Embed Size (px)
Citation preview

ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
NGUYỄN THỊ HOA
MÔ HÌNH HÓA VÀ PHÂN TÍCH ĐỘNG LỰC HỌC
MÁY GIẶT LỒNG NGANG
LUẬN ÁN TIẾN SĨ KỸ THUẬT
THÁI NGUYÊN-NĂM 2021

ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
NGUYỄN THỊ HOA
MÔ HÌNH HÓA VÀ PHÂN TÍCH ĐỘNG LỰC HỌC
MÁY GIẶT LỒNG NGANG
CHUYÊN NGÀNH: KỸ THUẬT CƠ KHÍ
MÃ SỐ: 9520103
LUẬN ÁN TIẾN SĨ KỸ THUẬT
Người hướng dẫn khoa học
PGS.TS. Ngô Như Khoa
THÁI NGUYÊN-2021

- i -
LỜI CAM ĐOAN
Tôi xin cam đoan mọi kết quả nghiên cứu của luận án: “Mô hình hóa và phân
tích động lực học máy giặt lồng ngang” là công trình nghiên cứu của cá nhân tôi
dưới sự hướng dẫn của PGS.TS. Ngô Như Khoa. Các kết quả, số liệu tính toán
trong luận án là trung thực, không sao chép của bất kì ai hay nguồn nào (trừ những
điểm được trích dẫn).
Thái Nguyên, ngày tháng 06 năm 2021
NGƯỜI HƯỚNG DẪN KHOA HỌC NGHIÊN CỨU SINH
PGS.TS. Ngô Như Khoa Nguyễn Thị Hoa

- ii -
LỜI CẢM ƠN
Luận án “Mô hình hóa và phân tích động lực học máy giặt lồng ngang”
được thực hiện tại Trường Đại học Kỹ thuật Công nghiệp – Đại học Thái Nguyên.
Người đầu tiên nghiên cứu sinh muốn được bày tỏ sự kính trọng và lòng biết
ơn sâu sắc đó là PGS.TS. Ngô Như Khoa - người đã truyền cho nghiên cứu sinh
cảm hứng và niềm say mê với kỹ thuật. Nếu không có sự tận tình hướng dẫn cũng
như sự động viên khích lệ của Thầy, luận án này có lẽ đã không thể hoàn thành.
Nghiên cứu sinh xin trân trọng cảm ơn Ban Giám Hiệu, Phòng đào tạo, Khoa
Cơ khí, Khoa Kỹ thuật Ô tô và Máy động lực, Bộ môn Cơ học - Trường Đại học Kỹ
thuật Công nghiệp – Đại học Thái Nguyên đã tạo mọi điều kiện thuận lợi cho
nghiên cứu sinh trong suốt quá trình học tập.
Nghiên cứu sinh xin chân thành cảm ơn tất cả các thành viên trong gia đình đã
luôn đồng hành, cảm thông, sẻ chia và là chỗ dựa vững chắc cho nghiên cứu sinh
trong thời gian qua.
Cuối cùng, nghiên cứu sinh gửi lời cảm ơn tới tất cả bạn bè, đồng nghiệp đã
động viên, hỗ trợ để nghiên cứu sinh hoàn thiện luận án này.
Thái Nguyên, ngày tháng 06 năm 2021
Nghiên cứu sinh
Nguyễn Thị Hoa

- iii -
MỤC LỤC
LỜI CAM ĐOAN ...................................................................................................... i
LỜI CẢM ƠN ........................................................................................................... ii
MỤC LỤC ................................................................................................................ iii
DANH MỤC CÁC CHỮ VIẾT TẮT....................................................................... i
DANH MỤC KÝ HIỆU ........................................................................................... ii
DANH MỤC HÌNH VẼ .......................................................................................... iv
DANH MỤC BẢNG BIỂU ................................................................................... viii
MỞ ĐẦU .................................................................................................................... 1
CHƯƠNG 1. TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU ......................................... 5
1.1. Giới thiệu về máy giặt .......................................................................................... 5
1.2. Tổng quan các công bố khoa học ......................................................................... 9
1.2.1. Các nghiên cứu trong nước ............................................................................... 9
1.2.2. Các nghiên cứu ngoài nước ............................................................................... 9
1.2.2.1. Về xây dựng mô hình động lực hệ thống treo ................................................ 9
1.2.2.2.Về cách thức kiểm soát rung động ................................................................ 17
1.3. Kết luận chương 1 .............................................................................................. 24
CHƯƠNG 2. XÂY DỰNG MÔ HÌNH ĐỘNG LỰC CHO HỆ THỐNG TREO
MÁY GIẶT LỒNG NGANG ................................................................................. 27
2.1. Cơ sở lý thuyết ................................................................................................... 27
2.1.1. Động lực học hệ nhiều vật .............................................................................. 27
2.1.1.1. Xác định vị trí của vật rắn trong không gian................................................ 27
2.1.1.2. Xác định vận tốc góc của vật rắn ................................................................. 29
2.1.1.3. Xác định vị trí, vận tốc, gia tốc của một điểm bất kì thuộc vật ................... 30
2.1.1.4. Các phương trình vi phân chuyển động của vật rắn ..................................... 31
2.1.2. Lực cản ............................................................................................................ 31
2.2. Cấu tạo và nguyên lý làm việc của hệ thống treo máy giặt lồng ngang ............ 35
2.2.1. Cấu tạo hệ thống treo máy giặt lồng ngang .................................................... 35
2.2.2. Nguyên lý làm việc ......................................................................................... 36
2.3. Mô hình vật lý của hệ thống treo ....................................................................... 36

- iv -
2.3.1. Đặc tính của phần tử đàn hồi ........................................................................... 37
2.3.2. Đặc tính của phần tử giảm chấn ...................................................................... 39
2.3.3.Đặc tính của phần tử quán tính ........................................................................ 49
2.3.4.Đặc tính của phần tử kích thích rung động ...................................................... 50
2.4. Xây dựng mô hình động lực của hệ thống treo ............................................... 52
2.4.1. Xây dựng mô hình không gian (Mô hình 1) ................................................... 52
2.4.2. Xây dựng mô hình động lực đối với hệ thống treo chuyển động phẳng ......... 61
(Mô hình 2) ............................................................................................................... 61
2.4.3. Mô hình phẳng hai bậc tự do (Mô hình 3) ...................................................... 68
2.4.4. Biểu diễn Simulink của các mô hình .............................................................. 69
2.4.4.1. Sơ đồ Simulink ............................................................................................. 69
2.4.4.2. Một số kết quả của chương trình mô phỏng ................................................ 73
2.5. Kết luận chương 2 .............................................................................................. 80
CHƯƠNG 3. XÂY DỰNG MÔ HÌNH THỰC NGHIỆM ĐO RUNG ĐỘNG
ĐÁNH GIÁ KIỂM CHỨNG MÔ HÌNH ĐỘNG LỰC HỆ THỐNG TREO
MÁY GIẶT LỒNG NGANG ................................................................................. 81
3.1. Mô hình thực nghiệm đo rung động ................................................................... 81
3.1.1. Hệ thống khung đỡ .......................................................................................... 81
3.1.2. Hệ thống thiết bị đo ......................................................................................... 82
3.1.2.1. Sơ đồ khối các hệ thống đo và xử lý tín hiệu ............................................... 82
3.1.2.2. Các dụng cụ đo và thiết bị thu thập dữ liệu sử dụng trong hệ thống ........... 84
3.1.3. Xây dựng chương trình xác định các thông số rung động .............................. 86
3.1.3.1. Chương trình đo, xác định phản lực gối đỡ và dịch chuyển lồng giặt .............. 86
3.1.3.2. Chương trình đo, xác định gia tốc ............................................................... 88
3.2. Đo đặc tính rung động của hệ thống treo ........................................................... 93
3.2.1. Thiết lập các thông số thí nghiệm ................................................................... 93
3.2.2. Kết quả thực nghiệm ..................................................................................... 101
3.3. Kiểm chứng mô hình động lực của hệ thống treo ............................................ 103
3.4. Kết luận chương 3 ............................................................................................ 109

- v -
CHƯƠNG 4. ẢNH HƯỞNG CỦA MỘT SỐ THÔNG SỐ HỆ THỐNG TREO
ĐẾN RUNG ĐỘNG CỦA THÂN VỎ MÁY GIẶT LỒNG NGANG ............... 111
4.1. Hệ phương trình cân bằng của thân vỏ máy .................................................... 111
4.2. Ảnh hưởng của một số thông số hệ thống đến rung động của vỏ máy ............ 113
4.2.1. Ảnh hưởng của vị trí kết nối giảm chấn với vỏ máy..................................... 113
4.2.2. Ảnh hưởng của số lượng giảm chấn ............................................................. 117
4.3. Kết luận chương 4 ............................................................................................ 120
KẾT LUẬN VÀ ĐỀ XUẤT .................................................................................. 122
CÁC CÔNG TRÌNH KHOA HỌC ĐÃ CÔNG BỐ ........................................... 123
TÀI LIỆU THAM KHẢO .................................................................................... 124
PHỤ LỤC ............................................................................................................... 131

- i -
DANH MỤC CÁC CHỮ VIẾT TẮT
Kí hiệu Tên tiếng Anh Giải nghĩa
VWM Vertical Washing Machine Máy giặt lồng đứng
HWM Horizontal Washing Machine Máy giặt lồng ngang
2D two-dimensional model Mô hình hai chiều
3D three-dimensional model Mô hình ba chiều
F-V Force - Velocity Lực – vận tốc
LVDT Linear Variable Differential
Transformer sensor Cảm biến đo dịch chuyển
Acc Accelerometer Gia tốc kế
DAQ Data Acquisition System Hệ thống thu thập dữ liệu
GA Genetic Algorithm Thuật toán di truyền
RPM Revolutions per minute Số vòng quay/phút
DOF Degrees of freedom Số bậc tự do
MR The magneto-
rheological damper
Thiết bị giảm chấn từ tính –
lưu biến
RS Right Spring Lò xo bên phải
LS Left Spring Lò xo bên trái
RD Right Damper Thiết bị giảm chấn bên phải
LD Left Damper Thiết bị giảm chấn bên trái
DE The Differential
Evolution algorithm Thuật toán vi phân tiến hóa
LC Loadcell Cảm biến lực
FEM Finite Element Method Phương pháp phần tử hữu hạn
CAD Computer Aided Design Thiết kế có máy tính trợ giúp
CAM Computer Aided
Manufacturing
Phần mềm thiết kế, gia công,
điều khiển máy công cụ

- ii -
DANH MỤC KÝ HIỆU
Kí hiệu Ý nghĩa Thứ
nguyên
Đơn vị M Khối lượng hệ thống treo kg
m Khối lượng lệch tâm kg
R Bán kính lồng chứa m
r Bán kính lồng giặt m
ICx, ICy, ICz Mômen quán tính chính tâm của hệ kg.m2
CI Tenxơ quán tính
x, y, z Chuyển dịch của khối tâm m
, ,x y z Vận tốc khối tâm m/s
, ,x y z Gia tốc khối tâm m/s2
α, , Các góc Cardan rad
, ,
Vận tốc góc Cardan rad/s
, ,
Gia tốc góc Cardan rad/s2
Góc quay của động cơ rad
, Vận tốc góc và gia tốc góc của động cơ rad/s, rad/s2
k Độ cứng của lò xo N/m
Ci, i=03 Hệ số trong biểu thức quan hệ lực-vận tốc của
giảm chấn
LS, LD Chiều dài lò xo, chiều dài thiết bị giảm chấn m
L0S, L0D Chiều dài ban đầu của lò xo, thiết bị giảm chấn m
∆LS, ∆LD Độ biến dạng của lò xo, thiết bị giảm chấn
N Tốc độ quay của động cơ vòng/phút
1 Góc lệch phương hướng kính tại điểm kết nối lò
xo với lồng chứa so với phương ngang rad
2 Góc lệch phương hướng kính tại điểm kết nối
giảm chấn với lồng chứa so với phương ngang rad
FRS, FLS Lực đàn hồi của lò xo phải và lò xo trái N
FRD, FLD Lực cản của thiết bị giảm chấn phải và trái N

- iii -
Fmx, Fmy, Fmz Lực kích thích của khối lệch tâm theo phương
x,y,z N
mCx(Fmu)
mCy(Fmu)
mCz(Fmu)
Mômen kích thích gây ra bởi khối lệch tâm quanh
các trục N.m
mCx(FiS)
mCy(FiS)
mCz(FiS)
Mômen xoắn gây ra bởi lực đàn hồi của lò xo N.m
mCx(FjD)
mCy(FjD)
mCz(FjD)
Mômen xoắn gây ra bởi lực cản của thiết bị giảm
chấn N.m
RD, LD Góc lệch của thiết bị giảm chấn với phương ngang rad
RS, LS Góc lệch của lò xo với với phương ngang rad
Dx, Dy, Dz
Góc chỉ hướng của thiết bị giảm chấn rad
Sx, Sy, Sx Góc chỉ hướng của lò xo rad
AC, [aij] Ma trận chuyển của phép biến đổi tọa độ
(0) (0) (0), ,x y ze e e
Vec-tơ đơn vị của các trục tọa độ cố định
, ,x y ze e e
Vec-tơ đơn vị của các trục tọa độ động
, ,r V a Vec-tơ vị trí, vận tốc, gia tốc của điểm trên lồng
chứa
m, m/s,
m/s2
n Số điểm đo
Ftt Giá trị lực giảm chấn tính theo lý thuyết N
Ftn Giá trị lực giảm chấn xác định từ thực nghiệm N

- iv -
DANH MỤC HÌNH VẼ
Hình 1.1. Vòng tròn Sinner - các nhân tố chính tác động đến quá trình giặt.............. 5
Hình 1.2. Máy giặt lồng đứng ..................................................................................... 6
Hình 1.3. Máy giặt lồng ngang.................................................................................... 7
Hình 1.4. Mô hình HWM của D.C. Conrad .............................................................. 10
Hình 1.5. Mô hình động lực do Aldrin và cộng sự xây dựng ................................... 11
Hình 1.6. Mô hình hệ thống treo trong nghiên cứu của Bascetta ............................. 12
Hình 1.7. Mô hình động lực hệ thống treo trong nghiên cứu của Hee-Tae Lim và
cộng sự ...................................................................................................................... 15
Hình 1.8. Mô hình động lực do Thomas Nygårds và cộng sự xây dựng .................. 16
Hình 1.9. Nguyên lý làm việc của thiết bị cân bằng chất lỏng ................................. 18
Hình 1.10. Mô hình máy giặt và khoang chất lỏng cân bằng của Leonardo Urbiola
Soto............................................................................................................................ 19
Hình 1.11. Mô hình của T.C. Chan ........................................................................... 20
Hình 1.12. Dịch chuyển của robot trong thiết bị cân bằng của Min Gyu Jo............. 21
Hình 1.13. Kết cấu giảm chấn MR ............................................................................ 22
Hình 2.1. Vật rắn trong không gian .......................................................................... 27
Hình 2.2. Minh họa một số mô hình ma sát [67] ...................................................... 33
Hình 2.3. Mặt sau của máy giặt................................................................................. 35
Hình 2.4. Lò xo sử dụng trong hệ thống treo của HWM .......................................... 37
Hình 2.5. Biến dạng của lò xo ................................................................................... 37
Hình 2.6. Đo đặc tính của lò xo ................................................................................ 38
Hình 2.7. Lực đàn hồi tuyến tính và lực đàn hồi phụ thuộc góc treo........................ 39
Hình 2.8. Thiết bị giảm chấn trong hệ thống treo máy giặt lồng ngang ................... 39
Hình 2.9. Nguyên lý hoạt động của thiết bị thí nghiệm ............................................ 40
Hình 2.10. Sơ đồ thí nghiệm đo đặc tính cản của thiết bị giảm chấn ....................... 40
Hình 2.11. Lưu đồ thuật toán chương trình điều khiển. ............................................ 41
Hình 2.12. Cấu trúc chương trình điều khiển ............................................................ 42
Hình 2.13. Giao diện của chương trình điều khiển trên Labview ............................. 43
Hình 2.14. Can nhiễu lên tín hiệu vận tốc thu trực tiếp từ encoder động cơ ............ 44

- v -
Hình 2.15. Cửa sổ phần mềm hiển thị kết quả đo lực và vận tốc theo thời gian ở dải
tốc độ 144 - 192 mm/s ............................................................................................... 44
Hình 2.16. Đồ thị quan hệ lực – vận tốc của thiết bị giảm chấn ............................... 46
Bảng 2.3. Hệ số của phương trình (2.24) .................................................................. 46
Hình 2.17. Sơ đồ khối của thuật toán DE ................................................................. 47
Hình 2.18. Đồ thị đường cong lực – vận tốc của thiết bị giảm chấn ........................ 48
Hình 2.19. Các thành phần của hệ thống treo ........................................................... 49
Hình 2.20. Sơ đồ lực tác dụng lên vật phẩm giặt ...................................................... 51
Hình 2.21. Phác thảo vị trí tải trọng các giai đoạn của quá trình giặt ....................... 51
Hình 2.22. Mô hình không gian của hệ thống treo HWM ........................................ 53
Hình 2.23. Vị trí của tải trọng lệch tâm trong hệ tọa độ Cxyz .................................. 56
Hình 2.24. Sơ đồ tính lực đàn hồi của lò xo.............................................................. 57
Hình 2.25. Sơ đồ tính lực giảm chấn của thiết bị giảm chấn .................................... 58
Hình 2.26. Mô hình hệ thống treo phẳng .................................................................. 62
Hình 2.27. Sơ đồ 2D phi tuyến hình học của lò xo phải ........................................... 63
Hình 2.28. Sơ đồ 2D phi tuyến hình học của lò xo trái............................................. 64
Hình 2.29. Sơ đồ 2D phi tuyến hình học của giảm chấn phải .................................. 66
Hình 2.30. Sơ đồ 2D phi tuyến hình học của thiết bị giảm chấn trái ........................ 67
Hình 2.31. Sơ đồ Simulink cho cơ hệ không gian của hệ thống treo HWM ............ 71
Hình 2.32. Sơ đồ Simulink cho mô hình phẳng của hệ thống treo HWM ................ 72
Hình 2.33. Lực và mômen xoắn kích thích (zu=0.1m) ............................................. 75
Hình 2.34. Đồ thị phản lực động lực của lò xo và giảm chấn ((zu=0.1m)) .............. 76
Hình 2.35. Đồ thị chuyển dịch và góc lắc (zu=0.1m) ............................................... 77
Hình 2.36. Đồ thị chuyển dịch, quỹ đạo điểm tâm và góc lắc (zu=0.0m) ................ 78
Hình 2.37. Đồ thị các phản lực động lực của lò xo và giảm chấn (zu=0.0m ) ......... 79
Hình 3.1. Hệ thống khung đỡ thay thế vỏ máy giặt .................................................. 81
Hình 3.2. Vị trí lắp đặt cảm biến lực ......................................................................... 82
Hình 3.3. Vị trí lắp đặt cảm biến chuyển dịch và gia tốc .......................................... 83
Hình 3.4. Sơ đồ nguyên lý hệ thống đo ..................................................................... 83
Hình 3.5. Sơ đồ kết nối các thiết bị ........................................................................... 83

- vi -
Hình 3.6. Cảm biến loadcell model MT 1041- 100 .................................................. 84
Hình 3.7. Khuếch đại tín hiệu model SCC-SG04 và sơ đồ khối của thiết bị ............ 84
Hình 3.8. Chức năng bộ ghép nối các mô-đun SCC, NI SCC-68 ............................. 85
Hình 3.9. Thiết bị ghép nối DAQ .............................................................................. 85
Hình 3.10. Thông số kỹ thuật K-Shear 8702B50M .................................................. 85
Hình 3.11. Thiết bị khuếch đại chuyển đổi tín hiệu ADLINK USB-2405(G) .......... 86
Hình 3.12. Cảm biến LVDT ...................................................................................... 86
Hình 3.13. Thiết lập các cổng vào trên DAQ USB-6251 ......................................... 87
Hình 3.14. Thiết lập bộ lọc thông thấp cho các tín hiệu vào .................................... 87
Hình 3.15. Thiết lập hệ thức quy đổi tín hiệu (dữ liệu) sang số liệu đo ................... 88
Hình 3.16. Thiết lập các kênh AI0-AI3 cho giao diện thu thập dữ liệu từ các gia tốc
kế trên U-Test ............................................................................................................ 90
Hình 3.17. Dữ liệu thu thập được trên 04 gia tốc kế được hiển thị trên U-Test. ...... 91
Hình 3.18. Dữ liệu gia tốc gốc (hình trái), dữ liệu qua bộ lọc thông số thấp FIR, tần
số cắt 50Hz (hình phải) của 4 kênh gia tốc kế .......................................................... 92
Hình 3.19. Khối lượng lệch tâm giả lập .................................................................... 93
Hình 3.20. Giao diện thiết lập các chế độ, thông số đo lường và hiển thị, giám sát
kết quả đo .................................................................................................................. 94
Hình 3.21. LVDT 1, 2 - Số liệu dịch chuyển theo 2 phương x (LVDT 2) và y
(LVDT 1) trong toàn thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N =
600 vòng/phút) .......................................................................................................... 95
Hình 3.22. Loadcell 1,2 – Số liệu các phản lực tại các các điểm treo lò xo trong
toàn thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N = 600 vòng/phút)
................................................................................................................................... 96
Hình 3.23. Loadcell 3,4,5 - Số liệu các phản lực tại các gối giảm chấn trong toàn
thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N=600 vòng/phút) ......... 97
Hình 3.24. LVDT 1, 2 - Số liệu dịch chuyển theo 2 phương x (LVDT 2) và y
(LVDT 1) trong toàn thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N =
800 vòng/phút) .......................................................................................................... 98

- vii -
Hình 3.25. Loadcell 1,2 – Số liệu các phản lực tại các các điểm treo lò xo trong
toàn thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N = 800 vòng/phút)
................................................................................................................................... 99
Hình 3.26. Loadcell 3,4,5 - Số liệu các phản lực tại các gối giảm chấn trong toàn
thời gian và trích xuất trong 1 giây tại giai đoạn ổn định (N=800 vòng/phút) ....... 100
Hình 3.27. Biểu đồ % sai lệch so với thực nghiệm của chuyển dịch theo phương x
và y .......................................................................................................................... 104
Hình 3.28. Biểu đồ đánh giá mức độ sai lệch so với thực nghiệm của biên độ lực
đàn hồi lò xo bên trái và bên phải ........................................................................... 105
Hình 3.29. Biểu đồ đánh giá mức độ sai lệch so với thực nghiệm của biên độ lực
cản các giảm chấn ................................................................................................... 105
Hình 3.30. Đồ thị chuyển dịch theo phương x và y của mô hình 2 và 3 ................ 107
Hình 3.31. Đồ thị lực cản của giảm chấn bên phải của mô hình 2 và 3 ................. 107
Hình 3.32. Biểu đồ đánh giá mức độ sai lệch biên độ dịch chuyển x và y ............. 108
Hình 3.33. Biểu đồ đánh giá mức độ sai lệch biên độ lực đàn hồi của lò xo phải và
trái ............................................................................................................................ 108
Hình 3.34. Biểu đồ đánh giá mức độ sai lệch biên độ lực cản của giảm chấn phải và
trái ............................................................................................................................ 108
Hình 4.1. Sơ đồ lực tác dụng lên vỏ máy ................................................................ 112
Hình 4.2. Đồ thị hàm FD theo vị trí kết nối giảm chấn .......................................... 114
Hình 4.3. Mô hình cải tiến khi thay đổi vị trí kết nối giảm chấn và sơ đồ bố trí các
cảm biến đo gia tốc ................................................................................................. 115
Hình 4.4. Đồ thị so sánh gia tốc tại điểm Acc3 giữa cấu hình gốc và cấu hình cải
tiến ........................................................................................................................... 116
Hình 4.5. Đồ thị so sánh gia tốc tại điểm Acc4 giữa cấu hình gốc và cấu hình cải
tiến ........................................................................................................................... 116
Hình 4.6. Đồ thị quỹ đạo điểm tâm ứng tại tốc độ .................................................. 118
Hình 4.7. Đồ thị góc lắc với các cấu hình giảm chấn tại tốc độ 610.99 vòng/phút 118
Hình 4.8. Đồ thị góc lắc với các cấu hình giảm chấn tại tốc độ 764.77 vòng/phút 119

- viii -
DANH MỤC BẢNG BIỂU
Bảng 2.1. Phân tích dữ liệu tốc độ trong 05 khoảng đầu tiên ................................... 45
Bảng 2.2. Các kết quả của dữ liệu quan hệ lực – vận tốc trong chu kì kéo và nén... 45
Bảng 2.3. Hệ số của phương trình (2.24) .................................................................. 46
Bảng 2.4.Tính chất hình học và khối lượng của các thành phần hệ thống treo ........ 50
Bảng 2.5. Các thông số hệ thống máy giặt lồng ngang LG WD 8990TDS .............. 73
Bảng 3.1. Chuyển vị và phản lực tại các liên kết trong các chế độ vắt................... 101
Bảng 3.2. Chuyển vị và phản lực động lực của chương trình mô phỏng và kết quả
thực nghiệm ở chế độ quay vắt. .............................................................................. 103
Bảng 3.3. Chuyển dịch và phản lực tại các liên kết trong mô hình 2 và mô hình 3. ......... 106
Bảng 4.1. Các phản lực động lực ............................................................................ 119
Bảng 4.2. Đánh giá các cấu hình giảm chấn theo biểu thức (4.13) và (4.14) ......... 120

- 1 -
MỞ ĐẦU
Vật quay là đối tượng phổ biến trong các hệ thống cơ khí, có thể thấy trong
các máy gia công cắt gọt, rôto của động cơ, trục của máy nghiền, lồng quay của
máy giặt… Trong quá trình hoạt động, các vật quay tạo ra rung động của hệ thống.
Nguồn gây ra rung động trên vật quay chủ yếu là do có khối lượng lệch tâm gây nên
lực quán tính ly tâm khi quay trong quá trình máy hoạt động. Vì vậy, vấn đề đặt bài
toán, mô hình hóa và phân tích động lực học vật quay theo hướng tính toán giảm
rung động giúp cho các thiết bị làm việc hiệu quả, tăng độ bền của máy, giúp cho
môi trường sống thân thiện bằng cách giảm tiếng ồn phát thải luôn là mối quan tâm
và cũng là thách thức đối với các nhà khoa học, nhà sản xuất.
Trong nghiên cứu này, đối tượng vật quay cụ thể được lựa chọn là lồng giặt
của máy giặt vì đây là thiết bị điện dùng cho gia đình rất phổ biến trên thế giới
cũng như ở Việt Nam. Nhu cầu sử dụng máy giặt ngày càng tăng nhanh, đến nay
máy giặt trở nên không thể thiếu trong mỗi gia đình hiện đại. Trong quá trình cải
tiến máy giặt, với yêu cầu nâng cao chất lượng cuộc sống, các yếu tố chính của
máy giặt cần được quan tâm đến bao gồm: giảm năng lượng tiêu thụ và tăng mức
độ thân thiện đối với môi trường (cụ thể: giảm lượng điện nước, giảm thời gian
giặt, giảm rung lắc và ồn, ...), các yếu tố này có thể cải thiện thông qua thiết kế hệ
thống treo.
Lực kích thích chủ yếu gây ra rung động cho máy giặt là sự phân bố không
đều của quần áo trong lồng giặt tạo nên khối lượng không cân bằng. Chu trình làm
việc của máy giặt được chia làm hai giai đoạn chủ yếu là giặt và vắt. Trong giai
đoạn giặt, máy quay với tốc độ thấp để làm nhiệm vụ đảo khuấy đồ giặt nên hiện
tượng rung động xảy ra với biên độ nhỏ. Tuy nhiên, trong giai đoạn vắt, hiện tượng
rung lắc xảy ra rất mạnh và thay đổi liên tục do lồng giặt quay với tốc độ cao làm cho
đồ giặt bị ép vào vách trong của lồng giặt, trở thành một khối lượng mất cân bằng lớn
cho đến khi giai đoạn vắt kết thúc. Đặc biệt đối với máy giặt lồng ngang, hiện tượng
mất cân bằng của đồ giặt càng dễ dàng xảy ra hơn do ảnh hưởng của trọng lực. Tải
trọng lệch tâm này có tính chất rất phức tạp do sự phân bố ngẫu nhiên trên suốt chiều

- 2 -
dài của lồng giặt, đồng thời khối lượng của tải trọng cũng thay đổi theo từng vòng
quay.
Biên độ dao động của lồng chứa khi rung động có thể gây ra sự va chạm với
thành và vỏ máy, gây rung động toàn máy, gây tiếng ồn lớn, thậm chí làm máy di
chuyển không mong muốn trên sàn. Để giảm biên độ, có thể tăng độ cứng của lò xo
và hệ số cản của giảm chấn. Tuy nhiên, khi độ cứng của hệ thống treo lớn, các lực
truyền đến thân máy có thể tăng; hệ quả là có thể tăng độ ồn và rung động đối với
thân, vỏ máy. Để giải quyết bài toán phân tích đặc tính rung động của máy, làm cơ
sở giải quyết các bài toán thiết kế, vận hành máy giặt tốt hơn, trước tiên cần xây
dựng mô hình mô phỏng hoạt động của máy. Do vậy, tác giả chọn vấn đề “Mô hình
hóa và phân tích động lực học máy giặt lồng ngang” làm đề tài nghiên cứu.
Mục đích nghiên cứu của luận án
Xây dựng được mô hình động lực cho máy giặt lồng ngang trong cả hệ tọa độ
phẳng và hệ tọa độ không gian, đồng thời đánh giá được ảnh hưởng của các thông
số hệ thống đến rung động của máy. Từ đó đề xuất các chiến lược để kiểm soát và
giảm rung động của máy giặt lồng ngang dân dụng trong khi vẫn giữ nguyên chế độ
và đặc tính làm việc.
Đối tượng và phạm vi nghiên cứu
Đối tượng nghiên cứu của nghiên cứu là động lực học và rung động của máy
giặt lồng ngang. Đề tài sử dụng hệ thống treo máy giặt lồng ngang dân dụng LG-
WD 8990TDS là đối tượng thực để xây dựng mô hình động lực và kiểm nghiệm.
Phương pháp nghiên cứu
Nghiên cứu sử dụng lý thuyết mô hình hóa, mô phỏng số kết hợp với nghiên
cứu thực nghiệm. Trong đó, bài toán mô hình hóa được giải quyết dựa trên các kiến
thức nền tảng của cơ học, động lực học hệ thống để thiết lập các phương trình vi
phân chuyển động của hệ thống treo. Phương pháp mô phỏng số được sử dụng trên
phần mềm Matlab/Simulink. Các kết quả thực nghiệm được sử dụng để kiểm chứng
mô hình lý thuyết.
Ý nghĩa khoa học và ý nghĩa thực tiễn của nghiên cứu
• Ý nghĩa khoa học

- 3 -
Nghiên cứu đóng góp thêm một phần nhỏ kiến thức về rung động của vật quay
có hệ thống treo, đặc biệt là bài toán mô hình hóa và phân tích rung động của máy
giặt lồng ngang, cụ thể là:
- Làm rõ đặc tính của quan hệ lực-vận tốc trong thiết bị giảm chấn ma sát nửa
ướt sử dụng trong hệ thống treo của máy giặt lồng ngang.
- Phát triển mô hình toán mô tả được mối quan hệ phi tuyến giữa các đại lượng
độ cứng của lò xo, đặc tính cản của thiết bị giảm chấn, khối lượng của tải trọng lệch
tâm, tọa độ các điểm liên kết mềm của hệ thống treo của máy giặt lồng ngang trong
cả không gian hai chiều và ba chiều.
Các kết quả thu được của đề tài cũng hình thành cơ sở lý thuyết và thực
nghiệm cho các nghiên cứu tiếp sau về máy giặt, đồng thời, có thể dùng làm tài liệu
tham khảo cho giảng dạy và nghiên cứu khoa học về rung động của hệ thống cơ khí.
• Ý nghĩa thực tiễn
Nghiên cứu đã xây dựng được mô hình tính toán động lực học cho máy giặt
lồng ngang dân dụng. Kết quả thu được có thể áp dụng trực tiếp để xây dựng bài
toán điều khiển hoặc ứng dụng giảm rung cho máy bằng hệ thống treo bán chủ động
hoặc chủ động.
Đề xuất hệ thống treo cải tiến giảm rung động cho máy giặt lồng ngang trong
cùng chế độ làm việc.
Những đóng góp mới của nghiên cứu
1- Nghiên cứu đã xây dựng được đặc tính ma sát của các thiết bị giảm chấn sử
dụng trong máy giặt lồng ngang từ dữ liệu thực nghiệm.
2- Xây dựng được mô hình rung động phi tuyến sáu bậc tự do cho hệ thống
treo của máy giặt lồng ngang. Mô hình đã được kiểm chứng bằng thực nghiệm.
3- Đề xuất một hệ thống treo cải tiến theo hướng giảm rung động cho máy giặt.
Các kết quả nghiên cứu của đề tài được công bố trên 07 bài báo khoa học,
trong đó có 04 bài báo đăng trong tuyển tập thuộc danh mục Scopus, Q4 và 03 bài
báo quốc gia trên tạp chí được Hội đồng chức danh Giáo sư Nhà nước tính điểm.

