Embed Size (px)
DESCRIPTION
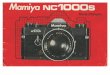
User Manual for the Mamiya Denshi MHP-30B Mk II Pick and Place Machine. It can place up to 7200 components per hour using its three heads.
Citation preview

I
E IN
plOl0012
C3030Z5/5/20052:08:00
AM
M P-30B MARK II
MNiAMiYA DEN5HI
5/5/2005 2:08:00AM


IM P-30B MARK II

(l)l\ct ivnt ion of 1,H1P························ .. o e··················E-l(2)Key Board· co 1& ••• .. • • .. •• • • .. • .. •• •• • ··6' .. · .. ··4
(3)function Key······························································5
(tl)Data Input·····················~··························· ···············7
1. Camera Setting·························································72. Explanation of Onto Input Commands·····································8
(l)Command "...••.••.••...•.••.••.•..•.......... ·······················8(2)Cornmand D···································· g(3)Comrnand Q••••••••••••••• ~ •••••••••••••••••••••••••••••••.••••• ·····10
3. Data Input [ITI '11
(l)Function key·······················································11(2)Hode change········ ...••.•...•.•....••.....•••..••.•..•........•• ··11
(3) }Iead (Modu Ie) No.··························· .. ········· .. ············ ·11(4)Distance dnta between Camera and Bit • • ·11
(5)t~umber of Parts····································,···············13(6)Feeder data························································13(7)Tape Feeder··················································0:·····13(8)Grid Tray··························································13(9)Chip Feeder·························································14
(lO)13it················ ····14
(11)Positioner·························································14(12)Part Pick Up Position on Tape Feeder·······························14(13)Grid Tray Start Position····················· •••••••••••••••••••• "16(14)Grid Tray Data Input···············································17(15)Part Pick Up Position on Chip Feeder·······························17(16)Bit Exchanging Position······················ 'O ••••• ····18(17)Positioner Position················································18(18)Part Type········ ........................•....................... ··19
(19)Dispenser Data and Bit number to be used···························19(20)Part Dumping Position and X-V Bias Point···························20(21)X-Y Bias Point·····················································20(22)Determination of Feeder to be used·································21(23)Part Hounting Data(including 251.252 and 0) ························22(21)Fixed Positioner···················································23(25)IC Hounting Position···············································24(2G)Data Saving························································24

(5)Data List~
(l)Number ot Parts to be mounted and feeder to be used ···············2G(2)Coordinates of Feeder Position·····································26(3)Part Hounting Data············· .. ···································27
2. Explanation of Data collection Command································28(l)Data Correction Commands···········································28(2)Command B··························································28(3)Command C··························································29(4)Comrnand D· .. • .. • •• .. •• .. • ••• • • ••• • .. • •••••• .. • .. ••• .. ·31(5)Command G··························································32(B)Command I··························································32(7)Command Q••••••••••••••••••••••••••••••••••••••••••••••••••••• ·····33
(8)Command R···············~······················· .. ··· .. ··············34(9)Command T························································· ·36
(lO)Command P •••••••••••••••••••••••••••••••••••••••••••••••••••••• ···36
(11)Command 11-································· .. ················ .. ····· ·36(12)Command W·· •••••••••••••••••••••••• ································37(13)Command + ····37
(6)Step Hode ~(Coordinate Check)····· .. •• ·40
1. Explanation of Commands···············································402. Coordinate Check····················································,. ·40
(l)llead Humber······················································ ··40(2)Data Load··········································!···············41(3)Re-Selection of Hode···············································41(4)Conflrmation of the Data Loaded····································41(5) 110m ing· •••••• 0 ••• 0 •• 0 •••••.••••••••••••••••••••••••• ···········.····42
(G)Warning Bell·······················································42(7)Coordinate Check Start·············································42(8) Distance between Camera and Dl t Head .. •• .... • ........ •.. •.......... 42
A. Bit Position······························· o ••••••••••••••••••• ·43D. Camera Position································· 00 •••••••••••• ··43
(9)Tape Feeder Position···············································44(lO)Other Feeder Position··············································44(ll)Bit Change Position······ ••••••••••.•.•..••.. ······················45(12)Positioner Position················································46(13)Distance between Dit and Dispenser Needle··························46(14)Dumping Posit ion···· .. ••••••••••• .. • •••••••••• .. ••••• /I) ·48(15)Bias Position································ ······················48(lG)Part Hounting Posi tion············ .. •••••· .. ••••••••••••••••••••••• ··48

(7)Assembly and Partial Assembly~~1. Assembly and Partial assembly··········································532. Data Load······························································533. Re-designation of Mode·················································544. Confirmation of Data Load···· .. •••••••• .. •••••••••••••••••• 0 ·54
5. Homing·································································546. Warning Bell···························································547. Designation of Module··················································558. Pick Up Biss Check·········· ••••••••••••••.•••••••••••••••••••••••••• Oo ·55
9. Bit Humber·····························································5610. Tray Start Point·······················································5711. Bad Hark·········'··········'·'···"······"'······'··' ················5712. Start Step················ 0 ~ •••••••••••••••••••••••••••••••••••••••••• ·57
13. Humber of Board to be assembled········································5814. Dispenser·······························································5815. Setting Confirmation·········· .••••.•. 00 ••••••••••••••••••••• 0 •••••••• ·5816. Status of Di t······· 0.0.0 ••••••••••••••••••••••••••••••••••••••••••••• ·5817. Assemb ly Operation······ 6' ·59
18. Status of Tray······· 6' •••••••••••••••••••••••••••••••••••••••••••••••• ·5919. Emergency Stop················ •••..••.•••.•••••••..•••••••••.••••••••• ·60
20. Completion of Assembly··············································"·60(o)D.L n ~ 61LO) al.a l\enew~ •••••••••••••••••••••••••••••••••••••••••••••••••••••.••••
1. Selection of Mode······················································612. Data Load······························································613. Re-selection of Hode·················································· ·62
(g)lIomi ng IT]] '63
(10)Copying Procedure························································64
(11)Diskette Formatting······················································G6
(12)Erasure of Data rile·····················································67
(13]Diagnostic·······························································701. Selection of Hade······················································702. Ilead Number····································.,·· .. ••••••••··••·••• .. ., .. ·703. Diagnostic Menu························································704. Sensor Check···························································715-a. Suction Head·········································· .. ··••· .. ········71

5-b. Eye Sensor Check················· ...•..••.•.•••...••• ,•.•••••.••• ....72
6~ Input/Output signal clleck··········· e ··································736-a. Checking items of Input signals ••••••••••••••••.•••••••••••••••••••••737~ Output Signal Check·············· •....•.•..•••••••...•.•..••.••••.•.•• '75

ELECTRICAL CIRCUIT DIAGRAM FOR MHP 30B MK-ll
°72135C
072132A
072129B
072134A
072133B
072130
072131A
072215
072186 (%)
ELECTRICAL CIRCUIT DIAGRAM •••.•••••••••••.•. 76
POWER SWITCH CIRCUIT DIAGRAM••.••..•••••••••• 77
MANUAL CONTROL .•••••••••••••••••••.••••••••• 78
WIRING DIAGRAM •••••••••••••••••••.•••••••••• 79
ELECTRICAL CHASSIS CIRCUIT DIAGRAM •••••••.•• 80
HEAD PCB (1) .••••••••.•.••••••...•••••••.•• 81
HEAD PC B (2) ••••••••••..•••••••.••••••••••• 82
HEAD PCB (3) ••.•••.••••••••.•.••.••••..•••• 83
CONVEYOR CONTROL .••••••••••••.••..••.••.•••• 84
072186 (2/2) CONVEYOR CONTROL •••••••••••••.••.•.••••••••• 85
072258A
072160A
TAPE FEEDER WIRING ASS'Y ••.•....•.•••••••••• 86
CONVEYOR CONTROL WIRING ASS'Y ••.••.•.••.•••• 87
~.,
,"

(1) Activation of M1IP.
1. Confirm that there is nothingin the head moving area.
2. Open air cock(l).
3. Confirm that the air pressureis 5.5kgf/cm by air guage(2).Air pressure is adjustable byturning the handle attached onthe air regulator toP.
4. Insert the floppy disks tocontroller.(a) Insert system disk to
Drive(4) .(b) Insert data disk to
Drive(5) .
5. Confirm that the emergencystop button (6) is released.(Confirm that the pushbuttonis not pressed.)
Pig. 1
[HlIP301J HK II E-l]
\
-- f:r
4)

[HIIP30B 11K II E-Z]6. Set the electric switches as follows:
Names of switches muol'l' RemarksBreaker switch(7) ONHa in sw itch (8) 011 Patrol light is lit up.Vibration switch(9) muol'l' When using tapefeeder.
and chipfeeder. turn toON
Loader switch(lO) muol'l' Turn the module switchto 01'1' when the moduleis driving.
Monitor switch(ll) 011Camera control switch OZ)I Oil
(lO)Loader switchWhen pressed.loader move bdownand P.C.D moves tonext module.
Re-start switchPress when pick UP
miss occured.AssemblY starts
Tempera tureU
control volume " 0 ,~].~D
\' 0.) "
. 0,~(I3)
~] l"J ~/ \ D-motion control,\,
Buzzer \ box socketBuzzer Sw itch
Patrol Light
Fig.27. Press the Motor Lock Button(13).
!'ig.3
White Balance switch(Set~ normallY) AGC Turnover switch
(Set lol'l' Inormally)
( Pi lot 1ight Coun ter Ti mer
(2)
l'ig.4~ ..
• A.

[HIIP3013 HKII E-3]7.At this stage, the controller is being activated and performing self test
ing. And The following message appears on the display.
286 Modular 1310S Version·········
Testing···············OK
Fig.5When self testing completes, the display changes as follows:
Current date is **** xx-xx-xxxx
Enter new data ( mm-dd-yy) : II
Fig.6
Press~ key, then the display shows" Operational Menu"
~.,
""A.

j..;;.I ~
~
1 B 9I~ , ,I",
5..
4 6-
1 2 Ii!",N
, .....0
i."...
" .\
[MIIP30B HK II E-4]
(2) Key Board.
IFunct i on Key I Pause Break
~~W3lB--··I~~~~~H
EPSOHEQUITY I +PC HOUSE 5160
IFunction Key I
"'" I,.M' II"
1 1 9 r;;;,.,., '".g 5 ~ _
IglrJIQ·1
o
\ I. I,Shift I Ctrl ISpace I lEnt
ISh i ft I I Cursor
IHTSUBISIlI MPL286
-r.' .,
>"

[MHP30B HK II E-5]
(3) Function Keys.In order to simplify the operation. the operation mode needed for performingeach work is set in the function key.The machine operation can be changed instantly to the desired operation modewhen the associated function key is pressed.
The operation mode of each function key and the functions are explainedbelow.
1. Operational Menu.
HIIP30B Operational Henu
Halt r 1Assembl ing = r 2
Data list - r 3Data input = F 4Step mode F 5Part I I ass'y = F 5
Diagnostic = r 7Data renew r 8Homing = r 9
Press desired function key?
rig.8
The above shown is the Operational Menu which shows 9 operation modes forperforming each work.The operation mode for each function key and its function are explainedbelow.
1. Operational Menu.
Key No.
F. 1
Operation mode
Halt
runetion
The operation is discontinued when this keyis pressed. The following message appears:
The operation discontinued. Continue=l Menu=2 Ouit=3
rig.9

Key No. Operation mode
F 2 Assembling
F 3 Data list
F 4 Data input
F 5 Step mode
F 6 Partial ass'y
[HIIP30B MK II E-5]
Function1) Discontinue the machine operation for a
while and continue operation again.2) Return to Operational Menu.3) Return to DOS mode.
Initiation of assembly operation.
Correction of data.1) Feeder position, bias position and part
mounting position.2) Change in part mounting feeder No.3) Addition and deletion of data.4) Creation of copy data.5) Change in bit up/down, waiting time, etc.
Input of part mounting data.(This operation must be performed first.)
The position of each feeder. the bias pointof the board. part mounting position, andthe like can be confirmed.When this operation mode is used, the bithead stops at each position designated inthe data input mode, and this permits theposition check to be performed correctly.
Th is mode can be used when mounting of partsbecomes necessary in the middle of operationdue to some reason. Hounting begins with thenumber designated as the part mounting sequence number.
/,
." :
F 7
F 8
F 9
Diagnostic
Data renew
1I0ming
Sensor function and input/output signals canbe checked.
This mode is used when changing the assemblyoperation. This mode can not be used unlessthe data is already created and saved in thefloppy disk.
This mode can be used to return the bit headto the home position due to some reason.
","", ,~.'

[HIIP3013 11K II E-7](4) Data Input.
1. Camera Setting for data input.(I)Disassemble the camera from Side Bracket on Left Cover.
Hate: Side Bracket is located inside or outside of Left Cover.(2)Assemble the camera to the L-8racket on the Solenoid 8racket.
Hate: 8e sure that the camera is assembled to the side bracket whenthe camera is not used for data input.
2. The illustrations below show how to handle the camera cord and how toassemble the camera to L-Dracket.
::: /loli to hand Ie the camera cord.
*~ow to assemble camera to L-Bracket.
Cord
Take enough a II owanC€for carnerq moving
!lead Plate
*lIow to assemb Ie camera to Side Bracket.
Disassemble the camera from L-Bracketand pass it through the hole on theLeft Cover and assemble to the SideBracket.
~J.. ', :f'
screV~lr(
~~I~lc~_~.'~. Camera Holder
VIl !lead
~ ;;:I
Fixing

UllIP30B 11K II E-8]
2. Explanation of Data Input Commands.
The command is an instruction which specifies the operation to be performed.
Q. D, N ? [E]
Fig.ll
N: (HumericaJ)0: (Teach ing data)Q: (Qui t)
(1) Command H
ttl *****Q, 0, II ? CEllDX 0DY 0
A 0
Fig.12
Numeric data input commandFine movement data input commandCoordinate position data input command
When the first message is displayed. the character [[] and cursor areflashing alternately. If~ key is pressed, the Command H is specified, and the cursor moves to the line DX.Enter the numeric data in DX, DY, and A.
As data input completes. the bit head moves in the direction of DX(Daxis) and DY(Y-axis) corresponding to the value entered.Bit head moves O.lmm when numeric value 1 is entered. The minimum valueto be able to enter is 0.25 and the bit head moves 0.025mm correspondingly.
Rotating angle is entered in A. The bit head rotates 0.20 when minimumnumeric value 0.2 is entered. And the dierection of bit rotation isclockwise looking from the bit toP.
Shown below is an example of numeric values entered .
.,..... ,."

Q. D, N 7DX 1800DY 200A 0
Fig.13
-1-
[MIIP30B MKII E-9]
~.
In this example, the bit head moves 180mm on X-axis and 20mm on Y-axis.Note that, if the command H is used to enter numerical data and thenthe command H is specified again, the data entered previouslY is addedto the currently entered data, and the bit head is moved by the totalvalue of both data.If the command His specified again by mistake, enter 0 in turn into DX,DY and A to recover the original specification of command H.When entering the mounting positon data on the board in spite of thefeeder position data, prefix B to the input value(DX B230, DY B25, ete.)to directly enter the deviation from the bias point.
(2) Command DThis command is used to move finely the bit head when determining thecoordinate position. When comand D is specified, the following message
appears.
Set target by Camera
Press desired arrow key on Remote Boxto move P/U head.To increase speed press both arrow keyand Fast key together~
-1-Press 1 to lower P/U headPress 2 to lower dispenser headPress 3 to raise and 4 to lower Bit exchanger
When fin ished press ISPACE Ikey
Fig.14

.r.'\,
[MIIP30B 11K II E-IO]When the cursor keys [1] QJ iii El on Remote Contro I Box is pressed. thebit head moves along the direction designated by O.025mm.The bit head can be moved fast when the [1] key and IFast Ikey arepressed together.When determining the coordinate position is completed. press ISPACE Ikey.
(3) Command Q
This command is specified after setting the coordinates position. (Thecoordinate postions are set using commands H and D.)If [Q] is specified. the coordinate position will be stored into thememory of the controller.
_.,."

[HIIP30B HK II E-ll]3. Data Input~
(1) Press function key []JJ after the CRT shows Operational Menu.
HIIP30B HK2 Operational Menu
HaltAssemb lingData listData inputStep modePrt I I ass I yDiagnosticData renewHoming
=fc' 1=fc' 2=fc' 3=fc' 4=fc' 5=fc' 5=fc' 7=fc' 8=fc' 9
fc'i g.16
Head tlo. please 7
Fig.15(2) Hode is changed to Data input mode and(3) Head (l.lodu Ie) No.
.-----------,
Press desired function key 7
the display changes as follows:Module 2
Hodul e 1 \ Module 3
. \.-. I~ I J Loader--y~irtfID.JdTIL
illilliill \ ""/ Bead 1 Head 3
Key board Head 2'
The display is asking the head number by which the operation is to beperformed. Enter the head number and press IEn!] key.
(4) Distance data between Camera and Bit.
C - P check VIti 7 [[]
fc'ig.17A. Enter [[J if the data previouslY input in our factory is used. The
CRT turns to fc'ig.20.B. Enter [Y] when it is necessary to correct the distance data between
Camera and Bit. The following display appears:
. ""A.

I
{:,
"\
[HIlP30B HKII E-12]
C - P check. Bit pas.
X=O. Y=O. A=O. Bias X=O. Y=O
Q. D. H ? CillJ
DX 0DY 0A 0
Fig .18
C. Designate some mark(such as pattern. etc.) on board as the mark forC-P check.
D. Have the bit onto the mark for C-P check by using command H orD •
E. When the bit position is correctly set on the mark for C-P check.
enter [Q] and press IEnt I. The CRT turns as follows:
C - P check. Camera pas.
Hnp'vt::b'Y::O:lHiro':::1
O. D. H ? DIJDX 0DY 0A 0
Fjg .19
F. Have and adjust the center of mark for C-P check to the center of
cross mark on the monitor screen by repeating the same steps as explained in above (D) and (E).
G. When the center of mark for C-P check is correctly set on the centerof cross mark. the distance data between Camera and Bit is correctlyadjusted.
~ .,".

'i
\.
;: .
(HIIP30B HK II E-13]
(5) Number of parts.
Humber of parts per P. C. Board?
Fig.20
Check the number of parts to be mounted on P.C. board.When the board eye sensor and bad mark are used, include such numbers Inthe total part numbers.
(6) Feeder Data.
Feeder data input YIH ? Vii:1
Flg.21
A. The system is asking whether it is necessary to create the feeder datanewly or not regarding tape feeder, grid tray and chip feeder.
B. In case the feeder data previously stored is used, enter [1].( Hote: IJIJ can be entered only when the data is prepared alr~ady and
change of the board mounting portion only Is needed. )C. If the data is to be created newly, press []] or simplY press IEnt I
key. The CRT shows following message.
(7) Tape Feeder.
Humber of Tape Feeder ?
Fig.22
Enter the number of feeder cassettes to be used.If no tape feeder is to be used, enter [2]. The display turns to Fig.28.
(8) Grid Tray.
Humber of Grid Tray ?
Fig.23
Enter the number of grid trays to be used. (Total number of Tr. tray andIC tray).If not used, enter [2].

