Embed Size (px)
DESCRIPTION
Elementi di Analisi funzionale e complessa progetto didattica in rete Luciano Pandolfi Politecnico di Torino, settembre 2004 Dipartimento di Matematica otto editore L UCIANO P ANDOLFI D IPARTIMENTO DI M ATEMATICA P OLITECNICO DI T ORINO È vietata la riproduzione, anche parziale, con qualsiasi mezzo effettuato, compresa la fotocopia, anche ad uso interno o didattico, non autorizzata. 2004, OTTO editore – Torino Prima edizione settembre 2004 C INDICE 1
Citation preview

progettodidattica in rete
prog
etto
dida
ttica
in re
te
Politecnico di Torino, settembre 2004Dipartimento di Matematica
Elementi di Analisifunzionale e complessa
Luciano Pandolfi
otto editore


ELEMENTI DI ANALISI FUNZIONALE ECOMPLESSA
LUCIANO PANDOLFI
DIPARTIMENTO DI MATEMATICA
POLITECNICO DI TORINO

Luciano Pandolfi
Elementi di Analisi funzionale e complessa
Prima edizione settembre 2004
C©2004, OTTO editore – Torino
http://www.otto.to.it
È vietata la riproduzione, anche parziale, con qualsiasi mezzo effettuato,
compresa la fotocopia, anche ad uso interno o didattico, non autorizzata.

INDICE
1. Le funzioni olomorfe 9
1.1. Richiami sui numeri complessi . . . . . . . . . . . . . . 9
1.1.1 Radici n–me di numeri complessi . . . . . . . . . . . 13
1.1.2 Esponenziale, logaritmo, formule di Eulero . . . . . . 14
1.2. Limiti e continuità . . . . . . . . . . . . . . . . . . . . . 17
1.2.1 Derivata e integrale di funzioni da R in C . . . . . . . 18
1.3. Curve nel piano complesso . . . . . . . . . . . . . . . . 20
1.4. Funzioni da R2 in R2 e funzioni da C in C . . . . . . . . 22
1.5. La derivata . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.5.1 Esempi di funzioni olomorfe e formule di derivazione 29
1.5.2 Osservazione sui “teoremi fondamentali . . . . . . .
del calcolo differenziale" . . . . . . . . . . . . . . . 33
1.5.3 La matrice jacobiana e le funzioni olomorfe . . . . . 34
1.5.4 Serie di potenze e serie di Laurent . . . . . . . . . . . 37
1.6. Funzioni olomorfe e trasformazioni conformi . . . . . . 42
1.6.1 La rappresentazione delle funzioni olomorfe . . . . . 44
1.7. Integrale di curva di funzioni olomorfe . . . . . . . . . . 47
1.8. Il teorema di Cauchy . . . . . . . . . . . . . . . . . . . 50
1.9. Primitive . . . . . . . . . . . . . . . . . . . . . . . . . . 52
1.9.1 Curve equipotenziali . . . . . . . . . . . . . . . . . . 55
1.9.2 Il caso della funzione z → z . . . . . . . . . . . . . . 56
1.9.3 La funzione logaritmo e le potenze . . . . . . . . . . 57
1

1.10. Indice e omotopia . . . . . . . . . . . . . . . . . . . . . 60
1.11. Convergenza uniforme sui compatti . . . . . . . . . . . 67
1.12. La formula integrale di Cauchy . . . . . . . . . . . . . 69
1.12.1 La proprietà della media . . . . . . . . . . . . . . . 71
1.12.2 Funzioni olomorfe rappresentate mediante integrali . 72
1.13. Analiticità delle funzioni olomorfe . . . . . . . . . . . . 74
1.13.1 Funzioni armoniche . . . . . . . . . . . . . . . . . . 75
1.13.2 Zeri e estensioni di funzioni olomorfe . . . . . . . . 77
1.14. Teorema di Morera e principio di riflessione . . . . . . . 81
1.15. Teoremi di Weierstrass e di Montel . . . . . . . . . . . . 84
1.16. Massimo modulo e teorema di Liouville . . . . . . . . . 87
1.17. Le singolarità isolate . . . . . . . . . . . . . . . . . . . 92
1.18. Formula di Laurent . . . . . . . . . . . . . . . . . . . . 98
1.19. Singolarità e zeri ad infinito . . . . . . . . . . . . . . . . 103
1.20. Il metodo dei residui . . . . . . . . . . . . . . . . . . . 106
1.20.1 Calcolo di integrali impropri . . . . . . . . . . . . . 107
1.20.2 Il Principio dell’argomento . . . . . . . . . . . . . . 112
1.20.3 I teoremi di Hurwitz e Rouché e della mappa aperta . 113
1.21. Trasformazioni conformi . . . . . . . . . . . . . . . . . 119
1.21.1 Il teorema di Riemann . . . . . . . . . . . . . . . . . 125
1.22. Monodromia e polidromia . . . . . . . . . . . . . . . . 128
1.22.1 Punti di diramazione di funzioni olomorfe . . . . . . 128
1.22.2Funzioni analitiche . . . . . . . . . . . . . . . . . . . 130
2. Funzioni armoniche 135
2.1. Funzioni armoniche e funzioni olomorfe . . . . . . . . . 135
2.2. Proprietà della media e teorema di Gauss . . . . . . . . . 137
2.3. Il problema di Dirichlet . . . . . . . . . . . . . . . . . . 139
2.3.1 La formula di Poisson . . . . . . . . . . . . . . . . . 141
2

3. La trasformata di Laplace 145
3.1. Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . 145
3.2. Proprietà della trasformata di Laplace . . . . . . . . . . 147
3.3. Trasformata di Laplace, derivata ed integrale . . . . . . . 150
3.4. Alcune trasformate fondamentali . . . . . . . . . . . . . 154
3.5. Il problema dell’antitrasformata . . . . . . . . . . . . . 155
3.5.1 Antitrasformata di funzioni razionali . . . . . . . . . 155
4. Misura e integrazione secondo Lebesgue 157
4.1. Introduzione . . . . . . . . . . . . . . . . . . . . . . . . 157
4.2. Anelli ed algebre di insiemi . . . . . . . . . . . . . . . . 159
4.3. Misure di insiemi . . . . . . . . . . . . . . . . . . . . . 162
4.4. Insiemi misurabili secondo Lebesgue . . . . . . . . . . . 167
4.4.1 Insiemi limitati e misurabili secondo Lebesgue . . . . 168
4.4.2 Insiemi illimitati . . . . . . . . . . . . . . . . . . . . 173
4.5. Insiemi nulli e proprietà che valgono quasi ovunque . . . 174
4.6. Funzioni misurabili . . . . . . . . . . . . . . . . . . . . 176
4.7. Integrale di Lebesgue . . . . . . . . . . . . . . . . . . . 181
4.7.1 L’integrale delle funzioni semplici . . . . . . . . . . 181
4.7.2 L’integrale delle funzioni positive . . . . . . . . . . . 183
4.7.3 Funzioni integrabili . . . . . . . . . . . . . . . . . . 186
4.7.4 Integrale ed insiemi nulli . . . . . . . . . . . . . . . 187
4.8. Integrale di Lebesgue ed integrale di Riemann . . . . . . 188
4.9. Limiti di successioni di funzioni e integrale . . . . . . . 191
4.10. Disuguaglianze . . . . . . . . . . . . . . . . . . . . . . 196
4.10.1Le relazioni tra spazi Lp(Ω) . . . . . . . . . . . . . . 205
4.11. I teoremi di Fubini e Tonelli . . . . . . . . . . . . . . . 207
4.11.1 Convoluzioni . . . . . . . . . . . . . . . . . . . . . 208
4.12. Estensioni . . . . . . . . . . . . . . . . . . . . . . . . . 210
4.13. La funzione integrale su R . . . . . . . . . . . . . . . . 211
4.13.1Estensioni . . . . . . . . . . . . . . . . . . . . . . . 213
3

5. Spazi di Banach 215
5.1. Introduzione all’analisi funzionale . . . . . . . . . . . . 215
5.1.1 L’equazione Ax = φ . . . . . . . . . . . . . . . . . . 216
5.1.2 L’equazione λx − Ax = y . . . . . . . . . . . . . . . 220
5.1.3 L’equazione di Fredholm a nucleo degenere . . . . . 221
5.1.4 L’equazione di prima specie . . . . . . . . . . . . . . 223
5.1.5 Ricapitolazione . . . . . . . . . . . . . . . . . . . . 224
5.2. Spazi lineari normati . . . . . . . . . . . . . . . . . . . 225
5.2.1 Dimostrazioni posposte . . . . . . . . . . . . . . . . 231
5.3. Spazi prodotto . . . . . . . . . . . . . . . . . . . . . . . 235
5.4. Gli esempi principali di spazi di Banach . . . . . . . . . 237
5.4.1 Gli esempi di spazi lineari normati . . . . . . . . . . 237
5.4.2 Le dimostrazioni della completezza . . . . . . . . . . 242
5.4.3 Teorema del doppio limite . . . . . . . . . . . . . . . 249
5.5. Sottospazi di spazi lineari normati . . . . . . . . . . . . 252
5.5.1 Identità approssimate e dimostrazione . . . . . . . .
del teorema di Weierstrass . . . . . . . . . . . . . . . 254
5.6. La compattezza . . . . . . . . . . . . . . . . . . . . . . 258
5.6.1 Dimostrazioni posposte . . . . . . . . . . . . . . . . 260
5.7. Operatori lineari . . . . . . . . . . . . . . . . . . . . . . 265
5.7.1 Proprietà geometriche degli operatori lineari . . . . . 266
5.7.2 La continuità degli operatori lineari . . . . . . . . . . 270
5.7.3 Funzionali lineari continui ed iperpiani . . . . . . . . 275
5.7.4 Lo spazio L(X,Y ) . . . . . . . . . . . . . . . . . . . 278
5.7.5 Inversi di un operatore . . . . . . . . . . . . . . . . . 284
5.8. Il teorema di Baire e le sue conseguenze . . . . . . . . . 289
5.8.1 Proiezioni . . . . . . . . . . . . . . . . . . . . . . . 295
5.8.2 Appendice: Applicazioni . . . . . . . . . . . . . . . 298
5.8.3 Dimostrazioni posposte . . . . . . . . . . . . . . . . 303
5.9. Lo spazio duale . . . . . . . . . . . . . . . . . . . . . . 307
5.9.1 Applicazioni: Insiemi convessi . . . . . . . . . . . . 312
5.9.2 Applicazioni: Funzioni convesse . . . . . . . . . . . 316
5.9.3 Dimostrazioni posposte . . . . . . . . . . . . . . . . 319
4

5.10. Convergenza debole e debole stella . . . . . . . . . . . . 328
5.10.1Dimostrazioni posposte . . . . . . . . . . . . . . . . 339
5.11. Esempi di spazi duali . . . . . . . . . . . . . . . . . . . 341
5.11.1 Relazione tra le convergenze debole e debole stella . 352
5.12. Lo spettro di un operatore . . . . . . . . . . . . . . . . . 353
5.12.1 Proiezioni spettrali . . . . . . . . . . . . . . . . . . 362
5.13. Trasformazioni non lineari . . . . . . . . . . . . . . . . 368
5.13.1 Teorema delle contrazioni e applicazioni . . . . . . . 368
5.13.2 I differenziali . . . . . . . . . . . . . . . . . . . . . 373
6. Spazi di Hilbert 377
6.1. Prodotto interno e norma . . . . . . . . . . . . . . . . . 377
6.1.1 Esempi di prodotti interni e di spazi di Hilbert . . . . 382
6.2. Teorema delle proiezioni . . . . . . . . . . . . . . . . . 384
6.3. Complementi ortogonali e proiezioni ortogonali . . . . . 389
6.3.1 Sistemi ortonormali e calcolo di proiezioni . . . . . . 393
6.3.2 Serie di Fourier astratte . . . . . . . . . . . . . . . . 397
6.4. Il duale di uno spazio di Hilbert . . . . . . . . . . . . . . 399
6.5. L’operatore aggiunto di un operatore tra spazi di Hilbert . 401
6.5.1 L’aggiunto di un operatore limitato . . . . . . . . . . 403
6.5.2 Operatori aggiunti ed operatori chiusi . . . . . . . . . 404
6.5.3 Operatori da H in sé; operatori autoaggiunti . . . . . 407
6.5.4 Dimostrazioni posposte . . . . . . . . . . . . . . . . 409
6.6. Operatori compatti . . . . . . . . . . . . . . . . . . . . 412
6.6.1 Lo spettro degli operatori compatti . . . . . . . . . . 417
6.6.2 Operatori compatti tra spazi diversi. Valori singolari . 419
6.6.3 Proprietà geometriche degli autovalori e valori singolari 422
6.6.4 Operatori compatti ed equazioni integrali di Fredholm 425
6.6.5 Dimostrazioni posposte . . . . . . . . . . . . . . . . 427
5

7. Distribuzioni e trasformata di Fourier 441
7.1. La trasformata di Fourier di funzioni . . . . . . . . . . . 441
7.2. Le proprietà della trasformata di Fourier . . . . . . . . . 443
7.2.1 Il teorema di Riemann-Lebesgue . . . . . . . . . . . 444
7.3. L’antitrasformata di Fourier . . . . . . . . . . . . . . . . 447
7.4. La trasformata di Fourier su L2(R ) . . . . . . . . . . . 451
7.5. Lo spazio S e il suo duale . . . . . . . . . . . . . . . . 455
7.6. La trasformata di Fourier su S ′ . . . . . . . . . . . . . . 459
7.6.1 Le operazioni sulle distribuzioni . . . . . . . . . . . . 464
7.6.2 Operazioni e trasformata di Fourier . . . . . . . . . . 467
7.6.3 Convoluzione di distribuzioni . . . . . . . . . . . . . 468
7.7. Il caso delle funzioni di più variabili . . . . . . . . . . . 474
6

L’ENS est l’un des meilleurs estabilissements de Francepour les estudes littéraires. On y entre pour apprendre àpenser et non pas pour apprendre à “communiquer”.
Arthur Muller, primo classificato al concorso 2003 perl’ammissione all’ENS, Le Figaro, 23.07.03


1. LE FUNZIONI OLOMORFE
1.1. RICHIAMI SUI NUMERI COMPLESSI
E’ nota la definizione seguente del campo dei numeri complessi:
– gli elementi del campo sono le coppie di numeri reali,
z = (x, y) =√
x2 + y2
(x√
x2 + y2,
y√x2 + y2
)
=√
x2 + y2(cos θ, sin θ) .
Si sa che il numero
ρ =√
x2 + y2
si chiama modulo del numero complesso z mentre θ si chiama argomento di z.
Il modulo del numero complesso z si indica col simbolo |z|.
L’argomento di z è identificato a meno di multipli di 2π se z = (0, 0). Ogni θ
si considera argomento di (0, 0).
Se z = (0, 0) e θ ∈ [−π, π), allora θ è unico e si chiama argomento principale
di z.
Per indicare l’argomento principale di z si usa il simbolo “Arg” (con l’iniziale
maiuscola),
Arg z .
9

1. LE FUNZIONI OLOMORFE
−0.5 0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
x
y
a+ib
c+id
(a+c)+i(b+d)
−1 −0.5 0 0.5 1 1.5 2−1
−0.5
0
0.5
1
1.5
2
2.5
x
y
r
ρ
ψ
φ
rρ
φ+ψ
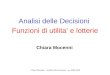
Fig. 1.1. Le operazioni.
– L’operazione di addizione tra numeri complessi si definisce “per componenti”:
se z = (x, y) e w = (a, b) allora si definisce
z + w = (x + a, y + b) .
– L’operazione di moltiplicazione è definita come segue: se z = ρ(cos θ, sin θ),
w = r(cos φ, sin φ) allora
zw = ρr (cos(θ + φ), sin(θ + φ)) .
E’ immediato verificare che il risultato non varia sommando multipli di 2π a θ
oppure a φ.
E’ noto, e facile da verificare, che in questo modo si definisce un campo, che si chiama
campo dei numeri complessi. Si sa inoltre che se z = (x, y) e w = (a, b) allora si ha
zw = (xa − yb, xb + ya) .
Invece, non esiste una rappresentazione semplice per la somma in coordinate polari.
Le operazione sono rappresentate nella figura 1.1.
Il campo dei numeri complessi si indica col simbolo C.
Ricordiamo che se z = (x, y), il numero (x,−y) si indica col simbolo z e si chiama
il coniugato di z. Si vede facilmente che
10

1. LE FUNZIONI OLOMORFE
|z|2 = zz .
L’elemento neutro rispetto all’addizione è (0, 0) mentre quello rispetto alla molti-
plicazione è (1, 0). Invece il numero complesso i = (0, 1), che si chiama unità
immaginaria, ha la seguente proprietà:
i2 = ii = (−1, 0) .
Osservazione 1.1. In molti testi, specialmente di ingegneria, si “definisce” i
mediante l’uguaglianza i2 = −1. Ciò è ambiguo, perché quest’equazione ha le due
soluzioni i e −i.
Notiamo ora che
z = (x, y) = (x, 0)(1, 0) + (y, 0)(0, 1)
e che la trasformazione da R in C che ad x fa corrispondere il numero (x, 0) è un
omomorfismo (i numeri complessi (x, 0) si chiamano anche numeri complessi reali ).
Ciò suggerisce di rappresentare ogni numero complesso z = (x, y) come segue: se
y = 0 invece di scrivere (x, 0) si scrive semplicemente x e invece di scrivere (0, 1) si
scrive i. In questo modo,
z = (x, y) = (x, 0)(1, 0) + (y, 0)(0, 1) = 1x + iy
e, sottintendendo 1, si trova la rappresentazione
z = x + iy
che si chiama la rappresentazione algebrica dei numeri complessi. Si chiama invece
rappresentazione trigonometrica la rappresentazione
z =√
x2 + y2(cos θ + i sin θ)
cos θ = x√x2+y2
sin θ = y√x2+y2
.
Si calcola facilmente che l’opposto di z = x + iy rispetto alla moltiplicazione, ossia
il numero che si indica col simbolo
11

1. LE FUNZIONI OLOMORFE
1z
=1
x + iy,
è il numero
x − iy
x2 + y2=
z
|z|2 .
Con la notazione trigonometrica, l’opposto di
z = r(cos θ + i sin θ)
è
1z
=1r
(cos(−θ) + i sin(−θ)) =1r(cos θ − i sin θ)
(si noti che l’ultima espressione scritta è una rappresentazione algebrica ma non una
rappresentazione trigonometrica del numero 1/z).
Il numero reale x si chiama la parte reale di z = x + iy mente il numero reale y si
chiama la parte immaginaria di z = x + iy. Essi si indicano con i simboli
e z , Im z .
Notiamo infine: un argomento di un prodotto è la somma degli argomenti; un
argomento di un quoziente è la differenza tra l’argomento del numeratore e
quello del denominatore.
Osservazione 1.2. Va notato esplicitamente che le affermazioni precedenti valgono
pur di scegliere un opportuno argomento. Non valgono per l’argomento principale.
Infatti, se z = w = i, Arg zw = −π mentre invece Arg z + Arg w = +π.
Interpretazione fisica delle operazioni
E’ utile vedere le relazioni tra le operazioni introdotte tra i numeri complessi e le leggi
della fisica. Per l’addizione ciò è facile: essa corrisponde all’addizione di vettori,
fatta componente per componente. La moltiplicazione si incontra invece estendendo
la legge di Ohm alle correnti alternate.
12

1. LE FUNZIONI OLOMORFE
Va inoltre notato che quando (x, y) ed (x ′, y′) sono due vettori del piano, ad essi si
associano:
– il prodotto scalare xx′ + yy′;
– il prodotto vettoriale, che è un vettore di R3, uguale a (xy′ − x′y)k.
I due numeri (xx′ + yy′) e xy′ − x′y si ritrovano calcolando il prodotto zw con
z = x + iy, w = x′ + iy′:
zw = (xx′ + yy′) + i(xy′ − x′y).
1.1.1 Radici n–me di numeri complessi
Sia z un numero complesso. Si chiamano radici n–me di z i numeri w tali che w n = z.
Se z = 0 si vede subito che c’è una sola radice n–ma, w = 0. Invece, ogni z = 0 ha
n radici n–me. Se
z = r(cos θ + i sin θ)
ciascuno dei numeri
n√
r
(cos(
θ + 2kπ
n
)+ i sin
(θ + 2kπ
n
))
verifica wn = z, qualunque sia il numero intero (positivo o meno) k. E’ facile vedere
però che soltanto i valori di k
k = 0 , 1 , . . . , n − 1
danno valori distinti. Dunque z = 0 ha esattamente n radici n–me le quali sono vertici
di un poligono regolare di n lati e appartengono alla circonferenza di centro 0 e raggion√
|z|.
Ciascuna delle funzioni
f(z) = |z|1/nei(Argz+2kπ/n)
si chiama una determinazione della radice n–ma.
13

1. LE FUNZIONI OLOMORFE
1.1.2 Esponenziale, logaritmo, formule di Eulero
Si definisce
ez = ex+iy = exeiy
dove ex è il valore noto dai corsi relativi alle funzioni di variabile reale mentre e iy è
ancora da definire. Si definisce
eiy = cos y + i sin y .
In questo modo,
ez = ex+iy = ex(cos y + i sin y) . 1.1
Dunque, la rappresentazione trigonometrica
r(cos θ + i sin θ)
si può anche scrivere come
elog r+iθ .
Si vede immediatamente che, se y = 0, allora ez = ex+i0 = ex + i0, numero
complesso reale e, usando le formule di trigonometria, si vede subito che vale
ez+w = ezew .
Vale inoltre:
∣∣ex+iy∣∣ = ex .
In particolare, l’equazione ez = 0 non ha soluzioni.
La funzione esponenziale ha sul piano complesso una proprietà inattesa: la funzione
ez è periodica di periodo 2πi.
Dalla 1.1 seguono immediatamente le formule d’Eulero
cos y =eiy + eiy
2, sin y =
eiy − e−iy
2i.
14

1. LE FUNZIONI OLOMORFE
Queste suggeriscono di estendere le funzioni trigonometriche al piano complesso,
definendo
cos z =eiz + eiz
2, sin z =
eiz − e−iz
2i.
Si suggerisce di risolvere le equazioni
cos z = w , sin z = w
rispetto a z notando che ambedue le funzioni cos z e sin z sono suriettive (e quindi
in particolare illimitate).
Conviene ora introdurre il logaritmo di numeri complessi. Sia z = 0. I logaritmi
(in base e) di z sono quei numeri w tali che ew = z. Si rappresenti z in forma
trigonometrica,
z = r(cos θ + i sin θ)
e w in forma algebrica,
w = x + iy .
Allora, w è un logaritmo di z quando
ex(cos y + i sin y) = r(cos θ + i sin θ) .
Questo avviene se
x = log r , y = θ + 2kπ
con k numero intero qualsiasi. Dunque, ogni numero complesso non nullo ha infiniti
logaritmi (e quindi, la funzione ew prende ogni valore non nullo):
log z = log |z| + i arg z
ove arg z è uno qualsiasi degli argomenti di z e log |z| è il logaritmo del numero reale
|z| definito nei corsi precedenti.
La non unicità del logaritmo dipende dal fatto che esso è definito come inverso di una
funzione periodica.
15

1. LE FUNZIONI OLOMORFE
Si chiama logaritmo principale di z il numero
Log z = log |z| + iArg z
(si noti l’uso dell’iniziale maiuscola).
Dunque, ciascuna delle funzioni
log z = log |z| + i(2kπ + Argz) 1.2
verifica
z = elog z=log |z|+i(2kπ+Argz) .
Per questa ragione, si dice che ciascuna delle funzioni in 1.2 è una determinazione del
logaritmo.
Definito il logaritmo, è facile definire le potenze zα ad esponente α qualsiasi, reale
o complesso. Se α = 0 si pone z0 = 1 (salvo il caso z = 0. Al simbolo 00 non si
attribuisce significato). Altrimenti si definisce
zα = eαlog z .
Si vede facilmente che se α è intero positivo, α = n, si ritrova z n; se α = 1/n si
ritrovano le radici n–me. In generale però la potenza ha infiniti valori.
Si calcolino per esercizio le potenze ii, 1i, (−1)i individuando la cardinalità
dell’insieme dei loro valori.
Osservazione importante
Abbiamo notato che vale la formula
ez+w = ezew .
La formula corrispondente,
log zw = log z + log w
vale, ma va interpretata come uguaglianza di insiemi.
Se A e B sono insiemi di numeri complessi, definiamo
A + B = a + b , a ∈ A , b ∈ B .
16

1. LE FUNZIONI OLOMORFE
Notiamo ora che
log zw = log |zw| + i (arg(zw) + 2kπ)
= log |z| + log |w| + i (arg z + argw + 2kπ)
= log |z| + i (arg z + 2nπ) + log |w| + i (argw + 2mπ) = log z + log w .
La formula corrispondente NON vale se si intende di lavorare con i logaritmi
principali, come mostra l’esempio seguente:
Esempio 1.3. Il logaritmo principale di i è
Log i = iπ/2
e
2Log i = iπ .
Invece,
Log(−1) = Log(i2) = −iπ = 2Log i .
1.2. LIMITI E CONTINUITÀ
La funzione
z → |z|
è una norma su C (l’immediata verifica si lascia per esercizio) e quindi è possibile
definire una topologia su C, introducendo gli intorni . L’intorno di z 0 di raggio r è
l’insieme
z | |z − z0| < r .
Geometricamente si tratta di un disco (privato della circonferenza) di centro z 0 e
raggio r.
Definiti gli intorni, e quindi la topologia, è ovvia la definizione di limite di una
successione (zn): si dice che lim zn = z0 quando per ogni ε > 0 esiste Nε tale
che per ogni n > Nε vale
|zn − z0| < ε .
17

1. LE FUNZIONI OLOMORFE
Sia zn = xn + iyn, z0 = x0 + iy0. Si provi per esercizio che lim zn = z0 se e solo se
limxn = x0 e anche lim yn = y0.
Si lascia per esercizio di adattare la definizione di limite e di continuità nota dal corso
di topologia al caso delle funzioni da R in C, da C in R e da C in C.
Per esercizio, si mostri che sono continue le seguenti funzioni:
z → z , z → |z| , z → e z , z → Im z , z → z . 1.3
Di conseguenza sono continui tutti i polinomi. Si studi invece la continuità della
funzione
z → Arg z ,
mostrando che questa è continua salvo che nei punti dell’asse reale negativo.
Osservazione 1.4. Di conseguenza, anche le determinazioni del logaritmo sono
continue in tutti i punti, salvo quelli dell’asse reale negativo. Asserto analogo vale
per le determinazioni della radice n–ma.
1.2.1 Derivata e integrale di funzioni da R in C
Sia t → z(t) = x(t) + iy(t) una funzione definita su un intervallo (a, b) e sia t0 ∈(a, b). Ovviamente, definiremo
z′(t0) = limh→0
z(t0 + k) − z(t0)h
= x′(t0) + iy′(t0) . 1.4
Vediamo due esempi:
Esempio 1.5. Sia α = a + ib un numero complesso e sia
z(t) = x(t) + iy(t) = eαt = eat(cos bt + i sin bt) .
Si verifica immediatamente che
x′(t) = ax(t) − by(t) , y′(t) = ay(t) + bx(t)
18

1. LE FUNZIONI OLOMORFE
e quindi
z′(t) = ax(t) − by(t) + i[ay(t) + bx(t)] = (a + ib)(x(t) + iy(t)) = αeαt .
Si ritrova quindi l’usuale formula di derivazione dell’esponenziale.
Esempio 1.6. La funzione z → Arg z è discontinua nei punti dell’asse reale
negativo. Inoltre, per ogni numero complesso α,
Arg αt =
Arg α se t > 0
(Arg α) − π se t < 0 .
E’ quindi derivabile in ogni t = 0, con derivata nulla. Ne segue che ciascuna delle
funzioni
log αt = log |αt| + i[Arg(αt) + 2kπ] = log (|α||t|) + i[Arg(αt) + 2kπ]
è derivabile per t = 0 e la derivata è
ddt
log αt =1
|αt| |α|sgn t =1t
.
Se z(t) = x(t) + iy(t), t ∈ [a, b], definiamo∫ b
a
z(t) dt =∫ b
a
x(t) dt + i
∫ b
a
y(t) dt .
E’ immediato dalla definizione che:
e
∫ b
a
z(t) dt =∫ b
a
e z(t) dt ,
Im
∫ b
a
z(t) dt =∫ b
a
Im z(t) dt ,
∫ b
a
z(t) dt =∫ b
a
z(t) dt .
Sia ora (zn(t)) una successione di funzioni continue su [a, b], convergente uniforme-
mente a z0(t). Applicando il teorema di scambio tra limiti ed integrali di Riemann
alla parte reale ed alla parte immaginaria, si vede che
lim∫ b
a
zn(t) dt =∫ b
a
z0(t) dt .
19

1. LE FUNZIONI OLOMORFE
Sia ora z(t, s) una funzione di due variabili reali t ed s, con (t, s) ∈ [a, b] × [c, d],
a valori complessi. Applicando alla parte reale e alla parte immaginaria di z i
corrispondenti teoremi relativi alle funzioni a valori reali si trova che se z(t, s) è
continua nelle due variabili,
s →∫ b
a
z(t, s) dt 1.5
è continua in s. Se z(t, s) è di classe C1((a, b)× (c, d)) allora la funzione è derivabile
e, dalla 1.4,
dds
∫ b
a
z(t, s) dt =∫ b
a
∂
∂sz(t, s) dt .
1.3. CURVE NEL PIANO COMPLESSO
Chiameremo curva parametrica una funzione t → z(t) continua da un intervallo
limitato e chiuso [a, b] in C. Diremo che la curva è chiusa quando z(a) = z(b) e
diremo che è semplice se z(t) = z(t′) può solo aversi per t = t′ oppure per t = a e
t′ = b (in questo caso la curva è semplice e chiusa).
Diremo che la curva è regolare quando
z′(t) = x′(t) + iy′(t)
esiste per ogni t ∈ (a, b) con |z ′(t)| = 0 per ogni t.
Se la derivata non esiste, oppure è nulla, solamente in un numero finito di punti e in
tali punti esistono finiti i limiti di z ′(t) da destra e da sinistra, diremo che la curva è
regolare a tratti . Una curva regolare a tratti si dirà un cammino.
Una curva regolare a tratti ottenuta giustapponendo segmenti si chiamerà una
poligonale. Chiameremo poligono una poligonale chiusa.
L’immagine della funzione z(t) si chiama il sostegno della curva. La curva è chiusa
quando z(a) = z(b), ed è semplice se la condizione a < t ′ < t′′ < b implica che
z(t′) = z(t′′).
20

1. LE FUNZIONI OLOMORFE
Una curva semplice e chiusa si chiama anche curva di Jordan e divide il piano in due
regione, una limitata e una illimitata. La regione limitata si dice interna alla curva.
Quest’asserto, apparentemente semplice, è invece di dimostrazione molto difficile.
Però in pratica, e anche per gli usi teorici, le curve che è necessario usare sono “molto
semplici” (per esempio poligonali, circonferenze, ellissi o riunione di un numero finito
di archi di tali curve). In tal caso è facile individuare la regione interna ed è anche
facile vedere se la curva è orientata positivamente. Ciò avviene quando, al passare
del parametro t da a a b, il punto mobile sulla curva vede la regione interna alla sua
sinistra (regola d’Ampère).
Se non esplicitamente detto il contrario, assumeremo sempre che le curve con cui
si lavora siano orientate positivamente.
La regione interna ad una curva di Jordan si chiama anche regione di Jordan.
Notiamo esplicitamente questa proprietà: se γ è una curva di Jordan il cui sostegno è
conenuto nella regione di Jordan Ω, e se Ωγ indica la regione intera a γ, vale
Ωγ ⊆ Ω .
Questa proprietà generalmente non vale se Ω non è di Jordan.
Un’ulteriore proprietà che è bene conoscere è la seguente: se due curve
z = z(t) , t ∈ [a, b] , ζ = ζ(τ) τ ∈ [α, β]
sono semplici ed hanno la medesima immagine allora esiste un cambiamento di
parametro
t = t(τ)
tale che
ζ(τ) = z(t(τ))
e inoltre la funzione τ → t(τ) è crescente oppure decrescente da [α, β] su [a, b] (e
quindi è anche continua). Detto in altro modo, a meno di riparametrizzazioni, il
sostegno di una curva semplice è sostegno solamente di una seconda curva, che si
ottiene dalla prima cambiando il verso di percorrenza. Questa proprietà permette
21

1. LE FUNZIONI OLOMORFE
di semplificare il nostro linguaggio come segue: dato per esempio un quadrato,
esiste un’unica curva che lo ha per sostegno e che è orientata positivamente. Allora
chiameremo “curva” il quadrato, intendendo con ciò di considerare quella curva
semplice che è orientata positivamente e che ha il quadrato assegnato come sostegno.
Potremo ricorrere a questa semplificazione di linguaggio solamente quando il sostegno
che consideriamo è sostegno di una curva semplice e chiusa.
Una curva si indicherà con una lettera greca minuscola, per esempio γ. Se la curva è
semplice e chiusa, la sua regione interna si indica col simbolo Ωγ .
Richiamiamo il teorema seguente:
Teorema 1.7 (Formula di Green). Siano u(x, y) e v(x, y) di classe C 1 in una
regione di Jordan Ω e sia γ una curva semplice e chiusa in Ω. Vale:∫γ
u dx + v dy =∫
Ωγ
[vx(x, y) − uy(x, y)] dx dy .
Si sa inoltre che questa formula si estende al caso in cui si abbiano due curve, γ nella
regione Ω e η nella regione Ωγ . In questo caso la formula di Green assume la forma∫γ
u dx + v dy −∫
η
u dx + v dy =∫
Ωγ−Ωη
[vx(x, y) − uy(x, y)] dx dy . 1.6
Da questa forma faremo discendere tutti i risultati relativi alle funzioni olomorfe che
vedremo.
1.4. FUNZIONI DA R2 IN R2 E FUNZIONI DA C IN C
Dato che i numeri complessi sono coppie di numeri reali, ogni funzione
(x, y) → (u(x, y), v(x, y) ) 1.7
si può intendere come funzione a valori complessi
(x, y) → u(x, y) + iv(x, y)
22

1. LE FUNZIONI OLOMORFE
e si può anche voler rappresentare il suo dominio con le notazioni dei numeri
complessi,
(x, y) = x + iy = z .
Essendo
x =z + z
2, y =
z − z
2i
la funzione in 1.7 si può anche rappresentare come
f(z) = u
(z + z
2,z − z
2i
)+ iv
(z + z
2,z − z
2i
)1.8
Notiamo, infatti, che z è funzione di z.
Notiamo subito una dissimmetria tra l’insieme di partenza e l’insieme d’arrivo: la
relazione di coniugio appare nella formula 1.8 soltanto applicata alla variabile z.
Anche la via opposta si può seguire: se w = f(z) si può scrivere
w = f(z) = f(x + iy) = u(x, y) + iv(x, y)
con u e v le parti reale ed immaginaria di f e x, y le parti reale ed immaginaria di
z. Ciò suggerisce che la teoria delle funzioni di variabile complessa sia un modo
diverso di formulare la teoria delle funzioni da R2 in sé. In realtà vedremo che le
cose non sono così semplici. Però, almeno al livello della rappresentazione grafica
l’identificazione appena presentata è utile. Una funzione da C in sé si rappresenta:
– rappresentando su R2 (insieme di arrivo) l’immagine di una griglia tracciata
su R2 (insieme di partenza);
– rappresentando in R3 il grafico della funzione
(x, y) → |u(x, y) + iv(x, y)|
e tracciando su tale grafico le linee identificate da
arg f(z) = cost .
Di una terza rappresentazione diremo più avanti.
Consideriamo alcuni esempi.
23

1. LE FUNZIONI OLOMORFE
– Esempio 1. Sia
u(x, y) = x , v(x, y) = −y .
Con notazione complessa questa funzione si rappresenta come
z → z .
– Esempio 2. Sia
u(x, y) = x2 + y2 , v(x, y) = 0 .
Con notazione complessa questa funzione si rappresenta come
z → zz .
– Esempio 3. Sia
u(x, y) = x2 + y2 , v(x, y) = 2xy .
Con notazione complessa questa funzione si rappresenta come
z → zz − i
2(z2 − z2) .
– Esempio 4. Sia
u(x, y) = x2 − y2 , v(x, y) = 2xy .
Con notazione complessa questa funzione si rappresenta come
z → z2 .
Notiamo che ciascuna delle funzioni degli esempi precedenti, come funzione delle
due variabili reali x ed y, è di classe C1. Cerchiamo però di calcolare il limite del
rapporto incrementale
limz→z0
f(z) − f(z0)z − z0
.
Nel case dell’esempio 4 questo si riduce a
24

1. LE FUNZIONI OLOMORFE
limz→z0
z2 − z20
z − z0= lim
z→z0
(z − z0)(z + z0)z − z0
= 2z0 .
Dunque, il limite esiste in ciascun punto z0. Invece nel caso dell’esempio 2 il limite
esiste solo per z0 = 0. Infatti, se z0 = 0 si ha
limz→0
zz
z= lim
z→z0z = 0 .
Se però z0 = 0 si trova
limz→z0
zz − z0z0
z − z0= lim
z→z0
z − z0
z − z0z + z0
z − z0
z − z0
.
Dato che
limz→z0
z0z − z0
z − z0
esiste, uguale a z0, rimane da capire se esiste anche il limite del primo addendo.
Scrivendo
z − z0
z − z0=
x − x0 + i(y0 − y)x − x0 + i(y − y0)
si vede che il limite non esiste. Infatti, calcolando il limite lungo la retta y = y 0 si
trova +1 mentre calcolandolo lungo la retta x = x0 si trova −1.
Si ritrovi l’esistenza del limite quando z0 = 0, per questa via.
In modo analogo si vede che il limite non esiste nemmeno nel caso delle funzioni degli
esempi 2 e 3.
Quando il limite del rapporto incrementale esiste, naturalmente lo chiameremo deri-
vata. Gli esempi precedenti mostrano che questo concetto di derivata apparentemente
non ha relazioni con le derivate nel campo reale. Una relazione in realtà esiste, e la
vedremo ai paragrafi 1.5. e 1.5.3.
Possiamo ora spiegare quale è l’oggetto della così detta Teoria delle funzioni. Per
antonomasia si chiama in questo modo la teoria delle funzioni di variabile complessa,
che sono derivabili in ciascun punto di una regione. La derivata si intende nel senso
del limite del rapporto incrementale, il rapporto essendo calcolato per mezzo del
quoziente di numeri complessi.
25

1. LE FUNZIONI OLOMORFE
1.5. LA DERIVATA
I numeri complessi costituiscono un campo e quindi è lecito studiare i rapporti
incrementali
f(z0 + h) − f(z0)h
.
L’esistenza di una norma su C permette di studiarne il limite per h → 0. Se questo
esiste finito, si chiama la derivata di f(z) in z0.
In pratica, la derivabilità in un solo punto ha ben poco interesse nella teoria delle
funzioni di variabile complessa. Piuttosto, interessa studiare le funzioni che sono
derivabili in ciascun punto di una regione.
Si noti che gli intorni dei punti in C sono dischi: h tende a zero prendendo tutti i
valori in dischi centrati in 0. In particolare, se la derivata esiste, i limiti calcolati con
h = x + i0 ed x → 0 e con h = 0 + iy ed y → 0 esistono e sono uguali. Dunque, se
esiste f ′(z0) esistono anche ambedue le derivate parziali in (x0, y0) sia di u(x, y) che
di v(x, y). Queste non sono indipendenti, come ora vediamo.
Teorema 1.8. Se f ′(z) esiste per ogni z in Ω, z = x + iy, allora valgono le
uguaglianze
ux(x, y) = vy(x, y) , uy(x, y) = −vx(x, y) 1.9
e inoltre
f ′(x + iy) = ux(x, y) + ivx(x, y) = vy(x, y) − iuy(x, y)
=12ux(x, y) + vy(x, y) − i[uy(x, y) − vx(x, y)] =
12
[∂f
∂x− i
∂f
∂y
].
1.10
DIMOSTRAZIONE
Il calcolo è immediato:
limh→0 h∈R
u(x + h, y) + iv(x + h, y) − u(x, y) − iv(x, y)
h= ux(x, y) + ivx(x, y)
e questo limite deve essere uguale sia ad f ′(z) che a
limk→0 k∈R
u(x, y + k) + iv(x, y + k) − u(x, y) − iv(x, y)
ik= −iuy(x, y) + vy(x, y) .
26

1. LE FUNZIONI OLOMORFE
Dunque valgono le uguaglianze 1.9 e le espressioni 1.10 per la derivata.
Le equazioni 1.9 sono importantissime e vanno sotto il nome di condizioni di
Cauchy–Riemann.
Vicevera:
Teorema 1.9. Siano u(x, y) e v(x, y) due funzioni di classe C 1 su una regione Ω. Si
definisca
f(z) = f(x + iy) = u(x, y) + iv(x, y) .
Se le funzioni u(x, y) e v(x, y) soddisfano alle condizioni di Cauchy–Riemann su Ω,
allora la funzione f(z) è derivabile ed f ′(z) è continua.
DIMOSTRAZIONE
Sia h = α + iβ. Scriviamo
f(z + h) − f(z) = u(x + α, y + β) − u(x, y) + i[v(x + α, y + β) − v(x, y)] .
Essendo le due funzioni u e v di classe C 1, si può applicare ad esse il teorema della
media
u(x + α, y + β) − u(x, y) = ux(x1, y1)α + uy(x1, y1)β
v(x + α, y + β) − v(x, y) = vx(x2, y2)α + vy(x2, y2)β
con (x1, y1) e (x2, y2) punti opportuni nel rettangolo di vertici (x, y), (x+α, y), (x, y+β),
(x + α, y + β).
Quando α e β tendono a zero sia (x1, y1) che (x2, y2) tendono ad (x, y).
Usando le condizioni di Cauchy–Riemann scriviamo
f(z + h) − f(z) = [ux(x1, y1) + ivx(x2, y2)]α + [uy(x1, y1) + ivy(x2, y2)]β
= [ux(x1, y1) + ivx(x2, y2)]α + [−vx(x1, y1) + iux(x2, y2)]β
= [ux(x1, y1) + ivx(x2, y2)]α + i[ux(x2, y2) + ivx(x1, y1)]β
= [ux(x1, y1) + ivx(x2, y2)](α + iβ)
+i [ux(x2, y2) − ux(x1, y1)] + i[vx(x1, y1) − vx(x2, y2)]β .
27

1. LE FUNZIONI OLOMORFE
Essendo β = Imh, vale |β/h| < 1 e inoltre la parentesi graffa tende a zero per h → 0
perché, per ipotesi, le funzioni u e v sono di classe C 1. La parentesi quadra tende a
[ux(x, y) + ivx(x, y)] così che
f ′(z) = limh→0
f(z + h) − f(z)
h= [ux(x, y) + ivx(x, y)] .
Ciò prova l’esistenza della derivata in ciascun punto. Inoltre, da questa formula si vede
che f ′(z) è continua perché sia ux(x, y) che vx(x, y) sono funzioni continue.
Le funzioni f(z) che sono derivabili con continuità su una regione Ω si chiamano
funzioni olomorfe.
E’ bene dire che il requisito della continuità nella definizione precedente potrebbe
rimuoversi, grazie al seguente risultato, che non proviamo:
Teorema 1.10. se la funzione continua f(z) è derivabile in ciascun punto della
regione Ω allora la sua derivata f ′(z) è continua.
Introduciamo infine due notazioni. L’uguaglianza 1.10 suggerisce di introdurre la
notazione ∂/∂z, definita da
∂
∂zf(z) =
12
[∂
∂x− i
∂
∂y
]f(x + iy) =
12
[∂f
∂x− i
∂f
∂y
]= f ′(z)
mentre le condizioni di Cauchy–Riemann 1.9 suggeriscono l’introduzione della
notazione ∂/∂z, definita da
∂
∂zf(z) =
12
[∂
∂x+ i
∂
∂y
]f(x+iy) =
12
[∂
∂xf + i
∂
∂yf
]=
12[ux+ivx+iuy−vy] .
E quindi le condizioni di Cauchy–Riemann si scrivono
∂
∂zf(z) = 0 .
Notiamo due conseguenze immediate delle condizioni di Cauchy–Riemann:
Teorema 1.11. Sia f(z) una funzione olomorfa su una regione Ω. Supponiamo
inoltre che essa prenda valori reali. Allora, essa è costante.
28

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
Se la funzione prende valori reali allora v(x, y) è identicamente zero e quindi u x(x, y)
ed uy(x, y) sono identicamente nulle su Ω per le condizioni di Cauchy–Riemann e
quindi anche u(x, y) è costante.
Lemma 1.12. Sia f(z) olomorfa su un disco D su cui |f(z)| è costante. Allora f(z)
stessa è costante su D.
DIMOSTRAZIONE
Per ipotesi, su D vale
|f(x + iy)|2 = |u(x, y) + iv(x, y)|2 = u2(x, y) + v2(x, y) = c .
Proviamo che f(z) stessa è costante. Questo è ovvio se c = 0. Sia quindi c > 0.
Derivando e usando le condizioni di Cauchy–Riemann si trova
0 = 2[uux + vvx] = 2[uux − vuy] , 0 = 2[uuy + vvy ] = 2[uuy + vux] .
Moltiplicando la prima per u e la seconda per v e sommando si trova
0 = (u2 + v2)ux = cux
e quindi ux = 0, perché c > 0. In modo analogo si vede che uy = 0 e quindi u è
costante. Dalle condizioni di Cauchy–Riemann segue che anche v è costante.
1.5.1 Esempi di funzioni olomorfe e formule di derivazione
Dal teorema 1.11, le funzioni
z → e z , z → Im z , z → |z| , z → Argz
non sono olomorfe. Abbiamo già notato che l’ultima non è nemmeno continua
sull’asse reale negativo; e, è del tutto ovvio che una funzione olomorfa è continua.
La dimostrazione è la stessa come per le funzioni di variabile reale. Dunque in
particolare log z non è olomorfa in una regione che interseca l’asse reale negativo.
29

1. LE FUNZIONI OLOMORFE
Inoltre, le usuali regole di derivazione della somma, del prodotto, del quoziente e
della funzione composta valgono anche per funzioni di variabile complessa, con
le medesime dimostrazioni come nel caso delle funzioni di una variabile reale. Di
conseguenza, dato che f(z) = z è ovviamente derivabile, con derivata uguale ad 1, i
polinomi sono funzioni olomorfe e, al di fuori dei poli, sono anche funzioni olomorfe
le funzioni razionali.
Mostriamo:
Teorema 1.13. La funzione z → ez è olomorfa su C e coincide con la sua funzione
derivata.
DIMOSTRAZIONE
Infatti,ez = ex+iy = [ex cos y] + i[ex sin y] .
Dunque, per questa funzione,
u(x, y) = [ex cos y] , v(x, y) = [ex sin y] .
E’ immediato verificare che queste funzioni sono di classe C 1 su C, e verificano le
condizioni di Cauchy–Riemann.
Dalla 1.10 si trova immediatamente che la derivata di e z è
ux(x, y) + ivx(x, y) = ex cos y + iex sin y = ez .
Di conseguenza, grazie alle formule di Eulero, le funzioni trigonometriche sono
olomorfe e si vede facilmente che per esse valgono le usuali regole di derivazione,
come nel caso reale.
Si è notato che la funzione Log z non è continua e quindi nemmeno olomorfa su C, e
ciò mostra che è necessaria una certa cautela nel derivare funzioni inverse. Se però si
sa “a priori” che g(z) è la funzione inversa della funzione olomorfa f(z) e che g(z)
stessa è olomorfa, allora si può applicare la regola della derivazione della funzione
composta all’uguaglianza
f(g(z)) = 1
30

1. LE FUNZIONI OLOMORFE
e trovare per g ′(z) l’usuale formula,
g′(z) = 1/f ′(g(z)) . 1.11
Torneremo su questo problema al paragrafo 1.5.3.
Studiamo ora le determinazioni di log z, usando direttamente le condizioni di Cauchy–
Riemann. Più avanti ritroveremo questi stessi risultati in modo meno diretto, ma più veloce
e più generale.
Il fatto che le funzioni logaritmo e radice non siano continue su C, non vieta che esse siano
olomorfe su regioni più piccole. Per capire se ciò accade, conviene scrivere le condizioni di
Cauchy–Riemann in coordinate polari. Notiamo prima di tutto che se
x = ρ cos θ , y = ρ sin θ ,
derivando la seconda rispetto ad x si trova
0 = ρx sin θ + ρ(cos θ)θx
e quindi
θx = −ρx
ρ
sin θ
cos θ= −ρx
ρ
y
x= − x
ρ2
y
x= − y
ρ2. 1.12
Infatti si calcola immediatamente, da ρ =p
x2 + y2,
ρx =x
ρ, ρy =
y
ρ.
In modo analogo si vede che
θy =x
ρ2. 1.13
Osservazione 1.14. Per la validità di queste formule si richiede ρ = 0. Noi le abbiamo
provate supponendo anche cos θ = 0, sin θ = 0 ma questa condizione immediatamente si
rimuove. Infatti, studiando lo jacobiano della trasformazione (ρ, θ) → (x, y) si vede che
questo non si annulla per ρ = 0 e quindi ρ(x, y) e θ(x, y) sono di classe C1 sul piano (x, y)
privato dell’origine; e quindi ivi si estendono per continuità le formule che abbiamo trovato.
Sia ora
f(z) = f(x + iy) = u(x, y) + iv(x, y) .
Sia U(ρ, θ) la funzione che nel punto (ρ, θ) prende come valore u(ρ cos θ, ρ sin θ). In modo
analogo definiamo V (ρ, θ). E’ immediato notare che U e V sono di classe C1, nelle variabili ρ
e θ, se e solo se rispettivamente u e v sono di classe C1 nelle variabili x ed y. Inoltre,
31

1. LE FUNZIONI OLOMORFE
Uρ = ux cos θ + uy sin θ .
Se valgono le condizioni di Cauchy–Riemann,
Uρ = vy cos θ − vx sin θ .
Analogamente,
Vθ = −vxρ sin θ + vyρ cos θ .
Si intende che le funzioni u e v sono calcolate nel punto x = ρ cos θ, y = ρ sin θ.
Dunque, se le condizioni di Cauchy–Riemann valgono, si ha anche
ρUρ = Vθ e analogamente ρVρ = −Uθ . 1.14
Viceversa, le 1.14 implicano le condizioni di Cauchy–Riemann. Infatti,
ux = Uρx
ρ− Uθ
y
ρ2
vy = Vρy
ρ+ Vθ
x
ρ2= −1
ρUθ
y
ρ+ ρUρ
x
ρ2
da cui
ux = vy e analogamente uy = −vx .
Introduciamo ora
F (ρ, θ) = U(ρ, θ) + iV (ρ, θ) .
Con questa notazione, le 1.14 valgono se e solo se
iρFρ = Fθ . 1.15Usiamo 1.15 per studiare la funzione
f(z) =√
ρ[cos θ/2 + i sin θ/2]
nella regione
ρ > 0 , −π ≤ θ < π . 1.16
E’ ovvio che la funzione, come funzione delle due variabili reali ρ e θ, equivalentemente x ed
y, è di classe C1. Si vede che è olomorfa notando che su questa regione vale la condizione 1.15.
Analogo discorso vale per ogni determinazione di z1/n.
In modo analogo si tratta la funzione
f(z) = log |z| + iArg z + 2kπi ,
32

1. LE FUNZIONI OLOMORFE
con k fissato, ancora sulla regione 1.16. Applicando il teorema della funzione implicita alle
relazioni
x = ρ cos θ , y = ρ sin θ
valide per ρ > 0 e −π ≤ θ < π, si vede che la funzione (ρ, θ), come funzione di x e di y, è di
classe C1 e quindi lo stesso vale per ciascuna funzione log |z|+iArg z+2kπi, in −π < θ < π.
Un calcolo immediato mostra che la condizione 1.15 è soddisfatta e quindi mostra che ciascuna
delle funzioni log z è olomorfa.
Usando la 1.11 si vede ora che ciascuna delle determinazioni della funzione log z, letta su su
π < Argz < π, ha per derivata 1/z, per ogni z nella regione 1.16. Infatti,
eLog z+2kπi = z
e quindi
1 = eLog z+2kπi ddz
(Log z + 2kπi) =ddz
(Log z + 2kπi) z ,
ddz
(Log z + 2kπi) =1
z.
Osserviamo ora un fatto imbarazzante: θ = −π non ha una relazione intrinseca con le funzioni
logaritmo (e nemmeno con le radici), ma solo dipende dalla nostra scelta per l’argomento
principale. Avessimo scelto per esempio 0 ≤ θ < 2π avremmo trovato funzioni olomorfe
nel piano privato dell’asse reale positivo; avessimo scelto π/2 ≤ θ < 5π/2 avremmo trovato
funzioni olomorfe ovunque, salvo che sull’asse immaginario positivo.
Più avanti diremo qualcosa di più su questo problema. Per ora limitiamoci a notare ciò.
1.5.2 Osservazione sui “teoremi fondamentali del calcolo differenziale”
Nella teoria delle funzioni di una variabile reale, si chiamano “teoremi fondamentali
del calcolo differenziale” varie formulazioni del teorema di Rolle: sia f(x) continua
per x ∈ [a, b], a valori in R e tale che f(a) = f(b) = 0. Sia inoltre f(x) derivabile in
ciascun punto di (a, b). Esiste un punto c ∈ (a, b) nel quale la derivata si annulla.
In particolare una funzione da R in sé, derivabile e periodica, ha derivata nulla in
infiniti punti.
E’ importante notare che asserti analoghi non valgono per le funzioni olomorfe.
33

1. LE FUNZIONI OLOMORFE
Esempio 1.15. La funzione f(z) = ez è olomorfa e periodica. Si è visto che la sua
derivata è
f ′(z) = ez
mai nulla.
E’ importante discutere la ragione di ciò. Ricordiamo che la dimostrazione del
teorema di Rolle si basa sul teorema di Fermat, che a sua volta dipende dalla regola
dei segni: il prodotto di numeri di segno concorde è positivo. Noi non abbiamo
introdotto una relazione d’ordine tra i numeri complessi. E’ però possibile introdurne
infinite. Per esempio si può introdurre l’ordinamento lessicografico: x + iy viene
prima di x′ + iy′ se x < x′ oppure se x = x′ ma y < y′. In questo modo i numeri
“positivi”, ossia maggiori di 0, sono quelli di parte reale strettamente positiva oppure
quelli con la parte reale nulla e parte immaginaria positiva. Queste proprietà non sono
conservate facendo il prodotto. Per esempio, i · i = −1. In generale, la regola dei
segni non vale tra i numeri complessi, qualsiasi sia la relazione d’ordine che si
voglia usare.
E’ appena il caso di notare che i problemi che si incontrano con la continuità e la
derivabilità della funzione inversa hanno un’origine analoga. Si ricordi infatti che
il teorema della funzione monotona interviene (in modo alquanto nascosto) nella
dimostrazione della derivabilità della funzione inversa di una funzione da R in sé.
1.5.3 La matrice jacobiana e le funzioni olomorfe
Siano u(x, y) e v(x, y) rispettivamente la parte reale ed immaginaria di una funzione
olomorfa f(z). La funzione (x, y) → (u(x, y), v(x, y)) è una trasformazione da R 2
in sé, la cui matrice jacobiana è
J =
ux(x, y) uy(x, y)
vx(x, y) vy(x, y)
=
ux(x, y) uy(x, y)
−uy(x, y) ux(x, y)
e quindi lo jacobiano è
u2x(x, y) + u2
y(x, y) .
34

1. LE FUNZIONI OLOMORFE
Dunque:
Teorema 1.16. Sia f(x + iy) = u(x, y) + iv(x, y) una funzione olomorfa. Lo
jacobiano è non nullo in un punto (x, y) se e solo se f ′(x + iy) = 0. In tale punto lo
jacobiano è positivo.
Si ricordi che lo jacobiano è positivo quando la trasformazione a cui esso corrisponde
conserva l’orientazione di R2; equivalentemente, quando l’area orientata di un
triangolo ha il medesimo segno prima e dopo la trasformazione.
Possiamo ora esaminare nuovamente il problema della derivazione della funzione
inversa di una funzione olomorfa.
Teorema 1.17. Sia f(z) olomorfa su una regione Ω, e con derivata non nulla. La
funzione è localmente invertibile e la sua inversa è olomorfa.
DIMOSTRAZIONE
Sia
f(x + iy) = u(x, y) + iv(x, y) .
Si è appena visto che lo jacobiano della trasformazione di classe C 1 su R2
(x, y) → (u(x, y), v(x, y))
non si annulla e quindi la trasformazione è localmente invertibile. Inoltre, la
trasformazione inversa, che indichiamo col simbolo
(u, v) → (x(u, v), y(u, v)) ,
è di classe C1.
Si è visto che la matrice jacobiana della trasformazione è
J =
24 ux(x, y) uy(x, y)
−uy(x, y) ux(x, y)
35
e si vede immediatamente che
J ′J =
24 u2
x + u2y 0
0 u2x + u2
y
35
35

1. LE FUNZIONI OLOMORFE
così che
J−1 =1
u2x + u2
y
J =1
u2x + u2
y
24 ux(x, y) uy(x, y)
−uy(x, y) ux(x, y)
35 .
D’altra parte, J−1 calcolato nel punto (u, v) che proviene da (x, y) è24 xu(u, v) xv(u, v)
yu(u, v) yv(u, v)
35
così che
xu = yv , yu = −xv ,
ossia la trasformazione (u, v) → (x(u, v), y(u, v)) è di classe C 1 e verifica le condizioni
di Cauchy–Riemann. Per il teorema 1.9, la funzione
g(u + iv) = x(u, v) + iy(u, v) ,
inversa della funzione f(x + iy), è olomorfa.
Esempio 1.18. La funzione f(z) = ez è olomorfa e si è visto che la sua derivata
è ancora ez e quindi non si annulla. Fissiamo un punto z0 ed il valore ez0 . Il
teorema 1.17 afferma che esistono un intorno U di z0 ed un introno V di ez0 ed
un’unica funzione g(z) definita su V a valori in U , tale che e g(z) = z. Dunque,
g(z) è una delle determinazioni della funzione log z. Per esempio, se z0 = 0 e
quindi ez0 = 1 allora g(z) = Log z; se z0 = 2πi e quindi ancora ez0 = 1,
g(z) = Log z + 2πi. Inoltre, sempre dal teorema 1.17, la funzione inversa g(z)
è olomorfa e, dalla formula 1.11, per ogni determinazione del logaritmo, ossia per
ogni k,
ddz
(Log z + 2kπi) =1z
.
Si ritrova quindi quanto già visto al paragrafo 1.5.1: tutte le determinazioni della
funzione log z sono derivabili, con derivata 1/z.
Osservazione 1.19. Con riferimento all’esempio 1.18, sia z0 = i. In questo
caso, ez0 = −1 e si è visto che esiste una funzione olomorfa g(z) tale che
36

1. LE FUNZIONI OLOMORFE
eg(z) = z, definita in un intorno di −1. Questa funzione quindi differisce da ciascuna
delle funzioni Log z + 2kπi, che sono discontinue sull’asse reale negativo. Questa
“stranezza” verrà chiarita al paragrafo 1.9.3 e all’esempio 1.58.
1.5.4 Serie di potenze e serie di Laurent
Abbiamo visto fino ad ora degli esempi particolari di funzioni olomorfe. Una classe
di funzioni olomorfe è offerta dalle serie di potenze
f(z) =+∞∑n=0
an(z − z0)n . 1.17
Una funzione siffatta è sempre definita in z0 e, può essere, in nessun altro punto. In
tal caso ovviamente essa non è una funzione olomorfa. Vale però:
Teorema 1.20 (di Abel). Se la serie 1.17 converge in un punto z1 = z0 allora essa
converge in ogni punto z tale che
|z − z0| < |z1 − z0|
DIMOSTRAZIONE
Per semplicità di notazioni, sia z0 = 0. Per provare la convergenza di una serie di
numeri complessi, è sufficiente provare la convergenza della serie dei moduli. Sia
allora |z| < |z1| e studiamo la serie (di numeri positivi)
+∞Xn=0
|anzn| =+∞Xn=0
|an| |z|n .
Dato che |z| < |z1| (disuguaglianza stretta) esiste r tale che
|z| < r < |z1| ossia|z||z1|
<r
|z1|= q ∈ (0, 1).
Dunque,
+∞Xn=0
|an||z|n ≤+∞Xn=0
(|an| |z1|n)
˛˛ z
z1
˛˛n
≤+∞Xn=0
(|an| |z1|n) qn .
La serieP+∞
n=0 |an| |z1|n per ipotesi converge e quindi il suo termine generale tende a
zero. In particolare, esiste M tale che
|an| |z1|n < M
37

1. LE FUNZIONI OLOMORFE
e quindi+∞Xn=0
|an| |z|n ≤ M
+∞Xn=0
qn < +∞ .
Di conseguenza,
z |+∞∑n=0
an(z − z0)n converge
è un disco centrato in z0 (che potrebbe essere ridotto al solo punto z0, o essere tutto
il piano complesso). Il suo interno si dice disco di convergenza della serie, e il suo
raggio R, 0 ≤ R ≤ +∞ si dice raggio di convergenza.
Esaminando la dimostrazione del teorema 1.20 si vede che in realtà abbiamo provato
un risultato molto più forte:
Teorema 1.21 (di Abel). Il raggio di convergenza R di una serie di potenze sia
strettamente positivo. In questo caso la serie converge assolutamente in ogni punto
interno al disco di convergenza, e converge uniformemente in ogni compatto contenuto
nel disco di convergenza. In particolare, la somma della serie è una funzione continua
nel disco di convergenza.
Se z è tale che |z − z0| > R la serie non converge in z.
Vedremo (al paragrafo 1.15.) che questo teorema implica:
Teorema 1.22. Il raggio di convergenza di una serie di potenze sia strettamente
positivo. La serie di potenze definisce una funzione olomorfa nel disco di convergenza.
Il raggio di convergenza di una serie di potenze si calcola facendo uso delle stesse
formule che sono note per le serie di potenze reali: se i coefficienti an non sono mai
nulli e se esiste
lim|an|
|an+1|
allora questo limite, finito o meno, è uguale al raggio di convergenza.
In generale, il raggio di convergenza si può calcolare con la seguente formula di
Hadamard:
1R
= lim sup n√|an| ,
38

1. LE FUNZIONI OLOMORFE
la cui dimostrazione è posposta.
Si noti che nella formula di Hadamard si usano le “regole” 1/0 = +∞, 1/(+∞) = 0.
La formula di Hadamard ha una conseguenza importante. Dato che
lim n√
n = 1 ,
le due serie
+∞∑n=0
an(z − z0)n ,
+∞∑n=0
nan(z − z0)n−1
hanno il medesimo raggio di convergenza. Dunque, quando R > 0, si pone il
problema di sapere se la seconda serie rappresenti la derivata della prima. La risposta
è affermativa, perché vale il teorema seguente, che verrà provato al paragrafo 1.15.
Teorema 1.23. Sia f(z) =∑+∞
n=0 an(z−z0)n e sia positivo il raggio di convergenza
della serie. Allora, in ogni punto del disco di convergenza, vale
f ′(z) =+∞∑n=0
nan(z − z0)n−1 .
La ragione per cui non proviamo ora i due teoremi 1.22 e 1.23 è che, più avanti,
proveremo un risultato molto più generale, di cui essi possono considerarsi dei
corollari.
Più in generale si chiamano serie di Laurent le serie di potenze con esponenti interi
sia positivi che negativi, ossia le serie della forma
+∞∑n=−∞
an(z − z0)n ,
ovviamente mai definite per z = z0. Per definizione, la somma della serie di Laurent
è la somma delle due serie di potenze una in z e l’altra in 1/z,
+∞∑n=−∞
an(z − z0)n =−1∑
n=−∞an(z − z0)n +
+∞∑n=0
an(z − z0)n
e quindi le proprietà delle serie di Laurent discendono immediatamente da quelle delle
serie di potenze. La serie di potenze positive di 1/(z−z0) converge per |1/(z−z0)| <
r ossia per |z − z0| > 1/r = r, la serie di potenze positive di (z − z0) converge per
39

1. LE FUNZIONI OLOMORFE
|z−z0| < R; e quindi la serie di Laurent converge se r ≤ R. Se r < R chiameremo
corona di convergenza la corona circolare
r < |z − z0| < R .
In tale corona la serie converge assolutamente, e converge uniformemente nei
compatti in essa contenuti.
Inoltre:
Teorema 1.24. La somma di una serie di Laurent è olomorfa nella corona di
convergenza e
ddz
+∞∑n=−∞
an(z − z0)n =+∞∑
n=−∞nan(z − z0)n−1 .
Dimostrazione della formula di Hadamard.
Per semplicità di notazioni sia z0 = 0 e sia
α = lim sup n√|an| .
Studiamo prima di tutto il caso α = +∞. Mostriamo che in questo caso il raggio di
convergenza è nullo. Sia z = 0 e scegliamo β ∈ (0, |z|). Scegliamo un qualsiasi k
tale che kβ > 1 e notiamo che, per infiniti n, vale
n√|an| > k e quindi |anzn| > (kβ)n .
La serie di potenze quindi non converge.
Consideriamo ora il caso in cui
lim sup n√
|an| = α ∈ (0, +∞) .
Sia z un numero per cui
|z| >1α
.
Vogliamo provare che la serie di potenze non converge in z. Ciò implicherà che il
raggio di convergenza non supera 1/α.
Sia r un numero tale che
1α
< r < |z| .
40

1. LE FUNZIONI OLOMORFE
Da (1/r) < α segue che per infiniti indici vale
1r
< n√|an|
e quindi
|z|nrn
< |anzn| .
Essendo |z| > r si ha
lim sup |anzn| = +∞
e la serie non converge.
Dunque, R ≤ 1/α.
Se α = 0 è ancora vero che R < 1/α, pur di intendere 1/α = +∞.
Ricapitolando, a questo punto sappiamo che
R ≤ 1α
, intendendo
1∞ = 010 = ∞ .
Proviamo la disuguaglianza opposta.
Consideriamo ancora prima di tutto il caso α > 0 e sia |z| < 1/α. Proviamo che in
tal caso la serie converge. Se α = +∞ allora z = 0 e niente va provato. Sia quindi
0 < α < +∞.
Essendo |z| < 1/α, avremo
|z| =c
α, |anzn| = |an|
cn
αncon 0 ≤ c < 1 .
Sia ε > 0. Esiste Nε tale che per n > Nε si ha
n√|an| < α + ε 1.18
e quindi
|anzn| =|an|αn
cn <(1 +
ε
α
)n
cn .
A questa disuguaglianza si arriva per ogni ε > 0. Essendo c ∈ (0, 1), si può scegliere
ε tale che
(1 +
ε
α
)c < 1 .
41

1. LE FUNZIONI OLOMORFE
In questo modo si vede che i termini della serie di potenze sono dominati da quelli di
una serie numerica convergente, e quindi la serie
+∞∑n=0
anzn
converge.
Consideriamo infine il caso α = 0 e z qualsiasi. In questo caso la 1.18 vale con α = 0.
Si sia scelto ε tale che ε|z| = c < 1. Si ha
|anzn| < cn
e ancora la convergenza della serie di potenze segue per confronto con la serie
geometrica.
In ambedue i casi R ≥ 1/α e quindi l’uguaglianza.
1.6. FUNZIONI OLOMORFE E TRASFORMAZIONI CONFORMI
Sia (x, y) → (u(x, y), v(x, y)) una trasformazione di classe C 1. Conviene spesso
rappresentarla mediante la notazione complessa, associando alla coppia (x, y) il
numero complesso z = x + iy e introducendo w = u + iv, così che la trasformazione
si rappresenta anche come
w = f(z) .
Conviene vedere questa funzione come trasformazione dal piano della variabile z al
piano della variabile w.
Supponiamo che il dominio di f(z) sia una regione Ω.
Siano γ e γ due curve in Ω, parametrizzate da
z = z(t) , z = z(t) ,
con t ∈ [a, b] in ambedue i casi (si sa che questa condizione non è restrittiva).
Supponiamo che le due curve si intersechino in un punto in cui le due
parametrizzazioni sono derivabili, ossia che per un valore t 0 ∈ (a, b) valga
z(t0) = z(t0) = z0 = x0 + iy0 .
42

1. LE FUNZIONI OLOMORFE
Le due rette
z = z0 + z′(t0)(t − t0) , z = z0 + z′(t0)(t − t0)
sono, per definizione, le rette tangenti alle due curve nel punto di intersezione. Per
“angolo tra le due curve” si intende quello formato dalle loro tangenti nel punto
comune. Facendo uso della notazione dei numeri complessi, è facile esprimere tale
angolo: questo è l’angolo tra i vettori rappresentati da z ′(t0) e z′(t0). Questo è, per
definizione, l’argomento del quoziente dei numeri complessi corrispondenti,
Argz′(t0)z′(t0)
.
Indichiamo ora con γf la curva immagine di γ mediante la trasformazione f , ossia la
curva
γf : w = f(z(t)) t ∈ [a, b] .
Analoga notazione usiamo per la trasformata mediante f di γ. Supponendo che la
funzione f(z) sia olomorfa e che f ′(z0) sia diversa da zero, è possibile calcolare
l’angolo tra γf e γf ,
Argf ′(z0)z′(t0)f ′(z0)z′(t0)
= Argz′(t0)z′(t0)
.
Abbiamo così provato che
Teorema 1.25. Una funzione olomorfa conserva l’angolo tra le curve nei punti nei
quali la sua derivata non si annulla.
Una trasformazione da una regione di R2 che conserva gli angoli si dice conforme e
quindi
Teorema 1.26. Se f(z) è olomorfa su Ω, e se la sua derivata non si annulla, essa
definisce una trasformazione conforme su Ω.
43

1. LE FUNZIONI OLOMORFE
−2
−1
0
1
2
−2
−1
0
1
20
1
2
3
4
5
6
7
8
−6−4
−20
24
6
−1
−0.5
0
0.5
10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Fig. 1.2. A sinistra |z2|, a destra | cos z|. Le linee sono le immagini di una griglia
x = cost, y = cost.
Abbiamo già notato che se u(x, y), v(x, y) sono parti reali ed immaginarie di una
funzione olomorfa f(x + iy) allora lo jacobiano della trasformazione è u 2x(x, y) +
u2y(x, y), strettamente positivo se f ′(z) non si annulla.
Dunque, una funzione olomorfa la cui derivata non si annulla su Ω definisce
una trasformazione conforme che inoltre conserva l’orientazione. Un esempio di
trasformazione conforme che non conserva l’orientazione è la trasformazione z → z.
Le trasformazioni conformi che conservano l’orientazione si chiamano anche
trasformazioni conformi dirette.
1.6.1 La rappresentazione delle funzioni olomorfe
Accenniamo ora a come rappresentare graficamente le funzioni olomorfe. Il grafico
naturalmente non serve, perché il grafico è un insieme di R 4. E’ però possibile
rappresentare il grafico di z → |f(z)|, che è in R3 e spesso su tale grafico si disegnano
le linee
Arg f(z) = cost
oppure l’immagine di una famiglia di linee del piano della variabile z. Le figure che
seguono mostrano alcuni esempi.
Un altro metodo consiste nel tracciare una famiglia di linee sul piano z e le loro
immagini sul piano w, o viceversa una famiglia di linee sul piano w e le loro
44

1. LE FUNZIONI OLOMORFE
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
0
1
2
3
4
5
−1
−0.5
0
0.5
1
−1−0.5
00.5
10.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Fig. 1.3. A sinistra |Logz|, a destra | sin z|. Le linee sono le immagini di una griglia
r = cost, θ = cost.
controimmagini sul piano z. Il caso della funzione f(z) = z 2/10 è mostrato nella
figura 1.4.
La figura 1.4 mostra una griglia di rette e semirette mutuamente ortogonali nel piano
Im z > 0. Queste si trasformano in due famiglie di parabole, mutuamente ortogonali,
dato che f ′(z) = 2z = 0. Queste parabole riempiono tutto il piano w.
La circonferenza
eiθ , 0 ≤ θ ≤ 2π
sotto l’azione di f(z) = z2 è ancora una circonferenza,
eiθ , 0 ≤ θ ≤ 4π ,
che però è percorsa due volte, anche se ovviamente ciò non può vedersi dalla figura.
Se però si rappresenta l’immagine di una circonferenza centrata nel punto (0, 1/5),
come in figura 1.5 si vede immediatamente che l’immagine è una curva non semplice,
che gira due volte intorno all’origine.
Pensiamo ora di disegnare l’immagine di una famiglia di circonferenze di centro
(0, 0) mediante le funzioni f(z) = z e g(z) = 1/z. Si trova ancora una famiglia
di circonferenze col medesimo centro, e da questo punto di vista le due funzioni
sembrano indistinguibili. Però, f(z) = z trasforma la regione interna di una
circonferenza nella regione interna della circonferenza corrispondente mentre g(z)
la trasforma nella regione esterna.
45

1. LE FUNZIONI OLOMORFE
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
−10 −8 −6 −4 −2 0 2 4 6 8 100
2
4
6
8
10
12
14
16
Fig. 1.4. Immagine di rette, sotto l’azione di f(z) = z 2/10.
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Fig. 1.5.
46

1. LE FUNZIONI OLOMORFE
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
10
0.5
1
1.5
2N
Fig. 1.6.
Analoga osservazione può farsi, per esempio, per le funzioni e z ed e−z e ciò
suggerisce di considerare la regione esterna ad un disco come “intorno di ∞”. Tec-
nicamente, di sostituire il piano complesso con la corrispondente compattificazione
di Alexandrov. Un modo comodo di fare ciò consiste nel considerare una sfera il cui
polo SUD tocca R2 (insieme di partenza della funzione) in (0, 0). Il polo NORD viene
ad avere il ruolo di ∞. Il piano R2 si rappresenta sulla sfera, mediante la proiezione
stereografica, dal polo NORD. La corrispondenza ottenuta è bicontinua tra il piano e
la sfera privata del polo NORD e la sfera stessa, usata in questo modo, si chiama sfera
di Riemann, si veda la figura 1.6.
La funzioni da C in sé possono quindi rappresentarsi anche come funzioni da C nella
sfera o dalla sfera in sé.
1.7. INTEGRALE DI CURVA DI FUNZIONI OLOMORFE
Ricordiamo che col termine curva intenderemo sempre un arco regolare a tratti a valori
in R2, ossia una funzione continua t → z(t) = x(t) + iy(t) definita per t ∈ [a, b],
ovunque derivabile salvo un numero finito di punti. In tali punti, e negli estremi a e
47

1. LE FUNZIONI OLOMORFE
b, richiederemo l’esistenza dei limiti direzionali della derivata. Richiederemo inoltre
che
|z′(t)| = 0 ,
salvo al più in un numero finito di punti.
Introduciamo la notazione
∫γ
f dz. 1.19
Se f(x + iy) = u(x, y) + iv(x, y), e se γ è parametrizzata da
z(t) = x(t) + iy(t) ,
definiamo∫γ
f dz =∫ b
a
f(z(t))z′(t) dt =∫ b
a
[u(x(t), y(t))+ iv(x(t), y(t))][x′(t)+ iv′(t)] dt .
Sviluppando i calcoli si trova∫γ
f dz =∫ b
a
[u(x(t), y(t))x′(t) − v(x(t), y(t))y′(t)] dt +
i
∫ b
a
[u(x(t), y(t))y′(t) + v(x(t), y(t))x′(t)] dt
=∫
γ
u dx − v dy + i
∫γ
v dx + u dy .
Si trova quindi ∫γ
f dz =∫
γ
u dx − v dy + i
∫γ
v dx + u dy ,
la somma di due integrali di forme differenziali.
Osservazione 1.27. Alla stessa espressione si perviene definendo l’integrale come
limite delle somme di Riemann
n∑i=0
f(z(ti))z′(ti)(ti+1 − ti) .
Omettiamo i dettagli della dimostrazione.
48

1. LE FUNZIONI OLOMORFE
E’ noto che gli integrali delle forme differenziali non mutano cambiando la
parametrizzazione di γ; cambiano segno cambiando il verso di percorrenza su
γ. Dunque queste stesse proprietà valgono per l’integrale 1.19.
Proviamo ora:
Lemma 1.28. Sia φ(t), t ∈ [a, b], una funzione continua a valori complessi. Vale:∣∣∣∣∣∫ b
a
φ(t) dt
∣∣∣∣∣ ≤∫ b
a
|φ(t)| dt .
DIMOSTRAZIONE
Indichiamo con z0 il numero
z0 =
Z b
a
φ(t) dt .
Si sa che
|z0| =z0z0
|z0|
e quindi
˛˛Z b
a
φ(t) dt
˛˛ = |z0| =
z0
|z0|z0 =
Z b
a
z0
|z0|φ(t) dt .
La funzione t → z0|z0|
φ(t) è ancora una funzione a valori complessi, ma l’uguaglianza
precedente mostra che il suo integrale è reale. Dunque, l’integrale della sua parte
immaginaria è nullo e quindi˛˛Z b
a
φ(t) dt
˛˛ =
Z b
a
e
z0
|z0|φ(t)
ffdt
≤Z b
a
˛˛ z0
|z0|φ(t)
˛˛ dt =
Z b
a
|φ(t)| dt .
Osservazione 1.29. La disuguaglianza precedente vale perché stiamo consideran-
do l’integrale su un segmento dell’asse reale. Non ha invece alcun senso scrivere∣∣∣∫γ f(z) dz∣∣∣ ≤
∫γ|f(z)| dz, con γ generica curva. Infatti in tal caso l’integrale
a destra prende valori complessi anche se l’integrando è reale. La formula che
sostituisce la disuguaglianza sbagliata precedente è data dal prossimo teorema.
49

1. LE FUNZIONI OLOMORFE
Ricordiamo ora che
Lγ =∫ b
a
|z′(t)| dt
è per definizione la lunghezza della curva regolare a tratti γ : z = z(t), t ∈ [a, b]. Dal
lemma precedente segue:
Teorema 1.30. Sia γ : z = z(t), t ∈ [a, b] una curva regolare a tratti e sia f(z) una
funzione da C in C, continua sul sostegno della curva γ. Sia M tale che
|f(z(t))| ≤ M , t ∈ [a, b] .
Vale: ∣∣∣∣∫
γ
f(z) dz
∣∣∣∣ ≤ MLγ .
DIMOSTRAZIONE
Si applichi il Lemma 1.28 alla funzione f(z(t))z ′(t). Si trova˛˛Z
γ
f(z(t))z′(t) dt
˛˛ ≤
Z b
a
|f(z(t))| |z′(t)|dt ≤ MLγ .
1.8. IL TEOREMA DI CAUCHY
Ricordiamo che se u(x, y) e v(x, y) sono funzioni di classe C 1, allora la funzione
f(x + iy) = u(x, y) + iv(x, y)
è olomorfa quando valgono le condizioni di Cauchy–Riemann, ossia quando
ux = vy , uy = −vx .
Si sa che queste sono le condizioni perché siano chiuse le forme differenziali
v dx + u dy , u dx − v dy
e ciò suggerisce di applicare alle funzioni olomorfe la teoria, nota, delle forme
differenziali.
50

1. LE FUNZIONI OLOMORFE
Sia γ una curva semplice e chiusa contenuta in una regione di Jordan Ω. Usando la
formula di Green si trova:
Teorema 1.31 (di Cauchy). Sia f(z) olomorfa in una regione di Jordan Ω e sia γ
una curva semplice e chiusa in Ω. Vale∫γ
f(z) dz = 0 .
DIMOSTRAZIONE
Dalla formula di Green si vede cheZγ
f dz = −Z
Ωγ
[vx + uy] dx dy + i
ZΩγ
[ux − vy ] dx dy .
Le condizioni di Cauchy–Riemann mostrano che ambedue gli integrali su Ω γ sono
nulli.
Osservazione 1.32. Notiamo:
– Se due curve γ ed η hanno le proprietà che giustificano la formula 1.6, la
formula 1.6 implica che ∫γ
f(z) dz =∫
η
f(z) dz . 1.20
– il teorema 1.31 può provarsi senza fare uso di risultati relativi alle forme
differenziali, e nella sola ipotesi che f(z) sia derivabile in ciascun punto di
Ω; ossia, le ipotesi di continuità delle derivate possono rimuoversi.
Vediamo infine un esempio di calcolo di integrale.
Esempio 1.33. Sia f(z) = (z − z0)n e sia γ la circonferenza
γ : z(t) = z0 + eit , t ∈ [0, 2kπ] .
Il numero k è intero positivo. Si osservi che la circonferenza è orientata positivamente
e che essa è semplice solo quando k = 1.
51

1. LE FUNZIONI OLOMORFE
Si ha: ∫γ
(z − z0)n dz =∫ 2kπ
0
eintieit dt = i
∫ 2kπ
0
ei(n+1)t dt
= i
∫ 2kπ
0
[cos(n + 1)t + i sin(n + 1)t] dt .
Se n = −1 si vede che l’integrale vale 2π. Altrimenti si vede che l’integrale vale 0,
sia per n ≥ 0 che per n < −1.
Se k = 1 l’uguaglianza a zero dell’integrale segue dal teorema di Cauchy 1.31 quando
n ≥ 0. Il fatto che l’integrale sia nullo anche per n ≤ −2 mostra che la condizione
del teorema 1.31 è solo sufficiente.
Se n = −1, ossia quando si integra la funzione 1/(z − z0), si trova
12πi
∫γ
1z − z0
dz = k ,
numero dei giri che la circonferenza fa intorno all’origine. Si chiama questo l’indice
della circonferenza rispetto al suo centro. Vedremo in seguito come generalizzare
quest’osservazione.
1.9. PRIMITIVE
Sia f(z) una funzione da C in C, definita su una regione Ω. NON si richiede che la
regione Ω sia di Jordan. Si chiama primitiva di f(z) una funzione F (z), anch’essa
definita su Ω, e tale che
F ′(z) = f(z) ∀z ∈ Ω .
Ovviamente
Teorema 1.34. Se la funzione continua f(z) ammette primitiva su Ω e se γ è una
curva chiusa, allora
∫γ
f dz = 0 .
52

1. LE FUNZIONI OLOMORFE
In generale, se γ non è chiusa, l’integrale dipende dai soli estremi di γ.
DIMOSTRAZIONE
Basta notare cheZγ
f dz =
Z b
a
f(z(t))z′(t) dt =
Z b
a
F ′(z(t))z′(t) dt
=
Z b
a
ddt
F (z(t)) dt = F (z(b)) − F (z(a)) .
Se la curva è chiusa si ha z(b) = z(a) e l’integrale è nullo. In generale, si vede che
l’integrale dipende dai soli estremi della curva.
Vale anche il viceversa:
Teorema 1.35. Sia f(z) una funzione continua su Ω. Se∫γ
f dz
è nullo su tutte le curve chiuse in Ω allora la funzione f(z) ammette una primitiva.
DIMOSTRAZIONE
Si fissi un punto z0 ∈ Ω. Ogni z ∈ Ω si connette a z0 mediante una poligonale (si ricordi
che Ω è un aperto connesso). Indichiamo con Pz una poligonale che connette z0 con
z e sia
F (z) =
ZPz
f dz .
La funzione F (z) è univoca perché per ipotesi l’integrale non dipende dalla particolare
poligonale scelta per connettere z 0 con z, ma solo dai suoi estremi; e quindi solo da z,
dato che z0 si intende fissato.
Mostriamo che F (z) è derivabile, con derivata f(z).
Per calcolare F (z + h) scegliamo una poligonale che congiunge z 0 con z e
estendiamola a z + h mediante il segmento
z + th , t ∈ [0, 1] .
53

1. LE FUNZIONI OLOMORFE
Sia S tale segmento. Allora,
F (z + h) − F (z)
h=
1
h
ZS
f dz =1
h
Z 1
0
f(z + th)h dt =
Z 1
0
f(z + th) dt .
Essendo f(z) continua, il limite dell’ultimo integrale per h → 0 è
F ′(z) =
Z 1
0
f(z) dt = f(z) .
Osservazione 1.36. Si noti che il teorema precedente può dimostrarsi anche
richiedendo che l’integrale di f(z) sia nullo sulle sole poligonali chiuse. E’ sufficiente
per questo che esso sia nullo quando γ è un triangolo.
In particolare, dal teorema di Cauchy si vede che:
Teorema 1.37. Sia f(z) olomorfa su Ω e sia γ una curva in Ω la cui regione interna
Ωγ è contenuta in Ω.
La funzione f(z) ammette primitiva in Ωγ .
Naturalmente, se una primitiva esiste, ne esistono infinite. Vale però:
Teorema 1.38. Se F (z) e G(z) sono definite sulla medesima regione Ω ed hanno
derivata uguale, la loro differenza è costante su Ω.
DIMOSTRAZIONE
Sia H(z) = F (z) − G(z). Vale H ′(z) = 0 su Ω.
Sia H(z) = U(z)+ iV (z). La condizione H ′(z) = 0 e l’espressione 1.10 per la derivata
mostrano che
Ux = 0 , Vx = 0 .
Dalle condizioni di Cauchy–Riemann si trova anche che
Uy = 0 , Vy = 0
54

1. LE FUNZIONI OLOMORFE
e quindi U e V ammettono ambedue le derivate parziali in ciascun punto di Ω, e queste
sono nulle. E quindi le funzioni sono costanti.
Concludiamo con alcune osservazioni.
Osservazione 1.39. Sia f(z) olomorfa su una generica regione Ω. Non è vero che
f(z) debba ammettere primitive su Ω, come mostra l’esempio della funzione f(z) =
1/z. Sia Ω = C − 0. Certamente f(z) ammette primitiva nella regione Ωγ , se γ
non gira intorno all’origine. Ma, se γ gira intorno all’origine, la primitiva non esiste
perchè l’integrale di f(z) su una circonferenza di centro l’origine non è nullo, si veda
l’Esempio 1.33.
Le condizioni del teorema 1.37 sono solamente sufficienti, come mostra il caso della
funzione
f(z) =1zn
, z ∈ C − 0 ,
con n intero maggiore di 1 ed Ω = C − 0 (si veda ancora l’Esempio 1.33). In
questo caso la primitiva esiste ed è
F (z) =1
(1 − n)zn−1.
Ricordiamo ora che la funzione Logz è derivabile, con derivata uguale a 1/z. Si sa
che l’integrale di quest’ultima funzione su una generica curva chiusa γ in C − 0
puó non essere nullo; ma ciò non contraddice il teorema 1.37 perchè la funzione Logz
non è olomorfa su C − 0.
1.9.1 Curve equipotenziali
Sia F (z) una primitiva di f(z) e sia
F (x + iy) = U(x, y) + iV (x, y) , f(x + iy) = u(x, y) + iv(x, y) .
Supponiamo inoltre che f(z) non si annulli su Ω.
55

1. LE FUNZIONI OLOMORFE
Ricordiamo le formule
F ′(z) = Ux + iVx = −iUy + Vy = u + iv .
Uguagliando F ′(z) af f(z) si trova
∇U = (u,−v) , ∇V = (v, u) 1.21
ossia U e V sono i potenziali rispettivamente dei campi vettoriali
ui− vj , vi + uj .
Consideriamo le curve equipotenziali γ1 e γ2 implicitamente definite da
U(x, y) = c , V (x, y) = d
(usando il teorema delle funzioni implicite si vede che queste equazioni definiscono
implicitamente due curve nell’intorno dei punti (x, y) nei quali F ′(x + iy) = f(x +
iy) = 0).
Non necessariamente queste curve si intersecano. Supponiamo che esse si
intersechino per x = x0 ed y = y0.
Si sa che ∇U(x0, y0) è ortogonale alla γ1 e che ∇V (x0, y0) è ortogonale alla γ2.
Usiamo 1.21 per calcolare il prodotto scalare di questi vettori:
∇U(x0, y0) · ∇V (x0, y0) = 0 ,
ossia, le curve equipotenziali rispettivamente del potenziale U e del potenziale V
sono mutuamente perpendicolari nei punti in cui si intersecano.
1.9.2 Il caso della funzione z → z
L’esempio 1.33 mostra che la funzione f(z) = 1/z non ha primitiva su una regione
di Jordan che contiene 0, dove pero’ non è definita. Questa funzione è olomorfa e
quindi ammette primitiva, uguale a −1/z 2, in qualunque regione di Jordan che non
contiene 0.
E’ naturale chiedersi se una funzione ovunque definita e continua debba avere
primitiva. L’esempio che ora studiamo mostra che ciò non accade.
56

1. LE FUNZIONI OLOMORFE
La funzione che a z associa il suo coniugato z è continua su C. Si è già visto, al
paragrafo 1.4., che non è olomorfa. Mostriamo che essa non ammette primitiva.
Se fosse F ′(z) = z, allora F (x + iy) = U(x, y) + iV (x, y) ed F ′(x + iy) = f(x +
iy) = x − iy.
Si ricordi che F ′(x + iy) = Ux(x, y) + iVx(x, y) e quindi
Ux(x, y) = x , Vx(x, y) = −y .
Dunque, U(x, y) = (x2/2) + φ(y). Essendo Uy = −Vx = y si trova che φ(y) =
(y2/2). Dunque,
U(x, y) =x2 + y2
2.
Invece, da Vx(x, y) = −y, si trova
V (x, y) = −xy + ψ(y)
e quindi
Vy(x, y) = −x + ψ′(y) = Ux(x, y) = +x .
Quest’ultima uguaglianza è impossibile, e quindi la primitiva F (x + iy) di f(z) = z
non esiste. Vedremo al paragrafo 1.13. che avremmo potuto dedurre ciò dal fatto che
la derivata di una funzione olomorfa è ancora una funzione olomorfa.
1.9.3 La funzione logaritmo e le potenze
Abbiamo già definito i logaritmi dei numeri complessi non nulli e quindi le funzioni
logaritmo,
log z = log |z| + iArg z + 2kπi , 1.22
una funzione per ciascun valore dell’intero k. Abbiamo notato che queste sono
funzioni olomorfe, con derivata 1/z, a parte che nei punti dell’asse reale negativo.
Però abbiamo notato che l’asse reale negativo entra in queste questioni solo a causa
della particolare scelta dell’argomento principale; e quindi le funzioni logaritmo, così
definite, hanno proprietà che non sono indipendenti dal modo scelto per rappresentare
la funzione. Vediamo ora un modo diverso di introdurre la funzione logaritmo, che
57

1. LE FUNZIONI OLOMORFE
−15 −10 −5 0 5 10−10
−8
−6
−4
−2
0
2
4
6
8
10
Ω
Fig. 1.7.
mostra che in realtà non si incontrano problemi se si decide di lavorare in una regione
di Jordan Ω qualsiasi, ma che non contiene l’origine. Si noti che tale regione può
spiraleggiare intorno all’origine, come nella figura 1.7.
Consideriamo la funzione 1/z su Ω. Questa funzione è olomorfa su Ω e quindi è
dotata di primitiva per il teorema 1.37. Si noti che per questo si usa l’ipotesi che Ω è
una regione di Jordan che non contiene 0.
Si fissi un punto z0 ∈ Ω e sia w0 uno dei suoi logaritmi,
w0 = log |z0| + iArg z0 + 2k0πi
per un certo numero intero k0. Sia Pz una poligonale che connette il punto z0 fissato
col generico punto z ∈ Ω, senza uscire da Ω.
Consideriamo la funzione
L(z) = w0 +∫
Pz
1ζ
dζ .
Questa è una funzione olomorfa su Ω che in z0 prende il valore w0 ed è primitiva di
1/z; ossia, la derivata di L(z) è 1/z e quindi la sua differenza dalla funzione 1.22
log |z| + iArg z + 2k0πi
58

1. LE FUNZIONI OLOMORFE
−15 −10 −5 0 5 10−10
−8
−6
−4
−2
0
2
4
6
8
10
Ω
Fig. 1.8.
è costante sulla regione in cui ambedue sono definite e derivabili. Se Ω interseca
l’asse reale negativo, ciò non avviene su tutta Ω, si veda la figura 1.8. Le due funzioni
coincidono sulla sola parte tratteggiata di Ω. Esse certamente non coincidono sulla
parte rimanente, perché L(z) traversa l’asse reale negativo con continuità.
Ricapitolando queste considerazioni, chiameremo la funzione L(z) una funzione
logaritmo su Ω, e la chiameremo il logaritmo principale se è stata costruita
scegliendo k0 = 0. Essa si indicherà col simbolo log z oppure, nel caso del
logaritmo principale, col simbolo Log z.
Dato che elog |z|+iArg z+2k0πi = z, lo stesso vale per L(z) nella parte tratteggiata di
Ω. Vedremo che ciò vale anche nella parte rimanente di Ω, si veda il paragrafo 1.13.2
e l’esempio 1.58. Dunque, quando un punto mobile z ∈ Ω traversa l’asse reale
negativo, la funzione L(z) passa dall’una all’altra determinazione della funzione
log z.
Ponendo
za = eaLogz
si trova che le potenze za sono definite e sono funzioni olomorfe in ogni regione di
Jordan che non contiene l’origine. Se la regione contiene l’asse reale positivo, allora
za prende valori reali su tale asse.
59

1. LE FUNZIONI OLOMORFE
Sia ora Ω una regione di Jordan e sia f(z) una funzione olomorfa su Ω, che non si
annulla. Fissiamo un punto z0 ∈ Ω e la poligonale Pz congiunga z0 col generico
punto z ∈ Ω. Si definisce
Log f(z) =∫
Pz
f ′(ζ)f(ζ)
dζ
e questa funzione è olomorfa su Ω. Ciò fatto, si definisce, per ogni α ∈ C,
fα(z) = eαLog f(z) :
su Ω si possono definire tutte le potenze di f(z), e queste vengono ad essere funzioni
olomorfe di z; ricordiamo, purché f(z) non si annulli si Ω, e purché Ω sia una
regione di Jordan.
1.10. INDICE E OMOTOPIA
Passiamo ora a considerare un’altra funzione importantissima nello studio delle
funzioni olomorfe. Questa funzione associa un numero intero alla coppia costituita
da una curva e da un punto z0 che non gli appartiene. Questo numero rappresenta,
intuitivamente, il numero dei giri che la curva fa intorno a z 0, considerati positivi se
la curva ruota in senso antiorario, negativi altrimenti.
Si veda l’esempio 1.33 per un caso particolare.
Sia Ω una regione di Jordan e sia z0 un suo punto. Sia γ una curva chiusa, semplice
o meno, il cui sostegno è in Ω e non passa per il punto z0. Definiamo
I(γ, z0) =1
2πi
∫γ
1z − z0
dz ,
si vedano le considerazioni dell’Esempio 1.33.
Dato che la curva γ non incontra z0, l’integrale è ben definito ed è una funzione di
classe C∞ di z0, almeno finché z0 non incontra il sostegno di γ. Mostriamo che
questa funzione prende valori interi e quindi è costante se z0 si muove su una
curva senza toccare γ.
60

1. LE FUNZIONI OLOMORFE
Teorema 1.40. La funzione I(γ, z0) prende valori interi.
DIMOSTRAZIONE
Sia z(t), t ∈ [a, b] una parametrizzazione della curva γ. Ricordiamo che implicitamente
supponiamo sempre che le parametrizzazioni (continue su [a, b]) siano derivabili con
continuità, salvo un numero finito di punti. Si ha:
I(γ, z0) =1
2πi
Zγ
1
z − z0dz =
1
2πi
Z b
a
z′(t)
z(t) − z0dt .
Si ha
φ(t) =
Z t
a
z′(t)
z(t) − z0dt , t ∈ [a, b] .
La funzione a valori complessi di variabile reale t è continua e continuamente
derivabile, perché z(t) = z0 per ogni t. Inoltre,
φ′(t) =z′(t)
z(t) − z0, φ(a) = 0 , φ(b) = I(γ, z0) .
Si ha
ddt
e−φ(t)(z(t) − z0) = e−φ(t) ˘−φ′(t)(z(t) − z0) + z′(t)¯
= 0 .
Dunque, la funzione e−φ(t)(z(t) − z0) è costante. Uguagliando i valori assunti per a e
per b si trova
e−φ(a)(z(a) − z0) = (z(a) − z0) = e−φ(b)(z(b) − z0) .
Ricordando che la curva γ è chiusa, ossia che z(a) = z(b), e che z(a)− z0 = 0 si trova
e−φ(b) = 1, ossia si trova che esiste un intero k per cui
φ(b) = 2kπi
e quindi I(γ, z0) = k, con k intero, come si voleva.
Questo prova che I(γ, z0) è sempre un numero intero. Esso si chiama l’indice della
curva γ rispetto al numero z0 che non le appartiene.
61