- 4 -
Cấu trúc nội dung của nghiên cứu
Nội dung nghiên cứu gồm: phần Mở đầu, bốn chương và phần Kết luận. Phần
Mở đầu trình bày tính cấp thiết, mục đích, đối tượng và phương pháp nghiên cứu
của đề tài. Những đóng góp mới của nghiên cứu cũng được giới thiệu tóm tắt trong
phần này.
Chương 1 trình bày tổng quan tài liệu về xây dựng mô hình toán và cách thức
kiểm soát rung động cho máy giặt lồng ngang.
Chương 2 trình bày đặc tính từng thành phần của hệ thống treo máy giặt lồng
ngang; thiết lập mô hình động lực cho máy giặt lồng ngang trong cả trường hợp hai
chiều và ba chiều; xây dựng chương trình mô phỏng trong môi trường
Matlab/Simulink.
Chương 3 xây dựng hệ thống đo rung động của máy giặt trong chế độ thực,
xác định phản lực khớp động tại các điểm kết nối hệ thống treo với vỏ máy theo
thời gian thực. Kiểm chứng, đánh giá về độ sai lệch của kết quả mô phỏng của mô
hình toán đã xây dựng so với kết quả thực nghiệm.
Chương 4 trình bày ứng dụng mô hình động lực vào việc đánh giá ảnh hưởng
của các tham số trong hệ thống treo đến rung động của vỏ máy giặt và đề xuất
phương án giảm rung. Cuối cùng là phần kết luận và kiến nghị hướng nghiên cứu
tiếp theo.

- 5 -
CHƯƠNG 1
TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU
1.1. GIỚI THIỆU VỀ MÁY GIẶT
Máy giặt là thiết bị gia dụng rất phổ biến trên thế giới cũng như ở Việt Nam,
nhu cầu sử dụng máy giặt ngày càng tăng nhanh, cho đến nay máy giặt trở thành
một thiết bị không thể thiếu trong mỗi gia đình hiện đại. Nguyên lý hoạt động cơ
bản của máy giặt là xoay đảo đồ giặt liên tục trong dung dịch chứa chất tẩy để hòa
tan bụi bẩn. Khi đó, bề mặt đồ giặt phát sinh tương tác ma sát với nhau, đồng thời
có sự tác động va đập của nước kết hợp cùng chất tẩy, làm cho các vết bẩn sẽ được
loại bỏ khỏi sợi vải. Quá trình giặt diễn ra dưới dạng các chu kì phức hợp liên quan
đến sự tương tác, ảnh hưởng của cả vật lý và hóa học. Quá trình giặt được miêu tả
như một hàm của nhiều biến khác nhau: nhiệt độ giặt, thời gian thực hiện chu trình
giặt, loại chất giặt tẩy, tác động cơ học – tạo thành vòng tròn Sinner [1]. Trong đó,
tác động cơ học thường được máy giặt kiểm soát thông qua thời gian giặt, tốc độ
quay và nhịp đảo chiều.
Hình 1.1. Vòng tròn Sinner - các nhân tố chính tác động đến quá trình giặt
Với nhu cầu sinh hoạt hàng ngày của mỗi gia đình, ước tính mỗi ngày trên thế
giới có tới hàng trăm triệu lượt giặt. Điều này tác động rất lớn đến môi trường do
tiêu thụ nước và năng lượng, gây rung động, phát ra tiếng ồn, thải hóa chất tẩy rửa
vào các hệ thống thoát và xử lý nước thải, …. khi quá trình giặt diễn ra. Có hai cách
để giảm các tác động tiêu cực này: (1) cải tiến thiết kế của máy nhằm giảm lượng
tiêu hao nước và điện năng, giảm rung, giảm ồn; (2) cải thiện công thức chất tẩy rửa
để đạt yêu cầu làm sạch vải ở nhiệt độ thấp và thân thiện với môi trường.
Tác động cơ
học
Tác động hóa
học
Thời gian
Nhiệt độ

- 6 -
Máy giặt dân dụng có hai cấu hình, gồm: máy giặt lồng đứng (còn gọi là máy
giặt cửa trên), máy giặt lồng ngang (còn gọi là máy giặt cửa trước). Mỗi loại đều có
những ưu điểm, hạn chế riêng, được phân tích tóm tắt như dưới đây.
Máy giặt lồng đứng (VWM) là loại máy giặt có lồng giặt bố trí thẳng đứng
trong bồn nước kín (Hình 1.2a). Đồ giặt lơ lửng trong nước và được khuấy đảo nhờ
bánh công tác đặt ở dưới đáy lồng giặt (Hình 1.2b) hoặc trục khuấy nằm ở trung
tâm của lồng giặt (Hình 1.2c). Loại máy có bánh công tác phía dưới được sử dụng
phổ biến ở Nhật Bản, Trung Quốc và Hàn Quốc. Loại máy có trục khuấy được sử
dụng phổ biến ở Mỹ và Canada.
Hình 1.2. Máy giặt lồng đứng
VWM có những ưu điểm nổi bật như: cửa máy giặt nằm ở phía trên; giá thành
rẻ, dễ thay thế linh kiện khi máy bị hỏng; dễ sử dụng; có thể đặt được trong không
gian nhỏ và hẹp; có khả năng thêm hoặc bớt đồ giặt trong quá trình máy hoạt động
mà không phải hủy cả chu trình. Tuy nhiên, bên cạnh những tính năng ưu việt đó,
VWM có nhiều hạn chế [2], [3] được liệt kê sau đây:
- Khả năng chiết tách nước kém trong giai đoạn vắt: do tốc độ quay của máy
giặt cửa trên thường chỉ đạt tối đa 600 vòng/phút;
- Xảy ra rung động mạnh trong quá trình máy hoạt động: do đồ giặt là một
khối không định hình dẫn đến việc xoay đảo trong quá trình giặt của dòng máy này
mang tính cưỡng bức, cho nên khi tăng công suất dễ làm tăng sự rung lắc;
- Để có thể hoạt động, máy giặt cửa trên yêu cầu phải có một lượng nước lớn
phủ hết tất cả đồ giặt trong lồng nên tiêu tốn nhiều nước;
(a) (b) (c)

- 7 -
- Giảm độ bền của đồ giặt: trong khi giặt, đồ giặt dễ bị xoắn vào nhau dẫn đến
tình trạng đồ giặt có thể bị sờn, giãn và không giữ được độ bền như mong muốn.
Máy giặt lồng ngang (HWM) là loại máy giặt có lồng giặt được bố trí nằm
ngang trong bồn nước kín (Hình 1.3). So với VWM, HWM có nhiều ưu điểm nổi
trội. Với thiết kế lồng giặt nằm ngang giúp tăng ma sát giữa đồ giặt và bề mặt lồng
giặt trong quá trình máy làm việc làm cho việc chà sát đồ giặt kỹ hơn nên quần áo
giặt bằng HWM sạch hơn. Cơ chế quay của HWM cho phép máy có thể đạt đến tốc
độ 1400 vòng/phút, lớn hơn tốc độ tối đa cho phép của VWM là 600 vòng/phút, làm
tăng khả năng chiết tách nước trong đồ giặt. Khi lồng giặt quay, lực hấp dẫn làm
cho đồ giặt rơi trở lại phần nước bên dưới, do không bị khuấy xoắn nên đồ giặt
được bảo vệ, việc là ủi và sử dụng cũng dễ dàng hơn.
Hình 1.3. Máy giặt lồng ngang
Ngoài những ưu điểm trên, so với VWM, sử dụng HWM còn mang lại hiệu
quả nổi bật về năng lượng. Nghiên cứu [4] cho thấy, HWM có công nghệ giặt hiệu
quả mà lượng nước tiêu thụ chỉ bằng 1/3 so với VWM.
Hạn chế của HWM là giá thành cao, độ bền kém hơn VWM, khi muốn thêm
hoặc bớt đồ giặt trong chu trình giặt thì phải hủy cả chu trình. Tuy nhiên, với mục
tiêu tiết kiệm năng lượng, việc giảm năng lượng tiêu thụ của các thiết bị trong gia
đình trở thành một vấn đề rất quan trọng, HWM trước đây chủ yếu được sử dụng ở
Châu Âu thì trong những năm gần đây đã giành được thị phần trong tất cả các khu

- 8 -
vực khác trên thế giới. Dù vậy, HWM vẫn tồn tại vấn đề về rung lắc, đây cũng là
một vấn đề rất cần quan tâm khi thiết kế, chế tạo máy giặt.
Nguyên nhân chủ yếu gây ra rung lắc trong máy giặt là do khối lượng không
cân bằng của đồ giặt phân bố trong lồng giặt. Chu trình làm việc của máy giặt được
chia làm hai giai đoạn chủ yếu là giặt và vắt. Trong giai đoạn giặt, máy quay với tốc
độ thấp để làm nhiệm vụ đảo khuấy đồ giặt nên hiện tượng rung động xảy ra có biên
độ nhỏ. Còn trong giai đoạn vắt, hiện tượng rung lắc xảy ra rất mạnh và thay đổi
liên tục do lồng giặt quay với vận tốc tương đối cao làm cho đồ giặt bị ép vào vách
trong của lồng giặt, trở thành một khối lượng mất cân bằng lớn cho đến khi giai
đoạn vắt kết thúc. Đặc biệt đối với HWM, hiện tượng không cân bằng của đồ giặt
càng dễ dàng xảy ra hơn do ảnh hưởng của trọng lực. Trong quá trình làm việc, lồng
giặt quét qua tất cả các dải tần số bao gồm các tần số dao động tự nhiên của máy, do
đó biên độ rung động lớn có thể xảy ra do sự cộng hưởng. Biên độ dao động lớn có
thể gây ra va chạm của bộ phận chuyển động với những phần đứng yên hoặc mài
mòn lò xo và các thành phần khác của giảm chấn. Để giảm biên độ rung động,
người ta có thể sử dụng lò xo có độ cứng lớn. Tuy nhiên khi đó, các lực động rất lớn
sinh ra khi máy quay sẽ truyền đến vỏ máy giặt và kết quả có thể dẫn đến hiện
tượng dịch chuyển (walking) của máy, tức là máy có thể tự nhảy cóc trên sàn.
Với sự phát triển của khoa học kỹ thuật, các loại máy giặt mới đã và đang
ngày càng được hoàn thiện, đáp ứng tốt hơn các yêu cầu của cuộc sống hiện đại.
Các tính năng được quan tâm cải tiến bao gồm giảm thời gian giặt, giảm rung động
và tiếng ồn. Tuy nhiên, để giảm thời gian giặt, máy phải quay với tốc độ quay cao
hơn nhưng như vậy sẽ gây ra lực quán tính ly tâm lớn, do đó tăng rung động và
tiếng ồn. Mặt khác, khi máy giặt làm việc trong điều kiện có tải sẽ xẩy ra chuyển
động lên – xuống của đồ giặt gây ra rung động và chuyển dịch không mong muốn
của vỏ máy. Để đảm bảo máy hoạt động ổn định thì đòi hỏi vỏ máy phải đứng yên
trong mọi trường hợp, nghĩa là không được có bất kì dịch chuyển nào so với sàn.
Khi xem xét tất cả những yêu cầu nói trên, có thể nhận thấy rõ các vấn đề cần
phải quan tâm, gồm: (1) lò xo, giảm chấn, vị trí khối lượng lệch tâm và các vị trí kết
nối của các thành phần trong hệ thống treo của máy giặt có ảnh hưởng rất lớn đến

- 9 -
sự rung động và ổn định của máy; (2) để có chiến lược giảm rung hiệu quả cho máy
giặt, đồng thời tránh được hiện tượng dịch chuyển của vỏ máy thì cần phải phát
triển được mô hình động lực học của máy hoàn thiện hơn với các mô hình đã có.
1.2. TỔNG QUAN CÁC CÔNG BỐ KHOA HỌC
1.2.1. Các nghiên cứu trong nước
Theo tìm hiểu, thống kê và dựa trên hiểu biết của tác giả, dường như vấn đề
nghiên cứu về rung động cũng như giảm rung động cho máy giặt chưa được các nhà
khoa học trong nước quan tâm. Đến nay, mới chỉ có nhóm các nhà khoa học tại
Trường Đại học Kỹ thuật Công nghiệp (TNUT) - Đại học Thái Nguyên thực hiện
nghiên cứu về lĩnh vực này [5]. Đề tài đã xây dựng được mô hình rung động hai bậc
tự do (2DOF) cho máy giặt, cải tiến thiết kế và thử nghiệm hệ thống giảm rung cho
máy giặt lồng ngang dân dụng.
1.2.2. Các nghiên cứu ngoài nước
Do máy giặt là sản phẩm của ngành công nghiệp nên nghiên cứu được công bố
trong lĩnh vực này không thực sự phổ biến như ở một số lĩnh vực khác (ví dụ như
gia công, tạo hình, vật liệu, …). Một phần là do các nghiên cứu nhằm cải tiến sản
phẩm máy giặt được tài trợ bởi các nhà sản xuất nên kết quả nghiên cứu được lưu
giữ như một bí mật thương mại. Tuy nhiên, với cách tiếp cận đối tượng ở các góc
độ khác nhau, một số lựa chọn cụ thể cũng đã được trình bày trong một số công bố
khoa học.
1.2.2.1. Về xây dựng mô hình động lực hệ thống treo
a) Mô hình phẳng (2D)
Trong các nghiên cứu về máy giặt đã công bố, phần lớn các nghiên cứu tập
trung vào xây dựng mô hình động lực trong không gian hai chiều (2D). C.D.
Conrad [6] đã xây dựng các mô hình cơ bản của máy giặt (cả HWM và VWM) để
xác định các ràng buộc khi thiết kế máy. Mô hình xây dựng trong cả trường hợp có
cản và không cản, hệ thống treo gắn ở phía trên và phía dưới lồng chứa (Hình 1.4).
Nghiên cứu này đã thu hút sự chú ý của các kỹ sư thiết kế tới các ràng buộc động
lực của hệ thống treo thông qua điều kiện giới hạn về độ cứng của hệ thống. Nghiên
cứu cũng chỉ ra rằng, tham số quan trọng để hệ thống treo ổn định là vị trí của các

- 10 -
thành phần trong hệ thống, tốc độ quay của máy giặt có thể cải thiện được phụ
thuộc vào thiết kế hệ thống treo. Nếu không có hệ thống treo, máy giặt chỉ có thể
đạt được tốc độ quay 200 vòng/phút trong khi máy giặt thực (có hệ thống treo) có
thể đạt tốc độ quay 1600 vòng/phút. Đồng thời, giảm tải trọng lệch tâm là cần thiết
để hiệu suất của hệ thống treo được cải thiện tại tốc độ quay lớn.
Hình 1.4. Mô hình HWM của D.C. Conrad [6]
C.D Conrad và Soedel [7] nghiên cứu các dịch chuyển của VWM và HWM
bằng cách sử dụng mô hình phẳng đơn giản một bậc tự do. Lực cản giữa máy giặt
và mặt sàn sử dụng mô hình ma sát Coulomb, xu hướng dịch chuyển của VWM và
HWM trong khi vận hành được so sánh với nhau. VWM có xu hướng dịch chuyển
trong một khu vực giới hạn trong khi HWM có xu hướng dịch chuyển không giới
hạn và được quyết định bởi hướng quay của lồng giặt. Điều này là do sự khác biệt
cơ bản trong động lực học của hai hệ thống.
Trong một nghiên cứu khác, Ahmet Yörükoğlu và Erdinç Altuğ [8] đã đề xuất
một cách tiếp cận để đánh giá vị trí và khối lượng của tải không cân bằng. Mô hình
mô phỏng của hệ thống được xây dựng và các thí nghiệm khác nhau đã được thực
hiện. Các thuật toán được đề xuất và phát triển hệ thống thử nghiệm có thể ước tính
vị trí góc của tải không cân bằng với sai số dưới 3%. Nhóm nghiên cứu cũng đề
xuất cách tiếp cận bằng sử dụng logic mờ và mạng nơron nhân tạo để có được ước
tính nhanh và chính xác vị trí và khối lượng tải không cân bằng [9].

- 11 -
Một mô hình động lực 2D của HWM để kiểm tra các đặc tính dao động của
chu trình quay và đề xuất cải thiện thiết kế hệ thống treo dựa trên kết quả tối ưu hóa
bằng thuật toán di truyền (GA) đã được thực hiện bởi Pınar Boyraz và Mutlu
Gündüz [10]. Mô hình động lực được mô phỏng số và các kết quả đã được kiểm
chứng bằng thực nghiệm. Nghiên cứu đã đóng góp một phương pháp cải tiến thiết
kế mới bằng cách ứng dụng GA để tối ưu hóa độ cứng của lò xo và hệ số cản của
thiết bị giảm chấn ma sát nhớt nhằm giảm biên độ rung động của hệ thống treo của
HWM.
Công trình của nhóm Ibtisam Mahdi Shihab [11] nghiên cứu sự rung động của
lồng giặt HWM ở các tốc độ khác nhau. Ảnh hưởng của hệ số độ cứng của lò xo, hệ
số giảm chấn và khối lượng lồng giặt với công suất giặt xác định cũng đã được khảo
sát. Nghiên cứu đạt được về mặt lý thuyết bằng cách gán giá trị tham số khác nhau
để khảo sát ảnh hưởng của các tham số đến hiệu quả cách ly rung động. Nghiên cứu
cho thấy: (1) việc lựa chọn phù hợp đồng thời hệ số độ cứng của lò xo, hệ số cản và
khối lượng lồng giặt có thể làm giảm biên độ rung động, tỉ lệ cải thiện đến 41% tại
tốc độ quay 12001400 vòng/phút và 42% tại 1000 vòng/phút; (2) biên độ và vận tố
rung động và vận tốc ở phía có hai thiết bị giảm chấn cao hơn so với bên chỉ có một
thiết bị giảm chấn. Tuy nhiên, mô hình nghiên cứu thực hiện đơn giản, chỉ xem xét
chuyển động theo phương thẳng đứng (phương x) và chưa có đánh giá xác nhận
mức độ chính xác giữa kết quả lý thuyết với kết quả thực nghiệm.
Hình 1.5. Mô hình động lực do Aldrin và cộng sự xây dựng [12]

- 12 -
Aldrin và cộng sự [12] đã đưa ra một tập hợp các biến thiết kế và các ràng
buộc cho một mô hình cơ bản của hệ thống treo máy giặt tự động kết hợp cả bộ
hấp thụ rung động thụ động và thích nghi. Sơ đồ của hệ thống chỉ ra trên Hình 1.5.
Tuy nhiên, nhóm nghiên cứu mới chỉ quan tâm đến rung động theo phương thẳng
đứng, lực đàn hồi và lực cản là các hàm tuyến tính nên mô hình nhận được là hệ
tuyến tính.
Kuo và Wang [13] tập trung vào phân tích lực ly tâm gây ra bởi đồ giặt.
Khoảng tần số mà máy giặt làm việc được tách thành năm dải khác nhau và chúng
được phân tích riêng biệt. Nghiên cứu đã thực hiện một hệ thống kiểm soát động cơ
của máy giặt, kết quả mô phỏng đã được kiểm chứng bằng thực nghiệm. Với mục
đích làm cho quy trình giặt linh hoạt hơn, các lệnh servo khác nhau được cung cấp
để có thể tạo ra chuyển động cần thiết.
Bascetta và cộng sự [14] đã sử dụng mô hình phẳng ba bậc tự do, như chỉ ra
trên Hình 1.6, để mô tả động cơ của máy giặt liên quan đến việc tạo ra mô men
xoắn. Nghiên cứu cũng đã sử dụng một bộ mã hóa để đo hướng và độ lệch của trống
máy giặt và đề xuất một hệ thống điều khiển vòng kín. Các quy trình thí nghiệm
đơn giản được sử dụng để xác định các thông số cơ học chính của máy. Với mục
đích đơn giản hóa quy trình điều khiển của máy giặt đối với kiểm soát vận tốc và dễ
dàng điều chỉnh bộ điều tốc để giảm thiểu cường độ rung, mô hình động lực xây
dựng được khai thác để phân tích hoạt động của máy ở giới hạn ổn định và đề xuất
sửa đổi trong thiết kế cơ học.
Hình 1.6. Mô hình hệ thống treo trong nghiên cứu của Bascetta [14]

- 13 -
Galal Ali Hassaan đã thực hiện một chuỗi nghiên cứu về phân tích rung động
của HWM và các kết quả đạt được trình bày trong bốn bài báo. Bài thứ nhất [15]
thiết lập mô hình động lực cho máy giặt trong không gian 2D và nghiên cứu ảnh
hưởng của các thông số khác nhau của máy giặt đến biên độ rung và vận tốc của
lồng giặt. Nghiên cứu khẳng định các thông số ảnh hưởng đến biên độ rung động
của hệ thống treo bao gồm độ cứng lò xo, hệ số cản của thiết bị giảm chấn, khối
lượng hệ thống treo và tốc độ quay của lồng giặt. Tuy nhiên, mô hình Galal Ali xây
dựng là mô hình 2D đơn giản, trong đó lực cản của thiết bị giảm chấn tỉ lệ bậc nhất với
vận tốc, góc nghiêng của lò xo và thiết bị giảm chấn là hằng số (nghiêng 45o). Mô hình
động lực nhận được là tuyến tính và kết quả nghiên cứu thuần túy về mặt lý thuyết,
chưa có kiểm chứng bằng thực nghiệm. Bài thứ hai [16] nghiên cứu lực truyền tới vỏ
máy và hiệu quả cách ly đối với hệ thống treo của HWM. Phân tích này nhằm mục
đích giảm rung và tiếng ồn gây ra bởi tải trọng mất cân bằng trong chu kỳ vắt của
máy giặt. Thông qua phân tích các tham số ảnh hưởng tới độ rung như: khối lượng
của lồng chứa, độ cứng của lò xo và hệ số thiết bị giảm chấn, có thể kiểm soát sự
thay đổi của lực truyền tới vỏ máy và hiệu quả cách ly rung động tương ứng với tốc
độ quay của máy. Hiệu quả cách ly được khảo sát ứng với tốc độ quay từ 600
vòng/phút đến 1200 vòng/phút. Nghiên cứu cho thấy thông qua việc lựa chọn đúng
các thông số máy giặt có thể tăng hiệu suất cách ly lên khoảng 96%. Bài thứ ba [17]
xác định các thông số tối ưu cho hệ thống treo bị động của HWM bằng cách sử
dụng hộp công cụ tối ưu hóa (Optimization Toolbox) trong MATLAB. Tốc độ quay
vắt được sử dụng làm biến đầu vào để giúp nhà thiết kế máy giặt ấn định giá trị
thích hợp cho các thông số độ cứng lò xo, hệ số cản và khối lượng lồng giặt với
mục đích tăng hiệu quả cách ly và giảm rung. Phương pháp này có khả năng tăng
hiệu quả cách ly lên trên 97% và giảm vận tốc rung của lồng giặt xuống dưới 14,8
mm/s. Bài thứ tư [18] đề xuất một bộ hấp thụ rung động gắn vào lồng giặt. Hệ thống
được mô hình hóa và bộ hấp thụ rung động được giả định là có khối lượng và hệ số
giảm chấn xác định. Độ cứng của thiết bị hấp thụ được điều chỉnh bằng hộp công cụ tối
ưu hóa trong MATLAB. Hiệu quả cách ly được sử dụng thông qua việc cô lập lực ly
tâm do khối lượng không cân bằng của đồ giặt gây ra trong chu trình vắt của máy giặt.

- 14 -
Phương pháp đề xuất có thể giảm tốc độ rung xuống dưới 0,7 mm/s và tăng hiệu suất
cách ly lên trên 99,7%. Tuy nhiên, các kết quả tính đưa ra trong các nghiên cứu của
Galal Ali đều dựa vào mô hình động lực xây dựng trong bài báo thứ nhất, mà mô hình
này còn nhiều hạn chế như đã chỉ ra ở trên.
b) Mô hình không gian
O.S Türkay và cộng sự [19] đã phát triển một mô hình động lực 3D với 06 bậc
tự do (DOF) cho hệ thống treo của HWM bằng cách sử dụng phương pháp Newton
– Euler, sau đó lập chương trình mô phỏng và đánh giá bằng thực nghiệm. Mô hình
mô phỏng dự báo biên độ rung động tức thời và trạng thái ổn định theo phương
thẳng đứng và phương ngang của lồng giặt với các sai số có thể chấp nhận. Các hiện
tượng gây ra sự trượt của vỏ máy đã được đánh giá bằng cách sử dụng bốn đầu dò
áp điện. Chương trình mô phỏng số được xây dựng dựa trên thuật toán Runge-Kutta
đã được xác nhận bằng thực nghiệm.
Trong nghiên cứu này, phương của các lò xo sử dụng trong hệ thống treo là
không đổi và mô hình lực cản trên các thiết bị giảm chấn là lực cản khô Coulomb.
Ở nghiên cứu [20], với mô hình động lực đã xây dựng, các tác giả đã tối ưu
hóa thiết kế của hệ thống treo HWM bằng cách sử dụng lưới và phương pháp tối ưu
hóa lập trình bậc hai tuần tự.
Hee-Tae Lim và cộng sự [21] đã tiến hành phân tích động lực học của HWM
với mục đích tập trung xem xét chuyển động tương đối giữa lồng giặt và lồng chứa
trong suốt quá trình máy hoạt động. Mô hình toán xây dựng có 6 bậc tự do (Hình
1.7), trong đó có 2DOF biểu diễn cho chuyển động quay quanh trục z, 2DOF biểu
diễn chuyển dịch theo phương y và 2DOF biểu diễn sự biến dạng của lồng giặt và
lồng chứa, được chuyển đổi sang không gian số phức. Phần mềm Matlab được sử
dụng để phân tích chuyển động. Tuy nhiên, trong nghiên cứu này mô hình xây dựng
phức tạp, không quan tâm đến phân tích giảm rung động cho máy. Kết quả nghiên
cứu cho thấy, độ biến dạng của lồng giặt và lồng chứa tỉ lệ thuận với khối lượng
lệch tâm, do vậy, nếu máy giặt HWM có độ cứng nhỏ thì sẽ bị mất ổn định khi rung
động quá lớn.

- 15 -
Hình 1.7. Mô hình động lực hệ thống treo trong nghiên cứu của
Hee-Tae Lim và cộng sự [21]
E. Papadopoulos và I. Papadimitriou [22] nghiên cứu sự dịch chuyển của
máy giặt. Trong nghiên cứu này, các tác giả thiết lập một mô hình đơn giản với một
bậc tự do để dự đoán hành vi dịch chuyển của HWM. Nghiên cứu cho thấy tốc độ
quay của máy là yếu tố ảnh hưởng quan trọng đến sự dịch chuyển ngang. Thêm vào
đó, nhóm tác giả đã đưa ra hai phương pháp kiểm soát sự ổn định của máy: (i) dựa
trên thiết kế với mục đích tăng lực theo phương thẳng đứng để làm giảm sự bất ổn
định theo phương ngang; (2) dựa trên điều khiển loại bỏ tính không ổn định khi kết
hợp với cân bằng động, cách này sử dụng cảm biến, một bộ vi điều khiển và động
cơ bước để giảm thiểu rung động.
Thomas Nygårds và Viktor Berbyuk [23] cũng đưa ra một mô hình động lực
của HWM (Hình 1.8). Mô hình này đã được xây dựng bằng cách sử dụng một
phương pháp thực nghiệm - lý thuyết bao gồm tích hợp hệ thống nhiều vật. Xây
dựng mô hình và các tính toán được thực hiện bằng phần mềm thương mại
Adams/View từ MSC.Software.
Công trình này trình bày một số kết quả nghiên cứu số về rung động của máy giặt
với mô hình ma sát khô Coulomb. Nhóm nghiên cứu đã tìm ra phương trình chuyển
động 3D tích hợp thời gian và có so sánh kết quả với thí nghiệm và mô hình FEM. Để
giảm thiểu rung động không mong muốn, nhóm tác giả đã sử dụng vành cân bằng. Trong
một nghiên cứu khác [24], nhóm đã phân tích bài toán ổn định của mô hình động và sử
dụng tối ưu hóa Pareto để tối ưu hóa các thông số của hệ thống treo.
y
x z
O
O
O
t
P
y, Y
z, Z z
y
s
d
Y
X Z

- 16 -
Hình 1.8. Mô hình động lực do Thomas Nygårds và cộng sự xây dựng [23]
T. Argentini và cộng sự [25] phát triển một mô hình số của HWM với 6DOF
để có thể dự đoán tính chất động lực của máy trong chu kỳ quay ở trạng thái ổn
định, nghiên cứu chú trọng vào các rung động của vỏ máy. Mô hình hoàn chỉnh có
được từ một mô hình nhiều vật được tuyến tính hóa các tham số dưới tác động của
khối lượng không cân bằng, đối tượng quan tâm trong mô hình là lồng giặt và mô
hình phần tử hữu hạn cho cấu trúc của vỏ máy. Lồng giặt và vỏ máy được kết nối
bằng hệ thống treo gồm ba lò xo và hai thiết bị giảm chấn ma sát khô.
F. Wagner [26] xem xét mô hình cơ học của máy giặt là một hệ thống nhiều
vật đàn hồi. Theo tính chất phức tạp của các bộ phận máy, các kết quả phân tích
dạng riêng được sử dụng để miêu tả ứng xử đàn hồi. Một thủ thuật mở rộng phương
pháp phân chia Ritz kết hợp với các số hạng được thêm vào trong các phương trình
chuyển động từ các phần tử vỏ và dầm được sử dụng. Mô hình xây dựng biểu diễn
thuần túy về mặt lý thuyết chưa được kiểm chứng bằng các kết quả thực nghiệm.
Buśkiewicz và cộng sự [27] [28] xây dựng mô hình động lực 3D của HWM
với 04 DOF (bỏ qua chuyển động rung lắc theo trục quay và chuyển động dọc theo
trục lồng giặt) bằng cách sử dụng phương trình Lagrange loại hai, kết quả thu được
trong miền thời gian. Nghiên cứu tập trung vào quỹ đạo chuyển động tại các tần số
khác nhau và đề xuất giảm chấn nhớt cho hệ thống treo để làm giảm lực truyền đến
vỏ máy ở tần số cao. Tuy nhiên, nhóm tác giả mới nghiên cứu thuần túy về mặt lý
thuyết, chưa có sự kiểm chứng bằng thực nghiệm.
Đối trọng
Lồng chứa
Lồng giặt
Giá đỡ
Động cơ
Chân máy
Đệm lót cao su
Phần tử giảm chấn
ma sát
Đệm lót cao su
Lò xo xoắn

- 17 -
Như vậy, qua các nghiên cứu về xây dựng mô hình toán nhận thấy: Hầu hết
các nghiên cứu đều xây dựng mô hình mô phỏng động lực học máy giặt ở dạng hai
chiều (mô hình phẳng, 2D). Các mô hình phẳng chỉ quan tâm đến chuyển dịch theo
hai phương x,y, không quan tâm đến chuyển động rung lắc quanh trục quay. Quan
hệ lực – vận tốc trong các thiết bị giảm chấn được mô hình hóa ở dạng quan hệ
tuyến tính. Đối với mô hình không gian, số các nghiên cứu xây dựng mô hình ba
chiều vẫn còn nhiều hạn chế. Điều này có thể có nguyên nhân là do máy giặt là một
hệ thống động lực học phức tạp. Hầu hết, các công trình đã công bố đều có xu
hướng giản lược bớt các thành phần, đặc biệt, các nghiên cứu chỉ xem xét các giảm
chấn với lực cản hằng số hoặc tỉ lệ bậc nhất đối với vận tốc để mô hình nhận được
là tuyến tính, chưa có bất kì mô hình nào mô tả quan hệ phi tuyến cho lực đàn hồi
và lực cản để phân tích động lực học cũng như tính toán rung động của hệ thống
HWM.
1.2.2.2.Về cách thức kiểm soát rung động
Dựa trên các công bố khoa học, các bằng sáng chế về kiểm soát rung động của
máy giặt, có thể phân loại thành hai cách tiếp cận chính: kiểm soát cân bằng lồng
chứa (sử dụng thiết bị tự cân bằng) và kiểm soát hệ thống treo.
a. Kiểm soát cân bằng lồng chứa
Năm 1916, Maurice Leblanc [29] lần đầu tiên giới thiệu một thiết bị cân bằng
động lực cho động cơ tuabin, bao gồm một khoang hình vành khuyên chứa đầy thủy
ngân hoặc chất lỏng có tỉ trọng lớn. Ở tốc độ quay xác định, khối chất lỏng di
chuyển tạo ra một vị trí cân bằng mới, tại đó khối tâm của chúng đối diện với khối
tâm của bánh đà, tức là trục hình học và trục quán tính trùng nhau. Tuy nhiên, loại
thiết bị này đã không nhận được nhiều sự chú ý. Năm 1940, trong một sáng chế,
Dyer [30] đã sử dụng một vành cân bằng chứa nước muối và lắp vào máy giặt trục
đứng ở phía cuối lồng chứa. Thiết bị cân bằng chất lỏng này có tác dụng khử đi
những ảnh hưởng không mong muốn do khối lượng lệch tâm gây ra bởi đồ giặt.
Thiết bị gồm một vành tròn rỗng bên trong có chứa một phần chất lỏng. Khi lồng
giặt quay với vận tốc góc , chất lỏng sẽ tạo thành một lớp mỏng trên bề mặt phía
trong của thành vành ngoài. Lồng giặt có vận tốc góc tới hạn cr. Khi lồng giặt quay
chậm hơn vận tốc góc tới hạn ( ≤ cr), khối tâm của chất lỏng sẽ có vị trí ở cùng
phía với khối lượng lệch tâm, như chỉ ra ở phần bên trái của Hình 1.9. Khi vận tốc