..,
,..
'..
(HIIP30B HKll E-14]
(9) Chip fi'eeder
Humber of Chip fi'eeder ?
fi'ig.24
Enter the total number of rails of chip feeder and IC stick feeder.
(lO)Bit.,---------------,
Humber of Bits used ?
fi'jg.25
When using the bit changer. the upper message is displayed. In such case.enter the numberof bits attached.
(ll)Positioner.
Humber of Positioners ?
Fig.26
Enter the number of positioners to be used,
Upon completing the above mentioned input step, the following message appearson the CRT.
,.--------------------,
Humber of parts per P.C. Board ? 10Feeder Data input YIH ? YHumber of Tape feeder ? 12Humber of Grid tray ? 1Humber of Chip feeder ? 12Humber of Bit used ? 6Humber of Positioners ? 1
fi'ig.27
Hote: The values displayed at right side is the example of input data.
(12) Part pick up position on Tape feeder.When [QJ is entered at step (7), the display turns as follows:
_. ,.x.

nll1P30B HK II E-15]
It 1 Tape feeder pick up pos i ti on
Bias X=O Y=O
I: I~~p,~t: ~~y ~i):~~ ~~'rl;: Ia. D. H ? CillJ
DX 0DY 0A 0
If OK then enter [9] and press~ key.
Fig.28
A. Enter the part pick up position data on It 1 tape feeder.B. Adjust the part pick UP position using command H or Dso as to set
the center of part onto the center of cross mark in monitor screen.C. Upon completion of data input, press [Q] and IEnt I.D. The display appears in turn until completion of data input for all
tape feeders. Enter correctly, paying attention not to enter a wronglocation data.
Hote: Use the control number shown below for Tape feeders.In case there is some feeder not to be used. for instance, if thefeeders 111----112 and 1l4----115 are to be used and 113 is not to be used.simply press lEnt 1 key. then the feeder data for 112 is entered forfeeder 113 as the dummy data.
Control number 1----
Fig.29.,.,., • ~A'

[HIIP30B HK II E-16](13)Grid tray start position.
H 1 Grid Tray start position
X- .1,-'I" Y_ .1,
-'I' A- .1,-'I' Bias x=o Y=O
Q. D. H ? [ill]
DX 0DY 0A 0
If OK ,then enter [9] and press IEnt Ikey.
Fig.30
A. Referring to the data input operation of tape feeder. enter the dataof part pick UP start position of Grid tray.
B. Upon comletion of data. the display turns to Fig.Hote: lIere the pick UP start position means the part pick UP position
nearest to the horne position at each head.
1I0me position
Part pick up operation starts fromthe part placed at start positionand goes to next part placed alongX-axis in sequence until the lastpart in this row is picked UP.
Then the bit moves back to the partplaced next to start position in thedirection of Y-axis and the opera-
tion is continued in the same manner.:Start position
Fig.31
(Hote) Control Humber.Tr. tray·····Use number with addition
of designated number 200Ie tray······Use nmuber with addition
of designated nmuber 210
200~
211~
..Start positionFig.32
-)X

[MI1P3013 HKIl E-17](14)Grid tray data input.
When completing the data input of grid tray start position. the .displaYasks as follows:
DODOIt 1 Gr id tray 0000
+0000It of repeat in X (250MAX) ? pyT~+wODO
X's pitch ? 4H of repeat in Y (250M AX) 7 Px II x::::: 5
Y's pitch ? Hy=4
Fig.33 Fig.34Enter the data as follows:
A. Humber of repetitions in X-axis.B. Distance(pitch) between the parts on the grid tray in X-axis.C. Humber of repetitions in Y-axis.D. Distance(pitch) between the parts on the grid tray in Y-axis.
Upon completion of data input for grid tray, the following messageappears on the display. (When 0 is entered in step (9) ,the displaY goesto Fig.36)
(15)Part pick up position of chip feeder
It 1 Chip feeder pick up position
13 i as X::::: 0 Y::::: 0
.~
I ..1
Q, D. H ? lIEJDX 0DY 0A 0
If OK then enter I]J and PI'ess~ key.
Fig.35
Enter the data of part pick up position of chip feeder referring themonitor by repeating the same steps as explained in data input of tapefeeder.
."

[HIIP3013 HK II E-18]Control number of tupe feeder and IC stick rail ure as follows:·Tape feeder •••• 'Use number with addition of designated number 100:100----'Ie stick feeder"Use number with addition of designated number 160:161----Upon completion of data input. the display asks the bit change position.
(15)13it exchanging position.
H1 Bit exchanging position
X= ::' y= ::' A-','- '1' Bias X=O y=o
:.i
\ f
O. D. 11 ? [ill]
DX 0DY 0A 0
If OK then enter [9] and press~ key.
l"ig.36Enter the X.Y coordinates of #1 bit exchanging position referring themonitor display. Enter all coodinates of bit exchanging positions ofwhich number is entered in step (10).
(17)Positioner position.
H 1 Positioner position
X- ,I,- ,,~ Bias X=O Y=O
,~ .1
.,',.,,'
0, D, N
DX 0DY 0A 0
? CTlU"::~
If OK then enter [Q] and press IEnt Ikey.
l"ig.37.,.,. ,
.~ .." ....

(HIlP300 11K II E-20]PT Enter the pitch of the dispenser bit. ( l=O.lmm)OT Enter number of exchangeable bit.va Cementing volume. ( 1=20ms.)
When YOU want to change the data entered, use command C and press 1Ent I.(Refer the explanation of command C in II Data List ", page E- )Upon comp let ing the da ta inpu t, press IEnt I.
(20)Part dumping point.
Dumping point of pick UP miss parts.
Bias X=O Y=O
0, D, H 7 [lI[]
DX 0DY 0A 0
Eig.40The display is asking the coordinates of part dumping position when pickup miss happens.Set position by H or D command referring the monitor display.After completing data input, press [Q] and ~.The CRT turns as shown below:
(20)X-Y bias point
x- Y Bias
Bias X=O Y=O
1::tn:p:Ut::iY.Y)Y:;IMJi(1
0, D. H 7 CEll
DX 0
DY 0A 0
.A.


[MIIP30B 11K II E-2l]This is the request of Input for the bias point.The bias point is a reference origin or datum point when mounting partson P.C.Board.Enter the coodinate data by repeating same steps as explained in abovedata input operations. The display turns as follows:
(21)Determlnation of feeder to be used.
tt 1 Part Set mark 111=251 Set mark 112=252 BM=O Tape=l-)1608=+50, Chip=+100. IC stick=+150. Tray=+200. IC tray=+210 ?
Fig.42Determine from which feeded rail. cassette. etc.) the part Is to be picked UP and mounted to what position of the board.Enter the c6ntrol number of feeder to be used for III part. The displayturns to Fig.46.When designating the feeder. enter the feeder number by adding the abovefigures according to its kind.(Example)
To designate chip feeder No.2, enter 102.
When use the part type 1608 packed in tape. add 50 to the control numberof tape feeder.
A. For designating the position of set mark for checking the board positoin in the direction of X and Y-axes. enter~ and press ~.The display turns to Fig.
B. For designating the position of set mark for checking the board position in angle. enter I 252 Iand press IEnt I. The display turns toFig.
C. For designating the position of Bad mark. enter [Q] and press ~.The display turns to Fig.
251- £0-------- ----- ]I ,#. I
I , 1I I: ~_l_
i ··t--hvs
'------ -- -JL-··Jxs
251 :,0 ,'. ~-252
: '--lI ·rb==: IL'----o~,__ I Ya
---'~~~-----)
(Note) a. When only the position datafor set mark 251 is entered.the gaps shown as Xs and Ysat left Fig.43 are automatically compensate before partmounting begins.
Fig.43 b. When positon data for set mark251 and 252 are entered. thegaps shown as Ya and Xa atleft Fig. 44 are compensatedat the same time with the con-
Fig.44 pensation for Xs and Ys..,.

nillP3013 MK II E-22]Compensation of part angle is not done here.To compensate the board angle, the data for set mark 251 must be inputbefore inputting data for set mark 252.
Sequence of data input is 251, 252, and l3admark. After that, the partmounting data is input.(Hote: In case data input for set marks 251 and 252 are not necessary,
data for Dad mark is input at first.)
(23)Part mounting data(including 251, 252 and 0)A. When sucking parts from other part feeder except Tape feeder, IC
stick feeder and IC tray, the display turns to Fig.B. When sucking parts from IC stick feeder(+160) and IC tray(+210) ,
the display turns to Fig.C. In case parts are picked up from Tape feeder:
ttl Part Tape, Index
For auto advance feeder
? [2]1':::t!.J
If enter 1 then advance onceenter 2 then advance twiceenter 3 then advance 3 times.
l'ig.45The sysytem is asking the tape advancing pitch for placing the partcorrectly under the bit. Three types of index are prepared.Select and enter the correct type of Index according to the type oftape feeder.Upon completing the input, the display changes as follows:
(Continue to next page)
"""', '1."

[HIIP30B HK II E-23],------------------------------,
Part 11 1
Bias X:=:O Y:=:O
0, D, H ? lIlEJ
DX 0DY 0A 0PH 1
A:=: 90 then part rotates 900
A:=: 180 then part rotates 1800
A:=: 270 then part rotates 2700
(Part type)PH:=: 1 PH:=:4PH:=:2 PH:=:5PH:=: 3 PH:=: 6
Fig.46D. Move and adjust the center of part mounting positon to the center of
cross mark on the monitor screen.When inputting the coordinate of 251, 252 and bad mark, adjust theposition so that the forcused point of the eye sensor light is placedcorrectly on to the center of set mark.Upon completion of data input, press [Q] and ~.
E. Repeat the same operartion steps as explained in steps (22) and (23)for all part to be mounted. Then the display turns to Fig.
(24)Fixed positioner.
114 Positoner Ho. ? [QJ
Fig.47Display is asking whether the fixed positioner is used or not.
A. Enter [Q] and~ if the fixed positioner is not used.B. Enter llJ and~ if the foxed positioner is used.
(Continue to next page)

[NHP30B MKII E-24]
(25)IC mounting position.::::-~~--'---'-'-----------------.
Part II 1
Bias x=o Y=O
0, 0, H 1 []]
ox 0OY 0A 0PH 1
A== 90 then part rotates 90°A== 180 then part rotates 180°A== 270 then part rotates 270°
(Part type)PH= 1 PH==4PH=2 PH=5PH=3 PH==B
Fig.48
message appears:
A. By using commands Hand D, move and adjust the upper right corner of IC to thelower left corner of the cross mark onthe monitor as shown in left Fig.47When the IC is set correct position,press [Q] and ~.
B. Move and adjust the lower left corner oftHe same IC to the upper right corner ofthe cross mark on the monitor screen asshown in left Fig.49Press [9] and~ upon completion ofcorrect positioning.C. The display turns to Fig.45 step (23) .
mark
.~mark/-
Cross
~/IC ~
Cross
Fig.49(25)Oata saving.
When completing data input, the fol lowing
IL--D_ata_sa_ve_1_Y/_H_I,1·",;, !
.~
1\
Fig.50When it is necessary to save the data, press m, and in case notnecessary, press [[]. When Wis pressed, the display turns as follows:

[HIIP30B ~IK II E-25],-------------------------,
**** . DAT • •• ••• . DAT 000 . DAT
35840 Bytes free.
Data File Hame 7(Up to 8 characters) ****
':1
Fig.51Enter the file name with alphabet and figure up to 8 characters.Press IEnt Ikey and the data is saved.
When data saving is completed. mode is changed to Data List mode ~.
~ .,.A.

[HIIP30B MK II E-25)(5) Data List.~
1. Content of Data List.This mode is used to ckeck whether the data prepared in the data input modeis loaded correctly, or to modify the input data.When the data input completes, or when the function key~ is pressed,this data list mode is obtained.
(1) Humber of parts to be mounted and feeder to be used.
MIIP MK2 Data Li st by O. 1mm
Humber of parts per P. C. Board = 5II of copies = 3II of Tape Magazi ne = 12II of Grid Tray = 1II of Chip Feeder =12
II of Bits used1/ of Positioners
Fig.52(2)Coordinates of Feeder position.
Typ II X Y A
tape 1 ~............ -.I............ "'''''''........ .,. .,. .... .,. '1"'l"'l'
grid 1 "J.",J, ..... oj........... "'''''''.... .,..,. ........ .,. 'l""'''''
q'ty 1 1 1pitch 1 1 1
f'dr 1 "''''''' "''''''' "" ..... "'-.... .,..,. .... .,. .... ............
Bit 1 "''''''' ...... oJ...... "'''''''.,..,. .... ")''1'''l' ""'C'''('-
Continue=l, Change =2 ?
Pos. 1 "''''''' "'''''''.,..,..,. ........ '"C-P "''''''' ..... oJ, .....
"''''.,. 't"(o'1"
D-P .J, ...... .,., "'''''''.... .,.'" .,."''''Dumping P. "''''''' -J,J,.,l..
"'''' .... "''''.,.Bias "''''''' .,L.J,..L
"''''''' "'''''''
.,... . ,."
= 5= 1
Fig.53

(l.{I/P30B HK II E-27](3) Part mounting duta.
II fdr X Y A Part Bit Tape index110. type Ho. or Pos. No.
I ........ ............ ............ -.L.J...,J.. .... .... ....'l''l' 'l''l''l' 'l''l''l' 'l''l''l' 'l' 'l' 'l'
234
DispenserX=O,Y=l
IAngle when dispe-nser used.
lIumber of tape index or numberof positioner.
Humber of bit used to mount partsType of part ( 5 types )
Part mounting angleCoordinate of part mounting position in Y-axis.
Coordinate of part mounting position in X-axis.Feeder number.
Sequence number of data input.Fig.54
" fdr X Y A Part Bit Tape index DispenserHo. type Ho. or Pos. 110. X=O,Y=I
I J, .... ..... ..L ..... ............ ..J• ..J..J.,. .... .... .... ....'l''l' 'l''l''l' ,.,.. .,~,.,.. 'l''l''l' 'r 'l' 'l' 'r
23
copy 0 0 0copy I . •••• 'shows X. Y pitches between copy 0 and copy 1.copy 2 . ·····shows X. Y pitches between copy o and copy 2.
IFig.55
-When 1
-When 2
is entered, the display returns to top of the data list.Is entered. the following display appears:
Command 13. C. D. G. r. O. R, T. P.11, W ? •
Fig.56
...... ' .,,"


[HlIP30B MK II E-28]2.Explanation of data correction commands.
(l)Data correction commands.Following message appears In data list mode.
Continue=1, Change=2 7
Fig.57
A. When enter fll and I Ent I-
B. When enter ~ and Ent.follows:
the data list is shown continuously.the data correction command is shown as
,',
Command B.C.D.G,LQ,R,T,P,II,W 7
Fig.58
B (Back)C (Change)D (De Iete)G (Goto)I (Insert)Q (Qu i t)R (Repeat)T (Top)P (Print)II Olelp)\J+: (Plus)
Re-display of data listData changeData deletionDisplay designated part mounting data in middle.Data additionSetting(Data save)COpyOperational Menu displayPrint out data listDisplay part type dataConvert step and repeat data to serial dataTime constant display
(2)Command BIf you want to return to the top of data list while checking a datalist, after commands are shown on display. enter 1Il. then the displayreturns to the top of data list as follows:
MIIP MK2 Data List by O.1mm
Humber of parts per P. C. Board = 5II of copies = 3II of Tape Magazine =12
Fig.59;0"."
."

.'
. 'I',
[HIIP30B 14K II E-29]
(3)Command C.This command is used to change the feeder designation number, X-axisvalue, Y-axis value, A(angle) and positioner designation number andpart type, index number and the angle of dispenser.This command cannot be used to change the number of parts to be mountedon P.C.Board nor the number of feeders.
1/ fdr X Y A Part Bit Tape index DispenserHo. type Ho. or Pos. No. X=O,Y=l
1 1 100.5 100 1 2 1 0 02 102 201 200.5 0 4 2 0 03 5 251 300 0 4 2 0 04 109 301.5 301 3 3 3 0 05 5 352 351.5 3 2 1 0 05 107 402.5 402 0 1 1 0 0
7 0 453 452.5 0 1 1 0 08 112 353 -47.5 0 1 1 0 0
9 101 403.5 3 0 1 1 0 010 201 454 53 0 5 4 0 0
Cont inue = I, Change=2
Fig.50
Let us assume that there is a positional displacement of 0.3mm in theX-axis direction, and -05mm in the Y-axis direction of the Ho.3 part,and try to change the data using the command C.First of all, ener 2 for data renew.Upon entering, the command will be displayed. Specify command C.
Command B,C,D,G,LO,R,T,P,II,W ?
D II
Fig.51
(Continue to next page)

[I~IIP30B ~IK II E-30]
II fdr X Y A Part Bit Tape index DispenserNo. type Ho. or Pas. Ho. X=O,Y=l
1 1 100.5 . 100 1 2 1 0 02 102 201 200.5 0 4 2 0 0
5 251 300 0 4 2 0 03 !:::;.jj;:
4 109 301.5 301 3 3 3 0 05 5 352 351.5 3 2 1 0 0
Fig.52As the correction of 0.3mm is required, change 251 to 254. Have cursorto next position 300, and change 300 to 295 as the correction of -0.5mmis required.Note: Be sure to arrange the first(leftmost) digit of numerical values
in line. Place the minus sign, if needed. on the leftside digitposition of the first numerical digit.
II fdr X Y A Part Bit Tape index DispenserNo. type No. or Pas. No. X=O.Y=l
1 1 100.5 100 1 2 1 0 02 102 201 200.5 0 4 2 0 03 5 ~ 300 0 4 2 0 0
CD 109 301.5 301 3 3 3 0 05 5 352 351. 5 3 2 1 0 0
~,
Fig.B3The mark Cd displayed at the top of the next line.If correction of the line is needed. perform similarly.In this example, we only need to change the position of No.3 part.Enter [I] (abbreviation of End) and this completes data change operation.When performing data correction, do not forget to enter this [[].After completeing data correction for one line, press IEnt Ikey andthen Cd mark automatically moves to the top of next line. By pressing~ key. the corrected data is stored in data memory. If this IEnt Ikey is not pressed after correcting data, the data stored in memory isnot corrected but data is corrected only on the monitor screen.
~ .,,"

[MllP30B HK II E-31JNote: As for the correction for Bit number, please refer the Command II.
(4)Command D.This command is used to delete unnecessary data.Enter ~ for data change to display commands.
Command B,C,D,G,I,O,R,T,P,Il,W ?Seq II-II ? II
Fig.64
Designate command D, then Seq II-II? and message will be displayed.The system Is asking to enter the data number to be deleted.Assume that liB data is to be deleted, the following display will appear:
8 107 402.5 402 0 1 1 0 07 0 453 452.5 0 1 1 0 08 112 353 -47.5 0 1 1 0 09 101 403.5 3 0 1 1 0 010 201 454 53 0 6 4 0 0
Continue=l, Change=2Command B, C, D, G, I, 0, R, 1', P, II. W+ ? DSeq II-II ? 6-86 107 402.5 402 0 1 1 0 07 0 453 452.5 0 1 1 0 08 112 353 -47.5 0 1 1 0 09 101 403.5 3 0 1 1 0 0
Chip feeder·······FBit exchanger·····BGrid tray········G
Fi8.65At this point, the data after deletion is displayed, and the data ismoved UP by one as shown above.To delete a range of consecutive data, connect the first number and thelast number of the data to be deleted using the sign "-".For instance, if the parts 113 to ll8 are unnecessary, enter 3-8.
To delete the number of feeder, select and enter the prefix from belowaccording to the kind of feeder, and then enter the feeder number to bedeleted.For instance, feeder number 2, 3, 4 of tape feeder are not necessary,enter T 2-4.
Tape feeder······T
."

