Embed Size (px)
Citation preview

Tecnología Aeroespacial (TAE)
2008 – 2011
LECTURE NOTES: AEROSPACE
TECHNOLOGY
Jose I. Rojas & Xavier Prats
Escola d’Enginyeria de Telecomuniació y Aeroespacial de Castelldefels (EETAC)
Universitat Politècnica de Catalunya (UPC BarcelonaTech)

2
CONTENTS
LIST OF FIGURES .................................................................................................. 7
1 FLIGHT PRINCIPLES .................................................................................... 10
1.1 INTRODUCTION ................................................................................................................................ 10 1.1.1 Some essential concepts ................................................................................................................ 10
1.2 THE ATMOSPHERE ........................................................................................................................... 12 1.2.1 Composition .................................................................................................................................. 12 1.2.2 Properties ....................................................................................................................................... 12 1.2.3 International Standard Atmosphere (ISA) ..................................................................................... 13
1.3 FLUID DYNAMICS PRINCIPLES .................................................................................................... 14 1.3.1 Continuity Equation (Mass Conservation Law) ............................................................................ 14 1.3.2 Bernoulli Equation ........................................................................................................................ 16 1.3.3 Dynamic pressure and total (or impact) pressure .......................................................................... 16 1.3.4 Venturi Effect ................................................................................................................................ 17
1.4 STUDY OF AIRFOILS ........................................................................................................................ 17 1.4.1 Symmetric airfoils ......................................................................................................................... 17 1.4.2 Effect of thickness and camber ...................................................................................................... 19 1.4.3 Stall ............................................................................................................................................... 20
1.5 AERODYNAMIC FORCE .................................................................................................................. 21 1.5.1 Lift ................................................................................................................................................. 22 1.5.2 Drag ............................................................................................................................................... 23 1.5.3 Aerodynamic efficiency: lift-to-drag ratio .................................................................................... 27
1.6 HORIZONTAL FLIGHT .................................................................................................................... 28 1.6.1 Rectilinear horizontal flight with level wings ............................................................................... 28 1.6.2 Influence of aerodynamic velocity in drag .................................................................................... 30 1.6.3 Turn in horizontal flight ................................................................................................................ 30 1.6.4 Load factor .................................................................................................................................... 31
1.7 HYPERLIFT DEVICES ...................................................................................................................... 32 1.7.1 Use of hyper-lift devices in various phases of flight ..................................................................... 32 1.7.2 Effects produced by hyper-lift devices .......................................................................................... 33 1.7.3 Types of hyper-lift devices ............................................................................................................ 33
1.8 REFERENCES ...................................................................................................................................... 37
2 CHAPTER 2: ESTABILITY AND CONTROL ................................................ 38
2.1 INTRODUCTION ................................................................................................................................ 38
2.2 REFERENCES ...................................................................................................................................... 38
3 CHAPTER 3: PERFORMANCES .................................................................. 39
3.1 INTRODUCTION ................................................................................................................................ 39

3
3.2 PERFORMANCES OF A TURBOJET AIRCRAFT ........................................................................ 39 3.2.1 Rectilinear horizontal flight with level wings ............................................................................... 39 3.2.2 Velocity for maximum endurance & velocity for maximum range for a turbojet aircraft ............. 42
3.3 PERFORMANCES OF A PISTON ENGINE AIRCRAFT .............................................................. 43 3.3.1 Rectilinear horizontal flight with level wings ............................................................................... 44 3.3.2 Velocity for maximum endurance & velocity for maximum range for a piston engine aircraft .... 46 3.3.3 Available power and propulsive efficiency of a propeller ............................................................. 47 3.3.4 Horizontal flight velocities ............................................................................................................ 49
3.4 PERFORMANCES IN ASCENT FLIGHT ........................................................................................ 51
3.5 PERFORMANCES IN DESCENT FLIGHT ..................................................................................... 55 3.5.1 Gliding descent .............................................................................................................................. 57
3.6 EFFECT OF WIND .............................................................................................................................. 58 3.6.1 Influence of wind in power P vs. velocity V curve ........................................................................ 59 3.6.2 Influence of wind in rate of ascent R/A vs. velocity V curve ......................................................... 59 3.6.3 Influence of wind in rate of descent R/D vs. velocity V curve ...................................................... 60
3.7 REFERENCES ...................................................................................................................................... 61
4 CHAPTER 4: PROPULSION SYSTEMS ....................................................... 62
4.1 INTRODUCTION ................................................................................................................................ 62
4.2 PROPULSION SYSTEMS CLASSIFICATION AND NOMENCLATURE .................................. 62
4.3 PROPELLER PROPULSION SYSTEMS ......................................................................................... 63 4.3.1 Components of a piston engine ..................................................................................................... 63 4.3.2 Magnetos ....................................................................................................................................... 63 4.3.3 Propeller ........................................................................................................................................ 63 4.3.4 Engine control ............................................................................................................................... 64
4.4 PURE TURBOJET ENGINE .............................................................................................................. 64 4.4.1 Air inlet ......................................................................................................................................... 64 4.4.2 Compressor(s) ............................................................................................................................... 64 4.4.3 Combustion system ....................................................................................................................... 64 4.4.4 Turbine(s) ...................................................................................................................................... 65 4.4.5 Nozzle ........................................................................................................................................... 65 4.4.6 Turbojet thrust ............................................................................................................................... 65
4.5 PURE TURBOJET ENGINE EFFICIENCIES ................................................................................. 65 4.5.1 Engine efficiency ........................................................................................................................... 65 4.5.2 Propulsion system efficiency ......................................................................................................... 66 4.5.3 Global efficiency ........................................................................................................................... 66 4.5.4 Compressibility drag and drag divergence .................................................................................... 67
4.6 TURBOPROPS ..................................................................................................................................... 68 4.6.1 Turboprop concept ........................................................................................................................ 68 4.6.2 Advantages and drawbacks of turboprops ..................................................................................... 68 4.6.3 Turboprop configurations .............................................................................................................. 69
4.7 BYPASS TURBOJETS ........................................................................................................................ 70 4.7.1 Bypass turbojet concept ................................................................................................................. 70

4
4.7.2 Bypass turbojet configurations ...................................................................................................... 72
4.8 REFERENCES ...................................................................................................................................... 72
5 CHAPTER 5: NAVIGATION .......................................................................... 73
5.1 INTRODUCTION ................................................................................................................................ 73
5.2 TYPES OF NAVIGATION .................................................................................................................. 73
5.3 ESTEEMED NAVIGATION ............................................................................................................... 73 5.3.1 Basis of esteemed navigation ........................................................................................................ 73 5.3.2 Doppler Effect ............................................................................................................................... 74 5.3.3 Inertial navigation.......................................................................................................................... 74
5.4 NAVIGATION BY EXTERNAL REFERENCES ............................................................................. 74 5.4.1 Radio-goniometry equipment ........................................................................................................ 75 5.4.2 Very High Frequency Omni Range (VOR) ................................................................................... 75 5.4.3 Radio-navigation: DME ................................................................................................................ 77 5.4.4 Instrumental Landing System (ILS) .............................................................................................. 77 5.4.5 Global Navigation Satellite System (GNSS) ................................................................................. 79
5.5 RADAR (VECTORING) NAVIGATION ........................................................................................... 80 5.5.1 Primary Surveillance Radar (PSR) ................................................................................................ 80 5.5.2 Secondary Surveillance Radar (SSR) ............................................................................................ 81
5.6 FLIGHT PROCEDURES .................................................................................................................... 83
5.7 REFERENCES ...................................................................................................................................... 83
6 CHAPTER 6: AVIONICS ............................................................................... 84
6.1 INTRODUCTION ................................................................................................................................ 84
6.2 INFORMATION SOURCES ............................................................................................................... 84
6.3 AIR DATA ............................................................................................................................................. 85 6.3.1 Anemometry .................................................................................................................................. 85 6.3.2 Altimetry ....................................................................................................................................... 90 6.3.3 Pressure-altitude ............................................................................................................................ 91 6.3.4 Altimeter calibration ...................................................................................................................... 92
6.4 DATA HANDLING .............................................................................................................................. 93 6.4.1 Air Data processing ....................................................................................................................... 93 6.4.2 Inertial navigation system (INS) ................................................................................................... 93 6.4.3 ADIRU or ADIRS ......................................................................................................................... 94
6.5 DATA DISPLAYING ........................................................................................................................... 95
6.6 CONTROL SYSTEMS ......................................................................................................................... 98
6.7 REFERENCES .................................................................................................................................... 100

5
7 CHAPTER 7: HELICOPTERS ..................................................................... 101
7.1 AERONAVES DE ALA GIRATORIA ............................................................................................. 101
7.2 TIPOS DE AERONAVES DE ALA GIRATORIA .......................................................................... 101
7.3 CARACTERIZACIÓN DEL HELICÓPTERO ............................................................................... 103
7.4 COMPONENTES DEL HELICÓPTERO ....................................................................................... 104 7.4.1 Célula .......................................................................................................................................... 104 7.4.2 Rotores ........................................................................................................................................ 104 7.4.3 Sistema de compensación del par motor ..................................................................................... 106 7.4.4 Controles de vuelo ....................................................................................................................... 108 7.4.5 Sistema de arrastre....................................................................................................................... 110 7.4.6 Otros sistemas del helicóptero ..................................................................................................... 111
7.5 AUTORROTACIÓN .......................................................................................................................... 113
7.6 REFERENCES .................................................................................................................................... 115
8 CHAPTER 8: SPACECRAFT ...................................................................... 116
8.1 TIPOS DE VEHÍCULOS ESPACIALES ......................................................................................... 116 8.1.1 Clasificación por misiones .......................................................................................................... 116 8.1.2 Clasificación por órbitas .............................................................................................................. 118 8.1.3 Perturbations of orbits ................................................................................................................. 119
8.2 SEGMENTOS DE LOS PROGRAMAS ESPACIALES ................................................................. 120 8.2.1 Segmento Terrestre...................................................................................................................... 120 8.2.2 Segmento Lanzador ..................................................................................................................... 121 8.2.3 Segmento Espacial ...................................................................................................................... 123
8.3 CARGA ÚTIL ..................................................................................................................................... 124
8.4 PLATAFORMA (BUS) ...................................................................................................................... 127 8.4.1 Estructura y mecanismos ............................................................................................................. 127 8.4.2 Control de actitud (Attitude control) ........................................................................................... 127 8.4.3 Propulsión (Space propulsion) .................................................................................................... 129 8.4.4 Energía o potencia ....................................................................................................................... 130 8.4.5 Control térmico (Thermal control) .............................................................................................. 131 8.4.6 Telemetría y telemando (TTC, Telemetry, Tracking and Command) ......................................... 132 8.4.7 Gestión de datos (Data handling) ................................................................................................ 133 8.4.8 Environmental Control and Life Support System (ECLSS) ........................................................ 133 8.4.9 Integración mecánica y eléctrica ................................................................................................. 133
8.5 REFERENCES .................................................................................................................................... 134
9 CHAPTER 9: AEROSPACE MATERIALS .................................................. 135
9.1 TYPES OF MATERIALS .................................................................................................................. 135 9.1.1 Metals .......................................................................................................................................... 135 9.1.2 Ceramics ...................................................................................................................................... 136 9.1.3 Polymers ...................................................................................................................................... 137 9.1.4 Composites .................................................................................................................................. 137

6
9.1.5 Semiconductors ........................................................................................................................... 138
9.2 SELECTION OF MATERIALS ........................................................................................................ 138
9.3 ALUMINIUM ALLOYS .................................................................................................................... 139 9.3.1 Properties of aluminium .............................................................................................................. 140 9.3.2 Aluminium alloys in aeronautics ................................................................................................. 143 9.3.3 Methods for hardening of aluminium .......................................................................................... 143
9.4 REFERENCES .................................................................................................................................... 150
10 CHAPTER 10: AIRCRAFT SYSTEMS ..................................................... 151
10.1 AA .................................................................................................................................................... 151
10.2 REFERENCES ............................................................................................................................... 151
11 ANNEXE I ................................................................................................. 152
11.1 FLUIDS DEFINITION AND TYPES ........................................................................................... 152
11.2 VISCOSITY OF FLUIDS .............................................................................................................. 152
11.3 DEPENDENCE OF VISCOSITY ON FLUID PROPERTIES .................................................. 153
12 ANNEXE II ................................................................................................ 154
12.1 AIRFOIL CHARACTERISTIC PARAMETERS ...................................................................... 154
12.2 WING LAY-OUT PARAMETERS .............................................................................................. 155
13 ANNEXE III ............................................................................................... 156
13.1 MACH NUMBER .......................................................................................................................... 156
13.2 FLIGHT REGIMES ...................................................................................................................... 156
ACRONYMS ....................................................................................................... 158
NOMENCLATURE .............................................................................................. 164

7
LIST OF FIGURES Fig. 1 Sketch of the body reference frame. ................................................................................................ 11 Fig. 2 Sketch of an airfoil. ............................................................................................................................. 11 Fig. 3 Angle of attack of an airfoil. ............................................................................................................... 11 Fig. 4 Plot of Temperature [ºC and K] vs. Height [Km] for the ISA. ........................................................ 14 Fig. 5 Plot of temperature [ºC] vs. height [Km]. ......................................................................................... 15 Fig. 6 Conic duct. Sections: 1) inlet and 2) outlet. .................................................................................... 15 Fig. 7 Sketch of a Venturi tube. ................................................................................................................... 17 Fig. 8 Symmetric airfoil at null angle of attack. .......................................................................................... 18 Fig. 9 a) Symmetric airfoil at angle of attack different from zero. b) Pressure profile. ........................ 19 Fig. 10 Effect of thickness and camber on the plot of lift vs. angle of attack. ....................................... 20 Fig. 11 Variation of lift L and drag D with the angle of attack. ................................................................. 21 Fig. 12 Location of the separation point at different angles of attack. ................................................... 21 Fig. 13 Aerodynamic force: lift L and drag D applied on the pressure centre of an airfoil. ................. 22 Fig. 14 Plot of lift L vs. aerodynamic velocity and vs. air density. .......................................................... 23 Fig. 15 Characteristic curve: plot of lift coefficient vs. angle of attack. .................................................. 24 Fig. 16 a) Flow downwash. b) Induced vortexes in the wing tips when generating lift. ....................... 25
Fig. 17 Plot of the polar curve: )( LD CfC . .......................................................................................... 26
Fig. 18 Layout of an aircraft: wing surface (S) and wingspan (b). .......................................................... 27 Fig. 19 Maximum efficiency or maximum lift-to-drag ratio on polar curve. ............................................ 28 Fig. 20 Forces acting on an aircraft in equilibrium in horizontal flight. ................................................... 29 Fig. 21 Plots of D, Dp and Di vs. aerodynamic speed for Gulfstream IV aircraft. ................................ 30 Fig. 22 Forces acting on an aircraft in equilibrium in a turn in horizontal flight. ................................... 31 Fig. 23 Variation of characteristic curve due to increase in camber. ..................................................... 34 Fig. 24 Variation of characteristic curve due to boundary layer control. ................................................ 34 Fig. 25 Types of hyper-lift devices. ............................................................................................................. 36 Fig. 26 Hyper-lift devices of Boeing 737. ................................................................................................... 36 Fig. 27 Increase in drag coefficient vs. increase in lift coefficient for several types of hyper-lift
devices. .................................................................................................................................................. 37 Fig. 28 Forces acting on an aircraft in equilibrium in horizontal flight. ................................................... 40 Fig. 29 Plot of required thrust TR vs. aerodynamic velocity V. ................................................................ 41 Fig. 30 Effect of weight W variation on plot of required thrust TR vs. aerodynamic velocity V. .......... 42 Fig. 31 Effect of weight W variation on plot of required thrust TR vs. aerodynamic velocity V. ......... 42 Fig. 32 Curva de potencia requerida PR frente a velocidad V. ................................................................ 45 Fig. 33 Evolución de la curva PR frente a V con cambio en el peso W. ............................................... 46 Fig. 34 Esquema del motor alternativo, hélice y potencias que intervienen. ........................................ 48 Fig. 35 Plot of SHP and available power for a fixed pitch propeller. ...................................................... 49 Fig. 36 a) Plot of SHP and available power for a variable pitch propeller. b) Blade pitch. ................. 49 Fig. 37 Curvas de potencia requerida y potencia disponible frente a V. ............................................... 50 Fig. 38 Efectos de la variación de W a lo largo del vuelo. ....................................................................... 51 Fig. 39 Sistema de fuerzas actuando sobre el avión en vuelo ascensional. ........................................ 52 Fig. 40 Representación gráfica de P y de R/C frente a V. ...................................................................... 53 Fig. 41 Variación de la curva R/C frente a V ante cambios en el peso. ................................................ 54 Fig. 42 Representación de dos de las opciones posibles en despegue. .............................................. 54 Fig. 43 Sistema de fuerzas actuando sobre el avión en vuelo de descenso. ...................................... 55 Fig. 44 Representación gráfica de R/D frente a V. ................................................................................... 56 Fig. 45 Esquema de la trayectoria de descenso en el vuelo de un planeador. .................................... 58 Fig. 46 Efecto del viento en las velocidades características de la curva P-V. ..................................... 59 Fig. 47 Efecto del viento en las velocidades características de la curva R/C-V. ................................. 60 Fig. 48 Efecto del viento en las velocidades características de la curva R/D-V. ................................. 60 Fig. 49 Newton’s 3rd Principle applied to a plane equipped with a propeller. ...................................... 62 Fig. 50 Turbojet engine architecture. .......................................................................................................... 64 Fig. 51 Turboprop engine architecture. ...................................................................................................... 68

8
Fig. 52 Linked turbines turboprop. .............................................................................................................. 69 Fig. 53 Free turbines turboprop. .................................................................................................................. 69 Fig. 54 Hybrid turbines turboprop. ............................................................................................................... 70 Fig. 55 Performances of a 3-axis, mixed-flow bypass turbojet. .............................................................. 71 Fig. 56 Bypass turbojet engine architecture. ............................................................................................. 71 Fig. 57 Esquemas de un helicóptero, girodino, autogiro y combinado. ............................................... 102 Fig. 58 Helicóptero para la realización de misiones salvamento. ........................................................ 104 Fig. 59 Articulaciones en una cabeza de rotor articulada. .................................................................... 105 Fig. 60 Helicóptero bipala UH-1M con cabeza de rotor semi-rígida (see saw teetering) (fotografía de
Butch Lottman) ................................................................................................................................... 106 Fig. 61 Tipos de cabeza de rotor............................................................................................................... 107 Fig. 62 Helicóptero Kamov 521 con rotores coaxiales para compensación de par motor. .............. 108 Fig. 63 Helicóptero con dispositivo NOTAR para compensación de par motor. ................................ 108 Fig. 64 Esquema del sistema de plato distribuidor. ................................................................................ 109 Fig. 65 Helicóptero Alouette-3 con cabeza de rotor rígida y sistema de plato distribuidor (fotografía
de Erik Frikke). .................................................................................................................................... 110 Fig. 66 Cabeza de rotor del helicóptero Bristol 171 Sycamore en la que se observa también el
engranaje (caja) reductor principal. ................................................................................................. 112 Fig. 67 Aviónica de un helicóptero no preparado para vuelo instrumental (IFR). .............................. 112 Fig. 68 Aviónica de un helicóptero preparado para vuelo instrumental (IFR). ................................... 113 Fig. 69 Curva de seguridad de un helicóptero. ....................................................................................... 114 Fig. 70 Esquema del flujo de aire entorno al rotor en autorrotación. ................................................... 114 Fig. 71 De izquierda a derecha: sección en autorrotación verdadera, sección extractora de energía
y sección comunicadora de energía. .............................................................................................. 115 Fig. 72 a) Satélite de la constelación NAVSTAR-GPS; b) Telescopio espacial HUBBLE. .............. 116 Fig. 73 Transparencia (transmitancia, transmittance) de la atmósfera en función de la longitud de
onda de la radiación electromagnética incidente. ......................................................................... 117 Fig. 74 Tracking station coverage cone (in blue), a generic orbit (in yellow), a Molniya orbit (in
purple) and a GEO (in flesh) (image from AGI’s STK software). ................................................ 119 Fig. 75 Ground-tracks of a satellite in a generic orbit (in yellow), another in a Molniya orbit (in
purple) and another in GEO (in flesh). The coverage area of the GEO satellite (borders in flesh) and the generic satellite (full red, FOV is 20º) are also shown (image from AGI’s STK software). ............................................................................................................................................. 120
Fig. 76 Sketch showing the relay satellite concept for non-interrupted data transmission between a single ground station and several satellites that are not visible from the station (Pulinets 2004). .............................................................................................................................................................. 122
Fig. 77 Resultados de los datos de observación de la galaxia Andrómeda adquiridos por diferentes misiones científicas (en diferentes rangos del espectro de radiación). ..................................... 122
Fig. 78 Sucesión de etapas en el lanzamiento de un cohete Ariane 5 (imagen cedida por Arianespace, www.arianespace.com). ............................................................................................ 124
Fig. 79 Example of Hohmann transfer from the inner circular orbit to the outer circular orbit.......... 125 Fig. 80 Visión artística de la misión científica LISA (Laser Interferometer Space Antenna) para
detección de ondas gravitacionales (ESA) (imagen cedida por la ESA, www.esa.int). .......... 125 Fig. 81 Vehículo desglosado y payload de la misión científica GAIA (imagen cedida por la ESA,
www.esa.int). ...................................................................................................................................... 126 Fig. 82 Sketch of a typical S/C configuration for GG control purposes. .............................................. 128 Fig. 83 Solar sail in test bench. ................................................................................................................. 129 Fig. 84 Sketch of a GIT (Gridded Ion Thruster), an electric propulsion system (in particular, included
in the so-called electrostatic propulsion systems). ........................................................................ 130 Fig. 85 Visión artística de la estación espacial internacional ISS, donde se puede apreciar
claramente los paneles solares y radiadores. ............................................................................... 131 Fig. 86 S/C en el que se puede apreciar claramente los diferentes revestimientos para control
térmico pasivo. .................................................................................................................................... 133 Fig. 87 Tabla comparativa de la densidad ρ de diferentes materiales. ............................................... 138 Fig. 88 Tabla comparativa del módulo de Young (E) de diferentes materiales. ................................ 139 Fig. 89 Tabla comparativa del límite elástico de diferentes materiales. .............................................. 140

9
Fig. 90 Tabla comparativa de la resistencia a tracción (TS) de diferentes materiales. .................... 141 Fig. 91 Propiedades del aluminio en estado puro. ................................................................................. 141 Fig. 92 Celdilla unidad de la red cristalina cúbica centrada en las caras. .......................................... 142 Fig. 93 Ejemplo de solicitaciones (especificaciones) estructurales en los diferentes elementos. ... 144 Fig. 94 Aleaciones empleadas en los diferentes elementos del avión DC-10. .................................. 144 Fig. 95 Evolución histórica de la aleación empleada en el extradós del ala. ..................................... 145 Fig. 96 Aleaciones empleadas en los diferentes elementos del avión B777...................................... 145 Fig. 97 Valores de viscosidad para algunos fluidos a 20ºC en unidades del sistema cegesimal cgs.
Viscosidad cinemática en [cm2/s] y viscosidad dinámica en [g/cm·s]. ...................................... 153 Fig. 98 Airfoil characteristic parameters. .................................................................................................. 154 Fig. 99 Wing lay-out parameters. .............................................................................................................. 155

10
1 FLIGHT PRINCIPLES
1.1 INTRODUCTION The flight of an aircraft is possible thanks to its interaction with the air in the atmosphere. In particular, the flight is due to the relative motion of the wing within this fluid. This motion gives rise to aerodynamic phenomena which in turn generate the lifting force responsible for the balance of the aircraft’s weight. The lifting force increases with the aircraft-air relative velocity, also called aerodynamic velocity. In order to balance the aircraft’s weight, the aerodynamic velocity must reach a sufficiently high value. The role of the aircraft’s engines is precisely providing the aircraft the required velocity for the wing to generate enough lift, so the engines are not directly responsible for the flight. Aircraft flight key concepts:
1. A fluid where the wing is submerged, which is air when flying in Earth’s atmosphere 2. The wing: wing layout shape and airfoil shape distribution
3. Fluid-wing interaction (i.e. fluid-wing relative motion or relative velocity) is mandatory for
flight. Fluid-body interactions are the scope of Fluid Dynamics, and Aerodynamics is the branch of Fluid Dynamics that studies specifically air-body interactions
1.1.1 Some essential concepts1 Essential concepts to be emphasized:
1. Body reference frame: The body reference frame (see Fig. 1) is a reference system attached to the aircraft. This reference frame is defined as follows:
a. The origin is located in the aircraft’s Centre of Gravity (CG), which on Earth can be safely considered the same as the Centre of Mass (CM)
b. The xb axis is contained in the aircraft's symmetry plane. The axis starts in the CG of the aircraft and its positive direction points to the nose of the plane
c. The zb axis is perpendicular to the previous one, also contained in the aircraft's symmetry plane, and its positive direction points downwards
2. Characteristic parameters of the airfoil2, e.g. the chord: c:
The chord is the straight line joining the Leading Edge (LE) and the Trailing Edge (TE) of the airfoil (see Fig. 2 and Fig. 3).
1 More information on these and other essential concepts can be found in the Annexes. 2 Extended information on characteristic parameters of the airfoil can be found in Annexe IIAnnexe I.

11
3. Angle of Attack/Incidence (AOA): α: The AOA is the angle between the airfoil's chord and the TAS (True Air Speed) or aerodynamic velocity vector (i.e. angle between the airfoil's chord and the direction of the free airflow, often named V0 or V∞, see Fig. 3).
Fig. 1 Sketch of the body reference frame.
Fig. 2 Sketch of an airfoil.
Fig. 3 Angle of attack of an airfoil.

12
1.2 THE ATMOSPHERE
1.2.1 Composition 78% Nitrogen (N2) 21% Oxygen (O2) 01% Inert gases, water steam (H2OV), hydrogen (H2), carbon dioxide (CO2)
1.2.2 Properties
1.2.2.1 Static pressure: pS
A fluid’s static pressure in a single point is the force per unit area in that point due to fluid’s weight.
A
WpS SI units: Pa
m
N
2
Other units: mbPaatm 25.1013 1013251
1.2.2.2 Temperature: T
From a microscopic point of view, a gas’ temperature is a measure stating the fluid particles’ kinetic energy. From a macroscopic point of view, temperature is a magnitude that governs thermal energy (heat) transfer between two or more systems.
T SI units: K
Other units: [ºC], [ºF] y [R]
At 0 K particles are motion less. As an example, at 20ºC (293.15 K), air particles are moving at an average velocity of 500 m/s, suffering more than 109 collisions per second; at 3000ºC, the mean velocity is around 2000 m/s.
1.2.2.3 Density: ρ A fluid’s density is its mass per unit volume.
V
m SI units:
3m
Kg
Water is almost an uncompressible fluid (i.e. its density remains constant independently of the applied compressive forces). Conversely, air is certainly a compressible fluid, but only under certain conditions (e.g. low flight velocities) it can be considered uncompressible.

13
1.2.2.4 Viscosity3 (momentum transport coefficient): μ
A fluid's viscosity is a parameter that indicates the degree of opposition that fluid exhibits to shear (tangential) strain. Therefore it is a parameter indicating the opposition of the fluid itself to flow. This property of resistance to flow arises due to the attraction forces between the fluid's molecules. Together with the heat transport coefficient k, the viscosity is considered a transport coefficient. It characterizes the momentum transport capacity of the fluid.
1. Absolute or dynamic viscosity: μ:
SI units:
sm
Kg
·
2. Kinematic viscosity:
SI units:
s
m2
1.2.2.5 Heat transport (or transfer) coefficient: K Together with the viscosity, the heat transport coefficient k is considered a transport coefficient. It characterizes the heat transport capacity of the fluid.
K SI units:
s
m2
1.2.3 International Standard Atmosphere (ISA) The International Standard Atmosphere (ISA) is a reference atmosphere defined by the International Civil Aviation Organization (ICAO), under the umbrella of the United Nations (UN). Namely, ICAO elaborates international regulations and recommendations to guarantee the safety, security, efficiency and regularity of the air transport and acts as a catalyst for the cooperation between its contracting states in all the spheres of civil aviation. ICAO states the following four characteristics to define ISA:
1. The established conditions (reference values) for ISA at zero altitude or Sea Level (SL) are the following:
a. Static pressure: 25.10130 SLpp mb
b. Temperature: 150 SLTT ºC 15.288 K
c. Density: 225.10 SL Kg/m3
3 Extended information on viscosity can be found in Annexe I.

14
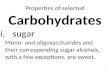
2. ISA temperature vs. height profile is defined as shown in Fig. 4 (see also Fig. 5):
Fig. 4 Plot of Temperature [ºC and K] vs. Height [Km] for the ISA.
3. Air in ISA behaves as a perfect gas (i.e. ISA is compliant with the perfect gases equation):
Equation 1 TRp
A
4. ISA is compliant with the fluid statics law:
Equation 2 dhgdp
1.3 FLUID DYNAMICS PRINCIPLES
1.3.1 Continuity Equation (Mass Conservation Law) The Continuity Equation (Mass Conservation Law) in the most general version states that the variation of mass per unit time inside a given enclosure (a control volume) is equal to the difference between the entering mass per unit time and the exiting mass per unit time. For a stationary4 problem (for which there is no variation of any magnitude with time, and particularly mass) the Continuity Equation states that the mass of fluid that exits the control volume per unit time must be equal to the mass of fluid that enters in it per unit time.
4 Por movimiento estacionario se entiende aquél en el que las propiedades y el comportamiento del fluido en un lugar determinado no varían con el tiempo (aunque sí que pueden variar en el espacio). Por ejemplo, esto se traduce, por un lado, en que las propiedades de las partículas fluidas que ocupan un punto determinado del campo fluido se mantienen constantes con el transcurso del tiempo, a pesar de que en cada instante ese punto esté ocupado por una partícula diferente; por otro lado, se traduce en que la masa total del fluido contenido en el conducto o uno de sus tramos nunca varía con el tiempo, a pesar de que el fluido fluya por su interior.

15
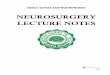
Fig. 5 Plot of temperature [ºC] vs. height [Km].
In the case of a uniform5, stationary fluid motion inside a duct (see Fig. 6) the formula for the equation is:
Equation 3 cteAV cteVAVA ...222111
Fig. 6 Conic duct. Sections: 1) inlet and 2) outlet.
In the case of an uncompressible fluid (i.e. density is constant or the same for any point of the fluid problem), the formula can be further simplified:
5 Por movimiento uniforme se entiende aquél en el que las propiedades de las partículas fluidas no varían espacialmente según ciertas direcciones. En el caso de un fluido que se mueve uniformemente por un conducto, como en la Fig. 1.1, que el movimiento sea uniforme significa que las propiedades se mantienen constantes en las secciones transversales a la dirección del movimiento. En consecuencia, las propiedades de todas las partículas que pasan por una sección transversal en un instante determinado son idénticas.

16
Equation 4 cteAV cteVAVA ...2211
1.3.2 Bernoulli Equation Daniel Bernoulli (1700-1782) applied the mechanic energy (sum of kinetic energy and potential energy) conservation principle to the fluid dynamics. In order to obtain the equation that wears his name, he simplified this mechanic energy conservation principle assuming the following hypotheses:
1. Incompressible fluid: The fluid is supposed to be uncompressible, which in turns means that its density is constant. The air can be considered incompressible when the aircraft flies at low speeds (typically below 0.3-0.5 Mach6). The error when making this assumption at low speed is acceptable (e.g. below 5%). It is important to note that this hypothesis is sufficient to study a wide variety of aircraft types and problems.
2. Ideal fluid:
Fluid’s viscosity μ and thermal conductivity coefficient k are null or negligible. As a consequence, for an ideal fluid there is neither transport of momentum nor heat transport by conduction. Ideal fluids do not exist, but a fluid can be considered ideal under certain conditions, for instance, far from the airfoil’s surface, beyond the boundary layer.
3. Stationary4 motion:
The properties and behaviour of the fluid being studied do not depend on time; they remain unchanged as time goes by. This is true for example for a flight where no manoeuvre is made, or assuming that there are no sudden wind gusts or any other perturbation, etc.
4. Mass forces derive from a potential:
The so-called mass forces, volumetric forces or long range forces (e.g. gravity or inertia forces) that are present in our problem derive from a potential.
Assuming these hypotheses are valid, Bernoulli’s Equation is:
Equation 5 cteVpS 2
2
1 cteVpVp SS ...2
1
2
1 222
211
1.3.3 Dynamic pressure and total (or impact) pressure
1. Dynamic pressure: q:
Equation 6 2
2
1Vq Pa
6 Extended information on the Mach number and flight regimes can be found in Annexe III.

17
2. Total pressure: pT:
Equation 7 qpp ST Pa
1.3.4 Venturi Effect Giovanni Battista Venturi (1746–1822) was an Italian physicist and inventor who did experimental studies on flows inside ducts. In particular, one of these ducts is the so-called Venturi Tube. When analyzing the experimental measures on the flow inside the Venturi Tube (see Fig. 7), he observed that the flow velocity increases and the flow static pressure decreases as the cross sectional area of the duct diminishes. This phenomenon is called the Venturi Effect and is coherent with the Continuity Equation and the Bernoulli Equation.
Fig. 7 Sketch of a Venturi tube.
1.4 STUDY OF AIRFOILS The airfoil of the wing is designed aiming at generating suitable pressure gradients on the wing, taking advantage of the Venturi Effect. The pressure acting on the wing's surface generates aerodynamic forces and in particular the lift, which enables the flight.
1.4.1 Symmetric airfoils
- Airfoil with null AOA ( 0 ): Say we study an airfoil inside a wind tunnel, and we consider a control volume with its frontiers sufficiently far from the airfoil both upwind and downwind (see Fig. 8). Beyond the boundaries, the air is not perturbed by the presence of the airfoil, i.e. we have free flow or stream in those regions: V and p are not affected by the airfoil. Inside the control volume, near the airfoil, the air is perturbed by the presence of the airfoil. For instance, V and p are effectively affected by the airfoil and will be different from those of the free flow. We can study the effects of the airfoil on the airflow in view of the fluid dynamics principles addressed in Section 1.3.

