Embed Size (px)
Citation preview
1
INDICE
1. COS’E’ ORBITER……………………………………………2
2. A PROPOSITO DI QUESTO MANUALE…………………3
3. ORBITER FORUM ITALIA………………………………..3
4. IL LAUNCHPAD…………………………………………….4 4.1 SCHEDA SCENARIO…………………………………………………………4
4.2 SCHEDA PARAMETRI……………………………………………………….5
4.3 SCHEDA VISUAL EFFECTS (EFFETTI GRAFICI)………………………7
4.4 MODULES TAB (SCHEDA MODULI)………………………………………8
4.5 VIDEO TAB (SCHEDA PER LE IMPOSTAZIONI GRAFICHE)…………9
4.6 SCHEDA JOYSTICK………………………………………………………….10
4.7 SCHEDA EXTRA………………………………………………………………11
5. INFORMAZIONI OGGETTO……………………………..11 5.1 INFORMAZIONI VASCELLO………………………………………………12
5.2 INFORMAZIONI SAZIOPORTI…………………………………………….12
5.3 INFORMAZIONE SUI CORPI CELESTI…………………………………..13
6. MODALITA CAMERA…………………………………….14 6.1 VISTA INTERNA……………………………………………………………..14
6.2 VISTE ESTERNE……………………………………………………………..15
6.3 SELEZIONARE IL CAMPO VISIVO……………………………………….16
6.4 CATALOGARE E RICHIAMARE LE MODALITA’ DI CAMERA……..16
7. VISTA GENERICA DALLA CABINA……………………17 7.1 DISPLAY DELLE INFORMAZIONI GENERALI…………………………18
7.2 DISPLAY DELLA MODALITA’/OBIETTIVO DELLA CAMERA………19
7.3 DISPLAY INFORMATIVO SUI MOTORI………………………………….19
7.4 INDICATORI E CONTROLLI MODALITA’ NAVIGAZIONE…………..20
7.5 MODALITA’ HUD DI SUPERFICIE ……………………………………….21
7.6 MODALITA’ HUD DELL’ORBITA…………………………………………22
7.7 MODALITA’ HUD DI ATTRACCO…………………………………………22
8. MODALITA’ DEI DISPLAY MULTIFUNZIONALI
(MFD)…………………………………………………………..22
2
8.1 SETTAGGIO DEL RICEVITORE COM/NAV……………………………..25
8.2 ORBITA………………………………………………………………………...27
8.3 VOR\VTOL…………………………………………………………………….31
8.4 HORIZONTAL SITUATION INDICATOR (INDICATORE DELLA
SITUAZIONE ORIZZONTALE)…………………………………………………33
8.5 DOCKING (ATTRACCO)…………………………………………………….34
8.6 SURFACE (SUPERFICIE)……………………………………………………37
8.7 MAP (MAPPA)…………………………………………………………………39
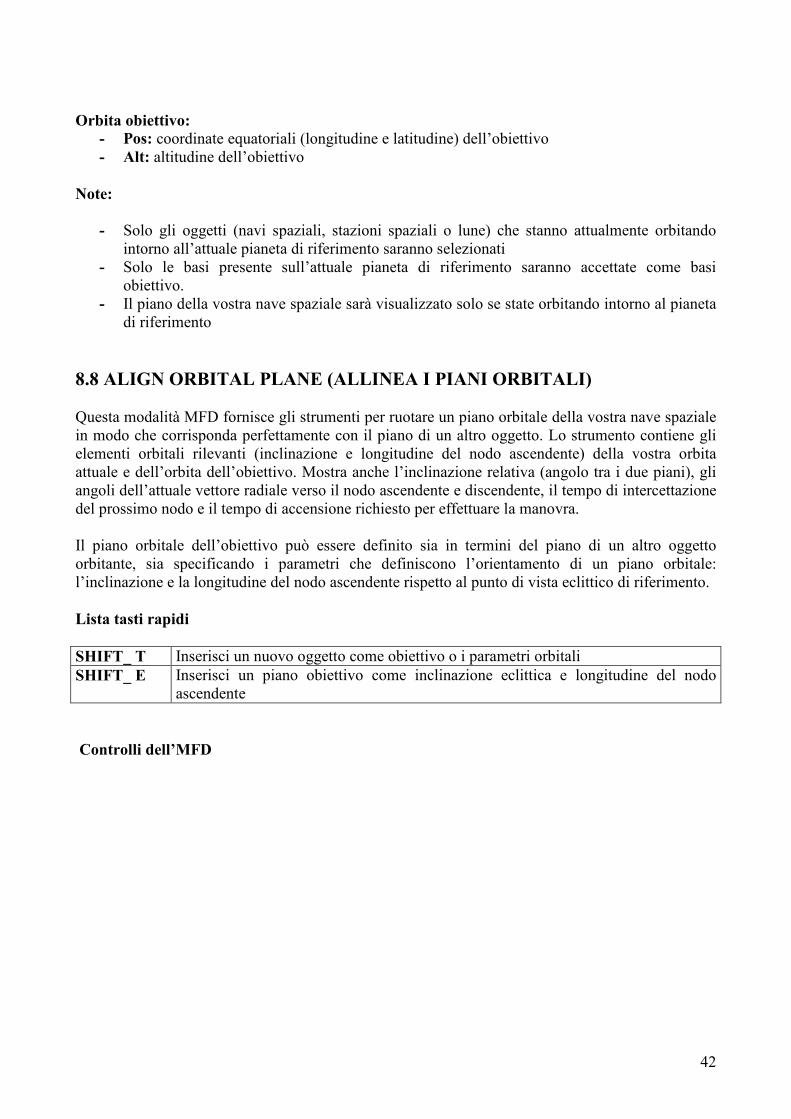
8.8 ALIGN ORBITAL PLANE (ALLINEA I PIANI ORBITALI)……………..42
8.10 TRANSFER (Trasferimento)………………………………………………...46
8.11 ASCENT PROFILE (MODALITA’ MFD FACOLTATIVA)……………..51 8.11.1 SPIEGAZIONE PRATICA: ARRIVARE IN ORBITA CON IL DELTA GLIDER …52
9. CONTROLLI DELLA NAVE SPAZIALE………………..56 9.1 MOTORI PRINCIPALI, MOTORI POSTERIORI E MOTORI DI
LEVITAZIONE…………………………………………………………………….57
9.2 PROPULSORI D'ASSETTO……………………………………………….….58
9.3 AIUTI PER LA NAVIGAZIONE RADIO……………………………………59
10. MANOVRE DI VOLO BASILARI……………………….60 10.1 VOLO DI SUPERFICIE…………………………………………………….60
10.2 LANCIO IN ORBITA………………………………………………………..61
10.3 CAMBIARE L'ORBITA…………………………………………………….63
10.4 RUOTARE IL PIANO ORBITALE………………………………………...63
10.5 SINCRONIZZAZIONE DELLE ORBITE…………………………………65
10.6 ATTERRAGGIO (APPROCCIO ALLA PISTA)………………………….66
10.7 DOCKING (AGGANCIO)…………………………………………………...67
11. DISCLAIMER e RINGRAZIAMENTI………………….69
NOTA: se nel manuale sono indicati due tasti separati da _ (ad esempio CTRL_I) significa che vanno premuti contemporaneamente.
1. COS’E’ ORBITER
Orbiter è un simulatore di volo spaziale basato su fisica newtoniana. È ambientato nel nostro Sistema Solare con molti dei suoi corpi celesti principali – il Sole, i pianeti e le lune. Puoi assumere il controllo di un veicolo spaziale – storico, ipotetico, o di fantascienza e manovrarlo secondo le leggi che governano il cosmo. Orbiter è diverso dalla maggior parte di giochi per pc a tema spaziale - non ci sono missioni predefinite da completare, alieni da distruggere o merci da scambiare. Invece, potrai farti un'idea di cosa voglia dire viaggiare nello spazio veramente – come pianificare una salita in orbita, come effettuare un rendez-vous con una stazione spaziale, o come volare verso un altro pianeta. È più difficile, ma è anche una sfida più coinvolgente. Alcune persone ne restano
3
entusiasmate, altre annoiate: scoprire se fa per te è facile, prova! Orbiter è gratuito, così un po' di tempo sarà l'unica cosa che dovrai investire.
Orbiter è un progetto della comunità: il nucleo di orbiter è solo lo scheletro che definisce le regole del mondo simulato (il modello fisico). Un sistema solare basico e alcune navi spaziali, sia reali che fittizie, sono incluse, ma è possibile ottenerne molte di più attraverso moduli aggiuntivi sviluppati dalla community di Orbiter.
Vi sono addon per quasi ogni vascello spaziale che abbia mai volato, oltre che per molti che in realtà non sono mai andati oltre la fase progettuale, per molti più corpi celesti del nostro sistema solare, per pannelli aggiuntivi e molto altro ancora. Il sito di Orbiter contiene anche i link per molti altri siti dove sono disponibili componenti aggiuntivi.
2. A PROPOSITO DI QUESTO MANUALE
Questo documento è la traduzione italiana del principale file di riferimento che è disponibile assieme alla distribuzione base di Orbiter. È una guida per l'utente al software Orbiter, e rappresenta un'introduzione sul come funzioni la maggior parte delle cose, ma non perché siano così come sono.
Seguendo questo manuale, scoprirai come operare i motori di una nave spaziale, come usare gli strumenti, e come completare i voli più comuni.
Ma una gran parte del fascino di Orbiter consiste nel scoprire il perché delle cose - perché le navi in orbita si comportano come fanno, cos'è necessario per completare una fionda gravitazionale, perché i razzi hanno stadi multipli, perché può essere difficile attraccare a una stazione spaziale, qual è il vero significato dei numeri nei pannelli strumenti, ecc.
Qui è dove entra in ruolo la fisica. Se aspiri a diventare un esperto orbinauta, prima o poi sarà necessario comprendere almeno alcuni dei più basilari concetti fisici che costituiscono la base dell'astrodinamica e del volo spaziale. Fortunatamente la maggior parte di questi non è difficile – se comprenderai le interazioni fra forze e gravità (“leggi newtoniane”) e che effetti hanno sul moto di pianeti e navi spaziali in orbita (“leggi di Keplero”) ne avrai coperto la maggior parte. Ovviamente c'è sempre la possibilità di approfondire più in dettaglio, così i tuoi prossimi passi potrebbero essere rappresentati dagli effetti delle perturbazioni orbitali, del controllo dell'assetto, ottimizzazione della traiettoria, pianificazione di missioni, e progettazione strumenti, solo per fare qualche esempio.
Potresti anche voler sviluppare i tuoi moduli aggiuntivi per migliorare la funzionalità di Orbiter, scrivere tutorial o file di aiuto per principianti, o magari partecipare attivamente nello sviluppo del nucleo di Orbiter trovando e discutendo errori od omissioni nel modello fisico di Orbiter (e ce ne sono ancora tanti!)
3. ORBITER FORUM ITALIA
Da qualche tempo è nata una community tutta italiana di Orbiter, che si riunisce e si scambia opinioni sul sito http://orbiteritalia.forumotion.com.
A questa community di deve la traduzione del manuale di Orbiter
4
Se avete dubbi, domande o avete bisogno di assistenza e volete porre delle domande in generale, gli utenti più esperti potranno fornirvele su Orbiter Forum Italia. Troverete anche una serie di avvincenti addon tutti italiani sviluppati per Orbiter!
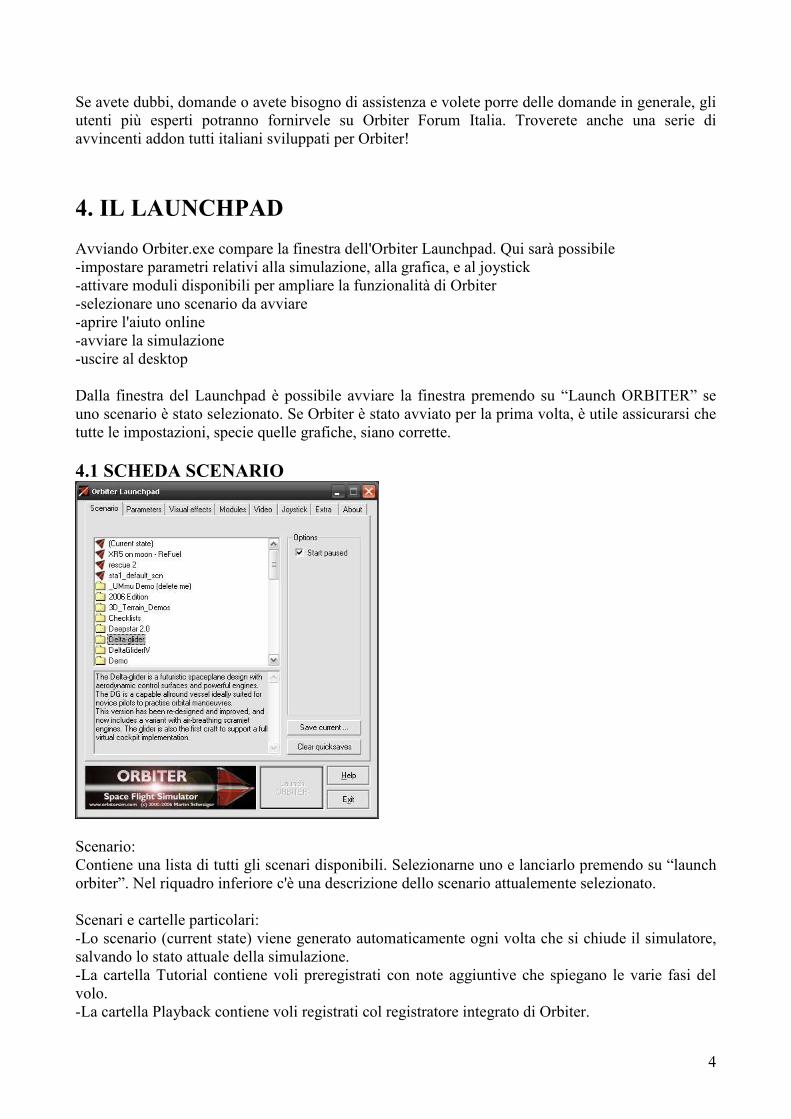
4. IL LAUNCHPAD Avviando Orbiter.exe compare la finestra dell'Orbiter Launchpad. Qui sarà possibile -impostare parametri relativi alla simulazione, alla grafica, e al joystick -attivare moduli disponibili per ampliare la funzionalità di Orbiter -selezionare uno scenario da avviare -aprire l'aiuto online -avviare la simulazione -uscire al desktop Dalla finestra del Launchpad è possibile avviare la finestra premendo su “Launch ORBITER” se uno scenario è stato selezionato. Se Orbiter è stato avviato per la prima volta, è utile assicurarsi che tutte le impostazioni, specie quelle grafiche, siano corrette. 4.1 SCHEDA SCENARIO
Scenario: Contiene una lista di tutti gli scenari disponibili. Selezionarne uno e lanciarlo premendo su “launch orbiter”. Nel riquadro inferiore c'è una descrizione dello scenario attualemente selezionato. Scenari e cartelle particolari: -Lo scenario (current state) viene generato automaticamente ogni volta che si chiude il simulatore, salvando lo stato attuale della simulazione. -La cartella Tutorial contiene voli preregistrati con note aggiuntive che spiegano le varie fasi del volo. -La cartella Playback contiene voli registrati col registratore integrato di Orbiter.
5
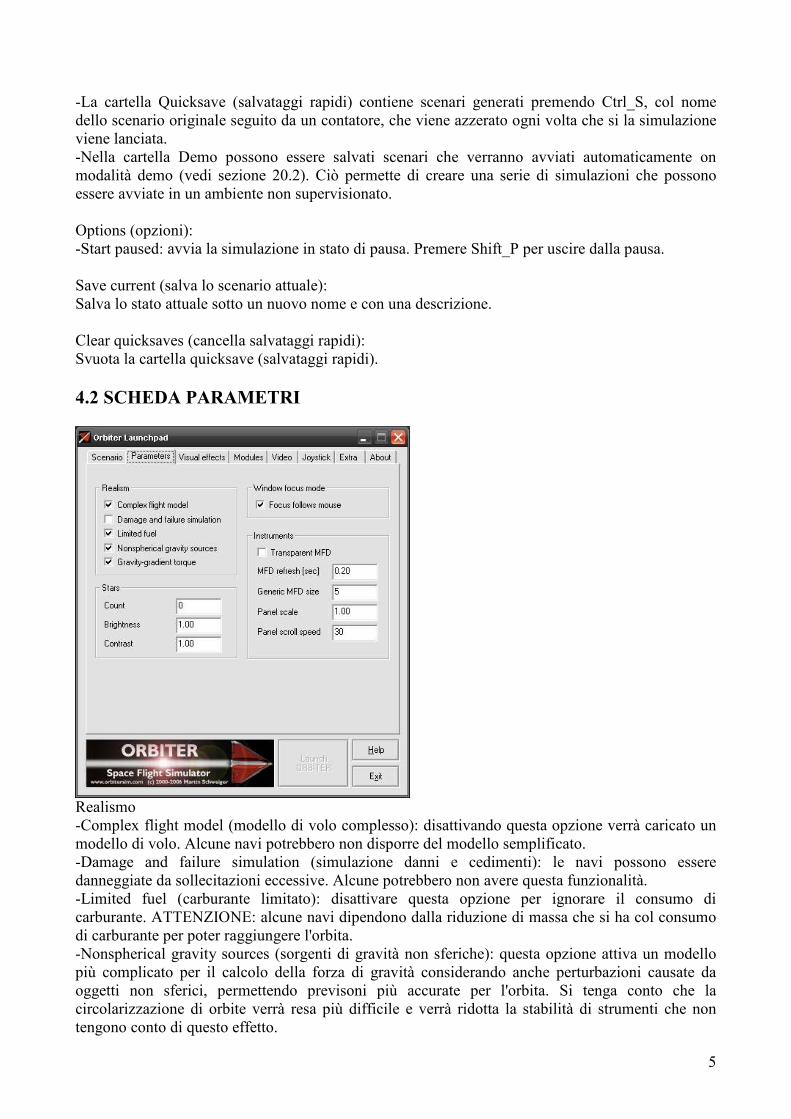
-La cartella Quicksave (salvataggi rapidi) contiene scenari generati premendo Ctrl_S, col nome dello scenario originale seguito da un contatore, che viene azzerato ogni volta che si la simulazione viene lanciata. -Nella cartella Demo possono essere salvati scenari che verranno avviati automaticamente on modalità demo (vedi sezione 20.2). Ciò permette di creare una serie di simulazioni che possono essere avviate in un ambiente non supervisionato. Options (opzioni): -Start paused: avvia la simulazione in stato di pausa. Premere Shift_P per uscire dalla pausa. Save current (salva lo scenario attuale): Salva lo stato attuale sotto un nuovo nome e con una descrizione. Clear quicksaves (cancella salvataggi rapidi): Svuota la cartella quicksave (salvataggi rapidi). 4.2 SCHEDA PARAMETRI
Realismo -Complex flight model (modello di volo complesso): disattivando questa opzione verrà caricato un modello di volo. Alcune navi potrebbero non disporre del modello semplificato. -Damage and failure simulation (simulazione danni e cedimenti): le navi possono essere danneggiate da sollecitazioni eccessive. Alcune potrebbero non avere questa funzionalità. -Limited fuel (carburante limitato): disattivare questa opzione per ignorare il consumo di carburante. ATTENZIONE: alcune navi dipendono dalla riduzione di massa che si ha col consumo di carburante per poter raggiungere l'orbita. -Nonspherical gravity sources (sorgenti di gravità non sferiche): questa opzione attiva un modello più complicato per il calcolo della forza di gravità considerando anche perturbazioni causate da oggetti non sferici, permettendo previsoni più accurate per l'orbita. Si tenga conto che la circolarizzazione di orbite verrà resa più difficile e verrà ridotta la stabilità di strumenti che non tengono conto di questo effetto.
6
Affinchè un pianeta possa usare questo modello dovrà essere contenuto il parametro JCoeff nel suo file di configurazione. -Gravity-gradient torque (coppia del gradiente di gravità): se questa opzione è attivata, le navi potranno avere un momento angolare in presenza di un campo gravitazionale adiacente. Sarà particolarmente evidente in orbite basse e potrà condurre a oscillazioni dell'attitudine. Windows focus mode: -Focus follows mouse (finestra principale segue il mouse): con questa opzione attivata ogni finestra su cui passa il mouse diventerà la finestra principale selezionata. Orbit stabilisation (stabilizzazione dell'orbita) -Enable stabilisation (Attivare stabilizzazione): se questa opzione è attivata, Orbiter usa un metodo alternativo per aggiornare i vettori di stato di corpi in orbita sotto certe condizioni, in cui soltanto le perturbazioni dei due corpi principali vengono propagati dinamicamente. Può essere utile per evitare degradazioni dell'orbita ad accelerazioni temporali elevate. -G-field perturbation limit (lmite delle perturbazioni del campo gravitazionale): definisce il limite superiore in percentuale delle perturbazioni del campo gravitazionale principale in base al quale si effettua la stabilizzazaione. Un valore elevato attiverà la stabilizzazione anche se la relazione fra i due corpi non è molto accurata. Il valore predefinito è 0.01 (1%). -Orbit stem limit (limite passo orbita): permette la stabilizzazione dell'orbita per “gradini” di tempo che propagano un corpo per più di una data parte del suo percorso orbitale. Più precisamente, la stabilizzazione dell'orbita avverrà solo se questa condizione viene soddisfatta: v[delta_t] > 2alfapigreco dove v è la velocità orbitale, r il raggio, delta_t il “passo” di tempo e alfa il limite specificato dall'utente. Il valore definito è pari a alfa=0.0001 (0.01%). Nota: Orbiter utilizza un algoritmo di stabilizzazione migliorato che tiene conto anche delle perturbazioni del campo gravitazionale e delle forze aerodinamiche e dei thruster. Stars (stelle) -Count (numero): numero di stelle di sfondo visualizzate. Orbiter usa il database Hipparcos di più di 100.000 stelle luminose. Un valore alto può peggiorare la fluidità del simulatore, mentre 0 elimina le stelle di sfondo. -Brightness (luminosità): coefficiente di luminosità. Valori validi compresi fra -4 e 4, predefinito 1. Valori molto elevati saranno meno realistici. -Contrast (contrasto): intensità del contrasto. Valori validi compresi fra 0 e 5, predefinito 1. Se si utilizza una piccola parte del database sarà preferibile aumentare il contrasto (per esempio a 1.5) e diminuire la luminosità (per esempio a 0.8). Se si utilizza il database completo, si otterranno dei buoni risultai con valori di 1.5 e 1 rispettivamente per luminosità e contrasto. Instruments (strumentazione di bordo): -Transparent MFD (MFD trasparente): rende i display multifunzione trasparenti, per ottenere una migliore visibilità, a discapito però della leggibilità della strumentazione. -MFD refresh (aggiornamento MFD): tempo in secondi fra aggiornamenti degli MFD. Intervalli più brevi garantiranno aggiornamenti più frequenti, ma potenzialmente a discapito della fluidità del simulatore. Alcuni MFD integrati come quello Surface e Map avranno un limite minimo integrato. -Panel scale (dimensioni pannello): dimensioni del pannello strumenti. Un valore pari a 1 garantisce la miglior qualità di visualizzazione, ma altri valori possono essere utilizzati per adattare il pannello a risoluzioni più alte o più basse.
7
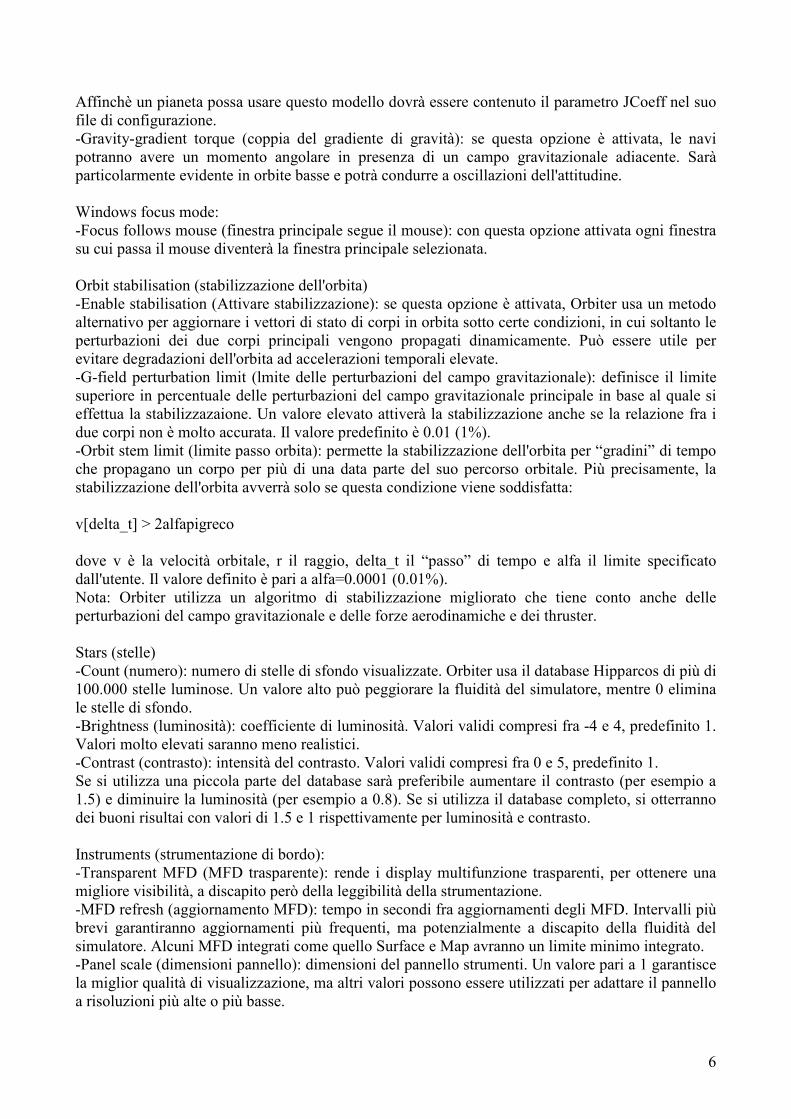
-Panel scroll speed (velocità di scorrimento del pannello): determina quanto velocemente il pannello può essere trascinato sullo schermo in pixel al secondo. Valori negativi invertono la direzione di scorrimento del pannello. 4.3 SCHEDA VISUAL EFFECTS (EFFETTI GRAFICI)
In questa scheda è possibile effettuare una serie di impostazioni grafiche che miglioreranno l'aspetto del simulatore, a discapito della fluidità di gioco: per questo è importante trovare una via di mezzo compatibilmente con le prestazioni del proprio sistema. Planetary effects (effetti per il pianeta) -Cloud layers (strati di nuvole): visualizza le nuvolo come strati separati di mesh per alcuni pianeti. -Cloud shadows (ombre di nuvole): visualizza le ombre proiettate dalle nuvole sulla superficie del pianeta. Solo i pianeti che conterranno la riga CloudShadowDepht < 1 visualizzeranno le ombre delle nuvole. -Horizon Haze (foschia dell'orizzonte): visualizza la foschia all'orizzonte per pianeti con atmosfera. -Specular water reflections: visualizza le superfici d'acqua con un riflesso speculare. -Specular ripples (increspature speculari): genera un effetto di increspatura per migliorare l'aspetto delle superfici d'acqua. -Planet night lights (luci notturne dei pianeti): visualizza l'illuminazione notturna sui pianeti, ove disponibile. -Night lights level (intensità luci notturne): definisce l'intensità dell'illuminazione notturna delle città. I valori validi sono compresi fra 0 e 1. Viene ignorato se l'illuminazione notturna è disattivata.

8
-Max. resolution level (livello massimo della risoluzione): si tratta del livello massimo della risoluzione delle texture dei pianeti. I valori validi sono compresi fra 1 e 10. Valori più alti permettono un miglior dettaglio dei pianeti con textures che supportano questo dettaglio, ma potenzialmente a discapito della fluidità e dei tempi di caricamento del simulatore. General effects (Effetti generici) -Vessel shadows (ombre della nave): abilità le ombre proiettate sul suolo da parte delle navi. -Object shadows (ombre di oggetti): abilita le ombre dinamiche di edifici e altri oggetti di terra. -Specular reflections from objects (riflessi da oggetti): abilità i riflessi su superfici tipo pannelli solari, finestre o superfici metalliche. Può diminuire la fluidità. -Reentry flames (fiamme al rientro): abilita la “fiamma” di plasma incandescente durante il rientro. -Particle streams (effetti particellari): abilita gli effetti particellari degli scarichi e di condensa. -Ambient light level (livello della luce d'ambiente): regola la luminosità del lato in ombra dei pianeti e delle lune. 0 è il valore più realistico ma rende difficile individuare oggetti. Il valore 255 corrisponde a illuminazione uniforme, senza zone d'ombra. 4.4 MODULES TAB (SCHEDA MODULI):
Questa scheda permette di attivare e disattivare moduli plug-in per Orbiter che possono ampliare la funzionalità del simulatore con strumenti, interfacce, ecc. aggiuntive. Assicurarsi di attivare soltanto i moduli effettivamente richiesti, poiché un modulo può occupare delle risorse anche se va solo in background. Per attivare un modulo, selezionarlo nella lista Inactive modules e cliccare su Activate selected o semplicemente fare doppio click. Il modulo verrà poi visualizzato nella lista dei moduli attivati. Analogamente i moduli possono essere disattivati. I moduli forniti con l'installazione standard di Orbiter sono demo dell'SDK e sono disponibili interamente come codice sorgente. Un'ampia gamma di moduli aggiuntivi può essere scaricata da librerie su internet, come, ad esempio, http://www.orbithangar.com . Alcuni dei moduli predefiniti di Orbiter sono:
9
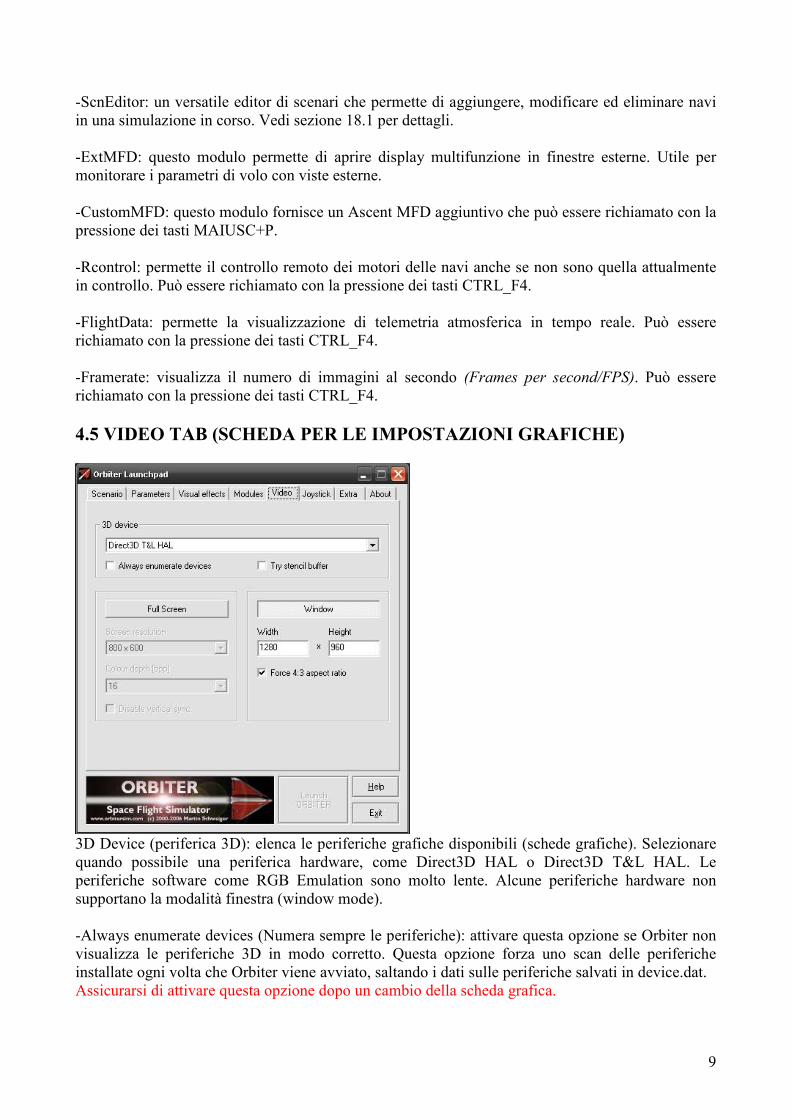
-ScnEditor: un versatile editor di scenari che permette di aggiungere, modificare ed eliminare navi in una simulazione in corso. Vedi sezione 18.1 per dettagli. -ExtMFD: questo modulo permette di aprire display multifunzione in finestre esterne. Utile per monitorare i parametri di volo con viste esterne. -CustomMFD: questo modulo fornisce un Ascent MFD aggiuntivo che può essere richiamato con la pressione dei tasti MAIUSC+P. -Rcontrol: permette il controllo remoto dei motori delle navi anche se non sono quella attualmente in controllo. Può essere richiamato con la pressione dei tasti CTRL_F4. -FlightData: permette la visualizzazione di telemetria atmosferica in tempo reale. Può essere richiamato con la pressione dei tasti CTRL_F4. -Framerate: visualizza il numero di immagini al secondo (Frames per second/FPS). Può essere richiamato con la pressione dei tasti CTRL_F4. 4.5 VIDEO TAB (SCHEDA PER LE IMPOSTAZIONI GRAFICHE)
3D Device (periferica 3D): elenca le periferiche grafiche disponibili (schede grafiche). Selezionare quando possibile una periferica hardware, come Direct3D HAL o Direct3D T&L HAL. Le periferiche software come RGB Emulation sono molto lente. Alcune periferiche hardware non supportano la modalità finestra (window mode). -Always enumerate devices (Numera sempre le periferiche): attivare questa opzione se Orbiter non visualizza le periferiche 3D in modo corretto. Questa opzione forza uno scan delle periferiche installate ogni volta che Orbiter viene avviato, saltando i dati sulle periferiche salvati in device.dat. Assicurarsi di attivare questa opzione dopo un cambio della scheda grafica.
