Embed Size (px)
Citation preview
ELEMENTI ZA PRENOS SNAGE
Elektromotori imaju veliku ugaoni brzinu obrtanja, oni obezbeđuju snagu u vidu obrtnog momenta relativno male veličine i velike brzine rotacije. U tim uslovima motori optimalno rade i njihova konstrukciona rešenja su racionalna. Smanjenjem brzine obrtanja znatno se povećavaju gabariti motora. Ekonomski i tehničko opravdano rešenje je da se razlike u parametrima koje daje motor i onih koje su potrebne premoste posredstvom prenosnika. Prenosnici-mašinski podsistemi ili komponente koje čine funkcionalno povezan skup elemenata za prenošenje i za transformaciju mehaničke energije i drugi mašinski sistemi i elementi namenjeni za izvršavanje sporednih i pomoćnih funkcija. Transformišu ulaznu ugaonu brzinu, izraženu brojem obrtaja koji dolazi od motora nul u izlazni broj obrtaja u jedinici vremena niz koji odgovara potrebama funkcionisanja radnog dela mašine.
Radni prenosni odnos: izl
ul
nni =
Usled međusobnog trenja delova prenosnika, deo mehaničke energije koja se prenosi prelazi u toplotu. Mehanička energija na izlazu je manja od mehaničke energije na ulazu. Snaga na ulazu Pul je veća od snage na izlazu Pizl.
Stepen iskorišćenja prenosnika: ul
kul
ul
izl
PPP
PP −
==η Pk-snaga gubitaka
Dobra strana mehaničkog prenosnika je što je stepen iskorišćenja prenosnika veoma blizak 1. Otpor koji se može savladati raspoloživom snagom P određen je veličinom
obrtnog momenta:ωPT =
iPP
P
P
TT
izl
ul
ul
izl
ul
ul
izl
izl
ul
izl ⋅=⋅== ηωω
ω
ω
ulizl TiT ⋅⋅= η Reduktor (i>1)-Smanuje ugaonu brzinu, povećava obrtni moment. Ugaona brzina se smanjuje od ulazu ka izlazu iz prenosnika. Što je ugaona brzina manja veći je obrtni moment koji se može savladati istom snagom.
Multiplikator (i<1)-Povećava ugaonu brzinu od ulaza ka izlazu i samim tim smanjuje obrtni moment. Obrtni moment na ulazu je manji od obrtnog momenta na izlazu. Menjački prenosnici-varijatori (i je promenljivo)
4
3
2
1
4
1
nn
nn
nni
nn
izl
ul ⋅=== n2 i n3 se nalaze na istom vratilu.
nizl
ul iiinn
⋅⋅⋅= ...21
Kinematski prenosni odnos (u>1) Uvek je veći od jedinice i definiše se odnosom većeg i manjeg prečnika tela koja su u dodiru. Vrste mehaničkih prenosnika
1. Frikcioni parovi 2. Zupčasti parovi 3. Kaišni parovi 4. Lančani parovi
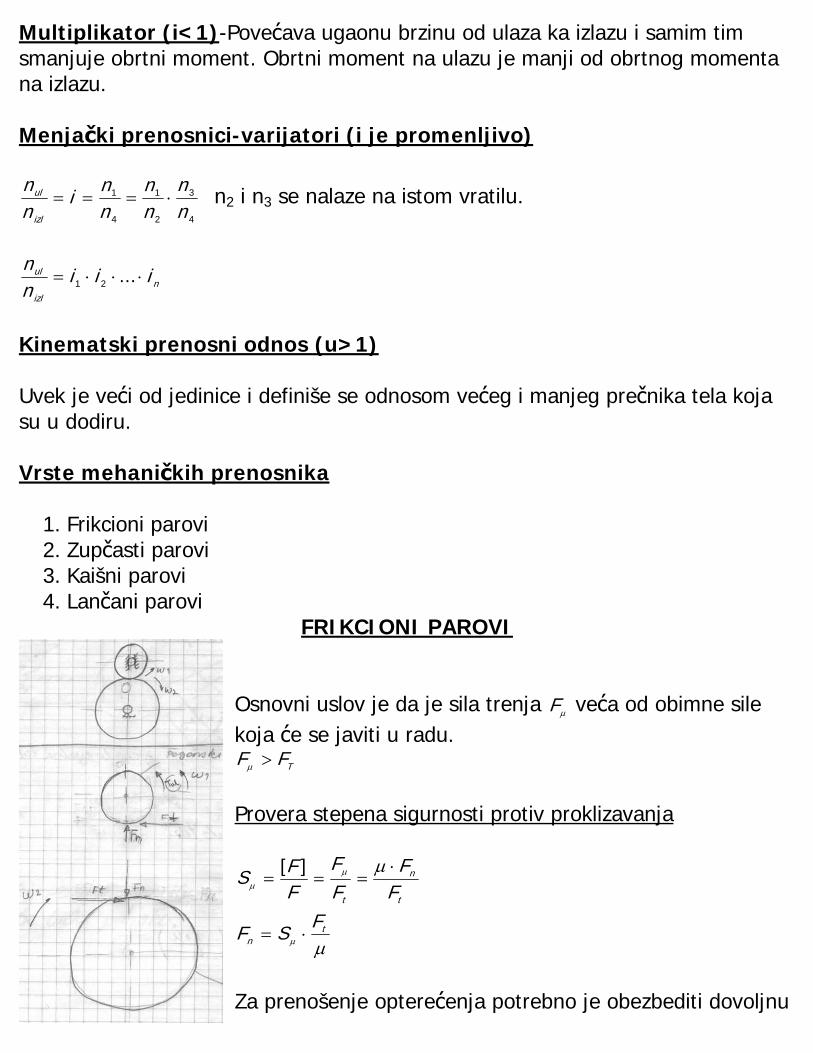
FRIKCIONI PAROVI Osnovni uslov je da je sila trenja µF veća od obimne sile koja će se javiti u radu.
TFF >µ Provera stepena sigurnosti protiv proklizavanja
µ
µ
µ
µµ
tn
t
n
t
FSF
FF
FF
FFS
⋅=
⋅===
][
Za prenošenje opterećenja potrebno je obezbediti dovoljnu