1. LE FUNZIONI OLOMORFE
−1 −0.5 0 0.5 1 1.5 2 2.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
z0
•
Fig. 1.9.
Giustifichiamo ora l’interpretazione intuitiva dell’indice come “numero dei giri” della
curva intorno a z0. Ciò si è già visto nel caso in cui γ sia una circonferenza percorsa
k volte. Se γ è una curva percorsa k volte, per l’additività dell’integrale, l’indice è k
volte l’indice che si ottiene percorrendo la curva una sola volta. Sia quindi γ semplice.
Scegliamo una piccola circonferenza C di centro z0, contenuta in Ωγ . Il teorema di
Cauchy ci dice che I(γ, z0) = I(C, z0) = 1 e ciò mostra l’interpretazione dell’indice
come “numero dei giri”, nel caso di una curva percorsa più volte.
Nel caso della curva γ in figura 1.9, che gira più volte intorno a z0, senza ripercorrere
se stessa, si arriva alla medesima interpretazione spezzando la curva in tante curve
semplici e chiuse.
Se la curva γ è semplice e se z0 è nella regione esterna alla curva allora il suo indice
è 0. Invece, se z0 è nella regione interna allora il suo indice è +1 oppure −1. Più in
generale, il complementare del sostegno di una curva γ è unione di un numero finito
di regioni semplicemente connesse. Si è già notato che l’indice rimane costante se z 0
varia senza incontrare γ. Dunque, I(γ, z0) è costante in ciascuna delle regioni nelle
quali γ divide C, si veda la figura 1.9
62

1. LE FUNZIONI OLOMORFE
Per finire, consideriamo il caso seguente, che ci interesserà in seguito. Sia γ una curva
semplice e chiusa orientata positivamente, il cui sostegno appartiene alla regione
di Jordan Ω su cui una funzione f(z) è olomorfa. Si è già introdotta la curva γ f ,
immagine di γ mediante la funzione f(z): se γ ha parametrizzazione z = z(t),
t ∈ [a, b], allora γf ha parametrizzazione f(z(t)), t ∈ [a, b].
La curva γf è chiusa perché γ lo è, ma può essere che non sia semplice.
Supponiamo che f(z) non si annulli su γ e consideriamo
12πi
∫ b
a
f ′(z(t))z′(t)f(z(t))
dt .
Quest’integrale è uguale ad ambedue gli integrali seguenti:
12πi
∫γ
f ′
fdz ,
12πi
∫γf
1w
dw
e l’ultimo integrale è I(γf , 0). Si ha quindi che
I(γf , 0) =1
2πi
∫γ
f ′
fdz .
Segue un semplice metodo grafico per il calcolo di (1/2πi)∫γ(f ′/f) dz (quando f(z)
non si annulla sul sostegno di γ) che è alla base di molti metodi grafici dell’ingegneria:
si disegna la curva γf e se ne conta il numero dei giri intorno all’origine.
Naturalmente, i metodi grafici sono sempre approssimati. E’ notevole il fatto che,
in questo caso, il metodo grafico dà in realtà valori esatti. Infatti, è intuitivamente
evidente, e si giustificherà in seguito, che il valore dell’integrale “varia di poco”
quando γ “varia di poco”, purchè la deformazione applicata a γ non conduca γ f ad
incontrare 0, ossia non conduca γ ad incontrare uno zero di f(z). Dato che l’indice
prende valori interi, esso rimane costante sotto l’azione di piccole perturbazioni su γ,
quali quelle che si incontrano nella rappresentazione numerica di γ e di γ f .
La giustificazione rigorosa di questo argomento conduce alla teoria dell’omotopia.
Siano γ1 e γ2 due curve diverse. Non è restrittivo assumere che il parametro vari nel
medesimo intervallo [a, b]. Diciamo che esse sono omotope se esiste una funzione
63

1. LE FUNZIONI OLOMORFE
−3 −2 −1 0 1 2 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
γ1
γ2
Fig. 1.10.
continua H(t, s) di due variabili reali s ∈ [0, 1], t ∈ [a, b], a valori complessi, tale
che H(0, t) parametrizzi γ1 mentre H(1, t) parametrizzi γ2.
Se le due curve appartengono ad una regione Ω, si dice che esse sono omotope in Ω
se i valori della funzione H(s, t) appartengono ad Ω.
Per ogni valore intermedio s0 ∈ [0, 1], la funzione H(s0, t) parametrizza una curva e
per s ∼ 0 la curva è “vicina” a γ1 mentre per s ∼ 1 è vicina a γ2. Quindi la H(s, t)
parametrizza una deformazione continua di γ1 in γ2.
Nei casi più importanti, le curve γ1 e γ2 hanno gli estremi comuni oppure sono chiuse.
Se esse hanno estremi comuni, si richiede anche che H(s, a) ed H(s, b) siano costanti.
In tal caso una deformazione continua di γ1 su γ2 è illustrata dalla figura 1.10.
Se le due curve γ1 e γ2 sono chiuse, nel parlare di omotopia si sottintende che ciascuna
delle curve t → H(s, t) sia chiusa.
Richiediamo ora che le due curve γ1 e γ2 siano omotope rispetto ad una regione Ω
che non contiene zeri della funzione f(z). In tal caso, indicando con γ s la curva di
parametrizzazione t → H(s, t), si trova che
64

1. LE FUNZIONI OLOMORFE
s → 12πi
∫γs
f ′
fdz
è continua per s ∈ [a, b] e quindi, prendendo valori interi, costante. Ciò giustifica
le considerazioni precedenti e suggerisce una diversa formulazione del teorema di
Cauchy, teorema 1.31. Ricordiamo che due curve sono omotope in una regione Ω
quando i valori di H(s, t) appartengono ad Ω per ogni s e per ogni t. Si ha:
Teorema 1.41 (forma omotopica del teorema di Cauchy). Siano γ1 e γ2 curve
tra loro omotope in una generica regione Ω su cui f(z) è olomorfa. Supponiamo che
le due curve siano chiuse o che abbiano gli stessi estremi. Allora vale∫γ1
f(z) dz =∫
γ2
f(z) dz
DIMOSTRAZIONE
(cenno) La dimostrazione del teorema è alquanto noiosa, ma l’idea della dimostrazione
è semplice e ci limitiamo a presentarla. Sia H(s, t) la funzione continua tale che H(0, t)
parametrizza γ1 e H(1, t) parametrizza γ2.
Non è restrittivo assumere t ∈ [0, 1].
Dividiamo il quadrato [0, 1] × [0, 1] in tanti piccoli quadrati, come nella figura 1.11 a
sinistra e consideriamo l’immagine mediante H(t, s) dei lati di tutti i quadrati ottenuti.
Si trova una struttura del tipo di quella nella figura 1.11 a destra (le immagini dei lati
sono state disegnate rettilinee per comodità di disegno, ma potrebbero non esserlo).
I lati dei quadrati si trasformano in curve chiuse e su tali curve l’integrale è nullo. Som-
mando ciascuno degli integrali sui singoli quadrati e tenendo conto delle cancellazioni
si trova l’asserto.
Vediamo ora un caso estremo: per definizione, una curva non può essere para-
metrizzata da una funzione costante. Supponiamo però che esista una funzione
H(s, t) continua su [0, 1] × [a, b] e tale che H(0, t) parametrizzi una curva γ mentre
H(1, t) = z0 per ogni t ∈ [a, b]. In questo caso si dice che la curva γ è omotopa al
punto z0.
65

1. LE FUNZIONI OLOMORFE
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
x
y
−4 −3 −2 −1 0 1 2−4
−3
−2
−1
0
1
2
3
4
Ω
γ1
γ2
Fig. 1.11.
E’ ancora vero che
s → 12πi
∫γs
f ′
fdz
dipende con continuità da s e inoltre, per s → 0, il limite è ora 0; e quindi la funzione
è identicamente zero. Vale quindi
Corollario 1.42. Se γ è omotopa ad un punto nella generica regione Ω allora
∫γ
f dz = 0
per ogni funzione f(z) olomorfa su Ω.
Sottolineiamo che né il teorema 1.41 né il corollario 1.42 richiedono che Ω sia una
regione di Jordan. Si potrebbe provare che tutti i teoremi che valgono per regioni
di Jordan valgono anche per le regioni che sono semplicemente connesse secondo la
definizione seguente: una regione Ω si dice semplicemente connessa se ogni curva di
Jordan di sostegno in Ω è omotopa ad un punto di Ω.
66

1. LE FUNZIONI OLOMORFE
1.11. CONVERGENZA UNIFORME SUI COMPATTI
Ricordiamo che se
f(x + iy) = u(x, y) + iv(x, y)
è continua, abbiamo definito∫γ
f dz =∫
γ
u dx − v dy + i
∫γ
v dx + u dy .
Se γ è parametrizzata da
z = z(t) = x(t) + iy(t) , t ∈ [a, b]
si trova ∫γ
f dz =∫ b
a
u(x(t), y(t))x′(t) − v(x(t), y(t))y′(t) dt
+i
∫ b
a
v(x(t), y(t))x′(t) + u(x(t), y(t))y′(t) dt
ossia si trova la somma di quattro integrali di funzioni continue su [a, b], intervallo
limitato e chiuso. Dunque, a tali integrali si possono applicare tutte le proprietà note
per gli integrali di funzione di variabile reale. In particolare, se (u n(x, y)) è una
successione che converge uniformemente ad u(x, y) allora
limn
un(x(t), y(t)) = u(x(t), y(t))
e il limite è uniforme su [a, b]. Dunque,
lim∫ b
a
un(x(t), y(t))x′(t) dt =∫ b
a
u(x(t), y(t))x′(t) dt
lim∫ b
a
un(x(t), y(t))y′(t) dt =∫ b
a
u(x(t), y(t))y′(t) dt .
Analogo argomento vale se (vn(x, y)) converge uniformemente a v(x, y).
Sia ora (fn(z)) una successione di funzioni della variabile complessa z, convergente
uniformemente ad f(z). Si sa che ciò avviene se e solo se le parti reali, rispettivamente
67

1. LE FUNZIONI OLOMORFE
immaginarie, delle fn(z) convergono rispettivamente alla parte reale ed immaginaria
di f(z). Dunque:
Teorema 1.43. Sia (fn(z)) una successione di funzioni continue su una regione Ω,
e sia γ una curva il cui sostegno è in Ω. Supponiamo che esista una funzione f(z),
definita sul sostegno di γ, tale che
limn
fn(z) = f(z) ,
uniformemente sul sostegno di γ. Allora vale
lim∫
γ
fn(z) dz =∫
γ
f(z) dz .
In pratica non è comodo studiare la convergenza di una successione di funzioni sul
sostegno di una singola curva. Si presenta però frequentemente il caso seguente: una
successione di funzioni continue (fn(z)) converge ad una funzione f(z) in ogni punto
di Ω, ma non uniformemente. E’ però possibile provare che per ogni compatto K
contenuto in Ω la convergenza è uniforme; ossia, per ogni ε > 0 esiste N = N(ε, K)
tale che se n > N allora vale
|fn(z) − f(z)| < ε ∀z ∈ K .
In tal caso si dice che la successione (fn(z)) converge uniformemente sui compatti
di Ω.
La convergenza uniforme sui compatti ovviamente implica la continuità della funzione
limite f(z) e inoltre implica la convergenza uniforme sui sostegni di curve che
sono contenuti in Ω, perchè i sostegni di curve sono compatti. Dunque permette
l’applicazione del teorema 1.43.
Un caso importante in cui si ha convergenza uniforme sui compatti è quello delle serie
di Laurent nei compatti contenuti nella corona di convergenza. In questo caso si ha:
Corollario 1.44. Sia∑+∞
k=−∞ an(z − z0)n una serie di Laurent la cui corona
di convergenza è non vuota e sia γ una curva il cui sostegno è nella corona di
68

1. LE FUNZIONI OLOMORFE
convergenza. Sia φ(z) una funzione continua su γ. In tal caso si ha:
∫γ
φ(ζ)
[+∞∑
k=−∞ak(ζ − z0)k
]dζ =
+∞∑k=−∞
ak
∫γ
φ(z)(ζ − z0)k dζ .
Se in particolare si sceglie φ(z) = 1 si trova
∫γ
[+∞∑
k=−∞ak(ζ − z0)k
]dζ =
+∞∑k=−∞
ak
∫γ
(ζ − z0)k dζ.
Asserti analoghi valgono per le serie di Taylor, naturalmente riformulati rispetto al
disco di convergenza.
1.12. LA FORMULA INTEGRALE DI CAUCHY
Sia f(z) olomorfa sulla regione di Jordan Ω e sia γ una curva di Jordan in Ω. La
formula integrale di Cauchy mostra in particolare che i valori di f(z) nella regione
interna a γ sono univocamente individuati dai valori che la f(z) assume sul sostegno
di γ e inoltre vengono ad essere espressi mediante una semplice formula integrale. Si
noti che niente di analogo vale per funzioni di classe C 1 di due variabili reali.
Più avanti vedremo che anche i valori che f(z) assume nella regione esterna a γ
sono individuati dai valori che essa assume sul sostegno di γ. Però, nessuna formula
semplice permette di trovarli.
La formula integrale di Cauchy vale per curve chiuse, anche non semplici, di sostegno
in Ω. In tale forma lo enunciamo anche se, di regola, lo useremo nel caso delle curve
semplici.
Teorema 1.45 (formula integrale di Cauchy). Sia f(z) olomorfa in una regione
di Jordan Ω e sia γ una curva in Ω. Sia z ∈ Ω un punto che non appartiene al sostegno
di γ. Vale:
I(γ, z)f(z) =1
2πi
∫γ
f(ζ)ζ − z
dζ . 1.23
69

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
Limitiamoci a provare il teorema per il caso delle curve semplici. In questo caso,
I(γ, z) = 0 quando z è nella regione esterna a γ e in tal caso l’integrale è nullo per il
teorema di Cauchy, teorema 1.31. Dunque, in tal caso l’uguaglianza è verificata. Sia
allora z ∈ Ωγ , la regione interna a γ. In questo caso I(γ, z) = 1 e dobbiamo provare
che
f(z) =1
2πi
Zγ
f(ζ)
ζ − zdζ .
Sia Cr una circonferenza di raggio r e centro z, con r così piccolo che C r sia contenuta
nella regione Ωγ . Il teorema di Cauchy mostra che
1
2πi
Zγ
f(ζ)
ζ − zdζ =
1
2πi
ZCr
f(ζ)
ζ − zdζ .
In particolare, la funzione di r,
r → 1
2πi
ZCr
f(ζ)
ζ − zdζ
è costante e quindi
limr→0+
1
2πi
ZCr
f(ζ)
ζ − zdζ
ff=
1
2πi
Zγ
f(ζ)
ζ − zdζ .
Il limite si calcola facilmente notando che
1
2πi
ZCr
f(ζ)
ζ − zdζ =
1
2πi
ZCr
f(ζ) − f(z)
ζ − zdζ +
1
2πi
ZCr
f(z)
ζ − zdζ
=1
2πi
ZCr
f(ζ) − f(z)
ζ − zdζ + f(z)
(se la curva non è semplice, l’addendo f(z) viene moltiplicato per I(γ, z)). Basta quindi
calcolare
limr→0
1
2πi
ZCr
f(ζ) − f(z)
ζ − zdζ .
E’ immediato notare che questo limite è nullo. Infatti, il modulo del rapporto
incrementale ˛˛f(ζ) − f(z)
ζ − z
˛˛
è limitato, diciamo da M = 2|f ′(z)|, per |ζ − z| piccolo. Dunque, per il teorema 1.30,
70

1. LE FUNZIONI OLOMORFE
vale ˛˛Z
Cr
f(ζ) − f(z)
ζ − zdζ
˛˛ ≤ 2πrM .
Il membro destro tende a zero per r → 0 e ciò prova l’uguaglianza richiesta.
La formula 1.23 si chiama formula integrale di Cauchy e, ripetiamo, non ha analogo
per le funzioni di variabile reale.
La formula integrale di Cauchy ha una conseguenza interessante: supponiamo che
f(z) sia olomorfa in |z| < 1 e continua in |z| ≤ 1. Supponiamo inoltre che f(e it) = 0
per ogni t. In tal caso, la funzione f(z) è identicamente zero.
Infatti, per ogni z0 di modulo minore di 1 vale
f(z0) =1
2πi
∫|z|=r
f(ζ)ζ − z0
dζ .
Questa formula vale per ogni r con |z0| < r < 1. Scrivendo esplicitamente la
parametrizzazione della circonferenza, si trova
f(z0) =1
2πi
∫ 2π
0
f(reit)reit − z0
ireit dt .
Passando al limite per r tendente ad 1 si vede che
f(z0) =12π
∫ 2π
0
f(eit)eit − z0
eit dt = 0 .
E’ importante sapere che in realtà la sola condizione f(e it) = 0 per t ∈ [α, β] con
α < β implica che f(z) è identicamente zero.
1.12.1 La proprietà della media
Scriviamo la formula integrale di Cauchy nel caso speciale in cui γ è una circonferenza
di raggio r centrata in z0. Vale
f(z0) =1
2πi
∫γ
f(ζ)ζ − z0
dζ .
Introducendo la parametrizzazione
ζ(t) = reit = r[cos t + i sin t] , t ∈ [0, 2π]
71

1. LE FUNZIONI OLOMORFE
si trova
f(z0) =12π
∫ 2π
0
f(z0 + reit) dt . 1.24
Questa formula mostra che f(z0) può interpretarsi come media dei valori che la
funzione prende sulla circonferenza di centro z 0 e raggio 1. Per questa ragione
la particolare forma 1.24 della formula integrale di Cauchy si chiama formula della
media.
Osserviamo ora che l’integrale che figura nella formula della media è su un intervallo
dell’asse reale; e quindi, scrivendo
f(x + iy) = u(x, y) + iv(x, y)
e prendendo la parte reale dei due membri, si trova
u(x0, y0) =12π
∫ 2π
0
u(x0 + r cos t, y0 + r sin t) dt , 1.25
ossia la proprietà della media vale anche per le parti reali (e immaginarie) di
funzioni olomorfe.
1.12.2 Funzioni olomorfe rappresentate mediante integrali
Abbiamo visto che le serie di potenze identificano una classe di funzioni olomorfe.
L’integrale che figura nella formula di Cauchy suggerisce una seconda classe di
funzioni olomorfe, dotate di una semplice rappresentazione. Sia h(ζ) una funzione
continua sul sostegno di γ (non necessariamente chiusa).
Sia f(z) definita da
f(z) =1
2πi
∫γ
h(ζ)ζ − z
dζ . 1.26
In questo modo, f(z) è ben definita per ogni z che non appartiene al sostegno di γ.
Inoltre, la funzione
z → h(ζ)ζ − z
dζ
è di classe C∞ ed ha derivate rispetto a z limitate uniformemente al variare di ζ su γ
e di z in un intorno di un punto z0 che non interseca γ. Dunque è lecito scambiare il
72

1. LE FUNZIONI OLOMORFE
segno di derivata e quello di integrale, ottenendo che
f ′(z) =1
2πi
∫γ
h(ζ)(ζ − z)2
dζ . 1.27
La funzione f ′(z) è continua e ciò mostra che f(z) è olomorfa. Abbiamo così
un’ulteriore classe di funzioni olomorfe, dotate di una semplice rappresentazione.
La funzione f ′(z) in 1.27 può nuovamente derivarsi e la sua derivata è nuovamente
continua, ossia anche f ′(z) è olomorfa.
Sia ora f(z) olomorfa su Ω e sia z0 un punto di Ω. Sia C una circonferenza contenuta
in Ω, di centro z0. La 1.26 vale con h(ζ) = f(ζ) e con γ = C. Dunque anche la 1.27
vale e quindi f ′(z) è nuovamente olomorfa. Iterando quest’osservazione si trova:
Teorema 1.46. Sia f(z) olomorfa in Ω. Essa ammette derivate di ogni ordine, e
tutte le derivate sono olomorfe.
Torniamo ora a considerare la situazione descritta dalla Formula integrale di Cauchy.
In questo caso è a priori noto che la funzione f(z) è olomorfa anche nei punti di γ e
la formula 1.23 mostra, nel caso delle curve semplici, che
limz→z0
12πi
∫γ
f(ζ)ζ − z
dζ = f(z0)
anche se z0 è un punto del sostegno di γ. Si potrebbe immaginare che il limite esista
anche nel caso di una generica funzione, definita mediante la formula 1.26. In genere
ciò non accade e, più ancora, se questo limite esiste esso può essere diverso da h(z 0)
perfino se h(z) è continua su C.
Esempio 1.47. Sia h(z) = z e sia γ: z = eit, t ∈ [0, 2π]. L’integrale
12πi
∫γ
ζ
ζ − zdζ =
12πi
∫ζ
1ζ
1ζ − z
dζ
si calcola immediatamente notando che
1ζ
1ζ − z
= −1z
1ζ
+1z
1ζ − z
.
Dunque,
12πi
∫γ
ζ
ζ − zdζ = −1
z
[1
2πi
∫γ
1ζ
dζ
]+
1z
[1
2πi
∫γ
1ζ − z
dζ
]
73

1. LE FUNZIONI OLOMORFE
1z
[−I(γ, 0) + I(γ, z)] = 0
per ogni z nella regione interna a γ, ossia nel disco |z| < 1. Dunque,
f(z) =1
2πi
∫γ
ζ
ζ − zdζ ≡ 0 :
la funzione f(z) è olomorfa in |z| < 1 e continua in |z| ≤ 1, ma i suoi valori su
|z| = 1 non coincidono con quelli di h(z) = z.
Per molte applicazioni è importante lo studio del comportamento di f(z) per z
tendente a γ.
1.13. ANALITICITÀ DELLE FUNZIONI OLOMORFE
Si è visto al teorema 1.46 che una funzione olomorfa ammette derivate di ogni ordine,
e queste sono tutte olomorfe. Mostriamo che vale anche di più. Una funzione f(z)
definita su una regione Ω si dice analitica su Ω quando è sviluppabile in serie di Taylor
(con raggio di convergenza non nullo) di centro z 0 per ogni z0 ∈ Ω.
Vedremo, al paragrafo 1.15., che una funzione analitica è anche olomorfa. Andiamo a
provare:
Teorema 1.48. Se f(z) è olomorfa su Ω, essa è anche analitica su Ω e inoltre, se
z0 ∈ Ω, vale
f(z) =+∞∑n=0
fn(z − z0)n , fn =1
2πi
∫C
f(ζ)(ζ − z0)n+1
ove C è una qualunque circonferenza di centro z0 e contenuta in Ω.
DIMOSTRAZIONE
Sia C una circonferenza di centro z0 e contenuta in Ω. Usando la formula integrale di
Cauchy, si scriva
f(z) =1
2πi
ZC
f(ζ)
ζ − zdζ =
1
2πi
ZC
f(ζ)
(ζ − z0) − (z − z0)dζ
=1
2πi
ZC
f(ζ)
ζ − z0
»1 − z − z0
ζ − z0
–−1
dζ .
74

1. LE FUNZIONI OLOMORFE
Dato che ζ è sulla circonferenza mentre z è nel disco, |(z − z 0)/(ζ − z0)| < 1 e quindi
1
2πi
ZC
f(ζ)
ζ − z0
»1 − z − z0
ζ − z0
–−1
dζ =1
2πi
ZC
f(ζ)
ζ − z0
+∞Xn=0
„z − z0
ζ − z0
«n
dζ
=
+∞Xn=0
»1
2πi
ZC
f(ζ)
(ζ − z0)n+1
–(z − z0)
n .
Questa è la formula che volevamo provare.
Si noti che lo scambio della serie con l’integrale è lecito perché per z e z 0 fissati la
serie+∞Xn=0
f(ζ)
ζ − z0
„z − z0
ζ − z0
«n
converge uniformemente su C.
In particolare si trova una nuova dimostrazione del teorema 1.46:
Teorema 1.49. Se f(z) è olomorfa su Ω, essa è ivi di classe C∞ e per le successive
derivate vale la formula di rappresentazione seguente:
f (n)(z0) =n!2πi
∫C
f(ζ)(ζ − z0)n+1
dz
ove C è una circonferenza di centro z0 contenuta in Ω.
Inoltre, ogni derivata di f(z) è a sua volta una funzione olomorfa.
Notiamo ora che, a rigore, l’uguaglianza
f(z) =1
2πi
+∞∑n=0
[∫C
f(ζ)(ζ − z0)n+1
](z − z0)n
ha senso solo se z ∈ Ω; ma niente vieta che il disco di convergenza della serie
fuoriesca da Ω. In tal caso la serie fornisce un’estensione analitica della funzione f(z).
1.13.1 Funzioni armoniche
Una funzione u(x, y) a valori reali delle due variabili reali x ed y si dice armonica
su una regione Ω se è ivi di classe C2 e se per ogni (x, y) ∈ Ω vale
∆u = uxx + uyy = 0 .
75

1. LE FUNZIONI OLOMORFE
Sia f(z) = f(x + iy) olomorfa su Ω. Si è visto che essa ammette derivate di ogni
ordine e quindi anche la sua parte reale u(x, y) è di classe C∞. Inoltre, la sua derivata
f ′(z) = ux(x, y) + ivx(x, y) è olomorfa e quindi verifica le condizioni di Cauchy–
Riemann, che ora si scrivono:
(ux)x = (vx)y , (vx)x = −(ux)y .
La derivata f ′(z) può anche rappresentarsi come f ′(z) = vy(x, y) − iuy(x, y) e
scrivendo le condizioni di Cauchy–Riemann si trova
(vy)x = −(uy)y , (uy)x = (vy)y .
Confrontando queste uguaglianze si vede che
∆u = 0 , ∆v = 0
ossia,
Teorema 1.50. Le parti reali ed immaginarie di funzioni olomorfe sono funzioni
armoniche.
Al paragrafo 2.1. proveremo il viceversa:
Teorema 1.51. Sia Ω una regione di Jordan e sia u(x, y) armonica su Ω. Esiste una
funzione v(x, y) armonica su Ω e tale che f(x + iy) = u(x, y) + iv(x, y) è olomorfa
su Ω.
Le funzioni v(x, y) con la proprietà detta sopra si chiamano funzioni armoniche
coniugate di u(x, y).
Questo teorema può sempre applicarsi “localmente” ossia in un intorno di ciascun
punto di Ω. Di conseguenza:
Corollario 1.52. Le funzioni armoniche su Ω sono di classe C∞(Ω).
Un ulteriore conseguenza del teorema 1.51 e del teorema della media è:
76

1. LE FUNZIONI OLOMORFE
Teorema 1.53 (della media). Sia u(x, y) armonica su Ω. Essa verifica la proprietà
della media: per ogni (x0, y0) ∈ Ω e per ogni cerchio di raggio r e centro (x0, y0) e
contenuto in Ω vale la 1.25.
1.13.2 Zeri e estensioni di funzioni olomorfe
Le serie di potenze hanno una proprietà importante:
Teorema 1.54. Sia f(z) =∑+∞
n=0 an(z − z0)n una serie di potenze con raggio
di convergenza non nullo e non identicamente nulla. Il punto z 0 non è punto di
accumulazione di zeri di f(z).
DIMOSTRAZIONE
L’assero è ovvio se a0 = 0 perché in tal caso f(z0) = a0 = 0. Sia quindi a0 = 0 e sia
ak il primo coefficiente non nullo. Si può scrivere
f(z) = (z − z0)kφ(z) , φ(z) =
+∞Xn=k
an(z − z0)n−k .
Si ha φ(z0) = ak = 0 e φ(z) è continua. Dunque, in un intorno di z 0 non si annulla.
In tale intorno il primo fattore (z − z 0) ha l’unico zero z0. Dunque, z0 non è punto di
accumulazione di zeri.
Ricordando che le funzioni olomorfe sono analitiche, il teorema precedente può
riformularsi come segue:
Corollario 1.55. Una funzione olomorfa su Ω, che ha una successione (z n) di zeri
convergente a z0 ∈ Ω, è identicamente nulla in un intorno di z0.
In realtà vale di più:
Teorema 1.56. Sia f(z) olomorfa sulla regione Ω e sia (zn) una successione di zeri
di f(z), convergente ad un punto z0 ∈ Ω. Allora, f(z) è identicamente nulla su Ω.
DIMOSTRAZIONE
Ricordiamo che una regione è un aperto connesso.
77

1. LE FUNZIONI OLOMORFE
Per il Corollario 1.55, esiste un intorno V di z0 su cui f(z) è nulla. Su quest’intorno,
ogni derivata di f(z) è nulla.
Indichiamo con Z l’insieme
Z = z | ∂i
∂zif(z) = 0 ∀i .
L’insieme Z contiene V e quindi non è vuoto. Inoltre è chiuso perché ciascuna delle
derivate parziali di f(z) è una funzione continua.
Mostriamo che Z è aperto, così che avremo Z = Ω. Sia per questo z ∈ Z. Mostriamo
che tutto un intorno di z è contenuto in Z. Per questo, sviluppiamo f(z) in serie di
Taylor di centro z:
f(z) =+∞Xn=0
1
n!f (n)(z)(z − z)n .
L’uguaglianza vale in un intorno W di z.
Dato che z ∈ Z, tutti i coefficienti della serie sono nulli e quindi f(z) = 0 su W . Ciò
mostra che W ⊆ Z e completa la dimostrazione.
Notiamo che il teorema precedente non vieta che una successione di zeri di una
funzione olomorfa non nulla f(z) possa avere punti di accumulazione. In tal caso
però tali punti non sono interni alla regione su cui f(z) è olomorfa.
Il teorema 1.56 ha conseguenze importanti.
Teorema 1.57 (principio di permanenza). Siano f(z) e g(z) due funzioni
olomorfe sulla stessa regione Ω e supponiamo che f(z) = g(z) su un insieme dotato
di punti di accumulazione appartenenti ad Ω. Il tal caso, f(z) = g(z) su Ω.
DIMOSTRAZIONE
Perchè, per il teorema 1.56, f(z) − g(z) è identicamente nulla.
Il teorema precedente vale se, per esempio, f(z) e g(z) sono uguali sul sostegno di
una curva in Ω. Ora, se z = x + i0, allora vale
sin2 z + cos2 z = 1
78

1. LE FUNZIONI OLOMORFE
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
y
x
Ω
Fig. 1.12.
e le funzioni a destra e a sinistra dell’uguaglianza sono olomorfe su C. Dunque
l’eguaglianza vale per ogni z in C.
Esempio 1.58. Torniamo ad esaminare la primitiva di 1/z, in una regione di Jordan
Ω come in figura.
La primitiva che si è indicata con L(z) al paragrafo 1.9.3 coincide con Logz nel
primo/secondo quadrante, e quindi ivi verifica
eL(z) = z .
Per il Principio di permanenza, tale uguaglianza vale ovunque L(z) è definita e quindi
anche nel terzo quadrante. Dunque, nei punti del terzo quadrante essa è uguale a
log |z| + i[Argz + 2kπ]
per un qualche valore di k che certamente non è 0, perché Logz è discontinuo quando
z traversa l’asse reale negativo, mentre L(z) è continua. Dunque L(z) passa dai
valori di una determinazione del logaritmo a quelli di un’altra.
L’applicazione del teorema precedente richiede una certa cautela. Supponiamo che
f(z) e g(z) siano olomorfe su due regioni Ω1 ed Ω2 tra loro diverse, ma con
79

1. LE FUNZIONI OLOMORFE
intersezione non vuota e supponiamo che f(z) e g(z) siano uguali sul sostegno di una
curva contenuta in Ω1 ∩ Ω2. Il teorema precedente NON implica che le due funzioni
debbano essere uguali su Ω1 ∩ Ω2. Implica che debbano essere uguali soltanto sulla
componente connessa di Ω1 ∩Ω2 che contiene il sostegno della curva. E’ importante
notare questo nella dimostrazione del teorema seguente che permette di chiarire una
stranezza delle funzioni di variabile reale. Per illustrarla, consideriamo la serie di
Taylor
log (1 + x) =+∞∑n=1
(−1)n+1 xn
n.
Questa serie ha raggio di convergenza 1 e si capisce che il raggio non possa superare
1 perché per x = −1 la funzione non è definita.
Consideriamo invece la serie di Taylor
11 + x2
=+∞∑n=0
(−1)nx2n .
Anche questa serie ha raggio di convergenza 1 nonostante che la funzione somma
abbia estensione di classe C∞ su R e, guardando le cose soltanto sulla retta reale,
non si capisce perché il raggio di convergenza non possa superare 1. Ciò si capisce
esaminando la funzione 1/(1 + z2) sul piano complesso: essa non è definita per x =
±i. Quest’osservazione ha una validità generale. Infatti, il teorema seguente mostra
che la convergenza di una serie di Taylor sul piano complesso trova solamente ostacoli
nelle singolarità della funzione.
Per chiarire meglio questo punto, chiamiamo punto regolare per la funzione f(z)
un punto z0 interno alla regione Ω su cui f(z) è olomorfa; diciamo che z 0 è
una singolarità eliminabile se z0 appartiene alla chiusura di Ω e se f(z) ammette
estensione olomorfa ad un intorno di z0 (il punto z0 stesso incluso). Ogni altro punto
della frontiera di Ω si dirà punto singolare di f(z).
Si noti che un punto z0 che è una singolarità eleminabile per f(z) è un punto regolare
per l’estensione olomorfa di f(z). Per questo non useremo il termine “singolarità”
(senza aggettivo) per indicare le singolarità eliminabili.
Teorema 1.59. Sia f(z) =∑+∞
n=0 fn(z − z0)n una serie di Taylor con raggio di
convergenza R > 0. Esiste un punto singolare z tale che |z − z0| = R.
80

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
La dimostrazione si fa per assurdo. Sia D il disco di convergenza e sia C la sua
circonferenza. Sia w un punto di C. Se w non è singolare, si trova un disco D w di
centro w e una funzione g(z) tale che g(z) è olomorfa in D w e coincide con f(z) in
D ∩ Dw . Se nessun punto della frontiera di D è singolare, si costruisce in questo
modo una copertura della circonferenza C, che è compatta. Dunque, per il teorema di
Heine-Borel, si trova un numero finito di dischi D1 = Dw1 , D2 = Dw2 ,. . . ,Dn = Dwn
che coprono C. Ordiniamoli in modo che i loro centri si susseguano per esempio in
verso antiorario.
Sia gi(z) la funzione che abbiamo definita sul disco D i.
Due dischi consecutivi Di e Di+1 hanno una parte comune su cui sono definite sia g i
che gi+1. Queste due funzioni coincidono ambedue con f(z) in (D i ∩Dj)∩D e quindi
coincidono ovunqe su Di ∩ Dj perchè esso è un insieme connesso.
Sia ora φ(z) la funzione definita su Ω = D ∪ (∪D i) da:
φ(z) =
8<: f(z) su D
gi(z) su Di.
Come abbiamo visto, la funzione φ(z) è olomorfa su Ω.
Sviluppiamo questa funzione in serie di potenze di centro z 0. Ovviamente, si ritrova la
stessa serie di potenze di f(z). Per il teorema 1.48, il raggio di convergenza della serie
così ottenuta è maggiore di R e ciò non può darsi. Dunque, almeno uno dei punti di C
è singolare per f(z).
1.14. TEOREMA DI MORERA E PRINCIPIO DI RIFLESSIONE
Il teorema di Morera inverte il teorema di Cauchy.
Teorema 1.60 (di Morera). Sia Ω una regione qualsiasi e supponiamo che f(z)
sia continua su Ω. Supponiamo che su ogni poligono P valga
81

1. LE FUNZIONI OLOMORFE
∫P
f(z) dz = 0 . 1.28
Allora, la funzione f(z) è olomorfa su Ω.
DIMOSTRAZIONE
Si sa che se vale la condizione 1.28 allora la funzione f(z) ammette una primitiva F (z),
ossia si sa che esiste una funzione olomorfa F (z) definita su Ω e tale che
F ′(z) = f(z) .
Si sa che le derivate delle funzioni olomorfe sono esse stesse olomorfe (si veda il
teorema 1.49) e quindi f(z) è olomorfa.
Il principio di riflessione di Schwarz, la cui dimostrazione usa il teorema di Morera,
permette di estendere funzioni olomorfe, in modo da conservare l’olomorfia, in
presenza di opportune proprietà di simmetria. Noi presentiamo la forma più semplice
di tale principio.
Se Ω è una regione, poniamo
Ω∗ = z | z ∈ Ω .
Dunque, Ω∗ è ottenuta da Ω mediante riflessione rispetto all’asse reale. In particolare,
Ω = Ω∗ quando Ω è simmetrica rispetto all’asse reale.
Sia f(z) olomorfa su Ω e sia
g(z) = f(z) .
Ovviamente, g(z) è continua su Ω∗. Mostriamo che è anche olomorfa, facendo vedere
che la sua derivata è funzione continua di z. Ciò si vede come segue: sia z ∈ Ω ∗, così
che z ∈ Ω. Si ha:
limh→0
f(z + h) − f(z)h
= limh→0
[f(z + h) − f(z)
h
]= f ′(z) ,
funzione continua di z.
82

1. LE FUNZIONI OLOMORFE
Supponiamo ora Ω = Ω∗, che f(z) sia olomorfa su Ω e e che prenda valori reali
sull’asse reale. Allora,
g(z) = f(z)
è olomorfa e coincide con f(z) sull’asse reale e quindi coincide con f(z) ovunque, si
veda il teorema 1.57. Dunque, f(z) gode della seguente proprietà di simmetria:
f(z) = f(z) .
Invertiamo questa costruzione per ottenere un teorema di estensione:
Teorema 1.61 (principio di riflessione di Schwarz). Sia Ω una regione
contenuta in Im z > 0 e sia f(z) olomorfa su Ω. Supponiamo che f(z) sia anche
continua su Ω ∪ z ∈ ∂Ω , Im z = 0 e che ivi prenda valori reali. In tal caso la
funzione
g(z) =
f(z) se z ∈ Ω ∪ z ∈ ∂Ω , Im z = 0
f(z) se z ∈ Ω∗
è olomorfa.
DIMOSTRAZIONE
Illustriamo l’idea della dimostrazione, senza entrare in tutti i dettagli del calcolo. La
funzione g(z) è definita e continua sulla regione
Ω ∪ Ω∗ ∪ z ∈ ∂Ω Im z = 0 .
Per ipotesi g(z) è olomorfa su Ω e si è già notato che è olomorfa su Ω ∗. Dobbiamo
provare che essa è anche olomorfa sui punti interni all’insieme
z ∈ ∂Ω , Im z = 0 .
Per mostrare l’olomorfia, usiamo il teorema di Morera. Sia P un qualsiasi poligono
nel dominio di g(z). Siano P +ε , P−
ε i due poligoni in figura 1.13, ottenuti “tagliando” P a
distanza ε, sopra e sotto l’asse reale. L’integrale di g(z) lungo P +ε e lungo P −
ε è nullo.
83

1. LE FUNZIONI OLOMORFE
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
y
x
Pε+
Pε−
Fig. 1.13.
Quando ε tende a zero,
0 = limε→0
ZP+
ε
g(z) dz +
ZP−
ε
g(z) dz
ff=
ZP
g(z) dz
dato che gli integrali sui segmenti paralleli tendono ad elidersi.
L’arbitrarietà di P prova che g(z) è olomorfa sul suo dominio.
1.15. TEOREMI DI WEIERSTRASS E DI MONTEL
I due teoremi di Weierstrass e di Montel riguardano successioni di funzioni.
Teorema 1.62 (di Weierstrass). Sia (fn(z)) una successione di funzioni olomorfe
sulla medesima regione Ω e supponiamo che (fn(z)) converga ad una funzione f(z)
uniformemente sui compatti di Ω. In tal caso, f(z) è olomorfa e inoltre vale
f ′(z) = lim f ′n(z) ,
anche tale limite essendo uniforme sui compatti.
84

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
Per provare che f(z) è olomorfa basta lavorare localmente, nell’intorno D di ciascun
punto z di Ω. In tale intorno si usa il teorema di Morera. Notiamo prima di tutto che
f(z) è continua, come limite uniforme di una successione di funzioni continue. Sia P
un poligono in D. La successione (fn(z)) converge ad f(z) uniformemente su P e
quindi
ZP
f(z) dz = lim
ZP
fn(z) dz .
Ciascuno degli integrali a destra è nullo perché ciascuna funzione f n(z) è olomorfa e
D è una regione di Jordan. Dunque
ZP
f(z) dz = 0
per ogni poligono P ed f(z) è olomorfa.
Fissiamo ora un compatto K ⊆ Ω. Vogliamo provare che (f ′n(z)) converge
uniformemente a f(z) su K.
Per il teorema di Heine–Borel, il compatto K è coperto da un numero finito di dischi,
ciascuno dei quali è contenuto in Ω e quindi basta provare la convergenza uniforme su
ciascuno di tali dischi. Fissiamo l’attenzione su uno di essi, che indichiamo con D e sia
D un disco con lo stesso centro di D e raggio maggiore, ancora contenuto in Ω. Sia C
la circonferenza di D. Sapendo già che f(z) è olomorfa, per ogni z ∈ D vale
f ′(z) =1
2πi
ZC
f(ζ)
(ζ − z)2dζ = lim
1
2πi
ZC
fn(ζ)
(ζ − z)2dζ = lim f ′
n(z) ,
il limite essendo uniforme per z ∈ D.
Osservazione 1.63. Applicando questo teorema alle serie di potenze ed alle serie di
Laurent si trovano dimostrazioni dei teoremi 1.23 e 1.24. Si noti infatti che la catena di
argomenti che conducono al teorema di Weierstrass non fa uso né delle serie di Taylor
né delle serie di Laurent.
85

1. LE FUNZIONI OLOMORFE
Il teorema di Montel è invece un teorema di compattezza. La dimostrazione si basa
sul teorema di Ascoli-Arzelà, che si assume noto dai corsi di topologia 1.
Teorema 1.64. Una successione di funzioni di due variabili reali che è equilimi-
tata ed equicontinua su un insieme K ammette una s.successione uniformemente
convergente.
Usando questo risultato, possiamo provare:
Teorema 1.65 (di Montel). Sia (fn(z)) una successione limitata di funzioni
olomorfe sulla regione Ω. Essa ammette una s.successione che è convergente
uniformemente sui compatti di Ω.
DIMOSTRAZIONE
Si sa dai corsi di topologia che esiste una successione (K r) di s.insiemi compatti di Ω
tali che
Kr ⊆ int Kr+1 , ∪Kr = Ω .
Mostreremo che per ogni r si può estrarre dalla (fn(z)) una s.successione uniforme-
mente convergente su Kr. Accettiamo per un attimo questo fatto e mostriamo come si
costruisce la s.successione cercata: si applica questo procedimento a (f n(z)) e K1 e si
costruisce una successione (fnk,1(z)) convergente uniformemente su K1. Non si co-
nosce il comportamento di questa successione fuori di K 1. Si applica quindi di nuovo il
procedimento a (fnk,1(z)) e K2, costruendo la successione (fnk,2(z)) uniformemente
convergente su K2 (e quindi anche su K1).
Si itera il procedimento e si sceglie come s.successione quella diagonale, ossia quella
delle funzioni (fnk,k(z)), si ricordi la dimostrazione del teorema di Ascoli-Arzelà.
Il procedimento descritto è riassunto dalla tabella seguente:
1Si veda il teorema 5.54 per il caso delle funzioni di una sola variabile. La dimostrazione per
funzioni di più variabili è la medesima.
86

1. LE FUNZIONI OLOMORFE
fn1,1(z) fn2,1(z) fn3,1(z) fn4,1(z) . . .
fn1,2(z) fn2,2(z) fn3,2(z) fn4,2(z) . . .
fn1,3(z) fn2,3(z) fn3,3(z) fn4,3(z) . . ....
In questa tavola:
– alla prima riga c’è una s.successione della (fn(z)) e ciascuna riga riporta
una s.successione di quella che figura alla riga precedente.
– dunque la “successione diagonale” (fnr ,r) è s.successione della (fn).
– La successione che figura alla riga i–ma converge su K i e quindi anche
su Kj , con j < i.
– la successione diagonale è s.successione di ciascuna (fni,j) (per cia-
scun j), alterata nei soli primi elementi. E quindi essa converge su ciascun
insieme Kj .
Per concludere, basta mostrare come estrarre dalla (fn(z)) una s.successione con-
vergente su un assegnato compatto K. Per ipotesi, su K la successione (f n(z)) è
limitata, |fn(z)| < MK . Se si prova che anche la successione (f ′n(z)) è limitata allo-
ra la fn(z) è sia equilimitata che equicontinua e la s.successione cercata esiste per il
teorema di Ascoli-Arzelà.
La limitatezza di f ′n(z) si vede come segue. Sia P un poligono in Ω che racchiude
K. Per ogni z ∈ K vale
f ′n(z) =
1
2πi
ZP
f(ζ)
(ζ − z)2dζ ≤
LP maxP |fn(z)|
2π
ff· max
ζ∈P,z∈K
1
|ζ − z|2 < M .
1.16. MASSIMO MODULO E TEOREMA DI LIOUVILLE
Abbiamo visto che le funzioni olomorfe soddisfano al teorema della media,
f(z0) =12π
∫ 2π
0
f(z0 + reit) dt
87

1. LE FUNZIONI OLOMORFE
da cui segue
|f(z0)| ≤12π
· 2π( max|z−z0|=r
|f(z)|) :
Il massimo del modulo di f(z) su una circonferenza è al più uguale al numero |f(z 0)|.
In realtà può provarsi di più:
Teorema 1.66 (Principio del massimo modulo). Sia f(z) olomorfa su una
regione Ω. Se la funzione |f(z)| ammette un punto di massimo relativo z 0 che
appartiene ad Ω, allora la funzione f(z) è costante su Ω.
DIMOSTRAZIONE
Per il Lemma 1.12 basta provare che il modulo di f(z) è costante in un intorno di z 0.
Infatti in tal caso f(z) è costante in un intorno di z 0 e quindi anche su Ω. Se ciò non
accade, in ogni disco di centro z0 esiste z tale che
|f(z)| < |f(z0)| .
Sia z1 uno di tali punti e supponiamo che, inoltre, valga
z | |z − z0| < 2|z1 − z0| ⊆ Ω .
Sia γ la circonferenza parametrizzata da
z0 + |z0 − z1|eit , 0 ≤ t ≤ 2π .
Il punto z1 appartiene a questa circonferenza e quindi, per la continuità di |f(z)|, esiste
ε > 0 ed esiste un arco della circonferenza su cui
|f(z0 + reit)| < |f(z0)| − ε , φ0 < t < φ1 .
Usiamo ora la formula della media come segue:
|f(z0)| =
˛˛ 1
2π
Z 2π
0
f(z0 + reit) dt
˛˛
≤˛˛ 1
2π
Z φ1
φ0
f(z0 + reit) dt
˛˛+˛˛ 1
2π
Zt/∈[φ0,φ1]
f(z0 + reit) dt
˛˛
≤ 1
2π
([φ1 − φ0][|f(z0)| − ε] + [2π − (φ1 − φ0)]|f(z0)|
)
≤ |f(z0)| − εφ1 − φ0
2π< |f(z0)|
88

1. LE FUNZIONI OLOMORFE
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x
y
z0
z1
Fig. 1.14.
e, ricordiamo, ε > 0. Ciò non può darsi e dunque f(z) ha modulo costante in un
intorno di z0, e quindi è essa stessa costante su Ω.
Si noti che l’asserto analogo per il minimo non vale. Infatti, il modulo della funzione
f(z) = z ha minimo per z = 0, senza essere costante. Però, applicando il principio
del massimo modulo alla funzione g(z) = 1/f(z) si vede immediatamente
Corollario 1.67. Sia f(z) olomorfa non costante e priva di zeri in Ω. Allora, |f(z)|
non raggiunge minimo in Ω.
Una conseguenza interessante di questi risultati è la seguente:
Teorema 1.68. Supponiamo che una curva di livello per |f(z)| sia una curva
semplice e chiusa. Allora f(z), se non è costante, ammette almeno uno zero nella
regione interna a γ.
89

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
Sia γ la curva di livello. Su γ vale
|f(z)| = c
e, dal principio del massimo, nei punti della regione interna vale
|f(z)| ≤ c .
Se c = 0 allora f(z) stessa è nulla. Sia quindi c > 0. Se la funzione non si annulla
nella regione interna a γ, anche il minimo del modulo viene assunto so γ, ossia nella
regione interna vale
c ≤ |f(z)| .
Dunque, |f(z)| è costante e quindi f(z) stessa è costante, per il Lemma 1.12.
Il principio del massimo si trasferisce dalle funzioni olomorfe alle loro parti reali,
ossia alle funzioni armoniche, come segue:
Teorema 1.69. Sia u(x, y) armonica non costante su Ω. Allora, u(x, y) non
raggiunge né massimo né minimo su Ω.
DIMOSTRAZIONE
Sia v(x, y) una funzione armonica coniugata di u(x, y) e consideriamo la funzione
olomorfa f(x + iy) = u(x, y) + iv(x, y).
Si applichi il principio del massimo modulo alla funzione olomorfa e mai nulla
g(z) = ef(z) .
Si sa che |g(z)| non ammette né punti di massimo né punti di minimo e
|g(x + iy)| = eu(x,y) .
L’asserto segue per la monotonia dell’esponenziale su R.
90

1. LE FUNZIONI OLOMORFE
Osservazione 1.70. Si noti che l’asserto relativo alle funzioni armoniche parla di
massimo e minimo della funzione, e non del suo modulo.
Supponiamo ora che una funzione f(z) sia olomorfa su C. Una tale funzione si dice
intera. Ovviamente il principio del massimo vale anche per le funzioni intere, ma in
tal caso può anche dirsi di più:
Teorema 1.71 (di Liouville). Una funzione intera e limitata è costante.
DIMOSTRAZIONE
Una funzione intera ammette sviluppo di Taylor, per esempio di centro 0, e raggio di
convergenza +∞,
f(z) =
+∞Xn=0
fnzn , ∀z ∈ C .
Si sa che
fn =1
2πi
ZCR
f(ζ)
ζn+1dζ
con CR circonferenza di centro l’origine e raggio R. Dunque su C R vale |ζ|n+1 = Rn+1.
Di conseguenza, se |f(z)| < M per ogni z, vale
|fn| ≤1
2π· 2πR · M
Rn+1=
M
Rn.
Questa diseguaglianza vale per ogni R e quindi
|fn| ≤ infR>0
M
Rn.
Se n > 0 l’estremo inferiore è nullo e quindi f n = 0 per ogni n > 0. Vale cioè f(z) = f0,
costante.
Il teorema di Liouville è un teorema assai potente. Per esempio vedremo più avanti
come dedurne la conseguenza seguente:
Corollario 1.72. Sia f(z) una funzione intera. Supponiamo che f(z) non prenda
valori su un segmento. Allora, f(z) è costante.
91

1. LE FUNZIONI OLOMORFE
Ora invece usiamolo per provare:
Teorema 1.73 (fondamentale dell’ algebra). Sia p(z) un polinomio. Se il suo
grado è positivo esso ammette zeri.
DIMOSTRAZIONE
Se p(z) ha grado almeno 1 allora
lim|z|→+∞
1
p(z)= 0 . 1.29
Se p(z) non si annulla, la funzione
f(z) =1
p(z)
è intera e, per 1.29, limitata. Dunque costante. Il suo limite essendo nullo, anche
la funzione è identicamente zero. Ciò contrasta con la definizione di f(z), perché
f(z)p(z) = 1. Dunque p(z), se ha grado almeno 1, deve annullarsi.
Concludiamo notando che anche il teorema di Liouville si estende alle funzioni
armoniche, applicandolo alla funzione olomorfa
g(x + iy) = eu(x,y)+iv(x,y) .
Se la funzione armonica u(x, y) è definita per ogni (x, y) e limitata, la funzione g(z)
è intera e limitata e quindi costante; e quindi anche u(x, y) è costante:
Teorema 1.74. Una funzione u(x, y) armonica su R2 e limitata è costante.
1.17. LE SINGOLARITÀ ISOLATE
Nella sezione 1.13. abbiamo definito i punti singolari di una funzione olomorfa. Niente
vieta che l’insieme dei punti singolari abbia punti di accumulazione. Noi vogliamo ora
studiare il caso in cui ciò non avviene, caso che può ridursi al seguente: una funzione
92

1. LE FUNZIONI OLOMORFE
f(z) è olomorfa in un disco D, escluso il suo centro z0. In tal caso diremo che z0 è
una singolarità isolata di f(z).
Caratterizziamo prima di tutto le singolarità eliminabili.
Ricordiamo che z0 è singolarità eliminabile se f(z) ha estensione olomorfa ad un
intorno di z0.
Teorema 1.75 (di Riemann). Sia z0 una singolarità isolata di f(z). Il punto z0 è
singolarità eliminabile se e solo se la funzione |f(z)| è limitata in un suo intorno.
DIMOSTRAZIONE
Se f(z) ammette estensione olomorfa anche in z 0 allora |f(z)| è limitato in un intorno
di z0. Per provare il viceversa, introduciamo la funzione
h(z) =
8<: 0 se z = z0
(z − z0)2f(z) altrimenti.
Questa funzione è continua in un disco D contenente z 0, incluso il punto z0 perché
f(z) è limitata in un intorno di z0. Proveremo che h(z) è olomorfa. Accettando questo,
notiamo che h(0) = 0 e che h′(0) = 0, perchè f(z) è limitata e quindi h(z) è infinitesi-
ma, per z → z0, di ordine maggiore di 1. Dunque h(z) è sviluppabile in serie di Taylor
di centro z0,
h(z) =
+∞Xn=0
hn(z − z0)n
con h0 = 0 e h1 = 0,
h(z) = (z − z0)2
+∞Xn=2
hn(z − z0)n
Per z = z0 si trova quindi che
f(z) = g(z) , g(z) =
+∞Xn=2
hn(z − z0)n ,
e g(z) è analitica anche in z0. Dunque, il punto z0 è una singolarità eliminabile di f(z).
93

1. LE FUNZIONI OLOMORFE
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x
y
x
y
Tε
Fig. 1.15.
Per completare la dimostrazione dobbiamo mostrare che h(z) è olomorfa 2. Si noti
che questo segue perché h(z) è ovunque derivabile; ma non avendo provato questo
teorema, non vogliamo usarlo. Facciamo quindi uso del teorema di Morera: sia T un
qualsiasi triangolo in D e mostriamo cheZT
h(z) dz = 0 .
Ciò è ovvio se T non racchiude z0. Altrimenti, decomponiamolo in tre triangoli con un
vertice comune in z0 come nella figura 1.15 a sinistra.
Basta provare che l’integrale è nullo su ciascuno di essi.
Si consideri uno di essi, indentato vicino al vertice z 0, come nella figura 1.15 a destra,
mediante un “piccolo” triangolo T ε. Sia ε il perimetro di Tε e sia Tε il trapezio residuo.
L’integrale di h(z) sul trapezio è nullo, e l’integrale sul triangolo T ε è maggiorato da
ε maxTε
||h(z)||
e questo tende a zero per ε → 0. Infatti, essendo f(z) limitata in un intorno di z 0, anche
h(z) lo è. Dunque,ZT
h(z) dz = limε→0
ZTε
h(z) dz +
ZTε
h(z) dz
ff= 0 .
2non è difficile vedere che h(z) è ovunque derivabile, e quindi olomorfa per il teorema 1.10.
Non avendo però provato questo risultato, non vogliamo usarlo.
94

1. LE FUNZIONI OLOMORFE
Ciò completa la dimostrazione.
Il teorema precedente mostra in particolare che se z0 è un punto singolare (non una
singolarità eliminabile) di f(z) allora
lim supz→z0
|f(z)| = +∞
e suggerisce di studiare separatamente i due casi
limz→z0
|f(z)| = +∞ ,
e in tal caso si dice che z0 è un polo di f(z), e il caso
limz→z0 |f(z)| non esiste.
In quest’ultimo caso si dice che z0 è singolarità essenziale di f(z).
Esaminiamo prima di tutto il caso del polo.
Teorema 1.76. Un punto z0 è un polo per f(z) se e solo se esiste un intorno D di
z0 su cui la funzione f(z) si rappresenta come
f(z) =+∞∑
n=−k
fn(z − z0)n , 1.30
con k numero positivo.
DIMOSTRAZIONE
E’ immediato verificare che se f(z) si rappresenta come richiesto, con k numero
positivo, allora limz→z0 |f(z)| = +∞. Viceversa, se z0 è un polo,
g(z) =1
f(z)
tende a zero per z → z0 e quindi in z0 ha singolarità eliminabile. Si può quindi scrivere,
per z = z0,
g(z) =+∞Xn=k
gn(z − z0)n
e k > 0 perchè g(z) tende a zero per z → z0.
95

1. LE FUNZIONI OLOMORFE
Mettendo in evidenza (z − z0)k,
g(z) = (z − z0)kφ(z)
con φ(z0) = 0 e quindi con 1/φ(z) olomorfa in un intorno di z 0, incluso z0. Dunque
f(z) =1
(z − z0)k
1
φ(z)=
1
(z − z0)k
+∞Xn=0
φn(z − z0)n
e questa è la rappresentazione richiesta.
Il numero k in 1.30 si chiama ordine del polo, se f−k = 0. Si confronti con la nota
definizione di ordine di uno zero, come quel numero k > 0 per cui
f(z) =+∞∑n=k
fn(z − z0)n
se fk = 0.
Passiamo ora a studiare il caso della singolarità essenziale. Ovviamente in questo caso
f(z) ha un comportamento “assai disordinato” quando z → z 0. Il teorema seguente,
di dimostrazione assai difficile, mostra che il comportamento è il peggiore che si possa
immaginare:
Teorema 1.77 (di Picard). Sia z0 una singolarità essenziale di f(z) e sia D un
disco di centro z0. L’immagine di D mediante f(z) è uguale a tutto C, escluso al più
un numero.
Non possiamo provare questo teorema, ma possiamo provarne una versione più
semplice:
Teorema 1.78 (di Casorati-Weierstrass). Sia z0 singolarità essenziale di f(z)
e sia D un disco di centro z0. L’immagine di D è densa in C.
DIMOSTRAZIONE
Per assurdo, sia f(D) non denso in C. In tal caso esiste un punto w che non è di
accumulazione per f(D). Il punto w può appartenere o meno ad f(D). Studiamo
96

1. LE FUNZIONI OLOMORFE
prima di tutto il caso in cui w ∈ f(D).
Se w = f(z1), z1 ∈ D, allora
w = lim f(zn)
per ogni successione (zn) tendente a z1. Ma, w non è di accumulazione per l’insieme
dei numeri f(zn) e quindi si ha f(zn) = w per ogni n (escluso un numero finito
al più). Dal teorema 1.57 segue che f(z) è costante e quindi che z0 è singolarità
eliminabile.
Studiamo ora il caso in cui w /∈ f(D). In tal caso esiste r > 0 tale che
|f(z) − w| > r ∀z ∈ D
e quindi la funzione olomorfa
g(z) =1
f(z) − w
verifica
|g(z)| <1
r.
Essa ha quindi una singolarità eliminabile in z 0 e quindi
g(z) = (z − z0)k
+∞Xn=0
gn(z − z0)n , g0 = 0 ,
si veda il teorema 1.75. Dunque,
f(z) = w +1
(z − z0)kφ(z)
con φ(z) olomorfa in D (incluso il punto z0). Dunque, f(z) ha in z0 una singolarità
eliminabile, se k = 0, oppure un polo.
Esempi di funzioni con singolarità essenziali sono forniti in particolare dalle serie di
Laurent convergenti in un disco privato del suo centro, come per esempio
e1/z =+∞∑n=0
1n!
1zn
.
97

1. LE FUNZIONI OLOMORFE
Infatti, sappiamo che sia nel caso del polo che della singolarità eliminabile il
corrispondente sviluppo in serie di potenze ha al più un numero finito di potenze
negative. Mostreremo che questo caso è del tutto generale:
Teorema 1.79. Sia z0 una singolarità isolata di f(z). Se z0 è singolarità essenziale
di f(z) allora vale
f(z) =n=+∞∑n=−∞
fn(z − z0)n
e la serie converge in un intorno di z0, privato del punto z0.
Invece di provare direttamente questo teorema, è conveniente dedurlo dallo studio di
un caso più generale.
1.18. FORMULA DI LAURENT
Ricordiamo che la formula integrale di Cauchy è immediata conseguenza del teorema
di Cauchy e che questo vale per funzioni olomorfe in regioni di Jordan. Abbiamo però
esteso il teorema di Cauchy a regioni di forma Ωγ1 − Ωγ2 , delimitate da due curve di
Jordan. Si ha in tal caso
∫γ1
f(z) dz =∫
γ2
f(z) dz 1.31
se γ1 e γ2 sono come nella figura 1.16, a sinistra.
Ricordiamo brevemente la dimostrazione, che poi useremo per estendere la formula
integrale di Cauchy. Si considera la curva γε della figura 1.16, a destra (per evitare
complicazioni supponiamo che γ1 e γ2 siano semplici così che anche γε si può segliere
semplice). Per essa vale
∫γε
f(z) dz = 0 .
Al limite per ε tendente a zero si trova che vale 1.31.
98

1. LE FUNZIONI OLOMORFE
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
γ1
γ2
x
y
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x
y
γε
Fig. 1.16.
Sia ora z un punto della regione interna a γε. Si può scrivere la formula integrale di
Cauchy
f(z) =1
2πi
∫γε
f(ζ)ζ − z
dζ
(si ricordi, curva semplice). Al limite per ε → 0 questa uguaglianza si riduce a
f(z) =1
2πi
∫γ2
f(ζ)ζ − z
dζ − 12πi
∫γ1
f(ζ)ζ − z
dζ . 1.32
Osservazione 1.80. Si noti che abbiamo scritto un segno “−” di fronte al secondo
integrale perché per convenzione il simbolo∫
γ indica l’integrale sulla curva percorsa
in verso positivo, mentre il secondo integrale si calcola sulla γ1 percorsa in verso
negativo.
Applichiamo la formula 1.32 al caso in cui f(z) è olomorfa in una corona circolare di
centro z0, come in figura 1.17.
In questo caso per γ1 e γ2 si scelgono due circonferenze concentriche di centro z 0 e
la 1.32 mostra che
f(z) = f2(z) − f1(z)
con
f2(z) =1
2πi
∫γ2
f(ζ)ζ − z
dζ , f1(z) =1
2πi
∫γ1
f(ζ)ζ − z
dζ .
99

1. LE FUNZIONI OLOMORFE
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Ω
Fig. 1.17.
La f2(z) si sviluppa in serie di Taylor, esattamente come si è già visto al
paragrafo 1.13.:
f2(z) =1
2πi
∫γ2
f(ζ)ζ − z0 + z0 − z
=
12πi
∫γ2
1ζ − z0
f(ζ)1 − z−z0
ζ−z0
dζ =1
2πi
∫γ2
f(ζ)ζ − z0
+∞∑n=0
(z − z0
ζ − z0
)n
dζ
=+∞∑n=0
(1
2πi
∫γ2
f(ζ)(ζ − z0)n+1
dζ
)(z − z0)n .
Si noti che questo calcolo si giustifica perché∣∣∣∣z − z0
ζ − z0
∣∣∣∣ < 1
dato che ζ appartiene a γ2, la circonferenza il cui disco contiene la corona circolare.
Un argomento analogo si applica all’espressione della f1(z), ma tenendo conto ora
del fatto che ζ è sulla circonferenza γ1 che lascia fuori la corona circolare e quindi
ora
∣∣∣∣ζ − z0
z − z0
∣∣∣∣ < 1 .
100

1. LE FUNZIONI OLOMORFE
Dunque,
f1(z) =1
2πi
∫γ1
f(ζ)ζ − z0 + z0 − z
=1
2πi
∫γ1
1z0 − z
· f(ζ)1 − ζ−z0
z−z0
dζ
=1
2πi
(− 1
z − z0
)∫γ1
f(ζ)+∞∑n=0
(ζ − z0
z − z0
)n
dζ
= −+∞∑n=0
1(z − z0)n+1
(1
2πi
∫γ1
f(ζ)(ζ − z0)n dζ
)1
(z − z0)n+1.
Ora notiamo che, per la formula 1.31, il valore degli integrali non muta se γ1 e γ2
vengono sostituite da una qualunque circonferenza C di centro z 0 e contenuta nella
corona circolare. Tenendo conto di ciò, scriviamo
−f1(z) =+∞∑n=0
(1
2πi
∫γ1
f(ζ)(ζ − z0)n dζ
)1
(z − z0)n+1
=+∞∑n=0
(1
2πi
∫C
f(ζ)(ζ − z0)n dζ
)1
(z − z0)n+1
=+∞∑n=1
(1
2πi
∫C
(ζ − z0)n−1f(ζ) dζ
)1
(z − z0)n
=−1∑
n=−∞
(1
2πi
∫C
f(ζ)(ζ − z0)n+1
dζ
)(z − z0)n .
Sommando f2(z) e −f1(z) si trova infine
f(z) =+∞∑
n=−∞
(1
2πi
∫C
f(ζ)(ζ − z0)n+1
dζ
)(z − z0)n . 1.33
Questa formula, valida quando f(z) è olomorfa in una corona circolare, si chiama
formula di Laurent.
Argomenti del tutto analoghi a quelli incontrati nella dimostrazione del teorema 1.59
mostrano che la funzione f(z) ha punti singolari sulla circonferenza esterna della
regione di convergenzae anche su quella interna, se essa non è ridotta ad un solo punto.
Se la corona di convergenza si riduce ad un disco privato del suo centro z 0 allora la
formula di Laurent vale, ma il punto z0 potrebbe essere una singolarità eliminabile.
Comunque sia, abbiamo provato:
101

1. LE FUNZIONI OLOMORFE
Teorema 1.81. Una funzione olomorfa f(z) di cui z0 è singolarità isolata, ammette
una serie di Laurent di centro z0 il cui raggio di convergenza r vale 0.
Osservazione 1.82. Osserviamo che una funzione olomorfa ammette un’unica serie
di Taylor di centro un punto z0. Essa però può ammettere più serie di Laurent
convergenti in corone circolari diverse, ma con lo stesso centro. Per esercizio, si
calcolino le serie di Laurent della funzione
f(z) =1
z(z − 1)(z + 2)
di centro z0 = 0.
Sappiamo già che se la funzione ha in z0 una singolarità eliminabile, allora la serie è
di Taylor, mentre se z0 è un polo allora la serie di Laurent è troncata da sotto. Dunque:
Teorema 1.83. sia z0 una singolarità isolata della funzione olomorfa f(z). La
singolarità isolata z0 è punto singolare essenziale se e solo se la serie di Laurent di
f(z) che converge in un disco di centro z0 privato del centro ha infiniti termini di
esponente negativo.
Concludiamo con un’osservazione concernente il coefficiente f−1 della serie di
Laurent 1.33. Per esso vale
f−1 =1
2πi
∫C
f(ζ) dζ .
Quindi, se si riesce a sviluppare una funzione in serie di Laurent, allora è immediato
il calcolo di tale integrale, e anche di altri integrali ad esso correlati.
Esempio 1.84. Consideriamo funzione
f(z) =1
1 − z,
che è già in forma di serie di Laurent di centro z0 = 1. Se C è la circonferenza di
raggio 2 e centro 0 si trova:
102

1. LE FUNZIONI OLOMORFE
∫C
f(ζ) dζ = −2πi .
Come altro esempio, consideriamo la funzione
f(z) = e1/z =+∞∑n=0
1n!
1zn
.
In questo caso si vede che f−1 = 1.
Sia C una circonferenza di centro z0, singolarità isolata di f(z). Il numero
f−1 =1
2πi
∫C
f(ζ) dζ
si chiama il residuo della funzione f(z) in z0.
Il residuo di f(z) in z0 si indica col simbolo
Res(f, z0) .
1.19. SINGOLARITÀ E ZERI AD INFINITO
Nello studio del limite di una funzione olomorfa f(z) per z tendente a +∞ conviene
usare una terminologia analoga a quella che si usa per z → z 0. Ciò si fa introducendo
la funzione
g(z) = f(1/z)
e dicendo che f(z) ha ad infinito una singolarità isolata se ciò accade per g(z) in
z0 = 0; e parlando di singolarità eliminabile, polo o singolarità essenziale, a seconda
del comportamento di g(z) in z0 = 0. La serie di Laurent di f(z) ad infinito si
costruisce a partire dalla serie di Laurent di g(z) a 0. Se
g(z) =+∞∑
n=−∞gnzn
allora la serie di Laurent
+∞∑n=−∞
fnzn , fn = g−n , 1.34
103

1. LE FUNZIONI OLOMORFE
si chiama la serie di Laurent di f(z) ad infinito. Dunque, se infinito è una singolarità
essenziale di f(z) allora la sua serie di Laurent ha infiniti termini con esponente
positivo. Se infinito è un polo allora la serie 1.34 ha solo un numero finito di termini
con esponente positivo. Si ha invece una singolarità eliminabile ad infinito quando
fn = 0 per n > 0.
Chiameremo residuo ad infinito il numero3
Res(f,∞) = − 12πi
∫C
f(ζ) dζ = −Res(
1z2
g(z), 0)
.
In questo caso C è una circonferenza di centro 0 e raggio così grande da racchiudere
tutte le singolarità “al finito” di f(z). Dunque,
Res(f,∞) = −f−1.
Si noti quindi che il residuo ad infinito può essere non nullo anche se infinito è una
singolarità rimuovibile.
Sia ora z0 ∈ C un polo di f(z). Si sa che si può scrivere
f(z) =−1∑
n=−r
fn(z − z0)n + φ(z)
con φ(z) regolare in z0. La funzione razionale
−1∑n=−r
fn(z − z0)n
si chiama la parte principale di f nel polo z0.
Se infinito è un polo, la funzione f(z) è in particolare olomorfa per |z| > R con R
sufficientemente grande e quindi, per |z| > R,
f(z) =k∑
n=0
fnzn + ψ(z)
con ψ(z) olomorfa (e nulla) ad infinito. In questo caso, il polinomio
3come sempre il verso di percorrenza su C è quello positivo, ossia antiorario.
104

1. LE FUNZIONI OLOMORFE
k∑n=0
fnzn
si chiama la parte principale di f ad infinito.
Sia ora f(z) una funzione che ha solo singolarità polari sia al finito che all’infinito.
Allora i poli sono in numero finito N e se Pm(z) è la parte principale dell’m–mo polo,
f(z) −N∑
m=1
Pm(z)
è intera e nulla ad infinito, ossia, per il teorema di Liouville, è identicamente zero. Si
ha dunque:
Teorema 1.85. Una funzione analitica le cui singolarità, al finito ed all’infinito,
sono poli, è razionale.
Sia quindi f(z) una funzione razionale e sia R un raggio così grande che la
circonferenza CR di centro 0 e raggio R racchiuda tutti i poli al finito. Consideraimo
i due integrali
12πi
∫CR
f(z) dz , − 12πi
∫CR
f(z) dz .
L’integrale di sinistra è la somma dei residui nei poli al finito mentre quello di destra
è il residuo ad infinito. Dunque:
Teorema 1.86. La somma dei residui in tutti i poli (al finito e ad infinito) di una
funzione razionale è nulla.
Se la serie di potenze 1.34 non ha termini con esponente positivo, diremo che la
funzione f(z) ha estensione olomorfa ad infinito, in particolare diremo che ha uno
zero ad infinito se essa ha solamente termini con esponente negativo. E il primo di
essi che è non nullo individua l’ordine dello zero.
105

1. LE FUNZIONI OLOMORFE
1.20. IL METODO DEI RESIDUI
Sia Ω una regione in cui f(z) è analitica, a parte che nei punti singolari isolati zn, in
numero finito o meno. Sia γ una curva semplice e chiusa in Ω, che non incontra punti
singolari di f(z). Si noti che γ racchiude al più un numero finito di punti singolari
perché questi, essendo isolati, possono solo accumularsi su punti di ∂Ω.
Una semplice iterazione della formula 1.31 mostra che vale∫γ
f(z) dz =∑∫
Ci
f(z) dz
ove Ci sono circonferenze centrate nei punti singolari z i ∈ Ωγ di f(z), così piccole
da non debordare da Ωγ e da non intersecarsi l’una con l’altra. La sommatoria è estesa
ai punti singolari zi ∈ Ωγ . Dunque:
Teorema 1.87 (dei residui). Sia γ una curva semplice e chiusa in Ω, che non
incontra i punti singolari di f(z). Alora vale∫γ
f(z) dz = 2πi∑
Res(f, zi) ,
la somma essendo estesa ai soli punti singolari che sono racchiusi da γ.
Questo teorema è particolarmente importante per il calcolo di integrali impropri di
funzioni di variabile reale. Facciamo una premessa
Premessa sugli integrali impropri
Sia f(z) una funzione di variabile reale che, per semplicità, assumiamo continua. Per
definizione,∫ +∞
−∞f(x) dx = lim
S→−∞
∫ 0
−S
f(x) dx + limT→+∞
∫ T
0
f(x) dx .
L’integrale improprio esiste quando ambedue i limiti esistono finiti.
Si chiama valore principale dell’integrale improprio il numero
limT→+∞
∫ T
−T
f(x) dx .
106

1. LE FUNZIONI OLOMORFE
E’ ovvio che se l’integrale improprio esiste allora esiste anche il suo valore
principale ed essi coincidono; ma il valore principale può anche esistere senza che
esista l’integrale improprio, come si vede considerando la funzione
f(x) = sin x .
Essendo la funzione dispari il valore principale è nullo, mentre l’integrale improprio
non esiste.
Il metodo dei residui può spesso usarsi per il calcolo del valore principale di
un integrale improprio, mentre frequentemente si richiede il valore dell’integrale
improprio stesso. Dunque prima di usare il metodo dei residui per il calcolo di
un integrale improprio, è necessario accertarsi che questo esista.
Un caso in cui nessuna verifica preliminare è richiesta è il caso di una funzione pari,
f(x) = f(−x) .
In tal caso
∫ 0
−T
f(x) dx =∫ T
0
f(x) dx
e quindi l’integrale improprio esiste se e solo se esiste il suo valore principale.
1.20.1 Calcolo di integrali impropri
Mostriamo un esempio semplice:
Esempio 1.88. Sia f(x) = 1/(1+ x2). Si sa che questa funzione ammette integrale
improprio e che
∫ +∞
−∞f(x) dx = π .
Mostriamo come si possa ritrovare questo valore usando il metodo dei residui.
La funzione f(x) è la restrizione all’asse reale della funzione
f(z) =1
1 + z2= −1
2i
z − i+
12
i
z + i
e quindi
Res(f, i) = − i
2.
107

1. LE FUNZIONI OLOMORFE
−1.5 −1 −0.5 0 0.5 1 1.5−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
y
x
Fig. 1.18.
Integriamo la funzione f(z) sulla curva in figura 1.18
L’integrale è ∫ R
−R
11 + x2
dx −∫
ΓR
11 + z2
dz = 2πiRes(f, i) = π .
Passando la limite per R → +∞ si trova∫ +∞
−∞
11 + x2
dx = π + limR→+∞
∫ΓR
11 + z2
dz .
Il risultato segue da qui se possiamo provare che l’ultimo limite è nullo.
Questo semplice esempio mostra che, per poter usare facilmente il metodo dei residui
per il calcolo di integrali impropri, dovremo dare metodi efficienti per il calcolo
dei residui; e dovremo dare criteri che assicurano che gli integrali su opportune
semicirconferenze tendono a zero quando il raggio tende a +∞. Al secondo problema
rispondono i due risultati seguenti:
Lemma 1.89 (del grande cerchio). Sia f(z) analitica su C salvo che nei punti
singolari zn, in numero finito o meno. Se però zn è infinito, sia
lim |zn| = +∞ .
108

1. LE FUNZIONI OLOMORFE
Siano Rn raggi tali che Rn = |zk| per ogni n e per ogni k,
limRn = +∞ .
Se esistono numeri positivi M ed ε per cui
|f(z)| <M
|z|1+εper |z| = Rn ,
allora vale
lim∫|z|=Rn
f(z) dz = 0 .
DIMOSTRAZIONE
La dimostrazione è immediata, notando che˛˛Z
|z|=Rn
f(z) dz
˛˛ ≤ 2πR · M
R1+ε
e il membro destro tende a zero.
Questo lemma si applica facilmente al caso dell’Esempio 1.88.
Osservazione 1.90. Si noti:
– se il lemma del grande cerchio si vuol applicare per integrare per esempio su
una semicirconferenza nel semipiano superiore, allora basta supporre che le
condizioni valgano per e z > −σ con σ > 0;
– la disuguaglianza |f(z)| < [M/|z|1+ε] vale anche per ogni z = x reale e
quindi nelle ipotesi del Lemma del grande cerchio, l’integrale improprio di
f(x) esiste.
Il secondo risultato si applica quando si devono calcolare integrali di funzioni della
forma
f(z)eiωz
lungo semicirconferenze nel semipiano Im z > 0 quando ω > 0, nel semipiano
Im z < 0 quando ω < 0.
Indicando con ΓR la semicirconferenza in figura 1.19, si ha
109

1. LE FUNZIONI OLOMORFE
−1.5 −1 −0.5 0 0.5 1 1.5−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
y
x
ΓR
Fig. 1.19.
Lemma 1.91 (di Jordan). Sia f(z) analitica con sole singolarità isolate in
Im z > 0. Supponiamo inoltre
lim|z|→+∞
f(z) = 0 , 1.35
il limite essendo calcolato nel semipiano Im z ≥ 0. Sia ω > 0. Il tal caso,
limR→+∞
∫ΓR
eiωzf(z) dz = 0 .
La dimostrazione è posposta.
Osservazione 1.92. Si noti:
– Dalla condizione 1.35 segue che f(z) ha solamente un numero finito di punti
singolari in Im z > 0.
– Il lemma di Jordan permette di asserire che esiste il valore principale
dell’integrale improprio di f(x). Niente dice sull’integrale improprio stesso.
Si confronti con l’Osservazione 1.90.
110

1. LE FUNZIONI OLOMORFE
Esaminiamo ora il primo problema, di dare formule semplici per il calcolo dei residui.
Ciò è possibile nel caso in cui il punto singolare z0 è un polo. In questo caso,
f(z) =+∞∑
n=−k
fn(z − z0)n , f−k = 0 .
Da questa formula dobbiamo ricavare il coefficiente f−1. E’ immediato vedere che,
se il polo ha ordine k,
f−1 = Res(f, z0) = limz→z0
1(k − 1)!
dk−1
dzk−1
[(z − z0)kf(z)
].
Nel caso del polo di ordine 1 si trova in particolare
limz→z0
(z − z0)f(z) .
Quest’ultima espressione assume un aspetto ancora più semplice nel caso particolare
in cui la funzione è data in forma di quoziente,
f(z) =n(z)d(z)
.
Sia z0 un polo di ordine 1 di f(z) e supponiamo n(z0) = 0, così che d(z) ha uno zero
semplice in z0. In questo caso,
limz→z0
(z − z0)f(z) = limz→z0
(z − z0)n(z)d(z)
=n(z0)d′(z0)
.
Dimostrazioni posposte
Dimostriamo il Lemma di Jordan.
Parametrizziamo ΓR come
ΓR : z(t) = Reit , 0 ≤ t ≤ π
e sia Γ+R la circonferenza ottenuta per t ∈ [0, π/2], Γ−
R quella ottenuta per t ∈ [π/2, π].
Mostriamo
limR→+∞
∫Γ+
R
eiωzf(z) dz = 0 , limR→+∞
∫Γ−
R
eiωzf(z) dz = 0 .
Consideriamo il primo limite (il secondo si tratta in modo analogo). Sia
M+R = max
Γ+R
|f(z)| .
111

1. LE FUNZIONI OLOMORFE
Per ipotesi,
limR→+∞
M+R = 0 .
Usando il lemma 1.28, stimiamo l’integrale come segue:∣∣∣∣∣∫
Γ+R
eiωzf(z) dz
∣∣∣∣∣ =∣∣∣∣∣∫ π/2
0
eiωReit
f(Reit)iReit dt
∣∣∣∣∣≤∫ π/2
0
R∣∣eiωR cos t−ωR sin tf(Reit)
∣∣ dt ≤ RM(R)∫ π/2
0
e−ωR sin t dt .
Ora notiamo che
− sin t ≤ −2t/π per 0 ≤ t ≤ π/2
e quindi
R
∫ π/2
0
e−ωR sin t dt ≤ R
∫ π/2
0
e−ωRt/2π dt =2π
ω
[1 − e−ωR/4
]rimane limitato per R → +∞, perché ω > 0. Dunque,
limR→+∞
M(R)∫ π/2
0
e−ωR sin t dt = 0
come si voleva.
L’integrale su Γ−R si tratta in modo analogo.
1.20.2 Il Principio dell’argomento
Sia f(z) una funzione olomorfa in una regione Ω, nulla in un punto z 0,
f(z) = (z − z0)kφ(z) , φ(z0) = 0 .
Essendo
f ′(z) = k(z − z0)k−1φ(z) + (z − z0)kφ′(z)
si vede che f ′(z)/f(z) ha polo semplice, con residuo uguale a k, l’ordine dello zero.
In modo analogo si vede che se
f(z) = (z − z0)−kφ(z) , φ(z0) = 0
112

1. LE FUNZIONI OLOMORFE
la funzione f ′(z)/f(z) ha ancora un polo semplice in z0, con residuo −k, essendo k
l’ordine del polo di f(z) in z0. Dunque, se C è una circonferenza (semplice) di centro
z0 che non racchiude altri zeri o punti singolari di f(z) oltre a z 0, si ha
12πi
∫C
f ′(z)f(z)
dz =
k se z0 è uno zero di ordine k
−k se z0 è un polo di ordine k.
Supponiamo ora che γ sia una curva semplice e chiusa in Ω, che non incontra né zeri
né punti singolari di f(z). Supponiamo inoltre che i punti singolari siano poli. In tal
caso,
12πi
∫γ
f ′(z)f(z)
dz = Z − P 1.36
ove Z è la somma delle molteplicità degli zeri racchiusi da γ e P è la somma delle
molteplicità dei poli racchiusi da γ. Quest’affermazione va sotto il nome di Principio
dell’argomento perché, cambiando la variabile di integrazione,
12πi
∫γ
f ′(z)f(z)
dz =1
2πi
∫γf
1ζ
dζ
ove γf è l’immagine di γ mediante f ,
γf : ζ = f(z(t)) , t ∈ [a, b] .
Dunque, il membro destro di 1.36 rappresenta l’indice della curva γf rispetto
all’origine ossia, intuitivamente, il numero dei giri che un punto mobile sulla curva
γf compie intorno all’origine: detto in modo intuitivo, la “variazione dell’argomento”
di ζ quando ζ percorre γf .
1.20.3 I teoremi di Hurwitz e Rouché e della mappa aperta
Il Principio dell’argomento è alla base di numerosi metodi grafici dell’ingegneria ed
ha importanti conseguenze teoriche. Tra queste proviamo i teoremi di Hurwitz e di
Rouché.
Teorema 1.93 (di Hurwitz). Sia (fn(z)) una successione di funzioni olomorfe su
Ω, convergente ad f(z) uniformemente sui compatti di Ω. Supponiamo che la funzione
f(z) non sia identicamente nulla e che z0 sia uno zero di f(z). In ogni intorno di z0
113

1. LE FUNZIONI OLOMORFE
si annullano tutte le funzioni fn(z), a parte un numero finito di esse. Inoltre, Sia D
un intorno di z0 su cui f(z) si annulla solo in z0. Per n sufficientemente grande, il
numero degli zeri di fn(z) in D, contati tenendo conto della molteplicità, è uguale
alla molteplicità dello zero z0 di f(z).
DIMOSTRAZIONE
Sia D un disco, intorno di z0. Supponiamo che
D = z | |z − z0| < r .
Sia C la circonferenza di D.
Si sa che gli zeri di f(z) sono isolati perché f(z) non è identicamente nulla e quindi
il raggio r si può scegliere in modo che f(z) non si annulli su C. La convergenza di
(fn(z)) ad f(z), uniforme su C, mostra che per n grande anche fn(z) non si annulla su
C. Dunque, il numero degli zeri può calcolarsi applicando il Principio dell’argomento
su C:
limn
»1
2πi
ZC
f ′n(z)
fn(z)dz
–=
1
2πi
ZC
f ′(z)
f(z)dz = N ≥ 1 .
Dato che
1
2πi
ZC
f ′n(z)
fn(z)dz
prende valori interi e il limite è N , la successione deve essere definitivamente uguale
a N . Ciò completa la dimostrazione.
Osservazione 1.94. Si noti che l’ipotesi f(z) non identicamente nulla non può
rimuoversi: la successione delle funzioni costanti
fn(z) = 1/n
converge uniformemente alla funzione nulla, e nessuna delle fn(z) ammette zeri.
Un secondo risultato importante mostra che gli zeri variano con continuità perturbando
la funzione.
114

1. LE FUNZIONI OLOMORFE
Teorema 1.95 (di Rouché). Siano g(z) ed h(z) funzioni olomorfe in una regione
di Jordan Ω e sia γ una curva semplice e chiusa in Ω.
Supponiamo che sul sostegno di γ valga la disuguaglianza stretta
|h(z)| < |g(z)| . 1.37
In tal caso la somma delle molteplicità degli zeri di g(z) nella regione Ωγ uguaglia la
somma delle molteplicità degli zeri di g(z) − h(z), ancora in Ωγ .
DIMOSTRAZIONE
Vediamo prima di tutto un argomento intuitivo, che però sarebbe lungo giustificare
completamente. Notiamo che
arg(g − h) = arg
„g
»1 − h
g
–«= arg g + arg
»1 − h
g
–.
La 1.37 mostra che
˛˛h(z)
g(z)
˛˛ < 1 ,
ossia che i punti
w = 1 − h
g
hanno parte reale positiva. Dunque, la curva parametrizzata da (1 − h/g) non gira in-
torno all’origine, e quindi, percorrendola, la variazione dell’argomento è zero. Dunque,
si intuisce che percorrendo γg−h l’argomento debba variare di tanto quanto varia per-
correndo γg. E quindi, le due funzioni g e g − h avranno il medesimo numero di zeri
racchiusi da γ.
Vediamo ora la dimostrazione rigorosa. Si noti che la disuguaglianza stretta 1.37
implica che né g(z) né
ψ(z) = g(z) − h(z)
hanno zeri sul sostegno di γ. Possiamo quindi usare il Principio dell’argomento e provareZγ
ψ′(z)
ψ(z)dz =
Zγ
g′(z)
g(z)dz
115

1. LE FUNZIONI OLOMORFE
ossia
Zγ
»ψ′(z)
ψ(z)− g′(z)
g(z)
–dz = 0 .
Ora,
ψ′(z)
ψ(z)− g′(z)
g(z)=
ψ′(z)g(z) − ψ(z)g′(z)
g(z)ψ(z)
h(z)g′(z) − h′(z)g(z)
g(z)[g(z)− h(z)]=
φ′(z)
φ(z)
ove
φ(z) =ψ(z)
g(z)=
g(z) − h(z)
g(z).
Va quindi provato che
Zγ
φ′(z)
φ(z)dz = 0 . 1.38
Di nuovo, quest’integrale ha senso perché né g(z) né h(z) si annullano su γ.
Scriviamo ora la disuguaglianza 1.37 nella forma
|g(z) − ψ(z)| < g(z) ossia |1 − φ(z)| < 1
sul sostegno di γ. Questa disuguaglianza ora mostra che la curva γ φ ha sostegno nel
disco di centro 1 e raggio 1: non gira intorno all’origine e quindi l’integrale in 1.38 è
effettivamente nullo, come dovevamo provare.
Si ricordi ora il teorema di Brower: una funzione h(z) dal disco chiuso z | |z| ≤ 1in sé che è continua, ammette un punto fisso; ossia, esiste un punto z0 di norma
minore o uguale ad 1, tale che h(z0) = z0. Ripetiamo che questo teorema vale sotto
la sola ipotesi che f(z) sia continua, e la sua dimostrazione è difficile. Se però h(z) è
olomorfa una semplice dimostrazione può dedursi dal teorema di Rouché:
Corollario 1.96. Sia h(z) olomorfa su una regione Ω che contiene z | |z| ≤ 1.
Supponiamo che
|z| ≤ 1 =⇒ |h(z)| < 1 .
Allora, la funzione h(z) ha un punto fisso z0 e uno solo. Inoltre, |z0| < 1.
116

1. LE FUNZIONI OLOMORFE
DIMOSTRAZIONE
Si noti che se h(z0) = z0 allora
|z0| = |h(z0)| < 1 .
Dobbiamo provare l’esistenza di z0, ossia dobbiamo provare che che la funzione h(z)−
z ha un unico zero. Confrontiamo h(z) con la funzione
g(z) = z ,
che ha un unico zero. Vale
|z| = 1 =⇒ |h(z)| < |z| = |g(z)|
e quindi g(z) = z e g(z) − h(z) = z − h(z) hanno il medesimo numero di zeri; ossia
h(z) = z ha esattamente una soluzione.
Diamo ora un’ulteriore dimostrazione del teorema fondamentale dell’algebra.
Corollario 1.97 (fondamentale dell’algebra). Un polinomio di grado n > 0 ha
esattamente n zeri complessi.
DIMOSTRAZIONE
L’ipotesi è che il polinomio ha grado n e quindi può scriversi come
zn + h(z) , h(z) = an−1zn−1 + · · · + a1z + a0 .
Il polinomio zn ha esattamente n zeri (si ricordi che nell’uso del principio dell’argomento
gli zeri vanno contati tenendo conto delle molteplicità).
Vale
lim|z|→+∞
h(z)
zn= 0
e quindi
|h(z)| < |zn|
su ogni circonferenza |z| = R, con R sufficientemente grande. Da qui l’asserto.
117

1. LE FUNZIONI OLOMORFE
Illustriamo ora una ulteriore differenza importante tra le funzioni “regolari” di una
variabile reale, e quelle “regolari”, nel senso della variabile complessa. Consideriamo
la funzione
f(x) = x2 ,
da R in sé. Questa funzione, non costante, è analitica nel senso delle funzioni di
variabile reale (è addirittura un polinomio). Il suo dominio è un aperto mentre la sua
immagine non è aperta. Proviamo che nel caso delle funzioni olomorfe ciò non può
aversi:
Teorema 1.98 (della mappa aperta). Una funzione olomorfa e non costante
trasforma aperti in aperti.
DIMOSTRAZIONE
Ricordiamo che i punti di accumulazione degli zeri di una funzione olomorfa su Ω e non
identicamente nulla non si accumulano su punti di Ω. Di conseguenza, anche l’insieme
z | f(z) = w
non ha punti di accumulazione in Ω, salvo nel caso in cui f(z) è costante.
Sia ora w0 un punto di f(Ω), z0 un punto per cui f(z0) = w0 e sia r > 0 tale che
D = z | |z − z0| < r ⊆ Ω .
Avendo notato che f−1(w0) non ha punti di accumulazione in Ω, si vede che, per r
abbastanza piccolo, f(z) = w0 se z ∈ D.
Vogliamo mostrare che w0 è interno a f(Ω).
Indichiamo con C la circonferenza |z − z0| = r, così che f(z) − w0 per |z − z0| ≤ r si
annulla solo per z = z0.
Sia
m = minC
|f(z) − w0| > 0 , Dm = w | |w − w0| < m/2 .
Proviamo che Dm ⊆ Ω. Sia per questo w1 ∈ Dm e studiamo l’equazione
f(z) = w1 .
118

1. LE FUNZIONI OLOMORFE
Scrivendo
f(z) − w1 = [f(z) − w0] + [w0 − w1] = g(z) − h(z)
si vede che su C vale
|w0 − w1| = |h(z)| <m
2< m < |f(z) − w0| = |g(z)| .
Dunque, per il teorema di Rouché, g(z) ed f(z) − w 1 hanno il medesimo numero di
zeri racchiusi da C. Dato che per ipotesi g(z) = f(z)−w0 si annulla, anche f(z)−w1
si deve annullare; ossia esiste z1 ∈ D ⊆ Ω tale che f(z1) = w1, come si voleva.
E’ conseguenza del teorema precedente che una trasformazione olomorfa
invertibile ha inversa continua.
1.21. TRASFORMAZIONI CONFORMI
Ricordiamo che una trasformazione olomorfa f(z) tra due regioni Ω ed Ω ′ è conforme
diretta se la sua derivata non si annulla. Conviene rinforzare questa definizione,
richiedendo che f(z) sia olomorfa, invertibile e con inversa olomorfa. Si noti che
se g(z), inversa olomorfa di f(z), esiste allora
g(f(z)) = z da cui g′(f(z))f ′(z) = 1 1.39
e quindi f ′(z) non si annulla. Si è imposto in più la biunivocità, proprietà che la
condizione f ′(z) = 0 non assicura globalmente: la funzione f(z) = ez ha derivata
priva di zeri, pur essendo periodica.
Da ora in poi, parlando di trasformazione conforme tra due regioni Ω ed Ω ′
intenderemo sempre una trasformazione f(z) olomorfa e invertibile da Ω in Ω ′, con
inversa olomorfa e quindi con derivata non nulla.
Vogliamo prima di tutto studiare le trasformazioni conformi da D = z | |z| < 1 in
sé. E’ facile trovare alcune di queste trasformazioni. Tra queste le rotazioni.
w = Rβ(z) = eiβz
119

1. LE FUNZIONI OLOMORFE
con β numero reale fissato, e anche le trasformazioni che indichiamo con T a,
w = Ta(z) =z − a
1 − az
con |a| < 1.
E’ facile vedere che Ta trasforma D in sé notando che se |z| = 1 allora
|Taz| =∣∣∣∣ z − a
1 − az
∣∣∣∣ = 1|z|
∣∣∣∣z − a
z − a
∣∣∣∣ = 1 .
Per il principio del massimo, |Taz| ≤ 1 su D. Dunque, Ta trasforma D in D. Per
mostrare che è suriettiva e iniettiva, notiamo che essa è invertibile: sia |w| ≤ 1 e
risolviamo l’equazione
z − a
1 − az= w .
Questa è risolta da
z =w + a
1 + aw= T−aw
e
| − a| = |a| < 1 .
Dato che T−1a = T−a, anche T −1
a è olomorfa e quindi, da 1.39, Ta ha derivata non
nulla, ossia è conforme.
Si noti che per a = 0 si ritrova il caso particolare della trasformazione identità, z → z.
Le trasformazioni Ta si chiamano trasformazioni di M’obius.
Ricapitolando, abbiamo trovato due famiglie di trasformazioni conformi da D in
D, la famiglia R delle rotazioni e la famiglia T delle trasformazioni di M ’obius di
parametro a, |a| < 1.
Osservazione 1.99. Nel definire Ta abbiamo imposto la condizione |a| < 1. Per
questa ragione, trasformazioni di M’obius e rotazioni vanno considerate separata-
mente. Avessimo permesso invece |a| = 1 avremmo ritrovato le rotazioni come
particolari trasformazioni di M’obius:
120

1. LE FUNZIONI OLOMORFE
z − eiβ
1 − e−iβz=
1e−iβ
z − eiβ
eiβ − z= −eiβ .
Calcoliamo la composizione di due trasformazioni di M’obius,
w =z − a
1 − az, z =
ζ − b
1 − bζ.
La trasformazione composta è
w =1 + ab
1 + ab· ζ − [(a + b)/(1 + ab)]
1 − (a + b)/(1 + ab)ζ
e
∣∣∣∣1 + ab
1 + ab
∣∣∣∣ = 1 ,
∣∣∣∣ a + b
1 + ab
∣∣∣∣ < 1
(l’ultima disuguaglianza è immediata perché si sa che la trasformazione composta
trasforma il disco in sé). Dunque, TaTb = RβT(a+b)/(1+ab) per un certo valore di
β ∈ R,
β =1 + ab
1 + ab.
Ossia, componendo trasformazioni di M’obius si trovano nuovamente trasformazioni
di M’obius, seguite da una rotazione. Equivalentemente, componendo trasformazioni
di M’obius si trovano trasformazioni di M’obius precedute da una rotazione. Infatti,
eiρ z − a
1 − az=
(eiρz) − aeiρ
1 − [aeiρ](eiρz).
Vogliamo provare che tutte le trasformazioni conformi di D in sé sono di tale forma.
Per questo abbiamo bisogno di premettere:
Lemma 1.100 (di Schwarz). Sia f(z) olomorfa su D a valori in D. Se f(0) = 0
allora vale
|f(z)| ≤ |z| , |f ′(0)| ≤ 1. 1.40
Se inoltre esiste z0 ∈ D per cui
|f(z0)| = |z0|
121