- 18 -
góc lớn hơn vận tốc tới hạn ( > cr), khối tâm của chất lỏng sẽ dịch chuyển về phía
đối diện với khối lượng không cân bằng, vì vậy sẽ làm giảm lực li tâm và giảm biên
độ lắc của lồng giặt.
Hình 1.9. Nguyên lý làm việc của thiết bị cân bằng chất lỏng [30]
Trong [6], Conrad đã đóng góp một cải tiến cho thiết bị cân bằng chất lỏng đó
là một hình khuyên cân bằng với nhiều khoang là các đường tròn đồng tâm để tăng
khả năng cân bằng của chất lỏng. S.Bae và cộng sự [31] phát triển một mô hình toán
học cho thiết bị cân bằng chất lỏng ở điều kiện trạng thái ổn định có được từ một
mô hình động lực của máy giặt trục đứng, với mục đích thực hiện phân tích động
lực học của máy giặt tự động trong chế độ quay vắt. Các lực ly tâm tác động lên
thiết bị cân bằng chất lỏng phụ thuộc vào khoảng cách lệch tâm của khối tâm chất
lỏng trong vành cân bằng. Kết quả mô phỏng được so sánh với kết quả thực
nghiệm. Từ đánh giá các tham số, nghiên cứu đề xuất phương án giảm rung, cụ thể:
tăng khối lượng, giảm tỷ lệ thể tích, và tăng bán kính bên trong của thiết bị cân bằng
chất lỏng; hiệu quả giảm rung của thiết bị cân bằng chất lỏng có thể được cải thiện
khi sử dụng chất lỏng có tỉ trọng lớn.
Sử dụng thiết bị cân bằng chất lỏng tự động trong các máy quay để khử đi
những ảnh hưởng không mong muốn của khối lượng không cân bằng đã trở thành
một tính năng được sử dụng trong hầu hết trong máy móc công nghiệp. M. A.
Langthjem và T. Nakamur [32] đề xuất một mô hình động lực học thiết bị cân bằng
dựa trên mô hình rotor hai bậc tự do chứa một lượng nhỏ chất lỏng. Lớp chất lỏng
mỏng tạo ra ở thành bên trong khi máy quay được miêu tả theo lý thuyết sóng và
được mô tả bởi phương trình Korteweg-de Vries-Burgers. Việc giải gần đúng
phương trình này đã làm sáng tỏ hơn về ứng xử động lực của vành cân bằng chất
lỏng. Trong nghiên cứu [33], Seok-Ho Son và cộng sự đã xác định kích thước tối ưu
của lượng nước muối cho một thiết bị cân bằng chất lỏng tự động để giảm thiểu độ

- 19 -
dịch chuyển lớn nhất của chu kỳ quay tại tốc độ thấp trong khi đáp ứng hạn chế thiết
kế về độ dịch chuyển lớn nhất của chu kỳ quay tại tốc độ cao. Để tối ưu hóa thiết kế,
mô hình gần đúng của chuyển vị tối đa được tạo ra bằng cách sử dụng các mô hình
hồi quy dựa trên dữ liệu thực nghiệm tại các điểm thiết kế. Sau đó, một thuật toán tối
ưu hóa đã được áp dụng cho các mô hình hồi quy để có được giải pháp tối ưu. Sử
dụng phương pháp thiết kế được đề xuất, giá trị tối ưu của dịch chuyển lớn nhất của
tốc độ thấp của chu kỳ vắt đã giảm 13,1% so với giá trị ban đầu, đồng thời đáp ứng
giới hạn thiết kế ở mức dịch chuyển tối đa của một chu kỳ quay tốc độ cao.
Năm 2011, Leonardo Urbiola Soto [34] thực hiện nghiên cứu lý thuyết kết hợp
với thực nghiệm về sự tương tác của chất lỏng-rắn giữa màng ngăn và chất lỏng chứa
trong các hốc của vành cân bằng; giải thích khả năng ổn định cao của thiết bị cân bằng
LeBlanc; phát triển một mô hình động lực học của sự tương tác chất lỏng-rắn và sử dụng
nó để thiết kế lại vành cân bằng cho máy giặt lồng đứng.
Hình 1.10. Mô hình máy giặt và khoang chất lỏng cân bằng
của Leonardo Urbiola Soto [34]
Tatsumi, Michiaki [35], năm 1984, đã sáng chế một VWM với một thiết bị
cân bằng chứa các viên bi gắn vào mặt trên của lồng giặt. Thiết bị này nhằm mục
đích để xác định mặt phẳng cân bằng cho một động cơ mất cân bằng tĩnh. Tương tự
như ứng xử của chất lỏng trong vành cân bằng chất lỏng, các viên bi tìm sự cân bằng
tại vị trí đối diện với khối lượng lệch tâm khi động cơ có vận tốc góc lớn hơn vận tốc
góc tới hạn. Chất lỏng có độ nhớt cao, thường là dầu bôi trơn, được sử dụng để cản
và giảm tiếng ồn phát ra khi các viên bi di chuyển. Nghiên cứu cũng sáng tạo ra một
Tải lớn
Tải nhỏ
Vành chất
lỏng
Tải lệch tâm
Ít chất lỏng Nhiều chất
lỏng

- 20 -
cơ hệ để điều khiển viên bi chuyển động ngẫu nhiên trong chế độ chuyển tiếp khi
máy khởi động.
Đối với HWM, Jin-Soo Kim [36] là người đầu tiên đưa ra ý tưởng sử dụng
một cặp vành cân bằng có chứa các viên bi trong một công bố sáng chế vào năm
1997.
T.C. Chan và cộng sự [37] nghiên cứu các tác động lên vị trí viên bi của bộ
cân bằng tự động được lắp đặt trong hệ thống rotor của hệ thống treo phi tuyến
(Hình 1.11). Sau khi thiết kế mức độ phi tuyến, các viên bi của vành cân bằng nằm
ở các vị trí cần thiết để giảm các rung động dự kiến. Mô phỏng số đã được thực hiện
để minh họa kết quả của mô hình lý thuyết.
Hình 1.11. Mô hình của T.C. Chan [37]
Hai-Wei Chen và cộng sự [38][39] cũng đưa ra một mô hình động lực của
HWM chứa vành cân bằng với một viên bi. Hệ phương trình chủ đạo được thiết lập
bằng cách sử dụng phương trình Lagrange loại 2. Nhân tử Floquet được sử dụng để
đánh giá tính ổn định của hệ thống, các vùng ổn định và không ổn định trên 4 Hz
được phát hiện.
Nhóm nghiên cứu của Min Gyu Jo [40] trình bày một phương pháp cải tiến
cho cả việc giảm sự mất cân bằng và thiết lập lại sự cân bằng cho một HWM bằng
sử dụng bộ cân bằng robot. Khi phát hiện chính xác khối lượng và vị trí không cân
bằng (unbalance force-UBF) gây ra do nước hoặc đồ giặt, các bộ cân bằng tự động
(unbalance robot – UBR) di chuyển tiến và lùi theo hướng ngược lại của vị trí mất
cân bằng được phát hiện (Hình 1.12). Kết quả nghiên cứu này cho thấy, rung động

- 21 -
của máy giặt ở tất cả các chế độ làm việc đã giảm đáng kể và thời gian cần thiết đạt
được trạng thái ổn định của lồng giặt cũng được giảm thiểu một cách rõ rệt.
Hình 1.12. Dịch chuyển của robot trong thiết bị cân bằng của Min Gyu Jo [40]
a) Kiểm soát hệ thống treo
Hệ thống treo là một thành phần quan trọng của máy giặt bao gồm lò xo, thiết
bị giảm chấn và khớp liên kết nối với lồng chứa và khung vỏ máy. Chức năng chính
của hệ thống treo là kiểm soát biên độ rung động, dập tắt rung động tự do, khử cộng
hưởng để tăng độ êm dịu, giảm lực truyền tới vỏ máy khi máy giặt làm việc. Do vậy,
tác động vào hệ thống treo cũng là một cách tiếp cận để giảm rung động cho máy
giặt. Thống kê từ các công bố khoa học, hệ thống treo sử dụng cho máy giặt bao
gồm: hệ thống treo bán chủ động và thụ động.
Hệ thống treo bán chủ động sử dụng một thiết bị giảm chấn có một hoặc nhiều
thành phần có thể thay đổi được. Ví dụ như thiết bị giảm chấn nhớt trong đó hệ số
cản nhớt có thể thay đổi bằng cách thay đổi đường kính của van tiết lưu, hoặc thiết bị
giảm chấn từ tính – lưu biến (magneto-rheological damper – thiết bị giảm chấn MR).
Sự thay đổi trong thiết bị giảm chấn được thực hiện bằng việc thay đổi áp suất, khi
áp suất tăng lên bởi từ trường, lực cản gây ra bởi thiết bị giảm chấn có thể tăng. Việc
điều khiển này thông qua điều khiển cường độ trường điện từ, tương tự trường hợp
điều khiển động cơ điện tuyến tính.
Nguyen và cộng sự [41] đã đề xuất và thiết kế tối ưu một thiết bị giảm chấn
MR để làm giảm độ rung do khối lượng lệch tâm gây ra cho một HWM, sơ đồ và
các thành phần của thiết bị chỉ ra trên Hình 1.13. Các kết quả thiết kế đã được kiểm
chứng bằng thực nghiệm.
Cân bằng

- 22 -
Hình 1.13. Kết cấu giảm chấn MR [41]
Cũng với mục đích kiểm soát rung động và tối ưu hóa thiết kế, nhóm tác giả
trong nghiên cứu [42] đã mô hình hóa đối tượng dựa trên nguyên mẫu là máy giặt
LG F1402FDS được sản xuất bởi LG Electronics. Trong đó, lồng giặt được liên kết
với vỏ máy nhờ hai lò xo có độ cứng không đổi và hai giảm chấn thủy lực. Mô hình
chuyển động hai chiều được thiết lập. Nghiên cứu tập trung vào việc thiết kế tối ưu
chế độ dòng chảy trong thiết bị giảm chấn MR để nhận được kích thước hình học
tối ưu.
Yalçın và Erol [43] sử dụng mô hình động lực tuyến tính hai chiều và tập
trung vào bốn điểm tiếp xúc của HWM với mặt đất. Để ngăn chặn hành vi dịch
chuyển của máy giặt, phương pháp kiểm soát dựa trên việc điều chỉnh các giá trị lực
tối đa được tạo ra bởi các phần tử treo bán chủ động. Trước khi các tín hiệu truyền
động được nhận bởi các động cơ bước của thiết bị giảm chấn ma sát, dữ liệu rung được
đánh giá, và sau đó, các động cơ bước bắt đầu thu hẹp hoặc mở rộng bán kính của vòng
đeo nằm trên thiết bị giảm chấn. Điều này làm thay đổi tính chất cản của bộ thiết bị
giảm chấn trong hệ thống treo, và do đó, hệ thống treo bán chủ động sẽ hấp thụ các
rung động không mong muốn và góp phần vào sự ổn định động của máy giặt. Các
nghiên cứu [44]–[52] tiếp tục đề cập kiểm soát rung động cho máy giặt bằng cách sử
dụng các thiết bị giảm chấn loại MR để làm giảm biên độ rung cho máy.
Trục pit-tông
Pit-tông trong
Pit-tông ngoài
Vỏ thiết bị
Cuộn cảm Nam châm
Dòng chất lỏng
MR Dẫn hướng pit-tông
Pit-tông lên xuống
Khoang khí
chất lỏng MR

- 23 -
Trong suốt quá trình quay, máy giặt thường trải qua hiện tượng cộng hưởng
đầu tiên tại tần số khá thấp, khoảng 100 vòng/phút đến 200 vòng/phút. Ở tốc độ quay
cao hơn 1000 vòng/phút, khung và vỏ máy có thể trải qua cộng hưởng gây ra tiếng
ồn và rung động truyền xuống sàn. Nếu một giảm chấn bị động được dùng để giảm
rung động của lồng giặt tại tần số thấp, nó sẽ gây ra rung lắc cho máy giặt ở tần số
cao dữ dội hơn, nguyên nhân do nhiều lực kích thích từ lồng giặt sẽ được truyền tới
khung qua giảm chấn thụ động. Do vậy, để giảm rung động của máy giặt ở tần số
thấp trong khi sự rung động của máy giặt ở tần số cao không bị ảnh hưởng đáng kể,
một hệ thống treo bán chủ động được đề xuất sử dụng là phù hợp. Tuy nhiên, hệ
thống treo này khá phức tạp, mô hình xây dựng không ổn định về mặt toán học, chi
phí điều khiển cho hệ thống cao. Chính những điều này gây khó khăn nhất định
trong việc ứng dụng kết quả nghiên cứu vào thực tế.
Đối với hệ thống treo thụ động, các ứng xử động lực của hệ thống treo bị động
được xác định bởi hệ số độ cứng của lò xo, hệ số cản của giảm chấn, vị trí khối
lượng lệch tâm và các vị trí kết nối của các thành phần trong máy giặt. Các thành
phần này có tác động rất lớn đến sự rung động và ổn định của máy giặt trong quá
trình hoạt động. Các máy giặt trên thị trường và trong các nghiên cứu [8]–[11] [15]–
[23] [25] [27] cũng sử dụng hệ thống treo này. Tìm ra mối quan hệ giữa các đại
lượng ảnh hưởng đến rung động của hệ thống treo cũng như dịch chuyển ngang của
vỏ máy sẽ giúp đề xuất phương án giảm rung và điều kiện hoạt động ổn định cho
máy. Để làm được điều này thì yêu cầu phải xây dựng được mô hình động lực của
hệ thống treo HWM.
Sử dụng hệ thống treo bị động, một số nghiên cứu đi theo hướng ứng dụng các
phần mềm chuyên dụng để phân tích động lực học kết cấu vì giảm được các bước
tính toán từ môi trường CAD đến phân tích, tính toán động lực học. Nghiên cứu
[53] sử dụng phần mềm chuyên dụng MSC.ADAMS để phân tích động lực học của
HWM. Trong [54], một mô hình nguyên mẫu ảo của HWM được xây dựng với
phần mềm CAD và CAM, từ đây một chuỗi các thí nghiệm được thiết kế để đạt
được các đặc tính động lực của các thiết bị thiết bị giảm chấn. Nhóm của Mehmet
Sait Özer [55] phát triển một công cụ phân tích số để thiết kế và phân tích mặt trước

- 24 -
của một máy giặt bằng cách sử dụng ANSYS Workbench. Nghiên cứu [56] xây
dựng mô hình phần tử hữu hạn của máy giặt trong ABAQUS 6.9-2.
Qua các nghiên cứu về cách thức kiểm soát rung động nhận thấy: Với cách
tiếp cận thứ nhất là dựa vào điều khiển cân bằng của lồng giặt để khử đi nguồn gây
rung động, một dạng cân bằng động lực đã được sử dụng để tự cân bằng cho lồng
giặt: sử dụng thiết bị cân bằng dùng nước muối, và các viên bi thép. Nước muối và
các viên bi trong bộ phận cân bằng sẽ tự chuyển động về phía ngược với khối lượng
mất cân bằng khi tốc độ quay của lồng giặt cao hơn tốc độ giới hạn. Nhờ vậy, rung
động của máy giặt có thể được giảm đáng kể bằng cách sử dụng một thiết bị tự cân
bằng động lực. Tuy nhiên, cấu trúc thiết bị phức tạp, chi phí sản xuất và bảo trì cao
là một trở ngại lớn để cách tiếp cận này được ứng dụng rộng rãi. Các kết quả nghiên
cứu nhận được hầu hết đều dựa vào nghiên cứu thực nghiệm, chỉ phù hợp với một
khoảng tốc độ nhất định, chịu một tải trọng nhất định. Thiết bị cân bằng này phù
hợp với máy giặt lồng đứng. Cách tiếp cận thứ hai là dựa vào kiểm soát hệ thống
treo. Hệ thống treo bán chủ động có thể điều chỉnh hệ số giảm chấn nên cho phép
máy giặt hoạt động êm dịu hơn so với hệ thống treo bị động. Tuy nhiên, chi phí cho
hệ thống điều khiển là khá cao - chính điều này gây ra khó khăn đối với việc ứng
dụng kết quả nghiên cứu vào thực tế. Hệ thống treo bị động không tự động thay đổi
hoặc tối ưu hóa đặc tính của lò xo hoặc giảm chấn để chống lại sự thay đổi của môi
trường. Các hệ số độ cứng của lò xo, hệ số cản của giảm chấn là các hằng số nên
không đủ tốt cho việc hấp thụ năng lượng gây ra do khối lượng không cân bằng, hệ
thống chỉ có hiệu quả trong một dãy hẹp các thông số đầu vào. Ưu điểm nổi bật của
hệ thống treo bị động chính là chi phí sản xuất và bảo trì thấp nên hệ thống này
được sử dụng hầu hết trong hệ thống giảm rung động của máy giặt hiện nay.
1.3. KẾT LUẬN CHƯƠNG 1
Các kết quả nghiên cứu đạt được từ các công trình đã công bố
Qua kết quả phân tích tổng quan về hướng mô hình hóa, có thể thấy mỗi công
trình công bố có một cách thức tiếp cận khác nhau. Các mô hình được xây dựng chủ
yếu mô tả rung động của nhóm rung lắc (gồm lồng chứa và lồng giặt), rung động
của vỏ máy, chuyển động tương đối của lồng giặt và lồng chứa, …Với các mô hình

- 25 -
2D, các nghiên cứu chỉ quan tâm đến dịch chuyển theo một hoặc hai phương của hệ
lồng giặt, không quan tâm đến chuyển động lắc của lồng. Đối với mô hình 3D, hệ
thống đã giản lược những thành phần phức tạp để mô hình toán nhận được tuyến
tính từ đó phân tích giảm rung cho HWM. Một số mô hình không gian của HWM
mới dừng ở nghiên cứu lý thuyết, chưa có sự kiểm chứng bằng thực nghiệm. Đề tài
sẽ thực hiện các nghiên cứu thực nghiệm trên đối tượng thực nhằm đóng góp thêm
cho lĩnh lực nghiên cứu.
Qua khảo sát tổng quan về cách thức kiểm soát rung động, có thể nhận thấy
sử dụng hệ thống treo bán chủ động cho hiệu quả rõ rệt trong việc giảm rung động
cho máy giặt. Tuy nhiên, do tích hợp điều khiển nên cơ cấu phức tạp, chi phí sản
xuất và bảo trì lớn cho nên hệ thống treo bị động vẫn được sử dụng chủ yếu. Vì vậy,
việc cải tiến hệ thống treo bị động, đề xuất phương án tăng hiệu quả giảm rung cho
hệ thống treo này trong các HWM có ý nghĩa thực tiễn và là hướng nghiên cứu của
đề tài.
Các vấn đề cần tiếp tục nghiên cứu
Sau khi nghiên cứu các kết quả đã công bố về hệ thống treo của máy giặt lồng
ngang có thể kết luận rằng các yếu tố tiềm năng ảnh hưởng đến đặc tính rung động
của hệ thống treo trong máy giặt gồm: (i) đáp ứng của các thành phần lò xo và thiết
bị giảm chấn; (ii) thông số hình học của các thành phần trong hệ thống gồm: mối
tương quan về vị trí kết nối (phương) của lò xo, giảm chấn, kích thức của lồng
giặt/lồng chứa,…mà việc nghiên cứu ảnh hưởng tổng thể của các yếu tố (thông số)
này chưa được thực hiện ở các công bố trước đó. Chính vì vậy, vấn đề đặt ra cho
nghiên cứu là xây dựng được mô hình toán phù hợp để có thể khảo sát ảnh hưởng
của các yếu tố này đến rung động của hệ thống treo.
Nhiệm vụ của luận án
Từ những phân tích ở trên, nghiên cứu được đề xuất định hướng nghiên cứu
nhằm giải quyết những vấn đề chính yếu sau:
1- Xây dựng mô hình rung động tổng quát sáu bậc tự do (3D) cho hệ thống
treo máy giặt, trong đó kể đến yếu tố phi tuyến về mặt hình học của hệ treo, yếu tố
phi tuyến của các thành phần lò xo và giảm chấn.

- 26 -
2- Xây dựng các mô hình thiết bị thí nghiệm nhằm xác định đặc tính thực tế
(phi tuyến) của các thành phần trong hệ thống treo và kiểm chứng, đánh giá độ tin
cậy của mô hình toán.
Để thực hiện được mục tiêu nghiên cứu đặt ra, tiến trình nghiên cứu được cụ
thể hóa thành các bước thực hiện sau:
• Xây dựng một mô hình toán cho hệ thống treo vật quay phỏng theo kết cấu
treo của máy giặt lồng ngang điển hình.
• Xây dựng chương trình mô phỏng để biểu diễn các yếu tố đầu vào - đầu ra
của mô hình toán.
• Lời giải số được xác định dựa trên các thông số đầu vào thực tế của máy,
bao gồm đặc tính kỹ thuật của từng bộ phận của hệ thống treo như độ cứng của lò
xo, hệ số cản của giảm chấn, mômen quán tính, ... của mẫu máy giặt lồng ngang phổ
thông LG. Tất cả các đại lượng này đều được xác định từ hệ thống đo thực nghiệm
được thiết lập riêng cho nghiên cứu.
• Kiểm chứng kết quả mô phỏng bằng cách đối chứng trực tiếp với kết quả
thực nghiệm. Các kết quả thu nhận được là cơ sở tham chiếu để đánh giá mô hình
toán xây dựng về độ tin cậy và phạm vi ứng dụng .
• Lựa chọn mô hình động lực phù hợp.
• Từ mô hình đã lựa chọn, tiến hành đánh giá ảnh hưởng của các tham số để
tìm kiếm giải pháp giảm rung cho máy giặt.

- 27 -
CHƯƠNG 2
XÂY DỰNG MÔ HÌNH ĐỘNG LỰC CHO HỆ THỐNG TREO
MÁY GIẶT LỒNG NGANG
Nội dung chương này, nghiên cứu tập trung vào xây dựng mô hình động lực
của hệ thống treo máy giặt lồng ngang trong không gian hai chiều và ba chiều từ hệ
thống thực dựa trên lý thuyết động lực học hệ nhiều vật. Đặc tính của các thành
phần hệ thống treo được xác định từ thực nghiệm. Từ hệ phương trình vi phân phi
tuyến chủ đạo của hệ thống, một chương trình tính được xây dựng trong môi trường
Matlab/Simulink để xác định chuyển dịch, góc lắc và các phản lực động lực.
2.1. CƠ SỞ LÝ THUYẾT
2.1.1. Động lực học hệ nhiều vật
2.1.1.1. Xác định vị trí của vật rắn trong không gian
Theo lý thuyết động lực học hệ nhiều vật [57], để mô tả chuyển động của vật
rắn (B) đối với hệ quy chiếu cố định {O0x0y0z0}, tại điểm O bất kì thuộc vật thêm
vào hai hệ quy chiếu: hệ {Ox1y1z1} có các trục tọa độ tương ứng luôn song song với
các trục của hệ {O0x0y0z0} và hệ {Oxyz}gắn chặt vào vật và quay cùng vật. Khi đó,
vị trí của vật rắn (B) trong hệ quy chiếu cố định được xác định bởi: vị trí của điểm
O và vị trí của hệ quy chiếu {Oxyz} đối với hệ quy chiếu {Ox1y1z1 }.
Hình 2.1. Vật rắn trong không gian
Trong hệ quy chiếu {O0x0y0z0}, vị trí của điểm O được xác định bởi vec-tơ rO
(0) (0) (0)
O x y zx y z= + +r e e e (2.1)
x0
y0
z0
O
x
y
z
Z0
Z0
Z0
Z0
P
Z0
x1
z1
y1
(B)
O0

- 28 -
trong đó x, y, z là các tọa độ của điểm O, còn (0) (0) (0), ,x y ze e e là các vec-tơ đơn vị của các
trục tọa độ hệ cố định. Có thể viết (2.1) dưới dạng vec-tơ đại số
, ,T
O x y z=r (2.2)
Để xác định hướng của vật rắn, tức là vị trí của vật quay quanh điểm O, ba
vec-tơ đơn vị , ,x y ze e e của hệ tọa độ động {Oxyz} (hệ gắn chặt vào vật ) được xác
định đối với hệ tọa độ {Ox1y1z1}.
(0) (0) (0)
11 21 31x x y za a a= + +e e e e
(0) (0) (0)
12 22 32y x y za a a= + +e e e e (2.3)
(0) (0) (0)
13 23 33z x y za a a= + +e e e e
trong đó, 1 2 3, , ( 1,2,3)i i ia a a i = là các thành phần hình chiếu của vec-tơ đơn vị
, 1, 2,3i i =e của hệ {Oxyz} lên các trục của hệ {Ox1y1z1}.
Khi đó, ma trận vuông cấp ba
(0) (0)
ij . os( , ) , ( , 1,2,3)C i j i ja c i j = = = = A e e e e (2.4)
được gọi là ma trận cosin chỉ hướng. Ma trận AC là ma trận trực giao nên 1 T
C CA A− =
Các tọa độ suy rộng thường được sử dụng để xác định các vị trí của vật rắn
quay quanh một điểm cố định là các góc Euler, các góc Cardan, …
Để xác định ma trận cosin chỉ hướng từ các góc Cardan, quay hệ quy chiếu
{Ox1y1z1}sang hệ quy chiếu động {Oxyz} bằng ba phép quay Cardan lần lượt theo
thứ tự quanh các trục x,y,z với các góc quay α, , . Các ma trận quay tương ứng
với phép quay Cardan có dạng
1 0 0
( ) 0 cos sin
0 sin cos
x
= −
A
cos 0 sin
( ) 0 1 0
sin 0 cos
y
= −
A
cos sin 0
( ) sin cos 0
0 0 1
z
−
=
A
Ma trận quay Cardan từ hệ quy chiếu {Ox1y1z1 }sang hệ quy chiếu động Oxyz là
( ) ( ) ( )C x y z =A A A A
tức là,
- 29 -
cos cos os sin sin
cos sin sin sin cos cos cos sin sin sin sin cos
sin sin cos sin cos sin cos cos sin sin cos cos
C
c
−
= + − − − +
A (2.5)
Đối với các bài toán dao động, các góc Cardan thường được sử dụng bởi vì khi
phép quay của vật rắn là đủ nhỏ, các góc α, , là nhỏ. Ta có thể xấp xỉ:
sin ,cos 1,sin ,cos 1,sin ,cos 1 .
Do vậy, ma trận cosin chỉ hướng (3.5) có thể thay thế gần đúng bằng ma trận:
1
1
1
C
−
= − = + −
A E φ (2.6)
trong đó E là ma trận đơn vị, [ , , ]T = ,
0
0
0
−
= − −
φ
2.1.1.2. Xác định vận tốc góc của vật rắn
Vận tốc góc của vật rắn là một trong các đặc trưng động học cơ bản nhất của
vật rắn, là sự thay đổi hướng của vật rắn theo thời gian.
Xét vật rắn (B) chuyển động quay đối với hệ quy chiếu cố định, tức là hệ quy
chiếu {Oxyz} chuyển động đối với hệ quy chiếu {Ox1y1z1}. Gọi ω vec-tơ vận tốc
góc của vật rắn trong hệ tọa độ cố định. Khi sử dụng các góc Cardan α, , để xác
định vị trí của vật rắn quay quanh một điểm cố định, theo nguyên lý cộng vận tốc
[57], suy ra:
= + +ω ω ω ω (2.7)
Chiếu (2.7) lên các trục tọa độ của hệ quy chiếu cố định, nhận được:
(0)
(0)
(0)
1 0 sin 1 0
0 cos sin cos 0 1
0 sin cos cos 0 1
x
y
z
+
= − − = − +
(2.8)
Chiếu (2.7) lên các trục tọa độ của hệ quy chiếu động Oxyz, nhận được:
cos cos sin 0 1 0
sin cos cos 0 1 0
sin 0 1 0 1
x
y
z
+
= − − = − +
(2.9)

- 30 -
2.1.1.3. Xác định vị trí, vận tốc, gia tốc của một điểm bất kì thuộc vật
Lấy điểm P bất kì thuộc vật rắn (B), vị trí của điểm P đối với điểm O được xác
định bằng vec-tơ uP. Nếu kí hiệu tọa độ của điểm P trong hệ {O0x0y0z0} là
(0) (0) (0), ,P P Px y z , trong hệ {Ox1y1z1} là (1) (1) (1), ,P P Px y z và trong hệ động {Oxyz} là * * *, ,P P Px y z ,
( * * *, ,P P Px y z là các hằng số). Viết dưới dạng vec-tơ đại số
(1) (1) (1) (1), ,T
P P P Px y z = u * * * *, ,T
P P P Px y z = u
Giữa hai vec-tơ này có mối quan hệ
(1) * * 1 (1) (1)T
P C P P C P C P
−= = =u A u u A u A u (2.10)
Từ hình 2.1, vị trí của điểm P trong hệ tọa độ cố định {O0x0y0z0}được xác
định:
0 0O P O O OP= + tức là P O P= +r r u (2.11)
Tọa độ điểm P nhận được:
(0) *
(0) *
(0) *
P P
P C P
P P
x x x
y y y
z z z
= +
A (2.12)
Đạo hàm theo thời gian biểu thức (2.11) trong hệ quy chiếu cố định nhận được
vận tốc của điểm P:
P O P= +v v u (2.13)
Vì uP là vec-tơ có độ lớn không đổi nên theo định lý Euler [57]
PP
d
dt=
uω u
Do vậy, biểu thức (2.13) được viết lại
P O P= + v v ω u (2.14)
Chiếu phương trình vec-tơ (2.14) lên hệ cố định
(0) (0) (0) (1)
P O P= +v v ω u
với

- 31 -
(0) (0)
(0) (0) (0)
(0) (0)
0
0
0
z y
z x
y x
−
= − −
ω
trong đó (0) (0) (0), ,x y z xác định theo (2.8).
Do (1) *
P C P=u A u nên biểu thức được viết lại
(0) (0) (0) *
P O C P= +v v ω A u (2.14’)
Tương tự, đạo hàm (2.14) theo thời gian để có được gia tốc của điểm P:
( )P O P P O P P= + + = + + a a ω u ω u a ω u ω ω u (2.15)
Chiếu phương trình vec-tơ (2.15) lên các trục của hệ tọa độ cố định để có được
các thành phần gia tốc:
(0) (0) (0) (0) (0) (1) (0) (0) (0) (0) *( ) ( )P O P O C P= + + = + +a a α ω ω u a α ω ω A u (2.15’)
với (0) (0)=α ω .
2.1.1.4. Các phương trình vi phân chuyển động của vật rắn
Kí hiệu vị trí khối tâm của vật rắn là điểm C. Các lực Fk, (k=1n) tác dụng lên
vật. Theo định lý biến thiên động lượng và mômen động lượng, có được hệ phương
trình vi phân chủ đạo của hệ thống [57]:
1
1
( ) ( )
nC
k
k
n
C C C k
k
dM
dt
I I
=
=
=
+ =
vF
ω ω ω m F
(2.16)
trong đó M là khối lượng của cơ hệ, CI được gọi là tenxo quán tính khối của vật rắn
đối với khối tâm C, vC là vận tốc khối tâm, ω là vận tốc góc của vật, Fk là các lực
tác động lên cơ hệ và mC(Fk) là mô-men của các lực lấy đối với khối tâm C. Các
phương trình này được gọi là các phương trình chuyển động Newton-Euler của vật
rắn trong không gian.
2.1.2. Lực cản
Ma sát tồn tại trong hầu hết các hệ thống cơ khí khi có chuyển động hoặc xu
hướng chuyển động giữa hai thành phần vật lý vì tất cả các bề mặt không tuyệt đối