10
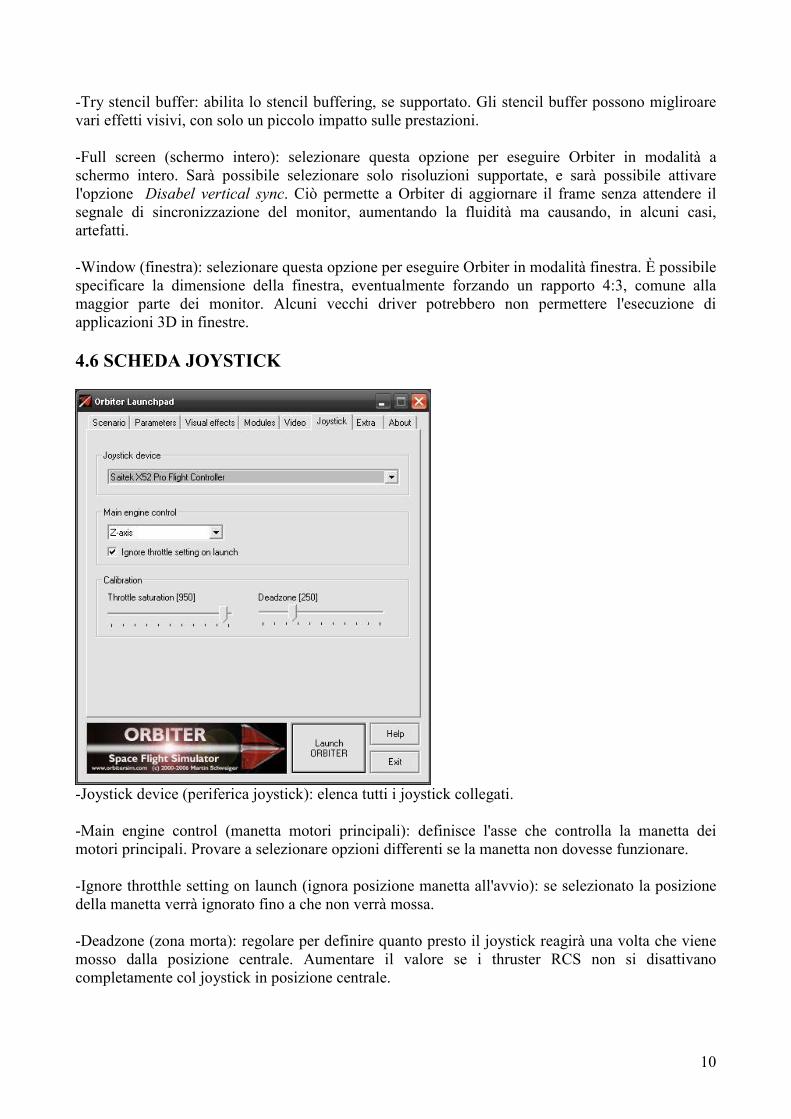
-Try stencil buffer: abilita lo stencil buffering, se supportato. Gli stencil buffer possono migliroare vari effetti visivi, con solo un piccolo impatto sulle prestazioni. -Full screen (schermo intero): selezionare questa opzione per eseguire Orbiter in modalità a schermo intero. Sarà possibile selezionare solo risoluzioni supportate, e sarà possibile attivare l'opzione Disabel vertical sync. Ciò permette a Orbiter di aggiornare il frame senza attendere il segnale di sincronizzazione del monitor, aumentando la fluidità ma causando, in alcuni casi, artefatti. -Window (finestra): selezionare questa opzione per eseguire Orbiter in modalità finestra. È possibile specificare la dimensione della finestra, eventualmente forzando un rapporto 4:3, comune alla maggior parte dei monitor. Alcuni vecchi driver potrebbero non permettere l'esecuzione di applicazioni 3D in finestre. 4.6 SCHEDA JOYSTICK
-Joystick device (periferica joystick): elenca tutti i joystick collegati. -Main engine control (manetta motori principali): definisce l'asse che controlla la manetta dei motori principali. Provare a selezionare opzioni differenti se la manetta non dovesse funzionare. -Ignore throtthle setting on launch (ignora posizione manetta all'avvio): se selezionato la posizione della manetta verrà ignorato fino a che non verrà mossa. -Deadzone (zona morta): regolare per definire quanto presto il joystick reagirà una volta che viene mosso dalla posizione centrale. Aumentare il valore se i thruster RCS non si disattivano completamente col joystick in posizione centrale.
11
-Throttle saturation (saturazione manetta): definisce la zona alla massima e minima escursione della manetta in cui il joystick riporta il valore massimo o minimo, rispettivamente. Ridurre se i motori principali non si spengono completamente al minimo. Per ulteriori opzioni di calibrazione utilizzare il pannello di controllo di windows. 4.7 SCHEDA EXTRA
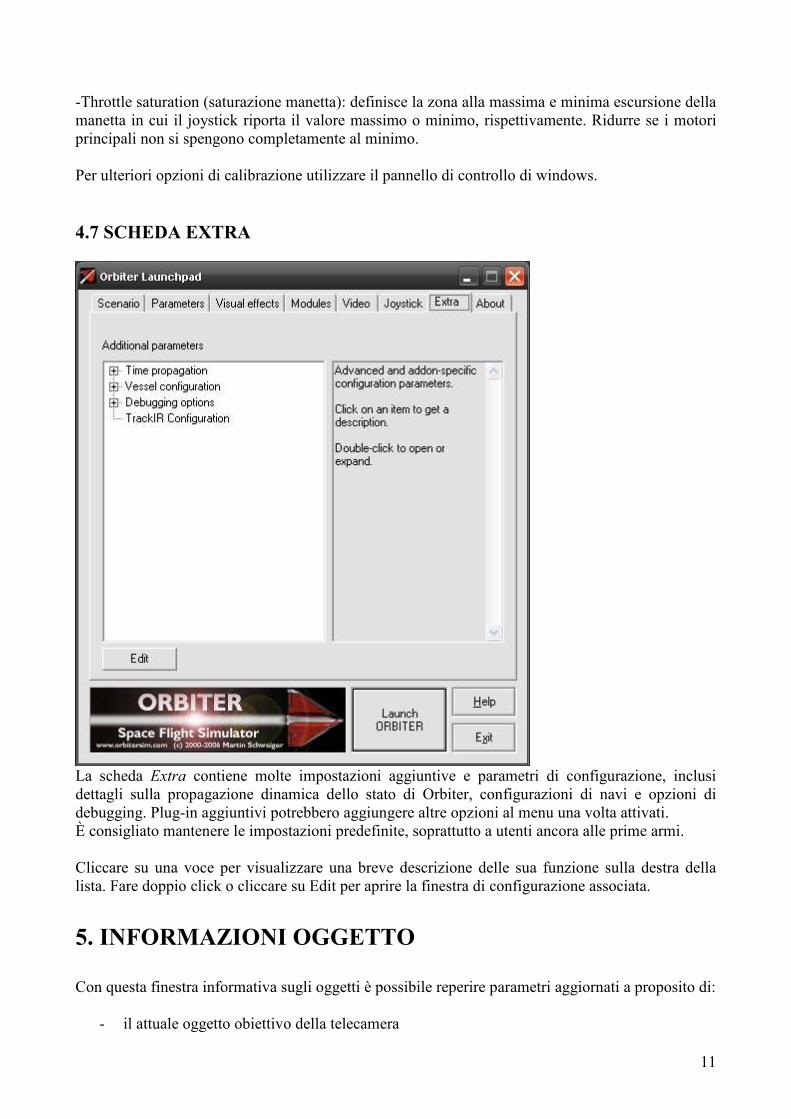
La scheda Extra contiene molte impostazioni aggiuntive e parametri di configurazione, inclusi dettagli sulla propagazione dinamica dello stato di Orbiter, configurazioni di navi e opzioni di debugging. Plug-in aggiuntivi potrebbero aggiungere altre opzioni al menu una volta attivati. È consigliato mantenere le impostazioni predefinite, soprattutto a utenti ancora alle prime armi. Cliccare su una voce per visualizzare una breve descrizione delle sua funzione sulla destra della lista. Fare doppio click o cliccare su Edit per aprire la finestra di configurazione associata.
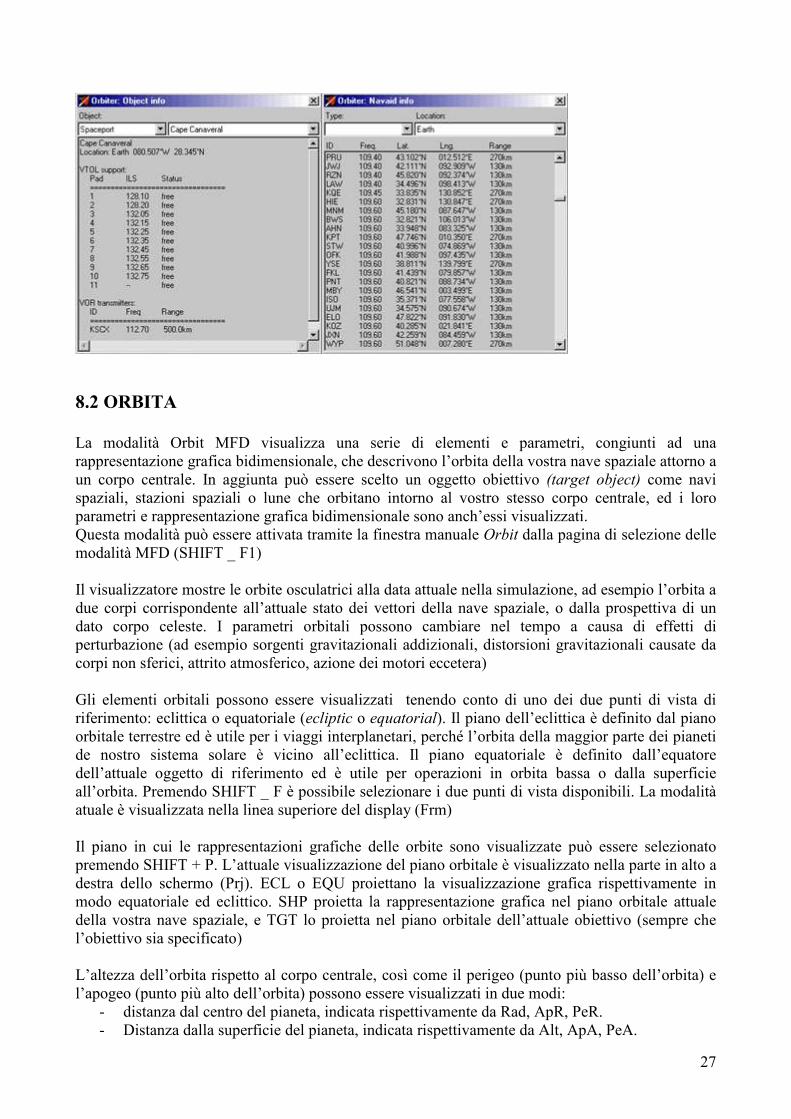
5. INFORMAZIONI OGGETTO
Con questa finestra informativa sugli oggetti è possibile reperire parametri aggiornati a proposito di:
- il attuale oggetto obiettivo della telecamera
12
- navi spaziali - spazioporti - oggetti celesti (sole, pianeti, satelliti naturali)
La finestra informativa sugli oggetti può essere aperta durante la simulazione selezionando Object
info nel menù principale o premendo CTRL _ I 5.1 INFORMAZIONI VASCELLO
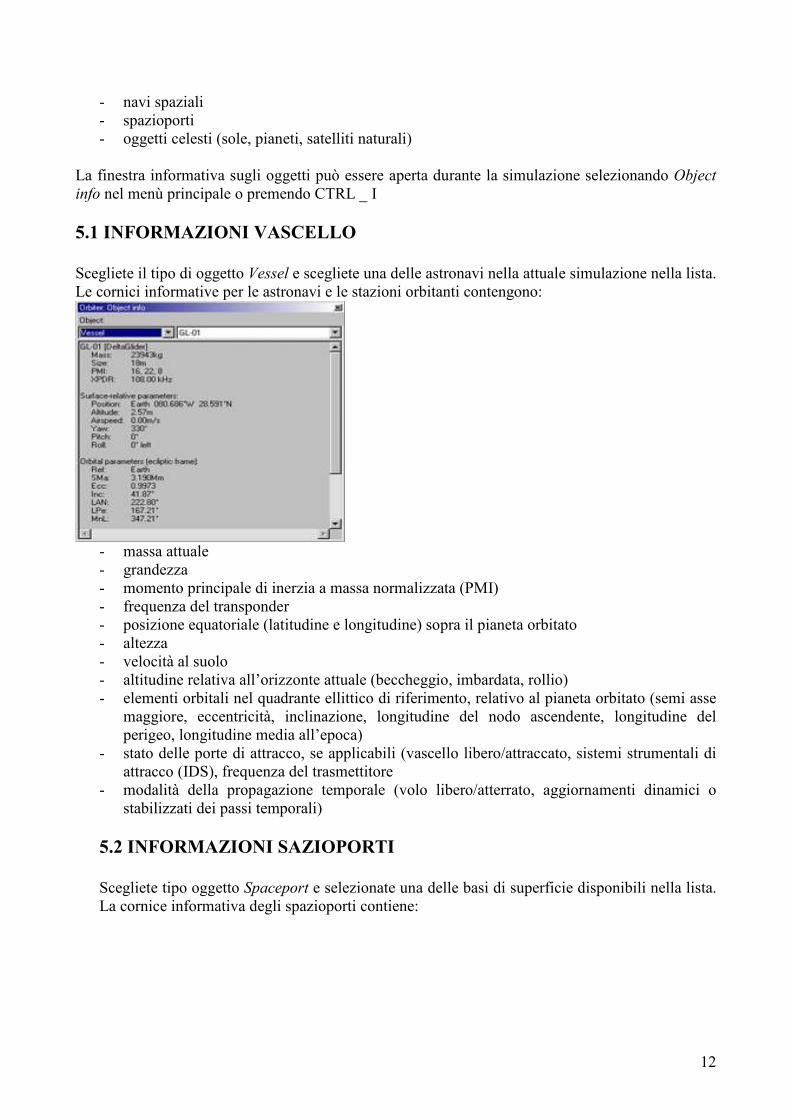
Scegliete il tipo di oggetto Vessel e scegliete una delle astronavi nella attuale simulazione nella lista. Le cornici informative per le astronavi e le stazioni orbitanti contengono:
- massa attuale - grandezza - momento principale di inerzia a massa normalizzata (PMI) - frequenza del transponder - posizione equatoriale (latitudine e longitudine) sopra il pianeta orbitato - altezza - velocità al suolo - altitudine relativa all’orizzonte attuale (beccheggio, imbardata, rollio) - elementi orbitali nel quadrante ellittico di riferimento, relativo al pianeta orbitato (semi asse
maggiore, eccentricità, inclinazione, longitudine del nodo ascendente, longitudine del perigeo, longitudine media all’epoca)
- stato delle porte di attracco, se applicabili (vascello libero/attraccato, sistemi strumentali di attracco (IDS), frequenza del trasmettitore
- modalità della propagazione temporale (volo libero/atterrato, aggiornamenti dinamici o stabilizzati dei passi temporali)
5.2 INFORMAZIONI SAZIOPORTI
Scegliete tipo oggetto Spaceport e selezionate una delle basi di superficie disponibili nella lista. La cornice informativa degli spazioporti contiene:
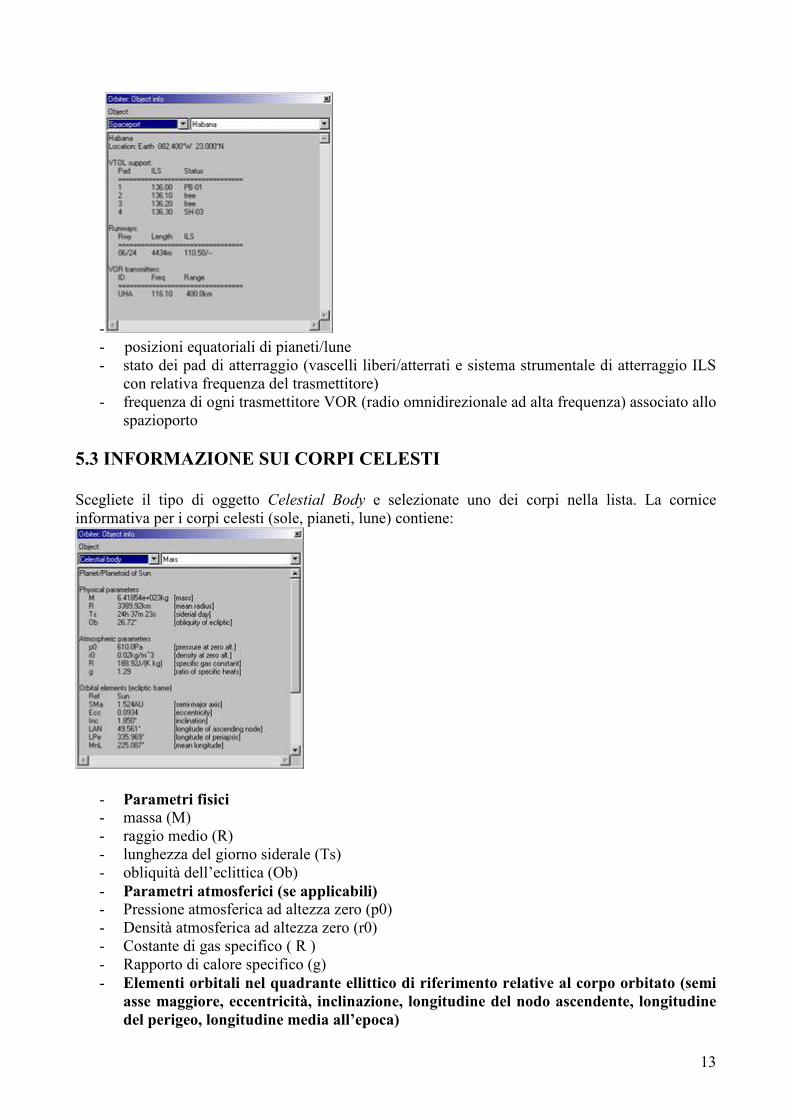
13
- - posizioni equatoriali di pianeti/lune - stato dei pad di atterraggio (vascelli liberi/atterrati e sistema strumentale di atterraggio ILS
con relativa frequenza del trasmettitore) - frequenza di ogni trasmettitore VOR (radio omnidirezionale ad alta frequenza) associato allo
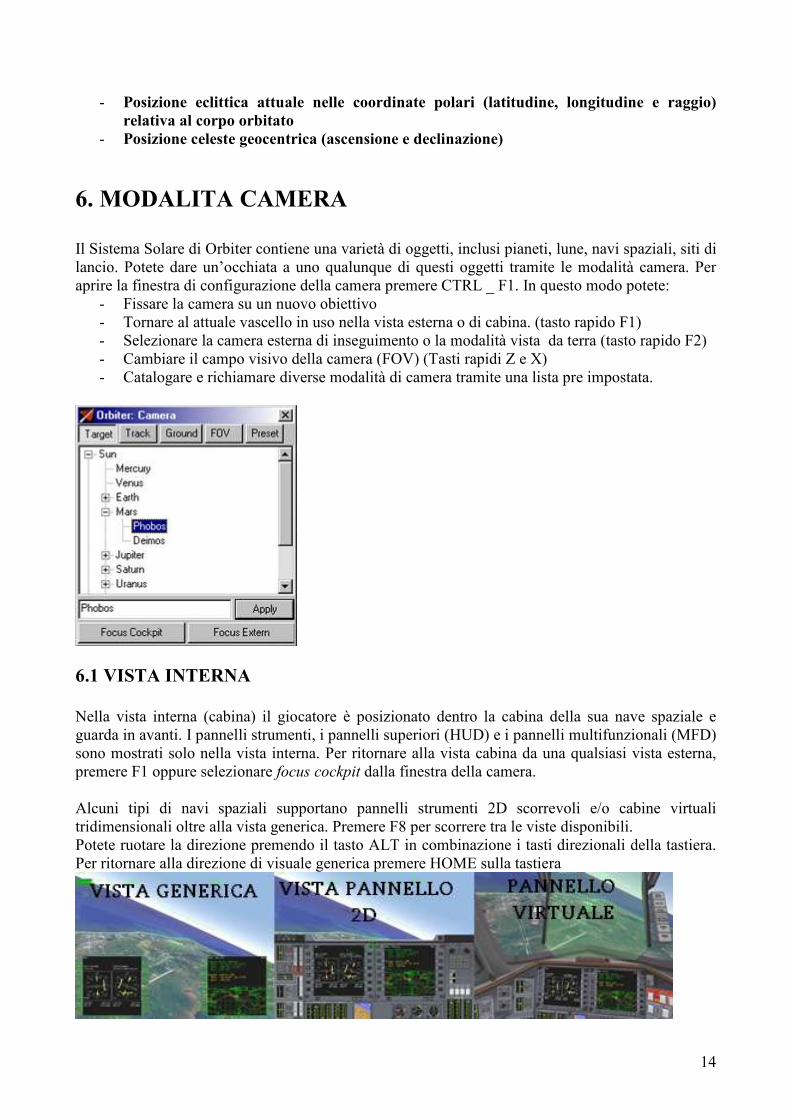
spazioporto 5.3 INFORMAZIONE SUI CORPI CELESTI
Scegliete il tipo di oggetto Celestial Body e selezionate uno dei corpi nella lista. La cornice informativa per i corpi celesti (sole, pianeti, lune) contiene:
- Parametri fisici
- massa (M) - raggio medio (R) - lunghezza del giorno siderale (Ts) - obliquità dell’eclittica (Ob) - Parametri atmosferici (se applicabili)
- Pressione atmosferica ad altezza zero (p0) - Densità atmosferica ad altezza zero (r0) - Costante di gas specifico ( R ) - Rapporto di calore specifico (g) - Elementi orbitali nel quadrante ellittico di riferimento relative al corpo orbitato (semi
asse maggiore, eccentricità, inclinazione, longitudine del nodo ascendente, longitudine
del perigeo, longitudine media all’epoca)
14
- Posizione eclittica attuale nelle coordinate polari (latitudine, longitudine e raggio)
relativa al corpo orbitato
- Posizione celeste geocentrica (ascensione e declinazione)
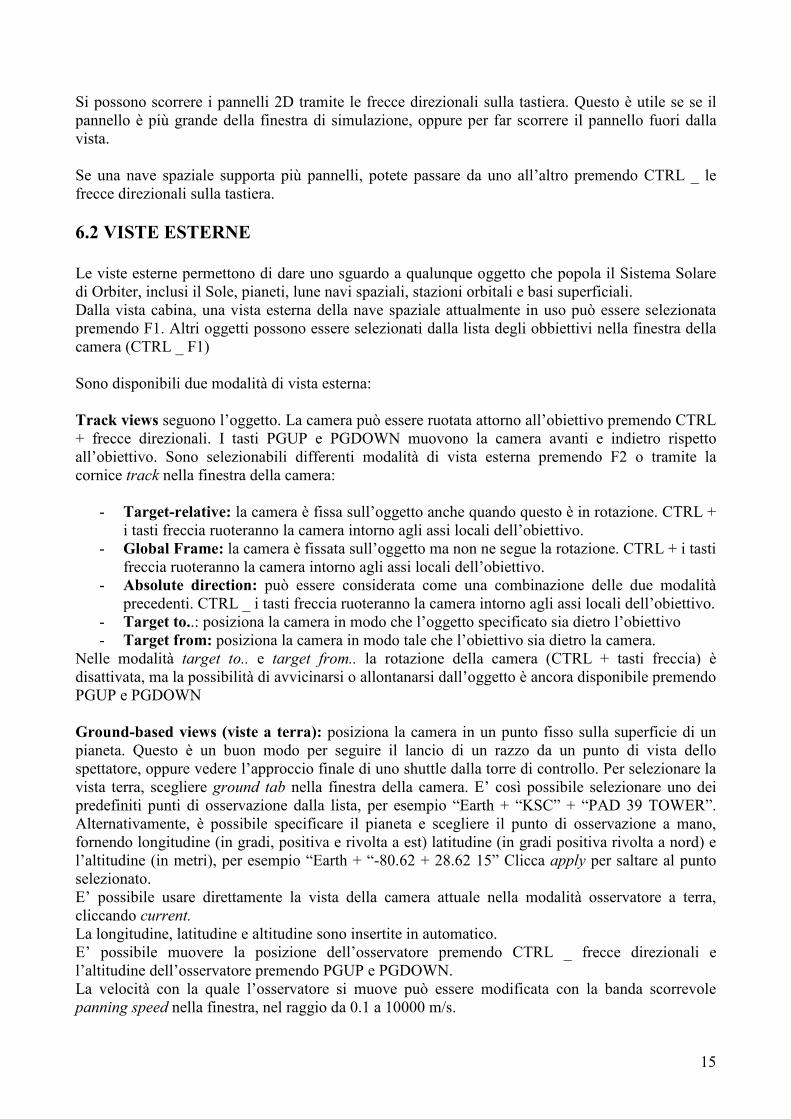
6. MODALITA CAMERA
Il Sistema Solare di Orbiter contiene una varietà di oggetti, inclusi pianeti, lune, navi spaziali, siti di lancio. Potete dare un’occhiata a uno qualunque di questi oggetti tramite le modalità camera. Per aprire la finestra di configurazione della camera premere CTRL _ F1. In questo modo potete:
- Fissare la camera su un nuovo obiettivo - Tornare al attuale vascello in uso nella vista esterna o di cabina. (tasto rapido F1) - Selezionare la camera esterna di inseguimento o la modalità vista da terra (tasto rapido F2) - Cambiare il campo visivo della camera (FOV) (Tasti rapidi Z e X) - Catalogare e richiamare diverse modalità di camera tramite una lista pre impostata.
6.1 VISTA INTERNA
Nella vista interna (cabina) il giocatore è posizionato dentro la cabina della sua nave spaziale e guarda in avanti. I pannelli strumenti, i pannelli superiori (HUD) e i pannelli multifunzionali (MFD) sono mostrati solo nella vista interna. Per ritornare alla vista cabina da una qualsiasi vista esterna, premere F1 oppure selezionare focus cockpit dalla finestra della camera. Alcuni tipi di navi spaziali supportano pannelli strumenti 2D scorrevoli e/o cabine virtuali tridimensionali oltre alla vista generica. Premere F8 per scorrere tra le viste disponibili. Potete ruotare la direzione premendo il tasto ALT in combinazione i tasti direzionali della tastiera. Per ritornare alla direzione di visuale generica premere HOME sulla tastiera
15
Si possono scorrere i pannelli 2D tramite le frecce direzionali sulla tastiera. Questo è utile se se il pannello è più grande della finestra di simulazione, oppure per far scorrere il pannello fuori dalla vista. Se una nave spaziale supporta più pannelli, potete passare da uno all’altro premendo CTRL _ le frecce direzionali sulla tastiera. 6.2 VISTE ESTERNE
Le viste esterne permettono di dare uno sguardo a qualunque oggetto che popola il Sistema Solare di Orbiter, inclusi il Sole, pianeti, lune navi spaziali, stazioni orbitali e basi superficiali. Dalla vista cabina, una vista esterna della nave spaziale attualmente in uso può essere selezionata premendo F1. Altri oggetti possono essere selezionati dalla lista degli obbiettivi nella finestra della camera (CTRL _ F1) Sono disponibili due modalità di vista esterna: Track views seguono l’oggetto. La camera può essere ruotata attorno all’obiettivo premendo CTRL + frecce direzionali. I tasti PGUP e PGDOWN muovono la camera avanti e indietro rispetto all’obiettivo. Sono selezionabili differenti modalità di vista esterna premendo F2 o tramite la cornice track nella finestra della camera:
- Target-relative: la camera è fissa sull’oggetto anche quando questo è in rotazione. CTRL + i tasti freccia ruoteranno la camera intorno agli assi locali dell’obiettivo.
- Global Frame: la camera è fissata sull’oggetto ma non ne segue la rotazione. CTRL + i tasti freccia ruoteranno la camera intorno agli assi locali dell’obiettivo.
- Absolute direction: può essere considerata come una combinazione delle due modalità precedenti. CTRL _ i tasti freccia ruoteranno la camera intorno agli assi locali dell’obiettivo.
- Target to..: posiziona la camera in modo che l’oggetto specificato sia dietro l’obiettivo - Target from: posiziona la camera in modo tale che l’obiettivo sia dietro la camera.
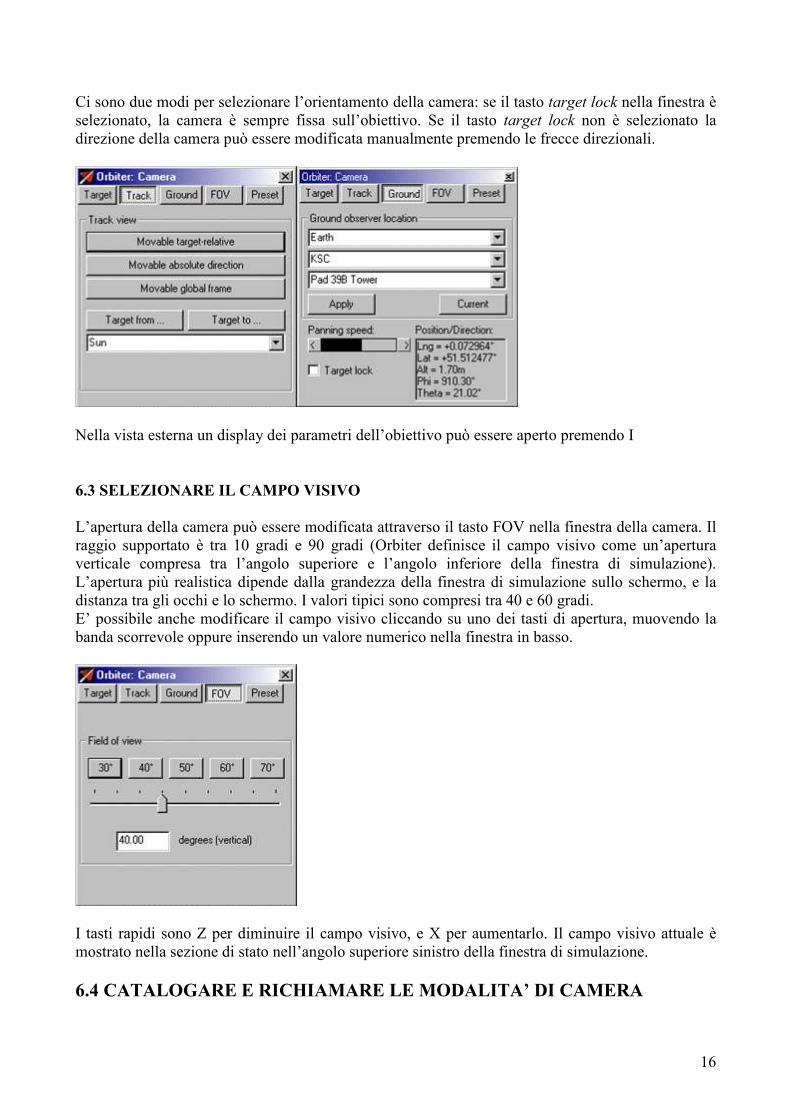
Nelle modalità target to.. e target from.. la rotazione della camera (CTRL + tasti freccia) è disattivata, ma la possibilità di avvicinarsi o allontanarsi dall’oggetto è ancora disponibile premendo PGUP e PGDOWN Ground-based views (viste a terra): posiziona la camera in un punto fisso sulla superficie di un pianeta. Questo è un buon modo per seguire il lancio di un razzo da un punto di vista dello spettatore, oppure vedere l’approccio finale di uno shuttle dalla torre di controllo. Per selezionare la vista terra, scegliere ground tab nella finestra della camera. E’ così possibile selezionare uno dei predefiniti punti di osservazione dalla lista, per esempio “Earth + “KSC” + “PAD 39 TOWER”. Alternativamente, è possibile specificare il pianeta e scegliere il punto di osservazione a mano, fornendo longitudine (in gradi, positiva e rivolta a est) latitudine (in gradi positiva rivolta a nord) e l’altitudine (in metri), per esempio “Earth + “-80.62 + 28.62 15” Clicca apply per saltare al punto selezionato. E’ possibile usare direttamente la vista della camera attuale nella modalità osservatore a terra, cliccando current.
La longitudine, latitudine e altitudine sono insertite in automatico. E’ possibile muovere la posizione dell’osservatore premendo CTRL _ frecce direzionali e l’altitudine dell’osservatore premendo PGUP e PGDOWN. La velocità con la quale l’osservatore si muove può essere modificata con la banda scorrevole panning speed nella finestra, nel raggio da 0.1 a 10000 m/s.
16
Ci sono due modi per selezionare l’orientamento della camera: se il tasto target lock nella finestra è selezionato, la camera è sempre fissa sull’obiettivo. Se il tasto target lock non è selezionato la direzione della camera può essere modificata manualmente premendo le frecce direzionali.
Nella vista esterna un display dei parametri dell’obiettivo può essere aperto premendo I 6.3 SELEZIONARE IL CAMPO VISIVO
L’apertura della camera può essere modificata attraverso il tasto FOV nella finestra della camera. Il raggio supportato è tra 10 gradi e 90 gradi (Orbiter definisce il campo visivo come un’apertura verticale compresa tra l’angolo superiore e l’angolo inferiore della finestra di simulazione). L’apertura più realistica dipende dalla grandezza della finestra di simulazione sullo schermo, e la distanza tra gli occhi e lo schermo. I valori tipici sono compresi tra 40 e 60 gradi. E’ possibile anche modificare il campo visivo cliccando su uno dei tasti di apertura, muovendo la banda scorrevole oppure inserendo un valore numerico nella finestra in basso.
I tasti rapidi sono Z per diminuire il campo visivo, e X per aumentarlo. Il campo visivo attuale è mostrato nella sezione di stato nell’angolo superiore sinistro della finestra di simulazione. 6.4 CATALOGARE E RICHIAMARE LE MODALITA’ DI CAMERA
17
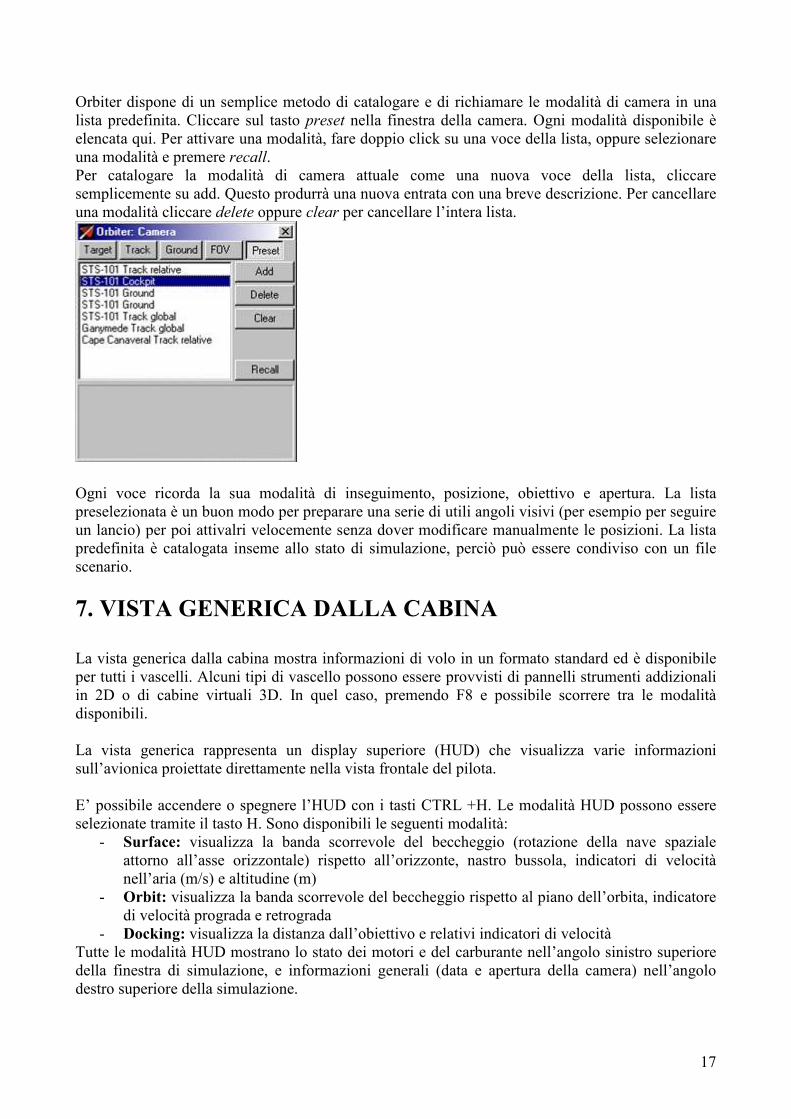
Orbiter dispone di un semplice metodo di catalogare e di richiamare le modalità di camera in una lista predefinita. Cliccare sul tasto preset nella finestra della camera. Ogni modalità disponibile è elencata qui. Per attivare una modalità, fare doppio click su una voce della lista, oppure selezionare una modalità e premere recall. Per catalogare la modalità di camera attuale come una nuova voce della lista, cliccare semplicemente su add. Questo produrrà una nuova entrata con una breve descrizione. Per cancellare una modalità cliccare delete oppure clear per cancellare l’intera lista.
