Embed Size (px)
DESCRIPTION
makalah sistem kendali
Citation preview
MAKALAH
SISTEM KENDALI CLOSE LOOP
DISUSUN OLEH :
IQBAL FASYA
2212122002
PROGRAM STUDI S-1 TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS JENDRAL AHMAD YANI
BANDUNG
2012
KATA PENGANTAR
Dengan segala puji syukur alhamdulillah kami panjatkan kepada Allah swt,
yang telah memberi rahmat, hidayah serta inayahnya sehingga kami dapat
menyelesaikan makalah ini sebagai salah satu tugas dari mata kuliah sistem kendali.
kami selaku penulis berharap, makalah ini selain sebagai salah satu tugas
dari mata kuliah system kendali, semoga dapat juga bermanfaat serta menambah
ilmu bagi setiap pembaca pada umumnya dan khususnya bagi penulis sendiri.
Penulis sadar bahwa dalam penulisan makalah ini mungkin masih banyak
kekurangan dan kesalahan, oleh karena itu kritik serta saran saya sebagai penulis
mengaharapkan dari pembaca sekalian.
Bandung, 30 Desember 2012
Penyusun
BAB I
PENDAHULUAN
A. Latar Belakang
Sistem kendali atau sistem kontrol merupakan hal yang penting di era
teknologi informasi maupun di dunia industri yang modern ini. Proses produksi
dan manufacturing dituntut kestabilannya dan setiap perubahan dapat direspon
secara cepat dan real time. Di dalam dunia industri, dituntut suatu proses kerja
yang aman dan berefisiensi tinggi untuk menghasilkan produk dengan kualitas
dan kuantitas yang baik serta dengan waktu yang telah ditentukan.
Kegiatan pengontrolan dan monitoring yang biasa dilakukan manusia bisa
digantikan perannya dengan menerapkan prinsip otomasi. Kegiatan kontrol yang
dilakukan secara berulang-ulang, kekurang-presisi-an manusia dalam membaca
data, serta resiko yang mungkin timbul dari sistem yang dikontrol semakin
menguatkan kedudukan alat/mesin untuk melakukan pengontrolan secara
otomatis.
Piranti-piranti pengontrol otomatis ini sangat berguna bagi manusia. Apalagi
jika ditambah dengan suatu kecerdasan melalui program yang ditanamkan dalam
sistem tersebut akan semakin meringankan tugas-tugas manusia. Akan tetapi
secerdas apapun sebuah mesin tentu masih membutuhkan peranan manusia
untuk mengatur dan mengontrol piranti-piranti ini. Otomasi kontrol bukan untuk
menggantikan sepenuhnya peranan manusia, tetapi mengurangi peranan dan
meringankan tugas-tugas manusia dalam pengontrolan suatu proses.
Dengan adanya perkembangan teknologi, maka mata kuliah Analisis Sistem
Teknik Kendali (control automatic) memberikan kemudahan dalam :
1. Mendapatkan performansi dari sistem Dinamik,
2. Dapat mempertinggi kualitas produksi
3. Menurunkan biaya produksi,
4. Mempertinggi laju produksi,
5. Dan meniadakan pekerjaan- pekerjaan rutin yang membosankan, yang harus
dilakukan oleh manusia.
BAB II
PEMBAHASAN
II.1. Sistem Kontrol
Sejarah Perkembangan Teknik Kendali :
Perkembangan teknik kendali begitu sangat pesat dimulai dari :
1. Karya pertama dimulai abad 18, control automatic, governor sentrifugal, sebagai
pengatur kecepatan mesin uap oleh James Watt
2. Pada tahun 1922, control automatic pengemudi kapal laut oleh Minosky
3. Pada tahun 1932, Kestablilan system loop tertutupdan terbuka terhadap
masukkan tunak( steady state ) sinusoidal
4. Pada tahun 1934, Diperkenalkan istilah servomekanis untuk system control
posisi, dalam hal ini membicarakan desain servo mekanis relay dengan
masukkan yang berubah-ubah.
5. Selama dasawarsa 40 tahun hingga 50 tahun kemudian, metoda dalam system
desain system control linear berumpan balik benar-benar telah berkembang.
6. Pada tahun 1960 an, kemudian dikembangkan kedalam bentuk multimasukkan
/keluaran karena kompleknya “Plant” modern dan persyaratan yang keras pada
tingkat ketelitian.
Sistem kontrol adalah proses pengaturan ataupun pengendalian terhadap
satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu
harga atau dalam suatu rangkuman harga (range) tertentu. Di dalam dunia industri,
dituntut suatu proses kerja yang aman dan berefisiensi tinggi untuk menghasilkan
produk dengan kualitas dan kuantitas yang baik serta dengan waktu yang telah
ditentukan. Otomatisasi sangat membantu dalam hal kelancaran operasional,
keamanan (investasi, lingkungan), ekonomi (biaya produksi), mutu produk, dll.
Ada banyak proses yang harus dilakukan untuk menghasilkan suatu produk
sesuai standar, sehingga terdapat parameter yang harus dikontrol atau di kendalikan
antara lain tekanan (pressure), aliran (flow), suhu (temperature), ketinggian (level),
kerapatan (intensity),dll. Gabungan kerja dari berbagai alat-alat kontrol dalam proses
produksi dinamakan sistem pengontrolan proses (process control system).
Sedangkan semua peralatan yang membentuk sistem pengontrolan disebut
pengontrolan instrumentasi proses (process control instrumentation). Dalam istilah
ilmu kendali, kedua hal tersebut berhubungan erat, namun keduanya sangat
berbeda hakikatnya. Pembahasan disiplin ilmu Process Control Instrumentation lebih
kepada pemahaman tentang kerja alat instrumentasi, sedangkan disiplin ilmu
Process Control System mengenai sistem kerja suatu proses produksi.
II.2. Prinsip Pengontrolan Proses
Ada 3 parameter yang harus diperhatikan sebagai tinjauan pada suatu sistem
kontrol proses yaitu :
- cara kerja sistem kontrol
- keterbatasan pengetahuan operator dalam pengontrolan proses
- peran instrumentasi dalam membantu operator pada pengontrolan proses
Empat langkah yang harus dikerjakan operator yaitu mengukur, membandingkan,
menghitung, mengkoreksi. Pada waktu operator mengamati ketinggian level, yang
dikerjakan sebenarnya adalah mengukur process variable (besaran parameter
proses yang dikendalikan).
Contohnya proses pengontrolan temperatur line fuel gas secara manual, proses
variabelnya adalah suhu. Lalu operator membandingkan apakah hasil pengukuran
tersebut sesuai dengan apa yang diinginkan. Besar proses variabel yang diinginkan
tadi disebut desired set point. Perbedaan antara process variabel dan desired set
point disebut error.
Dalam sistem kontrol suhu di atas dapat dirumuskan secara matematis:
Error = Set Point – Process Variabel
Process variabel bisa lebih besar atau bisa juga lebih kecil daripada desired
set point. Oleh karena itu error bisa diartikan negatif dan juga bisa positif.
II.3. Sistem Kontrol Otomatis
Suatu sistem kontrol otomatis dalam suatu proses kerja berfungsi
mengendalikan proses tanpa adanya campur tangan manusia (otomatis). Ada dua
sistem kontrol pada sistem kendali/kontrol otomatis yaitu :
A. Open Loop (Loop Terbuka)
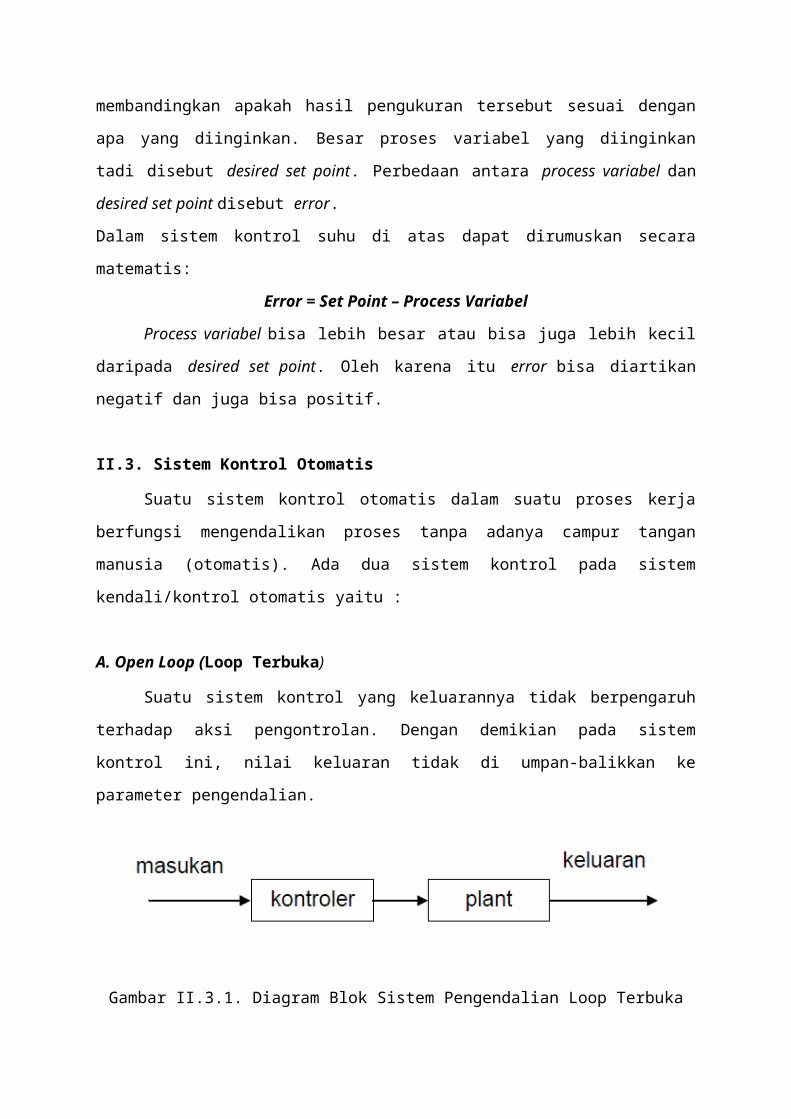
Suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi
pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di
umpan-balikkan ke parameter pengendalian.
Gambar II.3.1. Diagram Blok Sistem Pengendalian Loop Terbuka
Adapun keunggulan dan kerugiannya pada open loop adalah :
Keunggulannya:
- Konstruksinya sederhana
- Lebih murah dari system tertutup
- Tidak ada masalah dengan ketidakstabilan
- Ketelitian kerjanya ditentukan oleh kaliberasi
Kerugiannya:
- Gangguan dan perubahan kaliberasi, akan menimbulkan kesalahan,
sehingga keluaran tidak seperti yang dikehendaki.
- Untuk menjaga kualitas yang diperlukan pada keluaran diperlukan
kaliberasi ulang pada setiap waktu tertentu.
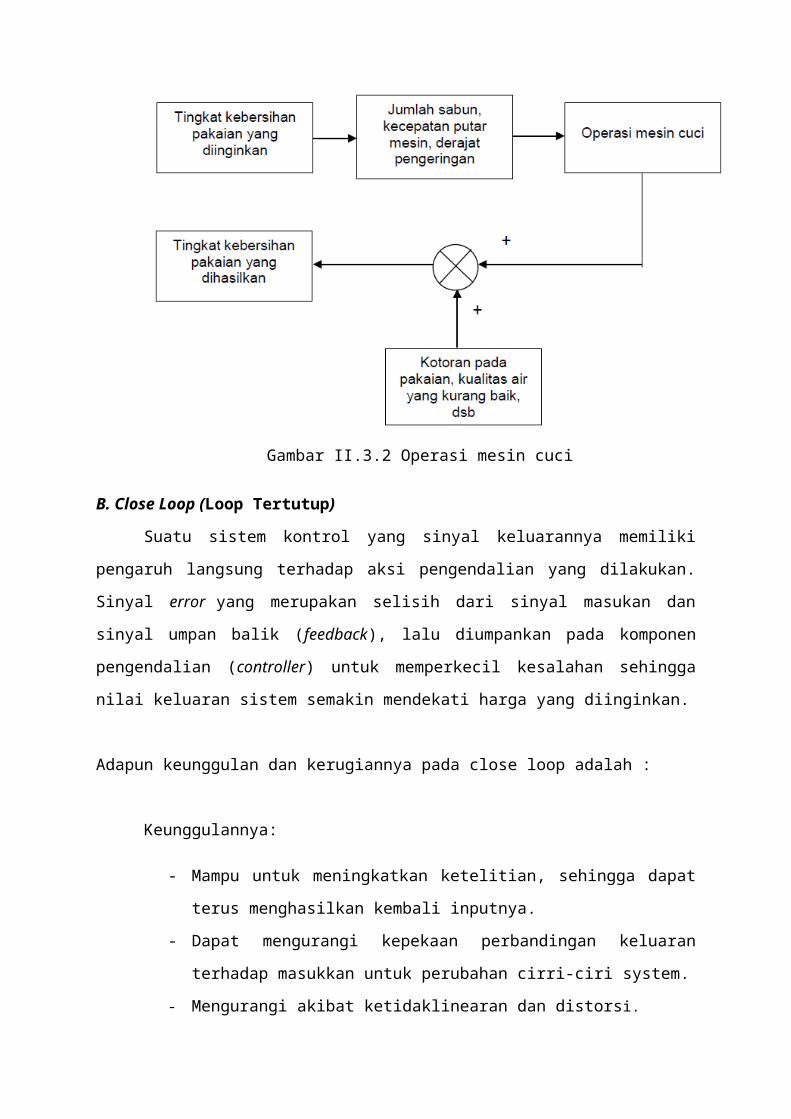
Contoh dari sistem loop terbuka adalah operasi mesin cuci. Penggilingan
pakaian, pemberian sabun, dan pengeringan yang bekerja sebagai operasi mesin
cuci tidak akan berubah (hanya sesuai dengan yang diinginkan seperti semula)
walaupun tingkat kebersihan pakaian (sebagai keluaran sistem) kurang baik akibat
adanya faktor-faktor yang kemungkinan tidak diprediksikan sebelumnya.. Diagram
kotak pada Gambar II.3.2 memberikan gambaran proses ini.
Gambar II.3.2 Operasi mesin cuci
B. Close Loop (Loop Tertutup)
Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung
terhadap aksi pengendalian yang dilakukan. Sinyal error yang merupakan selisih
dari sinyal masukan dan sinyal umpan balik (feedback), lalu diumpankan pada
komponen pengendalian (controller) untuk memperkecil kesalahan sehingga nilai
keluaran sistem semakin mendekati harga yang diinginkan.
Adapun keunggulan dan kerugiannya pada close loop adalah :
Keunggulannya:
- Mampu untuk meningkatkan ketelitian, sehingga dapat terus
menghasilkan kembali inputnya.
- Dapat mengurangi kepekaan perbandingan keluaran terhadap
masukkan untuk perubahan cirri-ciri system.
- Mengurangi akibat ketidaklinearan dan distorsi.
Kerugiannya:
- Tidak dapat mengambil aksi perbaikan terhadap suatu gangguan
sebelum gangguan tersebut mempengaruhi nilai prosesnya.
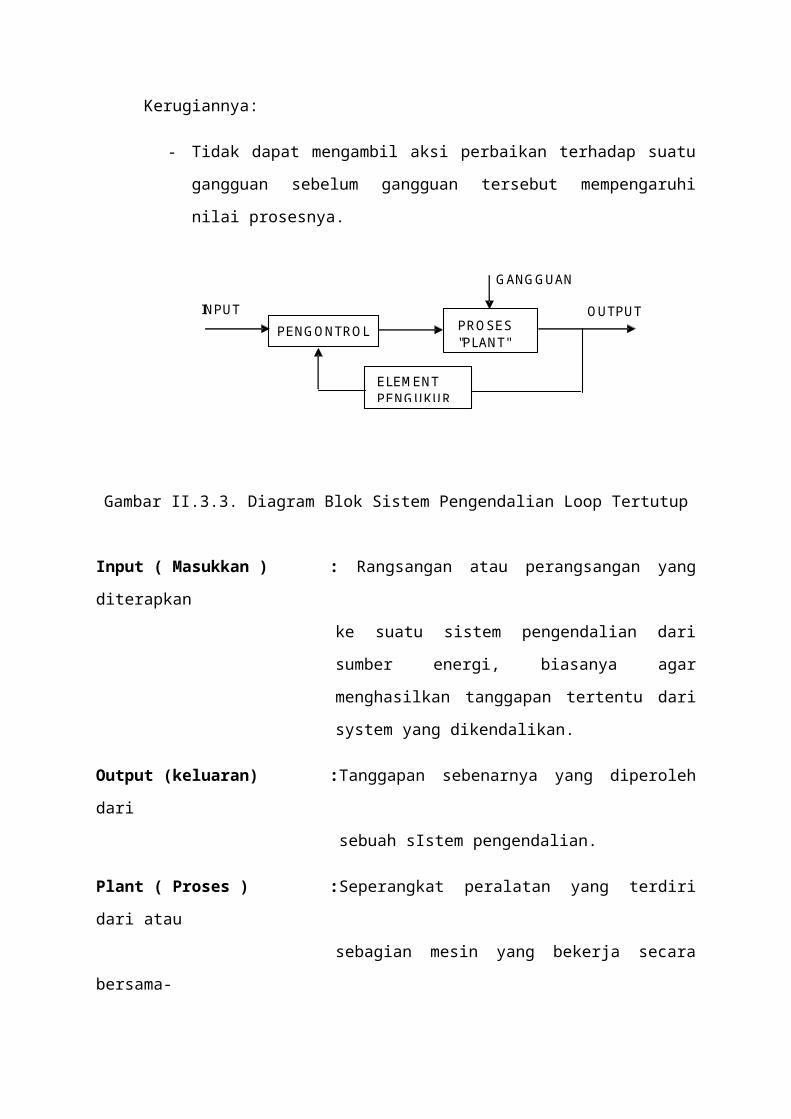
Gambar II.3.3. Diagram Blok Sistem Pengendalian Loop Tertutup
Input ( Masukkan ) : Rangsangan atau perangsangan yang diterapkan
ke suatu sistem pengendalian dari sumber energi,
biasanya agar menghasilkan tanggapan tertentu
dari system yang dikendalikan.
