Embed Size (px)
Citation preview
Enrico VitaliUniversita degli Studi di Pavia
Lezioni introduttive sulle
equazioni differenziali ordinarie
a.a. 2009/2010


i
Quelle che seguono sono le note del corso di “Equazioni differenziali” tenutonegli anni accademici 2007/2008, 2008/2009 e 2009/2010 per il Corso di laureain Matematica e per il Corso di laurea in Scienze Fisiche dell’Universita degliStudi di Pavia.
Vorrebbero essere un punto di partenza per lo studio delle opere classicheespressamente dedicate a questi argomenti e citate, in parte, in bibliografia.
Si ringraziano fin d’ora quanti (penso in particolare agli studenti del corso)segnaleranno errori, proporanno suggerimenti, avanzeranno commenti, . . .
E.V.
Pavia, 22 gennaio 2010

Indice
1 Esempi introduttivi 11.1 Modelli di crescita per una singola popolazione . . . . . . . . . . 11.2 Cinetica chimica . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Ordine di una reazione e modello differenziale . . . . . . . 41.2.2 Datazione mediante radiocarbonio . . . . . . . . . . . . . 6
1.3 L’oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . 71.4 Pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5 Equazione di Schrodinger . . . . . . . . . . . . . . . . . . . . . . 101.6 Circuiti elettrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.7 Specie in competizione: sistemi non lineari . . . . . . . . . . . . . 141.8 Equazioni in forma normale. . . . . . . . . . . . . . . . . . . . . . 15
2 Problemi ai valori iniziali 212.1 Risultati di esistenza ed unicita . . . . . . . . . . . . . . . . . . . 212.2 Prolungamento delle soluzioni . . . . . . . . . . . . . . . . . . . . 272.3 Lemma di Gronwall . . . . . . . . . . . . . . . . . . . . . . . . . 322.4 Disuguaglianze differenziali . . . . . . . . . . . . . . . . . . . . . 342.5 Dipendenza delle soluzioni dai dati . . . . . . . . . . . . . . . . . 382.6 Sistemi autonomi: generalita . . . . . . . . . . . . . . . . . . . . 43
3 Tecniche elementari di integrazione 473.1 Equazioni a variabili separabili . . . . . . . . . . . . . . . . . . . 473.2 Equazioni lineari del primo ordine . . . . . . . . . . . . . . . . . 483.3 Equazioni di Bernoulli; equazione di Riccati . . . . . . . . . . . . 503.4 Equazioni di tipo omogeneo . . . . . . . . . . . . . . . . . . . . . 513.5 Equazioni del tipo F (y, y′) = 0 o F (x, y′) = 0 . . . . . . . . . . . 523.6 Equazione di Clairaut . . . . . . . . . . . . . . . . . . . . . . . . 563.7 Equazioni differenziali e forme differenziali . . . . . . . . . . . . . 57Appendice A: equazione di Eulero di un funzionale . . . . . . . . . . . 64Appendice B: forme differenziali lineari . . . . . . . . . . . . . . . . . . 67
4 Equazioni e sistemi differenziali lineari 714.1 Equazione omogenea. Matrice risolvente . . . . . . . . . . . . . . 724.2 Equazione completa. Variazione delle costanti . . . . . . . . . . . 764.3 Esponenziale di una matrice . . . . . . . . . . . . . . . . . . . . . 774.4 Sistemi omogenei autonomi . . . . . . . . . . . . . . . . . . . . . 804.5 Calcolo della matrice esponenziale . . . . . . . . . . . . . . . . . 824.6 Equazioni scalari lineari di ordine superiore . . . . . . . . . . . . 99
iii

iv INDICE
4.7 Equazioni a coefficienti costanti . . . . . . . . . . . . . . . . . . . 1024.8 Sistemi omogenei autonomi: il caso bidimensionale . . . . . . . . 106Appendice: rappresentazione di operatori lineari . . . . . . . . . . . . 110
5 Comportamento asintotico. Stabilita 1195.1 Stabilita dei punti di equilibrio . . . . . . . . . . . . . . . . . . . 1195.2 Comportamento asintotico dei sistemi lineari . . . . . . . . . . . 1205.3 Stabilita linearizzata . . . . . . . . . . . . . . . . . . . . . . . . . 1255.4 Funzioni di Liapunov . . . . . . . . . . . . . . . . . . . . . . . . . 131
6 Equazioni della Fisica Matematica 1376.1 Equazione di Laplace su di un rettangolo . . . . . . . . . . . . . 1386.2 Equazione di Hermite . . . . . . . . . . . . . . . . . . . . . . . . 1416.3 Equazione di Bessel . . . . . . . . . . . . . . . . . . . . . . . . . 1426.4 Oscillatore armonico quantistico . . . . . . . . . . . . . . . . . . 1456.5 Modi normali di vibrazione per una membrana circolare . . . . . 146
Indice analitico 150
Bibliografia 153

Capitolo 1
Esempi introduttivi
Presentiamo alcuni esempi di modellizzazione matematica che danno luogo adequazioni differenziali ordinarie.
1.1 Modelli di crescita per una singola
popolazione
Si consideri una ‘popolazione’, intesa in senso lato: un agglomerato di entitadi qualunque genere (batteri, esseri umani, nuclei radioattivi, . . . ) la cui consi-stenza complessiva varia nel tempo. Supponiamo di poter misurare quantitati-vamente la consistenza della popolazione in modo “continuo” (la variazione diuna singola unita sia trascurabile sul totale della popolazione).
Se y(t) misura l’entita della popolazione all’istante di tempo t, il valore
y′(t)
y(t)
e il tasso di variazione di y: da la rapidita di variazione di y rispetto al temporapportata al totale della popolazione (cioe ‘per unita di popolazione’).
Supponiamo di essere nella condizione in cui il tasso di variazione dipendadal tempo e dalla popolazione stessa (vedremo esempi):
y′(t)
y(t)= r(t, y(t)),
o anche
(1.1) y′(t) = r(t, y(t))y(t).
Questa relazione esprime la legge di evoluzione di y. Si tratta di una equazio-ne differenziale: un’equazione in cui l’incognita e una funzione (la y) e comparealmeno una derivata della funzione stessa. Qui l’ordine massimo di derivazioneche compare e 1, per cui abbiamo un’equazione differenziale del primo ordine.
Assegnato il tasso r come funzione di t e di y, ci aspettiamo che la legge dievoluzione (1.1) specifichi completamente la funzione y se e noto, ad esempio, ilvalore assunto in un istante t0 “di riferimento”:
y(t0) = y0 (valore noto).
1

2 Capitolo 1. Esempi introduttivi
Spesso t0 = 0 (istante iniziale dell’esperimento o dell’intervallo di rilevazione deidati, ecc.): ci si riferisce pertanto alla condizione y(t0) = y0 come condizioneiniziale per l’equazione (1.1). Il problema:
(1.2)
y′ = r(t, y)yy(t0) = y0,
e detto problema ai valori iniziali o problema di Cauchy (per l’equazione (1.1)).
Per soluzione dell’equazione (1.1) intendiamo una qualunque funzione y diclasse C1 su un intervallo I per la quale
y′(t) = r(t, y(t))y(t) per ogni t ∈ I.
Se t0 ∈ I e y(t0) = y0 allora y e soluzione di (1.2).Vediamo alcuni esempi.
a) Tasso costante di variazione.Il modello di crescita di una popolazione in cui il tasso di variazione e as-
sunto costante e legato al nome di Thomas Robert Malthus (1766–1834),demografo ed economista politico inglese.1 L’equazione (1.1) diventa:
(1.3) y′ = ry.
Osserviamo innanzitutto che vi e la soluzione costante y ≡ 0.Sia y : I → R, con I intervallo, una soluzione di classe C1 (si noti che se y
e differenziabile allora e automaticamente C1, dovendo sussistere l’uguaglianzay′ = ry). Supponiamo che y abbia segno costante in I. Allora l’uguaglianzay′ = ry in I equivale a:
∫
y′(t)
y(t)dt = rt
∃c log |y(t)| = rt+ c
∃C > 0 |y(t)| = Cert
∃C ∈ R \ 0 y(t) = Cert.
Poiche, come sopra osservato, la funzione nulla e soluzione, otteniamo che lefunzioni
(1.4) t 7→ Cert : R → R, (C ∈ R)
sono soluzioni di (1.3). A questo punto e facile vedere che
le funzioni (1.4) esauriscono le soluzioni di (1.3).
1Malthus enuncio per la prima volta le sue teorie sull’evoluzione della popolazione nel saggioanonimo An essay on the principle of population as it affects the future improvement of society
nel 1798, ripubblicato successivamente piu volte a proprio nome in forma ampliata. Sulla basedei dati demografici dei coloni inglesi nordamericani Malthus sostenne che in condizione difecondita naturale la popolazione tende a raddoppiare ad ogni generazione (circa 25 anni).Questo modello corrisponde a una crescita esponenziale del tipo descritto dalle funzioni in(1.5): si verifichi che il modello di crescita corrispondente al raddoppiare della popolazioneogni 25 anni rientra nella legge (1.3) di evoluzione, e se ne determini il tasso (costante) r.

1.1. Modelli di crescita per una singola popolazione 3
Infatti, sia y : I → R una soluzione non identicamente nulla su un intervallo aperto I; perfissare le idee esista t0 con y(t0) > 0. Allora (permanenza del segno) y > 0 in un intervalloaperto J ; sia J0 = (t−, t+) il piu ampio degli intervalli aperti contenenti t0 in cui y > 0.Se J0 non coincidesse con I si avrebbe, ad esempio, t− ∈ I; quindi e definita y(t−). Deveessere y(t−) = 0, altrimenti J0 potrebbe essere ampliato; del resto quanto sopra dimostratoda y(t) = Cert in J0: le due affermazioni sono incompatibili. Quindi I = J0, per cui y hasegno costante: allora concludiamo che y e la restrizione di una delle funzioni in (1.4).
Se al tempo t = 0 e noto il valore y(0) = y0 allora deve essere:
(1.5) y(t) = y0ert.
Nel caso in cui r < 0 abbiamo una decrescita esponenziale.
b) Equazione logistica. Spesso in un ambiente naturale la crescita e inibitada fattori il cui effetto e sempre piu considerevole col passare del tempo, peresempio l’esaurimento delle risorse alimentari disponibili, la quantita di rifiutitossici prodotti, l’affollamento fisico, ecc. In tal caso non e piu ragionevoleammettere un tasso costante di crescita. Una possibile correzione al modello dicrescita malthusiano fu proposta da Pierre Francois Verhulst (matematicobelga, 1804–1849) assumendo l’esistenza di una capacita di carico (o portante)dell’ambiente, cioe di un livello K della popolazione oltre al quale il tasso dicrescita diventa negativo.2
Il piu semplice modello che realizza cio e una dipendenza lineare del tassodi crescita dalla popolazione:
(1.6)y′
y= r(
1 − y
K
)
Procediamo in modo analogo a quanto abbiamo fatto per la (1.3). Chia-ramente le funzioni costanti con valore 0 o K sono soluzioni. Se poi y e unasoluzione in un intervallo I che non assume mai i valori 0 e K, allora deve essere:
y′
y(1 − y/K)= r
e per integrazione si ottiene:
∃C ∈ R y(t) = KCert
1 + Cert= K
(
1 − 1
1 + Cert
)
(per C = 0 si recupera la soluzione nulla, per ‘C = ∞’ la soluzione costante divalore K; queste si scambiano ponendo C′ = 1/C). Non e difficile vedere chequeste esauriscono le soluzioni di (1.6).
Consideriamo il caso 0 < y(0) < K: si ottiene (posto y0 = y(0))
C =y0
K − y0> 0.
Se scriviamoC nella forma C = e−rt0 (come e sempre possibile per un opportunovalore t0 ∈ R) si nota che le soluzioni sono traslate una dell’altra:
y(t) = Ker(t−t0)
1 + er(t−t0).
2Al nome di Verhulst vanno associati anche quelli dei demografi americani R. Pearl eL.J. Reed, che negli anni ’20 del secolo scorso riscopersero le memorie pubblicate da Verhulstnegli anni attorno al 1840 e a lungo dimenticate.

4 Capitolo 1. Esempi introduttivi
K
y
t
Figura 1.1 - Curva logistica (Kert/(1 + ert)).
E sufficiente studiare il caso t0 = 0 (vedi Figura 1.1). Coerentemente conl’interpretazione modellistica considerata, K e il valore su cui si stabilizza asin-toticamente il valore y della popolazione.
1.2 Cinetica chimica
1.2.1 Ordine di una reazione e modello differenziale
La cinetica chimica studia i meccanismi che portano alle condizioni di equilibriotermodinamico per una data reazione.
Consideriamo una generica reazione chimica del tipo
aA + bB −−→ cC + dD.
Mettiamoci nell’ipotesi che la reazione sia omogenea (cioe avvenga tra specieall’interno della stessa fase (solida, liquida o gassosa)); supponiamo inoltre chesi svolga a volume e a temperatura costanti.3 Come misura della velocita direazione possiamo assumere l’aumento della concentrazione di uno dei prodottio la diminuzione di uno dei reagenti per unita di tempo:
v = −1
a
d[A]
dt= −1
b
d[B]
dt=
1
c
d[C]
dt=
1
d
d[D]
dt.
I coefficienti stechiometrici che compaiono tengono conto del fatto che le velocitadi variazione delle varie specie sono legate fra loro. Ad esempio:
N2 + 3 H2 −−→ 2 NH3
−d[N2]
dt= −1
3
d[H2]
dt=
1
2
d[NH3]
dt.
La legge, detta legge cinetica, secondo cui evolve una reazione e determinatasperimentalmente. E molto comune il caso in cui la velocita di reazione e pro-
3altrimenti conviene definire la velocita di reazione come la variazione, nell’unita di tempo,del numero di moli della specie considerata per unita di volume.

1.2. Cinetica chimica 5
porzionale alla concentrazione di uno o due dei reagenti, ciascuna elevata ad unesponente intero, generalmente piccolo.4 Ad esempio:
• 2N2O5 −−→ 4NO2 + O2
v = k[N2O5] reazione del 1 ordine
• H2 + I2 −−→ 2 HI
v = k[H2][I2] reazione del 2 ordine(1 ordine rispetto a ciascun reagente)
• 2HI −−→ H2 + I2
v = k[HI]2
reazione del 2 ordine
• 2H2 + 2 NO −−→ 2H2O + N2
v = k[H2][NO]2
reazione del 3 ordine
In una reazione del primo ordine la velocita di variazione della concentrazione[A]t di un reagente, al tempo t, e proporzionale alla concentrazione stessa; quindi
−d[A]tdt
= k[A]t.
Posto y(t) = [A]t si ottiene l’equazione
(1.7) y′ = −ky,
cioe la (1.3).Consideriamo ora le reazioni del secondo ordine. Supponiamo che la legge
cinetica sia del tipo:
(1.8) v = k[A][B],
con la stechiometria data da
A2 + B2 −−→ 2AB
(una molecola A2 formata da due atomi A e una molecola B2 formata da dueatomi B si combinano dando luogo a due molecole del composto AB; un esempioe H2 + I2 −−→ 2 HI). Posto
y(t) = [AB]t,
poiche ogni coppia A2, B2 produce due molecole di AB (cioe 12d[AB]/dt =
−d[A2]/dt = −d[B2]/dt), abbiamo (supponendo [AB]0 = 0)
[A2]t = [A2]0 −1
2y(t), [B2]t = [B2]0 −
1
2y(t).
Pertanto dall’equazione cinetica ricaviamo:
(1.9) y′ = k(
[A2]0 −1
2y(t)
)(
[B2]0 −1
2y(t)
)
.
4In realta molte reazioni sono costituite da diversi stadi o processi elementari; l’ordinedella reazione e individuato dallo stadio piu lento. Ad esempio 2N2O5 −−→ 4NO2 + O2 siscompone in N2O5 −−→ NO3 + NO2 (lento; 1 ordine) e 2NO3 −−→ 2NO2 + O2 (veloce).

6 Capitolo 1. Esempi introduttivi
Questa e della forma:y′ = α(β − y)(γ − y),
con α, β e γ parametri dati. Mediante il cambiamento di variabile β − y = z siottiene:
(1.10) z′ = αz[(β − γ) − z].
Per β 6= γ l’equazione e della stessa tipologia della (1.6).Se in (1.8) si ha [B]t ∼ [B]0 (ad esempio se uno dei reagenti e il solven-
te (presente in forte eccesso rispetto al soluto)), allora la reazione diventasostanzialmente del primo ordine.
Per una reazione del secondo ordine che segue una legge del tipo
−d[A]tdt
= k[A]2t ,
(ad esempio 2HI −−→ H2 + I2) si ottiene l’equazione
(1.11) y′ = −ky2.
Questa rientra ancora nella tipologia (1.10), con β = γ. Come e facile vedere lafamiglia delle soluzioni di (1.11) e:
t 7→ 1/k
t− α, α ∈ R.
1.2.2 Datazione mediante radiocarbonio
Una semplice applicazione della modellizzazione delle reazioni del primo ordinesi ha nel ben noto metodo di datazione mediante radiocarbonio.
L’isotopo radioattivo 14C del carbonio (o radiocarbonio) ha origine dalla tra-sformazione dell’azoto negli strati alti dell’atmosfera mediante cattura di neu-troni. Gli organismi viventi scambiano continuamente carbonio con l’atmosferaattraverso processi di respirazione (animali) o di fotosintesi (vegetali), oppure loassimilano nutrendosi di altri esseri viventi o sostanze organiche. Finche l’orga-nismo e vivo la concentrazione di 14C risultante nell’organismo rispetto a quelladell’isotopo stabile 12C si mantiene costante e uguale a quella che si riscontranell’atmosfera (attualmente 1 su 1012).
Alla morte dell’organismo, il radiocarbonio continua a decadere5 senza ve-nire rimpiazzato: cambia quindi il rapporto tra 14C e 12C; la misura di talerapporto permette di stimare il tempo trascorso dalla morte dell’organismo.Qualitativamente questo e il principio su cui si basa il metodo di datazione me-diante radiocarbonio proposto nel 1949 da W. F. Libby (che ottenne, per questocontributo, il premio Nobel per la Chimica nel 1960).
Poiche, come e sperimentalmente verificato, il decadimento radioattivo seguela stessa legge (1.7) gia vista per le reazioni del primo ordine, se y(t) indica laquantita di materiale radioattivo (nel nostro caso 14C) presente al tempo t,allora
y(t) = y(0)e−kt,
5mediante decadimento β−, trasformandosi in 14N: 146C −−→ 14
7N + e− + antineutrino.

1.3. L’oscillatore armonico 7
0
i
Figura 1.2 - Oscillatore armonico
dove k e costante e caratteristica dell’elemento considerato. Spesso k vienedeterminata mediante il tempo di dimezzamento: infatti se T1/2 e tale che y(T ) =y(0)/2, allora deve essere:
y(0)/2 = y(0)e−kT1/2 ,
da cui
k =log 2
T1/2.
Sperimentalmente si determina T1/2, che per il radiocarbonio e circa
T1/2 ∼ 5730 anni, quindi k−1 ∼ 8267 anni.
Se p ∈ (0, 1) e la percentuale di 14C residua, rispetto alla percentuale iniziale,rilevata in un reperto, ne possiamo stimare l’eta t mediante:
t = − log p
k.
Se il metodo di datazione mediante 14C e semplice in linea di principio,l’applicazione pratica e tuttavia molto delicata (infiltrazioni spurie di 12C o 14Cnel reperto, variazione nel tempo della proporzione6 fra 12C e 14C, ecc.).
1.3 L’oscillatore armonico
Un esempio classico che porta a una semplice equazione differenziale linearedel secondo ordine a coefficienti costanti si ottiene studiando il moto di unpunto materiale P di massa m vincolato a scorrere senza attrito su di una rettasotto l’azione di una forza elastica; quest’ultima puo essere pensata realizzatamediante una molla come in Figura 1.2.
Si supponga che l’origine del sistema di riferimento coincida con la posizionein cui la lunghezza della molla e quella a riposo. La forza di richiamo F(x)esercitata dalla molla quando il punto P si trova nella posizione di ascissa P ,secondo la legge di Hooke e:
F(x) = −kxi,dove i indica il versore dell’asse di riferimento e k la costante elastica della molla.
6A titolo di esempio si veda al riguardo l’articolo [Ren72].

8 Capitolo 1. Esempi introduttivi
0
i
x(t)
F(x)
Figura 1.3 - Oscillatore armonico: forza di richiamo
Se x = x(t) indica la legge oraria del punto P , la seconda legge della dinamicada:
mx(t) = −kx(t),da cui
(1.12) x(t) + ω2x(t) = 0, dove ω2 = k/m.
Le soluzioni di (1.12) sono date da (si veda § 4.6):
x(t) = c1 cosωt+ c2 sinωt,
al variare di c1, c2 ∈ R (la verifica che si tratta di soluzioni puo, peraltro, esseresvolta direttamente). Una forma piu espressiva della famiglia delle soluzione siottiene mettendo in evidenza l’ampiezza A =
√
c21 + c22 delle oscillazioni:
x(t) = A
(
c1√
c21 + c22cosωt+
c2√
c21 + c22sinωt
)
= A (cosϕ cosωt+ sinϕ sinωt) ,
dove ϕ e tale che (cosϕ, sinϕ) = (c1/A, c2/A). La famiglia delle soluzioni puoallora essere espressa come:
(1.13) x(t) = A cos(ωt− ϕ), al variare di A ≥ 0 e ϕ ∈ R.
Dalla (1.13) risulta anche evidente che si puo ottenere un moto armoni-co mediante proiezione di un moto circolare uniforme su un diametro dellatraiettoria.
1.4 Pendolo semplice
Assumiamo il punto di sospensione del pendolo come origine di un sistema diriferimento cartesiano nel piano verticale in cui si svolge il moto del pendolo;l’asse delle ordinate e verticale, diretto verso l’alto. Indichiamo con ϑ lo scosta-mento angolare rispetto alla posizione vericale (vedi Figura 1.4), e con ur e ut
i versori radiale e tangente, rispettivamente.

1.4. Pendolo semplice 9
l
ut
ur
ut
ϑ
ϑ
F
x
y
Figura 1.4 - Pendolo semplice
Proiettiamo la seconda legge della dinamica lungo il versore tangente ut =(cosϑ)i + (sinϑ)j:
(1.14) F · ut = ma · ut.
Indichiamo con ϑ = ϑ(t) il valore dell’angolo al tempo t; se l e la lunghezza delpendolo, risulta:
x(t) = l sinϑ(t)y(t) = −l cosϑ(t)
da cui:
x(t) = lϑ cosϑy(t) = lϑ sinϑ.
Le componenti dell’accelerazione sono quindi:
x(t) = −lϑ2 sinϑ+ lϑ cosϑy(t) = lϑ2 cosϑ+ lϑ sinϑ
Allora la (1.14) da rapidamente:
−mg sinϑ = mlϑ
e quindi:
(1.15) ϑ+g
lsinϑ = 0
si tratta di un’equazione differenziale non lineare del secondo ordine.Per “piccole” oscillazioni possiamo assumere che sinϑ ∼ ϑ, per cui si ottiene
un’equazione lineare:
ϑ+ ω2ϑ = 0 ω2 =g
l;
e l’equazione del moto armonico. Nei limiti di questa approssimazione il periodo
T = 2π/ω = 2π
√
l
g

10 Capitolo 1. Esempi introduttivi
risulta indipendente dall’ampiezza delle oscillazioni (isocronismo delle piccoleoscillazioni)7 .
1.5 Equazione di Schrodinger
L’equazione di Schrodinger svolge in meccanica quantistica il ruolo che le equa-zioni di Maxwell svolgono in elettromagnetismo. Per una particella di massa med energia potenziale U(x, t) assume la forma:
(1.16) − ~2
2m∆xψ(x, t) + U(x, t)ψ(x, t) = i~
∂ψ(x, t)
∂t,
dove x indica la variabile spaziale (in una, due o tre dimensioni) e t la variabiletemporale, ψ e la funzione d’onda e ~ = h/2π, con h costante di Planck.
Se supponiamo il potenziale indipendente dal tempo, il metodo della se-parazione delle variabili consente di caratterizzare le eventuali soluzioni dellaforma
ψ(x, t) = u(x)ϕ(t).
Infatti per tali soluzioni la (1.16) diventa:
− ~2
2m(∆u(x))ϕ(t) + U(x)u(x)ϕ(t) = i~u(x)ϕ′(t);
dividendo per u(x)ϕ(t) abbiamo:
1
u(x)
[
− ~2
2m∆u(x) + U(x)u(x)
]
= i~ϕ′(t)
ϕ(t).
Deve pertanto esistere E ∈ C tale che
− ~2
2m∆u(x) + U(x)u(x) = Eu(x)
ϕ′(t) =E
i~ϕ(t)
La seconda equazione, a parte essere espressa in C, e della stessa forma di (1.3),per cui ha come famiglia di soluzioni:
ϕ(t) = ϕ(0)eEi~
t.
L’equazione soddisfatta da u nel caso monodimensionale, cioe
(1.17) − ~2
2mu′′(x) + U(x)u(x) = Eu(x)
e detta equazione di Schrodinger degli stati stazionari ed e una equazione delsecondo ordine a coefficienti, in generale, non costanti. La variabilita dei coef-ficienti rende la studio di questo tipo di equazioni completamente diverso dallostudio delle equazioni a coefficienti costanti (come l’equazione (1.12) del mo-to armonico o la successiva equazione (1.22) per i circuiti RLC). Vedremo unesempio nel Capitolo 6.
7Questa legge era stata sperimentalmente osservata gia da Galileo (ne accenna in unalettera del 1602 a Guidubaldo del Monte), in connessione ai suoi studi sul moto dei gravi.

1.6. Circuiti elettrici 11
Le soluzioni dipendono dal tipo di energia potenziale considerata. Le con-dizioni di regolarita che devono essere richieste per avere soluzioni fisicamentesignificative (in primis la condizione di essere a quadrato integrabile) individua-no una successione ψn di funzioni e di valori En corrispondenti. Questi ultimi,che si dimostrano essere numeri reali, hanno il significato di energia totale del-lo stato stazionario individuato dalla corrispondente soluzione: ne risulta laquantizzazione dell’energia del sistema.
Caso del potenziale armonico. Nel caso monodimensionale, se
U(x) =1
2Kx2
eseguiamo, nella (1.17), il cambiamento di variabili:
ξ = αx, u(x) = u(ξ/α) =: v(ξ),
dove
α =(mK
~2
)1/4
.
Poiche u(x) = v(αx), si ottiene l’equazione:
(1.18) v′′(ξ) + (ε− ξ2)v(ξ) = 0,
dove si e posto ε = 2α2E/K. L’ulteriore cambiamento di variabile:
v(ξ) = H(ξ)e−12ξ2
conduce (svolgere i calcoli) all’equazione di Hermite
(1.19) H ′′ − 2ξH ′ + (ε− 1)H = 0.
A partire da questa e possibile ricavare la famiglia dei cosiddetti polinomi diHermite, mediante i quali rappresentare la generica soluzione dell’equazione diSchrodinger degli stati stazionari.
1.6 Circuiti elettrici
Vediamo alcune semplici equazioni e sistemi di equazioni differenziali che inter-vengono nello studio di circuiti elettrici elementari. In particolare il fenomenodella mutua induzione fra circuiti RL fornira un esempio appartenente dellafondamentale famiglia dei sistemi differenziali lineari.
Circuiti RC.Consideriamo un circuito in cui e presente un generatore di forza elettromo-
trice E , un resistore di resistenza R e un condensatore di capacita C (vedi Figura1.5). Sia q(t) la carica del condensatore all’istante t; la corrente nel circuito ei = dq/dt. A partire da un qualunque punto del circuito la somma algebricadelle variazioni di potenziale rilevate in un giro completo lungo il circuito stes-so e nulla (seconda legge di Kirchhoff). Procedendo nel verso della corrente siosserva un aumento di potenziale E attraversando il generatore di f.e.m., una

12 Capitolo 1. Esempi introduttivi
R
CE
Figura 1.5 - Circuito RC
R
LE
Figura 1.6 - Circuito RL
diminuzione di potenziale iR attraversando il resistore e una diminuzione q/Ccorrispondente al condensatore. Cio si traduce nell’equazione
E − iR− q
C= 0;
poiche i = dq/dt ricaviamo
(1.20) Rdq
dt+q
C= E .
Si tratta di un’equazione differenziale lineare non omogenea (vedi § 3.2 per latecnica risolutiva); la soluzione corrispondente al dato iniziale q(0) = 0 e
q(t) = CE(
1 − e−t/RC).
Circuiti RL.Consideriamo ora il caso in cui in luogo del condensatore nel circuito pre-
cedente sia presente un induttore di induttanza L (vedi Figura 1.6). Questocomponente del circuito da luogo a una f.e.m. EL tra i capi dell’induttore che sioppone alla variazione di corrente e che e proporzionale alla velocita di variazionedella corrente. La costante di proporzionalita e l’induttanza L:
EL = Ldi
dt.

1.6. Circuiti elettrici 13
Come per il circuito RC studiato prima, la legge di Kirchhoff da:
E − iR− EL = 0,
ovvero
(1.21) Ldi
dt+Ri = E .
A prescindere dal significato delle grandezze in gioco questa equazione non ealtro che la (1.20). Pertanto abbiamo la soluzione:
i(t) =E
R
(
1 − e−Rt/L),
nel caso di corrente iniziale nulla.
Circuiti RLC.
Nel caso piu generale in cui sia presente sia un resistore che un induttore eun condensatore, la legge di Kirchhoff da (i = dq/dt):
E − iR− q
C− EL = 0,
da cui:
(1.22) Ld2q
dt2+R
dq
dt+
1
Cq = E .
Questa e un’equazione differenziale lineare del secondo ordine, non omogenea(verranno trattate nel § 4.6).
Circuiti accoppiati: un sistema lineare
Consideriamo infine la situazione in cui due circuiti diano luogo a una mutuainduzione. Una corrente variabile i1 nel primo circuito produce, nel secondocircuito, una f.e.m. indotta proporzionale alla velocita di variazione della stessai1:
E(2)L = M
di1dt,
dove M e un coefficiente di proporzionalita. Analogamente, la variazione dicorrente nel secondo circuito produce nel primo la f.e.m.
E(1)L = M
di2dt.
Si dimostra che il coefficiente M e il medesimo nei due casi e dipende solo dallaforma dei circuiti e dal loro mutuo orientamento.
Nel caso di circuiti RL, sfruttando l’equazione (1.21) si ottiene la seguen-te relazione (in cui abbiamo supposto, per fissare le idee, che le f.e.m. indot-te da ciascun circuito sull’altro siano di segno opposto rispetto a quello dellef.e.m. fornite dalle sorgenti):
L1di1dt
+R1i1 = E1 −Mdi2dt

14 Capitolo 1. Esempi introduttivi
per il primo circuito; assieme all’analoga equazione per il secondo si ha
L1di1dt
+Mdi2dt
+R1i1 = E1
Mdi1dt
+ L2di2dt
+R2i2 = E2
Si tratta di un sistema di due equazioni differenziali lineari del primo ordine.Posto:
Λ :=
(
L1 MM L2
)
R :=
(
R1 00 R2
)
E :=
(
E1
E2
)
i(t) :=
(
i1(t)i2(t)
)
possiamo riscrivere
Λdi
dt+Ri = E .
Se assumiamo l’invertibilita di Λ il sistema assume la forma
(1.23)di
dt= Ai+ b
dove A = −Λ−1R e b = Λ−1E .
1.7 Specie in competizione: sistemi non lineari
Presentiamo ora un classico modello per l’evoluzione di due specie interagentiche conduce a un sistema nonlineare di equazioni differenziali.
Si abbiano due popolazioni, la cui entita al tempo t e data da
p(t) : “preda”; v(t) : “predatore”
(ad esempio volpi e conigli). Siano r1 e r2 i loro tassi di crescita, rispettivamente:
p′(t)
p(t)= r1,
v′(t)
v(t)= r2.
E naturale supporre che le variazioni delle singole popolazioni si influenzino avicenda, per cui assumiamo che
r1 = r1(t, p, v), r2 = r2(t, p, v).
Otteniamo allora un sistema di equazioni differenziali :
p′ = p r1(t, p, v)v′ = v r2(t, p, v)
Introducendo le funzioni vettoriali
y = (p, v) : t 7→ (p(t), v(t)), f = (f1, f2) : (t, y) 7→ (pr1(t, y), vr2(t, y)),
possiamo scrivere, piu semplicemente,
y′ = f(t, y).

1.8. Equazioni in forma normale. 15
Come nel caso di una singola popolazione esaminiamo due casi.
a) Partiamo dalla legge di variazione a tasso costante per ciascuna delledue specie in competizione e modifichiamola per tenere conto della presenzadell’altra specie. Cosı, il tasso p′/p = α (con α > 0 costante), valido in assenza dipredatori, viene corretto sottraendo a secondo membro un termine proporzionaleall’entita del predatore; otteniamo:
p′
p= α− βv.
Analogamente, al tasso costante negativo che caratterizzerebbe la variazione div in assenza di preda, viene sommato un termine proporzionale all’entita dellapreda:
v′
v= −γ + δp.
Ne risulta il sistema delle equazioni di Lotka-Volterra8:
(1.24)
p′ = p(α− βv)v′ = v(−γ + δp)
che possiamo anche scrivere, avendo posto y = (p, v),
(1.25) y′ = f(y), con f(y) = (p(α− βv), v(−γ + δp)).
b) Correggiamo ora ciascuna delle due equazioni in (1.24) rimpiazzando i tassiα e −γ con un termine analogo a quello che nell’equazione logistica introducevala capacita di carico dell’ambiente:
p′/p = α− λp− βvv′/v = −γ − µv + δp
o anche
(1.26)
p′ = (α− λp− βv)pv′ = (−γ − µv + δp)v
Prima di accennare al comportamento delle soluzioni, puntualizziamo ilquadro generale dei problemi differenziali ora presentati.
1.8 Equazioni in forma normale.
Rappresentazione delle soluzioni.
Sia D un aperto di Rn+1 e
f : D → Rn continua.
Diciamo che una funzione y : J → Rn e soluzione dell’equazione differenziale:
(1.27) y′ = f(t, y)
8Proposto indipendentemente nel 1924 dal demografo americano Alfred James Lotka e nel1926 dal matematico italiano Vito Volterra

16 Capitolo 1. Esempi introduttivi
se J e un intervallo, y ∈ C1(J ; Rn), risulta(
t, y(t))
∈ D per ogni t ∈ J e
y′(t) = f(
t, y(t))
per ogni t ∈ J .
Le equazioni della forma (1.27) si dice che sono poste in forma normale.In questa tipologia rientrano palesemente le equazioni (1.1), (1.20), (1.21),
(1.23), (1.24) e (1.26) precedentemente incontrate. Il significato modellisticodelle soluzioni gia motiva l’opportunita di considerare come soluzioni funzionidefinite su intervalli (non e ammessa una discontinuita temporale): se matema-ticamente una funzione e definita sull’unione di due intervalli e risolve l’equazio-ne, intenderemo che da luogo a due soluzioni. Questa convenzione semplificheraanche alcuni degli enunciati generali che verranno esposti nel seguito.
Dato (t0, y0) ∈ D, diciamo che una funzione y e soluzione del problema aivalori iniziali (o di Cauchy):
y′ = f(t, y)y(t0) = y0
se y e una soluzione di y′ = f(t, y) in un intervallo J contenente t0 e y(t0) = y0.Diremo anche che la soluzione y passa per il punto (t0, y0).
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Data un’equazione del secondo ordine nella forma:
y′′(t) = f(t, y(t), y′(t))
(fra cui rientrano le equazioni (1.12), (1.15) e (1.17), o (1.19), precedentementeincontrate) se poniamo
y′ = v
l’equazione si trasforma nel sistema del primo ordine:
y′ = vv′ = f(t, y, v)
che possiamo anche scrivere, in forma piu compatta, come:
Y ′ = F (t, Y (t))
conY = (y, v) e F(t, Y ) = (v, f(t, y, v)).
E facile vedere la generalizzazione a equazioni differenziali di ordine n deltipo:
y(n) = f(
t, y(t), y′(t), y′′(t), . . . , y(n−1)(t))
.
Quando, come in questi casi, e esplicitata la derivata di ordine massimo si parladi equazione differenziale in forma normale. Nei prossimi capitoli prenderemoin considerazione prevalentemente equazioni che possono essere poste in for-ma normale, in quanto per esse e possibile sviluppare un soddisfacente quadrogenerale. La teoria per le equazioni della forma generale
F(
t, y(t), y′(t), y′′(t), . . . , y(n−1)(t), y(n)(t))
= 0
e fortemente dipendente dalla tipologia della funzione F .
1.8. Equazioni in forma normale. 17
J
y(·)P
γy
f(x0)
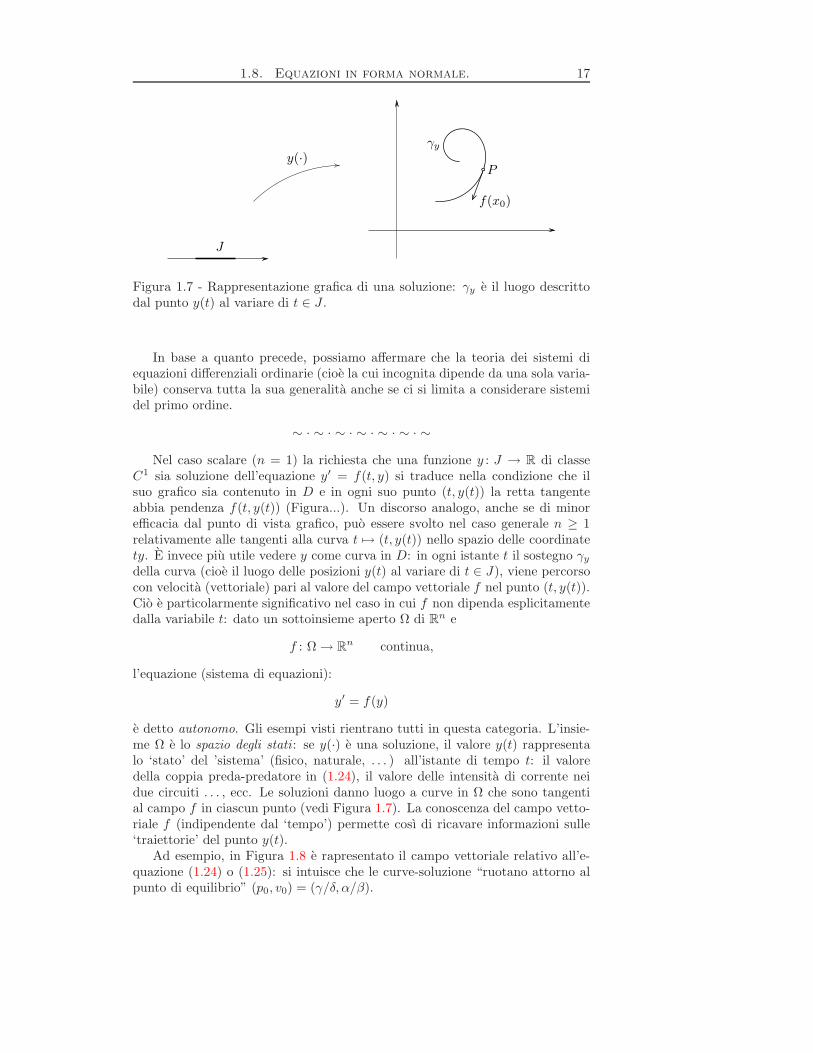
Figura 1.7 - Rappresentazione grafica di una soluzione: γy e il luogo descrittodal punto y(t) al variare di t ∈ J .
In base a quanto precede, possiamo affermare che la teoria dei sistemi diequazioni differenziali ordinarie (cioe la cui incognita dipende da una sola varia-bile) conserva tutta la sua generalita anche se ci si limita a considerare sistemidel primo ordine.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Nel caso scalare (n = 1) la richiesta che una funzione y : J → R di classeC1 sia soluzione dell’equazione y′ = f(t, y) si traduce nella condizione che ilsuo grafico sia contenuto in D e in ogni suo punto (t, y(t)) la retta tangenteabbia pendenza f(t, y(t)) (Figura...). Un discorso analogo, anche se di minorefficacia dal punto di vista grafico, puo essere svolto nel caso generale n ≥ 1relativamente alle tangenti alla curva t 7→ (t, y(t)) nello spazio delle coordinatety. E invece piu utile vedere y come curva in D: in ogni istante t il sostegno γy
della curva (cioe il luogo delle posizioni y(t) al variare di t ∈ J), viene percorsocon velocita (vettoriale) pari al valore del campo vettoriale f nel punto (t, y(t)).Cio e particolarmente significativo nel caso in cui f non dipenda esplicitamentedalla variabile t: dato un sottoinsieme aperto Ω di Rn e
f : Ω → Rn continua,
l’equazione (sistema di equazioni):
y′ = f(y)
e detto autonomo. Gli esempi visti rientrano tutti in questa categoria. L’insie-me Ω e lo spazio degli stati : se y(·) e una soluzione, il valore y(t) rappresentalo ‘stato’ del ’sistema’ (fisico, naturale, . . . ) all’istante di tempo t: il valoredella coppia preda-predatore in (1.24), il valore delle intensita di corrente neidue circuiti . . . , ecc. Le soluzioni danno luogo a curve in Ω che sono tangential campo f in ciascun punto (vedi Figura 1.7). La conoscenza del campo vetto-riale f (indipendente dal ‘tempo’) permette cosı di ricavare informazioni sulle‘traiettorie’ del punto y(t).
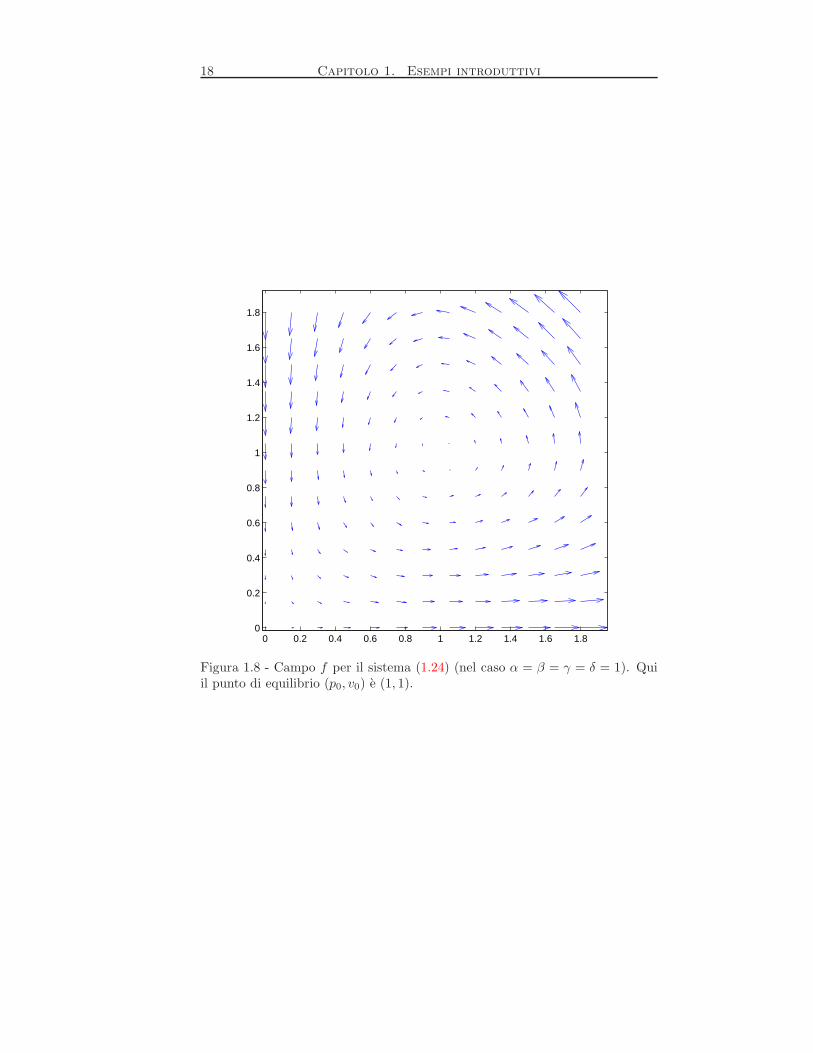
Ad esempio, in Figura 1.8 e rapresentato il campo vettoriale relativo all’e-quazione (1.24) o (1.25): si intuisce che le curve-soluzione “ruotano attorno alpunto di equilibrio” (p0, v0) = (γ/δ, α/β).
18 Capitolo 1. Esempi introduttivi
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Figura 1.8 - Campo f per il sistema (1.24) (nel caso α = β = γ = δ = 1). Quiil punto di equilibrio (p0, v0) e (1, 1).
1.8. Equazioni in forma normale. 19
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
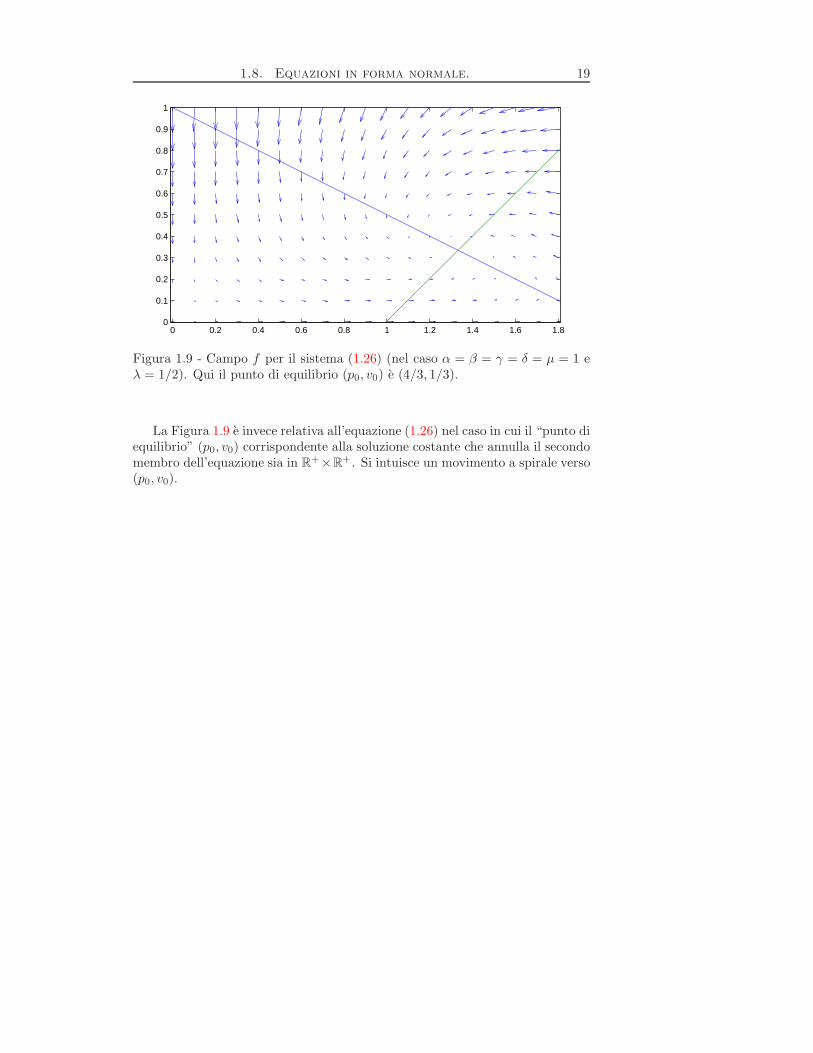
Figura 1.9 - Campo f per il sistema (1.26) (nel caso α = β = γ = δ = µ = 1 eλ = 1/2). Qui il punto di equilibrio (p0, v0) e (4/3, 1/3).
La Figura 1.9 e invece relativa all’equazione (1.26) nel caso in cui il “punto diequilibrio” (p0, v0) corrispondente alla soluzione costante che annulla il secondomembro dell’equazione sia in R+×R+. Si intuisce un movimento a spirale verso(p0, v0).