Ogni voce ricorda la sua modalità di inseguimento, posizione, obiettivo e apertura. La lista preselezionata è un buon modo per preparare una serie di utili angoli visivi (per esempio per seguire un lancio) per poi attivalri velocemente senza dover modificare manualmente le posizioni. La lista predefinita è catalogata inseme allo stato di simulazione, perciò può essere condiviso con un file scenario.
7. VISTA GENERICA DALLA CABINA
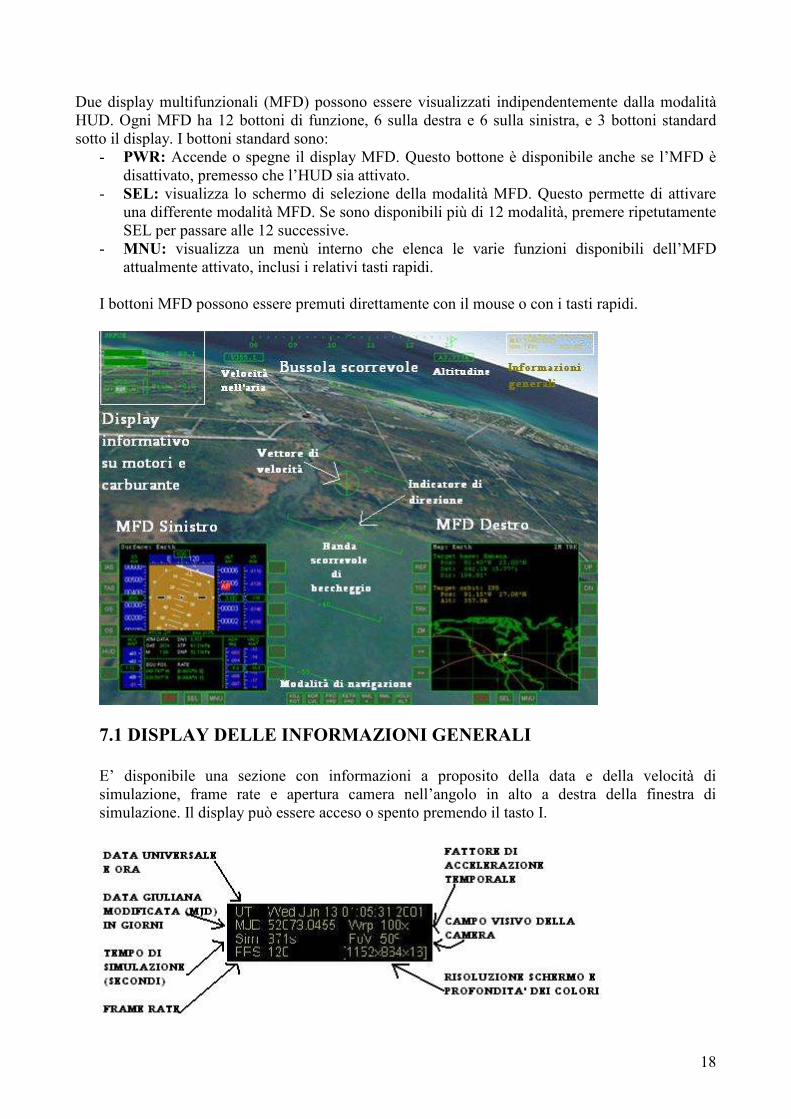
La vista generica dalla cabina mostra informazioni di volo in un formato standard ed è disponibile per tutti i vascelli. Alcuni tipi di vascello possono essere provvisti di pannelli strumenti addizionali in 2D o di cabine virtuali 3D. In quel caso, premendo F8 e possibile scorrere tra le modalità disponibili. La vista generica rappresenta un display superiore (HUD) che visualizza varie informazioni sull’avionica proiettate direttamente nella vista frontale del pilota. E’ possibile accendere o spegnere l’HUD con i tasti CTRL +H. Le modalità HUD possono essere selezionate tramite il tasto H. Sono disponibili le seguenti modalità:
- Surface: visualizza la banda scorrevole del beccheggio (rotazione della nave spaziale attorno all’asse orizzontale) rispetto all’orizzonte, nastro bussola, indicatori di velocità nell’aria (m/s) e altitudine (m)
- Orbit: visualizza la banda scorrevole del beccheggio rispetto al piano dell’orbita, indicatore di velocità prograda e retrograda
- Docking: visualizza la distanza dall’obiettivo e relativi indicatori di velocità Tutte le modalità HUD mostrano lo stato dei motori e del carburante nell’angolo sinistro superiore della finestra di simulazione, e informazioni generali (data e apertura della camera) nell’angolo destro superiore della simulazione.
18
Due display multifunzionali (MFD) possono essere visualizzati indipendentemente dalla modalità HUD. Ogni MFD ha 12 bottoni di funzione, 6 sulla destra e 6 sulla sinistra, e 3 bottoni standard sotto il display. I bottoni standard sono:
- PWR: Accende o spegne il display MFD. Questo bottone è disponibile anche se l’MFD è disattivato, premesso che l’HUD sia attivato.
- SEL: visualizza lo schermo di selezione della modalità MFD. Questo permette di attivare una differente modalità MFD. Se sono disponibili più di 12 modalità, premere ripetutamente SEL per passare alle 12 successive.
- MNU: visualizza un menù interno che elenca le varie funzioni disponibili dell’MFD attualmente attivato, inclusi i relativi tasti rapidi.
I bottoni MFD possono essere premuti direttamente con il mouse o con i tasti rapidi.
7.1 DISPLAY DELLE INFORMAZIONI GENERALI
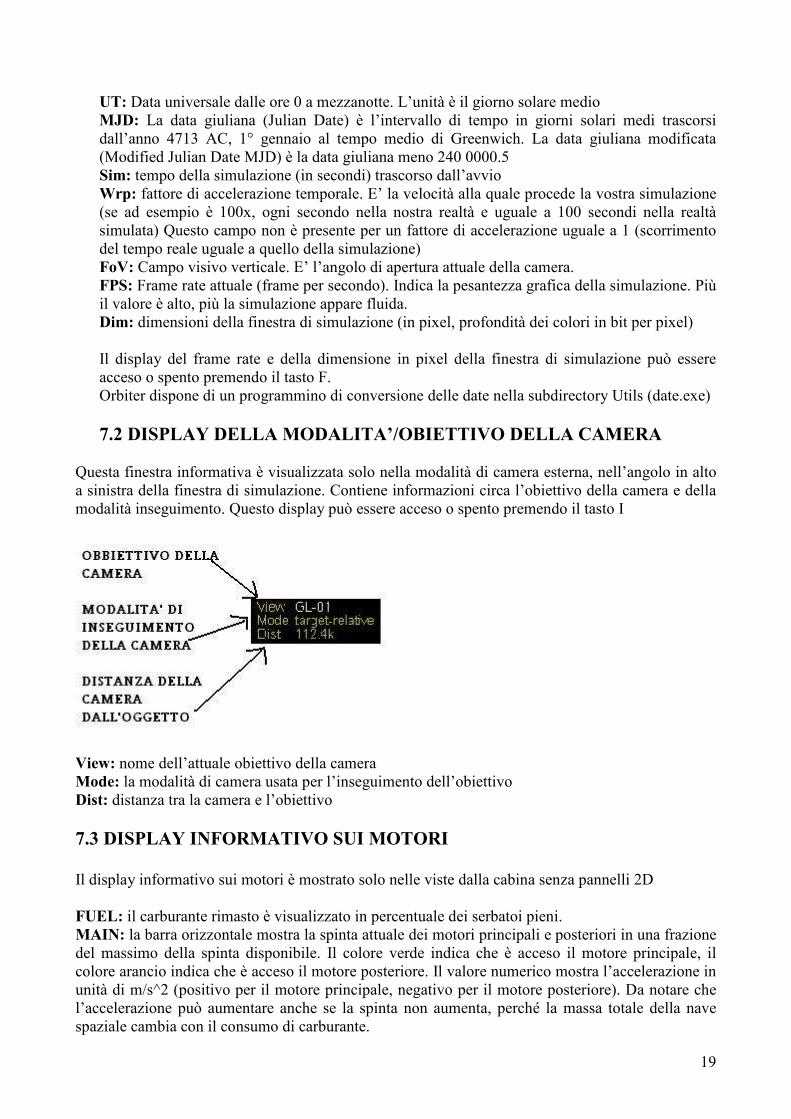
E’ disponibile una sezione con informazioni a proposito della data e della velocità di simulazione, frame rate e apertura camera nell’angolo in alto a destra della finestra di simulazione. Il display può essere acceso o spento premendo il tasto I.
19
UT: Data universale dalle ore 0 a mezzanotte. L’unità è il giorno solare medio MJD: La data giuliana (Julian Date) è l’intervallo di tempo in giorni solari medi trascorsi dall’anno 4713 AC, 1° gennaio al tempo medio di Greenwich. La data giuliana modificata (Modified Julian Date MJD) è la data giuliana meno 240 0000.5 Sim: tempo della simulazione (in secondi) trascorso dall’avvio Wrp: fattore di accelerazione temporale. E’ la velocità alla quale procede la vostra simulazione (se ad esempio è 100x, ogni secondo nella nostra realtà e uguale a 100 secondi nella realtà simulata) Questo campo non è presente per un fattore di accelerazione uguale a 1 (scorrimento del tempo reale uguale a quello della simulazione) FoV: Campo visivo verticale. E’ l’angolo di apertura attuale della camera. FPS: Frame rate attuale (frame per secondo). Indica la pesantezza grafica della simulazione. Più il valore è alto, più la simulazione appare fluida. Dim: dimensioni della finestra di simulazione (in pixel, profondità dei colori in bit per pixel) Il display del frame rate e della dimensione in pixel della finestra di simulazione può essere acceso o spento premendo il tasto F. Orbiter dispone di un programmino di conversione delle date nella subdirectory Utils (date.exe) 7.2 DISPLAY DELLA MODALITA’/OBIETTIVO DELLA CAMERA
Questa finestra informativa è visualizzata solo nella modalità di camera esterna, nell’angolo in alto a sinistra della finestra di simulazione. Contiene informazioni circa l’obiettivo della camera e della modalità inseguimento. Questo display può essere acceso o spento premendo il tasto I
View: nome dell’attuale obiettivo della camera Mode: la modalità di camera usata per l’inseguimento dell’obiettivo Dist: distanza tra la camera e l’obiettivo 7.3 DISPLAY INFORMATIVO SUI MOTORI
Il display informativo sui motori è mostrato solo nelle viste dalla cabina senza pannelli 2D FUEL: il carburante rimasto è visualizzato in percentuale dei serbatoi pieni. MAIN: la barra orizzontale mostra la spinta attuale dei motori principali e posteriori in una frazione del massimo della spinta disponibile. Il colore verde indica che è acceso il motore principale, il colore arancio indica che è acceso il motore posteriore. Il valore numerico mostra l’accelerazione in unità di m/s^2 (positivo per il motore principale, negativo per il motore posteriore). Da notare che l’accelerazione può aumentare anche se la spinta non aumenta, perché la massa totale della nave spaziale cambia con il consumo di carburante.
20
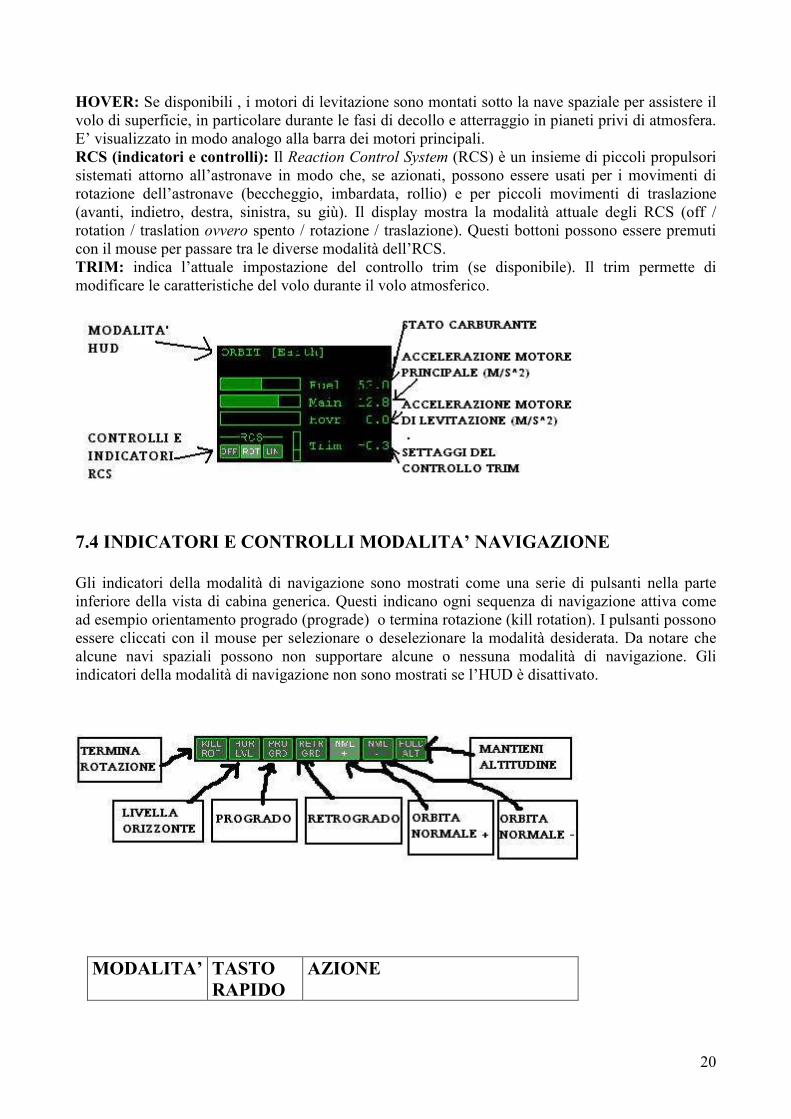
HOVER: Se disponibili , i motori di levitazione sono montati sotto la nave spaziale per assistere il volo di superficie, in particolare durante le fasi di decollo e atterraggio in pianeti privi di atmosfera. E’ visualizzato in modo analogo alla barra dei motori principali. RCS (indicatori e controlli): Il Reaction Control System (RCS) è un insieme di piccoli propulsori sistemati attorno all’astronave in modo che, se azionati, possono essere usati per i movimenti di rotazione dell’astronave (beccheggio, imbardata, rollio) e per piccoli movimenti di traslazione (avanti, indietro, destra, sinistra, su giù). Il display mostra la modalità attuale degli RCS (off / rotation / traslation ovvero spento / rotazione / traslazione). Questi bottoni possono essere premuti con il mouse per passare tra le diverse modalità dell’RCS. TRIM: indica l’attuale impostazione del controllo trim (se disponibile). Il trim permette di modificare le caratteristiche del volo durante il volo atmosferico.
7.4 INDICATORI E CONTROLLI MODALITA’ NAVIGAZIONE
Gli indicatori della modalità di navigazione sono mostrati come una serie di pulsanti nella parte inferiore della vista di cabina generica. Questi indicano ogni sequenza di navigazione attiva come ad esempio orientamento progrado (prograde) o termina rotazione (kill rotation). I pulsanti possono essere cliccati con il mouse per selezionare o deselezionare la modalità desiderata. Da notare che alcune navi spaziali possono non supportare alcune o nessuna modalità di navigazione. Gli indicatori della modalità di navigazione non sono mostrati se l’HUD è disattivato.
MODALITA’ TASTO
RAPIDO
AZIONE

21
KILLROT 5 NUMPAD Termina ogni rotazione della nave spaziale
HORLVL L Mantiene la nave spaziale allineata con l’orizzonte locale.
PROGRD [ Allinea la nave spaziale con il vettore di velocità orbitale (orienta la nave spaziale nella direzione del moto attuale
RETRGRD ] Allinea la nave spaziale con il vettore negativo di velocità orbitale (orienta la nave spaziale nella direzione opposta a quella del moto attuale)
NML+ ; Allinea la nave spaziale con il normale del piano orbitale (orienta la nave spaziale verticalmente in alto rispetto al moto attuale)
NML- ‘ Allinea la nave spaziale con il normale negativo del piano orbitale (orienta la nave spaziale verticalmente in basso rispetto al moto attuale)
HOLDALT A Mantiene l’altitudine (modalità che utilizza i motori di levitazione quando disponibili)
Tutte le modalità di navigazione eccetto HOLDALT fanno uso degli RCS. 7.5 MODALITA’ HUD DI SUPERFICIE
Questa modalità è indicata dalla scritta SRFCE nell’angolo sinistro superiore della finestra di simulazione. Questa modalità visualizza una banda scorrevole del beccheggio, che indica l’orientamento della nave spaziale rispetto al piano dell’orizzonte. Il piano dell’orizzonte è definito dal suo normale vettore, dal centro del pianeta al centro della nave spaziale. Questa banda è una scala numerata che indica la posizione rispetto all’orizzonte. Se il valore è 0 si è allineati all’orizzonte. Se il valore è +90 si è con il muso in su perpendicolari all’orizzonte. Se il valore è –90 si è con il muso in giù perpendicolari all’orizzonte. La bussola scorrevole nella parte superiore della finestra di simulazione indica la direzione frontale della nave spaziale con una scala numerata che rappresenta i vari punti cardinali. 0 gradi è il nord, 90 gradi è l’est, 180 gradi è il sud, 270 gradi è l’ovest. Ogni tacca rappresenta una differenza di 2.5 gradi. Un indicatore mostra la direzione dell’obiettivo attuale (spazioporto)
22
La finestrella a destra sotto la bussola scorrevole indica l’altitudine attuale in metri. La finestrella a sinistra sotto la bussola scorrevole mostra l’attuale velocità nell’aria in metri al secondo.(anche se non c’è atmosfera) Il vettore velocità relativo alla superficie (la direzione del moto) è indicato dal simbolo ⊕ 7.6 MODALITA’ HUD DELL’ORBITA
Indicato dalla scritta ORBIT Ref nell’angolo in alto a sinistra della finestra di simulazione, dove Ref è il nome dell’oggetto di riferimento. Questa modalità visualizza una banda scorrevole di beccheggio relativa al attuale piano orbitale., dove 0 indica che l’astronave è allineata al piano orbitale. Ci sono anche due indicatori del vettore di velocità orbitale (la direzione dell’astronave nell’orbita). La direzione in cui si muove l’astronave nell’orbita (prograde) è indicata dal simbolo ⊕, la direzione opposta a quella in cui si muove l’astronave nell’orbita (retrograde) è indicata dal simbolo +. Se nessuno dei due indicatori è visibile, allora la direzione del simbolo ⊕ è indicata da una freccia con accanto la scritta PG (prograde). L’oggetto di riferimento per l’HUD (la sorgente di gravità principale) può essere scelta manualmente premendo CTRL _ R. 7.7 MODALITA’ HUD DI ATTRACCO Indicata dalla scritta DOCK Tgt nell’angolo sinistro della finestra di simulazione, dove Tgt è il nome della stazione obiettivo. Questa modalità indica l’attuale obiettivo dell’attracco (stazione orbitale) con un indicatore quadrato, e visualizza il suo nome e la sua distanza. Mostra anche la direzione e il valore (in m/s) del vettore velocità relativo all’obiettivo. La velocità dell’obiettivo relativa alla vostra nave spaziale è indicato dal simbolo ⊕. Questa è la direzione nella quale dovete accelerare per sincronizzare la vostra velocità con quella dell’obiettivo. La direzione opposta (la velocità della nave spaziale relativa all’obiettivo) è indicata dal simbolo +. Se nessuno dei due simboli è visibile, la direzione del simbolo ⊕ è indicata da un tracciatore.. In modo simile, se il quadrato che indica la posizione dell’obiettivo non è visibile, anche questo è indicata da un tracciatore. La stazione obiettivo dell’HUD può essere scelta manualmente premendo CTRL _ R.
8. MODALITA’ DEI DISPLAY MULTIFUNZIONALI
(MFD)
I display multifunzionali o MFD sono usati nelle cabine della maggior parte degli aerei militari e dei moderni aerei di linea. Questi combinano la funzione di una grande varietà di strumenti tradizionali in un formato compatto, e in combinazione con dati dell’avionica computerizzati mettono il pilota nelle condizioni di portare a termine diversi compiti. Nel volo spaziale il pilota deve avere a disposizione queste informazioni con urgenza ancora maggiore, data la più alta complessità rispetto ad un volo atmosferico, e negli Space Shuttle viene fatto largo uso di questi display multifunzionali. Orbiter usa gli MFD in un modo molto versatile ed esteso, rendendo questi strumenti applicabili ad ogni nave spaziale presente nel simulatore.
23
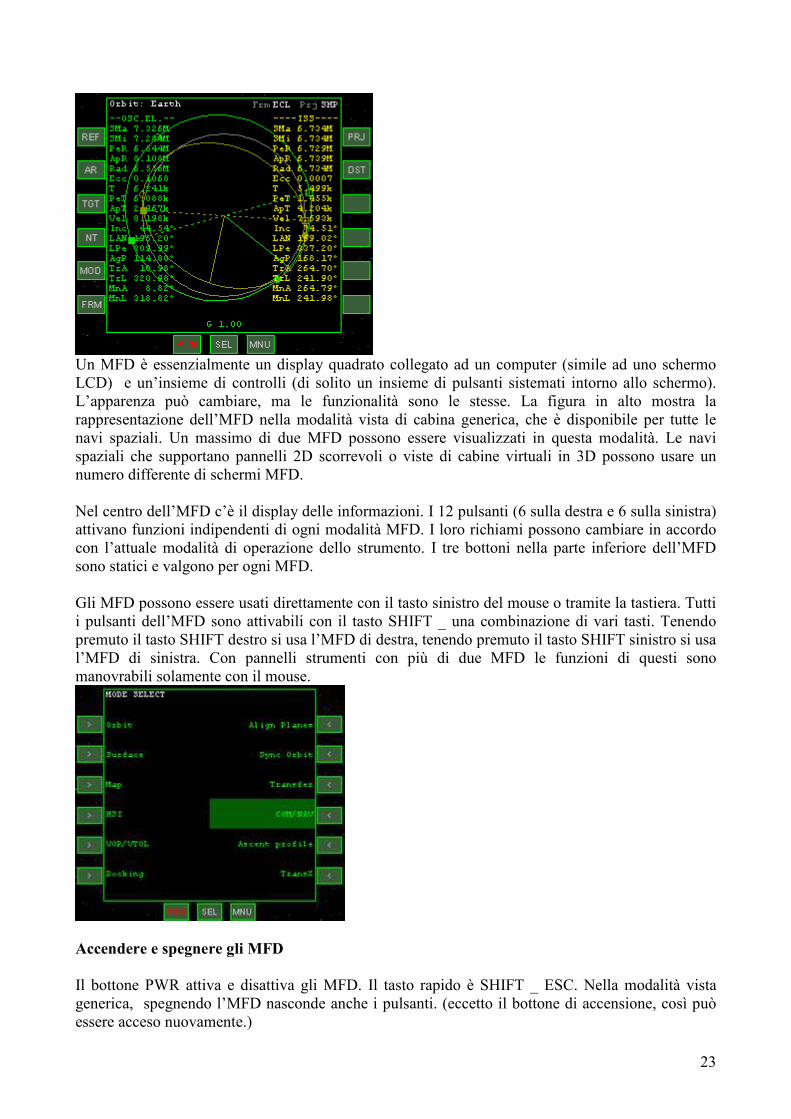
Un MFD è essenzialmente un display quadrato collegato ad un computer (simile ad uno schermo LCD) e un’insieme di controlli (di solito un insieme di pulsanti sistemati intorno allo schermo). L’apparenza può cambiare, ma le funzionalità sono le stesse. La figura in alto mostra la rappresentazione dell’MFD nella modalità vista di cabina generica, che è disponibile per tutte le navi spaziali. Un massimo di due MFD possono essere visualizzati in questa modalità. Le navi spaziali che supportano pannelli 2D scorrevoli o viste di cabine virtuali in 3D possono usare un numero differente di schermi MFD. Nel centro dell’MFD c’è il display delle informazioni. I 12 pulsanti (6 sulla destra e 6 sulla sinistra) attivano funzioni indipendenti di ogni modalità MFD. I loro richiami possono cambiare in accordo con l’attuale modalità di operazione dello strumento. I tre bottoni nella parte inferiore dell’MFD sono statici e valgono per ogni MFD. Gli MFD possono essere usati direttamente con il tasto sinistro del mouse o tramite la tastiera. Tutti i pulsanti dell’MFD sono attivabili con il tasto SHIFT _ una combinazione di vari tasti. Tenendo premuto il tasto SHIFT destro si usa l’MFD di destra, tenendo premuto il tasto SHIFT sinistro si usa l’MFD di sinistra. Con pannelli strumenti con più di due MFD le funzioni di questi sono manovrabili solamente con il mouse.
Accendere e spegnere gli MFD
Il bottone PWR attiva e disattiva gli MFD. Il tasto rapido è SHIFT _ ESC. Nella modalità vista generica, spegnendo l’MFD nasconde anche i pulsanti. (eccetto il bottone di accensione, così può essere acceso nuovamente.)
24
Selezione modalità
Il pulsante SEL attiva lo schermo della selezione delle modalità. Il tasto rapido è SHIFT _ F1. Ogni modalità MFD fornisce informazioni per diverse questioni riguardanti la navigazione e l’avionica (parametri orbitali, parametri superficiali, aiuti all’attracco e all’atterraggio ecc.). Per una completa lista delle modalità disponibili consultare la sezione successiva e i suoi capitoli. Molte modalità addizionali sono disponibili su siti come Orbit Hangar.com, grazie al lavoro degli add on developers. Il visualizzatore mostra le modalità disponibili nell’area dello schermo, ognuna affiancata dal relativo pulsante di funzione. Per selezionare una modalità, cliccare semplicemente sul pulsante corrispondente. Per la selezione con la tastiera, premere SHIFT insieme al tasto indicato sul visualizzatore e scritto in colore grigio. (Per esempio SHIFT _ O per la modalità Orbit) Se ci sono più modalità che non possono essere visualizzate in una singola pagina (più di dodici) allora cliccare il pulsante SEL (o SHIFT _ F1) farà scorrere avanti di una pagina il visualizzatore, mostrando le altre modalità disponibili. Premendo SEL sull’ultima pagina, lo schermo tornerà all’inizio, visualizzando la prima pagina. Da notare che i tasti rapidi aprono una funzione anche se sullo schermo dell’MFD è visualizzata una pagina che non la contiene. Pulsanti di funzione
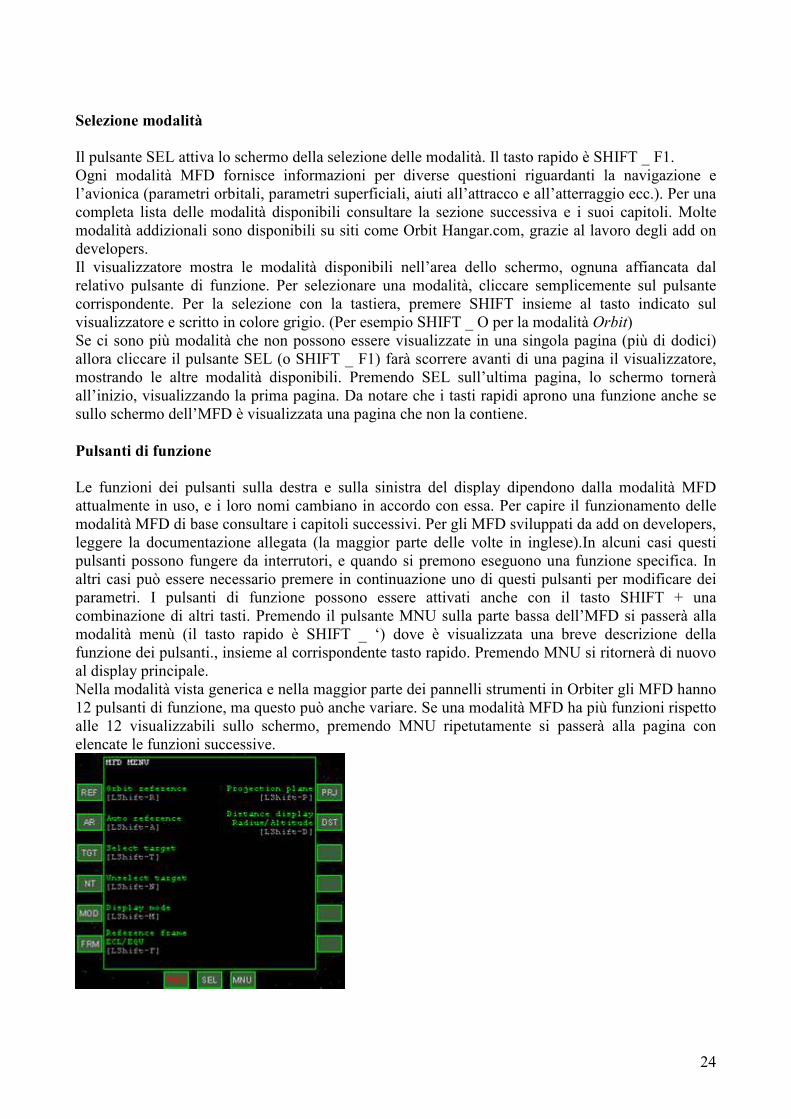
Le funzioni dei pulsanti sulla destra e sulla sinistra del display dipendono dalla modalità MFD attualmente in uso, e i loro nomi cambiano in accordo con essa. Per capire il funzionamento delle modalità MFD di base consultare i capitoli successivi. Per gli MFD sviluppati da add on developers, leggere la documentazione allegata (la maggior parte delle volte in inglese).In alcuni casi questi pulsanti possono fungere da interrutori, e quando si premono eseguono una funzione specifica. In altri casi può essere necessario premere in continuazione uno di questi pulsanti per modificare dei parametri. I pulsanti di funzione possono essere attivati anche con il tasto SHIFT + una combinazione di altri tasti. Premendo il pulsante MNU sulla parte bassa dell’MFD si passerà alla modalità menù (il tasto rapido è SHIFT _ ‘) dove è visualizzata una breve descrizione della funzione dei pulsanti., insieme al corrispondente tasto rapido. Premendo MNU si ritornerà di nuovo al display principale. Nella modalità vista generica e nella maggior parte dei pannelli strumenti in Orbiter gli MFD hanno 12 pulsanti di funzione, ma questo può anche variare. Se una modalità MFD ha più funzioni rispetto alle 12 visualizzabili sullo schermo, premendo MNU ripetutamente si passerà alla pagina con elencate le funzioni successive.
25
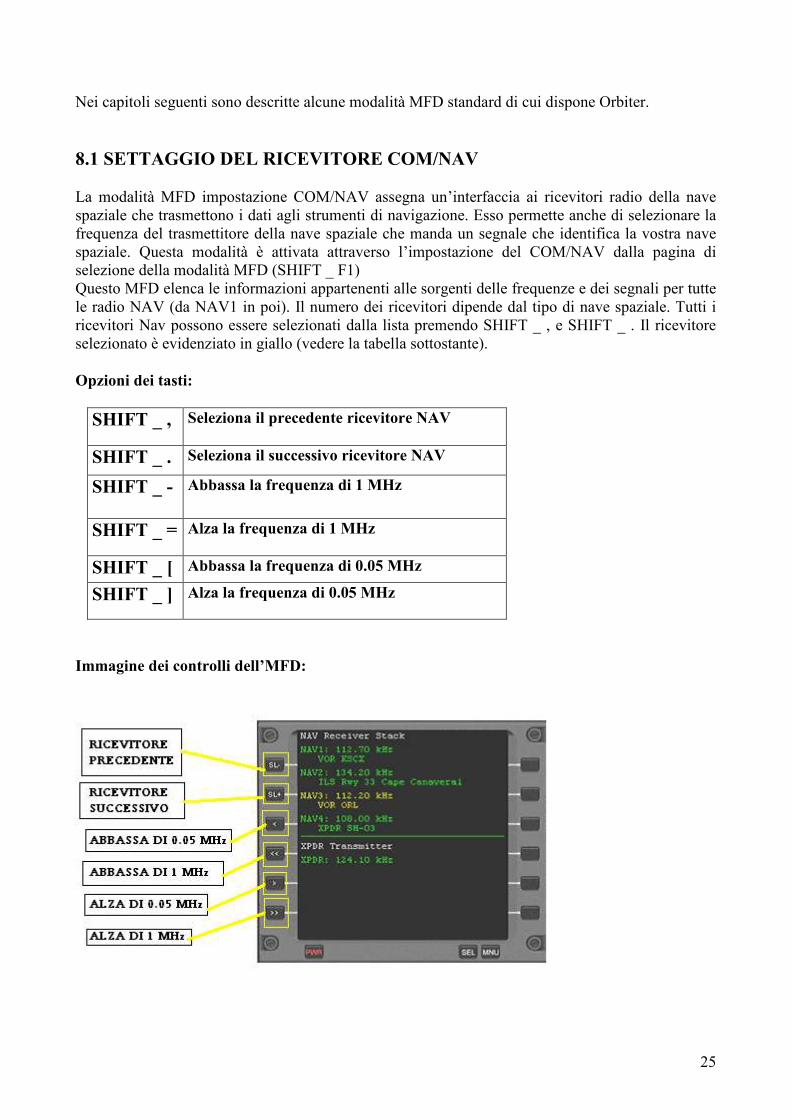
Nei capitoli seguenti sono descritte alcune modalità MFD standard di cui dispone Orbiter. 8.1 SETTAGGIO DEL RICEVITORE COM/NAV La modalità MFD impostazione COM/NAV assegna un’interfaccia ai ricevitori radio della nave spaziale che trasmettono i dati agli strumenti di navigazione. Esso permette anche di selezionare la frequenza del trasmettitore della nave spaziale che manda un segnale che identifica la vostra nave spaziale. Questa modalità è attivata attraverso l’impostazione del COM/NAV dalla pagina di selezione della modalità MFD (SHIFT _ F1) Questo MFD elenca le informazioni appartenenti alle sorgenti delle frequenze e dei segnali per tutte le radio NAV (da NAV1 in poi). Il numero dei ricevitori dipende dal tipo di nave spaziale. Tutti i ricevitori Nav possono essere selezionati dalla lista premendo SHIFT _ , e SHIFT _ . Il ricevitore selezionato è evidenziato in giallo (vedere la tabella sottostante). Opzioni dei tasti:
SHIFT _ , Seleziona il precedente ricevitore NAV
SHIFT _ . Seleziona il successivo ricevitore NAV
SHIFT _ -
Abbassa la frequenza di 1 MHz
SHIFT _ = Alza la frequenza di 1 MHz
SHIFT _ [ Abbassa la frequenza di 0.05 MHz
SHIFT _ ] Alza la frequenza di 0.05 MHz
Immagine dei controlli dell’MFD:
26
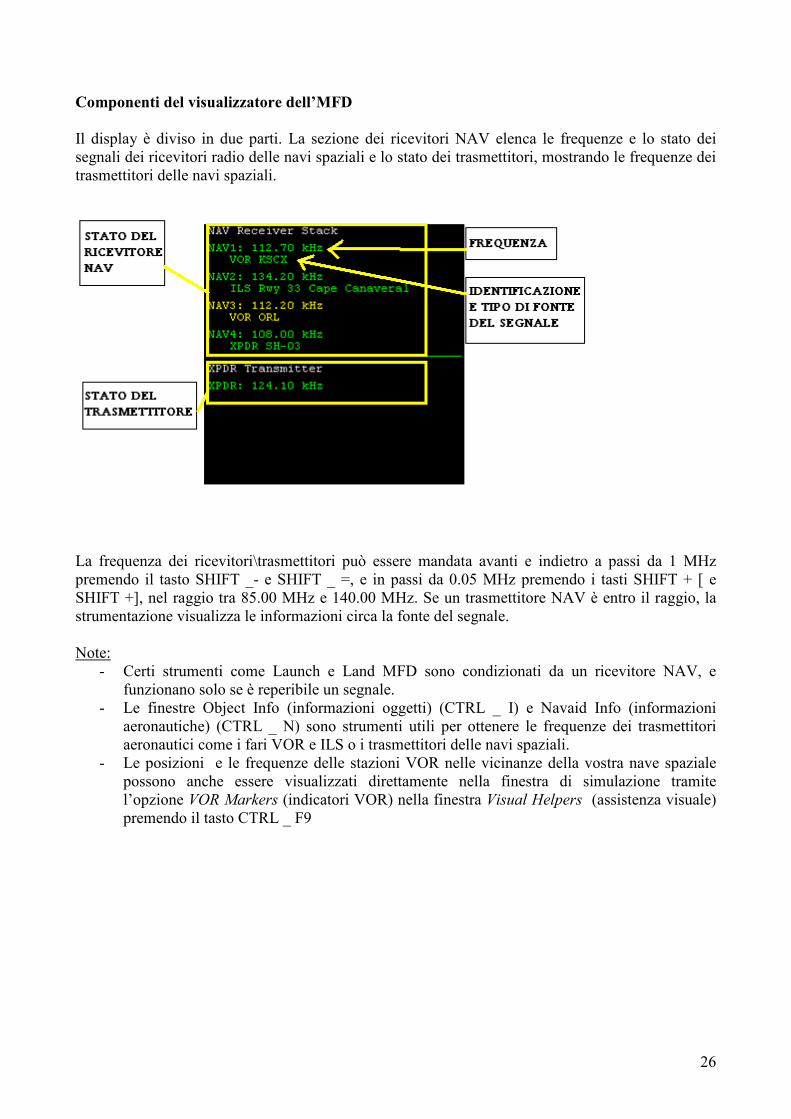
Componenti del visualizzatore dell’MFD
Il display è diviso in due parti. La sezione dei ricevitori NAV elenca le frequenze e lo stato dei segnali dei ricevitori radio delle navi spaziali e lo stato dei trasmettitori, mostrando le frequenze dei trasmettitori delle navi spaziali.