normalnu silu Fn, koja dodatno opterećuje vratila i ležaje. Karakteristike frikcionih parova su:
• Prenose male snage u odnosu na svoje gabarite • U toku rada prisutno je proklizavanje usled preopterećenja, elastično i
kinematsko klizanje • Proklizavanje usled peopterećenja ima ulogu osigurača od preteranog
naprezanja materijala
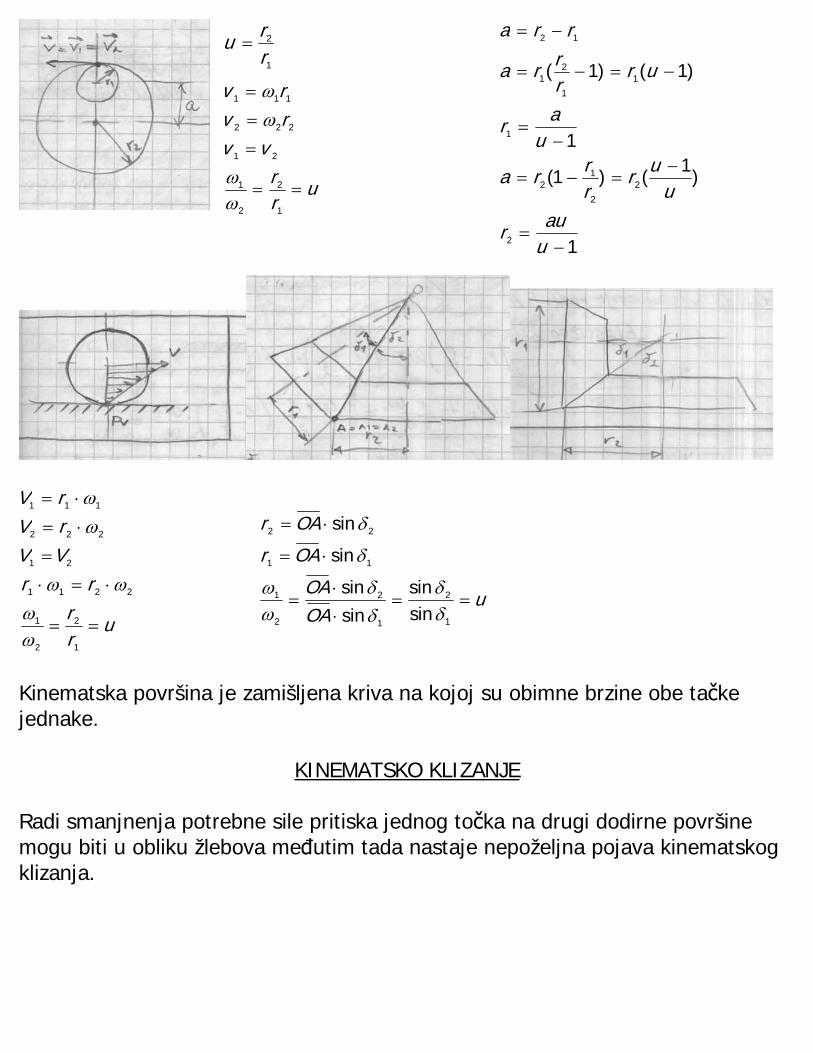
KINEMATIKA FRIKCIONIH PAROVA
Predstavljamo frikcioni par kao kruto telo.
u
rr
rr
==
⋅=⋅
1
2
2
1
2211
ωω
ωω
uar
urarra
+=
+=
+=
1
)1(
1
1
21
uaur
uur
rrra
+=
+=+=
1
)1
()1(
2
2
2
12
Tačka A je trenutna osa relativnih brzina za frikcioni par. Trenutna osa opisuje aksoid.
222
111
ωω⋅=
⋅=
rvrv
urr
rrVVrVrV
==
⋅=⋅
=
⋅=
⋅=
1
2
2
1
2211
21
222
111
ωω
ωω
ωω
uOAOA
OAr
OAr
==⋅⋅
=
⋅=
⋅=
1
2
1
2
2
1
11
22
sinsin
sinsin
sin
sin
δδ
δδ
ωω
δ
δ
Kinematska površina je zamišljena kriva na kojoj su obimne brzine obe tačke jednake.
KINEMATSKO KLIZANJE
Radi smanjnenja potrebne sile pritiska jednog točka na drugi dodirne površine mogu biti u obliku žlebova međutim tada nastaje nepoželjna pojava kinematskog klizanja.
urr
vvrvrv
==
=
=
=
1
2
2
1
21
222
111
ωω
ωω1
2
rru =
1
)1
()1(
1
)1()1(
2
2
2
12
1
1
1
21
12
−=
−=−=
−=
−=−=
−=
uaur
uur
rrra
uar
urrrra
rra
)1
(2
)1
1(2
22)
2()
2()
2()
2(
11
111111
11112211
uul
ul
ulrlr
ulurlrlrlrVkl
+⋅=+⋅
⋅=
=⋅⋅
+⋅−⋅+⋅=⋅−⋅−⋅+=⋅−−⋅+=
ωω
ωωωω
ωωωω
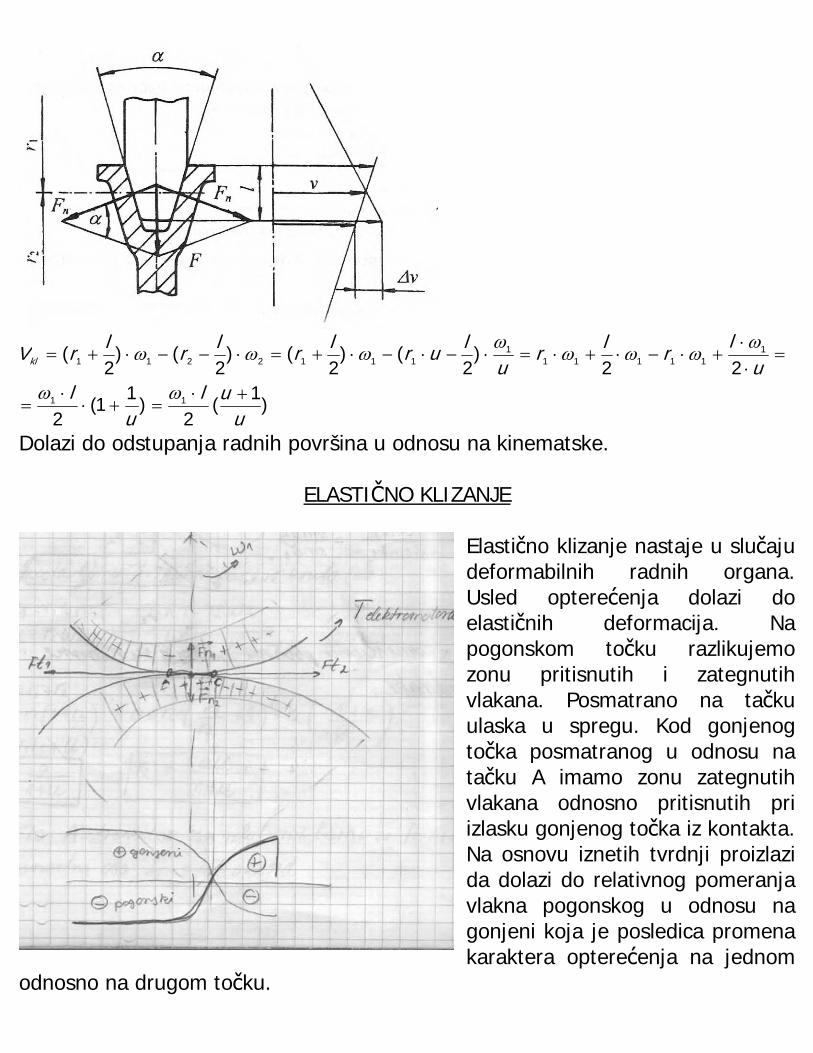
Dolazi do odstupanja radnih površina u odnosu na kinematske.
ELASTIČNO KLIZANJE
Elastično klizanje nastaje u slučaju deformabilnih radnih organa. Usled opterećenja dolazi do elastičnih deformacija. Na pogonskom točku razlikujemo zonu pritisnutih i zategnutih vlakana. Posmatrano na tačku ulaska u spregu. Kod gonjenog točka posmatranog u odnosu na tačku A imamo zonu zategnutih vlakana odnosno pritisnutih pri izlasku gonjenog točka iz kontakta. Na osnovu iznetih tvrdnji proizlazi da dolazi do relativnog pomeranja vlakna pogonskog u odnosu na gonjeni koja je posledica promena karaktera opterećenja na jednom
odnosno na drugom točku.
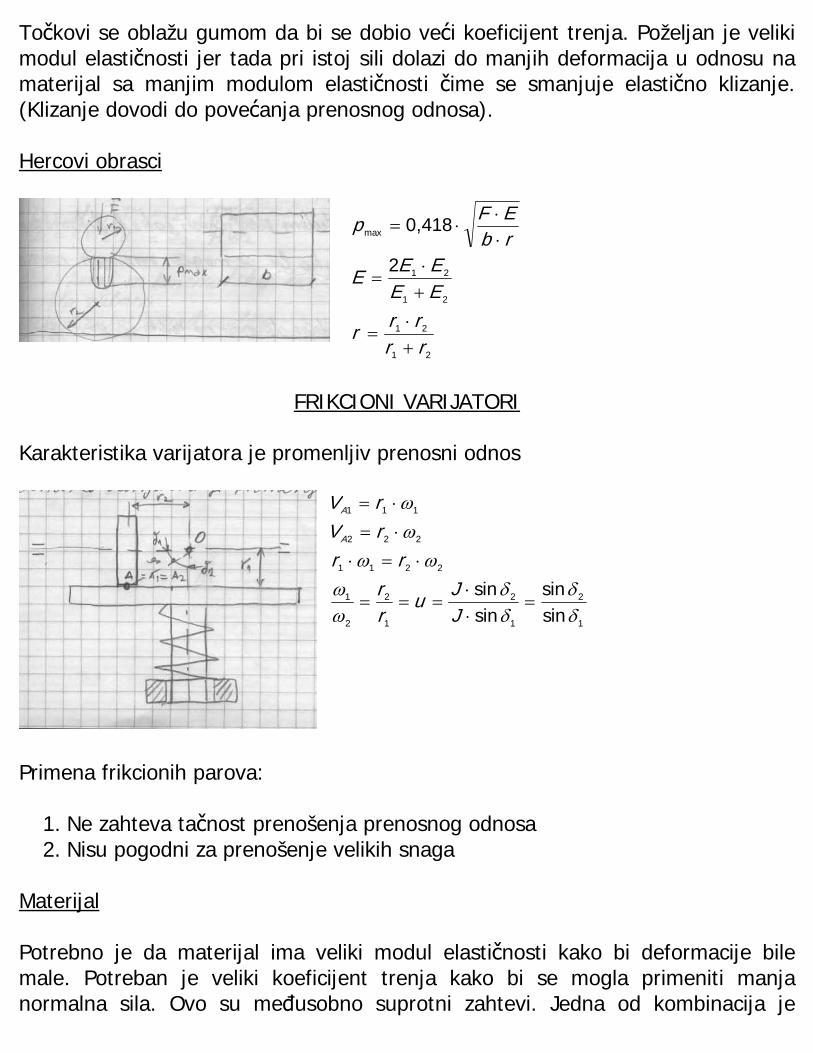
Točkovi se oblažu gumom da bi se dobio veći koeficijent trenja. Poželjan je veliki modul elastičnosti jer tada pri istoj sili dolazi do manjih deformacija u odnosu na materijal sa manjim modulom elastičnosti čime se smanjuje elastično klizanje. (Klizanje dovodi do povećanja prenosnog odnosa). Hercovi obrasci
21
21
21
21
max
2
418,0
rrrrr
EEEEE
rbEFp
+⋅
=
+⋅
=
⋅⋅
⋅=
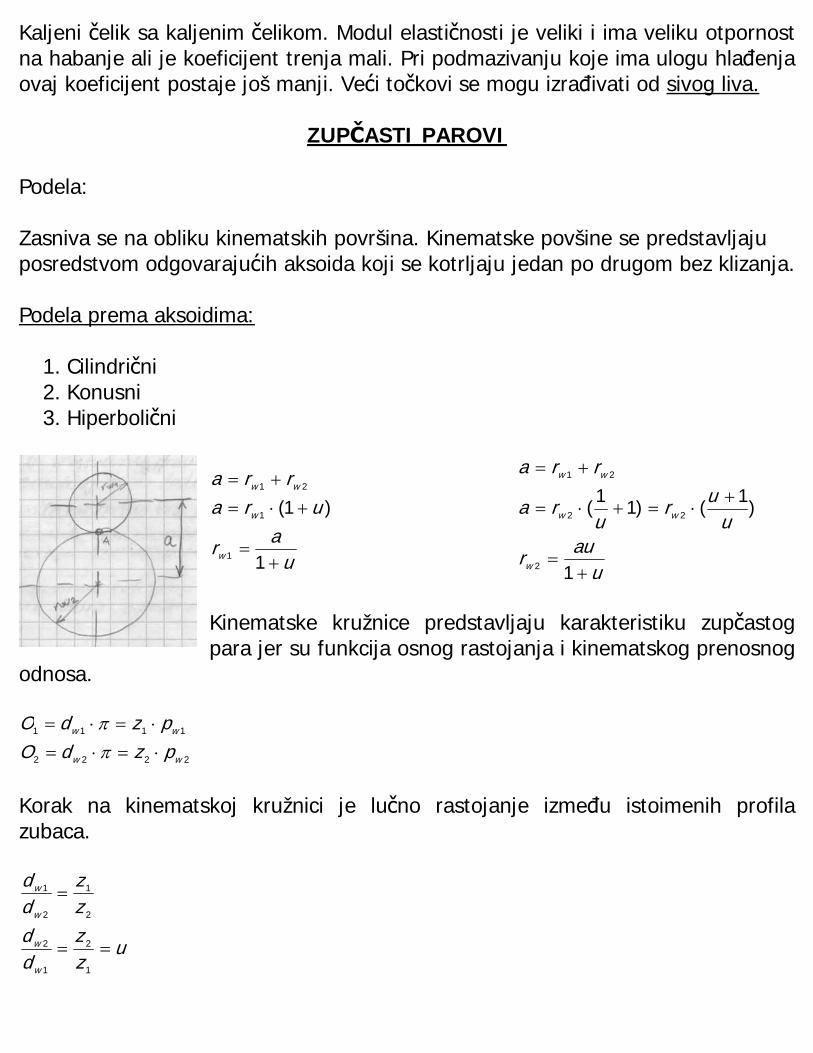
FRIKCIONI VARIJATORI
Karakteristika varijatora je promenljiv prenosni odnos
1
2
1
2
1
2
2
1
2211
222
111
sinsin
sinsin
δδ
δδ
ωω
ωωωω
=⋅⋅
===
⋅=⋅
⋅=
⋅=
JJu
rr
rrrVrV
A
A
Primena frikcionih parova:
1. Ne zahteva tačnost prenošenja prenosnog odnosa 2. Nisu pogodni za prenošenje velikih snaga
Materijal Potrebno je da materijal ima veliki modul elastičnosti kako bi deformacije bile male. Potreban je veliki koeficijent trenja kako bi se mogla primeniti manja normalna sila. Ovo su međusobno suprotni zahtevi. Jedna od kombinacija je
Kaljeni čelik sa kaljenim čelikom. Modul elastičnosti je veliki i ima veliku otpornost na habanje ali je koeficijent trenja mali. Pri podmazivanju koje ima ulogu hlađenja ovaj koeficijent postaje još manji. Veći točkovi se mogu izrađivati od sivog liva.
ZUPČASTI PAROVI
Podela: Zasniva se na obliku kinematskih površina. Kinematske povšine se predstavljaju posredstvom odgovarajućih aksoida koji se kotrljaju jedan po drugom bez klizanja. Podela prema aksoidima:
1. Cilindrični 2. Konusni 3. Hiperbolični
uar
urarra
w
w
ww
+=
+⋅=
+=
1
)1(
1
1
21
uaur
uur
ura
rra
w
ww
ww
+=
+⋅=+⋅=
+=
1
)1
()11
(
2
22
21
Kinematske kružnice predstavljaju karakteristiku zupčastog para jer su funkcija osnog rastojanja i kinematskog prenosnog
odnosa.
2222
1111
ww
ww
pzdOpzdO⋅=⋅=
⋅=⋅=
ππ
Korak na kinematskoj kružnici je lučno rastojanje između istoimenih profila zubaca.
uzz
dd
zz
dd
w
w
w
w
==
=
1
2
1
2
2
1
2
1
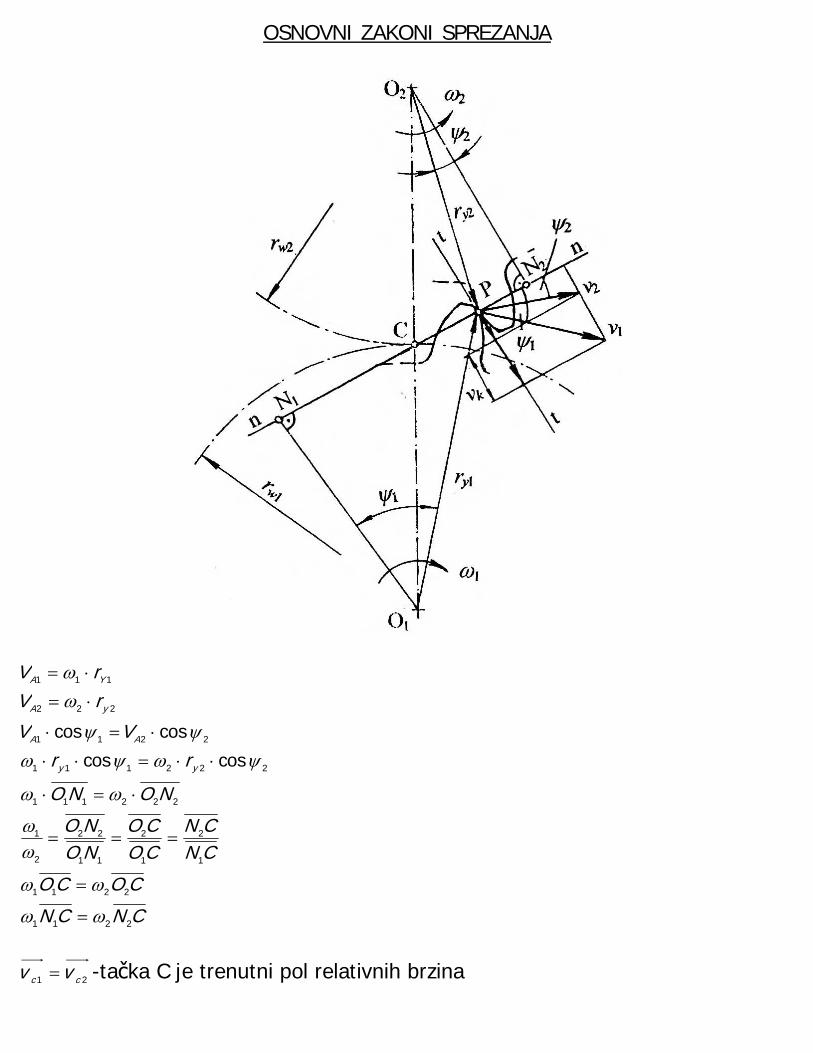
OSNOVNI ZAKONI SPREZANJA
CNCN
COCO
CNCN
COCO
NONO
NONO
rrVV
rVrV
yy
AA
yA
YA
2211
2211
1
2
1
2
11
22
2
1
222111
222111
2211
222
111
coscoscoscos
ωω
ωω
ωω
ωω
ψωψωψψ
ωω
=
=
===
⋅=⋅
⋅⋅=⋅⋅
⋅=⋅
⋅=
⋅=
21 cc vv = -tačka C je trenutni pol relativnih brzina