18
Fig. 8 Symmetric airfoil at null angle of attack.
In particular, due to the reduction on the cross-sectional areas 2 and 3 (see Fig. 8), the Venturi effect is caused, so:
1312 ; VVVV Due to symmetry: 32 VV
Bernoulli Equation
1312 ; pppp Due to symmetry: 0;32 ppp
As can be noticed, the pressure distributions in the upper surface and in the lower surface are identical but opposed due to the existing symmetry, and cancel mutually. Thus, the pressure gradient between both surfaces is null and so there is no net aerodynamic force acting on the airfoil.
- Airfoil with non-negative AOA ( 0 ): In this case, the asymmetry introduced in the fluid problem by the non-negative AOA (see Fig. 9 a) leads to a series of consequences. Again the Venturi effect is caused in section 3 due to the reduction on the cross-sectional area 3, but in section 2 the opposite effect occurs due to the broadening of the cross-sectional area 2, so:
1312 ; VVVV Due to asymmetry: 32 VV
Bernoulli Equation
1312 ; pppp Due to asymmetry: 0;32 ppp
In this case, the pressure distributions in the upper surface and in the lower surface are not identical and do not cancel mutually, due to the existing asymmetry. Thus, the pressure gradient between both surfaces is not null and so there is net aerodynamic force acting on the airfoil (see Fig. 9 b).

19
Fig. 9 a) Symmetric airfoil at angle of attack different from zero. b) Pressure profile.
1.4.2 Effect of thickness and camber
In Fig. 2 an example of a non-symmetric (asymmetric) airfoil and its characteristic parameters is shown. Starting from a symmetric airfoil (with null camber), next it is studied the effect of some types of modifications:
- Effect of an increase in thickness t:
If the airfoil thickness is increased, but the camber is not modified (it is still null), the airfoil is still symmetric and it would occur the same as explained before in Section 1.4.1 for a symmetric airfoil: net aerodynamic force acting on the airfoil would only appear when the AOA was different from zero. Compared with the airfoil in Section 1.4.1, with the same positive angle of attack, the effect of a thickness increase is a larger increase of air speed over the upper surface and around the suction peak, so the pressures drop more in that surface, too. For instance, the suction peak is larger there. Hence, the resulting net aerodynamic force acting on the airfoil is also larger than in the previous case, for a given AOA. The effect of a thickness increase can be seen as an increase of the slope of the lift vs. AOA curve (see Fig. 10, curve 2 vs. curve 1).
- Effect of an increase in camber c:
The increase in camber introduces asymmetry in the airfoil, and so asymmetry is also introduced in the fluid problem for null AOA. If camber is now positive, at null AOA the effect is that air velocity in the upper surface is higher than in the lower surface, compared with the airfoil in Section 1.4.1, where they are the same in each section. Therefore, the resulting net aerodynamic force acting on the airfoil is different from zero at null AOA. The effect of a camber increase is similar for the case of positive AOA, compared with the airfoil in Section 1.4.1: the air velocity in the upper surface is higher than for the case of the same airfoil with null camber. It can be seen in Fig. 10 (curve 3 vs. curve 1) that the effect of a camber increase is a parallel upwards displacement of the original lift vs. AOA curve. Note that this displacement reflects the existence of lift even for null AOA.

20
Fig. 10 Effect of thickness and camber on the plot of lift vs. angle of attack.
1.4.3 Stall In the following, it is presented the process by which a high-thickness airfoil stalls. The thickness of this type of airfoils is higher than 15%. As shown in the previous section, the lift force L generated by the airfoil increases almost linearly as the angle of attack (AOA) increases (see Fig. 11). But this is valid only up to certain values of the AOA.
Two phenomena affect negatively the air flow when flowing around the airfoil: the friction due to air’s viscosity and the adverse pressure gradient, due to the sharp increase of pressure downwash the suction peak in the upper surface of the airfoil. These phenomena produce a reduction of the kinetic energy of the flow and their intensity and influence on the flow is bigger as the AOA increases. At a certain point, they cause the flow to separate from the upper surface (see Fig. 12). Once the flow is separated, in the region of separation (which is just downwash the separation point), the airfoil is no longer capable of generating lift L. Lift is only generated where the flow travels adhered to the airfoil surface.
As the AOA increases more and more, the separation point moves to the leading edge (see Fig. 1.9). The lift still increases with AOA, but it grows more slowly (non-linear region), until the separation point is around 50% of the chord. When this happens, the lift reaches its maximum and the respective AOA is the so-called stall angle, S (or critic AOA). If the AOA is increased more, the lift starts decreasing (there is still lift due to the existence of a region where the flow is yet non-separated). For a certain AOA, the separation point finally reaches the leading edge. The flow is separated all along the upper surface of the airfoil, so it is no longer capable of generating lift in any region.
For conventional aircraft, the stall angle depends only on the geometric shape of the airfoil7 (i.e. camber and thickness). Two airfoils with the same geometric shape will have the same stall angle
7 Actually, the stall and the lift and drag coefficients also depend on the Mach number M and Reynolds number Re. We will not consider these issues in-depth, since this is out of our scope, but it is worth to mention though that Re depends on a characteristic dimension of the considered obstacle (e.g. the chord of the airfoil). In the common range of values of M and Re where conventional aircraft evolve, the variation of the stall, the CD and CL with M and Re is small and it is valid to consider that they are independent of M and Re.

21
(and thus the same CLmax, as will be shown later on) regardless how big they are (i.e. the stall angle is independent of the chord7). Two airfoils with different shape will have different stall angle. When the airfoil’s (or aircraft’s) AOA exceeds S, it is said that the airfoil (or aircraft) is at stall (in French, decrochage).
Fig. 11 Variation of lift L and drag D with the angle of attack.
Fig. 12 Location of the separation point at different angles of attack.
1.5 AERODYNAMIC FORCE As seen before, according to the mass conservation equation (Eq. 3), the airfoil (and thus the wing, adequately designed) causes the airflow speed to be higher in some regions of the upper surface

22
than in the lower surface, under certain conditions. Then, the pressure distribution in the lower surface is higher (higher pressure) than in the upper surface (lower pressure), according to Bernoulli equation (Eq. 5). These pressure distributions acting on upper and lower surface, as any system of forces applied to a body, can be reduced to a resulting net force (the aerodynamic force) and a resulting moment, applied on a single point. For convenience, it is common to reduce the pressure distribution to a resulting net force applied in the point of the airfoil where the resulting moment is null8. The point where the resulting moment due to the pressure distribution on the airfoil is zero is called centre of pressure (CP). The force depends on the following factors:
.),,,,(.),,,( etcVSfetcwingairfoilairfF The aerodynamic force is usually split into its two components (see Fig. 13):
- Lift L (in French, portance): La sustentación es la componente perpendicular a la corriente libre.
- Aerodynamic drag D (in French, traînée):
La resistencia es la componente paralela a la corriente libre.
Fig. 13 Aerodynamic force: lift L and drag D applied on the pressure centre of an airfoil.
1.5.1 Lift
Early experimental studies were conducted to ascertain the effect of variation of several parameters on the lift. For instance, the variation of the lift with the free stream velocity (or aircraft aerodynamic velocity, TAS) and with the air density is shown in Fig. 14. The results obtained by means of these experimental studies demonstrated that the lift has a second order dependence on free stream velocity whereas a linear dependence on air density. It was also observed thanks to them that, once the airfoil (or aircraft) shape and AOA are given or known, the following expression applies:
LCcteSq
L
Sq
L ...
2
2
1
1 qS
LperfilfCL ),(
8 Actually, in aerodynamics it is more common to apply the resulting force and moment to the aerodynamic centre (CA). We will not address this concept but they are very close to each other for many flight conditions.

23
Fig. 14 Plot of lift L vs. aerodynamic velocity and vs. air density.
The CL parameter is the so-called lift coefficient. Its order of magnitude is the unit and, for conventional aircraft, it only depends on the geometric shape of the airfoil (i.e. camber and thickness) and the AOA, so if these parameters are not changed, the lift coefficient is constant. Again, it is important to note that this coefficient does not depend on the chord (i.e. the size of the airfoil)7. Two airfoils identical in shape but with different dimensional scale, with the same AOA, will exhibit the same lift coefficient. In the study of the flight of a given aircraft, the following expression applies for the lift:
Equation 8 )(2
1)( 2 LL SCVqSCL
Equation 9 LLL CCfC 0)( )(,0 perfilfCC LL
Eq. 9 is often called characteristic curve of the airfoil, which is plotted in Fig. 15. The hypothesis of linear lift coefficient with AOA is perfectly valid except in the vicinity of the stall AOA. The lift coefficient is a dimensionless magnitude. The reason why non-dimensional variables are used instead of dimensional ones, in the study of aircrafts and aerodynamic performances, is simple. Dimensional variables, like the lift, are dependent not only on the aircraft’s characteristics but also on other parameters like the atmospheric conditions and the flight velocity. Coefficients enable easier and faster comparisons of performances and describe the behaviour of the aircraft in function only of a more reduced set of variables. Namely, in the case of the lift coefficient, only the shape of the airfoil and its angle of attack matter, and airfoil performances can be compared independently from the flight and weather conditions.
1.5.2 Drag Early experimental studies were conducted also to ascertain the effect of variation of several parameters on the drag (e.g. to determine the variation of the drag with the free stream velocity and with the air density). The results obtained by means of these experimental studies demonstrated that the drag has a second order dependence on free stream velocity whereas a linear dependence on air density.

24
It was also observed thanks to them that, once the airfoil (or aircraft) shape and AOA are given or known, the following expression applies:
DCcteSq
D
Sq
D ...
2
2
1
1 qS
DetcperfilfCD .),,(
Fig. 15 Characteristic curve: plot of lift coefficient vs. angle of attack.
The CD parameter is the drag coefficient. It is one or two orders of magnitude smaller than the unit or the lift coefficient (for conventional aircraft) and it only depends on the geometric shape of the aircraft (i.e. camber and thickness of the airfoil, wing layout shape and aspect ratio, etc.) and the AOA (or lift coefficient), so if these parameters are not changed, the drag coefficient is constant7. In the simplified study of a given aircraft, the following expression applies:
)(2
1)( 2 DD SCVqSCD (I.3)
DiDD CCfC 0)( (I.4) iP DDD
The aerodynamic drag is in turn decomposed into two contributions, each one representing the drag arising from different phenomena9:
- Parasitic or zero-lift drag, D0 or DP, and parasitic or zero-lift drag coefficient CD0: This coefficient can be considered constant for a given aircraft, supposing its configuration remains unchanged, since it is valid enough to assume that it only depends on the geometry of the aircraft itself7. This aerodynamic drag stems from several phenomena. On one hand, we have the friction drag, due to friction of the air moving around the aircraft with its wet surface, which causes on the aircraft a net force that opposes its flight. On the other
9 This is valid for low flight velocities. When the aircraft enters the transonic regime, a shock wave is formed in the upper surface and a third contribution to drag arises, which is related with this compressibility effect.

25
hand, the form drag, profile drag, or pressure drag, which is due to the pressure distribution over the upper and lower surface of the airfoil and the flow downwash (shape and intensity of vortex generation), behind the wing, all of these being closely related with the frontal area of the aircraft and its aerodynamic shape (see Fig. 16a). It is important to note that the parasitic drag appears even if no lift is generated by the wing.
Parasitic drag: 02
0 2
1DDP SCVqSCD
- Lift-induced drag DI and lift-induced drag coefficient CDi:
This coefficient accounts for the drag on the aircraft induced by the process of generation of lift. This drag is due to generation of wing tip vortexes that appear only when the pressure distributions over the upper and lower surfaces are different (see Fig. 16b). Hence, this coefficient not only depends on the geometry and configuration of the aircraft, but also on the AOA, or the lift coefficient, which are related with the lift as exposed in the previous section. It is important to note that the lift-induced drag is zero when the lift is null, and that it appears only when lift is generated by the wing. Generally, it is preferred to express the lift-induced drag coefficient as a function of the lift coefficient, instead of the AOA:
)();( 21 fCfC LDi )(3 LDi CfC
Lift-induced drag: DiDii SCVqSCD 2
2
1
Fig. 16 a) Flow downwash. b) Induced vortexes in the wing tips when generating lift.
The mathematical expression that relates the drag coefficient with the lift coefficient and other parameters that depend upon the aircraft geometry is called polar curve or polar. For a wide variety of problems, it is well accepted to assume that the polar curve is parabolic with the lift coefficient (see Fig. 17). The parabolic polar curve is then expressed as follows:
2
02
0
1· LDLDD C
AeCCkCC

26
Fig. 17 Plot of the polar curve: )( LD CfC .
Hence in this case, the lift-induced drag coefficient is:
22 1· LLDi C
AeCkC
The parabolic polar curve can also be found in literature written as follows:
00
1DDDDL CCAeCC
kC
The new parameters that appear in the parabolic polar curve are defined as:
- Aspect ratio (A): The aspect ratio is a non-dimensional parameter that characterizes the slenderness of the wing and is defined as (see Fig. 18):
S
bA
2
- Oswald factor (e):
The Oswald factor is related to the lay-out shape of the wing. Ideally, the Oswald factor of a wing that exhibits an elliptical lift distribution is the unit. For a wing which does not have an elliptical lift distribution, the Oswald factor will be smaller than one:
Wing that exhibits elliptical lift distribution: 1e General case: 95.06.0 e

27
Fig. 18 Layout of an aircraft: wing surface (S) and wingspan (b).
1.5.3 Aerodynamic efficiency: lift-to-drag ratio
The aerodynamic efficiency (which is often denoted E or f) is a non-dimensional parameter which establishes the ratio lift-to-drag for a given wing:
D
LE
D
L
D
L
C
C
SCV
SCVE
2
2
2
12
1
The aerodynamic efficiency depends only on the aircraft characteristics (e.g. geometric shape of the airfoils, wing lay-out and shape, etc.) and the AOA. An aircraft featuring good aerodynamic performances will be capable of generating large lift while keeping drag low, thus it will have a great aerodynamic efficiency. The aerodynamic efficiency exhibits a maximum EMAX. The lift coefficient for the maximum aerodynamic efficiency can be found mathematically, and is termed optimum lift coefficient CLOPT.
k
CDoOPT LC
kCC
C
D
LE
DMAXD
L
MAXMAX
·2
1
0
If we compute the lift-induced drag coefficient for CLOPT, we observe that for this flight condition this coefficient is equal to the parasitic drag coefficient, and so drag is two times the parasitic drag:
02· DOPTLDi CCkC 00 2 DDiDD CCCC
PPi DDDD 2

28
Graphically, it might be also found easily the values of the lift and drag coefficients which lead to maximum aerodynamic efficiency. To this end, the plot of the aircraft's polar curve is necessary, as shown in Fig. 19. The pair of values (CL, CD) for which we have EMAX corresponds to the tangency point of a straight line departing from the reference frame’s origin with the polar curve.
Fig. 19 Maximum efficiency or maximum lift-to-drag ratio on polar curve.
As will be seen later on, many significant aircraft performances are related to the aerodynamic efficiency. For example, it is of foremost importance as regards to the gliding behaviour of the aircraft. Namely, the maximum range for a gliding aircraft:
Maximum gliding range: hEd MAXMAX ·
Next, representative values of the maximum aerodynamic efficiency are shown for different types of aircrafts:
Glider: 5030 MAXE
Commercial aircraft: 2016 MAXE
Concorde: 8MAXE
STS (Space Shuttle Orbiter): 3MAXE
1.6 HORIZONTAL FLIGHT
1.6.1 Rectilinear horizontal flight with level wings
In this case, when applying Newton's 2nd Law (see Fig. 20):
Forces in axis xb: DT (I.5) Forces in axis yb: No forces (ideal case)
Forces in axis zb: MgWL (I.6)

29
Fig. 20 Forces acting on an aircraft in equilibrium in horizontal flight.
Por un lado se tiene que el vuelo es en un plano horizontal (no hay variación de altitud). Se supone que la densidad es constante, y por otro lado el avión viene fijado (S y W son constantes), luego combinando las ecuaciones (I.1) y (I.6) se tiene:
)(2
1 2 LSCVWL (I.7)
De esta expresión se deduce que, si se pretende mantener el vuelo horizontal, la velocidad y el coeficiente de sustentación (o el ángulo de ataque) están ligados, deben tener unos valores adecuados para que se cumpla la igualdad y no pueden tener valores arbitrarios. Esto es, el piloto podrá variar la velocidad de vuelo, por ejemplo, pero para mantener el vuelo horizontal deberá modificar también el coeficiente de sustentación (en definitiva el ángulo de ataque) y su nuevo valor vendrá determinado por la ecuación (I.7). Si el piloto quiere aumentar V manteniendo el vuelo horizontal, deberá disminuir con la palanca de mando.
Como se vio en la Sección 1.4.3, existe un ángulo de ataque máximo que no se puede rebasar, S, de ahí que asociado a éste exista una velocidad mínima o velocidad de pérdida, VS. Si el piloto quisiese reducir V por debajo de VS manteniendo el vuelo horizontal, debería emplear un ángulo de ataque mayor que S por lo que antes de lograrlo entraría en pérdida.
)(2
1
2
1 22SLMINMAXLMIN SCVSCVW
MAXLSMIN SC
WVV
2
Es importante recordar que S depende únicamente de la forma geométrica del perfil, luego sucede lo mismo con CLMAX (ver Fig. 15). En cambio, VS depende además de la densidad y otras características del avión. Cuanto mayor es la altitud a la que vuela el avión, mayor es VMIN, lo que es perjudicial ya que el avión entra en pérdida antes (entra en pérdida a velocidades más altas).
En vuelo horizontal rectilíneo se cumple que:
MINMAX
MAX D
W
D
LE
De lo que se deduce que, en un vuelo horizontal, si se vuela con CLOPT (i.e. con eficiencia aerodinámica máxima) supone que se vuela también con DMIN.

30
1.6.2 Influence of aerodynamic velocity in drag
Partiendo de las ecuaciones (I.1), (I.3) y (I.4) y para el caso de vuelo horizontal rectilíneo a nivel:
LSCVWL 2
2
1 SV
WCL 2
2
22
02
022
2
1
2
1)(
2
1
2
1LDDiDD SkCVSCVCCSVSCVD
Introduciendo el valor de CL en la segunda ecuación tenemos la expresión que liga la resistencia con la velocidad de vuelo. Fijado el avión que se estudia y el nivel de vuelo, la resistencia aerodinámica sólo depende de V:
iPDD DDSV
WkSCV
SV
WSkVSCVD
2
2
02
2
22
02 2
2
12
2
1
2
1
Como se puede apreciar en la Fig. 21 (donde aparecen representadas D, DP y Di en función de V) DP aumenta de forma cuadrática con la velocidad mientras que Di disminuye con el incremento de velocidad. Además se observa que la resistencia aerodinámica D presenta un valor mínimo DMIN.
Fig. 21 Plots of D, Dp and Di vs. aerodynamic speed for Gulfstream IV aircraft.
1.6.3 Turn in horizontal flight
In this case, when applying Newton's 2nd Law (ver Fig. 22):

31
Forces in axis x: DT (I.8) Forces in axis y: WL cos (I.9)
Forces in axis z: R
V
g
WL
2
sin (I.10)
Para equilibrar el peso del avión W, la sustentación L en viraje deberá ser mayor que la propia del vuelo horizontal rectilíneo estudiado en la Sección 1.6.1, como se deduce de (I.9) ya que el coseno del ángulo de inclinación es menor que 1. Por ello, para hacer el viraje, el piloto deberá aumentar V o para así aumentar la sustentación.
Fig. 22 Forces acting on an aircraft in equilibrium in a turn in horizontal flight.
Otra consecuencia no deseada del viraje es el aumento de VS en relación al caso anterior como se demuestra a partir de (I.1) e (I.9):
cos
1
cos
22RECTILINEOS
MAXLMAXLVIRAJES V
SC
W
SC
LV
1.6.4 Load factor
El factor de carga n se define como: W
Ln (I.11)
Este es un parámetro adimensional, aunque en general se emplean las [g] cuando se habla de él. Ejemplos del valor que toma son:
En vuelo horizontal rectilíneo: 1n
En viraje horizontal: 1n En el inicio del ascenso: 1n
En vuelo invertido horizontal rectilíneo: 1n

32
En el inicio del descenso: 1n
Se puede lograr el vuelo con un factor de carga nulo ( 0n ) si se realiza una maniobra adecuada. Cuando n se anula, se dice que se experimenta microgravedad. En los vuelos parabólicos se realizan ciclos de ascenso y descenso, buscando n nulo, para entonces realizar experimentos científicos (o entrenamiento de astronautas) en condiciones de microgravedad. De este modo se evita la necesidad de poner un vehículo espacial en órbita dentro del que realizar dichos experimentos, lo que representa unos costes mucho mayores.
Calculamos ahora la velocidad de entrada en pérdida en función de n:
nVSC
nW
SC
LV
nS
MAXLMAXLnS 11
22
Si consideramos el vuelo con viraje en el plano horizontal por ejemplo:
cos
1
W
Ln
1.7 HYPERLIFT DEVICES En el diseño de aviones los perfiles del ala se dimensionan optimizados para la fase de crucero, pues en general es la fase más larga del vuelo. En las etapas iniciales de la aviación comercial, el factor crítico en el diseño de perfiles era que estos tuvieran grandes CL (grandes espesores y curvaturas). La razón era que los aviones eran relativamente lentos y eran necesarios grandes CL para que la sustentación alcanzase los valores deseados. Actualmente los aviones vuelan en crucero a velocidades muy elevadas y por eso el ala puede generar suficiente sustentación teniendo pequeños CL. Así es que hoy en día la tendencia en el diseño se ha invertido. En lugar de buscar grandes CL, como ya no son necesarios, se tiende a diseñar perfiles con pequeños CL (pequeño espesor y pequeña curvatura) porque de ese modo se reduce la resistencia inducida y por tanto también se minimiza la resistencia aerodinámica y el consumo de combustible. El problema surge en las fases del vuelo en las que la velocidad del avión es menor. La consecuencia de tener bajo CLMAX es que la velocidad de entrada en pérdida es muy alta. Si se quisiese aterrizar o despegar sin entrar en pérdida en estas condiciones, se debería realizar estas maniobras a una velocidad muy elevada con lo que, además del peligro intrínseco, la longitud de pista que se necesitaría sería enorme, totalmente inaceptable desde el punto de vista de la construcción de aeropuertos. Es por este motivo que los aviones actuales van provistos de los dispositivos hipersustentadores. Estos dispositivos sólo se despliegan en las fases del vuelo a baja velocidad y el objetivo que persiguen es aumentar el CL, el CLMAX y/o retrasar la entrada en pérdida, esto es, aumentar S (en todo caso, disminuir la velocidad VS).
1.7.1 Use of hyper-lift devices in various phases of flight
Las fases del vuelo en las que se emplean son: - En despegue:
En el despegue interesa acelerar desde el reposo hasta la mayor velocidad posible en un recorrido corto, con el avión completamente cargado. El despliegue de los dispositivos

33
hipersustentadores es parcial porque si estuvieran completamente desplegados introducirían una resistencia aerodinámica demasiado elevada, perjudicando la aceleración en pista y el tramo de ascenso inicial.
- En aterrizaje: En el aterrizaje el avión es más ligero e interesa alcanzar la mínima velocidad segura. El despliegue de los dispositivos hipersustentadores es total en este caso porque la resistencia aerodinámica que introducen es beneficiosa en el proceso de deceleración.
- En aproximación:
En la aproximación los dispositivos hipersustentadores se despliegan parcialmente. La velocidad todavía es alta en relación a la de pérdida y no se despliegan completamente porque se pretende evitar incurrir en gradientes de descenso excesivo. Además existe el peligro de dañar los dispositivos si se despliegan a velocidades demasiado elevadas.
1.7.2 Effects produced by hyper-lift devices
Los diferentes tipos de dispositivos hipersustentadores que se estudiarán en la Sección 1.7.3 producen alguno de estos tres efectos (o una combinación de ellos):
- Aumento de la curvatura del perfil:
El despliegue del dispositivo hipersustentador produce un aumento de la curvatura del perfil que altera la característica del mismo en el modo que se observa en la Fig. 23, tal como se vio en la Sección 1.4.2. En este caso el aumento de resistencia es importante, ya que el aumento del coeficiente de sustentación produce a su vez un aumento notable de la resistencia inducida.
- Control de la capa límite:
El despliegue del dispositivo hipersustentador comunica el intradós con el extradós y retrasa la entrada en pérdida inyectando energía cinética a la zona afectada del flujo sobre el extradós o eliminando esta zona de baja energía por succión. El efecto se puede apreciar en la Fig. 24. En este caso sin embargo el aumento de la resistencia es mínimo.
- Aumento de la cuerda:
El despliegue del dispositivo hipersustentador produce en este caso un aumento del área efectiva del ala (i.e. aumento de la superficie alar).
1.7.3 Types of hyper-lift devices
Se estudiarán los dispositivos hipersustentadores pasivos (los únicos empleados en aviación civil), en los que no existe aporte energético externo (por ejemplo desde los motores) al fluido. En el caso de los dispositivos activos el fluido recibe energía de fuentes que no son el propio fluido. En la Fig. 25 aparecen los diferentes dispositivos partiendo de un perfil original inalterado (Fig. 25a).
- Dispositivos hipersustentadores de borde de salida: I. Flap simple/normal (plain flap):
Aumenta la curvatura y también puede servir a la vez como alerón o superficie de mando. Sencillo. Da momento de picado. Ver Fig. 25b.
II. Flap de intradós (split flap) :

34
Aumenta la curvatura pero a costa de un gran incremento de la resistencia. Ligero y sencillo. Da momento de picado. En desuso actualmente. Ver Fig. 25c.
Fig. 23 Variation of characteristic curve due to increase in camber.
Fig. 24 Variation of characteristic curve due to boundary layer control.
III. Flap Zap:
Aumenta la curvatura y el área proyectada del ala pero también aumenta la resistencia de forma apreciable. Es un flap de intradós cuyo eje de giro (o eje de charnela) se desplaza hacia atrás. Complejidad mecánica. Da momento de picado. Ver Fig. 25d.

35
IV. Flap con ranura simple/mono-ranurado (single slotted flap): Aumenta la curvatura y controla la capa límite. El aire que pasa de intradós a extradós succiona la capa límite de la parte fija del perfil. No incrementa mucho la resistencia. Muy sensible a la forma de la ranura. Ver Fig. 25e.
V. Flap con ranura doble/bi-ranurado (double slotted flap):
Evolución mejorada del anterior: retrasa el desprendimiento sobre el flap. Cargas aerodinámicas sobre el elemento intermedio muy elevadas. Ver Fig. 25f.
VI. Flap con ranura triple/tri-ranurado (triple slotted flap):
Retrasa todavía más el desprendimiento sobre el flap. VII. Flap Fowler:
Aumenta la curvatura, el área proyectada y controla la capa límite a costa de un aumento escaso de la resistencia. Da momento de picado. Ver Fig. 25g (monorranurado) o Fig. 25h (birranurado).
- Dispositivos hipersustentadores de borde de ataque:
I. Flap Krueger (o Krüger):
Aumenta la curvatura. Da momento de encabritado. Es típico en alas finas (i.e. de poco espesor). Ver Fig. 25i.
II. Ranura de borde de ataque (slot):
Controla la capa límite retrasando la pérdida. Sencillo. Aumenta demasiado la resistencia en vuelo a alta velocidad. Ver Fig. 25j.
III. Perfil de borde de ataque (slat):
Aumenta la curvatura, el área proyectada y controla la capa límite. Ver Fig. 25k (no desplegado) y Fig. 25l (desplegado).
En los aviones reales se utilizan combinaciones de estos dispositivos, por ejemplo slat y flap Fowler mono-ranurado (Fig. 25m) o tri-ranurados, slat y flap Fowler bi-ranurado (Fig. 25n), etc. En la Fig. 26 se puede apreciar el sistema de dispositivos hipersustentadores del avión Boeing 737 replegado y completamente desplegado. En la Fig. 27 aparece una representación gráfica en la que se puede ver el incremento del coeficiente de resistencia ∆CD frente al incremento del coeficiente de sustentación ∆CL para diferentes tipos de dispositivos hipersustentadores en función de la deflexión de los mismos.

36
Fig. 25 Types of hyper-lift devices.
Fig. 26 Hyper-lift devices of Boeing 737.

37
Fig. 27 Increase in drag coefficient vs. increase in lift coefficient for several types of hyper-lift devices.
1.8 REFERENCES [1] A.I. Carmona. Aerodinámica y Actuaciones del Avión [2] F. White. Fluid Mechanics [3] J. Meseguer & A. Sanz. Aerodinámica del Vuelo: Aves y Aeronaves [4] J. D. Anderson. Fundamentals of Aerodynamics [5] J. D. Anderson. Introduction to flight [6] J. Meseguer & A. Sanz. Aerodinámica básica

38
2 CHAPTER 2: ESTABILITY AND CONTROL
2.1 INTRODUCTION Damping: extraction of mechanical energy from a vibrating system usually by conversion into heat; serves to control the steady state resonant response and to attenuate travelling waves in structure. Types: 1) material damping: damping inherent in material; 2) system or structural damping: damping at supports, boundaries, joints, and interfaces, etc. Viscous damping, hysteretic damping, Coulomb damping, linear and proportional damping are vibration damping, and indicate the mathematical model that represents the physical mechanism of damping {{412 Rao,M.D. 2003}}.
2.2 REFERENCES [1] A.I. Carmona. Aerodinámica y Actuaciones del Avión [2] Rao

39
3 CHAPTER 3: PERFORMANCES
3.1 INTRODUCTION El estudio de las actuaciones (performances) es un área de la Mecánica del Vuelo que se ocupa del estudio del movimiento del centro de gravedad o centro de masas (CG o CM) del avión a lo largo de su trayectoria en vuelo. En contraposición al estudio de las actuaciones, el estudio de la estabilidad y control, abordado previamente en la Sección 2, es también un área de la Mecánica del Vuelo, pero en este caso se ocupa de los movimientos rotacionales del avión como sólido rígido alrededor de su propio centro de gravedad. Mediante este tipo de análisis se definen las cualidades de vuelo de un avión, la facilidad con la que se pilota el avión en cuestión. Sin embargo, en ambos casos se plantea la resolución de problemas relacionados con la dinámica del avión como sólido rígido. Generalizando, se estudian las fuerzas en el caso de performances y los momentos en el caso de estabilidad y control.
3.2 PERFORMANCES OF A TURBOJET AIRCRAFT En el estudio de aviones provistos de turborreactores se trabaja con el empuje T porque generalmente las prestaciones de este tipo de motores se suelen expresar en términos de empuje proporcionado. En particular, el consumo de combustible del motor es proporcional al empuje T. El empuje proporcionado por un motor turborreactor depende principalmente de las siguientes variables10: ),,,( régimenTVfT Consumo: Tc TTSFCc
De todas estas variables la única que el piloto controla directamente es el régimen de funcionamiento del motor, y el control lo ejerce por medio de la palanca de gases. El cambio de régimen se consigue gracias a que, con la palanca, el piloto ajusta (dependiendo del tipo de motor) el valor de las rpm (revoluciones por minuto) del compresor o el valor del EPR (Engine Pressure Ratio, relación entre la presión total en la tobera de salida y la presión total a la entrada del compresor). El aumento de las rpm o del EPR constituye un aumento del régimen al que funciona el motor, luego un aumento del empuje que proporciona.
3.2.1 Rectilinear horizontal flight with level wings
In this section, we study the performances of an aircraft equipped with a turbojet engine in a rectilinear horizontal flight condition. Upon application of Newton's 2nd Law the following equilibrium of forces is attained (see Fig. 28):
10 Actually, the thrust provided by a turbojet engine is also dependent on other secondary variables, e.g. the air viscosity, moisture, rain, condensation, etc. We neglect this fact since it is out of the scope of this course.

40
Fig. 28 Forces acting on an aircraft in equilibrium in horizontal flight.
Forces in axis xb: DT (III.1) Forces in axis yb: No forces (ideal case) Forces in axis zb: MgWL (III.2)
Should we recall the equations in Section 1.6.1:
LSCVWL 2
2
1 SV
WCL 2
2
SV
WkSCVSkCVSCVSCVD DLDD 2
2
0222
022 2
2
1
2
1
2
1
2
1
It is then possible to obtain the required thrust using equation (III.1), which is the thrust that the turbojet engine must provide in order to maintain the horizontal flight condition:
),,(2
2
1
2
0
22
02
0
2
0
2
000 WVf
V
WbVa
V
W
S
kVSCDT DR
(III.3)
A no ser que se diga lo contrario, el avión que se analiza es conocido (sus características están fijadas) y se supone que no varía su configuración durante el vuelo a estudiar, e.g. durante el crucero no despliega dispositivos hipersustentadores, ni tren de aterrizaje, etc. De ahí que los coeficientes a y b se puedan considerar constantes en el estudio de performances. En la Fig. 29 se muestra la curva de empuje requerido TR frente a velocidad V. Obviamente es la misma curva que la curva de D frente a V hallada en la Sección 1.6.2 para vuelo horizontal.
Para trabajar con expresiones que sean independientes de la altitud de vuelo (se debe recordar que existe dependencia con la altura de vuelo a través de la densidad ρ), a menudo se emplea esta variable en lugar de la velocidad aerodinámica:
Velocidad Equivalente (Ve o EAS): VVe0
(III.4)
La Velocidad Equivalente o EAS (Equivalent Air Speed) es una variable importante por dos motivos. En primer lugar, se emplea en el cálculo de estructuras aeronáuticas, para el que no basta conocer la velocidad a la que se desplazará el avión, sino que ésta se debe poner en relación con

41
la densidad de la atmósfera en la que se desarrollará este movimiento. En segundo lugar es una variable importante en anemometría (determinación de la velocidad del avión a partir de los datos aire, como se explica en el tema 6). Por poner un ejemplo, suele ser habitual que la velocidad proporcionada por el anemómetro de una avioneta sencilla sea precisamente la EAS. Si empleamos la EAS, se obtiene una nueva expresión para el empuje requerido11:
),(2
22
2
0
22
0
WVfV
WbaV
V
WbVaT e
e
eR
(III.5)
Fig. 29 Plot of required thrust TR vs. aerodynamic velocity V.
Matemáticamente se puede hallar la velocidad de mínima resistencia VDmin del siguiente modo:
0dV
dD 4
0
2
DMIND C
k
S
WV
Es importante recordar que volar con resistencia aerodinámica mínima es lo mismo que volar con eficiencia aerodinámica máxima, en vuelo horizontal rectilíneo. Entrando en (I.1) con (III.2) y el valor de CLOPT se obtendría la misma expresión para VDmin que se acaba de deducir. Variación de la curva de actuación en función de cambios en variables:
1. Cambios en el peso del avión W:
Se puede apreciar en la gráfica de la Fig. 30 la evolución de la curva con el aumento de W. Es importante destacar que la velocidad de vuelo para mínima resistencia VDmin aumenta con la raíz de W, como se aprecia en la expresión obtenida anteriormente.
11 A título indicativo se debe mencionar que, a partir de aquí y hasta la Sección 3.3, se puede proceder de forma análoga en el estudio de las actuaciones tanto si se trabaja con V como si se trabaja con Ve. Es más, las curvas de actuaciones son idénticas si la densidad del aire es la de la ISA a nivel del mar, independientemente del hecho que unas empleen V y otras Ve. Las curvas sólo se diferencian cuando la densidad del aire es distinta de ρ0 (y por tanto V es diferente de Ve), manteniendo eso sí cualitativamente cierta semejanza.