La frequenza dei ricevitori\trasmettitori può essere mandata avanti e indietro a passi da 1 MHz premendo il tasto SHIFT _- e SHIFT _ =, e in passi da 0.05 MHz premendo i tasti SHIFT + [ e SHIFT +], nel raggio tra 85.00 MHz e 140.00 MHz. Se un trasmettitore NAV è entro il raggio, la strumentazione visualizza le informazioni circa la fonte del segnale. Note:
- Certi strumenti come Launch e Land MFD sono condizionati da un ricevitore NAV, e funzionano solo se è reperibile un segnale.
- Le finestre Object Info (informazioni oggetti) (CTRL _ I) e Navaid Info (informazioni aeronautiche) (CTRL _ N) sono strumenti utili per ottenere le frequenze dei trasmettitori aeronautici come i fari VOR e ILS o i trasmettitori delle navi spaziali.
- Le posizioni e le frequenze delle stazioni VOR nelle vicinanze della vostra nave spaziale possono anche essere visualizzati direttamente nella finestra di simulazione tramite l’opzione VOR Markers (indicatori VOR) nella finestra Visual Helpers (assistenza visuale) premendo il tasto CTRL _ F9
27
8.2 ORBITA
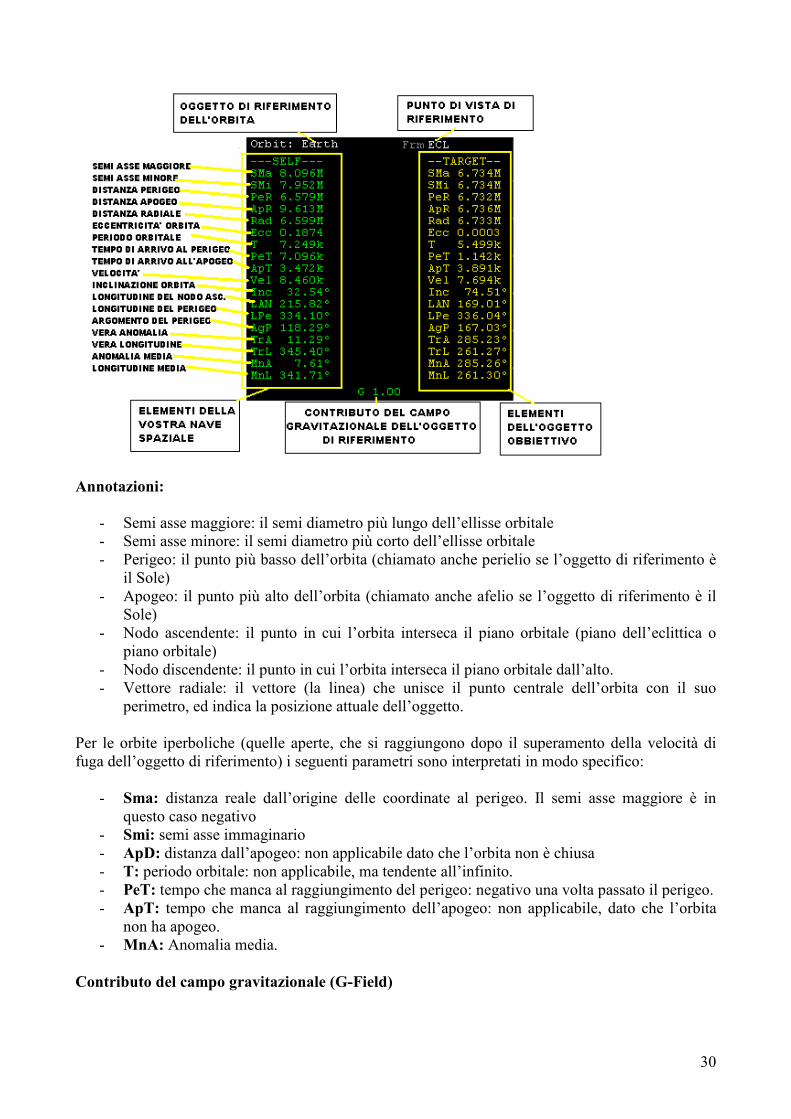
La modalità Orbit MFD visualizza una serie di elementi e parametri, congiunti ad una rappresentazione grafica bidimensionale, che descrivono l’orbita della vostra nave spaziale attorno a un corpo centrale. In aggiunta può essere scelto un oggetto obiettivo (target object) come navi spaziali, stazioni spaziali o lune che orbitano intorno al vostro stesso corpo centrale, ed i loro parametri e rappresentazione grafica bidimensionale sono anch’essi visualizzati. Questa modalità può essere attivata tramite la finestra manuale Orbit dalla pagina di selezione delle modalità MFD (SHIFT _ F1) Il visualizzatore mostre le orbite osculatrici alla data attuale nella simulazione, ad esempio l’orbita a due corpi corrispondente all’attuale stato dei vettori della nave spaziale, o dalla prospettiva di un dato corpo celeste. I parametri orbitali possono cambiare nel tempo a causa di effetti di perturbazione (ad esempio sorgenti gravitazionali addizionali, distorsioni gravitazionali causate da corpi non sferici, attrito atmosferico, azione dei motori eccetera) Gli elementi orbitali possono essere visualizzati tenendo conto di uno dei due punti di vista di riferimento: eclittica o equatoriale (ecliptic o equatorial). Il piano dell’eclittica è definito dal piano orbitale terrestre ed è utile per i viaggi interplanetari, perché l’orbita della maggior parte dei pianeti de nostro sistema solare è vicino all’eclittica. Il piano equatoriale è definito dall’equatore dell’attuale oggetto di riferimento ed è utile per operazioni in orbita bassa o dalla superficie all’orbita. Premendo SHIFT _ F è possibile selezionare i due punti di vista disponibili. La modalità atuale è visualizzata nella linea superiore del display (Frm) Il piano in cui le rappresentazioni grafiche delle orbite sono visualizzate può essere selezionato premendo SHIFT + P. L’attuale visualizzazione del piano orbitale è visualizzato nella parte in alto a destra dello schermo (Prj). ECL o EQU proiettano la visualizzazione grafica rispettivamente in modo equatoriale ed eclittico. SHP proietta la rappresentazione grafica nel piano orbitale attuale della vostra nave spaziale, e TGT lo proietta nel piano orbitale dell’attuale obiettivo (sempre che l’obiettivo sia specificato) L’altezza dell’orbita rispetto al corpo centrale, così come il perigeo (punto più basso dell’orbita) e l’apogeo (punto più alto dell’orbita) possono essere visualizzati in due modi:
- distanza dal centro del pianeta, indicata rispettivamente da Rad, ApR, PeR. - Distanza dalla superficie del pianeta, indicata rispettivamente da Alt, ApA, PeA.
28
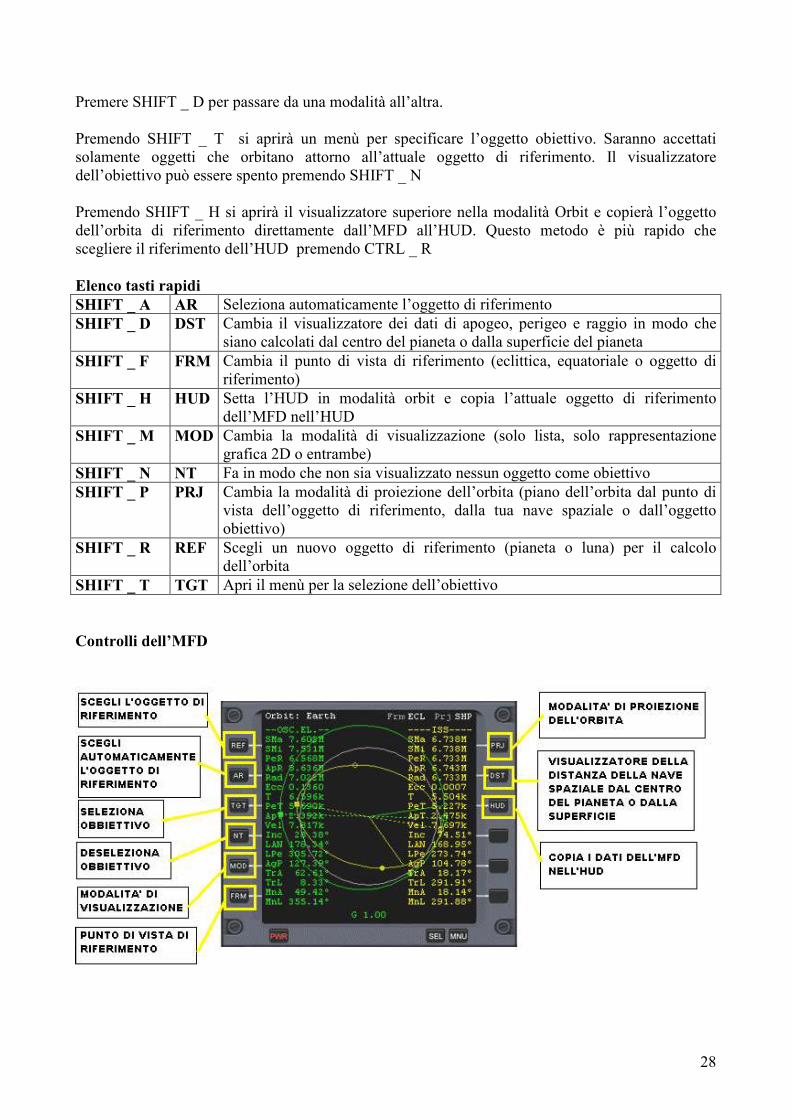
Premere SHIFT _ D per passare da una modalità all’altra. Premendo SHIFT _ T si aprirà un menù per specificare l’oggetto obiettivo. Saranno accettati solamente oggetti che orbitano attorno all’attuale oggetto di riferimento. Il visualizzatore dell’obiettivo può essere spento premendo SHIFT _ N Premendo SHIFT _ H si aprirà il visualizzatore superiore nella modalità Orbit e copierà l’oggetto dell’orbita di riferimento direttamente dall’MFD all’HUD. Questo metodo è più rapido che scegliere il riferimento dell’HUD premendo CTRL _ R Elenco tasti rapidi
SHIFT _ A AR Seleziona automaticamente l’oggetto di riferimento SHIFT _ D DST Cambia il visualizzatore dei dati di apogeo, perigeo e raggio in modo che
siano calcolati dal centro del pianeta o dalla superficie del pianeta SHIFT _ F FRM Cambia il punto di vista di riferimento (eclittica, equatoriale o oggetto di
riferimento) SHIFT _ H HUD Setta l’HUD in modalità orbit e copia l’attuale oggetto di riferimento
dell’MFD nell’HUD SHIFT _ M MOD Cambia la modalità di visualizzazione (solo lista, solo rappresentazione
grafica 2D o entrambe) SHIFT _ N NT Fa in modo che non sia visualizzato nessun oggetto come obiettivo SHIFT _ P PRJ Cambia la modalità di proiezione dell’orbita (piano dell’orbita dal punto di
vista dell’oggetto di riferimento, dalla tua nave spaziale o dall’oggetto obiettivo)
SHIFT _ R REF Scegli un nuovo oggetto di riferimento (pianeta o luna) per il calcolo dell’orbita
SHIFT _ T TGT Apri il menù per la selezione dell’obiettivo Controlli dell’MFD
29
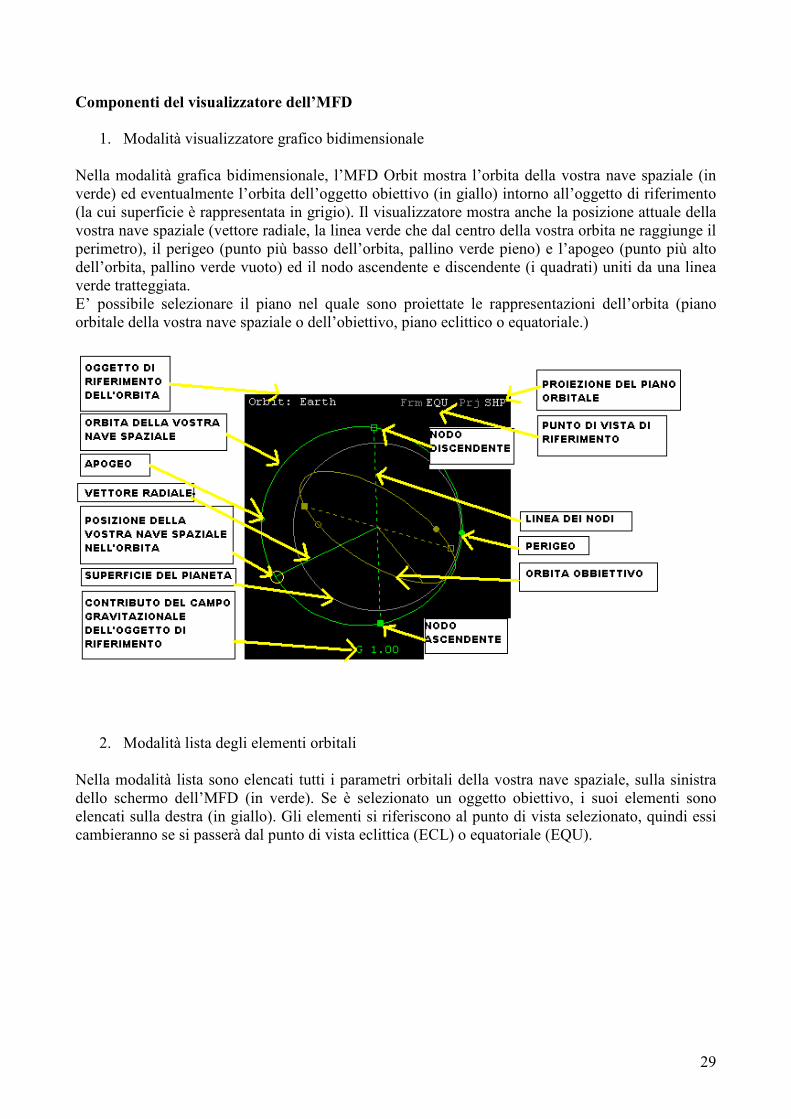
Componenti del visualizzatore dell’MFD
1. Modalità visualizzatore grafico bidimensionale Nella modalità grafica bidimensionale, l’MFD Orbit mostra l’orbita della vostra nave spaziale (in verde) ed eventualmente l’orbita dell’oggetto obiettivo (in giallo) intorno all’oggetto di riferimento (la cui superficie è rappresentata in grigio). Il visualizzatore mostra anche la posizione attuale della vostra nave spaziale (vettore radiale, la linea verde che dal centro della vostra orbita ne raggiunge il perimetro), il perigeo (punto più basso dell’orbita, pallino verde pieno) e l’apogeo (punto più alto dell’orbita, pallino verde vuoto) ed il nodo ascendente e discendente (i quadrati) uniti da una linea verde tratteggiata. E’ possibile selezionare il piano nel quale sono proiettate le rappresentazioni dell’orbita (piano orbitale della vostra nave spaziale o dell’obiettivo, piano eclittico o equatoriale.)
2. Modalità lista degli elementi orbitali Nella modalità lista sono elencati tutti i parametri orbitali della vostra nave spaziale, sulla sinistra dello schermo dell’MFD (in verde). Se è selezionato un oggetto obiettivo, i suoi elementi sono elencati sulla destra (in giallo). Gli elementi si riferiscono al punto di vista selezionato, quindi essi cambieranno se si passerà dal punto di vista eclittica (ECL) o equatoriale (EQU).
30
Annotazioni:
- Semi asse maggiore: il semi diametro più lungo dell’ellisse orbitale - Semi asse minore: il semi diametro più corto dell’ellisse orbitale - Perigeo: il punto più basso dell’orbita (chiamato anche perielio se l’oggetto di riferimento è
il Sole) - Apogeo: il punto più alto dell’orbita (chiamato anche afelio se l’oggetto di riferimento è il
Sole) - Nodo ascendente: il punto in cui l’orbita interseca il piano orbitale (piano dell’eclittica o
piano orbitale) - Nodo discendente: il punto in cui l’orbita interseca il piano orbitale dall’alto. - Vettore radiale: il vettore (la linea) che unisce il punto centrale dell’orbita con il suo
perimetro, ed indica la posizione attuale dell’oggetto. Per le orbite iperboliche (quelle aperte, che si raggiungono dopo il superamento della velocità di fuga dell’oggetto di riferimento) i seguenti parametri sono interpretati in modo specifico:
- Sma: distanza reale dall’origine delle coordinate al perigeo. Il semi asse maggiore è in questo caso negativo
- Smi: semi asse immaginario - ApD: distanza dall’apogeo: non applicabile dato che l’orbita non è chiusa - T: periodo orbitale: non applicabile, ma tendente all’infinito. - PeT: tempo che manca al raggiungimento del perigeo: negativo una volta passato il perigeo. - ApT: tempo che manca al raggiungimento dell’apogeo: non applicabile, dato che l’orbita
non ha apogeo. - MnA: Anomalia media.
Contributo del campo gravitazionale (G-Field)
31
Il valore di G nella parte bassa del display indica il contributo relativo dell’attuale oggetto di riferimento con il campo gravitazionale totale a cui è sottoposta la vostra nave spaziale. Questo valore può essere usato per stimare l’attendibilità del calcolo dell’orbita dell’MFD, e della relativa rappresentazione grafica bidimensionale. Per valori vicini a 1 il calcolo può ritenersi accurato. Per valori bassi la vera orbita è derivata da un calcolo analitico, risultante dalla modifica degli elementi orbitali in funzione del tempo trascorso. Per capire meglio, se il colore dell’indicatore G è verde allora l’orbita descritta nell’MFD è accurata ed attendibile. Se diventa giallo, allora significa che altri campi gravitazionali stanno entrando in gioco e il calcolo dell’MFD per determinare l’orbita risulta meno accurato. Se l’indicatore diventa rosso, l’accuratezza del calcolo è scarsa e inappropriata. In questo ultimo caso significa che l’oggetto di riferimento per la vostra orbita è cambiato e quindi premendo SHIFT _ A verrà selezionato automaticamente nel riquadro REF l’oggetto che rappresenta la fonte gravitazionale predominante. 8.3 VOR\VTOL
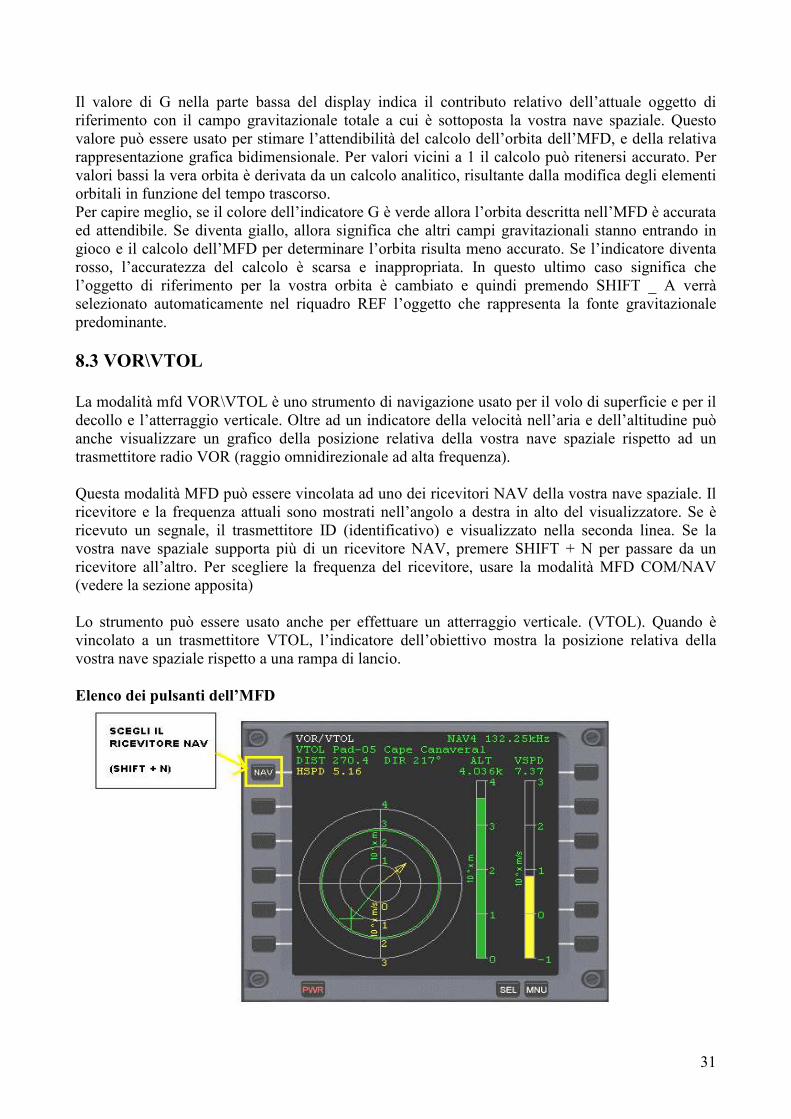
La modalità mfd VOR\VTOL è uno strumento di navigazione usato per il volo di superficie e per il decollo e l’atterraggio verticale. Oltre ad un indicatore della velocità nell’aria e dell’altitudine può anche visualizzare un grafico della posizione relativa della vostra nave spaziale rispetto ad un trasmettitore radio VOR (raggio omnidirezionale ad alta frequenza). Questa modalità MFD può essere vincolata ad uno dei ricevitori NAV della vostra nave spaziale. Il ricevitore e la frequenza attuali sono mostrati nell’angolo a destra in alto del visualizzatore. Se è ricevuto un segnale, il trasmettitore ID (identificativo) e visualizzato nella seconda linea. Se la vostra nave spaziale supporta più di un ricevitore NAV, premere SHIFT + N per passare da un ricevitore all’altro. Per scegliere la frequenza del ricevitore, usare la modalità MFD COM/NAV (vedere la sezione apposita) Lo strumento può essere usato anche per effettuare un atterraggio verticale. (VTOL). Quando è vincolato a un trasmettitore VTOL, l’indicatore dell’obiettivo mostra la posizione relativa della vostra nave spaziale rispetto a una rampa di lancio. Elenco dei pulsanti dell’MFD
32
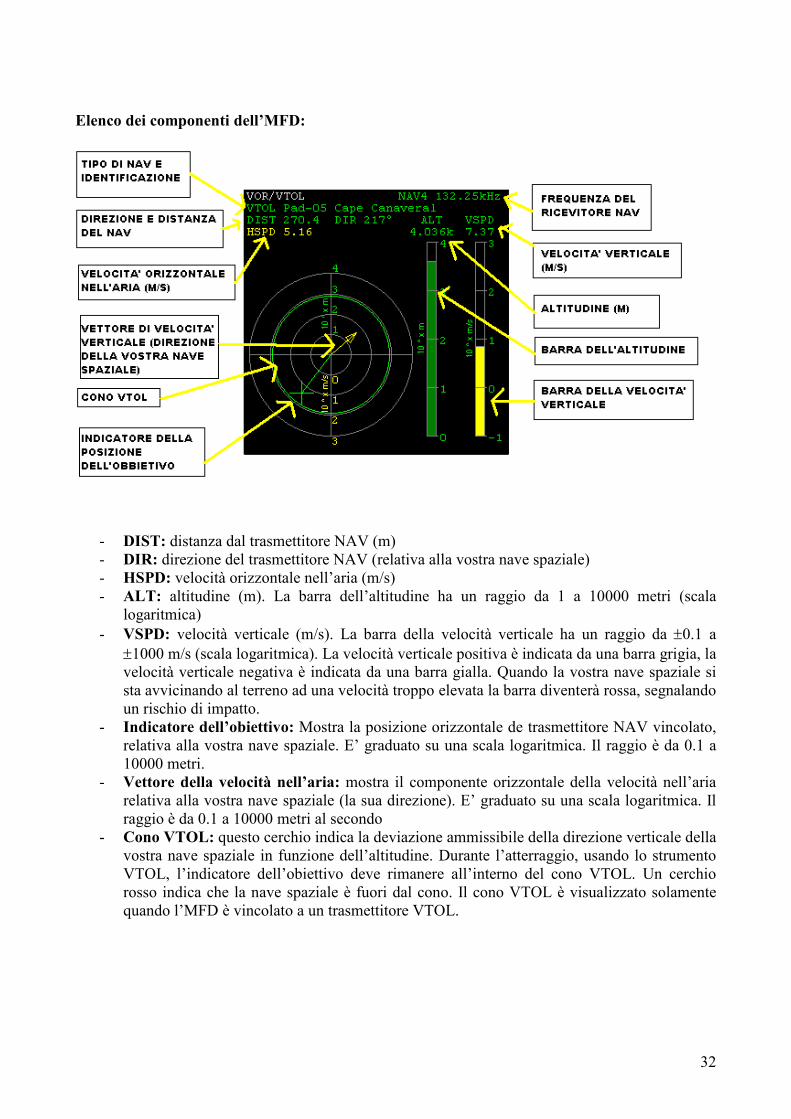
Elenco dei componenti dell’MFD:
- DIST: distanza dal trasmettitore NAV (m) - DIR: direzione del trasmettitore NAV (relativa alla vostra nave spaziale) - HSPD: velocità orizzontale nell’aria (m/s) - ALT: altitudine (m). La barra dell’altitudine ha un raggio da 1 a 10000 metri (scala
logaritmica) - VSPD: velocità verticale (m/s). La barra della velocità verticale ha un raggio da ±0.1 a
±1000 m/s (scala logaritmica). La velocità verticale positiva è indicata da una barra grigia, la velocità verticale negativa è indicata da una barra gialla. Quando la vostra nave spaziale si sta avvicinando al terreno ad una velocità troppo elevata la barra diventerà rossa, segnalando un rischio di impatto.
- Indicatore dell’obiettivo: Mostra la posizione orizzontale de trasmettitore NAV vincolato, relativa alla vostra nave spaziale. E’ graduato su una scala logaritmica. Il raggio è da 0.1 a 10000 metri.
- Vettore della velocità nell’aria: mostra il componente orizzontale della velocità nell’aria relativa alla vostra nave spaziale (la sua direzione). E’ graduato su una scala logaritmica. Il raggio è da 0.1 a 10000 metri al secondo
- Cono VTOL: questo cerchio indica la deviazione ammissibile della direzione verticale della vostra nave spaziale in funzione dell’altitudine. Durante l’atterraggio, usando lo strumento VTOL, l’indicatore dell’obiettivo deve rimanere all’interno del cono VTOL. Un cerchio rosso indica che la nave spaziale è fuori dal cono. Il cono VTOL è visualizzato solamente quando l’MFD è vincolato a un trasmettitore VTOL.
33
8.4 HORIZONTAL SITUATION INDICATOR (INDICATORE DELLA
SITUAZIONE ORIZZONTALE)
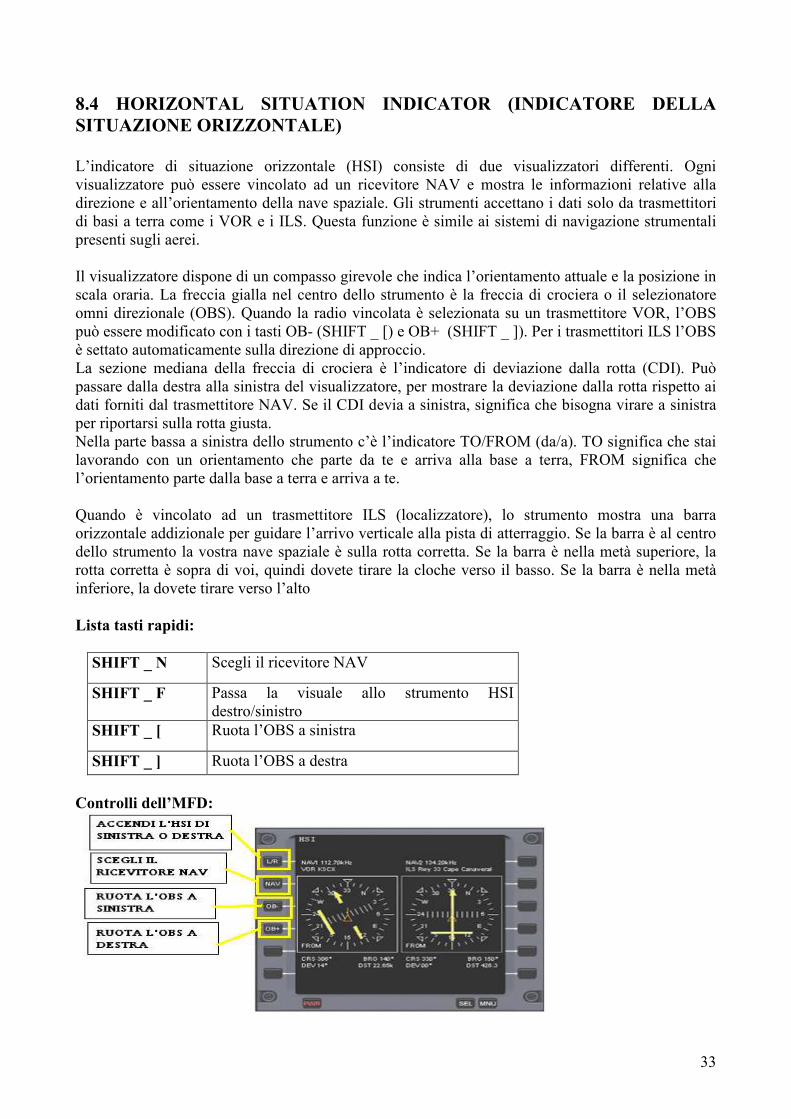
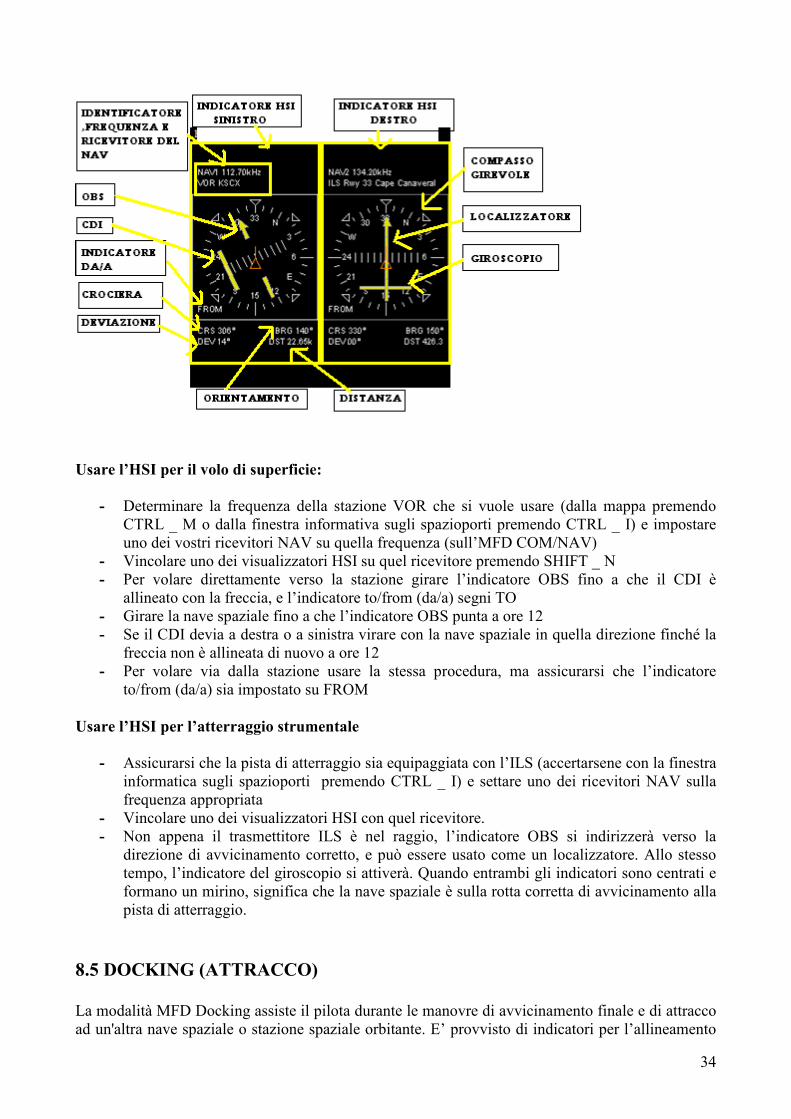
L’indicatore di situazione orizzontale (HSI) consiste di due visualizzatori differenti. Ogni visualizzatore può essere vincolato ad un ricevitore NAV e mostra le informazioni relative alla direzione e all’orientamento della nave spaziale. Gli strumenti accettano i dati solo da trasmettitori di basi a terra come i VOR e i ILS. Questa funzione è simile ai sistemi di navigazione strumentali presenti sugli aerei. Il visualizzatore dispone di un compasso girevole che indica l’orientamento attuale e la posizione in scala oraria. La freccia gialla nel centro dello strumento è la freccia di crociera o il selezionatore omni direzionale (OBS). Quando la radio vincolata è selezionata su un trasmettitore VOR, l’OBS può essere modificato con i tasti OB- (SHIFT _ [) e OB+ (SHIFT _ ]). Per i trasmettitori ILS l’OBS è settato automaticamente sulla direzione di approccio. La sezione mediana della freccia di crociera è l’indicatore di deviazione dalla rotta (CDI). Può passare dalla destra alla sinistra del visualizzatore, per mostrare la deviazione dalla rotta rispetto ai dati forniti dal trasmettitore NAV. Se il CDI devia a sinistra, significa che bisogna virare a sinistra per riportarsi sulla rotta giusta. Nella parte bassa a sinistra dello strumento c’è l’indicatore TO/FROM (da/a). TO significa che stai lavorando con un orientamento che parte da te e arriva alla base a terra, FROM significa che l’orientamento parte dalla base a terra e arriva a te. Quando è vincolato ad un trasmettitore ILS (localizzatore), lo strumento mostra una barra orizzontale addizionale per guidare l’arrivo verticale alla pista di atterraggio. Se la barra è al centro dello strumento la vostra nave spaziale è sulla rotta corretta. Se la barra è nella metà superiore, la rotta corretta è sopra di voi, quindi dovete tirare la cloche verso il basso. Se la barra è nella metà inferiore, la dovete tirare verso l’alto Lista tasti rapidi:
SHIFT _ N Scegli il ricevitore NAV
SHIFT _ F Passa la visuale allo strumento HSI destro/sinistro
SHIFT _ [ Ruota l’OBS a sinistra
SHIFT _ ] Ruota l’OBS a destra
Controlli dell’MFD:
34
Usare l’HSI per il volo di superficie:
- Determinare la frequenza della stazione VOR che si vuole usare (dalla mappa premendo CTRL _ M o dalla finestra informativa sugli spazioporti premendo CTRL _ I) e impostare uno dei vostri ricevitori NAV su quella frequenza (sull’MFD COM/NAV)
- Vincolare uno dei visualizzatori HSI su quel ricevitore premendo SHIFT _ N - Per volare direttamente verso la stazione girare l’indicatore OBS fino a che il CDI è
allineato con la freccia, e l’indicatore to/from (da/a) segni TO - Girare la nave spaziale fino a che l’indicatore OBS punta a ore 12 - Se il CDI devia a destra o a sinistra virare con la nave spaziale in quella direzione finché la
freccia non è allineata di nuovo a ore 12 - Per volare via dalla stazione usare la stessa procedura, ma assicurarsi che l’indicatore
to/from (da/a) sia impostato su FROM Usare l’HSI per l’atterraggio strumentale
- Assicurarsi che la pista di atterraggio sia equipaggiata con l’ILS (accertarsene con la finestra informatica sugli spazioporti premendo CTRL _ I) e settare uno dei ricevitori NAV sulla frequenza appropriata
- Vincolare uno dei visualizzatori HSI con quel ricevitore. - Non appena il trasmettitore ILS è nel raggio, l’indicatore OBS si indirizzerà verso la
direzione di avvicinamento corretto, e può essere usato come un localizzatore. Allo stesso tempo, l’indicatore del giroscopio si attiverà. Quando entrambi gli indicatori sono centrati e formano un mirino, significa che la nave spaziale è sulla rotta corretta di avvicinamento alla pista di atterraggio.