Output (keluaran) :Tanggapan sebenarnya yang diperoleh dari
sebuah sIstem pengendalian.
Plant ( Proses ) :Seperangkat peralatan yang terdiri dari atau
sebagian mesin yang bekerja secara bersama-
sama dan digunakan untuk suatu “ Proses”.
Proses :Merupakan suatu bagian operasi atau
perkembangan alamiah, yang berlangsung secara
kontinyu ( Continue ), yang ditandai oleh suatu
deretan perubahan kecil yang berurutan, dengan
cara yang relative tetap, untuk mendapatkan suatu
ahkiran yang dikehendaki.
Gangguan :gangguan bila ada, memungkinkan suatu sinyal
yang cendearung mempunyai pengaruh yang
merugiakan pada harga keluaran system.
PROSES"PLANT"
ELEMENTPENGUKUR
PENGONTROL
INPUT OUTPUT
GANGGUAN
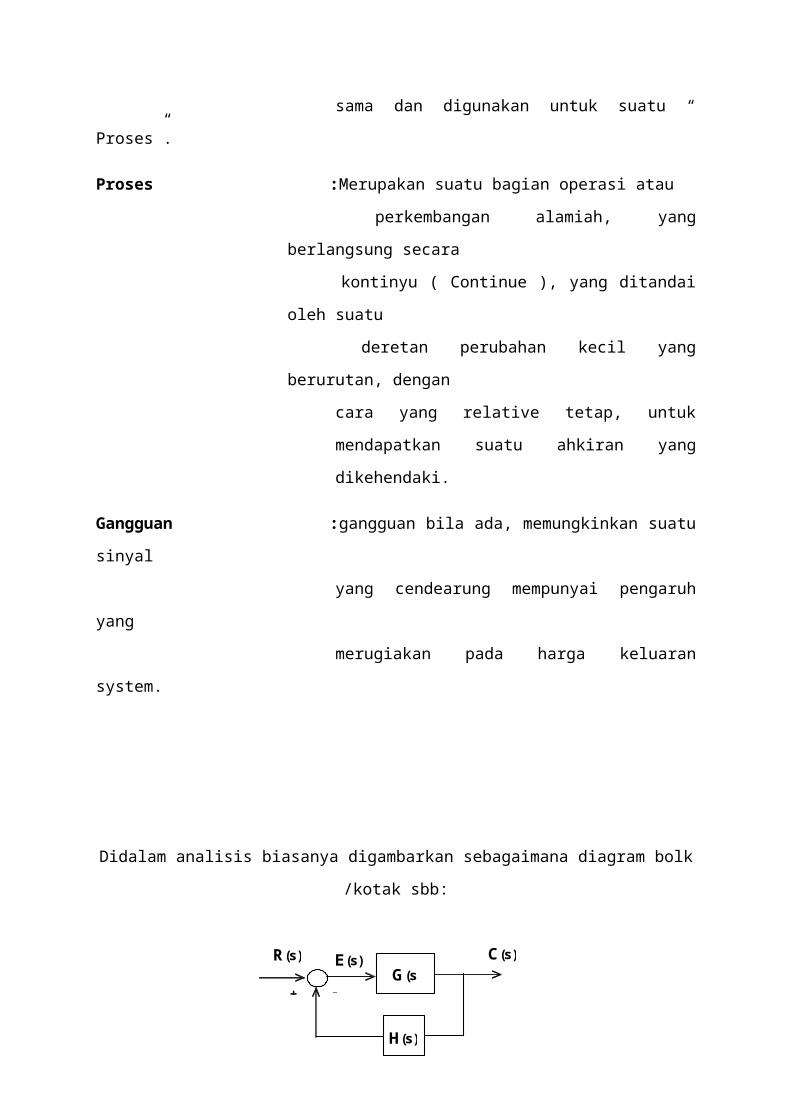
Didalam analisis biasanya digambarkan sebagaimana diagram bolk /kotak sbb:
Gambar II.3.4 diagram bolk
Dimana :
R(s) = Input Laplace transform
C(s) = Output Laplace transform
G(s) = Transfer function forword element
H(s) = TF. Feedback element
E(s) = Error sinyal
II.4. Definisi Istilah
Ada beberapa definisi istilah yang sering dipakai antara lain :
a. Sistem (system) adalah kombinasi dari komponen-komponen yang bekerja
bersama-sama membentuk suatu obyek tertentu.
b. Variabel terkontrol (controlled variable) adalah suatu besaran (quantity) atau
kondisi (condition) yang terukur dan terkontrol. Pada keadaan normal merupakan
keluaran dari sistem.
c. Variabel termanipulasi (manipulated variable) adalah suatu besaran atau
kondisiyang divariasi oleh kontroler sehingga mempengaruhi nilai dari variabel
terkontrol.
d. Kontrol (control) – mengatur, artinya mengukur nilai dari variabel terkontrol dari
sistem dan mengaplikasikan variabel termanipulasi pada sistem untuk
mengoreksi atau mengurangi deviasi yang terjadi terhadap nilai keluaran yang
dituju.
G(s)
H(s)
R(s) E(s) C(s)
+ -
e. Plant (Plant) adalah sesuatu obyek fisik yang dikontrol.
f. Proses (process) adalah sesuatu operasi yang dikontrol. Contoh : proses kimia,
proses ekonomi, proses biologi, dll.
g. Gangguan (disturbance) adalah sinyal yang mempengaruhi terhadap nilai
keluaran sistem.
h. Kontrol umpan balik (feedback control) adalah operasi untuk mengurangi
perbedaan antara keluaran sistem dengan referensi masukan.
i. Kontroler (controller) adalah suatu alat atau cara untuk modifikasi sehingga
karakteristik sistem dinamik (dynamic system) yang dihasilkan sesuai dengan
yang kita kehendaki.
j. Sensor adalah peralatan yang digunakan untuk mengukur keluaran sistem dan
menyetarakannya dengan sinyal masukan sehingga bisa dilakukan suatu operasi
hitung antara keluaran dan masukan.
k. Aksi kontrol (control action) adalah besaran atau nilai yang dihasilkan oleh
perhitungan kontroler untuk diberikan pada plant (pada kondisi normal
merupakan variabel termanipulasi).
l. Aktuator (actuator), adalah suatu peralatan atau kumpulan komponen yang
menggerakkan plant.
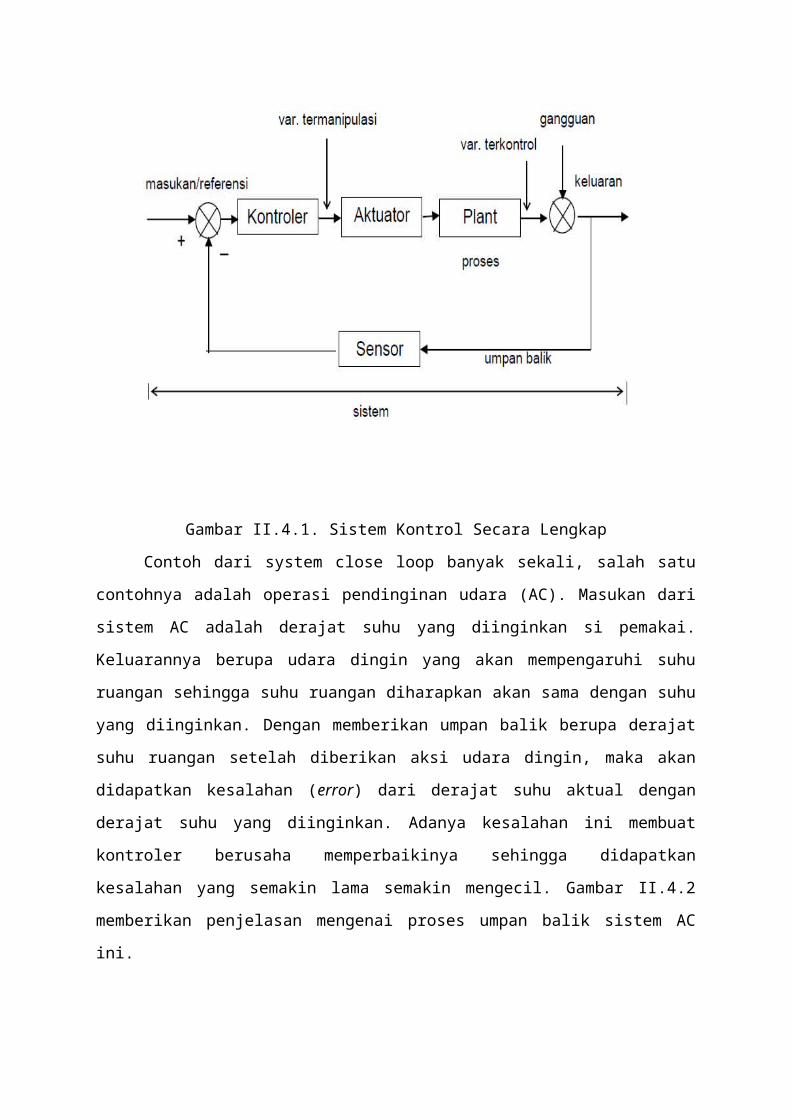
Gambar II.4.1. memberikan penjelasan terhadap beberapa definisi istilah di atas.
Gambar II.4.1. Sistem Kontrol Secara Lengkap
Contoh dari system close loop banyak sekali, salah satu contohnya adalah
operasi pendinginan udara (AC). Masukan dari sistem AC adalah derajat suhu yang
diinginkan si pemakai. Keluarannya berupa udara dingin yang akan mempengaruhi
suhu ruangan sehingga suhu ruangan diharapkan akan sama dengan suhu yang
diinginkan. Dengan memberikan umpan balik berupa derajat suhu ruangan setelah
diberikan aksi udara dingin, maka akan didapatkan kesalahan (error) dari derajat
suhu aktual dengan derajat suhu yang diinginkan. Adanya kesalahan ini membuat
kontroler berusaha memperbaikinya sehingga didapatkan kesalahan yang semakin
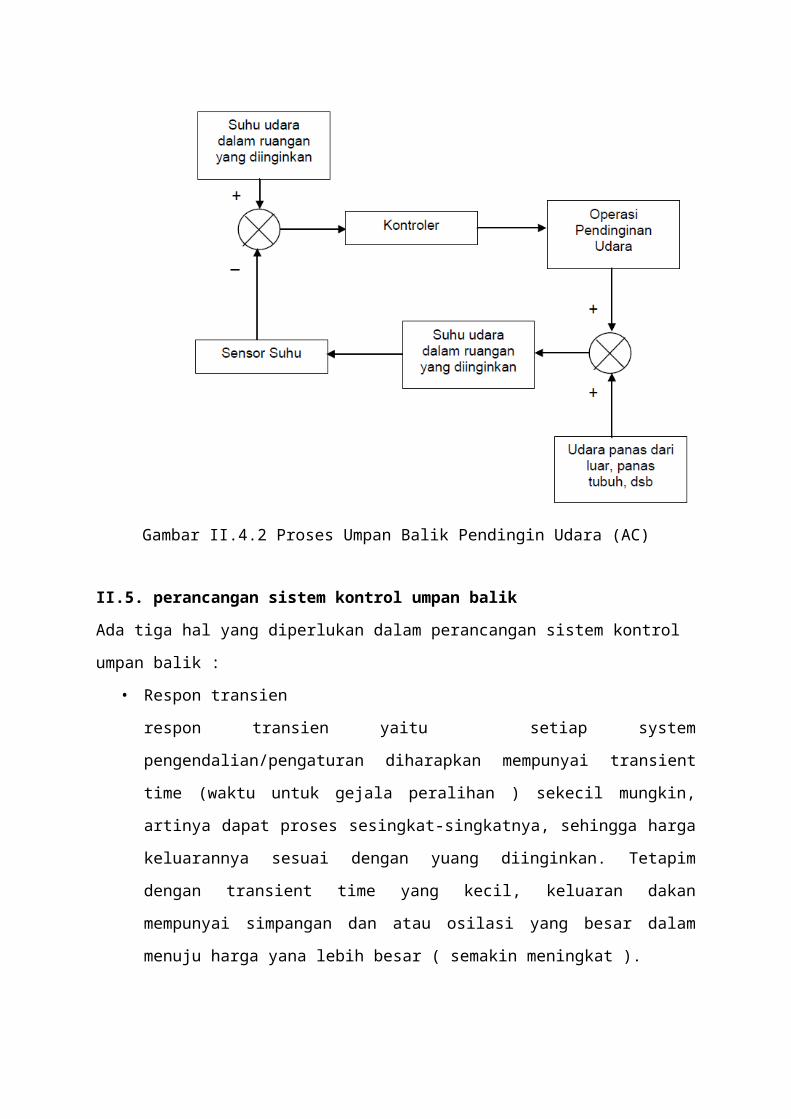
lama semakin mengecil. Gambar II.4.2 memberikan penjelasan mengenai proses
umpan balik sistem AC ini.
Gambar II.4.2 Proses Umpan Balik Pendingin Udara (AC)
II.5. perancangan sistem kontrol umpan balik
Ada tiga hal yang diperlukan dalam perancangan sistem kontrol umpan balik :
• Respon transien
respon transien yaitu setiap system pengendalian/pengaturan diharapkan
mempunyai transient time (waktu untuk gejala peralihan ) sekecil mungkin,
artinya dapat proses sesingkat-singkatnya, sehingga harga keluarannya
sesuai dengan yuang diinginkan. Tetapim dengan transient time yang kecil,
keluaran dakan mempunyai simpangan dan atau osilasi yang besar dalam
menuju harga yana lebih besar ( semakin meningkat ).
• Stabilitas
Stabilitas merupakan spesifikasi sistem yang paling penting. Jika suatu sistem
tidak stabil, kinerja transien dan steady-state errors menjadi inti masalah.
Sistem yang tidak stabil tidak dapat didisain agar memiliki respon-transien
dan steady-state errors tertentu.
• steady-state error ( setelah wahtu gejala peralihan dianggap selesai ), disini
ada 2 hal yang sangat penting yaitu:
• Adanya kesalahan (steady state error ) ialah output yag sebenarnya
tidak sama dengan output yang diinginkan.
• Besarnya kesalahan steady state error dari kedua system tersebut
sangat dipengaruhi oleh “ type system” dan macam “input”
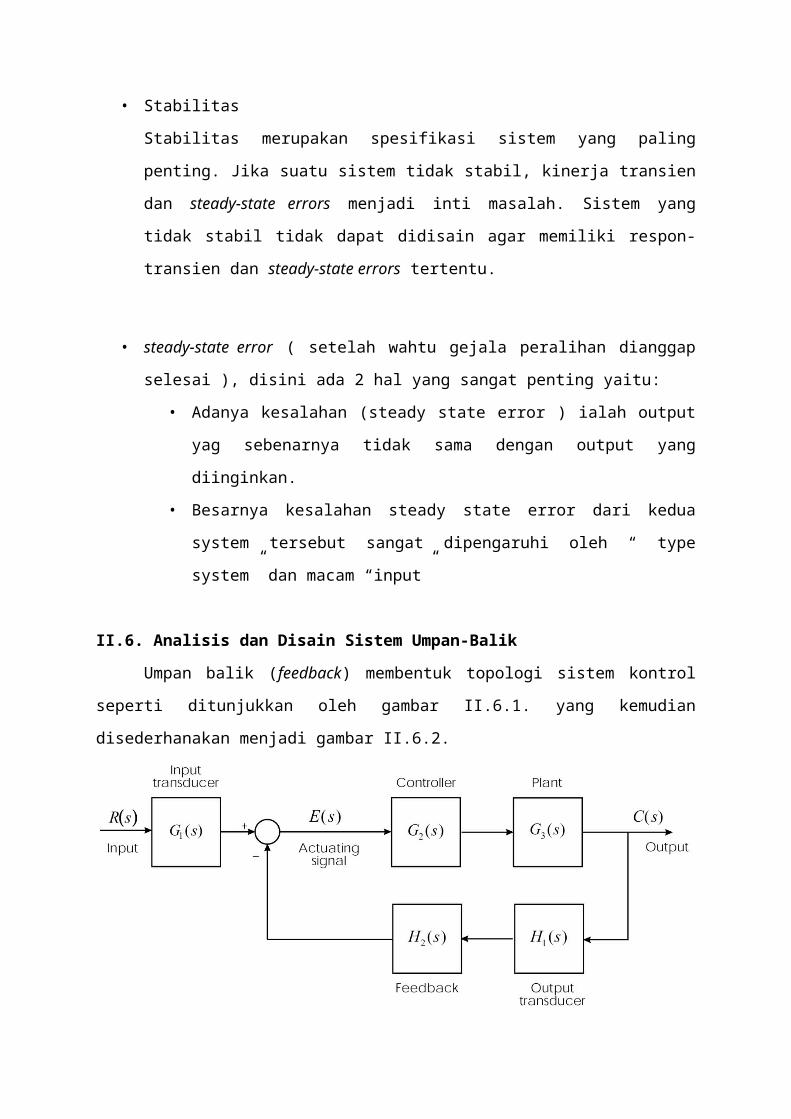
II.6. Analisis dan Disain Sistem Umpan-Balik
Umpan balik (feedback) membentuk topologi sistem kontrol seperti
ditunjukkan oleh gambar II.6.1. yang kemudian disederhanakan menjadi gambar
II.6.2.
