Embed Size (px)
DESCRIPTION
jj
Citation preview

Este manual pertence a Elevadores Otis Ltda., ficando proibida sua reprodução sem a autorizaçãoexpressa do Departamento de Operações de Campo – Centro Industrial de São Bernardo do Campo.
Elevadores Otis Ltda. - 2005
Malha Fechada VW2 WM2

3
Manual drive "w" OTIS1 INTRODUÇÃO ...........................................................................................................................................................4
2 DETALHES TÉCNICOS IMPORTANTES .................................................................................................................4
2.1 PRINCÍPIO BÁSICO .................................................................................................................................................42.2 COMPATIBILIDADE DE SOFTWARE ...........................................................................................................................42.3 ARQUITETURA DO SISTEMA EM APLICAÇÕES PARA ELEVADORES COM O DRIVE W....................................................42.4 ESPECIFICAÇÕES PRINCIPAIS .................................................................................................................................5
3 DESCRIÇÃO FUNCIONAL........................................................................................................................................6
3.1 SINAIS DE COMUNICAÇÃO ENTRE MCB-W, LCB-II E TODO O SISTEMA DO ELEVADOR ..............................................63.1.1 Comandos de Movimentação ......................................................................................................................8
3.2 ENCODER..............................................................................................................................................................93.3 PERFIL DE VELOCIDADE .......................................................................................................................................10
3.3.1 Corrida Longa ............................................................................................................................................103.3.2 Corrida Longa – Perfil Pré-Calculado Entre Andares Próximos................................................................113.3.3 Corrida Curta – Perfil Andar a Andar .........................................................................................................123.3.4 Corrida Reduzida – Perfil Andar a Andar ..................................................................................................123.3.5 Corrida em Modulo de Inspeção ...............................................................................................................143.3.6 Corrida em Modulo de Construção ...........................................................................................................153.3.7 Corrida de Resgate ....................................................................................................................................163.3.8 Corrida de Renivelamento .........................................................................................................................173.3.9 Operação de Partida. .................................................................................................................................183.3.10 Operação de Parada..................................................................................................................................19
3.4 USO DA IHM ( INTERFACE HOMEM MÁQUINA ) ..........................................................................................................203.3.11 Funções do Display de Leds......................................................................................................................203.3.12 Funções do Display de Cristal Líquido LCD ..............................................................................................203.3.13 Visualização e Alteração de Parâmetros...................................................................................................21
4 PROCEDIMENTO PRELIMINARES PARA FUNCIONAMENTO DO EQUIPAMENTO.........................................23
4.1 DADOS DA ETIQUETA DO DRIVE............................................................................................................................234.2 BALANCEAMENTO ................................................................................................................................................234.3 ATERRAMENTO....................................................................................................................................................244.4 SUPRESSORES ....................................................................................................................................................244.5 PROGRAMAÇÃO BÁSICA DA LCB-II .......................................................................................................................25
5 PROCEDIMENTO DE AJUSTE DO EQUIPAMENTO ............................................................................................26
5.1 PROCEDIMENTOS PARA CONFIGURAR MODULO DE INSPEÇÃO ................................................................................265.2 CONFIGURAÇÕES DO DRIVE PARA MODULO DE INSPEÇÃO......................................................................................285.3 CONFIGURAÇÃO DO DRIVE PARA MODULO NORMAL...............................................................................................33
6 SOLUÇÃO E PREVENÇÃO DE FALHAS...............................................................................................................36
6.1 ERROS E POSSÍVEIS CAUSAS NA PLACA CC09 .....................................................................................................366.2 FORMA DE ATUAÇÃO DOS ERROS.........................................................................................................................396.3 INDICAÇÃO DOS LEDS DE ESTADO DO INVERSOR ..................................................................................................406.4 ERROS E POSSÍVEIS CAUSAS NA PLACA MCB-W..................................................................................................406.5 SOLUÇÃO DOS PROBLEMAS MAIS FREQÜENTES ....................................................................................................41
7 TABELA DE SINAIS DE ENTRADAS E SAÍDAS DO DRIVE ................................................................................42
8 TABELA DE REFERÊNCIA DE PARÂMETROS DO DRIVE W.............................................................................43
9 HISTORICO DE DEFEITOS SOLUCIONADOS EM CAMPO.................................................................................61
10 APÊNDICE ...............................................................................................................................................................64
10.1 CURVA DE VELOCIDADE .......................................................................................................................................6410.2 ENCODER JAPONES JAA00633ABF ....................................................................................................................6510.3 ENCODER ALEMÃO BAA633A1............................................................................................................................66
4
Manual drive "w" OTIS1 Introdução
O Drive W é fruto de um desenvolvimento entre a WEG Indústrias e a Elevadores Otis para acustomização de um inversor de Freqüência comercial que pudesse atender a aplicação em elevadoresrespeitando suas exigências de performance e conforto sem a necessidade de adaptações ou interfacesexternas.
Para isto se tornar possível um novo software foi desenvolvido para o Inversor da linha CFW-09 daWEG que dentre outras vantagens destaca-se por sua robustez e adaptabilidade aos diversos tipos demotores existentes com a sua função Auto-Tuning que faz a leitura direta dos parâmetros do motor.
Além do software do Inversor exclusivo para a Otis este Drive em sua versão malha-fechada traz aplaca MCB-W que também é exclusiva da Otis e que concentra as funções de comunicação com a placade controle do elevador LCB-II, geração dos perfis de velocidade para o Inversor e o Learn-Run (corrida deaprendizado) que torna o Drive muito preciso na operação de nivelamento.
2 Detalhes Técnicos Importantes
2.1 Princípio Básico
O inversor possui uma ponte de diodos retificadora e um filtro capacitivo que transformam a tensãoalternada trifásica em tensão contínua DC. A tensão DC é então modulada por uma ponte de IGBT´S emlargura de pulso e se transforma numa tensão alternada com freqüência e amplitude variáveis.
Os valores das saídas de tensão e freqüência dependem dos sinais relativos ao movimento do carro,tais como UIS, DIS, 1LV, V1, V2, V3, V4, UIB, DIB, NOR, da velocidade medida com o speed encoder e dovalor da corrente exigida pelo motor. A velocidade a ser alcançada dependerá então dos sinaisprovenientes do controle operacional e dos sensores do passadiço.
2.2 Compatibilidade de Software
O Drive WEG é totalmente compatível com a LCB-II desde a versão de software GAA30082CAC1
2.3 Arquitetura do Sistema em Aplicações para Elevadores com o Drive W
O Drive W foi desenvolvido para ter a mesma confiabilidade e funcionalidade dos Drive's OVF10 eOVF20.
O Drive W é um inversor com realimentação de malha-fechada, chaveamento de freqüência na ordemde 10KHz e gerador próprio de perfil de velocidade usando a placa MCB-W baseado no learn-run (corridade aprendizado) e capacidade de auto-tuning.
A MCB-W mantém comunicação com a LCB-II e gerência as funções do Drive que são: controle develocidade, aceleração, desaceleração e jerk.
5
Manual drive "w" OTIS2.4 Especificações Principais
Nível de Tensão de Alimentação:
220/230V com variação de +10% ou -15%A alimentação também poderá ser de 208V com variação de +/- 10%380/400/415/440/460/480V com variação de +10% ou -15%
Freqüência: 50/60 Hz com variação de +/- 2Hz
Desbalanceamento entre fases: Menor que 3%
Cos ϕ: Maior que 0,98
Velocidade: Máximo 2,5 m/s
Carga: Máximo 2500 Kg
Aceleração: Máximo 1,2 m/s2
Jerk: Máximo 1,0 m/s3
Potência do Motor: Até 26 KW
Controle com Realimentação:Malha fechada com controle vetorial via Encoder 2 ou 3 canais 1024 PPR ( pulsos por revolução)
Percurso: Depende dos limites da máquina
140 VAT = 30m sem corrente de compensação ou 55m com corrente de compensação160VAT = 30m sem corrente de compensação ou 90m com corrente de compensação18ATF = 25m sem corrente de compensação ou 90m com corrente de compensação
OBS: Para modernização em equipamento OTIS ou de outras marcas a limitação depende da máquina, sendo a limitação do Drive 90m ou de acordo com o tempo máximo de Drive ligado que é de 100 segundos.
Precisão do nivelamento: +/- 5 mm
OBS: O renivelamento pode ser necessário dependendo do percurso e do duty.
Partidas Por Hora:Até 240 partidas por hora, pode ser necessário aplicar ventilação forçada dependendo dos limites damáquina.
6
Manual drive "w" OTIS3 Descrição Funcional
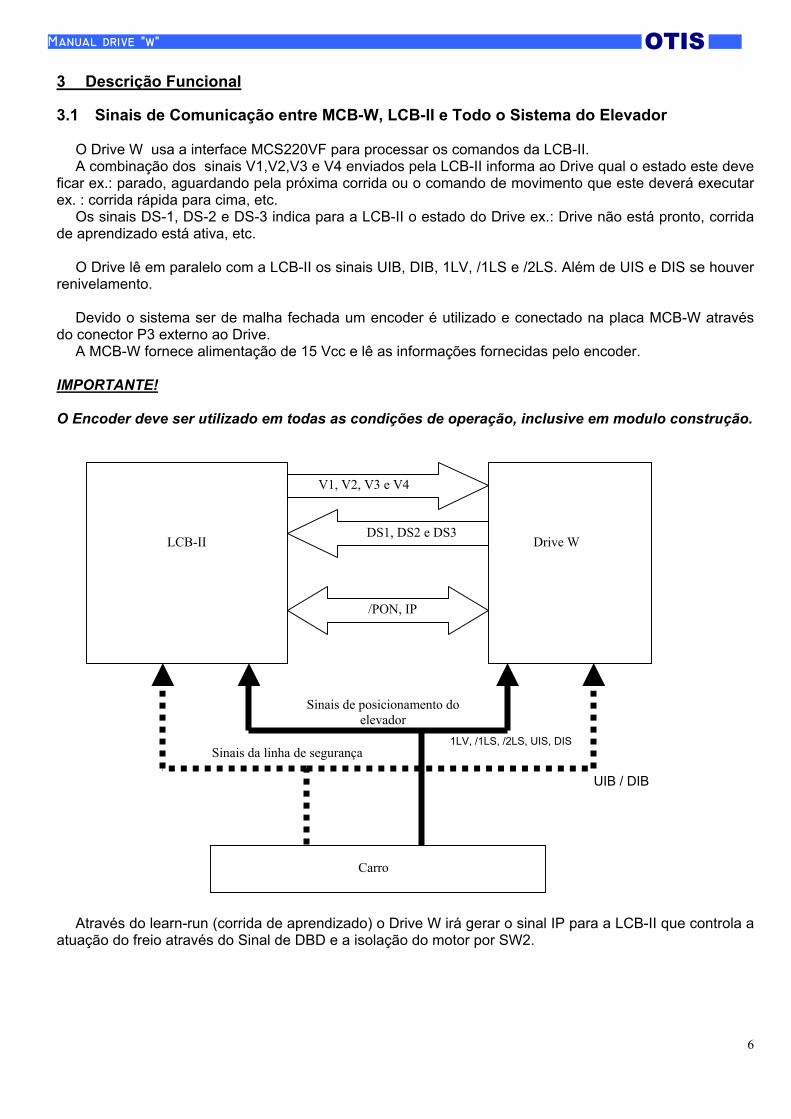
3.1 Sinais de Comunicação entre MCB-W, LCB-II e Todo o Sistema do Elevador
O Drive W usa a interface MCS220VF para processar os comandos da LCB-II.A combinação dos sinais V1,V2,V3 e V4 enviados pela LCB-II informa ao Drive qual o estado este deve
ficar ex.: parado, aguardando pela próxima corrida ou o comando de movimento que este deverá executarex. : corrida rápida para cima, etc.
Os sinais DS-1, DS-2 e DS-3 indica para a LCB-II o estado do Drive ex.: Drive não está pronto, corridade aprendizado está ativa, etc.
O Drive lê em paralelo com a LCB-II os sinais UIB, DIB, 1LV, /1LS e /2LS. Além de UIS e DIS se houverrenivelamento.
Devido o sistema ser de malha fechada um encoder é utilizado e conectado na placa MCB-W atravésdo conector P3 externo ao Drive.
A MCB-W fornece alimentação de 15 Vcc e lê as informações fornecidas pelo encoder.
IMPORTANTE!
O Encoder deve ser utilizado em todas as condições de operação, inclusive em modulo construção.
Através do learn-run (corrida de aprendizado) o Drive W irá gerar o sinal IP para a LCB-II que controla aatuação do freio através do Sinal de DBD e a isolação do motor por SW2.
1LV, /1LS, /2LS, UIS, DIS
UIB / DIB
Sinais da linha de segurança
LCB-II Drive W
V1, V2, V3 e V4
DS1, DS2 e DS3
Sinais de posicionamento doelevador
Carro
/PON, IP
7
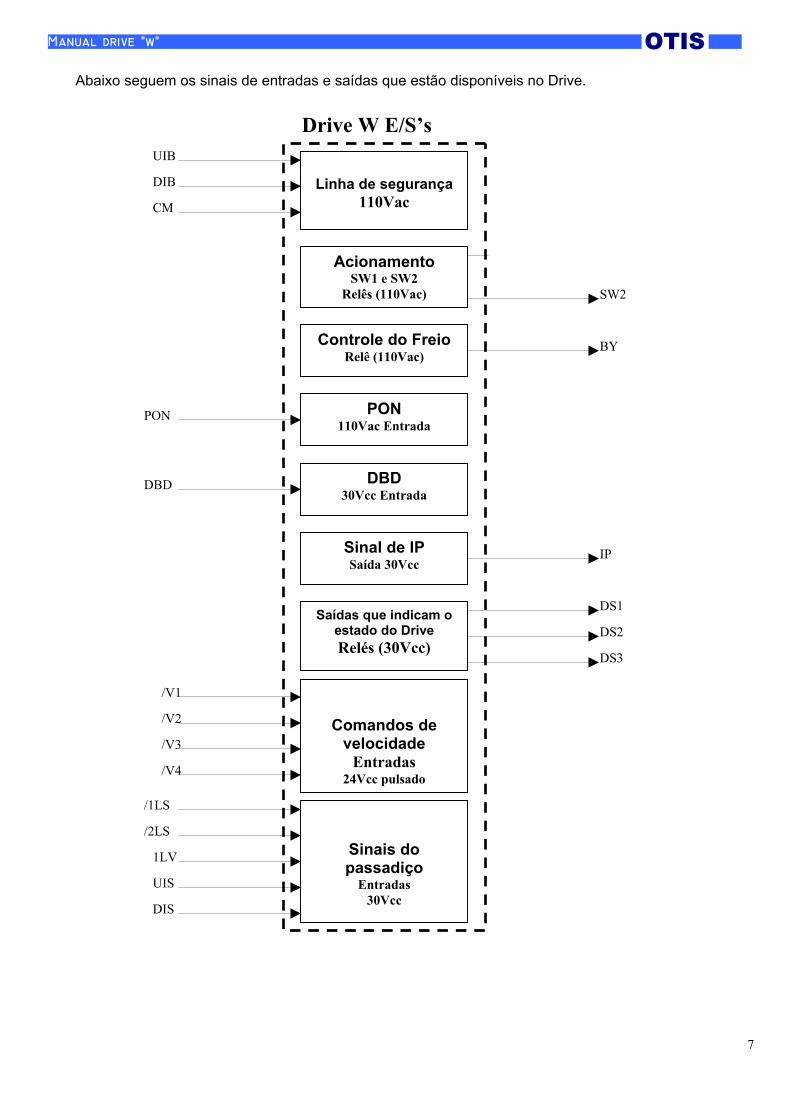
Manual drive "w" OTISAbaixo seguem os sinais de entradas e saídas que estão disponíveis no Drive.
Sinais dopassadiço
Entradas30Vcc
/1LS
/2LS
DIS
UIS
1LV
Linha de segurança110Vac
UIB
DIB
CM
AcionamentoSW1 e SW2
Relês (110Vac) SW2
PON110Vac Entrada
PON
DBD30Vcc Entrada
DBD
Controle do FreioRelê (110Vac)
BY
Sinal de IPSaída 30Vcc
IP
Saídas que indicam oestado do DriveRelés (30Vcc)
DS1
DS2
DS3
Comandos develocidade
Entradas24Vcc pulsado
/V1
/V2
/V3
/V4
Drive W E/S’s
8
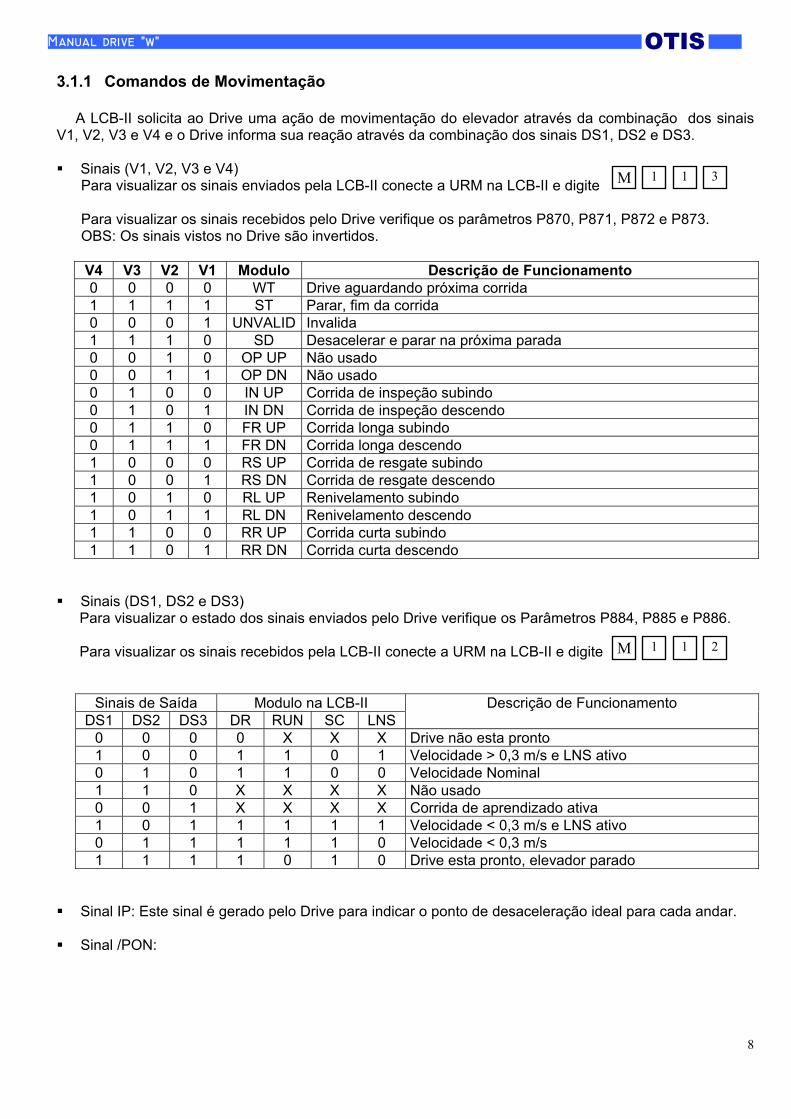
Manual drive "w" OTIS3.1.1 Comandos de Movimentação
A LCB-II solicita ao Drive uma ação de movimentação do elevador através da combinação dos sinaisV1, V2, V3 e V4 e o Drive informa sua reação através da combinação dos sinais DS1, DS2 e DS3.
Sinais (V1, V2, V3 e V4) Para visualizar os sinais enviados pela LCB-II conecte a URM na LCB-II e digite
Para visualizar os sinais recebidos pelo Drive verifique os parâmetros P870, P871, P872 e P873. OBS: Os sinais vistos no Drive são invertidos.
V4 V3 V2 V1 Modulo Descrição de Funcionamento0 0 0 0 WT Drive aguardando próxima corrida1 1 1 1 ST Parar, fim da corrida0 0 0 1 UNVALID Invalida1 1 1 0 SD Desacelerar e parar na próxima parada0 0 1 0 OP UP Não usado0 0 1 1 OP DN Não usado0 1 0 0 IN UP Corrida de inspeção subindo0 1 0 1 IN DN Corrida de inspeção descendo0 1 1 0 FR UP Corrida longa subindo0 1 1 1 FR DN Corrida longa descendo1 0 0 0 RS UP Corrida de resgate subindo1 0 0 1 RS DN Corrida de resgate descendo1 0 1 0 RL UP Renivelamento subindo1 0 1 1 RL DN Renivelamento descendo1 1 0 0 RR UP Corrida curta subindo1 1 0 1 RR DN Corrida curta descendo
Sinais (DS1, DS2 e DS3) Para visualizar o estado dos sinais enviados pelo Drive verifique os Parâmetros P884, P885 e P886.
Para visualizar os sinais recebidos pela LCB-II conecte a URM na LCB-II e digite
Sinais de Saída Modulo na LCB-II Descrição de FuncionamentoDS1 DS2 DS3 DR RUN SC LNS
0 0 0 0 X X X Drive não esta pronto1 0 0 1 1 0 1 Velocidade > 0,3 m/s e LNS ativo0 1 0 1 1 0 0 Velocidade Nominal1 1 0 X X X X Não usado0 0 1 X X X X Corrida de aprendizado ativa1 0 1 1 1 1 1 Velocidade < 0,3 m/s e LNS ativo0 1 1 1 1 1 0 Velocidade < 0,3 m/s1 1 1 1 0 1 0 Drive esta pronto, elevador parado
Sinal IP: Este sinal é gerado pelo Drive para indicar o ponto de desaceleração ideal para cada andar.
Sinal /PON:
1 31M
1 21M
9
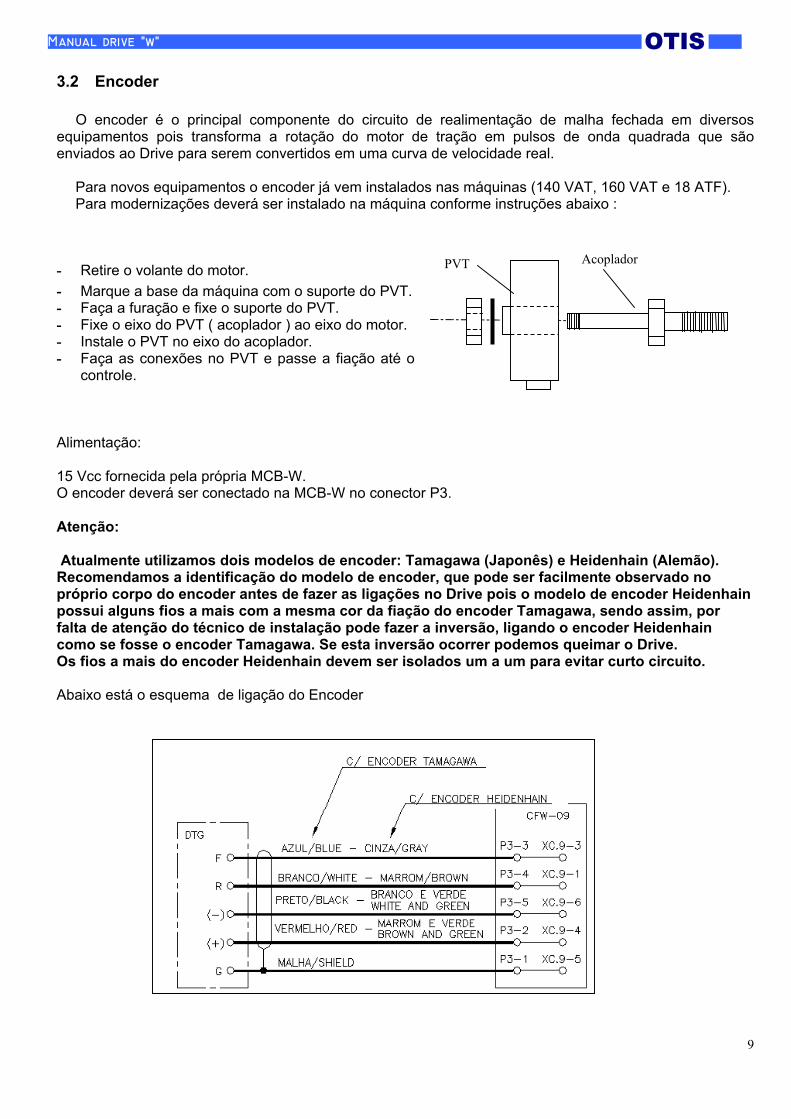
Manual drive "w" OTIS3.2 Encoder
O encoder é o principal componente do circuito de realimentação de malha fechada em diversosequipamentos pois transforma a rotação do motor de tração em pulsos de onda quadrada que sãoenviados ao Drive para serem convertidos em uma curva de velocidade real.
Para novos equipamentos o encoder já vem instalados nas máquinas (140 VAT, 160 VAT e 18 ATF).Para modernizações deverá ser instalado na máquina conforme instruções abaixo :
- Retire o volante do motor.- Marque a base da máquina com o suporte do PVT.- Faça a furação e fixe o suporte do PVT.- Fixe o eixo do PVT ( acoplador ) ao eixo do motor.- Instale o PVT no eixo do acoplador.- Faça as conexões no PVT e passe a fiação até o
controle.
Alimentação:
15 Vcc fornecida pela própria MCB-W.O encoder deverá ser conectado na MCB-W no conector P3.
Atenção:
Atualmente utilizamos dois modelos de encoder: Tamagawa (Japonês) e Heidenhain (Alemão).Recomendamos a identificação do modelo de encoder, que pode ser facilmente observado nopróprio corpo do encoder antes de fazer as ligações no Drive pois o modelo de encoder Heidenhainpossui alguns fios a mais com a mesma cor da fiação do encoder Tamagawa, sendo assim, porfalta de atenção do técnico de instalação pode fazer a inversão, ligando o encoder Heidenhaincomo se fosse o encoder Tamagawa. Se esta inversão ocorrer podemos queimar o Drive.Os fios a mais do encoder Heidenhain devem ser isolados um a um para evitar curto circuito.
Abaixo está o esquema de ligação do Encoder
AcopladorPVT
10
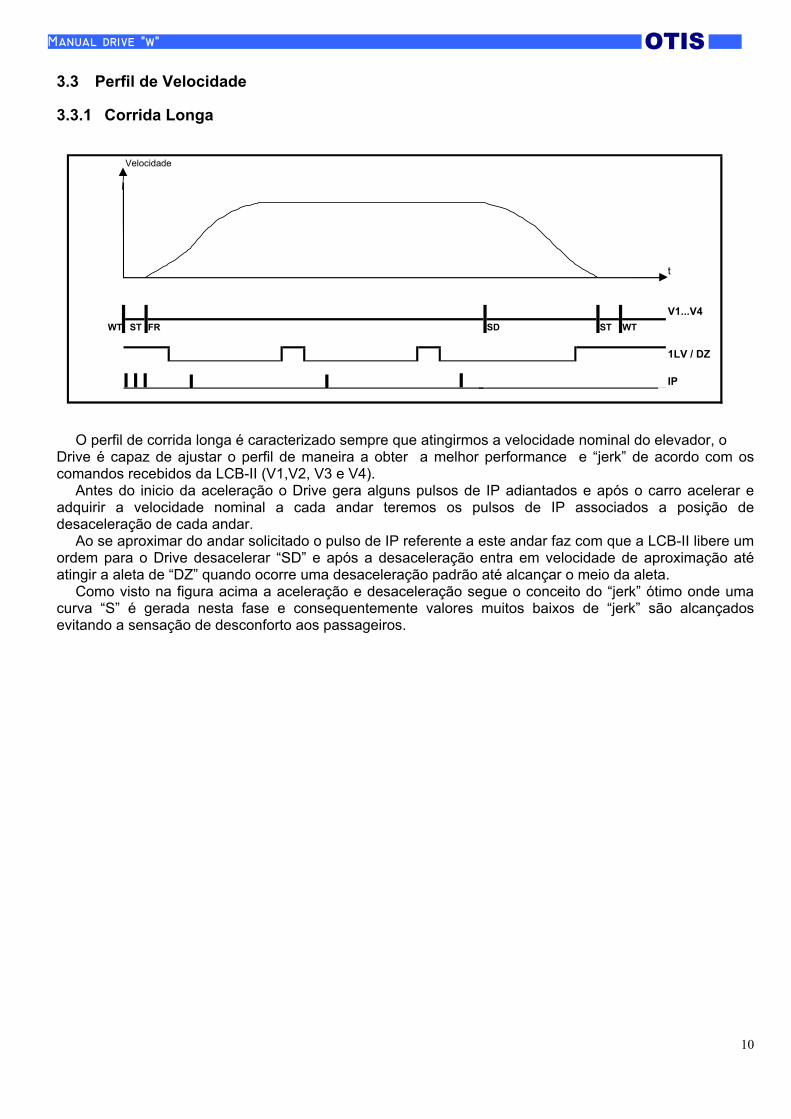
Manual drive "w" OTIS3.3 Perfil de Velocidade
3.3.1 Corrida Longa
O perfil de corrida longa é caracterizado sempre que atingirmos a velocidade nominal do elevador, oDrive é capaz de ajustar o perfil de maneira a obter a melhor performance e “jerk” de acordo com oscomandos recebidos da LCB-II (V1,V2, V3 e V4).
Antes do inicio da aceleração o Drive gera alguns pulsos de IP adiantados e após o carro acelerar eadquirir a velocidade nominal a cada andar teremos os pulsos de IP associados a posição dedesaceleração de cada andar.
Ao se aproximar do andar solicitado o pulso de IP referente a este andar faz com que a LCB-II libere umordem para o Drive desacelerar “SD” e após a desaceleração entra em velocidade de aproximação atéatingir a aleta de “DZ” quando ocorre uma desaceleração padrão até alcançar o meio da aleta.
Como visto na figura acima a aceleração e desaceleração segue o conceito do “jerk” ótimo onde umacurva “S” é gerada nesta fase e consequentemente valores muitos baixos de “jerk” são alcançadosevitando a sensação de desconforto aos passageiros.
Velocidade
t
V1...V4WT ST FR SD ST WT
1LV / DZ
IP
11
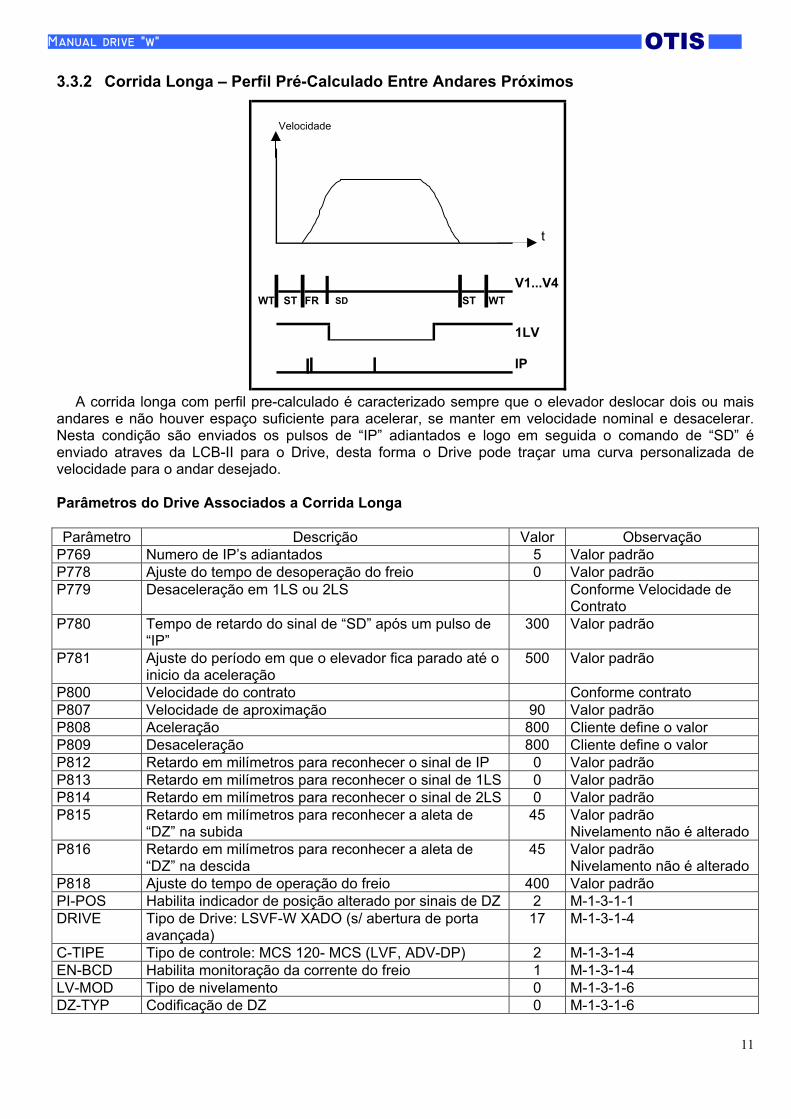
Manual drive "w" OTIS3.3.2 Corrida Longa – Perfil Pré-Calculado Entre Andares Próximos
A corrida longa com perfil pre-calculado é caracterizado sempre que o elevador deslocar dois ou maisandares e não houver espaço suficiente para acelerar, se manter em velocidade nominal e desacelerar.Nesta condição são enviados os pulsos de “IP” adiantados e logo em seguida o comando de “SD” éenviado atraves da LCB-II para o Drive, desta forma o Drive pode traçar uma curva personalizada develocidade para o andar desejado.