8.5 DOCKING (ATTRACCO)
La modalità MFD Docking assiste il pilota durante le manovre di avvicinamento finale e di attracco ad un'altra nave spaziale o stazione spaziale orbitante. E’ provvisto di indicatori per l’allineamento
35
di traslazione e di rotazione con la rotta di avvicinamento, così come la distanza e la velocità relativa rispetto al vascello che si vuole raggiungere. Lo strumento analizza i dati di attracco ricevuti dalla vostra nave spaziale. I dati di attracco possono essere reperiti in tre modi diversi:
- Modalità IDS: i dati sono acquisiti da un segnale radio spedito dalla nave spaziale con cui si vuole attraccare. Il segnale IDS (instrument docking system, sistema di attracco strumentale) è ottenuto accendendo un ricevitore NAV sulla frequenza appropriata e vincolare l’MFD docking a quel ricevitore. Il raggio tipico dell’IDS è di 100 km. Per selezionare un ricevitore NAV premere SHIFT _ N. La frequenza scelta è visualizzata nell’angolo destro in alto dell’MFD.
- Modalità visuale: i parametri di attracco sono acquisiti da un sistema visuale di bordo (tipicamente una videocamera montata sulla porta di attracco. Il sistema visuale aiuta ad attraccare con obbiettivi che non dispongono dell’IDS. Il raggio tipico della modalità visuale è di 100 metri. Per passare alla modalità visuale premere SHIFT _ V
- Selezione diretta dell’obiettivo: se volete tralasciare la necessità di effettuare un attracco tramite un trasmettitore radio, potete aprire la finestra dell’obiettivo (SHIFT _ T) e scrivere il nome dell’obiettivo (e in aggiunta la lista delle porte di attracco).
Indipendentemente dal loro differente raggio operativo, le tre modalità disponibili non cambiano il modo in cui il visualizzatore dell’MFD si presenta. Lista tasti rapidi:
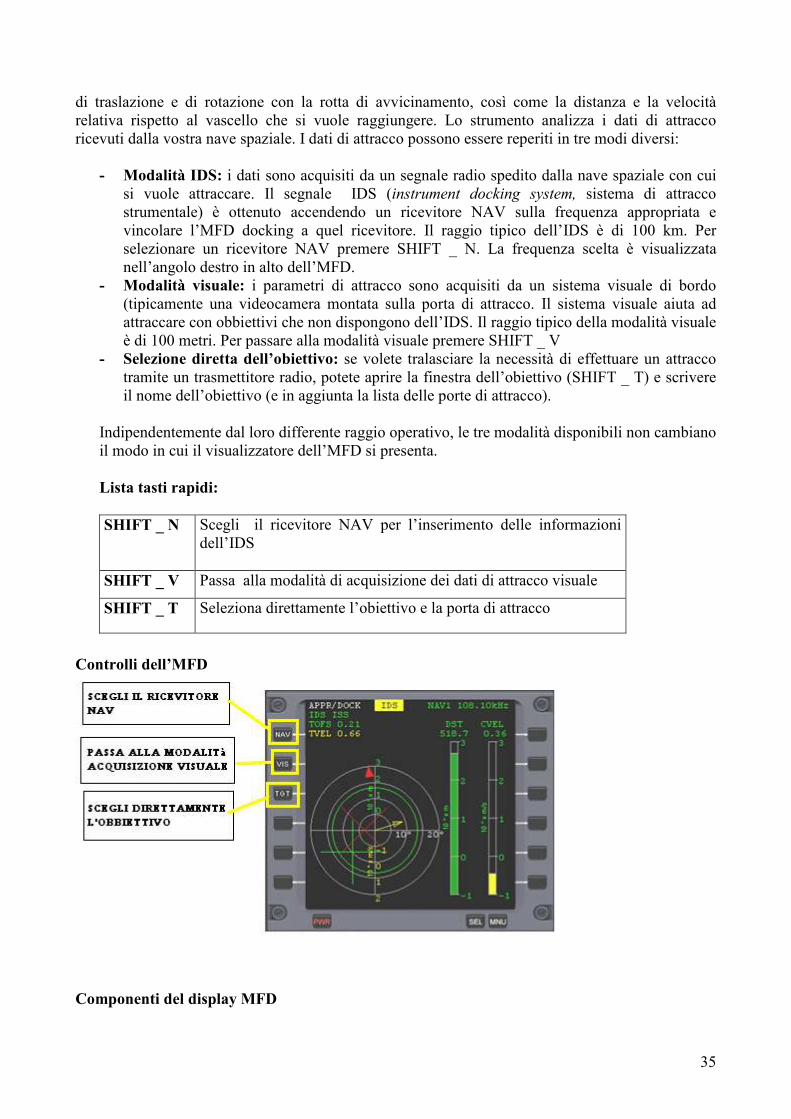
SHIFT _ N
Scegli il ricevitore NAV per l’inserimento delle informazioni dell’IDS
SHIFT _ V Passa alla modalità di acquisizione dei dati di attracco visuale
SHIFT _ T Seleziona direttamente l’obiettivo e la porta di attracco
Controlli dell’MFD
Componenti del display MFD
36
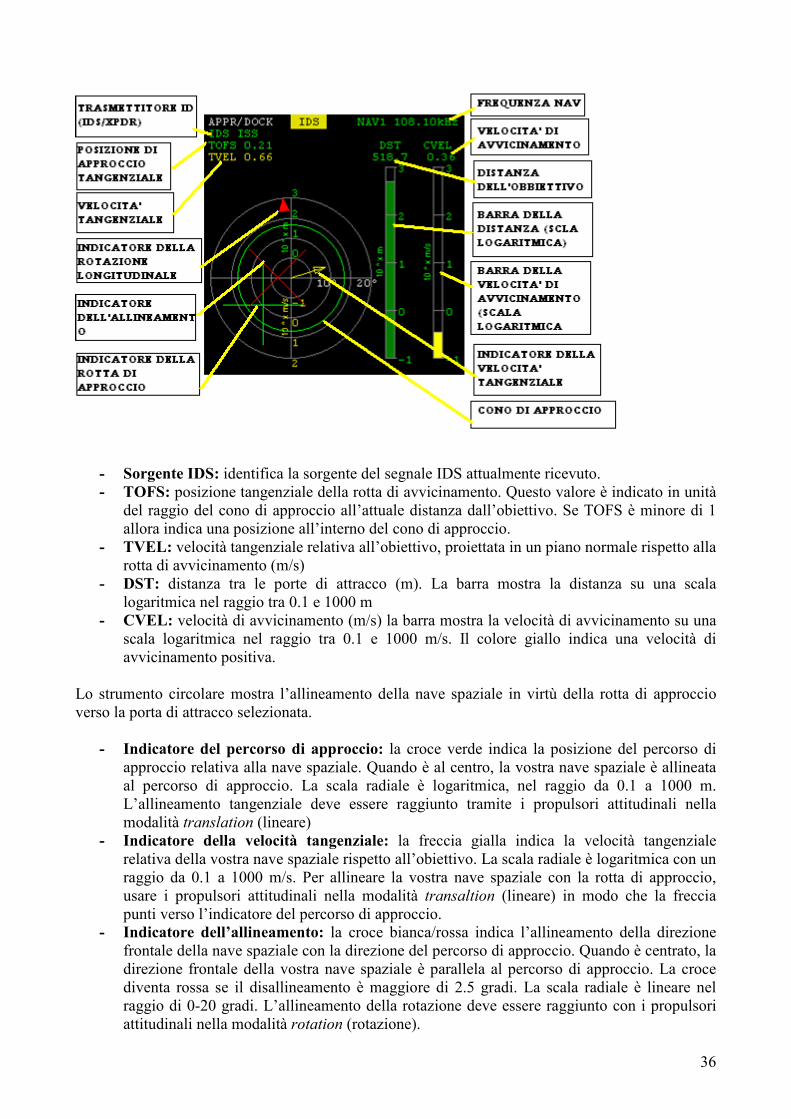
- Sorgente IDS: identifica la sorgente del segnale IDS attualmente ricevuto. - TOFS: posizione tangenziale della rotta di avvicinamento. Questo valore è indicato in unità
del raggio del cono di approccio all’attuale distanza dall’obiettivo. Se TOFS è minore di 1 allora indica una posizione all’interno del cono di approccio.
- TVEL: velocità tangenziale relativa all’obiettivo, proiettata in un piano normale rispetto alla rotta di avvicinamento (m/s)
- DST: distanza tra le porte di attracco (m). La barra mostra la distanza su una scala logaritmica nel raggio tra 0.1 e 1000 m
- CVEL: velocità di avvicinamento (m/s) la barra mostra la velocità di avvicinamento su una scala logaritmica nel raggio tra 0.1 e 1000 m/s. Il colore giallo indica una velocità di avvicinamento positiva.
Lo strumento circolare mostra l’allineamento della nave spaziale in virtù della rotta di approccio verso la porta di attracco selezionata.
- Indicatore del percorso di approccio: la croce verde indica la posizione del percorso di approccio relativa alla nave spaziale. Quando è al centro, la vostra nave spaziale è allineata al percorso di approccio. La scala radiale è logaritmica, nel raggio da 0.1 a 1000 m. L’allineamento tangenziale deve essere raggiunto tramite i propulsori attitudinali nella modalità translation (lineare)
- Indicatore della velocità tangenziale: la freccia gialla indica la velocità tangenziale relativa della vostra nave spaziale rispetto all’obiettivo. La scala radiale è logaritmica con un raggio da 0.1 a 1000 m/s. Per allineare la vostra nave spaziale con la rotta di approccio, usare i propulsori attitudinali nella modalità transaltion (lineare) in modo che la freccia punti verso l’indicatore del percorso di approccio.
- Indicatore dell’allineamento: la croce bianca/rossa indica l’allineamento della direzione frontale della nave spaziale con la direzione del percorso di approccio. Quando è centrato, la direzione frontale della vostra nave spaziale è parallela al percorso di approccio. La croce diventa rossa se il disallineamento è maggiore di 2.5 gradi. La scala radiale è lineare nel raggio di 0-20 gradi. L’allineamento della rotazione deve essere raggiunto con i propulsori attitudinali nella modalità rotation (rotazione).
37
- Indicatore della rotazione longitudinale. La freccia indica l’allineamento longitudinale della nave spaziale con la porta di attracco. Per essere allineato, l’indicatore deve puntare a ore 12 rutando la nave spaziale sull’asse longitudinale, attivando i propulsori attitudinali dell’imbardata nella modalità rotation (rotazione). Quando l’allineamento è raggiunto, l’indicatore diventa bianco (disallineamento minore di 2.5 gradi) Da notare che questo indicatore è visualizzato solamente quando l’allineamento direzionale è entro i 5 gradi.
- Cono di approccio: il cerchio concentrico rosso o verde indica la dimensione del cono di approccio all’attuale distanza dalla porta di attracco obiettivo. La nave spaziale dovrebbe avvicinarsi alla porta di attracco in modo che l’indicatore del percorso di approccio sia sempre all’interno del cono di approccio (indicato da un cerchio verde) Il cono di approccio diventa più piccolo mano a mano che la nave spaziale si avvicina alla porta di attracco.
La velocità di avvicinamento dovrebbe essere ridotta non appena la nave spaziale si avvicina all’attracco (usando i motori posteriori o i motori attitudinali). La velocità finale dovrebbe essere inferiore ai 0.1 m/s Note:
- Per attraccare con successo dovete avvicinarvi alla porta di attracco entro la distanza di 0.3 metri.
- Nessun programma per il rilevamento della collisione è stato attualmente sviluppato. Ciò significa che se si fallisce l’attracco, la vostra nave spaziale potrà passare attraverso la nave spaziale che si ha come obiettivo.
8.6 SURFACE (SUPERFICIE)
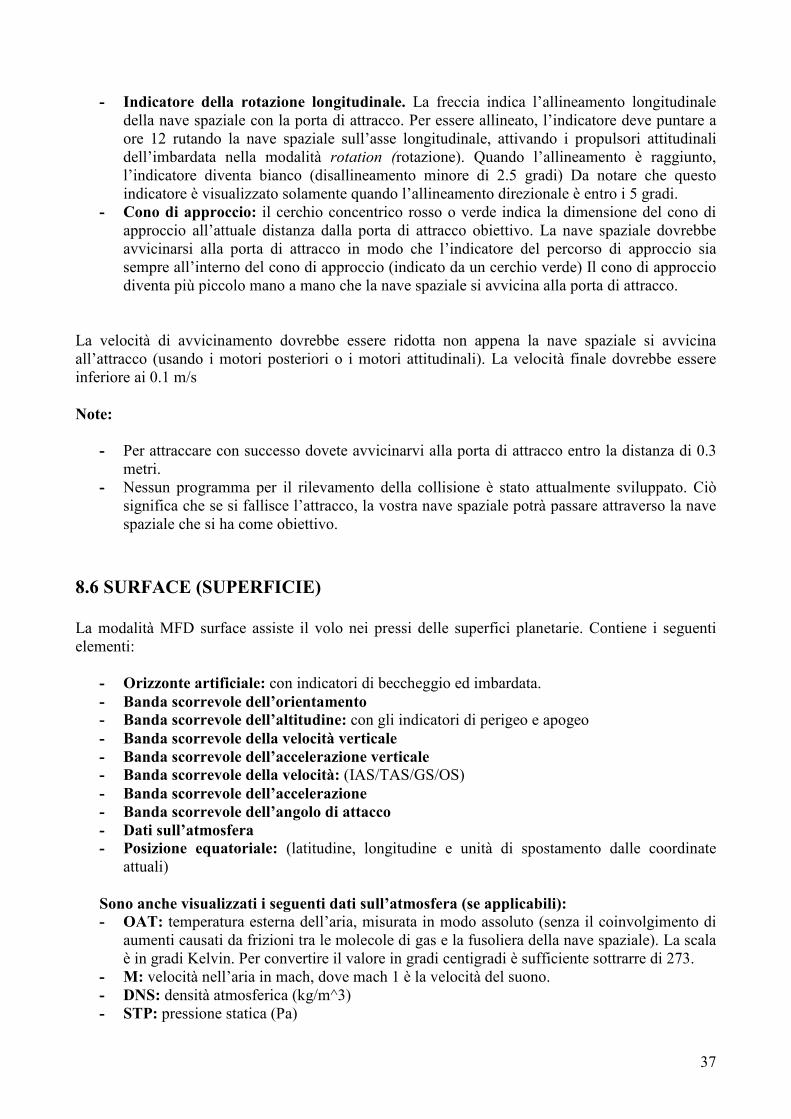
La modalità MFD surface assiste il volo nei pressi delle superfici planetarie. Contiene i seguenti elementi:
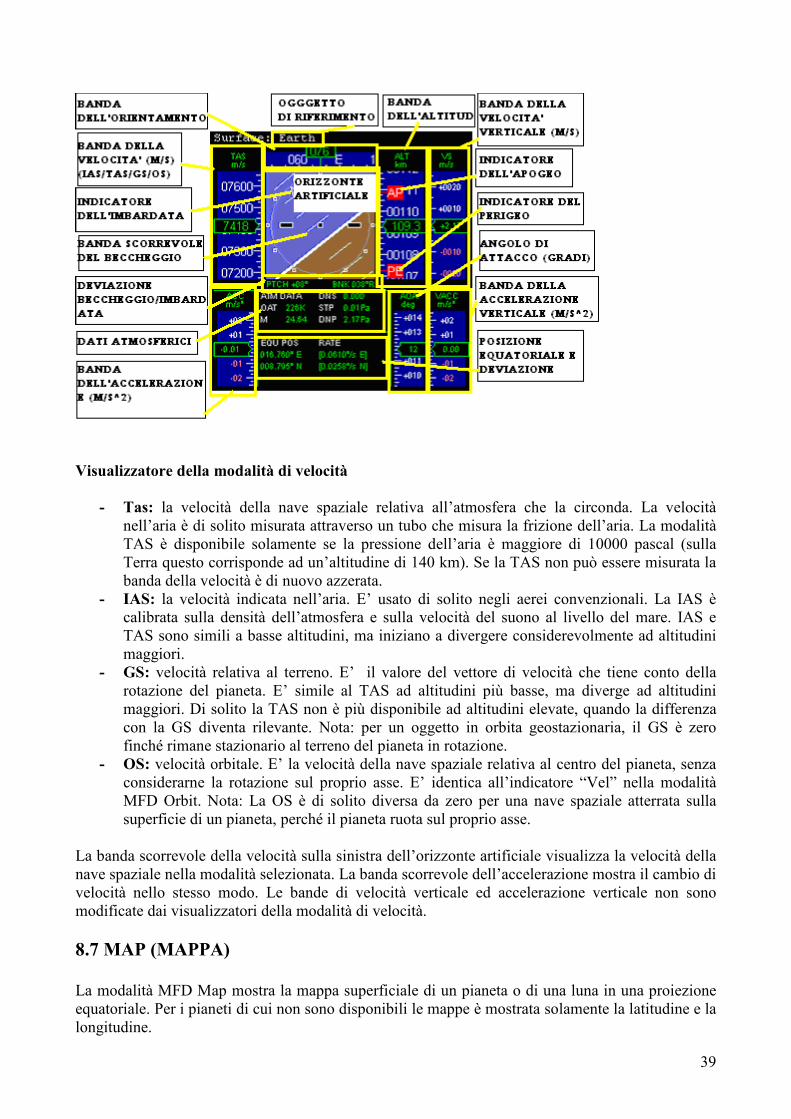
- Orizzonte artificiale: con indicatori di beccheggio ed imbardata. - Banda scorrevole dell’orientamento - Banda scorrevole dell’altitudine: con gli indicatori di perigeo e apogeo - Banda scorrevole della velocità verticale
- Banda scorrevole dell’accelerazione verticale
- Banda scorrevole della velocità: (IAS/TAS/GS/OS) - Banda scorrevole dell’accelerazione
- Banda scorrevole dell’angolo di attacco
- Dati sull’atmosfera
- Posizione equatoriale: (latitudine, longitudine e unità di spostamento dalle coordinate attuali)
Sono anche visualizzati i seguenti dati sull’atmosfera (se applicabili):
- OAT: temperatura esterna dell’aria, misurata in modo assoluto (senza il coinvolgimento di aumenti causati da frizioni tra le molecole di gas e la fusoliera della nave spaziale). La scala è in gradi Kelvin. Per convertire il valore in gradi centigradi è sufficiente sottrarre di 273.
- M: velocità nell’aria in mach, dove mach 1 è la velocità del suono. - DNS: densità atmosferica (kg/m^3) - STP: pressione statica (Pa)
38
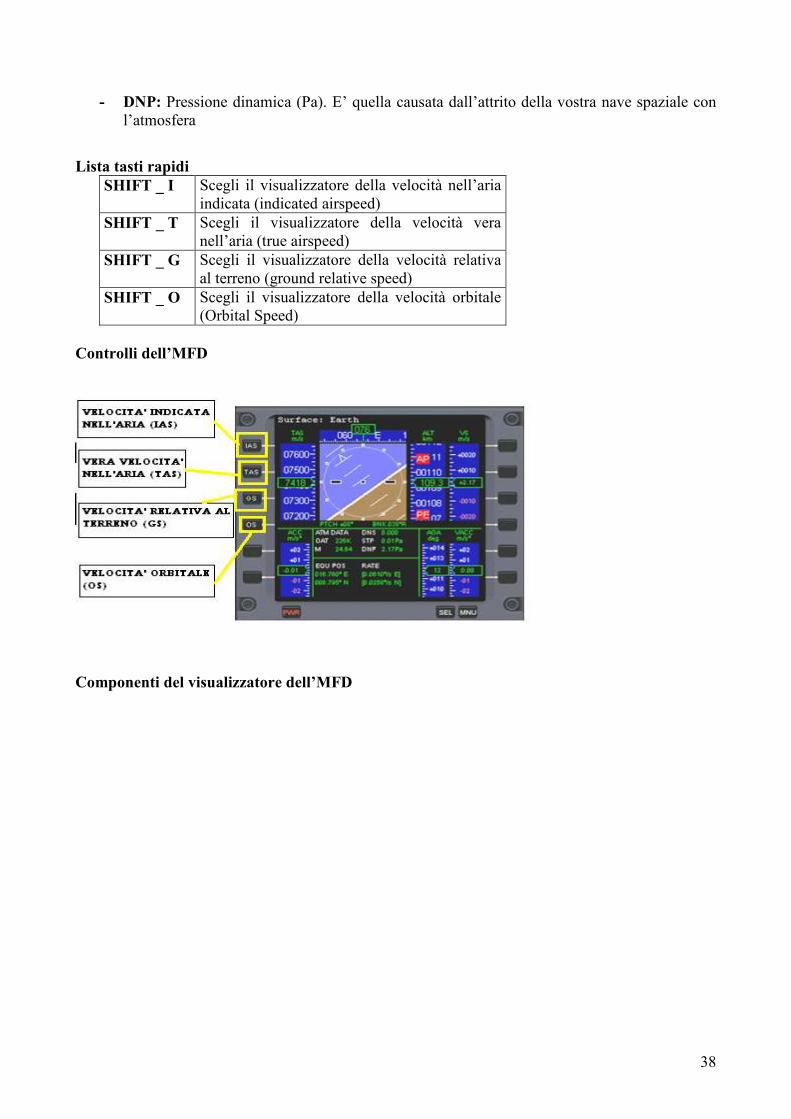
- DNP: Pressione dinamica (Pa). E’ quella causata dall’attrito della vostra nave spaziale con l’atmosfera
Lista tasti rapidi
SHIFT _ I Scegli il visualizzatore della velocità nell’aria indicata (indicated airspeed)
SHIFT _ T Scegli il visualizzatore della velocità vera nell’aria (true airspeed)
SHIFT _ G Scegli il visualizzatore della velocità relativa al terreno (ground relative speed)
SHIFT _ O Scegli il visualizzatore della velocità orbitale (Orbital Speed)
Controlli dell’MFD
Componenti del visualizzatore dell’MFD
39
Visualizzatore della modalità di velocità
- Tas: la velocità della nave spaziale relativa all’atmosfera che la circonda. La velocità nell’aria è di solito misurata attraverso un tubo che misura la frizione dell’aria. La modalità TAS è disponibile solamente se la pressione dell’aria è maggiore di 10000 pascal (sulla Terra questo corrisponde ad un’altitudine di 140 km). Se la TAS non può essere misurata la banda della velocità è di nuovo azzerata.
- IAS: la velocità indicata nell’aria. E’ usato di solito negli aerei convenzionali. La IAS è calibrata sulla densità dell’atmosfera e sulla velocità del suono al livello del mare. IAS e TAS sono simili a basse altitudini, ma iniziano a divergere considerevolmente ad altitudini maggiori.
- GS: velocità relativa al terreno. E’ il valore del vettore di velocità che tiene conto della rotazione del pianeta. E’ simile al TAS ad altitudini più basse, ma diverge ad altitudini maggiori. Di solito la TAS non è più disponibile ad altitudini elevate, quando la differenza con la GS diventa rilevante. Nota: per un oggetto in orbita geostazionaria, il GS è zero finché rimane stazionario al terreno del pianeta in rotazione.
- OS: velocità orbitale. E’ la velocità della nave spaziale relativa al centro del pianeta, senza considerarne la rotazione sul proprio asse. E’ identica all’indicatore “Vel” nella modalità MFD Orbit. Nota: La OS è di solito diversa da zero per una nave spaziale atterrata sulla superficie di un pianeta, perché il pianeta ruota sul proprio asse.
La banda scorrevole della velocità sulla sinistra dell’orizzonte artificiale visualizza la velocità della nave spaziale nella modalità selezionata. La banda scorrevole dell’accelerazione mostra il cambio di velocità nello stesso modo. Le bande di velocità verticale ed accelerazione verticale non sono modificate dai visualizzatori della modalità di velocità. 8.7 MAP (MAPPA)
La modalità MFD Map mostra la mappa superficiale di un pianeta o di una luna in una proiezione equatoriale. Per i pianeti di cui non sono disponibili le mappe è mostrata solamente la latitudine e la longitudine.
40
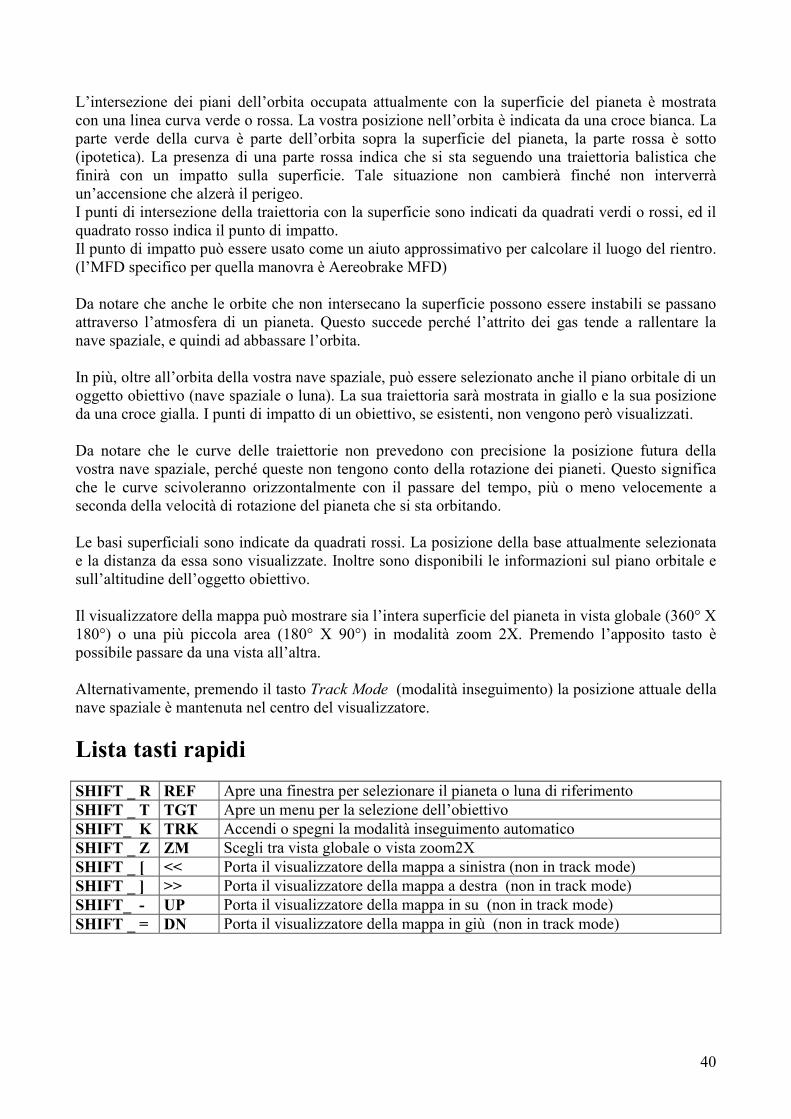
L’intersezione dei piani dell’orbita occupata attualmente con la superficie del pianeta è mostrata con una linea curva verde o rossa. La vostra posizione nell’orbita è indicata da una croce bianca. La parte verde della curva è parte dell’orbita sopra la superficie del pianeta, la parte rossa è sotto (ipotetica). La presenza di una parte rossa indica che si sta seguendo una traiettoria balistica che finirà con un impatto sulla superficie. Tale situazione non cambierà finché non interverrà un’accensione che alzerà il perigeo. I punti di intersezione della traiettoria con la superficie sono indicati da quadrati verdi o rossi, ed il quadrato rosso indica il punto di impatto. Il punto di impatto può essere usato come un aiuto approssimativo per calcolare il luogo del rientro. (l’MFD specifico per quella manovra è Aereobrake MFD) Da notare che anche le orbite che non intersecano la superficie possono essere instabili se passano attraverso l’atmosfera di un pianeta. Questo succede perché l’attrito dei gas tende a rallentare la nave spaziale, e quindi ad abbassare l’orbita. In più, oltre all’orbita della vostra nave spaziale, può essere selezionato anche il piano orbitale di un oggetto obiettivo (nave spaziale o luna). La sua traiettoria sarà mostrata in giallo e la sua posizione da una croce gialla. I punti di impatto di un obiettivo, se esistenti, non vengono però visualizzati. Da notare che le curve delle traiettorie non prevedono con precisione la posizione futura della vostra nave spaziale, perché queste non tengono conto della rotazione dei pianeti. Questo significa che le curve scivoleranno orizzontalmente con il passare del tempo, più o meno velocemente a seconda della velocità di rotazione del pianeta che si sta orbitando. Le basi superficiali sono indicate da quadrati rossi. La posizione della base attualmente selezionata e la distanza da essa sono visualizzate. Inoltre sono disponibili le informazioni sul piano orbitale e sull’altitudine dell’oggetto obiettivo. Il visualizzatore della mappa può mostrare sia l’intera superficie del pianeta in vista globale (360° X 180°) o una più piccola area (180° X 90°) in modalità zoom 2X. Premendo l’apposito tasto è possibile passare da una vista all’altra. Alternativamente, premendo il tasto Track Mode (modalità inseguimento) la posizione attuale della nave spaziale è mantenuta nel centro del visualizzatore.
Lista tasti rapidi SHIFT _ R REF Apre una finestra per selezionare il pianeta o luna di riferimento SHIFT _ T TGT Apre un menu per la selezione dell’obiettivo SHIFT_ K TRK Accendi o spegni la modalità inseguimento automatico SHIFT _ Z ZM Scegli tra vista globale o vista zoom2X SHIFT _ [ << Porta il visualizzatore della mappa a sinistra (non in track mode) SHIFT _ ] >> Porta il visualizzatore della mappa a destra (non in track mode) SHIFT_ - UP Porta il visualizzatore della mappa in su (non in track mode) SHIFT _ = DN Porta il visualizzatore della mappa in giù (non in track mode)
41
Controlli MFD
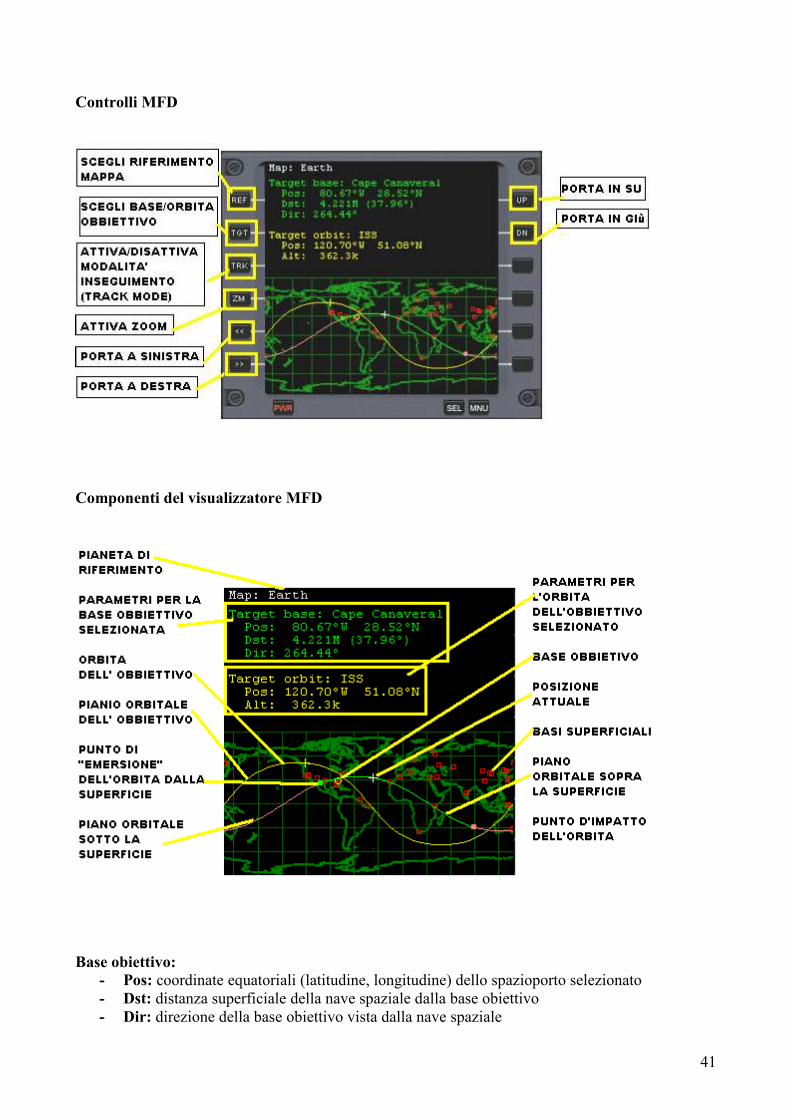
Componenti del visualizzatore MFD
Base obiettivo:
- Pos: coordinate equatoriali (latitudine, longitudine) dello spazioporto selezionato - Dst: distanza superficiale della nave spaziale dalla base obiettivo - Dir: direzione della base obiettivo vista dalla nave spaziale
42
Orbita obiettivo:
- Pos: coordinate equatoriali (longitudine e latitudine) dell’obiettivo - Alt: altitudine dell’obiettivo
Note:
- Solo gli oggetti (navi spaziali, stazioni spaziali o lune) che stanno attualmente orbitando intorno all’attuale pianeta di riferimento saranno selezionati
- Solo le basi presente sull’attuale pianeta di riferimento saranno accettate come basi obiettivo.