42
Fig. 30 Effect of weight W variation on plot of required thrust TR vs. aerodynamic velocity V.
2. Cambios en la configuración del avión:
Cuando se habla de cambios de configuración del avión se entiende por ejemplo cambios derivados del despliegue del tren de aterrizaje, de dispositivos hipersustentadores, etc. Estos cambios alteran el valor de los coeficientes que dependen de las características geométricas del avión (CL0, CLα, CD0, k), y esto se traduce a su vez en variaciones de las performances del avión. En la Fig. 31 se puede apreciar el efecto de desplegar el tren de aterrizaje (lo que induce un incremento CD0) sobre la curva TR frente a V.
Fig. 31 Effect of weight W variation on plot of required thrust TR vs. aerodynamic velocity V.
3.2.2 Velocity for maximum endurance & velocity for maximum range for a turbojet aircraft
1. Velocity for maximum endurance:
La máxima autonomía (máximo tiempo en el aire) se da cuando la tasa de consumo de combustible c del avión es mínima, i.e. el ratio tiempo en el aire por unidad de combustible consumido es máximo. Por tanto, si se asume que el TSFC es constante, la máxima autonomía se da en la condición de vuelo de mínimo empuje requerido, i.e. con resistencia

43
aerodinámica mínima, para vuelo horizontal. Como se ha demostrado en la Sección 1.6.1, esta condición, en vuelo horizontal, es lo mismo que volar con eficiencia aerodinámica máxima. Luego un avión con turborreactor conseguirá su máxima autonomía volando a la velocidad VDmin. La deducción matemática de esta conclusión se muestra seguidamente:
cdt
dW
DTcdW
dt 111
MINMAX DdW
dt 1
En cuanto a la altitud, la autonomía máxima se produce en la tropopausa12, siempre que el techo operacional13 del avión esté en la tropopausa o por encima de ésta (es decir, en la estratosfera).
2. Velocity for maximum range:
El máximo alcance se da cuando el ratio distancia recorrida por unidad de combustible consumido es máximo. Por tanto, un avión con turborreactor alcanzará su máxima distancia recorrida volando con D/V mínimo, como se deduce a continuación:
D
V
T
V
c
V
dtdW
dtdx
dW
dx
MINMAXMAX V
D
D
V
dW
dx
Thus, we are seeking the minimum of the function D/V:
0)/(
dV
VDd MIND
D
VC
k
S
WV 4/1
4
0
332
Hence, the velocity for the maximum range is 4/13 VDmin. As regards to altitude, the maximum range occurs in the vicinity of the aircraft’s operational ceiling13.
3.3 PERFORMANCES OF A PISTON ENGINE AIRCRAFT En el estudio de los aviones provistos de motores alternativos y de hélice se trabaja con la potencia P porque a diferencia del caso anterior las prestaciones de este tipo de motores se suelen expresar en términos de potencia. En particular, el consumo de combustible del motor es proporcional a la potencia P. Si se desprecian los efectos de compresibilidad y de viscosidad, esto es, si se desprecia la dependencia con el número de Mach M y el de Reynolds Re, la potencia proporcionada por un motor alternativo equipado con hélice depende principalmente de las siguientes variables: ),,,,( régimenpasoVfP Consumo: Pc PSFCc
12 La tropopausa es la frontera entre las dos capa de la atmósfera llamadas troposfera y estratosfera. La tropopausa se halla a una altitud media de unos 11 km. En la ISA (ver Sección 1.2.3), la troposfera llega hasta los 11 km de altitud. La estratosfera va de los 11 a los 50 km aproximadamente, aunque en la ISA sólo se considera una parte de ella. 13 El techo operacional de un avión es la máxima altitud a la que puede realizar un vuelo horizontal.

44
En el caso de tratarse de un avión de hélice de paso fijo en vuelo, la única de todas estas variables que el piloto controla directamente en vuelo es el régimen del motor, y el control lo ejerce por medio de la palanca de gases o palanca de presión de admisión, con la que se selecciona la presión de admisión (i.e. de entrada) de la mezcla (combustible y aire) en los cilindros del motor de pistones. Existe además la palanca de control de riqueza de la mezcla con la que el piloto puede seleccionar el dosado14 de la mezcla. Este mando no se usa en general para alterar el régimen, sino para garantizar que en todo momento (para cualquier altitud de vuelo) el motor funcione con la riqueza óptima de la mezcla para la que ha sido diseñado. Es sólo para esa riqueza óptima que el motor está en condiciones de proporcionar la potencia máxima de las máximas. Si se trata de un avión de hélice de paso variable en vuelo, el piloto puede además ajustar en vuelo el paso de la hélice mediante la palanca de regulación del paso de la hélice (en la Fig. 36 se puede ver un perfil de pala con la representación del ángulo llamado paso de la hélice). Para encontrar la relación existente entre la potencia de un motor alternativo y la tracción que proporciona:
FVdt
Fdx
dt
dP
Unidades en SI: W
s
J
s
mN
3.3.1 Rectilinear horizontal flight with level wings
En este caso se estudian las performances de un avión provisto de motor alternativo (o de émbolo, o de pistón) y hélice en vuelo horizontal rectilíneo. No obstante, tanto el análisis de fuerzas realizado en la Sección 3.2.1 como el diagrama mostrado en la Fig. 28 siguen siendo perfectamente válidos, luego de la aplicación de la 2ª Ley de Newton queda el siguiente equilibrio de fuerzas:
Forces in axis xb: DT Forces in axis yb: No hay fuerzas (caso ideal) Forces in axis zb: MgWL
Multiplicando la ecuación en el eje xb por V a ambos lados de la igualdad y entrando con la ecuación (III.3) se obtiene la potencia necesaria (required power) para el vuelo (que se define como el producto de D por V):
),,(2
2
1
0
23
0
0
2
0
3
000 WVf
V
WbVa
V
W
S
kVSCDVP DR
De nuevo se realiza un cambio de variables empleando:
Velocidad equivalente (Ve o EAS): VVe0
Potencia equivalente (Pe): PPe0
14 El dosado es la proporción de combustible frente a aire.

45
Entrando con estas variables en la expresión hallada para PR se obtiene una nueva expresión con la velocidad y potencia requerida equivalentes:
V
WbVaPR
0
23
0
),(
23
Re WVfV
WbaVP e
ee
A continuación, en la Fig. 32 se muestra la curva de potencia requerida PR frente a velocidad V.
Fig. 32 Curva de potencia requerida PR frente a velocidad V.
Se puede observar en la figura que la curva de potencia PR presenta un mínimo. Matemáticamente se puede hallar la velocidad que proporciona dicho mínimo de potencia requerida del siguiente modo:
0dV
dPR 4
0Pr 3
2
DMIN C
k
S
WV
MINDMIN VV4Pr
3
1
En la figura, también se puede observar que la velocidad para la que se da ese mínimo no coincide con la velocidad que proporciona mínima resistencia aerodinámica. Gráficamente se puede hallar esta última velocidad como la correspondiente al punto de tangencia de una recta que parte del origen con la curva. Matemáticamente se puede apreciar que la resistencia se minimiza para ese punto de la siguiente manera:
DVPR MINR
MIN V
PD )(
Variación de la curva de actuación en función de cambios en variables:

46
1. Cambios en el peso del avión W: Se puede apreciar en la gráfica de la Fig. 33 la evolución de la curva con el aumento de W. Es importante destacar que tanto la velocidad de mínima resistencia como la de mínima potencia requerida aumentan con el aumento de W.
Fig. 33 Evolución de la curva PR frente a V con cambio en el peso W.
Durante el vuelo el peso del avión W disminuye debido al consumo del combustible. De ahí que si el piloto quiere seguir volando en una de las dos condiciones presentadas deberá reducir la potencia con la palanca de gases.
2. Cambios en la configuración del avión: El efecto de incrementar CD0 (con el despliegue del tren de aterrizaje, por ejemplo), en la curva PR frente a V, se traduce en un aumento de la curva de potencia requerida parásita, con el consiguiente aumento de la curva de potencia requerida total, y el desplazamiento del mínimo hacia velocidades de vuelo más pequeñas.
3. Cambios en la altitud de vuelo: Los cambios en la altitud de vuelo se traducen, en la curva PR frente a V, en variaciones de la potencia requerida total en las que no entraremos salvo para remarcar que la potencia requerida
3.3.2 Velocity for maximum endurance & velocity for maximum range for a piston engine aircraft
1. Velocity for maximum endurance:
La máxima autonomía (máximo tiempo en el aire) se da cuando la tasa de consumo de combustible c del avión es mínima, i.e. el ratio tiempo en el aire por unidad de combustible consumido es máximo. Por tanto, si se asume que SFC es constante, la máxima autonomía se da en la condición de vuelo de potencia requerida mínima que, como se ha
visto en la Sección 3.3.1, es se produce para la velocidad 4/13 VDmin. Un avión provisto de motor alternativo y hélice volando a esa velocidad conseguirá permanecer el máximo tiempo posible en el aire, como se demuestra seguidamente:

47
cdt
dW
PcdW
dt 11
MINMAX PdW
dt 1
En cuanto a la altitud, la autonomía máxima de las máximas se dará cuando el avión vuele a la mínima altitud posible, i.e. a nivel del mar, porque en esta condición de vuelo la potencia requerida mínima es la más pequeña de todas las potencias requeridas mínimas, puesto que ésta decrece conforme disminuye la altitud.
2. Velocity for maximum range:
El máximo alcance se da cuando el ratio distancia recorrida por unidad de combustible consumido es máximo. Por tanto, el máximo alcance se da en la condición de vuelo con resistencia aerodinámica mínima (que, para vuelo horizontal, como se ha demostrado en la Sección 1.6.1, es lo mismo que volar con eficiencia aerodinámica máxima). Esto es, el avión alcanzará su máxima distancia recorrida volando a la velocidad VDmin, como se deduce a continuación:
DTP
V
c
V
dtdW
dtdx
dW
dx 11
MINMAX DdW
dx 1
Por último, el máximo alcance es independiente de la altitud de vuelo del avión porque, dado un avión (i.e. fijados su peso y superficie alar), la resistencia mínima es un valor constante e igual para cualquiera que sea su altitud de vuelo. Lo que aumenta con la altitud es la velocidad a la que se produce esa resistencia mínima, luego a mayor altitud, menor es el tiempo que se invierte en recorrer la distancia correspondiente al máximo alcance.
3.3.3 Available power and propulsive efficiency of a propeller
No toda la potencia proporcionada por el motor al árbol motor o eje del motor (SHP, Shaft Horse Power) es convertida en potencia útil para el vuelo por la hélice, precisamente debido a las propias limitaciones de ésta y los elementos involucrados en la transmisión. La hélice sólo es capaz de transformar una parte de la potencia dada por el motor en potencia útil para el vuelo, y esta parte recibe el nombre de potencia útil o potencia disponible (available) (ver Fig. 34). Esta potencia está asociada a la generación de una fuerza propulsora llamada tracción. La tracción se designa con la letra T, pero no se debe confundir con el empuje, que es otro tipo de fuerza propulsora propia de los motores turborreactores, cuyo origen es muy distinto, pero que también se suele designar con la misma letra.
El resto de potencia se disipa en forma de pérdidas producidas por fenómenos de fricción en el sistema de transmisión (engranajes, cojinetes, etc.), efectos asociados a la viscosidad, por ejemplo en las palas de la hélice (aparición de resistencia aerodinámica opuesta al sentido de avance de las palas que da lugar a un par resistente), rotación de la corriente y no uniformidad del campo de velocidades inducido por las palas en el flujo.
Potencia útil o disponible: TVPP UA
Potencia dada por el motor: MS PP
Rendimiento propulsivo o eficiencia de la hélice: HP

48
Fig. 34 Esquema del motor alternativo, hélice y potencias que intervienen.
Estas tres variables se relacionan por la siguiente expresión:
PSA PP ·
El rendimiento propulsivo de una hélice suele tener un valor comprendido entre 0.70 y 0.85. En una primera aproximación se puede considerar independiente de la velocidad, hipótesis que es suficientemente válida a bajas velocidades. Pero en realidad el rendimiento propulsivo cae con el aumento del Mach de vuelo del avión. La razón es la que sigue: el criterio fundamental en el diseño de hélices para operar a baja velocidad es la maximización del rendimiento propulsivo, que se logra con hélices de grandes diámetros, con pocas palas finas (esbeltas) y de puntas redondeadas. En estas hélices de gran diámetro, la composición de la velocidad de avance del avión con la velocidad de giro de las palas produce unas velocidades relativas de las palas al aire muy elevadas. Esto se traduce en la aparición de efectos de compresibilidad del aire (e.g. ondas de choque y entrada en pérdida de alta velocidad) en las puntas de las palas a velocidades de vuelo relativamente bajas (ya que en las puntas se alcanzan pronto velocidades entorno al régimen sónico). Estos efectos producen una caída del rendimiento de la hélice. Cuando este fenómeno se produce de forma generalizada a lo largo de toda la pala, la hélice deja de generar tracción. Éste es el motivo por el que las hélices sólo se pueden emplear en el régimen de velocidad subsónico bajo (hasta un valor de Mach entorno a 0.60-0.65).
La potencia dada por el motor, como se ha visto al principio de la Sección 3.3, depende de V. Generalmente, la curva de potencia frente a velocidad presenta un máximo para un paso de hélice y un régimen del motor fijados. En relación a esto, las hélices de los aviones se clasifican en dos categorías atendiendo a la posibilidad de reglar el paso en vuelo:
1. Hélices de paso fijo en vuelo:
Se incluyen en este grupo las hélices de paso fijo y las que son reglables pero únicamente en tierra con la hélice detenida. En ambos casos el piloto no puede variar el paso de la hélice durante el vuelo, por lo que el motor sólo será capaz de proporcionar la potencia máxima de las máximas cuando se vuele a la correspondiente velocidad (ver Fig. 35).
2. Hélices de paso variable en vuelo:
En este caso, durante el vuelo el piloto puede modificar la curva de potencia frente a velocidad, mediante la variación del paso de la hélice, que controla con la palanca de regulación del paso de la hélice. Seleccionando el paso adecuado, el piloto puede alterar la curva hasta conseguir que el motor esté en disposición de proporcionar su máxima potencia a la velocidad que desea volar. Así que se puede considerar que la potencia en el eje (y por lo tanto también la útil), fijado el régimen del motor, es prácticamente la misma para todas las velocidades de vuelo, y que el piloto está siempre en condiciones de

49
demandar la máxima potencia al motor en caso de necesitarla (ver Fig. 36). En realidad la potencia máxima que es capaz de proporcionar el motor no es del todo independiente de la velocidad de vuelo a pesar de que el paso sea ajustable en vuelo. En general esta potencia máxima decae ligeramente con la disminución de la velocidad de vuelo.
Fig. 35 Plot of SHP and available power for a fixed pitch propeller.
Fig. 36 a) Plot of SHP and available power for a variable pitch propeller. b) Blade pitch.
3.3.4 Horizontal flight velocities A continuación se realiza un estudio de potencias para el caso de vuelo horizontal. Desde este nuevo punto de vista se pueden determinar las dos velocidades características de esta condición de vuelo, que se obtienen en el momento en que se fija la potencia dada por el motor. En vuelo horizontal se cumple la siguiente igualdad:
TD
V
WbVaPP AR
0
23
0

50
Luego si el piloto mantiene constante la potencia dada por el motor (i.e. si el piloto no altera el régimen motor) y quiere realizar un vuelo horizontal, no le queda más remedio que volar a una de las dos velocidades para las que eso es posible. Matemáticamente esas velocidades se pueden hallar resolviendo la expresión anterior. También es sencillo obtener gráficamente dichas velocidades mediante la intersección de la curva de potencia disponible con la curva de potencia requerida, como se puede ver en la Fig. 37.
Fig. 37 Curvas de potencia requerida y potencia disponible frente a V.
Estas velocidades características reciben el nombre de velocidad de Primer régimen (V1) y velocidad de Segundo régimen (V2). Si el piloto variase el régimen motor, la curva de PA se desplazaría arriba o abajo, variando las mencionadas velocidades. Conclusiones importantes:
- Con la palanca de gases al máximo se obtendrían las velocidades máxima y mínima a las
que es posible mantener el vuelo horizontal. Aunque a menudo no es posible el vuelo horizontal a la velocidad del Segundo régimen porque es menor que la de entrada en pérdida.
- Reduciendo la potencia dada por el motor, se alcanza un caso límite en el que sólo es
posible mantener el vuelo horizontal a una velocidad determinada, que es justamente la velocidad de mínima potencia requerida para el vuelo horizontal, que como se ha visto es la que proporciona máxima autonomía en el caso de avión provisto de hélice.
Una diferencia importante entre los dos regímenes es que en el caso de Primer régimen de vuelo el avión es estable frente a perturbaciones de la velocidad, mientras que en el Segundo régimen el avión es inestable frente a perturbaciones de la velocidad:
1. Primer régimen: estable
1VV AR PP TD Frenado
1VV AR PP TD Aceleración
2. Segundo régimen: inestable
2VV AR PP TD Aceleración
2VV AR PP TD Frenado

51
Cuando se realiza un vuelo en la región correspondiente al Segundo régimen (entre VS y VPmin), el piloto debe estar muy pendiente a los cambios de velocidad, debidos a la inestabilidad, por la proximidad de la entrada en pérdida.
Se debe hacer notar que si el piloto fijase una velocidad diferente de la de Primer o Segundo régimen el exceso o déficit de potencia se traduciría en un ascenso o descenso del avión.
Finalmente se analizan los efectos de la disminución del peso del avión que se produce a lo largo del vuelo por el consumo de combustible (se supone vuelo horizontal). El piloto puede optar siempre por pilotar siguiendo diferentes leyes de pilotaje, entre las cuales se incluyen las de vuelo a máxima autonomía y vuelo a máximo alcance, mencionadas en secciones anteriores. A continuación se analizan otras dos leyes de pilotaje sencillas:
1. Vuelo a potencia constante: Al disminuir el peso, la curva de potencia requerida se desplaza hacia abajo. Si el piloto mantiene el vuelo horizontal y la potencia disponible constante, y está en la región de Primer régimen, la velocidad irá aumentando a lo largo del vuelo. En este caso se consume más combustible pero el vuelo es más corto (ver Fig. 38).
2. Vuelo a velocidad constante:
Al disminuir el peso, la curva de potencia requerida se desplaza hacia abajo. Si el piloto mantiene el vuelo horizontal y la velocidad constante, y está en la región de Primer régimen, la potencia que necesita proveniente del motor irá disminuyendo a lo largo del vuelo: se consume menos combustible pero el vuelo es más largo (ver Fig. 38).
Fig. 38 Efectos de la variación de W a lo largo del vuelo.
3.4 PERFORMANCES IN ASCENT FLIGHT En este caso se estudian las actuaciones de un avión en vuelo ascensional (climb). La densidad la suponemos constante. De la aplicación de la 2ª Ley de Newton queda el siguiente equilibrio de fuerzas (ver Fig. 39):
Forces in axis xb: sinWDT (III.5)
Forces in axis yb: No hay fuerzas (caso ideal) Forces in axis zb: cosWL (III.6)

52
Fig. 39 Sistema de fuerzas actuando sobre el avión en vuelo ascensional.
A parte de la altitud, que no consideramos por realizar el balance de fuerzas en un instante determinado, y la densidad, que suponemos constante, en el análisis del vuelo ascensional en actuaciones, las variables que nos interesan son:
- Velocidad ascensional Va o R/C (rate of climb): El ratio de ascenso o velocidad ascensional es la componente vertical de la velocidad del avión, esto es, la componente perpendicular al plano horizontal. Mediante R/C se tiene una medida del incremento de altitud h por unidad de tiempo. Con la ecuación (III.5) se tiene:
W
PP
W
DTVVCR RA
sin/ [m/s] (III.7)
En general este dato se suele proporcionar en las unidades del SI [m/s] o en pies por minuto [ft/min] (feet per minute).
- Ángulo de ascenso :
Este es el ángulo con el que asciende el avión. Nuevamente con la ecuación (III.5) se tiene:
W
DT sin
W
DT arcsin [º]
Es interesante determinar la velocidad de vuelo que proporciona máxima velocidad ascensional y la que proporciona máximo ángulo de ascenso. Si tomamos la hipótesis que la potencia útil es constante con la velocidad de vuelo, para un régimen determinado, se puede ver que la R/C máxima se produce para la velocidad de potencia requerida mínima. Seguidamente en la Fig. 40 se puede apreciar una representación gráfica de R/C frente a V.

53
Fig. 40 Representación gráfica de P y de R/C frente a V.
En la figura se puede observar que la velocidad para la que se da el mínimo de potencia requerida no coincide exactamente con la velocidad que proporciona máxima velocidad ascensional. Eso se debe a que, en un caso real, la potencia disponible no es constante con la velocidad (como se vio en la sección anterior), y la máxima diferencia entre las curvas PR y PA no se da para la velocidad de mínima potencia requerida, sino para una ligeramente mayor:
MINDALCANCEMAXMAXCRMINMAX
VVVVV /Pr
Se puede apreciar también en la figura la forma gráfica de determinar la velocidad que proporciona máximo ángulo de ascenso. Ésta corresponde a la velocidad del punto de tangencia de una recta que parte del origen con la curva de R/C. Se puede apreciar, partiendo de (III.7), que el ángulo de ascenso se maximiza para ese punto de la siguiente manera:
V
CR /sin MAXMAX V
CR)
/()(sin MAX
Seguidamente en la Fig. 41 se puede apreciar una representación gráfica de la variación de la curva R/C frente a V, si se producen variaciones en el peso del avión, y la potencia disponible se mantiene constante (palanca de gases en una posición fijada). Cabe destacar la disminución del R/CMAX alcanzable y el incremento de la velocidad al que éste se produce (por el aumento de la velocidad de mínima potencia requerida, o lo que es igual, el desplazamiento del mínimo de

54
potencia requerida a velocidades mayores), a medida que aumenta el peso del avión, así como el incremento de la velocidad de vuelo a la que se produce el ángulo de ascenso máximo.
Fig. 41 Variación de la curva R/C frente a V ante cambios en el peso.
En la Fig. 42 se pueden apreciar dos tipos de despegues diferentes, uno con ángulo de ascenso máximo y otro con velocidad ascensional máxima.
Fig. 42 Representación de dos de las opciones posibles en despegue.

55
En el despegue, el piloto pone la palanca de gases a potencia máxima, luego la potencia disponible está fijada y es la máxima. Para seleccionar la velocidad a la que quiere despegar juega con la palanca mando y mueve el timón de profundidad ajustando de este modo el ángulo . Se
suele despegar a un velocidad 10 nudos (knots) superior a V2, que es muy próxima a la de máximo ángulo de ascenso. Durante el vuelo, si el piloto desea realizar un ascenso, una vez elegida la velocidad del avión en la subida mediante la palanca de mando, para modificar el valor de la velocidad ascensional o del ángulo de ascenso actúa sobre la palanca de gases, variando la potencia disponible. En el aterrizaje el procedimiento es distinto ya que en ese caso la ligadura principal viene impuesta por el ángulo de descenso dado por el Sistema de Aterrizaje Instrumental ILS (Instrumental Landing System). El piloto debe descender con ese ángulo y juega con la potencia para ajustar la velocidad.
3.5 PERFORMANCES IN DESCENT FLIGHT Se estudian las actuaciones de un avión en vuelo de descenso (descent). De la aplicación de la 2ª Ley de Newton (ver Fig. 43):
Forces in axis xb: sinWDT (III.8)
Forces in axis yb: No hay fuerzas (caso ideal) Forces in axis zb: cosWL (III.9)
Fig. 43 Sistema de fuerzas actuando sobre el avión en vuelo de descenso.
En el análisis del vuelo de descenso las dos variables de estudio son:
- Velocidad de descenso R/D (rate of descent): El ratio de descenso o velocidad de descenso es la componente vertical de la velocidad del avión, esto es, la componente perpendicular al plano horizontal. Mediante R/D se tiene una medida de la disminución de la altitud h por unidad de tiempo. Con la ecuación (III.8) se tiene:

56
W
PP
W
TDVVDR AR
sin/ [m/s] (III.10)
Este dato se suele proporcionar en [m/s] o en [ft/min] (feet per minute).
- Ángulo de ascenso :
Este es el ángulo con el que desciende el avión. De la ecuación (III.8):
W
TD sin
W
TD arcsin [º]
En la Fig. 44 se puede apreciar una representación gráfica de R/D frente a V. Se puede observar que la velocidad para la que se da el mínimo de potencia requerida no coincide con la velocidad que proporciona mínima velocidad de descenso. Eso se debe a que, en un caso general, la potencia disponible no es constante con la velocidad (no es una recta paralela en el gráfico P frente a V), y la mínima diferencia entre las curvas PR y PA no se da para la velocidad de mínima potencia requerida, sino para otra ligeramente mayor.
Fig. 44 Representación gráfica de R/D frente a V.
Se puede apreciar también en la figura la forma gráfica de determinar la velocidad que proporciona mínimo ángulo de descenso. Ésta corresponde a la velocidad del punto de tangencia de una recta

57
que parte del origen con la curva de R/D. Matemáticamente se puede apreciar, partiendo de (III.10), que el ángulo de descenso se minimiza para ese punto de la siguiente manera:
V
DR /sin MINMIN V
DR)
/()(sin MIN
Si se produce un aumento del peso del avión, cabe destacar el aumento del R/DMIN alcanzable y el incremento de la velocidad al que éste se produce, así como el incremento de la velocidad de vuelo a la que se produce el ángulo de descenso mínimo. Es importante destacar que, supuestos el empuje y el peso constantes, la velocidad de vuelo para ángulo de descenso mínimo es la que corresponde a la mínima resistencia aerodinámica. Además, bajo la hipótesis de ángulos pequeños, ésta condición de vuelo se corresponde también con la de máxima eficiencia aerodinámica.
3.5.1 Gliding descent En el caso particular de un planeador el empuje es nulo porque el planeador carece de motor. Siguen siendo válidas las ecuaciones (III.8) y (III.9) si más que anular T. sin0 WD (III.11)
cosWL (III.12)
Para proseguir el estudio del vuelo del planeador se introducen una serie de simplificaciones matemáticas. Estas son válidas siempre que los ángulos sean muy pequeños (próximos a cero), que suele ser el caso para el vuelo convencional de un avión convencional. Las simplificaciones consisten en tomar los primeros términos de los Desarrollos en Serie de Taylor: 1 sin 1cos tan
Empleando estas simplificaciones en (III.11) y (III.12), tenemos ahora que: LWW cos
EL
D
W
D 1sin
MAXMIN E
1 (III.13)
La demostración matemática de la expresión hallada en la Sección 1.5.3 para calcular el alcance máximo de un planeador (también llamado condición de vuelo de máximo planeo) es la siguiente:
d
h tan Eh
hd
hE
hd MAX
MINMAX
Interesa minimizar el ángulo de descenso porque de ese modo se maximiza la distancia d que recorre el planeador desde que se deja en vuelo libre hasta que alcanza el suelo (ver Fig. 45). Para poder volar con el mínimo ángulo de descenso posible, según (III.13), forzosamente el vuelo deberá ser a EMAX. Recordar además que, bajo la hipótesis de ángulos pequeños, esto significa volar también a la velocidad de mínima resistencia aerodinámica.

58
Fig. 45 Esquema de la trayectoria de descenso en el vuelo de un planeador.
Se debe hacer notar que el ángulo de descenso mínimo es independiente del peso del planeador. Dos planeadores con diferente peso pero igual EMAX recorrerán la misma distancia hasta llegar al suelo. Donde sí se comportan de modo diferente es en lo referente al tiempo de vuelo de cada uno.
3.6 EFFECT OF WIND Hasta ahora se han estudiado las performances del avión considerando que el aire estaba en calma, o lo que es lo mismo, considerando que la velocidad del aire con respecto al suelo era nula. En esta sección se analiza qué efecto produce sobre las actuaciones del avión el hecho que el aire ya no esté en calma. La velocidad V que se ha empleado hasta ahora es la velocidad aerodinámica del avión (True Air Speed, TAS), que es la velocidad del avión con respecto al aire. Un observador que está en el suelo percibe una velocidad del avión con respecto al suelo VG (Ground Speed, GS) que es la resultante de la composición (suma vectorial) de la velocidad del avión con respecto al aire V más la velocidad del aire con respecto al suelo VW. Si esto se expresa matemáticamente:
WG VVV
Si en los estudios previos la velocidad del aire con respecto al suelo era:
0WV VVG
Ahora ya no sucede así. En adelante se estudian los efectos del viento sobre el avión en dos casos concretos (los más sencillos) en los que el movimiento del aire tiene la misma dirección que la velocidad del avión:
- Viento de cola: 0WV WG VVV
- Viento de cara: 0WV WG VVV
Seguidamente se verá que el efecto del viento en los gráficos estudiados hasta el momento se traduce en un desplazamiento del origen de coordenadas, para contemplar el hecho que la TAS ya no coincide con la GS. El eje de ordenadas se desplaza hacia la izquierda en el caso de viento de cola y hacia la derecha en el caso de viento de cara, con respecto a la posición original del eje cuando el aire está en calma.

59
3.6.1 Influence of wind in power P vs. velocity V curve
Como se puede ver en la Fig. 46, el viento no influye en la velocidad aerodinámica a la que se produce el mínimo de potencia requerida para el vuelo, ni en el valor mismo de esta potencia. Si el piloto quiere volar en condiciones de potencia requerida mínima, la V que debe mantener en vuelo para ello no depende del viento.
Fig. 46 Efecto del viento en las velocidades características de la curva P-V.
En cambio no sucede lo mismo con la velocidad aerodinámica a la que se produce el máximo alcance. Si el piloto quiere volar en condiciones de máximo alcance, la V que debe mantener en vuelo para lograrlo sí depende del viento, ya que se busca minimizar el cociente potencia entre velocidad con respecto al suelo. La resistencia aerodinámica mínima y la velocidad aerodinámica a la que se produce no se ven afectadas por el viento.
CARAALC
MAXMIND
NULOVIENTOALC
MAX
COLAALCMAX VVVV
3.6.2 Influence of wind in rate of ascent R/A vs. velocity V curve
Como se puede ver en la Fig. 47, el viento no influye en la velocidad aerodinámica a la que se produce el máximo R/C, ni en el propio valor de este R/C. Si el piloto quiere volar en condiciones de máximo R/C, la V que debe mantener en vuelo para ello no depende del viento.
En cambio no sucede lo mismo con la velocidad aerodinámica a la que se produce el ángulo de ascenso máximo. Si el piloto quiere volar en condiciones de ángulo de ascenso máximo (definido en relación a la velocidad con respecto al suelo), la V que debe mantener en vuelo para lograrlo sí depende del viento.
CARAMAX
NULOVIENTOMAXCOLAMAX
VVV
Obviamente también afecta al propio valor del ángulo de ascenso máximo, que es menor con viento de cola que con viento de cara. Gráficamente se puede ver porque el ángulo de la recta

60
tangente está relacionado con el valor del ángulo de ascenso máximo, y cuando uno es menor el otro también lo es.
CARAMAX
NULOVIENTOMAXCOLAMAX
Fig. 47 Efecto del viento en las velocidades características de la curva R/C-V.
3.6.3 Influence of wind in rate of descent R/D vs. velocity V curve
Como se puede ver en la Fig. 48, el viento no influye en la velocidad aerodinámica a la que se produce el mínimo R/D, ni en el propio valor de este R/D. Si el piloto quiere volar en condiciones de mínimo R/D, la V que debe mantener en vuelo para ello no depende del viento.
Fig. 48 Efecto del viento en las velocidades características de la curva R/D-V.