Parâmetros do Drive Associados a Corrida Longa
Parâmetro Descrição Valor ObservaçãoP769 Numero de IP’s adiantados 5 Valor padrãoP778 Ajuste do tempo de desoperação do freio 0 Valor padrãoP779 Desaceleração em 1LS ou 2LS Conforme Velocidade de
ContratoP780 Tempo de retardo do sinal de “SD” após um pulso de
“IP”300 Valor padrão
P781 Ajuste do período em que o elevador fica parado até oinicio da aceleração
500 Valor padrão
P800 Velocidade do contrato Conforme contratoP807 Velocidade de aproximação 90 Valor padrãoP808 Aceleração 800 Cliente define o valorP809 Desaceleração 800 Cliente define o valorP812 Retardo em milímetros para reconhecer o sinal de IP 0 Valor padrãoP813 Retardo em milímetros para reconhecer o sinal de 1LS 0 Valor padrãoP814 Retardo em milímetros para reconhecer o sinal de 2LS 0 Valor padrãoP815 Retardo em milímetros para reconhecer a aleta de
“DZ” na subida45 Valor padrão
Nivelamento não é alteradoP816 Retardo em milímetros para reconhecer a aleta de
“DZ” na descida45 Valor padrão
Nivelamento não é alteradoP818 Ajuste do tempo de operação do freio 400 Valor padrãoPI-POS Habilita indicador de posição alterado por sinais de DZ 2 M-1-3-1-1DRIVE Tipo de Drive: LSVF-W XADO (s/ abertura de porta
avançada)17 M-1-3-1-4
C-TIPE Tipo de controle: MCS 120- MCS (LVF, ADV-DP) 2 M-1-3-1-4EN-BCD Habilita monitoração da corrente do freio 1 M-1-3-1-4LV-MOD Tipo de nivelamento 0 M-1-3-1-6DZ-TYP Codificação de DZ 0 M-1-3-1-6
Velocidade
t
V1...V4WT ST FR ST WT
1LV
IP
SD
12
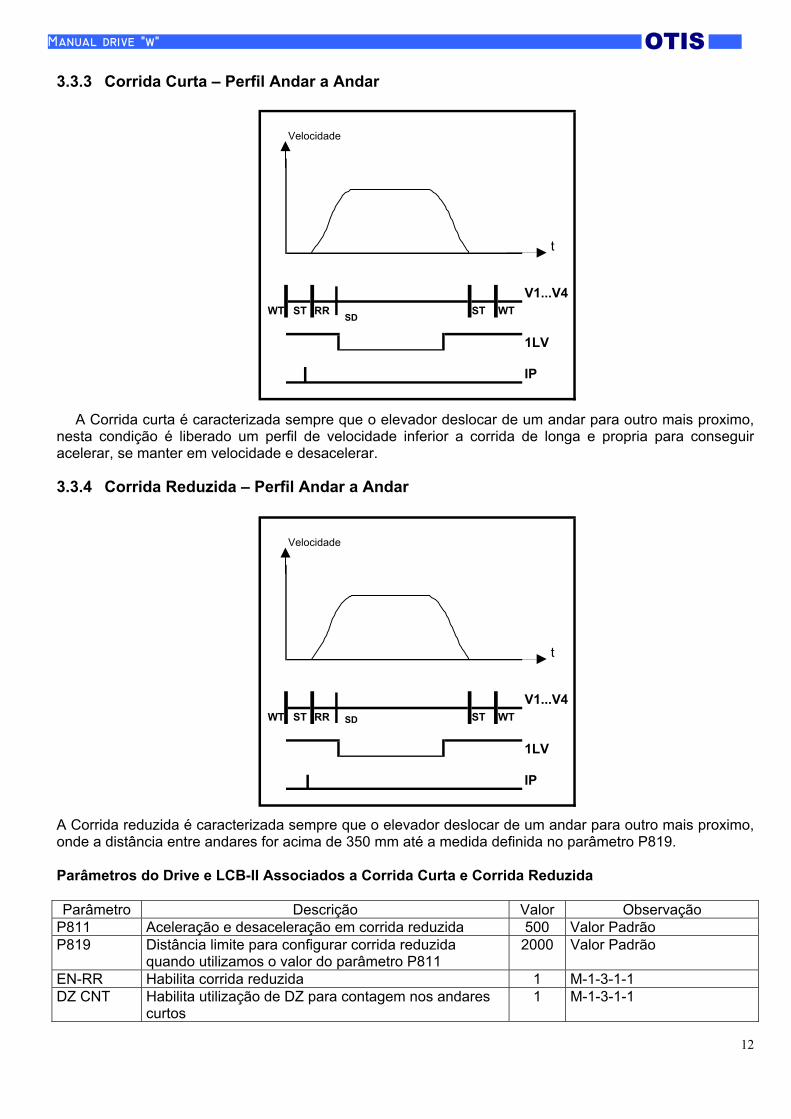
Manual drive "w" OTIS3.3.3 Corrida Curta – Perfil Andar a Andar
A Corrida curta é caracterizada sempre que o elevador deslocar de um andar para outro mais proximo,nesta condição é liberado um perfil de velocidade inferior a corrida de longa e propria para conseguiracelerar, se manter em velocidade e desacelerar.
3.3.4 Corrida Reduzida – Perfil Andar a Andar
A Corrida reduzida é caracterizada sempre que o elevador deslocar de um andar para outro mais proximo,onde a distância entre andares for acima de 350 mm até a medida definida no parâmetro P819.
Parâmetros do Drive e LCB-II Associados a Corrida Curta e Corrida Reduzida
Parâmetro Descrição Valor ObservaçãoP811 Aceleração e desaceleração em corrida reduzida 500 Valor PadrãoP819 Distância limite para configurar corrida reduzida
quando utilizamos o valor do parâmetro P8112000 Valor Padrão
EN-RR Habilita corrida reduzida 1 M-1-3-1-1DZ CNT Habilita utilização de DZ para contagem nos andares
curtos1 M-1-3-1-1
Velocidade
t
V1...V4WT ST RR ST WT
1LV
IP
SD
Velocidade
t
V1...V4WT ST RR ST WT
1LV
IP
SD
13
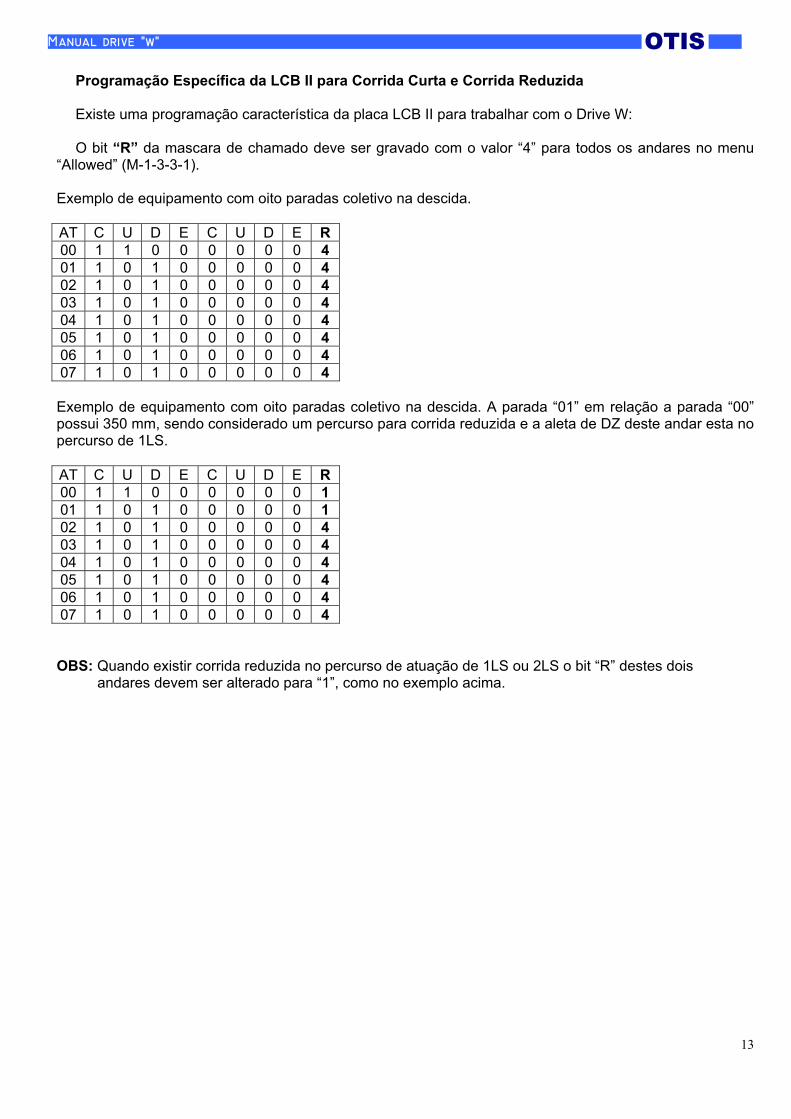
Manual drive "w" OTISProgramação Específica da LCB II para Corrida Curta e Corrida Reduzida
Existe uma programação característica da placa LCB II para trabalhar com o Drive W:
O bit “R” da mascara de chamado deve ser gravado com o valor “4” para todos os andares no menu“Allowed” (M-1-3-3-1).
Exemplo de equipamento com oito paradas coletivo na descida.
AT C U D E C U D E R00 1 1 0 0 0 0 0 0 401 1 0 1 0 0 0 0 0 402 1 0 1 0 0 0 0 0 403 1 0 1 0 0 0 0 0 404 1 0 1 0 0 0 0 0 405 1 0 1 0 0 0 0 0 406 1 0 1 0 0 0 0 0 407 1 0 1 0 0 0 0 0 4
Exemplo de equipamento com oito paradas coletivo na descida. A parada “01” em relação a parada “00”possui 350 mm, sendo considerado um percurso para corrida reduzida e a aleta de DZ deste andar esta nopercurso de 1LS.
AT C U D E C U D E R00 1 1 0 0 0 0 0 0 101 1 0 1 0 0 0 0 0 102 1 0 1 0 0 0 0 0 403 1 0 1 0 0 0 0 0 404 1 0 1 0 0 0 0 0 405 1 0 1 0 0 0 0 0 406 1 0 1 0 0 0 0 0 407 1 0 1 0 0 0 0 0 4
OBS: Quando existir corrida reduzida no percurso de atuação de 1LS ou 2LS o bit “R” destes dois andares devem ser alterado para “1”, como no exemplo acima.
14
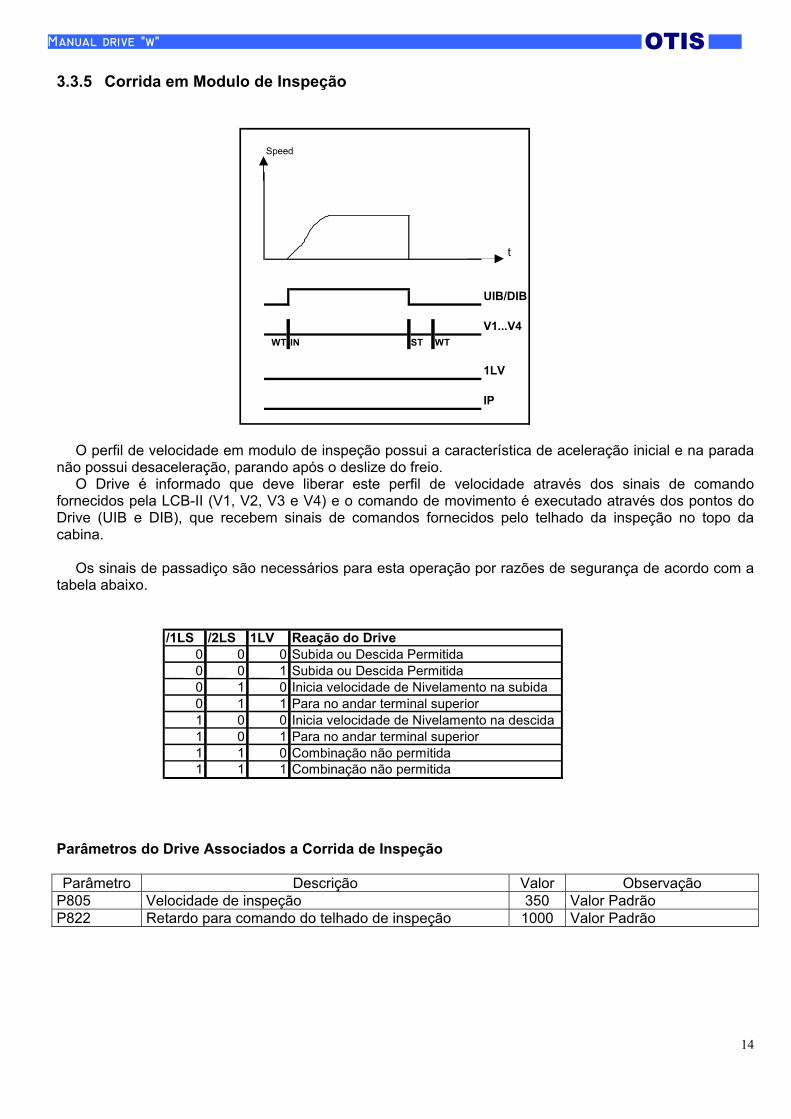
Manual drive "w" OTIS3.3.5 Corrida em Modulo de Inspeção
O perfil de velocidade em modulo de inspeção possui a característica de aceleração inicial e na paradanão possui desaceleração, parando após o deslize do freio.
O Drive é informado que deve liberar este perfil de velocidade através dos sinais de comandofornecidos pela LCB-II (V1, V2, V3 e V4) e o comando de movimento é executado através dos pontos doDrive (UIB e DIB), que recebem sinais de comandos fornecidos pelo telhado da inspeção no topo dacabina.
Os sinais de passadiço são necessários para esta operação por razões de segurança de acordo com atabela abaixo.
Parâmetros do Drive Associados a Corrida de Inspeção
Parâmetro Descrição Valor ObservaçãoP805 Velocidade de inspeção 350 Valor PadrãoP822 Retardo para comando do telhado de inspeção 1000 Valor Padrão
Speed
t
UIB/DIB
V1...V4WT IN ST WT
1LV
IP
/1LS /2LS 1LV Reação do Drive0 0 0 Subida ou Descida Permitida0 0 1 Subida ou Descida Permitida0 1 0 Inicia velocidade de Nivelamento na subida0 1 1 Para no andar terminal superior1 0 0 Inicia velocidade de Nivelamento na descida1 0 1 Para no andar terminal superior1 1 0 Combinação não permitida1 1 1 Combinação não permitida
15
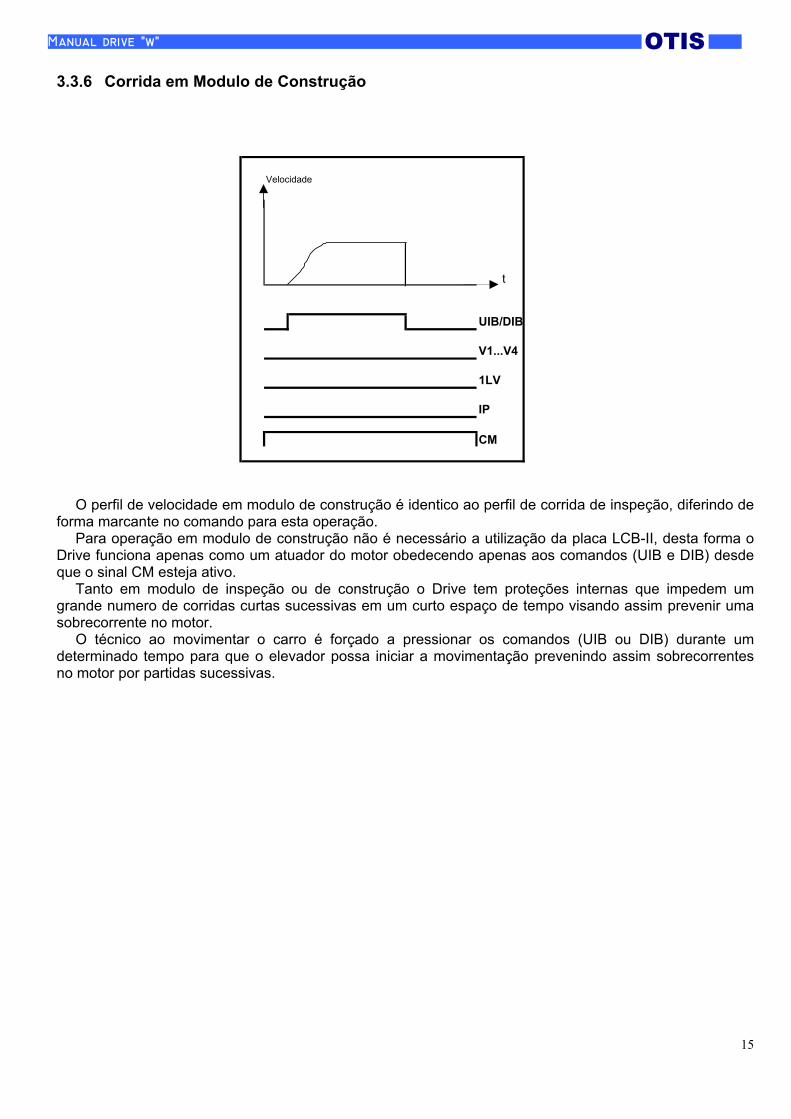
Manual drive "w" OTIS3.3.6 Corrida em Modulo de Construção
O perfil de velocidade em modulo de construção é identico ao perfil de corrida de inspeção, diferindo deforma marcante no comando para esta operação.
Para operação em modulo de construção não é necessário a utilização da placa LCB-II, desta forma oDrive funciona apenas como um atuador do motor obedecendo apenas aos comandos (UIB e DIB) desdeque o sinal CM esteja ativo.
Tanto em modulo de inspeção ou de construção o Drive tem proteções internas que impedem umgrande numero de corridas curtas sucessivas em um curto espaço de tempo visando assim prevenir umasobrecorrente no motor.
O técnico ao movimentar o carro é forçado a pressionar os comandos (UIB ou DIB) durante umdeterminado tempo para que o elevador possa iniciar a movimentação prevenindo assim sobrecorrentesno motor por partidas sucessivas.
Velocidade
t
UIB/DIB
V1...V4
1LV
IP
CM
16
Manual drive "w" OTIS3.3.7 Corrida de Resgate
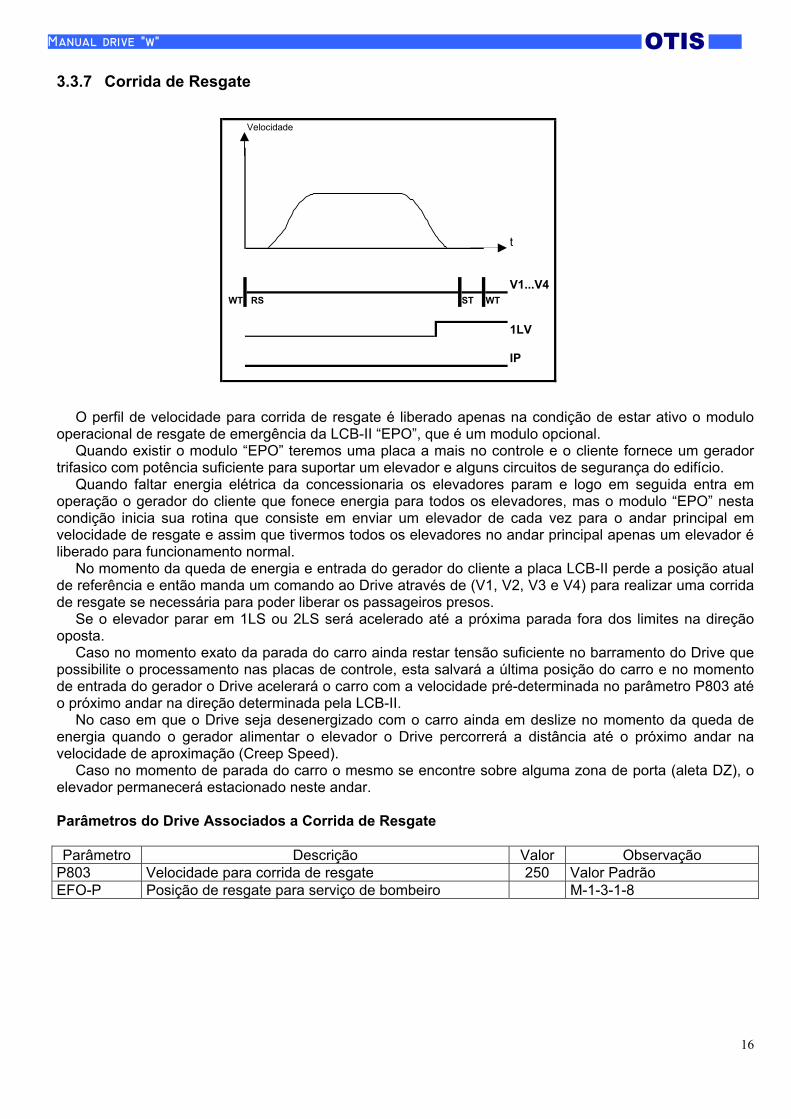
O perfil de velocidade para corrida de resgate é liberado apenas na condição de estar ativo o modulooperacional de resgate de emergência da LCB-II “EPO”, que é um modulo opcional.
Quando existir o modulo “EPO” teremos uma placa a mais no controle e o cliente fornece um geradortrifasico com potência suficiente para suportar um elevador e alguns circuitos de segurança do edifício.
Quando faltar energia elétrica da concessionaria os elevadores param e logo em seguida entra emoperação o gerador do cliente que fonece energia para todos os elevadores, mas o modulo “EPO” nestacondição inicia sua rotina que consiste em enviar um elevador de cada vez para o andar principal emvelocidade de resgate e assim que tivermos todos os elevadores no andar principal apenas um elevador éliberado para funcionamento normal.
No momento da queda de energia e entrada do gerador do cliente a placa LCB-II perde a posição atualde referência e então manda um comando ao Drive através de (V1, V2, V3 e V4) para realizar uma corridade resgate se necessária para poder liberar os passageiros presos.
Se o elevador parar em 1LS ou 2LS será acelerado até a próxima parada fora dos limites na direçãooposta.
Caso no momento exato da parada do carro ainda restar tensão suficiente no barramento do Drive quepossibilite o processamento nas placas de controle, esta salvará a última posição do carro e no momentode entrada do gerador o Drive acelerará o carro com a velocidade pré-determinada no parâmetro P803 atéo próximo andar na direção determinada pela LCB-II.
No caso em que o Drive seja desenergizado com o carro ainda em deslize no momento da queda deenergia quando o gerador alimentar o elevador o Drive percorrerá a distância até o próximo andar navelocidade de aproximação (Creep Speed).
Caso no momento de parada do carro o mesmo se encontre sobre alguma zona de porta (aleta DZ), oelevador permanecerá estacionado neste andar.
Parâmetros do Drive Associados a Corrida de Resgate
Parâmetro Descrição Valor ObservaçãoP803 Velocidade para corrida de resgate 250 Valor PadrãoEFO-P Posição de resgate para serviço de bombeiro M-1-3-1-8
Velocidade
t
V1...V4WT RS ST WT
1LV
IP
17
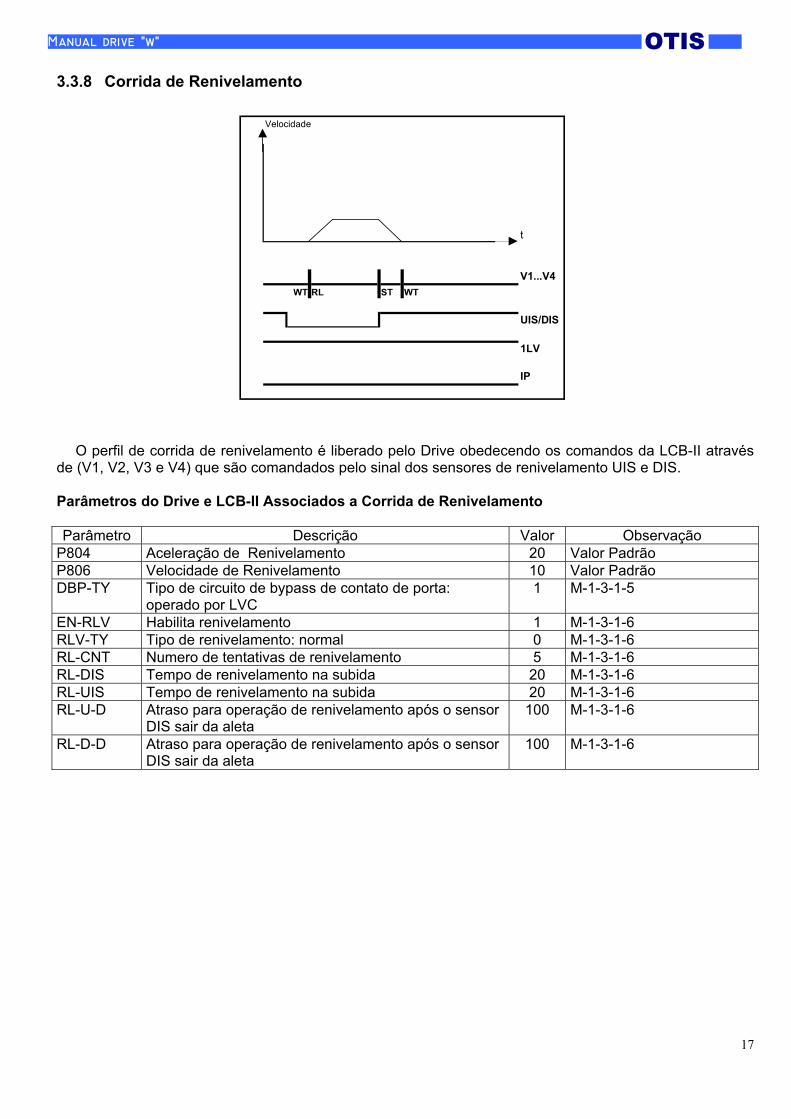
Manual drive "w" OTIS3.3.8 Corrida de Renivelamento
O perfil de corrida de renivelamento é liberado pelo Drive obedecendo os comandos da LCB-II atravésde (V1, V2, V3 e V4) que são comandados pelo sinal dos sensores de renivelamento UIS e DIS.
Parâmetros do Drive e LCB-II Associados a Corrida de Renivelamento
Parâmetro Descrição Valor ObservaçãoP804 Aceleração de Renivelamento 20 Valor PadrãoP806 Velocidade de Renivelamento 10 Valor PadrãoDBP-TY Tipo de circuito de bypass de contato de porta:
operado por LVC1 M-1-3-1-5
EN-RLV Habilita renivelamento 1 M-1-3-1-6RLV-TY Tipo de renivelamento: normal 0 M-1-3-1-6RL-CNT Numero de tentativas de renivelamento 5 M-1-3-1-6RL-DIS Tempo de renivelamento na subida 20 M-1-3-1-6RL-UIS Tempo de renivelamento na subida 20 M-1-3-1-6RL-U-D Atraso para operação de renivelamento após o sensor
DIS sair da aleta100 M-1-3-1-6
RL-D-D Atraso para operação de renivelamento após o sensorDIS sair da aleta
100 M-1-3-1-6
Velocidade
t
V1...V4WT RL ST WT
UIS/DIS
1LV
IP
18
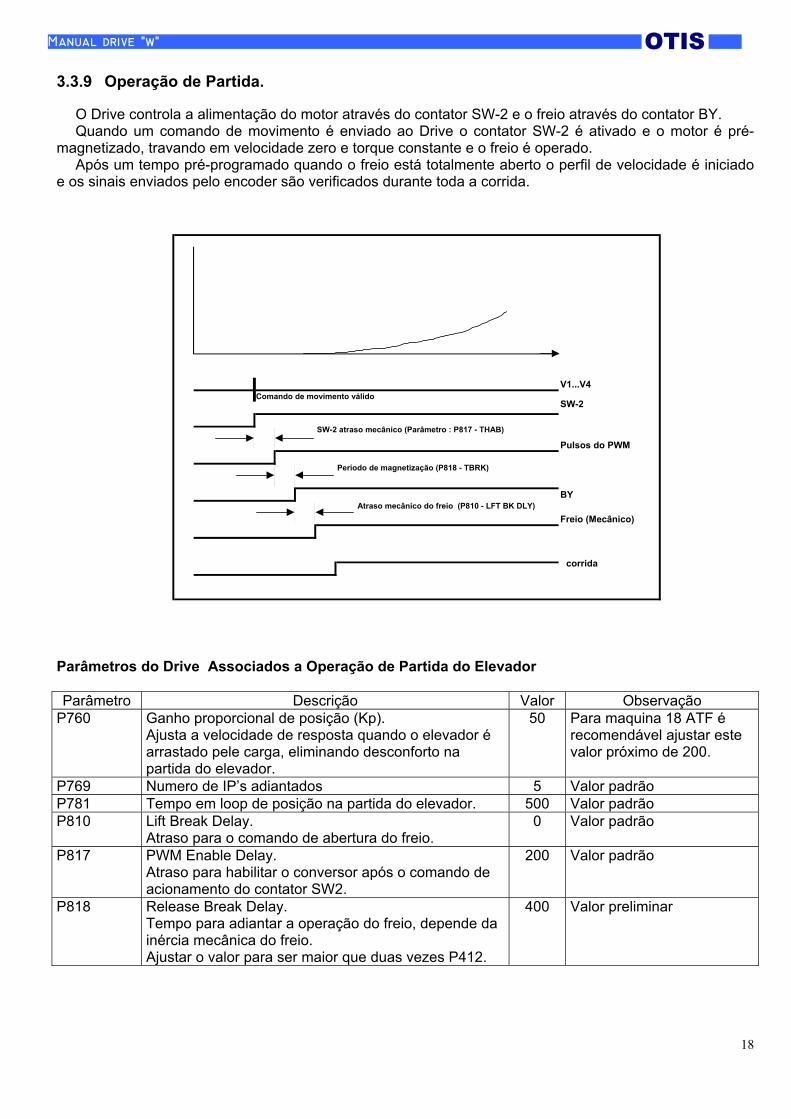
Manual drive "w" OTIS3.3.9 Operação de Partida.
O Drive controla a alimentação do motor através do contator SW-2 e o freio através do contator BY.Quando um comando de movimento é enviado ao Drive o contator SW-2 é ativado e o motor é pré-
magnetizado, travando em velocidade zero e torque constante e o freio é operado.Após um tempo pré-programado quando o freio está totalmente aberto o perfil de velocidade é iniciado
e os sinais enviados pelo encoder são verificados durante toda a corrida.
Parâmetros do Drive Associados a Operação de Partida do Elevador
Parâmetro Descrição Valor ObservaçãoP760 Ganho proporcional de posição (Kp).
Ajusta a velocidade de resposta quando o elevador éarrastado pele carga, eliminando desconforto napartida do elevador.
50 Para maquina 18 ATF érecomendável ajustar estevalor próximo de 200.
P769 Numero de IP’s adiantados 5 Valor padrãoP781 Tempo em loop de posição na partida do elevador. 500 Valor padrãoP810 Lift Break Delay.
Atraso para o comando de abertura do freio.0 Valor padrão
P817 PWM Enable Delay.Atraso para habilitar o conversor após o comando deacionamento do contator SW2.
200 Valor padrão
P818 Release Break Delay.Tempo para adiantar a operação do freio, depende dainércia mecânica do freio.Ajustar o valor para ser maior que duas vezes P412.
400 Valor preliminar
V1...V4Comando de movimento válido
SW-2
SW-2 atraso mecânico (Parâmetro : P817 - THAB)
Pulsos do PWM
Período de magnetização (P818 - TBRK)
BYAtraso mecânico do freio (P810 - LFT BK DLY)
Freio (Mecânico)
corrida
19
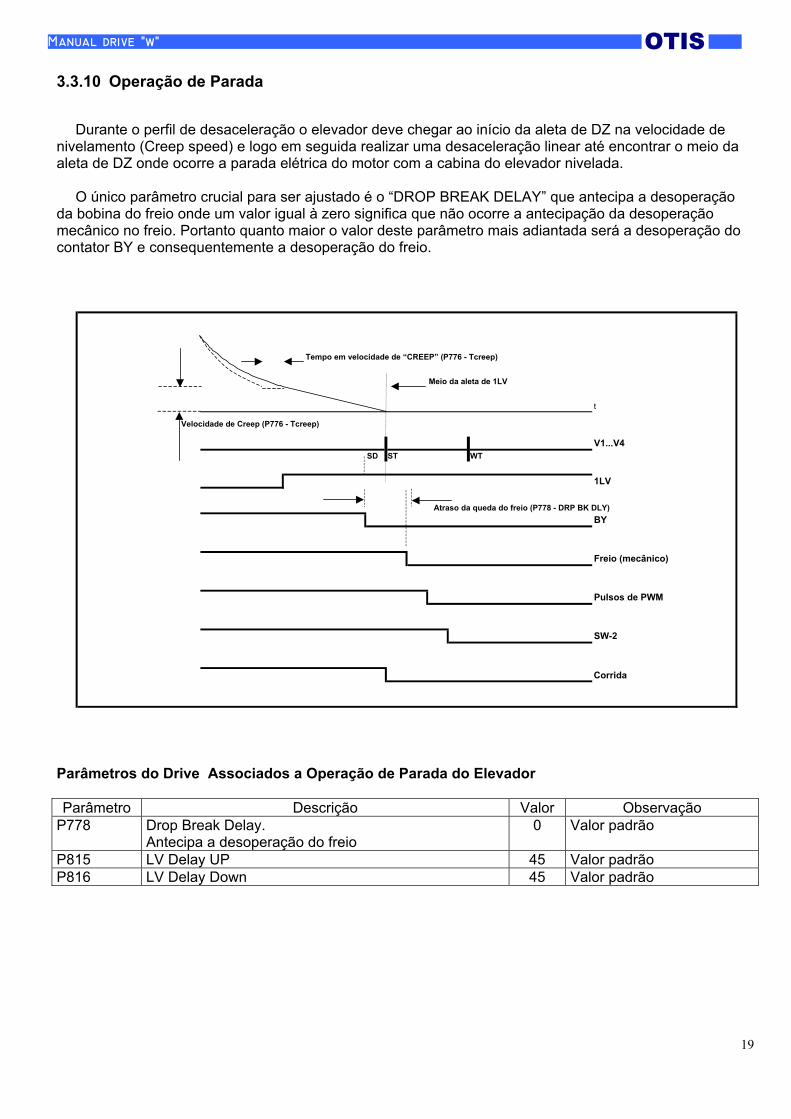
Manual drive "w" OTIS3.3.10 Operação de Parada
Durante o perfil de desaceleração o elevador deve chegar ao início da aleta de DZ na velocidade denivelamento (Creep speed) e logo em seguida realizar uma desaceleração linear até encontrar o meio daaleta de DZ onde ocorre a parada elétrica do motor com a cabina do elevador nivelada.
O único parâmetro crucial para ser ajustado é o “DROP BREAK DELAY” que antecipa a desoperaçãoda bobina do freio onde um valor igual à zero significa que não ocorre a antecipação da desoperaçãomecânico no freio. Portanto quanto maior o valor deste parâmetro mais adiantada será a desoperação docontator BY e consequentemente a desoperação do freio.
Parâmetros do Drive Associados a Operação de Parada do Elevador
Parâmetro Descrição Valor ObservaçãoP778 Drop Break Delay.