- 32 -
nhẵn. Để đạt được kiểm soát hiệu suất cao, mô hình ma sát động cần phải được mô
tả chính xác. Tuy nhiên, do ứng xử ma sát bị ảnh hưởng bởi nhiều yếu tố như vận
tốc, vị trí, nhiệt độ, chất bôi trơn và thậm chí cả lịch sử chuyển động nên việc xây
dựng các mô hình ma sát chính xác là một vấn đề tồn tại từ lâu nhưng vẫn chưa
được giải quyết đầy đủ [58]. Do vậy, việc xây dựng các mô hình ma sát sát thực là
điều kiện tiên quyết để có thể điều khiển chuyển động như mong muốn. Trong thực
tế rất khó có thể tìm ra một mô hình đại diện thực sự vì mô hình ma sát phải phản
ánh được các đặc tính quan sát được của thiết bị nhưng cũng phải đủ đơn giản để có
thể phân tích được. Một số mô hình ma sát cổ điển với các thành phần khác nhau (ví
dụ ma sát tĩnh, ma sát Coulomb, ma sát nhớt,…) đã được đề cập trong tài liệu [59].
Trong các nghiên cứu liên quan đến máy giặt, các mô hình lực cản được sử dụng là
ma sát khô hoặc ma sát nhớt được nhắc đến đến trong một số nghiên cứu đã công
bố [8]–[11] [15]–[23] [25] [27], những mô hình này chỉ phù hợp với một dải vận tốc
nhất định và cho độ chính xác không cao. Việc sử dụng một mô hình ma sát hoàn
chỉnh hơn sẽ mở rộng khả năng ứng dụng các kết quả phân tích và giải quyết các
khác biệt phát sinh trong các ứng dụng khác nhau. Sau đây, một danh sách các mô
hình ma sát thường được sử dụng để thiết kế bộ điều khiển và mô phỏng [59].
Ma sát tĩnh (ma sát nghỉ)
Ở vận tốc bằng không, ma sát tĩnh chống lại mọi xu hướng chuyển động khi
lực tác động có độ lớn nhỏ hơn lực cản cực đại Fs, và thường được mô tả bởi biểu
thức:
( )sgn( )s
uF
F x u
=
s
s
u F
u F
(2.17)
trong đó
1,( )
0,x
=
0
0
x
x
=
,
1,sgn( )
1,u
+=
− 0
0
u
u
Ma sát Coulomb hoặc ma sát khô.
Lực cản Coulomb không phụ thuộc vào diện tích tiếp xúc, ngược chiều với
chuyển động tương đối và được mô tả bởi biểu thức:

- 33 -
sgn( )CF F x= (2.18)
trong đó, C NF F= với là hệ số ma sát và NF là phản lực pháp tuyến. CF
không phụ thuộc vào độ lớn của vận tốc tương đối, Hình 2.2(a).
Hình 2.2. Minh họa một số mô hình ma sát [59]
(a) ma sát Coulomb, (b) ma sát Coulomb + nhớt, (c) ma sát tĩnh + Coulomb+
nhớt, (d) ma sát tĩnh + Stribeck+Coulomb+nhớt và (e) ma sát Stribeck cải tiến (mô
hình Karnopp)
Ma sát nhớt.
Ma sát nhớt là ma sát phổ biến nhất. Khi các hệ thống cơ khí rung động trong
các môi trường lỏng như không khí, chất khí, nước, hoặc dầu, sự cản trở (ma sát)
của chất lỏng tới chuyển động của vật sẽ gây ra sự tiêu hao năng lượng. Trong
trường hợp này, tổng năng lượng tiêu hao phụ thuộc vào nhiều yếu tố như kích
thước, hình dạng của vật thể rung động, độ nhớt của chất lỏng, tần số rung động, và
vận tốc của vật rung động. Lực cản nhớt tỉ lệ bậc nhất với vận tốc của vật rung
động, và sẽ bằng không khi vận tốc tiến tới không.
xF F x= (2.19)
Fc
-Fc
Fc
-Fc
Fc
Fs
-Fs
-Fc
-Fc
Fc
Fs
-Fs
x
x
x

- 34 -
trong đó xF là hệ số ma sát nhớt. Sự kết hợp giữa ma sát Coulomb với ma sát nhớt
được chỉ ra trên Hình 2.2(b) và được biểu diễn bởi
sgn( )C xF F x F x= + (2.20)
Ma sát Stribeck
Một hiện tượng ma sát trong quá trình cơ hệ hoạt động ở vận tốc thấp là hiệu
ứng Stribeck như chỉ ra trên đồ thị Hình 2.2(c). Hiệu ứng Stribeck bổ sung một
thành phần lực cản ở tốc độ thấp, lực này giảm dần theo cấp số nhân khi vận tốc
tăng lên [60].
Đồ thị Hình 2.2(d) minh họa lực cản tổng hợp cả ba loại biểu diễn trong biểu
đồ (a), (b) và (c).
Như vậy, lực cản là một hàm phụ thuộc vào vận tốc và đường cong biểu diễn
mối quan hệ lực – vận tốc (F-V) còn được gọi là đường cong Stribeck. Đường cong
Stribeck thường được tạo ra bởi dữ liệu vận tốc ở trạng thái ổn định để ứng xử ma
sát ban đầu có thể được loại bỏ.
Để biểu diễn đường cong lực – vận tốc, một mô hình hàm mũ kết hợp ma sát
Coulomb và ma sát nhớt được đưa ra [61]
( / )( ) sgn( ) ( ) sx x
C x s CF x F x F x F F e−
= + + − (2.21)
trong đó ,sx là các tham số thực nghiệm, CF là mức ma sát Coulomb, sF là mức
giá trị lực cản tĩnh và xF là hệ số ma sát nhớt. Bằng cách chọn các tham số khác
nhau thì các dạng ma sát khác nhau có thể được nhận diện. Khi 2 = , sẽ đưa đến
mô hình hàm mũ Gaussian [61]. Khi 1 = , phương trình (2.21) được biết đến ứng
với mô hình Tustin [62] và được mô tả bởi biểu thức:
( / )( ) sgn( ) ( ) sx x
C x s CF x F x F x F F e−
= + + − (2.22)
Mô hình của Tustin là một trong những mô hình tốt nhất mô tả lực cản tại vận
tốc gần bằng không. Các kết quả thử nghiệm đã chỉ ra rằng mô hình này có thể xấp
xỉ các lực cản thực với độ chính xác 90% [63] [64]. Trong phần sau, nghiên cứu sử
dụng mô hình Tustin để xác định đường hồi quy lực – vận tốc từ dữ liệu thực
nghiệm.

- 35 -
2.2. CẤU TẠO VÀ NGUYÊN LÝ LÀM VIỆC CỦA HỆ THỐNG TREO MÁY
GIẶT LỒNG NGANG
2.2.1. Cấu tạo hệ thống treo máy giặt lồng ngang
Trong nghiên cứu, máy giặt lồng ngang LG WD 8990TDS là đối tượng thực
được tác giả sử dụng cho các phân tích thực nghiệm. Ảnh chụp phía ngoài của máy
giặt này thể hiện trên hình 1.3(a). Kết cấu hệ thống treo được thể hiện trên hình
1.3(b), hình 2.3. Hình ảnh tháo rời các bộ phận của máy giặt được biểu diễn trong
các Hình A.1, Hình A.2 và Hình A.3 phần Phụ lục.
Hình 2.3. Mặt sau của máy giặt
1-lò xo, 2-đối trọng, 3-lồng chứa, 4-thiết bị giảm chấn
Quan sát các thành phần của máy giặt nhận thấy, hệ thống treo của máy giặt
lồng ngang gồm các bộ phận chính sau:
+) Lồng giặt có dạng hình trụ đục lỗ nằm bên trong lồng chứa chứa nước.
Lồng giặt giữ đồ giặt bên trong và quay xung quanh trục nằm ngang. Khi đạt tốc độ
quay nhất định, dưới tác dụng của lực quán tính ly tâm, đồ giặt được ép vào mặt bên
trong của lồng giặt, gây ra tải trọng lệch tâm. Lồng giặt quay tự do so với lồng chứa
nhờ kết cấu mối ghép ổ lăn bố trí dạng công-xôn. Trục lồng giặt gắn trực tiếp với
trục rotor của động cơ dẫn động trực tiếp.
2
4
1
3

- 36 -
+) Lồng chứa được treo vào vỏ máy bằng lò xo và thiết bị giảm chấn. Dưới
ảnh hưởng của tải trọng lệch tâm khi máy giặt hoạt động, lồng chứa và tất cả các bộ
phận khác trên nó đều rung động. Để giảm bớt rung động của lồng chứa và để ngăn
chặn lồng chứa không chạm vào vỏ máy, một giải pháp thông thường là gắn thêm
các đối trọng vào lồng chứa.
+) Lò xo và bộ phận giảm chấn một đầu gắn với lồng chứa, đầu còn lại được
gắn vào khung hoặc vỏ máy như trên Hình 1.3(b) và ảnh chụp trên Hình 2.3.
2.2.2. Nguyên lý làm việc
Động cơ máy giặt là loại động cơ ba pha dẫn động trực tiếp (rotor gắn cứng
với trục của lồng giặt, stator của động cơ gắn với lồng chứa. Trong chu trình giặt,
tốc độ quay nhỏ, đồ giặt được quấy đảo trong lồng giặt. Trong chu trình quay vắt,
tốc độ quay lớn làm đồ giặt ép vào thành trong của lồng giặt tạo ra một tải trọng
không cân bằng. Tải trọng không cân bằng này sẽ thay đổi theo các vòng quay của
lồng giặt. Lực quán tính ly tâm sinh ra do tải trong không cân bằng là nguyên nhân
gây ra rung động cho lồng chứa và sự dịch chuyển của vỏ máy. Hệ thống treo có
nhiệm vụ giữ cho lồng chứa ổn định khi máy hoạt động cho dù bị rung lắc bởi các
lực quán tính ly tâm nói trên. Bài toán phân tích động lực học hệ thống treo nhằm
cân bằng hệ thống trong các điều kiện làm việc khác nhau ngay từ bước thiết kế do
vậy có giá trị học thuật cao. Tuy nhiên, để thực hiện được điều này, các thông số
đặc tính kỹ thuật của các thành phần của hệ thống cần phải xác định bằng thực
nghiệm do chúng không được công bố bởi các nhà sản xuất hay các nghiên cứu
trước đó.
Vì vậy, phần tiếp theo nghiên cứu trình bày về cách thức xác định các đặc tính
của các thành phần hệ thống treo bằng thực nghiệm.
2.3. MÔ HÌNH VẬT LÝ CỦA HỆ THỐNG TREO
Hệ thống treo của máy giặt bao gồm: bộ phận dự trữ thế năng (lò xo), bộ phận
dự trữ động năng (khối lượng) và bộ phận tiêu tán năng lượng (thiết bị giảm chấn).
Rung động của hệ thống liên quan đến việc chuyển thế năng thành động năng và

- 37 -
ngược lại. Đây là một hệ thống rung động cưỡng bức với các lực kích thích là lực
quán tính gây ra bởi khối lượng lệch tâm.
2.3.1. Đặc tính của phần tử đàn hồi
Lò xo là một thiết bị được sử dụng trong liên kết cơ học, trong hầu hết các ứng
dụng đều được giả thiết bỏ qua khối lượng. Loại lò xo sử dụng phổ biến trong hệ
thống treo máy giặt là lò xo biến dạng dài như chỉ ra trên Hình 2.4.
Hình 2.4. Lò xo sử dụng trong hệ thống treo của HWM
Hình 2.5. minh họa cho sự biến dạng của lò xo. Dưới tác dụng của lực F theo
phương thẳng đứng, chiều dài tự nhiên của lò xo là l đã giãn thêm một lượng x. Lò
xo được xem là tuyến tính nếu biến dạng của lò xo quan hệ bậc nhất với lực tác
dụng F
F = k.x (2.23)
trong đó, k là hằng số và được gọi là độ cứng của lò xo. Công làm việc khi lò xo
biến dạng lưu trữ dưới dạng thế năng của lò xo và được xác định bởi 2 / 2U kx= .
Hình 2.5. Biến dạng của lò xo
Hầu hết các lò xo được sử dụng trong các hệ thống thực tế đều có mối quan hệ
lực – biến dạng là phi tuyến, đặc biệt khi mức độ biến dạng lớn. Trong phân tích
dao động, mối quan hệ lực - biến dạng của lò xo phi tuyến thường biểu diễn bowit
biểu thức: F = ax + b x3 (a > 0), b > 0 ứng với lò xo cứng (hard spring), b < 0 ứng
với lò so mềm (soft spring), b = 0 ứng với lò xo tuyến tính [65].

- 38 -
Nếu lò xo phi tuyến làm việc trong vùng biến dạng nhỏ thì có thể thay thế gần
đúng bằng một lò xo tuyến tính.
Đồ thị kết quả đo bằng thực nghiệm của lò xo thực sử dụng trong hệ thống
treo HWM được thể hiện trong Hình 2.6. Với mức độ xác định 99.7%, kết quả nhận
được chỉ ra đặc tính lực đàn hồi của lò xo là tuyến tính và độ lớn hệ số độ cứng (k)
có thể lấy là 5652 N / m.
Hình 2.6. Đo đặc tính của lò xo
Tuy nhiên, mặc dù lò xo là tuyến tính, nhưng trong hệ thống treo của máy giặt
vị trí lắp ráp của lò xo làm cho các lực đàn hồi là các hàm phi tuyến. Điều này có
thể nhận thấy khi xem xét hai ví dụ chỉ ra trên Hình 2.7 ứng với chuyển động theo
một phương x.
Trường hợp ở hình 2.7(a), lò xo gắn vào con trượt, con trượt trượt không ma
sát. Khi đó, lực đàn hồi của lò xo theo trục x được tính bằng biểu thức:
1 . .xF k k x= =
( là độ biến dạng của lò xo).
Trường hợp ở hình 2.7(b), lò xo được gắn tương tự như trong hệ thống treo
của máy giặt, phương của lò xo thay đổi theo vị trí của vật nặng. Giả sử chuyển dịch

- 39 -
của vật nặng m nhỏ hơn so với chiều dài của lò xo (x<<l), khi đó, độ biến dạng của
lò xo là
cosx
Vậy, lực đàn hồi của lò xo được xác định
2 . . . osF k k x c =
Và lực đàn hồi trên trục x được tính được bằng biểu thức:
2
2 2cos = (k.cos )xF F x =
Vì góc α thay đổi theo thời gian cho nên ứng xử của lực đàn hồi của lò xo
trong hệ thống treo của máy giặt được biểu diễn là một hàm phi tuyến.
(a) (b)
Hình 2.7. Lực đàn hồi tuyến tính và lực đàn hồi phụ thuộc góc treo
2.3.2. Đặc tính của phần tử giảm chấn
Trong máy giặt lồng ngang, các thiết bị giảm chấn được sử dụng là giảm chấn
ma sát dạng nửa ướt. Hình ảnh thực của thiết bị được chỉ ra trên Hình 2.8.
Hình 2.8. Thiết bị giảm chấn trong hệ thống treo máy giặt lồng ngang
1- Vỏ ngoài, 2- Trục pit-tông, 3- Chất bôi trơn, 4- Đệm mút
Để xác định đặc tính của thiết bị giảm chấn, nghiên cứu này sử dụng một thiết
bị thí nghiệm đã được chế tạo, lắp ráp tại Trường Đại học Kỹ thuật Công nghiệp
(Đại học Thái Nguyên), đây là sản phẩm của đề tài B2016-TNA-05 [5]. Từ yêu cầu
Lồng chứa
Chốt kết nối lồng chứa
với thiết bị giảm chấn
Thiết bị giảm chấn ma sát 4

- 40 -
phải xác định được lực, chuyển dịch và vận tốc, sơ đồ nguyên lý hoạt động của thiết
bị thí nghiệm được thể hiện trên Hình 2.9. Sơ đồ thí nghiệm đo lực cản theo vận tốc
của giảm chấn được chỉ ra trên Hình 2.10.
Mẫu thử là thiết bị giảm chấn của máy giặt với một đầu được gắn vào gối cố
định và đầu còn lại được gắn vào gối di động, gối di động chuyển động tịnh tiến
nhờ cơ cấu tạo chuyển động và một động cơ sẽ giúp cơ cấu tạo chuyển động.
Hình 2.9. Nguyên lý hoạt động của thiết bị thí nghiệm [5]
Khi động cơ quay, cơ cấu chuyển động làm gối di động di chuyển kéo theo
cần pit-tông di chuyển từ vị trí A1 về A2 và ngược lại.
Hình 2.10. Sơ đồ thí nghiệm đo đặc tính cản của thiết bị giảm chấn [5]
Để tiến hành thí nghiệm và xác định được thông số: lực, vận tốc, khoảng dịch
chuyển, trên thiết bị đã được bố trí hệ thống đo lường, xử lý số liệu.
ĐỘNG CƠ
n (vòng/phút)
P(công suất)
Cơ cấu
chuyển động
Gối di động
Loadcell
Fms
A
A1 A2
y(t), V
Cảm biến lực
MT 1260-50
DAQ
NI USB6221 Servo
DRV
Động cơ
Servo
Máy tính
và phần mềm
(điều khiển và xử lý)

- 41 -
➢ Đo lực: sử dụng cảm biến đo lực (loadcell) có khả năng đo được đến tải trọng
500N (50kg), gắn trực tiếp vào giá đỡ cố định và mẫu thử.
➢ Đo vận tốc dịch chuyển pit-tông (A): sử dụng tín hiệu phản hồi vận tốc trực
tiếp từ động cơ servo, quy đổi ra vận tốc dịch chuyển dựa trên thông số vit-me bi.
➢ Hệ thống điều khiển, thu thập và xử lý dữ liệu:
• Sử dụng mô-đun DAQ với các đầu vào/ra số và tương tự để điều khiển tốc
độ dịch chuyển, hành trình chuyển động;
• Sử dụng mô-đun NI USB6221 để thu thập dữ liệu từ các cảm biến lực và
dịch chuyển;
• Phần mềm điều khiển hệ thống và thu thập dữ liệu được xây dựng trên NI
Labview 2013 và NI Signal Express 2015;
• Sử dụng phần mềm Microsoft Excel và Matlab để xử lý dữ liệu và xây dựng
biểu đồ quan hệ.
Thuật toán điều khiển cơ bản được mô tả qua lưu đồ trên Hình 2.11. Cấu trúc
chương trình điều khiển lập trên Labview được mô tả trên Hình 2.12.
Bắt đầu
Tay/Tự động
CB 1 S=FĐ
- Tần số xung: PFI12=1000
CB 2 S=TĐ
S P2.2=T
P2.2=F
Stop
Kết thúc
Đ
S
- Chiều quay: S=F- BuocNhay: 0- SoChuKy: 3- MaxXung:0
S
X>=MaxXung Kết thúcĐ
Chu kỳ I =0PFI12=PFI12+Buocnhay
Đ
S
ChukyI>=SoChuKy
Đ
S
Hình 2.11. Lưu đồ thuật toán chương trình điều khiển.

- 42 -
Hình 2.12. Cấu trúc chương trình điều khiển

- 43 -
Từ thuật toán và các chức năng cơ bản có được giao diện của chương trình
điều khiển trên Labview mô tả trên Hình 2.13.
Hình 2.13. Giao diện của chương trình điều khiển trên Labview
Thí nghiệm được thực hiện ở 20 giá trị vận tốc khác nhau của pit-tông, với
bước tốc độ 16mm/s, tương ứng với sự thay đổi từ 96 đến 400 mm/s. Thực hiện tối
thiểu ba chu kỳ kéo-nén liên tục ở mỗi giá trị vận tốc rồi lấy giá trị trung bình. Trên
cơ sở dữ liệu thu nhận được, các đặc tính của mẫu thử được đánh giá.
• Đánh giá về độ chính xác của vận tốc
Hình 2.14 cho thấy đồ thị dạng sóng của dữ liệu vận tốc, sự biến động về
giá trị đo này chính là sự can nhiễu bậc thấp (có thể do nhiễu biên độ đường nguồn)
và can nhiễu bậc cao (có thể do sóng hài bậc cao từ mạch điện tử công suất
biến tần truyền qua nguồn cấp ba pha cho động cơ servo). Bảng 2.1 là kết quả
đánh giá về biên nhiễu và độ chính xác giữa tốc độ đặt với tốc độ thực được
phản hồi qua encoder và quy đổi thành vận tốc dịch chuyển, dựa trên bước vit-
me. Theo đó, sai lệch về tốc độ của thiết bị thí nghiệm lớn nhất -0.9% + 1.0%.
Hình 2.15 minh họa dữ liệu đo lực cản và vận tốc của thiết bị giảm chấn do hệ
thống thí nghiệm ghi lại.

- 44 -
Hình 2.14. Can nhiễu lên tín hiệu vận tốc thu trực tiếp từ encoder động cơ
Hình 2.15. Cửa sổ phần mềm hiển thị kết quả đo lực và vận tốc theo thời gian
ở dải tốc độ 144 - 192 mm/s
• Đặc tính F-V của thiết bị giảm chấn máy giặt
Để có được bộ dữ liệu thực nghiệm để xây dựng phương trình hồi quy lực cản -
vận tốc (F-V) cho thiết bị giảm chấn trong điều kiện lý tưởng, 04 bộ giảm chấn được sử
dụng làm mẫu thử trong đó có 02 bộ mới (D1_N, D2_N) và 02 bộ đã qua sử dụng
(D1_U, D2_U). Sau khi thử nghiệm từng bộ nghiên cứu lấy dữ liệu trung bình của cả 04

- 45 -
bộ để xem xét, đánh giá. Kết quả được tóm tắt trong Bảng 2.2 và mối quan hệ tương ứng
lực – vận tốc theo giá trị trung bình được biểu diễn trên đồ thị Hình 2.16.
Bảng 2.1. Phân tích dữ liệu tốc độ trong 05 khoảng đầu tiên
Thông số Lần 1 Lần 2 Lần 3 Lần 4 Lần 5
Tốc độ đặt (mm/s) 96 112 128 144 160
Tốc độ thực (biên dưới) (mm/s) 93.37 110.6 125.5 142.7 161.3
Tốc độ thực (biên trên) (mm/s) 96.91 113.8 129 145.9 161.9
Tốc độ thực trung bình (mm/s) 95.14 112.2 127.25 144.3 161.6
Biên độ nhiễu (mm) +/- 1.77 +/- 1.6 +/- 1.75 +/- 1.6 +/- 0.3
Sai lệch (%) -0.9 0.2 -0.6 0.2 1.0
Bảng 2.2. Các kết quả của dữ liệu quan hệ lực – vận tốc trong chu kì kéo và nén
Kết quả từ Bảng 2.2 và đồ thị Hình 2.16 cho thấy, trong dải vận tốc nhỏ lực
cản gần như tăng tuyến tính với vận tốc sau đó sự tăng giảm dần. Kết quả này cho
thấy tính chất phi tuyến của lực cản. Do đó, để biểu thị đường cong lực giảm chấn –
vận tốc (F-V), một mô hình hàm mũ kết hợp giữa ma sát Coulomb và ma sát nhớt
được đề xuất. Trong nghiên cứu, mô hình ma sát Tustin được sử dụng để xây dựng
mô hình động lực cho hệ thống treo của máy giặt nằm ngang. Ngoài ra, để thuận lợi
V(m/s) V(m/s)
D1_N D2_N D2_U D2_U Trung bình D1_N D2_N D2_U D2_U Trung bình
-0.096 -52.68 -48.00 -59.01 -50.12 -52.45 0.096 57.43 55.00 63.48 52.45 57.09
-0.112 -58.75 -52.55 -67.69 -60.96 -59.99 0.112 65.61 59.47 71.33 64.40 65.20
-0.128 -63.42 -56.75 -72.32 -67.27 -64.94 0.128 70.17 64.63 76.51 72.12 70.86
-0.144 -65.46 -59.88 -75.15 -71.42 -67.98 0.144 73.71 68.37 79.64 77.06 74.70
-0.16 -67.09 -62.42 -77.44 -74.31 -70.32 0.16 76.27 71.31 82.06 80.16 77.45
-0.176 -69.12 -64.19 -78.58 -76.61 -72.13 0.176 77.92 73.30 83.92 82.95 79.52
-0.192 -69.98 -65.89 -80.06 -78.11 -73.51 0.192 80.30 75.57 85.53 84.20 81.40
-0.208 -70.22 -66.39 -80.50 -79.35 -74.12 0.208 80.88 76.10 86.78 85.75 82.38
-0.224 -70.75 -67.51 -80.90 -80.71 -74.97 0.224 81.81 77.36 87.35 86.00 83.13
-0.24 -72.21 -67.15 -81.51 -81.24 -75.53 0.24 82.20 77.21 87.43 87.24 83.52
-0.256 -71.50 -67.15 -81.35 -80.12 -75.03 0.256 81.20 77.05 86.55 86.50 82.83
-0.272 -71.58 -67.43 -80.80 -80.65 -75.11 0.272 82.93 78.00 86.55 87.00 83.62
-0.288 -71.69 -67.40 -80.67 -80.48 -75.06 0.288 82.70 77.12 87.26 86.67 83.44
-0.304 -71.26 -67.51 -80.68 -80.79 -75.06 0.304 83.01 77.03 86.81 87.10 83.49
-0.32 -71.03 -67.72 -81.13 -80.34 -75.06 0.32 82.91 77.58 86.92 87.32 83.68
-0.336 -70.82 -67.57 -81.38 -80.44 -75.05 0.336 82.43 77.16 86.57 86.84 83.25
-0.352 -70.51 -67.15 -80.92 -80.84 -74.85 0.352 82.39 77.35 86.83 86.65 83.31
-0.368 -69.30 -67.01 -81.07 -80.40 -74.44 0.368 81.86 77.38 87.42 86.57 83.31
-0.384 -69.45 -67.18 -80.69 -80.12 -74.36 0.384 81.78 77.71 87.00 87.09 83.40
-0.4 -68.07 -67.41 -80.55 -80.28 -74.08 0.4 80.58 77.04 87.22 87.26 83.03
F(N)
Chu kì nén (-)
F(N)
Chu kì kéo (+)

- 46 -
cho việc xác định các tham số trong mô hình ma sát, phương trình (2.22) được đề
xuất cải tiến dưới dạng
/ 3
0 1 2( ) V C
DF V C C V C e−= + + (2.24)
Hình 2.16. Đồ thị quan hệ lực – vận tốc của thiết bị giảm chấn
Từ dữ liệu F-V dựa trên thực nghiệm, sử dụng một thuật toán tối ưu tiến hóa vi
phân (Differential Evolution -DE) [66]) để giảm thiểu sự khác biệt giữa dữ liệu đo
lường và dữ liệu tính toán từ đó xác định các hệ số của phương trình (2.24). Cực
tiểu hàm mục tiêu đã chọn được hiển thị trong phương trình (2.25).
2
1
1[F - F ]
n
tt tn
in
=
= (2.25)
trong đó n là số điểm đo được, Ftt là giá trị lực tính theo (2.24) và Ftn là giá trị lực từ
dữ liệu thực nghiệm. Sơ đồ khối của chương trình Matlab được thể hiện trong Hình
2.17, kết quả của các tham số tối ưu được thể hiện trong Bảng 2.3 và chương trình
tính chi tiết sẽ được trình bày trong phần Phụ lục.
Bảng 2.3. Hệ số của phương trình (2.24)
Tham số Dải giá trị
đặt trước
Giá trị tối ưu
trong chu kì kéo
Giá trị tối ưu
trong chu kì nén
Giá trị xấp xỉ
sử dụng
C0 [N] 70 100 90.19 81.27 85.73
C1 [N.s/m] -20 20 -15.0 -15.0 -15
C2 [N] -100 100 -97.0 90.0 93.5
C3 [s/m] -0.2 0.2 0.07 - 0.07 0.07

- 47 -
Các hệ số Ci, (i=03) của phương trình (2.24) trong các chu kỳ nén nhỏ hơn
trong các chu kỳ kéo. Điều này cho thấy sự trễ của lực giảm chấn trong các chu kỳ
nén, tuy nhiên, sự khác biệt không đáng kể. Để thuận lợi cho quá trình tính toán mô
phỏng, hệ số Ci ở hai chu kỳ kéo - nén được coi là đồng nhất và lấy giá trị trung
bình. Kết quả mô phỏng (đường cong F_tt) của quan hệ lực – vận tốc sử dụng các
tham số tối ưu được so sánh với kết quả thực nghiệm (đường cong F_tn) thể hiện
trên Hình 2.18. Quan sát đồ thị có thể nhận thấy rằng dữ liệu thực nghiệm và dữ liệu
mô phỏng có sự sai lệch nhỏ.
Hình 2.17. Sơ đồ khối của thuật toán DE
Khởi động
Đọc dữ liệu đầu vào
Khởi tạo
Hệ số PT (2.24)
Đánh giá PT (2.25)
Hoán đổi (Mutation)
Xuyên chéo (Crossover)
Lựa chọn (Selection)
Tiêu chuẩn dừng Không đạt
Viết dữ liệu đầu ra
Kết thúc

- 48 -
Do đó, mối quan hệ phi tuyến của lực và vận tốc của giảm chấn trong các chu
kỳ kéo và nén có thể được xấp xỉ bằng phương trình:
(2.26)
trong đó: C0 = 85.73, C1 = - 15.00, C2 = -93.50, C3 = 0.07.
Kết quả so sánh giữa đường cong lực – vận tốc tính theo phương trình (2.26)
(đường màu đỏ F_hq) với kết quả thực nghiệm (đường màu đen F_tn) chỉ ra trên
Hình 2.18 cho thấy tính sát thực của mô hình lý thuyết xây dựng.
Hình 2.18. Đồ thị đường cong lực – vận tốc của thiết bị giảm chấn
Ý nghĩa khi sử dụng quan hệ lực – vận tốc bằng mô hình Tustin cải tiến có thể
nhận thấy khi so sánh với quan hệ xấp xỉ bậc nhất. Sử dụng công cụ Linear Fit trong
Oringin từ dữ liệu thực nghiệm, xác định được xấp xỉ mối quan hệ tuyến tính lực
vận tốc (F = c.v) ) với hệ số cản có thể lấy xấp xỉ c = 273.95 N.s/m. Đồ thị mối
quan hệ tuyến tính lực- vận tốc được biểu diễn bằng đường thẳng (F_xxtt) chỉ ra
trên Hình 2.18. Tuy nhiên, mối quan hệ này chỉ có thể chấp nhận ở dải vận tốc thấp,
còn ở vùng vận tốc cao giá trị xấp xỉ tuyến tính nhận được khác xa giá trị thực.
Với xu hướng giảm thời gian của chu trình giặt, tăng khả năng chiết tách nước,
các máy giặt thế hệ mới ngày càng có tốc độ quay nhanh hơn, do vậy các thiết bị
3sgn( ). /
0 1 2( ) sgn( ) sgn( ). .V V C
DF V C V C V V C e−
= + +

- 49 -
giảm chấn chuyển động với vận tốc lớn hơn cho nên nghiên cứu này đề xuất một
quan hệ lực – vận tốc phù hợp với dải vận tốc lớn, tăng độ chính xác cho các đánh
giá là một việc có ý nghĩa.
2.3.3.Đặc tính của phần tử quán tính
Để giảm bớt sự phức tạp của mô hình động lực, trong nghiên cứu này khối
lượng của các phần tử của hệ thống được xem là hằng số, tức lồng giặt và lồng
chứa là vật rắn tuyệt đối, khi đó động năng của cơ hệ phụ thuộc vào sự thay đổi vận
tốc của vật. Ngoài ra, đệm và cửa ngăn nước là các phần tử đàn hồi cho nên cũng có
một số ảnh hưởng đến rung động của hệ thống treo, tuy nhiên theo nghiên cứu [20],
các tác động của các yếu tố này là không đáng kể so với các phần tử chính của nhóm
dao động cho nên trong nghiên cứu này các ảnh hưởng của chúng được bỏ qua.
Hình 2.19. Các thành phần của hệ thống treo
1-Lồng giặt, 2-Trục quay, 3-Stato, 4-Rotor, 5-Lồng chứa, 6-Đối trọng
Vì đối tượng chính của nghiên cứu là hệ thống treo của máy giặt nên vỏ máy
giặt được coi là cố định với mặt đất. Các thành phần của hệ thống treo được cân
khối lượng, đo kích thước để xác định khối tâm và mômen quán tính.
Chia các phần của hệ thống treo thành hai nhóm: nhóm quay quanh trục z và
nhóm không quay quanh trục z. Nhóm quay quanh trục z gồm: lồng giặt, trục quay,
stato và nhóm không quay quanh trục z gồm: lồng chứa, roto, đối trọng. Chọn gốc
hệ quy chiếu là tâm ổ trục của động cơ, tính chất vật lý của từng nhóm được chỉ ra
trong Bảng 2.4.