Capitolo 2
Problemi ai valori iniziali
2.1 Risultati di esistenza ed unicita
Sia D un aperto di Rn+1 e
f : D → Rn continua.
Occupiamoci dell’esistenza di soluzioni per l’equazione
(2.1) y′ = f(t, y)
con i valori iniziali
(2.2) y(t0) = y0,
dove (t0, y0) e un dato punto di D. Stiamo pertanto considerando il problemaai valori iniziali, o problema di Cauchy,
(2.3)
y′ = f(t, y)y(t0) = y0
Premettiamo una caratterizzazione integrale delle soluzioni del problema(2.3).
Lemma 2.1.1 Sia y una funzione continua su un intervallo J e tale che(
t, y(t))
∈D per ogni t ∈ J . Sia (t0, y0) ∈ D. Allora le seguenti condizioni sono equiva-lenti:
a) y e soluzione di (2.3);
b) y(t) = y0 +
∫ t
t0
f(
s, y(s))
ds per ogni t ∈ J .
21

22 Capitolo 2. Problemi ai valori iniziali
y
(t0, y0)y0
DR
tt0
Dimostrazione. Una semplice applicazione del teorema fondamentale delcalcolo integrale.
Nel seguito utilizzeremo spesso la cosiddetta condizione di lipschitzianita dif , su un insieme E ⊆ D, nella seconda variabile e uniformemente rispetto allaprima, condizione che si traduce nella richiesta che esista una costante LE > 0per la quale
|f(t, y1) − f(t, y2)| ≤ LE |y1 − y2|comunque presi (t, y1), (t, y2) ∈ E. Nel caso in cui questa condizione sia richiestaper ogni compatto K di D parleremo di lipschitzianita locale di f su D (nellaseconda variabile, uniformemente rispetto alla prima).
Osservazione 2.1.2 Mediante il teorema del valor medio non e difficile vederecome la condizione f ∈ C1(D) assicuri la condizione di lipschitzianita localenell’ipotesi che D sia convesso. In realta si puo dimostrare come sia sufficienteche D sia un aperto connesso.
Siano ora a, b > 0 tali che il “rettangolo”
R = [t0 − a, t0 + a] × Bb(y0)
sia contenuto in D (con Bb(y0) intendiamo la chiusura della palla di centro y0e raggio b).
Teorema 2.1.3 (Esistenza e unicita) (Picard-Lindelof) Supponiamo che lafunzione f(t, y) su R sia lipschitziana in y uniformemente rispetto a t. Allora:
a) il problema (2.3) ammette soluzione nell’intervallo [t0 − α, t0 + α], dove
α = min(
a,b
M
)
,
essendo M una limitazione per |f(t, y)| su R.

2.1. Risultati di esistenza ed unicita 23
b) esiste al piu una soluzione del problema (2.3), nel senso che se y1, y2 sonodue soluzioni di (2.3) in un intorno I (destro o sinistro) di t0 contenutoin [t0 − α, t0 + α], allora y1 = y2 in I.
Dimostrazione. a) (Esistenza) In base al lemma precedente ricerchiamo unafunzione y continua in I = [t0 −α, t0 +α] il cui grafico sia contenuto in D e taleche
(2.4) y(t) = y0 +
∫ t
t0
f(
s, y(s))
ds per ogni t ∈ I.
Osserviamo che, data una funzione y ∈ C0(I), se il suo grafico e contenutoin R, allora la funzione
Ty : t 7→ y0 +
∫ t
t0
f(
s, y(s))
ds
e definita in I e ha anch’essa il grafico in R. Infatti, per ogni t ∈ I
∣
∣(Ty)(t) − y0∣
∣ ≤∣
∣
∫ t
t0
f(
s, y(s))
ds∣
∣ ≤M |t− t0| ≤ b.
AlloraT : C0
(
I;Bb(y0))
→ C0(
I;Bb(y0))
.
Definiamo ora, per ricorrenza, la seguente successione di funzioni:
y0 ≡ y0
y1 = Ty0
y2 = Ty1
. . .
yn+1 = Tyn
. . .
Dimostriamo che (yn) converge uniformemente in I ad una funzione continuay. Risulta:
|y1(t) − y0(t)| ≤∣
∣
∫ t
t0
f(s, y0) ds∣
∣ ≤M |t− t0|;
mediante questa stimiamo analogamente |y2(t) − y1(t)|, tenendo conto dellalipschitzianita di f nella seconda variabile:
|y2(t) − y1(t)| ≤∣
∣
∫ t
t0
(
f(s, y1(s)) − f(s, y0(s))
ds∣
∣
≤ L∣
∣
∫ t
t0
|y1(s) − y0(s)| ds∣
∣
≤ML∣
∣
∫ t
t0
|s− t0| ds∣
∣
(L e una costante di Lipschitz di f su R), da cui
|y2(t) − y1(t)| ≤1
2ML|t− t0|2.

24 Capitolo 2. Problemi ai valori iniziali
Un semplice ragionamento per induzione porta a:
(2.5) |yn+1(t) − yn(t)| ≤ 1
(n+ 1)!MLn|t− t0|n+1.
Allora per ogni j ∈ N
|yn+j(t) − yn(t)| ≤ |yn+j(t) − yn+j−1(t)| + |yn+j−1(t) − yn+j−2(t)| + . . .
. . .+ |yn+1(t) − yn(t)|
≤ M
L
∞∑
k=n+1
(αL)k
k!→ 0 per k → ∞.
Pertanto:
maxt∈I
|yn+j(t) − yn(t)| → 0 per n→ ∞ e per ogni j.
Per il criterio di Cauchy per la convergenza uniforme la successione (yn) convergeuniformemente in I e la funzione limite y e ivi continua.
Dalla definizione di (yn) abbiamo
yn+1 = y0 +
∫ t
t0
f(
s, yn(s))
ds;
La convergenza uniforme di yn a y in I assicura che f(·, yn(·)) converge unifor-memente in I alla funzione f(·, y(·)), per cui possiamo passare al limite sotto ilsegno di integrale, ottenendo:
y = y0 +
∫ t
t0
f(
s, y(s))
ds.
Per il Lemma 2.1.1 la funzione y e soluzione del problema (2.3).
b) (Unicita) Sia ora z una qualunque soluzione del problema (2.3) in un intornodestro [t0, t0 + δ] di t0. Allora per ogni t ∈ [t0, t0 + δ]
z(t) = y0 +
∫ t
t0
f(
s, z(s))
ds.
Quindi
|z(t) − y0(t)| ≤M1(t− t0),
dove M1 e una limitazione del modulo di |f | su un compatto contenente ilgrafico di z
∣
∣
∣
[t0,t0+δ]. Detta L1 una costante di Lipschitz per f su un compatto
contenente z∣
∣
∣
[t0,t0+δ]e R, se procediamo in modo analogo a quanto fatto per
stimare |yn+1 − yn|, abbiamo poi:
|z(t) − y1(t)| ≤∣
∣
∫ t
t0
(
f(s, z(s)) − f(s, y0(s))
ds∣
∣
≤ L1
∫ t
t0
|z(s) − y0(s)| ds

2.1. Risultati di esistenza ed unicita 25
≤M1L1
∫ t
t0
|s− t0| ds =1
2M1L1(t− t0)
2.
Iterando il procedimento otteniamo cosı
|z(t) − yn(t)| ≤ 1
(n+ 1)!M1L
n1 (t− t0)
n+1 per ogni t ∈ [t0, t0 + δ].
Al tendere di n all’infinito risulta y(t) = z(t).
Il teorema precedente puo essere sostanzialmente riformulato come segue:
Teorema 2.1.4 Sia f localmente lipschitziana su D in y uniformemente ri-spetto a t. Allora il problema (2.3) ammette, in un opportuno intorno di t0,una e una sola soluzione.
Osservazione 2.1.5 [Unicita locale e globale] L’unicita di cui al teorema pre-cedente e locale, nel senso che e ristretta alla considerazione dell’intorno [t0 −α, t0 + α]. A partire da cio si puo tuttavia ottenere facilmente un risultato diunicita globale. Piu precisamente, dimostriamo che se y1, y2 sono due soluzionidel problema (2.3) negli intervalli J1 e J2 rispettivamente, allora y1 e y2 coin-cidono su J := J1 ∩ J2, e quindi e individuata un’“unica soluzione” su tuttol’intervallo J1 ∪ J2. Poniamo
t = supt ∈ J : t ≥ t0, y1 = y2 in [t0, t](per t ≤ t0 si procede in modo analogo). Se t = supJ non vi e nulla dadimostrare. Altrimenti y1 e y2 sarebbero definite in un intorno destro di t ecoinciderebbero in t; per l’unicita asserita nel Teorema 2.1.3 (applicato con t inluogo di t0) si avrebbe y1 = y2 in un intorno destro di t, contro la definizione dit.
In modo differente l’unicita globale delle soluzioni puo essere enunciata di-cendo che due soluzioni dell’equazione y′ = f(t, y) o hanno grafici disgiunti ocoincidono.
Ai fini dell’esistenza di una soluzione del problema (2.3) la lipschitzianita dif non e necessaria. Vale infatti il seguente risultato.
Teorema 2.1.6 (Peano) Sia R come sopra. Allora:
il problema (2.3) ammette soluzione nell’intervallo [t0 − α, t0 + α],dove
α = min(
a,b
M
)
,
essendo M una limitazione per |f(t, y)| su R.
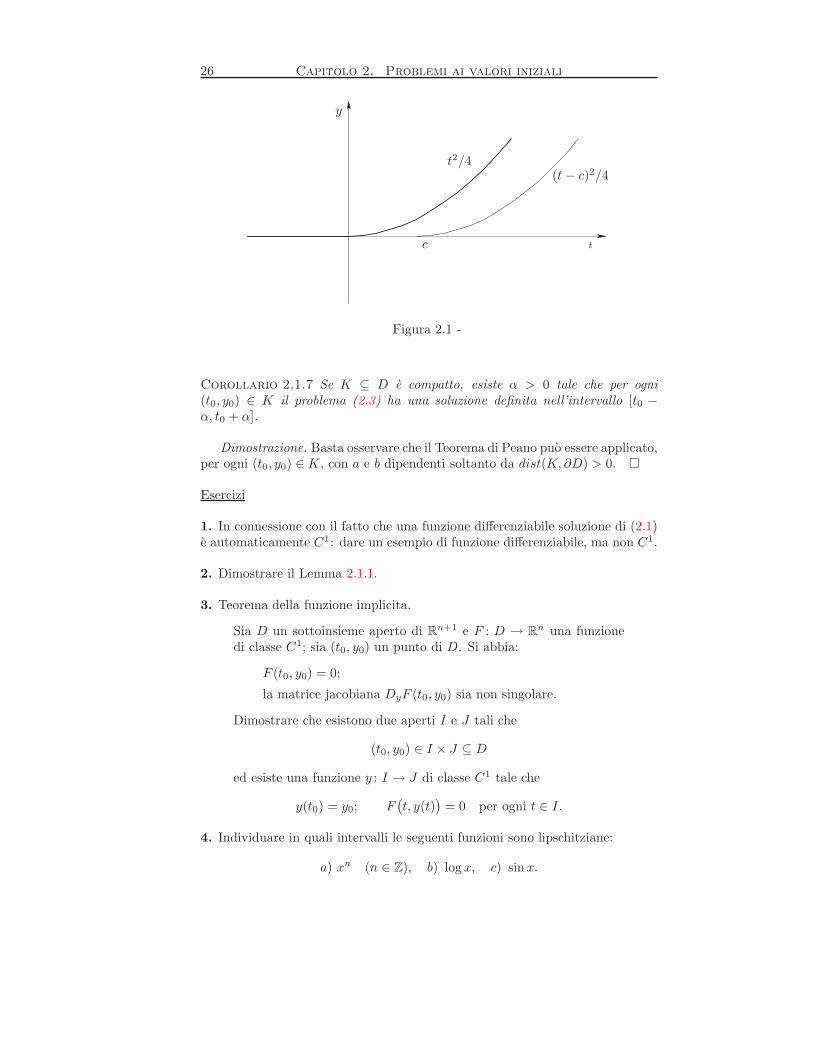
In assenza della condizione di lipschitzianita puo venire a mancare l’unicita.Si pensi al caso:
f(y) =√
|y|.Il problema (2.3) con (t0, y0) = (0, 0) ha come soluzioni, oltre la funzione nulla,tutte quelle della forma (vedi Figura 2.1):
(2.6) y(t) =
1
4(t− c)2 se t ≥ c ≥ 0
0 se t ≤ c.
26 Capitolo 2. Problemi ai valori iniziali
y
t2/4(t− c)2/4
c t
Figura 2.1 -
Corollario 2.1.7 Se K ⊆ D e compatto, esiste α > 0 tale che per ogni(t0, y0) ∈ K il problema (2.3) ha una soluzione definita nell’intervallo [t0 −α, t0 + α].
Dimostrazione. Basta osservare che il Teorema di Peano puo essere applicato,per ogni (t0, y0) ∈ K, con a e b dipendenti soltanto da dist(K, ∂D) > 0.
Esercizi
1. In connessione con il fatto che una funzione differenziabile soluzione di (2.1)e automaticamente C1: dare un esempio di funzione differenziabile, ma non C1.
2. Dimostrare il Lemma 2.1.1.
3. Teorema della funzione implicita.
Sia D un sottoinsieme aperto di Rn+1 e F : D → Rn una funzionedi classe C1; sia (t0, y0) un punto di D. Si abbia:
F (t0, y0) = 0;
la matrice jacobiana DyF (t0, y0) sia non singolare.
Dimostrare che esistono due aperti I e J tali che
(t0, y0) ∈ I × J ⊆ D
ed esiste una funzione y : I → J di classe C1 tale che
y(t0) = y0; F(
t, y(t))
= 0 per ogni t ∈ I.
4. Individuare in quali intervalli le seguenti funzioni sono lipschitziane:
a) xn (n ∈ Z), b) log x, c) sinx.

2.2. Prolungamento delle soluzioni 27
5.
a) Verificare che comunque dati a, b, c, d ∈ R risulta:
|a ∧ b− c ∧ d| ≤ max(
|a− c|, |b− d|).
b) Siano f, g funzioni reali definite su un intervallo I. Verificare che se f e gsono lipschitziane allora tale e anche f ∧ g.
2.2 Prolungamento delle soluzioni
Come risulta evidente dall’esempio y′ = f(t, y) con f(t, y) = y2 (vedi esercizialla fine del paragrafo), anche se la funzione f e ovunque definita e regolare none detto che le soluzioni della corrispondente equazione siano definite su tutto R.
Vediamo ora alcuni risultati sulla prolungabilita delle soluzioni.
Sia D aperto di Rn+1 e f : D → Rn continua. Data una soluzione y : J → Rn
di (2.1), chiamiamo prolungamento di y ogni soluzione y che sia definita su unintervallo J strettamente contenente J . Se y non ammette prolungamenti alloradiciamo che e definita su un intervallo massimale di esistenza. (Si pensi, adesempio, alle soluzioni dell’equazione y′ = y2).
Prima di enunciare il principale risultato sulla prolungabilita delle soluzioniconviene svolgere due semplici osservazioni, la cui dimostrazione e lasciata peresercizio.
Osservazione 2.2.1 Se y e soluzione di (2.1) in (a, b) ed esiste finito
limt→b−
y(t) = l, con (b, l) ∈ D,
allora y puo essere estesa in modo C1 in (a, b] e
y′(b) = f(b, y(b)),
cioe y e soluzione di (2.1) in (a, b]. (Si utilizzi il teorema del valor medio).
Teorema 2.2.2 (prolungamento massimale) Sia D aperto di Rn+1 e f : D →Rn continua. Ogni soluzione y di (2.1) ammette un prolungamento ad un in-tervallo massimale di esistenza (ω−, ω+). Inoltre (t, y(t)) “abbandona definiti-vamente” ogni compatto di D per t→ ω±, cioe
comunque preso K compatto contenuto in D, esiste un intorno U diω+ [e, analogamente, di ω−] tale che
(t, y(t)) /∈ K per t ∈ (ω−, ω+) ∩ U .
Scriveremo sinteticamente questa proprieta come:
(2.7) (t, y(t)) → ∂D per t→ ω±
Osservazione 2.2.3 In assenza di ipotesi di unicita per le soluzioni dei pro-blemi di Cauchy il prolungamento massimale non e necessariamente unico. Sipensi all’equazione y′ =
√
|y| e alle soluzioni (2.6), tutte definite su intervallimassimali e coincidenti su (−∞, c].

28 Capitolo 2. Problemi ai valori iniziali
Dimostrazione (del Teorema 2.2.2). Sia y : J → Rn soluzione di (2.1). Occu-
piamoci del prolungamento a destra. Sia a un punto di J e b = supJ . Se Je massimale allora deve essere b /∈ J : infatti, in caso contrario, il problema diCauchy con dato iniziale y(b) in b permetterebbe di estendere l’intervallo di esi-stenza, che pertanto non sarebbe massimale. Quindi se J e massimale (destro)allora e aperto a destra.
Se J non e un intervallo massimale (destro) allora possiamo supporre che ysia prolungabile almeno in b. Pertanto e lecito assumere che y : [a, b] → Rn.Passo 1. Sia K un qualunque compatto contenuto in D e contenente il grafico diy. In base al Corollario 2.1.7 esiste αK > 0 tale che il problema ai valori iniziali
z′ = f(t, z)z(t0) = z0
ha soluzione nell’intervallo [t0 −αK , t0 +αK ] comunque preso (t0, z0) ∈ K. Sce-gliendo (t0, z0) = (b, y(b)) possiamo prolungare y fino a b+αK ; se (b+αK , y(b+αK)) ∈ K possiamo ulteriormente prolungare y fino a b + 2αK . Ripetendo ilragionamento un numero finito di volte si ottiene bK tale che (bK , y(bK)) /∈ K.
Passo 2. Sia (Vn) una successione crescente di aperti di D a chiusura compattain D:
Vn ⊆ Vn+1 ⊂⊂ D.
Supponiamo inoltre che V1 contenga il grafico di y e che⋃
Vn esaurisca D:
(t, y(t)) ∈ V1 per ogni t ∈ [a, b];⋃
Vn = D.
Sia bn = bV nil valore costruito al passo precedente per K = V n. Possiamo
supporre che
• (bn) sia non decrescente;
• (bn) sia limitata superiormente (altrimenti si avrebbe un prolungamentoad [a,+∞), che e gia massimale).
Allora (bn) converge ad un valore reale ω+ cosı che abbiamo ottenuto un prolun-gamento ad [a, ω+). Mostriamo che tale prolungamento e massimale (destro).Se infatti cosı non fosse y sarebbe prolungabile in ω+, quindi per continuita siavrebbe:
(bn, y(bn)) → (ω+, y(ω+)) ∈ D;
del resto, fissato N ∈ N, risulta:
(bn, y(bn)) /∈ V n ⊇ VN per ogni n ≥ N ;
quindi(bn, y(bn)) /∈ VN per ogni n ≥ N,
da cui (ω+, y(ω+)) /∈ VN . Per l’arbitrarieta di N ∈ N concludiamo che
(ω+, y(ω+)) /∈⋃
N
VN = D : assurdo.
Per ora abbiamo dimostrato che e sempre possibile estendere y ad un inter-vallo massimale destro e che tale intervallo e aperto a destra.

2.2. Prolungamento delle soluzioni 29
D
K
t
y
y(·)
tk
ω+
Figura 2.2 - La negazione che y(t) → ∂D per t→ ω+ porta ad un assurdo (vediPasso 3 della dimostrazione del Teorema 2.2.2).
Passo 3. Rimane da dimostrare che (t, y(t)) → ∂D per t→ ω+.Se ω+ = +∞ non c’e nulla da dimostrare; sia pertanto ω+ < +∞. Per
assurdo supponiamo che esista K compatto di D e una successione tk → ω+ taliche:
(tk, y(tk)) ∈ K.
Assumiamo (tk) strettamente crescente. Per la compattezza di K possiamoanche supporre che
(tk, y(tk)) → (ω+, y) ∈ K.
Passo fondamentale e ora dimostrare che non si ha solo y(tk) → y, ma
(2.8) limt→ω+
y(t) = y.
Dobbiamo pertanto escludere la possibile non esistenza del limite di y per t →ω+ (vedi Figura 2.2).
Sia B una palla chiusa di centro (ω+, y) e tutta contenuta in D. Possiamosupporre che (tk, y(tk)) ∈ B per ogni k. Sia M = maxB |f |. Se sapessimo che(s, y(s)) ∈ B per ogni s in un intorno di ω+ allora per k sufficientemente grandee τ ≥ tk:
|y(τ) − y(tk)| ≤∫ τ
tk
|f(s, y(s))| ds ≤M(τ − tk)
≤M(ω+ − tk) → 0 per k → +∞;
di conseguenza se ne dedurrebbe facilmente la (2.8): infatti, se k soddisfa ladisuguaglianza ora ottenuta, per ogni τ ≥ tk abbiamo:
|y(τ) − y| ≤ |y(τ) − y(tk)| + |y(tk) − y|≤M |ω+ − tk| + |y(tk) − y| → 0
(2.9)
30 Capitolo 2. Problemi ai valori iniziali
Consideriamo pertanto l’insieme dei valori τ per i quali vale la disuguaglianza|y(τ) − y(tk)| ≤M(ω+ − tk) o, piu precisamente, per ogni k consideriamo
ωk = supt ∈ [tk, ω+) : |y(τ) − y(tk)| ≤M(ω+ − tk) per ogni τ ∈ [tk, t].Mostriamo che ωk = ω+ per k sufficientemente grande. Osserviamo i seguentidue fatti:
• Per ogni t ∈ [tk, ωk) e lecito applicare la disuguaglianza (2.9). Quindi possiamoaffermare che
(2.10) (t, y(t)) ∈ B per ogni t ∈ [tk, ωk) per k sufficientemente grande.
• Per ogni k per il quale sussiste (2.10) e ωk < ω+ (quindi, in particolare, risultadefinito y(ωk)) abbiamo:
|y(ωk) − y(tk)| ≤∫ ωk
tk
|f(s, y(s))| ds ≤M(ωk − tk) < M(ω+ − tk).
Pertanto esiste ε tale che per ogni ε < ε
|y(ωk + ε) − y(tk)| < M(ω+ − tk);
cio e assurdo in base alla definizione di ωk.
Abbiamo quindi dimostrato che per tutti i k per i quali vale la (2.10) deveessere ωk = ω+. Di conseguenza da (2.9) ricaviamo la (2.8).
Dall’esistenza del limite (2.8) concludiamo che y e prolungabile in ω+ (si ri-cordi l’Osservazione 2.2.1): assurdo poiche al passo precedente si era dimostratoche [a, ω+) e massimale destro.
Alcune conseguenze: condizioni per l’esistenza globale. Supponiamo che D siadella forma I ×Ω, con I intervallo aperto e Ω aperto di Rn. Sia y : J → Rn unasoluzione di (2.1); supponiamo che J sia un intervallo massimale di esistenza.
• Se esiste un compatto Y di Ω per il quale
y(t) ∈ Y per ogni t ∈ J ,
allora deve essere J = I: si ha cioe esistenza globale.
Infatti y(t), che rimane confinato in Y , non puo raggiungere ∂Ω, per cuil’unico modo di soddisfare la condizione (2.7) e che J = I.
• Sia Ω = Rn. Se f e limitata allora J = I (esistenza globale).
Infatti, fissato t0 ∈ I, per ogni t ∈ I si ha:
(2.11) |y(t) − y(t0)| ≤∣
∣
∣
∫ t
t0
f(s, y(s)) ds∣
∣
∣ ≤M |t− t0|.
Ancora, la condizione (2.7) da J = I1 (vedi Figura 2.3).
Definizione 2.2.4 In ipotesi di unicita per i problemi di Cauchy (2.3) indiche-remo con y(·, t0, y0) l’unica soluzione del problema, definita nel suo intervallomassimale di definizione.
Se D e una striscia della forma I × Rn con I ⊆ R intervallo aperto, il fatto
che y(·, t0, y0) sia definita in tutto I comunque preso (t0, y0) ∈ D viene spessoespresso dicendo che vi e esistenza globale per l’equazione y′ = f(t, y).
1ci si puo anche ricondurre al caso precedente, poiche la stima (2.11) assicura che su ognicompatto di I la y rimane in un compatto di Ω = Rn.

2.2. Prolungamento delle soluzioni 31
y(t0) +M |t− t0|
tt0
Figura 2.3 -
Esercizi
6. Si valuti la massima ampiezza garantita dal Teorema 2.1.3 per l’intervallo didefinizione della soluzione del problema di Cauchy:
y′ = y2
y(0) = y0.
7. Si dimostri quanto affermato nell’Osservazione 2.2.1.
8. Sia D aperto di Rn+1 e f : D → Rn continua. Siano p e v soluzioni dell’e-quazione (2.1) negli intervalli (a, b] e [b, c), rispettivamente. Dimostrare che sep(b) = v(b) allora la funzione
y =
p in (a, b],v in [b, c)
e soluzione di (2.1) in (a, c).
9. Sia f come sopra. Se f e limitata in D, ogni soluzione y in un intervallo(a, b) ammette limiti finiti
limt→a+
y(t) = y(a+) e limt→b−
y(t) = y(b−).
Se inoltre f e o puo essere definita in (b, y(b−)) in modo continuo, allora y esoluzione di (2.1) in (a, b]. Analogamente per l’estremo sinistro a.

32 Capitolo 2. Problemi ai valori iniziali
10. Se D e della forma I × Rn con I intervallo e f e lipschitziana su tutto
D nella seconda variabile, uniformemente rispetto alla prima, come puo esseresvolto, piu rapidamente, il Passo 3 della dimostrazione del Teorema 2.2.2?
2.3 Lemma di Gronwall
Il Lemma di Gronwall e le disuguaglianze differenziali di cui al successivo pa-ragrafo sono strumenti che spesso permettono di ottenere stime a priori per lesoluzioni di un’equazione differenziale; queste possono dare luogo a risultati diesistenza globale in connessione con il Teorema 2.2.2.
Ci sara utile (per la dimostrazione del Lemma di Gronwall) premettere latecnica risolutiva delle equazioni differenziali lineari del primo ordine, cioe dellaforma:
(2.12) y′ + p(t)y = q(t),
dove p, q sono funzioni continue su un intervallo I.Sia y : J → R una soluzione. Detta P una primitiva di p, moltiplichiamo
entrambi i membri dell’equazione per eP (t) e osserviamo che cosı facendo ilprimo membro non e altro che d
dt (eP (t)y(t)). Pertanto, passando agli integrali
indefiniti:
eP (t)y(t) =
∫
eP (t)q(t) dt.
Concludiamo che la famiglia delle soluzioni di (2.12) e data da:
y(t) = e−P (t)
∫
eP (t)q(t) dt.
In particolare, consideriamo il problema
u′(t) = β(t)u(t)
u(a) = α
dati α ∈ R e β funzione continua su un intervallo I = [a, b]. Ricordiamo che laformulazione integrale di questo problema e:
(2.13) u(t) = α+
∫ t
a
β(s)u(s) ds.
In base a quanto precede, la soluzione e data da:
(2.14) u(t) = αeR
ta
β(s) ds.
Il Lemma seguente risponde alla domanda: se in (2.13) vale il segno di disugua-glianza, anziche di uguaglianza, lo stesso si riflette nella (2.14)?
Lemma 2.3.1 (Gronwall) Siano α ∈ R e β ∈ C0([a, b]), con β ≥ 0. Siau ∈ C0([a, b]) tale che
u(t) ≤ α+
∫ t
a
β(s)u(s) ds per ogni t ∈ [a, b].
Allora:u(t) ≤ αe
R
ta
β(s) ds per ogni t ∈ [a, b].

2.3. Lemma di Gronwall 33
Dimostrazione. Poniamo
R(t) =
∫ t
a
β(s)u(s) ds.
Allora
R′(t) = β(t)u(t) ≤ β(t)(
α+R(t))
.
Applichiamo alla disuguaglianza R′(t) − βR(t) ≤ αβ(t) il ragionamento utiliz-zato poco sopra per le equazioni differenziali lineari del primo ordine. Sia B laprimitiva di β definita da:
B(t) =
∫ t
a
β(s) ds.
Allora, moltiplicando per e−B(t), si ha:
d
dt
(
e−B(t)R(t))
≤ αβ(t)e−B(t).
Integriamo ora fra a e t ≥ a, tenendo conto che R(a) = 0:
e−B(t)R(t) ≤ −α[
e−B(s)]t
a= −α(e−B(t) − 1).
Concludiamo ricavando R(t) ≤ −α + αeB(t) e sostituendo tale stima nelladisuguaglianza data come ipotesi.
Un’applicazione all’unicita delle soluzioni. Un’efficace dimostrazione alternativadell’unicita globale, rispetto a quanto gia visto nell’Osservazione 2.1.5, si puoottenere facilmente come applicazione del Lemma di Gronwall.
Proposizione 2.3.2 Sia D aperto di Rn+1 e f : D → Rn funzione continuae localmente lipschitziana nella seconda variabile, uniformemente rispetto allaprima. Siano yi : Ji → R
n (i = 1, 2) due soluzioni dell’equazione y′ = f(t, y).Se y1(t0) = y2(t0) per qualche t0 ∈ J1 ∩ J2 allora y1 = y2 su J1 ∩ J2 (e quindi eindividuata un’“unica soluzione”, definita su tutto J1 ∪ J2).
Dimostrazione. Supponiamo J1 ∩ J2 6= t0, altrimenti non vi e nulla dadimostrare. Prendiamo in considerazione i valori t ≥ t0 (per t ≤ t0 si procedein modo analogo).
Utilizzando la caratterizzazione integrale delle soluzioni abbiamo, per t ≥ t0:
|y1(t) − y2(t)| ≤ |y1(t0) − y2(t0)| +∫ t
t0
|f(s, y1(s)) − f(s, y2(s))| ds.
Fissiamo arbitrariamente t > t0 in J1 ∩ J2. Esiste K compatto di D contenentei grafici di y1,2
∣
∣
∣
[t0,t]. Sia LK una costante di Lipschitz per f in K. Allora per
ogni t ∈ [t0, t]:
|y1(t) − y2(t)| ≤ |y1(t0) − y2(t0)| + LK
∫ t
t0
|y1(s) − y2(s)| ds.

34 Capitolo 2. Problemi ai valori iniziali
Per il Lemma di Gronwall (con α = |y1(t0) − y2(t0)| e β = LK):
|y1(t) − y2(t)| ≤ |y1(t0) − y2(t0)|eLKt = 0,
poiche y1(t0) − y2(t0) = 0. Notiamo come la disuguaglianza ora ottenuta diauna stima di |y1(t) − y2(t)| in termini dei dati iniziali e del tempo t.
Possiamo quindi dire che le condizioni di lipschitzianita locale assicuranol’unicita globale.
A titolo di esempio ricordiamo l’equazione della crescita logistica (1.6):
y′ = ry(
1 − y
K
)
.
Poiche y ≡ 0 e y ≡ K sono soluzioni, il grafico di ogni soluzione con dato inizialey0 ∈ (0,K) deve rimanenre confinato nella striscia R× (0,K), non potendo, perunicita, attraversare le costanti 0 e K. Allora il Teorema 2.2.2 da esistenzaglobale su tutto R per tali soluzioni.
2.4 Disuguaglianze differenziali
Il teorema che ora enunciamo e una formalizzazione del fatto che date duefunzioni (scalari) y e u, se negli eventuali punti di intersezione dei grafici la pen-denza della prima e sempre inferiore a quella della seconda, allora l’informazioneche y ≤ u in un istante a permette di concludere che y ≤ u per tutti i tempisuccessivi t ≥ a.
Teorema 2.4.1 (confronto) Sia D = I × R ⊆ R2 con I intervallo aperto.Sia ω : D → R una funzione continua e localmente lipschitziana nella secondavariabile, uniformemente rispetto alla prima. Siano y e u funzioni di classe C1
su un intervallo J ⊆ I tali che
y′(t) ≤ ω(t, y(t)), u′(t) = ω(t, u(t))
per ogni t ∈ J . Sia a ∈ J tale che
y(a) ≤ u(a).
Allora
y(t) ≤ u(t) per ogni t ≥ a (t ∈ J).
Questo risultato vale in realta nelle ipotesi di unicita per l’equazione diffe-renziale u′ = ω(t, u), indipendentemente dall’ipotesi di lipschitzianita.
Dimostrazione. Supponiamo che in J esista t > a con y(t) > u(t). Sia
t0 = supt ∈ [a, t] : y(t) ≤ u(t).
Deve essere (teorema permanenza del segno) y(t0) = u(t0) e t0 < t. Inoltre:
y(t) > u(t) per t0 < t ≤ t.

2.4. Disuguaglianze differenziali 35
In [t0, t] risulta:
y(t) = y(t0) +
∫ t
t0
y′(s) ds ≤ y(t0) +
∫ t
t0
ω(s, y(s)) ds,
e
u(t) = u(t0) +
∫ t
t0
ω(s, u(s)) ds.
Sottraendo questa uguaglianza alla disuguaglianza precedente si ha:
y(t) − u(t) ≤ y(t0) − u(t0) +
∫ t
t0
(
ω(s, y(s)) − ω(s, u(s)))
ds.
Se K e un compatto di D contenente i grafici di y, u∣
∣
∣
[t0,t]e LK e una costante
di Lipschitz per ω in K, allora:
y(t) − u(t) ≤ LK
∫ t
t0
|y(s) − u(s)| ds = LK
∫ t
t0
(
y(s) − u(s))
ds
(notiamo la necessita di lavorare in un intervallo in cui y(t) − u(t) > 0). Per ilLemma di Gronwall concludiamo che (α = 0)
y(t) − u(t) ≤ 0.
Cio e assurdo.
Osservazione 2.4.2 Risultati analoghi a quello enunciato si ottengono inver-tendo opportunamente le disuguaglianze. Ad esempio, se y(a) ≥ u(a) deveessere y(t) ≥ u(t) per t ≤ a; oppure, sempre nell’ipotesi y(a) ≥ u(a), sey′(t) ≥ ω(t, y(t)) allora y(t) ≥ u(t) per t ≥ a.
Come applicazione dimostriamo l’esistenza globale per le soluzioni del siste-ma di Lotka-Volterra:
(2.15)
x′ = (α− βy)x
y′ = (−γ + δx)y
Sia(
x(·), y(·))
: J → R2 una soluzione, con J intervallo massimale di esistenza.Come si vedra piu avanti, ed e immediatamente verificabile, poiche le equazionisono autonome, cioe in esse non compare esplicitamente il tempo t, la soluzionedel problema ai valori iniziali con dato in t0 puo essere ottenuta per traslazio-ne temporale dalla soluzione che assume lo stesso dato al tempo 0. Pertantosupponiamo 0 ∈ J e poniamo:
x(0) = x0, y(0) = y0.
E facile vedere che se y0 = 0 e x0 6= 0 allora la funzione y ≡ 0 e soluzione dellaseconda equazione, mentre la prima fornisce;
x(t) = x0eαt.

36 Capitolo 2. Problemi ai valori iniziali
Analogamente se x0 = 0 e y0 6= 0.Assumiamo ora (caso di interesse modellistico) che x0 > 0 e y0 > 0. Per
unicita deve allora essere x > 0 e y > 0 in tutto J . Allora la prima delle dueequazioni da x′ ≤ αx; se u e la soluzione del problema di Cauchy
u′ = αu(t),u(0) = x0,
cioe u(t) = x0eαt, per il Teorema del confronto deduciamo che
x(t) ≤ x0eαt per ogni t > 0 (t ∈ J).
Di conseguenza la seconda delle due equazioni di Lotka-Volterra da:
y′(t) ≤ φ(t)y(t) per ogni t ∈ J ,
dove si e posto φ(t) = −γ + δx0eαt. Applichiamo allora il confronto utilizzando
la soluzione v del problema
v′(t) = φ(t)v(t)v(0) = y0.
Notiamo che v e definita su tutto R (l’equazione e lineare del primo ordine, concoefficienti ovunque definiti). Risulta pertanto:
y(t) ≤ v(t) per ogni t > 0 (t ∈ J).
Le limitazioni cosı ottenute per x(t) e y(t) assicurano, in base al Teorema 2.2.2,l’esistenza della soluzione per tutti i tempi t > 0. Un ragionamento analogopuo essere svolto per dimostrare l’esistenza globale per i tempi negativi (si inizistimando la y mediante un’esponenziale).
Corollario 2.4.3 Sia D come nel Teorema 2.4.1 e f : D → R continua sod-disfacente la seguente condizione:
|f(t, y)| ≤ ϕ(t) + ψ(t)|y| per ogni (t, y) ∈ D,
per opportune funzioni ϕ e ψ continue e non negative su I. Allora l’equazioney′ = f(t, y) ha esistenza globale.
Dimostrazione. Sia y : J → R una soluzione dell’equazione y′ = f(t, y).Fissato t0 ∈ J diamo limitazioni per y(t) per t ≥ t0.
Per ipotesi:y′(t) = f(t, y(t)) ≤ ϕ(t) + ψ(t)|y(t)|.
Sia u la soluzione del problema:
u′(t) = ϕ(t) + ψ(t)|u(t)|u(t0) = |y(t0)|.
Notiamo che u(t) ≥ 0 per ogni t ≥ t0 poiche u(t0) ≥ 0 e u′(t) ≥ 0; allora usoddisfa, per t ≥ t0, un’equazione differenziale lineare del primo ordine, per cuirisulta definita per ogni t ∈ I con t ≥ t0.