Antecipa a desoperação do freio0 Valor padrão
P815 LV Delay UP 45 Valor padrãoP816 LV Delay Down 45 Valor padrão
Corrida
t
Tempo em velocidade de “CREEP” (P776 - Tcreep)
Meio da aleta de 1LV
V1...V4SD ST WT
Velocidade de Creep (P776 - Tcreep)
1LV
Atraso da queda do freio (P778 - DRP BK DLY)BY
Freio (mecânico)
Pulsos de PWM
SW-2
20
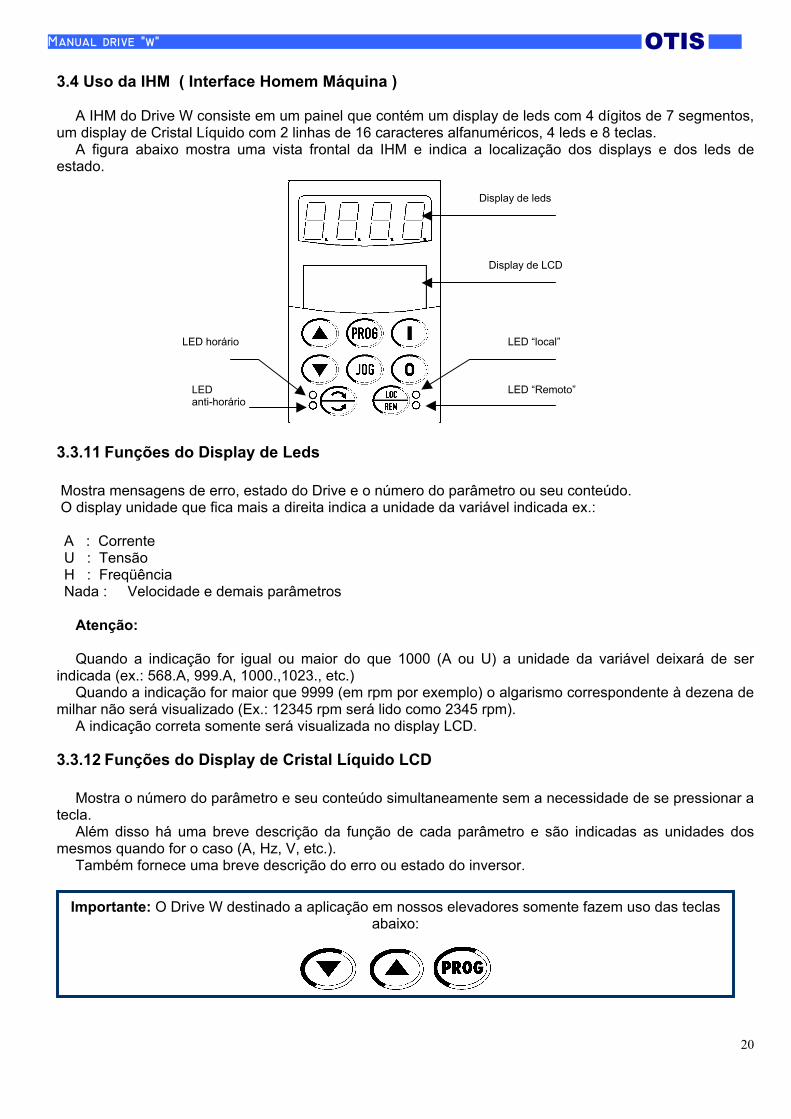
Manual drive "w" OTIS3.4 Uso da IHM ( Interface Homem Máquina )
A IHM do Drive W consiste em um painel que contém um display de leds com 4 dígitos de 7 segmentos,um display de Cristal Líquido com 2 linhas de 16 caracteres alfanuméricos, 4 leds e 8 teclas.
A figura abaixo mostra uma vista frontal da IHM e indica a localização dos displays e dos leds deestado.
3.3.11 Funções do Display de Leds
Mostra mensagens de erro, estado do Drive e o número do parâmetro ou seu conteúdo. O display unidade que fica mais a direita indica a unidade da variável indicada ex.:
A : CorrenteU : TensãoH : FreqüênciaNada : Velocidade e demais parâmetros
Atenção:
Quando a indicação for igual ou maior do que 1000 (A ou U) a unidade da variável deixará de serindicada (ex.: 568.A, 999.A, 1000.,1023., etc.)
Quando a indicação for maior que 9999 (em rpm por exemplo) o algarismo correspondente à dezena demilhar não será visualizado (Ex.: 12345 rpm será lido como 2345 rpm).
A indicação correta somente será visualizada no display LCD.
3.3.12 Funções do Display de Cristal Líquido LCD
Mostra o número do parâmetro e seu conteúdo simultaneamente sem a necessidade de se pressionar atecla.
Além disso há uma breve descrição da função de cada parâmetro e são indicadas as unidades dosmesmos quando for o caso (A, Hz, V, etc.).
Também fornece uma breve descrição do erro ou estado do inversor.
Display de leds
Display de LCD
LED “local”LED horário
LED “Remoto”LEDanti-horário
Importante: O Drive W destinado a aplicação em nossos elevadores somente fazem uso das teclasabaixo:
21
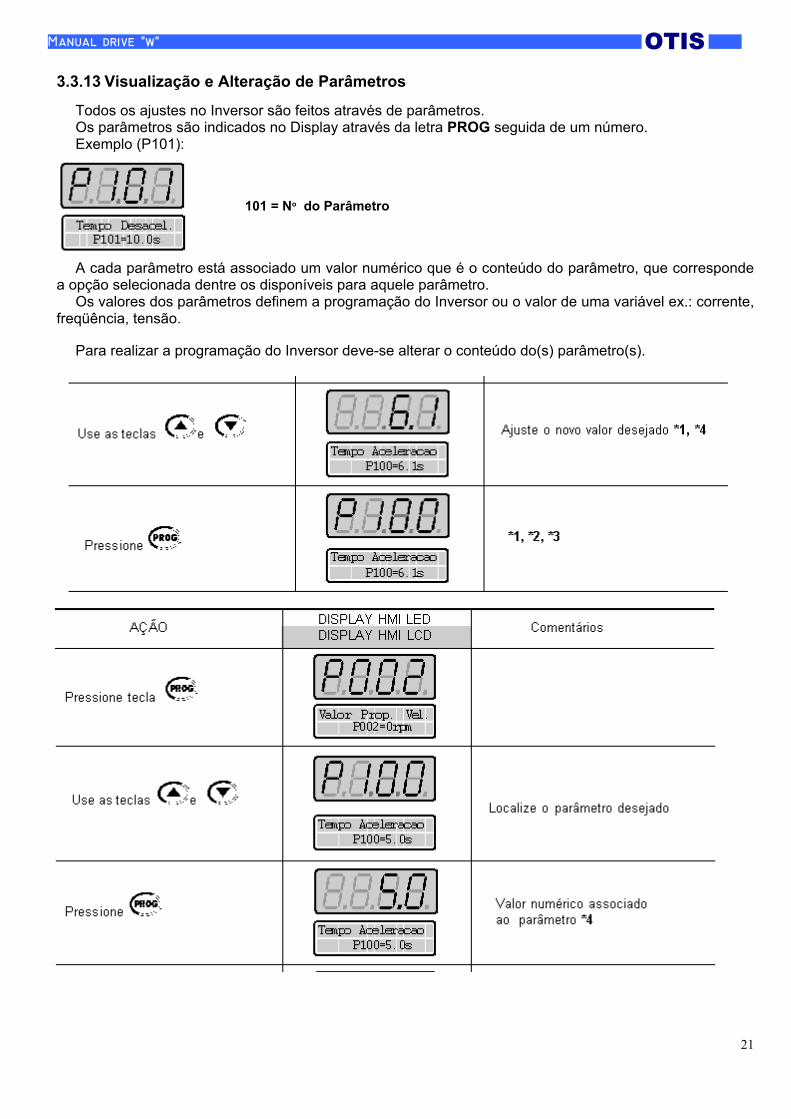
Manual drive "w" OTIS3.3.13 Visualização e Alteração de Parâmetros
Todos os ajustes no Inversor são feitos através de parâmetros.Os parâmetros são indicados no Display através da letra PROG seguida de um número.Exemplo (P101):
101 = No do Parâmetro
A cada parâmetro está associado um valor numérico que é o conteúdo do parâmetro, que correspondea opção selecionada dentre os disponíveis para aquele parâmetro.
Os valores dos parâmetros definem a programação do Inversor ou o valor de uma variável ex.: corrente,freqüência, tensão.
Para realizar a programação do Inversor deve-se alterar o conteúdo do(s) parâmetro(s).
22
Manual drive "w" OTISObservações:
*1 - Para os parâmetros que podem ser alterados com motor girando o Drive passa a utilizarimediatamente o novo valor ajustado.
Para os parâmetros que só podem ser alterados com motor parado o Drive passa a utilizar o novo valorajustado somente após pressionar a tecla:
*2 - Pressionando a tecla após o ajuste o último valor ajustado é automaticamente gravado namemória não volátil do Inversor ficando retido até nova alteração.
*3 - Caso o último valor ajustado no parâmetro torne funcionalmente incompatível com outro parâmetrojá ajustado ocorre a indicação de E24 - Erro de programação.
*4 – Para alterar o valor de um parâmetro é necessário ajustar antes P000= Valor da Senha.O Valor da senha para o padrão de fábrica é 5.Caso contrário só será possível visualizar os parâmetros mas não modificá-los.
ATENÇÃO!!!Não Modificar o Valor Padrão Desta Senha!
Para mais detalhes ver descrição de P000 e P200 no capítulo sobre parâmetros.
23
Manual drive "w" OTIS4 Procedimento Preliminares para Funcionamento do Equipamento
Para garantir o bom funcionamento do equipamento é indispensável executar algumas verificações antesde energizar o Drive.
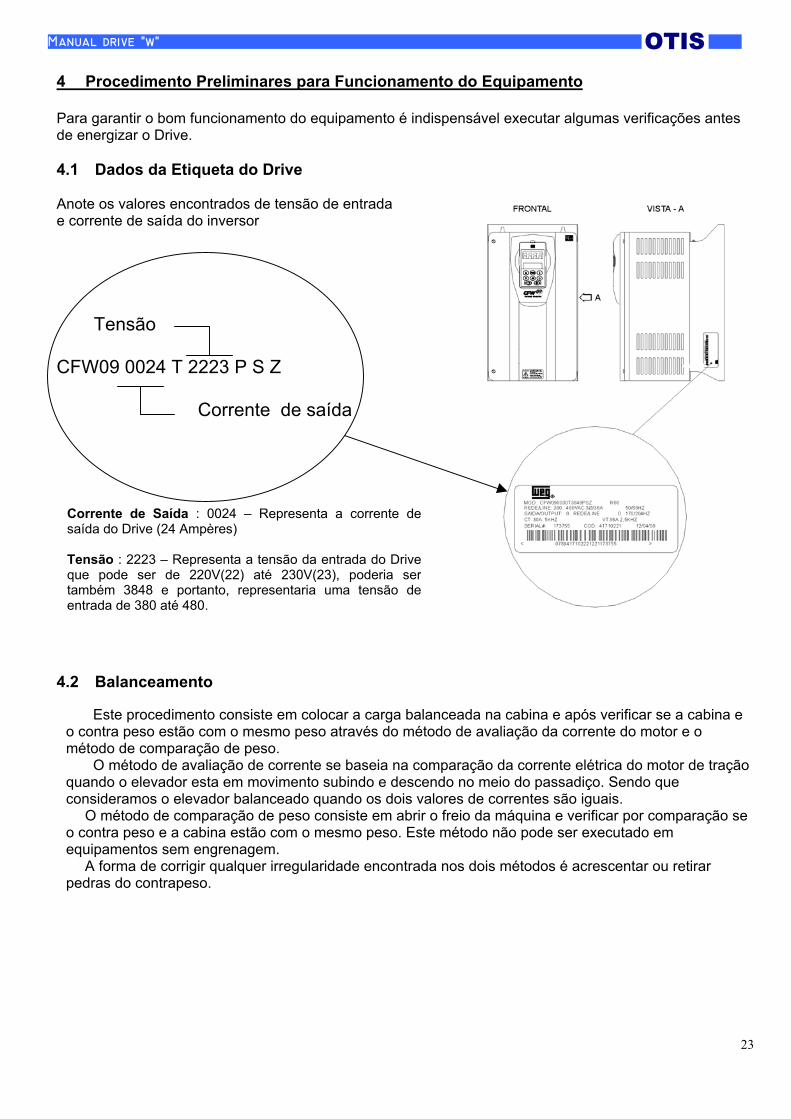
4.1 Dados da Etiqueta do Drive
Anote os valores encontrados de tensão de entradae corrente de saída do inversor
Tensão
CFW09 0024 T 2223 P S Z
Corrente de saída
4.2 Balanceamento
Este procedimento consiste em colocar a carga balanceada na cabina e após verificar se a cabina eo contra peso estão com o mesmo peso através do método de avaliação da corrente do motor e ométodo de comparação de peso.
O método de avaliação de corrente se baseia na comparação da corrente elétrica do motor de traçãoquando o elevador esta em movimento subindo e descendo no meio do passadiço. Sendo queconsideramos o elevador balanceado quando os dois valores de correntes são iguais.
O método de comparação de peso consiste em abrir o freio da máquina e verificar por comparação seo contra peso e a cabina estão com o mesmo peso. Este método não pode ser executado emequipamentos sem engrenagem.
A forma de corrigir qualquer irregularidade encontrada nos dois métodos é acrescentar ou retirarpedras do contrapeso.
Corrente de Saída : 0024 – Representa a corrente desaída do Drive (24 Ampères)
Tensão : 2223 – Representa a tensão da entrada do Driveque pode ser de 220V(22) até 230V(23), poderia sertambém 3848 e portanto, representaria uma tensão deentrada de 380 até 480.
24
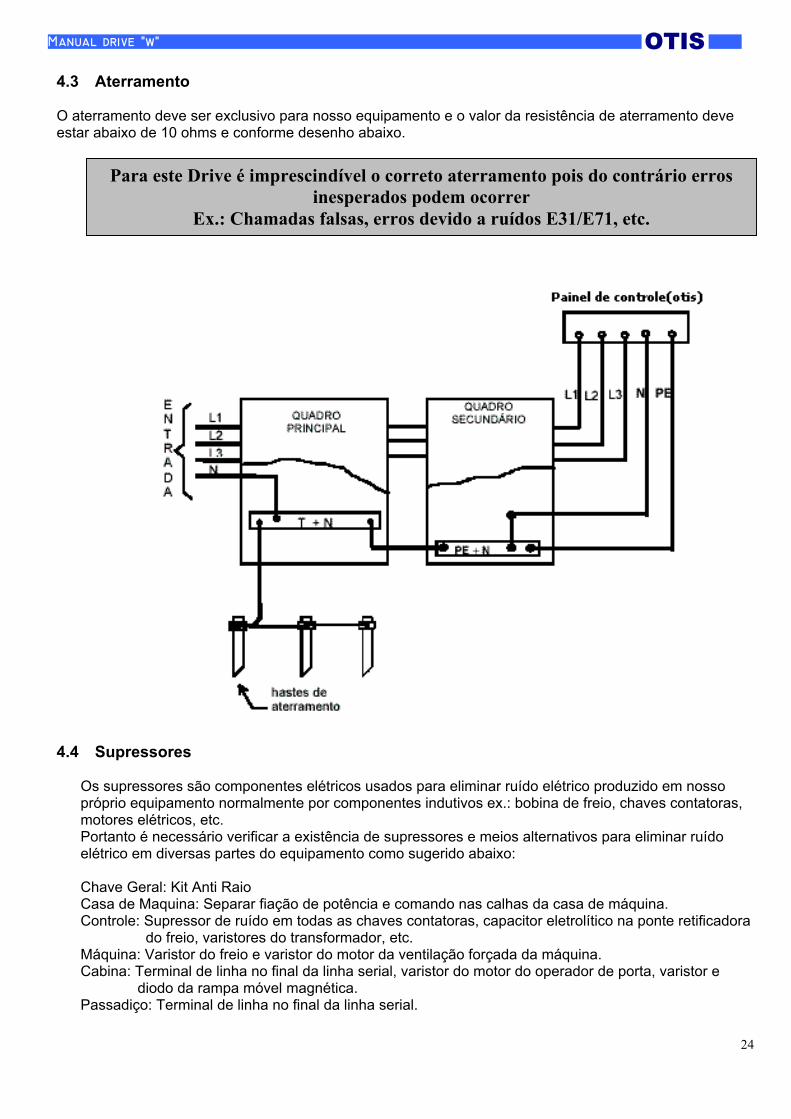
Manual drive "w" OTIS4.3 Aterramento
O aterramento deve ser exclusivo para nosso equipamento e o valor da resistência de aterramento deveestar abaixo de 10 ohms e conforme desenho abaixo.
4.4 Supressores
Os supressores são componentes elétricos usados para eliminar ruído elétrico produzido em nossopróprio equipamento normalmente por componentes indutivos ex.: bobina de freio, chaves contatoras,motores elétricos, etc.Portanto é necessário verificar a existência de supressores e meios alternativos para eliminar ruídoelétrico em diversas partes do equipamento como sugerido abaixo:
Chave Geral: Kit Anti RaioCasa de Maquina: Separar fiação de potência e comando nas calhas da casa de máquina.Controle: Supressor de ruído em todas as chaves contatoras, capacitor eletrolítico na ponte retificadora do freio, varistores do transformador, etc.Máquina: Varistor do freio e varistor do motor da ventilação forçada da máquina.Cabina: Terminal de linha no final da linha serial, varistor do motor do operador de porta, varistor e diodo da rampa móvel magnética.Passadiço: Terminal de linha no final da linha serial.
Para este Drive é imprescindível o correto aterramento pois do contrário errosinesperados podem ocorrer
Ex.: Chamadas falsas, erros devido a ruídos E31/E71, etc.
25
Manual drive "w" OTIS4.5 Programação Básica da LCB-II
Na tabela abaixo estão reunidos os parâmetros básicos da LCB-II.
Parâmetro Descrição Valor ObservaçãoPI-POS Habilita indicador de posição alterado por sinais de DZ 2 M-1-3-1-1DRIVE Tipo de Drive: LSVF-W XADO (s/ abertura de porta
avançada)17 M-1-3-1-4
C-TIPE Tipo de controle: MCS 120- MCS (LVF, ADV-DP) 2 M-1-3-1-4EN-BCD Habilita monitoração da corrente do freio 1 M-1-3-1-4LV-MOD Tipo de nivelamento 0 M-1-3-1-6DZ-TYP Codificação de DZ 0 M-1-3-1-6EN-RR Habilita corrida reduzida 1 M-1-3-1-1DZ CNT Habilita utilização de DZ para contagem nos andares
curtos1 M-1-3-1-1
Atenção: O bit “R” da mascara de chamado deve ser gravado com o valor “4” para todos os andares no menu “Allowed” (M-1-3-3-1).
Exemplo de equipamento com oito paradas coletivo na descida.
AT C U D E C U D E R00 1 1 0 0 0 0 0 0 401 1 0 1 0 0 0 0 0 402 1 0 1 0 0 0 0 0 403 1 0 1 0 0 0 0 0 404 1 0 1 0 0 0 0 0 405 1 0 1 0 0 0 0 0 406 1 0 1 0 0 0 0 0 407 1 0 1 0 0 0 0 0 4
Exemplo de equipamento com oito paradas coletivo na descida. A parada “01” em relação a parada “00”possui 350 mm, sendo considerado um percurso para corrida reduzida e a aleta de DZ deste andar esta nopercurso de 1LS.
AT C U D E C U D E R00 1 1 0 0 0 0 0 0 101 1 0 1 0 0 0 0 0 102 1 0 1 0 0 0 0 0 403 1 0 1 0 0 0 0 0 404 1 0 1 0 0 0 0 0 405 1 0 1 0 0 0 0 0 406 1 0 1 0 0 0 0 0 407 1 0 1 0 0 0 0 0 4
OBS: Quando existir corrida reduzida no percurso de atuação de 1LS ou 2LS o bit “R” deste destes dois andares devem ser alterado para “1”, como no exemplo acima.
26
Manual drive "w" OTIS5 Procedimento de Ajuste do Equipamento
5.1 Procedimentos para Configurar Modulo de Inspeção
Inicialmente configuramos o equipamento para funcionar em modulo de inspeção para executar todainstalação mecânica do equipamento.
Abaixo segue as etapas para configurar modulo de inspeção.
Desligar fusíveis do controle (F1 a F7) - O objetivo é preservar as placas eletrônicas do controle caso atensão de alimentação esteja fora da faixa de valores permitida.
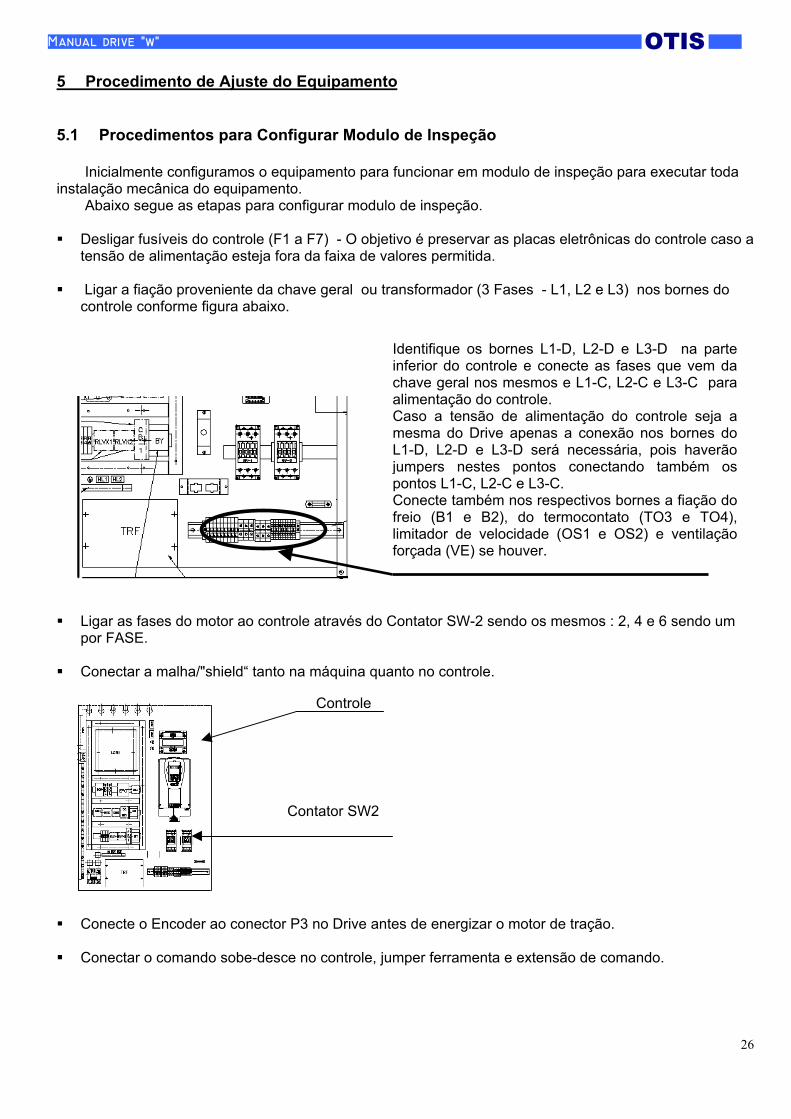
Ligar a fiação proveniente da chave geral ou transformador (3 Fases - L1, L2 e L3) nos bornes docontrole conforme figura abaixo.
Ligar as fases do motor ao controle através do Contator SW-2 sendo os mesmos : 2, 4 e 6 sendo umpor FASE.
Conectar a malha/"shield“ tanto na máquina quanto no controle.
Conecte o Encoder ao conector P3 no Drive antes de energizar o motor de tração.
Conectar o comando sobe-desce no controle, jumper ferramenta e extensão de comando.
Identifique os bornes L1-D, L2-D e L3-D na parteinferior do controle e conecte as fases que vem dachave geral nos mesmos e L1-C, L2-C e L3-C paraalimentação do controle.Caso a tensão de alimentação do controle seja amesma do Drive apenas a conexão nos bornes doL1-D, L2-D e L3-D será necessária, pois haverãojumpers nestes pontos conectando também ospontos L1-C, L2-C e L3-C.Conecte também nos respectivos bornes a fiação dofreio (B1 e B2), do termocontato (TO3 e TO4),limitador de velocidade (OS1 e OS2) e ventilaçãoforçada (VE) se houver.
Controle
Contator SW2
27
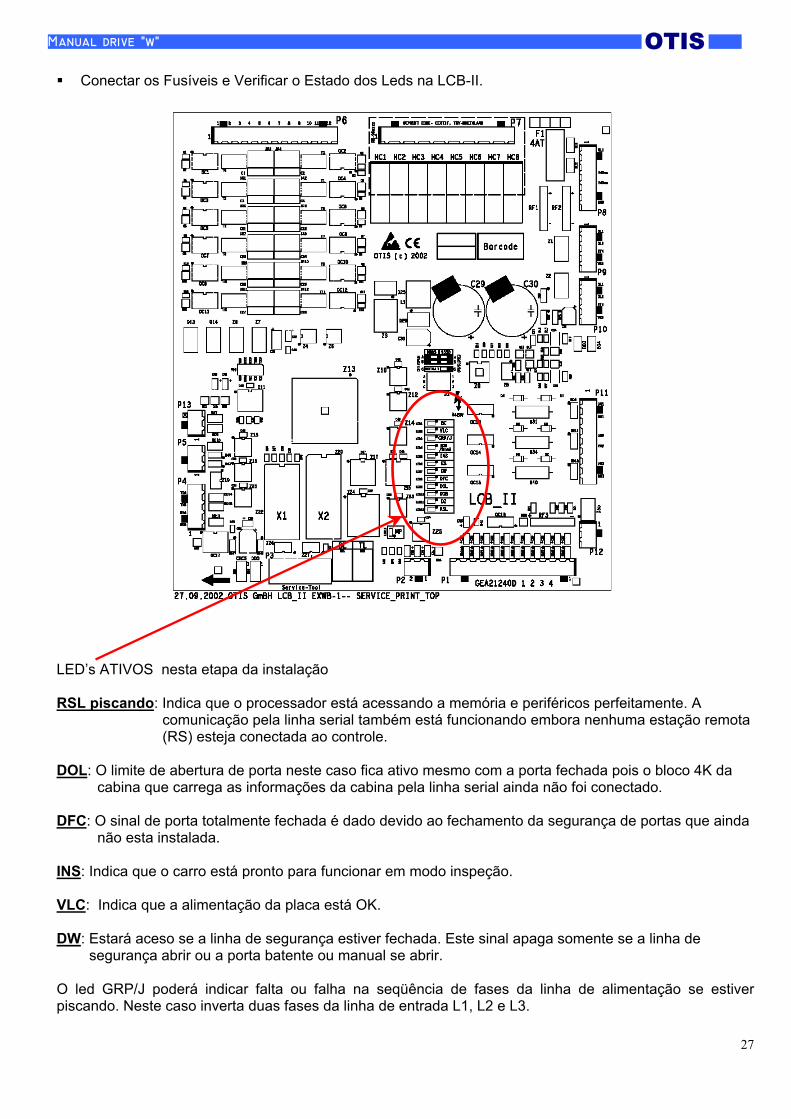
Manual drive "w" OTIS Conectar os Fusíveis e Verificar o Estado dos Leds na LCB-II.
LED’s ATIVOS nesta etapa da instalação
RSL piscando: Indica que o processador está acessando a memória e periféricos perfeitamente. A comunicação pela linha serial também está funcionando embora nenhuma estação remota (RS) esteja conectada ao controle.
DOL: O limite de abertura de porta neste caso fica ativo mesmo com a porta fechada pois o bloco 4K da cabina que carrega as informações da cabina pela linha serial ainda não foi conectado.
DFC: O sinal de porta totalmente fechada é dado devido ao fechamento da segurança de portas que ainda não esta instalada.
INS: Indica que o carro está pronto para funcionar em modo inspeção.
VLC: Indica que a alimentação da placa está OK.
DW: Estará aceso se a linha de segurança estiver fechada. Este sinal apaga somente se a linha de segurança abrir ou a porta batente ou manual se abrir.
O led GRP/J poderá indicar falta ou falha na seqüência de fases da linha de alimentação se estiverpiscando. Neste caso inverta duas fases da linha de entrada L1, L2 e L3.
28
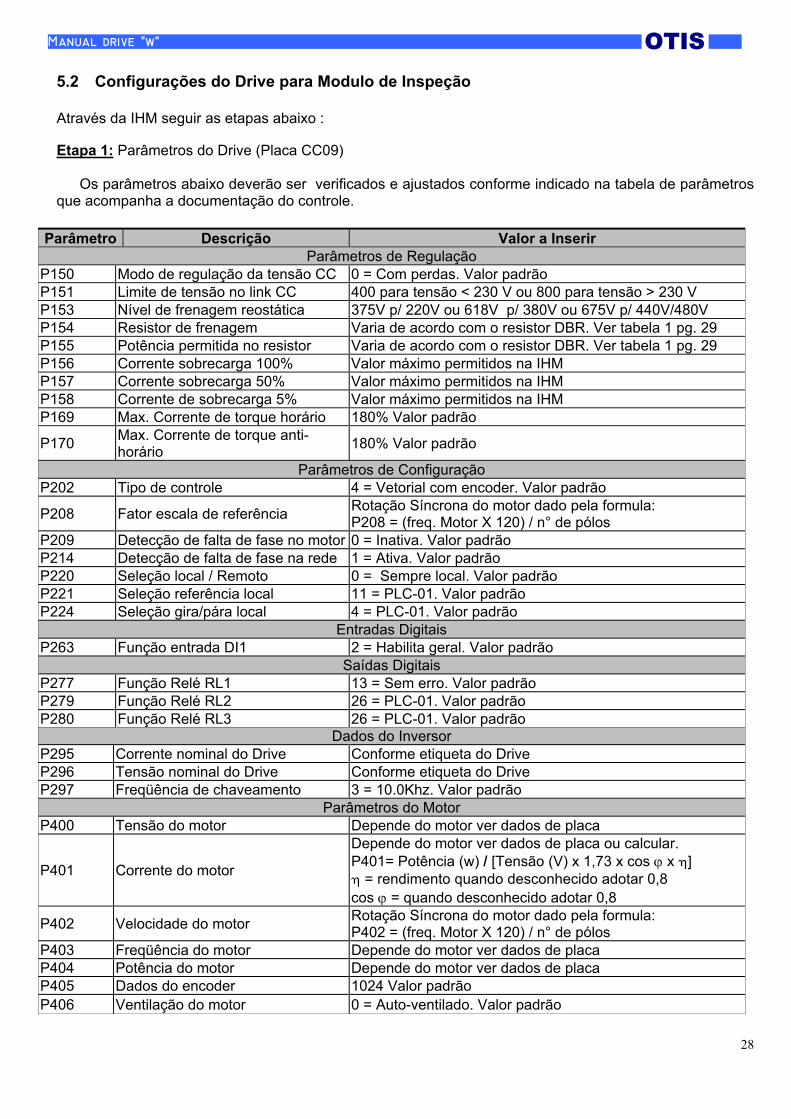
Manual drive "w" OTIS5.2 Configurações do Drive para Modulo de Inspeção
Através da IHM seguir as etapas abaixo :
Etapa 1: Parâmetros do Drive (Placa CC09)
Os parâmetros abaixo deverão ser verificados e ajustados conforme indicado na tabela de parâmetrosque acompanha a documentação do controle.
Parâmetro Descrição Valor a InserirParâmetros de Regulação
P150 Modo de regulação da tensão CC 0 = Com perdas. Valor padrãoP151 Limite de tensão no link CC 400 para tensão < 230 V ou 800 para tensão > 230 VP153 Nível de frenagem reostática 375V p/ 220V ou 618V p/ 380V ou 675V p/ 440V/480VP154 Resistor de frenagem Varia de acordo com o resistor DBR. Ver tabela 1 pg. 29P155 Potência permitida no resistor Varia de acordo com o resistor DBR. Ver tabela 1 pg. 29P156 Corrente sobrecarga 100% Valor máximo permitidos na IHMP157 Corrente sobrecarga 50% Valor máximo permitidos na IHMP158 Corrente de sobrecarga 5% Valor máximo permitidos na IHMP169 Max. Corrente de torque horário 180% Valor padrão
P170 Max. Corrente de torque anti-horário 180% Valor padrão
Parâmetros de ConfiguraçãoP202 Tipo de controle 4 = Vetorial com encoder. Valor padrão
P208 Fator escala de referência Rotação Síncrona do motor dado pela formula:P208 = (freq. Motor X 120) / n° de pólos
P209 Detecção de falta de fase no motor 0 = Inativa. Valor padrãoP214 Detecção de falta de fase na rede 1 = Ativa. Valor padrãoP220 Seleção local / Remoto 0 = Sempre local. Valor padrãoP221 Seleção referência local 11 = PLC-01. Valor padrãoP224 Seleção gira/pára local 4 = PLC-01. Valor padrão
Entradas DigitaisP263 Função entrada DI1 2 = Habilita geral. Valor padrão
Saídas DigitaisP277 Função Relé RL1 13 = Sem erro. Valor padrãoP279 Função Relé RL2 26 = PLC-01. Valor padrãoP280 Função Relé RL3 26 = PLC-01. Valor padrão
Dados do InversorP295 Corrente nominal do Drive Conforme etiqueta do DriveP296 Tensão nominal do Drive Conforme etiqueta do DriveP297 Freqüência de chaveamento 3 = 10.0Khz. Valor padrão
Parâmetros do MotorP400 Tensão do motor Depende do motor ver dados de placa
P401 Corrente do motor
Depende do motor ver dados de placa ou calcular.P401= Potência (w) / [Tensão (V) x 1,73 x cos ϕ x η]η = rendimento quando desconhecido adotar 0,8cos ϕ = quando desconhecido adotar 0,8
P402 Velocidade do motor Rotação Síncrona do motor dado pela formula:P402 = (freq. Motor X 120) / n° de pólos
P403 Freqüência do motor Depende do motor ver dados de placaP404 Potência do motor Depende do motor ver dados de placaP405 Dados do encoder 1024 Valor padrãoP406 Ventilação do motor 0 = Auto-ventilado. Valor padrão
29
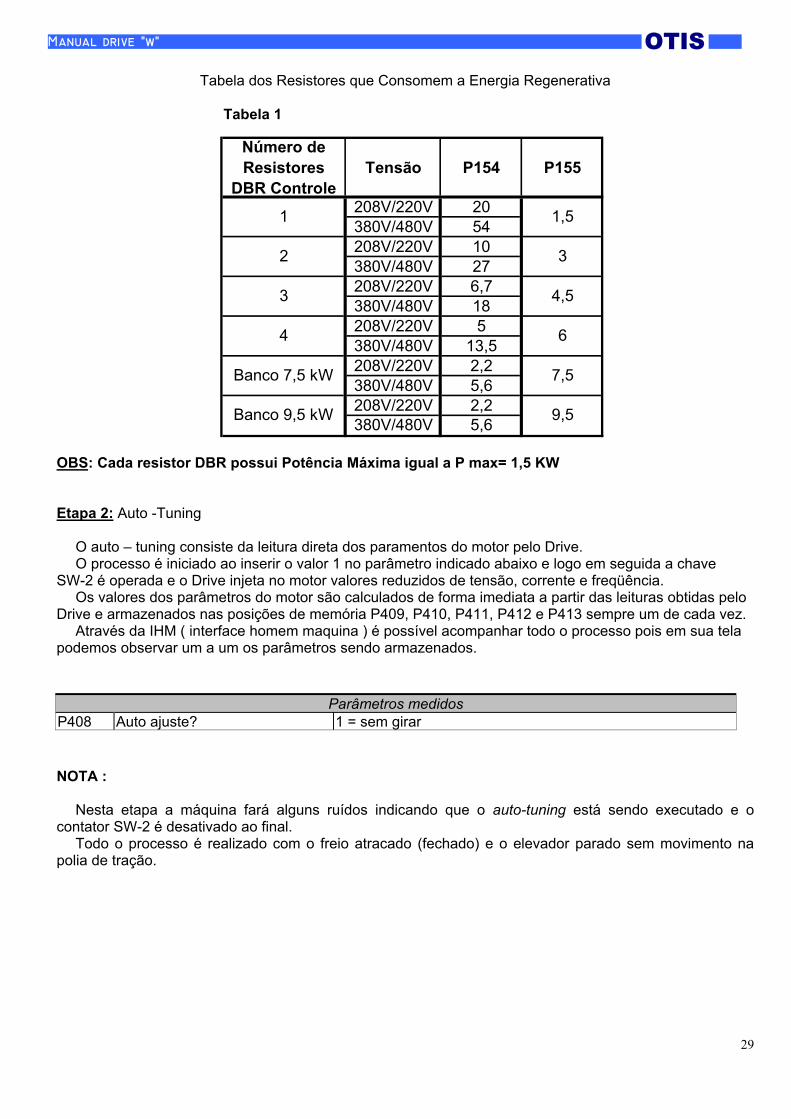
Manual drive "w" OTISTabela dos Resistores que Consomem a Energia Regenerativa
Tabela 1
OBS: Cada resistor DBR possui Potência Máxima igual a P max= 1,5 KW
Etapa 2: Auto -Tuning
O auto – tuning consiste da leitura direta dos paramentos do motor pelo Drive.O processo é iniciado ao inserir o valor 1 no parâmetro indicado abaixo e logo em seguida a chave
SW-2 é operada e o Drive injeta no motor valores reduzidos de tensão, corrente e freqüência.Os valores dos parâmetros do motor são calculados de forma imediata a partir das leituras obtidas pelo
Drive e armazenados nas posições de memória P409, P410, P411, P412 e P413 sempre um de cada vez.Através da IHM ( interface homem maquina ) é possível acompanhar todo o processo pois em sua tela
podemos observar um a um os parâmetros sendo armazenados.
