Embed Size (px)
Citation preview
1
MATEMÁTICAS II
UNIDAD 1: LÍMITE, CONTINUIDAD Y DERIVADA TEMA 1: LÍMITE DE UNA FUNCIÓN
1. Límite de una función en un punto. 2. Límites laterales. 3. Limites infinitos. 4. Límites en el infinito. 5. Propiedades de los límites. 6. Operaciones con infinito. 7. Cálculo de límites. 8. Cálculo de límites cuando x tiende a ∞. 9. Límite de un número partido por cero. 10. Indeterminaciones.
TEMA 2: CONTINUIDAD DE UNA FUNCIÓN
1. Continuidad de una función en un punto. 2. Continuidad lateral. 3. Continuidad de funciones. 4. Discontinuidad de funciones.
TEMA 3: DERIVADA DE UNA FUNCIÓN
1. Derivada de una función en un punto 2. Interpretación geométrica de la derivada 3. Función derivada 4. Derivadas laterales 5. Derivabilidad y continuidad 6. Tabla de derivadas inmediatas
UNIDAD 2: APLICACIONES DE LAS DERIVADAS TEMA 4: APLICACIONES DE LAS DERIVADAS
1. Monotonía: Crecimiento y decrecimiento de una función 2. Determinación de extremos relativos 3. Optimización de funciones 4. Curvatura: Concavidad o curvatura de una función 5. Puntos de inflexión 6. Aplicaciones de las derivadas al cálculo de límites
TEMA 5: GRÁFICA DE UNA FUCIÓN UNIDAD 3: INTEGRALES TEMA 6: INTEGRAL INDEFINIDA
1. Concepto de integral 2. Tabla de integrales 3. Integrales potenciales 4. Integrales logarítmicas y exponenciales 5. Integrales trigonométricas 6. Integrales trigonométricas inversas 7. Métodos de integración

2
TEMA 7: INTEGRALES DEFINIDAS. APLICACIONES 1. Integral definida. Propiedades 2. Función integral 3. Teorema fundamental del cálculo integral 4. Regla de Barrow 5. Teorema del valor medio 6. Área encerrada bajo una curva y el eje x 7. Área encerrada por dos curvas
UNIDAD 4: MATRICES Y DETERMINANTES TEMA 8: MATRICES Y DETERMINANTES
1. Definición de matriz. 2. Tipos de matrices. 3. Suma de matrices. 4. Producto de un número real por una matriz. 5. Producto de matrices. 6. Ejercicios 7. Determinante de una matriz. 8. Menor complementario y adjunto. 9. Propiedades de los determinantes. 10. La matriz inversa mediante determinantes. 11. Rango de una matriz mediante determinantes.
UNIDAD 5: SISTEMAS DE ECUACIONES TEMA 9: SISTEMAS DE ECUACIONES
1. Sistemas de ecuaciones lineales 2. Expresión matricial de un sistema 3. Clasificación de sistemas de ecuaciones 4. Teorema de Rouché-Fröbenius 5. Discusión de sistemas 6. Método de Gauss 7. Regla de Cramer 8. Sistemas homogéneos
UNIDAD 6: GEOMETRÍA TEMA 10: ESPACIO VECTORIAL
1. Vectores en el espacio 2. Estructura de espacio vectorial 3. Dependencia e independencia lineal. bases 4. Producto escalar 5. Producto vectorial 6. Producto mixto
TEMA 11: RECTAS Y PLANOS EN EL ESPACIO
1. Ecuaciones de la recta en el espacio 2. Ecuaciones del plano 3. Haz de planos 4. Posiciones relativas de dos planos 5. Posiciones relativas de tres planos 6. Posiciones relativas de una recta y un plano 7. Posiciones relativas de dos rectas

3
TEMA 12: PROBLEMAS MÉTRICOS A) ÁNGULO ENTRE RECTAS Y PLANOS
A.1) Ángulo entre dos rectas A.2) Ángulo entre dos planos A.3) Ángulo entre recta y plano
B) DISTANCIA ENTRE RECTAS Y PLANOS
B.1) Distancia de un punto a un plano B.2) Distancia entre planos paralelos B.3) Distancia entre un plano y una recta paralela B.4) Distancia entre un punto y una recta B.5) Distancia entre rectas paralelas B.6) Distancia entre rectas que se cruzan
4
UNIDAD 1: LÍMITE, CONTINUIDAD Y DERIVADA
TEMA 1: LÍMITE DE UNA FUNCIÓN
11. Límite de una función en un punto. 12. Límites laterales. 13. Limites infinitos. 14. Límites en el infinito. 15. Propiedades de los límites. 16. Operaciones con infinito. 17. Cálculo de límites. 18. Cálculo de límites cuando x tiende a ∞. 19. Límite de un número partido por cero. 20. Indeterminaciones.
1. LÍMITE DE UNA FUNCIÓN EN UN PUNTO
El límite de la función f(x) en el punto x = a, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor “a”. Es decir el valor al que tienden las imágenes cuando los originales tienden a “a”. Vamos a estudiar el límite de la función f(x) = x2 en el punto x = 2, dando valores a x a la izquierda y a la derecha de 2:
X f(x) x f(x)
1,9 3,61 2,1 4.41
1,99 3,9601 2,01 4,0401
1,999 3,996001 2,001 4,004001
... ... ... ...
↓ ↓ ↓ ↓
2 4 2 4 Tanto si nos acercamos a 2 por la izquierda o la derecha las imágenes se acercan a 4. Se dice que la función f(x) tiene como límite el número L , cuando x tiende a a”, si fijado un número real positivo ε , mayor que cero, existe un numero positivo δ dependiente de ε , tal que, para todos los valores de x distintos de “a” que cumplen la condición |x - a| < δ , se cumple que |f(x) - L| <ε .
εδδε <−→<−<>∃>∀↔=→
LxfaxLxfax
)(00,0)(lim
2. LÍMITES LATERALES Diremos que el límite de una función f(x) cuando x tiende hacia a por la izquierda es L, si y sólo si para todo ε > 0 existe δ > 0 tal que si x (a+δ, a ) , entonces |f (x) - L| <ε .
( ) εδδε <−→−∈>∃>∀↔=−→
LxfaaxLxfax
)(,0,0)(lim

5
Diremos que el límite de una función f(x) cuando x tiende hacia a por la derecha es L , si y sólo si para todo ε > 0 existe δ > 0 tal que si x (a, a + δ), entonces |f (x) - L| <ε .
( ) εδδε <−→+∈>∃>∀↔=+→
LxfaaxLxfax
)(,0,0)(lim
TEOREMA: El límite de una función en un punto si existe, es único. Por tanto, El límite de una función existe si existen y coinciden los límites laterales Para calcular el límite de una función en un punto, no nos interesa lo que sucede en dicho punto sino a su alrededor.
3. LÍMITE INFINITO LÍMITE INFINITO POSITIVO
Una función f(x) tiene por límite +∞ cuando x tiende hacia “a”, si fijado un número real positivo K > 0 se verifica que f(x) > K para todos los valores próximos a “a”.
KxfaxKxfax
>→<−<>∃ℜ∈∀↔∞= +
→)(00,)(lim δδ
EJEMPLO:
( )+∞=
−→ 42 25lim
xx
LÍMITE INFINITO NEGATIVO
Una función f(x) tiene por límite - ∞ cuando x tiende hacia “a”, si fijado un número real negativo K < 0 se verifica que f(x) < k para todos los valores próximos a “a”.
KxfaxKxfax
<→<−<>∃ℜ∈∀↔−∞= −
→)(00,)(lim δδ

6
EJEMPLO: ( )
−∞=−−
→ 21 12lim
xx
4. LÍMITES EN EL INFINITO
LÍMITE CUANDO X TIENDE A MAS INFINITO
εε <−→>>∃>∀↔=+∞→
LxfMxMLxfx
)(0,0)(lim
KxfMxMKxf
x>→>>∃ℜ∈∀↔+∞= +
+∞→)(0,)(lim
KxfMxMKxf
x<→>>∃ℜ∈∀↔−∞= −
+∞→)(0,)(lim
LÍMITE CUANDO X TIENDE A MENOS INFINITO
εε <−→<<∃>∀↔=−∞→
LxfMxMLxfx
)(0,0)(lim
KxfMxMKxf
x>→<<∃ℜ∈∀↔+∞= +
−∞→)(0,)(lim
KxfMxMKxf
x<→<<∃ℜ∈∀↔−∞= −
−∞→)(0,)(lim
EJEMPLOS:
1. 122
12lim −=−+
+∞→ xx
x
122
12lim −=−+
−∞→ xx
x

7
2. −∞=+
−+∞→ 12
3lim2
xx
x
+∞=+
−−∞→ 12
3lim2
xx
x
5. PROPIEDADES DE LOS LÍMITES
1. Límite de una constante KKax
=→
lim
2. Límite de una suma ( ) )(lim)(lim)()(lim xgxfxgxf
axaxax →→→±=±
3. Límite de un producto ( ) )(lim)(lim)()(lim xgxfxgxf
axaxax →→→⋅=⋅
4. Límite de un cociente )(lim
)(lim
)()(lim
xg
xf
xgxf
ax
ax
ax→
→
→= si 0)(lim ≠
→xg
ax
5. Límite de una potencia [ ] [ ] )(lim)( )(lim)(lim xg
ax
xg
axaxxfxf →
→→=
6. Límite de una función compuesta [ ] [ ])(lim)(lim xfgxfg
axax →→=
g puede ser una raíz, un log, sen ,cos, tg, etc.
6. OPERACIONES CON INFINITO
1. Sumas con infinito
→∞−∞∞=∞+∞∞=±∞
detIn
k
2. Productos con infinito ( )
→∞⋅∞=∞⋅∞
≠±∞=±⋅∞
det0
0,
In
kk

8
3. Cocientes con infinito y cero
→∞∞
→
±∞=∞
=∞
±∞=∞
=∞
±∞==
indind
kk
kk
00
000
00
00
4. Potencias con infinito y cero
INDETINDETINDETK →→∞→= ∞1,,0,1 000
∞
=0
0K sisi
negativoKpositivoK
,0,0
<>
=∞
=∞
=∞
∞=∞
∞+∞−
+∞
011
∞===
=
∞+∞−
+∞
01
010
00
Si K >1
==
∞=→
∞+∞−
+∞
01K
K
K Si 0 < K < 1
∞==
=→
∞+∞−
+∞
KK
K1
0
7. CÁLCULO DE LÍMITES Si f(x) no es una función definida a trozos, y está definida en el punto a, entonces se
suele cumplir que )()(lim afxfax
=→
Es decir, para calcular el límite se sustituye en la función el valor al que tienden las x. Ejemplo: 24131)43(lim 22
1=+⋅−=+−
→xx
x
Sólo si la solución que se obtiene es una indeterminación, habrá que aplicar otros procedimientos.
Cálculo del límite en una función definida a trozos - Si x tiende a un punto interior de uno de los intervalos de definición, se calcula
igual que antes, usando la función que se ha definido para ese intervalo. - Si x tiende a uno de los puntos donde cambia la función, tenemos que estudiar
los límites laterales, si coinciden este es el valor del límite y si no coinciden, el límite no existe.
Ejemplo:
−−−
=4
132
)(2xxx
xf sisisi
3
322
≥<<
<
xx
x
9
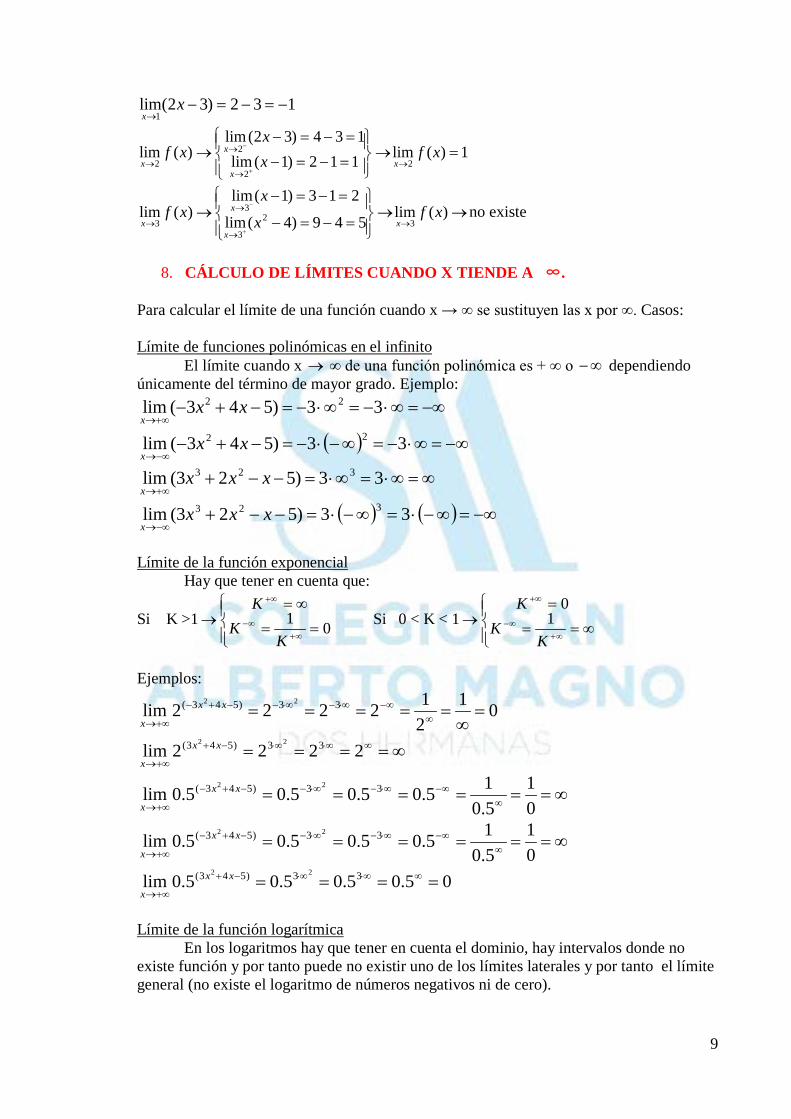
132)32(lim1
−=−=−→
xx
1)(lim112)1(lim134)32(lim
)(lim2
2
22
=
→
=−=−
=−=−→
→→
→
→+
− xfxx
xfx
x
xx
→
→
=−=−
=−=−→
→→
→
→+
−
)(lim549)4(lim
213)1(lim)(lim
32
3
3
3xfx
xxf
xx
x
xno existe
8. CÁLCULO DE LÍMITES CUANDO X TIENDE A ∞.
Para calcular el límite de una función cuando x → ∞ se sustituyen las x por ∞. Casos: Límite de funciones polinómicas en el infinito
El límite cuando x → ∞ de una función polinómica es + ∞ o ∞− dependiendo únicamente del término de mayor grado. Ejemplo:
−∞=∞⋅−=∞⋅−=−+−+∞→
33)543(lim 22 xxx
( ) −∞=∞⋅−=∞−⋅−=−+−−∞→
33)543(lim 22 xxx
∞=∞⋅=∞⋅=−−++∞→
33)523(lim 323 xxxx
( ) ( ) −∞=∞−⋅=∞−⋅=−−+−∞→
33)523(lim 323 xxxx
Límite de la función exponencial
Hay que tener en cuenta que:
Si K >1
==
∞=→
∞+∞−
+∞
01K
KK
Si 0 < K < 1
∞==
=→
∞+∞−
+∞
KK
K1
0
Ejemplos:
01212222lim 33)543( 22
=∞
===== ∞∞−∞⋅−∞⋅−−+−
+∞→
xx
x
∞==== ∞∞⋅∞⋅−+
+∞→2222lim 33)543( 22 xx
x
∞====== ∞∞−∞⋅−∞⋅−−+−
+∞→ 01
5.015.05.05.05.0lim 33)543( 22 xx
x
∞====== ∞∞−∞⋅−∞⋅−−+−
+∞→ 01
5.015.05.05.05.0lim 33)543( 22 xx
x
05.05.05.05.0lim 33)543( 22
==== ∞∞⋅∞⋅−+
+∞→
xx
x
Límite de la función logarítmica
En los logaritmos hay que tener en cuenta el dominio, hay intervalos donde no existe función y por tanto puede no existir uno de los límites laterales y por tanto el límite general (no existe el logaritmo de números negativos ni de cero).

10
Además, hay que tener en cuenta que - Si a > 1 (es el caso del
Ln) • −∞→0log a • ∞→∞alog
- Si 0 < a < 1 • ∞→0log a • −∞→∞alog
Ejemplo:
( ) ( )∞−∞−=→−= ,22,)()4ln()( 2 xDomfxxf , por tanto: • ( ) ( ) ∞=∞=−
+∞→ln4lnlim 2x
x
• ( ) ( ) ∞=∞+=−−∞→
ln4lnlim 2xx
• ( ) ( ) −∞==−−−→
0ln4lnlim 2
2x
x
• ( )→−+−→
4lnlim 2
2x
xno existe función a la derecha de – 2 (ej x = –1), por tanto no
existe el límite • ( )→−
−→4lnlim 2
2x
xno existe porque no existe uno de los límites laterales.
• ( ) ( )→−=−→
4ln4lnlim 2
0x
xno existe
9. LÍMITE DE UN NÚMERO PARTIDO POR CERO
0)(lim kxf
ax=
→
El límite puede ser + ∞, − ∞ o no tener límite. Hay que estudiar los límites laterales
tomando valores próximos a la derecha y a la izquierda de “a” Ejemplos:
1. 05
23lim
2=
−+
→ xx
x
Tomamos los límites laterales para determinar el signo de ∞: Límite por la izquierda:
Si damos a x un valor que se acerque a 2 por la izquierda como 1.999; el numerador es positivo y el denominador es negativo, por lo que el límite por la izquierda será – ∞:
( )( ) −∞=−+
=−+
−→ 23lim
2 xx
x
Límite por la derecha: Si damos a x un valor que se acerque a 2 por la derecha como 2,001. Tanto el
numerador como el denominador serán positivos, por lo que el límite por la derecha será + ∞.
( )( ) +∞=++
=−+
+→ 23lim
2 xx
x
Como no coinciden los límites laterales, la función no tiene límite cuando x →2.

11
2. 053lim 20
=+
→ xx
x
Tomamos los límites laterales para determinar el signo de ∞: Límite por la izquierda:
Si damos a x un valor que se acerque a 0 por la izquierda como -0.0001 el numerador como el denominador serán positivos, por lo que el límite por la izquierda será: +∞:
( )( ) +∞=++
=+
−→ 20
3limx
xx
Límite por la derecha:
Si damos a x un valor que se acerque a 0 por la derecha como 0,0001. Tanto el numerador como el denominador serán positivos, por lo que el límite por la derecha será: ∞.
( )( ) +∞=++
=+
+→ 20
3limx
xx
Como coinciden los límites laterales, existe +∞=+
→ 20
3limx
xx
10. INDETERMINACIONES
Existen siete tipos de indeterminaciones que ya se vieron en el apartado 6. Una indeterminación no significa que el límite no exista o no se pueda determinar, sino
que la aplicación de las propiedades de los límites tal como las hemos enunciadas no son válidas. En estos casos hay que efectuar operaciones particulares para resolver cada una de las indeterminaciones.
INDETERMINACIÓN INFINITO PARTIDO INFINITO
∞∞
=+∞→ )(
)(limxQxP
x
Podemos resolver esta indeterminación por dos métodos: I. Teniendo en cuenta que el término que determina el límite es el de mayor grado de cada polinomio, nos quedamos con estos términos y simplificamos la fracción. Después sustituimos la x por infinito y resolvemos:
022lim2lim112lim.3
23
23lim
23lim
12123lim.2
223lim
23lim
12123lim.1
22
2
2
2
2
22
=∞
===++
−=
−=
−=
++−−
−∞=∞−
=−
=−
=+
+−−
+∞→+∞→+∞→
+∞→+∞→+∞→
+∞→+∞→+∞→
xxx
xx
xx
xxx
xxx
xxx
xxx
xxx
xxx

12
II. Dividimos todos los términos por “x elevada al grado del denominador”:
010
11
12
11
12
lim1
12
lim112lim.3
23
12
123
12
123lim
12
123
lim12
123lim.2
23
12
123
12
123lim
12
123
lim12
123lim.1
2
2
2
2
22
2
22
2
2
2
2
2
22
2
222
2
2
2
2
2
==
∞+
∞+
∞=+
+=
+
+=
++
−
=
∞+
∞+
∞−−
=+
+−−=
+
+−−
=+
+−−
−∞=∞−
=
∞+
∞+−∞−
=+
+−−=
+
+−−
=+
+−−
+∞→+∞→+∞→
+∞→+∞→+∞→
+∞→+∞→+∞→
x
xx
xxx
xxx
xx
x
xx
xxx
xxx
xx
xxx
x
xx
xxx
xxx
xx
xxx
xxx
xxx
xxx
INDETERMINACIÓN CERO PARTIDO CERO
Dos casos: A. Función racional sin radicales: Se descomponen en factores los polinomios y se simplifica la fracción.
1. ( )( )( )( )
( )( ) 4
1222
12lim
1222lim
00
234lim
222
2
2=
−+
=−+
=−−+−
→=+−
−→→→ x
xxxxx
xxx
xxx
2. ( )( )( )
( )( ) →=
−+
=−+
=−
+−→=
+−−
→→→?
04
2222
22lim
222lim
00
444lim
2222
2
2 xx
xxx
xxx
xxx
Hay que calcular los límites laterales dando valores próximos a 2 a la izquierda y a la derecha (ver apartado 9): Límite por la izquierda:
Si damos a x un valor que se acerque a 2 por la izquierda como 1.999; el numerador es positivo y el denominador es negativos, por lo que el límite por la izquierda será: -∞:
( )( ) −∞=−+
=−+
−→ 22lim
2 xx
x
Límite por la derecha: Si damos a x un valor que se acerque a 2 por la derecha como 2,001. Tanto el
numerador como el denominador serán positivos, por lo que el límite por la derecha será: ∞.
( )( ) +∞=++
=−+
+→ 22lim
2 xx
x
Como no coinciden los límites laterales, la función no tiene límite cuando x →2.

13
B. Función racional con radicales: En primer lugar multiplicamos numerador y denominador por el conjugado de la expresión irracional. Realizamos las operaciones y simplificamos la fracción. Recuerda ( )( ) 22 bababa −=−+
( )( )( )( )
( )( )( )
( )( ) ( ) 21112312lim3
123lim
12
123lim1212
123lim00
123lim
33
22333
=+=+−=+−=−
+−−
=−−
+−−=
+−−−
+−−→=
−−
−
→→
→→→
xx
xx
x
xxxx
xxxx
xx
xxx
INDETERMINACIÓN INFINITO MENOS INFINITO
A. Con funciones racionales. Ponemos a común denominador.
∞−∞=−=
+−+
−−−
→ 08
02
345
31lim 23 xx
xxx
x
( )( )( )( ) ( )
( )( ) ( )( )
( )( ) ?04
1343lim
13512lim
13511lim
135
31lim
2
3
2
333
−=
−−−−
=−−
−−+−=
−−+−−−
=
−−
+−
−−
→
→→→
xxxx
xxxxx
xxxxx
xxx
xx
x
xxx
Calculamos los límites laterales:
( )( ) −∞=−−−−
−→ 1343lim
2
3 xxxx
x ( )( ) +∞=
−−−−
+→ 1343lim
2
3 xxxx
x
No coinciden, por tanto no existe límite. B. Cuando se trata de funciones irracionales Podemos multiplicar y dividir por el conjugado.
( ) ( )( )( )
( ) ( )( ) ( ) ( ) →
∞∞
=++−
−−=
++−
−−−=
++−
+−−
=++−
++−+−−→∞−∞=+−−
∞→∞→∞→
∞→∞→
xxx
x
xxx
xxx
xxx
xxx
xxx
xxxxxxxxx
xxx
xx
2222
22
22
22
22
22
222222
2
2lim2
2lim2
2lim
2
22lim2lim
Nos quedamos con los términos de mayor grado de cada polinomio:
( ) 21
2limlimlim
22
−=
−=
+−
=+
−∞→∞→∞→ x
xxx
x
xx
xxxx

14
EJERCICIOS DE LÍMITES
1) ( )163 2
1+−
→xxlim
x 2) ( )122 +−
∞→xxlim
x 3) ( )xxlim
x+−
−∞→
33
4) ( )22
2 1ax
axaxlimax −
++−→
5) 122
2
2
1 +−−+
→ xxxxlim
x 6)
−+
+∞→ 21
21
xxlimx
7) 122
2
2
1 +−−+
−→ xxxxlim
x 8)
441
2 +−∞→ xxlimx
9) 632 34
4
−+−∞→ xxxlim
x
10) 2
2
0
96x
xxlimx
+−→
11) xx
xlimx 5
252
2
5 −−
→ 12)
xxxxxlim
x 6222
23
−+−
∞→
13) 15
24
+−
∞→ xxxlim
x 14)
123
2
25
−+−
−∞→ xxxlim
x 15)
axaxlim
ax −−
→
16) x
xlimx
330
−+→
17) ( )xxlimx
−+→
3 2
52 18)
xxxlim
x
21 +−+∞→
19)
−++
∞→xxxxlim
x 20)
4211
2
2
−+
−+∞→ x
xlimx
21) 1
12
++
−∞→ xxlim
x
22) 3
1
3 421 −
→
−−
+
x
x xxlim 23)
+−−
∞→xxxxlim
x 24)
111212
−−+−−+
∞→ xxxxlim
x
25) ( )( )11 −−+∞→
xxxlimx
26) ( )( )xxxxxlimx
32221 553 +−−+∞→
27)
−
+−
∞→1
11
xxxlim
x 28) ( )
xxxxxxlim
x 6336
2
2
+−+
−−−∞→
29) 1
5634
23
1 −+−+−
→ xxxxxxlim
x
30) ( )( )4
3
3 31
++
−→ xxlim
x 31)
9157935
23
23
3 +++−++
−→ xxxxxxlim
x 32)
211422
23
34
2 −−+−+−
→ xxxxxxlim
x
33)
234
234
2 444454
xxxxxxxlim
x ++++++
−→ 34)
122386
34
24
1 −+−−+−
→ xxxxxxlim
x 35)
−−
−−−
→ 24
42 2
22 xx
xxlim
x
36) 13
23 −+
++−→ x
xlimx
37) 13
20 −+
+→ x
xlimx
38) 13
22 −+
+−→ x
xlimx
39) 13
2−+
+∞→ x
xlimx
40) 13
2−+
+−∞→ x
xlimx
41) ( )16sen2
24 −−
→ xxlim
x
15
TEMA 2: CONTINUIDAD DE UNA FUNCIÓN
5. Continuidad de una función en un punto. 6. Continuidad lateral. 7. Continuidad de funciones. 8. Discontinuidad de funciones.
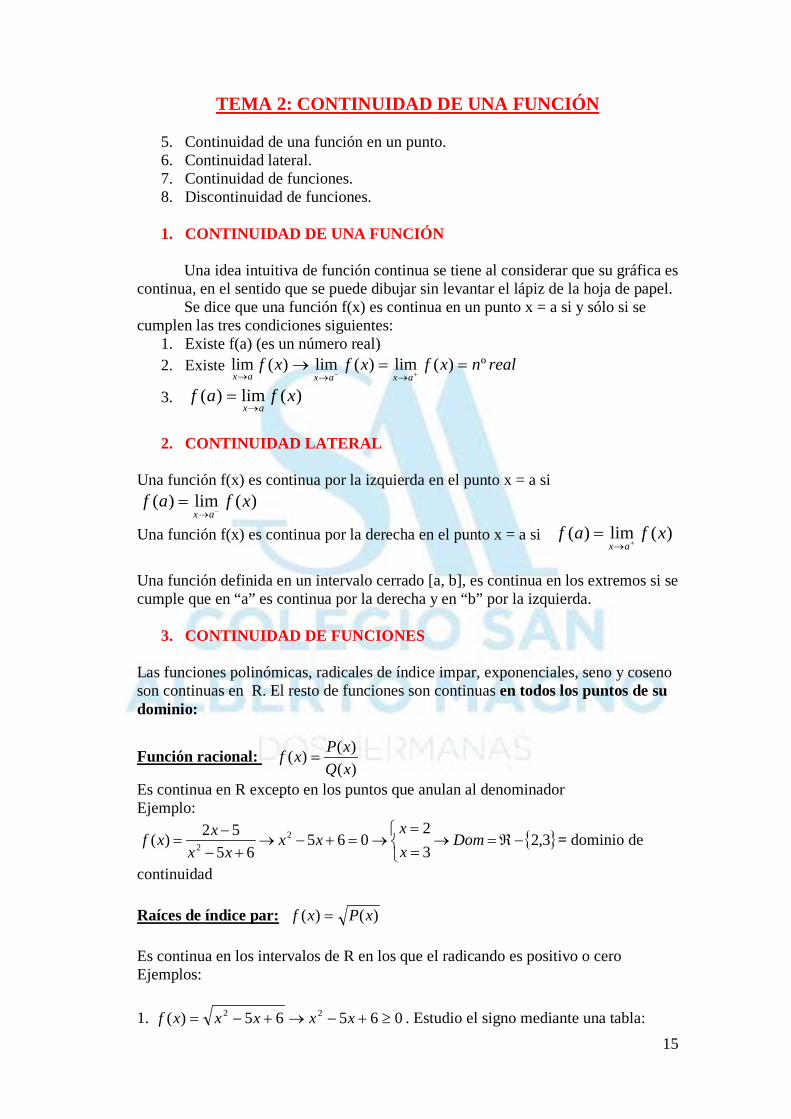
1. CONTINUIDAD DE UNA FUNCIÓN
Una idea intuitiva de función continua se tiene al considerar que su gráfica es continua, en el sentido que se puede dibujar sin levantar el lápiz de la hoja de papel.
Se dice que una función f(x) es continua en un punto x = a si y sólo si se cumplen las tres condiciones siguientes:
1. Existe f(a) (es un número real) 2. Existe realnxfxfxf
axaxaxº)(lim)(lim)(lim ==→
+− →→→
3. )(lim)( xfafax→
=
2. CONTINUIDAD LATERAL
Una función f(x) es continua por la izquierda en el punto x = a si )(lim)( xfaf
ax −→=
Una función f(x) es continua por la derecha en el punto x = a si )(lim)( xfafax +→
=
Una función definida en un intervalo cerrado [a, b], es continua en los extremos si se cumple que en “a” es continua por la derecha y en “b” por la izquierda.
3. CONTINUIDAD DE FUNCIONES
Las funciones polinómicas, radicales de índice impar, exponenciales, seno y coseno son continuas en R. El resto de funciones son continuas en todos los puntos de su dominio:
Función racional: )()()(
xQxPxf =
Es continua en R excepto en los puntos que anulan al denominador Ejemplo:
{ }3,232
06565
52)( 22 −
ℜ=→==
→=+−→+−
−= Dom
xx
xxxx
xxf = dominio de
continuidad Raíces de índice par: )()( xPxf = Es continua en los intervalos de R en los que el radicando es positivo o cero Ejemplos: 1. 06565)( 22 ≥+−→+−= xxxxxf . Estudio el signo mediante una tabla:

16
Calculo los puntos donde cambia de signo:
==
→=+−32
0652
xx
xx
Para estudiar el signo tomamos un valor en cada intervalo: 2 3 ( )( )( ) si
sisi
→∞→→∞−
,33,22,
→=→=→=
45.2
1
xxx
→
→>=+−→−=+−
→>=+−
positivonegativo
positivo
026)4(5425.06)5.2(55.2
026)1(51
2
2
2
Dominio de continuidad = ( ] [ )∞∞− ,32,
2. →≥−−
→−−
= 032
32)(
xx
xxxf Estudio el signo mediante una tabla
Calculo los puntos donde cambia de signo el numerador y el denominador:
303202
=→=−=→=−
xxxx
Para estudiar el signo tomamos un valor en cada intervalo: 2 3
( )( )( ) si
sisi
→∞→→∞−
,33,22,
→=
→=
→=
4
5.2
1
x
x
x
→
→>=−−
→−=−
=−−
→>−−
=−−
positivo
negativo
positivo
012
3424
15.0
5.035.225.2
021
3121
Dominio de continuidad = ( ] ( )∞∞− ,32, . Observa que x = 2 si pertenece al dominio porque es un cero del numerador y la fracción valdrá cero mientras que x = 3 no pertenece al dominio porque es un cero del denominador y la fracción valdrá infinito. Funciones logarítmica: )(log)( xPxf a= Es continua en los intervalos de R en los que P(x) es positivo (no cero) 1. ( ) 06565ln)( 22 >+−→+−= xxxxxf . Estudio el signo mediante una tabla: Calculo los puntos donde cambia de signo:
==
→=+−32
0652
xx
xx
Para estudiar el signo tomamos un valor en cada intervalo:

17
2 3 ( )( )( ) si
sisi
→∞→→∞−
,33,22,
→=→=→=
45.2
1
xxx
→
→>=+−→−=+−
→>=+−
positivonegativo
positivo
026)4(5425.06)5.2(55.2
026)1(51
2
2
2
Dominio de continuidad = ( ) ( )∞∞− ,32, Observa que en los logaritmos los intervalos siempre son abiertos
2. →>−−
→−−
= 032
32log)(
xx
xxxf Estudio el signo mediante una tabla
Calculo los puntos donde cambia de signo el numerador y el denominador:
303202
=→=−=→=−
xxxx
Para estudiar el signo tomamos un valor en cada intervalo: 2 3
( )( )( ) si
sisi
→∞→→∞−
,33,22,
→=
→=
→=
4
5.2
1
x
x
x
→
→>=−−
→−=−
=−−
→>−−
=−−
positivo
negativo
positivo
012
3424
15.0
5.035.225.2
021
3121
Dominio de continuidad = ( ) ( )∞∞− ,32, . Observa que en los logaritmos los intervalos siempre son abiertos Funciones definidas a trozos Las funciones definidas a trozos son continuas si: - cada función lo es en su intervalo de definición, - lo son en los puntos de división de los intervalos, por tanto tienen que coincidir sus límites laterales. Operaciones con funciones continuas Si f y g son continuas en x = a, entonces: f + g es continua en x = a. f · g es continua en x = a. f / g es continua en x = a, si g(a) ≠ 0. f ο g es continua en x = a.