- 50 -
Bảng 2.4.Tính chất hình học và khối lượng của các thành phần hệ thống treo
Phần
Khối
lượng
(kg)
Vị trí khối tâm
(mm)
Mômen quán tính
Đối với các trục (kgm2)
x y z Ix Iy Iz Phần
quay 6 0.00 0.00 91.92 0.93 0.34 0.21
Phần
không
quay
26.5 0.07 -0.27 89.18 2.3 2.90 2.74
Tổng 32.5 3.23 3.24 2.95
Từ đây, xác định được vị trí khối tâm C của hệ thống treo xC = 0.06 mm, yC =
-0.22mm, zC = 89.68mm. Khối tâm C của hệ thống treo nằm trong mặt phẳng chứa
cặp lò xo. Mômen quán tính của hệ thống treo đối với các trục đi qua khối tâm
được xác định [67]
2 2 2. 3.23 32.5( 0.22) 1.95Cx x CI I M y kgm= − = − − =
2 2 2. 3.24 32.5(0.06) 3.12Cy y CI I M x kgm= − = − = (2.27)
22.95Cz zI I kgm= =
2.3.4.Đặc tính của phần tử kích thích rung động
Rung động của máy giặt xảy ra là do tải không cân bằng trong lồng giặt khi
máy giặt hoạt động. Tải là các vật phẩm giặt, bao gồm các mảnh vải đơn lẻ có thể
khác nhau về kích thước, trọng lượng, hình dáng, chất liệu, … Thông thường khi
đưa vào máy giặt, chúng sẽ bị khuấy đảo một cách ngẫu nhiên, do vậy, tải không
được phân bố đồng đều và chính điều này sẽ tạo ra các lực động kích thích rung
động của hệ thống. Hình 2.20 (a) chỉ ra các lực tác động lên tải khi lồng giặt quay
đều, bao gồm: lực quán tính ( 2 ,n tF mr F mr = = , với m là khối lượng tải, r là bán
kính, là vận tốc góc và là gia tốc góc của lồng giặt), lực cản với lồng (Fms =
.N, với là hệ số ma sát giữa đồ giặt với lồng giặt, N là phản lực theo phương
pháp tuyến), trọng lực (m.g, với g là gia tốc trọng trường); Hình 2.20(b) và (c) biểu
diễn lực tác động lên tải khi tải ở vị trí góc lệch khác nhau trong trường hợp lồng
giặt quay đều ( 0 = ).
Chuyển động của vật phẩm giặt phụ thuộc vào nhiều yếu tố, trong đó tốc độ
quay của lồng giặt là một yếu tố quan trọng. Quá trình giặt thông thường trải qua ba
giai đoạn: lắc, xoay đảo và quay vắt (Hình 2.21). Trong gia đoạn quay vắt, máy giặt
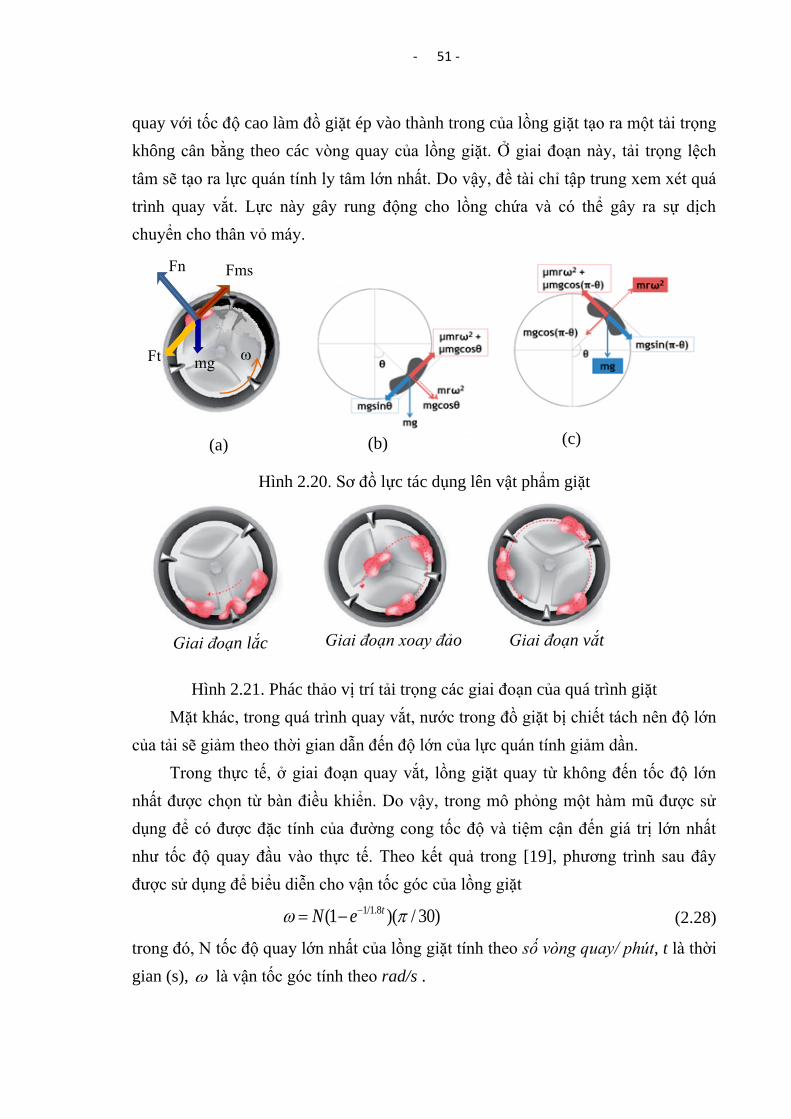
- 51 -
quay với tốc độ cao làm đồ giặt ép vào thành trong của lồng giặt tạo ra một tải trọng
không cân bằng theo các vòng quay của lồng giặt. Ở giai đoạn này, tải trọng lệch
tâm sẽ tạo ra lực quán tính ly tâm lớn nhất. Do vậy, đề tài chỉ tập trung xem xét quá
trình quay vắt. Lực này gây rung động cho lồng chứa và có thể gây ra sự dịch
chuyển cho thân vỏ máy.
Hình 2.20. Sơ đồ lực tác dụng lên vật phẩm giặt
Hình 2.21. Phác thảo vị trí tải trọng các giai đoạn của quá trình giặt
Mặt khác, trong quá trình quay vắt, nước trong đồ giặt bị chiết tách nên độ lớn
của tải sẽ giảm theo thời gian dẫn đến độ lớn của lực quán tính giảm dần.
Trong thực tế, ở giai đoạn quay vắt, lồng giặt quay từ không đến tốc độ lớn
nhất được chọn từ bàn điều khiển. Do vậy, trong mô phỏng một hàm mũ được sử
dụng để có được đặc tính của đường cong tốc độ và tiệm cận đến giá trị lớn nhất
như tốc độ quay đầu vào thực tế. Theo kết quả trong [19], phương trình sau đây
được sử dụng để biểu diễn cho vận tốc góc của lồng giặt
1/1.8(1 )( / 30)tN e −= − (2.28)
trong đó, N tốc độ quay lớn nhất của lồng giặt tính theo số vòng quay/ phút, t là thời
gian (s), là vận tốc góc tính theo rad/s .
Fn Fms
mg Ft
(a) (b) (c)
Giai đoạn lắc Giai đoạn xoay đảo Giai đoạn vắt

- 52 -
Từ phương trình (2.28), tích phân theo biến thời gian sẽ nhận được biểu thức
của góc quay và với một lần đạo hàm sẽ có được gia tốc góc của lồng giặt, từ
đó lực quán tính gây ra bởi khối lượng không cân bằng được xác định.
Với thiết bị thí nghiệm xác định đặc tính cản của giảm chấn được trình bày ở
trên và các dụng cụ đo đơn giản khác như lực kế, cân điện tử đã cho phép xác định
các thông số liên quan đến rung động của hệ treo. Các kết quả này sẽ phục vụ trực
tiếp cho việc xây dựng mô hình động lực và xác định lời giải số của mô hình.
2.4. XÂY DỰNG MÔ HÌNH ĐỘNG LỰC CỦA HỆ THỐNG TREO
Rung động xảy ra trong suốt thời gian hoạt động của máy giặt. Lồng giặt quét
qua tất cả các tần số, trong đó bao gồm các tần số dao động tự nhiên của hệ thống.
Khi tốc độ quay của lồng giặt đạt đến vùng tần số tự nhiên, rung động của hệ thống
treo đạt biên độ cực đại do cộng hưởng. Các rung động xảy ra theo tất cả các trục x,
y, z, cũng như các rung động quay xung quanh trục x, y, z. Trong mô hình toán
học, thông số đầu vào của hệ thống sẽ là lực ly tâm và lực này phụ thuộc vào tốc độ
quay, vị trí và giá trị của khối lượng lệch tâm. Do đó, các yếu tố chính của mô hình
tính toán sẽ là lò xo, thiết bị giảm chấn, khối lượng lệch tâm, tốc độ quay của lồng
giặt, khối lượng của hệ thống treo.
Để có thể phân tích đánh giá đầy đủ ảnh hưởng của từng yếu tố cấu thành hệ thống
đến đặc tính rung động của hệ thống, trong phần này, nghiên cứu tập trung vào việc xây
dựng mô hình toán cho hệ thống treo của máy giặt. Công cụ được sử dụng để dẫn ra các
phương trình chủ đạo của hệ thống đó là phương trình Newton – Euler [57].
2.4.1. Xây dựng mô hình không gian (Mô hình 1)
Như đã trình bày trong phần giới thiệu, rung động của hệ thống treo máy giặt
xảy ra theo phương các trục tọa độ và quay quanh các trục tọa độ. Do đó, để có thể
phân tích, đánh giá rung động của hệ thống một cách tổng quát cần phải xây dựng
một mô hình toán cho cơ hệ sáu bậc tự do. Dựa vào cơ sở lý thuyết Động lực học hệ
nhiều vật (Mục 2.1.1), vị trí của hệ thống treo máy giặt được xác định bởi khối tâm C
trong hệ quy chiếu cố định và hướng của lồng chứa. Gọi Ox0y0z0 là hệ tọa độ cố định,
Cxyz là hệ tọa độ gắn với lồng chứa và có gốc tại khối tâm của hệ thống.

- 53 -
Hình 2.22. Mô hình không gian của hệ thống treo HWM
Để ma trận mô-men quán tính của hệ thống treo đối với khối tâm C có dạng
đơn giản chọn Cz là trục dọc lồng chứa. Trục Cy, Cx nằm trong mặt phẳng đối
xứng của hệ thống với trục Cx hướng xuống dưới khi lồng giặt nằm ngang và trục
Cy được chọn sao cho hệ Cxyz lập thành một tam diện thuận. Như vậy, hướng của
lồng chứa được xác định bởi vị trí của hệ tọa độ Cxyz so với hệ tọa độ Ox0y0z0 còn
điểm định vị của hệ thống treo được xác định bởi khối tâm C trong hệ tọa độ cố
định (Hình 2.22). Sử dụng các tọa độ suy rộng: x, y, z để xác định vị trí khối tâm C
và , , (góc Cardan) để xác định hướng của hệ Cxyz. Giả sử tại thời điểm ban
hệ tọa độ động Cxyz trùng với hệ tọa độ cố định Ox0y0z0 .
Khi đó, vận tốc và gia tốc khối tâm C trong hệ tọa độ cố định được xác định
(0)(0) [ ] [ ]T TCC
dx y z x y z
dt= =
VV
Vec-tơ vận tốc góc của cơ hệ trong hệ tọa độ cố định ((0)) được tính theo biểu
thức (2.8) và trong hệ tọa độ động Cxyz () được tính theo biểu thức (2.9).
Sử dụng tính chất của đạo hàm véctơ trong hai hệ tọa độ [57]
(0)d d d
dt dt dt= + =
ω ω ωω ω
Hệ phương trình (2.16), được viết về dạng:
Lồng chứa
Lồng giặt
Giảm chấn
Lò xo
Đồ giặt
y
x z
A20
A2
A10
A1
A50
A5
A30
A3
A40
A4 x0
y0
z0
M
C O

- 54 -
(0)(0)
(0)
1
( )
( ) ( ) ( )C C
Ck
k
n
C k
k
dM a
dt
I I b=
=
+ =
VF
ω ω ω m F
(2.29)
Do C là khối tâm của vật rắn và các trục tọa độ của hệ động Cxyz là các trục
quán tính chính. Do đó, ma trận mômen quán tính khối lượng có dạng:
0 0
0 0
0 0
Cx
C Cy
Cz
I
I I
I
=
(2.30)
Thế các biểu diễn vào phương trình (2.29b), ta có:
1
1
1
( )
0 0 0
0 0 0 ( )
0 0 0
( )
n
Cx k
k
Cx x z y x Cx n
Cy y z x y Cy Cy k
k
Cz z y x z Cz n
Cz k
k
m
I I
I I m
I I
m
=
=
=
−
+ − = −
F
F
F
(2.31)
Hệ phương trình (2.29) có dạng
1
1
1
( ) ( )
( ) ( )
( ) ( )
kx
k
ky
k
kz
k
n
Cx x Cz Cy y z Cx k
k
n
Cy y Cx Cz x z Cy k
k
n
Cz z Cy Cx x y Cz k
k
M x F
M y F
M z F
I I I m
I I I m
I I I m
=
=
=
=
=
=
+ − =
+ − =
+ − =
F
F
F
(2.32)
trong đó Fkx, Fky, Fkz là hình chiếu của các lực tác dụng lên các trục của hệ tọa
độ cố định và mCx(Fk), mCy(Fk), mCz(Fk) là mô-men của các lực tác dụng lấy đối với
các trục của hệ tọa độ động Cxyz. Với
T
x y z
+
= = − +
ω

- 55 -
Và bỏ qua các đại lượng vô cùng bé bậc cao, nhận được hệ 06 phương trình vi phân
cấp hai dùng để xác định dịch chuyển và góc quay của hệ thống treo máy giặt:
1
1
1
( ) ( )
( ) ( )
( ) ( )
kx
k
ky
k
kz
k
n
Cx Cz Cy Cx k
k
n
Cy Cx Cz Cy k
k
n
Cz Cy Cx Cz k
k
M x F
M y F
M z F
I I I m
I I I m
I I I m
=
=
=
=
=
=
+ − =
+ − =
+ − =
F
F
F
(2.33)
Các lực Fk tác động lên hệ thống gồm: lực kích thích, lực đàn hồi, lực giảm
chấn và mômen của lực này đối với các trục gắn với khối tâm C của hệ thống treo
sẽ được trình bày sau đây.
a. Lực kích thích
Như chỉ ra ở phần trên, trong hệ Cxyz các kích thích gây bởi khối lượng lệch
tâm khi hệ thống làm việc được tính bằng biểu thức sau:
mu mx x my y mz zF F F= + +F e e e (2.34)
Với
2
2
cos sin
sin cos
0
mx
my
mz
F mr mr
F mr mr
F
= +
= −
=
(2.35)
Vị trí của khối lượng lệch tâm trong hệ Cxyz là
cos sinmu x y u zr r z = + +r e e e (2.36)
Mômen của lực kích thích đối với khối tâm C được xác định bằng biểu thức
( ) cos sin
x y z
C mu mu mu u
x y z
r r z
F F F
= =
e e e
m F r F (2.37)

- 56 -
Hình 2.23. Vị trí của tải trọng lệch tâm trong hệ tọa độ Cxyz
Từ đây, suy ra biểu thức mômen xoắn của lực kích thích đối với các trục
2
2
2
( ) sin ( sin cos )
( ) cos ( cos sin )
( ) cos sin
Cx mu z u y u
Cy mu u x z u
Cz mu y x
m r F z F z mr mr
m z F r F z mr mr
m r F r F mr
= − = − −
= − = +
= − = −
F
F
F
(2.38)
b. Lực đàn hồi của lò xo
Gọi điểm lò xo gắn với vỏ máy là A0 ( 0 0 0, ,i i ix y z ), điểm gắn với lồng chứa tại thời
điểm đầu là A1(* * *, ,iS iS iSx y z ) và thời điểm cơ hệ hoạt động là A2( , ,iS iS iSx y z ). Tọa độ của
điểm A0 và A1 các hằng số, còn tọa độ của điểm A2 được xác định theo (2.12):
*
*
*
1
1
1
iS iS
iS i S
iS i S
x x x
y y y
z z z
−
= + − −
(2.39)
Khi đó, chiều dài ban đầu và chiều dài khi lò xo hoạt động được tính bằng biểu
thức:
* 2 * 2 * 2
0 0 0 0( ) ( ) ( )iS iS i iS i iS iL x x y y z z= − + − + −
2 2 2
0 0 0( ) ( ) ( )iS iS i iS i iS iL x x y y z z= − + − + −
Lực đàn hồi được xác định như sau
0 2 0 20( ) .iS iS iS A A iS A Ak L L k L= − − = − F λ λ (2.40)
x y z
x
rcos
rsin
zu
m
rcos
zu
rsin
y
z

- 57 -
trong đó 0 2
0 2 0 0 0
0 2
( , , )(cos ,cos ,cos )iS i iS i iS i
A A iSx iSy iSz
S
A A x x y y z z
LA A
− − −= = =λ
là các cosin chỉ hướng của lò xo.
Hình 2.24. Sơ đồ tính lực đàn hồi của lò xo
Khi đó, các thành phần hình chiếu của lực đàn hồi lên các trục tọa độ được xác
định
cos
cos
cos
iSx iS iSx
iSy iS iSy
iSz iS iSz
F k L
F k L
F k L
= −
= −
= −
(2.41)
Mômen của lực đàn hồi đối với khối tâm C được tính theo biểu thức
2( ) det
x y z
C iS iS iS iS iS
iSx iSy iSz
CA x x y y z z
F F F
= = − − −
e e e
m F F (2.42)
Suy ra, các thành phần mô-men của lực đàn hồi đối với các trục của hệ Cxyz
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Cx iS iS iSz iS iSy
Cy iS iS iSx iS iSz
Cz iS iS iSy iS iSx
m y y F z z F
m z z F x x F
m x x F y y F
= − − −
= − − −
= − − −
F
F
F
(2.43)
iSx
iSy
iSz
xo
yo
A1 A2
zo
AO

- 58 -
c. Lực cản của thiết bị giảm chấn
Gọi điểm thiết bị giảm chấn gắn với vỏ máy là D0( 0 0 0, ,j j jx y z ), điểm gắn với
lồng chứa khi chưa hoạt động là D1* * *( , , )jD jD jDx y z và tại thời điểm cơ hệ hoạt động là
D2 ( , , )jD jD jDx y z . Tọa độ của điểm D0 và D1 các hằng số, còn tọa độ của điểm D2
được xác định theo (2.12):
*
*
*
1
1
1
jD jD
jD j D
jD j D
x x x
y y y
z z z
−
= + − −
(2.44)
Hình 2.25. Sơ đồ tính lực giảm chấn của thiết bị giảm chấn
Khi đó, chiều dài thiết bị giảm chấn ở thời điểm ban đầu và khi hoạt động
được tính bằng biểu thức:
* 2 * 2 * 2
0 0 0 0( ) ( ) ( )jD jD j jD j jD jL x x y y z z= − + − + −
2 2 2
0 0 0( ) ( ) ( )jD jD j jD j jD jL x x y y z z= − + − + −
Thiết bị giảm chấn chuyển dịch một lượng
0jD jD jDL L L = −
Suy ra, vận tốc tương đối của giảm chấn
0 0 0
2 2 2
0 0 0
( ) ( ) ( )
( ) ( ) ( )
jD j jD jD j jD jD j jDr
jD jD jD
jD j jD j jD j
x x x y y y z z zV L L
x x y y z z
− + − + −= = =
− + − + − (2.45)
jDx
jDy
jDz
x0
y0
D1
D2
z0
D0
z
0 0 0( , , )j j jx y z

- 59 -
Phương của thiết bị giảm chấn được xác định bằng biểu thức
0 2
0 0 00 2
2 2 20 2 0 0 0
( , , )
( ) ( ) ( )
(cos ,cos ,cos )
jD j jD j jD j
D D
jD j jD j jD j
jDx jDy jDz
x x y y z zD D
D D x x y y z z
− − −= =
− + − + −
=
λ (2.46)
Do vậy, biểu thức vận tốc tương đối của giảm chấn được viết lại
os os cosr
jD jD jDx jD jDy jD jDzV x c y c z = + + (2.47)
Theo (2.26), độ lớn lực giảm chấn được xác định bằng biểu thức
3sgn( ) /
0 1 2sgn( ) sgn( )r rjD jDV V Cr r r
jD jD jD jDF C V C V V C e−
= + + (2.48)
trong đó: C0 = 85.73, C1 = - 15.00, C2 = -93.50, C3 = 0.07.
Suy ra,
2 0 0 2jD jD D D jD D DF F= = −F λ λ (2.49)
Do vậy, các thành phần hình chiếu của lực giảm chấn lên các trục tọa độ
được xác định:
os
os
os
jDx jD jDx
jDy jD jDy
jDz jD jDz
F F c
F F c
F F c
= −
= −
= −
(2.50)
Mômen của lực giảm chấn đối với khối tâm được xác định theo biểu thức
2( )
x y z
C jD jD jD jD jD
jDx jDy jDz
CD x x y y z z
F F F
= = − − −
e e e
m F F (2.51)
Suy ra, các thành phần mô-men của lực giảm chấn đối với các trục của hệ
Cxyz
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Cx jD jD jDz jD jDy
Cy jD jD jDx jD jDz
Cz jD jD jDy jD jDx
y y F z z F
z z F x x F
x x F y y F
= − − −
= − − −
= − − −
m F
m F
m F
(2.52)
Thay thế biểu thức của lực kích thích, lực đàn hồi, lực giảm chấn vào phương
trình (2.32), hệ phương trình vi phân mô tả hệ thống treo được dẫn ra.

- 60 -
3
2 3
1 1
2 3sgn( ) /
0 1 2
1 1
2
2 3
1 1
2
0 1
1
( )cos ( sgn( ) sgn( ) ) os
( cos sin )
( )cos ( sgn( )
r rjD jD
iSx jDx mx
i j
V V Cr r r
iS iSx jD jD jD jDx
i j
iSy jDy my
i j
r
iS iSy jD
i
M x F F F
k L C V C V V C e c
mr mr
M y F F F
k L C V C V
= =
−
= =
= =
=
= + +
= − + − + +
+ +
= + +
= − + − +
3
3
3sgn( ) /
2
1 3,4,5
2
2 3
1 1
2 3sgn( ) /
0 1 2
1 1
sgn( ) ) os
( sin cos )
( )cos ( sgn( ) sgn( ) ) os
r rjD jD
r rjD jD
V V Cr r
jD jD jDy
j j
iSz jDz mz
i j
V V Cr r r
iS iSz jD jD jD jDz
i j
V C e c
mr mr
M z F F F
k L C V C V V C e c
−
= =
= =
−
= =
+
+ −
= + +
= − + − + +
(2.53)
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) os
(
r rjD jD
Cx Cz Cy Cx iS Cx jD Cx mu
i j
iS iS iSz iS iSy
i
V V Cr r r
jD jD jD jD jDz jD jDy
j
u
I I I m m m
k L y y z z
C V C V V C e y y c z z c
z mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
−
F F F
2 sin cos )mr −
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) os
(
r rjD jD
Cy Cx Cz Cy iS Cy jD Cy mu
i j
iS iS iSx iS iSz
i
V V Cr r r
jD jD jD jD jDx jD jDz
j
u
I I I m m m
k L z z x x
C V C V V C e z z c x x c
z mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
+
F F F
2cos sin )mr +
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
2
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) osr rjD jD
Cz Cy Cx Cz iS Cz jD Cz mu
i j
iS iS iSy iS iSx
i
V V Cr r r
jD jD jD jD jDy jD jDx
j
I I I m m m
k L x x y y
C V C V V C e x x c y y c
mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
−
F F F

- 61 -
Đây là một hệ 06 phương trình vi phân phi tuyến phức tạp. Việc tìm nghiệm
giải tích cho cơ hệ là không thể thực hiện được. Do vậy, nghiên cứu sử dụng
phương pháp giải số. Chương trình giải số được viết trong môi trường Matlab/
Simulink bằng cách sử dụng các khối hàm có sẵn trong Simulink kết hợp với biểu
thức tính được viết trong Matlab.
2.4.2. Xây dựng mô hình động lực đối với hệ thống treo chuyển động phẳng
(Mô hình 2)
Đối với hệ thống treo của máy giặt lồng ngang của thương hiệu Samsung,
Hitachi có hai lò xo và hai giảm chấn nằm cùng trong mặt phẳng chứa khối tâm
của hệ thống. Cho nên, khi khối lượng lệch tâm cũng nằm trong cùng mặt phẳng
này thì mô hình động lực của hệ thống treo chỉ cần xây dựng trong không gian hai
chiều (hệ chuyển động phẳng). Đối với máy giặt LG, hệ thống treo có ba thiết bị
giảm chấn (1 bên phải và 2 bên trái), tuy nhiên nếu khối lượng lệch tâm nằm trong
mặt phẳng đối xứng chứa khối tâm của hệ thống treo thì cũng có thể coi gần đúng
là mô hình phẳng. Do tải trọng lệch tâm và khối tâm của hệ thống treo nằm trong
cùng mặt phẳng nên lực quán tính ly tâm không tạo ra mômen quay quanh trục x
và y, cũng không có lực ly tâm tác động theo phương trục z. Vì vậy, mô hình
không gian sáu bậc tự do được đưa về mô hình phẳng ba bậc tự do. Vị trí của hệ
treo được xác định theo tọa độ khối tâm (C) và góc quay quanh khối tâm, tức là:
dịch chuyển theo trục x, trục y và góc lắc của lồng chứa trong mặt phẳng x-y.
Hình 2.26(a) cho thấy lồng chứa ở vị trí ban đầu đứng yên, còn Hình 2.26(b) cho
thấy sự quay của lồng giặt và khối lượng lệch tâm ở thời điểm bất kì khi máy giặt
hoạt động với m là khối lượng không cân bằng và là vận tốc góc quay của lồng
giặt.
Như đã trình bày trong phần tổng quan, trong nghiên cứu của Pinar Boyraz
[10] và Galal Ali [15][16][17][18] cũng đã đưa ra mô hình động lực phẳng cho
máy giặt lồng ngang, tuy nhiên các mô hình này không xét đến góc lắc của lồng
chứa nên chuyển động của hệ thống treo là chuyển động tịnh tiến. Ở mô hình
phẳng này, nghiên cứu tập trung xây dựng mô hình toán cho bài toán chuyển động
phẳng tổng quát (tức là chuyển động song phẳng). Mô hình động lực của hệ thống

- 62 -
treo được xây dựng với ba bậc tự do, sử dụng các tọa độ suy rộng: chuyển dịch
theo phương x và y, góc quay của lồng chứa trong mặt phẳng Oxy như đã chỉ ra
trên Hình 2.26.
Hình 2.26. Mô hình hệ thống treo phẳng
Hệ phương trình Newton - Euler (2.33) của mô hình hệ thống treo không gian
được viết dưới dạng:
1 2 1 2
1 2 1 2
1 2 1 2
1
( ) ( ) ( ) ( ) ( ) ( )
kx Sx Sx Dx Dx mx
k
ky Sy Sy Dy Dy my
k
n
Cz Cz k Cz S Cz S Cz D Cz D Cz mu
k
M x F F F F F F
M y F F F F F F
I m m m m m m=
= = + + + +
= = + + + +
= = + + + +
F F F F F F
(2.54)
trong đó, các thành phần lực kích thích gây ra bởi lực quán tính của tải trọng lệch
tâm và mômen của chúng đối với khối tâm C là tương tự như trong mô hình không
gian
2 cos sinmxF mr mr = +
2 sin cosmyF mr mr = − (2.55)
2( )Cz mum mr = −F
Còn biểu thức các thành phần lực đàn hồi của lò xo và lực cản của giảm chấn tính
có sự thay đổi, do vậy, biểu diễn tường minh cách xác định các thành phần này và mô-
m
O=C
x0
y0
O
x0
y0
C
x
LS
LD
A20
A10
A1 A
2
A3 A
4
A30
A40
RS
RD
m
A1 A
2
A3
A4

- 63 -
men của chúng đối với khối tâm bằng hình học sẽ được trình bày chi tiết sau đây (trong
hệ phương trình (2.54) chỉ số 1 ứng với lò xo và giảm chấn bên phải, chỉ số 2 ứng
với lò xo và giảm chấn bên trái).
a. Lực đàn hồi của lò xo
• Xét lò xo bên phải (RS):
Hình 2.27 biểu diễn sự thay đổi kích thước và lực đàn hồi của lò xo bên phải
trong quá trình máy giặt hoạt động.
Hình 2.27. Sơ đồ 2D phi tuyến hình học của lò xo phải
Chiều dài ban đầu và khi biến dạng của lò xo
' 2 2
0 10 1 10 10RSL A A x y= = + ; 2 2
10 1 1 1RSL A A X Y= = +
Với
1 10 1 1sin sin( )X x R x R = + + − +
1 10 1 1os os( )Y y Rc y Rc = + − − +
1 1sin cosRS RS
RS RS
X Y
L L = =
Lực đàn hồi được tính theo biểu thức
0( )RS RS RSF k L L= −
y+ y
x
x+
RS
A1 A’1
L0RS
LRS
A10
y
x
x+
FRSx
FRSy A’1
A10
A1
FRS
1
RS*
RS
+1
y+ O
C
y10
x10 X1
Y1
O
C
FRSt

- 64 -
Chiếu lên hai phương x, y
1 1sin cosSx RS RS Sy RS RSF F F F = − = (2.56)
Chiếu lên phương tiếp tuyến của lồng chứa
* 1 1sin sin( ( )) sin( )RSt RS RS RS RS RS RSF F F F = = − + = − −
1 1
1
tanRS
X
Y −
=
Mômen của lực đàn hồi bên phải đối với tâm C
1( ) .Cz S RStm R F=F (2.57)
• Xét lò xo bên trái (LS):
Việc xác định sự thay đổi chiều dài lò xo và lực đàn hồi của lò xo bên trái
như hình dưới đây tương tự như lò xo bên phải.
Hình 2.28. Sơ đồ 2D phi tuyến hình học của lò xo trái
Chiều dài ban đầu và khi biến dạng của lò xo
' 2 2
0 20 2 20 20LSL A A x y= = + ;
2 2
20 2 2 2LSL A A X Y= = +
Với 2 20 1 1sin sin( )X x R x R = + + − −
2 20 1 1os os( )Y y Rc y Rc = + + − −
y+ y
x
x+
LS
A2
LLS
A20
y+ y
x
x+
FLSx FLS
FLSy
L0LS
A20
1
LS*
C
O 1 -
A2
LS
A’2
Y2
y20
x20 X2
C
A’2 FLSt

- 65 -
2 2sin cosLS LS
LS LS
X Y
L L = =
Lực đàn hồi được tính theo biểu thức
( )LS LS OLSF k L L= −
Chiếu lên hai phương x, y
2 2sin cosSx LS LS Sy LS LSF F F F = − = − (2.58)
Chiếu lên phương tiếp tuyến của lồng chứa
* 1 1sin sin( ( )) sin( )LSt LS LS LS LS LS LSF F F F = = − − = − +
1 2
2
tanLS
X
Y −
=
Mômen của lực đàn hồi bên trái đối với tâm C
2( ) .Cz S LStm R F= −F (2.59)
b. Lực giảm chấn của thiết bị giảm chấn
• Xét giảm chấn bên phải (RD):
Sử dụng kỹ thuật tương tự như tính toán lực đàn hồi của lò xo. Hình 2.29 biểu
diễn ứng xử của thiết bị giảm chấn bên phải trong quá trình máy giặt hoạt động.
Chiều dài ban đầu và khi chuyển dịch của thiết bị giảm chấn
2 2
0 30 30RDL x y= +
2 2
3 3RDL X Y= +
Với
3 30 2 2
3 30 2 2
sin sin( )
cos cos( )
X x R x R
Y y R y R
= + − − −
= + − − −
3 3sin cosRD RD
RD RD
X Y
L L = =
Chuyển dịch của thiết bị giảm chấn
0RD RD RDL L L = −

- 66 -
Hình 2.29. Sơ đồ 2D phi tuyến hình học của giảm chấn phải
Vận tốc tương đối của thiết bị giảm chấn
2 2
3 3
3 2 3 2
2 2
( os( )) ( sin( ))
( os( )sin ( sin( )) os
R
RD RD RD
RD
RD RD
dV L L X Y
dt
X x R c Y y R
L
x R c y R c
= = = +
− + − + − − −=
= − + − + − − −
Lực cản của thiết bị giảm chấn phải
3sgn( ). /
0 1 2sgn( ) sgn( )R R
RD RDV V CR R R
RD RD RD RDF C V C V V C e−
= + +
Hình chiếu của lực cản theo hai phương x,y
1 1sin cosDx RD RD Dy RD RDF F F F = = (2.60)
Chiếu lên phương tiếp tuyến của lồng chứa
*
2sin sin( ( ))RDt RD RD RD RDF F F = = − −
1 3
3
tanRD
X
Y −
=
Mômen của lực cản bên phải đối với tâm C
1( ) .Cz D RDtm R F= −F (2.61)
• Xét giảm chấn bên trái (LD):
y+ y
x
x+
RD
A3
L0RD
LRD
A30
y+ y
x
x+
FRD
FRDx
A3 A’3
2
FRDy
RD*
O
Y3
X3
x30
y30
O
A’3 2-
RD
FRDt
C
C

- 67 -
Hình 2.30 biểu diễn sự thay đổi kích thước của thiết bị giảm chấn trái. Tính
toán tương tự như đối với giảm chấn bên phải, các kết quả nhận được ứng với thiết
bị giảm chấn bên trái như sau.
Chiều dài ban đầu và khi chuyển dịch của thiết bị giảm chấn
2 2
0 40 40LDL x y= +
2 2
4 4LDL X Y= +
Với
4 40 2 2
4 40 2 2
sin sin( )
cos cos( )
X x R x R
Y y R y R
= + − − +
= + + − +
4 4sin cosLD LD
LD LD
X Y
L L = =
Hình 2.30. Sơ đồ 2D phi tuyến hình học của thiết bị giảm chấn trái
Chuyển dịch của thiết bị giảm chấn
0LD LD LDL L L = −
Vận tốc tương đối của thiết bị giảm chấn
2 2
0 4 4
4 2 4 2
2 2
( )
( os( )) ( sin( ))
( os( ))sin ( sin( )) os
R
LD LD LD LD
LD
LD LD
dV L L L X Y
dt
X x R c Y y R
L
x R c y R c
= − = = +
− − + + + +=
= − − + + + +
y+ y
x
x+
LD
A4
A’4
L0LD
LLD
A40
y+
x+
A’4
A40
FLD
FLDy
FLDx
y
x 2
LD*
LD
A4 LD*
O O
C C
X4
Y4
y40
x40
+2
FLDt

- 68 -
Lực cản của giảm chấn bên trái:
3sgn( ). /
0 1 2sgn( ) sgn( )R R
LD LDV V CR R R
LD LD LD LDF C V C V V C e−
= + +
Hình chiếu của lực cản theo hai phương x,y
2 2sin cosDx LD RD Dy LD RDF F F F = = − (2.62)
Chiếu lên phương tiếp tuyến của lồng chứa
* 2sin sin( )LDt LD LD LD LDF F F = = + −
1 4
4
tanLD
X
Y −
=
Mômen của lực cản bên trái đối với tâm C
2( ) .Cz D LDtm R F= −F (2.63)
Thay thế các biểu thức từ (2.55) đến (2.63) vào hệ phương trình (2.54), khi đó
hệ phương trình chủ đạo của hệ thống treo phẳng tổng quát được thiết lập.
2.4.3. Mô hình phẳng hai bậc tự do (Mô hình 3)
Nếu ngoài các giả thiết đã nêu ra ở mô hình 2, thêm vào điều kiện ràng buộc là
cố định chuyển động xoay lắc của lồng chứa quanh trục z thì cơ hệ chỉ còn hai bậc
tự do, chuyển động của lồng chứa được xem như chuyển động tịnh tiến. Mô hình
này tương tự như mô hình động lực của hệ thống treo máy giặt đưa tra trong tham
khảo [10]. Chọn tọa độ suy rộng là x,y (chuyển dịch của khối tâm theo phương
ngang và phương thẳng đứng). Khi đó hệ phương trình Newton – Euler có dạng
1 2 1 2
1 2 1 2
Sx Sx Dx Dx mx
Sy Sy Dy Dy my
M x F F F F F
M y F F F F F
= + + + +
= + + + + (2.64)
trong đó:
• M là tổng khối lượng hệ thống treo.
• ,mx myF F là lực kích thích gây ra bởi khối lượng lệch tâm được xác định trong
biểu thức (2.55).
• 1 1 2 2, , ,Sx Sy Sx SyF F F F tương ứng là lực đàn hồi của lò xo bên phải và bên trái theo
phương x và y. Các lực này được xác định theo biểu thức (2.56) và (2.58) ứng
với góc lắc bằng không.