NOTA :
Nesta etapa a máquina fará alguns ruídos indicando que o auto-tuning está sendo executado e ocontator SW-2 é desativado ao final.
Todo o processo é realizado com o freio atracado (fechado) e o elevador parado sem movimento napolia de tração.
Parâmetros medidosP408 Auto ajuste? 1 = sem girar
Número de Resistores
DBR ControleTensão P154 P155
208V/220V 20380V/480V 54208V/220V 10380V/480V 27208V/220V 6,7380V/480V 18208V/220V 5380V/480V 13,5208V/220V 2,2380V/480V 5,6208V/220V 2,2380V/480V 5,6
7,5
9,5
1
2
3
4
Banco 7,5 kW
Banco 9,5 kW
1,5
3
4,5
6
30
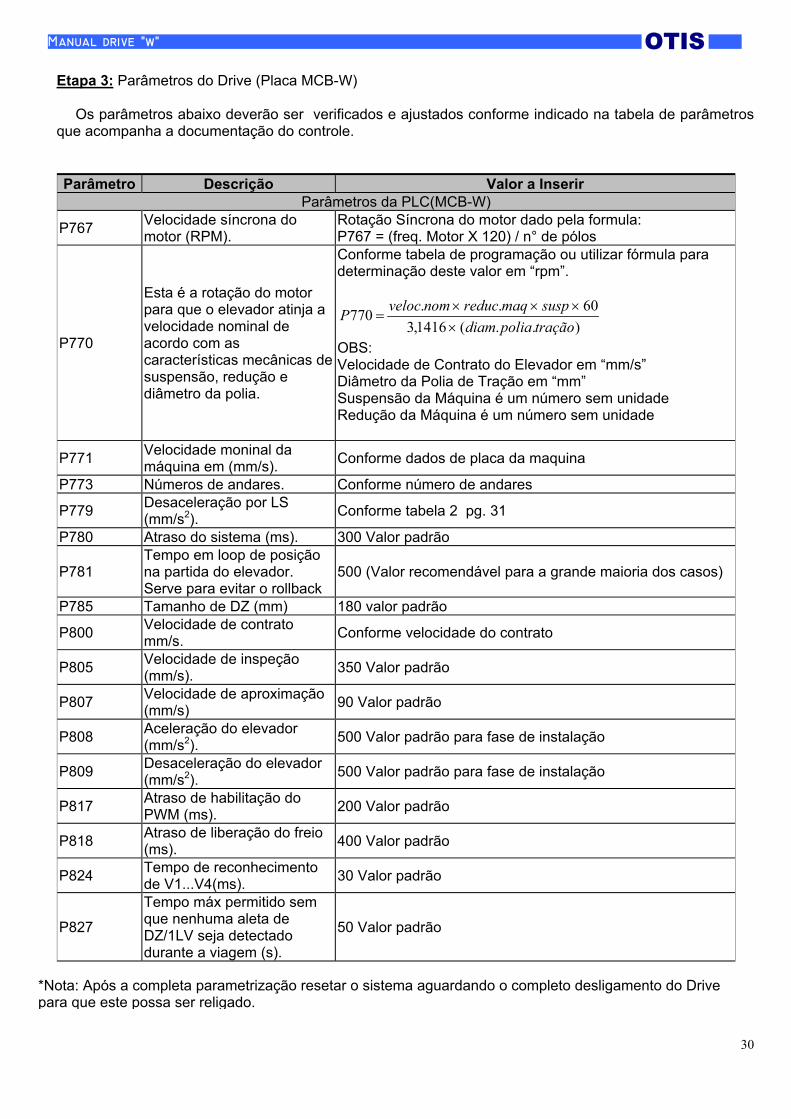
Manual drive "w" OTISEtapa 3: Parâmetros do Drive (Placa MCB-W)
Os parâmetros abaixo deverão ser verificados e ajustados conforme indicado na tabela de parâmetrosque acompanha a documentação do controle.
Parâmetro Descrição Valor a InserirParâmetros da PLC(MCB-W)
P767 Velocidade síncrona domotor (RPM).
Rotação Síncrona do motor dado pela formula:P767 = (freq. Motor X 120) / n° de pólos
P770
Esta é a rotação do motorpara que o elevador atinja avelocidade nominal deacordo com ascaracterísticas mecânicas desuspensão, redução ediâmetro da polia.
Conforme tabela de programação ou utilizar fórmula paradeterminação deste valor em “rpm”.
)..(1416,360..770
traçãopoliadiamsuspmaqreducnomvelocP
××××
=
OBS:Velocidade de Contrato do Elevador em “mm/s”Diâmetro da Polia de Tração em “mm”Suspensão da Máquina é um número sem unidadeRedução da Máquina é um número sem unidade
P771 Velocidade moninal damáquina em (mm/s). Conforme dados de placa da maquina
P773 Números de andares. Conforme número de andares
P779 Desaceleração por LS(mm/s2). Conforme tabela 2 pg. 31
P780 Atraso do sistema (ms). 300 Valor padrão
P781Tempo em loop de posiçãona partida do elevador.Serve para evitar o rollback
500 (Valor recomendável para a grande maioria dos casos)
P785 Tamanho de DZ (mm) 180 valor padrão
P800 Velocidade de contratomm/s. Conforme velocidade do contrato
P805 Velocidade de inspeção(mm/s). 350 Valor padrão
P807 Velocidade de aproximação(mm/s) 90 Valor padrão
P808 Aceleração do elevador(mm/s2). 500 Valor padrão para fase de instalação
P809 Desaceleração do elevador(mm/s2). 500 Valor padrão para fase de instalação
P817 Atraso de habilitação doPWM (ms). 200 Valor padrão
P818 Atraso de liberação do freio(ms). 400 Valor padrão
P824 Tempo de reconhecimentode V1...V4(ms). 30 Valor padrão
P827
Tempo máx permitido semque nenhuma aleta deDZ/1LV seja detectadodurante a viagem (s).
50 Valor padrão
*Nota: Após a completa parametrização resetar o sistema aguardando o completo desligamento do Drivepara que este possa ser religado.
31
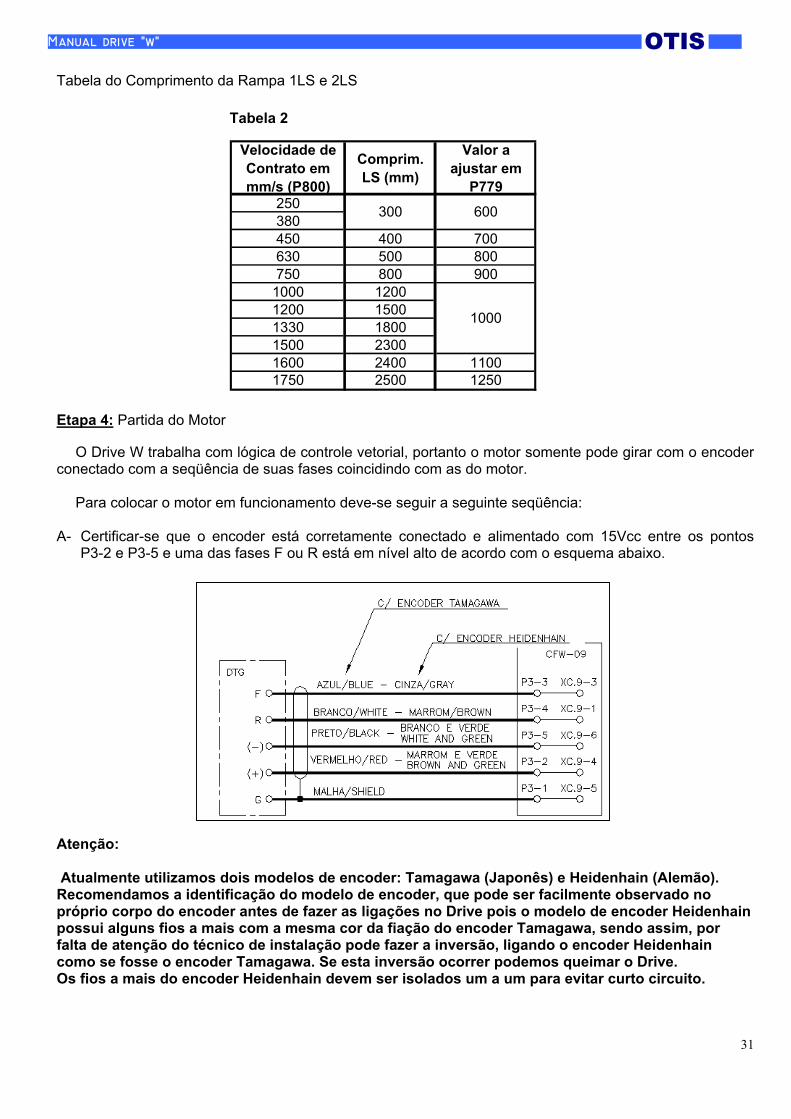
Manual drive "w" OTISTabela do Comprimento da Rampa 1LS e 2LS
Tabela 2
Etapa 4: Partida do Motor
O Drive W trabalha com lógica de controle vetorial, portanto o motor somente pode girar com o encoderconectado com a seqüência de suas fases coincidindo com as do motor.
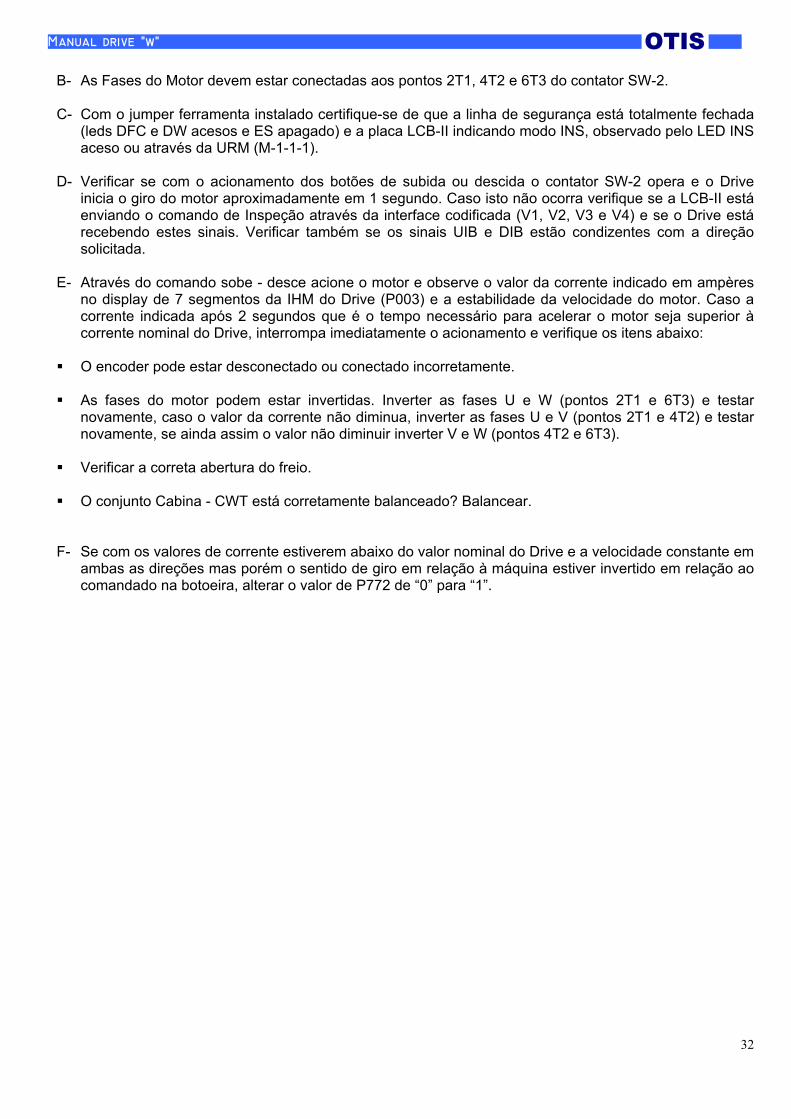
Para colocar o motor em funcionamento deve-se seguir a seguinte seqüência:
A- Certificar-se que o encoder está corretamente conectado e alimentado com 15Vcc entre os pontosP3-2 e P3-5 e uma das fases F ou R está em nível alto de acordo com o esquema abaixo.
Atenção:
Atualmente utilizamos dois modelos de encoder: Tamagawa (Japonês) e Heidenhain (Alemão).Recomendamos a identificação do modelo de encoder, que pode ser facilmente observado nopróprio corpo do encoder antes de fazer as ligações no Drive pois o modelo de encoder Heidenhainpossui alguns fios a mais com a mesma cor da fiação do encoder Tamagawa, sendo assim, porfalta de atenção do técnico de instalação pode fazer a inversão, ligando o encoder Heidenhaincomo se fosse o encoder Tamagawa. Se esta inversão ocorrer podemos queimar o Drive.Os fios a mais do encoder Heidenhain devem ser isolados um a um para evitar curto circuito.
Velocidade deContrato emmm/s (P800)
Comprim.LS (mm)
Valor aajustar em
P779250380450 400 700630 500 800750 800 900
1000 12001200 15001330 18001500 23001600 2400 11001750 2500 1250
300 600
1000
32
Manual drive "w" OTISB- As Fases do Motor devem estar conectadas aos pontos 2T1, 4T2 e 6T3 do contator SW-2.
C- Com o jumper ferramenta instalado certifique-se de que a linha de segurança está totalmente fechada(leds DFC e DW acesos e ES apagado) e a placa LCB-II indicando modo INS, observado pelo LED INSaceso ou através da URM (M-1-1-1).
D- Verificar se com o acionamento dos botões de subida ou descida o contator SW-2 opera e o Driveinicia o giro do motor aproximadamente em 1 segundo. Caso isto não ocorra verifique se a LCB-II estáenviando o comando de Inspeção através da interface codificada (V1, V2, V3 e V4) e se o Drive estárecebendo estes sinais. Verificar também se os sinais UIB e DIB estão condizentes com a direçãosolicitada.
E- Através do comando sobe - desce acione o motor e observe o valor da corrente indicado em ampèresno display de 7 segmentos da IHM do Drive (P003) e a estabilidade da velocidade do motor. Caso acorrente indicada após 2 segundos que é o tempo necessário para acelerar o motor seja superior àcorrente nominal do Drive, interrompa imediatamente o acionamento e verifique os itens abaixo:
O encoder pode estar desconectado ou conectado incorretamente.
As fases do motor podem estar invertidas. Inverter as fases U e W (pontos 2T1 e 6T3) e testarnovamente, caso o valor da corrente não diminua, inverter as fases U e V (pontos 2T1 e 4T2) e testarnovamente, se ainda assim o valor não diminuir inverter V e W (pontos 4T2 e 6T3).
Verificar a correta abertura do freio.
O conjunto Cabina - CWT está corretamente balanceado? Balancear.
F- Se com os valores de corrente estiverem abaixo do valor nominal do Drive e a velocidade constante emambas as direções mas porém o sentido de giro em relação à máquina estiver invertido em relação aocomandado na botoeira, alterar o valor de P772 de “0” para “1”.
33
Manual drive "w" OTIS
5.3 Configuração do Drive para Modulo Normal
Etapa 1: Verificações Preliminares para Colocar o Elevador em Velocidade Nominal
Certifique-se de que todo circuito de segurança está atuando e que não há nenhum jumper.
Certifique-se de que o Drive reconhece os sinais de /1LS e /2LS, desacelerando até a velocidade denivelamento (creep speed) nas direções correspondentes quando encontrar a rampa.
Passe o carro para normal e verifique se na corrida de correção em ambas as direções o carrodesacelera e para nos andares terminais.
Executar corridas em modulo normal entre os andares terminais através das chaves CTBL e CTTL naLCB-II, observando o comportamento da maquina e qualquer interferência mecânica no poço.
Certifique-se que o carro com 45% da carga nominal em ambas as direções apresenta valores decorrente iguais quando o elevador estiver na região próxima à metade do passadiço.
Retirar a carga do elevador.
Etapa 2 : Corrida de Aprendizagem
Com o carro fora dos limites de correção (/1LS e /2LS), de preferência na segunda parada acionar omodulo CHC e DDO para inibir chamadas de andar e impedir a abertura da porta de cabina. Através dachave ERO-S no controle passe o carro para modulo de inspeção e depois alterar o parâmetro P820 comoindicado abaixo para que seja iniciada a corrida de aprendizado (Learn run).
Após modificado o parâmetro a URM indicará “ >Learn Run “ (M-1-1-1) e através da chave ERO-S nocontrole passe o carro para NORMAL, depois para INSPEÇÃO e depois retorne para NORMAL. Esteprocesso deve ser cumprido em 30s.
Nesta etapa o carro irá até a parada mais inferior em velocidade normal e após acionar a aleta de DZ daprimeira parada o carro para e imediatamente começa a subir em velocidade (Creep speed) até a últimaparada.
Após concluído a corrida de aprendizado passe a chave ERO-S para INSPEÇÂO, retornar o parâmetroP820 para zero, desligue o controle aguardando o desligamento do Drive, retornar a chave ERO-S paranormal e ligar o controle.
Etapa 3: Simulação de Chamadas
Efetuar chamadas aleatórias através da URM (M-1-1-1) e verificar se o elevador funciona normal.
Etapa 4: Auto -Tuning com o Motor Aquecido
Inserir zero nos parâmetros P409 a P413 e com o motor aquecido repetir o Auto-Tuning (P408=1) paraque o Drive possa fazer a leitura dos valores válidos para regime de serviço.
Parâmetros da PLC (MCB-W)P820 Realizar corrida de aprendizagem 1
34
Manual drive "w" OTISEtapa 5: Ajuste do Fluxo de Tensão do Motor
Colocar o elevador para descer desde a última parada superior com a cabina vazia na metade davelocidade nominal, modificando o parâmetro P800.
Ler a tensão indicada no parâmetro P007 e verificar se o mesmo apresenta valor próximo de 45% datensão nominal quando o carro estiver na região do meio do passadiço.
Para tensão de saída do Drive 208 V o valor do parâmetro P007 deve ser de aproximadamente 94 VPara tensão de saída do Drive 220 V o valor do parâmetro P007 deve ser de aproximadamente 99 VPara tensão de saída do Drive 380 V o valor do parâmetro P007 deve ser de aproximadamente 171 VPara tensão de saída do Drive 480 V o valor do parâmetro P007 deve ser de aproximadamente 216 V
Se a tensão lida neste parâmetro for maior que 45% da nominal diminuir P178, caso contrário aumentar.Repetir o procedimento e confirmar o valor da leitura do parâmetro P007 sempre com a cabina
descendo vazia.
IMPORTANTE :
Normalmente o valor ajustado no parâmetro P178 fica entre 20% e 120%, caso não seja possívelajustar nesta faixa de valores para que o valor lido em P007 seja de 45% da tensão de alimentaçãonominal deve ser verificado o balanceamento da cabina e contra - peso.
O ruído de chaveamento do PWM no motor diminui consideravelmente quando o fluxo estácorretamente ajustado.
Se este parâmetro não for ajustado adequadamente pode ocorrer diferença significativa de velocidadeem função da carga, ex.: Velocidade da cabina vazia descendo menor que a velocidade da cabina subindovazia.
Parâmetros da Placa MCB-WP800 Velocidade de contrato do
ElevadorNesta etapa ajustar para metade da velocidade nominal
(mm/s)
Parâmetros de leituraP007 Tensão de saída deverá estar a 45% da nominal (+/- 5%)
35
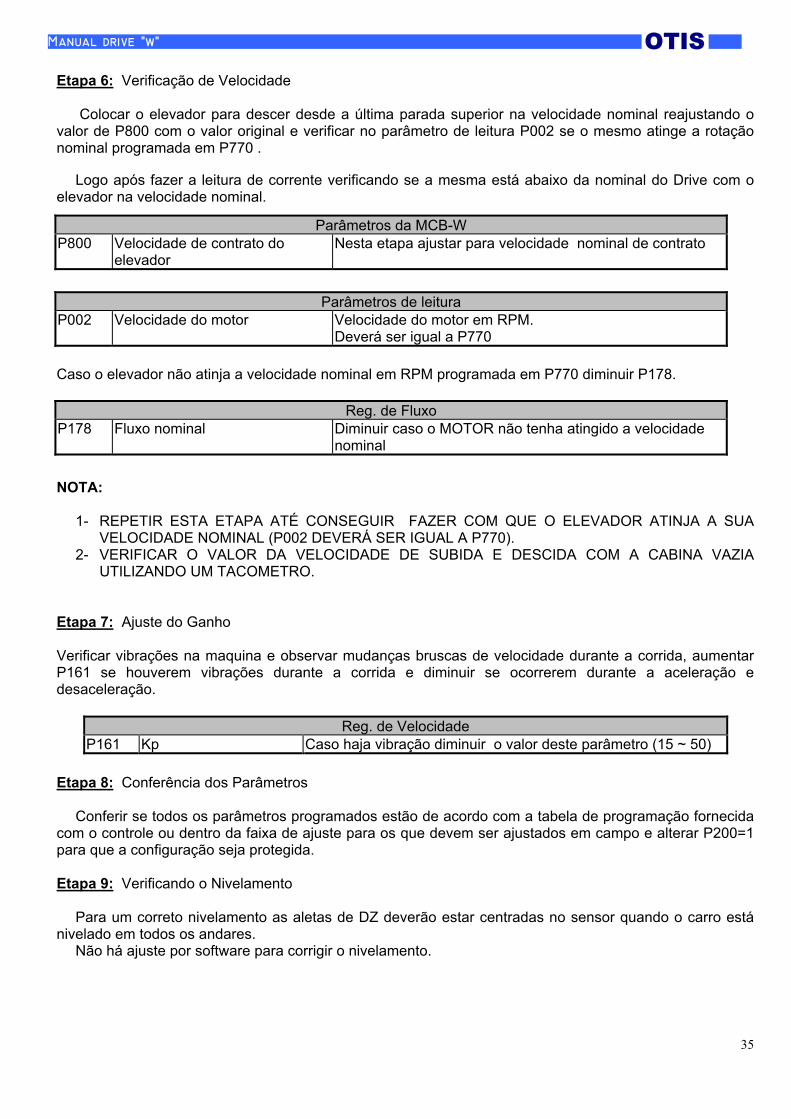
Manual drive "w" OTISEtapa 6: Verificação de Velocidade
Colocar o elevador para descer desde a última parada superior na velocidade nominal reajustando ovalor de P800 com o valor original e verificar no parâmetro de leitura P002 se o mesmo atinge a rotaçãonominal programada em P770 .
Logo após fazer a leitura de corrente verificando se a mesma está abaixo da nominal do Drive com oelevador na velocidade nominal.
Caso o elevador não atinja a velocidade nominal em RPM programada em P770 diminuir P178.
NOTA:
1- REPETIR ESTA ETAPA ATÉ CONSEGUIR FAZER COM QUE O ELEVADOR ATINJA A SUAVELOCIDADE NOMINAL (P002 DEVERÁ SER IGUAL A P770).
2- VERIFICAR O VALOR DA VELOCIDADE DE SUBIDA E DESCIDA COM A CABINA VAZIAUTILIZANDO UM TACOMETRO.
Etapa 7: Ajuste do Ganho
Verificar vibrações na maquina e observar mudanças bruscas de velocidade durante a corrida, aumentarP161 se houverem vibrações durante a corrida e diminuir se ocorrerem durante a aceleração edesaceleração.
Etapa 8: Conferência dos Parâmetros
Conferir se todos os parâmetros programados estão de acordo com a tabela de programação fornecidacom o controle ou dentro da faixa de ajuste para os que devem ser ajustados em campo e alterar P200=1para que a configuração seja protegida.
Etapa 9: Verificando o Nivelamento
Para um correto nivelamento as aletas de DZ deverão estar centradas no sensor quando o carro estánivelado em todos os andares.
Não há ajuste por software para corrigir o nivelamento.
Parâmetros da MCB-WP800 Velocidade de contrato do
elevadorNesta etapa ajustar para velocidade nominal de contrato
Reg. de FluxoP178 Fluxo nominal Diminuir caso o MOTOR não tenha atingido a velocidade
nominal
Parâmetros de leituraP002 Velocidade do motor Velocidade do motor em RPM.
Deverá ser igual a P770
Reg. de VelocidadeP161 Kp Caso haja vibração diminuir o valor deste parâmetro (15 ~ 50)
36
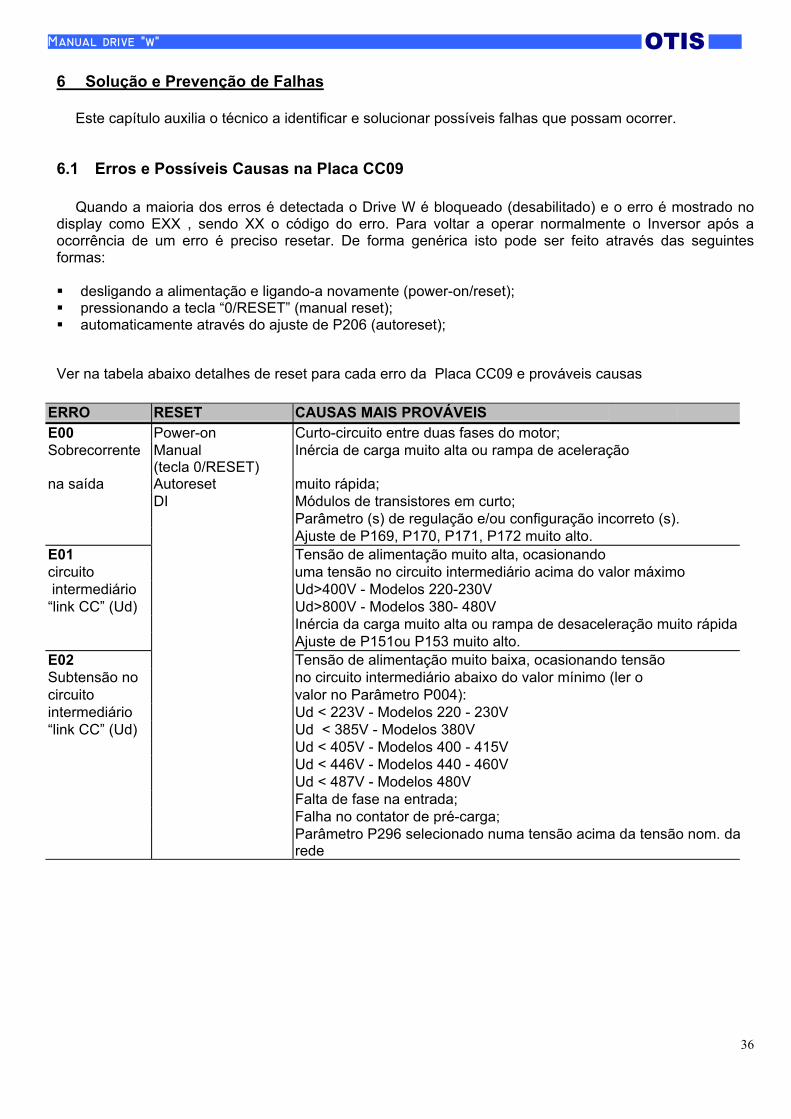
Manual drive "w" OTIS6 Solução e Prevenção de Falhas
Este capítulo auxilia o técnico a identificar e solucionar possíveis falhas que possam ocorrer.
6.1 Erros e Possíveis Causas na Placa CC09
Quando a maioria dos erros é detectada o Drive W é bloqueado (desabilitado) e o erro é mostrado nodisplay como EXX , sendo XX o código do erro. Para voltar a operar normalmente o Inversor após aocorrência de um erro é preciso resetar. De forma genérica isto pode ser feito através das seguintesformas:
desligando a alimentação e ligando-a novamente (power-on/reset); pressionando a tecla “0/RESET” (manual reset); automaticamente através do ajuste de P206 (autoreset);
Ver na tabela abaixo detalhes de reset para cada erro da Placa CC09 e prováveis causas
ERRO RESET CAUSAS MAIS PROVÁVEISE00 Power-on Curto-circuito entre duas fases do motor;Sobrecorrente Manual
(tecla 0/RESET)Inércia de carga muito alta ou rampa de aceleração
na saída Autoreset muito rápida;DI Módulos de transistores em curto;
Parâmetro (s) de regulação e/ou configuração incorreto (s).Ajuste de P169, P170, P171, P172 muito alto.
E01 Tensão de alimentação muito alta, ocasionandocircuito uma tensão no circuito intermediário acima do valor máximo intermediário Ud>400V - Modelos 220-230V“link CC” (Ud) Ud>800V - Modelos 380- 480V
Inércia da carga muito alta ou rampa de desaceleração muito rápidaAjuste de P151ou P153 muito alto.
E02 Tensão de alimentação muito baixa, ocasionando tensãoSubtensão no no circuito intermediário abaixo do valor mínimo (ler ocircuito valor no Parâmetro P004):intermediário Ud < 223V - Modelos 220 - 230V“link CC” (Ud) Ud < 385V - Modelos 380V
Ud < 405V - Modelos 400 - 415VUd < 446V - Modelos 440 - 460VUd < 487V - Modelos 480VFalta de fase na entrada;Falha no contator de pré-carga;Parâmetro P296 selecionado numa tensão acima da tensão nom. darede
37
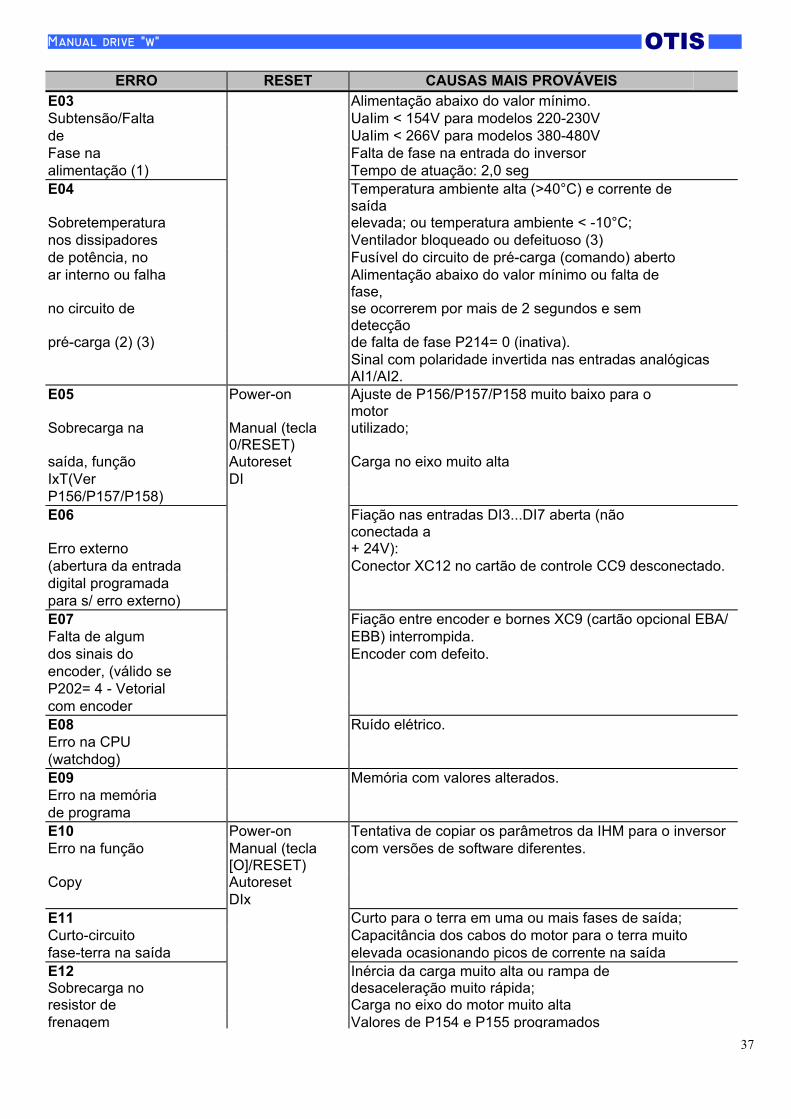
Manual drive "w" OTISERRO RESET CAUSAS MAIS PROVÁVEIS
E03 Alimentação abaixo do valor mínimo.Subtensão/Falta UaIim < 154V para modelos 220-230Vde UaIim < 266V para modelos 380-480VFase na Falta de fase na entrada do inversoralimentação (1) Tempo de atuação: 2,0 segE04 Temperatura ambiente alta (>40°C) e corrente de
saídaSobretemperatura elevada; ou temperatura ambiente < -10°C;nos dissipadores Ventilador bloqueado ou defeituoso (3)de potência, no Fusível do circuito de pré-carga (comando) abertoar interno ou falha Alimentação abaixo do valor mínimo ou falta de
fase,no circuito de se ocorrerem por mais de 2 segundos e sem
detecçãopré-carga (2) (3) de falta de fase P214= 0 (inativa).
Sinal com polaridade invertida nas entradas analógicasAI1/AI2.
E05 Power-on Ajuste de P156/P157/P158 muito baixo para omotor
Sobrecarga na Manual (tecla0/RESET)
utilizado;
saída, função Autoreset Carga no eixo muito altaIxT(Ver DIP156/P157/P158)E06 Fiação nas entradas DI3...DI7 aberta (não
conectada aErro externo + 24V):(abertura da entrada Conector XC12 no cartão de controle CC9 desconectado.digital programadapara s/ erro externo)E07 Fiação entre encoder e bornes XC9 (cartão opcional EBA/Falta de algum EBB) interrompida.dos sinais do Encoder com defeito.encoder, (válido seP202= 4 - Vetorialcom encoderE08 Ruído elétrico.Erro na CPU(watchdog)E09 Memória com valores alterados.Erro na memóriade programaE10 Power-on Tentativa de copiar os parâmetros da IHM para o inversorErro na função Manual (tecla
[O]/RESET)com versões de software diferentes.