[HIlP30B HK II E-32]Note: Enter the number of feeder actuallY used.
(5)Command G.This command permits direct designation to part mounting data by skipping the display of the feeder data.This can be used convenientlY when the number of part mounting data islarge.Enter 2 for data renew, and designate command G.
Command B,C,D,G,I.Q,R,T,P,Il,W 7
Sep "7 III
Fig.55The sysytem asks you what is the desired step. Enter the mounting stepnumber of the part to be displayed.Assume that there are 100 parts to be mounted, and to display the databeginning with the 85th part data, enter 85. the data beginning with85th data will be displayed.
35 80 1
50 50 085 120 0
" fdrNo.
85 385 ()87 103
Fig.57
(5) Command 1.
x Y A Part Bit Tape index Dispensertype No. or Pos. No. X=O,Y=l
2 1 0 01 1 0 01 2 0 0
" fdr X Y A Part Bit Tape index DispenserNo. type No. or Pos. No. X=O,Y=l
1 1 100.5 100 1 2 1 0 02 102 201 200.5 0 4 2 0 03 5 251 300 0 4 2 0 04 109 301.5 301 3 3 3 0 05 5 352 351.5 3 2 1 0 0. . . . . . . . •. . . . . . . . .Fig.58
-r.• • ,,"

, ;
i/'\
[MIIP30B MK II E-33lThis command is used when addition of mounting part is required due todesign change or other reason. Enter 2 for data renew for displayingcommand.Enter L and the system disp Iays SEa H II.
Command B,C.D,G,LQ.R,T.P,Il,W ?SEQ Il? II
Fig.59This is asking to what position the additional data is to be inserted.Enter the desired number.In this example, addition of new part is requested at the 3rd mountingstep. lienee number 3 must be entered.
II fdr X Y A Part Bit Tape index Dispenser!lo. type No. or Pos. !lo. X=O.Y=l
3 5 251 300 0 4 2 0 04 5 251 300 0 4 2 0 0
5 5 352 351.5 3 2 1 0 0
Fig.70The data of parts beginning with number 3 are displayed.You will find out that the duta for step number 3 and number 4 is identical. The data of step 3 is a dummy data.Change the data of the step number 3 using command C as explained above.When the addition of feeder number is required, enter the prefix and thenumber of feeder to be added as entered in D command.For instance, if T and 2 are entered. two dummy data are added to thelast tape feeder data alreadY entered.Correct the dummy data using command C.
(7) Command a.This command is used to save the created data into floppy disk.Enter 2 for change. and designate command a. The following message willappear:
Command B,C.D.G.LQ.R.T,P,II,W ? [Q]
Fig.71

[HIIP30B HKlI E-34]Upon pressing a. the display changes as follows=
Data Save 7 YIN
Fig.72The system is asking whether arnot to save the data into floppy disk.Enter [I] [};I] to save the data. And if not. enter OIJ IEnt I·Pressing of LrJ.[1ill will cause to exchange program to data save pro-gra,m_. --,
Data File Name 7
Fig.73The display is asking the File Name of data. so enter the name with alphabet within 8 characters.Do not forget to insert formatted disk into drive 2 before data saving.
(8)Command R.This command is used when mounting parts onto several P.C. boards whichare arranged and spaced equally.Enter 2 for change, and designate command R.
Command B. C, D. G. La. R. To P, II, 'vi 7 DO
Fig. 74Assume that the P.C. board are arranged as shown below:
ClQ)OOO~
GJQDDDG]UJUJDGJ+~DDG1J
Xp = 15mm
Fig.75.
U of copies in X 7 III
Fig.76
yp=10mm
1\ of copiesX's pitch1\ of copiesV's pitch
in X= 5=150
in V= 4=100

[MIIP3013 MKII E-35]
H of cop ies in X? W
Five
I
Fig.77boards are arranged on X-axis. lienee.
X's pitch 7 Il50J Ienter 5
Fig.78The pitch of boards on X-axis is 15mm. So. enter 150.
it of copies in Y? []]
Fig.79Four boards are arranged on Y-axis. Enter 4.
IY's pitch ? [lQQ]
IFig.80
The pitch of boards on Y-axis is 10mm. So. enter 100.The copy data of the boards has been created. To confirm the data, usethe command B and check the data list. The copy will be displayed at theend of the mounting step data.
8 112 100 120 0 19 104 290 280 0 110 101 60 80 0 1
Con t inue =1 Change =2
COpy 0 0 0copy 1 150 0copy 2 300 0copy 3 450 0copy 4 600 0copy 5 0 100copy 6 0 200copy 7 0 300
· · · ·· · · ·· · · ·
Fig.81

[MIlP30B ~IK II E-36JThe copy 0 indicates the original board for which the mounting data hasbeen created.The system will ask yoU the copy number in coordinates confirmation andpart mounting mode. So, enter the desired number correctly.
(9) Command T.The command T is used to return the display to the top of the system program. The top of the system program is Operational Menu.Enter 2 for change, and designate command T.
Command B,C,D,G,LO,R,T,P,H,W ? [I]
Fig.82Then the Operational ~Ienu is shown on the display.
MHP30B MK2 Operational Menu
Halt = F 1Assembl ing = F 2Data list - F 3Data input = F 4Step mode - F 5Part'l ass'y F (3
Diagnostic - F 7Data renew = F 8Homing F 9
Press desired function key ?
Fig.83
(0) Command P.This command Is used to print out the created data. Enter 2 for change,and designate command P. The data list is printed out.
(1) Command II.
This command is used when user wants to see or to change part type data.Enter command II, then the system displays:
(Continue to next page)
-r-,., ,
.'>

[HIIP3013 HK II E-37]
"'"'''',...., Part Type List W.J.,-J.'l''l''l' "t',.,....,.
II PC PT I3T va RBI---
1 1 0 1 20 15082 1 0 2 30 21253 1 0 3 40 3215
PC=Numoer of cementing spot 1, 2, or 3.PT=Cementing pitch.BT=l3it number.VO=Cementing Volume.
Return = 1, Change =2 ?
Fig.84
By entering 2 and EntWhen entering [I] ~an-d-,J~~
data can be editted with command C.the display returns to Data list.
(l2)Command W.This command is used when a set of data created by using command R isrequired to change to a serial data. This feature is useful when youwant to change an X or Y coordinate of a particular point only in a stepand repent data. If a master X Y coordinate is changed, all repeated
data are also changed.
(13) Command +.This command is used to changed the head speed and bit waiting time inbit UP and down operation, etc.Enter 2 for change, and des i gnate command +.The following display appears:
."

[MIIP 30B HK II E-38]
1. Motor speed = 1902. Start speed = 293. Motor slop =2254. Bi t down 'tit. = 25. Pick UP 'tit. = 6
6. Bit UP \.It. - 107. Bit down \!It. = {)
8. Placing Wt. = 59. Bitup\!lt. :::: 7
10. Theta \!It. = 311. Centering = 9
Command BCE 7
Fig.85
Each of the items is explained below:1) Motor speed The speed of the X-axis and Y-axis motors.2) Start speed X, Ymotor start speed.3) Motor slope Motor build up speed.
lIote: In items 1)----3), the speed is variable within the range of 0---
255. But motor malfunction may occur if the speed is changedimproperly.
When changing speed, check carefully the related conditions.
Waiting time before picking up of part.Waiting time for detecting Vaccum.Time from picking UP of part to start of bit.Waiting time before placing of part.The time during which the part is being held on theP.c. Board.Waiting time before the bit head begins to move upward.Time required for sending air to the bit rotatingcy I inder.
: Waiting time after the positioner operation completed.
4) Bit down \it.5) Pick UP 'tit.6) Bit up 'lit.7) Bit down Wt.8) Placing \It.
g) Bit UP \tit.
10) Theta Wt.
11) Center ing
o -E
Slow
o -E
short
-----7 255Quick
-----7 255long

[HIIP30B ~IK II E-39]Hote: Each items are adjustable from 0 to 255, but it is recommended
to operate the machine with the currently set time value.If any change is required, confirm carefully the accuracy ofmounting position and other related conditions.
Command C is used for change.If Command B is entered. the top of the data list will be displayed.If Command E is entered. ,the Operational Menu wi II be displayed.

[HIIP30B HK II E-40J .((» Step Hode I]]] (Coordi nate Check)
In this mode. the feeder position (part pick UP position) can be checkedbefore the part is mounted onto the board. In addition, part mounting to theboard and the correct ion of mounting posi ti on crn be performed for each part.( The bit head stops at the designated position.)Hounting of parts is permitted for only one P.C.board. (When copy data exists, parts mounting is limited to "0. 0 board only.)
I.Explanation of commands.
[ Q. D. II, R 7 [g]
l'ig.88Commands O. D. and" have the same function as used in Data Input mode.When command R is designated. the bit head returns to home position andmoves to the designated position again and stops there. Thus the confirmation of coordinate can be done repeatedly by using R(Retry) command.
2.Coordinate Check.
HIIP30B HK2 Operationa I Henu
lIalt =1' IAssembling =1' 2Data list =1' 3Data input = I' 4Step mode = 1'5Part'l ass'y =1' 8Diagnostic =1' 7Data renew = I' 8Homing =1' 9
Press desired function key 7
l'ig.87Press function key 1]]]. The Step mode is obtained.
(l) llead Humber.
Head "0. pIease 7
l'ig.88

(MHP30B MKII E-41JEnter the head number by which the coordinate confirmation is performedand press IEnt Ikey.
(2) Data Load.
Data load YIN 1 UriFig.89
A. When data load is not necessary( the data is already loaded on computer) , press [[] and lliU. The display changes to Fig.92.
B. When data load is necessary, press []J and lliU. The list of datasaved already is shown as follows:
***. DAT ····.DAT 1I1111.DAT 11111 •. OAT
35840 Bytes free
Head 1. Data Fi Ie Harne 1 ****Head 2. Data File Harne 1 •.••Ilead 3. Data File Name 1 0: 0: 0:
Fig.90Enter the necessary data name for each head and press lliU.When data load is unnecessary, press [ill and lliU.
(3)Re-selection of mode.
Assembly=l Data list=2 Menu=3 1mFig.91
When [I] is pressed, AssemblY mode is obtained and press ~ forData list.Press []] and lliU. then display returns to Operational Menu.
(4)Confirmation of the data loaded.
Head 2 data not loaded.
Fig.92If there is some head on which the data is not loaded, the messageshows the head number as above.
,"

[HIIP30B HK II E-42](5) Horn i ng.
Homing Y/Il 7
Fig.93A. If homing is unnecessary. press [[] and IJGIJ. The display changes
to Fig.B. If homing is necessary. press [YJ and IEnt I. The display shows fol
lowing message and homing of all modules are performed.
Homing
Please wait a while.
Fig.94
(6)Warning Bel I.
Vlarning Bell
On=l, Off=O ? HHFig.95
A. If it is necessary to ring the warning bell while the machine is running. press [I] and ~.
B. If it is not necessary to ring warning bell. press [Q] and~.(7)Coordinate Check Start.
I Start OK II
Fig.96If you are ready to stari. press the ISPACE Ibar.
(8)Distance between Camera and Bit head.
Verification. Coordinates
C-P check YIN 7 [[J
Fig.97When confirmation is unnecessary. press [[] and IJGIJ. Display goes toFi g.100.

[HIlP30B 11K II E-43)
When confirmation is necessary, press [I] and ~. The following display appears:
A. Bit position.
Verification, Coordinates C-P check, Bit pos.
X==O, Y==O, A==O
0, D, tI 7 [ill]
DX 0DY 0A 0
Bias X== 0, Y== 0
Fig.98Confirm that the center of the bit is at the center of cross markcorrectly on the monitor screen.If necessary, correct the position by using command H or D. Upon completion of confirmation, press [[] and IEnt I.
B. Camera position.
Verification, Coordinates C-P check, Camera pos.
X=o, Y==O, A=O
Hnp:~:t::bY::Q:;Hiili:]
0, D, H 7 DODX 0
DY 0II 0
Bias X==°,Y== 0
Fig.99Confirm that the center of the mark for C-P check is at the centerof cross mark correctly on the monitor screen.If necessary, adjust the position simi larly as explained in above A.
,"

[HIIP30B HK II E-44]
(9)Tape Feeder Poslton.
Verification, Coordinates
Tape magazine YIN ? mFig.100
The sysytem is asking whether or not to confirm the part pick UP positin of the tape feeder.If confirmation is unnecessary, press [E] and IEnt I. The display turnsto Fi8.102 and bit head moves to the grid tray if it exists.If necessary, press mand~. The bit head moves to the part pickup postion of the No.1 tape feeder, and stops at that position.
Verification, Coordinates
Tape magazine »1
0, 0, H ? 00ox 0
OY 0A 0
x=O, Y=O
O=OuitO==Teaching data inputH=Numer ical data inputR== Retry
Fig. 101Check the part pick up position on monitor screen.If necessary, correct the postion data by using command 0 or H.If the position is OK, press [9] and ~.Repeat the same operation for confirming the part pick UP positon ofall tape feeders.
(lO)Other Feeder Positon
Verification, Coordinates
Grid tray Y/H ? [[J
Fig.102
~.,
, ..

[HIIP30B ~IK II E-45)
Verification, Coordinates
Chip feeder YIN ? [E]
Fig.103Repeat the same operation as explained in step (9) for confirming partpick UP position on Grid tray and Chip feeder.
(11)Bit change position.
Verification, Coordinates
Bits YIN? [[]
Fig.104The system is asking whether or not to confirm the bit change positionof the bit changer.Perform the same operation as explained above.When IHl is entered, the display changes to Fig.107 in step (12).
Set All Bits in Nest.
Fig.105If some bit is not set in nest, the above message appears.Confirm that all bits are set correctly in nest. Press !'S-P-AC-E-I bar, thefollowing message appears:
Verification, Coordinates
Tape magazine "1 X=O, y=o
0, D, N
DX 0DY 0A 0
? rTlJt'::L!lJ
O=Ou i t
D=Teaching data inputN=Numerical data inputR=Retry
Fig .106

[HIIP30B HK II E-46]
Confirm the bit change positions on monitor screen.If there is some gap, adjust and move the center of change position tothe center of cross mark.
(12)Positioner position.
Verification. Coordinates
Positioner Yin ? lULl
rig .107Whether or not to confirm the position of tile fixed positioner is asked.Perform similarly to the above.
(13)Oistance between Bit and Dispenser needle.
Verification, Coordinates
0- P check YIN ? [ill]
rig .108When confirmation is unnecessary, press [IT] and ~. The display goesto Fig .111
If necessary, press [Y] and ~.A. Determine some point on the board as the mark for confirming pitch.B. Display turns as follows when [I] is pressed:
Verification. Coordinates D-P check. Bit pos.
x=o. Y=O, A=O
0, D, H ? [ill]
ox 0DY 0A 0
Fig.109
Bias X=O, y=o
~ ..

[HIIP3013 HK II E-47]
Hove and adjust the center of suction bit to the mark for confirmingpitch as set in above A.Upon completion, press [Q] and ~.C. The following display appears:
Ver if ication. Coordinates D-P check. Disp pos.
X=O. Y=O. A=O
Q. D, H ? [ill]
DX 0DY 0A 0
Bias X=O, y=o
Fig.ll0The needle of dispenser moves onto the mark for confirming pltcch.If necessary. correct the position of dispenser needle by using commandHand D.Upon completion, press [§] and ~.The pitch data between dispenser needle and the bit is now corrected.
(Continued on next page)
TV' ,."

[MIlP3013 MK II E-48](14)Dumping position.
Verification. Coordinates
Dumping point Y/H? [JIJ
Fig.l11Repeat the same operation as explained above for confirming the dumping position of pick UP miss parts. Upon completion. the following display appears:
(15)l3ias position.
Verification. Coordinates
Bias
Fig.112Repeat the same operation as explained above for confirming the position. Upon completion. the following display appears:
(16)Part mounting position.
Enter bit Ho. attached on PIU head» * ?
If no bit aUached on head enter 0 and press IEnt Ikey
Fig.113A. Enter the bit number attached on head by which the positon check is
to be performed.B. If no bit is attached. enter [Q].C. Enter the number of tr~y from which the part pick UP starts.
(In case the conf irma t ion is to be perf armed on Tr. tray and Ie tray.)
Head ** Tray start point (1-1)
Fig.114
?FflLIiJ
'..
;'GDDD00CillDDDlliJCDGJDDGCOGJGJOJ~
Start p~tion ~x
Fig.115

[M11P3013 HK II E-49]D.Step number from which confirmation starts.
lIead * Start with step II. copy II ?
Fig.lIBEnter the step number from which the confirmation starts and the copynumber.If no copy. enter I Start II I [J [2] and ~.
Example of COpy Part \I tostart with
II to beentered
~G]:"'0 0 D~-
3D 4-~\ 0 0
l-q cD '\ 0" 0 -
Hate: Only the first partposition is confirmed onthe copy P.C. board exceptP.C.board copy \I O.
copy 2
~COpy 0
Fig.1l7
b c
-e
~ COpy 3
-- copy 1
a
bcd
e
1, 01, 41, 12. 13. 1
E. Setting confirmation.
Start OK II
Enter mto move P/U head to bias point.Enter [I] to return to Menu.
Fig.lIB(a)If it is OK to start. press'ISPi\CElkey. The display changes to
Fig.121.(b)When the re-confirmation of bias point is necessary. press [[].
The head moves to bias point and the bias point on the screen alsomoves.
(c)Display returns to Operational Menu when [I] is pressed.
"tv." ,"

[HIIP30B HKII E-50]~-------------------~----,
Set target by Camera
Press desired arrow key on Remote Boxto move P/U head.To increase speed press both arrow keyand fast key together.
Press 1 to lower P/U headPress 2 to lower dispenser headPress 3 to raise and 4 to lower Bit exchanger
When finished press SPACE bar
Fig .119If the re-adJustment is necessary. move bias point to the center ofcross mark on the monitor by using command D.Upon 'comp Iet ion of adj uslment. press ISPACE Ibar.The following display appears
Q. D. H ? [EJ
DX 0DY 0A 0
Fi8.120Press [gJ and ~. The display changes as follows:
F.Bit status.
Bit choked. \lead 3
Continue=C, Ouit=Q
Fig.121,"

[MIIP30B HK II E-5U(a) This message is shown when the bit is choked. Remove the cause of
choke. lind if confirmation is to be continued. press [~] The display changes to Fig.123.
(b)Press [Q] to return to Operational Menu.
a.Status of Tray(Tr. tray and IC tray)
No part I I
Exchange Tray
Tray II 1
I f OK press Ht:1
Fig.122The above message is shown when the tray comes empty.Change the tray with full parts and press [9].
II.Part mounting.
Verification. Coordinates
Step= 1. COpy =0
IIssembling with III Bit
Fig.123Parts mounting starts when above message appears.
The sequence of confirmation of mounting position is as follows:Seq. of Data 1 2 3 4 5 6 7 8 9 10 11 12 ·.- - 1-
Bit II used 1 2 3 4 4 3 2 1 1 2 3 4 ·.Start step 1COpy 0 1 4 7 10 11 8 5 2 3 6 9 12 ·.Start step 6COpy 0 '" '" '" 3 4 1 * *
... '" 2 5 ·.'" '" 'r '" l'
-
Start step 10COpy 0 * '" 2 5 6 3 '" * '" 1 4 7 ·.l' l' '"
Fig .124 * Coordinate confirmation is not performed.
."

UIIIP30B HK II E-52]I.Confirmotion of part mounting position.
Verification, Coordinates
Part" 4 X=O, Y=O
0, D, H, R ? CRJ
DX 0DY 0A 0
Q=QuitD=Teaching data inputH=Humer ical data inputR=Retry
I" ig .125After part is mounted on P.C.board, the position of part is shownon the monitor.Correct the part mounting position, if necessary, by using command Hand D. Press [9] and~ when finished.
K.Repeat the same operation as explained above (step G. to I.) for allthe parts to be mounted.
L.l"inish.
Completed
Press ISPACE Ibar to return.
Fig.126When confirmation of mounting position for all parts are completed,press SPACE bar. The display returns to Operational Menu.Press I" 1 key to retrun to Operational Henu in the middle of operation.
-n" ,,"

[HIIP30B HK II E-53J(7)~ssembly and Partial ~ssembly. ~~
~ssemblin~ can be started after completing data input and check operations.
HIIP30B HK2 Operational Menu
lIa It = I' 1~ssembl ing =1' 2Data list =1' 3Data input =1' 4Step mode = I' 5Part'l ass'y=F 6Diagnostic =1' 7Data renew =1' 8lIoming = I' 9
Press desired function key?
Fig .127
1. ~ssernbly and partial assembly.\.Ihen the operational menu is displayed. press the function key IITl forselecting assembly mode. or press~ for partial assembly mode.
2. Data load.,---------------------,
Data load YIN ? [E]
Fig .128The system is asking whether or not the data is loaded from floppy disk.(l)If data load is not necessasry. press [E] and~. (The case that the
data is already loaded on controller)\.Ihen [E] is pressed. the display turns to Fig. 131 in step 4.
(2)If deata load is necessary. press [Y] and~. and the following display appears:
**** .DAT .D~T 0000 .D~T 0000 .D~T
35840 Bytes freelIead 1. Data Fi Ie Name ?lIead 2. Data Fi Ie Harne ?Head 3. Data Fi Ie Harne • 0000
Fig.129 L- ~ ...J
~.,
."