- 69 -
• 1 1 2 2, , ,Dx Dy Dx DyF F F F tương ứng là lực cản của thiết bị giảm chấn bên phải và bên
trái theo phương x và y. Các lực này được xác định theo biểu thức (2.60) và
(2.62) ứng với góc lắc bằng không.
2.4.4. Biểu diễn Simulink của các mô hình
2.4.4.1. Sơ đồ Simulink
Simulink là một gói phần mềm dùng để mô phỏng và phân tích hệ thống động
lực tuyến tính và phi tuyến. Đối với mô hình hóa, Simulink cung cấp một giao
diện đồ họa cho người dùng xây dựng mô hình như sơ đồ khối bằng cách sử
dụng thao tác nhấp chuột với các khối có sẵn đặc biệt thuận lợi cho việc tương
tác. Ngoài ra, môi trường Matlab và Simulink được hợp thành một thể thống
nhất, cho nên có thể phân tích, mô phỏng, và sửa đổi mô hình cần mô phỏng linh
hoạt trong cả hai môi trường này.
Để xây dựng chương trình tính trong môi trường Matlab/Simulink, hệ phương
trình (2.52) sau một số bước biến đổi được đưa về dạng:
2 3
1 1
2 3
1 1
2 3
1 1
1
1
1
iSx jDx mx
i j
iSy jDy my
i j
iSz jDz mz
i j
x F F FM
y F F FM
z F F FM
= =
= =
= =
= + +
= + +
= + +
2 3
1 1
1( ) ( ) ( ) ( )Cx iS Cx jD Cx mu Cz Cy
i jCx
m m m I II
= =
= + + − −
F F F (2.65)
2 3
1 1
1( ) ( ) ( ) ( )Cy iS Cy jD Cy mu Cx Cz
i jCy
m m m I II
= =
= + + − −
F F F
2 3
1 1
1( ) ( ) ( ) ( )Cz iS Cz jD Cz mu Cy Cx
i jCz
m m m I II
= =
= + + − −
F F F
Trong đó:
iS iSF k L= ; 3sgn( ) /
0 1 2sgn( ) sgn( )r rjD jDV V Cr r r
jD jD jD jDF C V C V V C e−
= + +
cos cos cosiSx iS iSx iSy iS iSy iSz iS iSzF F F F F F = − = − = −
osjDx jD jDxF F c = − osjDy jD jDyF F c = − osjDz jD jDzF F c = −

- 70 -
2 cos sinmxF mr mr = +
2 sin cosmyF mr mr = −
0mzF =
( ) ( )cos ( )cosCx iS iS iS iSz iS iSym F y y z z = − − − − F
( ) ( )cos ( )cosCy iS iS iS iSx iS iSzm F z z x x = − − − − F
( ) ( )cos ( )cosCz iS iS iS iSy iS iSxm F x x y y = − − − − F
( ) ( ) os ( ) osCx jD jD jD jDz jD jDym F y y c z z c = − − − − F
( ) ( ) os ( ) osCy jD jD jD jDx jD jDzm F z z c x x c = − − − − F
( ) ( ) os ( ) osCz jD jD jD jDy jD jDxm F x x c y y c = − − − − F
2( ) ( sin cos )Cx mu um z mr mr = − −F
2( ) ( cos sin )Cy mu um z mr mr = +F
2( )Cz mum mr = −F
Để giải quyết mô hình toán học này, công cụ Simulink/Matlab đã được sử
dụng. Một sơ đồ tính được thiết lập để giải hệ (2.65) trong môi trường
Matlab/Simulink chỉ ra trên Hình 2.31. Các khối cơ bản của Simulink kết hợp với
hàm m_file của Matlab được sử dụng. Phần tính toán chính nằm trong khối hàm
F_Func_6dof chính giữa sơ đồ. Các thông số đầu vào của sơ đồ khối là các thông số
về khối lượng, đặc tính hình học của hệ thống, tọa độ vị trí của các điểm kết nối lò
xo và giảm chấn với lồng chứa và vỏ máy, tốc độ quay của lồng giặt, khối lượng và
vị trí của khối lượng lệch tâm, hệ số độ cứng của lò xo (k), các hệ số của biểu thức
lực cản của giảm chấn. Các thông số đầu ra (kết quả mô phỏng) là chuyển dịch,
góc lắc của hệ thống và các phản lực động lực tại các điểm kết nối lò xo và giảm
chấn với vỏ máy.

- 71 -
Hình 2.31. Sơ đồ Simulink cho cơ hệ không gian của hệ thống treo HWM
#HWM_6dof_1209_2020.slx
#HWM_6dof_12092020.m

- 72 -
Hình 2.32. Sơ đồ Simulink cho mô hình phẳng của hệ thống treo HWM
#HWM_3dof_1009_2020.slx
#HWM_3dof_10092020.m

- 73 -
Trong sơ đồ Simulink, các hàm Matlab cơ bản (khối hàm ở giữa) là hàm chứa
các phương trình để xác định các thành phần lực đàn hồi, lực giảm chấn và mô-
men xoắn gây ra bởi các lực này. Các đầu ra của hàm Matlab là gia tốc theo trục
x,y và z cùng các góc quay α, và . Với tích phân một lần sẽ nhận được vận tốc,
vận tốc góc và tích phân hai lần sẽ thu được chuyển dịch, góc quay. Chuyển dịch,
vận tốc, góc quay, vận tốc góc thu được sẽ được đưa trở lại để sử dụng trong tính
toán các hàm Matlab chính. Ngoài ra, các đại lượng cần được trích xuất là các
phản lực động lực của lò xo và giảm chấn đều có thể trích xuất tại các cửa sổ nhờ
khối hàm Scope hoặc lưu dữ liệu số trong Workspace để so sánh, phân tích đánh
giá nhờ khối Simout.
Đối với mô hình phẳng, hệ phương trình (2.55) được viết lại để xây dựng sơ
đồ Simulink:
1 2 1 2
1 2 1 2
1 2 1 2
1
1
1( ) ( ) ( ) ( ) ( )
Sx Sx Dx Dx mx
Sy Sy Dy Dy my
Cz S Cz S Cz D Cz D Cz mu
z
x F F F F FM
y F F F F FM
m m m m mI
= + + + +
= + + + +
= + + + +F F F F F
(2.66)
Sơ đồ giải hệ (2.66) thể hiện trên Hình 2.32. Kết quả chương trình mô phỏng là
chuyển dịch theo hai phương x và y, góc lắc của lồng chứa và lực đàn hồi của lò
xo, lực cản của thiết bị giảm chấn, quỹ đạo của điểm tâm.
2.4.4.2. Một số kết quả của chương trình mô phỏng
Chương trình tính và mô phỏng cho hệ thống treo máy giặt bằng
Matlab/Simulink được thực hiện với các thông số đầu vào được cho trong Bảng 2.5.
Bảng 2.5. Các thông số hệ thống của máy giặt lồng ngang LG-WD 8990TDS
Thông số Kí hiệu Giá trị Đơn vị
Khối lượng hệ thống treo M 32.5 kg
Khối lượng lệch tâm m 0.62 kg
Tốc độ vòng quay N 610.99
764.77 vòng/phút

- 74 -
Độ cứng lò xo k 5652 N/m
Tọa độ điểm kết nối lò xo
• Lò xo 1
• Lò xo 2
A10(x10,y10,z10)
A11(x11,y11,z11)
A20(x20,y20,z20)
A21(x21,y21,z21)
(-0.328,0.284,0)
(-0.154,0.221,0)
(-0.328,-0.248,0)
(-0.154,-0.221,0)
m
m
Tọa độ điểm kết nối giảm
chấn
• Thiết bị giảm chấn 3
• Thiết bị giảm chấn 4
• Thiết bị giảm chấn 5
A30(x30,y30,z30)
A31(x31,y31,z31)
A40(x40,y40,z40)
A41(x41,y41,z41)
A50(x10,y10,z10)
A51(x11,y11,z11)
(0.402,0.278,0)
(0.218,0.158,0)
(0.402,-0.278,0.1)
(0.218,-0.158,0.1)
(0.402,-0.278,-0.1)
(0.218,-0.158,-0.1)
m
m
m
Mô-men quán tính khối
lượng đối với khối tâm ICx, ICy, ICz 1.95, 3.12, 2.95 kgm2
Hệ số cản Ci trong biểu thức
quan hệ lực – vận tốc của
thiết bị giảm chấn theo mô
hình Tustin
C0
C1
C2
C3
85.73
- 15
-93.5
0.07
Bán kính lồng chứa
Bán kính lồng giặt
R
r
0.27
0.24 m
Vị trí khối lượng lệch tâm zu 0, 0.1 m
Một số kết quả nhận được từ chương trình mô phỏng ở tốc độ quay 764.77
vòng/phút đối với mô hình không gian (ứng với zu =0.1m) được thể hiện trên đồ thị
các hình 2.33 ÷ hình 2.35.

- 75 -
Hình 2.33. Lực và mômen xoắn kích thích (zu=0.1m)

- 76 -
Hình 2.34. Đồ thị phản lực động lực của lò xo và giảm chấn ((zu=0.1m))

- 77 -
Hình 2.35. Đồ thị chuyển dịch và góc lắc (zu=0.1m)
Kết quả chỉ ra trên các đồ thị Hình 2.33 cho thấy vì không có lực kích thích
theo phương z nên chuyển dịch theo phương z bằng không. Mô-men xoắn gây lắc
quanh trục z giảm dần và tiệm cận đến không khi lồng giặt quay ổn định cho nên
góc lắc quanh trục z sẽ dao động tắt dần (đồ thị gama – Hình 2.35).
Khi khối lượng lệch tâm (m) không nằm trong mặt phẳng đối xứng sẽ gây
mô-men xoắn quanh trục x và y do vậy gây ra góc rung lắc quanh trục x và y, tuy
nhiên biên độ của các góc lắc này cũng khá nhỏ thể hiện qua đồ thị anpha(α) và
beta() – Hình 2.35. Khi khối lượng lệch tâm nằm trong mặt phẳng đối xứng thì các
góc lắc này bằng không.

- 78 -
Một số kết quả nhận được từ chương trình mô phỏng tại tốc độ quay 764.77
vòng/phút đối với mô hình không gian (ứng với zu = 0.0m) được thể hiện trên đồ thị
các Hình 2.36 và Hình 2.37. Để có dữ liệu so sánh với thực nghiệm, các thông số
chuyển dịch cũng như phản lực động lực của lò xo và giảm chấn được được xác định
giá trị lớn nhất, nhỏ nhất, biên độ ở giai đoạn hệ thống treo làm việc ổn định. Sử
dụng lệnh Quick Peaks trong nhóm lệnh Gadgets của phần mềm Origin Lab để tìm
các điểm cực trị, biên độ sẽ được tính gần đúng từ trung bình giá trị của các điểm cực
trị này. Từ chuyển dịch theo phương x và y có thể vẽ được quỹ đạo chuyển động của
điểm tâm. Các kết quả về biên độ chuyển dịch và phản lực động lực tại tốc độ quay
khác được xác định tương tự.
Hình 2.36. Đồ thị chuyển dịch, quỹ đạo điểm tâm và góc lắc (zu=0.0m)

- 79 -
Hình 2.37. Đồ thị các phản lực động lực của lò xo và giảm chấn (zu=0.0m )

- 80 -
2.5. KẾT LUẬN CHƯƠNG 2
Trong chương 2, nghiên cứu đã thực hiện được một số kết quả sau:
- Xây dựng được bộ dữ liệu để xác định đặc tính của thiết bị giảm chấn bằng
cách thực hiện thí nghiệm trên 04 mẫu thiết bị giảm chấn, tại 20 giá trị vận tốc khác
nhau. Bộ dữ liệu được thực hiện trên thiết bị thí nghiệm xác định đặc tính của thiết
bị giảm chấn với các thông số kỹ thuật: (1) Lực kéo/nén lớn nhất 500 N; độ phân
giải 0.02 N; độ sai lệch không lớn hơn ± 5% trên toàn dải; (2) Tốc độ lớn nhất
0.8m/s; độ sai lệch tốc độ không lớn hơn -1.0%, + 4% toàn dải; biên độ dịch chuyển
tới 600 mm, độ phân giải 0,0015 mm; độ sai lệch không lớn hơn ± 1%; (3) Điều
khiển tốc độ, chu kỳ bằng máy tính; dữ liệu đo được ghi nhận và lưu trữ theo thời
gian thực, xử lý và hiển thị trên máy tính.
- Xây dựng được mô hình động lực của hệ thống treo của HWM trong cả
trường hợp phẳng (2D) và không gian (3D), cụ thể: đã mô tả được các thành phần
của HWM thực tế, đưa ra các giả định để xây dựng mô hình toán, chỉ rõ các đại
lượng đầu ra và đầu vào của mô hình, mỗi thành phần hệ thống mô hình hóa được
giải thích một cách riêng biệt với đặc tính kỹ thuật của từng bộ phận của hệ thống
được đo đạc xác định từ thực nghiệm, biểu thức ứng xử theo thời gian của lực đàn
hồi, lực giảm chấn và lực kích thích được giải thích chi tiết. Điểm đặc biệt ở mô
hình động lực của hệ thống treo của HWM xây dựng trong nghiên cứu này đó
là: lực đàn hồi của lò xo là hàm phi tuyến hình học, lực cản nhớt của thiết bị
giảm chấn có quan hệ lực – vận tốc theo hàm mũ ứng với mô hình ma sát
Tustin. Do vậy, hệ phương trình vi phân nhận được là các phương trình vi phân
phi tuyến.
- Xây dựng chương trình giải số cho hệ phương trình vi phân phi tuyến
trong môi trường Matlab/Simulink.

- 81 -
CHƯƠNG 3
XÂY DỰNG MÔ HÌNH THỰC NGHIỆM ĐO RUNG ĐỘNG
ĐÁNH GIÁ KIỂM CHỨNG MÔ HÌNH ĐỘNG LỰC HỆ THỐNG TREO
MÁY GIẶT LỒNG NGANG
Trong chương này nghiên cứu tập trung trình bày nội dung xây dựng hệ thống
thí nghiệm nhằm thu thập các thông số phản ánh đặc tính rung động của hệ thống.
Đồng thời, để đánh giá độ chính xác của mô hình động lực của hệ thống treo máy
giặt lồng ngang thiết lập trong chương 2, phần này nghiên cứu sẽ so sánh các kết
quả mô phỏng tương ứng các mô hình đã xây dựng với dữ liệu đo từ thực nghiệm
tại các tốc độ quay khác nhau.
3.1. MÔ HÌNH THỰC NGHIỆM ĐO RUNG ĐỘNG
3.1.1. Hệ thống khung đỡ
Để dễ dàng điều chỉnh, gá lắp thêm các thiết bị đo rung động và phụ kiện thí
nghiệm, toàn bộ phần vỏ máy giặt (trong Hình 1.3a -trang 7) được tháo gỡ và
thay thế bằng hệ thống khung thép cứng vững. Ảnh chụp hệ thống khung đỡ
được chỉ ra trên Hình 3.1.
Hình 3.1. Hệ thống khung đỡ thay thế vỏ máy giặt

- 82 -
Khung đỡ đã được thiết kế thỏa mãn điều kiện khi lắp thêm các thiết bị
đo, vị trí của các điểm kết nối lò xo và thiết bị giảm chấn với khung thép không
thay đổi so với máy giặt nguyên mẫu, điều này sẽ giúp hệ thống treo của máy
giữ nguyên được các đặc tính khi làm việc.
3.1.2. Hệ thống thiết bị đo
3.1.2.1. Sơ đồ khối các hệ thống đo và xử lý tín hiệu
Để nghiên cứu, phân tích và đánh giá rung động của hệ thống treo HWM, hệ
thống thí nghiệm cần đo được các thông số rung động của lồng giặt trong các chế
độ khảo sát, bao gồm:
(1) Đo, xác định lực động trên 02 lò xo treo (LC1, LC2) và 03 thiết bị giảm
chấn (LC3, LC4, LC5). Việc xác định các thành phần lực này thực hiện thông qua
đo giá trị phản lực tại các liên kết giữa lò xo, giảm chấn với khung máy bằng các
cảm biến lực thông dụng (loadcell), chỉ ra trên Hình 3.2;
Hình 3.2. Vị trí lắp đặt cảm biến lực
(2) Đo, xác định chuyển dịch của lồng giặt theo hai phương. Việc xác định các
thành phần dịch chuyển này thực hiện bằng cách đo trực tiếp thông qua cảm biến
dịch chuyển LVDT hoặc thông qua đo gia tốc bằng các cảm biến gia tốc theo các
phương và tính toán quy đổi, chỉ ra trên Hình 3.3;
(3) Đo gia tốc theo các phương của lồng giặt, khung máy. Việc xác định các
thành phần gia tốc này phụ thuộc vào số bậc tự do cần xác định để có thể bố trí các
cặp cảm biến gia tốc phù hợp.
Sơ đồ nguyên lý của hệ thống đo được trình bày trên Hình 3.4 và sơ đồ kết nối
với các thiết bị đo, thu thập, xử lý số liệu được trình bày trên Hình 3.5.
LC1 LC2 LC3 LC4 LC5

- 83 -
Hình 3.3. Vị trí lắp đặt cảm biến chuyển dịch và gia tốc
1-Cảm biến chuyển dịch (LVDT), 2- Cảm biến gia tốc
Hình 3.4. Sơ đồ nguyên lý hệ thống đo
Hình 3.5. Sơ đồ kết nối các thiết bị
Loadcell, cảm biến gia tốc, cảm biển dịch chuyển
Bộ khuếch đạiDAQ
chuyển đổi dữ liệu
ComputerXử lý, lưu trữ
m
O
A20
A10
A1 A
2
A3 A
4,5
A30
A4,50
LVDT1
LVDT2
LC3 LC4,5
LC1 LC2
Acc2
Acc1
Ni SCC – 68 và SCC – SG 04
2
1
1
2

- 84 -
3.1.2.2. Các dụng cụ đo và thiết bị thu thập dữ liệu sử dụng trong hệ thống
a. Hệ thống đo lực
• Cảm biến lực
Nghiên cứu sử dụng loại loadcell của hãng Mettler Toledo (Hình 3.6). Tại các
gối đỡ của 03 thiết bị giảm chấn trên đế máy, sử dụng 03 loadcell tải trọng 50kg,
model được chọn là MT 1260-50 [68]. Tại hai giá treo lò xo trên khung máy, sử
dụng 02 loadcell tải trọng 100kg, model được chọn là MT 1041-100. Đặc tính kỹ
thuật: Giới hạn đo được: F = 100kg ≈ 980N; Độ nhạy: 2mV/V [69].
Hình 3.6. Cảm biến loadcell model MT 1041- 100
• Bộ khuếch đại
Sử dụng loại SCC-SG04 của National Instruments [70] bao gồm các mô-đun
khuếch đại kênh kép cho việc ghép nối theo sơ đồ Full bridge. SCC-SG04 có 2 kênh
độc lập, mỗi kênh của một SCC-SG bao gồm một bộ khuếch đại với hệ số khuếch
đại G =100, sai số khuyếch đại đạt ±0.8%; bộ lọc băng thông thấp (lowpass) với tần
số cắt 1.6kHz, và một chiết áp điều chỉnh điểm không của cầu đo. Điện áp kích
thích cầu đo 2.5V.
Hình 3.7. Khuếch đại tín hiệu model SCC-SG04 và sơ đồ khối của thiết bị
• Bộ ghép nối các mô-đun khuếch đại
Mô-đun khuếch đại được sử dụng là loại SCC-68 của National Instruments [70].

- 85 -
Hình 3.8. Chức năng bộ ghép nối các mô-đun SCC, NI SCC-68
• Thiết bị giao tiếp DAQ ghép nối máy tính
Loại thiết bị: NI USB 6251 [71]
Hình 3.9. Thiết bị ghép nối DAQ
Ngoài ra, sử dụng phần mềm LabView để hỗ trợ lập trình điều khiển thiết bị
và thu thập dữ liệu.
b. Hệ thống đo gia tốc
• Gia tốc kế
Sử dụng gia tốc kế K-Shear 8702B50M của hãng Kistler [72].
Hình 3.10. Thông số kỹ thuật K-Shear 8702B50M
• Thiết bị khuếch đại, chuyển đổi tín hiệu gia tốc kế, ghép nối máy tính
1- Rãnh SCC
2- Vít nối SCC
3- Rắc nối 68-Pin I/O
4- Công tắc nguồn
5- Vít nối với nguồn
bên ngoài
6- Vít nối DIO
7- Vít nối DIO
8- Cụm đầu nối
9- Vít nối AO

- 86 -
Thiết bị khuyếch đại, chuyển đổi tín hiệu từ gia tốc kế, ghép nối máy tính
ADLINK USB-2405(G) [73]. Thiết bị cho phép thu thập dữ liệu đồng thời từ 04
cảm biến gia tốc.
Hình 3.11. Thiết bị khuếch đại chuyển đổi tín hiệu ADLINK USB-2405(G)
Phần mềm sử dụng để thu thập và phân tích dữ liệu: U-Test và Visual Signal
DAQ Express.
c. Hệ thống đo dịch chuyển lồng giặt
• Loại cảm biến: Linear Variable Differential Transformer - LVDT
ACT4000C [74].
Hình 3.12. Cảm biến LVDT
3.1.3. Xây dựng chương trình xác định các thông số rung động
3.1.3.1. Chương trình đo, xác định phản lực gối đỡ và dịch chuyển lồng giặt
Thiết lập các cổng vào trên DAQ USB-6251: (1) LC12 (loadcell 1 và 2) vào
tại AI0 và AI1; (2) LC345 (loadcell 3, 4 và 5) vào tại AI2, AI3 và AI4; LVDT 1
(phương Y) vào tại AI5 và LVDT 2 (phương X) vào tại AI6. Các cổng AI được
thiết lập dải điện áp vào, chế độ lấy mẫu liên tục, tần số lấy mẫu là 500Hz, như
minh họa trên Hình 3.13.
Thiết lập các bộ lọc thông thấp trên DAQ USB-6251 tại các cổng vào: (1)
LC12 filtered (cho LC12); (2) LC345 filtered (cho LC345); LVDT1 (phương Y) và
LVDT2 (phương X) vào tại AI6. Loại bộ lọc được sử dụng là lọc thông thấp, tần số
cắt 20Hz. Thông số chi tiết bộ lọc được thể hiện trên Hình 3.14.

- 87 -
Hình 3.13. Thiết lập các cổng vào trên DAQ USB-6251
Hình 3.14. Thiết lập bộ lọc thông thấp cho các tín hiệu vào

- 88 -
Hình 3.15. Thiết lập hệ thức quy đổi tín hiệu (dữ liệu) sang số liệu đo
Thiết lập các hệ thức quy đổi tín hiệu (dữ liệu) đo – sang số liệu vật lý (Hình
3.15). Ứng với mỗi phần tử cảm biến (loadcell hay LVDT), dữ liệu thu nhận được
từ cảm biến, thông qua các bộ khuếch đại tín hiệu thích hợp để đưa đến các cổng
Analog Input (AI) của DAQ, được quy đổi sang số liệu (giá trị đo lường) vật lý
thông qua biểu thức:
Số liệu quy đổi = (giá trị lệch đặt trước + dữ liệu đo)*(hệ số quy đổi) + giá trị lệch
Trong đó, các hệ số quy đổi của từng cảm biến được xác định theo sơ đồ ghép
nối thực tế của từng thiết bị và cặp giá trị lệch được xác định từ việc calip phép đo.
Chi tiết của công tác calip được thưc hiện trong [5].
3.1.3.2. Chương trình đo, xác định gia tốc
• Cấu hình trực tiếp trên phần mềm U-Test để thu thập dữ liệu; kết quả đo gia
tốc tại 4 điểm A, B, C và D được thực hiện trên U-Test, thể hiện trên Hình 3.16,
Hình 3.17 nhờ chức năng View data của U-Test.
View
data

- 89 -
• Sử dụng chức năng View data trên U-Test là cho phép quan sát đồ thị gia
tốc từ các gia tốc kế trong các khung thời gian chứ 1000 điểm lấy mẫu khác nhau.
Đồng thời trên giao diện này, cho phép kết xuất dữ liệu của khung thời gian ra hai
dạng: dạng đồ họa hoặc dạng text – Chức năng Copy. Để xuất dữ liệu đo cho phần
mềm xử lý dữ liệu Visual Signal DAQ Express, sẽ cần sử dụng dữ liệu dạng text.
• Dữ liệu dạng text này cần xử lý sơ bộ trên Excel bằng cách xóa các cột
AI1(X), AI2(X) và AI3(X). Một lần nữa dữ liệu từ Excel cần được copy trở lại file
định dạng text thuần túy, được tạo trên Notepad. Dữ liệu từ file text này sẽ tiếp tục
có thể đưa vào (Import) Visual Signal DAQ Express, sử dụng để phân tích.
• Dữ liệu thu trực tiếp nói chung có sự can thiệp nhiễu tần số cao (nhiều nguồn
gây nhiễu khác nhau), cần được xử lý (lọc nhiễu) và tiếp tục có thể được đánh giá
(trực tiếp về biên độ, giá trị tại từng khung thời gian chi tiết theo yêu cầu), phân tích
(FFT, tích phân, v.v) bằng phần mềm Visual Signal DAQ Express như được trình
bày trên Hình 3.18.
Copy
Xóa các cột AI1,2,3 (X)

- 90 -
Hình 3.16. Thiết lập các kênh AI0-AI3 cho giao diện thu thập dữ liệu từ các gia tốc kế trên U-Test

- 91 -
Hình 3.17. Dữ liệu thu thập được trên 04 gia tốc kế được hiển thị trên U-Test.
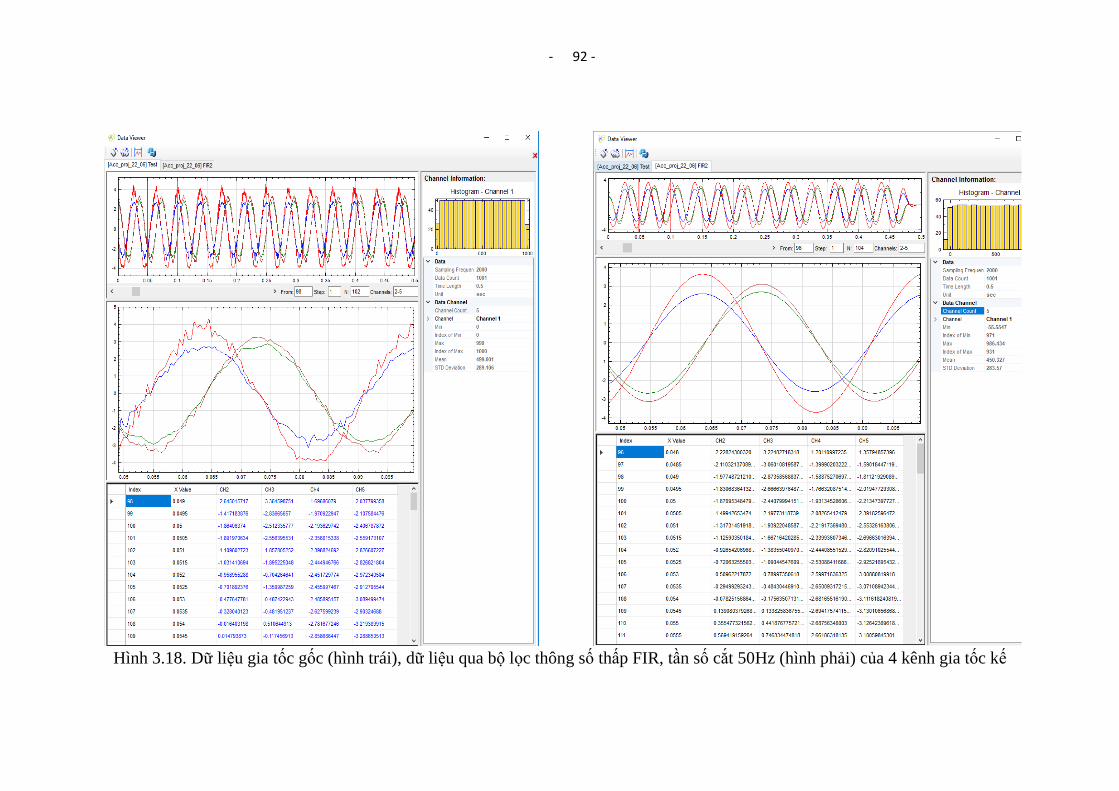
- 92 -
Hình 3.18. Dữ liệu gia tốc gốc (hình trái), dữ liệu qua bộ lọc thông số thấp FIR, tần số cắt 50Hz (hình phải) của 4 kênh gia tốc kế

