opera(fuerza, torque, sistema de visión) a la unidad de control.• Las juntas utilizadas para vincular los ejes de un robot sonnormalmente acoplados a sensores.
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
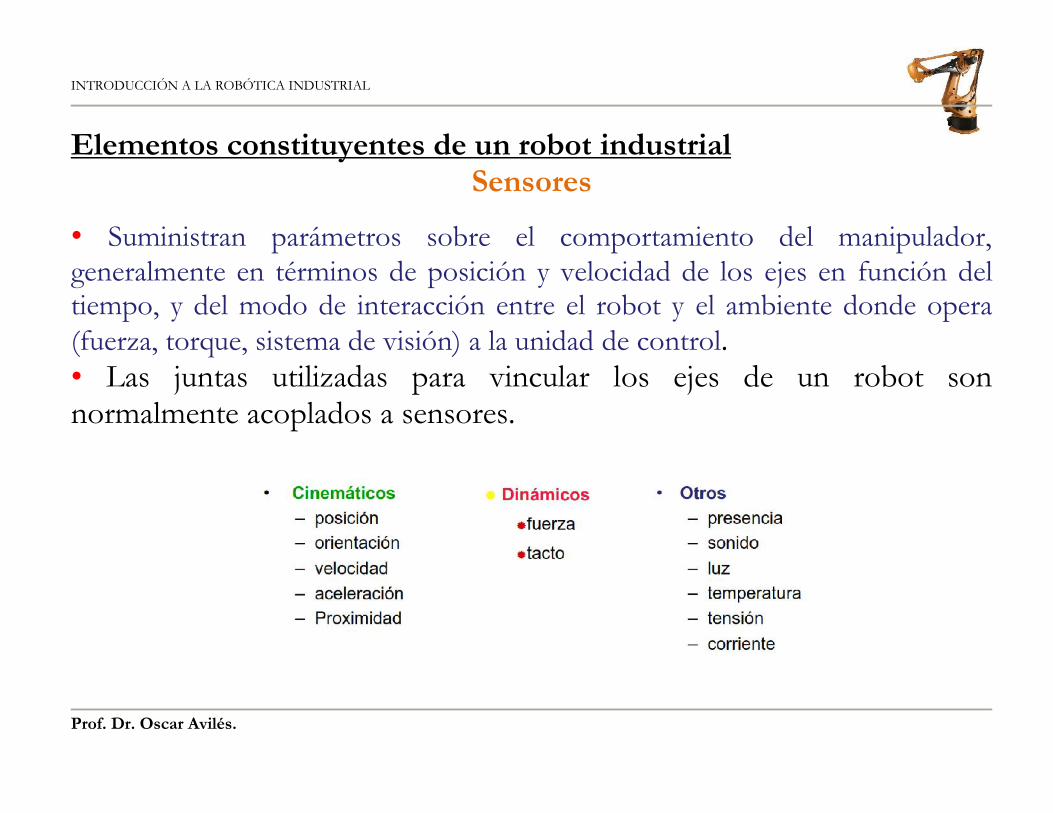
Elementos constituyentes de un robot industrialSensores
• Suministran parámetros sobre el comportamiento del manipulador,generalmente en términos de posición y velocidad de los ejes en función deltiempo, y del modo de interacción entre el robot y el ambiente donde opera(fuerza, torque, sistema de visión) a la unidad de control.• Las juntas utilizadas para vincular los ejes de un robot sonnormalmente acoplados a sensores.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialUnidad de Control
• Responsable por el gerenciamiento y monitorización de los parámetrosoperacionales requeridos para realizar las tareas del robot.
• Comandos de movimientos originados de controladores de movimiento(computador industrial, CLP, placa controladora de paso) y basados eninformaciones obtenidas a través de sensores.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialEfector
• Es el elemento de unión entre el robot y el medio que lo rodea. Puede ser deltipo garra o herramienta.• Función principal: Sujeción de un determinado objeto y transporte a unaposición pre establecida y luego de alcanzar esta posición, soltarlo.• La herramienta tiene como función realizar una acción o trabajo sobre unapieza, sin necesariamente manipularla.