Brzina klizanja pogonskog zupčanika u odnosu na gonjeni
)ωPC(ωV 21kl +=
+=+−+=−−+=
−=
−=−=
PCPCPCCNPCCNPCCNPCCNV
PNPNV
rrVVV
kl
kl
yyAAkl
212221112211
2211
2221112211
)()(
sinsinsinsin
ωωωωωωωω
ωω
ψωψωψψ
Zaključak: Brzina klizanja je proporcionalna zbiru ω1 i ω2 i rastojanju od kinematskog pola. U trenutnom polu relativnih brzina brzina klizanja je 0. Zbog čega je klizanje važno? Važno je zbog energetskih gubitaka Pri prolasku kroz trenutni pol brzina, brzina klizanja menja smer.
Rezime: Da bi se ostvarilo sprezanje zupčanika profili zubaca u svakoj trenutnoj tački dodira moraju imati zajedničku tangentu. Da bi se ostvarilo konstantno prenošenje kretanja sa pogonskog na gonjeni zupčanik komponente obimnih brzina u trenutnoj tački dodira moraju biti istovetne. Vn1=Vn2. U tački C se ostvaruje kotrljanje bez klizanja, odnosno tačka C je
trenutni pol relativnih brzina, odnosno kinematski pol.
COCO
1
2
2
1 =ωω
Tačka C je definisan presekom dodirnice profila i osnog rastojanja za dati zupčasti par.
EVOLVENTNI PROFIL
AB=CB, A=B u početnom trenutku Evolventa predstavlja krivu liniju koju opisuje bilo koja tačka tangente na osnovnu kružnicu pri kotrljanju bez klizanja. S obzirom da se ostvaruje kotrljanjem bez klizanja BCAB = .

NAPADNI UGAO PROFILA
rb-prečnik osnovne kružnice CB-radijus krivine Napadni ugao profila u nekoj proizvoljnoj tački dodira može se definisati kao ugao između napadne linije profila i tangente na kružnicu kroz posmatranu tačku dodira.
yy
yyy
yb
bby
rBCABr
BDABrDA
ααα
ααθ
α
θ
−=
−=
⋅==
−==
taninv
tan
tan
t
OSNOVNA ZUPČASTA LETVA –ZUBČANICA-
Spoljašnje i unutrašnje ozubljenje. z=beskonačno – zupčasta letva
ππ⋅=
⋅=⋅=
⋅=
mp
zmzpd
zpO
m-modul πpm =
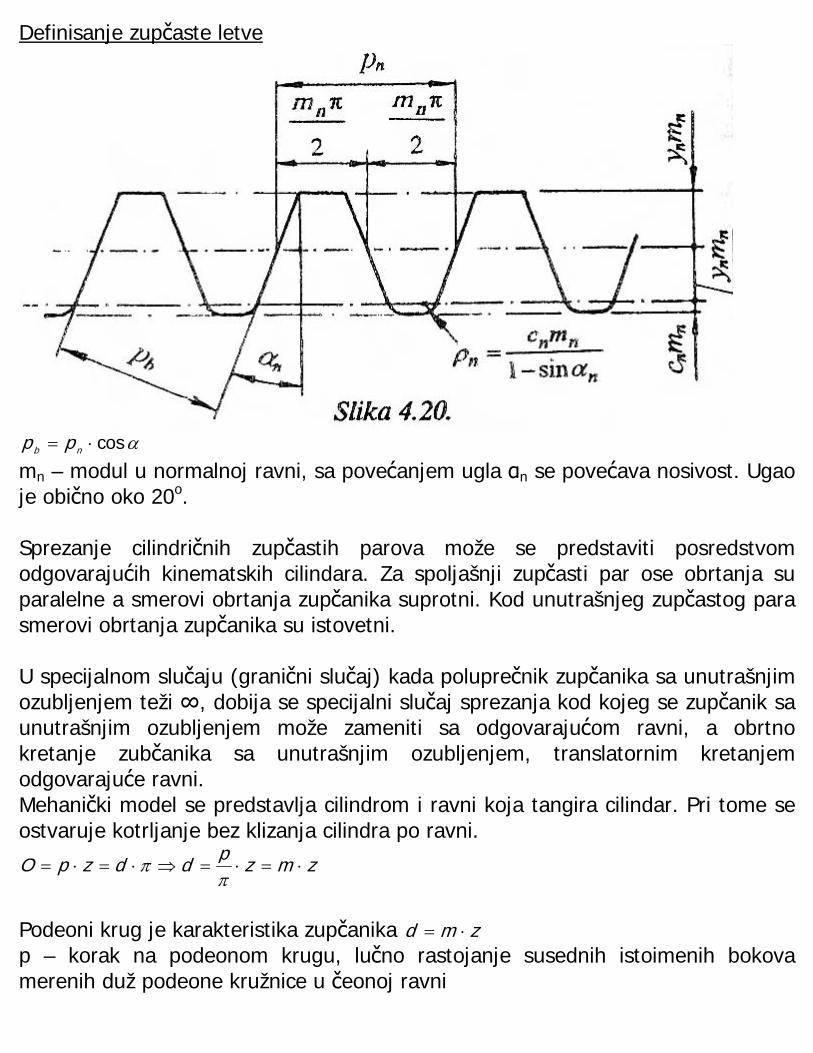
Definisanje zupčaste letve
αcos⋅= nb pp
mn – modul u normalnoj ravni, sa povećanjem ugla αn se povećava nosivost. Ugao je obično oko 20o. Sprezanje cilindričnih zupčastih parova može se predstaviti posredstvom odgovarajućih kinematskih cilindara. Za spoljašnji zupčasti par ose obrtanja su paralelne a smerovi obrtanja zupčanika suprotni. Kod unutrašnjeg zupčastog para smerovi obrtanja zupčanika su istovetni. U specijalnom slučaju (granični slučaj) kada poluprečnik zupčanika sa unutrašnjim ozubljenjem teži ∞, dobija se specijalni slučaj sprezanja kod kojeg se zupčanik sa unutrašnjim ozubljenjem može zameniti sa odgovarajućom ravni, a obrtno kretanje zubčanika sa unutrašnjim ozubljenjem, translatornim kretanjem odgovarajuće ravni. Mehanički model se predstavlja cilindrom i ravni koja tangira cilindar. Pri tome se ostvaruje kotrljanje bez klizanja cilindra po ravni.
zmzpddzpO ⋅=⋅=⇒⋅=⋅=π
π
Podeoni krug je karakteristika zupčanika zmd ⋅= p – korak na podeonom krugu, lučno rastojanje susednih istoimenih bokova merenih duž podeone kružnice u čeonoj ravni

m – modul zupčanika u čeonoj ravni, osnovni parametar veličine zubaca i zupčanika preko kog se određuju sve ostale dimenzije
LUČNA DEBLJINA ZUBACA NA PODEONOM KRUGU
)tan2
2(tan2
2απαπ xmxmms +⋅=+⋅=
Položaj srednje linije profila u odnosu na podeoni pravac, definisan je pomeranjem profila (xm) koji predstavlja algebarsku vrednost. Pri odmicanju zupčaste letve u odnosu na osu obrtanja zupčanika (xm>0), a pri primicanju je (xm<0).
VEZA IZMEĐU KORAKA NA OSNOVNOJ I PODEONOJ KRUŽNICI
αcos⋅= ppb

LUČNA DEBLJINA ZUBCA NA KRUGU PROIZVOLJNOG POLUPREČNIKA
r – poluprečnik podeone kružnice 2r=mz Interesuje nas koliko je sY
)invinv2
(2)inv(2
inv2 y
YYyyy
y
y
rss
rs
ααγαλγ
αλ
−+=−=
+=
Predhodna formula predstavlja lučnu dužinu zubca na proizvoljnom mestu.
Specijalni slučajevi
)inv2
(
inv y
α
θα
+=
=
=
=
rsds
dd
ss
bb
by
by
Pojava šiljatog zubca za slučaj da je sY=0
αα
αα
αα
inv2
inv
0invinv2
)invinv2
(0
0
y
y
+=
=−+
−+=
=
rs
rs
rsd
s
y
y
y
Određuje se napadni ugao na temenoj kružnici koji odgovara sY=0, dobija se xmax – maksimalni koeficijent pomeranja.

MERA PREKO ZUBACA
Zašto je bitno: Bitno je zbog kontrole tačnosti izrade zubčanika. Mera preko zubaca predstavlja rastojanje raznoimenih bokova zubaca mereno duž zajedničke tangente osnovnog kruga preko određenog broja zubaca (merni broj zubaca).
bbw spzW +−= )1(
wz - merni broj zubaca Mera preko zubca je kumulativna veličina i sastoji se od (zw-1) osnovnog koraga i jedne lučne debljine zubca na osnovnoj kružnici. Mera preko zubaca koristi se i za izbor bočnog zazora. Aog
AodW -uvek se daje negativno

PODSECANJE PROFILA
)cos()( min αbrrmymx −−⋅=⋅ Zupčasta letva se koristi za definisanje oblika. Evolventni profil definisan je od osnovne kružnice zupčanika. Pri izradi zupčanika mora se voditi računa o položaju zupčaste letve u odnosu na zupčanik. Položaj zupčaste letve definisan je tačkom A (prelaz pravolinijskog i zaobljenog dela zupčaste letve). Tački A odgovara tačka N koja predstavlja početnu tačku evolventnog profila zubca. Ovde je uzpostavljena koincidencija između tačke A i tačke N. Položaj zupčaste letve u odnosu na podeonu pravu definisan je pomeranjem (x◦m)min, koje odgovara graničnom slučaju ispravnog definisanja evolventnog profila zupca. Ako bi smo išli sa manjom vrednošću pomeranja, tačka A definisala bi profil zupca iz unutrašnjosti osnovnog kruga (trohoida). U početnoj tački na osnovnom krugu ove dve krive nemaju zajedničku tangentu. Zubac je podsečen i to je negativna pojava.
α
ααα
2
2
2
min
sin2
y
sin )cos1(
)cos()(
⋅⋅−⋅=
−⋅=
−⋅−⋅=
=⋅−−⋅=⋅
zmm
rmyrmy
rrmymx b
zmr
zpr
zpdrrb
⋅=
⋅=
⋅=⋅
⋅=
2
2
cos
π
πα
α2min sin
2⋅−=
zyx
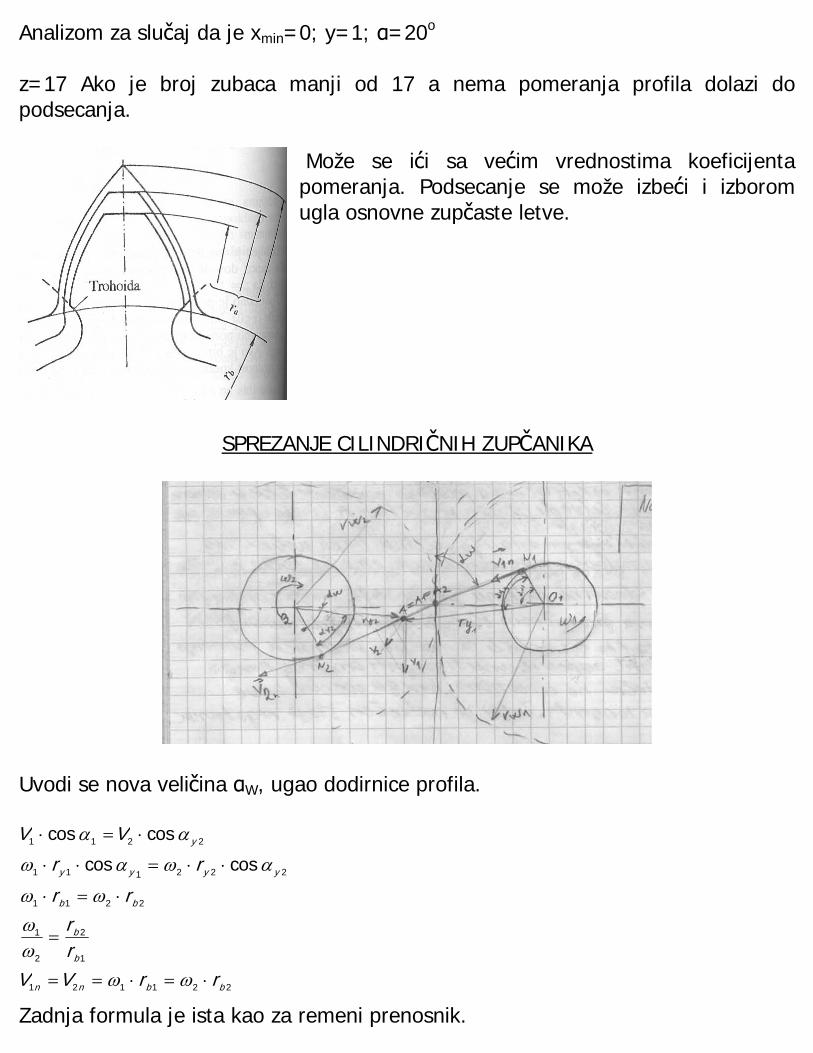
Analizom za slučaj da je xmin=0; y=1; α=20o z=17 Ako je broj zubaca manji od 17 a nema pomeranja profila dolazi do podsecanja.
Može se ići sa većim vrednostima koeficijenta pomeranja. Podsecanje se može izbeći i izborom ugla osnovne zupčaste letve.
SPREZANJE CILINDRIČNIH ZUPČANIKA
Uvodi se nova veličina αW, ugao dodirnice profila.
Zadnja formula je ista kao za remeni prenosnik. 221121
1
2
2
1
2211
222111
2211
coscos
coscos
bbnn
b
b
bb
yyyy
y
rrVVrr
rr
rr
VV
⋅=⋅==
=
⋅=⋅
⋅⋅=⋅⋅
⋅=⋅
ωωωω
ωω
αωαω
αα