- 93 -
3.2. ĐO ĐẶC TÍNH RUNG ĐỘNG CỦA HỆ THỐNG TREO
3.2.1. Thiết lập các thông số thí nghiệm
Trong phần này, nghiên cứu tập trung trình bày các thông số rung động của
lồng giặt ở các chế độ vắt của máy giặt thông qua các thí nghiệm được thiết lập
trên hệ thống đo.
Để giả lập chế độ tải với cùng mức độ gây rung động, một quả cân có khối
lượng xác định được gắn trực tiếp vào thành trong lồng quay, trong mặt phẳng chứa
cặp lò xo (Hình 3.19) trong tất cả các thí nghiệm.
Hình 3.19. Khối lượng lệch tâm giả lập
1-Quả cân (khối lượng lệch tâm giả lập), 2- Thành trong lồng giặt
Trên thực tế, ở giai đoạn ban đầu của quá trình giặt hay quay vắt, các máy giặt
đều trang bị chu trình xoay lắc nhằm tự phân phối vật phẩm trong lồng quay để
giảm mức độ mất cân bằng và hệ thống tiến hành đánh giá mức độ mất cân bằng.
Từ dữ liệu này, phần mềm điều khiển sẽ cho phép tiếp tục hay dừng chu trình kèm
thông báo lỗi. Do các nhà sản xuất máy giặt không cung cấp các tài liệu liên quan
đến mức độ, giới hạn không cân bằng (lệch tâm) về khối lượng trong các chế độ giặt
hay quay vắt khác nhau, dựa vào đặc tính này của máy giặt, đề tài đã thử nghiệm và
xác định được đối với máy giặt dung tích 7kg sẽ có khối lượng lệch tâm tối đa là
700g. Trong nghiên cứu này, để máy giặt không bị dừng chu trình làm việc khối
lượng giả lập được chọn là 620g và các chế độ quay vắt của máy giặt LG WD
8990TDS được cài đặt tại các tốc độ : 600 và 800 vòng/phút.
2
1

- 94 -
Hình 3.20. Giao diện thiết lập các chế độ, thông số đo lường và hiển thị, giám sát kết quả đo

- 95 -
Hình 3.21. LVDT 1, 2 - Số liệu dịch chuyển theo 2 phương x (LVDT 2) và y (LVDT 1) trong toàn thời gian
và trích xuất trong 1 giây tại giai đoạn ổn định (N = 600 vòng/phút)
Giá trị lớn nhất (mm) 4.30
Giá trị nhỏ nhất (mm) -4.18
Biên độ (mm) 4.22
Giá trị lớn nhất (mm) 6.23
Giá trị nhỏ nhất (mm) -5.03
Biên độ (mm) 6.19

- 96 -
Hình 3.22. Loadcell 1,2 – Số liệu các phản lực tại các các điểm treo lò xo trong toàn thời gian và trích xuất trong 1 giây tại giai
đoạn ổn định (N = 600 vòng/phút)
Giá trị lớn nhất (N) 29.28
Giá trị nhỏ nhất (N) -34.20
Biên độ (N) 30.88
Giá trị lớn nhất (N) 26.96
Giá trị nhỏ nhất (N) -27.55
Biên độ (N) 26.06

- 97 -
Hình 3.23. Loadcell 3,4,5 - Số liệu các phản lực tại các gối giảm chấn trong toàn thời gian và trích xuất trong 1 giây
tại giai đoạn ổn định (N=600 vòng/phút)
Giá trị lớn nhất (N) 50.22
Giá trị nhỏ nhất (N) -44.81
Biên độ (N) 46.66
Giá trị lớn nhất (N) 55.88
Giá trị nhỏ nhất (N) -57.21
Biên độ (N) 54.43
Giá trị lớn nhất (N) 51.51
Giá trị nhỏ nhất (N) -52.72
Biên độ (N) 51.41

- 98 -
c
Hình 3.24. LVDT 1, 2 - Số liệu dịch chuyển theo 2 phương x (LVDT 2) và y (LVDT 1) trong toàn thời gian
và trích xuất trong 1 giây tại giai đoạn ổn định (N = 800 vòng/phút)
Giá trị lớn nhất (mm) 4.31
Giá trị nhỏ nhất (mm) -3.86
Biên độ (mm) 4.04
Giá trị lớn nhất (mm) 5.28
Giá trị nhỏ nhất (mm) -4.59
Biên độ (mm) 4.95

- 99 -
Hình 3.25. Loadcell 1,2 – Số liệu các phản lực tại các các điểm treo lò xo trong toàn thời gian và trích xuất trong 1 giây tại giai
đoạn ổn định (N = 800 vòng/phút)
Giá trị lớn nhất (N) 30.93
Giá trị nhỏ nhất (N) -33.35
Biên độ (N) 31.29
Giá trị lớn nhất (N) 28.43
Giá trị nhỏ nhất (N) -25.68
Biên độ (N) 25.82

- 100 -
Hình 3.26. Loadcell 3,4,5 - Số liệu các phản lực tại các gối giảm chấn trong toàn thời gian và trích xuất trong 1 giây
tại giai đoạn ổn định (N=800 vòng/phút)
Giá trị lớn nhất (N) 57.96
Giá trị nhỏ nhất (N) -51.91
Biên độ (N) 54.07
Giá trị lớn nhất (N) 61.00
Giá trị nhỏ nhất (N) -59.67
Biên độ (N) 59.41
Giá trị lớn nhất (N) 60.23
Giá trị nhỏ nhất (N) -60.19
Biên độ (N) 58.90

- 101 -
3.2.2. Kết quả thực nghiệm
Với ứng dụng đo lường được xây dựng trên phần mềm Ni SignalExpress, đã
trình bày ở phần trước, cho phép quan sát trực tiếp và đánh giá kết quả (Hình 3.20).
Đồ thị biểu diễn cho kết quả về chuyển dịch theo phương x,y (ghi nhận từ cảm biến
dịch chuyển LVDT) và các phản lực của động lực của lò xo cũng như thiết bị giảm
chấn theo phương thẳng đứng (ghi nhận từ các loadcell) ở tốc độ 600 vòng/phút
chọn từ bảng điều khiển biểu diễn trên các hình 3.21 ÷ hình 3.23 và ở tốc độ 800
vòng/phút biểu diễn trên các hình 3.24 ÷ hình 3.26. Các thông số về giá trị lớn nhất
(max), giá trị nhỏ nhất (min) và biên độ rung động (amp) ở các chế vắt khác nhau
xét trong giai đoạn ổn định được thống kê trong Bảng 3.1.
Bảng 3.1. Chuyển vị và phản lực tại các liên kết trong các chế độ vắt
Tốc độ Chọn trên bảng điều khiển 600 vòng/phút 800 vòng/phút
Thu nhận thực tế 610.99 vòng/phút 764.77 vòng/phút
Chuyển
dịch
(mm)
LVDT2
x_max 4.30 4.31
x_min -4.18 -3.86
x_amp 4.22 -4.04
LVDT1
y_max 6.23 5.28
y_min -5.03 -4.59
y_amp 6.19 4.95
Phản lực
động lực
(N)
Loadcell 1
F_RSx_max 29.28 30.93
F_RSx_min -34.20 -33.35
F_RSx_amp 30.88 31.29
Loadcell2
F_LSx_max 26.96 28.43
F_LSx_min -27.55 -25.68
F_LSx_amp 26.06 25.82
Loadcell3
F_RDx_max 50.22 57.96
F_RDx_min -44.81 -51.91
F_RDx_amp 46.66 54.07
Loadcell4
F_LD1x_max 55.88 61.00
F_LD1x_min -57.21 -59.67
F_LD1x_amp 54.43 59.41
Loadcell5
F_LD2x_max 51.51 60.23
F_LD2x_min -52.72 -60.19
F_LD2x_amp 51.41 58.90

- 102 -
Nhận xét:
✓ Trong Bảng 3.1, vận tốc đặt trên máy giặt và vận tốc thực tế thu nhận
được có sự khác nhau là do khi làm việc máy có một độ sai số nhất định của hệ
thống. Để so sánh kết quả của chương trình mô phỏng với kết quả thực nghiệm thì
trong chương trình mô phỏng phải nhập giá trị vận tốc thực.
✓ Kết quả đo đã chỉ ra trong Bảng 3.1 cho thấy hệ thống treo của máy giặt
LG WD 8990TDS được thiết kế cho độ rung động tối ưu ở tốc độ vắt cao nhất 800
vòng/phút, vì đây là tốc độ thường dùng nhất trong chế độ vắt đối với các vật phẩm
nhẹ. Các tốc độ thấp thường dùng cho vắt các vật phẩm khối lượng lớn. Bên cạnh
đó, xét về mặt cơ học, khi lồng giặt quay ở tốc độ càng cao thì khả năng tự định tâm
càng tốt, dẫn đến biên độ rung động theo các phương giảm so với khi quay ở tốc độ
thấp hơn. Tại tốc độ quay 600 vòng/phút, biên độ rung động theo phương x, y lần
lượt là 4.22mm (LVDT2) và 6.19mm (LVDT1) còn tại tốc độ quay 800 vòng/phút
biên độ x giảm còn 4.04mm (LVDT1) và biên độ y còn 4.95mm (LVDT2).
✓ Đối với các phản lực động lực là lực đàn hồi của lò xo, kết quả ghi nhận
được trong Bảng 3.1 cho thấy: biên độ lực đàn hồi của lò xo bên phải lớn hơn so với
lò xo bên trái. Tại tốc độ quay 600 vòng/phút, biên độ lực đàn hồi của lò xo phải và
trái lần lượt là 30.88N (loadcell1) và 26.06N (loadcell2) còn tại tốc độ quay 800
vòng/phút biên độ lực đàn hồi phải là 31.29N (loadcell1) và bên trái là 25.82N
(loadcell2).
✓ Đối với các phản lực động lực là lực cản của thiết bị giảm chấn, kết quả
ghi nhận được trong Bảng 3.1 cho thấy: biên độ lực cản của giảm chấn bên phải nhỏ
hơn hơn so với giảm chấn bên trái. Tại tốc độ quay 600 vòng/phút, biên độ lực cản
của giảm chấn phải và trái lần lượt là 46.66N (loadcell3) và 54.43N (loadcell4),
51.41N (loadcell5) còn tại tốc độ quay 800 vòng/phút biên độ lực cản phải là
54.07N (loadcell3) và bên trái là 59.41N (loadcell4), 58.90N (loadcell5). Giá trị
biên độ của lực cản thu được ở loadcell 4 lớn hơn so với loadcell 5.

- 103 -
3.3. KIỂM CHỨNG MÔ HÌNH ĐỘNG LỰC CỦA HỆ THỐNG TREO
Kết quả dịch chuyển theo phương x, y và các lực đàn hồi của lò xo, lực cản
của giảm chấn ứng với các mô hình lý thuyết đã xây dựng và dữ liệu thực nghiệm
được trình bày trong Bảng 3.2.
Bảng 3.2. Chuyển vị và phản lực động lực của chương trình mô phỏng và kết quả
thực nghiệm ở chế độ quay vắt.
Tốc độ 600 (764.77) vòng/phút 800 (764.77) vòng/phút
Kết quả so sánh Thực nghiệm Mô phỏng Thực nghiệm Mô phỏng
Chuyển
dịch
(mm)
x_max 4.30 4.63 4.31 4.47
x_min -4.18 -4.55 -3.86 -4.23
x_amp 4.22 4.56 4.04 4.41
y_max 6.23 5.65 5.28 3.95
y_min -5.03 -5.53 -4.59 -6.04
y_amp 6.19 5.6 4.95 4.98
Phản
lực
động
lực
(N)
F_RSx_max 29.28 29.78 30.93 27.56
F_RSx_min -34.20 -34.22 -33.35 -30.37
F_RSx_amp 30.88 31.33 31.29 28.19
F_LSx_max 26.96 28.27 28.43 28.64
F_LSx_min -27.55 -29.21 -25.68 -25.99
F_LSx_amp 26.06 27.3 25.82 23.62
F_RDx_max 50.22 54.24 57.96 55.29
F_RDx_min -44.81 -49.24 -51.91 -55.51
F_RDx_amp 46.66 50.44 54.07 55.39
F_LD1x_max 55.88 53.35 61.00 61.81
F_LD1x_min -57.21 -55.45 -59.67 -63.46
F_LD1x_amp 54.43 54.08 59.41 62.49
F_LD2x_max 51.51 53.8 60.23 61.87
F_LD2x_min -52.72 -51.59 -60.19 -60.11
F_LD2x_amp 51.41 52.4 58.90 60.7
Từ số liệu nhận được từ kết quả chương trình mô phỏng của mô hình toán hệ thống
treo xây dựng và kết quả thực nghiệm cho thấy:
+ Kết quả số của mô hình động lực về chuyển dịch đã thể hiện được tính chất
định tâm trong chuyển động quay của lồng, tại tốc độ cao thì biên độ dịch chuyển

- 104 -
nhỏ hơn so với ở tốc độ thấp hơn. Tại tốc độ quay 600 vòng/phút, biên độ rung
động theo phương x, y lần lượt là 4.56mm và 5.6mm còn tại tốc độ quay 800
vòng/phút biên độ x giảm còn 4.41mm và biên độ y còn 4.98mm.
+ Kết quả về lực đàn hồi cũng đã thể hiện được biên độ của lực đàn hồi của lò
xo bên phải lớn hơn so với lò xo bên trái. Tại tốc độ quay 600 vòng/phút, biên độ
lực đàn hồi của lò xo phải (F_RSx) và trái (F_LSx) lần lượt là 31.33N và 27.3N còn
tại tốc độ quay 800 vòng/phút biên độ lực đàn hồi phải là 28.19N và bên trái là
23.62N.
+ Kết quả về lực cản cũng đã thể hiện được biên độ của lực cản của thiết bị
giảm chấn bên phải nhỏ hơn so với giảm chấn bên trái. Tại tốc độ quay 600
vòng/phút, biên độ lực cản của giảm chấn phải (F_RDx) và trái (F_LD1x, F_LD2x)
lần lượt là 50.44N và (54.08N, 52.4N) còn tại tốc độ quay 800 vòng/phút biên độ
lực cản phải là 55.39N và bên trái là (62.49N, 60.07N). Giá trị biên độ của lực cản
F_LD1x lớn hơn so với F_LD2x.
Để đánh giá độ tin cậy của mô hình động lực đã xây dựng, biểu đồ thể hiện %
sai lệch về biên độ của các đại lượng mô phỏng (chuyển dịch và phản lực động lực
của lò xo và thiết bị giảm chấn) so với thực nghiệm được trình bày trên hình 3.27 ÷
hình 3.29. Trong đó, mức độ % sai lệch tương đối được tính theo công thức:
% 𝑠𝑎𝑖 𝑙ệ𝑐ℎ =𝑘ế𝑡 𝑞𝑢ả 𝑚ô 𝑝ℎỏ𝑛𝑔 – 𝑘ế𝑡 𝑞𝑢ả 𝑡ℎự𝑐 𝑛𝑔ℎ𝑖ệ𝑚
𝑘ế𝑡 𝑞𝑢ả 𝑡ℎự𝑐 𝑛𝑔ℎ𝑖ệ𝑚100
Hình 3.27. Biểu đồ % sai lệch so với thực nghiệm của chuyển dịch
theo phương x và y

- 105 -
Hình 3.28. Biểu đồ đánh giá mức độ sai lệch so với thực nghiệm của
biên độ lực đàn hồi lò xo bên trái và bên phải
Hình 3.29. Biểu đồ đánh giá mức độ sai lệch so với thực nghiệm của
biên độ lực cản các giảm chấn
Các kết quả nhận được cho thấy mức sai lệch giữa kết quả mô phỏng và thực
nghiệm là tương đối nhỏ (nhỏ hơn 10%) nên mô hình động lực không gian (mô hình
1) đã xây dựng cho hệ thống treo của máy giặt lồng ngang là đúng đắn và độ tin cậy
có thể chấp nhận được. Do vậy, mô hình này có thể được sử dụng để đánh giá ảnh
hưởng của các thông số đến rung động hệ thống treo từ đó đề xuất các phương án
giảm rung cho máy giặt.
Sử dụng chương trình mô phỏng để đánh giá, so sánh các đại lượng về biên
độ, phản lực động lực giữa mô hình phẳng tổng quát (mô hình 2) và mô hình tịnh
tiến (mô hình 3) ở chế độ quay vắt 610.99 vòng/phút và 764.77 vòng/phút, kết quả
được tổng hợp trong Bảng 3.3.

- 106 -
Bảng 3.3. Chuyển dịch và phản lực tại các liên kết trong mô hình 2 và mô hình 3.
x_max
(mm)
x_min
(mm)
x_amp
(mm)
y_max
(mm)
y_min
(mm)
y_amp
(mm)
FRSx_
max
(N)
FRSx_
min
(N)
FRSx_
amp
(N)
FLSx_
max
(N)
FLSx_
min
(N)
FLSx_
amp
(N)
FRDx_
max
(N)
FRDx_
min
(N)
FRDx_
amp
(N)
FLDx_
max
(N)
FLDx_
min
(N)
FLDx_
amp
(N)
4.30 -4.18 4.22 6.23 -5.03 6.19 29.28 -34.2 30.88 26.96 -27.55 26.06 50.22 -44.81 46.66 53.7 -54.7 52.9
4.98 -4.78 4.88 5.60 -2.62 4.11 22.19 -26.93 24.56 29.99 -24.38 27.18 56.29 -54.51 55.40 55.87 -58.42 57.14
15.81 14.35 15.64 10.11 47.91 33.60 24.21 21.26 20.47 11.24 11.51 4.30 12.09 21.65 18.73 4.04 6.76 7.97
4.32 -4.36 4.34 4.46 -5.45 5.01 27.80 -29.54 28.67 28.21 -26.44 23.11 51.71 -52.02 51.86 56.73 -54.78 55.75
0.47 4.31 2.84 28.41 8.35 19.06 5.05 13.63 7.16 4.64 4.03 11.32 2.97 16.09 11.14 5.64 0.11 5.35
4.31 -3.86 4.04 5.28 -4.59 4.95 30.93 -33.35 31.29 28.43 -25.68 25.82 57.96 -51.91 54.07 60.62 -59.9 59.2
4.70 -4.70 4.70 5.84 -2.46 4.10 28.83 -27.30 28.06 28.62 -22.89 25.75 58.55 -57.10 57.50 59.37 -60.65 60.01
9.05 21.76 16.34 10.61 46.41 17.17 6.79 18.14 10.32 0.67 10.86 0.27 1.02 10.00 6.34 2.06 1.20 1.44
4.33 -4.39 4.34 4.03 -5.14 4.58 27.09 -29.24 28.17 28.74 -26.11 23.37 53.73 -54.51 54.12 59.56 -58.47 59.02
0.46 13.73 7.43 23.67 11.98 7.47 12.42 12.32 9.97 1.09 1.67 9.49 7.30 5.01 0.09 1.75 2.44 0.24
Thông số
Thực nghiệm
N = 610.99 vòng/phút
Mô hình 2
(2D-3DOF)
Sai lệch (%)
N = 764.77 vòng/phút
Mô hình 3
(2D-2DOF)
Sai lệch (%)
Mô hình 2
(2D-3DOF)
Sai lệch (%)
Mô hình 3
(2D-2DOF)
Sai lệch (%)
Thực nghiệm

- 107 -
Đồ thị chuyển dịch theo phương x,y và lực cản của giảm chấn bên phải tính
theo mô hình 2 và 3 tại tốc độ quay 610.99 vòng/phút và 764.77 vòng/phút được
biểu diễn trên Hình 3.30 và Hình 3.31.
Hình 3.30. Đồ thị chuyển dịch theo phương x và y của mô hình 2 và 3
Hình 3.31. Đồ thị lực cản của giảm chấn bên phải của mô hình 2 và 3

- 108 -
Hình 3.32. Biểu đồ đánh giá mức độ sai lệch biên độ dịch chuyển x và y
Hình 3.33. Biểu đồ đánh giá mức độ sai lệch biên độ lực đàn hồi
của lò xo phải và trái
Hình 3.34 Biểu đồ đánh giá mức độ sai lệch biên độ lực cản
của giảm chấn phải và trái

- 109 -
Để đánh giá độ chính xác của mô hình 2 và 3, biểu đồ so sánh độ sai lệch về
biên độ chuyển dịch theo các phương, lực đàn hồi của lò xo, lực cản của các thiết
bị giảm chấn giữa kết quả mô phỏng số của các mô hình 2 và 3 đối với kết quả
thực nghiệm được trình bày trong Hình 3.32 ÷ Hình 3.34. Kết quả cho thấy mô
hình 2 và 3 đều kém tin cậy hơn so với mô hình 1 (thể hiện qua % sai lệch khá
lớn), trong đó mô hình 2 có độ chính xác và đáng tin cậy hơn so với mô hình 3.
Như vậy, mặc dù góc lắc quanh trục quay là khá nhỏ nhưng có ảnh hưởng đến
rung độ của hệ thống và để tăng tính chính xác của các đại lượng khi khảo sát hệ
thống treo phải xem xét đến các góc lắc này. Do vậy, có thể suy ra kết luận về
phạm vi ứng dụng của các mô hình:
- Mô hình 3 chỉ nên sử dụng khi tính toán sơ độ hệ thống rung động.
- Để tính toán, phân tích hệ thống với độ tin cậy cao về quỹ đạo, độ sai lệch
chấp nhận được về các phản lực động lực và chương trình tính không quá phức tạp
nên sử dụng mô hình 2.
- Để tính toán, phân tích hệ thống với độ tin cậy cao về phản lực động lực và
để đánh giá được ảnh hưởng của vị trí khối lệch tâm đến rung động của máy nên
sử dụng mô hình 1.
3.4. KẾT LUẬN CHƯƠNG 3
Trong chương 3, nghiên cứu đã trình bày một số kết quả chính sau:
- Thiết lập hệ thống thí nghiệm đo các phản lực động lực của hệ thống treo.
Thiết bị đo theo thời gian thực, đồng thời 5 thành phần lực tại các gối treo, gối đỡ
hệ thống treo lồng giặt, độ phân giải 0.68 N; Đo theo thời gian thực đồng thời dịch
chuyển theo hai phương của lồng giặt và gia tốc tại 04 điểm theo yêu cầu bất kỳ,
độ phân giải 0.0015 mm (dịch chuyển) và 0.029 mm/s2 (gia tốc), sai số của gia tốc
kế ±5%; Dữ liệu đo được ghi nhận và lưu trữ theo thời gian thực, xử lý và hiển thị
trên máy tính.
- Xác định được giá trị phản lực động lực tại các điểm nối lò xo và thiết bị
giảm chấn với vỏ máy theo phương thẳng đứng, giá trị chuyển dịch, gia tốc tại một
điểm trên lồng chứa theo các tốc độ quay đặt sẵn.

- 110 -
- Dựa trên dữ liệu đo rung động hệ thống treo từ thực nghiệm đánh giá, kiểm
chứng mô hình động lực của máy giặt được xây dựng trong chương 2. Kết quả
nhận được khẳng định tính đúng đắn và độ tin cậy của mô hình toán xây dựng. Từ
đó đưa ra kết luận về phạm vi ứng dụng của các mô hình động lực hệ thống treo đã
xây dựng.
Từ việc khẳng định tính chính xác, độ tin cậy của các mô hình toán đã xây
dựng, phần tiếp theo của nghiên cứu tiến hành đánh giá ảnh hưởng các thông số hệ
thống, đề xuất các giải pháp cải tiến hệ thống treo theo hướng giảm rung động cho
vỏ máy giặt.

- 111 -
CHƯƠNG 4
ẢNH HƯỞNG CỦA MỘT SỐ THÔNG SỐ HỆ THỐNG TREO
ĐẾN RUNG ĐỘNG CỦA THÂN VỎ MÁY GIẶT LỒNG NGANG
Trong phần này, luận án tập trung đánh giá ảnh hưởng của một số thông số
hệ thống treo như vị trí kết nối của thiết bị giảm chấn với vỏ máy, số lượng giảm
chấn đến rung động của vỏ máy dựa trên kết quả tính toán số ứng với mô hình
động lực học phẳng tổng quát (ba bậc tự do) của máy giặt đã xây dựng được trong
chương 3. Từ kết quả nhận được đề xuất phương án giảm rung cho máy giặt.
4.1. HỆ PHƯƠNG TRÌNH CÂN BẰNG CỦA THÂN VỎ MÁY
Xem xét mô hình phẳng tổng quát (03 bậc tự do) của HWM, sơ đồ các lực
tác dụng lên vỏ máy giặt được chỉ ra trên Hình 4.1. Các lực này bao gồm: phản lực
pháp tuyến lần lượt tại chân đế phải (N03), tại chân đế trái (N04); lực cản tĩnh lần
lượt tại chân đế phải (F03), tại chân đế trái (F04); trọng lượng WG của vỏ máy; các
phản lực động lực của lò xo theo hai phương lần lượt tại điểm kết nối phải (FRSx,
FRSy ) và điểm kết nối bên trái (FLSx, FLSy) với vỏ máy; các phản lực động lực của
giảm chấn theo hai phương lần lượt tại điểm kết nối phải (FRDx, FRDy) và điểm kết
nối trái (FLDx, FLDy) với vỏ máy.
Để máy giặt hoạt động ổn định thì trong quá trình giặt vỏ máy phải không
có bất kì sự dịch chuyển nào. Từ sơ đồ lực trên Hình 4.1, bỏ qua độ cao của chân
đế, sử dụng kiến thức cân bằng vật rắn [67], các phương trình cân bằng cho vỏ
máy được thiết lập
04 03 W 0LSx RSx LDx RDx GF F F F N N+ − − − − + = (4.1)
R 04 03 0LSy RSy LDy DyF F F F F F− + − − − = (4.2)
03( ) ( ) ( ) W 02
RDx LDx RSy LSy RSx G
LL N L d F dF hF hF L F+ − + + − − − = (4.3)
03 03 04 04,F fN F fN (4.4)
trong đó: h là độ cao, L là độ rộng của máy giặt, d là khoảng cách từ mép máy giặt
đến vị trí kết nối giảm chấn với vỏ máy, f là hệ số ma sát trượt tĩnh, hệ số ma sát

- 112 -
giữa chân đế cao su và mặt sàn bê tông thường được lấy trong khoảng 0.6 < f <
0.9 [67].
Hình 4.1. Sơ đồ lực tác dụng lên vỏ máy
Từ phương trình (4.1) và (4.3), xác định được phản lực tại các chân đế theo
các phản lực động lực
03
W( ) ( ) ( )
2
GRSx RDx LSy RSy RDx LDx
h dN F F F F F F
L L= + − + − + − (4.5)
04
W( ) ( ) ( )
2
GLSx LDx LSy RSy RDx LDx
h dN F F F F F F
L L= + − − − − − (4.6)
Như vậy, để vật không bị lật quanh chân đế phải, tức là chân đế trái không bị
mất liên kết, thì N04 > 0, suy ra:
W( ) ( ) ( )
2
GLDx LSx LSy RSy RDx LDx
h dF F F F F F
L L− + − + − (4.7)
Tương tự, để vật không bị lật quanh chân đế trái thì N03 > 0.
W( ) ( ) ( )
2
GRDx RSx RSy LSy LDx RDx
h dF F F F F F
L L− + − + − (4.8)
m
A1
A2
A3
A4
A03 A04
A01 A02
h=
0.8
5m
L=0.58m
N04 N03
F04 F03
y
x
G
WG
L/2 d
d

- 113 -
Từ phương trình (4.2) và (4.4), xác định được quan hệ giữa các thành phần
để không xảy ra sự trượt
04 03 R 03 04( )LSy RSy LDy DyF F F F F F f N N+ = − + − + (4.9)
Thay (4.5) và (4.6) vào (4.7), nhận được
R
W
LSy RSy LDy Dy
G RSx LSx RDx LDx
F F F Ff
F F F F
− + −
+ + − − (4.10)
Biểu thức (4.10) chỉ ra điều kiện để máy giặt không bị lật.
Từ điều kiện để vỏ máy không bị lật quanh đế và không bị trượt ngang thu
được, nghiên cứu xem xét ảnh hưởng của thiết bị giảm chấn đến rung động của vỏ
máy giặt khi máy hoạt động.
4.2. ẢNH HƯỞNG CỦA MỘT SỐ THÔNG SỐ HỆ THỐNG ĐẾN RUNG
ĐỘNG CỦA VỎ MÁY
4.2.1. Ảnh hưởng của vị trí kết nối giảm chấn với vỏ máy
Xem xét khả năng gây lật quanh chân đế phải, viết lại biểu thức (4.7) dưới
dạng
W( ) ( )
2
GLSy RSy LSx RDx LDx
h d L dF F F F F
L L L
−− − + + (4.11)
Đặt
( )
( )
LSy RSy LSx S
RDx LDx D
hF F F F
L
d L dF F F
L L
− − =
−+ =
Biểu thức (4.11), có dạng
W
2
GS DF F+ (4.12)
Từ (4.12) nhận thấy rằng nếu thành phần FD hoặc FS nhỏ sẽ giảm khả năng
gây lật quanh chân đế phải, trong nghiên cứu này xem xét thành phần FD.
Để đánh giá sự thay đổi của hàm FD theo d. Xem xét kết quả mô phỏng tại
tốc độ 764.77 vòng/phút, các thông số đầu vào chương trình mô phỏng sử dụng
tương tự trong Bảng 2.5. Lấy d=0, d=L/4, d=L/3, d=L/2, đồ thị hàm FD được chỉ
ra trên Hình 4.2.