18
4. DISCONTINUIDAD DE FUNCIONES
1. Discontinuidad evitable. Dos posibilidades:
I. No existe función. Ejemplo
=4
)(2x
xf sisi
→><
22
xx
4)(lim4)(lim
42)(lim2
2
2
2 =→
=
==→
→
→
+
− xfxfxf
xx
x , pero no existe f(2)
II. La imagen no coincide con el límite. Ejemplo
=1
2)(
2
xx
xf sisisi
222
=><
xxx
)(lim)2(
1)2(
4)(lim4)(lim
42)(lim
22
2
2
2
xff
f
xfxfxf
xx
x
x
→→
→
→
≠→
=
=→
=
==
+
−
Cuando una función presenta una discontinuidad evitable en un punto se puede redefinir en dicho punto para convertirla en una función continua. 2. Discontinuidad inevitable o de primera especie.
Una discontinuidad es inevitable o de primera especie si existen los límites laterales en x = a, pero son distintos: )(lim)(lim xfxf
axax +− →→≠
Salto es la diferencia en valor absoluto de los límites laterales:
)(lim)(lim xfxfaxax +− →→
−
Dos tipos:
I. De salto finito
=1
)(2x
xf sisi
→≥<
22
xx
→
=
==
+
−
→
→
1)(lim42)(lim
2
2
2xf
xf
x
x En x = 2 hay una discontinuidad inevitable de salto
finito
II. De salto infinito.
−=
22)(
2
x
xxf
sisi
→≥<
22
xx
→
∞==
==
+
−
→
→
02)(lim
42)(lim
2
2
2
xf
xf
x
x En x = 2 hay una discontinuidad inevitable de salto
infinito. 3.Discontinuidad esencial o de segunda especie.
Una discontinuidad es esencial o de segunda especie si no existe alguno de los límites laterales en x = a.

19
EJERCICIOS DE CONTINUIDAD
a) 1
12 ++
=xxy
b) 252
53)( 2 +−+
=xx
xxf
c) 463
1234 −+−−
=xxx
xy
d) 5)( −= xxf
e) 252)( 2 +−= xxxf
f) 4)( 2 ++= xxxf
g) 31)(
−+
=xxxf
h) 34ln
2
+−
=x
xy
i) ( )65ln 2 +−= xxy
j)
+−=
06
1
)(xx
xf
sisisisi
66331
1
>≤<≤<
≤
xxx
x
k)
−
−
=
senxx
xxf
22
12)(
sisisi
4
400
>≤≤
<
xx
x

20
TEMA 3: DERIVADA DE UNA FUNCIÓN
7. Derivada de una función en un punto 8. Interpretación geométrica de la derivada 9. Función derivada 10. Derivadas laterales 11. Derivabilidad y continuidad 12. Tabla de derivadas inmediatas
1. DERIVADA DE UNA FUNCIÓN EN UN PUNTO La derivada de la función f(x) en el punto x = a es el valor del límite, si existe, de un cociente incremental. Dos formas de calcularla:
hafhafaf
axafxfaf
h
ax
)()(lim)('
)()(lim)('
0
−+=
−−
=
→
→
2. INTERPRETACIÓN GEOMÉTRICA DE LA DERIVADA La pendiente de la tangente a la curva en un punto es igual a la derivada de la función en ese punto.
La ecuación de la recta tangente vendrá dada por el punto A(a, f(a)) y la pendiente m = f'(a): ))((')( axafafyrt −=−≡
La ecuación de la recta normal vendrá dada por el punto A(a, f(a)) y la
pendiente m = -1/ f'(a): )()('
1)( axaf
afyrn −−
=−≡
3. FUNCIÓN DERIVADA La función derivada de una función f(x) es una función que asocia a cada número real su derivada, si existe. Se denota por f'(x).
hxfhxfxf
h
)()(lim)('0
−+=
→
4. DERIVADAS LATERALES
Derivada por la izquierda ax
afxfafax −
−=
−→
− )()(lim)('
Derivada por la derecha ax
afxfafax −
−=
+→
+ )()(lim)('
Una función es derivable en un punto si es derivable por la izquierda y por la derecha en dicho punto y las derivadas laterales coinciden. 5. DERIVABILIDAD Y CONTINUIDAD Si una función es derivable en un punto x = a, entonces es continua para x = a. El reciproco es falso, es decir, hay funciones que son continuas en un punto y que, sin embargo, no son derivables.

21
6. TABLA DE DERIVADAS INMEDIATAS 1. Derivada de una constante 0'=→= yky
2. Derivada de x 1'=→= yxy
3. Derivada de una potencia 1' −⋅=→= nn xnyxy
')(' 1 ffnxffy nn ⋅⋅=→= −
4. Derivada de una raíz cuadrada x
yxy2
1'=→=
f
fff
yfy2
''2
1' =⋅=→=
5. Derivada de una raíz n n
n
xnyxy
1
1'−⋅
=→=
n nn n
n
fnff
fnyfy
11
''1'−− ⋅
=⋅⋅
=→=
EJEMPLOS
f(x) f’(x)
-2 0
-5x -5
327
−− x 2
7−
4x
34x
44
1 −= xx
55 44
xx −
=− −
3
212
−x
22
21262
2123
−⋅=⋅
−⋅ xx
25 +x 25255
2521
+=⋅
+ xx
4 42 −x ( ) ( )4 34 3 422
12424
1
−⋅=⋅
−⋅ xx
211 −
= xx
323
231
21
21
2
121
21
xxxx −=−=−=−−−−
6. Derivada de una suma ''' gfygfy +=→+=

22
7. Derivada de una constante por una función '' fkyfky ⋅=→⋅=
8. Derivada de un producto ''' gfgfygfy ⋅+⋅=→⋅=
9. Derivada de un cociente 2
'''g
gfgfygfy ⋅−⋅
=→=
EJEMPLOS f(x) f’(x)
252 2 +−− xx 54 −− x
2523 23 +−− xxx
549 2 −− xx
( )( )xxx 31 32 +− ( ) ( )( )33132 223 +−++ xxxxx
( ) ( )3232
253
523
+=+ xx
( ) ( ) 2222 2
518
22353
+⋅=⋅+⋅⋅ xxxx
1523
2
3
+++
xxx
( )( ) ( )( )
( )( )
( )22
24
22
24224
22
322
15120415
1520103015945
1510231519
+
+−+
=+
++−+++
=+
⋅++−++
xxxx
xxxxxxx
xxxxxx
11
+−
xx
( )
( ) ( )
( )
( )
( ) ( )22
2
2
22
1123
112)1(21
112
121
1
112
1
1
11112
1
+⋅−
+−=
+⋅−
−⋅−++−
−−+
=+
−−−
+
=+
⋅−−+−
xxx
xxxx
xx
xx
x
xx
x
x
xxx
x2
( ) xxxx
xx
x1
12
120
2
−=
−=
⋅−⋅
10. Derivada de la función exponencial aayay xx ln'=→= 'ln' faayay ff ⋅⋅=→=
11. Derivada de la función exponencial de base e xx eyey =→= ' '' feyey ff ⋅=→= EJEMPLOS:

23
f(x) f’(x)
12
2 −x 2ln22 12
⋅⋅ −xx
12
3 −x 1
3ln33ln3212
12
11
2
22
−
⋅⋅=⋅⋅⋅
−
−−
x
xxx
xx
xe1
xe
x
1
2
1⋅
−
xex 33 −⋅ ( ) xxx exxexex 3323332 33)3(3 −−− ⋅−=⋅−⋅+⋅
xe x2
( )
( )
( )xxex
xxexe
xx
exe
xx
exe
xxx
xxxx
214
24
24
212
222
222
2
22
−=
−⋅⋅
=
−⋅⋅
=⋅−⋅⋅
12. Derivada de un logaritmo ax
yxy a ln1'log⋅
=→=
af
ffaf
yfy a ln''
ln1'log
⋅=⋅
⋅=→=
13. Derivada del logaritmo neperiano x
yxy 1'ln =→=
fff
fyfy ''1'ln =⋅=→=
EJEMPLOS: f(x) f’(x)
( )xx 3log 42 −
( ) ( ) ( ) 2ln33434
2ln31
4
33
4 xxxx
xx −−
=−⋅−
34 3log x
( ) ( )3 24
3 24 3log4ln3
134ln3
1
3log3
1
xxxx ⋅⋅=⋅
⋅⋅
⋅
+−
xx
11ln
( ) ( )( ) ( )
( )( ) 2
22
12
112
111
111
1111
11
1
xxx
xxx
xxx
xx
xx
−−
=+−
−
=+⋅
+−
+−−−=
+
−−+−⋅
+−
xx ln5 ⋅ 4454 ln51ln5 xxxx
xxx +⋅=⋅+⋅
( )53ln x ( ) ( )x
xx
x4
4 3ln53313ln5 =⋅⋅
24
xx
−+
11log
( ) ( )( )( )
( ) ( )
( )( ) ( )2
22
2
2
110ln1
1110ln22
11110ln2
2
11110ln2
11
11111
112
1
10ln11
1
xxx
xxx
xxx
xx
xxx
xx
xx
−⋅=
−+⋅⋅
=−
−+
⋅⋅=
−
−+
⋅⋅
++−
=−
−+−−⋅⋅
−+
⋅
⋅
⋅−+
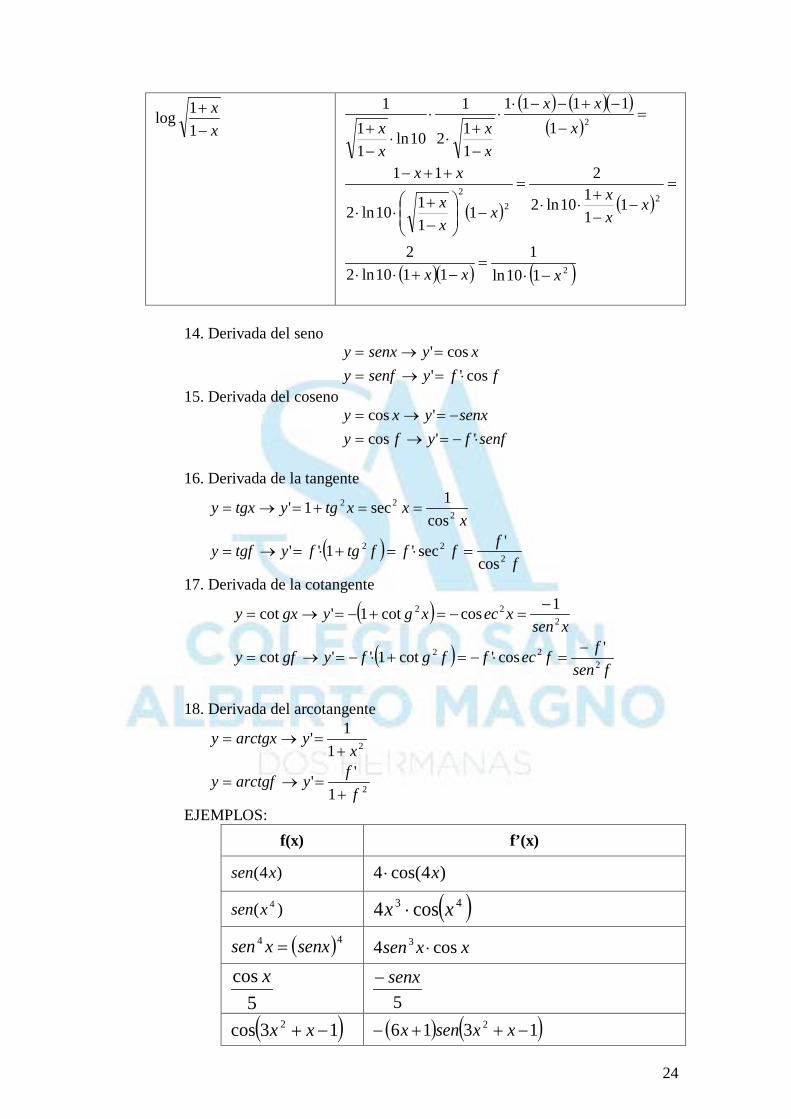
14. Derivada del seno
ffysenfy
xysenxycos''
cos'⋅=→=
=→=
15. Derivada del coseno
senffyfy
senxyxy⋅−=→=
−=→=''cos
'cos
16. Derivada de la tangente
( )
ffffftgfytgfy
xxxtgytgxy
222
222
cos'sec'1''
cos1sec1'
=⋅=+⋅=→=
==+=→=
17. Derivada de la cotangente
( )
( )fsen
ffecffgfygfy
xsenxecxgygxy
222
222
'cos'cot1''cot
1coscot1'cot
−=⋅−=+⋅−=→=
−=−=+−=→=
18. Derivada del arcotangente
2
2
1''
11'
ffyarctgfy
xyarctgxy
+=→=
+=→=
EJEMPLOS: f(x) f’(x)
)4( xsen )4cos(4 x⋅
)( 4xsen ( )43 cos4 xx ⋅
( )44 senxxsen = xxsen cos4 3 ⋅
5cos x
5senx−
( )13cos 2 −+ xx ( ) ( )1316 2 −++− xxsenx

25
(2
5cos21
25cos xx
=
( ) xsenxxsenx 55cos5555cos2
21
⋅−=⋅−⋅⋅
xtg xx
2sec2
1⋅
24cot xg 22 4cos8 xcx ⋅−
(2 4cot4cot xgxg =
( ) xgxcxg co4cot84cos44cot2 2 ⋅−=−⋅⋅
19. Regla de la cadena
[ ] ( ) )(''')( xggfyxgfy ⋅=→=
f(x) f’(x)
x3cos ( ) xxxx sensen 33ln333ln3 ⋅−=−⋅
( )xtg ln ( )xx
lnsec1 2
( )senxsen ( )senxx coscos ⋅
( )xsen 31ln − ( )( ) ( )x
xx31lncos3
311
31ln21
−−⋅−
⋅−
( )xarctg ln ( )2ln111
xx +⋅

26
EJERCICIOS DE DERIVADAS 1. Utiliza la definición para calcular la derivada de las siguientes funciones en
los puntos que se indican:
a) 2
1)(x
xf = en x = 1
b) x
xxf 2)( += en x = 1
c) 1
1)( 2 −−
=x
xxf en x = 0
d) 323)( 2 +−= xxxf en x = -2
2. Calcula la recta tangente y la recta normal de las funciones anteriores en los
puntos que se indican. 3. Utiliza la definición para calcular la función derivada de las siguientes
funciones:
a) 2
1)(x
xf =
b) x
xxf 2)( +=
c) 1
1)( 2 −−
=x
xxf
d) 323)( 2 +−= xxxf
4. Utilizando la tabla, calcula la derivada de las siguientes funciones:
a) 51)(
2
−−
=xxxf
b) xxxf =)(
c) 2
2 )3()(xxsenxf +
=
d) 2
32
)(x
exfx +
=
e) 2
2 )3ln()(x
xxf +=
5. 2008 MODELO 2 OPCIÓN A. Ejercicio 1. Sea f: R → R la función definida por:
>−−≤+
=2423
)( 2
2
xsibxxxsixax
xf
a) [1’5 puntos] Halla a y b sabiendo que f es derivable en R. b) [1 punto] Determina la recta tangente y la recta normal a la gráfica de
f en el punto de abscisa x = 3.
6. 2008 MODELO 4 OPCIÓN B. Ejercicio 1. Sea la función f : [0, 4] → R definida por
≤≤+<≤++
=42120
)(2
xsicxxsibaxx
xf
a) [2 puntos] Determina a, b y c sabiendo que f es continua en el intervalo cerrado [0, 4], derivable en el intervalo abierto (0, 4) y que f(0) = f(4).
b) [0’5 puntos] ¿En qué punto del intervalo se anula la derivada de la función?
7. 2009 MODELO 4 OPCIÓN B.
Ejercicio 1.- Sea f : R+ → R la función definida por ( )( )
=
≠−=
1,
1,1
ln)( 2
2
xa
xx
xxxf
a) [1’25 puntos] Sabiendo que f es continua, calcula a

27
b) [1’25 puntos] Estudia la existencia de asíntota horizontal para la gráfica de esta función. En caso de que exista, determina su ecuación.
8. 2009 MODELO 5 OPCIÓN A. Ejercicio 1.- [2’5 puntos] Se sabe que la función f: R →R definida por
>→+−≤→++−
=12511
)( 2
2
xaxaxxbxx
xf , es derivable. Determina los valores de a
y b
9. 2010 MODELO 3 OPCIÓN A Ejercicio 1. [2’5 puntos] Sea la función f : R → R dada por
+++
=1
)()( 2
2
xcbxaxxe
xfx
00
>≤
xsixsi
Calcula las constantes a, b y c sabiendo que f es derivable y que la recta tangente a la gráfica de f en el punto de abscisa x = 1 tiene pendiente 3.
10. 2010 MODELO 5 OPCIÓN B
Ejercicio 1. Considera la función f:[0,4] → R definida por
++
=cx
baxxxf
2
)( 4220
≤<≤≤
xsixsi
(a) [1’75 puntos] Sabiendo que f es derivable en todo el dominio y que verifica f(0) = f(4), determina los valores de a, b y c.
(b) [0’75 puntos] Para a = -3, b = 4 y c = 1 halla los extremos absolutos de f (abscisas donde se obtienen y valores que se alcanzan).
11. 2010 MODELO 6 OPCIÓN B
Ejercicio 1. [2’5 puntos] Considera la función f : R → R definida por
≤+
<<−≤
=
−
xsix
xsixxsie
xf
x
11
2101
0)( 2
Estudia su continuidad y derivabilidad. Determina la función derivada de
f.
12. 2011 MODELO 1 OPCIÓN B Ejercicio 1.- Sea f : [1/e,4] → R la función definida por
−++−
=2ln1
)ln()(
bxaxx
xf sisi
42
2/1≤<≤≤
xxe
donde ln denota la función logaritmo neperiano (a) [1'25 puntos] Calcula los valores de a y b para que f sea derivable en el intervalo (1/e, 4). (b) [1'25 puntos] Para a = 0 y b = 1/2 halla los extremos absolutos de f (abscisas donde se obtienen y valores que se alcanzan).

28
EJERCICIOS DE REPASO UNIDAD 1
1. Calcula los siguientes límites:
a) 12lim 2 +−∞→
xxx
b) 6262
23lim 23
2
1 −−+++
−→ xxxxx
x
c) 87
1lim 3
2
1 −+−
→ xxx
x
d)
−−
−→ 912
32lim 23 xxx
e) 1
1lim 2
23
−−+++
∞→ xxxxx
x
f)
1331464lim 23
234
1 −+−+−+−
−→ xxxxxxx
x
2. Estudia la continuidad de las siguientes funciones:
a)
>
≤−=
1,21,3
)(2
xx
xxxf
b)
−
−+
=
x
xxx
x
xf
1
12)(2
1
10
0
≥
<≤
<
x
x
x
c)
−−−
=1
11
)(2
3
xxx
xf 2
211
≥<<
≤
xx
x
d) 9)( 2 −= xxf
e) 41)( 2
2
+−
=xxxf
f) 94ln 2 −
−=
xxy
g) 3164
−−
=x
xy
i) ( )xxxy 23ln 23 +−=
3. Utiliza la definición para calcular la derivada de las siguientes funciones en los puntos que se indican:
a) 4
1)( 3 −=
xxf en x = 1
b) 413)(
−+
=xxxf en x = 1
c) 1
)( 2
2
−−
=x
xxxf en x = 0
d) 35)( 2 ++= xxxf en x = - 2 e) 323)( 2 +−= xxxf en x = 1
4. Calcula la recta tangente y la recta normal de las funciones anteriores en los puntos
que se indican. 5. Utiliza la definición para calcular la función derivada de las siguientes funciones:
a) 2
1)(x
xf = b) x
xxf 2)( +=

29
c) 1
1)( 2 −−
=x
xxf d) 323)( 2 +−= xxxf
6. 2004 MODELO 3 OPCIÓN A.
Ejercicio 2. Se sabe que la función f : (− 1, 1) → ℜ definida por
−
+−=
x
cxxxf1
212)(
2
1001
<≤<<−
xx
es derivable en el intervalo (− 1, 1). (a) [1 punto] Determina el valor de la constante c. (b) [0’5 puntos] Calcula la función derivada de f . (c) [1 punto] Halla las ecuaciones de las rectas tangentes a la gráfica de f que son paralelas a la recta de ecuación y = x.
7. 2006 MODELO 5 OPCIÓN B. Ejercicio 1. Se sabe que la función f : [0, 5] → ℜ definida por
−+−+
=14
)(2
xbxax
xf 5220
≤≤<≤
xx
es derivable en el intervalo (0, 5). (a) [1’75 puntos] Calcula las constantes a y b. (b) [0’75 puntos] Halla la ecuación de la recta tangente a la gráfica de f en el punto de abscisa x = 2.

30
UNIDAD 2: APLICACIONES DE LAS DERIVADAS
TEMA 4: APLICACIONES DE LAS DERIVADAS
7. Monotonía: Crecimiento y decrecimiento de una función 8. Determinación de extremos relativos 9. Optimización de funciones 10. Curvatura: Concavidad o curvatura de una función 11. Puntos de inflexión 12. Aplicaciones de las derivadas al cálculo de límites
1. MONOTONÍA: CRECIMIENTO Y DECRECIMIENTO DE UNA FUNCIÓN
Si f(x) es derivable,
• f(x) es estrictamente creciente en (a, b) si su derivada es positiva (f’(x) > 0) • f(x) es estrictamente decreciente en (a, b) si su derivada es negativa (f’(x) < 0)
Cálculo de los intervalos de crecimiento y decrecimiento Ejemplo: f(x) = x3 − 3x + 2 Pasos:
1. Se deriva la función: f '(x) = 3x2 −3 2. Se obtienen los ceros de la derivada primera: f ´(x) = 0.
11033 22 ±=→=→=− xxx
3. Formamos intervalos abiertos con los ceros de la derivada primera y los puntos de discontinuidad (ceros del numerador y del denominador, si hubiese un cociente)
4. Tomamos un valor de cada intervalo, y hallamos el signo que tiene en la derivada
primera. • Del intervalo (−∞, −1) tomamos x = -2, f'(−2) = 3(−2)2 −3 > 0
• Del intervalo (−1, 1) tomamos x = 0, f'(0) = 3(0)2 −3 < 0
• Del intervalo (1, ∞) tomamos x = 2, f'(2) = 3(2)2 −3 > 0
5. Escribimos los intervalos de crecimiento y decrecimiento:
• Creciente en: (−∞, −1) (1, ∞) • Decreciente en: (−1,1)
EJERCICIO RESUELTO:
( ) 121)( 2
3
2
3
+−=
−=
xxx
xxxf , { }1)( −ℜ=xDomf

31
1. Derivo la función:
( ) ( )22
234
22
34234
22
322
)12(34
)12(22363
)12(22)12(3)('
+−+−
=+−
−−+−=
+−−−+−
=xx
xxxxx
xxxxxxx
xxxxxxf
2. Igualo a cero el numerador y el denominador para calcular los puntos donde
cambia de signo el cociente:
CEROS DEL NUMERADOR:
( )
==
→=+−
=→=→=+−→=+−
31
034
00034034 2
2
22234
xx
xx
xxxxxxxx
CEROS DEL DENOMINADOR: 10122 =→=+− xxx
3. Divido la recta en intervalos: - ∞ 0 1 3 ∞ 4. Estudio el signo de la derivada en cada intervalo:
5. Expreso los intervalos de crecimiento y decrecimiento:
Creciente ( ) ( ) ( )∞∞− ,31,00, Decreciente en (1, 3)
2. EXTREMOS RELATIVOS O LOCALES.
Máximos locales (la función cambia de creciente a decreciente) Si f y f ´ son derivables en a, a es un máximo relativo o local si se cumple:
1. f ´(a) = 0 2. f ´´(a) < 0
Mínimos locales (la función cambia de decreciente a creciente) Si f y f' son derivables en a, a es un mínimo relativo o local si se cumple:
1. f ´(a) = 0 2. f ´´(a) > 0

32
Cálculo de máximos y mínimos Ejemplo: f(x) = x3 − 3x + 2 Pasos:
1. Hallo la derivada primera y calculamos sus ceros:
11033)(' 22 ±=→=→=−= xxxxf
2. Realizo la 2ª derivada, y sustituimos los valores obtenidos en el paso 1:
→<−=−→−=→>=→=
→=máximofx
mínimofxxxf
06)1(''106)1(''1
6)(''
3. Sustituyo en la función f(x) = x3 − 3x + 2 (sin derivar) para obtener la segunda
coordenada de los puntos:
• Si x = 1: f(1) = (1)3 − 3(1) + 2 = 0 Mínimo(1, 0)
• Si x = -1: f(−1) = (−1)3 − 3(−1) + 2 = 4 Máximo(−1, 4) EJERCICIO RESUELTO:
( ) 121)( 2
3
2
3
+−=
−=
xxx
xxxf , { }1)( −ℜ=xDomf
1. Derivo la función e igualo a cero:
( ) ( )
→=+−+−
=+−
−−+−=
+−−−+−
=
0)12(
34)12(
22363)12(
)22)12(3)('
22
234
22
34234
22
322
xxxxx
xxxxxxx
xxxxxxxxf
El denominador pasa a la derecha multiplicando a cero y desaparece:
( )
==
→=+−
=→=→=+−→=+−
31
034
00034034 2
2
22234
xx
xx
xxxxxxxx
2. Realizo la 2ª derivada, y sustituimos los valores obtenidos en el paso 1, o bien me fijo en el crecimiento de la función para averiguar si son máximos o mínimos:
Teniendo en cuenta la tabla:
• En x = 0 no hay extremo local (no cambia la monotonía) • En x = 1 hay una asíntota (es un cero del denominador de la función) • En x = 3 hay un mínimo (cambia de decreciente a creciente)

33
3. Sustituyo en la función ( ) 121
)( 2
3
2
3
+−=
−=
xxx
xxxf para obtener la segunda
coordenada de los puntos:
• En x = 1 ( )
→=−
=01
111)( 2
3
xf no hay función
• En x = 3 ( )
→
→=
−=
427,3
427
133)3( 2
3
f es un mínimo
3. OPTIMIZACIÓN Pasos para la resolución de problemas de optimización
1. Se plantea la función que hay que maximizar o minimizar. 2. Se plantea una ecuación que relacione las dos variables del problema, y se despeja
una de ellas 3. Se sustituye en la función de modo que nos quede una sola variable. 4. Se deriva la función y se iguala a cero, para hallar los extremos locales. 5. Se realiza la 2ª derivada para comprobar si el resultado obtenido es un máximo o
un mínimo, o se estudia la monotonía Ejemplo
De todos los triángulos isósceles de 12 m de perímetro, hallar los lados del que tome
área máxima.
1. Se plantea la función que hay que maximizar en función de las variables
2hbS ⋅
=
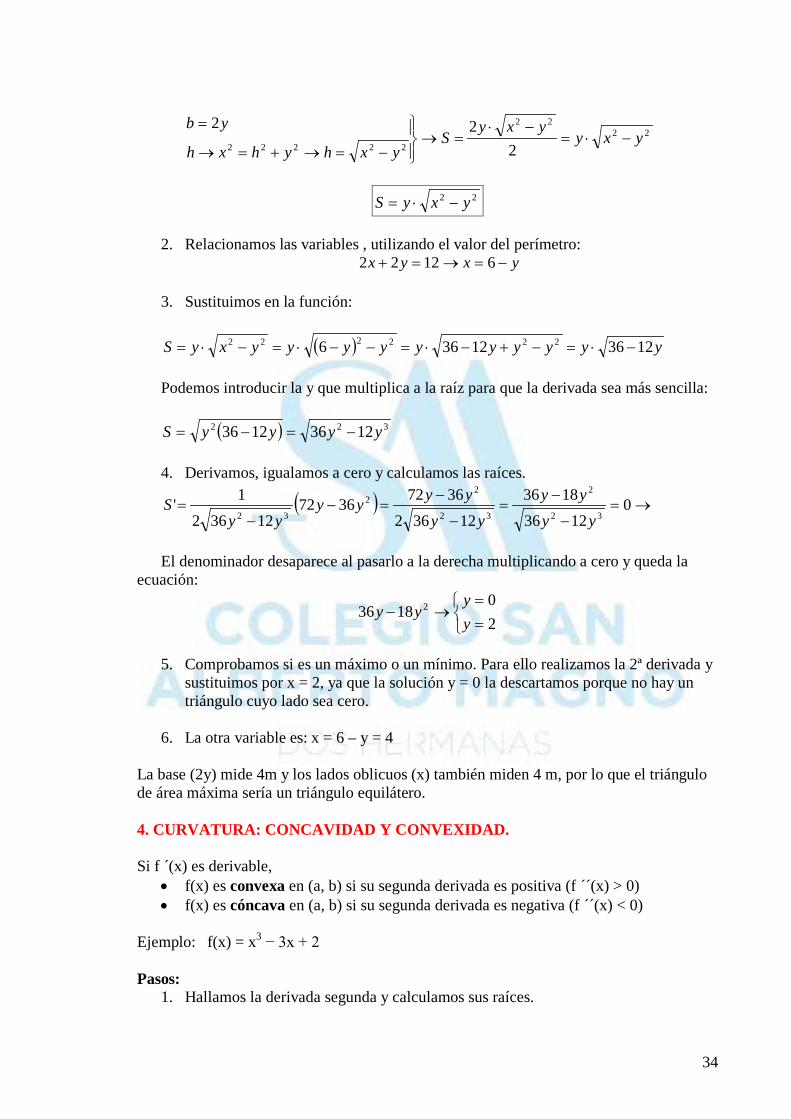
34
2222
22222 222
yxyyxy
Syxhyhxh
yb−⋅=
−⋅=→
−=→+=→
=
22 yxyS −⋅=
2. Relacionamos las variables , utilizando el valor del perímetro:
yxyx −=→=+ 61222 3. Sustituimos en la función:
( ) yyyyyyyyyyxyS 123612366 222222 −⋅=−+−⋅=−−⋅=−⋅=
Podemos introducir la y que multiplica a la raíz para que la derivada sea más sencilla:
( ) 322 12361236 yyyyS −=−=
4. Derivamos, igualamos a cero y calculamos las raíces.
( ) →=−
−=
−
−=−
−= 0
12361836
1236236723672
123621'
32
2
32
22
32 yyyy
yyyyyy
yyS
El denominador desaparece al pasarlo a la derecha multiplicando a cero y queda la
ecuación:
==
→−20
1836 2
yy
yy
5. Comprobamos si es un máximo o un mínimo. Para ello realizamos la 2ª derivada y
sustituimos por x = 2, ya que la solución y = 0 la descartamos porque no hay un triángulo cuyo lado sea cero.
6. La otra variable es: x = 6 – y = 4
La base (2y) mide 4m y los lados oblicuos (x) también miden 4 m, por lo que el triángulo de área máxima sería un triángulo equilátero. 4. CURVATURA: CONCAVIDAD Y CONVEXIDAD. Si f ´(x) es derivable,
• f(x) es convexa en (a, b) si su segunda derivada es positiva (f ´´(x) > 0) • f(x) es cóncava en (a, b) si su segunda derivada es negativa (f ´´(x) < 0)
Ejemplo: f(x) = x3 − 3x + 2 Pasos:
1. Hallamos la derivada segunda y calculamos sus raíces.