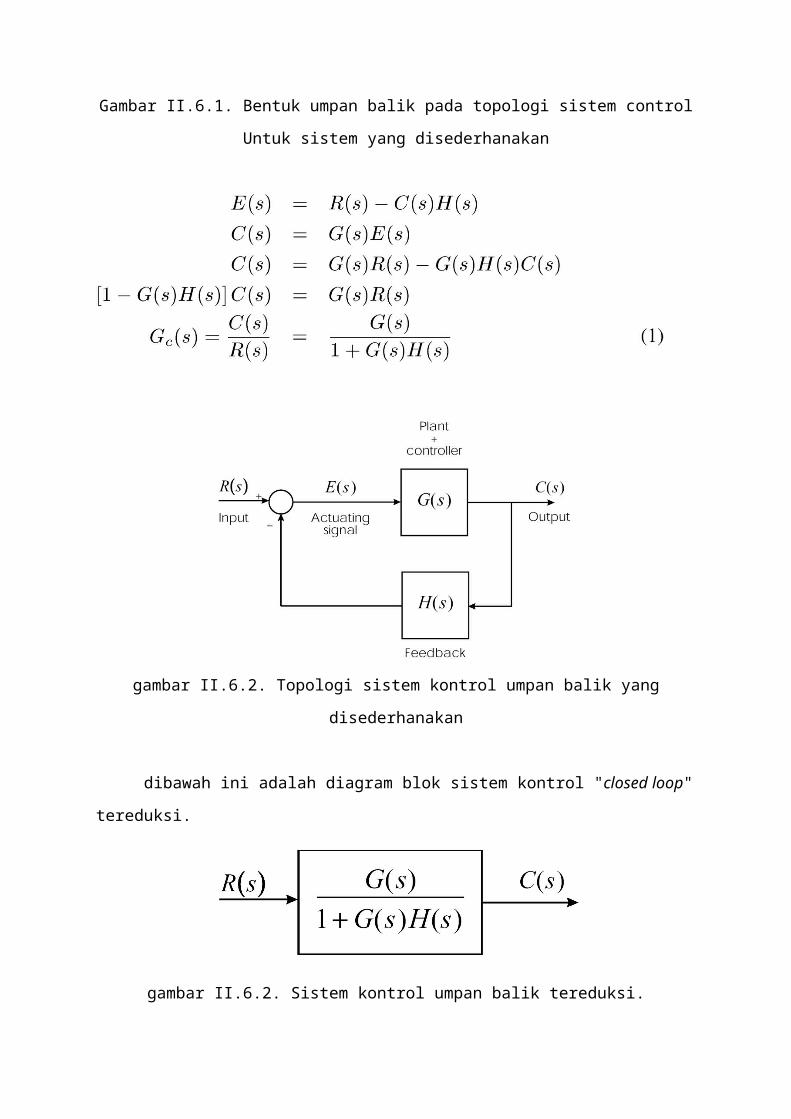
Gambar II.6.1. Bentuk umpan balik pada topologi sistem control
Untuk sistem yang disederhanakan
gambar II.6.2. Topologi sistem kontrol umpan balik yang disederhanakan
dibawah ini adalah diagram blok sistem kontrol "closed loop" tereduksi.
gambar II.6.2. Sistem kontrol umpan balik tereduksi.
1. Interpretasi fungsi transfer closed-loop tergeneralisasi
Komponen persamaan (1) diinterpretasikan sebagai berikut :
Fungsi transfer G(s)H(s) dinamakan "fungsi transfer loop"
1 + G(s)H(s) = 0 dinamakan "persamaan karakteristik closed-loop" /
"closed
loop characteristic equation" (CLCE)
Gc(s) dinamakan "fungsi transfer closed-loop"
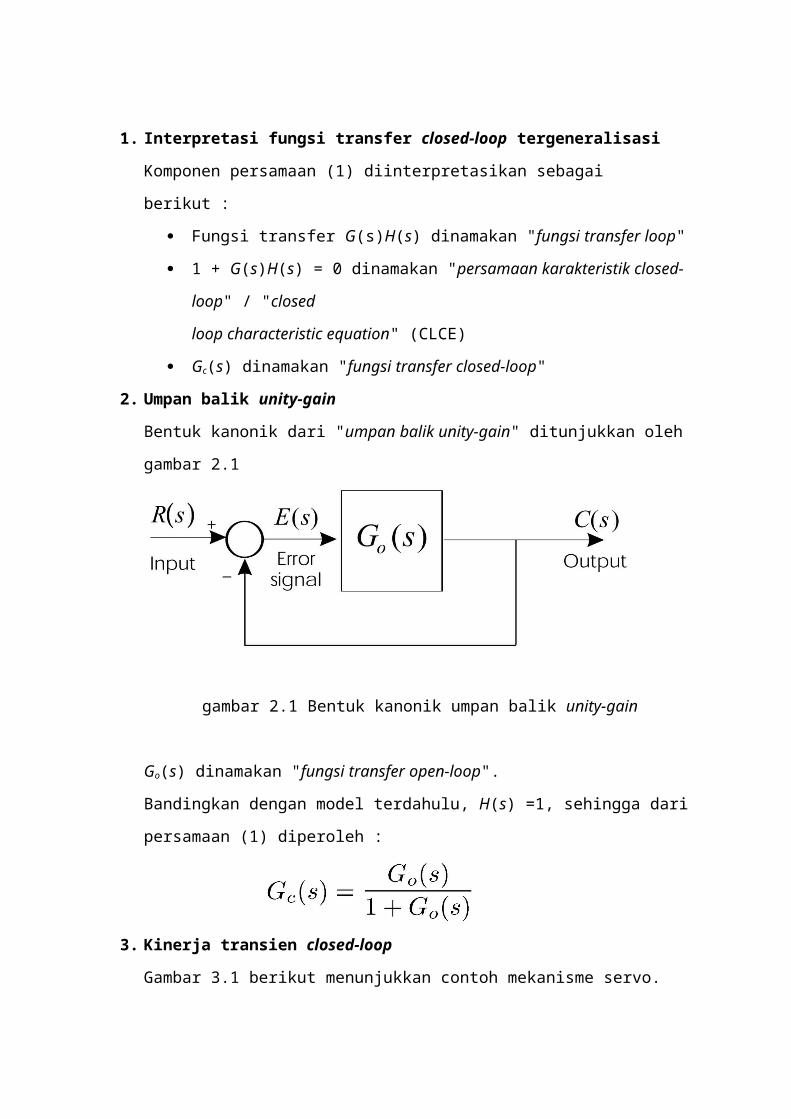
2. Umpan balik unity-gain
Bentuk kanonik dari "umpan balik unity-gain" ditunjukkan oleh gambar 2.1
gambar 2.1 Bentuk kanonik umpan balik unity-gain
Go(s) dinamakan "fungsi transfer open-loop".
Bandingkan dengan model terdahulu, H(s) =1, sehingga dari persamaan (1)
diperoleh :
3. Kinerja transien closed-loop
Gambar 3.1 berikut menunjukkan contoh mekanisme servo.
Gambar 3.1 contoh mekanisme servo
Untuk sistem diatas :
Terlihat bahwa fungsi transfer order-dua, yang dapat memiliki
beberapa bentuk peredaman, bergantung pada nilai K. Jika K berubah, pole
closed-loop bergerak menuju tiga bentuk perilaku, dari respon overdamped,
ke critically-damped, hingga underdamped.
• Pada K = 0, pole-pole akan sama seperti open-loop, yaitu p1,2 = 0,-a
(ditandai dengan s1 pada gambar 4.1)
gambar 4.1 Lokasi pole untuk sistem contoh
• Untuk 0 < K < a2/4, pole-pole terletak pada (ditandai dengan s2 pada gbr 4.1)
• Jika K naik, pole bergerak saling men-dekati di sepanjang sumbu-real dan
responnya adalah overdamped (meskipun rise- dan settling-time ber-kurang),
hingga kedua pole sampai pada p1,,2 = -a/2, ketika K = a2/4 dan responnya
adalah critically-damped (s3 pada gambar 4.1)
Jika K terus naik, pole menjadi bilangan kompleks, dengan bagian real
d = -a/2 dan bagian imajiner :
yang akan meningkat dari sisi ukuran, pada saat K naik (s4 pada gambar 6).
Bagian real akan bernilai konstan sementara rasio peredaman berkurang.
Jadi, %OS akan meningkat sementara nilai settling-time tidak mengalami
perubahan.
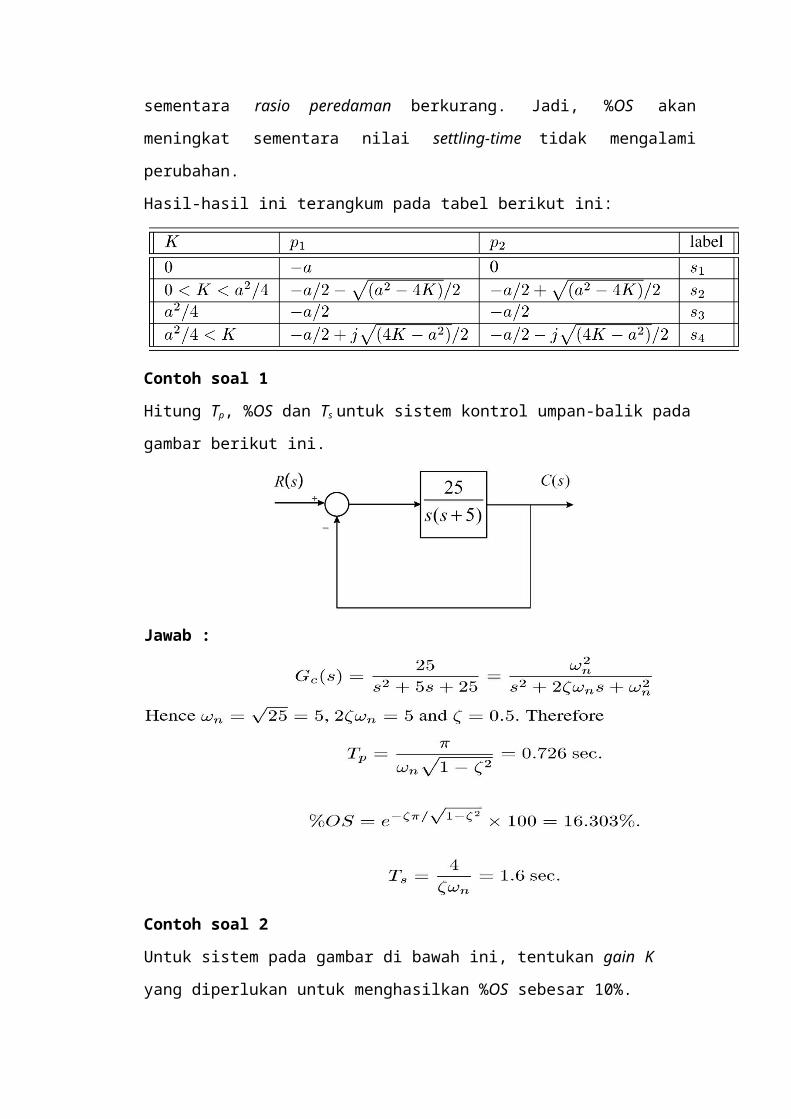
Hasil-hasil ini terangkum pada tabel berikut ini:
Contoh soal 1
Hitung Tp, %OS dan Ts untuk sistem kontrol umpan-balik pada gambar berikut
ini.
Jawab :
Contoh soal 2
Untuk sistem pada gambar di bawah ini, tentukan gain K yang diperlukan
untuk menghasilkan %OS sebesar 10%.
Jawab :
Catatan :
Untuk sistem ini, settling-time adalah Ts = 4/() = 4/(2.5) = 1.6 detik. Sistem
dengan settling-time yang lebih kecil tidak dapat didisain, karena bagian real
dari pole bernilai tetap dantidak dapat diatur melalui gain K. Diperlukan
komponen tambahan untuk memperoleh settling-time kurang dari 2 detik
4. Root-Locus
Kembali pada sistem di gambar 3.1. Sistem tersebut memiliki fungsi transfer
closed-loop :
Untuk overshoot sebesar 10%,
2n = 5, n = K1/2 , sehingga
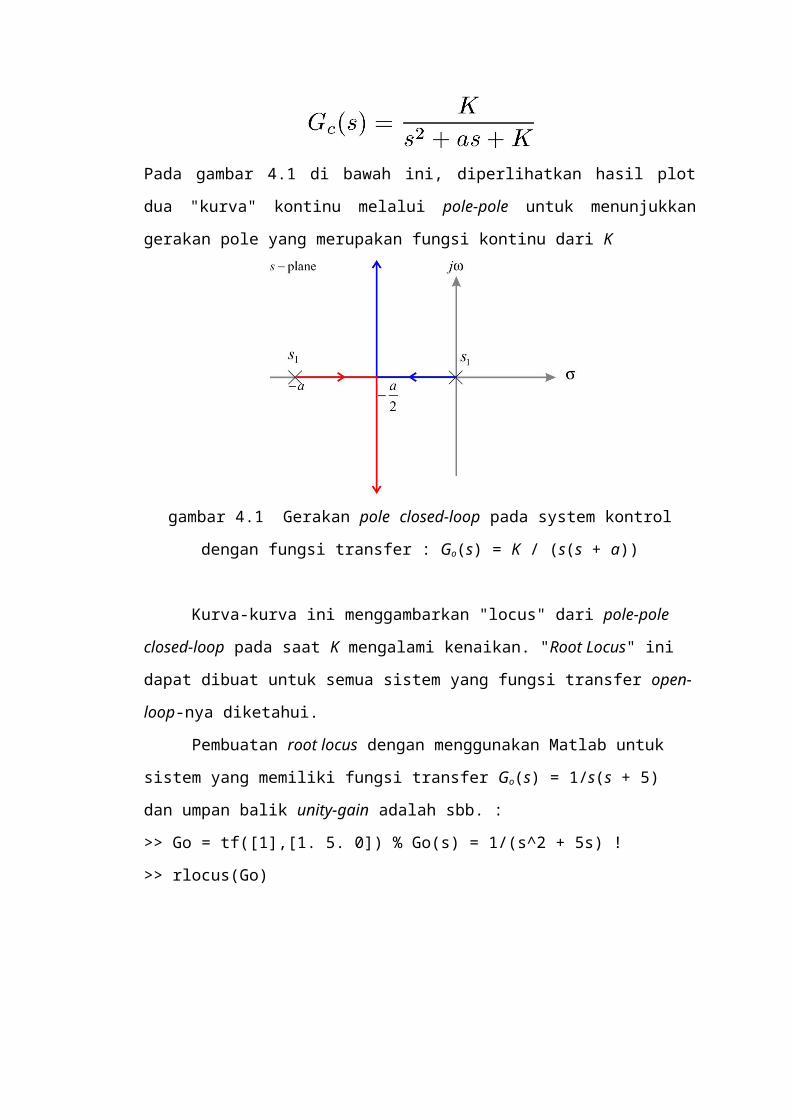
Pada gambar 4.1 di bawah ini, diperlihatkan hasil plot dua "kurva" kontinu
melalui pole-pole untuk menunjukkan gerakan pole yang merupakan fungsi
kontinu dari K
gambar 4.1 Gerakan pole closed-loop pada system kontrol dengan fungsi
transfer : Go(s) = K / (s(s + a))
Kurva-kurva ini menggambarkan "locus" dari pole-pole closed-loop
pada saat K mengalami kenaikan. "Root Locus" ini dapat dibuat untuk semua
sistem yang fungsi transfer open-loop-nya diketahui.