1. LE FUNZIONI OLOMORFE
oppure se
|f ′(0)| = 1
allora f(z) è una rotazione.
DIMOSTRAZIONE
Si noti che |f(z)| ≤ 1 per il principio del massimo modulo e che le due condizio-
ni f(0) = 0 e |f(z)/z| ≤ 1 implicano che |f ′(0)| ≤ 1. Dunque basta provare che
|f(z)| ≤ |z|.
Introduciamo la funzione
F (z) =
8><>:
f(z)/z z = 0
f ′(0) z = 0 .
Dal teorema di Riemann, questa funzione è olomorfa perché f(z) si annulla in z = 0.
Leggiamo la funzione F (z) nel disco di raggio 1 − ε. Sulla circonferenza vale
|F (z)| =|f(z)|1 − ε
≤ 1
1 − ε
perchè, come si è notato, |f(z)| ≤ 1.
Ancora per il principio del massimo modulo, la disuguaglianza |F (z)| ≤ 1/(1 − ε) vale
per ogni ε ∈ (0, 1) e per ogni z tale che |z| < 1 − ε. Dunque, per ogni z ∈ D vale˛˛f(z)
z
˛˛ ≤ inf
ε∈(0,1)
1
1 − ε= 1 .
Ciò prova 1.40.
Supponiamo ora di sapere che per un certo z 0 ∈ D vale
|f(z0)| = |z0|, ossia |F (z0)| = 1 .
Per il principio del massimo modulo, F (z) è costante, F (z) = a con |a| < 1 e quindi
f(z) = az
è una rotazione.
In modo analogo si procede se
|f ′(0)| = 1 ossia |F (0)| = 1 .
122

1. LE FUNZIONI OLOMORFE
Proviamo ora:
Teorema 1.101. Sia f(z) una trasformazione conforme da D = z | |z| < 1 in sé.
Esiste a ∈ C, con |a| < 1 e β ∈ R tale che
f(z) = Ta(Rβ(z))
ossia, f = TaRβ .
DIMOSTRAZIONE
Sia a = f(0) e consideriamo la trasformazione g(z),
g(z) = (Taf)(z) =f(z) − f(0)
1 − f(0)f(z).
Questa funzione manda D in sé, perché |a| = |f(0)| < 1 e inoltre g(0) = 0. Dunque,
per il Lemma di Schwarz, |g ′(0)| ≤ 1.
Consideriamo ora la trasformazione h(z) inversa di g(z). Anch’essa è una trasfor-
mazione conforme da D in sé e inoltre h(0) = 0 cosí che anche per essa vale
|h′(0)| ≤ 1.
Essendo
h′(z) =1
g′(w), w = h(z)
si ha, per z = 0,
h′(0) =1
g′(0)
e quindi valgono contemporaneamente le disuguaglianze
|g′(0)| ≤ 1 , |g′(0)| ≥ 1 .
Si ha dunque
|g′(0)| = 1 .
Per la seconda parte del Lemma di Schwarz, g(z) è una rotazione, g(z) = R β(z) per
qualche β ∈ R. Dunque,
f(z) =`T−f(0)Rβ
´(z) .
123

1. LE FUNZIONI OLOMORFE
In modo più esplicito, abbiamo provato che se f(z) è una trasformazione conforme
da D in sé, esiste β ∈ C, |β| = 1 per cui
f(z) =(βz) + f(0)1 − f(0)(βz)
.
Un’ulteriore conseguenza del Lemma di Schwarz permette di rinforzare moltissimo il
teorema di Liouville. Indichiamo col simbolo Π+ il semipiano
Π+ = z | e z > 0
e notiamo che la trasformazione S,
w = S(z) =z − 1z + 1
, 1.41
trasforma Π+ in D ed è invertibile, la sua inversa essendo data da
z =w + 11 − w
da D in Π+; ossia, S è una trasformazione conforme di Π+ in D.
Proviamo ora:
Teorema 1.102. Sia f(z) una funzione intera che non prende valori in un segmento.
La funzione f(z) è costante.
DIMOSTRAZIONE
Non è restrittivo assumere che il segmento sia
x + i0 , x ∈ [0, 1] .
Dunque, f(z) = x + i0, x ∈ [0, 1], per ogni z.
Consideriamo la funzione
φ(z) =z
z − 1= 1 − 1
1 − z.
Notiamo che
φ(z) = −x + i0 , x > 0 se e solo se z ∈ [0, 1].
124

1. LE FUNZIONI OLOMORFE
Dunque,
g(z) = φ(f(z))
non prende valori sull’asse reale negativo e dunque si può definire la funzione
g1/2(z) ,
olomorfa su C, si veda il paragrafo 1.9.3. La funzione g1/2(z) prende valori in Π+ e
quindi componendola con la trasformazione S in 1.41 si trova una funzione intera a
valori in D, e quindi limitata. Per il teorema di Liouville essa è costante e quindi f(z)
stessa è costante.
1.21.1 Il teorema di Riemann
Il teorema di Riemann mostra una condizione topologica perché una regione sia
conforme ad un disco. Prima di enunciarlo, è bene notare che non tutte le regioni
possono essere trasformate biunivocamente su un disco mediante una trasformazione
olomorfa. Infatti:
Esempio 1.103. Nessuna funzione olomorfa trasforma in modo biunivoco C su una
regione limitata: infatti una tale funzione sarebbe intera e limitata e quindi costante,
ossia non biunivoca.
E’ un po’ più macchinoso vedere il caso seguente: sia D = z | |z| < 1 e sia D 0 il
disco D privato dell’origine.
Nessuna funzione olomorfa f(z) può trasformare in modo biunivoco D 0 su D. Infatti,
se ciò accadesse, il punto 0 non sarebbe di accumulazione per le singolarità di
f(z), che non cadono in punti di D0, e la f(z) stessa è limitata; e quindi f(z) si
estenderebbe in modo olomorfo a 0. Però, f(0) non può essere interno a D, se si
vuole che f(z) sia biunivoca; e quindi
|f(0)| = 1 = sup|z|<1
|f(z)| .
Per il principio del massimo modulo, f(z) viene ad essere costante, e quindi non
biunivoca.
Enunciamo ora il teorema di Riemann in generale. Il teorema verrà quindi provato in
un caso particolare.
125

1. LE FUNZIONI OLOMORFE
Teorema 1.104 (di Riemann). Sia Ω una regione semplicemente connessa che
non è tutto il piano complesso. Esiste una funzione olomorfa che trasforma Ω su D in
modo biunivoco.
DIMOSTRAZIONE
(Il teorema si prova nel caso particolare in cui Ω è una regione di Jordan Ω γ .)
Fissiamo un punto z0 ∈ Ωγ . Essendo Ωγ limitata, essa è contenuta in un disco DR
di raggio R e centro 0. La trasformazione conforme z → z/(R + 1) trasforma D R in
D = z | |z| < 1 e quindi Ωγ in D. Applicando una trasformazione di M ’obius, si trova
una trasformazione da Ωγ in D, che trasforma z0 in 0. La trasformazione così costruita
è inoltre iniettiva. Non è però suriettiva.
Sia F la famiglia delle trasformazioni olomorfe ed iniettive da Ω γ a D, che trasfor-
mano z0 in 0. Il teorema è dimostrato se si riesce a provare che F contiene una
trasformazione suriettiva.
Si noti che se f(z) ∈ F allora |f(z)| < 1 e quindi, per il teorema di Montel, ogni
successione in F contiene s.successioni convergenti uniformemente sui compatti di
Ωγ . Inoltre, se f(z) ∈ F ,
|f ′(z0)| =1
2π
˛˛Z
C
f(ζ)
(ζ − z0)2
˛˛ ≤ 1
r
se C è una circonferenza di raggio r e centro z 0, contenuta in Ωγ . Dunque,
MF = sup|f ′(z0)| , f ∈ F < +∞ .
Sia (fn(z)) una successione in F , tale che
lim |f ′n(z0)| = MF .
Per il teorema di Montel, si può supporre che essa converga ad una funzione olomorfa
f0(z), uniformemente sui compatti di Ωγ e quindi, per il teorema di Weierstrass e per
la continuità della funzione modulo,
|f ′0(z0)| = lim |f ′
n(z0)| = MF , f0(z0) = 0 .
Proviamo che la funzione f0(z) è iniettiva, e quindi che appartiene a F . Fissiamo un
punto z2 ∈ Ωγ e mostriamo che f(z1) = f(z2) per ogni altro punto z1 = z2 di Ωγ .
126

1. LE FUNZIONI OLOMORFE
Sia s = |z1 − z2|/2. La funzione fn(z) è iniettiva e quindi
ψn(z) = fn(z) − fn(z2) , n > 0
non si annulla sul disco di centro z1 e raggio s. Ciò vale per ogni indice n e quindi
nemmeno ψ0(z) si annulla, per il teorema di Hurwitz; ossia, f0(z1) = f0(z2).
Ciò prova che f0(z) è iniettiva e quindi f0(z) appartiene ad F .
Proviamo ora che la funzione f0(z) è anche suriettiva, completando così la dimostra-
zione del teorema. Per assurdo supponiamo che non lo sia e sia a uno dei valori di D
che essa non assume.
Consideriamo la funzione
φ(z) =
sa − f0(z)
1 − af0(z).
Dato che Ωγ è una regione di Jordan, e che il radicando non si annulla su Ω γ , è possi-
bile definire una determinazione della radice quadrata, in modo da avere φ(z) olomorfa
su Ωγ , si veda il paragrafo 1.9.3. La φ(z) è quindi olomorfa e, essendo ottenuta appli-
cando ad f(z) prima la trasformazione di M’obius Ta e poi una determinazione della
radice quadrata, è iniettiva. Essa non apparterrà a F perché in generale φ(z 0) = 0.
Applichiamo dunque a φ(z) la trasformazione di M ’obius che riporta φ(z0) in 0. Si trova
g(z) =φ(z) −
√a
1 −√
aφ(z)
e la funzione g(z) è ora un elemento di F .
Calcoliamo g ′(z0). Procediamo in due passi:
g′(z) =φ′(z)
h1 −
√aφ(z)
i+ [φ(z) −
√a]
√aφ′(z)h
1 −√
aφ(z)i2
così che
g′(z0) =1
1 − |√
a|2 φ′(z0) .
Ora calcoliamo
φ′(z) =1
2
s1 − af0(z)
a − f0(z)
−1 + |a|2
[1 − af0(z)]2f ′0(z)
127

1. LE FUNZIONI OLOMORFE
così che
φ′(z0) = − 1
2√
a
`1 − |
√a|2´ `
1 + |√
a|2´f ′0(z) .
Combinando insieme queste uguaglianze si trova
g′(z0) = −»1 + |√a|2
2√
a
–f ′(z0) , |g′(z0)| = MF ·
»1 + |√a|2
2√
a
–.
Ora,
»1 + |a|2√
a
–> 1
perché 1+ |√
a|2−2|√
a| > 0, l’uguaglianza essendo stretta, dato che |a| < 1. Dunque,
|g′(z0)| > MF , in contrasto con la definizione del numero MF .
La contraddizione trovata prova il teorema.
Abbiamo provato il teorema di Riemann in un caso particolare. In questo caso può
dirsi di più:
Teorema 1.105. Sia Ωγ una regione di Jordan e sia f(z) una funzione olomorfa che
è conforme da Ωγ su D. La funzione f(z) può estendersi con continuità a ∂Ωγ .
Non proviamo questo teorema.
1.22. MONODROMIA E POLIDROMIA
Possiamo solo accennare informalmente a questo argomento, sui cui è però bene avere
qualche nozione.
1.22.1 Punti di diramazione di funzioni olomorfe
Un punto z0 ∈ ∂Ω, Ω dominio di una funzione olomorfa f(z), si dice punto di
diramazione quando ogni suo intorno contiene una curva chiusa γ la cui immagine
γf non è chiusa. Dunque, f(z) è discontinua in ogni intorno di z 0. Vedremo più
avanti una definizione più generale di punto di diramazione.
128

1. LE FUNZIONI OLOMORFE
Si noti che z0 = 0 è punto di diramazione per le funzioni z → |z|1/nei(Arg z)/n e
z → Log z.
I punti di diramazione si incontrano spesso trattando le funzioni inverse di funzioni che
non sono biunivoche e questo suggerisce un modo di trattare le funzioni che è stato
introdotto da Riemann. Accenniamo all’idea, considerando l’esempio della funzione
Log z. Consideriamo prima di tutto la funzione
f(x + iy) = ex(cos y + i sin y)
che trasforma ogni striscia
(2k − 1)π ≤ y < (2k + 1)π
su tutto il piano complesso privato dell’origine.
Fissiamo l’attenzione sulla striscia
−π ≤ y < π.
Quando si rappresenta l’immagine della striscia sul piano complesso in realtà si
considera la trasformazione da R2 in R2 data da
(x, y) → (ex cos y, ex sin y) .
Consideriamo invece la trasformazione da R2 in R3
(x, y) → (ex cos y, ex sin y, y) = (ξ, η, ζ) . 1.42
In questo modo l’immagine di y → ex+iy con x fissato è una spira di un’elica.
La successiva striscia è caratterizzata da
π ≤ y < 3π
e la trasformazione 1.42 rappresenta ora y ∈ [π, 3π), con lo stesso valore di x, nella
successiva spira; e la striscia π ≤ y < 3π ha immagine che ora non si sovrappone a
quella calcolata prima.
In questo modo si ha una rappresentazione dell’esponenziale come funzione biunivoca
da C su una superficie di R3; e quindi la funzione inversa viene ora ad essere univoca.
129

1. LE FUNZIONI OLOMORFE
−5
0
5
10−4 −2 0 2 4 6 8 10 12 14
0
2
4
6
8
10
12
14
x
y
z
Fig. 1.20.
La superficie che abbiamo costruito si chiama la superficie di Riemann della funzione
log x.
Costruzioni analoghe, ma un po’ più complesse, possono farsi per le funzioni radice.
1.22.2 Funzioni analitiche
Sia f(z) una funzione olomorfa su una regione Ω. Si è già notato che sviluppando
la funzione in serie di Taylor con centro un punto z 1 di Ω, può essere che la serie
converga su un disco che fuoriesce da Ω. In tal caso usando la serie si trova
un’estensione di f(z). Per studiare meglio questo fenomeno, introduciamo questo
termine: chiamiamo elemento analitico (più semplicemente elemento) la coppia di
una regione Ω e di una funzione f(z) olomorfa su Ω. Se Ω è un disco e quindi f(z) è
sviluppabile in serie di Taylor su Ω, l’elemento si chiamerà canonico.
Due elementi (Ω1, f1(z)) e (Ω2, f2(z)) si dicono equivalenti se Ω1 ∩ Ω2 = ∅ e se
f1(z) = f2(z) ∀z ∈ Ω1 ∩ Ω2 .
Se Ei, i = 1,. . . ,n sono elementi canonici e se ciascuno è equivalente al precedente,
l’insieme degli Ei si chiama una catena. L’elemento E1 si dirà il primo elemento della
130

1. LE FUNZIONI OLOMORFE
catena ed En l’ultimo. Diremo anche che la catena è una funzione analitica ottenuta
da E1 per prolungamento lungo catene di cerchi.
In generale, chiameremo funzione analitica secondo Weierstrass l’insieme di tutti gli
elementi canonici che fanno parte di tutte le catene che si ottengono prolungando per
catene di cerchi un elemento dato.
La definizione di funzione analitica secondo Weierstrass dipende quindi dal
primo elemento che è stato scelto. Si prova però che scegliendo come primo
elemento un altro elemento della stessa funzione analitica, la funzione analitica
non cambia.
Esempio 1.106. Si consideri la funzione
f(z) =√|z|ei(Arg z)/2
che è olomorfa nella regione |Arg z| < π. Fissiamo z0 e sviluppiamo la funzione in
serie di Taylor, di centro z0. Si trova
f(z) = [(z − z0) + z0]1/2 = f(z0)+∞∑n=0
1/2
n
(z − z0)n
e questa serie ha raggio di convergenza uguale ad 1.
Sia z0 è il punto indicato in figura 1.21. La serie definisce una funzione olomorfa
anche attraverso un segmento dell’asse reale negativo. Dunque, l’estensione così
ottenuta di f(z) coincide con la funzione data nei punti del terzo quadrante, ma non
in quelli del quarto.
Si confronti con quanto detto ai paragrafi 1.9.3 e 1.13.2.
L’esempio precedente mostra che elementi diversi della medesima catena possono
prendere valori diversi nel medesimo punto. Ciò suggerisce di definire monòdroma
o univalente una funzione analitica secondo Weierstrass che ha la seguente ulteriore
proprietà: siano (Di, fi) e (Dj , fj) elementi diversi. Se z0 ∈ Di ∩ Dj allora vale
fi(z0) = fj(z0); altrimenti la funzione si dice polìdroma.
Possiamo ora dare la seguente definizione generale di singolarità isolata: il punto z 0
sia di accumulazione per il dominio Ω di un elemento (Ω, f(z)) . Diciamo che il punto
131

1. LE FUNZIONI OLOMORFE
−8 −6 −4 −2 0 2 4 6 8−6
−4
−2
0
2
4
6 y
x
Fig. 1.21.
z0 è una singolarità isolata se è possibile estendere f(z) ad un intorno di z 0, escluso
z0, mediante una catena di cerchi che però non coprono z 0. Va osservato che questa
definizione fa riferimento ad una catena. Niente vieta che una diversa catena produca
un’estensione ad un intorno di z0, incluso il punto z0.
Esempio 1.107. Sia z0 = 1 e sia
f(z) =1
1 +√
z
ottenuta scegliendo
√z =
√|z|ei[π+(Arg z)/2] . 1.43
Si vede che il punto z0 = 1 è singolare per f(z) nonostante che
g(z) =1
1 +√|z|ei(Arg z)/2
sia regolare in z0 = 1, e sia un’estensione per catene di cerchi di 1.43.
Quest’osservazione suggerisce di estendere come segue la definizione di punto di
diramazione.
132

1. LE FUNZIONI OLOMORFE
Sia z0 un punto singolare isolato di una funzione analitica secondo Weierstrass. Si
dice che il punto z0 è un punto di diramazione se ogni intorno di z0 contiene una
catena di cerchi della funzione i cui domini coprono una circonferenza centrata in z 0
e col primo elemento che è diverso dall’ultimo.
Esempio 1.108. La funzione
f(z) =√
z =√|z|ei(Arg z)/2
ha z0 = 0 come punto di diramazione, perché, come si è visto sopra, estendendo per
catene di cerchi si passa dall’una all’altra determinazione della radice. Osservazione
analoga vale per la funzione Log z.
Osservazione 1.109. I punti di diramazione non sono stati considerati nello studio
dei punti singolari di funzioni olomorfe. Infatti, con riferimento ad un singolo
elemento olomorfo (Ω, f), essi non sono punti singolari isolati: ogni loro intorno
contiene punti nei quali la funzione f(z) è discontinua.
Mostriamo infine che una funzione analitica secondo Weierstrass, se non ha punti
singolari in una regione di Jordan Ω coincide con un elemento olomorfo.
Teorema 1.110 (di monodromia). Sia Ω una regione di Jordan contenuta nel
dominio di una funzione analitica secondo Weierstrass. La funzione è univalente su Ω.
DIMOSTRAZIONE
Illustriamo l’idea della dimostrazione. Si fissi un punto z 0 ∈ Ω. Se la funzione non è
univalente, è possibile trovare z1 ∈ Ω e due curve γa e γb congiungenti z0 con z1, tali
che l’estensione di f(z) da z0 a z1 lungo catene di cerchi centrati in γa, rispettivamente
in γb, conduce a valori f1, f2, tra loro diversi. Dobbiamo provare che ciò non accade.
Non è restrittivo assumere che le due curve siano semplici e prive di punti comuni, a
parte gli estremi.
Indichiamo con γ la curva di Jordan ottenuta connettendo γ b a γa e sia d la distanza di
γ da ∂Ω. Indichiamo con Ωγ la regione interna a γ e siano
γ0 = γa , γ1 , . . . , γn−1 , γn = γb
133

1. LE FUNZIONI OLOMORFE
curve con γi ∈ Ωγ per i = 0 e i = n, distanti l’una dall’altra meno di d.
Si noti che Ωγ ⊆ Ω perché Ω è regione di Jordan.
Prolungando f(z) da z0 a z1 lungo γa = γ0 e lungo γ1, si trova in z1 il medesimo valore
f(z1) perché ciascun cerchio della catena centrato su punti di γ 0 interseca il sostegno
di γ1 e viceversa, dato che i raggi di convergenza delle serie che si ottengono sono
almeno uguali a d.
Lo stesso accade per γ1 e γ2 e quindi anche prolungando lungo una catena di cerchi
centrati in γ1 si ritrova lo stesso valore di f(z1).
Dopo un numero n di passi si vede che il valore di f(z 1) che si trova prolungando lungo
una catena di cerchi centrati su γb coincide con quello che si trova prolungando con
cerchi centrati su γa. E quindi la restrizione ad Ω della funzione f(z) è univalente.
Osservazione 1.111. Il teorema precedente non vieta che seguendo curve che
congiungono z0 con z1 e che escono da Ω, si trovi un valore diverso per f(z1).
134

2. FUNZIONI ARMONICHE
In generale si chiama funzione armonica una funzione u(x1, . . . , xn) di classe
C2 su un aperto Ω ⊆ Rn e che ivi verifica l’equazione di Laplace
ux1,x1 + · · · + uxn,xn= 0 .
La teoria delle funzioni armoniche è importantissima per le applicazioni, e
ricchissima di risultati. Noi ci limitiamo a presentare poche proprietà delle
funzioni armoniche di due variabili, facendole discendere da quelle delle
funzioni olomorfe.
2.1. FUNZIONI ARMONICHE E FUNZIONI OLOMORFE
Si è già notato che le parti reali ed immaginarie di funzioni olomorfe sono funzioni
armoniche. Proviamo ora il viceversa:
Teorema 2.1. Sia Ω una regione di Jordan e sia u(x, y) armonica su Ω. Esiste una
funzione armonica v(x, y) tale che
f(x + iy) = u(x, y) + iv(x, y) 2.1
è olomorfa.
135

2. FUNZIONI ARMONICHE
DIMOSTRAZIONE
Se v(x, y) esiste, allora v(x, y) deve verificare
vx = −uy , vy = ux . 2.2
Per costruire v(x, y) fissiamo (x0, y0) ∈ Ω e sia P(x,y) una poligonale in Ω che
congiunge (x0, y0) con (x, y). Costruiamo v(x, y) ponendo
v(x, y) =
ZP(x,y)
[vx dx + vy dy]
Naturalmente, questa formula non può usarsi direttamente, perché l’integrando
dipende da v(x, y); ma, le 2.2 suggeriscono di definire
v(x, y) =
ZP(x,y)
[−uy dx + ux dy] .
La funzione così costruita è univoca perché Ω è una regione di Jordan e la forma
differenziale
−uy dx + ux dy
è esatta, dato che u(x, y) è armonica.
Dunque la v(x, y) così costruita è di classe C 1 e, con dimostrazione analoga a quella
del teorema 1.9., si vede che verifica 2.2, come richiesto. Dunque, v(x, y) è la parte
immaginaria della funzione olomorfa f(x + iy) = u(x, y) + iv(x, y).
Fissato un punto (x, y) ∈ Ω, il teorema precedente può applicarsi in un suo intorno e
quindi:
Corollario 2.2. Ogni funzione armonica è localmente parte reale di una funzione
olomorfa. Dunque, ogni funzione armonica è in particolare di classe C ∞.
Di conseguenza, per le funzioni armoniche valgono i teoremi che abbiamo provato per
le parti reali di funzioni olomorfe,
– il teorema della media;
136

2. FUNZIONI ARMONICHE
– il principio sia del massimo che del minimo;
– il teorema di Liouville.
La funzione v(x, y) che si associa ad u(x, y) in modo che la funzione 2.1 sia olomorfa
si chiama funzione armonica coniugata di u(x, y). Essa non è unica (si vede dalla
dimostrazione del teorema 2.1 che v(x, y) muta cambiando (x0, y0)). Non è difficile
provare che due funzioni armoniche su un regione Ω, coniugate della stessa
funzione armonica u(x, y) hanno differenza costante.
Conviene ora elencare alcune funzioni armoniche. Naturalmente sono funzioni
armoniche i polinomi di grado 0 oppure 1, e sono funzioni armoniche i polinomi
u(x, y) = x2 − y2 , u(x, y) = xy .
Ma non tutti i polinomi sono funzioni armoniche: u(x, y) = x2 + y2 non lo è. Ciò
nonostante,
Log (x2 + y2) = 2eLogz
è armonica sul complementare di arg z = −π. Sulla stessa regione è anche armonica
la funzione
u(x, y) = arctany
x.
Un calcolo diretto mostra che in realtà queste funzioni sono armoniche su R 2− (0, 0).
2.2. PROPRIETÀ DELLA MEDIA E TEOREMA DI GAUSS
Si è visto che per le funzioni armoniche vale la proprietà della media
u(x0, y0) =12π
∫ 2π
0
u(x0 + r cos t, y0 + r sin t) dt . 2.3
Naturalmente si intende che il disco di centro (x0, y0) e raggio r sia contenuto in Ω.
Vale anche il viceversa:
137

2. FUNZIONI ARMONICHE
Teorema 2.3. Sia Ω una regione di Jordan e sia u(x, y) una funzione di classe
C2(Ω). Se per ogni (x0, y0) ∈ Ω vale l’uguaglianza 2.3 almeno per ogni r
sufficientemente piccolo, allora la funzione u(x, y) è armonica su Ω.
DIMOSTRAZIONE
Dobbiamo provare che ∆u = 0 su Ω. Notiamo che è sufficiente provare cheZD
∆u(x, y) dx dy = 0 2.4
per per ogni disco D ⊆ Ω con raggio abbastanza piccolo. Infatti se in un punto (x 0, y0)
fosse ∆u(x0, y0) > 0, per continuità si avrebbe anche ∆u(x, y) > 0 su un opportuno
disco D, e quindi l’integrale 2.4 non potrebbe essere nullo.
Derivando rispetto ad r i due membri di 2.3. Si trova:
0 =
Z 2π
0
[ux(x0 + r cos t, y0 + r sin t) cos t + uy(x0 + r cos t, y0 + r sin t) sin t] dt
=
ZCr
∂u
∂nds ,
ove Cr indica la circonferenza parametrizzata da
t → (x0 + r cos t, y0 + r sin t) , t ∈ [0, 2π]
ed n = n(t), parametrizzata da
n(t) = (x0 + cos t, y0 + sin t) , t ∈ [0, 2π] ,
la sua normale esterna. Si usi ora il teorema di Gauss:
0 =
ZCr
∂u
∂nds =
ZD
∆u(x, y) dx dy .
Ciò è quanto volevamo provare.
Nella dimostrazione precedente abbiamo usato il teorema di Gauss in un caso
particolare: il caso in cui la regione è una circonferenza. Si sa che esso vale più
in generale e ciò permette di provare:
138

2. FUNZIONI ARMONICHE
Teorema 2.4. Sia Ω una regione di Jordan. Supponiamo u(x, y) ∈ C 2(Ω), continua
sulla chiusura di Ω. La funzione u(x, y) è armonica se e solo se∫γ
∂
∂nu ds = 0 2.5
per ogni curva di Jordan regolare a tratti, il cui sostegno è in Ω.
DIMOSTRAZIONE
Nelle ipotesi che abbiamo detto, per il teorema di Gauss vale
ZΩγ
∆u(x, y) dx dy =
Zγ
∂
∂nu ds .
E quindi, se u(x, y) è armonica, valeZγ
∂
∂nu ds = 0 ;
se, viceversa, la 2.5 vale per ogni γ, curva di Jordan con sostegno in Ω, scegliendo per
γ le circonferenze, si trova
ZD
∆u(x, y) dx dy = 0
per ogni disco in Ω e quindi ∆u = 0 in Ω.
2.3. IL PROBLEMA DI DIRICHLET
Si chiama problema di Dirichlet per l’equazione di Laplace il problema seguente: è
data una curva di Jordan γ (regolare a tratti) e una funzione g(x, y) continua sul suo
sostegno. Si vuole una funzione u(x, y) armonica in Ωγ , continua nella chiusura di
Ωγ e tale che
u|γ = g ;
Dunque, si vuole che la u risolva
∆u = 0 in Ωγ , u|γ = g .
139

2. FUNZIONI ARMONICHE
Si parla di problema di Poisson quando è data anche una funzione continua h(x, y) in
Ωγ e si vuol risolvere
∆u = h in Ωγ , u|γ = g . 2.6
Più avanti potremo studiare il problema dell’esistenza di soluzioni del problema di
Dirichlet. Per ora, limitiamoci a studiare alcune proprietà delle soluzioni, se queste
esistono. Proviamo:
Teorema 2.5. Se esiste una soluzione u(x, y) di 2.6, essa è unica.
DIMOSTRAZIONE
Ricordiamo che, per la definizione che abbiamo dato di soluzione, la u(x, y) è continua
nella chiusura di Ωγ .
Siano u1(x, y) e u2(x, y) due diverse soluzioni di 2.6 e definiamo
w(x, y) = u1(x, y) − u2(x, y) .
La w(x, y) è una soluzione del problema di Dirichlet
∆u = 0 in Ωγ , u|γ = 0 .
In particolare, è una funzione armonica. Essendo continua sulla chiusura di Ω γ , essa
ivi raggiunge massimo e minimo; essendo armonica, massimo e minimo sono raggiunti
su γ = ∂Ωγ e quindi sono ambedue nulli: la funzione w(x, y) è nulla e quindi u 1(x, y) =
u2(x, y).
Nello stesso modo si può vedere che le soluzioni “dipendono con continuità” dal dato
g. Consideriamo per questo i due problemi di Poisson
∆u = h in Ωγ , u|γ = g1 , 2.7
∆u = h in Ωγ , u|γ = g2 . 2.8
con la medesima funzione h(x, y). Supponiamo che esistano u1(x, y), soluzione
di2.7 e u2(x, y), soluzione di2.8. Sia ha:
140

2. FUNZIONI ARMONICHE
Teorema 2.6. Le funzioni u1(x, y) e u2(x, y) verificano la diseguaglianza
supΩγ
|u1(x, y) − u2(x, y)| ≤ maxγ
|g1(x, y) − g2(x, y)| .
DIMOSTRAZIONE
Introduciamo ancora la funzione w(x, y) = u1(x, y) − u2(x, y). Questa funzione è
armonica in Ωγ e continua sulla sua chiusura e inoltre su γ vale w(x, y) = g 1(x, y) −
g2(x, y). Dunque, dal principio del massimo e del minimo per le funzioni armoniche,
si ha
minγ
[g1(x, y) − g2(x, y)] ≤ w(x, y) ≤ maxγ
[g1(x, y) − g2(x, y)] .
2.3.1 La formula di Poisson
Ricordiamo che la formula della media permette di esprimere il valore u(0, 0) di una
funzione armonica su un disco centrato in (0, 0), mediante i valori u(R cos t, R sin t),
che la funzione assume su una circonferenza di centro (0, 0). Chiediamoci ora se si
riesce a trovare una formula che, per mezzo di tali valori, esprima anche u(x, y), per
ogni (x, y) tale che
x2 + y2 < R2 .
In tal caso si trova una formula risolutiva per il problema di Diriclet nel disco.
Si sa che questo può farsi per la funzione olomorfa f(x + iy) di cui u(x, y) è parte
reale. Sia f(x + iy) = u(x, y) + iv(x, y) e scriviamo
u(x, y) + iv(x, y) =1
2πi
∫C
f(ζ)ζ − (x + iy)
dζ ,
C : t → Reit , t ∈ [0, 2π] .
Passando alle parti reali, a sinistra si trova u(x, y) ma a destra si trova un’espressione
complicata, che fa intervenire sia i valori di u(x, y) che quelli di v(x, y) perché il
fattore
12π
1Reit − (x + iy)
Reit
141

2. FUNZIONI ARMONICHE
non prende valori reali se x = 0, y = 0. Allora, abbandoniamo un momento lo studio
delle funzioni armoniche e torniamo a considerare la formula integrale di Cauchy, che
scriviamo con x0 = 0, y0 = 0:
f(z) =12π
∫ 2π
0
f(Reit)Reit
Reit − zdt .
Chiediamoci se sia possibile modificarla in modo da far comparire f(z) moltiplicata
per un fattore reale. Per questo notiamo che
12π
∫ 2π
0
f(Reit)zeit
zReit − R2dt =
12πi
∫C
f(ζ)z
zζ − R2dζ = 0
dato che il denominatore è nullo soltanto per ζ = R2/|z|, punto esterno alla
circonferenza. Dunque, vale anche
f(z) =12π
∫ 2π
0
f(Reit)[
Reit
Reit − z− zReit
zReit − R2
]dt
=12π
∫ 2π
0
f(Reit)[
R
Reit − z− z
zeit − R
]eit dt
=12π
∫ 2π
0
f(Reit)R2 − |z|2
R2 + |z|2 − 2e [(Rz)e−it]dt .
Sia ora
z = reiθ ossia
x = r cos θ
y = r sin θ .
La formula precedente si scrive
u(x, y) + iv(x, y)
=12π
∫ 2π
0
[u(R cos t, R sin t) + iv(R cos t, R sin t)]R2 − r2
R2 − 2Rr cos(θ − t) + r2dt .
Nella formula precedente l’integrando è la funzione f(z) moltiplicata per una
funzione a valori reali.
Prendendo ora le parti reali dei due membri si trova la formula di Poisson
u(x, y) =12π
∫ 2π
0
u(R cos t, R sin t)R2 − r2
R2 − 2Rr cos(θ − t) + r2dt .
142

2. FUNZIONI ARMONICHE
Osservazione 2.7. Si noti che se ζ = Reit e z = reiθ allora
R2 − 2Rr cos(θ − t) + r2 = |ζ − z|2 .
Esaminando i vari passi del calcolo precedente, si vede che questa formula è
giustificata se u(x, y) è olomorfa in una regione Ω che contiene il disco |ζ| ≤ R,
e vale se x2 + y2 < R. Di fatto, una volta trovata questa formula, è possibile provare
di più:
Teorema 2.8. Sia g(x, y) una funzione continua sulla circonferenza x 2 + y2 = R2
e si definisca u(x, y) nel disco che essa delimita mediante la formula
u(x, y) =12π
∫ 2π
0
R2 − r2
R2 − 2Rr cos(θ − t) + r2g(cos t, sin t) dt ,
x = r cos θ
y = r sin θ .
Allora, la funzione u(x, y) è armonica nel disco aperto, è continua nel disco chiuso e
la sua restrizione alla circonferenza restituisce la funzione g(x, y).
Ossia, u(x, y) risolve il problema di Dirichlet
∆u = 0 , per x2 + y2 ≤ R2 ,
u(x, y) = g(x, y) per x2 + y2 = R2 .
Vedremo che facendo uso di questo risultato sarà possibile provare l’esistenza di
soluzioni del problema di Dirichlet in casi molto più generali.
Il problema di Dirichlet in regioni di Jordan
Proviamo ora che il problema di Dirichlet è risolubile in ogni regione di Jordan. Sia
per questo γ una curva semplice e chiusa, regolare a tratti e sia g(x, y) una funzione
continua sul suo sostegno. Indicando con Ωγ la regione interna a γ, vale
Teorema 2.9. Esiste un’unica funzione u(x, y) ∈ C 2(Ωγ) e tale che
∆u = 0 in Ωγ , u = g su γ . 2.9
143

2. FUNZIONI ARMONICHE
DIMOSTRAZIONE
L’unicità si è già provata nel teorema 2.5. E’ da provare l’esistenza. Per questo
facciamo uso del teorema di Riemann, teorema 1.104 e del teorema 1.105.
Indichiamo con z = x + iy i punti di Ωγ e del sostegno di γ e con w = ξ + iη quelli del
disco
D = w | |w| < 1 .
Sia φ(z) una trasformazione olomorfa e biunivoca da Ω γ al disco. Per il teorema
1.105, questa funzione ha estensione continua su γ e trasforma γ sulla circonferenza.
Indichiamo con G(w) la funzione
G(w) = g(φ−1(w)) .
Questa funzione è continua sulla circonferenza e quindi, per il teorema 2.8, esiste
una funzione armonica U(ξ, η) nel disco aperto, continua nel disco chiuso e che sulla
circonferenza restituisce G.
Sia V (ξ, η) una funzione coniugata di U(ξ, η) e sia F (ξ, η) = U(ξ, η) + iV (ξ, η). Sia
f(x + iy) = F (φ(x + iy)) = u(x, y) + iv(x, y) .
La funzione u(x, y) è armonica su Ωγ e su γ restituisce U e quindi la funzione g. E’
dunque la soluzione del problema 2.9.
144

3. LA TRASFORMATA DI LAPLACE
La trasformata di Laplace è una trasformazione che associa a certe funzioni
di una variabile reale, definite su R e nulle per argomento negativo una
funzione olomorfa. La trasformata di Laplace è uno strumento importante per
esempio nello studio delle equazioni differenziali.
Talvolta è necessario studiare la trasformata di Laplace di funzioni di n
variabili. Noi ci limiteremo a trattare il caso delle funzioni di una sola
variabile.
Molto spesso nelle applicazioni la variabile da cui dipende la funzione f è il
tempo e, per questa ragione, la indicheremo col simbolo t.
3.1. DEFINIZIONI
Descriviamo prima di tutto una classe di funzioni per le quali si può definire la
trasformata di Laplace. Questa non è la classe più generale possibile, ma è sufficiente
per la maggior parte delle applicazioni.
Ripetiamo che a noi interessano funzioni f(t) definite su R, nulle per t < 0. Diciamo
che una tale funzione f , a valori reali oppure complessi, è a crescita esponenziale se
è limitata su ogni intervallo [0, T ], T > 0, e inoltre esiste un numero reale r tale che
limt→+∞ e−rtf(t) = 0 ;
145

3. LA TRASFORMATA DI LAPLACE
Equivalentemente, una funzione è a crescita esponenziale se esistono numeri reali M
ed r tali che
|f(t)| ≤ Mert t > 0 . 3.1
Si chiama ordine di esponenziale della funzione f il numero
αf = infr | ∃Mr per cui |f(t)| < Mrert .
Si noti che se r > αf allora esiste M per cui vale 3.1. Invece, se r = αf , la 3.1
può non valere, come si vede considerando la funzione f(t) = te t che ha ordine di
esponenziale 1, ma è un infinito di ordine maggiore di 1.
La classe delle funzioni per cui definiremo la trasformata di Laplace è la classe delle
funzioni, a valori reali oppure complessi, ma di una variabile reale, continue a tratti,
a crescita esponenziale e nulle per t < 0.
Osservazione 3.1. Nelle applicazioni è frequentemente necessario considerare la
trasformata di Laplace di funzioni che prendono per valori vettori di Cn o addirittura
matrici. La trasformata di Laplace si calcola elemento per elemento. Quello che va
sottolineato è comunque che le funzioni di cui si calcola la trasformata di Laplace
sono nulle per t < 0.
La trasformata di Laplace di f è la funzione
f(λ) =∫ +∞
0
e−λtf(t) dt .
Il numero λ è complesso e il dominio di f(λ) è l’insieme dei numeri λ per cui
l’integrale converge.
Per indicare la trasformata di Laplace si usa anche il simbolo L(f)(λ) o sem-
plicemente la lettera maiuscola corrispondente a quella che si usa per indicare
la funzione: F (λ).
146

3. LA TRASFORMATA DI LAPLACE
3.2. PROPRIETÀ DELLA TRASFORMATA DI LAPLACE
Vale:
Teorema 3.2. La trasformata di Laplace è definita sul semipiano e λ > α f ed è
ivi una funzione olomorfa.
DIMOSTRAZIONE
L’esistenza degli integrali
Z T
0
e−λtf(t) dt
per ogni T > 0 è ovvia. L’esistenza di
limT→+∞
Z T
0
e−λtf(t) dt
segue dal teorema del confronto. Per vederlo, non è restrittivo supporre che f prenda
valori reali. In tal caso, posto λ = x+iy, va provata l’esistenza dei due integrali impropriZ +∞
0
f(t)e−xt cos yt dt ,
Z +∞
0
f(t)e−xt sin yt dt
Sia e λ = x > αf e sia r ∈ (αf , x). Sia M tale che
|f(t)| < Mert .
Allora,
|e−λtf(t)| ≤ Me(−x+r)t
e l’esponente è negativo. Dunque ambedue gli integrali convergono e inoltre˛˛Z +∞
0
f(t)e−xt cos yt dt
˛˛ ≤ M
x − αf,
˛˛Z +∞
0
f(t)e−xt sin yt dt
˛˛ ≤ M
x − αf3.2
Per provare che f(λ) è olomorfa, usiamo il teorema di Morera. Mostriamo prima di
tutto che la funzione f(λ) è continua per λ > αf . Fissiamo ε > 0 e mostriamo che
esiste δ > 0 tale che se |λ1 − λ2| < δ allora |f(λ1)− f(λ2)| < ε. Per fissare le idee sia
e λ1 > e λ2 > a + σ > a > αf . Dato che l’integrale è di variabile reale, usando il
Lemma 1.28, si ha
147

3. LA TRASFORMATA DI LAPLACE
|f(λ1) − f(λ2)| =
˛˛Z +∞
0
he−λ1t − e−λ2t
ieatˆe−atf(t)
˜dt
˛˛
≤ supt≥0
˛e−e (λ1−a)t
h1 − e−e (λ1−λ2)t
i ˛· L(|f |)(a) .
Notiamo che e (λ1 − a) > 0 e e (λ1 − λ2) > 0 così che
˛1 − e−e (λ1−λ2)t
˛< 2 ∀t ≥ 0 ,
˛1 − e−e (λ1−λ2)t
˛≤˛1 − e−e (λ1−λ2)T
˛∀t ≥ T .
Fissiamo T tale che per t > T valga
2e−e (λ1−α)t < 1 .
Ciò può farsi perché e (λ1 − a) > σ > 0. Fissato questo valore per T , scegliamo δ
tale che se e (λ1 − λ2) < δ valga
˛1 − e−e (λ1−λ2)T
˛· L(|f |)(a) < ε .
Si ha quindi che se, in particolare, |λ 1 − λ2| < δ allora vale |f(λ1) − f(λ2)| < ε, ossia
la continuità di f(λ).
Sia ora γ una curva chiusa di sostegno in e λ > αf . Scambiando l’ordine di
integrazione, si ha:Zγ
f(λ) dλ =
Zγ
»Z +∞
0
e−λtf(t) dt
–dλ =
Z +∞
0
»Zγ
e−λt dλ
–f(t) dt = 0 .
L’ultimo integrale è nullo perché la funzione λ → e −λt è olomorfa su C per ogni valore
di t.
In particolare, la formula 3.2 mostra che:
Corollario 3.3. Se f(λ) è una trasformata di Laplace allora
limeλ→+∞
f(λ) = 0 .
Osservazione 3.4. Abbiamo provato che la trasformata di Laplace esiste per
e λ > αf . In realtà si potrebbe provare che la trasformata di Laplace esiste in
un semipiano e λ > α, con α ≤ αf .
148

3. LA TRASFORMATA DI LAPLACE
La trasformata di Laplace è lineare nel senso detto dal teorema seguente di ovvia
dimostrazione:
Teorema 3.5. Siano f e g due funzioni continue a tratti e a crescita esponenziale.
Se e λ > maxαf , αg ed a, b sono numeri, vale
L(af + bg)(λ) = af(λ) + bg(λ) .
Sia ora
g(t) = f(t − h) con h > 0 .
Allora
g(λ) = e−λhf(λ) .
Osservazione 3.6. Si noti che, essendo f(t) = 0 per t < 0, allora f(t−h) = 0 per
t < h. Questo fatto è essenziale per provare la formula precedente.
Sia invece
g(t) = f(at) con a > 0 .
Allora vale
g(λ) =1af(λ/a) .
Le semplici dimostrazioni sono omesse.
Sia ora f(t) una funzione periodica su R, continua a tratti e limitata:
f(t + T ) = f(t) .
La restrizione di f(t) a t ≥ 0 ammette trasformata di Laplace, definita su e λ > 0:
f(λ) =∫ +∞
0
e−λtf(t) dt =+∞∑n=0
∫ (n+1)T
nT
e−λtf(t) dt
=+∞∑n=0
∫ T
0
e−λ(nT+s)f(nT + s) dt =+∞∑n=0
∫ T
0
e−λ(nT+s)f(s) ds
+∞∑n=0
e−λnT
[∫ T
0
e−λsf(s) ds
]=[∫ T
0
e−λsf(s) dt
]· 11 − e−λT
.
L’ultima uguaglianza è ottenuta sommando la serie geometrica, grazie al fatto che
|e−λT | < 1, perché e λ > 0.
149

3. LA TRASFORMATA DI LAPLACE
E’ invece un po’ più delicato provare:
Teorema 3.7. Vale
ddλ
f(λ) =∫ +∞
0
e−λt[−tf(t)] dt = L(−tf(t)) .
Omettiamo la dimostrazione notando che, invece di scambiare una derivata con
un’integrale improprio, si arriva più facilmente al risultato mediante la formula
integrale di Cauchy per rappresentare la derivata di una funzione olomorfa, e quindi
scambiando l’ordine di integrazione.
3.3. TRASFORMATA DI LAPLACE, DERIVATA ED INTEGRALE
Le relazioni della trasformata di Laplace con l’integrale si vedono meglio introducen-
do la convoluzione di due funzioni. La convoluzione verrà studiata in generale nel
paragrafo 4.11.1 ed è
(f ∗ g)(t) =∫ +∞
−∞f(t − s)g(s) ds .
In questa parte a noi interessano funzioni nulle per argomenti negativi e quindi
(f ∗ g)(t) =∫ t
0
f(t − s)g(s) ds .
Dato che le funzioni si assumono continue a tratti, l’esistenza dell’integrale è ovvia.
Inoltre,
Lemma 3.8. Se f e g sono a crescita esponenziale lo stesso vale per f ∗ g.
DIMOSTRAZIONE
Sia r tale che
|f(t)| < Mert , |g(t)| < Mert ∀t > 0
Allora,
|f(t − s)g(s)| ≤ M2ert
e quindi
0 ≤ limt→+∞
e−(r+1)t
˛˛Z t
0
f(t − s)g(s)ds
˛˛ = 0 .
150

3. LA TRASFORMATA DI LAPLACE
In particolare, se g(t) ≡ 1 per t ≥ 0 (ed è nulla per t < 0), f ∗ g è una primitiva di f .
Dunque:
Corollario 3.9. Ogni primitiva di una funzione a crescita esponenziale è essa stessa
a crescita esponenziale.
Proviamo ora:
Teorema 3.10. Vale:
L(f ∗ g)(λ) = f(λ)g(λ) .
DIMOSTRAZIONE
Si deve calcolare l’integrale iteratoZ +∞
0
e−λt
»Z t
0
f(t − s)g(s)ds
–dt .
Scambiando prima l’ordine di integrazione e poi facendo la trasformazione di variabile
t − s = r nell’integrale più interno si trova:Z +∞
0
e−λt
»Z t
0
f(t − s)g(s)ds
–dt =
Z +∞
0
»Z +∞
s
e−λtf(t − s) dt
–g(s) ds
=
Z +∞
0
»Z +∞
0
e−λ(r+s)f(r) dr
–g(s)ds
=
Z +∞
0
»Z +∞
0
e−λrf(r) dr
–e−λsg(s)ds = f(λ)g(λ) .
In particolare:
Corollario 3.11. Sia h(t) = 1 per t ≥ 0, h(t) = 0 per t < 0. La sua trasformata di
Laplace è
h(λ) =1λ
e quindi
L(∫ t
0
f(s) ds
)(λ) =
1λ
f(λ) .
151

3. LA TRASFORMATA DI LAPLACE
DIMOSTRAZIONE
La prima affermazione discende daZ +∞
0
e−λt dt =1
λ
per ogni e λ > 0 mentre la seconda discende dal teorema 3.10, notando cheZ t
0
f(s) ds =
Z t
0
h(t − s)f(s) ds .
La funzione h(t) introdotta nel lemma precedente si chiama funzione di Heaviside.
Vediamo infine le relazioni tra la trasformata di Laplace e la derivazione. Supponiamo
f(t) continua per t ≥ 0, derivabile per t > 0 (e nulla per t < 0). La derivata basta
che sia continua a tratti e che esista con l’eccezione di un numero finito di punti.
Supponiamo che f ′(t) sia a crescita esponenziale così che anche f(t) lo è, si ricordi
il Corollario 3.9. Allora:
Teorema 3.12. Se e λ > αf , αf ′ vale
L(
ddt
f
)(λ) = λf(λ) − f(0) .
DIMOSTRAZIONE
Integrando per partiZ T
0
e−λtf ′(t) dt = e−λT f(T ) − f(0) + λ
Z T
0
e−λtf(t) dt .
L’asserto segue passando al limite per T → +∞, ricordando che e λ > α f .
Esempio 3.13. Si consideri l’equazione differenziale
x′ = ax + f .
Si può provare che se f ha crescita esponenziale lo stesso vale per x; e quindi,
calcolando la trasformata di Laplace dei due membri,
x(λ) =x0
(λ − a)−1+
1(λ − a)−1
f(λ) .
152

3. LA TRASFORMATA DI LAPLACE
In modo analogo può trattarsi per esempio un’equazione integrale del tipo
x(t) =∫ t
0
k(t − s)x(s) ds + f(t) .
Se sia k che f hanno crescita esponenziale, lo stesso avviene per x e quindi
x(λ) =1
1 − k(λ)f(λ) .
Si noti però che l’uso formale di questo metodo può condurre a perdere soluzioni,
come si vede studiando l’equazione
tx′′ + x′ + tx = 0 . 3.3
La trasformata di Laplace di tf(t) è − ddλ
f(λ) e
L(f ′′)(λ) = λL(f ′)(λ) − f ′(0) = λ2f(λ) − λf(0) − f ′(0)
così che
L(tf ′′)(λ) = − ddλ
λ2f(λ) − λf(0) − f ′(0)
= −2λf(λ) − λ2 d
dλf(λ) + f(0) .
Dunque, trasformando, si trova che se x risolve 3.3 e inoltre se la sua derivata seconda
ammette trasformata di Laplace, allora vale[−2λx(λ) − λ2 d
dλx(λ) + x(0)
]+ [λx(λ) − x(0)] − d
dλx(λ) = 0
e quindi x(λ) risolve
(1 + λ2)x(λ) + λx(λ) = 0 .
Quest’equazione si risolve facilmente per separazione di variabili e le soluzioni sono
le funzioni
x(λ) =c√
1 + λ2, c ∈ C .
Dunque, le funzioni x(t) trovate sono tutte multiple una dell’altra. Però, l’equazio-
ne 3.3 è del secondo ordine e quindi deve avere una seconda famiglia di soluzioni,
linearmente indipendenti da quella che abbiamo trovato. Questa famiglia di soluzioni
non si trova mediante la trasformata di Laplace perché si tratta di funzioni illimitate
per t → 0+, e non integrabili, e quindi prive di trasformata di Laplace.153

3. LA TRASFORMATA DI LAPLACE
3.4. ALCUNE TRASFORMATE FONDAMENTALI
Le due tabelle seguenti mostrano le regole di calcolo che abbiamo già incontrato e
alcune trasformate “fondamentali” nel senso che si incontrano più frequentemente
nelle applicazioni. Si intende che le funzioni sono nulle per t < 0 e nella tabella
seguente se ne indica la restrizione a t ≥ 0.
funzione trasformata
af(t) + bg(t) af(λ) + bg(λ)
f ′(t) f(λ) − f(0)
(f ∗ g)(t) f(λ)g(λ)
∫ t
0 f(s) ds 1λ f(λ)
f(t − h) con h > 0 e−λhf(λ)
f(at) con a > 0 1a f(λ/a)
−tf(t) ddλ
f(λ)
f(t) = f(t + T )[∫ T
0e−λsf(s) dt
]· 1
1−e−λT
funzione trasformata
11λ
tnn!
λn+1
eat 1λ − a
tneat n!(λ − a)n+1
sin ωtω
λ2 + ω2
cosωtλ
λ2 + ω2
sinh ωtω
λ2 − ω2
coshωtλ
λ2 − ω2
154

3. LA TRASFORMATA DI LAPLACE
La verifica delle formule precedenti è immediata: si calcolano direttamente le 1) e 3)
e si usa la formula di trasformazione dell’integrale per la 2) e per la 4). Le regole 5) e
6) si ottengono dalla 3) mediante le formule di Eulero.
3.5. IL PROBLEMA DELL’ANTITRASFORMATA
Notiamo che più funzioni possono avere la medesima trasformata. Se però imponiamo
alle funzioni continue a tratti ed a crescita esponenziale di essere continue da
sinistra (oppure da destra) allora la corrispondenza tra funzioni e trasformate è 1–
1. Ciò nonostante, il problema di caratterizzare quelle funzioni olomorfe che sono
trasformate di Laplace è molto difficile e in realtà trova una soluzione accettabile
aumentando lo spazio di “oggetti” per i quali può calcolarsi la trasformata fino ad
introdurre la trasformata di “distribuzioni”, come vedremo per la “trasformata di
Fourier”.
Qui limitiamoci a dire che esiste una formula che talvolta permette di calcolare
l’antitrasformata di Laplace. Sia F (λ) una funzione olomorfa in un semipiano
e λ > α e sia c > α. Consideriamo la funzione
f(t) =1
2πi
∫ c+i∞
c−i∞e+λtF (λ) dλ
(ossia, si intende di calcolare l’integrale sulla retta e λ = c). Se |F (λ)| < M|λ|1+ε
con ε > 0, allora l’integrale converge e la trasformata di Laplace di f(t) è proprio
F (λ). Però, la condizione sul comportamento di F (λ) per |λ| → +∞ lungo una
retta verticale è molto restrittiva e il calcolo dell’integrale è in generale macchinoso.
Quindi per il calcolo dell’antitrasformata di Laplace si ricorre all’uso delle tavole di
trasformate, combinato con le regole di calcolo che abbiamo visto. C’è però un caso
importantissimo per le applicazioni, che è necessario conoscere, ed è il caso in cui
F (λ) è una funzione razionale.
3.5.1 Antitrasformata di funzioni razionali
Sia F (λ) = n(λ)d(λ) una funzione razionale, ossia il quoziente di due polinomi. Se
essa deve essere una trasformata di Laplace, il grado del denominatore deve essere
155

3. LA TRASFORMATA DI LAPLACE
strettamente maggiore di quello del numeratore; in tal caso la funzione razionale si
chiama strettamente propria. Questa ovvia condizione necessaria è anche sufficiente:
Teorema 3.14. Una funzione razionale è una trasformata di Laplace se e solo se è
strettamente propria.
DIMOSTRAZIONE
Infatti, ogni funzione razionale strettamente propria si rappresenta come
n(λ)
d(λ)=
nXi=1
"piX
j=1
Ai,j
(λ − λi)j
#.
La tavola delle trasformate che abbiamo visto al paragrefo 3.4. mostra che ciascun
addendo è una trasformata di Laplace.
In particolare, l’antitrasformata di Laplace delle funzioni razionali strettamente
proprie è combinazione lineare di polinomi, esponenziali e funzioni seno e coseno
e loro prodotti.
Un caso particolarmente importante è il caso in cui la funzione razionale ha solamente
poli semplici. In questo caso
n(λ)d(λ)
=n∑
i=1
Ai
(λ − λi)
ove n è il grado del denominatore ed A i è il residuo del polo semplice λi. Nel caso
in cui n(λ) e d(λ) non hanno zeri comuni,
Ai =n(λi)d′(λi)
e quindi l’antitrasformata è
n∑i=1
n(λi)d′(λi)
eλit .
156

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
4.1. INTRODUZIONE
In questo capitolo si presentano gli elementi di una teoria dell’integrazione, dovuta
a Lebesgue, più generale di quella di Riemann. E’ noto che esistono funzioni, come
la funzione di Dirichlet, che non sono integrabili secondo Riemann. Vedremo che
la funzione di Dirichlet è integrabile secondo Lebesgue, ma la ragione per introdurre
questo nuovo integrale non è di allargare la classe delle funzioni integrabili. La ragione
invece è la seguente: in numerosi problemi dell’Analisi matematica è necessario
scambiare il segno di limite, o di serie, con quello di integrale, si pensi per esempio
alle serie di Fourier. Tipicamente, le serie di Fourier non convergono uniformemente,
condizione che è richiesta per lo scambio di limiti ed integrali di Riemann. E’ questa
la ragione che ha indotto a costruire integrali più generali di quello di Riemann.
Consideriamo la funzione di Dirichlet da questo punto di vista.
Esempio 4.1. La funzione di Dirichlet è definita su 0 ≤ x ≤ 1 da:
f(x) =
1 se x = q è razionale
0 altrimenti.
Essa è limite di una successione (fk) di funzioni integrabili secondo Riemann. Si
ricordi infatti che i razionali sono numerabili. Sia (qr) la successione dei razionali e
157

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
sia
fk(x) =
1 se x = qr con r ≤ k
0 altrimenti.
Ovviamente,
lim fk(x) = f(x) , lim∫ 1
0
fk(x) dx = 0 .
Non possiamo però dire che
lim∫ 1
0
fk(x) dx =∫ 1
0
lim fk(x) dx =∫ 1
0
f(x) dx
perché la funzione f(x) non è integrabile.
Se vogliamo dare un senso alla formula precedente, dovremo costruire una teoria
dell’integrazione che permetta di integrare anche la funzione di Dirichlet.
Si osservi che se la formula precedente deve valere, allora l’integrale della funzione
di Dirichlet deve essere nullo.
La funzione di Dirichlet è la funzione caratteristica dei razionali di [0, 1] e quindi il suo
integrale è la “misura” dell’insieme di tali razionali. Dunque, l’insieme dei razionali
di [0, 1] deve avere “misura di Lebesgue” nulla. Si ricordi che tale insieme non è
misurabile secondo Peano-Jordan. D’altra parte la teoria della misura di Peano-Jordan
è insufficiente anche per la trattazione del solo integrale di Riemann. Per vedere questo
enunciamo la seguente caratterizzazione dell funzioni integrabili secondo Riemann.
Diciamo che un insieme I ⊆ R è nullo se per ogni ε > 0 esiste una successione di
intervalli aperti (ar, br), disgiunti o meno, tali che:
∑r
(br − ar) < ε , I ⊆⋃
(ar, br) .
Si nota facilmente che un insieme che ha misura zero secondo Peano-Jordan è anche
un insieme nullo secondo la definizione precedente, ma non viceversa. Si prova infatti
che l’insieme dei razionali di [0, 1], non misurabile secondo Peano-Jordan, è però un
insieme nullo secondo la definizione precedente, si veda l’Esempio 4.27.
158

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Vale:
Teorema 4.2 (di Riemann-Lebesgue). Una funzione limitata f(x) definita su un
intervallo limitato (a, b) di R è integrabile secondo Riemann se e solo se l’insieme dei
suoi punti di discontinuità è un insieme nullo.
Osservazione 4.3. Si noti che questo teorema implica che la funzione di Dirichlet
non è integrabile secondo Riemann. Infatti essa è discontinua in ciascun punto di
[0, 1] e [0, 1] non è un insieme nullo. Si sa inoltre che ogni unione di intervalli aperti
può rappresentarsi come unione disgiunta di intervalli aperti. Nella definizione di
insieme nullo è però più comodo, ed ovviamente non restrittivo, non richiedere che gli
intervalli siano disgiunti.
Passiamo ora ad introdurre la teoria dell’integrazione secondo Lebesgue. Conviene
premettere alcune nozioni di teoria degli insiemi.
4.2. ANELLI ED ALGEBRE DI INSIEMI
Sia S una famiglia non vuota di s.insiemi di un assegnato insieme Ω. In S
consideriamo le due operazioni di intersezione e di differenza simmetrica. Diciamo
che la famiglia di insiemi S è un anello di insiemi se è chiusa rispetto a tali operazioni:
A , B ∈ S =⇒
AB ∈ S ,
A ∩ B ∈ S .
Dato che
A − B = A(A ∩ B) , A ∪ B = (AB)(A ∩ B) ,
si vede che se S è un anello di insiemi allora esso è chiuso rispetto alle operazioni di
unione e di differenza e inoltre
∅ = A − A ∈ S .
159

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Dato che ∅ è l’identità rispetto all’operazione , si vede che un anello di insiemi è
un anello (secondo la definizione incontrata nel corso di Algebra) rispetto alle due
operazioni + = e · = ∩.
Si sa che un anello con identità moltiplicativa si chiama un’algebra; e l’identità rispetto
all’operazione di intersezione è Ω. Dunque un’anello di s.insiemi di Ω che contiene
anche Ω si chiama un’algebra di insiemi.
Si osservi ora che
A ∩ B = ˜(A ∪ B) , AB =
˜(A ∩ B)∩ (A ∪ B) ,
dove la tilde (˜) indica il complementare. Dunque:
Teorema 4.4. Sia S una famiglia di s.insiemi di Ω e valga:
Ω ∈ S , A , B ∈ S =⇒
A ∪ B ∈ S
A ∈ S .
La famiglia S è un’algebra di insiemi.
Il teorema precedente dà una definizione alternativa di algebra di insiemi, che risulta
più comoda per le applicazioni.
Un anello, rispettivamente un’algebra, di insiemi si dice σ-anello, rispettivamente
σ-algebra quando è chiusa rispetto alle unioni numerabili di suoi elementi.
Usando le proprietà delle operazioni tra insiemi si vede che un σ-anello è anche
chiuso rispetto alle operazioni di intersezione, differenza, differenza simmetrica, di
successioni di suoi elementi.
Ricordando la proprietà di additività dell’integrale di Riemann,∫A∪B
=∫
A
+∫
B
che dovrà valere anche per l’integrale di Lebesgue, si capisce l’interesse che anelli ed
algebre di insiemi hanno nella teoria dell’integrazione.
160

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Osservazione 4.5. E’ opportuno sottolineare la differenza tra la definizione di
topologia e quella di σ-algebra. Una topologia in Ω contiene l’insieme vuoto ed
Ω, e contiene l’unione degli elementi di ciascun suo s.insieme. Contiene inoltre le
intersezioni degli elementi dei suoi s.insiemi finiti. Invece, una σ-algebra contiene,
oltre ad Ω e ∅, sia le unioni che le intersezioni degli elementi dei suoi s.insiemi che
sono finiti o numerabili.
Si vede facilmente:
Teorema 4.6. Sia S una famiglia non vuota di s.insiemi di Ω. Esistono un minimo
anello, algebra, σ-anello, σ-algebra contenenti S.
Da ora in poi ci limiteremo a considerare il caso
Ω = (a, b) ⊆ R −∞ ≤ a < b ≤ +∞
oppure
Ω =n∏
i=1
(ai, bi) ⊆ Rn , −∞ ≤ ai < bi ≤ +∞ .
Consideriamo il caso Ω = (a, b) ⊆ R. Ricordiamo che ogni aperto di R è unione
finita o numerabile di intervalli aperti, due a due disgiunti. Però la famiglia degli
intervalli aperti non è un anello (infatti, per esempio, la differenza di due aperti non è
un aperto). E’ invece un anello la famiglia delle unioni finite di intervalli
[a, b) 4.1
aperti a destra e chiusi a sinistra e
Teorema 4.7. Ogni aperto di R è unione numerabile di intervalli come in 4.1, due
a due disgiunti.
Un risultato analogo vale anche in Rn:
161

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Teorema 4.8. Ogni aperto di Rn è unione numerabile di insiemi, due a due disgiunti,
della forma
n∏i=1
[xi, yi) .
Questo teorema suggerisce di chiamare insieme elementare di Rn un insieme della
forma
n∏i=1
[xi, yi) .
Chiameremo insieme semplice l’insieme vuoto oppure un insieme che è unione finita
di insiemi elementari. Si noti che un insieme semplice può rappresentarsi in più modi
come unione di insiemi elementari.
Come si è detto, la famiglia degli insiemi semplici di Rn è un anello; e, se si decide
di lavorare soltanto con quelli che sono contenuti in un dato insieme elementare, si ha
un’algebra.
La minima σ-algebra che contiene tutti gli insiemi semplici di Rn, e che contiene Rn
stesso, si chiama la σ-algebra di Borel di Rn, e i suoi elementi si chiamano boreliani.
Da ciò che abbiamo detto, non è difficile provare che sia gli insiemi aperti che gli
insiemi chiusi sono boreliani.
4.3. MISURE DI INSIEMI
Sia Ω un insieme. Si chiama misura su Ω una funzione A → m(A) dai s.insiemi di Ω
nei reali non negativi, tale che:
– Il dominio della funzione è un anello S di s.insiemi di Ω;
– se A, B sono elementi disgiunti di S, ossia tali che A ∩ B = ∅, allora
m(A ∪ B) = m(A) + m(B) .
162

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
La misura si chiama σ-additiva se è una misura e inoltre per ogni successione (A r) di
elementi di S, due a due disgiunti, ossia tali che Ar ∩ Ak = ∅ per r = k, vale
⋃Ar ∈ S =⇒ m
(+∞⋃r=1
Ar
)=
+∞∑r=1
m(Ar) .
Osservazione 4.9. In generale, l’unione degli A r non è un elemento dell’anello. In
tal caso niente si richiede alle misure degli Ar.
Talvolta conviene permettere ad una misura di prendere valori in [0, +∞]. Per
contrasto, la misura si dice finita se essa prende valore in [0, +∞). La misura si
chiama probabilità se prende valori in [0, 1].
Teorema 4.10. Se m è una misura e se esiste A tale che m(A) < +∞, allora
m(∅) = 0 .
DIMOSTRAZIONE
Infatti,
A ∪ ∅ = A , A ∩ ∅ = ∅ così che m(A) = m(A) + m(∅) .
Semplificando m(A) segue m(∅) = 0.
Presentiamo ora alcuni lemmi che saranno utili in seguito e che mostrano una proprietà
di “continuità” delle misure σ–additive.
Lemma 4.11. Sia S un anello e sia m una misura finita su S. La misura è σ-additiva
se per ogni successione (Yr) di elementi di S “decrescente all’insieme vuoto”, ossia
tale che
Yr+1 ⊆ Yr ,
+∞⋂r=1
Yr = ∅ ,
vale
limm(Yr) = m(∅) .
163

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
DIMOSTRAZIONE
Siano gli Ar insiemi disgiunti di S e si sappia che
A =
+∞[r=1
Ar ∈ S .
Dobbiamo provare che
m(A) =
+∞Xr=1
m(Ar) .
Introduciamo per questo gli insiemi
Xk =
k[r=1
Ar .
Vale
A = Xk ∪ [A − Xk] , m(A) = m(Xk) + m(A − Xk) . 4.2
Per costruzione,
Yk+1 = A − Xk+1 ⊆ A − Xk = Yk ,
+∞\k=1
Yk =
+∞\k=1
[A − Xk] = ∅ .
Dunque, per ipotesi,
lim m(A − Xk) = m(∅)
e quindi
lim m(A − Xk) = 0
perché la misura è finita. La proprietà di additività della misura mostra che
m(Xk) =
kXr=1
m(Ar)
e la successione
k →kX
r=1
m(Ar)
cresce e quindi ammette limite. Dunque, da 4.2,
m(A) = limk
kXr=1
m(Ar) + lim m (A − Xk) =
+∞Xr=1
m(Ar)
Ciò è quanto volevamo provare.
164

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Il risultato seguente, che useremo in seguito, si potrebbe provare in modo analogo:
Lemma 4.12. Se per ogni successione (Ar) crescente di insiemi, ossia per ogni
successione tale che
Ar ⊆ Ar+1
vale
m
(+∞⋃r=1
Ar
)= limm(Ar) ,
allora la misura è σ-additiva.
Osservazione 4.13. L’ipotesi che la misura sia finita non è richiesta nel Lem-
ma 4.12; è invece essenziale1 nel Lemma 4.11. Infatti, se Ω = R e se Yr = [r, +∞)
allora m(Yr) = +∞ per ogni r mentre m(∩Yr) = m(∅) = 0.
I due lemmi precedenti possono invertirsi. Vale infatti:
Lemma 4.14. Sia (Ar) una successione crescente e sia (Br) una successione
decrescente di elementi di S. Sia rispettivamente
A =+∞⋂r=1
Ar , B =+∞⋃r=1
Br .
Sia m una misura σ-additiva su S. Allora
m(A) = limr
m(Ar) , m(B) = limr
m(Br) .
Consideriamo ora gli insiemi elementari contenuti in un dato insieme elementare J ⊆
Rn. Definiamo
m(∅) = 0 , m
(n∏
i=1
[xi, yi)
)=
n∏i=1
(yi − xi) . 4.3
1In realtà questa condizione potrebbe indebolirsi un po’, richiedendo che m(Yr) < +∞ per un
indice r.
165

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Estendiamo quindi questa misura all’algebra S delle unioni finite di insiemi
elementari, ossia all’algebra degli insiemi semplici contenuti in J , imponendo
m(I1 ∪ I2) = m(I1) + m(I2) se I1 ∩ I2 = ∅ . 4.4
Osservazione 4.15. Si noti che uno stesso insieme semplice può rappresentarsi in
più modi come unione di insiemi elementari disgiunti:
[0, 1) = [0, 1/2)∪ [1/2, 1) .
Se n = 1 è facile provare che il valore che m associa ad un insieme non dipende dal
modo con cui esso si rappresenta. Lo stesso vale in dimensione maggiore di 1, ma la
dimostrazione è macchinosa.
Vogliamo provare che la misura m che abbiamo introdotta è σ-additiva:
Teorema 4.16. La misura definita da 4.3 e da 4.4 è σ-additiva.
DIMOSTRAZIONE
La misura è finita perché m(J) < +∞. Possiamo quindi applicare il Lemma 4.11 e
provare che per ogni successione di insiemi semplici decrescente a ∅, la successione
delle misure converge a 0:
+∞\k=1
Ak = ∅ =⇒ lim m(Ak) = 0 .
Si noti che la successione m(Ak) decresce. Sia per assurdo
m(Ak) > α > 0 ∀k .
Fissiamo ε ∈ (0, α/4).
Sia k = 1 e consideriamo l’insieme semplice A1. Possiamo rappresentarlo come unio-
ne finita di insiemi elementari disgiunti, ciascuno della formaQn
i=1[ai, bi). Inoltre, esso
contiene l’insieme semplice A2. Sostituendo ciascuno insieme elementareQn
i=1[ai, bi)
con un insieme elementareQn
i=1[ai, bi − σ) si trova ancora un insieme elementare,
diciamo J1, e si può scegliere σ > 0 così piccolo che
m(J1 ∩ A2) > α − ε .
166

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Inoltre,
J1 ⊆ J1 ⊆ A1 .
L’insieme J1 ∩ A2 è ancora un insieme semplice. Indichiamolo col simbolo A2,
A2 = J1 ∩ A2 .
Ripetiamo la stessa costruzione, ma a partire dall’insieme A2. Si costruisce un insieme
J2 tale che
J2 ⊆ J2 ⊆ A2 ⊆ A2 , m(J2 ∩ A3) > α − ε − ε/2 .
Si noti che J 2, essendo contenuto in A2, è sia s.insieme di A2 che di J1.
Iterando questa costruzione, si trova una successione (Jk) con queste proprietà:
i) Jk ⊆ Jk ⊆ Ak;
ii) Jk ⊆ A1 per ogni k, e quindi i Jk sono limitati;
iii) Jk ⊆ Jk−1;
iv) m(Jk − Ak+1) > α −“Pk
i=1 ε/2k”
> α − ε > 0 e quindi nessuno dei J k è vuoto.
Grazie alle proprietà ii)–iv), segue dal teorema di Cantor che gli insiemi J k hanno un
punto comune x0 che, per la proprietà i) appartiene a ciascuno degli A k. Ciò contrasta
con l’ipotesi. La contraddizione trovata mostra che deve aversi
lim m(Ak) = 0 .
Dunque, la misura è σ-additiva.
4.4. INSIEMI MISURABILI SECONDO LEBESGUE
Estendiamo ora la famiglia degli insiemi cui si può attribuire una misura. Per fissare
le idee, supponiamo di lavorare in R2, ma la stessa costruzione può farsi in ogni
dimensione.
Considereremo prima di tutto il caso degli insiemi limitati e quindi estenderemo la
definizione ad insiemi illimitati.
167

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
4.4.1 Insiemi limitati e misurabili secondo Lebesgue
Fissiamo un insieme semplice Q e lavoriamo ora soltanto con suoi s.insiemi. A
ciascun insieme A ⊆ Q associamo un numero che si chiama la sua misura esterna, in
simboli m∗(A), come segue:
m∗(A) = inf
∑
m(Rj), Rj elementare,⋃i≥1
Rj ⊇ A
.
Nella definizione precedente, l’insieme degli Rj può essere finito o numerabile.
Si nota immediatamente che se S è un insieme elementare, e quindi anche se è un
insieme semplice, allora
m∗(S) = m(S) .
Ovviamente:
Corollario 4.17. Se A ⊆ B allora m∗(A) ≤ m∗(B).
La funzione m∗ è quindi una funzione monotona d’insieme, che però non è una misura
perché non è additiva. Per essa vale solamente:
Teorema 4.18. La funzione m∗ è subadditiva; ossia per ogni famiglia Aj finita o
numerabile di s.insiemi di Q e per ogni insieme A tale che
A ⊆⋃j≥1
Aj
vale
m∗(A) ≤∑j≥1
m∗(Aj) . 4.5
DIMOSTRAZIONE
Si fissi ε > 0. Sia R(j)i una famiglia finita o numerabile di insiemi elementari per cui
Aj ⊆[i≥1
R(j)i
Xi≥1
m(R(j)i ) ≤ m∗(Aj) + ε/2j .
Essendo
A ⊆[j>1
[i≥1
R(j)i ,
168

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
segue
m∗(A) ≤Xj≥1
Xi≥1
m(R(j)i ) ≤
Xj≥1
hm∗(Aj) +
ε
2j
i≤ ε +
Xj≥1
m∗(Aj) .
L’asserto segue perché questa diseguaglianza vale per ogni ε.
Osservazione 4.19. In generale, la disuguaglianza in 4.5 è stretta, anche se gli Aj
sono due a due disgiunti.
Indichiamo ora col simbolo L la famiglia dei s.insiemi di Q con questa proprietà:
A ∈ L se per ogni ε > 0 esiste un insieme semplice Iε tale che
m∗(AIε) < ε .
Gli insiemi di L si dicono misurabili secondo Lebesgue.
Si osservi il procedimento che abbiamo fatto: si è usato m∗ per definire una “misura da
sopra” che permetta di valutare quanto bene un dato insieme A si possa approssimare
con insiemi semplici. Gli insiemi misurabili secondo Lebesgue sono quelli che si
approssimano tanto bene quanto si vuole con insiemi semplici.
Proveremo che L è una σ-algebra. Nel fare ciò introdurremo anche una misura σ-
additiva λ su L, che estende m, e che si chiama la misura di Lebesgue. La misura λ
è la restrizione di m∗ alla famiglia di insiemi L ed è quindi subadditiva. Proveremo
che L è una σ-algebra e che λ è una misura σ-additiva. Per questo:
Lemma 4.20. Se A ∈ L allora A = Q − A ∈ L.
DIMOSTRAZIONE
Sia ε > 0 e sia R un insieme semplice tale che
m∗(AR) < ε .
Si noti che Q − R è ancora un insieme semplice, e che
(Q − A)(Q − R) = AR .
Dunque,
m∗((Q − A)(Q − R)) < ε .
169

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Proviamo ora che L è un’algebra di insiemi.
Teorema 4.21. Siano A, B in L. Allora, A ∪ B ∈ L.
DIMOSTRAZIONE
Sia ε > 0 e siano RA ed RB insiemi semplici e tali che
m∗(ARA) < ε/2 , m∗(BRB) < ε/2 .
Notiamo che RA ∪ RB è ancora un insieme semplice e che
(A ∪ B)(RA ∪ RB) ⊆ (ARA) ∪ (BRB) .
La subadditività della misura esterna mostra che
m∗ ((A ∪ B)(RA ∪ RB)) < ε .
Dunque, A ∪ B ∈ L.
Si è così provato che L è un’algebra di insiemi. Come si è detto, su L definiamo la
funzione
λ(A) = m∗(A) .
Mostreremo che questa è una misura σ-additiva, che si chiama la misura di Lebesgue.
Vale:
Teorema 4.22. La funzione d’insieme λ, definita su L, è una misura.
DIMOSTRAZIONE
Va provato che λ è additiva. Osserviamo per questo che se A e B sono s.insiemi
qualsiasi di Q allora vale
A ⊆ B ∪ (AB) =⇒ m∗(A) − m∗(B) ≤ m∗(AB) .
Scambiando il ruolo di A e di B si vede che
|m∗(A) − m∗(B)| ≤ m∗(AB) . 4.6
170

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Usiamo questa proprietà per mostrare che λ è additiva, come segue: Siano A e B
disgiunti, elementi di L. Fissiamo ε > 0 ed insiemi semplici R A ed RB tali che
m∗(ARA) < ε , m∗(BRB) < ε .
Si sa già che A ∪ B ∈ L. Inoltre, essendo A e B disgiunti,
RA ∩ RB ⊆ (ARA) ∪ (BRB)
e quindi
m(RA ∩ RB) = m∗(RA ∩ RB) ≤ m∗(ARA) + m∗(BRB) < 2ε .
Inoltre,
(A ∪ B)∆(RA ∪ RB) ⊆ (A∆RA) ∪ (B∆RB)
e quindi
m∗ ((A ∪ B)∆(RA ∪ RB)) ≤ m∗(A∆RA) + m∗(B∆RB) < 2ε .
Dunque, usando 4.6, si ha
|m∗(A ∪ B) − m∗(RA ∪ RB)| < 2ε
e quindi
λ(A ∪ B) = m∗(A ∪ B) ≥ m(RA ∪ RB) − 2ε
= m(RA) + m(RB) − m(RA ∩ RB) − 2ε ≥ m∗(A) + m∗(B) − 4ε .
L’arbitrarietà di ε mostra che
λ(A ∪ B) ≥ m∗(A) + m∗(B) = λ(A) + λ(B) ;
ma, per la subadditività della misura esterna,
λ(A ∪ B) = m∗(A ∪ B) ≤ m∗(A) + m∗(B) = λ(A) + λ(B)
e quindi l’additività.
Proviamo ora:
171

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Teorema 4.23. L’algebra di insiemi L è una σ-algebra.
DIMOSTRAZIONE
Sia (An) una successione in L. Dobbiamo provare che ∪+∞n=1An ∈ L. Mostriamo prima
di tutto che non è restrittivo assumere che gli An siano due a due disgiunti. Definiamo
per questo
Bn = An −n−1[i=1
Ai .
Ciascuno degli insiemi Bn è in L, perché L è un’algebra di insiemi; e i B n sono due a
due disgiunti. Inoltre,
+∞[n=1
An =
+∞[n=1
Bn .
Dunque, eventualmente sostituendo ciascun An col corrispondente Bn, si suppone da
ora in poi che gli An siano due a due disgiunti.
Si è vistro che λ su L è una misura e quindi
nXk=1
λ(Ak) = λ
n[
i=1
Ak
!= m∗
n[
i=1
Ak
!≤ m∗
+∞[i=1
Ak
!≤ λ(Q) .
Ciò prova che la seriePn
k=1 λ(Ak) converge.
Fissiamo ora ε > 0 e sia Nε tale che
+∞Xk=Nε
λ(Ak) < ε/2 .
Essendo L un’algebra,
Nε−1[k=1
Ak ∈ L
e quindi esiste un insieme semplice R per cui
m∗
"Nε−1[k=1
Ak
#R
!< ε/2 .
Ora,
∞[k=1
Ak
!R ⊆
" Nε−1[k=1
Ak
!R
#["+∞[
k=Nε
Ak
#.
172

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Dunque,
m∗
"+∞[k=1
Ak
#R
!≤ ε
2+
+∞Xk=Nε
λ(Ak) < ε .
Dunque,+∞[k=1
Ak ∈ L .
Sappiamo ora che L è una σ-algebra. Completiamo questi argomenti provando:
Teorema 4.24. La misura di Lebesgue λ è σ-additiva.
DIMOSTRAZIONE
Sia An una successione di insiemi due a due disgiunti di L. Si vuol provare
λ
+∞[n=1
An
!=
+∞Xn=1
λ(An) .
Si sa già che per ogni N vale l’uguaglianza
NXn=1
λ(An) ≤ λ
N[
n=1
An
!≤ λ
+∞[n=1
An
!.
Dunque,
+∞Xn=1
λ(An) ≤ λ
+∞[n=1
An
!.
L’uguaglianza discende dalla subadditività di m ∗, e quindi di λ.
Osservazione 4.25. Chiaramente, L è una σ-algebra che contiene tutti gli insiemi
semplici, e quindi L contiene la σ-algebra dei boreliani. L’inclusione è propria.
4.4.2 Insiemi illimitati
Vogliamo ora estendere la definizione di misura di Lebesgue includendo anche insiemi
illimitati. Per questo dovremo permettere alla misura di prendere il valore +∞.
Rappresentiamo Rn come unione disgiunta dei quadrati
Qn,k = (x, y) | n ≤ x < n + 1 , k ≤ y < k + 1
173

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
con n e k interi qualsiasi. Diciamo che A è misurabile se A ∩ Qn,k è misurabile per
ogni scelta di n e di k. In tal caso, definiremo
λ(A) =+∞∑
n,k=−∞λ(A⋂
Qn,k
).
4.5. INSIEMI NULLI E PROPRIETÀ CHE VALGONO QUASI OVUNQUE
Sia A un insieme con questa proprietà: per ogni ε > 0 esistono insiemi semplici Rn
tali che
A ⊆⋃n≥1
Rn ,∑n≥1
m(Rn) < ε .
Un insieme con questa proprietà si è chiamato un insieme nullo. Ovviamente:
– ogni insieme nullo è misurabile secondo Lebesgue e la sua misura di Lebesgue
è 0 e viceversa;
– ogni s.insieme di un insieme nullo è un insieme nullo.
Gli insiemi nulli sono quindi “invisibili” per la misura di Lebesgue. Questo suggerisce
di dire che una proprietà che vale in tutti i punti di un insieme Ω, salvo che in quelli
di un insieme nullo, vale quasi ovunque su Ω e si scrive brevemente che essa vale q.o.
Ω. Per esempio diremo che una funzione è continua q.o. su Ω se l’insieme dei suoi
punti di discontinuità è un insieme nullo.
Osservazione 4.26. Naturalmente esistono anche dei boreliani che hanno misura
nulla; ma un boreliano che ha misura nulla può contenere dei s.insiemi che non sono
boreliani. Si chiama completa una misura per la quale ogni s.insieme di un insieme
di misura zero è misurabile (e quindi ha misura zero). La misura di Lebesgue definita
su L è completa mentre la sua restrizione ai boreliani non lo è.
Si vede facilmente che ogni insieme costituito da un solo punto è nullo. La σ-additività
della misura implica che ogni unione numerabile di insiemi nulli è un insieme nullo.
In particolare, l’insieme dei razionali è nullo. E’ interessante provare ciò direttamente:
174

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Esempio 4.27. Sia (qn) la successione dei razionali in [0, 1]. Fissiamo ε > 0 ed
associamo a qn l’intervallo
Rn =(qn − ε
2n, qn +
ε
2n
).
Chiaramente, l’unione degli Rn contiene i razionali di [0, 1] e∑+∞
i=1 λ(Rn) < ε.
Dunque, l’insieme dei razionali di [0, 1] è un insieme nullo.
E’ bene sapere che esistono anche insiemi non numerabili che sono nulli. Per esempio,
è un insieme nullo l’insieme di Cantor. Ciò si vede facilmente notando che la somma
degli intervalli che si tolgono, ossia la misura del complementare in [0, 1] dell’insieme
di Cantor, vale 1.
Ricordiamo infine che il concetto di insieme nullo si è già incontrato nell’enunciato
del teorema di Riemann-Lebesgue.
Enunciamo ora formalmente un’osservazione già fatta, ed una sua conseguenza:
Teorema 4.28. Sia (An) una successione di s.insiemi di Ω:
1. se λ(An) = 0 per ogni n allora λ (∪An) = 0;
2. se per ogni n vale λ(An) = λ(Ω) < +∞ allora λ (∩An) = λ(Ω).
DIMOSTRAZIONE
La prima proprietà si è già notata, e discende dalla σ-additività della misura. La secon-
da immediatamente discende dalla prima, passando ai complementari. Infatti, essendo
Ω di misura finita, λ(An) = 0 e quindi
λ“[
An
”= 0 ossia λ(Ω) = λ
„[An
«= λ
“\An
”.
L’esempio Ω = [0, +∞), An = [n, +∞) mostra che la condizione λ(Ω) < +∞ non
si può rimuovere dall’ultimo enunciato.
175

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
4.6. FUNZIONI MISURABILI
Da ora in poi, con “misura” intenderemo sempre la misura di Lebesgue.
Definita la misura di Lebesgue, si può introdurre l’integrale di Lebesgue, come si
è visto nei corsi di probabilità per il caso delle misure “astratte”. Prima di tutto
si definisce la classe delle funzioni misurabili. Una funzione f(x) su Rn si dice
misurabile quando per ogni r è misurabile l’insieme
x | f(x) > r.
E’ immediato mostrare che una funzione è misurabile se e solo se sono misurabili gli
insiemi
x | f(x) ≥ r , x | s < f(x) ≤ r
o, equivalentemente, se sono misurabili le contrimmagini dei boreliani. Dunque:
Teorema 4.29. Sia f una funzione misurabile. Allora |f | è misurabile.
DIMOSTRAZIONE
Infatti,
|f(x)| ≥ c quando
8>>><>>>:
f(x) ≥ c
oppure
f(x) ≤ −c
e quindi l’insieme degli x per cui f(x) ≥ c è l’unione di due insiemi misurabili e quindi
è misurabile.
Si prova inoltre:
Teorema 4.30. Il limite puntuale o anche q.o. di una successione di funzioni
misurabili è una funzione misurabile.
176

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
DIMOSTRAZIONE
Proviamo prima di tutto che l’asserto vale per il limite superiore. Sia quindi
f(x) = lim supn
fn(x) .
Per definizione, f(x) = lim supn fn(x) vuol dire
f(x) = limk
φk(x) , φk(x) = supn≥k
fn(x) .
Si osservi che la successione di funzioni φk(x) decresce e quindi ammette limite.
Studiamo l’insieme x | f(x) ≥ r. Si ha:
x | f(x) ≥ r = x | φk(x) ≥ r per ogni k =\k≥1
x | φk(x) ≥ r .
Ora, ricordando la definizione di φk(x),
x | φk(x) ≥ r = x | supn≥k
fn(x) ≥ r
e
supn≥k
fn(x) ≥ r ⇐⇒ ∀ε ∃nε ≥ k per cui fnε (x) ≥ r − ε .
Dunque, x | sup
n≥kfn(x) ≥ r
ff=\ε>0
x | ∃nε ≥ k per cui fnε(x) ≥ r − ε
=\ε>0
[n≥k
x | fn(x) ≥ r − ε .
Combinando le uguaglianze precedenti si trova che
x | f(x) ≥ r =\k≥1
\ε>0
[n≥k
x | fn(x) ≥ r − ε =\ε>0
\k≥1
[n≥k
x | f(x) ≥ r − ε .
Per ogni r, l’insieme a destra è misurabile e quindi lim sup f n è misurabile.
In modo analogo si vede che lim inf fn è misurabile e quindi, se (fn) ammette limite f ,
la funzione f è misurabile.
Osservazione 4.31. Si è già notato, e si prova facilmente, che se B è un
boreliano di R ed f una funzione misurabile, allora f −1(B) è misurabile secondo
177

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Lebesgue. Invece, la contrimmagine di un insieme misurabile secondo Lebesgue
può non essere misurabile secondo Lebesgue. Di conseguenza, la composizione
di funzioni misurabili non è generalmente una funzione misurabile. Invece,
f(g(x)) è misurabile se g è misurabile secondo Lebesgue ed f è “misurabile secondo
Borel”, ossia antitrasforma semirette in boreliani. E’ questa una delle ragioni per cui
l’introduzione della classe L degli insiemi misurabili secondo Lebesgue non permette
di “dimenticare” i boreliani.
Le funzioni misurabili hanno importanti relazioni con le funzioni continue, espresse
dai due teoremi seguenti, che non proviamo:
Teorema 4.32 (di Lusin). Sia f una funzione misurabile su un insieme limitato Ω.
Per ogni ε > 0 esiste un insieme chiuso Fε tale che
– λ(Ω − Fε) < ε;
– la restrizione di f ad Fε è uniformemente continua.
Osservazione 4.33. Una funzione misurabile può essere ovunque discontinua,
come è il caso della funzione di Dirichlet. E’ interessante vedere direttamente che
la funione di Dirichlet su [0, 1] verifica la proprietà del teorema di Lusin. Per
questo, introduciamo gli insiemi Rn costruiti all’esempio 4.27. Questi sono aperti
e quindi aperta è la loro unione. Sia Fε il complementare di ∪n≥1Rn. Allora,
λ( (0, 1) − Fε) < ε e la restrizione di f ad Fε è identicamente nulla perché Fε non
contiene razionali. Dunque, è ivi uniformemente continua.
La funzione di Dirichlet stessa è invece ovunque discontinua.
Un secondo teorema che lega le funzioni misurabili a concetti propri delle funzioni
continui è:
Teorema 4.34 (di Egorov-Severini). Sia Ω un insieme di misura finita e sia (fn)
una successione di funzioni misurabili su Ω, convergente q.o. ad una funzione f . Per
178

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
ogni ε > 0 esiste un insieme Fε misurabile e tale che:
– λ(Ω − Fε) < ε,
– la restrizione ad Fε delle funzioni fn è una successione di funzioni
uniformemente convergente ad f .
Le funzioni misurabili hanno anche una relazione importante con le funzioni a
codominio finito.
Chiameremo funzione semplice una funzione della forma
s(x) =r∑
j=1
ajχAj (x) 4.7
dove gli Aj sono insiemi misurabili secondo Lebesgue e con χAj si intende la
funzione caratteristica di Aj .
Si ricordi che la funzione caratteristica di un insieme A è
χA(x) =
1 se x ∈ A
0 se x /∈ A .
Dunque, una funzione semplice è una funzione misurabile che ha codominio
finito.
Vale:
Teorema 4.35. Sia f una funzione misurabile. Esiste una successione di funzioni
semplici (sn) convergente ad f . Inoltre, si può imporre alla (sn) di essere una
successione monotona, crescente oppure decrescente.
Se la funzione f è limitata allora la convergenza è uniforme.
DIMOSTRAZIONE
Supponiamo prima di tutto che f sia limitata,
−M ≤ f(x) ≤ M .
179

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Dividiamo [−M, M ] con i punti
−M + k2M
n, 0 ≤ k ≤ n .
Sia quindi
An,k =
x | f(x) ∈
»−M + k
2M
n,−M + (k + 1)
2M
n
«ff, 0 ≤ k < n .
Ciascuno degli An,k è misurabile. Definiamo sn ponendo
sn(x) = −M + k2M
nx ∈ An,k
così che
|sn(x) − f(x)| ≤ 2M
n.
Si trova in questo modo una successione crescente (s n) convergente unifor-
memente ad f .
In modo analogo si costruisce una successione decrescente.
Se f non è limitata, si costruisce prima la successione (fN ),
fN (x) =
8>>><>>>:
f(x) se −N ≤ f(x) ≤ N
−N se f(x) < −N
+N se f(x) > N .
La (fN ) converge ad f , non uniformemente; si approssima ciascuna f N con una suc-
cessione di funzioni semplici (sn,N), come si è fatto sopra. E’ facile costruire ora una
successione che converge ad f in ciascun punto.
La costruzione di una successione decrescente che approssima f è analoga.
Segue:
Teorema 4.36. le operazioni algebriche applicate a funzioni misurabili producono
funzioni misurabili.
DIMOSTRAZIONE
Si approssimino le funzioni misurabili mediante funzioni semplici, si eseguano le
operazioni e si usi il teorema 4.30.
180

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Osservazione 4.37. Abbiamo visto che il valore assoluto di una funzione misurabile
è misurabile. Il viceversa non vale perché esistono insiemi che non sono misurabili
secondo Lebesgue. Se A è uno di tali insiemi, la funzione f(x) = 1 su A, f(x) = −1
su A non è misurabile, mentre |f(x)| è misurabile, essendo identicamente 1.
4.7. INTEGRALE DI LEBESGUE
Vogliamo ora definire l’integrale di Lebesgue. Il teorema 4.35 suggerisce di definire
prima l’integrale delle funzioni semplici e quindi l’integrale di una funzione misura-
bile f come limite degli integrali delle funzioni semplici che la approssimano. Per
evitare però di incontrare il simbolo +∞ − ∞, conviene seguire la via seguente:
definito l’integrale delle funzioni semplici, prima si definisce l’integrale di funzioni
positive e poi si estende la definizione al caso dell’integrale di generiche funzioni
misurabili.
4.7.1 L’integrale delle funzioni semplici
Sia s(x) una funzione semplice,
s(x) =r∑
j=1
ajχAj (x) , Ai ∩ Aj = ∅ se i = j .
Il suo integrale è definito da ∫Ω
s(x) dx =r∑
j=1
ajλ(Aj) .
Osservazione 4.38. Una stessa funzione semplice può rappresentarsi in più
modi. E’ però vero che il valore dell’integrale non dipende dalla particolare
rappresentazione usata per calcolarlo.
E’ del tutto ovvio che le usuali proprietà dell’integrale, linearità, monotonia ed
additività, valgono per l’integrale delle funzioni semplici definito sopra; ed è ancora
vero che il prodotto di funzioni semplici integrabili è integrabile.
181

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Sia inoltre
s+(x) = maxs(x), 0 , s−(x) = −mins(x), 0 .
Ambedue queste funzioni sono semplici, e vale∫Ω
s(x) dx =∫
Ω
s+(x) dx −∫
Ω
s−(x) dx ,∫Ω
|s(x)| dx =∫
Ω
s+(x) dx +∫
Ω
s−(x) dx .
Infine, sia s(x) una funzione semplice. L’insieme
x | |s(x)| > t
è un insieme misurabile. Ha quindi senso definire la funzione di distribuzione di s(x)
ponendo
λs(t) = λ(x | |s(x)| > t) .
E’ immediatamente evidente che la funzione di distribuzione è monotona decrescente
(non in modo stretto) ed è quindi integrabile secondo Riemann. Inoltre, la funzione
di distribuzione di una funzione semplice è costante a tratti. Le discontinuità cadono
nei valori assunti dalla s(x) e quindi sono un numero finito.
Vale:
Teorema 4.39. Supponiamo che la funzione semplice s prenda valori non negativi.
Allora,
∫ +∞
0
λs(t) dt =∫
Ω
s(x) dx .
DIMOSTRAZIONE
Conviene introdurre a0 = 0, A0 = ∅.
La funzione di distribuzione λs è costante a tratti e
ai < t ≤ ai+1 =⇒ λs(t) = λ(Ai+1) + λ(Ai) + · · · + λ(Ar) ,
t > ar =⇒ λs(t) = 0 .
Dunque,
182

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Z +∞
0
λs(t) dt = (a1 − a0)
rXi=1
λ(Ai) + (a2 − a1)
rXi=2
λ(Ai)
+ · · · + (aj+1 − aj)rX
i=j+1
λ(Ai) + . . . + (ar − ar+1)λ(Ar)
=rX
j=1
(aj − aj−1)rX
i=j
λ(Ai) =rX
j=1
aj
rXi=j
λ(Ai) −rX
j=1
aj−1
rXi=j
λ(Ai)
=
rXj=1
aj
rXi=j
λ(Ai) −r−1Xj=0
aj
rXi=j+1
λ(Ai)
= −a0
rXi=1
λ(Ai) +
r−1Xj=1
ajλ(Aj) + arλ(Ar) =
ZΩ
s(x) dx .
4.7.2 L’integrale delle funzioni positive
Sia f(x) una funzione misurabile, non negativa. Sia (sn) una qualsiasi successione
di funzioni semplici crescente ad f . Definiamo∫Ω
f(x) dx = limn
∫Ω
sn(x) dx .
Naturalmente, perché la definizione abbia senso dobbiamo provare che essa è
indipendente dalla particolare successione di funzioni semplici scelta. Premettiamo
un lemma che verrà utile anche in seguito:
Lemma 4.40. Sia (sn) una successione crescente di funzioni semplici non negative
e sia s(x) una funzione semplice. Se
lim sn(x) ≥ s(x) ∀x ∈ Ω
allora
limn
∫Ω
sn(x) dx ≥∫
Ω
s(x) dx .
DIMOSTRAZIONE
Non è restrittivo assumere s(x) ≥ 0. Se λ(Ω) = +∞, scegliamo una successione (B r)
di insiemi tutti di misura finita, crescente e tale che
+∞[r=1
Br = Ω .
183