61
En cambio no sucede lo mismo con la velocidad aerodinámica a la que se produce el ángulo de descenso mínimo. Si el piloto quiere volar en condiciones de ángulo de descenso mínimo (definido en relación a la velocidad con respecto al suelo), la V que debe mantener en vuelo para lograrlo sí depende del viento.
CARAMIN
NULOVIENTOMINCOLAMIN
VVV
Obviamente también afecta al propio valor del ángulo de descenso mínimo, que es menor con viento de cola que con viento de cara. Gráficamente se puede ver porque el ángulo de la recta tangente está relacionado con el valor del ángulo de descenso mínimo, y cuando uno es menor el otro también lo es.
CARAMIN
NULOVIENTOMINCOLAMIN
3.7 REFERENCES [1] A.I. Carmona. Aerodinámica y Actuaciones del Avión

62
4 CHAPTER 4: PROPULSION SYSTEMS
4.1 INTRODUCTION Propulsion is thought to provide a force to accelerate a vehicle or to maintain steady its motion by balancing opposing forces. According to Newton’s 3rd Principle, a reaction force appears as a consequence of each action. A vehicle deformation would be produced if both the action and the reaction where applied on the vehicle. So at least another medium is needed to achieve propulsion of the vehicle instead of deforming it. This way, reaction applies on this medium while action on the vehicle results in its propulsion. Reaction increases medium’s momentum while action does the same on vehicle’s momentum (see Fig. 49). Each momentum increase is related to a rise in kinetic energy, which is to be provided by the engine-propulsion system.
Fig. 49 Newton’s 3rd Principle applied to a plane equipped with a propeller.
The primary function of an engine-propulsion system is to ensure transformation of part of a source’s energy into vehicle’s kinetic energy. In some cases the system also fulfils a secondary mission consisting of providing energy to feed on board systems.
4.2 PROPULSION SYSTEMS CLASSIFICATION AND NOMENCLATURE
Propulsion systems can be classified roughly according to the propulsion force they generate. In this sense, the following groups can be distinguished:
1. Propeller propulsion systems: Propulsion systems generating traction force by means of a propeller. Generally, a motor system transforms part of the chemical energy of the fuel and provides the propeller with mechanical power it partially transforms into traction (or useful energy for aircraft’s flight). The reaction is the increase of the kinetic energy of the air flow passing through the propeller. The most common systems belonging to this group consist of the combination of a piston (or reciprocating) engine and a propeller.
2. Jet propulsion systems:
Propulsion systems generating thrust force by ejection of a jet of particles (usually exhaust gases ejected through a nozzle). The source’s energy is transformed into a rise in jet’s kinetic energy, which is considered the reaction in the thrust generation process. According to the origin of the jet’s matter, the following subgroups are considered:

63
a. Autonomous systems: All jet’s matter stems from storage tanks on board the vehicle. These propulsion systems do not use any external matter. They are usually called rocket engines.
b. Non-autonomous systems:
A major part of the jet’s matter stems from air taken by the system from the surrounding atmosphere. The system needs to be fed with collected air to run properly. This group includes pure turbojet engines and bypass turbojets (or also called turbofans, a hybrid system between pure turbojet engines and turboprops), and also other uncommon systems like ramjets and scramjets.
3. Jet-propeller hybrid propulsion systems:
Propulsion systems mixing both jet and propeller propulsion concepts. Systems belonging to this group are usually called turboprops.
It is worth to mention that, on one hand, both non-autonomous jet propulsion systems and turboprops are usually called air breathing engines. Finally, on the other hand, air breathing engines together with rocket engines constitute the so-called jet engines.
4.3 PROPELLER PROPULSION SYSTEMS
4.3.1 Components of a piston engine The main components of a piston engine (or also called reciprocating engine) are:
1. Carburettor (nowadays substituted by fuel-injection systems) 2. Cylinders (typically 4 or 6) 3. Spark plugs 4. Magnetos 5. Batteries 6. Generator (alternator) 7. Refrigeration system: piston engines are air refrigerated (less weight and complexity)
4.3.2 Magnetos Usually two independent, high-voltage circuits feed the spark plugs. In accordance to the redundancy philosophy, one of the circuits is a back-up option in case the first one fails. These circuits are independent of the batteries too. The two respective magnetos (one per circuit) are capable of generating high-voltage electric currents. The circuits deliver then this high-tension current to the spark plugs where the sparks needed for the ignition of the air-fuel mixture are created. The electric current is generated by using part of the engine power.
4.3.3 Propeller The following design rules apply for low velocity propellers, which are aiming at propulsion efficiency maximization:
1. Large diameter of propeller 2. Small number of blades (e.g. 2 or 3)

64
3. High aspect ratio of blades 4. Blades have rounded tips
4.3.4 Engine control
4.4 PURE TURBOJET ENGINE The architecture of a pure turbojet engine is shown in Fig. 50.
Fig. 50 Turbojet engine architecture.
4.4.1 Air inlet The air inlet draws air into the engine and delivers it in optimum conditions to the compressor steps.
4.4.2 Compressor(s)15 The compressors pressurise the air, and delivers it to the combustion chamber. They are driven by the turbine by one or more shafts. There are two types of compressor: the centrifugal flow impeller type and the axial flow type which has several stages of alternate rotating and stationary aerofoil blades. The rotor blades are mounted on a drum and the stator vanes in the compressor casing. Axial compressors can achieve compression ratios in excess of 40:1. For example, at full power the blades of the Trent 89216 compressors rotate at 1600 Km/h and take in 1200 Kg of air per second.
4.4.3 Combustion system15 The combustion chamber receives air from the compressors which mixes with fuel sprayed from nozzles in the front of the chamber. The mixture is burned at temperatures up to 2000ºC to generate the maximum possible heat energy. The burning process is initiated by igniter plugs, isolated after start-up, and then remains continuous until the fuel supply is shut off. Typically, the ignition system is not on all the time, but only during some phases to help keeping the engine
15 Information credit: http://www.rolls-royce.com/education/default.jsp 16 It must be noted that the Trent 892 is a bypass turbojet engine from Rolls-Royce, not a pure turbojet.

65
running in the event it flames out. For example, at cruise the Trent 892 uses about 4500 litres of fuel per hour. The components of the combustion chamber are the following:
1. Nozzle (diffuser): The nozzle aims at reducing air velocity so to enhance combustion.
2. Primary zone: The air-kerosene mixture is rich enough so to ensure burning at any regime.
3. Intermediate zone: More air is introduced to burn fuel that did not burn in the primary zone.
4. Dilution zone: Additional air is injected to reduce exhaust gases temperature prior to their entry into the turbines step.
4.4.4 Turbine(s) Each turbine consists of one or more stages of alternate stationary and rotating aerofoil-section blades. The rotating turbine blades are carried on discs, which are connected by a shaft to the compressor. The stationary blades (nozzle guide vanes) are housed in the turbine casing. The turbine extracts energy from the hot exhaust gases to drive the compressor. For example, in the Trent 892, the first turbine has to be air-cooled as it operates in a gas stream temperature of around 1500ºC (hotter than the melting point of the blade material). The total power generated by the engine is 200000 KW and the exhaust gases exit at 1600 Km/h.
4.4.5 Nozzle Exhaust gases velocity is around 2 to 2.5 Mach in a pure turbojet engine.
4.4.6 Turbojet thrust The thrust developed by a pure turbojet engine can be computed using:
)()( VVGGVVcGT EGEG
4.5 PURE TURBOJET ENGINE EFFICIENCIES It is worth to mention that the following study regarding turbojet engine efficiencies is valid either considering energies or considering powers.
4.5.1 Engine efficiency The combustion engine is a system capable of transforming the chemical energy stored in a fuel into mechanical energy. The engine efficiency can be defined this way:

66
M Produced net mechanical energy / Consumed chemical energy
fL
VV
cL
GVVcGEG
EG
M 22
1)(
2
122
22
Nomenclature:
c [kg/s] fuel (kerosene) mass flow ( Gc ) f [-] fuel mass flow-to-air mass flow ratio G [kg/s] air mass flow L [J/kg] thermal energy released by fuel combustion V [m/s] aircraft aerodynamic velocity (True Air Speed, TAS) VEG [m/s] exhaust gases velocity
Pure turbojet engines efficiency is reasonably acceptable (around 0.50) in the common range of
velocities where these engines are utilized (the plot M vs. V is usually plateau shaped all along
this velocity range). This is not valid when the aircraft aerodynamic velocity is approaching exhaust gases jet velocity. In this region, engine efficiency decreases dramatically and finally reaches zero when both velocities are equal. This is due to the fact that, at this point, the turbojet is not causing a rise in kinetic energy of the gases flow (the reaction), and consequently neither rise in kinetic energy of the vehicle nor thrust (the action) are achieved. In the case of a reciprocating engine, the numerator in the efficiency equation would have been the well known shaft power PS (or also called Shaft Horse Power, SHP).
4.5.2 Propulsion system efficiency The propulsion system is that capable of transforming the mechanical energy produced by another system into usable energy for propulsion. The propulsion system efficiency can be defined this way:
P Usable energy for propulsion / Received mechanical energy
EG
EG
EGEGEG
EG
EG
P
VVV
V
VV
V
VVVVG
VVVG
GVVcG
TV
1
22))((
)(2
2
1)(
2
1 22
The pure turbojet engines propulsion efficiency depends strongly on the relation between the aircraft aerodynamic velocity and the exhaust gases jet velocity. The higher the difference the poorer the propulsion efficiency is. Theoretically, when the aircraft aerodynamic velocity is zero, propulsion efficiency is also zero, and it is the unit when both velocities are equal.
4.5.3 Global efficiency
The global efficiency or also called engine-propulsion system efficiency can be defined this way:
MP Usable energy for propulsion / Consumed energy MP ·

67
fL
VVV
cL
VVVG
cL
TV EGEGMP
)()(
LTSFC
V
cL
TVMP
Theoretically, the global efficiency is zero when the aircraft has no aerodynamic velocity (since propulsion efficiency is zero) and when the aircraft aerodynamic velocity and the exhaust gases jet velocity are equal (since engine efficiency is zero). It is very important to note that the maximum global efficiency for a pure turbojet engine occurs for supersonic velocities. For subsonic flight, global efficiency is very low, which in turn makes specific fuel consumption (TSFC) to be very high. As a consequence, the flight with pure turbojet engines at subsonic velocities is highly contaminant and very expensive, making cheap air transport not viable.
4.5.4 Compressibility drag and drag divergence
As seen in previous sections, the maximum global efficiency for a pure turbojet engine occurs for supersonic velocities. It seems therefore that commercial civil aviation aircraft should conveniently fly at supersonic velocities so that turbojet engine specific fuel consumption was minimized. Optimum flight cruise velocity selection is not that easy, since problems arise when approaching supersonic regime that must be taken into account. These problems are due to the advent of air compressibility effects. Commercial civil aviation aircraft usually do not exceed 0.90 Mach. The reason is the dramatic rising of drag coefficient once the Drag Divergence Mach17 is superseded. Once the Critical Mach has been reached (i.e. the first point where flow is sonic has appeared on aircraft surface; typically on upper wing surface), when increasing flight Mach, a region grows over the upper wing surface where Mach is supersonic. When the flow begins to decelerate as it surpasses the suction peak on the upper wing surface, the return from supersonic to subsonic regime is done through a shock wave. The wave is a discontinuity where flow experiences a sudden sharp (almost step-function shaped) increase in temperature, pressure and density, and a sudden decrease in velocity. This is an irreversible (non-isentropic) phenomenon, and part of the flow’s mechanical energy is dissipated in the form of thermal energy (flow heating). This energy loss, appearing when the Mach number is larger than the Critical Mach, is sourced by the engines, thus it can be considered as an additional drag to be balanced by the motors. This third component of the drag is called compressibility drag, and it is the cause of a sharp increase in the drag for the Mach numbers that are higher than the Drag Divergence Mach.
Critical Mach and Drag Divergence Mach are usually around 0.75 and 0.85 for commercial civil aviation aircraft in cruise phase. For higher Mach numbers, a slight increase in cruise velocity causes the drag to increase appreciably, as mentioned above, and also does the fuel consumption, which in turn makes flight excessively expensive. At that point, air transport industry considers that the reduction in flight time thanks to the speed increase is not worth enough to justify the fuel costs increase.
Summarizing, on one hand, turbojet engines are known to waste fuel at subsonic velocities due to their low global efficiency at that regime. On the other hand, it was found not convenient for aircraft to fly at sonic or supersonic velocities because of the unacceptable increase in fuel costs. As a consequence, new engines had to be developed that could fly at subsonic velocities while guaranteeing high fuel economy. The most extended solutions up to present day are turboprops and bypass turbojets.
17 The Drag Divergence Mach is slightly larger than the Critical Mach and is used as a reference stating the Mach number at which a determined, significant increase in the drag (or drag slope) can be noticed.

68
4.6 TURBOPROPS
4.6.1 Turboprop concept For low subsonic flight, the exhaust gases jet velocity of a turbojet is much higher than aircraft aerodynamic velocity, which in turn makes pure turbojet engines global efficiency to be very poor, since propulsion efficiency is very low. To solve this problem and make flight affordable at low velocities, exhaust gases velocity shall be diminished. This way, the range of flight velocities providing maximum global efficiency is shifted to lower velocities, and subsonic aircraft flight velocities are then closer to that range. To achieve the reduction of exhaust gases velocity, another turbine step is added before gases expand in the nozzle. This turbine obtains power from the exhaust gases and reduces their velocity, increasing the efficiency of the jet. Thrust is also reduced as a negative consequence, so this loss has to be counterbalanced by generating another propulsive force, in order not to lose performance capabilities. Hopefully, the mechanical power obtained thanks to the added turbine is available to drive a propulsion system more efficient than the exhaust gases jet at low subsonic flight (see architecture in Fig. 51). In turboprops, this more efficient system is a propeller that transforms the added turbine mechanical power into an additional propulsion force called traction. Hence, the turboprop is a hybrid jet-propeller propulsion system generating two propulsive forces: a thrust force applied on the internal walls of the engine and a traction force applied on the propeller blades. Usually, in turboprops, 10-15% of available power for propulsion stems from the jet and the remaining 85-90% stems from the propeller.
Fig. 51 Turboprop engine architecture. Propeller propulsion efficiency is usually ranging from 0.70 to 0.85 and is roughly constant for low velocities (but the trend is to decrease with increasing velocity). Foremost propeller design criterion at low velocities is to maximize propulsion efficiency. Maximization is achieved when propeller diameter is big and it has only a few high aspect ratio blades with rounded tips.
4.6.2 Advantages and drawbacks of turboprops
Flow velocity at the blade is the composition of aircraft aerodynamic velocity and blades rotational velocity. Large propeller diameter causes blades’ rotational velocity to be high at the tips and thus the flow velocity at the blade tip easily reaches high values even at low cruise velocities. Once the blade tip velocity approaches the supersonic regime non desired air compressibility effects appear, causing the propeller propulsion efficiency to decrease. For higher aircraft velocities the efficiency falls dramatically and the propeller is no longer capable of generating traction. This is the reason why turboprops can only be employed in low subsonic flight, typically less than 0.60-0.65 Mach.

69
Propellers should spin at much lower rotational speed than turbines to delay compressibility, so a reducing drive wheel is needed to transfer motion from the turbine shaft to the propeller shaft. There is almost no available margin of variation for propeller rotational velocity (rpm), if the engine-propulsion system is intended to run always at optimum regime. That means that turboprops need a system to control the blade pitch, so that the propeller spins at practically constant rate. The added turbine step, the reducing drive wheel and the complex blade pitch control system make turboprops to be more complex than pure turbojet engines (this means higher maintenance costs), but on the contrary turboprops are clearly more efficient at low velocities, so the fuel consumption is remarkably lower. Compared to piston engine aircrafts, turboprop propelled aircrafts have several important advantages. They allow higher flight velocities and altitudes, while reducing maintenance costs thanks to turboprop engine lower complexity. In turboprops, combustion is continuous and compressed air is used, leading to a higher production of power in relation to a piston engine with identical weight/size. Typically, turboprops produce 10 times the power produced by a piston engine having the same weight/size. The disadvantages are higher specific fuel consumption and a higher cost of acquisition for turboprop engines. Nevertheless, aviation gas (AVGAS or AVIGAS), which is piston engines fuel, is more expensive than kerosene, which is turbojet engines fuel.
4.6.3 Turboprop configurations Turboprop common configurations use one, two or three shafts. Depending on shafts configuration, the following turboprops can be found:
1. Linked turbines turboprop: One unique shaft is linking turbines, propeller and compressors (Fig. 52).
Fig. 52 Linked turbines turboprop.
2. Free turbines turboprop:
One shaft driving the propeller and other(s) driving compressors (Fig. 53).
Fig. 53 Free turbines turboprop.

70
3. Hybrid turbines turboprop: One shaft driving the propeller and the low pressure (LP) compressors and another shaft driving the high pressure (HP) compressors (Fig. 54).
Fig. 54 Hybrid turbines turboprop.
Most common configurations are those with two shafts working in free turbine or hybrid fashion.
4.7 BYPASS TURBOJETS
4.7.1 Bypass turbojet concept As mentioned before, for subsonic flight, pure turbojet engines propulsion and global efficiency are very low, which in turn make specific fuel consumption to be very high. In Section 4.6 a first solution was presented to solve this problem, the turboprop engine concept, but it was found to be valid only at low subsonic velocities (lower than 0.60-0.65 Mach). For higher velocities the propeller is no longer capable of generating traction due to the rising of undesired air compressibility effects at the blades, hence flight is not possible for turboprops at those speeds. The development of bypass turbojets (see Fig. 55) was motivated by air transport clients demanding higher flight velocities which turboprops could not reach, while guaranteeing affordable fuel consumption for airlines. The bypass turbojet (informally, also called turbofan) is a hybrid solution between pure turbojet engines and turboprops. Nowadays, bypass turbojets allow high subsonic cruise velocities (around 0.85-0.90 Mach) where they provide improved propulsive and global efficiency compared to pure turbojet engines, hence consuming less kerosene. Recalling the previous sections, in the range of high subsonic cruise velocities the difference between the aircraft aerodynamic velocity and the exhaust gases jet velocity for a pure turbojet is still very high, thus pure turbojet propulsion efficiency is very poor. To solve this problem, as developers did in the case of turboprops, exhaust gases jet velocity shall be diminished. To achieve that, again another turbine is added before gases expand in the nozzle, which obtains power from the exhaust gases and reduces their velocity, increasing the efficiency of the primary jet. Thrust is also reduced as a negative consequence, so this loss has to be counterbalanced by generating another propulsive force, in order not to lose performance capabilities. In this case, the mechanical power obtained by the added turbine is utilized to drive a fan (a low compression ratio compressor) and to produce a secondary high propulsive efficiency, low velocity jet. This jet generates a secondary thrust to balance the loss of thrust from the primary flow (see architecture of a bypass turbojet in Fig. 56). So in bypass turbojets two flows can be found:
1. The primary flow (hot flow): This flow runs through the same circuit the single flow in a pure turbojet engine does. It is often called ‘hot’ flow because it passes through the combustion chamber and hence it reaches higher temperatures.

71
Fig. 55 Performances of a 3-axis, mixed-flow bypass turbojet.
Fig. 56 Bypass turbojet engine architecture.
2. The secondary flow (cold flow): This flow runs through a circuit having fewer steps, only three: the air inlet, the fan and the secondary exit nozzle. It is often called ‘cold’ flow because it does not run through the combustion chamber and hence it does not reach high temperatures.
As seen, now we have two propulsive jets, then the bypass turbojet engine total thrust is:
VVVGVVGVVGT EGEGEGEG )1()()( 2112211
1
2
G
GBPR

72
The secondary mass flow-to-primary mass flow ratio is called the bypass ratio (BPR or ). Commercial civil aviation aircraft bypass turbojets usually run with a bypass ratio ranging from 6 to 9 (the present trend in new bypass turbojet engines is to increase the BPR even more). On the contrary, this ratio is lower than one for military bypass turbojets and other aircrafts that can fly at supersonic velocities. The higher the bypass ratio, the bigger the engine is. In some cases, especially for high bypass ratios where the fan is much larger than the driving turbine, a reducing drive wheel may be necessary.
4.7.2 Bypass turbojet configurations The fan step can be added at the back or at the front of the engine. The former configuration is called parallel fan and this way only the secondary flow goes through the fan. In the latter configuration (called serial fan, which is the most common), both primary and secondary flow go through the fan. There are also mixed flow bypass engines. As regards to number and configuration of shafts, several solutions can be found. Most common configurations are:
1. Two shafts: One shaft is linking the fan and the low pressure (LP) compressor with the LP turbine, and another is linking the high pressure (HP) compressor with the HP turbine.
2. Three shafts:
One shaft is linking the fan with the LP turbine, another is linking the intermediate pressure (IP) compressor with the IP turbine, and the last is linking the HP compressor with the HP turbine.
4.8 REFERENCES [1] El-Sayed, A.F. Aircraft propulsion and gas turbine engines, 2008, 876, CRC Press, Boca
Raton, USA [2] Hünecke, K. Jet engines: fundamentals of theory, design, and operation, 1997, 241,
Motorbooks International, Osceola, WI, USA [3] Otis, C.E., Vosbury, P.A. Aircraft gas turbine power-plants, 2002, Jeppesen Sanderson,
Englewood, USA [4] Saravanamuttoo, H.I.H., Rogers, G.F.C., Cohen, H. Gas turbine theory, 2001, 491, Prentice
Hall, Harlow, England, New York, 5th ed.

73
5 CHAPTER 5: NAVIGATION
5.1 INTRODUCTION La navegación es por definición el proceso de determinar la posición de un vehículo y dirigir su movimiento de un punto a otro del espacio. En el caso particular de la navegación aérea el vehículo en cuestión es una aeronave.
5.2 TYPES OF NAVIGATION La navegación aérea se clasifica según el método utilizado en los siguientes grupos:
- Navegación a estima - Navegación por referencias externas - Navegación por radar
5.3 ESTEEMED NAVIGATION La navegación a estima es un tipo de navegación que se basa en la estimación de la posición por extrapolación a partir de una posición anterior. Características más relevantes de la navegación a estima:
- Sistemas de navegación autónomos: En general, los sistemas de navegación a estima son autónomos, no necesitan ayuda de instalaciones en tierra para su funcionamiento, esto es, en la navegación a estima el cálculo de la posición del avión se realiza a partir de datos suministrados por los instrumentos a bordo del propio avión y elaborados por otros equipos embarcados en el propio avión.
- Necesidad de conocer una posición previa:
En este tipo de métodos es necesario conocer una posición y velocidad anterior del avión o condición de vuelo inicial a partir de la que realizar la extrapolación.
- Errores acumulativos: Los errores cometidos en la determinación de la posición del avión son acumulativos en este tipo de métodos. Con el paso del tiempo el error crece (error creciente).
5.3.1 Basis of esteemed navigation En los inicios de la aviación, el piloto o navegante sólo necesitaba disponer en este caso de un instrumento que proporcionase la velocidad de la aeronave (por ejemplo un anemómetro, que proporciona la IAS (Indicated Air Speed), un reloj, una brújula y cartas de navegación o mapas.

74
En caso de trabajar con la IAS puede aparecer, entre otros, un error considerable en la estimación de la posición derivado de la presencia de una componente desconocida de velocidad de viento con respecto a tierra. Algunas aeronaves disponen en la actualidad de instrumentos que proporcionan la velocidad con respecto a tierra GS (Ground Speed), con lo que dicho problema quedaría resuelto.
5.3.2 Doppler Effect El efecto Doppler consiste en la variación de la frecuencia y longitud de una onda, tal y como es percibida por un observador (receptor), cuando existe velocidad relativa entre éste y la fuente de las ondas (emisor). Los sistemas basados en el efecto Doppler proporcionan lecturas de velocidad y velocidad de ascenso. Sin hacer uso ya del efecto Doppler, mediante la simple emisión de ondas electromagnéticas, y midiendo el tiempo que tardan en realizar el viaje de ida y vuelta hasta su reflexión en el suelo, también se puede determinar la altura (radar altimétrico o radioaltímetro).
5.3.3 Inertial navigation Actualmente, entre los métodos de navegación a estima hay equipos muy sofisticados: Sistemas de Navegación Inercial INS (Inertial Navigation System), y otros sistemas inerciales IRS, IRU, IMU.
Estos sistemas se basan en la determinación del vector aceleración del avión en tres ejes mediante tres acelerómetros embarcados sobre la plataforma inercial terrestre. A partir de estas medidas, el sistema puede calcular por un lado la velocidad de la aeronave mediante una integración, y por el otro puede calcular la posición de la aeronave con una doble integración. Es necesario conocer una posición y una velocidad previas (condición inicial de vuelo) de la aeronave para establecer los límites inferiores de integración.
dt
dva dtav
2
2
dt
rda dtvdtar 2
5.4 NAVIGATION BY EXTERNAL REFERENCES La navegación por referencias externas también recibe el nombre de navegación mediante radioayudas o radionavegación, y en ella el cálculo de la posición se basa en datos obtenidos a partir de ondas electromagnéticas radiadas desde instalaciones en tierra. Una amplia descripción de este tipo de sistemas se puede hallar en el Anexo 10 de OACI: Telecomunicaciones Aeronáuticas, capítulo 6: Radioayudas para la navegación. Características más relevantes de la navegación por referencias externas:
- Sistemas de navegación no autónomos: En general, los sistemas de radionavegación son no autónomos, se basan en parte en instalaciones en tierra para su funcionamiento, esto es, para el cálculo de la posición del avión. Por este motivo se suele distinguir entre segmento terrestre y segmento embarcado en el avión.

75
- Sin necesidad de conocer una posición previa: En este tipo de métodos no es necesario conocer una posición previa del avión para determinar la posición deseada.
- Errores no acumulativos:
Los errores cometidos en la determinación de la posición del avión no son acumulativos en este tipo de métodos. La magnitud del error en la posición depende de la precisión de los diferentes sistemas implicados, pero este error no crece con el paso del tiempo.
5.4.1 Radio-goniometry equipment El radiogoniómetro es un equipo embarcado que detecta la dirección de procedencia de una señal de radio determinada. Actualmente este sistema de navegación por referencias externas está cayendo en desuso. La señal recibida por el equipo a bordo puede corresponder a la emitida por:
- Radiofaro no direccional NDB (Non Directional Beacon):
Instalación terrestre dispuesta como ayuda a la navegación aérea que emite una señal identificable en corto alcance. Se emplea como ayuda a la navegación en ruta, en aproximaciones de no precisión (aquéllas en las que sólo se proporciona guiado azimutal y en distancia) y en salidas.
- Emisora de radiodifusión:
Emisora de radio convencional que emite señal en abierto.
El radiogoniómetro a bordo de la aeronave suele ser un equipo automático y recibe entonces el nombre de ADF (Automatic Direction Finder). El piloto conoce la posición del NDB o la emisora por las cartas de navegación, y gracias a la indicación dada por el ADF conoce la dirección en la que se encuentra dicho emisor. Por ello se dice que es un sistema acimutal y no telemétrico, proporciona direcciones o ángulos, y no distancias.
5.4.2 Very High Frequency Omni Range (VOR) El radiofaro omnidireccional de muy alta frecuencia VOR (Very High Frequency (VHF) Omni Range) es un sistema de guiado acimutal de ayuda a la navegación en ruta, en aproximaciones de no precisión (aquéllas en las que sólo se proporciona guiado azimutal y en distancia) y en salidas, y es de corto alcance (alrededor de 200 km). Esta radioayuda (a menudo en combinación con el DME) es la estación terrestre empleada clásicamente para la definición de las aerovías (AWY).
El equipo a bordo del avión calcula la marcación (bearing) o ángulo de azimut del avión con respecto al norte, medido desde el VOR en sentido horario, esto es, calcula el ángulo que forman dos radiovectores con origen en el VOR, uno que apunta al Norte y otro que apunta al avión. El cálculo se basa en la diferencia de fase entre una señal de referencia y una señal variable, ambas emitidas por el VOR (ver Fig. 4.1).

76
Fig. 4.1: Desfase entre señal de referencia y señal variable. La presentación de la información se realiza en general en los indicadores HSI (Horizontal Situation Indicator), que proporcionan: - Radial (dirección o ruta) seleccionada por el piloto para el vuelo con el OBS (Omnibearing
Selector). - Curso o varilla (CDI o cross pointer) indicadora de las desviaciones a derecha o izquierda
del radial elegido.
- Indicación del semiplano en el que se encuentra el avión mediante el indicador TO/FROM. Si el avión se encuentra en el semiplano del radial seleccionado el indicador marcará FROM. Por el contrario, si el avión se encuentra en el semiplano que no contiene el radial seleccionado, el indicador marcará TO.
En la Fig. 4.2 se puede apreciar un ejemplo de vuelo en las proximidades de dos VOR y las presentaciones en dos indicadores HSI, cada uno presentando información con respecto a uno de los VOR.

77
Fig. 4.2: Presentación: Indicadores HSI.
5.4.3 Radio-navigation: DME El equipo de radioayuda DME (Distance Measuring Equipment) es un sistema telemétrico de ayuda a la navegación en ruta, en aproximaciones de no precisión (aquéllas en las que sólo se proporciona guiado azimutal y en distancia) y en salidas, de corto alcance. En esencia es un sistema de radar con respuesta activa, como el SSR, pero en este caso el interrogador es el equipo embarcado en la aeronave y el respondedor es la estación terrestre de DME. Tiene dos modos de funcionamiento: rastreo y seguimiento, en los que puede dar servicio respectivamente entorno a 30 y 100-120 aviones simultáneamente.
El piloto selecciona el DME al que interroga mediante la selección de la frecuencia adecuada. El equipo a bordo distingue la respuesta que corresponde a su interrogación porque están sincronizadas y calcula la distancia a la estación en tierra a partir de la medida del tiempo que ha tardado en llegar la respuesta. La presentación de la distancia medida se realiza en el HSI. Es importante destacar que la distancia medida es oblicua y no su proyección sobre el terreno. Es muy común encontrar una instalación terrestre compuesta de VOR y DME, que de ese modo proporciona guiado azimutal y telemétrico.
5.4.4 Instrumental Landing System (ILS) En las aproximaciones de precisión (aquellas en las que se proporciona guiado azimutal, en distancia y en elevación) en procedimientos de vuelo instrumental IFR (Instrumental Flight Rules), la radioayuda de uso más extendido actualmente es el ILS (Instrumental Landing System), que tiene un alcance inferior a los 50 km. Este sistema proporciona a la aeronave una trayectoria ideal de aproximación a la pista mediante tres subsistemas cuya disposición en las proximidades de la pista se puede apreciar en la Fig. 4.3.

78
Fig. 4.3: Localización de los subsistemas de ILS.
- Localizador LOC o LLZ (Localizer):
El LOC o LLZ define un plano vertical (perpendicular) con respecto al terreno y que contiene al eje de la pista CL. Proporciona guiado azimutal en la aproximación (proporciona el azimut de la aeronave con respecto a ese plano). El sistema radiante está formado por una batería de antenas a 300 m aproximadamente del extremo de pista (cabecera opuesta a la de aproximación).
- Senda o trayectoria de planeo GP (Glide Path):
El GP proporciona una superficie cónica que por intersección con el plano vertical del LOC define una rama hiperbólica para guiado en elevación (proporciona un ángulo de descenso ideal para la aeronave). El sistema radiante está constituido por una torre emplazada a unos 300 m del umbral de pista THR (threshold) y a unos 150 m del eje de la misma (ver Fig. 4.4).
Fig. 4.4: Sistema radiante del GP.
- Radiobalizas IM, MM y OM:
Las radiobalizas son elementos radiantes que proporcionan información referente a la distancia hasta el umbral de la pista. Hay la radiobaliza exterior OM (Outer Marker), la radiobaliza intermedia MM (Middle Marker) y la radiobaliza interior IM (Inner Marker).

79
Las aproximaciones de precisión se clasifican según OACI en tres categorías (ver Tabla 4.1). Para poder realizar la aproximación de precisión en una categoría determinada, el piloto, la aeronave y el sistema ILS del aeropuerto en cuestión deben estar certificados para una categoría igual o superior a la que se pretende volar.
CATEGORIA Visibilidad [m] DH [m] RVR [m] I > 800 > 60 > 550 II - 30 - 60 > 350 III a - 0 - 30 > 200 III b - 0 - 15 50 - 200 III c - 0 0
Tabla 4.1: Categorías de aproximación de precisión.
Anexo 10 y Anexo 14 de OACI.
Los valores que aparecen en la Tabla 4.1 establecen las condiciones que se deben cumplir en la aproximación de precisión para que el piloto pueda realizar el aterrizaje, en función de la categoría de la aproximación:
- Altura de decisión DH (Decision Height):
Altura (distancia vertical con respecto al aeropuerto o pista) a la que el piloto debe decidir si se puede realizar el aterrizaje.
- Alcance visual en pista RVR (Runway Visual Range):
Distancia hasta la cual el piloto de una aeronave que se encuentra sobre el eje de una pista puede ver las señales de superficie de la pista o las luces que la delimitan o que señalan su eje. Es posible medir el RVR con ciertos sensores a bordo.
Si para la DH correspondiente el piloto aprecia que el RVR es inferior al establecido por la normativa para poder proseguir con el aterrizaje, debe iniciar una maniobra de aterrizaje interrumpido (o aproximación frustrada). Esta maniobra es obligada también en otras ocasiones, como por ejemplo cuando la velocidad de viento cruzado supera los valores permitidos.
Teóricamente, en una aproximación de categoría III c, la precisión del guiado es tal que el piloto podría ser capaz de aterrizar con visibilidad nula.
5.4.5 Global Navigation Satellite System (GNSS) El Sistema Global de Navegación por Satélite GNSS (Global Navigation Satellite System) es un método de navegación basado en la radiotelemetría (triangulación, trilateration). El sistema cuenta con tres segmentos:
- Segmento espacio:
Constelación de satélites: GPS (20 200 km de altitud aprox.), GLONASS y Galileo (23 222 km de altitud). Sistemas de aumentación: WAAS, EGNOS, MSAS.
- Segmento usuario:
Receptor a bordo del vehículo.
- Segmento control: Estaciones de control en la superficie terrestre.

80
El sistema GNSS funciona mediante una red (constelación) de satélites que se encuentran orbitando alrededor de la Tierra. El receptor debe poder localizar automáticamente (esto es, ser visible desde) un mínimo de cuatro satélites de la red, de los que recibe una serie de señales electromagnéticas indicando la posición y el reloj (instante en el que se emitieron las señales) de cada uno de ellos. El aparato receptor sincroniza su reloj y calcula el retraso en la recepción de las señales (tiempo transcurrido) desde que han sido enviadas desde los satélites. A partir de esas medidas de tiempo (instante de partida e instante de llegada) y la velocidad de propagación de las señales, calcula su distancia a los satélites.
Desde un punto de vista geométrico, para realizar la triangulación (trilateration) y determinar la posición, bastarían tres satélites para hallar la posición del receptor (3 ecuaciones y 3 incógnitas). Conocidas las tres distancias a los respectivos satélites, se podrían definir 3 esferas en las que está contenido el receptor. Por intersección de las tres esferas se obtendría generalmente dos puntos en los que puede estar ubicado el receptor. Uno de ellos se puede descartar fácilmente por varios métodos. El otro es el punto en el que se halla el receptor. Como además las coordenadas o posiciones de cada uno de los satélites son conocidas, se conoce la posición del receptor.
En la realidad, la necesidad del cuarto satélite se justifica precisamente porque las distancias se calculan a partir de la medición de tiempos de propagación. Así como los relojes atómicos a bordo de los satélites tienen gran precisión, no sucede lo mismo con los relojes de los receptores, cuya precisión no garantiza buenas medidas temporales. Luego el tiempo de recepción presenta un error importante (tERROR), y también la distancia calculada (la distancia con el error recibe el nombre de pseudodistancia, PSRi). Para solventar el problema, el cuarto satélite añade más información (una ecuación más, la cuarta) que permite calcular el error de referencia (o de sincronismo) de tiempo en el receptor (cuarta incógnita) y corregirlo.
1,2,3,4i 2222ERRORiEiRiii tttczzyyxx
iEiRi ttcPSR
A partir de aquí se puede determinar la latitud, longitud y altura del receptor. La posición calculada por el receptor aparece en la presentación del GNSS a bordo de la aeronave. Puede proporcionar también medidas de velocidad, etc.
5.5 RADAR (VECTORING) NAVIGATION El radar se puede emplear como método de navegación, en cuyo caso se habla de navegación por radar o vectorial (Radar Vectoring). En ese caso un controlador en tierra sigue la trayectoria del avión y da instrucciones al piloto mediante comunicación oral. No es extraño encontrar este tipo de navegación incluido entre los métodos de navegación por referencias externas dado que guarda muchas similitudes con estos (el radar es una instalación terrestre externa al avión, y el sistema se fundamenta también en la emisión/recepción de señales electromagnéticas). En la realidad, la navegación por radar se usa raramente y los equipos de radar se emplean con mayor extensión como elementos de detección, control y vigilancia.
5.5.1 Primary Surveillance Radar (PSR) El radar primario de vigilancia PSR (Primary Surveillance Radar) es un sistema de telemetría de corto alcance (menos de 500 km) que emite ondas electromagnéticas en el sector del espacio aéreo que se desea cubrir. Estas señales se reflejan sobre los cuerpos sólidos en los que impactan

81
(los blancos), y las reflexiones son captadas de nuevo por el sistema PSR. Es importante destacar que en este caso el blanco es pasivo, únicamente se limita a reflejar la onda electromagnética incidente, y no necesita disponer de ningún equipo específico a bordo. La detección del eco reflejado por el blanco resulta en una señal luminosa en la pantalla radar (display) del controlador de tráfico aéreo (ver Fig. 5.1). La información proporcionada por el PSR es la distancia oblicua desde el radar hasta el blanco i el radial o plano vertical en el que se encuentra este.
ctd 2 2
ctd
Fig. 5.1: Display o pantalla de presentación del PSR.
El sistema PSR no da ningún otro tipo de información sobre los cuerpos que originan las señales que aparecen en la pantalla, en consecuencia es el controlador quien debe deducir el significado de dichas señales en función, por ejemplo, del seguimiento radiofónico de las aeronaves en vuelo.
Los sistemas PSR que se utilizan actualmente son del tipo MTI (Moving Target Indicator), que cancelan los blancos fijos basándose en que la fase de la señal reflejada por estos no cambia entre un eco y el siguiente. En los aeropuertos existen sistemas PSR pero en general su utilización se reduce a casos de emergencia por fallo del sistema SSR (garantizan redundancia) o para detección de aviones sin equipo embarcado (transponder) para SSR.
5.5.2 Secondary Surveillance Radar (SSR) El sistema de seguimiento de aeronaves ATCRBS (Air Traffic Control Radar Beacon System) se compone de dos partes:
- Parte terrestre:
Radar secundario de vigilancia SSR (Secondary Surveillance Radar). Es también un sistema telemetría de corto alcance (menos de 500 km).

