Embed Size (px)
Citation preview
TPE Des mécanismes aux systèmes automatiques
Les stores d'extérieurs
Quelles sont les solutions techniques et technologiques qui permettent
d'automatiser un store d'extérieur ?
DUPRAT Vincent et GIRARD Thibault
1° SN
Année 2008-2009 Lycée Gustave EIFFEL
Encadrés par Mr Leclerq et Mr Arné
TPE les stores d'extérieurs Page 1/37
Sommaire
SommaireRemerciements Page 3
Introduction Page 4
I) Analyse fonctionnelle du système Page 5
1) Le store manuel Page 5
2) Le store automatique Page 5
3) Définitions des seuils Page 9
II) Le store automatique d'un point de vue mécanique Page 11
1) Le fonctionnement du store Page 11
2) Le choix du moteur Page 13
3) Le système de « secours » : La manivelle Page 14
III) Le store automatique d'un point de vue électrique Page 15
1) Réagir avec l'environnement Page 15
A) Le fonctionnement des capteurs Page 15
a) Vent Page 15
b) Soleil Page 17
c) Début et fin de course Page 23
B) Le boîtier de commande Page 25
2) Un API est-il nécessaire ? Page 26
a) Fonctionnement d'un API Page 26
b) Les mêmes fonctions sont réalisées avec nos propres circuits Page 29
c) La différence ? Quelle solution choisir ? Page 31
IV) Améliorations possibles dans le futur Page 32
Bibliographie Page 33
Fiche de synthèse personnelles Page 34
Vincent Duprat Page 34
Thibault Girard Page 36
TPE les stores d'extérieurs Page 2/37
REMERCIEMENTS
Nous tenons à remercier plus particulièrement :
Mr Leclerq (professeur de SI) pour son encadrement, ses conseils concernant la partie électrique et son aide sur les synthèses personnelles.
Mr Arne (professeur de SI) pour son encadrement, ses conseils et son aide concernant la partie mécanique.
Mr Philippe GIRARD (directeur de l'IUFM) pour avoir relu notre travail et nous avoir prodigué quelques conseils.
La société Komilfo pour son accueil, ses conseils professionnels et pour la documentation qu'elles nous a fournit
TPE les stores d'extérieurs Page 3/37
INTRODUCTION
Thème : Des mécanismes aux systèmes automatiquesSujet : Les stores d'extérieursMatières : Sciences de l'ingénieurProblématique : Quelles sont les solutions techniques et technologiques qui permettent d'automatiser un store d'extérieur ?
Après un bon repas, vous vous installez sur votre terrasse, et commencez à somnoler. Très agréable moment, mais cela est très énervant de devoir se lever en pleine sieste pour descendre son store et ainsi éviter les « coups de soleil » ? Surtout que de nos jours, des stores d'extérieurs sont équipés pour s'adapter à ce changement sans avoir à interrompre votre sieste.En effet au XXI ème siècle, le temps des stores de terrasse descendus et remontés manuellement est révolu. Maintenant avec les progrès technologiques de la domotique, il est habituel de voir des stores extérieurs automatiques. Pendant notre TPE, nous étudierons les solutions technologiques qui permettent d'automatiser un store de terrasse. Nous verrons tout d'abord que ce store doit remplir des fonctions que nous définirons. Ensuite, nous analyserons le store automatique d'un point de vue mécanique pour qu'il réponde aux contraintes et aux fonctions du « cahier des charges ». Enfin, nous analyserons les solutions d'automatisation du store d'un point de vue électrique .Grâce à cette démarche, nous serons en mesure de fabriquer un prototype fonctionnel .A la fin de la réflexion de ce TPE, nous verrons que beaucoup d'améliorations sont possibles pour le store de demain.
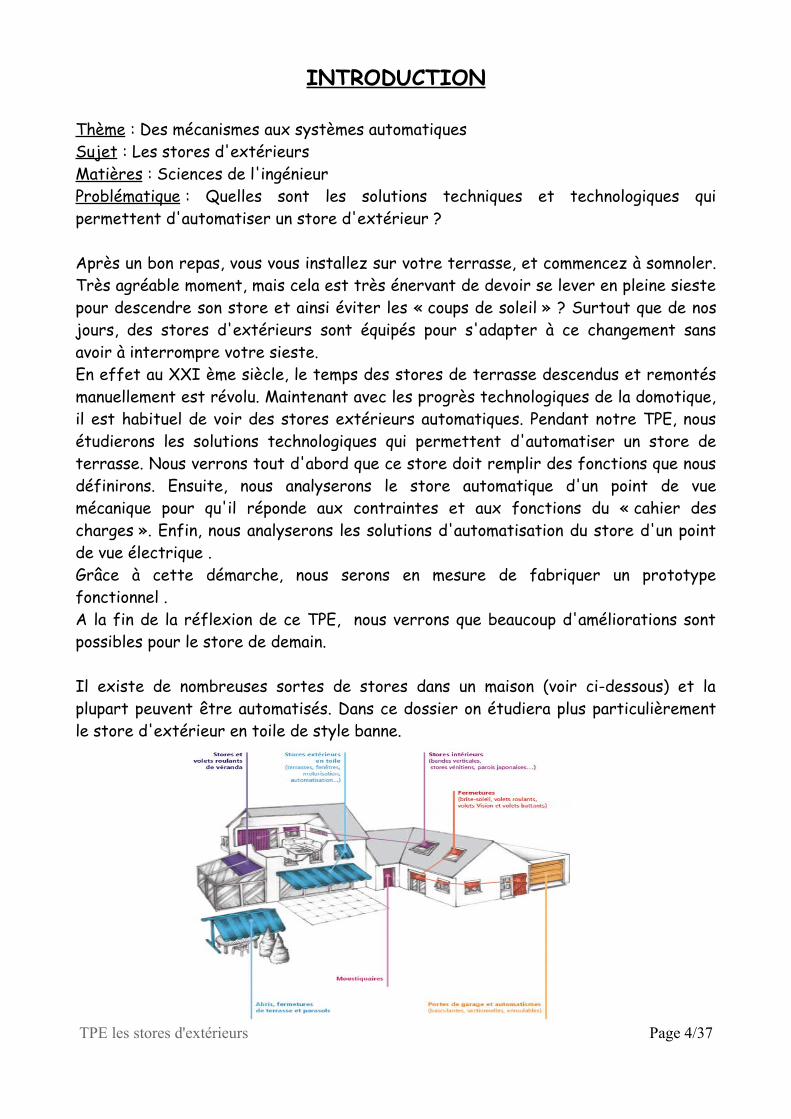
Il existe de nombreuses sortes de stores dans un maison (voir ci-dessous) et la plupart peuvent être automatisés. Dans ce dossier on étudiera plus particulièrement le store d'extérieur en toile de style banne.
TPE les stores d'extérieurs Page 4/37
Partie I : Analyse fonctionnelle du système
Dans cette première partie, nous allons analyser les fonctions que doit remplir ce store, c'est à dire que nous allons établir le « cahier des charges » pour notre store automatique. Nous analyserons tout d'abord le store manuel, pour ensuite voir en quoi le store automatique pourra améliorer le confort de l'utilisateur.En premier lieu, définissons la fonction principale de tout store d'extérieur manuel. Il est là pour répondre à un besoin de l'utilisateur : faire de l'ombre lorsque celui ci en a envie, comme nous le montre le graphe « bête à cornes » suivant :
Pour ce faire, il doit répondre à plusieurs contraintes : s'adapter à tous les supports auxquels il est susceptible d'être fixé, être facile à manipuler pour les utilisateurs, plaire à l'utilisateur au niveau visuel et respecter les normes qui garantissent la sécurité.Ce store manuel a plusieurs avantages : il est très simple et de par cette simplicité très fiable. Mais cette simplicité entraîne un inconvénient : il nécessite l'intervention de l'utilisateur et un effort de sa part à chaque fois qu'il doit être manipulé.
C'est donc pour supprimer cet inconvénient majeur que l'automatisation du store est un plus. En effet, on peut remarquer qu'un store manuel est toujours manipulé aux mêmes moments. Ces manipulations sont à chaque fois prévisibles par la simple mesure de quelques éléments : •l'utilisateur veut avoir de l'ombre lorsque la luminosité est trop importante, comme en milieu d'une journée ensoleillée d'été par exemple. Lorsque l'on mesurera ce changement de luminosité il faudra donc déplier le store. Au contraire il faudra le replier lorsque la luminosité baisse, comme en fin de journée par exemple, car l'utilisateur ne veut plus d'ombre à ce moment là.
TPE les stores d'extérieurs Page 5/37
Utilisateur Soleil
Store extérieurmanuel
Faire de l'ombre en s'adaptant aux envie
de l'utilisateur
( Pour qui agit-il ? ) ( Sur quoi ? )
( Le Système )
( Son but ? )
•Il y a même des fois où le fait de laisser le store déplié peut être dangereux pour le store lui même car il pourrait être endommagé, mais surtout pour l'utilisateur qui pourrait être blessé par la chute d'éléments notamment en cas de vent. Il faut donc fixer un seuil limite de vent au delà duquel le store se repliera de lui même.
Nous voyons bien ici que notre store automatique pourrait facilement réagir en fonction de la simple mesure du vent et de la luminosité ambiante. Mais parfois, même s'il y a une forte luminosité, l'utilisateur peut ne pas vouloir d'ombre. Par exemple lorsque la luminosité due au soleil n'est pas gênante comme un après midi ensoleillé en hiver par exemple. Dans ce cas là l'ombre faite par le store s'il se déplie n'est pas souhaitable car l'utilisateur aimerait peut-être profiter de ce soleil.Pour ces situations qui sortent des capacités de l'automatisme, car il ne sait pas distinguer une forte luminosité gênante d'une forte luminosité agréable, il est nécessaire de prévoir un système de commande direct par l'utilisateur pour ordonner la montée ou la descente du store quand il le souhaite.Par contre, il apparaît aussi que à certains moments, les commandes que l'utilisateur veut donner seront opposées à celles données par l'automate. Il faudra donc que l'utilisateur puisse choisir de n'activer qu'un seul des deux modes de fonctionnement (manuel ou automatique).Ce choix de pouvoir donner la priorité à un des deux systèmes de commande entraîne avec lui un gros inconvénient : l'utilisateur pourrait choisir de déplier le store, ou de ne pas le replier, dans des situations dangereuses, comme en cas de vent par exemple. Cela entraîne donc des risques physiques pour l'utilisateur. Il faudra donc prévoir d'informer l'utilisateur lorsqu'il y a trop de vent pour garantir sa sécurité.Même si en France, actuellement nous avons presque tout le temps l'électricité du secteur disponible, elle est quelquefois coupée à cause d'intempéries ou de travaux. Sur notre store, il y a donc un système « de secours » pour pouvoir manipuler le store de façon manuelle en toutes circonstances.