35
f ´(x) = 3x2 −3 f ´´(x) = 6x = 0 x = 0 2. Formamos intervalos abiertos con los ceros de la segunda derivada y los puntos de
discontinuidad (ceros del numerador y del denominador, si hubiese un cociente)
3. Tomamos un valor de cada intervalo, y hallamos el signo que tiene en la derivada
segunda. • Del intervalo (− ∞, 0) tomamos x = −1, f ´´(−1) = 6(−1) < 0 Cóncava. • Del intervalo (0, ∞) tomamos x = 1, f ´´(1) = 6 (1) > 0 Convexa.
4. Escribimos los intervalos:
Concavidad: (−∞, 0) Convexidad: (0, ∞) EJERCICIOS RESUELTOS
( ) 121)( 2
3
2
3
+−=
−=
xxx
xxxf , { }1)( −ℜ=xDomf
1. Derivo la función dos veces:
( ) ( )22
234
22
34234
22
322
)12(34
)12(22363
)12(22)12(3)('
+−+−
=+−
−−+−=
+−−−+−
=xx
xxxxx
xxxxxxx
xxxxxxf
( ) ( )22
234
22
34234
22
322
)12(34
)12(22363
)12(22)12(3)('
+−+−
=+−
−−+−=
+−−−+−
=xx
xxxxx
xxxxxxx
xxxxxxf
( )( ) ( ) ( )( )( )42
22342223
122212234126124)(''
+−
−+−⋅+−−+−+−=
xxxxxxxxxxxxxxf
En el numerador se puede sacar factor común ( 122 +− xx ) y simplificarlo con un factor del denominador:
( )( ) ( ) ( )( )
( )( )
( )( )
( ) ( )2232
2
32
23
32
23344523234345
32
234223
126
12126
126126
1212121616446126122412484
124434126124)(''
+−=
+−
+−=
+−
+−
=+−
−++−−−+−+−+−+−
=+−
−⋅+−−+−+−=
xxx
xxxxx
xxxxx
xxxxxxxxxxxxxxxxx
xxxxxxxxxxxxf
2. Igualo a cero el numerador y el denominador para calcular los puntos donde
cambia de signo el cociente:

36
CEROS DEL NUMERADOR: 006 =→= xx CEROS DEL DENOMINADOR: 10122 =→=+− xxx
3. Divido la recta en intervalos: - ∞ 0 1 ∞ 4. Estudio el signo de la derivada segunda en cada intervalo:
5. Expreso los intervalos de curvatura:
Convexa en ( ) ( )∞,11,0 Cóncava en ( )0,∞− 5. PUNTOS DE INFLEXIÓN DE UNA FUNCIÓN. Son los puntos de la función en los que cambia de curvatura Si f y f' son derivables en a, a es un PUNTO DE INFLEXIÓN si se cumple:
1. f ´´(a) = 0 2. f ´´´(a) ≠ 0
Estudio de los puntos de inflexión EJEMPLO: f(x) = x3 − 3x + 2 Pasos:
a) Hallamos la derivada segunda y calculamos sus ceros: f '(x) = 3x2 −3 f''(x) = 6x = 0 x = 0
b) Realizamos la derivada tercera, y sustituimos en ella los ceros de derivada segunda y si:
f'''(x) ≠ 0 Tenemos un punto de inflexión. f'''(x) = 6, por tanto x = 0 será un punto de inflexión.
c) Calculamos la imagen (en la función f(x) = x3 − 3x + 2) del punto de inflexión. f(0) = (0)3 − 3(0) + 2 = 2 Punto de inflexión: (0, 2)
6. TEOREMA DE L’HÔPITAL
1. Sean f(x) y g(x) dos funciones derivables en x = a, y sea 0)(lim)(lim ==→→
xgxfaxax
.
Si existe )(')('lim
)()(lim
)(')('lim
xgxf
xgxf
xgxf
axaxax →→→=→

37
2. Sean f(x) y g(x) dos funciones derivables en x = a, y sea
∞==→→
)(lim)(lim xgxfaxax
. Si existe )(')('lim
)()(lim
)(')('lim
xgxf
xgxf
xgxf
axaxax →→→=→
3. Sean f(x) y g(x) dos funciones derivables, y sea 0)(lim)(lim ==∞→∞→
xgxfxx
. Si
existe )(')('lim
)()(lim
)(')('lim
xgxf
xgxf
xgxf
xxx ∞→∞→∞→=→
4. Sean f(x) y g(x) dos funciones derivables, y sea ∞==
∞→∞→)(lim)(lim xgxf
xx. Si
existe )(')('lim
)()(lim
)(')('lim
xgxf
xgxf
xgxf
xxx ∞→∞→∞→=→
Para aplicar la regla de L'Hôpital hay que tener un límite de la forma )()(lim
xgxf
ax→, donde a
puede ser un número o infinito, y aparecer las indeterminaciones: 00 o
∞∞
EJEMPLOS
1. ( )00
)1(12lnlim
2
1=
−−
→ xtgx
x
( ) ( ) 401
401
14
)1(112
4
lim)1(12lnlim 22
2
1
2
1=
+=
+=
−+−
=−−
→→ tgxtgx
x
xtgx
xx
2. 00lim 30
=−
→ xsenxx
x
61
6lim
3cos1limlim
02030==
−=
−→→→ x
senxx
xxsenxx
xxx
3. ( ) 0
0ln
)1cos(1lim 21=
−−→ x
xx
( )
21
210
112
0cos10112
)1cos()1(1lim
ln2)1(limln2
)1(limln
)1cos(1lim
1
1121
=+
=⋅
⋅+⋅=
⋅
−+−⋅
=−⋅
=−
=−−
→
→→→
sen
x
xxxsen
xxsenx
xx
xsenxx
x
xxx
4. 001coslim 2
2
0=
−→ x
xx
12
)10(22
cos)cos(2lim2
cos2lim1coslim002
2
0
−=+−
=+⋅−−
=⋅−
=−
→→→
xsenxsenxx
senxxx
xxxx

38
INDETERMINACIÓN INFINITO MENOS INFINITO En la indeterminación infinito menos infinito, si son fracciones, se ponen común
denominador y se transforma en 00 o
∞∞
EJEMPLO
1. ∞−∞=
−
→ xgx
x
1cotlim0
020
coscoscoslim
'cos
limcos
coscoslim
'coslim1coslim
0
00
00
==
⋅++⋅−−
=
⋅+⋅−
=
⋅+−⋅−
=
⋅−
=
−
→
→→
→→
senxxxxxxsenx
HLxxsenx
senxxxxsenx
xsenxxx
HLsenxx
senxxxxsenx
x
x
xx
xx
INDETERMINACIÓN CERO POR INFINITO La indeterminación cero por infinito, se transforma del siguiente modo:
B
ABAaxax 1
lim)(lim→→
=⋅
EJEMPLO
( ) ( )∞−⋅=⋅+→
0lnlim0
xxx
( )
0)(limlim1
1
lim
'1lnlimlnlim
0
2
0
2
0
00
=−=−
=−
==⋅
+++
++
→→→
→→
xxx
x
x
HL
x
xxx
xxx
xx
39
EJERCICIOS DE APLICACIONES DE LAS DERIVADAS 1. 2008 MODELO 1 OPCIÓN A.
Ejercicio 1. Sean f : R → R y g : R → R las funciones definidas por f(x) = x2 + ax + b y g(x) = ce -(x + 1)
Se sabe que las gráficas de f y g se cortan en el punto (−1, 2) y tienen en ese punto la misma recta tangente. (a) [2 puntos] Calcula los valores de a, b y c. (b) [0’5 puntos] Halla la ecuación de dicha recta tangente.
2. 2008 MODELO 2 OPCIÓN B.
Ejercicio 1. [2’5 puntos] De entre todas las rectas del plano que pasan por el punto (1, 2), encuentra aquella que forma con las partes positivas de los ejes coordenados un triángulo de área mínima. Halla el área de dicho triángulo. 3. 2008 MODELO 3 OPCIÓN B.
Ejercicio 1. [2’5 puntos] De entre todos los rectángulos de perímetro 8cm, determina las dimensiones del que tiene diagonal de menor longitud.
4. 2008 MODELO 4 OPCIÓN A.
Ejercicio 1. [2’5 puntos] Dada la función f: R → R definida por f(x) = (x + 1)/(ex), determina la ecuación de la recta tangente a la gráfica de f en su punto de inflexión.
5. 2009 MODELO 1 OPCIÓN A.
Ejercicio 1.- [2’5 puntos] Sea f : R R la función definida por f(x)==ax3+bx2+cx+d. Calcula los valores de a, b, c y d sabiendo que f verifica: • El punto (0 , 1) es un punto de inflexión de la gráfica f • f tiene un mínimo local en el punto de abscisa x = 1 • La recta tangente a la gráfica de f en el punto de abscisa x = 2 tiene pendiente 1 6. 2009 MODELO 1 OPCIÓN B.
Ejercicio 1.- [2’5 puntos] Se divide un segmento de longitud L = 20 cm. en dos trozos. Con uno de los trozos se forma un cuadrado y con el otro un rectángulo en el que la base es el doble de la altura. Calcula la longitud de cada uno de los trozos para que la suma de las áreas del cuadrado y del rectángulo sea mínima.
7. 2009 MODELO 2 OPCIÓN B.
Ejercicio 1.- [2'5 puntos] De entre todos los rectángulos cuya área mide 16 cm2, determina las dimensiones del que tiene diagonal de menor longitud
8. 2009 MODELO 5 OPCIÓN B.
Ejercicio 1.- [2’5 puntos] Se sabe que la función f :R → R definida por dcxbxaxxf +++= 23)( , tiene extremos relativos en (0 , 0) y (2 , 2). Calcula a, b, c
y d.
9. 2009 MODELO 6 OPCIÓN B. Ejercicio 1.- [2’5 puntos] De todos los triángulos cuya base y altura suman 20 cm.,
¿qué base tiene el de área máxima? 10. 2010 MODELO 1 OPCIÓN A.

40
Ejercicio 1. [2’5 puntos] Entre todos los triángulos rectángulos de 5 metros de hipotenusa, determina los catetos del de área máxima. 11. 20010 MODELO 1 OPCIÓN B.
Ejercicio 1. Sea f : (0, +∞) → R la función definida por f(x) = ln(x2 +3x), donde ln denota el logaritmo neperiano. a) [1’5 puntos] Determina, si existen, los puntos de la gráfica de f en los que la
recta tangente a la gráfica es paralela a la recta de ecuación x − 2y +1 = 0. b) [1 punto] Halla la ecuación de la recta tangente y de la recta normal a la gráfica
de f en el punto de abscisa x=3.
12. 2010 MODELO 2 OPCIÓN A. Ejercicio 1. Sea f la función definida como f(x) = (ax2 + b) / (a – x) para x ≠ a. a) [1'5 puntos] Calcula a y b para que la gráfica de f pase por el punto (2,3) y
tenga una asíntota oblicua con pendiente - 4. b) [1 punto] Para el caso de a = 2, b = 3, obtén la ecuación de la recta tangente
a la gráfica de f en el punto de abscisa x = 1
13. 2010 MODELO 3 OPCIÓN B. Ejercicio 1. [2’5 puntos] Sea f : R → R la función f(x) = (x + 1)∙ √3 − 𝑥3 .
Halla las ecuaciones de la recta tangente y de la recta normal a la gráfica de f en el punto de abscisa x = −5 y en el punto de abscisa x = 2.
14. 2010 MODELO 4 OPCIÓN A
Ejercicio 1. [2’5 puntos] La hipotenusa de un triángulo rectángulo mide 90 cm. Si se hace girar alrededor de uno de sus catetos, el triángulo engendra un cono. ¿Qué medidas han de tener los catetos del triángulo para que el volumen del cono engendrado sea máximo? (Recuerda que el volumen del cono es V = (1/3)πr2h). 15. 2010 MODELO 5 OPCIÓN A
Ejercicio 1. [2’5 puntos] Una hoja de papel tiene que contener 18 cm2 de texto. Los márgenes superior e inferior han de ser de 2 cm cada uno y los laterales 1 cm. Calcula las dimensiones de la hoja para que el gasto de papel sea mínimo.
16. 2010 MODELO 6 OPCIÓN A
Ejercicio 1. [2’5 puntos] Dada la función f : R → R, f(x) = a.sen(x)+ bx2 + cx + d, determina los valores de las constantes a, b, c y d sabiendo que la gráfica de f tiene tangente horizontal en el punto (0, 4) y que la segunda derivada es f ´´(x) = 3.sen(x) − 10.
17. 2011 MODELO 1 OPCIÓN A
Ejercicio 1.- [2’5 puntos] Una ventana normanda consiste en un rectángulo coronado con un semicírculo.
De entre todas las ventanas normandas de perímetro 10 m, halla las dimensiones del marco de la de área máxima.

41
18. 2011 MODELO 2 OPCIÓN A Ejercicio 1.- [2'5 puntos] Calcula la base y la altura del triángulo isósceles de
perímetro 8 y de área máxima.
19. 2011 MODELO 3 OPCIÓN A Ejercicio 1.- [2'5 puntos] Dada la función f : R → R definida por f(x) = ax3 + bx2 +
cx, determina a, b y c sabiendo que su gráfica tiene un punto de inflexión en (1,0), y que la recta tangente en ese punto tiene por ecuación y = - 3x + 3.
20. 2011 MODELO 3 OPCIÓN B
Ejercicio 1.- [2'5 puntos] En el primer cuadrante representamos un rectángulo de tal manera que tiene un vértice en el origen de coordenadas y el vértice opuesto en la parábola y = - x2 + 3. Determina las dimensiones del rectángulo para que su área sea máxima.
. 21. 2011 MODELO 4 OPCIÓN A
Ejercicio 1.- [2'5 puntos] Queremos hacer junto a la carretera un cercado rectangular para unos caballos en una zona llana. Cada metro del lado del cercado que está junto a la carretera nos cuesta 100 euros, mientras que para el resto del cercado nos cuesta 10 euros el metro. ¿Cuáles son las dimensiones del prado de área máxima que podemos cercar con 3000 euros?
22. 2011 MODELO 4 OPCIÓN B
Ejercicio 1.- [2'5 puntos] En una empresa los ingresos (en euros) dependen de la edad. Si la edad, x, es de 18 a 50 años, los ingresos vienen dados por la fórmula – x2 + 70x, mientras que para edades iguales o superiores a 50 años los ingresos están
determinados por la expresión 30
400−x
x . Calcula cuál es el máximo de los ingresos y a
qué edad se alcanza.
23. 2011 MODELO 5 OPCIÓN A Ejercicio 1.- [2'5 puntos] Un alambre de 100 m de longitud se divide en dos trozos.
Con uno de los trozos se construye un cuadrado y con el otro un rectángulo cuya base es doble que su altura. Calcula las longitudes de cada uno de los trozos con la condición de que la suma de las áreas de estas dos figuras sea mínima.
24. 2011 MODELO 5 OPCIÓN B
Ejercicio 1.- Sea f : R → R la función definida por f(x) = 4 – x2
a) [1 punto] Halla la ecuación de la recta normal a la gráfica de f en el punto de abscisa x = 2.
b) [1'5 puntos] Determina el punto de la gráfica en el que la recta tangente es perpendicular a la recta x +2y – 2 = 0.
25. 2011 MODELO 6 OPCIÓN A
Ejercicio 1.- [2'5 puntos] Se desea construir un depósito cilíndrico cerrado de área total igual a 54 m2. Determina el radio de la base y la altura del cilindro para que éste tenga volumen máximo.

42
26. 2011 MODELO 6 OPCIÓN A Ejercicio 1.- [2’5 puntos] Sea f :[1,+∞) → R la función definida como
1)( −= xxf . Determina el punto P de la gráfica de f que se encuentra a menor distancia del punto A(2, 0). ¿Cuál es la distancia?
EJERCICIOS DE SELECTIVIDAD: LÍMITES
27. SELECTIVIDAD 2000: MODELO 2 OPCIÓN A
Ejercicio 2. [2.5 puntos] Calcula )tan(
lim 2xsenxx
ox
⋅→
28. SELECTIVIDAD 2001: MODELO 1 OPCIÓN B
Ejercicio 2. [2.5 puntos] Calcula
−
−→ xxx
x ln1
1lim
1
29. SELECTIVIDAD 2001: MODELO 3 OPCIÓN A
Ejercicio 2. [2.5 puntos] Calcula ( )23
1limxxsenxe x
ox −⋅−
→
30. SELECTIVIDAD 2001: MODELO 4 OPCIÓN A
Ejercicio 2. Calcula
(a) [1.25 puntos] 2
211limx
xox
−−→
(b) [1.25 puntos] x
xex 32lim −
+∞→⋅
31. SELECTIVIDAD 2001: MODELO 6 OPCIÓN B
Ejercicio 2. [2.5 puntos] Determina α sabiendo que existe y es finito el límite:
senxxxee xx
ox −+− −
→
αlim
Calcula dicho límite. 32. SELECTIVIDAD 2002: MODELO 3 OPCIÓN A
Ejercicio 2. Considera la función f definida por 1
22)(2
−+−
=x
xxxf para 1≠x
(a) [1.5 puntos] Calcula las asíntotas de la gráfica de f. (b) [1 punto] Estudia la posición de la gráfica f respecto de sus asíntotas. 33. SELECTIVIDAD 2002: MODELO 5 OPCIÓN B
Ejercicio 2. Considera la curva de ecuación 32
22
3
−−+
=xx
xxy
(a) [1.5 puntos] Determina sus asíntotas (b) [2.5 puntos] ¿Corta la curva a alguna de sus asíntotas en algún punto? Justifica la
respuesta.

43
34. SELECTIVIDAD 2002: MODELO 6 OPCIÓN A
Considera la función ℜ→ℜ:f definida por 22)(x
exxf ⋅= (a) [1 punto] Calcula
)(lim xfx +∞→
y )(lim xfx −∞→
(b) [1.5 puntos] Calcula los intervalos de monotonía y los extremos locales de f (puntos donde se obtienen y valor que se alcanzan)
35. SELECTIVIDAD 2003: MODELO 1 OPCIÓN A
Ejercicio 2. [2.5 puntos] Calcula senxx
senxxLnox ⋅
−+→
)1(lim
36. SELECTIVIDAD 2003: MODELO 5 OPCIÓN B
Ejercicio 2. Considera la función f definida para 2−≠x por 2
22)(2
++
=xxxf
(c) [1.5 puntos] Halla las asíntotas de la gráfica de f. (d) [1 punto] Estudia la posición de la gráfica f respecto de sus asíntotas. 37. SELECTIVIDAD 2003: MODELO 6 OPCIÓN A
Ejercicio 2. Considera la función f definida por ( )2
3
1)(
xxxf+
= para 1≠x
(e) [1.5 puntos] Calcula las asíntotas de la gráfica de f. (f) [1 punto] Estudia la posición de la gráfica f respecto de sus asíntotas. 38. 2005 MODELO 3 OPCIÓN A.
Ejercicio 1. [2’5 puntos] Se sabe que 2limx
senxxox
⋅−→
α es finito. Determina el valor
de α y calcula el límite. 39. 2006 MODELO 1 OPCIÓN B.
Ejercicio 1. [2’5 puntos] Calcula
−−
→ 111lim
1 xLnxx
siendo Ln la función logaritmo neperiano.
40. 2008 MODELO 3 OPCIÓN A. (JUNIO)
Ejercicio 1. [2’5 puntos] Sea f la función definida, para x ≠ 0, por xexxf1
)( ⋅= Determina las asíntotas de la gráfica de f.
41. 2008 MODELO 6 OPCIÓN B
Ejercicio 1. [2’5 puntos] Dada la función f definida, para 0≠x , por
11)(
−+
= x
x
eexf determina las asíntotas de su gráfica.
42. 2009 MODELO 2 OPCIÓN A
Ejercicio 1. [2’5 puntos] Se considera la función f : (1, +∞) → R definida por
xxxxf +−= 2)( Determina las asíntotas.

44
43. 2009 MODELO 3 OPCIÓN A (JUNIO) Ejercicio 1. [2'5 puntos] Calcula el siguiente límite (In denota logaritmo
neperiano),
−−
→ 121lim 21 xLnxx
44. 2010 MODELO 2 OPCIÓN B
Ejercicio 1. [2’5 puntos] Calcula
−→ 20
limx
ee senxx
x

45
TEMA 5: GRÁFICA DE UNA FUCIÓN
Para representar una función tenemos estudiaremos los siguientes apartados:
1. Dominio de una función 2. Simetría
Simetría respecto del eje de ordenadas f(-x) = f(x)
Simetría respecto al origen f(- x) = - f(x)
3. Periodicidad )(),()(/ xDomfxxfTxfT ∈∀=+ℜ∈∃
T = periodo
4. Puntos de corte con los ejes Puntos de corte con el eje OX
Para hallar los puntos de corte con el eje de abscisas hacemos y = 0 y resolvemos la ecuación resultante.
Punto de corte con el ejes OY Para hallar el punto de corte con el eje de ordenadas hacemos x = 0 y calculamos el valor de f(0).
5. Asíntotas Asíntotas horizontales Si kxf
x=
±∞→)(lim , entonces la función tiene una asíntota
horizontal en y = k
Ejemplo: →=−+
→−+
=∞→
2132lim
132)( 2
2
2
2
xx
xxxf
xla función tiene una asíntota
horizontal en y = 2
Asíntotas verticales Si →±∞=→
)(lim xfkx
la función tiene una asíntota vertical en
x = K En un cociente, las posibles asíntotas verticales son los puntos que no pertenecen al dominio (valores de x que anulan el denominador)
Ejemplo: 101132)( 2
2
2
±=→=−→−+
= xxxxxf
→
±∞==−+
±∞==−+
−→
→
05
132lim
05
132lim
2
2
1
2
2
1
xx
xx
x
xla función tiene dos asíntotas verticales, una en x =1
y otra en x = - 1

46
En un logaritmo, las posibles asíntotas verticales se obtienen igualando a cero la función sobre la que actúa el logaritmo. Si, además, esta función es un cociente, también son posibles asíntotas los ceros del denominador.
Ejemplo:
=→=−−=→=+
→−+
=101303
13log)(
xxxx
xxxf
→
−∞==−
=−+
+∞=∞==
−+
−→
→
0log4
0log13loglim
log04log
13loglim
3
1
xxxx
x
xla función tiene dos asíntotas
verticales, una en x =1 y otra en x = - 3
Asíntotas oblicuas f(x) tiene asíntota oblicua y = mx + n, si m y n existen y son finitos. Se calculan resolviendo los siguientes límites:
( )xmxfnxxfm
x
x
⋅−=
=
∞→
∞→
)(lim
)(lim
Si la función tiene asíntota horizontal, no tiene asíntota oblicua.
EJEMPLO: Calcular las asíntotas de la función: 22)(
2
−+
=x
xxf
Asíntotas horizontales: →∞=−+
∞→ 22lim
2
xx
xno hay asíntota horizontal
Asíntotas verticales: →±∞==−+
→ 06
22lim
2
2 xx
xhay asíntota vertical en x = 2
Asíntotas oblicuas
→=
−+
=
−
−−+=
−
−+
=
→=−+
=−+
=
∞→∞→∞→
∞→∞→
22
22lim2
)2(2lim22lim
122lim2
2
lim
22
2
2
2
xx
xxxxx
xxn
xxx
xx
x
m
xxx
xx
Hay una asíntota oblicua de ecuación y = x + 2
6. Crecimiento y decrecimiento. Máximos y mínimos relativos
7. Concavidad y convexidad. Puntos de inflexión
Ejemplo de representación de una función
21)(
xxxf+
=
Dominio: Todos los números reales Puntos de corte con los ejes:
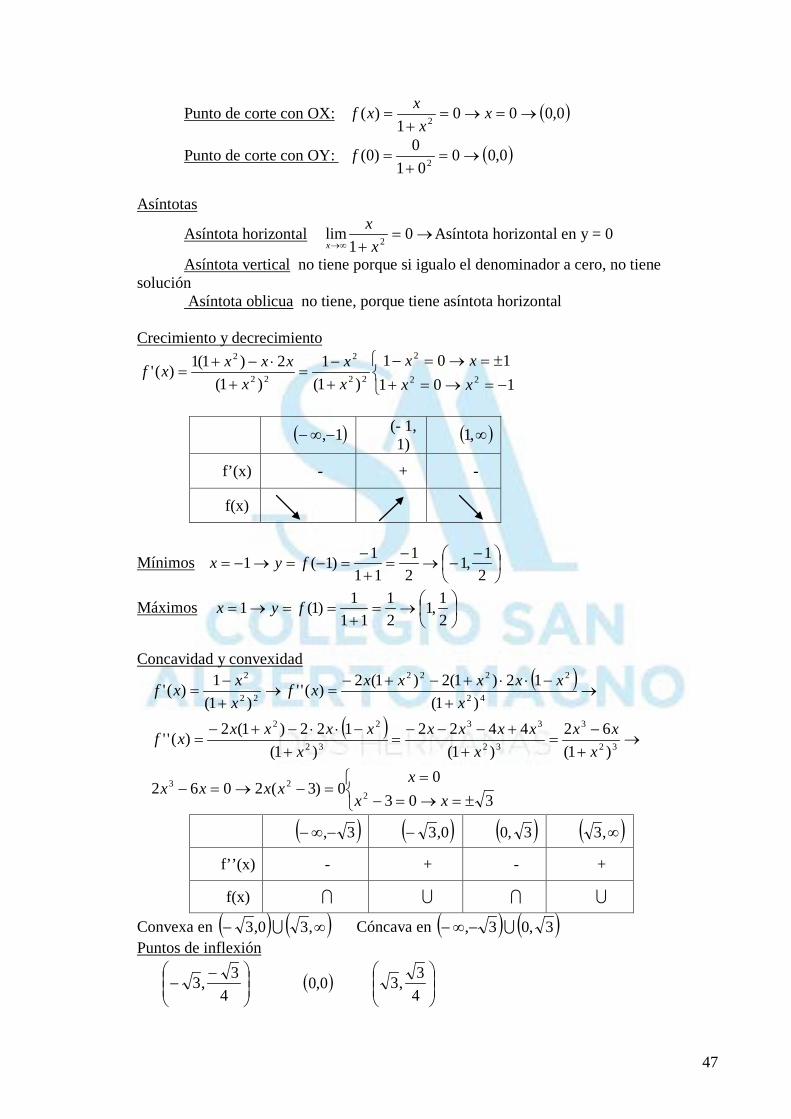
47
Punto de corte con OX: ( )0,0001
)( 2 →=→=+
= xx
xxf
Punto de corte con OY: ( )0,0001
0)0( 2 →=+
=f
Asíntotas
Asíntota horizontal →=+∞→
01
lim 2xx
xAsíntota horizontal en y = 0
Asíntota vertical no tiene porque si igualo el denominador a cero, no tiene solución
Asíntota oblicua no tiene, porque tiene asíntota horizontal Crecimiento y decrecimiento
−=→=+±=→=−
+−
=+
⋅−+=
101101
)1(1
)1(2)1(1)(' 22
2
22
2
22
2
xxxx
xx
xxxxxf
( )1,−∞− (- 1, 1) ( )∞,1
f’(x) - + -
f(x)
Mínimos
−−→
−=
+−
=−=→−=21,1
21
111)1(1 fyx
Máximos
→=
+==→=
21,1
21
111)1(1 fyx
Concavidad y convexidad
( )
( )
±=→=−=
=−→=−
→+−
=+
+−−−=
+−⋅⋅−+−
=
→+
−⋅⋅+−+−=→
+−
=
3030
0)3(2062
)1(62
)1(4422
)1(122)1(2)(''
)1(12)1(2)1(2)(''
)1(1)('
223
32
3
32
33
32
22
42
2222
22
2
xxx
xxxx
xxx
xxxxx
xxxxxxf
xxxxxxxf
xxxf
( )3,−∞− ( )0,3− ( )3,0 ( )∞,3
f’’(x) - + - +
f(x)
Convexa en ( ) ( )∞− ,30,3 Cóncava en ( ) ( )3,03, −∞− Puntos de inflexión
−−
43,3 ( )0,0
43,3

48
Representación gráfica
Ejercicio 6. Sea f : R → R la función definida por f(x) = (3x − 2x2)ex . (a) [1’5 puntos] Determina los intervalos de crecimiento y de decrecimiento de f . (b) [1 punto] Calcula los extremos relativos de f (abscisas donde se obtienen y valores que se alcanzan). SOLUCIÓN Los apartados (a) y (b) se pueden hacer juntos pues lo único que hay que estudiar es la primera derivada f’(x), de la cual saldrá el crecimiento, decrecimiento, máximos y mínimos relativos
f ´(x) = (x − 4x)ex + (3x − 2x2)ex = ex(– 2x2 – x + 3) De f ´(x) = 0 → (– 2x2 – x + 3) = 0, puesto que la exponencial ex nunca se anula. – 2x2 – x + 3 = 0 → x = 1 y x = – 1’5, que serán los posibles máximos y mínimos relativos. – 1,5 1 en (– ∞ , –1’5): f ´(–2) = e –2 (– 2(–2)2 – (–2) + 3) = e -2(– 3) < 0, f(x) es estrictamente decreciente en (–1’5, 1): f ´(0) = e 0 (3) = 1( 3) > 0, f(x) es estrictamente creciente en (1, +∞ ): f ´(2) = e (2) (– 2(2)2 – (2) + 3) = e 2(– 7) < 0, f(x) es estrictamente decreciente - ∞ - 1,5 1 ∞ f’ - + - f Por definición x = –1’5 es un mínimo relativo que vale f(–1’5) = (3(−1’5) − 2(–1’5)2)e -1’5 = – 9.e -1’5
Por definición x = 1 es un máximo relativo que vale f(1) = (3(1) − 2(1)2)e 1 = e

49
EJERCICIOS DE GRÁFICA DE FUNCIONES 1. 2008 MODELO 5 OPCIÓN A.
Ejercicio 1. Sea f : [0, 2π] → R la función definida por f(x)= ex(sen x + cos x). (a) [1’25 puntos] Determina los intervalos de crecimiento y de decrecimiento (b) [1’25 puntos] Calcula los puntos de inflexión de la gráfica de f.
2. 2008 MODELO 6 OPCIÓN A.
Ejercicio 1. Sea f : R R la función definida por 2)ex . (a) [1’5 puntos] Determina los intervalos de crecimiento y de decrecimiento (b) [1 punto] Calcula los extremos relativos de f (abscisas donde se obtienen y
valores que se alcanzan).
3. 2009 MODELO 3 OPCIÓN B.
Ejercicio 1. Sea f : R → R la función definida por
≥−−
<−=
0,13
0,1
1)(
2 xxx
xxxf
(a) [0'75 puntos] Estudia su continuidad y derivabilidad. (b) [1'25 puntos] Determina sus asíntotas y sus extremos relativos. (c) [0'5 puntos] Esboza la gráfica de f.
4. 2009 MODELO 4 OPCIÓN A.
Ejercicio 1.- Sea Sea f : R → R la función definida por 3)(( 2 +⋅= xxxf . a) [1’5 puntos] Estudia la continuidad y derivabilidad de f b) [1’5 puntos] Estudia el crecimiento y decrecimiento de f. Calcula sus extremos relativos (abscisas donde se obtienen y valores que alcanzan)
5. 2009 MODELO 6 OPCIÓN A. Ejercicio 1.- Sea la función f:R→ R definida por xexxf −+=)(
a) [0’75 puntos] Determina los intervalos de crecimiento y decrecimiento de f, así como los extremos relativos o locales de f b) [0’5 puntos] Determina los intervalos de concavidad y convexidad de f c) [0’75 puntos] Determina las asíntotas de la gráfica de f. d) [0’5 puntos] Esboza la gráfica de f
6. 2010 MODELO 4 OPCIÓN B.
Ejercicio 1. Sea f la función definida como 1
)( 2
3
−=
xxxf para x ≠ - 1 y x ≠ 1.
(a) [1 punto] Estudia y halla las asíntotas de la gráfica de f (b) [1 punto] Determina los intervalos de crecimiento y decrecimiento de f. (c) [0’5 puntos] Con los datos obtenidos esboza la gráfica de f .
7. 2011 MODELO 2 OPCIÓN B.
Ejercicio 1.- Sea f la función definida por 3
4 13)(x
xxf += , para x ≠ 0.
(a) [1’25 puntos] Estudia las asíntotas de la gráfica de la función. (b) [1’25 puntos] Halla los intervalos de crecimiento y de decrecimiento, y los extremos relativos (abscisas donde se obtienen y valores que se alcanzan).