82
- Parte aérea: Respondedor o transpondedor: modo A, modo C y modo S.
El SSR es una instalación en tierra que emite ondas electromagnéticas (interrogaciones) que son recibidas por un equipo a bordo de la aeronave llamado respondedor o transpondedor (transponder). Tras recibirlas, el transpondedor genera y emite una respuesta codificada que es captada por el SSR en tierra (ver Fig. 5.2b). Es importante destacar que en este caso el blanco es activo, dispone de un sistema embarcado que colabora con el radar en tierra (genera la respuesta o eco).
Fig. 5.2a: Display del SSR.
Fig. 5.2b: SSR en tierra.
El ATCRBS, además de proporcionar al controlador la distancia oblicua de la aeronave al radar y el radial sobre el que se halla ésta, le proporciona información adicional que viaja codificada en la señal de respuesta. La información codificada es un código identificador de la aeronave que ha emitido la respuesta (al que se llama modo A del transponder), con lo que es más sencillo reconocer en la pantalla las aeronaves en vuelo, distinguirlas unas de otras y diferenciarlas de otros objetos) e información sobre la altitud de vuelo de la aeronave (modo C). Ver la presentación en pantalla de la Fig. 5.2a. Finalmente el transponder mode S permite la comunicación de la aeronave con otras en el mismo espacio aéreo, y la comparación de posición y rumbos para determinar el riesgo de colisión, que es la base del sistema TCAS o ACAS (Traffic-Alert Collision Avoidance System). En los aeropuertos se utilizan con gran extensión los sistemas SSR, reservándose los sistemas PSR a casos de emergencia por fallo del SSR o para detección de aeronaves desprovistas de transpondedor. Las ventajas del SSR con respecto al PSR son las siguientes:
- Facilita la tarea del controlador al adjuntar información adicional de las aeronaves
codificada en la señal de respuesta: identificador (modo A) y altitud (modo C).
- La propiedad de codificación de información en la señal de respuesta del transpondedor puede utilizarse para indicar situaciones especiales, como fallo de comunicaciones, emergencia e interferencia ilícita.
- El modo S (base del TCAS o ACAS) ha aumentado sensiblemente la seguridad del vuelo al
reducir las posibilidades de una colisión en vuelo. Los pilotos de las aeronaves en rumbo de colisión reciben una señal de advertencia y se puede corregir la situación para evitar la colisión.

83
- Permite discernir entre aeronaves y fenómenos atmosféricos y otros reflejos (es inmune al clutter, reflexiones no deseadas que aparecen en la pantalla del radar).
- El SSR permite un mayor alcance que el PSR para una potencia dada o un menor gasto de
potencia para un mismo alcance. La razón es que en el caso del PSR la señal radiada debe recorrer una distancia que es el doble que en el caso del SSR, puesto que debe hacer el camino de ida hasta el blanco y vuelta como onda reflejada. En el SSR el retorno consiste en la respuesta emitida por el transpondedor, que recibe la potencia de las fuentes embarcadas.
5.6 FLIGHT PROCEDURES El vuelo se clasifica en dos tipologías en función de los procedimientos de vuelo empleados:
- Procedimientos de vuelo visual VFR (Visual Flight Rules)
En esta tipología de vuelo el piloto navega básicamente de forma visual y empleando los métodos de navegación a estima vistos en la sección [3.1], pudiendo emplear de forma opcional métodos de radionavegación (NDB - ADF) así como otros tipos de referencias externas.
- Procedimientos de vuelo instrumental IFR (Instrument Flight Rules)
En esta tipología de vuelo el piloto navega empleando métodos de radionavegación y guiado por radar.
5.7 REFERENCES [1] OACI. Anexo 10: Telecomunicaciones Aeronáuticas [2] Carmona, A.I., Aerodinámica y actuaciones del avión, Ed. Paraninfo [3] González, I., Quirós, B., Radar y Ayuda a la Navegación Aérea, Ed. Paraninfo [4] Sparks, J., Aircraft Maintenance Technology, March 2004, 22-25

84
6 CHAPTER 6: AVIONICS
6.1 INTRODUCTION La aviónica de una aeronave es un concepto que incluye a los instrumentos e indicadores de a bordo de la aeronave cuya misión fundamental consiste en la transmisión y comunicación de datos e información entre los sistemas de la propia aeronave y la tripulación u otras aeronaves. Avionics (Aviation Electronics): All the electronic and electro-mechanical systems and subsystems (hardware and software) installed in an aircraft or attached to it, which interact with the crew or other aircraft systems in these functional areas: communications, navigation, weapons delivery, identification, instrumentation, electronic warfare, reconnaissance, flight control, engine control, power distribution, and support equipment. La importancia de la aviónica reside en el hecho que juega un papel principal en el control del avión. Para optimizar la eficiencia del control de la aeronave por parte de la tripulación, en el diseño de la aviónica se debe prestar la máxima atención a dos aspectos:
- Información a presentar - Presentación de dicha información
6.2 INFORMATION SOURCES Los datos para la navegación que la aviónica de la aeronave presenta a la tripulación proceden de diferentes fuentes de información:
- Datos aire: Son aquellos datos procedentes de la medición de magnitudes físicas del aire que rodea la aeronave. En los inicios de la aviación, el aire era prácticamente la única fuente de la que disponía el piloto para la obtención de datos útiles para la navegación.
- Campo magnético terrestre:
También es otra fuente clásica. Mediante una brújula es posible medir la dirección del campo magnético y conocer así el rumbo de la aeronave.
- Acelerómetros:
Proporcionan las aceleraciones a las que está sometido el avión, útiles para conocer el factor de carga o para el cálculo de la posición (INS).
- Giróscopos18:
Proporcionan información con respecto a la actitud de la aeronave y las velocidades angulares (o de rotación) de la misma.
18 A gyroscope is a spinning mass mounted within a Gimbaled system. In absence of friction and unbalance, the spinning mass would remain stationary in inertial space, demonstrating the principle of conservation of angular momentum, also known as gyroscopic inertia or rigidity in space. Gyroscopes ideally act as a portable reference direction and are used extensively to sense angular movement and sensor to stabilize platforms.

85
- Emisión de ondas electromagnéticas: Permite la obtención de información meteorológica (mediante el radar meteorológico), altura (radar altimétrico o radio-altímetro), proximidad de aeronaves (radar convencional), etc.
- Recepción de ondas electromagnéticas:
La recepción de señales procedentes de radio-ayudas a la navegación (VOR, DME, etc.) y de sistemas GNSS proporciona información que permite la determinación de la posición de la aeronave.
- Reloj de a bordo
6.3 AIR DATA Como se mencionó en la sección [2.], reciben el nombre de datos aire aquellos datos procedentes de la medición de magnitudes físicas del aire que rodea la aeronave. En lo referente a esta fuente de información, se distinguen dos disciplinas dependiendo del tipo de datos aire que contemplan:
- Anemometría - Altimetría
6.3.1 Anemometry
La anemometría se ocupa de determinar la velocidad aerodinámica de la aeronave V (velocidad de la aeronave con respecto al aire), que es un parámetro muy importante. Prueba de ello es que aparece en:
LSCVL 2
2
1
DSCVD 2
2
1
De las diferentes velocidades definidas en la nomenclatura aeronáutica, la V empleada en estas expresiones se corresponde con la Velocidad Verdadera o TAS (True Air Speed), entendida como la velocidad que realmente tiene el avión respecto al aire. El proceso que conduce a la determinación de la velocidad, previo a su presentación a la tripulación a través de instrumentos a bordo (clásicamente se presenta la velocidad al piloto mediante el anemómetro), es un proceso laborioso que se puede descomponer en las siguientes etapas:
PRIMERA ETAPA:
Toma de medidas de presión (presión estática pS y presión total pT) del aire que rodea a la aeronave.
- Medida de la presión total pT:
Esta medida se realiza mediante el tubo de Pitot. La abertura A de dicho tubo (Fig. 3.2) está dispuesta de modo que la corriente de aire libre incide sobre ella. La velocidad del aire en el interior del tubo es nula por estar todo él lleno de aire.

86
Por lo tanto, la presión en el punto A y en todo el interior del tubo es la correspondiente a un punto de remanso (punto en el que la velocidad del flujo es nula), pT. Esta presión se comunica con un lado de una cámara de presión.
- Medida de la presión estática pS:
Esta medida se obtiene mediante las tomas de presión estática (tomas B en la Fig. 3.2). Las tomas se sitúan en lugares del avión en los que la corriente de aire se puede considerar no perturbada (la velocidad del aire es igual a la del avión). La presión estática en esos puntos es la de la corriente libre de aire sin perturbar, esto es, la presión estática de la atmósfera en calma. Esta presión se comunica con el otro lado de la cámara de presión anterior. La localización de los puntos no perturbados a lo largo del fuselaje del avión es un proceso que requiere un estudio aerodinámico meticuloso. Se disponen en general varias tomas en diferentes lugares por razones de seguridad (redundancia) y para realizar promedios de cara a mejorar la calibración.
El tubo de Pitot y las tomas de estática son elementos que se encuentran generalmente de forma redundante en una aeronave de aviación civil comercial, como se puede ver en el esquema de la Fig 3.1, donde aparece un sistema de adquisición y tratamiento de datos aire.
Fig. 3.1: Esquema de un sistema de adquisición y tratamiento de datos aire.
En algunas ocasiones, el tubo de Pitot y las tomas de estática se encuentran integrados constituyendo un único instrumento que recibe el nombre de Tubo de Pitot-estática (ver el ejemplo de la Fig. 3.2).

87
Fig. 3.2: Esquema de un tubo de Pitot-estática.
SEGUNDA ETAPA:
Como se mencionó, las presiones anteriores se llevan a sendos lados de una cámara de presión donde un sensor (transductor) transforma su diferencia en una señal digital. El transductor es generalmente una membrana que separa los dos lados de la cámara, cuya deflexión está relacionada con la diferencia de presiones a un lado y a otro de la misma, y determinada la señal digital de salida. Antiguamente el desplazamiento de la membrana se llevaba a un indicador de aguja. TERCERA ETAPA:
En arquitecturas de aviónica ya en desuso, las señales digitales anteriores eran tratadas adecuadamente por el ADC (Air Data Computer) para intentar obtener la Velocidad Verdadera. El objetivo consiste en transformar una lectura de diferencias de presión en una lectura de velocidad. Es importante destacar que para este cálculo no es necesario conocer por separado pT y pS; basta conocer su diferencia qp y el valor de la densidad del aire ρ.
- En régimen subsónico incompresible:
Se acude a la Ecuación de Bernoulli:
TSS pcteqpVp 2~~2
1 qppV ST 2~~2
1
De ahí se despeja:
~2
~)(2~ qpp
V ST
Con la notación V~
para la velocidad se quiere evitar la confusión con la V que se asociaba a la TAS al inicio de esta sección [3.1]. En este caso denota una velocidad genérica a falta de concretar ciertos aspectos. El que la velocidad que se obtenga al final con este cálculo

88
sea la TAS u otra velocidad (de las definidas en la nomenclatura aeronáutica) dependerá del valor que se emplee para la densidad (de momento también genérica) ~ .
a) Velocidad Verdadera o TAS:
Si se emplease la densidad real ρ (medida del aire que rodea a la aeronave) se obtendría la Velocidad Verdadera V o TAS. El problema reside en que la medición de la densidad real del aire es muy compleja, luego no se suele proporcionar la TAS.
)(2 ST ppTASV
b) Velocidad Equivalente o EAS:
Se suele emplear la densidad al nivel del mar (en atmósfera ISA), ρ0, y así se obtiene una lectura de Velocidad Equivalente Ve o EAS (Equivalent Air Speed).
TASpp
EASV STe
00
)(2
La Velocidad Equivalente o EAS (Equivalent Air Speed) es una variable importante por dos motivos. En primer lugar, se emplea en el cálculo de estructuras aeronáuticas, para el que no basta conocer la velocidad a la que se desplazará el avión, sino que ésta se debe poner en relación con la densidad de la atmósfera en la que se desarrollará este movimiento. En segundo lugar es una variable importante en anemometría, como se ha visto. Suele ser habitual que la velocidad proporcionada por el anemómetro de una avioneta sencilla (u otra aeronave que sólo vuele a bajas velocidades) sea precisamente la EAS (si despreciamos los errores que se verán más adelante).
- En régimen subsónico compresible: En la realidad aparece una complicación derivada del hecho que el aire es un fluido compresible, y la compresibilidad del aire es una propiedad cuyos efectos se aprecian tanto más cuanto mayor sea la velocidad o el número de Mach de vuelo. Por eso los efectos derivados de la compresibilidad del aire se pueden considerar despreciables a bajas velocidades, pero no así cuando el avión vuela a gran velocidad (típicamente por encima de Mach 0.5). El Mach verdadero que lleva el avión es:
a
TAS
a
VM Velocidad del sonido: SRTa
En caso de tratar el régimen compresible, partiendo de la expresión del teorema de Bernoulli para fluidos compresibles, aplicada entre un punto de remanso (velocidad nula y presión pT) y otro donde existe velocidad V y presión pS, se puede deducir esta expresión que recibe el nombre de ecuación de Saint-Venant:
12
1
2
2
2
11
2
11
M
a
V
p
p
S
T
Partiendo de ella se puede obtener otra expresión válida en régimen compresible:

89
)~
4
11(
~~2
1 22 MVpp ST
)~
4
11(~
)(2~
2M
ppV ST
a) Velocidad Equivalente o EAS:
Si se emplease en esta expresión la densidad a nivel del mar (en atmósfera ISA), ρ0, y el Mach verdadero, se obtendría la EAS:
)4
11(
)(2
20 M
ppEASV ST
e
b) Velocidad Calibrada o CAS:
Para permitir la estandarización de la calibración y ante la dificultad de medir el Mach verdadero de un avión en vuelo, los anemómetros emplean en lugar de éste un valor aproximado, que es el Mach que correspondería a esa EAS al nivel del mar y atmósfera ISA. La velocidad así obtenida deja de llamarse EAS y recibe el nombre de Velocidad Calibrada o CAS (Calibrated Air Speed), que es la que tendría el avión si volase a nivel del mar en condiciones ISA:
0
*
a
CASM
)4
11(
)(22*
0 M
ppCASV ST
C
Análogamente se podría obtener la CAS haciendo uso de la ecuación de Saint-Venant. Previamente se debería operar del siguiente modo:
12
1
2
2
2
11
2
11
M
a
V
p
p
S
T
SST pa
Vpp
12
11
1
2
2
Entrando en esta expresión con los valores de la atmósfera ISA a nivel del mar y sabiendo que 4.1 para el aire:
0
5.3
20
2
12.01 SST pa
CASpp
CUARTA ETAPA:
Hasta este punto se ha considerado siempre que el anemómetro es un instrumento perfecto. En caso de que así fuese, el piloto contemplaría efectivamente en su presentación la CAS, pero en

90
realidad no sucede así, dado que el anemómetro, como todo instrumento, está afectado por una serie de errores:
- Error del instrumento:
Error que incluye a todos aquellos errores derivados de la imprecisión en la construcción del anemómetro.
- Error de posición:
Este error se compone por un lado del error en la medida de pS, derivado de la imposibilidad de encontrar una posición en el avión en la que la corriente sea verdaderamente no perturbada, independientemente del régimen de vuelo y actitud del avión. Por otro lado se compone también del error en la medida de pT, que se origina cuando la corriente libre de aire no incide directamente en el tubo de Pitot, y que también está relacionado con la actitud del avión.
El resultado de estos errores es que la indicación que el piloto lee directamente en el anemómetro no es la CAS sino la Velocidad Indicada o IAS (Indicated Air Speed).
6.3.2 Altimetry La altimetría se ocupa de determinar la altitud de vuelo de la aeronave h (distancia vertical de la aeronave al nivel del mar). El conocimiento de la altitud es de vital importancia, por ejemplo, para la circulación de las aeronaves en una aerovía (AWY), ya que la circulación se distribuye y organiza verticalmente en niveles de vuelo en función de la altitud.
El instrumento clásico que presenta la altitud al piloto es el altímetro aneroide. Éste obtiene una lectura de altitud partiendo únicamente de la medición de la presión estática que rodea la aeronave (proveniente por ejemplo de las tomas de estática). La palabra aneroide significa que es un tipo de barómetro que no utiliza líquidos para realizar la lectura de presión.
Para la determinación de la expresión que permite calcular la altitud se parte de la división de la ecuación fundamental de la fluidoestática entre la ecuación de los gases perfectos para el aire:
gdhdpS
SS RT
p
SS
S
T
dh
R
g
p
dp
Entrando en esta ecuación con las siguientes hipótesis:
- La variación de la gravedad con la altitud es despreciable:
Se toma gravedad constante y de valor 81,90 g m/s2.
- Ley de dependencia de TS con la altitud:
Como en la realidad no se conoce como varía la temperatura estática con la altitud en la región donde vuela el avión, se emplea como aproximación para la integración la ley proporcionada por la atmósfera ISA (ver Fig. 3.3):
Hasta altitud 11 km: khTTS 0 [ºC]
5.6k ºC/km

91
Fig. 3.3: Ley de variación de la temperatura con la altitud en la ISA.
Finalmente, integrando con límite de integración inferior las condiciones de referencia y límite de integración superior las condiciones en la altitud de vuelo genérica, queda la siguiente expresión:
Rk
g
REF
REF
REF
S
T
khT
p
p0
(VI.1)
Con esta expresión, una vez medida la presión estática, es posible obtener la altitud. Como aproximación para el cálculo de altitudes (válida en capas bajas de la atmósfera), la presión estática disminuye un milibar por cada 28 pies. Esto se deduce de la ecuación fundamental de la fluidoestática, empleando la densidad ISA a 36.000 pies. Obviamente la lectura obtenida no es la altitud real del avión debido a varias razones:
- Error del instrumento - Error de posición - Hipótesis tomadas:
Por un lado, la gravedad sí que varía con la altura (disminuye con el cuadrado de la distancia al centro de la Tierra) y, por el otro, el instrumento está calibrado de acuerdo a la atmósfera ISA, y sin embargo la atmósfera real no coincide en general con la atmósfera ISA. Por ejemplo, si la atmósfera es más fría que la atmósfera tipo, el altímetro marca una altitud superior a la que realmente tiene el avión (lo que es peligroso).
6.3.3 Pressure-altitude La altitud presión es la altitud que corresponde en la atmósfera ISA a un valor determinado de la presión estática, y es la altitud que marca un altímetro cuando está reglado con 1013 milibares. En

92
general esta altitud presión no coincide con la altitud real porque la atmósfera real no coincide en general con la ISA.
En la circulación aérea en la fase de crucero se emplea el reglaje a 1013 mb (llamado reglaje standard) para ordenar el tráfico en el eje vertical. Se habla en este caso de una distribución de las aeronaves en niveles de vuelo FL (Flight Levels), que es un concepto equivalente al de altitud presión. En particular, un nivel de vuelo corresponde a ft100 de altitud presión.
Aeronaves que circulan próximas en una misma AWY lo hacen separadas al menos por 10 FL por razones de seguridad hasta FL290 y 20 FL por encima de FL290, según las reglas CVSM (Conventional Vertical Separation Minima).
6.3.4 Altimeter calibration La tripulación, al realizar el reglaje de un altímetro, lo que hace es asignar el valor de altitud cero a unas determinadas condiciones de referencia (e.g. presión a nivel del mar, etc.). El altímetro toma la presión estática del aire que rodea la aeronave y a partir de esta medida y la presión de referencia seleccionada realiza el cálculo de la altitud del avión según la expresión (VI.1) que se vio en la Sección 6.3.2. Los tipos de reglajes definidos son:
- Reglaje Standard: La presión de referencia a la que se asigna la altitud cero es 1013 mb, luego la lectura que proporciona el altímetro es en este caso la altitud presión. Cuando se vuela con reglaje Standard se habla siempre en términos de niveles de vuelo, en lugar de emplear el término altitud, para evitar la confusión con el vuelo con reglaje QNH o QFE.
- Reglaje QNH:
La presión de referencia a la que se asigna la altitud cero es la adecuada para que la altitud que marca el altímetro cuando el avión está en un aeropuerto coincida con la elevación del mismo. Cuando se vuela con reglaje QNH se habla siempre de altitudes.
- Reglaje QFE:
La presión de referencia a la que se asigna la altitud cero es la presión real en un punto seleccionado, por ejemplo la presión real en un aeropuerto, de modo que, si el avión se encuentra en el punto seleccionado, el altímetro indica altitud cero. Cuando se vuela con reglaje QFE se habla siempre en término de altitudes.
En el ascenso desde un aeropuerto a la fase de crucero, la tripulación cambia del reglaje QNH al Standard cuando alcanza la Altitud de Transición (Transition Altitude), que AENA establece en 6000 pies para todos los aeropuertos españoles salvo en el caso del aeropuerto de Granada donde vale 7000 pies.
En el descenso hacia un aeropuerto, la tripulación cambia del reglaje Standard al QNH cuando alcanza el Nivel de Transición (Transition Level). Este siempre debe ser mayor o igual que la altitud de transición.
La franja comprendida entre ambos es la Capa de Transición (Transition Layer), dentro de la cual no se autoriza a volar a ningún avión. Para evitar posibles confusiones, sólo se habla de altitud para referirse a vuelo con reglaje QNH del altímetro y se habla de niveles de vuelo para referirse a vuelo con reglaje Standard del altímetro.

93
6.4 DATA HANDLING En lo referente al tratamiento de datos a bordo de la aeronave sólo se hablará de los datos aire y aquéllos obtenidos por el Sistema de Navegación Inercial.
6.4.1 Air Data processing
El sistema principal de tratamiento de datos aire a bordo de la aeronave era el ADC (Air Data Computer). En una gran variedad de aeronaves de aviación comercial (A300, B747, etc.), el ADC se encontraba por duplicado por razones de seguridad, de acuerdo con el concepto de redundancia de sistemas (ver Fig. 4.1). En relación a su funcionamiento mencionar que, en primer lugar, este computador recibe de los diferentes sensores distribuidos a lo largo del avión los siguientes datos:
- Presión estática pS procedente de las tomas de estática - Presión total pT procedente del tubo de Pitot - Temperatura total TAT (Total Air Temperature, TT) que procede en este caso de las sondas
de temperatura Una vez los datos han sido recogidos, el ADC realiza los cálculos pertinentes presentados en la sección precedente y obtiene una serie de lecturas. Las lecturas que sea capaz de obtener el ADC dependen del grado de sofisticación del equipo. Las indicaciones clásicas son la CAS y la altitud presión hP, aunque los ADC más sofisticados pueden proporcionar además la SAT (Static Air Temperature, TS), el M y la TAS.
6.4.2 Inertial navigation system (INS) El Sistema de Navegación Inercial (INS) es otra fuente principal de datos para la navegación aérea. Así como sucedía al tratar el ADC, este sistema también era redundante. En una gran variedad de aeronaves de aviación comercial, como por ejemplo el A300 y B747, el INS se encontraba por triplicado por razones de seguridad (ver Fig. 4.1). Su funcionamiento se basa en la medida de las tres componentes de la aceleración de la aeronave (medida del vector aceleración). En los INS clásicos, la medida se realizaba mediante tres acelerómetros colocados sobre la plataforma inercial terrestre. Ésta es una bandeja estabilizada, en el sistema de referencia inercial terrestre, mediante giróscopos (se dice que está giroestabilizada). A partir de las medidas de aceleración, el INS calcula el vector velocidad y el vector posición de la aeronave mediante dos etapas de integración. Los giróscopos proporcionan a su vez la actitud del avión o ángulos de un sistema de referencia ligado al avión frente al sistema de referencia inercial terrestre y las velocidades de variación de estos ángulos con el tiempo.

94
Fig. 4.1: Arquitectura del sistema de tratamiento de datos de un B747.
6.4.3 ADIRU or ADIRS
La tendencia actual en la aviónica pasa por la integración de componentes y digitalización de la información. En este sentido, la arquitectura clásica de tratamiento de datos, con dos ADC y tres INS, ha sido reemplazada por una nueva arquitectura con un nuevo tipo de sistemas que reciben el nombre de ADIRU o ADIRS (Air Data and Inertial Reference Unit-System).
El ADIRS es un sistema que integra las funciones y responsabilidades del ADC y el INS. Por razones de seguridad, este sistema es redundante, siendo habitual encontrar un mínimo de tres ADIRS a bordo de la aeronave, como sucede por ejemplo en el A320 y el B747-400 (ver Fig. 4.2).

95
Fig. 4.2: Arquitectura del sistema de tratamiento de datos de un A320.
Las ventajas de la nueva arquitectura de tratamiento de datos con respecto a la arquitectura anterior son apreciables, y la mayoría de ellas se derivan de la reducción en el número de sistemas abordo (puesto que en un caso típico se pasa de tener 5 sistemas a 3). De este modo, la integración de funciones en la nueva arquitectura permite conseguir un aumento de la precisión en los datos proporcionados y una reducción en el peso, el consumo eléctrico y el coste (tanto de compra como de mantenimiento).
6.5 DATA DISPLAYING Para ilustrar el proceso de presentación de datos se ha escogido como ejemplo el sistema de visualización de datos del A320. El sistema del A320 tiene una arquitectura jerarquizada de transmisión y presentación final de información compuesta por elementos que se encuentran de forma redundante (ver Fig. 5.1). Este sistema recibe el nombre de EIS (Electronic Instrument System).

96
Fig. 5.1: Electronic Instrument System de la aeronave A320. Entre los elementos más destacados de este sistema cabe mencionar:
- DAC: Concentrador de datos procedentes de sistemas, alarmas ámbar, etc. En el A320 se encuentra por duplicado.
- Flight Warning Computer o FWC: Recibe datos del DAC y datos procedentes de otros sistemas, alarmas rojas, fases de vuelo, etc. Se encuentra por duplicado.
- Display Management Computer o DMC: Recibe los datos del FWC y el resto de datos de la aeronave (datos de navegación, de masa y centrado, de cantidad de carburante, datos del piloto automático, etc.). Procesa todos estos datos y actúa como filtro, dando paso hacia las pantallas a la información

97
dependiendo del grado de prioridad e importancia de la misma (siguiendo la filosofía need to know) o de acuerdo con las solicitudes de la tripulación. En definitiva, el DMC selecciona los datos que aparecerán en las pantallas (o displays o presentaciones) PFD y ND y las genera. Estas pantallas son multifuncionales y en ellas sólo aparece la información importante, con lo que se disminuye la carga de trabajo de la tripulación y se mejora la seguridad, evitando inundar a la tripulación con datos no relevantes. En el A320 el DMC se encuentra por triplicado.
- Navigation Display o ND: Esta pantalla es la interfaz de la información de navegación: piloto automático, GPS, VOR, ILS, transpondedor, radioaltímetro, radiobalizas, ADF y DME. Junto con el PFD constituye el EFIS (Electronic Flight Instrument System), que se encuentra por duplicado (ver Fig. 5.1 y 5.2). La información que aparece y el modo en que se presenta se pueden modificar en cierta medida mediante el EFIS Control Panel.
Fig. 5.2: Ejemplo de ND.
- Primary Flight Display o PFD:
Esta pantalla es la interfaz de la información primaria de vuelo: velocidad, actitud, altitud, velocidad vertical, rumbo, etc. En el A320 se encuentra por duplicado (ver Fig. 5.1 y 5.3).

98
Fig. 5.3: Ejemplo de PFD.
- Electronic Centralized Aircraft Monitoring o ECAM:
Esta pantalla presenta la información del sistema de vigilancia de los sistemas del avión. En el A320 se encuentra por duplicado (ver Fig. 5.1). El ECAM sustituye al ingeniero o mecánico de vuelo (que antiguamente era el tercer tripulante en el cockpit del avión).
6.6 CONTROL SYSTEMS El sistema de mandos para el pilotaje de la aeronave puede corresponder a uno de los tres siguientes:
- Sistema reversible: La definición estricta de sistema reversible dice que es aquél sistema en el que el piloto realiza una fuerza en palanca que equilibra el momento de las fuerzas aerodinámicas en las superficies de control (momento en el eje de charnela). No es necesario disponer de un sistema de sensación artificial para el piloto a bordo de la aeronave, ya que existe una conexión mecánica entre los mandos y las superficies de control. Los mandos de vuelo mecánicos clásicos son sistemas reversibles.
- Sistema irreversible o completamente operado por potencia:
La definición estricta de sistema irreversible dice que es aquél sistema en el que la fuerza que el piloto realiza en palanca ya no equilibra el momento de las fuerzas aerodinámicas sobre las superficies de control. No existe una conexión mecánica entre los mandos y las superficies de control. El momento debido a las fuerzas aerodinámicas es equilibrado por un servomotor hidráulico que es el encargado de accionar las superficies de control, y la sensación que el piloto percibe en el mando de vuelo se genera mediante un sistema de sensación artificial

99
(artificial feel), un ejemplo del cual se puede ver en la Fig. 6.2. Los mandos de vuelo eléctricos (filosofía fly by wire) suelen ser sistemas de tipo irreversible (ver Fig. 6.1). En el caso de un sistema de mandos fly by wire, la tripulación ejerce el control de la aeronave de forma indirecta mediante el empleo de mandos conectados a un computador de vuelo (que también es un sistema redundante). Al ser accionados por la tripulación, los mandos generan señales eléctricas que son recibidas y procesadas por el computador de vuelo. El computador de vuelo interpreta las órdenes que le envía la tripulación con los mandos y actúa en consecuencia, generando señales eléctricas a modo de órdenes que gobiernan los servomotores (o dispositivos servo-hidráulicos). Los servomotores hidráulicos deflectan las superficies de control de acuerdo con las señales recibidas.
Fig. 6.1: Mandos de vuelo eléctricos.
- Sistema con potencia auxiliar o asistido (power-boosted):
Es un sistema a medio camino entre reversible e irreversible. El piloto realiza una fracción del esfuerzo necesario para deflectar las superficies de control. La parte restante del esfuerzo para compensar los momentos de las fuerzas aerodinámicas en las superficies de control es realizada por un sistema auxiliar. No es necesario disponer de un sistema de sensación artificial para el piloto a bordo de la aeronave.

100
Fig. 6.2: Sistema de sensación artificial.
6.7 REFERENCES [1] Carmona, A.I., Aerodinámica y actuaciones del avión, Ed. Paraninfo. [2] González, I., Quirós, B., Radar y Ayuda a la Navegación Aérea, Ed. Paraninfo

101
7 CHAPTER 7: HELICOPTERS
7.1 AERONAVES DE ALA GIRATORIA El helicóptero es un tipo de aeronave que se incluye dentro de la categoría de los aerodinos, aeronaves más pesadas (más densas) que el aire (como también los aviones), puesto que pesa más que el aire que ocuparía su respectivo volumen, en contraposición de los globos y dirigibles, que constituyen la categoría de los aeróstatos o aeronaves menos pesadas (menos densas) que el aire. Dentro de los aerodinos, el helicóptero es una aeronave de ala giratoria, a diferencia de los aviones, que son aeronaves de ala fija. Así como las aeronaves más ligeras que el aire se sustentan en vuelo gracias a la fuerza de flotación (fuerza de Arquímedes), las aeronaves que son más pesadas que el aire deben generar de algún modo otro tipo de fuerza que asimismo las sustente. El ala es el elemento estructural que cumple la misión fundamental de generar esa fuerza que debe mantener en vuelo a la aeronave. La fuerza en cuestión recibe el nombre de sustentación. Es necesario que exista un cierto movimiento relativo (velocidad relativa) del ala con respecto al aire para generar la sustentación. De ahí el hecho que distingue a las aeronaves de ala fija de las aeronaves de ala giratoria, que no es otro que el modo en que cada uno de ellos consigue esa velocidad relativa entre el ala y el flujo incidente. En el caso de las primeras, el ala está fija a la estructura principal de la aeronave, el fuselaje, y todo el conjunto se desplaza impulsado por la planta propulsora hasta alcanzar la velocidad necesaria para despegar y mantenerse en vuelo. En el caso de las aeronaves de ala giratoria, existen dos o más alas móviles que reciben el nombre de palas (blades) y que giran con una determinada velocidad angular entorno a un eje de rotación, logrando así la necesaria velocidad relativa entre el ala y el aire. El conjunto de palas y el elemento de unión (cabeza del rotor) de las mismas con el eje de rotación recibe el nombre de rotor. De esta diferencia entre ambos tipos de aeronaves se deducen otras peculiaridades, como, por ejemplo, el hecho que una aeronave de ala fija no puede detenerse en el aire, puesto que al dejar de existir la velocidad relativa antes mencionada, dejaría de generarse sustentación. En cambio, algunos tipos de aeronaves de ala giratoria sí que pueden detenerse, ya que a pesar de estar suspendidas en vuelo, la rotación del ala garantiza ese desplazamiento relativo fundamental del ala en el seno del aire.
7.2 TIPOS DE AERONAVES DE ALA GIRATORIA Dentro de este subgrupo de aeronaves más pesadas que el aire se incluyen los siguientes tipos de aeronaves (ver Fig. 56):
- Autogiro (Girocóptero)19: La potencia del motor se aplica únicamente a una hélice que proporciona velocidad de avance al autogiro. El movimiento del aire entorno de las palas imprime sobre ellas un movimiento de rotación. El giro del rotor provoca una velocidad relativa entre palas y aire
19 Autogiro es una marca registrada y el nombre más extendido, mientras que girocóptero es el nombre genérico del aparato.