[HIIP30B HK II E-54JThe display shows the list of data file name already saved.Enter the data file name necessary for assembly operation or partial assembly operation.If it is not necessary to load the data, press []] and ~. The disp layturns as follows:
3. Re-designation of mode.
IIssembly=1 Data I ist=2 Henu=3 7[81'::;UJ
Fig.130When entering Ill~, theWhen entering ~~, theare pressed. display returns
4. Confirmation of data load.
display goes to Fig.131 inData List mode is obtainedto Operational Henu.
step 4.and when Q] IEnt I
Head 2. data not loaded.
Fig.131The system confirms whether the data is loaded or not for each head. lind ifthere is a head of which data is not loaded on computer, the above messageappears.
5. Homing,,....------------,
Homing YIN 7
Fig .132(l)When homing operation is not necessary, press []] and Ent .(2)When homing operation is necessary, press [I] and Ent the display
changes as follows and the homing operation of all modules are performed.
Homing
Please wait a while
I" ig .1336. Warning Bell
.---------~
Warning BellOn=l, Off=2
Fig.134........._A'

[MHP30BMK II E-54-1J
( CmlPLEMENT )
Homing
Please wait a while
Numbers of Auto tray ? []
This message is displayed only when use IC Auto Feeder.
When above message appear enter No. of feeder used
If not used
Nol. only
o1
Tray pick up mISS check menu
I. Advance after one attempts
2. Advance after two attempts
3. Advance after three attempts
Select the pick UP function by entering the desired number according to the
above menu.
HoI Prepare Ie's on the tray YIN ? ~
If IC's are already seated enter "Y", otherwise enter "N".
n1 Head 3 tray start point Y (1-**) ? 1
n1 Head 3 tray start point X (1-**)? 1
."

[MHP30BHK II E-54-2]The number for X and Ydirection are as follows.
Hol (fdr 211)
1
2
3
4
Y 56
7
8
9
I--
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0
Example :
Y= 5X= 3
f- Pick UP position1 2 345
X
Switch machine OFF and move head to the center. then switchpowewr OH again if OK then press SPACE bar
If OK. press space bar.
Then tray feeder will start for homing.
IC tray Homing
And then homing of Z. X and Y axis starts.
HomingPlease wait a while
If the power is not yet connected. the mounter remains standstill after thisdisplay appears on the CRT.
In such case. turn on the power of the mounter .
..,.,.... ,."

[HIIP30I3 HK II E-55](1)When it is necessary to ring warning bell, press [I] IEnt I·(2)If it is not necessary, press [QJ~.
7. Designation of Hodule.
****Assembling Hode****
All heads =0
Head 1. on Iy = 1Head 2. on ly =2Head 3. on Iy= 3Ilead 1. & 2. = 4Head 1. & 3. =5Head 2. & 3. =6
Enter number desired choice? ClliJ
Fig .135Enter the number shown above right side according to the head number to beused.
8. Pick Up Hiss Check.
Pick Up Hiss Check Henu
O. Advance without check.1. Stop after one attempt.2. Advance after two attempts.3. Stop after three attempts.
Enter number desired choice? ill[]
Fig .138Select the pick up function by entering the desired number according to theabove menu.OH/hen entering [QJ and~ :
Part mounting is performed without checking pick up miss. In this case,bit moves down on the board without part if pick UP miss occurred.Except when performing the test mounting, do not use this function sincethe cream solder or cement adheres to the bit tip and causes the trouble.

[HllP30B HK II E-56](2Hlhen entering OJ and ~.:
When pick UP miss occures one time, the bit head stops automaticallY.find patrol light is lighted.
(3) When enter ing [}] and IEnt I :When pick UP miss occures twice on the same parts, the bit moves to pickup next part to be mounted. In this case bit does not stoP.
(4)When entering [l] and~ :When pick up miss occures, bit attempts to suck part three times.
Fdr 101 Pick up Hiss 1
Fig .137
Fdr 101 Pick up Miss 2
Fig .138When pick up miss occures three times continuously, the bit head stops atthe designated position and the display shows following message:
Fdr 101 Pick up HissPress [K]~ next stepor press llJ to rtry.
Fig .139Hote: To start the bit head again after the bit stops due to pick UP mIss,
press key as shown below:lIead 1 Head 2 Head 3
To start again from the part designated. [TI [I] [l]
To skip the pick UP miss part and start rIl [I) [I]again from the next part to be mounted.
When the IRE-STflRT I bu tton located on the front panel of machine ispressed, the machine performs the same operation as the [TI , mor [1] keys are pressed.
8. Bit number.
Enter Bit 110. attached on P/U head" 1 7
Fig.140
."

[HI\P30B HK II E-57]TIds is a check for the number of the bit currently attached to the head.If the bi t is not attached to the head, enter [2J and ~.
10. Tray Start Point.,----------------------------,
II 1 !lead 1 Tray start pointII 1 !lead 2 Tray start point
11
1
1
Fig.141When tray is not used, display goes to Fig.143 in step 11.Enter the tray start number according to the number shown below:
yt~~D00200000 15
00DDGOJGJGJGJ5
--H
Fig.14211. Bad Hark.
,---------------------,
Bad Hark ( Black==O, White==l) 7
Fig.143Enter the bad mark designation by pressing 0 or 1 according to the color ofthe mark to be used.This message is displayed only when the bad mark is designated in data inputmode. If the bad mark is not designated, the display turns to Fig.145.
12. Start Step.When [IT] the partial assembly mode is designated, the following displayappeaers:
.-----------------------------,
!lead 2 Start with step If copy II 7 Ollil CIIJ []]
Fig.145Enter the step number from which the part mounting starts and the copy number pressing keys [IT]~ and ~. From next part, the part mounting startsfrom the first step of mounting.

(MIIP30B MK II E-58]13. Number of board to be assembled.
Humber of assemblies required ?
Fig.146Enter the number of board to be assembled.
14. Dispenser.,------------------,
Ilead 1 Dispenser YIH ? [ill]
Fig.147Before part mounting, if the cementing operation by dispenser is requiredfor each head, press [IJ and IEnt I·
15. Setting confirmation.
Start OK I I
Enter fill to move P/U to Bias point.Enter ~ to return to Menu.
Fig.148(l)If you are ready, press ISPliCE Ibar and the display changes to Fi&.149.(2)If the re-confirmation of Bias point is necessary, press IJD ' then the
head moves to bias point.(3)To return to Menu, press [IJ.
16. Status of Bit.,--------------,
Bit choked, lIead 3.
Contlnue==C, Quit==Q
Fig.149(1)The above message is displayed when the bit is choked due to some reason.
Remove the cause and press 8J If the assembly operation is to be continued. The display changes to Fig.150 in step 17.
(2)To return to Menu, press [9].
(Continued on next page)
.........,"

[HIIP30B MK II E-59]
17. Assembly operation.
Assembling File Hame ****
Step 15. CCpy =0, Step 5. COpy=O
Assembling with 1 Bit Assembling with 1..........
Assembled=2 Assemb Ied = 1 Assembled=" •Schedu Ied = 1 Scheduled=l Schedu led='"
Fig .150
I IModule 1 Module 2 Module 3
Assembling data is shown for each module.
18. Status of tray.,----=-----------,
Assembling File Hame****
110 part I I
Exchange TrayTray" = 1
Assembled 3Scheduled =100
If OK then press ~
Fig.151When tray(Tr. tray and IC tray) becomes empty, the above message appears.Change the tray wIth full parts and press the key as shown below. The assembly operation is continued.
Module 1 Module 2 Module 3
W [I] [I]
Fig.152
"""." ."

(HIIP30B HK II E-60]19. Emergency StoP.
(l)When some trouble occurs while thetion. press emergency stop switch.lighted. And the following display appears:
EGM stop
Press any key then return to Henu
Fig.153 Fig.154Press ISPACE I key and the display returns to Operational Menu.
HIIP30B HK2 Operational Henu
lIal t =F 1Assembling=F 2Da ta lis t = F 3
Hotor Lock Button
o 0iJ. 'L]' 0
',.-' 09 '
oID]~
Fig .155the emergency stop switch(turnmotor lock button 8S shown in
Fig,155(2)Before running the machine again. release
switch knob counter-clockwiswe) and pressFig.156.
(3)To start operation again. select the desired mode from operational menuand press that function key,
20. Completion of Assembly.
Completed
Press SPACE key to return.
Fig.156When the scheduled number of P.C.board are assembled. the above displayappears.Press SPACE key to return to Operational Menu .
."

';.,1
(HIIP3013 HK II E-6U(8JData Renew.~
This mode is used when assembling of one lot is terminated and assembling ofanother lot is to be started.
~IP3013 HK2 Operational Menu
lIa It = F 1Assembling =1' 2Da ta 11st =I' 3Data Input =1' 4Step mode = I' 5Part I 1 Ass I Y= I' 5Diagnostic =1' 7Data renew = I' 8lIoming = I' 9
Press desired function key 7
I'lg.1571. Selection of mode.
Press function key ff.8l, The following display appears:
Data load YIN 7 [E]
Fig .158
2. Data load.(l)When same assembling Is to be continued, press [E] and ~.
AssemblY mode is obtained and the display goes to I'lg.132 on page E-54.(2)When assembl ing of new lot Is required, press mand~ to load the
data from floppy disk. The data name list is shown as follows:
****.DAT ·····.DAT OOO.DAT OOO.DAT
35840 Byte freelIead 1. Da ta I'i Ie Harne 7 **~;*
lIead 2. Data File Harne 7lIead 3. Data Fi Ie Name 7 $$$$
Fi&.159Enter the necessary data file name to be loaded for each head and press
~.

(HIlP30B HK II E-62]
When data loading completes, the following message appears:
3. Re-selection of mode.
Assembly=l Data list=2 Henu=3 ? f'Tlr'::~
;-,'
", .
Fig .160Select the necessary mode again according to the above menu.

[MIIP30B MK2 E-63](g)lIorning. [II]
This mode can be used to return the machine to the home position in case thatthe machine is stopped due to some reason. (For instance, in case that keysIBREAK I+ ISIIIFT Iare pressed together.)
MIIP30B MK II Operat iona I Menu
Halt =1' 1Assembl ing =17 2Data list =1' 3Data input =17 4Step mode =F 5Part'l ass'y=F 5Diagnostic =17 7Data renew =1' 8Homing =1' 9
Press desired function key 7
Fig.161Press the function key [II]. /Ioming operation of each module starts in X andY axes.
HOming
Please wait a while
Fig.162The operational menu appears when the machine stops at the home position.

(HIIP30B HK II E-64J[lO]Copy!ng Procedure.
1. Insert system diskette to " Drive A ".2. Turn the power switch of computer to " 0" ".3. After the operational menu appears on the display, press \ Ctrl \+1 Pause I
(or IBREAK I) together. The mark A> appears at the lowel' left corner ofdisplay.
,-----------------,
~IP30B HKII Operational Henu
I\al t = I" 1Assembl ing =1" 2Data list = I" 3Data input =1" 4Step mode =1" 5
. Part I I ass' y=I" 6Diagnostic =1" 7Data renew =I" 8Homing =1" 9
Press desired function key?
Fig.163
4. Enter IDISKCOPY I[}J IT] and press ~. The following display appears:
~A> DISKCOPY A: 13:
Insert SOURCE diskette in drive A:Insert TARGET diskette in drive B:
Press any key when ready······
Fig.164Insert the source diskette to drive A, new diskette to drive B, and press
~.Hote: Hake sure that the write protect seal is attached to source disk-
ette and that the write protect seal is not attached to new diskette.
.k.

(MIIP30B MK II E-65]5. Copying operation.
The following message appears while the copying operation is being performed.,---------------,
Copying 40 tracks9 Sector/Track, 2 Side(s)
Formatting while copying
Fig .165
6. Upon completing copying operation, the following display appears:
COpy another diskette (Y/N)? EillJ
Fig.166When it is necessary to make another copy diskette, press [X] and ~.If unnecessary. press [E] and ~.
7. When yOU want to continue operation by MIIP30B, press [[] [JJ lJD III andEnt
A> H30B
Fig.167The operational menu appears after the above message is displayed.

(HllP30B HK II E-66](11)Diskette Formatting.
I. A newly purchased floppy diskette must be formatted before using.Repeat the same operation as explained in steps 1"'3 in chapter (lO)COpying procedure (page E-64).When A> is already displayed on monitor. formatting operation starts fromstep 2 explained below after inserting system diskette to "drive A".
2. Enter IA> FORHAT B: Iand press IEnt I·3. Insert new diskette to "drive B" and press ~.4. Upon completing formatting, the following display appears:
Format complete
362495 bytes total disk space352495 bytes available on disk
Format another (YIN) ? !::ir:l
Fig.168
When it is necessary to format another diskette, press [I] and IEnt I.When formatt ing camp letes. press []] and Ent .
To return to opera t iana I menu. enter A> H30B and~.
~ ..".

[HlIP30B HK II E-67](12]Erasure of Data File.
lIereafter explained is the operation how to erase the unnecessary data filesaved in data diskette with other data fles.
1. Insert the system diskette to "drive A".2. Insert the data diskette in which the unnecessary data file is saved.
Hote: Hake sure that the write protect se~1 is removed from the data diskette.
3. Turn the power switch of computer to "ON".4. After the operational menu appears on the display, press @ill+\ PAUSE I
(or IBREAK I) together. The mark A> appears at the lower left corner ofdisplay.
HIIP30B HK2 Operational Henu
Halt =1' 1!lssembl ing =1' 2Data list =1' 3Data input =1' 4Step mode =1' 5Part'l ass'y=1' 6Diagnostic =1' 7Data renew =1' 81I0ming =1' 9
Press desired function key 7
~A>~ .
l'ig.169
5. Change the designation of drive from Ato B.Enter~ after A> and press ~. The display changes as follows:
A> 13:13>
Fig. 170
-r,•• ,
."

[MIlP30B MKII E-68]6. Enter [Q] OJ [[J after the mark 13> and press [}ill.
The list of data file saved in data diskette is shown as below:
13> DIR
Volume in drive Bhas no labelDirectory of B:¥
11111111
OAT 23791 12-30-85OAT 65 6-12-87OAT 219407 1-01-80
12:00p12:07a12:15a
ABC OAT 850 1-01-80 12:31a
16 File(s) 33792 byte free
Fig.171
7. Example:If you want to erase data file"~after 13>.
ABC-OAT ", enter I1ill1JI[[]The data file "ABC-OAT" is erased.
8. Repeat the same operation as explained above for the files to be erased.
9. After the erasure of unnecessary data file completes. enter [Q][!J[[J .[}ill. The list of data file is displayed again.Confirm that the unnecessary data files are erased without fail.
10. Upon completion of erasing operation. change the designation of driveto " drive A " from" drive B ".Enter~ after mark 13> and press [}ill
B>A:
Fig.l72
........ ,.k.

• j
UlllP3013 11K II E-69]11. Confirm that the designation of drive is changed to A>.
B>A:A>
Fig.173
12. If the operation is continued by I1IlP30B, enter I1130BI after the mark A>.
BFig.174
The operational menu will appear .

[MIIP30B MK II E-70J(13)Diagnostic.~
In this mode, sensor function and input/output signals can be checked.
MIIP30B HK2 Operational Menu
lIa It = fi' 1I\ssemb ling = fi' 2Da ta lis t == fi' 3Data input =fi' 4Step mode == fi' 5Part I I ass' Y = fi' 6Diagnostic =fi' 7Data renew = fi' 8Homing =fi' 9
Press desired function key?
fi'ig.175
1. Selection of mode.Press function key ~. and the diagnostic mode can be obtained.
2. Head number.
Ilead No. pIease ?
fi'ig.176Enter the head number for which the diagnostic operation is performed andpress [}ill.
3. Diagnostic menu.
Sensor Check = 1I/O Port Check = 2Return to Menu == 3
fi'ig.177(l)To check the sensor function and the sucking function, press II] and
[}ill. The display goes to fi'ig.178 in step 4.(2)To check the input/output signals, enter [}] and [}ill. The display
goes to rig.18B in step 6.(3)To return to Operational Menu, enter [}] and ~.

[HIIP30B HK II E-7l]4. Sensor Check.
Sensor Check
Vaccum(l) =0, Vaccum(2)=1, Eye=2 ?
l"ig.178(OTo check the vaccum sensor attached to suction head which is used for
the larg part (ex. 2125), enter [Q] and I};l].The display changes to l"ig.179 in step 5-a.
(2)To check the vaccum sensor attached to suction head which is used forsmall part(ex. 1608), enter [I] and ~.The display changes to l"ig.179 in step 5-a.
(3)To check eye sensor, enter []] and ~. The display changes to Fig.184 in step 5-b.
5-a. Suction head.
Sensor Check
Vaccum(l) =0, Vaccum(2)=1, Eye=2 ?
o
Vaccum(1) not sensed
Press (E) to return to Diagnostic Henu
I" ig.179(1)When a part is not picked up by the suction head, the above message
appears.(2) In case that the part is not picked up by the suction head and the
display shows following message, the vaccum sensor is not sensedcorrectly.
Sensor Check
Vaccum(1) Sensed OK
I" ig .180This message appears when the head bit is contaminated with cream solder or cement and when the sensitivity is not adjusted correctly.Clean bit and adjust the sensitivity again.

nHlP30B HK If E-72](3)Attach the part to suction bit by hand or tweezers. If the message
shown in Pig.180 appears, the sensor is in normal condition.(4)Upon completing check, press ~ and the display returns to Diagnostic
Menu.
Vacculll Sensor(2)(for 1508)
D
Adjust the sensitivity with driver
Pig.181
5-b. Eye sensor check.(l)Move the light of eye sensor
onto the pattern of board.How to move the head.(a)Press emergency stop button(l).(b) Have the head by hand to the
eye sensor set mark, and setlight position inside or outside of the mark.
(c) When checking operation completes, release the emergencystop button and press motorlock button (2) .
(2)
;~]I~ • 1.I. IJ~ .
e)A~ ~ .
Pig .182
for checking eye sensor.
Sensor Check
Vaccum (l) = O. Vaccum (2) = 1, Eye = 2 ? []]
Eye sensed OK
l'ig.183

[HIIP3011 HK II E-73](3Hlhen eye sensor light is in"{:he set mark, the display shown in Fig.183
appears.(4)When eye sensor light is out of the set mark, the following display
appears:
Sensor Check
Eye not sensed
Fig.184Eye-sensor adjusting knob
Fig.185(5)When the displays shown above do not appear, re-adJustment of eye
sensor sensitivity is necessary.(6)When re-adjustment is Impossible, the eye sensor has some trouble.
Upon completion of checking operation, press [[] and the display returnsto Diagnostic Menu.
5. Input/Output signal check.
InputOutputMenu
=1=2=3 ?
Fig.185(l)When checking input signal, press OJ and ~. The display goes to
Fig.186 in step 6-a.(2)\.lhen checking output signal, press [I) and ~.The display goes to
FIg.192 in step 7.(3)To return to Diagnostic Menu, press lJJ and ~.
5-n.Checking item of input signals.
Input Port" (0 - 7=1, 8 - 15=2) ?
Enter [[] to return to Henu.
Fig .186

[HilP30B HK II E-74J• <
Check i ng Item' .
Conlenl of checking ResultCode 110. Bil.lIo.0 PCB selling "0" is shown when PCB is set
IV 1 Bit down sensor 15mm HO" is shown when in down position2 Bit changer locking UOH is shown when locked.
I 3 Z-axis home sensor 110" is shown when plate is out of slit4 Bit changer up/down "0" is shown when in down position
'--N5 Sequencer busy 110 11 is shown when busy
6 Suction sensor (1) "0 11 is shown when sucked.7 X.Y-axes home sensor "0" is shown when plate is out of sl it.
IJ 0 Positoiner Sensor 110" is shown wwhen closed.A/I Bit UP sensor 15mm IlOH is shown when in UP position
2 Eye sensor "0" is shown when reflected.2 3 RE-STIIRT
j\/4 Pos i ti oner home sensor I "0" is shown when plale is in sl it.5() Suction sensor (2) "0" is shown when sucked.7 Emergency stop "0" is shown when machine is runningFig.187
1I0te: Code number means the code to selecl the checking items.Bit number means the number of bit which shows checking result.
(l)Select and enter [I] or ~ from above code number and press ~.(2)To return to Oi agnost ic Henu. press [I].(3)Status of input signals is shown as below.
Input Port II (0 - 7=1, 8 - 15=2) ?
II S B ,J.; "',J~ ,J.;,J, 4 ..... ,J;'f'''r ....... '1'''r'1"''l'''T' L S B
Press any key to return to Menu.
Fig.188
HS B7 () 543 2 1 0 Bit Code No.
I \ \ I I I I I I L S B No. I
I 0 PCB setting1 Bit down sensor 15mm2 Bit changer locking3 Z-axis home sensor4 Bit changer up/down5 Sequencer busy6 Suction sensor(l)7 X,V-axes home sensorPig .189
',.
I'

I I I I I I I I I L S B 110. 2
I 0 Positioner Senser1 Bit up sensor 15mm2 Eye sensor3 RE-START4 Positioner home sensor5 Sequencer busy6 Suction sensor(2)7 Emergency stop
HS n7 6 5 4 3 2 1 0 nit
Fig.100
Code 110.
nll!P30B HK II E-75]
,~' :
(4)For instance, if you select [IJ and~ . the following displayappears:
Input Port II (0 - 7=1. 8 - 15=2) ?
H S n 11111110 L S n
Press any key to return to Henu.
Fig.191
The binary data shows the status signal in each INPUT PORT.Refer Figs.187 and 189. then the status of each checking item can beknown.
(5)Press ISPliCE Ikey to return to Fig.186 in step 6-a.
7. Output signal check.
Output Port II ( 0-15) ?
Enter E to return to Henu
Fig .192Enter the operational number according to the item to be checked as ~hown
on Output Port List on next page. Machine starts to perform operation designated.Function of each item can be checked.



