Embed Size (px)
DESCRIPTION
M etody poszukiwania punkt ów siodłowych. E. x 1. x 2. H. H 3 N. Cl. x 2. NH 4 + ...Cl -. x 1. x 1 *. NH 3 ...H...Cl. E. NH 3 ...HCl. x 2. x 2 *. x 1. Charakterystyka punktów siodłowych. - PowerPoint PPT Presentation
Citation preview

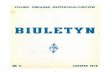
Metody poszukiwania punktów siodłowych
x1
x2
NH3...HCl
NH4+...Cl-
NH3...H...Cl
H3N H Clx1 x2
E
E

Charakterystyka punktów siodłowych
Istnieje taka baza ortonormalna, że wartość funkcji wzrasta (posiada minimum kierunkowe) w kierunkach wszystkich wektorów bazowych z wyjątkiem jednego (tam posiada maksimum kierunkowe). Zatem:
1. Gradient funkcji w punkcie siodłowym jest równy zeru (punkt jest punktem krytycznym).
2. Wszystkie wartości własne hesjanu funkcji są dodatnie z wyjątkiem jednej. Kierunek związanego z nią wektora własnego jest kierunkiem wzdłuż którego funkcja posiada maksimum.
Jeżeli w punkcie krytycznym mamy k>1 wartości własnych ujemnych to punkt ten jest punktem siodłowym k-tego rzędu. Takie punkty krytyczne nie są istotne w analizie powierzchni energii ponieważ nie odpowiadają stanom przejściowym reakcji chemicznych/przemian konformacyjnych.

Algorytmy lokalizacji punktów siodłowych
1. Minimalizacja normy gradientu funkcji (zaimplementowana w pakiecie MOPAC jako opcja NLLSQ).
n
i ix
E
1
22
minx
xgx
Metoda ta nie gwarantuje nawet znalezienia punktu stacjonarnego (o zerowym gradiencie) natomiast jest „łagodna” w sensie zmian energii.
2. Metoda Newtona (rozwiązujemy układ równań nieliniowych):
ni
x
Eg
ii ,,2,10
x
x
Gwarantuje znalezienie jakiegoś punktu krytycznego ale może to być minimum, maksimum lub punkt siodłowy wyższego rzędu.
W przypadku obu rodzajów metod musimy wystartować z obszaru zbieżności do punktu siodłowego; w szczególności hesjan musi mieć odpowiednią strukturę (jedna wartość własna ujemna pozostałe dodatnie).

gVF
Vh
VVBH
BVBVH
gHh
hxHhhxgxx 00
T
n
iiii
T
nT
TT
bF
bbb
EE
1
11
21
1
0
,,,diag
)(2
1)()()(
3. Metody poruszania się wzdłuż kierunków własnych (eigenvector following)
Wyrażamy krok metody Newtona w bazie wektorów własnych hesjanu.

Przypuśćmy, że szukamy punktu siodłowego z punktu w którym wszystkie wartości własne są dodatnie. Przeprowadźmy następującą modyfikację metody Newtona:
n
iiii bF
1
Vh
Jeżeli teraz wybierzemy takie , że b1-<0 to w granicach przybliżenia kwadratowego wartość funkcji będzie rosła wzdłuż pierwszego kierunku a malała wzdłuż pozostałych.
Przybliżenie wymierne funkcji minimalizowanej
110
01
101
21
121
0 hSh
h
g
gHh
Shh
Hhhhg
T
TT
T
TT
EE
S – diagonalna macierz czynników skalujących; zwykle macierz jednostkowa

n
iii
T
bF1
2
λhg
0ghSH
1. Istnieje n+1 wartości własnych l. Dwie sąsiadujące wartości własne ograniczają odpowiednią wartość hesjanu, tj. ibii+1.
2. W minimum energii 1=0 a 2,...,n są wartościami własnymi hesjanu.
3. W punkcie siodłowym 1<0, 2=0, 3,...,n>0
Metoda poruszania się wzdłuż kierunków własnych ma zastosowanie zarówno do poszukiwania minimum (w pakiecie MOPAC znana jako opcja EF) jak i punktu siodłowego (TS).