Na osnovu izvedenog proizilazi analogija između kretanja bilo koje tačke jednog kraka remena ukrštenog remenog prenosnika i tačke profila spregnutog profila zubca u pravcu dodirnice profila. Pri tome prečnici remenica su istovetni sa odgovarajućim prečnicima osnovnih kružnica spregnutih zupčanika. U proizvoljnim tačkama dodira nisu jednaki αY1 i αY2, međutim za slučaj sprezanja u trenutnom relativnom polu brzina ugao između napadne linije profila i tangente na kinematsku kružnicu je istovetan i naziva se ugao dodirnice profila αW.
OSNO RASTOJANJE
www
bbww
zzmrrrrrraαα
αα
α coscos
2)(
coscos
)(cos
2121
2121
+=⋅+=
+=+=
Ako je wαα = 2121 rrrra ww +=+= - kinematske i podnožne kružnice se poklapaju
UGAO DODIRNICE PROFILA
2w121
2211
e www
wwwww
sesesesp
==
+=+=
21 www ssp += Hoćemo da nađemo wαinv
ααα
ααπ
ααπ
ααααπ
invtan2inv
))(invinv(
))1)(invinv((
invinvinvinv
21
21
21w21
2
2
1
11
w2
22w
1
11
1
1
+⋅++
=
+−++
=
+−++=
⎥⎦
⎤⎢⎣
⎡−++⎥
⎦
⎤⎢⎣
⎡−+=
zzxx
zzm
ss
uuds
dsz
dsd
dsd
zd
w
w
www
Ako je zbir pomeranja profila x1+x2=0 ugao dodirnice je αw=α Ako je zbir pomeranja profila x1+x2>0 αw>α i obrnuto
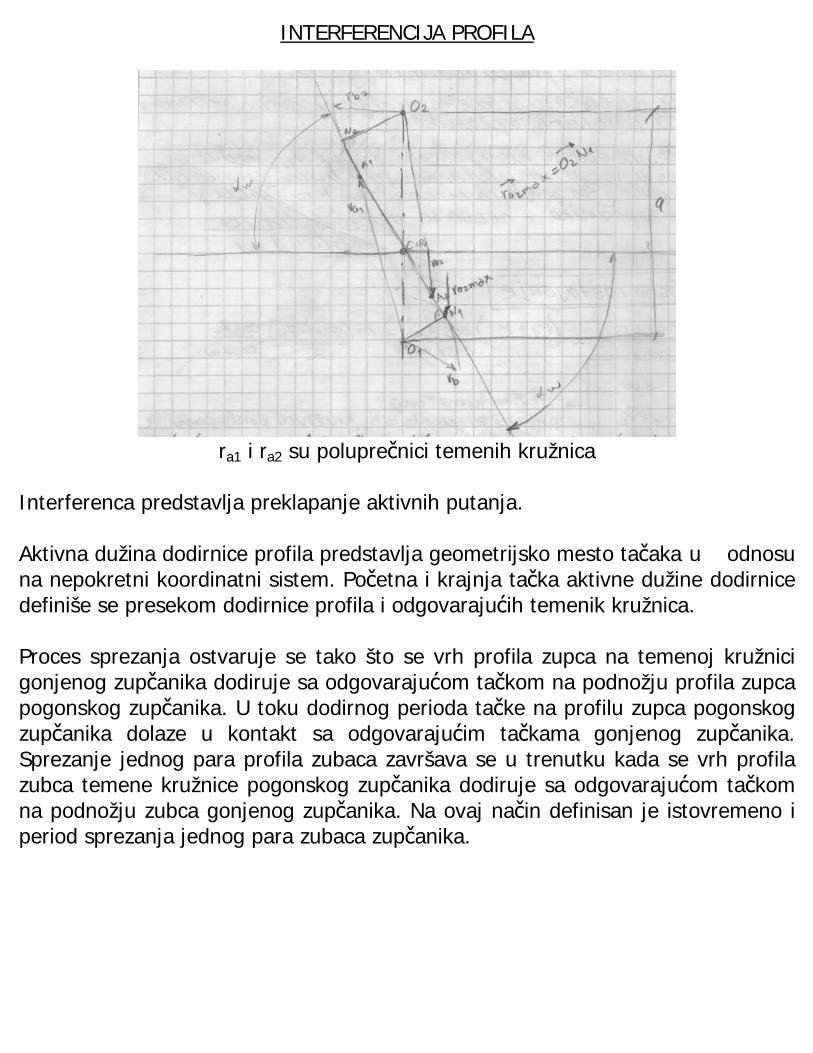
INTERFERENCIJA PROFILA
ra1 i ra2 su poluprečnici temenih kružnica
Interferenca predstavlja preklapanje aktivnih putanja. Aktivna dužina dodirnice profila predstavlja geometrijsko mesto tačaka u odnosu na nepokretni koordinatni sistem. Početna i krajnja tačka aktivne dužine dodirnice definiše se presekom dodirnice profila i odgovarajućih temenik kružnica. Proces sprezanja ostvaruje se tako što se vrh profila zupca na temenoj kružnici gonjenog zupčanika dodiruje sa odgovarajućom tačkom na podnožju profila zupca pogonskog zupčanika. U toku dodirnog perioda tačke na profilu zupca pogonskog zupčanika dolaze u kontakt sa odgovarajućim tačkama gonjenog zupčanika. Sprezanje jednog para profila zubaca završava se u trenutku kada se vrh profila zubca temene kružnice pogonskog zupčanika dodiruje sa odgovarajućom tačkom na podnožju zubca gonjenog zupčanika. Na ovaj način definisan je istovremeno i period sprezanja jednog para zubaca zupčanika.
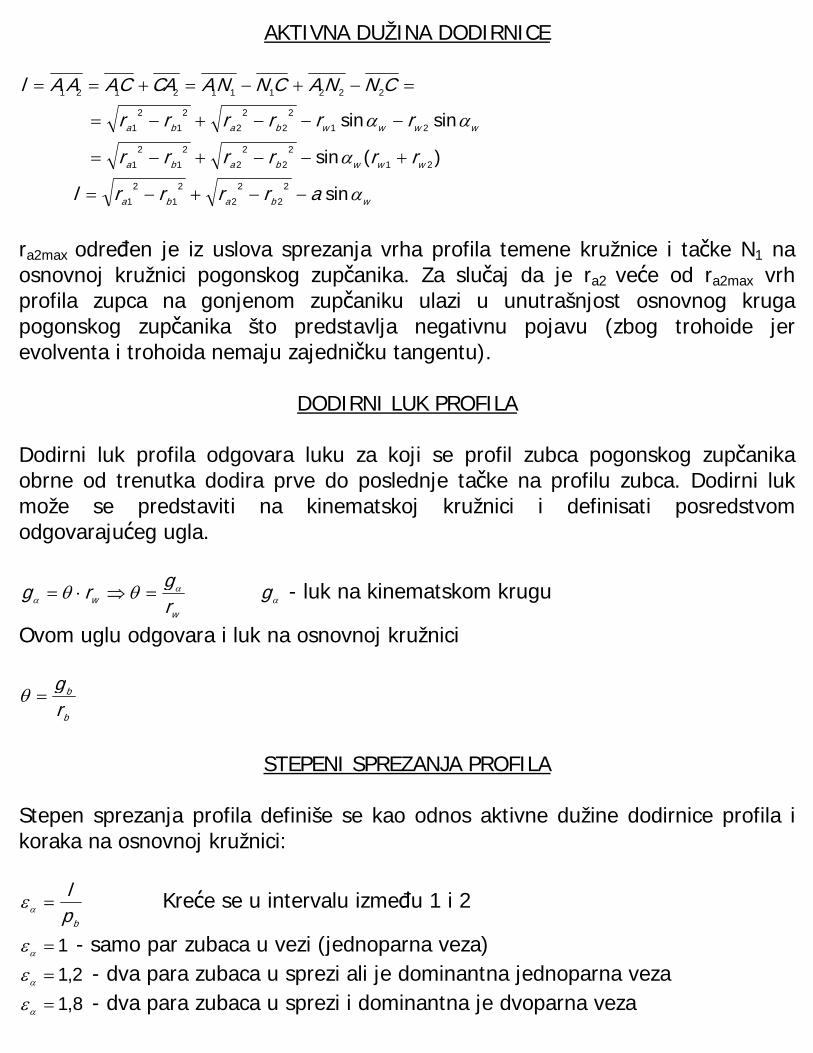
AKTIVNA DUŽINA DODIRNICE
wbaba
wwwbaba
wwwwbaba
arrrrl
rrrrrr
rrrrrr
CNNACNNACACAAAl
α
α
αα
sin
)(sin
sinsin
2
2
2
2
2
1
2
1
21
2
2
2
2
2
1
2
1
21
2
2
2
2
2
1
2
1
2221112121
−−+−=
+−−+−=
−−−+−=
=−+−=+==
ra2max određen je iz uslova sprezanja vrha profila temene kružnice i tačke N1 na osnovnoj kružnici pogonskog zupčanika. Za slučaj da je ra2 veće od ra2max vrh profila zupca na gonjenom zupčaniku ulazi u unutrašnjost osnovnog kruga pogonskog zupčanika što predstavlja negativnu pojavu (zbog trohoide jer evolventa i trohoida nemaju zajedničku tangentu).
DODIRNI LUK PROFILA
Dodirni luk profila odgovara luku za koji se profil zubca pogonskog zupčanika obrne od trenutka dodira prve do poslednje tačke na profilu zubca. Dodirni luk može se predstaviti na kinematskoj kružnici i definisati posredstvom odgovarajućeg ugla.
ww r
grg αα θθ =⇒⋅= αg - luk na kinematskom krugu
Ovom uglu odgovara i luk na osnovnoj kružnici
b
b
rg
=θ
STEPENI SPREZANJA PROFILA
Stepen sprezanja profila definiše se kao odnos aktivne dužine dodirnice profila i koraka na osnovnoj kružnici:
bpl
=αε Kreće se u intervalu između 1 i 2
1=αε - samo par zubaca u vezi (jednoparna veza) 2,1=αε - dva para zubaca u sprezi ali je dominantna jednoparna veza 8,1=αε - dva para zubaca u sprezi i dominantna je dvoparna veza