TPE les stores d'extérieurs Page 6/37

Toutes ces différentes parties de notre store automatique peuvent être schématiser ainsi :
TPE les stores d'extérieurs Page 7/37
Automatisme du store
Capteur d'intensité lumineuse
+Anémomètre
Boîtier de commande
Système de motorisation du store
UtilisateurEnvironnement
Toile du store
Manipule
Commande en fonction des informations reçues
Créé de l'ombre
Acquiert et envoie des informations sur l'état de l'environnement
Reçoit et transmet les ordres reçus
Manivelle de secours
Manipule
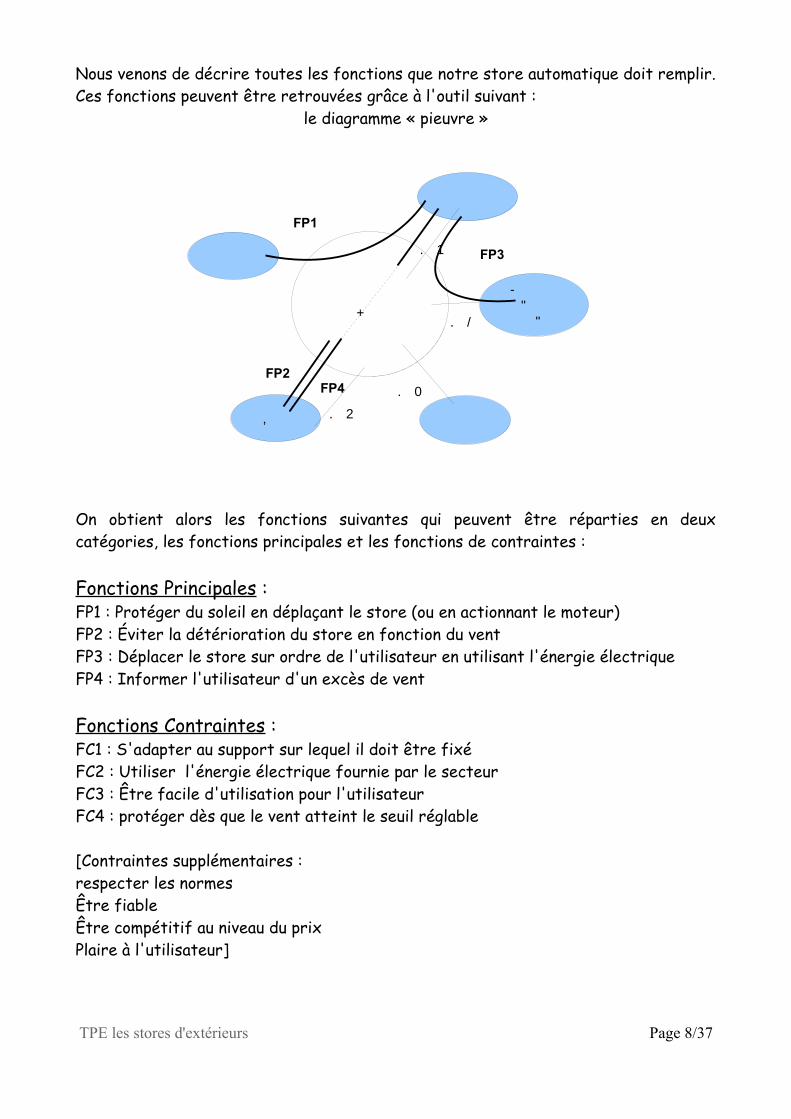
Nous venons de décrire toutes les fonctions que notre store automatique doit remplir. Ces fonctions peuvent être retrouvées grâce à l'outil suivant :
le diagramme « pieuvre »
On obtient alors les fonctions suivantes qui peuvent être réparties en deux catégories, les fonctions principales et les fonctions de contraintes :
Fonctions Principales :FP1 : Protéger du soleil en déplaçant le store (ou en actionnant le moteur)FP2 : Éviter la détérioration du store en fonction du ventFP3 : Déplacer le store sur ordre de l'utilisateur en utilisant l'énergie électriqueFP4 : Informer l'utilisateur d'un excès de vent
Fonctions Contraintes : FC1 : S'adapter au support sur lequel il doit être fixéFC2 : Utiliser l'énergie électrique fournie par le secteurFC3 : Être facile d'utilisation pour l'utilisateurFC4 : protéger dès que le vent atteint le seuil réglable
[Contraintes supplémentaires : respecter les normesÊtre fiableÊtre compétitif au niveau du prixPlaire à l'utilisateur]
TPE les stores d'extérieurs Page 8/37
Store automatiqued'extérieur
L'utilisateur
Vent
Soleil
Énergie électrique du secteur
Support
FP2
FP1
FP3
FC2
FC1
FC3
FP4
FC4
Caractérisations sur ces fonctions : FP1 : temps de remontée : 12,5 secondes
seuils à atteindre pour la descente du store : 100 000 lux seuils à atteindre pour la remontée du store : 70 000 lux
FP3 : système automatique ou manuel par un sélecteurFP4 : Voyant lumineux en cas de vent supérieur au seuil réglé grâce à une DELFC1 : Mur vertical ou partie horizontale sous l'avant-toit
facilité de montage par visFC2 : S'adapter au courant alternatif 230 volts 50hertzFC3 : Réglages simples à réaliser à l'aide d'un tournevis
boîtier de commande le plus simple possible (voir partie III.1.B)FC4 : Remonter le store dès que le vent atteint la vitesse de 10km/h
Toutes ces possibilités d'actions peuvent être synthétisées ainsi : ● S'il y a plus de vent que le seuil limite ou s'il y a moins de soleil que la limite
inférieure et si le store n'est pas dans sa position haute maximale, il faut le remonter.
● S'il n'y a pas plus de vent que le seuil limite et s'il y a plus de soleil que la limite supérieure et si le store n'est pas dans sa position basse maximale, il faut le descendre.
● S'il y a plus de vent que le seuil limite, il faut allumer le voyant lumineux du boîtier de commande.
● Si l'utilisateur appuie sur le bouton descente du boîtier de commande et si le store n'est pas dans sa position basse maximale, il faut le descendre.
● Si l'utilisateur appuie sur le bouton montée du boîtier de commande et si le store n'est pas dans sa position haute maximale, il faut le monter.
TPE les stores d'extérieurs Page 9/37
On utilisera les mnémoniques suivantes : Mnémoniques d'entrée :
L+ : Seuil supérieur de luminosité atteint ou dépasséL- : Seuil inférieur de luminosité atteint ou dépasséV : Seuil limite de vent atteint ou dépasséB : Store en position basse maximaleH : Store en position haute maximaleD+ : Commande manuelle de descente du storeM+ : Commande manuelle de montée du store
Mnémoniques de sortie :
M : Monter le storeD : Descendre le storeVo : Allumer le voyant lumineux d'alerte de vent
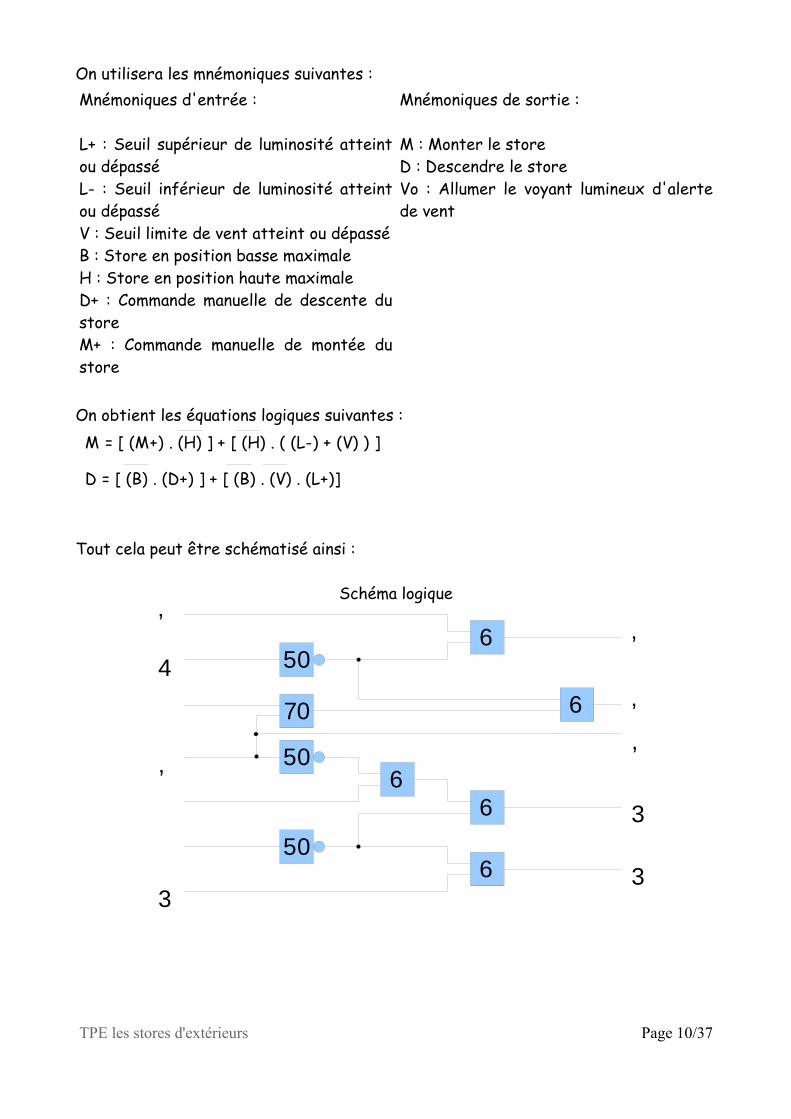
On obtient les équations logiques suivantes :
Tout cela peut être schématisé ainsi :
Schéma logique
TPE les stores d'extérieurs Page 10/37
V
L-
L+
M+
D+
B
H
=1
=1
&&
=1
&
&
& M
D
D
M
≥1Vo
M = [ (M+) . (H) ] + [ (H) . ( (L-) + (V) ) ]
D = [ (B) . (D+) ] + [ (B) . (V) . (L+)]
Partie 2 : Le store automatique d'un point de vue mécanique
1) Le fonctionnement du storeDans cette deuxième partie, nous allons étudier le système d'un point de vue mécanique. Nous étudierons tout d'abord le fonctionnement global du store. Ensuite nous calculerons les caractéristiques nécessaires du moteur. Et enfin nous verrons le système « de secours » : la manivelle qui permet de manipuler le store en toutes circonstances.
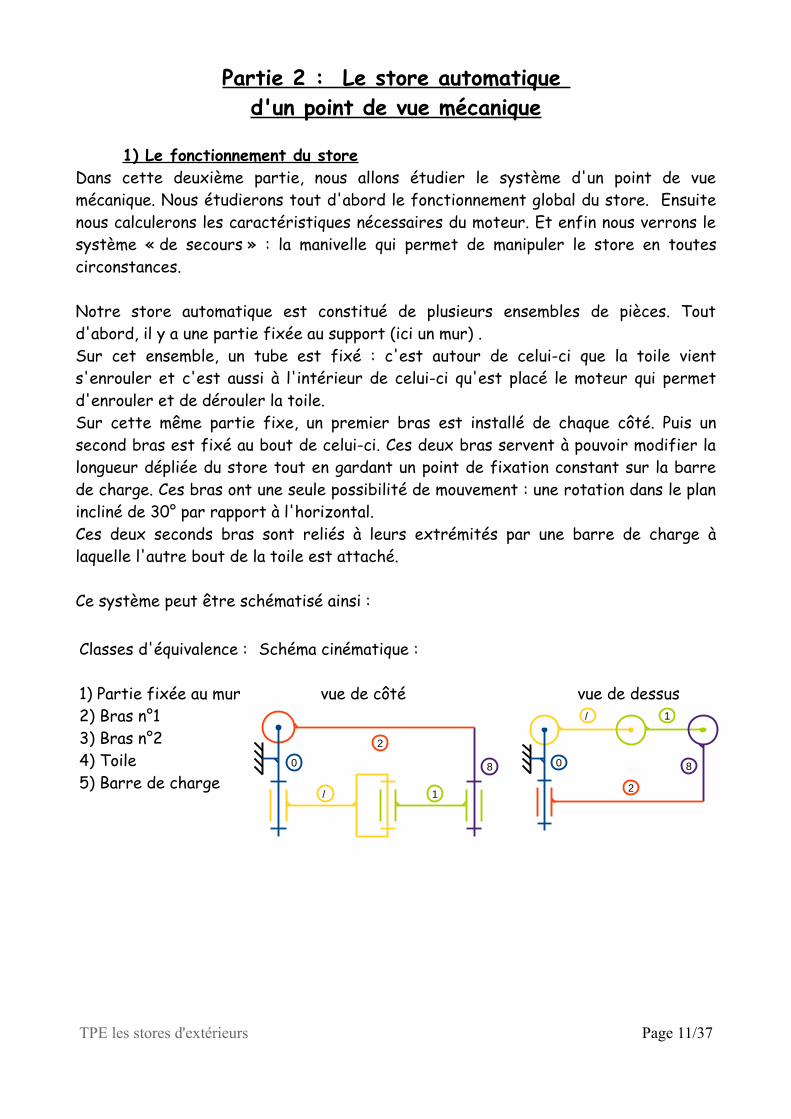
Notre store automatique est constitué de plusieurs ensembles de pièces. Tout d'abord, il y a une partie fixée au support (ici un mur) . Sur cet ensemble, un tube est fixé : c'est autour de celui-ci que la toile vient s'enrouler et c'est aussi à l'intérieur de celui-ci qu'est placé le moteur qui permet d'enrouler et de dérouler la toile.Sur cette même partie fixe, un premier bras est installé de chaque côté. Puis un second bras est fixé au bout de celui-ci. Ces deux bras servent à pouvoir modifier la longueur dépliée du store tout en gardant un point de fixation constant sur la barre de charge. Ces bras ont une seule possibilité de mouvement : une rotation dans le plan incliné de 30° par rapport à l'horizontal. Ces deux seconds bras sont reliés à leurs extrémités par une barre de charge à laquelle l'autre bout de la toile est attaché.