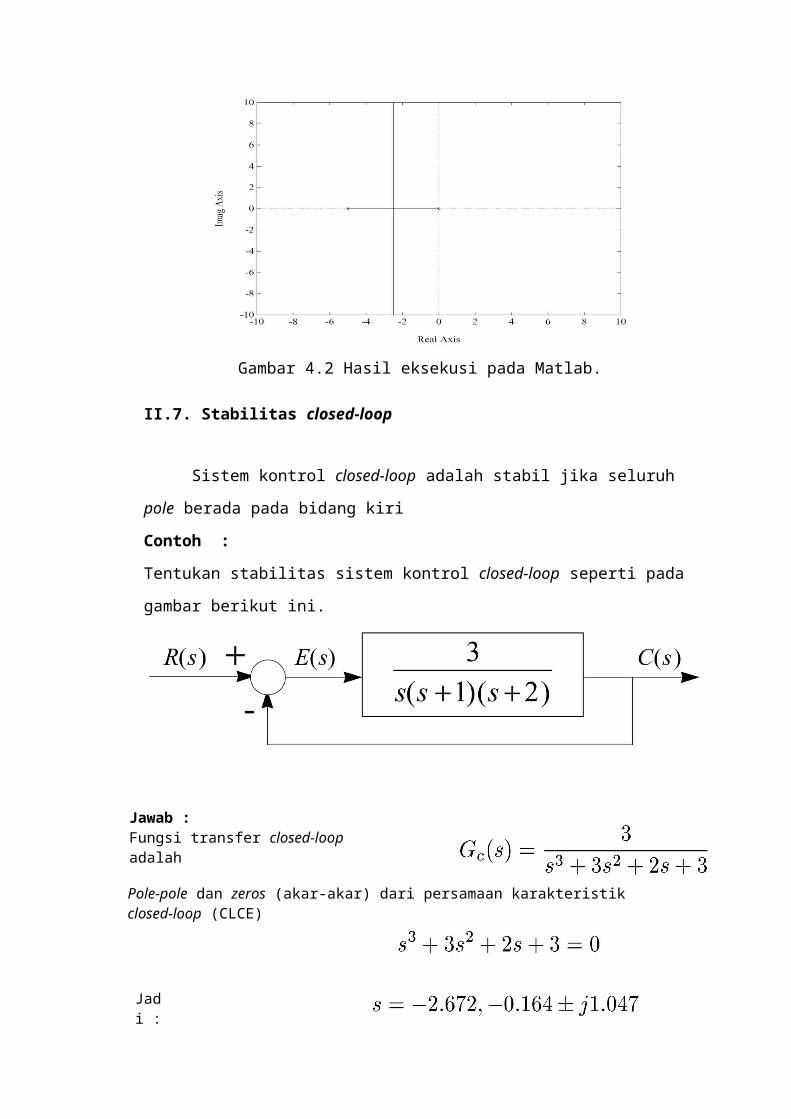
Pembuatan root locus dengan menggunakan Matlab untuk sistem yang
memiliki fungsi transfer Go(s) = 1/s(s + 5) dan umpan balik unity-gain adalah
sbb. :
>> Go = tf([1],[1. 5. 0]) % Go(s) = 1/(s^2 + 5s) !
>> rlocus(Go)
Gambar 4.2 Hasil eksekusi pada Matlab.

II.7. Stabilitas closed-loop
Sistem kontrol closed-loop adalah stabil jika seluruh pole berada pada
bidang kiri
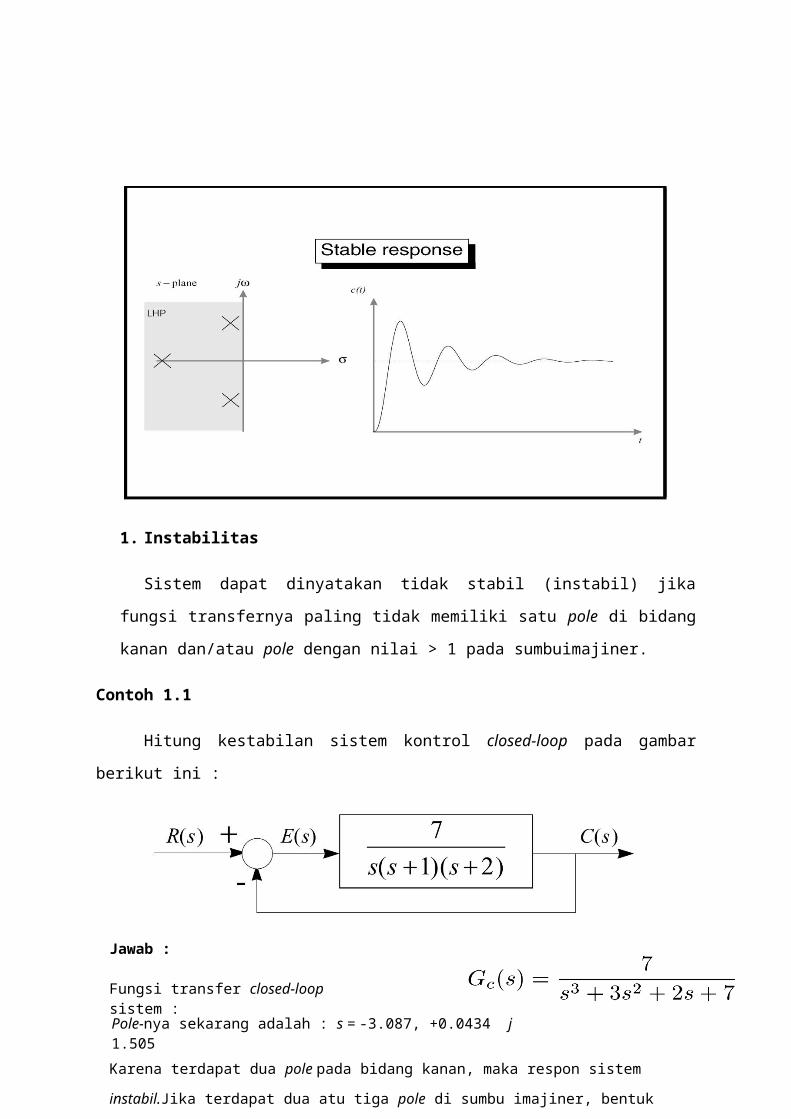
Contoh :
Tentukan stabilitas sistem kontrol closed-loop seperti pada gambar berikut ini.
Jadi :
Pole-pole dan zeros (akar-akar) dari persamaan karakteristik closed-loop (CLCE)
Jawab :Fungsi transfer closed-loop adalah

1. Instabilitas
Sistem dapat dinyatakan tidak stabil (instabil) jika fungsi transfernya paling
tidak memiliki satu pole di bidang kanan dan/atau pole dengan nilai > 1 pada
sumbuimajiner.
Contoh 1.1
Hitung kestabilan sistem kontrol closed-loop pada gambar berikut ini :
Karena terdapat dua pole pada bidang kanan, maka respon sistem instabil.
Jika terdapat dua atu tiga pole di sumbu imajiner, bentuk respon adalah :
Atn cos(t + ); n = 1,2, ... . Respon seperti ini juga terus membesar, karena
tn jika t
Pole-nya sekarang adalah : s = -3.087, +0.0434 j 1.505
Jawab :
Fungsi transfer closed-loop sistem :
1.2. Stabilitas Marginal
Sistem yang memiliki sepasang pole pada sumbu imaginer, atau pole tunggal
pada titik origin, disebut sebagai sistem stabil marginal. Sistem ini memiliki
respons natural yang terdiri dari osilasi tanpa redaman atau nilai konstan pada
t
2. Uji Stabilitas
Dalam sekilas, pengujian stabilitas sistem terlihat mudah, yaitu cukup melalui
pencarian lokasi pole fungsi transfer. Namun, kenyataannya tidak selalu mudah.
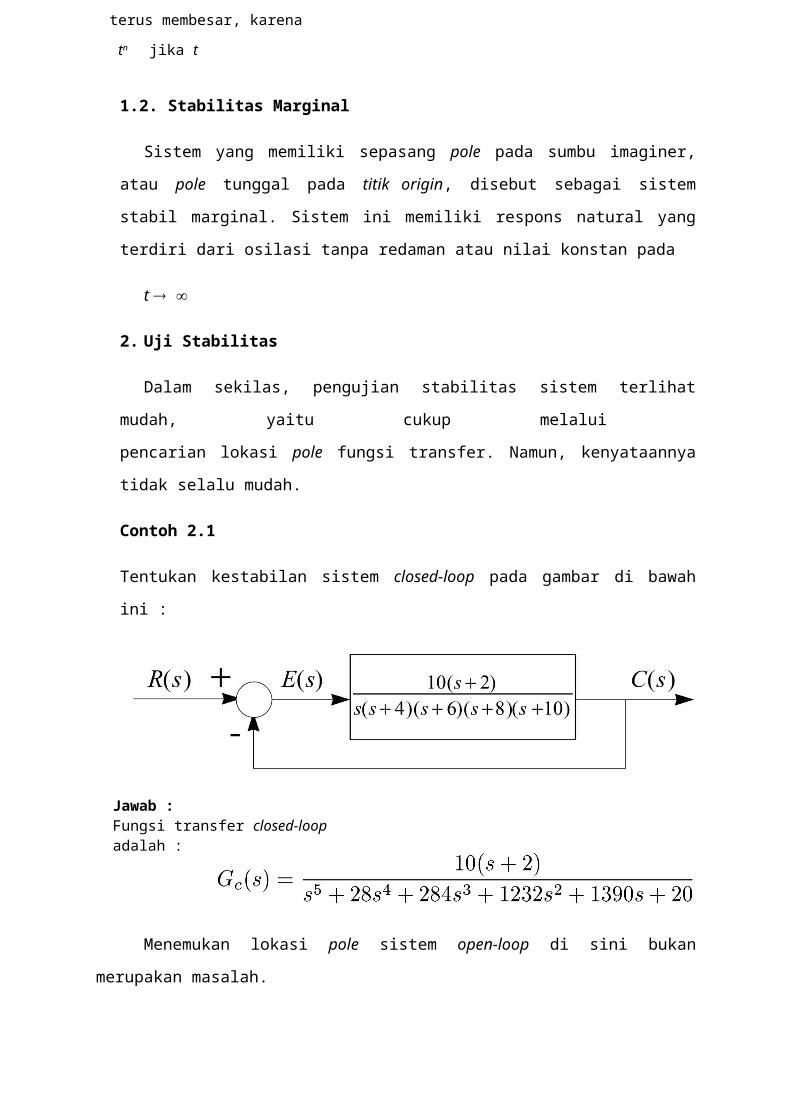
Contoh 2.1
Tentukan kestabilan sistem closed-loop pada gambar di bawah ini :
Menemukan lokasi pole sistem open-loop di sini bukan merupakan masalah.
Tapi tidak demikian dengan pole sistem closed-loop. Tidak ada cara analitis
yang bisa digunakan untuk mencari akar CLCE. Salah satu cara untuk
menyelesaikannya adalah dengan menggunakan algoritma "roots" yang ada
di Matlab. Cara lain untuk menyelesaikan masalah ini adalah dengan
menggunakan metode yang dinamakan "tes Hurwitz".
Jawab :Fungsi transfer closed-loop adalah :

3. Kriteria Hurwitz
Jika terdapat polinom karakteristik closed-loop dalam bentuk terfaktorisasi sbb
dengan pi adalah zero P(s) (yaitu akar CLCE). Jika seluruh pole berada di LHP
(left-half plane), maka faktornya akan memiliki bentuk (s + pi) (karena setiap pi
akan memiliki bagian real yang negatif). Dengan demikian, koefisien polinom
terekspansi hanya akan memiliki tanda positif. Hal ini tetap berlaku, walaupun
beberapa faktor pi merupakan bilangan kompleks.
Karena faktor kompleks selalu muncul dalam bentuk pasangan konyugasi, maka:
yang juga memiliki koefisien positif. Di sini tidak boleh ada koefisien yang hilang,
karena akan mengubah akar positif dan negatif, atau akar-akar pada sumbu
imajiner. Jadi, hal yang penting bagi suatu sistem untuk menjadi stabil adalah
seluruh koefisien CLCE-nya dalam bentuk sn,sn-1,...,s0 ada dan bernilai positif.
Dalam bentuk yang lebih formal :
Kriteria Hurwitz
Kriteria Hurwitz menyatakan bahwa sebuah sistem disebut instabil jika
terdapat banyak koefisien negatif atau koefisien hilang pada persamaan
karakteristik closed-loop. Uji stabilitas yang dinamakan Tes Hurwitz ini sangat
mudah untuk digunakan :
• s3 + 27s2 - 26s + 24 bersifat instabil karena koefisien salah satu sukunya
negatif.
• s3 + 27s2 + 26s bersifat instabil karena suku s0 nya hilang, tetapi
• s3 + 27s2 + 26s + 24 bisa jadi stabil
Permasalahan yang ada pada kriteria Hurwitz ini adalah sistem yang lolos uji
Herwitz belum tentu bersifat stabil, seperti contoh di atas. Dengan demikian Tes
Hurwitz efektif untuk mengidentifikasi sistem yang instabil, namun tidak cukup
untuk meng-identifikasi sistem yang stabil. Proses uji yang lebih efektif adalah
kriteria Routh-Hurwith, yang dinamakan Routh Test.
Metode ini menggunakan Routh Array yang berisi koefisien karakteristik polinom.
Untuk mengetahui stabilitas suatu sistem, kita tidak perlu mencari lokasi
aktual pole, namun cukup dengan melihat sign-nya, yang akan menunjukkan
apakah pole berada di RHP (right-half-plane) atau LHP (left-halp-plane).
Kriteria Hurwitz dapat digunakan untuk mengetahui instabilitas sistem, tapi tidak
cukup untuk memastikan stabilitas sistem. Kriteria Routh-Hurwitz adalah metode.
ang efektif untuk menguji kestabilan sistem. Kriteria ini juga dapat menunjukkan
jumlah pole pada RHP atau pada sumbu imajiner. Tes stabilitas yang handal
untuk segala bentuk kasus dapat digunakan dalam proses disain untuk
memastikan kestabilan sistem, misalnya untuk memantau kapan system mulai
tidak stabil jika gain terus ditingkatkan. Penggunaan tes stabilitas dalam disain
dinamakan disain untuk stabilitas relative.
4. Kriteria Stabilitas Routh-Hurwitz
4.1 Larik Routh (Routh Array)
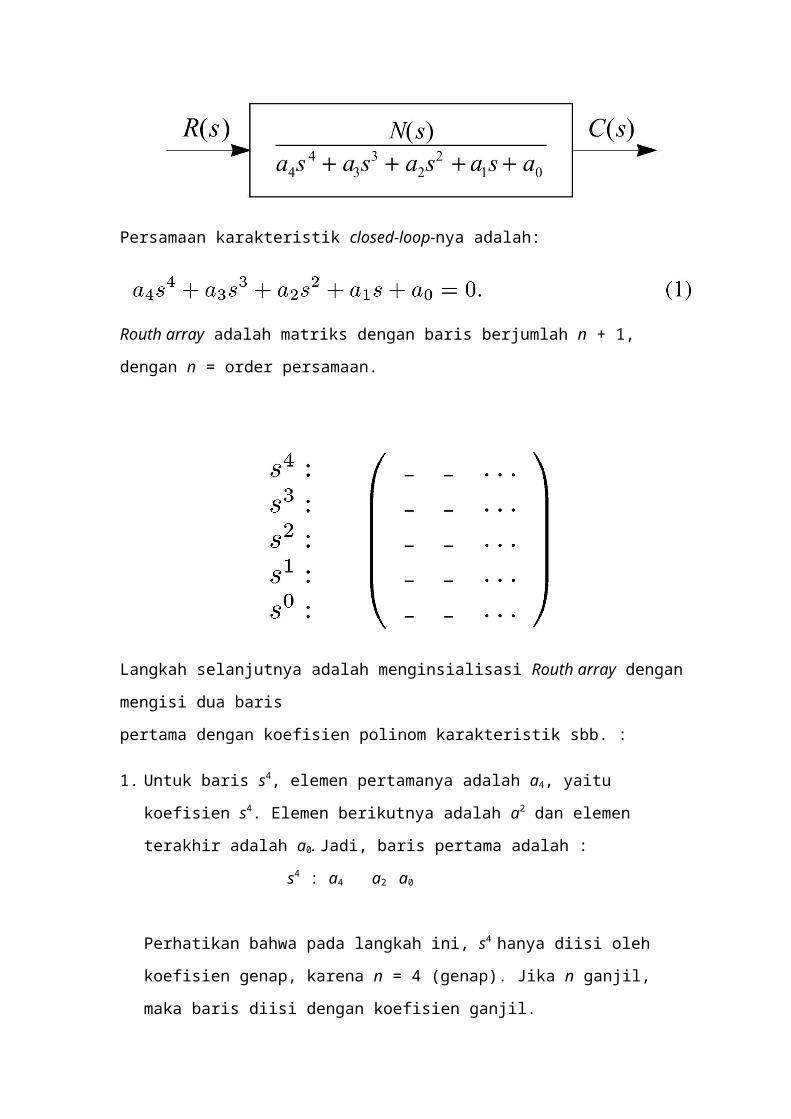
Gambar berikut adalah sebuah sistem (sebagai contoh kasus) :
Persamaan karakteristik closed-loop-nya adalah:
Routh array adalah matriks dengan baris berjumlah n + 1, dengan n = order
persamaan.
Langkah selanjutnya adalah menginsialisasi Routh array dengan mengisi dua
baris
pertama dengan koefisien polinom karakteristik sbb. :
1. Untuk baris s4, elemen pertamanya adalah a4, yaitu koefisien s4. Elemen
berikutnya adalah a2 dan elemen terakhir adalah a0. Jadi, baris pertama
adalah :
s4 : a4 a2 a0
Perhatikan bahwa pada langkah ini, s4 hanya diisi oleh koefisien genap,
karena n = 4 (genap). Jika n ganjil, maka baris diisi dengan koefisien ganjil.