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Proviamo:
limn
ZBr
sn(x) dx ≥Z
Br
s(x) dx 4.8
per ogni r. Ciò fatto, la diseguaglianza su Ω seguirà da
limn
ZΩ
sn(x) dx ≥ limn
ZBr
sn(x) dx ≥Z
Br
s(x) dx
per ogni r.
Ricapitolando, basta lavorare su un fissato insieme B di misura finita. Proviamo
che su tale insieme vale
limn
ZB
sn(x) dx ≥Z
B
s(x) dx .
Fissiamo ε > 0 e consideriamo gli insiemi
An = x ∈ B | sn(x) ≥ s(x) − ε .
Chiaramente, la successione di insiemi (An) cresce,
+∞[n=1
An = B .
Dunque, dal Lemma 4.14, lim[λ(B − An)] = 0. Inoltre,
sn(x) ≥ (s(x) − ε)χAn(x) .
Dunque, ZB
sn(x) dx ≥Z
B
(s(x) − ε)χAn(x) dx =
ZB
s(x)χAn(x) dx − ελ(An)
=
ZB
s(x) dx −Z
B−An
s(x) dx − λ(B)ε .
Si ricordi che s(x) è una funzione semplice, e quindi è limitata, |s(x)| < C. Dunque,
limn
˛˛Z
B−An
s(x) dx
˛˛ ≤ lim
n[Cλ(B − An)] = 0 .
Quindi, per n abbastanza grande ZB−An
s(x) dx < ε
184

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
e
ZB
sn(x) dx ≥Z
B
s(x) dx − [λ(B) + 1]ε .
La disuguaglianza richiesta segue dall’arbitrarietà di ε.
Possiamo ora provare:
Lemma 4.41. Due successioni (sn) ed (sn), ambedue crescenti e convergenti alla
medesima funzione f non negativa, verificano
limn
∫Ω
sn(x) dx = limn
∫Ω
sn(x) dx .
DIMOSTRAZIONE
Basta provare
limn
ZΩ
sn(x) dx ≥ limk
ZΩ
sk(x) dx .
L’uguaglianza segue invertendo il ruolo di (s n) e di (sn).
Si noti che
limn
sn(x) = f(x) ≥ sk(x)
per ogni k. Dunque, dal Lemma 4.40, si ha che
limn
ZΩ
sn(x) dx ≥Z
Ω
sk(x) dx .
per ogni k. Passando al limite rispetto a k si trova la disuguaglianza voluta.
Osservazione 4.42. Ovviamente, dovremo anche svincolarci dalla condizione che
l’integrale è stato costruito a partire da successioni crescenti. Ciò sarà conseguenza
dei teoremi relativi allo scambio di limiti e integrali, che vedremo.
Dato che le usuali proprietà di monotonia, linearità e additività rispetto al
dominio valgono per gli integrali delle funzioni semplici, queste si trasferiscono
agli integrali delle funzioni positive.
185

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Osservazione 4.43. Per il modo come abbiamo definito l’integrale delle funzioni
misurabili positive, ∫Ω
f(x) dx ≥ 0
e, può essere, +∞. Diremo che f(x) è integrabile se l’integrale è finito.
4.7.3 Funzioni integrabili
Sia ora f una generica funzione misurabile. Associamole le due funzioni
f+(x) = max0, f(x) , f−(x) = max0,−f(x)
così che
f+(x) ≥ 0 , f−(x) ≥ 0
e inoltre
f(x) = f+(x) − f−(x) , |f(x)| = f+(x) + f−(x) .
Diciamo che la funzione f è integrabile se ambedue le funzioni f+ ed f− sono
funzioni (positive) integrabili, e quindi con integrale finito, e in tal caso poniamo∫Ω
f(x) dx =∫
Ω
f+(x) dx −∫
Ω
f−(x) dx .
Osservazione 4.44. Talvolta conviene estendere la definizione di funzione integra-
bile. Se accade che una sola delle due funzioni f+ oppure f− ha integrale +∞,
allora diremo che f(x) ha integrale +∞ oppure −∞. Il termine “integrabile” si
riserva però al caso di funzioni il cui integrale è finito.
E’ immediato dalla definizione di integrale:
Teorema 4.45. Una funzione f(x) misurabile è integrabile se e solo se |f(x)| è
integrabile.
Si noti che niente di simile avviene per l’integrale di Riemann.
E’ ancora vero che valgono le usuali proprietà dell’integrale:
186

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Teorema 4.46. Siano f(x) e g(x) funzioni integrabili. Vale
–∫Ω[αf(x) + βg(x)] dx = α
∫Ω
f(x) dx + β∫Ω
g(x) dx;
– se f(x) ≤ g(x) allora∫Ω
f(x) dx ≤∫Ω
g(x) dx;
– vale∣∣∫
Ω f(x) dx∣∣ ≤ ∫Ω |f(x)| dx;
– se Ω = Ω1 ∪ Ω2 con Ω1 e Ω2 misurabili allora∫Ω
f(x) dx =∫
Ω1
f(x) dx +∫
Ω2
f(x) dx .
4.7.4 Integrale ed insiemi nulli
Chiaramente, una funzione semplice q.o. nulla ha integrale zero. Infatti, sia |f(x)| = 0
q.o. Ogni funzione semplice maggiorata da f ha integrale nullo; e quindi, se (s n) è
una successione crescente di funzioni semplici che converge ad f ,∫Ω
|f(x)| dx = lim∫
Ω
sn(x) dx = 0 .
Più ancora:
Teorema 4.47. Una funzione f(x) ≥ 0 q.o. ha integrale nullo se e solo se è
nulla q.o.
DIMOSTRAZIONE
Già si è provato che se f è q.o. nulla su Ω allora il suo integrale è nullo. Mostriamo il
viceversa. Sia dunque
f(x) ≥ 0 q.o. x ∈ Ω ,
ZΩ
f(x) dx = 0 .
Introduciamo gli insiemi
A = x | f(x) = 0 An = x | f(x) ≥ 1/n .
La successione di insiemi (An) è crescente e A = ∪nAn. Dunque,
λ(A) = lim λ(An).
187

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Ma,
0 ≤ 1
nλ(An) ≤
ZAn
f(x) dx ≤Z
Ω
f(x) dx = 0 .
Dunque, λ(An) = 0 per ogni n, così che anche λ(A) = 0.
Inoltre, sia
An = x | |f(x)| > n .
Teorema 4.48. Se f(x) è integrabile allora
limn
λ(An) = 0 .
DIMOSTRAZIONE
Basta studiare il caso in cui f(x) ≥ 0. In tal caso vale
0 ≤ nλ(An) ≤Z
An
f(x) dx ≤Z
Ω
f(x) dx
e quindi
0 ≤ limn
λ(An) ≤ limn
1
n
ZΩ
f(x) dx = 0 .
Usa chiamare ∩An l’insieme su cui “f è infinita”; e quindi dire che “una funzione
integrabile è finita q.o.”.
4.8. INTEGRALE DI LEBESGUE ED INTEGRALE DI RIEMANN
Ricordiamo che l’integrale di Riemann si definisce per funzioni limitate definite su
insiemi limitati.
Sia l’integrale di Riemann che quello di Lebesgue si ottengono “approssimando”
la funzione da integrare f con “funzioni semplici”; ma, nel caso dell’integrale di
Riemann, le “funzioni semplici” si ottengono “affettando” il dominio, e quindi sono
funzioni costanti a tratti. Nel caso dell’integrale di Lebesgue le funzioni semplici si
ottengono “affettando” il codominio: sono ancora funzioni che prendono un numero
188

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
finito di valori ma gli insiemi su cui esse sono costanti sono generici insiemi misurabili
secondo Lebesgue. Esistono però relazioni tra i due integrali. Infatti, il teorema di
Riemann-Lebesgue, Teorema 4.2, mostra che una funzione integrabile di Riemann è
continua q.o., e quindi misurabile. Essendo anche limitata e definita su un insieme
limitato, essa è anche integrabile secondo Lebesgue, e non è difficile vedere che
i due integrali hanno lo stesso valore. La definizione di integrale improprio è
invece sostanzialmente diversa dalla costruzione di Lebesgue, ed esistono funzioni
che ammettono integrale improprio senza avere integrale di Lebesgue. Tra queste
anche funzioni importanti per le applicazioni, come per esempio le funzioni
f(x) =sinx
x, f(x) = sin x2 .
Si sa che queste funzioni ammettono integrale improprio, senza essere assolutamente
integrabili; e quindi non possono avere integrale di Lebesgue, per il Teorema 4.45.
Ciò nonostante, se l’integrale di Lebesgue di una funzione f esiste, questo ha sempre
una relazione con un opportuno integrale di Riemann. Vale infatti il teorema seguente,
che generalizza il teorema 4.39. Introduciamo la funzione di distribuzione della
funzione misurabile f ,
λf (t) = λ(x ∈ Ω | |f(x)| > t) .
Chiaramente la funzione λf è definita su [0, +∞) e decrescente; e quindi integrabile
nel senso dell’integrale improprio di Riemann, può essere con integrale uguale a +∞.
Vale
Teorema 4.49. Sia f(x) una funzione misurabile su Ω, q.o. non negativa. Allora,∫Ω
f(x) dx =∫ +∞
0
λf (t) dt .
DIMOSTRAZIONE
Limitiamoci a provare il teorema nel caso in cui la funzione f(x) è limitata, 0 ≤ f(t) ≤
M e λ(Ω) < +∞. In questo caso λf (t) = 0 per t > M . Inoltre,
189

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Z M
0
λf (t) dt
si approssima in questo modo: dato ε > 0 si divida [0, M ], dominio di integrazione, in
segmenti [ti, ti+1], 0 ≤ i ≤ n, di lunghezza minore di ε/M . Essendo λf decrescente,
vale
n−1Xi=0
λf (ti)[ti+1 − ti] ≥Z M
0
λf (t) dt ≥n−1Xi=0
λf (ti+1)[ti+1 − ti] . 4.9
Consideriamo la somma a sinistra. Notando che t 0 = 0 si ha
n−1Xi=0
λf (ti)[ti+1 − ti] = λf (t0)(t1 − t0) + λf (t1)(t2 − t1)
+λf (t2)(t3 − t2) + · · · + λf (tn−1)(tn − tn−1)
= t1[λf (t0) − λf (t1)] + t2[λf (t1) − λf (t2)]
+ · · · + tn[λf (tn−2) − λf (tn−1)] + tnλf (tn−1) .
Ora, λf (tn) = λf (M) = 0 così che
λf (ti) − λf (ti+1) = λ (x | ti < f(x) ≤ ti+1) .
Sia
Ai = x | ti < f(x) ≤ ti+1 .
La somma di sinistra in 4.9 è
n−1Xi=0
tiλ(Ai) =
ZΩ
sr(x) dx
con sr(x) funzione semplice minorante f(x). In modo analogo si vede che la somma
di destra è l’integrale di una funzione semplice S r(x) maggiorante f(x). D’altra parte,
ambedue gli integrali
ZΩ
Sr(x) dx ,
ZΩ
sr(x) dx
tendono a
Z M
0
λf (t) dt
e
190

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
ZΩ
sr(x) dx ≤Z
Ω
f(x) dx ≤Z
Ω
Sr(x) dx .
Passando al limite su r si trovaZ M
0
λf (t) dt =
ZΩ
f(x) dx .
4.9. LIMITI DI SUCCESSIONI DI FUNZIONI E INTEGRALE
Abbiamo detto che la ragione per introdurre un integrale più generale di quello di
Riemann è di trovare teoremi migliori per lo scambio del segno di limite e di integrale.
Questi teoremi mostriamo ora.
Teorema 4.50 (di Beppo Levi o della convergenza monotona). Sia (fn) una
successione crescente di funzioni misurabili, che verifica
fn(x) ≥ 0 , lim fn(x) = f(x) q.o. x ∈ Ω .
Allora,
lim∫
Ω
fn(x) dx =∫
Ω
f(x) dx .
Non si esclude che l’integrale di f(x) possa essere +∞.
DIMOSTRAZIONE
Escludendo da Ω i punti nei quali la successione (f n) non converge ad f , si vede che
basta studiare il caso in cui (fn) converge ad f su Ω.
La funzione non negativa f , essendo limite di funzioni misurabili, è misurabile e quindi
il suo integrale esiste, può essere uguale a +∞.
Da
ZΩ
fn(x) dx ≤Z
Ω
f(x) dx
si vede che se il limite degli integrali delle f n è +∞ allora f ha integrale uguale a +∞.
Ciò prova, in questo caso, l’uguaglianza cercata.
191

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Si noti che questo caso si presenta se, in particolare, una delle f n ha integrale uguale
a +∞. Per completare la dimostrazione, bisogna considerare il caso
lim
ZΩ
fn(x) dx = α ∈ R
e mostrare che
ZΩ
f(x) dx = α .
Si è visto, al Teorema 4.35 che le funzioni f ed fn possono approssimarsi da sotto
mediante funzioni semplici. Sia (ξr) una successione di funzioni semplici che converge
crescendo ad f :
ξr−1 ≤ ξr(x) ≤ f(x) , limr
ξr(x) = f(x) ∀x ∈ Ω .
Per ciascuna fj consideriamo una funzione semplice s j tale cheZΩ
|fj(x) − sj(x)| ds <1
j.
Sostituendo sj con maxs1 , . . . , sj, si può supporre che la successione (sj) sia
crescente.
Introduciamo ora la successione (ηj,r), dipendente dal doppio indice (j, r),
ηj,r(x) = minsj(x), ξr(x) .
Per ogni r fissato,
ηj+1,r(x) ≥ ηj,r(x) e limj
ηj,r(x) = ξr(x) .
Dunque, per il Lemma 4.40,
limj
ZΩ
ηj,r(x) dx ≥Z
Ω
ξr(x) dx .
Quindi,
lim
ZΩ
fn(x) dx ≥ limj
ZΩ
ηj,r(x) dx ≥Z
Ω
ξr(x) dx .
Passando al limite su r si trova
lim
ZΩ
fn(x) dx ≥Z
Ω
f(x) dx .
192

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
La disuguaglianza opposta è ovvia e ciò prova che vale il teorema.
Osservazione 4.51. Il teorema di Beppo Levi può applicarsi anche se le funzioni
non hanno segno costante, purché valga
g(x) ≤ fn(x) ≤ fn+1(x) , lim fn(x) = f(x)
con g(x) funzione integrabile. Infatti, basta applicare il teorema alla successione
(fn−g) ed alla funzione f−g. Si può applicare anche se le funzioni fn sono negative
(o almeno maggiorate da una funzione g integrabile) e convergono, decrescendo ad
f . Basta infatti applicare il teorema alla successione (−fn) ed alla funzione −f .
Però, senza condizioni di questo tipo l’asserto del teorema non vale, come mostrano
gli esempi seguenti:
Es. 1. Sia
fn(x) =
n se 0 ≤ x ≤ 1
n
0 altrimenti.
Allora, lim fn(x) = f(x) = 0 q.o., ma gli integrali delle fn valgono tutti 1.
Si noti che la successione (fn) non è monotona.
Es. 2. Sia
fn(x) =
1n se 0 ≤ x ≤ n
0 altrimenti.
Allora, lim fn(x) = f(x) = 0 per ogni x, ma gli integrali delle fn valgono tutti 1.
Ancora, la successione (fn) non è monotona.
Es. 3. Sia
fn(x) =1n
193

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
per ogni x. La successione (fn) è ora una successione di funzioni positive con limite
f(x) = 0; ma la successione è decrescente. Ciascuna delle fn ha integrale +∞
mentre f ha integrale nullo.
Il teorema di Beppo Levi talvolta si usa direttamente; più spesso se ne usano le
conseguenze seguenti:
Teorema 4.52 (Lemma di Fatou). Sia (fn) una successione di funzioni integrabili
su Ω e sia
fn(x) ≥ 0 q.o. x ∈ Ω , f(x) = lim fn(x) q.o. x ∈ Ω .
Allora vale
∫Ω
f(x) dx ≤ lim inf∫
Ω
fn(x) dx .
DIMOSTRAZIONE
La funzione f è non negativa e quindi il suo integrale esiste, eventualmente +∞.
Inoltre,
ZΩ
f(x) dx =
ZΩ
hlim
nfn(x)
idx =
ZΩ
»lim
kinf
m>kfm(x)
–dx .
Si noti che la successione
k → infm>k
fm(x)
è crescente. Si può quindi usare il teorema di Beppo Levi e si vede che l’ultimo integrale
è uguale a
limk→+∞
ZΩ
infm>k
fm(x) dx = lim infk→+∞
ZΩ
infm>k
fm(x) dx ≤ lim infk→+∞
ZΩ
fk(x) dx .
Proviamo infine:
Teorema 4.53 (di Lebesgue o della convergenza dominata). Sia g una
funzione non negativa tale che
194

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
∫Ω
g(x) dx < +∞ .
Siano fn(x), f(x) misurabili su Ω e tali che q.o. x ∈ Ω valga
lim fn(x) = f(x) , |fn(x)| ≤ g(x) .
Allora vale
lim∫
Ω
fn(x) dx =∫
Ω
f(x) dx .
In particolare, la funzione f(x) è integrabile.
DIMOSTRAZIONE
Applichiamo il teorema di Fatou alle funzioni non negative g − f n. Si trovaZΩ
[g(x) − f(x)] dx ≤ lim inf
ZΩ
[g(x) − fn(x)] dx
=
ZΩ
g(x)dx + lim inf
ZΩ
[−fn(x)] dx =
ZΩ
g(x)dx − lim sup
ZΩ
fn(x) dx
ossia
ZΩ
f(x) dx ≥ lim sup
ZΩ
f(x) dx .
Procedendo in modo analogo con le funzioni
g + fn
si trova
ZΩ
f(x) dx ≤ lim inf
ZΩ
fn(x) dx .
L’uguaglianza cercata segue combinando tali disuguaglianze.
In particolare ciò mostra che˛˛Z
Ω
f(x) dx
˛˛ < +∞ e
ZΩ
|f(x)| dx < +∞ .
Di conseguenza:
195

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Corollario 4.54. Sotto le ipotesi del Teorema 4.53 si ha:
lim∫
Ω
|fn(x) − f(x)| dx = 0 .
DIMOSTRAZIONE
Dal Teorema 4.53 si sa che la funzione f(x) ha integrale finito. Dunque,
|fn(x) − f(x)| → 0 q.o. x ∈ Ω , |fn(x) − f(x)| ≤ g(x) + |f(x)| .
Essendo g(x) + |f(x)| integrabile, ancora dal teorema della convergenza dominata si
trova
lim
ZΩ
|fn(x) − f(x)| dx = 0 .
4.10. DISUGUAGLIANZE
Proviamo ora alcune importanti disuguaglianze per gli integrali.
Ricordiamo che una funzione f definita su R è convessa quando
f
(n∑
i=1
αixi
)≤
n∑i=1
αif(xi) 4.10
con n numero naturale qualsiasi e con
αi ≥ 0 ,
n∑i=1
αi = 1 .
Ricordiamo inoltre che ogni funzione convessa su R è continua e quindi misurabile.
Il grafico di una funzione convessa sta sopra a ciascuna delle sue tangenti. Però una
funzione convessa non è necessariamente derivabile. Più in generale vale la proprietà
seguente: se (t0, f(t0)) è un punto del grafico, si trova sempre almeno una retta (non
verticale) per tale punto, che è sotto al grafico. Ossia, esiste un coefficiente angolare
m tale che
f(t) ≥ f(t0) + m(t − t0) ∀t ∈ R . 4.11
196

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
0
1
2
3
4
5
6
7
8
Fig. 4.1.
Proviamo:
Teorema 4.55. Siano h(x), g(x) due funzioni misurabili. Sia inoltre
g(x) ≥ 0 ,
∫Ω
g(x) dx = 1 .
Sia f convessa su R e siano integrabili ambedue le funzioni
h(x)g(x) , f(h(x))g(x) .
Sotto queste ipotesi vale
f
(∫Ω
h(x)g(x) dx
)≤∫
Ω
f(h(x))g(x) dx . 4.12
DIMOSTRAZIONE
Usiamo la disuguaglianza 4.11. Scegliendo
t = h(x)
si ha
f(h(x)) ≥ f(t0) + m(h(x) − t0) .
197

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Moltiplicando i due membri per g(x), che è non negativa, si trova
f(h(x))g(x) ≥ f(t0)g(x) + m(h(x) − t0)g(x) . 4.13
Scegliamo ora
t0 =
ZΩ
h(x)g(x)dx
così che ZΩ
h(x)g(x) − t0g(x) = 0 ,
dato cheRΩ
g(x)dx = 1. Integrando ambedue i membri di 4.13 il coefficiente di m si
annulla e, ricordando che g ha integrale 1, si trova la 4.12.
La 4.12 si chiama disuguaglianza di Jensen.
La disuguaglianza di Jensen talvolta si usa direttamente; più spesso si usa la sua
conseguenza seguente. Per illustrarla, dobbiamo introdurre una ulteriore definizione.
Due numeri p, q in (1, +∞) si dicono esponenti coniugati se
1p
+1q
= 1 ; equivalentemente se q =p
p − 1.
Se p = 1 il suo esponente coniugato è, per definizione, +∞ mentre l’esponente
coniugato di +∞ è, per definizione, 1.
Si noti che p = 2 coincide col suo coniugato.
Si ha:
Teorema 4.56. Sia p > 1 e q il suo esponente coniugato. Siano |f(x)| p e |g(x)|q
integrabili su Ω. Allora f(x)g(x) è integrabile su Ω e vale:
∫Ω
|f(x)g(x)| dx ≤[∫
Ω
|f(x)|p]1/p [∫
Ω
|g(x)|q]1/q
. 4.14
DIMOSTRAZIONE
La disuguaglianza è ovvia se uno degli integrali a destra è nullo perché in tal caso la
corrispondente funzione è nulla q.o., e quindi anche l’integrale a sinistra è nullo. Con-
sideriamo quindi il caso in cui ambedue gli integrali a destra sono positivi. Dividendo i
198

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
due membri per
»ZΩ
|f(x)|p–1/p »Z
Ω
|g(x)|q–1/q
si vede che basta provare
ZΩ
f(x)g(x) dx ≤ 1 ,
ove
f(x) =|f(x)|
[RΩ|f(x)|p dx]1/p
, g(x) =|g(x)|
[RΩ|g(x)|q dx]1/q
.
Queste funzioni sono non negative eZΩ
fp(x) dx = 1 ,
ZΩ
gq(x) dx = 1 .
Essendo p > 1, la funzione t → |t|p è convessa su R e:
p(1 − q) + q = 0 .
Scriviamo allora:»ZΩ
f(x)g(x) dx
–p
=
»ZΩ
f(x)[g(x)]1−q[g(x)]q dx
–p
≤Z
Ω
hf(x)[g(x)]1−q
ip
[g(x)]q dx =
ZΩ
fp(x) [g(x)]p(1−q)+q dx
=
ZΩ
fp(x) dx = 1 .
La diguaglianza 4.14 si chiama disuguaglianza di H’older. Nel caso p = 2 la
disuguaglianza si chiama disuguaglianza di Schwarz. Da essa si deduce:
Teorema 4.57. Sia p ≥ 1 e siano f , g funzioni misurabili. Vale[∫Ω
|f(x) + g(x)|p]1/p
≤[∫
Ω
|f(x)|p]1/p
+[∫
Ω
|g(x)|p]1/p
. 4.15
DIMOSTRAZIONE
Ci sono due casi nei quali la disuguaglianza è ovvia: il primo è il caso in cui uno dei
due integrali a destra è +∞ e l’altro è il caso p = 1. Dunque studiamo il caso in cui
199

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
p > 1 e anche ciascuno dei due integrali a destra è finito. In tal caso, |f(x) + g(x)| p ha
integrale finito, come si vede usando la disuguaglianza
(a + b)p ≤ 2p maxap, bp ≤ 2p(ap + bp) ,
valida per ogni coppia di numeri positivi.
Scriviamo:ZΩ
|f(x) + g(x)|p dx =
ZΩ
|f(x) + g(x)|p−1f(x) dx +
ZΩ
|f(x) + g(x)|p−1g(x) dx .
Essendo (p − 1)q = p si trova eZΩ
`|f(x) + g(x)|p−1´q
dx =
ZΩ
|f(x) + g(x)|p dx < +∞ .
Possiamo quindi usare la disuguaglianza di H ’older, ottenendoZΩ
|f(x) + g(x)|p−1f(x) dx ≤Z
Ω
`|f(x) + g(x)|p−1´qff1/q Z
Ω
|f(x)|p dx
ff1/p
Analogamente,ZΩ
|f(x) + g(x)|p−1g(x)dx ≤Z
Ω
`|f(x) + g(x)|p−1´qff1/q Z
Ω
|g(x)|p dx
ff1/p
.
Sommando le due disuguaglianze (e usando ancora (p − 1)q = p) si trova
ZΩ
|f(x)+g(x)|p dx ≤»Z
Ω
|f(x) + g(x)|p dx
–1/q(»Z
Ω
|f(x)|p dx
–1/p
+
»ZΩ
|g(x)|p dx
–1/p)
.
Essendo 1 − 1/q = 1/p, l’asserto segue dividendo i due membri per»ZΩ
|f(x) + g(x)|p dx
–1/q
.
La disuguaglianza 4.15 si chiama disuguaglianza di Minkowski. Essa ha la seguente
importante conseguenza:
Teorema 4.58. L’insieme delle funzioni a potenza p–ma integrabile, p ≥ 1, è uno
spazio lineare.
Lo spazio lineare delle funzioni a potenza p–ma integrabile su Ω, p ≥ 1, si indica col
simbolo Lp(Ω). Conviene definire subito anche il simbolo L∞(Ω). Introduciamo per
200

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
questo l’estremo superiore essenziale di una funzione f . Esso si indica col simbolo
ess sup f ed è definito da
ess sup f = inf r | λ(x | f(x) > r) = 0 .
Si definisce quindi
L∞(Ω) = f | ess sup |f | < +∞ .
La notazione L∞ è giustificata dal risultato seguente, che non proviamo:
Teorema 4.59. Vale
limp→+∞
[∫Ω
|f(x)|p dx
]1/p
= ess sup |f | .
E’ immediato verificare che L∞(Ω) è uno spazio lineare, e che
ess sup |f + g| ≤ ess sup |f | + ess sup |g| ,
disuguaglianza che in questo caso sostituisce quella di Minkowski. Analogamente, se
f ∈ L1(Ω) e g ∈ L∞(Ω), vale∫Ω
|f(x)g(x)| dx ≤ (ess sup |g|)∫
Ω
|f(x)| dx ,
disuguaglianza che sostituisce quella di H’older.
E’ utile per il seguito sapere che la disuguaglianza di H’older può invertirsi:
Teorema 4.60. Sia g una funzione misurabile su Ω e supponiamo che esista un
numero M che gode della seguente proprietà: per ogni funzione misurabile e limitata
f si ha: ∣∣∣∣∫
Ω
f(x)g(x) dx
∣∣∣∣ ≤ M
[∫Ω
|f(x)|p dx
]1/p
. 4.16
Allora g ∈ Lq(Ω) e, più precisamente,[∫Ω
|g(x)|q dx
]1/q
< M . 4.17
201

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
DIMOSTRAZIONE
Si noti che la 4.16 vale sempre seZΩ
|f(x)|p dx = +∞
e in tal caso non dà informazioni. Dunque consideriamo soltanto le funzione f per cuiZΩ
|f(x)|p dx < +∞ .
Sia R > 0 e sia
ΩR = x ∈ Ω | |x| < R .
Introduciamo le funzioni
gn(x) =
8<: g(x) se |g(x)| < n e se x ∈ ΩR
0 altrimenti .
Scegliamo
fn(x) =h|gn(x)|q/p
isgn gn(x) .
Si noti che
ZΩ
|fn(x)|p dx =
ZΩ
|gn(x)|q dx
e che
fn(x)gn(x) = |gn(x)|1+q/p = |gn(x)|q = |g(x)|q x ∈ ΩR .
Usando 4.16 si trova:ZΩ
fn(x)gn(x) dx =
ZΩ
fn(x)g(x)dx ≤ M
»ZΩ
|fn(x)|p dx
–1/p
= M
»ZΩ
|gn(x)|q dx
–1/p
.
Dunque, ZΩ
|gn(x)|q dx =
ZΩ
fn(x)gn(x) dx ≤ M
»ZΩ
|gn(x)|q dx
–1/p
.
Dividendo si trova
»ZΩ
|gn(x)|q dx
–1/q
< M .
202

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Essendo g(x) = lim gn(x) per ogni x ∈ Ω, dal Lemma di Fatou si trova:»ZΩR
|g(x)|q dx
–1/q
≤ lim infn
»ZΩ
|gn(x)|q dx
–1/q
≤ M .
La 4.17 segue passando al limite per R → +∞.
Osservazione 4.61. L’ipotesi di limitatezza sulle funzioni f è stata solo imposta
perché così il teorema diventa di uso più facile.
Una diversa dimostrazione della disuguaglianza di Jensen
Ha interesse vedere una dimostrazione della disuguaglianza di Jensen, basata diret-
tamente sulla 4.10. Limitiamoci a considerare il caso di funzioni limitate definite su
insiemi di misura finita.
Notiamo che la composizione di una funzione convessa su una funzione semplice è
ancora una funzione semplice. Premettiamo:
Lemma 4.62. Siano s e ξ funzioni semplici su Ω e sia f una funzione convessa su
R. Supponiamo inoltre
ξ(x) ≥ 0 ,
∫Ω
ξ(s) ds = 1 . 4.18
Vale:
f
(∫Ω
s(x)ξ(x) dx
)≤∫
Ω
f(s(x))ξ(x) dx . 4.19
DIMOSTRAZIONE
Rappresentiamo
s(x) =
nXi=1
siχAi(x) , ξ(x) =
nXi=1
ξiχAi(x)
con Ai ∩ Aj = ∅ se i = j (e i medesimi insiemi Ai in ambedue le rappresentazioni,
come sempre può farsi).
Si ha:
ZΩ
s(x)ξ(x)dx =
nXi=1
si [ξiλ(Ai)] .
203

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
I numeri αi = ξiλ(Ai) verificano
αi ≥ 0 ,
nXi=1
αi =
nXi=1
ξiλ(Ai) =
ZΩ
ξ(x) dx = 1 .
Dunque possiamo usare la disuguaglianza 4.10, ottenendo
f
„ZΩ
s(x)ξ(x)dx
«= f
nX
i=1
si [ξiλ(Ai)]
!
≤nX
i=1
ξiλ(Ai)f(si) =
ZΩ
f(s(x))ξ(x)dx .
Osservazione 4.63. Si noti che la condizione 4.18 è quella che permette l’uso
della 4.10. Ha quindi un ruolo cruciale nella dimostrazione del lemma precedente,
e del teorema successivo.
Proviamo ora il teorema, considerando il caso in cui le funzioni non sono semplici.
Ricordiamo che stiamo solo studiando il caso in cui le due funzioni h e g sono
limitate, su un insieme Ω di misura finita.
Si costruiscono successioni crescenti di funzioni semplici, (sn(x)), (ξn(x)),
convergenti uniformemente rispettivamente a h(x) e g(x).
Vorremmo usare il lemma precedente, ma la ξn potrebbe non avere integrale uguale
ad 1. Per ovviare a ciò sostituiamo ξn con ξn,
ξn(x) =ξn(x)∫
Ωξn(x) dx
.
Essendo
lim∫
Ω
ξn(x) dx =∫
Ω
g(x) dx = 1 ,
vale ancora
lim ξn(x) = g(x) ,
e il limite è ancora uniforme. Si può ora applicare la 4.19:
f
(∫Ω
sn(x)ξn(x) dx
)≤∫
Ω
f(sn(x))ξn(x) dx .
La f è continua su R perché è convessa e ([f(sn(x))ξn(x)
]) è una successione di
funzioni limitata. Si ha quindi
204

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
limn
f(sn(x)) = f(h(x)) ,
lim f
(∫Ω
sn(x)ξn(x) dx
)= f
(∫Ω
h(x)g(x) dx
),
lim∫
Ω
f(sn(x))ξn(x) dx =∫
Ω
f(h(x))g(x) dx .
Segue dunque la 4.12.
Osservazione 4.64. La dimostrazione che abbiamo presentato ora è più diretta,
perché usa soltanto l’usuale definizione di funzione convessa. Però l’estensione al
caso delle funzioni illimitate su insiemi illimitati richiederebbe delle considerazioni
alquanto delicate.
4.10.1 Le relazioni tra spazi Lp(Ω)
La disuguaglianza di H’older permette di studiare quali relazioni intercorrano tra spazi
Lp(Ω), sul medesimo insieme Ω, ma con esponenti diversi. E’ immediato costruire
esempi di funzioni in Lp(R) che non sono in Lr(R) per ogni scelta degli esponenti p
ed r. Però:
Teorema 4.65. Se λ(Ω) < +∞ e se p < q allora Lq(Ω) ⊆ Lp(Ω).
DIMOSTRAZIONE
Vogliamo provare che se f ∈ Lq(Ω) allora si ha anche f ∈ Lp(Ω), purché sia p < q. Si
noti che |f |p = (|f |q)p/q e che (q/p) > 1. Il suo esponente coniugato è
q
q − p.
Dunque, dalla disuguaglianza di H ’older,ZΩ
|f(x)|p dx =
ZΩ
|f(x)|p · 1 dx
≤»Z
Ω
( |f(x)|p)q/p dx
–p/q
·»Z
Ω
(1)q/(q−p) dx
–(q−p)/q
< +∞ .
Se invece Ω ha misura infinita, nessuno dei due spazi include l’altro, come facilmente
si vede nel caso Ω = R. Infatti, f(x) = e−|x|/[√|x|] è in L1(R) ma non in L2(R).
205

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Invece, f(x) = 1/(1 + |x|) è in L2(R) ma non in L1(R). Vale però:
Teorema 4.66. Sia 1 ≤ p < r < +∞ e sia f ∈ Lp(Ω) ∩ Lr(Ω). Allora, f
appartiene anche a Lq(Ω) per ogni q intermedio tra p ed r: p < q < r.
DIMOSTRAZIONE
Proviamo che nelle ipotesi del teorema vale la diseguaglianza seguente, da cui
immediatamente segue l’asserto:
ZΩ
|f(x)|q dx ≤»Z
Ω
|f(x)|r dx
– q−pr−p
»ZΩ
|f(x)|p dx
– r−qr−p
. 4.20
Si noti che un punto q del segmento (p, r) si rappresenta come
q = αr + βp , α =q − p
r − p, β =
r − q
r − p.
Inoltre,
α + β = 1 ,1
α> 1 ,
1
β> 1
e quindi possiamo usare la disuguaglianza di H ’older come segue:ZΩ
|f(x)|q dx =
ZΩ
|f(x)|αr|f(x)|βp dx
≤»Z
Ω
(|f(x)|αr)1/α dx
–α »ZΩ
“|f(x)|βp
”1/β
dx
–β
< +∞ .
Questa è la diseguaglianza cercata.
La 4.20 si chiama disuguaglianza di interpolazione.
Mostriamo infine:
Teorema 4.67. Sia f ∈ Lp(Ω) ∩ L∞(Ω). Allora, f ∈ Lr(Ω) per ogni r > p.
DIMOSTRAZIONE
Dividendo per ess sup |f |, e alterando il valore di f su un insieme di misura nulla, si
può supporre |f(x)| ≤ 1 su Ω. In questo caso,
|f(x)|r ≤ |f(x)|p e quindiZ
Ω
|f(x)|r ≤Z
Ω
|f(x)|p < +∞ .
206

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
4.11. I TEOREMI DI FUBINI E TONELLI
Abbiamo definito l’integrale di Lebesgue su un insieme misurabile Ω di R n. Esten-
dendo f(x) = 0 per x /∈ Ω si trova che ci si può sempre ricondurre a lavorare con
funzioni definite su tutto Rn, cosa che ora conviene fare.
Talvolta una funzione è data come “funzione di due variabili”
f(x, y) , x ∈ Rm , y ∈ Rk m + k = n .
Ci si può chiedere sotto quali condizioni l’integrale “doppio” di f(x, y), ossia
l’integrale su Rn, si può scrivere come “integrale iterato”. A questa domanda risponde
il teorema seguente:
Teorema 4.68 (di Fubini). Sia f(x, y) integrabile su Rm+k = Rn. Definiamo
fx(y) = f(x, y) , y ∈ Rk , fy(x) = f(x, y) , x ∈ Rm .
Allora:
– le funzioni fx(y) ed fy(x) sono misurabili su Rk q.o. x ∈ Rm e su Rm
q.o. y ∈ Rk;
– le funzioni fx(y) ed fy(x) sono integrabili su Rk q.o. x ∈ Rm e su Rm
q.o. y ∈ Rk;
– Posto
Φ(x) =∫
Rk
f(x, y) dy , Ψ(y) =∫
Rm
f(x, y) dx ,
le due funzioni Φ e Ψ sono integrabili, rispettivamente su Rm e su Rk;
– vale:
∫Rn
f(x, y) d(x, y) =∫
Rk
Ψ(y) dy =∫
Rm
Φ(x) dx .
Il teorema precedente richiede di saper che la funzione f(x, y) è integrabile su R n.
Talvolta ciò non è noto. L’ipotesi che la funzione f(x, y) sia integrabile su R n può
207

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
venir rimossa a patto di assumere f(x, y) ≥ 0 e che almeno uno dei due integrali
iterati sia finito:
Teorema 4.69 (di Tonelli). Sia f(x, y) misurabile e q.o. non negativa su Rn =
Rm+k. Sia inoltre∫Rm
[∫Rk
f(x, y) dy
]dx < +∞ oppure
∫Rk
[∫Rm
f(x, y) dx
]dy < +∞ .
In tal caso la funzione f(x, y) è integrabile su Rn e vale∫Rn
f(x, y) d(x, y) =∫
Rm
[∫Rk
f(x, y) dy
]dx =
∫Rk
[∫Rm
f(x, y) dx
]dy .
La dimostrazione di questi teoremi è piuttosto complessa, e viene omessa.
Mostriamone però un’applicazione importante.
4.11.1 Convoluzioni
In questa parte si usa una una proprietà importante della misura di Lebesgue, che è
l’invarianza per traslazioni. E’ immediatamente evidente dalla definizione di misura
che per ogni α reale e per ogni insieme misurabile A vale
λ(A) = λ(α + A)
dove
α + A = x | x = α + a , a ∈ A .
Conseguenza di questo è che∫Rn
f(x + α) dx =∫
Rn
f(x) dx .
Siano f e g due funzioni definite su Rn. Si chiama convoluzione delle due funzioni la
funzione
(f ∗ g)(x) =∫
Rn
f(x − y)g(y) dy ,
definita per quei valori di x per i quali l’integrale esiste finito.
208

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Per esempio, sia n = 1 e sia f(x) = 0, g(x) = 0 per x < 0. In questo caso,
(f ∗ g)(x) =∫ x
0
f(x − s)g(s) ds ,
un integrale che si incontra, per esempio, nella soluzione delle equazioni differenziali
ordinarie e che già abbiamo incontrato al paragrafo 3.3..
Vogliamo dare condizioni sotto le quali la convoluzione è definita q.o., ed è una
funzione integrabile.
Vale:
Teorema 4.70. Se f e g sono integrabili su Rn allora la loro convoluzione è
definita q.o.; è una funzione integrabile e vale:∫Rn
|(f ∗ g)(x)| dx ≤[∫
Rn
|f(x)| dx
] [∫Rn
|g(x)| dx
]. 4.21
DIMOSTRAZIONE
Applichiamo i teoremi di Fubini e Tonelli alla funzione
F (x, y) = |f(x − y)g(y)| .
La F (x, y) è non negativa e uno dei suoi integrali iterati è finito. Infatti,ZRn
»ZRn
|f(x − y)g(y)|dx
–dy
=
ZRn
»ZRn
|f(x − y)|dx
–|g(y)|dy =
»ZRn
|f(x)| dx
– »ZRn
|g(y)|dy
–< +∞
(si noti che abbiamo usato l’invarianza per traslazione della misura di Lebesgue).
Per il teorema di Tonelli, esiste ZRn×Rn
|F (x, y)|d(x, y) .
Ricordando che una funzione misurabile e assolutamente integrabile è anche inte-
grabile, si vede che si può applicare il teorema di Fubini. Quindi per q.o. x ∈ R n
esiste
ZRn
F (x, y) dy =
ZRn
f(x − y)g(y)dy = (f ∗ g)(x) .
Inoltre,
209

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
ZRn
|(f ∗ g)(x)|dx =
ZRn
˛˛Z
Rn
f(x − y)g(y)dy
˛˛ dx
≤Z
Rn
»ZRn
|f(x − y)g(y)|dy
–dx =
ZRn
»ZRn
|f(x − y)g(y)|dx
–dy
=
ZRn
»ZRn
|f(x − y)|dx
–|g(y)|dy =
»ZRn
|g(y)|dy
– »ZRn
|f(x)| dx
–,
Vale quindi la 4.21.
La disuguaglianza 4.21 si chiama disuguaglianza di Young.
Osservazione 4.71. Si è provato che la convoluzione è definita q.o. Si osservi che
in generale essa non è ovunque definita, come prova l’esempio seguente. Sia
f(x) =e−|x|√|x|
= g(x) .
Sia f che g sono integrabili, e quindi la loro convoluzione è definita q.o.; ma non è
definita per x = 0 perché
(f ∗ g)(0) =∫ +∞
−∞
e−2|y|
|y| dy = +∞ .
4.12. ESTENSIONI
Si noti il metodo che abbiamo seguito per introdurre l’integrale di Lebesgue: prima
abbiamo definito una misura σ-additiva e quindi la classe delle funzioni misurabili
rispetto a tale misura. Abbiamo visto che ogni funzione misurabile si approssima
mediante funzioni semplici e abbiamo usato ciò per definire l’integrale.
Sia ora Ω un insieme qualsiasi e sia F una σ-algebra di s.insiemi di Ω. Sia µ una
misura σ-additiva definita su F . E’ ancora possibile definire le funzioni da Ω in R che
sono misurabili, come quelle funzioni tali che per ogni t ∈ R si ha:
x ∈ Ω | f(x) > t ∈ F .
E’ facile vedere che ogni funzione misurabile si approssima mediante funzioni
semplici e quindi definirne l’integrale. Tutte le proprietà delle funzioni misurabili e dei
210

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
loro integrali si estendono a questo contesto “astratto”. Si noti però che gli enunciati
che contengono “q.o.” valgono solo se la misura è completa; ossia se ogni s.insieme di
un insieme di misura zero è misurabile (e quindi ha misura zero). Altrimenti bisogna
richiedere che la proprietà corrispondente valga ovunque su Ω.
4.13. LA FUNZIONE INTEGRALE SU R
Vogliamo presentare i risultati che intercorrono tra l’integrazione e la derivazione per
le funzioni di una variabile reale. Si tratta di risultati dalla dimostrazione alquanto
complessa e quindi ci limitiamo a presentarli senza dimostrazione, a parte il seguente.
Supponiamo che f sia integrabile e non negativa. In questo caso
A →∫
A
f(s) ds = φ(A)
è una misura e l’additivitá dell’integrale mostra che si tratta di una misura σ-additiva.
Se f prende anche valori negativi, si ottiene una funzione d’ insieme definita su L;
ossia una funzione che associa un numero ad ogni elemento di L . Questa funzione
ha l’ulteriore proprietà che se (Ai) è una successione di insiemi due a due disgiunti
allora
φ
(+∞⋃i=1
Ai
)=
+∞∑i=1
φ(Ai)
e questa uguaglianza vale anche se f non prende valori soltanto positivi. Anzi,
dato che una funzione è integrabile se e solo se è assolutamente integrabile, la serie
converge assolutamente.
Osserviamo però che per studiare la funzione φ(A) non è restrittivo assumere f(x) ≥
0 q.o. x. Infatti, se ciò non avviene, si studiano separatamente
φ+(A) =∫
A
f+(x) dx , φ−(A) =∫
A
f−(x) dx
con
f+(x) = maxf(x), 0 , f−(x) = max−f(x), 0 .
211

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
Vale:
Teorema 4.72. Sia f(x) da R in sé una funzione q.o. non negativa e integrabile su
(a, b). Per ogni ε > 0 esiste δ > 0 tale che se λ(A) < δ allora φ(A) < ε.
DIMOSTRAZIONE
Limitiamoci a considerare il caso in cui −∞ < a < b < +∞ (l’estensione al caso
dell’intervallo illimitato non è difficile e si lascia al lettore).
Se 0 ≤ f ≤ M l’asserto è ovvio. Altrimenti, definiamo
fN (x) = minf(x), N .
Vale
limN
fN (x) = f(x) , 0 ≤ fN (x) ≤ f(x)
e per ipotesi f(x) è integrabile. Dunque, per il teorema della convergenza dominata,
limN
Z b
a
[f(x) − fN (x)] dx = 0 .
Fissiamo N tale che
0 ≤Z b
a
[f(x) − fN (x)] dx < ε/2
e scriviamoZA
f(x) dx =
ZA
[f(x) − fN (x)] dx +
ZA
fN (x) dx <ε
2+ Nλ(A) .
La disuguaglianza richiesta vale se λ(A) < ε/(2N).
Se f non è positiva il risultato precedente si può applicare sia alle funzioni f+ ed f−
che alla funzione |f |, ottenendo un asserto analogo per la funzione d’insieme φ(A).
Al risultato precedente si può dare un’espressione più “esplicita” (valida anche se f
non ha segno costante): per ogni ε > 0 esiste un δ > 0 tale che per ogni famiglia finita
di intervalli (xi, xi+1), 1 ≤ i ≤ n, tra loro disgiunti e tali che
n∑i=1
(xi+1 − xi) < δ
212

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
valen∑
i=1
|f(xi+1) − f(xi)| < ε .
Una funzione con tale proprietà si dice assolutamente continua. Dunque, ogni funzio-
ne integrale di una funzione che è integrabile secondo Lebesgue è assolutamente
continua. In particolare, se f è integrabile secondo Lebesgue su un intervallo
(a, b), la sua funzione integrale è continua. In questa definizione non si richiede che
la funzione f(x) abbia segno costante.
Viceversa, per funzioni di una variabile reale, vale:
Teorema 4.73. Sia f(x) definita su [a, b] ed assolutamente continua. Allora f ′(x)
esiste q.o. su (a, b) e inoltre
f(x) − f(a) =∫ x
a
f ′(s) ds .
E’ bene sapere che l’insieme delle funzioni q.o. derivabili e continue è assai più ampio
di quello delle funzioni assolutamente continue: per esempio ogni funzione monotona
e continua è q.o. derivabile. Però l’integrale della derivata in generale non restituisce
la funzione. Esistono, infatti, esempi di funzioni f(x) continue su [0, 1], strettamente
crescenti con f(0) = 0, f(1) = 1 e con
f ′(x) = 0 q.o. x ∈ (0, 1) .
In tal caso,
f(1) − f(0) = 1 >
∫ 1
0
f ′(s) ds = 0 .
4.13.1 Estensioni
I risultati visti al paragrafo precedente per le funzioni di una variabile possono
estendersi a funzioni di più variabili e al caso di una generica misura σ-additiva su
un insieme Ω. Sia µ una misura σ-additiva definita su una σ-algebra F di s.insiemi di
213

4. MISURA E INTEGRAZIONE SECONDO LEBESGUE
un’assegnato insieme Ω, come si è detto al paragrafo 4.12.. Sia f (per semplicità non
negativa) una funzione integrabile su Ω e sia
φ(A) =∫
A
f(x)dµ . 4.22
Vale ancora l’analogo del teorema 4.72: per ogni ε > 0 esiste δ > 0 tale che se
µ(A) < δ allora φ(A) < ε. La dimostrazione è uguale a quella del teorema 4.72.
Una funzione φ definita su F a valori non negativi 2 e che ha questa proprietà si dice
assolutamente continua rispetto a µ.
Viceversa, vale il risultato seguente, che ci limitiamo ad enunciare nel caso delle
funzioni d’insieme non negative:
Teorema 4.74 (di Radon-Nikodym). Sia µ una misura σ-additiva finita, de-
finita su una σ-algebra F di s.insiemi di un assegnato insieme Ω. Sia φ una
funzione di insieme non negativa definita su F , assolutamente continua rispetto a
µ. Esiste una funzione f , integrabile rispetto alla misura µ, per la quale vale la
rappresentazione 4.22.
Se g è una seconda funzione integrabile per cui
φ(A) =∫
A
g(x) dx
allora f = g q.o. su Ω.
2Ci limitiamo a considerare funzioni non negative. Sarebbe possibile studiare il caso di generiche
funzioni di insieme, ma questo richiederebbe l’introduzione di una decomposizione analoga a
quella che si trova decomponendo f = f+ + f−, anche senza sapere che la φ è rappresentata
come in 4.22.
214

5. SPAZI DI BANACH
5.1. INTRODUZIONE ALL’ANALISI FUNZIONALE
L’Analisi funzionale è nata quando, tra la fine del XIX secolo e il primo trentennio
del XX, sono stati raccolti in un’unica teoria molti risultati provenienti da varie parti
dell’analisi matematica; in particolare, dalla teoria delle equazioni integrali della
forma
x(s) = µ
∫ b
a
K(s, ξ)x(ξ) dξ + y(s) , s ∈ [a, b] 5.1
ove µ è un parametro e K(s, ξ), y(s) sono funzioni note mentre la funzione x(s) è
incognita.
L’intervallo [a, b] è limitato. Equazioni di questo tipo si chiamano equazioni di
Fredholm di seconda specie e si incontrano per esempio nella soluzione di problemi
di elasticità (problemi che hanno stimolato i primi studi di Fredholm).
La funzione K(s, ξ) si chiama il nucleo dell’equazione di Fredholm.
Si chiama equazione di Fredholm di prima specie l’equazione∫ b
a
K(s, ξ)x(ξ) dξ = y(s) , s ∈ [a, b] 5.2
che pure si incontra nelle applicazioni, ma che ha una teoria sostanzialmente più
delicata, per una ragione che vedremo.
215

5. SPAZI DI BANACH
Come introduzione all’analisi funzionale, vediamo come sia possibile trattare l’equa-
zione di Fredholm (di prima o di seconda specie) quando il nucleo è degenere, ossia
quando
K(s, ξ) =m∑
i=1
ai(s)bi(ξ) , s , ξ ∈ [a, b] . 5.3
Per semplicità supporremo che le funzioni a(s) e b(ξ) siano continue su [a, b].
Nel caso del nucleo degenere la soluzione dell’equazione di Fredholm si riduce ad un
problema di algebra lineare e quindi richiamiamo alcune nozioni che dovremo usare.
5.1.1 L’equazione Ax = φ
Ricordiamo che C indica l’insieme dei numeri complessi e che Cn indica il prodotto
cartesiano di n copie di C. In Cn esistono infinite basi, ciascuna di n elementi. Si
chiama base canonica la base e1 , . . . , en, avendo indicato con ei il vettore le cui
componenti sono tutte nulle, salvo la i–ma, che vale 1.
Se x è un vettore di Cn, scriveremo
x = col[
x1 . . . xn
],
intendendo con ciò che
x =n∑
i=1
xiei .
Affermazioni del tutto analoghe valgono per Cm. Per evitare ambiguità, indicheremo
con ε1 , . . . , εm la sua base canonica. Anzi, per chiarezza indicheremo con lettere
romane i vettori di Cn e con lettere greche quelli di Cm.
Sia A una matrice m × n,
A =
a11 a12 . . . a1n
a21 a22 . . . a2n
...
am1 am2 . . . amn
.
216

5. SPAZI DI BANACH
L’espressione Ax = φ si usa per rappresentare in modo compatto il sistema di m
equazioni in n incognite
a11x1 + a12x2 + · · · + a1nxn = φ1
a21x1 + a22x2 + · · · + a2nxn = φ2
...
am1x1 + am2x2 + · · · + amnxn = φm .
5.4
Vogliamo ricordare le condizioni, note dai corsi precedenti, perché:
1. L’equazione Ax = φ ammetta al più una soluzione;
2. L’equazione Ax = φ ammetta almeno una soluzione;
3. L’equazione Ax = φ ammetta esattamente una soluzione per ogni φ ∈ Cm.
Consideriamo prima di tutto il problema 1), unicità di soluzione. Si noti la
formulazione del problema di unicità: non si richiede che una soluzione debba
esistere per ogni φ; si richiede che se una soluzione esiste allora questa sia unica.
Se per la medesima φ si hanno due soluzioni x ′ ed x′′ tra loro diverse, allora y =
x′ − x′′ verifica
Ay = A(x′ − x′′) = Ax′ − Ax′′ = φ − φ = 0 .
Dunque, se per una φ la soluzione non è unica, allora esiste y = 0 e tale che Ay = 0.
E viceversa:
Teorema 5.1. Se per una φ il problema 5.4 ammette soluzione e questa è unica,
allora
kerA = x | Ax = 0 = 0 .
Viceversa, se kerA = 0 allora il problema 5.4 ammette soluzione unica per ogni φ.
Osservazione 5.2. Si noti che il problema dell’unicità, come è stato enunciato,
sembra dipendere dalla scelta di φ. Ossia, si potrebbe pensare che la soluzione di 5.4
sia unica per alcune φ ma non per altre. Invece, il teorema precedente mostra che si
ha unicità di soluzione per ogni φ se e solo se si ha unicità di soluzione per una φ.
217

5. SPAZI DI BANACH
L’insieme
kerA = x | Ax = 0
si chiama il nucleo di A.
Passiamo ora a studiare il problema dell’esistenza di soluzioni. Chiamiamo
immagine di A l’insieme
im A = Ax | x ∈ Cn .
Dunque, im A è esattamente l’insieme dei vettori φ per i quali l’equazione 5.4 è
risolubile.
Si ricordi che im A è un s.spazio di Cm. Ora un generico s.spazio V di Cm può
caratterizzarsi descrivendone gli elementi; e ciò abbiamo fatto per definire im A; ma
può anche identificarsi per mezzo del suo s.spazio ortogonale V ⊥.
Definizione 5.3. Un vettore ψ ∈ Cm si dice ortogonale a V quando è ortogonale a
tutti gli elementi di V ; e V ⊥ è il s.spazio di tutti i vettori ψ ortogonali a V .
Indicando col simbolo 〈φ, ψ〉 il prodotto interno dei vettori φ e ψ,
V ⊥ = ψ | 〈φ, ψ〉 = 0 ∀φ ∈ V .
Quando V = imA, è facile identificare V ⊥. Introduciamo per questo la matrice A∗,
aggiunta di A. Si sa che A∗ verifica
〈Ax, φ〉 = 〈x, A∗φ〉 . 5.5
Teorema 5.4. si ha
(im A)⊥ = kerA∗ , im A = (kerA∗)⊥ .
DIMOSTRAZIONE
Se φ ⊥ im A allora per ogni x vale
〈Ax,φ〉 = 0 ossia 〈x, A∗φ〉 = 0 ∀x ∈ Cn ;
218

5. SPAZI DI BANACH
e quindi A∗φ = 0. Viceversa, se A∗φ = 0 allora per ogni x ∈ Cn vale
0 = 〈x,A∗φ〉 = 〈Ax,φ〉 ∀x ∈ Cn
e quindi φ ⊥ im A. Ciò prova la prima uguaglianza. La seconda si può provare in
modo analogo, ma può anche dedursi dalla prima, ricordando che`V ⊥´⊥ = V per
ogni s.spazio di Cm.
E quindi:
Teorema 5.5. L’equazione 5.4 è risolubile se e solo se φ ⊥ (kerA∗) .
Questo teorema assume un aspetto particolarmente semplice se vogliamo che
l’equazione 5.4 sia risolubile per ogni φ:
Teorema 5.6. L’equazione 5.4 è risolubile per ogni φ se e solo se kerA∗ = 0.
Si può dunque enunciare:
Teorema 5.7 (alternativa di Fredholm). La matrice A identifica una trasforma-
zione iniettiva se e solo se la matrice A∗ identifica una trasformazione suriettiva; La
matrice A identifica una trasformazione suriettiva se e solo se la matrice A∗ identifica
una trasformazione iniettiva.
L’alternativa di Fredholm si incontra anche in situazioni più generali dello studio di
sistemi di n equazioni in m incognite. Però, nel caso particolare del problema 5.4 si
può essere anche più precisi e notare che se kerA = 0 e inoltre A è suriettiva, allora
deve essere n = m.
Osservazione 5.8. L’alternativa di Fredholm per le matrici è utile perché in pratica
è assai più semplice verificare l’unicità di soluzione piuttosto che l’esistenza di
soluzione.
219

5. SPAZI DI BANACH
5.1.2 L’equazione λx − Ax = y
Sia ora X = Y e quindi A una matrice quadrata, e studiamo l’equazione
λx − Ax = y , ossia (λI − A)x = y 5.6
ove I indica la matrice identità. Naturalmente quest’equazione è un caso particolare
di 5.4 e quindi si tratta di adattare a questo caso particolare i risultati già trovati. In
particolare:
Teorema 5.9. L’equazione 5.6 ammette una e una sola una soluzione per ogni y se e
solo se l’equazione
(λI − A∗)ψ = φ
ammette esattamente una soluzione. Ciò avviene se e solo se
det(λI − A) = 0 . 5.7
Si noti che la condizione 5.7 è specifica del caso n = m e quindi non ha analogo tra i
risultati trovati prima.
L’insieme dei numeri λ per cui vale l’unicità di soluzione si chiama l’insieme
risolvente della matrice A e si indica col simbolo ρ(A); il suo complementare si
chiama lo spettro della matrice e si indica col simbolo σ(A). Gli elementi di σ(A) si
chiamano gli autovalori di A.
Si noti che
det(λI − A)
è un polinomio di grado n ≥ 1; e quindi lo spettro di una matrice non è vuoto.
Gli autovalori sono in generale numeri complessi, anche se la matrice A è reale. Si
ricordi che se la matrice A è reale allora λ ∈ σ(A) se e solo se λ ∈ σ(A).
In generale si ha che se λ ∈ σ(A) allora λ ∈ σ(A∗).
Si lascia per esercizio di enunciare risultati analoghi per l’equazione
x = µAx + y . 5.8
220

5. SPAZI DI BANACH
Notiamo però che quest’equazione è risolubile in modo banale quando µ = 0 perché
in tal caso essa si riduce a x = y.
5.1.3 L’equazione di Fredholm a nucleo degenere
Studiamo ora l’equazione 5.1 nel caso particolare in cui il nucleo ha forma 5.3, ossia
nel caso del nucleo degenere.
Si noti che il parametro µ moltiplica l’integrale, così che l’equazione di Fredholm così
scritta viene ad essere di seconda specie per ogni valore di µ. Avessimo invece scritto
λx(s) =∫ b
a
K(s, ξ)x(ξ) dξ + y(s) , s ∈ [a, b]
per λ = 0 avremmo trovato un’equazione di prima specie.
L’equazione 5.1 si scrive
x(s) = µ
m∑r=1
ar(s)∫ b
a
br(ξ)x(ξ) dξ + y(s) 5.9
ossia
x(s) = µ
m∑r=1
ar(s)xr + y(s) , xr =∫ b
a
br(ξ)x(ξ) dξ .
I numeri xi dipendono dalla funzione incognita x(s) e quindi non sono noti; però,
moltiplicando i due membri dell’uguaglianza per b i(s) e integrando da a a b, si trova
che essi risolvono
xi = µ
m∑r=1
kirxr + yi ,
kir =∫ b
a bi(s)ar(s) ds
yi =∫ b
a bi(s)y(s) ds .5.10
Dunque, i numeri xi risolvono un sistema della forma 5.8. Introduciamo allora la
matrice K i cui elementi sono kir e i vettori x e y, i cui elementi sono rispettivamente
i numeri xi e yi e scriviamo il sistema 5.10 come
(I − µK)x = y . 5.11
Dunque ogni soluzione dell’equazione di Fredholm 5.9 identifica una soluzione x
di 5.11 e si vede anche che vale il viceversa: se x risolve 5.11 allora
x(s) = µm∑
r=1
ar(s)xr + y(s)
221

5. SPAZI DI BANACH
risolve l’equazione 5.9. Mostriamo infatti che questa funzione, sostituita a destra ed a
sinistra di 5.9, verifica l’uguaglianza. A sinistra si trova
µ
m∑r=1
ar(s)xr + y(s)
mentre sostituendo a destra e tenendo conto di 5.10 (e scambiando il nome degli indici)
si trova
µ
m∑r=1
ar(s)∫ b
a
br(ξ)
µ
m∑i=1
ai(ξ)xi + y(ξ)
dξ + y(s)
= µ
m∑r=1
ar(s)
µ
m∑i=1
krixi + yr
+ y(s) = µ
m∑r=1
ar(s)xr + y(s) ,
come si voleva.
Possiamo quindi trasferire all’equazione integrale di Fredholm i risultati che abbiamo
enunciato per i sistemi di equazioni lineari:
Teorema 5.10. L’equazione di Fredholm 5.1 con nucleo degenere ammette al più
una soluzione se e solo se l’equazione
ψ = µK∗ψ + φ 5.12
è risolubile per ogni φ; l’equazione di Fredholm è risolubile per ogni funzione y(x)
se e solo se l’equazione 5.12 ammette unicità di soluzione.
Il teorema precedente dà una specie di “alternativa di Fredholm”, per l’equazione
integrale, ma trascritta mediante le matrici. E’ però facile vedere che l’equazione 5.12
corrisponde all’equazione integrale
ψ(ξ) = µ
∫ b
a
K(ξ, s)ψ(ξ) dξ + φ(ξ) , 5.13
equazione che si chiama aggiunta della 5.1. Possiamo quindi enunciare l’alternativa
di Fredholm per le equazioni integrali di Fredholm a nucleo degenere:
Teorema 5.11. Quando il nucleo è degenere, la 5.1 ammette unicità di soluzione se
la sua aggiunta è risolubile per ogni φ(s); la 5.1 è risolubile per ogni y(s) se la sua
aggiunta ammette unicità di soluzione.
222

5. SPAZI DI BANACH
Ancora, è assai più facile verificare l’unicità piuttosto che l’esistenza di soluzioni, e
ciò spiega l’interesse di questo teorema.
5.1.4 L’equazione di prima specie
Le considerazioni precedenti possono tutte ripetersi nel caso dell’equazione di prima
specie 5.2. In tal caso, invece della 5.10 si trova l’equazione
m∑r=1
kirxr = yi
ossia
Kx = y . 5.14
Per vedere la differenza tra questa e l’equazione 5.11, esaminiamo il caso particolare
in cui
kir =∫ b
a
bi(ξ)ar(ξ) dξ =
0 se i = r
kii = 0 se i = r .
In tal caso la 5.11 e la 5.14 divengono rispettivamente
(1 − µk11)
(1 − µk22). . .
(1 − µkmm)
x1
x2
...
xm
=
y1
y2
...
ym
,
k11
k22
. . .
kmm
x1
x2
...
xm
=
y1
y2
...
ym
.
Ambedue queste equazioni sono, in principio, facilmente risolubili e le soluzioni
sono, rispettivamente,
y1/[1 − µk11]
y2/[1 − µk22]...
ym/[1 − µkmm]
,
y1/k11
y2/k22
...
ym/kmm
.
223

5. SPAZI DI BANACH
In generale, al crescere dell’indice i, i numeri k ii divengono “velocemente” piccoli
e quindi nel caso dell’equazione di prima specie, gli errori commessi nella misura di
y(s), e quindi nel calcolo degli yi, si amplificano velocemente. Ciò non accade per
il caso dell’equazione di seconda specie, salvo nel caso in cui 1/µ è circa uguale ad
uno dei numeri kii; e anche in questo caso la sola componente i–ma può provocare
dei problemi numerici.
Queste considerazioni mostrano che, almeno nel caso del nucleo degenere, la
soluzione delle equazioni integrali di prima specie è assai più delicata della soluzione
di quelle di seconda specie.
5.1.5 Ricapitolazione
Ora poniamoci alcuni problemi, la cui soluzione guiderà la scelta degli argomenti di
analisi funzionale che studieremo. Il primo è questo: tutti i nuclei espressi mediante
polinomi sono degeneri. Ma per esempio
k(t, s) = esξ
non è un nucleo degenere. Quindi possiamo chiedere se sia possibili approssimare
nuclei abbastanza regolari mediante nuclei degeneri. A questo problema risponderà il
teorema di Weierstrass, teorema 5.43.
Per applicare il teorema 5.11 è necessario ricondursi alla situazione matriciale del
teorema 5.10. In tal caso l’unicità di soluzione si ha quando 1/µ non è un’autovalore
della matrice A. Se però il nucleo non è degenere, ciò certamente non può farsi; e
allora ci si chiede se l’alternativa di Fredholm, opportunamente reinterpretata, continui
a valere e, in caso affermativo, come sia possibile verificare l’unicità di soluzione.
Vorremo infine capire se anche nel caso dei nuclei non degeneri l’equazione di prima
specie sia più delicata di quella di seconda, e chiarire la ragione di ciò.
Fatte queste premesse, passiamo ad uno studio sistematico dell’Analisi Funzionale.
224

5. SPAZI DI BANACH
5.2. SPAZI LINEARI NORMATI
Richiamiamo, dai corsi precedenti, le definizioni di spazio lineare e di norma. In
questo corso gli spazi lineari avranno sempre, come campo scalare, il campo R o, più
frequentemente, C. Per indicare genericamente uno di questi due campi useremo il
simbolo F, specificando, se necessario, quando si intende F = R oppure F = C.
Definizione 5.12 (di spazio lineare). Si dice che X è uno spazio lineare su F
quando è un gruppo commutativo (rispetto ad un’operazione usualmente indicata
col segno +) ed inoltre esiste un’operazione (usualmente indicata con notazione
moltiplicativa) che ad ogni coppia (α, x) ∈ F × X associa un elemento di X e che
verifica le seguenti proprietà:
α(x + y) = αx + αy ∀α ∈ F , ∀x , y ∈ X
(α + β)x = αx + βx ∀α , β ∈ F , ∀x ∈ X
1x = x ∀x ∈ X .
Regole di calcolo che discendono dalla precedente definizione sono:
0x = 0 ∀x ∈ X
(−αx) = −(αx) ∀α ∈ F , ∀x ∈ X
α0 = 0 ∀α ∈ F .
Ricordiamo alcuni esempi di spazi lineari.
Esempio 5.13. Gli spazi Rn e Cn sono esempi di spazi lineari rispettivamente
su R e su C. (lo spazio C è anche uno spazio lineare su R). Gli spazi dei
polinomi, delle funzioni continue, delle funzioni integrabili secondo Riemann; lo
spazio delle successioni; o quello delle successioni convergenti; o quello delle
successioni limitate; o quello delle successioni convergenti a zero sono sono spazi
lineari su R oppure su C a seconda che sia R oppure C l’insieme dei valori.
Sia X uno spazio lineare su F e sia G un suo s.insieme finito o meno. Si dice che G è
un insieme di generatori se per ogni x ∈ X esistono un numero naturale n; elementi
225

5. SPAZI DI BANACH
g1 , . . . , gn ∈ G; scalari α1 , . . . , αn ∈ F, tali che
x =n∑
i=1
αigi .
Se in X esiste un insieme G finito di generatori, si dice che X ha dimensione finita;
si dice che ha dimensione infinita altrimenti.
La dimensione di X è il numero degli elementi di uno dei generatori di X che ha il
minimo numero di elementi.
Gli spazi Rn hanno dimensione n; lo spazio Cn ha dimensione n su C e dimensione
2n su R.
Ha dimensione finita lo spazio dei polinomi di grado al più n. Se come campo scalare
si prende il campo cui appartengono i coefficienti, la dimensione è n + 1. Nonostante
questi esempi importanti, in questo corso noi studieremo solamente spazi lineari di
dimensione infinita.
Ricordiamo ora la definizione di norma.
Definizione 5.14. Sia X uno spazio lineare su F. Si chiama norma su X una
funzione, che si indica col simbolo ||x||, da X in R (anche quando il campo scalare è
C), che soddisfa:
||x|| ≥ 0 ∀x ∈ X
||x|| = 0 se e solo se x = 0
||αx|| = |α| · ||x|| ∀α ∈ F , ∀x ∈ X
||x + y|| ≤ ||x|| + ||y|| ∀x , y ∈ X .
L’ultima proprietà della norma si chiama disuguaglianza triangolare.
Quando ci sia possibilità di confusione, si scrive || · ||X per la norma dello spazio X .
Uno spazio lineare dotato di norma si chiama uno spazio lineare normato e da ora in
poi scriveremo semplicemente s.l.n..
Se X è uno s.l.n., la funzione
226

5. SPAZI DI BANACH
d(x, y) = ||x − y||
è una distanza per la quale
d(x + z, y + z) = d(x, y) ;
ossia, è una distanza invariante per traslazioni .
L’introduzione di una norma su X permette di definire:
1. gli intorni B(x0, ε) = x | ||x − x0|| < ε, con ε > 0;
2. gli insiemi aperti di X , e quindi una topologia su X : A ⊆ X è aperto se esso
contiene un intorno di ciascun suo punto;
3. gli insiemi limitati : un insieme si dice limitato quando è contenuto in un
intorno di 0;
4. la convergenza di successioni: si dice che la successione (xn) converge ad x0,
limxn = x0 ,
se per ogni ε > 0 esiste Nε tale che da n > Nε segue
||xn − x0|| < ε ossia xn ∈ B(x0, ε).
In modo del tutto analogo si definiscono limiti e continuità di funzioni che operano tra
s.l.n-ti: per esempio f(·) da X in Y è continua nel punto x0 ∈ X se è ivi definita e se
per ogni ε > 0 esiste δ > 0 tale che
||x − x0||X < δ , x ∈ domf(·) , segue ||f(x) − f(x0)||Y < ε .
Esattamente come nel caso dei valori assoluti e dei moduli dei numeri complessi, si
prova:
Teorema 5.15. Vale:
∣∣∣∣ ||x|| − ||y||∣∣∣∣ ≤ ||x − y|| 5.15
227

5. SPAZI DI BANACH
DIMOSTRAZIONE
Va provato che:
− ||x − y|| ≤ ||x|| − ||y|| ≤ ||x − y|| . 5.16
Usando la disuguaglianza triangolare si vede che
||x|| ≤ ||x − y|| + ||y|| ed anche ||y|| ≤ ||y − x|| + ||x|| ,
ossia la 5.16.
E’ conseguenza della 5.15:
Teorema 5.16. La norma, come trasformazione dallo s.l.n. X a R, è uniformemente
continua.
Inoltre:
Teorema 5.17. Sia f(x) una funzione da uno s.l.n. X ad uno s.l.n. Y . Si equivalgono
le condizioni
limx→x0
f(x) = 0 e limx→x0
||f(x)||Y = 0
Introduciamo ora la seguente definizione:
Definizione 5.18. Diciamo che una successione (xn) di elementi di X è fondamen-
tale quando per ogni ε > 0 esiste un indice Nε tale che, per ogni n, m maggiori di
Nε, vale
||xn − xm|| < ε .
Con la stesa dimostrazione che si conosce per le successioni di numeri reali, si prova
che ogni successione convergente è fondamentale.
Lo s.l.n. X si dice completo se ogni successione fondamentale è convergente.
228

5. SPAZI DI BANACH
Si vede facilmente che tutte le regole di calcolo dei limiti che valgono in R n o in Cn
valgono in qualunque s.l.n. (ma ovviamente il teorema della funzione monotona, che
dipende dalla relazione di ordine, non ha corrispondente). Importanti eccezioni sono
le seguenti: si sa che sia Rn che Cn sono spazi completi. Invece:
Teorema 5.19. Esistono s.l.n-ti non completi.
Questo teorema suggerisce:
Definizione 5.20. Uno spazio lineare normato e completo si chiama spazio di
Banach.
Vedremo in seguito esempi di spazi di Banach. Dovrebbe essere noto, come
conseguenza del teorema dei limiti, che lo spazio lineare C(a, b) è completo. Per
una dimostrazione si veda il paragrafo 5.4.2.
Si sa che esistono successioni (qn) la cui immagine è densa in Rn o in Cn. Invece:
Teorema 5.21. Esistono s.l.n-ti nei quali nessuna successione ha immagine densa.
L’ultimo teorema suggerisce la seguente definizione:
Definizione 5.22. Sia X uno s.l.n. Se esiste una successione (xn) a valori in X la
cui immagine è densa in X , lo spazio X si dice separabile.
Il teorema 5.21 può quindi enunciarsi dicendo che esistono s.l.n-ti non separabili.
Per concludere quest’introduzione, ricordiamo che sul medesimo s.l.n. X possono
introdursi più norme. Per esempio su Cn sono norme tra loro diverse le seguenti. Se
x = col[
x1 . . . xn
]:
||x||p =
[n∑
i=1
|xi|p]1/p
, (se p ≥ 1) ||x||∞ = max|xi| , i = 1 . . . , n .
229

5. SPAZI DI BANACH
(E’ facile provare che || · ||1 e || · ||∞ sono norme. Gli altri casi sono più difficili. Si
noti però che || · ||2 è l’usuale norma euclidea).
Tuttavia, su Cn, la proprietà
limxn = x0 5.17
è indipendente dalla particolare norma che si usa per verificarla.
Invece:
Teorema 5.23. Esistono s.l.n-ti X sui quali si possono definire due diverse norme,
|| · ||1 e || · ||2, tali che la 5.17 valga per una norma, ma non per l’altra.
Questo teorema suggerisce di definire:
Definizione 5.24. Siano || · ||1 e || · ||2 due norme sul medesimo s.l.n. X . Si dice che
le due norme sono equivalenti se la condizione
lim ||xn − x0||1 = 0 per ogni x0
implica la condizione
lim ||xn − x0||2 = 0 per ogni x0,
e viceversa.
E’ importante poter decidere se due norme sono equivalenti. Il teorema seguente dà
un test utile:
Teorema 5.25. Sia X uno s.l.n. e siano || · ||1 e || · ||2 due norme su X . Esse sono
equivalenti se e solo se esistono due numeri m ed M tali che
m > 0 , e inoltre m||x||1 ≤ ||x||2 ≤ M ||x||1 . 5.18
230

5. SPAZI DI BANACH
Osservazione 5.26. Si ricordi che i chiusi nella topologia di uno spazio metrico
sono tutti e soli gli insiemi sequenzialmente chiusi. Dunque, le due norme sono
equivalenti quando subordinano la stessa topologia.
Abbiamo notato che esistono spazi lineari normati e non completi. E’ bene sapere:
Teorema 5.27. Sia X uno s.l.n. Si costruisce uno s.l.n. X con queste proprietà:
– X è completo;
– un s.spazio X0 di X , denso in X , è isometricamente isomorfo ad X .
L’ultima affermazione vuol dire che esiste un isomorfismo J tra X ed X 0 tale che
x ∈ X , x = Jx , x ∈ X0 =⇒ ||x||X = ||X||X .
5.2.1 Dimostrazioni posposte
Passiamo ora alla dimostrazione dei teoremi che abbiamo enunciato.
Dimostrazione del TEOREMA 5.19. Un esempio di spazio lineare normato non
completo si costruisce come segue: i suoi elementi sono le funzioni x(·) continue
su [−1, 1] con l’usuale struttura lineare. La norma è
||x(·)|| =∫ 1
−1
|x(s)| ds .
E’ facile vedere che la successione (xn):
xn(t) =
−1 se −1 ≤ t ≤ − 1n
nt se − 1n ≤ t ≤ 1
n
1 se 1n ≤ t ≤ 1
è fondamentale. Per ogni t, la successione numerica (xn(t)) converge al numero
sgn(t). Essendo la successione (xn) limitata, segue che
lim∫ 1
−1
|xn(s) − sgn(s)| ds = 0 .
231

5. SPAZI DI BANACH
Se fosse anche limxn(·) = φ(·) nello spazio in cui stiamo lavorando, ossia con φ(·)continua avremmo∫ 1
−1
|φ(s) − sgn(s)| ds ≤ lim ||φ − xn|| + lim∫ 1
−1
|xn(s) − sgn(s)| ds = 0 ;
ossia, φ(t) = sgn(t) q.o. t ∈ [−1, 1]. Ciò non può aversi perché φ(·) dovrebbe essere
continua mentre la funzione segno ha un salto.
Dimostrazione del TEOREMA 5.21. Un esempio di s.l.n. non separabile è il
seguente, che si indica col simbolo l∞: i suoi elementi sono le successioni (xn)
limitate e la norma è
||(xn)||∞ = sup |xn| .
Sia S una successione di elementi di l∞, S = (x(n)). Notiamo che per ogni n
il simbolo x(n) indica un elemento di l∞, ossia una successione (x(n)k ) di indice k.
Mostriamo che l’immagine di S non è densa in l∞ costruendo un elemento y = (yk) ∈l∞ che dista almeno 1 da ciascun elemento x(n) della successione S. Costruiamo y
specificandone gli elementi yk. Per scegliere y1, primo elemento della successione y,
si guarda il primo elemento della successione x(1) e si pone:
y1 =
0 se |x(1)
1 | > 1
2 altrimenti .
In questo modo, qualunque siano i successivi elementi di y, si ha
||y − x(1)|| ≥ 1 .
Per scegliere yk si guarda la k-ma successione x(k) e si pone
yk =
0 se |x(k)
k | > 1
2 altrimenti .
Indipendentemente dai valori degli yr con r = k, ||y − x(k)|| ≥ 1. Dunque, la
successione y ∈ l∞ che abbiamo costruita verifica
||y − x(k)|| ≥ 1
per ogni k; e quindi la successione S non è densa in l∞.
232

5. SPAZI DI BANACH
−1.5 −1 −0.5 0 0.5 1 1.5−0.5
0
0.5
1
1.5
Fig. 5.1.
Dimostrazione del TEOREMA 5.23. Si consideri lo spazio lineare che indichiamo
con X , i cui elementi sono funzioni continue su [−1, 1], con le due norme
||x||1 =∫ 1
−1
|x(s)| ds , ||x||∞ = max[−1,1]
|x(t)| .
La norma || · ||∞ corrisponde alla convergenza uniforme.
Sia (xn) una successione in X . Se essa converge ad x0 per || · ||∞, ossia se converge
uniformemente, allora vale anche
lim∫ 1
−1
|xn(t) − x0(t)| dt = 0
e quindi anche lim ||xn − x0||1 = 0. Esitono però successioni convergenti in || · ||1ma non nella norma della convergenza uniforme. Sia xn(·) la funzione il cui grafico è
disegnato in figura 5.1:
xn(t) =
0 t < − 1n
n(t + 1
n
)− 1
n ≤ t ≤ 0
−n(t − 1
n
)0 ≤ t ≤ 1
n
0 t > 1n .
233

5. SPAZI DI BANACH
L’area del triangolo tende a zero, e quindi limxn = 0 in || · ||1; ma la successione
(xn) non è fondamentale in || · ||∞.
Dimostrazione del TEOREMA 5.25. Proviamo la condizione sufficiente. Si sappia
che xn → x0 in || · ||2, ossia si sappia che
||xn − x0||2 → 0 .
Dalla prima disuguaglianza in 5.18 segue
m||xn − x0||1 ≤ ||xn − x0||2 → 0 ,
ossia xn → x0 in || · ||1 perché m > 0.
Se si sa che xn → x0 in || · ||1, segue la convergenza in || · ||2 dalla seconda delle 5.18.
Proviamo il viceversa. Si sappia che ogni successione convergente in || · || 2 converge,
ed ha il medesimo limite, anche in || · ||1; ma supponiamo per assurdo che la prima
disuguaglianza in 5.18 non valga per nessuna scelta di m > 0. In tal caso, per ogni n
esiste xn tale che
||xn||2 = 1 e ||xn||1 > n .
Definiamo yn = xn/n. E’ ovvio che (yn) tenda a zero in ||·||2 mentre invece ||yn||1 ≥1 per ogni n; e quindi (yn) non converge a zero rispetto a || · ||1. Questo non si dà, per
ipotesi, e quindi esiste m > 0 per cui vale la prima diseguaglianza in 5.18.
Analogamente si vede che se la convergenza in || · ||1 implica la convergenza in || · ||2allora vale la seconda disuguaglianza in 5.18 per un certo M .
Dimostrazione del TEOREMA 5.27. La costruzione di X è del tutto simile alla
costruzione di Cantor dei numeri reali, e viene solamente accennata. Si considera
l’insieme delle successioni fondamentali in X e in questo insieme si stabilisce la
relazione di equivalenza
(xn) ∼ (yn) se lim(xn − yn) = 0 .
Si vede facilmente che questa è una relazione di equivalenza. Indichiamo con [(x n)]
la classe di equivalenza cui (xn) appartiene. Si vede facilmente che l’insieme delle
234

5. SPAZI DI BANACH
classi di equivalenza diviene uno spazio lineare se dotato delle operazioni
[(xn)] + [(yn)] = [(xn + yn)] , α[(xn)] = [(αxn)] .
In questo spazio, che indichiamo con X , si introduce la norma
|| [(xn)] || = lim ||xn|| .
Questa definizione ha senso perché se (xn) è fondamentale allora (||xn||) è una
successione fondamentale di numeri, come si vede facilmente dal Teorema 5.15. Si
vede inoltre che la norma così definita dipende dalla classe di equivalenza e non dal
rappresentante, ed ha effettivamente le proprietà di una norma su X .
Lo spazio X0 è quelo delle classi di equivalenza che hanno un rappresentante costante.
E’ immediato verificare che X0 ed X sono isometrici.
Notiamo ora che X0 è denso in X perché ogni elemento [(xn)] di X si approssima
mediante la successione ( [(yn)]r ) così costruita: yn = xn se n < r; altrimenti
yn = xr.
5.3. SPAZI PRODOTTO
Ricordiamo che il prodotto cartesiano X × Y di due insiemi X ed Y è l’insieme
delle coppie ordinate (x, y), il cui primo elemento è in X ed il secondo in Y .
Se X ed Y sono spazi lineari, si può rendere X × Y uno spazio lineare definendo
(x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) , α(x, y) = (αx, αy) .
Se inoltre X ed Y sono dotati di norma, rispettivamente || · ||X e || · ||Y , si possono
definire norme su X × Y . Per esempio
||(x, y)||p = [||x||pX + ||y||pY ]1/p ∀p ≥ 1 , ||(x, y)||∞ = max||x||X+||y||Y .
E’ un fatto che non proviamo, il seguente: le norme precedenti su X × Y sono
equivalenti.
Come casi particolari, si possono considerare i casi
235

5. SPAZI DI BANACH
Y = X oppure X = F
perché, ricordiamo, il valore assoluto su R o il modulo su C, sono norme. Tenendo
presente questi due casi particolari, possiamo provare:
Teorema 5.28. Le due trasformazioni
(x, y) → x + y da X × X → X
(α, x) → αx da F × X → X
sono continue.
DIMOSTRAZIONE
Per provare la prima affermazione, si fissa (x0, y0) e si nota che, lavorando con || · ||1
su X × Y , la disuguaglianza triangolare implica
||(x + y) − (x0 + y0)||X = ||(x − x0) + (y − y0)||X ≤ ||x − x0||X + ||y − y0||X
= ||(x − x0, y − y0)||1 = ||(x, y) − (x0, y0)||1 . 5.19
Segue da qui la continuità della trasformazione (x, y) → x + y.
Per provare la continuità del prodotto, fissiamo (α 0, x0) con α0 = 0 e valutiamo:
||αx − α0x0||X = ||(α − α0)x + α0(x − x0)||X
≤ |α − α0| · ||x||X + |α0| · ||x − x0||X .
Si ha quindi
||αx − α0x0||X < ε
se si sceglie
||x − x0||X ≤ ε/2α0
(e quindi anche ||x||X ≤ ||x0||X + ε/2α0) ed anche
|α − α0| <ε
2[||x0||X + ε/2α0].
In particolare quindi se si sceglie la coppia (α, x) in un intorno di (α 0, x0) la cui esplicita
determinazione si lascia al lettore.
Il caso α0 = 0 si lascia per esercizio.
236

5. SPAZI DI BANACH
Osservazione 5.29. Si noti la stretta somiglianza della dimostrazione del teorema
precedente con le usuali dimostrazioni sui limiti della somma e del prodotto di funzioni
di una variabile; e si noti, da 5.19, che la somma è anche uniformemente continua;
una proprietà che invece non vale per il prodotto.
Il teorema precedente implica che in particolare sono continue le trasformazioni
x −→ x0 + x , x −→ α0x
(con x0 ed α0 fissati) dette rispettivamente traslazioni ed omotetie .
5.4. GLI ESEMPI PRINCIPALI DI SPAZI DI BANACH
Mostriamo ora gli esempi di spazi lineari normati che sono più importanti per le
applicazioni. Essi sono tutti spazi completi, ossia spazi di Banach. La dimostrazione
della completezza viene vista successivamente.
Sottolineiamo da subito che gli spazi che si incontrano nelle applicazioni hanno un
simbolo standard, che indica sia lo spazio vettoriale che la norma su esso.
5.4.1 Gli esempi di spazi lineari normati
Introduciamo ora gli esempi più importanti di s.l.n. con i simboli comunemente usati
per indicarli.
– Il simbolo C([a, b]) (più semplicemente C(a, b)).
Questo simbolo indica lo s.l.n. i cui elementi sono le funzioni continue sull’intervallo
[a, b] chiuso e limitato. La struttura lineare è quella usuale e la norma è quella della
convergenza uniforme:
||x|| = max[a,b]
|x(t)| .
237

5. SPAZI DI BANACH
In generale, se K è un compatto di Fn, con C(K) si intende lo spazio delle funzioni
continue su K , con norma maxK |x(t)|.
I valori assunti dalla funzione sono numeri o vettori; talvolta sono matrici.
Osservazione 5.30. Sottolineiamo nuovamente che che ciascuno dei simboli se-
guenti indica uno spazio lineare con la norma che è ad esso associata nella definizione
corrispondente. Quindi, per esempio, non useremo il simbolo C(a, b) per indicare lo
spazio delle funzioni continue con una norma integrale, per esempio quella introdotta
nella dimostrazione del Teorema 5.23. Per questo, in quella dimostrazione abbiamo
indicato genericamente con X tale s.l.n..
– I simboli lp, 1 ≤ p ≤ +∞.
Questi simboli indicano spazi di successioni. Gli elementi sono le successioni (xn)
tali che:∑
|xn|p < +∞ se 1 ≤ p < +∞, ||(xn)||p =[∑
|xn|p]1/p
sup |xn| < +∞ se p = +∞, ||(xn)||∞ = sup |xn| .
E’ immediato verificare che gli spazi di successioni appena descritti sono s.l.n-
ti rispetto alle usuali operazioni di somma elemento per elemento e di prodotto
α(xn) = (αxn). La verifica è diretta se p = 1 oppure p = +∞ mentre fa uso
della disuguaglianza di Minkovski per le serie se 1 < p < +∞.
– il simbolo c0.
Si usa per per indicare lo s.l.n. delle successioni (xn) tali che limxn = 0. La norma
in c0 è
||(xn)|| = sup |xn| .
Dunque c0 è un s.spazio di l∞.
– I simboli Lp(a, b) ed Lp(a, b), 1 ≤ p ≤ +∞.
Il simbolo Lp(a, b) si usa per indicare gli s.l.n-ti i cui elementi sono le funzioni f(·)tali che, rispettivamente,
238

5. SPAZI DI BANACH
∫ b
a
|f(x)|p dx , ess sup |f(t)| < +∞
(si ricordi il paragrafo 4.10.). Però le funzioni
f(·) →[∫ b
a
|f(x)|p dx
]1/p
, ess sup |f(t)|
non sono norme su questi spazi: una funzione nulla in tutti i punti salvo uno ha nulli sia
l’integrale che l’estremo superiore essenziale. Si rimedia a questo problema definendo
una relazione di equivalenza, f ∼ g, con
f ∼ g ⇐⇒ f(t) = g(t) q.o. t ∈ (a, b).
E’ chiaro che due funzioni equivalenti hanno i medesimi integrali, finiti o meno, ed il
medesimo estremo superiore essenziale. Si definisce una struttura lineare sull’insieme
delle classi di equivalenza ponendo
[f ] + [g] = [f + g] , α[f ] = [αf ]
(è facile vedere che questa definizione dipende solo dalle classi di equivalenza e non
dai rappresentanti scelti per definire le operazioni). Quindi, per 1 ≤ p ≤ +∞, si
definiscono i simboli Lp(a, b) come gli spazi lineari delle classi di equivalenza di
elementi di Lp(a, b) (stesso esponente p), dotati delle norme
|| [f ] ||p =
[∫ b
a
|f(x)|p dx
]1/p
1 ≤ p < +∞ , || [f ] ||∞ = ess sup |f(t)| .
Si vede facilmente che queste funzioni dipendono solo dalla classe di equivalenza e
non dai rappresentanti usati per calcolarle.
Osserviamo nuovamente che gli spazi sopra introdotti sono s.l.n-ti grazie alla disu-
guaglianza di Minkowski per gli integrali (si veda ancora il paragrafo 4.10.); e che per
p = 1 è equivalente integrare x(·) o il suo valore assoluto.
Definizioni analoghe si danno per funzioni di più variabili. Se queste sono definite su
un insieme K il simbolo che si usa è Lp(K).
Osservazione 5.31. Mentre nella definizione di C(K) l’insieme K deve essere
compatto, tale condizione non è richiesta nella definizione di L p(K).
239

5. SPAZI DI BANACH
Bisogna sapere:
Teorema 5.32. Esistono successioni (xn(·)) di funzioni misurabili e limitate su un
intervallo [a, b] e tali che: 1) la successione di numeri (xn(t)) non converge per
nessun valore di t; ma 2) esiste una funzione integrabile x0 tale che
limn
∫ b
a
|xn(t) − x0(t)| dt = 0 .
DIMOSTRAZIONE
Mostriamo un esempio di successione di funzioni con le proprietà del teorema, e con
x0(t) ≡ 0. Sia [a, b] = [0, 1].
Costruiamo la successione in due passi; e quindi le funzioni verranno a dipendere da
due indici n ed r. Ovviamente sarà possibile riscrivere la successione in modo da farla
dipendere da un solo indice.
Al passo n dividiamo l’intervallo [0, 1] in n intervalli uguali, I n0 , In
1 ,. . . , In−1n . definiamo
quindi le funzioni xn,r, 0 ≤ r ≤ (n − 1) come segue:
xn,r(t) = (−1)n
8<: (−1)r se t ∈ In
r
0 altrimenti.
L’integrale di |xn,r| vale 1/n, e quindi vale la proprietà 2) con x 0 = 0; e si vede im-
mediatamente che in ogni punto t infinite funzioni prendono il valore +1, infinite altre
prendono il valore −1; e quindi vale anche la proprietà 1).
Osservazione 5.33. Nonostante il teorema 5.32, nel seguito sempre confonderemo
le funzioni con le loro classi di equivalenza, e quindi scriveremo f per indicare la
classe di equivalenza [f ] di cui f è un rappresentante.
– il simbolo W 1,p(Ω) (spazi di Sobolev).
Sia Ω ⊆ Rn un aperto (limitato o meno). Si usa il simbolo W 1,p(Ω) per indicare lo
spazio delle (classi di equivalenza di) funzioni u(·) ∈ Lp(Ω) tali che esistono funzioni
(ossia, classi di equivalenza) g1, g2,. . . , gn in Lp(Ω), tali che∫Ω
u(x)∇φ(x) dx =∫
Ω
[g1(x) . . . gn(x)
]φ(x) dx
240

5. SPAZI DI BANACH
per ogni funzione φ di classe C∞ a supporto compatto in Ω.
La funzione gi si chiama la i-ma derivata parziale debole di u.
Lo spazio W 1,p(Ω) si dota della norma
||u|| =
∫
Ω
|u(x)|p dx +n∑
j=1
∫Ω
|gj(x)|p dx
1/p
oppure della norma ad essa equivalente
||u||Lp(Ω) +n∑
j=1
||gj ||Lp(Ω) .
Se n = 1 allora esiste una sola derivata parziale debole e vale il seguente teorema, che
non proviamo:
Teorema 5.34. Se n = 1 ed Ω = (a, b), ogni funzione u ∈ W 1,p(a, b) è
assolutamente continua; e la sua derivata debole coincide con la derivata usuale,
calcolata q.o.
Se n = 1 una norma equivalente alle precedenti ed un po’ più comoda da usare è[|u(a)|p +
∫ b
a
|u′(x)|p dx
]1/p
.
Osservazione 5.35. Se n > 1 l’esistenza di tutte le derivate deboli non implica la
continuità della funzione.
Quando p = 2 si usa anche il simbolo H 1(Ω), invece di W 1,2(Ω). Questo simbolo
non va confuso con quello che si usa per denotare gli spazi di Hardy, che ora
definiamo.
– I simboli Hp(D) (spazi di Hardy)
Col simbolo D indichiamo il disco D = z | |z| < 1 del piano complesso. Col
simbolo Hp(D), 1 ≤ p < +∞, si indica lo spazio lineare i cui elementi sono le
funzioni olomorfe φ(z) tali che
supr<1
∫ 2π
0
|φ(reit)|p dt con ||φ|| = supr<1
[∫ 2π
0
|φ(reit)|p dt
]1/p
.
241

5. SPAZI DI BANACH
Col simbolo H∞(D) si indica lo spazio delle funzioni olomorfe limitate su D e norma
||φ|| = supD |φ(z)|.
Definizioni analoghe si danno sostituendo a D il semipiano Π+,
Π+ = z | e z > 0 .
In questo caso l’integrazione sulla circonferenza si sostituisce con l’integrazione sulle
rette parallele all’asse immaginario (e il fattore (1/2π) che compare nella definizione
della norma si sostituisce col fattore 1/π):
supx>0
[1π
∫ +∞
−∞|φ(x + iy)|p dy
]1/p
.
Invece, la norma di H∞(Π+) è
||φ||H∞(Π+) = supx>0
|φ(x + iy)| .
5.4.2 Le dimostrazioni della completezza
Ricordiamo che si chiama Spazio di Banach uno s.l.n. che è anche completo e
che esistono s.l.n-ti che non sono completi, si veda il Teorema 5.19. Inoltre, al
paragrafo 5.4.1 abbiamo presentato numerosi esempi di s.l.n-ti.
Vale:
Teorema 5.36. Tutti gli s.l.n-ti presentati al paragrafo 5.4.1 sono completi.
Per provare questo teorema dovremo esaminare separatamente i vari spazi del
par. 5.4.1, fissare l’attenzione su una generica successione (xn) fondamentale e
associarle in qualche modo un elemento x0 dello spazio, che intuiamo essere il limite
della successione. Dobbiamo quindi provare che effettivamente x 0 = lim xn; ossia
dobbiamo provare:
a) la funzione x0 appartiene a X ;
b) la funzione x0 è limite di (xn) nella norma di X .
Questo richiederà dimostrazioni diverse a seconda dello spazio che consideriamo.
242

5. SPAZI DI BANACH
Prima di studiare le singole dimostrazioni, ricordiamo:
Lemma 5.37. Sia X uno s.l.n. e sia (xn) una successione fondamentale in X . La
successione (xn) è limitata, ossia esiste M tale che
||xn|| < M ∀n .
Completezza degli spazi l∞, c0, L∞(Ω) e C(K)
Si ricordi che l’insieme K del simbolo C(K) è un compatto di Fn mentre nessuna
condizione si impone all’insieme Ω che compare nel simbolo L∞(Ω); e notiamo che
sia l∞ che c0 sono spazi di funzioni sull’insieme Ω = N.
Le dimostrazioni della completezza di questi spazi sono tra loro simili, basate sul
Teorema del doppio limite, provato in appendice.
Indichiamo con X uno degli spazi che stiamo considerando e sia (xn) una successione
fondamentale. Gli spazi che stiamo considerando sono accomunati da questo: sono
spazi di funzioni su un certo insieme (indicheremo con t i suoi elementi) e la norma è
definita in modo tale che se (xn) è fondamentale allora ciascuna delle funzioni (xn(t))
è una successione fondamentale di numeri; e quindi converge. Questa affermazione si
interpreta se X = L∞(Ω) in questo modo: gli elementi della successione sono classi
di equivalenza [xn] di funzioni. Si fissa un rappresentante, che ancora indichiamo xn,
in ciascuna classe. Il limite della successione di numeri (xn(t)) esiste q.o. su Ω.
Dunque, per ogni valore di t (o q.o. su Ω se X = L∞(Ω)) si può definire
y(t) = limxn(t) :
una funzione che si spera appartenga allo spazio che stiamo considerando e che sia
limite di (xn). Proviamo:
a) la funzione y appartiene ad X .
Questo è facile se X non è né C(K) né c0. Infatti in tal caso basta notare che y
è una funzione limitata come limite puntuale di una successione (xn) che, essendo
fondamentale, è limitata: |xn(t)| < M per ogni t e per ogni n. Inoltre, se X =
L∞(Ω), la funzione y può costruirsi a partire da un qualsiasi rappresentante delle
classi di funzioni [xn], e ne è limite puntuale q.o.; e dunque è misurabile.
243