Ce système peut être schématisé ainsi :
Classes d'équivalence :
1) Partie fixée au mur2) Bras n°13) Bras n°24) Toile 5) Barre de charge
Schéma cinématique :
vue de côté vue de dessus
TPE les stores d'extérieurs Page 11/37
1
4
32
5 1
2 3
4
5
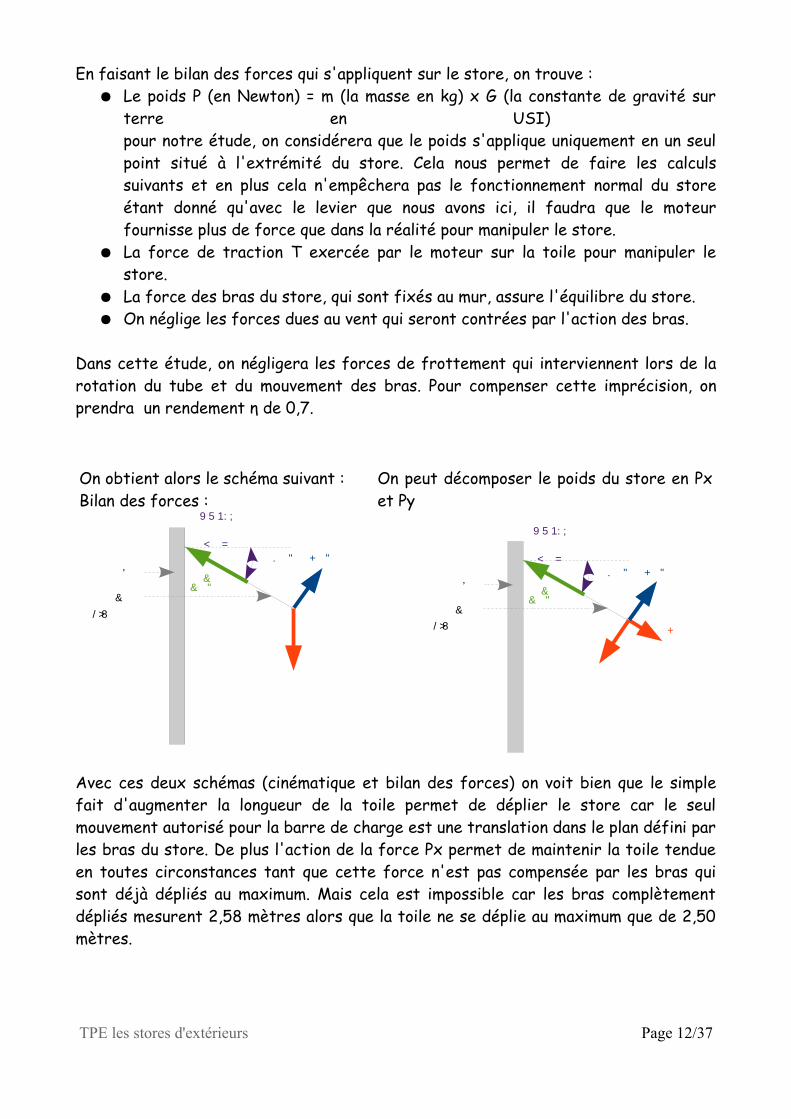
En faisant le bilan des forces qui s'appliquent sur le store, on trouve : ● Le poids P (en Newton) = m (la masse en kg) x G (la constante de gravité sur
terre en USI) pour notre étude, on considérera que le poids s'applique uniquement en un seul point situé à l'extrémité du store. Cela nous permet de faire les calculs suivants et en plus cela n'empêchera pas le fonctionnement normal du store étant donné qu'avec le levier que nous avons ici, il faudra que le moteur fournisse plus de force que dans la réalité pour manipuler le store.
● La force de traction T exercée par le moteur sur la toile pour manipuler le store.
● La force des bras du store, qui sont fixés au mur, assure l'équilibre du store.● On néglige les forces dues au vent qui seront contrées par l'action des bras.
Dans cette étude, on négligera les forces de frottement qui interviennent lors de la rotation du tube et du mouvement des bras. Pour compenser cette imprécision, on prendra un rendement η de 0,7.
On obtient alors le schéma suivant :Bilan des forces :
On peut décomposer le poids du store en Px et Py
Avec ces deux schémas (cinématique et bilan des forces) on voit bien que le simple fait d'augmenter la longueur de la toile permet de déplier le store car le seul mouvement autorisé pour la barre de charge est une translation dans le plan défini par les bras du store. De plus l'action de la force Px permet de maintenir la toile tendue en toutes circonstances tant que cette force n'est pas compensée par les bras qui sont déjà dépliés au maximum. Mais cela est impossible car les bras complètement dépliés mesurent 2,58 mètres alors que la toile ne se déplie au maximum que de 2,50 mètres.
TPE les stores d'extérieurs Page 12/37
α = 30° entre le store et l'horizontale
Mur
Toile
T(Traction)
(2,5 mètres) Px
Py
Force exercée par les bras
α = 30° entre le store et l'horizontale
Mur
Toile
P(Poids)
T(Traction)
(2,5 mètres)
Force exercée par les bras
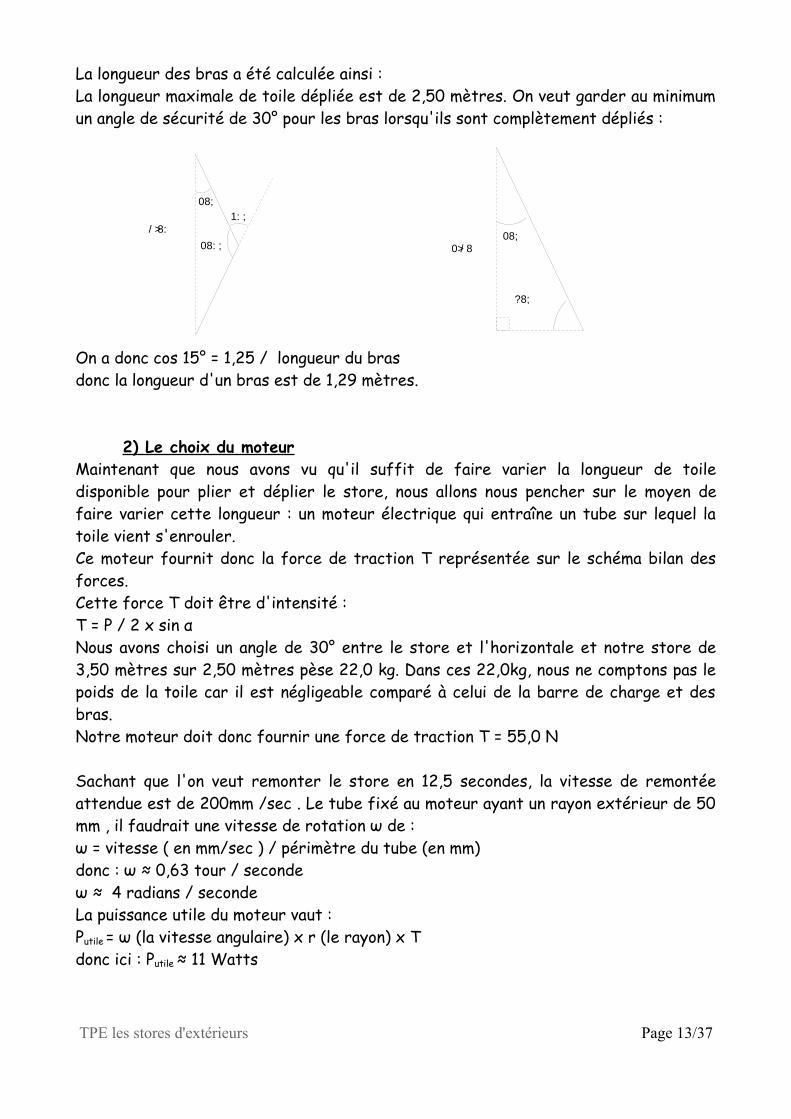
La longueur des bras a été calculée ainsi : La longueur maximale de toile dépliée est de 2,50 mètres. On veut garder au minimum un angle de sécurité de 30° pour les bras lorsqu'ils sont complètement dépliés :
On a donc cos 15° = 1,25 / longueur du brasdonc la longueur d'un bras est de 1,29 mètres.
2) Le choix du moteurMaintenant que nous avons vu qu'il suffit de faire varier la longueur de toile disponible pour plier et déplier le store, nous allons nous pencher sur le moyen de faire varier cette longueur : un moteur électrique qui entraîne un tube sur lequel la toile vient s'enrouler.Ce moteur fournit donc la force de traction T représentée sur le schéma bilan des forces.Cette force T doit être d'intensité :T = P / 2 x sin αNous avons choisi un angle de 30° entre le store et l'horizontale et notre store de 3,50 mètres sur 2,50 mètres pèse 22,0 kg. Dans ces 22,0kg, nous ne comptons pas le poids de la toile car il est négligeable comparé à celui de la barre de charge et des bras.Notre moteur doit donc fournir une force de traction T = 55,0 N
Sachant que l'on veut remonter le store en 12,5 secondes, la vitesse de remontée attendue est de 200mm /sec . Le tube fixé au moteur ayant un rayon extérieur de 50 mm , il faudrait une vitesse de rotation ω de :ω = vitesse ( en mm/sec ) / périmètre du tube (en mm)donc : ω ≈ 0,63 tour / secondeω ≈ 4 radians / secondeLa puissance utile du moteur vaut : Putile = ω (la vitesse angulaire) x r (le rayon) x Tdonc ici : Putile ≈ 11 Watts
TPE les stores d'extérieurs Page 13/37
150°
30°2,50m
15°
bras
75°
1,25m15°
bras
Mais la puissance réelle fournie par le moteur doit être supérieure à cette puissance utile pour contrer tous les frottements et autres phénomènes non pris en compte dans nos calculs. Nous avons donc choisi un rendement η = 0,7 La puissance du moteur vaut donc :Pmoteur = Putile / η = 15,7 Watts
Le couple du moteur est une autre caractéristique importante à déterminer. Il peut être calculé par la formule suivante : C = Pmoteur / ω C ≈ 2,75 Newton / mètres
Il nous faut donc un moteur électrique à courant continu qui délivre une puissance de 15,7 Watts et un couple de 2,75 N.m
Maintenant que nous avons vu les moyens mécaniques d'automatiser le store, il nous faut encore prévoir un moyen de le manipuler manuellement pour les fois par exemple où il y a une coupure d'électricité. Il faut donc prévoir une manivelle qui pourra agir sur le store comme celles des stores extérieurs manuels. Par contre, il faut que la manivelle puisse s'enlever lorsqu'elle ne sert pas car cela n'est pas très esthétique. Le tube du store pour remonter à sa vitesse normale doit effectuer un peu plus d'un tour par seconde ce qui paraît raisonnable pour un homme donc il n'est pas nécessaire de démultiplier la force de l'utilisateur par un système d'engrenage.Par contre le moteur lorsqu'il est inactif oppose une résistance aux mouvements du tube pour empêcher la descente du store. Il faut donc penser à le mettre en « roue libre » pour qu'il n'oppose pas de résistance et que l'utilisateur n'ait pas besoin de forcer plus que nécessaire pour remonter le store.