Copy AutoresetDIx
E11 Curto para o terra em uma ou mais fases de saída;Curto-circuito Capacitância dos cabos do motor para o terra muitofase-terra na saída elevada ocasionando picos de corrente na saídaE12Sobrecarga no
Inércia da carga muito alta ou rampa dedesaceleração muito rápida;
resistor de Carga no eixo do motor muito altafrenagem Valores de P154 e P155 programados
38
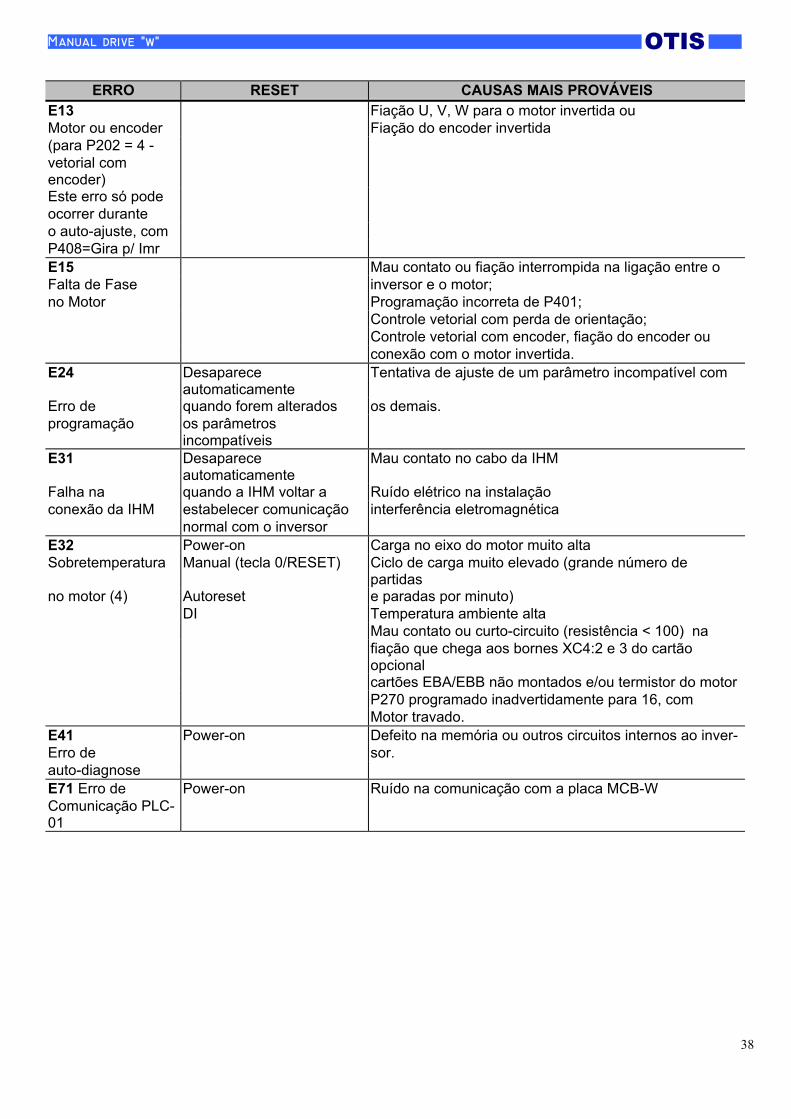
Manual drive "w" OTIS
ERRO RESET CAUSAS MAIS PROVÁVEISE13 Fiação U, V, W para o motor invertida ouMotor ou encoder Fiação do encoder invertida(para P202 = 4 -vetorial comencoder)Este erro só podeocorrer duranteo auto-ajuste, comP408=Gira p/ ImrE15 Mau contato ou fiação interrompida na ligação entre oFalta de Fase inversor e o motor;no Motor Programação incorreta de P401;
Controle vetorial com perda de orientação;Controle vetorial com encoder, fiação do encoder ouconexão com o motor invertida.
E24 Desapareceautomaticamente
Tentativa de ajuste de um parâmetro incompatível com
Erro de quando forem alterados os demais.programação os parâmetros
incompatíveisE31 Desaparece
automaticamenteMau contato no cabo da IHM
Falha na quando a IHM voltar a Ruído elétrico na instalaçãoconexão da IHM estabelecer comunicação interferência eletromagnética
normal com o inversorE32 Power-on Carga no eixo do motor muito altaSobretemperatura Manual (tecla 0/RESET) Ciclo de carga muito elevado (grande número de
partidasno motor (4) Autoreset e paradas por minuto)
DI Temperatura ambiente altaMau contato ou curto-circuito (resistência < 100) nafiação que chega aos bornes XC4:2 e 3 do cartãoopcionalcartões EBA/EBB não montados e/ou termistor do motorP270 programado inadvertidamente para 16, comMotor travado.
E41 Power-on Defeito na memória ou outros circuitos internos ao inver-Erro de sor.auto-diagnoseE71 Erro de Power-on Ruído na comunicação com a placa MCB-WComunicação PLC-01
39
Manual drive "w" OTISObservações:
6.2 Forma de Atuação dos Erros
E00,..., E08, E10, E11, E12, E13, E15 e E32 :Desliga relé que estiver programado para “sem erro”; Bloqueia pulsos do PWM;Indica o código do erro no display de leds e no led “ERROR” de forma piscante;Display LCD indica o código e a descrição do erro; Salvos alguns dados na memória EEPROM;Número do erro ocorrido desloca os três últimos erros anteriores.
E03: Não irá para a memória dos 4 últimos erros se acontecer o desligamento da energia (rede) com o Inversor em "Desabilita Geral".
E09: Não permite a operação do Inversor.
E24: Indica o código no display de Leds e o código e a descrição do erro no display LCD; Bloqueia pulsos do PWM; Não permite acionar o motor.
E31: Inversor continua a operar normalmente; Não aceita os comandos da IHM; Indica o código no display de Leds; Indica o código e a descrição do erro no display LCD.
E41: Não permite a operação do Inversor (não é possível habilitar o Inversor); Indica o código do erro no display de Leds e a descrição no display LCD; Indica no led “ERROR” de forma piscante.
1- E03 só poderá ocorrer nos modelos 220-230V e corrente nominal maior ou igual a 45A ou 380-480V e corrente maior ou igual a 30A.
2- E04 sobretemperatura no inversor é necessário esperar este esfriar um pouco antes de resetá-lo, pode significar também falha no circuito de pré-carga somente nos modelos220-230V e corrente nominal maior ou igual a 70A ou 380-480V e corrente maior ou igual a86A. A falha no circuito de pré-carga significa que o contator (modelos até 142A) ou Tiristor(modelos acima de 142A) de pré-carga não estão fechados, sobreaquecendo os resistores depré-carga.
Nos modelos 220-230V e corrente nominal maior ou igual a 16A ou 380-480V e correntemaior ou igual a 13A e menor ou igual a 142A, o E04 pode ser ocasionado pela temperaturamuito alta do ar interno. Verificar ventilador do ar interno da eletrônica.
3- E32 sobretemperatura no motor é necessário esperar o mesmo esfriar um pouco antes deresetar o inversor.
4- O Drive W é extremamente exigente com relação à qualidade do aterramento e correta instalação do supressores de freio e contatores, portanto erros freqüentes decomunicação como E31, E71, E62, E63, etc. são indicação de que estes pontos necessitamser revistos.
40
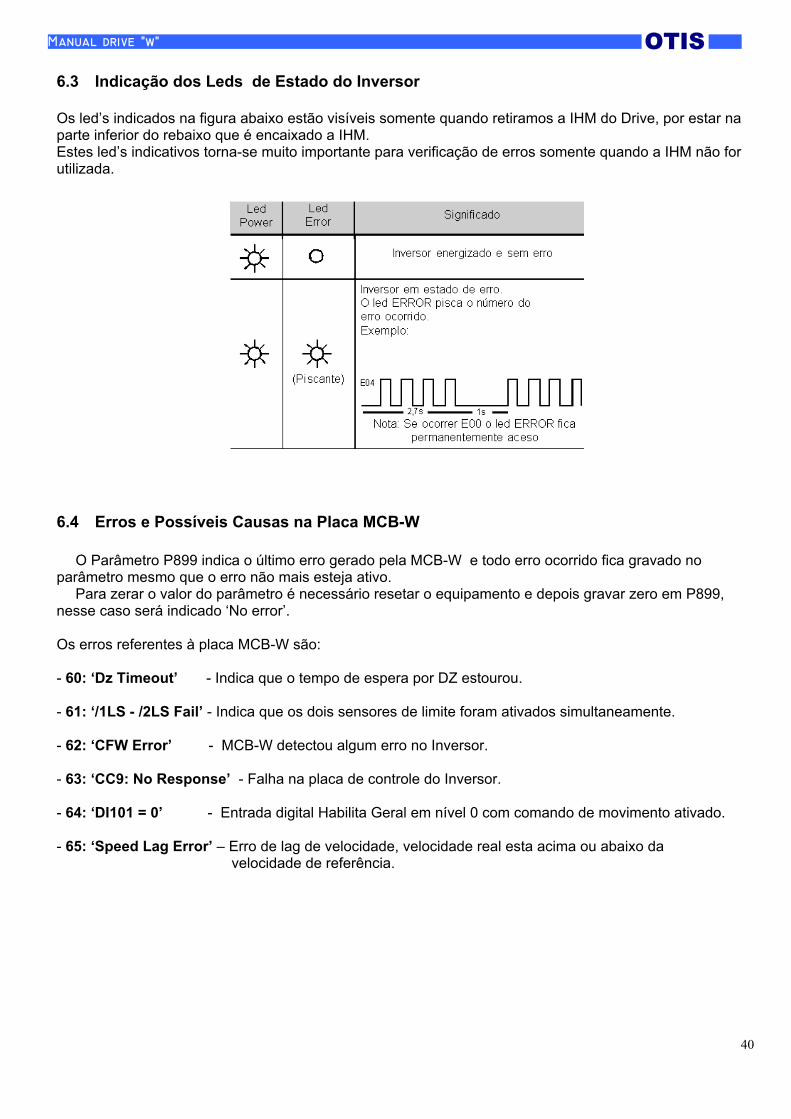
Manual drive "w" OTIS6.3 Indicação dos Leds de Estado do Inversor
Os led’s indicados na figura abaixo estão visíveis somente quando retiramos a IHM do Drive, por estar naparte inferior do rebaixo que é encaixado a IHM.Estes led’s indicativos torna-se muito importante para verificação de erros somente quando a IHM não forutilizada.
6.4 Erros e Possíveis Causas na Placa MCB-W
O Parâmetro P899 indica o último erro gerado pela MCB-W e todo erro ocorrido fica gravado noparâmetro mesmo que o erro não mais esteja ativo.
Para zerar o valor do parâmetro é necessário resetar o equipamento e depois gravar zero em P899,nesse caso será indicado ‘No error’.
Os erros referentes à placa MCB-W são:
- 60: ‘Dz Timeout’ - Indica que o tempo de espera por DZ estourou.
- 61: ‘/1LS - /2LS Fail’ - Indica que os dois sensores de limite foram ativados simultaneamente.
- 62: ‘CFW Error’ - MCB-W detectou algum erro no Inversor.
- 63: ‘CC9: No Response’ - Falha na placa de controle do Inversor.
- 64: ‘DI101 = 0’ - Entrada digital Habilita Geral em nível 0 com comando de movimento ativado.
- 65: ‘Speed Lag Error’ – Erro de lag de velocidade, velocidade real esta acima ou abaixo da velocidade de referência.
41
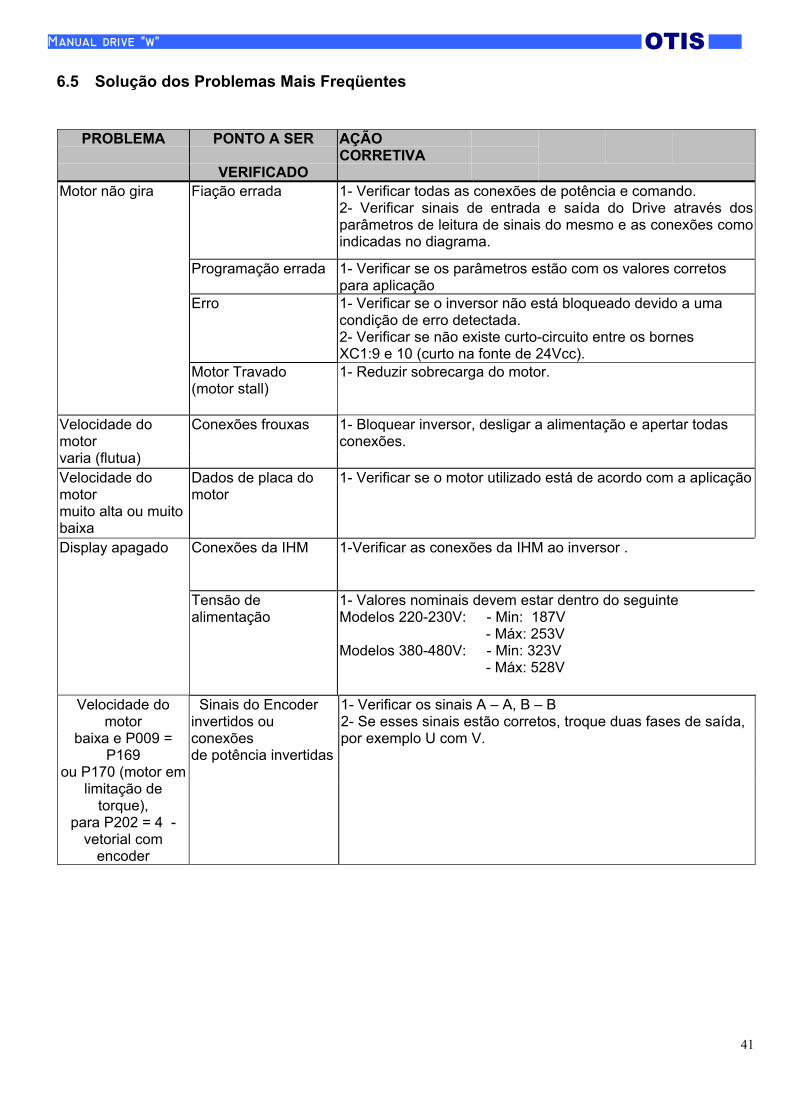
Manual drive "w" OTIS6.5 Solução dos Problemas Mais Freqüentes
PROBLEMA PONTO A SER AÇÃOCORRETIVA
VERIFICADOFiação errada 1- Verificar todas as conexões de potência e comando.
2- Verificar sinais de entrada e saída do Drive através dosparâmetros de leitura de sinais do mesmo e as conexões comoindicadas no diagrama.
Programação errada 1- Verificar se os parâmetros estão com os valores corretospara aplicação
Erro 1- Verificar se o inversor não está bloqueado devido a umacondição de erro detectada.2- Verificar se não existe curto-circuito entre os bornesXC1:9 e 10 (curto na fonte de 24Vcc).
Motor não gira
Motor Travado(motor stall)
1- Reduzir sobrecarga do motor.
Velocidade domotorvaria (flutua)
Conexões frouxas 1- Bloquear inversor, desligar a alimentação e apertar todasconexões.
Velocidade domotormuito alta ou muitobaixa
Dados de placa domotor
1- Verificar se o motor utilizado está de acordo com a aplicação
Conexões da IHM 1-Verificar as conexões da IHM ao inversor .Display apagado
Tensão dealimentação
1- Valores nominais devem estar dentro do seguinteModelos 220-230V: - Min: 187V - Máx: 253VModelos 380-480V: - Min: 323V - Máx: 528V
Velocidade domotor
baixa e P009 =P169
ou P170 (motor emlimitação de
torque),para P202 = 4 -
vetorial comencoder
Sinais do Encoderinvertidos ouconexõesde potência invertidas
1- Verificar os sinais A – A, B – B2- Se esses sinais estão corretos, troque duas fases de saída,por exemplo U com V.
42
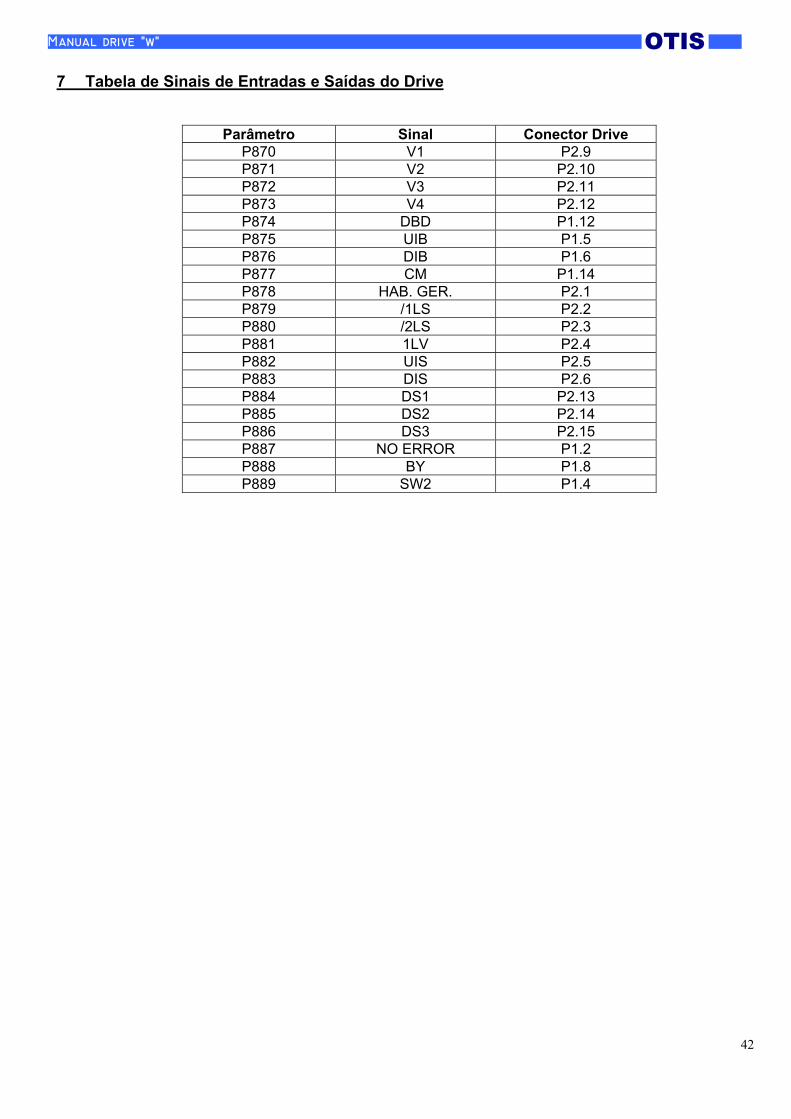
Manual drive "w" OTIS7 Tabela de Sinais de Entradas e Saídas do Drive
Parâmetro Sinal Conector DriveP870 V1 P2.9P871 V2 P2.10P872 V3 P2.11P873 V4 P2.12P874 DBD P1.12P875 UIB P1.5P876 DIB P1.6P877 CM P1.14P878 HAB. GER. P2.1P879 /1LS P2.2P880 /2LS P2.3P881 1LV P2.4P882 UIS P2.5P883 DIS P2.6P884 DS1 P2.13P885 DS2 P2.14P886 DS3 P2.15P887 NO ERROR P1.2P888 BY P1.8P889 SW2 P1.4
43
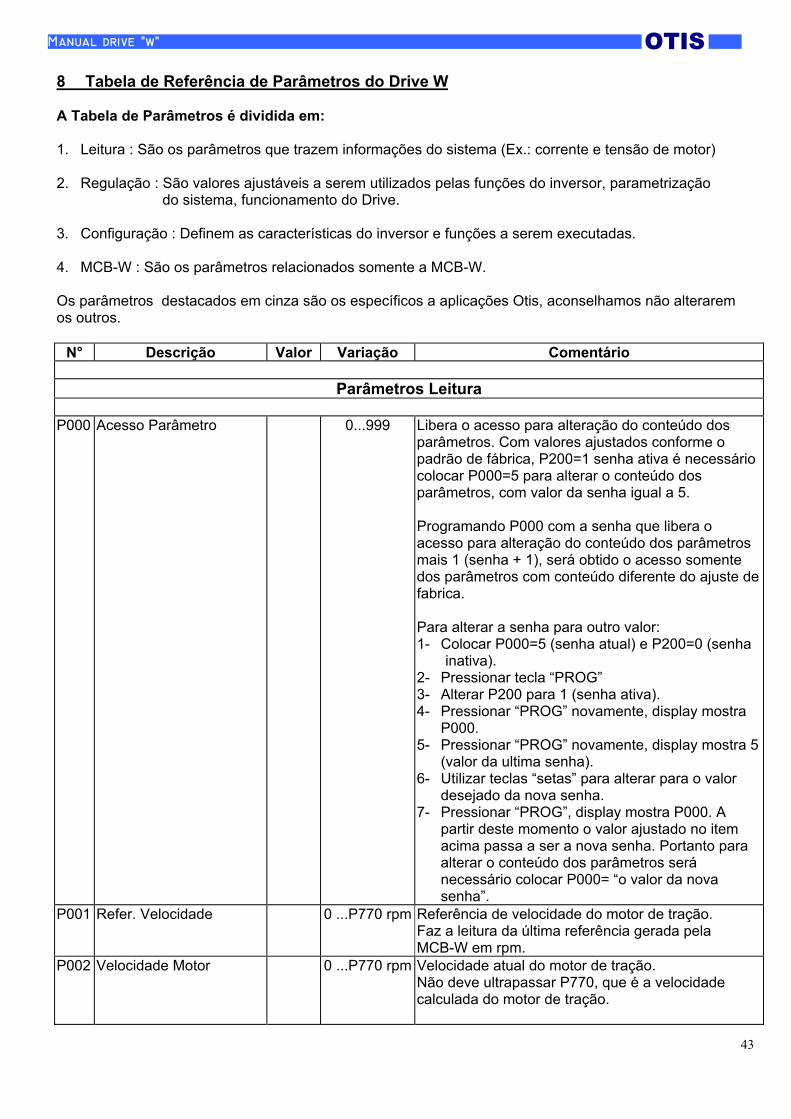
Manual drive "w" OTIS8 Tabela de Referência de Parâmetros do Drive W
A Tabela de Parâmetros é dividida em:
1. Leitura : São os parâmetros que trazem informações do sistema (Ex.: corrente e tensão de motor)
2. Regulação : São valores ajustáveis a serem utilizados pelas funções do inversor, parametrização do sistema, funcionamento do Drive.
3. Configuração : Definem as características do inversor e funções a serem executadas.
4. MCB-W : São os parâmetros relacionados somente a MCB-W.
Os parâmetros destacados em cinza são os específicos a aplicações Otis, aconselhamos não alteraremos outros.
N° Descrição Valor Variação Comentário
Parâmetros Leitura
P000 Acesso Parâmetro 0...999 Libera o acesso para alteração do conteúdo dosparâmetros. Com valores ajustados conforme opadrão de fábrica, P200=1 senha ativa é necessáriocolocar P000=5 para alterar o conteúdo dosparâmetros, com valor da senha igual a 5.
Programando P000 com a senha que libera oacesso para alteração do conteúdo dos parâmetrosmais 1 (senha + 1), será obtido o acesso somentedos parâmetros com conteúdo diferente do ajuste defabrica.
Para alterar a senha para outro valor:1- Colocar P000=5 (senha atual) e P200=0 (senha inativa).2- Pressionar tecla “PROG”3- Alterar P200 para 1 (senha ativa).4- Pressionar “PROG” novamente, display mostra
P000.5- Pressionar “PROG” novamente, display mostra 5
(valor da ultima senha).6- Utilizar teclas “setas” para alterar para o valor
desejado da nova senha.7- Pressionar “PROG”, display mostra P000. A
partir deste momento o valor ajustado no itemacima passa a ser a nova senha. Portanto paraalterar o conteúdo dos parâmetros seránecessário colocar P000= “o valor da novasenha”.
P001 Refer. Velocidade 0 ...P770 rpm Referência de velocidade do motor de tração.Faz a leitura da última referência gerada pelaMCB-W em rpm.
P002 Velocidade Motor 0 ...P770 rpm Velocidade atual do motor de tração.Não deve ultrapassar P770, que é a velocidadecalculada do motor de tração.
44
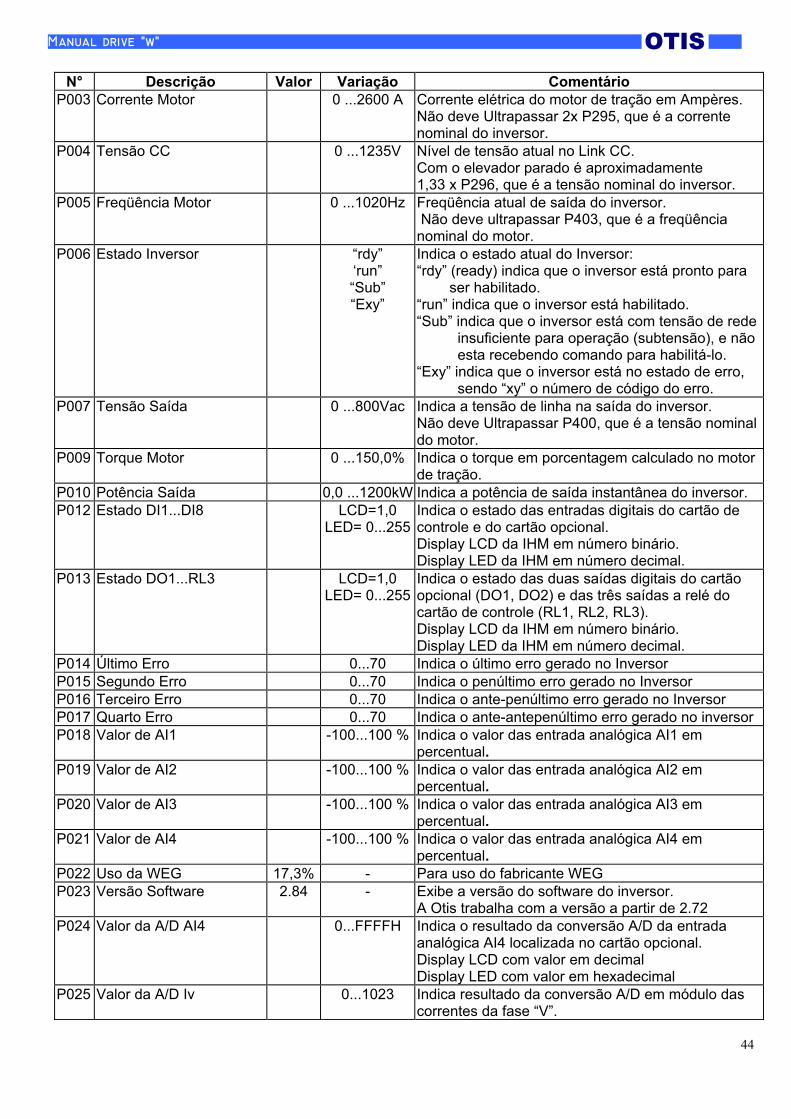
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P003 Corrente Motor 0 ...2600 A Corrente elétrica do motor de tração em Ampères.Não deve Ultrapassar 2x P295, que é a correntenominal do inversor.
P004 Tensão CC 0 ...1235V Nível de tensão atual no Link CC.Com o elevador parado é aproximadamente1,33 x P296, que é a tensão nominal do inversor.
P005 Freqüência Motor 0 ...1020Hz Freqüência atual de saída do inversor. Não deve ultrapassar P403, que é a freqüêncianominal do motor.
P006 Estado Inversor “rdy”‘run”“Sub”“Exy”
Indica o estado atual do Inversor:“rdy” (ready) indica que o inversor está pronto para ser habilitado.“run” indica que o inversor está habilitado.“Sub” indica que o inversor está com tensão de rede insuficiente para operação (subtensão), e não esta recebendo comando para habilitá-lo.“Exy” indica que o inversor está no estado de erro, sendo “xy” o número de código do erro.
P007 Tensão Saída 0 ...800Vac Indica a tensão de linha na saída do inversor.Não deve Ultrapassar P400, que é a tensão nominaldo motor.
P009 Torque Motor 0 ...150,0% Indica o torque em porcentagem calculado no motorde tração.
P010 Potência Saída 0,0 ...1200kW Indica a potência de saída instantânea do inversor.P012 Estado DI1...DI8 LCD=1,0
LED= 0...255Indica o estado das entradas digitais do cartão decontrole e do cartão opcional.Display LCD da IHM em número binário.Display LED da IHM em número decimal.
P013 Estado DO1...RL3 LCD=1,0LED= 0...255
Indica o estado das duas saídas digitais do cartãoopcional (DO1, DO2) e das três saídas a relé docartão de controle (RL1, RL2, RL3).Display LCD da IHM em número binário.Display LED da IHM em número decimal.
P014 Último Erro 0...70 Indica o último erro gerado no InversorP015 Segundo Erro 0...70 Indica o penúltimo erro gerado no InversorP016 Terceiro Erro 0...70 Indica o ante-penúltimo erro gerado no InversorP017 Quarto Erro 0...70 Indica o ante-antepenúltimo erro gerado no inversorP018 Valor de AI1 -100...100 % Indica o valor das entrada analógica AI1 em
percentual.P019 Valor de AI2 -100...100 % Indica o valor das entrada analógica AI2 em
percentual.P020 Valor de AI3 -100...100 % Indica o valor das entrada analógica AI3 em
percentual.P021 Valor de AI4 -100...100 % Indica o valor das entrada analógica AI4 em
percentual.P022 Uso da WEG 17,3% - Para uso do fabricante WEGP023 Versão Software 2.84 - Exibe a versão do software do inversor.
A Otis trabalha com a versão a partir de 2.72P024 Valor da A/D AI4 0...FFFFH Indica o resultado da conversão A/D da entrada
analógica AI4 localizada no cartão opcional.Display LCD com valor em decimalDisplay LED com valor em hexadecimal
P025 Valor da A/D Iv 0...1023 Indica resultado da conversão A/D em módulo dascorrentes da fase “V”.
45
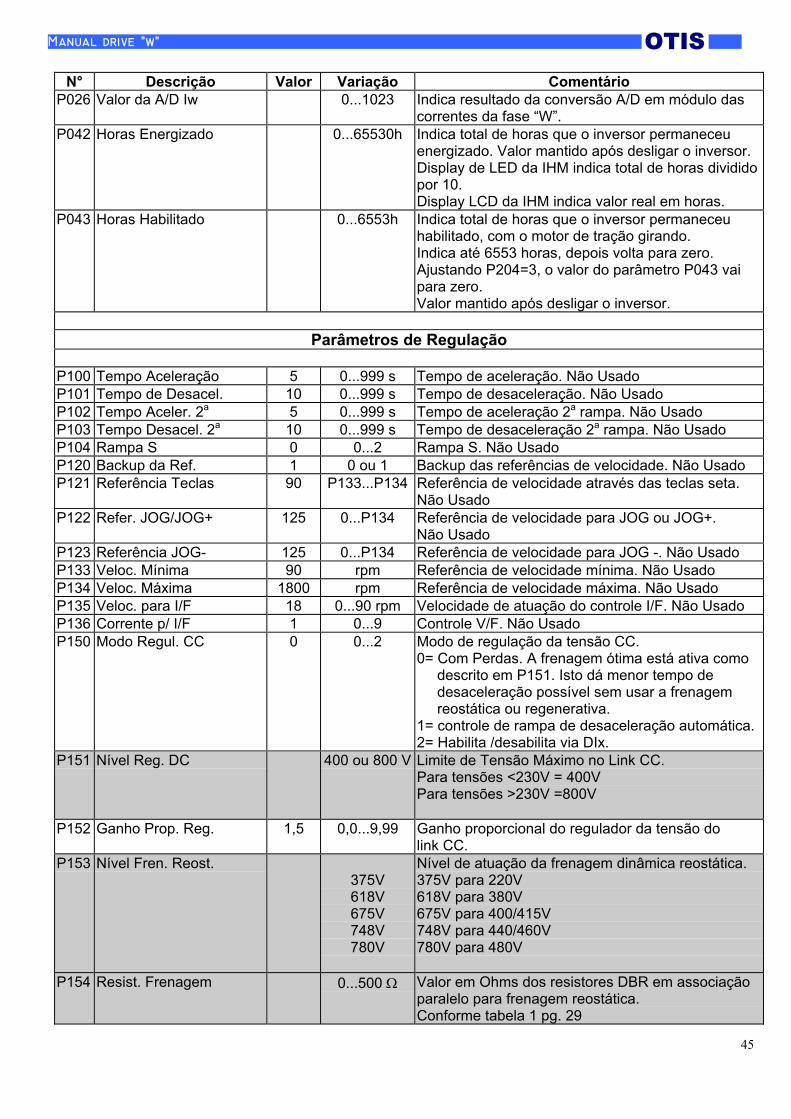
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P026 Valor da A/D Iw 0...1023 Indica resultado da conversão A/D em módulo dascorrentes da fase “W”.
P042 Horas Energizado 0...65530h Indica total de horas que o inversor permaneceuenergizado. Valor mantido após desligar o inversor.Display de LED da IHM indica total de horas divididopor 10.Display LCD da IHM indica valor real em horas.
P043 Horas Habilitado 0...6553h Indica total de horas que o inversor permaneceuhabilitado, com o motor de tração girando.Indica até 6553 horas, depois volta para zero.Ajustando P204=3, o valor do parâmetro P043 vaipara zero.Valor mantido após desligar o inversor.
Parâmetros de Regulação
P100 Tempo Aceleração 5 0...999 s Tempo de aceleração. Não UsadoP101 Tempo de Desacel. 10 0...999 s Tempo de desaceleração. Não UsadoP102 Tempo Aceler. 2a 5 0...999 s Tempo de aceleração 2a rampa. Não UsadoP103 Tempo Desacel. 2a 10 0...999 s Tempo de desaceleração 2a rampa. Não UsadoP104 Rampa S 0 0...2 Rampa S. Não UsadoP120 Backup da Ref. 1 0 ou 1 Backup das referências de velocidade. Não UsadoP121 Referência Teclas 90 P133...P134 Referência de velocidade através das teclas seta.
Não UsadoP122 Refer. JOG/JOG+ 125 0...P134 Referência de velocidade para JOG ou JOG+.
Não UsadoP123 Referência JOG- 125 0...P134 Referência de velocidade para JOG -. Não UsadoP133 Veloc. Mínima 90 rpm Referência de velocidade mínima. Não UsadoP134 Veloc. Máxima 1800 rpm Referência de velocidade máxima. Não UsadoP135 Veloc. para I/F 18 0...90 rpm Velocidade de atuação do controle I/F. Não UsadoP136 Corrente p/ I/F 1 0...9 Controle V/F. Não UsadoP150 Modo Regul. CC 0 0...2 Modo de regulação da tensão CC.
0= Com Perdas. A frenagem ótima está ativa como descrito em P151. Isto dá menor tempo de desaceleração possível sem usar a frenagem reostática ou regenerativa.1= controle de rampa de desaceleração automática.2= Habilita /desabilita via DIx.
P151 Nível Reg. DC 400 ou 800 V Limite de Tensão Máximo no Link CC.Para tensões <230V = 400VPara tensões >230V =800V
P152 Ganho Prop. Reg. 1,5 0,0...9,99 Ganho proporcional do regulador da tensão dolink CC.