102
que permite generar sustentación suficiente como para hacer posible el vuelo. No puede realizar vuelo a punto fijo porque se detendría el giro del rotor.
Fig. 57 Esquemas de un helicóptero, girodino, autogiro y combinado.
- Girodino:
Parte de la potencia del motor se aplica a una hélice que proporciona velocidad de avance y la otra parte se aplica al rotor que así genera la sustentación que hace posible el vuelo, por lo que sí puede realizar vuelo a punto fijo.
- Helicóptero: Toda la potencia del motor se aplica al rotor que se encarga de generar una fuerza que tiene dos misiones fundamentales: mantener en vuelo el helicóptero e imprimirle velocidad (propulsarlo). Sí puede realizar vuelo a punto fijo.

103
- Combinado: La potencia del motor se puede aplicar al rotor o a la hélice, pudiendo actuar como helicóptero o autogiro (o avión si dispone de ala fija). En el primer caso sí puede realizar vuelo a punto fijo.
7.3 CARACTERIZACIÓN DEL HELICÓPTERO Las diferencias principales del helicóptero con respecto a los demás tipos de aeronaves de ala giratoria son las siguientes:
- El helicóptero consta de un único elemento, el rotor, para generar las fuerzas que garanticen tanto la sustentación como la propulsión (movimiento de avance)
- El rotor está articulado para permitir el control de la orientación del plano del rotor y de ese modo permitir el control longitudinal (cabeceo o pitch) y lateral (alabeo o roll) de la aeronave
Las principales características de los helicópteros son:
- Capacidad de despegue y aterrizaje vertical (Vertical Take-off and Landing, VTOL) en cualquier superficie (ya sea preparada o no, siempre y cuando ésta soporte el peso del vehículo y su carga)
- Posibilidad de vuelo a punto fijo o vuelo estacionario (hovering) - Posibilidad de vuelo en todas direcciones - Elevados costes directos de operación DOC (Direct Operation Costs) - Capacidad de vuelo a muy baja cota
Las prestaciones y actuaciones del helicóptero hacen de él un buen modo de transporte en general para cargas relativamente pequeñas, internas o externas, que deben ser llevadas a distancias cortas o medias (no más de 500 km), a una velocidad moderadamente elevada (el límite en la velocidad de crucero de los helicópteros actuales es del orden de 150 a 170 knots, por la aparición de problemas derivados de la compresibilidad del aire que encuentra la pala que avanza) y siendo el coste un parámetro con una influencia menor frente al ahorro de tiempo y la flexibilidad en trayectos punto a punto que se logra haciendo uso de este vehículo. Mientras que en determinados usos y misiones no resulta competitivo frente a otros vehículos (i.e. transporte aéreo de masas, donde los aviones de aviación civil comercial presentan DOCs sensiblemente menores, en relación al número de pasajeros que pueden transportar y a los kilómetros recorridos), el helicóptero presenta unas características que le permiten desarrollar una serie de misiones que no es capaz de llevar a cabo ningún otro tipo de vehículo (luego en ellas no tiene competencia) y que han sido el motor de su invención y posterior desarrollo. Estas misiones son las más importantes dentro del abanico de misiones que puede desarrollar un helicóptero, y son básicamente aquellas que involucran el vuelo a punto fijo y el despegue o aterrizaje vertical (VTOL). Como ejemplos:
- Servicio médico de emergencia - Servicio de salvamento, tanto marítimo como terrestre (ver Fig. 58) - Transporte fuera de la costa (off shore) - Vigilancia aérea del tráfico rodado - Vigilancia policial - Sobrevuelo de ciudades con fines turísticos - Transporte de pasajeros o carga entre núcleos urbanos

104
Fig. 58 Helicóptero para la realización de misiones salvamento.
7.4 COMPONENTES DEL HELICÓPTERO A continuación se realiza un análisis detallado de los principales elementos que componen un helicóptero.
7.4.1 Célula
Las partes principales que componen la célula son: - Cabina - Fuselaje: estructura central, estructura inferior y recubrimiento - Cono de cola - Tren de aterrizaje: patines, ruedas de tipo retráctil o no retráctil, flotadores - Sistema de empenaje: empenaje horizontal y empenaje vertical de cola
7.4.2 Rotores
Todo helicóptero dispone al menos de un rotor (el rotor principal), cuya misión más importante es generar la fuerza que se encarga de la sustentación y la propulsión del helicóptero simultáneamente. El movimiento rotatorio del rotor principal se logra gracias a la potencia comunicada a éste por el motor mediante el sistema de transmisión (ver Sección 7.4.6), y en particular a través del eje o árbol del rotor. Velocidades de rotación típicas están entorno a 200-350 rpm. En relación a los rotores principales, cabe destacar que están compuestos básicamente de dos elementos:
- Palas:
En definitiva son alas en las que de nuevo la forma de los perfiles es un parámetro fundamental que determina las performances de las mismas. La rotación permite una

105
velocidad relativa entre palas y aire, con lo que así se genera la sustentación. En cuanto al número de palas del rotor principal, en general el helicóptero puede ser bipala, tripala o cuatripala.
- Cabeza del rotor: La cabeza del rotor es el elemento que une las palas con el eje o árbol del rotor, esto es, con el resto del helicóptero. Existen diferentes tipos (ver Fig. 61), pero en todos los casos la cabeza del rotor desarrolla dos misiones de vital importancia puesto que: 1) transmite las cargas de las palas al eje, luego en definitiva al resto del helicóptero, y por lo tanto lo sostiene; 2) interviene en el control lateral y longitudinal del vehículo.
Fig. 59 Articulaciones en una cabeza de rotor articulada.
I. Articulada:
Dispone de articulaciones que permiten movimiento de batimiento, arrastre y paso de las palas (ver Fig. 59), luego se permite a la pala oscilar o vibrar hasta cierto punto según esos grados de libertad. Existen sistemas de amortiguación que generan fuerzas que se oponen a algunas de estas vibraciones para mitigarlas.
II. Semi-rígida:
Permite movimiento de batimiento y paso de las palas (ver Fig. 60). Esta configuración, con dos palas con un movimiento de batimiento anti-simétrico, era típica de helicópteros Bell (e.g. Bell UH-1).
III. Rígida:
Dispone de articulaciones que únicamente permiten el movimiento de paso de las palas (ver Fig. 65). Hay flexibilidad en la raíz de pala. Las cargas dinámicas (oscilantes) que se producen en la cabeza del rotor conducen a la larga a problemas de fatiga de los materiales.

106
Fig. 60 Helicóptero bipala UH-1M con cabeza de rotor semi-rígida (see saw teetering) (fotografía de Butch Lottman)
IV. Sin articulación o flexible:
Se distinguen las cabezas BIFLEX, con articulaciones de paso, y las TRIFLEX, sin articulación de ningún tipo. Hay flexibilidad en la cabeza del rotor, que se deforma adecuadamente dependiendo de las cargas y la maniobra de control que se demanda al aparato.
7.4.3 Sistema de compensación del par motor
A la acción del motor sobre el rotor le corresponde una reacción igual y contraria (por la tercera Ley de Newton) que recibe el nombre de par motor (o también, par de reacción). Como el motor está unido solidariamente con el resto de la estructura del helicóptero, este momento debe ser compensado porque en caso contrario provocaría un movimiento de rotación del helicóptero en sentido opuesto al del rotor. Los sistemas de compensación del par motor generan un par (momento) que se opone a éste, con lo que impiden esa consecuencia no deseada. Los métodos empleados para la compensación del par motor se pueden clasificar en tres categorías:
- Rotor antipar: El helicóptero dispone de un segundo rotor en el extremo del cono de cola (i.e. alejado del centro de gravedad del helicóptero) que se encarga de generar una fuerza, que a su vez produce un momento que compensa el par motor. Velocidades de rotación típicas están entorno a 1000-1500 rpm.
- Fenestrón: El helicóptero dispone en el extremo del cono de cola de un ventilador o soplador (fan o blower), llamado Fenestrón. Este elemento es también de hecho un segundo rotor, pero guarda ciertas diferencias con respecto a un rotor antipar normal. En primer lugar, consta de un número sensiblemente mayor de palas que el rotor antipar y, en segundo lugar, se encuentra protegido e integrado en el empenaje vertical de cola (se trata por lo tanto de una hélice carenada, con la aerodinámica más controlada). Como en el caso anterior, se

107
encarga de generar una fuerza, que a su vez produce un momento que compensa el par motor. El motor se encarga de suministrar la potencia necesaria para mover el rotor antipar o el Fenestrón.
Fig. 61 Tipos de cabeza de rotor.
- NOTAR (No Tail Rotor):
En este caso, el helicóptero no dispone de un segundo rotor en la cola sino que emplea otro método para compensar el par motor. Existe una gran variedad de métodos dentro de esta categoría, como la utilización de dos rotores principales coaxiales (o no coaxiales) con sentidos opuestos de rotación (ver Fig. 62), la expulsión de gases del motor turbo-eje o aire a gran velocidad en el extremo del cono de cola (ver Fig. 63), etc.
El sistema de compensación del par motor tiene otra misión fundamental estrechamente vinculada con la función recién mencionada y no es otra que la de permitir el control direccional del helicóptero (control de guiñada), como se verá en la Sección siguiente.

108
Fig. 62 Helicóptero Kamov 521 con rotores coaxiales para compensación de par motor.
Fig. 63 Helicóptero con dispositivo NOTAR para compensación de par motor.
7.4.4 Controles de vuelo - Control longitudinal y lateral:
Existen básicamente dos sistemas para el control longitudinal y lateral en los helicópteros dotados de cabeza de rotor articulada: el sistema mediante araña y el sistema mediante

109
plato distribuidor. Se va a estudiar únicamente el caso de control mediante plato distribuidor porque es el sistema de control clásico más extendido. Un esquema y una fotografía de este sistema se pueden ver en la Fig. 64 y Fig. 65. Consta de dos platos: el plato móvil que se puede inclinar o desplazar verticalmente y que gira arrastrado por el árbol del rotor; y el plato fijo, que sólo se puede inclinar o desplazar verticalmente, y que está sujeto para que no gire por efecto de la fricción. El contacto entre ambos se produce por una rótula que queda entremedio de los dos y garantiza que no se transmita movimiento de rotación del plato móvil al fijo. Finalmente, los dos platos tienen varillas o bieletas. Las del plato móvil están unidas a las palas y determinan su paso. Las del plato fijo son gobernadas por los correspondientes mandos de vuelo de la tripulación, a través del sistema hidráulico (ver Sección 7.4.6).
Fig. 64 Esquema del sistema de plato distribuidor.
Para el control longitudinal y lateral del helicóptero el piloto dispone de los siguientes mandos de vuelo actuando sobre el plato fijo: I. Palanca de paso colectivo:
Esta palanca, que el piloto maneja con la mano izquierda y que puede mover únicamente hacia arriba y hacia abajo, desplaza verticalmente los platos alterando por igual el paso de las palas sea cual sea la posición azimutal que ocupen, en su movimiento de rotación entorno al árbol rotor. Variando así por igual el paso de las palas se logra variar el valor (módulo) de la tracción dada por el rotor principal.
II. Palanca de paso cíclico:
Esta palanca, que el piloto maneja con la mano derecha y que puede mover adelante, atrás, a izquierda y derecha, inclina los platos alterando el paso de las palas de forma diferente según cual sea la posición azimutal que ocupan, en su movimiento de rotación entorno al árbol rotor. De este modo, lo que se consigue es

110
cambiar la orientación del plano del rotor, o lo que es lo mismo, cambiar la dirección del vector tracción. Gracias a ello se puede lograr generar una componente de la tracción que acelere el helicóptero en una dirección determinada.
Fig. 65 Helicóptero Alouette-3 con cabeza de rotor rígida y sistema de plato distribuidor (fotografía de Erik Frikke).
- Control direccional:
Como se mencionó, el control direccional se ejerce mediante el sistema de compensación del par motor. El piloto dispone de unos pedales con los cuales puede variar el valor de la fuerza generada por el sistema de compensación, de modo que el momento generado por ésta sea mayor o menor que el par motor y permitiendo así el movimiento angular de guiñada de forma controlada, en el sentido deseado. Se pisa el pedal del lado hacia el que se desea guiñar.
7.4.5 Sistema de arrastre
Los tipos de grupo motor o plantas de potencia que se emplean como sistema de arrastre (llamado así porque proporciona el movimiento de arrastre del rotor) se pueden clasificar en sistemas de arrastre mecánico y sistemas de arrastre por reacción (o termopropulsión). La ventaja de estos últimos, mayoritariamente todavía en etapas de desarrollo muy tempranas, es que en general no requieren sistema de compensación de par motor.
En el caso de los helicópteros, los sistemas empleados casi exclusivamente en la actualidad son los sistemas de arrastre mecánico que incluyen los siguientes:
- Motores alternativos:
También llamados de émbolo o de pistón, este primer tipo de motores se emplea típicamente en los helicópteros de menor tamaño (helicópteros ligeros y ultraligeros), puesto

111
que en éstos las necesidades de potencia son reducidas y pueden ser cubiertas sin problemas por estos motores, sin ser demasiado grandes y/o pesados.
- Turbo-motores o motores turbo-eje (turbo-shaft): Los motores turbo-eje se emplean en los helicópteros de tamaño medio a super-pesados. La razón es que las necesidades de potencia en estos helicópteros son tales que los motores alternativos necesarios para cubrirlas tendrían unos volúmenes y pesos del todo inaceptables. Los motores turbo-eje en cambio poseen potencias específicas mucho mayores y pueden cubrir las necesidades de potencia teniendo pesos y volúmenes mucho menores.
Turbine engines, as compared to piston engines, are smoother (lesser noticeable vibration), quieter, with lighter weight for the same horsepower, more reliable, overhauled at greater intervals, easier to start in the cold, require less maintenance between overhauls and consume less oil. On the other hand, turbine engines are more expensive to purchase and overhaul, consume more fuel, less tolerant to abuse and more surprising when they fail (lesser warning of failure).
En lo referente al número de motores de que disponen, se distinguen los helicópteros monomotor (un único motor) o multi-motor (dos o más motores). Dentro de esta categoría puede precisarse si se trata de un bimotor, trimotor, etc. El número de motores influye en las prestaciones a certificar.
7.4.6 Otros sistemas del helicóptero El resto de sistemas del helicóptero se mencionan seguidamente:
- Sistema hidráulico:
La misión primaria de este sistema es mover la instalación de control del rotor principal (en el sistema de plato distribuidor o araña). Esta misión la desarrolla el subsistema principal del sistema hidráulico.
- Sistema de transmisión: El sistema de transmisión se encarga de transmitir la potencia del motor o motores al rotor principal y al rotor antipar (si lo hubiese). Los elementos que componen este sistema son: el embrague, la rueda libre, el freno del rotor, el reductor principal (que puede tener varias etapas, ver Fig. 66) y el reductor antipar, las transmisiones (o ejes intermedios), el árbol del rotor principal y los cambios de ángulo.
- Sistema de combustible:
Tanques de combustible, conductos de distribución, etc. - Sistema eléctrico:
Generación, almacenamiento (baterías) y distribución. - Sistema de aceite del reductor:
Se encarga de la lubricación de los engranajes para evitar el gripado, etc. - Sistema de instrumentos de navegación:
En general, el vuelo de helicópteros se realiza siguiendo reglas de vuelo visual o VFR porque la mayoría de los helicópteros no dispone de equipos para vuelo instrumental (ver Fig. 67). En algunas ocasiones los helicópteros sí disponen de equipos para vuelo instrumental (ver Fig. 68). En el caso de realizar un vuelo siguiendo las reglas de vuelo instrumental IFR, la navegación se realiza mediante radio-ayudas para la navegación y sistemas de posicionamiento por satélite, como en el caso de los aviones.

112
Fig. 66 Cabeza de rotor del helicóptero Bristol 171 Sycamore en la que se observa también el
engranaje (caja) reductor principal.
Fig. 67 Aviónica de un helicóptero no preparado para vuelo instrumental (IFR).
- Sistema de ventilación y aire acondicionado - Sistema anti-fuego - Sistema de alumbrado

113
Fig. 68 Aviónica de un helicóptero preparado para vuelo instrumental (IFR).
7.5 AUTORROTACIÓN La autorrotación es una condición de vuelo del helicóptero de gran importancia en la evaluación de sus actuaciones, puesto que permite un descenso de forma estacionaria (sin aceleración, esto es, a velocidad constante), en caso de fallo de motor, con velocidades de descenso aceptables (no peligrosas). Luego es un requisito necesario desde el punto de vista de la seguridad del vuelo en helicóptero (considérese por ejemplo el caso de helicópteros monomotor). El vuelo en autorrotación debe garantizar la posibilidad de realizar un descenso con el helicóptero a velocidades verticales suficientemente bajas como para permitir un aterrizaje aceptable en lo que se refiere a la integridad estructural de la propia aeronave y a la integridad de la tripulación y de los pasajeros (ver en la Fig. 69 un ejemplo de la curva de seguridad). En la Fig. 70 y Fig. 71 se pueden apreciar esquemas del estado del rotor en la condición de autorrotación. Desde el punto de vista aerodinámico, el punto de autorrotación constituye un balance energético en el rotor, donde existen secciones que extraen energía del aire (en el centro de la Fig. 71), secciones que comunican energía al aire (en el lado derecho de la Fig. 71) y secciones que se encuentran en autorrotación verdadera (en el lado izquierdo de la Fig. 71), esto es, que ni extraen ni ceden energía al aire. Las secciones que extraen energía del aire generan el par de arrastre necesario para compensar el par de arrastre de frenado de las secciones que comunican energía al aire. Este balance de fuerzas provoca que el rotor se mantenga girando sin aceleración, a una velocidad constante. La autorrotación en definitiva es la condición que marca la transición desde una situación en la que la tracción del rotor se genera mediante la inyección de energía al aire por parte del rotor, a una situación en la que la tracción del rotor se genera mediante la extracción de energía del aire por parte del rotor. Desde el punto de vista del pilotaje, el piloto, una vez detecta el fallo del motor y constata que éste es irreversible, debe desembragar el rotor para que éste pueda girar libremente, al no estar ya conectado al sistema de transmisión y motor. Usando su habilidad, debe entonces lograr llevar el rotor a la condición de autorrotación y estabilizar el helicóptero en un descenso estacionario a una velocidad no muy alta. Las posibilidades de lograr esto, y las condiciones de descenso que se

114
alcanzan (e.g. velocidad de descenso), dependen mucho de la velocidad de avance y la altitud de vuelo del helicóptero en el momento en el que el fallo tiene lugar (ver un ejemplo de curva de seguridad en la Fig. 69). A pesar de que el sistema de compensación del par motor tampoco reciba potencia, esto no supone un problema, ya que no existe par de reacción y este sistema no es del todo necesario. Sencillamente, en el instante inmediatamente después del fallo de motor, hay que accionar adecuadamente los pedales con objeto de compensar el desequilibrio en guiñada que el fallo causa en el vuelo del helicóptero.
Fig. 69 Curva de seguridad de un helicóptero.
Fig. 70 Esquema del flujo de aire entorno al rotor en autorrotación.

115
Fig. 71 De izquierda a derecha: sección en autorrotación verdadera, sección extractora de energía y sección comunicadora de energía.
Una vez que el helicóptero se encuentra muy próximo al suelo, el piloto debe aplicar un aumento del paso colectivo (sale de la condición de autorrotación) de modo que parte de la energía cinética de rotación del rotor se intercambia por energía potencial. Esto es, se produce un aumento instantáneo de la tracción y se frena así el descenso, suavizando el posado en el suelo. Es importante recalcar que esto se logra a costa de la pérdida de la energía cinética del rotor, que se detiene por el incremento de resistencia aerodinámica en las palas, después del aumento instantáneo de la tracción, ya fuera de la condición de autorrotación (y por tanto del balance o equilibrio energético). Esta maniobra debe realizarse en un margen de tiempo muy estrecho: si se realiza demasiado pronto, el helicóptero podría desplomarse desde una altura peligrosa y, si se realiza demasiado tarde, no se frenaría a tiempo el descenso, con lo que el posado podría resultar excesivamente violento.
7.6 REFERENCES [1] Wayne, J., Helicopter theory. Ed. Dover Publications, 1994 [2] Padfield, G., Helicopter flight dynamics. [3] Prouty, R.W., Helicopter performance, stability and control. [4] López Ruiz, J.L., Helicópteros teoría y diseño conceptual. [5] Normativas JAR 27 y JAR 29 [6] Normativa de Transporte Comercial JAR-OPS-3 [7] OACI, Anexo 6 – Parte III: Operaciones Internacionales [8] OACI, Anexo 14 – Parte II: Helipuertos [9] Coyle, S., Aircraft Maintenance Technology, March 2004, 14-16, excerpts from Coyle, S.,
Cyclic and collective

116
8 CHAPTER 8: SPACECRAFT
8.1 TIPOS DE VEHÍCULOS ESPACIALES Un vehículo espacial es aquél preparado para realizar uno o más trayectos en el espacio.
8.1.1 Clasificación por misiones
Se considera que el criterio más adecuado para la clasificación de los vehículos espaciales es la definición de su misión (estrechamente vinculada con la carga útil embarcada), aunque como se verá más adelante existen otros posibles criterios para la clasificación de los mismos. En cuanto a las misiones espaciales, se distinguen los siguientes tres grandes grupos de misiones:
- Misiones comerciales:
I. Meteorología:
Por ejemplo, se incluyen en este tipo los satélites de observación meteorológicos como el METEOSAT, para la ayuda en la elaboración de predicciones meteorológicas.
II. Comunicaciones:
Se incluyen en este tipo todos los satélites de telecomunicaciones para la prestación de servicios tales como las comunicaciones telefónicas, transmisiones de televisión, etc.
III. Recursos naturales:
Se incluyen en este tipo los satélites de observación terrestre, que emplean técnicas de teledetección en campos tan diversos como la agricultura, la oceanografía, la minería, la hidrología, el medio ambiente, etc.
IV. Navegación:
Se incluyen en este tipo los satélites de las constelaciones GNSS (GLONASS, NAVSTAR-GPS (ver Fig. 72 a)) y Galileo) que prestan servicios como ayudas a la navegación.
Fig. 72 a) Satélite de la constelación NAVSTAR-GPS; b) Telescopio espacial HUBBLE.

117
- Misiones científicas: I. Estudio de la Tierra y su entorno:
Se incluyen en este tipo misiones para el estudio de las capas de la atmósfera, el campo magnético terrestre, estudios de geodesia y topografía, biología, etc.
II. Astronomía y astrofísica:
Existen vehículos espaciales pensados para la realización de observaciones astronómicas, salvando así la presencia de la atmósfera terrestre, que dificulta y empeora la calidad de las observaciones de las señales electromagnéticas en algunos de los rangos del espectro de frecuencias, y que incluso impide la observación en otros (ver Fig. 72 b) y Fig. 73).
Fig. 73 Transparencia (transmitancia, transmittance20) de la atmósfera en función de la longitud de onda de la radiación electromagnética incidente.
Se distinguen diferentes campos de la observación astronómica según las radiaciones que se pretende estudiar: rayos gamma, rayos X, rayos UV, rayos infrarrojos, espectro visible, espectro de radio (see Fig. 77). Sin olvidar la astrometría, que mide las posiciones y movimientos de los astros.
III. Exploración: Típicamente se incluyen en esta categoría todas las misiones relacionadas con la exploración de los cuerpos del Sistema Solar y del medio interplanetario. Los vehículos que realizan estas misiones son las naves (tripuladas) y las sondas (no tripuladas). Se encuentran en este grupo los vehículos de exploración de la Luna (Proyecto Apollo), de Marte (Mars Explorer, Mars Pathfinder, Mars Global Surveyor), de Venus (Venera), de cometas (Sonda Giotto), de Mercurio (MESSENGER), de asteroides (NEAR), etc.
IV. Experimentación en microgravedad:
En las estaciones espaciales (e.g. SkyLab MIR, ISS) se han desarrollado numerosos experimentos de investigación científica en condiciones de microgravedad.
- Misiones militares:
I. Reconocimiento:
Son los satélites espía que se emplean para tomar imágenes de los objetivos seleccionados en la superficie terrestre.
20 In optics and spectroscopy, transmittance is the fraction of incident electromagnetic radiation at a specified wavelength that passes through a sample.

118
II. Alerta temprana: Detectan la radiación producida durante la fase propulsada de los misiles balísticos intercontinentales. Recaban todo tipo de datos sobre el momento y el lugar del lanzamiento, así como de la trayectoria, para el cálculo del objetivo y alertan a la autoridad correspondiente.
III. Inteligencia electrónica:
Tienen como misión captar y grabar señales electromagnéticas emitidas por el objetivo, que suelen ser señales como las comunicaciones orales, imágenes, etc. radiadas al entorno por otro sistema de comunicaciones o sistema radar.
IV. Sistemas anti-satélites:
En este apartado se incluyen todo tipo de vehículos diseñados para interceptar y destruir otros satélites.
En general, un mismo satélite o vehículo espacial se puede incluir en varias de estas categorías porque es muy usual que realice varias de estas misiones simultáneamente, cuando incluye cargas útiles de diferente procedencia y con diferente objetivo.
8.1.2 Clasificación por órbitas
Otro posible criterio para la clasificación de los vehículos espaciales, en el caso de tratarse de satélites terrestres, es según la órbita en la que se hallan emplazados. De este modo se distinguen:
- Satélites geosíncronos o en órbitas geosíncronas:
Una órbita geosíncrona es aquella cuyo periodo coincide con el del movimiento de rotación terrestre, i.e. aquella que tiene un periodo de 24 horas. En el caso particular de una órbita geosíncrona circular, si la órbita tiene inclinación21 i (no nula), la traza22 tiene forma de 8, de tal modo que el punto de intersección de este 8 está sobre el Ecuador y los puntos más alejados de la intersección tienen latitudes iguales a i .
- Satélites geoestacionarios o en GEO:
Las órbitas GEO (Geostationary Earth Orbit) son órbitas circulares geosíncronas, a una altura de 35 863 Km sobre la superficie terrestre (see Fig. 74 and Fig. 75), y cuya inclinación es nula. Estas órbitas son muy interesantes (e.g. para telecomunicaciones) porque la traza de los satélites es un punto fijo sobre la superficie terrestre, es decir, el satélite da siempre cobertura a una misma zona geográfica, (i.e. para un observador posado en la superficie terrestre, el satélite parece estar fijo en un punto de la bóveda o esfera celeste).
- Satélites en MEO:
Las órbitas MEO (Medium Earth Orbit) tienen una altura comprendida entre las orbitas LEO y las GEO. Los satélites de la constelación GNSS Galileo estarán emplazados en una órbita MEO a una altura de 23 222 Km. Los NAVSTAR-GPS están a 20 200 Km.
- Satélites en LEO: Las órbitas LEO (Low Earth Orbit) son aquellas con una altura máxima de 1000 o 1600 Km (aunque este límite varía mucho según la referencia consultada, hasta 2000 Km incluso). La
21 La inclinación de una órbita es el ángulo que forma el plano de la órbita con el plano ecuatorial medido en el nodo ascendente, que es el punto en el que el satélite cruza el plano ecuatorial de modo que su traza penetra en el hemisferio norte. 22 La traza es el lugar geométrico que describen los puntos sub-satélite (puntos de intersección de la superficie terrestre con la línea que une el centro de la Tierra y el satélite).

119
ISS está emplazada en una órbita LEO a 250-400 Km de altura, del mismo modo que el telescopio espacial Hubble.
- Satélites en HEO:
Las órbitas HEO (Highly Elliptical Orbit) son aquellas que tienen alta excentricidad23, como por ejemplo las órbitas Molniya (see Fig. 74 and Fig. 75). Una perturbación de las órbitas debida al achatamiento terrestre, llamada avance del perigeo (incremento del argumento del perigeo), es típicamente secular (i.e. crece con el tiempo). La particularidad más relevante de las órbitas Molniya es que, gracias a su inclinación de 63.4º, el avance del perigeo es nulo. Otros ejemplos de HEO son las órbitas Cobra y las Tundra (cuya inclinación es también de 63.4º, siendo además la última geosíncrona).
Fig. 74 Tracking station coverage cone (in blue), a generic orbit (in yellow), a Molniya orbit (in purple) and a GEO (in flesh) (image from AGI’s STK software).
- Satélites en órbitas polares:
Las órbitas polares son aquellas de inclinaciones próximas a 90º. Un ejemplo típico son las SSO (Sun Synchronous Orbits) de inclinación 83 o 97º. The main feature of these orbits is that the S/C flies over any given point of the Earth's surface at the same local solar time. The surface illumination angle will be nearly the same every time.
8.1.3 Perturbations of orbits - Harmonic J2: - Atmospheric (aerodynamic) drag: - Lunar gravitational field: - Solar gravitational field: - Harmonics J3 to Jn: - Solar wind pressure:
23 The eccentricity of an orbit is a ratio describing its shape. Particularly, it is the ratio of the distance between the two foci to the length of the major axis. Elliptical orbits have eccentricity between 0 and 1. A circular orbit is an ellipse with zero eccentricity.

120
8.2 SEGMENTOS DE LOS PROGRAMAS ESPACIALES Un vehículo espacial se enmarca generalmente dentro de una iniciativa con objetivos más amplios que los del propio vehículo. Estos conceptos de mayor dimensión son los llamados Programas, Proyectos o Sistemas Espaciales. A su vez, éstos se suelen subdividir en tres segmentos:
- Segmento terrestre (o segmento tierra o segmento terreno) - Segmento lanzador - Segmento espacial
Fig. 75 Ground-tracks of a satellite in a generic orbit (in yellow), another in a Molniya orbit (in purple) and another in GEO (in flesh). The coverage area of the GEO satellite (borders in flesh) and the generic satellite
(full red, FOV24 is 20º) are also shown (image from AGI’s STK software).
8.2.1 Segmento Terrestre
El segmento terrestre se compone de forma genérica de los siguientes elementos. Puede que alguno de ellos no se encuentre en algún Programa Espacial, en función de la misión a desarrollar por el mismo.
- Red de estaciones en tierra: Se suele disponer de una o varias estaciones en tierra que se encargan de la transmisión de órdenes al vehículo (telemando, telecommand), de la recepción de datos procedentes de la carga de pago (payload data) y de la plataforma (telemetría, telemetry, y housekeeping data) y por último del seguimiento o rastreo del vehículo (tracking). Por ejemplo, en el caso del sistema GPS, las estaciones que componen la red reciben el nombre de MSs (Monitor Stations).
24 FOV: Field of View of the sensor on-board the satellite.

121
El número y las características de las estaciones en tierra dependen obviamente de las necesidades de la misión y del presupuesto disponible. Estos parámetros afectan de forma directa al diseño de los sistemas de gestión de datos y de telemetría y telemando25 (ver Secciones 8.4.6 y 8.4.7). Algunas misiones requieren una cobertura (visibilidad) continua del vehículo espacial (para una transmisión de datos sin interrupción entre éste y el segmento tierra), y ello implica la implementación de una red importante de estaciones a lo largo de la superficie terrestre, cuyo número depende de parámetros tales como la altura de la órbita del vehículo sobre la superficie terrestre, las características de las antenas a bordo del vehículo y en tierra, etc. En el caso que la misión no requiera que el vehículo espacial sea continuamente visible desde una estación en tierra (es decir, que no se requiera una transmisión ininterrumpida de datos entre el vehículo y el segmento tierra) o no se disponga de suficiente dinero para implementar la red de estaciones pertinente, el vehículo deberá estar preparado para almacenar los datos a la espera de una ventana en la que poder transmitirlos. Otra solución es emplear uno o varios relay satellites, esto es, satélites que actúan como repetidores para permitir una comunicación continua a pesar de que el vehículo espacial no sea visible desde las estaciones en tierra (ver Fig. 76).
- Centro de Control Operacional (CCO):
Estación desde la que se supervisa y controla el vehículo y donde se realiza el cálculo de su posición y actitud, se planifican las operaciones y se procesan y almacenan los datos recibidos. Por ejemplo, en el caso del sistema GPS, el CCO recibe el nombre de MCS (Master Control Station).
- Procesado de la carga de pago:
Los datos recabados por la carga de pago (payload data), sean en bruto (raw data) o con un cierto grado de procesado (si hay pre-procesado a bordo del S/C), se reenvían a los clientes o usuarios para una fase de post-proceso o tratamiento final. El objetivo es extraer información o resultados útiles a partir de ellos (see Fig. 77).
- Sistema de comunicaciones:
Red que permite la comunicación entre los elementos anteriores.
8.2.2 Segmento Lanzador
El vehículo lanzador se encarga de depositar en el espacio los vehículos espaciales que no son capaces de acceder al espacio por si mismos. Hoy en día, el único método empleado para ubicar un vehículo en el espacio, venciendo la fuerza de atracción terrestre, consiste en acelerarlo hasta lograr una determinada velocidad. La misión de los vehículos lanzadores es precisamente ésta, acelerar el vehículo espacial y situarlo en una órbita determinada, estos es, emplazarlo en una posición determinada con un vector velocidad determinado.
25 A link budget is the accounting of all of the gains and losses from the transmitter, through the medium and propagation environment (free space, transmission lines: cable, waveguide, fiber, etc.) to the receiver in a telecommunication system. It accounts for the attenuation of the transmitted signal due to propagation, as well as the antenna gains, feed-line and miscellaneous losses.

122
Fig. 76 Sketch showing the relay satellite concept for non-interrupted data transmission
between a single ground station and several satellites that are not visible from the station (Pulinets 2004).
Fig. 77 Resultados de los datos de observación de la galaxia Andrómeda adquiridos por
diferentes misiones científicas (en diferentes rangos del espectro de radiación).