TPE les stores d'extérieurs Page 14/37
Partie 3 : Le store automatique d'un point de vue électrique
1)Réagir avec l'environnementA) le fonctionnement des capteurs
a) VentAfin d’éviter que le store ne soit détérioré par le vent, il faut enrouler la toile dès que la vitesse du vent atteint un seuil limite.
Étude fonctionnelle :
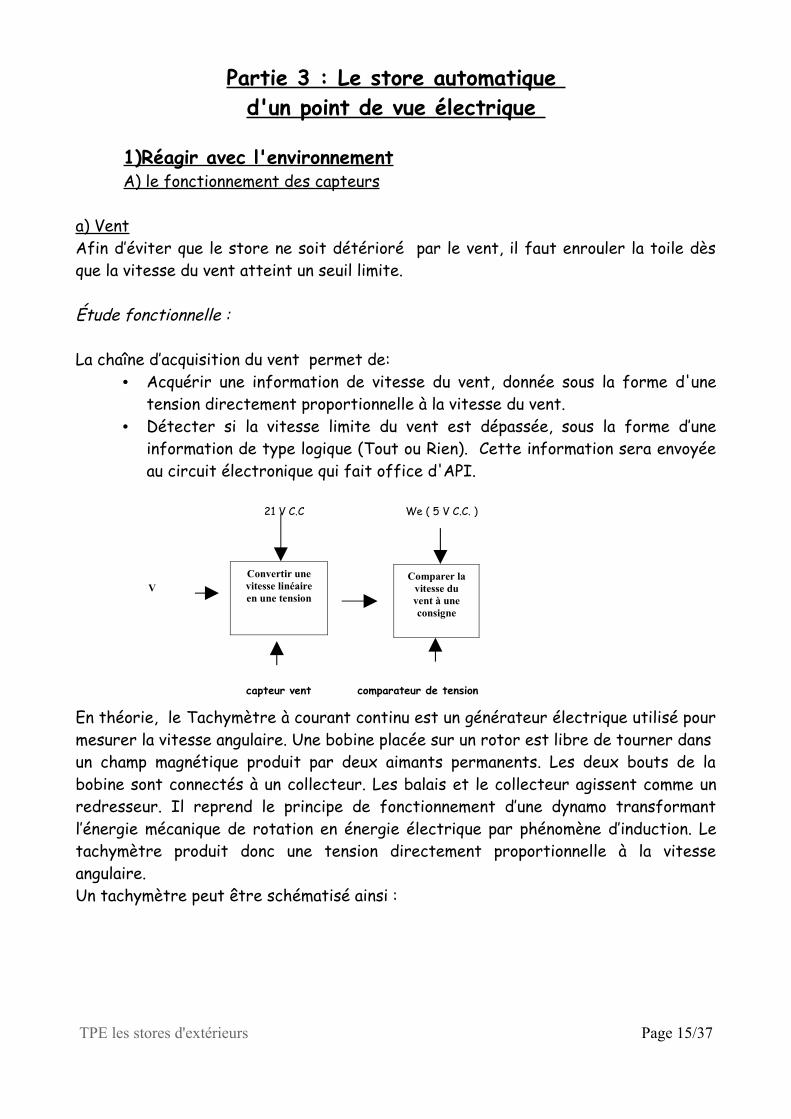
La chaîne d’acquisition du vent permet de:• Acquérir une information de vitesse du vent, donnée sous la forme d'une
tension directement proportionnelle à la vitesse du vent.• Détecter si la vitesse limite du vent est dépassée, sous la forme d’une
information de type logique (Tout ou Rien). Cette information sera envoyée au circuit électronique qui fait office d'API.
21 V C.C We ( 5 V C.C. )
capteur vent comparateur de tension
En théorie, le Tachymètre à courant continu est un générateur électrique utilisé pour mesurer la vitesse angulaire. Une bobine placée sur un rotor est libre de tourner dansun champ magnétique produit par deux aimants permanents. Les deux bouts de la bobine sont connectés à un collecteur. Les balais et le collecteur agissent comme un redresseur. Il reprend le principe de fonctionnement d’une dynamo transformant l’énergie mécanique de rotation en énergie électrique par phénomène d’induction. Le tachymètre produit donc une tension directement proportionnelle à la vitesse angulaire.Un tachymètre peut être schématisé ainsi :
TPE les stores d'extérieurs Page 15/37
Convertir une vitesse linéaire en une tension
Comparer la vitesse du vent à une consigne
V
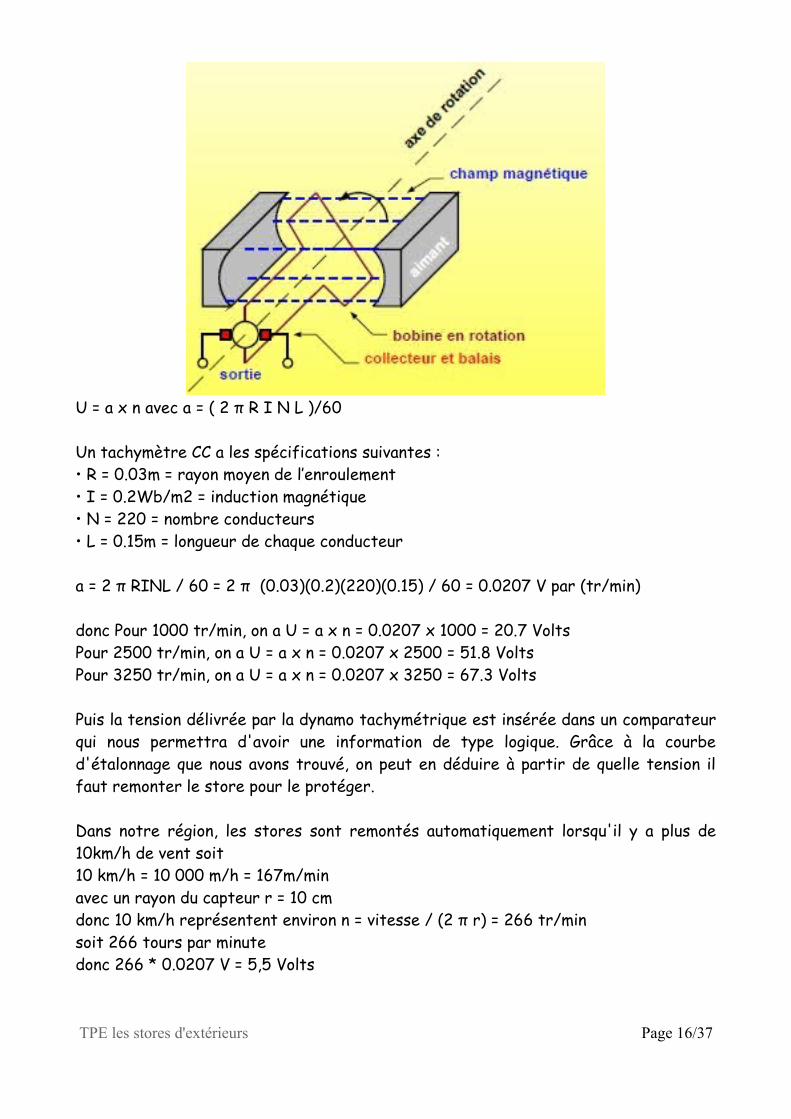
U = a x n avec a = ( 2 π R I N L )/60
Un tachymètre CC a les spécifications suivantes :• R = 0.03m = rayon moyen de l’enroulement• I = 0.2Wb/m2 = induction magnétique• N = 220 = nombre conducteurs• L = 0.15m = longueur de chaque conducteur
a = 2 π RINL / 60 = 2 π (0.03)(0.2)(220)(0.15) / 60 = 0.0207 V par (tr/min)
donc Pour 1000 tr/min, on a U = a x n = 0.0207 x 1000 = 20.7 VoltsPour 2500 tr/min, on a U = a x n = 0.0207 x 2500 = 51.8 VoltsPour 3250 tr/min, on a U = a x n = 0.0207 x 3250 = 67.3 Volts
Puis la tension délivrée par la dynamo tachymétrique est insérée dans un comparateur qui nous permettra d'avoir une information de type logique. Grâce à la courbe d'étalonnage que nous avons trouvé, on peut en déduire à partir de quelle tension il faut remonter le store pour le protéger.
Dans notre région, les stores sont remontés automatiquement lorsqu'il y a plus de 10km/h de vent soit 10 km/h = 10 000 m/h = 167m/minavec un rayon du capteur r = 10 cm donc 10 km/h représentent environ n = vitesse / (2 π r) = 266 tr/minsoit 266 tours par minutedonc 266 * 0.0207 V = 5,5 Volts
TPE les stores d'extérieurs Page 16/37
b)Soleil
La fonction principale du store est de faire de l'ombre à son utilisateur. Un capteur de luminosité permettra de descendre ou monter le store en fonction du temps qu'il fera.
Étude fonctionnelle :
La chaîne d’acquisition du soleil permet de:• Acquérir une information de luminosité, donnée sous la forme d'une tension.• Détecter la luminosité, sous la forme d’une information de type logique
(Tout ou Rien). Cette information sera envoyée au circuit qui fait office d'API.
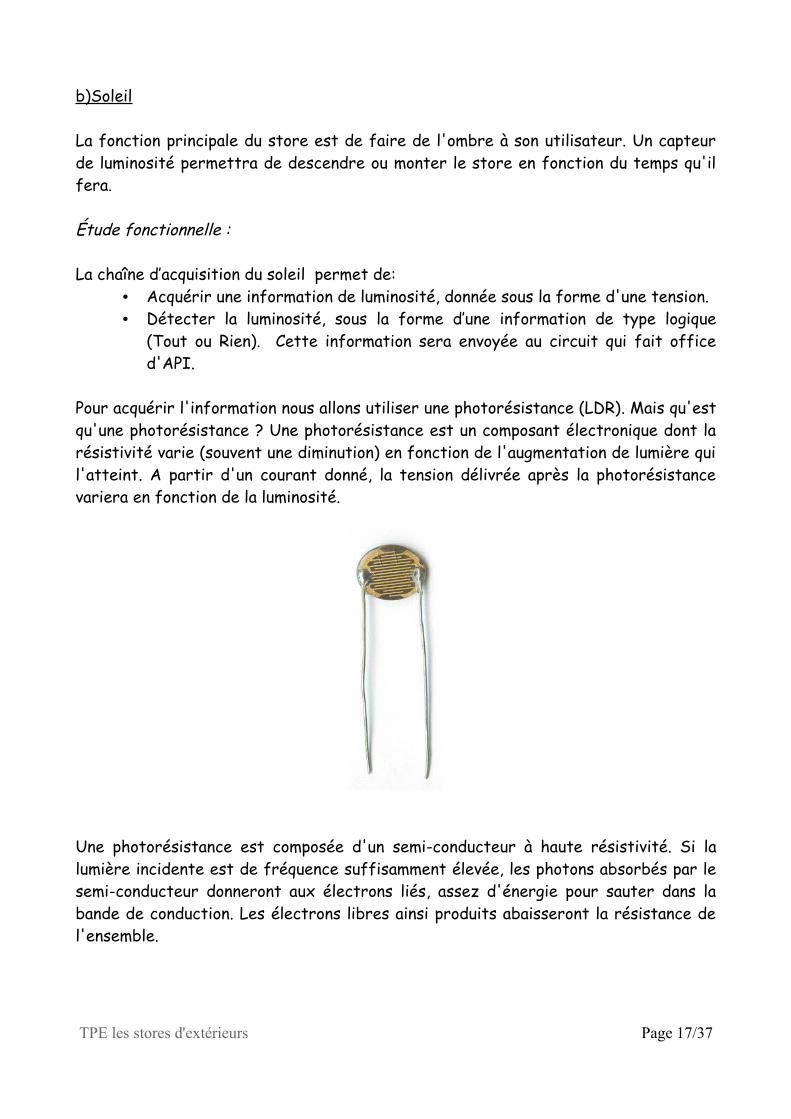
Pour acquérir l'information nous allons utiliser une photorésistance (LDR). Mais qu'est qu'une photorésistance ? Une photorésistance est un composant électronique dont la résistivité varie (souvent une diminution) en fonction de l'augmentation de lumière qui l'atteint. A partir d'un courant donné, la tension délivrée après la photorésistance variera en fonction de la luminosité.