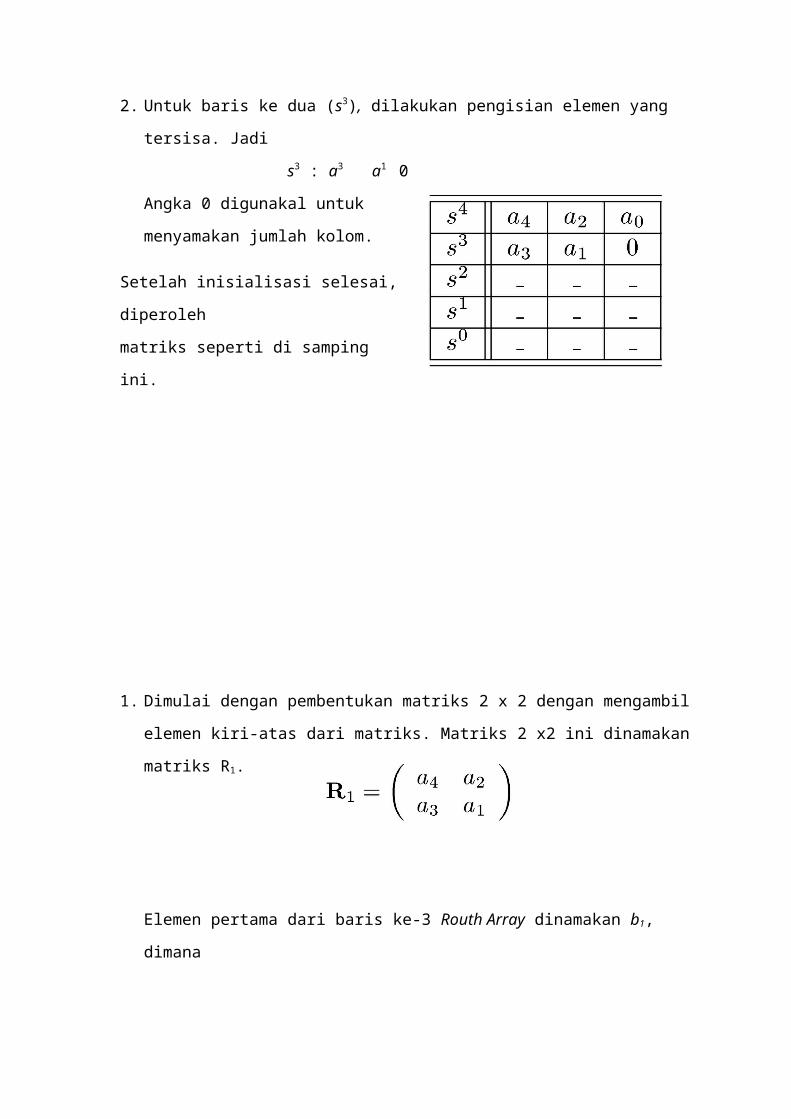
2. Untuk baris ke dua (s3), dilakukan pengisian elemen yang tersisa. Jadi
s3 : a3 a1 0
Angka 0 digunakal untuk menyamakan jumlah kolom.
Setelah inisialisasi selesai, diperoleh
matriks seperti di samping ini.
1. Dimulai dengan pembentukan matriks 2 x 2 dengan mengambil elemen kiri-
atas dari matriks. Matriks 2 x2 ini dinamakan matriks R1.
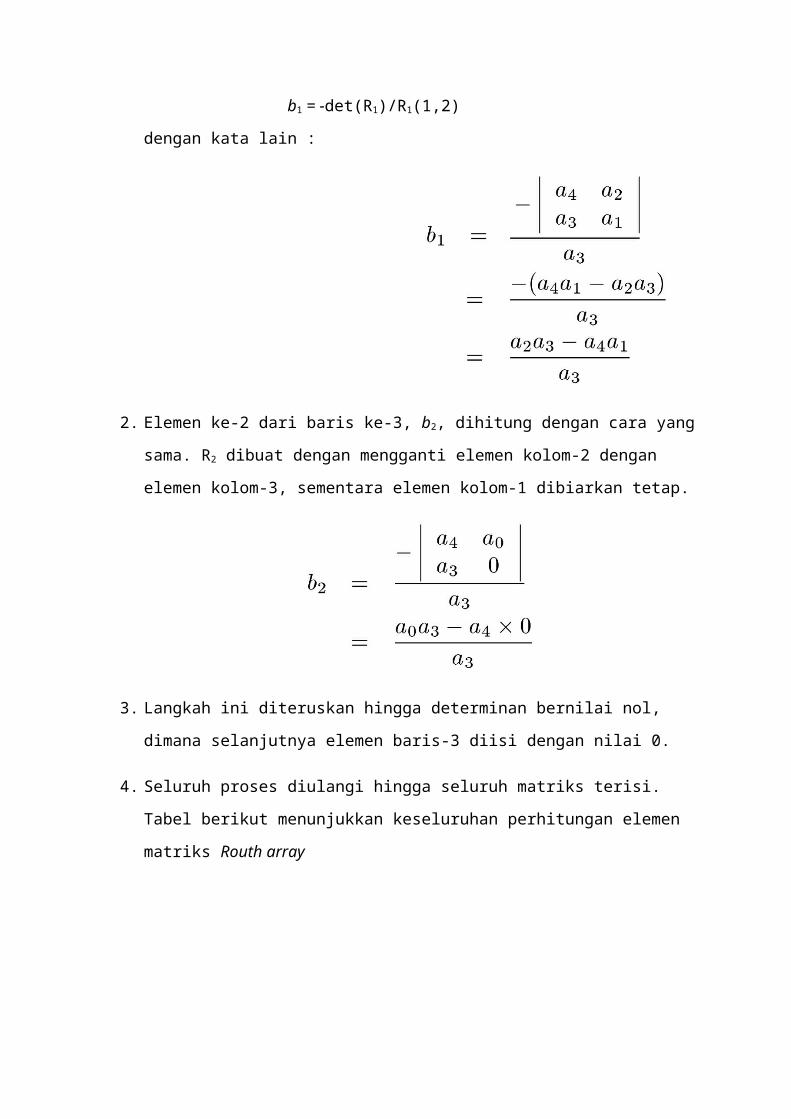
Elemen pertama dari baris ke-3 Routh Array dinamakan b1, dimana
b1 = -det(R1)/R1(1,2)
dengan kata lain :
2. Elemen ke-2 dari baris ke-3, b2, dihitung dengan cara yang sama. R2 dibuat
dengan mengganti elemen kolom-2 dengan elemen kolom-3, sementara
elemen kolom-1 dibiarkan tetap.
3. Langkah ini diteruskan hingga determinan bernilai nol, dimana selanjutnya
elemen baris-3 diisi dengan nilai 0.
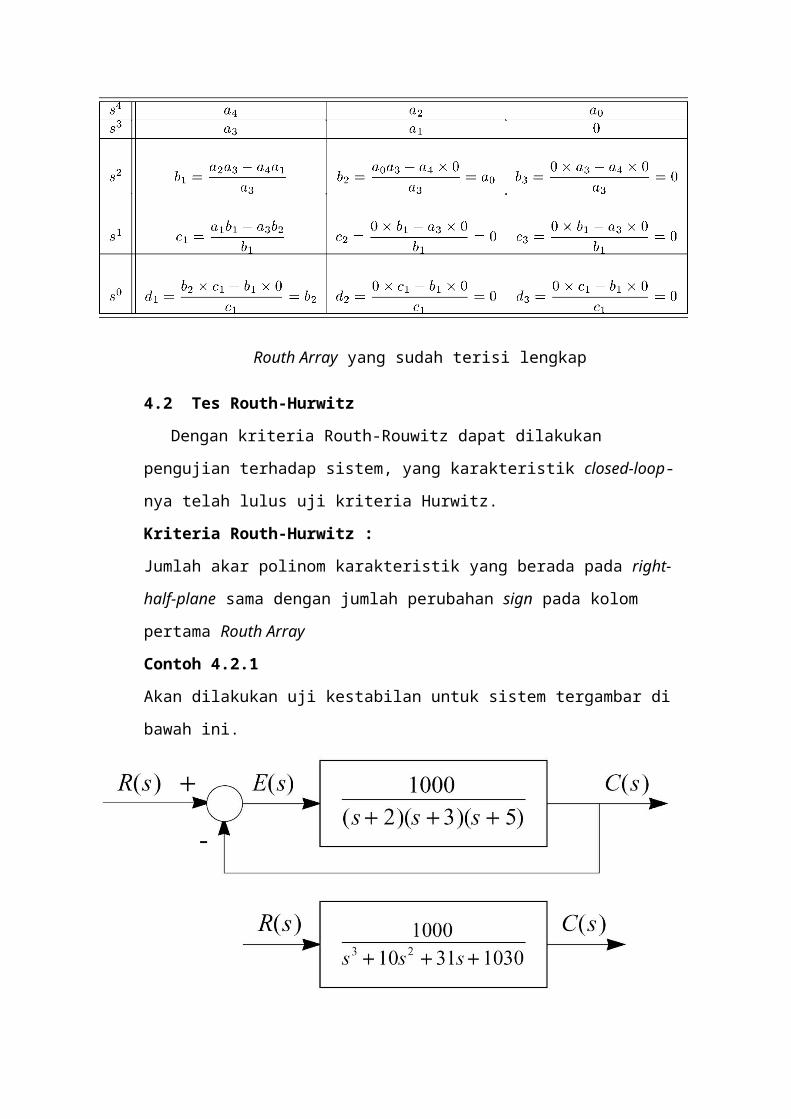
4. Seluruh proses diulangi hingga seluruh matriks terisi. Tabel berikut
menunjukkan keseluruhan perhitungan elemen matriks Routh array
Routh Array yang sudah terisi lengkap
4.2 Tes Routh-Hurwitz
Dengan kriteria Routh-Rouwitz dapat dilakukan pengujian terhadap
sistem, yang karakteristik closed-loop-nya telah lulus uji kriteria Hurwitz.
Kriteria Routh-Hurwitz :
Jumlah akar polinom karakteristik yang berada pada right-half-plane sama
dengan jumlah perubahan sign pada kolom pertama Routh Array
Contoh 4.2.1
Akan dilakukan uji kestabilan untuk sistem tergambar di bawah ini.
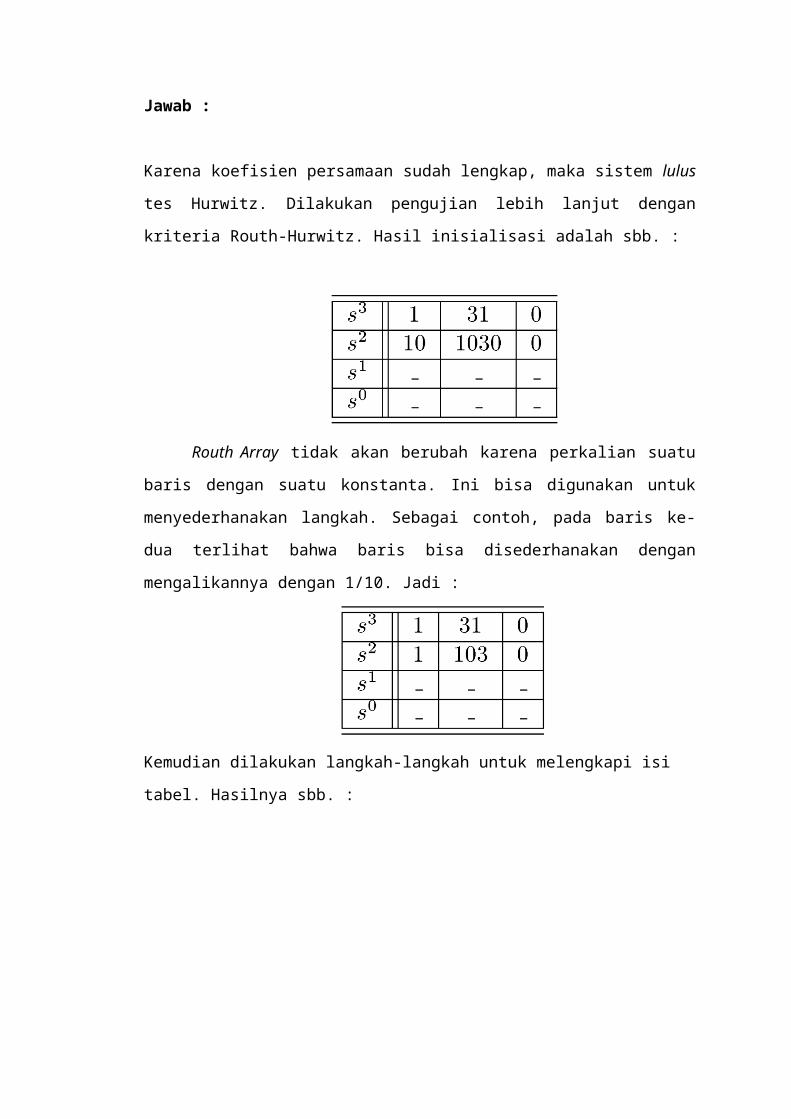
Jawab :
Karena koefisien persamaan sudah lengkap, maka sistem lulus tes Hurwitz.
Dilakukan pengujian lebih lanjut dengan kriteria Routh-Hurwitz. Hasil
inisialisasi adalah sbb. :
Routh Array tidak akan berubah karena perkalian suatu baris dengan
suatu konstanta. Ini bisa digunakan untuk menyederhanakan langkah.
Sebagai contoh, pada baris ke-dua terlihat bahwa baris bisa disederhanakan
dengan mengalikannya dengan 1/10. Jadi :
Kemudian dilakukan langkah-langkah untuk melengkapi isi tabel. Hasilnya
sbb. :
Jadi matriksnya adalah
dan isi kolom ke-1 adalah
Pada kolom-1 terjadi dua kali perubahan sign (dari 1 ke -72 dan dari -72 ke
103). Dengan demikian, sistem tidak stabil dan memiliki dua pole pada RHP.
5. Kasus-kasus khusus
Dua kasus khusus dapat terjadi pada saat pembuatan Routh array
• Nilai nol bisa muncul pada kolom pertama array.
• Seluruh elemen pada satu baris bernilai nol.
5.1 Nilai nol di kolom pertama
Jika kolom pertama memiliki elemen bernilai nol, maka akan terjadi
operasi "pembagian dengan nol" pada langkah pencarian elemen untuk baris
berikutnya. Untuk menghindari-nya, digunakan satu nilai kecil e (epsilon)
sebagai pengganti nilai nol di kolom pertama.
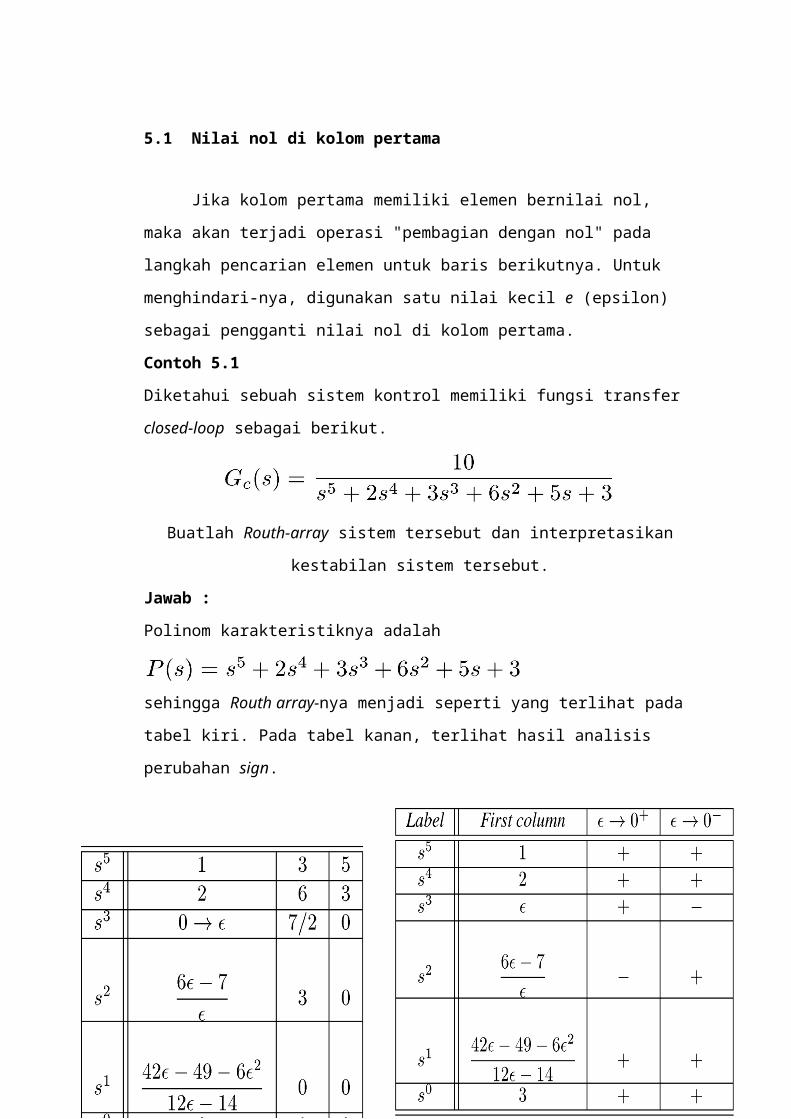
Contoh 5.1
Diketahui sebuah sistem kontrol memiliki fungsi transfer closed-loop sebagai
berikut.
Buatlah Routh-array sistem tersebut dan interpretasikan kestabilan sistem
tersebut.
Jawab :
Polinom karakteristiknya adalah
sehingga Routh array-nya menjadi seperti yang terlihat pada tabel kiri. Pada
tabel kanan, terlihat hasil analisis perubahan sign.
Jika e dipilih bernilai +, akan
terdapat dua perubahan sign. Jika e dipilih bernilai - ,juga terdapat dua
perubahan sign. Jadi, tidak jadi masalah apakah e dipilih bernilai+ atau -.
Hasil analisis adalah : sistem di atas memiliki dua pole pada RHP.