123
Para tener una idea de los órdenes de magnitud de las velocidades necesarias, basta mencionar, por ejemplo, la primera velocidad cósmica, cuyo valor está entorno a 7.9 Km/s, que es la velocidad teórica que se debe alcanzar para poder emplazar un vehículo espacial en una órbita circular de altura nula, suponiendo despreciable la resistencia aerodinámica. La segunda velocidad cósmica o velocidad de escape, entorno a 11.2 Km/s, es la velocidad necesaria para que un vehículo escape del campo gravitatorio terrestre. El vehículo, en este caso, quedaría emplazado en el infinito con velocidad nula respecto al sistema de referencia Geocéntrico Ecuatorial. La secuencia de inserción de un vehículo espacial en su órbita final consta de las siguientes etapas en un caso genérico de inserción en una órbita GEO (see Fig. 78):
- Fase de despegue e inserción en órbita provisional:
Despegue del lanzador con el vehículo espacial en su interior, que sigue una trayectoria vertical inicial y ubica el vehículo en una órbita baja circular provisional (aproximadamente a 200-250 Km), que suele recibir el nombre de órbita de aparcamiento (parking orbit).
- Transferencia orbital e inserción en órbita final:
Desde la órbita provisional se produce la inserción del vehículo espacial en una órbita de transferencia hacia la órbita final (GTO, Geostationary Transfer Orbit). Dependiendo de la misión (órbita final nominal, etc.), del tipo de lanzador, etc. los impulsos (incrementos de velocidad) necesarios para realizar cada maniobra son proporcionados por el lanzador, el propio sistema de propulsión del vehículo espacial, o ambos. Lo mismo sucede con el impulso para la inserción desde la órbita de transferencia GTO en la órbita final.
A typical example of transfer orbit is the so-called Hohmann Transfer Orbit (see Fig. 79), which is the most economic (i.e. minimum energy or minimum total value of impulses is used) between two circular coplanar orbits. The first impulse occurs at the periapsis26 of the Hohmann ellipse and the second impulse (for final orbit insertion) occurs at its apoapsis27. Obviously, in exploration missions, the trip of the S/C28 can consist of many more phases (and consequently, many more impulses).
One of the first and most important equation in rocketry is Tsiolkovski equation, relating mass of the rocket m to impulse (∆V), initial rocket mass m0, and exhaust gases velocity VP (which is related to specific impulse).
Equation 10
m
mVV P
0ln
Equation 11
PP V
Vmm exp10
8.2.3 Segmento Espacial El segmento espacial está constituido por el propio vehículo espacial, con sus dos partes principales: por un lado la carga útil, o también llamada carga de pago (payload), y por otro lado la plataforma (o bus).
26 The periapsis of an orbit is the point in which the distance between the two bodies is minimal. 27 The apoapsis of an orbit is the point in which the distance between the two bodies is maximal. 28 S/C: spacecraft.

124
Fig. 78 Sucesión de etapas en el lanzamiento de un cohete Ariane 5 (imagen cedida por Arianespace, www.arianespace.com).
8.3 CARGA ÚTIL Todos los aspectos relacionados con las características de la carga de pago, sean los elementos que la componen, el funcionamiento de los mismos, sus prestaciones, etc. responden a los objetivos de la misión espacial (o misiones) a cumplir por la misma y a su integración en un vehículo espacial viable (ver Fig. 80 y Fig. 81 como ejemplos de vehículos espaciales con diferentes configuraciones). En algunos casos la plataforma está fijada, luego impone una serie de limitaciones en el diseño de la carga útil y los equipos que la componen, por ejemplo, en lo referente a dimensiones (volumen, longitud, etc.), potencia consumida por los equipos, refrigeración, masas, etc. Sin olvidar por supuesto el límite de masa total de la carga útil más la plataforma que impone el lanzador, si este ha sido elegido previamente. Puede suceder perfectamente que el lanzador sea escogido a posteriori, y que por tanto su elección no imponga una limitación tan crítica. Eso sí, sin olvidar que las prestaciones de éste afectan también a la configuración del vehículo espacial (e.g. vibraciones y aceleraciones que debe soportar, etc.).

125
Fig. 79 Example of Hohmann transfer from the inner circular orbit to the outer circular orbit.
Fig. 80 Visión artística de la misión científica LISA (Laser Interferometer Space Antenna) para detección de ondas gravitacionales (ESA) (imagen cedida por la ESA, www.esa.int).
Si la disponibilidad de tiempo, recursos materiales y humanos lo permiten, y la plataforma no viene fijada, se emplea el procedimiento de diseño o ingeniería competente (concurrent design o engineering). Este tipo de diseño integra el diseño de la plataforma y la carga útil, de modo que los equipos responsables de los diferentes subsistemas y carga útil compiten para lograr las condiciones más beneficiosas para su subsistema en un proceso iterativo que exige comunicación constante con los otros equipos. Este procedimiento de diseño es más complejo, puesto que las

126
modificaciones en la plataforma afectan a la carga útil y viceversa, pero permite tras sucesivas iteraciones unos diseños más optimizados. La carga de pago se presenta por lo tanto en una gran variedad de formatos, en lo referente a elementos constituyentes, configuración, dimensiones, etc. adaptados a las necesidades y especificaciones de cada misión y cada vehículo en particular. Se podría decir que prácticamente cada vehículo espacial que se ha lanzado (salvo en el caso de constelaciones de satélites idénticos) dispone de una carga de pago diferente a los anteriores. Por tanto, no es posible un estudio más profundo de la carga de pago en el marco de este curso, dada esa gran variedad de posibilidades. Se puede mencionar, eso sí, algunos tipos de sensores y equipos que se pueden hallar en la carga útil de un vehículo espacial: equipos de teledetección como son los sensores de rayos gamma, rayos X, rayos UV, rayos infrarrojos, sensores de radiaciones en el espectro visible (cámaras con teleobjetivos, etc.), sensores de campos magnéticos (magnetómetros, sondas Hall), etc.
Fig. 81 Vehículo desglosado y payload de la misión científica GAIA (imagen cedida por la ESA, www.esa.int).

127
8.4 PLATAFORMA (BUS)
En cuanto a la plataforma, concepto que incluye el resto del vehículo espacial que no es carga de pago propiamente, su misión primordial es garantizar el correcto funcionamiento de ésta última. A continuación se explican brevemente los subsistemas típicos que componen la plataforma, cada uno de los cuales cumple una función de vital importancia para el desarrollo de la misión.
8.4.1 Estructura y mecanismos La estructura es el esqueleto que soporta todos los equipos y aguanta todas las cargas mecánicas, durante la vida del vehículo espacial, producidas por el transporte en tierra, las aceleraciones (por ejemplo, entorno a un máximo de 4.5 g, en el caso del cohete lanzador Ariane 5) y las vibraciones en el lanzador, las cargas generadas en la operación del propio vehículo, etc.
Un diseño cuidadoso de la arquitectura de la estructura es esencial para lograr una óptima disposición de los diferentes elementos en el interior del vehículo (tanto los pertenecientes a la carga útil como al resto de la plataforma), un volumen y un peso óptimo del vehículo, etc. que tienen importantes consecuencias en las prestaciones finales del vehículo espacial.
El concepto mecanismos incluye los dispositivos para el despliegue de los diferentes elementos replegados hasta adoptar la posición adecuada para la operación del vehículo. Ejemplos destacables son el despliegue de paneles solares (cuando son de tipo replegable), el despliegue de mecanismos para garantizar una reentrada y alunizaje en condiciones seguras, el despliegue de antenas, brazos mecánicos y grúas/plumas (booms, equipados con sensores o para actividades extra-vehiculares EVA), etc.
8.4.2 Control de actitud (Attitude control)
Subsistema encargado de la determinación de la actitud del vehículo espacial, la estabilización en actitud (mantenimiento de la orientación deseada) y la realización de las maniobras de control, que permiten el cambio de la actitud del vehículo. Los métodos de control de actitud pueden ser pasivos (passive attitude control systems, no hay loop o feedback) o activos (active attitude control systems o closed loop).
8.4.2.1 Passive attitude control systems Passive attitude control systems often do not allow determination of attitude or realization of control manoeuvres. They are simply capable of maintaining a particular orientation. The most common methods are the following:
- Spinning satellites (Spinners):
The method is based on the principle of conservation of the angular momentum (or also called gyroscopic inertia principle): in absence of friction and unbalance, a spinning mass would remain stationary in an inertial reference frame. In particular, the S/C spins around one of its principal inertia axes and thus the spinning axis remains ideally inertial, according to the gyroscopic inertia. This feature must be taken into account when facing mission design.

128
A spinner is only stable when spinning around its major inertia axis. Thus, when the spin is initially applied to the satellite, it should be applied over the major axis of inertia. Care must be taken in this manoeuvre, since whenever the angular momentum is not co-linear with the angular motion, the S/C will nutate, which depends only on the initial conditions. Due to this reason, lateral components of the angular momentum (arising from lateral impulses, perturbing impulses...) should not be produced if nutation of the satellite is to be avoided. On the other hand, if the spinner is stable, the nutation angle decreases with time. This method is used for instance for Sun observation missions, where the payload consists of sensors pointing to the Sun.
- Gravity gradient (GG) control:
The method is based on the decrease of the gravitational attraction as the distance to the centre of attraction increases (gravity gradient). The mass distribution and configuration of the S/C is designed in a manner that benefit is taken from the gravity gradient to achieve satellite's attitude control (fixed pointing) (see Fig. 82). The unbalance of torque due to the gravity gradient stabilizes only when the satellite's moment of inertia around its yaw axis (the one pointing to the Earth’s centre) is the smallest one. This method is only used for Earth observation missions where low precision is required (pointing accuracy of 5º).
Fig. 82 Sketch of a typical S/C configuration for GG control purposes. - Magnetic passive control:
Attitude control is achieved thanks to forces produced by the interaction of the Earth’s magnetic field with equipment on-board the S/C.
- Aerodynamic (passive) control: Attitude control is achieved thanks to aerodynamic drag, which is only possible when the S/C evolves through a planet’s atmosphere. S/C shape and/or control surfaces are designed in ways that forces are produced that maintain the desired attitude.
- Solar sail (passive) control: Attitude control is achieved thanks to forces produced on a solar sail (see Fig. 83). A solar sail is a surface that allows momentum exchange between S/C and photons coming from the Sun. Forces on the solar sail can only be as high as 9 N/Km2 in the vicinity of the Earth.

129
8.4.2.2 Active attitude control systems Los elementos principales que componen un subsistema de control de actitud activo son los sensores (para estimación de la actitud), los actuadores (para estabilizar o cambiar la actitud) y el algoritmo de control (para elaborar órdenes de control hacia los actuadores pertinentes a partir del cálculo de la actitud).
Fig. 83 Solar sail in test bench.
At present day, the following types of sensors are the most commonly used: - Star sensors (Star trackers) - Sun sensors - Earth sensors - Horizon sensors - Magnetic sensors - Inertial sensors (INS, IMU)
At present day, the following types of actuators are the most commonly used: - Momentum wheels (MW) - Reaction wheels (RW) - Thrusters - Magnetic torquers
8.4.3 Propulsión (Space propulsion) Los propulsores se emplean para la ejecución de maniobras de cambio de órbita o de actitud, control de órbita (corrección de perturbaciones que alejan al vehículo de su órbita nominal) y propulsión en misiones de exploración. Existe un gran número de técnicas para la propulsión en el espacio, pero muchas de ellas sólo están en fase conceptual o experimental i rara o ninguna vez se han utilizado. Las técnicas más comunes siguen siendo las de propulsión química: motores cohete de combustible sólido o líquido, etc., en los que la magnitud de los impulsos y el tipo de combustible seleccionado dependen de muchos parámetros. Tras algunas misiones de demostración, se empieza a considerar seriamente el uso de los electric propulsion systems (GIT (see Fig. 84) y Hall Thrusters).

130
Fig. 84 Sketch of a GIT (Gridded Ion Thruster), an electric propulsion system (in particular,
included in the so-called electrostatic propulsion systems).
8.4.4 Energía o potencia
Subsistema encargado de la generación de energía eléctrica, el almacenamiento de la misma (mediante baterías) y la distribución (mediante cableado) para la alimentación de los equipos embarcados que así lo necesiten. La energía eléctrica para el funcionamiento de todos los subsistemas que constituyen la plataforma y la carga útil se puede obtener de diferentes fuentes. Una fuente clásica es el Sol, aunque se debe tener en cuenta que la potencia obtenible por unidad de área cae a medida que crece la distancia él (idealmente va con 1/r2 siendo r la distancia al centro del Sol).
Mediante paneles solares compuestos de células fotovoltaicas (e.g. de silicio Si, germanio Ge, GaAs) se transforma la energía de los fotones en energía eléctrica apta para el consumo de los equipos a bordo. Esta fuente se emplea en la mayoría de casos para vehículos que operan en regiones no muy alejadas del Sol (see Fig. 85). Se dedican grandes esfuerzos de I+D en mejorar el rendimiento de los paneles para obtener la máxima energía posible. Hoy en día, los paneles tienen unos rendimientos alrededor de 10-30%, y son capaces de proporcionar, por ejemplo, una potencia de 100-150 W/m2 en las proximidades de la Tierra. En referencia al diseño del sistema de energía, es muy importante conocer la potencia máxima necesaria para los equipos abordo, ya que afecta decisivamente al diseño (e.g. superficie de los paneles, tiempo de exposición de los paneles al Sol, ángulos de incidencia, si están fijos, etc.). En algunos casos, los paneles son orientables (con la complejidad mecánica que ello conlleva) para garantizar un ángulo de incidencia óptimo y la máxima exposición. Es interesante destacar, por ejemplo, que el valor de la potencia mínima imprescindible para que sea posible la vida en un vehículo espacial (la mínima que necesita el sistema de soporte de vida ECLSS) está entorno a los 2000 W por persona, lo que por tanto supone una superficie mínima de paneles solares de 20 m2 por persona.

131
Fig. 85 Visión artística de la estación espacial internacional ISS, donde se puede apreciar
claramente los paneles solares y radiadores.
Las baterías se deberán cargar durante las fases en que los paneles estén iluminados y deberán garantizar un suministro eléctrico adecuado a las necesidades del S/C en las fases en que los paneles no estén iluminados.
Otra fuente de energía es el generador termoeléctrico de radioisótopos (RTG, Radioisotope Thermoelectric Generator), donde el calor generado por la desintegración de un material radioactivo se transforma en energía eléctrica mediante un dispositivo Peltier-Seebeck. Esta fuente de energía se emplea habitualmente para vehículos en misiones tales que deben operar en zonas alejadas del entorno solar, en las que el suministro de energía eléctrica producido por paneles solares sería insuficiente. Es un método controvertido por el rechazo social a las formas de energía nuclear y la preocupación por la radiación y contaminación.
8.4.5 Control térmico (Thermal control)
El subsistema de control térmico se encarga de mantener cada elemento a bordo del vehículo dentro de los márgenes de temperatura adecuados para su correcto funcionamiento. Las regiones más frías del espacio pueden llegar a temperaturas entre los 3 y los 7 K, muy próximas al cero absoluto. En las proximidades de la Tierra las temperaturas no son tan bajas, pero las condiciones resultan igualmente extremas para los componentes a bordo. Las temperaturas de estos componentes pueden oscilar aproximadamente entre valores de -180ºC, para componentes o zonas no iluminadas por el Sol, y +120ºC, para las zonas que sí están iluminadas. En misiones a planetas más próximos al Sol, la intensidad UV puede llegar a ser 10 o más veces la que hay en órbitas terrestres típicas y las temperaturas superficiales del S/C en las zonas iluminadas pueden alcanzar los 400ºC. Ello conduce a gradientes térmicos muy importantes entre las zonas que están en sombra y las que no lo están. Por otro lado, la evacuación de calor de los componentes en el espacio sólo es posible mediante conducción (transmisión de calor entre componentes en contacto directo) y radiación (evacuación

132
de calor por emisión de radiación electromagnética al vacío). La transferencia de calor al exterior por convección no es posible dada la ausencia de atmósfera en el espacio.
Los métodos de control térmico pueden ser de tipo pasivo o activo. Dentro del primer grupo, los pasivos, se incluyen técnicas como las que siguen:
- Selección de materiales: Adecuada selección de los materiales de los componentes embarcados, los revestimientos y/o las pinturas (see Fig. 86) en función de sus propiedades termo-ópticas: coeficiente de conducción térmica29 k, índice de absorción30 a (absorptance), índice de reflectancia31 (reflectance), índice de emisividad32 e (emittance o emissivity), etc. Por poner un ejemplo, el ratio absorptance frente a emittance, es el parámetro crítico en la determinación de la temperatura superficial en una zona iluminada por el Sol.
- Circuitos térmicos: Adecuado diseño de circuitos hechos de materiales que son muy buenos conductores del calor, para transporte del calor de los componentes o zonas a alta temperatura (e.g. los procesadores) hacia aquellos a baja temperatura o hacia radiadores para su evacuación al vacío (see Fig. 85).
- Radiadores: Los radiadores son dispositivos hechos de materiales de muy bajo ratio absorptance frente a emittance, que por tanto tienen alta capacidad de evacuación de calor por radiación.
Dentro del segundo grupo, los de tipo activo (que son más complejos y costosos), se incluyen técnicas como las que siguen:
- Circuitos calentadores (o sistemas de calefacción) - Dispositivos enfriadores criogénicos
8.4.6 Telemetría y telemando (TTC, Telemetry, Tracking and Command)
Subsistema que permite la transmisión bi-direccional (uplink y downlink) de información entre el segmento tierra y el segmento espacial. Dentro del enlace descendente cabe destacar la transferencia de datos recabados por la carga de pago (payload data) y datos referentes al estado del vehículo y el funcionamiento de sus sistemas (housekeeping data). En el enlace ascendente cabe destacar la transmisión de órdenes (telecommand).
29 The thermal conduction coefficient is a heat transport coefficient which characterizes the ability of a material to transport heat by conduction. 30 Absorptance is the non-dimensional ratio of electromagnetic radiant energy absorbed by a body to the total electromagnetic radiant energy incident on it. 31 Reflectance is the non-dimensional ratio of the electromagnetic radiant energy reflected by a body to the total electromagnetic radiant energy incident on it. 32 Emittance or emissivity is the non-dimensional ratio of the electromagnetic radiant energy emitted from an object at a particular temperature and wavelength to the electromagnetic radiant energy that a blackbody (the perfect emitter) would emit at that same temperature and wavelength. Thus a surface with an emissivity equal to 1.0 is a blackbody.

133
Fig. 86 S/C en el que se puede apreciar claramente los diferentes revestimientos para control térmico pasivo.
8.4.7 Gestión de datos (Data handling)
Subsistema para el tratamiento de datos: pre-procesado, almacenamiento, codificación y compresión de datos previamente a su emisión en el downlink, etc. Algunos vehículos espaciales realizan un pre-proceso de los datos adquiridos por la carga de pago antes de ser enviados a la Tierra, otros simplemente mandan todos los datos recabados, etc.
8.4.8 Environmental Control and Life Support System (ECLSS)
Only present in human space missions, the Environmental Control and Life Support System (ECLSS) is the system in charge of guaranteeing the survivability for the human crew and providing the necessary environmental conditions to maintain the health and performance of the crew, so as it can accomplish its mission. Among others, it provides a breathable atmosphere (with appropriate conditions as regards to humidity, pressure, temperature, composition of the air), allows waste processing and recycling, etc.
8.4.9 Integración mecánica y eléctrica Resto de elementos de la plataforma. Elementos mecánicos y eléctricos que no se incluyen en los anteriores subsistemas.

134
8.5 REFERENCES [1] Astorg, J.M., Bec, R., Bernard-Lepine, C., de Groote, K., & Amouroux, F. (2007). PERSEUS:
A Nanosatellite Launch System Project Focusing on Innovation and Education, IAC-07-E1.I.01, Paper presented at the 58th International Astronautical Congress, Hyderabad, India.
[2] Brown, C.D. Spacecraft Mission Design. 2ªed. Virginia: AIAA Educational Series, 1998. ISBN
1-56347-262-7 [3] Dupont, C., Bullock, M., Prevost, M., Maisonneuve, Y., Bec, R., Pillet, N., & Barenes, R.
(2006). The PERSEUS Student Launcher Project & Associated Hybrid Propulsion Activities, AIAA 2006-4317. Paper presented at the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Sacramento, California, USA.
[4] Fortescue, P.W., Stark, J., & Swinerd, G. (Ed.). (2003). Spacecraft Systems Engineering,
John Wiley & Sons, 3rd ed. [5] Larson, W.J., & Pranke, L.K. (Ed.). (2000). Human Space Flight – Mission & Analysis.
McGraw-Hill Companies, New York, NY, USA. [6] Schneider, S.P., & Sullivan, J.P. (1992). Aerodynamics Laboratory Education at Purdue
University; Ground Testing Facilities, AIAA 92 4018. Paper presented at the 17th AIAA Aerospace Ground Testing Conference, Nashville, Tennessee, USA.
[7] Tajmar, M. (2003). Advanced Space Propulsion Systems. Springer Cop, New York, NY,
USA. [8] Turner, M.J.L., Rocket and Spacecraft Propulsion, Ed. Springer. [9] Wertz, J.R., & Larson, W.J. (Ed.). (1999). Space Mission Analysis & Design, Kluwer
Academic Cop., 3rd ed. Dordrecht, The Netherlands.

135
9 CHAPTER 9: AEROSPACE MATERIALS
9.1 TYPES OF MATERIALS Los tipos de materiales que se pueden encontrar en ingeniería son los que se listan a continuación:
- Metales - Cerámicos - Polímeros - Materiales compuestos (Composites) - Semiconductores
9.1.1 Metals
Dentro de los metales se incluyen todos aquellos materiales (cristalinos o amorfos) formados por uno o más elementos metálicos. Un material en el que sólo existe un elemento metálico recibe el nombre de metal puro, mientras que un material formado por la combinación de dos o más elementos metálicos recibe el nombre de aleación.
En un metal, el tipo de enlace entre los átomos que lo componen se conoce como enlace metálico, y se caracteriza por el hecho que los electrones no pertenecen a ningún átomo en particular. En lugar de eso, se encuentran deslocalizados formando una distribución compartida de electrones, también llamada nube o gas de electrones. Las propiedades que en general caracterizan a los metales son las siguientes:
- Conductividad térmica y eléctrica: Un metal es buen conductor del calor y de la electricidad debido precisamente a la deslocalización de los electrones y a la amplia libertad de movimientos de la que gozan.
- Resistencia mecánica:
Los metales son capaces de resistir esfuerzos (tensiones) elevados. Se considera que son materiales resistentes (en la Fig. 90 se muestran valores de resistencia a tracción).
- Plasticidad (ductilidad):
Los metales son por lo general materiales dúctiles: tienen la capacidad de deformarse plásticamente33 al ser sometidos a esfuerzos importantes y son capaces de experimentar grandes deformaciones plásticas sin romperse.
- Tenacidad a la fractura: Los metales presentan buena resistencia a la propagación de grietas y a cargas severas de impacto, gracias a su ductilidad.
- Brillo metálico:
La superficie recién cortada de un metal presenta un brillo característico. Las propiedades mecánicas de los metales los hacen muy indicados para desarrollar funciones estructurales34. Las aleaciones habitualmente empleadas en ingeniería incluyen los hierros, los
33 La deformación plástica es aquella deformación de tipo permanente o irreversible.

136
aceros (hierro y carbono), las aleaciones de aluminio, las de magnesio, las de titanio, las de níquel, las de zinc, las de cobre, los latones (aleaciones de cobre y zinc) y los bronces (aleaciones de cobre y estaño). Los metales más utilizados en la industria aeronáutica han sido aleaciones de aluminio (e.g. paneles de revestimiento del fuselaje, ala, etc.), acero y aleaciones de titanio (e.g. pylons35, tren de aterrizaje, anclajes) y super-aleaciones de níquel (e.g. álabes de turbina).
9.1.2 Ceramics
Los materiales cerámicos son compuestos químicos cristalinos constituidos por elementos metálicos y elementos no metálicos. Los enlaces predominantes entre los diferentes componentes son los enlaces híbridos iónicos y covalentes. En los primeros se produce transferencia de electrones de valencia entre átomos, con lo que el enlace se debe a las fuerzas de atracción de Coulomb, por quedar los átomos con cargas eléctricas opuestas; y en los segundos se produce la compartición de electrones de valencia entre átomos adyacentes, que quedan enlazados por este vínculo. Las propiedades que generalmente caracterizan a los cerámicos son las siguientes:
- Estabilidad química: Los cerámicos tienen mayor estabilidad química que los metales (son menos reactivos porque sus enlaces son más estables, más difíciles de romper), o lo que es igual, son más resistentes al ataque químico y a los ambientes agresivos.
- Refractarios (muy baja conductividad térmica):
Los cerámicos son materiales refractarios: pueden actuar como aislantes térmicos y pueden trabajar y ofrecer propiedades aceptables a altas temperaturas, dado que sus puntos de fusión son muy elevados. Un ejemplo de la utilidad de esta propiedad son los escudos térmicos de vehículos espaciales, formados por losetas cerámicas, que les permiten resistir las altas temperaturas debidas a la fricción con la atmósfera en la reentrada a la Tierra.
- Aislantes eléctricos (muy baja conductividad eléctrica): Los cerámicos son malos conductores de la electricidad por la alta energía necesaria para liberar sus electrones, y por ello se emplean habitualmente como aislantes eléctricos.
- Fragilidad y baja tenacidad a la fractura: Los cerámicos son materiales frágiles, no tienen prácticamente capacidad de deformarse plásticamente al ser sometidos a esfuerzos grandes, y se rompen antes de experimentar grandes deformaciones plásticas. Su resistencia a propagación de grietas y a cargas severas de impacto es baja.
A pesar de sus buenas propiedades químicas y propiedades a altas temperaturas, los cerámicos no son aptos para multitud de aplicaciones estructurales debido a su gran fragilidad, que se traduce en una escasa resistencia a la propagación de grietas y en la incapacidad de soportar cargas severas de impacto o grandes deformaciones sin romperse. Desde el punto de vista comercial, los materiales cerámicos más relevantes son aquellos en los que el elemento no metálico es el oxígeno (óxidos, e.g. la alúmina, sílice, etc.), el carbono (carburos) o el nitrógeno (nitruros). En aeronáutica se utilizan cerámicos para protección contra corrosión (e.g. capa de alúmina en el Alclad) o para protección térmica (e.g. álabes de turbina, tiles36 para reentrada segura del STS37).
34 Un componente desarrolla una función estructural cuando en una estructura soporta cargas primarias, de modo que, si el componente se rompe, la estructura se colapsa (sufre un fallo catastrófico). 35 Los pylons son los elementos que unen los motores al ala. 36 Losetas cerámicas empleadas en el STS para la protección contra las altas temperaturas que se producen en la superficie del vehículo, en la reentrada atmosférica, debido a la fricción con el aire a alta velocidad. 37 El STS es el Space Transportation System, formado por el Orbiter (conocido popularmente como Space Shuttle) y las demás etapas (principal y Solid Rocket Boosters) para la misión de lanzamiento.

137
9.1.3 Polymers
Los polímeros (también llamados plásticos) son compuestos artificiales o sintéticos que se incluyen en la química orgánica, puesto que son compuestos basados en el carbono y el hidrógeno (por eso se habla de hidrocarburos) y otros elementos no metálicos. Las moléculas de los polímeros son cadenas muy extensas que se obtienen por unión de muchos monómeros (moléculas individuales de hidrocarburo). El enlace entre los monómeros es covalente, pero entre las secciones vecinas de las largas cadenas moleculares sólo existen enlaces débiles secundarios (enlaces de Van der Waals, que son enlaces físicos). En este tipo de enlace no existe transferencia o compartición de electrones, sino que el enlace débil se debe a fuerzas de atracción de Coulomb entre cargas opuestas de las secciones vecinas. Las propiedades que generalmente caracterizan a los polímeros son las siguientes:
- Plasticidad (ductilidad): Los polímeros son por lo general materiales muy dúctiles: tienen una gran capacidad de deformarse plásticamente al ser sometidos a esfuerzos y son capaces de experimentar grandes deformaciones plásticas antes de romperse.
- Baja densidad: Los polímeros suelen ser materiales muy ligeros (ver Fig. 87).
- Baja conductividad eléctrica
- Baja estabilidad química
- Baja resistencia y bajo punto de fusión: La pobre rigidez y resistencia mecánica (ver Fig. 88 y 90), y el bajo punto de fusión de los polímeros se debe a que el enlace entre las moléculas es débil.
Por sus propiedades, los polímeros pueden constituir en algunos casos alternativas de bajo coste o de baja densidad frente a los metales en algunas aplicaciones estructurales. Aunque no se suelen utilizar en aeronáutica con esos propósitos, sino que se utilizan, por ejemplo, para la construcción de elementos de interior de cabina.
9.1.4 Composites
Los materiales compuestos (composites) se obtienen por la combinación de al menos dos materiales de las categorías previas. El objetivo que se persigue con la combinación de materiales es la obtención de un material compuesto con propiedades mejoradas (acción estructural) o incluso inexistentes con respecto a las propiedades que poseen los materiales constituyentes de forma individual (acción sustancial). Un buen composite reúne las mejores propiedades de cada componente y es un producto superior a cada uno de ellos por separado. En general, en los composites se puede distinguir un material que actúa como matriz o aglutinante y otro que actúa como refuerzo o fibra. Por ejemplo antiguamente se empleaba composites para construir casas, como el adobe (barro o bostas y paja) o la madera (fibras de celulosa en una matriz de lignina). Los composites de uso más extendido en aeronáutica actualmente son los de matriz polimérica (epoxy) reforzada con fibras de carbono (CFRP) o fibras de vidrio (GFRP), el GLARE (GLAss-REinforced Fibre Metal Laminate (FML)), Arall y Carall (láminas de aluminio y composites) etc. con importantes aplicaciones estructurales. Aunque hoy en día se están desarrollando y empezando a emplear nuevos composites con matrices metálicas y matrices cerámicas.

138
9.1.5 Semiconductors
Los materiales semiconductores son un grupo de elementos y compuestos que tienen la propiedad eléctrica de la semi-conducción: no son ni buenos conductores eléctricos ni buenos aislantes eléctricos, sino que tienen una capacidad de conducción eléctrica intermedia entre los materiales conductores y los aislantes. El silicio y el germanio son ejemplos de este tipo de materiales, en los que el control de su pureza química, esto es, el control de la cantidad y tipo de impurezas presentes, permite seleccionar sus propiedades electrónicas, que los hacen aptos para la construcción de circuitos integrados. En el proceso de producción de semiconductores basados en Si y Ge, estos materiales, que son tetravalentes, se dopan con impurezas que consisten en átomos de galio trivalentes o de arsénico pentavalentes, y que provocan que haya defecto o exceso de electrones.
9.2 SELECTION OF MATERIALS La selección de materiales contempla el proceso de determinación del material más apropiado para desarrollar una función. Se parte de unas especificaciones iniciales y se evalúa en qué medida las satisfacen los materiales existentes. En las Fig. 87 a 90 se pueden ver a modo de ejemplo los valores de las propiedades de diferentes materiales, clasificados por tipos.
Fig. 87 Tabla comparativa de la densidad ρ de diferentes materiales.

139
El primer paso es elegir el tipo de material más apropiado y el segundo paso consiste en averiguar qué material de los que se incluyen en el tipo elegido se ajusta mejor a las necesidades. La selección final entre los distintos candidatos posibles obedece a los resultados de un estudio comparativo, en el que se obtienen las puntuaciones ponderadas de cada uno de los candidatos con respecto a determinados parámetros (e.g. propiedades mecánicas, coste) de evaluación. Existen diferentes criterios de selección que pueden condicionar el peso relativo o importancia de cada uno de estos parámetros.
Fig. 88 Tabla comparativa del módulo de Young (E) de diferentes materiales. Al final, como muchas veces sucede en ingeniería, el material seleccionado será una solución de compromiso entre la mejor solución (aquél material con unas propiedades netamente superiores a los otros candidatos pero que es excesivamente caro) y un material con un precio más razonable y unas propiedades aceptables.
9.3 ALUMINIUM ALLOYS En los inicios de la aviación los materiales fundamentales en la construcción de aeronaves eran la madera, las telas, las cuerdas y los cables. Los metales se hallaban escasamente presentes debido a su elevada densidad y peso. Durante la Primera Guerra Mundial, y especialmente tras

140
ella, se empieza a emplear el aluminio38 y sus aleaciones, que pronto se erige en un material básico para el sector aeronáutico gracias a sus propiedades, desplazando a la madera.
Fig. 89 Tabla comparativa del límite elástico de diferentes materiales.
9.3.1 Properties of aluminium
A continuación se presenta la Tabla 3.1 en la que aparecen algunas de las propiedades del aluminio en estado puro, con una valoración de las mismas desde el punto de vista aeronáutico. Justificación de la valoración de las propiedades del aluminio:
- Tipo de red cristalina:
El hecho que la red cristalina sea cúbica centrada en las caras (fcc o CF4) (ver Fig. 92) le otorga alta plasticidad (ductilidad), que es la capacidad de deformarse plásticamente al ser sometido a un esfuerzo elevado. Esta característica es una ventaja puesto que hace del aluminio un material resistente a la propagación de grietas y con tendencia a la rotura dúctil
38 El aluminio había sido producido por primera vez el año 1825 por H. Oersted. En 1856 se inició tímidamente su producción industrial en Nanterre. Pero no fue hasta 1888 que se instalaron las primeras fábricas en EEUU, Francia y Suiza que empleaban el recién desarrollado método de producción de aluminio mediante electrólisis de alúmina fundida.

141
a temperatura ambiente, menos catastrófica que la rotura frágil (sin embargo, a unas temperaturas suficientemente bajas, podría sufrir rotura frágil).
Fig. 90 Tabla comparativa de la resistencia a tracción (TS) de diferentes materiales.
Propiedad Valor Unidades Valoración Red cristalina fcc - bueno Densidad 2700 kg/m3 bueno T de fusión 660 ºC malo T de ebullición 2520 ºC - Calor específico 894 J/K·kg - Coef. de dilatación 22.5e-6 1/K - Conductividad térmica 222 W/m·K - Ratio óxido-metal 1.3 - bueno Resistencia a corrosión - - bueno Módulo de elasticidad 72.2 GPa malo Resistencia a tracción 300 MPa malo Coste económico 6-12 €/kg bueno
Fig. 91 Propiedades del aluminio en estado puro.