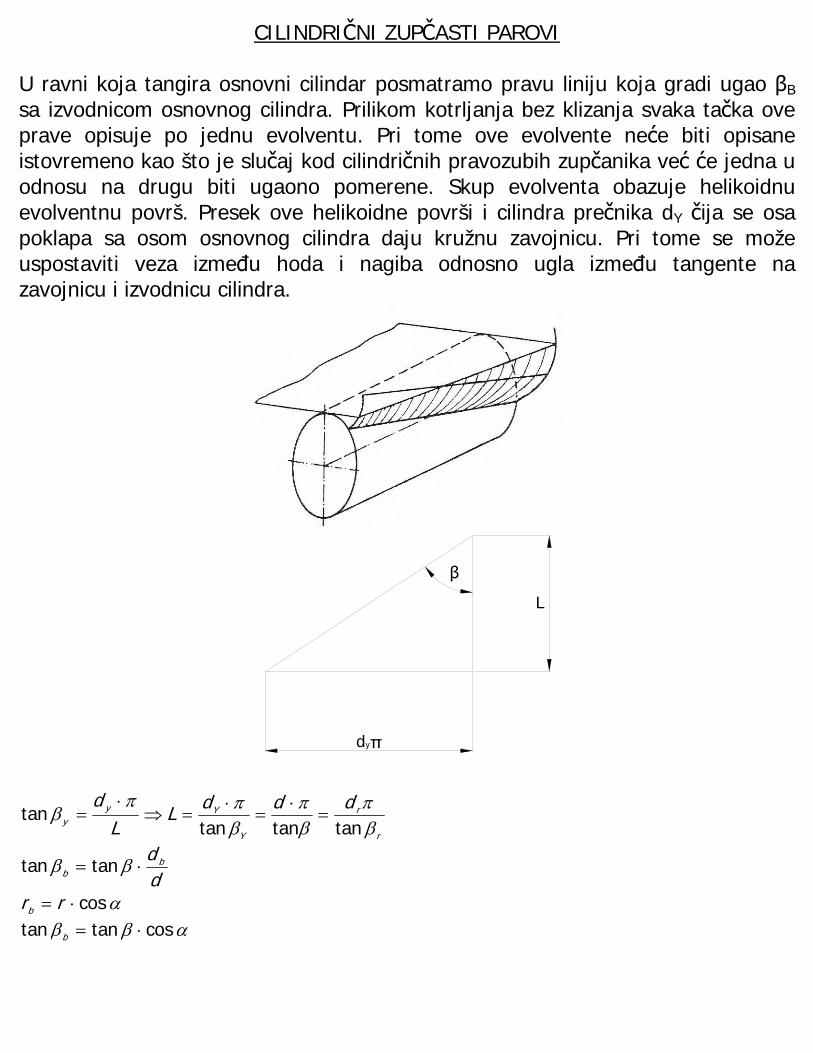
CILINDRIČNI ZUPČASTI PAROVI
U ravni koja tangira osnovni cilindar posmatramo pravu liniju koja gradi ugao βB sa izvodnicom osnovnog cilindra. Prilikom kotrljanja bez klizanja svaka tačka ove prave opisuje po jednu evolventu. Pri tome ove evolvente neće biti opisane istovremeno kao što je slučaj kod cilindričnih pravozubih zupčanika već će jedna u odnosu na drugu biti ugaono pomerene. Skup evolventa obazuje helikoidnu evolventnu površ. Presek ove helikoidne površi i cilindra prečnika dY čija se osa poklapa sa osom osnovnog cilindra daju kružnu zavojnicu. Pri tome se može uspostaviti veza između hoda i nagiba odnosno ugla između tangente na zavojnicu i izvodnicu cilindra.
r
r
Y
Yyy
dddLL
dβπ
βπ
βππ
βtantantan
tan =⋅
=⋅
=⇒⋅
=
dd b
b ⋅= ββ tantan
αcos⋅= rrb αββ costantan ⋅=b
dyπ
L
β
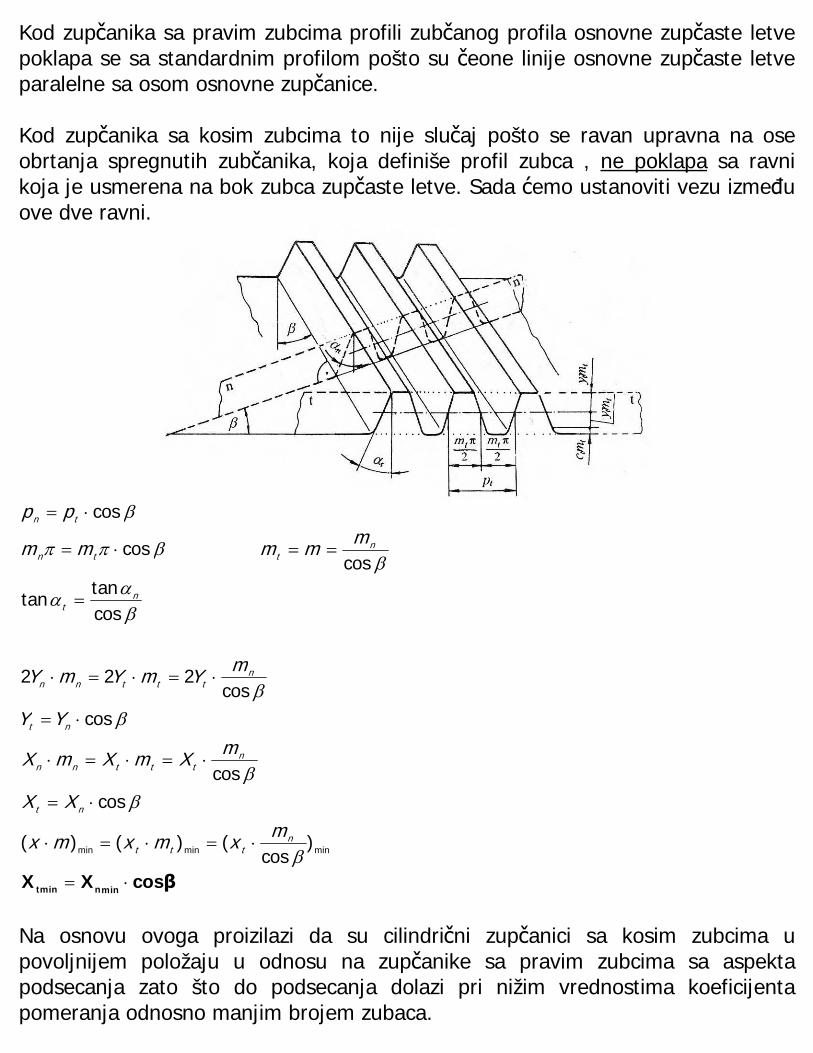
Kod zupčanika sa pravim zubcima profili zubčanog profila osnovne zupčaste letve poklapa se sa standardnim profilom pošto su čeone linije osnovne zupčaste letve paralelne sa osom osnovne zupčanice. Kod zupčanika sa kosim zubcima to nije slučaj pošto se ravan upravna na ose obrtanja spregnutih zubčanika, koja definiše profil zubca , ne poklapa sa ravni koja je usmerena na bok zubca zupčaste letve. Sada ćemo ustanoviti vezu između ove dve ravni.
βcos⋅= tn pp
βππ cos⋅= tn mm βcos
nt
mmm ==
βαα
costan
tan nt =
minminmin )cos
()()(
coscos
coscos
222
β
ββ
ββ
nttt
nt
ntttnn
nt
ntttnn
mxmxmx
XX
mXmXmX
YY
mYmYmY
⋅=⋅=⋅
⋅=
⋅=⋅=⋅
⋅=
⋅=⋅=⋅
cosβXX minntmin ⋅= Na osnovu ovoga proizilazi da su cilindrični zupčanici sa kosim zubcima u povoljnijem položaju u odnosu na zupčanike sa pravim zubcima sa aspekta podsecanja zato što do podsecanja dolazi pri nižim vrednostima koeficijenta pomeranja odnosno manjim brojem zubaca.
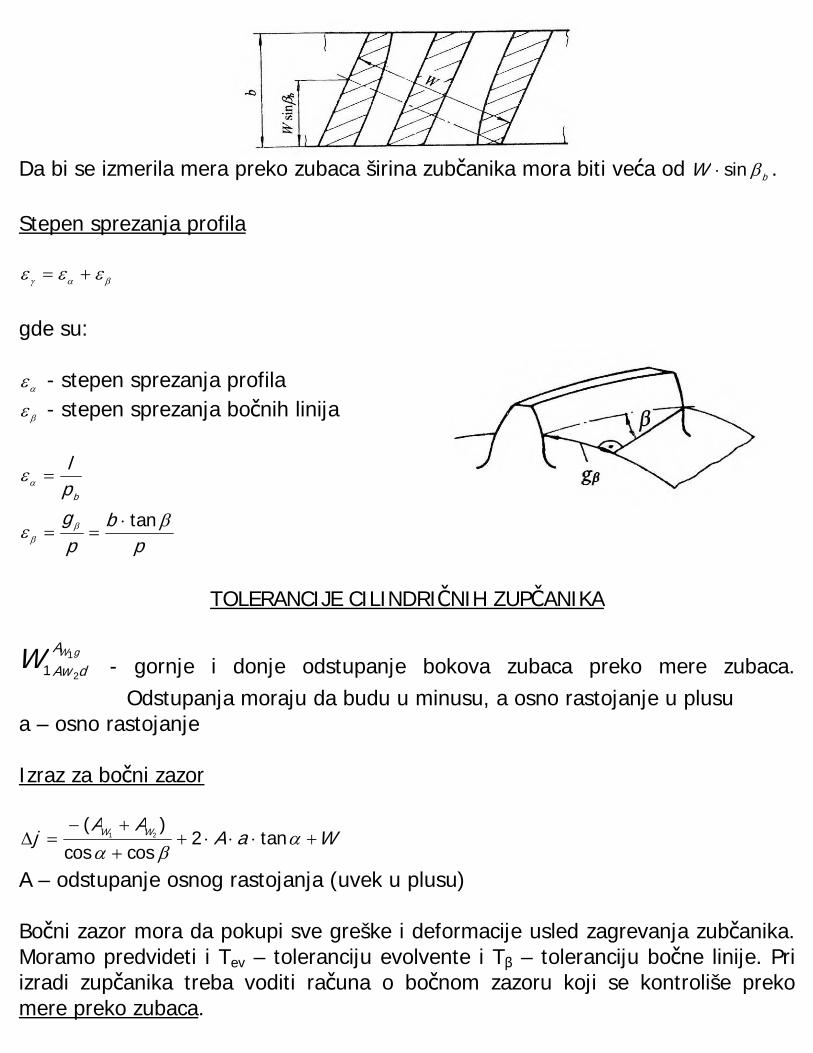
Da bi se izmerila mera preko zubaca širina zubčanika mora biti veća od bW βsin⋅ . Stepen sprezanja profila
βαγ εεε += gde su:
αε - stepen sprezanja profila
βε - stepen sprezanja bočnih linija
pb
pgpl
b
βε
ε
ββ
α
tan⋅==
=
TOLERANCIJE CILINDRIČNIH ZUPČANIKA
gWA
dAwW 1
21 - gornje i donje odstupanje bokova zubaca preko mere zubaca. Odstupanja moraju da budu u minusu, a osno rastojanje u plusu
a – osno rastojanje Izraz za bočni zazor
WaAAA
j WW +⋅⋅⋅+++−
=∆ αβα
tan2coscos
)(21
A – odstupanje osnog rastojanja (uvek u plusu) Bočni zazor mora da pokupi sve greške i deformacije usled zagrevanja zubčanika. Moramo predvideti i Tev – toleranciju evolvente i Tβ – toleranciju bočne linije. Pri izradi zupčanika treba voditi računa o bočnom zazoru koji se kontroliše preko mere preko zubaca.
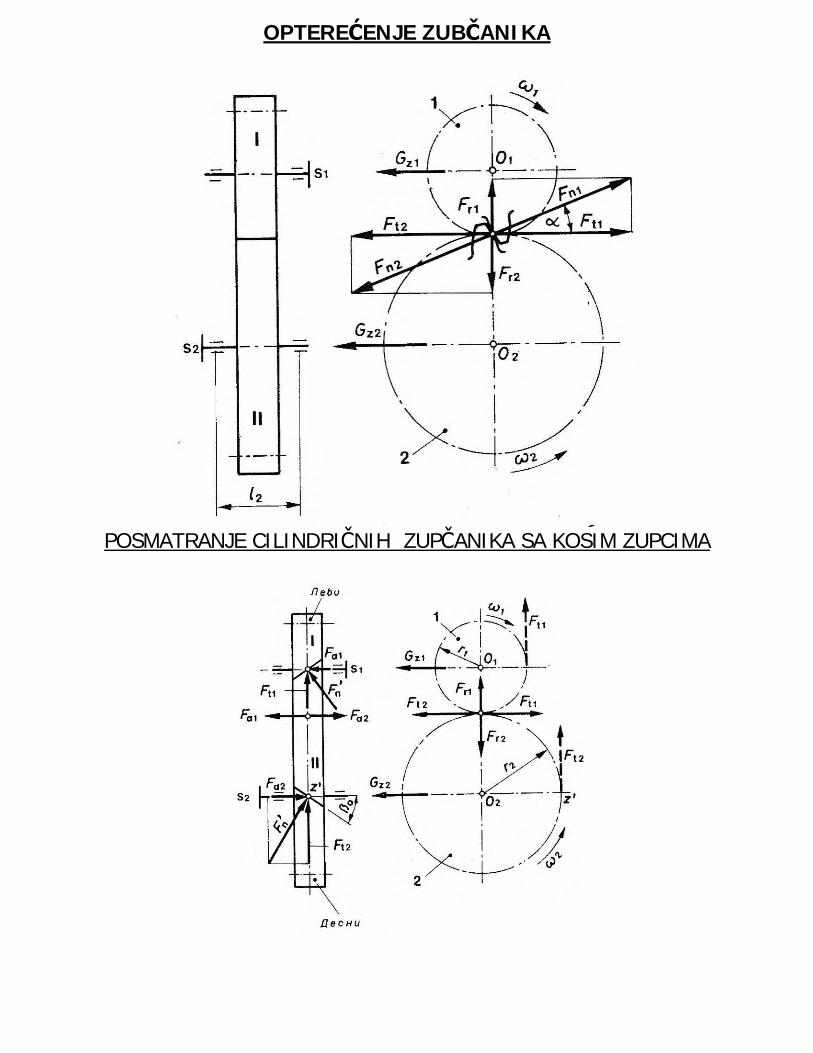
OPTEREĆENJE ZUBČANIKA
POSMATRANJE CILINDRIČNIH ZUPČANIKA SA KOSIM ZUPCIMA
IZRAZ ZA ODREĐIVANJE OPTEREĆENJA ZUPČANIKA
2
2
1
121
wwtwtw r
TrTFF ===
βα
η
tan
tan
22
22
121212
⋅=
⋅=
⋅⋅=
twa
twtwr
FFFF
iTT
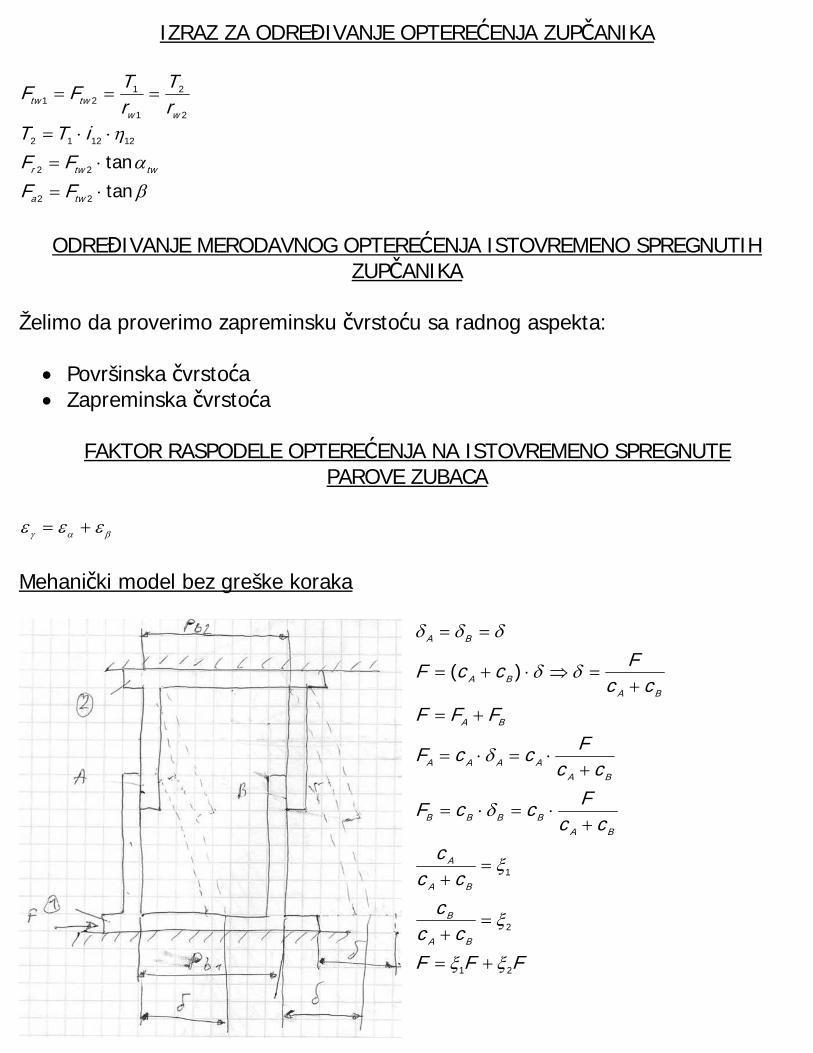
ODREĐIVANJE MERODAVNOG OPTEREĆENJA ISTOVREMENO SPREGNUTIH
ZUPČANIKA
Želimo da proverimo zapreminsku čvrstoću sa radnog aspekta:
• Površinska čvrstoća • Zapreminska čvrstoća
FAKTOR RASPODELE OPTEREĆENJA NA ISTOVREMENO SPREGNUTE
PAROVE ZUBACA
βαγ εεε += Mehanički model bez greške koraka
FFFcc
ccc
ccc
FccF
ccFccF
FFFcc
FccF
BA
B
BA
A
BABBBB
BAAAAA
BA
BABA
BA
21
2
1
)(
ξξ
ξ
ξ
δ
δ
δδ
δδδ
+=
=+
=+
+⋅=⋅=
+⋅=⋅=
+=
+=⇒⋅+=
==