- Il piano della vostra nave spaziale sarà visualizzato solo se state orbitando intorno al pianeta di riferimento
8.8 ALIGN ORBITAL PLANE (ALLINEA I PIANI ORBITALI) Questa modalità MFD fornisce gli strumenti per ruotare un piano orbitale della vostra nave spaziale in modo che corrisponda perfettamente con il piano di un altro oggetto. Lo strumento contiene gli elementi orbitali rilevanti (inclinazione e longitudine del nodo ascendente) della vostra orbita attuale e dell’orbita dell’obiettivo. Mostra anche l’inclinazione relativa (angolo tra i due piani), gli angoli dell’attuale vettore radiale verso il nodo ascendente e discendente, il tempo di intercettazione del prossimo nodo e il tempo di accensione richiesto per effettuare la manovra. Il piano orbitale dell’obiettivo può essere definito sia in termini del piano di un altro oggetto orbitante, sia specificando i parametri che definiscono l’orientamento di un piano orbitale: l’inclinazione e la longitudine del nodo ascendente rispetto al punto di vista eclittico di riferimento. Lista tasti rapidi
SHIFT_ T Inserisci un nuovo oggetto come obiettivo o i parametri orbitali SHIFT_ E Inserisci un piano obiettivo come inclinazione eclittica e longitudine del nodo
ascendente
Controlli dell’MFD
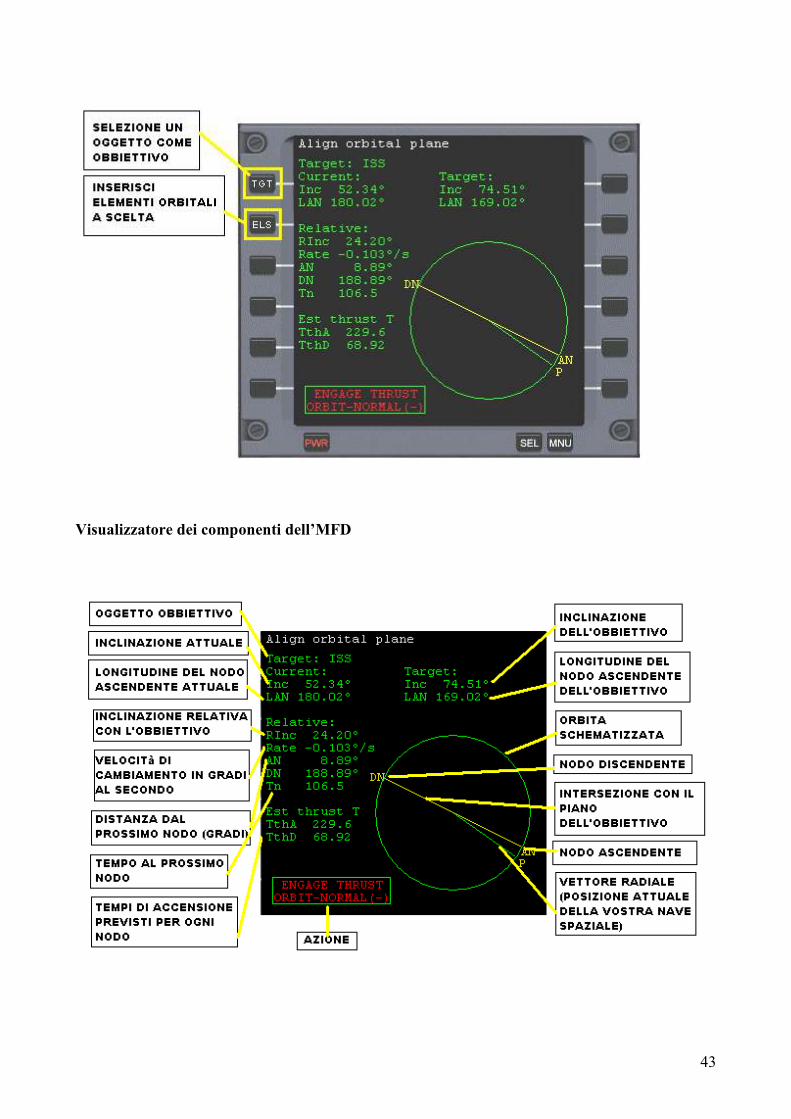
43
Visualizzatore dei componenti dell’MFD
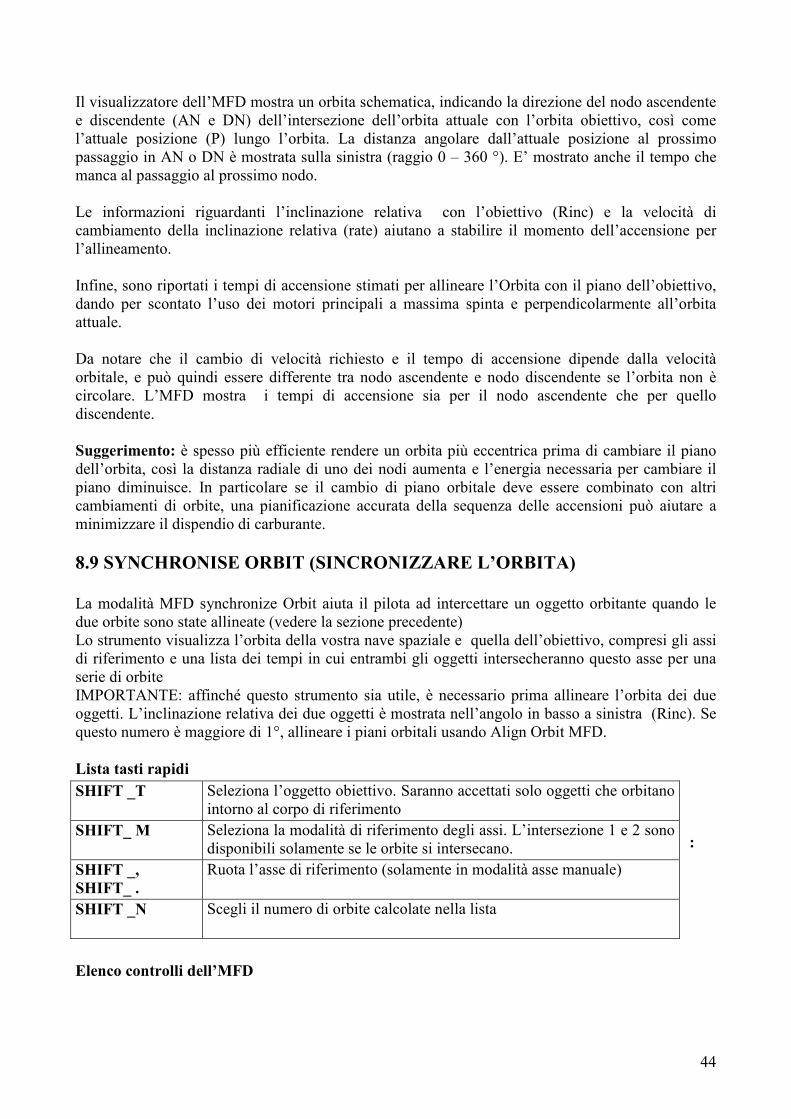
44
Il visualizzatore dell’MFD mostra un orbita schematica, indicando la direzione del nodo ascendente e discendente (AN e DN) dell’intersezione dell’orbita attuale con l’orbita obiettivo, così come l’attuale posizione (P) lungo l’orbita. La distanza angolare dall’attuale posizione al prossimo passaggio in AN o DN è mostrata sulla sinistra (raggio 0 – 360 °). E’ mostrato anche il tempo che manca al passaggio al prossimo nodo. Le informazioni riguardanti l’inclinazione relativa con l’obiettivo (Rinc) e la velocità di cambiamento della inclinazione relativa (rate) aiutano a stabilire il momento dell’accensione per l’allineamento. Infine, sono riportati i tempi di accensione stimati per allineare l’Orbita con il piano dell’obiettivo, dando per scontato l’uso dei motori principali a massima spinta e perpendicolarmente all’orbita attuale. Da notare che il cambio di velocità richiesto e il tempo di accensione dipende dalla velocità orbitale, e può quindi essere differente tra nodo ascendente e nodo discendente se l’orbita non è circolare. L’MFD mostra i tempi di accensione sia per il nodo ascendente che per quello discendente. Suggerimento: è spesso più efficiente rendere un orbita più eccentrica prima di cambiare il piano dell’orbita, così la distanza radiale di uno dei nodi aumenta e l’energia necessaria per cambiare il piano diminuisce. In particolare se il cambio di piano orbitale deve essere combinato con altri cambiamenti di orbite, una pianificazione accurata della sequenza delle accensioni può aiutare a minimizzare il dispendio di carburante. 8.9 SYNCHRONISE ORBIT (SINCRONIZZARE L’ORBITA)
La modalità MFD synchronize Orbit aiuta il pilota ad intercettare un oggetto orbitante quando le due orbite sono state allineate (vedere la sezione precedente) Lo strumento visualizza l’orbita della vostra nave spaziale e quella dell’obiettivo, compresi gli assi di riferimento e una lista dei tempi in cui entrambi gli oggetti intersecheranno questo asse per una serie di orbite IMPORTANTE: affinché questo strumento sia utile, è necessario prima allineare l’orbita dei due oggetti. L’inclinazione relativa dei due oggetti è mostrata nell’angolo in basso a sinistra (Rinc). Se questo numero è maggiore di 1°, allineare i piani orbitali usando Align Orbit MFD. Lista tasti rapidi
:
Elenco controlli dell’MFD
SHIFT _T Seleziona l’oggetto obiettivo. Saranno accettati solo oggetti che orbitano intorno al corpo di riferimento
SHIFT_ M Seleziona la modalità di riferimento degli assi. L’intersezione 1 e 2 sono disponibili solamente se le orbite si intersecano.
SHIFT _,
SHIFT_ .
Ruota l’asse di riferimento (solamente in modalità asse manuale)
SHIFT _N Scegli il numero di orbite calcolate nella lista
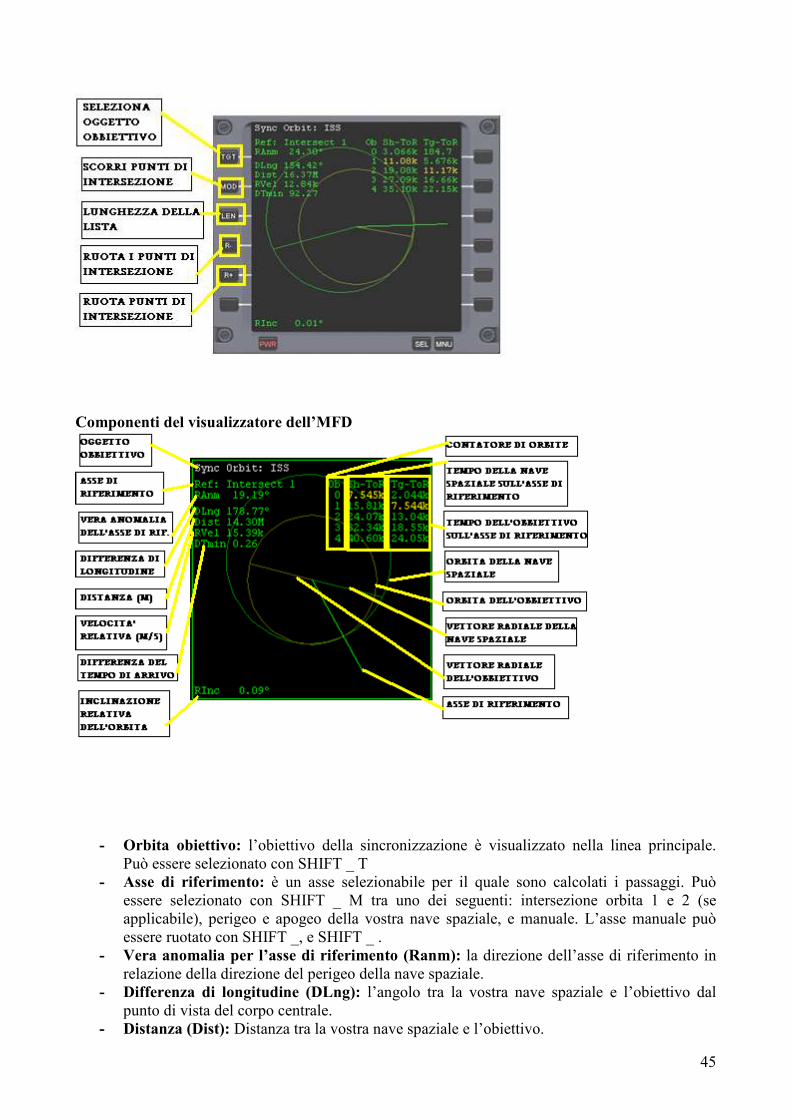
45
Componenti del visualizzatore dell’MFD
- Orbita obiettivo: l’obiettivo della sincronizzazione è visualizzato nella linea principale. Può essere selezionato con SHIFT _ T
- Asse di riferimento: è un asse selezionabile per il quale sono calcolati i passaggi. Può essere selezionato con SHIFT _ M tra uno dei seguenti: intersezione orbita 1 e 2 (se applicabile), perigeo e apogeo della vostra nave spaziale, e manuale. L’asse manuale può essere ruotato con SHIFT _, e SHIFT _ .
- Vera anomalia per l’asse di riferimento (Ranm): la direzione dell’asse di riferimento in relazione della direzione del perigeo della nave spaziale.
- Differenza di longitudine (DLng): l’angolo tra la vostra nave spaziale e l’obiettivo dal punto di vista del corpo centrale.
- Distanza (Dist): Distanza tra la vostra nave spaziale e l’obiettivo.
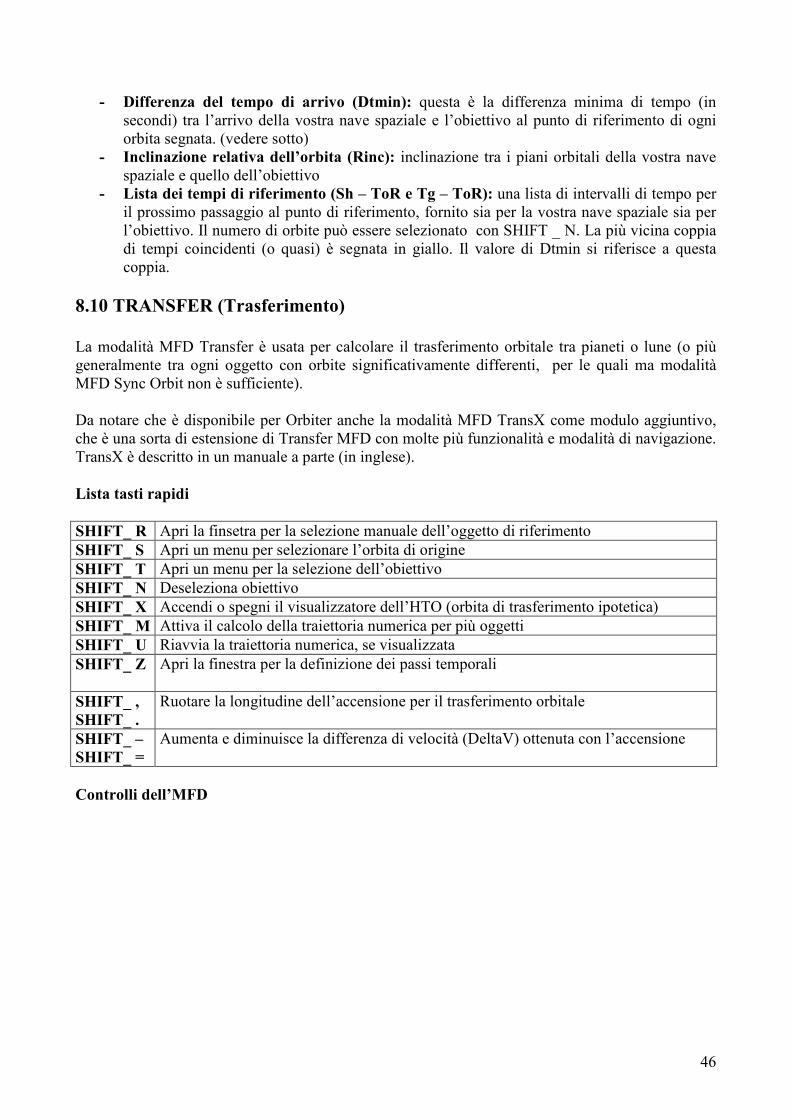
46
- Differenza del tempo di arrivo (Dtmin): questa è la differenza minima di tempo (in secondi) tra l’arrivo della vostra nave spaziale e l’obiettivo al punto di riferimento di ogni orbita segnata. (vedere sotto)
- Inclinazione relativa dell’orbita (Rinc): inclinazione tra i piani orbitali della vostra nave spaziale e quello dell’obiettivo
- Lista dei tempi di riferimento (Sh – ToR e Tg – ToR): una lista di intervalli di tempo per il prossimo passaggio al punto di riferimento, fornito sia per la vostra nave spaziale sia per l’obiettivo. Il numero di orbite può essere selezionato con SHIFT _ N. La più vicina coppia di tempi coincidenti (o quasi) è segnata in giallo. Il valore di Dtmin si riferisce a questa coppia.
8.10 TRANSFER (Trasferimento)
La modalità MFD Transfer è usata per calcolare il trasferimento orbitale tra pianeti o lune (o più generalmente tra ogni oggetto con orbite significativamente differenti, per le quali ma modalità MFD Sync Orbit non è sufficiente). Da notare che è disponibile per Orbiter anche la modalità MFD TransX come modulo aggiuntivo, che è una sorta di estensione di Transfer MFD con molte più funzionalità e modalità di navigazione. TransX è descritto in un manuale a parte (in inglese). Lista tasti rapidi
SHIFT_ R Apri la finsetra per la selezione manuale dell’oggetto di riferimento SHIFT_ S Apri un menu per selezionare l’orbita di origine SHIFT_ T Apri un menu per la selezione dell’obiettivo SHIFT_ N Deseleziona obiettivo SHIFT_ X Accendi o spegni il visualizzatore dell’HTO (orbita di trasferimento ipotetica) SHIFT_ M Attiva il calcolo della traiettoria numerica per più oggetti SHIFT_ U Riavvia la traiettoria numerica, se visualizzata SHIFT_ Z Apri la finestra per la definizione dei passi temporali
SHIFT_ ,
SHIFT_ .
Ruotare la longitudine dell’accensione per il trasferimento orbitale
SHIFT_ –
SHIFT_ =
Aumenta e diminuisce la differenza di velocità (DeltaV) ottenuta con l’accensione
Controlli dell’MFD
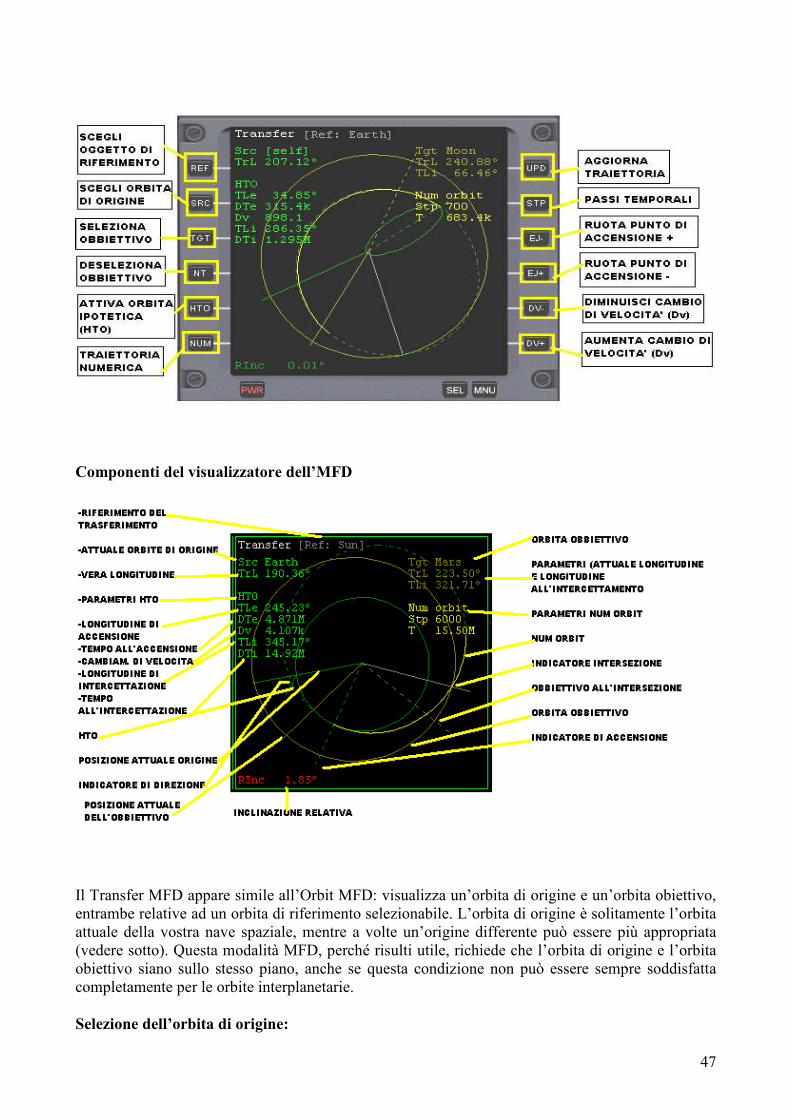
47
Componenti del visualizzatore dell’MFD
Il Transfer MFD appare simile all’Orbit MFD: visualizza un’orbita di origine e un’orbita obiettivo, entrambe relative ad un orbita di riferimento selezionabile. L’orbita di origine è solitamente l’orbita attuale della vostra nave spaziale, mentre a volte un’origine differente può essere più appropriata (vedere sotto). Questa modalità MFD, perché risulti utile, richiede che l’orbita di origine e l’orbita obiettivo siano sullo stesso piano, anche se questa condizione non può essere sempre soddisfatta completamente per le orbite interplanetarie. Selezione dell’orbita di origine:
48
L’orbita di origine è l’orbita dalla quale si effettua l’accensione per inserirsi nell’orbita di trasferimento. Di solito l’orbita di origine è l’attuale orbita della vostra nave spaziale. In alcune situazioni tuttavia è più utile usare altre orbite di origine. Si consideri ad esempio un trasferimento interplanetario dalla Terra a Marte usando il Sole come oggetto di riferimento. Dal momento che la forza gravitazionale predominante sarà quella della Terra, almeno durante le prime fasi del viaggio, il calcolo dell’orbita risulterà notevolmente distorto. In questo caso è meglio scegliere la Terra come oggetto di riferimento. Ogni volta che l’origine non è identica alla nave spaziale, un piccolo indicatore di direzione verrà visualizzato nell’attuale posizione dell’origine che indica la direzione della vostra nave spaziale rispetto all’origine. Questo è di aiuto per stabilire il momento nel quale effettuare l’accensione. Orbita di trasferimento ipotetica. (HTO)
A differenza che nella modalità MFD Orbit, Transfer MFD da la possibilità di tracciare un orbita di trasferimento ipotetica, che permette di sapere cosa succederebbe se si effettuasse un’accensione in un determinato momento senza effettivamente cambiare l’orbita della vostra nave spaziale. Questo visualizzatore è attivato premendo SHIFT _X. Il calcolo è effettuato dando per scontato che da qualche parte lungo l’orbita ci sia un’accensione prograda e un’accensione retrograda. L’HTO ha due parametri: la longitudine nella quale si effettuerebbe l’accensione (modificabile attraverso i tasti SHIFT _, e SHIFT _.) e il cambiamento di velocità che comporterebbe l’accensione (modificabile attraverso i tasti SHIFT _ - e SHIFT _ =) . L’HTO è visualizzato come una linea curva verde tratteggiata nell’MFD. La posizione dell’accensione nell’orbita è indicata da una linea dritta verde tratteggiata (vettore radiale). Alcuni parametri sono attivi quando l’HTO è messo in funzione: Tle: vera longitudine del punto di accensione Dte: tempo mancante al punto di accensione in secondi Dv: cambio di velocità determinato dall’accensione in metri al secondo Tli: Vera longitudine di intersezione con l’orbita obiettivo (se applicabile) Dti: Tempo mancante all’intercettazione dell’orbita obiettivo in secondi (se applicabile) Indicatore di intercettazione
Se l’origine dell’orbita (o se è attivo l’HTO) interseca l’orbita obiettivo, il punto di intersezione è marcato da una linea verde, ed è visualizzata la longitudine di intercettazione (Tli) La posizione dell’obiettivo nel momento in cui la vostra nave spaziale raggiunge il punto di intersezione è marcato da una linea gialla tratteggiata. Il vostro obiettivo deve essere quello di modificare l’HTO in modo che la linea gialla tratteggiata e quella grigia coincidano. Così facendo la nave spaziale e l’obiettivo arriveranno al punto di intersezione simultaneamente. Trasferimento orbitale di Hohmann
Un trasferimento orbitale che sfiora l’orbita obiettivo senza superarla, e che fa arrivare la vostra nave spaziale al punto di intersezione allo stesso momento dell’obiettivo, è chiamato trasferimento orbitale di Hohmann ad energia minima. E’ possibile effettuare questo tipo di trasferimento quando la longitudine di intersezione e la longitudine di accensione sono ad una distanza di 180 gradi l’uno dall’altro. E’ il trasferimento più conveniente per risparmiare il più possibile in quanto a carburante, ma è anche quello che richiede il viaggio più lungo. Dato che Orbiter è un simulatore fedele alla realtà, è possibile informarsi in rete riguardo alle cosiddette “finestre di trasferimento” per ogni
49
pianeta, cioè quegli intervalli di tempo utili per effettuare il trasferimento di Hohmann verso ogni destinazione nel Sistema Solare Ad esempio, per raggiungere Marte questa finestra si apre ogni due anni, e rimane aperta quasi due mesi. Accensione
Una volta che l’HTO è stato impostato, l’accensione si effettua quando si è raggiunto il punto previsto (quando la linea verde continua e la linea verde tratteggiata coincidono). L’accensione è prograda o retrograda data l’orbita rispetto all’attuale orbita di riferimento. Quando l’accensione è effettuata, l’orbita attuale della vostra nave spaziale (linea verde continua) si avvicinerà all’HTO. L’accensione è terminata quando l’orbita della vostra nave spaziale coincide con l’HTO e Dv ha raggiunto zero. Dopo l’accensione l’HTO dovrebbe essere spento, in modo che i parametri di intercettazione siano visualizzati per l’attuale orbita di trasferimento. Calcolo della traiettoria numerica per più oggetti
L’orbita di origine, quella obiettivo e quella di trasferimento discusse finora analizzano le soluzione per un problema a 2 corpi. Tranfer MFD supporta anche un calcolo numerico della traiettoria, per tenere conto dell’effetto di più sorgenti gravitazionali. Il display della traiettoria numerica si attiva premendo SHIFT_M. La traiettoria è visualizzata come una linea gialla continua brillante. Il calcolo è eseguito in passi temporali, partendo dall’attuale posizione di origine, o (se attivato) dal punto di accensione indicato dall’HTO. Dato che il calcolo della traiettoria può essere lungo, non è automaticamente aggiornato, ma si può ricominciare premendo SHIFT_U. L’intervallo tra i passi temporali è automaticamente modificato per fornire una certa accuratezza. Il numero dei passi temporali, così come la lunghezza della traiettoria possono essere selezionati con il tasto SHIFT_Z. Il numero dei passi temporali e l’intervallo di tempo totale coperto dalla traiettoria sono visualizzati sotto la voce “Num orbit” nell’MFD. Trasferimenti interplanetari
Usare Transfer MFD per raggiungere l’orbita della Luna da quella della Terra dovrebbe essere semplice. Per i trasferimenti interplanetari (ad esempio dalla Terra a Marte) sono necessari alcuni accorgimenti:
- Per i trasferimenti interplanetari il riferimento dovrebbe essere il Sole, e l’origine dovrebbe essere il pianeta attualmente orbitato. Questo perché l’orbita della vostra nave spaziale con origine il Sole sarebbe notevolmente distorta dalla gravità del pianeta.
- La nave spaziale dovrebbe essere in un orbita con zero inclinazione rispetto all’eclittica prima dell’accensione. L’inclinazione relativa tra orbite di origine e obiettivo non può essere modificata tra diversi pianeti, quindi bisogna tenere l’eclittica come inclinazione di riferimento, perché questa è pressappoco il piano su cui si muovono le orbite di tutti i pianeti.
- L’accensione di trasferimento dovrebbe essere effettuata con il Sole in opposizione (dalla parte del pianeta di origine non esposta al Sole) in modo che la velocità orbitale della nave spaziale si aggiunga alla velocità orbitale del pianeta. Questo è il caso in cui l’indicatore di direzione nave spaziale – origine è puntato lontano dal Sole.
- Immediatamente prima dell’accensione impostare l’orbita di origine sulla vostra nave spaziale, in modo che Dv (il cambiamento di velocità) possa essere stimato accuratamente.
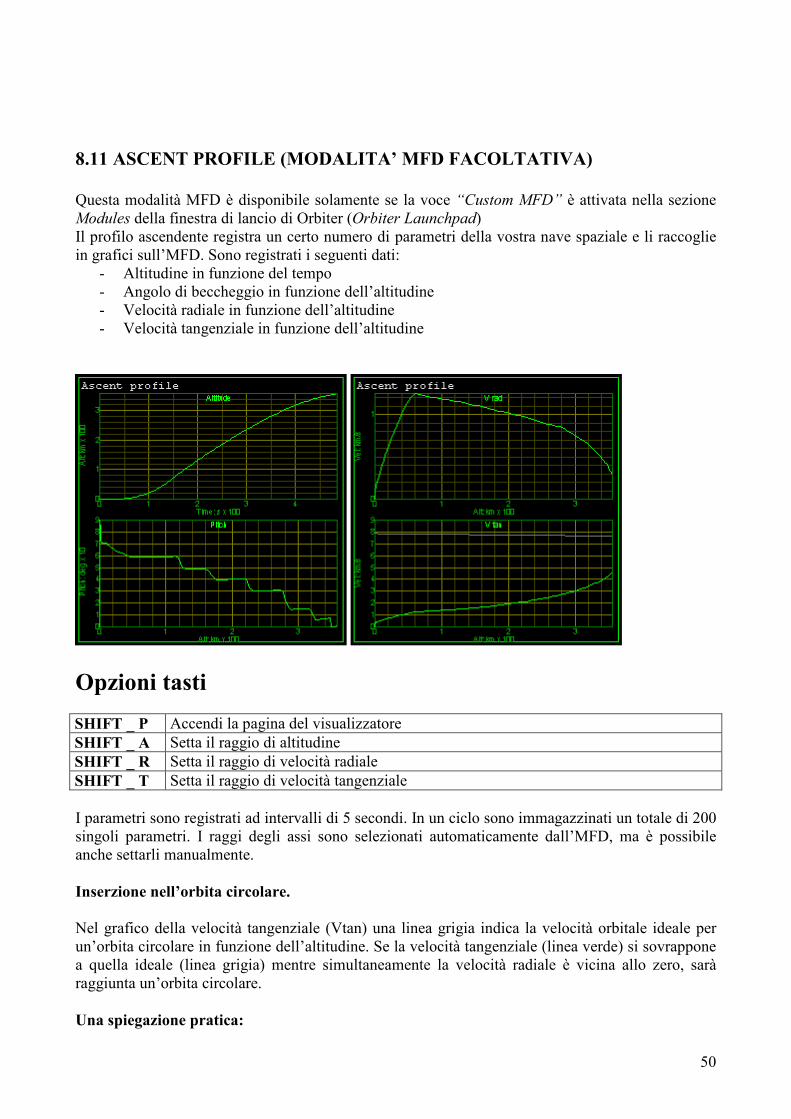
50
8.11 ASCENT PROFILE (MODALITA’ MFD FACOLTATIVA)
Questa modalità MFD è disponibile solamente se la voce “Custom MFD” è attivata nella sezione Modules della finestra di lancio di Orbiter (Orbiter Launchpad) Il profilo ascendente registra un certo numero di parametri della vostra nave spaziale e li raccoglie in grafici sull’MFD. Sono registrati i seguenti dati:
- Altitudine in funzione del tempo - Angolo di beccheggio in funzione dell’altitudine - Velocità radiale in funzione dell’altitudine - Velocità tangenziale in funzione dell’altitudine
Opzioni tasti SHIFT _ P Accendi la pagina del visualizzatore SHIFT _ A Setta il raggio di altitudine SHIFT _ R Setta il raggio di velocità radiale SHIFT _ T Setta il raggio di velocità tangenziale I parametri sono registrati ad intervalli di 5 secondi. In un ciclo sono immagazzinati un totale di 200 singoli parametri. I raggi degli assi sono selezionati automaticamente dall’MFD, ma è possibile anche settarli manualmente. Inserzione nell’orbita circolare.
Nel grafico della velocità tangenziale (Vtan) una linea grigia indica la velocità orbitale ideale per un’orbita circolare in funzione dell’altitudine. Se la velocità tangenziale (linea verde) si sovrappone a quella ideale (linea grigia) mentre simultaneamente la velocità radiale è vicina allo zero, sarà raggiunta un’orbita circolare. Una spiegazione pratica:
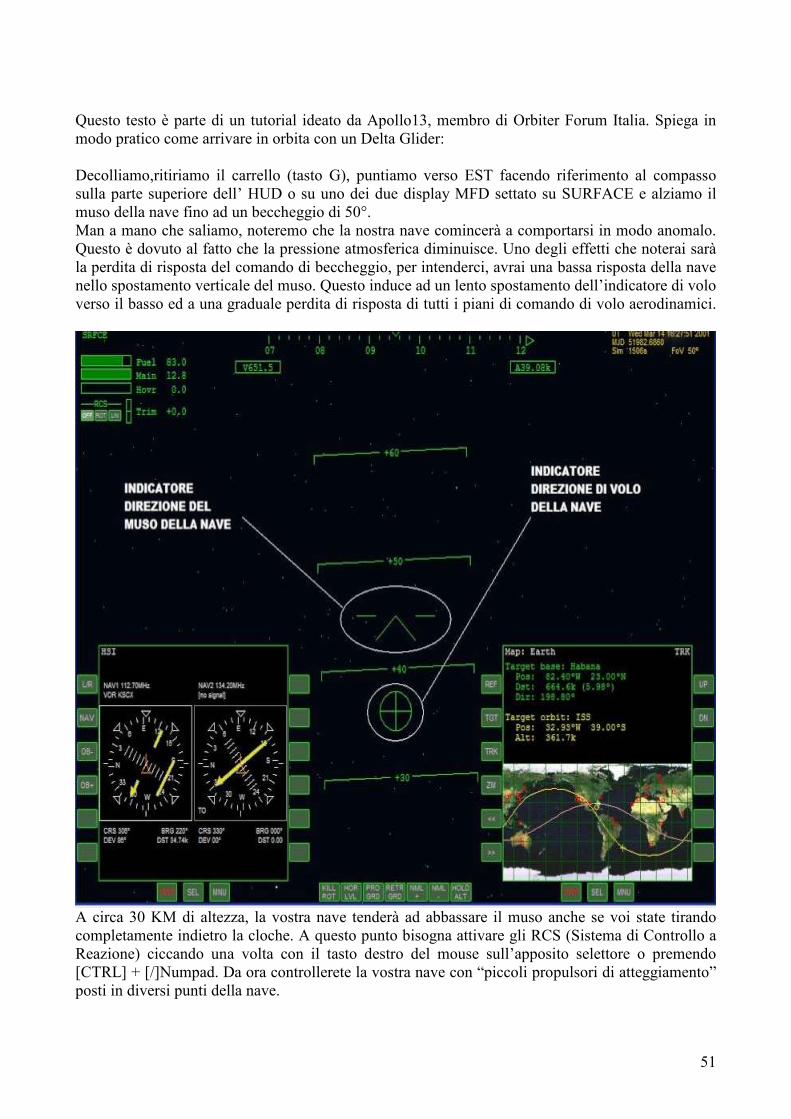
51
Questo testo è parte di un tutorial ideato da Apollo13, membro di Orbiter Forum Italia. Spiega in modo pratico come arrivare in orbita con un Delta Glider:
Decolliamo,ritiriamo il carrello (tasto G), puntiamo verso EST facendo riferimento al compasso sulla parte superiore dell’ HUD o su uno dei due display MFD settato su SURFACE e alziamo il muso della nave fino ad un beccheggio di 50°. Man a mano che saliamo, noteremo che la nostra nave comincerà a comportarsi in modo anomalo. Questo è dovuto al fatto che la pressione atmosferica diminuisce. Uno degli effetti che noterai sarà la perdita di risposta del comando di beccheggio, per intenderci, avrai una bassa risposta della nave nello spostamento verticale del muso. Questo induce ad un lento spostamento dell’indicatore di volo verso il basso ed a una graduale perdita di risposta di tutti i piani di comando di volo aerodinamici.