2.4. Disuguaglianze differenziali 37
Applichiamo ora il Teorema di confronto 2.4.1 con ω(t, y) = ϕ(t) + ψ(t)|y|;dal momento che y(t0) ≤ u(t0), abbiamo:
y(t) ≤ u(t) per ogni t ≥ t0.
In modo analogo, per avere una stima dal basso osserviamo che
y′(t) = f(t, y(t)) ≥ −ϕ(t) − ψ(t)|y(t)|;consideriamo poi la soluzione v del problema
v′(t) = −ϕ(t) − ψ(t)|v(t)|v(t0) = −|y(t0)|.
La funzione v risulta non positiva per t ≥ t0, quindi risolve un’equazione diffe-renziale lineare del primo ordine per la quale vi e esistenza globale. Inoltre, peril Teorema del confronto risulta:
y(t) ≥ v(t) per ogni t ≥ t0.
Il grafico di y e quindi confinato fra quelli di u e v, per cui abbiamo esistenzaglobale (Teorema 2.2.2).
Osservazione 2.4.4 Il corollario ora considerato ha portata piu generale, va-lendo in realta anche per sistemi di equazioni (e non soltanto per incognitescalari), con il medesimo enunciato (ora D = I × Rn). Una dimostrazione puoessere ottenuta mediante il Lemma di Gronwall come segue.
Sia y : J → Rn una soluzione e t0 ∈ J . Occupiamoci dei tempi t ≥ t0.Risulta:
|y(t)| ≤ |y(t0)| +∫ t
t0
|f(s, y(s))| ds
≤ |y(t0)| +∫ t
t0
[
ϕ(s) + ψ(s)|y(s)|]
ds
Detto b l’estremo destro di I, fissiamo t ∈ (t0, b). Dalla disuguaglianza prece-dente abbiamo subito:
|y(t)| ≤ α+M
∫ t
t0
|y(s)| ds,
doveα = |y(t0)| + (t− t0)max
[t0,t]ϕ, M = max
[t0,t]ψ.
Per il Lemma di Gronwall
|y(t)| ≤ αeM(t−t0) ≤ αeM(t−t0)
per ogni t ≤ t (t ∈ J). Ne segue che la soluzione y rimane in un compatto diR
n su J ∩ [t0, t], per cui J deve contenere [t0, t] (si ricordi quanto detto dopo ladimostrazione del Teorema 2.2.2).
Osservazione 2.4.5 Il Corollario 2.4.3, nella forma estesa di cui all’osserva-zione precedente, ha una notevole applicazione al caso dei sistemi lineari :
y′ = A(t)y + b(t),
con A matrice n×n di funzioni continue su un intervallo I e b : I → Rn continua.

38 Capitolo 2. Problemi ai valori iniziali
2.5 Dipendenza delle soluzioni dai dati
Teorema 2.5.1 (Dipendenza continua) Sia (fn)n una successione di fun-zioni continue D → Rn e sia
(
(tn, yn))
una successione di punti di D. Suppo-niamo esistano
f0 : D → Rn, (t0, y0) ∈ D
tali che
i) fn → f0 uniformemente sui compatti di D;
ii) (tn, yn) → (t0, y0)
iii) la funzione f0 e localmente lipschitziana in D.
Sia φ0 la soluzione del problema di Cauchy
y′ = f0(t, y)
y(t0) = y0
e supponiamo sia definita su un intervallo [a, b].Sia φn una soluzione del problema
y′ = fn(t, y)
y(tn) = yn .
Allora per n sufficientemente grande φn puo essere definita su [a, b] e φn → φ0
uniformemente in [a, b].
Osservazione 2.5.2 Il teorema vale in realta nell’ipotesi che il problema cherisolve φ0 abbia unicita, indipendentemente dall’ipotesi di lipschitzianita (vedi,ad esempio, [Hal80], Lemma 3.1, pag. 24).
Osservazione 2.5.3 Si notino i casi particolari in cui la successione fn o ipunti (tn, yn) non dipendano da n.
Alla dimostrazione del teorema premettiamo un lemma, che precisa quantogia contenuto nel Corollario 2.1.7, mettendo in evidenza l’uniformita dell’am-piezza dell’intervallo di esistenza in presenza di una limitazione uniforme perf ; cio vale per ogni soluzione, indipendentemente dall’ipotesi di unicita o dellaspecifica costruzione considerata per dimostrare l’esistenza di una soluzione.
Lemma 2.5.4 Sia f : D → Rn continua, K compatto e V aperto di Rn tali che
K ⊆ V ⊂⊂ D.
Sia M > maxV |f |. Esiste allora α > 0 dipendente soltanto da K,V e M taleche, comunque preso (t0, y0) ∈ K, se y : J → Rn e una soluzione di
(2.16)
y′ = f(t, y)
y(t0) = y0
con J intervallo massimale, allora y e definita almeno in J ⊇ [t0 − α, t0 + α] eil grafico di y
∣
∣
∣
[t0−α,t0+α]e contenuto in V .

2.5. Dipendenza delle soluzioni dai dati 39
K
V
Ra,b(t0, y0)
t0−a t0+a t
(t0, y0)
(a)
Ra,b(t0, y0)
t0−a t0+a
t
t
(t0, y0)
(b)
Figura 2.4 - Dimostrazione del teorema di dipendenza continua
Dimostrazione. Chiaramente esistono a, b > 0 dipendenti soltanto da d(K, ∂V ),tali che
Ra,b(t0, y0) := (t, y) : |t− t0| < a, |y − y0| < b ⊆ V.
Mostriamo che se y : J → Rn e una soluzione di (2.16), con J = (ω−, ω+)intervallo massimale di esistenza, allora J ⊇ [t0 − α, t0 + α], con
α = min(
a,b
M
)
(e pertanto α dipende soltanto da K,V e M). Occupiamoci dell’intervallo[t0, t0 + α] (analogamente si procede per il [t0 − α, t0]).
Sia
t = supt ∈ [t0, ω+) : ∀τ ∈ [t0, t] (τ, y(τ)) ∈ Ra,b(t0, y0).
Se t = ω+ allora il grafico di y in [t0, ω+) sarebbe tutto contenuto in R, che eun compatto di D: cio e assurdo.
Sia pertanto t < ω+ e supponiamo, per assurdo, che t < t0 + α. Allora deveessere (vedi Figura 2.4(b))
|y(t) − y0| = b;
ma per ogni t ∈ [t0, t] risulta (t, y(t)) ∈ Ra,b(t0, y0), per cui |f(t, y(t))| ≤M e
b = |y(t) − y0| ≤∫ t
t0
|f(s, y(s))| ds ≤M |t− t0| < Mα ≤ b.
Allora deve essere t ≥ t0 + α e quindi, essendo ω+ > t, anche ω+ > t0 + α.
Dimostrazione. (Teorema di dipendenza continua). Siano V e V ′ aperti diD, con
graf φ0
∣
∣
∣
[a,b]⊆ V ′ ⊂⊂ V ⊂⊂ D.
Per (ii) possiamo supporre
(tn, yn) ∈ V ′ per ogni n.
Per (i), detto M un valore tale che maxV |f0| < M, possiamo supporre che
maxV
|fn| < M per ogni n.

40 Capitolo 2. Problemi ai valori iniziali
Infatti la (ii) assicura che
|fn| ≤ |fn − f0| + |f0| ≤ maxV
|fn − f0| + maxV
|f0| → maxV
|f0| < M.
Applichiamo il lemma precedente con K = V′: poiche M da una maggiora-
zione comune ad ogni |fn|, esiste α > 0 tale che
φn e definita in [tn − α, tn + α] per ogni n
grafφn
∣
∣
∣
[tn−α,tn+α]e contenuto in V per ogni n.
A motivo della convergenza di tn a t0
[tn − α, tn + α] ⊇ [t0 −α
2, t0 +
α
2] per n sufficientemente grande.
Mostriamo ora la convergenza uniforme φn → φ0 su tutto [t0 − α/2, t0 + α/2].Occupiamoci di [t0, t0 +α/2] (analogamente si procede su [t0 +α/2, t0]). In taleintervallo abbiamo:
φn(t) − φ0(t) = yn − y0 +
∫ t
tn
fn(s, φn(s)) ds−∫ t
t0
f0(s, φ0(s)) ds
= yn − y0 +
∫ t0
tn
fn(s, φn(s)) ds+
∫ t
t0
[
fn(s, φn(s)) − f0(s, φ0(s))]
ds
da cui
|φn(t) − φ0(t)| ≤ |yn − y0| +M |t0 − tn| +∫ t0+α/2
t0
|fn(s, φn(s)) − f0(s, φn(s))| ds
+
∫ t
t0
|f0(s, φn(s)) − f0(s, φ0(s))| ds.
Per la convergenza uniforme di fn a f0 in V (in cui stanno i grafici di φn),risulta:
∫ t0+α/2
t0
|fn(s, φn(s)) − f0(s, φn(s))| ds
≤ α
2max
V|fn − f0| := σn → 0 per n→ +∞.
Inoltre, per la locale lipschitzianita di f0 su V :
∫ t
t0
|f0(s, φn(s)) − f0(s, φ0(s))| ds ≤ LV
∫ t
t0
|φn(s) − φ0(s)| ds.
Allora
|φn(t) − φ0(t)| ≤ αn + LV
∫ t
t0
|φn(s) − φ0(s))| ds,
conαn = |yn − y0| +M |tn − t0| + σn → 0.
Per il Lemma di Gronwall:
|φn(t) − φ0(t)| ≤ αneLV (t−t0) ≤ αne
LV α/2 → 0 per n→ +∞.

2.5. Dipendenza delle soluzioni dai dati 41
Quindi φn → φ0 uniformemente in [t0, t0 + α/2].Il procedimento seguito per dimostrare che per n sufficientemente grande le
funzioni φn sono definite in [t0 − α/2, t0 + α/2] e che su tale intervallo conver-gono uniformemente a φ0 puo essere ripetuto a partire dagli estremi t0 ± α/2:l’ampiezza α e infatti indipendente dal punto iniziale considerato. Allora, conun numero finito di passi si ottiene quanto asserito.
Dal Teorema precedente si puo ricavare con facilita il seguente risultato.
Sia F un aperto di R × Rn × Rm e f : F → Rn una funzione continua. Siconsiderino i problemi di Cauchy
(2.17)
y′ = f(t, y, λ)
y(t0) = y0.
Supponiamo che per ogni λ la funzione f(·, ·, λ) sia localmente lipschitziana (nel-la seconda variabile, uniformemente rispetto alla prima).2 Pertanto il problema(2.17) ammette soluzione unica, che indichiamo con
y(·, t0, y0, λ)
Sia (ω−(t0, y0, λ), ω+(t0, y0, λ)) il suo intervallo massimale di esistenza.
Teorema 2.5.5 La funzione ω−(t0, y0, λ) [ω+(t0, y0, λ)] e semicontinua supe-riormente [inferiormente], l’insieme
E = (t, t0, y0, λ) : (t0, y0, λ) ∈ F, ω−(t0, y0, λ) < t < ω+(t0, y0, λ)
e aperto e la funzione
(t, t0, y0, λ) 7→ y(t, t0, y0, λ)
e continua in E.
La dimostrazione utilizza la continuita (uniforme) garantita dal Teorema 2.5.1 rispettoalle variabili (t0, y0, λ): assieme alla continuita in t si ottiene la continuita di (t, t0, y0, λ) 7→y(t, t0, y0, λ). Il fatto che E sia aperto discende dalla semicontinuita delle funzioni ω− e ω+
(per questa dimostrazione si veda [Har64], Theorem 2.1 pag. 94 e [Hal80], Capitolo 1, Theorem3.4 e Theorem 3.1).
Osservazione 2.5.6 Il teorema precedente contiene, in particolare, la seguenteversione del Teorema 2.5.1. Dati t0, y0 e λ0, se [a, b] e un intervallo contenuto in(
ω−(t0, y0, λ0), ω+(t0, y0, λ0))
, la semicontinuita di ω± assicura l’esistenza di unintorno U di (t0, y0, λ0) tale che y(·, τ, z, λ) e definita almeno in [a, b] per ogni(τ, z, λ) ∈ U ; inoltre, potendosi chiaramente supporre U chiuso, la continuita(uniforme) di y su [a, b] × U da:
lim(τ,z,λ)→(t0,y0,λ0)
y(t, τ, z, λ) = y(t, t0, y0, λ0) uniformemente.
2In realta, come per il Teorema di dipendenza continua, sarebbe sufficiente l’ipotesi che iproblemi (2.17) abbiano unicita.

42 Capitolo 2. Problemi ai valori iniziali
x
t
(t0, y0)
t0
ε
δ
t0 + T
z
Figura 2.5 - Dipendenza continua dal dato iniziale y0
Dipendenza continua e stabilita Consideriamo il caso in cui l’equazione diffe-renziale y′ = f(t, y) presenti la funzione f definita su tutto R×Rn. Supponiamoinoltre di essere in ipotesi di unicita per i problemi di Cauchy
y′ = f(t, y)
y(t0) = y0
e indichiamone con y(·, t0, y0) la soluzione. Supponiamo inoltre che la funzionenulla sia soluzione.
Dati comunque t0 ∈ R e T > 0 applichiamo i risultati visti sulla dipenden-za continua all’intervallo [t0, t0 + T ], al variare del dato iniziale y0 (si ricordi,in particolare, l’Osservazione 2.5.6). Esiste allora un valore δ(T ) > 0 tale chese |y0| < δ(T ) la soluzione y(·, t0, y0) e definita su tutto [t0, t0 + T ]. Inol-tre y(·, t0, y0) converge uniformemente alla funzione nulla (che e la soluzionecorrispondente al dato (t0, 0)) per y0 → 0. Quindi (vedi Figura 2.5), fissato t0:
per ogni ε > 0 esiste δ(T, ε) > 0 tale che se |y0| < δ(T, ε) allora lasoluzione y(·, t0, y0) e definita su tutto [t0, t0 + T ] e |y(t, t0, y0)| < εper ogni t ∈ [t0, t0 + T ].
E istruttivo verificare questo fatto nel caso dell’equazione
y′ = y2.
Sappiamo che la soluzione con dato y0 6= 0 per t0 = 0 e data da:
y(t, 0, y0) =1
(1/y0) − t.
Dati ε > 0 e T > 0 abbiamo esistenza su [0, T ] se y0 < 1/T , mentre la condizione|y(t, 0, y0)| < ε per ogni t ∈ [0, T ] e verificata se |y0| < δ, con δ tale che (δ < 1/T

2.6. Sistemi autonomi: generalita 43
e)1
(1/δ) − T< ε, cioe δ <
11ε + T
.
Al crescere di T o al decrescere di ε l’ampiezza δ dell’intorno di 0 in cui pren-dere il dato iniziale per avere una soluzione vicina alla soluzione nulla a menodi ε diminuisce e tende a zero. Quindi per l’equazione y′ = y2 non e possibi-le generalizzare il ragionamento precedente all’intervallo [0,+∞). Si cerchi divisualizzare la situazione in un grafico.
La dipendenza continua dai dati iniziali su intervalli illimitati e una proprietamolto rilevante su cui torneremo, la cosiddetta proprieta di stabilita.
2.6 Sistemi autonomi: generalita
Consideriamo un sistema autonomo di equazioni differenziali:
(2.18) x′ = f(x) con f : Ω → Rn continua (Ω aperto di R
n).
Osserviamo innazitutto che:
Se x : J → Ω e una soluzione, allora tale e anche ogni sua traslazionetemporale xτ (t) := x(t− τ) (per t ∈ J + τ).
Infatti:
x′τ (t) = x′(t− τ) = f(x(t− τ)) = f(xτ (t)).
Ricordiamo che, secondo la Definizione 2.2.4, se f e tale da assicurare l’u-nicita per i corrispondenti problemi di Cauchy, con x(·, t0, x0) indichiamo lasoluzione del problema di Cauchy con dato x0 in t0, definita nel suo intervallomassimale di esistenza. Allora la proprieta ora dimostrata implica che
(2.19) x(t, t0, x0) = x(t− t0, 0, x0).
Pertanto, per i sistemi autonomi e sufficiente considerare la funzione x(t, 0, x0),cioe considerare, per ogni x0 ∈ Ω, la soluzione per la quale x(0) = x0. Indichia-mo con
(
ω−(x0), ω+(x0))
il suo intervallo massimale di esistenza.
Definizione 2.6.1 La funzione ϕ definita da ϕ(t, x0) = x(t, 0, x0) e detta flusso(o sistema dinamico) associato all’equazione (2.18).
Proposizione 2.6.2 Valgono le seguenti proprieta:
a) L’insieme E = (t, x) ∈ R×Ω : ω−(x) < t < ω+(x) e aperto e ϕ : E → Ωe continua.
b) ϕ(0, ·) = idΩ;
c) ϕ(
t, ϕ(s, x))
= ϕ(s+ t, x).

44 Capitolo 2. Problemi ai valori iniziali
x1
x2
t
x(·)
γ
Figura 2.6 - L’orbita della soluzione x(·) e la proiezione γ del grafico di x(·) sullospazio degli stati.
Dimostrazione. Per la prima proprieta si veda il Teorema 2.5.5, mentre laseconda e immediata per la definizione stessa di ϕ. Per la terza proprieta bastaosservare che le funzioni ϕ
(
·, ϕ(s, x))
e ϕ(s + ·, x) sono entrambe soluzioni delproblema con dato iniziale ϕ(s, x), quindi coincidono.
Fissato t, la funzione x 7→ ϕ(t, x) e una trasformazione biunivoca di Ω in se:ogni stato x viene portato nel nuovo stato ϕ(t, x), che rappresenta l’evoluzionedel sistema dopo che e trascorso il tempo t.
Diciamo orbita di un punto p ∈ Ω l’immagine della soluzione x(·, p). Altri-menti detto, le orbite sono le proiezioni dei grafici delle soluzioni sullo spaziodegli stati o delle fasi Rn. Se interpretiamo “cinematicamente” una soluzionex(·) come legge oraria del moto di un punto, l’orbita individuata da x (dettaanche orbita della soluzione x) non e altro che l’insieme delle posizioni assunte.
Se x0 e tale che f(x0) = 0 allora x(t) ≡ x0 e soluzione e x0 e un’orbita.
Proposizione 2.6.3 In ipotesi di unicita valgono le seguenti proprieta:
a) due orbite distinte non possono avere alcun punto in comune.
b) se x : J → Ω e una soluzione non costante, allora e necessariamente unacurva regolare, cioe x′(t) 6= 0 per ogni t ∈ J .
Dimostrazione. a) Siano γ1 e γ2 due orbite, corrispondenti alle soluzioni x1
e x2, rispettivamente. Se fosse
x1(t1) = x2(t2) per una coppia t1, t2 (nei rispettivi domini),
allorau(t2) = x2(t2), con u(t) := x1
(
t− (t2 − t1))
.
La funzione u e soluzione, per cui u ≡ x2 e quindi le orbite devono coincidere(poiche la proiezione del grafico di u sullo spazio degli stati non e altro che γ1,essendo u una traslata temporale di x1).

2.6. Sistemi autonomi: generalita 45
b) Se esistesse t0 ∈ J con x′(t0) = 0 allora dovrebbe essere
0 = x′(t0) = f(x(t0)),
quindi x0 := x(t0) sarebbe tale che f(x0) = 0: l’orbita di x e quella dellasoluzione costante con valore x0 dovrebbero coincidere perche presentano unpunto in comune.
Nello studio delle orbite del sistema (2.18), le particolari rappresentazioni pa-rametriche fornite dalle soluzioni del sistema stesso perdono la loro centralita.Infatti, dal punto di vista della geometria delle orbite, non e rilevante la velocitacon cui sono percorse (il che e specificato dalla rischiesta che x′(t) = f(x(t)));cosı, se γ e l’orbita individuata dalla soluzione x : (a, b) → Ω, e naturale con-siderare la classe delle rappresentazioni parametriche di γ equivalenti a x (leriparametrizzazioni di x), cioe la classe delle funzioni u per le quali esiste unafunzione ϕ : (α, β) → (a, b) di classe C1, invertibile con inversa C1, per la quale:
u = x ϕ.
Risultau′ = λf(u), con λ = ϕ′.
La funzione λ e continua e mai nulla, per cui l’uguaglianza u′ = λf(u) traduce ilparallelismo fra il vettore tangente u′ e il campo assegnato f . Inoltre caratterizzale riparametrizzazioni delle soluzioni di (2.18). Piu precisamente vale il seguenterisultato:
Proposizione 2.6.4 Si consideri il problema
(2.20) u′//f(u)
cioe il problema della determinazione delle funzioni u : J → Ω, con J intervallodi R, di classe C1 per le quali esiste λ ∈ C0(J) mai nulla e tale che
u′ = λf(u).
Le soluzioni di (2.20) sono tutte e sole le riparametrizzazioni delle soluzioni di(2.18).
Dimostrazione. Gia abbiamo visto che se u e una riparametrizzazione di unasoluzione allora u′ = λf(u) per un’opportuna λ continua e mai nulla. Viceversa,sia ϕ una primitiva di λ. Allora ϕ e invertibile, con inversa C1, e si controllaimmediatamente che x = u ϕ−1 e una soluzione di (2.18).
Il problema (2.20) viene anche espresso mediante la scrittura seguente (doveutilizziamo la variabile x in luogo della u):
(2.21)dx1
f1(x)=
dx2
f2(x)= . . . =
dxn
fn(x).


Capitolo 3
Tecniche elementari di
integrazione
3.1 Equazioni a variabili separabili
Si tratta di equazioni della forma
(3.1) y′ = g(t)h(y) g ∈ C0(I1), h ∈ C0(I2),
con I1 e I2 intervalli. Osserviamo subito che le funzioni costanti che assumonouno degli eventuali zeri di h sono soluzioni dell’equazione differenziale.
Sia ora y una soluzione di (3.1), su un intervallo J in cui t 7→ h(y(t)) e nonnulla, risulta:
(3.2)1
h(y(t))y′(t) = g(t) per ogni t ∈ J,
e quindi∫
1
h(y(t))y′(t) dt =
∫
g(t) dt;
quest’ultima uguaglianza puo anche essere riscritta come:
(
∫
1
h(ξ)dξ)
ξ=y(t)=
∫
g(t) dt (t ∈ J).
In tal modo viene individuata implicitamente la soluzione y su J .Piu precisamente, detto t0 un punto di J e posto y0 = y(t0) (per cui h(y0) 6=
0), definiamo
H(y) =
∫ y
y0
1
h(ξ)dξ,
per ogni y nella componente connessa U di h−1(R \ 0) contenente y0; e sia
G(t) =
∫ t
t0
g(τ) dτ per t ∈ I1.
Allora, integrando la (3.2) fra t0 e t ∈ J , risulta:
H(y(t)) = G(t) per t ∈ J.
47

48 Capitolo 3. Tecniche elementari di integrazione
Poiche su U la funzione H e invertibile con inversa C1 (essendo la derivata 1/hmai nulla), quest’ultima equazione individua univocamente y su J :
(3.3) y(t) = H−1(
G(t))
per t ∈ J.
(E immediato ora vedere che questa da effettivamente una soluzione). Notiamocome l’espressione ora ottenuta per y mostra come sia univocamente individua-to, indipendentemente dalla soluzione y considerata, il piu ampio intervallo J0
contenente t0 in cui una soluzione soddisfacente il dato y(t0) = y0 puo esseredefinita in modo che h(y(t)) 6= 0. Infatti in base alla (3.3) l’intervallo J0 deveessere contenuto in G−1(V ) con V = H(U) (l’insieme V e aperto in quanto He una funzione invertibile di classe C1). Pertanto J0 e la componente connessadi G−1(V ) contenente t0.
Riassumendo:
Dato (t0, y0) ∈ I1 × I2 con h(y0) 6= 0, risulta univocamente in-dividuato un intervallo J0 che risulta essere per ogni soluzione ydell’equazione (3.1) il piu ampio in cui y puo essere definita conh y 6= 0; in tale intervallo queste soluzioni sono univocamenteindividuate dall’equazione;
H(y(t)) = G(t).
Osservazione 3.1.1 Le considerazioni sopra esposte tengono conto della pos-sibilita che l’equazione non presenti unicita per i corrispondenti problemi diCauchy: due soluzioni che coincidono in un punto t0 in cui h(y0) 6= 0 devonocoincidere fintanto che si mantengono diverse da uno zero di h. Puo essere utilepensare all’esempio
y′ =√
|y|,che presenta le soluzioni
y0 ≡ 0, y1 =
14 (t− c)2 se t ≥ c0 se t ≤ c
, y2 =
14 (t− c)2 se t ≥ c− 1
4 (t− c)2 se t ≤ c.
Esempi y′ = 2te−y, y′ = −2t(y−1), y′ = y(y−1), y′ = ty(y−1),
y′ = tey+1
y(0) = 0,
y′ = 3√
y2.
3.2 Equazioni lineari del primo ordine
In occasione dello studio del Lemma di Gronwall abbiamo gia incontrato leequazioni della forma
(3.4) y′ + p(t)y = q(t),
dove p, q sono funzioni continue su un intervallo I.Detta P una primitiva di p, la famiglia delle soluzioni e data da:
y(t) = e−P (t)
∫
eP (t)q(t) dt.

3.2. Equazioni lineari del primo ordine 49
Osserviamo che se q ≡ 0 allora la (3.4) diventa un’equazione a variabiliseparabili, le cui soluzioni sono:
y(t) = Ce−P (t) al variare di C ∈ R.
Mostriamo ora come da queste sia possibile ricavare l’integrale generale della(3.4). Al riguardo utilizzeremo il seguente risultato di struttura.
Proposizione 3.2.1 Se y e una fissata soluzione dell’equazione (3.4) tutte esole le soluzioni della stessa equazione (3.4) sono esprimibili nella forma
y = yo + y,
al variare di yo fra le soluzioni dell’equazione omogenea associata y′+p(t)y = 0.
Dimostrazione. La dimostrazione e immediata conseguenza del risultato suc-cessivo, applicato all’operatore lineare
L : C1(I) → C0(I), Ly = y′ + p(t)y.
Proposizione 3.2.2 Sia L : V →W un’applicazione lineare fra spazi vettoriali.Sia q ∈W e y ∈ V tale che Ly = q. Allora
L−1(q) = L−1(0) + y.
Dimostrazione. Un elemento y sta in L−1(q) se e solo se Ly = q = Ly, cioeL(y − y) = 0. Ma cio significa che y − y ∈ L−1(0), cioe y ∈ L−1(0) + y.
Una soluzione cosiddetta particolare y dell’equazione completa (3.4) puoessere ottenuta dall’espressione Ce−P (t) dell’integrale generale dell’equazioneomogenea mediante il metodo di variazione delle costanti arbitrarie, che consistenel cercare una soluzione nella forma
y(t) = C(t)e−P (t),
con C(t) funzione da determinare. Deve allora essere:
C′(t)e−P (t) − C(t)e−P (t)p(t) + p(t)C(t)e−P (t) = q(t),
da cuiC′(t) = q(t)eP (t).
Per integrazione si ricava una possibile funzione C; ad esempio, se t0 e un puntodi I, possiamo scegliere
C(t) =
∫ t
t0
q(s)eP (s) ds.
Quindi l’integrale generale dell’equazione (3.4) diventa(K costante arbitraria):
y = Ke−P (t) + e−P (t)
∫ t
t0
q(s)eP (s) ds
= e−P (t)[
K +
∫ t
t0
q(s)eP (s) ds]
= e−P (t)
∫
q(s)eP (t) dt,(3.5)
coerentemente con quanto gia noto.
Esempi y′ = t2y + t5, y′ + 1t+1y = sin t.

50 Capitolo 3. Tecniche elementari di integrazione
3.3 Equazioni di Bernoulli; equazione di
Riccati
Sono dette di Bernoulli le equazioni della forma
y′ + p(t)y = q(t)yα, α ∈ R.
Se α = 0 o α = 1 l’equazione si riduce ad un’equazione lineare. Se α > 0 vi e lasoluzione y ≡ 0. In ogni caso le altre soluzioni si ottengono dividendo per y−α
y−αy′ + p(t)y1−α = q(t)
e ponendo
z = y1−α.
Infatti risulta z′ = (1 − α)y−αy′ e quindi l’equazione si trasforma nella
1
1 − αz′ + p(t)z = q(t),
che e un’equazione lineare.
Esempio Determinare la curva y = ϕ(x) del piano xy per la quale il puntomedio dei segmenti di normale aventi un estremo sulla curva stessa e l’altrosull’asse x si trova sulla parabola di equazione x = y2. [Si ottiene l’equazioneϕ′ − 1
2ϕ = −2x/ϕ].
Un caso classico in cui si giunge ad un’equazione differenziale di Bernoulli equello dell’equazione di Riccati. Si tratta di un’equazione della forma
(3.6) y′ = a(t) + b(t)y + c(t)y2 ,
con a, b e c funzioni continue su un intervallo I.
Osservazione 3.3.1 Notiamo come il secondo membro costituisca la piu sem-plice nonlinearita in y, ottenibile, ad esempio, sviluppando in y = 0 una fun-zione y 7→ f(t, y). Inoltre, osserviamo anche che se utilizziamo la variabile uindividuata dalla relazione:
y(t) = − 1
c(t)
d
dtlog u(t)
e immediato verificare che l’equazione soddisfatta da u e lineare del secondoordine (a coefficienti variabili).
Si verifica immediatamente che se e nota una soluzione y di (3.6), la posizioneu = y + u da un’equazione di Bernoulli in u:
u′ −(
b(t) + 2c(t)y)
u = c(t)u2.
Esempio
y′ =1
t−(1
t+ 2)
y + ty2

3.4. Equazioni di tipo omogeneo 51
Una soluzione e data da y(t) = 1/t. La sostituzione y = u + 1/t portaall’equazione di Bernoulli (con α = 2):
u′ +1
tu = tu2,
la quale, con la sostituzione z = 1/u, si trasforma nell’equazione lineare
z′ − 1
tz = −t.
Esempio Per ogni α ∈ R consideriamo l’equazione
(3.7) y′ + y2 = t2 + α.
Se α = 1 la funzione y(t) = t e soluzione; cio permette di applicare il metodo
risolutivo (le soluzioni saranno espresse tramite∫ t
0 e−s2
ds). Per un genericovalore di α osserviamo che la posizione
u(t) = t+α+ 1
y + t
trasforma l’equazione (3.7) nella seguente:
u′ + u2 = t2 + (α+ 2).
Si tratta della stessa equazione (3.7), ma con α + 2 in luogo di α. Poicheper α = 1 e nota la soluzione y(t) = t, cio consente di ricavare una soluzioneparticolare per α = 3:
u(t) = t+2
y(t) + t= t+
1
t.
Quindi l’equazione (3.7) e risolubile per ogni α dispari.
3.4 Equazioni di tipo omogeneo
Si tratta di equazioni della forma
y′ = g(y
x) (g continua).
(qui chiameremo x la ‘variabile indipendente’, per cui y = y(x)). Si risolveponendo
z(x) =y(x)
x.
Infatti, y = xz e y′ = z + xz′, per cui l’equazione diventa:
z′ =g(z)− z
x,
che e a variabili separabili.
Esempio y′ =x+ y
x− y(le soluzioni sono archi di spirale logaritmica).

52 Capitolo 3. Tecniche elementari di integrazione
Equazioni di tipo omogeneo generalizzato.a) Per equazioni della forma
y′ = g(ax+ by) (g continua, a, b costanti).
dove, chiaramente possiamo supporre b 6= 0, la posizione
z(x) = ax+ by(x)
conduce all’equazione:
z′ = a+ bg(z),
che e a variabili separabili.
b) Consideriamo ora equazioni della forma
y′ = g
(
ax+ by + c
a′x+ b′y + c′
)
con g continua.
Se∣
∣
∣
a ba′ b′
∣
∣
∣ = 0 allora si puo scrivere, ad esempio, a′x+ b′y = λ(ax+ by), per
cui si ricade nel caso precedente.
Sia pertanto∣
∣
∣
a ba′ b′
∣
∣
∣ 6= 0. In tal caso le equazioni ax + by + c = 0 e a′x +
b′y + c′ = 0 sono le equazioni di due rette incidenti: sia (x0, y0) il loro puntodi intersezione. Eseguiamo un cambiamento di variabili che porti l’origine in(x0, y0), in modo da ricondursi al caso in cui l’argomento di g sia quoziente didue polinomi omogenei. Poniamo:
t = x− x0, u = y − y0 ;
cio significa considerare come nuova incognita la funzione u(t) = y(t+ x0)− y0.Pertanto:
u′(t) = y′(t+ x0) = g
(
a(t+ x0) + b(u+ y0) + c
a′(t+ x0) + b′(u+ y0) + c′
)
= g
(
at+ bu
a′t+ b′u
)
,
poiche ax0 + by0 + c = 0 e a′x0 + b′y0 + c′ = 0. Allora l’equazione puo essereriscritta come:
η′ = g
(
a+ b(η/ξ)
a′ + b′(η/ξ)
)
,
che e di tipo omogeneo.
Esempio y′ =y − x− 2
y + x.
3.5 Equazioni del tipo F (y, y′) = 0 o F (x, y′) = 0
Consideriamo equazioni della forma
a) F (y, y′) = 0; b) F (x, y′) = 0

3.5. Equazioni del tipo F (y, y′) = 0 o F (x, y′) = 0 53
(trattiamo assieme i due casi fin dove possibile). Cerchiamo di risolverle me-diante un cambiamento di variabile x = x(s). Sia y : J → R una soluzione,cioe:
a) F (y(x(s)), y′(x(s))) = 0; b) F (x(s), y′(x(s))) = 0
per ogni s ∈ J . Geometricamente possiamo esprimere queste uguaglianzedicendo che, al variare di s ∈ J ,
(3.8) a) s 7→ (y(x(s)), y′(x(s))); b) s 7→ (x(s), y′(x(s)))
forniscono rappresentazioni parametriche di un arco C della curva di equazio-ne F = 0 (nel piano yy′ o xy′, rispettivamente). Supponiamo sia nota unarappresentazione parametrica
(3.9) a)
y = A(s)y′ = B(s)
; b)
x = A(s)y′ = B(s)
di tale arco C . Cerchiamo di determinare il cambiamento di variabile x(s) inmodo che questa coincida con la rappresentazione (3.8); quindi richiediamo chesia:
a)
y(x(s)) = A(s)y′(x(s)) = B(s)
; b)
x(s) = A(s)y′(x(s)) = B(s)
.
Con notazione impropria, ma significativa, poniamo y(s) := y(x(s)). Per evitare
equivoci denoteremo condy
dsla derivazione di y rispetto alla variabile s, mentre
y′ indica la derivazione rispetto a x. Allora:
(3.10)dy
ds= y′(x(s))
dx
ds.
Nel caso (a) questo da:
A′(s) = B(s)x′(s)
quindi, ricavando x′(s) e integrando,
x(s) =
∫
A′(s)
B(s)ds.
La coppia (x(s), y(s)) fornisce, chiaramente, una rappresentazione parametricadel grafico della soluzione:
a)
x = x(s) =
∫
A′(s)
B(s)ds
y = y(s) = A(s)
Nel caso (b) la (3.10) da invece
dy
ds= B(s)A′(s)
per cui il grafico della soluzione e rappresentato da
b)
x = x(s) = A(s)
y = y(s) =∫
A′(s)B(s) ds.

54 Capitolo 3. Tecniche elementari di integrazione
x
y
y=u(x)
P1
P2
Figura 3.1 - Il problema del cammino di piu rapida discesa
Osservazione 3.5.1 Sottolineiamo come le espressioni per x(s) e y(s) sonoricavate dall’uguaglianza (3.10):
dy
ds=
dy
dx
dx
ds
tenendo conto delle rappresentazioni parametriche (3.9) dell’arco C della curvadi equazione F = 0.
Esempio (Brachistocrona o problema della piu rapida discesa: Johann Ber-noulli - 1696)
Dati due punti P1 e P2 in un piano verticale (il primo a quota mag-giore), determinare il cammino liscio che li congiunge lungo il qualeun punto materiale discenda da P1 a P2 per efffetto della sola gravitanel piu breve tempo possibile (Figura 3.1).
Siano P1 = (x1, y1) e P2 = (x2, y2) e sia
x = x(t)y = y(t)
la legge oraria del moto del punto. Supponiamo che il tempo t = 0 corrispondaalla posizione iniziale P1. Lo spazio percorso fino all’istante t e
s(t) =
∫ x(t)
x1
√
1 + u′(x)2 dx.
Pertanto la velocita (scalare) e
v(t) =√
1 + u′(x(t))2x′(t),
da cui
(3.11) x′(t) =v(t)
√
1 + u′(x(t))2.

3.5. Equazioni del tipo F (y, y′) = 0 o F (x, y′) = 0 55
Del resto possiamo calcolare v utilizzando la conservazione dell’energia: se m ela massa del punto e v0 = v(0) la velocita iniziale, allora
1
2mv2
0 +mgy1 =1
2mv(t)2 +mgy(t)
da cui, tenendo conto che y(t) = u(x(t)),
v(t)2 = v20 + 2gy1 − 2gu(x(t))
= 2g(
H − u(x(t)))
, con H =v20
2g+ y1.
Sostituiamo nella (3.11) e otteniamo
x′(t) =
√
2g(
H − u(x(t)))
√
1 + u′(x(t))2.
Possiamo assumere che la funzione x(t) sia invertibile; per l’inversa t′(x) risulta
t′(x) =1
x′(t)=
√
1 + u′(x)2√
2g(H − u(x)).
Il tempo impiegato per percorrere l’arco fra P1 e P2 si ottiene ora per integra-zione:
T (u) =1√2g
∫ x2
x1
√
1 + u′(x)2√
H − u(x)dx.
Come verra maggiormente dettagliato in appendice a questo capitolo, leeventuali soluzioni del problema di minimo per il funzionale
T (u) =
∫ x2
x1
f(u(x), u′(x)) dx, con f(u, u′) =
√
1 + u′(x)2√
H − u(x)
rendono costante la funzione f(u, u′) − u′fu′(u, u′) (vedi Osservazione 3.7.12).Un calcolo diretto porta cosı alla condizione:
(H − u)(1 + u′2) = c2 (c costante).
Si tratta di un’equazione della forma F (u, u′) = 0.Seguiamo il metodo di risoluzione sopra delineato. Una rappresentazione
parametrica della curva (H − u)(1 + u′2) = c2 e:
u = H − c2
1 + tan2 s2
= H − 1
2c2(1 + cos s) =: A(s)
u′ = tans
2=: B(s)
.
Pertanto
x(s) =
∫
A′(s)
B(s)ds = c2
∫
cos2s
2ds =
c2
2(s+ sin s) +K,

56 Capitolo 3. Tecniche elementari di integrazione
x
y
O A
C
P
ϑ
Figura 3.2 - Cicloide: le coordinate di P sono x = rϑ− r sinϑ e y = r − r cosϑ
con K costante arbitraria. Quindi:
x = K +c2
2(s+ sin s)
z = H − c2
2(1 + cos s)
,
od anche:
x = K + r(s + sin s)
z = H − r(1 + cos s)con K ∈ R e r ≥ 0 arbitrari.
Si tratta delle equazioni parametriche di una cicloide, cioe del luogo delleposizioni assunte da un punto fissato su una circonferenza di raggio r quandoviene fatta rotolare su una retta come in Figura 3.2. Le coordinate del puntodopo la rotazione di un angolo ϑ come in figura sono date da
x = rϑ − r sinϑ = r(ϑ − sinϑ), z = r − r cosϑ = r(1 − cosϑ);
il cambiamento di parametro ϑ = π + s da (a meno di una traslazione)
x = r(s+ sin s),z = r(1 + cos s).
Rispetto a questa curva l’arco di minima discesa e capovolto (e opportunamentetraslato).
3.6 Equazione di Clairaut
Si tratta di equazioni cui si perviene spesso nella determinazione di una curvamediante imposizioni di condizioni sulla retta tangente.1 Sono equazioni dellaforma
(3.12) y = xy′ + g(y′),
1Si puo verificare che localmente le tangenti ad una curva regolare soddisfano adun’equazione di Clairaut.

3.7. Equazioni differenziali e forme differenziali 57
con g di classe C2.Se y e una soluzione C1, derivando entrambi i membri dell’equazione otte-
niamoy′′(x+ g′(y′)) = 0;
quindi y′′ = 0, cioe y′ = C costante, oppure x + g′(y′) = 0. Nel primo caso lacostante C individua subito la soluzione a partire dall’equazione stessa:
(3.13) y = Cx+ g(C), C ∈ R.
Si tratta di una famiglia di funzioni lineari che effettivamente sono soluzioni. Lacondizione x+ g′(y′) = 0, cioe x = −g′(y′), assieme all’equazione stessa da:
x = −g′(y′)y = −y′g′(y′) + g(y′)
;
cio suggerisce la curva in forma parametrica:
(3.14)
x = −g′(t)y = −tg′(t) + g(t)
.
Negli intervalli in cui g′ e invertibile si verifica che questa definisce effettivamenteuna soluzione dell’equazione data. Infatti possiamo eliminare il parametro tricavandolo dalla prima equazione e ottenere cosı per la funzione y:
y′ =dy
dt
/dx
dt=
−g′(t) − tg′′(t) + g′(t)
−g′′(t) = t,
per cui l’uguaglianza y = −tg′(t)+g(t) assieme a x = −g′(t) da y = xy′ +g(y′).Si puo dimostrare che la curva (3.14) e l’inviluppo dei grafici (rette) della
famiglia (3.13) di soluzioni.
Esempio y = xy′ + y′2.Si ottiene la famiglia di rette
y = Cx+ C2 (C ∈ R).
La curva (3.14) diventa:
x = −2ty = −t2
che in forma cartesiana e y = −x2/4: e facile verificare che la famiglia dellerette tangenti a questa parabola e proprio data da y = Cx + C2 al variare diC ∈ R.
3.7 Equazioni differenziali e forme differenziali
Riprendiamo le considerazioni fatte nel §2.6, in particolare il problema sintetiz-zato dall’equazione (2.21), nel caso n = 2. Data la funzione continua f : Ω → R2
(con Ω aperto di R2), consideriamo il sistema autonomo
x′1 = f1(x1, x2)x′2 = f2(x1, x2)
.