5. SPAZI DI BANACH
Se X = C(K) allora la continuità di y seguirà dalla convergenza uniforme
della successione di funzioni continue (xn), che proveremo al punto b), grazie al
Corollario 5.40.
Sia X = c0. In questo caso ciascuna delle successioni xn = xn(k) tende a zero
per k → +∞, e, come proveremo al punto b), la successione stessa converge
uniformemente ad y = (y(k)). Il Teorema del doppio limite, teorema 5.39, mostra
che limk y(k) = 0, ossia che y ∈ c0.
Proviamo ora
b) la funzione y è limite della successione (xn).
La funzione y è stata costruita come limite puntuale di xn(t). Mostriamo che in
realtà il limite è nel senso della norma. Per questo fissiamo ε > 0 ed un numero Nε
tale che se n, m sono maggiori di Nε allora valga
||xn − xm|| < ε .
Valutiamo ora |y(t) − xn(t)| per n > Nε come segue:
|y(t)−xn(t)| ≤ |y(t)−xn+r(t)|+ |xn+r(t)−xn(t)| ≤ |y(t)−xn+r(t)|+ ε . 5.20
Questa disuguaglianza vale per ogni t e per ogni r > 0. Esiste r (dipendente da t) tale
che |y(t) − xn+r(t)| < ε. Il numero r esiste perché y(t) (per il valore fissato di t) è
limite della successione di numeri (xn+r(t)) (l’argomento precedente vale q.o. su Ω
se X = L∞(Ω)).
Dunque,
|y(t) − xn(t)| ≤ infr|y(t) − xn+r(t)| + ε < 2ε .
Completezza dello spazio H∞(D)
Se (xn) è una successione fondamentale in H∞(D), essa è anche una successione
fondamentale in L∞(D) e quindi converge in L∞(D) ad una funzione x0, che è
limitata. Per provare la completezza di H∞(D) basta mostrare che x0 è olomorfa.
Ciò discende dal Teorema di Weierstrass, Teorema 1.62.
Ciò prova che x0 ∈ H∞, x0 = lim xn, come si voleva.
244

5. SPAZI DI BANACH
Non proveremo la completezza degli spazi H p(D), proprietà che vale per ogni
p ∈ [1, +∞].
Completezza degli spazi lp con 1 ≤ p < +∞
Indichiamo col simbolo (xn) = (xn(k)) una successione di elementi di lp. Sia essa
fondamentale. Da
|xn(k) − xm(k)| =
[+∞∑r=0
|xn(r) − xm(r)|p]1/p
segue che per ogni k la successione numerica (xn(k)) è fondamentale e quindi
convergente. Ciò induce a definire la successione x0 con
x0(k) = limn
xn(k) .
Proviamo ora
a) la successione x0 appartiene ad lp.
Notiamo per questo che la successione (xn) di lp, essendo fondamentale, è limitata:
esiste M indipendente da n e tale che[+∞∑k=0
|xn(k)|p]1/p
≤ M .
Segue che per ogni ν vale[ν∑
k=0
|x0(k)|p]1/p
= limn
[
ν∑k=0
|xn(k)|p]1/p
≤ M .
Passando al limite rispetto a ν, si vede che x0 ∈ lp.
b) vale x0 = lim xn in lp.
Si fissi ε > 0 e sia N = N(ε) tale che se n, m superano N allora vale
||xn − xm|| < ε .
Per n, m maggiori di Nε e per ogni ν vale
245

5. SPAZI DI BANACH
[ν∑
r=0
|xn(r) − xm(r)|p]1/p
≤[
+∞∑r=0
|xn(r) − xm(r)|p]1/p
< ε .
Tenendo fermi ν ed n, si passi al limite per m → +∞. Si trova:[ν∑
r=0
|xn(r) − x0(r)|p]1/p
≤ ε
e questa disuguaglianza vale per ogni ν. Prendendo l’estremo superiore rispetto a ν si
vede che, quando n > N(ε), vale
||xn − x0||lp ≤ ε .
Questo volevamo provare.
Completezza degli spazi Lp(Ω), p < +∞
In questa parte conviene distinguere tra gli elementi [x] di Lp(Ω), ossia le classi di
equivalenza, e i loro rappresentanti.
Sia ([xn]) una successione fondamentale di Lp(Ω). Il primo passo per mostrarne la
convergenza è di costruire una funzione x0, la cui classe di equivalenza è candidata ad
essere limite di ([xn]). Gli esempi precedenti suggeriscono di costruire x0 calcolando
il limite puntuale dei valori di opportuni rappresentanti delle classi [xn]. Questo
metodo però non può applicarsi nel caso di Lp(Ω) perché si sa che una successione
di funzioni che converge in media può non convergere in nessun punto, si veda il
Teorema 5.32. Usiamo quindi una strategia diversa.
Ricordiamo una proprietà generale delle successioni fondamentali: una successione
fondamentale che ha una sottosuccessione convergente è essa stessa convergente.
Consideriamo una successione ([xn]) di elementi di Lp(Ω) e per ogni classe fissiamo
un rappresentante che indichiamo xn. In questo modo si trova una successione (xn)
di funzioni definite q.o. su Ω, e tali che per ogni ε > 0 esiste N = N(ε) con questa
proprietà: se n, è maggiore di Nε allora per ogni m vale[∫Ω
|xn(s) − xn+m(s)| ds
]1/p
< ε .
Facciamo vedere che una successione di funzioni (xn) con tale proprietà ammette una
sottosuccessione convergente q.o.
La sottosuccessione si costruisce con la regola seguente:
246

5. SPAZI DI BANACH
– si fissa ε = 1 ed il numero N(1). Si sceglie n1 = N(1) + 1;
– si fissa ε = 1/2 e si sceglie n2 = N(1/2) + 1;
– in generale, con ε = 1/2k, si sceglie nk = N(1/2k) + 1.
Si considera quindi la sottosuccessione (yk) = (xN(k)+1).
La successione (yk) gode della seguente proprietà:
||yr − yr+1||Lp(Ω) ≤12r
.
Proviamo che la successione di funzioni (yk) converge q.o. E’ strumentale a ciò
introdurre la serie telescopica
∞∑k=1
zk , zk = yk+1 − yk .
Essendo
m∑k=1
zk = ym+1 − y1 ,
per provare la convergenza della successione, basta provare quella della serie.
La costruzione della successione (yk) implica la convergenza assoluta della serie:
∞∑k=1
[∫Ω
|zk(s)|p ds
]1/p
≤∞∑
k=1
12k
= 1 . 5.21
Consideriamo la successione di funzioni
gn(s) =n∑
k=1
|zk(s)| .
Questa successione è monotona crescente e quindi esiste
g(s) = lim gn(s) =+∞∑k=1
|zk(s)|
e inoltre, dalla disuguaglianza di Minkowski,[∫Ω
|gn(s)|p dx
]1/p
≤n∑
k=1
[∫Ω
|zk(s)|p dx
]1/p
<+∞∑k=1
12k
= 1 .
Dunque, dal teorema della convergenza monotona, |g(s)|p è integrabile su Ω.
Questo implica che la funzione g(s) è finita q.o. su Ω (si veda il paragrafo 4.7.4).
247

5. SPAZI DI BANACH
Dunque, per q.o. x ∈ Ω, la serie numerica
+∞∑k=1
|zk(s)|
converge; e dunque anche la serie numerica
+∞∑k=1
zk(s)
converge q.o. su Ω. Ciò mostra che la successione (yk(s)) converge q.o. su Ω e
permette di definire una funzione
x0(s) = lim yk(s) =+∞∑k=1
zk(s) + y1(s) .
La 5.21 mostra che x0 ∈ Lp(Ω). Inoltre,
[∫Ω
∣∣∣∣∣x0(s) −n∑
k=1
zk(s) − y1(s)
∣∣∣∣∣p
ds
]1/p
≤+∞∑
k=n+1
[∫Ω
|zk(s)|p ds
]1/p
≤+∞∑
k=n+1
12k
→ 0 .
Ciò prova che la successione di classi di equivalenza ([yk]) converge alla classe di
equivalenza ([x0]). Ciò è quanto volevamo provare.
Osserviamo che, in particolare, abbiamo anche provato un teorema sulla convergenza
in media:
Teorema 5.38. Sia 1 ≤ p < +∞. Se una successione di funzioni (xn) in Lp(Ω)
converge in media di ordine p ad x0 allora esiste una sottosuccessione della (xn) che
converge ad x0 q.o. su Ω.
Completezza degli spazi di Sobolev
Ricordiamo: sia Ω è un aperto di Rn e siano u ∈ Lp(Ω) una funzione a valori scalari
e v ∈ Lp(Ω) una funzione a valori vettori n–dimensionali. Si dice che
v = ∇u
se per ogni φ di classe C∞ ed a supporto compatto in Ω vale∫Ω
u(s)∇φ(s) ds = −∫
Ω
v(s)φ(s) ds .
In questo caso si dice che u ∈ W 1,p(Ω) e
248

5. SPAZI DI BANACH
||u||W 1,p(Ω) =[∫
Ω
|u(s)|p ds +∫
Ω
|v(s)|p ds
]1/p
.
Dunque, se (un) è fondamentale in W 1,p(Ω), le due successioni (un) e (vn) = (∇un)
sono fondamentali in norma Lp(Ω); e dunque convergenti,
un → u0 , vn → v0 .
Passando al limite si trova quindi
−∫
Ω
v0(s)φ(s) ds = − lim∫
Ω
∇un(s)φ(s) ds
= lim∫
Ω
un(s)∇φ(s) ds =∫
Ω
u0(s)∇φ(s) ds
per ogni funzione φ di classe C∞(Ω), a supporto compatto.
Dunque u0 ∈ W 1,p(Ω) ha per gradiente v0, ed (un) converge ad u0 in W 1,p(Ω).
Ciò prova la completezza di W 1,p(Ω).
5.4.3 Teorema del doppio limite
Il Teorema del doppio limite riguarda una successione di funzioni (xn), definite su
un qualsiasi insieme Ω. Per esempio, per ogni n la xn può essere una successione
(xn(k)), oppure può essere una funzione xn(t) definita su un intervallo [a, b].
Indichiamo genericamente con t gli elementi di Ω.
Le funzioni prendono valori in uno spazio completo.
Supponiamo che per ogni n esista
limt
xn(t) = Ln .
In questa scrittura può essere t → t0 oppure t → +∞, |t| → +∞ e simili. Per
sottolineare questo, scriviamo genericamente
limt→α
xn(t) = Ln . 5.22
Vale allora:
Teorema 5.39 (del doppio limite ). Per ogni n, esista finito il limite Ln definito
in 5.22.
249

5. SPAZI DI BANACH
Se (xn) converge ad x0 uniformemente su Ω allora esiste finito
limt→α
x0(t) = L0
e vale
L0 = limn
Ln ;
ossia vale
limn
[limt→α
xn(t)]
= limt→α
[limn
xn(t)]
.
DIMOSTRAZIONE
Proviamo prima di tutto che L0 = limt→α x0(t) esiste finito. Dato che le funzioni pren-
dono valori in uno spazio completo, basta provare che per ogni ε > 0 esiste un intorno
Iε di α tale che:
t′ , t′′ ∈ Iε =⇒ ||x0(t′) − x0(t
′′)|| < ε .
Valutiamo ||x0(t′) − x0(t
′′)|| come segue:
||x0(t′) − x0(t
′′)|| ≤ ||x0(t′) − xn(t′)|| + ||xn(t′) − xn(t′′)|| + ||xn(t′′) − xm(t′′)|| .
Usando la convergenza uniforme, si scelgano n, m così grandi da avere
||x0(t′) − xn(t′)|| < ε , ||xn(t′′) − xm(t′′)|| < ε .
Con n ed m ormai fissati, si usi l’esistenza del limite finito
limt→α
xn(t) = Ln .
Ciò implica che esiste un intorno Iε di α tale che se t′ ∈ Iε, t′′ ∈ Iε, allora
||xn(t′) − xn(t′′)|| < ε .
Si noti che Iε dipende anche da n, ma n è stato scelto, a sua volta, dipendente dal
solo ε.
A questo punto sappiamo che esiste finito
L0 = limt→α
x0(t) .
250

5. SPAZI DI BANACH
Proviamo ora che
L0 = limn
Ln .
Valutiamo ||L0 − Ln|| come segue:
||L0 − Ln|| ≤ ||L0 − x0(t)|| + ||x0(t) − xn(t)|| + ||xn(t) − Ln|| .
Sia ε > 0 fissato. Esiste un intorno Iε di α tale che
t ∈ Iε =⇒ ||L0 − x0(t)|| < ε .
Scegliamo t ∈ Iε.
Fissiamo ora Nε tale che
n > Nε =⇒ ||x0(t) − xn(t)|| < ε .
Il numero Nε esiste, e non dipende da t, grazie alla convergenza uniforme.
Infine, da Ln = limt→α xn(t), esiste un intorno I ′ε ⊆ Iε di α tale che, per t ∈ I ′
ε vale
||xn(t) − Ln|| < ε .
L’intorno I ′ε dipende, oltre che da ε, anche da n. Comunque, da questa proprietà
deduciamo che per ogni n esistono valori di t ∈ I ε per cui
||xn(t) − Ln|| < ε
e quindi, per n > Nε, vale
||L0 − Ln|| ≤ 2ε + inft∈Ω
||xn(t) − Ln|| ≤ 3ε .
Ciò è quanto dovevamo provare.
In particolare si ha:
Corollario 5.40. Una successione (xn) di funzioni continue definite su un qua-
lunque insieme Ω ivi converga uniformemente ad x0. Allora x0 è continua
su Ω.
251

5. SPAZI DI BANACH
5.5. SOTTOSPAZI DI SPAZI LINEARI NORMATI
Sia X uno s.l.n., la cui norma indicheremo col simbolo || · ||. Sia Y un s.spazio di X .
Ricordiamo che questo significa
∀y1 , y2 ∈ Y , ∀α , β ∈ F =⇒ αy1 + βy2 ∈ Y .
In particolare, Y stesso è uno spazio lineare e viene ad essere uno s.l.n. se ad Y si
restringe la funzione norma definita su X . In tal caso diremo che Y è un s.spazio
dello s.l.n. X e diremo che la norma su Y è quella indotta dalla norma di X . Notiamo
che talvolta potrà essere necessario considerare su Y una norma diversa da quella
indotta da X . Ciò va sempre esplicitamente specificato per evitare ambiguità. In caso
contrario assumeremo sempre che la norma su Y sia quella indotta dalla norma di X .
Quando X ha dimensione finita, i sottospazi sono le controimmagini di 0 sotto
l’azione di trasformazioni lineari; e si sa che:
Teorema 5.41. In dimensione finita, tutte le trasformazioni lineari sono continue; e
quindi tutti i s.spazi sono chiusi.
Invece, se X ha dimensione infinita, esso ammette sia s.spazi chiusi che non chiusi.
Esempi di s.spazi chiusi sono ovviamente 0 ed X stesso. Vediamo un esempio di
s.spazio non chiuso.
Esempio 5.42. Si considera lo spazio C(a, b) ed in esso il s.spazio Y dei polinomi.
E’ chiaro che Y non è chiuso perchè la restrizione ad [a, b] della funzione esponenziale
è limite uniforme di polinomi. Infatti, la serie di Taylor
+∞∑k=0
tk
k!= et
converge uniformemente sui compatti.
E’ importante sapere che non soltanto funzioni “regolari” possono approssimarsi
uniformemente con polinomi. Anzi
252

5. SPAZI DI BANACH
Teorema 5.43 (di Weierstrass). Sia f una funzione continua su un intervallo
limitato e chiuso [a, b], a valori reali. Esiste una successioni pn di polinomi a
coefficienti reali che converge ad f , uniformemente su [a, b].
La dimostrazione di questo teorema è importantissima perché permette di introdurre
il concetto di “identità approssimata”. Ad essa è dedicato il paragrafo 5.5.1.
Una ulteriore proprietà puramente algebrica degli spazi lineari è la seguente: ogni
loro s.spazio ammette complementare. Ricordiamo che un spazio lineare Z è un
complementare di un spazio lineare Y (ambedue s.spazi di X) se:
Z ∩ Y = 0 , Z + Y = X ;
equivalentemente, se ogni elemento x di X si rappresenta in modo unico come somma
di un elemento di Z e di uno di Y .
Quando si lavora con spazi normati, è naturale chiedere se tutti i s.spazi chiusi
ammettano complementare, anch’esso chiuso. In dimensione finita la risposta è
affermativa. Invece:
Teorema 5.44. Esistono s.l.n-ti X, completi, dotati di s.spazi chiusi i quali sono privi
di complementare chiuso.
Quando un s.spazio Y è dotato di complementare Z , la dimensione (finita o meno) di
Z si chiama la codimensione di Y .
Particolarmente importanti sono i sottospazi chiusi di codimensione 1, e anche i
s.insiemi della forma
x0 + H ,
con H sottospazio chiuso di codimensione 1. Si chiamano tali s.insiemi gli iperpiani
di X .
253

5. SPAZI DI BANACH
La dimostrazione del Teorema 5.44 consiste nella esplicita costruzione di un s.spazio
chiuso privo di complementare, per esempio di l p, con 1 ≤ p < 2 oppure con p > 2.
La costruzione è alquanto macchinosa e viene omessa.
Osservazione 5.45. E’ bene ricordare che gli spazi l p, 1 ≤ p ≤ +∞, sono
completi. Si veda il paragrafo 5.4.2 per la dimostrazione. E’ anche bene sapere
che ogni s.spazio chiuso di l2 ammette complementare. Si veda il paragrafo 6.15
per la dimostrazione.
5.5.1 Identità approssimate e dimostrazione del teorema di Weierstrass
Una famiglia di funzioni hν(s) che gode delle proprietà 0–3 seguenti si chiama
identità approssimata. Le proprietà richieste sono:
0. per ciascun valore di ν, la funzione s → hν(s) è integrabile su R;
1. hν(s) ≥ 0 per ogni s;
2.∫ +∞−∞ hν(s) ds = 1 per ogni ν > 0;
3. per ogni ε > 0 si ha:
limν→0+
∫ −ε
−∞hν(s) ds = 0 , lim
ν→0+
∫ +∞
+ε
hν(s) ds = 0 .
La ragione del termine “identità approssimata” è espressa dal teorema seguente, che
prova che la famiglia hν “approssima” l’identità rispetto alla convoluzione. Per una
giustificazione più precisa si veda il paragrafo 7.6.3.
Teorema 5.46. Sia hν(s) un’identità approssimata e sia f(x) una funzione
uniformemente continua e limitata su R. Sia u(ν, x) la funzione
u(ν, x) =∫ +∞
−∞hν(x − s)f(s) ds =
∫ +∞
−∞hν(s)f(x − s) ds .
Vale:
limν→0+
u(ν, x) = f(x) .
Il limite è uniforme su R.
254

5. SPAZI DI BANACH
DIMOSTRAZIONE
La proprietà 1. dice che l’integrale di h ν(s) vale 1. Dunque, si può scrivere
u(ν, x) − f(x) =
Z +∞
−∞hν(s)[f(x − s) − f(x)] ds
=
Z −ε
−∞hν(s)[f(x − s) − f(x)] ds +
Z +∞
ε
hν(s)[f(x − s) − f(x)] ds
+
Z +ε
−ε
hν(s)[f(x − s) − f(x)] ds .
Il numero ε deve ancora determinarsi.
Si fissa un numero σ e si usa l’uniforme continuità di f su R per scegliere ε = ε σ in
modo tale che
|f(x − s) − f(x)| < σ s ∈ (−ε, ε) .
Le proprietà 1. e 2. implicano che l’integrale su (−ε, ε) ha modulo minore di σ per ogni
ν > 0.
Fissato tale numero εσ si usino le proprietà 1. e 3. e la limitatezza di f su R per
trovare νσ tale che, se ν ∈ (0, νσ), ciascuno degli integrali rimanenti sia in modulo
minore di σ.
Le identità approssimate che si incontrano più spesso in pratica si costruiscono come
segue: si assegna una funzione integrabile h(s), non negativa. Dividendola per il suo
integrale, si può assumere
∫ +∞
−∞h(s) ds = 1 .
L’identità approssimata si ottiene ponendo
hν(s) =1ν
h(s/ν) .
La figura 5.2 mostra i grafici di alcune delle funzioni hν(s) così ottenute a partire dalla
funzione
1π(1 + s2)
(sinistra)exp−(s2)√
π(destra).
255

5. SPAZI DI BANACH
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
s
y
ν=1
ν=.5
ν=.3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−0.2
0
0.2
0.4
0.6
0.8
1
s
y
ν=1
ν=.5
ν=.3
Fig. 5.2. Esempi di identità approssimate
Osservazione 5.47. Implicitamente abbiamo supposto che ν sia un parametro con-
tinuo. Talvolta ν prende valori naturali, e l’identità approssimata è una successione
di funzioni. In questo caso il limite per ν → 0+ si sostituisce col limite per ν → +∞.
Diciamo infine che, così come si introducono le identità approssimate su R, si possono
anche introdurre le proprietà approssimate su Rn. Le modifiche alla definizione (e alla
costruzione a partire da una data funzione positiva) sono ovvie e vengono lasciate al
lettore.
Veniamo ora alla dimostrazione del teorema 5.43.
La dimostrazione del Teorema di Weierstrass è suggerita da certe considerazioni
sull’equazione del calore, che conducono ad introdurre gli integrali
1√4πt
∫ +∞
−∞e−s2/4tf(x − s) ds = u(t, x) . 5.23
La famiglia delle funzioni
1√4πt
e−s2/4t
è un’identità approssimata (il cui parametro si indica con t perché nelle applicazioni
all’equazione del calore indica il tempo). Essa è ottenuta a partire dalla funzione
h(s) =1√π
e−s2: ht(s) =
1√4t
h
(s√4t
).
Si veda la figura 5.2, a destra.
256

5. SPAZI DI BANACH
Sia ora f una funzione continua su [a, b]. Estendiamola in modo qualsiasi ad una
funzione continua su R, nulla per x < a − 1 e per x > b + 1. Indichiamo ancora con
f la funzione così estesa.
E’ chiaro che la funzione f è uniformemente continua su R. Sia u(t, x) la funzione
definita in 5.23. Si vede facilmente che questa funzione è continua per t > 0 ed x ∈ R.
Applichiamo il Teorema 5.46, ottenendo
f(x) = limt→0+
u(t, x) = limt→0+
1√4πt
∫ +∞
−∞e−(x−s)2/4tf(s) ds .
Ora facciamo intervenire la condizione che f è nulla per s < a − 1 e per s > b + 1.
Si ha così
u(t, x) =1√4πt
∫ b+1
a−1
e−(x−s)2
4t f(s) ds .
Si fissi σ > 0 e tσ tale che
|u(tσ, x) − f(x)| < σ/2 . 5.24
Il numero tσ esiste, grazie al Teorema 5.46.
La disuguaglianza 5.24 vale per ogni x ∈ R. Limitiamoci però a considerare i valori
di x in [a − 1, b + 1]. Si rappresenti
e−s24tσ =
+∞∑k=0
1k!
(− s2
4tσ
)k
e la convergenza è uniforme sui compatti. Dunque, esiste Nσ tale che∣∣∣∣∣e− s24tσ −
Nσ∑k=0
1k!
(− s2
4tσ
)k∣∣∣∣∣ < σ
√4πtσ
4(b − a)M, s ∈ [a − b − 1, b − a + 1]
con M = max |f |.
Si ha quindi:∣∣∣∣∣u(tσ, x) − 1√4πtσ
∫ b+1
a−1
Nσ∑k=0
1k!
(− (x − s)2
4tσ
)k
f(s) ds
∣∣∣∣∣=
1√4πtσ
∣∣∣∣∣∫ b+1
a−1
[e−
(x−s)2
4tσ −Nσ∑k=0
1k!
(− (x − s)2
4tσ
)k]
f(s) ds
∣∣∣∣∣257

5. SPAZI DI BANACH
=1√
4πtσ
∣∣∣∣∣∫ x−a+1
x−b−1
[e−
r24tσ −
Nσ∑k=0
1k!
(− r2
4tσ
)k]
f(x − r) dr
∣∣∣∣∣ < σ/2 .
Combinando questa disuguaglianza con 5.24 si vede che la funzione f(x) si
approssima uniformemente su [a, b] mediante i polinomi
1√4πtσ
∫ b+
a−1
Nσ∑k=0
1k!
(− (x − s)2
4tσ
)k
f(s) ds .
Il teorema si estende a funzioni di n variabili, sostanzialmente con la medesima
dimostrazione. Si ricorre per questo al seguente risultato:
Teorema 5.48 (di Tietze). Ogni funzione continua su un compatti di R n ammette
estensione continua e limitata ad R n.
Si fa quindi uso dell’identità approssimata
ht(x) =1
n/2√
4πte
|x|n4t . 5.25
Si noti che troncando la serie della funzione e |x|n si trovano polinomi in |x|.
Osservazione 5.49. I punti x ∈ R2 si possono anche leggere come punti x + iy del
piano complesso e gli argomenti precedenti possono adattarsi al caso delle funzioni a
valori complessi. Però, gli approssimanti che si ottengono troncando la serie di Taylor
dell’identità approssimata 5.25 sono polinomi in√
x2 + y2 e non in z = x + iy. Non
si trova quindi un’approssimazione mediante polinomi della variabile complessa z.
5.6. LA COMPATTEZZA
Ricordiamo che un s.insieme K dello s.l.n. X si dice relativamente compatto quando
ogni successione (xn) a valori in K ammette s.successioni (xnk) convergenti. K
si dice compatto quando è relativamente compatto e chiuso. Il teorema di Bolzano-
Weierstrass può riformularsi dicendo che se Φ = R oppure Φ = C allora ogni
s.insieme limitato e chiuso di Fn è compatto. Si ricordi che questa proprietà è
258

5. SPAZI DI BANACH
cruciale per la dimostrazione del teorema di Weierstrass sull’esistenza di massimi e
minimo.
Sfortunatamente, l’analogo del Teorema di Bolzano-Weierstrass non vale in spazi di
Banach di dimensione infinita; anzi:
Teorema 5.50. Sia X uno spazio normato. Se una sfera
x | |x − x0| = ε
è compatta allora lo spazio ha dimensione finita.
Il Teorema 5.50 implica in particolare:
Corollario 5.51. Sia dimX = +∞. Se K è relativamente compatto, allora K non
ha punti interni.
Infatti, se K contiene punti interni esso contiene una palla chiusa, che deve essere
compatta perché ogni s.insieme chiuso di un compatto è esso stesso compatto. Ciò
non può darsi se dimX = +∞.
E’ però vero che:
Teorema 5.52. Se il s.insieme K di X è compatto, allora esso è limitato.
Infatti, se K è illimitato esso contiene l’immagine di una successione (xn) tale che
||xn|| → +∞; e si vede facilmente che (xn) non ammette s.successioni convergenti.
Ricapitolando, in dimensione infinita gli insiemi compatti (rispetto alla topologia della
norma) sono pochi (e ciò avrà conseguenze nefaste nei problemi di ottimizzazione) e
difficili da caratterizzare. Di conseguenza i teoremi che caratterizzano gli insiemi
compatti sono importanti. Il prototipo ed il più utile di essi è il Teorema di Ascoli-
Arzelà, che caratterizza gli insiemi compatti di C(a, b) (ricordiamo che con questo
simbolo si intende in particolare che l’intervallo [a, b] è limitato e chiuso).
259

5. SPAZI DI BANACH
Sia K compatto contenuto in C(a, b). Abbiamo già notato, nel Teorema 5.52 che K
deve essere limitato; ossia deve esistere R > 0 tale che
||x|| = max[a,b]
|x(t)| < R ∀x ∈ K .
Trattandosi di limitatezza nella norma della convergenza uniforme, usa anche dire che
K è uniformemente limitato.
Ricordiamo che ogni funzione x ∈ C(a, b) è uniformemente continua perché [a, b]
è limitato e chiuso; ossia, per ogni ε > 0 esiste un numero δ, che dipende da ε e dalla
funzione x, tale che
|x(t′) − x(t′′)| < ε , ∀t′ t′′ ∈ [a, b] per cui |t′ − t′′| < δ.
Si dice che l’insieme K è equicontinuo quando δ si può scegliere dipendente da ε ma
non dall’elemento x ∈ K; ossia:
Definizione 5.53. Si dice che l’insieme K è equicontinuo quando per ogni ε > 0
esiste δ > 0 tale che per ogni x ∈ K e per ogni t′, t′′ in [a, b] tali che |t′ − t′′| < δ
si ha:
|x(t′) − x(t′′)| < ε .Vale:
Teorema 5.54 (di Ascoli-Arzelà). Gli insiemi relativamente compatti di C(a, b)
sono tutti e soli quelli uniformemente limitati ed equicontinui.
5.6.1 Dimostrazioni posposte
Proviamo i teoremi enunciati.
Dimostrazione del TEOREMA 5.50. Basta mostrare una successione di elementi
di norma 1 priva di sottosuccessioni fondamentali. Notiamo il seguente lemma (di
immediata dimostrazione) che verrà utile anche in seguito:
Lemma 5.55. Sia (xn) una successione tale che ||xn − xm|| ≥ σ > 0 per ogni
coppia n ed m. La successione (xn) non ha s.successioni fondamentali.
260

5. SPAZI DI BANACH
Per costruire una successione (xn) con le proprietà richieste dal lemma, facciamo
intervenire:
Lemma 5.56 (Lemma di Riesz). Sia M un s.spazio chiuso di X , diverso da X .
Per ogni ε > 0, esiste un elemento x ∈ X di norma 1, che dista da M più di 1 − ε.
DIMOSTRAZIONE
Ricordiamo che la distanza d(x,M) di x da M è
d(x,M) = inf||x − m|| | m ∈ M .
Essendo M = X, ed M chiuso, esiste x1 = M a distanza positiva da M :
d(x1, M) = d > 0 .
La definizione di distanza mostra che per ogni σ > 0 esiste v σ ∈ M tale che
||x1 − vσ|| < d(1 + σ) .
Sia
y = x1 − vσ .
Ovviamente,
δ = ||y|| = ||x1 − vσ|| ≤ d(1 + σ)
e inoltre d(y,M) = d(x1, M) perché vσ ∈ M ; ossia
d(y,M) = d(x1, M) = d ≥ 1
1 + σ||x1 − vσ|| =
1
1 + σ||y|| .
In particolare,
||y|| ≤ d(1 + σ) . 5.26
Scegliamo ora
x0 =y
||y||e notiamo che
d(x0, M) = d
„y
||y|| , M«
= inf˛˛˛˛ y
||y|| − m
˛˛˛˛ | m ∈ M
= inf 1
||y|| ||y − (m||y||) || | m ∈ M = inf 1
||y|| ||x1 − (vσ + m||y||) || | m ∈ M
= inf 1
||y|| ||x1 − m|| | m ∈ M =d
||y|| >1
1 + σ.
261

5. SPAZI DI BANACH
L’ultima disuguaglianza discende da 5.26.
L’asserto segue se si è preventivamente scelto σ tale che 11+σ
> 1 − ε.
E’ ora facile costruire una successione di elementi di norma 1, priva di s.successioni
convergenti: si sceglie x1 = 0 qualsiasi e si definisce
M1 = spanx1 = tx1 | t ∈ F .
Si sceglie quindi x2, di norma 1, con
d(x2, M1) >12
.
In particolare vale ||x2 − x1|| > 1/2.
Definiti x1,. . . , xk, si sceglie xk+1 di norma 1, distante almeno 1/2 dallo spazio
generato dai vettori x1,. . . , xk.
Essendo dimX = +∞, X = span x1 , . . . xk e quindi questa costruzione
conduce ad una successione (xn) i cui elementi distano due a due almeno 1/2, e
quindi priva di s.successioni convergenti.
Dimostrazione del TEOREMA 5.52. La dimostrazione è analoga a quella che vale
in dimensione finita: se A non è limitato, per ogni n esiste an ∈ A, con ||an|| > n.
La successione (an) è priva di s.successioni convergenti.
Dimostrazione del TEOREMA 5.54. Proviamo la parte necessaria. Si è già detto che
se K è compatto allora deve essere limitato. Proviamo che se è compatto in C(a, b)
allora esso è anche equicontinuo. Facciamo uso del lemma seguente:
Lemma 5.57. Sia K compatto in uno spazio di Banach X e sia ε > 0. Esiste un
insieme finito di elementi k1,. . .ks di K , tali che
K ⊆⋃
B(ki, ε) , B(ki, ε) = x ∈ X | ||x − ki|| < ε .
262

5. SPAZI DI BANACH
DIMOSTRAZIONE
Per assurdo sia K compatto e sia ε0 > 0 un numero tale che la proprietà non valga.
Scelto un qualsiasi x1 ∈ K, B(x1, ε0) non copre K; e quindi esiste x2 ∈ K che
dista da x1 più di ε0. Ancora perchè ε0 non soddisfa alla proprietà detta nel lemma,
B(x1, ε0)∪B(x2, ε0) non copre K. Dunque esiste x3 in K che dista più di ε0 sia da x1
che da x2.
Iterando questo procedimento, si trova una successione (x n) i cui punti distano l’uno
dall’altro almeno ε0, e quindi priva di s.successioni convergenti. Ciò contrasta con la
compattezza di K.
Proviamo ora che l’insieme K , compatto in X = C(a, b), è equicontinuo. Si fissi
ε > 0 e si fissino k1, . . . , kr tali che
K ⊆ ∪B(ki, ε) .
Ciascuna delle funzioni ki è una funzione uniformemente continua e quindi l’insieme
delle ki, che sono in numero finito, è equicontinuo: esiste δ > 0 tale che se |t ′−t′′| < δ
allora |ki(t′) − ki(t′′)| < ε per ogni i.
Sia ora x ∈ K qualsiasi e ki0 una funzione dell’insieme k1 , . . . , kr che dista da x
meno di ε. Valutiamo:
|x(t′) − x(t′′)| ≤ |x(t′) − ki0(t′)| + |ki0(t
′) − ki0(t′′)| + |ki0(t
′′) − x(t′′)| < 3ε .
Questa disuguaglianza vale per |t′ − t′′| < δ e per ogni x ∈ K . Notando che δ non
dipende da x ∈ K segue l’equicontinuità.
Proviamo ora la condizione sufficiente: proviamo che se K ⊆ C(a, b) è sia limitato
che equicontinuo allora K è relativamente compatto.
Fissiamo prima di tutto una successione iniettiva (tn) la cui immagine è densa in
[a, b]. Consideriamo quindi una qualunque successione (xn) di elementi di K e
consideriamo la successione di numeri (xn(t1)). Questa è una successione di numeri
limitata perché K è limitato. Dunque ammette una s.successione convergente.
Indichiamo col simbolo x(1)n (t1) questa successione di numeri e consideriamo la
successione di funzioni (x(1)n ). Valutiamo queste funzioni nel punto t2 ottenendo la
263

5. SPAZI DI BANACH
successione di numeri (x(1)n (t2)). Estraiamo da questa una successione convergente,
che indichiamo col simbolo (x(2)n (t2)). Consideriamo quindi la successione di
funzioni (x(2)n ) e la successione di numeri (x(2)
n (t3)). Iteriamo il procedimento.
In questo modo si definiscono induttivamente le successioni di funzioni (x (1)n ),
(x(2)n ),. . . , ciascuna delle quali è s.successione delle precedenti. Dunque, la succes-
sione (x(k)n (tr)) è una successione di numeri che converge per ogni r ≤ k. Inoltre,
(x(1)n ) è s.successione della (xn).
Consideriamo ora la tabella seguente:
x(1)1 x
(1)2 x
(1)3 x
(1)4 x
(1)5 . . .
x(2)1 x
(2)2 x
(2)3 x
(2)4 x
(2)5 . . .
x(3)1 x
(3)2 x
(3)3 x
(3)4 x
(3)5 . . .
x(4)1 x
(4)2 x
(4)3 x
(4)4 x
(4)5 . . .
......
......
...
Si ha:
– in ogni casella compare una delle funzioni della successione;
– gli elementi della prima riga costituiscono una s.successione della (xn);
– ciascuna delle successive righe contiene gli elementi di una s.successione di
quella che compare alla riga precedente;
– se si calcolano gli elementi della riga i–ma per t = tj , con j ≤ i, si trova una
successione di numeri che converge.
Queste proprietà implicano che la successione diagonale (x(n)n ) è una successione
di funzioni con questa proprietà: le successioni di numeri (x(n)n (tk)) convergono,
per ogni k.
Notiamo che per ora abbiamo usato la sola limitatezza dell’insieme K . Usiamo ora
l’equicontinuità per provare che la successione diagonale è fondamentale (e quindi
convergente in C(a, b) che, come si è detto, è uno spazio completo).
264

5. SPAZI DI BANACH
Sia ε > 0. Si vuol provare l’esistenza di Nε tale che se n, m sono maggiori di Nε
allora vale
||xn − xm|| < 3ε ossia |xn(t) − xm(t)| < 3ε ∀t ∈ [a, b].
Si fissi δ > 0 tale che se |t′ − t′′| < δ allora ogni x ∈ K verifica
|x(t′) − x(t′′)| < ε .
Rappresentiamo l’intervallo [a, b], che è limitato, come unione finita di intervalli di
lunghezza minore di δ:
[a, b] =ν⋃
s=1
[as, bs] , bs − as < δ .
Per ciascun intervallo [as, bs], fissiamo uno dei punti della successione (tn) che gli
appartiene. Indichiamolo col simbolo ts.
Sia t ∈ [a, b] qualsiasi e sia s tale che t ∈ [as, bs]. Valutiamo, usando
l’equicontinuità,
|x(n)n (t) − x(m)
m (t)| ≤ |x(n)n (t) − x(n)
n (ts)| + |x(n)n (ts) − x(m)
m (ts)|
+|x(m)m (ts) − x(m)
m (t)| ≤ 2ε + |x(n)n (ts) − x(m)
m (ts)| .
Per ogni s, esiste Ns tale che, se n, m sono maggiori di Ns, vale
|x(n)n (ts) − x(m)
m (ts)| < ε
ed i punti ts sono in numero finito e non dipendono dal punto t. Dunque, la
dimostrazione si completa scegliendo Nε = maxN1 , . . . , Nν.
Il procedimento di estrarre la successione diagonale, dovuto a Cantor, va sotto il nome
di metodo diagonale di Cantor.
5.7. OPERATORI LINEARI
Siano X ed Y due s.l.n-ti e sia f una trasformazione da X in Y . Non si richiede che
il dominio di f sia tutto X . Per dire che f opera tra due s.l.n-ti, si dice che f è un
operatore.
265

5. SPAZI DI BANACH
Si chiamano funzionali le trasformazioni che operano da X , s.l.n. sul campo scalare
F, nel campo scalare F stesso.
Siano ora X ed Y due spazi lineari sul medesimo campo scalare. Si dice che f è un
operatore lineare da X in Y quando
– domf è un sottospazio (non si richiede chiuso) di X ;
– vale f(αx + βy) = αf(x) + βf(y) per ogni x, y in X e per ogni α, β in F.
Quando si lavora con operatori lineari, invece della notazione f(x) usa indicare
l’operatore con una lettera maiuscola, per esempio F , A; e scrivere Fx, Ax invece
di F (x), A(x); ossia si usa la “notazione moltiplicativa” nota dall’Algebra lineare.
Studiamo ora le proprietà degli operatori lineari.
5.7.1 Proprietà geometriche degli operatori lineari
Si ricordi che il grafico di una trasformazione y = f(x) da un insieme X ad un
insieme Y è l’insieme delle coppie
(x, y) | y = f(x) .
Invece, l’immagine ed il nucleo 1 sono rispettivamente s.spazi di Y e di X ,
imf = y | y = f(x) , ker f = x | f(x) = 0 .
Si provi per esercizio:
Teorema 5.58. Siano X ed Y due s.l.n-ti e sia f una trasformazione da X in Y .
Vale:
– la trasformazione f è lineare se e solo se il suo grafico è un s.spazio di X×Y ;
– se f è lineare sia la sua immagine che il suo nucleo sono s.spazi.
1Il termine “nucleo” per indicare l’insieme degli zeri di una funzione si usa solamente se la
funzione è lineare.
266

5. SPAZI DI BANACH
Notiamo ora:
Teorema 5.59. Un operatore lineare da X in Y che ha immagine limitata è
identicamente zero.
DIMOSTRAZIONE
Infatti, l’immagine di un operatore lineare è un sottospazio: questo è limitato se e solo
se è il sottospazio 0.
Col simbolo B(x0, r) indichiamo la palla
B(x0, r) = x | ||x − x0|| ≤ r .
Lemma 5.60. Sia x0 ∈ domA. Vale
B(x0, r) ∩ (domA) = x0 + B(0, r) ∩ (domA) .
DIMOSTRAZIONE
Infatti, con L = domA,
B(x0, r) ∩ L = x ∈ L | ||x − x0|| < r .
Sia x ∈ B(x0, r) ∩ L. Essendo x0, x nel sottospazio L, y = x − x0 è in L e verifica
||y|| < r; ossia,
x = x0 + y , y ∈ B(0, r) ∩ L .
Dunque, B(x0, r)∩L ⊆ x0+B(0, r)∩L. L’inclusione opposta si vede in modo analogo.
Siano x0 ed x1 due punti di uno s.l.n. X . Il segmento di estremi x0 ed x1 è per
definizione l’insieme dei punti
x = tx0 + (1 − t)x1 , t ∈ [0, 1] .
Sia K ⊆ X un insieme. Si dice che K è convesso quando il segmento che unisce due
qualsiasi punti di K è contenuto in K; ossia quando
x0 , x1 ∈ K , t ∈ [0, 1] =⇒ tx0 + (1 − t)x1 ∈ K .
267

5. SPAZI DI BANACH
Ovviamente, ogni palla è un insieme convesso. Invece, la superficie sferica
S(x0, r) = x | ||x − x0|| = r
non è convessa.
Gli insiemi convessi di R sono tutti e soli gli intervalli (limitati o meno).
Il risultato seguente è di ovvia dimostrazione:
Teorema 5.61. Sia A lineare da X in Y . Se K ⊆ domA è convesso in X , allora
AK è convesso in Y .
Le palle centrate in 0 sono insiemi che hanno in più una proprietà di simmetria: se
x ∈ B(0, r) allora αx ∈ B(0, r) per ogni α tale che |α| ≤ 1.
In generale, un insieme K si dice equilibrato se
|α| ≤ 1 , x ∈ K =⇒ αx ∈ K .
Si dice che K è equilibrato rispetto ad un suo punto x0 se
K = x0 + K , con K insieme equilibrato.
Si vede immediatamente:
– un insieme di C equilibrato rispetto a z0 e che contiene z ′ contiene anche il
disco di centro z0 e raggio |z ′−z0|. Affermazione analoga vale per gli insiemi
equilibrati di R, sostituendo i dischi con gli intervalli simmetrici rispetto a z 0.
In particolare:
Lemma 5.62. Un insieme equilibrato di R oppure di C che è illimitato è
uguale, rispettivamente, a R oppure a C.
– Se A è un operatore lineare da X in Y e se K è equilibrato in X , allora AK
è equilibrato in Y ; se K è equilibrato rispetto ad x0 allora AK è equilibrato
rispetto ad Ax0.
268

5. SPAZI DI BANACH
Torniamo a considerare un operatore lineare A da uno s.l.n. X in un s.l.n. Y e
consideriamo le palle B(0, 1), B(0, r′) e B(x0, r) di X . Si ha:
AB(0, r) = r(AB(0, 1)) , AB(x0, r) = Ax0 + r(AB(0, 1)) :
Lemma 5.63. Un operatore lineare A che è limitato su una palla è limitato su ogni
altra palla.
D’altra parte, con S(0, 1) = x | ||x|| = 1,
x ∈ B(0, r) = ||x|| x
||x|| ,x
||x|| ∈ S(0, 1) .
Dunque:
Lemma 5.64. Vale:
sup||x||X≤1
||Ax||Y = sup||x||X=1
||Ax||Y .
In particolare, un operatore lineare A è limitato su una palla se e solo se è limitato
sulla sfera S(0, 1).
Un operatore lineare che è limitato su una palla, non può “crescere troppo
velocemente”. Infatti:
Teorema 5.65. Sia A lineare da X in Y e sia
MA = sup||x||X≤1
||Ax||Y < +∞ .
Per ogni x ∈ X vale
||Ax||Y ≤ MA||x||X . 5.27
Viceversa, se esiste M tale che ||Ax||Y ≤ M ||x||X allora l’operatore lineare A è
limitato su ogni palla.
DIMOSTRAZIONE
Il viceversa è ovvio e quindi basta provare che se A è limitato su B(0, 1), allora vale la
disuguaglianza 5.27. Basta considerare il caso x = 0. Se x = 0, x/||x|| ∈ B(0, 1) e
269

5. SPAZI DI BANACH
quindi
1
||x|| ||Ax|| =
˛˛˛˛A x
||x||
˛˛˛˛ ≤ MA .
Questa è la disuguaglianza cercata.
Dunque, se A è limitato su una palla, per esso vale
lim||x||X→0
||Ax||Y = 0
ed è quindi continuo in 0. Viceversa, il teorema della limitatezza locale mostra che se
A è continuo a 0 allora è limitato su una palla B(0, r), e quindi su ogni altra palla.
Vale dunque:
Teorema 5.66. Un operatore lineare A da X in Y è continuo a zero se e solo se è
limitato su una qualsiasi palla; equivalentemente, se e solo se esiste un numero M
per cui vale
||Ax||Y ≤ M ||x||X .
Ciò suggerisce un punto di partenza per lo studio della continuità degli operatori
lineari. Prima di fare ciò, ricordiamo, dal Teorema 5.59 che l’unico operatore lineare
e limitato da X in Y è quello identicamente zero; e quindi il termine “limitato”
riferito ad operatori lineari rimane libero, e può essere usato con un significato diverso.
Chiamiamo quindi operatore lineare limitato un operatore lineare che è limitato su una
(qualsiasi) palla; ossia uno per il quale vale la disuguaglianza 5.27. Dunque:
Teorema 5.67. Un operatore lineare A da X in Y è continuo a zero se e solo se è
limitato.
5.7.2 La continuità degli operatori lineari
E’ noto:
Teorema 5.68. Se dimX < +∞ e se la trasformazione A è lineare da X in Y
allora A è continua.
270

5. SPAZI DI BANACH
Gli esempi seguenti mostrano che, se X ha dimensione infinita, allora esistono sia
operatori lineari continui che non continui. Un esempio banale di operatore lineare
continuo è quello che ad ogni elemento di X associa lo 0 di Y , ossia il funzionale
nullo. Un esempio meno banale è il seguente:
Esempio 5.69. Sia X = C(a, b), Y = F e sia
domA = X , Ax = x(a) .
Essendo
||Ax − Ay||F = |x(a) − y(a)| ≤ ||x − y||X
si vede che A è addirittura uniformemente continuo.
Mostriamo ora un esempio di funzionale lineare non continuo.
Esempio 5.70. Su C(−1, 1) si consideri l’operatore lineare Ψ definito da
domΨ = x derivabili in 1 , Ψx = x′(1) .
Quest’operatore, chiaramente lineare, non è continuo. Per mostrare ciò si consideri
la successione delle funzioni xn
xn(t) = tn/n .
Da ||xn|| < 1/n segue che
limxn = x0 = 0
mentre per ogni n si ha:
Ψxn = 1 ;
ossia,
lim Ψxn = Ψx0
e quindi Ψ non è continuo.
Si noti che l’esempio precedente mostra che anche funzionali lineari importanti per
le applicazioni possono essere discontinui; e, l’esempio specifico spiega perchè il
problema della derivazione numerica è assai delicato.
271

5. SPAZI DI BANACH
Esempi di operatori lineari, rispettivamente continui e non continui, tra s.l.n-ti
ambedue di dimensione infinita sono i seguenti:
Esempio 5.71. Sia X = Y = C(a, b) e sia A con dominio uguale ad X ,
(Ax)(t) =∫ t
a
x(s) ds .
E’
||Ax − Ay||Y = max[a,b]
∣∣∣∣∫ t
a
[x(s) − y(s)] ds
∣∣∣∣ ≤ (b − a) · ||x − y||X ;
e nuovamente si vede che l’operatore A è uniformemente continuo.
Un esempio di operatore lineare discontinuo è il seguente:
Sia X = L2(0, 1), Y = C([0, 1]). Il dominio di A sia lo spazio lineare delle classi di
equivalenza dotate di rappresentante continuo. Sia
Ax = y , y(t) ≡ x(1) .
Le (classi di equivalenza delle) funzioni
xn(t) = tn
costituiscono una successione in L2(0, 1), convergente a 0; mentre, per ogni x,
Axn ≡ 1 .
Passiamo ora a studiare le proprietà degli operatori lineari che sono anche continui.
Abbiamo notato che gli operatori lineari continui degli esempi precedenti sono anche
uniformemente continui. Come ora vedremo, è questo un fatto generale.
Teorema 5.72. Siano X ed Y due s.l.n-ti e sia A lineare da X in Y . Vale:
– l’operatore A è continuo in ciascun punto del suo dominio se e solo se è
continuo in un punto;
– l’operatore A è continuo se e solo se è uniformemente continuo;
– l’operatore A è continuo se e solo se è limitato.
272

5. SPAZI DI BANACH
DIMOSTRAZIONE
Proviamo che se A è continuo in un punto x 0 allora esso è continuo in qualunque altro
punto x1. Ovviamente, sia x0 che x1 devono appartenere al dominio di A. Sia ε > 0 e
sia B(x0, δ) tale ce
x ∈ B(x0, δ) ∩ domA =⇒ ||Ax − Ax0|| < ε .
Sia ora x ∈ B(x1, δ) ∩ domA. Usando il Lemma 5.60 si vede che
x = x1 + (x′ − x0) , x′ ∈ domA , x′ ∈ B(x0, δ) .
Dunque,
||Ax − Ax1|| = ||A(x1 − (x′ − x0)) − Ax1|| = ||A(x′ − x0)|| = ||Ax′ − Ax0|| < ε .
Ciò prova la continuità in x1 e prova anche che il numero δ nel punto x 1 è il medesimo
usato in x0. Essendo x1 arbitrario, si ha la continuità uniforme.
In particolare, la continuità in un qualsiasi punto x 0 equivale alla continuità in 0, e quindi
alla limitatezza, si veda il Teorema 5.67.
Frequentemente conviene verificare la continuità di un operatore verificando
direttamente che è limitato.
Come si è visto, l’operatore lineare A è continuo se e solo se
MA = sup||x||X≤1
||Ax||Y < +∞ .
Ci si può chiedere se l’estremo superiore sia in realtà un massimo. E’ facile
immaginare che l’estremo superiore non sarà un massimo se il dominio di A non è
chiuso. Però:
Teorema 5.73. Esistono s.l.n-ti completi X ed operatori lineari continui A con
dominio uguale ad X e tali che
max||Ax||Y | ||x||X ≤ 1
non esiste.
273

5. SPAZI DI BANACH
DIMOSTRAZIONE
Si scelga X = L1(0, 1) ed il funzionale
Lx =
Z 1
0
sx(s) ds .
E’ immediato verificare che questo funzionale è continuo e che
||x|| ≤ 1 =⇒ |Lx| ≤ 1 ;
anzi, si vede che
sup||Lx||Y , | ||x||X ≤ 1 = 1 .
Infatti, se
xn(t) =
8<: 0 se 0 ≤ t ≤ 1 − 1/n
n se 1 − 1n≤ t ≤ 1
allora:
lim Lxn = 1 .
Mostriamo che se ||x||L1(0,1) ≤ 1 allora non vale Lx = 1. Sia infatti x tale che Lx = 1.
In questo caso x non è zero q.o. e quindi esiste δ ∈ (0, 1) tale cheZ δ
0
|x(s)| ds = α > 0 .
sottolineiamo che il numero δ si può scegliere minore di 1. Si scriva ora:
1 =
Z 1
0
sx(s) ds =
Z δ
0
sx(s) ds +
Z 1
δ
sx(s) ds
≤ δ
Z δ
0
|x(s)| ds +
Z 1
δ
|x(s)| ds
=
Z 1
0
|x(s)| ds − (1 − δ)
Z δ
0
|x(s)| ds
ossia
Z 1
0
|x(s)| ds ≥ 1 + (1 − δ)α .
Dunque ||x|| > 1 e quindi il massimo non viene raggiunto.
274

5. SPAZI DI BANACH
Infine, introduciamo due operatori particolari, ed i loro simboli: col simbolo 0, riferito
ad operatori che operano da X in Y , si intende l’operatore nullo, ossia quello che
associa ad ogni x ∈ X l’elemento 0 di Y . Col simbolo I , riferito ad operatori da X in
X , si intende l’operatore identità , ossia quell’operatore che ad ogni x di X associa se
stesso:
Ix = x .
5.7.3 Funzionali lineari continui ed iperpiani
Proviamo:
Teorema 5.74. Sia Ψ un funzionale lineare definito su X non identicamente nullo,
continuo o meno. Il suo nucleo ammette complementare di dimensione 1.
DIMOSTRAZIONE
Sia x0 tale che Ψx0 = 0. Si noti che per ogni x ∈ X
nx = x − x0Ψx
Ψx0∈ ker Ψ .
Ogni x ∈ X si rappresenta come
x = nx + αxx0 , αx =Ψx
Ψx0.
Questa rappresentazione è unica perché se si ha anche
x = n′x + α′
xx0
allora sottraendo si trova
0 = (nx − n′x) + (αx − α′
x)x0 .
Applicando il funzionale Ψ ai due membri si trova
0 = (αx − α′x)Ψx0
e quindi αx = α′x, perché Ψx0 = 0. E dunque si ha anche nx = n′
x.
Ciò prova che βx , β ∈ C è uno spazio complementare di kerΨ.
275

5. SPAZI DI BANACH
Osservazione 5.75. Il teorema precedente non richiede la completezza di X e
nemmeno richiede la chiusura di kerΨ. Per esempio, sia X lo s.l.n. delle funzioni
continue su [−1, 1] e derivabili su (−1, 1), dotato della norma del massimo. Questo
spazio non è completo. Sia
Ψx = x′(0) .
Il funzionale Ψ è ovunque definito, e non è continuo, come facilmente si vede
riadattando gli argomenti presentati nell’esempio 5.70.
Il nucleo di Ψ è l’insieme delle funzioni di C 1(−1, 1) la cui derivata è nulla in 0.
Non è difficile mostrare che questo spazio lineare è denso in C(−1, 1) e quindi in
C1(−1, 1). Ciò nonostante ammette complementare: ogni x ∈ X si rappresenta in
modo unico come
x(t) = [x(t) − x′(0)t] + x′(0)t
somma di un elemento di kerΨ e di un multiplo di x0, x0(t) = t /∈ kerΨ.
Se Ψ è una qualsiasi trasformazione continua tra s.l.n-ti X ed Y , l’insieme degli zeri
di Ψ è chiuso, come controimmagine continua di un chiuso. Il viceversa vale nel caso
particolare dei funzionali lineari:
Teorema 5.76. Sia Ψ un funzionale lineare su uno s.l.n. Esso è continuo se e solo
se il suo nucleo è chiuso.
DIMOSTRAZIONE
Se il nucleo di Ψ è tutto X allora Ψ è costante e quindi continuo. Altrimenti, sia x 0 /∈
kerΨ. Dato che ker Ψ è chiuso e diverso da X, esiste δ > 0 tale che
δ = dist(x0, kerΨ) .
Sia B(x0, δ/2) = x | ||x − x0|| < δ/2. L’immagine ΨB(x0, δ/2) di B(x0, δ/2) è
un insieme equilibrato di R oppure di C, che non contiene 0, perché B(x 0, δ/2) non
interseca kerΨ. Per il Lemma 5.62, ΨB(x0, δ/2) è limitato, e quindi Ψ è continuo.
276

5. SPAZI DI BANACH
Si chiamano iperpiani i sottospazi chiusi di codimensione 1 e gli insiemi che si
ottengono da essi per traslazione. Dunque:
Teorema 5.77. Gli iperpiani sono tutti e soli gli insiemi della forma
H = x | Ψx = c
ove Ψ è un funzionale lineare e continuo.
DIMOSTRAZIONE
Se ψ è un funzionale lineare continuo, il suo nucleo è chiuso, come contrimmagine
dell’insieme chiuso 0.
Viceversa, sia N un spazio lineare chiuso di codimensione 1. Costruiamo un funzionale
lineare Ψ che ha N per nucleo, e che quindi è continuo per il Teorema 5.76.
Essendo N di codimensione 1, esiste x0 /∈ N tale che ogni elemento di X si
rappresenta in modo unico come
x = n + αx0 , n ∈ N .
Il funzionale cercato è quello che ad x associa il numero α.
Ossia, gli iperpiani sono gli insiemi di livello di funzionali lineari e continui.
Se Ψ è un funzionale lineare continuo, definiamo i due semispazi
H+ = x | Ψ(x) > c , H− = x | Ψ(x) < c .
I due semispazi H+ ed H− sono ovviamente disgiunti (perché le disuguaglianze sono
strette). Le loro chiusure, che si chiamano anche semispazi chiusi, hanno in comune i
punti dell’iperpiano x | Ψ(x) = c.
E’ opportuno notare che le notazioni H+ ed H− non hanno significato intrinseco.
Infatti, il funzionale Ψ che il teorema 5.77 associa ad H non è unico. Se, per esempio,
c = 0, allora si identifica lo stesso iperpiano H sia col funzionale Ψ che col funzionale
−Ψ; e lo scambio di Ψ con −Ψ scambia tra di loro i due semispazi.
277

5. SPAZI DI BANACH
Notiamo infine che il teorema 5.76 vale per i funzionali. Non vale per generici
operatori lineari, come mostra l’esempio seguente.
Esempio 5.78. Sia X = Y = C(0, 1) e sia
domA = C1(0, 1) , Ax = x′ .
Argomenti analoghi a quelli visti all’esempio 5.70 mostrano che A non è continuo.
Il suo nucleo è il s.spazio i cui elementi sono le funzioni costanti, e quindi è chiuso
nonostante che l’operatore A non sia continuo.
5.7.4 Lo spazio L(X, Y )
Siano X ed Y due s.l.n-ti ed A, B due operatori lineari da X in Y . Definendo
dom(A + B) = (domA) ∩ (domB) , (A + B)x = Ax + Bx ,
si ottiene chiaramente un operatore lineare A + B; ma in generale dom(A + B),
domA e domB sono diversi e quindi non è possibile dare una struttura di spazio
lineare all’insieme di tutti gli operatori lineari da X in Y . Per esempio, B + (−B)
non è in generale l’operatore 0, perchè l’operatore 0 è definito su X mentre B +(−B)
è solo definito su domB; e quindi A+B +(−B) non è, in generale, l’operatore A. Se
però ci si limita a considerare soltanto gli operatori lineari e continui si può ottenere
di più. Vale infatti:
Teorema 5.79. Sia A un operatore lineare e continuo da X in Y . Se Y è completo
allora l’operatore A ammette un’unica estensione continua alla chiusura del suo
dominio.
DIMOSTRAZIONE
Presentiamo i punti salienti della dimostrazione (del tutto analoga a quella che si usa
per costruire l’estensione per continuità di funzioni reali), per mostrare il ruolo della
completezza di Y .
Se x0 è un punto della chiusura del dominio di A, esiste una successione (x n) conver-
gente ad x0, xn ∈ domA (si noti che se x0 ∈ domA allora si può scegliere xn = x0 per
ogni n).
278

5. SPAZI DI BANACH
Per la continuità di A si ottiene
||Axn − Axm||Y = ||A(xn − xm)||Y ≤ M ||xn − xm||X . 5.28
La successione (xn) è fondamentale in X, essendo per ipotesi convergente. Dunque,
anche la successione (yn), yn = Axn è fondamentale, però nello spazio Y . Essendo
Y completo, si ha
lim Axn = y0 .
Si definisce quindi
Ax0 = y0.
Se (x′n) è una seconda successione convergente ad x0, vale
||Axn − Ax′n||Y ≤ M ||xn − x′
n||X → 0
e quindi
lim Axn = lim Ax′n ;
ossia il valore y0 dipende solo da x0, e non dalla particolare successione (conver-
gente ad x0) scelta per calcolarlo. Dunque l’operatore A che abbiamo costruito è un
operatore univoco.
Ovviamente, A estende A: se x0 ∈ domA, scegliendo xn = x0 per ogni n si vede che
Ax0 = Ax0 .
Si prova facilmente che l’operatore A è lineare, ed è limitato.
Lasciamo per esercizio la dimostrazione della linearità e proviamo la limitatezza: se
xn → x0 ed Axn → y0,
||Ax0||Y = lim ||Axn||Y ≤ M lim ||xn||X = M · ||x0||X 5.29
(si ricordi che la norma è continua).
Ricapitolando, A è (l’unica) estensione continua di A alla chiusura del suo dominio.
In particolare, se il dominio di A è denso in X , allora A è definito su X .
Naturalmente, in pratica identificheremo A con A (usando il simbolo più semplice A
per ambedue gli operatori).
279

5. SPAZI DI BANACH
Da ora in poi, lavorando con operatori lineari e continui, assumeremo di averli
estesi per continuità alla chiusura del dominio; e se non diversamente detto,
assumeremo che il dominio sia X . Lavorando con operatori definiti su X , sia A+B
che αA (definito da (αA)x = α(Ax) per ogni x) hanno dominio X e sono continui.
Dunque, l’insieme degli operatori lineari continui su X è uno spazio lineare. Ciò che
è più importante, esso può essere dotato di norma, come segue:
||A|| = sup||x||X≤1
||Ax||Y . 5.30
Si lascia al lettore la facile verifica che quella appena definita è una norma.
Conviene notare una conseguenza utile della definizione 5.30:
Corollario 5.80. Per ogni x ∈ X vale:
||Ax||Y ≤ ||A|| · ||x||X . 5.31
Se anche Z è uno s.l.n. completo, e B è lineare e continuo da Y a Z , allora vale
||BA|| ≤ ||B|| · ||A|| . 5.32
DIMOSTRAZIONE
Infatti, se ||ξ||X ≤ 1, allora vale ||Aξ||Y ≤ ||A||. Se x = 0 allora ξ = x/||x||X ha norma
1 e quindi
||A|| ≥ ||Aξ||Y =1
||x||X· ||Ax||Y
ossia la 5.31.
La 5.31 mostra che:
||BAx|| ≤ ||B|| · ||Ax||Y ≤ ||B|| · ||A|| · ||x||X .
Prendendo l’estremo superiore per ||x||X ≤ 1, si trova la 5.32.
La disuguaglianza 5.32 nel caso in cui Z = Y = X mostra
||A2|| ≤ ||A||2
280

5. SPAZI DI BANACH
e, più in generale,
||An|| ≤ ||A||n .
Conviene mostrare subito un modo equivalente per il calcolo di ||A||:
Teorema 5.81. Vale:
||A|| = minM | ||Ax||Y ≤ M ||x|| . 5.33
DIMOSTRAZIONE
Indichiamo con M0 il numero
M0 = infM | ||Ax||Y ≤ M ||x||
e proviamo che M0 = ||A||, ossia che
M0 = sup||x||X≤1
||Ax||Y .
Ciò in particolare mostra che l’estremo inferiore è un minimo.
La 5.31 implica che M0 ≤ ||A||. Per mostrare la disuguaglianza opposta, fissiamo
δ > 0 arbitrario. Vale, per ogni x,
||Ax||Y ≤ (M0 + δ) · ||x||X
e quindi, se ||x||X ≤ 1,
||Ax||X ≤ (M0 + δ) · ||x||X ≤ M0 + δ .
Dunque, la disuguaglianza
||A|| ≤ M0 + δ
vale per ogni δ > 0. Passando all’estremo inferiore rispetto a δ si trova
||A|| ≤ M0 5.34
e quindi l’uguaglianza 5.33.
281

5. SPAZI DI BANACH
Possiamo ora tornare a considerare la diseguaglianza 5.29. Essa può ora scriversi
||Ax0|| ≤ M ||x0|| M = sup||x||≤1 x∈domA
||Ax||
ossia
||A|| ≤ M .
Però, A estende A e quindi ||A|| ≥ M . dunque:
Corollario 5.82. La norma dell’operatore A, estensione per continuità di A, è
sup||x||≤1 x∈domA
||Ax|| .
Ossia, il calcolo della norma di un operatore lineare continuo definito su X può
effettuarsi a partire da una sua restrizione ad un sottospazio denso in X .
Si lascia per esercizio di provare la seguente ulteriore caratterizzazione di ||A||:
Teorema 5.83. Vale:
||A|| = sup||x||=1
||Ax||Y = supx =0
||Ax||Y||x||X
.
Quando sia X che Y sono s.l.n-ti completi, ossia spazi di Banach, lo spazio degli
operatori lineari e continui da X in Y , normato nel modo che abbiamo appena
introdotto, si indica col simbolo L(X, Y ) oppure B(X, Y ). Due casi sono di uso
particolarmente frequente e ad essi si riservano simboli speciali: il caso in cui X = Y
ed il caso, importantissimo, X = F. Nel primo caso si usa il simbolo L(X) invece di
L(X, X); nel secondo caso si usa il simbolo X ∗ o X ′ invece di L(X, F). Lo spazio
X∗ si chiama lo spazio duale di X .
Infine, esaminiamo il problema della completezza dello spazio L(X, Y ). La dimo-
strazione del teorema seguente usa la completezza dello spazio Y ma non quella
dello spazio X . Per questa dimostrazione abbiamo bisogno di ricordare che una
successione fondamentale è anche limitata; e che la successione (An) è limitata in
L(X, Y ) quando esiste un numero M , indipendente da n, tale che
||An|| < M .
282

5. SPAZI DI BANACH
Teorema 5.84. Lo spazio L(X, Y ) è completo.
DIMOSTRAZIONE
Dobbiamo mostrare che ogni successione (An) fondamentale in L(X, Y ) è anche con-
vergente. Sia allora (An) fondamentale. Per definizione di norma in L(X, Y ), per ogni
ε > 0 esiste Nε tale che per n, m maggiori di Nε vale
||An − Am|| ≤ ε ossia sup||x||X≤1
||(An − Am)x||Y ≤ ε . 5.35
Segue che la successione (Anx) di elementi di Y è fondamentale per ogni x di norma
minore o uguale ad 1; e quindi per ogni x ∈ X. Ciò permette di definire l’operatore B
dato da
Bx = lim Anx .
Proviamo la linearità e la continuità di B e poi proviamo che lim A n = B.
Da
B(αx + βy) = lim An(αx + βy) = lim αAnx + βAny = αBx + βBy
segue la linearità. La continuità segue perché, se ||x|| ≤ 1,
||Bx|| = || lim Anx|| = lim ||Anx|| ≤ M ||x||
con M indipendente da n perchè la successione (A n), essendo fondamentale, è
limitata.2
Mostriamo ora che B = lim An, ossia che
lim ||B − An|| = 0 . 5.36
E’:
||B − An|| = sup||x||≤1
||(B − An)x||Y .
Sia ε > 0 e sia Nε tale che, per n, m maggiori di Nε, valga 5.35. Fissato x con ||x|| < 1,
scriviamo
||Bx − Anx||Y = ||(B − Am)x + (Am − An)x||Y ≤ ||(B − Am)x||Y + ε . 5.37
2Si noti che in questa dimostrazione si usa anche la continuità della norma.
283

5. SPAZI DI BANACH
Notiamo che questa disuguaglianza vale per ogni x con ||x|| ≤ 1 e per tutti gli
m > Nε.
Notiamo ora l’esistenza di un opportuno m > N ε (dipendente sia da x che da ε) per
cui vale anche
||(B − Am)x|| < ε .
Dunque, la 5.37 dà:
||Bx − Anx||Y ≤ infm||(B − Am)x||Y + ε ≤ 2ε ∀n > Nε .
Ciò prova 5.36.
5.7.5 Inversi di un operatore
In dimensione finita, l’equazione
Ax = y , x , y ∈ Cn
con x, y vettori ed A trasformazione lineare, è risolubile per ogni y se e solo se
kerA = 0
ed in tal caso esiste l’operatore inverso A−1 di A che è lineare e che verifica ambedue
le condizioni AA−1 = I
A−1A = I ;
anzi, se un operatore indicato con A−1 soddisfa una delle due uguaglianze precedenti
esso soddisfa anche la seconda ed è l’operatore inverso di A, si veda il paragrafo 5.1.23.
La situazione è più complessa in dimensione infinita. Infatti:
Esempio 5.85. Un operatore può avere nucleo nullo senza essere suriettivo. Per
esempio, sia X = Y = l2. Un operatore con tali proprietà è l’operatore S dato da:
Sx = S(x1, x2, x3, . . .) = (0, x1, x2, x3, . . .) .
3Si ricordi che x ed y appartengono ambedue a Cn. Se essi appartengono a spazi diversi allora
l’ultima affermazione è falsa.
284

5. SPAZI DI BANACH
Un operatore può avere nucleo non nullo ed essere suriettivo: per esempio,ancora
con X = Y = l2, Un operatore con tali proprietà è l’operatore T dato da:
Tx = T (x1, x2, x3, . . .) = (x2, x3, . . .) .
Dato che kerS = 0, si può definire un operatore A inverso di S, con dom A = im S
(si noti che, in quest’esempio particolare, A è la restrizione di T ad im S). Dunque, A
verifica
ASx = x ∀x ∈ l2
ma non verifica SAx = x per ogni x di l2.
Invece, si verifica facilmente l’esistenza di un operatore lineare B che verifica TBx =
x per ogni x ∈ l2. Non vale però BTx = x per ogni x ∈ l2 nonostante che si stiano
considerando trasformazioni da l2 in sé.
Queste considerazioni suggeriscono la seguente definizione:
Definizione 5.86. Sia K un operatore lineare, limitato o meno, da X in Y . Se un
operatore A, con dominio im K , verifica
AKx = x ∀x ∈ X ,
l’operatore A si chiama inverso sinistro di K . Se un operatore lineare B verifica
KBy = y ∀y ∈ Y
l’operatore B si chiama inverso destro di K .
Un operatore che è sia inverso destro che sinistro di K si chiama inverso di K e si
indica col simbolo K−1.
Si noti che la definizione di linearità è stata esplicitamente richiesta nella definizione
di inverso destro, ma non in quella di inverso sinistro. Ciò perché:
Teorema 5.87. Un operatore lineare K da X in Y ammette inverso sinistro se e
solo se kerK = 0. In tal caso l’inverso sinistro è unico, ed è lineare.
285

5. SPAZI DI BANACH
DIMOSTRAZIONE
Se esiste l’inverso sinistro A di K allora per ogni x ∈ domK vale:
x = AKx
e quindi se Kx = 0 si ha anche x = 0. Dunque, l’esistenza dell’inverso sinistro implica
kerK = 0, ossia che K è iniettivo.
Viceversa, sia kerK = 0. Allora K, essendo lineare, è (univoco e) iniettivo. Il suo
inverso sinistro è l’operatore che a Kx associa x.
La definizione di inverso sinistro mostra che il suo grafico in Y × X è l’insieme
(Kx, x) | x ∈ X. Questo è un s.spazio percé l’operatore K è lineare; e quindi anche
l’inverso sinistro, avendo per grafico un s.spazio, è lineare, si veda il teorema 5.58.
Per contrasto si noti che l’inverso destro non è unico e che possono anche esistere
operatori B non lineari che verificano l’uguaglianza KBy = y per ogni y:
Esempio 5.88. Sia X = Y = l2. Sia T l’operatore introdotto nell’esempio 5.85.
Per ogni numero naturale n e per ogni numero reale α, definiamo Bn,α ponendo
Bn,α(y1, y2, y3, . . .) = (αyn1 , y1, y2, y3, . . .) .
L’operatore Bn,α è non lineare se n > 1 ed è lineare se n = 1. Per ogni scelta di n e
di α si ha: TBn,αy = y per ogni y ∈ l2.
In particolare si vede la non unicità dell’inverso destro perfino con la condizione che
esso debba essere lineare.
Le considerazioni precedenti suggeriscono di privilegiare lo studio dell’inverso
sinistro. Approfondendo tale studio, notiamo che non c’è relazione tra continuità di
un operatore e continuità del suo inverso sinistro, come ora vediamo:
Esempio 5.89. Mostriamo l’esempio di un operatore continuo ed invertibile, con
inverso sinistro non continuo.
Sia X = Y = l2 e sia A l’operatore definito da
A(x1, x2, x3, x4, . . .) = (x1,12x2,
13x3,
14x4, . . .) .
286

5. SPAZI DI BANACH
E’ facile vedere che l’operatore A è continuo e iniettivo, e che il suo inverso sinistro,
definito su im A, è l’operatore non continuo B:
B(y1, y2, y3, . . .) = (y1, 2y2, 3y3, . . .) .
Per avere un esempio di operatore illimitato il cui inverso è limitato, si scambino i
ruoli degli operatori A e B appena introdotti.
E’ facile dare un test per la limitatezza dell’inverso sinistro: sia B inverso sinistro di
A. Per definizione, l’operatore B è limitato se e solo se esiste ρ > 0 tale che
||By||X ≤ ρ||y||Y ∀y ∈ domB .
Un elemento y è in domB se e solo se esiste x per cui y = Ax e quindi la
disuguaglianza precedente equivale a
m||x||X ≤ ||Ax||Y 5.38
(con m = 1/ρ > 0). Questa condizione implica anche che kerA = 0. Dunque:
Teorema 5.90. L’operatore A ammette inverso sinistro continuo se e solo se esiste
m > 0 (disuguaglianza stretta!) per cui vale 5.38.
La condizione 5.38 non è di facile verifica ed in generale non è facile costruire
l’espressione esplicita dell’inverso. Un caso semplice ed importante è il seguente:
Teorema 5.91. Sia A ∈ L(X), con ||A|| < 1 (disuguaglianza stretta!) e si consideri
l’operatore I − A. L’operatore I − A è iniettivo e suriettivo, ossia invertibile, ed è
(I − A)−1 =+∞∑k=0
Ak . 5.39
DIMOSTRAZIONE
Sia q < 1 tale che ||A|| < q, ossia tale che ||Ax|| ≤ q||x|| per ogni x. Vale:
||(I − A)x|| = ||x − Ax|| ≥˛˛ ||x|| − ||Ax||
˛˛ = ||x|| − ||Ax|| ≥ (1 − q)||x|| .
287

5. SPAZI DI BANACH
Dunque, l’operatore I −A ammette l’inverso sinistro continuo, per il Teorema 5.90. Per
trovare un’espressione per l’inverso sinistro consideriamo la serie in 5.39 (suggerita
dalla serie geometrica!) Mostriamo prima di tutto che essa converge in L(X). Per
questo consideriamo la successione delle somme parziali
Sn =nX
k=1
Ak .
Si ha:
||Sn − Sn+m|| =
˛˛˛˛ n+mXk=n+1
Ak
˛˛˛˛ ≤ n+mX
k=n+1
||Ak|| ≤n+mX
k=n+1
qk .
Essendo q ∈ [0, 1) si ha che la successione delle somme parziali è fondamentale e
quindi convergente in L(X).
Notiamo che, in particolare,
||Ak|| ≤ ||A||k ≤ qk così che limk
Ak = 0 .
Per definizione +∞Xk=1
Ak
!x =
lim
k
nXk=1
Ak
!x = lim
k
nX
k=1
Akx
!=
+∞Xk=1
Akx .
Dunque: +∞Xk=0
Ak
!(I − A)x =
+∞Xk=0
Akx −+∞Xk=0
Ak+1x
= lim
(nX
k=0
Akx −nX
k=0
Ak+1x
)= limx − Ak+1x = x
e quindi la serie in 5.39 rappresenta l’inverso sinistro di (I − A). Con calcoli analoghi
si vede che è anche inverso destro, e quindi inverso. In particolare segue che I − A è
suriettivo.
La serie 5.39 si chiama serie di von Neumann.
Sottolineiamo ora che un operatore ammette inverso quando ammette sia inverso
destro che sinistro; in particolare quando è sia iniettivo che suriettivo. Conviene
indebolire un po’ questa definizione.
288

5. SPAZI DI BANACH
Definizione 5.92. Sia A lineare da X in Y con dominio denso in X e con
immagine densa in Y . Sia A iniettivo. L’inverso sinistro di A, definito su im A
ed a valori in dom A, si chiama inverso di A.
Il simbolo A−1 si usa anche per indicare l’inverso di A, nel senso generalizzato che
abbiamo ora definito.
Notiamo infine:
Teorema 5.93. Siano A e B operatori lineari ambedue invertibili con
im B ⊆ dom A .
Siano continui gli operatori inversi A−1 e B−1. Allora (AB)−1 esiste e vale
(AB)−1 = B−1A−1 .
DIMOSTRAZIONE
Immediato, notando che dom AB = dom B e che
B−1A−1ABx = x ∀x ∈ domA .
5.8. IL TEOREMA DI BAIRE E LE SUE CONSEGUENZE
Una semplice osservazione che vale in R2 è la seguente: gli iperpiani per 0 in questo
caso sono rette di equazione y = mx oppure x = 0. Esse sono parametrizzate dal
punto in cui intersecano la circonferenza x2 + y2 = 1. Dunque R2 non è unione di
una famiglia numerabile di rette per 0; e questa osservazione si generalizza a rette
qualsiasi, ed a dimensione n > 2. Vediamo come questo risultato si estende ad un
generico spazio di Banach.
Proveremo il teorema seguente, non ovvio nemmeno in dimensione finita:
Teorema 5.94 (di Baire). Sia X uno spazio di Banach e sia (An) una successione
di s.insiemi di X , ciascuno dei quali è chiuso e privo di punti interni. Allora,
289

5. SPAZI DI BANACH
⋃An = X .
Rimandando alla fine di questo paragrafo la dimostrazione, illustriamo varie
conseguenze importanti di questo teorema.
Notiamo prima di tutto che un s.spazio di X , diverso da X stesso, non ha punti interni.
Dunque vale in un generico spazio di Banach la proprietà che abbiamo notato sopra
per R2, che conviene enunciare come segue:
Teorema 5.95. Sia (Xn) una successione di s.spazi di uno spazio di Banach X .
Se X = ∪Xn allora esiste n0 tale che X = Xn0 .
Il Teorema di Baire è un potente strumento per lo studio delle proprietà degli operatori
lineari tra due spazi di Banach X ed Y . Esso talvolta si usa direttamente; più spesso
interviene grazie ai quattro teoremi seguenti. Il primo che presentiamo va sotto il nome
di Teorema di Banach-Steinhaus. Esso concerne s.insiemi A di L(X, Y ). Ricordiamo
che L(X, Y ) è uno spazio normato e quindi ha senso investigare quando A è un
s.insieme limitato di L(X, Y ). Ciò avviene se esiste M tale che ||A|| ≤ M per ogni
A ∈ A.
Fissiamo ora un qualsiasi elemento x ∈ X e consideriamo l’insieme dei “valori”
Ax, A ∈ A. Questo è un s.insieme di Y che è limitato se l’insieme A è limitato in
L(X, Y ). Infatti, ||Ax||Y ≤ ||A|| · ||x|| ≤ M · ||x|| per ogni A ∈ A. Il teorema di
Banach-Steinhaus permette di invertire questa proprietà:
Teorema 5.96 (di Banach-Steinhaus). Sia A un s.insieme di L(X, Y ).
Supponiamo che per ogni x ∈ X esista un numero Mx tale che
||Ax|| ≤ Mx ∀A ∈ A . 5.40
(Sottolineiamo: Mx indipendente da A ∈ A). In questo caso A è un s.insieme
limitato di L(X, Y ).
DIMOSTRAZIONE
Indichiamo con Xn ⊆ X l’insieme
Xn = x | ||Ax|| ≤ n ∀A ∈ A .
290

5. SPAZI DI BANACH
La condizione 5.40 mostra che
[Xn = X .
Consideriamo ora un operatore A ∈ A. Essendo A continuo, l’insieme x | ||Ax|| ≤ n
è chiuso e quindi
Xn =\
A∈Ax | ||Ax|| ≤ n
è esso stesso chiuso. Abbiamo quindi una famiglia di chiusi la cui unione è X. Per il
Teorema di Baire, uno almeno deve avere punti interni. Sia esso X N . Esiste x0 ∈ XN
ed esiste ε > 0 per cui
x0 + x | ||x|| ≤ ε ⊆ XN .
Dunque, se ||x|| < ε si ha
||Ax|| ≤ ||A(x + x0)|| + ||Ax0|| ≤ N + ||Ax0|| = N + Mx0 = M ,
con M indipendente da A. Ciò prova la limitatezza del s.insieme A di L(X, Y ).
Il Teorema di Banach-Steinhaus permette di passare da un’informazione puntuale,
la limitatezza dell’insieme dei valori assunti in ciascun punto x, ad una limitatezza
uniforme sulla sfera x | ||x|| ≤ 1. Per questo esso va anche sotto il nome di
Teorema della limitatezza uniforme.
In dimensione finita una trasformazione lineare invertibile non può “schiacciare” un
aperto trasformandolo in un s.insieme di un s.spazio proprio. Si ricordi il ruolo
importante di questa proprietà nella dimostrazione del teorema della funzione inversa
e della funzione implicita.
Una proprietà analoga vale anche in spazi di Banach:
Teorema 5.97 (della mappa aperta). Siano X ed Y spazi di Banach e sia A ∈
L(X, Y ). Se A è suriettiva allora l’immagine di ogni aperto di X è un aperto di Y .
291

5. SPAZI DI BANACH
Posponiamo la dimostrazione presentando invece due conseguenze del Teorema di
Baire che si provano più facilmente mediante il teorema della Mappa aperta. Esse
riguardano questo problema: abbiamo visto che gli operatori lineari tra X ed Y
possono essere discontinui se X ha dimensione infinita. Gli esempi che abbiamo
visto di operatori discontinui sono però esempi di operatori il cui dominio non è tutto
X . Ci chiediamo se quando il dominio è tutto lo spazio allora l’operatore debba essere
continuo. La risposta è negativa:
Teorema 5.98. Siano X ed Y spazi di Banach. Esistono operatori lineari da X in
Y , definiti su X e non continui.
Si veda l’osservazione 5.133.
Però:
Teorema 5.99 (di Banach). Siano X ed Y spazi di Banach e sia A ∈ L(X, Y ) una
trasformazione lineare iniettiva da X in Y . Se l’immagine di A è chiusa allora la
trasformazione lineare A−1 (definita su imA) è continua.
DIMOSTRAZIONE
Ricordiamo che, per definizione di L(X, Y ), un operatore A ∈ L(X, Y ) ha dominio
uguale ad X.
L’immagine di una trasformazione lineare è un s.spazio e in questo caso l’immagine è
chiusa; dunque l’immagine di A è essa stessa uno spazio di Banach. Sostituendo Y
con imA, possiamo supporre che A sia anche suriettiva.
La trasformazione inversa di A−1, che è A, è suriettiva: per il teorema della mappa
aperta, A =`A−1
´−1 ∈ L(X, Y ) trasforma aperti in aperti; e quindi A−1 è continua.
Diamo infine un test importante per provare la continuità direttamente di un operatore
(e non del suo operatore inverso).
292

5. SPAZI DI BANACH
Si prova facilmente che se A ∈ L(X, Y ) (e quindi domA = X) allora il grafico di A
è chiuso in X × Y .
Vale anche l’implicazione opposta:
Teorema 5.100 (del grafico chiuso). Siano X ed Y spazi di Banach e sia A un
operatore lineare da X in Y , con dominio uguale ad X . Se il grafico di A è chiuso
allora A è continuo.
DIMOSTRAZIONE
Indichiamo con G il grafico di A. Per ipotesi, G è un s.spazio chiuso dello spazio di
Banach X × Y ; e quindi è esso stesso uno spazio di Banach.
Introduciamo i due operatori, ovviamente lineari e continui:
P : G → Y , P (x,Ax) = Ax
Π : G → X , Π(x,Ax) = x .
Oltre che continuo, l’operatore Π è suriettivo, perché domA = X per ipotesi; ed è
iniettivo perchè se Ax1 = Ax2 allora x1 = x2. Dunque esiste Π−1 e, per il Teorema di
Banach, Π−1 è continuo. Dunque,
Ax = P (Π−1x)
è continua.
Bisogna notare che esistono anche operatori lineari il cui grafico è chiuso ma che
non sono continui. Naturalmente, il loro dominio non sarà tutto lo spazio. Definiamo
quindi:
Definizione 5.101. Sia A uno operatore lineare tra due spazi di Banach X ed Y .
L’operaore A si dice chiuso quando il suo grafico è chiuso in X × Y .
L’esempio seguente mostra che operatore chiusi ma non continui non solo esistono
ma sono anche importanti per le applicazioni:
293

5. SPAZI DI BANACH
Esempio 5.102. Sia X = Y = C(0, 1) e sia
domA = C1(0, 1) , Ax = x′ .
Se x ∈ domA, vale
x(t) = x(0) +∫ t
0
x′(s) ds .
Come si verifica facilmente, l’operatore A non è continuo. Proviamo che il suo
grafico è chiuso. Consideriamo quindi una successione nel grafico che è convergente
e mostriamo che essa converge ad un punto del grafico. Sia quindi
(xn, Axn) → (x0, y0) .
Dobbiamo provare che x0 ∈ domA e che Ax0 = y0.
Si noti che y0 è limite uniforme delle funzioni continue Axn e quindi y0 è una funzione
continua. Dunque dobbiamo provare che si può scrivere
x0(t) = x0(0) +∫ t
0
y0(s) ds .
Questa uguaglianza segue da
xn(t) = xn(0) +∫ t
0
x′n(s) ds
e da xn → x0 uniformemente su [0, 1]
x′n → y0 uniformemente su [0, 1].
Osserviamo infine:
Corollario 5.103. Siano X , Y e Z tre spazi di Banach. Sia A ∈ L(X, Y ) e sia B
un operatore lineare chiuso da Y in Z . Se
im A ⊆ dom B
allora l’operatore composto BA è continuo.
DIMOSTRAZIONE
Si vede facilmente che BA è definito su X, ed è chiuso. Dunque è continuo.
294

5. SPAZI DI BANACH
5.8.1 Proiezioni
Un operatore P ∈ L(X) si dice una proiezione se
P 2 = P .
Si noti che le proiezioni vengono sempre a coppie. Infatti,
Teorema 5.104. L’operatore P è una proiezione se e solo se l’operatore I − P è
una proiezione. Inoltre, imP ∩ im(I − P ) = 0.
DIMOSTRAZIONE
Infatti,
(I − P )(I − P ) = I − P − P + P 2 = I − P
se e solo se P 2 = P ossia se e solo se P è una proiezione.
Se x = Px′ = (I − P )x′′ allora
Px′ = x′′ − Px′′ da cui Px′ = Px′′ − P 2x′′ = Px′′ − Px′′ = 0
e quindi x = Px′ = 0.
Inoltre:
Teorema 5.105. L’immagine di una proiezione è un s.spazio chiuso di X .
DIMOSTRAZIONE
Sia infatti (Pxn) una successione in imP , Pxn → y0. Dobbiamo provare che y0 ∈ imP .
Poniamo yn = Pxn e notiamo che
Pyn = P 2xn = Pxn → y0
e d’altra parte, essendo P continua, Pyn = P 2yn → Py0. Dunque, y0 = Py0 ∈ imP .
Di conseguenza, ogni proiezione identifica sempre una coppia di s.spazi chiusi:
l’immagine di P e quella di (I−P ). Questi s.spazi hanno in comune solo l’elemento
0. Inoltre, ogni x si rappresenta come
x = Px + (I − P )x .
295

5. SPAZI DI BANACH
Questa formula suggerisce un legame tra operatori di proiezione e complementare.
Vale infatti:
Teorema 5.106. L’immagine di una proiezione P è un s.spazio chiuso di X , dotato
di complementare chiuso. Viceversa, sia X1 un s.spazio di X chiuso e dotato di
complementare chiuso X2. Esiste una proiezione P la cui immagine è X1.
DIMOSTRAZIONE
Sia P una proiezione ed X1 = imP . Definiamo
X2 = im(I − P ) .
Si è già visto che X1 ∩ X2 = 0 e
X1 + X2 = Px + (I − P )y | x ∈ X , y ∈ Y = X .
Dunque, l’immagine di P è un s.spazio dotato di complementare.
Viceversa, sia
X = X1 ⊕ X2 ,
somma diretta di due s.spazi chiusi. Questo vuol dire che per ogni x esistono x 1 ed x2
unici e tali che
x = x1 + x2 . 5.41
Si definisca Px = x1 = x1 + 0. Segue da qui che P (Px) = x1.
L’operatore P è lineare perchè se x ′ = x′1 + x′
2, x′′ = x′′1 + x′′
2 , allora αx′ + βx′′ =
α(x′1 + x′
2) + β(x′′1 + x′′
2 ) = (αx′1 + βx′
2) + (αx′′1 + βx′′
2 ); e quindi P (αx′ + βx′′) =
(αx′1 + βx′
2) = αPx′ + βPx′′. Se possiamo provare la continuità di P , abbiamo che P
è una proiezione.
L’operatore P è definito su X e quindi, per provare che è continuo, basta provare
che è chiuso. Sia quindi (xn) una successione convergente ad x0 e sia yn = Pxn.
Supponiamo che (yn) converga ad y0.
L’uguaglianza 5.41 mostra l’esistenza di un elemento zn ∈ X2 tale che
xn = Pxn + zn = yn + zn .
Di conseguenza, anche la successione (zn) converge, a z0 = x0 − y0.
296

5. SPAZI DI BANACH
I s.spazi essendo chiusi, vale y0 ∈ X1, z0 ∈ X2. Essendo inoltre
x0 = y0 + z0 , si ha Px0 = y0 .
Segue da qui che l’operatore P è chiuso e quindi continuo; dunque è una proiezione.
Si consideri ora un esempio.
Esempio 5.107. Sia X = R2 normato dalla usuale norma
||(ξ, η)|| =√
ξ2 + η2
e siano
X1 = (ξ, 0) | ξ ∈ R , X2 = r(cos θ, sin θ) | r ∈ R
ove θ ∈ (0, π/2) è fissato. Dunque, X2 è una retta per l’origine, non coincidente con
X1.
Ogni punto x = (ξ, η) può rappresentarsi nella forma
x = (ξ − η
sin θcos θ, 0) +
η
sin θ(cos θ, sin θ) ,
si veda la figura seguente.
L’operatore P :
P (ξ, η) = (ξ − η
sin θcos θ, 0)
è una proiezione.
L’operatore P dipende dalla scelta di θ, P = Pθ .
La norma di Pθ è
maxξ2+η2=1
∣∣ξ − ηsin θ cos θ
∣∣√ξ2 + η2
≥ |cotg θ| .
Dunque,
limθ→0
||Pθ|| = +∞ .
297

5. SPAZI DI BANACH
0 0.5 1 1.5 2
0
0.5
1
1.5
2
Fig. 5.3.
5.8.2 Appendice: Applicazioni
Il Teorema di Baire e le sue conseguenze sono strumenti potenti per provare l’esistenza
di oggetti dalle proprietà “strane”. Mostriamo due esempi.
Si costruiscono “esplicitamente”, come somma di serie uniformemente convergenti
di funzioni continue, delle funzioni che, pur essendo continue, non hanno derivata in
nessun punto. Una dimostrazione, dovuta a Banach, dell’esistenza di tali funzioni si
basa sul Teorema di Baire.
Teorema 5.108. Esistono funzioni continue su un intervallo [a, b], ovunque prive di
derivata.
DIMOSTRAZIONE
Consideriamo in C(0, 1) il s.insieme An i cui elementi sono funzioni f con questa
proprietà: esiste x ∈ [0, 1 − 1n] ed esiste h ∈ (0, 1 − x) tale che
|f(x + h) − f(x)| ≤ nh .
298

5. SPAZI DI BANACH
Si prova che:
– L’insieme An è chiuso e privo di punti interni.
Accettando queste proprietà che proveremo più avanti, il Teorema di Baire mostra che
esiste una funzione continua f(x) che non appartiene a ∪A n.
Se f /∈ ∪An allora per ogni x e per ogni h vale
|f(x + h) − f(x)| > nh
e ciò per ogni n; ossia il rapporti incrementale è illimitato e quindi la derivata f ′(x) non
esiste, e ciò per ogni x.
Per completare la dimostrazione, mostriamo che gli insiemi A n sono chiusi e privi di
punti interni.
Proviamo prima di tutto che An è chiuso. Sia per questo fk → f (uniformemente su
[0, 1]), con fk ∈ An. Dunque, esiste xk ∈ [0, 1 − 1/n] tale che
|fk(xk + h) − fk(xk)| ≤ nh .
Passando ad una s.successione, si può assumere xk → x0 ∈ [0, 1 − 1/n]. Vale:
|f(x0 + h) − f(x0)|
≤ |f(x0 + h) − fk(x0 + h)| 5.42
+|fk(x0 + h) − fk(xk + h)| 5.43
+|fk(xk + h) − fk(xk)| 5.44
+|fk(xk) − fk(x0)| 5.45
+|fk(x0) − f(x0)| . 5.46
Il termine5.44 verifica
|fk(xk + h) − fk(xk)| ≤ nh
Essendo f limite uniforme di fk, per k sufficientemente grande i due addendi 5.42 ed5.46
sono minori di un prefissato ε > 0.
Usiamo ora il Teorema di Ascoli-Arzelà: essendo convergente, la successione (f k) è
equicontinua e: ||(x0+h)−(xk+h)|| → 0. Dunque, per k grande, anche gli addendi 5.43
e5.45 sono minori di ε.
299

5. SPAZI DI BANACH
0 1 2 3 4 5 6 7 8 9 10−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x
Fig. 5.4.
Ricapitolando, la funzione f verifica, per ogni ε > 0,
|f(x0 + h) − f(x0)| ≤ nh + 4ε e, essendo ε arbitrario, |f(x0 + h) − f(x0)| ≤ nh .
Ciò prova che ciascuno degli insiemi An è chiuso. Proviamo ora che ciascuno di essi è
privo di punti interni. Fissato n ed f ∈ An, proviamo che per ogni ε > 0 esiste ζ /∈ An
che dista da f meno di ε.
Si sa che esistono funzioni g continue e lineari a tratti tali che
||f − g|| < ε/2 .
Basta quindi provare che data una qualunque g continua e lineare a tratti si può
costruire ζ /∈ An, che dista meno di ε/2 da g. Sia per questo
φ(x) = distanza di x dall’intero più vicino.
Il grafico di φ(x) è in figura 5.4:
Fissiamo quindi una funzione g lineare a tratti. Essa è lipschitziana e quindi soddisfa
|g(x) − g(x′)| < r|x − x′| per un r opportuno. Sia ζ la funzione
ζ(x) = g(x) + εφ(mx) .
300

5. SPAZI DI BANACH
Chiaramente, per ogni m, ||g − ζ|| ≤ ε/2. Vogliamo mostrare che, per un’opportuna
scelta di m, ζ /∈ An. Notiamo
|ζ(x) − ζ(x′)| ≥˛˛ ε|φ(mx) − φ(mx′)| − |g(x) − g(x′)|
˛˛
=
˛˛ εm|x − x′| − |g(x) − g(x′)|
˛˛ ≥ (εm − r)|x − x′|
se m > r/ε, con x′ tale che |x − x′| < 1/2m. Se ora m verifica anche m > (n + r)/ε,
allora ζ /∈ An. Ciò completa la dimostrazione.
Sia ora f(x) una funzione continua su [−π, π]. Si associ ad essa la serie
+∞∑n=−∞
fneinx , fn =12π
∫ +π
−π
f(s)e−ins ds
che si chiama la serie di Fourier della funzione f(x). Sotto ipotesi di regolarità, per
esempio se la funzione f(x) è di classe C1 e inoltre f(−π) = f(π), la serie converge
ad f(x) e questa condizione può indebolirsi, ma non fino alla sola continuità. Infatti:
Teorema 5.109. Esiste una funzione continua f su [−π, π] tale che f(0) = f(2π)
e tale che inoltre la serie di Fourier ad essa associata non converge in nessun punto.
DIMOSTRAZIONE
Indichiamo con CP (−π, π) il s.spazio di C(−π, π) i cui elementi sono funzioni continue
che verificano
f(−π) = f(π) .
Si vede facilmente che questo è un s.spazio chiuso di C(−π, π), e quindi esso stesso
uno spazio di Banach.
Studiamo le somme parziali della serie di Fourier. Indichiamo per questo con F N
l’operatore definito su CP (−π, π) da
(FNf)(x) =NX
n=−N
fneinx =1
2π
Z π
−π
f(s)NX
n=−N
ein(x−s) ds .
Si provi che
DN (x) =NX
n=−N
einx =sin(N + 1/2)x
sin x/2.
La funzione DN (x) si chiama nucleo di Dirichlet.
301