A circa 30 KM di altezza, la vostra nave tenderà ad abbassare il muso anche se voi state tirando completamente indietro la cloche. A questo punto bisogna attivare gli RCS (Sistema di Controllo a Reazione) ciccando una volta con il tasto destro del mouse sull’apposito selettore o premendo [CTRL] + [/]Numpad. Da ora controllerete la vostra nave con “piccoli propulsori di atteggiamento” posti in diversi punti della nave.
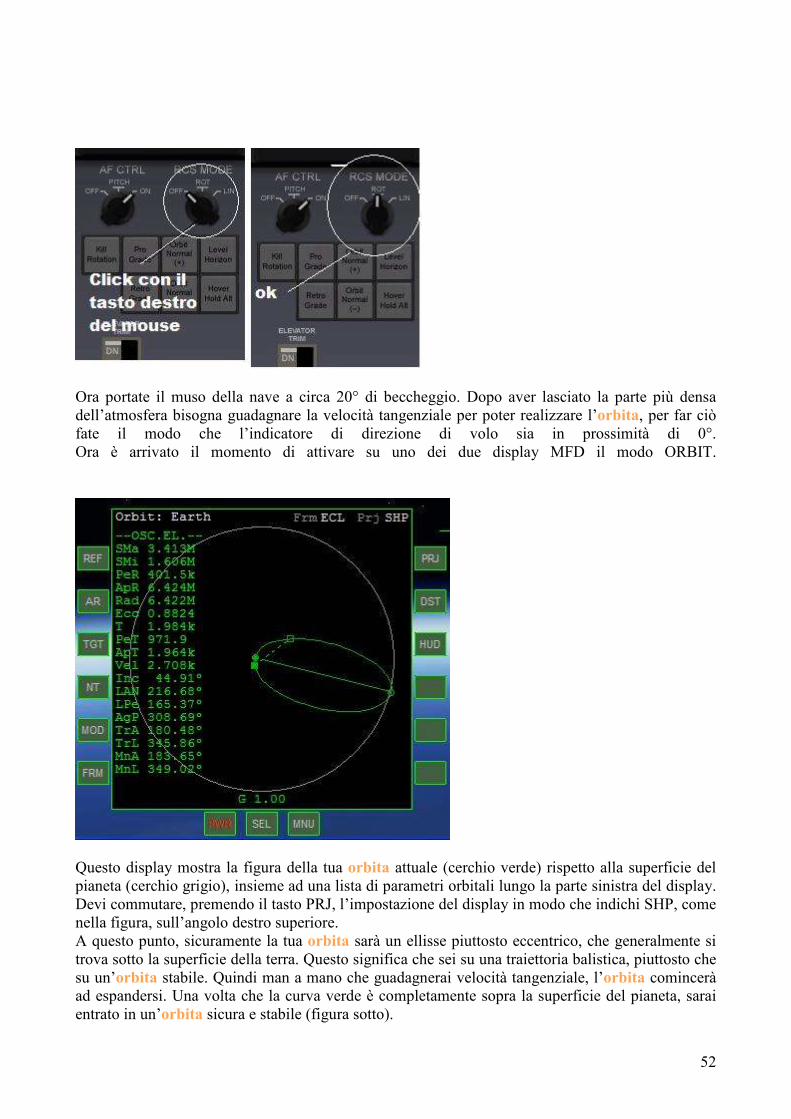
52
Ora portate il muso della nave a circa 20° di beccheggio. Dopo aver lasciato la parte più densa dell’atmosfera bisogna guadagnare la velocità tangenziale per poter realizzare l’orbita, per far ciò fate il modo che l’indicatore di direzione di volo sia in prossimità di 0°. Ora è arrivato il momento di attivare su uno dei due display MFD il modo ORBIT.
Questo display mostra la figura della tua orbita attuale (cerchio verde) rispetto alla superficie del pianeta (cerchio grigio), insieme ad una lista di parametri orbitali lungo la parte sinistra del display. Devi commutare, premendo il tasto PRJ, l’impostazione del display in modo che indichi SHP, come nella figura, sull’angolo destro superiore. A questo punto, sicuramente la tua orbita sarà un ellisse piuttosto eccentrico, che generalmente si trova sotto la superficie della terra. Questo significa che sei su una traiettoria balistica, piuttosto che su un’orbita stabile. Quindi man a mano che guadagnerai velocità tangenziale, l’orbita comincerà ad espandersi. Una volta che la curva verde è completamente sopra la superficie del pianeta, sarai entrato in un’orbita sicura e stabile (figura sotto).
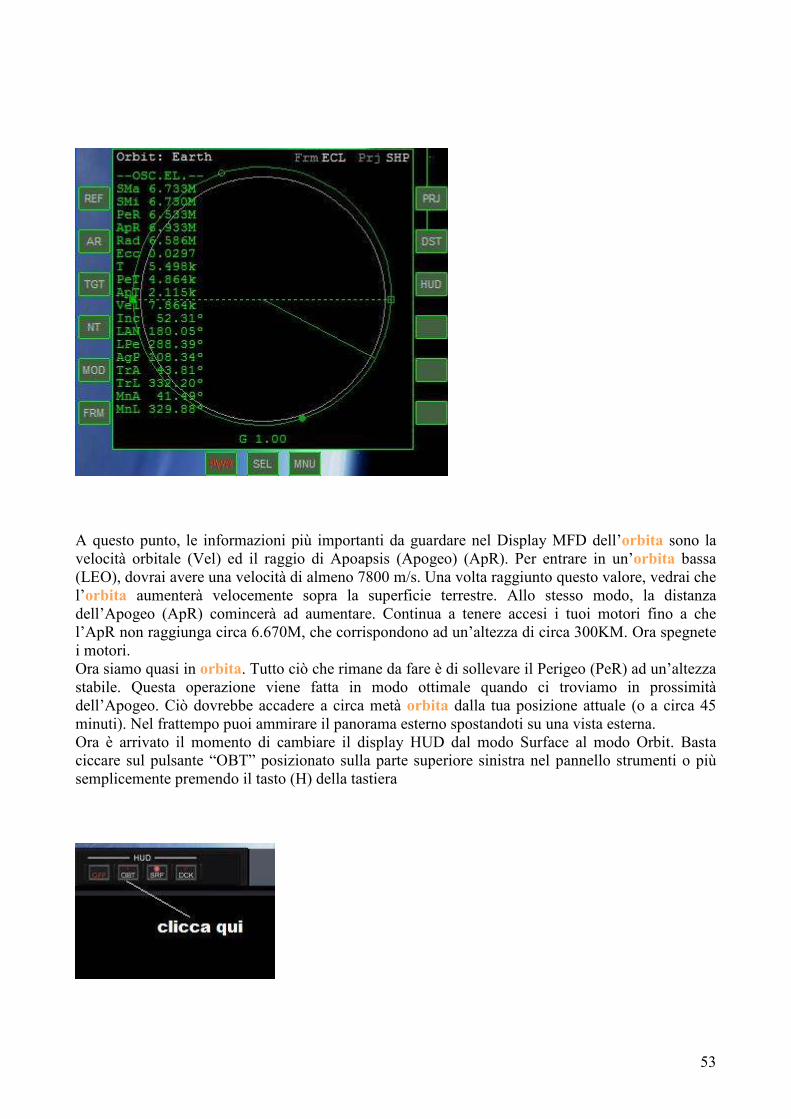
53
A questo punto, le informazioni più importanti da guardare nel Display MFD dell’orbita sono la velocità orbitale (Vel) ed il raggio di Apoapsis (Apogeo) (ApR). Per entrare in un’orbita bassa (LEO), dovrai avere una velocità di almeno 7800 m/s. Una volta raggiunto questo valore, vedrai che l’orbita aumenterà velocemente sopra la superficie terrestre. Allo stesso modo, la distanza dell’Apogeo (ApR) comincerà ad aumentare. Continua a tenere accesi i tuoi motori fino a che l’ApR non raggiunga circa 6.670M, che corrispondono ad un’altezza di circa 300KM. Ora spegnete i motori. Ora siamo quasi in orbita. Tutto ciò che rimane da fare è di sollevare il Perigeo (PeR) ad un’altezza stabile. Questa operazione viene fatta in modo ottimale quando ci troviamo in prossimità dell’Apogeo. Ciò dovrebbe accadere a circa metà orbita dalla tua posizione attuale (o a circa 45 minuti). Nel frattempo puoi ammirare il panorama esterno spostandoti su una vista esterna. Ora è arrivato il momento di cambiare il display HUD dal modo Surface al modo Orbit. Basta ciccare sul pulsante “OBT” posizionato sulla parte superiore sinistra nel pannello strumenti o più semplicemente premendo il tasto (H) della tastiera
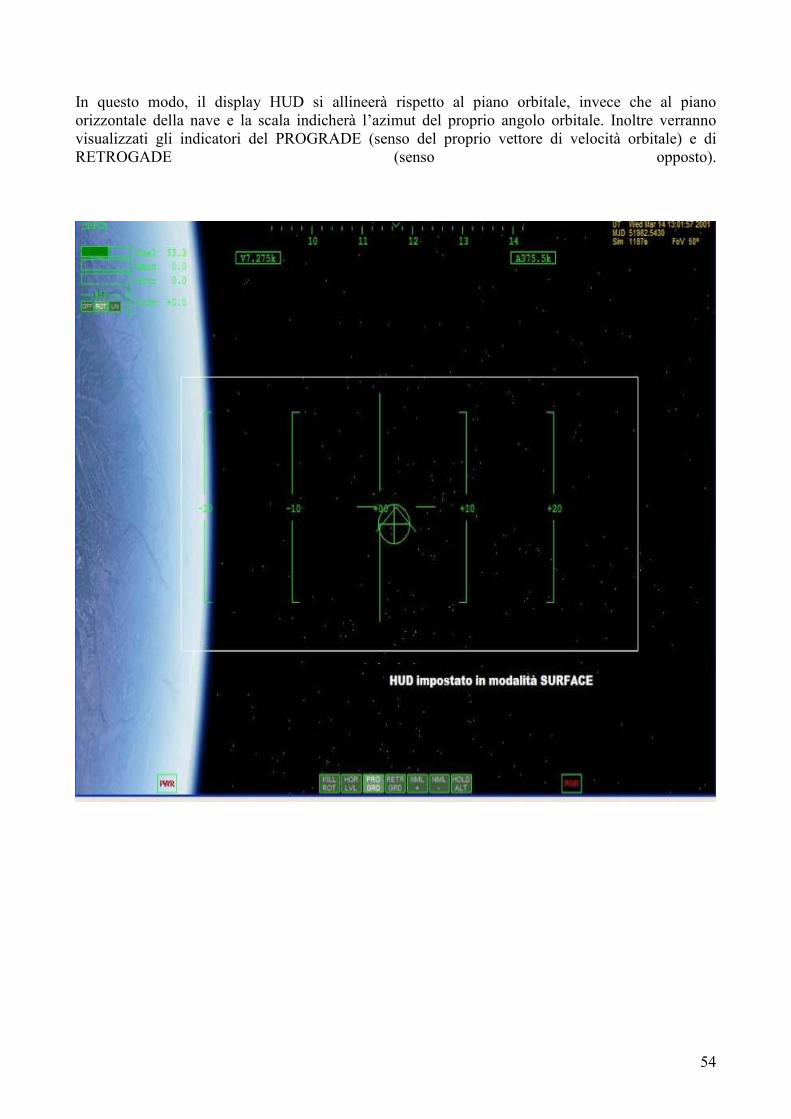
54
In questo modo, il display HUD si allineerà rispetto al piano orbitale, invece che al piano orizzontale della nave e la scala indicherà l’azimut del proprio angolo orbitale. Inoltre verranno visualizzati gli indicatori del PROGRADE (senso del proprio vettore di velocità orbitale) e di RETROGADE (senso opposto).
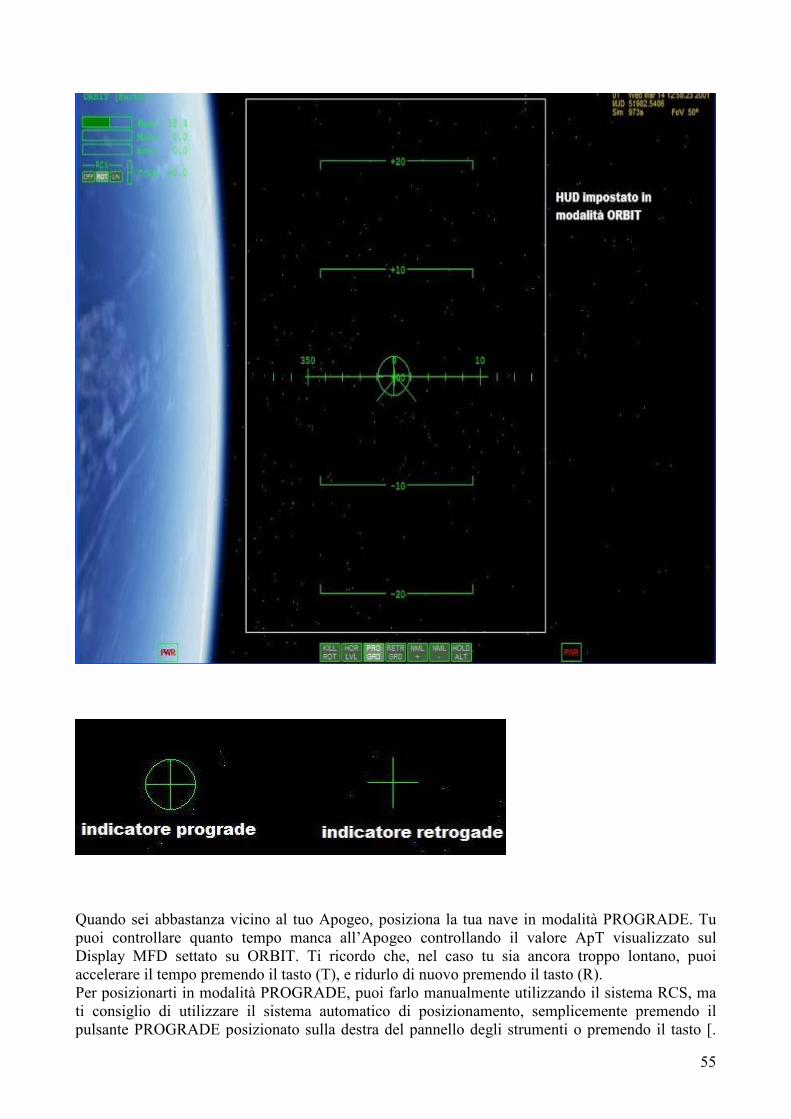
55
Quando sei abbastanza vicino al tuo Apogeo, posiziona la tua nave in modalità PROGRADE. Tu puoi controllare quanto tempo manca all’Apogeo controllando il valore ApT visualizzato sul Display MFD settato su ORBIT. Ti ricordo che, nel caso tu sia ancora troppo lontano, puoi accelerare il tempo premendo il tasto (T), e ridurlo di nuovo premendo il tasto (R). Per posizionarti in modalità PROGRADE, puoi farlo manualmente utilizzando il sistema RCS, ma ti consiglio di utilizzare il sistema automatico di posizionamento, semplicemente premendo il pulsante PROGRADE posizionato sulla destra del pannello degli strumenti o premendo il tasto [.
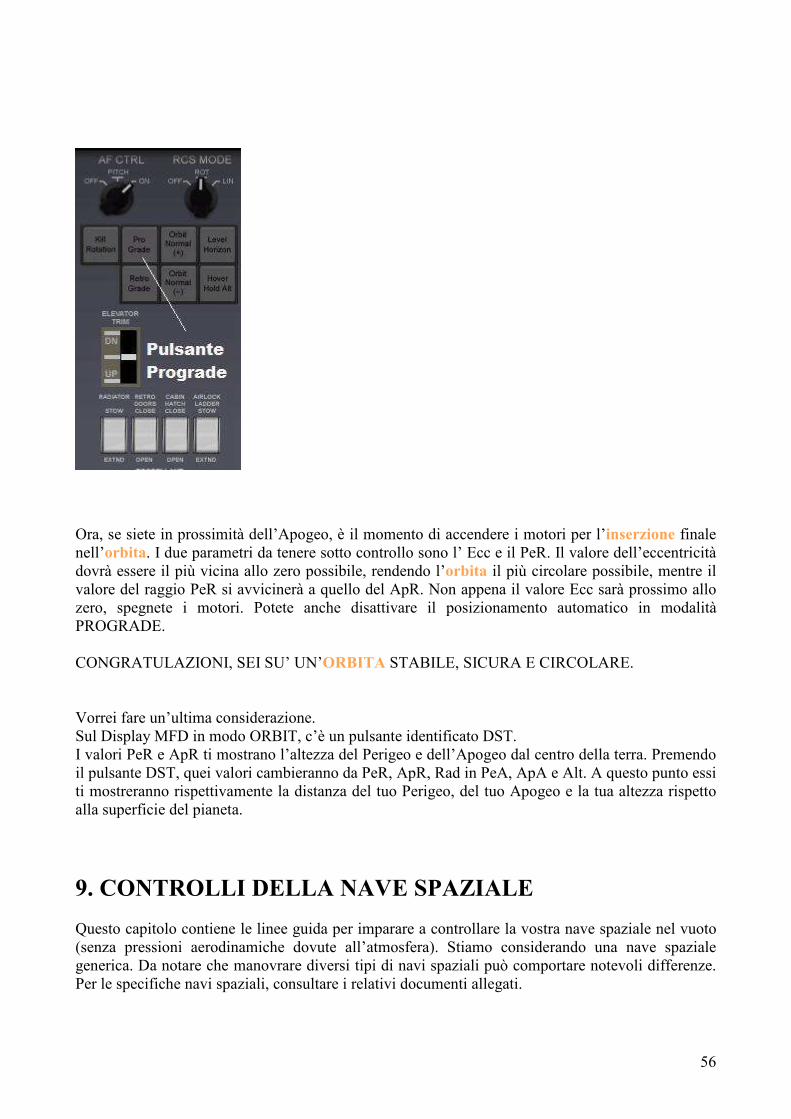
56
Ora, se siete in prossimità dell’Apogeo, è il momento di accendere i motori per l’inserzione finale nell’orbita. I due parametri da tenere sotto controllo sono l’ Ecc e il PeR. Il valore dell’eccentricità dovrà essere il più vicina allo zero possibile, rendendo l’orbita il più circolare possibile, mentre il valore del raggio PeR si avvicinerà a quello del ApR. Non appena il valore Ecc sarà prossimo allo zero, spegnete i motori. Potete anche disattivare il posizionamento automatico in modalità PROGRADE. CONGRATULAZIONI, SEI SU’ UN’ORBITA STABILE, SICURA E CIRCOLARE. Vorrei fare un’ultima considerazione. Sul Display MFD in modo ORBIT, c’è un pulsante identificato DST. I valori PeR e ApR ti mostrano l’altezza del Perigeo e dell’Apogeo dal centro della terra. Premendo il pulsante DST, quei valori cambieranno da PeR, ApR, Rad in PeA, ApA e Alt. A questo punto essi ti mostreranno rispettivamente la distanza del tuo Perigeo, del tuo Apogeo e la tua altezza rispetto alla superficie del pianeta.
9. CONTROLLI DELLA NAVE SPAZIALE Questo capitolo contiene le linee guida per imparare a controllare la vostra nave spaziale nel vuoto (senza pressioni aerodinamiche dovute all’atmosfera). Stiamo considerando una nave spaziale generica. Da notare che manovrare diversi tipi di navi spaziali può comportare notevoli differenze. Per le specifiche navi spaziali, consultare i relativi documenti allegati.
57
9.1 MOTORI PRINCIPALI, MOTORI POSTERIORI E MOTORI DI
LEVITAZIONE
I motori principali accelerano la nave spaziale in avanti, i motori posteriori la accelerano indietro. La spinta dei motori principali e dei motori posteriori può essere modificata premendo il tasto CTRL _+ (NUMPAD) (per aumentare la spinta principale o diminuire la spinta posteriore) e CTRL _- (NUMPAD) (per diminuire la spinta principale e aumentare quella posteriore). Entrambe le spinte possono essere azzerate premendo CTRL _ = La spinta massima principale può essere attivata temporaneamente premendo + (NUMPAD) e la spinta massima posteriore può essere temporaneamente attivata premendo – (NUMPAD) Se disponibili, il tasto scorrevole di spinta sul joystick può essere usato per settare la spinta. L’accelerazione della nave spaziale a motori accesi dipende dalla forza F prodotta dal motore e dalla massa totale della nave spaziale, secondo questa formula: F = ma Da notare che sia a che F sono vettori, cioè hanno una direzione e una magnitudine. Uno dei concetti più importanti del volo nello spazio vuoto è che se un motore imprime una certa velocità ad una nave spaziale (ed in assenza di campi gravitazionali) essa manterrà quella velocità all’infinito finché uno dei motori sarà acceso o interviene un’altra forza. Quando un motore è acceso, la velocità dell’astronave cambierà secondo questa formula Dv(t) / dt = a(t) Da notare che se un motore rimane acceso fornendo sempre la stessa spinta, l’accelerazione della nave spaziale aumenterà con il passare del tempo, perché il carburante che via via si consuma fa progressivamente diminuire la massa totale della nave spaziale. I motori di levitazione, se disponibili, sono di solito montati sotto la fusoliera della nave spaziale per fornire una spinta verso l’alto. Premendo il tasto 0 (NUMPAD) si aumenta la spinta dei motori di levitazione, premendo . (NUMPAD) la si diminuisce. I motori di levitazione sono utili per compensare la forza gravitazionale di un pianeta (di solito senza atmosfera) per un volo di superficie in cui si vuole sempre mantenere la stessa altitudine. L’attuale spinta dei motori principali/posteriori ed il loro stato è visualizzato nella parte a sinistra in alto dell’HUD, nella vista cabina generica. La barra di indicazione è verde se la spinta è fornita dai motori principali, gialla se fornita dai motori posteriori. E’ anche visualizzato lo stato dei motori di levitazione, se disponibili. Il valore numerico vicino alle barre è in m/s^2, l’unità di misura dell’accelerazione. Le navi spaziali forniti di un proprio pannello strumenti personalizzato hanno di solito i loro indicatori specifici per la visualizzazione dello stato dei motori. Le navi spaziali dotate di ali che si muovono nei limiti di un’atmosfera planetaria di solito non richiedono i motori di levitazione, eccetto per il decollo e l’atterraggio verticale. Siccome le ali producono una forza verso l’alto chiamata portanza, se la nave spaziale si muove con sufficiente velocità nell’aria la spinta dei motori di levitazione a quel punto non diventa più necessaria. Se la velocità nell’aria sarà sotto un certo limite, detta velocità di stallo, la nave spaziale rimarrà priva della portanza e tenderà a precipitare al suolo.

58
La spinta massima di tutti i motori nel vuoto , come l’attuale massa della nave spaziale, sono visualizzati nella finestra informativa (CTRL_I). I valori sono in Newton (1 N = 1 kg m s^2). Da notare che i valori di spinta possono essere nella realtà più bassi quando si vola nell’atmosfera, a causa della resistenza aerodinamica che questa crea sulla nave spaziale.
9.2 PROPULSORI D'ASSETTO I propulsori d'assetto sono piccoli motori che sono impegnati in coppia per consentire la rotazione o la traslazione del veicolo spaziale. In modalità di rotazione, i propulsori sono accesi a coppie incrociate ed opposte per produrre un momento di rotazione (ad esempio, anteriore destro e posteriore sinistro per ruotare a sinistra). In modalità di traslazione, i propulsori sono accesi a coppie parallele per produrre un momento lineare (ad esempio anteriore destra e posteriore destra per muoversi verso sinistra). La modalità attuale dei motori d'assetto è indicata in alto a sinistra della HUD (Att ROT e Att LIN) e può essere attivata con / (numpad) I propulsori Attitude sono controllati con il joystick o la tastiera. In modalità di rotazione: Rotazione: Imbardata Rotazione: Beccheggio Rotazione: Rollio
Controllo del Timone via Joystick Joystick avanti/indietro Joystick sinistra/destra oppure Joystick a sinistra/destra + tasto 2 Figura 22: propulsori d'assetto in modalità rotazione
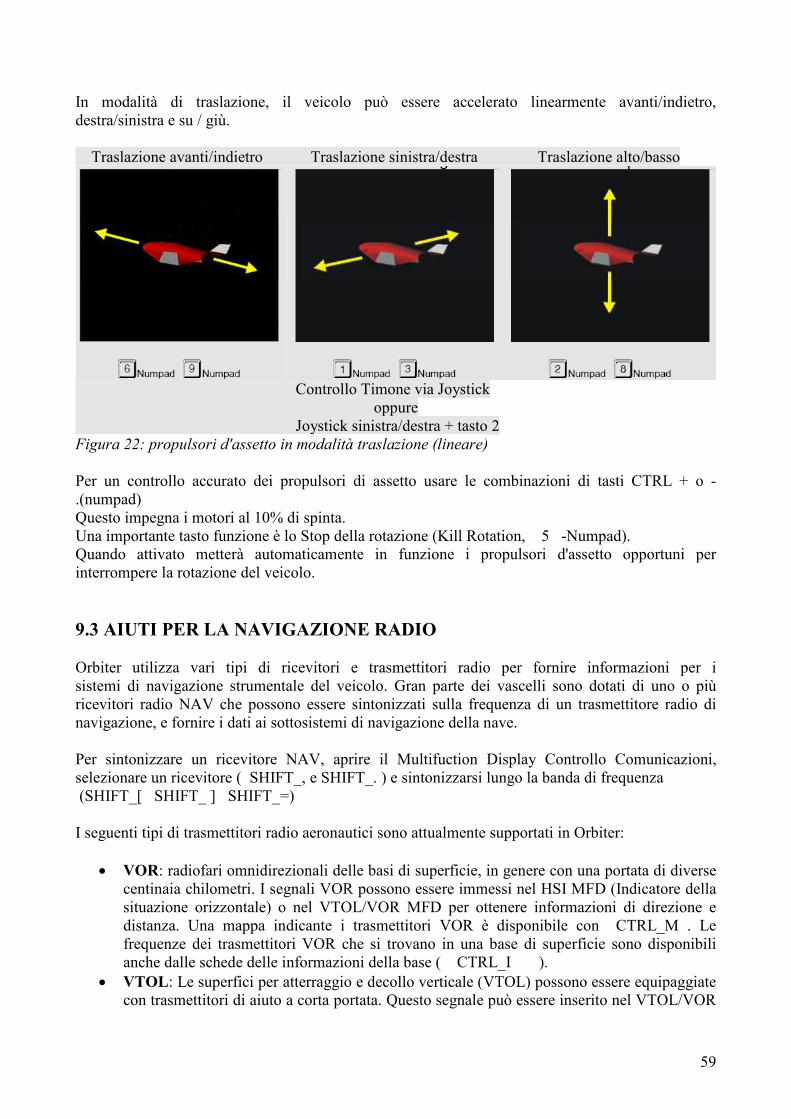
59
In modalità di traslazione, il veicolo può essere accelerato linearmente avanti/indietro, destra/sinistra e su / giù.
Traslazione avanti/indietro Traslazione sinistra/destra Traslazione alto/basso
Controllo Timone via Joystick oppure Joystick sinistra/destra + tasto 2 Figura 22: propulsori d'assetto in modalità traslazione (lineare)
Per un controllo accurato dei propulsori di assetto usare le combinazioni di tasti CTRL + o -.(numpad) Questo impegna i motori al 10% di spinta. Una importante tasto funzione è lo Stop della rotazione (Kill Rotation, 5 -Numpad). Quando attivato metterà automaticamente in funzione i propulsori d'assetto opportuni per interrompere la rotazione del veicolo. 9.3 AIUTI PER LA NAVIGAZIONE RADIO Orbiter utilizza vari tipi di ricevitori e trasmettitori radio per fornire informazioni per i sistemi di navigazione strumentale del veicolo. Gran parte dei vascelli sono dotati di uno o più ricevitori radio NAV che possono essere sintonizzati sulla frequenza di un trasmettitore radio di navigazione, e fornire i dati ai sottosistemi di navigazione della nave. Per sintonizzare un ricevitore NAV, aprire il Multifuction Display Controllo Comunicazioni, selezionare un ricevitore ( SHIFT_, e SHIFT_. ) e sintonizzarsi lungo la banda di frequenza (SHIFT_[ SHIFT_ ] SHIFT_=) I seguenti tipi di trasmettitori radio aeronautici sono attualmente supportati in Orbiter:
• VOR: radiofari omnidirezionali delle basi di superficie, in genere con una portata di diverse centinaia chilometri. I segnali VOR possono essere immessi nel HSI MFD (Indicatore della situazione orizzontale) o nel VTOL/VOR MFD per ottenere informazioni di direzione e distanza. Una mappa indicante i trasmettitori VOR è disponibile con CTRL_M . Le frequenze dei trasmettitori VOR che si trovano in una base di superficie sono disponibili anche dalle schede delle informazioni della base ( CTRL_I ).
• VTOL: Le superfici per atterraggio e decollo verticale (VTOL) possono essere equipaggiate con trasmettitori di aiuto a corta portata. Questo segnale può essere inserito nel VTOL/VOR
60
MFD per ottenere informazioni sull'allineamento dell'atterraggio. Un elenco di trasmettitori disponibili VTOL può essere ottenuta dalle schede delle informazioni delle basi ( )
• ILS : Molte piste sono dotate del Sistema di Atterraggio Strumentale (ILS) in grado di fornire informazioni sulla rotta e sulla planata. Le informazioni ILS vengono usate dal HSI MFD. Le frequenze ILS sono disponibili dalla lista delle piste nelle schede delle informazioni delle basi.
• XPDR : Alcuni veicoli spaziali e le stazioni orbitali sono dotate di transponder per l'identificazione e l'attracco a lungo raggio. Un segnale XPDR può essere inviato al Docking MFD per ottenere informazioni di distanza e velocità di avvicinamento. E' riconosciuto anche in modalità HUD Docking, che visualizzerà un rettangolo di destinazione, indicatore di velocità e distanza. L'HUD Docking può essere asservito ad un ricevitore con NAV con . Le frequenze XPDR possono essere ottenute dalle schede delle informazioni dei vascelli ( CTRL_I )
• IDS : Sistema di attracco strumentale. La maggior parte delle stazioni spaziali e alcuni veicoli spaziali forniscono segnali di approccio a corto raggio per le loro porte di attracco (intervallo tipico di 10 km). Questo segnale può essere inviato al Docking MFD per ottenere le informazioni di allineamento durante l'aggancio. Può anche essere inviato al Docking HUD per visualizzare il percorso di approccio come una serie di rettangoli. Le frequenze IDS sono disponibili dalla scheda informazioni della nave ( CTRL_I )
Per sapere come impostare i trasmettitori XPDR e IDS tramite gli script di configurazione (file .cfg) visualizzare il documento 3DModel.
10. MANOVRE DI VOLO BASILARI Le seguenti tecniche di volo sono per lo più una mia invenzione. Sembrano plausibili, ma non essendo un esperto di volo spaziale (pur essendo un appassionato dilettante) possono essere inefficienti o chiaramente sbagliate. Correzioni e suggerimenti sono sempre benvenuti. 10.1 VOLO DI SUPERFICIE
Con volo di superficie intendo traiettorie di volo nei pressi di una superficie planetaria, che non sono effettivamente orbite, cioè quando il campo gravitazionale del pianeta deve essere contrastato mediante l'applicazione di un vettore di accelerazione, piuttosto che la situazione di caduta libera di un orbita. Trasferimenti Superficie-superficie (da un base di superficie ad un altra) comprendono di norma il volo di superficie.
Se il pianeta non ha atmosfera
In questo caso le uniche forze che agiscono sulla nave sono il campo gravitazionale del pianeta e qualsiasi vettore di spinta si applica. Più in particolare, non c'è attrito atmosferico per ridurre la "velocità" della nave. Ciò causa un modello di volo piuttosto diverso da un aereo normale. La strategia più semplice per il volo di superficie, anche se probabilmente non la più efficace, è:
• Usa i propulsori di levitazione per bilanciare l'accelerazione di gravità (può essere fatto automaticamente con la modalità di navigazione "Hold altitude”). Questo significa anche che il velivolo dovrebbe essere mantenuto a livello con l'orizzonte.
• Naviga con brevi accensioni del propulsore principale. • Al alta velocità orizzontale la traiettoria di volo può trasformarsi in una traiettoria
orbitale. In tal caso la potenza dei propulsori di levitazione deve essere ridotta per
61
mantenere l'altitudine. Nel caso estremo di velocità orizzontale superiore alla velocità orbitale di un'orbita circolare a quota zero, il velivolo guadagnerà quota anche con i propulsori di levitazione disinseriti. Ciò significa che vi siete inseriti in un'orbita ellittica al perigeo.
Se il pianeta ha un'atmosfera
Quando si vola attraverso un atmosfera, il modello di volo sarà simile a un aereo, in particolare se la vostra nave è essenzialmente un aereo, cioè ha profili che producono un vettore ascensionale in funzione della velocità. Come nel caso di un aereo, è necessario applicare una spinta continua per contrastare l'attrito atmosferico e mantenere una velocità costante. Se la tua nave riceve una spinta ascensionale, i propulsori di levitazione non sono necessari a meno che non si scenda di velocità al di sotto della velocità di stallo (es. durante l'atterraggio e il decollo verticali). Se la tua nave non genera un vettore ascensionale, si dovranno utilizzare i propulsori di levitazione, o la nave deve essere inclinato in modo tale che i propulsori principali forniscano una componente verticale per contrastare il campo gravitazionale. Si noti che la "spinta ascensionale", prodotta dai propulsori di levitazione è indipendente dalla velocità.
10.2 LANCIO IN ORBITA
Il lancio da una superficie planetaria e l'entrata in un'orbita bassa è uno dei più elementari problemi del volo spaziale. Durante la prima parte del lancio della nave si devono applicare una spinta verticale atta a superare il campo gravitazionale e acquisire altitudine. Come la nave si avvicina la desiderata di altitudine, l'inclinazione è ridotta per aumentare la componente orizzontale di accelerazione, in modo per raggiungere la velocità orbitale. Un'orbita stabile è raggiunta quando la distanza perigeo è sufficientemente al di sopra della superficie del pianeta in modo che l'attrito atmosferico può essere trascurato. Le orbite di solito dovrebbero essere “prograde” cioè ruotare nella stessa direzione della superficie del pianeta, per sfruttare il vettore iniziale di velocità fornita dal pianeta. (questo significa che sulla Terra i razzi dovrebbero essere lanciati verso est). Questo significa anche che i siti di lancio vicino all'equatore sono più efficienti perché forniscono una velocità iniziale maggiore. In pratica:
• (Ciò presuppone che la nave è inizialmente posta sulla superficie terrestre). • Settare l'HUD in modalità di superficie. Attivare Surface MFD e Orbit MFD. • Accendere i propulsori di levitazione ad almeno 10m/s2. • Appena distanti dalla superficie, girare verso est (90 ° sull'indicatore bussola dell'HUD). • Alzare il muso cabrando a 70°, e allo stesso tempo attivare a piena potenza i propulsori
principali. • A mano a mano che aumenta la velocità nell'aria, portate lentamente i propulsori di
levitazione a zero. • A mano a mano che si guadagna quota, lentamente ridurre l'angolo di cabrata (ad esempio
60° a 20 km, 50° a 50 km, 40 ° a 80 km, ecc) • Quando l'altitudine desiderata viene raggiunta (ad esempio 200 km), la velocità verticale e
l'accelerazione dovrebbero scendere a zero. (riducendo l'angolo di cabrata, non spegnendo i propulsori).
• L'angolo di cabrata può ancora essere > 0 perché una parte della spinta del vettore è tenuta a contrastare la gravitazione fino a quando la piena velocità orbitale viene raggiunto.
• Con l'aumento della velocità tangenziale, l'angolo di cabrata deve essere ridotto fino a mantenere la quota costante.
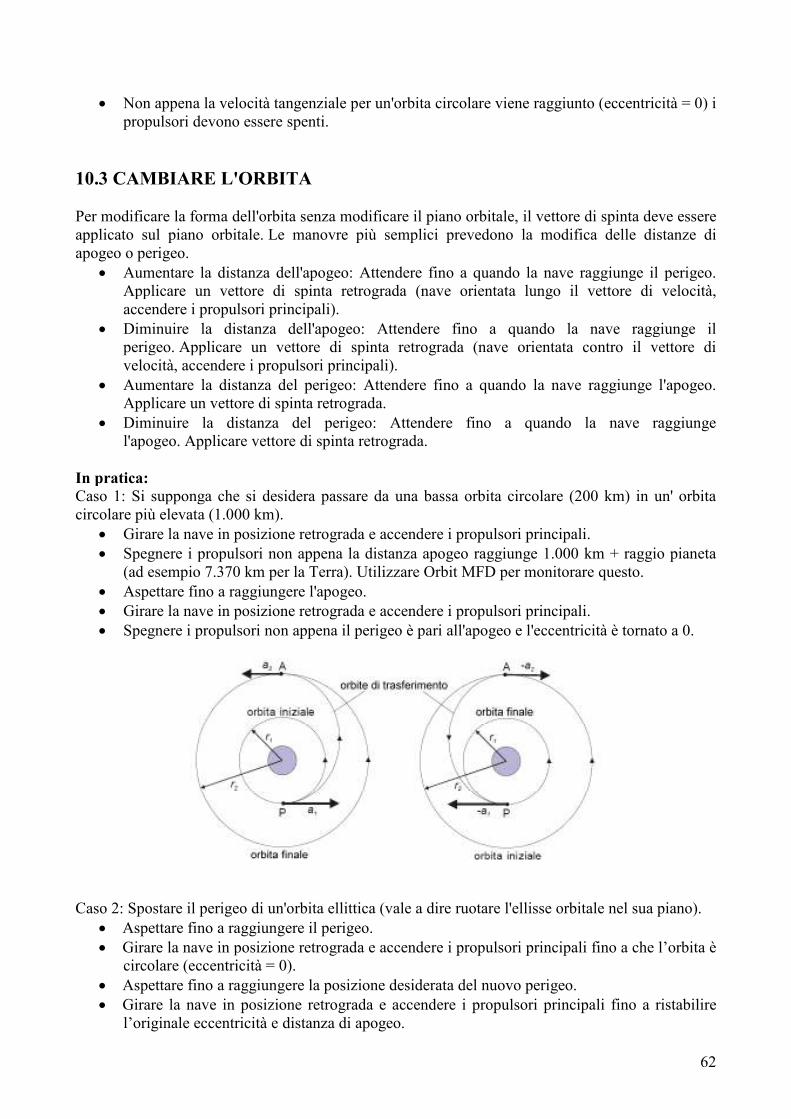
62
• Non appena la velocità tangenziale per un'orbita circolare viene raggiunto (eccentricità = 0) i propulsori devono essere spenti.
10.3 CAMBIARE L'ORBITA
Per modificare la forma dell'orbita senza modificare il piano orbitale, il vettore di spinta deve essere applicato sul piano orbitale. Le manovre più semplici prevedono la modifica delle distanze di apogeo o perigeo.
• Aumentare la distanza dell'apogeo: Attendere fino a quando la nave raggiunge il perigeo. Applicare un vettore di spinta retrograda (nave orientata lungo il vettore di velocità, accendere i propulsori principali).
• Diminuire la distanza dell'apogeo: Attendere fino a quando la nave raggiunge il perigeo. Applicare un vettore di spinta retrograda (nave orientata contro il vettore di velocità, accendere i propulsori principali).
• Aumentare la distanza del perigeo: Attendere fino a quando la nave raggiunge l'apogeo. Applicare un vettore di spinta retrograda.
• Diminuire la distanza del perigeo: Attendere fino a quando la nave raggiunge l'apogeo. Applicare vettore di spinta retrograda.
In pratica:
Caso 1: Si supponga che si desidera passare da una bassa orbita circolare (200 km) in un' orbita circolare più elevata (1.000 km).
• Girare la nave in posizione retrograda e accendere i propulsori principali. • Spegnere i propulsori non appena la distanza apogeo raggiunge 1.000 km + raggio pianeta
(ad esempio 7.370 km per la Terra). Utilizzare Orbit MFD per monitorare questo. • Aspettare fino a raggiungere l'apogeo. • Girare la nave in posizione retrograda e accendere i propulsori principali. • Spegnere i propulsori non appena il perigeo è pari all'apogeo e l'eccentricità è tornato a 0.
Caso 2: Spostare il perigeo di un'orbita ellittica (vale a dire ruotare l'ellisse orbitale nel sua piano).
• Aspettare fino a raggiungere il perigeo. • Girare la nave in posizione retrograda e accendere i propulsori principali fino a che l’orbita è
circolare (eccentricità = 0). • Aspettare fino a raggiungere la posizione desiderata del nuovo perigeo. • Girare la nave in posizione retrograda e accendere i propulsori principali fino a ristabilire
l’originale eccentricità e distanza di apogeo.
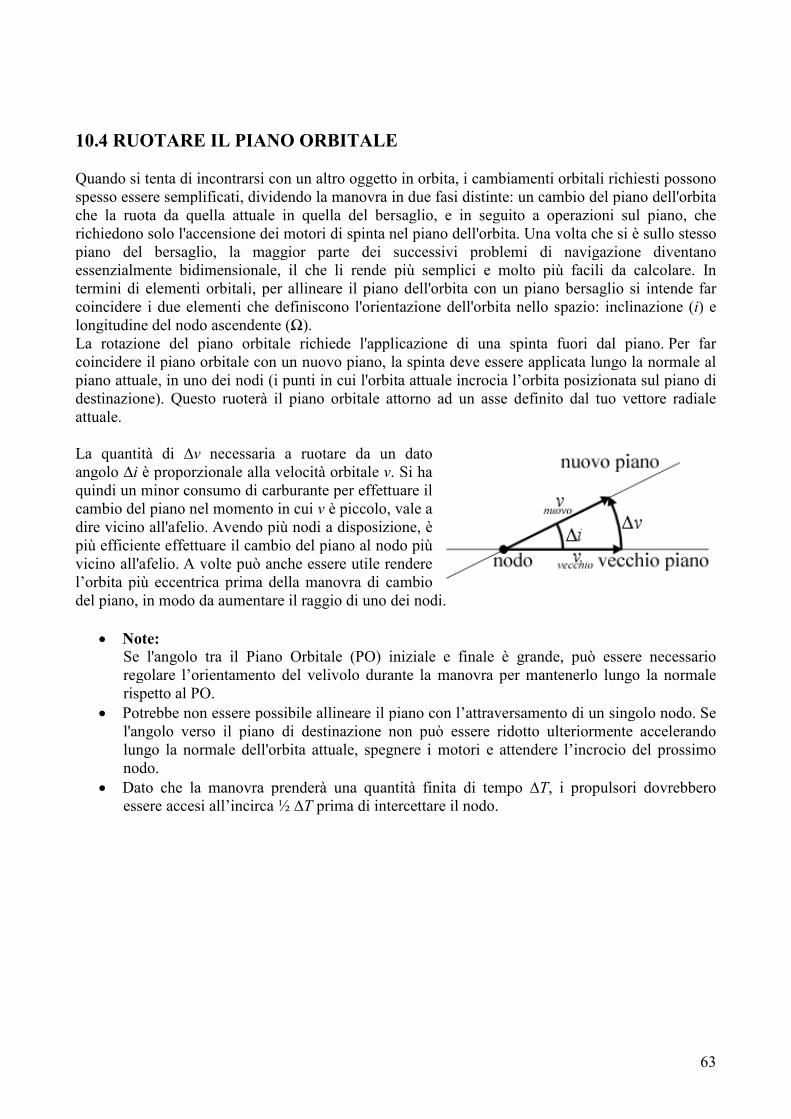
63
10.4 RUOTARE IL PIANO ORBITALE Quando si tenta di incontrarsi con un altro oggetto in orbita, i cambiamenti orbitali richiesti possono spesso essere semplificati, dividendo la manovra in due fasi distinte: un cambio del piano dell'orbita che la ruota da quella attuale in quella del bersaglio, e in seguito a operazioni sul piano, che richiedono solo l'accensione dei motori di spinta nel piano dell'orbita. Una volta che si è sullo stesso piano del bersaglio, la maggior parte dei successivi problemi di navigazione diventano essenzialmente bidimensionale, il che li rende più semplici e molto più facili da calcolare. In termini di elementi orbitali, per allineare il piano dell'orbita con un piano bersaglio si intende far coincidere i due elementi che definiscono l'orientazione dell'orbita nello spazio: inclinazione (i) e longitudine del nodo ascendente (Ω). La rotazione del piano orbitale richiede l'applicazione di una spinta fuori dal piano. Per far coincidere il piano orbitale con un nuovo piano, la spinta deve essere applicata lungo la normale al piano attuale, in uno dei nodi (i punti in cui l'orbita attuale incrocia l’orbita posizionata sul piano di destinazione). Questo ruoterà il piano orbitale attorno ad un asse definito dal tuo vettore radiale attuale. La quantità di ∆v necessaria a ruotare da un dato angolo ∆i è proporzionale alla velocità orbitale v. Si ha quindi un minor consumo di carburante per effettuare il cambio del piano nel momento in cui v è piccolo, vale a dire vicino all'afelio. Avendo più nodi a disposizione, è più efficiente effettuare il cambio del piano al nodo più vicino all'afelio. A volte può anche essere utile rendere l’orbita più eccentrica prima della manovra di cambio del piano, in modo da aumentare il raggio di uno dei nodi.
• Note: Se l'angolo tra il Piano Orbitale (PO) iniziale e finale è grande, può essere necessario regolare l’orientamento del velivolo durante la manovra per mantenerlo lungo la normale rispetto al PO.
• Potrebbe non essere possibile allineare il piano con l’attraversamento di un singolo nodo. Se l'angolo verso il piano di destinazione non può essere ridotto ulteriormente accelerando lungo la normale dell'orbita attuale, spegnere i motori e attendere l’incrocio del prossimo nodo.
• Dato che la manovra prenderà una quantità finita di tempo ∆T, i propulsori dovrebbero essere accesi all’incirca ½ ∆T prima di intercettare il nodo.
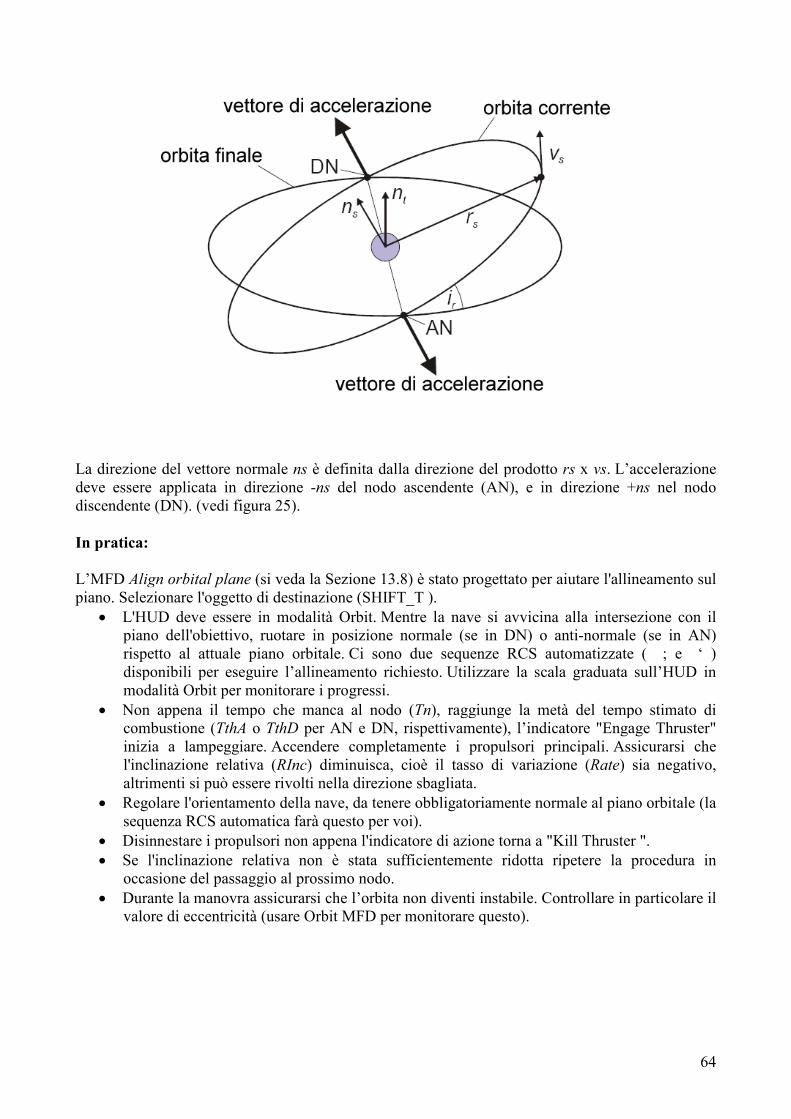
64
La direzione del vettore normale ns è definita dalla direzione del prodotto rs x vs. L’accelerazione deve essere applicata in direzione -ns del nodo ascendente (AN), e in direzione +ns nel nodo discendente (DN). (vedi figura 25). In pratica:
L’MFD Align orbital plane (si veda la Sezione 13.8) è stato progettato per aiutare l'allineamento sul piano. Selezionare l'oggetto di destinazione (SHIFT_T ).
• L'HUD deve essere in modalità Orbit. Mentre la nave si avvicina alla intersezione con il piano dell'obiettivo, ruotare in posizione normale (se in DN) o anti-normale (se in AN) rispetto al attuale piano orbitale. Ci sono due sequenze RCS automatizzate ( ; e ‘ ) disponibili per eseguire l’allineamento richiesto. Utilizzare la scala graduata sull’HUD in modalità Orbit per monitorare i progressi.
• Non appena il tempo che manca al nodo (Tn), raggiunge la metà del tempo stimato di combustione (TthA o TthD per AN e DN, rispettivamente), l’indicatore "Engage Thruster" inizia a lampeggiare. Accendere completamente i propulsori principali. Assicurarsi che l'inclinazione relativa (RInc) diminuisca, cioè il tasso di variazione (Rate) sia negativo, altrimenti si può essere rivolti nella direzione sbagliata.
• Regolare l'orientamento della nave, da tenere obbligatoriamente normale al piano orbitale (la sequenza RCS automatica farà questo per voi).
• Disinnestare i propulsori non appena l'indicatore di azione torna a "Kill Thruster ". • Se l'inclinazione relativa non è stata sufficientemente ridotta ripetere la procedura in
occasione del passaggio al prossimo nodo. • Durante la manovra assicurarsi che l’orbita non diventi instabile. Controllare in particolare il
valore di eccentricità (usare Orbit MFD per monitorare questo).
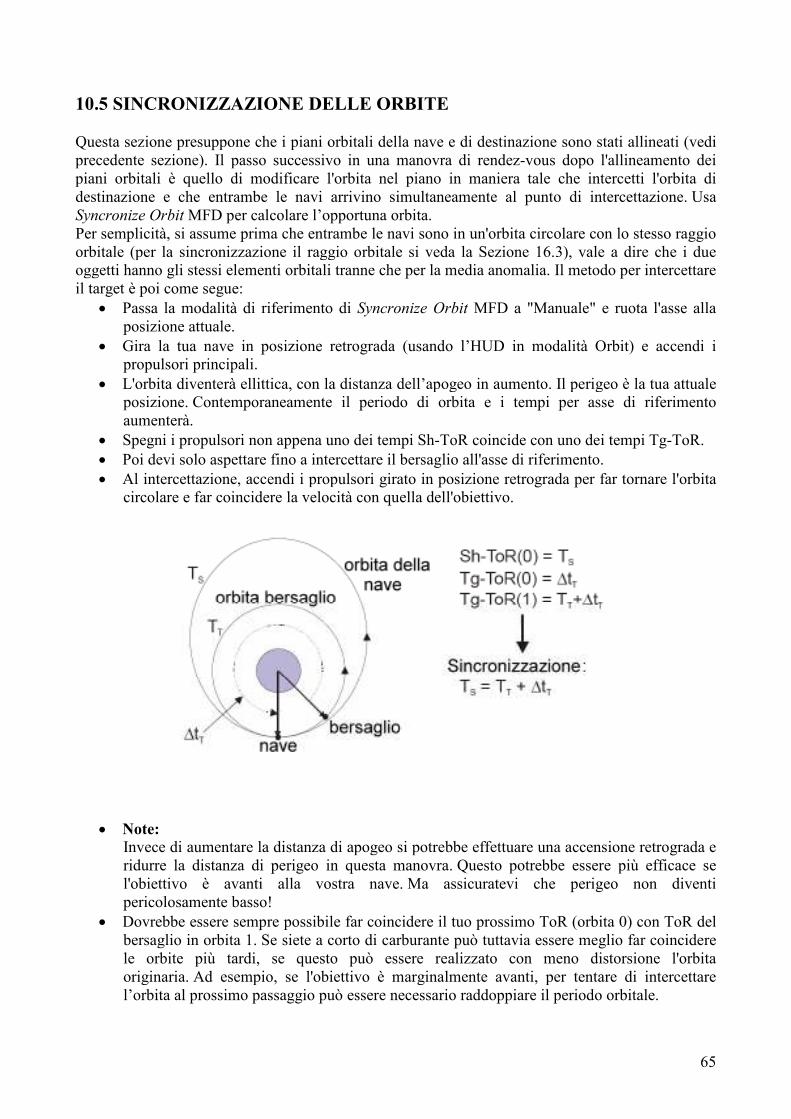
65
10.5 SINCRONIZZAZIONE DELLE ORBITE Questa sezione presuppone che i piani orbitali della nave e di destinazione sono stati allineati (vedi precedente sezione). Il passo successivo in una manovra di rendez-vous dopo l'allineamento dei piani orbitali è quello di modificare l'orbita nel piano in maniera tale che intercetti l'orbita di destinazione e che entrambe le navi arrivino simultaneamente al punto di intercettazione. Usa Syncronize Orbit MFD per calcolare l’opportuna orbita. Per semplicità, si assume prima che entrambe le navi sono in un'orbita circolare con lo stesso raggio orbitale (per la sincronizzazione il raggio orbitale si veda la Sezione 16.3), vale a dire che i due oggetti hanno gli stessi elementi orbitali tranne che per la media anomalia. Il metodo per intercettare il target è poi come segue:
• Passa la modalità di riferimento di Syncronize Orbit MFD a "Manuale" e ruota l'asse alla posizione attuale.
• Gira la tua nave in posizione retrograda (usando l’HUD in modalità Orbit) e accendi i propulsori principali.
• L'orbita diventerà ellittica, con la distanza dell’apogeo in aumento. Il perigeo è la tua attuale posizione. Contemporaneamente il periodo di orbita e i tempi per asse di riferimento aumenterà.
• Spegni i propulsori non appena uno dei tempi Sh-ToR coincide con uno dei tempi Tg-ToR. • Poi devi solo aspettare fino a intercettare il bersaglio all'asse di riferimento. • Al intercettazione, accendi i propulsori girato in posizione retrograda per far tornare l'orbita
circolare e far coincidere la velocità con quella dell'obiettivo.
• Note:
Invece di aumentare la distanza di apogeo si potrebbe effettuare una accensione retrograda e ridurre la distanza di perigeo in questa manovra. Questo potrebbe essere più efficace se l'obiettivo è avanti alla vostra nave. Ma assicuratevi che perigeo non diventi pericolosamente basso!
• Dovrebbe essere sempre possibile far coincidere il tuo prossimo ToR (orbita 0) con ToR del bersaglio in orbita 1. Se siete a corto di carburante può tuttavia essere meglio far coincidere le orbite più tardi, se questo può essere realizzato con meno distorsione l'orbita originaria. Ad esempio, se l'obiettivo è marginalmente avanti, per tentare di intercettare l’orbita al prossimo passaggio può essere necessario raddoppiare il periodo orbitale.
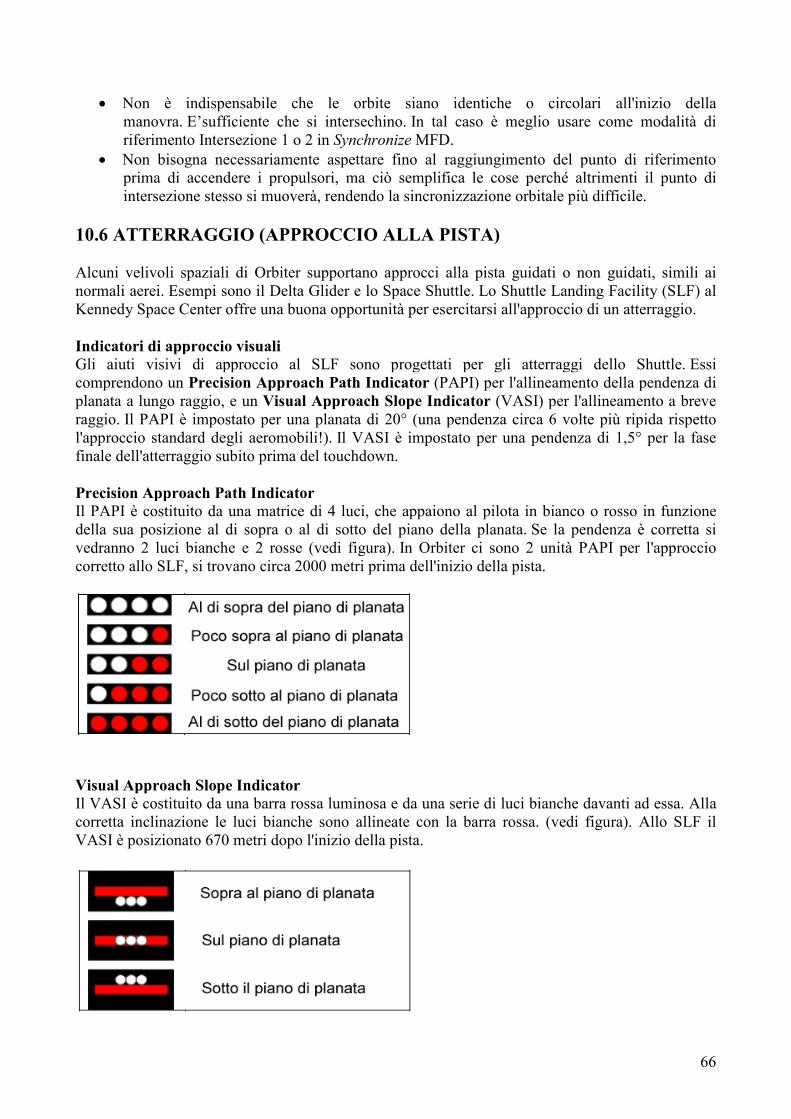
66
• Non è indispensabile che le orbite siano identiche o circolari all'inizio della manovra. E’sufficiente che si intersechino. In tal caso è meglio usare come modalità di riferimento Intersezione 1 o 2 in Synchronize MFD.
• Non bisogna necessariamente aspettare fino al raggiungimento del punto di riferimento prima di accendere i propulsori, ma ciò semplifica le cose perché altrimenti il punto di intersezione stesso si muoverà, rendendo la sincronizzazione orbitale più difficile.
10.6 ATTERRAGGIO (APPROCCIO ALLA PISTA) Alcuni velivoli spaziali di Orbiter supportano approcci alla pista guidati o non guidati, simili ai normali aerei. Esempi sono il Delta Glider e lo Space Shuttle. Lo Shuttle Landing Facility (SLF) al Kennedy Space Center offre una buona opportunità per esercitarsi all'approccio di un atterraggio. Indicatori di approccio visuali
Gli aiuti visivi di approccio al SLF sono progettati per gli atterraggi dello Shuttle. Essi comprendono un Precision Approach Path Indicator (PAPI) per l'allineamento della pendenza di planata a lungo raggio, e un Visual Approach Slope Indicator (VASI) per l'allineamento a breve raggio. Il PAPI è impostato per una planata di 20° (una pendenza circa 6 volte più ripida rispetto l'approccio standard degli aeromobili!). Il VASI è impostato per una pendenza di 1,5° per la fase finale dell'atterraggio subito prima del touchdown. Precision Approach Path Indicator
Il PAPI è costituito da una matrice di 4 luci, che appaiono al pilota in bianco o rosso in funzione della sua posizione al di sopra o al di sotto del piano della planata. Se la pendenza è corretta si vedranno 2 luci bianche e 2 rosse (vedi figura). In Orbiter ci sono 2 unità PAPI per l'approccio corretto allo SLF, si trovano circa 2000 metri prima dell'inizio della pista.
Visual Approach Slope Indicator
Il VASI è costituito da una barra rossa luminosa e da una serie di luci bianche davanti ad essa. Alla corretta inclinazione le luci bianche sono allineate con la barra rossa. (vedi figura). Allo SLF il VASI è posizionato 670 metri dopo l'inizio della pista.
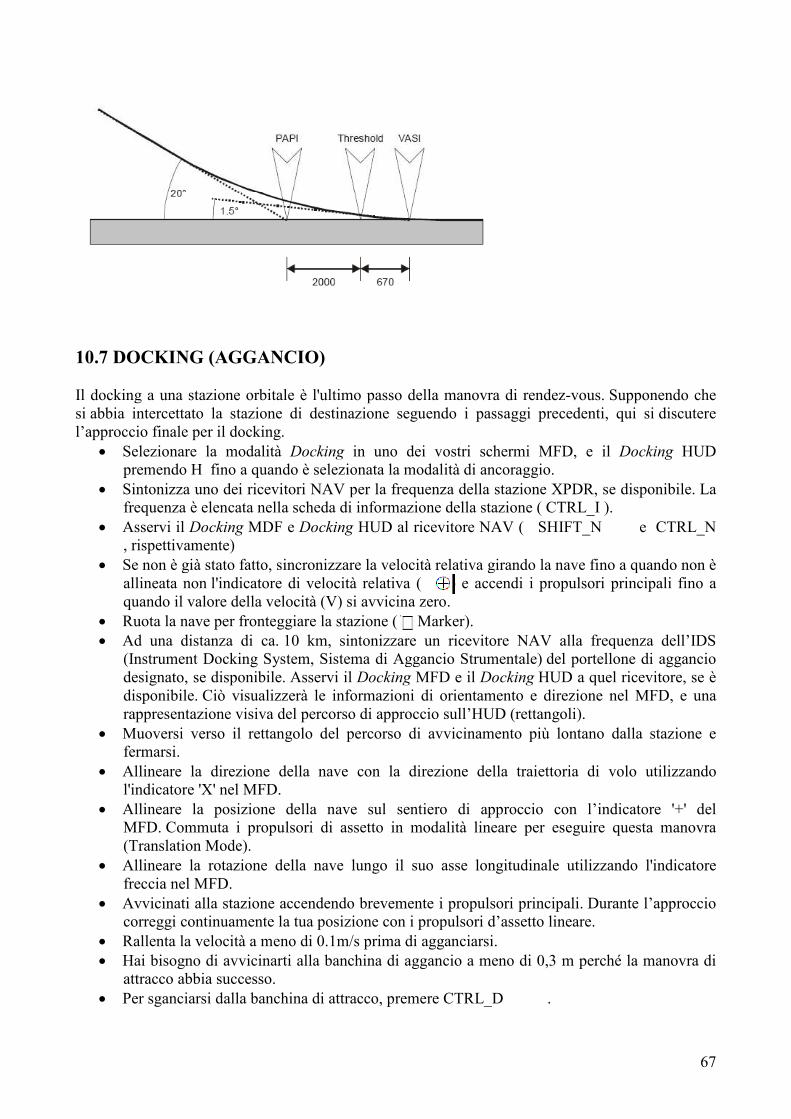
67
10.7 DOCKING (AGGANCIO) Il docking a una stazione orbitale è l'ultimo passo della manovra di rendez-vous. Supponendo che si abbia intercettato la stazione di destinazione seguendo i passaggi precedenti, qui si discutere l’approccio finale per il docking.
• Selezionare la modalità Docking in uno dei vostri schermi MFD, e il Docking HUD premendo H fino a quando è selezionata la modalità di ancoraggio.
• Sintonizza uno dei ricevitori NAV per la frequenza della stazione XPDR, se disponibile. La frequenza è elencata nella scheda di informazione della stazione ( CTRL_I ).
• Asservi il Docking MDF e Docking HUD al ricevitore NAV ( SHIFT_N e CTRL_N , rispettivamente)
• Se non è già stato fatto, sincronizzare la velocità relativa girando la nave fino a quando non è allineata non l'indicatore di velocità relativa ( ) e accendi i propulsori principali fino a quando il valore della velocità (V) si avvicina zero.
• Ruota la nave per fronteggiare la stazione ( Marker). • Ad una distanza di ca. 10 km, sintonizzare un ricevitore NAV alla frequenza dell’IDS
(Instrument Docking System, Sistema di Aggancio Strumentale) del portellone di aggancio designato, se disponibile. Asservi il Docking MFD e il Docking HUD a quel ricevitore, se è disponibile. Ciò visualizzerà le informazioni di orientamento e direzione nel MFD, e una rappresentazione visiva del percorso di approccio sull’HUD (rettangoli).
• Muoversi verso il rettangolo del percorso di avvicinamento più lontano dalla stazione e fermarsi.
• Allineare la direzione della nave con la direzione della traiettoria di volo utilizzando l'indicatore 'X' nel MFD.
• Allineare la posizione della nave sul sentiero di approccio con l’indicatore '+' del MFD. Commuta i propulsori di assetto in modalità lineare per eseguire questa manovra (Translation Mode).
• Allineare la rotazione della nave lungo il suo asse longitudinale utilizzando l'indicatore freccia nel MFD.
• Avvicinati alla stazione accendendo brevemente i propulsori principali. Durante l’approccio correggi continuamente la tua posizione con i propulsori d’assetto lineare.
• Rallenta la velocità a meno di 0.1m/s prima di agganciarsi. • Hai bisogno di avvicinarti alla banchina di aggancio a meno di 0,3 m perché la manovra di
attracco abbia successo. • Per sganciarsi dalla banchina di attracco, premere CTRL_D .
68
Figura 30: una nave cargo classe Shuttle-A dopo aver completato con successo un aggancio alla ISS
Note:
• Per un controllo preciso dell’assetto con la tastiera utilizzare i propulsori d’assetto in modalità "bassa potenza" (Ctrl + tasto numerico).
• L'allineamento lungo l’asse di rotazione non è attualmente implementato, ma potrà esserlo nelle versioni future.
• Attualmente in caso di collisione non viene segnalato l’errore, per cui si può volare dritto attraverso la stazione, se si sbaglia l'approccio al docking.
Docking a stazioni rotanti
Le stazioni come Luna-OB1 ruotano per usare le forze centrifughe per simulare la forza di gravità – il che è bello per i loro abitanti, ma rende l'attracco di un pò più complicato. Il docking è possibile solo lungo l'asse di rotazione, per cui sono disponibili al massimo 2 porte di docking. La procedura di docking è simile a quella standard, ma una volta in linea con il percorso di avvicinamento, la rotazione intorno al asse longitudinale della nave deve essere allineata con quella della stazione. Importante:
• Iniziare la rotazione longitudinale della tua nave solo immediatamente prima del docking (dopo aver passato l’ultimo marker di approccio). Una volta che siete in rotazione, gli spostamenti lineari diventano molto difficili.
• Una volta che la vostra rotazione coincide con quella della stazione, fare attenzione a non premere Numpad5 (Kill Rotation) per caso, o si dovrà iniziare l'allineamento della rotazione da capo.
Suggerimento: Dal momento che l'allineamento lungo l’asse di rotazione non viene applicato al momento, si può semplicemente ignorare la rotazione della stazione e agganciarsi direttamente.
69
11. DISCLAIMER e RINGRAZIAMENTI
Questa guida è stata realizzata traducendo liberamente molti dei capitoli dell’Orbiter User Guide di Martin Schweiger con il suo esplicito consenso. Le immagini, concetti e le idee riportate in questo manuale sono proprietà esclusiva dell’autore. Il tutorial “arrivare in orbita con il Delta Glider” è stato inserito nel manuale con il gentile consenso di Apollo13. Per la traduzione si ringraziano: -Fausto -Buzz Aldrin -Fabri91 Un ringraziamento particolare va a tutta la community di Forum Orbiter Italia per l’aiuto nella correzione e nel miglioramento di questa Guida. Il sito di Forum Orbiter Italia è http://orbiteritalia.forumotion.com












![Lunar Reconnaissance Orbiter (LRO): Leading NASA’s Way ...2].pdf · Lunar Reconnaissance Orbiter (LRO): Leading NASA’s Way Back to the Moon ... nancy.n.jones@nasa.gov Jonas Dino](https://img.pdfslide.tips/doc/110x75/5e703682e07d8403d07255d8/lunar-reconnaissance-orbiter-lro-leading-nasaas-way-2pdf-lunar-reconnaissance.jpg)












![⃝charles j byrne] lunar orbiter photographic atla](https://img.pdfslide.tips/doc/110x75/568caa521a28ab186da120ce/charles-j-byrne-lunar-orbiter-photographic-atla.jpg)