58 Capitolo 3. Tecniche elementari di integrazione
e il problema della determinazione delle curve in Ω i cui vettori tangenti sianoin ogni punto paralleli al campo f in quel punto, richiesta espressa dall’ugua-glianza:
(3.15)dx1
f1(x)=
dx2
f2(x).
Osservazione 3.7.1 A questa situazione puo essere ricondotto anche il caso diuna singola equazione scalare y′(x) = f(x, y(x)), considerando il sistema
(3.16)
x′(t) = 1y′(t) = f(x(t), y(t))
nel senso che i grafici dell’equazione sono le orbite del sistema. Infatti: se y euna soluzione di y′ = f(x, y) allora (x(t), y(t)) := (t, y(t)) risolve (3.16), e lacorrispondente orbita e il grafico di y. Viceversa, se u = (x(·), y(·)) : J → R
2 esoluzione di (3.16), allora esiste c ∈ R per il quale x(t) = t + c per ogni t ∈ J ;ne consegue che l’orbita descritta da u e:
(t+c, y(t)) : t ∈ J = (s, y(s−c)) : s ∈ J+c = (s, φ(s)) : s ∈ J+c = graf φ
dove φ(s) = y(s− c); inoltre
φ′(s) = y′(s− c) = f(
x(s− c), y(s− c))
= f(s, φ(s)).
per cui φ e soluzione di φ′(s) = f(s, φ(s)).
L’equazione (3.15) puo formalmente essere riscritta come
(3.17) f2(x)dx1 − f1(x)dx2 = 0.
Il significato di questa uguaglianza e precisato dalla seguente proposizione.
Proposizione 3.7.2 Sia x : J → Ω una curva regolare di classe C1 e tale chef x non si annulli mai (al riguardo si ricordi l’osservazione (b) del paragrafo§2.6). Allora x soddisfa (3.15) se e solo se
(3.18) f2(x)x′1(t) − f1(x)x
′2(t) = 0 per ogni t ∈ J .
Dimostrazione. Sia x soddisfacente (3.15). Fissato t ∈ J sia, ad esempio,x′1(t) 6= 0. Allora, dall’uguaglianza x′ = λf(x) ricaviamo f1(x(t)) 6= 0 e
x′2(t)
x′1(t)=f2(x(t))
f1(x(t)),
da cui la (3.18). Viceversa, se vale (3.18) e t e un dato punto di J , si abbia,ad esempio, f2(x(t)) 6= 0 (per ipotesi f x non si annulla mai). Per continuitaquesta relazione e vera per tutti i t in un intorno di t; allora
x′1(t) =x′2(t)
f2(x(t))f1(x(t)), x′2(t) =
x′2(t)
f2(x(t))f2(x(t)),
da cui x′ = λf(x) con λ(t) = x′2(t)/f2(u(t)); notiamo che λ(t) 6= 0 poichealtrimenti x′1(t) = x′2(t) = 0.

3.7. Equazioni differenziali e forme differenziali 59
Se ricordiamo la nozione di forma differenziale lineare, la condizione (3.17)esprime proprio l’annullarsi, nei punti della curva x, della forma differenziale
ω(x) := f2(x)dx1 − f1(x)dx2
sul vettore tangente x′(t) = (x′1(t), x′2(t)).
2
In generale, data una forma differenziale lineare
ω(x) =
n∑
i=1
ai(x)dxi (ai ∈ C0(Ω))
su un aperto Ω di Rn, diciamo che una funzione x : J → Ω, con J intervallo, euna (curva-)soluzione dell’equazione
ω = 0
se
(3.19)
n∑
i=1
ai(x(t))x′i(t) = 0 per ogni t ∈ J.
Questa condizione puo anche essere espressa dicendo che il pull-back x∗ω dellaforma ω tramite la funzione x e nullo.
Esempio Il sistema di equazioni di Lotka-Volterra
x′ = (α− βy)xy′ = (−γ + δx)y
da luogo all’equazione:
(3.20) (γ − δx)ydx+ (α− βy)xdy = 0.
L’equazione scalare
y′ = − t
y
corrisponde al sistema
x′ = 1y′ = −x
y
e quindi si ottiene l’equazione
(3.21) xdx+ ydy = 0.
Rilevante e il caso in cui la forma differenziale ω(x) = f2(x)dx1 − f1(x)dx2
e esatta, cioe esiste H ∈ C1(Ω) (detta primitiva) tale che
dH(x) = ω(x).
(Un esempio e proprio la (3.21)). In tal caso H si mantiene costante sulleorbite. Cio e precisato nella successiva proposizione, alla quale anteponiamouna definizione.
2Un richiamo alle forme differenziali lineari e in Appendice B.

60 Capitolo 3. Tecniche elementari di integrazione
Data H ∈ C1(Ω) e c ∈ R, diciamo che c e un valore regolare per H se
dH(x) 6= 0 per ogni x ∈ H−1(c).
Ad esempio c = 0 non e un valore regolare per H(x) = x21−x2
2; l’insieme H−1(0)si spezza in due rette incidenti.
Proposizione 3.7.3 Sia data la forma differenziale
ω(x) = a(x)dx1 + b(x)dx2 (a, b ∈ C0(Ω)).
Supponiamo che ω sia esatta: esiste H ∈ C1(Ω) tale che
dH = ω [cioe∂H
∂x1= a(x) e
∂H
∂x2= b(x)].
Sia c un valore regolare di H. Allora l’insieme di livello H−1(c) e localmenteorbita di una soluzione dell’equazione
ω = 0.
Viceversa, ogni curva soluzione di ω = 0 e contenuta in un insieme di livello diH (cioe H e costante lungo ogni soluzione di ω = 0).
Dimostrazione. Se c e un valore regolare di H , per il Teorema della funzio-ne implicita H−1(c) e localmente grafico di una funzione C1; sia, ad esempio,H(x0) = c, con ∂H
∂x2(x0) 6= 0: allora nell’intorno di (x0) l’insieme H−1(c) e
grafico di una funzione x2 = ψ(x1). Quindi t 7→ (t, ψ(t)) risolve ω = 0:
a(t, ψ(t)) + b(t, ψ(t))ψ′(t) =d
dtH(t, ψ(t)) = 0,
poiche (t, ψ(t)) ∈ H−1(c).
Viceversa, se x : J → Ω e soluzione di ω = 0, allora
0 = a(x(t))x′1(t) + b(x(t))x′2(t) =d
dtH(x(t)),
per cui per ogni t ∈ J
H(x(t)) = c per un opportuno valore c ∈ R.
Esempio. Sia
ω(x, y) = xdx+ ydy
la funzione H(x, y) = (x2 +y2)/2 ne e una primitiva, per cui le orbite sono archidi circonferenza:
x2 + y2 = costante.
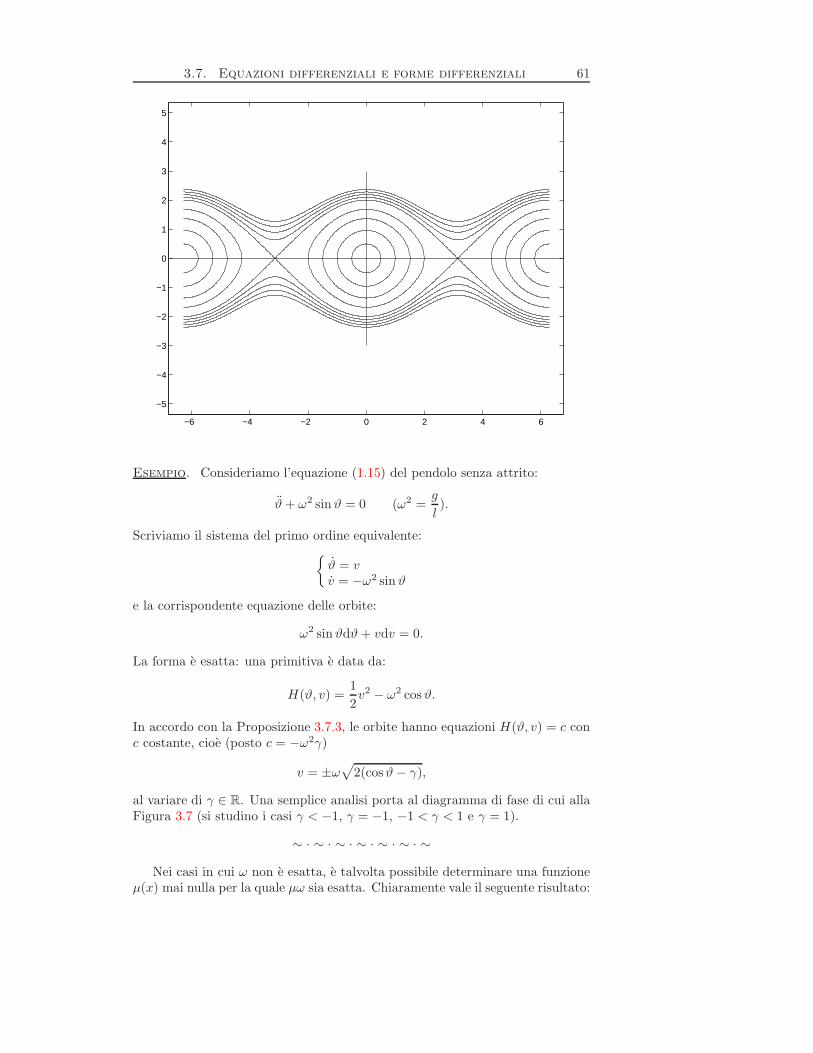
3.7. Equazioni differenziali e forme differenziali 61
−6 −4 −2 0 2 4 6
−5
−4
−3
−2
−1
0
1
2
3
4
5
Esempio. Consideriamo l’equazione (1.15) del pendolo senza attrito:
ϑ+ ω2 sinϑ = 0 (ω2 =g
l).
Scriviamo il sistema del primo ordine equivalente:
ϑ = vv = −ω2 sinϑ
e la corrispondente equazione delle orbite:
ω2 sinϑdϑ+ vdv = 0.
La forma e esatta: una primitiva e data da:
H(ϑ, v) =1
2v2 − ω2 cosϑ.
In accordo con la Proposizione 3.7.3, le orbite hanno equazioni H(ϑ, v) = c conc costante, cioe (posto c = −ω2γ)
v = ±ω√
2(cosϑ− γ),
al variare di γ ∈ R. Una semplice analisi porta al diagramma di fase di cui allaFigura 3.7 (si studino i casi γ < −1, γ = −1, −1 < γ < 1 e γ = 1).
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Nei casi in cui ω non e esatta, e talvolta possibile determinare una funzioneµ(x) mai nulla per la quale µω sia esatta. Chiaramente vale il seguente risultato:

62 Capitolo 3. Tecniche elementari di integrazione
y
x
α/β
γ/δ
Figura 3.3 - Orbite delle equazioni di Lotka-Volterra (linee di livello di H(x, y) =γ log x+ α log y − δx− βy).
Proposizione 3.7.4 Sia µ ∈ C0(Ω) mai nulla. Allora u e soluzione di ω = 0se e solo se u e soluzione di µω = 0.
Si dice che la funzione µ e un fattore integrante per la forma ω.
Esempio Riprendiamo l’esempio della forma differenziale (3.20), che non eesatta; cerchiamone un fattore integrante µ. Deve essere
∂µ
∂y(γ − δx)y + µ(x, y)(γ − δx) =
∂µ
∂x(α− βy)x + µ(x, y)(α− βy).
Cerchiamo µ nella forma a variabili separate: µ(x, y) = ϕ(x)ψ(y); allora
ϕ(x)[ψ′(y)y + ψ(y)](γ − δx) = ψ(y)[ϕ′(x)x + ϕ(x)](α − βy).
Una possibile soluzione si ottiene richiedendo:
ψ′(y)y + ψ(y) = 0 = ϕ′(x)x + ϕ(x).
Otteniamo cosı ϕ(x) = 1/x e ψ(y) = 1/y, cioe µ(x, y) = 1/(xy). Allora:
µω =(γ
x− δ)
dx+(α
y− β
)
dy = dH(x, y),
con
H(x, y) = γ log x+ α log y − δx− sβy.
pertanto gli insiemi di livello di H danno le orbite del sistema di equazioni diLotka-Volterra (vedi Figura 3.3).

3.7. Equazioni differenziali e forme differenziali 63
Esempio L’equazione
y′ =x+ y
x− y
che abbiamo risolto come equazione di tipo omogeneo (ottenendo come soluzioniarchi di spirale logaritmica), una volta espressa come annullamento di una formalineare diventa:
ω := (x+ y)dx+ (y − x)dy = 0.
Tuttavia la forma ω non e esatta, e non e immediato individuare un fattoreintegrante, anche localmente. Risulta piu naturale esprimere l’equazione incoordinate polari, cioe cercare soluzioni nella forma
x(t) = ρ(t) cosϑ(t)y(t) = ρ(t) sinϑ(t).
Se calcoliamo x′(t) e y′(t) e applichiamo la definizione di soluzione (vedi (3.19)),otteniamo (per ρ 6= 0):
1
ρdρ− dϑ = 0,
cioed(log ρ− ϑ) = 0,
da cui log ρ− ϑ = c o ancheρ = Ceϑ.
L’esempio ora illustrato e un caso di cambiamento di variabili nella formadifferenziale. In generale, sia φ : G → Ω un’applicazione C1 fra aperti di Rn,invertibile con inversa C1, e sia ω(x) =
∑
i ai(x)dxi una forma differenzialesu Ω. Le soluzioni x(·) dell’equazione ω = 0 possono essere espresse comecomposizione tramite φ di curve in G, cioe
x = φ u, con u : J → G,
dove J e un intervallo reale (si definisca u come φ−1 x). La condizione che xrisolva ω = 0 diventa:
〈ω(φ(u(t)), (φ u)′(t)〉 = 0 per t ∈ J ,
cioe 〈ω(φ(u(t)), Dφ(u(t))u′(t)〉 = 0, od anche
〈ω(φ(u(t)), (dφ)u(t)u′(t)〉 = 0,
cioe (ricordando la nozione di pull-back di una forma differenziale (vedi Appen-dice B di questo capitolo)
φ∗ω = 0.
Posto φ = (φi)i, osserviamo che per ogni ξ ∈ G e v ∈ Rn
〈dxi, (dφ)ξ(v)〉 = (dφi)ξ(v);
pertanto possiamo scrivere φ∗ω come
(3.22) φ∗ω =
n∑
i=1
(ai φ)dφi.

64 Capitolo 3. Tecniche elementari di integrazione
Formalmente, questa non e altro che l’espressione di ω(x) in cui alla variabile xvenga sostituita la φ(ξ).
Esempio Riprendiamo l’esempio precedente e scriviamo la (3.22) nel caso in cuiω = (x+ y)dx+ (y − x)dy e
φ :
x = ρ cosϑy = ρ sinϑ
Si ottiene subito(φ∗ω)(ρ, ϑ) = ρdρ− ρ2dϑ.
Appendice A: equazione di Eulero di un
funzionale
Nel problema della brachistocrona, il tempo T di percorrenza relativo al cam-mino di discesa z = u(x), con x1 ≤ x ≤ x2, e dato da:
(3.23) T = T (u) =1√2g
∫ x2
x1
√1 + u′2√H − u
dx,
con H costante assegnata; si cerca una funzione u che risolva il problema diminimo:
minu∈X
T (u),
dove X = u ∈ C1([a, b]) : u(x1) = z1, u(x2) = z2. Questo problema puoessere inquadrato in un contesto piu generale e di ampia applicabilita.
Sia V uno spazio vettoriale reale e X un sottoinsieme di V . Sia F : X → R
una funzione definita (almeno) in X e consideriamo il problema
(P ) minu∈X
F (u) .
Dato u ∈ X , diremo variazione ammissibile di u rispetto a X ogni elementov ∈ V per il quale esiste δ > 0 tale che
u+ tv ∈ X per ogni |t| < δ .
Vale la semplice, ma fondamentale:
Osservazione 3.7.5 Se u e soluzione del problema (P ) e v e una variazioneammissibile di u rispetto a X , allora la funzione
φ(t) = F (u + tv) , (|t| < δ)
ha minimo in t = 0. Pertanto, se φ e derivabile in t = 0, risulta φ′(0) = 0.
Motivati da cio, indipendentemente dalla considerazione del problema (P ),diamo la seguente:
Definizione 3.7.6 (Variazione prima) Sia F come sopra. Dato u ∈ X ev ∈ V variazione ammissibile di u rispetto a X, se φ(t) = F (u+ tv) e derivabileper t = 0, diciamo variazione prima di F in u rispetto a v il valore
δF (u; v) := φ′(0) .

3.7. Equazioni differenziali e forme differenziali 65
Pertanto:
Proposizione 3.7.7 Sia u soluzione del problema (P ). Allora
(3.24) δF (u; v) = 0
per ogni variazione ammissibile v (per la quale esista δF (u; v)).
Osservazione 3.7.8 La condizione δF (u; v) = 0 e soltanto una condizionenecessaria per la minimalita; si tratta di una condizione di stazionarieta.
Specializziamo ora lo studio al caso di funzionali integrali della forma
(3.25) F (u) =
∫ b
a
f(
x, u(x), u′(x))
dx
dove (f = f(x, u, ξ)):
f ∈ C1([a, b] × R × R) , u ∈ C1([a, b]).
In tal caso F : V → R con V = C1([a, b]).Il problema della stazionarieta per funzionali della forma (3.25) si incontra,
ad esempio, in Meccanica Analitica: si ricordi infatti il principio variazionale diHamilton, secondo cui fra tutti i moti virtuali nello spazio delle configurazioni imoti effettivi x(t) in un intervallo [t1, t2] rendono stazionario l’integrale
L (x) =
∫ t2
t1
L(
t, x(t), x(t))
dt
dove L e la funzione lagrangiana del sistema e la stazionarieta e intesa nellacosiddetta classe dei moti variati sincroni, cioe soddisfacenti le stesse condizioniiniziali e finali di x.
Proposizione 3.7.9 Nelle ipotesi poste risulta:
δF (u; v) =
∫
Ω
[
fu
(
x, u(x), u′(x))
v(x) + fξ
(
x, u(x), u′(x))
v′(x)]
dx
comunque prese u, v ∈ C1([a, b]).
Dimostrazione. Date u e v risulta
d
dtf(
x,u+ tv, u′ + tv′)
= fu
(
x, u+ tv, u+ tv)
v + fξ
(
x, u + tv, u′ + tv′)
v′;
l’applicazione (x, t) 7→(
x, u + tv, u′ + tv′)
su [a, b] × [−1, 1] e continua e quindi
ha immagine compatta. Pertanto ddtf(
x, u + tv, u′ + tv′)
e limitata in x uni-formemente rispetto a t: possiamo applicare il teorema di derivazione sotto ilsegno di integrale.
Ritornando al funzionale in (3.23), ogni ϕ ∈ C∞c ([a, b]) e una variazione
ammissibile (e questo e vero, in generale, tutte le volte che X e un sottoinsieme

66 Capitolo 3. Tecniche elementari di integrazione
di C1([a, b]) ottenuto prescrivendo i dati al bordo). In tal caso l’equazione (3.24),assieme a quanto asserito nella Proposizione 3.7.9, da:
∫ b
a
[
fu
(
x, u(x), u′(x))
ϕ+ fξ
(
x, u(x),u′(x))
ϕ′]
dx = 0
per ogni ϕ ∈ C∞c ([a, b]).
Se ora supponiamo che u ∈ C1([a, b])∩C2((a, b)) allora un’applicazione dellaregola di integrazione per parti, da:
∫ b
a
[
fu
(
x, u(x), u′(x))
− d
dxfξ
(
x, u(x),u′(x))
]
ϕdx = 0
per ogni ϕ ∈ C∞c ([a, b]).
(3.26)
Cio implica che la funzione in parentesi quadre sia nulla per ogni x ∈ (a, b). Perdimostrare cio supponiamo che se esista x tale che [. . .](x) > 0; allora dovrebbeessere [. . .](x) > 0 in tutto un intorno aperto I di x. Detta ϕ una funzione3
C∞c ([a, b]) che sia nulla su [a, b] \ I e strettamente positiva in I, l’integrale a
primo membro in (3.26) sarebbe strettamente positivo, contro quanto assunto.Concludiamo pertanto con il seguente risultato:
Proposizione 3.7.10 Se u ∈ C1([a, b]) ∩ C2((a, b)) risove il problema (P ),allora u soddisfa l’equazione di Eulero:
d
dx
(
fξ(x, u, u′))
= fu(x, u, u′) in (a, b).
Definizione 3.7.11 Diciamo estremale del funzionale F ogni soluzione u ∈C1([a, b]) ∩ C2((a, b)) dell’equazione di Eulero.
Osservazione 3.7.12 Se f non dipende esplicitamente da x allora la funzione
f(u, u′) − u′fu′(u, u′)
e un integrale primo del funzionale F , cioe e costante lungo ogni estremale (quifu′ sta per fξ). Infatti:
d
dx
(
f(u,u′) − u′fξ(u, u′))
=
fuu′ + fu′u′′ − u′′fu′ − u′
d
dxfξ = fuu
′ − u′fu = 0.
3si consideri un opportuno riscalamento della funzione che vale exp`
−1/(1−x2)´
per |x| < 1e zero altrimenti.

3.7. Equazioni differenziali e forme differenziali 67
Appendice B: forme differenziali lineari
Ricordiamo la definizione di differenziale.
Sia f : Ω → Rk, con Ω aperto di Rn. Sia x0 un punto di Ω. Diciamo che lafunzione f e differenziabile in x0 se esiste A : Rn → Rk lineare tale che
(3.27) limh→0
f(x0 + h) − f(x0) −Ah
|h| = 0.
L’applicazione A e detta differenziale di f in x0 e indicata con
df(x0) oppure (df)x0
Se k = 1 il differenziale df(x0) e un elemento del duale (Rn)∗ di Rn.La (3.27) puo anche essere riscritta come:
f(x0 + h) = f(x0) + Ah+ o(h) per h→ 0,
od anche
f(x) = f(x0) +A(x− x0) + o(x− x0) per x→ x0.
Pertanto:
l’applicazione x 7→ f(x0) + 〈df(x0), x − x0〉 e la funzione affine chemeglio approssima f nell’intorno del punto x0.
Si dimostra che
〈df(x0), h〉 = Df(x0) · h con Df(x0) matrice jacobiana di f in x0.
Si visualizzino i casi n = k = 1 e n = 2, k = 1.
E utile interpretare il differenziale anche in altra forma. Dato v ∈ Rn stu-diamo il modo in cui viene trasformato da f il moto di un punto mobile chepassa per x0 con velocita v. Pertanto consideriamo una curva
ϕ : (−1, 1) → Ω con ϕ(0) = x0, ϕ′(0) = v,
e valutiamo la velocita del punto f(ϕ(t)) all’istante t = 0. Risulta:
d
dtf(ϕ(t))
∣
∣
∣
t0= Df(ϕ(0)) · ϕ′(0) = Df(x0) · v,
cioe
(3.28)d
dtf(ϕ(t))
∣
∣
∣
t0= 〈df(x0), v〉.
pertanto
il differenziale df da la trasformazione dei vettori velocita tramitela funzione f .
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼

68 Capitolo 3. Tecniche elementari di integrazione
yy
J
ϕ
xx
yy f
MN
0
1−1
x0
v〈df(x0),v〉
Figura 3.4 - Trasformazione dei vettori velocita tramite f
La (3.28) trova facile generalizzazione al caso in cui f sia una funzione fra“sottoinsiemi d-dimensionali regolari in Rn” (piu precisamente “varieta diffe-renziabili”), come ad esempio le curve e le superficie C1 in R
3. Pertanto, con-sideriamo il caso di una funzione f : M → N , con M e N , per fissare le idee,superficie in R3. Come svolto sopra per una funzione su un aperto di uno spazioeuclideo, analizziamo come f trasforma il moto di un punto su M . Quest’ul-timo viene dato assegnando una curva ϕ : (−1, 1) → M sulla superficie M ; siaϕ(0) = x0 e ϕ′(0) = v. Osserviamo subito che la regolarita di M permette didimostrare che l’insieme
Tx0M = v ∈ R
3 : ∃ϕ : (−1, 1) →M, ϕ(0) = x0, ϕ′(0) = v
e un sottospazio di R3 detto spazio tangente ad M in x0. L’immagine tramite fdella curva ϕ e data da f ϕ, che e una curva su N passante per f(x0). Allorarisulta definita l’applicazione
v ∈ Tx0M 7→ d
dtf(ϕ(t))
∣
∣
∣
t=0∈ Tf(x0)N
(e si dimostra non dipendere dalla particolare curva ϕ scelta a cui il vettore v etangente). Questa applicazione e detta differenziale di f in x0:
df(x0) : Tx0M → Tf(x0)N.
Si verifica essere un’applicazione lineare.Se M e N sono aperti di Rn e Rk rispettivamente, allora (le definizioni sopra
riportate continuano a valere e) risulta:
Tx0M = R
n, Tf(x0)N = Rk;
In questo caso si riottiene cosı la definizione gia vista.Osserviamo inoltre che se N = R allora df(x0) e un funzionale lineare su
Tx0M , cioe un elemento del suo duale algebrico:
df(x0) ∈(
Tx0M)∗.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼

3.7. Equazioni differenziali e forme differenziali 69
Un caso particolare e quello in cui f e la i-esima proiezione di Rn:
πi : x 7→ xi : Rn → R.
In tal caso il differenziale coincide con πi stessa:
〈dπi, v〉 = vi, se v =∑
j
vjej .
Usualmente si utilizza il simbolo dxi anziche dπi; quindi:
〈dxi, v〉 = vi, se v =∑
j
vjej .
La sequenzadx1, dx2, . . . ,dxn
forma una base del duale di Rn; infatti se A ∈ (Rn)∗ e v =∑
j vjej, allora:
〈A, v〉 =∑
j
vj〈A, ej〉 =∑
j
αj〈dxj , v〉 = 〈∑
j
αjdxj , v〉,
dove si e posto αj = 〈A, ej〉. Quindi
A =∑
j
αjdxj .
In particolare, sia f : Ω → R un’applicazione differenziabile in x0; allora
〈df(x0), v〉 =∑
j
∂f
∂xjvj ,
per cui
df(x0) =∂f
∂x1dx1 +
∂f
∂x2dx2 + . . .+
∂f
∂xndxn.
Definizione 3.7.13 Diciamo forma differenziale lineare (o 1-forma) di classeC0 su un aperto Ω di Rn l’assegnazione continua in ogni punto di Ω di unelemento di (Rn)∗.
Quindi una forma ω su Ω puo essere scritta come:
ω(x) =
n∑
i=1
ai(x)dxi, ai ∈ C0(Ω).
Un caso particolare e chiaramente il differenziale di una funzione C1. Una formaω su Ω si dice esatta se esiste H ∈ C1(Ω) tale che ω = dH .
Dalle considerazioni svolte sopra si puo cogliere come il concetto di formadifferenziale lineare possa essere esteso al caso in cui anziche un aperto Ω siabbia, ad esempio, una superficie.
Una forma differenziale ω(x) =∑n
i=1 ai(x)dxi su Ω si dice chiusa se
∂ai(x)
∂xj=∂aj(x)
∂xiper ogni x ∈ Ω.

70 Capitolo 3. Tecniche elementari di integrazione
Se i coefficienti ai sono di classe C2, allora il Teorema di Schwarz sull’inversionedell’ordine di derivazione implica che se ω e esatta allora e chiusa. Si puodimostrare che il viceversa vale se Ω e semplicemente connesso. In quest’ultimocaso la verifica dell’esattezza di una forma e immediata.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Ricordiamo infine la nozione di pull-back di una forma differenziale.Siano G ⊆ Rm e Ω ⊆ Rn aperti e φ : G → Ω di classe C1. Sia ω(x) =
∑
i ai(x)dxi una forma differenziale su Ω. Per ogni ξ ∈ G e v ∈ Rm poniamo
〈(φ∗ω)(ξ), v〉 := 〈ω(φ(ξ)), 〈(dφ)ξ , v〉〉
(la forma ω agisce nel punto immagine φ(ξ) sul vettore trasformato di v tramitel’applicazione differenziale dφ in ξ). In ogni punto ξ di G e quindi assegnataun’applicazione lineare su R
m, ottenendo pertanto una forma differenziale φ∗ωsu G, detta pull-back di ω tramite φ. La forma φ∗ω e il modo piu naturale ditrasportare la forma ω da Ω su G tramite φ.
Posto φ = (φi)i, poiche 〈dxi, (dφ)ξ(v)〉 = (dφi)ξ(v), possiamo scrivere φ∗ωcome
φ∗ω =n∑
i=1
(ai φ)dφi.
Formalmente, questa si ottiene dall’espressione di ω(x) sostituendo la variabilex con φ(ξ).
Capitolo 4
Equazioni e sistemi
differenziali lineari
Ci occupiamo ora di (sistemi di) equazioni differenziali lineari, cioe della forma
(4.1) x′ = A(t)x + b(t),
dove la funzione incognita x(·) e a valori in Rn, il coefficiente A e una matricen×n a elementi reali continui in un intervallo I, mentre b e una funzione continuain I a valori in Rn:
A ∈ C0(I;Mn×n(R)), b ∈ C0(I; Rn).
Il prodotto A(t)x(t) e inteso come usuale prodotto fra una matrice n× n e unvettore (colonna) x(t).1
Un esempio di sistema del tipo (4.1) e stato incontrato nello studio dei circuitiaccoppiati (vedi (1.23)).
Sappiamo (per l’Osservazione 2.4.5) che ogni soluzione di (4.1) e prolungabilea tutto l’insieme I di continuita dei coefficienti, per cui assumiamo
x : I → Rn.
L’equazione
(4.2) x′ = A(t)x
verra detta equazione omogenea associata all’equazione (4.1); in contrapposizio-ne ci si riferisce a volte all’equazione (4.1), come all’equazione completa.
Osserviamo inoltre che sono chiaramente soddisfatte le condizioni che assicu-rano l’unicita per i problemi di Cauchy (il secondo membro della (4.1) e linearein x). Indicheremo la soluzione (unica) del problema
x′ = A(t)x + b(t)
x(t0) = x0
con x(·, t0, x0).
1Per comodita, se il contesto e sufficientemente chiaro, scriveremo a volte in riga anche ivettori !colonna.
71

72 Capitolo 4. Equazioni e sistemi differenziali lineari
Osservazione 4.0.14 Se le funzioni A e b nell’equazione (4.1) sono di classe C1,allora ogni soluzione x ha la derivata x′ di classe C1. Per induzione otteniamo
A, b ∈ Ck ⇒ x ∈ Ck+1
per k = 0, 1, . . .. Se A e b sono di classe C∞ anche le soluzioni sono pertanto diclasse C∞.
Analizziamo ora la struttura dell’insieme delle soluzioni, iniziando dal casodell’equazione omogenea.
4.1 Equazione omogenea. Matrice risolvente
Basilare e il seguente semplice risultato sulla struttura dell’insieme delle solu-zioni di un’equazione omogenea.
Teorema 4.1.1 (di struttura per l’equazione omogenea) L’insieme Vdelle soluzioni dell’equazione (4.2) e un sottospazio vettoriale di C1(I; Rn). Perogni t0 ∈ I l’applicazione
φt0 : ξ 7→ x(·, t0, ξ) : Rn → V
e un isomorfismo di spazi vettoriali. Pertanto V ha dimensione n.
Dimostrazione. Dati u1, u2 ∈ V e α, β ∈ R, la funzione u = αu1 + βu2 e unasoluzione di (4.2):
u′ = αu′1 + βu′2 = αA(t)u1 + βA(t)u2 = A(t)(αu1 + βu2) = A(t)u.
Quindi V e un sottospazio di C1(I; Rn).
Siano assegnati ξ1, ξ2 ∈ Rn e α, β ∈ R e indichiamo con u1 e u2 le soluzionicon dati ξ1 e ξ2 per t = t0, rispettivamente, cioe u1 = φt0(ξ1) e u2 = φt0(ξ2); lasoluzione u = αu1 + βu2 assume in t0 il valore αξ1 + βξ2, quindi e la soluzioneφt0(αξ1 + βξ2), cioe:
αφt0 (ξ1) + βφt0 (ξ2) = αu1 + βu2 = φt0(αξ1 + βξ2).
Cio dice che φt0 e un omomorfismo. Del resto se u = φt0(ξ) ≡ 0 allora ξ =u(t0) = 0: φt0 e iniettivo. La suriettivita e ovvia (ogni soluzione u e definitaanche in t0, per cui u = φt0(ξ) con ξ = u(t0)).
Dall’essere φt0 un isomorfismo discende che la dimensione di V e n.
Corollario 4.1.2 Siano u1, u2, . . . , un in V e t0 ∈ I. Allora u1, u2, . . . , un
sono linearmente indipendenti ( in V ) se e solo se u1(t0), u2(t0), . . . , un(t0) sonolinearmente indipendenti ( in R
n).

4.1. Equazione omogenea. Matrice risolvente 73
Dimostrazione. Discende immediatamente dal fatto che φt0 e un isomorfi-smo.
Osservazione 4.1.3 Quanto detto sopra continua a sussistere ambientando,con ovvia estensione, lo studio in C (e considerando, piu in generale, matrici acoefficienti complessi). Il passaggio al campo C, algebricamente chiuso, renderapiu agevole lo studio dei sistemi a coefficienti costanti (vedi §§ 4.4 e 4.5).
Da cio segue che per verificare l’indipendenza di n soluzioni u1, u2, . . . , un
e sufficiente verificare la lineare indipendenza di u1(t), u2(t), . . . , un(t) per unqualche t ∈ I, quindi valutare l’annullarsi o meno di:
W (t) = detX(t)
dove
(4.3) X(t) = (u1(t) | u2(t) | . . . | un(t))
e la matrice che ha nelle colonne le soluzioni u1, . . . , un. La matrice X(t)e il suo determinante W (t) sono detti, rispettivamente matrice wronskiana edeterminante wronskiano delle n soluzioni u1, . . . , un.
Osservazione 4.1.4 Dare n soluzioni dell’equazione (4.2) equivale a dare unasoluzione dell’equazione matriciale
X ′ = A(t)X
(le colonne di X(t) sono soluzioni di x′ = A(t)x).
Esempio. Consideriamo un caso elementare per illustrare i concetti esposti:
x′
1 = ωx2
x′
2 = −ωx1cioe x′ = Ax con A =
„
0 ω−ω 0
«
.
Sappiamo (vedi § 1.8) che questo sistema e equivalente all’equazione:
x′′
2 + ω2x2 = 0.
Le soluzioni di sono fornite da (si ricordi la (1.13) del Cap. I):
x2(t) = K cos(ωt + ϕ), K ≥ 0, ϕ ∈ R;
Inoltre x1 = −x′
2/ω, per cui:
x(t) =
„
x1(t)x2(t)
«
=
„
K sin(ωt + ϕ)K cos(ωt + ϕ)
«
.
In particolare, le soluzioni del problema di Cauchy
(4.4)
x′ = Axx(0) = ξ
con ξ = e1 e ξ = e2 si ottengono per K = 1 e ϕ = π/2 o ϕ = 0, rispettivamente:
u1 =
„
cos ωt− sinωt
«
, u2 =
„
sinωtcos ωt
«
.
Queste sono linearmente indipendenti, come si puo ricavare osservando che la loro matricewronskiana X(t) ha sempre determinante uguale a 1 (basterebbe osservare che, per come sonostate definite u1 e u2, risulta det X(0) = det I = 1, con I matrice identita). Dall’espressione

74 Capitolo 4. Equazioni e sistemi differenziali lineari
esplicita sopra ricavata si deduce che la generica soluzione x(·) si esprime come combinazionelineare di u1 e u2:
(4.5) x(t) =
„
K sinωt cos ϕ + K cos ωt sinϕK cos ωt cos ϕ − K sinωt sinϕ
«
= K(sinϕ)u1 + K(cosϕ)u2
(al variare di K e ϕ le costanti K sin ϕ e K cos ϕ danno una qualunque coppia (c1, c2) dicostanti reali). Notiamo che K sinϕ = x1(0) e K cos ϕ = x2(0); del resto e evidente che lasoluzione del problema (4.4) per un arbitrario ξ e
x(t) = X(t)ξ,
poiche le soluzioni u1 e u2 sono state scelte con i valori e1 ed e2, rispettivamente, in t = 0.Generalizziamo ora queste osservazioni.
Dato τ ∈ I, sia ui(·, τ) la soluzione di
(4.6)
x′ = A(t)xx(τ) = ξ
con ξ = ei, e si definisca
(4.7) R(·, τ) =(
u1(·, τ) | u2(·, τ) | . . . | un(·, τ))
;
la matrice le cui colonne sono date dalle funzioni ui(·, τ); si tratta di soluzionilinearmente indipendenti poiche R(τ, τ) = I (matrice identita).
Definizione 4.1.5 La matrice R e detta matrice risolvente del sistema x′ =A(t)x.
Proposizione 4.1.6 Comunque dati τ ∈ I e ξ ∈ Rn la soluzione del problemadi Cauchy (4.6) si puo esprimere nella forma:
x(t) = R(t, τ)ξ.
Infatti, R(·, τ) e una soluzione del sistema x′ = A(t)x e all’istante t = τassume il valore R(τ, τ)ξ = Iξ = ξ.
Osservazione 4.1.7 La matrice R e univocamente individuata come soluzionedell’equazione:
∂R
∂t(t, τ) = A(t)R(t, τ)
R(τ, τ) = I.
Osservazione 4.1.8 Se il sistema e autonomo (A costante) allora (si ricordi la(2.19) del Cap. II)
R(t, τ) = R(t− τ, 0).
Nell’esempio precedente la matrice A e costante, per cui la soluzione del problema (4.6)per ξ = ei non e altro che t 7→ ui(t − τ), dove ui e la soluzione determinata per τ = 0; quindiin questo caso
(4.8) R(t, τ) =
„
cos ω(t − τ) sin ω(t − τ)− sin ω(t − τ) cos ω(t − τ)
«
.
Se ui, . . . , un e una qualunque n-upla di soluzioni di (4.2), comunque presoτ ∈ I si ha
ui(t) = R(t, τ)ui(τ),

4.1. Equazione omogenea. Matrice risolvente 75
o anche, indicando con X la matrice wronskiana di ui, . . . , un
X(t) = R(t, τ)X(τ).
Se poi le ui, . . . , un sono linearmente indipendenti allora X e invertibile, per cuipossiamo esprimere la matrice risolvente R tramite X :
(4.9) R(t, τ) = X(t)X(τ)−1.
Terminiamo il paragrafo con un’interessante relazione soddisfatta dalla ma-trice wronskiana di una n-upla di soluzioni dell’equazione omogenea (4.2).
Teorema 4.1.9 (Liouville) Sia X una soluzione di
X ′ = A(t)X (X ∈ C1(I;Mn×n)).
Allora il determinante wronskiano W (t) di X(t) e soluzione di
(4.10) z′ =(
trA(t))
z.
Quindi
W (t) = W (t0) exp
∫ t
t0
(trA(s))
ds
comunque presi t, t0 ∈ I.
Dimostrazione. Abbiamo visto che se X ′ = AX allora
X(t) = R(t, τ)X(τ),
per cui (teorema di Binet), comunque presi t, τ ∈ I,
W (t) = detX(t) = detR(t, τ) detX(τ).
Quindi
(4.11) W ′(t) =( ∂
∂tdetR(t, τ)
)
W (τ).
Ricordiamo che la derivata di un determinante si ottiene come somma dei de-terminanti delle matrici ottenute derivando successivamente le singole colonne.2
Allora:
∂
∂tdetR(t, τ) =
n∑
j=1
det(
u1(t, τ) | . . . | u′j(t, τ) | . . . | un(t, τ))
.
2Il determinante di una matrice A(t) =`
aij (t)´
si puo esprimere come
det A(t) =X
σ
(−1)σaσ(1)1(t)aσ(2)2(t) . . . aσ(n)n(t),
dove σ varia fra tutte le permutazioni dell’insieme 1, . . . , n e (−1)σ indica il segno dellapermutazione σ. Allora l’usuale regola di derivazione del prodotto da:
d
dtdet A(t) =
nX
i=1
X
σ
(−1)σaσ(1)1(t) . . . a′
σ(1)i(t) . . . aσ(n)n(t);
Ciascun addendo della sommaP
i non e altro che il determinante della matrice ottenutaderivando soltanto la i-esima colonna Ai(t), quindi:
d
dtdet A(t) =
nX
i=1
det`
A1(t) . . . A′
i(t) . . . An(t)´
.

76 Capitolo 4. Equazioni e sistemi differenziali lineari
Osserviamo che u′j(t, τ) = A(t)uj(t, τ) e poniamo t = τ : ricordando che ui(τ, τ) =ei per ogni i, si ottiene:
∂
∂tdetR(t, τ)
∣
∣
∣
t=τ=
n∑
j=1
det(
e1 | . . . | A(τ)ej | . . . | en
)
=n∑
j=1
ajj(τ) = trA(τ).
Di conseguenza la (4.11) per t = τ da:
W ′(τ) = trA(τ)W (τ).
In base all’arbitrarieta di τ , questo conclude la dimostrazione.
4.2 Equazione completa. Variazione delle
costanti
Teorema 4.2.1 (di struttura dell’equazione completa) Se x e una so-luzione dell’equazione completa (4.1) allora tutte e sole le soluzioni dell’equazio-ne completa stessa sono date da
x = xo + x
al variare di xo fra le soluzioni dell’equazione omogenea associata (4.2).
Dimostrazione. La dimostrazione ricalca quanto visto in merito alla Propo-sizione 3.2.1.
Variazione delle costanti. Mostriamo come sia possibile individuare un integra-le particolare x dell’equazione completa (4.1) una volta noto un insieme di nsoluzioni linearmente indipendenti dell’equazione omogenea associata (4.2).
Sia pertanto X una soluzione dell’equazione matriciale X ′ = A(t)X , condetX(t) 6= 0. Allora le soluzioni di (4.2) si esprimono come X(t)ξ al variare diξ ∈ Rn. In analogia con quanto gia svolto al § 3.2, cerchiamo x della forma
x(t) = X(t)ξ(t),
per un’opportuna funzione ξ. Questa deve alllora soddisfare
X ′ξ +Xξ′ = AXξ + b,
da cui, essendo X ′ = AX ,
ξ′(t) = X(t)−1b(t).
Come funzione ξ possiamo quindi scegliere una qualunque primitiva diX(t)−1b(t):
ξ(t) =
∫
X(t)−1b(t) dt.