P153 Nível Fren. Reost.375V618V675V748V780V
Nível de atuação da frenagem dinâmica reostática.375V para 220V618V para 380V675V para 400/415V748V para 440/460V780V para 480V
P154 Resist. Frenagem 0...500 Ω Valor em Ohms dos resistores DBR em associaçãoparalelo para frenagem reostática.Conforme tabela 1 pg. 29
46
Manual drive "w" OTISN° Descrição Valor Variação Comentário
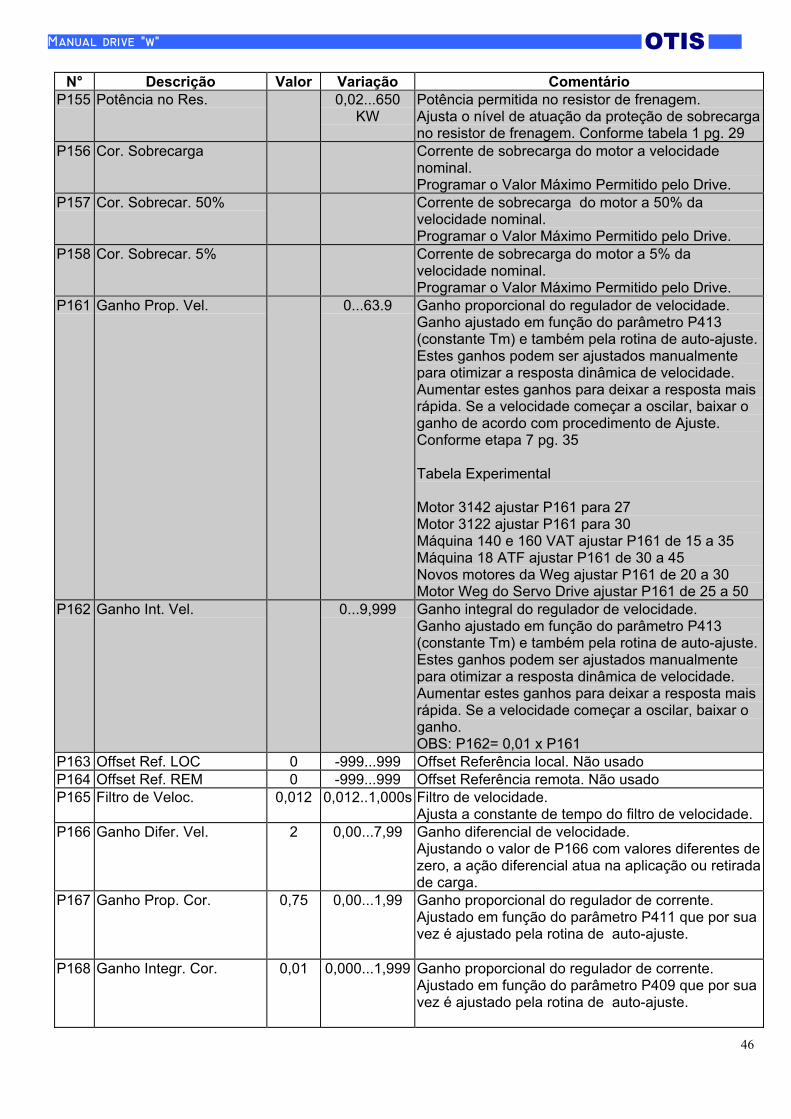
P155 Potência no Res. 0,02...650KW
Potência permitida no resistor de frenagem.Ajusta o nível de atuação da proteção de sobrecargano resistor de frenagem. Conforme tabela 1 pg. 29
P156 Cor. Sobrecarga Corrente de sobrecarga do motor a velocidadenominal.Programar o Valor Máximo Permitido pelo Drive.
P157 Cor. Sobrecar. 50% Corrente de sobrecarga do motor a 50% davelocidade nominal.Programar o Valor Máximo Permitido pelo Drive.
P158 Cor. Sobrecar. 5% Corrente de sobrecarga do motor a 5% davelocidade nominal.Programar o Valor Máximo Permitido pelo Drive.
P161 Ganho Prop. Vel. 0...63.9 Ganho proporcional do regulador de velocidade.Ganho ajustado em função do parâmetro P413(constante Tm) e também pela rotina de auto-ajuste.Estes ganhos podem ser ajustados manualmentepara otimizar a resposta dinâmica de velocidade.Aumentar estes ganhos para deixar a resposta maisrápida. Se a velocidade começar a oscilar, baixar oganho de acordo com procedimento de Ajuste.Conforme etapa 7 pg. 35
Tabela Experimental
Motor 3142 ajustar P161 para 27Motor 3122 ajustar P161 para 30Máquina 140 e 160 VAT ajustar P161 de 15 a 35Máquina 18 ATF ajustar P161 de 30 a 45Novos motores da Weg ajustar P161 de 20 a 30Motor Weg do Servo Drive ajustar P161 de 25 a 50
P162 Ganho Int. Vel. 0...9,999 Ganho integral do regulador de velocidade.Ganho ajustado em função do parâmetro P413(constante Tm) e também pela rotina de auto-ajuste.Estes ganhos podem ser ajustados manualmentepara otimizar a resposta dinâmica de velocidade.Aumentar estes ganhos para deixar a resposta maisrápida. Se a velocidade começar a oscilar, baixar oganho.OBS: P162= 0,01 x P161
P163 Offset Ref. LOC 0 -999...999 Offset Referência local. Não usadoP164 Offset Ref. REM 0 -999...999 Offset Referência remota. Não usadoP165 Filtro de Veloc. 0,012 0,012..1,000s Filtro de velocidade.
Ajusta a constante de tempo do filtro de velocidade.P166 Ganho Difer. Vel. 2 0,00...7,99 Ganho diferencial de velocidade.
Ajustando o valor de P166 com valores diferentes dezero, a ação diferencial atua na aplicação ou retiradade carga.
P167 Ganho Prop. Cor. 0,75 0,00...1,99 Ganho proporcional do regulador de corrente.Ajustado em função do parâmetro P411 que por suavez é ajustado pela rotina de auto-ajuste.
P168 Ganho Integr. Cor. 0,01 0,000...1,999 Ganho proporcional do regulador de corrente.Ajustado em função do parâmetro P409 que por suavez é ajustado pela rotina de auto-ajuste.
47
Manual drive "w" OTISN° Descrição Valor Variação Comentário
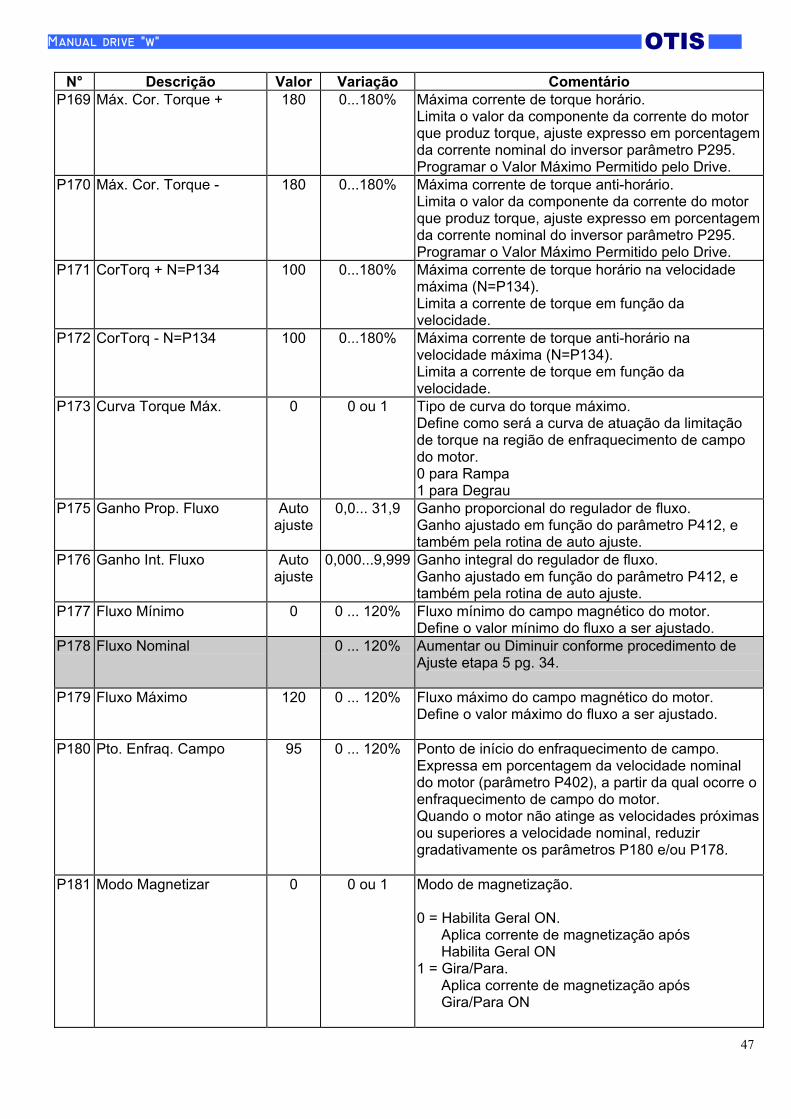
P169 Máx. Cor. Torque + 180 0...180% Máxima corrente de torque horário.Limita o valor da componente da corrente do motorque produz torque, ajuste expresso em porcentagemda corrente nominal do inversor parâmetro P295.Programar o Valor Máximo Permitido pelo Drive.
P170 Máx. Cor. Torque - 180 0...180% Máxima corrente de torque anti-horário.Limita o valor da componente da corrente do motorque produz torque, ajuste expresso em porcentagemda corrente nominal do inversor parâmetro P295.Programar o Valor Máximo Permitido pelo Drive.
P171 CorTorq + N=P134 100 0...180% Máxima corrente de torque horário na velocidademáxima (N=P134).Limita a corrente de torque em função davelocidade.
P172 CorTorq - N=P134 100 0...180% Máxima corrente de torque anti-horário navelocidade máxima (N=P134).Limita a corrente de torque em função davelocidade.
P173 Curva Torque Máx. 0 0 ou 1 Tipo de curva do torque máximo.Define como será a curva de atuação da limitaçãode torque na região de enfraquecimento de campodo motor.0 para Rampa1 para Degrau
P175 Ganho Prop. Fluxo Autoajuste
0,0... 31,9 Ganho proporcional do regulador de fluxo.Ganho ajustado em função do parâmetro P412, etambém pela rotina de auto ajuste.
P176 Ganho Int. Fluxo Autoajuste
0,000...9,999 Ganho integral do regulador de fluxo.Ganho ajustado em função do parâmetro P412, etambém pela rotina de auto ajuste.
P177 Fluxo Mínimo 0 0 ... 120% Fluxo mínimo do campo magnético do motor.Define o valor mínimo do fluxo a ser ajustado.
P178 Fluxo Nominal 0 ... 120% Aumentar ou Diminuir conforme procedimento deAjuste etapa 5 pg. 34.
P179 Fluxo Máximo 120 0 ... 120% Fluxo máximo do campo magnético do motor.Define o valor máximo do fluxo a ser ajustado.
P180 Pto. Enfraq. Campo 95 0 ... 120% Ponto de início do enfraquecimento de campo.Expressa em porcentagem da velocidade nominaldo motor (parâmetro P402), a partir da qual ocorre oenfraquecimento de campo do motor.Quando o motor não atinge as velocidades próximasou superiores a velocidade nominal, reduzirgradativamente os parâmetros P180 e/ou P178.
P181 Modo Magnetizar 0 0 ou 1 Modo de magnetização.
0 = Habilita Geral ON. Aplica corrente de magnetização após Habilita Geral ON1 = Gira/Para. Aplica corrente de magnetização após Gira/Para ON
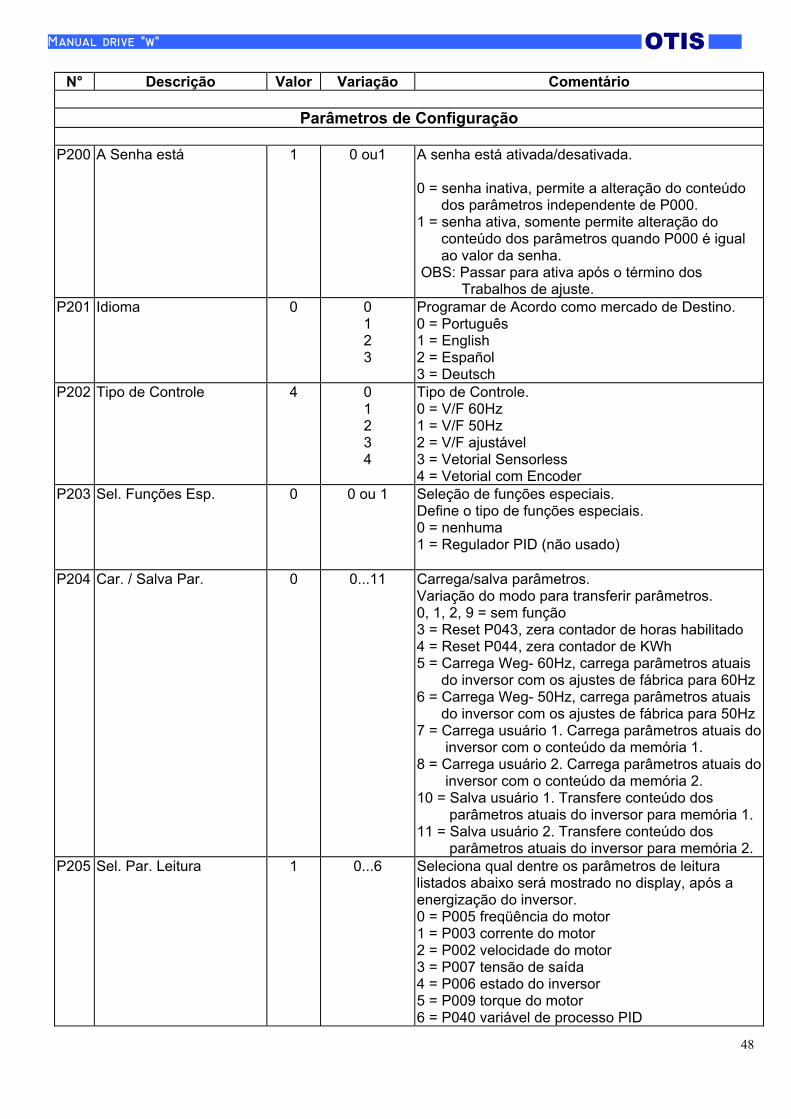
48
Manual drive "w" OTISN° Descrição Valor Variação Comentário
Parâmetros de Configuração
P200 A Senha está 1 0 ou1 A senha está ativada/desativada.
0 = senha inativa, permite a alteração do conteúdo dos parâmetros independente de P000.1 = senha ativa, somente permite alteração do conteúdo dos parâmetros quando P000 é igual ao valor da senha. OBS: Passar para ativa após o término dos Trabalhos de ajuste.
P201 Idioma 0 0123
Programar de Acordo como mercado de Destino.0 = Português1 = English2 = Español3 = Deutsch
P202 Tipo de Controle 4 01234
Tipo de Controle.0 = V/F 60Hz1 = V/F 50Hz2 = V/F ajustável3 = Vetorial Sensorless4 = Vetorial com Encoder
P203 Sel. Funções Esp. 0 0 ou 1 Seleção de funções especiais.Define o tipo de funções especiais.0 = nenhuma1 = Regulador PID (não usado)
P204 Car. / Salva Par. 0 0...11 Carrega/salva parâmetros.Variação do modo para transferir parâmetros.0, 1, 2, 9 = sem função3 = Reset P043, zera contador de horas habilitado4 = Reset P044, zera contador de KWh5 = Carrega Weg- 60Hz, carrega parâmetros atuais do inversor com os ajustes de fábrica para 60Hz6 = Carrega Weg- 50Hz, carrega parâmetros atuais do inversor com os ajustes de fábrica para 50Hz7 = Carrega usuário 1. Carrega parâmetros atuais do inversor com o conteúdo da memória 1.8 = Carrega usuário 2. Carrega parâmetros atuais do inversor com o conteúdo da memória 2.10 = Salva usuário 1. Transfere conteúdo dos parâmetros atuais do inversor para memória 1.11 = Salva usuário 2. Transfere conteúdo dos parâmetros atuais do inversor para memória 2.
P205 Sel. Par. Leitura 1 0...6 Seleciona qual dentre os parâmetros de leituralistados abaixo será mostrado no display, após aenergização do inversor.0 = P005 freqüência do motor1 = P003 corrente do motor2 = P002 velocidade do motor3 = P007 tensão de saída4 = P006 estado do inversor5 = P009 torque do motor6 = P040 variável de processo PID
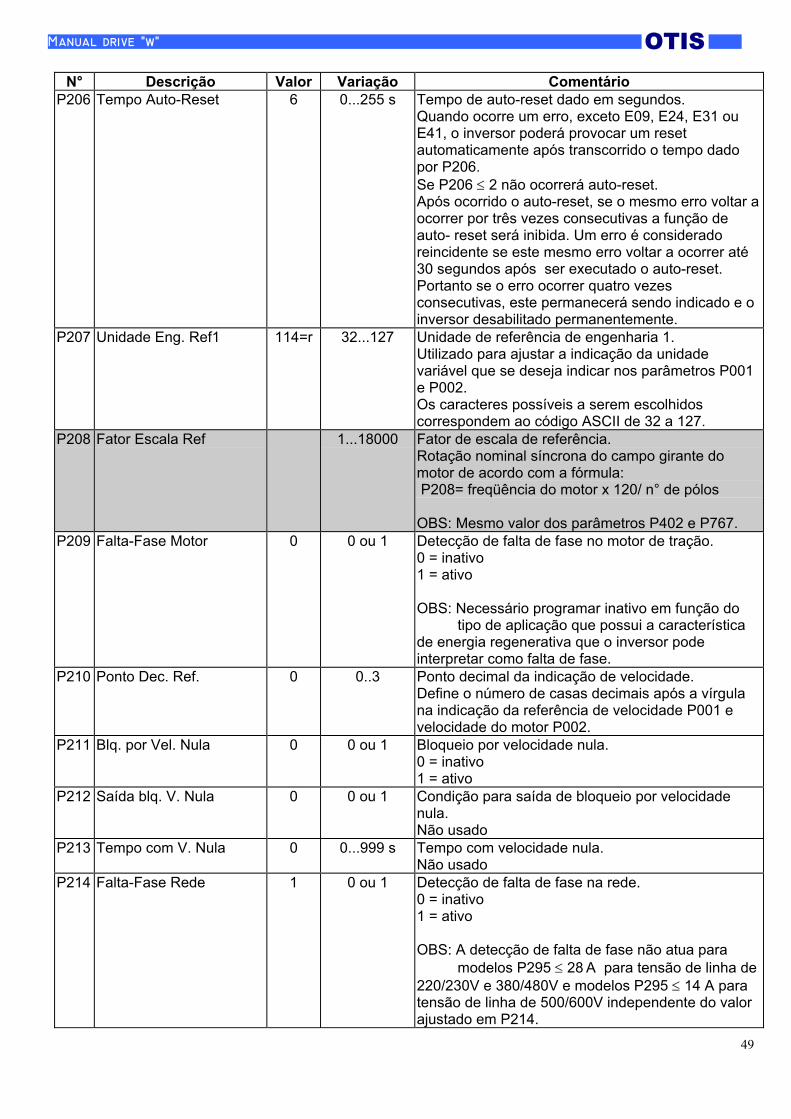
49
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P206 Tempo Auto-Reset 6 0...255 s Tempo de auto-reset dado em segundos.Quando ocorre um erro, exceto E09, E24, E31 ouE41, o inversor poderá provocar um resetautomaticamente após transcorrido o tempo dadopor P206.Se P206 ≤ 2 não ocorrerá auto-reset.Após ocorrido o auto-reset, se o mesmo erro voltar aocorrer por três vezes consecutivas a função deauto- reset será inibida. Um erro é consideradoreincidente se este mesmo erro voltar a ocorrer até30 segundos após ser executado o auto-reset.Portanto se o erro ocorrer quatro vezesconsecutivas, este permanecerá sendo indicado e oinversor desabilitado permanentemente.
P207 Unidade Eng. Ref1 114=r 32...127 Unidade de referência de engenharia 1.Utilizado para ajustar a indicação da unidadevariável que se deseja indicar nos parâmetros P001e P002.Os caracteres possíveis a serem escolhidoscorrespondem ao código ASCII de 32 a 127.
P208 Fator Escala Ref 1...18000 Fator de escala de referência.Rotação nominal síncrona do campo girante domotor de acordo com a fórmula: P208= freqüência do motor x 120/ n° de pólos
OBS: Mesmo valor dos parâmetros P402 e P767.P209 Falta-Fase Motor 0 0 ou 1 Detecção de falta de fase no motor de tração.
0 = inativo1 = ativo
OBS: Necessário programar inativo em função do tipo de aplicação que possui a característicade energia regenerativa que o inversor podeinterpretar como falta de fase.
P210 Ponto Dec. Ref. 0 0..3 Ponto decimal da indicação de velocidade.Define o número de casas decimais após a vírgulana indicação da referência de velocidade P001 evelocidade do motor P002.
P211 Blq. por Vel. Nula 0 0 ou 1 Bloqueio por velocidade nula.0 = inativo1 = ativo
P212 Saída blq. V. Nula 0 0 ou 1 Condição para saída de bloqueio por velocidadenula.Não usado
P213 Tempo com V. Nula 0 0...999 s Tempo com velocidade nula.Não usado
P214 Falta-Fase Rede 1 0 ou 1 Detecção de falta de fase na rede.0 = inativo1 = ativo
OBS: A detecção de falta de fase não atua para modelos P295 ≤ 28 A para tensão de linha de220/230V e 380/480V e modelos P295 ≤ 14 A paratensão de linha de 500/600V independente do valorajustado em P214.
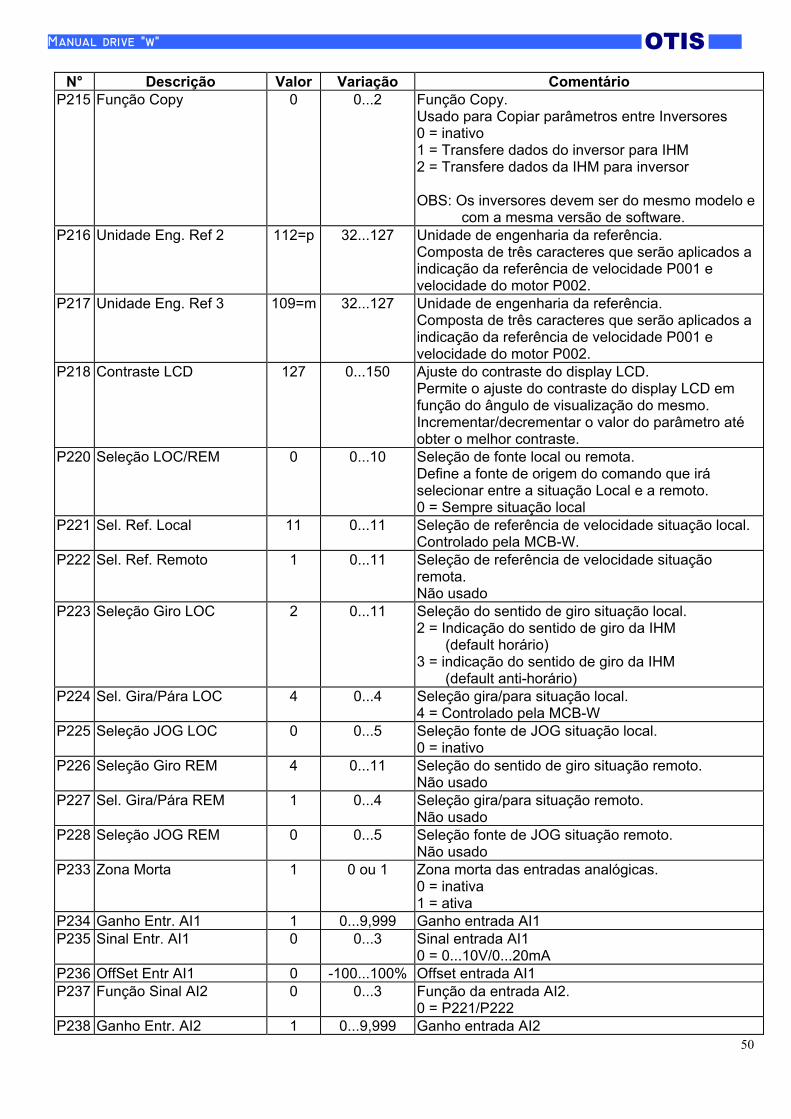
50
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P215 Função Copy 0 0...2 Função Copy.Usado para Copiar parâmetros entre Inversores0 = inativo1 = Transfere dados do inversor para IHM2 = Transfere dados da IHM para inversor
OBS: Os inversores devem ser do mesmo modelo e com a mesma versão de software.
P216 Unidade Eng. Ref 2 112=p 32...127 Unidade de engenharia da referência.Composta de três caracteres que serão aplicados aindicação da referência de velocidade P001 evelocidade do motor P002.
P217 Unidade Eng. Ref 3 109=m 32...127 Unidade de engenharia da referência.Composta de três caracteres que serão aplicados aindicação da referência de velocidade P001 evelocidade do motor P002.
P218 Contraste LCD 127 0...150 Ajuste do contraste do display LCD.Permite o ajuste do contraste do display LCD emfunção do ângulo de visualização do mesmo.Incrementar/decrementar o valor do parâmetro atéobter o melhor contraste.
P220 Seleção LOC/REM 0 0...10 Seleção de fonte local ou remota.Define a fonte de origem do comando que iráselecionar entre a situação Local e a remoto.0 = Sempre situação local
P221 Sel. Ref. Local 11 0...11 Seleção de referência de velocidade situação local.Controlado pela MCB-W.
P222 Sel. Ref. Remoto 1 0...11 Seleção de referência de velocidade situaçãoremota.Não usado
P223 Seleção Giro LOC 2 0...11 Seleção do sentido de giro situação local.2 = Indicação do sentido de giro da IHM (default horário)3 = indicação do sentido de giro da IHM (default anti-horário)
P224 Sel. Gira/Pára LOC 4 0...4 Seleção gira/para situação local.4 = Controlado pela MCB-W
P225 Seleção JOG LOC 0 0...5 Seleção fonte de JOG situação local.0 = inativo
P226 Seleção Giro REM 4 0...11 Seleção do sentido de giro situação remoto.Não usado
P227 Sel. Gira/Pára REM 1 0...4 Seleção gira/para situação remoto.Não usado
P228 Seleção JOG REM 0 0...5 Seleção fonte de JOG situação remoto.Não usado
P233 Zona Morta 1 0 ou 1 Zona morta das entradas analógicas.0 = inativa1 = ativa
P234 Ganho Entr. AI1 1 0...9,999 Ganho entrada AI1P235 Sinal Entr. AI1 0 0...3 Sinal entrada AI1
0 = 0...10V/0...20mAP236 OffSet Entr AI1 0 -100...100% Offset entrada AI1P237 Função Sinal AI2 0 0...3 Função da entrada AI2.
0 = P221/P222P238 Ganho Entr. AI2 1 0...9,999 Ganho entrada AI2
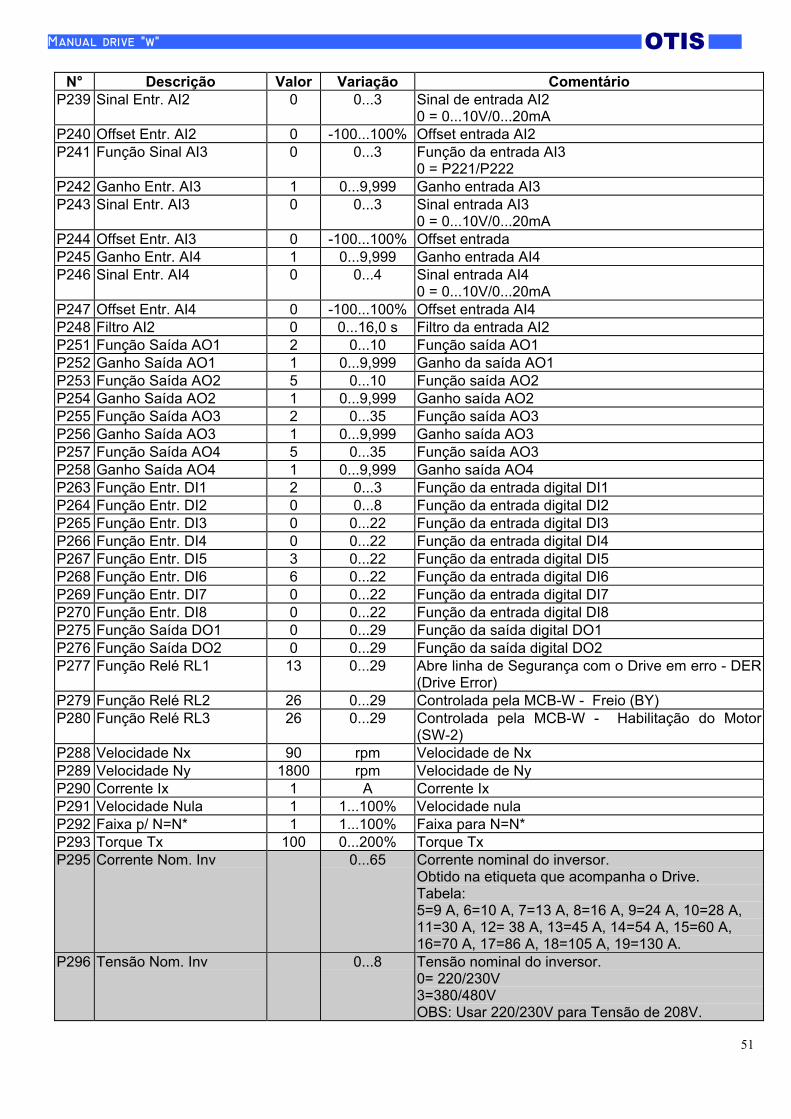
51
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P239 Sinal Entr. AI2 0 0...3 Sinal de entrada AI20 = 0...10V/0...20mA
P240 Offset Entr. AI2 0 -100...100% Offset entrada AI2P241 Função Sinal AI3 0 0...3 Função da entrada AI3
0 = P221/P222P242 Ganho Entr. AI3 1 0...9,999 Ganho entrada AI3P243 Sinal Entr. AI3 0 0...3 Sinal entrada AI3
0 = 0...10V/0...20mAP244 Offset Entr. AI3 0 -100...100% Offset entradaP245 Ganho Entr. AI4 1 0...9,999 Ganho entrada AI4P246 Sinal Entr. AI4 0 0...4 Sinal entrada AI4
0 = 0...10V/0...20mAP247 Offset Entr. AI4 0 -100...100% Offset entrada AI4P248 Filtro AI2 0 0...16,0 s Filtro da entrada AI2P251 Função Saída AO1 2 0...10 Função saída AO1P252 Ganho Saída AO1 1 0...9,999 Ganho da saída AO1P253 Função Saída AO2 5 0...10 Função saída AO2P254 Ganho Saída AO2 1 0...9,999 Ganho saída AO2P255 Função Saída AO3 2 0...35 Função saída AO3P256 Ganho Saída AO3 1 0...9,999 Ganho saída AO3P257 Função Saída AO4 5 0...35 Função saída AO3P258 Ganho Saída AO4 1 0...9,999 Ganho saída AO4P263 Função Entr. DI1 2 0...3 Função da entrada digital DI1P264 Função Entr. DI2 0 0...8 Função da entrada digital DI2P265 Função Entr. DI3 0 0...22 Função da entrada digital DI3P266 Função Entr. DI4 0 0...22 Função da entrada digital DI4P267 Função Entr. DI5 3 0...22 Função da entrada digital DI5P268 Função Entr. DI6 6 0...22 Função da entrada digital DI6P269 Função Entr. DI7 0 0...22 Função da entrada digital DI7P270 Função Entr. DI8 0 0...22 Função da entrada digital DI8P275 Função Saída DO1 0 0...29 Função da saída digital DO1P276 Função Saída DO2 0 0...29 Função da saída digital DO2P277 Função Relé RL1 13 0...29 Abre linha de Segurança com o Drive em erro - DER
(Drive Error)P279 Função Relé RL2 26 0...29 Controlada pela MCB-W - Freio (BY)P280 Função Relé RL3 26 0...29 Controlada pela MCB-W - Habilitação do Motor
(SW-2)P288 Velocidade Nx 90 rpm Velocidade de NxP289 Velocidade Ny 1800 rpm Velocidade de NyP290 Corrente Ix 1 A Corrente IxP291 Velocidade Nula 1 1...100% Velocidade nulaP292 Faixa p/ N=N* 1 1...100% Faixa para N=N*P293 Torque Tx 100 0...200% Torque TxP295 Corrente Nom. Inv 0...65 Corrente nominal do inversor.
Obtido na etiqueta que acompanha o Drive.Tabela:5=9 A, 6=10 A, 7=13 A, 8=16 A, 9=24 A, 10=28 A,11=30 A, 12= 38 A, 13=45 A, 14=54 A, 15=60 A,16=70 A, 17=86 A, 18=105 A, 19=130 A.
P296 Tensão Nom. Inv 0...8 Tensão nominal do inversor.0= 220/230V3=380/480VOBS: Usar 220/230V para Tensão de 208V.
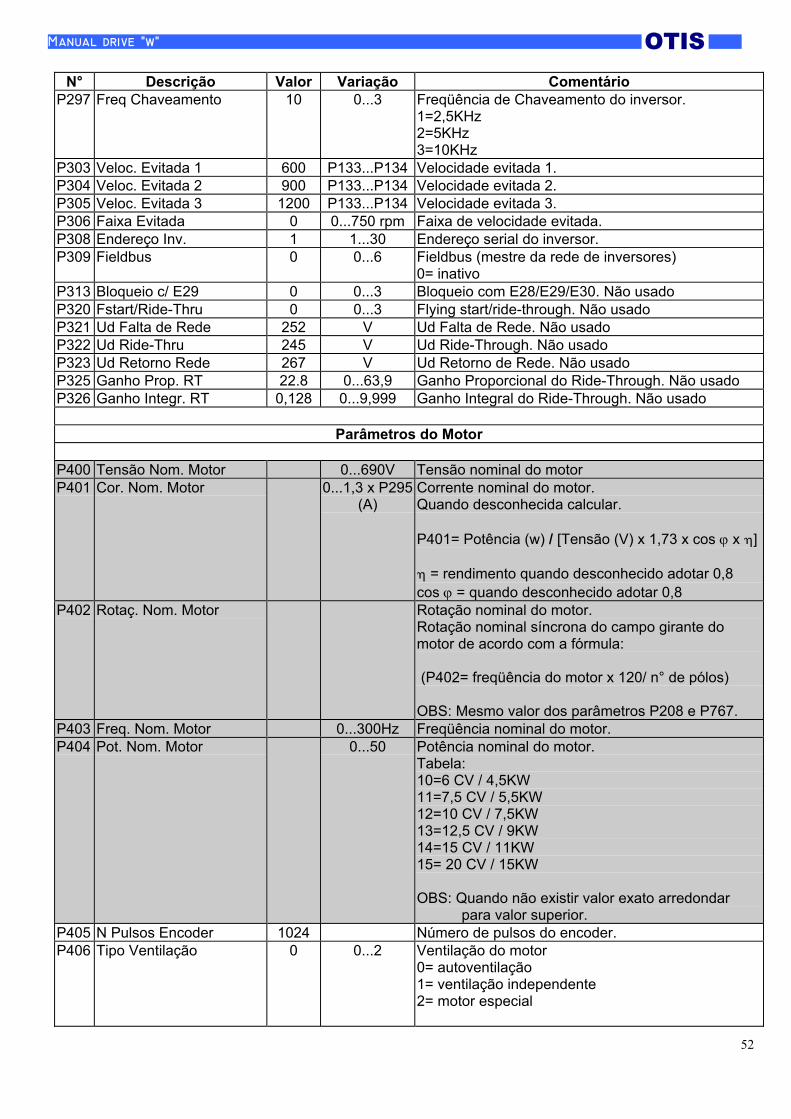
52
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P297 Freq Chaveamento 10 0...3 Freqüência de Chaveamento do inversor.1=2,5KHz2=5KHz3=10KHz
P303 Veloc. Evitada 1 600 P133...P134 Velocidade evitada 1.P304 Veloc. Evitada 2 900 P133...P134 Velocidade evitada 2.P305 Veloc. Evitada 3 1200 P133...P134 Velocidade evitada 3.P306 Faixa Evitada 0 0...750 rpm Faixa de velocidade evitada.P308 Endereço Inv. 1 1...30 Endereço serial do inversor.P309 Fieldbus 0 0...6 Fieldbus (mestre da rede de inversores)
0= inativoP313 Bloqueio c/ E29 0 0...3 Bloqueio com E28/E29/E30. Não usadoP320 Fstart/Ride-Thru 0 0...3 Flying start/ride-through. Não usadoP321 Ud Falta de Rede 252 V Ud Falta de Rede. Não usadoP322 Ud Ride-Thru 245 V Ud Ride-Through. Não usadoP323 Ud Retorno Rede 267 V Ud Retorno de Rede. Não usadoP325 Ganho Prop. RT 22.8 0...63,9 Ganho Proporcional do Ride-Through. Não usadoP326 Ganho Integr. RT 0,128 0...9,999 Ganho Integral do Ride-Through. Não usado
Parâmetros do Motor
P400 Tensão Nom. Motor 0...690V Tensão nominal do motorP401 Cor. Nom. Motor 0...1,3 x P295
(A)Corrente nominal do motor.Quando desconhecida calcular.