Literatura:
1. C.J. Cerjan, W.H. Miller, On finding transition states, J. Chem. Phys., 75, 2800-2806 (1981).
2. J. Simons, P. Jorgensen, H. Taylor, J. Ozment, J. Phys. Chem., 87, 2745 (1983).
3. J. Baker, An algorithm for location of transition states, J. Comput. Chem., 7, 385-395 (1986).
4. F. Jensen, Locating transition structures by mode following: A comparison of six methods on the Ar8 Lennard-Jones potential. J. Chem. Phys., 102, 6706-6718 (1995).

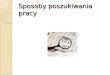
x
f(x) punkt początkowy
minimum lokalne
minimum globalne
Poszukiwanie minimum globalnego
Przykłady zadań optymalizacji globalnej:
•Przewidywanie struktur białek i innych makromolekuł (globalna minimalizacja energii).
•Przewidywanie struktur krystalicznych.
•Problem fazowy w krystalografii (dopasowywanie struktury do zaobserwanego wzoru refleksów.
•Problem komiwojażera (ekonomia).

Podstawowe typy metod poszukiwania minimum globalnego:
1. Metody stochastyczne oparte na algorytmach Monte Carlo.
2. Metody deformacjii oryginalnej funkcji (deterministyczne).
3. Metody średniego pola.
4. Algorytmy genetyczne.
5. Proste przeszukiwanie przestrzeni zmiennych (ograniczone do niewielu wymiarów).

Ilustracja działania metod deformacyjnych

Przykłady metod deformacyjnych.
Metoda równania dyfuzyjnego
xx
xxx
fF
t
tF
x
tFtF
xft
txft
t
tt
xftN
ttxF
n
i i
N
N
0;
;;;
exp!2
1
1lim;
12
2
2
2
2
22
2
2
2
2

Metoda skalowania odległości
bt
trrtr
r
eeE
oijij
ij
ji
ij
jiij
N
iii
1~
1
xxxx
rij
eij
rij
eij

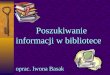
LJ38 LJ55 LJ75
J. P. K. Doye, M. A, Miller, D. J. Wales J. Chem. Phys. 1999, 111, 8417-8428.

N=38
(fcc)
N=55
(Ikosahedron Mackaya)
N=75
(Dziesięciościan Marksa)

Bezwodnik kwasu bursztynowegoBezwodnik kwasu maleinowego
ImidazolFormamid

Metoda Monte Carlo z minimalizacją energii (stochastyczna).
1. Wybrać punkt początkowy.
2. Zminimalizować lokalnie funkcję; dostajemy x0 i f0.
3. Zaburzyć x0.
4. Zminimalizować funkcję; dostajemy x1i f1.
5. Jeżeli f1<f0 to wstawić x1 za x0 a f1 za f0 i przejść do punktu 3; w przeciwnym razie wykonać test Metropolisa (punkt 6).
6. Wylosować y z przedziału [0,1] i obliczyć z=exp[-(f1-f0)]. Jeżeli y>z wstawić x1 za x0 a f1 za f0 w przeciwnym wypadku nic nie zmieniać. Przejść do punktu 3.

Algorytmy genetyczne
1. Tworzymy początkową populację rozwiązań (np. generujemy przypadkowo konformacje a następnie minimalizujemy lokalnie energię każdej z nich).
2. Na elementach populacji wykonujemy dwa typy operacji:
a) Mutacje (przypadkowe zaburzenie jednej lub grupy zmiennych).
b) Krzyżowanie (wymiana grupy zmiennych pomiędzy dwoma rozwiązaniami).
3. Z nowej populacji usuwamy te elementy, które mają największe wartości funkcji (są najgorzej “przystosowane”).
D.E. Goldberg, Algorytmy genetyczne i ich zastosowania, WNT, Warszawa.

Struktura o najniższej energii w modelu uproszczonym
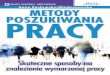
Metody średniego pola: ilustracja graficzna

Pełnoatomowa reprezentacja łańcucha polipeptydowego w roztworze z uwzględnieniem rozpuszczalnika
Model UNRES

Przewidziana struktura białka HDEA: część C-końcowa. Kolor czerwony: struktura krystaliczna.
Przewidziana struktura białka HDEA: część N-końcowa