Uticaj greške koraka profila Grešku koraka profila označićemo: 0>−=∆ OpOgO PPP
)(5,0)(5,0
)(
)(
12
∆⋅−=
∆⋅+=
==
+∆⋅−
⋅=∆−⋅=⋅=
+∆⋅+
⋅=⋅=⋅=
+∆+
=⇒∆−⋅+=
+=
∆−=
=
−=∆
cFFcFF
ccccc
cFcccF
cccFcccF
cccFcccF
FFF
PP
B
A
BA
BA
ABBBBB
BA
BAAAAA
BA
BBBA
BA
B
A
bb
δδ
δδ
δδ
δδδδ
Između tačaka B1 i D1 (vidi donju sliku) je samo jedan par zubaca u sprezi. Višezubno sprezanje ide u delu od E1 do D1 i od E2 do D2.
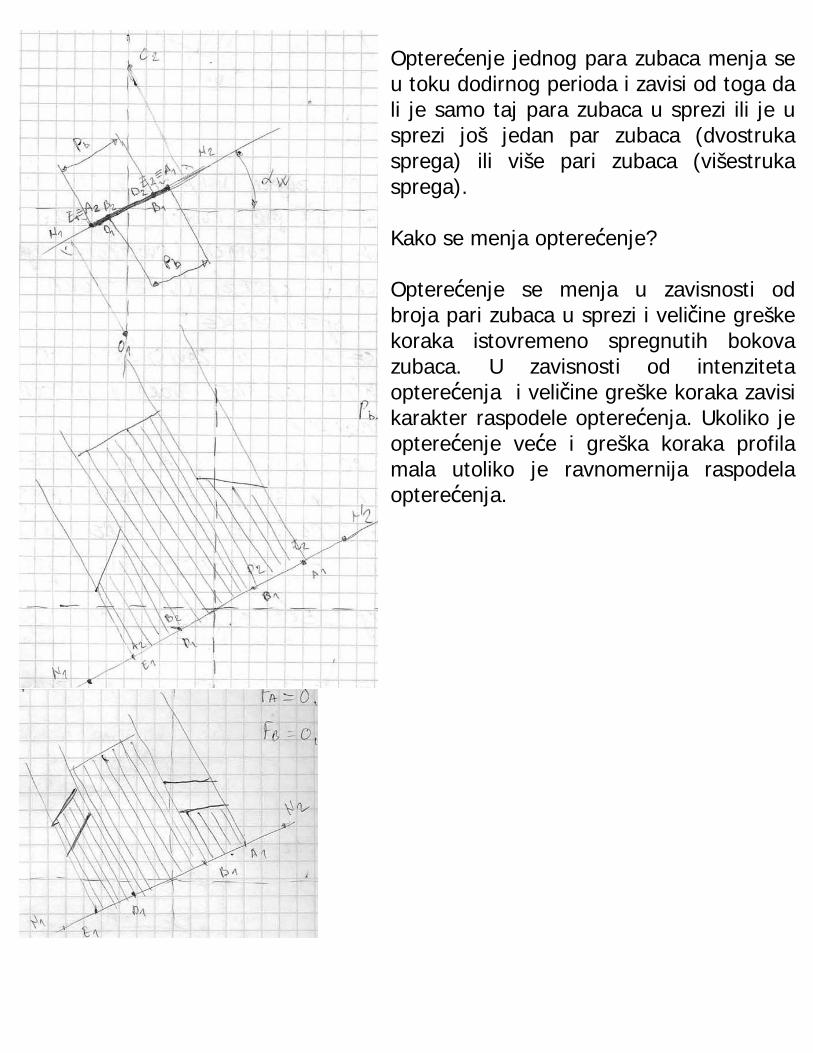
Opterećenje jednog para zubaca menja se u toku dodirnog perioda i zavisi od toga da li je samo taj para zubaca u sprezi ili je u sprezi još jedan par zubaca (dvostruka sprega) ili više pari zubaca (višestruka sprega). Kako se menja opterećenje? Opterećenje se menja u zavisnosti od broja pari zubaca u sprezi i veličine greške koraka istovremeno spregnutih bokova zubaca. U zavisnosti od intenziteta opterećenja i veličine greške koraka zavisi karakter raspodele opterećenja. Ukoliko je opterećenje veće i greška koraka profila mala utoliko je ravnomernija raspodela opterećenja.
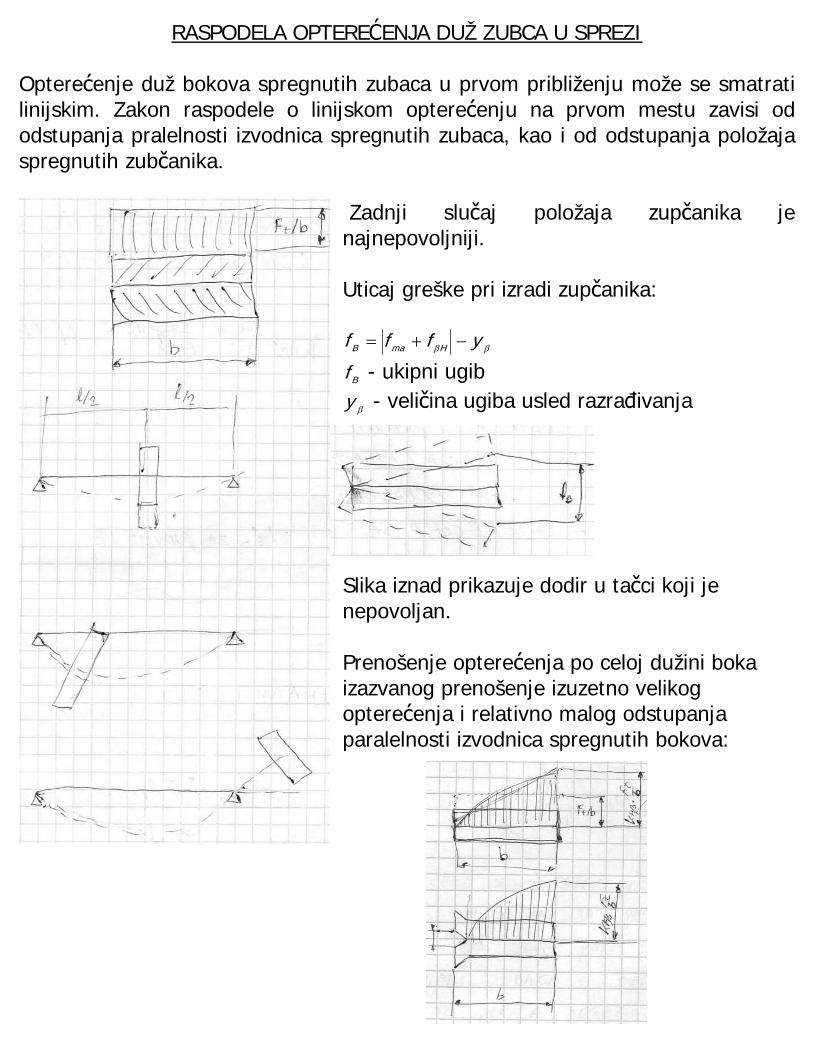
RASPODELA OPTEREĆENJA DUŽ ZUBCA U SPREZI
Opterećenje duž bokova spregnutih zubaca u prvom približenju može se smatrati linijskim. Zakon raspodele o linijskom opterećenju na prvom mestu zavisi od odstupanja pralelnosti izvodnica spregnutih zubaca, kao i od odstupanja položaja spregnutih zubčanika.
Zadnji slučaj položaja zupčanika je najnepovoljniji. Uticaj greške pri izradi zupčanika:
ββ yfff HmaB −+=
Bf - ukipni ugib
βy - veličina ugiba usled razrađivanja
Slika iznad prikazuje dodir u tačci koji je nepovoljan. Prenošenje opterećenja po celoj dužini boka izazvanog prenošenje izuzetno velikog opterećenja i relativno malog odstupanja paralelnosti izvodnica spregnutih bokova:
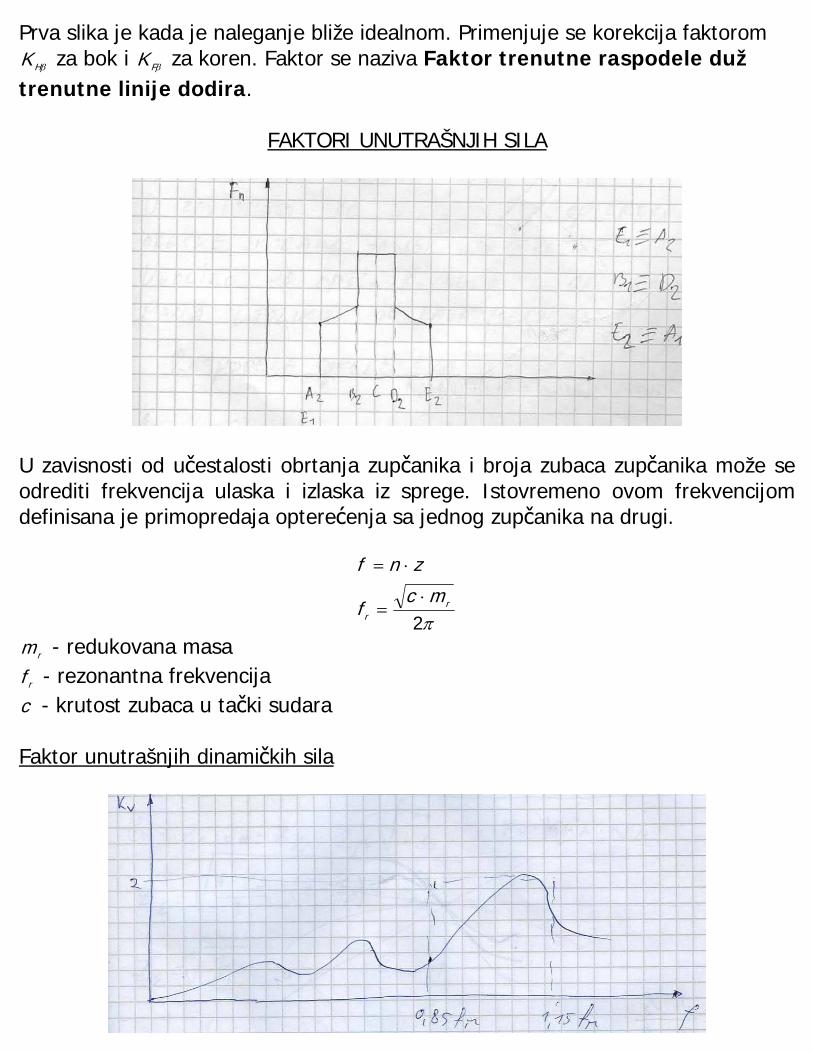
Prva slika je kada je naleganje bliže idealnom. Primenjuje se korekcija faktorom βHK za bok i βFK za koren. Faktor se naziva Faktor trenutne raspodele duž
trenutne linije dodira.
FAKTORI UNUTRAŠNJIH SILA
U zavisnosti od učestalosti obrtanja zupčanika i broja zubaca zupčanika može se odrediti frekvencija ulaska i izlaska iz sprege. Istovremeno ovom frekvencijom definisana je primopredaja opterećenja sa jednog zupčanika na drugi.
π2r
r
mcf
znf
⋅=
⋅=
rm - redukovana masa
rf - rezonantna frekvencija c - krutost zubaca u tački sudara Faktor unutrašnjih dinamičkih sila