4.3. Esponenziale di una matrice 77
Allora la famiglia delle soluzioni dell’equazione (4.2) diventa:
x(t) = X(t)(
K +
∫
X(t)−1b(t) dt)
(K ∈ Rn),
(X(t)K al variare di K ∈ Rn fornisce le soluzioni dell’equazione omogenea); lacostante K puo essere incorporata nell’integrale indefinito successivo.
E significativo mettere in evidenza la matrice risolvente nell’espressione dix(t) ora determinata. Fissato t0 ∈ I, sia ξ(t) =
∫ t
t0X(s)−1b(s) ds e
x(t) = X(t)
∫ t
t0
X(s)−1b(s) ds .
Ricordando la (4.9) abbiamo:
x(t) =
∫ t
t0
R(t, s)b(s) ds.
Proposizione 4.2.2 La funzione x sopra definita e una soluzione del sistemalineare x′ = A(t)x + b(t).
Esempio Riprendiamo l’esempio precedente aggiungendo un termine b(t) =(
t
0
)
non nullo:
x′1 = ωx2 + tx′2 = −ωx1
.
Gia abbiamo calcolato la matrice risolvente: si veda la (4.8). Scegliamo t0 = 0;otteniamo la soluzione
x(t) =
∫ t
0
R(t, s)b(s) ds =
∫ t
0
s cosω(t− s) ds
−∫ t
0
s sinω(t− s) ds
=
1
ω2(1 − cosωt)
− 1
ω
(
t− 1
ωsinωt
)
.
Se riprendiamo le soluzioni (4.5) del sistema omogeneo associato, concludiamoche le soluzioni del sistema proposto sono date da
x1 = c1 cosωt+ c2 sinωt+1
ω2(1 − cosωt)
x2 = −c1 sinωt+ c2 cosωt− 1
ω
(
t− 1
ωsinωt
)
al variare di c1 e c2 in R.
4.3 Esponenziale di una matrice
Nel prossimo paragrafo vedremo come l’applicazione del metodo delle appros-simanti successive per l’equazione omogenea x′ = Ax, con A matrice costante,porti alla considerazione della successione di funzioni:
t 7→ I + tA+1
2(tA)2 + . . .+
1
m!(tA)m.

78 Capitolo 4. Equazioni e sistemi differenziali lineari
Pertanto trattiamo preliminarmente il problema della convergenza di questotipo di funzioni.
Sia A ∈ Mn×n(C) una matrice n × n ad elementi in C; questa induce inmodo canonico un’applicazione lineare:
x 7→ Ax : Cn → C
n.
Definiamo ‖A‖ come la norma di tale operatore, cioe:
‖A‖ = max|Ax| : |x| ≤ 1.
Le seguenti proprieta sono di verifica immediata.
Proposizione 4.3.1 Siano A,B ∈Mn×n(C); allora
a) |Ax| ≤ ‖A‖ |x|;
b) ‖AB‖ ≤ ‖A‖ ‖B‖;
c) ‖Am‖ ≤ ‖A‖m.
Ricordiamo che in uno spazio finito-dimensionale (nel caso attuale Mn×n(C)
non e altro che Cn2
) tutte le norme sono equivalenti. La nozione (topologica)di convergenza e pertanto indipendente dalla norma scelta.
In particolare, data una successione (Ak) in Mn×n(C), diciamo che∑∞
k=0 Ak
e convergente se tale e la successione delle sue somme parziali(∑m
k=0 Ak
)
m.
Diremo inoltre che la serie∑∞
k=0 Ak converge assolutamente se e convergente laserie
∑∞k=0 ‖Ak‖. Come per le serie numeriche, si dimostra che se una serie e
assolutamente convergente allora e convergente (si utilizzi il criterio di Cauchy).
Teorema 4.3.2 Data A ∈Mn×n(C), la serie
∞∑
k=0
Ak
k!
converge assolutamente. Indichiamo la somma con eA. Risulta inoltre:
‖eA‖ ≤ e‖A‖.
Dimostrazione. La dimostrazione e immediata poiche
∥
∥
Ak
k!
∥
∥ ≤ 1
k!‖A‖k
e la serie di termine generale ‖A‖k/k! converge a e‖A‖.
Della funzione esponenziale reale la funzione ora introdotta conserva la pro-prieta fondamentale di trasformare la somma in prodotto. Piu precisamentevale il seguente risultato.
Teorema 4.3.3 Siano A,B ∈Mn×n(C). Se AB = BA allora
eA+B = eAeB.

4.3. Esponenziale di una matrice 79
Dimostrazione. Poiche A e B commutano possiamo utilizzare l’usuale svi-luppo della potenza del binomio (A+B)k, per cui:
eA+B =∞∑
k=0
(A+B)k
k!=
∞∑
k=0
1
k!
k∑
j=0
(
k
j
)
AjBk−j
=
∞∑
k=0
k∑
j=0
Aj
j!
Bk−j
(k − j)!.
Si ottiene la serie prodotto delle due serie assolutamente convergenti
∞∑
j=0
Aj
j!,
∞∑
h=0
Bh
h!;
come enunciato nel successivo lemma, la serie prodotto converge al prodottodelle due serie, e cio conclude la dimostrazione.
Lemma 4.3.4 Siano∞∑
j=0
Aj ,∞∑
h=0
Bh
due serie in Mn×n(C) assolutamente convergenti. Allora la serie prodotto defi-nita da:
∞∑
k=0
k∑
j=0
AjBk−j
e assolutamente convergente ed ha per somma il prodotto delle somme delle dueserie fattore.
Dimostrazione. Indichiamo con Ck il termine generale della serie prodotto.Chiaramente
‖Ck‖ ≤k∑
j=0
‖Aj‖‖Bk−j‖ .
Il secondo membro non e altro che il termine generale della serie prodotto di∑ ‖Aj‖ e
∑ ‖Bh‖; ne segue che∑ ‖Ck‖ e convergente, cioe che la serie
∑
Ck eassolutamente convergente, quindi convergente. Pertanto e sufficente calcolareil limite delle somme parziali su una particolare successione. Fissato m ∈ N,se ripartiamo le coppie (j, h) di indici che compaiono in questa somma comeindicato in Figura 4.1, abbiamo:
2m∑
k=0
Ck =2m∑
k=0
k∑
j,h=0
j+h=k
AjBh
=
m∑
j=0
m∑
h=0
AjBh +Rm1 +Rm
2 ,

80 Capitolo 4. Equazioni e sistemi differenziali lineari
h
m
m
2m
2m
j+h=k
(j,h)
j
Figura 4.1 - L’insieme degli indici (j, h) per i quali 0 ≤ j+h ≤ 2m si decomponein [0,m]2 e nei due triangoli rimanenti m + 1 ≤ j ≤ 2m, 0 ≤ h ≤ 2m − j em+ 1 ≤ h ≤ 2m, 0 ≤ j ≤ 2m− h.
dove
Rm1 =
2m∑
j=m+1
2m−j∑
h=0
AjBh , Rm2 =
2m∑
h=m+1
2m−h∑
j=0
AjBh .
Risulta:
‖Rm1 ‖ ≤
(
2m∑
j=m+1
‖Aj‖)(
∞∑
h=0
‖Bh‖)
→ 0 per m→ +∞.
Cosı pure per Rm2 . Poiche
∑mj=0
∑mh=0AjBh = (
∑mj=0 Aj)(
∑mh=0Bh), conclu-
diamo che2m∑
k=0
Ck →∞∑
j=0
Aj
∞∑
h=0
Bh per m→ +∞.
Corollario 4.3.5 La matrice eA e invertibile e risulta (eA)−1 = e−A.
Dimostrazione. I = e0 = eA−A = eAe−A.
Notiamo infine che se P e una matrice invertibile, allora
(4.12) eP−1AP = P−1eAP.
Infatti (P−1AP )k = P−1AkP per ogni k, per cui e sufficiente applicare ladefinizione.
4.4 Sistemi omogenei autonomi
Consideriamo ora il caso di un sistema lineare omogeneo e autonomo:
(4.13) x′ = Ax.

4.4. Sistemi omogenei autonomi 81
Sappiamo che la matrice risolvente R(t, τ) soddisfa alla condizione R(t, τ) =R(t − τ, 0), per cui possiamo limitarci a calcolare R(t, 0), cioe (si ricordi l’Os-servazione 4.1.7) la soluzione dell’equazione matriciale:
(4.14)
X ′ = AXX(0) = I.
La formulazione integrale del problema diventa:
X(t) = I +A
∫ t
0
X(s) ds.
Applichiamo il metodo iterativo delle approssimanti successive (come utilizzatonel Teorema 2.1.3). Posto:
T : X 7→ I +A
∫ t
0
X(s) ds : C0(I;Mn×n) → C0(I;Mn×n),
consideriamo la successione:
X0(t) ≡ I
X1(t) = (TX0)(t) = I + tA
X2(t) = (TX1)(t) = I +A
∫ t
0
(I + sA) ds = I + tA+1
2t2A2
. . .
Xm+1(t) = (TXm)(t) = I + tA+1
2t2A2 + . . .+
1
(m+ 1)!tm+1Am+1
. . .
Per quanto visto nel paragrafo precedente la successione(
Xm(t))
converge aX(t) = etA. Inoltre la convergenza e uniforme sui compatti di R (se |t| ≤ Mallora ‖Xm(t) − etA‖ ≤ ∑
k=m+1(M‖A‖)k/k! → 0 per m → +∞). Pertantodall’uguaglianza
Xm+1(t) = I +A
∫ t
0
Xm(s) ds
ricaviamo che X e soluzione dell’equazione (4.14), quindi coincide con R(·, 0).Concludiamo che
R(t, τ) = e(t−τ)A.
Riassumiamo quanto ottenuto nel seguente enunciato:
Teorema 4.4.1 Comunque fissato τ ∈ R, la soluzione del problema di Cauchy
x′ = Axx(τ) = x0
e data dax(t) = e(t−τ)Ax0.
Pertanto, la famiglia di tutte le soluzioni dell’equazione x′ = Ax e data dallefunzioni:
x(t) = etAξ al variare di ξ ∈ Rn.

82 Capitolo 4. Equazioni e sistemi differenziali lineari
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Come vedremo nel prossimo paragrafo, nel calcolo della matrice esponenzialesara utile passare al calcolo dell’esponenziale di un’opportuna matrice simile,sfruttando quindi la relazione (4.12): se P e una matrice n×n invertibile, postoA = P−1AP , abbiamo
x(t) = etAξ = PetAP−1ξ,
cioe
(4.15) x(t) = PetAC al variare di C ∈ Rn
(l’arbitrarieta di ξ in Rn si traduce nell’arbitrarieta di C ∈ Rn). Possiamoanche interpretare questa relazione come il risultato di un cambiamento linearedi variabile nel sistema x′ = Ax; infatti, posto
x = Py,
il sistema diventa
y′ = Ay con A = P−1AP .
Poiche y(t) = etAC, ne scende ancora la (4.15).
Esercizio. Dimostrare che se AB = BA allora AeB = eBA.
Esercizio.
a) Utilizzando la definizione di esponenziale dimostrare che
limh→0
ehA − I
h= A.
b) Mediante la definizione di derivata verificare che
d
dtetA = etAA = AetA.
Rimane cosı verificato direttamente che etAx0 e soluzione dell’equazionex′ = Ax.
4.5 Calcolo della matrice esponenziale
Data una matrice A ∈Mn×n(C), occupiamoci del calcolo di eA, o meglio di etA
per t ∈ R. Si tratta quindi delle soluzioni del sistema x′ = Ax impostato, conovvia estensione, in campo complesso. Porsi in C permette un’esposizione piunitida dei risultati, avendosi esattamente n autovalori (contati con la rispettivamolteplicita). In un secondo momento vedremo come sia possibile ottenere nsoluzioni reali linearmente indipendenti dell’equazione x′ = Ax nel caso in cuila matrice A sia a coefficienti reali.
Vi sono due situazioni in cui la matrice eA puo essere esprimibile facilmentein termini finiti.

4.5. Calcolo della matrice esponenziale 83
1) A matrice diagonale
A =
λ1 0. . .
0 λn
.
In tal caso, per ogni k ∈ N
Ak =
λk1 0
. . .
0 λkn
, per cui eA =
∞∑
k=0
Ak
k!=
eλ1 0. . .
0 eλn
.
Quindi
(4.16) etA =
etλ1 0. . .
0 etλn
.
2) A matrice nilpotente, cioe soddisfacente la proprieta
esiste s ∈ N tale che As = 0.
In tal caso la serie che definisce eA si riduce ad una somma finita. Un esempioimportante di questo tipo e il seguente (blocco nilpotente elementare):
(4.17) N =
0 1 0 . . . 00 0 1 . . . 0...
. . .. . . 0
.... . . 1
0 0 0 . . . 0
.
E facile vedere che Nn = 0, mentre le potenze Nk, con 2 ≤ k ≤ n−1, sono dateda:
N2 =
0 0 1 . . . . . . 00 0 0 1 . . . 0...
. . .. . . 0
.... . .
. . . 1...
. . . 00 0 0 . . . . . . 0
. . . Nn−1 =
0 0 0 . . . . . . 10 0 0 0 . . . 0...
. . .. . .
. . . 0...
. . .. . . 0
.... . . 0
0 0 0 . . . . . . 0
Allora la serie che definisce etN , si riduce a:
(4.18) etN =
n−1∑
k=0
(tN)k
k!=
1 tt2
2. . . . . .
tn−1
(n− 1)!
0 1 tt2
2. . .
...
.... . .
. . .. . .
......
. . .. . .
t2
2... 1 t0 0 0 . . . . . . 1
.

84 Capitolo 4. Equazioni e sistemi differenziali lineari
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Nel caso generale potremo ricondurci (essenzialmente) al calcolo di un’espo-nenziale che rientri in uno dei casi precedenti mediante il passaggio a un’oppor-tuna matrice simile, utilizzando poi la relazione (4.12) (o meglio, ai fini dellarisoluzione del sistema differenziale, la (4.15)).
Sara utile pensare alla matrice A come alla matrice associata a un operatorelineare T su uno spazio vettoriale di dimensione n rispetto a una data baseB = (e1, e2, . . . , en): ad esempio la base canonica su V = Cn e T = TA : x 7→Ax : Cn → Cn. Ogni matrice A = P−1AP viene di conseguenza interpretatacome la matrice associata a T rispetto alla base B = (e1, e2, . . . , en), doveej =
∑
i pijei (si ricordi la relazione (4.48) in Appendice): se (e1, e2, . . . , en) ela base canonica di Cn allora ej non e altro che la j-esima colonna della matriceP (vedi Osservazione 4.8.4 in Appendice).
Matrice diagonalizzabile
La situazione piu semplice e quello in cui la matrice A e diagonalizzabile (inC). In tal caso (si veda la Proposizione 4.8.7 e l’Osservazione 4.8.8 in Appen-dice), esiste una base di Cn formata da autovettori e la matrice P che ha nellecolonne gli elementi di tale base diagonaliza A, cioe P−1AP e diagonale.
Vediamo un esempio.
Esempio.
x′(t) = Ax(t), A =
1 −6 6−3 4 −6−3 6 −8
Risulta:det(A− λI) = (1 − λ)(λ + 2)2.
Gli autovalori sono pertanto λ1 = 1, semplice, e λ2 = −2, di molteplicitaalgebrica 2. Determiniamo gli autospazi corrispondenti; si ha
E(λ1) = 〈v1〉, v1 = (−1, 1, 1)
E(λ2) = 〈v2, v3〉, v2 = (2, 1, 0), v3 = (−2, 0, 1).
Allora (vedi Proposizione 4.8.7) T : x 7→ Ax e diagonalizzabile, e nella base
B = (v1, v2, v3)
la matrice associata e diagonale:
A = P−1AP =
1 0 00 −2 00 0 −2
, con P = (v1 | v2 | v3) =
−1 2 −21 1 01 0 1
(notiamo come non sia necessario il calcolo del prodotto P−1AP ; si veda l’Os-servazione 4.8.8). Posto
x(t) = Py(t),
risulta y′ = Ay, quindi
y(t) = etAC, C ∈ C3.

4.5. Calcolo della matrice esponenziale 85
Infine
x(t) = Py(t) = (v1 | v2 | v3)
et 0 00 e−2t 00 0 e−2t
c1c2c3
.
cioex(t) = c1e
tv1 + c2e−2tv2 + c3e
−2tv3, c1, c2, c3 ∈ C.
L’esempio ora esposto rientra nel seguente schema:
Se la matrice A e diagonalizzabile (in C), detta B = (v1, v2, . . . , vn) una basedi Cn formata da autovettori e P = (v1 | v2 | . . . | vn) la matrice che ha nellecolonne gli elementi di B (matrice che permette di passare dalla base canonicaalla base B), si ha:
x(t) = Py(t), y(t) = etAC, con A =
λ1 0. . .
0 λn
, C ∈ Cn.
Quindi:
x(t) = c1eλ1tv1 + c2e
λ2tv2 + . . .+ cneλntvn, c1, c2, . . . , cn ∈ C.
Notiamo come questo risultato possa essere verificato direttamente a poste-riori osservando che ogni funzione eλktvk e soluzione del sistema x′ = Ax poichevk e un autovettore di A, e inoltre si tratta di soluzioni linearmente indipen-denti in quanto la loro matrice wronskiana per t = 0 non e altro che la matriceP = (v1 | v2 | . . . | vn).
Osservazione 4.5.1 Se la matrice A e a elementi reali e le n funzioni cheformano una base dello spazio vettoriale (su C) delle soluzioni dell’equazioneomogenea x′ = Ax sono reali, allora le loro combinazioni lineari a coefficientireali danno tutte e sole le soluzioni reali dell’equazione stessa (trattasi, infatti,di uno spazio di dimensione n su R).
Caso generale
Prima di affrontare la situazione generale consideriamo il caso in cui
A ∈ Mn×n(C) presenta il solo autovalore λ, con molteplicita alge-brica n.
Possiamo allora facilmente decomporre A nella somma di due matrici, che fraloro commutano e ricadono nei casi (1) e (2) sopra menzionati:
(4.19) A = λI + (A− λI).
Vale infatti il seguente risultato, che applichiamo all’operatore T : x 7→ Ax : Cn →Cn.
Proposizione 4.5.2 Sia T : V → V un operatore lineare su uno spazio vetto-riale V (su C) di dimensione n. Supponiamo vi sia soltanto l’autovalore λ (dimolteplicita algebrica n). Allora esiste s ∈ N, con s ≤ n, tale che (T −λI)s = 0,cioe tale che V = ker(T − λI)s.

86 Capitolo 4. Equazioni e sistemi differenziali lineari
Dimostrazione. Per il Lemma 4.8.9 (applicato a T −λI, che presenta 0 comeunico autovalore), esiste s ≤ n per il quale
Cn = ker(T − λI)s ⊕ Im(T − λI)s .
Inoltre, T − λI non ha autovalori nulli su Im(T − λI)s: pertanto deve essereIm(T − λI)s = 0.
Pertanto la (4.19) decompone A in una parte diagonale e una nilpotente.
Nel caso generale, indichiamo con
λ1, . . . , λq gli autovalori distinti di A
con molteplicita m(λ1), . . . ,m(λq), rispettivamente.
Il calcolo della matrice esponenziale sarebbe risolto nell’ipotesi di riuscire adecomporre Cn in somma diretta V1 ⊕ V2 ⊕ . . . ⊕ Vq mediante sottospazi T -invarianti in modo che T
∣
∣
∣
Vk
presenti un solo autovalore λk (separazione degli
autovalori):
Cn = V1 ⊕ V2 ⊕ . . .⊕ Vq, T (Vk) ⊆ Vk
T∣
∣
∣
Vk
presenta solo l’autovalore λk.
Infatti:
− rispetto a una base di Cn costruita come unione di basi dei singoli sotto-spazi Vk la matrice associata a T e diagonale a blocchi (vedi Proposizione4.8.1); ogni blocco fornisce la matrice associata a T sul corrispondentesottospazio;
− per ogni k e possibile applicare a T∣
∣
∣
Vk
la decomposizione corrispondente
alla (4.19) .
Notiamo che, in base alla Proposizione 4.5.2, se tale decomposizione esiste devenecessariamente valere l’uguaglianza Vk = ker
(
T∣
∣
∣
Vk
− λkI)s
per un qualche
s ≤ dim Vk.
Si dimostra che una decomposizione con le proprieta dette esiste: si trat-ta della decomposizione in autospazi generalizzati (vedi Proposizione 4.8.11e Teorema 4.8.12 nell’Appendice a questo capitolo). Lo schema e quindi ilseguente:

4.5. Calcolo della matrice esponenziale 87
Detti λ1, . . . , λq gli autovalori distinti, si indichi con Bk una base dell’autospaziogeneralizzato E′(λk) (per k = 1, . . . , q), la cui dimensione e pari alla molteplicitam(λk). Allora nella base B = B1 ∪ . . . ∪ Bq la matrice associata all’operatoreT e data da (vedi (4.52) in Appendice):
(4.20) A = P−1AP =
A1
A2
A3
. . .
Aq
,
dove P e la matrice le cui colonne sono formate, ordinatamente, dagli elementidella base B; la matrice Ak risulta essere la matrice associata a T
∣
∣
∣
E′(λk)nella
base Bk.
La decomposizione
Ak = λkI +Nk, dove Nk = Ak − λkI,
esprime Ak come somma di una matrice diagonale e una nilpotente (Nk e lamatrice associata a (T − λkI)
∣
∣
∣
E′(λk)nella base Bk). Pertanto risulta:
(4.21) etAk = eλkt[
I + tNk +1
2(tNk)2 + . . .+
1
(s− 1)!(tNk)s−1
]
.
dove s ≤ m(λk) e tale che Nsk = 0.
La matrice P permette poi di passare alla soluzione x(t) (vedi la (4.15)).
Anche in questo contesto vale quanto affermato nell’Osservazione 4.5.1.
Vediamo un esempio.
Esempio (I parte) Risolvere il seguente sistema lineare:
x′(t) = Ax(t), A =
−4 1 32 −2 −2−3 1 2
Risulta:det(A− λI) = −(λ+ 1)2(λ+ 2).
Gli autovalori sono pertanto λ1 = −2, semplice, e λ2 = −1, di molteplicitaalgebrica 2. Consideriamo gli autospazi corrispondenti; si ha
A− λ1I =
−2 1 32 0 −2−3 1 4
;
e il sistema (A− λ1I)x = 0 da:x1 = x3
x2 = −x3 .

88 Capitolo 4. Equazioni e sistemi differenziali lineari
Pertanto:
E(λ1) = 〈v1〉, con v1 =
1−11
.
Passiamo a λ2:
A− λ2I =
−3 1 32 −1 −2−3 1 3
,
quindi il rango di A − λ1I e 2 e dimE(λ2) = 3 − 2 = 1 < m(λ2). Allora (vediProposizione 4.8.7) T : x 7→ Ax non e diagonalizzabile. Utilizziamo allora ladecomposizione di C3 mediante gli autospazi generalizzati (Teorema 4.8.12):
C3 = E′(λ1) ⊕ E′(λ2).
Risulta E′(λ1) = E(λ1) poiche dimE(λ1) = m(λ1) (molteplicita algebrica).Determiniamo l’autospazio generalizzato E′(λ2). Risulta:
(A− λ2I)2 =
2 −1 −2−2 1 22 1 −2
,
Allora il rango di (A− λ2I)2 e 1, e quindi dim ker(A− λ2)
2 = 2; se ricordiamoche dimE′(λ2) = m(λ2) = 2, concludiamo che
E′(λ2) = ker(A− λ2I)2 .
(del resto (vedi Proposizione 4.8.11) E′(λ2) = ker(A− λ2I)s per un opportuno
s ≤ dimE′(λ2) = 2, per cui deve essere s = 2). Il sistema (A − λ2I)2x = 0 si
riduce all’equazione2x1 − x2 − 2x3 = 0,
per cui
E′(λ2) = 〈v2, v3〉, con v2 =
120
e v3 =
0−21
.
Posto P = (v1 | v2 | v3) si ottiene:
P−1 =
2 −1 −2−1 1 2−2 1 3
e A = P−1AP =
−2 0 0
0 −2 1
0 −1 0
(anziche mediante calcolo diretto la matrice A puo essere ottenuta esprimendole immagini dei vettori di base v1, v2, v3 come combinazione lineare della basestessa).3 Come ci si aspettava (vedi (4.20)), la matrice A e diagonale a blocchi.La matrice
A2 =
(
−2 1−1 0
)
3Chiaramente risulta Av1 = −2v1; inoltre:
Av2 =
0
@
−2−2−1
1
A = −2v2 − v3; Av2 = v2.
Pertanto le colonne di A sono (1 − 2, 0, 0)T , (0,−2,−1)T e (0, 1, 0)T .

4.5. Calcolo della matrice esponenziale 89
e la matrice associata a T∣
∣
∣
E′(λ2)nella base (v2, v3). Decomponiamo A2 come:
A2 = λ2I + (A2 − λ2I) = −I +
(
−1 1−1 1
)
=: −I +N.
La matrice N e nilpotente: come subito si verifica N2 = 0. Allora:
etA2 = e−tIetN = e−tI(I + tN) = e−t
(
1 − t t−t 1 + t
)
.
Quindi:
etA =
(
e−2t
etA2
)
=
(
e−2t
e−t(
1−t t−t 1+t
)
)
Infine x(t) = Py(t)C al variare di C = (c1, c2, c3) ∈ R3, cioe:
x(t) =(
e−2tv1 | e−t[(1 − t)v2 − tv3] | e−t[tv2 + (1 + t)v3])
C
= c1e−2tv1 + c2e
−t[v2 − (v2 + v3)t] + c3e−t[v3 + (v2 + v3)t].
(4.22)
Come si vede, secondo quanto indicato dal Teorema 4.5.4, si tratta delle com-binazioni lineari di soluzioni della forma eλtp(t) con λ autovalore di A e p(t)polinomio a coefficienti in R3.
Esempio (II parte) Il calcolo della matrice A2 associata all’operatore T sullospazio E′(λ2) puo essere semplificato scegliendo opportunamente una base diE′(λ2).
Sia w1 un autovettore relativo all’autovalore λ2 = −1: poiche ker(T−λ2I) =(t(1, 0, 1) : t ∈ R, assumiamo
w1 =
101
.
Cerchiamo ora una controimmagine di w1 tramite T − λ2I: chiaramente, se untale w2 esiste, deve appartenere a ker(T −λ2I)
2 = E′(λ2). Risolvendo il sistema
−3x1 + x2 + 3x3 = 12x1 − x2 − 2x3 = 0−3x1 + x2 + 3x3 = 1
si ottiene x = (t− 1,−2, t) : t ∈ R. Sia
w2 =
−1−20
.
E facile vedere che, rispetto alla base (w1, w2), la matrice associata all’operatore(T − λ2I)
∣
∣
∣
E′(λ2)diventa
N =
(
0 10 0
)
;

90 Capitolo 4. Equazioni e sistemi differenziali lineari
infatti w1 e w2 hanno componenti (1, 0) e (0, 1), rispettivamente, e le componentiin (w1, w2) delle loro immagini, cioe le colonne di A2, devono essere (0, 0) e (0, 1),rispettivamente (poiche (T − λ2I)w1 = 0 e (T − λ2I)w2 = w1). Pertanto
A2 =
(
λ2 10 λ2
)
=
(
−1 10 −1
)
.
Il calcolo dell’esponenziale di A2 = λ2I +N e quindi particolarmente semplice(N2 = 0):
etA2 = eλ2tetN = e−t(I + tN) = e−t
(
1 t0 1
)
.
Posto P = (v1 | w1 | w2) e x = Py, risulta:
y(t) =
(
e−2t
etA2
)
c1c2c3
=
(
e−2t
e−t ( 1 t0 1 )
)
c1c2c3
,
da cui:
x(t) =(
e−2tv1 | e−tw1 | e−t(tw1 + w2))
c1c2c3
= c1e−2tv1 + c2e
−tw1 + c3e−t(tw1 + w2).
E facile vedere che si tratta della stessa famiglia di funzioni data dalla (4.22).Infatti quest’ultima puo essere riscritta utilizzando, anziche le funzioni
u1 = e−2tv1, u2 = e−t[v2 − (v2 + v3)t], u3 = e−t[v2 + (v2 + v3)t],
le seguenti:
u1, u2, u2 + u3.
Se teniamo conto che
v2 = −w1, v3 = w1 + w2,
risulta
u2 = (−w1t− w2)e−t, u2 + u3 = w1e
−t ,
da cui l’asserita uguaglianza delle due famiglie di funzioni.
Osservazione 4.5.3 Il procedimento seguito nella seconda parte dell’esempioprecedente per costruire una base dell’autospazio generalizzato ha portato a unamatrice, relativamente a quell’autospazio, della forma
(
λ 10 λ
)
= λI +N, con N =
(
0 10 0
)
.
La struttura di N e quella del blocco nilpotente elementare introdotto nella(4.17). In generale. il procedimento descritto porta ad una matrice associata a

4.5. Calcolo della matrice esponenziale 91
T per la quale in corrispondenza ad ogni autospazio generalizzato E′(λ) compareuno o piu blocchi della forma
(4.23) A =
λ 1 0λ 1
. . .. . . 0. . . 1
0 λ
= λI +N,
con N come in (4.17). Si tratta della cosiddetta forma canonica di Jordan dellamatrice (si veda l’Appendice a questo capitolo, in particolare l’Osservazione4.8.16).
Sfruttiamo ora i risultati ottenuti per dare un utile risultato di struttura perle soluzioni.
La matrice etAk nella (4.21) e espressa come polinomio in t i cui coefficientisono matrici mk × mk, dove mk = m(λk) = dimE′(λk). Estendiamo questicoefficienti a una matrice n×n completando opportunamente con righe e colonnenulle: in particolare, se indichiamo con i1, . . . , imk
gli indici delle colonne di Ache contengono il blocco Ak, in tale estensione sono nulle tutte le colonne diindice i con i 6= i1, . . . , imk
. La struttura a blocchi di A consente allora di
esprimere etA nel seguente modo:
etA = eλ1tM1(t) + eλ2tM2(t) + . . .+ eλqtMq(t),
dove
Mk(t): polinomio di grado al piu m(λk) − 1 a coefficienti in Mn×n(C); ognicolonna di indice i 6= i1, . . . , imk
dei coefficienti di Mk(t) e nulla.
In particolare, il fattore eλkt compare solo nelle colonne di indice i1, . . . , imk
nella matrice etA. Questa proprieta di struttura si conserva passando alla
matrice PetA. Concludiamo pertanto con il seguente teorema.
Teorema 4.5.4 Le soluzioni dell’equazione x′ = Ax sono tutte e sole le com-binazioni lineari di n opportune soluzioni della forma
(4.24) eλtp(t),
dove λ e autovalore (in C) di A e p(t) e un polinomio in t a coefficienti in Cn
di grado al piu m(λ) − 1 (con m(λ) molteplicita algebrica di λ).
Ne risulta confermato, in particolare, che le soluzioni sono di classe C∞.
Quanto asserito nel Teorema 4.5.4 risulta particolarmente evidente utilizzan-do la forma (4.53) di Jordan della matrice. Consideriamo il semplice caso in cuivi sia un solo blocco, relativo all’autovalore λ, come nella (4.23). Utilizzando ladecomposizione in parte diagonale e parte nilpotente abbiamo . . . Quindi:
etA = eλt[
I + tN +1
2(tN)2 + . . .+
1
(n− 1)!(tN)n−1
]
.

92 Capitolo 4. Equazioni e sistemi differenziali lineari
Se (v1, v2, . . . , vn) e la base rispetto a cui T (x) = Ax e rappresentato da A,allora le soluzioni dell’equazione x′ = Ax hanno la forma:
x(t) = c1eλtv1+
+ c2eλt(v1t+ v2)+
+ c3eλt(
1
2t2v1t+ tv2 + v3)+
. . .
+ cn−1eλt(
1
(n− 1)!tn−1v1 + . . .+ tvn−1 + vn),
(4.25)
al variare di c1, c2, . . . , cn ∈ R.
Soluzioni reali
Nel caso in cui la matrice A del sistema, a elementi reali, abbia tutti gliautovalori reali, il procedimento sopra illustrato puo essere svolto in campo realeottenendo una base reale per lo spazio delle soluzioni. Supponiamo, invece, chegli autovalori non siano necessariamente tutti reali:
λ1, λ2, . . . , λr ∈ R
µ1, . . . , µl, µ1, . . . , µl ∈ C \ R
(se l = 0 o r = 0 intenderemo che gli autovalori sono tutti in R o in C\R, rispet-tivamente). La forma matriciale (4.20) puo essere ottenuta in campo complessoutilizzando per ciascun autospazio E′(λk) una base in generale complessa. Perogni coppia µ, µ di autovalori non reali possiamo considerare basi di E′(µ) eE′(µ) fra loro coniugate. E facile vedere che in tal caso le soluzioni linearmen-te indipendenti della forma (4.24) ottenute in corrispondenza agli autovaloricomplessi µ e µ si presentano a coppie coniugate:
u(t) = eµtp(t), u(t) = eµtp(t),
con p(t) polinomio a coefficienti in Cn di grado al piu m(µ) − 1. Osserviamoche anche le funzioni:
(4.26) ℜu(t) =1
2[u(t) + u(t)], ℑu(t) =
1
2i[u(t) − u(t)],
sono soluzioni di x′ = Ax; viene inoltre mantenuta l’indipendenza lineare, percui otteniamo una base reale per lo spazio delle soluzioni.
Posto r(t) = ℜp(t) e s(t) = ℑ(p(t), cioe p(t) = r(t) + is(t), risulta:
ℜu(t) = (r(t) cos βt− s(t) sinβt)eαt, ℑu(t) = (r(t) sin βt+ s(t) cosβt)eαt.
Si ottiene quindi il seguente risultato (si noti che per β = 0 si recuperano glielementi della base corrispondenti agli autovalori reali):
Teorema 4.5.5 Le soluzioni dell’equazione x′ = Ax sono combinazioni linearidi funzioni della forma
eαtp(t) cosβt, eαtq(t) sin βt,
dove µ = α + iβ varia fra gli autovalori di A e p(t), q(t) sono polinomi in t acoefficienti in Rn di grado al piu m(µ) − 1 (con m(µ) molteplicita algebrica diµ).

4.5. Calcolo della matrice esponenziale 93
Alternativamente, rispetto alla considerazione delle parti reale e immaginariadi cui alla (4.26), e possibile utilizzare direttamente una base reale di E′(µ) ⊕E′(µ) considerando parte reale e parte immaginaria degli elementi di una basedi E′(µ).
Vediamo dapprima il tutto nel caso generale bidimensionale.Sia A ∈M2×2(R) con autovalori
µ = α+ iβ, µ = α− iβ (β 6= 0).
Sia w un autovettore relativo a µ (e quindi w autovettore relativo a µ). Nellabase (w,w) di C2(= E(µ)⊕E(µ)) la matrice associata a T : x 7→ Ax e diagonale:
(4.27) S =
(
µ 00 µ
)
.
Pertanto si ottengono le seguenti soluzioni fra loro coniugate (sono le colonnedella matrice PetS, dove P = (w | w)):
u(t) = weµt, u(t) = weµt.
Posto z = ℜw, ζ = ℑw, si ha:
u(t) = eαt[
(cos βt)z − (sinβt)z + i(
(sinβt)z + (cos βt)ζ)]
;
quindi:
ℜu(t) = eαt[
(cosβt)z − (sinβt)ζ]
,
ℑu(t) = eαt[
(sinβt)z + (cosβt)ζ]
.
Le loro combinazioni lineari danno le soluzioni di x′ = Ax.Alternativamente, possiamo procedere utilizzando la base reale (z, ζ) per C2.
Poiche
z =1
2(w + w)
ζ =1
2i(w − w)
la matrice di passaggio dalla base (w,w) alla (z, ζ) e (si vedano la (4.48) e la(4.50)):
Q =
(
1/2 1/21/(2i) −1/(2i)
)T
.
Allora, nella base (z, ζ) la matrice associata a T e:
(4.28) Bµ := Q−1SQ =
(
α β−β α
)
.
Pertanto, la posizione
x = Py, con P = (z | ζ)
da il sistema equivalente nella forma canonica:
y′ = Bµy, con Bµ =
(
α β−β α
)
.

94 Capitolo 4. Equazioni e sistemi differenziali lineari
Calcoliamo la matrice esponenziale etBµ . Poiche
Bµ =
(
α 00 α
)
+
(
0 β−β 0
)
,
abbiamo
etBµ = eαt(I + tH +t2
2H2 + . . .+
tn
n!Hn + . . .), con H =
(
0 β−β 0
)
.
Svolgendo i calcoli si ottiene:
etH =
1 − t2
2+t4
4!− . . . t− t3
3!+t5
5!+ . . .
−t+ t3
3!− t5
5!+ . . . −1 +
t2
2− t4
4!+ . . .
=
(
cosβt sinβt− sinβt cosβt
)
.
Quindi:
(4.29) et“
α β−β α
”
= eαt
(
cosβt sinβt− sinβt cosβt
)
.
Da qui le soluzioni del sistema y′ = Bµy, e quindi, passando a x = (z | ζ)y,quelle del sistema x′ = Ax: si vede immediatamente che si ritrova l’espressioneottenuta sopra.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Prima di svolgere alcuni esempi, vediamo come, nel caso generale, la conside-razione di una base reale di E′(µ) ⊕ E′(µ), ottenuta passando alle parti realee immaginaria degli elementi di una base di E′(µ), si riflette sul calcolo dellamatrice esponenziale.
Sia (w1, w2, . . . , wm) una base di E′(µ) e sia Aµ la matrice associata a T∣
∣
∣
E′(µ)
in tale base; e sia Aµ associata a T∣
∣
∣
E′(µ)rispetto alla base (w1, w2, . . . , wm) di
E′(µ) (si ottiene la matrice coniugata della precedente). Quindi la matriceassociata a T
∣
∣
∣
E′(µ)⊕E′(µ)e
A =
(
Aµ
Aµ
)
.
Sappiamo che le matrici Aµ −µI e Aµ −µI sono nilpotenti. Allora tale e anchela matrice
(4.30) N = A− S, con S =
(
µI
µI
)
.
Pertanto, la decomposizione A = S + N esprime A come somma di una partediagonale e una nilpotente.
Indichiamo ora con AE′(µ)⊕E′(µ) la matrice associata a T∣
∣
∣
E′(µ)⊕E′(µ)rispetto
alla base reale
(4.31) ℜw1,ℑw1, . . . ,ℜwm,ℑwm .

4.5. Calcolo della matrice esponenziale 95
Come nel caso bidimensionale studiato poco sopra (si veda il passaggio dalla(4.27) alla (4.28), non e difficile rendersi conto che in tale base la parte diagonaleS della decomposizione (4.30) diventa:
Dµ =
Bµ
Bµ
. . .
Bµ
, con Bµ =
(
α β−β α
)
(µ = α+ iβ),
cioe la matrice quadrata di ordine 2m che ha sulla diagonale il bloccoBµ ripetutom volte. Pertanto:
(4.32) AE′(µ)⊕E′(µ) = Dµ + (AE′(µ)⊕E′(µ) −Dµ)
decompone AE′(µ)⊕E′(µ) nella somma di una matrice diagonale a blocchi, dicui e immediato il calcolo dell’esponenziale (si ricordi la (4.29)), e una matricenilpotente.
Osservazione 4.5.6 Parallelamente a quanto accennato nell’Osservazione 4.5.3,scegliendo opportunamente la base (w1, w2, . . . , wm) di ciascun E(µ), la matriceassociata da la cosiddetta forma canonica reale della matrice A (rimandiamoulteriori dettagli all’Appendice di questo capitolo).
Esempio.
x′(t) = Ax(t), A =
4 5 −10 −30 −1 6 00 0 2 015 15 −30 −8
.
Gli autovalori sono:
λ1 = −1, λ2 = 2, µ = −2 + 3i, µ = −2 − 3i.
Allora A e semisemplice (diagonalizzabile in C). Una base di autovettori di C4,
relativi a λ1, λ2, µ, µ, rispettivamente, e:
v1 = (1,−1, 0, 0)
v2 = (0, 2, 1, 0)
w = (1, 0, 0, 2 − i)
w = (1, 0, 0, 2 + i).
Rispetto a questa base sappiamo che la matrice associata e:
A =
−1 0 0 00 2 0 00 0 −2 + 3i 00 0 0 −2 − 3i
.
Si ottengono allora le quattro soluzioni linearmente indipendenti (si tratta delle
colonne della matrice PetA, dove P = (v1 | v2 | w | w)):
v1e−t, v2e
2t, we(−2+3i)t, we(−2−3i)t .

96 Capitolo 4. Equazioni e sistemi differenziali lineari
Sostituiamo le ultime due con le funzioni:
ℜ(we(−2+3i)t) =
cos 3t00
2 cos 3t+ sin 3t
, ℑ(we(−2+3i)t) =
sin 3t00
− cos 3t+ 2 sin 3t
.
Allora:
x(t) =
c1e−t + [c3 cos 3t+ c4 sin 3t]e−2t
−c1e−t + 2c2e2t
c2e2t
[c3(2 cos 3t+ sin 3t) + c4(2 sin 3t− cos 3t)]e−2t
al variare di c1, c2, c3, c4 ∈ R.
In modo equivalente e possibile ottenere le soluzioni passando tramite lamatrice associata a T nella base reale ottenuta considerando le parti reale eimmaginaria di w (infatti (ℜw,ℑw) e una base reale di E(µ) ⊕ E(µ)); postoquindi
P = (v1 | v2 | ℜw | ℑw),
svolgendo i calcoli si ha:
A = P−1AP =
−1 0 0 00 2 0 00 0 −2 30 0 −3 −2
.
Del resto, la matrice A e ottenibile anche senza eseguire esplicitamente il pro-dotto P−1AP , in quanto il blocco relativo a T
∣
∣
∣
E′(µ)⊕E′(µ)ricade nel caso bidi-
mensionale di cui alla matrice (4.28). Allora, tenendo conto della (4.29),
etA =
e−t
e2t
e−2t
(
cos 3t sin 3t− sin 3t cos 3t
)
.
Infine:
x(t) = PetA
c1c2c3
= c1e−tv1 + c2e
2tv2 + c3e−2t[(cos 3t)ℜw − (sin 3t) Imw]
+ c4e−2t[(sin 3t)ℜw + (cos 3t) Imw],
che coincide con l’espressione precedentemente trovata per le soluzioni.
Esempio.
x′(t) = Ax(t), A =
0 1 1 0−2 3 10 21 −1 −2 0−2 1 0 −1
.