P401= Potência (w) / [Tensão (V) x 1,73 x cos ϕ x η]
η = rendimento quando desconhecido adotar 0,8cos ϕ = quando desconhecido adotar 0,8
P402 Rotaç. Nom. Motor Rotação nominal do motor.Rotação nominal síncrona do campo girante domotor de acordo com a fórmula:
(P402= freqüência do motor x 120/ n° de pólos)
OBS: Mesmo valor dos parâmetros P208 e P767.P403 Freq. Nom. Motor 0...300Hz Freqüência nominal do motor.P404 Pot. Nom. Motor 0...50 Potência nominal do motor.
Tabela:10=6 CV / 4,5KW11=7,5 CV / 5,5KW12=10 CV / 7,5KW13=12,5 CV / 9KW14=15 CV / 11KW15= 20 CV / 15KW
OBS: Quando não existir valor exato arredondar para valor superior.
P405 N Pulsos Encoder 1024 Número de pulsos do encoder.P406 Tipo Ventilação 0 0...2 Ventilação do motor
0= autoventilação1= ventilação independente2= motor especial
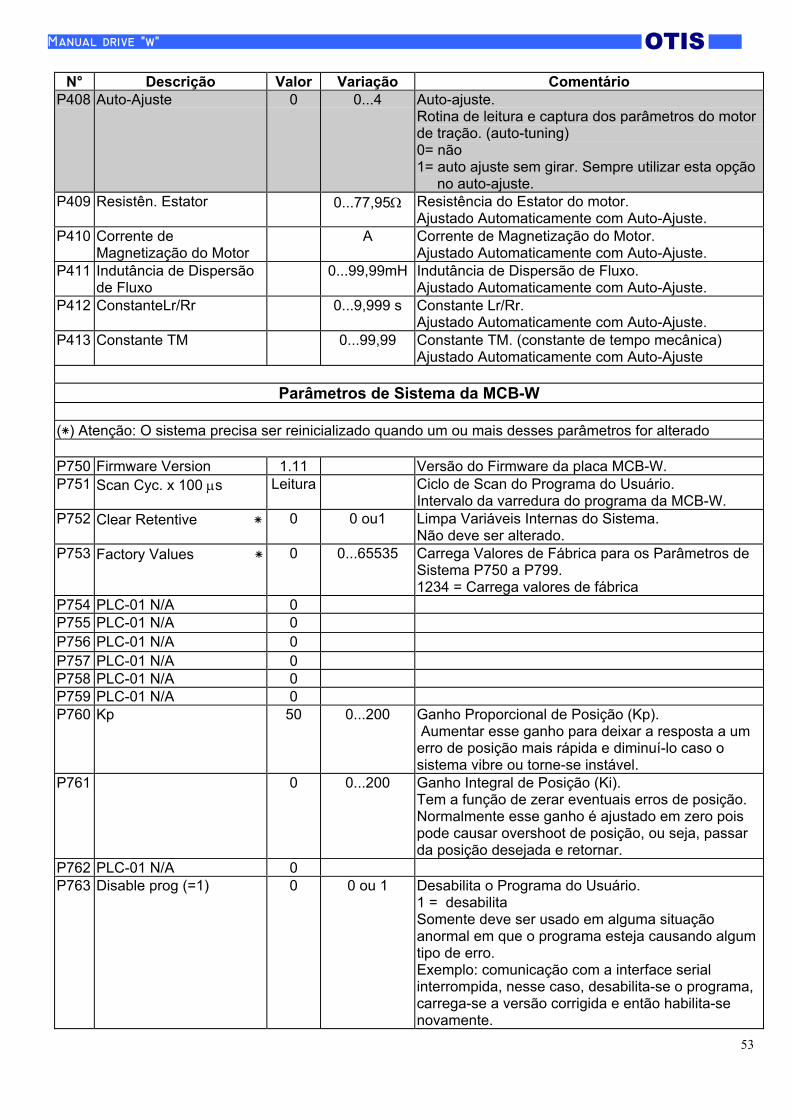
53
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P408 Auto-Ajuste 0 0...4 Auto-ajuste.Rotina de leitura e captura dos parâmetros do motorde tração. (auto-tuning)0= não1= auto ajuste sem girar. Sempre utilizar esta opção no auto-ajuste.
P409 Resistên. Estator 0...77,95Ω Resistência do Estator do motor.Ajustado Automaticamente com Auto-Ajuste.
P410 Corrente deMagnetização do Motor
A Corrente de Magnetização do Motor.Ajustado Automaticamente com Auto-Ajuste.
P411 Indutância de Dispersãode Fluxo
0...99,99mH Indutância de Dispersão de Fluxo.Ajustado Automaticamente com Auto-Ajuste.
P412 ConstanteLr/Rr 0...9,999 s Constante Lr/Rr.Ajustado Automaticamente com Auto-Ajuste.
P413 Constante TM 0...99,99 Constante TM. (constante de tempo mecânica)Ajustado Automaticamente com Auto-Ajuste
Parâmetros de Sistema da MCB-W
Atenção: O sistema precisa ser reinicializado quando um ou mais desses parâmetros for alterado (٭)
P750 Firmware Version 1.11 Versão do Firmware da placa MCB-W.P751 Scan Cyc. x 100 µs Leitura Ciclo de Scan do Programa do Usuário.
Intervalo da varredura do programa da MCB-W.P752 Clear Retentive ٭ 0 0 ou1 Limpa Variáveis Internas do Sistema.
Não deve ser alterado.P753 Factory Values ٭ 0 0...65535 Carrega Valores de Fábrica para os Parâmetros de
Sistema P750 a P799.1234 = Carrega valores de fábrica
P754 PLC-01 N/A 0P755 PLC-01 N/A 0P756 PLC-01 N/A 0P757 PLC-01 N/A 0P758 PLC-01 N/A 0P759 PLC-01 N/A 0P760 Kp 50 0...200 Ganho Proporcional de Posição (Kp).
Aumentar esse ganho para deixar a resposta a umerro de posição mais rápida e diminuí-lo caso osistema vibre ou torne-se instável.
P761 0 0...200 Ganho Integral de Posição (Ki).Tem a função de zerar eventuais erros de posição.Normalmente esse ganho é ajustado em zero poispode causar overshoot de posição, ou seja, passarda posição desejada e retornar.
P762 PLC-01 N/A 0P763 Disable prog (=1) 0 0 ou 1 Desabilita o Programa do Usuário.
1 = desabilitaSomente deve ser usado em alguma situaçãoanormal em que o programa esteja causando algumtipo de erro.Exemplo: comunicação com a interface serialinterrompida, nesse caso, desabilita-se o programa,carrega-se a versão corrigida e então habilita-senovamente.
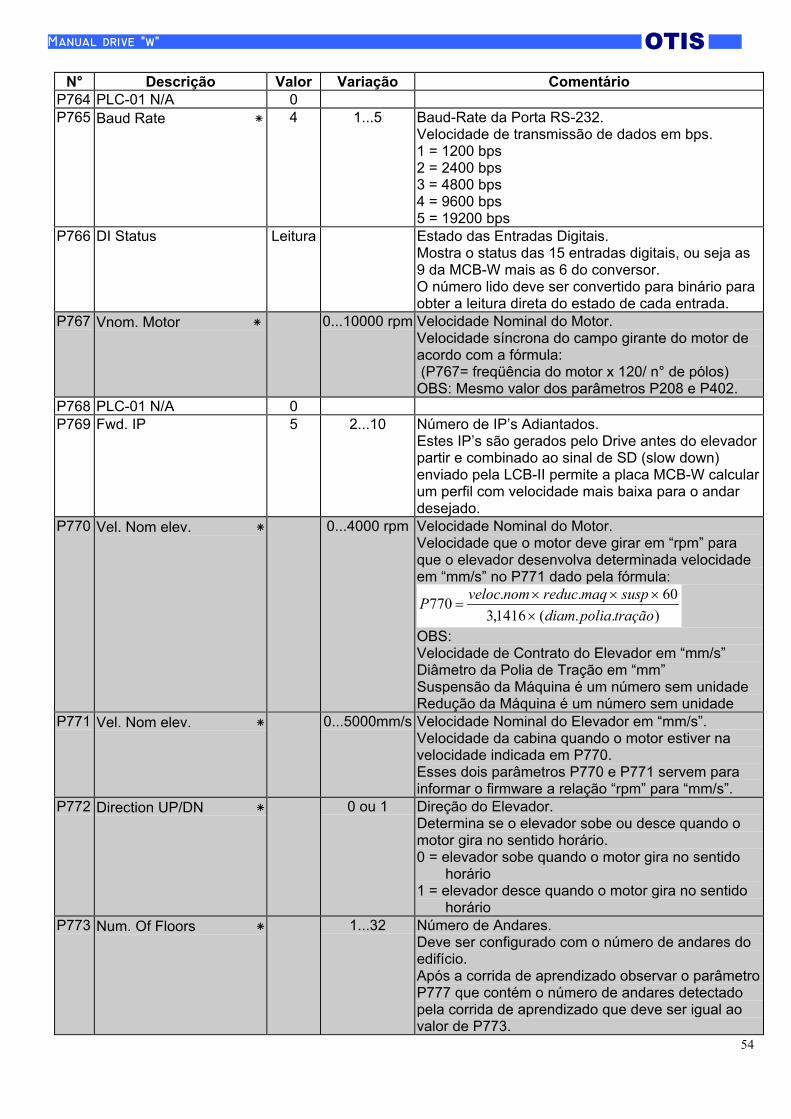
54
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P764 PLC-01 N/A 0P765 Baud Rate ٭ 4 1...5 Baud-Rate da Porta RS-232.
Velocidade de transmissão de dados em bps.1 = 1200 bps2 = 2400 bps3 = 4800 bps4 = 9600 bps5 = 19200 bps
P766 DI Status Leitura Estado das Entradas Digitais.Mostra o status das 15 entradas digitais, ou seja as9 da MCB-W mais as 6 do conversor.O número lido deve ser convertido para binário paraobter a leitura direta do estado de cada entrada.
P767 Vnom. Motor ٭ 0...10000 rpm Velocidade Nominal do Motor.Velocidade síncrona do campo girante do motor deacordo com a fórmula: (P767= freqüência do motor x 120/ n° de pólos)OBS: Mesmo valor dos parâmetros P208 e P402.
P768 PLC-01 N/A 0P769 Fwd. IP 5 2...10 Número de IP’s Adiantados.
Estes IP’s são gerados pelo Drive antes do elevadorpartir e combinado ao sinal de SD (slow down)enviado pela LCB-II permite a placa MCB-W calcularum perfil com velocidade mais baixa para o andardesejado.
P770 Vel. Nom elev. ٭ 0...4000 rpm Velocidade Nominal do Motor.Velocidade que o motor deve girar em “rpm” paraque o elevador desenvolva determinada velocidadeem “mm/s” no P771 dado pela fórmula:
)..(1416,360..770
traçãopoliadiamsuspmaqreducnomvelocP
××××
=
OBS:Velocidade de Contrato do Elevador em “mm/s”Diâmetro da Polia de Tração em “mm”Suspensão da Máquina é um número sem unidadeRedução da Máquina é um número sem unidade
P771 Vel. Nom elev. ٭ 0...5000mm/s Velocidade Nominal do Elevador em “mm/s”.Velocidade da cabina quando o motor estiver navelocidade indicada em P770.Esses dois parâmetros P770 e P771 servem parainformar o firmware a relação “rpm” para “mm/s”.
P772 Direction UP/DN ٭ 0 ou 1 Direção do Elevador.Determina se o elevador sobe ou desce quando omotor gira no sentido horário.0 = elevador sobe quando o motor gira no sentido horário1 = elevador desce quando o motor gira no sentido horário
P773 Num. Of Floors ٭ 1...32 Número de Andares.Deve ser configurado com o número de andares doedifício.Após a corrida de aprendizado observar o parâmetroP777 que contém o número de andares detectadopela corrida de aprendizado que deve ser igual aovalor de P773.
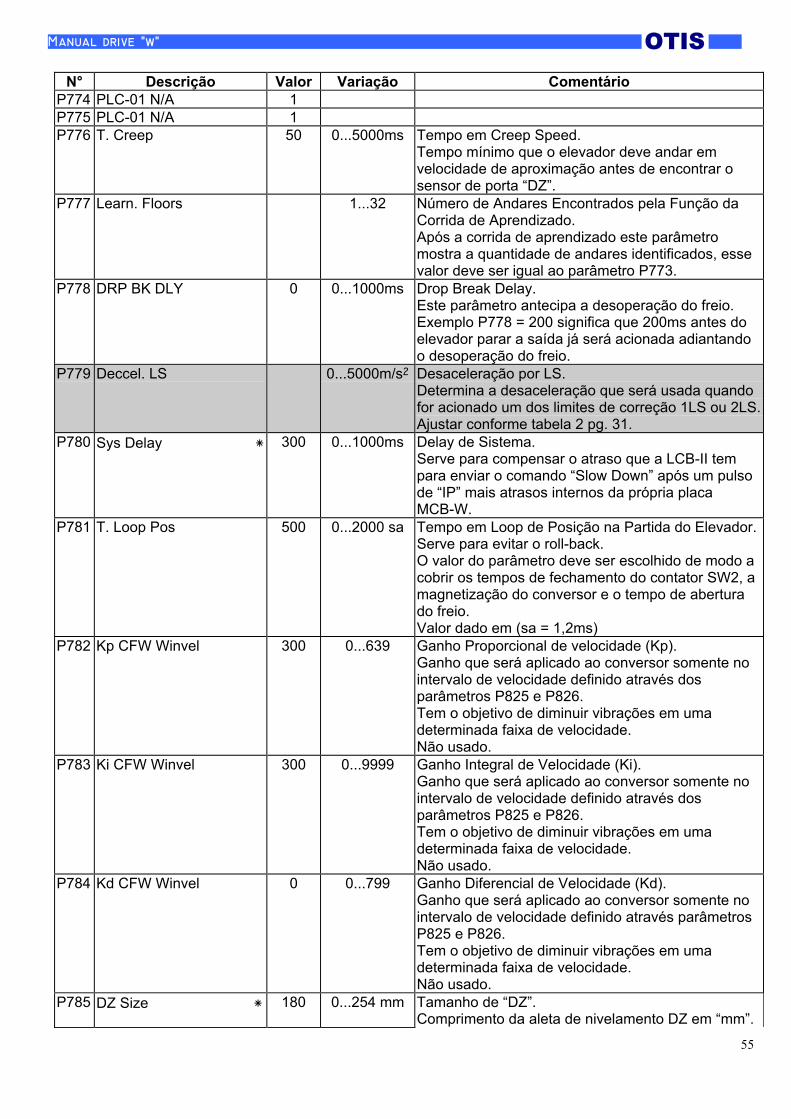
55
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P774 PLC-01 N/A 1P775 PLC-01 N/A 1P776 T. Creep 50 0...5000ms Tempo em Creep Speed.
Tempo mínimo que o elevador deve andar emvelocidade de aproximação antes de encontrar osensor de porta “DZ”.
P777 Learn. Floors 1...32 Número de Andares Encontrados pela Função daCorrida de Aprendizado.Após a corrida de aprendizado este parâmetromostra a quantidade de andares identificados, essevalor deve ser igual ao parâmetro P773.
P778 DRP BK DLY 0 0...1000ms Drop Break Delay.Este parâmetro antecipa a desoperação do freio.Exemplo P778 = 200 significa que 200ms antes doelevador parar a saída já será acionada adiantandoo desoperação do freio.
P779 Deccel. LS 0...5000m/s² Desaceleração por LS.Determina a desaceleração que será usada quandofor acionado um dos limites de correção 1LS ou 2LS.Ajustar conforme tabela 2 pg. 31.
P780 Sys Delay ٭ 300 0...1000ms Delay de Sistema.Serve para compensar o atraso que a LCB-II tempara enviar o comando “Slow Down” após um pulsode “IP” mais atrasos internos da própria placaMCB-W.
P781 T. Loop Pos 500 0...2000 sa Tempo em Loop de Posição na Partida do Elevador.Serve para evitar o roll-back.O valor do parâmetro deve ser escolhido de modo acobrir os tempos de fechamento do contator SW2, amagnetização do conversor e o tempo de aberturado freio.Valor dado em (sa = 1,2ms)
P782 Kp CFW Winvel 300 0...639 Ganho Proporcional de velocidade (Kp).Ganho que será aplicado ao conversor somente nointervalo de velocidade definido através dosparâmetros P825 e P826.Tem o objetivo de diminuir vibrações em umadeterminada faixa de velocidade.Não usado.
P783 Ki CFW Winvel 300 0...9999 Ganho Integral de Velocidade (Ki).Ganho que será aplicado ao conversor somente nointervalo de velocidade definido através dosparâmetros P825 e P826.Tem o objetivo de diminuir vibrações em umadeterminada faixa de velocidade.Não usado.
P784 Kd CFW Winvel 0 0...799 Ganho Diferencial de Velocidade (Kd).Ganho que será aplicado ao conversor somente nointervalo de velocidade definido através parâmetrosP825 e P826.Tem o objetivo de diminuir vibrações em umadeterminada faixa de velocidade.Não usado.
P785 DZ Size ٭ 180 0...254 mm Tamanho de “DZ”.Comprimento da aleta de nivelamento DZ em “mm”.
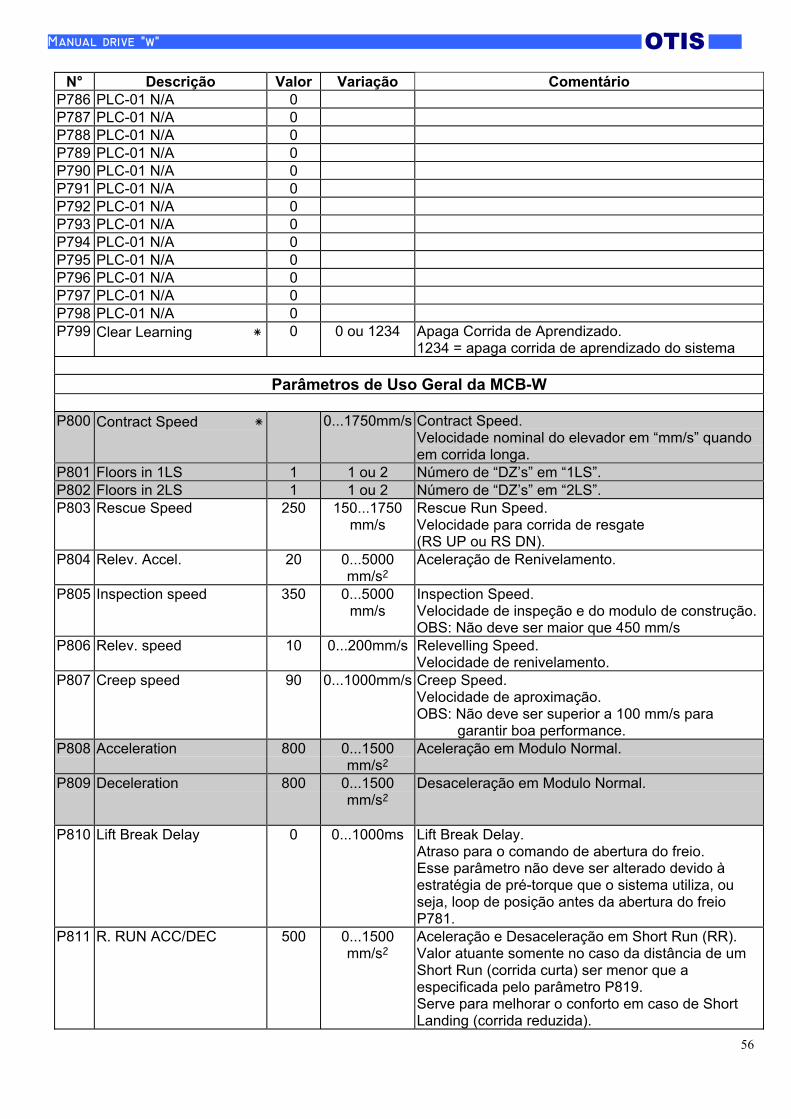
56
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P786 PLC-01 N/A 0P787 PLC-01 N/A 0P788 PLC-01 N/A 0P789 PLC-01 N/A 0P790 PLC-01 N/A 0P791 PLC-01 N/A 0P792 PLC-01 N/A 0P793 PLC-01 N/A 0P794 PLC-01 N/A 0P795 PLC-01 N/A 0P796 PLC-01 N/A 0P797 PLC-01 N/A 0P798 PLC-01 N/A 0P799 Clear Learning ٭ 0 0 ou 1234 Apaga Corrida de Aprendizado.
1234 = apaga corrida de aprendizado do sistema
Parâmetros de Uso Geral da MCB-W
P800 Contract Speed ٭ 0...1750mm/s Contract Speed.Velocidade nominal do elevador em “mm/s” quandoem corrida longa.
P801 Floors in 1LS 1 1 ou 2 Número de “DZ’s” em “1LS”.P802 Floors in 2LS 1 1 ou 2 Número de “DZ’s” em “2LS”.P803 Rescue Speed 250 150...1750
mm/sRescue Run Speed.Velocidade para corrida de resgate(RS UP ou RS DN).
P804 Relev. Accel. 20 0...5000mm/s²
Aceleração de Renivelamento.
P805 Inspection speed 350 0...5000mm/s
Inspection Speed.Velocidade de inspeção e do modulo de construção.OBS: Não deve ser maior que 450 mm/s
P806 Relev. speed 10 0...200mm/s Relevelling Speed.Velocidade de renivelamento.
P807 Creep speed 90 0...1000mm/s Creep Speed.Velocidade de aproximação.OBS: Não deve ser superior a 100 mm/s para garantir boa performance.
P808 Acceleration 800 0...1500mm/s²
Aceleração em Modulo Normal.
P809 Deceleration 800 0...1500mm/s²
Desaceleração em Modulo Normal.
P810 Lift Break Delay 0 0...1000ms Lift Break Delay.Atraso para o comando de abertura do freio.Esse parâmetro não deve ser alterado devido àestratégia de pré-torque que o sistema utiliza, ouseja, loop de posição antes da abertura do freioP781.
P811 R. RUN ACC/DEC 500 0...1500mm/s²
Aceleração e Desaceleração em Short Run (RR).Valor atuante somente no caso da distância de umShort Run (corrida curta) ser menor que aespecificada pelo parâmetro P819.Serve para melhorar o conforto em caso de ShortLanding (corrida reduzida).
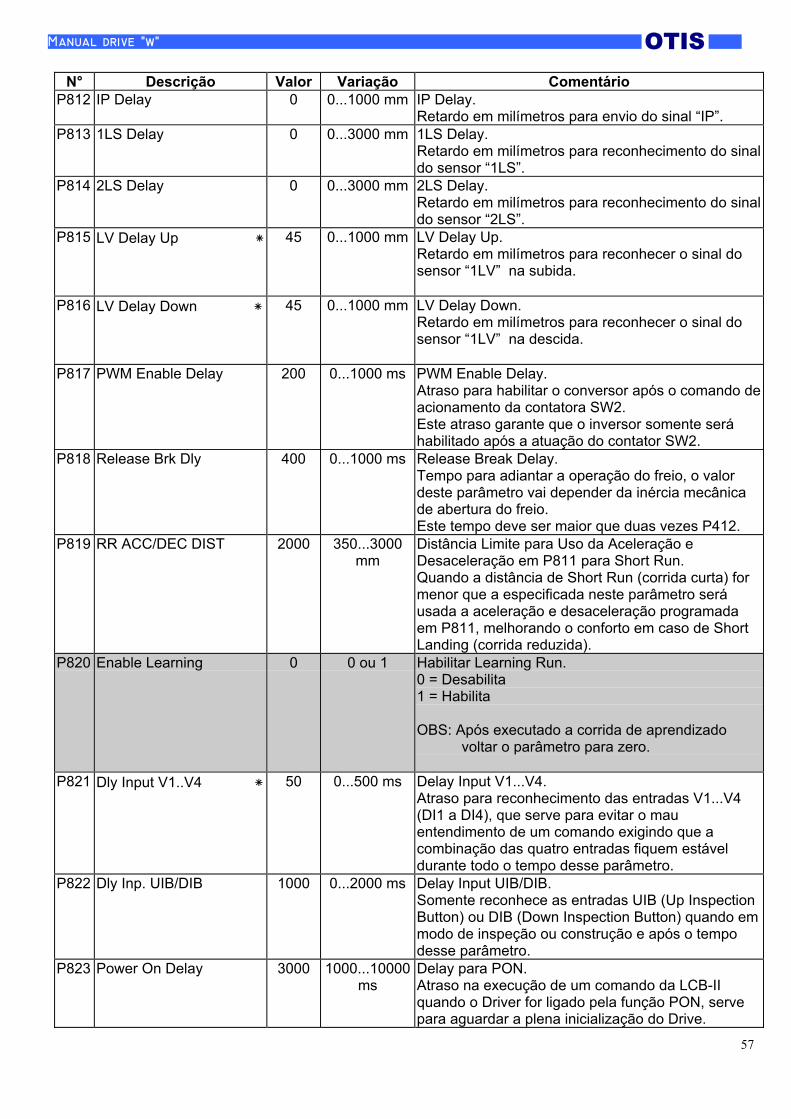
57
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P812 IP Delay 0 0...1000 mm IP Delay.Retardo em milímetros para envio do sinal “IP”.
P813 1LS Delay 0 0...3000 mm 1LS Delay.Retardo em milímetros para reconhecimento do sinaldo sensor “1LS”.
P814 2LS Delay 0 0...3000 mm 2LS Delay.Retardo em milímetros para reconhecimento do sinaldo sensor “2LS”.
P815 LV Delay Up ٭ 45 0...1000 mm LV Delay Up.Retardo em milímetros para reconhecer o sinal dosensor “1LV” na subida.
P816 LV Delay Down ٭ 45 0...1000 mm LV Delay Down.Retardo em milímetros para reconhecer o sinal dosensor “1LV” na descida.
P817 PWM Enable Delay 200 0...1000 ms PWM Enable Delay.Atraso para habilitar o conversor após o comando deacionamento da contatora SW2.Este atraso garante que o inversor somente seráhabilitado após a atuação do contator SW2.
P818 Release Brk Dly 400 0...1000 ms Release Break Delay.Tempo para adiantar a operação do freio, o valordeste parâmetro vai depender da inércia mecânicade abertura do freio.Este tempo deve ser maior que duas vezes P412.
P819 RR ACC/DEC DIST 2000 350...3000mm
Distância Limite para Uso da Aceleração eDesaceleração em P811 para Short Run.Quando a distância de Short Run (corrida curta) formenor que a especificada neste parâmetro seráusada a aceleração e desaceleração programadaem P811, melhorando o conforto em caso de ShortLanding (corrida reduzida).
P820 Enable Learning 0 0 ou 1 Habilitar Learning Run.0 = Desabilita1 = Habilita
OBS: Após executado a corrida de aprendizado voltar o parâmetro para zero.
P821 Dly Input V1..V4 ٭ 50 0...500 ms Delay Input V1...V4.Atraso para reconhecimento das entradas V1...V4(DI1 a DI4), que serve para evitar o mauentendimento de um comando exigindo que acombinação das quatro entradas fiquem estáveldurante todo o tempo desse parâmetro.
P822 Dly Inp. UIB/DIB 1000 0...2000 ms Delay Input UIB/DIB.Somente reconhece as entradas UIB (Up InspectionButton) ou DIB (Down Inspection Button) quando emmodo de inspeção ou construção e após o tempodesse parâmetro.
P823 Power On Delay 3000 1000...10000ms
Delay para PON.Atraso na execução de um comando da LCB-IIquando o Driver for ligado pela função PON, servepara aguardar a plena inicialização do Drive.
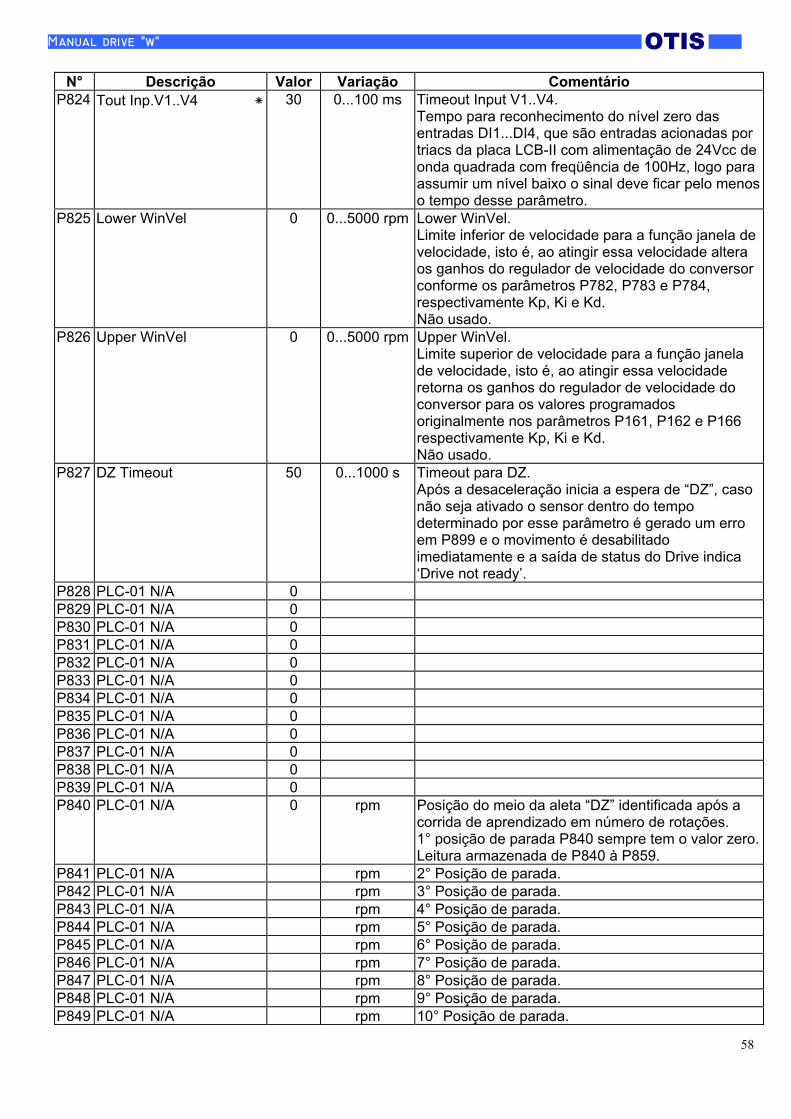
58
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P824 Tout Inp.V1..V4 ٭ 30 0...100 ms Timeout Input V1..V4.Tempo para reconhecimento do nível zero dasentradas DI1...DI4, que são entradas acionadas portriacs da placa LCB-II com alimentação de 24Vcc deonda quadrada com freqüência de 100Hz, logo paraassumir um nível baixo o sinal deve ficar pelo menoso tempo desse parâmetro.
P825 Lower WinVel 0 0...5000 rpm Lower WinVel.Limite inferior de velocidade para a função janela develocidade, isto é, ao atingir essa velocidade alteraos ganhos do regulador de velocidade do conversorconforme os parâmetros P782, P783 e P784,respectivamente Kp, Ki e Kd.Não usado.
P826 Upper WinVel 0 0...5000 rpm Upper WinVel.Limite superior de velocidade para a função janelade velocidade, isto é, ao atingir essa velocidaderetorna os ganhos do regulador de velocidade doconversor para os valores programadosoriginalmente nos parâmetros P161, P162 e P166respectivamente Kp, Ki e Kd.Não usado.
P827 DZ Timeout 50 0...1000 s Timeout para DZ.Após a desaceleração inicia a espera de “DZ”, casonão seja ativado o sensor dentro do tempodeterminado por esse parâmetro é gerado um erroem P899 e o movimento é desabilitadoimediatamente e a saída de status do Drive indica‘Drive not ready’.
P828 PLC-01 N/A 0P829 PLC-01 N/A 0P830 PLC-01 N/A 0P831 PLC-01 N/A 0P832 PLC-01 N/A 0P833 PLC-01 N/A 0P834 PLC-01 N/A 0P835 PLC-01 N/A 0P836 PLC-01 N/A 0P837 PLC-01 N/A 0P838 PLC-01 N/A 0P839 PLC-01 N/A 0P840 PLC-01 N/A 0 rpm Posição do meio da aleta “DZ” identificada após a
corrida de aprendizado em número de rotações.1° posição de parada P840 sempre tem o valor zero.Leitura armazenada de P840 à P859.
P841 PLC-01 N/A rpm 2° Posição de parada.P842 PLC-01 N/A rpm 3° Posição de parada.P843 PLC-01 N/A rpm 4° Posição de parada.P844 PLC-01 N/A rpm 5° Posição de parada.P845 PLC-01 N/A rpm 6° Posição de parada.P846 PLC-01 N/A rpm 7° Posição de parada.P847 PLC-01 N/A rpm 8° Posição de parada.P848 PLC-01 N/A rpm 9° Posição de parada.P849 PLC-01 N/A rpm 10° Posição de parada.