- 114 -
Hình 4.2. Đồ thị hàm FD theo vị trí kết nối giảm chấn
Kết quả nhận được trên đồ thị cho thấy, nếu di chuyển điểm kết nối giảm
chấn với vỏ máy về điểm giữa (d=L/2) thì hàm FD cho kết quả nhỏ nhất.
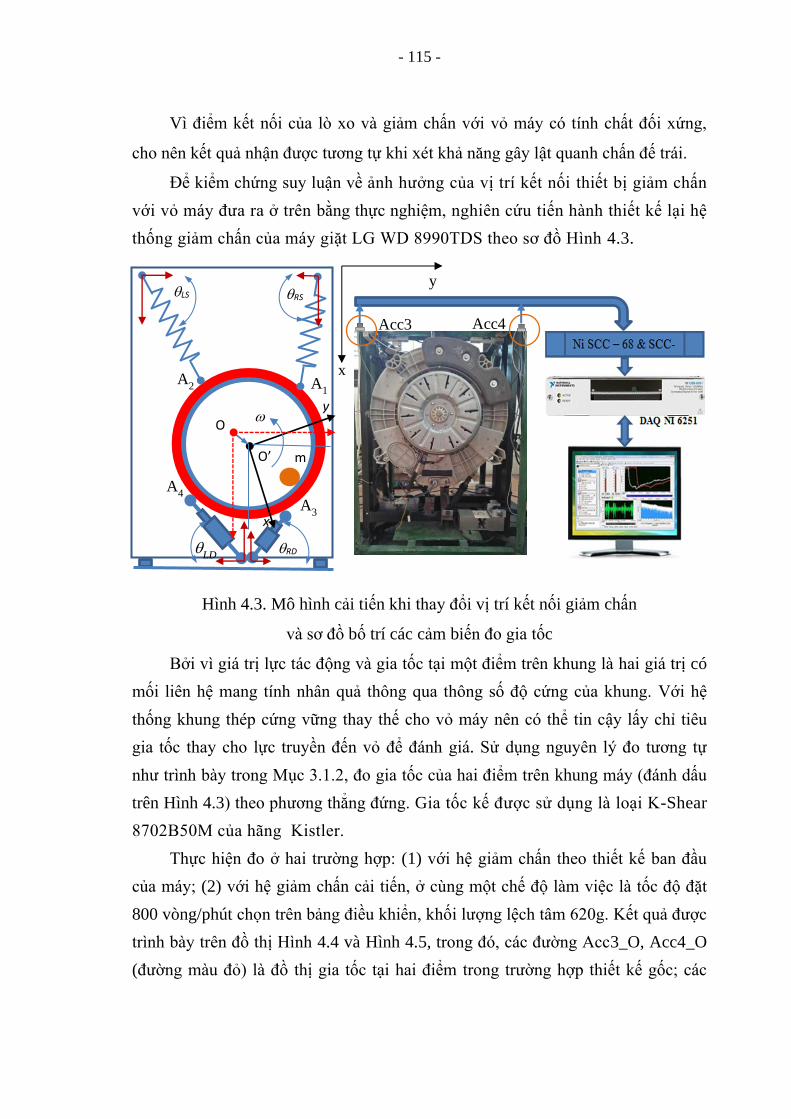
- 115 -
Vì điểm kết nối của lò xo và giảm chấn với vỏ máy có tính chất đối xứng,
cho nên kết quả nhận được tương tự khi xét khả năng gây lật quanh chấn đế trái.
Để kiểm chứng suy luận về ảnh hưởng của vị trí kết nối thiết bị giảm chấn
với vỏ máy đưa ra ở trên bằng thực nghiệm, nghiên cứu tiến hành thiết kế lại hệ
thống giảm chấn của máy giặt LG WD 8990TDS theo sơ đồ Hình 4.3.
Hình 4.3. Mô hình cải tiến khi thay đổi vị trí kết nối giảm chấn
và sơ đồ bố trí các cảm biến đo gia tốc
Bởi vì giá trị lực tác động và gia tốc tại một điểm trên khung là hai giá trị có
mối liên hệ mang tính nhân quả thông qua thông số độ cứng của khung. Với hệ
thống khung thép cứng vững thay thế cho vỏ máy nên có thể tin cậy lấy chỉ tiêu
gia tốc thay cho lực truyền đến vỏ để đánh giá. Sử dụng nguyên lý đo tương tự
như trình bày trong Mục 3.1.2, đo gia tốc của hai điểm trên khung máy (đánh dấu
trên Hình 4.3) theo phương thẳng đứng. Gia tốc kế được sử dụng là loại K-Shear
8702B50M của hãng Kistler.
Thực hiện đo ở hai trường hợp: (1) với hệ giảm chấn theo thiết kế ban đầu
của máy; (2) với hệ giảm chấn cải tiến, ở cùng một chế độ làm việc là tốc độ đặt
800 vòng/phút chọn trên bảng điều khiển, khối lượng lệch tâm 620g. Kết quả được
trình bày trên đồ thị Hình 4.4 và Hình 4.5, trong đó, các đường Acc3_O, Acc4_O
(đường màu đỏ) là đồ thị gia tốc tại hai điểm trong trường hợp thiết kế gốc; các
O
O’
y
x
LS
LD
RS
RD
m
A1 A
2
A3
A4
Acc3 Acc4
x
y

- 116 -
đường Acc3_N, Acc4_N (đường màu xám) là đồ thị gia tốc trong trường hợp hệ
cải tiến.
Hình 4.4. Đồ thị so sánh gia tốc tại điểm Acc3
giữa cấu hình gốc và cấu hình cải tiến
Hình 4.5. Đồ thị so sánh gia tốc tại điểm Acc4
giữa cấu hình gốc và cấu hình cải tiến

- 117 -
Từ kết quả trên cho thấy, vị trí điểm kết nối giảm chấn có ảnh hưởng lớn đến
rung động của HWM. Với việc chuyển vị trí gối đỡ giảm chấn về tâm máy, rung
động của vỏ máy giảm, lần lượt: tại điểm Acc3 là 14.5%; tại điểm Acc4 là 11.2%,
mức độ rung chủ yếu tính theo vùng có gia tốc lớn nhất.
Như vậy, với kết quả nhận được có thể đề xuất phương án cải tiến giảm rung
cho HWM dựa trên thay đổi vị trí kết nối giảm chấn, khả năng giảm rung của hệ
treo cải tiến có sự phù hợp về cơ sở lý thuyết và thực tiễn. Ngoài ra, phương án
thay đổi vị trí kết nối của giảm chấn với vỏ máy cũng không làm thay đổi nhiều
kết cấu của máy giặt nguyên mẫu nên chi phí phát sinh là không đáng kể.
4.2.2. Ảnh hưởng của số lượng giảm chấn
Biểu thức (4.10) cho thấy vế trái của biểu thức luôn phải nhỏ hơn hệ số ma
sát f (hằng số). Như vậy, mẫu số của biểu thức bên trái càng lớn thì giá trị của biểu
thức bên trái sẽ càng nhỏ. Do đó, có thể suy ra số lượng của giảm chấn (bên trái và
bên phải) cũng có ảnh hưởng đến sự ổn định của hệ thống, tức là giảm sự di
chuyển ngang cho máy giặt khi máy hoạt động.
Gọi ld và rd tương ứng là số lượng giảm chấn bên trái và bên phải, biểu thức
(4.10) được viết lại
. .
W . .
LSy RSy LDy RDy
G RSx LSx RDx LDx
F F ld F rd Ff
F F rd F ld F
− + −
+ + − − (4.13)
Ngoài ra, từ biểu thức (4.7) và (4.8) suy ra điều kiện ràng buộc để máy không
bị lật
( ) ( ) WLDx RDy LSx RSy Gld F rd F F F+ − − (4.14)
Xem xét, đánh giá một số cấu hình giảm chấn của HWM:
• Sử dụng 02 giảm chấn, trong đó 01 bên phải và 01 bên trái (R1L1)
• Sử dụng 03 giảm chấn, trong đó 01 bên phải và 02 bên trái (R1L2)
• Sử dụng 04 giảm chấn, trong đó 02 bên phải và 02 bên trái (R2L2)
• Sử dụng 05 giảm chấn, trong đó 02 bên phải và 03 bên trái (R2L3)
• Sử dụng 06 giảm chấn, trong đó 03 bên phải và 03 bên trái (R3L3)
Đồ thị hàm biên độ quỹ đạo điểm tâm lồng chứa ứng với các trường hợp tại
các tốc độ 610.99 vòng/phút và 764.77vòng/phút được biểu diễn trên Hình 4.6,
góc lắc biểu diễn trên Hình 4.7 và Hình 4.8. Giá trị biên độ của các phản lực động

- 118 -
lực của lò xo và thiết bị giảm chấn theo phương thẳng đứng ứng với các cấu hình
thiết bị giảm chấn được biểu diễn trong Bảng 4.1.
(a) (b)
Hình 4.6. Đồ thị quỹ đạo điểm tâm ứng tại tốc độ
(a) 610.99 vòng/phút, (b) 764.77 vòng/phút
Hình 4.7. Đồ thị góc lắc với các cấu hình giảm chấn tại tốc độ 610.99 vòng/phút
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0 1000 2000 3000 4000 5000
Gó
c lắ
c (r
ad)
Bước thời gian
R1L1 R1L2 R2L2 R2L3 L3R3

- 119 -
Hình 4.8. Đồ thị góc lắc với các cấu hình giảm chấn tại tốc độ 764.77 vòng/phút
Bảng 4.1. Các phản lực động lực
Biên độ (N) R1L1 R1L2 R2L2 R2L3 R3L3
n = 764.77 vòng/phút
F_LSx 29.72 28.17 25.79 23.83 23.68
F_RSx 27.72 23.37 24.66 24.53 24.19
F_LDx 61.14 59.02 58.81 58.62 58.38
F_RDx 54.99 54.12 54.02 53.85 53.37
n = 610.99 vòng/phút
F_LSx 28.49 23.11 23.05 22.87 22.34
F_RSx 32.57 28.67 27.13 24.06 24.85
F_LDx 58.48 55.75 55.47 55.22 55.13
F_RDx 53.09 51.36 51.02 50.50 50.36
Như vậy, với các kết quả nhận được có thể đưa ra một số nhận xét sau khi
tăng số lượng giảm chấn:
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
Gó
c lắ
c (r
ad)
Bước thời gian
R1L1 R1L2 R2L2 R2L3 L3R3

- 120 -
- Bán kính của vòng tròn quỹ đạo điểm tâm lồng chứa có giảm, tuy nhiên quỹ
đạo bị lệch dần sang trái.
- Góc lắc có biên độ nhỏ và giảm dần nhanh hơn.
- Biên độ của các phản lực tại các điểm treo lò xo và giảm chấn giảm dần.
Tuy nhiên, dựa vào phương trình (4.13) và (4.14) nhận thấy chỉ có cấu hình
R1L1, R1L2 và R2L2 phù hợp để máy làm việc ổn định do vế phải của biểu thức
(4.13) và (4.14) tương ứng f =0.7, WG =mG.g=(25)(9.81)=245.25N). Giá trị cụ thể
của biểu thức vế trái được trình bày trong Bảng 4.2.
Bảng 4.2. Đánh giá các cấu hình giảm chấn theo biểu thức (4.13) và (4.14)
Giá trị R1L1 R1L2 R2L2 R2L3 R3L3
GTLN vế trái (4.13) 0.227 0.290 0.265 38816.79 6938.222
GTLN vế trái (4.14) 204.836 205.248 225.714 265.981 296.6162
Từ các phân tích ở trên nhận thấy để tăng khả năng hấp thụ năng lượng rung
động, giảm biên độ quỹ đạo của điểm trên lồng chứa mà vẫn đảm bảo sự ổn định
của hệ thống có thể chọn cấu hình R2L2 (04 giảm chấn: 02 bên phải và 02 bên
trái) để cải tiến hệ thống treo của HWM. Việc thay đổi này làm tăng không đáng
kể chi phí, không ảnh hưởng lớn đến kết cấu của máy giặt.
4.3. KẾT LUẬN CHƯƠNG 4
Trong chương 4, luận án đã trình bày các kết quả chính đạt được:
-Phân tích được nguyên nhân gây rung động, xác định được biểu thức quan
hệ giữa các phản lực động lực để vật không bị lật quanh chân đế.
-Đánh giá được ảnh hưởng của vị trí kết nối giảm chấn với lồng chứa, số
lượng lồng chứa đến rung động của HWM.
-Từ các kết quả nhận được, nghiên cứu đề xuất một số phương án giảm rung
cho HWM:
(1) Phương án cải tiến thay đổi trí vị gối đỡ giảm chấn, đồng thời là thay đổi
phương các giảm chấn là phương án hoàn toàn khả thi có khả năng giảm rung cho
máy tới gần 14.5%.

- 121 -
(2) Phương án sử dụng cấu hình 02 giảm chấn phải và 02 giảm chấn trái
(R2L2) tăng khả năng hấp thụ năng lượng rung động, giảm biên độ quỹ đạo của
điểm trên lồng chứa mà vẫn đảm bảo sự ổn định của hệ thống.
Các phương án đề xuất đều cho thấy chi phí chế tạo của nhà sản xuất có thể
không tăng do mức độ thay đổi kết cấu hiện tại của máy giặt không đáng kể, do đó
có thể áp dụng để thiết kế lại phần đế máy và thay thế cho hầu hết các loại máy
giặt lồng ngang gia dụng hiện đang sử dụng.

- 122 -
KẾT LUẬN VÀ ĐỀ XUẤT
Kết luận chung
So sánh với các nghiên cứu cùng lĩnh vực của các tác giả khác thực hiện
trước, nghiên cứu đạt được những kết quả có giá trị khoa học và thực tiễn như sau:
1- Mô hình hóa được một hệ thống treo kiểm soát rung động cho vật quay
điển hình phỏng theo đối tượng thực phổ biến là máy giặt lồng ngang. Trong đó
việc xây dựng mô hình dựa trên đối tượng thực bao gồm đánh giá, phân tích các
yếu tố để xác định các lớp bài toán từ mô hình phẳng đến mô hình không gian, xác
định đặc tính của từng thành phần của hệ thống treo bằng thực nghiệm. Kết quả
nhận được là ba mô hình đều đưa về dạng hệ phương trình vi phân phi tuyến với
độ phức tạp khác nhau.
2- Thực hiện tính toán, mô phỏng, giải hệ phương trình toán nhận được bằng
phương pháp số. Chương trình tính có thể xác định và mô phỏng được các đại
lượng mong muốn như: chuyển dịch, vận tốc, gia tốc, quỹ đạo của điểm trên hệ
thống treo và các phản lực động lực tại các vị trí kết nối lò xo, giảm chấn,…
3- Kiểm định được tính đúng đắn và độ tin cậy của mô hình động lực thông
qua các thí nghiệm trên đối tượng thực để từ đó đề xuất các giải pháp thiết thực, có
tính khả thi cao nhằm giảm rung cho máy giặt lồng ngang mà không làm tăng
đáng kể chi phí.
Đề xuất nghiên cứu tiếp theo
1) Nghiên cứu và xác định tỉ lệ tối ưu giữa đường kính và độ sâu của lồng
giặt (dựa vào ảnh hưởng của sự phân bố tải trọng lệch tâm dọc theo phương trục
lồng giặt) đến độ rung lắc của lồng chứa để phục vụ cho thiết kế lồng giặt đối với
máy giặt có công suất lớn, đánh giá tối ưu các thông số của hệ thống.
2) Nghiên cứu xác định hàm điều khiển mômen xoắn/tốc độ quay nhằm
giảm rung hoặc khử hiện tượng lật của máy giặt bằng phương pháp chủ động.
3) Phát triển mô hình không gian cho hệ thống treo đối với máy giặt cửa
nghiêng.

- 123 -
CÁC CÔNG TRÌNH KHOA HỌC ĐÃ CÔNG BỐ
1. Ngo Nhu Khoa, Nguyen Thi Hoa, and Nguyen Thi Bich Ngoc, The
Effect of Damper Configurations on the Vibration of Horizontal Washing
Machines, Proceedings of the International Conference, ICERA 2018,
LNNS 63, pp. 298–308, 2019 (SCOPUS).
https://doi.org/10.1007/978-3-030-04792-4_40
2. Ngo Nhu Khoa, Nguyen Thi Hoa, and Nguyen Thi Bich Ngoc,
Numerical Modeling and Experimental Study on Vibration of a Horizontal
Washing Machine, Proceedings of the International Conference, ICERA
2018, LNNS 63, pp. 415–424, 2019 (SCOPUS).
https://doi.org/10.1007/978-3-030-04792-4_54
3. Nguyen Thi Hoa, Ngo Nhu Khoa, and Nguyen Thi Bich Ngoc, New
Vibration Model to Analyze the Correlation of Components in the Washing
Machine Suspension System, Proceedings of the International Conference,
ICERA 2019, LNNS 104, pp. 500–511, 2020 (SCOPUS)
https://doi.org/10.1007/978-3-030-37497-6_58
4. Nguyen Thi Hoa, Ngo Nhu Khoa, Force-velocity relation of dampers in
horizontal washing machines, Advances in Engineering Research and
Application - Proceedings of the International Conference, ICERA 2020,
K.-U. Sattler et al. (Eds.): ICERA 2020, LNNS 178, pp. 469–477, 2021.
https://doi.org/10.1007/978-3-030-64719-3_52
5. Nguyễn Thị Hoa, Nguyễn Đại Phong, Mô hình và mô phỏng động lực
của máy giặt cửa ngang, Tạp chí Cơ khí Việt Nam, 3.2017, ISSN 0866 –
7056, trang 170-175.
6. Nguyễn Thị Hoa, Ngô Như Khoa, Giảm rung động cho máy giặt lồng
ngang bằng cách cải tiến thiết kế hệ thống treo, Tạp chí Cơ khí Việt Nam,
6.2019, ISSN 0866-7056, trang 52 – 55.
7. Nguyễn Thị Hoa, Ngô Như Khoa, Sự ảnh hưởng của hệ số độ cứng lò
xo tới rung động của máy giặt trục ngang, Tạp chí Cơ khí Việt Nam,
6.2019, ISSN 0866-7056, trang 78-82.
- 124 -
TÀI LIỆU THAM KHẢO
[1] C. Barthel and T. Götz, “What users can save with energy and water
efficient washing machines,” bigEE.net, 2013.
[2] ION, “6 Major Differences between Front-Loading and Top-Loading
Washing Machine.” https://designlike.com/6-major-differences-between-
front-loading-and-top-loading-washing-machine.
[3] E. Gillespie, “Vertical Drum Vs. Horizontal Drum in Washing Machines.”
https://homeguides.sfgate.com/vertical-drum-vs-horizontal-drum-washing-
machines-69784.html.
[4] B. Lebot, I. Thrlel, and G. Rosenquist, “Horizontal axis domestic clothes
washer: an alternative technology that can reduce energy and water use,”
Build. Equip. Appliances, pp. 147–156, 1990.
[5] N. N. Khoa, Nghiên cứu xây dựng mô hình rung động của máy giặt, cải tiến
thiết kế và thử nghiệm hệ thống giảm rung cho máy giặt lồng ngang dân
dụng. 2018.
[6] D. C. Conrad, “The fundamentals of automatic washing machine design
based upon dynamic constraints,” 1994.
[7] D. C. Conrad and W. Soedel, “On the problem of oscillatory walk of
automatic washing machines,” J. Sound Vib., vol. 188, no. 3, pp. 301–314,
1995, doi: 10.1006/jsvi.1995.0595.
[8] A. Yörükoǧlu and E. Altuǧ, “Determining the mass and angular position of
the unbalanced load in horizontal washing machines,” IEEE/ASME Int.
Conf. Adv. Intell. Mechatronics, AIM, pp. 118–123, 2009, doi:
10.1109/AIM.2009.5230027.
[9] A. Yörükoǧlu and E. Altuǧ, “Estimation of unbalanced loads in washing
machines using fuzzy neural networks,” IEEE/ASME Trans. Mechatronics,
vol. 18, no. 3, pp. 1182–1190, 2013, doi: 10.1109/TMECH.2012.2199510.
[10] P. Boyraz and M. Gündüz, “Dynamic modeling of a horizontal washing
machine and optimization of vibration characteristics using Genetic
Algorithms,” Mechatronics, vol. 23, no. 6, pp. 581–593, 2013, doi:

- 125 -
10.1016/j.mechatronics.2013.05.006.
[11] I. M. Shihab, W. A. Soud, and N. A. Jebur, “Theoretical and Experimental
Study of the Vibration of a Drum Type Washing Machine at Different
Speeds,” J. Eng. Sci., vol. 20, no. 5, pp. 1160–1171, 2017.
[12] D. C. Conrad, “Investigation of Passive and Adaptive Passive Dynamic
Absorbers Applied to an Automatic Washer Suspension Design John Aidrin
Daniel C. Conrad Advanced Technology Development and Application -,”
in Proceedings of the SPIE, 1996, vol. 2720, pp. 50–61.
[13] J. L. Kuo and T. Y. Wang, “Investigation of flexible multi-mode harmonic
vibration for the automatic washing process,” Proc. Inst. Mech. Eng. Part C
J. Mech. Eng. Sci., vol. 222, no. 12, pp. 2373–2384, 2008, doi:
10.1243/09544062JMES1056.
[14] L. Bascetta, P. Rocco, A. M. Zanchettin, and G. Magnani, “Velocity control
of a washing machine: A mechatronic approach,” Mechatronics, vol. 22, no.
6, pp. 778–787, 2012, doi: 10.1016/j.mechatronics.2012.04.005.
[15] G. A. Hassaan, “Vibration Analysis of a Horizontal Washing Machine, Part
I: Vibration Displacement and Velocity,” Int. J. Adv. Eng. Technol. Manag.
Appl. Sci., vol. 2, no. 11, pp. 26–36, 2015.
[16] G. Ali and H. Emeritus, “Vibration Analysis of a Horizontal Washing
Machine, Part II: Isolation Efficiency,” Int. J. Recent Eng. Sci., vol. 2, no. 5,
pp. 2349–7157, 2015, [Online]. Available: www.ijresonline.com.
[17] G. Ali Hassaan, “Vibration Analysis of a Horizontal Washing Machine, Part
III: Optimal Parameters,” Int. J. Eng. Tech., vol. 1, no. 5, pp. 45–49, 2015,
[Online]. Available: http://www.ijetjournal.org.
[18] G. Ali Hassaan, “Vibration Analysis of a Horizontal Washing Machine, Part
IV: Optimal Damped Vibration Absorber,” Int. J. Comput. Tech. -–, vol. 2,
no. 5, pp. 67–71, 2015, [Online]. Available: http://www.ijctjournal.org.
[19] O. S. Türkay, I. T. Sümer, A. K. Tuğcu, and B. Kiray, “Modeling and
experimental assessment of suspension dynamics of a horizontal-axis
washing machine,” J. Vib. Acoust. Trans. ASME, vol. 120, no. 2, pp. 534–

- 126 -
543, 1998, doi: 10.1115/1.2893862.
[20] O. S. Türkay, B. Kiray, A. K. Tugcu, and T. Sümer, “Formulation and
implementation of parametric optimisation of a washing machine suspension
system,” Mech. Syst. Signal Process., vol. 9, no. 4, pp. 359–377, 1995, doi:
10.1006/mssp.1995.0029.
[21] H. T. Lim, W. B. Jeong, and K. J. Kim, “Dynamic modeling and analysis of
drum-type washing machine,” Int. J. Precis. Eng. Manuf., vol. 11, no. 3, pp.
407–417, 2010, doi: 10.1007/s12541-010-0047-7.
[22] E. Papadopoulos and I. Papadimitriou, “Modeling, design and control of a
portable washing machine during the spinning cycle,” IEEE/ASME Int.
Conf. Adv. Intell. Mechatronics, AIM, vol. 2, no. July, pp. 899–904, 2001,
doi: 10.1109/aim.2001.936786.
[23] T. Nygårds and V. Berbyuk, “Multibody modeling and vibration dynamics
analysis of washing machines,” Multibody Syst. Dyn., vol. 27, no. 2, pp.
197–238, 2012, doi: 10.1007/s11044-011-9292-5.
[24] T. Nygårds and V. Berbyuk, “Optimization of washing machine kinematics,
dynamics, and stability during spinning using a multistep approach,” Optim.
Eng., vol. 15, no. 2, pp. 401–442, 2014, doi: 10.1007/s11081-012-9206-2.
[25] T. Argentini et al., “On a numerical model of a complete washing machine,”
WIT Trans. Modelling Simul., vol. 46, pp. 723–733, 2007, doi:
10.2495/CMEM070711.
[26] F. Wagner and F. Pfeiffer, “On the dynamics of washing machines,” ZAMM
Zeitschrift fur Angew. Math. und Mech., vol. 80, no. 4 SUPPL. 2, pp. 307–
308, 2000, doi: 10.1002/zamm.20000801425.
[27] J. Buśkiewicz and G. Pittner, “Dynamic model of the drum of the washing
machine SAMSUNG WF0804,” Vib. Phys. Syst., vol. 25, no. November
2016, pp. 89–96, 2012.
[28] J. Bus̈kiewicz and G. Pittner, “Reduction in vibration of a washing machine
by means of a disengaging damper,” Mechatronics, vol. 33, pp. 121–135,
2016, doi: 10.1016/j.mechatronics.2015.11.002.

- 127 -
[29] M. Leblanc, “Automatic balancer for rotating bodies,” 1916.
[30] J. B. Dyer, “Domestic appliance,” 1945.
[31] S. Bae, J. M. Lee, Y. J. Kang, J. S. Kang, and J. R. Yun, “Dynamic analysis
of an automatic washing machine with a hydraulic balancer,” J. Sound Vib.,
vol. 257, no. 1, pp. 3–18, 2002, doi: 10.1006/jsvi.2001.4162.
[32] M. A. L. T. Nakamurab, “Dynamics of the fluid balancer : Perturbation
solution of a forced Korteweg-de Vries-Burgers equation,” pp. 73–85, 2013.
[33] S. H. Son, S. Bin Lee, and D. H. Choi, “Experiment-based design
optimization of a washing machine liquid balancer for vibration reduction,”
Int. J. Precis. Eng. Manuf., vol. 13, no. 8, pp. 1433–1438, 2012, doi:
10.1007/s12541-012-0188-y.
[34] L. Urbiola-Soto and M. Lopez-Parra, “Dynamic performance of the LeBlanc
balancer for automatic washing machines,” J. Vib. Acoust. Trans. ASME,
vol. 133, no. 4, 2011, doi: 10.1115/1.4003597.
[35] “Balancer for use in centrifugal rotary machine,” 1984.
[36] J. Kim, “Balancing device for drum washing machine,” 1998.
[37] T. C. Chan, C. K. Sung, and P. C. P. Chao, “Non-linear suspension of an
automatic ball balancer,” Int. J. Non. Linear. Mech., vol. 46, no. 2, pp. 415–
424, 2011, doi: 10.1016/j.ijnonlinmec.2010.11.001.
[38] H. W. Chen and Q. Zhang, “Design of horizontal axis washing machine with
ball balancer and MR dampers,” Int. J. Precis. Eng. Manuf., vol. 18, no. 12,
pp. 1783–1793, 2017, doi: 10.1007/s12541-017-0207-0.
[39] H. W. Chen, Q. J. Zhang, and X. Q. Wu, “Stability and dynamic analyses of
a horizontal axis washing machine with a ball balancer,” Mech. Mach.
Theory, vol. 87, pp. 131–149, 2015, doi:
10.1016/j.mechmachtheory.2015.01.001.
[40] M. G. Jo, J. H. Kim, and J. W. Choi, “Rebalancing Method for a Front-
loading Washing Machine Using a Robot Balancer System,” Int. J. Control.
Autom. Syst., vol. 18, no. 4, pp. 1053–1060, 2020, doi: 10.1007/s12555-019-
0514-6.

- 128 -
[41] Q. H. Nguyen, N. D. Nguyen, and S. B. Choi, “Optimal design and
performance evaluation of a flow-mode MR damper for front-loaded
washing machines,” Asia Pacific J. Comput. Eng., vol. 1, no. 1, pp. 1–14,
2014, doi: 10.1186/2196-1166-1-3.
[42] Q. H. Nguyen, S. B. Choi, and J. K. Woo, “Optimal design of
magnetorheological fluid-based dampers for front-loaded washing
machines,” Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci., vol. 228, no. 2,
pp. 294–306, 2014, doi: 10.1177/0954406213485908.
[43] B. C. Yalçin and H. Erol, “Semiactive vibration control for horizontal axis
washing machine,” Shock Vib., vol. 2015, 2015, doi: 10.1155/2015/692570.
[44] M. J. Chrzan and J. D. Carlson, “MR Fluid Sponge Devices and Their Use
in Vibration Control of Washing,” in Smart Structures and Materials 2001:
Damping and Isolation, 2001, vol. 4331, pp. 370–378, doi:
10.1117/12.432719.
[45] T. Argentini, M. Belloli, F. C. Robustelli, L. Martegani, and G. Fraternale,
“Innovative designs for the suspension system of horizontal-axis washing
machines: Secondary suspensions and tuned mass dampers,” ASME Int.
Mech. Eng. Congr. Expo. Proc., vol. 4 B, pp. 1–11, 2013, doi:
10.1115/IMECE2013-64425.
[46] F. Previdi and C. Spelta, “Vibration control in a washing machine by using
magnetorheological dampers.”
[47] S. B. Choi, T. H. Lee, and S. B. Choy, “Design and Analysis of a New
Magnetorheological Damper for Generation of Tunable Shock-Wave
Profiles,” Shock Vib., vol. 2018, 2018, doi: 10.1155/2018/8963491.
[48] F. Tyan, C.-T. Chao, and S.-H. Tu, “Modeling and Vibration Control of a
Drum-Type Washing Machine via MR Fluid Dampers,” CACS Int. Autom.
Control Conf., pp. 1–5, 2009.
[49] C. Spelta, S. Savaresi, G. Fraternale, and N. Gaudiano, “Vibration reduction
in a washing machine via damping control,” IFAC Proc. Vol., vol. 17, no. 1
PART 1, pp. 11835–11840, 2008, doi: 10.3182/20080706-5-KR-1001.0320.

- 129 -
[50] H. Salahshoor and S. Mohammadzadeh, “Semi-Active Vibration Control of
a Washing Machine Using Magnetorheological Dampers,” no. July, pp. 20–
24, 2009.
[51] B. Minorowicz, F. Stefański, G. Pittner, and R. Regulski, “Share mode
magnetorheological dampers for vibration attenuation in domestic washing
machines,” Adv. Intell. Syst. Comput., vol. 350, pp. 147–156, 2015, doi:
10.1007/978-3-319-15796-2_15.
[52] Y. Shen, M. F. Golnaraghi, and G. R. Heppler, “Semi-active vibration
control schemes for suspension systems using magnetorheological
dampers,” JVC/Journal Vib. Control, vol. 12, no. 1, pp. 3–24, 2006, doi:
10.1177/1077546306059853.
[53] T. Nygårds and V. Berbyuk, “Dynamics of washing machines: MBS
modeling and experimental validation,” Proc. MULTIBODY Dyn. 2007,
ECCOMAS Themat. Conf. C.L. Bottasso, P. Masarati, L. Trainelli (eds.),
Milano, Italy, 25–28 June 2007., no. June, pp. 25–28, 2007.
[54] S. Fu, H. Gao, Q. Zhang, X. Chen, and X. Zhang, “Virtual prototyping and
validation of an automatic washing machine,” Adv. Mater. Res., vol. 97–
101, pp. 3387–3391, 2010, doi: 10.4028/www.scientific.net/AMR.97-
101.3387.
[55] L. Kirkayak, “Systematic analysis of washing machine front block,” vol.
1505, no. May, 2016.
[56] A. Mechanics, M. Degree, P. Performed, L. Author, S. Gundeboina, and T.
Andersson, “Finite Element Analysis of a Washing Machine Cylinder,”
2010.
[57] N. Van Khang, Động lực học hệ nhiều vật. 2007.
[58] S. S. Ge, T. H. Lee, and S. X. Ren, “Adaptive friction compensation of
servo mechanisms,” Int. J. Syst. Sci., vol. 32, no. 4, pp. 523–532, 2001, doi:
10.1080/00207720119378.
[59] E. Pennestrì, V. Rossi, P. Salvini, and P. P. Valentini, “Review and
comparison of dry friction force models,” Nonlinear Dyn., vol. 83, no. 4, pp.

- 130 -
1785–1801, 2016, doi: 10.1007/s11071-015-2485-3.
[60] B. Armstrong-Helouvry, Control of Machines with Friction the Kluwer
International Series Consulting Editor : Takeo Kanade. 1991.
[61] B. Armstrong-Helouvry, “Stick-slip arising from Stribeck friction,” vol.
53201, pp. 1377–1382, 1990, doi: 10.1109/robot.1990.126194.
[62] A. Tustin, “The effects of backlash and of speed-dependent friction on the
stability of closed-cycle control systems,” J. Inst. Electr. Eng. - Part IIA
Autom. Regul. Servo Mech., vol. 94, no. 1, pp. 143–151, 1947, doi:
10.1049/ji-2a.1947.0021.
[63] Anon, “Friction: Experimental Determination, Modeling and
Compensation.,” pp. 1422–1427, 1988, doi: 10.1109/robot.1988.12266.
[64] C. C. de Wit and J. Carrillo, “A modified EW-RLS algorithm for systems
with bounded disturbances,” Automatica, vol. 26, no. 3, pp. 599–606, 1990,
doi: 10.1016/0005-1098(90)90032-D.
[65] S. S. Rao, Mechanical Vibrations, vol. 33, no. 6. 2011.
[66] S. Editors et al., Differential Evolution APractical Approach to Global
Optimization. 2005.
[67] B. I. Johnston and I. M. I. Cornwell, “S TAT I C S | D Y N A M I C S for
ENGINEERS.”
[68] F. Scale and T. Weighing, “MT1260 Load Cell Easy System Integration,”
pp. 50–53.
[69] B. Scales, “MT1041 Load Cell Easy System Integration.”
[70] N. Instruments, “USER GUIDE SCC-SG Series Strain Gage Modules,”
National Instruments. .
[71] N. Instruments, “NI 6251 M Series Data Acquisition:16 AI, 1.25 MS/s, 24
DIO, 2 AO The.” pp. 1–26.
[72] K. I. Corporation, “Data Sheet, Type 8702B..., 8704B...,” 2008.
[73] ADLINK, “USB-2405 Series, 2 or 4-ch 24-bit 128kS/s Dynamic Signal
Acquisition USB 2.0 Module.” pp. 10–11.
[74] RDP FROUP, “Displacement act LVDT Displacement Transducer.” .

- 131 -
PHỤ LỤC
A. HÌNH ẢNH THÁO RỜI CÁC BỘ PHẬN CỦA MÁY GIẶT
LỒNG NGANG LG (Nguồn: searspartsdirect.com/LG washer parts).
Hình A.1. Hình ảnh một số bộ phận tháo rời phần vỏ máy
1-vỏ xung quanh; 2-vỏ trên; 3-cửa máy; 4- đệm cao su;
5-đế máy và bộ phận cấp nhiệt; 6-bảng điều khiển
6
2
4
1
3
5

- 132 -
Hình A.2 Hình ảnh một số bộ phận tháo rời trên hệ thống treo
1-Động cơ dẫn động trực tiếp; 2- lò xo; 3- thiết bị giảm chấn; 4- lồng giặt;
5-nửa trước lồng chứa; 6-nửa sau lồng chứa
1
2
3
4
5
5
6

- 133 -
Hình A.3 Hình ảnh khoang chứa chất giặt tẩy và bộ phận cấp nước
1- Khoang chứa chất giặt tẩy; 2- bộ phận cấp nước
1
2

- 134 -
B. CHƯƠNG TRÌNH MATLAB
Chương trình tìm hệ số của đường cong lực – vận tốc clear all;clc;
close all
Popsize = 200;
NP= Popsize;
Totalgen=200;
n=4;
DATA=load('Data_May_Giat.txt');
V=DATA(:,3);
FF=DATA(:,4);
Lb = [70 -10 -70 -0.2];
Ub = [90 10 90 0.2]; % high boundary constraint
lu = [Lb;Ub];
% Initialize the main population
xp = ones(NP, 1) * lu(1, :) + rand(NP, n) .* (ones(NP, 1) * (lu(2,
:) - lu(1, :)));
% Evaluate the objective function
[fit_xp] = EvalPenalty(xp, V,FF);
gen = 1;
xgood=xp;
while gen < Totalgen
% Generate the offspring population
offpop = ModifiedReproduce(xp, NP, lu, n);
% Evaluate "offpop" by slightly revising the current program
[fit_off] = EvalPenalty(offpop,V,FF);
% Update x, g,f using elistist operator
x = [xp; offpop];
fit = [fit_xp; fit_off];
[~,id] = sort(fit);
xp = x(id(1:Popsize),:);
fit_xp = fit(id(1:Popsize));
[fbest,idb] = min(fit_xp);
xbest=xp(idb,:);
gen = gen + 1;
end
plot(V(:),FF(:),'b','LineWidth',1.5);
hold on
Y=friction_model(xbest,V);
plot(V(:),Y(:),'r-.','LineWidth',2);





