4.5. Calcolo della matrice esponenziale 97
Gli autovalori di A sono ±i con molteplicita algebrica 2. Come si verifica facil-mente, il rango di A − iI e 3, per cui l’autospazio relativo a i (e quindi anchequello relativo a −i) ha dimensione 1: la matrice non e diagonalizzabile in C.Calcoliamo gli autospazi generalizzati; risulta:
(A− iI)2 =
−2 2 − 2i 8 − 2i 24i −2 − 6i 8 − 20i 4 − 4i−2i 2i −6 + 4i −24i −2i 8 2 + 2i
e E′(i) = ker(A− iI)2 (infatti, per la Proposizione 4.8.11, E′(i) = ker(A− iI)s
per un opportuno s ≤ dimE′(i) = 2, per cui deve essere s = 2). Le soluzionidel sistema (A− iI)2x = 0 sono date da:
x1 = (−2 + i)s− tx2 = −(4 + 2i)s− (1 + i)tx3 = sx4 = t
s, t ∈ C.
Allora una base di E′(i) e:
w1 = (−2 + i,−4 − 2i, 1, 0), w2 = (−1,−1 − i, 0, 1),
mentre w1, w2 formano una base per E′(−i). Determiniamo la matrice dirappresentazione valutando l’immagine dei vettori di base; risulta:
Aw1 = (−3 − 2i, 2 − 8i, 3i,−4i) = 3iw1 − 4iw2
Aw2 = (−1 − i, 1 − 3i, i,−i) = iw1 − iw2 .
Allora
A =
3i i−4i −i
−3i −i4i i
.
Posto
B =
(
3i i−4i −i
)
=
(
i 00 i
)
+
(
2i i−4i −2i
)
il secondo addendo risulta nilpotente (a quadrato nullo), per cui:
etB = eit
(
1 + 2it it−4it 1 − 2it
)
.
Quindi:
etA = eit
1 + 2it it−4it 1 − 2it
1 − 2it −it4it 1 + 2it
.
Ne risultano le quattro soluzioni linearmente indipendenti
eitp(t), eitq(t), e−itp(t), e−itq(t),
dove:
p(t) = (1 + 2it)v1 − 4itv2 = v1 + 2i(v1 − 2v2)t

98 Capitolo 4. Equazioni e sistemi differenziali lineari
= (−2 + i− 2t,−4 − 2i− 4it, 1 + 2it,−4it),
q(t) = itv1 + (1 − 2it)v2 = v2 + i(v1 − 2v2)t
= (−1 − t,−1 − i− 2it, it, 1− 2it).
Come indicato in (4.26), passando alle parti reali e immaginarie delle solu-zioni cosı trovate possiamo ottenere una base reale:
u1(t) =
−2(1 + t) cos t− sin t−4 cos t+ 2(1 + 2t) sin t
cos t− 2t sin t4t sin t
, u2(t) =
cos t− 2(1 + t) sin t−2(1 + 2t) cos t− 4 sin t
2t cos t+ sin t−4t cos t
,
u3(t) =
−(1 + t) cos t− cos t+ (1 + 2t) sin t
−t sin tcos t+ 2t sin t
, u4(t) =
−(1 + t) sin t− sin t− (1 + 2t) cos t
t cos t−2t cos t+ sin t
.
Come nell’esempio precedente calcoliamo le soluzioni anche passando tra-mite la matrice associata a T nella base reale ottenuta da una base di E′(i)prendendone le parti reale e immaginaria.
Consideriamo i vettori w1, w2 sopra determinati e, come base di E′(i) ⊕E′(−i),
ℜw1, Imw1,ℜw2, Imw2.
Sia
P = (ℜw1 | Imw1 | ℜw2 | Imw2) =
−2 1 −1 0−4 −2 −1 −11 0 0 00 0 1 0
.
La matrice associata a T e
AE′(i)⊕E′(−i) = P−1AP =
0 3 0 1−3 0 −1 00 −4 0 −14 0 1 0
.
Posto
D =
0 1−1 0
0 1−1 0
,
sappiamo che la matrice AE′(i)⊕E′(−i) −D e nilpotente (vedi la (4.32)):
M := AE′(i)⊕E′(−i) −D =
0 2 0 1−2 0 −1 00 −4 0 −24 0 2 0
;
risulta M2 = 0. Inoltre (vedi la (4.29))
et“
0 1−1 0
”
=
(
cos t sin t− sin t cos t
)
.

4.6. Equazioni scalari lineari di ordine superiore 99
Quindi:
exp[
tAE′(i)⊕E′(−i)
]
= etD(I + tM)
=
cos t sin t− sin t cos t
cos t sin t− sin t cos t
1 2t 0 t−2t 1 −t 00 −4t 1 −2t4t 0 2t 1
;
Infine, una base dello spazio delle soluzioni e data dalle colonne della matrice
P exp[
tAE′(i)⊕E′(−i)
]
: svolgendo i calcoli si ottengono le soluzioni u1, u2, u3 e
u4 sopra menzionate.
4.6 Equazioni scalari lineari di ordine superiore
Sia I un intervallo reale aperto e a0, a1, . . . , an e f funzioni continue in I. SiaL : Cn(I) → C0(I) l’operatore differenziale definito da:
(Ly)(t) =
n∑
k=0
ak(t)y(k)(t)
= an(t)y(n) + . . .+ a1(t)y′(t) + a0(t)y(t).
(4.33)
Consideriamo l’equazione completa
(4.34) Ly = f,
e l’equazione omogenea associata
(4.35) Ly = 0.
Supporremo che il coefficiente an non si annulli mai in I, in modo che l’equazionesia effettivamente di ordine n. Come sappiamo, l’equazione (4.34) puo esseretrasformata in sistema equivalente ponendo:
x0 = y, x1 = y′, x2 = y′′, . . . , xn−1 = y(n−1).
Si ottiene
(4.36)
x′0 = x1
x′1 = x2
x′2 = x3
...x′n−2 = xn−1
x′n−1 = − 1
an[an−1xn−1 + an−2xn−2 + . . .+ a1x1 + a0x0] +
f
an
cioe
x′ = Ax+ b

100 Capitolo 4. Equazioni e sistemi differenziali lineari
con
(4.37) A =
0 1 00 0 1...
. . .. . .
0 0 1
− a0
an. . . −an−1
an
b =
00...0f
an
.
Utilizzando quanto noto sulla struttura delle soluzioni di un sistema lineare,abbiamo:
Teorema 4.6.1 L’insieme delle soluzioni dell’equazione omogenea (4.35) e unsottospazio vettoriale di Cn(I) di dimensione n. L’insieme delle soluzioni del-l’equazione (4.34) puo essere rappresentato nella forma:
y + V,
dove y e una qualunque soluzione dell’equazione (4.34) stessa.
Se y1, . . . , yn sono n soluzioni dell’equazione (4.35), la matrice wronskianadelle corrispondenti soluzioni del sistema (4.36), per f ≡ 0, cioe
(y1, y′1, . . . , y
(n−1)1 ), . . . (yn, y
′n, . . . , y
(n−1)n ),
e detta matrice wronskiana, e il suo determinante e detto determinante wron-skiano, delle soluzioni y1, y2, . . . , yn:
w(t) = det
y1(t) . . . yn(t)...
...
y(n−1)1 (t) . . . y(n−1)
n (t)
.
Sappiamo che w(t) non si annulla mai in I o e ivi identicamente nullo. Il Teoremadi Liouville assume ora la forma
w(t) = w(τ) exp(
−∫ t
τ
an−1(s)
an(s)ds)
,
poiche trA = −an−1(s)/an(s).
Proposizione 4.6.2 Siano y1, . . . , yn elementi di V (cioe soluzioni di (4.35))e sia t0 ∈ I. Allora
y1, y2, . . . , yn sono l.i. in V se e solo se w(t0) 6= 0.
Dimostrazione. Conviene dimostrare che
y1, y2, . . . , yn sono l.d. (in V ) se e solo se w(t0) = 0.
Siano y1, y2, . . . , yn l.d. (in V ): esistono α1, α2, . . . , αn valori reali non tuttinulli per i quali
α1y1 + . . .+ αnyn ≡ 0 in I.

4.6. Equazioni scalari lineari di ordine superiore 101
Per derivazione si ottiene
α1y(k)1 + . . .+ αny
(k)n ≡ 0 in I.
Allora le funzioni
ui = (yi, y′i, . . . , y
(n−1)i ), (i = 1, . . . , n),
che sono soluzioni di (4.36), sono l.d., per cui il loro determinante wronskiano,che e w(t), e identicamente nullo.
Viceversa, se w(t0) = 0, allora sono l.d. (in Rn) i vettori ui(t0) per i =
1, . . . , n (le ui sono definite come sopra). Il Corollario 4.1.2 assicura allora cheu1, . . . , un sono l.d.; in particolare lo sono y1, . . . , yn.
Parallelamente a quanto svolto per i sistemi del primo ordine, prima dipassare alla determinazione di una n-upla di soluzioni linearmente indipendentidell’equazione omogenea (per la quale considereremo essenzialmente solo il casodei coefficienti costanti), vediamo come si traduce il metodo di variazione dellecostanti illustrato nel § 4.2 per i sistemi.
Siano y1, . . . , yn soluzioni linearmente indipendenti dell’equazione (4.35). SiaX(t) la corrispondente matrice wronskiana, che e soluzione del sistema X ′ =A(t)X , con A come in (4.37). Sappiamo che la matrice risolvente del sistemax′ = A(t)x e R(t, s) = X(t)X(s)−1 e che una soluzione particolare di x′ =A(t)x + b(t) e data da
x(t) =
∫ t
t0
R(t, s)b(s) ds.
La prima componente y di x sara soluzione dell’equazione (4.34).Teniamo conto che b(s) =
(
f(s)/an(s))
en, per cui
(4.38) y(t) =
∫ t
t0
r(t, s)f(s) ds,
con
r(t, s) =1
an(s)eT1X(t)X(s)−1en.
Indicata con (xij(·)) la matrice X(·) e ricordando l’espressione della matriceinversa X(s)−1, risulta:
r(t, s) =1
an(s)x1i(t)
1
w(s)αi(s),
dove αi(s) e il complemento algebrico dell’elemento xni(s) della matrice X(s).E immediato verificare che (si sviluppi secondo l’ultima riga):
(4.39) r(t, s) =1
w(s)an(s)
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
y1(s) . . . yn(s)y′1(s) . . . y′n(s)
......
y(n−2)1 (s) . . . y(n−2)
n (s)y1(t) . . . yn(t)
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
Riassumiamo quanto ottenuto:
Proposizione 4.6.3 La funzione y definita in (4.38), con r(t, s) dato dalla(4.39), e una soluzione particolare dell’equazione completa (4.34).
La funzione r(t, s) e detta nucleo risolvente dell’equazione (4.34).
102 Capitolo 4. Equazioni e sistemi differenziali lineari
4.7 Equazioni a coefficienti costanti
Equazione omogenea.
Occupiamoci di determinare n soluzioni linearmente indipendenti dell’equa-zione omogenea (4.35). Individuiamo gli autovalori della matrice A in (4.37).Consideriamo il determinante:
det(A− λI) =
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
−λ 1 0 . . . 00 −λ 1 . . . 00 0 −λ . . . 0...0 . . . 1
− a0
an− a1
an. . . . . . −an−1
an− λ
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
Sviluppando secondo l’ultima riga otteniamo:
det(A− λI) = (−1)n+1(
− a0
an
)
+ (−1)n+2(
− a1
an
)
(−λ) + (−1)n+3(
− a2
an
)
(−λ)2
+ . . .+ (−1)n+n−1(
−an−2
an
)
(−λ)n−2
+ (−1)n+n(
−an−1
an− λ)
(−λ)n−1
=(−1)n
an
[
a0 + a1λ+ a2λ2 + . . .+ an−2λ
n−2 + an−1λn−1 + anλ
n]
.
L’equazione
P (λ) := anλn + an−1λ
n−1 + an−2λn−2 + . . .+ a1λ+ a0 = 0
e detta equazione caratteristica dell’equazione (4.35); il polinomio a primo mem-bro e detto polinomio caratteristico e le sue radici danno gli autovalori dellamatrice A, con le corrispondenti molteplicita.
Indichiamo conλ1, λ2, . . . , λq
le radici distinte di P (λ), con molteplicita m1, . . . ,mk, rispettivamente. Dallateoria svolta per i sistemi lineari a coefficienti costanti deduciamo che le soluzionidell’equazione (4.35), considerata in campo complesso, sono combinazioni linearidelle funzioni
(4.40) tjeλkt (k = 1, . . . , q, j = 0, . . . ,mk − 1).
Notiamo come si tratti di un insieme di n funzioni: verifichiamo direttamenteche si tratta di soluzioni di (4.35) e che sono linearmente indipendenti:
Teorema 4.7.1 Le funzioni (4.40) sono n soluzioni linearmente indipendentidi (4.35).
Alla dimostrazione premettiamo alcune considerazioni.Sia K[λ] l’anello dei polinomi nell’indeterminata λ a coefficienti in K (con
K = R o K = C). Dato P ∈ K[λ],
P (λ) = anλn + an−1λ
n−1 + . . .+ a0,

4.7. Equazioni a coefficienti costanti 103
definiamo l’operatore lineare
P (D) : C∞(I) → C∞(I)
P (D)y = anDny + an−1D
n−1y + . . .+ a0y.
L’applicazione P 7→ P (D) e tale che
P +Q 7→ P (D) +Q(D)
P ·Q 7→ P (D) Q(D) (composizione).
Si tratta quindi di un isomorfismo fra K[λ] e un sottoanello commutativo dell’a-nello degli operatori differenziali lineari su C∞ (si tratta del sottoanello generatodagli operatori di moltiplicazione e da D).
Se K = C allora il polinomio caratteristico di Ly = 0 si decompone nellaforma:
P (λ) = an(λ− λ1)m1 · . . . · (λ− λq)
mq ,
quindi
P (D) = an(D − λ1)m1 · . . . · (D − λq)
mq .
La verifica che le funzioni (4.40) sono soluzioni dell’equazione Ly = 0 e a que-sto punto una conseguenza immediata del seguente lemma (la cui dimostrazionee una facile verifica). Infatti:
(D − λk)mk(tjeλkt) = eλktDmk tj
e il secondo membro e nullo se j < mk.
Lemma 4.7.2 Dati λ ∈ C, u ∈ C∞(R) e m ∈ N risulta:
(D − λ)m(
eλtu(t))
= eλtDmu(t).
Per concludere la dimostrazione del Teorema 4.7.1 rimane da verificare l’in-dipendenza lineare delle funzioni (4.40). Consideriamo pertanto una loro com-binazione lineare che dia la funzione nulla; in base all’espressione delle funzionistesse cio equivale a considerare q polinomi P1, . . . , Pq, con Pk di grado nonsuperiore a mk − 1, tali che
(4.41) P1(t)eλ1t + . . .+ Pq(t)e
λqt ≡ 0.
Mostriamo, per induzione su q, che questa condizione implica che tutti i poli-nomi sono nulli, e che quindi le funzioni (4.40) sono linearmente indipendenti.Chiaramente l’implicazione vale per q = 1. Valga per un valore q ∈ N e dimo-striamo che vale per q+1. Dividendo per eλq+1t entrambi i membri dell’identita(4.41), scritta con q + 1 in luogo di q, si ottiene4:
P1(t)e(λ1−λq+1)t + . . .+ Pq(t)e
(λq−λq+1)t + Pq+1(t) ≡ 0.
4e facile verificare che se λ ∈ C \ 0 e P (t) e un polinomio, allora
Dˆ
P (t)eλt˜
= Q(t)eλt
dove Q(t) e un polinomio dello stesso grado di P (t).

104 Capitolo 4. Equazioni e sistemi differenziali lineari
Derivando mq+1 volte otteniamo:
Q1(t)e(λ1−λq+1)t + . . .+Qq(t)e
(λq−λq+1)t ≡ 0,
dove Qk e un polinomio dello stesso grado di Pk; applicando l’ipotesi induttivaogni Qk e nullo per cui anche ogni Pk deve essere nullo.
Se consideriamo le parti reali e immaginarie delle funzioni (4.40) otteniamouna base reale per le soluzioni dell’equazione omogenea Ly = 0:
Teorema 4.7.3 Le soluzioni dell’equazione omogenea (4.35) sono tutte e solele combinazioni lineari delle funzioni
tjeαt cosβt, tjeαt sinβt
al variare di λ = α+ iβ fra le radici del polinomio caratteristico.
Equazione completa.
Vi e un caso notevole in cui e possibile determinare in modo standard unasoluzione y dell’equazione completa (4.34). Supponiamo che la funzione f asecondo membro sia della forma (conviene lavorare in campo complesso):
(4.42) f(t) = P (t)eλt,
con λ ∈ C e P (t) polinomio di gradom. Siano inoltre λ1, . . . , λk le radici distintedel polinomio caratteristico di L, con molteplicita rispettive m1, . . . ,mk.
In base al Lemma 4.7.2 risulta
Mf(t) ≡ 0, con M = (D − λ)m+1
Pertanto, se y e soluzione dell’equazione Ly = f allora (M L)y = 0.5 Distin-guiamo ora due casi:
− se λ non e radice del polinomio caratteristico di L allora il polinomio carat-teristico di M L ha come radici λ1, . . . , λk, con le rispettive molteplicitam1, . . . ,mk, e λ, con molteplicita m+ 1. In base al Teorema 4.7.1
y(t) = yo(t) +Q(t)eλt
dove yo, combinazione lineare di funzioni della forma tjeλit, per i =1, . . . , k, e una soluzione dell’equazione omogenea Ly = 0, mentre Q(t)e un opportuno polinomio di grado al piu m. Chiaramente, la condizioneLy = f si riflette solamente sul polinomio Q, per cui possiamo scegliereyo = 0 e cercare y della forma
y(t) = Q(t)eλt,
con Q(t) polinomio di grado al piu m.
5Per questo motivo il metodo ora descritto e anche detto degli annichilatori.

4.7. Equazioni a coefficienti costanti 105
− sia invece λ radice del polinomio caratteristico di L con molteplicita µ:ad esempio λ = λk e µ = mk. Allora il polinomio caratteristico di M Lpresenta le radici λi (i 6= k) con le rispettive molteplicita mi, e λ, conmolteplicita µ+m+ 1. Quindi
y(t) =k−1∑
i=1
Pi(t)eλit + Q(t)eλt,
con Pi(t) di grado al piu mi e Q(t) di grado al piu µ + m. Si osservi
ora che, posto Q(t) =∑
j cjtj , la funzione (
∑µ−1j=0 cjt
j)eλt e soluzionedell’equazione omogenea, per cui possiamo scrivere
y(t) = yo(t) + tµQ(t)eλt,
con Q(t) polinomio di grado al piu m. Come nel caso precedente ricer-chiamo y di questa forma, con yo ≡ 0.
Riassumendo:
se nell’equazione Ly = f il secondo membro e dato da (4.42), conP (t) di grado m, allora esiste una soluzione della forma
y(t) = tµQ(t)eλt,
dove Q(t) e un polinomio di grado non superiore a m e µ e la mol-teplicita di λ come radice del polinomio caratteristico di L (quindiµ = 0 se non e radice).
Il polinomio Q(t) viene individuato determinandone i coefficienti in modo chetµQ(t)eλt sia soluzione di Ly = f .
Se lavoriamo in campo reale non e difficile verificare che: se
f(t) = eαt[Ph(t) cosβt+Qk(t) sinβt],
con Ph e Qk polinomi di gradi h e k, rispettivamente, allora e possibile deter-minare una soluzione y secondo la seguente regola:
− se α ± iβ non e radice del polinomio caratteristico, allora esiste y dellaforma:
y(t) = eαt[R(t) cosβt+ S(t) sinβt].
con R e S polinomi di grado al piu maxh, k;
− se α ± iβ e radice di molteplicita m del polinomio caratteristico, alloraesiste y della forma:
y(t) = tmeαt[R(t) cosβt+ S(t) sinβt].
con R e S come sopra.
La determinazione effettiva di y avviene determinando i coefficienti dei polinomiR e S in modo che la funzione y sia soluzione.

106 Capitolo 4. Equazioni e sistemi differenziali lineari
Esempio Consideriamo l’equazione
y′′ − 3y′ + 2y = f(t),
con f(t) = (1 + 3t)e4t. Rientriamo nelle condizioni dell’osservazione precedentecon α + iβ = 4; poiche questo valore non e radice del polinomio caratteristico,e possibile determinare una soluzione y della forma:
y(t) = (a+ bt)e4t,
con a, b ∈ R da determinare. Se imponiamo che questa funzione sia soluzioneotteniamo a = −1/4 e b = 1/2.
Se invece avessimo f(t) = (1 + 3t)e2t, poiche α = 2 e radice (semplice) delpolinomio caratteristico, cerchiamo y della forma:
y(t) = t(a+ bt)e2t,
con a, b ∈ R da determinare. Svolgendo i calcoli risulta y(t) = ((3/2)t2 − 2t)e2t.
4.8 Sistemi omogenei autonomi: il caso
bidimensionale
Analizziamo piu in dettaglio le soluzioni di un sistema differenziale lineareomogeneo e autonomo:
x′1 = a11x1 + a12x2
x′2 = a21x1 + a22x2
con A = (aij) matrice ad elementi reali. Abbiamo visto che mediante unopportuno cambiamento di variabile (x = Py) possiamo ricondurci al sistema:
(4.43) y′ = Ay, (A = P−1AP )
dove A rientra in uno dei seguenti casi:
a) A =
(
λ1 00 λ2
)
; b) A =
(
λ 10 λ
)
; c) A =
(
α β−β α
)
(con β 6= 0).
Nel seguito supporremo che nessun autovalore sia nullo (se cosı non fosse si vedefacilmente che le traiettorie sarebbero rettilinee). Distinguiamo i seguenti casi:
I) autovalori reali e distinti (siano essi λ1 < λ2);
II) autovalori complessi coniugati α± iβ con α 6= 0;
III) autovalori reali e coincidenti
caso diagonalizzabilecaso non diagonalizzabile
IV ) autovalori complessi con parte reale nulla (±iβ).
Notiamo che i casi (III) e (IV ) possono essere visti come “casi limite” deiprecedenti, e pertanto piu suscettibili di cambiamenti di tipologia per “piccoleperturbazioni”.
In ciascuno dei casi e possibile determinare esplicitamente la forma dellesoluzioni del sistema equivalente (4.43).

4.8. Sistemi omogenei autonomi: il caso bidimensionale 107
λ1<λ2<0
λ1<0<λ2
Figura 4.2 - Nodo stabile e punto di sella
0<λ1<λ2
Figura 4.3 - Nodo instabile
Caso (I). Se λ1 < λ2 indicano gli autovalori (reali) distinti, allora:
(4.44)
y1 = c1eλ1t
y2 = c2eλ2t .
Individuiamo le traiettorie; se c1 = 0 allora si ha y1 = 0 (asse y2), altrimenti:
y2 = c2(
eλ1t)λ2/λ1
= c2∣
∣
y1c1
∣
∣
λ2/λ1,
quindi, per l’arbitrarieta di c1 e c2:
(4.45) y2 = γ|y1|λ2/λ1 .
Si vedano le Figure 4.2 e 4.3: le frecce indicano l’orientamento corrispondenteal parametro t crescente e puo essere immediatamente desunto dalle equazioni(4.44).
Caso (II). Autovalori complessi coniugati α± iβ, con parte reale α non nulla:
y1 = eαt(c1 cosβt+ c2 sinβt)y2 = eαt(−c1 sinβt+ c2 cosβt)
.

108 Capitolo 4. Equazioni e sistemi differenziali lineari
Figura 4.4 - Fuoco stabile (α < 0) e instabile (α > 0)
Nell’ipotesi in cui c1 e c2 non siano contemporaneamente nulli, se poniamo
K =√
c21 + c22 > 0, cosϕ = c1/K, sinϕ = c2/K,
possiamo esprimere le soluzioni come
y1 = Keαt cos(ϕ− βt)y2 = Keαt sin(ϕ− βt)
.
Pertanto, in coordinate polari, le traiettorie hanno equazione parametriche
= Keαt
ϑ = ϕ− βt
e quindi, eliminando t, = Ce−(α/β)ϑ,
con C ≥ 0 costante arbitraria. Si tratta di spirali logaritmiche, che si avvolgonoattorno all’origine al crescere o al decrescere di ϑ secondo che il rapporto α/β siapositivo o negativo, rispettivamente. In Figura 4.4 e rappresentata la situazioneα/β > 0. Il verso delle frecce si deduce subito dalla relazione = Keαt.
Caso (III). Autovalori reali e coincidenti λ1 = λ2 = λ. Se la matrice ediagonalizzabile, allora (come nel caso (I)):
y1 = c1eλt
y2 = c2eλt
quindi le traiettorie sono semirette uscenti dall’origine.Se invece la matrice non e diagonalizzabile allora nelle coordinate y le solu-
zioni sono date da:
y1 = (c1 + c2t)eλt
y2 = c2eλt
da cui l’equazione delle orbite (a parte l’asse y1, corrispondente a c2 = 0):
y1 =1
λy2(log |y2| + γ), γ ∈ R.

4.8. Sistemi omogenei autonomi: il caso bidimensionale 109
Figura 4.5 - Nodo improprio stabile (λ < 0)
Figura 4.6 - Centro (autovalori ±iβ); l’orientamento delle traiettorie dipendedal segno di β
In tal caso si parla di nodo improprio (Figura 4.5).
Caso (IV ). Autovalori con parte reale nulla: ±iβ.Le traiettorie nelle coordinate y sono circonferenze:
y1 = K cos(ϕ− βt)y2 = K sin(ϕ− βt)
(K ≥ 0).
In tal caso l’origine e detto centro (vedi Figura 4.6).

110 Capitolo 4. Equazioni e sistemi differenziali lineari
Appendice: operatori lineari
Richiamiamo, prevalentemente senza dimostrazione, alcuni risultati di AlgebraLineare utilizzati in questo capitolo.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
Sia V uno spazio vettoriale su C di dimensione n e T : V → V un operatorelineare.
Matrice associata a un operatore lineare.Sia B una base di V . Le componenti in B di ogni vettore v ∈ V e del
suo trasformato Tv sono legate da una relazione lineare; esiste cioe una matriceA ∈ Mn×n(C) con la proprieta che se x ∈ Cn e il vettore delle componenti div in B, allora Tv ha come componenti, sempre in B, il vettore y = Ax. Lamatrice A e detta matrice associata a T nella base B.
Rilevante sara il caso in cui V si decompone in somma diretta di sottospaziT -invarianti, cioe sottospazi tali che
V = V1 ⊕ V2 ⊕ . . .⊕ Vq ,
con TVk ⊆ Vk.
Proposizione 4.8.1 Nelle ipotesi poste, se Bk e una base di Vk allora B1 ∪. . .∪ Bq (o meglio, la base ottenuta prendendo ordinatamente gli elementi delle
basi B1, . . . , Bq) e una base di V rispetto a cui la matrice associata a T ediagonale a blocchi:
(4.46) A =
A1
A2
A3
. . .
Aq
,
(ciascun blocco ha la diagonale principale sulla diagonale principale di A). Lamatrice Ak e di tipo mk ×mk con mk = dimVk. Inoltre
Ak e la matrice associata a T∣
∣
∣
Vk
in Bk.
Autovalori e autospazi. Diagonalizzabilita.
Definizione 4.8.2 Un elemento λ ∈ C si dice autovalore di T se esiste v ∈V \ 0 tale che
(4.47) T (v) = λv.
Tali vettori sono detti autovettori di T relativi a λ. Il sottospazio E(λ) =ker(T − λI) e detto autospazio di T relativo a λ.

4.8. Sistemi omogenei autonomi: il caso bidimensionale 111
Ad ogni matrice A ∈ Mn×n(C) rimane associato l’operatore lineare T =TA : Cn → Cn definito da TA(x) = Ax. Come autovalori di A intenderemo gliautovalori di TA. L’equazione (4.47) diventa:
Av = λv.
Fondamentale e la seguente caratterizzazione.
Proposizione 4.8.3 Data A ∈ Mn×n(C), un elemento λ ∈ C e autovalore diA se e solo se λ e radice del seguente polinomio, detto polinomio caratteristicodi A:
p(z) = det(A− zI).
Se P e una matrice invertibile, un’applicazione del Teorema di Binet da:
det(P−1AP − zI) = detP−1(A− zI)P = det(A− zI),
per cui matrici simili hanno lo stesso polinomio caratteristico.L’importanza di questa osservazione sta nel fatto che le matrici associate a un
operatore lineare T : V → V sono legate dalla relazione di similitudine. Siano,infatti, B = (e1, . . . , en) e B = (e1, . . . , en) due date basi di V , e indichiamocon P = (pij) la matrice di passaggio da B a B, cioe tale che:
(4.48) ej =∑
i
pijei.
Siano x = (x1, . . . , xn) le componenti di un vettore v in B e y = (y1, . . . , yn)quelle in B, cioe:
v =∑
j
yj ej =∑
j
yj
∑
i
pijei =∑
i
(∑
j
pijyj)ei;
allora
(4.49) x = Py.
Se A = (aij) e A = (aij) sono le matrici associate a T nelle basi B e B,
rispettivamente, le componenti di Tv nelle due basi sono Ax e Ay; secondo la(4.49) la relazione deve pertanto essere
Ax = PAy,
da cui, poiche x = Py,
(4.50) A = P−1AP.
Quindi A e A, matrici associate a T nelle basi B e B rispettivamente, sono traloro simili.
Osservazione 4.8.4 Se V = Cn e B e la base canonica, allora la matrice Pha come colonne gli elementi di B:
P = (e1 | e2 | . . . | en).
Infatti, se consideriamo la componente h-ima dei due membri nella (4.48) ab-biamo (ej)h =
∑
i pijδih = phj).

112 Capitolo 4. Equazioni e sistemi differenziali lineari
Quanto detto permette di definire il polinomio caratteristico di un opera-tore T : V → V come polinomio caratteristico della matrice associata in unaqualunque fissata base.
Diciamo molteplicita algebrica di un autovalore λ la molteplicita m(λ) di λcome radice del polinomio caratteristico. Diciamo molteplicita geometrica di λla dimensione ρ(λ) dell’autospazio E(λ).
Proposizione 4.8.5 Per ogni autovalore λ risulta ρ(λ) ≤ m(λ).
Teorema 4.8.6 Siano λ1, λ2, . . . , λq gli autovalori distinti di T . Allora gliautospazi E(λ1), . . . , E(λq) sono in somma diretta.
Proposizione 4.8.7 Le seguenti proprieta sono equivalenti:
a) T e diagonalizzabile (cioe esiste una base di V rispetto a cui T e rappre-sentato da una matrice diagonale);
b) esiste una base di V costituita da autovettori di T ;
c) per ogni autovalore la molteplicita algebrica coincide con quella geometrica.
In tali condizioni, la matrice associata a T in una qualunque base formata daautovettori e diagonale.
In particolare, se T ha tutti gli autovalori semplici allora e diagonalizzabile.
Dimostrazione. L’equivalenza fra (a) e (b) e immediata poiche il fatto cheT sia esprima in una base B = (v1, . . . , vn) mediante una matrice diagonaleD = diag (λ1, . . . , λn) equivale ad affermare che le componenti di Tvi nella baseB sono date da Dei (con ei i-esimo elemento della base canonica di Cn), cioeTv = λivi: questa uguaglianza traduce il fatto che vi e un autovettore.6
Se teniamo conto del teorema precedente, la proprieta (b) sussiste se e solose C
n = E(λ1) ⊕ E(λ2) ⊕ . . .⊕ E(λq), e questo e vero se e solo se vale (c).
Osservazione 4.8.8 E utile notare esplicitamente, ricordando l’Osservazione4.8.4 e il risultato precedente, che se V = Cn e B = (v1, v2, . . . , vn) e una basedi Cn costituita da autovettori di A, allora la matrice P = (v1 | v2 | . . . | vn)che ha come colonne tali autovettori diagonalizza A, cioe P−1AP e diagonale.
Autospazi generalizzati.
Indichiamo con λ1, . . . , λq gli autovalori distinti dell’operatore T : V → V ,di molteplicita algebriche m(λ1), . . . ,m(λq), rispettivamente.
Se T non e diagonalizzabile allora V non possiede una base di autovettori,per cui non puo essere espresso come somma diretta dei suoi autospazi. Il ruolodi questi viene invece svolto dai cosiddetti autospazi generalizzati.
Svolgiamo dapprima alcune osservazioni preliminari. Data un’applicazionelineare T : V → V , risulta
kerT ⊆ kerT 2 ⊆ . . . ⊆ kerT k ⊆ kerT k+1 ⊆ . . .
6Del resto, anche esprimendo la disgonalizzabilita direttamente come esistenza di unamatrice P tale che P−1AP = diag (λ1, . . . , λn), si ottiene AP = Pdiag (λ1, . . . , λn), cioeAvi = λivi se vi e la i-ima colonna di A.

4.8. Sistemi omogenei autonomi: il caso bidimensionale 113
ImT ⊇ ImT 2 ⊇ . . . ⊇ ImT k ⊇ ImT k+1 ⊇ . . .
E immediato verificare che sono tutti sottospazi T -invarianti, cioe sottospazi Wper i quali T (W ) ⊆ W . Poiche la dimensione di V e finita, esiste s ≤ n per ilquale
kerT s = kerT s+1.
Sia ν = dim kerT s. Dal momento che dim ImT s = n − ν = dim ImT s+1, nesegue che
ImT s = ImT s+1.
Il valore s per il quale kerT s = kerT s+1 (e ImT s = ImT s+1) e unico, poichese vale questa uguaglianza risulta anche kerT s+1 = kerT s+2 = kerT s+3 = . . .;infatti, se v ∈ kerT s+2 allora Tv ∈ kerT s+1 = kerT s, quindi T sTv = 0, cioev ∈ kerT s+1. Quindi kerT s+1 = kerT s+2 (si procede per induzione).
Osserviamo ora due fatti:
− l’applicazione T : ImT s → ImT s e biunivoca; a tal fine e sufficiente ve-rificare la suriettivita (dominio e codominio hanno la stessa dimensione).Dato v ∈ ImT s = ImT s+1, esiste v′ per il quale
v = T s+1v′ = T (T sv′) = Tv′′, con v′′ = T sv′ ∈ ImT s,
da cui la suriettivita.
− la biunivocita di T : ImT s → ImT s da anche la biunivocita di T s : ImT s →ImT s; allora
kerT s ∩ ImT s = 0.
Poiche dimkerT s + dim ImT s = n, concludiamo che V = kerT s ⊕ ImT s.Infine, osserviamo che, se kerT s non e banale, allora T ha, su kerT s, solo
l’autovalore nullo, poiche la relazione T (v) = λv con v ∈ kerT s da T 2(v) =λT (v) = λ2v, . . . , 0 = T s(v) = λsv, da cui λ = 0.
Del resto, T∣
∣
∣
Im T snon puo presentare 0 come autovalore, perche ker(T−0I) =
kerT ⊆ kerT s, e quest’ultimo ha intersezione nulla con ImT s.
Riassumiamo questi risultati nel seguente enunciato.
Lemma 4.8.9 (Decomposizione di Fitting) Sia T : V → V un’applicazionelineare. Allora:
a) esiste s ≤ n = dimV tale che
(4.51) kerT s = kerT s+1, ImT s = ImT s+1 .
b) Se s soddisfa la (4.51), allora kerT s e ImT s sono sottospazi T -invariantie
V = kerT s ⊕ ImT s .
Inoltre, T∣
∣
∣
Im T snon puo presentare l’autovalore nullo, mentre se kerT s e
non banale, allora T∣
∣
∣
ker T sha solo l’autovalore nullo

114 Capitolo 4. Equazioni e sistemi differenziali lineari
La decomposizione in somma diretta di cui al punto (b) del lemma precedentee la struttura diagonale a blocchi della matrice associata a T secondo la Propo-sizione 4.8.1 permettono di spezzare il polinomio caratteristico nel prodotto deipolinomi caratteristici di T
∣
∣
∣
ker T se T∣
∣
∣
Im T s. In particolare, se 0 e autovalore di
T di molteplicita m, allora
dimkerT s = m, quindi s ≤ m.
Applichiamo ora questi risultati all’operatore T −λI, dove λ e un autovaloredi T ; otteniamo una decomposizione Cn = Vλ⊕W tale che T ha solo l’autovaloreλ su Vλ, e autovalori diversi da λ su W (separazione degli autovalori). Inoltre,Vλ e W sono T -invarianti (perche (T − λI)-invarianti).
Il sottospazio Vλ = ker(T − λI)s e il cosiddetto autospazio generalizzatorelativo a λ, indicato con E′(λ). Possiamo anche porre, equivalentemente:
Definizione 4.8.10 Si dice autospazio generalizzato relativo all’autovalore λil sottospazio
E′(λ) =⋃
j∈N
ker(T − λI)j .
La proposizione seguente riassume le proprieta fondamentali di questi sot-tospazi ricavate sopra.
Proposizione 4.8.11 Sia λ autovalore di T con molteplicita algebrica m. Al-lora:
a) E′(λ) = ker(T − λI)s per un opportuno s ∈ N. Inoltre dimE′(λ) = m erisulta s ≤ m.
b) T : E′(λ) → E′(λ) cioe T(
E′(λ))
⊆ E′(λ).
c) λ e l’unico autovalore di T∣
∣
∣
E′(λ).
A questo punto un’applicazione ripetuta della decomposizione di Fittingfornisce il seguente risultato.
Teorema 4.8.12 Si supponga che tutti gli autovalori di T siano in K; indi-chiamo con λ1, . . . , λq gli autovalori distinti. Allora:
V = E′(λ1) ⊕ E′(λ2) ⊕ . . .⊕ E′(λq).
Questa decomposizione di Cn in somma diretta da luogo a una matrice A
associata a T come indicato nella Proposizione 4.8.1, con Vk = E′(λk):
(4.52) A =
A1
A2
A3
. . .
Aq
,
dove:Ak e la matrice associata a T
∣
∣
∣
E′(λk)rispetto a Bk.

4.8. Sistemi omogenei autonomi: il caso bidimensionale 115
Forma canonica di Jordan.
Si puo dimostrare che e possibile scegliere una base per ogni autospaziogeneralizzato E′(λk) in modo che la matrice (4.52) associata a T sia di ‘formaspeciale’. Poiche T trasforma ogni E′(λk) in se, il problema puo chiaramenteessere riformulato per un operatore T : V → V con un solo autovalore λ dimolteplicita n (quindi E′(λ) = V ). Prima di enunciare il risultato premettiamouna definizione.
Definizione 4.8.13 a) Si dice blocco di Jordan di ordine r, o matrice elemen-tare di Jordan di ordine r, associato a λ, la matrice di ordine r:
B =
λ 1 0λ 1
. . .. . . 0. . . 1
0 λ
.
b) Si dice matrice di Jordan di ordine n una matrice di ordine n della forma:
(4.53) A =
B1
B2
B3
. . .
Bs
,
dove B1, . . . , Bs sono blocchi di Jordan.
Il blocco di ordine r = 1 relativo a λ e semplicemente la matrice (λ) di tipo1 × 1.
Teorema 4.8.14 Sia T : V → V un operatore lineare e sia λ ∈ C autovaloredi molteplicita n = dim V . Allora esiste una base di V rispetto a cui la matricedi rappresentazione di T e una matrice di Jordan con blocchi associati a λ.Tale matrice e univocamente individuata da T a meno di una permutazione deiblocchi.
Il caso diagonalizzabile corrisponde al situazione in cui tutti i blocchi sonodi ordine 1.
Il teorema precedente, applicato ad ogni blocco della rappresentazione (4.52)da subito il seguente risultato.
Teorema 4.8.15 (Forma canonica di Jordan) Sia T : V → V un opera-tore lineare. Allora esiste una base di V rispetto a cui la matrice associata a Te una matrice di Jordan formata da blocchi associati agli autovalori di T . Talematrice e unica a meno di una permutazione dei blocchi.

116 Capitolo 4. Equazioni e sistemi differenziali lineari
Osservazione 4.8.16 Mentre la determinazione della matrice (4.52) associataa T puo essere ottenuta dalla scelta di una qualunque base per ciascun E′(λk),il calcolo della forma di Jordan J richiede l’individuazione di una particolarebase; una base in cui accanto ad ogni elemento vi siano tutte le controimmaginiiterate tramite T−λI. Data una base dell’autospazioE(λ), a partire da ciascunodei suoi elementi si costruiscono in tal modo i vettori di una base di E′(λ)corrispondenti ad un blocco di Jordan. Ad esempio, se E(λ) = 〈v, w〉 e
(T − λI)v′ = v, (T − λI)v′′ = v′, v′′ /∈ Im(T − λI)
(T − λI)w′ = w, w′ /∈ Im(T − λI),
allora, chiaramente, rispetto alla base (v, v′, v′′, w, w′) di C5 la matrice associataa T − λI e:
0 1 00 0 10 0 0
0 10 0
, quindi la matrice di T e
λ 1 00 λ 10 0 λ
λ 10 λ
.
In generale il numero dei blocchi e pari alla molteplicita geometrica di λ. (Peri dettagli sulla struttura della forma di Jordan si veda, ad esempio, [HS74]).
Matrici reali con autovalori complessi. Forma canonica reale.
Consideriamo ora il caso di una matrice A ∈ Mn×n(R) che non abbia ne-cessariamente tutti gli autovalori reali. La matrice (4.52) associata a T puocomunque essere ottenuta utilizzando una base complessa. Poiche la matrice ea elementi reali, se µ e µ sono due autovalori coniugati le basi per i corrisponden-ti autospazi possono essere scelte fra loro coniugate; pertanto, se w1, w2, . . . , wm
e una base di E′(µ) allora
w1, w2, . . . , wm, w1, w2, . . . , wm
e una base di E′(µ)⊕E′(µ). A questa possiamo sostituire la base reale ottenutaprendendo la parte reale e immaginaria dei wj :
(4.54) z1, ζ1, z2, ζ2, . . . , zm, ζm, dove zj =wj + wj
2, ζj =
wj − wj
2i.
Se indichiamo con
λ1, . . . , λr autovalori reali
µ1, . . . , µl, µ, . . . , µl autovalori non reali
allora la rappresentazione (4.52) diventa una matrice reale diagonale a blocchidella forma
(4.55) A =
A1
. . .
Ar
AR
1
. . .
AR
l
,

4.8. Sistemi omogenei autonomi: il caso bidimensionale 117
dove
Ak : matrice associata a T∣
∣
∣
E′(λk)
AR
j : matrice associata a T∣
∣
∣
E′(µj)⊕E′(µj).
Se le basi (w1, w2, . . . , wm) per gli autospazi generalizzati sono tali da dar luogoalla forma canonica di Jordan, non e difficile vedere che il passaggio alle partireale e immaginaria degli elementi wj ilustrato sopra porta a una matrice nel-la forma canonica descritta dal seguente teorema (si ricordi il passaggio dallamatrice (4.27) alla (4.28)).
Teorema 4.8.17 (Forma canonica reale) Esiste una base di V rispetto acui T si rappresenta mediante la matrice
JR =
(
J ′ 0
0 J ′′
)
,
dove J ′ e la matrice di Jordan relativa a
T∣
∣
∣
E′(λ1)⊕...⊕E′(λr),
mentre J ′′ si ottiene dalla matrice di Jordan relativa a
T∣
∣
∣
E′(µ1)⊕...⊕E′(µl),
sostituendo:
µj con Bµj =
(
αj βj
−βj αj
)
(µj = αj + iβj)
1 con I2 =
(
1 00 1
)
.
Esempio. Riprendiamo l’ultimo esempio considerato nel § 4.5. Risulta:
A− iI =
−i 1 1 0−2 3 − i 10 21 −1 −2 − i 0−2 1 0 −1 − i
;
un autovettore relativo all’autovalore i e, ad esempio,
v1 =
i−21−2
.
Seguendo quanto indicato nell’Osservazione 4.8.16 (vedi anche la seconda partedell’esempio svolto a pag. 89), cerchiamo un vettore v2 soddisfacente la relazione
(A− iI)v2 = v1.

118 Capitolo 4. Equazioni e sistemi differenziali lineari
Risulta, ad esempio,
v2 =
(1/2) + i−1 + 2i−i/2
0
.
Chiaramente, (A− iI)2v2 = 0, per cui v2 ∈ ker(T − iI)2 = E′(i). Rispetto allabase (v1, v2) la matrice associata all’operatore (T − iI)
∣
∣
∣
E′(i)e:
(
0 10 0
)
;
Quindi la matrice associata a T nella base (v1, v2, v1, v2) e in forma canonica diJordan:
i 10 i
−i 10 −i
Invece, rispetto alla base
(ℜv1, Im v1,ℜv2, Im v2),
la matrice associata a T e data da P−1AP , dove P e la matrice che ha nellecolonne gli elementi di tale base. Svolgendo i calcoli si ottiene
P−1AP =
0 1 1 0−1 0 0 10 0 0 10 0 −1 0
,
coerentemente con quanto sopra affermato.
Capitolo 5
Comportamento asintotico.
Stabilita
Negli esempi lineari bidimensionali studiati nel § 4.8 abbiamo notato la relazionefra l’origine (punto di equilibrio), il comportamento asintotico delle soluzioni pert → ∞ e il segno degli autovalori della matrice dei coefficienti. Mettiamo orain evidenza la validita generale di questa relazione, e come la si possa applicarelocalmente nel caso non lineare. Esponiamo infine il metodo di Liapunov per lostudio della stabilita dei sistemi non lineari.
Nel primo paragrafo diamo le definizioni base dei concetti di stabilita nelcaso generale dei sistemi autonomi non lineari.
5.1 Stabilita dei punti di equilibrio
Sia Ω un aperto di Rn e f : Ω → Rn una funzione localmente lipschitziana.Consideriamo l’equazione autonoma
(5.1) x′ = f(x).
Come visto nel paragrafo 2.6, la dinamica dell’equazione e individuata dal flussoϕ, che per ogni punto x0 ∈ Ω da la soluzione ϕ(·, x0) del problema di Cauchy
x′ = f(x)x(0) = x0,
intesa definita nel suo intervallo massimale di esistenza(
ω−(x0), ω+(x0))
.Nel caso in cui f(x) = Ax, con A matrice n× n a elementi reali, si ottiene
un flusso lineare, dato da:ϕ(t, x) = etAx.
Usualmente ci si riferisce con il termine di flusso anche alla funzione etA.
Osservazione 5.1.1 Nozioni come quella di stabilita, che esporremo fra poco,coinvolgono soltanto il flusso ϕ sopra definito e possono essere utilmente estesead ogni situazione in cui sia data una funzione ϕ soddisfacente le proprieta dellaProposizione 2.6.2, indipendentemente dal fatto che questa sia definita a partireda un’equazione differenziale. Da qui lo studio generale dei sistemi dinamici.
119

120 Capitolo 5. Comportamento asintotico. Stabilita
Sia x ∈ Ω un punto di equilibrio del flusso ϕ, cioe un punto per il qualef(x) = 0 (od anche, in termini del flusso, ϕ(·, x) = x). Nella definizione seguenteprendiamo in considerazione il comportamento delle soluzioni per tempi t ≥ 0.
Definizione 5.1.2 Nella ipotesi precedenti:
a) il punto x e detto punto di equilibrio stabile (secondo Liapunov) se perogni intorno U di x esiste un intorno V di x per il quale, comunque presox ∈ V ∩ Ω, si ha
ω+(x) = +∞, e ϕ(t, x) ∈ U per ogni t ≥ 0.
b) il punto x e detto attrattivo se esiste un intorno V di x tale che, per ognix ∈ V ∩ Ω
ω+(x) = +∞, e limt→+∞
ϕ(t, x) = x.
c) Il punto x e detto asintoticamente stabile se e stabile e attrattivo.
Il punto x si dice instabile se non e stabile.
Osservazione 5.1.3 La richiesta ω+(x) = +∞ puo essere omessa in quanto,considerando un intorno U ⊂⊂ Ω, la condizione che ϕ(t, x) ∈ U per ogni t ∈[0, ω+(x)) assicura che ω+(x) = +∞.
5.2 Comportamento asintotico dei sistemi
lineari
Consideriamo un sistema lineare omogeneo a coefficienti costanti: x′ = Ax.L’origine e chiaramente un punto di equilibrio.
Introduciamo le seguenti definizioni1:
Definizione 5.2.1 Diremo che l’origine e un pozzo per l’equazione x′ = Axse comunque presa una soluzione x(·) risulta;
limt→+∞
x(t) = 0.
L’origine e invece detta sorgente se comunque presa una soluzione non nullax(·) risulta;
limt→+∞
|x(t)| = +∞.
Nel primo caso si dice anche che il corrispondente flusso lineare etA e unacontrazione, mentre nel secondo caso si dice che e un’espansione.
La natura dell’origine come punto di equilibrio dipende dal segno della partereale degli autovalori di A:
Teorema 5.2.2 L’origine e un pozzo (o una sorgente) per l’equazione x′ = Axse e solo se la parte reale di ogni autovalore della matrice A e negativa (o,rispettivamente, positiva).
1il termine pozzo viene usualmente reso con sink in inglese

5.2. Comportamento asintotico dei sistemi lineari 121
Dimostrazione. Supponiamo che ℜλ < 0 per ogni autovalore λ. Se x =(x1, . . . , xn) e una soluzione, sappiamo che ogni xi e combinazione lineare difunzioni della forma
(5.2) tjeαt cosβt, tjeαt sinβt,
al variare di α+ iβ fra gli autovalori di A. Allora x(t) → 0 per t→ +∞ se ogniα e negativo.
Invece, nell’ipotesi che ℜλ > 0 per ogni autovalore λ, si osservi che la matrice−A ha tutti gli autovalori con parte reale negativa, per cui
limt→+∞
|e−tAξ| = 0 per ogni ξ ∈ Rn.
L’arbitrarieta di ξ implica che ‖e−tA‖ → 0 per t → +∞ (infatti, se ξ e l’i-imoelemento della base canonica si ottiene l’annullarsi, al limite, della i-ima colonnadella matrice etA). Sia ora x(·) una soluzione non nulla di x′ = Ax; esiste allorax0 ∈ R
n \ 0 tale che x(t) = etAx0. Quindi:
|x0| = |e−tAx(t)| ≤ ‖e−tA‖|x(t)|.
Poiche ‖e−tA‖ → 0 per t→ +∞ e x0 6= 0, deve essere |x(t)| → +∞ per t→ +∞.Per il viceversa, sia v un autovettore di A relativo ad un autovalore λ =
α+ iβ. Allora x(t) = eλtv e soluzione di x′ = Ax (in C). Poiche
|x(t)| = eαt|v|,
le soluzioni tendono a zero o all’infinito (in modulo) secondo che sia ℜλ < 0 oℜλ > 0, rispettivamente.
Il passo successivo e analizzare i cosiddetti flussi iperbolici.
Definizione 5.2.3 Diciamo che il flusso etA e iperbolico se ogni autovalore diA ha parte reale non nulla.
Indichiamo con λ1, . . . , λq ∈ C gli autovalori distinti di A. Sappiamo che(vedi Teorema 4.8.12):
Cn = E′(λ1) ⊕ . . .⊕ E′(λq).
Se etA e iperbolico, suddividiamo gli autovalori distinguendoli rispetto al segnodella parte reale:
ℜλk < 0 k = 1, . . . , rℜλk > 0 k = r + 1, . . . , q
(intenderemo che ℜλ > 0 per ogni λ se r = 0 e che ℜλ < 0 per ogni λ se r = q).Quindi
Cn = EC
s ⊕ EC
u ,
dove
EC
s = E′(λ1) ⊕ . . .⊕ E′(λr), EC
u = E′(λr+1) ⊕ . . .⊕ E′(λq).

122 Capitolo 5. Comportamento asintotico. Stabilita
Poiche la matrice A e a elementi reali, esiste una base reale di E′(µ)⊕E′(µ),per ogni autovalore µ ∈ C \ R; possiamo quindi decomporre Rn nella somma2
Rn = Es ⊕ Eu , con Es = EC
s ∩ Rn e Eu = EC
u ∩ Rn.
Sappiamo che entrambi i sottospazi sono invarianti rispetto all’operatoreT : x 7→ Ax (vedi Proposizione 4.8.11) e quindi anche rispetto al flusso etA
(basti ricordare la definizione di matrice esponenziale). Inoltre gli autovalori diT∣
∣
∣
Es
sono λ1, . . . , λr e quelli di T∣
∣
∣
Eu
sono λr+1, . . . , λq. Pertanto:
Proposizione 5.2.4 Lo spazio Rn puo essere decomposto nella forma:
Rn = Es ⊕ Eu
in modo che:
• ciascuno dei due sottospazi sia invariante rispetto ad A e quindi rispettoal flusso etA;
• etA∣
∣
∣
Es
e una contrazione, mentre etA∣
∣
∣
Eu
e un’espansione.
Si puo dimostrare che questa decomposizione e unica. I sottospazi Es ed Eu
sono anche detti varieta stabile e varieta instabile, rispettivamente.3
Notiamo che il cambiamento di variabile x = Py applicato nel § 4.4 perstudiare la struttura delle soluzioni di un sistema lineare omogeneo e autonomoutilizzava una matrice P costruita mediante autovettori generalizzati. Sia Es ⊕Eu la decomposizione di Rn relativa al sistema y′ = Ay, con A = P−1AP :poiche A e diagonale a blocchi e ogni blocco presenta un solo autovalore, Es eEu sono sottospazi coordinati. I sottospazi Es := PEs e Eu := PEu danno laparte stabile e instabile di Rn relativamente al sistema x′ = Ax.
Esempi
1. x′ = Ax con A =
(
1 42 −1
)
.
Gli autovalori sono ±3 e
Es = E(−3) = 〈(2, 1)〉, Eu = E(3) = 〈(1,−1)〉.
Se P =
(
2 11 −1
)
allora nelle coordinate y date da x = Py il sistema si scrive
equivalentemente in forma diagonale;
y′1 = 3y1y′2 = −3y2.
Le traiettorie sono iperboli (vedi Figura 5.1).
2. x′ = Ax con A =
3 2 −63 −1 −42 2 −5
.
2si noti che le combinazioni lineari reali degli elementi di una base reale di E′(µ) ⊕ E′(µ)e un sottospazio di Rn di dimensione 2dim E′(µ).
3Gli indici s e u stanno per stable e unstable.
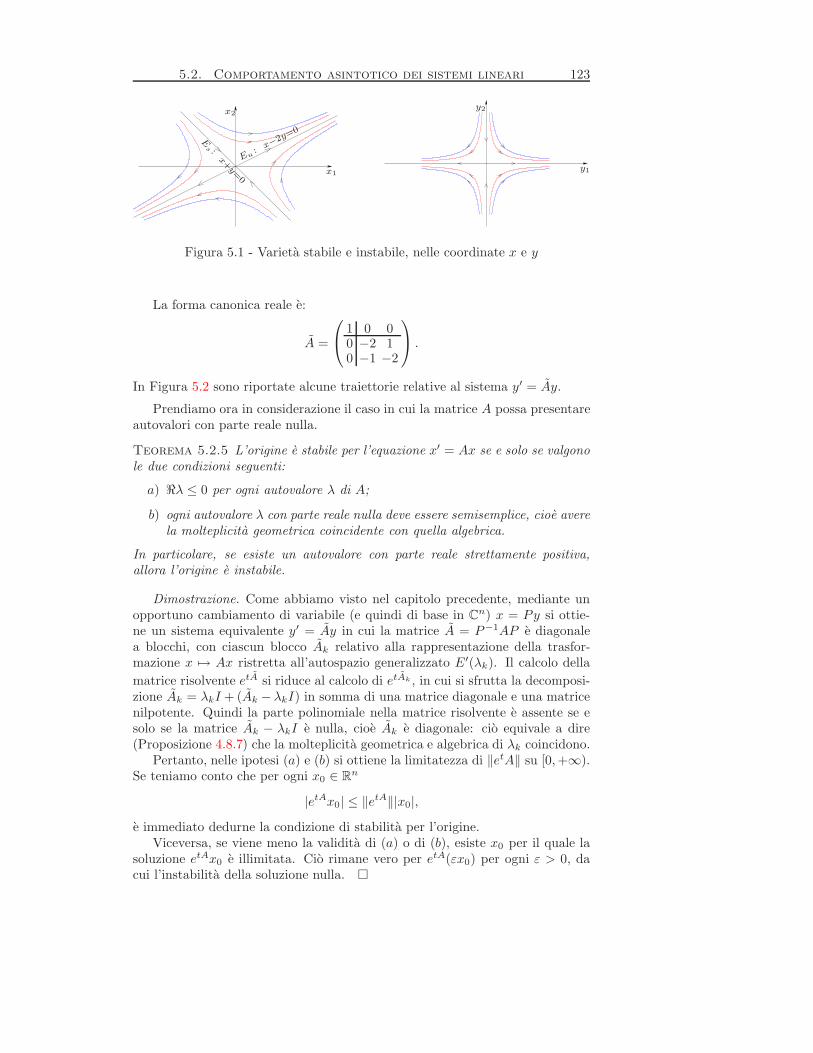
5.2. Comportamento asintotico dei sistemi lineari 123
x1
x2
Eu:
x−2y
=0E
s :x+
y=0
y1
y2
Figura 5.1 - Varieta stabile e instabile, nelle coordinate x e y
La forma canonica reale e:
A =
1 0 00 −2 10 −1 −2
.
In Figura 5.2 sono riportate alcune traiettorie relative al sistema y′ = Ay.
Prendiamo ora in considerazione il caso in cui la matrice A possa presentareautovalori con parte reale nulla.
Teorema 5.2.5 L’origine e stabile per l’equazione x′ = Ax se e solo se valgonole due condizioni seguenti:
a) ℜλ ≤ 0 per ogni autovalore λ di A;
b) ogni autovalore λ con parte reale nulla deve essere semisemplice, cioe averela molteplicita geometrica coincidente con quella algebrica.
In particolare, se esiste un autovalore con parte reale strettamente positiva,allora l’origine e instabile.
Dimostrazione. Come abbiamo visto nel capitolo precedente, mediante unopportuno cambiamento di variabile (e quindi di base in C
n) x = Py si ottie-ne un sistema equivalente y′ = Ay in cui la matrice A = P−1AP e diagonalea blocchi, con ciascun blocco Ak relativo alla rappresentazione della trasfor-mazione x 7→ Ax ristretta all’autospazio generalizzato E′(λk). Il calcolo della
matrice risolvente etA si riduce al calcolo di etAk , in cui si sfrutta la decomposi-zione Ak = λkI + (Ak − λkI) in somma di una matrice diagonale e una matricenilpotente. Quindi la parte polinomiale nella matrice risolvente e assente se esolo se la matrice Ak − λkI e nulla, cioe Ak e diagonale: cio equivale a dire(Proposizione 4.8.7) che la molteplicita geometrica e algebrica di λk coincidono.
Pertanto, nelle ipotesi (a) e (b) si ottiene la limitatezza di ‖etA‖ su [0,+∞).Se teniamo conto che per ogni x0 ∈ Rn
|etAx0| ≤ ‖etA‖|x0|,
e immediato dedurne la condizione di stabilita per l’origine.Viceversa, se viene meno la validita di (a) o di (b), esiste x0 per il quale la
soluzione etAx0 e illimitata. Cio rimane vero per etA(εx0) per ogni ε > 0, dacui l’instabilita della soluzione nulla.
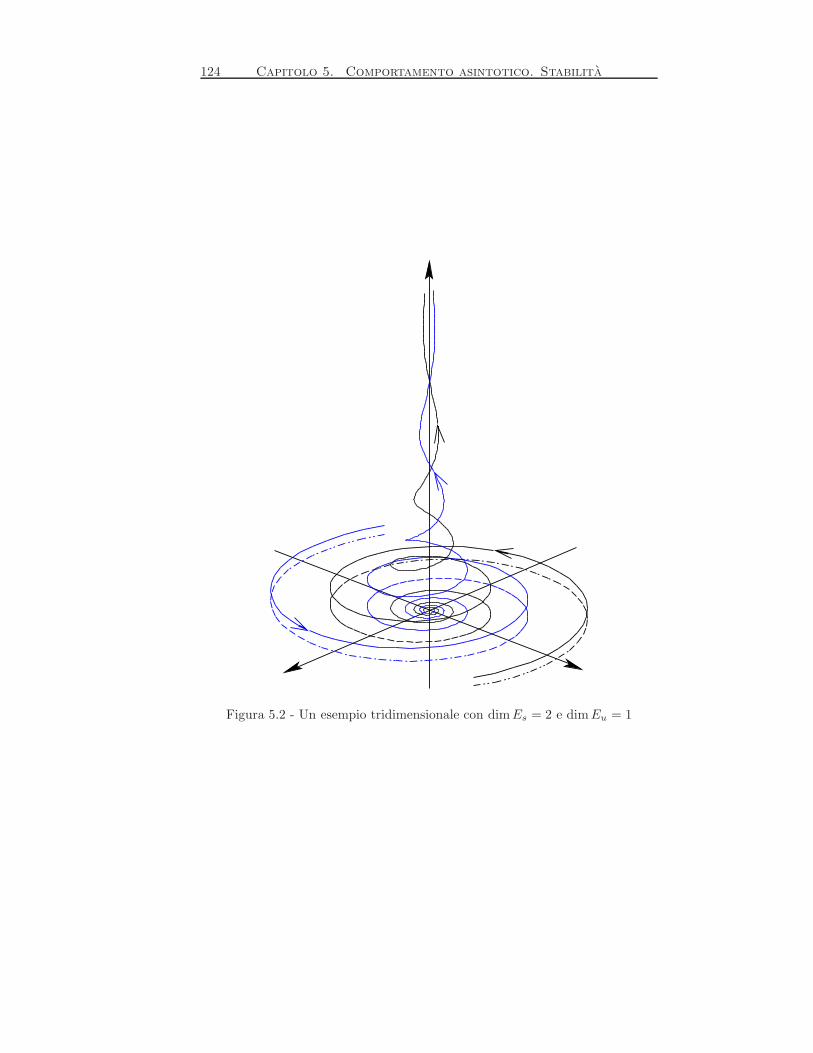
124 Capitolo 5. Comportamento asintotico. Stabilita
Figura 5.2 - Un esempio tridimensionale con dimEs = 2 e dimEu = 1

5.3. Stabilita linearizzata 125
5.3 Stabilita linearizzata
Cerchiamo ora di applicare quanto visto nel caso lineare allo studio locale dellesoluzioni di un’equazione non lineare
(5.3) x′ = f(x)
nell’intorno di un suo punto x di equilibrio. Sia pertanto Ω un aperto di Rn
e f : Ω → Rn di classe C1 e supponiamo che x = 0 (se cosı non fosse bastaeseguire un’opportuna traslazione). A motivo della natura locale dell’indagine,consideriamo la linearizzazione del campo f attorno all’origine:
f(x) = Ax+ o(|x|) per x→ 0, con A = Df(0).
Mostriamo che se tutti gli autovalori di A hanno parte reale negativa o tuttihanno parte reale positiva, allora il comportamento asintotico delle soluzioniattorno all’origine e come quello del sistema x′ = Ax. A tal fine e utile unastima che ‘quantifichi’ l’andamento lineare del termine Ax, o, come nel lemmache segue, l’andamento quadratico del termine 〈Ax, x〉.
Data una base B di Rn, utilizzeremo la notazione 〈·, ·〉B e | · |B per indicareil prodotto scalare e la norma indotte da B, quindi
〈x′, x′′〉B = 〈y′, y′′〉, |x|B = |y|
se y, y′ e y′′ indicano le componenti di x, x′ e x′′ in B e 〈·, ·〉 e |·| l’usuale prodottoscalare e modulo in Rn. Indichiamo con P = (pij) la matrice di passaggio dallabase canonica a B (quindi, secondo la (4.48), se v1, . . . , vn sono gli elementi diB, risulta vj =
∑
i pijei). Allora:
〈x′, x′′〉B = 〈P−1x′, P−1x′′〉, |x|B = |P−1x|.
Lemma 5.3.1 Siano α, β ∈ R tali che
α < ℜλ < β
per ogni autovalore λ di A. Allora esiste una base B di Rn rispetto alla quale
α|x|2B ≤ 〈Ax, x〉B ≤ β|x|2B
per ogni x ∈ Rn.
La dimostrazione si basa sull’osservazione che, data una base B e il corri-spondente prodotto scalare definito come sopra, risulta:
〈Ax, x〉B = 〈P−1Ax, P−1x〉 = 〈P−1APy, y〉 = 〈Ay, y〉,
dove A = P−1AP rappresenta x 7→ Ax nella base B; quest’ultima viene sceltain modo che A abbia un’opportuna forma canonica.

126 Capitolo 5. Comportamento asintotico. Stabilita
Dimostrazione. Sappiamo che esiste una base B di Rn rispetto a cui l’opera-
tore T : x→ Ax si rappresenta in forma canonica reale, cioe in forma diagonalea blocchi, con blocchi di una delle forme
a)
λ 1 0. . .
λ 1λ
(λ ∈ R); b)
D I 0. . .
D ID
,
con D =(
ℜλ ℑλ−ℑλ ℜλ
)
, nel caso di autovalore complesso. Ciascuno di questi bloc-chi rappresenta T ristretto a un opportuno sottospazio; possiamo cosı trattareseparatamente ciascuno di questi sottospazi e supporre pertanto che la formacanonica A presenti un unico blocco, del tipo (a) o (b) sopra specificato.
Consideriamo il caso (a). Sia B = (ej) una base in cui T si rappresenti
mediante la matrice A = λI + AN , con AN blocco nilpotente elementare. Datoε > 0 poniamo
vj = εj ej .
La matrice P di passaggio dalla base B a B e
P = diag (ε, ε2, . . . , εn);
e l’operatore T , nella base B, e rappresentato da
P−1AP = λI + P−1ANP.
Calcoliamo gli elementi della matrice N = P−1ANP :
(P−1ANP )ij = (P−1)ih(AN )hkPkj = (P−1)ii(AN )ijPjj
=
0 se j 6= i+ 1ε−iεj = ε se j = i+ 1.
Quindi:
N =
0 ε 0. . .
0 ε0
(λ ∈ R);
Da cio deduciamo che per ogni y ∈ Rn,
|〈Ny, y〉| ≤ ε|y|2.
Dato x ∈ Rn e indicato con y il vettore delle sue componenti in B, poiche inquesta base T e rappresentato da λI +N , risulta:
〈Ax, x〉B = 〈(λI +N)y, y〉 = λ|y|2 + 〈Ny, y〉;
possiamo concludere in base alla stima precedente e all’arbitrarieta di ε.Il caso (b) si tratta analogamente.

5.3. Stabilita linearizzata 127
Teorema 5.3.2 (Stabilita per linearizzazione) Se ogni autovalore di Df(0)ha parte reale strettamente negativa, allora l’origine e punto di equilibrio asin-toticamente stabile per l’equazione (5.3).
Piu precisamente, se Λ > 0 e tale che
ℜλ < −Λ per ogni autovalore λ di Df(0),
allora esiste un intorno U dell’origine ed una base B di Rn tali che, comunquepreso x ∈ U la funzione ϕ(·, x) e definita per ogni t ≥ 0 e
|ϕ(t, x)|B
≤ |x|Be−Λt
per ogni t ≥ 0.
Dimostrazione. Applichiamo il lemma precedente alla linearizzazione di fattorno all’origine.
Sia β ∈ R tale che
ℜλ < β < −Λ per ogni autovalore λ di A := Df(0).
Sia B la base di Rn fornita dal lemma precedente.
Dato x0 ∈ Ω \ 0 sia x(·) = ϕ(·, x0). Per ogni t dell’intervallo di definizionedi x(·) abbiamo
d
dt|x(t)|2B = 2〈x(t), x′(t)〉B = 2〈f(x(t)), x(t)〉B = 2〈Ax(t), x(t)〉B + o(|x(t)|2B).
Sia δ > 0 tale che:
U := x ∈ Rn : |x|B < δ ⊂⊂ Ω,
β|x|2B + o(|x|2B) ≤ −Λ|x|2B per ogni x ∈ U .
Sia x0 ∈ U e t ∈ [0, ω+(x0)) tale che x(t) ∈ U per ogni t ∈ [0, t]. Allora,applicando il lemma precedente e tenendo conto della scelta di δ, abbiamo:
d
dt|x(t)|2
B≤ −2Λ|x|2
Bper ogni t ∈ [0, t].
Ne deduciamo che:
|x(t)|2B
≤ |x0|2Be−2Λt per ogni t ∈ [0, t].
e quindi |x(t)|B ≤ |x0|Be−Λt per ogni t ∈ [0, t]. Pertanto la soluzione x(·) nonesce da U e pertanto ω+(x0) = +∞ e la disuguaglianza precedente vale per ognit ≥ 0.
Come nel caso lineare la presenza di un autovalore con parte reale positivaimplica l’instabilita (omettiamo la dimostrazione):
Teorema 5.3.3 Se Df(0) ha un autovalore con parte reale strettamente posi-tiva, allora l’origine e un punto di equilibrio instabile.

128 Capitolo 5. Comportamento asintotico. Stabilita
Esempio. (Pendolo smorzato) Ricordiamo l’equazione del pendolo semplicesenza attrito (§ 1.4):
mlϑ = −mg sinϑ;
consideriamo il caso in cui sia presente una forza di attrito proporzionale allavelocita lϑ:
mlϑ = −mg sinϑ− klϑ, (k > 0),
o anche:
ϑ+ ω2 sinϑ+ 2aϑ = 0.
con ω2 = g/l e 2a = k/m. Scritta come sistema di equazioni questa diventa:
ϑ = vv = −ω2 sinϑ− 2av.
I punti di equilibrio sono dati da (kπ, 0) al variare di k ∈ Z. Posto f(ϑ, v) =(
v,−ω2 sinϑ− 2av)
, risulta:
Df(kπ, 0) =
(
0 1−ω2 cos kπ −2a
)
.
Gli autovalori sono:
λ1,2 = −a±√
a2 − ω2 cos kπ =
−a±√a2 − ω2 se k e pari,
−a±√a2 + ω2 se k e dispari.
Pertanto:
se k e pari ℜλ1,2 < 0 e i punti (kπ, 0) risultano asintoticamente stabili:
ricordando che v e la velocita angolare ϑ, si tratta delle configurazionicorrispondenti al punto di minima quota e velocita nulla.
se k e dispari vi e un autovalore negativo e uno positivo: i punti (kπ, 0)sono instabili.
Le Figure 5.3 e 5.4 delineano il diagramma di fase nei due casi in cui ilcoefficiente di attrito a sia sopra o sotto il valore critico ω.
Esempio. L’esempio precedente, per a = 0, da il pendolo privo di attrito. Lalinearizzazione attorno ai punti (kπ, 0) con k dispari presenta i due autovalori±ω: pertanto si tratta ancora di punti di equilibrio instabile (Figura 3.7).
I diagrammi di fase attorno ai punti ((2k+ 1)π, 0) nel caso del pendolo sen-za attrito (vedi Figura 3.7), o quelli attorno ai punti (2kπ, 0) per il pendolocon attrito (vedi Figure 5.3 e 5.4) hanno la stessa struttura dei corrispondentidiagrammi di fase relativi ai problemi linearizzati: nel primo caso il problemalineare presenta un punto di sella, nel secondo caso un fuoco o un nodo sta-bili a seconda che si tratti della situazione sottocritica o sovracritica. Questaequivalenza topologica locale e resa precisa dal seguente teorema.
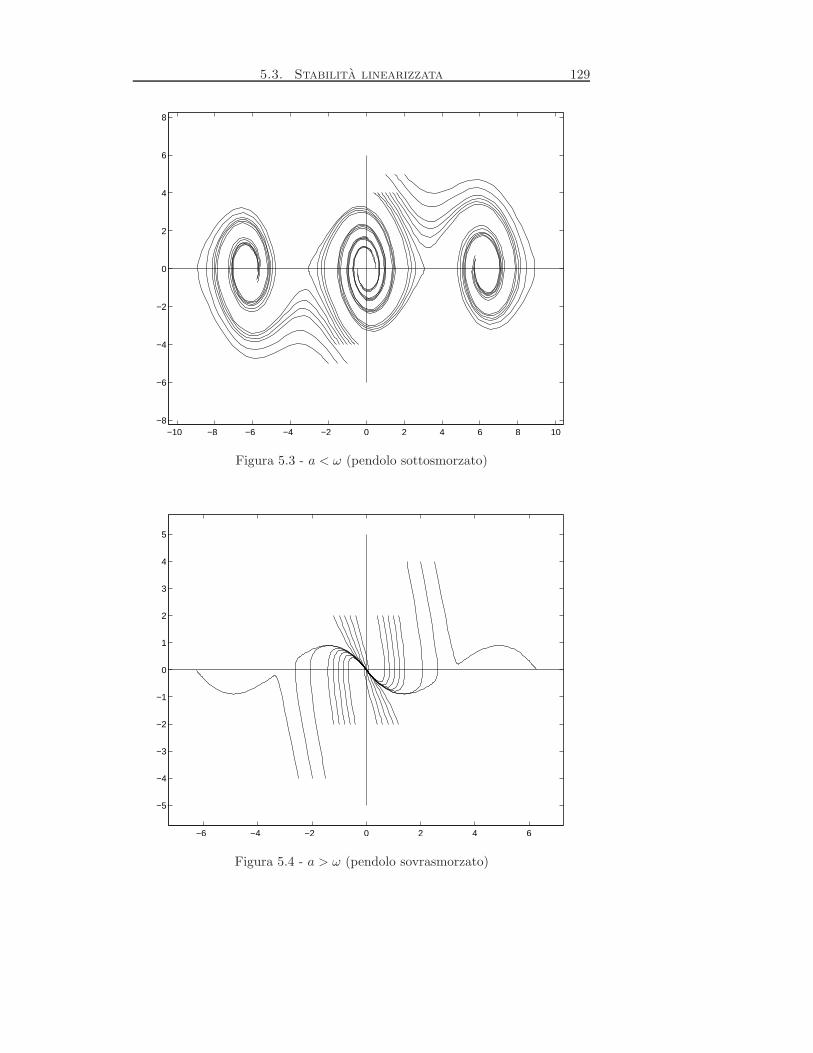
5.3. Stabilita linearizzata 129
−10 −8 −6 −4 −2 0 2 4 6 8 10−8
−6
−4
−2
0
2
4
6
8
Figura 5.3 - a < ω (pendolo sottosmorzato)
−6 −4 −2 0 2 4 6
−5
−4
−3
−2
−1
0
1
2
3
4
5
Figura 5.4 - a > ω (pendolo sovrasmorzato)

130 Capitolo 5. Comportamento asintotico. Stabilita
Teorema 5.3.4 (Grobman-Hartman) Se 0 e un punto di equilibrio per ilsistema (5.3) e nessuno degli autovalori della matrice Df(0) ha parte reale nulla,allora il flusso relativo al sistema (5.3) e il flusso relativo al sistema linearizzatox′ = Df(0)x sono localmente isocronalmente equivalenti, cioe esistono U e Vintorni dell’origine e un omemomorfismo h : U → V tali che
h(ϕ(t, x)) = etDf(0)h(x) per ogni x ∈ U .
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼
In presenza di autovalori di cui si sappia soltanto la non positivita o la nonnegativita della parte reale, nulla possiamo concludere sulla stabilita dell’originecome punto di equilibrio sfruttando solamente lo studio del sistema linearizzato.Consideriamo, ad esempio,
(5.4)
x′ = −y + x3
y′ = x+ y3.
L’unico punto di equilibrio e l’origine, ma la linearizzazione nell’origine e datadalla matrice
(
0 −11 0
)
.
Quindi l’origine e un centro per l’equazione linearizzata; mostriamo che invecee instabile per l’equazione data. Sia
(
x(·), y(·))
= ϕ(·, (x0, y0)) una soluzione;posto
(t) =√
x(t)2 + y(t)2,
risulta:
d
dt2(t) = 2[xx′ + yy′] = 2[x(−y + x3) + y(x+ y3)] = 2(x4 + y4);
poiche x4 + y4 ≥ 12
4, otteniamo
d
dt2(t) ≥
(
2)2,
da cui 2(t) → +∞ in tempo finito.
Se invece nella (5.4) i termini x3 e y3 vengono rimpiazzati da −x3 e −y3,rispettivamente, allora l’equazione linearizzata non cambia, ma nelle stessenotazioni precedenti:
d
dt2(t) = −2(x4 + y4),
da cui si ricava la decrescenza di e quindi l’esistenza globale della soluzione(
x(·), y(·))
e la sua convergenza a zero per t→ +∞: l’origine e asintoticamentestabile.
Nel caso del pendolo senza attrito trattato poco sopra, i punti di equilibrio(kπ, 0) con k pari danno un problema linearizzato con autovalori con parte realenulla: vedremo nel prossimo paragrafo un modo per dimostrare la stabilita ditali punti.

5.4. Funzioni di Liapunov 131
5.4 Funzioni di Liapunov
Il metodo delle funzioni di Liapunov puo essere visto come una generalizzazionedel fatto fisico che i punti di equilibrio stabile corrispondono a punti di minimodell’energia.
Consideriamo l’equazione (5.1), con f di classe C1.Se V : U → R e una funzione differenziabile (U ⊆ Ω aperto), per ogni x ∈ U
definiamo la derivata orbitale di V in x:
V (x) =d
dtV(
ϕ(t, x))∣
∣
∣
t=0
,
dove ϕ indica il flusso associato all’equazione (5.1). Osserviamo che
(5.5) V (x) = ∇V (x) · f(x),
quindi V puo essere calcolata senza conoscere ϕ, cioe senza risolvere l’equazionedifferenziale.
Notiamo anche che, fissato x ∈ U e t0 ∈(
ω−(x), ω+(x))
, abbiamo:
d
dtV(
ϕ(t, x))∣
∣
∣
t=t0
= ∇V(
ϕ(t0, x))
· ϕ′(t0, x)
= ∇V(
ϕ(t0, x))
· f(
ϕ(t0, x))
= V(
ϕ(t0, x))
.
Quindi in ogni punto ϕ(t, x) il valore V(
ϕ(t, x))
rappresenta la derivata di V nel
punto ϕ(t, x) lungo la soluzione ϕ(·, x). Ad esempio, se V ≤ 0 allora V decrescelungo ogni soluzione.
Teorema 5.4.1 Sia x un punto di equilibrio per l’equazione (5.1). Sia V : U →R una funzione continua definita in un intorno U ⊆ Ω di x, differenziabile inU \ x e tale che:
a) V (x) = 0, V (x) > 0 se x 6= x;
b) V ≤ 0 in U \ x.
Allora il punto x e stabile. Se inoltre
c) V < 0 in U \ x,
allora il punto x e asintoticamente stabile.
Una funzione V soddisfacente (a) e (b) e detta funzione di Liapunov per x;se vale anche la proprieta (c) si parla di funzione di Liapunov stretta.
Dimostrazione. Sia δ > 0 tale che Bδ(x) ⊆ U e
α = minV (x) : x ∈ ∂Bδ(x) > 0.
SiaU1 = x ∈ Bδ(x) : V (x) < α.
Per ogni x ∈ U1 si ha
d
dtV(
ϕ(t, x))
= V(
ϕ(t, x))
≤ 0,

132 Capitolo 5. Comportamento asintotico. Stabilita
finche ϕ(t, x) ∈ U ; quindi V(
ϕ(·, x))
e non crescente, per cui:
ϕ(t, x) ∈ Bδ(x) per ogni t ∈(
ω−(x), ω+(x))
.
Ne segue che x e stabile. Notiamo che, in particolare, ω+(x) = +∞ (si ricordil’Osservazione 5.1.3).
Supponiamo che valga anche la proprieta (c). Fissiamo x ∈ U1 e sia (tn)n
una successione tendente a +∞. Poiche(
ϕ(tn, x))
ne limitata ammette una
sottosuccessione convergente (che per semplicita denotiamo sempre allo stessomodo):
ϕ(tn, x) → z.
Dimostriamo che z = x. Poiche V e strettamente decrescente lungo ϕ(·, x),risulta:
(5.6) V(
ϕ(t, x))
> V (z) per ogni t ≥ 0
(infatti V(
ϕ(tn, x))
> V (z) e per ogni t > 0 esiste n tale che tn < t). Suppo-niamo che z 6= x. Allora
V (z) > V(
ϕ(s, z))
per ogni s ≥ 0.
Fissiamo S > 0; per la dipendenza continua dai dati iniziali, per ogni ε > 0 epossibile determinare nε ∈ N tale che
|ϕ(
S, ϕ(tnε , x))
− ϕ(S, z)| < ε.
Poiche V(
ϕ(S, z))
< V (z) e V e continua (nel punto ϕ(S, z), per ε sufficiente-mente piccolo risulta:
V(
ϕ(
S, ϕ(tnε , x)))
< V (z).
Osserviamo ora che:
ϕ(
S, ϕ(tnε , x))
= ϕ(tnε + S, x),
per cuiV(
ϕ(tnε + S, x))
< V (z);
cio e assurdo per (5.6).Per l’arbitrarieta della successione (tn) concludiamo che ϕ(t, x) → x per
t→ +∞.
Esempio. Consideriamo l’equazione del moto di un punto materiale di massam in un campo di forze conservativo di potenziale −φ(x):
mx = −∇φ(x).
Equivalentemente possiamo scrivere:
(5.7)
x = v
v = − 1
m∇φ(x).
Se x e punto di minimo per φ allora (x, 0) e punto di equilibrio per il sistema(5.7). Poniamo:
V (x, v) =1
2m|v|2 + φ(x) − φ(x)
(si tratta dell’energia totale del sistema). Allora:

5.4. Funzioni di Liapunov 133
− V (x, v) = 0, come subito si verifica utilizzando la (5.5);
− se x e punto di minimo stretto allora (x, 0) e di equilibrio, V (x, 0) = 0 e
V (x, v) > 0 se (x, v) 6= (x, 0) e in un intorno di (x, 0).
Pertanto la funzione V e di Liapunov per (x, 0), che quindi e stabile.
Sistemi hamiltoniani. L’esempio precedente rientra nell’importante categoriadei sistemi hamiltoniani. Si tratta si sistemi di equazioni differenziali della forma
(5.8)
q = Hp(q, p)p = −Hq(q, p),
dove H(p, q) e una funzione differenziabile in 2n variabili (p ∈ Rn, q ∈ R
n).Come subito si verifica, H e un integrale primo del sistema (5.8), cioe e costantelungo le soluzioni; infatti:
d
dtH(
q(t), p(t))
= Hq
(
q(t), p(t))
q(t) +Hp
(
q(t), p(t))
p(t) ≡ 0.
Cio significa che la derivata orbitale di H e nulla.Sia ora (q, p) un punto di minimo stretto per H ; allora (q, p) e critico, quindi
e un punto di equilibrio per il sistema (5.8); inoltre
V (q, p) := H(q, p) −H(q, p)
e una funzione di Liapunov per (q, p). Concludiamo che (q, p) e di equilibriostabile. Notiamo che l’essere H costante lungo le soluzioni esclude l’asintoticastabilita.
Il caso precedente si ottiene per
H(x, v) =1
2|v|2 +
1
mφ(x)
(la funzione V dell’esempio precedente e mH).
Esempio. Lo studio del moto di un pendolo di lunghezza l senza attrito conduceall’equazione:
ϑ+ ω2 sinϑ = 0 (ω2 =g
l),
cioe al sistema del primo ordine:
ϑ = vv = −ω2 sinϑ
(si veda il § 3.7 per lo studio delle orbite, in particolare la Figura 3.7). Lafunzione
H(ϑ, v) =1
2|v|2 − ω2 cosϑ
e una funzione di Liapunov per i punti di equilibrio (kπ, 0), con k intero pari:pertanto si tratta di punti di equilibrio stabile. Come gia sopra notato, non epossibile applicare il metodo di linearizzazione in quanto gli autovalori hannoparte reale nulla.

134 Capitolo 5. Comportamento asintotico. Stabilita
Sistemi gradiente. Si tratta di sistemi della forma
(5.9) x′ = −∇V (x)
con V ∈ C2(Ω); quindi il campo di velocita e un campo gradiente. Sia x unpunto di minimo stretto per V ; per semplicita supponiamo che V (x) = 0. Allora
V > 0 in un intorno di x.
InoltreV (x) = −|∇V (x)|2 ≤ 0.
Quindi V e una funzione di Liapunov per x, che pertanto e di equilibrio stabile.Se in piu x e anche isolato come punto critico, allora V e una funzione diLiapunov stretta e x e asintoticamente stabile.
Osservazione 5.4.2 Nello studio della stabilita degli equilibri per sistemi bidi-mensionali e utile tenere presente i metodi del § 3.7 per la determinazione delletraiettorie.
∼ · ∼ · ∼ · ∼ · ∼ · ∼ · ∼Concludiamo con un risultato di asintotica stabilita che da una stima del
cosiddetto bacino di attrazione di un punto di equilibrio asintoticamente stabilex, cioe l’insieme dei punti x per i quali ϕ(t, x) → x per t→ +∞. E convenientepremettere alcuni concetti (che si inquadrerebbero in modo naturale nel piuvasto quadro dei sistemi dinamici).
Definizione 5.4.3 Sia ϕ il flusso associato all’equazione (5.1). Sia x ∈ Ω.Poniamo:
γ+(x) = ϕ(t, x) : t ∈ [0, ω+(x)) semiorbita positiva di xγ−(x) = ϕ(t, x) : t ∈ (ω−(x), 0] semiorbita negativa di xγ(x) = ϕ(t, x) : t ∈ (ω−(x), ω+(x) orbita di x.
Se ω+(x) = +∞, si dice ω-limite di x l’insieme
ω(x) =⋂
t>0
γ+(
ϕ(t, x))
=⋂
t>0
ϕ(s, x) : s ≥ t.
In modo analogo si definisce l’α-limite di x.
Diremo poi che un insieme e positivamente [negativamente] invariante secontiene la semiorbita positiva [negativa] di ogni suo punto. Si parla invecedi insieme invariante se e sia positivamente che negativamente invariante, cioecontiene l’orbita di ogni suo punto.
Enunciamo senza dimostrazione la seguente proprieta:
Proposizione 5.4.4 L’insieme ω(x) e invariante, cioe contiene l’orbita di ognisuo punto.
Utilizzando questo risultato e facile dimostrare:
Teorema 5.4.5 Sia x ∈ Ω un punto di equilibrio per l’equazione (5.1) e siaV : U → R una funzione di Liapunov per x. Sia A un intorno chiuso e limitatodi x che sia positivamente invariante e tale che su nessuna orbita in A \ x lafunzione V sia costante. Allora x e asintoticamente stabile e A e contenuto nelbacino d’attrazione di x.

5.4. Funzioni di Liapunov 135
Dimostrazione. Sia x ∈ A; poiche A e positivamente invariante e chiuso
ω(x) ⊆ γ+(x) ⊆ A.
Poiche V decresce lungo le orbite,
V(
ϕ(t, x))
→ α := infV(
ϕ(τ, x))
: τ ≥ 0.
I punti di ω(x) sono limite di successioni(
ϕ(tk, x))
k(con tk → +∞) e V e
continua; quindi V = α su ω(x). Per ipotesi ω(x), in quanto sottoinsieme di A,non contiene orbite su cui V e costante, se non l’orbita x. Deve allora essereω(x) = x, da cui si deduce che ϕ(t, x) → x per t→ +∞.

Capitolo 6
Equazioni della Fisica
Matematica: problemi ai
limiti e funzioni speciali
La modellizzazione dei fenomeni fisici mediante equazioni differenziali da luogosovente a equazioni del secondo ordine: si pensi, ad esempio, ai problemi incen-trati sulla seconda legge della dinamica, nella quale il termine di accelerazione siesprime tramite le derivate seconde della funzione della posizione. Poiche la pri-ma fase di approssimazione nel tradurre matematicamente un fenomeno passa ingenere attraverso un’operazione di linearizzazione, le equazioni differenziali delsecondo ordine e lineari, sia ordinarie che a derivate parziali, svolgono un ruolorilevante in una molteplicita di modelli. Da essi scaturisce poi la maggior partedelle tipologie di problemi: ne sono esempio i problemi ai valori iniziali, come siincontrano nella determinazione della legge oraria di un moto nota la posizionee la velocita iniziale. Un’altra rilevante tipologia di problemi per un’equazionedel secondo ordine e quella in cui la prescrizione del valore iniziale dell’incognitae della sua derivata vengono sostituiti dall’assegnazione del valore dell’incognitaagli estremi di un fissato intervallo: si tratta dei cosiddetti problemi ai limi-ti, collegati all’importante questione della determinazione degli autovalori deglioperatori differenziali e della ricerca delle corrispondenti autofunzioni.
In questo capitolo accenniamo ad alcune di tali questioni connesse allo studiodi equazioni fondamentali della Fisica Matematica. Il § 6.1 presenta un esempiostandard di problema ai limiti come scaturisce dalla risoluzione dell’equazionedi Laplace su un rettangolo mediante separazione di variabili. I §§ 6.2 e 6.3 trat-tano l’equazione di Hermite e l’equazione di Bessel (di ordine 0), come esempidi equazioni differenziali lineari del secondo ordine a coefficienti variabili, intro-ducendo il metodo di risoluzione mediante sviluppi in serie di potenze. Infatti,ad eccezione di alcuni casi particolari, non e possibile esprimere le soluzionidelle equazioni a coefficienti variabili mediante combinazioni finite di funzionielementari. Soluzioni particolari (usualmente espresse come sviluppi in serie)di equazioni come quelle di Hermite o di Bessel danno luogo a funzioni specia-li della Fisica Matematica di ampio utilizzo nei problemi modellistici e quindidiffusamente studiate di per se.
Nei §§ 6.4 e 6.5 per ciascuna delle due equazioni introdotte illustriamo un
137

138 Capitolo 6. Equazioni della Fisica Matematica
problema in cui essa si presenta in modo naturale. I contesti scelti sono la mo-dellizzazione dell’oscillatore armonico quantistico (gia incontrato nel § 1.5) e deimodi normali di vibrazione di una membrana circolare elastica. Entrambi coin-volgono lo studio di problemi ai limiti e problemi agli autovalori per equazionilineari del secondo ordine.
6.1 Equazione di Laplace su di un rettangolo
Una delle equazioni a derivate parziali piu note e l’equazione di Laplace:
(6.1) ∆u(x, y) = 0(
∆ =∂2
∂x2+
∂2
∂y2
)
in un assegnato aperto Ω di R2. Ad esempio, il potenziale u in una regionepiana Ω, in assenza di carica elettrica interna, soddisfa l’equazione (6.1). Unproblema che si presenta in modo naturale per la (6.1) e il seguente
(6.2)
∆u = 0 in Ωu = u0 su ∂Ω
Si tratta della ricerca di quelle particolari soluzioni di (6.1) che assumono l’as-segnato valore u0 su ∂Ω: si pensi, ad esempio, all’interpretazione di u comepotenziale.
L’operatore ∆ e lineare (∆(αu+βv) = α∆u+β∆v), per cui l’insieme V dellesoluzioni di (6.1) e uno spazio vettoriale rispetto alle usuali operazioni di sommae prodotto per scalari. E possibile individuare una base di V ? Non affrontere-mo qui il problema nella sua generalita; individueremo invece alcune soluzioni‘elementari’ a partire dalle quale cercheremo di rappresentare la soluzione delproblema (6.2) per domini Ω rettangolari.
Sia pertanto Ω = (0, 1) × (0, 1) e riscriviamo il problema nella forma
(6.3)
∆u(x, y) = 0 in Ωu(x, 0) = u1
0(x), u(1, y) = u20(y)
u(x, 1) = u30(x) u(0, y) = u4
0(y)
con ui0 restrizione, al corrispondente lato di Ω, della funzione (continua) u0.
Poiche ∆ e lineare, possiamo risolvere separatamente ciascuno dei problemiottenuti ponendo uguali a zero i dati ui
0 su tre dei quattro lati e sommare infinele quattro funzioni cosı ottenute. Ad esempio, prendiamo in considerazione ilproblema
(6.4)
∆u(x, y) = 0 in Ωu(x, 0) = f(x),u(1, y) = u(x, 1) = u(0, y) = 0
con f = u10. Determiniamo innazitutto soluzioni della forma ‘a variabili separa-
te’u(x, y) = v(x)w(y)
dell’equazione ∆u = 0 soddisfacenti le prescritte condizioni di annullamento suitre lati. Deve essere
v′′(x)w(y) + v(x)w′′(y) = 0;

6.1. Equazione di Laplace su di un rettangolo 139
questa e implicata da:v′′(x)
v(x)= −w
′′(y)
w(y).
Poiche i due membri dipendono da variabili differenti, devono essere costanti,diciamo −λ; da cio e dalle condizioni di annullamento arriviamo ad imporre av e w di risolvere1
(6.5)
v′′(x) + λv(x) = 0v(0) = 0 = v(1)
(6.6)
w′′(y) − λw(y) = 0w(1) = 0
Il problema (6.5) e un problema ai limiti per l’equazione v′′ + λv = 0. Si-curamente ammette la soluzione nulla, ma per gli scopi che ci siamo prefissatidobbiamo vedere se e possibile determinare λ in modo che esistano soluzioninon identicamente nulle. Dobbiamo distinguere tre casi:
a) λ = −a2 < 0 (con a > 0)
In tal caso le soluzioni sono date da:
v(x) = c1eax + c2e
−ax (c1, c2 ∈ R).
La condizione di annullamento agli estremi di (0, 1) da c1 = c2 = 0, comesi vede facilmente.
b) λ = 0
Le soluzioni sono affini: v(x) = c1 + c2x; chiaramente solo la funzionenulla assume valore zero nei punti x = 0 e x = 1.
c) λ = a2 (con a > 0)
Le soluzioni hanno la forma
v(x) = c1 cos ax+ c2 sinax (c1, c2 ∈ R).
Se richiediamo che v si annulli negli estremi di (0, 1), allora c1 = 0e c2 sin a = 0. Otteniamo allora soluzioni diverse da quella nulla incorrispondenza dei valori a = ±nπ per n ∈ N.
Pertanto, esistono infiniti valori
λn = n2π2 (n ∈ N)
per i quali il problema (6.5) ha soluzioni non nulle, date, a meno di una costantemoltiplicativa, da
vn(x) = sinnπx.
I valori λn sono detti autovalori del problema (6.5), e le funzioni vn sono lecorrispondenti autofunzioni.
Poniamo ora λ = λn nella (6.6); otteniamo:
w(y) = c1enπy + c2e
−nπy
1Se v′′(x)+λv(x) = 0 e w′′(y)−λw(y) = 0 allora v′′(x)w(y)+λv(x)w(y) = 0 e v(x)w′′(y)−λv(x)w(y) = 0, per cui, sommando membro a membro, si ha v′′(x)w(y) + v(x)w′′(y) = 0.

140 Capitolo 6. Equazioni della Fisica Matematica
con la condizionec1e
nπ + c2e−nπ = 0,
da cui si ricava facilmente che w differisce per una costante moltiplicativa dallafunzione
wn = sinhnπ(1 − y).
Riassumendo, le funzioni
un(x, y) = vn(x)wn(y) = sinnπx sinhnπ(1 − y) (n ∈ N)
risolvono l’equazione ∆u = 0 e soddisfano le condizioni
u(1, y) = u(x, 1) = u(0, y) = 0.
Cerchiamo ora di soddisfare anche la condizione u(x, 0) = f(x) mediante unacombinazione lineare ‘infinita’ di funzioni un, cioe una serie
(6.7) u(x, y) =
∞∑
n=1
cn sinnπx sinhnπ(1 − y).
Deve essere (y = 0)
f(x) =
∞∑
n=1
bn sinnπx
con bn = cn sinhnπ. Allora la successione (bn) deve coincidere con la successionedei coefficienti dello sviluppo di f in serie di Fourier di soli seni. Notiamo espres-samente che si tratta dello sviluppo di f in serie di autofunzioni del problema(6.5).
E possibile verificare che la funzione cosı ottenuta, sommata a quelle ricavatea partire dai problemi analoghi a (6.4), risolve effettivamente il problema (6.3):la funzione e C2 e verifica l’equazione ∆u = 0 in Ω = (0, 1) × (0, 1) ed e esten-dibile con continuita a ∂Ω in modo da assumere il valore u0: ci limitiamo qui averificare la prima di queste condizioni (mentre piu delicato e dimostrare l’esten-dibilita continua sul bordo con valore u0). A tal fine e sufficiente considerare lau in (6.7).
Dalla teoria delle serie di Fourier segue che
bn =
∫ 1
0
f(x) sinnπxdx.
Nell’ipotesi di continuita, e quindi di limitatezza, di f la successione (bn) eequilimitata; inoltre
sinhnπ(1 − y)
sinhnπ= e−nπy 1 − e−2nπ(1−y)
1 − e−2nπ
≤ e−nπy 1
1 − e−2π.
Pertanto esiste C > 0 per il quale il termine generale della serie (6.7) e maggio-rato, in valore assoluto, da:
C(e−πy)n.

6.2. Equazione di Hermite 141
Ne segue che la serie (6.7) converge assolutamente in modo uniforme in ogniinsieme
[0, 1]× [y0, 1] con y0 > 0.
Con ragionamento analogo si vede che le serie derivate, prime e seconde, sonodominate da
∑
n2(e−πy)n, a meno di una costante positiva. Quindi le derivatedi u uguagliano le corrispondenti serie derivate, da cui ∆u = 0. (Si veda, adesempio, [Wei65]).
6.2 Equazione di Hermite
Come avremo modo di vedere nel successivo §6.4, lo studio dell’oscillatore ar-monico quantistico porta alla considerazione della seguente equazione, dettaequazione di Hermite
(6.8) u′′(x) − 2xu′(x) + 2γu(x) = 0,
dove γ e una data costante reale.Cerchiamo di determinare le soluzioni che possono essere sviluppate in serie
di potenze della forma:
u(x) =
∞∑
n=0
anxn
con raggio di convergenza R > 0. Se |x| < R possiamo considerare le seriederivate:
u′(x) =
∞∑
n=1
nanxn−1, quindi xu′(x) =
∞∑
n=1
nanxn =
∞∑
n=0
nanxn
e
u′′(x) =
∞∑
n=2
n(n− 1)anxn−2 =
∞∑
n=0
(n+ 2)(n+ 1)an+2xn.
La condizione che u risolva l’equazione si traduce pertanto nella seguente rela-zione fra i coefficienti an dello sviluppo:
(n+ 2)(n+ 1)an+2 − 2nan + 2γan = 0,
cioe
(6.9) an+2 = 2n− γ
(n+ 2)(n+ 1)an, per ogni n ≥ 0.
I valori a0 e a1 possono essere assegnati arbitrariamente, mentre i coefficientisuccessivi risultano determinati per ricorrenza dalla (6.9).
La scelta a0 = 1 e a1 = 0 da a2k+1 = 0 per ogni k, mentre
a2(k+1) = 22k − γ
(2k + 2)(2k + 1)a2k,
da cui, per iterazione,
a2(k+1) = 2k+1 (2k − γ)(2k − 2 − γ) . . . (−γ)(2k + 2)!
.

142 Capitolo 6. Equazioni della Fisica Matematica
Mediante il criterio del rapporto e immediato verificare che la serie∑
k a2kx2k
converge assolutamente per ogni x; pertanto definisce una funzione analitica u1
su tutto R la quale, in base a quanto svolto, risolve l’equazione (6.8).Analogamente, se poniamo a0 = 0 e a1 = 1 otteniamo a2k = 0 per ogni k,
mentre
a(2k+1)+2 = 2k+1 (2k + 1 − γ)(2k − 1 − γ) . . . (1 − γ)
(2k + 3)!.
La corrispondente serie e ancora assolutamente convergente su tutto R, per cuida luogo ad una funzione analitica u1 che risolve (6.8) su tutto R.
Osserviamo che il determinante wronskiano di u1 e u2 per t = 0 e
w(0) =
∣
∣
∣
∣
u1(0) u2(0)u′1(0) u′2(0)
∣
∣
∣
∣
=
∣
∣
∣
∣
1 00 1
∣
∣
∣
∣
= 1 6= 0.
Pertanto u1 e u2 sono soluzioni linearmente indipendenti e le soluzioni di (6.8)sono date da:
u(t) = c1u1(t) + c2u2(t),
al variare di c1, c2 ∈ R.
Osservazione 6.2.1 Nel caso in cui γ e un intero naturale pari, la serie chedefinisce u1 e in realta una somma finita, quindi u1 e un polinomio, di grado γ.Cosı pure, se γ e un intero naturale dispari, allora la funzione u2 e un polinomio,di grado γ. In tutti gli altri casi le funzioni u1 e u2 sono serie effettive, chedefiniscono una funzione pari e una funzione dispari, rispettivamente; quindise γ /∈ N nessuna delle soluzioni c1u1(t) + c2u2(t) e polinomiale. Vedremol’importanza di questa osservazione nel § 6.4.
6.3 Equazione di Bessel
Analizziamo ora un’importante equazione differenziale del secondo ordine chenasce in connessione all’operatore di Laplace in coordinate polari nel piano(come vedremo, a titolo d’esempio, nel problema presentato nel prossimo para-grafo).
Per t 6= 0 consideriamo l’equazione:
(6.10) u′′ +1
tu′ + u = 0,
detta equazione di Bessel di ordine 0.Cerchiamo una soluzione in forma di serie di potenze:
u(t) =
∞∑
n=0
antn.
con raggio di convergenzaR positivo. Per ogni t interno al cerchio di convergenzaabbiamo
u′(t) =
∞∑
n=1
nantn−1, u′′(t) =
∞∑
n=2
n(n− 1)antn−2.
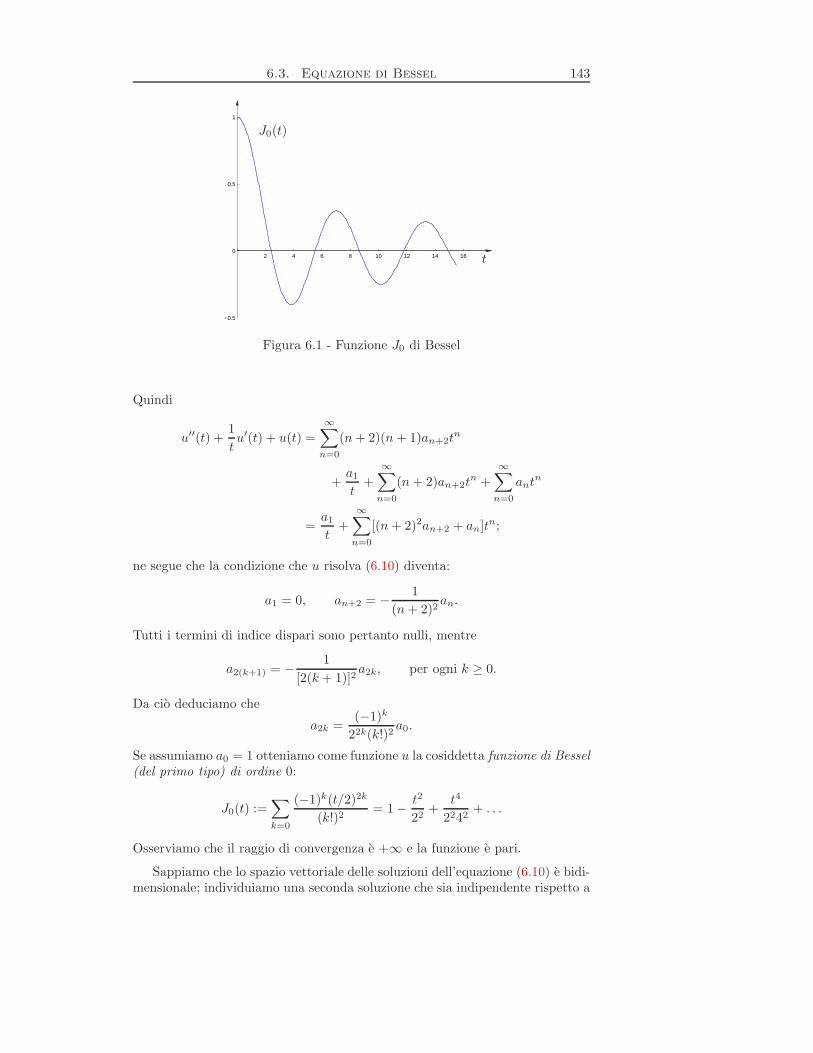
6.3. Equazione di Bessel 143
2 4 6 8 10 12 14 16
−0.5
0
0.5
1
J0(t)
t
Figura 6.1 - Funzione J0 di Bessel
Quindi
u′′(t) +1
tu′(t) + u(t) =
∞∑
n=0
(n+ 2)(n+ 1)an+2tn
+a1
t+
∞∑
n=0
(n+ 2)an+2tn +
∞∑
n=0
antn
=a1
t+
∞∑
n=0
[(n+ 2)2an+2 + an]tn;
ne segue che la condizione che u risolva (6.10) diventa:
a1 = 0, an+2 = − 1
(n+ 2)2an.
Tutti i termini di indice dispari sono pertanto nulli, mentre
a2(k+1) = − 1
[2(k + 1)]2a2k, per ogni k ≥ 0.
Da cio deduciamo che
a2k =(−1)k
22k(k!)2a0.
Se assumiamo a0 = 1 otteniamo come funzione u la cosiddetta funzione di Bessel(del primo tipo) di ordine 0:
J0(t) :=∑
k=0
(−1)k(t/2)2k
(k!)2= 1 − t2
22+
t4
2242+ . . .
Osserviamo che il raggio di convergenza e +∞ e la funzione e pari.
Sappiamo che lo spazio vettoriale delle soluzioni dell’equazione (6.10) e bidi-mensionale; individuiamo una seconda soluzione che sia indipendente rispetto a

144 Capitolo 6. Equazioni della Fisica Matematica
J0. Nello spirito del metodo di variazione delle costanti cerchiamo una soluzionedella forma
u(t) = v(t)J0(t), (t > 0)
con v da determinare. Deve essere:
v′′J0 + 2v′J ′0 + vJ ′′
0 +1
t(v′J0 + vJ ′
0) + vJ0 = 0,
da cui, tenendo conto che J0 e soluzione dell’equazione,
v′′ +(
2J ′
0
J0+
1
t
)
v′ = 0,
in ogni intervallo in cui J0 6= 0. Come equazione in v′ questa da subito
v′(t) = c1
tJ20 (t)
(c costante),
quindi:
v(t) = c
∫
1
tJ20 (t)
dt.
Si puo verificare che, a meno di un addendo multiplo di J0, risulta:
J0(t)
∫
1
tJ20 (t)
dt = J0(t) log t+t2
22
− t4
22 · 42
(
1 +1
2
)
+t6
22 · 42 · 62
(
1 +1
2+
1
3
)
− . . .
Si puo dimostrare che la serie che segue il termine J0(t) log t converge assoluta-mente per ogni t ∈ R. La funzione u0 a secondo membro costituisce pertantoun’estensione di v a tutto (0,+∞), quindi anche nei punti di annullamento diJ0. Concludiamo che le soluzioni dell’equazione (6.10) sono date da:
u(t) = c1J0(t) + c2u0(t),
al variare di c1, c2 ∈ R. In realta, per coerenza con definizioni alternative, sipreferisce utilizzare anziche u0 la funzione
Y0(t) := − 2
π(log 2 − γ)J0(t) +
2
πu0,
dove γ indica la costante di Eulero-Mascheroni:
γ := limn→+∞
(
1 +1
2+
1
3+ . . .+
1
n− logn
)
∼ 0.5772 . . .
La funzione Y0 e detta funzione di Neumann-Bessel del secondo tipo, di ordine0. Il grafico e indicato in Figura 6.2; notiamo che, dalla definizione stessa siricava la singolarita di tipo logaritmico per t0: Y0(t)/ log t→ 1 per t→ 0+.

6.4. Oscillatore armonico quantistico 145
2 4 6 8 10 12 14 16
−2
−1.5
−1
−0.5
0
0.5
1
Y0(t)
t
Figura 6.2 - Funzione Y0 di Neumann-Bessel
6.4 Oscillatore armonico quantistico
Riprendiamo l’equazione di Schrodinger degli stati stazionari nel caso di po-tenziale armonico (vedi § 1.5): riscalando opportunamente la variabile spazialeotteniamo l’equazione (1.18), cioe
(6.11) v′′(x) + (2γ + 1 − x2)v(x) = 0,
dove abbiamo nuovamente utilizzato la variabile x e, per comodita di notazionein vista delle successive trasformazioni, abbiamo indicato con 2γ+1 la costanteε; risulta pertanto:
2γ + 1 = 2(mK
~2
)1/2 E
K= 2
E
~
√
m
K.
Le soluzioni di interesse fisico (funzioni d’onda) devono soddisfare la condi-zione
lim|x|→+∞
v(x) = 0.
Considerazioni euristiche2 suggeriscono di operare il cambiamento di variabile
v(x) = u(x)e−x2/2.
2Per valori grandi di |x| possiamo trascurare il termine γ del coefficiente di u(x) nella(6.11), ottenendo
v′′(x) = x2v(x).
La funzione v(x) = e−x2/2 e una soluzione approssimata di tale equazione, nel senso che
v′′(x) = (−1 + x2)e−x2/2 ∼ x2e−x2/2 = x2v(x) per |x| grande.
E quindi ragionevole cercare soluzioni esatte della (6.11) nella forma u(x)e−x2/2 (si pensi almetodo di variazione delle costanti . . . ). Nel ragionamento svolto e anche possibile considerare,
in luogo di e−x2/2, la funzione ex2/2, ma questa non soddisfa la condizione di annullamentoall’infinito.

146 Capitolo 6. Equazioni della Fisica Matematica
L’equazione si trasforma cosı nell’equazione di Hermite
u′′(x) − 2xu′(x) + 2γu(x) = 0.
Pertanto, cerchiamo soluzioni u(x) dell’equazione di Hermite per le quali
(6.12) lim|x|→+∞
u(x)e−x2/2 = 0.
Come visto nell’Osservazione 6.2.1, le uniche soluzioni polinomiali si otten-gono se γ e un intero naturale. Queste soddisfano banalmente la condizione(6.12). Si puo dimostrare che si tratta delle uniche soluzioni con tale proprieta.Per ogni n ∈ N si conviene di indicare con Hn(x) l’unico polinomio di grado nche risolve l’equazione (6.8) per γ = n e che ha il coefficiente del termine di gra-do massimo dato da 2n. Si tratta dei cosiddetti polinomi di Hermite. Risulta,ad esempio,
H0(x) = 1, H1(x) = 2x, H2(x) = −2 + 4x2, H3(x) = −12x+ 8x3, . . .
Se ricordiamo il significato attribuito a γ, la condizione (6.12) di ammissibi-lita delle soluziioni dell’equazione di Hermite e quindi di ammissibilita per lecorrispondenti soluzioni dell’equazione di Schrodinger, si traduce nel richiederel’esistenza di un numero naturale n tale che
2n+ 1 = 2(mK
~2
)1/2 E
K= 2
E
~
√
m
K,
cioe
E =(
n+1
2
)
√
K
m~.
Ricordiamo l’equazione classica x(t) + ω2x(t) = 0 (con ω2 = K/m, se K e lacostante elastica e m indica la massa): le soluzioni x(t) = A cos(ωt+ ϕ) hannoperiodo T = 2π/ω = 2π
√
m/K, o T = 1/ν, con
ν =1
2π
√
K
m.
Utilizzando questa definizione di ν anche per il caso dell’oscillatore armonicoquantistico, la formula precedente assume la forma
E = En = hν(
n+1
2
)
,
che esprime la ben nota quantizzazione dell’energia: i valori ammissibili dell’e-nergia formano un insieme discreto.
6.5 Modi normali di vibrazione per una
membrana circolare
Consideriamo il problema delle vibrazioni trasversali di una membrana fissataal bordo della regione circolare D = (x, y) ∈ R2 : x2 + y2 < 1. Una possibile
6.5. Modi normali di vibrazione per una membrana circolare 147
modellizzazione e tradotta dal problema differenziale
(6.13)
utt(x, y; t) = c2∆x,yu(x, y; t) in Du(x, y; t) = 0 per (x, y) ∈ ∂Du(· ; 0) = u0
ut(· ; 0) = u1,
dove u(x, y; t) rappresenta lo scostamento verticale dalla posizione di riposo nelpunto (x, y) all’istante t di tempo, c > 0 e la velocita di propagazione delle ondeelastiche nel mezzo, u0 indica il profilo iniziale della membrana e u1 la velocitainiziale in ogni punto.
Cerchiamo innanzitutto soluzioni ‘elementari’ che soddisfino la condizione diannullamento al bordo di D.
a) Come primo passo determiniamo soluzioni che presentino la variabile tempo-rale t separata dalle variabili spaziali x, y, nella seguente forma:
u(x, y; t) = T (t)v(x, y).
Deve allora essereT ′′(t)v(x, y) = c2T (t)∆v(x, y),
e quindiT ′′(t)
c2T (t)=
∆v(x, y)
v(x, y).
Entrambi i membri devono essere costanti, diciamo −λ, quindi
T ′′ + c2λT = 0(6.14)
− ∆v = λv.(6.15)
La seconda equazione, con la condizione che u sia costantemente nulla sul bordodi D, da:
(Pλ)−∆v = λv in Dv = 0 su ∂D.
I valori λ per i quali il problema (Pλ) ha soluzioni non nulle sono detti autovaloridi −∆ (sul dominio D); le corrispondenti soluzioni sono dette autofunzioni.
Proposizione 6.5.1 Gli autovalori di −∆ su D sono strettamente positivi.
Dimostrazione. Sia λ un autovalore di (Pλ) e v un’autofunzione corrispon-dente. Utilizzando la formula di integrazione per parti in piu variabili e tenendoconto che v = 0 su ∂D, abbiamo:
∫ ∫
D
∇v∇v dxdy = −∫ ∫
D
v∆v dxdy +
∫
∂D
v∂v
∂νdσ
= λ
∫ ∫
D
v2 dxdy.
Ne segue che λ deve essere positivo, strettamente poiche v non e identicamentenulla.
b) Per individuare gli autovalori del problema (Pλ) sfruttiamo la forma deldominio D, scrivendo il problema in coordinate polari (, ϑ). Indichiamo per

148 Capitolo 6. Equazioni della Fisica Matematica
semplicita con v(, ϑ) la funzione v( cosϑ, sinϑ) e ricordiamo l’espressione dellaplaciano in coordinate polari; abbiamo quindi
(6.16)
−(
v +1
v +
1
2vϑϑ) = λv 0 < < 1, ϑ ∈ R
v(1, ϑ) = 0
con l’ulteriore condizione che v sia 2π-periodica in ϑ e che
esista finito lim→0
v(, ϑ).
Osserviamo che se i dati iniziali u0 e u1 sono indipendenti da ϑ, la simmetriadel problema suggerisce che anche la soluzione u goda della medesima proprieta.Consideriamo quindi innanzitutto la situazione v = v(); in tal caso le condizionisu v sono:
v′′ +1
v′ + λv = 0, 0 < < 1,
v(1) = 0, esista finito lim→0
v().
Assumiamo λ > 0 in base alla Proposizione 6.5.1. Se eseguiamo il cambiamentodi variabile
r =√λ, w(r) = v(r/
√λ)
l’equazione diventa:
w′′ +1
rw′ + w = 0,
che e l’equazione di Bessel di ordine 0 introdotta nel paragrafo precedente.Le soluzioni si esprimono dunque nella forma
w(r) = c1J0(r) + c2Y0(r),
cioev() = c1J0(
√λ) + c2Y0(
√λ).
La condizione di regolarita in = 0 da c2 = 0 (ricordiamo che Y0 e singolare in0); del resto, la richiesta v(1) = 0 da
J0(√λ) = 0.
Come il comportamento qualitativo di J0 in Figura 6.1 lascia intuire, esiste unasuccessione di zeri di J0, quindi una successione di soluzioni λn per l’equazioneJ0(
√λ) = 0. In corrispondenza a questi la (6.14) diventa:
T ′′ + c2λnT = 0,
da cuiT (t) = A cos(c
√λnt− ϕ),
al variare di A ≥ 0 e ϕ ∈ R.Concludiamo che le funzioni
un(, t) = J0(√λn) cos(c
√λnt− ϕn),
con λn determinati come detto e ϕn arbitrari valori reali, risolvono
utt(x, y; t) = c2∆x,yu(x, y; t) in Du(x, y; t) = 0 per (x, y) ∈ ∂D.
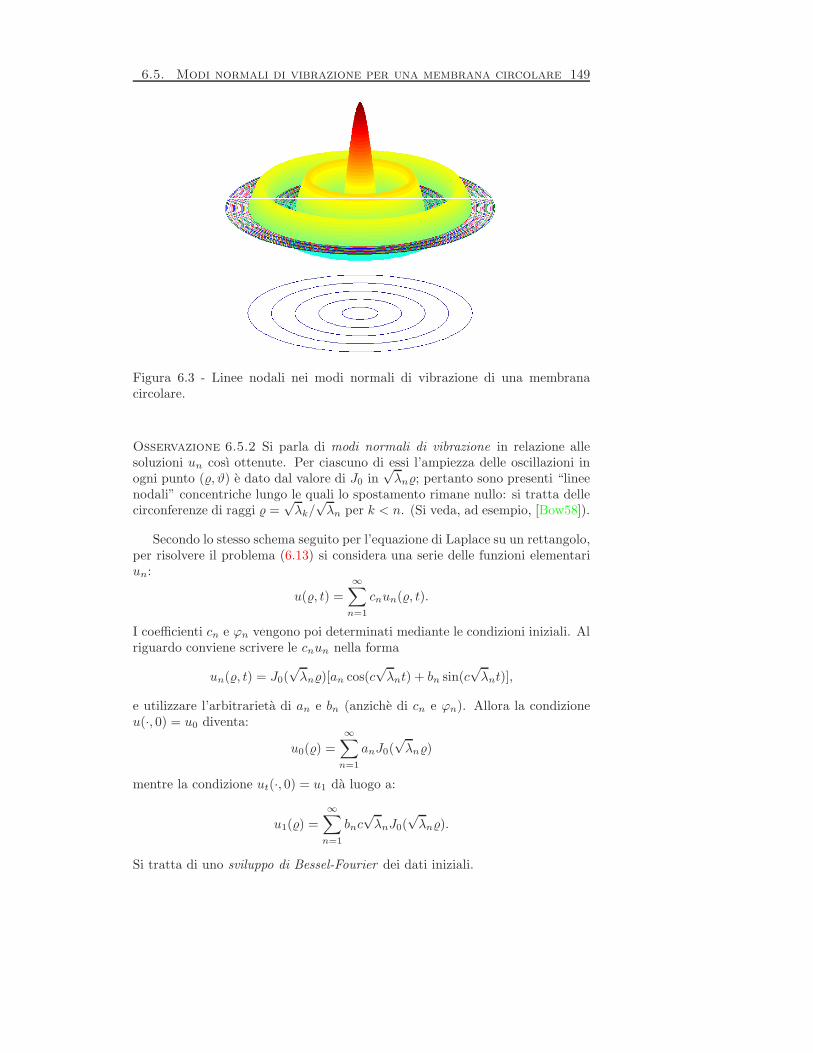
6.5. Modi normali di vibrazione per una membrana circolare 149
Figura 6.3 - Linee nodali nei modi normali di vibrazione di una membranacircolare.
Osservazione 6.5.2 Si parla di modi normali di vibrazione in relazione allesoluzioni un cosı ottenute. Per ciascuno di essi l’ampiezza delle oscillazioni inogni punto (, ϑ) e dato dal valore di J0 in
√λn; pertanto sono presenti “linee
nodali” concentriche lungo le quali lo spostamento rimane nullo: si tratta dellecirconferenze di raggi =
√λk/
√λn per k < n. (Si veda, ad esempio, [Bow58]).
Secondo lo stesso schema seguito per l’equazione di Laplace su un rettangolo,per risolvere il problema (6.13) si considera una serie delle funzioni elementariun:
u(, t) =
∞∑
n=1
cnun(, t).
I coefficienti cn e ϕn vengono poi determinati mediante le condizioni iniziali. Alriguardo conviene scrivere le cnun nella forma
un(, t) = J0(√λn)[an cos(c
√λnt) + bn sin(c
√λnt)],
e utilizzare l’arbitrarieta di an e bn (anziche di cn e ϕn). Allora la condizioneu(·, 0) = u0 diventa:
u0() =
∞∑
n=1
anJ0(√λn)
mentre la condizione ut(·, 0) = u1 da luogo a:
u1() =
∞∑
n=1
bnc√λnJ0(
√λn).
Si tratta di uno sviluppo di Bessel-Fourier dei dati iniziali.
Indice analitico
α-limite, 134ω-limite, 134
autofunzioni, 139, 147autospazi generalizzati, 112, 114autovalori
di d2/dx2, 139di −∆ su un cerchio, 147
bacino di attrazione, 134brachistocrona, 54
capacita di carico, 3centro, 109cicloide, 56cinetica chimica, 4confronto (teorema di), 34crescita malthusiana, 2
decadimento radioattivo, 6differenziale, 67dinamica delle popolazioni, 1dipendenza continua dai dati, 38, 42disuguaglianze differenziali, 34
equazionedi Bessel, 142di Laplace, 138di Hermite, 11, 141di Schrodinger, 10logistica, 3
equazione caratteristica, 102equazione di Eulero di un funzionale,
64, 66equazioni
a fattore integrante, 62a variabili separabili, 47del tipo F (y, y′) = 0 o F (x, y′) =
0, 52di Bernoulli, 50di Clairaut, 56di Riccati, 50
di tipo omogeneo, 51di tipo omogeneo generalizzato, 52e forme differenziali, 59e forme differenziali, 57lineari
del primo ordine, 32, 48di ordine superiore, 99
equazioni in forma normale, 15equilibrio, vedi punto di equilibrioesistenza globale, 30, 36, 37esponenziale di una matrice, 77, 81, 82estremale di un funzionale integrale, 66
fattore integrante, 62flusso, 43
isocrona equivalenza, 130iperbolico, 121lineare, 119
forma canonicadi Jordan, 115reale, 117
forme differenziali, 69cambiamento di variabile, 63esatte, chiuse, 69pull-back, 63, 70
funzioni di Bessel, 143, 144fuoco, 108
Grobman-Hartman, teorema di, 130Gronwall, lemma di, 32
integrale primo, 66, 133invariante, 134
Jordan, vedi forma canonica
Liapunov, funzione di, 131Liouville, teorema di, 75, 100lipschitzianita, 22Lotka-Volterra, 15, 35, 59, 62
Malthus, Thomas Robert, 2
150

INDICE ANALITICO 151
massimale, intervallo, 27modi normali di vibrazione, 149
nilpotente, 83nodo, 109nucleo risolvente, 101
operatori lineari, rappresentazione, 110orbita, 44, 134
caso bidimensionale, 57riparametr. delle soluzioni, 45
oscillatore armonico, 7quantistico, 145
Peano, teorema di, 25pendolo semplice, 8, 128, 133
smorzato, 128Picard-Lindelof, teorema di, 22polinomi di Hermite, 146pozzo, 120, 120preda-predatore, 14problema ai limiti, 139problema ai valori iniziali, 21problema di Cauchy, 2, 21prolungamento delle soluzioni, 27punto di equilibrio, 120
radiocarbonio, datazione, 6reazioni
del primo ordine, 5del secondo ordine, 5
risolvente, matrice, 74
separazione di variabili, 138sink, 120sistemi autonomi, 43sistemi dinamici, 43, 119, 134sistemi gradiente, 134sistemi hamiltoniani (stabilita), 133sistemi lineari bidimensionali, 106sorgente, 120spazio degli stati o delle fasi, 44spazio tangente, 68stabilita, 42, 120
per linearizzazione, 127sviluppo in serie
di Bessel-Fourier, 149di Fourier, 140
unicita, 22, 25, 33esempio di non unicita, 25
valore regolare, 60variazione ammissibile, 64variazione delle costanti, 76
per eq. lineari del I ordine, 49variazione prima di un funzionale, 64varieta instabile, 122varieta stabile, 122Verhulst, Pierre Francois, 3
wronskiana, matrice, 73, 100

Bibliografia
[AMS86] E. Acerbi, L. Modica, and S. Spagnolo. Problemi scelti di AnalisiMatematica II. Liguori, Napoli, 1986.
[Arn06] V. I. Arnold. Ordinary differential equations. Universitext. Springer-Verlag, 2006. Translated from the Russian by Roger Cooke. Secondprinting of the 1992 edition.
[Bow58] F. Bowman. Introduction to Bessel functions. Dover Publications Inc.,New York, 1958.
[Bra93] Martin Braun. Differential equations and their applications. An in-troduction to applied mathematics., volume 11 of Texts in AppliedMathematics. Springer-Verlag, New York, fourth edition, 1993.
[Hal80] Jack K. Hale. Ordinary differential equations. Robert E. KriegerPublishing Co., Huntington, N.Y., second edition, 1980.
[Har64] Philip Hartman. Ordinary differential equations. John Wiley & SonsInc., New York, 1964.
[HK91] Jack K. Hale and Huseyin Kocak. Dynamics and bifurcations, volu-me 3 of Texts in Applied Mathematics. Springer-Verlag, New York,1991.
[HS74] Morris W. Hirsch and Stephen Smale. Differential equations, dynami-cal systems, and linear algebra., volume 60 of Pure and Applied Mathe-matics. Academic Press [A subsidiary of Harcourt Brace Jovanovich,Publishers], New York-London, 1974.
[HSD04] Morris W. Hirsch, Stephen Smale, and Robert L. Devaney. Dif-ferential equations, dynamical systems, and an introduction tochaos., volume 60 of Pure and Applied Mathematics (Amsterdam).Elsevier/Academic Press, Amsterdam, 2004.
[PSV78] Livio C. Piccinini, Guido Stampacchia, and Giovanni Vidossich. Equa-zioni differenziali ordinarie in Rn : (problemi e metodi). Serie dimatematica e fisica; 5. Liguori, Napoli, 1978.
[Ren72] C. Renfrew. Il carbonio-14 e la preistoria d’europa. Le Scienze,gennaio, 1972.
153
154 BIBLIOGRAFIA
[Sim72] George F. Simmons. Differential equations with applications and hi-storical notes. International Series in Pure and Applied Mathematic.McGraw-Hill Book Co., New York-Dusseldorf-Johannesburg, 1972.
[SS94] S. Salsa and A. Squellati. Esercizi di analisi matematica 2. Masson,1994.
[Wei65] H.F. Weinberger. A first course in Partial Differential Equations.Blaisdell Publishing Company, 1965.
[Wil71] H. K. Wilson. Ordinary differential equations. Introductory and in-termediate courses using matrix methods. Addison-Wesley PublishingCo., Reading, Mass.-London-Don Mills, Ont., 1971.





