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Elementos constituyentes de un robot industrialEfector
• Es el elemento de unión entre el robot y el medio que lo rodea. Puede ser deltipo garra o herramienta.• Función principal: Sujeción de un determinado objeto y transporte a unaposición pre establecida y luego de alcanzar esta posición, soltarlo.• La herramienta tiene como función realizar una acción o trabajo sobre unapieza, sin necesariamente manipularla.
Para efecto de comparación, se observa que:• Una garra con dos dedos puede manipular con éxito aproximadamente 40%de los objetos de las más diferentes formas.• Una garra con tres dedos podría manipular 90% de todos objetos, y• Una configuración con cuatro dedos podría manipular en torno de 99% deestos objetos (MATSUOKA, 1995).
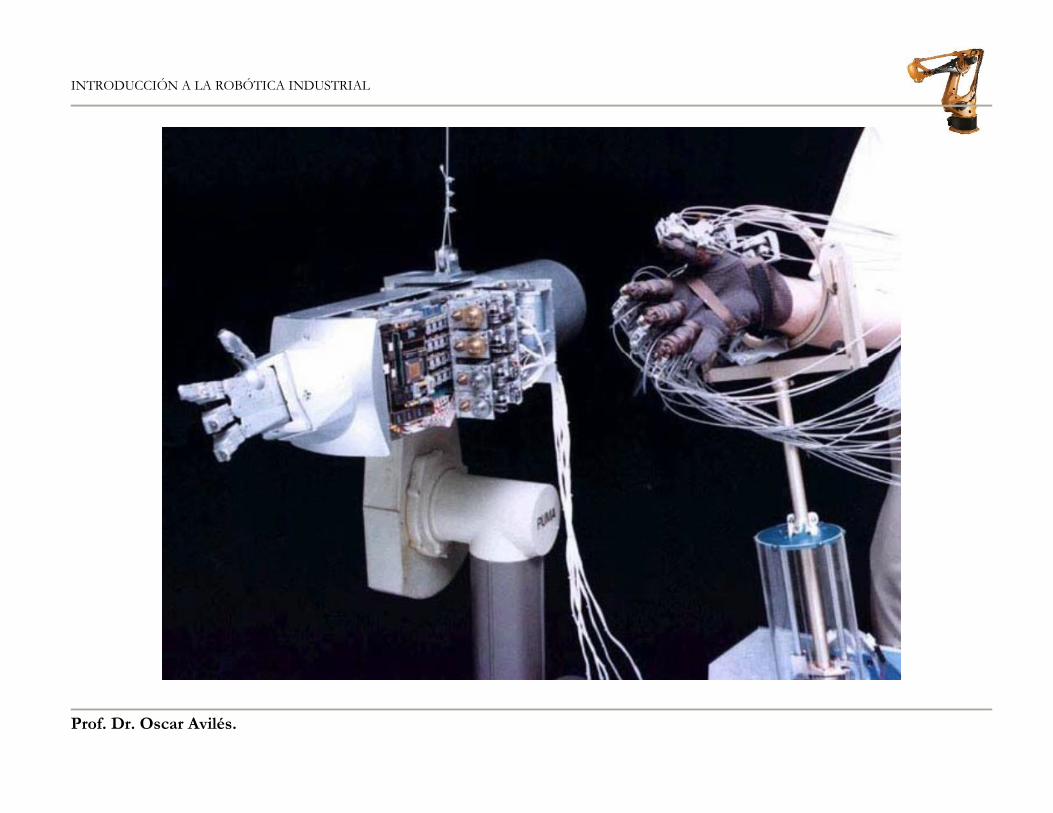
ANALOGÍA CON LA MANO HUMANA
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Y entonces …
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