Une photorésistance est composée d'un semi-conducteur à haute résistivité. Si la lumière incidente est de fréquence suffisamment élevée, les photons absorbés par le semi-conducteur donneront aux électrons liés, assez d'énergie pour sauter dans la bande de conduction. Les électrons libres ainsi produits abaisseront la résistance de l'ensemble.
TPE les stores d'extérieurs Page 17/37
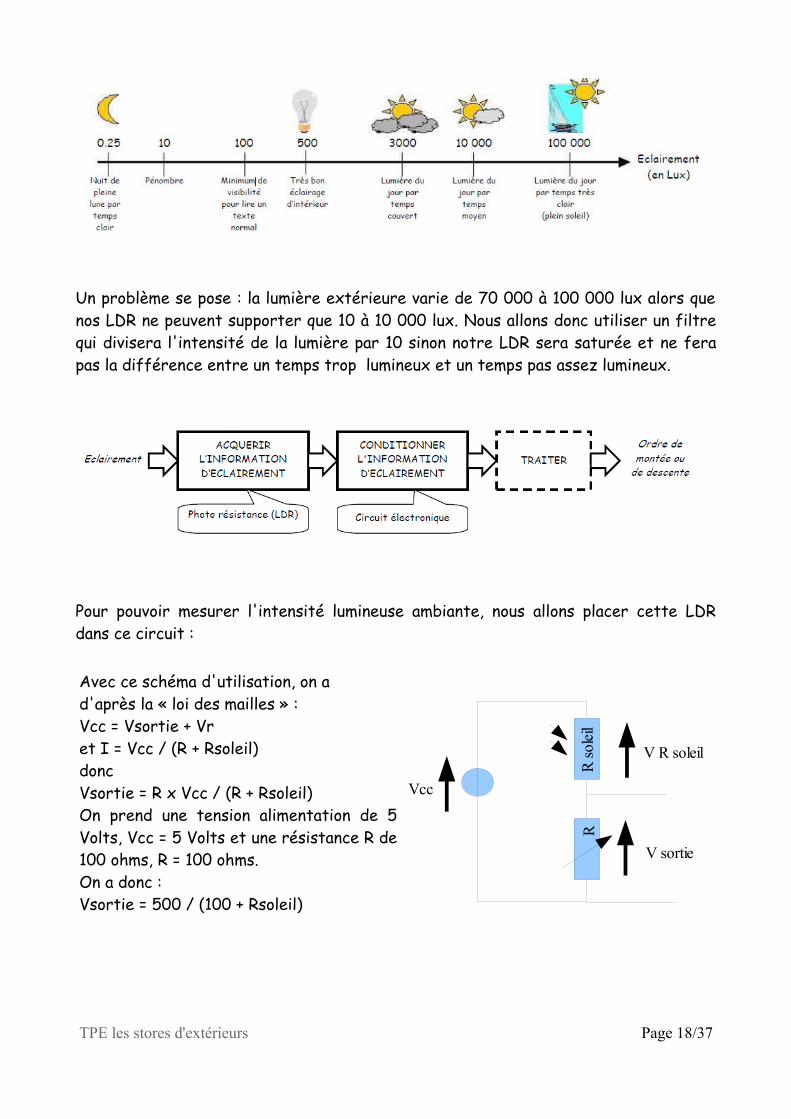
Un problème se pose : la lumière extérieure varie de 70 000 à 100 000 lux alors que nos LDR ne peuvent supporter que 10 à 10 000 lux. Nous allons donc utiliser un filtre qui divisera l'intensité de la lumière par 10 sinon notre LDR sera saturée et ne fera pas la différence entre un temps trop lumineux et un temps pas assez lumineux.
Pour pouvoir mesurer l'intensité lumineuse ambiante, nous allons placer cette LDR dans ce circuit :
Avec ce schéma d'utilisation, on ad'après la « loi des mailles » :Vcc = Vsortie + Vret I = Vcc / (R + Rsoleil)donc Vsortie = R x Vcc / (R + Rsoleil)On prend une tension alimentation de 5 Volts, Vcc = 5 Volts et une résistance R de 100 ohms, R = 100 ohms.On a donc :Vsortie = 500 / (100 + Rsoleil)
TPE les stores d'extérieurs Page 18/37
Vcc
V R soleil
V sortie
R so
leil
R
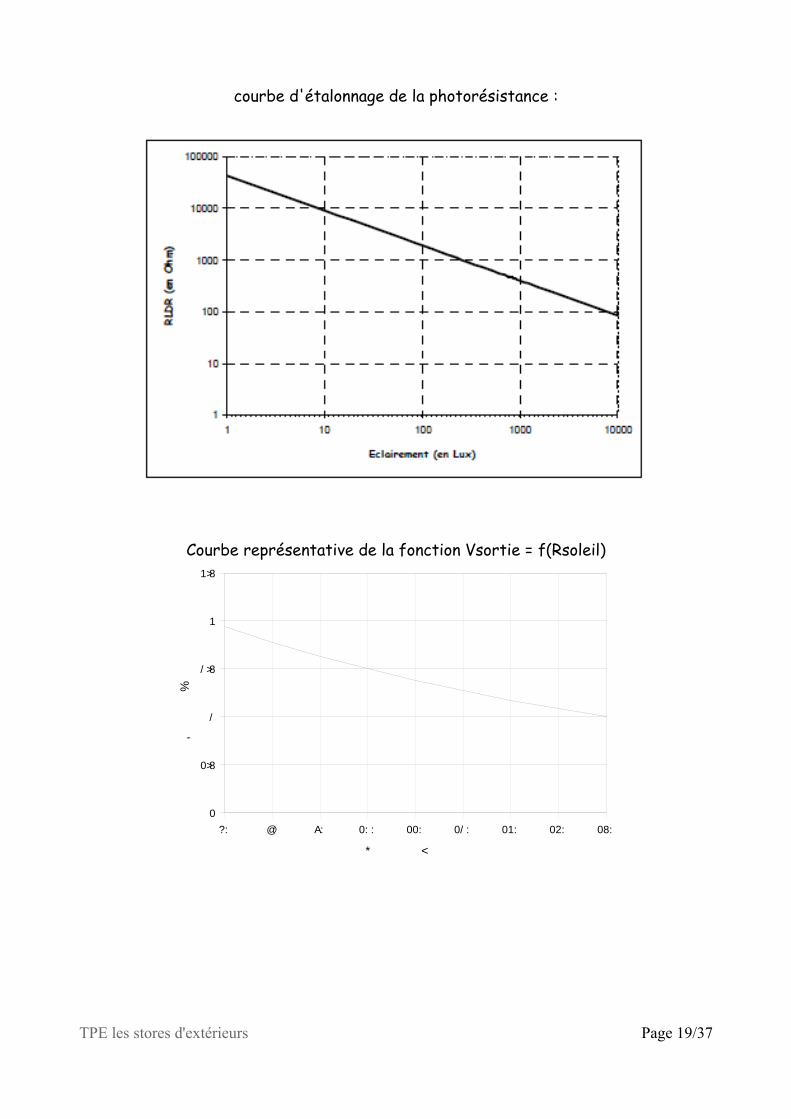
courbe d'étalonnage de la photorésistance :
Courbe représentative de la fonction Vsortie = f(Rsoleil)
TPE les stores d'extérieurs Page 19/37
70 80 90 100 110 120 130 140 1501
1,5
2
2,5
3
3,5
R soleil (ohms)
V so
rtie
(vol
ts)
La lumière qui arrive à la photorésistance a une intensité de :10 000 lux en plein soleil7 000 lux par temps voilé
D'après la courbe d'étalonnage de notre photorésistance, les seuils des valeurs des résistances sont : limite supérieure : 90 ohmslimite inférieure : 120 ohms
On calcule alors les seuils des tensions de sortie car ce sont elles que l'on va pouvoir comparer.
● Limite supérieure de luminosité : il faut descendre le store lorsque la tension de sortie dépasse Vsortie = 500 / (100 + 90) = 2,63 V
● Limite inférieur de luminosité : il faut monter le store lorsque la tension de sortie est en dessous de Vsortie = 500 / (100 + 120) = 2,27 V
Cette tension sera insérée dans deux comparateurs : un pour monter le store, l'autre pour descendre le store.La sortie du comparateur 1 ordonnera la descente du store tandis que la sortie du comparateur 2 ordonnera la remontée du store.
TPE les stores d'extérieurs Page 20/37
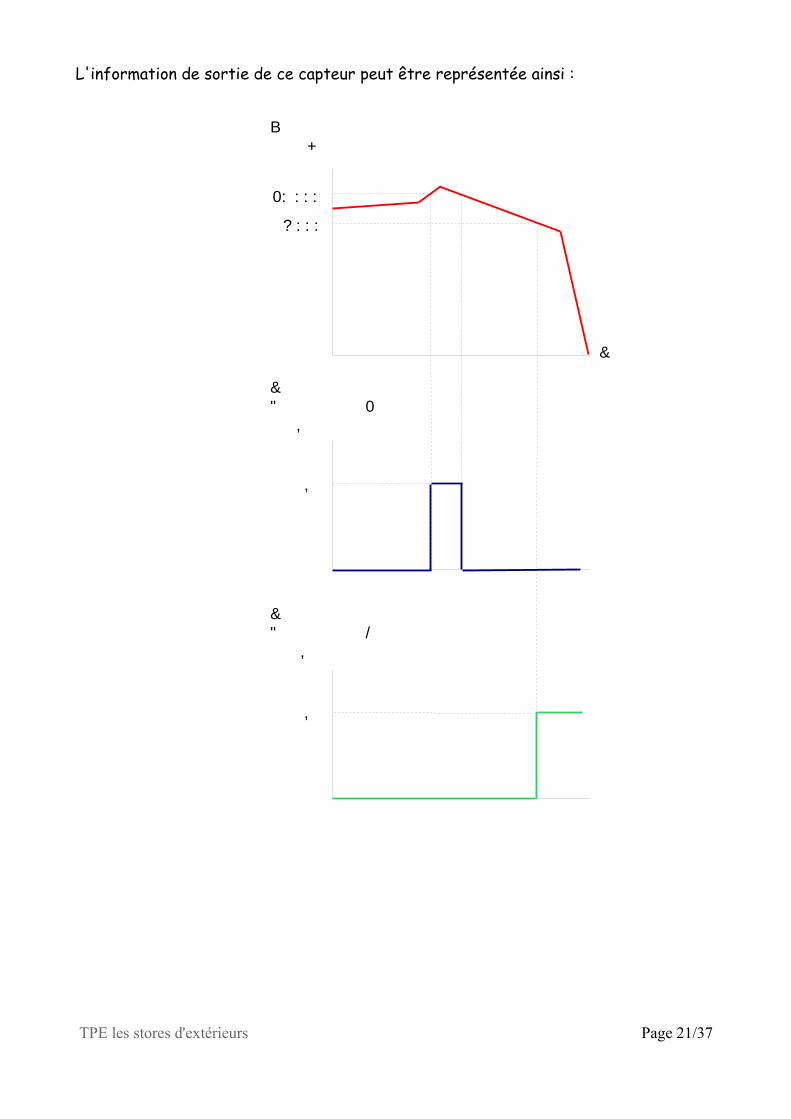
L'information de sortie de ce capteur peut être représentée ainsi :
TPE les stores d'extérieurs Page 21/37
Temps
Intensité lumineuse ambiante (en lux)
Tension de sortie du comparateur 1(en Volts)
+Ve
Tension de sortie du comparateur 2 (en Volts)
+Ve
10 000
7 000

Le comparateur de tension
Le comparateur de tension a un fonctionnement relativement simple. Il produit une différence de potentiel de type logique notée VS qui indique si les deux tensions d’entrées VE1 et VE2 sont inférieures ou supérieures.En général, l’une des deux tensions est constante alors que l’autre est variable.La valeur de la tension de sortie dépend de plusieurs paramètres du système utilisé :pour réaliser la fonction « Comparaison de tensions » :-le niveau logique 1 est équivalent à la tension appelée VSAT+=(+VCC)-tensionde déchet haute,-le niveau logique 0 est équivalent à la tension appelée VSAT-=VEE+tension dedéchet basse.