5.2 Seluruh elemen pada baris bernilai nol
Hal ini bisa terjadi untuk polinom genap
Contoh 5.2
Buat Routh array untuk sistem dengan fungsi transfer closed-loop sbb. :
Jawab :
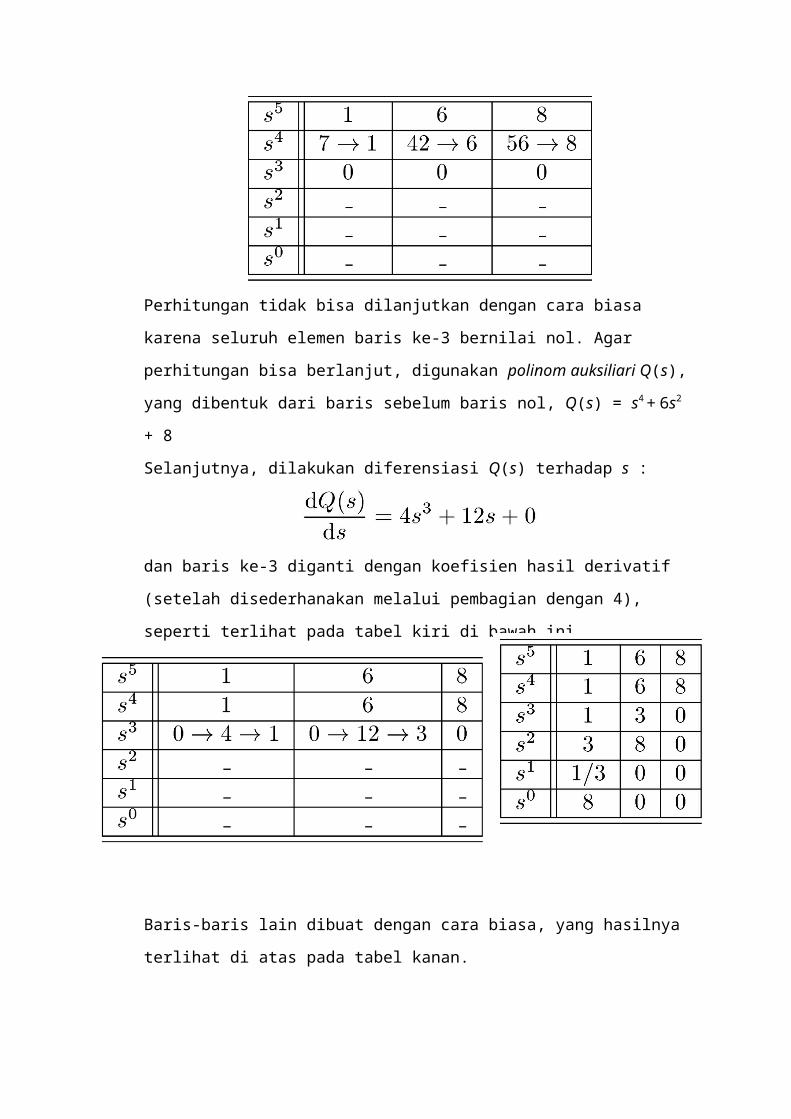
Routh array dari sistem adalah :
Perhitungan tidak bisa dilanjutkan dengan cara biasa karena seluruh elemen
baris ke-3 bernilai nol. Agar perhitungan bisa berlanjut, digunakan polinom
auksiliari Q(s), yang dibentuk dari baris sebelum baris nol, Q(s) = s4 + 6s2 + 8
Selanjutnya, dilakukan diferensiasi Q(s) terhadap s :
dan baris ke-3 diganti dengan koefisien hasil derivatif (setelah
disederhanakan melalui pembagian dengan 4), seperti terlihat pada tabel kiri
di bawah ini.
Baris-baris lain dibuat dengan cara biasa, yang hasilnya terlihat di atas pada
tabel kanan.
Terlihat tidak adanya perubahan sign pada Routh array. Jadi, sistem stabil.
5.2 Interpretasi baris nol
Baris nol akan muncul pada Routh array jika polinom genap murni merupakan
factor dari polinom karakteristik. Sebagai contoh, polinom s4 + 5s2 + 7 adalah
polinom genap murni, yang hanya memiliki pangkat genap untuk s. Polinom
genap memiliki akar-akar simetris terhadap sumbu imajiner. Beberapa kondisi
simetri dapat terjadi :
Ketiga kondisi di atas dapat meng-hasilkan polinom genap.
1. akar-akar real dan simetris terhadap sumbu imajiner (A)
2. akar-akar imajiner dan simetris terhadap sumbu real (B), atau
3. akar-akar bersifat kuadrantal (C)
Adalah polinom genap yang menimbulkan baris nol pada Routh array.
Dengan demikian, baris nol mengindikasikan adanya akar-akar simetris
terhadap origin.Beberapa akar dapat berada pada sumbu imajiner (simetri
jenis B). Sebaliknya,jika kita tidak mendapatkan baris nol, kemungkinan kita
tidak memiliki akar padasumbu j.
Karakteristik lain dari Routh array untuk kasus di atas yang masih perlu
diperta-nyakan adalah apakah baris sebelum baris nol mengandung polinom
genap, yangmerupakan faktor polinom asalnya. Pada contoh yang lalu,
polinom s4 + 6s2 + 8 adalah faktor dari polinom asal. Akhirnya, uji Routh, dari
baris yang mengan-dung polinom genap hingga baris terakhir, hanya menguji
pole pada polinom genap.Contoh berikut dapat menjelaskan hal ini.
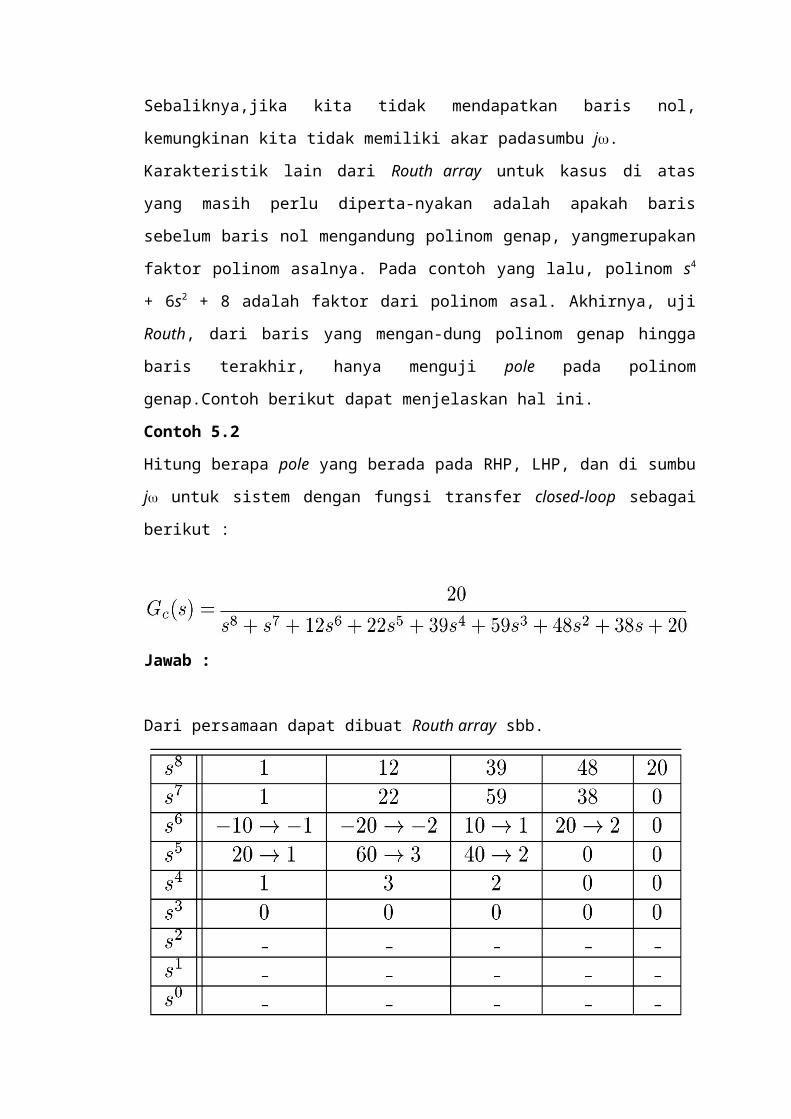
Contoh 5.2
Hitung berapa pole yang berada pada RHP, LHP, dan di sumbu j untuk
sistem dengan fungsi transfer closed-loop sebagai berikut :
Jawab :
Dari persamaan dapat dibuat Routh array sbb.
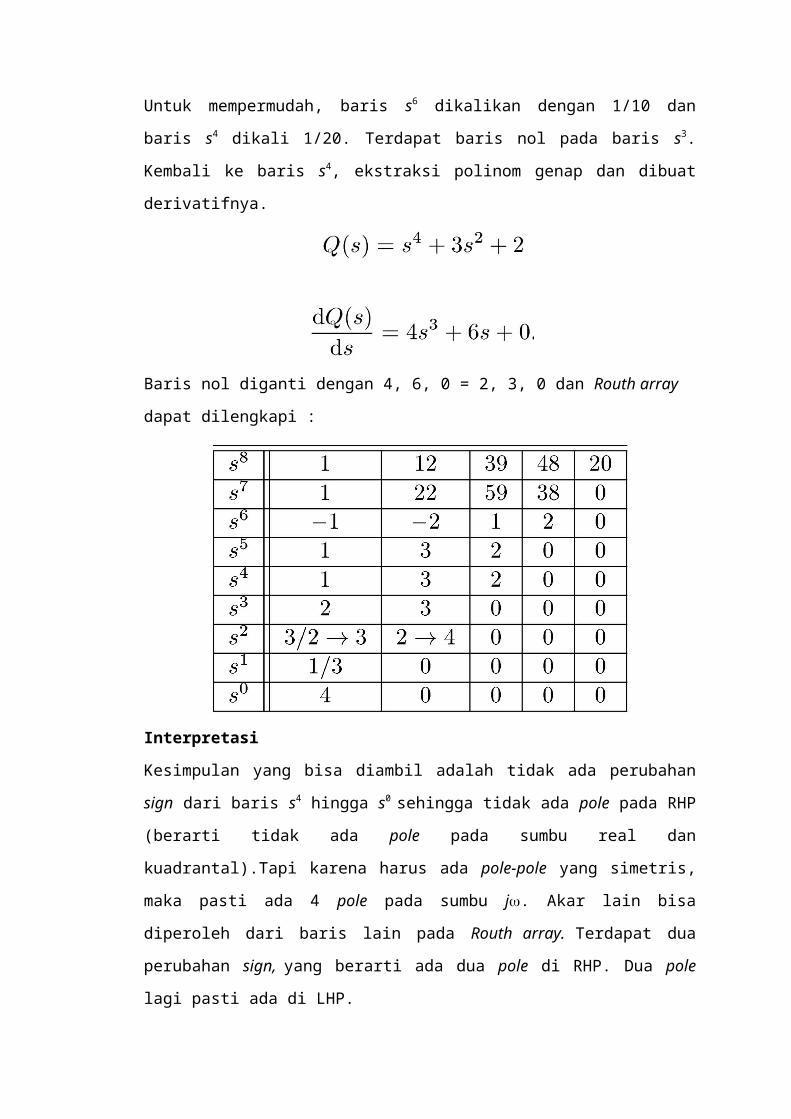
Untuk mempermudah, baris s6 dikalikan dengan 1/10 dan baris s4 dikali 1/20.
Terdapat baris nol pada baris s3. Kembali ke baris s4, ekstraksi polinom genap
dan dibuat derivatifnya.
Baris nol diganti dengan 4, 6, 0 = 2, 3, 0 dan Routh array dapat dilengkapi :
Interpretasi
Kesimpulan yang bisa diambil adalah tidak ada perubahan sign dari baris s4
hingga s0 sehingga tidak ada pole pada RHP (berarti tidak ada pole pada
sumbu real dan kuadrantal).Tapi karena harus ada pole-pole yang simetris,
maka pasti ada 4 pole pada sumbu j. Akar lain bisa diperoleh dari baris lain
pada Routh array. Terdapat dua perubahan sign, yang berarti ada dua pole di
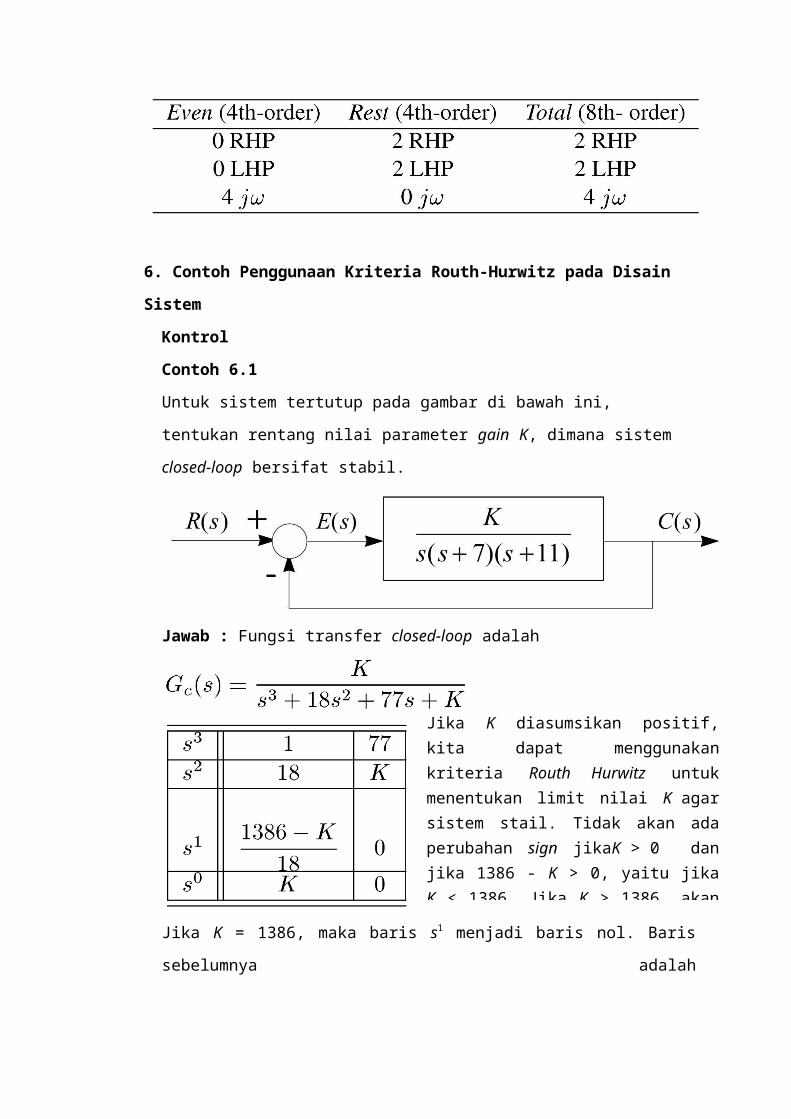
RHP. Dua pole lagi pasti ada di LHP.
6. Contoh Penggunaan Kriteria Routh-Hurwitz pada Disain Sistem
Kontrol
Contoh 6.1
Untuk sistem tertutup pada gambar di bawah ini, tentukan rentang nilai
parameter gain K, dimana sistem closed-loop bersifat stabil.
Jawab : Fungsi transfer closed-loop adalah
Jika K = 1386, maka baris s1 menjadi baris nol. Baris sebelumnya adalah
Q(s) = 18s2 + 1386 dan derivatifnya adalah 36s, sehingga Routh array
barunya adalah :
Jika K diasumsikan positif, kita dapat menggunakan kriteria Routh Hurwitz untuk menentukan limit nilai K agar sistem stail. Tidak akan ada perubahan sign jikaK > 0 dan jika 1386 - K > 0, yaitu jika K < 1386. Jika K > 1386, akan ada dua perubahan sign, sehingga terdapat dua pole di RHP dan sistem jadi instabil
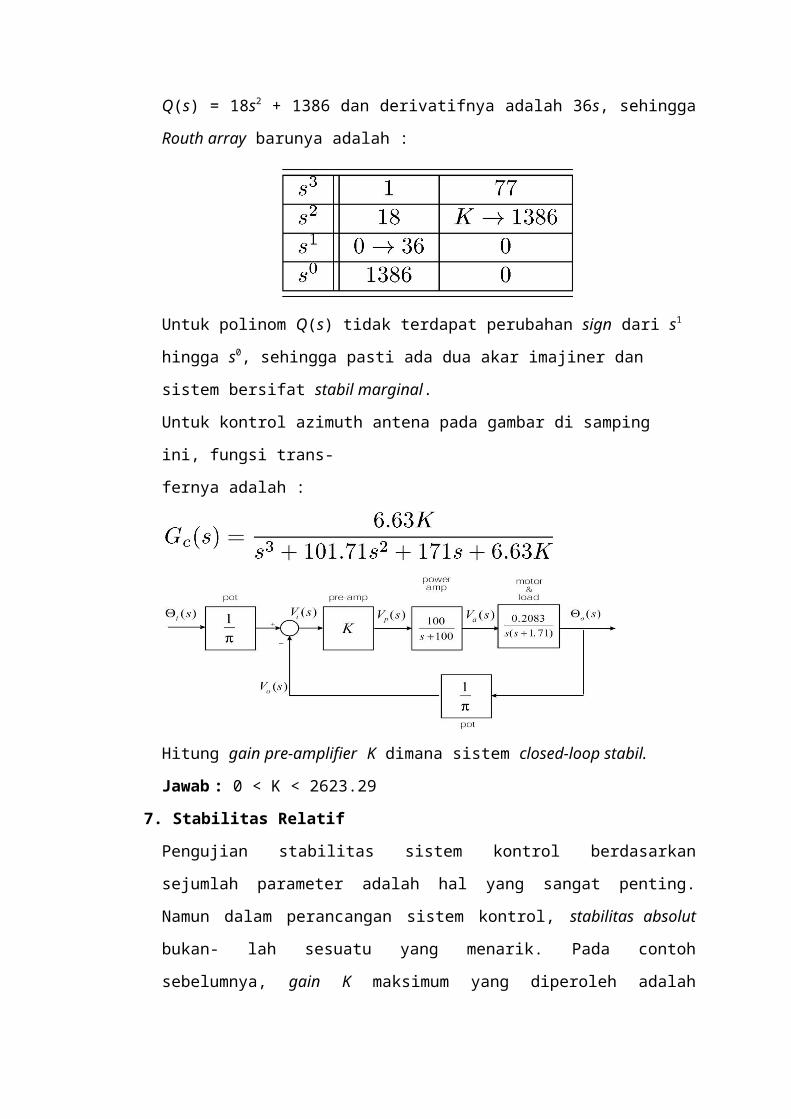
Untuk polinom Q(s) tidak terdapat perubahan sign dari s1 hingga s0,
sehingga pasti ada dua akar imajiner dan sistem bersifat stabil marginal.
Untuk kontrol azimuth antena pada gambar di samping ini, fungsi trans-
fernya adalah :
Hitung gain pre-amplifier K dimana sistem closed-loop stabil.
Jawab : 0 < K < 2623.29
7. Stabilitas Relatif
Pengujian stabilitas sistem kontrol berdasarkan sejumlah parameter adalah
hal yang sangat penting. Namun dalam perancangan sistem kontrol,
stabilitas absolut bukan- lah sesuatu yang menarik. Pada contoh
sebelumnya, gain K maksimum yang diperoleh adalah 2623.29. Jika kita
menginginkan "margin of safety" (margin aman) untuk memastikan bahwa
sistem tidak akan pernah instabil. Sebagai contoh, untuk kasus di atas kita
bisa batasi gain K maksimum sebesar 2620.29, yang berarti kita
memberikan margin untuk gain sebesar 3. Gain margin (GM) adalah
contoh parameter disain yang memastikan telah tercapainya "stabilitas
relatif" dalam disain.
II.8 Steady-state errors
Kesalahan sistem (system error) :

untuk sistem kontrol umpan-balik didefinisikan sebagai selish antara
keluaran yang diharapkan (r(t)) dan keluaran aktuan (c(t)).
Steady-state error :
didefinisikan sebagai selisih antara keluaran yang diharapkan dan keluaran
actual pada t
Dari sejumlah sinyal uji (test input) untuk analisis sistem kontrol, yang telah
dibahas sebelumnya, yaitu impuls, step, ramp, parabola, dan sinusoidal,
akan digunakan tiga sinyal uji untuk menilai kinerja steady-state sistem
kontrol dan hubungannya dengan steady-state error. Ketiga sinyal input
tersebut adalah
• input step
• input ramp, dan
• input parabolik
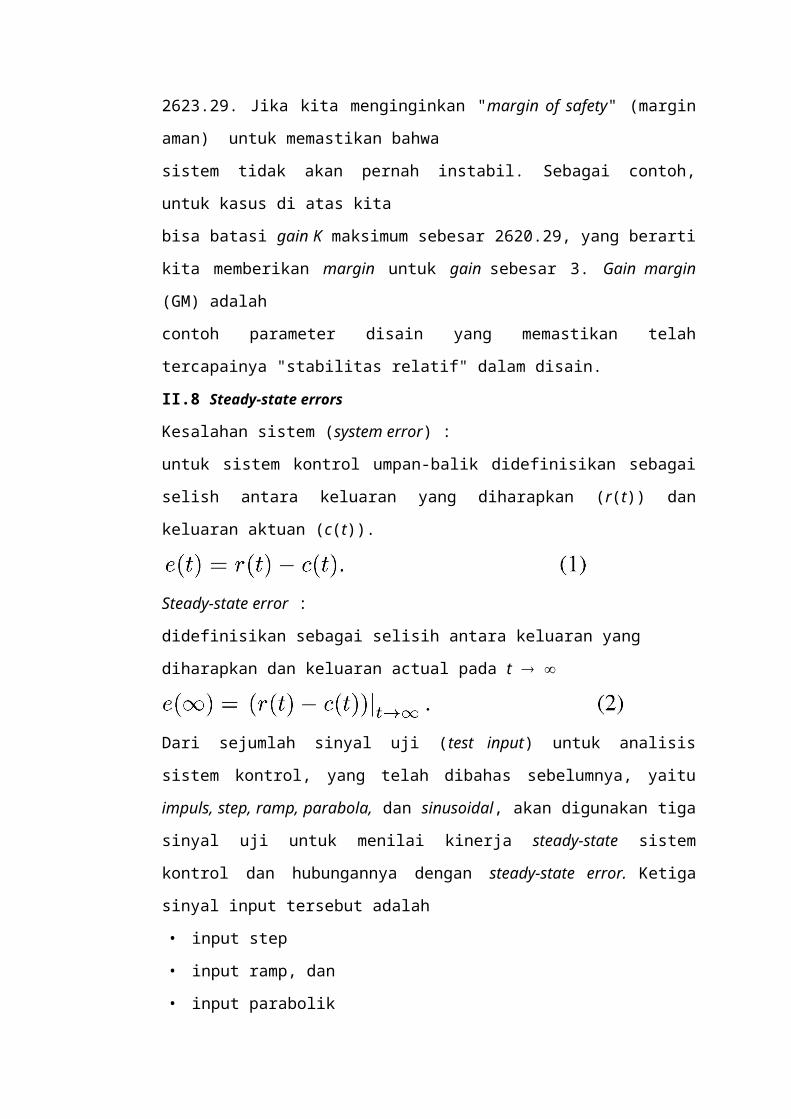
Input Step
Sinyal input ini merepresentasikan kebutuhan akan posisi yang konstan
dan sangat berguna untuk melihat kemampuan sistem kontrol dalam
memposisikan dirinya relatif terhadap "target" stasioner, seperti satelit
geostasioner.
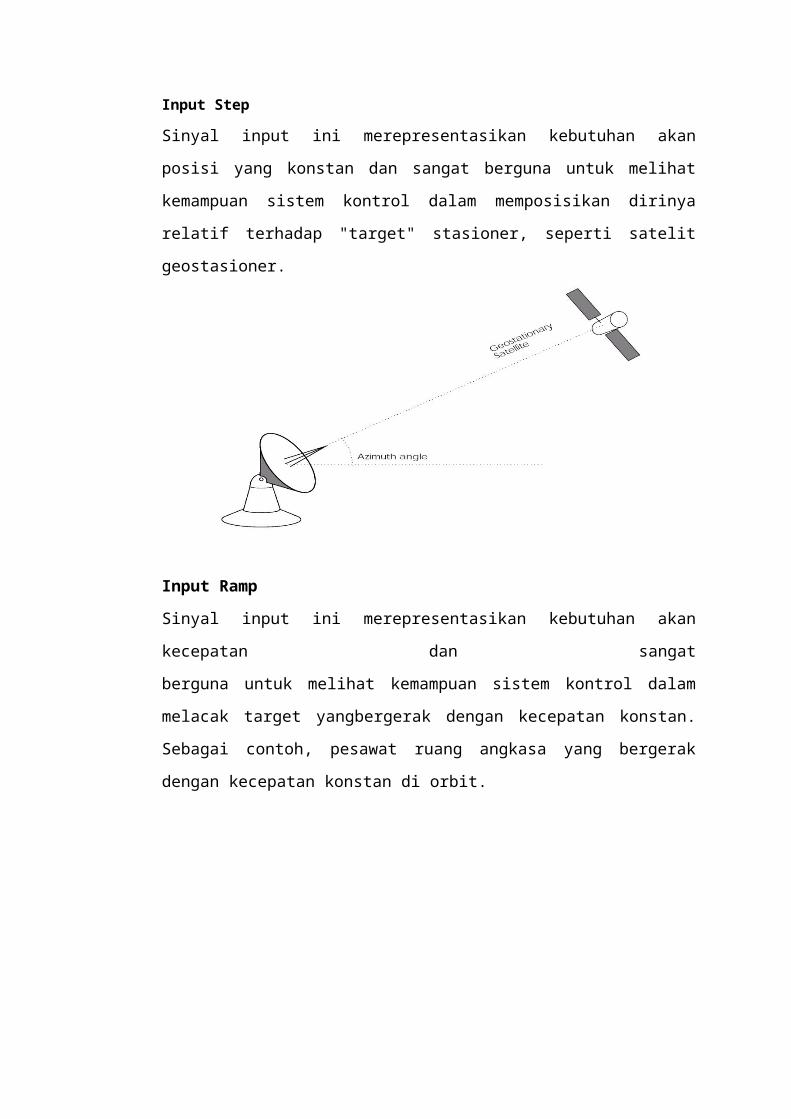
Input Ramp
Sinyal input ini merepresentasikan kebutuhan akan kecepatan dan sangat
berguna untuk melihat kemampuan sistem kontrol dalam melacak target
yangbergerak dengan kecepatan konstan. Sebagai contoh, pesawat ruang
angkasa yang bergerak dengan kecepatan konstan di orbit.
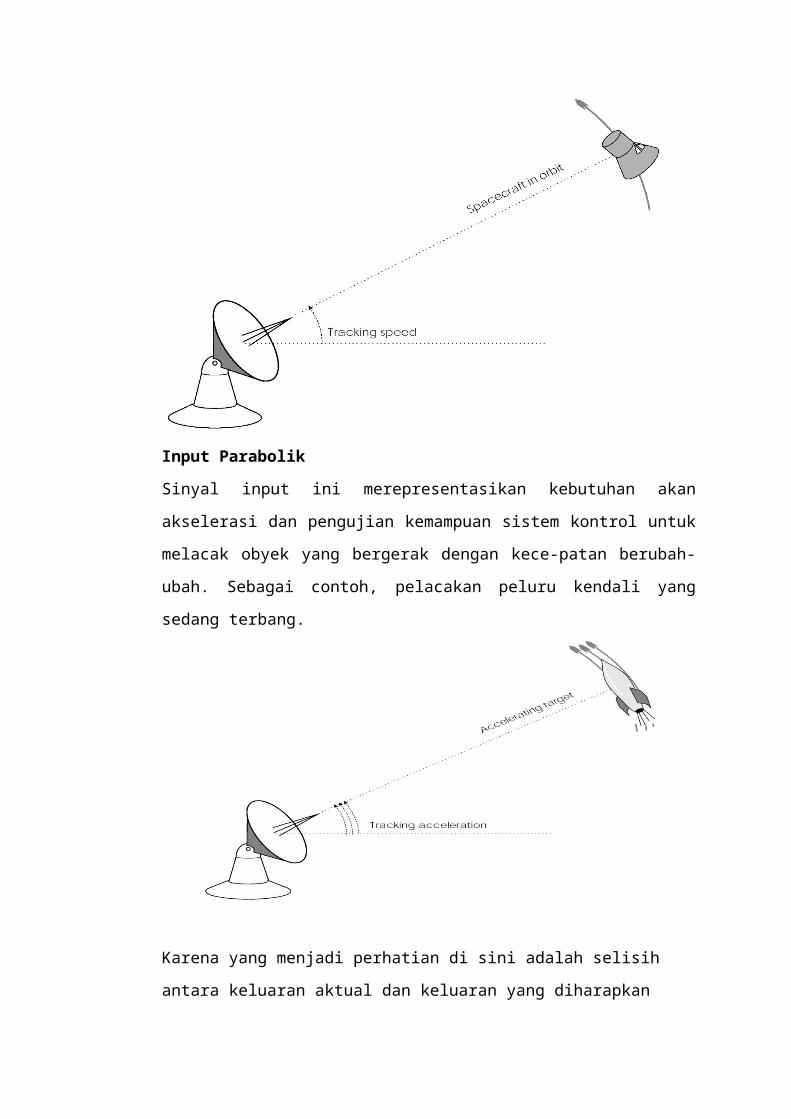
Input Parabolik
Sinyal input ini merepresentasikan kebutuhan akan akselerasi dan
pengujian kemampuan sistem kontrol untuk melacak obyek yang bergerak
dengan kece-patan berubah-ubah. Sebagai contoh, pelacakan peluru
kendali yang sedang terbang.

Karena yang menjadi perhatian di sini adalah selisih antara keluaran aktual
dan keluaran yang diharapkan setelah kondisi steady-state tercapai, kita
hanya dapat menghitung steady-state error sistem yang respon naturalnya
mencapai zero pada t
8.1 Bentuk-bentuk Steady-State Errors
Berikut ini akan diuraikan bentuk-bentuk steady-state error untuk input step
dan ramp.
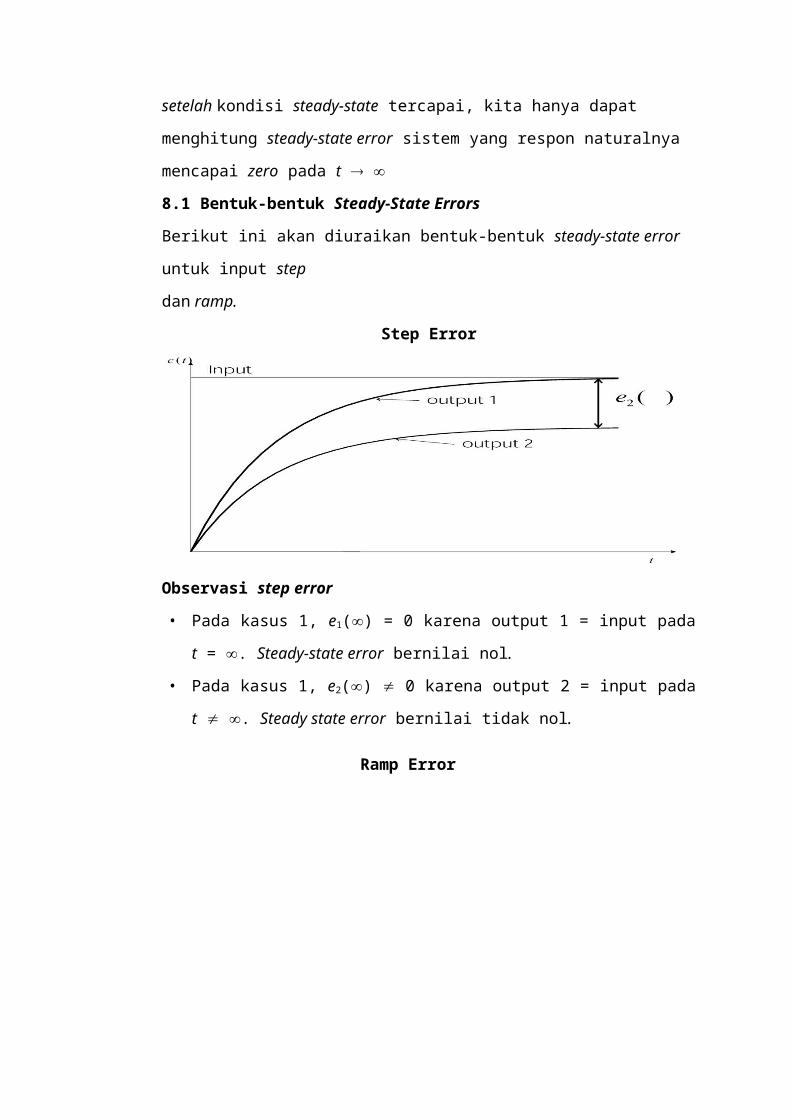
Step Error
Observasi step error
• Pada kasus 1, e1() = 0 karena output 1 = input pada t = . Steady-
state error bernilai nol.
• Pada kasus 1, e2() 0 karena output 2 = input pada t . Steady
state error bernilai tidak nol.