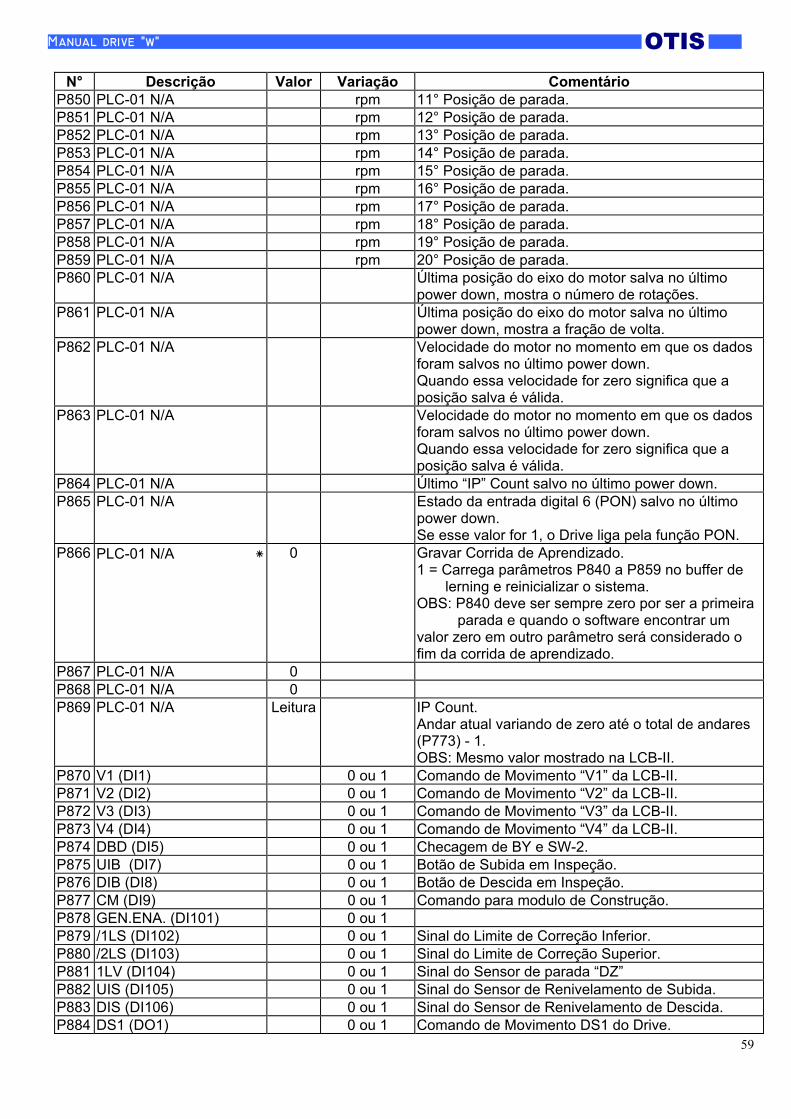
59
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P850 PLC-01 N/A rpm 11° Posição de parada.P851 PLC-01 N/A rpm 12° Posição de parada.P852 PLC-01 N/A rpm 13° Posição de parada.P853 PLC-01 N/A rpm 14° Posição de parada.P854 PLC-01 N/A rpm 15° Posição de parada.P855 PLC-01 N/A rpm 16° Posição de parada.P856 PLC-01 N/A rpm 17° Posição de parada.P857 PLC-01 N/A rpm 18° Posição de parada.P858 PLC-01 N/A rpm 19° Posição de parada.P859 PLC-01 N/A rpm 20° Posição de parada.P860 PLC-01 N/A Última posição do eixo do motor salva no último
power down, mostra o número de rotações.P861 PLC-01 N/A Última posição do eixo do motor salva no último
power down, mostra a fração de volta.P862 PLC-01 N/A Velocidade do motor no momento em que os dados
foram salvos no último power down.Quando essa velocidade for zero significa que aposição salva é válida.
P863 PLC-01 N/A Velocidade do motor no momento em que os dadosforam salvos no último power down.Quando essa velocidade for zero significa que aposição salva é válida.
P864 PLC-01 N/A Último “IP” Count salvo no último power down.P865 PLC-01 N/A Estado da entrada digital 6 (PON) salvo no último
power down.Se esse valor for 1, o Drive liga pela função PON.
P866 PLC-01 N/A ٭ 0 Gravar Corrida de Aprendizado.1 = Carrega parâmetros P840 a P859 no buffer de lerning e reinicializar o sistema.OBS: P840 deve ser sempre zero por ser a primeira parada e quando o software encontrar umvalor zero em outro parâmetro será considerado ofim da corrida de aprendizado.
P867 PLC-01 N/A 0P868 PLC-01 N/A 0P869 PLC-01 N/A Leitura IP Count.
Andar atual variando de zero até o total de andares(P773) - 1.OBS: Mesmo valor mostrado na LCB-II.
P870 V1 (DI1) 0 ou 1 Comando de Movimento “V1” da LCB-II.P871 V2 (DI2) 0 ou 1 Comando de Movimento “V2” da LCB-II.P872 V3 (DI3) 0 ou 1 Comando de Movimento “V3” da LCB-II.P873 V4 (DI4) 0 ou 1 Comando de Movimento “V4” da LCB-II.P874 DBD (DI5) 0 ou 1 Checagem de BY e SW-2.P875 UIB (DI7) 0 ou 1 Botão de Subida em Inspeção.P876 DIB (DI8) 0 ou 1 Botão de Descida em Inspeção.P877 CM (DI9) 0 ou 1 Comando para modulo de Construção.P878 GEN.ENA. (DI101) 0 ou 1P879 /1LS (DI102) 0 ou 1 Sinal do Limite de Correção Inferior.P880 /2LS (DI103) 0 ou 1 Sinal do Limite de Correção Superior.P881 1LV (DI104) 0 ou 1 Sinal do Sensor de parada “DZ”P882 UIS (DI105) 0 ou 1 Sinal do Sensor de Renivelamento de Subida.P883 DIS (DI106) 0 ou 1 Sinal do Sensor de Renivelamento de Descida.P884 DS1 (DO1) 0 ou 1 Comando de Movimento DS1 do Drive.
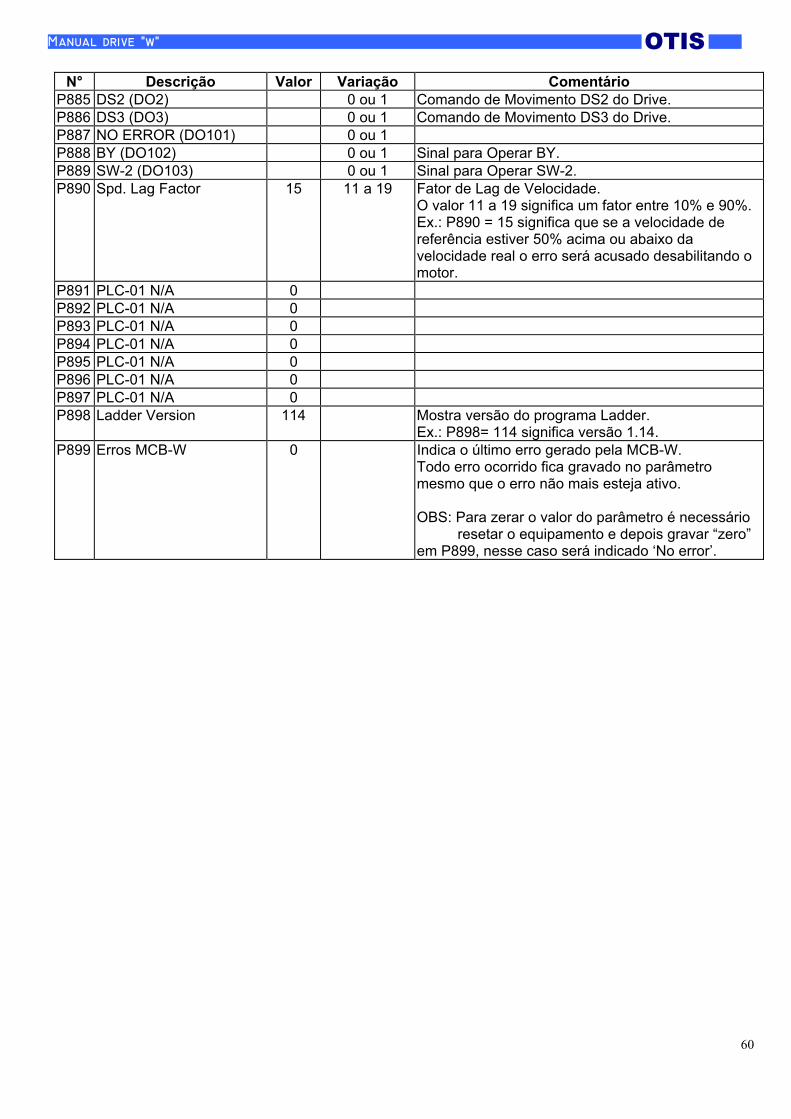
60
Manual drive "w" OTISN° Descrição Valor Variação Comentário
P885 DS2 (DO2) 0 ou 1 Comando de Movimento DS2 do Drive.P886 DS3 (DO3) 0 ou 1 Comando de Movimento DS3 do Drive.P887 NO ERROR (DO101) 0 ou 1P888 BY (DO102) 0 ou 1 Sinal para Operar BY.P889 SW-2 (DO103) 0 ou 1 Sinal para Operar SW-2.P890 Spd. Lag Factor 15 11 a 19 Fator de Lag de Velocidade.
O valor 11 a 19 significa um fator entre 10% e 90%.Ex.: P890 = 15 significa que se a velocidade dereferência estiver 50% acima ou abaixo davelocidade real o erro será acusado desabilitando omotor.
P891 PLC-01 N/A 0P892 PLC-01 N/A 0P893 PLC-01 N/A 0P894 PLC-01 N/A 0P895 PLC-01 N/A 0P896 PLC-01 N/A 0P897 PLC-01 N/A 0P898 Ladder Version 114 Mostra versão do programa Ladder.
Ex.: P898= 114 significa versão 1.14.P899 Erros MCB-W 0 Indica o último erro gerado pela MCB-W.
Todo erro ocorrido fica gravado no parâmetromesmo que o erro não mais esteja ativo.
OBS: Para zerar o valor do parâmetro é necessário resetar o equipamento e depois gravar “zero”em P899, nesse caso será indicado ‘No error’.
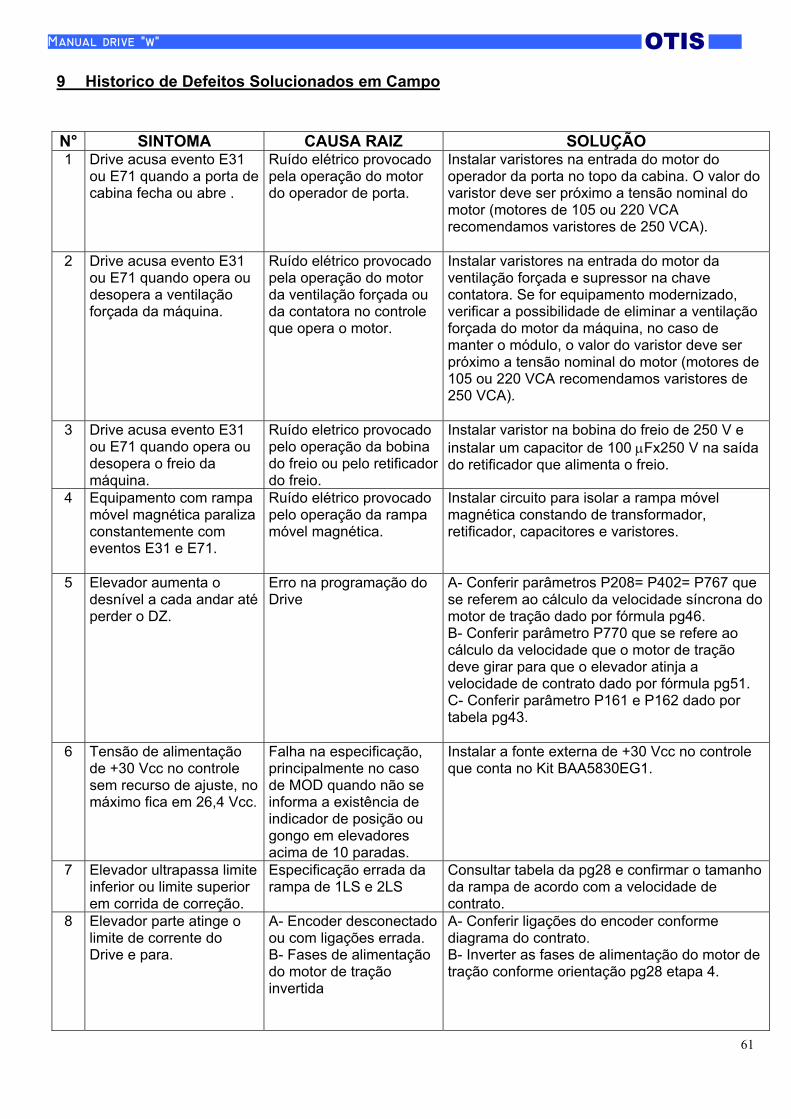
61
Manual drive "w" OTIS9 Historico de Defeitos Solucionados em Campo
N° SINTOMA CAUSA RAIZ SOLUÇÃO1 Drive acusa evento E31
ou E71 quando a porta decabina fecha ou abre .
Ruído elétrico provocadopela operação do motordo operador de porta.
Instalar varistores na entrada do motor dooperador da porta no topo da cabina. O valor dovaristor deve ser próximo a tensão nominal domotor (motores de 105 ou 220 VCArecomendamos varistores de 250 VCA).
2 Drive acusa evento E31ou E71 quando opera oudesopera a ventilaçãoforçada da máquina.
Ruído elétrico provocadopela operação do motorda ventilação forçada ouda contatora no controleque opera o motor.
Instalar varistores na entrada do motor daventilação forçada e supressor na chavecontatora. Se for equipamento modernizado,verificar a possibilidade de eliminar a ventilaçãoforçada do motor da máquina, no caso demanter o módulo, o valor do varistor deve serpróximo a tensão nominal do motor (motores de105 ou 220 VCA recomendamos varistores de250 VCA).
3 Drive acusa evento E31ou E71 quando opera oudesopera o freio damáquina.
Ruído eletrico provocadopelo operação da bobinado freio ou pelo retificadordo freio.
Instalar varistor na bobina do freio de 250 V einstalar um capacitor de 100 µFx250 V na saídado retificador que alimenta o freio.
4 Equipamento com rampamóvel magnética paralizaconstantemente comeventos E31 e E71.
Ruído elétrico provocadopelo operação da rampamóvel magnética.
Instalar circuito para isolar a rampa móvelmagnética constando de transformador,retificador, capacitores e varistores.
5 Elevador aumenta odesnível a cada andar atéperder o DZ.
Erro na programação doDrive
A- Conferir parâmetros P208= P402= P767 quese referem ao cálculo da velocidade síncrona domotor de tração dado por fórmula pg46.B- Conferir parâmetro P770 que se refere aocálculo da velocidade que o motor de traçãodeve girar para que o elevador atinja avelocidade de contrato dado por fórmula pg51.C- Conferir parâmetro P161 e P162 dado portabela pg43.
6 Tensão de alimentaçãode +30 Vcc no controlesem recurso de ajuste, nomáximo fica em 26,4 Vcc.
Falha na especificação,principalmente no casode MOD quando não seinforma a existência deindicador de posição ougongo em elevadoresacima de 10 paradas.
Instalar a fonte externa de +30 Vcc no controleque conta no Kit BAA5830EG1.
7 Elevador ultrapassa limiteinferior ou limite superiorem corrida de correção.
Especificação errada darampa de 1LS e 2LS
Consultar tabela da pg28 e confirmar o tamanhoda rampa de acordo com a velocidade decontrato.
8 Elevador parte atinge olimite de corrente doDrive e para.
A- Encoder desconectadoou com ligações errada.B- Fases de alimentaçãodo motor de traçãoinvertida
A- Conferir ligações do encoder conformediagrama do contrato.B- Inverter as fases de alimentação do motor detração conforme orientação pg28 etapa 4.
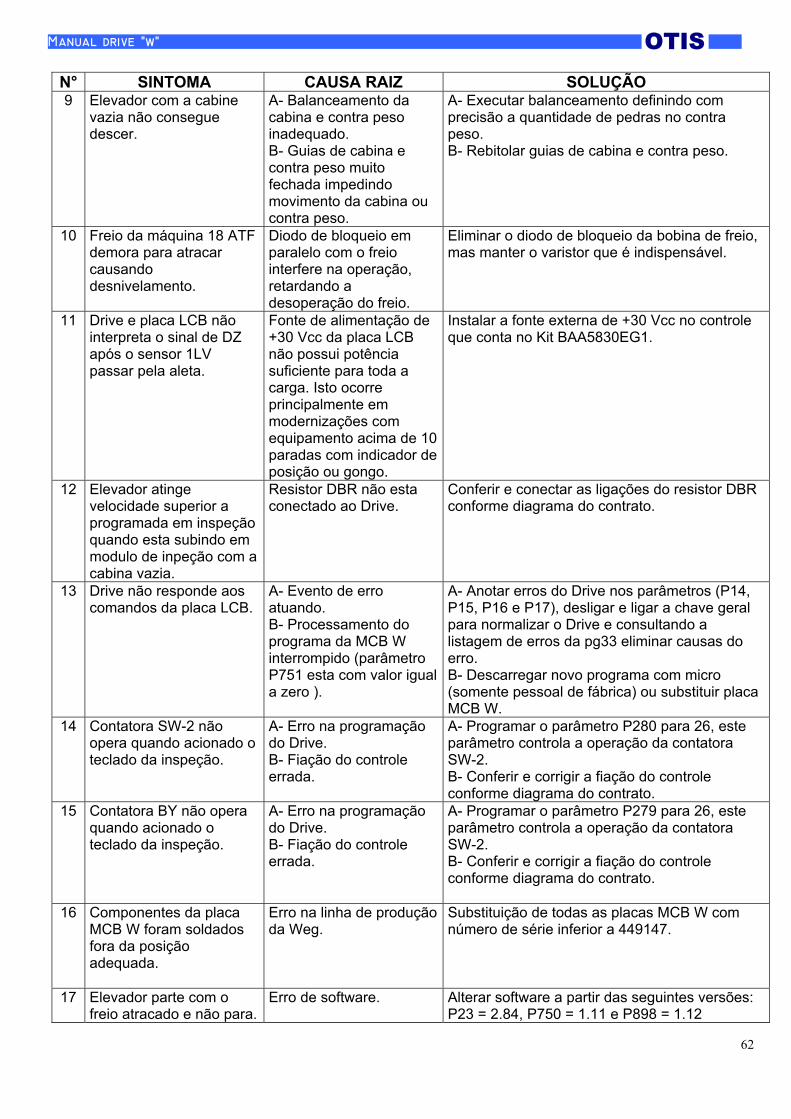
62
Manual drive "w" OTISN° SINTOMA CAUSA RAIZ SOLUÇÃO9 Elevador com a cabine
vazia não conseguedescer.
A- Balanceamento dacabina e contra pesoinadequado.B- Guias de cabina econtra peso muitofechada impedindomovimento da cabina oucontra peso.
A- Executar balanceamento definindo comprecisão a quantidade de pedras no contrapeso.B- Rebitolar guias de cabina e contra peso.
10 Freio da máquina 18 ATFdemora para atracarcausandodesnivelamento.
Diodo de bloqueio emparalelo com o freiointerfere na operação,retardando adesoperação do freio.
Eliminar o diodo de bloqueio da bobina de freio,mas manter o varistor que é indispensável.
11 Drive e placa LCB nãointerpreta o sinal de DZapós o sensor 1LVpassar pela aleta.
Fonte de alimentação de+30 Vcc da placa LCBnão possui potênciasuficiente para toda acarga. Isto ocorreprincipalmente emmodernizações comequipamento acima de 10paradas com indicador deposição ou gongo.
Instalar a fonte externa de +30 Vcc no controleque conta no Kit BAA5830EG1.
12 Elevador atingevelocidade superior aprogramada em inspeçãoquando esta subindo emmodulo de inpeção com acabina vazia.
Resistor DBR não estaconectado ao Drive.
Conferir e conectar as ligações do resistor DBRconforme diagrama do contrato.
13 Drive não responde aoscomandos da placa LCB.
A- Evento de erroatuando.B- Processamento doprograma da MCB Winterrompido (parâmetroP751 esta com valor iguala zero ).
A- Anotar erros do Drive nos parâmetros (P14,P15, P16 e P17), desligar e ligar a chave geralpara normalizar o Drive e consultando alistagem de erros da pg33 eliminar causas doerro.B- Descarregar novo programa com micro(somente pessoal de fábrica) ou substituir placaMCB W.
14 Contatora SW-2 nãoopera quando acionado oteclado da inspeção.
A- Erro na programaçãodo Drive.B- Fiação do controleerrada.
A- Programar o parâmetro P280 para 26, esteparâmetro controla a operação da contatoraSW-2.B- Conferir e corrigir a fiação do controleconforme diagrama do contrato.
15 Contatora BY não operaquando acionado oteclado da inspeção.
A- Erro na programaçãodo Drive.B- Fiação do controleerrada.
A- Programar o parâmetro P279 para 26, esteparâmetro controla a operação da contatoraSW-2.B- Conferir e corrigir a fiação do controleconforme diagrama do contrato.
16 Componentes da placaMCB W foram soldadosfora da posiçãoadequada.
Erro na linha de produçãoda Weg.
Substituição de todas as placas MCB W comnúmero de série inferior a 449147.
17 Elevador parte com ofreio atracado e não para.
Erro de software. Alterar software a partir das seguintes versões:P23 = 2.84, P750 = 1.11 e P898 = 1.12
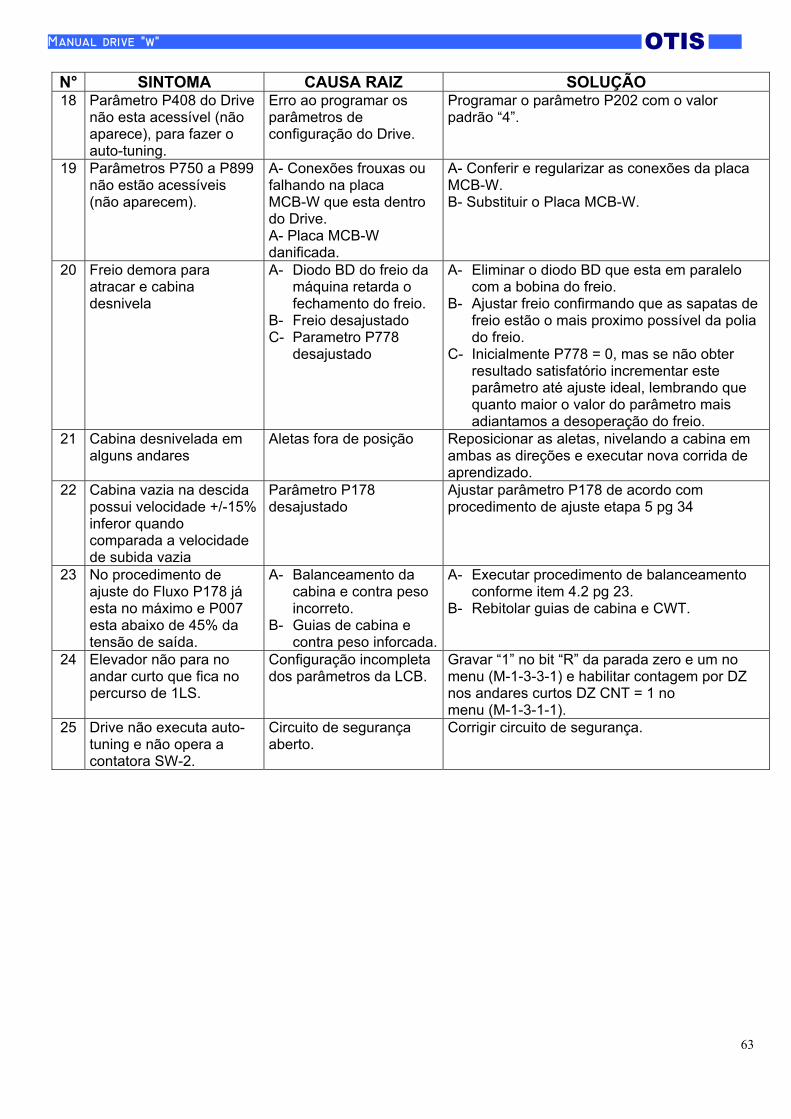
63
Manual drive "w" OTISN° SINTOMA CAUSA RAIZ SOLUÇÃO18 Parâmetro P408 do Drive
não esta acessível (nãoaparece), para fazer oauto-tuning.
Erro ao programar osparâmetros deconfiguração do Drive.
Programar o parâmetro P202 com o valorpadrão “4”.
19 Parâmetros P750 a P899não estão acessíveis(não aparecem).
A- Conexões frouxas oufalhando na placaMCB-W que esta dentrodo Drive.A- Placa MCB-Wdanificada.
A- Conferir e regularizar as conexões da placaMCB-W.B- Substituir o Placa MCB-W.
20 Freio demora paraatracar e cabinadesnivela
A- Diodo BD do freio damáquina retarda ofechamento do freio.
B- Freio desajustadoC- Parametro P778
desajustado
A- Eliminar o diodo BD que esta em paralelocom a bobina do freio.
B- Ajustar freio confirmando que as sapatas defreio estão o mais proximo possível da poliado freio.
C- Inicialmente P778 = 0, mas se não obterresultado satisfatório incrementar esteparâmetro até ajuste ideal, lembrando quequanto maior o valor do parâmetro maisadiantamos a desoperação do freio.
21 Cabina desnivelada emalguns andares
Aletas fora de posição Reposicionar as aletas, nivelando a cabina emambas as direções e executar nova corrida deaprendizado.
22 Cabina vazia na descidapossui velocidade +/-15%inferor quandocomparada a velocidadede subida vazia
Parâmetro P178desajustado
Ajustar parâmetro P178 de acordo comprocedimento de ajuste etapa 5 pg 34
23 No procedimento deajuste do Fluxo P178 jáesta no máximo e P007esta abaixo de 45% datensão de saída.
A- Balanceamento dacabina e contra pesoincorreto.
B- Guias de cabina econtra peso inforcada.
A- Executar procedimento de balanceamentoconforme item 4.2 pg 23.
B- Rebitolar guias de cabina e CWT.
24 Elevador não para noandar curto que fica nopercurso de 1LS.
Configuração incompletados parâmetros da LCB.
Gravar “1” no bit “R” da parada zero e um nomenu (M-1-3-3-1) e habilitar contagem por DZnos andares curtos DZ CNT = 1 nomenu (M-1-3-1-1).
25 Drive não executa auto-tuning e não opera acontatora SW-2.
Circuito de segurançaaberto.
Corrigir circuito de segurança.
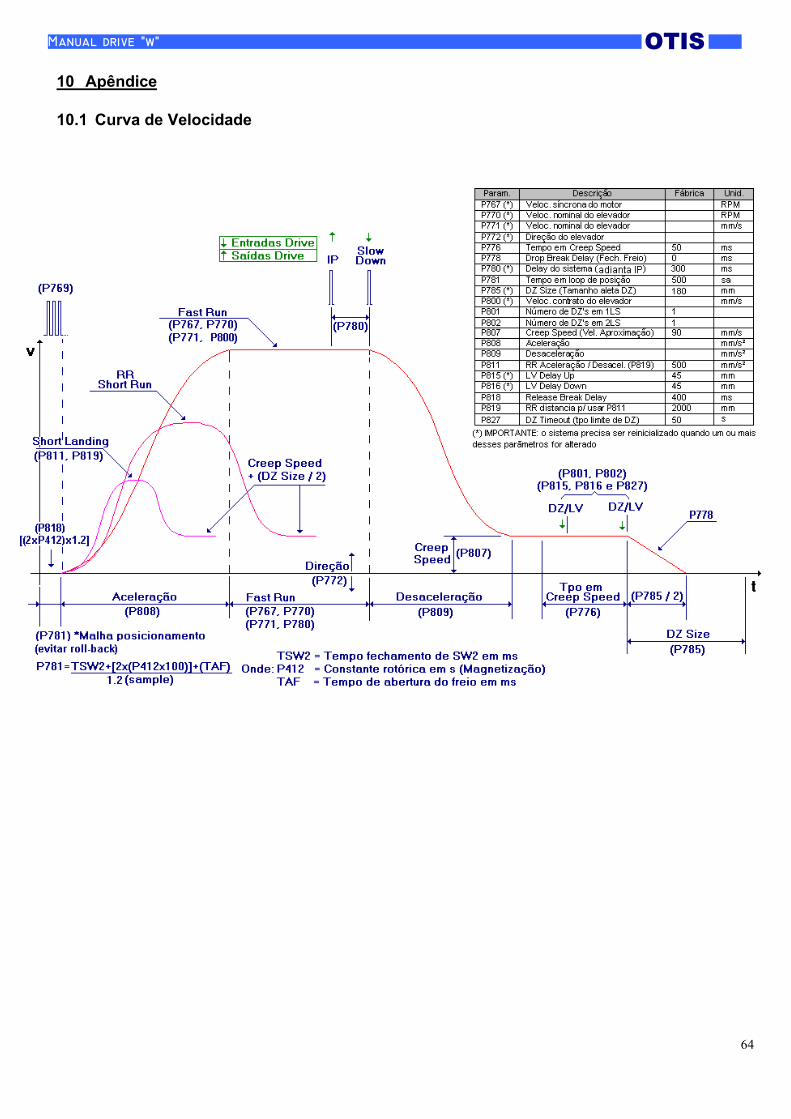
64
Manual drive "w" OTIS10 Apêndice
10.1 Curva de Velocidade
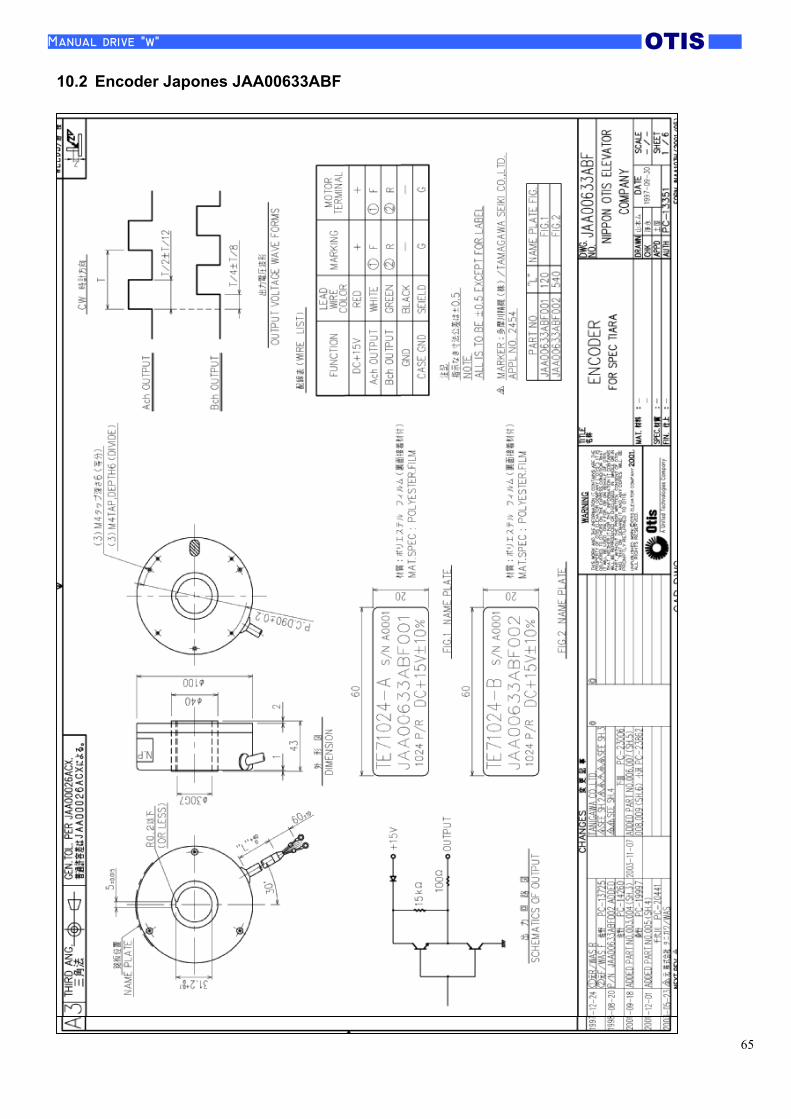
65
Manual drive "w" OTIS10.2 Encoder Japones JAA00633ABF
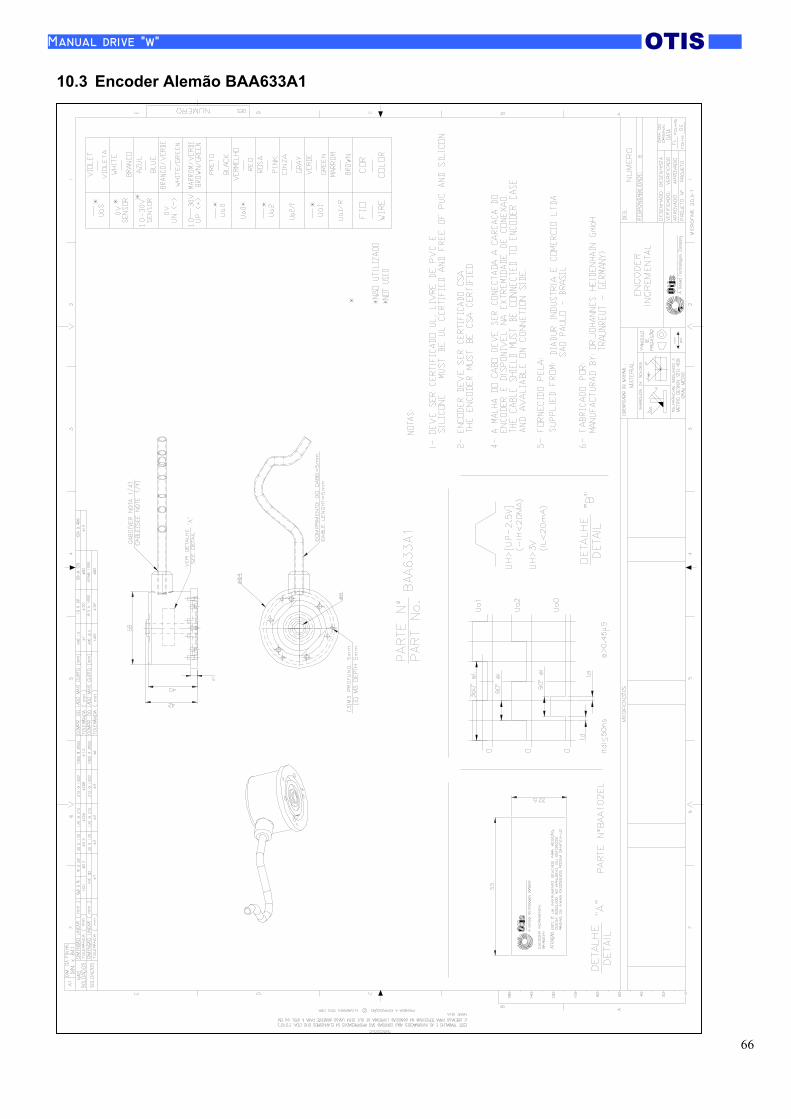
66
Manual drive "w" OTIS10.3 Encoder Alemão BAA633A1





