(+VCC) : tension d’alimentation positive du composant (VEE) : tension d’alimentation négative du composant tension de déchet : c’est une chute de tension par rapport à l’alimentation ducomposant.
Toutes ces données se trouvent en analysant le câblage du composant pour déterminer les valeurs de (+VCC) et (-VCC) puis par une analyse de la documentation constructeur du composant (pour les tensions de déchets).
En résumé, si la tension constante est supérieure à celle insérée dans le comparateur, on a une information logique 0 alors que si la tension insérée est supérieure à la tension constante, on aura donc une information logique 1.
donc si V+ › V- on a Vs=+Vcc V+ ‹ V- on a Vs=0
TPE les stores d'extérieurs Page 22/37

c)Début et fin de course
Le dernier paramètre en fonction duquel le store doit réagir est le fait que le store soit descendu au maximum ou remonté au maximum. En effet, il ne faut pas qu'une fois le store remonté, le moteur continue à tourner sinon il détériorerait le store. Nous allons donc mettre en place des capteurs de début et de fin de course.Le problème est de savoir comment détecter que le store est entièrement déroulé ou enroulé. On ne peut pas compter le nombre de tours que fait le moteur sinon il nous faudrait la présence d'un API (Automate Programmable Industriel) ce qui n'est pas le plus adapté car le fonctionnement du store n'est pas séquentiel. Nous avons donc décidé de mettre une capteur mécanique qui fonctionne ainsi :Sur l'arbre du moteur, une vis est rattachée; elle est donc solidaire de l'arbre du moteur au niveau de la rotation.Cette vis est vissée dans un écrou qui est rattaché par une liaison glissière à la partie fixe du store.Ainsi au fur et à mesure que le tube entraîné par le moteur va tourner, l'écrou va avoir un mouvement de translation.Cela peut être schématisé ainsi : les différentes classes d'équivalence sont :
1) la vis fixée au moteur2) l'écrou3) La partie fixe qui empêche la rotation de l'écrou
Ainsi à chaque tour du moteur, l'écrou se déplace latéralement de la valeur du pas de la vis. On définit le point de départ de l'écrou c'est à dire la position de l'écrou lorsque le store est complètement relevé que l'on note A. On note B la position de l'écrou. On peut donc dire que AB = Valeur du pas x Nombre de tour effectué par le moteur. Le moteur doit faire environ 15,9 tours pour dérouler entièrement le store. On peut donc dire que la longueur maximale de AB doit être AB max = 15,9 pasGrâce à cela, on peut maintenant utiliser deux ILS (Interrupteurs à Lame Souple) qui sont des interrupteurs normalement ouverts et qui se ferment lorsque quelque chose appuie légèrement dessus (car cette action déforme l'une des deux lames qui vient au
TPE les stores d'extérieurs Page 23/37
moteur
1
2
3
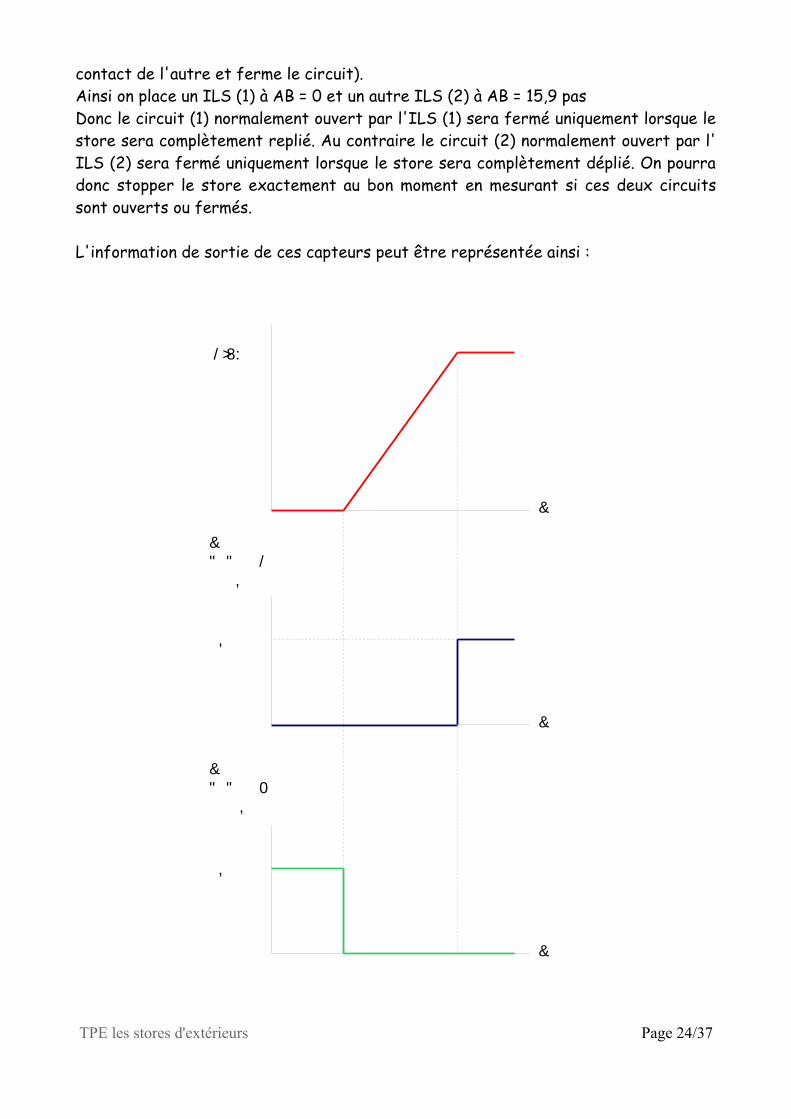
contact de l'autre et ferme le circuit).Ainsi on place un ILS (1) à AB = 0 et un autre ILS (2) à AB = 15,9 pasDonc le circuit (1) normalement ouvert par l'ILS (1) sera fermé uniquement lorsque le store sera complètement replié. Au contraire le circuit (2) normalement ouvert par l' ILS (2) sera fermé uniquement lorsque le store sera complètement déplié. On pourra donc stopper le store exactement au bon moment en mesurant si ces deux circuits sont ouverts ou fermés.
L'information de sortie de ces capteurs peut être représentée ainsi :
TPE les stores d'extérieurs Page 24/37
Temps
Temps
Longueur de toile dépliée (en mètre)
Tension de sortie du circuit (2)(en Volts)
+Ve
Temps
Tension de sortie du circuit (1) (en Volts)
+Ve
2,50
B) Le boîtier de commandeNous avons eu le problème des systèmes de commande de ce store pour qu'ils prennent en compte le vent, le soleil et les instructions de l'utilisateur. On a donc choisit de diviser la partie électrique en plusieurs éléments : un boîtier contenant le circuit d'alimentation (pour le moteur et les capteurs), un boîtier de commande actionné par l'utilisateur et un autre qui déclenche le moteur en fonction des informations reçues.
Nous avons donc deux parties: la partie contenant le circuit d'alimentation et le boîtier de commande actionné par l'utilisateur qui va décider si le store est en mode manuel ou automatique.
Étude fonctionnelle :Le système de commande du store permet de :
• Alimenter le moteur ou les capteurs suivant le mode demandé
• Passer du mode manuel au mode automatique
• Prévenir l'utilisateur s'il y a trop de vent
• Mettre sous ou hors tension le store
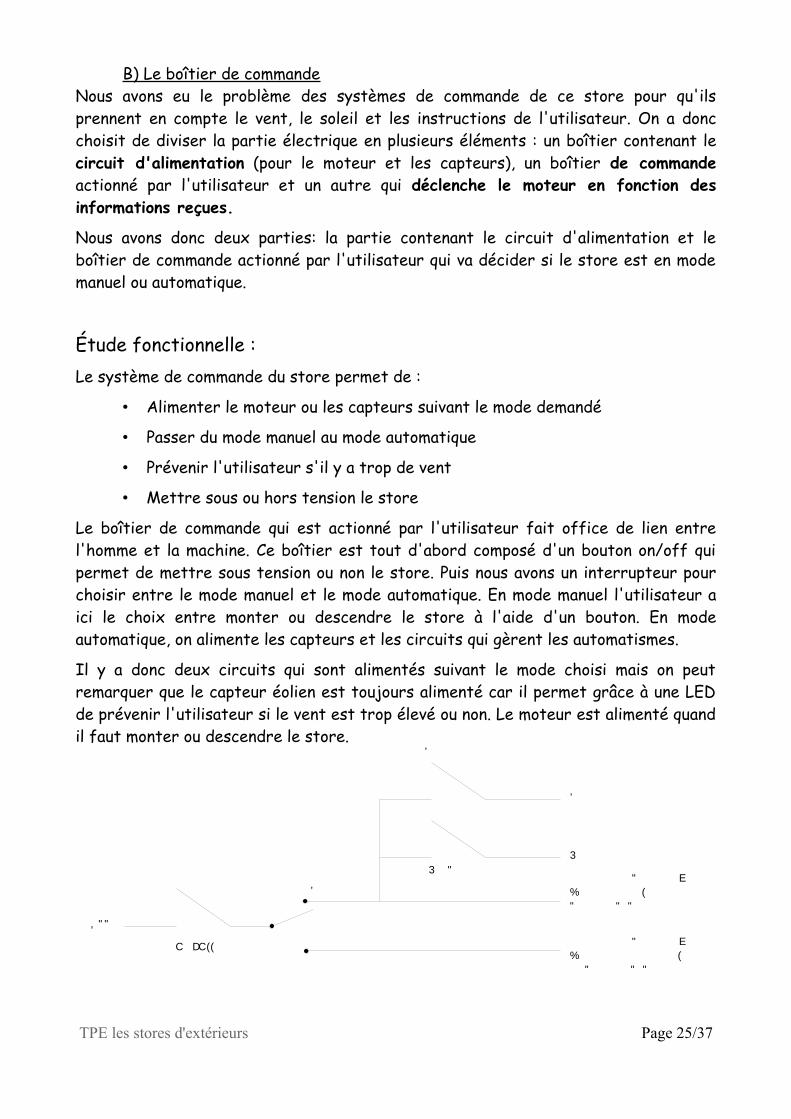
Le boîtier de commande qui est actionné par l'utilisateur fait office de lien entre l'homme et la machine. Ce boîtier est tout d'abord composé d'un bouton on/off qui permet de mettre sous tension ou non le store. Puis nous avons un interrupteur pour choisir entre le mode manuel et le mode automatique. En mode manuel l'utilisateur a ici le choix entre monter ou descendre le store à l'aide d'un bouton. En mode automatique, on alimente les capteurs et les circuits qui gèrent les automatismes.
Il y a donc deux circuits qui sont alimentés suivant le mode choisi mais on peut remarquer que le capteur éolien est toujours alimenté car il permet grâce à une LED de prévenir l'utilisateur si le vent est trop élevé ou non. Le moteur est alimenté quand il faut monter ou descendre le store.
TPE les stores d'extérieurs Page 25/37
Automatique
Manuel
On / Off
Vcc
Monter
DescendreD+
M+
Alimentation capteurs : vent + début + f in de course + circuit manuel
Alimentation capteurs : vent + soleil + début + f in de course + circuit automatique
1)Un API est-il nécessaire ?
a) fonctionnement d'un APIL'automate Programmable Industriel, API (en anglais Programmable Logic Controller, PLC) est un dispositif similaire à un ordinateur, utilisé pour automatiser des processus comme la commande des machines sur une ligne de montage dans une usine. Là où les systèmes automatisés plus anciens emploieraient des centaines ou des milliers de relais et de cames, un simple automate suffit.
L'API est structuré autour d'une unité de calcul ou processeur (en anglais Central Processing Unit, CPU), d'une alimentation (depuis des tensions AC ou DC) et, de modules suivant les besoins de l'application, tel que:
Des cartes d'entrées - sorties (en anglais Input - Output, I/O) numériques (Tout ou rien) ou analogiques Cartes d'entrées pour brancher des capteurs, boutons poussoirs, ... Cartes de sorties pour brancher des actionneurs, voyants, vannes, ... Des modules de dialogue (homme-machine) tel que le pupitre (tactile ou avec clavier) dialoguant avec l'automate.
Les programmes des API sont traités selon un cycle précis : acquisition de toutes les entrées (recopie dans une mémoire image) - traitement des données (calculs) - mise à jour des sorties. Le temps d'un cycle d'API varie selon la taille du programme, la complexité des calculs et de la puissance de l'API. Le temps de cycle est généralement de l'ordre d'une vingtaine de millièmes de seconde.
L'absence d'interface Homme-machine (IHM, HMI en anglais) pour visualiser l'action et le fonctionnement du programme sur la partie opératrice fait que les automates sont très souvent reliés à un pupitre opérateur, une interface graphique (écran d'affichage ou écran tactile) ou un PC.
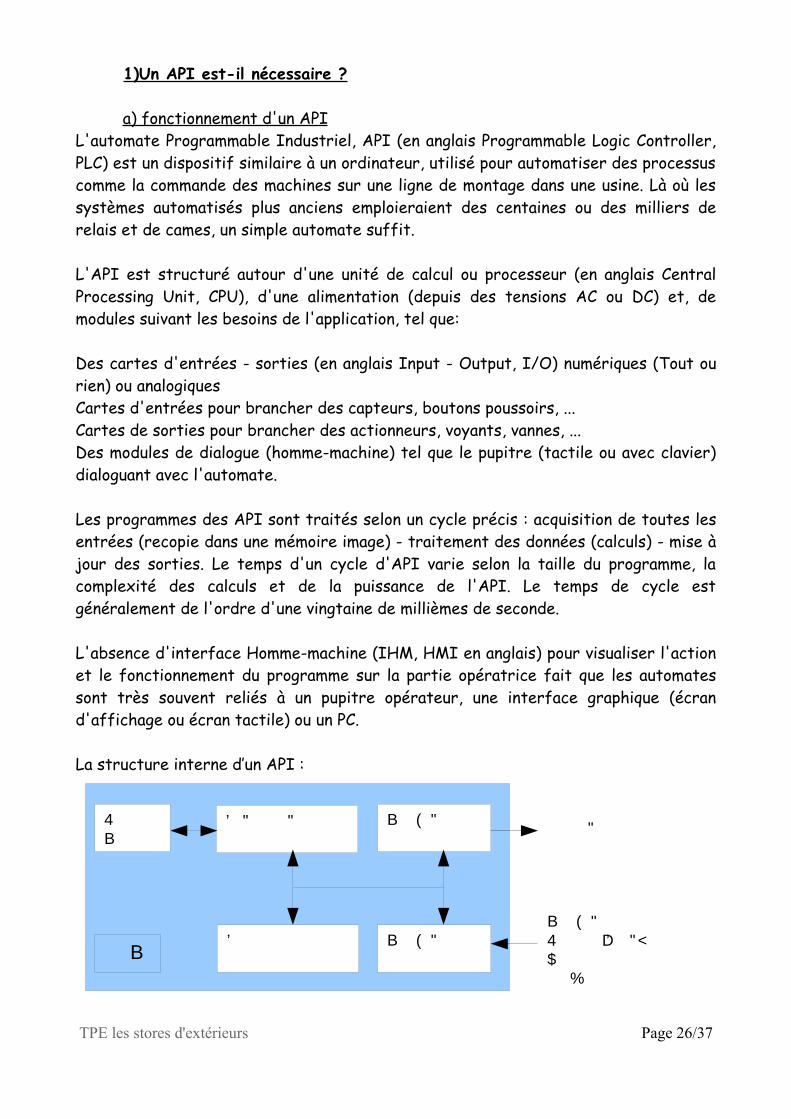
La structure interne d’un API :
TPE les stores d'extérieurs Page 26/37
API
HorlogeInterne
Microprocesseur Interface de Sortie
Mémoire Interface d'entrée
Bus
Pré-actionneurs
Interface Homme/MachineEtat du système et de l'environnement
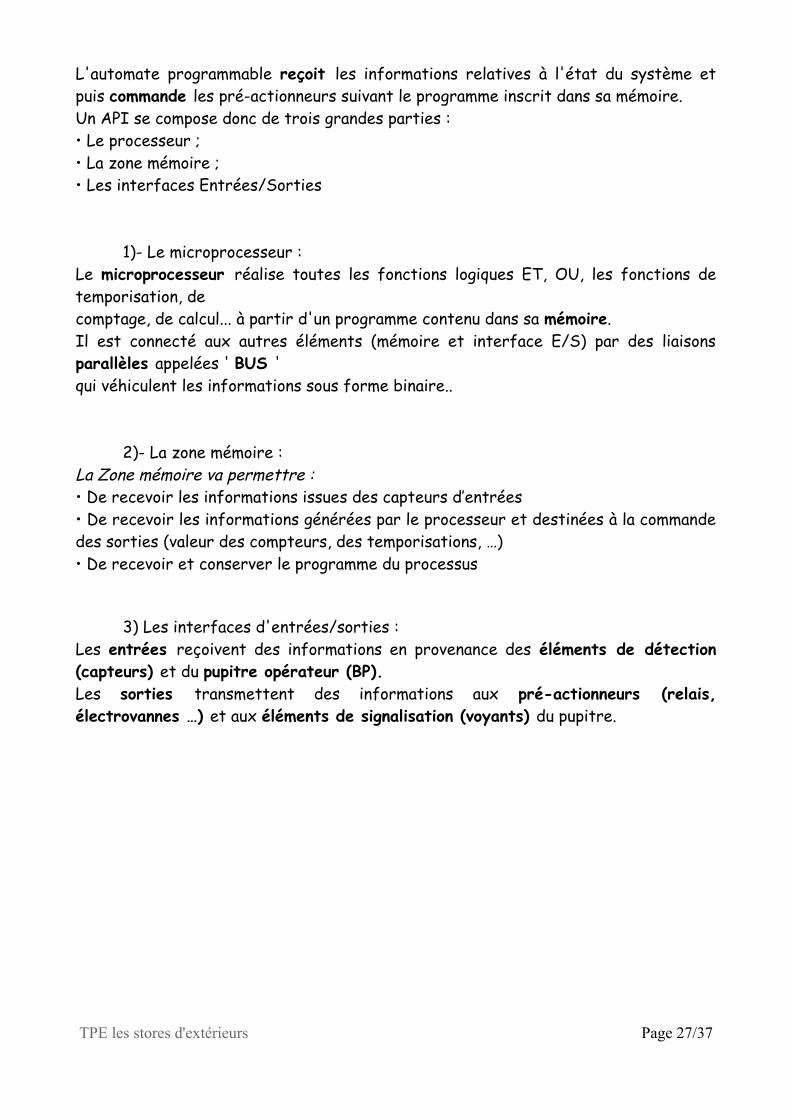
L'automate programmable reçoit les informations relatives à l'état du système et puis commande les pré-actionneurs suivant le programme inscrit dans sa mémoire.Un API se compose donc de trois grandes parties :• Le processeur ;• La zone mémoire ;• Les interfaces Entrées/Sorties
1)- Le microprocesseur :Le microprocesseur réalise toutes les fonctions logiques ET, OU, les fonctions de temporisation, decomptage, de calcul... à partir d'un programme contenu dans sa mémoire.Il est connecté aux autres éléments (mémoire et interface E/S) par des liaisons parallèles appelées ' BUS 'qui véhiculent les informations sous forme binaire..
2)- La zone mémoire :La Zone mémoire va permettre :• De recevoir les informations issues des capteurs d’entrées• De recevoir les informations générées par le processeur et destinées à la commande des sorties (valeur des compteurs, des temporisations, …)• De recevoir et conserver le programme du processus
3) Les interfaces d'entrées/sorties :Les entrées reçoivent des informations en provenance des éléments de détection (capteurs) et du pupitre opérateur (BP).Les sorties transmettent des informations aux pré-actionneurs (relais, électrovannes …) et aux éléments de signalisation (voyants) du pupitre.
TPE les stores d'extérieurs Page 27/37
4)- Fonctionnement automate programmable industriel :
AVANTAGES• Simplification du câblage.
• Modifications du programme faciles à effectuer par rapport à une logique câblée.
• Énormes possibilités d'exploitation.
• Fiabilité professionnelle.
TPE les stores d'extérieurs Page 28/37
LECTURE DE L'ETAT DES ENTREES
EXECUTION DU PROGRAMME
AFFECTATION DES SORTIES
INCONVENIENTS• En cas d'arrêt du système, la panne sera très dure à réparer…
• Son prix qui ne le met pas à la portée de toutes les bourses.
b) Les mêmes fonctions sont réalisées avec nos propres circuits
Celui-ci est le circuit qui gère le fonctionnement automatique du store :Il utilise simplement des transistors qui fonctionnent en mode non linéaire : ils sont utilisés comme des interrupteurs commandés de manière électrique. Dans les transistors NPN, si le courant de la base est positif, le transistor est comme un interrupteur fermé. Au contraire, si le courant dans la base du transistor est nul, le transistor est comme un interrupteur ouvert. Dans les transistors PNP, c'est l'inverse.
NPN PNP
TPE les stores d'extérieurs Page 29/37
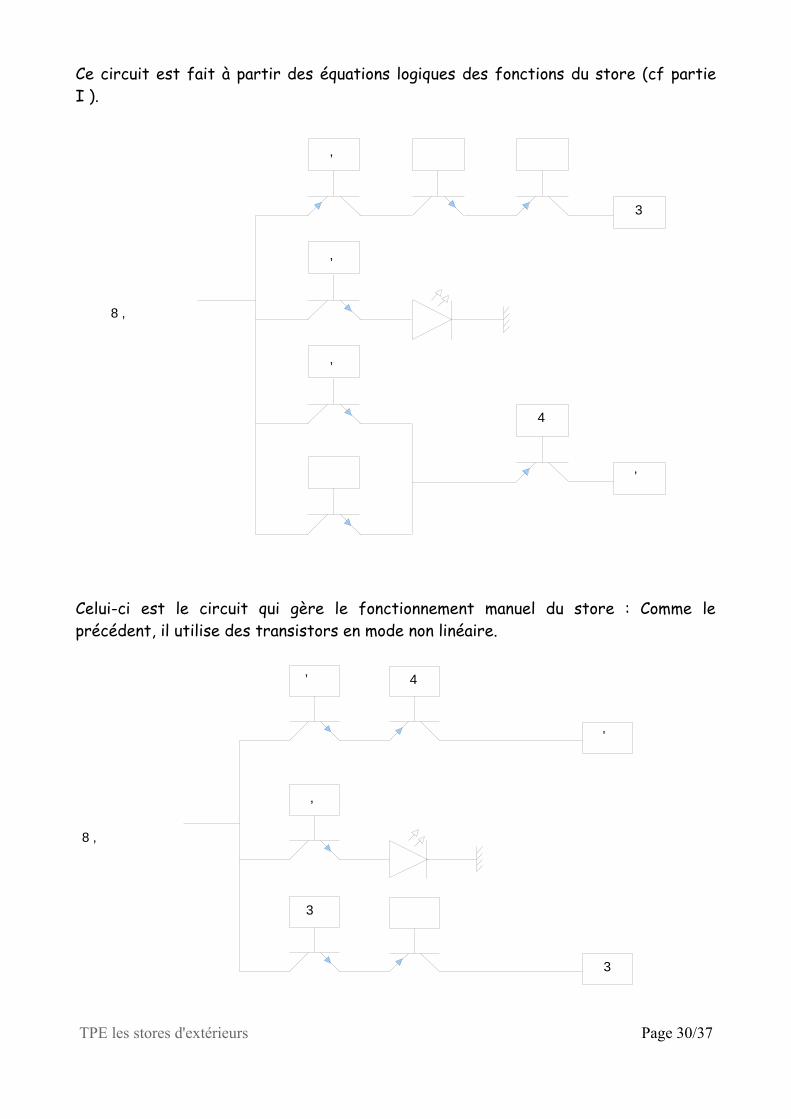
Ce circuit est fait à partir des équations logiques des fonctions du store (cf partie I ).
Celui-ci est le circuit qui gère le fonctionnement manuel du store : Comme le précédent, il utilise des transistors en mode non linéaire.
TPE les stores d'extérieurs Page 30/37
Alimentation partie manuelle+5 Volts
HM+
M
V
BD+
D
Alimentation Automatisme+5 Volts
V L+
D
B
V
V
L-
H
M

c) La différence ? Quelle solution choisir ?
La différence se fait surtout au niveau du prix, nos circuits ne fonctionnent qu'avec des composant simples et bon marché comparés à l'API qui lui est très coûteux. Une question se pose dans notre système: un API est-il vraiment nécessaire? La réponse est non, ici l'API n'est pas vraiment nécessaire mais il pourrait bien sûr fonctionner. Son fonctionnement ne serait pas optimal car notre système n'est pas séquentiel. L'avantage d'utiliser un API pourrait être une amélioration future. En effet un API est programmable à volonté il pourrait donc subir des améliorations (voir IV).
TPE les stores d'extérieurs Page 31/37

Partie 4 : Améliorations possibles dans le futur
Un avenir pour notre store d'extérieur automatique? Des améliorations possibles? Au XXI°s, où chaque jour des produits nouveaux inondent le marché mondial; on peut penser que notre store peut être plus performant. Pour améliorer celui-ci, il faudrait pouvoir rajouter des capteurs ou des effecteurs,et donc pouvoir modifier les circuits internes du store. C'est dans ce cas-là que l'API pourrait être d'un grande utilité.Les améliorations possibles ne sont limités que par la technologie d'aujourd'hui et notre imagination. Pour notre part, nous avons pensé à un store qui serait branché directement sur internet, qui pourrait récupérer des données météorologiques et en fonction prévoir la montée et descente du store. Ce qui ferait de notre store une mini « station météo ». On pourrait aussi ajouter des spots sous le store avec un capteur de luminosité pour les soirées d'été. On pourrait également le compléter avec une horloge interne, ainsi l'utilisateur pourrait choisir l'heure de descente et de montée du store ou encore avec un logiciel qui permettrait de commander le store à distance.Dans le cadre du développement durable, on pourrait imaginer un store autonome sur le plan énergétique qui utiliserait une alimentation électrique à partir de panneaux photovoltaïques.
TPE les stores d'extérieurs Page 32/37
Bibliographie
Les bannes cassette et coffre documentation papier disponible sur demande à la société KOMILFO (Z.A. de la Madeleine 2, Avenue de la Madeleine 33174 Gradignan)
moteurs et automatisme pour Stores extérieurs ils se plient à vos désirs et aux aléas de la météo [documentation papier éditée par Somfy ( 1 place du Crêtet BP 138 – 74307 Cluses Cedex) ] disponible sur demande à la société KOMILFO (Z.A. de la Madeleine 2, Avenue de la Madeleine 33174 Gradignan)
Présentation papier de Experts Storistes agréés Soliso [ édité par STORE GIRONDE ] disponible sur demande à la société KOMILFO (Z.A. de la Madeleine 2, Avenue de la Madeleine 33174 Gradignan)
Documentation technique de la société Somfy sur les caractéristiques des capteurs vent et soleil.
Documentation en ligne store banne coffre B.I.E.R. Store de Tournus consultée le 13 janvier 2009
Documentation en ligne de Jean Lhivert à propos des photopile disponible à l'adresse http://www.lyc-emperi.ac-aix-marseille.fr/asp/sti/ressources_communes/systemes/panneau_solaire/photopile.pdf et consultée le 9/12/2008
Les Capteurs Documentation du génie mécanique de l'École Polytechnique de Montréal réalisée par le Professeur E.K. Boukas à l'automne 2003
Guide du dessinateur industriel édition 2004 réalisé par André Chevalier éditeur : hachette technique; collection : Guides Industriels
TPE les stores d'extérieurs Page 33/37
Duprat VincentGirard Thibault1ère SN
Quelles sont les solutions techniques et technologiques qui permettent d'automatiser un
store d'extérieur ?
Au XXIe remonter un store avec une manivelle est dépassé, maintenant avec les progrès de la domotique, il est très fréquent de voir des stores extérieurs automatiques. Notre problématique est donc : Quelles sont les solutions techniques et technologiques qui permettent d'automatiser un store d'extérieur ?
Au début j'ai beaucoup cherché le fonctionnement des différents types de capteurs qui existent. Par exemple pour le soleil nous avions la possibilité d'utiliser une photorésistance ou une photopile. J'ai opté pour la photorésistance plus souvent appelée LDR (Light Dependent Resistor) qui est plus simple à gérer dans les circuits (il suffit de l'alimenter et de définir une résistance pour avoir une tension de sortie qui se calcule directement en fonction de la luminosité).
En plus de nos recherches, je suis allé voir plusieurs stores automatiques installés dans ma famille. Ainsi les quelques questions que j'avais sur le fonctionnement d'un store ont pu être résolues par l'observation du système en action.
De plus j'ai noté quelques données techniques comme les dimensions (L x l) du store (3,50x2,50 m), le temps (Δt) de remontée (12 sec), le poids (P) qui était indiqué par le fabriquant (22 kg) et l'angle (α) entre le store et l'horizontale (30°). Ainsi j'ai pu faire tous les calculs de choix du moteur avec ces chiffres tandis que Thibault se chargeait de la modélisation du système sur ordinateur. Par exemple j'ai calculé la force de traction nécessaire (T) : T = P/2 x sin (α) , la puissance utile du moteur Putile= ω (en rad /sec) x R (25 mm) x T , et le couple du moteur Couple = Pmoteur / ω . Après cela il m'a encore fallu décider des systèmes de commande de ce store pour que cela prenne en compte le vent, le soleil et les instructions de l'utilisateur. J'ai choisi de diviser la partie électrique en plusieurs éléments : un boîtier contenant le circuit d'alimentation (pour le moteur et les capteurs), un boîtier de commande actionné par l'utilisateur et un autre qui déclenche le moteur en fonction des informations reçues.
Lors de ce TPE mon problème majeur a été la recherche du fonctionnement précis de la partie qui gère l'automatisme (les circuits nécessaires pour réagir en fonction des informations reçues sur le vent, le soleil et ce que veut l'utilisateur). Un autre problème a été le fait que en réalité ce sujet demande plus de connaissances que celles que nous avons déjà acquises. Ainsi avec l'aide de notre
TPE les stores d'extérieurs Page 34/37

professeur de mécanique, je me suis donc débrouillé à simplifier le système pour le mettre à notre niveau (par exemple nous avons considéré que la totalité du poids du store s'applique à l'extrémité pour simplifier les calculs de puissance du moteur etc).
En conclusion de ce travail de TPE, je dirais que dans l'état actuel du projet, je serais en mesure de fabriquer une maquette opérationnelle car tout a été prévu (les capteurs de début et de fin de course, les automatismes etc). Par contre, la maquette serait surdimensionnée car le moteur que nous avons choisi n'est pas optimal. En effet pour simplifier les calculs j'ai considéré que le poids du store était uniquement appliqué à son extrémité et j'ai pris un rendement moteur de 0,7 pour contrer les frottements. Le moteur que j'ai choisi est plus gros que celui nécessaire dans la réalité donc la maquette fonctionnerai mais consommerais plus d'énergie que nécessaire. Pour construire une maquette il faudrait aussi trouver les bons capteurs, les étalonner et calculer les résistances nécessaires pour les intégrer dans le système. Donc avec l'étude du système que nous avons mené, je pense être en mesure d'expliquer complètement le fonctionnement du store.
TPE les stores d'extérieurs Page 35/37
Girard ThibaultDuprat Vincent1ère SN
Quelles sont les solutions techniques et technologiques qui permettent
d'automatiser un store d'extérieur ?
Au XXI°s, le temps des stores extérieurs descendus ou remontés avec une manivelle est révolu. Maintenant avec les progrès technologiques en domotique, il est habituel de voir des stores extérieurs automatiques. Notre problématique est donc la suivante : Quelles sont les solutions techniques et technologiques qui permettent d'automatiser un store d'extérieur ?
Pour automatiser un store extérieur à l’aide des techniques et de la technologie contemporaines, il a fallu motoriser la montée et la descente du store mais aussi implanter des capteurs qui, en fonction du vent et du soleil ordonnent au store son mouvement. De plus, il a fallu grâce à un boitier de commande transmettre les données Homme-machine. Pour le soleil, il y avait deux possibilités, soit une photorésistance, soit une photopile. J'ai opté pour la photorésistance plus souvent appelée LDR (Light Dependent Resistor). Pour le capteur du vent, j'ai choisi une dynamo tachymétrique dont la tension de sortie est U sortie = (K x V) / rayon, avec V la vitesse du vent. De plus, j’ai utilisé un pont de transistor pour le moteur. J’ai décidé d’utiliser mes propres circuits plutôt qu’un API (automate programmable industriel) car mon système n’est pas séquentiel et ce ne serait pas un fonctionnement optimal pour l’API.
En plus de mes recherches, j'ai pu observer le fonctionnement réel d'un store qui était dans notre salle de SI. Cela m'a permis de comprendre certains problèmes comme l'angle du store ou son temps de remontée... A partir d'un schéma professionnel et des données comme la longueur et la largeur du store (3.5x2.5m), j'ai pu créer une modélisation 3D SolidWorks (le logiciel) qui nous a permis d'analyser les liaisons et l'utilité de chaque pièce.
Après cela, il a encore fallu décider comment le store serait commandé en fonction des capteurs et de l'utilisateur. J'ai choisi de diviser la partie électrique en trois parties indépendantes : un boîtier contenant le circuit d'alimentation (pour le moteur et les capteurs), un boîtier de commande actionné par l'utilisateur et un autre qui déclenche le moteur en fonction des informations reçues.
Lors de ce TPE, un problème majeur a été la recherche du fonctionnement des capteurs notamment les circuits électriques qui permettent au store de fonctionner en tenant compte des informations reçues par les capteurs.Un autre problème majeur a été la recherche des connaissances. Au début je pensais tout trouver sur internet mais la réalité était que j’avais déjà les compétences de
TPE les stores d'extérieurs Page 36/37
bases, il me fallait juste y ajouter quelques informations supplémentaires données par les professeurs et surtout beaucoup de travail personnel d’analyse et de synthèse.
En conclusion de ce Travail Personnel Encadré, je peux dire que je suis capable d'expliquer entièrement ou presque le fonctionnement de tout le store extérieur, autant la partie électrique que mécanique. Bien qu'à partir de mon travail une production à grande échelle ne serait pas rentable, mon store fonctionnerait parfaitement malgré quelques imperfections dues à mon manque de connaissances. On pourrait construire une maquette mais il faudrait tout d'abord trouver les bons capteurs, les étalonner et calculer les résistances nécessaires pour les intégrer dans le système. Mon travail sur l'étude du système permet donc d'expliquer complètement le fonctionnement du store mais également de montrer les progrès technologiques du XXI° au service du consommateur.
TPE les stores d'extérieurs Page 37/37





