KA – faktor neravnomernosti opterećenja prenosnika, ovaj faktor zavisi od pogonske radne mašine
PROMENLJIVOST OPTEREĆENJA
NAPONI NA BOKOVIMA ZUBACA CILINDRIČNOG ZUPČANIKA
bEFn
H ⋅⋅
=ρ
σ 418,0 - Hercov obrazac
WWWWb rrrrr
αααα
ρρρρρ
coscos
coscos 1111
21
21
=⇒⋅=⋅=
+=
ααρ
ααααααρ
costan
costansincoscos
sin
22
1111
⋅⋅=
⋅⋅=⋅⋅=⋅=
WW
WWW
WWW
r
rrr

uu
d WWW
1tancos
2111
121
+=+=
ααρρρ
uu
bdFzz
uu
bdFE
EEEEE
rTFF
tHEHC
t
wH
www
twn
1
1tancos
2175,0
2coscos
1
12
21
21
+⋅
⋅=
+=
+=
==
σ
αασ
αα
u - kinematski prenosni odnos u≥1
w
b
tH
E
z
Ez
αβ
α tancos2
cos1
175,0
=
= - faktor modula elastičnosti i oblika zubca respektivno
βαβεσ HHVAt
HEH KKKKdb
Fzzzz ⋅⋅⋅⋅⋅
⋅⋅⋅⋅=1
α
ββ
αε ε
εεε
+−−
= )1(3
4z - faktor stepena sprezanja zubaca ako je 1<βε
αε ε
1=z - faktor stepena sprezanja zubaca ako je 1>βε
ββ cos=z - faktor uticaja nagiba zubaca
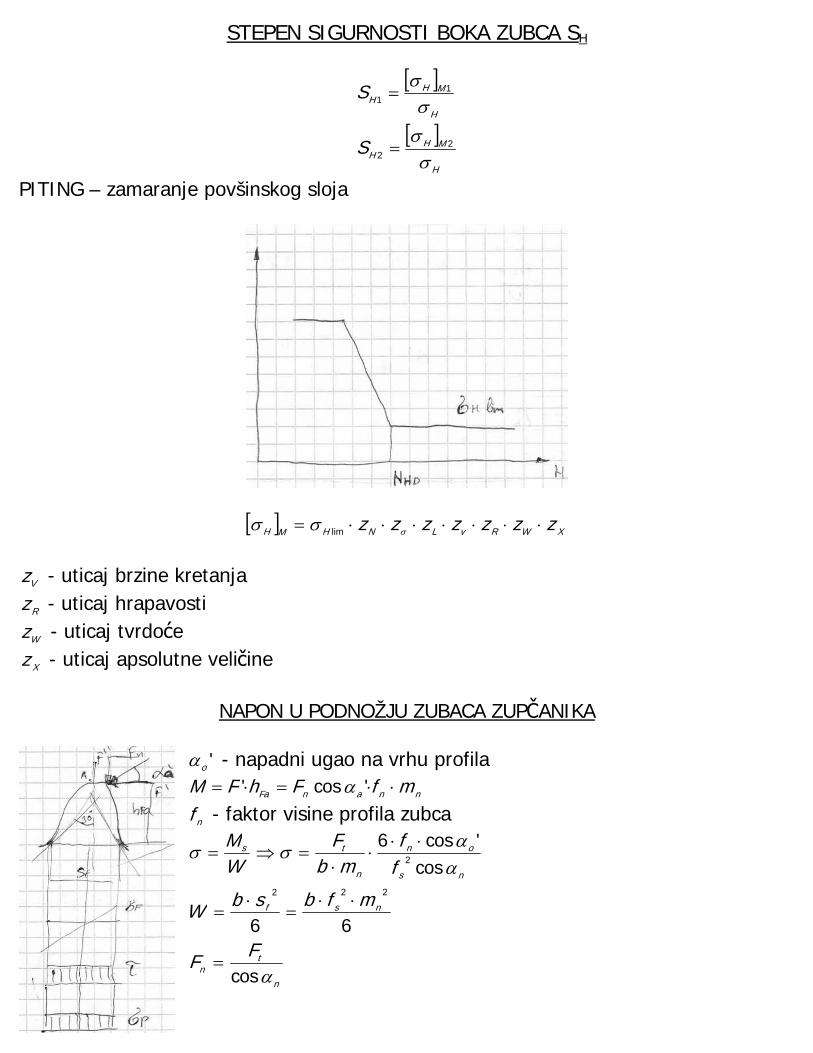
STEPEN SIGURNOSTI BOKA ZUBCA SH [ ]
[ ]H
MHH
H
MHH
S
S
σσσσ
22
11
=
=
PITING – zamaranje povšinskog sloja
Vz - uticaj brzine kretanja
Rz - uticaj hrapavosti
Wz - uticaj tvrdoće
Xz - uticaj apsolutne veličine
NAPON U PODNOŽJU ZUBACA ZUPČANIKA
'oα - napadni ugao na vrhu profila
nnanFa mfFhFM ⋅⋅=⋅= 'cos' α
nf - faktor visine profila zubca
n
tn
nsf
ns
on
n
ts
FF
mfbsbW
ff
mbF
WM
α
αασσ
cos
66
cos'cos6
222
2
=
⋅⋅=
⋅=
⋅⋅⋅
⋅=⇒=
[ ] XWRvLNHMH zzzzzzz ⋅⋅⋅⋅⋅⋅⋅= σσσ lim

αα
cos'cos6
2
s
onFa f
fy ⋅⋅=
n
tSaFaFa mb
Fyy⋅
⋅⋅=σ
Say - faktor koncentracije napona
Fay - faktor oblika profila zubca
βαβεσ FFVAn
tsaFaFa KKKK
mbFyyyy ⋅⋅⋅⋅⋅
⋅⋅⋅⋅= - izraz za cilindrične zupčanike sa kosim z.
[ ] XRRTNStFMF yyyyyy ⋅⋅⋅⋅⋅⋅= δσσσ lim
RTy - uticaj hrapavosti podnožnog zubca zupčanika
STy - koncentracija napona
Ny - uticaj vremenske izdržljivosti
σy - uticaj radne izdržljivosti
Ry δ - uticaj korekcije s obzirom na razliku osetljivosti na koncentraciju napona
Xy - uticaj razlike u veličini zupca
KONUSNI ILI KONIČNI ZUPČASTI PAROVI
A1
2
R
[ ][ ]
21
1
2
2
1
2211
222
111
21ln
22
11
sinsin
0sinsinsinsin
0,
,
ωωω
δδ
ωω
δωδωδωδω
ω
ω
−=
=
=−
⋅=
⋅=
=−=
=
=
rel
n
n
nnre
RRRVRV
VVVRV
RV