142
Fig. 92 Celdilla unidad de la red cristalina cúbica centrada en las caras.
- Densidad:
La baja densidad del Al justifica su uso en el sector aeronáutico, en el que la minimización del peso es un factor crítico. A pesar de la mediocridad de sus propiedades mecánicas con carácter general, estas mismas propiedades tienen valores específicos buenos, esto es, cuando se calculan en relación a la densidad o peso del material en cuestión.
- Temperatura de fusión:
Excesivamente baja para ciertas aplicaciones en las que el aluminio puede experimentar elevadas temperaturas por fricción, proximidad de puntos calientes, etc. Puede conducir a la aparición de fenómenos de termo-fluencia, consistente en la deformación excesiva y rotura de un material cuando soporta cargas a temperaturas relativamente elevadas, incluso cuando la carga a la que está sometido es muy inferior a su resistencia mecánica.
- Ratio volumen de óxido frente a volumen de metal:
La oxidación de los metales es en muchos casos inevitable: el oxígeno reacciona con el metal y produce la formación de una capa superficial de óxido. El ratio de volumen de óxido formado frente al volumen de metal consumido se llama Relación de Pilling-Bedworth R. Su importancia radica en el hecho que determina el tipo de capa de óxido que se forma: I. Para valores de R menores que 1, la capa de óxido sobre el metal es discontinua y
nunca recubre todo el metal, con lo que el ataque del oxígeno prosigue indefinidamente.
II. Para valores de R iguales o ligeramente mayores que 1 la capa de óxido sobre el
metal es continua, luego al cabo de un rato el óxido recubre y protege el metal, y produce el efecto beneficioso de detener el ataque u oxidación (es el caso del aluminio y su capa de óxido, la alúmina, Al2O3, en el Alclad).
III. Para valores de R mucho mayores que 1 la capa también es continua e
inicialmente recubre el metal, pero su volumen es comparativamente tan grande que se puede producir fractura y descascarillado de la misma (como consecuencia de la aparición de tensiones importantes), con la consiguiente pérdida de la protección frente al ataque u oxidación.

143
- Resistencia a corrosión: Por lo general, el aluminio puro presenta buena resistencia frente a varios tipos de corrosión existente. Cuando se alea con otros metales para mejorar sus propiedades mecánicas, su resistencia a corrosión puede empeorar significativamente.
- Módulo de elasticidad:
El módulo de elasticidad del aluminio es bajo en relación a otros metales. - Resistencia a tracción:
La resistencia a tracción del aluminio es baja en relación a otros metales. - Coste económico:
El aluminio es relativamente barato, su coste es de entre 6 y 12 €/kg.
9.3.2 Aluminium alloys in aeronautics
Las aleaciones de aluminio más empleadas en el sector aeronáutico son: - Aleaciones de la serie/familia 2000:
Aleaciones de aluminio, cobre y magnesio como aleantes más importantes (el cobre es el elemento que se encuentra en mayor proporción tras el aluminio). En general, en esta serie se pueden encontrar las aleaciones con mejor resistencia a fatiga, mayor resistencia a propagación de grieta y mayor tenacidad a fractura.
- Aleaciones de la serie/familia 6000:
Aleaciones de aluminio y magnesio y silicio como aleantes más importantes (el magnesio es el elemento que se encuentra en mayor proporción tras el aluminio).
- Aleaciones de la serie/familia 7000: Aleaciones de aluminio, zinc y magnesio como aleantes más importantes (el zinc es el elemento que se encuentra en mayor proporción tras el aluminio). En general, en esta serie se encuentran las aleaciones más resistentes, es decir, aquéllas que presentan mayor dureza, resistencia a tracción, etc.
A continuación, en la Fig. 93, se puede apreciar las especificaciones que deben cumplir los materiales que constituyen los diferentes elementos de una aeronave dependiendo de las condiciones de trabajo de los mismos. Por otro lado, en la Fig. 94 y 96, se puede apreciar también las diferentes soluciones adoptadas por los fabricantes para satisfacer tales solicitudes. En la Fig. 95 se puede apreciar la evolución histórica de la aleación empleada en el extradós del ala, y el valor de su resistencia en porcentaje de la máxima alcanzada hasta la fecha para un aluminio.
9.3.3 Methods for hardening of aluminium Aluminium is a metal with face-centred cubic (fcc) crystal structure. Consequently, aluminium admits significant plastic deformation, i.e. it is very ductile. El aluminio en estado puro presenta baja dureza, resistencia a tracción y módulo de elasticidad (ver Sección 9.3.1) en relación a otros metales, por lo que resulta imprescindible endurecerlo si se pretende emplearlo en algún tipo de aplicación estructural en aeronáutica. Los métodos que se emplean para lograr el endurecimiento del aluminio son los siguientes:

144
- Endurecimiento por acritud: Se aplica a una deformación plástica al aluminio (proceso conocido como endurecimiento por acritud), que produce los siguientes efectos en las propiedades mecánicas del mismo: I. Incremento significativo del límite elástico y la dureza II. Incremento de la resistencia a tracción III. Apreciable pérdida de plasticidad IV. Apreciable pérdida de tenacidad a la fractura
Fig. 93 Ejemplo de solicitaciones (especificaciones) estructurales en los diferentes elementos.
Fig. 94 Aleaciones empleadas en los diferentes elementos del avión DC-10.

145
Fig. 95 Evolución histórica de la aleación empleada en el extradós del ala.
Fig. 96 Aleaciones empleadas en los diferentes elementos del avión B777.
- Endurecimiento mediante tratamiento de precipitación:
En este método, se parte de una solución sobresaturada de aluminio (solvente) y los aleantes (solutos) adecuados, obtenida a altas temperaturas. Tras un enfriamiento a suficiente velocidad (e.g. temple en agua) y un tratamiento térmico de curado natural o artificial y controlado (e.g. annealing), se logra una micro-estructura del aluminio con

146
precipitados que proporciona las propiedades mecánicas deseadas dentro de ciertos límites.
Según la Norma UNE EN 515, la designación de los estados de tratamiento básicos en el aluminio son los siguientes:
F para el Al en estado bruto de fabricación. O para el Al en estado de recocido. H para el Al endurecido por acritud. T para el Al con tratamiento térmico de endurecimiento estructural. W para el Al que ha recibido un tratamiento térmico de solución.
Precipitation or age hardening was discovered thanks to the aluminium alloy hardness increase with time at RT after quenching. This was first attributed to a precipitation effect and was extremely important for it pointed the way to development of a whole host of precipitation-hardened alloys. It was correctly pointed out that the solubility of copper in aluminium decreases markedly on cooling and that quenching gives a supersaturated solid solution. The change in solubility with temperature in the terminal solid solution is typical for age-hardening systems. At room temperature the stable state of an aluminium-2 atom percent copper alloy is an aluminium-rich solid solution (α) and an intermetallic phase with a tetragonal crystal structure having nominal composition CuAl2 (θ). According to the suggestion of these authors, fine particles of θ (and similar precipitates in other systems) form during aging. These were visualized to lie astride and key the slip planes, a proposal put forth by Jeffries and Archer. However, with the treatment to give maximum hardness, in general precipitate particles are not visible with the highest-resolution light microscope. When the particles are visible the alloy has over-aged. Not only is the hardness less in the over-aged state but usually the alloy is very much less ductile compared to maximum hardness. The mystery was solved first in aluminium-copper alloys independently by Guinier and Preston in 1937 by careful X-ray diffraction work. Diffuse scattering occurs outside but associated with the Bragg reflections of the solid solution, and these are due to regions in the matrix solid solution enriched in solute atoms. Small solute-enriched regions in a solid solution where the lattice is identical or somewhat perturbed from that of the solid solution are called Guinier-Preston zones. Precipitation in Al-Cu Alloys In aluminium-2 atom percent copper, four different precipitates occur and each may be made to form by controlling the heat treatment. The occurrence of metastable precipitates is quite common in precipitation-hardening alloys. Typical system for describing in details the sequence of events is aluminium-copper although the phenomena mentioned here occur in many other systems. Guinier-Preston zones of the first kind (GP-I) are plates of copper atoms one or two atoms thick and commonly 25 atoms in diameter oriented parallel to {100} planes in the aluminium-rich matrix. Since the sizes of copper and aluminium atoms differ by about 12 per cent, the lattice is distorted in the regions of the zones. As a matter of fact, the zones here form as thin platelets to minimize strain energy. They form parallel to {100} because the elastic modulus is least in this direction. GP-I forms at room temperature and is the first precipitate to form at 100°C. It is not stable at 210°C; GP-1 formed at a lower temperature rapidly dissolves in about 30 seconded if the metal is heated to 210°C. This is called reversion or retrogression. Guinier-Preston zones of the second kind (GP-II) are thicker (10 atoms) and of larger diameter (75 atoms) than GP-I, but they are not just big GP-I precipitates. In GP-II an ordering of aluminium and copper atoms occurs to give an average composition of about Cu2Al5. GP-II is the second precipitate to form at, say, 130°C or the first at 210°C. The strongest aluminium-2 atom percent copper at room temperature contains mainly GP-II.

147
θ’ is a third metastable precipitate. It has the nominal composition CuAl2 and is tetragonal with a lattice distorted from θ so that it may form nearly coherently or epitaxially with the aluminium-rich matrix. It forms in the matrix in a Widmenstatten pattern. The arrangements of atoms in the interface or habit plane are nearly identical in θ’ and the matrix. θ’ begins to form later than GP-II at 130 or 210°C. Actually all types of precipitates may give hardening but GP zones and ordinary precipitates with some degree of coherency give greater hardening. In some systems, maximum precipitate on hardening occurs with GP zones (aluminium-copper and aluminium-zinc); in some systems maximum hardening occurs with a coherent ordinary precipitate (nickel-titanium, aluminium; nickel, chromium-titanium, aluminium; and aluminium-silver). Guinier divides GP zones into two classes: ideal and nonideal. The atomic sizes of zinc and silver differ little from that of aluminium. With these, the lattice of the aluminium-rich matrix is not distorted very much in the region of the zones, which are spherical in shape. These are classed as ideal zones. The zones in aluminium-copper are an example of non-ideal zones. An important consideration is why metastable precipitates such as GP zones and θ’ should form at low temperatures, rather than the stable precipitate. The answer lies in the theory of nucleation and diffusion-controlled growth. In these cases a large surface energy exists between the stable phase and the matrix, but the GP zone is a perturbation of the matrix and the surface energy is small, indention is difficult for the former, easy for the latter. Very little diffusion is required to nucleate a GP zone. A large number of small part ides are able to form during the quench from the solution-treating temperature and on the subsequent low-temperature precipitation heat treatment. Quenched-in vacancies play an important role in facilitating diffusion. If extra vacancies are present -- they may be put in by quenching, irradiation or cold work -- diffusion processes take place at very low temperatures. Some age-hardening alloys (copper-beryllium) do not develop full hardness unless they are cold-worked before aging. The free energy of the system may, of course, be further lowered if the metastable precipitate is replaced by the stable (or a more stable) precipitate. This occurs if the temperature is raised. Interaction of Dislocation and Precipitate Discussion about the various precipitates in aluminium-copper showed that the problem which must be considered to understand precipitation hardening is the interaction of a dislocation with a field of obstacles. The obstacles of primary interest here are precipitates defined broadly to include Guinier-Preston zones and metastable second phases as well as stable phases. Consider a row of such obstacles and a dislocation moving on a slip plane. For slip to occur, the dislocation must either move around the particles or through the particles. An active dislocation will select from the various paths available to it the path where the least energy is expanded. The dislocation may avoid the particles or obstacles by leaving the slip plane in the vicinity of each particle, or it may avoid the particles by the Orowan mechanism. In this mechanism, the dislocation bends between the particles leaving a dislocation ring about each particle. In either case, energy must be supplied to increase the total length of dislocation line; the stress required is, neglecting a numerical factor, roughly (Gb)/ L where G is the shear modulus, b is the Burgers vector, and L is the spacing between obstacles. Cutting of Particles by Dislocations In all age-hardened or precipitation-hardened alloys, the particles are generally cut during plastic deformation when the metal is aged to maximum hardness; avoiding of the particles corresponds to the overaged state.

148
For a dislocation to move through a particle, energy must be supplied for three basic processes, which may be involved in the cutting. * First, if the particle is formed by a solid-state reaction or if there is a difference in coefficient of expansion, there may be elastic misfit stresses between the particle and the matrix since the particle will generally occupy a different volume than the parent phase it replaced. * Second, the surface area of the particle is increased by cutting it and slipping the two halves. * Third, the flow stress for moving a dislocation inside the particle may be larger than that in the matrix. However, we will first briefly mention dislocation pinning effects due to the presence of particles. Dislocations may catalyze precipitation, and then precipitates may form at dislocations. This is thought to be the source of the yield drop commonly observed in iron and mild steel. Yield-drop effects are not commonly observed in precipitation-hardened alloys with GP zones or with a general distribution of precipitates. Strengthening by Elastic Misfit Stresses The importance of elastic misfit strains in age hardening has long been recognized going back to Rosenhain. Transition phases such as θ’ in aluminium-copper or γ’ in nickel-base alloys form with close matching across the habit or interface plane. The lattice must be strained to give matching. Very large equivalent stresses may be computed if the mismatch is assumed to be taken up completely by strain. Recently was shown that the maximum precipitation hardening in nickel-base aluminium-titanium alloys from γ’ occurs at the proportion of aluminium to titanium giving the largest difference in lattice parameter between the precipitate (at large particle size) and matrix. The dislocation theory of the strengthening from misfitting precipitates is due to Mott and Nabarro. Consider first that particles are so closely spaced that the dislocation must move essentially as a rigid line, that is, the maximum bending of the dislocation between particles is negligible. The minimum radius of curvature to which a dislocation may be bent under the applied stress is larger than the spacing between particles on the slip plane. Depending on the relative orientation of the dislocation and precipitate, the internal stress will aid dislocation motion or hinder dislocation motion. The sum-total effect on a length of dislocation which is long compared to the spacing is zero; no strengthening is predicted to a first approximation. The situation is analogous to a solid solution. Second, Mott and Nabarro considered the case where the particle spacing is not negligible compared to the minimum radius of curvature of the dislocation, but are of the same order of magnitude. The dislocation will tend to be wavy, assuming a position in the stress fields of the particles, which minimizes the total self-energy of the dislocation. The dislocation does not assume exactly the position corresponding to the minimum self-energy per unit length, but the dislocation is shortened a little by the line tension of the dislocation. Strengthening from Modulus Change It was pointed out that variation of the elastic module between the precipitate and matrix may be a source of strengthening. A general theory of stresses about particles must include misfit as well as variation in the elastic module. Further, the self-energy of the dislocation depends on G; therefore, if G of the particle is larger than that of the matrix, an extra stress will be required to force the dislocation through the particle. The point values of the module will be functions of local composition since the module are related to the second derivatives of the interatomic interaction energies with respect to interatomic distance. Anisotropy in the elastic constants must also be taken into consideration. Cyclic response curves comprise the following stages {{469 Srivatsan,T.S. 2001}}:

149
rapid initial hardening during first loading cycles due to a rapid increase in dislocation density and conjoint influence of dislocation-microstructure and dislocation-dislocation interactions,
progressive hardening or strengthening for most of fatigue life, and a rapid drop in cyclic stress carrying capability, attributed to growth and coalescence of
microscopic cracks to form macroscopic cracks, and growth of these through the microstructure.
The intrinsic micro-mechanisms responsible for the stress behaviour (e.g. stress amplitude increase during fatigue cycling) and fracture behaviour are due to competing and synergistic influences of intrinsic microstructural effects and dislocation-microstructure interactions (e.g. dislocation-dislocation and dislocation-second-phase particle interactions) during cyclic straining. At 27°C, hardening contributions dominate over softening occurring from dislocation-precipitate particle interaction resulting in progressive shearing and/or disordering of the precipitates. Continuing cyclic straining results in dislocation concentration at: 1) coarse second-phase particles, and 2) the grain boundaries and grain boundary triple junctions. This results in locally high concentration of stress. When this reaches a critical value, dislocation build-up promotes slip band cracking in the matrix or de-cohesion and cracking at grain boundaries and coarse second phase particle-matrix interfaces. Stress concentration causes microscopic cracks to nucleate at grain boundaries and coarse second-phase particles. When microscopic cracks grow and eventually coalesce to form a macroscopic crack, the stress carrying capability of the structure decreases and the material softens to failure. At 94°C, influence of microscopic crack growth and degradation of matrix strengthening precipitates and other second-phase particles dominates, resulting in rapid softening to failure after initial hardening and upon reaching peak stress. Fracture is predominantly trans-granular, with microscopic crack propagation along grain boundaries {{469 Srivatsan,T.S. 2001}}. Constitutive equations allow determining contributions of major strengthening mechanisms that contribute to RT yield strength for AA 2024-T3, and modelling of yield strength as a function of various microstructural variables {{312 Dixit,V. 2009}}:
Grain boundary strengthening: Hall–Petch relationship, where 46.2 MPa is strength of matrix and k (56.1 MPa micron-1/2) is Hall–Petch constant [22]
Particle precipitation strengthening from incoherent S phase precipitates: Orowan looping mechanism [23]
Particle precipitation strengthening from coherent GPBZ [6, 24, 25] Solid solution strengthening: contributions mainly from Cu and Mg atoms dissolved in Al
matrix. The yield strength of fcc metals is usually correlated to grain (crystallite) size (Hall–Petch Eq.) or to dislocation density (Taylor Eq.) [2, 9, 10], determined by X-ray line profile analysis. In this study, the yield strength (σY, determined by tensile and Vickers hardness tests) for different fcc metals (pure Al, Al–Mg alloys, Cu and Ni) correlates well with that calculated using Taylor Eq. The reason is that obstacles to dislocation motion in SPD materials, cell or sub-grain boundaries, consist of dislocations, consequently the main strengthening mechanism is interaction between dislocations, and strength is basically determined by dislocation density. This is valid not only for pure metals but also for solid solutions. The Taylor Eq is: σ=σ0+αMGbρ1/2, where σ is the yield strength, σ0 friction stress, α a constant depending on the arrangement of dislocations (0.33), G shear modulus (26 GPa for Al and its alloys), b length of Burgers vector of dislocations (b = 0.286 nm) and M the Taylor factor (M = 3 for un-textured polycrystalline materials). The values of friction stress are 20, 25 and 50 MPa for Al, AlMg (also for Al6082) and Al3Mg. For Cu, G = 47 GPa, σ0 = 20 MPa and b = 0.256 nm are taken. For Ni, G = 82 GPa, σ0 = 20 MPa and b = 0.249 nm are used. When measures by mechanical tests deviate from values calculated with Taylor Eq., deviations can be explained by the fact that Taylor Eq takes into account only dislocation–dislocation interactions in strengthening, and the yield strength might be further increased by interaction between dislocations and precipitates (e.g. Mg2Si and Mn12Si7Al5 phases in AA 6082) [7] {{453 Gubicza,J. 2006}}.

150
9.4 REFERENCES [1] ,., Aircraft Maintenance Technology, March 2004, -, NDT [2] ,., Aircraft Maintenance Technology, April 2004, -, Costs of Maintenance [3] ,., Aircraft Maintenance Technology, May 2004, -, Corrosion [4] ,., Aircraft Maintenance Technology, August 2004, -, NDT [5] Aparicio Bádenas, C., Gil, F.X., Manero Planella, J.M., Rodríguez Rius, D., Andrés
Domènech, A., Arandés Salvadó, P.M., Planell, J.A., Aleaciones ligeras, Ed. Edicions UPC (2001), 106, 155, Barcelona.
[6] Callister. Materials science and engineering. An introduction [6] Dixit [7] Shackelford. Introducción a la ciencia de materiales para ingenieros [8] Smith. Ciencia e ingeniería de materiales [9] Srivatsan [10] Starke, E.A. & Staley, J.T., Progress in Aerospace Science, 32 (1996) ,131-172 [11] The strengthening of metals: http://www.keytometals.com/Article128.htm

151
10 CHAPTER 10: AIRCRAFT SYSTEMS
10.1 AA
10.2 REFERENCES [1] ,., Aircraft Maintenance Technology, March 2004, -, NDT [2] ,., Aircraft Maintenance Technology, April 2004, -, Diesel Engines, Costs of Maintenance,
Electricity Basics (Avionics) [3] ,., Aircraft Maintenance Technology, May 2004, -, Corrosion [4] ,., Aircraft Maintenance Technology, August 2004, -, NDT [5]

152
11 Annexe I
11.1 FLUIDS DEFINITION AND TYPES Un fluido es una sustancia que se deforma continuamente bajo la acción de un esfuerzo cortante o tangencial. En ausencia de éste, no existe deformación. Los fluidos se pueden clasificar en forma general, según la relación que existe entre el esfuerzo cortante aplicado y la rapidez de deformación resultante:
- Fluidos Newtonianos: Son aquellos en los que los esfuerzos son funciones lineales de las velocidades de deformación. En estos fluidos la viscosidad no depende de la velocidad de deformación.
ddtfffffffff
dudyffffffffff
La mayor parte de los fluidos comunes como el agua, el aire, y la gasolina son prácticamente newtonianos bajo condiciones normales.
- Fluidos No Newtonianos:
Son aquellos fluidos en los que los esfuerzos no son directamente proporcionales a las velocidades de deformación. En estos fluidos la viscosidad sí depende de la velocidad de deformación. Algunos ejemplos de fluidos no newtonianos son las grasas, los aceites multigrado de automoción (mezclas de polímeros y aceite) y todo tipo de fluidos poco convencionales como yogur batido, papilla, etc.
11.2 VISCOSITY OF FLUIDS La viscosidad de un fluido es un coeficiente de transporte (transporte de cantidad de movimiento de una región del fluido a otra) que, en el caso de:
- Líquidos: Está relacionado con la forma de las moléculas que lo componen y las fuerzas intermoleculares. Los líquidos que tienen baja viscosidad (fluyen con facilidad) están constituidos, por lo general, por moléculas pequeñas y fuerzas intermoleculares débiles.
- Gases:
Está relacionado con la agitación molecular.

153
Fig. 97 Valores de viscosidad para algunos fluidos a 20ºC en unidades del sistema cegesimal
cgs. Viscosidad cinemática en [cm2/s] y viscosidad dinámica en [g/cm·s].
11.3 DEPENDENCE OF VISCOSITY ON FLUID PROPERTIES Si se cumplen una serie de condiciones en el fluido se puede hablar de que existe equilibrio termodinámico local en el mismo. En ese caso el estado de un fluido queda unívocamente determinado con conocer solamente dos variables termodinámicas: el par T y p, o el par T y ρ, o el par ρ y p. La relación de la viscosidad con otras variables depende del tipo de fluido que se tenga en consideración:
- Fluidos Newtonianos: En este caso la viscosidad depende de las variables termodinámicas locales T y p: i) Presión p:
La viscosidad siempre aumenta con el aumento de la presión p.
ii) Temperatura T:
- Líquidos: El aumento de T conlleva un aumento de las distancias intermoleculares y una disminución de las fuerzas de cohesión que resultan en una disminución de la viscosidad.
- Gases: El aumento de T conlleva un aumento de agitación molecular que resulta en un incremento de la viscosidad.
No hay ninguna relación funcional = (T,p) que describa realmente a una gran variedad de fluidos.
- Fluidos No Newtonianos:
En este caso la viscosidad depende de las variables termodinámicas locales T y p, pero también de las velocidades de deformación.

154
12 Annexe II
12.1 AIRFOIL CHARACTERISTIC PARAMETERS
Fig. 98 Airfoil characteristic parameters.

155
12.2 WING LAY-OUT PARAMETERS
Fig. 99 Wing lay-out parameters.

156
13 Annexe III
13.1 MACH NUMBER The Mach number is a non-dimensional parameter which is the aerodynamic velocity (True Air Speed, TAS) divided by the speed of sound:
a
VM
Speed of sound: SATRa [m/s]
Adiabatic coefficient for air (almost constant): 4.1 [-]
Universal constant for perfect gases: 314.8R [J/mol·K]
Constant of perfect gases for air: 287A
A M
RR [J/kg·K]
Static temperature: ST [K]
13.2 FLIGHT REGIMES According to the Mach number:
- Uncompressible subsonic: M < 0.30 or 0.50
The air is supposed to be uncompressible, which in turns means that its density is constant. The air is in fact a compressible fluid, but compressibility effects can be neglected, and then air can be considered uncompressible, if Mach number M is lower than 0.3 or 0.5. The reason is that the error when using this simplification is considered acceptable (small enough) below this Mach number and the reduction of the complexity is worth. The hypothesis of uncompressible air is sufficient for studying many types of aircraft (those flying below M 0.3 or 0.5), like light aircraft.
- Compressible subsonic: 0.50 < M < 0.75
The error due to neglecting compressibility effects grows as M grows. Beyond a certain threshold (M 0.3 or 0.5), the error is so big that it is no longer considered acceptable.
- Transonic: 0.75 < M < 1.20
When M is around 0.75, the first fluid point with M equal to 1 appears in the aircraft’s surface. Then we say that the aircraft is in transonic regime. When M is around 1.20, for the first time, all the fluid points have a M equal or higher than 1.
- Sonic: M = 1 - Supersonic: 1.20 < M < 5.00 - Hypersonic: M > 5.00

157
When M is around 5 and higher, the friction of the air with the vehicle’s walls is very high. Then, the air temperature increases to a level that the oxygen and nitrogen molecules are dissociated.

158
ACRONYMS AA Aluminium Alloy AC~ Alternative Current AC Advisory Circular ACO Aircraft Certification Office A/D Analogical/Digital AG Active Gage AIA Aerospace Industries Associations AIAA American Institute of Aeronautics and Astronautics Al Aluminium AT Analytical Test BC Boundary Conditions BCJ Bonded Composite Joint BE Boundary Elements BT Bondable Terminals CBDisP Custom-Built Displacement Probe CC Computer Control Ccw Counter-clockwise CDS Calibration Data Sheets (see file and Section) CE Crack Extension CEME Civil Engineering Mechanical Engineering CG Centre of Gravity Ch Channel COD Crack-mouth Opening Displacement CSA CTOA Crack-Tip Opening Angle Cw Clockwise D Downloaded DAS-20 8-channels box (8-channels set) data acquisition system DC Direct Current DCM Displacement Control Mode DefP Deflection Probes DplP Displacement Probes DLJ Double Lap Joint Dpl Displacement DOF Degree of Freedom DS Double-Shear or Double-Sided DSR Double-Sided Repair DSRf Double -Sided Reinforcement DTA Damage Tolerance Analysis FDP Face Displacement Probe EC Eddy Current ET Element Type EV Engineering Village EXT Extensometer FAA Federal Aviation Administration FB Full Bridge FE Finite Elements FEA Finite Elements Analysis FEM Finite Elements Model FG Fibre Glass

159
FIX States that there is an error, a doubt or a problem related to the corresponding concept
FL Fatigue Life Fti Fatigue Test Information (file extension) FTM MTS 436 Fatigue Testing Machine GAG Ground-Air-Ground GF Gage Factor GL Gage Length GND Ground GP Gage Pattern GR Gage Resistance GRM Generalized Rose Model GS Google Scholar GUI Graphical User Interface HB Half Bridge HD Hard Disk HP High Pressure HSE Health, Safety and Environment ICAO International Civil Aviation Organization ISA International Standard Atmosphere SI International System of Units ISI Institute for Scientific Information KW Key Words Lab Laboratory LCM Load Control Mode LD Lateral Displacement (Deflection) LE Leading Edge LG Lower Grip LEFM Linear Elastic Fracture Mechanics LP Low Pressure MC Manual Control MDT-4 4-channels box (4-channels set) data acquisition system MEK Methyl Ethyl Ketone MMPDS Metallic Materials Properties Development and Standardization MSDS Material Safety Data Sheet MSL Mean Sea Level MU Multiplier Unit NA Non-applicable NAS National Aerospace Standards ND Not Downloaded NDT Non-Destructive Testing NI Non Interesting (Reference) NRC National Research Council OR Operating Range OS Operative System OuS Output Signal P Printed PACE Partners for the Advancement of Collaborative Engineering Education PC092 Personal Computer (PC) at project Laboratory 092 PC1052 Personal Computer (PC) at Laboratory 1052 PCom Personal Communication PRC Prevention of … Corrosion QB Quarter Bridge R Read RAPID Repair Assessment and Integrated Design RAS Remote Applied Stress

160
RC Real Constant R/E Run/Execute RJ Riveted Joint RMS Root Mean Square RTC Real Time Clock SGS Strain Gauges System SIF Stress Intensity Factor SL Sea Level SLJ Single Lap Joint Soft Software SP Set Point SS Single-Shear or Single-Sided SSR Single-Sided Repair SSRf Single-Sided Reinforcement STAGS Structural Analysis of General Shells STC Self Temperature Compensation TASK States that there is a task related to this concept that has to be completed TC Transducer Conditioner TE Trailing Edge TR Technical Report UG Upper Grip USS Ultimate Shearing Strength USSt Ultimate Shearing Stress UT Ultrasonic Testing VI Very Interesting (Reference) WB Wheatstone Bridge AA Aluminium Alloy AA Auroral Absorption AC Arquitectura de Computadors (Computers Architecture) ACO Aircraft Certification Office ACS Attitude Control System A/D Analogical/Digital AFF Autonomous Formation Flight AG Active Gage Al Aluminium AIAA American Institute of Aeronautics and Astronautics BCJ Bonded Composite Joint BE Boundary Elements BPR Bypass Ratio BRITE Bright Target Explorer BT Bondable Terminals (C) Means this speaker has been contacted CanX Canadian Advanced Nano-space Experiment CASSIOPE CASCADE Smallsat and Ionospheric Polar Explorer CEOS Committee on Earth Observation Systems CNT Carbon Nano-Tubes COTS Components Off-The-Shelf CRC Communications Research Council CSA Canadian Space Agency CC Computer Control Ccw Counter-clockwise CDS Calibration Data Sheets (see file and Section) CE Crack Extension CEME Civil Engineering Mechanical Engineering Ch Channel

161
CFD Computacional Fluid Dynamics CFRP Carbon Fibre Reinforced Polymer CIF Código de Identificación fiscal (see VAT below) COD Crack-mouth Opening Displacement CTOA Crack-Tip Opening Angle Cw Clockwise DEXTRE See SPDM below DGPS Differential Global Positioning System DRDC Defence Research and Development Canada ECLSS Environmental Control and Life Support System EF Electric Field EO Earth Observation ESA European Space Agency ESMO European Student Moon Orbiter e-POP Enhanced Polar Outflow Probe f Frequency FF Formation Flying GEOSS Global Earth Observation System of Systems GG Gravity Gradient GNB Generic Nanosatellite Bus GNC Guidance, Navigation and Control GNSS Global Navigation Satellite Systems GPS Global Positioning System GPSR Global Positioning System Relative GS Ground Segment HF High Frequency HVI High Velocity Impact IADC Introductory Aerospace Design Course InSAR Interferometric Synthetic Aperture RADAR IP Intellectual Property ISRO Indian Space Research Organization ISS International Space Station JAXA Japanese Aerospace Exploration Agency JWST James Webb Space Telescope LAR Large Angle Rotation LEO Low Earth Orbit LIDAR Laser Interferometry (or Light) Detection and Ranging LTDN L … Time at Descending Node MDA MacDonald, Dettwiler and Associates Ltd. MEOS Miniature Earth Observation Satellite MF Magnetic Field MGS Mars Global Surveyor MOD Multiple Object Damage MOMENT Magnetic Obser of Mars Enabled by Nanosatellite Tech MOST Micro-variability and Oscillations of Stars MOU Memorandum MTP Multi-mode Integrated Transponder MW Momentum Wheel OO On-Orbit OOS On-Orbit Servicing PCA Polar Cap Absorption ppm Parts Per Million Req Requirement R&D Research and Development RS Remote Sensing RW Reaction Wheel

162
DAS-20 8-channels box (8-channels set) data acquisition system DCM Displacement Control Mode DEA Advanced Studies Diploma (Diploma d’Estudis Avançats) DefP Deflection Probes DplP Displacement Probes DLJ Double Lap Joint DPI Dye Penetrant Inspections Dpl Displacement FDP Face Displacement Probe EC Eddy Current EXT Extensometer FAA Federal Aviation Administration FB Full Bridge FE Finite Elements FEA Finite Elements Analysis FIX This is a flag stating that there is an error, doubt or problem related to the
corresponding concept FG Fibre Glass FTM MTS 436 Fatigue Testing Machine GCM Grup de Caracterització de Materials GF Gage Factor GL Gage Length GP Gage Pattern GPS Global Positioning System GR Gage Resistance HB Half Bridge IVA Impuesto sobre el Valor Añadido K Thermal expansion coefficient Lab Laboratory LCM Load Control Mode LD Lateral Displacement (Deflection) MC Manual Control MDT-4 4-channels box (4-channels set) data acquisition system MEDD Magnetic Early Defect Detection MNT Nano- and Micro-Technology MU Multiplier Unit NDT Non-Destructive Testing NI Non Interesting (Reference) NRC National Research Council OS Operative System PC092 Personal Computer (PC) at project Laboratory 092 PC1052 Personal Computer (PC) at Laboratory 1052 PFor Pla de Formació (Formation Plan) PRC Prevention of … Corrosion QB Quarter Bridge RADAR Radio Detection and Ranging R/E Run/Execute RJ Riveted Joint RTC Real Time Clock RTG Radioisotope Thermoelectric Generator S SA Synthetic Aperture Sat Satellite SAR Synthetic Aperture RADAR SBAS Satellite Based Augmentation System

163
SBSR Satellite Based Search and Rescue S/C Spacecraft SDS Small Demonstration Satellite SFC Specific Fuel Consumption SFL Space Flight Laboratory SGS Strain Gauges System SLJ Single Lap Joint Soft Software SOHLA Space Oriented Higashiosaka Leading Association SP Set Point SPDM Special Purpose Dexterous Manipulator SRMS Shuttle Remote Manipulator System SS Space Segment SSRMS Space Station Remote Manipulator System SSO Sun Synchronous Orbit SSP Space Solar Power STC Self Temperature Compensation STDRC Space Technology Demonstration Research Center STS Space Transportation System T TASK This is a flag stating that there is a task related to the corresponding
concept that has to be completed TEC Total Electron Content TFC Treball de Fi de Carrera (Undergraduate Degree Thesis) TRL Technology Readiness Level TSFC Thrust Specific Fuel Consumption TT&C Telemetry, Tracking and Command U UN United Nations UPC Universitat Politècnica de Catalunya US(A) United States (of America) UTIAS University of Toronto Institute of Aerospace UTM Universal Testing Machine VAT Value Added Tax Ve Voltage, Excitation VHRU Vuelo Horizontal Rectilíneo Uniforme VI Very Interesting (Reference) V0 Voltage Output WAAS Wide Area Augmentation System WB Wheatstone Bridge WinGS WinCube Ground Station WMO World Meteorological Organization

164
NOMENCLATURE f Frequency k Thermal expansion coefficient Kmod Modified Stress Intensity Factor t time T Temperature Ve Voltage, Excitation V0 Voltage Output Φ Diameter