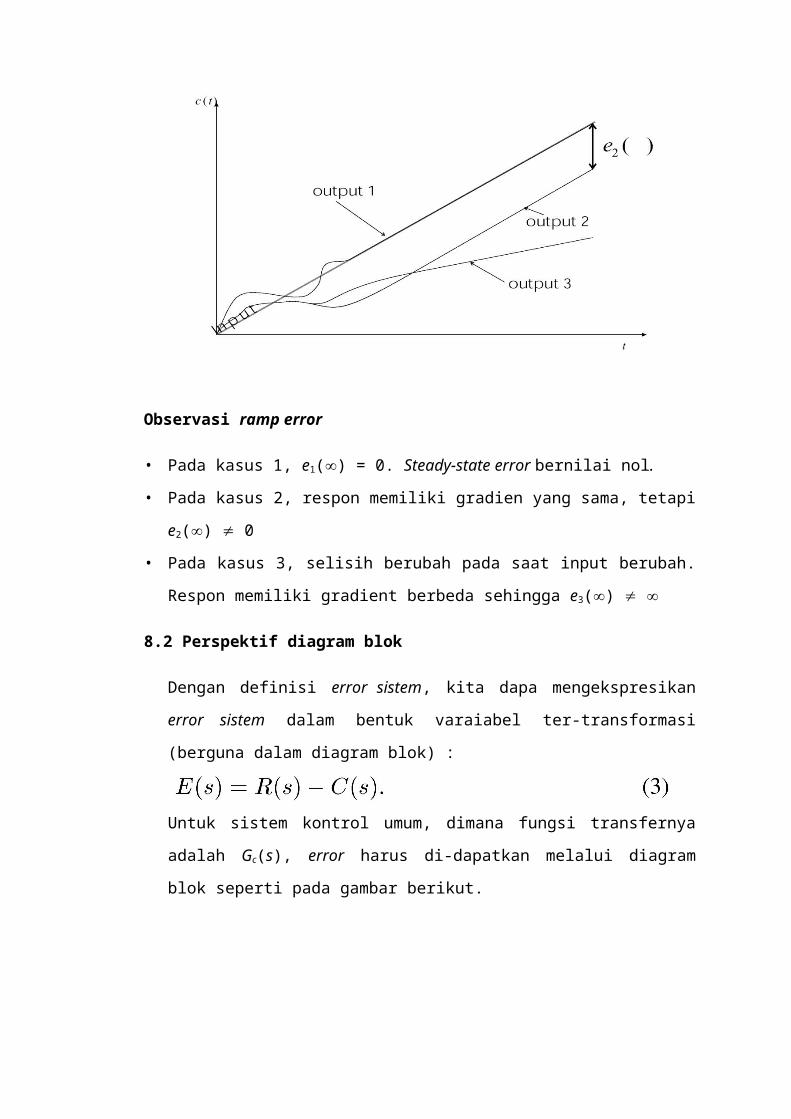
Ramp Error
Observasi ramp error
• Pada kasus 1, e1() = 0. Steady-state error bernilai nol.
• Pada kasus 2, respon memiliki gradien yang sama, tetapi e2() 0
• Pada kasus 3, selisih berubah pada saat input berubah. Respon memiliki
gradient berbeda sehingga e3()
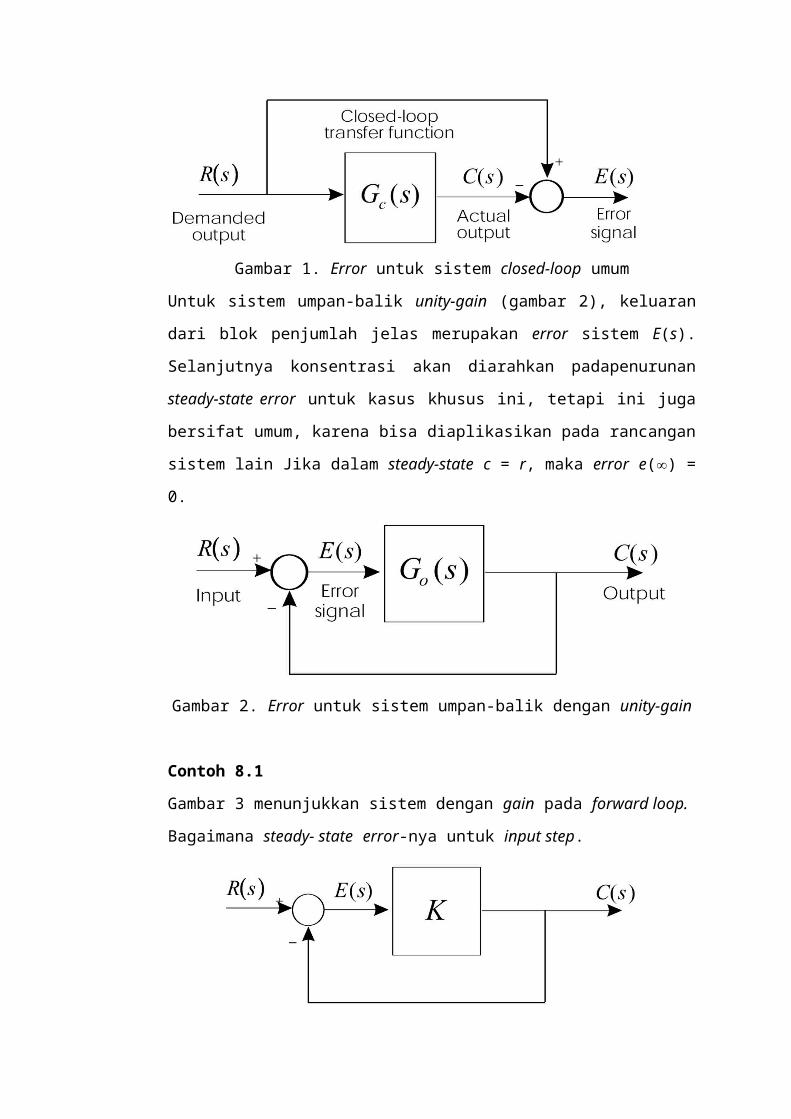
8.2 Perspektif diagram blok
Dengan definisi error sistem, kita dapa mengekspresikan error sistem
dalam bentuk varaiabel ter-transformasi (berguna dalam diagram blok) :
Untuk sistem kontrol umum, dimana fungsi transfernya adalah Gc(s), error
harus di-dapatkan melalui diagram blok seperti pada gambar berikut.
Gambar 1. Error untuk sistem closed-loop umum
Untuk sistem umpan-balik unity-gain (gambar 2), keluaran dari blok
penjumlah jelas merupakan error sistem E(s). Selanjutnya konsentrasi
akan diarahkan padapenurunan steady-state error untuk kasus khusus ini,
tetapi ini juga bersifat umum, karena bisa diaplikasikan pada rancangan
sistem lain Jika dalam steady-state c = r, maka error e() = 0.
Gambar 2. Error untuk sistem umpan-balik dengan unity-gain

Contoh 8.1
Gambar 3 menunjukkan sistem dengan gain pada forward loop.
Bagaimana steady- state error-nya untuk input step.
Gambar 3. Sistem closed-loop dengan gain dalam forward-loop
Jawab :
Digunakan input step r(t) = u(t), c(t) = Kc(t), sehingga steady-state error
0 jika c(t) 0. Semakin besar nilai K, semakin kecil steady-state error
(1/(1 + K)), tetapi tidak pernah menjadi nol. Dengan demikian, untuk
system dengan gain murni pada arah maju (forward), steady-state-error
tidak nol untuk input step.
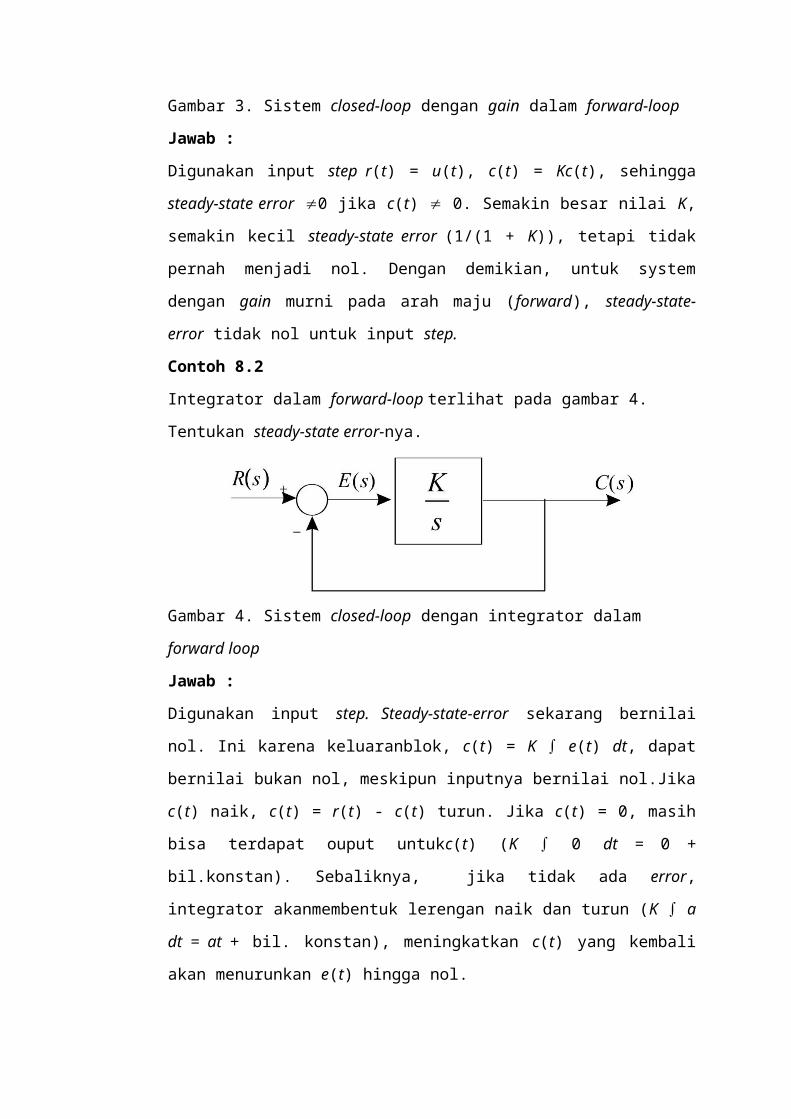
Contoh 8.2
Integrator dalam forward-loop terlihat pada gambar 4. Tentukan steady-
state error-nya.
Gambar 4. Sistem closed-loop dengan integrator dalam forward loop
Jawab :
Digunakan input step. Steady-state-error sekarang bernilai nol. Ini karena
keluaranblok, c(t) = K e(t) dt, dapat bernilai bukan nol, meskipun
inputnya bernilai nol.Jika c(t) naik, c(t) = r(t) - c(t) turun. Jika c(t) = 0, masih
bisa terdapat ouput untukc(t) (K 0 dt = 0 + bil.konstan). Sebaliknya, jika
tidak ada error, integrator akanmembentuk lerengan naik dan turun (K a
dt = at + bil. konstan), meningkatkan c(t) yang kembali akan menurunkan
e(t) hingga nol.
Model motor yang paling sederhana adalah integrator. Jika diberikan
tegangan konstanakan terjadi perubahan posisi - dengan kecepatan
konstan. Jika tegangan dihilangkan, motor berhenti, tapi posisi akhirnya
tidak harus nol ! Meskipun demikian, jika sebuahmotor digunakan dalam
sistem closed-loop, ia akan berhenti pada nilai yang sama dengan
inputnya. Dengan demikian, sistem kontrol dengan integrator dalam
forward loop akan selalu memiliki steady-state error bernilai nol untuk
posisi.
8.3 Steady-State Error untuk sistem dengan umpan balik unity-gain
Di sini digunakan kembali sistem kanonik seperti pada gambar 1 di bawah
ini.
sehingga
Teorema Nilai-Akhir (final value theorem) menyatakan bahwa
Untuk sistem ini :
8.3.1 Input step
Dari persamaan 3, lims 0G0(s) adalah steady-state gain dari fungsi
transfer open-loop.Untuk mendapatkan steady-state step error sebesar
nol, diperlukan lims 0G0(s) = . Dengan demikian G0(s) harus memiliki
bentuk sbb.:
dimana jika s 0, penyebut akan bernilai nol sehingga G0(s) = .
Dengan demikian, untuk mendapatkan steady-state step error sebesar
nol, paling tidak harus ada satu pole pada origin s = 0 (yaitu n > 1).
Faktor s pada penyebut dari fungsi transfer open-loop
merepresentasikan integrator pada arah maju. Dengan demikian, untuk
mendapatkan steady-state step error sebesar nol, paling tidak kita harus
memiliki satu integrator di dalam fungsi transfer open-loop.
Jika tidak ada penyebut dengan faktor sn berarti n = 0 dan diperoleh
Untuk input step satuan (unity step input) r(t) = u(t), dimana :
u(t) = 1 untuk t > 0 = 0 di tempat lain
transformasinya adalah
yang bersifat
terhingga (finite) dan menghasilkan steady-state step error terhingga.
Untuk mendapatkan steady-state ramp error bernilai nol, lims 0sG(s) = .
Untuk itu, n > 2, sehingga paling tidak harus ada dua integrator di dalam
fungsi transfer open-loop. Jika hanya ada satu integrator, n = 1, maka
yang bersifat terhingga dan oleh karena itu akan terdapat steady-state ramp
error yang terhingga.
Jika tidak ada integrator, maka n = 0 dan akan diperoleh :
sehingga
Untuk input r(t) = tu(t) dengantu(t) = t untuk t > 0 = 0 di tempat lain
8.3.2 Input Ramp
Sehingga kita mendapatkan steady-state velocity error tak terhingga
8.3.3 Input Parabolik
Untuk input parabolic dimana.
Agar steady-state parabolic error bernilai nol, lims0s2G0(s) = . Untuk itu, n
> 3.Berarti harus ada tiga integrator di dalam fungsi transfer open-loop. Jika
hanya ada dua integrator, n = 2, terdapat steady-state parabolic error
terhingga. Jika n < 2, terdapat steady-state parabolic error tak hingga.
8.4 Definisi Konstanta Galat Statik dan Jenis Sistem
8.4.1 Konstanta Galat Statik (Static Error Constants)Dari perhitungan-
perhitungan di atas, kita dapatkan definisi steady-state error
untukgalat step, ramp, dan parabolik, sbb. :
Konstanta-konstanta di atas dapat bernilai nol, terhingga, atau tak
terhingga, tergantungpada sifat G0(s). Dalam kenyataannya, mereka
bergantung pada jumlah faktor s padapenyebut G0(s) atau jumlah integrator
pada alur maju. Berikut ini adalah konstantagalat statis (static error
constants).
8.4.2 Nomor jenis system
Perhatikan gambar di atas. Nomor jenis sistem didefinisikan berdasarkan
nilai n, yang berarti menurut jumlah integrator di dalam G0(s).
• Sistem dengan n = 0 dinamakan jenis 0• Sistem dengan n = 1 dinamakan jenis 1• Sistem dengan n = 2 dinamakan jenis 2• dst.Jelas bahwa nilai konstanta galat statis berhubungan dengan nomor jenis
sistem. Hubungan ini secara eksplisit digambarkan pada bagian berikut.
Nomor jenis sistem dan konstanta galat statisnya
Jenis sistem dan steady-state error
8.5 Spesifikasi Steady-State Error
Contoh 8.1
Tentukan spesifikasi Kv = 1000. Apa yang ditunjukkannya mengenai
sistem kontrol ?
Jawab :
1. Sistem stabil
2. Sistem tipe 1
3. Input sistem adalah ramp
4. Steady-state error-nya adalah 1/Kv per unit gradien ramp
Contoh 8.2
Untuk sistem kontrol azimuth antena berikut ini
1. Carilah steady-state error dalam K untuk input step, ramp, dan parabolik
2. Cari nilai K yang menghasilkan steady-state error 10%. Apakah sistem
stabil ?
Jawab :
1.
Sistem tipe 1,
berarti
2. Galat 10% berlaku untuk ramp. Jadi untuk galat 10% :
K = 257,9. Nilai ini berada dalam rentangan 0<K<2623,9. Sistem stabil
Pada bagian ini dibahas mengenai steady-state error untuk sistem
kontrol umpan-balik unity-gain. Dengannya kita dapat menentukan kinerja
lengkap dalam konteksi fungsi transfer open-loop. Ini dapat dilakukan
karena jumlah integrator dalam fungsi transfer open-loop berhubungan
dengan kinerja sistem. Selanjutnya dibuat Nomor Jenis Sistem yang
besarnya sama dengan jumlah integrator, dimana sifatnya terlihat di tabel
berikut.
Dengan konstanta galat statis : konstanta galat posisi Kp = G0(s)|s=0;
konstanta galat kecepatan Kv = sG0(s)|s=0; konstanta galat akselerasi
Ka = s2G0(s)|s = 0.
BAB III
Penutup
A. Kesimpulan
Dalam perancangan sistem kontrol, langkah pertama yang harus dilakukan
adalah menganalisa sistem yang akan dikontrol terlebih dahulu. Pembuatan
model yang lebih sederhana akan mempermudah kita dalam menganalisa sistem
tersebut. Kemudian pemodelan tersebut dapat kita nyatakan dalam suatu
persamaan matematis, sehingga aplikasi perhitungan matematis akan sangat
memungkinkan dalam menganalisa sistem tersebut.
Dalam perancangan sistem kontrol umpan balik Ada tiga hal yang diperlukan
dalam perancangan sistem kontrol umpan balik diantaranya :
Respon transien
Stabilitas
steady-state eror
Daftar Pustaka
http://subali.staff.gunadarma.ac.id/Downloads/files/2042/Bab4_part3_Lec09.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2040/
Bab4_Part1_Eval_o_Sist_Res_lec050607.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2043/Bab5_Lec10.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2044/Bab6_Lec11.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2045/Bab6_part2_Lec12.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2046/Bab7_part1_Lec13.ppt
http://subali.staff.gunadarma.ac.id/Downloads/files/2047/Bab7_part2_Lec14.ppt
http://kk.mercubuana.ac.id/files/14021-1-973447051328.doc
http://202.91.15.14/upload/files/4616_Pendahuluan.doc


























![Bugabuga - Muhammad Zafar Iqbal [amarboi.com] Writer/02... · Bugabuga - Muhammad Zafar Iqbal [amarboi.com] Author: Bugabuga - Muhammad Zafar Iqbal [amarboi.com] Subject: Bugabuga](https://img.pdfslide.tips/doc/110x75/5ec9747e21939034e86c765b/bugabuga-muhammad-zafar-iqbal-writer02-bugabuga-muhammad-zafar-iqbal.jpg)