50
UNIDAD 3: INTEGRALES
TEMA 6: INTEGRAL INDEFINIDA
8. Concepto de integral 9. Tabla de integrales 10. Integrales potenciales 11. Integrales logarítmicas y exponenciales 12. Integrales trigonométricas 13. Integrales trigonométricas inversas 14. Métodos de integración
1. INTEGRAL INDEFINIDA
Integrar es el proceso recíproco de derivar, es decir, dada una función f(x) buscamos aquellas funciones F(x) cuyas derivadas son f(x). Se dice que F(x) es una primitiva de f(x)
Es decir, las primitivas de f(x) son las funciones derivables F(x) tales que: F ´(x) = f(x).
Si una función f(x) tiene primitiva, tiene infinitas primitivas, diferenciándose todas
ellas en una constante. [F(x) + C] ´ = F'(x) + 0 = F ´(x) = f(x)
Integral indefinida es el conjunto de todas las infinitas primitivas que puede tener
una función. Se representa por ∫ f(x) dx. Se lee: integral de x diferencial de x.
• ∫ es el signo de integración. • f(x) es el integrando o función a integrar. • dx es diferencial de x, e indica cuál es la variable de la función que se integra. • C es la constante de integración y puede tomar cualquier valor numérico real.
Si F(x) es una primitiva de f(x) se tiene que:
∫ f(x) dx = F(x) + C Para comprobar que la primitiva de una función es correcta basta con derivarla. PROPIEDADES DE LA INTEGRAL INDEFINIDA
1. La integral de una suma de funciones es igual a la suma de las integrales de esas funciones.
∫[f(x) + g(x)] dx =∫ f(x) dx +∫ g(x) dx
2. La integral del producto de una constante por una función es igual a la constante por la integral de la función.
∫ k f(x) dx = k ∫f(x) dx

51
2. TABLA DE INTEGRALES CONSTANTE 1. ∫ += Cxdx
2. ∫ +⋅=⋅ Cxkdxk POTENCIA
3. ∫ ++
=+
Cnxdxx
nn
1
1
, si 1−≠n ∫ ++
=⋅→+
Cnfdxff
nn
1'
1
, si 1−≠n
(En el integrando debe aparecer la derivada de la BASE) LOGARÍTMICA
4. ∫ += Cxdxx
ln1 ∫ +=→ Cfdxff ln'
(En el NUMERADOR debe aparecer la derivada del DENOMINADOR) EXPONENCIAL
5. ∫ += Ca
adxax
x
ln ∫ +=→ C
aadxaf
ff
ln'
6. ∫ += Cedxe xx ∫ +=→ Cedxef ff' (En el integrando debe aparecer la derivada del EXPONENTE)
TRIGONOMÉTRCAS
(En el integrando debe aparecer la derivada del ÁNGULO) 7. ∫ +−=⋅ Cxdxsenx cos ∫ +−=⋅→ Cfdxfsenf )cos()('
8. ∫ +=⋅ Csenxdxxcos ∫ +=⋅→ Cfsendxff )()cos('
9. Ctgx
dxx
dxxtg
dxx
+=
⋅
⋅+
⋅
∫
∫∫
2
2
2
cos1
)1(
sec
Cftg
dxf
f
dxftgf
dxff
+=
⋅
⋅+
⋅⋅
→
∫
∫∫
)(
)(cos'
))(1('
)(sec'
2
2
2
10. Cgx
dxxsen
dxxg
dxxec
+−=
⋅
⋅+
⋅
∫
∫∫
cot
1
)cot1(
cos
2
2
2
Cfg
dxfsen
f
dxfgf
dxfecf
+−=
⋅
⋅+
⋅⋅
→
∫
∫∫
)(cot
)('
))(cot1('
)(cos'
2
2
2
ARCOTANGENTE
11. ∫ +=⋅+
Carctgxdxx 21
1 ∫ +=⋅+
→ Cfarctgdxf
f )(1
'2
(En el NUMERADOR debe aparecer la derivada de la BASE del cuadrado)

52
3. INTEGRAL DE UNA POTENCIA
∫ ++
=+
Cnxdxx
nn
1
1
, si 1−≠n ∫ ++
=⋅→+
Cnfdxff
nn
1'
1
, si 1−≠n
(En el integrando debe aparecer la derivada de la BASE) EJERCICIOS 1. ∫ += Cxdx 77
2. ∫ += Cxdxx6
65
3. ∫ += Cxdxx4
774
3
4. CxCxCxdxx +=+=++
=∫+
53
351
32
3 5351
32
32
5. Cx
CxCxCxdxxdxx
+−=+−=+−
=++−
⋅== −−+−
−∫ ∫ 33
3144
4
13
314
333
6. CxCxCxCxdxxdxx +⋅
=+=+=++
==∫ ∫+
43
43
341
31
3 434
341
31
31
3
7. CxCxCxCxdxxdxx
+⋅=+=+=++
−==∫ ∫
+−
−33
1311
32
32
3 233
311
32
1
8. ( )∫ ++−−=+−− Cxxxxdxxxx 43
65
426 235
24
9.
Cx
xCxxCxxdxxxdxx
x +−=+−
+=++−
++
=
+=
+
−+−+
−∫ ∫ 53
523
16121
621
6
225
10
23
316
10
1213103103
10. ∫ +=⋅ Cxsenxdxsenx 2
21cos
11. ( ) ( ) Cxtgxdxtgxtgdxxtgxtg +=⋅+=+∫ ∫ 41
43253

53
4. INTEGRALES LOGARITMICAS Y EXPONENCIALES LOGARÍTMICA
12. ∫ += Cxdxx
ln1 ∫ +=→ Cfdxff ln'
(En el NUMERADOR debe aparecer la derivada del DENOMINADOR) EXPONENCIAL
13. ∫ += Ca
adxax
x
ln ∫ +=→ C
aadxaf
ff
ln'
14. ∫ += Cedxe xx ∫ +=→ Cedxef ff' (En el integrando debe aparecer la derivada del EXPONENTE)
EJERCICIOS
15. Cxdxx
xdxx
x++=
+=
+ ∫∫ 8ln31
83
31
83
3
2
3
2
16. ∫ ∫ +== Csenxdxsenx
xgxdx lncoscot
17. Cxxxdxx
xdxx
xxx+−+=
−+=
−+∫∫ ln1122 2
2
23
18. Cdxdx
x
x
x
x
+
=
=∫ ∫
32ln
32
32
32
19. Cedxexdxex xxx +=⋅=⋅ ∫∫222
212
21
20. Cedxesenxdxesenx xxx +−=⋅−−=⋅ ∫∫ coscoscos
21. Cedxx
e tgxtgx
+=∫ 2cos
22. Cdxx
dxx
dxx
xxx
x
+===∫ ∫∫ 5ln525
212515
23. Cedxexdxex xsenxsenxsen +=⋅=⋅ ∫∫ 555
515cos5
515cos
5. INTEGRALES TRIGONOMÉTRICAS
(En el integrando debe aparecer la derivada del ÁNGULO)
1. ∫ +−=⋅ Cxdxsenx cos ∫ +−=⋅→ Cfdxfsenf )cos()('
2. ∫ +=⋅ Csenxdxxcos ∫ +=⋅→ Cfsendxff )()cos('

54
3. Ctgx
dxx
dxxtg
dxx
+=
⋅
⋅+
⋅
∫
∫∫
2
2
2
cos1
)1(
sec
Cftg
dxf
f
dxftgf
dxff
+=
⋅
⋅+
⋅⋅
→
∫
∫∫
)(
)(cos'
))(1('
)(sec'
2
2
2
4. Cgx
dxxsen
dxxg
dxxec
+−=
⋅
⋅+
⋅
∫
∫∫
cot
1
)cot1(
cos
2
2
2
Cfg
dxfsen
f
dxfgf
dxfecf
+−=
⋅
⋅+
⋅⋅
→
∫
∫∫
)(cot
)('
))(cot1('
)(cos'
2
2
2
EJERCICIOS 24. ( ) Cxsenxdxsenxx ++=−∫ coscos
25. ( ) Ctgxxdxxx +−=−∫ 322 sec3
26. ( ) ( ) Cesendxee xxx +=∫ cos
27. ( ) ( ) ( ) Cxdxxxsendxxxsen ++−=+=+ ∫∫ 5cos2152
215 222
6. INTEGRALES TRIGONOMÉTRICAS INVERSAS
ARCOTANGENTE
∫ +=⋅+
Carctgxdxx 21
1 ∫ +=⋅+
→ Cfarctgdxf
f )(1
'2
(En el NUMERADOR debe aparecer la derivada de la BASE del cuadrado) EJERCICIOS
28. ( )∫ ∫ +=+
=+
Cxarctgdxx
dxx 5
11
151
551
22
29. ( )
( )∫ ∫ +=+
=+
Cxarctgdxx
dxx
441
414
41
1611
22

55
30.
∫ ∫ ∫ ∫ +
=
+
=
+
=+
=+
Csenxarctgdxsenx
x
dxsenx
xdxxsen
xdxxsen
x55
5
51
5cos
55
51
cos51
51
cos51
5cos
2222
31. ( ) ( )
( )∫ ∫ ∫ +=+
=+
=+
Cxarctgdxxxdx
xxdx
xx 3
23
2
23
2
6
2
31
13
31
11
32. ( )
( )∫ ∫ +=+
=+
Cearctgdxe
edxe
e x
x
x
x
x
22 11
7. MÉTODOS DE INTEGRACIÓN
1. INTEGRALES RACIONALES ∫ dxxQxP)()(
Si el numerador no puede convertirse en la derivada del denominador, se descompone la fracción en suma de fracciones simples y se integra.
Si el grado del numerador es mayor o igual que el grado del denominador, primero hay que realizar la división y expresar la fracción de la siguiente manera:
)()()(
)()(
xQxRxC
xQxP
+= , siendo C(x) el cociente y R(x) el resto. Así, la integral quedaría:
∫ ∫∫∫ +=
+= dx
xQxRdxxCdx
xQxRxCdx
xQxP
)()()(
)()()(
)()(
Una vez que sabemos que el denominador tiene mayor grado que numerador, descomponemos el denominador en factores.
Dependiendo de las raíces del denominador nos encontramos con los siguientes tipos de fracciones racionales:
1º Fracciones racionales con raíces reales simples: ( )( )...)( bxaxxQ −−=
La fracción puede escribirse así: ...)()(
+−
+−
=bx
Bax
AxQxR
Los coeficientes A, B y C son números que se obtienen efectuando la suma y dando valores a x. 2º Integrales racionales con raíces reales múltiples: ( )( ) ...)( nbxaxxQ −−=
Al factor múltiple le corresponde tantas fracciones como indica su grado, en la
primera se eleva a 1, en la segunda a 2, y así sucesivamente. La fracción puede escribirse así:
( ) ( ) ( )nbxK
bxD
bxC
bxB
axA
xQxR
−+
−+
−+
−+
−= ...
)()(
32

56
Una vez descompuesta la fracción en suma de fracciones múltiples, integramos como suma de integrales, teniendo en cuenta que:
• La integral del cociente es la integral de un polinomio ∫ dxxC )(
• Si el denominador está elevado a 1 es logarítmica:
∫ ∫ −⋅=−
=−
axAdxax
Adxax
A ln1
• Si el denominador está elevado a un número mayor o igual que dos (factor múltiple) es una potencia y se escribe en el numerador con exponente negativo:
( )( ) ( )
∫ ∫ +−−
⋅=−=−
+−−
1
1
naxAdxaxAdx
axA n
nn
EJEMPLOS
1. ∫ −−+ dxxx
xx2
532
3
. Realizamos la división pues el numerador es de mayor grado:
∫∫∫ −−+
++=
−−+
++=−−
+ dxxx
xxxdxxx
xxdxxx
xx2
61432
32
614332
532
2
22
3
Para realizar la integral que nos queda, descomponemos la fracción en suma de fracciones simples, teniendo en cuenta los factores del denominador:
( )( )
( )( ) ( )( )12)2()1(
12614
:122
614122
2
2
+−−++
=+−
+
→+
+−
=−−+
→+−=−−
xxxBxA
xxx
sumamosx
Bx
Axx
xxxxx
Como las dos fracciones tienen el mismo denominador, los numeradores han de ser iguales. Calculamos los coeficientes de A, B y C dando a la x los valores que anulan al denominador:
=→=→⋅+⋅=+→=
=→−=→−⋅+⋅=+−→−=→−++=+
3343340)3(6282
3838)3(06141
)2()1(614AABAx
BBBAxxBxAx
La fracción queda descompuesta de la forma: 1
38
23
34
2614
2 ++
−=
−−+
xxxxx , y la integral
queda:

57
Cxxxxdxx
dxx
xx
dxxx
xxxdxxx
xxdxxx
xx
+++−++=+
+−
++
=−−+
++=
−−+
++=−−
+
∫∫
∫∫∫
1ln382ln
3343
23
11
38
21
3343
23
26143
23
261433
253
22
2
2
22
3
2. ∫ +−−+ dx
xxxx
153
23 El numerador es de menor grado por lo que no hay que dividir.
Descomponemos en fracciones simples teniendo en cuenta los factores del denominador (se descompone por la Regla de Ruffini)
( ) ( )
( )
( ) ( )( ) ( )
( ) ( )1111)1()1(
1153
:1111
53111
2
2
2
223
223
+−+++−+−
=+−
+
→−
+−
++
=+−−
+→+−=+−−
xxxCxxBxA
xxx
sumamosx
Cx
Bx
Axxx
xxxxxx
Como las dos fracciones tienen el mismo denominador, los numeradores han de ser iguales. Calculamos los coeficientes de A, B y C dando a la x los valores que anulan al denominador, y otro más:
( ) ( )
−=−+=→⋅+⋅−+⋅=→=
=→=→−=+−→−=
==→⋅=+→=
→
→+++−+−=+
2154
21141)1(1
2150
2142)2(531
4282531
11)1()1(53
2
2
BBx
AAAx
CCx
xCxxBxAx
( )
( )
( ) Cx
xxCxxx
dxxdxx
dxx
dxxxx
xxxxxxx
x
+−
−−−+=+−−
+−−+
=−+−
−+
=+−−
+
→−
+−
−+
+=
+−−+
−
−∫∫∫∫
141ln
211ln
21
1141ln
211ln
21
141
121
11
21
153
14
121
121
153
1
223
223
2. INTEGRACIÓN POR PARTES
El método de integración por partes permite calcular la integral de un producto de dos funciones aplicando la fórmula: ∫ ∫ ⋅−⋅=⋅ duvvudvu “u” será la primera de las funciones que aparece en el siguiente orden:

58
• Arcotangente, arcoseno,…. • Logaritmos • Polinomios • Exponenciales • Seno, coseno, tangente,…
“dv” será la otra función multiplicada por dx “du” se calcula derivando u y multiplicando por dx “v” se calcula integrando dv Es decir:
∫ ∫
==
→=→=
→⋅⋅ dxxgvdxxfdu
dxxgdvxfu
dxxgxf )()('
)()(
)()(
∫ ∫ ⋅−⋅=⋅⋅ duvvudxxgxf )()( EJEMPLOS 1. ∫ ⋅⋅ dxxx cos
∫ ∫ ===
→=→=
→⋅⋅ senxxdxvdxdu
xdxdvxu
dxxx cos1
coscos
∫ ∫ ++⋅=+−−⋅=⋅−⋅=⋅⋅ CxsenxxCxsenxxdxsenxsenxxdxxx cos)cos(1cos 2. ∫ ⋅ dxex x3
∫ ∫ ====
→=→=
→⋅ xxxx
edxedvvdxxdu
dxedvxu
dxex23
3 3
∫ ∫∫ ===
→=→=
→⋅−⋅=⋅ xxxxxx
edxevxdxdu
dxedvxu
dxxeexdxex63
32
233
( )→−⋅−⋅=⋅ ∫∫ xdxeexexdxex xxxx 63 233 Quitamos paréntesis:
∫∫∫ ===
→=→=
→+⋅−⋅=⋅ xxxxxxx
edxevdxu
dxedvxu
xdxeexexdxex66
63 233
( )( ) CexxxCeexexex
dxeexexexdxeexexexdxexxxxxx
xxxxxxxxx
+−+−=+−⋅+⋅−⋅
=−⋅+⋅−⋅=−⋅+⋅−⋅=⋅ ∫∫∫663663
6636632323
23233

59
NOTA: si en el integrando hay un polinomio multiplicando a una exponencial, el método se aplica reiteradamente hasta que desaparece dicho polinomio. El número de veces que se aplica coincide con el grado del polinomio. DOS INTEGRALES PARTICULARES: Si tenemos una integral con sólo un logaritmo o un "arco", integramos por partes suponiendo que dicha funciones están multiplicadas por 1 y “dv = 1dx”
∫∫
==+
=
→=→=
→xdxv
dxx
dudxv
arctgxuarctgxdx
11
1
12
∫∫∫ →+
−⋅=+
⋅−⋅= dxx
xarctxxdxx
xarctxxarctgxdx 22 111
La integral que queda es inmediata ya que el numerador se puede convertir en la derivada del denominador multiplicando y dividiendo por 2 y será logarítmica:
( ) Cxarctgxxdxxxarctgxxarctgxdx ++−⋅=
+−⋅= ∫∫ 2
2 1ln21
12
21
3. INTEGRACIÓN POR SUSTITUCIÓN O CAMBIO DE VARIABLE
Para cambiar de variable identificamos una parte de lo que se va a integrar con una nueva variable t, de modo que se obtenga una integral más sencilla. ∫ ∫= dttgdxxf )()( PASOS PARA INTEGRAR POR CAMBIO DE VARIABLE
1. Identifico qué es “t” 2. Despejo x como una función de t 3. Calculo dx como la derivada de la función obtenida en el paso 2º por dt 4. Sustituyo en la integral, simplifico e integro 5. Escribimos la solución en función de la variable x
EJEMPLO
1. dxx
x∫ +3
2
21
dttdxtxxtxt2
32
1212123
33 =→−
=→+=→+=
( )
Cttt
dttttdttttdtttt
dtttttdtt
t
tt
dttt
t
dxx
x
+
++
=+−=⋅+−
=⋅+−
=⋅+−
=⋅
+−
=⋅
−
=+
∫∫∫
∫∫∫∫
23
56
83
81
36381
8363
23
412
23
412
234
12
232
1
21
258
474736
2362
36
2
23
3
2

60
→+= 3 21 xt ( ) ( ) ( ) Cxxxdxx
x+
++
++
+=
+∫ 2213
5216
8213
81
21
235383
3
2
2. dxx
x∫
−3
1
dttdxtxxt 566 6=→=→=
( ) ( ) Cttdtttdtttdttt
tdttt
tdxx
x+−=−=−=
−=
−=
−∫∫∫∫∫ 7
64
6666161611 7463335
2
35
3 6
6
3
→= 6 xt ( ) ( ) ( ) ( ) CxxCxxdxx
x+−=+−=
−∫ 7
62
37
62
3176237646
3

61
EJERCICIOS DE INTEGRALES
1. 2008 MODELO 3 OPCIÓN A.
Ejercicio 2. [2’5 puntos] Calcula ( )( )∫−
− −−
1
2 2 1xxxdx
2. 2008 MODELO 4 OPCIÓN B.
Ejercicio 2. [2’5 puntos] Calcula ∫ +⋅1
0)1ln( dxxx (ln denota la función
logaritmo neperiano).
3. 2008 MODELO 5 OPCIÓN B.
Ejercicio 2. [2’5 puntos] Calcula ∫ +⋅e
dxxx1
2 )1ln( (ln denota la función
logaritmo neperiano).
4. 2008 MODELO 6 OPCIÓN A. Ejercicio 2. Considera las funciones f :(0,π) R y g : (0, + ∞)
por x
senxxf 3cos)( = y g(x) = x3.ln(x). [ ln denota la función logaritmo neperiano].
(a) [1’25 puntos] Halla la primitiva de f que toma el valor 1 cuando x = /3 (se puede hacer el cambio de variable t = cos x). (b) [1’25 puntos] Calcula ∫ dxxg )( .
5. 2009 MODELO 2 OPCIÓN B.
Ejercicio 2.- [2'5 puntos] Sea f la función definida por 494
)(x
xxf−
=
Halla la primitiva F de f que cumple F(0) = 3. (Sugerencia: Utiliza el cambio de variable
2
23 xt = )
6. 2009 MODELO 5 OPCIÓN A.
Ejercicio 2.- a) [1’25 puntos] Calcula ∫ ⋅ senxdxx b) [1’25 puntos] Sean las funciones f, g : R → R, definidas por f(x) = – x2 + 1 y g(x) = x – 1. Calcula el área del recinto limitado por sus gráficas.
7. 2010 MODELO 1 OPCIÓN A. Ejercicio 2. [2’5 puntos] Sea f :(−2, +∞) → R, f(x) = ln(x + 2). Halla una
primitiva F de f que verifique F(0) = 0. (ln denota el logaritmo neperiano)
8. 2010 MODELO 2 OPCIÓN A.
Ejercicio 2. [2’5 puntos] Calcula ∫ ⋅2
0)(
πdxxsenx
(Sugerencia: Efectúa el cambio tx = )

62
9. 2010 MODELO 5 OPCIÓN A.
Ejercicio 2. Sea ∫ −+= dx
eI
x15
(a) [ 1 punto] Expresa I haciendo el cambio de variable t2 = e-x. (b) [ 1’5 puntos] Determina I.
10. 2010 MODELO 6 OPCIÓN A.
Ejercicio 2. Sea la función f dada por f(x) = xx +2
1 para x ≠ -1 y x ≠ 0. Determina una
primitiva F de f tal que F(1) = 1.
11. 2011 MODELO 1 OPCIÓN B. Ejercicio 2.- [2'5 puntos] Sea f : (0;+∞) → R la función definida por ( )xxxf ln1)( −= ,
donde ln denota la función logaritmo neperiano. Determina la primitiva de f cuya gráfica pasa por el punto P(1,1).
12. 2011 MODELO 3 OPCIÓN B.
Ejercicio 2.- [2'5 puntos] Calcula: ∫ ⋅20
)cos(π
dxxx
13. 2011 MODELO 5 OPCIÓN A.
Ejercicio 2.- [2'5 puntos] Determina la función f :(-1,+∞) → R tal que su segunda derivada es f’’(x) = 1/x y su gráfica tiene tangente horizontal en el punto P(1,1).
14. 2011 MODELO 5 OPCIÓN B.
Ejercicio 2.- [2'5 puntos] Calcula: dxxxxx
∫ −++
22
23
15. 2011 MODELO 6 OPCIÓN B.
Ejercicio 2.- [2’5 puntos] Halla ( )( )∫ +−dx
eee
xx
x
112
Sugerencia: efectúa el cambio t = ex.

63
TEMA 7: INTEGRALES DEFINIDAS. APLICACIONES 8. Integral definida. Propiedades 9. Función integral 10. Teorema fundamental del cálculo integral 11. Regla de Barrow 12. Teorema del valor medio 13. Área encerrada bajo una curva y el eje x 14. Área encerrada por dos curvas
1. INTEGRALES DEFINIDAS. PROPIEDADES
Dada una función f(x) y un intervalo [a,b] de la recta real, la integral definida es igual al área limitada entre la gráfica de f(x), el eje de abscisas, y las líneas verticales x = a y x = b.
Se representa por ∫b
a
dxxf )( .
∫ es el signo de integración. a límite inferior de la integración. b límite superior de la integración. f(x) es el integrando o función a integrar. dx es diferencial de x, e indica cuál es la variable de la función que se integra. PROPIEDADES DE LA INTEGRALES DEFINIDAS 1. El valor de la integral definida cambia de signo si se permutan los límites de integración.
∫∫ −=a
b
b
a
dxxfdxxf )()(
2. Si los límites de integración coinciden, la integral definida vale cero.
0)( =∫a
a
dxxf
3. Si c es un punto interior del intervalo [a, b], la integral definida se descompone como una suma de dos integrales extendidas a los intervalos [a, c] y [c, b].
∫∫∫ +=b
c
c
a
b
a
dxxfdxxfdxxf )()()(
4. La integral definida de una suma de funciones es igual a la suma de sus integrales
[ ] ∫∫∫ +=+b
a
b
a
b
a
dxxgdxxfdxxgxf )()()()(

64
5. La integral del producto de una constante por una función es igual a la constante por la integral de la función.
∫∫ ⋅=⋅b
a
b
a
dxxfkdxxfk )()(
2. FUNCIÓN INTEGRAL Sea f(t) una función continua en el intervalo [a, b]. A partir de esta función se define la
función integral: ∫=x
adttfxF )()( , que depende del límite superior de integración.
Para evitar confusiones cuando se hace referencia a la variable de f, se la llama t, pero si la referencia es a la variable de F, se la llama x. Geométricamente la función integral, F(x), representa el área del recinto limitado por la curva y = f(t), el eje de abscisas y las rectas t = a y t = x.
A la función integral, F(x), también se le llama función de áreas de f en el intervalo [a, b]. 3. TEOREMA FUNDAMENTAL DEL CÁLCULO
La derivada de la función integral, F(x), de la función continua f(x) es la propia f(x):
F'(x) = f(x).
El teorema fundamental del cálculo nos indica que la derivación y la integración
son operaciones inversas: si una función continua primero se integra y luego se deriva, se recupera la función original. EJEMPLOS Calcula la derivada de las siguientes funciones:
1. 21
2 11)('
1'11)(
xxF
txt
dtt
xFx
+=→
==
→+
= ∫
2. 21
2
1
2 11)('
1'11
11)(
xxF
txt
dtt
dtt
xFx
x +−=→
==
→+
−=+
= ∫∫
3. ( )
xx
xx
xFxt
xtdt
txF
x
21
121
1)('2'1
1)( 422
2
12
2
⋅+
=⋅+
=→
==
→+
= ∫

65
4. ( )
26
2232
3
12 3
113
11)('
3'11)(
3
xx
xx
xFxtxt
dtt
xFx
⋅+
=⋅+
=→
==
→+
= ∫
5. ( ) xexexFxt
xtdtexF xx
xt 22)('
2')(
422
2
22
1
⋅=⋅=→
==
→= ∫
4. REGLA DE BARROW
Isaac Barrow (1630-1677) fue un matemático inglés, cuya aportación más importante a las Matemáticas fue la unión del cálculo diferencial e integral.
La regla de Barrow dice que la integral definida de una función continua f(x) en un
intervalo cerrado [a, b] es igual a la diferencia entre los valores que toma una función primitiva F(x) de f(x), en los extremos de dicho intervalo.
[ ] )()()()( aFbFxFdxxf ba
b
a
−==∫
EJEMPLOS Calcula las siguientes integrales definidas aplicando la regla de Barrow: 1.
( ) ( ) ( ) ( )
381
21
31
431
21
31
43
121
31
4131
21
31
413
2343)13(
234234
1
1
2341
1
23
−=
+++−
−+−
=
−−
−+
−−
−−
−+−
⋅
=
−+−=−+−
−−∫ xxxxdxxxx
2. [ ] 1011lnlnln11
1
=−=−==∫ exdxx
ee
3. [ ] 110)0cos(2
coscos 20
2
0
=+=−−−=−=∫ππ
π
xsenxdx
4. ),2()4(log4
2
FFxdx −=∫ siendo
xv
dxx
dudxdv
xuxdxxF
=
=→
==
→= ∫ 10ln1log
log)(
xxxdxxxdxx
xxxxF10ln1log
10ln1log
10ln1log)( −=−=−= ∫∫
10ln22log62
10ln12log24
10ln14log4
10ln1loglog
4
2
4
2
−=
−−
−=
−=∫ xxxxdx

66
5. TEOREMA DEL VALOR MEDIO El teorema de la media o teorema del valor medio para integrales dice que:
Si una función es continua en un intervalo cerrado [a, b], existe un punto c en el interior del intervalo tal que:
)()()( cfabdxxfb
a
⋅−=∫
6. ÁREA DE UNA FUNCIÓN Y EL EJE DE ABSCISAS
1. SI LA FUNCIÓN ES POSITIVA
Si la función es positiva en un intervalo [a, b] entonces la gráfica de la función está por encima del eje de abscisas. El área de la función viene dada por:
∫=b
a
dxxfA )(
Para hallar el área seguiremos los siguientes pasos: 1º Se calculan los puntos de corte con el eje OX, haciendo f(x) = 0 y resolviendo la ecuación. 2º El área es igual a la integral definida de la función que tiene como límites de integración los puntos de corte. EJEMPLOS 1. Calcula el área del recinto limitado por la curva y = 4x − x2 y el eje OX.
En primer lugar hallamos los puntos de corte con el eje OX para representar la curva y conocer los límites de integración.

67
==
→=−→=−40
0)4(04 2
xx
xxxx
En segundo lugar se calcula la integral:
( ) 24
0
324
0
2
3320
36432
324 uxxdxxxA =−
−=
−=−= ∫
2. Halla el área de la región del plano encerrada por la curva y = ln x entre el punto de corte con el eje OX y el punto de abscisa x = e.
En primer lugar calculamos el punto de corte con el eje de abscisas: 10ln 0 ==→= exx
En segundo lugar se calcula la integral: ∫ −==e
FeFxdxA1
)1()(ln . Calculamos la
primitiva utilizando el método de integración por partes:
−=−=−==−=−=
→−=−=⋅−=
=
=→
==
→=
∫∫ ∫
∫
11011ln1)1(0ln)(
ln1ln1lnln
1lnln)(
FeeeeeeF
xxxdxxxdxx
xxxxdx
xv
dxx
dudxdv
xuxdxxF
2
11)1(0)1()(ln uFeFxdxA
e=−−=−== ∫
2. SI LA FUNCIÓN ES NEGATIVA
Si la función es negativa en un intervalo [a, b] entonces la gráfica de la función está por debajo del eje de abscisas. El área de la función viene dada por:
→−= ∫b
a
dxxfA )( ∫=b
a
dxxfA )(
EJEMPLOS 1. Calcula el área del recinto limitado por la curva y = x2 − 4x y el eje OX.

68
En primer lugar hallamos los puntos de corte con el eje OX para representar la curva y conocer los límites de integración.
==
→=−→=−40
0)4(042
xx
xxxx
Luego se calcula la integral:
( ) ( ) 24
0
324
0
24
0
2
3320
36432
3244 uxxdxxxdxxxA =−
−=
−=−=−−= ∫∫
2. Halla el área limitada por la curva y = cos x y el eje OX entre π/2 y 3π/2.
[ ] ( ) 223
2
23
2
21122
3cos usensensenxxdxA =−−−=
−−=−=−= ∫
πππ
π
π
π
3. LA FUNCIÓN TOMA VALORES POSITIVOS Y NEGATIVOS
En ese caso el recinto tiene zonas por encima y por debajo del eje de abscisas. Para calcular el área de la función seguiremos los siguientes pasos: 1. Se calculan los puntos de corte con el eje OX, resolviendo la ecuación f(x) = 0 y se
ordenan de menor a mayor pues serán los límites de integración. 2. El área es igual a la suma de las integrales definidas en valor absoluto en cada
intervalo. EJEMPLO 1. Calcula el área de las regiones del plano limitada por la curva f(x) = x3 − 6x2 + 8x y el eje OX. Primero se calculan los puntos de corte con el eje OX
==
→=+−
=→=+−→=+−
42
086
00)86(086 2
223
xx
xx
xxxxxxx

69
( )∫
=+−=
=+−=
=
→+−=+−=
06412864)4(
416164
16)2(
0)0(
424
86)( 234
23
F
F
F
xxxdxxxxxF
( )( )
221
2
4
2
232
1
2
0
231
84440)2()4(86
4404)0()2(86uAAA
AFFdxxxxA
AFFdxxxxA=+=→
=→−=−=−=+−→
=→=−=−=+−→
∫∫
7. ÁREA COMPRENDIDA ENTRE DOS FUNCIONES
El área comprendida entre dos funciones es igual al área de la función que está
situada por encima menos el área de la función que está situada por debajo.
Si las gráficas se cortan en más de dos puntos, irán cambiando las posiciones relativas entre ellas. EJEMPLOS 1. Calcula el área limitada por la curva y = x2 -5x + 6 y la recta y = 2x.
En primer lugar hallamos los puntos de corte de las dos funciones para conocer los límites de integración. Para ello igualamos las expresiones de ambas funciones y resolvemos la ecuación:
==
→=+−→=+−61
067265 22
xx
xxxxx
De x = 1 a x = 6, la recta queda por encima de la parábola. Si no tenemos la gráfica
podemos averiguarlo calculando el valor e ambas funciones en un punto interior del intervalo, por ejemplo x = 3, y observar cuál es mayor. El área será por tanto la integral entre 1 y 6 de la recta menos la parábola:
( ) ( )[ ] ( )
( )
2
23
6
1
2326
1
2
6125
61718
63621236126726
27
3136
267
36
62
73
67652
u
xxxdxxxdxxxxA
=
−−
=
−+−
−−+−=
−+−−
−
⋅+−
=
−+−=−+−=+−−= ∫∫

70
2. Calcula el área limitada por las gráficas de las funciones 3
2xy = e y = −x2 + 4x.
Hallamos los puntos de corte de las funciones, que nos darán los límites de integración.
==
→=−→=−→+−=→+−=30
0)124(012412343
22222
xx
xxxxxxxxxx
( )
2233
0
23
3
0
23
0
223
0
22
618120329342
94
43
43
43
4
uxx
dxxxdxxxxdxxxxA
=+−=−
⋅+
⋅−=
+−
=
+−=
−+−=
−+−= ∫∫∫

71
EJERCICIOS DE LA INTEGRAL DEFINIDA. APLICACIONES
1. 2008 MODELO 1 OPCIÓN A. Ejercicio 2. [2’5 puntos] Dadas las funciones f : [0,+ ∞ ) → R y g : [0, + ∞ )
→ R definidas por xxf =)( y 3)( xxg =
Calcula el área del recinto limitado por las gráficas de f y g.
2. 2008 MODELO 1 OPCIÓN B. Ejercicio 1. [2’5 puntos] Sea f: R → R la función definida por f(x) = ax3 + bx2 + cx
+ d. Se sabe que f tiene un máximo local en x = 1, que el punto (0, 1) es un punto de
inflexión de su gráfica y que 49)(
1
0=∫ dxxf . Calcula a, b, c y d.
3. 2008 MODELO 1 OPCIÓN B.
Ejercicio 2. Sea g: (0, + ∞) → R la función dada por g(x) = ln x (ln denota logaritmo neperiano).
(a) [0’75 puntos] Justifica que la recta de ecuación 𝑦 = 1𝑒𝑥 es la recta
tangente a la gráfica de g en el punto de abscisa x = e. (b) [1’75 puntos] Calcula el área del recinto limitado por la gráfica de g, el eje
de abscisas y la recta tangente del apartado anterior.
4. 2008 MODELO 2 OPCIÓN A. Ejercicio 2. Dada la función g: R → R, definida por g(x) = 2x + |x2 - 1|.
(a) [1 punto] Esboza la gráfica de g.
(b) [1’5 puntos] Calcula ∫2
0)( dxxg
5. 2008 MODELO 2 OPCIÓN B.
Ejercicio 2. Sean f: R → R y g: R → R las funciones definidas por f(x) = x2 – 1 y g(x) = 2x + 2
(a) [0’5 puntos] Esboza las gráficas de f y g. (b) [2 puntos] Calcula el área del recinto limitado por dichas gráficas.
6. 2008 MODELO 3 OPCIÓN B.
Ejercicio 2. Sea f : R → R la función definida por f(x) = e -2x
(a) [1 punto] Justifica que la recta de ecuación y = -2ex es la recta tangente a la gráfica de f en el punto de abscisa x = -1/2.
(b) [1’5 puntos] Calcula el área el recinto limitado por la gráfica e f, el eje de ordenadas y la recta tangente del apartado anterior.
7. 2008 MODELO 4 OPCIÓN A. Ejercicio 2. Sean f: R → R y g : R → R las funciones definidas mediante
f(x) = x3 − 4x y g(x) = 3x − 6 (a) [0’75 puntos] Determina los puntos de corte de las gráficas de f y g. (b) [1’75 puntos] Calcula el área del recinto limitado por dichas gráficas.

72
8. 2008 MODELO 5 OPCIÓN A. Ejercicio 2. [2’5 puntos] Sean f : R → R y g : R → R las funciones dadas por
f(x) = x2 y g(x) = a (con a > 0) Se sabe que el área del recinto limitado por las gráficas de las funciones f y g
es 4/3. Calcula el valor de la constante a.
9. 2008 MODELO 5 OPCIÓN B.
Ejercicio 1. Sea f : R → R la función definida por
−⋅
=xxx
xf6
)( sisi
22
>≤
xx
(a) [0’75 puntos] Esboza la gráfica de f. (b) [1 punto] Estudia la derivabilidad de f. (c) [0’75 puntos] Calcula el área comprendida entre la gráfica de f y el eje de abscisas.
10. 2008 MODELO 6 OPCIÓN B.
Ejercicio 2. Sea g : R → R la función definida por xxxxg +−= 23
41)( .
(a) [0’5 puntos] Esboza la gráfica de g. (b) [0’75 puntos] Determina la ecuación de la recta tangente a la gráfica de g en el punto de abscisa x = 2. (c) [1’25 puntos] Calcula el área del recinto limitado por la gráfica de g y el eje de abscisas.
11. 2009 MODELO 1 OPCIÓN A.
Ejercicio 2.- Considerar las funciones f : R → R y g : R → R definidas por xxf =)( y 26)( xxg −=
a) [1 punto] Esboza el recinto limitado por sus gráficas b) [1’5 puntos] Calcula el área de dicho recinto
12. 2009 MODELO 1 OPCIÓN B.
Ejercicio 2.- La recta tangente a la gráfica de la función f : R → R, definida por f(x) = mx2 + nx - 3 en el punto (1 , - 6), es paralela a la recta y = - x a) [1’25 puntos] Determina las constantes m y n. Halla la ecuación de dicha recta tangente b) [1’25 puntos] Calcula el área del recinto limitado por la gráfica de la función, la recta tangente anterior y el eje de ordenadas
13. 2009 MODELO 2 OPCIÓN A.
Ejercicio 2.- La curva 2
21 xy = divide el rectángulo de vértices A = (0,0) ,
B = (2,0) ,C=(2,1) y D = (0, 1) en dos recintos a) [0’75 puntos] Dibujar dichos recintos
b) [1’75 puntos] Hallar el área de cada uno de ellos
14. 2009 MODELO 3 OPCIÓN A. Ejercicio 2. Sea f : R → R la función definida por f(x) = 1−⋅ xx .
(a) [0'5 puntos] Esboza la gráfica de f.

73
(b) [0'75 puntos] Comprueba que la recta de ecuación y = x es la recta tangente a la gráfica de f en el punto de abscisa x = 0. (c) [1'25 puntos] Calcula el área del recinto limitado por la gráfica de f y la de dicha tangente.
15. 2009 MODELO 3 OPCIÓN B. Ejercicio 2. Considera la curva de ecuación y = x3 - 3x.
(a) [0'5 puntos] Halla la ecuación de la recta tangente a la curva en el punto de abscisa x = - 1. (b) [2 puntos] Calcula el área del recinto limitado por la curva dada y la recta y = 2.
16. 2009 MODELO 4 OPCIÓN A.
Ejercicio 2.- Sea f : R+ → R definida por f (x) =1 + ln x , siendo ln la función logaritmo neperiano
a) [1 punto] Comprueba que la recta de ecuación xe
y 11+= es la recta tangente a la
gráfica de f en el punto de abscisa x = e b) [1’5 puntos] Calcula el área del recinto limitado por la gráfica de f, el eje de abscisa y la recta tangente del apartado a)
17. 2009 MODELO 4 OPCIÓN B.
Ejercicio 2.- Se consideran las funciones f : R+ → R y g : R → R definidas por:
xxf 3)( = y 2
31)( xxg =
a) [0’5 puntos] Haz un esbozo de sus gráficas b) [2 puntos] Calcula el área del recinto limitado por la gráficas de ambas funciones.
18. 2009 MODELO 6 OPCIÓN A.
Ejercicio 2.- Sea las funciones f:R→ R y g:R→ R definidas por xxxf += 2)( y g(x) = 2 a) [1 punto] Determina los puntos de corte de las gráficas de f y g. Esboza dichas gráficas. b) [1’5 puntos] Calcula el área del recinto limitado por dichas graficas
19. 2009 MODELO 6 OPCIÓN B.
Ejercicio 2.- [2’5 puntos] Calcula un número positivo a, menor que 4, para que el recinto limitado por la parábola de ecuación y = x2 y las dos rectas de ecuaciones y =
4 y y = a, tenga un área de 328 u2
20. 2010 MODELO 1 OPCIÓN B.
Ejercicio 2. [2’5 puntos] Calcula el valor de a > 0 sabiendo que el área del recinto comprendido entre la parábola y = x2 + ax y la recta y + x = 0 vale 36 unidades cuadradas.

74
21. 2010 MODELO 2 OPCIÓN B. Ejercicio 2. Considera la función f dada por f(x) = 5 – x y la función g definida
como g(x) =x4 para x ≠ 0.
(a) [1 punto] Esboza el recinto limitado por las gráficas de f y g indicando sus puntos de corte. (b) [1’5 puntos] Calcula el área de dicho recinto.
22. 2010 MODELO 3 OPCIÓN A.
Ejercicio 2. [2’5 puntos] Dada la función f definida por f(x) = 45
32 +− xx
para x ≠1y x ≠ 4. Calcula el área del recinto limitado por la gráfica de f, el eje de abscisas, y las rectas x = 2, x = 3.
23. 2010 MODELO 3 OPCIÓN B.
Ejercicio 2. Considera la función f : R → R definida por f(x) = x|2 − x|. (a) [1 punto] Esboza su gráfica. (b) [1’5 puntos] Calcula el área del recinto limitado por la gráfica de f, el eje
de abscisas y la recta de ecuación x = 3.
24. 2010 MODELO 4 OPCIÓN A. Ejercicio 2. Considera las funciones f, g : R → R definidas por f(x) = 2 – x2, g(x) = |x|.
(a) [ 1 punto] Esboza sus gráficas en unos mismos ejes coordenados. (b) [ 1’5 puntos] Calcula el área del recinto limitado por las gráficas de f y g.
25. 2010 MODELO 4 OPCIÓN B.
Ejercicio 2. Dada la función f: (0,+∞) → R definida por f(x) = ln x, donde ln la función logaritmo neperiano, se pide:
a) [0’75 puntos] Comprueba que la recta de ecuación y = - ex + 1+ e2 es la recta normal a la gráfica de f en el punto de abscisa x = e. b) [1’75 puntos] Calcula el área de la región limitada por la gráfica de f , el eje de abscisas y la recta normal del apartado (a).
26. 2010 MODELO 5 OPCIÓN B.
Ejercicio 2. Considera la función f: R → R dada por f(x) = x2 + 4. (a) [0’75 puntos] Halla la ecuación de la recta tangente a la gráfica de f en el punto de abscisa x = 1. (b) [1’75 puntos] Esboza el recinto limitado por la gráfica de f, el eje de ordenadas y la recta de ecuación y = 2x + 3. Calcula su área
27. 2010 MODELO 6 OPCIÓN B.
Ejercicio 2. Sean f, g : R → R las funciones definidas por f(x) = x2 − 2x +3 y
g(x) = 121 2 +x .
(a) [1 punto] Esboza las gráficas de f y g, y halla su punto de corte. (b) [1’5 puntos] Calcula el área del recinto limitado por las gráficas de ambas funciones y el eje de ordenadas.

75
28. 2011 MODELO 1 OPCIÓN A. Ejercicio 2.- [2’5 puntos] Calcula el valor de b > 0, sabiendo que el área de la
región comprendida entre la curva xy = y la recta bxy = es de 34 unidades
cuadradas. 29. 2011 MODELO 2 OPCIÓN A.
Ejercicio 2.- Considera las funciones f, g: R → R definidas por f(x) = 6x – x2 y g(x) = x2 – 2x.
(a) [0'75 puntos] Esboza sus gráficas en unos mismos ejes coordenados y calcula sus puntos de corte. (b) [1’75 puntos] Calcula el área del recinto limitado por las gráficas de f y g.
30. 2011 MODELO 2 OPCIÓN B.
Ejercicio 2.- Sean f, g: R → R las funciones definidas por 441)( 2 += xxf y
1)( 2 −= xxg (a) [0'75 puntos] Halla la ecuación de la recta tangente a la gráfica de f en el punto de abscisa x = -2. (b) [1’75 puntos] Esboza el recinto limitado por las gráficas de ambas funciones y la recta y = x + 5. Calcula el área de este recinto
31. 2011 MODELO 3 OPCIÓN A.
Ejercicio 2.- Sean f : R → R y g: R → R las funciones definidas por: xxf 34)( −= y 2)( xxg =
(a) [1 punto] Esboza las gráficas de f y g. Determina sus puntos de corte. (b) [1'5 puntos] Calcula el área del recinto limitado por las gráficas de f y g.
32. 2011 MODELO 4 OPCIÓN A. Ejercicio 2.- [2'5 puntos] Calcula un número positivo a, menor que 2, para que el
recinto limitado por la parábola de ecuación 2
21 xy = y las dos rectas horizontales de
ecuaciones
y = a e y = 2, tenga un área de 3
14 unidades cuadradas.
33. 2011 MODELO 4 OPCIÓN B.
Ejercicio 2.- Dada la función f : R → R definida por f(x) = - 2x2 + 3x - 1 (a) [0'5 puntos] Prueba que las rectas y = - x + 1 e y = 3x - 1 son tangentes a su gráfica. (b) [2 puntos] Halla el área del recinto limitado por la gráfica de f y las rectas mencionadas en el apartado anterior.
34. 2011 MODELO 6 OPCIÓN A.
Ejercicio 2.- Sea f :(-1,+∞) → R la función definida como f(x) = ln(x + 1), donde ln denota la función logaritmo neperiano. (a) [0'75 puntos] Esboza el recinto limitado por la gráfica de f, el eje OY y la recta y = 1. Calcula los puntos de corte de las gráficas. (b) [1’75 puntos] Halla el área del recinto anterior

76
UNIDAD 4: MATRICES Y DETERMINANTES
TEMA 8: MATRICES Y DETERMINANTES
12. Definición de matriz. 13. Tipos de matrices. 14. Suma de matrices. 15. Producto de un número real por una matriz. 16. Producto de matrices. 17. Ejercicios 18. Determinante de una matriz. 19. Menor complementario y adjunto. 20. Propiedades de los determinantes. 21. La matriz inversa mediante determinantes. 22. Rango de una matriz mediante determinantes.
1. DEFINICIÓN DE MATRIZ
Se denomina matriz a todo conjunto de números o expresiones dispuestos en forma rectangular, formando filas y columnas.
EJEMPLO:
−
−=
130121
A
Cada uno de los números de que consta la matriz se denomina elemento. Un elemento se distingue de otro por la posición que ocupa, es decir, la fila y la columna a la que pertenece.
El número de filas y columnas de una matriz se denomina dimensión de una matriz. El conjunto de matrices de m filas y n columnas se denota por Amxn o (aij), y un
elemento cualquiera de la misma, que se encuentra en la fila i y en la columna j, por aij.
=
mnmm
n
mxn
aaa
aaaA
.......................................................
....................
21
11211
En el ejemplo: la matriz A es de orden 2x3 El elemento a13 = 1, a22 = 3, a21 = 0 Dos matrices son iguales cuando tienen la misma dimensión y los elementos que
ocupan el mismo lugar en ambas, son iguales. 2. TIPOS DE MATRICES
• Matriz fila: Es una matriz constituida por una sola fila. ( )102 −
• Matriz columna: Es una matriz con una sola columna.
−
−
12
01
• Matriz rectangular: Aquella matriz que tiene distinto número de filas que de columnas, siendo su dimensión mxn.
• Matriz cuadrada: La que tiene el mismo número de filas que de columnas.

77
Los elementos de la forma aii constituyen la diagonal principal.
→
−
−
120231
201 Es una matriz de orden 3
Diagonal principal • Matriz nula: “O” Todos los elementos son nulos. • Matriz triangular superior: Los elementos situados por debajo de la diagonal
principal son 0.
−
100030311
• Matriz triangular inferior: Los elementos situados por encima de la diagonal principal son 0.
312001́002
• Matriz diagonal: Todos los elementos situados por encima y por debajo de la diagonal principal son nulos.
−
3000010000200001
• Matriz escalar: Es una matriz diagonal en la que los elementos de la diagonal principal son iguales.
2000020000200002
• Matriz identidad o unidad: “I” Es una matriz diagonal en la que los elementos de la diagonal principal son iguales a 1.
I =
100010001
• Matriz transpuesta: “At” Dada una matriz A, se llama transpuesta de A a la matriz que se obtiene cambiando ordenadamente las filas por las columnas.
=→
=
422301
420231 tAA
PROPIEDADES: 1. (At)t = A 2. (A + B)t = At + Bt
3. (α · A)t = α· At 4. (A · B)t = Bt · At
• Matriz idempotente: Si A2 = A.

78
• Matriz involutiva:Si A2 = I. • Matriz simétrica: Es aquella matriz cuadrada que verifica: A = At. Una
matriz es simétrica si es cuadrada y el elemento aij es igual al elemento aji
−
−=→
−
−=
231302121
231302121
tAA
• Matriz antisimétrica o hemisimétrica: Es aquella matriz cuadrada que verifica: A = - At. La matriz debe ser cuadrada y aij = - aji, por tanto los elementos de la diagonal aii deben ser nulos
AAA t −=
−−−
=→
−−
−=
031302120
031302120
• Matriz ortogonal: Si verifica: A·At= I 3. SUMA DE MATRICES
Dadas dos matrices de la misma dimensión, A=(aij) y B=(bij), se define la matriz suma como: A+B=( aij + bij ).
Es decir, aquella matriz cuyos elementos se obtienen sumando los elementos de las dos matrices que ocupan la misma posición.
−
−=
−−−−−−+
=−
−=
++++−+−
=+
−=
−=
032324
113002211331
232142
113002211331
130213
102131
BA
BA
B
A
PROPIEDADES
• Asociativa: A + (B + C) = (A + B) + C • Elemento neutro: A + O = A • Elemento opuesto: A + (-A) = O • Conmutativa: A + B = B + A
4. PRODUCTO DE UN NÚMERO REAL POR UNA MATRIZ
Dada una matriz A=(aij) y un número real k R, se define el producto de un número real por una matriz: a la matriz del mismo orden que A, en la que cada elemento está multiplicado por k: kA=(kaij)
Es decir, todos los elementos de A quedan multiplicados por k
−
=→
−
=6393
32131
AA
PROPIEDADES
• a · (b · A) = (a · b) · A A∈Mmxn, a, b ℜ∈ • a · (A+B) = a · A + a · B A,B∈Mmxn a ℜ∈ • (a+b)·A = a·A + b·A A∈ Mmxn a, b ℜ∈ • 1 · A = A A∈ Mmxn

79
5. PRODUCTO DE MATRICES Dos matrices A y B se dicen multiplicables si el número de columnas de A
coincide con el número de filas de B. Mmxn x Mnxp = Mmxp El elemento cij de la matriz producto se obtiene multiplicando cada elemento de la fila i de la matriz A por cada elemento de la columna j de la matriz B y sumándolos.
Es decir, se multiplica cada fila de A por cada columna de B como si fuese un producto escalar de vectores
−=
+−++++−+−
=
=
−−−−−
=⋅
−=
−=
8111714
910192610162
)3,1)(3,1()0,1)(3,1()3,2)(3,1()3,1)(2,1()0,1)(2,1()3,2)(2,1(
303112
3121
BAB
A
PROPIEDADES
• Asociativa: A · (B · C) = (A · B) · C • Elemento neutro: A · I = A • No es Conmutativa: A · B ≠ B · A • Distributiva del producto respecto de la suma: A · (B + C) = A · B + A · C
6. EJERCICIOS
1. Dadas las matrices:
−
−=
122013121
A y
−=231214
013B
Calcular: a) A + B b) A – B c) A.B d) B.A e) At.
2. Demostrar que: A2 - A- 2 I = 0, siendo:
=
011101110
A
3. Sea A la matriz
100010101
. Hallar An , para n
4. Obtener las matrices A y B que verifiquen el sistema:
−−−−−
=−
−
=+
101234
3
012221
2
BA
BA

80
5. Sean las matrices:
−
−=
122013121
A
−=231214
013B
−
−=
123111
211C
Calcula: a) (A + B)2 b) (A - B)2 c) (B)3 d)A·Bt·C.
7. CONCEPTO DE DETERMINANTE Es un escalar que se asigna a cada matriz cuadrada A. Se expresa como |A| o det (A). DETERMINANTE DE ORDEN UNO |a11| = a11 55 =→ 22 −=− DETERMINANTE DE ORDEN DOS
743)2(2131223
211222112221
1211 =+=−−⋅=−
→−⋅= aaaaaaaa
DETERMINANTE DE ORDEN TRES Consideremos una matriz 3 x 3 arbitraria A = (aij). El determinante de A se define como sigue:
=
333231
232221
131211
aaaaaaaaa
(a11 a22 a33 + a12 a23 a31 + a13 a21 a32) – (a13 a22 a31 + a12 a21 a33 + a11 a23 a32)
Obsérvese que hay seis productos, cada uno de ellos formado por tres elementos de la matriz. Tres de los productos aparecen con signo positivo (conservan su signo) y tres con signo negativo (cambian su signo). Regla de Sarrous
Pierre Sarrous (1798, 1861) fue un matemático francés que estableció una regla para calcular determinantes de orden 3:
• Los términos con signo + están formados por los elementos de la diagonal principal y los de las diagonales paralelas con su correspondiente vértice opuesto.
333231
232221
131211
aaaaaaaaa
• Los términos con signo – están formados por los elementos de la diagonal secundaria y los de las diagonales paralelas con su correspondiente vértice opuesto.

81
333231
232221
131211
aaaaaaaaa
Ejemplo
( ) ( )[ ]
15161)0106(405
101512213212013511502111
321
−=−=++−−+=
=−⋅⋅+⋅⋅+⋅⋅−−⋅⋅+⋅⋅+⋅⋅=−
8. MENOR COMPLEMENTARIO Y ADJUNTO DE UN ELEMENTO MENOR COMPLEMENARIO αij Se llama menor complementario de un elemento aij al valor del determinante de orden n-1 que se obtiene al suprimir en la matriz la fila i y la columna j.
8)4(42412
124201312
23 =−−=−
=→−
α
ADJUNTO DE UN ELEMENTO DE UN DETERMINANTE Aij Se llama adjunto del elemento aij al menor complementario multiplicado por (- 1)i+j , es decir, anteponiendo: El signo es + si i+j es par. El signo es – si i+j es impar.
[ ] 8)4(42412
2412
)1(124201312
3223 −=−−−=
−−=
−−=→
−+A
CALCULO DE UN DETERMINANTE POR LOS ADJUNTOS DE UNA LÍNEA El valor de un determinante es igual a la suma de productos de los elementos de una línea por sus adjuntos correspondientes: Ejemplo
=−−=−+−−++→
=+−+−−=
−++
−+
−+−→
=++−−=
−
++
−+
−+−→
=−−
23)12(11)1002()308(
23)5(1)2(0)9(21213
14253
04151
21
23)1(2)1(3)9(25110
24110
34151
21
412513102
SARROUS
F
C

82
9. PROPIEDADES DE LOS DETERMINANTES 1. El determinante de una matriz A y el de su transpuesta At son iguales. |At|= |A|
2. |A|=0 si posee dos líneas paralelas iguales 0212103212==→ A (la fila 1 y 3 son
iguales)
3. |A|=0 si todos los elementos de una línea son nulos 0000103212==→ A
4. |A|=0 si los elementos de una línea son combinación lineal de las otras
0315103212==→ A (F3 = F1 + F2)
5. En una matriz triangular el determinante es igual al producto de los elementos de la diagonal principal.
40542512043002
=⋅⋅==→ A
6. Si en un determinante se cambian entre sí dos líneas paralelas su determinante cambia de signo.
103031212
031103212
−=→ (se ha cambiado la fila 2 con la 3)
7. Si a los elementos de una línea se le suman los elementos de otra paralela multiplicados previamente por un nº real el valor del determinante no varía.
( )
→
−=−=++−++=
−=−=++−−+=−
15321701814089902211721
15161)0106(405502111
321
a la C3 se le ha sumado 2C1
+ C2
8. Si se multiplica un determinante por un número real, queda multiplicado por dicho número cualquier línea, pero sólo una.

83
⋅←−
⋅←−
=−
2
1
3502131
361
3502111
963
502111
3213
C
F
9. Si todos los elementos de una fila o columna están formados por dos sumandos, dicho determinante se descompone en la suma de dos determinantes.
102
341
102
341
102
341fdbecafedcba +=+++
10. El determinante de un producto es igual al producto de los determinantes: |A·B| =|A|·|B|
EJEMPLOS:
1. Sabiendo que cbavutzyx
= - 6 , calcula, indicando las propiedades que utilices,
los siguientes determinantes:
(a) [0’75 puntos] cbavutzyx
333 −−−
. (b) [0’75 puntos] cabvtuzxy
222
−−−
.
(c) [1 punto] czbyax
vutzyx
−−− 222
2. Sabiendo que 2==ihgfedcba
A , calcula, indicando las propiedades que
utilices, los siguientes determinantes:
(a) [1 punto] | - 3A| y |A -1| (b) [0'75 puntos] (c) [0'75 puntos]

84
3. Sabiendo que 2==ihgfedcba
A , calcula, indicando las propiedades que
utilices, los siguientes determinantes:
(a) [1 punto] ihgfedcba
551533
(b) [1’5 puntos] hihgefedbcba
222
+++
10. MATRIZ INVERSA La matriz inversa de una matriz cuadrada, es otra matriz que cumple que:
A · A-1 = A-1 · A = I No todas las matrices cuadradas tienen inversa. Para que exista la matriz inversa de A su determinante tiene que ser distinto de cero:
A-1 existe si 0≠A PROPIEDADES
1. (A · B)-1 = B-1 · A-1 2. (A-1)-1 = A 3. (k · A)-1 = k-1 · A-1
4. (A t)-1 = (A -1)t CÁLCULO DE LA MATRIZ INVERSA
( )tdAA
A ⋅=− 11 , siendo Ad la matriz formada por los adjuntos de los elementos de
A
EJEMPLO 3)000(300115003102
115003102
=++−++==→
= AA
Hallamos los adjuntos de cada elemento:
01100
11 =+=A 31503
12 −=−=A 31503
13 =+=A
11110
21 =−=A 31512
22 −=+=A 21502
23 −=−=A
00010
31 =+=A 30312
32 =−=A 00302
33 =+=A
−−
−=
030231
330dA
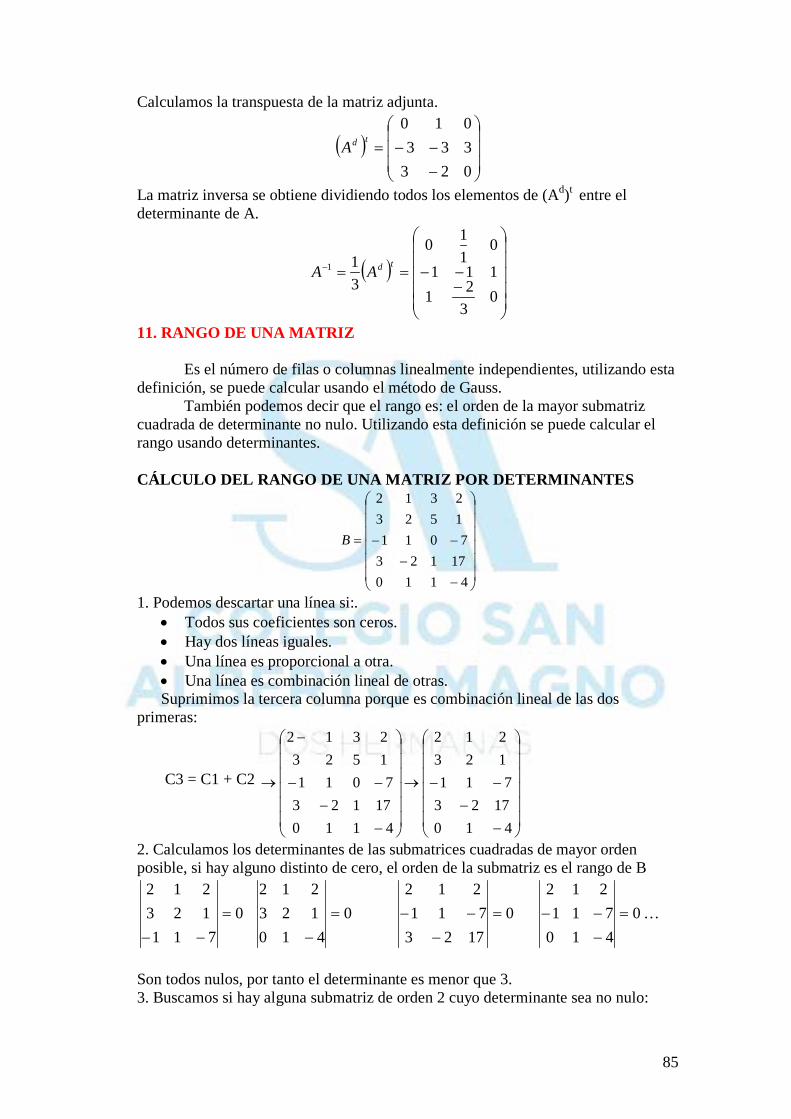
85
Calculamos la transpuesta de la matriz adjunta.
( )
−−−=
023333010
tdA
La matriz inversa se obtiene dividiendo todos los elementos de (Ad)t entre el determinante de A.
( )
−−−==−
0321
111
0110
311 tdAA
11. RANGO DE UNA MATRIZ Es el número de filas o columnas linealmente independientes, utilizando esta
definición, se puede calcular usando el método de Gauss. También podemos decir que el rango es: el orden de la mayor submatriz
cuadrada de determinante no nulo. Utilizando esta definición se puede calcular el rango usando determinantes. CÁLCULO DEL RANGO DE UNA MATRIZ POR DETERMINANTES
−−
−−=
411017123
701115232312
B
1. Podemos descartar una línea si:. • Todos sus coeficientes son ceros. • Hay dos líneas iguales. • Una línea es proporcional a otra. • Una línea es combinación lineal de otras. Suprimimos la tercera columna porque es combinación lineal de las dos
primeras:
C3 = C1 + C2
−−
−−→
−−
−−
−
→
4101723
711123212
411017123
701115232312
2. Calculamos los determinantes de las submatrices cuadradas de mayor orden posible, si hay alguno distinto de cero, el orden de la submatriz es el rango de B
0711
123212
=−−
0410
123212
=−
01723
711212
=−
−− 0410711
212=
−−− …
Son todos nulos, por tanto el determinante es menor que 3. 3. Buscamos si hay alguna submatriz de orden 2 cuyo determinante sea no nulo:

86
→≠=−= 01342312
rango = 2
CÁLCULO POR EL MÉTODO DE GAUSS Podemos descartar una línea si:
• Todos sus coeficientes son ceros. • Hay dos líneas iguales. • Una línea es proporcional a otra. • Una línea es combinación lineal de otras.
En general consiste en hacer nulas el máximo número de líneas posible, y el rango será el número de filas no nulas. EJEMPLOS: 1.
3
1310347000001241
123132
13101012361231241
=→
−−
−−
→
−−
→
−−
−−−−
= rgDFFFF
D

87
EJERCICIOS DE MATRICES Y DETERMINANTES
1. 2008 MODELO 1 OPCIÓN B Ejercicio 3. [2’5 puntos] Dadas las matrices
=
221010111
A
−=1210
01B
−
−−=
111102
C
Calcula la matriz P que verifica AP − B = CT (CT es la matriz transpuesta de C).
2. 2008 MODELO 5 OPCIÓN A Ejercicio 3. [2’5 puntos] Sea I la matriz identidad de orden 3 y
−−−−
=311201210
A . Calcula, si existe, el valor de k para el cual ( )2IkA ⋅−
es la matriz nula. 3. 2008 MODELO 5 OPCIÓN B
Ejercicio 3. Dadas las matrices
=
111121211
A y
−=
111402201
B
(a) [1 punto] Calcula, si existen, la matriz inversa de A y la de B. (b) [1’5 puntos] Resuelve la ecuación matricial AX + B = A + I, donde I denota la matriz identidad de orden 3.
4. 2008 MODELO 6 OPCIÓN B
Ejercicio 3. Dada la matriz
=
KK
KA
7131
31
(a) [1’25 puntos] Estudia el rango de A en función de los valores del parámetro k. (b) [1’25 puntos] Para k = 0, halla la matriz inversa de A.
5. 2009 MODELO 1 OPCIÓN B
Ejercicio 3. Sean A, B, C y X matrices que verifican que AXB = C (a) [1 punto] Si las matrices son cuadradas de orden 3, y se sabe que el
determinante de A es 3, el de B es – 1 y el de C es 6, calcula el determinante de X y 2X
(b) [ 1’5 puntos] Si
−
=20
11A ,
−−
=3221
B y
=
2430
C , calcula la
matriz X 6. 2009 MODELO 2 OPCIÓN B
Ejercicio 3. [2’5 puntos] Sean las matrices:

88
−−−−
=101
112121
A ,
−
=121013
B y
−
−=
3021
12C
Determina la matriz X que verifica AX – Bt =2C
7. 2009 MODELO 3 OPCIÓN A Ejercicio 3. Sean F1, F2 , F3 , las filas primera, segunda y tercera, respectivamente, de una matriz B de orden 3, cuyo determinante vale -2. Calcula, indicando las propiedades que utilices: (a) [0'5 puntos] El determinante de B -1. (b) [0'5 puntos] El determinante de (B t)4 (Bt es la matriz transpuesta de B). (c) [0'5 puntos] El determinante de 2B. (d) [1 punto] El determinante de una matriz cuadrada cuyas filas primera, segunda y tercera son, respectivamente, 5F1 - F3, 3F3, F2.
8. 2009 MODELO 4 OPCIÓN A
Ejercicio 3. Dada las matrices
=
2173
A y
−
−=
2431
B
(a) [1 punto] Calcula, si existe, la matriz inversa de A (b) [1’5 puntos] Calcula las matrices X e Y que satisfacen las ecuaciones matriciales
XA = A + 2B AY = A + 2B
9. 2009 MODELO 5 OPCIÓN B
Ejercicio 3. Considera las matrices
−−−−
−−=
221212
122A y
=
zyx
X
(a) [1 punto] Calcula, si existe, A-1 (b) [1’5 puntos] Resuelve la ecuación AX = 3X e interpreta
geométricamente el conjunto de soluciones.
10. 2009 MODELO 6 OPCIÓN A
Ejercicio 3.- Se consideran las matrices
−
−=
1213
A y IkAB ⋅−= , donde k
es una constante e I la matriz identidad de orden 2 a) [0’75 puntos] Determina los valores de k para los que B no tiene inversa b) [0’5 puntos] Calcula 1−B para k = -1 c) [1’25 puntos] Determina la constantes α y β para las que se cumple A2+αA= βI
11. 2010 MODELO 1 OPCIÓN B
Ejercicio 3. Considera las matrices A =
αα
2031321
y B =
−
432

89
(a) [0’5 puntos] Determina los valores de α para los que A tiene inversa. (b) [1’25 puntos] Calcula la inversa de A para α = 1. (c) [0’75 puntos] Resuelve, para α = 1, el sistema de ecuaciones AX = B.
12. 2010 MODELO 2 OPCIÓN A
Ejercicio 3. Sean las matrices A =
−
−
mm14
30101
, B =
− 112301
y
C =
−−−
223435
a) [0'5 puntos] Indica los valores de m para los que A es invertible. b) [2 puntos] Resuelve la ecuación XA – Bt = C para m = 0. (Bt es la matriz transpuesta de B)
13. 2010 MODELO 3 OPCIÓN A
Ejercicio 3. Considera las siguientes matrices A =
−1021
y B =
−
−12
03
(a) [0’75 puntos] Calcula A -1. (b) [1’75 puntos] Resuelve la ecuación matricial AXAt − B = 2I, donde I es la matriz identidad de orden 2 y At es la matriz transpuesta de A.
14. 2010 MODELO 3 OPCIÓN B
Ejercicio 3. [2’5 puntos] Obtén un vector no nulo v =(a, b, c), de manera que las matrices siguientes tengan simultáneamente rango 2.
A =
cba
110111
B =
−
cba
1310
02
15. 2010 MODELO 4 OPCIÓN A
Ejercicio 3. Sea la matriz A =
−−−−
144112245
.
(a) [1’25 puntos] Comprueba que se verifica 2A − A2 = I. (b) [1’25 puntos] Calcula A-1. (Sugerencia: Puedes utilizar la igualdad del apartado (a)).
16. 2010 MODELO 5 OPCIÓN B
Ejercicio 3. [2’5 puntos] Sean las matrices
−
=1101
A ,
−−=210110
001B y
−
=210
213C . Calcula la matriz X que cumpla la ecuación AXB = C
90
17. 2010 MODELO 6 OPCIÓN B
Ejercicio 3. De la matriz A =
dcba
se sabe que det(A) = 4. Se pide:
(a) [1’25 puntos] Halla det( tA3− ) y det
−− cd
ab33
22. Indica las propiedades
que utilizas. (b) [0’75 puntos] Calcula det( tAA ⋅−1 ). (c) [0’5 puntos] Si B es una matriz cuadrada tal que IB =3 , siendo I la matriz identidad, halla det(B).
18. 2011 MODELO 1 OPCIÓN A
Ejercicio 3.- Considera las matrices
−=
λλ10
10001
A y
=
010001100
B
(a) [1 punto] ¿Hay algún valor de λ para el que A no tiene inversa? (b) [1’5 puntos] Para λ = 1, resuelve la ecuación matricial A-1.X.A = B.
19. 2011 MODELO 2 OPCIÓN A
Ejercicio 3.- Dadas las matrices
−−−−
=α
αα
111111
A y
=
110
B
(a) [1’75 puntos] Calcula el rango de dependiendo de los valores de α. (b) [0’75 puntos] Para α = 2, resuelve la ecuación matricial A.X = B.
20. 2011 MODELO 2 OPCIÓN B
Ejercicio 3.- Sean las matrices
−
=31
αα
A y
−
=241131
B
(a) [1’25 puntos] Calcula los valores de α para los que la matriz inversa de A es
A121 .
(b) [1’25 puntos] Para α = -3, determina la matriz X que verifica la ecuación BXAt =⋅ .
21. 2011 MODELO 3 OPCIÓN A
Ejercicio 3.- Sean A y B dos matrices que verifican
=+
2324
BA y
−
=−2142
BA
(a) [1 punto] Halla las matrices (A + B)(A − B) y A2 − B2 . (b) [1’5 puntos] Resuelve la ecuación matricial XA − XB − (A + B)t =2I, siendo I la matriz identidad de orden 2 y (A + B)t la matriz transpuesta de A + B.

91
22. 2011 MODELO 3 OPCIÓN B
Ejercicio 3.- Sea la matriz
−−=3055
03
λλ
λA
(a) [1 punto] Determina los valores de λ para los que la matriz A − 2I tiene inversa, siendo I la matriz identidad de orden 3 (b) [1’5 puntos] Para λ = −2, resuelve la ecuación matricial AX = 2X + I.
23. 2011 MODELO 4 OPCIÓN B
Ejercicio 3.- Dada la matriz
−
−=
1211
A
(a) [1 punto] Demuestra que A2 + 2A = I y que A−1 = A +2I, siendo I la matriz identidad de orden 2. (b) [1’5 puntos] Calcula la matriz X que verifica la ecuación A2 + XA +5A =4I.
24. 2011 MODELO 5 OPCIÓN A
Ejercicio 3.- Sean A y B dos matrices cuadradas de orden 3 cuyos determinantes son |A| = 1/2 y |B| = -2. Halla: (a) [0'5 puntos] |A3|. (b) [0'5 puntos] |A-1|. (c) [0'5 puntos] |-2A|. (d) [0'5 puntos] tBA ⋅ , siendo Bt la matriz transpuesta de B. (e) [0'5 puntos] El rango de B.
25. 2011 MODELO 5 OPCIÓN B
Ejercicio 3.- Dada la matriz
−−−=431541
430A
(a) [0'5 puntos] Demuestra que se verifica la igualdad A3 = - I, siendo I la matriz identidad de orden 3. (b) [1'25 puntos] Justifica que A es invertible y halla su inversa. (c) [0'75 puntos) Calcula razonadamente A100.
26. 2011 MODELO 6 OPCIÓN B
Ejercicio 3.- Dada la matriz
−
+=
1101λ
A
(a) [1’25 puntos] Determina los valores de λ para los que la matriz A2 + 3A no tiene inversa. (b) [1’25 puntos] Para λ = 0, halla la matriz X que verifica la ecuación AX + A = 2I, siendo I la matriz identidad de orden 2.

92
UNIDAD 5: SISTEMAS DE ECUACIONES
TEMA 9: SISTEMAS DE ECUACIONES 9. Sistemas de ecuaciones lineales 10. Expresión matricial de un sistema 11. Clasificación de sistemas de ecuaciones 12. Teorema de Rouché-Fröbenius 13. Discusión de sistemas 14. Método de Gauss 15. Regla de Cramer 16. Sistemas homogéneos
1. SISTEMAS DE ECUACIONES LINEALES Es un conjunto de expresiones algebraicas de la forma:
=+++
=+++=+++
mnmnmm
nn
nn
bxaxaxa
bxaxaxabxaxaxa
..........................................................
......
......
2211
22222121
11212111
xi son las incógnitas, (i = 1,2,...,n). aij son los coeficientes, (i = 1,2,...,m) (j = 1,2,...,n). bi son los términos independientes, (i = 1,2,...,m).
Solución de un sistema: Es cada conjunto de valores que satisface a todas las ecuaciones simultáneamente.
Dos sistemas son equivalentes si tienen la misma solución. 2. EXPRESIÓN MATRICIAL DE UN SISTEMA El sistema de m ecuaciones con n incógnitas se puede expresar de la siguiente forma: IXA =⋅ Siendo:
=
mnmm
n
n
aaa
aaaaaa
A
.....................................................
..................
..................
21
22221
11211
La matriz del sistema (formada por los coeficientes)
=
nx
xx
X....
2
1
La matriz de las incógnitas
=
mb
bb
B....
2
1
La matriz de los términos
independientes.
93
=+++
=+++=+++
→
=
⋅
mnmnmm
nn
nn
mnmnmm
n
n
bxaxaxa
bxaxaxabxaxaxa
b
bb
x
xx
aaa
aaaaaa
..........................................................
......
......
..........................
.......................................................................
2211
22222121
11212111
2
1
2
1
21
22221
11211
3. CLASIFICACIÓN DE SISTEMAS DE ECUACIONES Atendiendo al número de sus soluciones INCOMPATIBLE: No tiene solución. COMPATIBLE DETERMINADO: Solución única. COMPATIBLE INDETERMINADO: Infinitas soluciones. 4. TEOREMA DE ROUCHÉ-FRÖBENIUS La condición necesaria y suficiente para que un sistema de m ecuaciones y n incógnitas tenga solución es que el rango de la matriz de los coeficientes y el de la matriz ampliada sean iguales. Siendo
=
mnmm
n
n
aaa
aaaaaa
A
.....................................................
..................
..................
21
22221
11211
la matriz del sistema y
=
mmnmm
n
n
baaa
baaabaaa
A
...........................................................
..................
..................
21
222221
111211
* la matriz ampliada
Si rgA = rgA* Sistema Compatible.
AMPLIACIÓN DEL TEOREMA Sistema Compatible Determinado: rgA = rgA*= n (NÚMERO DE INCÓGNITAS). Sistema Compatible Indeterminado: rgA = rgA*< n. Sistema Incompatible: rgA ≠ rgA* EJEMPLO Estudiar el sistema:
=−=+−=++−−=−−
622820222
yxzyxzyxzyx

94
1. Tomamos la matriz de los coeficientes y le hallamos el rango:
−−
−−−
=
022121111212
A
DETERMINANTES DE ORDEN 3: 302121111212
=→≠=−
−−
rgA
2. Hallamos el rango de la matriz ampliada
−−
−−−−
=
6022812101112212
*A
DETERMINANTE DE ORDEN 4 0
6022812101112212
=
−−
−−−−
porque f4 = f1 + f2+ f3
DETERMINANTE DE ORDEN 3 (el mismo que A)
302121111212
* =→≠=−
−−
rgA
3. Aplicamos el teorema de ROUCHÉ-FRÖBENIUS rgA = rgA*= 3 (número de incógnitas), el sistema es compatible determinado. 5. DISCUSIÓN DE SISTEMAS Para discutir un sistema con parámetros, calculamos el determinante de la matriz cuadrada (A o A*), lo igualamos a cero y resolvemos la ecuación que se obtiene para ver los distintos casos que se pueden dar. EJEMPLO
→
=−+=−+⋅
=+−
123145
32
zyxzyxk
zyx
−−
−=
12345
211kA y
−−
−=
11231453211
* kA
Hallamos el determinante de la matriz cuadrada:
5015312345
211=→=→−=
−−
−= kAkkA
DOS CASOS: I) Si →≠→≠ 05 Ak Es un determinante de orden tres distinto de cero,
como no existen de orden cuatro, rgA = rgA* = 3 (número de incógnitas)→COMPATIBLE DETERMINADO.

95
II) Si →=→= 05 Ak
−−
−=
123455
211A y
−−
−=
112314553211
*A
Rango de A: no puede ser tres porque su determinante es cero y no hay más determinantes de ese orden. Buscamos un determinante de orden dos distinto de cero:
2010)5(55511
=→≠=−−=−
rgA
Rango de A*: Además del determinante de A, dentro de A* existen tres determinantes más de orden tres. Comprobamos si alguno es distinto de cero: (quitando la columna 1)
3*0137)11024(1544112145321
=→≠+−=++−−−+=−−
−rgA
Aplicamos el teorema de ROUCHÉ-FRÖBENIUS →
==
3*2
rgArgA
SISTEMA INCOMPATIBLE 6. MÉTODO DE GAUSS
El método de Gauss consiste en transformar un sistema de ecuaciones en otro equivalente de forma que éste sea triangular. Es decir, vamos a aplicar el método de reducción para hacer ceros todos los coeficientes de las x1 por debajo de la primera ecuación, todos los coeficientes de las x2 por debajo de la segunda ecuación, todos los coeficientes de las x3 por debajo de la tercera ecuación,…
=++++
=++++=++++=++++
→
=+++
=+++=+++
mnmn
nn
nn
nn
mnmnmm
nn
nn
bxaxxx
bxaxaxxbxaxaxaxbxaxaxaxa
bxaxaxa
bxaxaxabxaxaxa
''......000....................................................
''......'00''......''0''......'''
..........................................................
......
......
321
3333321
223232221
11313212111
2211
22222121
11212111
Para facilitar el cálculo vamos a transformar el sistema en una matriz, en la que
pondremos los coeficientes de las variables y los términos independientes (separados por una recta). Se podrá operar entre filas, pero no entre columnas
mmnmm
n
n
baaa
baaabaaa
...........................................................
..................
..................
21
222221
111211
(el año pasado a cada fila le llamábamos Ei)
Hay que tener en cuenta que:

96
- Si al reducir dos ecuaciones, una fila está formada por ceros, podemos
eliminarla. - Si nos interesa, podemos cambiar las filas de posición. - Si al reducir una ecuación, todos los coeficientes de las x son ceros y el
término independiente es distinto de cero, el sistema no tiene solución (INCOMPATIBLE)
- Si todos los números de una fila son múltiplos de un mismo número, podemos simplificarla dividiendo todos los coeficientes entre dicho número
- Si el terminar de triangular obtenemos tantas ecuaciones como incógnitas, el sistema es COMPATIBLE DETERMINADO
- Si el terminar de triangular obtenemos menos ecuaciones que incógnitas, el sistema es COMPATIBLE INDETERMINADO
EJEMPLO
=−+=++=++
12435
123
zyxzyxzyx
→
− 111124351123
cambio la fila 1 con la fila 3 para facilitar los
cálculos
→
−
112324351111
(f2 – 5f1)→ 3920'5555:5
2435:
2
1
2
−−−−−−
ff
f (f3 – 3f1)→
2410'3333:3
1123:
3
1
3
−−−−−−
ff
f
−−−−
−
39202410
1111 He cambiado el orden de la fila 2 y la fila 3 por comodidad
(f3 – 2f2)→ 1100'4820:23920:
3
2
3
ff
f−−
−−
−−
−
11002410
1111

97
Ya está triangulado, escribimos las ecuaciones resultantes y resolvemos de abajo hacia arriba.
El sistema es compatible determinado porque hemos obtenido tres ecuaciones y hay tres incógnitas.
4116:624:
1:1:
24:1:
1
2
3
3
2
1
−=→=−+=→−=+−
=
→
=−=+−=−+
xxEyyE
zEzE
zyEzyxE
SOLUCIÓN (x, y, z) = (- 4, 6, 1)
7. REGLA DE CRAMER
La regla de Cramer sirve para resolver sistemas de ecuaciones lineales. Se aplica a sistemas que cumplan las dos condiciones siguientes:
• El número de ecuaciones es igual al número de incógnitas. • El determinante de la matriz de los coeficientes es distinto de cero.
Tales sistemas se denominan sistemas de Cramer (n ecuaciones y n incógnitas)
=+++
=+++=+++
nnnnnn
nn
nn
bxaxaxa
bxaxaxabxaxaxa
..........................................................
......
......
2211
22222121
11212111
Sea Δ =
nnnn
n
n
aaa
aaaaaa
A
.....................................................
..................
..................
21
22221
11211
=
Y sean Δ1, Δ2 , Δ3, ... , Δn los determinantes que se obtiene al sustituir la 1ª columna , la 2ª columna, la 3ª columna y la enésima columna respectivamente, por la columna de los términos independientes
Un sistema de Cramer tiene una sola solución que viene dada por las siguientes
expresiones:
∆∆
== 12
2222
1121
1
.....................................................
..................
..................
Aaab
aabaab
x nnnn
n
n
∆∆
== 21
2221
1111
2
.....................................................
..................
..................
Aaba
abaaba
x nnnn
n
n
…..

98
EJEMPLO
2101321111
5232
1=−==∆→
=+=+−=++
Azx
zyxzyx
11501221111
8151321111
21105322111
321 −=−=∆−==∆=−=∆
SOLUCIÓN ( )
−
−=
−−
=211,4,
221
211,
28,
221,, zyx
8. SISTEMAS HOMOGÉNEOS Si un sistema de m ecuaciones y n incógnitas tiene todos los términos independientes nulos se dice que es homogéneo.
=+++
=+++=+++
0..........................................................
0......0......
2211
2222121
1212111
nmnmm
nn
nn
xaxaxa
xaxaxaxaxaxa
=
mnmm
n
n
aaa
aaaaaa
A
.....................................................
..................
..................
21
22221
11211
la matriz del sistema y
=
0...........................................................0..................0..................
21
22221
11211
*
mnmm
n
n
aaa
aaaaaa
A la matriz ampliada
Las dos matrices van a tener el mismo rango, por tanto siempre es compatible.
- Si el rango de las matrices coincide con el número de incógnitas, será COMPATIBLE DETERMINADO, Y LA ÚNICA SOLUCIÓN POSIBLE ES LA TRIVIAL:
X1 = X2 = X3 = ……=Xn = 0
- Si el rango de las matrices no coincide con el número de incógnitas, será COMPATIBLE INDETERMINADO Y HABRÁ QUE RESOLVERLO POR GAUSS

99
EJERCICIOS DE SISTEMAS DE ECUACIONES 1. 2008 MODELO 1 OPCIÓN A.
Ejercicio 3. Dado el sistema de ecuaciones lineales x + λy − z = 0 2x + y + λz = 0
x + 5y − λz = λ +1 (a) [1’5 puntos] Clasifícalo según los valores del parámetro λ. (b) [1 punto] Resuélvelo λ = −1.
2. 2008 MODELO 2 OPCIÓN A. Ejercicio 3. Considera el siguiente sistema de ecuaciones
x + y + z = a - 1 2x + y + az = a x + ay + z = 1
(a) [1’5 puntos] Discútelo según los valores del parámetro a. (b) [1 punto] Resuelve el caso a = 2.
3. 2008 MODELO 2 OPCIÓN B.
Ejercicio 3. Sabemos que el sistema de ecuaciones
=−+=+−22132
zyxzyx
Tiene las mismas soluciones que el que resulta al añadirle la ecuación
ax + y + 7z = 7 (a) [1’25 puntos] Determina el valor de a.. (b) [1’25 puntos] Calcula la solución del sistema inicial de dos ecuaciones,
de manera que la suma de los valores de las incógnitas sea igual a la unidad.
4. 2008 MODELO 3 OPCIÓN A. Ejercicio 3. Un cajero automático contiene sólo billetes de 10, 20 y 50
euros. En total hay 130 billetes con un importe de 3000 euros. (a) [1’25 puntos] ¿ Es posible que en el cajero haya el triple número
de billetes de 10 que de 50? (b) [1’25 puntos] Suponiendo que el número de billetes de 10 es el
doble que el número de billetes de 50, calcula cuantos billetes hay de cada t
5. 2008 MODELO 3 OPCIÓN B.
Ejercicio 3. Considera la matriz
=
2
22
111
mmmmmmA .
(a) [1 punto] Halla los valores del parámetro m para los que el rango de A es menor que 3
(b) [1’5 puntos] Estudia si el sistema
=
⋅
111
zyx
A tiene solución para
cada uno de los valores de m obtenidos en el apartado anterior.

100
6. 2008 MODELO 4 OPCIÓN A. Ejercicio 3. [2’5 puntos] Dado el siguiente sistema de ecuaciones
x + y = 1 ky + z = 0 x +(k + 1)y + kz = k +1
(a) [1’25 puntos] Determina el valor del parámetro k para que sea incompatible.
(b) [1’25 puntos] Halla el valor del parámetro k para que la solución del sistema tenga z = 2.
7. 2008 MODELO 4 OPCIÓN B. Ejercicio 3. [2’5 puntos] Halla los valores del parámetro m que hacen
compatible el sistema de ecuaciones: − x +2y − 2z = 2 2x + y + z = m x +3y − z = m2
8. 2008 MODELO 6 OPCIÓN A.
Ejercicio 3. (a) [1 punto] Determina razonadamente los valores del parámetro m para los que el siguiente sistema de ecuaciones tiene más de una solución:
2x + y + z = mx x +2y + z = my x +2y +4z = mz
(b) [1’5 puntos] Resuelve el sistema anterior para el caso m = 0 y para el caso m = 1.
9. 2009 MODELO 2 OPCIÓN A.
Ejercicio 3.- a) [1’75 puntos] Discute según los valores λ el siguiente sistema: 3x+λy=0 x+λz=λ x+y+3z=1
b) [0’75 puntos] Resuélvelo para λ=0
10. 2009 MODELO 4 OPCIÓN B. Ejercicio 3. Dado el sistema de ecuaciones lineales
x + λy +z = 4 x + 3y +z = 5 λx + y + z = 4
(a) [1’5 puntos] Discute el sistema según los valores del parámetro λ. (b) [1 punto] Resuélvelo para λ = 1.
11. 2009 MODELO 5 OPCIÓN A. Ejercicio 3.- [1’25 puntos] a) Resuelve el sistema de ecuaciones
=++−=++−
=+
25202
2
zyxzyx
zx

101
b) [1’25 puntos] Calcula λ sabiendo que el siguiente sistema tiene alguna solución común con el del apartado a)
−=++=++−
=++
3213
1
zyxzyx
zyx
λ
12. 2009 MODELO 6 OPCIÓN B.
Ejercicio 3.- Sea el sistema de ecuaciones
=−+=+++=+
mzymxzmyx
myx11
a) [1’5 puntos] Determina los valores de m para los que el sistema es compatible b) [1 punto] Resuelve el sistema en el caso m = -1
13. 2010 MODELO 1 OPCIÓN A.
Ejercicio 3. Considera el sistema 3x − 2y + z = 5 2x − 3y + z = −4
(a) [1’5 puntos] Calcula razonadamente un valor de λ para que el sistema resultante al añadirle la ecuación x + y + λz = 9 sea compatible indeterminado. (b) [1 punto] ¿Existe algún valor de λ para el cual el sistema resultante no tiene solución?
14. 2010 MODELO 2 OPCIÓN B.
Ejercicio 3. Sea el siguiente sistema de ecuaciones λx + y + z = λ + 2 2x - λy + z = 2 x - y + λz = λ
(a) [1’75 puntos] Discútelo según los valores de λ. ¿Tiene siempre solución? (b) [0’75 puntos] Resuelve el sistema para λ = -1.
15. 2010 MODELO 4 OPCIÓN B.
Ejercicio 3. Considera el siguiente sistema de ecuaciones (m + 2)x – y – z = 1 – x – y + z = –1 x + my – z = m
(a) [1’75 puntos] Discútelo según los valores de m. (b) [1 punto] Resuelve para el caso m = 1.
16. 2010 MODELO 5 OPCIÓN A.
Ejercicio 3. (a) [1’75 puntos] Discute, según los valores del parámetro λ, el siguiente sistema de ecuaciones
– x + λy + z = λ λx + 2y + (λ +2)z = 4 x + 3y + 2z = 6- λ
(b) [0’75 puntos] Resuelve el sistema anterior para λ = 0.

102
17. 2010 MODELO 6 OPCIÓN A. Ejercicio 3. Considera el sistema de ecuaciones
λx +2y + 6z = 0 2x + λy + 4z = 2 2x + λy + 6z = λ − 2
(a) [1’75 puntos] Discútelo según los valores del parámetro λ. (b) [0’75 puntos] Resuélvelo para λ = 2.
18. 2011 MODELO 1 OPCIÓN B.
Ejercicio 3.- Dadas las matrices
+−−−+=
3012112
011
ttttA y
=
zyx
X
(a) [1'75 puntos] Calcula el rango de A según los diferentes valores de t. (b) [0'75 puntos] Razona para qué valores de t el sistema homogéneo AX = O tiene más de una solución.
19. 2011 MODELO 4 OPCIÓN A.
Ejercicio 3.- Considera el sistema de ecuaciones 2x − 2y + 4z = 4 2x + z = a −3x − 3y + 3z = −3
(a) [1’75 puntos] Discútelo según los valores del parámetro a. (b) [0’75 puntos] Resuélvelo cuando sea posible.
20. 2011 MODELO 6 OPCIÓN A.
Ejercicio 3.- Dado el siguiente sistema de ecuaciones lineales -λx + y + z = 1 x + λy + z = 2 λx + y + z = 1
(a) [1’75 puntos] Clasifica el sistema según los valores del parámetro λ. (b) [0’75 puntos] Resuelve el sistema para λ = 0.
PROBLEMAS CON SISTEMAS DE ECUACIONES
21. 1996 MODELO 2 OPCIÓN B. Ejercicio 3. Un punto M se mueve en el espacio tridimensional de manera que en un instante de tiempo t se encuentra en el punto (1+t, 3+t, 6+2t) (a) [0’5 puntos] ¿Es esta trayectoria una línea recta? Si es así, escribe sus ecuaciones de dos formas distintas. (b) [1 punto]Halla el instante de tiempo en el que el punto está en el plano dado por la ecuación x – 2y + z – 7 = 0.. (c) [1 punto] Halla la ecuación de la recta que corta perpendicularmente a la trayectoria de M y pasa por el punto (1,1,0)
22. 1997 MODELO 3 OPCIÓN A.
Ejercicio 3. Una fábrica de electrodomésticos tiene una producción semanal fija de 42 unidades. La fábrica abastece a tres establecimientos - digamos A, B y C - que demandan toda su producción. En una determinada semana el

103
establecimiento A solicitó tantas unidades como B y C juntos y, por otro lado, B solicitó un 20% más que la suma de la mitad de lo que pidió A más la tercera parte de lo que pidió C. ¿ Cuantas unidades solicitó cada establecimiento dicha semana?.
23. 1999 MODELO 2 OPCIÓN A.
Ejercicio 4.- Una persona trata de adivinar, mediante ciertas pistas, el coste de tres productos A, B y C que un amigo suyo ha comprado.
Pista 1: Si compro una unidad de A, dos de B y una de C me gasto 900 ptas.
Pista 2: Si compro m unidades de A, m + 3 de B y 3 de C me gasto 2950 ptas. (a) [1 punto] ¿Hay algún valor de m para el que estas dos pistas no son compatibles? (b) [1puntos] Si en la Pista 2 se toma m = 4, ¿es posible saber el coste de cada uno de los productos? (c) [2'5 puntos] Pista 3. el amigo le dice finalmente que el producto C vale 5 veces lo que vale el producto A y que en la Pista 2 se tiene m = 4. ¿Cuánto valen A, B y C?
24. 1999 MODELO 6 OPCIÓN B.
Ejercicio 4. [2'5 puntos] En un supermercado se ofrecen dos lotes formados por distintas cantidades de los mismos productos. - El primer lote está compuesto por una botella de cerveza, tres bolsas de
cacahuetes y siete vasos y su precio es de 565 ptas. - El segundo lote está compuesto por una botella de cerveza, cuatro bolsas
de cacahuetes y diez vasos y su precio es de 740 ptas. Con estos datos, ¿podrías averiguar cuánto debería valer un lote formado por una botella de cerveza, una bolsa de cacahuetes y un vaso? Justifica la respuesta.
25. 2000 MODELO 6 OPCIÓN B.
Ejercicio 4. [2'5 puntos] Un mayorista de café dispone de tres tipos base, Moka, Brasil y Colombia, para preparar tres tipos de mezcla, A, B y C, que envasa en sacos de 60 Kg. Con los siguientes contenidos en kilos y precios del kilo en euros:
Mezcla A
Mezcla B
Mezcla C
Moka 15 30 12
Brasil 30 10 18
Colombia 15 20 30
Precio (cada Kg.) 4€ 4'5€ 4'7€
Suponiendo que el preparado de las mezclas no supone coste alguno, cual es el precio de cada uno de los tipos de café.

104
26. 2001 MODELO 1 OPCIÓN A. Ejercicio 3. [2'5 puntos]. En el sector de las aceitunas sin hueso, tres empresas A, B y C, se encuentran en competencia. Calcula el precio por unidad dado por cada empresa sabiendo que verifican las siguientes relaciones: - El precio de la empresa A es 0'6 euros menos que la media de los precios
establecidos por B y C. - El precio dado por B es la media de los precios de A y C. - El precio de la empresa C es igual a 2 euros más 2/5 del precio dado por
A más 1/3 del precio dado por B.
27. 2003 MODELO 6 OPCIÓN B. Ejercicio 3. [2'5 puntos] Una empresa cinematográfica dispone de tres salas, A, B y C. Los precios de entrada a estas salas son de 3, 4 y 5 euros, respectivamente. Un día la recaudación conjunta de las tres salas fue de 720 euros y el número total de espectadores fue de 200. Si los espectadores de la sala A hubieran asistido a la sala B y los de la sala B a la sala A, se hubiese obtenido una recaudación de 20 euros más. Calcula el número de espectadores que acudió a cada una de las salas.
28. 2004 MODELO 3 OPCIÓN B.
Ejercicio 3. Un tendero dispone de tres tipos de zumo en botellas que llamaremos A, B y C. El mencionado tendero observa que si vende a 1€ las botellas del tipo A, a 3 € las del tipo B y a 4 € las del tipo C, entonces obtiene un total de 20 € . Pero si vende a 1€ las del tipo A, a 3 € las del B y a 6 € las del C, entonces obtiene un total de 25 €
(a) [0’75 puntos] Plantea el sistema de ecuaciones que relaciona el número de botellas de cada tipo que posee el tendero. (b) [1 punto] Resuelve dicho sistema. (c) [0’75 puntos] ¿Puede determinarse el número de botellas de cada tipo de que dispone el tendero? (Ten en cuenta que el número de botellas debe ser entero y positivo).
29. 2005 MODELO 5 OPCIÓN A. Ejercicio 3. [2’5 puntos] Álvaro, Marta y Guillermo son tres hermanos. Álvaro dice a Marta: si te doy la quinta parte del dinero que tengo, los tres hermanos tendremos la misma cantidad. Calcula lo que tiene cada uno si entre los tres juntan 84 euros.
30. 2005 MODELO 6 OPCIÓN A.
Ejercicio 3. [2’5 puntos] En una excavación arqueológica se han encontrado sortijas, monedas y pendientes. Una sortija, una moneda y un pendiente pesan conjuntamente 30 gramos. Además, 4 sortijas, 3 monedas y 2 pendientes han dado un peso total de 90 gramos. El peso de un objeto deformado e irreconocible es de 18 gramos. Determina si el mencionado objeto es una sortija, una moneda o un pendiente, sabiendo que los objetos que son del mismo tipo pesan lo mismo.