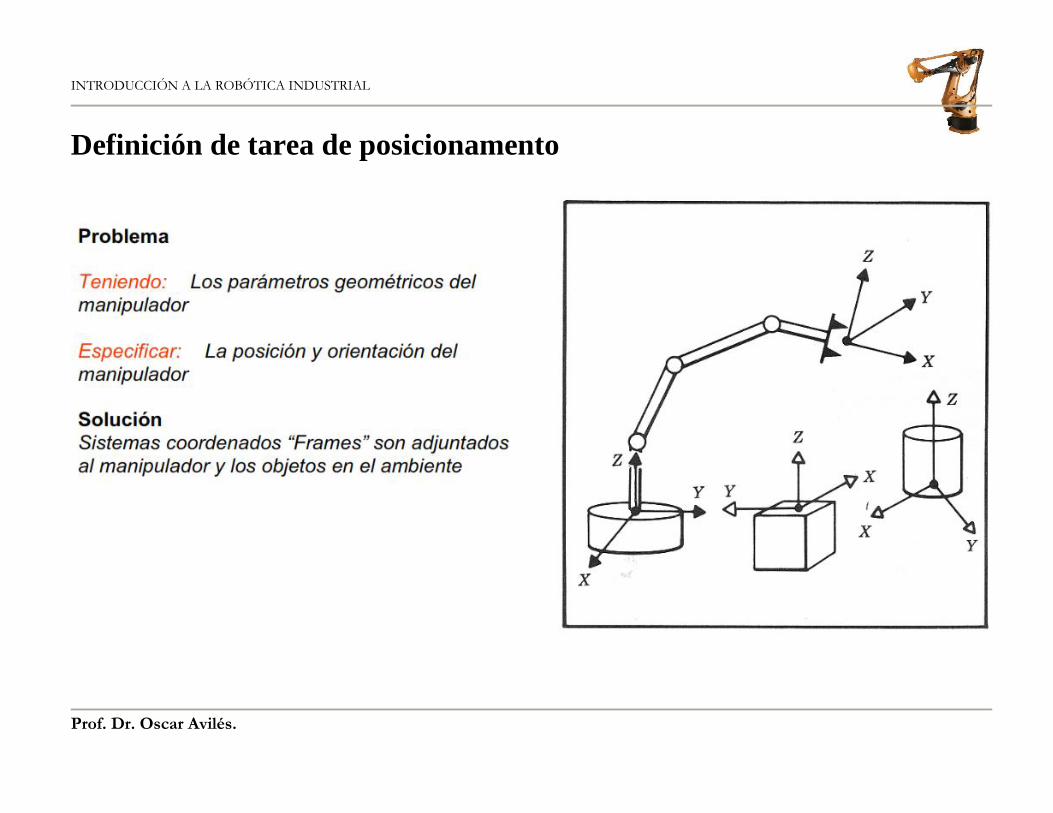
Definición de tarea de posicionamento

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Cinemática directa

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Cinemática inversa
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
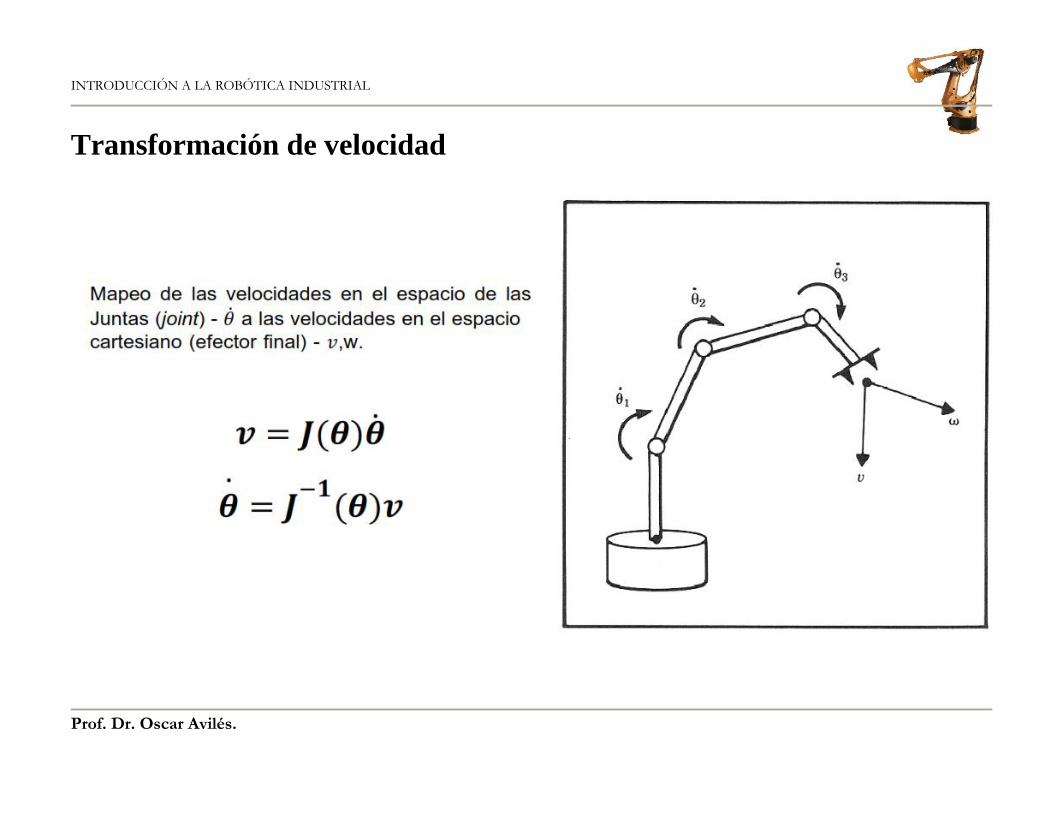
Transformación de velocidad
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
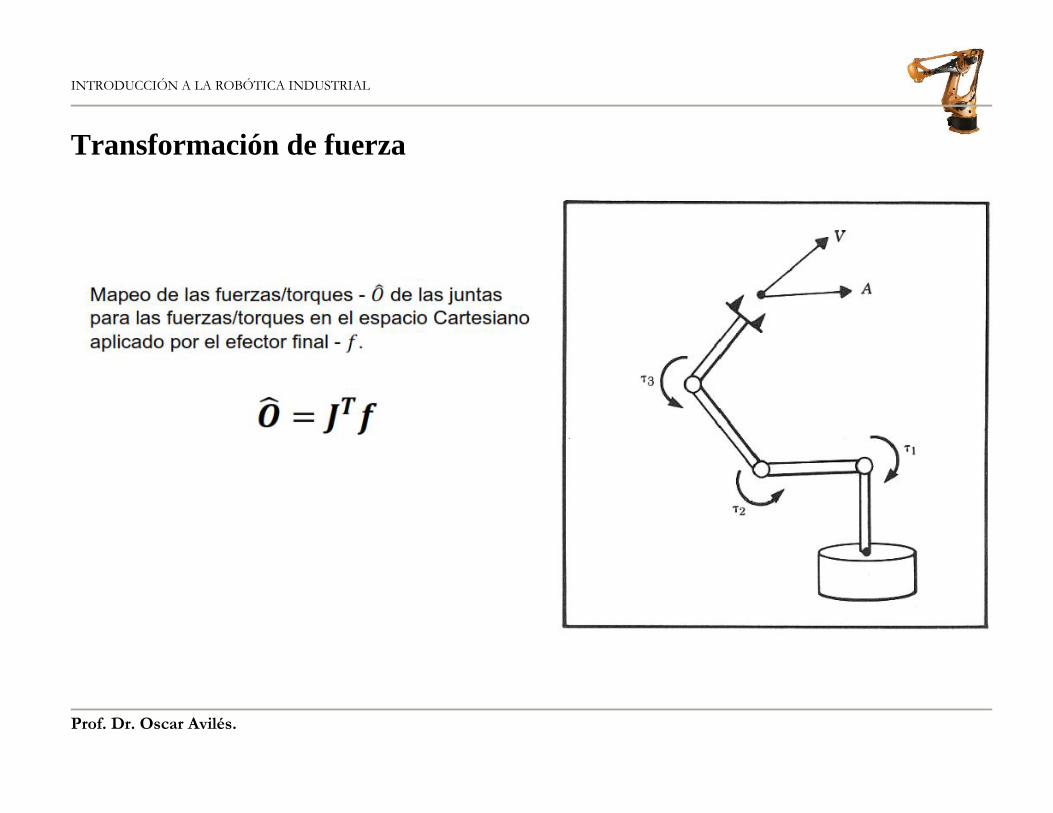
Transformación de fuerza

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Dinámica directa