~ H P :3 0 B - ~ K II
OPERT ING ~ANUAL
(Part 2, Maintenance)
MDe M c 0., Ltd.4-28 Honcho 2 chome Higashimurayama-shi Tokyo 189, JapanTel. No. : 0423 (91) 2111, 2112, 2113, 2115FAX: 0423 (94) 8767

You have just made a very important purchase, your new super hand HHP30B-HKII.
The M D C comapny hopes that the super hand HHP30B-MKII will be the bestpurchase you have ever made. The model HHP30B-HKII automatic chip mountercombines latest design features with the high quality engineering that has beenaccumulated for more than a decade.It can mount a part, from small chip to large QFP, and also various packages.
If this is your first machine, you may find that it is very different from other
machines you may have been using. Even if it is your second or third machine,
you will find that it has many new features you will want to be familiar withbefore you use them.
Notes to Users
This manual presents the basic concepts of the MDC superhand HHP30B-HKII.
It contains instruction for the installation, the operation, and the maintenanceof HHP30B-HKII to guide the operater in the use of it's facilities.Before operating this system, you should first thoroughly read this manual,
and would understand how to operate it.
Spare parts should be ordered through our agent.
Please consult our agent, or contact SHD division in our cffice, for futherinformtion :
M D C co., LTD.
4-28 2-CHOHE, HON-CHO, HIGASHIHURAYAHA-SHITOKYO, JAPAN. 189PHONE 0423-91-2111 FAX 0423-94-8767

-Mechinery-
1 . Specifications
2. Optional Feeders and parts
3. Figures
4. Installation
5. Packing List
6. Specifications of Parts and Operations
PAGE1
2
3
5
6
7
6- 1. Loader 76- 2. Head Assembly 116- 3. Patrol light in case of emergency stop 136- 4. Filter Regurator 146- 5. Bit Exchanger 156- 6. Manual Operating Panel and Remote Controlling Box 166- 7. Switch Panel 176- 8. Tape Feeder 186- 9. Vibratory Feeder (Option) 236-10. Horizontal Stick Feeder (Option) 276-11. Camera 30
7. Inspection and Maintenance 37
8. Trouble shooting on chip mounting ------------------ 50
9. Electrical Circuit Diagrams for MHP30B-MKII
1 O. Air Tube Diagrams
60
65
1 1 . Parts List and Parts Drawings ------------------------ 68
11 -1. Loader11-2. Head Assembly11-3. Cassette Tape Feeder11-4. Cassette Tape Base11-5. Vibratory Feeder11-6. Horizontal Stick Feeder
6972
82858890

1 . Specifications
1. Main body
(1) SizeDepth
VidthHeight
Veight
(2) P.C.B. height on runing(3) P.C.B. Waiting station
(4) Bit exchanger
(5) P.C.B. dimension
900mm
1550mm (2125mrn including ext. Loader)1350mm (apporox.)
300Kg (apporox.)
900mm ±20Detachable on relocation
4 types (Each one at each station)
Min. 50mmx 50mm t=2Max.Max. 250mrnx330mm t=2Hax.
Thickness 2.0mm Max.
2. Pick and Place
(1) Motion space X : 340mm
Y : 624mm(2) Dri ve system X-axis Single motor (5 Phase stepping motor)
Y-axis : Dual motor (5 Phase stepping motor)(3) Hin pulse operating
speed 0.025mmlpulse(4) X,Yaxis Guided by ball bearing(5) Clearlance (X-axis) 130mm(6) Acting time 7200 parts/hour (Standard small chip)(7) Hounting accuracy ±O .15mm, ±1.0°
3. Head (Digital type)
(1) Up-down traverse 15mm+5mm (Two steps in vertical)(2) Sensory control for rerification run(3) Positioner variable angular-aperture mechanism(4) Theta angulor resolution 0.2°/step
(5) Three heads equipped as standard at each mounting station
(6) Dispenser temperature controlling mechanism (Controller at option)
(7) Camera with position reader (One set equipped as standard)
,-1-;

4. Loader (Conveyor)
(1) Loading system(2) P.C.Board size(3) Movement
(4) Width adjust(5) Board he ight
(6) Board back up system:(7) Board registration
(8) Board feeding speed
Belt system (Belt width under P.C.B. 2rnm)Min. 50mm~Max. 250mrnLeft to right (as standard)Manua lly
143mm from main frame surfaceEquipped
Edge or guide pin
4 second
5. Controller16 Bit (in English)
2. Optional feeders and applicable
Part Feeder Package Optionat a station
P
o
IQ F pi Fs Automat ic tray feeder -j Or id tray 1 1(back only)
x t
e i
P Lee d 0 PLCC feeder Tube/Stick 2
n
e
r
1-1 Taping'-----------
IHorizontal stick feeder HTube/Stick 1-1'---__5__-'
P
CHI P d
o
IS 0 I Cf-Hse i
a t ITape feeder
o
n -j Vibratory feeder
e
1-1 Bulk part 1-1~_2 __
r

IWI
'0'>-or--:;:0
0.+10""0'>"1'
~
'C::j.....I7Q
J--'
43016.92'
::
2125. 83.66"
1204.T2l..--.J.
I, I
155061.02'
702.76
_..--.,
\
, ',,,,,
r 1003B4
N
o
wW
I
-- 'C::j.....I7QC"1(Drn

ACRYLIC COVER3-2.
FILTER REGULATOR
CAMERA CONTOROL UNIT
Fig 2
PATROL LIGHT
SWITCH PANEL
TAPE FEEDER
HANUAL OPERATING PANEL
REHORT CONTROLLING BOX
KEY BOARD
MAIN BODY

4. InstllationThe main body must be placed on a hard, level place with the anchor bolts.
One the installation, you shall prepare for as follow:1. Power supply 100V 880VA
3 codesPulg with a ground
Fig 3Behavior of a plug
The main body and the controller must be placed on the ground.
2. PneumaticsPneumatics in the air tubes of the machine shall be kept 5.5kg/cm 2
at a minimum. A minimum of pneumatics at the inlet of the tube shall
NOT be less than 5.5kg/cm 2•
Dry air is ONLY available in the machine.Dust and powder in the air may cause the mulfunction of the machine.
There are 3m of a air tube 81> in diameter equipped with the machine,but is NOT a quick joint at the end of the tube. It is because the
setting condition at a factory is different from each other.
A atandard model of the KOGANEI quick joint 81> in diameter should
be recommended.When nessesary to connect to the longer distance than the standard,
a tube of the same diameter as such is good for the operation, butthe narrower than standard is NOT suitable .
.-5:

5. Packing 1ist
On shipping, we packed the following goods
1. A main body and feeders
2. A controller
3. Spared parts
4. Aset of tools
A display
A keYboard
A I/O card
Interconnecting cables
5. Oil : Nihon Sekiyu
6. A manual
Hi-white »70 5cc
,-6:

6. Specifications
6-1. Loader (Conveyor)
1. The loader consists of main belt and sub belt near the opening of the
main body, having a P.C.board stopper, a back-up mechanism, a push
mechanism, and sensor at each three stations.
2. Specification
1) Movement2) P.C. Board size
3) Board registration
4) Space under the board
5) Clearance between loader
and board6) Board height
7) Board feeding speed
Left to right (as standard) Belt systemMin. 50x50mm ~ 250x330mm
(width adjust Manually)
Edge or guide pin type
30mm
7mm (lower)
3mm (upper)
143mm from main frame surface
4 second
3. Operating principle
The board is backed up by a board-shaped supporter and pushed at the side
to the fixed guide rail on the first sensor by the variable guide rail,being fixed not to play.
After finishing mounting, the board is sent to the next station with the
board stopper turned down. As the second sensor make sure the board to
pass, the stopper returns status quo ante which is uP.
4. AdjustmentAdjust the width of the guide rails on the loader by loosening the handle
at each station under the loarder (see figure) in accordance with the
width of the board.
The range of side play can be accepted within O.5mm~O.lmm.
Be sure the board to be loaded stably and not to deviate from the belt.
After finishing the adjustment, fasten the handle tightly.Confirm to set the board stably at a right angle against the line.

. BELT(2)
CHAIN
VLOCK LEVER
8
IIANDL, ADJUSTABL
BELT(3)
~I
PUSH HECHA.
BELT(I)
HOlDR~ ·Z·
REAR SIDE'
HIIP 30B-HK IIP.C.B. CONVEYOR
M Deco., LTD.

(1) Width aJust
.C~j
D~liSitl~~mmr=:=:=.-'__ -----.~ -'--~ LOOK LEVER Fig 4
Each of the handle is set at each station nuder the loader viewed
from the rear side of the main body, and adjust the width of the
loader .
After setting, the handle should be fastened tightly.
(2) Adjustment of the push mechanismThe push mechanism is the on which two pushers slides the variable
guide rail to push the board to the fixed guide rail so the board
does not play on the loader.
Vary the space between the two pushers in accordance with the length
of the P.C.B (the print circuit board).Control the board loading speed in your disposal by using the speedcontroller.
Turning the speed controller in the clockwise direction will make
the acting speed faster,
Fig 5

(3) Adjustment of the sensitivity of the photo-sensor
The sensor is on green, when the P.C.board on the loader is over it.Poor reflexing on the surface of the board makes it's sensitivitylower.Turn the knob (A) of the controller from HIN(low) to HAX(high) to
light green, in accordance with the behavior of the board.(see Fig 6)
(4) Adjustment of the up-and-down action of the board stopper
Turning the knob (B) of the speed controller. which locates upperthe cylinder on the loader, in the clockwise direction can make the
acting speed faster. on the other hand turning the knob (C) of the
speed controller in the clockwis~ direction slower.(see Fig 6)
(5) The back-up mechanismTurning the knob (D) of the speed controller. which locates upper
the cylinder on the loader, in the clockwise direction can make the
acting speed faster. on the other hand turning the knob (E) of the
speed controller in the clockwise direction slower. Adjust each two
board-shaped supporters simultaneously to raise up.
(see Fig 6)
Note The air cylinders of board stopper and back-up mechanism work duallY.
The acting speed is controlled by air escapement from a air cylinder.
(1)
AIR COHTROL C
(2) BOARD STOPPER (3) BACK UP HECHANISM
..' .... '
Fig 6

6-2. Head assembly
The HHP30B-HKlI is standardly equipped with 3 digital heads.
A pick-up bit is a component of the head assembly and have turningfunction which is operated at each O.lo/step, and is selected its turning
in both clockwise and counter-clockwise direction with the small stepping
motor.
1. Specifications1) Size 90mmx60mmx230mm2) Voltage DC24V
3) Pneumatics 5"-'6Kg/cm2 (dry air)
4) Theta resolution 0.1°
5) Turning 0"-'360°
6) Up-down traverse of bit 5mm
7) Up-down traverse of head 13mm8) Anglular aperture 15mm or 30mm (max imum)
2. Operating principle
The head assembly has a pick -up bit at its end.
The bit is autmaticaly eachanged for other type by the command of the
contro 11 er .When center of a part holded by the two jaws, and registers the position
at O.lo/step by the force of the stepping motor. At the same time, the eye
sensor can read the set mark of the board to set the correct position and
also do the had mark not to mount the bad-marked board.
3. AdjustmentBefore operating the system, be sure the condition of the following parts
1) The connecter of the motor to complete.
2) A bit of the head assembly without any pausing on exchange.
-11-;

Fig 7
STEPPING BaTOR
EYE SENSOR
-12-
(POSITIONER)
AIR TUBE
PIIOTO SENSOR/ (RIGHT LEFT TURNING)
PII01D SENSOR/ (UP AND DOWN)
PICK UP BIT
POSITIONER
AIR CONTROL
HHP 30B-HK II DEGITAL HEAD
M Deco. f LTD.

6-3. Emergency stop switch and patrol light
1. When some trouble occurs while the machine is mounting. press the
emergency stop switch. And all operations will stoP. After clearing thetrouble. release the emergency stop switch (turn the switch knob
counterclockwise) and press the motor lock button.
2. The patrol light will flicker to announce the occurence of some trouble.
in the case of the previous emergency or the machine stopped due tomissing picking-up or some other happenings.
-13~

6-4. Filter regulator
A filter regulator is the nuit to remove impurities in the compressed air
such as dust. moisture. oil. carbon which cause almost all troubles in acompressor.
The meter on the compressor indicates the suitable condition of pneumatics.
The diminishing pressure
Turn the handle upper the regulator to obtain the assigned pressure.(5.5Kg/cm 2 ) •
Sink the handle into regulator to lock
Turn the handle clockwise
and counter-clockwise
to increse the secondary pressure.
to decrease it.
Turn the draincock at the bottom of the regulator to remove the water andoil. dirt. dust. or some other things which will mix into the drain.
Operating principle and names of parts
TIle operating principle of the filter regulator and names of parts are
shown below.
Fig 8
Filter element

6-5. Bit exchanger
The bi t exchanger can select automatically 4 types of it's bit', satisfyingthe requirement of tasks.It arranges multiple tasks in bulk, tape reel, stick, grid tray and otherpackage formats.
1. Adjustment and servicing
(1) Up-and-down speed controlling
Control the piston movement of a cylinder through pneumatics by aspeed controller.
(2) Height adjustment
Reset the improper height by loosening the nut fixed at the cylinderwhen exchanging the bit.
(3) Cleaning the lock system of the bit exchangerClean the slider with a cloth soaked with a alcohol, and coat it
in the HIGH WIIITE 1170 (refined by Nippon Oil Co., LTD.)
LOCK MECHANISM
CYLINDER forUP/DOWN ACTION
SLIDER(see 5-1-3)
SENSOR for UP/DOWN

6-6. Manual operating panel and remote controlling box
Operating panel
"LOADER PASS"Fig 10
Manual operating panel
Remote controlling box
To press 1 has a board in the first station
moved.to the scond,
press 2 has one in the second to the third,
and then to press 3 has one in the third out.
"RESTART"
This button has the machine start~d again
which stopped when a bit missing picking-up ....f~V""/vCl" J t~~ --
()
"MOTOR LOCK"
This button has the machine started at first,or again after the emergency stop switch isreleased.
"TEACHING"
is connected with the remote controlling box.
"HOT 1,2,3"
Adjust the temperature governor on thedispenser
-16-·
Remote controller box
~ has Y-axis moves toward (+ ) direction
~ has Y-axis moves toward (- ) direction
ITa has X-axis moves toward (+ ) direction
..'... '
@] has X-axis moves toward (- ) direction
®.
DOWN
FAST
makes the bit in the D mode.
makes the head faster as pressing
sirnaltaneously the cursor I~I