2
2
2
1
21 90
ωωω
δδ
+=
=Σ=+
rel
o
o9021 ≠Σ=+ δδ - slučaj u slici 2
[ ])cos(2
)(180cos2
2122
21
2
212122
21
2
Σ++=
+−−+=
ωωωωωδδωωωωω
rel
rel
U grupi koničnih zupčanih parova spadaju zupčanici čije se ose seku. Vektor relativne ugaone brzine jednog zupčanika u odnosu na drugi određen je izrazom:
21 ωωω −=rel
Za trenutnu osu relativno kretanje jednog zupčanika u odnosu na drugi za proizvoljno izabranu tačku A koja se nalazi na rastojanju R važi sledeći izraz:
[ ][ ]RV
RV
,
,
22
11
ω
ω
=
=
Da bi se ostvarilo kotrljanje bez klizanja jednog zupčanika u odnosu na drugi komponenta relativne normalne brzine jednaka je 0:
021 =−= nnrel VVV
Na osnovu gornjeg izlaza proizilazi prenosni odnos:
1
2
2
1
sinsin
δδ
ωω
=
rel
rel
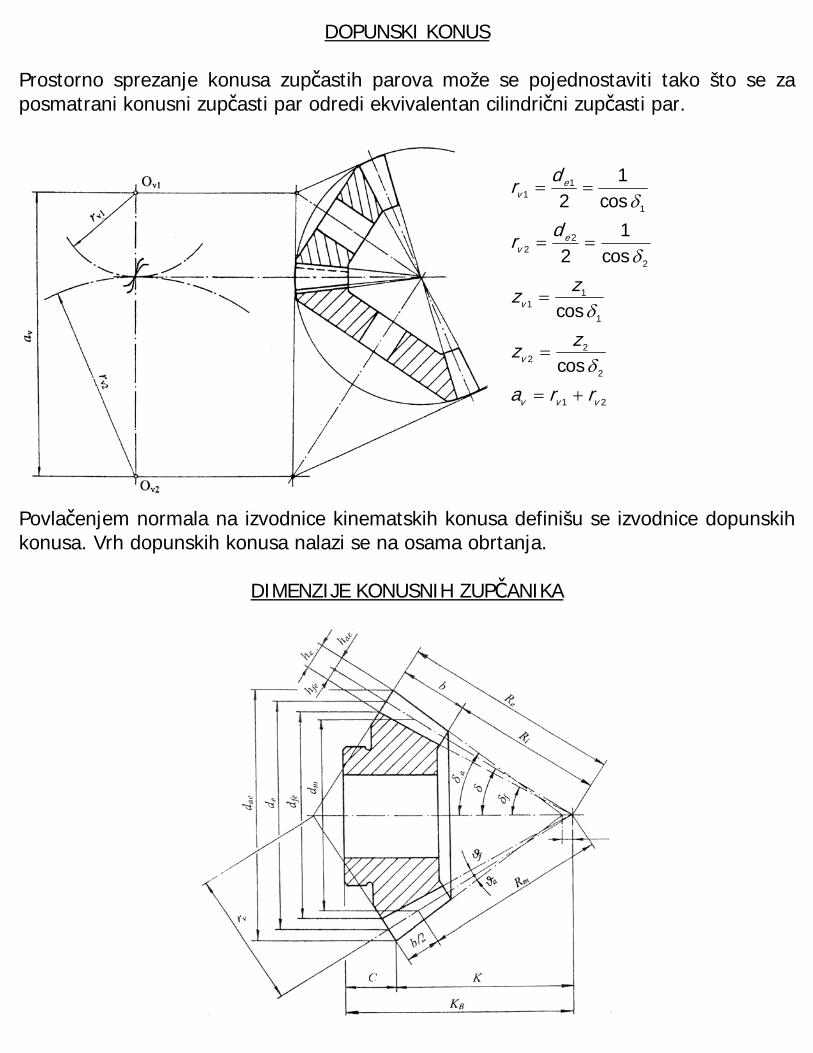
DOPUNSKI KONUS Prostorno sprezanje konusa zupčastih parova može se pojednostaviti tako što se za posmatrani konusni zupčasti par odredi ekvivalentan cilindrični zupčasti par.
21
2
22
1
11
2
22
1
11
cos
cos
cos1
2
cos1
2
vvv
v
v
ev
ev
rra
zz
zz
dr
dr
+=
=
=
==
==
δ
δ
δ
δ
Povlačenjem normala na izvodnice kinematskih konusa definišu se izvodnice dopunskih konusa. Vrh dopunskih konusa nalazi se na osama obrtanja.
DIMENZIJE KONUSNIH ZUPČANIKA

Prema obliku bočnih linija konusniparovi mogu biti:
1. Sa pravim zupcima 2. Sa kosim zupcima 3. Sa lučnim zupcima
OPTEREĆENJE KONIČNIH ZUPČANIKA
Aksijalna sila deluje od kinematskog konusa u pravcu ose. Normalna sila deluje na zajedničku izvodnicu i razlaže se na aksijalnu i radijalnu silu.
δαδα
δ
α β
sintan
costan2sin
222
coscos
21
21
⋅⋅=
⋅⋅=
⋅−=
⋅−
⋅=
⋅=
=
nta
ntr
mm
mmmt
n
tn
FFFF
bmd
dT
dT
dTF
FFn
NAPON
βαβεσ HHVAm
tHEH KKKK
uu
dbFzzzz ⋅⋅⋅
+⋅
⋅⋅⋅=12
- napon na boku
βαβεσ FFVAm
tSaFaF KKKK
mbFyyyy ⋅⋅⋅⋅⋅
⋅⋅⋅= - napon u korenu
[ ]
[ ]F
MFF
H
MHH
S
S
σσσσ
1
1
=
=

HIPERBOLIČNI ZUPČASTI PAROVI
Pužasti parovi
U pužaste parove spadaju zupčanici čije se ose mimoilaze, a nisu paralelne. Kinematske površine su jednograni hiperboloidi sa grlom na mestu najmanjeg osnog rastojanja. Komponente obimne brzine u ravni upravnoj na trenutnu osu su istovetne (ostvaruje se kotrljanje bez klizanja), a u pravcu ose su različite što znači da se ostvaruje klizanje. Za razliku od cilindričnih zupčanih parova koje karakteriše klizanje po visini zupca, hiperboloidne zupčaste parove karakteriše klizanje u pravcu linije dodira. Posledica klizanja je habanje boka zubca i smanjenje stepena iskorišćenja. Podela pužastih parova ostvarena je prema obliku podnožne i temene površine malog zupčanika-puža, koji ima oblik sličan navoju. Za slučaj da su podnožna i temena površina delovi cilindra, tada su podnožna i temena površina pužnog točka delovi kružnog torusa, pa ovaj zupčasti par spada u grupu cilindričnih zupčastih parova. U ovom slučaju podnožna i temena površina pužastok točka prilagođena je obliku podnožne i temene površine puža. Za slučaj da su temena i podužna povšina delovi kružnih torusa, tada ovaj zupčasti par spada u grupu globoidnih zupčastih parova.
GEOMETRIJA CILINDRIČNIH ZUPČASTIH PAROVA
S obzirom da se ostvaruje kotrljanje bez klizanja podeonog kruga (pužastog točka) po podeonoj pravoj puža, tada važi relacija:
πmpp == 21
1p - aksijalni korak na podeonoj pravi puža
2p - podeoni korak na podeonom krugu
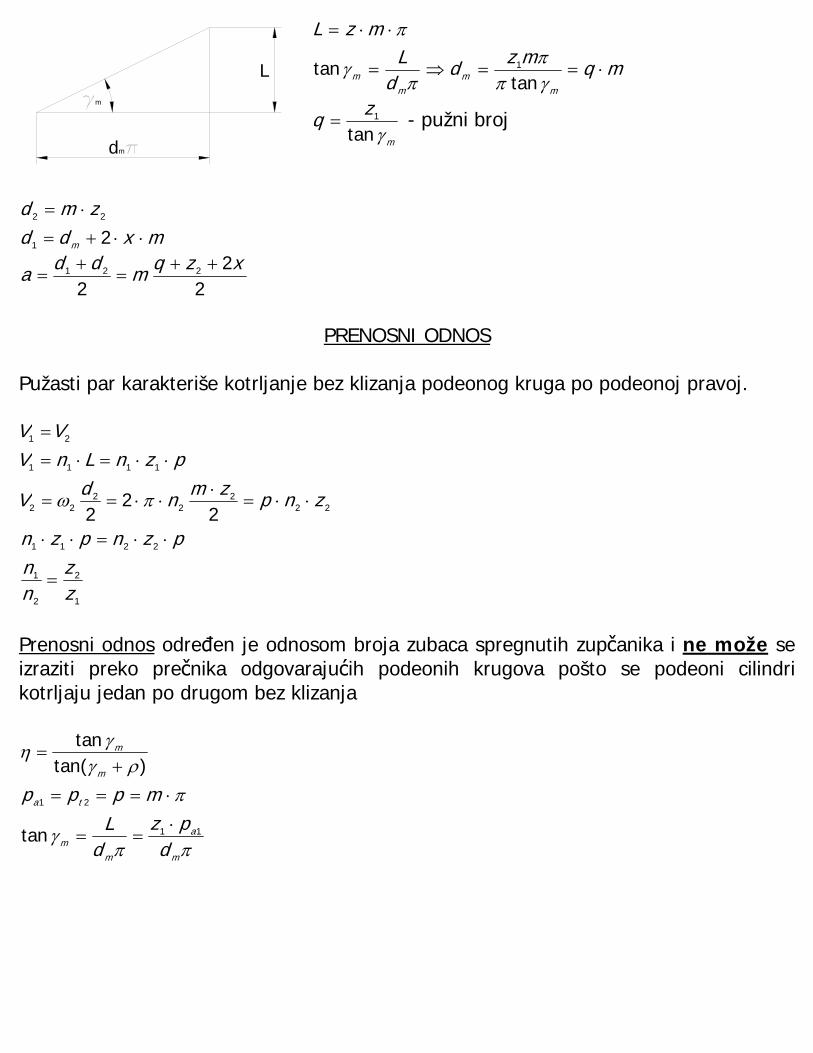
mqmzdd
LmzL
mm
mm ⋅==⇒=
⋅⋅=
γππ
πγ
π
tantan 1
m
zqγtan1= - pužni broj
mxddzmd
m ⋅⋅+=
⋅=
21
22
22
2221 xzqmdda ++
=+
=
PRENOSNI ODNOS
Pužasti par karakteriše kotrljanje bez klizanja podeonog kruga po podeonoj pravoj.
1
2
2
1
2211
222
22
22
1111
21
22
2
zz
nn
pznpzn
znpzmndV
pznLnVVV
=
⋅⋅=⋅⋅
⋅⋅=⋅
⋅⋅==
⋅⋅=⋅=
=
πω
Prenosni odnos određen je odnosom broja zubaca spregnutih zupčanika i ne može se izraziti preko prečnika odgovarajućih podeonih krugova pošto se podeoni cilindri kotrljaju jedan po drugom bez klizanja
ππγ
πργ
γη
m
a
mm
ta
m
m
dpz
dL
mppp
11
21
tan
)tan(tan
⋅==
⋅===
+=
dm
Lm
)tan(tan
12
121212
2
22
1
11
ργγη
η
η
η
+=
⋅⋅=
=
=
m
m
mt
mt
iTTdTF
dTF
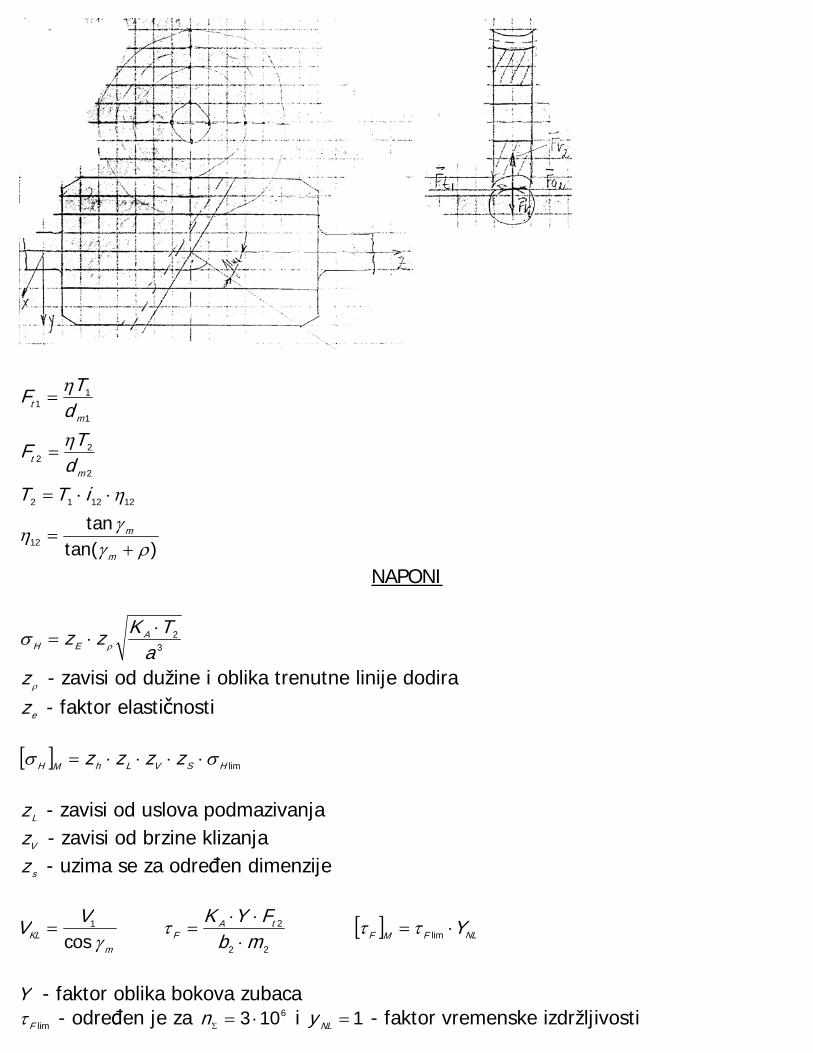
NAPONI
32
aTKzz A
EH
⋅⋅= ρσ
ρz - zavisi od dužine i oblika trenutne linije dodira
ez - faktor elastičnosti [ ] limHSVLhMH zzzz σσ ⋅⋅⋅⋅=
Lz - zavisi od uslova podmazivanja
Vz - zavisi od brzine klizanja
sz - uzima se za određen dimenzije
mKL
VVγcos
1= 22
2
mbFYK tA
F ⋅⋅⋅
=τ [ ] NLFMF Y⋅= limττ
Y - faktor oblika bokova zubaca
limFτ - određen je za 6103 ⋅=Σn i 1=NLy - faktor vremenske izdržljivosti