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Dinámica inversa

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Generación de trayectorias

INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Control de posición
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
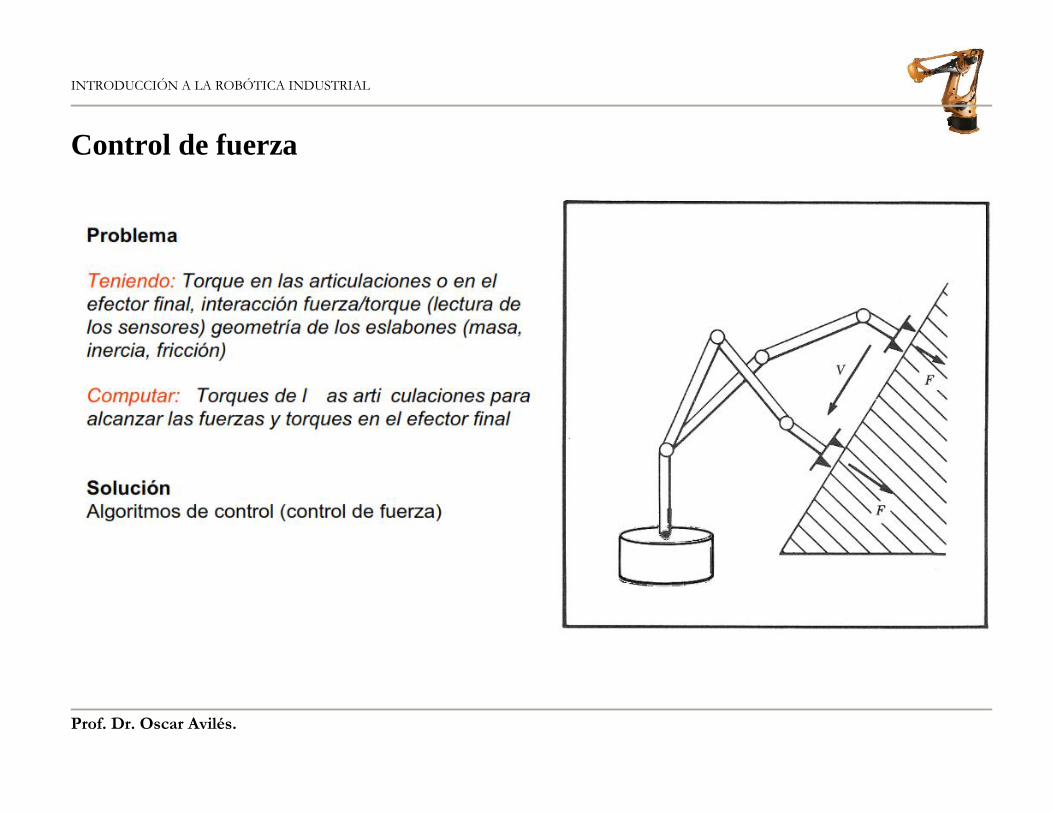
Control de fuerza
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Preguntas?
INTRODUCCIÓN A LA ROBÓTICA INDUSTRIAL
Prof. Dr. Oscar Avilés.
Gracias