6-7. Switch panel
INTEGRATING HOUR METER BREAKER
) ~I" /
lOADER VIS / \
/ CD ED'
~ 00
~~~ ~ [Q I I~0
I ®j@I
1/ I I I "-
~II for LOADER SWITCH for FEEDER 7MIH SWIm
Fig 11
lhis is the front view of the electrical unit.
BrakerHain switchHour meterVIBLoader
Breaks all sourses of electricity on overload I. C (
Activates the main bodyIndicates the time integrated since the switch was on (Activates the vibratory feederHoves the loader in each station
..'...'
-1'7-
/

6-8. Tape feeder
General description
The device feeder automaticallY a reel of two-layer tape on which chip areset each in the grooves at intervals of 8mm or 12mm between the upper tape
and the lower tape, and winds the upper sending the lower out.
There are 12 tape sassettes equipped with a device, and each cassette canrc
be easily ejected 'from the slot at the top of the shaft to be eachanged rc1)X .
tape reel for another
It permits also setting in 25rnm pitch.
The 8mm and 12mm tape cassettes can be (Ilse;LmixedlY.
~ Tape feeder base
Tape cassette
Fig 12
..'...:

1. Tape feeder cassette
(1) SpecificationTape reelTota 1 unmber of the lane:
Corresponding to EIAJ RC100912 lanes/unit applicable to 30B. 60B30B-HK 11
Tape pitch
Overall dimensions
4m or 8mm310(L)x250(W)x210(lI) (8 lanes)310 (L) x330 (W) x21 0(H) (12 1anes)
The device feeds a tape at regular intervals. reading signals thatexecute the instruction issued by the command of the centralprocessing unit built-in the to select the tape.
Note: A8mm-size tape cassette is NOT apllied to a 12mm pitch tapereel. and a 12mm-size tape cassette is NOT apllied to a 8mmpitch tape ree 1.
SPRING PULLING LEVERFig 13
TAPE REEL
. USED LOWER TAPE
SETTING SLOT
UPPER TAPE,----
PICK UP POINT
RATCHET
UPPER TAPE TAKE UP HACHANISH·

(2) Explanation of operation
Fig 14
a. A cylinder pushes a feeding lever uP.
b. The cylinder. just as reaching the TDC(Top Dead Centre). is pulleddown to the BDC(Bottom Dead Centre) by the force of the spring.
c. While the spring pulling down the cylinder. a two-layer tape is fed one
step and simultaneouslY its upper tape is being stripped by the upper
tape take-up mechanism.
d. When the pawl makes the ratchet wheel stop by one step. a bit £f the
chip head lowers and picks UP a part on the lower tape at this stopping
point by suction pressure.

2. Tape feeder base
TAPE CASSElTE POSITION ING SHAFT PITCH rEEDING SYLINDER
CONNECTER
fig 15
SLIDE BASE
BASE SHAFT
ELECTRO-MAGNETIC VALVE
AIR CONTROLLER for CYLINDER I
(1) Setting up a cassette on the tape feeder base
This tape feeder base is designed to be slidable.
At first, set a tape on a cassette drawn out from a slot of the
shaft on the base.
And then slide it base, inserting into the fixture on the b~se.
Note : Be sure to lock the cassette tightly.
The poor insertion of the cassette may result in missing
picking UP a part, or breaking a bit of the chip head.

(2) Speed controlling
Adjust a speed controller so the reel works at requiared speed to feeda part. The stroke of it's cylinder can be controlled by air flow ratethrough a valve of the controller in front of the electromagnetic valve.After finishing adjusting the speed. set the locknut completely.The cylinder's upward acting speed depends on the amount of the air flowrate. on the hand its lowering speed is adjusted by air escapement fromit. which is called the meter-out mechanism.
LREGURATEDBLOWOFF
Turning the valve of the controllerclockwise makes the flow rate decreased.
counter-clockwise increased.
ESCAPEMENT Fig 16
(3) Height adjusterFailing to keep theheight according to
proper distanse for picking-up action. adjust thethe following procedure:
Fig 17
I, ' SET SCREW
ADJUSTING SCREW
kS'·~'~T~·
'~ =c~.-------
ADJUSTING LOCKNUT
make the base higher.
lower.
a. Loosen the adjusting locknut.
b. Loosen the set screw.c. Adjust the adjusting screw for height.
Turning it clockwisecounter- clockwise
d. Tighten the set screw. after finishing adjusting.e. Set the adjusting locknut.
Note : All three screws MUST NOT be loosened at a time to keep the baselevel. Above procedure should be done one by one, or otherwise
the base will be on a slant.

6-9. Vibratry feeder (Option)
1. General descriptionEach one the 12 rails of the every vibratory feeder feeds parts providedthrough the hopper, by the action of vibrating itself.
Every hopper and every rail can be disassembled and combined with the
various size of the other to meet that of a part.
2. SpecificationsMax. part typeQuantity of a part
storage
Notes : The quantity
Power supply
Ovarall dimension
Weight
Feeding method
Up to 12 different types at a time(Model 2125) Max. 500 pcs
(Model 3216) Max. 300 pcs(Model 1/8w) Max. 300 pcs
(Model 1/4w) Max. 100 pcsdepends on the part size, especially its thickness.
ACI00V/50Hz-unit, or 60Hz-nuit (choice)
300(L) x140 (W)x175(H)
3.5Kg
Of vibration (on the rail),
of blowoff (in the hopper)
3. Rail modelIts model depends on the part thickness.
3 models of a rail are standardlY prepared.
Part Model Thickness Color
Square chip 2125 0.5 Si Iver!! 3216, 2125 0.7 BlackII 3216, 2125 1.0 Blue!! 3216, 2125 1.3 Orenge
Cy 1indr ica I chip 1/4V, 1/8\!! Green
tCAUSION-Any other optinal model of rails MUST be specified for any otherpart than the above.Mismatching rail with part may result in failing to feed part, for
instance its jumping- out, jamming, or setting.

"rj....... oq
-24-

5. Description and working procedure of the hopper
OPENING
OPENING ~I~ .-~~
POOL
AIR HOLE
PART LANDING POINT
'VENTILATION FLUE
~
Fig 19
Working procedurea. Put a part into the hopper from the opening.
(see the item of the specification in terms of its maximum
quantity of a part storage in the hopper)
b. The part in the pool is sent UP to the entry of the rail by air
flow blowing off at regular intervals from the air hole.
c. The part drops into the rail from its entry, and is aligned on thechip rail under the action of vibration.
d. The part failed to put in good order on it is dropped out to the
pool by the selection bar at the rail.
TIle air flow rate can be controlled by the (speed) controller.
Turning the controller clockwise makess the flow rate decreased.
counter-clockwise does·
-25~
it increased.

6. Adjustment
The vibrator plays a very impotant role in feeding parts to the outlet of
the rail, so adjust for amplitude so that parts may not stand up or dropout at the outlet.
Fig 20
SHEET SPRING for VIBRATION
VIBRATORADJUSTING LEVER
Adjust the distance between shoe and the vibrator with the lever to changethe tate of the vibration.
7. Caution
a. Be sure whether the part suits the rail, when you put the part into thehopper.
b. Take any other unrequired part than will be fed out of the rail or the
hopper, or both.
c. DO NOT remove rails and hoppers which are not engaged in feeding.
The removal of rail and hopper may cause the change in frequency.
d. DO NOT loosen the screw fixed plate spring on the vibrator to keep
frequency or height of the rail.
8. Height adjustment
Adjust the screw for height, if necessarry.
Fig 21
~ ADJUSTING SCREW
LOCKNUT
After finishing adjusting, tighten the locknut.

6-10. Horizontal stick feeder (Option)
1. General descriptionThe divice autmatically feeds a IC (SOIC) packed in the stick. and dropsout the used one.
2. Caution• Use OIlLY the assigned stick and part.
(Each maker has its own behavior of a stick and part.)• DO HOT use the part with bent pins. (or leads)
3. Part discription
FIXED 'SLOT
~STICK flOLDER JSTICK DROPOUT MECHANISM
LE!.9TH ADJUSTER
STICK RETAINING MECHANISM &SYlCK fALLOUTHEC~~
Fig 22 I PLUG
-27-.
STICK
, STICK BLOCK COVER
~

4. Specification
HumberPower supplyOvarall dimensionsPart type
5 sticks (Standard)
24V
600 (L) x50 (W) x900 (II)
SOIC (8Pin-16Pin)
5. Operating procedure
a. Be sure that the line is plugged in the service power outlet, and that
the air tube is connected with in the air intake.b. Set the stick to the stick holder.
(Check the IC for oriention in the stick.)
c. Press the power switch on the rear side of the machine.
When everything is turned on, belts start in motion, and each part is
set in each pickup position of each device.A sensor is built-in each pickup position of each device.
When some IC is in the stick the baIt stops in motion.
When any UC is NOT in the stick ---- the baIt starts in motion.d. As a IC is took out of the pickup position, a belt starts in action,
and next IC is set there.
e. The head keeps picking up a IC in the stick to the last.
When the sensor finds the stick empty, the first stick is dropped out
and then the next is set.
When some IC is under the sensor --- the stick is NOT exchanged.
When some IC is NOT under the sensor --- the stick is exchanged.(with pausing few minutes)
f. When the sensor finds the stick empty, the cylinder starts in motion,and the shoe A and the shoe B holds the rest of the stick.
g. At the same time, the driver plate disengages the first empty stick.
Fig 23
ACTUATES with CYLlIlDER
~ DRIVER PLATE.,,//'-,/ "-28 ...

h. As the empty stick drops. the driver plate return status quo ante and
simultaneously the shoes keep the rest bf the sticks off. and complete
to prepare for feeding a part.
All operation will stop when the electoric current go off. for instance.in case of the electricity failure. Yhen the power supplying again and
the main switch is still on. the operation will start from 3 of
" operating procedure".
Notes 1. MUST put the block (prevention from excessive play) on the stick in
the stick holder. after setting.Notes 2. DO NOT use any les with bent pins which may result in the jam of
feeder.
6. Adjustment
The change of the type of the part may require the adjustment.
a. Adjuster on the magazine
Fig 24
Loosen the adjusting screw. and adjust the length to match that of
the stick. After adjustment. tighten the screw firmly.
b. Adjuster on the pickup point
Fig 25
Lengthwise adjuster
adjuster

6-11. Camera to read a position on the coordinates
1. General description
Installing this camera on our chip placer, data input procedure becomesvery easy and accurate. TIle MWV-CD camera head is very tiny and light
weight.
Its diameter is 17mm and 48mm long. And it is connected to control unit by
dedicated cable. Please read this instruction before use.
2. Harne of parts and their function
2-a. Camera head
Fig 26
Hanual Iris ring Focus Lock
Adjust exposure~ r--- Rotating this ring to
level ..JL 1.._.._ arrow direction. the
rl_=]\~]==05S ring is locked.
Adjust focus Jby this ring -------'---
Focus ring
Factory adjustment of
camera distance from PCB
is made as Fig 2.(minimum distance is 20mm)
~)~L·25
r~inP. I11111
I
±5mm
PCB Fig 27

2-b. Camera contral unit
- Front -
Wh ite ba lance se lector sw itch -----,(ATW, MANU, AWe)
lloma lly set to ATW andcolor temperature change is
automatically corrected.
.. 1<...... 111,"
AGC selector switch(SENS UP, ON, OFF)If the illumination isenoubh, turn it off
normally .
Ha ins lamp P£JEJ~
L."~+'II.' \-l-~'Mains switch . - .
(Power ON, OFF)
White balance trimmer( R, B )
When white balance selector
switch is set to HANU, it is
adjustable by these trimmers.
- Rear
Ext. Sync
Video Out
CD12VSupplied from machine
Do not connect other
power supply.
Camera connector
Connect cable from camera.
Auto white set switch(Push to SET)When white balance
selector switch is set
to AWe, push this button
to set.
Sub carrierPhase adj trimmer.
Sub carrierPhase a.qj. sw.
(1,2,3,4)
Horizontal phase
adjust trimmer.

3. Connection with chip placer and controller
Make sure that your equipments are connected corTectly.
3-a. Color monitor
Color monitor
/ECM85~IK II /HHP30B-HK IIcontroller connected with ECH8300/ECM8500
1([\(1 IN
'fcyN llJL~--I Til (.f)"'IRoL.
[-- -----
TV Monitor
v I I)EO 11-1
---0
Camera/
,,I
WV-CDI
rv II) tD our-0
tl::'~; ~ClHH k'11
Camera control unit---C:IL:I
Contro ller------------
f
f--------------,--:-------, ,-----,
/f
____L _\. 'y ~1
col.oR
bf 'If IJ\I, c. ~ Tl)/Jil ,-olr
o 0
'-----IjTV (e"l fl.o!.
C)
;' ..
Chip placer
DCIZ V
c-::.Ic:r------ I----
l=:I
( I I:=J c=:J
(set controller system switch
as belowSet DIGITAL/ANALOGswitch to analog
~2 3
ANALOG DIGITAL
o x

3-b. Mono chrome monitor
Mono chrome monitor controller connected with ECH8300/ECM8500
IECM85MKII/MPH30B-MKII.
/. S- C. - 2. V X 2
TV Monitor
-oVllJ£:O IN
".--I-OVIDT::O oUT Vlt>EO oVI
U'lilllJ11 lJJ1j U
I CameraI
/I
bc.12 vr-:J en" r /vl
I
Camera control unitWV-CIJI
Chip placer
-0 ~rr-J
~O~i12£
~- --1-------'
'------
-0
lvcoi/<oLa
--,.-
1.5 c. - zv
Controller
tJlfrlTllL •(\NI1 LO lr
=1.9 ~?I~r::,
CoLnR iern
'-'----I
>:DIGITAL/ANALOGswitch to analog
[
Mil P 3 0 IJ - M I<. Ii
Set controller system switch
as below
[C=II~IC)I~I1 2 3 1
ANALOG
oDIG ITAL
x --33-

3-c. Mono chrome monitor
Mono chrome monitor
IHHP30BMK II
3C-2V
..TV Monitor
V 11)1::.0 ,,,'f-........_ ------D
connected wi th ECH8300/ECM8500/ECM85MK U
Vl'~o.ollr ..r----I--·O
LJ·
ac,-'2.V
u. \~Vm~50,.nr-BG1 =tOCf-0 U
. ()be11V. c:Y>N\Ii fUC>.,
I\tU .
d... !l
5)<.
.'
bunit
11111In11iU! ,~
Camera
Controller
ChlP placer
MllP30B-MKH

4. Operating procedure
Be sure the following procedure as below, inputting the mounting data
using camera in tasks teaching method
a. Put the pick-up point deta in the main storage of the CPU, monitering
on the screen, and also put the mounting position deta in it.
b. To register a coordinates position in the main storage, push the Q-key
on the control unit.
c. Confirm the actual part center by using the function-key F5, the way
which the actual center on the screen is superposed on the inputcoordinates position on the monitor screen.
5. Caution
a. DO NOT open the cover of the camera control unit. This may result in
an electric shock or some other accidents.b. DO NOT give a camera or a control unit to a heavy shock or a strong
vibration. This may result in the failure of their actions.
c. DO NOT turn the camera eye toword excessively intense light.
The intensity of light such as a spotlight may result in blooming
or smear on the monitor screen.
d. Also intense light may have the screen emerged vertical stripes,but it is not the fault.
e. DO put "OFF" the main swich, when plug IN/OUT the interconnecting
cable of the camara at the connecter on the control nuit.
f. When cleaning the camera body, DO out OFF the main swich, and wipe
the camera body with a dry cloth. And remove the tough stain from
it with a cloth soaked with synthetic detergents. DO use a sheet oflens cleaning paper (applicable to glasses or cameras) to clear the
lens of the camera.
g. DO NOT change the level of trimmers and switches, which are properly
set at the factory.

6. Installation and removal of a camera head
Befor executing the deta entry, install the camera head to the assembly,
and after day's work, remove it from the assembly.
a. Installation of a camera
Fig 30
HEAD ASS'Y
CAMERA
SCREW
HOLDER
SET SCREW (DO leave it as it set at the factory)
The screw fixes a camera head to the head assembly.During the installation and the removal, DO only by finger tips, but
DO NOT by wrentch. Using the it may cause the break of the guide pins.
b. The camera head should be removed from the actuator and contained in
the holder as described in the Figure when not in use.
To aviod this procedure, the contact between the camera head and thecable may be broken when the machine starting again.
Fig 31
-36;-:-

7. Maintenance schedule
The following servicing tasks should be carried out on these units to bein top operating condition. To avoid these procedures, it may damage them.
1. Schedule of periodic servicing and cleaning
S C HDUL E
POI N T CHECKING or SERVICINGDETAIL Fig.No. INSTRUCTION DAILY WEEKLY HONTHL)
A. Chip headPositioner Jaws Wear or break 0
Link mech. Wear or break 0Cam Wear or break 0Cy I inder Air leakage 0
Pick-up Bit Fig 32 Cleaning 0Bit Wear or break 0
Bit holder Cleaning 0
Suction pressure 0Rotary Gear and rack Cleaning 0
Cy I inder Wear or seizure 0
Air leakage 0Up/Down Cy I inder Air leakage 0
B. Dispenser
headOutlet Needle and Fig 33 Cleaning 0
syringeNeedle point Wear or break 0
C. XY drive
unitXV-axis shaft Fig 34 Cleaning 0Head folder Fig 36 Wear or break 0Ti rn i ng be It Fig 37 Wear or slack 0
Fig 38
Fig 39
-37-.

POI N T CHECKING or SERVICINGDETAIL Fig.No. INSTRUCTION DAILY WEEKLY MONTHLY
D. LoaderBowl screw Fig 40 Cleaning 0
Guide shaft Cleaning 0
Loading belt Cleaning 0
Board guide Sides tension 0
Wear or break 0
Reflectingboard Cleaning 0
Cy 1inder Action 0
E.Tape Cassetefeeder
Engagement ofgears Cleaning 0
Winder Fig 41 Cleaning 0
Ratchet whee I Fig 42 Wear or break 0
Fig 43Lever Action 0
Base Cylinder head Wear or break 0Cy 1inder Air leakage 0
F. Vibratoryfeeder
Rail Cleaning 0
Outlet Wear or break 0Hopper Cleaning 0
G. Hor izonta Istick feeder
Ra i1 Cleaning 0
Shooter Fig 44 Cleaning 0Belt Cleaning,
belt wear 0
Cy 1inder Action 0
Shoe A, B Fig 45 Wear or break(rubber pad) 0

POI NT CHECKING or SERVICINGDETAIL Fig.No. INSTRUCTION DAILY WEEKLY MONTHLY
H. Bit exhan-ger
Lock Cleaning 0
I. Fixedpositioner
Jaws Wear or break 0
(~motion)H. Others
Jointer Air leakage 0
Fi 1ter Fig 46 Cleaning 0
Electromag-netic valve Action 0
Regulator Pneumatics 0

A. Chip head(1) Positioner
1) ServicingCheck the jaws, the link, and the contact of the cam for wear,or break. Change as necessary.Also, check the cylinder for air leakage.
Renew a packing rubber in the cylinder, if excessive air leakslpi'! /// (ii!
out from it.
(2) Pic-up1) Servicing
Check the mount of the bit for wear, or berak. Change as
necessary.2) Cleaning
Clean the pick-up and the bit holder with alchol or in aultrasonic cleaner. Clean if the mouth of the bit is blocked.
Fig 32BIT HOLDER
PICK-UP BIT
(3) Rotary
1) Servicing
Check the cylinder for wear.Adjust when working sluggishly, and renew as necessary.
2) CleaningClean the gear and the rack.
(4) Up/Down
1) ServicingCheck the bit for Up/Down moving.Renew a packing rebber in the cylinder, if excessive ~!r leaks
out from it.
-40-;

B. Dispenser head(1) Outlet
1) ServicingCheck the needle point for wear. or break.Renew it as necessary.
2) CleaningClean the sylinge and the needle of the dispenser head withalchol or in a ultrasonic cleacer. after day's work.
Fig 33
Also. clean the needle point with a 4>0.50 in.dia.drill if
blocked.
C. XY drive unit(1) XV-axis shaft
1) Clean ing
XAXIS SHAFT
YAXIS TIMING BELT
XAXIS TIMING BELT
Fig 34
Clean the shafts with cloth with a alcohol.
-41-,

(2) Head holder
1) Servicing
Check the play between the head holder and the shaft.2) adjustment
ADJUSTING SCREW
Fig 36
X: 400g 3mm inward
Y: 300g 3mm inward
Adjust the motor bracket
Adjust the adjusting screw so that the head holder can slide on
the shafts. The rate of sliding is required for less than 500gon belt driving.
Change the one which cannot be adjusted.
(3) Timing belt
1) Servicing
Cheack the belt for wear. Change as necessary.
Also, check the belt tension periodically.
2) Adjustment
a. Motor-belt tensionMeasure the tension of the belt at the center of a pulley,
Il~)b. X-axis belt temsion ~~ Fig 37
Measure the tension of the belt at the center of a pulley,
150g 5mm inwardAdjust the tension by tension adjusing device.
ADJUSTING-TENSION MECHANISM
Fig 38

c. Y-axis belt tensionMeasure the tension of the belt at the center of a pulley.
200g 10mm inward
Adjust the tension by tension adJusing device.
~ ,jg39
~~ - ADJUSTING-TENSION MECNANISM
D. Loader
1) Cleaninga. Wipe dirt off around the loading belt. so that something to rest
there may not cause mismounting a part.b. Wipe dirt or dust off the eye of the sensor. as it plays a
important role in sensing the light when the P.C. board passing.
Fig 40
~REAR SIDE
P.C.B. PASS SENSOR

E. Tape feeder
(1) Tape cassette
1) Serv icing
Clean UP the residue of rubber at the engagement points of gearsthrough a vaccum cleaner.
Clean the rubber ring on the winder with a cloth soaked with a
alcohol.
RUBBER RING
Fig 41
(2) Winder1) Adjustment
Tighten the spirng at the lower than the standard, or renew it,
when you cleaned with a cloth soaked with a alcohol and the the
tape reel fails to wind the tape.
Fig 42~'1l~(3) Ratchet
1) Servicing
Check the pitch lever to move without any setting.
Also, check the ratchet wheel for wear or break.Change, as necessary.
RATCHET-44-,
Fig 43

(4) Cassette base1) Servicing
Check each head of cylenders which push UP the levers for wear