105
31. 2008 MODELO 3 OPCIÓN A. Ejercicio 3. Un cajero automático contiene sólo billetes de 10, 20 y 50 euros. En total hay 130 billetes con un importe de 3000 euros. (a) [1’25 puntos] ¿Es posible que en el cajero haya el triple número de billetes de 10 que de 50? (b) [1’25 puntos] Suponiendo que el número de billetes de 10 es el doble que el número de billetes de 50, calcula cuantos billetes hay de cada t
32. 2009 MODELO 1 OPCIÓN A.
Ejercicio 3.- Tratamos de adivinar, mediante ciertas pistas, los precios de tres productos A , B y C Pista 1: Si compramos una unidad de A, dos de B y una de C gastamos 118 euros Pista 2: Si compramos n unidades de A, n+3 de B y tres de C gastamos 390 euros
a) [1’5 puntos] ¿Hay algún valor de n para el que estas dos pistas sean
incompatibles? b) [1 punto] Sabiendo que n = 4 y que el producto C cuesta el triple que el
producto A, calcula el precio de cada producto
33. 2009 MODELO 3 OPCIÓN B. Ejercicio 3. [2'5 puntos] Una empresa envasadora ha comprado un total de 1500 cajas de pescado en tres mercados diferentes, a un precio por caja de 30, 20 y 40 euros respectivamente. El coste total de la operación ha sido de 40500 euros. Calcula cuánto ha pagado la empresa en cada mercado, sabiendo que en el primero de ellos se ha comprado el 30 % de las cajas.
34. 2012 MODELO 6 OPCIÓN A.
Ejercicio 3.- Un estudiante ha gastado 57 euros en una papelera por la compra de un libro, una calculadora y un estuche. Sabemos que el libro cuesta el doble que el total de la calculadora y el estuche juntos. (a) [1'25 puntos] ¿Es posible determinar de forma única el precio del libro? ¿Y
el de la calculadora? Razona las respuestas. (b) [1'25 puntos] Si el precio del libro, la calculadora y el estuche hubieran
sufrido un 50 %, un 20% y un 25% de descuento respectivamente, el estudiante habría pagado un total de 34 euros. Calcula el precio de cada artículo.

106
UNIDAD 6: GEOMETRÍA
TEMA 10: ESPACIO VECTORIAL
7. Vectores en el espacio 8. Estructura de espacio vectorial 9. Dependencia e independencia lineal. bases 10. Producto escalar 11. Producto vectorial 12. Producto mixto
1. VECTORES EN EL ESPACIO
Un vector fijo →
AB es un segmento orientado que va del punto A (origen) al punto B (extremo).
ELEMENTOS DE UN VECTOR
• Dirección de un vector: es la dirección de la recta que contiene al vector.
• Sentido de un vector: El sentido del vector →
AB es el que va desde el origen A al extremo B (hacia el punto al que se dirige).
• Módulo de un vector →
AB es la longitud del segmento AB, se representa por →
AB . El módulo de un vector es un número siempre positivo o cero.
VECTORES LIBRES Definimos una relación de equipolencia entre vectores de forma que dos vectores son equipolentes si tienen igual módulo, direcciones paralelas y el mismo sentido.
Un vector libre es un representante de cada conjunto de vectores equipolentes. Se caracteriza porque lo puedes dibujar en cualquier parte del plano. COORDENADAS DE UN VECTOR LIBRE:
Para expresar un vector libre utilizamos su representante en el origen, de forma que las coordenadas del vector son las coordenadas del punto final, el punto inicial será (0, 0, 0)
107
COORDENADAS DE UN VECTOR DADO POR DOS PUNTOS Si las coordenadas de los puntos extremos son A(a1, a2, a3) y B(b1, b2, b3)
Las coordenadas del vector →
AB son las coordenadas del extremo B menos las coordenadas del origen A
( )332211 ,, abababAB −−−=→
VECTOR DE POSICIÓN
El vector a que une el origen de coordenadas O con un punto A se llama vector de posición del punto A. Un punto y su vector de posición tienen las mismas coordenadas. Las coordenadas de un vector dado por dos puntos A y B se pueden expresar de la
forma abAB −=
→
CÁLCULO DEL MÓDULO DE UN VECTOR Si 222),,( cbaucbau ++=→=
EJEMPLO: uuu 211641)4,2,1( =++=→−−=
En el caso de un vector dado por dos puntos, ( )332211 ,, abababABu −−−==→
DISTANCIA ENTRE DOS PUNTOS La distancia entre dos puntos A y B es igual al módulo del vector que tiene de extremos dichos puntos. Ejemplo: Hallar la distancia entre los puntos A(1, 2, 3) y B(−1, 2, 0).
( ) ( ) uBAdAB 13904),(3,0,230,22,11 =++=→−−=−−−−=→
VECTOR NORMAL O UNITARIO
Un vector normal es un vector unitario, es decir, de módulo la unidad. La normalización de un vector consiste en asociarle otro vector unitario, de la misma dirección y sentido que el vector dado, dividiendo cada componente del vector por su
módulo. aaua
=
EJEMPLO: El vector unitario asociado a ( ) →=++=→−= 51041,0,2 aa
−=
51,0,
52
au , es un vector con la misma dirección y sentido que a
pero de módulo 1. 2. ESTRUCTURA DE ESPACIO VECTORIAL SUMA DE VECTORES Para sumar dos vectores se suman sus componentes.
( )( ) ( )332211
321
321 ,,,,,,
bababababbbbaaaa
+++=+
==

108
EJEMPLO ( )( ) ( )1,1,1
1,0,22,1,3
−=+
−=−=
baba
PROPIEDADES DE LA SUMA DE VECTORES (GRUPO CONMUTATIVO)
1. ASOCIATIVA ( ) ( ) wvuwvu ++=++
2. CONMUTATIVA vwwv +=+
3. ELEMENTO NEUTRO ( ) vovo =+→= 0,0,0
4. ELEMENTO OPUESTO ( ) ouu =−+
PRODUCTO DE UN NÚMERO REAL (ESCALAR) POR UN VECTOR
Se multiplican las componentes del vector por dicho número ( ) ( )321321 ,,,, akakakakaaaa ⋅⋅⋅=⋅→=
EJEMPLO: ( ) ( )3,9,631,3,2 −=⋅→−= aa PROPIEDADES DEL PRODUCTO DE UN NÚMERO POR UN VECTOR
1. ASOCIATIVA ( ) ( ) uu ⋅⋅=⋅⋅ βαβα
2. DISTRIBUTIVA RESPECTO A LA SUMA DE VECTORES ( ) baba
ααα +=+ 3. DISTRIBUTIVA RESPECTO A LOS ESCALARES ( ) uuu
⋅+=+ βαβα 4. ELEMENTO NEUTRO uu
=⋅1
( )•ℜ+,,3V TIENE ESTRUCTURA DE ESPACIO VECTORIAL 3. DEPENDENCIA E INDEPENDENCIA LINEAL. BASES COMBINACIÓN LINEAL
Una combinación lineal de dos o más vectores es el vector que se obtiene al sumar esos vectores multiplicados por escalares: cbau
⋅+⋅+⋅= λβα VECTORES LINEALMENTE DEPENDIENTES
Varios vectores libres del espacio se dice que son linealmente dependientes si hay una combinación lineal de ellos que es igual al vector cero, sin que sean cero todos los coeficientes de la combinación lineal.
( )0,0,0==⋅+⋅+⋅ ocba λβα Si para que esta igualdad se cumpla todos los coeficientes tienen que ser cero (solución trivial), entonces los vectores son linealmente independientes. PROPIEDADES
1. Si varios vectores son linealmente dependientes, entonces al menos uno de ellos se puede expresar como combinación lineal de los demás. También se cumple el reciproco: si un vector es combinación lineal de otros, entonces todos los vectores son linealmente dependientes.
2. Dos vectores del espacio son linealmente dependientes si, y sólo si, son
paralelos, y por tanto, proporcionales: ( )( ) k
ba
ba
ba
bbbbaaaa
===
==
3
3
2
2
1
1
321
321
,,,,
Si no son proporcionales, entonces los vectores son linealmente independientes.
109
3. Tres vectores del espacio son linealmente dependientes si, y sólo si, están en un mismo plano (son coplanarios). Si son linealmente dependientes, al menos uno de ellos se puede expresar como combinación lineal de los otros dos, por tanto el determinante que forman sus coordenadas es nulo:
( )( )( )
0,,,,,,
321
321
321
321
321
321
=→
===
cccbbbaaa
ccccbbbbaaaa
Si el determinante es distinto de cero, entonces los vectores son linealmente independientes. EJEMPLO Determinar los valores de k para los que son linealmente dependientes los vectores
( )6,,3 −= ku , ( )3,1,2 +−= kv y ( )4,2,1 += kw . Los vectores son linealmente dependientes si el determinante de la matriz que
forman es nulo, es decir que el rango de la matriz es menor que 3.
( ) →=+++−−−++++→=+
+−−
0181538624123120421
31263
22 kkkkkkk
kk
=−=
→=−−62
01242
kk
kk
Los vectores son linealmente dependientes si k = -2 o k = 6 BASE ORTONORMAL
Una base es ortonormal si los vectores de la base son perpendiculares entre sí, y además tienen módulo 1.
BASE CANÓNICA: { }( )( )( )
=→=
=→=
=→=
→
11,0,0
10,1,010,0,1
,,
kk
jjii
kji
y ji
⊥ ki
⊥ kj
⊥ j
i
x k
z Cualquier vector se puede expresar en la base canónica de la forma
( ) kujuiuuuuu⋅+⋅+⋅== 321321 ,,
4. PRODUCTO ESCALAR
El producto escalar de dos vectores es un número real que resulta al multiplicar el producto de sus módulos por el coseno del ángulo que forman.
αcos⋅⋅=⋅ vuvu

110
EXPRESIÓN ANALÍTICA DEL PRODUCTO ESCALAR Si expresamos las coordenadas de los vectores en la base canónica
( ) kujuiuuuuu⋅+⋅+⋅== 321321 ,, y ( ) kvjvivvvvv
⋅+⋅+⋅== 321321 ,, ,
podemos obtener la expresión ( )( ) 332211321321 vuvuvukvjvivkujuiuvu ⋅+⋅+⋅=⋅+⋅+⋅⋅+⋅+⋅=⋅
Ya que
=⋅⋅=⋅⋅=⋅
=⋅⋅=⋅⋅=⋅
=⋅⋅=⋅⋅=⋅
1111º0cos
1111º0cos1111º0cos
kkkk
jjjjiiii
=⋅⋅=⋅⋅=⋅
=⋅⋅=⋅⋅=⋅
=⋅⋅=⋅⋅=⋅
0011º0cos
0011º0cos
0011º90cos
kiki
kjkj
jiji
EJEMPLO Hallar el producto escalar de dos vectores cuyas coordenadas en una base ortonormal son: (1, 1/2, 3) y (4, −4, 1). (1, 1/2, 3) · (4, −4, 1) = 1 · 4 + (1/2) · (−4) + 3 · 1 = 4 −2 + 3 = 5 ÁNGULO DE DOS VECTORES
vuvuvuvu
vuvuvuvu
⋅⋅+⋅+⋅
=⋅⋅
=→⋅⋅=⋅ 332211coscos αα
EJEMPLO Determinar el ángulo que forman los vectores ( )3,2,1 −=u y ( )1,4,2−=v
º92'792943
21143cos
3382211164
14941=→=
⋅=→
=−+−=⋅=++==++=
ααvu
vu
VECTORES ORTOGONALES Dos vectores son ortogonales si forman un ángulo de 90º, cos90º = 0, por tanto, su producto escalar es 0.
0332211 =⋅+⋅+⋅=⋅ vuvuvuvu PROPIEDADES DEL PRODUCTO ESCALAR
1. CONMUTATIVA vwwv ⋅=⋅
2. ASOCIATIVA ( ) ( ) ( )wkvwvkwvk ⋅⋅=⋅⋅=⋅⋅
3. DISTRIBUTIVA ( ) bcacbac⋅+⋅=+⋅
4. El producto escalar de un vector no nulo por sí mismo siempre es positivo. ( ) 00,0,0 2 >=⋅→≠ uuuu
5. PRODUCTO VECTORIAL El producto vectorial de dos vectores vu
× es otro vector cuya dirección es perpendicular a los dos vectores y su sentido sería igual al avance de un sacacorchos al girar de u hacia v. Su módulo es igual a αsenvuvu ⋅⋅=×

111
El producto vectorial se puede expresar mediante un determinante:
( )131211131211
321
321 ,, AAAkAjAiAvvvuuukji
vu =⋅+⋅+⋅==×
EJEMPLOS Calcular el producto vectorial de los vectores ( )3,2,1=u y ( )2,1,1−=v
( )35,13511121
2131
2132
211321 −−=⋅+⋅−⋅=⋅
−+⋅
−
−+⋅=−
=× kjikjikji
vu
ÁREA DEL PARALELOGRAMO Geométricamente, el módulo del producto vectorial de dos vectores coincide con el área del paralelogramo que tiene por lados a esos vectores: vusenvuhuA
×=⋅⋅=⋅= α
EJEMPLO Dados los vectores ( )1,1,3 −=u y ( )4,3,2=v , hallar el área del paralelogramo que tiene por lados dichos vectores
( )7,14,771473213
4213
4311
432113 −=⋅+⋅−⋅=⋅+⋅
−−+⋅
−=−=× kjikji
kjivu
22944919649 uvuA =++=×=
ÁREA DE UN TRIÁNGULO

112
EJEMPLO Determinar el área del triángulo cuyos vértices son los puntos A(1, 1, 3), B(2, −1, 5) y C(−3, 3, 1).
)2,2,1( −=−=→
abAB
)2,2,4( −−=−=→
acAC
( ) 2
27272363606,6,0
224221 uAACABkji
ACAB =→=++=×→−−=−−
−=×→→→→
PROPIEDADES DEL PRODUCTO VECTORIAL
1. ANTICONMUTATIVA uvvu ×−=×
2. HOMOGÉNEA ( ) ( ) ( )vuvuvu ⋅×=×⋅=×⋅ ααα
3. DISTRIBUTIVA ( ) wuvuwvu ×+×=+×
4. El producto vectorial de dos vectores paralelos en igual al vector nulo. (tendríamos un determinante con dos filas proporcionales)
6. PRODUCTO MIXTO El producto mixto de los vectores u , v y w es igual al producto escalar del primer vector por el producto vectorial de los otros dos. El producto mixto se representa por [u , v , w ] = u .( v x w ) El producto mixto de tres vectores es igual al determinante que tiene por filas las coordenadas de dichos vectores:
[ u , v , w ] = u .( v x w ) =
321
321
321
wwwvvvuuu
EJEMPLOS Calcular el producto mixto de los vectores ( )3,1,2 −=u , ( )5,2,0 −=v y ( )2,1,1 −−=w
[ u , v , w ] = ( ) 191630106058211520
312−=−−=++−++−=
−−−
−
VOLUMEN DEL PARALELEPÍPEDO El valor absoluto del producto mixto representa el volumen del paralelepípedo cuyas aristas son tres vectores con origen en un mismo vértice. EJEMPLO Hallar el volumen del paralelepípedo formado por los vectores ( )5,2,3 −=u ,
( )1,2,2 −=v y ( )2,3,4−=w
[ u , v , w ] = 39191234122
523uV =→=
−−
−

113
VOLUMEN DE UN TETRAEDRO El volumen de un tetraedro es igual a 1/6 del producto mixto, en valor absoluto. EJEMPLO Obtener el volumen del tetraedro cuyos vértices son los puntos A(3, 2, 1), B(1, 2, 4), C(4, 0, 3) y D(1, 1, 7).
)3,0,2(−=−=→
abAB D
)2,2,1( −=−=→
acAC C
)6,1,2( −−=−=→
adAD A B
[ u , v , w ] = 3
655
615
612221302
uV =⋅=→=−−−
−
PROPIEDADES DEL PRODUCTO MIXTO
1. El producto mixto no varía si se permutan circularmente sus factores, pero cambia de signo si éstos se trasponen. [ u , v , w ] = [ v , w , u ] = [ w , u , v ]
[ u , v , w ] = - [ v , u , w ] = - [ u , w , v ]
2. Si tres vectores son linealmente dependientes, es decir, si son coplanarios, producto mixto vale 0.

114
EJERCICIOS DE VECTORES EN EL ESPACIO 1. Determinar el valor del parámetro k para que los vectores ( )3,2,−= ka y )1,,2( kb −=
sean: a) Ortogonales. b) Paralelos
2. Dados los puntos A(1, 0, 1), B(1, 1, 1) y C(1, 6, a), se pide: a) Hallar para qué valores del parámetro a están alineados. b) Hallar si existen valores de a para los cuales A, B y C son tres vértices de un
paralelogramo de área 3 y, en caso afirmativo, calcularlos.
3. Hallar dos vectores de módulo la unidad y ortogonales a u=(2, −2, 3) y v =(3, −3, 2). 4. Dados los vectores ( )3,2,1=u , ( )1,0,2=v ( )0,3,1−=w , hallar:
a) vu ⋅ y wv
⋅ b) vu
× y wv ×
c) ( ) wvu ⋅× y ( ) uwv
⋅× d) u , v y w e) ),cos( vu y ),cos( wv
5. Dados los vectores ( )1,1,3 −=u y ( )4,3,2=v , hallar:
a) El producto vectorial de u y v · b) El área del paralelogramo que tiene por lados los vectores u y v ·
6. Dados los vectores ( )3,1,2=u , ( )3,2,1=v ( )0,1,1 −−=w , hallar el producto mixto [ ]wvu ,, . ¿Cuánto vale el volumen del paralelepípedo que tiene por aristas los vectores dados? 7. Sean A(−3, 4, 0), B(3, 6, 3) y C(−1, 2, 1) los tres vértices de un triángulo. Se pide:
a) Calcular el coseno de cada uno de los tres ángulos del triángulo. b) Calcular el área del triángulo.
8. Considerar la siguiente figura:
Se pide:
a) Coordenadas de D para qué ABCD sea un paralelogramo. b) Área de este paralelogramo.
9. Dados los puntos A(1, 0, 1), B(1, 1, 1) y C(1, 6, a), se pide:
a) Hallar para qué valores del parámetro a están alineados. b) Hallar si existen valores de a para los cuales A, B y C son tres vértices de un
paralelogramo de área 3 y, en caso afirmativo, calcularlos.

115
TEMA 11: RECTAS Y PLANOS EN EL ESPACIO
8. Ecuaciones de la recta en el espacio 9. Ecuaciones del plano 10. Haz de planos 11. Posiciones relativas de dos planos 12. Posiciones relativas de tres planos 13. Posiciones relativas de una recta y un plano 14. Posiciones relativas de dos rectas
1. ECUACIONES DE LA RECTA EN EL ESPACIO
Una recta queda determinada por un punto y un vector director (vector con la misma dirección que la recta)
= ),,(),,(
321
321
uuuuaaaA
r
A) ECUACIÓN VECTORIAL DE LA RECTA ℜ∈⋅+= tuuutaaazyxr ),,,(),,(),,(: 321321
EJEMPLO: ℜ∈⋅+−=
→
=−
ttzyxruA
r ),1,1,2()3,2,1(),,(:)1,1,2()3,2,1(
B) ECUACIONES PARAMÉTRICAS DE LA RECTA Operando en la ecuación vectorial de la recta llegamos a la igualdad:
⋅+=⋅+=⋅+=
tuaztuaytuax
r
33
22
11
: , ℜ∈t
EJEMPLO:
+=+=+−=
→
=−
tztytx
ruA
r32
21:
)1,1,2()3,2,1(
, ℜ∈t
C) ECUACIONES CONTINUAS DE LA RECTA Despejando e igualando t en las ecuaciones paramétricas se tiene:
3
3
2
2
1
1
uaz
uay
uax −
=−
=−
EJEMPLO: 1
31
22
1:)1,1,2()3,2,1( −
=−
=+
→
=− zyxr
uA
r
D) ECUACIONES IMPLÍCITAS DE LA RECTA Una recta puede venir determinada por la intersección de los planos.
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
r

116
Si en las ecuaciones continuas de la recta escogemos dos de las igualdades, quitamos denominadores y pasamos todo al primer miembro, obtenemos las ecuaciones implícitas. EJEMPLO:
=+−→−=−→−
=−
=+−→−=+→−
=+
→−
=−
=+
→
=−
01321
31
2
0524211
22
1
13
12
21:
)1,1,2()3,2,1(
zyzyzy
yxyxyx
zyxruA
r
Para obtener las ecuaciones paramétricas de la recta, a partir de las
ecuaciones implícitas, se resuelve el sistema por Gauss, como sólo hay dos ecuaciones y tres incógnitas, quedará en función de “t” 2. ECUACIONES DEL PLANO Un plano queda determinado por:
- un punto y dos vectores directores (vectores paralelos al plano)
==
),,(),,(
),,(:
321
321
321
vvvvuuuu
aaaA
π
- un punto y un vector normal (vector perpendicular al plano)
= ),,(),,(
:321
321
nnnnaaaA
π
El vector normal se puede obtener como producto vectorial de los vectores directores:
321
321
vvvuuukji
vun
=×=
A) ECUACIÓN VECTORIAL
( ) ),,(),,(),,(,,: 321321321 vvvuuuaaazyx ⋅+⋅+= βαπ , ℜ∈βα , EJEMPO:
( )
( )
⋅+−⋅+−=→
=−=
−)1,1,1()3,0,2()4,3,1(,,:
)1,1,1()3,0,2(
4,3,1: βαππ zyx
vu
A
, ℜ∈βα ,
B) ECUACIONES PARAMÉTRICAS DEL PLANO
⋅+⋅+=⋅+⋅+=⋅+⋅+=
βαβαβα
π
333
222
111
:vuazvuayvuax
, ℜ∈βα ,

117
EJEMPO:
( )
+⋅−=+=
⋅+⋅+−=→
=−=
−
βαβ
βαππ
343
121:
)1,1,1()3,0,2(
4,3,1:
zy
x
vu
A
, ℜ∈βα ,
C) ECUACIÓN GENERAL O IMPLÍCITA DEL PLANO
→
= ),,(),,(
:321
321
nnnnaaaA
π 0=+++ DCzByAx
A, B y C son las coordenadas del vector normal, y D se obtiene sustituyendo las coordenadas del punto. EJEMPO:
( )( )
( ) 100815304235)1(34,3,1
0253:
2,5,31102
,1132
,1130
111302
)1,1,1()3,0,2(
4,3,1:
=→=++−−→=+⋅+⋅−−→
−=++−
→−=
−−
−=−=
→
=−=
−
DDDA
Dzyx
kjin
vu
A
π
π
010253: =++−→ zyxπ Para obtener las ecuaciones paramétricas del plano, a partir de la ecuación
implícita, se resuelve el sistema por Gauss, como sólo hay una ecuación y tres incógnitas, quedará en función de dos parámetros. 3. HAZ DE PLANOS HAZ DE PLANOS PARALELOS
Todos los planos paralelos a uno dado tienen el mismo vector normal, por tanto, en la ecuación general solo cambia D. La ecuación del haz de planos será de la forma:
ℜ∈=+++ kkCzByAx ,0 HAZ DE PLANOS QUE PASAN POR UNA RECTA
Se llama haz de planos de eje r al conjunto de todos los planos que contienen a la recta r.

118
Si r viene definida por sus ecuaciones implícitas:
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
r
la ecuación del haz de planos de eje r nieve dada por la igualdad: ( ) ( ) 022221111 =+++++++ DzCyBxADzCyBxA µλ
Si dividimos por λ y, la ecuación del haz resulta: ( ) ( ) 022221111 =+++++++ DzCyBxAkDzCyBxA EJEMPLO Hallar en la ecuación del plano que pasa por el punto (3, 2, −3) y pertenece al haz de
planos de eje en la recta:
=+++−=−−+
02320932
:zyx
zyxr
Haz de planos: ( ) ( ) 0232932 =+++−+−−+ zyxkzyx Sustituyendo las coordenadas del punto (3, 2, −3), obtenemos el valor de k que le corresponde a ese plano: ( ) ( ) →=→=−→=+−+−+−++ 1066029439366 kkk El plano será: ( ) ( ) 072502321932 =−++→=+++−+−−+ zyxzyxzyx 4. POSICIONES RELATIVAS DE DOS PLANOS
Los planos se expresan en forma general:
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
2
1
2
1
2
1
CC
BB
AA
≠≠ 2
1
2
1
2
1
2
1
DD
CC
BB
AA
≠== 2
1
2
1
2
1
2
1
DD
CC
BB
AA
===
5. POSICIONES RELATIVAS DE TRES PLANOS
Los planos se expresan en forma general:
=++=++=++
3333
2222
11111
:DzCyBxADzCyBxADzCyBxA
Y se estudian las posibles soluciones del sistema de ecuaciones que forman. Sean:
=
333
222
111
CBACBACBA
A Y
=
3333
2222
1111
*DCBADCBADCBA
A

119
CASOS: 1. rgA = rgA* =3 (COMPATIBLE DETERMINADO)
Planos secantes en un punto (El punto se puede calcular resolviendo el sistema)
2. rgA = 2, rgA* =3 (INCOMPATIBLE)
2.1 Planos secantes dos a dos.
2.2 Dos planos paralelos y el tercero secante
Hay que estudiar las posiciones relativas de dos en dos para saber de qué caso se trata 3. rgA = rgA* =2 (COMPATIBLE INDETERMINADO)
3.1 Planos secantes y distintos
3.2 Dos planos coincidentes y uno secante
Hay que estudiar las posiciones relativas de dos en dos para saber de qué caso se trata
120
4. rgA = 1, rgA* =2 (INCOMPATIBLE)
4.1 Planos paralelos y distintos dos a dos
4.2 Planos paralelos y dos coincidentes
Hay que estudiar las posiciones relativas de dos en dos para saber de qué caso se trata 5. rgA = rgA* =1 (COMPATIBLE INDETERMINADO)
6. POSICIONES RELATIVAS DE UNA RECTA Y UN PLANO La ecuación del plano debe venir dada en forma implícita, mientras que la recta tiene dos posibilidades:
1. LA RECTA VIENE DEFINIDA EN FORMA IMPLÍCITA (por dos planos secantes)
Sea la recta:
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
r y el plano :π 0=+++ DCzByAx .
Para estudiar la posición relativa de la recta y el plano discutimos el sistema:
−=++−=++−=++
3333
2222
1111
DzCyBxADzCyBxADzCyBxA
Sean
=
333
222
111
CBACBACBA
A Y
−−−
=
3333
2222
1111
*DCBADCBADCBA
A
TEN EN CUENTA QUE AL SER LAS ECUACIONES DE LA RECTA DOS PLANOS SECANTES, LOS RANGOS NO PUEDEN SER MENOR QUE DOS

121
CASOS:
1.1 Si rgA = rgA* = 3, el sistema es compatible determinado, la recta corta al plano en un punto, que se puede calcular resolviendo el sistema (SECANTES)
1.2 Si →
==
3*2
rgArgA
sistema incompatible, no tienen puntos en común,
PARALELOS
1.3 Si rgA = rgA* = 2, compatible indeterminado, infinitos puntos en común, la recta está CONTENIDA en el plano (no se puede decir que coincidan)
2. LA RECTA VIENE DEFINIDA POR UN PUNTO Y UN VECTOR
Sea una recta
= ),,(),,(
321
321
uuuuaaaA
r y un plano :π 0=+++ DCzByAx , cuyo rector
normal es ( )CBAn ,,= .
CASOS: Multiplico el vector director de la recta por el vector normal del plano:
1.1 Si 0≠⋅ nu , SECANTES
1.2 Si 0=⋅ nu , sustituyo el punto de la recta en el plano, y si no verifica la ecuación, PARALELOS
1.3 Si 0=⋅ nu , sustituyo el punto de la recta en el plano, y si sí verifica la ecuación, RECTA CONTENIDA EN EL PLANO

122
8. POSICIONES RELATIVAS DE DOS RECTAS Rectas de las que conocemos un punto y el vector director.
Si la recta r viene determinada por
= ),,(),,(
321
321
uuuuaaaA
r y la recta s por
= ),,(),,(
321
321
vvvvbbbB
s ,
La posición relativa de r y s viene dada por la posición de u , v y →
AB . Empezamos por estudiar el rango de las matrices:
=
33
22
11
vuvuvu
A y
−−−
=
3333
2222
1111
*abvuabvuabvu
A
CASOS
I. si rgA* = 3, →≠−−−
0
3333
2222
1111
abvuabvuabvu
los tres vectores son linealmente
independientes, no están en el mismo plano, por tanto las rectas se CRUZAN (no son paralelas, pero no están el mismo plano). Se dice que las rectas NO SON COPLANARIAS
II. Si →=−−−
0
3333
2222
1111
abvuabvuabvu
los tres vectores son linealmente dependientes, están
en el mismo plano, por tanto las rectas SON COPLANARIAS. Tendremos tres posibilidades: II.1. Si rgA = 2, u , v no son proporcionales pero las rectas están en el mismo plano SECANTES
II.2. Si rgA = rgA* = 1, los tres vectores son paralelos, las rectas COINCIDEN
II.3 Si rgA = 1 ( u , v son paralelos ) y rgA* = 2 (
→
AB no es paralelo a ellos), rectas PARALELAS

123
A. POSICIONES RELATIVAS DE DOS PLANOS
Los planos se expresan en forma general:
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
2
1
2
1
2
1
CC
BB
AA
≠≠ 2
1
2
1
2
1
2
1
DD
CC
BB
AA
≠== 2
1
2
1
2
1
2
1
DD
CC
BB
AA
===
SECANTES PARALELOS COINCIDEN
B. POSICIONES RELATIVAS DE TRES PLANOS
Los planos se expresan en forma general:
=++=++=++
3333
2222
11111
:DzCyBxADzCyBxADzCyBxA
CASOS: 1. rgA = rgA* =3 (COMPATIBLE DETERMINADO): Secantes en un punto 2. rgA = 2, rgA* =3 (INCOMPATIBLE)
2.1 Planos secantes dos a dos. 2.2 Dos planos paralelos y el tercero secante
Hay que estudiar las posiciones relativas de dos en dos para saber de que caso se trata 3. rgA = rgA* =2 (COMPATIBLE INDETERMINADO)
3.1 Planos secantes en una misma recta 3.2 Dos planos coincidentes y uno secante (en una recta)
Hay que estudiar las posiciones relativas de dos en dos para saber de que caso se trata 4. rgA = 1, rgA* =2 (INCOMPATIBLE)
4.1 Planos paralelos y distintos dos a dos 4.2 Planos paralelos y dos coincidentes
Hay que estudiar las posiciones relativas de dos en dos para saber de que caso se trata 5. rgA = rgA* =1 (COMPATIBLE INDETERMINADO) Los tres planos coinciden
C. POSICIONES RELATIVAS DE UNA RECTA Y UN PLANO
Sea la recta:
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
r y el plano :π 0=+++ DCzByAx .
CASOS:
2.1 Si rgA = rgA* = 3, el sistema es compatible determinado, la recta corta al plano en un punto, que se puede calcular resolviendo el sistema (SECANTES)
2.2 Si →
==
3*2
rgArgA
sistema incompatible, no tienen puntos en común,
PARALELOS
2.3 Si rgA = rgA* = 2, compatible indeterminado, infinitos puntos en común, la recta está CONTENIDA en el plano (no se puede decir que coincidan)

124
D. POSICIONES RELATIVAS DE DOS RECTAS
Rectas de las que conocemos un punto y el vector director.
Si la recta r viene determinada por
= ),,(),,(
321
321
uuuuaaaA
r y la recta s por
= ),,(),,(
321
321
vvvvbbbB
s ,
La posición relativa de r y s viene dada por la posición de u , v y →
AB . Empezamos por estudiar el rango de las matrices:
=
33
22
11
vuvuvu
A y
−−−
=
3333
2222
1111
*abvuabvuabvu
A
CASOS
I. Si rgA* = 3, →≠−−−
0
3333
2222
1111
abvuabvuabvu
los tres vectores son linealmente
independientes, no están en el mismo plano, por tanto las rectas se CRUZAN
II. Si rgA* < 3 →=−−−
0
3333
2222
1111
abvuabvuabvu
los tres vectores son linealmente dependientes,
están en el mismo plano, por tanto las rectas SON COPLANARIAS. Tendremos tres posibilidades:
II.1. Si rgA = rgA* = 2 SECANTES II.2. Si rgA = rgA* = 1 COINCIDEN II.3 Si rgA = 1 y = rgA* = 2 PARALELAS

125
TEMA 12: PROBLEMAS MÉTRICOS
A) ÁNGULO ENTRE RECTAS Y PLANOS A.1) Ángulo entre dos rectas A.2) Ángulo entre dos planos A.3) Ángulo entre recta y plano
B) DISTANCIA ENTRE RECTAS Y PLANOS
B.1) Distancia de un punto a un plano B.2) Distancia entre planos paralelos B.3) Distancia entre un plano y una recta paralela B.4) Distancia entre un punto y una recta B.5) Distancia entre rectas paralelas B.6) Distancia entre rectas que se cruzan
A) ÁNGULO ENTRE RECTAS Y PLANOS A.1) ÁNGULO ENTRE DOS RECTAS
El ángulo que forman dos rectas es igual al ángulo agudo determinado por los vectores directores de las rectas.
23
22
21
23
22
21
332211),cos(),cos(vvvuuu
vuvuvuvuvu
vusr++⋅++
⋅+⋅+⋅=
⋅
⋅==
Dos rectas son perpendiculares si sus vectores directores son ortogonales, es
decir, si el producto escalar es nulo: srvu ⊥→=⋅ 0 EJEMPLOS Hallar el ángulo que forman las rectas:
a) zyxr =+=−
≡ 12
2 y zyxs ==−+
≡21
1
Los vectores directores de r y s son respectivamente ( )1,1,2=u y ( )1,2,1−=v
º41,8061arccos,
61
66122
),cos( =
=→=
⋅
++−=
∧
srsr
b)
=++−=+−+
≡0220132
zyxzyx
r y
=+−+=−+−
≡0132033
zyxzyx
s
Los vectores directores de r y s se obtienen multiplicando vectorialmente los vectores normales de los planos que las definen:
( )5,5,5211132 −−=
−−=kji
u
y ( )5,11,2312
113 =−
−=kji
v
º70,481125070arccos,
1125070
15075255510
),cos( =
=→=
⋅−−
=∧
srsr

126
A.2) ÁNGULO ENTRE DOS PLANOS El ángulo formado por dos planos es igual al ángulo agudo determinado por los vectores normales de dichos planos, ( )1111 ,, CBAn =
y ( )2222 ,, CBAn =
22
22
22
21
21
21
212121
21
212121 ),cos(),cos(
CBACBA
CCBBAAnnnn
nn++⋅++
⋅+⋅+⋅=
⋅
⋅==
ππ
Dos planos son perpendiculares si sus vectores normales son ortogonales, es
decir, si el producto escalar es nulo: 21212121 0 ππ ⊥→=⋅+⋅+⋅ CCBBAA EJEMPLO: Hallar el ángulo que forman los planos 0121 =−+−= zyxπ y 032 =++= zxπ Los vectores normales de los planos son ( )1,1,21 −=n y ( )1,0,12 =n
º30123arccos,
123
26102
),cos( 2121 =
=→=
⋅
++=
∧
ππππ
A.3) ÁNGULO ENTRE RECTA Y PLANO El ángulo que forman una recta, r, y un plano, π, es el ángulo formado por r con su proyección ortogonal sobre π, r'.
El ángulo que forman una recta y un plano es igual al complementario (ángulos que suman 90º) del ángulo agudo que forman el vector director de la recta y el vector normal del plano. Si βαβα cosº90 =→=+ sen
Sea ( )321 ,, uuuu = el vector director de la recta, y sea ( )CBAn ,,=
el vector normal del plano
22223
22
21
321),cos(),(CBAuuu
CuBuAununu
nursen++⋅++
⋅+⋅+⋅=
⋅
⋅==
π
Si la recta r y el plano π son perpendiculares, el vector director de la recta y el
vector normal del plano tienen la misma dirección y, por tanto, sus componentes son
proporcionales: Cu
Bu
Au 321 ==
EJEMPLO: Determina el ángulo que forman la recta 2
12
1 zyxr =+=−
≡ y el plano
01 =−+≡ yxπ .

127
El vector director de la recta es ( )2,1,2=u y el vector norma del plano ( )0,1,1=n
º45183,
183
29012
),cos(),( =
=→=
⋅
++==
∧
arcsenrnursen ππ
B) DISTANCIA ENTRE RECTAS Y PLANOS B.1) DISTANCIA DE UN PUNTO A UN PLANO La distancia de un punto, P, a un plano, π, es la menor de la distancia desde el punto a los infinitos puntos del plano. Esta distancia corresponde a la perpendicular trazada desde el punto al plano. Se puede calcular mediante una fórmula o calculando la proyección del punto sobre el plano. FÓRMULA:
Sea P(p1, p2, p3) y 222
321),(0:CBA
DCpBpApPdDCzByAx
++
+++=→=+++ ππ
EJEMPLO Hallar la distancia del punto P(3, 1, −2) al plano 012 =+−+≡ zyxπ
uPd6
10114
1)2(132),( =
+++−−+⋅
=π
PROYECCIÓN DEL PUNTO SOBRE EL PLANO
Se llama proyección de P sobre π al punto P’ del plano que se obtiene al trazar una perpendicular a π que pase por P P P’ π
Calculando la proyección de P sobre el plano, la distancia del punto al plano será
la distancia entre los dos puntos. Para calcular P’:
• Construyo la recta que pasa por P y es perpendicular a π:
= πnuP
rr
:
• P’ será el punto de corte entre la recta construida y el plano. Para hallarlo, se expresa P’ con las paramétricas de r y se sustituye en π. Obtendremos el valor de t que corresponde al punto P’ y con ello P’
• La distancia del punto P al plano será →
= '),( PPPd π EJEMPLO Hallar la distancia del punto P(3, 1, −2) al plano 012 =+−+≡ zyxπ

128
( )( ) ( )
−−++=→
−−=+=+=
→−==
−tttP
tztytx
rnu
Pr
r
2,1,23'21
23:
1,1,22,1,3
:π , por ser un punto de r.
Al ser también un punto del plano, P’ verifica su ecuación:
( ) ( ) ( )3506100121232 −
=→=+→=+−−−+++→ tttttπ
( )urPdPP
P
P3
509
150),(35,
35,
310'
2,1,331,
32,
31
352,
351,
3103'
==→
−−
=→
−
−−−
=
+−−−= →
B.2) DISTANCIA ENTRE PLANOS PARALELOS
Es igual a la distancia de un punto cualquiera de uno de los planos al otro plano B.3) DISTANCIA ENTRE UN PLANO Y UNA RECTA PARALELA
Es igual a la distancia entre un punto de la recta y el plano (no al revés)
B.4) DISTANCIA ENTRE UN PUNTO Y UNA RECTA La distancia de un punto, P, a una recta, r, es la menor de la distancia desde el
punto a los infinitos puntos de la recta. Esta distancia corresponde a la perpendicular trazada desde el punto hasta la recta.
Se puede calcular mediante una fórmula o calculando la proyección del punto sobre la recta: FÓRMULA: Sea A un punto cualquiera de la recta y u el vector director de la recta,
u
APurPd
→
×=),(
EJEMPLO: Hallar la distancia desde el punto P(1, 3, −2) a la recta
−=+−=+=
tztytx
r21
132
:
Un punto de la recta es A(2, -1, 1) y el vector director ( ) 142,1,3 =→−= uu
( ) ( ) 31513,11,53412133,4,1 =×→=
−−−=×→−−=−=
→→→
APukji
APuapAP
.
uu
APurPd
245
14315
14315),( ===
×=
→

129
PROYECCIÓN DEL PUNTO SOBRE LA RECTA Se llama proyección de P sobre r al punto P’ de la recta que se obtiene al trazar una perpendicular a r que pase por P P r P’
Calculando la proyección de P sobre r, la distancia del punto a la recta será la
distancia entre los dos puntos. Para calcular P’:
• Expreso P’ con las paramétricas de r
• El vector '→
PP es perpendicular al vector director de la recta, por tanto el
producto escalar es cero: →=⋅→
0' uPP obtenemos una ecuación que nos permite calcular el valor de t que corresponde a P’ y con ello el valor de P’.
• La distancia del punto P a la recta r será →
= '),( PPrPd
EJEMPLO: Hallar la distancia desde el punto P(1, 3, −2) a la recta
−=+−=+=
tztytx
r21
132
:
→=→=→=+−+−+→=⋅
−=−+−+=→−+−+
→
→
2/17140464930'
)2,1,3()23,4,31(')21,1,32('
tttttuPP
utttPPtttP
( )urPdPP
P
P245
490),(2,
27,
25'
2,3,1
0,21,
27)11,
211,
232('
==→
−
=→
−
−
=−+−+ →
B.5) DISTANCIA ENTRE RECTAS PARALELAS
La distancia de una recta, r, a otra paralela, s, es la distancia desde un punto cualquiera de s a r.

130
Se calcula un punto B de s y se calcula su distancia a r utilizando una de las dos formas anteriores. B.6) DISTANCIA ENTRE RECTAS QUE SE CRUZAN
La distancia entre dos sectas que se cruzan es la distancia entre los dos planos paralelos que las contienen.
Se puede calcular de tres formas: mediante una fórmula, mediante un plano que contenga a una recta y sea paralela a la otra o con la perpendicular común.
FÓRMULA: Sea A y B un punto cualquiera de las rectas r y s respectivamente, y u y v los vectores directores de las rectas,
vu
vuABsrd
×
=
→
,,),(
EJEMPLO Sabiendo que 6
310
28
−=−
=+
≡ zyxr y 4
12
111 −
=−
=−−
≡zyxs se cruzan,
halla la mínima distancia entre ellas ( )
( )
=−
1,3,26,10,8
:uA
r ( )( )
−= 4,2,11,1,1
:v
Bs
( )
( )
usrd
vuAB
vukji
vu
AB
230136),(
136)721815(209108421132599
,,
2307,9,10421132
5,9,9
=→
=−+−−+=−
−−=
=×→−=−
=×
−−=
→
→
PLANO QUE CONTIENE A s Y ES PARALELO A r: A r ),(),( πAdsrd = s π

131
El plano π se calcula teniendo en cuenta que los puntos de s son puntos del plano, y los vectores directores de las rectas son vectores directores del plano. Se escribirá en forma implícita y calculamos la distancia del punto A de r al plano. EJEMPLO
Sabiendo que las rectas 6310
28
−=−
=+
≡ zyxr y 4
12
111 −
=−
=−−
≡zyxs se cruzan, halla
la mínima distancia entre ellas. ( )
( )
=−
1,3,26,10,8
:uA
r ( )( )
−= 4,2,11,1,1
:v
Bs
( )( )( )
( ) 07910:7,9,10421132
4,2,11,3,2
1,1,1=++−→
−=−
=×=→
−== Dzyx
kjivun
vu
Bππ
Sustituyo B(1, 1, 1) para calcular D 10 – 9 + 7 + D = 0, D = - 8 087910: =−+−→ zyxπ Si utilizamos la fórmula de la distancia de un punto a un plano:
uAdsrd230
1364981100
8429080),(),( =
++
−+−−== π
PERPENDICULAR COMÚN:
Se llama así a la única recta que corta perpendicularmente a dos rectas que se cruzan. Podremos obtener la distancia entre las rectas como la distancia entre los puntos de corte de la perpendicular común con las rectas que se cruzan: A r
→
= ABsrd ),( B s Perpendicular común Para calcular A y B:
• Expresamos sus coordenadas con las ecuaciones paramétricas de la recta que los contiene, de forma que A sólo dependerá del parámetro t de r, y B del parámetro t’ de s
• Construimos el vector →
AB

132
• Teniendo en cuenta que →
AB es perpendicular a r y a s, y por tanto a sus vectores
directores, los productos escalares son nulos,
=⋅
=⋅→
→
0
0
s
r
vAB
uAB
, y resolviendo el sistema de
ecuaciones que se forma, obtendremos el valor de t y de t’ para A y B EJEMPLO
Sabiendo que las rectas 6310
28
−=−
=+
≡ zyxr y 4
12
111 −
=−
=−−
≡zyxs se cruzan, halla
la mínima distancia entre ellas. Escribimos las ecuaciones en forma paramétrica:
( )( ) )6,310,28(
631028
1,3,26,10,8
: tttAtztytx
uP
r ++
+−→
+=+=+−=
→
=−
( )( ) ( )
++−→
+=+=−=
→
−='41,'21,'1
'41'21
'1
4,2,11,1,1
: tttBtzty
tx
vQ
s
( )
( ) ( ) ( )
( ) ( ) ( )→
=+−−++−−+−−−→=⋅
=+−−++−−+−−→=⋅
+−−+−−−−=
→
→
→
0'454'2392'2910
0'451'2393'2920
'45,'239,'29
ttttttvAB
ttttttuAB
ttttttAB
115273',
11541
0'218470'81414
==→
=+−−=+−−
tttttt
−=
+−−+−−−−=
→
115476,
115612,
115680
1151092
115415,
115546
1151239,
115273
115829AB
uABsrd1159258
132251063520),( ===
→

133
EJERCICIOS DE GEOMETRÍA 1. 2008 MODELO 1 OPCIÓN A (vectores y ecuaciones)
Ejercicio 4.- Los puntos A(−2, 3, 1), B(2, −1, 3) y C(0, 1, −2) son vértices consecutivos del paralelogramo ABCD.
(a) [1 punto] Halla las coordenadas del vértice D. (b) [1 punto] Encuentra la ecuación de la recta que pasa por B y es paralela a la diagonal AC. (c) [0’5 puntos] Halla la ecuación del plano que contiene a dicho paralelogramo.
2. 2008 MODELO 1 OPCIÓN B (posiciones relativas)
Ejercicio 4. Sea la recta r:
−=−−=−+mzyx
mzyx 22 y el plano π definido por x + my − z =1
(a) [1 punto] ¿Existe algún valor de m para el que π y r son paralelos ? (b) [1 punto] ¿Para qué valor de m está la recta contenida en el plano ? (c) [0’5 puntos] ¿Cuál es la posición relativa de la recta y el plano cuando m = 0?
3. 2008 MODELO 2 OPCIÓN A (ecuaciones y posiciones relativas)
Ejercicio 4. Sea la recta s:
=+−=−
321
zyzx
(a) [1’25 puntos] Halla la ecuación del plano π1 que es paralelo a la recta s y contiene a la recta r, dada por x - 1 = - y + 2 = z - 3
(b) [1’25 puntos] Estudia la posición relativa de la recta s y el plano π2, de ecuación x + y = 3, y deduce la distancia entre ambos.
4. 2008 MODELO 2 OPCIÓN B (vectores y ecuaciones)
Ejercicio 4. Considera los puntos A(1,1,0), B(1,1,2) y C(1,-1,1). (a) [1’5 puntos] Comprueba que no están alineados y calcula el área del triángulo que determinan. (b) [1 punto] Halla la ecuación del plano que contiene al punto A y es perpendicular a la recta determinada por B y C.
5. 2008 MODELO 3 OPCIÓN A (ecuaciones)
Ejercicio 4. Dada la recta r: 23
12
1−=
+=
− zyx
(a) [1’25 puntos] Halla la ecuación del plano que pasa por el origen y contiene a r. (b) [1’25 puntos] Halla la ecuación del plano que pasa por el origen y es perpendicular a r.
6. 2008 MODELO 3 OPCIÓN B (vectores) Ejercicio 4. [2’5 puntos] Dado los puntos A(2,1,1) y B(0,0,1), halla los puntos C en el eje OX tales que el área del triángulo de vértices A, B y C es 2.
7. 2008 MODELO 4 OPCIÓN A (ecuaciones y posiciones relativas)
Ejercicio 4.- Considera la recta r:
=+=
330
zyx
y la recta s:
==−0
32y
zx
(a) [1 punto] Estudia la posición relativa de r y s. (b) [1’5 puntos] Halla la ecuación general de un plano que contiene a s y es paralelo a r.
134
8. 2008 MODELO 4 OPCIÓN B (ecuaciones)
Ejercicio 4. [2’5 puntos] Sea la recta r:
=−=
01
yxx
y sean los planos π1: x + y + z =0, y
π2: y + z = 0. Halla la recta contenida en el plano π1, que es paralela al plano π2 y que corta a la recta r.
9. 2008 MODELO 5 OPCIÓN A (ecuaciones y posiciones relativas)
Ejercicio 4.- Se sabe que los planos de ecuaciones π1: x +2y + bz = 1, π2: 2x + y + bz = 0, y π3: 3x +3y − 2z = 1 se cortan en una recta r.
(a) [1’25 puntos] Calcula el valor de b. (b) [1’25 puntos] Halla unas ecuaciones paramétricas de r.
10. 2008 MODELO 5 OPCIÓN B (lugares geométricos) Ejercicio 4. [2’5 puntos] Dados los puntos A(2, 1, −1) y B(−2, 3, 1) y la recta r:
−=−−=−−5231
zxzyx
Halla las coordenadas de un punto de la recta "r" que equidiste de los puntos A y B.
11. 2008 MODELO 6 OPCIÓN A (vectores y ecuaciones) Ejercicio 4.- Se considera la recta r: mx = y = z + 2, (m ≠ 0), y la recta s: (x − 4)/4 = y − 1 = z/2
(a) [1’5 puntos] Halla el valor de m para el que r y s son perpendiculares. (b) [1 punto] Deduce razonadamente si existe algún valor de m para el que r y s
son paralelas.
12. 2008 MODELO 6 OPCIÓN B (ecuaciones y lugares geométricos) Ejercicio 4. Considera los puntos A(2, 0, 1), B(−1, 1, 2), C(2, 2, 1) y D(3, 1, 0).
(a) [1 punto] Calcula la ecuación del plano π que contiene a los puntos B, C y D. (b) [1’5 puntos] Halla el punto simétrico de A respecto del plano π.
13. 2009 MODELO 1 OPCIÓN A (ecuaciones y distancias)
Ejercicio 4. Considera el punto A(1, -2, 1) y la recta r:
=++=+
722
zyxyx
(a) [1 punto] Halla la ecuación del plano perpendicular a r que pasa por A (b) [1’5 puntos] Calcula la distancia del punto A a la recta r
14. 2009 MODELO 1 OPCIÓN B (ecuaciones)
Ejercicio 4.- Considera la recta r:
=−−=
221
zxy
y la recta s: ℜ∈
+=−=+=
ttztytx,
453
34
Halla la ecuación general de un plano que contiene a r y es paralelo a s.
15. 2009 MODELO 2 OPCIÓN A (ecuaciones y posiciones relativas)
Ejercicio 4. Considera el punto P (1, 0, 0), la recta r:21
23
−+
==−zyx y la recta
)0,2,1()0,1,1(),,(: −+= λzyxs , λ ϵ R

135
(a) [1’25 puntos] Estudia la posición relativa de r y s (b) [1’25 puntos] Halla la ecuación del plano que pasa por P y es paralelo a r y s
16. 2009 MODELO 2 OPCIÓN B (ecuaciones)
Ejercicio 4.- Considera la recta r:
=−−+=+−
0103
zyxyx
y la recta s:
=+−=+
032012
zxy
(a) [1’5 puntos] Halla la ecuación de un plano que contiene a r y es paralelo a s. (b) [1’5 puntos] ¿Existe algún plano que contenga a r y sea perpendicular a s?. Razona
la respuesta.
17. 2009 MODELO 3 OPCIÓN A (ecuaciones)
Ejercicio 4. [2'5 puntos] Considera la recta r:
−===
211
λzyx
, y la recta s:
−=−=
=
11
zy
xµµ
.
Halla la ecuación de la recta perpendicular común a "r"
18. 2009 MODELO 3 OPCIÓN B (posiciones relativas y vectores)
Ejercicio 4. Considera la recta r:
=+=+
02
zyyx
y la recta s que pasa por los puntos
A(2,1, 0) y B(1, 0, -1). (a) [1 punto] Estudia la posición relativa de ambas rectas. (b) [1'5 puntos] Determina un punto C de la recta "r" tal que los segmentos CA y CB sean perpendiculares.
19. 2009 MODELO 4 OPCIÓN A (ecuaciones)
Ejercicio 4. Considera el punto P (1, 0, -2), la recta r:
=−+=−−
02012
zyyx
y el plano
π: 2x + y + 3z – 1 = 0 (a) [1’25 puntos] Halla la ecuación del plano que pasa por P, es paralelo a r y perpendicular a π (b) [1’25 puntos] Halla la ecuación de la recta que pasa por P, corta a r y es paralela a π
20. 2009 MODELO 4 OPCIÓN B (ecuaciones)
Ejercicio 4. Considera el el plano π: 3x - 2y - 2z= 7 y la recta r:2
212
2 −=+=
− zyx
(a) [1’25 puntos] Halla la ecuación del plano paralelo a π que contiene a r (b) [1’25 puntos] Halla la ecuación del plano ortogonal a π que contiene a r
21. 2009 MODELO 5 OPCIÓN A (ecuaciones)
Ejercicio 4. [2’5 puntos] Halla la ecuación de la recta que pasa por el punto A(1 , 1 , -1), es paralela al plano de ecuación x – y + z = 1 y corta al eje Z
22. 2009 MODELO 5 OPCIÓN B (ecuaciones y distancias)
Ejercicio 4.- Considera la recta r:
=+=+03023
zxyx
(a) [1’5 puntos] Halla la ecuación de un plano perpendicular a r que pasa por P(1, 1, 1). (b) [1’5 puntos] Halla los puntos de r cuya distancia al origen es 4 unidades

136
23. 2009 MODELO 6 OPCIÓN A (ecuaciones y posiciones relativas)
Ejercicio 4.- Considera la recta r:
−=−−=−
32
zxyx
y la recta s:
−=−=
221
zyx
a) [1 punto] Estudia la posición relativa de r y s b) [1’5 puntos] Halla la ecuación del plano que contiene a s y es paralelo a s
24. 2009 MODELO 6 OPCIÓN B (ecuaciones y vectores)
Ejercicio 4.- Sea el punto P(2 , 3 , -1) y la recta r:
=−−=++
14212
zyxzyx
a) [1’25 puntos] Halla la ecuación del plano que pasa por P y contiene r b) [1’25 puntos] Halla el punto de r que está más cerca de P
25. 2010 MODELO 1 OPCIÓN A (ecuaciones y distancias)
Ejercicio 4. Considera los puntos A(1, 0, 2), B(−1, 2, 4) y la recta r:
311
22 −
=−=+ zyx
(a) [1’5 puntos] Determina la ecuación del plano formado por los puntos que equidistan de A y de B. (b) [1 punto] Halla la ecuación del plano paralelo a r y que contiene los puntos A y B.
26. 2010 MODELO 1 OPCIÓN B (ecuaciones y vectores)
Ejercicio 4. Considera los puntos A(1, 1, 1), B(0, −2, 2), C(−1, 0, 2) y D(2, −1, 2). (a) [1 punto] Calcula el volumen del tetraedro de vértices A, B, C y D. (b) [1’5 puntos] Determina la ecuación de la recta que pasa por D y es
perpendicular al plano que contiene a los puntos A, B y C.
27. 2010 MODELO 2 OPCIÓN A (ecuaciones y ángulos)
Ejercicio 4. Considera las rectas r: x – 1 = y = 1 – z, y s:
=+−=−1
12zyyx
(a) [0'75 puntos] Determina su punto de corte. (b) [1 punto] Halla el ángulo que forma "r" y "s". (c) [0’75 puntos] Determina la ecuación del plano que contiene a "r" y "s".
28. 2010 MODELO 2 OPCIÓN B (ecuaciones y ángulos)
Ejercicio 4. Los puntos P(2,0,0) y Q(-1,12,4) son dos vértices de un triángulo. El tercer
vértice S pertenece a la recta r:
==+0
3334y
zx
(a) [1’5 puntos] Calcula las coordenadas del punto S sabiendo que "r" es perpendicular a la recta que pasa por P y S. (b) [1 punto] Comprueba si el triángulo es rectángulo.
29. 2010 MODELO 3 OPCIÓN A (ecuaciones y vectores)
Ejercicio 4. Considera los puntos A(1, 2, 1) y B(−1, 0, 3). (a) [1’25 puntos] Calcula las coordenadas de los puntos que dividen el segmento AB en tres partes iguales. (b) [1’25 puntos] Halla la ecuación del plano perpendicular al segmento AB y que pasa por A.

137
30. 2010 MODELO 3 OPCIÓN B (posiciones relativas)
Ejercicio 4. Considera el plano π: 2x − y + nz = 0 y la recta r:2
14
1 −==
− zym
x con
m ≠ 0. (a) [1’25 puntos] Calcula m y n para que la recta r sea perpendicular al plano π. (b) [1’25 puntos] Calcula m y n para que la recta r esté contenida en el plano π.
31. 2010 MODELO 4 OPCIÓN A (vectores)
Ejercicio 4. [2’5 puntos] Calcula el área del triángulo cuyos vértices son los puntos de intersección del plano 6x + 3y + 2z = 6 con los ejes coordenados.
32. 2010 MODELO 4 OPCIÓN B (ecuaciones y vectores)
Ejercicio 4. Sean los puntos A(1,1,1), B(-1,2,0), C(2,1,2) y D(t, -2, 2) (a) [1’25 puntos] Determina el valor de t para que A, B, C y D estén en el mismo plano. (b) [1’25 punto] Halla la ecuación de un plano perpendicular al segmento determinado por A y B que contenga al punto C.
33. 2010 MODELO 5 OPCIÓN A (ecuaciones)
Ejercicio 4. [2’5 puntos] Halla la ecuación del plano que es paralelo a la recta
r ≡
=−+=+−
01920112
zyyx
y contiene a la recta s:
ℜ∈
+=+−=−=
λλλλ
,2232
51
zyx
34. 2010 MODELO 5 OPCIÓN B (posiciones relativas)
Ejercicio 4. Considera los planos π1: x + y = 1, π2 : ay + z = 0, y π3: x + (1+ a)y + az = a + 1 (a) [1’5 puntos] ¿Cuánto ha de valer "a" para que no tengan ningún punto en común? (b) [1 punto] Para a = 0, determina la posición relativa de los planos.
35. 2010 MODELO 6 OPCIÓN A (lugares geométricos)
Ejercicio 4. [2’5 puntos] Halla el punto simétrico de P(1,1,1) respecto de la recta
r: 11
321
−+
==− zyx
36. 2010 MODELO 6 OPCIÓN B (vectores y ecuaciones y distancias)
Ejercicio 4. Sean los puntos A(2, λ, λ), B(−λ, 2, 0) y C(0, λ, λ − 1). (a) [1 punto] ¿Existe algún valor de λ ∈ R para el que los puntos A, B y C estén alineados? Justifica la respuesta. (b) [1’5 puntos] Para λ = 1 halla la ecuación del plano que contiene al triangulo de vértices A, B y C. Calcula la distancia del origen de coordenadas a dicho plano.
37. 2011 MODELO 1 OPCIÓN A (vectores y ecuaciones)
Ejercicio 4.- Dados los puntos A(1,0,0), B(0,0,1) y P(1,−1,1), y la recta r:
==−−
002
zyx
(a) [2 puntos] Halla los puntos de la recta r cuya distancia al punto P es de 3 unidades. (b) [0’5 puntos] Calcula el área del triángulo ABP.
138
38. 2011 MODELO 1 OPCIÓN B (ecuaciones)
Ejercicio 4.- Dados el punto P(1,1,-1) y la recta r:
=+=+
01
zyzx
(a) [1 punto] Halla la ecuación del plano que contiene a r y pasa por P. (b) [1'5 puntos] Halla la ecuación de la recta contenida en el plano de ecuación y + z = 0, que es perpendicular a r y pasa por P.
39. 2011 MODELO 2 OPCIÓN A (vectores)
Ejercicio 4.- Considera los puntos A(-1,k,3), B(k+1,0,2), C(1,2,0) y D(2,0,1).
(a) [1’25 puntos] ¿Existe algún valor de k para que los vectores →
AB ,→
BC y →
CD sean linealmente dependientes? (b) [1’25 puntos] Calcula los valores de k para que los puntos A, B, C y D formen un tetraedro de volumen 1.
40. 2011 MODELO 2 OPCIÓN B (lugares geométricos)
Ejercicio 4.- Dado el plano π de ecuación x + 2y – z = 0 y la recta r:
−=−+=−
13453
zyxyx
(a) [1’75 puntos] Halla el punto de intersección del plano π y la recta r. (b) [0’75 puntos] Halla el punto simétrico del punto Q(1,-2,3) respecto del plano π.
41. 2011 MODELO 3 OPCIÓN A (ecuaciones, lugares geométricos y distancias)
Ejercicio 4.- Sea el punto P(2,3,−1) y la recta r:
=−==
λλ
zy
x21
(a) [1 punto] Halla la ecuación del plano perpendicular a “r” que pasa por P . (b) [1’5 puntos] Calcula la distancia del punto P a la recta “r” y determina el punto simétrico de P respecto de r.
42. 2011 MODELO 3 OPCIÓN B (distancias)
Ejercicio 4.- [2’5 puntos] Considera los planos π1: (x,y,z) = (−2,0,7) + λ(1,−2,0) +
μ(0,1,−1) y π2: 2x + y − z + 5 = 0. Determina los puntos de la recta r:311
−−
=+=zyx
que equidistan de π1 y π2.
43. 2011 MODELO 4 OPCIÓN A (ecuaciones) Ejercicio 4.- Dada la recta “r” definida por (x – 1)/3 = (y +1)/2 = −z + 3 y la recta
s:
−=−=
221
zyx
(a) [1’25 puntos] Halla la ecuación del plano que pasa por el origen y contiene a “r”. (b) [1’25 puntos] Halla la ecuación del plano que contiene a “s” y es paralelo a “r”.

139
44. 2011 MODELO 4 OPCIÓN B (lugares geométricos)
Ejercicio 4.- Dada la recta r: zyx=
−−
=+
17
27 , y la recta s:
=−=
=
λzyx
52
(a) [1’75 puntos] Halla la ecuación de la recta que corta perpendicularmente a ambas. (b) [0’75 puntos] Calcula la distancia entre “r” y “s”.
45. 2011 MODELO 5 OPCIÓN A (vectores y ecuaciones)
Ejercicio 4.- Considera los puntos A(1,0,2) y B(1,2,-1). (a) [1'25 puntos] Halla un punto C de la recta de ecuación (x-1)/3 = y/2 = z que verifica que el triángulo de vértices A, B y C tiene un ángulo recto en B. (b) [1'25 puntos] Calcula el área del triángulo de vértices A, B y D, donde D es el punto de corte del plano de ecuación 2x – y + 3z = 6 con el eje OX .
46. 2011 MODELO 5 OPCIÓN B (ecuaciones)
Ejercicio 4.- [2'5 puntos] Considera los planos π1:3x – y + z – 4 = 0, π2:x - 2y + z – 1 = 0, π3:x + z – 4 = 0 Halla la ecuación de la recta que pasa por el punto P(3,1,-1), es paralela al plano π1 y corta a la recta intersección de los planos π2 y π3 .
47. 2011 MODELO 5 OPCIÓN A (lugares geométricos)
Ejercicio 4.- [2’5 puntos] Determina el punto simétrico del punto A(-3,1,6) respecto de la recta x – 1 = (y + 3)/2 = (z + 1)/2.
48. 2011 MODELO 5 OPCIÓN B (ecuaciones)
Ejercicio 4.- Considera los puntos A(1,0,-1) y B(2,1,0), y la recta r:
=+=+
21
zxyx
(a) [1’75 puntos] Determina la ecuación del plano que es paralelo a r y pasa por A y B. (b) [0’75 puntos] Determina si la recta que pasa por los puntos P(1,2,1) y Q(3,4,1) está contenido en dicho plano.