5. SPAZI DI BANACH
Dunque,
(FNf)(x) =1
2π
Z π
−π
f(s)sin[(N + 1/2)(x − s)]
sin[(x − s)/2]ds .
Facciamo vedere che esiste una funzione f ∈ CP (−π, π) tale che
supN
|(FN f)(x)| = +∞
per ogni x. Ciò vuol dire che la serie di Fourier di questa funzione f non converge per
nessun valore di x.
Per completare la dimostrazione basta quindi provare l’esistenza di f . Supponiamo
che tale funzione f non esista. Allora esiste un punto x 0 ∈ [−π, π] tale che per ogni
f ∈ CP (−π, π) si ha:
supN
|(FNf)(x0)| < +∞ .
In tal caso per ogni f ∈ CP (−π, π) esiste Mf per cui
|(FNf)(x0)| < Mf
per ogni N . E quindi, per il teorema di Banach–Steinhaus, esiste M = M(x 0),
indipendente da N , tale che
|(FNf)(x0)| < M(x0)||f ||CP (−π,π) .
Indicando con Fx0,N il funzionale che ad f ∈ CP (−π, π) associa (FNf)(x0), la
disuguaglianza precedente si scrive
||Fx0,N || < M(x0) ; 5.47
ossia, la famiglia dei funzionali lineari e continui F x0,N è limitata. Calcoliamo
esplicitamente la norma del funzionale Fx0,N e mostriamo che ciò non vale.
Per semplicità limitiamoci a fare il calcolo con x 0 = 0. In questo caso
F0,Nf =1
2π
Z π
−π
DN (t)f(t) dt .
e
|F0,N f | ≤ 1
2π
Z π
−π
|DN (t)f(t)|dt ≤„
1
2π
Z π
−π
|DN (t)|dt
«||f ||CP (−π,π)
302

5. SPAZI DI BANACH
così che
||F0,N || ≤ 1
2π
Z π
−π
|DN (t)|dt . 5.48
In realtà vedremo che vale l’uguaglianza. Accettando ciò,
||F0,N || =1
2π
Z π
−π
|DN (t)|dt =1
2π
Z π
−π
˛˛ sin[(N + 1/2)t]
sin t/2dt
˛˛
>1
π
Z π
−π
˛˛ sin[(N + 1/2)t]
t
˛˛ dt =
2
π
Z (N+1/2)π
0
| sin t|t
dt
≥ 2
π
N−1Xk=0
Z (k+1)π
kπ
| sin t|t
dt ≥N−1Xk=0
2
(k + 1)π2
Z (k+1)π
kπ
| sin t| dt
=4
π2
2nXk=0
1
(k + 1)−→ +∞ .
Ciò contrasta con la 5.47 e mostra che la funzione f esiste.
Accenniamo ora alla dimostrazione del fatto che l’uguaglianza vale nella formula 5.48.
Per mostrare ciò è sufficiente trovare una successione di funzioni (f k) di norma al più
uguale ad 1 e tale che
limk
|F0,Nfk| =1
2π
Z π
−π
|DN (t)| dt 5.49
Introduciamo per questo la funzione
y(x) = sign DN (x)
e una successione (fk) di funzioni continue convergente puntualmente ad y e inoltre
limitata da 1. L’uguaglianza 5.49 vale per questa successione di funzioni.
Ciò completa la dimostrazione.
5.8.3 Dimostrazioni posposte
Dimostrazione del TEOREMA 5.94, Teorema di Baire.
Premettiamo un’osservazione: Sia Bn una successione di palle contenuta ciascuna
nella precedente:
Bn = x | ||x − xn|| < εn ⊆ x | ||x − xn−1|| < εn−1 = Bn−1
303

5. SPAZI DI BANACH
così che
||xn − xn+m|| < εn .
Sia lim εn = 0. Da
||xn − xn+m|| < εn
si vede che la successione (xn) è fondamentale ossia convergente,
limxn = x .
Il punto x appartiene alla chiusura di Bn per ogni n:
x ∈⋂n
cl Bn .
Sia ora (An) una successione di insiemi chiusi e (Bn) una successione di palle con le
proprietà appena dette e tali che, inoltre,
(cl Bn) ∩ An = ∅ . 5.50
Allora, x non appartiene a An per nessun n, grazie alla 5.50:
x /∈⋃
An .
Per provare il Teorema di Baire, costruiamo una successione di palle Bn che ha le
proprietà dette sopra rispetto alla successione di insiemi (An), chiusi e privi di punti
interni. Ciò porterà a trovare che x /∈ ∪An e quindi ∪AN = X . Scegliamo x1 /∈ A1 e
una palla B1 di centro x1 e raggio minore di 1, tale che (cl B1) ∩ A1 = ∅. Sia ε1 > 0
il suo raggio. Non è restrittivo assumere ε1 < 1.
La palla B1 esiste perché A1 è chiuso e, essendo privo di punti interni, non è uguale
ad X .
La palla B1 non è contenuta in A2 perché A2 non ha punti interni. Dunque in
B1 esite un punto x2 /∈ A2 e quindi interno al complementare dell’insieme chiuso
A2. Possiamo quindi scegliere una palla B2 di centro x2, contenuta in B1 e di raggio
minore di ε1/2 < 1/2, tale che (cl B2) ∩ A2 = ∅.
Sia ε2 > 0 il raggio di B2.
Procedendo per induzione, scelti i punti x1, . . . , xk e le corrispondenti palle B1, . . . ,
Bk, scegliamo in Bk un punto xk+1 /∈ Ak+1 e una sfera di centro xk+1 e raggio
304

5. SPAZI DI BANACH
minore di εk/2 < 1/2k, tale che (cl Bk+1) ∩ Ak+1 = ∅. Sia εk+1 > 0 il raggio di
questa sfera.
La costruzione dei punti xk e delle palle Bk può farsi perché gli Ak non hanno punti
interni e sono chiusi.
Dato che εk → 0, esiste x = limxk e x ∈ ∩ncl Bn, ossia x ∈ cl Bn. Se fosse
x ∈ ∪Ak allora avremmo x ∈ Aj per almeno un indice j. E quindi avremmo
contemporaneamente x ∈ Aj , x ∈ cl Bj . Ciò contrasta con la costruzione di Bj
e quindi x /∈ ∪Ak. Ossia
⋃Ak = X ,
come si voleva provare.
Dimostrazione del TEOREMA 5.97, Teorema della mappa aperta.
In questa dimostrazione interverrà la “differenza algebrica” di insiemi C, D di Y :
C − D = c − d | c ∈ C , d ∈ D =⋃
d∈D
(C − d) .
Si noti che C − C = ∅ (e anche che C − C = 0, salvo nel caso in cui C ha un unico
elemento).
Se C ha interno non vuoto anche
C − D =⋃
d∈D
(C − d)
ha interno non vuoto grazie alla continuità delle traslazioni, per ogni insieme D (e
quindi anche per D = C).
Inoltre, se C contiene punti interni, allora (cl C) − (cl C) contiene un intorno di 0.
Proviamo ora il teorema 5.97. Ricordiamo che per definizione, un operatore A ∈L(X, Y ) ha dominio uguale ad X .
Per provare che l’operatore A, suriettivo, trasforma aperti in aperti, è sufficiente
mostrare che l’immagine di una palla
BX,r = x ∈ X | ||x|| < r
305

5. SPAZI DI BANACH
contiene una palla BY,σ,
BY,σ = y ∈ Y | ||y|| < σ .
Ciò prova che A0 è interno ad im A e, per traslazione, si trova che Ax0 è interno ad
im A per ogni x0 (nuovamente, si usa la continuità delle traslazioni).
Precisamente, proveremo che esiste un intorno W di 0 in Y che è contenuto in
A(BX,2). Useremo per questo l’inclusione seguente, che vale per ogni r > 0 ed
r′ > 0:
BX,r − BX,r′ ⊆ BX,r+r′ . 5.51
Consideriamo le palle
BX,2n = x ∈ X | ||x|| < 2n .
Dato che
X =⋃n
BX,2n
e che A è suriettivo, si trova
Y =⋃n
cl (A(BX,2n))
e quindi, per il teorema di Baire almeno uno degli insiemi cl (A(BX,2n)) ha
punti interni. Moltiplicando per numeri positivi si vede che ciascuno degli insiemi
cl (A(BX,r)) contiene punti interni, grazie alla continuità della moltiplicazione per
scalari.
Da 5.51 si ha che
cl A(BX,r) − cl A(BX,r) ⊆ cl [A(BX,r) − A(BX,r)] ⊆ cl A(BX,2r)
e quindi ciascun insieme cl A(BX,2r) contiene un intorno di 0. Naturalmente, r è
arbitrario: ogni insieme cl A(BX,r) contiene un opportuno intorno di 0.
Rimane da provare che A(BX,r) stesso contiene un intorno di 0. Sia W un intorno
di 0 contenuto in clA(BX,1). Completiamo la dimostrazione mostrando che W ⊆A(BX,2). Per questo basta provare
306

5. SPAZI DI BANACH
cl A(BX,1) ⊆ A(BX , 2) .
Ciò mostriamo ora. Sia per questo y ∈ cl A(BX,1). Mostriamo che y ∈ A(BX,2).
Si sa che cl A(BX,1/2) contiene un intorno di 0. Dunque esiste x1 ∈ BX,1 tale che
||y − Ax1|| è così piccolo da aversi y − Ax1 ∈ cl A(BX,1/2).
In modo analogo, cl ABX,1/4 contiene un intorno di 0 e quindi esiste x2 ∈ BX,1/2
per cui (y − Ax1) − Ax2 ∈ cl A(BX,1/4). Iterando questo procedimento per ogni n
si trova
x1 ∈ BX,1 tale che y − Ax1 ∈ cl A(BX,1/2) cioè ||y − Ax1|| ≤ 1/2
x2 ∈ BX,1/2 tale che (y − Ax1) − Ax2 ∈ cl A(BX,1/4) cioè ||(y − Ax1) − Ax2|| ≤ 1/4
...
xn ∈ BX,1/2n tale che y − Pnk=1 Axn ∈ cl A(BX,1/2n ) cioè ||y − P
nk=1 Axn|| ≤ 1/2n .
Sia ora
x =+∞∑i=1
xi così che ||x|| ≤+∞∑i=1
12n
< 2 .
Per questo vettore x vale
||y − Ax|| = lim ||y − Axn|| ≤ lim12n
= 0 , ossia y = Ax con ||x|| < 2 .
Ciò mostra che ogni y ∈ cl A(BX1 ) è anche in A(BX,2) e conclude la dimostrazione.
5.9. LO SPAZIO DUALE
Abbiamo già visto la relazione tra i funzionali lineari e continui su X e la nozione
geometrica di iperpiano. Ciò suggerisce di studiare più a fondo i funzionali lineari
continui, sia singolarmente che nel loro insieme, studiando le proprietà dello spazio
di Banach X∗.
E’ ovvio che il funzionale 0, quello che ad ogni elemento di X associa l’elemento
nullo del campo scalare, è in X ∗. Non è affatto ovvio che esistano altri elementi di
X∗. Infatti:
307

5. SPAZI DI BANACH
Teorema 5.110. Esistono spazi lineari X , dotati di una metrica rispetto alla quale
le operazioni di somma e moltiplicazioni per scalari sono continue e su cui nessun
funzionale lineare diverso da 0 è continuo.
Ossia, in tal caso, nello spazio X non si trovano iperpiani.
La dimostrazione è posposta.
E’ quindi estremamente importante sapere che se X è uno spazio di Banach allora X ∗
ha “molti” elementi. Ciò è conseguenza del teorema seguente:
Teorema 5.111 (di Hahn-Banach). Sia X uno s.l.n. e sia Y un suo s.spazio. Sia
L0 un funzionale lineare continuo su Y . Esiste un’estensione di L ad X tale che
||L||X∗ = sup|Ly| | y ∈ Y , ||y||X = 1 .
Ossia, ogni funzionale lineare e continuo su Y può estendersi ad X senza alterarne la
norma.
Si noti che nell’enunciato precedente si può assumere che Y sia chiuso, perché
l’operatore L0 si può estendere per continuità alla chiusura del suo dominio.
Per certe applicazioni (allo studio degli insiemi convessi, si veda il paragrafo 5.9.1)
è necessario provare una versione un po’ più generale del Teorema 5.111; ossia è
necessario provare i due teoremi seguente:
Teorema 5.112. Sia X uno spazio lineare su R. Esista una funzione p: X → R
1. positivamente omogenea, ossia tale che p(tx) = tp(x) per ogni x e per ogni
t ≥ 0;
2. subadditiva, ossia tale che p(x + y) ≤ p(x) + p(y) per ogni x, y in X .
Sia Y un s.spazio di X e sia L0 un funzionale lineare definito su Y , tale che
L0x ≤ p(x) ∀x ∈ Y .
308

5. SPAZI DI BANACH
Esiste un’estensione L di L0 ad X che verifica
Lx ≤ p(x) ∀x ∈ X .
Teorema 5.113. Sia X uno spazio lineare su C e sia p da X in R una funzione tale
che:
1. p(tx) = |t| · p(x) per ogni x in X e per ogni t ∈ C;
2. p(x + y) ≤ p(x) + p(y).
Sia Y un s.spazio di X e sia L0 un funzionale lineare definito su Y , tale che
|L0x| ≤ p(x) ∀x ∈ Y . 5.52
Esiste un’estensione L di L0 ad X che verifica
|Lx| ≤ p(x) ∀x ∈ X .
Posponiamo le dimostrazioni, notando che la dimostrazione del Teorema 5.113 si
ridurrà, con un opportuno artificio, a quella del Teorema 5.112.
Dimostrazione del TEOREMA 5.111. La dimostrazione discende immediatamente
dai Teoremi 5.112 e 5.113. Sia
M = sup|L0x| | x ∈ Y , ||x|| = 1 , p(x) = M ||x|| .
Nel caso reale, dal Teorema 5.112 si vede l’esistenza di L, funzionale lineare su X ,
che estende L0 e tale che
Lx ≤ M ||x||
e quindi anche
−Lx = L(−x) ≤ M || − x|| = M ||x||
ossia
|Lx| ≤ M ||x|| . 5.53
309

5. SPAZI DI BANACH
Nel caso complesso la disuguaglianza 5.53 figura direttamente nell’enunciato del
Teorema 5.113. Dunque il Teorema 5.111 vale.
Mostriamo ora alcune conseguenze importanti. La prima è che X ∗, duale di X , ha
“molti” elementi. Più precisamente,
Teorema 5.114. Per ogni x0 = 0 in X ed ogni m ∈ F, esiste L ∈ X∗ tale che
Lx0 = m , ||L|| =m
||x0||. 5.54
DIMOSTRAZIONE
Si sceglie come spazio Y la retta per 0 ed x0,
Y = λx0 | λ ∈ F .
Il s.spazio ha dimensione 1 e su esso è facile definire
L0(λx0) = λm .
Il funzionale L0 verifica 5.54 sui soli elementi di Y . Si usa quindi il Teorema di Hahn-
Banach per estendere L ad X.
In particolare si può segliere m = 1 oppure m = ||x0|| oppure m = ||x0||2. In
particolare, con quest’ultima scelta si trova
||L|| = ||x0|| .
Invece, scegliendo m = ||x0||, si trova
Corollario 5.115. Sia x0 ∈ X . Vale:
||x0|| = max||L||X∗=1
|Lx0| .
DIMOSTRAZIONE
Si fissi x0 = 0 in X. Per ogni L ∈ X∗ di norma 1 si ha:
|Lx0| ≤ ||x0|| , ossia sup||L||X∗=1
||Lx0|| ≤ ||x0|| .
310

5. SPAZI DI BANACH
Il funzionale definito in 5.54 con m = ||x0|| ha norma 1 e per esso
|Lx0| = ||x0|| .
Osservazione 5.116. L’asserto del corollario precedente somiglia alla definizione
della norma di un funzionale,
||L|| = sup||x||=1
|Lx| 5.55
Ma abbiamo provato che In generale, l’estremo superiore in 5.55 non è un massimo,
si veda il teorema 5.73.
Ciò mostra una prima differenza importante tra uno spazio ed il suo duale, che
commenteremo in seguito nel contesto del Teorema di Banach-Alaoglu, Teorema 5.150.
Il Teorema 5.114 in particolare afferma che se un elemento x0 è diverso da 0 allora
esiste un funzionale L di X ∗ che “lo vede non nullo”; e, traslando, se x1 = x0, esiste
un L ∈ X∗ tale che
Lx1 = Lx0 .
Dunque, X∗ ha così tanti elementi da distinguere quelli di X . Geometricamente,
abbiamo provato l’esistenza di un iperpiano che non contiene ambedue gli elementi
x0 ed x1. Questa osservazione può essere estesa fino a “separare” mediante iperpiani
due insiemi convessi tra loro disgiunti. Prima di studiare gli insiemi convessi conviene
però introdurre una notazione comoda per indicare l’azione degli elementi di X ∗ su
X . Invece di scrivere Lx, Ax ecc, usa scrivere4
〈〈f, x〉〉
4In realtà la notazione comunemente usata è 〈·, ·〉. Noi usiamo la notazione 〈〈·, ·〉〉 perché la
notazione 〈·, ·〉 si usa anche per indicare i “prodotti interni” nel contesto degli spazi di Hilbert.
Dato che vedremo una relazione tra funzionali lineari e prodotti interni, è opportuno essere
precisi nel distinguere gli uni dagli altri.
311

5. SPAZI DI BANACH
per indicare il valore che il funzionale f ∈ X ∗ assume sull’elemento x ∈ X (si
noti: l’elemento di X∗ è scritto prima di quello di X . In altri testi si trova scritto
dopo). Inoltre, per distinguere immediatamente gli elementi di X da quelli di X ∗, usa
indicare questi ultimi con lettere greche, o con simboli del tipo x∗, y∗ ecc. se i simboli
x, y,. . . si riservano agli elementi di X .
5.9.1 Applicazioni: Insiemi convessi
Per semplicità supponiamo che il campo scalare sia R.
Ricordiamo che un insieme A non vuoto si dice convesso quando ogni segmento di
estremi in A è tutto contenuto in A; ossia quando
x , y ∈ A =⇒ tx + (1 − t)y ∈ A ∀t ∈ [0, 1] .
Si verifica facilmente che gli iperpiani ed i semispazi sono insiemi convessi e che
l’intersezione di una qualsiasi famiglia di insiemi convessi è un insieme che, se non è
vuoto, è convesso.
Siano ora A e B due insiemi e sia x∗ ∈ X∗. Si dice che l’iperpiano
x | 〈〈x∗, x〉〉 = α
separa i due insiemi A e B se
A ⊆ x | 〈〈x∗, x〉〉 ≤ α , B ⊆ x | 〈〈x∗, x〉〉 ≥ α .
Si dice che la separazione è stretta se esiste ε > 0 tale che
A ⊆ x | 〈〈x∗, x〉〉 ≤ α − ε , B ⊆ x | 〈〈x∗, x〉〉 ≥ α .
E’ ovvio che in generale due insiemi disgiunti non possono essere separati da
iperpiani, si veda la figura 5.5 a sinistra. Per avere buoni risultati di separazione
dovremo lavorare con insiemi convessi. La figura 5.5 a destra mostra che insiemi
convessi e disgiunti non possono, in generale, separarsi strettamente.
Valgono però i due teoremi seguenti, la cui dimostrazione viene posposta:
312

5. SPAZI DI BANACH
y
x
−0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−3
−2
−1
0
1
2
3
y
x
Fig. 5.5.
Teorema 5.117. Sia A ⊆ X un convesso aperto. Se x0 /∈ A allora esiste un
iperpiano che separa x0 da A; ossia esiste x∗ ∈ X∗ tale che
〈〈x∗, x〉〉 ≤ 〈〈x∗, x0〉〉 ∀x ∈ A .
e
Teorema 5.118. Siano A, B convessi e disgiunti. Si ha:
– Se A è aperto, esiste un iperpiano che separa A e B;
– se A è chiuso e B è compatto allora esiste un iperpiano che separa
strettamente A e B.
Di conseguenza:
Teorema 5.119. Sia H un s.spazio chiuso dello spazio di Banach X . Vale H = X
se e solo se esiste x∗ ∈ X∗, x∗ = 0, tale che
H ⊆ kerx∗ .
DIMOSTRAZIONE
Se H = X, esiste x0 /∈ H e quindi per la seconda affermazione del Teorema 5.118,
x0 si separa strettamente da H : esistono ε > 0 ed x∗ tale che
〈〈x∗, x0〉〉 ≤ α − ε , 〈〈x∗, h〉〉 ≥ α , ∀h ∈ H .
313

5. SPAZI DI BANACH
Essendo H un s.spazio, segue
α ≤ 〈〈x∗,−h〉〉 = −〈〈x∗, h〉〉 .
Dunque, 〈〈x∗, h〉〉 = α per ogni h ∈ H . Essendo H un s.spazio, 0 appartiene ad H e
quindi 〈〈x∗, 0〉〉 = α, ossia α = 0. Si ha dunque
〈〈x∗, h〉〉 = 0 ∀h ∈ H ,
come volevamo.
Il viceversa è ovvio.
Inoltre,
Teorema 5.120. Se X ∗ è separabile, anche X lo è.
DIMOSTRAZIONE
Sia x∗n un s.insieme denso in X ∗. Si scelgano elementi xn ∈ X di norma 1 e tali che˛
˛〈〈x∗n, xn〉〉
˛˛ ≥ 1
2λn , λn = ||x∗
n|| .
Combinando linearmente gli xn, con coefficienti razionali, si trova un s.insieme A nu-
merabile di X. Procedendo per assurdo, mostriamo che A è denso in X, che pertanto
è separabile.
Se A non fosse denso in X, la sua chiusura sarebbe un s.spazio H di X diverso da
X. Dunque, per il Teorema 5.119, si potrebbe trovare φ∗ ∈ X∗ tale che
A ⊆ H ⊆ kerφ∗ .
Si sa che φ∗ = lim x∗nk
per una opportuna successione (x∗nk
) così che
0 = lim ||φ∗ − x∗nk
||X∗ ≥ lim
˛˛〈〈φ∗ − x∗
nk, xnk〉〉
˛˛
= lim
˛˛〈〈x∗
nk, xnk〉〉
˛˛ ≥ lim
1
2λn
e quindi lim λn = 0. D’altra parte, mentre
0 = ||φ∗||X∗ = lim ||x∗nk
||X∗ = lim λnk .
314

5. SPAZI DI BANACH
La contraddizione trovata completa la dimostrazione.
Osservazione 5.121. Invece, il duale di uno spazio separabile può non essere
separabile. Mostreremo infatti che l∞ è isometricamente isomorfo al duale di l1.
Si sa già che l∞ non è separabile mentre è facile verificare che l1 lo è.
Un’ulteriore conseguenza importante del Teorema 5.118 è la seguente: ogni insieme
A, anche non convesso, è contenuto nell’intersezione dei semispazi che lo contengono.
Se A è convesso vale:
Teorema 5.122. Un insieme A non vuoto è convesso e chiuso se e solo se è
intersezione dei semispazi chiusi che lo contengono.
DIMOSTRAZIONE
L’intersezione di una famiglia di chiusi è un chiuso e l’intersezione di una famiglia di con-
vessi, se non è vuota, è un convesso. Dunque, se l’insieme non vuoto A è intersezione
dei semispazi chiusi che lo contengono, A è convesso e chiuso.
Viceversa, sia B l’intersezione dei semispazi chiusi che contengono l’insieme A. In
generale, B ⊇ A. Dobbiamo provare che se A è convesso e chiuso allora vale l’ugua-
glianza. Per questo basta notare che se x 0 /∈ A allora, per il Teorema 5.118, esiste
un iperpiano che separa strettamente A da x 0. E quindi x0 non appartiene nemmeno
a B.
Si chiamano iperpiani di supporto all’insieme convesso e chiuso A quelli che godono
della seguente proprietà: esiste x0 ∈ A tale che
A ⊆ x | 〈〈x∗, x〉〉 ≤ 〈〈x∗, x0〉〉 .
Più precisamente, in questo caso si dice che l’iperpiano è di supporto nel punto x 0.
Naturalmente, se esiste un iperpiano di supporto ad A in x0 allora x0 non è interno ad
A. Più precisamente:
315

5. SPAZI DI BANACH
Teorema 5.123. Sia A un convesso con interno non vuoto. Per ogni x 0 ∈ ∂A, esiste
almeno un iperpiano di supporto ad A in x0.
DIMOSTRAZIONE
Usiamo la proprietà seguente degli insiemi convessi, che non proviamo: se A è
convesso ed il suo interno è non vuoto allora l’interno di A è convesso e denso
in A.
Dunque int A è un convesso, ovviamente separato da x 0 ∈ ∂A: per il Teorema 5.117,
esiste x∗ tale che
〈〈x∗, x〉〉 < 〈〈x∗, x0〉〉 ∀x ∈ intA
e la disuguaglianza, non stretta, si estende per continuità ad A.
L’iperpiano di supporto è
x | 〈〈x∗, x〉〉 = 〈〈x∗, x0〉〉 .
Osservazione 5.124. Il teorema precedente può anche estendersi al caso in
cui l’interno di A è vuoto. Essendo A convesso, si prova l’esistenza di un più
piccolo s.spazio (traslato) contenente A. Il teorema si può enunciare in tale
s.spazio. Non insistiamo su ciò.
La figura 5.6 mostra che uno stesso iperpiano può essere di supporto in infiniti
punti, e che in un punto si possono avere infiniti iperpiani di supporto.
Abbiamo dunque due modi di descrivere un insieme convesso e chiuso, tra loro
equivalenti: il primo consiste nell’elencare i punti dell’insieme ed il secondo consiste
nell’elencare gli iperpiani di supporto all’insieme. Questo secondo modo assume un
aspetto particolare nel caso in cui l’insieme A è l’epigrafo di una funzione, caso che
ora andiamo a studiare.
5.9.2 Applicazioni: Funzioni convesse
Ancora, supponiamo di lavorare in spazi lineari su R e studiamo certe proprietà
delle funzioni convesse definite su uno spazio di Banach X . Per semplicità
316

5. SPAZI DI BANACH
−4 −3 −2 −1 0 1 2 3 4−4
−3
−2
−1
0
1
2
3
4
Fig. 5.6.
supporremo che esse siano definite su insiemi, ovviamente convessi, dotati di punti
interni.
Ricordiamo che si chiama epigrafo di una funzione f definita su X , a valori reali,
l’insieme
Epi(f) = (x, t) | t ≥ f(x) ⊆ X × R .
E’ facile provare:
Teorema 5.125. La funzione f è convessa se e solo se il suo epigrafo è un insieme
convesso.
Un iperpiano di supporto in (x0, t0) alla chiusura dell’epigrafo di f è rappresentato da
una coppia (x∗, φ) ∈ X∗ × R tale che, per ogni punto (x, t) dell’epigrafo, valga
〈〈x∗, x〉〉 + φ · t ≤ 〈〈x∗, x0〉〉 + φ · t0
ossia
〈〈x∗, (x − x0)〉〉 ≤ (−φ) · (t − t0) . 5.56
Notiamo che se φ = 0 si ha
〈〈x∗, x〉〉 ≤ 〈〈x∗, x0〉〉 ∀x ∈ domf .
317

5. SPAZI DI BANACH
In questo caso x0 deve appartenere alla frontiera di domf . Supponendo di lavorare in
punti interni al dominio, avremo φ = 0 e si ha −φ > 0. Infatti: se x∗ = 0 allora
deve essere
0 ≤ (−φ)(t − t0) ∀t ≥ t0 ossia −φ > 0.
Dunque non è restrittivo assumere −φ = 1 perché dividendo i due membri per −φ si
vede che la 5.56 può scriversi
〈〈x∗, x − x0〉〉 ≤ t − t0 .
Supponiamo ora che l’epigrafo di f sia chiuso. In questo caso t 0 = f(x0) mentre
t ≥ f(x). Dunque:
Teorema 5.126. Se l’epigrafo di f è chiuso allora il funzionale (x ∗, 1) ∈ X∗ ×R è
di supporto all’epigrafo di f in (x0, f(x0)) se e solo se
〈〈x∗, x − x0〉〉 ≤ f(x) − f(x0) ∀x ∈ domf . 5.57
La 5.57 si scrive anche
f(x) ≥ 〈〈x∗, x − x0〉〉 + f(x0)
e quindi, se f(x) è convessa,
– il grafico è sopra a tutti gli iperpiani di supporto;
– il numero f(x) è l’estremo superiore dei valori delle funzioni lineari affini il
cui grafico è sotto quello di f . L’estremo superiore è un massimo, in ogni
punto x, se l’epigrafo è chiuso.
La 5.57 e la pratica con i grafici delle funzioni da R in R suggerisce:
Definizione 5.127. Un funzionale x∗ che verifica 5.57 si chiama un sottodifferen-
ziale di f in x0.
L’insieme dei sottodifferenziali di f in x0 si chiama il sottodifferenziale di f in x0.
Il sottodifferenziale di f in x0 si indica col simbolo ∂f(x0).
318

5. SPAZI DI BANACH
Osserviamo che il sottodifferenziale può essere l’insieme vuoto ma, come si è già
notato, in tal caso il punto x0 deve appartenere alla frontiera del dominio di f :
Esempio 5.128. Sia X = R e sia domf = [0, +∞), f(x) = −√
x. Si vede
facilmente che ∂f(0) = ∅.
Invece, come si è notato il sottodifferenziale è non vuoto nei punti interni al
dominio di f .
La proprietà di avere epigrafo chiuso è ovviamente importante nei problemi di
ottimizzazione e merita una definizione specifica:
Definizione 5.129. Una funzione (anche non convessa) con epigrafo chiuso si chia-
ma semicontinua inferiormente. Una funzione f si dice semicontinua superiormente
se −f è semicontinua inferiormente.
E’ facile immaginare che il sottodifferenziale sia uno strumento utile per il calcolo dei
minimi. Infatti,
Teorema 5.130. Sia f convessa e sia non vuoto il suo sottodifferenziale in x 0. Il
punto x0 è punto di minimo se e solo se 0 ∈ ∂f(x0).
DIMOSTRAZIONE
Immediate, leggendo la 5.57 con x∗ = 0.
5.9.3 Dimostrazioni posposte
Dimostrazione del TEOREMA 5.110.
Indichiamo con X l’insieme delle (classi di equivalenza di) funzioni f(x) definite su
(0, 1) e tali che
∫ 1
0
√|f(x)| dx < +∞ .
319

5. SPAZI DI BANACH
La disuguaglianza
√a + b ≤
√a +
√b ∀a ≥ 0 , b ≥ 0 5.58
permette di provare che X è uno spazio vettoriale e che
d(f, g) =∫ 1
0
√|f(x) − g(x)| dx
è una distanza invariante per traslazioni su X (per provare la disuguaglianza
triangolare si usa la 5.58).
Si può provare che lo spazio X è completo.
Lo spazio X ha una proprietà curiosa: l’unico convesso (non vuoto) di X che è
anche aperto è X stesso. Accettando questa proprietà, che proveremo in seguito, si
vede che l’unico funzionale L lineare e continuo su X è quello nullo. Infatti, per ogni
ε > 0, l’insieme L−1(−ε, ε) non è vuoto, perché contiene 0; è convesso perchè L è
lineare e, se L è anche continuo, è aperto; e quindi è tutto lo spazio X . Dunque,
LX ⊆⋂ε>0
(−ε, ε) = 0 ;
ossia, L è il funzionale nullo.
Per completare la dimostrazione, consideriamo un aperto V di X , non vuoto e
convesso e proviamo che V = X . A meno di traslazioni, si può supporre 0 ∈ V .
Dunque può trovarsi r > 0 tale che
B(0, r) = x | d(x, 0) < r ⊆ V .
Fissiamo una qualsiasi f ∈ X e sia n tale che
1√n
d(f, 0) < r .
Consideriamo ora la funzione integrale
F (x) =∫ x
0
√|f(s)| ds .
Vale F (0) = 0 ed F (1) = d(f, 0). La continuità di F implica l’esistenza di un primo
punto x1 tale che
F (x1) =∫ x1
0
√|f(s)| ds =
1n
d(f, 0) ;
320

5. SPAZI DI BANACH
di un primo punto x2 tale che∫ x2
x1
√|f(s)| ds =
1n
d(f, 0) .
Analogamente, si trovano esattamente n punti x i tali che∫ xi
xi−1
√|f(s)| ds =
1n
d(f, 0) (ove x0 = 0).
Per 1 ≤ i ≤ n definiamo le funzioni
gi(s) =
nf(s) se xi−1 < s < xi
0 altrimenti.
In questo modo,
d(gi, 0) =√
n
nd(f, 0) =
1√n
d(f, 0) < r ,
ossia gi ∈ B(0, r) ⊆ V . Inoltre,
nf =n∑
i=1
gi ossia f =1n
n∑i=1
gi .
L’ultima uguaglianza mostra che anche f appartiene al convesso V .
L’arbitrarietà di f implica che V = X .
Dimostrazione del TEOREMA 5.112.
La dimostrazione del Teorema 5.112 fa uso del Lemma di Zorn, che ora enunciamo.
Sia F un insieme parzialmente ordinato. Chiamiamo catena ogni s.insieme di F che
è totalmente ordinato.
Sia M un qualsiasi s.insieme di F e sia z ∈ F . Diciamo che z è un maggiorante di
M se per ogni m ∈ M vale m ≤ z; diciamo che z0 è un elemento massimale di M
se z0 ∈ M e se, inoltre, le condizioni m ∈ M ed m ≥ z0 implicano m = z0.
Un elemento massimale di M confrontabile con tutti gli elementi di M si chiama un
massimo.
Si noti che un elemento massimale z0 può non essere un massimo perché M può
contenere elementi non confrontabili con z0. E quindi un insieme M parzialmente
ordinato può avere più elementi massimali, ma ha al più un massimo.
321

5. SPAZI DI BANACH
Invece, una catena ha al più un solo elemento massimale che è anche il suo massimo.
Il Lemma di Zorn si enuncia come segue:
Lemma 5.131 (di Zorn). Sia F parzialmente ordinato. Se ogni catena di Fammette maggioranti, allora esiste in F un elemento massimale.
Osservazione 5.132. Si noti che l’enunciato del Lemma di Zorn non richiede che
ogni catena debba avere massimo; ossia, nell’applicare il Lemma di Zorn, basta
mostrare l’esistenza in F di maggioranti delle singole catene.
Possiamo ora provare il Teorema 5.112. In questo caso Φ = R.
Notiamo che l’enunciato del teorema non fa alcun riferimento alla presenza
di norme su X; e quindi nessuna considerazione topologica può usarsi nella
dimostrazione.
L’idea della dimostrazione del Teorema 5.112 è la seguente: si prova che se Y = X
allora esiste un’estensione lineare propria L1 di L0 e che L1, definito sul sottospazio
Y1 propriamente contenente Y0, soddisfa ancora alla disuguaglianza
L1x ≤ p(x) ∀x ∈ Y1 .
Per indicare che vale questa disuguaglianza, diremo che L 1 è dominata da p.
Questa è la parte tecnica della dimostrazione, che vedremo in seguito. Accettando ciò,
si indichi con F la famiglia di tutte le estensioni di L0 dominate da p; ossia, L ∈ Fse L estende L0 ed Lx ≤ p(x) per ogni x nel dominio di L.
In F si introduce una relazioni d’ordine parziale ponendo
L1 ≤ L2 se L2 estende L1.
Si vede immediatamente che ogni catena C in F ammette come maggiorante quell’ele-
mento L ∈ F il cui dominio è l’unione dei domini di tutti gli elementi della catena Ce così definito: se x ∈ domL allora esiste L′ ∈ C (non unico) il cui dominio contiene
x. Si definisce
Lx = L′x .
322

5. SPAZI DI BANACH
Si è detto che L′ non è unico; ma l’essere C una catena prova che la trasformazione L
appena definita è univoca e lineare.
E’ ovvio che L è dominato da p.
Discende dal Lemma di Zorn che F ha un elemento massimale L: un’estensione L di
L0, dominata da p, non ulteriormente estendible, e quindi con dominio X .
Proviamo ora la parte tecnica della dimostrazione, consistente nella costruzione
dell’estensione L1. Prima però notiamo:
Osservazione 5.133. Sia X uno spazio di Banach di dimensione infinita e sia e nun sistema linearmente indipendente di elementi, tutti di norma 1. Definiamo
L0en = n
e quindi estendiamo L0 a
span en = ∑finita
αiei .
L’argomento precedente basato sul lemma di Zorn può ripetersi anche senza far
intervenire la funzione p(x) e conduce a provare l’esistenza di un funzionale L
definito su X e che estende L0. Ciò mostra che esistono funzionali lineari non
continui, il cui dominio è tutto lo spazio X .
Veniamo ora a costruire una opportuna estensione L 1 di L0, dominata da p.
Essendo Y0 = X , esiste x0 /∈ Y0. Scegliamo per Y1 lo spazio lineare generato da Y0
e dal x0,
Y1 = y + tx0 | y ∈ Y0 , t ∈ R .
Se vogliamo che L1 sia un’estensione lineare di L0, dovrà essere
L1(y + tx0) = L1y + tL1x0 = L0y + tL1x0
e il problema si riduce a trovare un valore ξ per L1x0, in modo tale che L1 sia
dominato da p. Si vuole cioè che valga
L0y + tξ ≤ p(y + tx0) , ∀y ∈ Y0 , t ∈ R .
323

5. SPAZI DI BANACH
Distinguiamo i due casi t > 0 e t < 0. Se t > 0 allora si richiede
L0y
t+ ξ ≤ p(
y
t+ x0) ossia ξ ≤ p(
y
t+ x0) − L0
y
t; 5.59
Se t < 0 si richiede
L0y
t+ ξ ≥ − 1
−tp(y + tx0) = −p(−y
t− x0) ,
ossia
ξ ≥ −L0y0
t− p(−y
t− x0) . 5.60
Dunque è da provare l’esistenza di un numero ξ che verifica la 5.59 per t > 0 e la 5.60
per t < 0.
Notiamo che, essendo y arbitrario in Y0, anche y/t, t > 0 e −y/t, t < 0 sono arbitrari
elementi di Y0. Dunque, le 5.59, 5.60 equivalgono a
supy∈Y0
−L0y − p(−y − x0) ≤ ξ ≤ infy∈Y0
p(y + x0) − L0y .
Dunque il numero ξ esiste se si può provare che
−L0y − p(−y − x0) ≤ −L0y + p(y + x0) ∀y , y ∈ Y0 .
Quest’eguaglianza equivale a
L0(y − y) ≤ p(y + x0) + p(−y − x0)
e questa vale certamente perché, per ipotesi, L0 è dominato da p. Dunque si ha:
L0(y − y) ≤ p(y − y) = p(y + x0 − x0 − y) ≤ p(y + x0) + p(−x0 − y) .
Ciò completa la dimostrazione nel caso in cui F = R.
Dimostrazione del TEOREMA 5.113.
Il caso F = C si fa discendere dal precedente, procedendo come segue.
Si nota che se X è uno spazio lineare complesso, allora esso è anche uno spazio
lineare reale. Indichiamo allora con i simboli X (R) ed Y0,(R) gli spazi lineari reali i
cui elementi sono quelli di X e di Y0. Sia inoltre L0,(R) il funzionale lineare definito
su Y0,(R) da
324

5. SPAZI DI BANACH
L0,(R)x = eL0x .
La 5.52 mostra che L0,(R) è dominato da p e quindi che esiste un’estensione L (R) di
L0,(R) ad X(R), ancora dominata da p. Inoltre, essendo LRx ≤ p(x) per ogni x ∈ X ,
vale anche
L(R)(−x) ≤ p(−x) = p(x)
ossia,
− p(−x) ≤ L(R)(x) ≤ p(x) . 5.61
Definiamo ora l’operatore
Lx = L(R)x − iL(R)(ix) .
Si verifica immediatamente che quest’operatore è lineare su X (con F = C). Inoltre,
se x ∈ Y0, vale
Lx = eL0x − ie [iL0x] = eL0x − ie ieL0x − Im L0x = L0x .
Dunque, L estende L0 e inoltre vale |Lx| ≤ p(x) per ogni x ∈ X . Infatti se ciò non
fosse potrebbe trovarsi x0 tale che
|Lx0| > p(x0) .
Con θ = arg Lx0 avremmo
LRx0 = eLx0 = |eiθLx0| = |Lx0| > p(x0) .
Ciò contrasta con 5.61.
La dimostrazione è ora completa.
Dimostrazione del TEOREMA 5.117.
Ricordiamo che si è supposto F = R.
Sia A un convesso aperto. A meno di una traslazione, si può supporre 0 ∈ A.
Definiamo il seguente funzionale pA su X :
pA(x) = inft > 0 | x ∈ tA
dove con tA si intende l’insieme ty | y ∈ A.
325

5. SPAZI DI BANACH
E’ chiaro che il funzionale pA è non negativo, positivamente omogeneo. Inoltre, esso
è subadditivo. Infatti, sia ε > 0 e siano t1 = pA(x) + ε, t2 = pA(y) + ε. Vale quindi
(x + y) ∈ [pA(x) + ε]A + [pA(y) + ε]A = [pA(x) + pA(y) + 2ε]A .
Dunque, per ogni ε > 0 vale pA(x+y) ≤ pA(x)+pA(y)+2ε. La subadditività segue
dall’arbitrarietà di ε.
Consideriamo ora un punto x0 /∈ A ed il s.spazio
X0 = tx0 | t ∈ R .
La convessità di A implica la convessità di A ∩ X0 e quindi l’insieme t | tx0 ∈ Aè un segmento a cui non appartiene 1. Si definisca il funzionale lineare L 0 su X0,
L0(tx) = t .
Questo funzionale verifica
L0(x0) = 1 , L0(tx0) ≤ pA(tx0) .
La prima proprietà è immediata e la seconda è ovvia se t < 0. Che essa valga anche
se t > 0 si vede notando che pA(x0) ≥ 1 e quindi
L0(tx0) = t ≤ tpA(x0) = pA(tx0) .
Per il Teorema di Hahn–Banach, il funzionale L0 si estende ad un funzionale L
lineare e continuo su X , che ancora verifica 〈〈L, x〉〉 ≤ pA(x) e quindi
〈〈L, x〉〉 ≤ pA(x) ≤ 1 ∀x ∈ A , 〈〈L, x0〉〉 = 1 .
Il funzionale pA si chiama il finzionale di Minkowski del convesso A.
Dimostrazione del TEOREMA 5.118.
Il Teorema 5.118 è immediata conseguenza del Teorema 5.117. Studiamo prima il caso
in cui A è aperto. Fissiamo a0 ∈ A e b0 ∈ B e sia x0 = a0 − b0. Sia inoltre
C = A − B = a − b | a ∈ A , b ∈ B =⋃b∈B
(A − b) .
326

5. SPAZI DI BANACH
E’ facile vedere che C è aperto (anche se B non lo è); e che x 0 ∈ C. Dunque,
0 ∈ D = C − x0 mentre x0 /∈ D. Infatti, se fosse x0 ∈ D, esisterebbero a ∈ A,
b ∈ B per cui
x0 = a − b − x0 ossia a = b
mentre per ipotesi A e B sono disgiunti.
Dunque, per il Teorema 5.117, x0 si separa da D con un funzionale x∗:
〈〈x∗, d〉〉 ≤ 〈〈x∗, x0〉〉 ∀d ∈ D .
Dunque,
〈〈x∗, (a − b + x0)〉〉 < 〈〈x∗, x0〉〉 ∀a ∈ A , b ∈ B ;
Ossia,
〈〈x∗, a〉〉 < 〈〈x∗, b〉〉 .
Ciò prova la prima parte del teorema.
La dimostrazione della seconda parte si riconduce a quella della prima, grazie al
lemma seguente:
Lemma 5.134. Siano K e C due s.insiemi di X , K compatto e C chiuso. Se K ∩C = ∅, allora esiste una sfera B di X tale che
(K + B) ∩ C = ∅ .
DIMOSTRAZIONE
Per ogni k ∈ K esiste una opportuna sfera B ε(k) tale che k +2Bε(k) ∩ (C +Bε(k)) = ∅.
L’unione degli aperti k i +2Bε(k) copre K e quindi esistono ki, in numero finito, diciamo
n, tali che
K ⊆n[
i=1
`ki + 2Bε(ki)
´.
Sia B la sfera di minimo raggio tra le sfere B ε(ki). Allora,S`
ki + 2Bε(ki)
´non interseca
C + B e quindi vale anche:
K + B ⊆+∞[i=1
`ki + Bε(ki) + B
´⊆
n[i=1
`ki + Bε(ki) + Bε(ki)
´
e quest’insieme non interseca C.
327

5. SPAZI DI BANACH
E’ ora facile provare la seconda parte del Teorema 5.113. Sia Bε una sfera tale che
A1 = A + Bε non intersechi B. Gli insiemi A1 e B verificano le ipotesi della prima
parte del teorema e quindi esiste x∗ tale che
sup〈〈x∗, a〉〉 | a ∈ A1 ≤ inf〈〈x∗, b〉〉 | b ∈ B .
Ciò prova che x∗ separa A e B. Proviamo ora che la separazione è stretta. Notiamo
che
〈〈x∗, A1〉〉 = 〈〈x∗, x〉〉 | x ∈ A1
è un intervallo aperto di R. Infatti, sia α = 〈〈x∗a0〉〉 ∈ 〈〈x∗, A1〉〉 e Bσ = x | ||x|| <
σ una sfera tale che a0 + Bσ ∈ A1. Allora, 〈〈x∗, (a0 + Bσ)〉〉 è un intervallo non
ridotto ad un sol punto perché il funzionale x∗ non è zero; e dunque α è interno ad
〈〈x∗, A1〉〉. D’altra parte, 〈〈x∗, A〉〉 è compatto e contenuto nell’aperto 〈〈x∗, A1〉〉 e
quindi ha distanza positiva dall’insieme 〈〈x∗, B〉〉, che non interseca 〈〈x∗, A1〉〉. Ciò
prova che la separazione è stretta.
Osservazione 5.135. Abbiamo enunciato i teoremi di separazione assumendo F =
R per semplicità. Tali teoremi possono estendersi al caso F = C. In questo caso le
diseguaglianze valgono tra le parti reali. Si hanno cioè condizioni del tipo
supeLa | a ∈ A ≤ infeLb | b ∈ B .
5.10. CONVERGENZA DEBOLE E DEBOLE STELLA
Si è visto che in uno spazio di Banach di dimensione infinita i compatti sono “rari”.
D’altra parte, si sa dai corsi precedenti che la proprietà di compattezza è cruciale nello
studio dei problemi di minimo. Infatti:
Teorema 5.136 (di Weierstrass). Una funzione f continua su un insieme
compatto K ammette sia minimo che massimo.
328

5. SPAZI DI BANACH
Accenniamo alla dimostrazione, che dovrebbe essere nota: per provare l’esistenza del
minimo, si costruisce una successione minimizzante (kn) in K , ossia una successione
tale che
lim f(kn) = inff(k) | k ∈ K .
Si usa la compattezza di K per estrarre una sottosuccessione (knr ) convergente a
k0 ∈ K; e la continuità di f per concludere
f(k0) = lim f(knr ) = inff(k) | k ∈ K . 5.62
Ciò prova che k0 è punto di minimo.
Osservazione 5.137. Alla medesima conclusione si giunge se la funzione f , invece
di essere continua, ha soltanto epigrafo chiuso, ossia è semicontinua inferiormente.
Infatti in tal caso da knr → k0, f(knr) → inff(k) | k ∈ K. Se l’epigrafo è chiuso
si ha
(k0, inff(k) | k ∈ K) ∈ Epif ;
ossia, invece della 5.62, vale
f(k0) ≤ lim f(knr ) = inff(k) | k ∈ K .
Ovviamente la disuguaglianza stretta non può valere, e quindi, nella sola ipotesi di
semicontinuità inferiore, segue la 5.62; ossia segue che k0 è punto di minimo.
E’ facile vedere che:
– se un insieme è compatto in una topologia, tale rimane anche in topologie
meno fini;
– se una funzione è continua oppure semicontinua inferiormente rispetto ad una
topologia, tale rimane anche in topologie più fini.
329

5. SPAZI DI BANACH
Dunque in uno spazio di Banach conviene introdurre topologie meno fini di quella
della norma, in modo da avere più insiemi compatti; ma sufficientemente fini in modo
tale che almeno opportune classi di funzioni continue rimangano, se non continue,
almeno semicontinue inferiormente.
Noi ci limiteremo ad introdurre concetti di convergenza per topologie meno fini di
quella della norma. Non descriveremo invece la topologia.
Definizione 5.138. Sia (xn) una successione in uno spazio di Banach X . Diciamo
che (xn) converge debolmente ad x0 se
lim〈〈x∗, xn〉〉 = 〈〈x∗, x0〉〉 ∀x∗ ∈ X∗ .
Per indicare la convergenza debole si usa uno dei due simboli
w− limxn = x0 oppure xn x0 .
La definizione stessa di convergenza debole mostra che:
Teorema 5.139. Ogni x∗ ∈ X∗ è continuo rispetto alla convergenza debole di
successioni di X .
Supponiamo ora di sapere che stiamo lavorando nello spazio di Banach X ∗, duale
dello spazio di Banach X . In X ∗ si può definire la convergenza debole, come sopra,
facendo intervenire il suo duale; ma si può anche definire la convergenza debole stella,
come segue:
Definizione 5.140. Sia (x∗n) una successione in X ∗. Diciamo che (x∗
n) converge in
senso debole stella ad x∗0 se
lim〈〈x∗n, x〉〉 = 〈〈x∗
0 , x〉〉 ∀x ∈ X .
Per indicare la convergenza debole stella si usa uno dei due simboli
w∗− limx∗n = x0 oppure x∗
n x0 .
330

5. SPAZI DI BANACH
(la notazione con la mezza freccia è la stessa per la convergenza debole e la
convergenza debole stella. Il contesto evita ambiguità).
E’ facile vedere che la convergenza in norma implica la convergenza debole,
rispettivamente debole stella. Il viceversa, in dimensione infinita, non vale.
Esempio 5.141. Sia X = L2(0, 2π). Vedremo che (L2(0, 2π))∗ è isometricamente
isomorfo ad L2(0, 2π) stesso. In particolare ogni g ∈ L2(0, 2π) si interpreta come
elemento di (L2(0, 2π))∗, quell’elemento definito da
f −→∫ 2π
0
g(x)f(x) dx .
Si sa, dalla teoria della serie di Fourier, che ogni f ∈ L2(0, 2π) si rappresenta
f(x) =k=+∞∑k=−∞
fkeikx , fk =1√2π
∫ 2π
0
f(x)e−ikx dx = 〈〈ek, f〉〉
con ek = eikx. Si sa, dalla teoria della serie di Fourier, che
lim fk = 0 .
Questo vuol dire che,
w∗− lim ek = 0 .
Ma,
||ek||2 =√
2π
e quindi la successione (ek) non tende a zero in norma.
Vale però:
Teorema 5.142. Il teorema di unicità del limite vale sia per la convergenza debole
che per la convergenza debole stella.
DIMOSTRAZIONE
Se
w− lim xn = x0 ed anche w− lim xn = y0
331

5. SPAZI DI BANACH
allora si ha
〈〈x∗, (x0 − y0)〉〉 = lim〈〈x∗, xn〉〉 − 〈〈x∗, xn〉〉 = 0
per ogni x∗ ∈ X∗. Dunque x0 ed y0 sono indistinguibili da elementi di X ∗. E’
conseguenza del Teorema di Hahn-Banach che x 0 = y0.
L’asserto relativo alla convergenza debole stella è invece elementare: sia
w∗− lim x∗n = x∗
0 ed anche w∗− lim x∗n = y∗
0 .
Si ha
〈〈[x∗0 − y∗
0 ], x〉〉 = lim〈〈x∗n, x〉〉 − 〈〈x∗
n, x〉〉 = 0
per ogni x ∈ X. E quindi x∗ = y∗.
Esistono alcune relazioni importanti tra la convergenza debole, oppure debole stella,
e le proprietà che valgono in norma. Tra queste:
Teorema 5.143. Ogni successione convergente in senso debole stella è limitata nella
norma di X∗.
DIMOSTRAZIONE
Sia x ∈ X. Se w∗− lim x∗n = x∗ allora
lim〈〈x∗n, x〉〉 = 〈〈x∗, x〉〉 .
Dunque, per ogni x ∈ X esiste un numero Mx, dipendente da x, tale che
|〈〈x∗n, x〉〉| < Mx .
Il teorema di Banach-Steinhaus mostra che l’insieme dei funzionali x ∗n è limitato nella
norma di X∗.
Un asserto analogo vale anche per la convergenza debole, ed anzi il risultato relativo
alla convergenza debole è un corollario del precedente. Per provarlo, abbiamo bisogno
332

5. SPAZI DI BANACH
di una premessa. Ogni x ∈ X si può vedere come funzionale lineare continuo su X ∗.
Basta associare ad esso il funzionale
x∗ → 〈〈x∗, x〉〉 . 5.63
Dunque, ogni elemento x ∈ X si può porre in corrispondenza con un elemento jx ∈
(X∗)∗, duale di X∗.
Lo spazio (X∗)∗ si chiama il biduale di X e si indica col simbolo X ∗∗.
Vale:
Teorema 5.144. La trasformazione j da X in X ∗∗ definita in 5.63 è isometrica.
DIMOSTRAZIONE
Dobbiamo provare che
||x||X = ||jx||X∗∗ ,
ossia:
||x||X = sup||x∗||X∗
|〈〈x∗, x〉〉| .
Questo è l’asserto del Corollario 5.115.
Osservazione 5.145. In particolare segue che j è una trasformazione iniettiva.
Vedremo che, in generale, essa non è suriettiva.
Possiamo ora provare:
Corollario 5.146. Ogni successione debolmente convergente in X è limitata in
norma.
DIMOSTRAZIONE
Sia (xn) una successione in X, debolmente convergente ad x 0. Ciò vuol dire che
lim〈〈x∗, xn〉〉 = 〈〈x∗, x0〉〉 ∀x∗ ∈ X∗ ,
333

5. SPAZI DI BANACH
ossia
lim〈〈jxn, x∗〉〉 = 〈〈jx0, x∗〉〉 ∀x∗ ∈ X∗ .
Dunque, la successione (jxn) converge in X∗∗ a jx0, nel senso debole stella ed è
quindi limitata in X ∗∗. Il Teorema 5.144 implica che (xn) è limitata in X.
Osservando con attenzione la dimostrazione del Teorema 5.143 si vede che:
Teorema 5.147. vale:
– se w− limxn = x0 allora lim inf ||xn||X ≥ ||x0||X ;
– se w∗ − limx∗n = x∗
0 allora lim inf ||x∗n||X∗ ≥ ||x∗
0||X∗ .
DIMOSTRAZIONE
Proviamo l’asserto relativo alla convergenza debole stella.
Per ogni x, con ||x||X ≤ 1, vale
〈〈x∗n, x〉〉 ≤ ||x∗
n||X∗
e dunque
〈〈x∗0, x〉〉 = lim〈〈x∗
n, x〉〉 ≤ lim inf ||x∗n||X∗ .
Da qui:
||x∗0||X∗ = sup
||x||X=1
〈〈x∗0, x〉〉 = sup
||x||X=1
lim〈〈x∗n, x〉〉 ≤ lim inf ||x∗
n||X∗ .
L’asserto relativo alla convergenza debole si deduce dall’asserto relativo alla
convergenza debole stella mediante il Teorema 5.144:
||x0||X = sup||x∗||X∗=1
〈〈x∗, x0〉〉 = sup||x∗||X∗=1
lim〈〈x∗, xn〉〉 = sup||x∗||X∗=1
lim〈〈jxn, x∗〉〉 ≤
sup||x∗||X∗=1
lim inf ||jxn||X∗∗ ||x∗||X∗ = lim inf ||jxn||X∗∗ = lim inf ||xn||X .
Il Teorema 5.147 può riformularsi dicendo che la norma di X è debolmente
semicontinua inferiormente e la norma di X ∗ è debolmente stella semicontinua
inferiormente.
334

5. SPAZI DI BANACH
Grazie al Teorema di Weierstrass, segue che la norma ammette minimo sugli insiemi
che sono compatti rispetto alla convergenza debole oppure debole stella.
Proviamo ora:
Teorema 5.148. Sia A un insieme sequenzialmente debolmente chiuso in X . Allora,
A è anche chiuso in norma. Se A è sequenzialmente debolmente stella chiuso in X ∗,
esso è anche chiuso nella norma di X ∗.
DIMOSTRAZIONE
Sia A chiuso rispetto alla convergenza debole. Sia (x n) una successione in A, che
converge in norma ad un x0.
La convergenza in norma implica la convergenza debole, e quindi (x n) converge de-
bolmente ad x0. Dato che A è debolmente chiuso, si ha x0 ∈ A; e quindi A è chiuso
in norma. L’assero relativo alla convergenza debole stella si prova in modo analogo.
L’esempio 5.141 mostra che la superficie di una sfera di L2(0, 2π), pur essendo chiusa
in norma, non è debolmente chiusa. Combinando questo col teorema precedente si
vede che che la topologia della convergenza debole è effettivamente meno fine di
quella della norma.
Vale:
Teorema 5.149. Sia A un sottoinsieme di uno spazio di Banach X . Sia A convesso
e chiuso rispetto alla norma. L’insieme A è anche chiuso rispetto alla convergenza
debole.
DIMOSTRAZIONE
Sia (xn) una successione a valori in A, debolmente convergente ad x 0. Dobbiamo
provare che x0 appartiene ad A. Ciò discende dai teoremi di separazione: se x 0 /∈ A,
allora esiste x∗ ∈ X∗ che separa x0 da A. Inoltre, la separazione è stretta perché
l’insieme A è chiuso in norma e l’insieme costituito dal solo punto x 0 è compatto.
335

5. SPAZI DI BANACH
Dunque, esiste ε > 0 tale che
〈〈x∗, x0〉〉 + ε < inf 〈〈x∗, x〉〉 | x ∈ A ≤ inf〈〈x∗, xn〉〉 .
Ciò contrasta con l’ipotesi che (xn) converge debolmente ad x0.
E’ bene notare esplicitamente che l’asserto analogo per la topologia debole stella
non vale. Però nella topologia debole stella successioni compatte si identificano
facilmente:
Teorema 5.150 (di Alaoglu). Ogni successione limitata in X ∗ ammette
s.successioni convergenti in senso debole stella.
La dimostrazione è posposta.
L’asserto analogo non vale in X e ciò suggerisce di dare un nome particolare agli
spazi X tali che jX = X∗∗.
Definizione 5.151. Se uno spazio X è isometrico al suo biduale, lo spazio X si dice
riflessivo.
In uno spazio riflessivo, la convergenza debole equivale alla debole stella e quindi:
Teorema 5.152. Ogni successione limitata in uno spazio riflessivo ammette s.suc-
cessioni debolmente convergenti.
Il Teorema 5.149 ha un corollario che bene illustra la geometria della convergenza
debole:
Corollario 5.153 (di Mazur). Sia (xn) una successione debolmente convergente
ad x0. Esiste una successione (sn) in X , tale che:
– sn =∑n
k=1 λkxk per opportuni numeri λk ∈ [0, 1] tali che∑n
k=1 λk = 1;
– la successione (sn) converge ad x0 in norma.
336

5. SPAZI DI BANACH
Ossia, x0 è limite in norma di una successione ottenuta da combinazioni convesse
degli xn.
DIMOSTRAZIONE
Sia A = coxn, il più piccolo convesso chiuso contenente gli xn. Per il Teorema 5.149,
x0 appartiene ad A. Da qui segue l’asserto.
Applichiamo ora il Teorema 5.149 allo spazio X×R. Sia A l’epigrafo di una funzione
convessa e continua su X . L’insieme A è convesso e chiuso e quindi sequenzialmente
chiuso. Dunque vale:
Teorema 5.154. Una funzione convessa e continua in norma è anche semicontinua
inferiormente rispetto alla convergenza debole.
Questo teorema ed il Teorema di Alaoglu mostrano che il Teorema di Weierstrass può
applicarsi alla minimizzazione di funzionali convessi su insiemi limitati e chiusi su
spazi riflessivi; e ciò è importantissimo nella teoria dell’ottimizzazione.
Per completare queste considerazioni, mostriamo che, in contrasto con l’asserto del
Teorema di Alaoglu, in un generico spazio di Banach esistono successioni limitate
che non ammettono s.successioni convergenti nella topologia debole; e quindi che
esistono spazi di Banach che non sono riflessivi. Infatti:
Teorema 5.155. Esistono successioni limitate in L1(0, 1), prive di s.successioni
debolmente convergenti; e quindi L1(0, 1) non è riflessivo.
DIMOSTRAZIONE
Si è visto al Teorema 5.139 che ogni elemento x∗ ∈ X∗ è continuo rispetto alla con-
vergenza debole in X. Se ogni successione limitata avesse s.successioni debolmen-
te convergenti, allora, per il Teorema di Bolzano-Weierstrass, ogni elemento di X ∗
raggiungerebbe massimo su
337

5. SPAZI DI BANACH
x |Z 1
0
|x(s)|ds ≤ 1
ff.
L’esempio riportato al Teorema 5.73 mostra che ciò non accade.
Osservazione 5.156. Ciò mostra una profonda differenza tra lo spazio L 1(a, b)
e gli spazi Lp(a, b) con 1 < p < +∞. Vedremo infatti che questi ultimi spazi
sono riflessivi e quindi tutte le successioni limitate in Lp(0, 1), con 1 < p < +∞
ammettono s.successioni debolmente convergenti.
Continuità e continuità debole di operatori lineari
Fa parte della definizione di convergenza debole che ogni elemento di X ∗, ossia
ogni funzionale lineare su X che è continuo in norma, è anche continuo rispetto
alla convergenza debole. E’ importante sapere che gli elementi di X ∗ sono tutti i
funzionali lineari su X , continui rispetto alla convergenza debole:
Teorema 5.157. Sia φ un funzionale lineare su X . Esso è continuo rispetto alla
convergenza debole se e solo se è continuo in norma.
DIMOSTRAZIONE
Se φ è continuo rispetto alla convergenza debole lo è anche in norma perché ogni
successione convergente in norma converge anche debolmente, al medesimo limite.
Il viceversa è provato al Teorema 5.139.
Un asserto analogo vale in realtà per generici operatori lineari, ma la dimostrazione è
più profonda:
Teorema 5.158. Siano X ed Y due spazi di Banach e sia A un operatore lineare da
X in Y , con dominio uguale ad X e debolmente continuo, ossia tale che
se xn x0 in X allora Axn Ax0 in Y .
In tal caso, l’operatore A è continuo in norma.
338

5. SPAZI DI BANACH
DIMOSTRAZIONE
Proviamo che nelle ipotesi del teorema, l’operatore lineare A, definito su X, è chiuso.
Sia xn → x0 tale che Axn → y0 (rispettivamente nelle norme di X e di Y ). Allora,
xn x0 e quindi, per le ipotesi, Axn Ax0; D’altra parte, Axn → y implica Axn y.
Per l’unicità del limite debole, y = Ax 0 ossia la successione di punti ( (xn, Axn) ) se
converge, converge ad un punto del grafico, che quindi è chiuso.
Ciò prova che l’operatore lineare A è chiuso e quindi, avendo dominio uguale ad X,
continuo.
Si osservi che la dimostrazione precedente fa uso sia del teorema di Hahn-Banach che
del Teorema di Baire.
5.10.1 Dimostrazioni posposte
Dimostrazione del TEOREMA 5.150.
Il teorema vale in qualsiasi spazio duale. Però la dimostrazione che presentiamo usa
un’ipotesi ulteriore, non richiesta dal teorema: presentiamo la dimostrazione nel caso
in cui lo spazio X è separabile. Dunque supponiamo l’esistenza di una successione
(xn) la cui immagine è densa in X . Se vale quest’ipotesi, la dimostrazione si ottiene
usando il procedimento diagonale di Cantor.
Sia (y∗n) una successione limitata in X ∗, ||y∗
n|| < α. Vogliamo estrarne una
s.successione convergente.
Consideriamo la successione numerica (〈〈y∗n, x1〉〉). Questa è limitata e quindi
ammette una s.successione convergente. Indichiamola (〈〈y ∗n,1, x1〉〉). Consideriamo
quindi (〈〈y∗n,1, x2〉〉). Anche questa successione è limitata e quindi se ne estrae una
s.successione convergente, che indichiamo (〈〈y ∗n,2, x2〉〉). Procedendo in questo modo
si costruisce la tavola seguente:
339

5. SPAZI DI BANACH
〈〈y∗1,1, x1〉〉 〈〈y∗
2,1, x1〉〉 〈〈y∗3,1, x1〉〉 〈〈y∗
4,1, x1〉〉 . . .
〈〈y∗1,2, x2〉〉 〈〈y∗
2,2, x2〉〉 〈〈y∗3,2, x2〉〉 〈〈y∗
4,2, x2〉〉 . . ....
〈〈y∗1,k, xk〉〉 〈〈y∗
2,k, xk〉〉 〈〈y∗3,k, xk〉〉 〈〈y∗
4,k, xk〉〉 . . ....
la successione (y∗n,k) che figura su ciascuna riga è s.successione di tutte le successioni
y∗n,r, con r < k; e quindi (〈〈y∗
n,k, xr〉〉) converge, per ogni r ≤ k.
Dunque, la successione diagonale (y∗n,n) ha la proprietà che (〈〈y∗
n,n, xr〉〉) converge
per ogni r.
Proviamo che in realtà la successione (〈〈y∗n,n, x0〉〉) converge per ogni x0 ∈ X . Basta
provare che essa è fondamentale, dato che essa prende valori in F.
Si fissi per questo ε > 0 ed x0 ∈ X , qualsiasi. Sia N tale che
||x0 − xN || < ε/(3α) .
Si noti che N dipende da x0. Si stimi quindi
|〈〈y∗m,m, x0〉〉 − 〈〈y∗
n,n, x0〉〉|
≤ |〈〈y∗m,m, x0 − xN 〉〉| + |〈〈y∗
m,m − y∗n,n, xN 〉〉 + |〈〈y∗
n,n, xN − x0〉〉| .
Il primo e l’ultimo addendo sono minori di ε/3, per la scelta fatta di xN . L’addendo
intermedio è minore di ε/3 se m, n superano un numero N , che dipende da ε e da N
ossia da ε e da x0. Ciò prova la convergenza della successione di numeri (〈〈y ∗n,n, x〉〉),
per ogni x ∈ X .
Si costruisce ora un funzionale y∗0 su X ponendo
〈〈y∗0 , x〉〉 = lim〈〈y∗
n,n, x〉〉 .
E’ immediato verificare che y∗0 è lineare. Inoltre, y∗
0 è continuo perché la succesione
(y∗n) è limitata, ||y∗
n||X∗ < α per ogni n così che per ||x||X < 1,∣∣∣∣〈〈y∗0 , x〉〉
∣∣∣∣ = lim∣∣∣∣〈〈y∗
n,n, x〉〉∣∣∣∣ ≤ α .
340

5. SPAZI DI BANACH
Dunque y∗0 è continuo. E quindi, y∗
0 = w∗− lim y∗n,n. Ciò è quanto volevamo provare.
Osservazione 5.159. Nel caso in cui il duale X ∗ di X sia separabile, può
sembrare possibile applicare il ragionamento precedente ad una successione (xn)
di X , arrivando a provare un analogo del teorema di Alaoglu in X . Ci si convinca
che ciò è falso esaminando bene la dimostrazione e notando che, tentando di ripetere
la dimostrazione, NON si proverebbe la convergenza debole di (xn) in X , ma la
convergenza debole stella di (jxn) in X∗∗.
5.11. ESEMPI DI SPAZI DUALI
Sia X uno spazio di Banach. Per definizione, X ∗ è lo spazio (di Banach) dei funzionali
lineari e continui su X . Il problema che vogliamo studiare ora è il seguente: se
X è uno spazio “particolare”, per esempio uno spazio di funzioni o di successioni,
vogliamo vedere se esiste un altro spazio “particolare” Y che è isometricamente
isomorfo ad X∗; ossia tale che esista una trasformazione L da Y in X ∗ che è 1)
suriettiva; 2) isometrica; 3) lineare (se Φ = R) oppure antilineare (se Φ = C). 5
Ricordiamo che la trasformazione L è isometrica quando
||Ly||X∗ = ||y||Y .
E quindi una trasformazione isometrica è necessariamente iniettiva.
In questo caso, Y viene ad avere tutte le proprietà topologiche di X ∗. Inoltre,
definendo yn y0 quando w∗− limLyn = Ly0 si trasferiscono ad Y le proprietà
della convergenza debole stella di X ∗. Si dice allora che Y è una realizzazione di X ∗
e, frequentemente, non si distingue tra Y ed X ∗.
Un esempio particolare è ben noto: se X = l2(n), lo spazio euclideo n-dimensionale,
allora una realizzazione del duale è lo spazio stesso.
5Una trasformazione L si dice antilineare se vale L(αx + βy) = αLx + βLy.
341

5. SPAZI DI BANACH
Non sempre è possibile trovare delle realizzazioni concrete (e comode) di uno
spazio duale; e d’altra parte esistono spazi di Banach che non sono isometri-
camente isomorfi a nessuno spazio duale. Per questo conviene elencare alcuni
casi particolarmente importanti. Prima di presentare le dimostrazioni, raccogliamo
i risultati nella tabella seguente:
spazio duale
l1 l∞
lp , p < +∞ lp′, p′ = p/(p− 1)
c0 l1
L1(Ω) L∞(Ω)
Lp(Ω) , p < +∞ Lp′(Ω) , p′ = p/(p − 1)
C(a, b) NV (a, b)
Lo spazio NV (a, b) è definito in seguito.
Non abbiamo inserito nella tabella precedente gli spazi l∞ ed L∞(Ω). Realizzazioni
dei loro duali sono note, ma per descriverle avremmo bisogno di conoscenze di teoria
della misura che non abbiamo presentato.
Il duale di lp, 1 ≤ p < +∞
Per caratterizzare il duale di lp ed anche di c0 abbiamo bisogno di una particolare
successione di elementi dello spazio lp stesso, che indichiamo con (e(n)). Dunque,
ciascun e(n) è a sua volta una successione di numeri. Per definizione,
e(n)i =
1 se i = n
0 altrimenti.5.64
Notiamo che ||e(n)||p = 1 per ogni p, 1 ≤ p ≤ +∞ e che lo spazio lineare generato
dagli elementi e(n) è denso in lp per ogni p, 1 ≤ p < +∞. Non è invece denso in l∞.
Sia X = lp con 1 ≤ p < +∞. In questo caso una realizzazione di X ∗ è
lp′
con p′ =
+∞ se p = 1
pp−1 se p > 1 .
5.65
342

5. SPAZI DI BANACH
Proviamo ciò prima di tutto nel caso p = 1. Sia (yn) ∈ L∞. Si vede immediatamente
che il funzionale lineare x∗, dipendente da (yn),
〈〈x∗, x〉〉 =+∞∑n=0
ynxn 5.66
è lineare, ed è continuo perché
|〈〈x∗, x〉〉| = |+∞∑n=0
ynxn| ≤ supn|yn| · ||x||1 .
Inoltre, la trasformazione y = (yn) → x∗ è antilineare e si vede facilmente che è
isometrica. Infatti, la disuguaglianza precedente mostra che
||x∗|| = sup||x||1=1
〈〈x∗, x〉〉 ≤ ||y||∞ . 5.67
Per vedere che vale anche la disuguaglianza inversa, e quindi l’uguaglianza, si scelga
la successione x(N) definita da
x(N)r =
yr
|yr| se r = N e yr = 0
0 altrimenti.
Ovviamente, ||x(N)||1 ≤ 1 e
supN
〈〈x∗, x(N)〉〉 = supN
|yN | = ||y||∞
e quindi in 5.67 vale l’uguaglianza.
Per completare la dimostrazione, dobbiamo far vedere che la trasformazione che ad
y ∈ l∞ associa x∗ ∈ (l1)∗ data da 5.66 è suriettiva; ossia dobbiamo assegnare un
qualsiasi x∗ ∈ (l1)∗ ed associargli un opportuno y ∈ l∞, in modo che valga 5.66. Per
costruire y consideriamo la successione e(n) in 5.64. Definiamo y ponendo
yn = 〈〈x∗, e(n)〉〉 .
Da
|yn| ≤ ||x∗||
segue che y ∈ l∞.
Sia ora x ∈ l1. Associamogli la successione x(N) definita come segue:
x(N) =N∑
k=0
xke(k) ossia x(N)k =
xk se k ≤ N
0 altrimenti.
343

5. SPAZI DI BANACH
Si ha
〈〈x∗, x〉〉 = limN
〈〈x∗, x(N)〉〉 = limN
〈〈x∗,N∑
k=0
xke(k)〉〉
= limN
N∑k=0
xk〈〈x∗, e(k)〉〉 = limN
N∑k=0
ykxk =+∞∑k=0
ykxk .
Si noti che l’ultima uguaglianza si giustifica perchè già sappiamo che y ∈ l∞ e già
sappiamo che, in tal caso,
x →+∞∑k=0
ykxk
è continua su l1.
Ciò completa l’analisi del caso p = 1.
In modo analogo trattiamo il caso 1 ≤ p < +∞.
Siano x = (xn) ∈ lp ed y = (yn) ∈ lp′. Dalla disuguaglianza di H’older si vede che:
+∞∑k=0
ynxn ≤ ||(yn)||p′ · ||(xn)||p = ||y||p′ · ||x||p .
Ciò mostra che la trasformazione lineare
x →+∞∑k=0
ykxk
è continua su lp e suggerisce di considerare la trasformazione L da Y = l p′in X∗:
(Ly)(x) =+∞∑k=0
ynxn ,
che è chiaramente iniettiva e inoltre
||Ly||X∗ ≤ ||y||p′ .
Si vede che vale l’uguaglianza. Infatti, sia
xn =(|yn|p
′/p yn
|yn|
)1
||y||(p′/p)
p′se yn = 0, xn = 0 altrimenti.
Si vede facilmente che x = (xn) è un elemento di X = lp di norma 1. Per esso vale
(Ly)(x) =1
||y||p′/p
p′||y||p
′p′ = ||y||p′ .
In questo modo si è trovata una trasformazione antilineare L che è isometrica da l p′in
(lp)∗.
344

5. SPAZI DI BANACH
Per concludere, basta mostrare che L è suriettiva, ossia che ogni elemento di (l p)∗ si
rappresenta come in 5.65. Sia allora x∗ ∈ (lp)∗. Dobbiamo prima di tutto trovare una
successione da associare a x∗. Per questo usiamo ancora la successione e(n) definita
in 5.64 e definiamo
yi = 〈〈x∗, e(i)〉〉 .
In questo modo si costruisce una successione y = (y i).
Proviamo prima di tutto che y ∈ lp′, ||y|| ≤ ||x∗||. Proveremo infine che
〈〈x∗, x〉〉 =+∞∑i=1
yixi . 5.68
Introduciamo la successione x(n) ∈ lp definita da
x(n) = x(n)i con x
(n)i =
|yi|p
′−1 yi
|yi| se i ≤ n e yi = 0
0 altrimenti.
Ovviamente, x(n) ∈ lp per ogni n e
〈〈x∗, x(n)〉〉 ≤ ||x∗|| · ||x(n)||p
e, d’altra parte,
〈〈x∗, x(n)〉〉 =n∑
i=1
|yi|p′.
Passando al limite rispetto ad n si trova
||y||p′ ≤ ||x∗|| .
Dunque, y ∈ lp′
e ||y|| ≤ ||x∗||.
Proviamo ora che vale la 5.68. Fissato l’elemento x ∈ lp, consideriamo la successione
x(n) di elementi di lp,
x(n) =n∑
i=0
xiei , ossia x(n)
r =
xr se r ≤ n
0 se r > n .
Si vede che, se p < +∞,
x = limr→+∞x(n) .
Questo limite si calcola nella norma di lp. Dunque, essendo x∗ continuo,
limn〈〈x∗, x(n)〉〉 = 〈〈x∗, x〉〉 .
345

5. SPAZI DI BANACH
Inoltre,
limn〈〈x∗, x(n)〉〉 = lim
+∞∑r=0
yrx(r)n = lim
n∑r=0
yrxn =+∞∑i=0
yrxr
perchè si è già provato che y ∈ lp′e quindi che x →
∑+∞i=0 yrxr è un funzionale
continuo. Si trova così che vale la rappresentazione
〈〈x∗, x〉〉 =+∞∑i=0
yrxr .
Osservazione 5.160. Nel caso particolare p = 2, una realizzazione del duale di l 2
è lo spazio stesso.
Il duale di c0
Ricordiamo che il simbolo c0 indica il s.spazio di l∞ i cui elementi sono le successioni
che convergono a zero. Proviamo che il duale di c 0 è realizzato da l1. Per provare
questo notiamo che se (ξk) ∈ l1 allora la trasformazione
x →+∞∑k=1
ξkxk 5.69
è lineare e continua su l∞ e che la trasformazione da ξ ∈ l1 al funzionale definito
da 5.69 è isometrica e antilineare. Queste proprietà si conservano sostituendo l∞ con
c0.
Dobbiamo provare che ogni x∗ ∈ (c0)∗ ammette la rappresentazione 5.69.
Notiamo prima di tutto che ogni lp, p < +∞, è un sottospazio di c0 e che
l’immersione di lp in c0 è continua. Dunque, ogni funzionale lineare continuo su
c0 è anche un funzionale lineare continuo su l p, per ogni p < +∞. Ciò suggerisce di
porre ancora
ξi = 〈〈x∗, e(i)〉〉 .
Si trova così un vettore ξ = (ξi), candidato ad essere un rappresentante di x∗.
Come si è detto, il vettore ξ è nel duale lp′di lp per ogni p < +∞. In particolare
quindi è in l∞. Proviamo che inoltre tale vettore è anche in l 1. Scegliamo per questo
la seguente successione x(n) in c0:
346

5. SPAZI DI BANACH
x(n)r =
ξr
|ξr| se r ≤ n e ξr = 0
0 altrimenti=
∑r≤nξr =0
ξr
|ξr|e(r) .
Dato che (ξn) ∈ l∞, la successione (x(n)) è una successione limitata in c0. Esiste
quindi un numero M tale che∣∣∣〈〈x∗, x(n)〉〉∣∣∣ =∑ |ξr| < M
per ogni n. Ciò prova che (ξr) ∈ l1.
Ora, per ogni x ∈ c0, x = (xi), vale:
〈〈x∗, x〉〉 = limN
〈〈x∗,N∑
i=0
xiei〉〉 = limN
N∑i=0
ξixi =+∞∑i=0
ξixi .
Ciò completa la dimostrazione.
Osservazione 5.161. Notiamo nuovamente che nella dimostrazione si usa la densità
in c0 della successione e(i). Questa successione è densa in lp per 1 ≤ p < +∞ e
anche in c0; ma non in l∞.
Il duale di Lp(Ω), 1 ≤ p < +∞
In questo caso X∗ è isometricamente isomorfo a Lp′(Ω), con
p′ =p
p − 1se p > 1; L∞(Ω) se p = 1.
Ciò vale con Ω ⊆ Rn, limitato o meno.
Accenniamo alla dimostrazione nel caso p = 1 e Ω = (a, b).
E’ ovvio che per ogni ξ ∈ L∞(a, b), il funzionale su L1(a, b) definito da
x →∫ b
a
ξ(s)x(s) ds
è continuo, di norma minore o uguale a ||ξ||∞ e in realtà si vede che vale
l’uguaglianza.
Viceversa, sia x∗ un funzionale lineare e continuo su L1(a, b). Dobbiamo associargli
una funzione ξ(s) ∈ L∞(a, b) tale che
〈〈x∗, x〉〉 =∫ b
a
ξ(s)x(s) ds .
347

5. SPAZI DI BANACH
Introduciamo la famiglia delle funzioni χ t(s), una funzione per ogni t ∈ (a, b),
χt(s) =
1 se a < t < s
0 altrimenti5.70
e studiamo i valori che x∗ assume su queste funzioni. La ragione di ciò è che6 le
funzioni a costanti a tratti sono dense in L1(a, b).
Associamo ad x∗ ∈ (L1(a, b))∗ la funzione
g(t) = 〈〈x∗, χt〉〉
E’:
|g(t) − g(t′)| = |〈〈x∗, χt − χt′〉〉 ≤ ||x∗|| · ||χt − χt′ ||1 = ||x∗|| · |t − t′| .
Dunque la funzione g(t) è lipschitziana e quindi è assolutamente continua. Per essa
vale
g(t) =∫ t
a
ξ(s) ds
e inoltre ξ(s) è q.o. la derivata di g(t). Dunque ξ ∈ L∞(a, b) perché il rapporto
incrementale di g è limitato.
Notiamo che
〈〈x∗, χt〉〉 = g(t) =∫ t
a
ξ(s) ds =∫ b
a
ξ(s)χt(s) ds .
Una qualunque funzione a scala si rappresenta come combinazione lineare di funzioni
χt:
ψ(t) =n∑
i=1
ψiχti(s)
e quindi
〈〈x∗, ψ〉〉 =n∑
i=1
ψi
∫ b
a
ξ(s)χti(s) ds =∫ b
a
ξ(s)ψ(s) ds .
6Questa proprietà non è stata provata nella parte relativa all’integrale di Lebesgue. E’ stato
provato però che sono dense le funzioni semplici, ossia costanti su insiemi misurabili. La
densità delle funzioni costanti a tratti, ossia costanti su intervalli, discende dal fatto che ogni
insieme misurabile si approssima mediante unioni di intervalli.
348

5. SPAZI DI BANACH
Abbiamo già notato che il funzionale
x →∫ b
a
ξ(s)x(s) ds
è continuo.
Sia ora x ∈ L1(a, b). Esiste una successione di funzioni a scala ψn convergente ad x
in L1(a, b). Allora,
〈〈x∗, x〉〉 = limN
〈〈x∗, ψN 〉〉 = limN
∫ b
a
ξ(s)ψN (s) ds =∫ b
a
ξ(s)x(s) ds .
Ciò è quanto volevamo provare.
Osservazione 5.162. Una dimostrazione del tutto analoga porta ad identificare il
duale di Lp(Ω), per ogni p < +∞. Invece gli argomenti precedenti non si estendono
al caso L∞(Ω) perché le funzioni costanti a tratti non sono dense in L∞(Ω).
Il duale di C(a, b)
Introduciamo ora una realizzazione del duale di C(a, b), lo spazio di Banach delle
funzioni continue sull’intervallo limitato e chiuso [a, b], con la norma dell’estremo
superiore. Fissiamo un elemento x∗ del duale. Per rappresentarlo, procediamo in tre
passi:
PASSO 1) Introduciamo lo spazio lineare di tutte le funzioni limitate su [a, b], continue
o meno, dotato della norma dell’estremo superiore. Si trova uno spazio di Banach che
indicheremo col generico simbolo B.
C(a, b) essendo un s.spazio di B, il funzionale lineare e continuo x∗, definito su
C([a, b]), si estende ad in funzionale lineare continuo su B, con la stessa norma,
per il Teorema di Hahn-Banach. Tale estensione non è unica. Fissiamone una, che
indichiamo col simbolo x∗.
Per ogni t ∈ [a, b], introduciamo le funzioni definite come in 5.70 e la funzione
v(t) = 〈〈x∗, χt〉〉 .
Sia ora f ∈ C(a, b). Essendo [a, b] compatto, la funzione f è uniformemente continua
e quindi si approssima in modo uniforme con funzioni costanti a tratti. Queste possono
349

5. SPAZI DI BANACH
costruirsi scegliendo un insieme finito tini=1 di punti di [a, b], abbastanza fitto, e
quindi definendo
zn(t) = f(ti−1) ∀t ∈ [ti−1, ti)
ossia
zn(t) =n∑
i=1
f(ti−1)[χti(s) − χti−1(s)] .
Si ha quindi
〈〈x∗, f〉〉 = 〈〈x∗, f〉〉 = lim〈〈x∗, zn〉〉 = limn∑
i=1
f(ti−1)[〈〈x∗, χti(s)〉〉 − 〈〈x∗, χti−1(s)〉〉]
= limn∑
i=1
f(ti−1)[vti(s) − vti−1(s)] .
Si noti che nel caso particolare in cui v(t) = t, tale limite è∫ b
af(s) ds.
PASSO 2) Introduciamo un simbolo per indicare il limite precedente,∫ b
a
f dv = limn∑
i=1
f(ti−1)[vti(s) − vti−1(s)] 5.71
(ovviamente, il limite non dipende dalla partizione scelta per definirlo, dato che esso
deve essere 〈〈x∗, f〉〉).
Il particolare integrale definito da 5.71 si chiama integrale di Stiltjes.
Si osservi che la rappresentazione di x∗ come integrale di Stiltjes usa la continuità
uniforme di f ; e quindi in generale x∗ non avrà tale rappresentazione.
PASSO 3) Ricapitolando, abbiamo rappresentato ogni elemento del duale di C(a, b)
come un integrale di Stiltjes. Dobbiamo ora studiare le proprietà di tale integrale, per
trovare uno spazio di Banach che realizzi [C(a, b)]∗.
Si han∑
i=1
|v(ti) − v(ti−1)| =n∑
i=1
sgn [v(ti) − v(ti−1)][v(ti) − v(ti−1)]
n∑i=1
〈x∗,sgn [v(ti) − v(ti−1)][χti − χti−1 ]
〉〉
= 〈x∗,n∑
i=1
sgn [v(ti) − v(ti−1)][χti − χti−1 ]
〉〉
350

5. SPAZI DI BANACH
≤ ||x∗|| sups
n∑i=1
|χti(s) − χti−1(s)| = ||x∗|| = ||x∗||
perché la differenza |χti(s) − χti−1(s)| vale 1 oppure 0.
Questa disuguaglianza vale per ogni suddivisione dell’intervallo [a, b] in un numero
finito di punti e quindi esiste un numero M , M = ||x∗||, tale che
V ba v = sup
ti
∑|v(ti) − v(ti−1)| < M .
Funzioni v con questa proprietà si dicono a variazione limitata.
La struttura delle funzioni a variazione limitata è stata studiata con estrema precisione.
Si prova in particolare che ogni funzione a variazione limitata è differenza di due
funzioni monotone e che, quindi, i suoi punti di discontinuità sono salti. Si prova
inoltre che
sup||f ||<1
∫ b
a
f dv = V ba v
e questo suggerisce di scegliere come spazio per rappresentare [C(a, b)] ∗ uno spazio
di funzioni a variazione limitata. Bisogna però notare che può aversi∫ b
a
f dv =∫ b
a
f dv′ ∀f ∈ C(a, b)
anche con v = v′. E quindi la rappresentazione che abbiamo trovato per x ∗ non
è unica. Si prova però che l’uguaglianza può aversi, per ogni f , solo se v e v ′
differiscono per il valore che assumono in un punto di salto oppure nell’estremo
sinistro a dell’intervallo. Ciò suggerisce di definire
NV (a, b)
lo spazio delle funzioni a variazione limitata normalizzate su [a, b], continue a sinistra
e nulle in a, dotato della norma
V ba (v) .
Si prova che questo spazio è di Banach e che vale:
Teorema 5.163 (di Riesz). Lo spazio NV (a, b) è una realizzazione del duale di
[C(a, b)]∗ e ogni x∗ ∈ [C(a, b)]∗ si rappresenta (in modo unico) come
〈〈x∗, f〉〉 =∫ b
a
f dv , v ∈ NV (a, b) .
351

5. SPAZI DI BANACH
Il duale di C(K)
Ricordiamo che simbolo C(K) l’insieme K è compatto.
Non abbiamo gli strumenti per studiare il duale di C(K). Possiamo però descrivere
come si rappresenta l’azione su C(K) di un elemento x∗ del suo duale. Per ogni
x∗ ∈ (C(K))′ si trovano una misura di Borel m ed una funzione ψ(s) misurabile
secondo Borel su K e tale che
|ψ(s)| = 1 q.o. s ∈ K
e per la quale vale
〈〈x∗, x〉〉 =∫
K
ψ(s)x(s) dm
5.11.1 Relazione tra le convergenze debole e debole stella
Avendo a disposizione gli esempi precedenti, possiamo chiarire meglio le relazioni tra
le convergenze debole e debole stella, quando queste si possano definire sul medesimo
spazio, che in tal caso è lo spazio X ∗ duale di uno spazio di Banach X .
Queste due nozioni di convergenza non sono indipendenti. Infatti:
Teorema 5.164. Sia x∗n una successione in X ∗. Se essa converge debolmente ad
x∗0, allora essa converge anche debole stella al medesimo x0.
DIMOSTRAZIONE
Ciò discende dal fatto che si è già notato che X è isometrico ad un s.spazio di X ∗∗.
L’esempio seguente mostra che non vale l’implicazione inversa.
Esempio 5.165. Sia X = c0, X∗ = l1 ed X∗∗ = l∞.
In X∗ = l1 si consideri la successione e(n) definiti da 5.64.
Se x ∈ c0, x = (xn) allora
〈〈x, e(n)〉〉 = xn → 0 e quindi w∗− lim e(n) = 0 .
352

5. SPAZI DI BANACH
Invece, se x ∈ l∞ = X∗∗ è la successione ogni cui elemento vale 1,
〈〈x, e(n)〉〉 = 1 e quindi la successione (e(n)) non converge debolmente a 0.
5.12. LO SPETTRO DI UN OPERATORE
Se X ha dimensione finita è noto che molte informazioni si ottengono studiando gli
autovalori della trasformazione, i quali hanno spesso iterpretazioni fisiche importanti.
Vogliamo ora estendere questo tipo di studio a generici spazi di Banach. In tal caso
la situazione è resa complessa dall’esistenza di operatori lineari non continui e di
sottospazi non chiusi, due fatti che non si verificano in dimensione finita.
Si sa che, anche in dimensione finita, autovalori ed autovettori possono solo trovarsi
se il campo scalare è quello dei numeri complessi. Per questo supporremo F = C.
In dimensione finita, un numero complesso z0 si dice un autovalore di A se
(z0I − A)x = y
non è risolubile per ogni y; equivalentemente, se la soluzione x, quando esiste, non
è unica. L’esempio seguente mostra che la non risolubilità per ogni y in dimensione
infinita non equivale alla non unicità.
Esempio 5.166. Sia X = lp, per un qualsiasi p ∈ [1, +∞] e siano T ed S definiti
da
S[
x0 x1 x2 . . .]
=[
0 x0 x1 . . .]
T[
x0 x1 x2 . . .]
=[
x1 x2 x3 . . .]
.5.72
E’ chiaro che
kerS = 0 e im S = X ,
kerT = 0 e im T = X .
353

5. SPAZI DI BANACH
I due operatori precedenti sono particolarmente importanti. In particolare, l’operatore
S si chiama operatore di traslazione (sottinteso, verso destra).
Ricordiamo inoltre che se l’equazione
(zI − A)x = y 5.73
è risolubile in modo unico allora (zI − A) ammette inverso, definito sulla sua
immagine e questo è un operatore lineare. Ma, in generale, l’inverso non è continuo.
Queste considerazioni suggeriscono la definizione seguente, che si applica ad ogni
operatore lineare A da X in X , anche non continuo ma con dominio denso:
Definizione 5.167. Sia A lineare da X in X , con dominio denso. Si chiama insieme
risolvente di A l’insieme dei numeri complessi z tali che la 5.73 ammette un’unica
soluzione x per ogni y in un s.insieme denso di X e tali che, inoltre, l’inverso (zI −
A)−1 sia continuo.
Se z appartiene all’insieme risolvente di A, l’operatore (zI − A)−1 si chiama
l’operatore risolvente di A.
L’insieme risolvente si indica col simbolo ρ(A). Il suo complementare si indica col
simbolo σ(A) e si chiama lo spettro dell’operatore A.
Da un punto di vista logico, z ∈ σ(A) se si verifica uno dei casi seguenti, mutuamente
incompatibili:
i) ker(zI − A) = 0;
ii) ker(zI − A) = 0 ma im (zI − A) non denso in X ;
iii) ker(zI − A) = 0, im (zI − A) denso in X ma (zI − A)−1 non continuo.
Definiamo quindi:
– spettro di punti l’insieme dei numeri z per i quali si verifica il caso i);
– spettro residuo l’insieme dei punti per i quali si verifica il caso ii);
354

5. SPAZI DI BANACH
– spettro continuo l’insieme dei punti per i quali si verifica il caso iii).
Gli elementi dello spettro di punti si chiamano autovalori dell’operatore A.
Abbiamo definito una partizione dello spettro di A in tre s.insiemi. Essi si indicano
rispettivamente con i simboli
σp(A) , σr(A) , σc(A) .
In dimensione finita solo il caso i) può verificarsi. Mostriamo che, invece, in
dimensione infinita anche gli altri casi possono verificarsi.
Esempio 5.168. Sia S l’operatore definito in 5.72. Si vede facilmente che 0 ∈ σr(S)
(invece, 0 ∈ σp(T )).
Mostriamo un operatore con spettro continuo non vuoto. Sia X = l 2 e sia A definito
come segue:
A[
x0 x1 x2 . . . xn . . .]
=[
x012x1
13x2 . . . 1
n+1xn . . .]
.
L’equazione Ax = y è risolubile per ogni successione (yn) definitivamente nulla,
ossia per ogni y in un s.spazio denso di X = l2, ed è
[x0 x1 x2 . . . xn . . .
]=[
y0 2y1 3y2 . . . (n + 1)yn . . .]
.
Dunque, l’inverso non è continuo.
Grazie al teorema fondamentale dell’algebra, si sa che in dimensione finita lo spettro
non è mai vuoto ed è un insieme finito. Mostriamo invece che esistono operatori
lineari su spazi di Banach, con spettro vuoto ed operatori con risolvente vuoto.
Esempio 5.169. Sia X = L2(0, 1) e siano A e B definiti come segue:
domA = x ∈ C(0, 1) | x′ ∈ L2(0, 1) , Ax = x′ ,
domB = x ∈ C(0, 1) | x′ ∈ L2(0, 1) , x(0) = 0 , Bx = x′ .
355

5. SPAZI DI BANACH
Allora σ(A) = σp(A) = C perché per ogni z vale (z − A)χz = 0, con χz(t) = ezt.
Invece, σ(B) = ∅ perché
(zI − B)x = y ⇐⇒
x′ = zx − y
x(0) = 0 .
Dunque x è dato da
x(t) = −∫ t
0
ez(t−s)y(s) ds
così che l’operatore (zI − B)−1 è continuo.
Nell’esempio precedente intervengono, vedremo non per caso, operatori che non sono
continui; ma anche lo spettro di operatori continui può avere una struttura piuttosto
complessa:
Esempio 5.170. Sia X = l2 e sia T l’operatore definito in 5.72. Risolvendo
(zI − T )x = 0
si trova come soluzione:
x = q[
1 z z2 z3 . . .]
con q ∈ C qualsiasi. Questa successione appartiene ad l 2 per ogni z di modulo
minore di 1. Dunque, σp(T ) ⊇ z | |z| < 1.
Nonostante questi esempi, spettro e risolvente non possono essere insiemi qualsiasi.
Infatti:
Teorema 5.171. Se A è continuo, σ(A) ⊆ z | |z| ≤ ||A||.
DIMOSTRAZIONE
Supponiamo che A sia continuo e che sia |z| > ||A||. Vogliamo provare che in tal caso
z ∈ ρ(A). Scriviamo per questo
(zI − A) = z(I − K) , K =1
zA così che ||K|| < 1 .
356

5. SPAZI DI BANACH
Dunque,
(zI − A)−1 =1
z
+∞Xn=0
Kn =1
z
+∞Xn=0
An
zn. 5.74
Quest’operatore è continuo, dato che ||K|| = ||A/z|| < 1; e quindi z ∈ ρ(A).
Lo spettro non può essere un insieme qualsiasi nemmeno se l’operatore A non è
continuo. Infatti:
Teorema 5.172. Il risolvente è sempre un insieme aperto e quindi lo spettro è chiuso.
DIMOSTRAZIONE
Sia A qualsiasi, anche non continuo. Proviamo che il suo risolvente è aperto. Se esso
è vuoto niente va provato. Dunque supponiamo che esista un numero z 0 ∈ ρ(A) e
mostriamo che esso è interno al risolvente; ossia proviamo l’esistenza di ε > 0 (che
dipende sia da z0 che da A) tale che se |z| < ε allora z + z0 ∈ ρ(A). Per questo
scriviamo
(z + z0)I − A = zI + (z0I − A) = (z0I − A)ˆI + z(z0I − A)−1
˜. 5.75
Per il Teorema 5.171, l’operatore
ˆI + z(z0I − A)−1˜
è invertibile se
|z| < ε =1
||(z0I − A)−1||
e in tal caso (z + z0)I − A è invertibile con inverso limitato, essendo composizione di
operatori invertibili ciascuno con inverso limitato.
La 5.75 permette anche di trovare un’espressione per [(z + z0)I − A]−1:
[(z + z0)I − A]−1 =
+∞∑k=0
zn[(z0I − A)−1
]n(z0I − A)−1
=+∞∑k=0
zn[(z0I − A)−1
]n+1.
5.76
357

5. SPAZI DI BANACH
Dunque, fissato z0 ∈ ρ(A), la funzione [(z + z0)I − A]−1 si esprime come serie di
potenze di z, a coefficienti operatori limitati.
Chiameremo funzioni olomorfe a valori operatori quelle funzioni di z ∈ C che si
esprimono localmente, in un opportuno intorno di ogni punto z 0 del loro dominio,
mediante serie
+∞∑n=0
Kn(z − z0)n
convergenti (nella norma di L(X)). Dunque:
Corollario 5.173. Se l’operatore A ha risolvente non vuoto, la funzione z → (zI −
A)−1 è olomorfa su ρ(A).
Osservazione 5.174. Combinando il calcolo dell’esempio 5.170 con i teoremi 5.171
e 5.172, si vede che
σ(T ) = z | |z| ≤ 1 .
Torniamo ora a considerare un operatore continuo A. Si è detto che il suo risolvente
non è vuoto, e anzi contiene l’esterno del disco z | |z| ≤ ||A||. Naturalmente, esso
può anche estendersi all’interno di tale disco; ma non può riempirlo. Infatti:
Teorema 5.175. Sia A ∈ L(X). Lo spettro di A non è vuoto.
DIMOSTRAZIONE
La dimostrazione procede per assurdo, e va confrontata con la dimostrazione del
Teorema fondamentale dell’algebra.
Dal Corollario 5.173 si sa che, se σ(A) = ∅, la funzione (zI − A)−1 è olomorfa su C.
Dunque, per ogni x ∈ X, y∗ ∈ X∗, la funzione
z → f(z) = 〈〈y∗, (zI − A)−1x〉〉
è una funzione intera.
358

5. SPAZI DI BANACH
Dalla 5.76 si vede che per |z| → +∞, la funzione f(z) tende a zero; e quindi f(z) è
una funzione intera e limitata, e quindi costante. Dato che un suo limite è nullo, essa
deve essere identicamente zero.
Dunque, abbiamo provato che
〈〈y∗, (zI − A)−1x〉〉 ≡ 0 ∀x ∈ X , ∀y∗ ∈ X∗ .
Dato che X∗ distingue punti di X, deve essere
(zI − A)−1x ≡ 0
per ogni x ∈ X. Ciò non può darsi perché (zI − A)(zI − A)−1x = x per ogni x ∈ X.
La contraddizione trovata prova il teorema.
Nonostante che lo spettro di un operatore continuo non possa essere vuoto, può essere
che esso sia un insieme molto più piccolo del disco di raggio ||A||. Per esempio, in
dimensione 2, la trasformazione lineare la cui matrice è 0 1
0 0
ha norma 1 ed il solo autovalore 0. E’ un utile esercizio vedere che un caso analogo
può darsi anche in dimensione infinita.
Esempio 5.176. Sia X = L2(0, 1) e sia
Ax =∫ t
0
x(s) ds .
Si sa che A è continuo e si vede immediatamente che 0 ∈ σ(A), dato che A−1 è
l’operatore di derivazione, A−1y = y′, che non è continuo.
Mostriamo che ogni altro numero z appartiene al risolvente. Per questo risolviamo
(zI − A)x = y ossia zx(t) −∫ t
0
x(s) ds = y(t) .
Dividendo per z si trova
x(t) − 1zy(t) =
1z
∫ t
0
x(s) ds =1z
∫ t
0
[x(s) − 1
zy(s)
]ds +
∫ t
0
1z2
y(s) ds .
359

5. SPAZI DI BANACH
Quest’uguaglianza mostra che la funzione
ξ(t) = x(t) − 1zy(t)
è derivabile quasi ovunque, che ξ(0) = 0 e che
ξ′(t) =1zξ(t) − 1
z2y(t) ossia ξ(t) = − 1
z2
∫ t
0
e1z (t−s)y(s) ds .
Da qui,
x(t) =1zy(t) − 1
z2
∫ t
0
e1z (t−s)y(s) ds .
La trasformazione da y ad x è, per ogni fissato z = 0, lineare e continua. Dunque,
σ(A) = 0.
Questi esempi suggeriscono di chiamare raggio spettrale r(A) il numero
r(A) = max|z| | z ∈ σ(A) .
Il raggio spettrale di un operatore continuo si esprime in modo che richiama la formula
per il raggio di convergenza di una serie di potenze:
Teorema 5.177. Sia A ∈ L(X). Vale:
r(A) = lim n√||An|| .
DIMOSTRAZIONE
Si prova, esattamente come nel caso scalare, che una serie di potenze a valori ope-
ratori converge in un disco di centro z0, che si chiama ancora disco di convergenza,.
Questo disco coincide col disco di convergenza della serie di potenze
+∞Xn=0
||An||(z − z0)n .
Applicando questo alla serie 5.74 si vede che
r(A) = lim sup np
||An|| .
Si deve ora provare che in realtà esiste
360

5. SPAZI DI BANACH
lim np
||An|| .
Risulta più semplice provare l’esistenza del limite
lim1
nlog ||An|| .
Notiamo che
log ||An+m|| ≤ log ||An|| · ||Am|| ≤ log ||An|| + log ||Am|| .
Una successione di numeri (an), tutti positivi, che verificano
an+m ≤ an + am
si dice subadditiva. La dimostrazione del Teorema 5.177 si completa usando il lemma
seguente:
Lemma 5.178. Se la successione (an) è subadditiva allora esiste
lim1
nan .
DIMOSTRAZIONE
Si fissa un numero naturale m e si studiano i quozienti a n/n con n > m. Notiamo che
si può scrivere
n = md + r , 0 ≤ r < m
e quindi
an = amd+r ≤ dam + ar .
Dividiamo per n e passiamo al limite per n → +∞.
Il numero ar è funzione di n limitata al variare di r perché prende valori nell’insieme
finito a1,. . . , am−1. Dunque lim ar/n = 0.
Ancora perché r prende un numero finito di valori,
d
n=
n − r
nm=
1
m− r
nm→ 1
m.
Dunque,
lim supan
n≤ am
m∀m.
E quindi
361

5. SPAZI DI BANACH
lim supan
n≤ lim inf
an
n.
Ciò prova l’esistenza del limite.
Il teorema è così provato.
Esempio 5.179. Su R2 (riferito alla base canonica) consideriamo la trasformazione
lineare descritta mediante la matrice
A =
0 2
1 0
.
Per calcolare il raggio spettrale mediante la formula 5.177 bisogna prima di tutto
calcolare le potenze di A:
A2n = 2nI , A2n+1 = 2nA .
E’ immediatamente evidente che ||A|| = 2 e quindi
||A2n||1/2n =√
2 , ||A2n+1||1/(2n+1) = [√
2](2n+2)/(2n+1) .
Dunque, il raggio spettrale è√
2. Si noti che la successione (||An||1/n) non è
monotona.
5.12.1 Proiezioni spettrali
Sia X uno spazio di Banach e sia A un operatore, anche non continuo, da X in sé, con
dominio denso.
Abbiamo notato che il risolvente è una funzione analitica e ciò suggerisce di studiare
l’analogo, scritto per gli operatori, della formula integrale di Cauchy:
12πi
∫γ
f(z)(zI − A)−1 dz 5.77
ove γ è una curva semplice e chiusa7 il cui sostegno è contenuto in ρ(A). La funzione
f(z) è olomorfa.
7Come al solito, orientata in verso positivo, ossia antiorario.
362

5. SPAZI DI BANACH
Naturalmente, dovremo dare un senso all’integrale. Dato che la funzione a valori in
L(X)
z → f(z)(zI − A)−1
è uniformemente continua sul sostegno di γ, l’integrale si definisce coll’usuale metodo
di Riemann, come “limite” delle somme di Riemann. Lasciamo al lettore i semplici
dettagli.
Nonostante che la 5.77 abbia senso per ogni operatore lineare A da X in sé, purché
il sostegno di γ sia contenuto in ρ(A), noi ci limiteremo a considerare il cao degli
operatori A continui.
Per interpretare la 5.77, consideriamo la funzione
f(z) =+∞∑n=0
fnzn
e la serie corrispondente
+∞∑n=0
fnAn . 5.78
Nel caso particolare in cui f(z) = p(z) è un polinomio, la serie 5.78 è una somma
finita e definisce un operatore che, ovviamente, si indica col simbolo p(A). Per
esempio, se p(z) = z2, allora p(A) = A2. Se f(z) è una generica funzione analitica
la cui serie converge in un intorno di 0, la serie 5.78 in generale non converge, ma
certamente converge in L(X) se
||A|| < R
con R raggio di convergenza della serie di potenze di f(z). Infatti in tal caso∣∣∣∣∣∣∣∣∣∣
m∑n=k
fnAn
∣∣∣∣∣∣∣∣∣∣ ≤
m∑n=k
fn||A||n ≤m∑
n=k
fnrn , r < R ,
e la convergenza si vede dal test di Cauchy per la convergenza delle serie.
Ricapitolando, se ||A|| < R, la serie 5.78 definisce un operatore di L(X), che
indicheremo col simbolo
f(A) .
363

5. SPAZI DI BANACH
Ricordiamo ora che i coefficienti fn si rappresentano come
fn =1
2πi
∫γ
f(ζ)ζn+1
dζ
con γ curva semplice e chiusa orientata positivamente, il cui sostegno è contenuto nel
disco di convergenza di f(z).
Supponiamo che la curva γ racchiuda il disco z | |z| < r, con
||A|| < r < R . 5.79
In tal caso si trova
f(A) =+∞∑n=0
fnAn =1
2πi
+∞∑n=0
∫γ
f(ζ)An
ζn+1dζ
=1
2πi
∫γ
f(ζ)
(+∞∑n=0
An
ζn+1
)dζ =
12πi
∫γ
f(ζ)(ζI − A)−1 dζ .
Si noti che questo calcolo vale grazie alla condizione 5.79 e, se vale 5.79, allora si ha
anche
σ(A) ⊆ z | |z| < R .
Osservazione 5.180. Si noti che l’integrale 5.77 ha senso anche se γ, di sostegno
in ρ(A), racchiude solo una parte dello spettro di A. Però in tal caso non useremo la
notazione f(A) per indicarlo.
In un caso particolare è facile calcolare l’integrale 5.77: supponiamo che ρ(A)
contenga una regione di Jordan Ω e supponiamo che il sostegno di γ appartenga
a Ω. In questo caso un argomento analogo a quello usato nella dimostrazione del
teorema 5.175, basato sul teorema di Hahn–Banach, prova che l’integrale è nullo.
Ossia, il Teorema di Cauchy 1.31 vale anche per integrali della forma 5.77. Dunque, i
casi interessanti saranno quelli nei quali γ “gira” intorno a punti di σ(A). Per intuire
cosa dobbiamo attenderci, consideriamo l’esempio seguente:
Esempio 5.181. Sia X = C3 a sia
A =
0 1 0
0 0 0
0 0 2
così che (zI − A)−1 =
1/z 1/z2 0
0 1/z 0
0 0 1/(z − 2)
.
364

5. SPAZI DI BANACH
Sia γ una curva semplice e chiusa che racchiude 0 e che lascia fuori 2. Si calcola
immediatamente che
12πi
∫γ
(zI − A)−1 dz =
1 0 0
0 1 0
0 0 0
.
Si trova così la proiezione sull’autospazio generalizzato dell’autovalore 0.
Operando in modo analogo con una curva che racchiude 2 e lascia fuori 0 si trova la
proiezione sull’altro autospazio.
Abbiamo così calcolato l’integrale nel caso della funzione f(z) = 1. Se f(z) = z un
calcolo analogo dà
0 1 0
0 0 0
0 0 0
,
0 0 0
0 0 0
0 0 2
rispettivamente, a seconda della scelta della curva. Queste sono le restrizioni di A ai
due autospazi. Si trova così una “diagonalizzazione a blocchi” della matrice A.
Senza trattare l’integrale 5.77 in generale, vogliamo limitarci a considerare i due casi
f(z) = 1 ed f(z) = z, che sono particolarmente importanti per le applicazioni, e che
verranno usati nel paragrafo 6.6.5.
Generalizzando l’esempio 5.181, supponiamo che σ(A) = σ1(A) ∪ σ2(A) e che una
regione di Jordan Ω contenga σ1(A) e lasci fuori σ2(A). Sia γ una curva semplice e
chiusa col sostegno in Ω, che gira intorno a σ1(A), come nella figura 5.7, a sinistra:
In tal caso:
Teorema 5.182. Valgano le condizioni appena dette. L’operatore
P =1
2πi
∫γ
(zI − A)−1 dz
è una proiezione.
DIMOSTRAZIONE
Ricordiamo che vale il teorema di Cauchy. Usando ciò, una dimostrazione analoga a
quella del teorema 1.41, porta a concludere che due curve γ e γ ′ semplici e chiuse
365

5. SPAZI DI BANACH
−4 −3 −2 −1 0 1 2 3 4−6
−4
−2
0
2
4
6
γ σ
1(A)
σ2(A)
−4 −3 −2 −1 0 1 2 3 4−6
−4
−2
0
2
4
6
γ σ
1(A)
σ2(A)
γ’
Fig. 5.7.
in Ω, che ambedue racchiudono σ1(A) e lasciano fuori σ2(A) (come in figura 5.7, a
destra) definiscono il medesimo operatore P :
P =1
2πi
Zγ
(zI − A)−1 dz =1
2πi
Zγ′
(ζI − A)−1 dζ .
Dunque,
P 2 =
1
2πi
Zγ
(zI − A)−1 dz
ff1
2πi
Zγ′
(ζI − A)−1 dζ
ff
=1
2πi· 1
2πi
Zγ
»Zγ′
(zI − A)−1(ζI − A)−1
–dζ dz .
Non è restrittivo supporre che la curva γ racchiuda la curva γ ′, come nella figura 5.7, a
destra. A questo punto usiamo una formula 8 che si chiama prima formula del risolvente
e che è di verifica immediata:
(zI − A)−1(ζI − A)−1 =1
ζ − z
ˆ(zI − A)−1 − (ζI − A)−1
˜.
Usando questa formula, si trova
P 2 =1
2πi
Zγ
»1
2πi
Zγ′
1
ζ − z(zI − A)−1 dζ − 1
2πi
Zγ′
1
ζ − z(ζI − A)−1 dζ
–dz .
8Si noti che questa formula estende l’uguaglianza, valida tra numeri,
1
(z − a)(ζ − a)=
1
ζ − z
»1
z − a− 1
ζ − a
–.
366

5. SPAZI DI BANACH
Ora, dal Teorema di Cauchy,
1
2πi
Zγ′
1
ζ − z(zI − A)−1 dζ = 0
perché il punto z, che è sulla curva γ, è nella regione esterna a γ ′.
Dunque rimane
P 2 = − 1
2πi
Zγ
»1
2πi
Zγ′
1
ζ − z(ζI − A)−1 dζ
–dz
=1
2πi
Zγ′
»−1
2πi
Zγ
1
ζ − zdz
–(ζI − A)−1 dζ .
L’integrando
z → 1
z − ζ
ha ζ per polo semplice, perché la curva γ ′ è racchiusa dalla curva γ. Dunque
−1
2πi
Zγ
1
ζ − zdz =
1
2πi
Zγ
1
z − ζdz = 1
e quindi
P 2 =1
2πi
Zγ′
(ζI − A)−1 dζ = P .
Supponiamo ora che σ1 e σ2 sino due s.insiemi limitati di σ(A), appartenenti alla
regione interna rispettivamente di γ1 e di γ2, curve di Jordan di sostegno in ρ(A) ed
esterne l’una all’altra come in figura 5.8.
Poniamo
P1 =1
2πi
∫γ1
(zI − A)−1 dz , P2 =1
2πi
∫γ2
(zI − A)−1 dz .
Una dimostrazione analoga a quella del teorema precedente porta a:
Teorema 5.183. Nelle ipotesi dette, si ha: P1P2 = P2P1 = 0. Inoltre X1 = im P1
ed X2 = im P2 sono spazi lineari invarianti per A e lo spettro della restrizione di A
ad im Pi è l’insieme σi. Tale restrizione è data da
Ax =1
2πi
∫γi
z(zI − A)−1x dz , ∀x ∈ Xi .
Omettiamo i dettagli della dimostrazione di questo teorema, che è analoga a quella del
teorema 5.182.
367

5. SPAZI DI BANACH
−4 −3 −2 −1 0 1 2 3 4−6
−4
−2
0
2
4
6
σ1(A)
σ2(A)
γ1
γ2
Fig. 5.8.
Si noti che il Teorema 5.183 mostra una diagonalizzazione a blocchi dell’operatore A,
analoga a quella vista nell’Esempio 5.181.
5.13. TRASFORMAZIONI NON LINEARI
Fino ad ora abbiamo trattato soltanto di operatori lineari. Vogliamo ora presentare
alcune considerazioni riguardanti i funzionali non lineari. Proviamo prima di tutto
un teorema di punto fisso, ossia diamo una condizione per l’esistenza di soluzioni di
un’equazione del tipo
f(x) = x .
In seguito, mostreremo come sia possibile estendere la prima formula degli incrementi
finiti e la formula di Taylor.
5.13.1 Teorema delle contrazioni e applicazioni
Supponiamo che f sia una trasformazione da uno spazio di Banach X in sé stesso,
non necessariamente lineare. Si dice che f(x) è una contrazione se esiste un numero
α ∈ [0, 1) tale che
||f(x) − f(x′)|| ≤ α||x − x′|| .
368

5. SPAZI DI BANACH
Una contrazione è lipschitziana e quindi continua.
Se f è una qualsiasi trasformazione da X in sé, un punto x0 ∈ X si chiama punto
fisso di f se
f(x) = x .
Vale:
Teorema 5.184 (delle contrazioni). Sia K un insieme chiuso dello spazio di
Banach X che è invariante per la contrazione f(x). Esiste uno ed un solo punto
fisso di f(x) che appartiene a K .
DIMOSTRAZIONE
Proviamo prima di tutto che il punto fisso, se esiste, è unico. Siano per questo x ed y
due punti fissi. Vale per essi
||x − y|| = ||f(x) − f(y)|| ≤ α||x − y||
ove α è strettamente minore di 1, per definizione di contrazione; e quindi la
disuguaglianza precedente può solo valere se x = y.
Proviamo ora l’esistenza del punto fisso.
Fissiamo k0 ∈ K e costruiamo la successione
k1 = f(k0) , . . . , kn = f(kn−1) .
Si noti che kn ∈ K per ogni n, perché f(K) ⊆ K.
Proveremo che (kn) è una successione fondamentale e quindi convergente dato che
lo spazio X è completo. Essendo K chiuso, il limite x 0 di (kn) è in K. Passando al
limite nei due membri dell’uguaglianza
kn = f(kn−1)
si trova
x0 = f(x0)
e quindi x0 è punto fisso di f .
Per completare la dimostrazione, basta mostrare che (kn) è una successione
fondamentale.
369

5. SPAZI DI BANACH
Stimiamo prima di tutto
||kn − kn−1|| = ||f(kn−1) − f(kn−2)|| ≤ α||kn−1 − kn−2|| .
Iterando si vede che
||kn − kn−1|| ≤ αn−1||k1 − k0|| .
Valutiamo ora
||kn+m − kn|| ≤ ||kn+m − kn+m−1|| + ||kn+m−1 − kn+m−2|| + · · · + ||kn+1 − kn||
≤ αn+m−1 + αn+m−2 + · · · + αn||k1 − k0|| ≤αn
1 − α||k1 − k0|| .
Ciò prova che la successione (kn) è fondamentale e completa la dimostrazione.
Osservazione 5.185. Sottolineiamo che la successione (kn) costruita nella
dimostrazione del teorema converge al punto fisso per ogni scelta del valore
iniziale k0.
Presentiamo ora una semplice modifica del teorema 5.184 che è spesso utile.
Indichiamo con f (n) la funzione su X ottenuta componendo f con sé stessa n–volte:
f (1)(x) = f(x) , f (k)(x) = f(f (k−1)(x)
).
Può accadere che f non sia una contrazione, ma che esista un numero ν per cui f (ν) è
una contrazione. Vale:
Corollario 5.186. Se f è continua e se f (ν) è una contrazione su un s.insieme K
chiuso di X tale che f(K) ⊆ K , allora f(x) ammette un punto fisso in K e questo è
unico.
DIMOSTRAZIONE
Notiamo che se f(x0) = x0 allora vale anche
f(f(x0)) = f(x0) = x0
e quindi x0 è anche punto fisso di f (2). Iterando questo procedimento, si vede che
x0 è anche punto fisso della contrazione f (ν). Ciò mostra l’unicità del punto fisso.
Proviamone ora l’ esistenza.
370

5. SPAZI DI BANACH
Si sa che esiste il punto fissa x0 di f (ν):
x0 = f (ν)(x0) .
Applicando f ai due membri dell’uguaglianza si vede che
f(x0) = f(f (ν)(x0)) = f (ν)(f(x0))
ossia, anche f(x0) è punto fisso della contrazione f (ν). L’unicità del punto fisso implica
che
f(x0) = x0 .
Osservazione 5.187. Osserviamo che la ricerca dei punti fissi conduce anche alla
ricerca di zeri di funzioni: il funto x0 verifica f(x0) = 0 se e solo se x0 è punto fisso
di F (x) = x − f(x).
Applicazioni: il metodo delle tangenti
E’ noto il metodo delle tangenti per la determinazioni di zeri di funzioni convesse
di variabile reale. Mostriamo come tale metodo si ritrovi mediante il teorema delle
contrazioni. Sia per questo f(x) convessa su R e di classe C 2. Supponiamo che la
derivata prima non si annulli e supponiamo che sia∣∣∣∣f(x)f ′′(x)f ′(x)2
∣∣∣∣ ≤ α < 1 .
La funzione
F (x) = x − f(x)f ′(x)
ha un punto fisso x0 se e solo se f(x0) = 0 e viceversa (si ricordi che la derivata non
si annulla).
Si calcola immediatamente che
F ′(x) =f(x)f ′′(x)
f ′(x)2
e quindi, nelle ipotesi fatte, F è una contrazione. Ha quindi un punto fisso che si
costruisce come segue: fissato un qualsiasi x0, il punto x1 è
x1 = F (x0) = x0 −f(x0)f ′(x0)
,
371

5. SPAZI DI BANACH
punto nel quale la tangente in (x0, f(x0)) al grafico di f ,
y = f(x0) + f ′(x0)(x − x0) ,
taglia l’asse delle ascisse.
Ciò è l’interpretazione geometrica del punto x1 e quindi anche dei successivi punti xn
che approssimano lo zero di f(x).
Equazioni integrali di Fredholm ed equazioni differenziali ordinarie
Sia K(t, s, x) una funzione a valori reali continua su [a, b] × [a, b] × R, lipschitziana
nella terza variabile, uniformemente rispetto alla prima e alla seconda:
|K(t, s, x) − K(t, s, x′)| ≤ M |x − x′|
con M indipendente da t e da s. Consideriamo la trasformazione T µ da C(a, b) in sé
definita da
(Tµx)(t) = µ
∫ b
a
K(t, s, x(s)) ds + f(t)
con f(t) funzione continua fissata. E’ chiaro che
|(Tµx)(t) − (Tµx′)(t)| ≤ µ
∫ b
a
M |x(s) − x′(s)| ds ≤ µM(b − a)||x − x′||
e quindi la trasformazione T è una contrazione se
µM(b − a) < 1 . 5.80
Dunque:
Teorema 5.188. Se µM(b − a) < 1, l’equazione di Fredholm
x(t) = µ
∫ b
a
K(t, s, x(s)) ds + f(t) 5.81
ammette soluzione e questa è unica.
Si noti che la condizione 5.80 puó realizzarsi o con [a, b] fissato, prendendo µ piccolo,
o con µ fissato, spesso µ = 1, prendendo b − a piccolo.
Le ipotesi di questo teorema possono indebolirsi e in particolare si vede che anche
l’operatore
372

5. SPAZI DI BANACH
(Tµx)(t) = µ
∫ t
a
K(t, s, x(s)) ds + f(t)
è una contrazione se K(t, s, x) è continua per a ≤ s ≤ t ≤ b ed uniformemente
lipschitziana in x ∈ R. Nel caso particolare in cui f(t) = x0, costante, e
µK(t, s, x) = K(s, x), l’equazione 5.81 equivale a
x′(t) = K(t, x(t)) , x(a) = x0 . 5.82
Dunque,
Teorema 5.189. Sia K(t, x) continua in t, x ed uniformemente lipschitziana in x.
Il problema di Cauchy 5.82 ammette soluzione su (a, b), con b abbastanza piccolo, e
tale soluzione è unica.
5.13.2 I differenziali
Sia f(x) una trasformazione da uno spazio di Banach X in uno spazio di Banach Y .
Supponiamo che x0 sia un punto interno al suo dominio.
Nel caso in cui X = Rn si sa che si possono definire le “derivate direzionali” in x0 e
la “matrice jacobiana”, che rappresenta il “differenziale”. Vogliamo estendere queste
definizioni al caso in cui X è un generico spazio di Banach.
Sia v un qualsiasi elemento di X . Consideriamo il limite
limt→0
f(x0 + tv) − f(x0)t
.
Questo limite può esistere o meno. Se esiste si indica col simbolo
Dvf(x0)
e si chiama la derivata direzionale nella direzione v.
La derivata direzionale può esistere in una direzione e non esistere in altre direzioni;
e, se anche esiste in ogni direzione, la trasformazione
v −→ Dvf(x0) 5.83
è in generale non lineare, come prova l’esempio seguente.
373

5. SPAZI DI BANACH
Esempio 5.190. Si definisce una funzione f(x, y) su R2 come segue: prima di tutto
si fissa una successione di punti (xk, yk) due a due distinti, tutti di norma 1, ossia tutti
appartenenti alla circonferenza
C = (x, y) | x2 + y2 = 1 .
Fissato un qualsiasi punto (x, y) di R2 si considera il punto
(x, y)||(x, y)|| .
Questo può essere uno dei punti (xk, yk) o meno. Se non è uno di tali punti, si pone
f(x, y) = 0. Se invece esiste un indice k per cui
(x, y)||(x, y)|| = (xk, yk)
allora si definisce
f(x, y) = k||(x, y)|| = k√
x2 + y2 .
In particolare, f(0, 0) = 0.
Fissata una qualsiasi direzione v = (x, y), consideriamo i rapporti incrementali
f(tv)t
=f(tx, ty)
t.
Se v/||v|| non è uno dei punti (xk, yk), il valore del rapporto incrementale è zero per
ogni t; e quindi
limt→0
f(tv)t
= 0 .
Altrimenti, se esiste un indice kv per cui
v
||v|| = kv(xkv , ykv)
allora
limt→0
f(tv)t
= limt→0
tkv||v||t
= kv||v|| .
Dunque, df(x0, v) esiste per ogni direzione v, ma non è funzione lineare di v.
374

5. SPAZI DI BANACH
Quando invece l’operatore
v −→ df(x0, v) ,
è lineare, questo si chiama il differenziale di Gâteaux di f in x0.
Se esiste il differenziale di Gâteaux di f in x0 allora, per ogni v fissato, si ha
limt→0
∣∣∣∣∣∣∣∣f(x0 + tv) − f(x0)
t− df(x0, v)
∣∣∣∣∣∣∣∣ = 0 5.84
e quindi
f(x0 + tv) − f(x0)t
= df(x0, v) + o(t; x0, v)
ove o(t; x0, v) indica una funzione della variabile reale t a valori in X e tale che
limt→0
o(t; x0, v)t
= 0 .
Si noti però che il limite non è generalmente uniforme rispetto a v. Si consideri infatti
l’esempio seguente:
Esempio 5.191. Sia X = R2 e sia
f(x, y) =
1 se x2 < x < x4
0 altrimenti.
Si vede facilmente che il differenziale di Gâteaux di questa funzione in (0, 0) esiste e
vale 0. Però, il limite 5.84 non è uniforme rispetto alla direzione. Infatti, sulla retta
x = t , y = mt
la disuguaglianza ∣∣∣∣f(t, mt)t
∣∣∣∣ < ε
vale, per t > 0, quando 0 ≤ t ≤ 3√
m .
Si osservi che la funzione f(x, y), pur essendo differenziabile secondo Gâteaux in
(0, 0), non è continua.
Si dice che una funzione f(x) è differenziabile secondo Fréchet nel punto x 0 quando
esiste un funzionale lineare L per cui
375

5. SPAZI DI BANACH
f(x0 + v) − f(x0) = Lv + o(v; x0) .
Col simbolo o(v; x0) si intende una funzione, questa volta da X in sé, tale che
lim||v||→0
o(v; x0)||v|| = 0 .
Si richiede cioè che L verifichi
lim||v||→0
||f(x0 + v) − f(x0) − Lv||||v|| = 0 .
Il funzionale lineare L si chiama il differenziale di Fréchet della funzione f in x 0, e
si indica col simbolo
df(x0)v .
E’ facile provare:
– Se esiste il differenziale di Fréchet in un punto x0 allora esiste anche quello di
Gâteaux, e questi coincidono;
– se esiste il differenziale di Fréchet nel punto x0 allora la funzione è continua
in x0.
La formula
f(x0 + v) − f(x0) = df(x0)v + o(v; x0)
generalizza la prima formula degli incrementi finiti.
Se esiste, df(x0) è un elemento di L(X, Y ).
Quando il differenziale di Fréchet esiste in ogni punto di un intorno di x 0, la funzione
x → df(x)
si indica col simbolo f ′(x) e si chiama la funzione derivata secondo Fréchet di f(x).
Questa funzione è generalmente non lineare, da X a L(X, Y ). Può ben essere che
questa sia a sua volta differenziabile secondo Fréchet nei punti di un intorno di x 0. Si
può quindi definire la derivata seconda di f in x0.
Procedendo analogamente, si definiscono anche le derivate successive.
376

6. SPAZI DI HILBERT
6.1. PRODOTTO INTERNO E NORMA
Gli spazi di Hilbert sono particolari spazi di Banach, che generalizzano Rn o Cn con
l’usuale distanza euclidea.
Conviene introdurre prima di tutto la definizione di prodotto interno. Sia X uno spazio
lineare. Si chiama prodotto interno su X una funzione f(x, y) su X ×X , a valori nel
campo scalare, con queste proprietà:
– per ogni fissato y, la funzione x → f(x, y) è lineare:
f(αx + βx′, y) = αf(x, y) + βf(x′, y) .
– per ogni x ed y vale f(x, y) = f(y, x). Questa proprietà implica in particolare
che la parte immaginaria di f(x, x) è nulla per ogni x.
– vale f(x, x) > 0 per ogni x = 0.
La prima proprietà mostra che
f(0, 0) = f(r · 0, 0) = rf(0, 0)
per ogni numero r; e quindi
377

6. SPAZI DI HILBERT
f(0, 0) = 0 .
Si noti che la funzione f(x, y) non è lineare rispetto ad y ma, per ogni fissato x, vale
f(x, αy + βy′) = f(αy + βy′, x) = αf(y, x) + βf(y′, x)
= αf(x, y) + βf(x, y′) . 6.1
Se accade che F = R allora gli scalari sono reali e quindi si ha linearità anche nella
seconda componente.
Le proprietà6.1 si chiama antilinearità.
In pratica per indicare il prodotto interno di x ed y si usa il simbolo 〈x, y〉 (o simboli
analoghi, per esempio 〈x|y〉). Si osservi la somiglianza col simbolo 〈〈x∗, x〉〉 usato
per rappresentare l’azione del funzionale lineare x∗ su x. Si noti però che 〈〈x∗, x〉〉 è
lineare sia rispetto alla prima che alla seconda variabile, anche quando F = C.
Due vettori x ed y si dicono ortogonali quando il loro prodotto interno è nullo:
x ⊥ y ⇐⇒ 〈x, y〉 = 0 .
Proviamo che per i prodotti interni vale la disuguaglianza di Schwarz:
Teorema 6.1. Per ogni x, y vale
|〈x, y〉|2 ≤ 〈x, x〉〈y, y〉 .
L’uguaglianza vale se e solo se i vettori x ed y sono colineari, ossia se e solo se
x = αy, α ∈ F.
DIMOSTRAZIONE
Se 〈x, y〉 = 0 allora la disuguaglianza è ovvia. Supponiamo quindi esplicitamente
〈x, y〉 = 0 e introduciamo
a =〈x, y〉|〈x, y〉| .
Consideriamo quindi che per ogni t (reale o complesso) vale
378

6. SPAZI DI HILBERT
0 ≤ 〈ax + ty, ax + ty〉 .
Scegliamo t reale e introduciamo in quest’espressione la definizione di a. Si trova
0 ≤ 〈ax + ty, ax + ty〉 = 〈y, y〉t2 + 2|〈x, y〉|t + 〈x, x〉 . 6.2
Questo è un polinomio in t, a coefficienti reali. Il segno di questo polinomio è costante
e quindi il suo discriminante è negativo, ossia:
|〈x, y〉|2 ≤ 〈x, x〉〈y, y〉 . 6.3
Questa è la disuguaglianza che volevamo provare.
Se in 6.3 vale l’uguaglianza, allora il polinomio 6.2 è un quadrato:
〈ax + ty, ax + ty〉 = (mt + n)2
per certi numeri m ed n. E’ quindi nullo per t = −n/m, ossia
ax + ty = 0 .
I vettori x ed y sono quindi colineari.
Teorema 6.2. La funzione definita su X da
x →√〈x, x〉
è una norma su X .
DIMOSTRAZIONE
Usando la disuguaglianza di Schwarz, proviamo che vale la disuguaglianza triangolare:
〈x + y, x + y〉 = 〈x, x〉 + 〈x, y〉 + 〈y, x〉 + 〈y, y〉
= 〈x, x〉 + 2e 〈x, y〉 + 〈y, y〉
≤ 〈x, x〉 + 2|〈x, y〉| + 〈y, y〉 (usando la disuguaglianza di Schwarz)
≤ 〈x, x〉 + 2 (〈x, x〉)1/2 (〈y, y〉)1/2 + 〈y, y〉 =h〈x, x〉1/2 + 〈y, y〉1/2
i2.
Si ha quindi
379

6. SPAZI DI HILBERT
p〈x + y, x + y〉 ≤
p〈x, x〉 +
p〈y, y〉 .
Questa è la disuguaglianza triangolare. Le altre proprietà della norma sono immediate.
Si noti che la proprietà ||x|| > 0 per x = 0 vale perché 〈x, x〉 = 0 per x = 0.
Naturalmente scriveremo
||x|| =√〈x, x〉 . 6.4
E’ conseguenza della disuguaglianza di Schwarz e della definizione di norma l’asserto
seguente:
Corollario 6.3. Per ogni y ∈ X fissato, il funzionale lineare
x → 〈x, y〉
è continuo sullo s.l.n. X , dotato della norma 6.4
DIMOSTRAZIONE
Infatti, dalla disuguaglianza di Schwarz,
|〈x, y〉| ≤ M ||x|| , con M = ||y|| .
Le norme che discendono da un prodotto interno godono di una proprietà bene
particolare:
Teorema 6.4. Sia ||x|| =√〈x, x〉. Questa particolare norma verifica l’uguaglianza
||x + y||2 + ||x − y||2 = 2(||x||2 + ||y||2
)6.5
DIMOSTRAZIONE
Si calcola immediatamente
||x + y||2 + ||x − y||2 = 〈x + y, x + y〉 + 〈x − y, x − y〉
= ||x||2 + 〈x, y〉 + 〈y, x〉 + ||y||2 + ||x||2 − 〈x, y〉 − 〈y, x〉 + ||y||2
= 2`||x||2 + ||y||2
´.
380

6. SPAZI DI HILBERT
L’uguaglianza 6.5 si chiama identità del parallelogramma. Nella geometria piana
essa si enuncia dicendo che la somma dei quadrati costruiti sulle diagonali di un
parallelogramma è uguale alla somma dei quadrati costruiti sui lati.
E’ importante sapere che non tutte le norme discendono da un prodotto interno. Infatti
vale:
Esempio 6.5. Si doti R2 della norma
||(ξ, η)|| = max|ξ| , |η| .
Si provi che l’identità del parallelogramma non vale per la coppia dei vettori x =
(1, 0) ed y = (0, 1).
Quest’osservazione suggerisce di dare un nome particolare agli s.l.n-ti la cui norma
proviene da un prodotto interno. Questi si chiamano spazi prehilbertiani e, se sono
anche completi, si chiamano spazi di Hilbert.
Lavoreremo ora esclusivamente con spazi di Hilbert, che indicheremo genericamente
col simbolo H .
E’ chiaro che ogni spazio di Hilbert è anche uno speciale spazio di Banach. Vedremo
che le sue proprietà sono particolarmente importanti per le applicazioni. Per esempio,
possiamo notare subito che in spazi prehilbertiani vale il teorema di Pitagora:
Teorema 6.6. Siano h, k due elementi tra loro ortogonali di uno spazio di
prehilbertiano H . Vale:
||h + k||2 = ||h||2 + ||k||2 .
DIMOSTRAZIONE
Si calcola immediatamente
||h + k||2 = 〈h + k, h + k〉 = ||h||2 + 〈h, k〉 + 〈k, h〉 + ||k||2 = ||h||2 + ||k||2
perché h ⊥ k.
381

6. SPAZI DI HILBERT
6.1.1 Esempi di prodotti interni e di spazi di Hilbert
Elenchiamo gli spazi di Hilbert di uso più comune. Naturalmente essi si sono già
incontrati come particolari spazi di Banach.
Lo spazio euclideo ad n dimensioni
è uno spazio di Hilbert, con prodotto interno
〈h, k〉 =n∑
i=1
kihi se h = col [hi] , k = col [ki] .
Lo spazio l2
è uno spazio di Hilbert, dotato del prodotto interno
〈(hi), (ki)〉 =+∞∑i=i
kihi .
La convergenza della serie, quando h i e ki sono in l2, è stata provata nel paragrafo 10.
Possiamo ora notare che la convergenza segue applicando la disuguaglianza di
Schwarz alle somme finite, e passando al limite.
Si ricordi che il duale di l2 è isometrico a l2 stesso.
Lo spazio L2(K)
è uno spazio di Hilbert, il cui prodotto interno è
〈f, g〉 =∫
K
f(x)g(x) dx .
L’integrale dipende dagli elementi di L2(K), ossia dalle classi di equivalenza, e non
dai rappresentanti delle classi stesse, e converge grazie alla disuguaglianza di Schwarz
per gli integrali.
Si ricordi, dal paragrafo 10, che anche in questo caso lo spazio è una realizzazione del
suo duale.
Lo spazio H2
è uno spazio di Hilbert. Il prodotto interno nel caso di H 2(D) è
382

6. SPAZI DI HILBERT
〈f, g〉 = supr∈(0,1)
[12π
∫ 2π
0
f(reit)g(reit) dt
].
Nel caso di H2(Π) il prodotto interno è
〈f, g〉 = supx>0
[1π
∫ +∞
−∞f(x + iy)g(x + iy) dy
].
Lo spazio W 12(K)
è uno spazio di Hilbert dotato del prodotto interno
〈f, g〉 =∫
K
g(x)f(x) dx +∫
K
∇f(x) · ∇g(x) dx .
Nel caso in cui K = [a, b], un prodotto interno che conduce ad una norma
equivalente è
〈f, g〉 = g(a)f(a) +∫ b
a
g′(x)f ′(x) dx .
Uno spazio di Hilbert non separabile
Tutti gli esempi precedenti sono esempi di spazi di Hilbert separabili. Mostriamo un
esempio di spazio di Hilbert non separabile. Osserviamo che se ||x|| = ||y|| = 1 e se
x ⊥ y, allora
||x − y||2 = 2 ,
ossia x dista√
2 da y. Dunque, se in uno spazio di Hilbert si trova una famiglia
non numerabile di vettori a due a due ortogonali, questo spazio non è separabile.
Consideriamo le funzioni
t → eist , t ∈ R
dove s è un parametro reale.
Consideriamo lo spazio lineare generato da queste funzioni e su esso il prodotto
interno
〈f, g〉 = limT→+∞
12T
∫ T
−T
g(t)f(t) dt .
383

6. SPAZI DI HILBERT
Lo spazio che si ottiene è uno spazio prehilbertiano. Il suo completamento, introdotto
nel teorema 5.27, è quindi uno spazio di Hilbert che non è separabile perchè se f(t) =
eist, g(t) = eirt, s = r, allora
〈f, g〉 = limT→+∞
12T
∫ T
−T
ei(s−r)t dt = limT→+∞
ei(s−r)T − e−i(s−r)T
2T (s− r)= 0 .
Dunque in questo spazio c’è un sistema non numerabile di vettori due a due
ortogonali. Come si è detto, ciò basta a mostrare che lo spazio non è separabile.
6.2. TEOREMA DELLE PROIEZIONI
Gli spazi di Hilbert, come si è notato, sono particolari spazi di Banach, dotati di
proprietà speciali, utili per le applicazioni. Essenzialmente esse discendono tutte
dal teorema delle proiezioni, che è in realtà un complesso di affermazioni che
è bene studiare separatamente. In particolare è bene essere precisi, distinguendo
le affermazioni che valgono in spazi prehilbertiani da quelle che richiedono la
completezza.
Sia H uno spazio prehilbertiano e sia X un suo s.spazio. Sia h ∈ H . Un punto
x0 ∈ X si chiama proiezione ortogonale di h su X se
h − x0 ⊥ x ∀x ∈ X .
Per indicare che h − x0 è perpendicolare ad ogni elemento di X , scriveremo anche
h − x0 ⊥ X .
Si noti che se h ∈ X allora h è proiezione di se stesso su X , h = x0.
In un generico spazio di Banach, una definizione analoga non può darsi perché
l’ortogonalità non è definita. Anche in spazi di Hilbert però non è affatto ovvio che,
dato h, la sua proiezione x0 su X debba esistere. Se però essa esiste allora si può
scrivere
h = (h − x0) + x0
384

6. SPAZI DI HILBERT
e h − x0, essendo perpendicolare ad X , è in particolare perpendicolare a x 0 ∈ X .
Dunque, usando il teorema di Pitagora, si ha
Teorema 6.7. Sia h ∈ H , H uno spazio prehilbertiano, ed esista la proiezione x 0
di h su X . Vale:
||h||2 = ||h − x0||2 + ||x0||2 .
In particolare,
||x0|| ≤ ||h|| , ||h − x0|| ≤ ||h|| .
Abbiamo detto che l’esistenza della proiezione non è ovvia. Possiamo però
immediatamente provare che, se la proiezione esiste, essa è unica:
Teorema 6.8. Sia h un elemento dello spazio prehilbertiano H . Sia X un s.spazio
di H . Se esiste, la proiezione di h su X è unica.
DIMOSTRAZIONE
Siano infatti x0 ed x1 due proiezioni di h su X. In tal caso,
〈h − x0, x〉 = 0 , 〈h − x1, x〉 = 0 ∀x ∈ X .
Usando la linearità della prima componente del prodotto interno si trova
〈x1 − x0, x〉 = 0 ∀x ∈ X .
Ora, X è uno spazio lineare a cui appartengono sia x 0 che x1 e quindi anche x1−x0 ∈
X. Scegliendo x = x1 − x0 si trova
0 = 〈x1 − x0, x1 − x0〉 = ||x1 − x0||2
e quindi x1 = x0.
Il problema della proiezione è uno dei problemi che si studiano nella geometria
euclidea e si sa che, in tale contesto, la proiezione x0 di h è anche il punto di X
che ha minima distanza da h. Questa proprietà vale anche in spazi prehilbertiani:
385

6. SPAZI DI HILBERT
Teorema 6.9. Sia H uno spazio prehilbertiano e sia X un suo sottospazio. Un punto
x0 ∈ X è proiezione su X di h ∈ H se e solo se
||h − x0|| ≤ ||h − x|| ∀x ∈ X .
DIMOSTRAZIONE
Sia x0 la proiezione di h su X e sia x ∈ X qualsiasi. Si scriva
h − x = (h − x0) + (x0 − x) .
Essendo (h − x0) ⊥ (x − x0), dal teorema di Pitagora se gue
||h − x||2 = ||h − x0||2 + ||x − x0||2 ≥ ||h − x0||2 .
Ciò prova che x0 è punto di minima distanza.
Viceversa, sia
||h − x0|| ≤ ||h − x|| ∀x ∈ X .
Mostriamo che x0 è proiezione di h su X, procedendo per assurdo: supponiamo che
ciò non valga. Esiste quindi ξ ∈ X tale che h−x0 non è ortogonale a ξ, ossia tale che
δ = 〈h − x0, ξ〉 = 0 .
Non è restrittivo assumere
||ξ|| = 1 .
Indichiamo con x1 il punto
x1 = x0 − δξ ∈ X
e calcoliamo ||h − x1||. Mostriamo che, se δ = 0, allora si ha
||h − x1|| < ||h − x0|| . 6.6
Ciò contrasta con la proprietà di x0 e mostra quindi che h − x0 ⊥ ξ. La 6.6 segue da:
||h − x1||2 = ||h − x0 + δξ||2 = 〈h − x0 + δξ, h − x0 + δξ〉
= ||h − x0||2 − δ〈h − x0, ξ〉 − δ〈ξ, h − x0〉 + |δ|2||ξ||2
= ||h − x0||2 − δδ − δδ + |δ|2 = ||h − x0||2 − |δ|2 < ||h − x0||2 .
386

6. SPAZI DI HILBERT
Osservazione 6.10. Si osservi che la proprietà di minima distanza può anche
introdursi in un generico spazio di Banach. Però in generale il punto di X che meno
dista da h, se H non è uno spazio di Hilbert, né esiste né è unico.
Rinunciamo a presentare un esempio che mostra la non esistenza e mostriamo la non
unicità. Sia per questo H lo spazio R2, ma dotato della norma
||x|| = ||(ξ, η)|| = max|ξ| , |η| .
Sia X = (ξ, 0) | ξ ∈ R l’asse delle ascisse e sia h = (0, 1). Si vede facilmente che
||h − x|| = 1 ∀x = (ξ, 0) , ξ ∈ [−1, 1] .
Se invece x = (ξ, 0) con |ξ| > 1 allora
||h − x|| = |ξ| > 1 .
Dunque, il punto dell’asse delle ascisse che ha minima distanza da h non è unico e i
punti di minima distanza sono quelli del segmento [−1, 1].
Esaminiamo ora il problema di minimo
min||h− x|| | x ∈ X .
In generale, un problema di minimo non ha soluzione, ma si possono sempre costruire
“successioni minimizzanti”. Nel caso nostro, sia
d = inf||h − x|| x ∈ X
e, per ogni n, sia xn tale che
d ≤ ||h − xn|| < d + 1/n . 6.7
Proviamo:
Teorema 6.11. Sia H uno spazio prehilbertiano. La successione (xn) è
fondamentale.
387

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Fissati n ed m, si deve valutare ||xn − xm||. Per semplicità valutiamone il quadrato.
Usiamo l’identità del parallelogramma per scrivere
||xn − xm||2 = ||(xn − h) + (h − xm)||2
= 2ˆ||xn − h||2 + ||h − xm||2
˜− ||(xn − h) − (h − xm)||2
= 2ˆ||xn − h||2 + ||h − xm||2
˜− 4||xn + xm
2− h||2 .
E’
1
2(xn + xm) ∈ X
e quindi
||xn + xm
2− h||2 > d2 .
Dalla definizione di (xn), assegnato ε > 0, segue l’esistenza di Nε tale che, se n, m
sono maggiori di Nε, si ha
||xn − h||2 < d2 + ε/4 , ||xm − h||2 < d2 + ε/4 .
Dunque, per n, m maggiori di Nε vale anche
||xn − xm||2 < 2h2d2 +
ε
2
i− 4||xn + xm
2− h||2 ≤ 4d2 + ε − 4d2 = ε .
La successione (xn) è quindi fondamentale.
Di conseguenza:
Teorema 6.12. Sia H uno spazio di Hilbert e sia X un suo s.spazio chiuso. Per ogni
h ∈ H esiste x0, proiezione di h su X .
DIMOSTRAZIONE
Si costruisce la successione (xn), definita da 6.7. Si sa che questa è una successione
fondamentale in H , e quindi convergente, perché H è completo.
Sia
x0 = lim xn .
Per ogni n, si ha xn ∈ X e quindi x0 ∈ X perché X è chiuso.
388

6. SPAZI DI HILBERT
Da 6.7 si ha
d = lim ||h − xn|| .
D’altra parte la continuità della norma mostra che
||h − x0|| = lim ||h − xn||
e quindi x0 è punto di minima distanza; e quindi è la proiezione di h su X.
6.3. COMPLEMENTI ORTOGONALI E PROIEZIONI ORTOGONALI
Sia A un qualsiasi sottoinsieme di uno spazio di Hilbert H . Definiamo
A⊥ = h | h ⊥ A = h | 〈h, a〉 = 0 ∀a ∈ A .
Ovviamente:
Lemma 6.13. Per ogni insieme A vale
A ∩ A⊥ = 0 .
DIMOSTRAZIONE
Se infatti a ∈ A ∩ A⊥ allora 〈a, a〉 = 0 e quindi a = 0.
Vale:
Teorema 6.14. L’insieme A⊥ è un s.spazio chiuso di H . Se A è denso in H allora
A⊥ = 0.
Se A⊥ = 0 e se A è un s.spazio, allora A è denso in H .
DIMOSTRAZIONE
Siano x, y elementi di A⊥ e siano α e β scalari. Per ogni a ∈ A vale
〈αx + βy, a〉 = α〈x, a〉 + β〈y,α〉 = 0 .
389

6. SPAZI DI HILBERT
Ciò prova che A⊥ è un s.spazio (anche se A non lo è.)
Per provare che A⊥ è chiuso, sia (xn) una successione di elementi di A⊥ e suppo-
niamo che essa converga ad x0. Dobbiamo provare che x0 ∈ A⊥. La continuità del
prodotto interno mostra che, per ogni a ∈ A,
〈x0, a〉 = lim〈xn, a〉 = 0 .
Dunque, x0 ∈ A⊥, come volevamo.
Sia ora A denso in H e sia x ∈ A⊥. Mostriamo che
〈x, h〉 = 0 6.8
per ogni h ∈ H . Da ciò, scegliendo in particolare h = x, segue x = 0. Se accade che
h ∈ A, allora vale 6.8. Se h /∈ A, essendo A denso, esiste una successione (an) in A,
convergente ad h. Dunque, ancora per la continuità del prodotto interno,
〈x, h〉 = lim〈x, an〉 = 0 .
Ricapitolando, abbiamo provato che se A è denso in H allora A ⊥ = 0.
Viceversa sia A⊥ = 0 e sia inoltre A un s.spazio (anche non chiuso). Mostriamo
che A è denso in H . Procedendo per assurdo, se il s.spazio A non è denso in H , la
sua chiusura X è un s.spazio chiuso che non contiene un elemento h ∈ H . Sia x 0 la
proiezione di h su X. Il vettore h − x0 è non nullo, ed ortogonale ad X e quindi anche
ad A.
Consideriamo ora un s.spazio chiuso X di H , ed il suo ortogonale X ⊥. Associamo
ad ogni h ∈ H la sua proiezione su X , che indichiamo col simbolo Ph. Dunque P
indica un operatore da H in sé. Studieremo più avanti le proprietà dell’operatore P .
Per ora scriviamo x nella forma
x = (Px) + (x − Px) = x + y così che y = x − Px ⊥ X . 6.9
Vale:
Teorema 6.15. Se X è un s.spazio chiuso di H , si ha:
H = X ⊕ X⊥ .
390

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Abbiamo già notato che X ∩ X⊥ = 0. La 6.9 mostra che ogni elemento di H è
somma di un elemento di X e di uno di X ⊥.
Osservazione 6.16. Grazie a quest’osservazione, la dimostrazione del teorema di
Hahn-Banach in spazi di Hilbert si fa in modo elementare. Se L 0 è un funzionale
lineare e continuo sul s.spazio chiuso X0 di H , esso si estende ad H definendolo
nullo su X⊥ e ponendo quindi
L(Px + (x − Px) ) = L0x .
Ovviamente, ||L|| = ||L0||.
Infine, esaminiamo le proprietà di [A⊥]⊥. E’ chiaro che
A ⊆ [A⊥]⊥
e generalmente l’inclusione è propria perché [A⊥]⊥ è un s.spazio chiuso, mentre A
generalmente non lo è. Però:
Teorema 6.17. Se X è un s.spazio chiuso allora
X = [X⊥]⊥ .
DIMOSTRAZIONE
Per assurdo, l’inclusione sia propria, esista cioè ξ ∈ [X ⊥]⊥, che non appartiene ad X.
Sia ξ0 la proiezione ortogonale di ξ su X. In tal caso ξ− ξ 0 ⊥ X, ossia ξ− ξ0 ∈ X⊥ ed
anche ξ− ξ0 ∈ [X⊥]⊥, dato che sia ξ che ξ0 sono in [X⊥]⊥. E quindi ξ− ξ0 appartiene
sia ad X⊥ che al suo ortogonale. E’ dunque nullo, ossia ξ = ξ 0 ∈ X.
Studiamo ora le proprietà dell’operatore P , proiezione ortogonale di H sul suo
s.spazio chiuso X . L’operatore P è ovviamente una proiezione, ed è naturalmente
391

6. SPAZI DI HILBERT
associato alla proiezione su X⊥, che è data da Q = I − P , ove I è l’operatore
identità. Dal teorema di Pitagora, per ogni h ∈ H vale
||h||2 = ||Ph + (I − P )h||2 = ||Ph||2 + ||(I − P )h||2 .
Dunque,
||P || ≤ 1 , ||(I − P )|| ≤ 1 . 6.10
L’operatore P ha un’ulteriore proprietà interessante. Vale
〈Ph, k〉 = 〈h, Pk〉 h , k ∈ H . 6.11
Infatti,
〈Ph, k〉 = 〈Ph, Pk + (I − P )k〉 = 〈Ph, Pk〉
perché P (I − P ) = 0. Per questa stessa ragione,
〈h, Pk〉 = 〈Ph + (I − P )h, Pk〉 = 〈Ph, Pk〉
e quindi vale 6.11.
Seguendo la terminologia nota dalla dimensione finita, un operatore lineare continuo
per cui vale la 6.11 si dice simmetrico. Dunque, ogni proiezione ortogonale è un
operatore simmetrico. Si vede facilmente che vale anche il vicevera:
Teorema 6.18. Sia P ∈ L(H) una proiezione. L’operatore P è la proiezione
ortogonale sul s.spazio X = PH se e solo se è simmetrico.
DIMOSTRAZIONE
Basta mostrare che se P ∈ L(H) è un operatore di proiezione che è anche simmetrico
allora P è proiezione ortogonale. Sia per questo X = im P . Mostriamo prima di tutto
che X è un s.spazio chiuso. Sia per questo (xn) una successione in X, convergente
ad un h ∈ H . Dobbiamo provare che h ∈ X.
Essendo xn ∈ X, si ha
xn = Pxn .
392

6. SPAZI DI HILBERT
Passando al limite, grazie alla continuità di P , si trova
h = lim xn = lim Pxn = Ph ∈ im P = X .
Ciò prova che X è chiuso.
Sia ora h ∈ H . Mostriamo che
h − Ph ⊥ X ,
così che Ph è effettivamente la proiezione ortogonale di h su X. Sia per questo x un
generico element di X, ossia un generico elemento Pk dell’immagine di P . Si ha
〈h − Ph, x〉 = 〈h − Ph, Pk〉 = 〈P (h − Ph), k〉 = 〈Ph − Ph, k〉 = 0
(si noti che in questo calcolo si è usato il fatto che P è sia una proiezione che un
operatore simmetrico.)
Ciò è quanto volevamo provare.
6.3.1 Sistemi ortonormali e calcolo di proiezioni
Un insieme S di vettori di uno spazio di Hilbert si chiama ortogonale se
x , y ∈ S , x = y =⇒ x ⊥ y .
Se ogni elemento di S ha norma 1, l’insieme S si chiama ortonormale.
Ovviamente, un sistema ortogonale che non contiene 0 è linearmente
indipendente, e quindi un sistema ortonormale è linearmente indipendente.
Esponiamo un metodo, detto metodo di Gram–Schmidt che permette di costruire
sistemi ortonormali a partire da un qualsiasi insieme numerabileX ⊆ H . Supponiamo
per semplicità che X = xn sia linearmente indipendente. In tal caso, in particolare,
ciascun suo elemento è non nullo.
Associamo a x1 l’elemento
e1 =x1
||x1||.
Ad x2 associamo
e2 =z2
||z2||ove z2 = x2 − 〈x2, e1〉e1 .
393

6. SPAZI DI HILBERT
Scelti e1 ,. . . , en−1 definiamo
en =zn
||zn||ove zn = xn −
n−1∑k=1
〈xn, ek〉ek .
E’ immediato vedere che gli ei sono due a due ortogonali ed ovviamente di norma 1.
Inoltre,
Teorema 6.19. Per ogni n vale
span e1 , . . . , en = span x1 , . . . , xn .
Osservazione 6.20. Abbiamo visto che la sfera di uno spazio di Banach di dimensio-
ne infinita non è compatta. Ovviamente ciò vale in particolare per gli spazi di Hilbert.
Però nel caso degli spazi di Hilbert si può dare una dimostrazione elementare: col
metodo precedente si costruisce un sistema numerabile ed ortonormale en. Si nota
quindi che la successione (en) non ha s.successioni convergenti. Infatti, per n = m
si ha
||en − em||2 = 2 .
Mostriamo ora come i sistemi ortonormali numerabili si possano usare per il calcolo
di proiezioni. Consideriamo prima di tutto il caso in cui X sia un s.spazio di H , di
dimensione finita k.
Sia
e1 , . . . , ek
una base ortonormale di X .
In tal caso la proiezione x0 di h su X è data da
x0 =k∑
i=1
αiei
perché ogni elemento di X ha questa forma.
I numeri αi si calcolano facilmente:
〈h, er〉 = 〈k∑
i=1
αiei, er〉 = αr ,
con un calcolo del tutto analogo a quello noto in dimensione finita. Dunque,
394

6. SPAZI DI HILBERT
x0 =k∑
i=1
〈h, ei〉ei .
E’ utile calcolare ora
||x0||2 = 〈k∑
i=1
αiei,
k∑j=1
αjej〉 =n∑
i,j=1
αiαj〈ei, ej〉 =n∑
i=1
|αi|2
perché i vettori ei sono due a due ortogonali e di norma 1.
Ricordando l’espressione di αi e la 6.10 si trova
n∑i=1
|〈h, ei〉|2 = ||x0||2 ≤ ||h||2 . 6.12
Sia ora S = ei un sistema ortonormale numerabile. Il s.spazio di H
spanS = n∑
i=1
αiei αi ∈ C , n ∈ N
non è chiuso. Indichiamo con X la sua chiusura. Vogliamo rappresentare x 0, la
proiezione su X di un generico elemento h ∈ H .
Notiamo prima di tutto:
Lemma 6.21. Vale
∣∣∣∣∣∣∣∣∣∣+∞∑i=1
αiei
∣∣∣∣∣∣∣∣∣∣2
=+∞∑i=1
|αi|2
DIMOSTRAZIONE
La somma di una serie è il limite della successione delle somme parziali,
+∞Xi=1
αiei = limn
nXi=1
αiei
e, per la continuità della norma,˛˛˛˛+∞Xi=1
αiei
˛˛˛˛2
=
˛˛˛˛lim
n
nXi=1
αiei
˛˛˛˛2
= limn
˛˛˛˛ nXi=1
αiei
˛˛˛˛2
.
L’asserto segue dall’uguaglianza˛˛˛˛ nXi=1
αiei
˛˛˛˛2
=nX
i=1
|αi|2 .
395

6. SPAZI DI HILBERT
Inoltre
Teorema 6.22 (di Riesz–Fischer). Sia S = ei un sistema ortonormale
numerabile. La serie
n∑i=1
αiei
converge in H se e solo se la successione (αn) è in l2.
DIMOSTRAZIONE
Dal Lemma 6.21, se la serie converge in H si ha
+∞Xi=1
|αi|2 =
˛˛˛˛+∞Xi=1
αiei
˛˛˛˛2
< +∞ .
Il viceversa segue notando che se (αn) ∈ l2 allora la successione delle somme parziali
è fondamentale. Infatti,
˛˛˛˛ mXi=n
αiei
˛˛˛˛2
=
mXi=n
|αi|2
e, per ipotesi, la successione (αn) è in l2.
Indichiamo ora con Xn lo spazio lineare (di dimensione finita) generato dai vettori
e1 ,. . . , en. Come si è visto, la proiezione xn di h su Xn è
xn =n∑
i=1
〈h, ei〉ei
e, dalla 6.12, per ogni n vale
n∑i=1
|αi|2 =n∑
i=1
|〈h, ei〉|2 ≤ ||h||2 .
Dunque la successione (αi) è in l2 e quindi
x0 =+∞∑i=1
〈h, ei〉ei 6.13
converge in H . E’ facile immaginare che valga:
Teorema 6.23. Il vettore x0 definito in 6.13 è la proiezione di h su X .
396

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Per mostrare ciò si prova che h − x0 è ortogonale ad ogni elemento di X. Ricordiamo
che per definizione ogni x ∈ X è limite di una successione (s n) in spanS e, per la
continuità del prodotto interno,
〈x, h − x0〉 = 〈lim sn, h − x0〉 = lim〈sn, h − x0〉 .
Dunque basta provare che h − x0 è ortogonale a spanS e per questo basta provare
che è ortogonale ad ogni elemento e k. Ciò si vede immediatamente perchè 1
〈h − x0, ek〉 = 〈h, ek〉 − 〈+∞Xi=1
〈h, ei〉ei, ek〉
= 〈h, ek〉 −+∞Xi=1
〈〈h, ei〉ei, ek〉 = 〈h, ek〉 − 〈h, ek〉 = 0 .
Abbiamo così identificato la proiezione x0 di h su X ,
x0 =+∞∑i=1
〈h, ei〉ei .
Dalla 6.12, vale
+∞∑i=1
|〈h, ei〉|2 ≤ ||h||2 .
Questa disuguaglianza si chiama disuguaglianza di Bessel.
6.3.2 Serie di Fourier astratte
Le considerazioni svolte al paragrafo precedente si possono interpretare come segue:
in uno spazio di Hilbert H è dato un s.spazio X separabile, generato da un sistema
ortonormaleS = ei (niente vieta che sia X = H . In tal caso S si chiama un sistema
ortonormale massimale o completo.) Si vuole sviluppare un elemento h di H in serie
degli ei. Questi problemi sono stati studiati prima di tutto nel caso concreto in cui
1Si noti l’uso della linearità e continuità della prima componente del prodotto interno, per
scambiare i segni di serie e di prodotto interno.
397

6. SPAZI DI HILBERT
H = L2(−π, π) e S = cos nt√π
, sin nt√π e quindi si parla in generale di serie di Fourier
astratte per riferirsi allo sviluppo di h in serie degli e i.
E’ possibile provare, usando il lemma di Zorn, che ogni spazio di Hilbert ha un
sistema ortonormale massimale, e che questo è numerabile se e solo se H è
separabile. E’ utile conoscere alcuni test utili per verificare se un sistema ortonormale
numerabile in uno spazio di Hilbert è massimale o meno. Vale:
Teorema 6.24. Sia S = ei un sistema ortonormale finito o numerabile in uno
spazio di Hilbert H . Si equivalgono le affermazioni seguenti:
i) il sistema S è massimale;
ii) ogni h ∈ H si sviluppa in serie degli ei,
h =∑
αiei ;
iii) per ogni h ∈ H vale l’uguaglianza
||h||2 =+∞∑i=1
|〈h, ei〉|2 ; 6.14
iv) se 〈h, ei〉 = 0 per ogni i allora h = 0.
DIMOSTRAZIONE
Si è già visto che i) implica ii) e quindi iii) vale per il lemma 6.21. In particolare,
se 〈h, ei〉 = 0 per ogni i allora h = 0, ossia vale iv). La dimostrazione si completa
provando che se vale iv) allora S è massimale.
La condizione iv) significa
[spanS ]⊥ = 0
Si sa, dal teorema 6.14 che in tal caso spanS è denso in H . Dunque, S è massimale.
L’uguaglianza 6.14 si chiama identità di Parseval.
398

6. SPAZI DI HILBERT
6.4. IL DUALE DI UNO SPAZIO DI HILBERT
Abbiamo già notato che, per ogni k fissato, il funzionale lineare
h → 〈h, k〉
è continuo grazie alla disuguaglianza di Schwarz
|〈h, k〉| ≤ M ||h|| con M = ||k|| .
Dunque la norma di questo funzionale non supera ||k|| e in realtà è uguale a ||k||,
come si vede scegliendo
h =k
||k|| .
Così come in dimensione finita, si mostra che questi funzionali esauriscono tutto il
duale di H , ossia che H è un modello per il suo duale. Più precisamente vale:
Teorema 6.25 (di Riesz). Sia φ un funzionale lineare e continuo su H . Esiste un
unico xφ ∈ H tale che
φ(h) = 〈h, xφ〉 ∀h ∈ H . 6.15
La corrispondenza che a φ fa corrispondere xφ è antilineare e inoltre
||φ||H∗ = ||xφ||H .
DIMOSTRAZIONE
Si è appena detto che la trasformazione h → 〈h, y〉 è lineare e continua su H , per ogni
fissato y ∈ H . Ossia, almeno alcuni elementi del duale di H possono rappresentarsi
come
φ(h) = 〈h, y〉 .
Mostriamo che questa rappresentazione, se esiste, è unica. Infatti sia
φ(h) = 〈h, y〉 = 〈h, x〉 ∀h ∈ H .
399

6. SPAZI DI HILBERT
Sottraendo, si trova 〈h, x− y〉 = 0 per ogni h ∈ H e quindi x− y ⊥ H , ossia x− y = 0.
Proviamo ora che ogni elemento φ di H ∗ si rappresenta come in 6.15.
Se φ = 0 allora xφ = 0. Se φ = 0,
kerφ = H
e la continuità di φ mostra che kerφ è un s.spazio chiuso di H , diverso da H stesso.
Dunque esiste z = 0, z ⊥ kerφ. Non è restrittivo assumere
||z|| = 1 .
Si sa che ker φ ha complementare di dimensione 1, si veda il teorema 5.74. Quindi
H = (kerφ) ⊕ span z .
Si rappresenti ogni h ∈ H nella forma
h =
„h − φ(h)
φ(z)z
«+
φ(h)
φ(z)z .
Essendo „h − φ(h)
φ(z)z
«∈ kerφ , z ∈ [ker φ]⊥
si ha
〈h, [φ(z)z]〉 = 〈φ(h)
φ(z)z, φ(z)z〉 = φ(h) .
Dunque,
xφ = φ(z)z .
Ciò prova che ogni φ ∈ H ∗ si rappresenta come in 6.15.
E’ immediato verificare che la trasformazione φ → xφ, definita su H∗, è antilineare.
Inoltre, si è notato che la norma della trasformazione h → 〈h, x φ〉 è uguale a ||xφ||.
Osservazione 6.26. E’ importante notare che nella dimostrazione precedente il
funzionale continuo φ potrebbe anche avere soltanto dominio denso in X . Anche
in tal caso l’elemento xφ può costruirsi, e il funzionale h → 〈h, xφ〉 è l’estensione
per continuità di φ ad H . Useremo quest’osservazione al teorema 6.30.
Notiamo inoltre che con le notazioni del paragrafo 5.9., la 6.15 si scrive
φ(h) = 〈〈φ, h〉〉 = 〈h, xφ〉 .
400

6. SPAZI DI HILBERT
I risultati precedenti provano in particolare che ogni spazio di Hilbert è uno spazio
di Banach riflessivo. A questo proposito, concludiamo con un’osservazione relativa
alla convergenza debole:
Teorema 6.27. Sia
w− lim hn = h0 ed anche lim ||hn|| = ||h0|| .
In tal caso la successione (hn) converge ad h0 in norma.
DIMOSTRAZIONE
Si valuti
||hn − h0||2 = 〈hn − h0, hn − h0〉 = −〈hn − h0, h0〉 + 〈hn, hn〉 − 〈h0, hn〉 .
Il primo addendo tende a zero perché w− lim hn = h0 e per la stessa ragione
lim〈h0, hn〉 = ||h0||2; il secondo addendo tende a ||h0||2 perché lim ||hn||2 = ||h0||2.
Dunque, lim ||hn − h0||2 = 0.
6.5. L’OPERATORE AGGIUNTO DI UN OPERATORE TRA SPAZI DI HILBERT
Siano ora H e K due spazi di Hilbert e sia A un operatore lineare da H in K anche
NON continuo, ma con dominio denso in H . Associamogli un operatore lineare da
K in H che chiameremo operatore aggiunto. L’operatore aggiunto di A si indica col
simbolo A∗.
Dobbiamo definire prima di tutto il dominio di A∗. Per definizione,
dom A∗ = k ∈ K | ∃z ∈ H per cui 〈Ah, k〉K = 〈h, z〉H .
Vale:
Teorema 6.28. L’elemento z, se esiste, è unico.
401

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Ne esistano due, z e ζ. Per ogni h ∈ dom A vale
〈Ah, k〉K = 〈h, z〉H = 〈h, ζ〉H
e quindi
〈h, z − ζ〉H .
Quest’uguaglianza vale per ogni h ∈ dom A, che è denso in H. ciò implica che
ζ = z.
E’ quindi lecito definire
A∗k = z .
E’ immediato verificare che l’operatore A∗, da K in H , è lineare.
E’ facile vedere che dom A∗ può essere “molto piccolo”:
Esempio 6.29. Sia H = L2(0, 1) e sia
dom A = x ∈ L2(0, 1) con rappresentante continuo .
Sia x il rappresentante continuo e
Ax = x(0) .
Ossia, A è un funzionale. Se k ∈ C è nel dominio di A∗, esiste z ∈ L2(0, 1) per cui
kh(0) =∫ 1
0
z(s)h(s) ds ∀h ∈ L2(0, 1) .
Ciò può solo aversi se k = 0 (e allora anche z = 0); ossia, dom A∗ = 0.
E’ chiaro che, se dom A∗ è “troppo piccolo” allora A∗ conterrà “poche informazioini”
e sarà di scarsa utilità. E’ quindi importante individuare classi di operatori il cui
aggiunto ha dominio denso. A questo proposito vale:
Teorema 6.30. Se A è lineare e continuo da H in K , con dominio denso in H ,
allora il suo aggiunto ha dominio uguale a K .
402

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Infatti, il funzionale
h → 〈Ah, k〉
è continuo per ogni k e quindi, per il teorema di Riesz, si rappresenta nella forma
〈h, z〉.
Prima di studiare casi più generali, conviene studiare più in dettaglio l’aggiunto di un
operatore limitato.
6.5.1 L’aggiunto di un operatore limitato
Vale:
Lemma 6.31. Sia A lineare e continuo da H in K , con dominio denso in H . Allora,
A∗ ∈ L(K, H) e ||A∗||L(K,H) ≤ ||A||.
DIMOSTRAZIONE
Si è già notato che A∗ è definito su K. Dalla disuguaglianza di Schwarz,
||A∗k|| = sup||h||=1
〈h, A∗k〉 = sup||h||=1
〈Ah, k〉 ≤ sup||h||=1
||Ah|| · ||k|| = ||A|| · ||k|| .
Dunque, A∗ è un operatore limitato e
||A∗|| ≤ ||A|| .
Possiamo quindi calcolare A∗∗ = (A∗)∗. Dal lemma precedente, ||A∗∗|| ≤ ||A∗||.Proviamo ora:
Teorema 6.32. Sia A lineare e continuo da H in K , con dominio denso in H .
L’operatore A∗∗ è l’estensione continua di A ad H e quindi, in particolare,
||A|| = ||A∗|| .
403

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Si sa già che A∗∗ è definito su H . Proviamo che estende A. Per questo consideriamo
il funzionale
k → 〈A∗k, h〉H .
Per definizione, se h ∈ dom A, questo è uguale a
〈k, Ah〉H
e quindi h ∈ domA∗∗, con A∗∗h = Ah, ossia A∗∗ estende A.
Di conseguenza vale anche ||A∗|| ≤ ||A|| = ||A∗∗|| ≤ ||A∗|| e quindi ||A|| = ||A∗||.
Se in particolare A ∈ L(H, K) (e quindi con dominio H) vale
〈Ah, k〉K = 〈h, A∗k〉H ∀h ∈ H , k ∈ K .
E’ inoltre facile verificare che valgono le seguenti regole di calcolo:
Teorema 6.33. Sia A ∈ L(H, K). Vale:
(αA)∗ = αA∗ ; (A + B)∗ = A∗ + B∗ .
Se A−1 esiste allora esiste anche (A∗)−1 e vale
(A−1)∗ = (A∗)−1 . 6.16
Se B ∈ L(K, Z) allora vale
(BA)∗ = A∗B∗ .
Una forma più generale della 6.16 sarà provata nel teorema 6.39. Le altre proprietà
sono ovvie.
6.5.2 Operatori aggiunti ed operatori chiusi
Proviamo:
Teorema 6.34. Ogni operatore aggiunto è chiuso.
404

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Sia A un operatore lineare da H in K, con dominio denso in H , e sia A ∗ il suo aggiunto.
Dobbiamo provare che il grafico di A∗ è chiuso. Sia per questo ( (yn, A∗yn) ) una
successione che appartiene al grafico di A∗ e che è convergente,
lim yn = η , lim A∗yn = ξ .
Dobbiamo provare che (η, ξ) appartiene al grafico di A ∗, ossia che η ∈ dom A∗ e che
inoltre ξ = A∗η.
Per ogni x ∈ dom A vale
〈Ax, yn〉 = 〈x,A∗yn〉 .
Passando al limite rispetto ad n si ha:
〈Ax, η〉 = 〈x, ξ〉 ∀x ∈ dom A .
Dunque, η ∈ dom A∗ e A∗η = ξ. Ciò volevamo provare.
Si noti: nel teorema precedente non si è supposto che A sia continuo oppure
chiuso.
Osservazione 6.35. Si è notato che se A è continuo allora A ∗ ha dominio K .
Abbiamo ora visto che A∗ è chiuso e quindi è continuo per il teorema 5.100. E’ questa
una diversa dimostrazione di una parte del lemma 6.31.
Se anche A∗ ha dominio denso in K allora si può definire A∗∗. Vale:
Teorema 6.36. L’operatore A∗∗ estende A.
DIMOSTRAZIONE
Sia h ∈ dom A, k ∈ dom A∗. Da
〈Ah, k〉 = 〈h, A∗k〉
si vede dunque che la funzione k → 〈h, A∗k〉 è continua, così che h ∈ dom A∗∗ e
inoltre A∗∗h = Ah.
405

6. SPAZI DI HILBERT
Dunque, A∗∗ è un’estensione chiusa di A e si potrebbe provare che è la minima
estensione chiusa.
Osservazione 6.37. Si noti quindi che se A∗ è continuo con dominio denso anche
A è continuo; e ciò spiega perché nel caso dell’esempio 6.29 il dominio dell’aggiunto
deve essere 0. Infatti, ogni operatore lineare su R è continuo. Se A∗ fosse definito su
R il suo aggiunto sarebbe esso stesso continuo; e quindi A sarebbe continuo.
Supponiamo ora che A sia esso stesso chiuso. In tal caso vale
Teorema 6.38. Se A è chiuso con dominio denso anche A ∗ è chiuso con dominio
denso; e quindi A∗∗ può definirsi, ed è uguale ad A.
La dimostrazione è posposta.
Abbiamo così identificato una classe di operatori, più generale diL(H, K), nella quale
il calcolo dell’aggiunto ha buone proprietà.
Concludiamo infine con alcune regole di calcolo per gli operatori aggiunti. E’
immediato verificare che
(αA)∗ = αA∗ .
Valgono inoltre le regole
(A + B)∗k = A∗k + B∗k , (AB)∗k = B∗A∗k ,
ma soltanto per gli elementi k per cui le espressioni hanno senso, per esempio nel caso
della prima regola per k ∈ (dom A∗) ∩ (domB∗).
E’ più precisa, e più importante, la regola per l’aggiunto dell’inverso:
Teorema 6.39. Sia A lineare da H in K con dominio denso e supponiamo che A −1
sia continuo su K . Allora A∗ ha inverso continuo su H e vale
(A∗)−1 = (A−1)∗ . 6.17
406

6. SPAZI DI HILBERT
6.5.3 Operatori da H in sé; operatori autoaggiunti
Nel caso particolare in cui H = K il teorema 6.39 si riformula dicendo:
Corollario 6.40. 0 ∈ ρ(A) se e solo se 0 ∈ ρ(A∗).
DIMOSTRAZIONE
Se 0 ∈ ρ(A) allora 0 ∈ ρ(A∗) per il Teorema 6.39. Se 0 ∈ ρ(A∗), ancora per il
Teorema 6.39, 0 ∈ ρ(A∗∗), ossia (A∗∗)−1 è continuo. Ma, si sa che A∗∗ estende A e
quindi (A∗∗)−1 estende A−1, che pertanto è continuo.
Ciò suggerisce di studiare con maggiori dettagli le relazioni tra lo spettro di un
operatore e quello del suo aggiunto. Dato che λ ∈ ρ(A) equivale a 0 ∈ ρ(λI − A) si
vede che:
Teorema 6.41. Vale: λ ∈ ρ(A) se e solo se λ ∈ ρ(A∗); λ ∈ σ(A) se e solo se
λ ∈ σ(A∗).
Invece, le singole componenti dello spettro non si conservano. Si ha invece:
Teorema 6.42. Se λ ∈ σp(A) allora λ ∈ σp(A∗) ∪ σr(A∗); se λ ∈ σr(A) allora
λ ∈ σp(A∗); se λ ∈ σc(A) allora λ ∈ σc(A∗) ∪ σr(A∗).
La dimostrazione della seconda proprietà è immediata: se λ ∈ σr(A) allora esiste
h ⊥ im (λI − A) e per esso
0 = 〈h, (λI − A)x〉 = 〈(λI − A∗)h, x〉 ∀x ∈ dom A .
E quindi (λI − A∗)h = 0 .
Proviamo la prima. Se λ ∈ σp(A) allora esiste x0 per cui
0 = 〈(λI − A)x0, h〉 = 〈x0, (λI − A∗)h〉 ∀h ∈ dom A∗ .
Ciò vuol dire che im (λI−A∗) non è densa e quindi se λ /∈ σp(A∗) allora λ ∈ σr(A∗).
407

6. SPAZI DI HILBERT
Sia ora 0 ∈ σc(λI − A). In questo caso (λI − A)−1 non è continuo e quindi (λI −A∗)−1 non è continuo, si veda il Teorema 6.41. Se (λI−A∗)−1 non ha dominio denso
in H allora λ ∈ σr(A∗), altrimenti λ ∈ σc(A∗).
La situazione è riassunta nello specchietto seguente:
λ ∈ ρ(A) ⇐⇒ λ ∈ ρ(A∗)
λ ∈ σ(A) ⇐⇒ λ ∈ σ(A∗)
λ ∈ σp(A) =⇒ λ ∈ σp(A∗) ∪ σr(A)
λ ∈ σr(A) =⇒ λ ∈ σp(A∗)
λ ∈ σc(A) =⇒ λ ∈ σc(A∗) ∪ σr(A∗)
Un corollario interessante del teorema 6.42 è:
Corollario 6.43. Si sappia che σ(A) è reale e che A∗ = A. In tal caso σr(A) = ∅.
DIMOSTRAZIONE
Infatti, se λ ∈ σr(A) allora deve aversi anche λ = λ ∈ σp(A∗) = σp(A). Ciò è
impossibile perché le tre componenti dello spettro sono disgiunte.
E’ importante sapere che il corollario precedente contiene un’ipotesi ridondante.
Infatti
Teorema 6.44. Se A = A∗ allora σ(A) è reale.
La dimostrazione è posposta.
408

6. SPAZI DI HILBERT
Gli operatori per cui A = A∗ si chiamano autoaggiunti e sono importantissimi nelle
applicazioni. Per essi vale anche
Teorema 6.45. Sia A autoaggiunto e siano λ e µ autovalori tra loro diversi. Siano
x ed y non nulli e tali che
Ax = λx , Ay = µx .
Allora, x ⊥ y.
DIMOSTRAZIONE
Dal Teorema 6.44 si sa che λ e µ sono reali. Come nel caso delle matrici, si moltiplichi
scalarmente la prima per y, la seconda per x e si sommi. Si trova:
(λ − µ)〈x, y〉 = 0 .
Dato che λ = µ, deve essere x ⊥ y.
Osservazione 6.46. E’ bene notare che la condizione A = A ∗ in particolare
richiede l’uguaglianza dei domini. Se invece A∗ estende A, senza che si abbia
l’uguaglianza, l’operatore A si chiama simmetrico. Esattamente come in dimensione
finita, si prova che se A è simmetrico i suoi autovalori sono reali e che autovettori
corrispondenti ad autovalori diversi sono ortogonali.
Notiamo infine che le due definizioni di operatore simmetrico e di operatore
autoaggiunto coincidono nel caso degli elementi di L(X).
6.5.4 Dimostrazioni posposte
Dimostrazione del TEOREMA 6.38. In questa dimostrazione useremo più volte il
teorema 6.17: [X⊥]⊥ = X
se X è us s.spazio chiuso. Useremo inoltre questa proprietà, provata nel lemma 6.47:
se X ed Y sono due s.spazi di H , con X ⊆ Y , allora X⊥ ⊇ Y ⊥.
409

6. SPAZI DI HILBERT
Se A∗ non ha dominio denso, esiste k ∈ K non nullo ed ortogonale a dom A∗. In tal
caso,
(k, 0) ∈ [G(A∗)]⊥ .
Si prova che ciò non può darsi identificando esplicitamente lo spazio [G(A ∗)]⊥.
Indichiamo per questo con G l’insieme (−Ah, h) | h ∈ dom A. Ovviamente,
G ⊆ [G(A∗)]⊥ e quindi G(A∗) =[G(A∗)⊥
]⊥ ⊇ G⊥ 6.18
perché A∗ è un operatore chiuso. Mostriamo che in realtà vale l’uguaglianza, così
che (k, 0) = (−A0, 0) e quindi k = 0.
Essendo l’operatore A chiuso, G è un s.spazio chiuso di K × H e quindi[G⊥]⊥
= G .
Da 6.18 segue
[G(A∗)]⊥ ⊇ G =[G⊥]⊥
⊇ [G(A∗)]⊥
e quindi l’uguaglianza che volevamo.
Per completare la dimostrazione notiamo:
Lemma 6.47. Siano X ed Y due s.spazi di H , con X ⊆ Y , allora X ⊥ ⊇ Y ⊥.
DIMOSTRAZIONE
Se h ⊥ Y allora 〈h, y〉 = 0 per ogni y ∈ Y ; in particolare ciò vale anche per ogni x ∈ X,
dato che X ⊆ Y . Dunque ogni h ∈ Y ⊥ è anche in X⊥.
Dimostrazione del TEOREMA 6.39.
L’operatore (A−1)∗ è definito da
〈h, A−1k〉 = 〈(A−1)∗h, k〉 ∀h ∈ H , k ∈ K .
Indichiamo con ξ il vettore ξ = (A−1)k ∈ domA. L’uguaglianza precedente diviene
410

6. SPAZI DI HILBERT
〈h, ξ〉 = 〈(A−1)∗h, Aξ〉 ∀ξ ∈ dom A .
Ciò mostra che (A−1)∗h è nel dominio di A∗ e inoltre che
A∗(A−1)∗h = h ∀h ∈ H . 6.19
Mostriamo ora che
(A−1)∗A∗ξ = ξ ∀ξ ∈ domA∗ . 6.20
Sia h = A−1ξ un generico elemento di domA. Essendo
〈h, A∗k〉 = 〈Ah, k〉 ∀h ∈ domA , k ∈ domA∗
si ha
〈A−1ξ, A∗k〉 = 〈ξ, k〉 .
Ciò prova che A∗k ∈ dom(A−1)∗ per ogni k ∈ domA∗ e che
(A−1)∗A∗k = k ∀k ∈ domA∗ .
Vale dunque 6.20. Le uguaglianze 6.19 e 6.20 insieme equivalgono a 6.17.
Dimostrazione del TEOREMA 6.44.
Sia λ = α + iβ ∈ σ(A). Si deve provare che β = 0.
Per ogni x ∈ domA vale
〈(λI − A)x, x〉 = λ〈x, x〉 − 〈Ax, x〉
Ma ora, essendo A = A∗, 〈Ax, x〉 è reale. Infatti,
〈Ax, x〉 = 〈x, Ax〉 = 〈Ax, x〉 .
Dunque si trova
〈(λI − A)x, x〉 = λ〈x, x〉 − 〈Ax, x〉 .
Sottraendo,
2iβ||x||2 = 〈(λI − A)x, x〉 − 〈(λI − A)x, x〉 = 2iIm 〈(λI − A)x, x〉 .
411

6. SPAZI DI HILBERT
Passando ai moduli si vede che
|β| · ||x||2 ≤ |Im 〈(λI − A)x, x〉| ≤ |〈(λI − A)x, x〉| ≤ ||(λI −A)x|| · ||x|| . 6.21
Ciò implica che l’inverso sinistro di (λI − A) è continuo, si veda la 5.38.
Proviamo ora che le proprietà precedenti implicano che β = 0.
Per ipotesi, λ ∈ σ(A) e quindi im (λI − A) non può essere densa. Altrimenti,
dalla 6.21, avremmo λ ∈ ρ(A). Esiste quindi ξ = 0 per cui
0 = 〈ξ, (λI − A)x〉 ∀x ∈ domA .
Ciò in particolare implica che ξ ∈ dom A∗ = domA. Dunque, con x = ξ si ha:
|β| ||ξ|| ≤ |〈ξ, (λI − A)ξ〉| = 0
e quindi β = 0, come si voleva.
6.6. OPERATORI COMPATTI
Siano H e K spazi di Hilbert e sia C ∈ L(H, K). Essendo C continuo, il
suo nucleo è un s.spazio chiuso di H e inoltre la restrizione di C a [kerC]⊥ è
iniettiva. Se in particolare [kerC]⊥ ha dimensione finita allora anche im C è uno
spazio di dimensione finita e lo studio di C si fa semplicemente lavorando tra spazi
di dimensione finita. In particolare, esistono basi e1 , . . . , en di [kerC]⊥ ed
ε1 , . . . , εn di im C tali che
Cx =n∑
i=1
〈x, ei〉εi
per ogni x ∈ H (e non solo per ogni x ∈ [kerC]⊥).
Osservazione 6.48. Si ha quindi una “diagonalizzazione” di C, ma rispetto a basi
diverse. Si noti che le basi possono essere diverse anche se H = K . Per esempio sia
H = K = C2 e sia C rappresentato dalla matrice 1 1
0 1
412

6. SPAZI DI HILBERT
rispetto alla base canonica. L’operatore C non è diagonalizzabile scegliendo una
medesima base per rappresentare C2 sia come spazio di partenza che d’arrivo; se
però si sceglie come e1 ed e2 gli elementi della base canonica e invece
ε1 =
1
0
, ε2 =
1
1
allora
C[x1e1 + x2e2] = x1ε1 + x2ε2 .
La classe degli operatori C il cui nucleo ha codimensione finita ha quindi proprietà
ben particolari. Sfortunatamente essa è troppo piccola per le applicazioni. Una classe
più vasta di operatori, che ha proprietà ancora ben particolari e che però si incontra in
numerose applicazioni è quella degli operatori compatti. Per definizione, un operatore
si dice compatto quando ogni insieme limitato di H è trasformato in un insieme
relativamente compatto nella topologia della norma di K .
Naturalmente, per vedere se un operatore è compatto basta verificare che una sfera ha
per immagine un insieme relativamente compatto.
Osservazione 6.49. Ricordiamo che ogni insieme relativamente compatto è limita-
to. Dunque la sola proprietà di trasformare limitati in relativamente compatti implica
la limitatezza e quindi la continuità dell’operatore.
Ricordiamo che una successione è compatta quando ogni sua s.successione ammette
punti limite. Ovviamente:
Teorema 6.50. L’operatore C ∈ L(H, K) è compatto se e solo se trasforma ogni
successione limitata di H in una successione compatta di K (con la topologia della
norma).
Chiaramente tutti gli operatori con nucleo di codimensione finita, ossia con immagine
di dimensione finita, trasformano insiemi limitati in insiemi relativamente compatti e
inoltre:
413

6. SPAZI DI HILBERT
Teorema 6.51. Sia (Cn) una successione di operatori compatti. Se
C = limCn
(il limite nel senso di L(K, H)), allora C è compatto.
In particolare ciò vale se per ciascun Cn si ha:
dim [imCn] = cn < +∞ .
DIMOSTRAZIONE
Proviamo il teorema nel caso generale in cui ogni operatore C n è compatto, senza fare
ipotesi sul suo nucleo.
Proviamo che ogni successione (xn) limitata di H ha per immagine una successione
(Cxn) compatta in K (dotato della topologia della norma). Usiamo il procedimento
diagonale di Cantor: si consideri la successione
n → C1xn .
Questa ammette s.successioni convergenti, perché l’operatore C 1 è compatto. Indi-
chiamo col simbolo (x1,n) una s.successione di (xn) per cui (C1x1,n) converge. La
s.successione (x1,n) è limitata perché la successione (xn) è limitata. Dunque (C2x1,n)
ammette una s.successione convergente che indichiamo col simbolo (C 2x2,n).
Proseguendo in questo modo si costruiscono successioni (x r,n) tali che:
– (xr,n) è s.successione di (xr−1,n);
– per ogni fissato i, la successione (di indice n) (C ixi,n) è convergente.
– Dunque, (Cjxi,n) è convergente per ogni indice j < i, perché (x i,n) con
i > j è s.successione di (xj,n).
Si consideri ora la tabella seguente.
C1x1,1 C1x1,2 C1x1,3 C1x1,4 C1x1,5 . . .
C2x2,1 C2x2,2 C2x2,3 C2x2,4 C2x2,5 . . .
C3x3,1 C3x3,2 C3x3,3 C3x3,4 C3x3,5 . . .
C4x4,1 C4x4,2 C4x4,3 C4x4,4 C4x4,5 . . ....
......
......
414

6. SPAZI DI HILBERT
Proviamo che la successione diagonale (Cxr,r) è convergente. Scriviamo per questo
||Cxn,n − Cxm,m|| ≤ ||Cxn,n − Crxn,n|| + ||Crxn,n − Crxm,m||
+||Crxm,m − Cxm,m|| ≤ ||C − Cr||||xn,n|| + ||xm,m|| + ||Crxn,n − Crxmm|| .
Per ipotesi, (xn) è limitata,
||xn|| < M ∀n .
Sia ε > 0 fissato e sia rε tale che
||C − Cr|| < ε/4M
Con questo valore di r fissato, si ha
||C − Cr||||xn,n|| + ||xm,m|| < ε/2 .
Il numero r è ormai fissato e si sa che (Crxn,n) converge. Dunque si trova Nε tale che,
per n, m maggiori di Nε vale
||Crxn,n − Crxmm|| < ε/2 .
Dunque la successione (Cxn,n) è fondamentale e quindi convergente.
Ciò prova che la successione (Cxn) è compatta in K, come volevamo.
In particolare,
Corollario 6.52. L’insieme degli operatori compatti è un s.spazio chiuso di
L(H, K).
Infatti, che è un insieme chiuso discende dalla dimostrazione precedente. Che è un
s.spazio si vede facilmente.
In realtà vale di più: si ricordi che un operatore lineare continuo trasforma limitati
in limitati e compatti in compatti. Dunque, se C è compatto, la sua composizione, a
destra o a sinistra, con un operatore continuo è un operatore compatto. Dunque:
Teorema 6.53. L’insieme degli operatori compatti di L(K) è un ideale chiuso.
415

6. SPAZI DI HILBERT
Vale inoltre:
Teorema 6.54. L’operatore C ∈ L(H, K) è compatto se e solo se C ∗ ∈ L(K, H) è
compatto.
DIMOSTRAZIONE
Dato che C = C∗∗, basta provare che se C è compatto il suo aggiunto lo è.
Per assurdo, supponiamo che C ∗ non sia compatto. In tal caso esiste una successione
(kn) limitata in K, e tale che (C ∗kn) non ammette s.successioni convergenti. Dunque,
per ogni successione di indici (nk) esiste almeno un ε > 0 tale che
||C∗xnk − C∗xnm || > ε
per infiniti indici n ed m. Passando ad una ulteriore s.successione, non è restrittivo
assumere che ciò avvenga per ogni n e per ogni m.
Sia ora hk,m con ||hk,m|| = 1 e tale che
ε/2 ≤ 〈hk,m, C∗xnk − C∗xnm〉 = 〈Chk,m, xnk − xnm〉 . 6.22
Per ipotesi, l’operatore C è compatto. Dunque, l’insieme Ch k,m o è finito o ammette
punti di accumulazione. Nel primo caso esiste z0 ed esiste una successione (kr, mr)
per cui
Chkr ,mr = z0 .
Nel secondo caso esiste una successione (kr, mr) per cui
lim Chkr ,mr = z0 .
Limitandoci a considerare tale successione, si ha, per r sufficentemente grande,
〈z0, xnkr− xnmr
〉 = 〈z0 − Chkr ,mr , xnkr− xnmr
〉 + 〈Chkr ,mr , xnkr− xnmr
〉 > ε/4
perché vale 6.22 e il primo addendo tende a zero.
Ciò non può darsi perché la successione (〈z0, xnkr−xnmr
〉) è una successione limitata
di numeri, e quindi deve avere s.successioni convergenti per il teorema di Bolzano–
Weierstrass.
416

6. SPAZI DI HILBERT
6.6.1 Lo spettro degli operatori compatti
Consideriamo un operatore compatto C da uno spazio di Hilbert di dimensione
infinita H in sé e studiamone lo spettro. Esponiamo i risultati, posponendo le
dimostrazioni.
Essendo C continuo, il suo spettro è non vuoto e limitato. Si sa inoltre che
λ ∈ σ(C) =⇒ |λ| ≤ ||C|| .
Dunque, o lo spettro è finito oppure è dotato di punti di accumulazione. Mostriamo
prima di tutto che σ(C) può essere finito:
Esempio 6.55. Sia H = L2(0, 1) e sia C l’operatore da H in sé definito da
(Ch)(t) =∫ t
0
h(s) ds .
E’ noto che σ(C) = 0, si veda l’Esempio 5.176. Mostriamo che C è compatto.
Notiamo per questo che l’immagine di C contiene soltanto funzioni continue e che C
è anche continuo da L2(0, 1) in C(0, 1). Inoltre, ogni s.insieme compatto di C(0, 1)
è anche un s.insieme compatto di L2(0, 1). Dunque basta provare che è compatto
l’operatore
C : L2(0, 1) → C(0, 1) , (Ch)(t) =∫ t
0
h(s) ds .
Come si è notato, è sufficiente provare che l’immagine della sfera unità di L 2(0, 1)
è compatta in C(0, 1). La continuità di C mostra che l’immagine è limitata. La
disuguaglianza
|(Ch)(r) − (Ch)(t)| ≤∣∣∣∣∫ t
r
|h(s)| ds
∣∣∣∣ ≤√|t − r|[∫ 1
0
|h(s)|2 ds
]1/2
mostra l’equicontinuità dell’immagine, e quindi la compattezzo per il teorema di
Ascoli–Arzelà.
Nell’esempio precedente, 0 ∈ σ(C). Ciò non per caso. Infatti vale
Teorema 6.56. Sia H uno spazio di Hilbert di dimensione infinita. Se C è compatto,
il suo spettro contiene il punto 0.
417

6. SPAZI DI HILBERT
Se lo spettro di C è infinito, esso è numerabile ed ha 0 come unico punto di
accumulazione.
Il risultato seguente va sotto il nome di alternativa di Fredholm.
Teorema 6.57. Se λ = 0, allora im (λI − C) è chiusa e λ appartiene al risolvente
di C oppure appartiene allo spettro di punti di C.
Ossia, gli elementi non nulli dello spettro sono autovalori. Invece, il punto 0 può
essere o meno un autovalore: nel caso dell’operatore visto nell’esempio 6.55 si ha
0 ∈ σc(C).
Ad ogni autovalore si associano i corrispondenti autovettori, uno o più, e ad ogni
autovettore si associa una catena di Jordan. E’ questa una successione, oppure una
sequenza finita, (xn) di vettori tali che
Ax0 = λx0 , Axn = xn−1 + λxn per n > 0 .
Dunque, il primo elemento x0 della catena è un autovettore relativo all’autovalore λ.
Lo spazio generato da tutti gli elementi di catene di Jordan che corrispondono
all’autovettore λ si chiama autospazio generalizzato di λ.
Vale:
Teorema 6.58. Gli autospazi generalizzati di autovalori non nulli hanno dimensione
finita.
Naturalmente, se 0 è l’unico punto dello spettro, o anche se lo spettro è finito, lo spettro
darà poche informazioni sull’operatore. Il caso in cui lo spettro dà informazioni
“complete” sull’operatore è il caso in cui le catene di Jordan costituiscono un sistema
massimale in H o almeno in [kerC]⊥, perché in tal caso l’operatore può rappresentarsi
mediante “blocchi di Jordan”. Un caso in cui ciò avviene è quello degli operatori
compatti e autoaggiunti:
418

6. SPAZI DI HILBERT
Teorema 6.59. Sia C compatto e autoaggiunto sullo spazio di Hilbert H di
dimensione infinita. Esiste una famiglia ortonormale (vn) (finita o numerabile)
di autovettori di C,
Cvn = λnvn λn = 0 ,
tale che
Cx =∑
λn〈x, vn〉vn
per ogni x ∈ H .
La famiglia vn è massimale in [kerC]⊥.
Questo risultato generalizza la diagonalizzazione delle matrici simmetriche: rispetto
a una base di autovettori l’operatore C può “scriversi in forma diagonale”.
Chiameremo questa la diagonalizzazione di C.
6.6.2 Operatori compatti tra spazi diversi. Valori singolari
Studiamo ora il caso di un operatore C compatto tra due spazi di Hilbert H e K .
Niente vieta che possa essere H = K e ciò è utile nel caso in cui l’operatore C non è
autoaggiunto. Ciascuno degli operatori
CC∗ ∈ L(K) , C∗C ∈ L(H)
è compatto autoaggiunto e quindi si rappresenta rispettivamente come
C∗Ch =+∞∑i=1
mi〈h, vi〉vi , CC∗k =+∞∑i=1
µi〈k, wi〉wi . 6.23
Naturalmente, mi e µi sono gli autovalori non nulli rispettivamente di C ∗C e di CC∗
mentre vi e wi rappresentano corrispondenti autovettori normalizzati.
I numeri mi e µi sono reali e positivi. Infatti,
0 ≤ 〈CC∗vi, vi〉 = mi||vi||2 = mi , 0 ≤ 〈C∗Cwi, wi〉 = µi||wi||2 = µi .
E’ inoltre immediato vedere che i numeri m i (ricordiamo, tutti non nulli) coincidono
con i µi (ricordiamo: anch’essi non nulli). Infatti, sia µ = 0 tale che
CC∗v = µv .
419

6. SPAZI DI HILBERT
Essendo µ = 0, C∗v non è 0 e applicando C∗ ai due membri si trova
(C∗C)C∗v = µC∗v
e quindi il numero µ (non nullo) è uno degli m (non nulli). In modo analogo si vede
che ciascuno degli mi coincide con uno dei numeri µi.
Osservazione 6.60. Nelle rappresentazioni 6.23 figurano i soli autovalori non nulli,
ed abbiamo provato che essi sono i medesimi per CC ∗ come per C∗C. E’ però
possibile che 0 sia nello spettro di uno solo di questi operatori, come accade se H =
R2, K = R e C =[
1 0].
Introduciamo i numeri non nulli
σi =√
mi .
che si possono anche ottenere a partire dai µ i e che si chiamano i valori singolari di
C.
Generalmente si assume di ordinare i valori singolari in modo non crescente.
Indichiamo con ωi il vettore
ωi =1σi
Cvi
(si ricordi che i valori singolari sono non nulli.)
Vale:
Lemma 6.61. L’insieme ωi è ortonormale in K .
DIMOSTRAZIONE
Infatti,
〈ωr, ωs〉 = 〈 1
σrCvr,
1
σsCvs〉 =
1
σrσs〈C∗Cvr, vs〉 =
1
σrσsmr〈vr, vs〉
nullo se r = s perché vr ⊥ vs, altrimenti uguale a 1.
Poiché i vi sono un sistema ortonormale massimale in [kerC ∗C]⊥, si può scrivere
x =+∞∑i=1
〈x, vi〉vi + n , n ∈ kerC = kerC∗C
420

6. SPAZI DI HILBERT
e quindi
Cx =+∞∑i=1
〈x, vi〉Cvi =+∞∑i=1
σi〈x, vi〉ωi . 6.24
In particolare ciò mostra una “diagonalizzazione” per operatori compatti tra spazi
diversi (in particolare, operanti nello stesso spazio, ma rispetto a basi diverse) e
mostra che ogni operatore compatto si approssima nella norma di L(H, K) mediante
operatori con immagine di dimensione finita. Combinando ciò col teorema 6.51 si
trova:
Teorema 6.62. Un operatore C ∈ L(H, K) è compatto se e solo se è limite, in
L(H, K), di una successione di operatori con immagine di dimensione finita.
Osservazione 6.63. Gli operatori compatti possono definirsi anche in spazi di
Banach e il teorema 6.51 vale anche in spazi di Banach. Però in spazi di Banach
esistono operatori compatti che non possono approssimarsi con operatori la cui
immagine ha dimensione finita.
Per concludere, mostriamo una particolare rappresentazione sotto cui si possono porre
gli operatori compatti da H in K .
Sia prima di tutto C ∈ L(H) compatto autoaggiunto e positivo. Ciò vuol dire che
〈Cx, x〉 ≥ 0 ∀x .
In tal caso si definisce
C1/2x =+∞∑i=1
√λi〈x, vi〉vi .
Sia ora C compatto da H in K . Si definisce l’ operatore modulo di C ponendo
|C|x = (C∗C)1/2x =+∞∑i=1
σi〈x, vi〉vi .
Si noti che il simbolo |C| indica un operatore, e non un numero.
Dato ora un generico operatore compatto, diciamo A, tra spazi diversi,
Ax =+∞∑i=1
σi〈x, vi〉ωi
421

6. SPAZI DI HILBERT
introduciamo l’operatore (continuo ma generalmente non compatto)
UAx =+∞∑i=1
〈x, vi〉ωi .
Le proprietà importanti di UA sono:
– se x ∈ [span vi ]⊥ allora UAx = 0;
– se x ∈ cl span vi allora
||UAx||2 =
∣∣∣∣∣∣∣∣∣∣+∞∑i=1
〈x, vi〉ωi
∣∣∣∣∣∣∣∣∣∣2
=+∞∑i=1
|〈x, vi〉|2 = ||x||2 .
E’ ora facile verificare che l’operatore compatto A si rappresenta come
A = UA|A| .
Questa rappresentazione si chiama la rappresentazione polare dell’operatore A.
6.6.3 Proprietà geometriche degli autovalori e valori singolari
Sia C compatto da H in K . Si è visto che
Cx =∑
σi〈x, vi〉ωi .
Dunque,
||Cx||2 =
∣∣∣∣∣∣∣∣∣∣+∞∑i=1
σi〈x, vi〉ωi
∣∣∣∣∣∣∣∣∣∣2
=+∞∑i=1
σ2i |〈x, vi〉|2 ≤ σ2
1 ||x||2
e l’uguaglianza vale se x = v1. Dunque,
Teorema 6.64. Il numero σ1, massimo valor singolare di C, è uguale a ||C||. In
particolare, se C è compatto ed autoaggiunto, ||C|| è anche uguale a maxλ i.
Vogliamo estendere questa caratterizzazione al caso di generici autovalori. Conside-
riamo un operatore compatto autoaggiunto C, limitandoci a considerare il caso in cui
tutti i suoi autovalori sono non negativi. In questo caso, ordiniamo quelli strettamente
positivi in modo non crescente, λi ≥ λi+1. Gli autovalori si elencano più volte
quando ad essi corrispondono più autovettori linearmente indipendenti. Indichiamo
422

6. SPAZI DI HILBERT
con vi un autovettore di norma 1 di λi, in modo da avere un sistema ortonormale v imassimale in [kerC]⊥.
Indichiamo con L[n] la famiglia di tutti i s.spazi di H di dimensione n. Un generico
elemento di L[n] è
L = span x1 , . . . , xn.
Con Ln indichiamo il particolare s.spazio generato dai primi n autovettori:
Ln = span v1 , . . . , vn .
Ricordiamo che stiamo studiando gli autovalori λ i con i > 1. Un primo risultato è il
seguente:
Lemma 6.65. Sia C compatto autoaggiunto, con autovalori non negativi. Vale:
λn+1 = max〈Cx, x〉 | ||x|| = 1 , x ∈ [Ln]⊥
.
DIMOSTRAZIONE
Se x ∈ [Ln]⊥, si ha
x =∞X
i=n+1
xivi + n , xi = 〈x, vi〉 , n ∈ kerC
e quindi
〈Cx, x〉 =∞X
i=n+1
λix2i ≥ λn+1
∞Xi=n+1
x2i
!≥ λn+1 .
L’ultima uguaglianza vale perché x =P+∞
i=n+1 xivi ha norma 1.
Il risultato precedente richiede l’esplicita conoscenza degli autospazi. In pratica
interessano risultati che non fanno uso esplicito degli autospazi. Tra questi:
Teorema 6.66. Sia C come nel Lemma 6.65. Si ha:
λn+1 = min
max
〈Cx, x〉 | ||x|| = 1 , x ∈ L⊥ , L ∈ L[n]
.
423

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Il lemma 6.65 mostra che
λn+1 = maxn〈Cx, x〉 , | ||x|| = 1 , x ∈ [Ln]⊥
o.
Per provare il teorema basta mostrare che per ogni altra scelta di L ∈ L[n] si ha
λn+1 ≤ maxn〈Cx, x〉 , | ||x|| = 1 , x ∈ L⊥
o. 6.25
Sia L = span h1 , . . . , hn e sia
φ =n+1Xi=1
φivi .
Scegliamo coefficienti φi non tutti nulli in modo da avere φ ∈ L⊥. Per avere ciò si deve
richiedere
n+1Xi=1
φi〈hj , vi〉 = 0 j = 1 , . . . n .
Questo è un sistema di n equazioni in (n + 1) incognite e quindi ammette soluzione
non nulla. Si può quindi effettivamente trovare φ ⊥ L e, dividendo per ||φ|| = 0, si può
assumere ||φ|| = 1. Per questo particolare elemento φ vale
〈Cφ, φ〉 =
n+1Xi=1
λiφ2i ≥ λn+1||φ||2 = λn+1 .
Dunque vale 6.25, come volevamo.
Proviamo ora una caratterizzazione importante dei valori singolari. In questo caso C è
compatto tra spazi di Hilbert H e K , può essere tra loro diversi. Con A[n] indichiamo
la famiglia degli operatori lineari da H in K , ciascuno dei quali ha immagine di
dimensione n al più.
Ricordiamo che i valori singolari per definizione sono non nulli ed ordinati in modo
decrescente.
Teorema 6.67. Vale:
σn+1 = min||C − A|| | A ∈ A[n] .
424

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Consideriamo l’operatore A definito da
Ax =nX
i=1
σi〈x, vi〉ωi .
Per quest’operatore si ha
(C − A)x =
∞Xi=n+1
σi〈x, vi〉ωi
e quindi ||C − A|| = σn+1. Ovviamente, A ∈ A[n].
Sia ora A un generico operatore che appartiene ad A[n]. La sua restrizione a
span v1 , . . . , vn+1 non è iniettiva, perché A ha immagine di dimensione n al più,
minore di quella del dominio. Dunque esiste x =Pn+1
i=1 xivi tale che Ax = 0 e inoltre
||x|| = 1. Per quest’elemento x vale
||(C − A)x|| = ||Cx|| ≥ σn+1
e ciò completa la dimostrazione.
6.6.4 Operatori compatti ed equazioni integrali di Fredholm
Consideriamo una funzione K(t, s) continua su [a, b]× [a, b] e l’operatore da L 2(a, b)
in sé definito da
x → Kx =∫ b
a
K(t, s)x(s) ds .
Si sa già che quest’operatore è continuo. Mostriamo che esso è addirittura compatto,
facendo uso del teorema di Ascoli–Arzelà. Ciò generalizza l’osservazione usata
nell’Esempio 6.55.
Sia x ∈ B,
B = x | ||x|| < 1 .
Se possiamo provare che KB è un insieme relativamente compatto di L 2(a, b) allora
K è un operatore compatto.
425

6. SPAZI DI HILBERT
Si sa anche che K trasforma L2(a, b) in C(a, b) e, come si è già visto, basta provare
che KB è un s.insieme compatto di C(a, b). La uniforme limitatezza di KB discende
dalla continuità di K . Proviamo quindi l’equicontinuità. Notiamo:
|(Kx)(t) − (Kx)(t′)| =
∣∣∣∣∣∫ b
a
[K(t, s) − K(t′, s)]x(s) ds
∣∣∣∣∣≤[∫ b
a
|K(t, s) − K(t′, s)|2]1/2 [∫ b
a
|x(s)|2]1/2
≤[∫ b
a
|K(t, s) − K(t′, s)|2]1/2
.
Sia ε > 0. L’uniforme continuità di K mostra che esiste δ > 0 tale che
|t − t′| < δ =⇒ |K(t, s) − K(t′, s)| < ε2
e quindi, per |t − t′| < δ,
|(Kx)(t) − (Kx)(t′)| < ε .
Ciò prova l’equicontinuità e quindi la compattezza.
Consideriamo ora l’equazione integrale
x = µKx + φ = µ
∫ b
a
K(t, x)x(s) ds + φ(t) .
Nel caso in cui K sia autoaggiunto, ossia nel caso in cui
K(t, s) = K(s, t) ,
l’operatore K si può diagonalizzare rispetto ad un sistema ortonormale, mentre in
generale si potrà scrivere
Kx =+∞∑i=1
σi〈x, vi〉ωi .
Se accade che questa somma è finita, l’equazione integrale di Fredholm ha nucleo
degenere; altrimenti, l’equazione integrale diviene
x(t) =+∞∑i=1
σi
[∫ b
a
x(s)vi(s) ds
]ωi(t) + φ(t) ,
forma che generalizza quella che abbiamo introdotto, per le equazioni con nucleo
degenere, al paragrafo 5.1.3.
426

6. SPAZI DI HILBERT
6.6.5 Dimostrazioni posposte
Si provano ora i teoremi relativi agli operatori compatti. Per questo avremo bisogno
di introdurre alcune proprietà che valgono anche per operatori non compatti. Per
chiarezza, indicheremo con A un generico operatore lineare e con C uno che è anche
compatto.
Conviene seguire un’ordine un po’ diverso da quello del paragrafo 6.6.1 e spezzare le
dimostrazioni in vari lemmi.
Avremo spesso bisogno di lavorare con successioni limitate o addirittura convergenti
(vn) di elementi dell’immagine di λI − C,
vn = (λI − C)xn .
La successione (xn) in generale non sarà né convergente né limitata. Però:
Lemma 6.68. Sia (vn) una successione limitata che appartiene ad im(λI −C), con
C compatto e λ = 0:
vn = lim(λI − C)xn , λ = 0 . 6.26
Esiste una successione (kn) limitata e tale che
vn = (λI − C)kn .
DIMOSTRAZIONE
Se (xn) stessa è limitata, niente è da provare. Consideriamo il caso in cui
l’uguaglianza 6.26 vale, con (xn) successione illimitata.
Si rappresenti
X = ker(λI − C) ⊕ [ker(λI − C)]⊥ , xn = hn + kn .
Ovviamente, (λI − C)xn = (λI − C)kn e quindi si può sostituire xn con kn. Basta
dunque provare che la successione (kn) è limitata.
Sia per assurdo la successione (kn) illimitata. In tal caso,
yn = limvn
||kn||= 0
427

6. SPAZI DI HILBERT
perché (vn) è limitata.
Usiamo l’ipotesi che l’operatore C è compatto, e la limitatezza di (k n/||kn||), per estrar-
re dalla successione“C kn
||kn||
”una s.successione convergente. Cambiando nome agli
indici, si può supporre
lim Ckn
||kn||= w0 .
Essendo
(λI − C)kn
||kn||=
vn
||kn||= yn −→ 0 ,
si ha anche
lim λkn
||kn||= lim C
kn
||kn||= w0 . 6.27
Poiché λ = 0 e kn/||kn|| ha norma 1, segue che ||w0|| = |λ| = 0, e dunque w0 = 0.
Inoltre, w0 ∈ [ker(λI − C)]⊥ perchè kn ∈ [ker(λI − C)]⊥. Usando ambedue le ugua-
glianze in 6.27, mostriamo ora che si ha anche w0 ∈ ker(λI −C) così che si arriva alla
contraddizione w0 = 0.
(λI − C)w0 = λw0 − Cw0 = limn
˘λ2I − C2
¯ kn
||kn||
= lim(λI + C)(λI − C)kn
||kn||= (λI + C)
lim(λI − C)
kn
||kn||
ff= 0 .
La contraddizione trovata mostra che la successione (kn) è limitata.
Osservazione 6.69. Si noti che l’ipotesi della compattezza di C si è esplicitamente
usata. L’asserto precedente non vale per generici operatori.
Usiamo questo lemma per provare:
Teorema 6.70. Se C è compatto e λ = 0 allora (λI − C) ha immagine chiusa.
DIMOSTRAZIONE
Sia (vn) una successione in im (λI − C), convergente a v0. Dobbiamo provare v0 ∈
im (λI − C) ossia che, per un opportuno x0, si ha
v0 = (λI − C)x0 .
428

6. SPAZI DI HILBERT
Assumiamo quindi che valga 6.26. Come si è visto al Lemma 6.68, possiamo assumere
che la successione (xn) sia limitata. In questo caso, passando ad una s.successione,
si può assumere lim Cxn = y, perché C è compatto. Si ha quindi che
xn =1
λ[vn + Cxn] , lim xn =
1
λ[v0 + y] = x0 ,
ossia (xn) converge ad x0. D’altra parte C, essendo compatto, è continuo. Dunque,
da vn = (λI − C)xn, si ha v0 = (λI − C)x0. Ciò prova che v0 ∈ im (λI − C), come
volevamo.
Proviamo ora:
Teorema 6.71. Se l’operatore C ∈ L(H, K) è compatto e se lo spazio di Hilbert K
ha dimensione infinita, allora 0 ∈ σ(C).
DIMOSTRAZIONE
Supponiamo che 0 sia nel risolvente di C. In questo caso, C −1 è continuo e quindi
I = CC−1
è un operatore compatto. Dunque, la sfera x | ||x|| ≤ 1 è compatta. Ciò non può
essere se lo spazio di Hilbert H ha dimensione infinita, si veda il Teorema 5.50.
Proviamo ora un lemma che sarà reso più preciso in seguito:
Lemma 6.72. Sia C compatto. Se λ ∈ σ(C) non è zero, allora λ ∈ σp(C)∪σr(C).
DIMOSTRAZIONE
Sia λ = 0, e sia λ /∈ σp(C). Si è visto che l’immagine di (λI −C), con λ = 0, è chiusa.
Se questa è diversa da X allora λ ∈ σr(C). Se l’immagine è X allora, per il teorema
di Banach, Teorema 5.99, (λI − C)−1 è continuo e quindi λ ∈ ρ(C).
Osservazione 6.73. In particolare si è provato che lo spettro continuo di un
operatore compatto, se non è vuoto, contiene il solo elemento 0.
429

6. SPAZI DI HILBERT
Notiamo che non abbiamo ancora provato che gli elementi non nulli di σ(C) sono
autovalori. Possiamo però provare:
Lemma 6.74. L’insieme degli autovalori dell’operatore compatto C, se non è finito,
ha per unico punto di accumulazione il punto 0.
DIMOSTRAZIONE
Ricordiamo che autovettori corrispondenti ad autovalori diversi sono linearmente indi-
pendenti. Questo risultato, noto dai corsi di algebra lineare, è provato per completezza
nel Lemma 6.77.
Essendo C continuo, il suo spettro è un insieme limitato e quindi se C ha infiniti auto-
valori, si trova una successione (λk) di autovalori tra loro diversi, che converge a λ 0.
Supponiamo per assurdo che sia λ0 = 0. Indichiamo con xk un autovettore di λk di
norma 1 e sia Xn = span x1 , . . . xn.
Lo spazio lineare Xn è trasformato in sé dall’operatore C,
CXn ⊆ Xn
ed inoltre
(λnI − C) Xn ⊆ Xn−1
perché (λnI − C)xn = 0.
Grazie al Lemma 6.77, la dimensione di Xn è esattamente n e quindi Xn−1 ⊆ Xn,
l’inclusione essendo stretta. Dunque in Xn può trovarsi un vettore en di norma 1,
che dista 1 da Xn−1. Mostriamo che se λ0 = 0, la successione“C en
λn
”non ammette
s.successioni convergenti. Ciò contrasta con la compattezza di C e mostra che λ 0 = 0.
Per ottenere ciò, basta provare che per ogni n, m vale˛˛˛˛C en
λn− C
em
λm
˛˛˛˛ > 1 .
Per fissare le idee, sia n > m e si scriva
Cen
λn− C
em
λm= en −
C
em
λm+
„I − C
λn
«en
ff.
430

6. SPAZI DI HILBERT
I due vettori
„I − C
λn
«en , C
em
λm
appartengono a Xn−1 mentre en ∈ Xn. Dunque,˛˛˛˛C en
λn− C
em
λm
˛˛˛˛ ≥ dist(en, Xn−1) ≥ 1 .
Si trova quindi che la successione limitata (en/λn) ha immagine priva di s.successioni
convergenti. Ciò contrasta con la compattezza di C. La contraddizione trovata mo-
stra che l’insieme degli autovalori di C, se non è finito, ha 0 come unico punto di
accumulazione.
Vorremo provare che
σr(C) − 0 = ∅ .
Per ora però proviamo:
Corollario 6.75. Sia C compatto. L’insieme σr(C) è finito oppure ha 0 come unico
punto di accumulazione.
DIMOSTRAZIONE
Infatti, si sa dal teorema 6.42 che se λ ∈ σr(C) allora λ ∈ σp(C∗) e C∗ è compatto,
si veda il Teorema 6.54; e quindi l’unico punto che può essere di accumulazione per
σr(C) è il punto 0.
Per completare le dimostrazioni dei risultati relativi allo spettro di operatori compatti,
dobbiamo far intervenire le proiezioni spettrali introdotte al teorema 5.182.
Per i risultati già provati, si può trovare una successione di numeri positivi (rn), rn →0, tali che
λ : |λ| = rn ⊆ ρ(C) .
Infatti, 0 è l’unico punto di accumulazione sia di σp(C) che di σr(C); e si è già visto
che σc(C) ⊆ 0.
431

6. SPAZI DI HILBERT
Con un abuso di linguaggio comune nella teoria delle funzioni olomorfe, indichiamo
con Γn la “curva” costituita dalle due circonferenze di centro 0 e di raggio rispet-
tivamente rn, rn+1. Sia Ωn la corona circolare delimitata da Γn. Consideriamo
l’operatore
Pn =1
2πi
∫Γn
(zI − C)−1 dz .
Ricordiamo, dal teorema 5.182:
– I due s.spazio im Pn ed im (I − Pn) sono complementari;
– L’insieme σn = σ(C) ∩Ωn è lo spettro della restrizione di C ad im Pn (che è
un s.spazio invariante per C).
Proviamo ora:
Teorema 6.76. Sia C compatto. La proiezione Pn ha immagine di dimensione
finita e quindi ogni elemento non nullo di σ(C) è un autovettore il cui autospazio
generalizzato ha dimensione finita.
DIMOSTRAZIONE
Notiamo che la funzione 1/z è olomorfa in Ωn e quindi
Pn =1
2πi
ZΓn
(zI − C)−1 dz =1
2πi
ZΓn
(zI − C)−1 − 1
z
ffdz
=1
2πi
ZΓn
(zI − C)−1 C
zdz .
L’ultimo integrale si approssima nella topologia di L(X), mediante le somme di
Riemann
Pn =1
2πi
(Xr
(zrI − C)−1 zr − zr−1
zr
)C
(i punti zr sono quelli di una partizione del sostegno di Γ n). Per il Teorema 6.53,
ciascuno degli operatori Pn è compatto e quindi anche P lo è, si ricordi il teorema 6.51.
Dunque, la palla di im P è compatta e quindi, per il Teorema 5.182, im P ha dimensione
finita.
432

6. SPAZI DI HILBERT
Infine, per completezza, proviamo:
Lemma 6.77. Siano λ1,. . . , λk autovalori distinti di un operatore lineare A e sia xk
un autovettore di λk. Gli autovettori xk sono linearmente indipendenti.
DIMOSTRAZIONE
Ricordiamo che gli autovettori, per definizione, sono non nulli. Dunque, in particolare
x1 = 0 così che l’insieme x1 è linearmente indipendente e, se gli autovettori non
sono linearmente indipendenti, esiste un primo n 0 per cui
xn0+1 =
n0Xi=1
αixi .
Applicando l’operatore A ai due membri dell’uguaglianza si trova
λn0+1xn0+1 =
n0Xi=1
αiλixi .
Moltiplicando i due membri della prima uguaglianza per λ n0+1 e sottraendo la seconda,
si trova
n0Xi=1
[λn+1 − λi]αixi = 0 .
Ciò mostra che xn0+1 non è il primo degli autovettori linearmente dipendente dai
precedenti. Ciò contraddice la scelta di n 0 e prova l’asserto.
Osservazione 6.78. Si noti che l’asserto precedente vale per ogni operatore lineare
A, anche non compatto ed anche non continuo.
Il caso degli operatori compatti autoaggiunti
Premettiamo due osservazioni:
Lemma 6.79. Sia A ∈ L(K) e sia X un s.spazio invariante per A: sia cioè AX ⊆X . Allora, X⊥ è invariante per A∗.
433

6. SPAZI DI HILBERT
DIMOSTRAZIONE
Bisogna provare che A∗X⊥ ⊆ X⊥. Sia per questo h ∈ X⊥ e sia x ∈ X. Si ha:
〈x,A∗h〉 = 〈Ax,h〉 = 0 .
Ciò vale per ogni x ∈ X e quindi A∗h ∈ X⊥.
Lemma 6.80. Sia A ∈ L(K) e sia X0 invariante per A: AX0 ⊆ X0. Sia X =
cl X0. Il s.spazio chiuso X è invariante per A.
DIMOSTRAZIONE
Sia infatti x ∈ H ,
x = lim xn , xn ∈ X0 .
Vale:
Ax = lim Axn ∈ X
perché Axn ∈ X0 per ogni n e X = cl X0.
Gli operatori compatti autoaggiunti godono della proprietà seguente:
Teorema 6.81. Sia C ∈ L(H) un operatore compatto e autoaggiunto. Almeno uno
dei due numeri ||C|| oppure −||C|| appartiene a σ(C).
Proveremo in seguito questo teorema. Per ora illustriamone le conseguenze.
Una prima conseguenza è che il raggio spettrale di un operatore compatto autoaggiun-
to è uguale a ||C||. In generale invece il raggio spettrale di un generico operatore
lineare A è minore della sua norma: r(A) ≤ ||A|| . La disuguaglianza può essere
stretta, anche se l’operatore è compatto (non autoaggiunto) come prova l’esempio
della trasformazione da R2 in sé rappresentata, rispetto alla base canonica, dalla
matrice [0 1
0 0
].
In questo caso lo spettro è 0 mentre la norma dell’operatore è 1.
434

6. SPAZI DI HILBERT
Notiamo ora che ||C|| = 0 se e solo se C = 0 e in questo caso σp(C) = ∅. Se C = 0,
+||C|| , −||C|| ∩ σ(C) = +||C|| , −||C|| ∩ σp(C) .
Corollario 6.82. Se C ∈ L(H) è compatto autoaggiunto allora σp(C) = ∅.
Da ora in poi, assumiamo esplicitamente C = 0. Il corollario precedente mostra che
esistono autovalori non nulli dell’operatore C. Indichiamo con X 0 lo spazio lineare
generato dagli autovettori di C relativi ad autovalori non nulli. Questo è un s.spazio
di H invariante per C:
CX0 ⊆ X0 .
Sia X = cl X0 così che X stesso è invariante per C.
Lemma 6.83. Siano X0 ed X gli spazi appena definiti. E’: X = cl X0 = [kerC]⊥.
DIMOSTRAZIONE
Sia per assurdo X = [ker C]⊥ e quindi X⊥ = kerC. Essendo X invariante per C,
allora X⊥ è invariante per C ∗ ed essendo C = C∗, X⊥ è anch’esso invariante per C.
La restrizione di C ad X⊥ è essa stessa un operatore autoaggiunto e quindi ammette
un autovalore, per il Corollario 6.82 e se X⊥ = ker C allora l’autovalore è non nullo. Il
corrispondente autovettore è autovettore anche di C. Ciò contrasta con la definizione
di X che, per costruzione, contiene tutti gli autovettori di C relativi ad autovalori non
nulli. La contraddizione trovata prova il teorema.
Per costruzione, l’insieme degli autovettori (normalizzati) di C che corrispondono ad
autovalori non nulli genera X0 ed è quindi un sistema ortonormale massimale in X .
Mostriamo:
Teorema 6.84. Sia C compatto autoaggiunto. Si possono scegliere gli autovettori
di C, di autovalore non nullo, in modo da avere un sistema ortonormale massimale di
X = [kerC]⊥.
DIMOSTRAZIONE
Basta provare che gli autovettori si possono scegliere due a due ortogonali. Si è già
visto al Teorema 6.45 che l’ortogonalità è automatica per autovettori che corrispondono
435

6. SPAZI DI HILBERT
ad autovalori diversi. Sia ora λ0 = 0 un autovettore di molteplicità maggiore di 1 e sia
N0 il relativo autospazio. Essendo C compatto, la dimensione di N 0 è finita e quindi
N0 ammette una base ortonormale di autovettori.
Osservazione 6.85. Supponiamo che X = H , ossia che 0 ∈ σ p(C). Sia F
la famiglia ortonormale degli autovettori costruita sopra, e sia F0 una famiglia
linearmente indipendenti di autovettori tutti con autovalore 0. Si sa che F è una
famiglia numerabile mentre F0 potrebbe anche essere non numerabile.
In conclusione, ogni h ∈ H può rappresentarsi come
h = h0 ++∞∑i=1
〈h, ei〉ei
con
Cei = λiei , λi = 0 , Ch0 = 0 .
Dunque, per ogni h ∈ H si ha anche
Ch =+∞∑i=1
λi〈h, ei〉ei .
Questa è la forma diagonale cercata dell’operatore C.
Passiamo ora a provare il Teorema 6.81. La dimostrazione richiede diversi passi.
Proviamo prima di tutto due lemmi che valgono per operatori autoaggiunti, anche
non compatti.
Lemma 6.86. Siano x ed y in H e sia A ∈ L(H) un operatore autoaggiunto. Si ha:
4e 〈Ax, y〉 = 〈A(x + y), (x + y)〉 − 〈A(x − y), (x − y)〉 .
DIMOSTRAZIONE
Usando A = A∗, calcoliamo:
〈A(x + y), (x + y)〉 = 〈Ax,x〉 + 〈Ay, y〉 + 〈Ax, y〉 + 〈Ay,x〉
= 〈Ax,x〉 + 〈Ay, y〉 + 〈Ax, y〉 + 〈y,Ax〉
= 〈Ax,x〉 + 〈Ay, y〉 + 2e 〈Ax, y〉 . 6.28
436

6. SPAZI DI HILBERT
Analogamente si vede che
〈A(x− y), (x − y)〉 = 〈Ax,x〉 + 〈Ay, y〉 − 2e 〈Ax, y〉 . 6.29
L’asserto segue sottraendo la 6.29 da6.28.
Proviamo ora:
Lemma 6.87. Sia A un operatore lineare continuo ed autoaggiunto. Vale:
||A|| = sup |〈h, Ah〉| , ||h|| = 1 .
DIMOSTRAZIONE
Sia
α = sup |〈h, Ah〉| , ||h|| = 1 .
Per ogni operatore lineare A vale α ≤ ||A||. Si deve provare che se A è autoaggiunto,
allora la disuguaglianza non può essere stretta; ossia, si deve provare che se A è
autoaggiunto, allora
||A|| ≤ α .
Ricordiamo, come conseguenza del Teorema di Riesz e del Teorema 5.115 che
||A|| = sup 〈Ah, k〉 , ||h|| = 1 , ||k|| = 1 .
D’altra parte, per il Lemma 6.86 e per l’identità del parallelogramma, essendo ||h|| = 1,
||k|| = 1,
4e 〈Ah, k〉 ≤ |〈A(h + k), (h + k)〉| + |〈A(h − k), (h − k)〉|
≤ α˘||h + k||2 + ||h − k||2
¯= 2α
˘||h||2 + ||k||2
¯= 4α
ossia
e 〈Ah, k〉 ≤ α .
In generale, 〈Ah, k〉 è un numero complesso,
〈Ah, k〉 = eiθ |〈Ah, k〉| .
Sostituendo h con z = e−iθh si trova
|〈Ah, k〉| ≤ α .
Questo calcolo può venir ripetuto per ogni h, k di norma 1, come volevamo provare.
437

6. SPAZI DI HILBERT
Osservazione 6.88. Come si è detto, per ogni operatore lineare A vale
||A|| = sup〈Ah, k〉 . 6.30
L’estremo superiore si calcola al variare di h e di k in modo indipendente nella palla
di raggio 1. Se A è autoaggiunto vale di più:
||A|| = sup||h||=1
|〈Ah, h〉| .
Si noti la presenza del modulo in quest’ultima uguaglianza.
E’ indifferente mettere o meno il modulo nella 6.30.
Torniamo ora a considerare un operatore compatto autoaggiunto C e proviamo il
Teorema 6.81.
Come si è notato, si può assumere C = 0.
Sappiamo già che lo spettro dell’operatore C è reale, perché C è autoaggiunto; e
quindi
σ(C) ⊆ [−||C||, ||C|| ] .
Bisogna provare che uno almeno degli estremi di quest’intervallo appartiene allo
spettro.
Si è provato nel Lemma 6.87 che
||C|| = sup |〈h, Ch〉| , ||h|| = 1 .
Esiste quindi una successione (hn), con ||hn|| = 1, tale che
lim〈Chn, hn〉 = α dove α = ||C|| oppure α = −||C||.
Si noti che α = 0 perché si suppone C = 0.
Proviamo prima di tutto che
lim[Chn − αhn] = 0 . 6.31
Calcoliamo per questo
||Chn − αhn||2 = ||Chn||2 − 2α〈Chn, hn〉 + α2 .
In questo calcolo si sono utilizzate le ipotesi che C è autoaggiunto, che α è reale e che
||hn|| = 1.
438

6. SPAZI DI HILBERT
Si sa che lim〈Chn, hn〉 = α così che
lim[−2α〈Chn, hn〉 + α2
]= −α2 .
Consideriamo ora la successione (||Chn||2). Vale
||Chn||2 ≤ α2 ,
e quindi
0 ≤ lim sup ||Chn − αhn||2 = lim sup||Chn||2 − 2α〈Chn, kn〉 + α2
≤ 0 .
Ciò prova 6.31.
La dimostrazione del Teorema 6.81 si completa come segue: essendo C compatto ed
(hn) limitata, esiste una s.successione (Chnr ) di (Chn), convergente in norma,
limChnr = k . 6.32
Usiamo ora il fatto che α = 0 e notiamo che
hnr =1αChnr − [Chnr − αhnr ] .
Si è visto che il termine in parentesi quadra tende a zero, mentre (Chnr ) tende a k.
Dunque,
limhnr =1α
k e quindi limChnr = C
[1α
k
].
Di conseguenza, da 6.32,
C
[1α
k
]= k ossia Ck = αk .
Ciò prova che α è un’autovalore di C. Ricordando che α è ||C|| oppure −||C||, si
vede che l’asserto è provato.
439


7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
7.1. LA TRASFORMATA DI FOURIER DI FUNZIONI
Sia f(x) una funzione definita su R, a valori reali o complessi. La sua trasformata di
Fourier è la funzione della variabile reale ω
f(ω) =∫ +∞
−∞e−iωtf(t) dt . 7.1
Noi ci limiteremo a studiare la trasformata di Fourier di funzioni definite su R; è però
importante sapere che se f(x) è definita su Rn allora la sua trasformata di Fourier è
f(ξ) =∫
Rn
e−iξ·xf(x) dx , ξ ∈ Rn .
Talvolta indicheremo la trasformata di Fourier di f col simbolo F(f).
Si noti che f denota sia la trasformata di Fourier che la trasformata di Laplace di f . Il
contesto chiarisce il significato del simbolo; si noti però che se f(x) = 0 per x < 0 e
se la sua trasformata di Laplace esiste per e λ > −ε, ε > 0, allora vale
L(f)(iω) =∫ +∞
0
e−iωtf(t) dt =∫ +∞
−∞e−iωtf(t) dt = F(f)(ω) .
Però, in generale, la trasformata di Fourier non ammette estensione al piano
complesso.
441

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Prima di studiare la trasformata di Fourier, è necessario dire per quale classe di
funzioni essa è definita. E’ immediato notare che la definizione di trasformata di
Fourier ha senso se f è integrabile (nel senso di Lebesgue) su R e anzi per ogni ω vale
|f(ω)| ≤ ||f ||L1(R) .
Dunque, la trasformazione
f → f(ω)
è continua da L1(R) in C, per ogni ω fissato. Vale anche di più:
Teorema 7.1. Sia (fn) una successione in L1(R ), convergente a f0 nella norma di
L1(R). Allora,
lim fn(ω) = f0(ω) ,
uniformemente su R.
L’immediata dimostrazione si omette.
In realtà lo spazio L1(R) è troppo piccolo per la maggior parte delle applicazioni
nelle quali la trasformata di Fourier interviene. Però, come primo passo, limitiamoci
a studiare le proprietà della trasformata di Fourier di funzioni integrabili.
Vale:
Teorema 7.2. Se f ∈ L1(R) allora la sua trasformata di Fourier è uniformemente
continua su R.
DIMOSTRAZIONE
E’:
f(ω) − f(ω′) =
Z +∞
−∞[eiω − eiω′
]f(t) dt .
Si impone prima di tutto la condizione |ω − ω ′| < 1. Si fissa quindi ε > 0 e Tε tale cheZ|t|>Tε
|f(t)| dt < ε/4 .
442

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Allora,
|f(ω) − f(ω′)| =
˛˛Z −Tε
−∞[eiωt − eiω′t]f(t) dt
˛˛
+
˛˛Z Tε
−Tε
[eiωt − eiω′t]f(t) dt
˛˛+˛˛Z +∞
−Tε
[eiωt − eiω′t]f(t) dt
˛˛
≤ ε
2+
Z Tε
−Tε
|e−iωt − e−iω′t| |f(t)| dt
≤ ε
2+ max
t∈[−Tε,Tε]|e−iωt − e−iω′t|
Z +∞
−∞|f(t)| dt .
La funzione s → es è uniformemente continua sui compatti e quindi esiste σ = σ ε > 0
tale che se
|ωt − ω′t| ≤ |ω − ω′|Tε < σε , ossia se |ω − ω′| < σε/Tε ,
allora
|eiωt − eiω′t| <ε
[2R +∞−∞ |f(t)| dt]
.
Dunque, per |ω − ω ′| < σε/Tε vale
|f(ω) − f(ω′)| < ε .
7.2. LE PROPRIETÀ DELLA TRASFORMATA DI FOURIER
La trasformata di Fourier è ovviamente lineare,
F(αf + βg) = αf + βg
e inoltre valgono le proprietà seguenti, di immediata dimostrazione:
se g(t) = f(t − h) allora g(ω) = e−iωhf(ω) ,
se a = 0 e g(t) = f(at) allora g(ω) =1|a| f(
ω
a) ,
Si confrontino con le corrispondenti proprietà della trasformata di Laplace.
Ricordiamo ora, dal paragrafo 4.11.1 che se f e g sono integrabili su R allora la
convoluzione
443

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
h = f ∗ g =∫ +∞
−∞f(t − s)g(s) ds
esiste in L1(R) (non è detto che debba esistere puntualmente). Vale inoltre
||h||L1(R) ≤ ||f ||L1(R)||g||L1(R) .
Dunque, h esiste e, per il teorema di Fubini,
h(ω) =∫ +∞
−∞e−iωt
∫ +∞
−∞f(t − s)g(s) ds dt =
∫ +∞
−∞
∫ +∞
−∞e−iωtf(t − s) dt g(s) ds
=∫ +∞
−∞
∫ +∞
−∞e−iω(s+r)f(r) dr g(s) ds = f(ω)g(ω) .
Osservazione 7.3. La formula precedente è importantissima per le applicazioni.
Si osservi che la sua dimostrazione dipende dal fatto che la misura di Lebesgue è
invariante per traslazioni e dal fatto che t → et è un omomorfismo del gruppo
additivo R nel gruppo moltiplicativo dei reali positivi.
7.2.1 Il teorema di Riemann-Lebesgue
Vogliamo ora studiare
lim|ω|→+∞
f(ω)
quando f è integrabile. Consideriamo prima di tutto gli operatori di traslazione su
L1(R). Se τ è fissato, con Sτ indichiamo l’operatore da L1(R) in sé definito da
(Sτf)(t) = f(t − τ)
Ovviamente:
Teorema 7.4. Sia τ fissato. L’operatore Sτ da L1(R ) in sé è lineare e continuo.
Studiando invece la dipendenza di Sτ da τ si trova che vale il teorema seguente, di
difficile dimostrazione:
444

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
f(t)=e(−5t2)
f(t)=e−5(t+.2)2
f(t)=e−5(t−.2)2
Fig. 7.1.
Teorema 7.5 (di Lebesgue). Si fissi f ∈ L1(R ) e si consideri la funzione τ → Sτf
da R in L1(R ). Questa funzione è continua.
Usando il teorema 7.5 si prova:
Teorema 7.6 (di Riemann– Lebesgue). Sia f ∈ L1(R ). Vale:
lim|ω|→+∞
f(ω) = 0 .
DIMOSTRAZIONE
Per definizione,
f(ω) =
Z +∞
−∞e−iωtf(t) . 7.2
Si faccia la sostituzione t = τ + πω
e si noti che
e−iω(τ+π/ω) = e−iωτe−iπ = −e−iωτ .
Si trova:
f(ω) = −Z +∞
−∞f(τ + π/ω)e−iωτ dτ . 7.3
445

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Sommando 7.3 e 7.2 si trova
f(ω) =1
2
Z +∞
−∞[f(τ ) − f(τ + π/ω)]e−iωτ dτ
così che
|f(ω)| ≤ 1
2
Z +∞
−∞|f(τ ) − f(τ + π/ω)| dτ .
Essendo f ∈ L1(R), il membro destro tende a zero per |ω| → +∞, dal teorema 7.5.
Osserviamo ora:
Teorema 7.7. Sia f una funzione derivabile su R e siano integrabili sia f che la sua
derivata f ′. Allora vale:
(Ff ′) (ω) = iωf(ω) .
DIMOSTRAZIONE
L’uguaglianza
f(T ) = f(0) +
Z T
0
f ′(s) ds
e l’integrabilità di f e di f ′ mostrano
lim|T |→+∞
f(T ) = 0 .
Scriviamo oraZ +T
−T
e−iωtf ′(t) dt = e−iωT f(T ) − eiωT f(−T ) + iω
Z +T
−T
e−iωtf(t) dt .
L’asserto segue passando al limite per |T | → +∞.
Nelle ipotesi del teorema 7.7, applicando il teorema di Riemann–Lebesgue ad f ′, si
trova
lim|ω|→+∞
ωf(ω) = 0
446

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
e in generale se esistono e sono integrabili f , f ′, . . . f (k), allora
lim|ω|→+∞
ωkf(ω) = 0 : 7.4
la regolarità di f si riflette sul comportamento asintotico di f . D’altra parte:
Teorema 7.8. Se f(t) e tf(t) sono ambedue integrabili, allora f(ω) è derivabile,
con derivata
ddω
f(ω) =∫ +∞
−∞e−iωt[−itf(t)] dt .
DIMOSTRAZIONE
L’integrabilità di tf(t) permette di giustificare lo scambio della derivata rispetto ad ω
con l’integrale.
Analogamente si vede che se f è continua e tkf(t) è integrabile allora f(ω) è k volte
derivabile. Dunque, il comportamento asintotico di f(t) si riflette sulla regolarità
di f(ω).
E’ importante ricordare queste proprietà, che sono la chiave per l’estensione della
definizione della trasformata di Fourier.
7.3. L’ANTITRASFORMATA DI FOURIER
Vogliamo ora capire sotto quali condizioni la conoscenza di f permette di ricostruire
f . Consideriamo prima di tutto il caso particolare
h(t) = e−|t| .
In questo caso, h si calcola facilmente usando la definizione della trasformata di
Fourier,
h(ω) =2
1 + ω2
e quindi h è integrabile.
447

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Si noti che, se t > 0,∫ +∞
−∞eiωt 2
1 + ω2dω = 2πiRes
[eizt 2
1 + z2, i
]= 2πe−t
mentre se t < 0 si ha∫ +∞
−∞eiωt 2
1 + ω2dω = 2πiRes
[eizt 2
1 + z2,−i
]= 2πet .
Dunque, in quest’esempio particolare, nota h, la funzione h si ritrova calcolando
12π
∫ +∞
−∞eiωth(ω) dω .
Questa relazione tra h ed h vale molto più in generale; ma non può valere per
la generica funzione integrabile perché generalmente la sua trasformata non è
integrabile.
Esempio 7.9. La funzione caratteristica dell’intervallo [−T, T ],
χ[−T,T ](t) =
1 se t ∈ [−T, T ]
0 altrimenti
è integrabile. La sua trasformata di Fourier si calcola immediatamente ed è
f(ω) = 2sinωT
ω.
Questa funzione non è integrabile secondo Lebesgue, perché si sa che non è
assolutamente integrabile.
Limitiamoci dunque a provare un teorema, sotto ipotesi assai più restrittive del
necessario, ma sufficiente per il seguito.
Notiamo prima di tutto che
12π
∫ +∞
−∞
21 + ω2
dω = 1
e quindi, come si è visto al paragrafo 5.5., da essa si può costruire l’identità
approssimata (hν),
448

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
hν(ω) =1ν
[12π
21 + (ω/ν)2
].
Vale quindi
f(t) = limν→0
12π
∫ +∞
−∞f(t − s)
1ν
21 + (s/ν)2
ds . 7.5
Inoltre, ciascuna delle funzioni hν è una trasformata di Fourier,
hν(ω) = F(e−|νt|) . 7.6
Fatte queste premesse, possiamo provare:
Teorema 7.10. Sia f ∈ C 2(R) e siano f , f ′, f ′′ in L1(R). Allora vale
f(t) =12π
∫ +∞
−∞e+iωtf(ω) dω . 7.7
DIMOSTRAZIONE
Si è già notato che, nelle ipotesi del teorema,
lim|ω|→+∞
ω2f(ω) = 0
(si veda 7.4) e quindi la funzione continua f è integrabile su R. Ciò mostra che
l’integrale in 7.7 ha senso. Inoltre, l’integrabilità di f ′ mostra che f è limitata.
Consideriamo l’uguaglianza 7.5. Usando 7.6, questa si scrive
f(t) =1
2πlim
ν→0+
Z +∞
−∞f(t − s)
»Z +∞
−∞e−isre−ν|r| dr
–ds .
La funzione (s, t) → f(t − s)e−isre−ν|r| è integrabile su R2 e quindi si può usare il
teorema di Fubini per scambiare l’ordine di integrazione ottenendo
f(t) = limν→0
Z +∞
−∞
»1
2π
Z +∞
−∞f(t − s)e−isr ds
–e−ν|r| dr
= limν→0+
1
2π
Z +∞
−∞
»Z +∞
−∞f(ξ)e−i(t−ξ)r dξ
–e−ν|r| dr
=1
2π
Z +∞
−∞e−itrf(−r) dr =
1
2π
Z +∞
−∞eitω f(ω) dω .
Lo scambio del segno di limite col segno di integrale è lecito perch鲲»Z +∞
−∞f(ξ)e−iξr dξ
–e−ite−ν|t|
˛˛ ≤ |f(t)|
449

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
e, nelle ipotesi del teorema, f è integrabile.
Ciò completa la dimostrazione.
La formula 7.7 si chiama la formula dell’antitrasformata di Fourier. Ripetiamo che
essa vale sotto condizioni assai più generali di quelle assunte nel teorema 7.10. Per
esempio, si è visto che essa vale per la funzione e−|t| che non è derivabile su R. Però
l’enunciato del teorema 7.10 è sufficiente per il seguito.
Osservazione 7.11. Sia
f(x) = e−x2/2 . 7.8
Si può provare che la sua trasformata di Fourier è
f(ω) =√
2πe−ω2/2 ,
una funzione integrabile su R e non negativa. Si ricordi infatti l’integrale di Laplace,∫ +∞
−∞e−x2/2 dx =
√π .
Si scriva quindi∫ +∞
−∞e−x2/2e−iωx dx = e−ω2/2
√2∫ +∞
−∞e−[(x/
√2)+i(ω/
√2)]2 d[(x/
√2) + i(ω/
√2)]
= e−ω2/2√
2∫ +∞
−∞e−s2
ds =√
2πe−ω2/2 .
Si vede immediatamente che (hν),
hν(x) =1ν
e−(x/ν)2/2
è un’identità approssimata, la cui antitraformata di Fourier è
e−(xν)2/2 .
Il teorema 7.10 si può provare anche usando quest’identità approssimata.
Si noti che l’identità approssimata costruita a partire da 7.8 è quella che permette di
provare il Teorema di Weierstrass, Teorema 5.43.
450

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
7.4. LA TRASFORMATA DI FOURIER SU L2(R )
Abbiamo detto che intendiamo estendere la trasformata di Fourier ad un insieme assai
più grande di L1(R). Come primo passo, estendiamola ad L2(R). Notiamo però che
anche L1(R)∪L2(R) è ancora troppo piccolo per le applicazioni nelle quali interviene
la trasformata di Fourier.
Si indica col simbolo D l’insieme delle funzioni di classe C∞ a supporto compatto
in R. Una proprietà che non abbiamo provato, ma che non è difficile mostrare, è che
D è denso sia in L1(R) che in L2(R). Inoltre, ogni f ∈ D verifica le condizioni del
teorema 7.10 e quindi per essa vale la formula dell’antitrasformata.
Introduciamo la trasformazione lineare F su D, definita da
Ff = f .
Consideriamo questa come trasformazione su L2(R), con dominioD denso in L2(R).
Si è già notato che il teorema di Riemann–Lebesgue implica che, se f ∈ D,
limω→+∞ω2f(ω) = 0
e quindi che f ∈ L2(R). Dunque, F è una trasformazione da L2(R) in sé, con
dominio denso.
Siano ora f e g elementi di D. Vale:
∫ +∞
−∞f(x)g(x) dx =
12π
∫ +∞
−∞f(x)
∫ +∞
−∞e+iωxg(ω) dω dx
=12π
∫ +∞
−∞
[∫ +∞
−∞f(x)eiωx dx
]g(ω) dω =
12π
∫ +∞
−∞f(−ω)g(ω) dω .
Notando che ∫ +∞
−∞f(x)eiωx dx =
∫ +∞
−∞f(x)e−iωx dx = F(f)(ω) ,
l’uguaglianza precedente conduce a:
451

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Teorema 7.12. Se f , g appartengono a D allora vale∫ +∞
−∞f(x)g(x) dx =
12π
∫ +∞
−∞F(f)(ω)g(ω) dω .
In particolare, ∫ +∞
−∞f(x)g(x) dx =
12π
∫ +∞
−∞f(ω)g(ω) dω . 7.9
Ponendo f = g in 7.12 si trova l’identità di Parseval
||f ||L2 =1√2π
||f ||L2 .
Ciò mostra che
Teorema 7.13. La trasformazione F , definita su D, da L2(R) in sé è continua, con
norma 1/√
2π, e quindi ammette estensione unica ad L2(R).
Un calcolo analogo a quello visto sopra mostra che vale anche l’uguaglianza∫ +∞
−∞f(s)g(s) ds =
∫ +∞
−∞f(s)g(s) ds 7.10
che va sotto il nome di identità di Plancherel. Introducendo il simbolo 〈〈·, ·〉〉,
〈〈x, y〉〉 7.11
per indicare
〈〈x, y〉〉 =∫ +∞
−∞x(t)y(t) dt = 〈x, y〉 ,
la 7.10 si scrive
〈〈f , g〉〉 = 〈〈f, g〉〉 . 7.12
Osservazione 7.14. Si noti che il funzionale 〈〈x, y〉〉 è lineare sia in x, tenendo y
costante, che in y, tenendo x costante.
Indichiamo momentaneamente con F l’estensione di F ad L2(R) (è ovvio che in
pratica si userà il medesimo simbolo per le due trasformazioni). Per la trasformazione
F continuano a valere le identità di Parseval e di Plancherel.
452

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Osservazione 7.15. Si noti che la trasformata di Fourier F è definita su L2(R)
come estensione per continuità. In generale, l’integrale 7.1 non converge se la
funzione è a quadrato integrabile.
Tutti gli argomenti precedenti possono ripetersi per la trasformazione G da D ⊆
L2(R) in L2(R),
(Gφ)(t) =12π
∫ +∞
−∞e+iωtφ(ω) dω .
Anche G si estende per continuità ad L2(R). Provvisoriamente, indichiamo con G tale
estensione. Per essa vale
F G = GF = I ,
ossia:
Teorema 7.16. La trasformazione di Fourier è biunivoca su L2(R).
Si noti che una proprietà analoga non vale su L1(R).
Ricapitolando, abbiamo esteso la trasformata e l’antitrasformata di Fourier ad L 2(R)
per continuità. Si sa, dal teorema 6.32 che l’estensione per continuità può anche
costruirsi calcolando aggiunti:
F = [F∗]∗ , G = [G∗]∗ ;
ossia, Ff è definita da
〈Ff, φ〉 = 〈f,F∗φ〉 ∀φ ∈ D . 7.13
Ciò suggerisce di interpretare
f = Ff
come il funzionale su L2(R) definito da
φ → 〈f,F∗φ〉 ∀φ ∈ D . 7.14
453

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Osservazione 7.17. Si noti che φ ∈ D se e solo se φ ∈ D. Il segno di coniugio è
stato introdotto soltanto per avere una trasformazione lineare in 7.14.
Questa è una diversa interpretazione della trasformata di Fourier, equivalente a
quella ottenuta estendendo per continuità. Suggerisce però un modo per estendere la
trasformata di Fourier ad uno spazio molto grande: prima si identifica uno spazio con
una topologia molto debole, su cui la trasformata di Fourier è continua e biunivoca. Si
usa quindi un metodo “di dualità” per estenderla al duale dello spazio. L’idea intuitiva
è che se lo spazio ha una topologia “molto debole” il suo duale sarà “grande”.
Notiamo che
F∗φ =∫ +∞
−∞e+iωtφ(ω) dω .
Dunque, con la notazione 7.12, la 7.13 si scrive
〈〈Ff, φ〉〉 = 〈〈f,Fφ〉〉 ∀φ ∈ D .
Converrà quindi usare, come punto di partenza per l’estensione della trasformata di
Fourier, la formula di Plancherel 7.12. Va notato subito però che lo spazio D è troppo
piccolo. In particolare, la trasformata di Fourier di una φ ∈ D non appartiene a D.
La definizione di questo spazio è stata introdotta soltanto perché esso è importante
in numerose applicazioni e la definizione va conosciuta. Vedremo però al paragrafo
successivo lo spazio S, più grande di D, ancora denso sia in L 1(R) che in L2(R) e
su cui la trasformata di Fourier è invertibile. Gli argomenti appena presentati valgono
anche sostituendo ovunque D con S.
Concludiamo questa parte esaminando l’esempio seguente:
Esempio 7.18. Applichiamo l’identità di Parseval alla funzione χ [−1,1], studiata
all’esempio 7.9. La sua trasformata di Fourier
2sin ω
ω
454

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
è in L2(R), come si verifica immediatamente, e come deve essere perché χ [−1,1] è a
quadrato integrabile. Dunque,
∫ +∞
−∞
[2sinω
ω
]2dω = 2π
∫ +∞
−∞[χ[−1,1](x)]2 dx = 4π .
Si trova quindi
∫ +∞
−∞
[sin ω
ω
]2dω = π .
7.5. LO SPAZIO S E IL SUO DUALE
L’idea per la scelta dello spazio S su cui definire la trasformata di Fourier è fornita
dal teorema di Riemann-Lebesgue, e dalle sue conseguenze: la regolarità di f si
trasferisce nel comportamento asintotico di f ; il comportamento asintotico di f si
trasferisce nella regolarità di f , e viceversa. Ciò suggerisce di introdurre lo spazio S
i cui elementi sono le funzioni φ ∈ C∞(R) tali che:
lim|x|→+∞
xkφ(n)(x) = 0 ∀k , n . 7.15
E’ chiaro che S è un sottoinsieme sia di L1(R) che di L2(R) e che per gli elementi di
S valgono sia la formula della trasformata che dell’antitrasformata di Fourier:
φ(ω) =∫ +∞
−∞e−iωtφ(t) dt , φ(t) =
12π
∫ +∞
−∞eiωtφ(ω) dω .
Vogliamo mimare su S la costruzione della trasformata ottenuta per dualità su
L2(R). Per questo è necessario munire S di una topologia la quale tenga conto della
proprietà 7.15. E’ un fatto che ciò non può farsi introducendo una norma in S. D’altra
parte, la definizione della topologia porterebbe via troppo tempo. Dunque limitiamoci
a introdurre un concetto di convergenza di successioni in S.
Per definizione,
limφn(x) = 0
455

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
quando per ogni k intero non negativo e per ogni r intero non negativo si ha
limn
xkφ(r)n (x) = 0
uniformemente su R.
Esplicitamente questo vuol dire che per ogni ε > 0 esiste N = N(ε, k, r) tale che se
n > N(ε, k, r) allora
|xkφ(r)n (x)| < ε .
Si è scritta esplicitamente questa condizione per sottolineare che la convergenza
NON è uniforme in k ed r.
Definiamo inoltre:
lim φn = φ0 ⇐⇒ lim[φn − φ0] = 0 .
Lo spazio lineare S, dotato della definizione di convergenza appena introdotta, si
chiama lo spazio delle funzioni rapidamente decrescenti su R.
Sia ora A un funzionale su S oppure una trasformazione da S in sé. Diremo che A è
continuo quando
lim φn = φ0 =⇒ limAφn = Aφ0 .
Si prova immediatamente:
Teorema 7.19. L’operazione di derivazione:
φ → Dφ
è continua da S in sé.
Con S ′ indichiamo lo spazio lineare dei funzionali lineari e continui su S, dotato della
relazione di convergenza seguente
lim ln = l0 ⇐⇒ lim ln(φ) = l0(φ) ∀φ ∈ S .
456

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Si confronti questa definizione di convergenza con la convergenza debole stella.
Gli elementi di S ′ si chiamano distribuzioni temperate.
Come al solito, per indicare l’azione di l ∈ S ′ su φ ∈ S, invece di scrivere l(φ)
scriveremo
〈〈l, φ〉〉 .
Mostriamo alcuni esempi di trasformazioni continue da S in sé.
Esempio 7.20. le trasformazioni
φ → φ + ψ , φ → αφ
(con ψ fissata) sono continue e la seconda è anche lineare.
Più ancora, sia p un polinomio. La trasformazione lineare
φ(x) → p(x)φ(x)
è continua.
Sono anche continue le trasformazioni seguenti:
φ(x) → φ(rx) , r ∈ R
φ(x) → φ(k)(x) .
Per ogni ω fissato, la trasformazione
φ(x) → eiωxφ(x)
è continua. In generale, se f ∈ C∞(R) e se f e tutte le sue derivate sono limitate, la
trasformazione lineare
φ(x) → f(x)φ(x)
è continua. Per esempio, sono anche continue le trasformazioni
φ → e−x2φ(x) , φ → φ(x) sin x .
457

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Mostriamo ora alcuni esempi di distribuzioni temperate.
Esempio 7.21. Sia l tale che
〈〈l, φ〉〉 = φ(0) .
E’ immediato verificare che l è lineare e continuo, ossia che l ∈ S ′.
Questa distribuzione è particolarmente importante per le applicazioni ed ha un
simbolo standard: si indica col simbolo δ,
〈〈δ, φ〉〉 = φ(0)
e si chiama delta di Dirac.
E ancora immediato verificare la continuità di
φ →ν∑
k=0
akφ(k)(xk) .
In seguito chiariremo le relazioni tra le due distribuzioni temperate introdotte
nell’esempio precedente.
Consideriamo ora:
Esempio 7.22. Sia f ∈ Lp(R), 1 ≤ p ≤ +∞. E’ una distribuzione temperata
quella definita da
φ →∫ +∞
−∞f(s)φ(s) ds .
Questo si verifica immediatamente usando il teorema della convergenza dominata, se
p = 1. Se p > 1 si usa la disuguaglianza di H’older per notare che
1x2 + 1
f(x) ∈ L1(R) .
Si scrive quindi∫ +∞
−∞f(s)φ(s) ds =
∫ +∞
−∞
f(x)1 + x2
[(1 + x2)φ(x)
]dx .
458

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Sappiamo già che la trasformazione che a φ associa (1+x2)φ(x) è continua. E quindi
la trasformazione che stiamo studiando è continua, essendo composizione delle due
trasformazioni lineari e continue
φ → (1 + x2)φ(x) , ψ →∫ +∞
−∞
f(x)1 + x2
ψ(x) dx .
Le particolari distribuzioni introdotte nell’esempio 7.22 si chiamano distribuzioni
regolari. Esse si indicano con un simbolo del tipo lf o più spesso semplicemente
f o∫
fφ. In analogia con questo simbolo, specialmente nei testi più applicativi, una
distribuzione si indica col simbolo ∫lφ
attribuendo al simbolo “∫
” il significato del simbolo “〈〈·, ·〉〉”.
In pratica, non si distingue tra le funzioni e le distribuzioni regolari ad esse associate.
Esempio 7.23. Sia (hn) un’identità approssimata. Per ogni φ ∈ S si ha
limn
∫ +∞
−∞hn(t − s)φ(s) ds = φ(t) ,
si veda il paragrafo 5.5.. Ciò vale in particolare per t = 0 e quindi
limn
∫ +∞
−∞hn(−s)φ(s) ds = φ(0) , φ ∈ S .
Dunque, la successione di distribuzioni regolari definite da
φ →∫ +∞
−∞hn(−s)φ(s) ds
converge in S ′ alla δ di Dirac. Si dice più brevemente che “le identità approssimate
approssimano la δ di Dirac”.
7.6. LA TRASFORMATA DI FOURIER SU S ′
Si è già detto che su S la trasformata di Fourier è definita dall’integrale 7.1 e che su S
vale la formula dell’antitrasformata. Proviamo ora:
459

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Teorema 7.24. La trasformazione di Fourier F trasforma S in sé, è continua e
biunivoca.
DIMOSTRAZIONE
Si è già notato che F trasforma S in sé.
La linearità è ovvia. Proviamo la continuità. Sia (ψ n) una qualsiasi successione ten-
dente a zero. Basta provare che la successione (Fψn) tende a zero. Fissiamo per
questo k ed r e consideriamo
ωk dr
dωr
Z +∞
−∞e−iωxψn(x) dx = ωk
Z +∞
−∞(−1)re−iωx[xrψn(x)] dx
=
Z +∞
−∞(−1)r(i)k
»dk
dxke−iωx
–[xrψn(x)] dx .
Integriamo per parti tenendo conto che
lim|x|→+∞
[xrψn(x)] = 0 .
Si trova: Z +∞
−∞(−1)r+k(i)ke−iωx
»dk
dxkxrψn(x)
–dx
= (−1)r+k(i)k
Z +∞
−∞
e−iωx
1 + x2
»(1 + x2)
dk
dxkxrψn(x)
–dx
Sia ora ε > 0. Esiste N(ε, k, r) tale che
n > N(ε, k, r) =⇒˛˛(1 + x2)
dk
dxkxrψn(x)
˛˛ < ε
così che, per tali indici n si ha anche˛˛ωk dr
dωr
Z +∞
−∞e−iωxψn(x) dx
˛˛ ≤ πε .
Questo prova la continuità di F .
La trasformazione F è suriettiva perché ammette l’inversa.
Possiamo ora estendere la trasformata di Fourier ad S ′.
460

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Si ricordi che se f ∈ L2(R) la sua trasformata di Fourier può definirsi usando la
formula 7.13 e che questa può interpretrarsi dicendo che f è quel funzionale lineare e
continuo che a φ associa 〈〈f, φ〉〉.
Traendo ispirazione da questa definizione, definiamo la trasformata di Fourier di
distribuzioni temperate come segue: Sia l ∈ S ′. La sua trasformata di Fourier l è
il funzionale lineare
φ → 〈〈l, φ〉〉 .
E’ immediato verificare1 che l ∈ S′, e quindi che l’uguaglianza
〈〈l, φ〉〉 = 〈〈l, φ〉〉
è ora le definizione stessa della trasformata di Fourier.
Così come si estende ad S ′ la trasformazione F , si estende anche l’antitrasformata G:
G : 〈〈Gl, φ〉〉 = 〈〈l,Gφ〉〉
e la relazione
〈F [Gl] , φ〉〉 = 〈〈l,G [F ] φ〉〉 = 〈〈l, φ〉〉
mostra che l’estensione di G è inversa destra di F . Procedendo in modo analogo si
vede che è anche inversa sinistra, e quindi che è l’antitrasformata di Fourier.
La trasformata di Fourier di l si indica l.
Ricapitolando:
Teorema 7.25. La trasformazione di Fourier è continua e biunivoca da S ′ in sé.
DIMOSTRAZIONE
La continuità è ovvia: sia
lim ln = l0
1Si veda la dimostrazione del Teorema 7.25.
461

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
ossia
lim〈〈ln, φ〉〉 = 〈〈l0, φ〉〉 ∀φ ∈ S .
Ogni φ è in S e quindi la precedente si scrive, scegliendo per φ la φ:
lim〈〈ln, φ〉〉 = 〈〈l0, φ〉〉 ossia lim〈〈ln, φ〉〉 = 〈l0, φ〉〉 .
Ciò vuol dire
lim ln = l0 .
La biunivocità della trasformata si ottiene perché, come si è già notato, anche
l’antitrasformata si estende per dualità ad S ′.
Conviene ora vedere il calcolo di alcune trasformate.
Esempio 7.26. Sia f ∈ L1(R) ed lf la distribuzione regolare
〈〈lf , φ〉〉 =∫ +∞
−∞f(x)φ(x) dx .
La trasformata di Fourier di lf è la distribuzione
φ → 〈〈lf , φ〉〉 =∫ +∞
−∞f(ω)
∫ +∞
−∞e−iωxφ(x) dx dω
=∫ +∞
−∞
[∫ +∞
−∞e−iωxf(ω) dω
]φ(x) dx = 〈〈lf , φ〉〉 :
la trasformata di Fourier della distribuzione regolare identificata dalla funzione f è
la distribuzione regolare identificata dalla funzione f .
In particolare,
Esempio 7.27. Sia
f(t) =
1 se |t| < T
0 se |t| > T .
Allora, come si è visto all’esempio 7.9,
462

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
f(ω) =sin ωT
ω.
La funzione f non appartiene ad L1(R); è però limitata e quindi identifica una
distribuzione regolare lf .
Ad f come funzione la formula dell’antitrasformata che abbiamo provato al
paragrafo 7.3. non può applicarsi. Invece, ad essa può applicarsi la formula
dell’antitrasformata nel senso che abbiamo introdotto in S ′.
Esempio 7.28. Consideriamo ora la funzione f(t) = e iαt, che non è né integrabile
né a quadrato integrabile, e quindi non ha trasformata di Fourier nel senso che
abbiamo introdotto per le funzioni. Nel senso delle distribuzioni, la sua trasformata
di Fourier è
φ → 〈〈lf , φ〉〉 =∫ +∞
−∞eiαxφ(x) dx = 2πφ(α) .
Indicando con δα la distribuzione
〈〈δα, φ〉〉 = φ(α) ,
si vede che
F(eiαx) = 2πδα .
Usando le formule di Eulero,
F(sin αx) = −iπδα − δ−α , F(cosαx) = πδα + δ−α .
Quest’esempio mostra che la trasformata di una distribuzione regolare può non essere
una distribuzione regolare.
Veniamo ora al calcolo della trasformata di Fourier di distribuzioni che non sono
regolari.
Esempio 7.29. La trasformata δ della delta di Dirac è la distribuzione
φ → 〈〈δ, φ〉〉 = φ(0) =∫ +∞
−∞φ(s) ds .
463

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
E’ quindi la distribuzione regolare identificata dalla funzione identicamente 1.
Diremo, più semplicemente, che è la funzione 1:
δ = 1 ;
Viceversa, sia f(x) ≡ 1. Dalla formula dell’antitrasformata si vede immediatamente
che la sua trasformata è la distribuzione 2πδ.
Indichiamo provvisoriamente con λ la distribuzione
φ → 〈〈λ, φ〉〉 = φ′(0)
(vedremo più avanti un simboli “migliore” per identificare questa distribuzione). La
sua trasformata di Fourier è
φ → 〈〈λ, φ〉〉 = φ′(0) =∫ +∞
−∞ixφ(x) dx :
la sua trasformata è ix. Si noti:
F(λ) = ixF(δ) .
Quest’esempio mostra che la trasformata di una distribuzione che non è regolare può
essere una distribuzione regolare.
7.6.1 Le operazioni sulle distribuzioni
Si sa già che S ′ è uno spazio lineare, ossia che in S ′ è definito il prodotto per
scalari e la somma; e in S ′ si è definita la trasformata di Fourier, con un metodo
di dualità. Ancora con un metodo di dualità si definiscono altre operazioni, a partire
dalle corrispondenti operazioni su S. Sia h ∈ R e Th la traslazione in S,
(Thφ)(x) = φ(x − h)
(se h > 0 questa si interpreta come traslazione verso destra). Ovviamente, Th è
continua su S e quindi per ogni l ∈ S ′ si definisce
T ∗h l : φ → 〈〈l, Thφ〉〉 .
464

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Se h > 0 questa si interpreta come traslazione (applicata ad l) verso sinistra.
Si esprima in modo esplicito l’effetto di T ∗h sulle distribuzioni regolari e si giustifichi
la notazione più comunemente usata “T−h” invece di “T ∗h”.
Esempio 7.30. Sia δ la delta di Dirac. Si ha:
〈〈Thδ, φ〉〉 = 〈〈δ, T−hφ〉〉 = φ(h) .
Sia ora a = 0 e sia
Ra : (Raφ)(x) = φ(ax) .
Anche Ra è continua da S in sé e quindi si può definire R∗a ponendo
〈〈R∗al, φ〉〉 = 〈〈l, Raφ〉〉 .
Si verifica facilmente che se lf è una distribuzione regolare allora
Ra(lf ) = lR1/af .
Si è notato che se g ∈ C∞(R) è limitata con tutte le sue derivate, o anche se g è un
polinomio, allora Mg: Mgφ = gφ è continua da S in sé. Ciò permette di definire
〈〈(M∗g l), φ〉〉 = 〈〈l, Mgφ〉〉 .
Si esamini l’azione di M ∗g sulle distribuzioni regolari e si spieghi perchè si scrive
Mgl
invece di M ∗g l.
Osservazione 7.31. La Mg è la “moltiplicazione” della distribuzione l per la
funzione g. più comunemente, invece di scrivere Mgl si scrive gl.
Introduciamo ora la derivata delle distribuzioni.
Essendo continua la trasformazione D
φ → Dφ = φ′
465

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
da S in sé, definiremo
〈〈D∗l, φ〉〉 = 〈〈l, Dφ〉〉 .
Si esamini l’effetto di D∗ sulle distribuzioni regolari e si chiarisca perché invece di
“D∗” si usa il simbolo “−D”:
〈〈Dl, φ〉〉 = −〈〈l, Dφ〉〉 .
La derivata di distribuzioni si indica anche con l’apice:
Dl = l′ .
Presentiamo alcuni calcoli di derivate.
Esempio 7.32. Si chiama funzione di Heaviside la funzione
u(t) =
0 se t < 0
1 se t > 0 .
Questa funzione non è derivabile nel senso ordinario. E’ però derivabile nel senso
delle distribuzioni, ossia è derivabile la distribuzione regolare ad essa associata, e
vale
〈〈Dlu, φ〉〉 = −〈〈u, φ′〉〉 = −∫ +∞
0
φ′(s) ds = φ(0) .
Dunque la sua derivata è la delta di Dirac e scriveremo brevemente
Du = δ .
Calcoliamo ora la derivata della delta di Dirac:
〈〈Dδ, φ〉〉 = −〈〈δ, Dφ〉〉 = −φ′(0) .
Dunque, Dδ è la trasformazione (che all’esempio 7.29 abbiamo chiamato λ)
φ → −φ′(0) .
466

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
7.6.2 Operazioni e trasformata di Fourier
Studiamo ora le relazioni tra le operazioni introdotte in S ′ e la trasformata di Fourier.
Calcoliamo prima di tutto
F(Thl) .
Per definizione,
〈〈F(Thl), φ〉〉 = 〈〈Thl, φ〉〉 = 〈〈l, T−hφ〉〉 .
Ora,
T−hφ = φ(ω + h) =∫ +∞
−∞e−i(ω+h)xφ(x) dx = F(Mfφ)
con
f(x) = e−ihx .
Dunque,
F(Thl) = Mf l ,
la moltiplicazione della distribuzione l per e−ihω.
Analogamente, la derivata di Ral si calcola da
〈〈F(Ral), φ〉〉 = 〈〈l, R1/aφ〉〉 = 〈〈l, 1aF(Raφ)〉〉 = 〈〈aRa l, φ〉〉 :
F(Ral) =1aRa l .
Veniamo infine alla trasformata della derivata di una distribuzione:
〈〈F(Dl), φ〉〉 = 〈〈Dl, φ〉〉 = −〈〈l, Dφ〉〉 = −〈〈l,F(M−itφ)〉〉 = −〈〈M−it l, φ〉〉
e quindi
F(Dl) = iωl .
467

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Osservazione 7.33. Si consideri la funzione di Heaviside u(t). La sua derivata è δ
e quindi
1 = δ = iωu
da cui sembra di poter dedurre u = 1iω . Si noti che questa è una scrittura
solamente formale, a cui non abbiamo attribuito alcun significato, perché 1/(iω)
non è integrabile.
Un calcolo diretto mostra che u è quella distribuzione che a φ ∈ S associa∫ +∞
0
φ(ω) dω =∫ +∞
0
[∫ +∞
−∞e−iωxφ(x) dx
]dω
= limR→+∞
∫ R
0
[∫ +∞
−∞e−iωxφ(x) dx
]dω = lim
R→+∞
∫ +∞
−∞
[∫ R
0
e−iωx dω
]φ(x) dx
limR→+∞
∫ +∞
−∞
1 − e−iRx
ixφ(x) dx .
Ciò mostra che l’azione di certe distribuzioni viene descritta mediante integrali
dipendenti da parametri, e loro limiti. Noi non presentiamo questo aspetto del pro-
blema. Diciamo solamente che in questo modo si riesce a dare senso all’espressione
u = 1/(iω).
7.6.3 Convoluzione di distribuzioni
Il problema di estendere il concetto di convoluzione al caso delle distribuzioni è
piuttosto delicato, e ci limitiamo ad enunciare alcuni risultati. Consideriamo due
funzioni integrabili f e g. La loro convoluzione h = f ∗ g identifica una distribuzione
regolare lh, la cui azione su φ ∈ S è:∫ +∞
−∞
[∫ +∞
−∞f(s − y)g(y) dy
]φ(s) ds =
∫ +∞
−∞
[∫ +∞
−∞f(s − y)φ(s) ds
]g(y) dy
=∫ +∞
−∞
[∫ +∞
−∞f(x)φ(x + y) dx
]g(y) dy .
Per interpretare la formula precedente quando f e g sono sostituite da distribuzioni, è
necessario considerare funzioni φ dipendenti da due variabili x ed y e, per ogni valore
468

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
di una di esse, per esempio y, applicare una distribuzione l alla funzione x → φ(x, y).
Per intendere che l agisce sulla φ vista come funzione di x, scriveremo lx invece di l.
Siano ora l ed m due distribuzioni. Per definire il significato di l ∗m, convoluzione di
l e di m, dobbiamo spiegare come essa agisce su ciascuna funzione φ ∈ S. Per questo,
scelta φ ∈ S, consideriamo la funzione x → φ(x + y), per ogni scelta di y ∈ R, e
consideriamo il numero
〈〈mx, φ(x + y)〉〉 .
Si trova in questo modo una funzione
ψ(y) = 〈〈mx, φ(x + y)〉〉 .
Se accade che ψ ∈ S, allora può definirsi
〈〈l, ψ〉〉
e per definizione porremo
〈〈l ∗ m, φ〉〉 = 〈〈l, ψ〉〉 = 〈〈ly, 〈〈mx, φ(x + y)〉〉〉〉 . 7.16
Si noti che per poter utilizzare la definizione precedente abbiamo bisogno di più che
non semplicemente ψ ∈ S: abbiamo bisogno che la funzione
φ(x) → ψ(y) = 〈〈mx, φ(x + y)〉〉
sia continua da S in sé, in modo da avere
φ → 〈〈l ∗ m, φ〉〉
continua su S.
Di conseguenza, la possibilità di definire la distribuzione l ∗m dipende dalle proprietà
di m.
Le proprietà da imporre ad m sono suggerite da questo teorema, che non proviamo.
Teorema 7.34. Sia l una distribuzione temperata. Esiste una funzione continua g(x)
ed esistono numeri interi non negativi µ e ν tali che
469

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
l = Dνg , lim|x|→+∞
|x|−µg(x) = 0 .
Le derivate che figurano nel teorema precedente sono nel senso delle distribuzioni; e
quindi, per esempio, Dg indica la derivata della distribuzione regolare l g.
Ossia
〈〈Dνg, φ〉〉 = (−1)ν
∫ +∞
−∞g(x)Dνφ(x) dx .
Le funzioni g che crescono al più polinomialmente per |x| tendente ad ∞ si dicono
funzioni a crescita lenta.
Esempio 7.35. Consideriamo la distribuzione δ. Si è già visto che questa è la
derivata della funzione di Heaviside u(x) = 0 per x < 0, u(x) = 1 per x ≥ 0.
Questa funzione non è continua. Si vede però che u(x) è la derivata della funzione
g(x) =
0 se x < 0
x se x ≥ 0 .
E quindi δ è derivata seconda di una funzione continua.
In modo analogo si vede che la derivata k–ma della δ è derivata (k + 1)–ma di g.
Questo teorema suggerisce di considerare le distribuzioni l tali che per ogni polinomio
p(x) si possa scrivere
p(x)l =m∑
k=0
Dkfk 7.17
fk funzioni continue e limitate.
Il numero k e le funzioni fk dipendono dal polinomio p.
Le distribuzioni temperate con queste proprietà si chiamano convolutori.
Esempio 7.36. Sia u(x) la funzione di Heaviside. L’equazione
u(x) = f ′(x)
470

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
non ammette soluzione f(x) limitata e si potrebbe anche mostrare che nessuna
equazione del tipo 7.17, con l = u, ammette soluzioni fk continue e limitate. Dunque,
la funzione di Heaviside u(x) non è un convolutore.
Sia l = Dνg con g costante per |x| grande, diciamo g(x) ≡ g0 per |x| > R.
Sostituendo g con g−g0 non si altera la distribuzione l, e si ha g(x) = 0 per |x| > R.
Consideriamo l’equazione
Df = xl = xDg .
Si vede immediatamente che una soluzione limitata di quest’equazione è
f(x) = xg(x) −∫ x
0
g(s) ds
(questa funzione è limitata perchè g(x) è nulla per |x| > R).
Si può anche vedere che ogni equazione 7.17 ammette soluzioni fk continue e limitate;
e dunque l = Dνg, con g costante per |x| grande, è un convolutore.
Le distribuzioni l = Dνg, con g costante per |x| grande si chiamano distribuzioni a
supporto compatto:
Teorema 7.37. Ogni distribuzione a supporto compatto è un convolutore.
Dunque la δ di Dirach e le sue derivate, che sono distribuzioni a supporto compatto,
sono convolutori. Si vede facilmente però che esistono convolutori che non sono
distribuzioni a supporto compatto: tutti gli elementi di S sono infatti convolutori.
Sia ora m un convolutore e consideriamo
ψ(y) = 〈〈mx, φ(x + y)〉〉 . 7.18
Si può provare:
Teorema 7.38. Se m è un convolutore allora la funzione ψ(y) definita in 7.18 è in Se la trasformazione che a φ associa ψ, da S in sé, è continua; e quindi la convoluzione
di l ∗ m è definita (da 7.16 ) per ogni l ∈ S ′.
471

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
L’ipotesi che una delle due distribuzioni di cui si vuol calcolare la convoluzione sia
un convolutore è troppo restrittiva per molte applicazioni. Però la convoluzione può
definirsi anche in casi più generali. Per esempio:
Teorema 7.39. La formula 7.16 definisce la convoluzione delle due distribuzioni
temperate l ed m anche nel caso in cui ambedue hanno supporto in [0, +∞).
Inoltre:
Teorema 7.40. Nelle ipotesi sia del teorema 7.38 che del teorema 7.39, l’operazione
di convoluzione gode delle seguenti proprietà:
– distributività:
l ∗ (h + k) = l ∗ h + l ∗ k ,
(l + m) ∗ h = l ∗ h + m ∗ h ;
– associatività:
l ∗ (h ∗ k) = (l ∗ h) ∗ k ;
– commutatività:
h ∗ k = k ∗ h ;
– regola di derivazione:
D(l ∗ k) = (Dl) ∗ k = l ∗ (Dk) ;
– regola per la trasformata di Fourier:
F(l ∗ h) = l(ω)h(ω) ;
– esistenza dell’identità rispetto alla convoluzione:
δ ∗ h = h .
472

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
L’ultima proprietà, ossia δ ∗ h = h, si interpreta dicendo che la delta di Dirac
è l’identità rispetto alla convoluzione. L’esempio 7.23 mostra che le identitá
approssimate approssimano la δ di Dirac, ossia approssimano l’identità rispetto alla
convoluzione. Si giustifica così il termine “identità approssimata”.
Notiamo esplicitamente:
Esempio 7.41. Non tutte le funzioni di classe C∞ e integrabili su R sono dei
convolutori. Per esempio, la funzione
g(x) =1
1 + x2
non è un convolutore perchè l’equazione
p(x)g(x) = f ′(x)
non ammette soluzione limitata se p(x) = 1 + x2.
Sono invece convolutori le funzioni g(x) = e−|x| e g(x) = e−x2.
La formula 7.16 può permettere di definire la convoluzione di due distribuzioni anche
in casi più generali di quelli descritti dai teoremi 7.38 e 7.39. In tal caso però si possono
incontrare fenomeni indesiderati, come mostra l’esempio seguente.
Esempio 7.42. Consideriamo le tre distribuzioni seguenti: l è la distribuzione
regolare 1; la seconda distribuzione è δ ′ mentre la terza è la funzione di Heaviside
u. Si è già visto che u non è un convolutore ed è facile vedere che nemmeno l lo è. Ciò
nonostante, per φ ∈ S
ψ(y) = 〈〈ux, φ(x + y)〉〉 =∫ +∞
0
φ(x + y) dy
è in S e la trasformazione da φ in ψ è continua. Dunque si può calcolare
η(ξ) = 〈δ′y, ψ(y + ξ)〉〉 = ψ′(ξ) = φ(x) .
E quindi si può anche definire
〈〈l, η〉〉 =∫ +∞
−∞φ(x) dx = 〈〈l, φ〉〉 .
Dunque,
473

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
l ∗ (δ′ ∗ u) = l .
Anche (l ∗ δ′) può calcolarsi, dato che δ ′ ha supporto compatto e si vede facilmente
che
l ∗ δ′ = δ .
Dunque,
(l ∗ δ′) ∗ u = δ ∗ u .
Calcoliamo esplicitamente δ ∗ u.
Ricordiamo che
ψ(y) = 〈〈ux, φ(x + y)〉〉 =∫ +∞
0
φ(x + y) dx
così che
〈〈δ, ψ〉〉 = ψ(0) =∫ +∞
0
φ(x) dx = 〈〈u, φ〉〉 .
Si è quindi trovato δ ∗ u = u, ossia
(l ∗ δ′) ∗ u = u = l = l ∗ (δ′ ∗ u) .
Dunque, in questo caso la proprietà associativa non vale.
7.7. IL CASO DELLE FUNZIONI DI PIÙ VARIABILI
Abbiamo trattato la trasformata di Fourier per il caso delle funzioni che dipendono
da una sola variabile. In pratica è necessario lavorare anche con la trasformata di
Fourier di funzioni che dipendono da n variabili x 1 , . . . , xn, n > 1. In questo caso la
trasformata di Fourier è la funzione ancora di n variabili ξ1 , . . . , ξn. La trasformata
di Fourier di f(x1 , . . . , xn) è
f(ξ1 , . . . , ξn) =∫
Rn
e−i[x1ξ1+···+xnξn]f(x1 , . . . , xn) dx1 . . . dxn .
Praticamente nessun cambiamento va fatto a ciò che abbiamo visto per le funzioni di
una variabile, salvo che la formula per l’antitrasformata è ora
474

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
f(x1 , . . . , xn) =1
(2π)n
∫Rn
ei[x1ξ1+···+xnξn]f(ξ1 , . . . , ξn) dξ1 . . . dξn .
Naturalmente questa formula vale sotto ipotesi alquanto restrittive ma, esattamente
come nel caso delle funzioni di una sola variabile, essa si estende al caso delle
distribuzioni.
Infine raccogliamo gli esempi di trasformate di Fourier che abbiamo visto:
f(t) f(ω)
e−|t| 21+ω2
χ[−T,T ](t) 2 sin ωTω
e−x2/2√
2πe−ω2/2
eiαt 2πδα
sin αx −iπδα − δ−α
cosαx πδα + δ−α
δ 1
1 2πδ
u φ →∫ +∞0
φ(ω) dω
475


INDICE ANALITICO
algebra di insiemi 160
alternativa di Fredholm 219
alternativa di Fredholm 222
anello di insiemi 159
angolo tra due curve 43
antilinearità 378
antitrasformata di Laplace 155
argomento 9
argomento principale 9
autovalori 220
autovalori 355
B(X,Y ) 282
base canonica 216
biduale 333
boreliani 162
cammino 20
477

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
campo dei numeri complessi 10
catena 130
catena 321
codimensione 253
compatto 258
completezza 228
condizioni di Cauchy–Riemann 27
coniugato 10
continuità 227
contrazione 368
convergenza di successioni 227
convergenza debole 330
convergenza debole stella 330
convergenza uniforme 233
convergenza uniforme sui compatti 68
convesso 312
convoluzione 150
convoluzione 208
coppie ordinate 235
corona di convergenza 40
curva 20
curva 47
curva chiusa 20
curva di Jordan 21
curva omotopa ad un punto 65
478

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
curva regolare 20
curva regolare a tratti 20
curva semplice 20
curva semplice e chiusa 20
curve omotope 63
derivata 26
derivata debole 241
derivata direzionale 373
derivata secondo Fréchet 376
determinazione del logaritmo 16
determinazione della radice n–ma 13
differenziale di Gâteaux 375
differenziale secondo Fréchet 375
dimensione infinita 226
dimensione finita 226
dimensione 226
disco di convergenza 360
disco di convergenza 38
distanza 227
distanza invariante per traslazioni 227
disuguaglianza di H’older 199
disuguaglianza di interpolazione 206
disuguaglianza di Jensen 198
disuguaglianza di Minkowski 200
disuguaglianza di Schwarz 199
479

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
disuguaglianza di Schwarz 378
disuguaglianza di Young 210
disuguaglianza triangolare 226
elementi equivalenti 130
elemento 130
elemento canonico 130
elemento massimale 321
epigrafo 317
equazione aggiunta 222
equazione di Fredholm di prima specie 215
equazione di Fredholm di seconda specie 215
equazione di Laplace 135
equazioni integrali 215
equicontinuità 260
esponente coniugato 198
estremo superiore essenziale 201
formula della media 72
formula di Green 22
formula di Hadamard 38
formula di Laurent 101
formula di Poisson 142
formula integrale di Cauchy 69
formula integrale di Cauchy 71
formule d’Eulero 14
funzionale di Minkowski 326
480

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
funzione armonica coniugata 76
funzione a crescita esponenziale 145
funzione analitica 131
funzione analitica 74
funzione armonica 75
funzione armonica coniugata 137
funzione assolutamente continua 213
funzione caratteristica 179
funzione d’insieme 211
funzione d’insieme assolutamente continua 214
funzione di Dirichlet 157
funzione di distribuzione 182
funzione di distribuzione 189
funzione di Heaviside 152
funzione integrabile 186
funzione intera 91
funzione misurabile 176
funzione monodroma 131
funzione polidroma 131
funzione positiva integrabile 186
funzione positivamente omogenea 308
funzione razionale strettamente propria 156
funzione semplice 179
funzione subadditiva 168
funzione subadditiva 308
481

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
funzione univalente 131
funzioni a variazione limitata 351
funzioni a variazione limitata normalizzate 351
funzioni olomorfe 28
funzioni olomorfe 358
generatori 225
grafico 266
identità approssimata 254
identità del parallelogramma 381
immagine 218
immagine 266
indice 52
indice di una curva 61
insieme aperto 227
insieme convesso 267
insieme elementare 162
insieme equilibrato 268
insieme limitato 227
insieme misurabile 174
insieme misurabile secondo Lebesgue 169
insieme nullo 158
insieme nullo 174
insieme risolvente 220
insieme semplice 162
integrale di funzioni semplici 181
482

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
integrale di Stiltjes 350
intorno 17
intorno 227
invarianza per traslazioni 208
inverso 285
inverso 289
inverso destro 285
inverso sinistro 285
iperpiani di supporto 315
iperpiano 253
iperpiano 277
L(X) 282
L(X,Y ) 282
lemma del grande cerchio 108
lemma di Jordan 110
Lemma di Riesz 261
lemma di Schwarz 121
lemma di Zorn 322
logaritmo 15
logaritmo principale 16
logaritmo principale 59
maggiorante 321
massimo 321
metodo di Gram–Schmidt 393
metodo diagonale di Cantor 265
483

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
misura σ-additiva163
misura 162
misura completa 174
misura completa 211
misura di Lebesgue 169
misura di Lebesgue 170
misura esterna 168
misura finita 163
modulo 9
norma 226
norma indotta 252
norme equivalenti 230
nucleo 215
nucleo 218
nucleo 266
nucleo degenere 216
nucleo degenere 221
nucleo di Dirichlet 301
numeri complessi reali 11
omotetie 237
omotopia 63
operatore 265
operatore chiuso 293
operatore identità 275
operatore lineare 266
484

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
operatore nullo 275
operatore risolvente 354
operatore simmetrico 392
ordinamento lessicografico 34
ordine di esponenziale 146
ordine di un polo 96
ordine di uno zero 96
orientazione di una curva 21
ortogonale 218
ortogonale 393
ortogonalità 378
ortonormale 393
palla 267
parte immaginaria 12
parte reale 12
poligonale 20
poligono 20
polo 104
potenze 16
prima formula del risolvente 366
primitiva 52
principio del massimo modulo 88
principio dell’argomento 113
principio di permanenza 78
principio di riflessione di Schwarz 83
485

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
probabilità 163
problema di Dirichlet 139
problema di Poisson 140
procedimento diagonale di Cantor 339
prodotto cartesiano 235
prodotto interno 377
proiezione 295
proiezione 384
proprietà della media 76
punti di diramazione 132
punto di diramazione 128
punto fisso 369
punto regolare 80
punto singolare 80
punto singolare isolato 131
quasi ovunque 174
radici 13
raggio di convergenza 38
raggio spettrale 360
rappresentazione algebrica 11
rappresentazione trigonometria 11
realizzazione (di uno spazio duale) 341
regione di Jordan 21
regione interna 21
regola d’Ampère 21
486

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
relativamente compatto 258
residuo 103
residuo ad infinito 104
rotazione 119
segmento 267
semicontinuità 319
semicontinuità inferiore 329
semispazi 277
semplicemente connessa 66
separazione (di insiemi convessi) 312
serie di Fourier 301
serie di Laurent 39
serie di potenze 37
serie di von Neumann 288
sfera di Riemann 47
σ-algebra di Borel 162
σ-anello di insiemi 160
singolarità eliminabile 104
singolarità eliminabile 80
singolarità essenziale 104
singolarità essenziale 95
singolarità isolata 93
sostegno 20
sottodifferenziale 318
spazi di Banach 242
487

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
spazi di Hardy 241
spazi di Hilbert 381
spazi di Sobolev 240
spazi prehilbertiani 381
spazi riflessivi 336
spazio l∞ 232
spazio complementare 253
spazio di b Banach 229
spazio duale 282
spazio lineare 225
spazio lineare normato separabile 226
spazio lineare normato separabile 229
spazio di Hilbert 377
spettro 220
spettro 354
spettro continuo 355
spettro di punti 354
spettro residuo 354
subadditività 361
successione fondamentale 228
successione minimizzante 329
superficie di Riemann 130
superficie sferica 268
teorem di Tonelli 208
Teorema del doppio limite 249
488

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
Teorema del doppio limite 249
teorema della convergenza dominata 194
teorema della convergenza monotona 191
teorema della limitatezza uniforme 291
teorema della mappa aperta 118
teorema della mappa aperta 291
teorema delle contrazioni 369
teorema delle proiezioni 384
teorema di Riemann- Lebesgue 159
teorema di Weierstrass 84
teorema di Abel 37
Teorema di Alaoglu 336
teorema di Ascoli-Arzelà 260
teorema di Baire 289
Teorema di Banach 292
Teorema di Banach-Steinhaus 290
teorema di Beppo Levi 191
teorema di Casorati-Weierstrass 96
teorema di Cauchy 51
teorema di Cauchy 65
teorema di Egorov-Severini 178
teorema di Fatou 194
teorema di Fubini 207
Teorema di Hahn-Banach 308
teorema di Hurwitz 113
489

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
teorema di Lebesgue 194
teorema di Lusin 178
Teorema di Mazur 336
teorema di monodromia 133
teorema di Montel 86
teorema di Morera 81
teorema di Picard 96
teorema di Pitagora 381
teorema di Radon-Nikodym 214
teorema di Riemann 125
teorema di Riemann 126
teorema di Riemann 93
teorema di Riesz 351
teorema di Rouché 115
Teorema di Weierstrass 253
Teorema di Weierstrass 328
teorema fondamentale dell’algebra 117
topologia 227
trasformata di Laplace 145
trasformazione antilineare 341
trasformazione conforme 119
trasformazione conforme 43
trasformazioni conformi dirette 44
traslazione 354
traslazioni 237
490

7. DISTRIBUZIONI E TRASFORMATA DI FOURIER
uniforme limitatezza 260
unità immaginaria 11
valore principale 106
X∗ 282
X ′ 282
491