or break. Change as necessary.Test the cylinders for air leakage.
2) Cleaning
Clean the shaft with a cloth soaked with a alcohol.
Clean up some dust on the base through a vacuum cleaner.
F. Vibratory feeder1) Servicing
Check each tip of the rails for wear or break.Change them not to affect the flow of the parts or the pick-upaction.
2) Cleaning
Clean the flutes of rails with a paper soaked with a alcohol, if~_ 1 .
the parts sort of hesit~te on the rail./--", --,
(j low off dirt Dr~IlIe)other residue in the hopper/by a 'air gun.f' /j ()
G. Horizontal stick feeder
1) Cleaning
Clean the shooters, in which stick willbe dropped, or the railswith a paper soaked with a alcohol.
Also, clean the loading belt.
RAIL
Fig 44
-45-.

Check the rubber pads for wear or break.Change as necessary.
II. Bit exchangerRemove dust.
Cleaning.
I. Fixed positioner
cleaning jaws.
J. Fi Iter
1) Cleaning
Clean the filter in the cap.
Fig 45
CAP
Fig 46
-46- .

2. Periodic servicing and cleaning of digital head
a. Pick-up head assembly, picks UP a part by the suction pressure of the
air-tube with it.Be careful not to stain the bit of the chop head with dirt or dust.
sa it plays a very important role in the function of the assembly.
At least clean the mouth of the bit with trichloroethylene after day's
work. or it may be blocked with paste solder. adhesive, or some other
fragments.
Also. check the bit for wear or deformation.b. Be careful not to stain the cap of the sensor with dirt or dust.
c. Clean the sliding parts so that it will move up and down smoothly.
d. Disassemble the unit into components, if necessary, following the
instructions given by the part drawings.
Adjustment of positioner jaws
1) Turn the right eccentric shaft
for opening jaws, so set them at
at a angular aperture of 15°
away frpm a perpendicular line.
and tighten a setscrew to lockthe shaft.
Adjust cam for proper
positioning on a bearing, viewed
from the rear side. when
ditermining a angular aperture
of 15° .2) Closing jaws, moving the cam
down by pneumatics.BEARING
'f:-'-.::::- J"t I
~. )~L~S_FIXED IN TOUCH
SPRING
SET SC~W /
POSITIONER Xbfr1/ II,CAMSHAFT (B) ~ .
CAH~~b I b
;W~
-47-;

VACUUM 6¢ HOSEAir supply
TOW STEP UP-DOWN TRAVERESEADJUSTING BOLT (Max. 5mm)
BIT HOLDER BDCADJUSTING NUT
(ADJUST TIlE STROKE for 15mm)CYLINDER
(INNER TUBE)Stopper
@1RESITOR THE CLEARANCE ABITAND JAW for 4.5mm
ADJUST ABIT for BDC INTHE TWO STEP ACTION
-48,-

3. Greasing
L s t
ServicingPoint Fig.No. Product da i ly Weekly Monthly
A. Chip head
Link mechanism Fig 47 Si I icone oi I 0
(Sinetsu siliconeG-40H)
B. LoaderBowl screw Fig 48 Si I icone 0 i I 0
(Sinetsu siliconeG-401l)
A. Chip headLINK MECHANISM
Grease there with silicon grease(S inetsu • G-40H)
B. LoaderBOWL SCREW
-49-;-
Note Excessive greasing may
cause trouble in working
Grease the bowl screw withsilicone grease, except
the shafts
Ji'ig48

8. Truble shootingA. Parts mounting portion
TROUBLEPART PICK-UP HISS
REASON &REPAIRREASON: Clogged bit with cream colder or
adhesive.
Bindingof bit
REPAIR: Disaddemble bit and wash
PART PICK-UP HISS REASON: Bit not move down smoothly alongupper portion of slot on bitholder.
Bit holder slotbites bit screw
REPAIR : Change bit screw.Change head if the slot is notmade correctly.
PART PICK-UP HISS
--B:-r~~~:
·l\::::.ll Contamination
PART PICK-UP HISS
REASON : Lrregular operation of bit due tothe contamination of bit slidingportion.
REPAIR : Clean the bit sliding portion(outside of bit and inside of bitholder) with alcohol.
REASON : Leakage of vaccum.
REPAIR : Check the pressure of main air.Disassemble and clean the ~ir pipejoint.Clean air filter and air nozzle ofmicroejctor.
Fi Iter

TROUBLEPART PICK-UP MISS
Vaccum sensor(Copal-PS3-120V)
PART PICK-UP MISS
PART PICK-UP MISS
PART PICK-UP MISS
Top tape
REASON &REPAIRREASON: Poor adjustment of vaccum sensor.
Irregular operation due to thebreak of vaccum sensor.
REPAIR: Re-adjustmen of vaccum sensor.
Change vaccum sensor.
REASON: Break of electro-maganetic valve.
(due to the water in air)
REPAIR: Change electro-magnetic valve.Check the air used. If wet. usedry air and try agin.
REASON : Poor adjustment of bit downnheight.
REPAIR : Re-adjustment of bit down height.(Height must be adjusted to be
143mm from base)
REASON : Top tape not wound due to thedispersion of tape size.Top tape not wound due to thepoor winding tension.
REPAIR : Change tape.Clean O-ring for winding w.ith
alcohol.Change O-ring(K362356) and spring
(K362120)

TROUBLEPART PICK-UP MISS
PART PICK-UP MISS
Wear of spring
REASON &REPAIRREASON: Motor comes to be nucontrolled due
to the increase of load on X andY-axis movement.Improper belt tension.
REPAIR Cleaning of Xand Y-axis.Oil supply.
Re-adjustment of belt tension.
REASON Poor matching of tape perforation
and feeding jaw due to the wear oftape stripper spring.
REPAIR Change tape stripper spring.(U014105)
REPAIR Change stopper ratchet spring.
(K362102)
PART PICK-UP MISS
PART PICK-UP MISS
Stopper ra tche tspring
REASON
REPAIR
REASON
Pitch feeding lever not return.
Apply small amount of oil onsliding portion.Remove top tape being wound.
Poor matching of bit suctiontiming with the part on tape due
to the wear of stopper retchetspring.

TROUBLEPICK-UP MISS
U...I·
_Lt~ -.J-1-'\ y.\ JI--\ 1'--l- t_
REASON &REPAIRREASON: Poor alignment of centers between
bit and positioner jaw.
REPAIR: Re-ajust the cam-plate of rink
mechaism so as to align the center
of bit with that of positionerjaw.
PICK-UP HISS REASON : Bit bites the folder at the upper
edge of slot and not moves down.
~~
~REPAIR : Change bit screw.
Change head if bit holder is,-,manufactured incorrectly.
Re-adjustment of bit hright.
PICK-UP HISS REASON : Improper bit down speed.. ,
Bit down speed
too fast
V REPAIR : Re-adjustment of bit down speedI "] by adjusting speed ccontroller.
POOR HaUNTING REASON : Improperly coated adhesive.Improper amount
of adhesive
..Too sma II Too much REPAIR : Adjust to coat proper amo~~t of
JJU ;1 111/11'\
adhesive.

TROUBLEPOOR ANGLE
-t
~- -
POOR ANGLE
y~I, Chip
____I r::=:::::
REASON &REPAIRREASON : Poor adjustment of stroke of
Z-axis piston.
REPAIR : Re-ajustment of stoppre.
Stopper for .
adjusting angle. U·~fr~
REASON : Poor adjustment of bit down height.
Part falls down.
REPAIR : Re-adjustment of bit down height.Cleaning of bit sliding portion.
POOR ANGLE REASON : Poor angle for omly mini-Tr..,
l\iI ~);:-:v ' REPAIR : Poor timing of positioning due tol!:. :YIl.jj ~~- ....... p....
~. unsmooth operation of Z-axis.~~
. Ifiit Apply oil to sliding portion.
Change head or worn parts.
POOR ANGLE REASON : Positioner jaws not close.Wear of jaw.Cam adheres to stopper with grease.
~w~ REPAIR : Cha~ge jaws or packing of piston.Re-adjustment of speed cintroller.Disassemble and clean positioner
Not close arm.

TROUBLE REASON &REPAIRPOOR ANGLE REASON : Positioner jaws not open.
ILd~I;f.;Gj~ REPAIR : Clean and apply grease topositioner piston.Disassemble and apply oil to
Not open positioner arm.
POOR ANGLE REASON : Scraping of tefron washer for
~~thrust washer as shown left.
REPAIR : Change thrust washer and tefron~Tefron washer washer.~Thrust washer Polish washer surface with «2000 po 1ish paper.0
.::1.
REASON :
REPAIR :
REASON :
I
--REPAIR :
.
-56-;:

TROUBLECRACK Of DHIP
~~ Sliding pnrtinn
t[l .CRACK Of CHIP
REASON &REPAIRREASON : Bit not move or not move smoothly
due to the obstacles in bit slidingportion.
REPAIR: Cleaning of bit and slidingportion.
REASON: Due to the strong impact when bit
move down.Due to the strong impact when
posiitoner jaws close.
CRACK Of CHIP
REPAIR: Re-adjustment of bit down speed by
speed controller.Re-adjustment of jaw closing speed
by speed controller.Change bit spring to weaker one.
REASON : Due to the improper amount and
improper type of cream solder as
shown leftside.
CRACK Of CHIP
~ Chip
r~.~~(--_.....=1-1-~"h .I~
-/-.
REPAIR: Change type of cream solder.Adjustment of amount of creamsolder.
REASON: No allowance for spring movement
Poor adjustment of bit down height.
REPAIR: Re-adjustment of bit down height.
-57.

TROUBLE
STANDING UP OF PART
STANDING UP OF PART
REASON &REPAIRREASON: Poor matching of bit position and
part stop position.
REPAIR: Re-adjustment of center positionbetween part and bit.
REASON: Due to too fast bit down speed.part is pressed down and stands UP
when sucking.
REPAIR: Re-adjustment of bit down speed by
speed controller.
STANDING UP OF PART,
REASON : Due to too fast tape feeding speed.part stands UP by feeding impact.
I=m~=== REPAIR : Re-adjustment of return speed of",..-
tape feeding piston by speed
sontroller.Change tape stripper spring if
worn.
STANDING UP OF PART REASON : Poor tape feeding.
.-
REPAIR : check engaging status of stopper
ratchet.Change stopper ratchet spring if
worn.
.
-58-;-

UNEVEN COATING STANDING UP OF CHIPS POOR MOUNTING POSITION
n::rf-'ra::rrDPJp...
PJ::Jp...
raoenf-'rt'f-'o::JrDH
rt'Ho~tr'I-'rD
PJ::;:lPJI-'
\.<;enf-'enp...f-'PJ
I..QHPJ:3
Clearance
Posit1onerpara ellsm
I Blnd]ngof bit
Accuracy of boarddImenSions
Improper mounting data
Guard ral I levelness
I~groper form ofChipPoor positioning ofboard
Positioner paral lei Ism
Stattee eetr te ity
Shock In tape . 'feeding operation
POOR e AXIS ANGLE
Improper bItmollntlng height
Operation of I I ~osltlonerrack Jaw ho Iding
position
Pos Itloner tlml ng I Vacuum
~1rg~~~icularlty
Worn timingbelt
~~obifliding
Board warpage
ImprOPer su~kingopero'tloll orsllctlon head
Poor positioneropera't I on ---
Improgerly coatedadhesive
BIndIng of bit
Poor mount Ingtiming
Heiqht of bItlowi'!r limit positionDispersion In tapeSTOp pOSition
Dfspersion Intape size
Ooeratlon of feederCY I I nljer(sensitivity)Vacuum sensor setting
Clogged bit -i--Worn timIng belt
Weakened bIt
Improper aIr flowand pressure
/ ....
~l~ratlon of
Incorrect hold positionor pOSIT oner Jaws
I~groper position ofChip and part
Dispersion of tape--- feeder operation
Vacuum
Leakage of vacuum I
Static electricity I
Dislocation of parts IIn paTe
Blnd1nq of parts intap~ ti'!eder
Poor matchlllq of tapefeeder and hi'!ad pOSition
Perpendicularity of head~__.l.I _
SUCTION FAILED
Tape stop Iposition
Incorrectfeeder data
Poor suctloosensor setT I ng
Poor su.:;:t I onriming (Loweringand suction)
Height of bit lowerIlmfT posit on
Static electricity
~1rg~~~lcularlty
Dispersion InseT posITion
Clearance between Itape and part
MOUNTING FAILED
Dete("lorated:iUcT.j.on sensortunc Ion
Lowered suct.l.onsensor • I IsensitivIty
Air Incyl i nder
Re;; I dt,Ja I --ladhesive
Ic.n~'I

9. Circuit diagram
-60-,

1 1 . Parts list
~68-


11-1. Loader Ass'y 0724031/2
No Part No. Part Name p'tyRevision Remarks441912 Slider 4 I
441915 Main guide bearing 2 I
445791 Bush 6 I
447230 Loader variable block 2 I
447234 Variable block 2 I
447257 Pushing board 6 I
447260 Cylinder bearing 6 I
447262 Shut 15 I
447267 Board stopper 3 I
447275 Guide pin 6 I
447276 /I 6 I
447278 Guide board A 12 I
447338 Linear bush cylinder 15 I
447877 Back-up board 3 I
448026 Back-up variable board 3 I
448027 Back-up board 3 I
448958 Pullely (Machine) 1 I
448959 /I ( /I ) 1 I
450511 Variable shaft 1 I
447995 Knob 1 I
441914 Sprocket 4 I
447235 Loader motor pullely 4 I
450469 Stopper bush 4 I
450470 Plate 5 I
450471 Loader clamp A 3 I
450472 II B 1 I
450473 Auxi 1ian loader set board 1 I
450474 Auxi liary loader motor bearing 1 I
450475 Slider B 4 I
450476 Loader belt bearing 2 I
450477 Motor bearing 2 I
450478 Loader belt bearing 1 I
450479 Auxiliary loader motor bearing board 2 I
450480 Pullely support 4 I
450481 Jointing plate A 2 I450482 II B 6 I
,-69-


2/2
No PART No PART NAME b'tyREVISION REMARKSWire-chain ; TM-I05-N04 3m I
Timing belt ; T5-05-140 1 I
Bearing (THK) ; LM6 30 I
MY packing ; MY3 6 I
Bearing (Top bearing) ; DO-22B 10 I
!J ; DO-22H 4 I
Belt ; TU6 w=5 ~ =1050 2 I
11 ; TU6 w=5 ~ =3490 2 I
Gear (Servo) ; 6H15 2 I
Motor ; IH6P3 2 I
Sensor ; GS5 7 I
Spring ; tt1257 6 I
!J ; #1107 6 I
Pency1inder ; PDA 10x30A 3 I
11 ; PDA 10x15A 6 I
Clunk lever ; KR6-10 4 I
Connecter ; HS-12R-2 2 I
!J ; HS-12P-2 2 I
Nut ; MI0 8 I
Solenoid, air-valve; PCS241-AB-D24-LPK 12 I
Manifold ; 12MFU-PC-I-M3 1 I
Bearing ; 6E6ZZ5 4 I
I
I
I
I
I
I
I
I
I
I
I
I
-:-70-


11-2. Parts list of desital head (1) 020034
No PART No PART NAME Q'tyREVISION REMARKSM0944062 Spring 1 I
M0944072 Joint plate 1 I
M0944412 Sp line 1 I
M0944422 Up/down dog 1 I
M0944432 Z-axis dog 1 I
M0944441 Speacer 1 I
446151 Clamp 2 I
446152 Holder 1 I
446156 Bit P 1.0 1 I
Clamp joint / CS-BF6F 1 I
Revolving joint / CS-SF 1 I
Mini Y packing I MYN-12 2 I
Si licone tube / S5(5x150) 1 I
Set screw / PB1.7x3 2 I
Aset screw / M2x2 2 I
!! / M2x3 2 I
Hexagon head screw I M3x30 3 I
Spring washer / SW(M3S) 3 I
Washer / IV (M3S) 3 I
Nut / N4 (M4) 1 I
I
I
I
I
I
I
I
I
I
I
I
I
I
-72-,

11-2.

11-2. Parts list of desital head (2) DETAIL "A"
No PART No PART NAME Q'ty~EVISION REMARKSM0934712 Z-axis plat 1 I
M0940431 Timing pullely assembly 1 I
M0940441 Motor assemb ly 1 I
M0940451 Pullely assembly 1 I
M0944452 Stopper angle 1 I
M0944463 Sensor stay 1 I
M0944474 Guide push 2 I
M0944713 Z-axis spacer 1 I
M0944721 Main guide bearing 1 I
M0944752 Motor fl unge 1 I
M0944761 Mainfold 1 I
Timing belt / B40S2M126 1 I
Clamp joint / CS-BF6N 1 I
Universal elbow / CS-UEF6 1 I
Photo micro sensor / EE-SF5 2 I
!! EE-SV3 1 I
Bearing / SSLF-1790ZZ 2 I
Hexagon head bolt / M2x6 1 I
Round head small screw / M2x15 1 I
Hexagon head bolt / M2.6x3 1 I
Round head small screw / M3x5 1 I
Hexagon head bolt / M3x8 6 I
Round head small screw / M3x15 1 I
Hexagon head bolt / M3x30 4 I
Nut / N3(H3) 1 I
Spring washer / SW(M2) 3 I
!! / SW (M3) 14 I
Washer / W(H2) 3 I
Washer (small)) / W(M3S) 12 I
Washer (Big) / W(M3L) 2 I
Hexagon head bolt / M3x10 2 I
I
I
-74-,

11
M093<1712

11-2. Parts list of desital head (3) DETAIL "B"
No PART No PART NAME O'tyREVISION REMARKSM0944111 Plug 1 I
M0944122 Positioner piston 1 I
M0944132 Positioner cam 1 I
M0944142 PC spring 1 I
M0944151 PC spring 1 I
M0944162 Psitioner dog 1 I
M0944221 Eye sensor joint 1 I
M0944231 Sensor stay 1 I
M0944261 Eye sensor holder 1 I
Lens I 63301 1 I
Lens stopper I K521006 1 I
Barb joint I CS-BF3.2 2 I
Clamp joint I CS-BF4N 1 I
Universal elbow I CS-UEF 2 I
Plug I PF-M2-2W 2 I
Multi-mount cylinder I MTA10 x5 1 I
Flunge bush I 80B-040G 1 I
Bush I 80B-0610 1 I
Mini Y packing I MYN-3 1 I
Hexagon Head Bolt I M2x4 1 I
Hexagon Head Bolt I M2x6 2 I
Spring washer I SW(M2) 3 I
Washer I W(M2) 3 I
I
I
I
I
I
I
I
I
II
-76-,

11-2.
"O9'<''':'~
00"-06'0 ~
UYN-J . rg
6JJOl ,®K52100G ~
-77-
n 1i"1' " T r n

11-2. Parts list of desital head (4) DETAIL "B"
No PART No PART NAME P'tyREVISION REMARKSM0644551 Tefron washer 3 I
H0924013 Block 1 I
H0940421 Li nk B assemb Iy 1 I
H0940481 Shaft assembly 1 I
H0944172 Cam shaft A 1 I
H0944183 Cam shaft B 1 I
H0944194 Link A 1 I
H0944355 Posi itoner arm 1 I
H0944812 Stopper 1 I
H0944821 Co lIar 1 I
H0944831 Arm shaft 1 I
H0944861 ArmB 1 I
H0944871 Ring 1 I
448123 Guide plate 2 I
448125 Positioner jaw 2 I
Spri ng / 2049 1 I
!1 / 6159 1 I
Spri ng pin / 101-0801-2008 4 I
Stainless parallel pin/161-4701-30280 1 I
!1 /161-4701-30300 1 I
E-ring / E-2 4 I
GS-ring / GS-3 4 I
Bearing / SSL-630ZZ 2 I
Round head small bolt / H2x4 3 I
Hexagon head bolt / H2x6 5 I
!1 / H2x10 1 I
!1 / H2.6x3 2 I
Nut / N2 (H2) 1 I
Spri ng washer / SW (H2) 8 I
Washer / W(H2) 2 I
Black POM washer / W(4 ¢ x8 ¢ xO. 3) 1 I
I
I
-78-.

11-2.
-112x1O
6159
DETAIL D
-79-

11-2. Parts list of desital head (5) DETAIL "e"
No PART No PART NAME P'tyREVISION REMARKSM0644741 ¥lasher 2 I
M0644751 Thrust washer 3 I
M0934012 Inner tube 1 I
M0934361 Bit holder 1 I
M0940411 Stopper assembly 1 I
M0944032 Spring 1 I
M0944042 Rot bush 1 I
M0944051 Nut 2 I
M0944083 Spring 1 I
M0944241 Bush 1 I
446153 Bit chuck 1 I
448178 Bit set screw 1 I
Mini Y packing / MYN-5 1 I
!/ / MYN-7 1 I
O-ring / 0-10 1 I
Pipe nut / N7(M7) 1 I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
-80-,

-81- '
DETAIL C

//-J
MHP Tape Cassette Ass'y (8mm, 12mm
1/3It. Part ft. Part Name Q'ty Revision Remark
072466 Tape Cassette main Ass'y ( 8mm) 1 II
072467 II (12mm) 1 IIII
071455 Rachet pully Ass'y ( 8mm) 1 II
071458 Main plate Ass'y ( 8mm) 1 II
071427 Winding reel Ass'y ( 8mm) 1 II
071459 Main plate Ass'y (12mm) 1 II
071457 Rachet pully Ass'y (l2mm) 1 II
071428 Winding reel Ass'y (l2mm) 1 IIII
362067 Pin, winding pully 2 II
362130 Bush 2 II
362356 Ring 1 II
448034 Shaft, winding reel 1 I
448038 Winding reel ( 8mm) 1448039 II (l2mm) 1
448042 Flange winding pully 1448043 Winding pully 1448045 Arm. winding reel 1
E4 E-ring 4mm 1I
362076 Sprocket. tape 1 II
362077 Rachet gear 1 II
362080 Spacer B rachet 1 II
449877 Hook. rachet 1 II
362097 Gear A 1 II
362122 Washer hook rachet 1 II
362130 Bush. tape feeder 2 I
448089 Rachet pully (8mm) 1448140 Spacer rachet 1448141 rachet pully (12mm) 1U014107 Rachet shaft hook 1U054102-2C Rachet arm 1
Pan head M2xL15 screw 3
M3 Nut 1
-3'2-

;/- J
2/3
fl. Part fl. Part Name Q'ty Revision Remark
362070 Washer, gear A 1 II
362071 Shaft, gear B 1 II
362075 Shaft, stopper rahcet 1 II
362093 Stopper arm rachet 1 II
362098 Gear B 1 II
362102 Spring stopper rachet 1 II
362120 Coil spring hook rachet 1 II
362256 Arm pu lly gu ide 1 II
445612 Stopper rachet 1 II
446763 Bush stopper rachet 1 II
447969 Stopper 1 II
448030 Gear C 1 II
U014104 Tape stripper shaft 1 II
448032 Tape stripper ( 8mm) 1 II
448033 II (l2mm) 1 II
448037 Tape pressure spring shaft 1 II
448040 Pressure tape shaft 1 II
448041 Winding arm shaft 1 II
448046 Main plate 1 II
448048 Shaft rachet pully 1 II
448088 Pressure Tape ( 8mm) 1 II
U014302 II (l2mm) 1 I. I
448149 Shaft reel 1 II
U014105 Spring, tape stripper shaft 1 II
U014108 Rachet spring 1 II
U014109 Tape pressure spring 1 II
U064551 Tape guide 1 II
449264 Shaft reel 1 II
450116 Stopper pin 1 II
450150 Cover plate, gear 1 II
451715 Shaft gear 1 IIIIIIIII

/I-J
3/3It. Part II. Part Name Q'ty ~evision Remark
Pan M2xL5 Screw 2 II
Pan M2xL6 Screw 1 II
Pan M2xLlO Screw 1 II
HZ Spring washer 2 II
HZ Washer 2 II
HZ Nut 2 II
Pan M3xL6 Screw 3 II
Pan M3xL8 Screw 2 II
Pan M3xLl5 Screw 1 II
Cap H3xL6 Screw 3 II
Hexa,vort M3xLlO 1 II
H3 Spring washer 7 II
H3 Washer 8 II
M3 Nut 4 II
E-ring-3 3 II
E-ring-4 4 II
E-ring-6 2 II
G-ring GS6 1 IIIII

a 7 6 L~_~_~ 5 I 4 3 I 2 I5'
""-I~
M~-h... i-
'<2'';
-t-"",'1\.-I--;:'X10
e"~,/)D-""t-i}··.a...
0'7\4SS- I
.....2~
M:'SvJ
t-.-\"'=3' V\l
M':' IN
'__ EO'i:.1';,q"4-
~rsr-c"-1--
.--- -=====-,~~:2:......"316
@uOI Lf-Io4-1" ....... I' ~ -44'60"'32
44.'l'-1b"1 ~c::zz:"r~l;;~~'J'''' -USl\ ~Gl;) .---- - / .dA..c:;o4..a
, _ UO~4-\O" 4A.y.,o~7"'-'.!5':'."'-ez, ~,D"",oq!,~, <"L / "DV/0) f..o',' -'-" ~ -rtIf!'-,. /? A V -/ -----p" tifr-
r
.:t!{'HZ"A4 <0@J ~ I ,""" ~<1. 0 D ili)
/ .Y.ti:::!1:JiL4: ~!I . ~ -.:;:;~/ ~. !. \. 1_ 0 """
v
1'crfV-"
--Crr±, ~~ ~ -' ~©'0'" 'oW" \9-, 0 ~",- ..'-3! _ ______.\ v, '~'ZX(,~ M1-;-",,-
~ /l'~~6o"'-6 y;'''-jl ~ "'!I
-----:.., .J ...~U CJ'------ -------. ~ //,60<1.1~ - {/I! 0~ /--'0'10 ~C3b __ ", ~. -"""'@l
~1.~Q~:'~r::l~~~:~,;~::"6'2@@J_~~ ~, w-~ V](J'V1,'2-",,0<;~ • '~"'~r-o ~'706q/ ~._ ~,.,~'3 "
I R >-''''3'1'.+ <:;","')" ,'"' , -. ~,..
@ b@'i~2~ ~-'_ <l'b ""3 __''''- "" "',>+.,'- ~ /\('36~70"::>-v '~~'vv b'l-t;s-I !~"''''M2XS/',,';:::S - _ NO
~\CS®
k7'M"J<~-:=)'~-...J ,UO\<1.IO(;(2J "'0' _
())M~..b
----~@@ ~
~G 0-«';
q;.~'~-:-i:-
/
__I"b
~?_j~~
~I\~'''-
C:O)~J'& ..J
-?(/1:!J '45.5<t /
I 07/438 I
44-6' 14- 9
44-6() 4-6
:J>
I
~
JI --. "",,. """"'''' """"'0 "''''''''c " " $P'ltc.1'lO,
i ;:uct::t~ee{;.:. C ct'Hlf 4-:JiII? f,tL'':' l: .. It .. ill .. ill '" ..I -rtSfI..:t...,. ...... "'C~"'C'.,,-& .. )1
....0._ 1z-1-~:J!t:1...,..-"'Ctt:J:."tf"S"'C'7>". )1 If'§!f-i2.z:JJ! "1".et'J,ftA~ "'t" ±O.2S_ ,
~fo'J '/tilf'/''J'ftJ:J.T 1 m ::!::O.l_
....0. ....JR-:-l6S~
.CALC
'" I!Il'. ~ .. ±Z'" "- I< I I
~~~Q~~~~W.~~~9~-?m - " .. HHf (,8mm)le! ...... n 'l ill ""'C.'o. OS-
....0._ Tap~ feeder Cassette Haln as,,; 'yIIR.L'P1DSUCO.25
'.L Y?A5iJI..50 i.;t;-Y 719/,13 I , I I I I I
~ bjD/IQ1'lO. rryl zl~ 6161 E
~MfrLL~~m7~~~T2~~~ A ;.;f;Jfu.45"011,L. ,d:::;./ 'T/t'? /u- 0-7/1,{5;:r.-~A 44BO-:,11ft ,fiB. '
SJlI'I:c./IOO.
00 ..... 0._ l.aa 3.2S e..3lII 12.68 2e-lI 'l'I MHP0 0 0 0 0 0 0 " MOC CO. , LTO. '
~,.~".,..,-0 DAT1t
NO, j /I Jr:.!I!/..:t:t5!JllIl'lII8cn~IiII .... ..,...-..
'" .. • I< .--."""""""""' "., ""........,."
~e.",,- 'U:Q.
I I , I I ... I ,."~ 4- ., A ..

8 f 7 I 6 3
"/'-4-,+~o'3'3
I 2 ,IN
""I
Gv
El\~'/~
Ci'<v'A-
.;11///A5:5 ''/ LiZt4-69 [
P'~ IQl
1(:36:0\:>-1
II ..
UO\4-IO'6
------@
E:'1~1'~-4-
-------.~ ~~ ~w
..;...,.
-~'---~
/ I
~t\':l-"1'"c::» O'l-tF' &,
4a,.ZO 4-6
,:t
"""'-f::
G:J,

11-4. Tape cassette base M0710511/2
No PART No PART NAME O'ty REVISION REMARKS1 MOB3551 Side plate 1 I
2 M07350B Back bar 1 I
3 MOB3552 Base bar right 1 I
4 M073502 Slide base front 1 I
5 M064553 Sl ide foot 4 I
6 M074502 Bar holder 4 I
7 M073503 S1ide base rear 1 I
8 Manifold / 12MF-TI -23H-M5 1 I
9 Speed cintroller / SPU-1-N 12 I
10 One touch joint / 3181-06-19 1 I
11 M073504 Back stand 1 I
12 M064558 Slide bar 2 I
13 M063553 Base bar lift 1 I
14 Electro magnetic valve / SS-23H-ND-Dl 12 I
15 M074503 Base plate bar 1 I
16 M073505 Front bar 1 I
17 M074504 Guide sub conver 1 I
18 M063551 Side plate 1 I
19 M064556 Piston stand right 1 I
20 U024110 Connecting pin 12 I
U024111 Piston head 12 I
U024115 Head joint 12 I
U027102 E-ring / E-13 24 I
21 M073507 Rod cover 1 I
U027103 Casket / 8914 12 I
22 M072501 Cylinder tube 1 I
23 M064555 Piston stand left 1 I
24 U024114 Piston pin 12 I
U027104 Mini Y packing / MY7 12 I
U027101 O-ring / P-ll 12 I
25 M073508 Head cover 1 I
26 M064557 Clip plate 2 I
27 M074501 Bar holder 1 I
28 M073501 Cassette base 1 I29 M064561 Pad 3 I
,-8Q-

1/2
No PART No PART NAME Q't:v ~EVISION REMARKS30 M064560 Adjuster 3 I
31 M072509 Tape guide plate 1 I
32 M074505 "'eight bar 1 I
33 U074506 Sheet 1 I
34 K362089 Plate spring base 12 I
35 Ball plunger / BST6 2 I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
II
.-8Q-

t'!1-3
1
tJ'
11-4.
I\))---\.-i- '\
I\)OJ

11-5. Linear feeder 070621
No PART No PART NAME P'tyREVISION REMARKS1 K352347 Subtable 2 I
2 K352330 Rai I cover 12 I
3 K322123 Gate single 60 I
4 K352270 Upper right base 1 I
5 K352262 Upper center base 1 I
6 K352263 Upper left base 1 I
7 K352264 Lower base stay 2 I
8 K352269 Plate spring 12 I
9 K352267 Lower base 1 I
10 K881636 Magnet coi I 1 I
11 K352346 Vibrator adjuster 1 I
12 440433 Support 4 I
13 440434 Lower base 1 I
14 K352266 Connecting bracket 1 I
15 K352265 Upper base stay 2 I
16 K352331 Rai 1 black I
K352335 Rai 1 blue I
K352336 Rail orange I
K352332 Rail green I
17 440033 Block base 1 I
18 K350024 Hopper 12 I
19 440041 Plate 12 I
20 440044 Block 4 I
21 Electromagnetic valve / 050E1 4 I
Manifold / SM4 1 I
22 440042 Nozzle 12 I
23 Quick joint / TS6-01 1 I
24 440758 Cover 1 I
25 440431 Upper base 1 I
I
I
I
II
-88-;

11-5.
//
<\
\\
\\ /\
\ II )\J --
-89-

11-6. Horizontal stick feeder 070656 (1 of 2)1/2
No PART No PART NAME Q'tyREVISION REMARKS1 441987 Side plate A 1 I
2 441988 Side plate B 1 I
3 441267 base plate 1 I
4 441985 Rear cover 1 I
5 Switch I DS-004 1 I
6 444457 Cover B 1 I
7 444601 Ra i1 1 I
8 444456 Cover A 1 I
9 444458 Stopper 1 I
10 441977 Adjust plate lea. I
11 070880 PCB ass'y for parts supply sensor lea. I M=c CD., DID.
12 Belt I 4.430 1 I
13 441983 Motor gear 1 I
14 441971 Motor bracket 1 I
15 441972 Front cover 1 I
16 Pulse motor I 42S1-22DCYA 1 I
17 441982 Gear 1 I
18 441981 Pu lley 1 I
19 Bearing I 685ZZ 5 I
20 441980 Pulley shaft 3 I
21 441979 Pu lley 1 I
22 Bush I <l>3.2 x ¢6x ~ 6 4 I
23 441978 Shaft 1 I
24 Electro magnetic vale I PCS-241-H3 2 I
25 CNl, CN2 connector I CN-3795 2 I
26 441972 Front cover 1 I
27 441314 Board cover 1 I
28 070889 Main PCB ass'y 1 I MX: CD., IlID:
29 441268 Separater 1 I
30 Convex base I
31 Lead fastener I CK20 1 I
32 441281 Ra i 1 A 1 I
441282 Rail B 1 I
33 441973 Rail A' 1 I
441974 Ra i 1 B' 1 I
-.90-

2/2
No PART No PART NAME Q'ty~EVISION REMARKS34 442082 Locating pin I
35 444610 Stick holder 1 I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
-91-;

11-6.
".\
c./ /Ci0 /
/
I
:s: ":r:J :::t:t:J t:r:l 0
t:r:l ;'CI() '0 1-1
t:r:l N() :::<:l 0
0 ::z:~. ~ F: -92-.. .......
t-i0 (/)":r:J :j
NllJ. \
\\\\\\
~ \\~~~\=~. 9
\\
\,
\\\\\\\.
\
"

11-6. Horizontal stick feeder 070656 (2 of 2)
No PART No PART NAME Q'tyREVISION REMARKS1 441271 Post 2 I
2 441299 Spring 2 I
3 441339 Lever spring 1 I
4 441273 Lever lea. I
5 444173 Collar 2 I
6 441272 Collar A 2 I
7 444602 Rubber pad 2 I
8 441274 Shoe B 1 I
9 441976 Adjust plate lea. I
10 441270 Roller 1 I
11 441986 Supporter 1 I
12 441269 Shaft 1 I
13 441279 Slider 1 I
14 441276 Driver plate 1 I
15 441340 Sl ider B 1 I
16 441266 Cylinder bracket 1 I
17 441278 Piston bracket 1 I
18 Pen cy 1inder / PSA 6x15 1 I
19 441284 Stopper guide B 1 I
20 441283 Stopper guide A 1 I
21 444597 Adjust plate 1 I
22 444596 Stopper ( for TI ) 1 I
23 Pen cy 1inder / KAOS2.5xl0 1 I
24 444599 Cylinder bracket 1 I
25 444598 Stopper rubber 1 I
26 444600 Chuter block ( for TI ) 1 I
27 441272 Collar B 2 I
28 441275 Shoe A 1 I
29 444425 Cover 1 I
I
I
I
I

ll-G.
-94-
M D C
10
co., LTD


1 . Specifications
1. Main body
(1) Size
Depth
Width
Height
Weight
(2) P.C.B. height on runing(3) P.C.B. Waiting station
(4) Bit exchanger
(5) P.C.B. dimension
900mm1550mm (2125mm including ext. Loader)1350mm (apporox.)
300Kg (apporox.)
900mm ±20Detachable on relocation
4 types (Each one at each station)
Min. 50mmx 50mm t=2Max.
Max. 250mmx330mm .t=2Max.Thickness 2.0mm Max.
2. Pick and Place
(1) Motion space X ; 340mm
Y ; 624mm(2) Drive system X-axis Single motor (5 Phase stepping motor)
Y-axis ; Dual motor (5 Phase stepping motor)(3) Min pulse operating
speed 0.025mm/pulse(4) X, Y axis Guided by ball bearing(5) Clear lance (X-ax is) 130mm(6) Acting time 7200 parts/hour (Standard small chip)(7) Mounting accuracy ±0.15mm, ±1.0 D
3. Head (Digi tal type)
(1) Up-down traverse 15mm+5mm (Two steps in vertical)(2) Sensory control for rerification run(3) Positioner variable angular-aperture mechanism(4) Theta angulor resolution 0.2 D /step
(5) Three heads equipped as standard at each mounting station
(6) Dispenser temperature controlling mechanism (Controller at option)
(7) Camera with position reader (One set equipped as standard)
,-1-,.


4. Loader (Conveyor)
(1) Loading system
(2) P. C. Board si:ze(3) Movement
(4) Width adjust
(5) Board height
(6) Board back up system:
(7) Board registration
(8) Board feeding speed
5. Controller16 Bit (in English)
2. Optional feeders and applicable
Belt system (Belt width under P.C.B. 2mm)Min. 50mm~Max. 250mmLeft to right (as standard)
Manually
143mm from main frame surfaceEquipped
Edge or guide pin
4 second
Part
P
Feeder Package Option
at a station
o
IQ F pi Fsi i
x t
e i
Automat ic tray feeder -l Gr id tray I 1(back only)
P Lee d 0
n
e
r
PLCC feeder Tube/Stick 2
P
o IHorizontal stick feeder HTube/Stick 1-1 5
IS 0 I Cr-Hse i
a t Il-T_a_p_e_f_e_e_d_er -'I-i TapingCHI P d i
1-1,--_1___o
n ~ Vibratory feeder
e
r
I~ Bulk part 1-1__2__


wW
I..... ""=l.....
()Q>="""l(0(JJ
960 180037".80 I 70.87'
I 1650 .r-T-,::6
I i I 53.15
II~""I *900_,. . 35.43
II Jt-~i;L ..... ";~~80'~ ····--------·1: . , :I I •.
: . :.; :I , I I' , ,' , .I , ,I 4 11I' I,
I I,I , ,: :: ....:., i: 100 ". . , " '. ' --,; 4: ---. -' c_________ 3.9
~ u 9~0 . _ ~I 0
35.43
885
~155061.02'
. . "
:', '~.
~.:::" ~"
2125, 83.66'
120 1204.72' 4.72"
400 ' ! 4D0 ---t-t- 40015.75' I I 15.75' I I I 15.75'
I I 1.1,
I I - "",,'; .~.
;.1'
~L'
853.35'
D\ ~
I-- 43016.92
I. ~B :~- ··-~I [.iilll !Immuu
'I[L1=I - -- _ , ,IiE' u •• - •••• h.
1I1:"MHP30B -<; :ij",uaoOI :'cp I ,....... ; 1 : : ~ i.'0 1"-: : E:::J ; : ' rn : ;m :NO; :. '. ,-H -H : : : : : ,O· r . . , .o C'? ! : : : :cp ~ I: E::J ;.' " ; : .'
l!') : ;' ..
CO? " ~.-: .·.:.: 1 L......•..~· l..' ~
IWJ
""=l_.()Q
t .
.......


ACRYLIC COVER3-2.
FILTER REGULATOR
CAHERA CONTOROL UNIT
Fig 2
PATROL LIGllT
.EMERGENCY STOP SIHTCl
SWITCH PANEL
TAPE FEEDER
MANUAL OPERATING PANEL
REMORT CONTROLLING BOX
KEY BO/IRD
MAIN BODY


4. Instll at ion
The main body must be placed on a hard. level place with the anchor bolts.
One the install~tion, you shall prepare for as follow:1. Power supply 100V 880VA
3 codes
Pulg with a ground
Fig 3
Behavior of a plug
The main body and the controller must be placed on the ground.
2. Pneumatics
Pneumatics in the air tubes of the machine shall be kept 5.5kg/cm 2
at a minimum. A minimum of pneumatics at the inlet of the tube shall
NOT be less than 5.5kg/cm 2•
Dry air is ONLY available in the machine.
Dust and powder in the air may cause the mulfunction of the machine.
There are 3m of a air tube 8 </> in diameter equipped with the machine,
but is NOT a quick joint at the end of the tube. It is because the
setting condition at a factory is different from each other.
A atandard model of the KOGANEI quick joint 8 </> in diameter should
be recommended.
When nessesary to connect to the longer distance than the standard,
a tube of the same diameter as such is good for the operation, but
the narrower than standard is NOT suitable.
,-5:


5. Packing list
On shipping, we packed the following goods
1. A main body and feeders
2. A controller
3. Spared parts
4. A set of tools
A display
A keyboard
A I/O card
Interconnecting cables
5. 0 i 1
6. A manual
Nihon Sek iyu Hi-white #70 5cc
.-6.: